

Page 1

CS
120A
and CS125
Visibility and Present
Weather Sensors
Revision
Copyright ©
Campbell Scientific, Inc.
: 01/2021
2013 – 2021
Page 2

About this manual
Some useful conversion factors:
Area: 1 in
Length: 1 in. (inch) = 25.4 mm
2
(square inch) = 645 mm2
1 ft (foot) = 304.8 mm
1 yard = 0.914 m
1 mile = 1.609 km
Mass:
Pressure: 1 psi (lb/in
Volume: 1 UK pint = 568.3 ml
1 oz. (ounce) = 28.35 g
1 lb (pound weight) = 0.454 kg
2
) = 68.95 mb
1 UK gallon = 4.546 litres
1 US gallon = 3.785 litres
Recycling information
At the end of this product’s life it should not be put in commercial or domestic refuse
but sent for recycling. Any batteries contained within the product or used during the
products life should be removed from the product and also be sent to an appropriate
recycling facility.
Campbell Scientific Ltd can advise on the recycling of the equipment and in some cases
arrange collection and the correct disposal of it, although charges may apply for some
items or territories.
For further advice or support, please contact Campbell Scientific Ltd, or your local agent.
Campbell Scientific Ltd, Campbell Park, 80 Hathern Road, Shepshed, Loughborough, LE12 9GX, UK
Tel: +44 (0) 1509 601141 Fax: +44 (0) 1509 270924
Email: support@campbellsci.co.uk
www.campbellsci.co.uk
Page 3

Contents
PDF viewers note: These page numbers refer to the printed version of this document. Use
the Adobe Acrobat® bookmarks tab for links to specific sections.
1. Introduction ................................................................. 1
1.1 General Safety........................................................................................... 2
1.2 Sensor Unit Safety .................................................................................... 2
1.3 Principle of operation ................................................................................ 3
1.4 Recommended Tools ................................................................................ 6
1.5 Quickstart .................................................................................................. 6
2. Measurement specification ........................................ 6
3. Technical specification ................................ .............. 7
3.1 Electrical specification .............................................................................. 7
3.2 Optical specification ................................................................................. 7
4. Communications specification .................................. 8
4.1 Communications electrical specifications ................................................. 8
4.2 Supported data rates and formats .............................................................. 8
5. Environmental specifications .................................... 9
6. Mechanical specifications .......................................... 9
6.1 Dimensions ............................................................................................... 9
6.2 Weights ................................................................................................... 10
6.3 Mounting................................................................................................. 10
7. Installation procedure .............................................. 10
7.1 Equipment grounding ............................................................................. 11
7.2 Mounting the sensor ................................ ................................ ................ 12
7.3 Optional Campbell Scientific Mount ...................................................... 14
8. Sensor internal connectors’ description ................ 17
8.1 Sensor recommended wiring using Campbell Scientific cables ............. 19
9. HygroVUE 5, HygroVUE 10 or CS215 T/RH Sensor
(CS125 only) ................................................................... 21
10. Functions of the internal switches ........................ 23
Page 4

ii
11. Message Formats: A breakdown of the different
default outputs of the sensor –
Basic/Partial/Full ............................................... 24
11.1 Visibility only messages ....................................................................... 25
11.2 Messages with SYNOP Present Weather Codes (CS125 only) .............. 26
11.3 Messages with METAR Present Weather Codes (CS125 only) ............. 27
11.4 Messages with Generic SYNOP Present Weather Codes (CS125 only) 28
11.5 Example sensor message outputs .......................................................... 33
11.6 Custom message format ........................................................................ 34
12. Interface methods – Device Configuration
Utility/Command line/Menu .................................. 36
12.1 Configuring a PC for talking to the sensor ........................................... 37
13. Definition of the variables that can be set by
the user on the sensor ........................................ 37
14. Command line mode............................................... 39
14.1 The SET Command .............................................................................. 40
14.1.1 Example of a SET Command ................................................... 40
14.2 The SETNC Command ......................................................................... 41
14.2.1 Example of a SETNC Command .............................................. 41
14.3 The MSGSET Command ...................................................................... 41
14.4 The GET Command .............................................................................. 43
14.5 The MSGGET Command ..................................................................... 45
14.6 The POLL Command – Polling the sensor ........................................... 46
14.7 The ACCRES Command – Resetting the accumulation value ............. 47
15. Entering the sensor menu system ........................ 47
16. Calibrating the sensor ............................................ 53
16.1 Visibility calibration ............................................................................. 53
16.2 Dirty window zero calibration .............................................................. 57
16.3 Internal temperature check (CS125) ..................................................... 57
17. Performing an operating system update .............. 58
18. Cleaning .................................................................. 60
19. Lubricating the enclosure screws ......................... 61
20. Desiccant ................................................................. 61
Addendum .................................................................Add-1
Page 5

iii
Appendices
A. Sensor Block Diagram ........................................... A-1
B. Example C code of the checksum CRC-16 ........... B-1
C. Present Weather Codes ........................................ C-1
D. A comparison of the two alternative visibility
calibrations ........................................................... D-1
Figures
1-1 Particles in the sample volume scatter light in all directions, including
into the detector ....................................................................................... 3
1-2 Signals from large, slow falling snowflakes and smaller, faster,
raindrops .................................................................................................. 4
1-3 Defining possible precipitation types based on wet bulb and dry
bulb temperatures ..................................................................................... 5
1-4 A typical size/speed map used by the CS125 present weather
algorithm ................................................................................................... 5
7-1 Airflow ................................................................................................... 11
7-2 Grounding boss ....................................................................................... 12
7-3 Mounting arrangement ........................................................................... 13
7-4 Mounting to a flat surface ....................................................................... 13
7-5 Use of band clamps ................................................................................ 14
7-6 Optical sensor mast ................................................................ ................. 15
7-7 Mounting footprint ................................................................................. 16
8-1 Connections ............................................................................................ 17
8-2 Communications and power connections ............................................... 19
8-3 Communications and power connector .................................................. 20
8-4 Configuration cable ................................................................................ 20
8-5 USB configuration cable ........................................................................ 20
9-1 Connection for the optional HygroVUE 5, HygroVUE 10 &
CS215 T/RH sensors .......................................................................... 22
10-1 Internal switches ................................................................................... 23
16-1 Calibration disk .................................................................................... 55
16-2 Mounting calibration disk ..................................................................... 56
17-1 Sensor DevConfig download instructions ............................................ 58
17-2 Sensor DevConfig screen when OS update is complete ....................... 59
Tables
10-1 Internal switch functions ..................................................................... 24
11-1 Summary of message IDs and descriptions ......................................... 30
11-2 Summary of system alarms and descriptions ....................................... 31
13-1 User definable settings and descriptions .............................................. 37
Page 6

1
CS120A and CS125 Visibility and Present
Weather Sensors
1. Introduction
The CS120A is a visibility sensor. The CS125 additionally detects and reports
present weather in the form of SYNOP, METAR or NWS codes. The CS125 has
the same specification for visibility measurement as the CS120A. It is possible to
upgrade a CS120A to a CS125, please contact Campbell Scientific for more
details.
The sensors are infra-red forward scatter visibility and present weather sensors for
automatic weather stations including road, marine and airport based stations.
They both use the well-established forward scatter system for visibility
measurement, utilising a 42º scatter angle. The CS125 uses high speed sampling
to reduce missed events and improves response to other suddenly changing
conditions.
The CS125 has a temperature sensor mounted in the cross arm used as part of the
process for identifying precipitation.
When an optional CS215 or HygroVUE temperature and RH sensor is connected,
the CS125 can distinguish wet and dry obscuration (for example mist and haze)
and make more precise discrimination between liquid and frozen precipitation.
Dew heaters are provided to keep the sensor optics clear of condensation and more
powerful hood heaters to prevent the build up of snow or ice.
This sensor is certified for Aviation use by the German Meteorological Service,
Deutscher Wetterdienst (DWD) (see Section 1.3 regarding the settings).
Page 7

CS120A and CS125 Visibility and Present Weather Sensors
2
1.1 General Safety
This manual provides important safety considerations for the installation,
operation and maintenance of the sensor. These safety considerations are
classified into three levels:
Warnings alert the installer or user to serious hazards.
Ignoring these warnings could result in injury or death
and/or irrevocable damage to the sensor unit.
Cautions warn of potential hazards. Ignoring these cautions
could result in the sensor being damaged and data being lost.
Notes highlight useful information in the installation, use and
maintenance of this product. These should be followed carefully in
order to gain the maximum benefit from the use of this product.
1.2 Sensor Unit Safety
The sensor has been checked for safety before leaving the factory and
contains no internally replaceable or modifiable parts.
Do not modify the sensor unit. Such modifications will
lead to damage of the unit and could expose users to
dangerous light levels and voltages.
In unusual failure modes and environmental conditions
the sensor hood could become hot. In normal operation
they will be at ambient temperature or slightly above.
Ensure that the correct voltage supply is provided to the
sensor.
WARNING
CAUTION
NOTE
WARNING
WARNING
CAUTION
Page 8

Instruction Manual
3
1.3 Principle of operation
Figure 1-1. Particles in the sample volume scatter light in all directions,
including into the detector
The CS120A and CS125 comprise an emitter and detector aligned as in
Figure 1-1. The emitter produces a beam of near infra-red light pulsed at 1 kHz. A
detector has a field of view which overlaps the beam and is inclined at 42 degrees
to it. Light scattered by a particle (for example a fog droplet or particle of
precipitation) from the overlap or sample volume towards the detector is detected
by a photodiode and recorded as a signal. The size of the signal is therefore
proportional to the extinction of the emitted beam caused by scattering. The
scattering signal averaged over one second is used to calculate an extinction
coefficient or EXCO assuming the relationship between forward scatter and
EXCO is linear. Sixty one second averages are then themselves averaged to give a
one minute average EXCO. This is then converted to a value of Meteorological
Optical Range (MOR) using Koschmieder’s law:
MOR = 3/EXCO where MOR is in km and EXCO in units of km-1.
The CS125 calibration for visibility was derived by comparison with other high
grade, forward scatter sensors and has also been verified in a study by trained
meteorological observers. This is called the MOR calibration in this manual.
An alternative calibration, known as TMOR, is also available. This was derived
by following the ICAO procedure of calibrating the sensor against a
transmissometer. An empirical equation to convert from MOR to TMOR was
developed.
Page 9

CS120A and CS125 Visibility and Present Weather Sensors
4
This non-linear equation results in significantly higher visibility readings at lower
visibilities below 5000 metres. Further details of the calibration and graphs
comparing the two calibration options are given in Appendix D.
The TMOR calibration should be used for aviation applications as it is considered
to give more representative visibility values for a plane landing and viewing
landing lights. Use of the TMOR calibration is obligatory for use of this sensor on
German airfields.
The CS125 can be switched between outputting data using the original MOR or
the alternative TMOR calibration by using a configuration switch (See Section
10). Sensors made from early December 2020 leave the factory with this switch
set to ON to make the sensor output values according to the TMOR calibration.
The CS125 is capable of identifying weather type in addition to measuring
visibility. It does this by analysing the amplitude and width of spikes in the APD
signal corresponding to particles of precipitation passing through the sample
volume. The amplitude of the signal is a guide to the size of the particle and the
width, because it represents the time taken for the particle to fall through the
sample volume, is proportional to the fall speed, see Figure 1-2.
Figure 1-2. Signals from large, slow falling snowflakes and smaller, faster,
raindrops
The CS125 also has a temperature sensor. These three parameters, fall speed, size
and temperature are used to identify the type of particle. If an additional external
temperature and relative humidity probe is connected then a wet-bulb temperature
can be calculated. This provides useful additional information identifying particles
more accurately especially, between liquid and frozen around 0°C.
Figure 1-3 shows how these temperatures are used to define possible precipitation
types around 0°C.
Page 10

Instruction Manual
5
Figure 1-3. Defining possible precipitation types based on wet bulb and
dry bulb temperatures
The processing algorithm then works with several ‘maps’ such as Figure 1-4 to
identify each particle.
Figure 1-4. A typical size/speed map used by the CS125 present weather
algorithm
Page 11

CS120A and CS125 Visibility and Present Weather Sensors
6
1.4 Recommended Tools
The following installation tools are recommended:
10 mm open spanner/wrench (for grounding boss, must be open ended)
13 mm spanner/wrench
19 mm open spanner/wrench (for cable glands, must be open ended)
2 mm flat screwdriver
Number 2 cross head screwdriver
1.5 Quickstart
The sensor is shipped set to the following default communication RS-232, 8N1,
38400 baud, a sensor ID = 0 and set to transmit default messages, full format,
visibility only for the CS120A, SYNOP present weather full format for the
CS125, at 1 minute intervals (see Section 11).
To start using the CS120A or CS125, first connect a DC supply matching the
specification in Section 3.1 to the red and black wires on the ‘D-connector’ (see
Figure 8-3) and connect to a PC communications port with a terminal emulator set
to RS-232, 38400 baud, 8N1. After a couple of minutes, data messages will be
received. Typing ‘open 0’ will access the menu structure, see Section 15.
2. Measurement specification
Minimum
Value
Nominal
Value
Maximum
Value
Visibility characteristics
Reported visibility (metric)
5 metres
-
75,000
metres
Reported visibility (imperial)
16 feet
-
46 miles
Visibility accuracy calibration
against factory calibration disk**
-
+/- 2%
-
Visibility accuracy up to 600 m
-
+/-8%
-
Visibility accuracy up to 10,000 m
-
+/-10%
-
Visibility accuracy up to 15,000 m
-
+/-15%
-
Visibility accuracy above 15,000 m
-
+/-20%
-
Precipitation characteristics, water equivalent (CS125 only)
Reported accumulation range
0 – 999.9 mm
Accumulation accuracy
+/-15%
Accumulation resolution
0.1 mm
Reported intensity range (up to *)
0 - 999.99 mm/hr
Intensity accuracy**
+/-15%
Intensity resolution
0.01 mm/hr
*The maximum intensity reported is dependent on the mixture of precipitation falling.
**Please refer to Section 1.3 regarding the calibration options for the sensor.
Page 12

Instruction Manual
7
3. Technical specification
3.1 Electrical specification
Minimum
Value
Nominal
Value
Maximum
Value
Main power supply for DSP and dew heaters
Power supply, (DC only)
7V
12V
30V
(1)
Current consumption sampling
continuously with dew heaters ON and
RS-232 communications active
(2, 3)
(at 12V DC)
-
200 mA
248 mA
Current consumption sampling
continuously with dew heaters disabled
(at 12V DC)
-
110 mA
151 mA
Current consumption without any
sampling occurring and dew heaters
disabled (at 12V DC)
-
21 mA
30 mA
Hood heater power supply
Hood heater voltage (AC or DC)
-
24V
(3)
30V
(4)
Hood heater wattage (at 24V AC or
DC)
-
60W
(5)
-
User alarm outputs
User output high level (at 85ºC)
3.8V - -
User output high level (at 25ºC )
4.13V - -
User output low (All temperatures)
0.25V - 0.55V
User output current
- - 32 mA
(1) If a CS215 or HygroVUE probe is being used with a CS125 the supply voltage should not exceed
28V.
(2) The RS-232 communications interface will automatically turn itself off when not transmitting.
(3) If hood heaters are not being used ensure ‘Hood heater override’ (details in Section 13) is set to
off.
(4) It is recommended that the hood heaters are run at 24V AC/DC. It is possible to run the heaters at
any voltage below 24V but the heaters will generate proportionally less heat reducing their ability
to prevent ice build-up.
(5) Each hood takes 30W, 60W is the total for both hoods on the sensor together.
If a CS215 or HygroVUE probe is being used the supply
voltage should not exceed 28V.
3.2 Optical specification
Minimum
Value
Nominal
Value
Maximum
Value
Optical characteristics
LED centre wavelength
-
850 nm
-
LED spectral bandwidth
-
+/-35 nm
-
Pulse characteristics
CAUTION
Page 13

CS120A and CS125 Visibility and Present Weather Sensors
8
Light pulse rate
-
1KHz
-
4. Communications specification
4.1 Communications electrical specifications
Minimum
Value
Nominal
Value
Maximum
Value
RS-232 Communications
(1)
RS-232 input threshold Low
0.8V
1.5V
-
RS-232 input threshold High
-
2.0V
2.4V
RS-232 input absolute maximum
-15V
-
+15V
RS-232 input resistance
12K
-
-
RS-232 output voltage low
- - 0.4V
RS-232 output voltage high (into
3K)
4.4V - -
RS-485 Communications
RS-485 input threshold voltage
-0.2V
-
+0.2V
RS-485 output (Unloaded)
- - 5V
RS-485 output (Load 50)
2V - -
Maximum voltage at any terminal
(2)
-7V
-
+7V
(1) The RS-232 communications interface will automatically turn itself off when not transmitting.
(2) The ground of the sensor and the ground of any RS-485 equipment cannot be further apart than
this voltage. The sensor ground (pin 1) on connector B, see page 18, can be connected to the
ground of the host equipment. This will reduce any parasitic currents.
4.2 Supported data rates and formats
Serial setting 8N1
Supported data rates
• 1200 bps
• 2400 bps
• 9600 bps
• 19200 bps
• 38400 bps - default
• 57600 bps
• 115200 bps
Supported formats
• RS-232 (Full duplex only), default
• RS-485 (Half duplex)
• 8 bit data bytes
• 1 stop bit
• Parity checking is not supported as most communication protocols used by
the CS125 have built in checksums as well as checks that communications
have been understood.
Page 14

Instruction Manual
9
5. Environmental specifications
Minimum
Value
Nominal
Value
Maximum
Value
Sensor temperature ranges
Operating temperature
-25°C
-
+60°C
Extended operating temperature
-40°C
-
+70°C
(1)
Storage temperature
-40°C
-
+85°C
Sensor humidity ranges
Operating humidity range
0%
-
100%
Sensor heater thresholds
Dew heater Turn On
-
<35°C
-
Dew heater Turn Off
-
>40°C
-
Hood heater Turn On
-
<15°C
-
Hood heater Turn Off
-
>25°C
-
(1) Extended temperature ranges are only guaranteed if the sensor has been tested by Campbell
Scientific and verified within this temperature range. Some degradation of absolute accuracy can
be expected at the extremes of the extended ranges.
6. Mechanical specifications
6.1 Dimensions
Page 15

CS120A and CS125 Visibility and Present Weather Sensors
10
6.2 Weights
Sensor weight: 3 Kg
Shipping weight: 6 Kg (including packing box)
6.3 Mounting
Sensor mounting: Bracket mounts on a vertical pole 32-52.5 mm diameter. The
mounting bracket has cut-outs for band clamps for larger
diameter masts.
7. Installation procedure
The sensor measures environmental variables and is designed to be located in
harsh weather conditions. However, there are a few considerations to take into
account if accurate and representative data from a site are to be obtained.
The descriptions in this section are not exhaustive. Please refer to
meteorological publications for further information on locating
weather instruments
The sensor should be sited in a position representative of local weather conditions
and not of a specific microclimate (unless the analysis of microclimate weather is
being sought).
The sensor has good resistance to background light but it is a good idea to avoid
locations where the transmitter is pointing at a light scattering or reflecting
surface. Ideally, the receiver should point north in the northern hemisphere or
south in the southern hemisphere but this is not critical. This is because it is more
important to make sure the receiver is not pointing towards any possible sources
or reflected light in its field of view, for instance nearby sensors or enclosures
mounted below it on a mast. Where those objects cannot be moved, pointing the
sensor away from North/South is acceptable. Failure to do this can result in the
sensor reporting a DC light saturation error when there is bright sunlight.
To give non-microclimatic measurements the sensor should be sited away from
possible physical obstructions that could affect the fall of precipitation. The sensor
should also be positioned away from sources of heat, electrical interference and in
such a position as to not have direct light on the sensor lenses. Whenever possible,
the sensor should be located away from windbreaks.
Several zones have been identified upwind and downwind of a windbreak in
which the airflow is unrepresentative of the general speed and direction. Eddies
are generated in the lee of the windbreak and air is displaced upwind of it. The
height and depth of these affected zones varies with the height and to some extent
the density of the obstacle.
Generally, a structure disturbs the airflow in an upwind direction for a distance of
about twice the height of the structure, and in a downwind direction for a distance
of about six times the height. The airflow is also affected to a vertical distance of
about twice the height of the structure. Ideally, therefore, the sensor should be
located outside this zone of influence in order to obtain representative values for
the region.
NOTE
Page 16

Instruction Manual
11
Figure 7-1. Airflow
In order to reduce the service frequency with the unit, the sensor should be placed
away from sources of contamination, in the case of roadside monitoring; larger
mounting poles can be used. More regular maintenance will be required when the
instrument is placed in areas where contamination is unavoidable or where
measurements may be safety critical.
The WMO recommend a sample volume height of 1.5 m. However, for
applications such as aviation or road visibility other heights may be appropriate.
If operating a sensor indoors it is likely that there will be sources of
light and/or reflections that will create false readings and erratic
results.
If carrying out simple checks, blocking a lens or the sample volume
will simulate an INCREASE in visibility not a decrease.
7.1 Equipment grounding
The sensor must be properly grounded. It is sufficient to ground the mounting
bracket and if the sensor is connected to a grounded metal mast, and in electrical
contact with it, then this will be sufficient. Otherwise, the mounting bracket
should be earthed and a grounding boss is supplied to allow this.
A ground wire with a minimum cross section of 6 mm2 and maximum length of
5 m should be used.
The pole and foundations of a pole mounted installation will provide some basic
lightning protection and protection against radio frequency interference and
should also be correctly grounded.
NOTE
NOTE
Page 17

CS120A and CS125 Visibility and Present Weather Sensors
12
Figure 7-2. Grounding boss
7.2 Mounting the sensor
A quick release pole mounting kit is supplied with the sensor.
If a power supply enclosure has been supplied with the sensor it can be mounted
on the pole, near its base using the brackets supplied with the enclosure.
Alternatively the power supply can be mounted elsewhere, e.g. on a wall at some
distance from the sensor. The power supply enclosure should be mounted away
from the sensor head to avoid wind flow disturbance or rain drops bouncing back
up into the sensor’s sensing volume.
Take care not to overtighten the nuts on the bolts, as it may
be possible to distort and/or damage the brackets or DSP
plate by doing so, and/or the nuts may seize up. Only tighten
the nuts to a degree necessary to hold the sensor firmly in
place.
Where the sensor is to be mounted onto another type of mast, please refer to the
manual for that mast for mounting details.
Ensure that the sensor is mounted according to the following
figure. Do not reposition, once fixings are tightened, by
forcing the arms of the unit as this can cause damage.
CAUTION
CAUTION
Page 18

Instruction Manual
13
Do not remove the mounting plate as this will compromise
resistance to water ingress.
Figure 7-3. Mounting arrangement
If you need to mount the sensor to a flat surface, remove the plastic formers from
the mounting brackets and use the holes as shown in Figure 7-4.
If mounting to a flat surface ensure that there is no obstruction to
airflow through the sample volume.
Figure 7-4. Mounting to a flat surface
CAUTION
NOTE
Page 19

CS120A and CS125 Visibility and Present Weather Sensors
14
Slots are provided to allow band clamps to be used with larger diameter masts, see
Figure 7-5.
Figure 7-5. Use of band clamps
7.3 Optional Campbell Scientific Mount
A Campbell Scientific ‘optical sensor mount’ is available. This will put the
sample volume at about 1.5 m in compliance with the WMO ‘Guide to
Meteorological Instruments and Methods of Observation’, 7th Edition, Section
9.3.4.
Page 20

Instruction Manual
15
Figure 7-6. Optical sensor mast
If one is to be used, use the following installation instructions.
Install the mount on a concrete foundation. If one does not already exist then a
concrete foundation should be constructed at least 600 mm square and 600 mm
deep. Ensure the ground consistency is not too loose and will be able to support
the mount and concrete foundation.
Page 21

CS120A and CS125 Visibility and Present Weather Sensors
16
Drill four 12 mm diameter holes using the mount base as a template or using the
following in Figure 7-7 to a depth of 77 mm.
Figure 7-7. Mounting footprint
Clean the holes of all debris.
Place washers and nuts on the ends of the wedge anchors supplied (to protect the
threads during installation).
Hammer the wedge anchors into the holes until the start of the threads are below
the surface.
Tighten the nuts until about 25 mm of thread protrudes above the surface.
Remove the washers and nuts from the protruding length screw. Then lower the
mount into place.
Finally secure the mount with the washers and nuts.
If the surface is not level and flat it may be necessary to add washers under the
base on one or more of the foundation screws.
Page 22

Instruction Manual
17
8. Sensor internal connectors’ description
The sensor has four standard IP66 rated glands. The first gland is by default used
by the power/communications line. This comprises the 7-30 V for the main
electronics, and the serial communications wires. The sensor is supplied with 5 m
cable already connected.
The second gland is used for the 24 V feeds for the hood heaters fitted with a 5 m
cable.
Glands 3 and 4 are spare. If user alarms are connected they usually use gland 3
and if a CS215 or HygroVUE probe is fitted this usually uses gland 4.
If you need to run cables through the cable glands follow these guidelines. If a
torque wrench is available use a torque of 2.5 Nm (do not over tighten).
Otherwise tighten with fingers as tight as possible and then add a further ¾ turn
with a 19 mm spanner (do not over tighten).
The glands are suitable for cables between 5 and 9 mm diameter.
If the power cable is incorrectly wired to the sensor then
damage can be done to the unit.
10 m is the longest length of the cable type supplied
recommended. In particular, additional RS-485
communication should be twisted pair. Please contact
Campbell Scientific if you wish to use a longer length of cable.
Figure 8-1. Connections
CAUTION
CAUTION
Page 23

CS120A and CS125 Visibility and Present Weather Sensors
18
Connector A - Five way connector
Pin number
Description
Notes
Pin 1
+ve supply
Main electronics +ve supply input
Pin 2
0V
Auxiliary Electronics 0V. Common with the main electronics 0V.
Pin 3
Hood low
This is for the hood heater power supply. If the hood heater supply is
DC it should be the negative connection and if it is AC it should be
the ‘neutral’ or ‘ground’ connection if there is one.
Pin 4
0V
Auxiliary Electronics 0V. Common with the main electronics 0V.
Pin 5
Hood high
This is for the hood heater power supply. If the hood heater supply is
DC it should be the positive connection.
To avoid damage to noise filters on the hood heater inputs if
the heater voltage is DC the –ve connection should be made
to pin 3 and the +ve to pin 5. If the heater voltage is AC with a
ground or neutral wire then this should be connected to pin 3.
Pin 3 should not be more than 5 volts from the main
electronics 0V.
Connector B - Three way connector
Pin number
Description
Notes
Pin 1
0V
0V connection for serial communications. This connection is
common with the main electronics 0V (Connector A, pin 2).
Pin 2
Receive
RS-232 receive line, RXD, B/D+ for RS-485 half duplex
Pin 3
Transmit
RS-232 transmit line, TXD, A/D− for RS-485 half duplex
It may be necessary to use a 120 ohm termination resistor to reduce signal
distortion when using RS-485 for cable runs over about 500 m and baud rates
above 38400. It should be connected between pins 2 and 3.
Connector C - Four way connector
Pin number
Description
Notes
Pin 1
0V
0V connection for user alarms. This connection is common with the
main electronics 0V (Connector A, Pin 2).
Pin 2
User 2
Output for user alarm 2
Pin 3
0V
0V connection for user alarms. This connection is common with the
main electronics 0V (Connector A, Pin 2).
Pin 4
User 1
Output for user alarm 1
CS125 only
Pin number
Description
Pin 1
+12V
Pin 2
SDI-12
Pin 3
0V
To use these connections it is necessary to either use the cable gland
taking the hood heater power or, if the hood heater is also required,
to use different cables to those supplied. Please contact Campbell
Scientific if you need any advice on choice of cable.
CAUTION
NOTE
Page 24

Instruction Manual
19
8.1 Sensor recommended wiring using Campbell Scientific cables (this cable is supplied already connected as standard)
The sensor is provided pre-wired with a default 5 m power and communications
cable which is terminated at one end with a 9 pin D-connector (DB9). The
D-connector can be connected directly to a PC or to a datalogger such as the
Campbell Scientific CR1000 using a suitable interconnecting cable such as the
SC110. If another type of connection is required then the D-connector should be
removed.
Figure 8-2. Communications and power connections
Page 25

CS120A and CS125 Visibility and Present Weather Sensors
20
Figure 8-3. Communications and power connector
Two types of configuration cable are available from Campbell Scientific that plug
directly into connector B in place of the normal connector and cable. One has a
RS-232 or RS-485 output according to how the CS120A/CS125 is configured
(Figure 8-4) and one has a USB output (Figure 8-5).
If the lid is removed, take care not to overtighten the fixing screws.
A small gap should remain between the lid and box.
Figure 8-4. Configuration cable
Figure 8-5. USB configuration cable
NOTE
Page 26

Instruction Manual
21
9. HygroVUE 5, HygroVUE 10 or CS215 T/RH Sensor (CS125 only)
The CS125 has a temperature sensor mounted in the crossarm that is used in
determining precipitation type.
A HygroVUE 5, HygroVUE 10 or CS215 temperature and RH sensor can be
connected to a CS125. This is recommended as it will improve the performance of
the CS125 in identifying precipitation and allows it to, for example, distinguish
between mist and haze. Precipitation identification at temperatures close to
freezing will be much improved by a CS215 and its use is highly recommended in
regions where temperatures close to 0°C are common if information on
precipitation type is important. It also allows RH information to be included in
data messages.
If a HygroVUE 5, HygroVUE 10 or CS215 is connected then the temperature
used for assessment of precipitation type and included in data messages will come
from the HygroVUE 5, HygroVUE 10 or CS215 instead of the temperature sensor
mounted in the cross arm.
The connections for the HygroVUE 5, HygroVUE 10 or CS215 are shown in
Figure 9-1. The HygroVUE 5 can be mounted in the Rad 6, the HygroVUE 10 in
the Rad 10E, or CS215 itself can be mounted in a Met20 screen on the same mast
as the CS125. The screen can be mounted on the top section of an OSM1 optical
mast below a CS125.
WMO – No. 8, 2.1.4.1 recommends temperature measurement at a height of
between 1.2 and 2.0 m above ground. The screen should be below the height of
the CS125 electronics box.
Page 27

CS120A and CS125 Visibility and Present Weather Sensors
22
Connections for temperature
and RH sensor
Figure 9-1. Connection for the optional HygroVUE 5, HygroVUE 10 and
CS215 T/RH sensors
CS215 WIRING
COLOUR
FUNCTION
PIN
Red
+12V
1
Green
SDI-12
2
Black
Power Ground
3
Clear
Shield
3
White
Power Ground
3 or NC
HYGROVUE 5 & HYGROVUE 10
WIRING
COLOUR
FUNCTION
PIN
Brown
+12V
1
White
SDI-12
2
Black
Power Ground
3
Clear
Shield
3
Page 28

Instruction Manual
23
10. Functions of the internal switches
The sensor is equipped with four switches located within the main enclosure.
These switches perform certain functions at power up, their functions are detailed
in Figure 10-1.
The switches are only read during the power up sequence of the
sensor. This means that if the switches are pressed whilst the sensor
is running nothing will happen, the sensor will need to be power
cycled leaving at least 10 seconds with the sensor off for any of
their functions to be performed.
Figure 10-1. Internal switches
IMPORTANT
Page 29

CS120A and CS125 Visibility and Present Weather Sensors
24
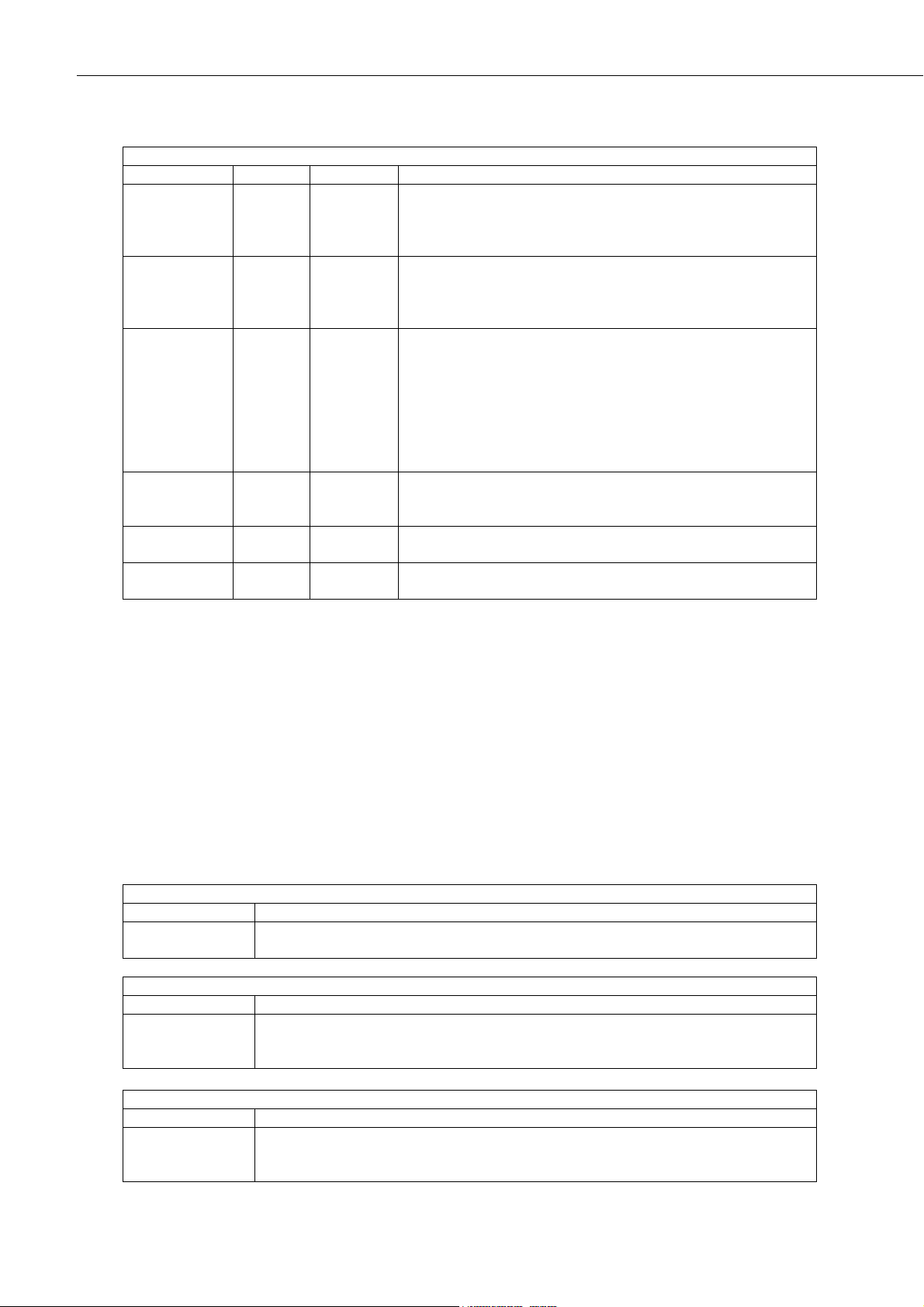
Table 10-1. Internal switch functions
Switch number
Function
4
When switched ON the sensor uses the TMOR
calibration and OFF it uses the MOR calibration.
Please refer to Section 1.3 for a description of
these two calibration options.
3
When switched to the ON position and the sensor
is power cycled this switch temporarily sets the
sensor communications port to a default RS-232
communication state at 38400 baud. This is useful
during field tests or maintenance when the sensor
has been remotely configured for RS-485 mode or
a baud rate your PC does not support. This change
is temporary and will not be stored to flash.
However, if the menu system is accessed and a
‘Save and exit’ command is performed these new
data rate settings will be committed to flash.
Once this switch is returned to its OFF position
and the sensor is power cycled the sensor will
return to its previous communications settings.
2
Reserved for future use, set to OFF.
1
When switched to the ON position this switch
will reset the sensor to its factory default values.
This reset will affect all communication settings.
This will take immediate effect upon power up.
NOTE: To use this the power supply must be
stable. Do not leave this switch set permanently.
If the lid is removed take care not to overtighten the screws when it
is replaced. A small gap should remain between the lid and box.
11. Message Formats: A breakdown of the different default outputs of the sensor – Basic/Partial/Full
The sensor has twelve different message formats available to the user. All
parameters are space delimited with a unique start and end character allowing easy
storage into any logger (see Section 15 on how to set default outputs). The
SYNOP Full Format message is the default message for the CS125 and the Full
Format Visibility only message is the default for the CS120A. These can be
selected from the Message – Sub 3 menu.
NOTE
CS125 MESSAGE - SUB 3
Set the message output format. Current format is: FULL SYNOP
- Basic = 0
- Partial = 1
- Full = 2
- Basic SYNOP = 3
- Partial SYNOP = 4
- Full SYNOP = 5
- Basic METAR = 6
- Partial METAR = 7
- Full METAR = 8
- Generic Basic SYNOP = 9
- Generic Partial SYNOP = 10
- Generic Full SYNOP = 11
- Custom output = 12
->
Page 30

Instruction Manual
25
STX and ETX are hexadecimal command characters.
Refer to Appendix B for the checksum algorithm.
11.1 Visibility only messages
Basic Format, Visibility Only
STX
Message ID Sensor ID System
status Visibility distance
Visibility units
Checksum (CCITT) ETX
Carriage return Line feed
0x02
0
M or F
XXXX
0x03
0x0D
0x0A
0 0 0 19837 M FC92 (Example message, visibility units = metres)
In the following example messages the shown message intervals are
12 seconds and visibility units are in metres unless otherwise
indicated.
Partial Format, Visibility Only
STX
Message
ID
Sensor ID System status Message interval Visibility distan
ce
Visibility units
User alarms Checksum (CCITT) ETX
Carriage return Line feed
0x02
1
M or F
0 0
XXXX
0x03
0x0D
0x0A
1 0 0 12 20405 M 0 0 EF07 (Example message)
NOTE
NOTE
NOTE
Page 31

CS120A and CS125 Visibility and Present Weather Sensors
26
Full Format, Visibility Only (Default message for CS120A)
STX
Message ID
Sensor ID
System status Message interval Visibi
lity
distance
Visibility units Averaging duration User
alarms
System
alarms 10 charac
ters
Checksum (CCITT) ETX
Carriage return Line feed
0x02
2
M or F
0 0
0 0 0 0 0…
XXXX
0x03
0x0D
0x0A
2 0 0 12 68218 F 1 0 0 0 0 0 0 0 0 0 0 0 0 D378 (Example with Visibility Units = Feet)
2 0 0 12 21793 M 1 0 0 0 0 0 0 0 0 0 0 0 0 CB0F (Example with Visibility Units = Metres)
11.2 Messages with SYNOP Present Weather Codes (CS125 only)
SYNOP Present Weather Basic Format
STX
Message ID Sensor ID System status Visibility distance
Visibility units
SYNOP Code Checksum (CCITT) ETX
Carriage return Line feed
0x02
3
M or F
0-99
XXXX
0x03
0x0D
0x0A
3 0 0 20428 M 0 20B8 (Example message)
SYNOP Present Weather Partial Format
STX
Message ID Sensor ID System status Message interval Visibility distance
Visibility units
User a
larms
Particle
count
(minute)
Intensi
ty (mm/h)
SYNOP Code Tempera
ture (deg C)
Relative humidity* Checksum (CCITT) ETX
Carriage return Line feed
0x02
4
M or F
0 0
0-99
XXXX
0x03
0x0D
0x0A
4 0 0 12 21157 M 0 0 0 0.00 0 24.1 -99 5A55 (Example message)
Page 32

Instruction Manual
27
SYNOP Present Weather Full Format (Default message for CS125)
STX
Message ID Sensor ID System status Message in
terval
Visibili
ty distance
Visibility units
Averaging durat
ion
User alarms
System alarms 12 characters
Particle count (minute) Intensity (mm/h) SYNO
P Code
Temperatu
re (deg C)
Relative humidity* Checksum (CCIT
T)
ETX
Carriage Return Line feed
0x02
5
M or F
0 0
0 0 0 0 0…
0-99
XXXX
0x03
0x0D
0x0A
5 0 0 12 20880 M 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.00 0 24.1 -99 CAFA (Example message)
11.3 Messages with METAR Present Weather Codes (CS125 only)
METAR Present Weather Basic Format
STX
Message ID Sensor
ID
System status Visibility distance
Visibil
ity
units
METAR Code Checksum (CCITT) ETX
Carriage return Line feed
0x02
6
M or F
XXXX
0x03
0x0D
0x0A
6 0 0 20573 M NSW 291A (Example message)
METAR Present Weather Partial Format
STX
Message ID Sensor ID
System status Message interval Visibility distance Visibility
units
User alarms Particle
count (minute)
Intensity (mm/h) SYNOP
Code
METAR Code Temperature (deg C) Relative hu
midity*
Check
sum
(CCITT) ETX
Carriage
return
Line fe
ed
0x02
7
M or F
0 0
XXXX
0x03
0x0D
0x0A
7 0 0 12 20673 M 0 0 0 0.00 0 NSW 24.2 -99 BD78 (Example message)
Page 33

CS120A and CS125 Visibility and Present Weather Sensors
28
METAR Present Weather Full format
STX
Message ID Sensor ID System status Message inter
val
Visibility distance Visibility units
Averaging duration User alarms
System alarms 12 characters Particle count (minute) Intensity (mm/h) SYNOP Code METAR Code Temperature (
deg C)
Relative h
umidity
*
Checksu
m (CCITT)
ETX
Carriage Return Line feed
0x02
8
M or F
0 0
0 0 0 0 0…
XXXX
0x03
0x0D
0x0A
8 0 0 12 20504 M 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.00 0 NSW 24.2 -99 40A2 (Example message)
Relative humidity is only available if a CS215 or HygroVUE probe
temperature and RH sensor is attached. If not this field is “-99”.
11.4 Messages with Generic SYNOP Present Weather Codes
(CS125 only)
These messages include simplified, generic present weather codes such as 70 for
snow which may be required for some data collection systems.
Generic SYNOP Present Weather Basic format
STX
Message ID Sensor ID System status Visibility
distance
Visibility
units
Gener
ic SYNOP code
SYNOP code METAR code Checksum
(CCITT)
ETX
Carriage
return
Line feed
0x02
9
M or F
XXXX
0x03
0x0D
0x0A
9 0 0 20481 M 0 0 NSW 73DF (Example message)
*NOTE
Page 34

Instruction Manual
29
Generic SYNOP Present Weather Partial format
STX
Message ID Sensor ID System status Message
interval
Visibility
distance
Visibility units
User alarms Particle count (minute)
Intensity (mm/h) Generic SYNOP code SYNOP code METAR code Temperature (deg
C)
Relative hu
midity (%)
Checksum(CC
ITT)
ETX
Carriage
Return
Line feed
0x02
10
M or F
0 0
XXXX
0x03
0x0D
0x0A
10 0 0 12 20909 M 0 0 0 0.00 0 0 NSW 24.2 -99 AB02 (Example message)
Generic SYNOP Present Weather Full format
STX
Message
ID
Sensor ID System status Message
interval
Visibility
distance
Visibility un
its
Averaging
duration
User alarms
System alarms
Particle count (minut
e)
Intensity (mm/h) Generic SYNOP
code
SYNOP code METAR code Temp
erature (deg
C)
Relative humidity (%) Checksum(CCITT) ETX
Carriage
Return
Line feed
0x02
11
M or F
0 0
0 0 0 0
0…
XXXX
0x03
0x0D
0x0A
11 0 0 12 21342 M 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.00 0 0 NSW 24.3 -99 9AD6 (Example message)
Page 35

CS120A and CS125 Visibility and Present Weather Sensors
30
Table 11-1. Summary of message IDs and descriptions
Message ID break down
ID
Definition
0
Basic format. Contains only distance and system information
1
Partial format. Contains user alarm outputs
2
Full format. Contains all system alarms codes
3*
Basic SYNOP present weather format
4*
Partial SYNOP present weather format
5*
Full SYNOP present weather format
6*
Basic METAR present weather format
7*
Partial METAR present weather format
8*
Full METAR present weather format
9*
Generic Basic SYNOP present weather format
10*
Generic Partial SYNOP present weather format
11*
Generic Full SYNOP present weather format
12
Custom output
*CS125 only
Sensor ID break down
ID
Definition
0-9
Unit number defined by the user to aid identification of data. Zero by default.
Useful for RS-485 networks. Operates as an address in RS-485 mode
System status break down
(1)
Status level
Definition
0
No fault
1
Possible degraded performance
2
Degraded performance
3
Maintenance required
(1) System status break down reflects the highest level of severity of any active alarm.
Message interval
Time
Definition
1-3600
The amount of time, in seconds, between outputs in continuous mode
Visibility distance break down
ID
Definition
0-75,000 metres
Current visibility distance being detected by the sensor
Visibility units break down
ID
Definition
M
Metres
F
Feet
Averaging duration break down (see note)
ID
Definition
1
One minute average
10
Ten minute average
Page 36

Instruction Manual
31
In accordance with WMO requirements the sensor produces
visibility measurement that are either one or ten minute rolling
averages that are updated at the chosen output interval or when the
sensor is polled. Those averages are not direct averages of MOR
measurements but are averages of extinction coefficient and that
average is then used to calculate the MOR for that period. As the
relationship between extinction coefficient and MOR is not linear it
is possible to see quite rapid changes in MOR that might not be
expected if the result was a rolling average of MOR. Please consider
this, especially when testing the sensor with artificial obscurants or
using the calibration disc.
User alarms
ID
Range
Definition
1
0-1
Visibility either less or greater than a user specified threshold
2
0-1
Visibility either less or greater than a user specified threshold
Table 11-2. Summary of system alarms and descriptions
System alarms break down
Alarm
Range
Severity
Definition
Emitter failure
(emitter hoods
main LED
output power
level)
0-2
0
3
3
0 = Everything is within normal parameters
1 = Light output level too low
2 = Light output level too high
Emitter lens
dirty
(1)
0-3
0
3
1
2
0 = OK. The reported attenuation is below 10%
1 = Reported window signal value is out of range (>30%)
Possible sensor fault or hood could be blocked
2 = Slight dirt build up (10% signal attenuation or higher)
3 = High level of dirt build up (>20%)
Emitter
temperature
0-3
0
1
1
3
0 = Temperature is within operating conditions
1 = Too low. Less than -40°C
2 = Too high. Over 80°C
3 = No sensor detected or below -54°C
Detector lens
dirty
(1)
0-3
0
3
1
2
0 = OK. The reported attenuation is below 10%
1 = Reported window signal value is out of range (>30%)
Possible sensor fault or hood could be blocked
2 = Slight dirt build up (10% signal attenuation or higher)
3 = High level of dirt build up (>20%)
Detector
temperature
0-3
0
1
1
2
0 = Temperature is within operating conditions
1 = Too low. Less than -40°C
2 = Too high. Over 80°C
3 = No sensor detected or below -54°C
Detector DC
saturation
level (amount
of background
light seen by
the detector
hood)
(1)
0-1
0
2
0 = Within limits
1 = Saturated. The sensor may not be able to perform visibility
readings in some circumstances. Possibly due to high level of
reflections into the detector.
NOTE
Page 37
CS120A and CS125 Visibility and Present Weather Sensors
32
System alarms break down
Alarm
Range
Severity
Definition
Hood
temperature
0-3
0
1
1
2
0 = Temperature is within operating conditions
1 = Too low. Less than -40°C
2 = Too high. Over 80°C
3 = No sensor detected or below -56°C
External
temperature
(CS125 only)
0-3
0
1
1
2
0 = Temperature is within operating conditions
1 = Too low. Less than -40°C
2 = Too high. Over 80°C
3 = No sensor detected or below -54°C
Signature
error
0-4
0
3
2
2
3
0 = No fault
1 = OS signature error at power up
2 = User memory signature did not match when last read
3 = User memory fault at power up. Secondary copy was
reinstated to correct error.
4 = User memory fault at power up. No secondary copy was
found to reinstate. Factory defaults have been reinstated.
System will need re-calibrating
Flash read
error
0-1
0
3
0 = No errors
1 = One or more errors reading user variables from flash
occurred
Flash write
error
0-1
0
3
0 = No errors
1 = One or more errors writing user variables to flash occurred
Particle limit
(CS125 only)
0-1
0
1
0 = No errors
1 = More particles detected than can be processed
(1)
With operating system 14 onwards, to avoid short term appearance of alarms caused by transient
events, such as insects or raindrops on the lens, the condition which triggers an increase in alarm level
must persist for 15 minutes before the alarm is set.
Errors are checked every 10 seconds and the next message output is updated with
the following exceptions:
Signature error is checked and reset at power up.
Flash read and write errors are checked when flash memory is updated, for
example when changes are made through the memory structure. They are also
reset on power up.
Particle limit is checked every minute and reset when read.
Particle count*
Range
Definition
0-7200
Value represented by an integer number of the current number of particle per minute.
(-99 indicates either an error or that the sensor has been powered less than one minute)
Intensity value*
Range
Definition
0 - 999.99
Value represented by a single precision value of the last minutes rainfall intensity in
mm/hr (-99 indicates either an error or that the sensor has been powered up less than
one minute)
SYNOP code*
Range
Definition
See Appendix C
SYNOP weather code for the last minute as defined by the WMO code table 4680.
(-1 indicates either an error or that the sensor has been powered up less than one
minute)
Page 38

Instruction Manual
33
Generic SYNOP code*
Range
Definition
See Appendix C
SYNOP weather code for the last three minutes as defined by the WMO code table
4680 simplified to give generic codes. (-1 indicates either an error or that the sensor
has been powered up for less than one minute)
METAR code*
Range
Definition
See Appendix C
METAR weather code for the last minute as defined by the WMO code table 4678.
External temperature*
Range
Definition
-40.0 - +80.0°C
External temperature in degrees Celsius
Relative humidity*
Range
Definition
0 - 100
External relative humidity in %RH (-99 indicates either a fault or no CS215 or
HygroVUE T/RH sensor is connected)
*CS125 only, see Appendix C.
11.5 Example sensor message outputs
Full format, visibility only (CS120A default)
2 0 0 10 9622 M 1 0 0 0 0 0 0 0 0 0 0 0 0 46AA
SYNOP present weather full format (CS125 default)
5 0 0 10 112 M 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 6 0.14 52 24.0 -99 9190
METAR present weather full format
8 9 0 60 6682 M 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 54 4.5 63 +RA 20.2 91 ABCD
Where:
9 is the sensor id
60 is the message interval (60 seconds)
6682 is the visibility in metres
M is the visibility units (metres)
54 is particle count
4.5 is intensity (4.5 mm/hr)
63 is the SYNOP code (heavy rain)
+RA is the METAR code (heavy rain)
20.2 is the temperature (20.2 deg. C)
91 is the RH (91%)
ABCD is the checksum
Page 39

CS120A and CS125 Visibility and Present Weather Sensors
34
11.6 Custom message format
Once a custom message has been formatted it can be output by selecting option 12
from the message - sub 3 menu.
The custom message format allows the CS120A/CS125 message to be modified to
meet particular requirements. The custom message contains a fixed basic set of
variables and up to 16 additional fields.
The custom message output is only available on OS7 and above.
The custom message is as follows:
Custom format
STX
Message ID Unit ID System status
Message
interv
al
Visibility
distance
Visibility
units
Up to 16
custom f
ields
Checksum
EOT
0x02
12
M or F
X X X …
XXXX
0x04
There are two ways to configure the custom message. The first is through the user
menu system. The second is through the use of logger commands. These logger
commands are MSGSET and MSGGET.
To configure the message using the user menu you will need to enter the sensor
menu system, see the following and Section 15. Entering the sensor menu system.
Return to the message menu 1 and select option 7. You will now be presented
with the list of options shown below:
NOTE
CS125 MESSAGE - SUB 3
Set the message output format. Current format is: FULL SYNOP
- Basic = 0
- Partial = 1
- Full = 2
- Basic SYNOP = 3
- Partial SYNOP = 4
- Full SYNOP = 5
- Basic METAR = 6
- Partial METAR = 7
- Full METAR = 8
- Generic Basic SYNOP = 9
- Generic Partial SYNOP = 10
- Generic Full SYNOP = 11
- Custom output = 12
->
Page 40

Instruction Manual
35
12 0 0 1 0 92 M1 000000000000 2 0 3 0 92 135 88EF
Menu 1: The message output menu
This will take you to message sub 4 so that the parameters required can be
selected from the available options to configure the message output format;
Enter the number of a custom message field you wish to use and type return. The
screen will update with a 1 next to the chosen field. Repeat for each field you
want then exit the menu. The changes take effect after selecting “Exit and Save”
from the main menu.
Example
In the following example selecting options 1, 3, 4, 10, 15 and 17 puts averaging
duration, system alarms, dirty windows values, SYNOP code, 10 minute average
visibility, and 1 sec visibility into the custom message.
This would give the following output:
Above the custom fields are “1 000000000000 2 0 30 92 135”. The averaging
duration is 1 minute, no system alarms are set, the emitter is reading 2%
contamination, the detector is reading 0% contamination, the SYNOP code is 30,
the 10 minute average visibility is 92 m and the 1 sec reading is 135 m.
CS125 MESSAGE - SUB 4
Configure the message output format:
1 - Averaging duration = 0
2 - User alarms = 0
3 - System alarms = 0
4 - Dirty windows values = 0
5 - Sensor serial number = 0
6 - Particle count = 0
7 - Intensity = 0
8 - Accumulation = 0
9 - Generic SYNOP = 0
10 - SYNOP code = 0
11 - METAR code = 0
12 - NWS code = 0
13 - Temperature (Degrees C) = 0
14 - Humidity (%) = 0
15 - 10 minute ave. vis. = 0
16 - Special 1 = 0
17 - One second vis = 0
18 - Past SYNOP = 0
19 - EXCO = 0
Or, choose 0 to exit when done.
->0
CS125 MESSAGE - MENU 1
ID 0
S/N E1007
(1) Set message format: FULL METAR
(2) Toggle units: METRES
(3) Toggle polled or continuous mode: CONTINUOUS
(4) Set continuous mode message-interval: 1 second(s)
(5) Toggle output averaging period: 1 minute(s)
(6) Sampling interval: 1 second(s)
(7) Configure custom message format
(9) Refresh
(0) Return to main menu
Page 41

CS120A and CS125 Visibility and Present Weather Sensors
36
The following describes the number of values output.
List of custom output values
Field
Description
Number of
values output
1
Averaging duration
1
2
User alarms
2
3
System alarms
12 4 Dirty windows values, as percentages, emitter followed by detector
2
5
Sensor serial number
1
6
Particle count
(1)
, particles in the previous minute
1 7 Intensity
(1)
, mm/hr
1
8
Accumulation
(1),(2)
1
9
Generic SYNOP
(1)
1
10
SYNOP code
(1)
1
11
METAR code
(1)
1
12
NWS code
(1)
1
13
Temperature (degrees C)
(1)
1
14
Humidity (%)
(1)(3)
1
15
Visibility averaged over the last 10 minutes
1
16
Special 1 (reserved)
1
17
One second visibility
(4)
1
18
Past SYNOP
1
19
EXCO
1
(1) These options are only available with a CS125.
(2) This increments to 999.99 mm before resetting to zero. It may be reset to zero at any time with the ACCRES command.
(3) Only outputs a valid value when a CS215/HygroVUE temperature and humidity probe is connected.
(4) The 1 second visibility output is provided ffor special applicationsand research purposes only. This output will have increased noise
levels especially at high visibilities.
12. Interface methods – Device Configuration Utility/Command line/Menu
The sensor can be set up and controlled in one of three ways.
The first method is by using Campbell Scientific’s Device Configuration Utility
Software (DevConfig) which is included with each delivery on the manuals/
resource disk. This software allows an easy menu driven interface for configuring
the sensor on any Microsoft™ based personal computer. All settings can be
accessed using this program.
The program includes online help instructions that describe its general use with
the sensor and also how to load an operating system.
The Device Configurator can also be used as a terminal emulator to use the builtin menu system of the sensor and to access its calibration menu.
The second method is by using the command line interface where discrete
commands are sent without response from the sensor. This would be the preferred
Page 42

Instruction Manual
37
method of setting up a sensor if it was connected to a logger for instance. The
configuration setting commands can be sent via a logger to the sensor removing
the need for a local PC to set up the unit.
The third method is by using the simple menu interface built into the sensor
communicating via RS-232 or RS-485, using a terminal emulator program. This
menu system gives access to the more common settings.
All three of these methods use the sensor’s serial connector B to communicate
with the sensor. This can be via the normal communications cable or a
configuration cable as described in Section 8.1.
12.1 Configuring a PC for talking to the sensor
The following describes the procedure for setting up communications using a
terminal emulator program. The terminal emulators built into many Campbell
Scientific software products can also be used.
The following settings should then be used by default:
Bits per second: 38400
Data bits: 8
Parity: none
Stop bits: 1
Flow control: none
Ensure that if the baud rate of the unit has been adjusted and then the
corresponding bits per second value is entered in the port settings of the terminal
emulator. The sensor should now be ready to accept commands.
It is possible to set the sensor into the default communication state via one of the
internal switches on the sensor main board. See Section 9.
13. Definition of the variables that can be set by the user on the sensor
Both DevConfig and the command line interface can access all the user
configurable variables within the sensor. The following lists the acceptable range
and the identification number for these variables along with a short description.
Table 13-1. User definable settings and descriptions
ID
Name
Range
Description
Factory
default
1
Sensor ID
0-9
Separate ID used as an extra identifier for a
particular sensor on a network.
0
2
User Alarm 1 Enabled
0-1
User alarm one activation state
0 = Alarm one disabled
1 = Alarm one enabled
0
3
User Alarm 1 Active
0-1
0 = Check if distance is less than ‘User alarm 1
Distance’
1 = Check if distance is greater than ‘User alarm
1 Distance’
0
Page 43

CS120A and CS125 Visibility and Present Weather Sensors
38
Table 13-1. User definable settings and descriptions
ID
Name
Range
Description
Factory
default
4
User Alarm 1 Distance
060000
Distance value that alarm one will trigger against.
This value will correspond to metres or feet
depending upon which is selected in ‘Visibility
Unit’
10000
5
User Alarm 2 Enabled
0-1
User alarm two activation state
0 = Alarm two disabled
1 = Alarm two enabled
0
6
User Alarm 2 Active
0-1
0 = Check if distance is less than ‘User alarm 2
Distance’
1 = Check if distance is greater than ‘User alarm 2
Distance’
0
7
User Alarm 2 Distance
060000
Distance value that alarm one will trigger against.
This value will correspond to metres or feet
depending upon which is selected in ‘Visibility
Unit’
10000
8
Baud rate
0-6
Baud rate for the main RS-232/RS-485 interface
0 = 115200 bps
1 = 57600 bps
2 = 38400 bps
3 = 19200 bps
4 = 9600 bps
5 = 2400 bps
6 = 1200 bps
2
9
Serial number
-
Internal serial number for the sensor.
(Read only)
-
10
Visibility Unit
M or F
Unit the visibility value will be presented as
M = metres
F = feet
M
11
Message Interval
1-3600
Interval in seconds between outputs in continuous
mode. This value has no effect if polled mode has
been selected in ‘Measurement mode’
60
12
Measurement mode
0-1
Selects polled or continuous modes.
In continuous mode the sensor will output a string
in the format as set by ‘Message Format’ at
regular intervals as defined by ‘Continuous
Interval’.
0 = Continuous mode
1 = Polled mode
0
13
Message Format
0-12
Output message
0, 1 and 2 = Basic, partial or full visibility
messages
3, 4 and 5 = Basic, partial or full SYNOP
messages
6, 7 and 8 = Basic, partial or full METAR
messages
9, 10 and 11 = Generic basic, partial or full
SYNOP messages
12 = Custom message
5
14
Serial port protocol
0-1
Selects the physical serial interface
0 = RS-232 mode
1 = RS-485 mode
0
15
Averaging period
1 or 10
The period of time that the visibility measurement
is averaged over. Either one minute or ten.
1
Page 44

Instruction Manual
39
ID
Name
Range
Description
Factory
default
16
Sample timing
1-60
Used to define the time interval between sampling
the volume. It is recommended that this value is
left at one except when very low power demands
are needed. Note that 1s sample timing is needed
for present weather measurement. For example:
1 = Sample every second
2 = Sample one second in every two
3 = Sample one second in every three etc.
1
17
Dew heater override
0-1
0 = Allow the sensor to automatically control the
dew heaters
1 = Turn the dew heaters off
0
18
Hood heater override
(1)
0-1
0 = Allow the sensor to automatically control the
hood heaters
1 = Turn the hood heaters off
0
19
Dirty window
compensation
0-1
0 = No compensation applied
1 = Compensation for dirt on lenses applied.
The sensor will compensate for up to 10% signal
loss due to dirt per lens.
0
20
Use CRC-16
0-1
0 = Disable command line CRC-16 checking
(2)
1 = Enable command line CRC-16 checking
Note: this does not affect communications via
DevConfig or terminal emulator.
0
21
Sensor power down
voltage
7-30
PSU Input voltage level below which the sensor
will enter low power mode. This is usually used to
protect batteries.
7.0
22
Relative humidity
(3)
threshold
1-99
Threshold at which the sensor will define
obscuration as liquid or dry if a CS215 is fitted.
80%
(1) Hood heater override needs to be set to ‘1’ (off) when either no hood heaters are installed or
the hood heaters have no power connected to them. This will save power as the relay is not
enabled at low temperatures in this mode.
(2) If disabled the sensor does not check the validity of received data against the checksum sent.
It is, however, recommended that checksum checking is enabled to remove any chance of the
sensor being configured incorrectly by accident.
(3) CS125 only.
14. Command line mode
The command line interface is broken down into three major commands. These
are GET, SET and POLL. The GET command is used to request all current user
settable values from the sensor. The SET commands sets user settable values and
the POLL command is used to request the current visibility and/or alarm
conditions from the sensor.
The sensor can be configured to expect any commands sent to it to include a valid
checksum. For simple commands, e.g. GET and POLL, fixed value checksums
can be used (see the downloadable example programs at:
www.campbellsci.com/downloads/cs125-example-programs or
www.campbellsci.com/downloads/cs120a-example-programs ).
For more complex SET commands the checksum needs to be calculated (see
Appendix B). The use of the checksum is disabled by default. It is recommended
that the checksum functionality is enabled where possible, especially when long
cable runs are used, or in electronically noisy environments.
Page 45

CS120A and CS125 Visibility and Present Weather Sensors
40
14.1 The SET Command
The set command is used to configure the sensor via the command line. The SET
command is a single space delimited string that can be sent from any data logger
or PC equipped with serial communications. The SET command and the ‘Device
Configuration Utility’ software access identical settings within the sensor, please
refer to the ‘Device Configuration Utility’ section of this document for a more
detailed breakdown of the setting available here. This command is used to change
the default power up state of the sensor. See Section 14.2 if a setting is going to be
changed on a regular basis e.g. heater controls.
See Section 12 for more information on the values used by the ‘SET’ command.
SET transmitted data
Example
Description
0x02
(1)
STX ^ B
(2)
SET
SET
:
Delimiting character
Current Sensor ID
:
Delimiting character
Sensor ID (may be a new ID)
User Alarm 1 Set
User Alarm 1 Active
User Alarm 1 Distance
User Alarm 2 Set
User Alarm 2 Active
User Alarm 2 Distance
Serial Baud Rate
Sensor serial number (read only)
Visibility Units
Message interval
Polling or Continuous modes
Message Format
RS-232 or RS-485 serial communications enabled
Averaging Period
Sample timing
Dew heater override
Hood heater override
Dirty window compensation
CRC-16 checking on received commands
Sensor power down voltage
Relative humidity threshold
(3)
:
Delimiting character
XXXX
Checksum (use the valid CRC-16 checksum)
:
Delimiting character
0x03
(1)
ETX ^ C
(2)
0x0D
(1)
Carriage return
0x0A
Line feed
(1) These values are shown in hexadecimal format not ASCII.
(2) As entered on a keypad.
(3) CS125 only.
14.1.1 Example of a SET Command
SET:0:0 1 1 1000 1 0 15000 2 0 M 60 1 2 0 1 1 0 0 0 1 7 80 :68A3:
Page 46

Instruction Manual
41
14.2 The SETNC Command
The format of the SETNC command is nearly exactly the same as the SET
command. The only functional difference is that the SETNC command does not
commit the values set into flash memory. This means that the next time the sensor
is power cycled it will revert back to its previous settings. This command should
be used when a setting in the sensor is changed regularly, e.g. heater functions, as
this command avoids the risk of wearing out the flash storage memory.
This includes communication data rates as well.
14.2.1 Example of a SETNC Command
14.3 The MSGSET Command
The user customisable message format can be configured using the MSGSET
command.
When a valid MSGSET command is issued a MSGGET response comes back
from the sensor.
Example
Bit
Description
0x01
(Hex)
-
SOH
:
-
Delimiting character
MSGSET
-
MSG SET
:
-
Delimiting character
0
-
Sensor ID
:
-
Delimiting character
The following represent 16 bits of a hex value
16
Reserved
15
Reserved
14
Humidity (%)
(1) (2)
13
Temperature (Degrees C)
(1)
12
NWS code
(1)
11
METAR code
(1)
10
SYNOP code
(1)
9
Generic SYNOP
(1)
8
Accumulation
(1)
7
Intensity
(1)
6
Particle count
(1)
5
Sensor serial number
4
Dirty windows values
3
System alarms
2
User alarms
1
Averaging duration
:
Delimiting character
XXXX
Checksum
:
Delimiting character
0x04
(Hex)
EOT
NOTE
SETNC:0:0 1 1 1000 1 0 15000 2 0 M 60 1 2 0 1 1 0 0 0 1 7 80 :XXXX:
Page 47

CS120A and CS125 Visibility and Present Weather Sensors
42
These selections output more than one variable
(1) These options will only be available if you’re using a CS125
(2) Only outputs a valid final message value when a CS215 temperature and humidity probe is connected
Description of the custom message bits
Bit
Description
8000
Reserved
4000
Reserved
2000
Humidity (%)
1000
Temperature (Degrees C)
0800
NWS code
0400
METAR code
0200
SYNOP code
0100
Generic SYNOP
0080
Accumulation
0040
Intensity
0020
Particle count
0010
Sensor serial number
0008
Dirty windows values
0004
System alarms
0002
User alarms
0001
Averaging duration
The HEX value is the sum of all the required fields.
The following example shows the calculation of the HEX value to use a MSGSET
message to set a CS125 to output temperature, SYNOP code, sensor serial
number, dirty windows values and system alarms.
Description of the custom message bits
Bit
Description
8000
Reserved
4000
Reserved
2000
Humidity (%)
1000
Temperature (Degrees C)
0800
NWS code
(3)
0400
METAR code
0200
SYNOP code
(3)
0100
Generic SYNOP
(3)
0080
Accumulation
(3)
0040
Intensity
(3)
0020
Particle count
(3)
0010
Sensor serial number
0008
Dirty windows values
0004
System alarms
Page 48

Instruction Manual
43
0002
User alarms
0001
Averaging duration
121C
Sum for MSGSET message
The hex value is the hexadecimal sum of the hex values of the chosen fields (in
bold text).
The message sent is:
The response is:
In this case “7067” is the checksum
14.4 The GET Command
The GET command retrieves settings data from the sensor, including message
format data and user alarm settings amongst others. This command does not
retrieve visibility or environmental information from the sensor. To retrieve
visibility data refer to the POLL command.
The GET command
GET command transmitted data
Example
Description
0x02
(1)
STX ^ B
(2)
GET
GET
:
Delimiting character
0
Address based on Sensor ID
:
Delimiting character
0
Reserved for future use, zero default
:
Delimiting character
XXXX
Checksum
:
Delimiting character
0x03
(1)
ETX ^ C
(2)
0x0D
(1)
Carriage return
0x0A
Line feed
(1) These values are shown in hexadecimal format not ASCII.
(2) As entered on a keypad
Example of a GET command
GET:0:0:XXXX:
MSGSET:0:161C:9794:
161C 7067
Page 49

CS120A and CS125 Visibility and Present Weather Sensors
44
Data returned by the GET command
GET returned data
Example
Description
0x02
(1)
STX
Sensor ID
User Alarm 1 Set
User Alarm 1 Active (0 = less than)
User Alarm 1 Distance
User Alarm 2 Set
User Alarm 2 Active
User Alarm 2 Distance
Serial Baud Rate
Sensor serial number (read only)
Visibility Units
Message interval
Polling or Continuous modes
Message Format
RS-232 or RS-485 serial communications enabled
Averaging Period
Sample timing
Dew heater override
Hood heater override
Dirty window compensation
CRC-16 checking on received commands
Sensor power down voltage
Relative humidity threshold
XXXX
Checksum
0x04
(1)
EOT
0x0D
(1)
Carriage return
0x0A
Line feed
(1) These values are shown in hexadecimal format not ASCII.
Example of a GET returned data
0 0 0 10000 0 0 10000 2 1009 M 30 0 2 1 1 1 0 0 0 1 11.5 80 D4FD
Explanation:
Sensor ID = 0
User Alarm 1 not set
User Alarm 1 not active
User Alarm 1 distance = 10000 metres
User Alarm 2 not set
User Alarm 2 not active
User Alarm 2 distance = 10000 metres
Serial baud rate 2 (= 38400 Bd)
Serial number = 1009
Visibility Units = M
Page 50

Instruction Manual
45
Continuous mode output interval = 30 seconds
Polling mode = 0 (continuous mode)
Message format = 2 (full message)
RS-232 or RS-485 serial communications = 1 (RS-485)
Averaging period = 1 minute
Sample timing = 1 sample per second
Dew heater override = 0 (sensor will automatically control the dew heaters)
Hood heater override = 0 (sensor will automatically control the hood heaters)
Dirty window compensation = 0 (dirty window compensation off)
CRC-16 checking on received commands = 1 (CRC-16 checking enabled)
Sensor power down voltage = 11.5V
Relative humidity threshold 80 (CS125 only)
Checksum = D4FD
14.5 The MSGGET Command
The Message Get (MSGGET) command retrieves the current settings of the
custom message from the sensor.
MSGGET command transmitted data
Example
Description
0x01
(Hex)
SOH
:
Delimiting character
MSGGET
MSG GET
:
Delimiting character
0
Address based on Sensor ID
:
Delimiting character
0
Payload
:
Delimiting character
XXXX
Checksum
:
Delimiting character
0x04
(Hex)
EOT
Example of the MSGGET command as sent to the sensor
The message sent is:
The response is:
MSGGET:0:0:C6ED:
161C 7067
Page 51

CS120A and CS125 Visibility and Present Weather Sensors
46
14.6 The POLL command – Polling the sensor
The POLL command requests the current visibility and/or alarm conditions from
the sensor. The output format of this command depends on how the sensor is
configured using the SET command or the menu interfaces.
The POLL command
POLL command transmitted data
Example
Description
0x02
(1)
STX, ^B
(2)
POLL
POLL
:
Delimiting character
0
Address based on Sensor ID
:
Delimiting character
0
Reserved for future use, zero default
:
Delimiting character
XXXX
Checksum
(3)
:
Delimiting character
0x03
(1)
ETX, ^C
(2)
0x0D
(1)
Carriage return
0x0A
Line feed
(1) These values are shown in hexadecimal format not ASCII.
(2) As entered on a keypad.
(3) Not case sensitive.
The maximum response time to a poll command is 100 ms.
If the setting to check the checksum on received commands is enabled the
checksum varies with the Sensor ID value. The following table gives the POLL
command for different sensor ID’s with the correct checksum.
POLL commands for different sensor IDs
ID
POLL command with checksum
0
POLL:0:0:3A3B:
1
POLL:1:0:0D0B:
2
POLL:2:0:545B:
3
POLL:3:0:636B:
4
POLL:4:0:E6FB:
5
POLL:5:0:D1CB:
6
POLL:6:0:889B:
7
POLL:7:0:BFAB:
8
POLL:8:0:939A:
9
POLL:9:0:A4AA:
NOTE
Page 52

Instruction Manual
47
14.7 The ACCRES command – Resetting the accumulation value
If accumulation is included in a custom message the ACCRES command resets
the accumulation to zero. See Section 11.6.
The ACCRES command
ACCRES command transmitted data
Example
Description
0x02
(1)
STX, ^B
(2)
ACCRES
ACCRES
:
Delimiting character
0
Address based on Sensor ID
:
Delimiting character
0
Reserved for future use, zero default
:
Delimiting character
XXXX
Checksum
(3)
:
Delimiting character
0x03
(1)
ETX, ^C
(2)
0x0D
(1)
Carriage return
0x0A
Line feed
(1) These values are shown in hexadecimal format not ASCII.
(2) As entered on a keypad.
(3) Not case sensitive.
Example of an ACCRES command
If the setting to check the checksum on received commands is enabled the
checksum varies with the Sensor ID value.
15. Entering the sensor menu system
The user can enter the menu system by typing ‘open id’ into their terminal
program then pressing the return key on their keyboard. The id corresponds to the
sensor ID number. The Sensor ID number can be in the range of 0 to 9. The
factory default is 0.
ACCRES:2:0:3A68:
Page 53

CS120A and CS125 Visibility and Present Weather Sensors
48
The ‘open 0’ command is not normally echoed.
The terminal menu only gives access to more common settings.
The following text should now be displayed:
The setup menu
The displayed options are accessed simply by typing the corresponding number
then pressing return. No changes will take effect until you ‘save and exit’. The
exception to this is the calibration menu, but you will be informed before any
changes are made.
The displayed options are accessed simply by typing the corresponding number
then pressing return. No changes will take effect until you ‘Exit and Save’. The
exception to this is the calibration menu, but you will be informed before any
changes are made.
Typing ‘1’ opens the message menu containing settings relating to the sensor’s
outputs.
Menu 1: The message output menu
CS125 MESSAGE - MENU 1
ID 0
S/N E1007
(1) Set message format: FULL METAR
(2) Toggle units: METRES
(3) Toggle polled or continuous mode: CONTINUOUS
(4) Set continuous mode message-interval: 1 second(s)
(5) Toggle output averaging period: 1 minute(s)
(6) Sampling interval: 1 second(s)
(7) Configure custom message format
(9) Refresh
(0) Return to main menu
->0
While in the message output menu, typing ‘1’ allows the message format to be set
(Section 11.6). The following lists options. Type the appropriate number to set the
required message format. The messages are described in more detail in Section 11.
Note that the CS120A Visibility Sensor can only output messages 0-2 and a
limited custom message.
NOTE
WELCOME TO THE CAMPBELL SCIENTIFIC LTD CS125 SETUP
MENU
ID 0
S/N 2003
(1) Message output menu
(2) User alarm menu
(3) Calibrate sensor
(4) System information
(5) Communications setup
(6) System configuration
(9) Exit and save
(0) Exit and don't save
Page 54

Instruction Manual
49
CS125 MESSAGE - SUB 3
Set the message output format. Current format is: FULL
SYNOP
- Basic = 0
- Partial = 1
- Full = 2
- Basic SYNOP = 3
- Partial SYNOP = 4
- Full SYNOP = 5
- Basic METAR = 6
- Partial METAR = 7
- Full METAR = 8
- Generic Basic SYNOP = 9
- Generic Partial SYNOP = 10
- Generic Full SYNOP = 11
- Custom output = 12
->
While in the message output menu, typing ‘2’ will toggle the units through the
options ‘METRES’ and ‘FEET’ or by typing ‘4’ it will allow the message interval
to be entered.
In setup menu, typing ‘2’ allows the User Alarms to be set, again by toggling
through options or changing values.
Menu 2: The user alarm menu. Sub menu 2: Alarm two activation level
(Option 6)
Option (3) is the calibration menu
CS125 ALARM - MENU 2
ID 0
S/N 1009
(1) Toggle user alarm one: DISABLED
(2) Toggle alarm one threshold: LESS THAN
(3) Set new user alarm one activation point: 10000 m
(4) Toggle user alarm two: DISABLED
(5) Toggle alarm two threshold: LESS THAN
(6) Set new user alarm two activation point: 10000 m
(9) Refresh
(0) Return to main menu
->
Page 55

CS120A and CS125 Visibility and Present Weather Sensors
50
Typing ‘3’ while in the setup menu opens the calibration menu.
Menu 3: The calibration menu
Consult the ‘calibration’ section (Section 16) of this manual for information on
how to calibrate the sensor.
Once a calibration is finished changes are immediate, but factory
calibrations can be restored if needed using Option ‘(2)’ in the
calibration menu. The disk constants however remain as the last
disk used.
Typing ‘4’ while in the setup menu option opens the systems information menu
containing useful information such as temperature and system alarms.
The parameters ‘calibration value factory offset’ and ‘calibration value factors
scale’ are the factory calibration coefficients from the last factory calibration. The
parameters ‘calibration value cal offset’ and ‘calibration value cal scale’ are the
calibration coefficients from the latest calibration.
NOTE
CS125 CALIBRATION - MENU 3
ID 0
S/N 1003
(1) Perform calibration
(2) Restore the factory calibration
(3) Perform dirty windows zero offset calibration
(4) Restore dirty windows factory calibration
(9) Refresh
(0) Return to main menu
->
Page 56

Instruction Manual
51
Menu 4: The system information menu
If either of the dirty window alarms are set it is recommended you follow the
cleaning section of this manual (Section 18).
If there is a flash error or signature error it is recommended that you contact
Campbell Scientific.
The sensor power down voltage shown before the supply voltage is not available
for CS120A sensors with serial numbers less than E1030.
CS125 INFORMATION - MENU 4
ID 0
S/N E1007
OS version: 007646v14
Alarm Value
- Last visibility reading: - 14899m
- Overall system status: 0 No faults
- Emitter dirty window alarm: 0 0%
- Emitter internal temperature: 0 27.6
- Detector dirty window alarm: 0 0%
- Detector internal temperature: 0 25.1
- Detector DC light saturation: 0 -
- Hood heater temperature: 0 20.3
- CS125 Calibrator Serial No: - 2000
- CS125 Calibrator EXCO: - 23.7
- Calibration value factory offset: - 0.031
- Calibration value factory scale: - 0.02493
- Calibration value cal offset: - 0.031
- Calibration value cal scale: - 0.02493
- Signature fault: 0 -
- Flash write errors: 0 0
- Flash read errors: 0 0
- Supply voltage: <7.0V 12.4V
- Aux supply voltages: +5V=5.0 -5V=-5.1 +6V=5.9
- External temperature: 0 22.2
- Present weather mode enabled
- TMOR mode disabled
(8) Get debug
(9) Refresh
(0) Return to main menu
->0
Page 57

CS120A and CS125 Visibility and Present Weather Sensors
52
Menu 5: The communication menu
The communications menu is used to set baud rates and the mode of operation
(RS-232/RS-485).
No change will take effect until you ‘exit and save’.
Menu 6: Configuration
This menu sets dew and hood heaters to automatic or off, dirty window
compensation and CRC-16 checking.
In addition it allows the sensor power down voltage to be set. If set this will put
the sensor into a low power state (which will not make measurements) before the
battery voltage has fallen low enough to damage a back-up battery.
The RH threshold for a CS125 can also be set from this menu. This applies if a
CS215 sensor is attached and defines the level of RH below which obscuration is
deemed to be dry (that is haze, SYNOP 04 or 05, METAR HZ) rather than wet
(mist, SYNOP 10, METAR BR or fog, SYNOP 30 etc. METAR FG).
The default for Patchy Fog is ON in which case the message outputs will include
BCFG. If patchy fog is toggled to OFF the message output will not include BCFG.
It can be better sometimes to not output BCFG with some aviation systems.
NOTE
CS125 COMMUNICATIONS - MENU 5
ID 0
S/N 1009
(1) Set sensor ID
(2) Set RS-232/RS-485 baud rate: 38400
(3) Toggle RS-232/RS-485 modes: RS-232
(9) Refresh
(0) Return to main menu
->
CS125 CONFIGURATION - MENU 6
ID 0
S/N E1007
(1) Dew heater: AUTOMATIC
(2) Hood heater: AUTOMATIC
(3) Dirty window compensation: COMPENSATED
(4) Command line CRC Checking: DO NOT CHECK
(5) Sensor power down voltage: 7.0V
(6) RH threshold: 80%
(7) Toggle patchy fog: ON
(8) Toggle status LED: AUTOMATIC
(10) Set hood heater ON above: 15
(11) Set hood heater OFF below: 25
(9) Refresh
(0) Return to main menu
->
Page 58

Instruction Manual
53
Option (8) is reserved for future use.
Option (10) and (11) allows the user to manually set the temperatures at which the
hood heaters turn on and off. These values are not normally changed as they are
set to reduce the chances of icing in bad weather conditions and dew formation on
the lenses.
Menu 9 and 0: Exiting the menu system
Options ‘9’ and ‘0’ exit from the menu system. Note that typing ‘0’ will lose all
changes made including communications settings.
16. Calibrating the sensor
16.1 Visibility calibration
The sensor can be checked and adjusted using the optional sensor high grade
calibration kit. The calibration must be run using the onboard menu system. If you
have Campbell Scientific’s Device Configuration program a terminal emulation
screen is provided in the sensor screens to let you access this function. To perform
the calibration you will need a sensor calibrator disk and a computer with a
standard serial port compatible with the sensor. If your sensor is not currently
configured for RS-232 communications you can set the internal switch, switch
three, to temporarily set the sensor to RS-232 mode 38400 bps. If the sensor is
already set in RS-232 mode it should not be necessary to change any internal
switches. (See Section 10 for more information on the sensor internal switches.)
The test should ideally be performed in the following conditions:
• Ambient temperature should be between 0ºC and 50ºC
• The local visibility should be approximately 10,000 metres or higher.
The system is self-regulating. However, it is recommended that the sensor is
calibrated at least every two years.
The calibration is performed from menu item 3 on the main terminal screen.
Please refer to the menu section (Section 13) of this manual for further
information on how to access this menu.
Once you have selected menu item 3 you should be presented with the following
screen.
CAMPBELL SCIENTIFIC LTD sensor menu exited.
Page 59

CS120A and CS125 Visibility and Present Weather Sensors
54
CS125 CALIBRATION - MENU 3
ID 0
S/N 1006
(1) Perform calibration
(2) Restore the factory calibration
(3) Perform dirty windows zero offset calibration
(4) Restore dirty windows factory calibration
(9) Refresh
(0) Return to main menu
Select option 1 to start the calibration. You will then be asked to confirm that you
would like to perform a calibration. Please note, once you have entered yes at this
point you will not be able to exit until the test is complete. However, power
cycling the unit at this point will have no adverse effect on the sensor.
At this stage it is advisable to clean the lenses. Refer to Section 18
‘Cleaning’ for more information. A simple visual check may be
enough to confirm the lenses are clean.
Once you have started the tests you will be asked for the sensor calibrator serial
number and extinction coefficient (EXCO) with a confirmation at each step giving
you the chance to correct typing mistakes.
You should not enter the “E” at the start of the calibration disk serial number.
When asked for confirmation you do not need to press return after
you type ‘y’.
NOTE
NOTE
Do you want to perform a calibration Y/N? Y
Starting calibration.
Input the calibration disk serial number ->2000
Is 2000 correct? (Y/N)? Y
Input the calibration disk EXCO ->23.7
Is 23.7 correct? (Y/N)? Y
Place one calibration bung into each hood, then
press any key.
Do you want to perform a calibration Y/N?
Page 60

Instruction Manual
55
Figure 16-1. Calibration disk
When you have entered the calibrator information the sensor will wait for you to
place the foam bungs into the sensor hoods. The bungs are designed to block all
light from the outside reaching inside the head. Place one bung into each hood. If
either of the bungs are damaged or appear to have any gaps around the edge please
contact Campbell Scientific.
This part of the test will take approximately two minutes. Every ten seconds a dot
should appear indicating that the test is progressing as normal.
Remove the bungs once the sensor instructs you to. Place the sensor calibrator
into the volume by fastening it to the central mounting point.
At this stage it is advisable to perform a simple visual check of the
cleanliness of the calibration plate. If contaminated clean it on both
sides. Refer to Section 18, Cleaning.
NOTE
CS120A/CS125 High
grade calibrator serial
number, extinction
coefficient (EXCO) and
equivalent MOR will be
written here
Starting dark level calibration.
This test will take approximately two minutes.
Dark level test complete. Please remove the bungs.
Now place the sensor calibrator into the sampling
volume.
Press any key once this is done.
CS120A/CS125 High
grade calibrator serial
number, extinction
coefficient (EXCO) and
equivalent MOR and
TMOR will be written here.
Page 61

CS120A and CS125 Visibility and Present Weather Sensors
56
Figure 16-2. Mounting calibration disk
This part of the test will take approximately two minutes. Every ten seconds a dot
should appear indicating that the test is progressing as normal.
Once the second stage of the test has been completed the new calibration constants
will be saved automatically. All calibration constants including both the user and
the factory setting can be viewed from menu item 4 from the main menu once the
test is completed. It is generally good practice to check the process has worked by
observing the measured visibility values output by the sensor with the calibration
disk still in place. The sensor should output a visiblity reading in its messages or
in the information screen which is close to the value printed on the disc. On disks
made from late 2020 on two values are printed on the disk arm, a value or MOR
and a value of TMOR. Use the value that matches the setup of your sensor (the
MOR/TMOR mode is set by switch 4).
Starting light level calibration.
This test will take approximately two minutes.
Calibration is now complete.
Saving user settings.
Press any key to exit.
Page 62

Instruction Manual
57
16.2 Dirty window zero calibration
Option 3 in the calibration menu allows the user to reset the zero contamination
level for dirty windows detection (option 4 allows a return to the factory value if
something goes wrong with the calibration process.)
This should be carried out every two years to correct for any slight drift in the
dirty window detection or changes caused by scratches or degradation of the
lenses some of which may not be visible to the naked eye.
To carry out the dirty window zero offset calibration make sure the windows are
very clean (see Section 18). Temperature should ideally be in the range 15-30°C
and the sensor should have been powered up for over 5 minutes. Before starting
this process make sure the lenses are dry and that neither the calibration bungs or
calibration disk are in place.
CS125 CALIBRATION - MENU 3
ID 0
S/N 1006
(1) Perform calibration
(2) Restore the factory calibration
(3) Perform dirty windows zero offset calibration
(4) Restore dirty windows factory calibration
(9) Refresh
(0) Return to main menu
Typing ‘3’ returns text similar to the following:
Current values EO=3200 DO=4649 DD=995
Cal DW offset? Y/N?
Then type ‘Y’. The sensor responds in a similar way to the following:
Calibrating dirty window system...Please wait
EO=3230 ES=371 DO=2251 DS=234 DD=1140
Press any key to exit (Not return)
The numbers reported are internal measurements reported for reporting to the
factory in case of a fault. Press any key and the dirty window zero offset
calibration is complete. As a final check of a successful calibration return to the
information screen and check the two dirty window alarm values which should not
report close to 0%.
16.3 Internal temperature check (CS125 only)
The CS125 has an internal temperature sensor in one of the cross arms. This is
used as part of the present weather identification if a CS215 temperature and RH
sensor is not connected. This does not need recalibration but can be checked if a
suitable nearby reference temperature measurement is available. The CS125
external temperature given in some standard messages (see Section 11) or in the
system information menu (see Section 15) should be within about 3°C of the
reference. The comparison should ideally be made in cloudy and windy conditions
and as near to 0°C as possible.
Page 63

CS120A and CS125 Visibility and Present Weather Sensors
58
17. Performing an operating system update
Operating system updates for the present weather sensor are performed using
Campbell Scientific’s Device Configuration Utility (DevConfig) software. Please
refer to the help built into the DevConfig software for full instructions on how to
update the sensor operating system. The following figures show the procedure
using DevConfig.
To use DevConfig to carry out an OS change requires RS-232
communication. If a sensor is set to communicate by RS-485 it can
be temporarily set to RS-232 with switch 3 (see Section 10).
Figure 17-1. Sensor DevConfig download instructions
NOTE
Page 64

Instruction Manual
59
Figure 17-2. Sensor DevConfig screen when OS update is complete
Page 65

CS120A and CS125 Visibility and Present Weather Sensors
60
18. Cleaning
The sensor is a robust instrument that will provide years of uninterrupted weather
monitoring. Calibration is carried out at the factory and can be redone easily on
site with the optional sensor calibrator or carried out by Campbell Scientific if
required. Only general cleaning of the lenses is required to keep the sensor
working efficiently.
Cleaning of the sensor will be required from time to time to ensure that the lenses
are free from contaminants. The frequency of required cleaning depends on the
exposure of the instrument to such contaminants. This will vary depending on the
site location. The sensor is capable of self diagnosing dirty lenses and will indicate
in its output when the lenses are contaminated to such a degree that its visibility
measurements may be affected.
A lower level of contamination than is detected by the dirty window
alarms, can affect the visibility measurements. The sensor can be
configured to attempt to make a correction for contamination
although the accuracy of that correction depends on the ‘type of
dirt’.
We suggest 6 monthly intervals for locations not prone to contaminants and
monthly intervals for those prone to contamination (roadside or airport use). In
some cases more frequent cleaning may be required where there are high levels of
contaminants and high dependency on the instrument output.
If the lenses require cleaning, it is very important that only a
proper lens cloth or lens tissue be used. The use of
inappropriate materials to clean the lenses can permanently
damage or reduce the effectiveness of the lenses leading to
errors in measurement of precipitation and visibility.
It is advisable to use an air duster to blow any loose dust and dirt from the lenses
as a first step. Using a lint free lens cloth or lens tissue impregnated with a small
amount of isopropyl alcohol solvent clean the lens surface by dragging the cloth
across the lens surface being careful not to apply excessive pressure.
Excessive pressure may lead to some types of contaminant scratching the lens
surface. Over time such scratches can lead to reduced sensor accuracy.
Spiders webs and certain ‘fluffy ’ seeds which get lodged in the
optical path can lead to the sensor permanently giving low readings
and can lead to false reports of precipitation. Cleaning the visibility
contamination away with a duster will return the sensor to normal
operation.
If spiders are a persistent problem, using some carefully applied
insecticide can deter them.
NOTE
CAUTION
NOTE
Page 66

Instruction Manual
61
19. Lubricating the enclosure screws
The sensor enclosure screws should be lubricated with a suitable anti-seize grease
to protect the threads from corrosion. This should be reapplied when resealing the
enclosure at regular intervals, normally after replacing the desiccant. This is of
particular importance if using the sensor in corrosive or salt laden atmospheres.
20. Desiccant
Two bags of desiccant are supplied. One is inside the enclosure, the other is
separate and sealed in a plastic bag. Desiccant use depends on your application but
for use in typical temperature conditions one bag is sufficient for a twelve month
period. The desiccant should be placed inside the enclosure taking care that it is
not trapped between the lid and the enclosure when the lid is replaced.
The second bag of desiccant should be kept in the plastic shipping bag as a
replacement for when the initial bag needs to be dried out. The bags can be rotated
in this way many times. Desiccant bags can be dried out by the following method:
1. Arrange the bags on a wire tray in a single layer to allow for adequate air flow
around the bags during the drying process. The oven’s inside temperature
should be room or ambient temperature (25°C - 30°C). A convection,
circulating, forced air type oven is recommended for this regeneration
process. Seal failures may occur if any other type of heating unit or appliance
is used.
2. When placed in a forced air, circulating air, or convection oven, allow a
minimum of 4 to 5 cm of air space between the top of the bags and the next
metal tray above the bags. If placed in a radiating exposed infra-red element
type oven, shield the bags from direct exposure to the heating element, giving
the closest bags a minimum of 40 cm clearance from the heat shield.
Excessive surface film temperature due to infra-red radiation will cause the
Tyvek material to melt and/or the seals to fail. Seal failure may also occur if
the temperature is allowed to increase rapidly. This is due to the fact that the
water vapour is not given sufficient time to diffuse through the Tyvek
material, thus creating internal pressure within the bag, resulting in a seal
rupture. Temperature should not increase faster than 0.1°C to 0.3°C per
minute.
3. Set the temperature of the oven to 118°C, and allow the bags of desiccant to
reach equilibrium temperature.
Tyvek has a melting temperature of 121°C - 127°C.
(NON MIL-D-3464E activation or reactivation of both silica gel and
Bentonite clay can be achieved at temperatures of 104°C).
4. Desiccant bags should be allowed to remain in the oven at the assigned
temperature for 24 hours. At the end of this period, the bags should be
immediately removed and placed in a desiccators jar or dry (0% relative
humidity) air tight container for cooling. If this procedure is not followed
precisely, any water vapour driven off during reactivation may be re-adsorbed
during cooling and/or handling.
CAUTION
Page 67

CS120A and CS125 Visibility and Present Weather Sensors
62
5. After the bags of desiccant have been allowed to cool in an airtight desiccator,
they may be removed and placed in either an appropriate type polyliner
tightly sealed to prevent moisture adsorption, or a container that prevents
moisture from coming into contact with the regenerated desiccant. Some care
should be taken when re-activating desiccant bags. If heated in an oven which
is too hot, the bags may burst. If in any doubt, we recommend purchasing
new desiccant packs instead of oven drying. Failure to use or exchange the
desiccant may lead to condensation inside the enclosure. Not only will this
lead to corrupted data but, in the long term, can also cause corrosion which is
expensive to repair.
Page 68

Add-1
Addendum - Hail monitoring (CS125 only)
The CS125 can specifically report hail in its output messages by connecting to it a
WXT531 hail sensor via the internal SDI-12 port, which is otherwise used for
connecting the CS215 T/RH sensor to the CS125. The connections are shown in
Figure A1 overleaf.
When connected to a WXT531 the CS125 reads the number of hail particles that are
detected every minute. To ensure that hail is attributed accurately, the CS125 only
reports hail, sensed by the WXT531 if, during the same period, the CS125 has
detected one or more particle passing through its sensing volume. In this case it will
change the WMO code to the hail code.
If it is required that the CS125 monitor hail, RH and Temperature, the alternative
WXT535 hail sensor should be used. This is a combined sensor that connects to the
CS125 in the same manner as the WXT531.
Either WXT sensor can be mounted on the same mast as the CS125 but care should
be taken to ensure that it is placed to avoid the sampling zone for the CS125.
Operation of the CS125 with either the WXT531, or WXT535, requires the CS125
to be installed with Operating System 11 (OS11) or later. Free OS upgrades for
CS125 sensors are available from Campbell Scientific.
Note on connecting a hail sensor to a CS125
Summary
This describes the wiring and mechanical arrangement in connecting a WXT531, or
WXT535, hail sensor to a CS125.
This is applicable to CS125 sensors running OS11 or above.
Wiring
The hail sensor connects to the SDI-12 port inside the CS125 otherwise used for a
T/RH sensor as shown in Figure A1. It draws power over this connection in addition
to communicating to the CS125.
See also Sections 8 and 9 of this instruction manual.
Page 69

CS120A and CS125 Visibility and Present Weather Sensors
Add-2
Figure A1. Electrical connections between the WXT531 (shown) or WXT535
Hail Sensor and host CS125
Page 70

A-1
Appendix A. CS120A/CS125 block diagram
Page 71

B-1
Appendix B. Example C code of the CRC-16 checksum
This appendix is an example for programmers implementing their own code to
communicate with the sensor. The Checksum command in CRBasic can generate a
CRC-16 checksum. Command: Checksum/ChkSumString,1,0).
The checksum includes all characters excluding the SOT, EOT and the checksum
itself.
The POLL, SET and SETNC commands also exclude the two delimiting `:’ characters,
one on each side of the checksum itself.
//---------------------------------------------------------------------------// Creates a CCITT CRC-16 checksum seeded with 0x0000 (XModem style) using a
// fast non table based algorithm.
// Pass in the data to convert into a CRC-16 in the form of a NULL terminated
// character array (a string).
// Returns the CRC-16 in the form of an unsigned 16 bit integer value
// Note: This algorithm has only been tested on a native 16-bit processor with
// a hardware barrel shifter
// All integers are 16-bits long
//---------------------------------------------------------------------------unsigned int CRC-16_CCITT(char LineOfData[]){
unsigned int crc; // returned CRC-16 value
unsigned int i; // counter
crc = 0x0000;
// create a check sum for the incoming data
for(i=0;i < strlen(LineOfData); i++){
unsigned crc_new = (unsigned char)(crc >> 8) | (crc << 8);
crc_new ^= LineOfData[i];
crc_new ^= (unsigned char)(crc_new & 0xff) >> 4;
crc_new ^= crc_new << 12;
crc_new ^= (crc_new & 0xff) << 5;
crc = crc_new;
}
return(crc);
}
Page 72

C-1
Appendix C. Present Weather Codes
C1. SYNOP Codes produced by the CS125
56 codes are available.
Weather Type
4680 Code
No significant weather observed
0
Haze or smoke, or dust in suspension in the air, visibility ≥ 1 km*
4
Haze or smoke, or dust in suspension in the air, visibility < 1 km*
5
Mist
10
Fog (in the preceding hour)
20
Precipitation (in the preceding hour)
21
Drizzle (not freezing) or snow grains (in the preceding hour)
22
Rain (not freezing), (in the preceding hour)
23
Snow (in the preceding hour)
24
Freezing rain or freezing drizzle (in the preceding hour)
25
FOG
30
Fog or ice fog in patches
31
Fog or ice fog, has become thinner during the past hour
32
Fog or ice fog, no appreciable change during the past hour
33
Fog or ice fog has begun or become thicker during the past hour
34
Fog depositing rime
35
PRECIPITATION
40
Precipitation, slight or moderate
41
Precipitation, heavy
42
Solid precipitation, slight or moderate**
45
Freezing precipitation, slight or moderate**
47
Freezing precipitation, heavy**
48
DRIZZLE**
50
Drizzle, not freezing, slight
51
Drizzle, not freezing, moderate
52
Drizzle, not freezing, heavy
53
Drizzle, freezing, slight
54
Drizzle, freezing, moderate
55
Drizzle, freezing, heavy
56
Drizzle and rain, slight
57
Drizzle and rain, moderate or heavy
58
RAIN**
60
Rain, slight
61
Rain, moderate
62
Rain, heavy
63
Rain, freezing, slight
64
Rain, freezing, moderate
65
Rain, freezing, heavy
66
Rain (or drizzle) and snow, slight
67
Rain (or drizzle) and snow, moderate or heavy
68
SNOW**
70
Snow, slight (snow includes graupel)
71
Snow, moderate (snow includes graupel)
72
Snow, heavy (snow includes graupel)
73
Ice pellets, slight
74
Ice pellets, moderate
75
Ice pellets, heavy
76
Snow grains
77
SHOWER(S) OR INTERMITTENT PRECIPITATION
80
Rain shower(s) or intermittent rain, slight
81
Rain shower(s) or intermittent rain, moderate
82
Page 73

CS120A and CS125 Visibility and Present Weather Sensors
C-2
Rain shower(s) or intermittent rain, heavy
83
Rain shower(s) or intermittent rain, violent
84
Snow shower(s) or intermittent snow, slight
85
Snow shower(s) or intermittent snow, moderate
86
Snow shower(s) or intermittent snow, heavy
87
Hail
89
*Only reported if a CS215 is connected to provide relative humidity, otherwise they will default to mist (10) or fog (20, 30, 31,
32, 33, 34 or 35).
**Only reported in the generic SYNOP messages.
C2. METAR Codes produced by the CS125
The following METAR codes from WMO table 4678 can be output by the sensor.
UP Unidentified precipitation
HZ Haze
BR Mist
FG Fog
DZ Drizzle
RA Rain
SG Snow grains
SN Snow
PL Ice pellets
SMGR Hail*
Notes:
HZ will only be reported if a CS215 is connected to allow relative humidity
information to be available.
FZ (freezing) may be added as a descriptor in front of BR, FG, DZ and RA
Intensity qualifiers, ‘-‘ for light, ‘+’ for heavy, may be added in front of DZ, RA,
SN, and PL
Combinations, for example RASN for rain and snow can be reported.
*Only reported if an optional hail sensor is connected. Contact Campbell
Scientific for details.
C3. NWS Codes produced by the CS125
NWS codes produced by the CS125 available in a custom message
Weather type
NWS code
Drizzle
L
Rain
R
Snow
S
Snow grains
SG
Z (freezing) may be added as a descriptor in front of L and R
Intensity qualifiers, ‘-‘ for light, ‘+’ for heavy, may be added after the NWS code.
Page 74

D-1
Appendix D. A comparison of the two alternate visibility calibrations
D.1. Introduction
The original and standard calibration of the sensor was derived by comparison
with several other forward scatter sensors and later verified by trained
meteorological observers. The calibration assumes a linear relationship between
the forward scatter signal and extinction coefficient. We have named this
calibration the MOR calibration. It is used as the base calibration of the sensor.
A secondary calibration was derived by comparison of the MOR output against
measurements made with short pathlength transmissometers, following the
procedures laid down by the ICAO. The process involved collecting data from two
CS125 sensors running alongside two calibrated transmissometers, at the test site
of a National Meteorological Service. An empirical, non-linear calibration was
fitted to data collected on that site. This was later verified by a third party at
another site run by a different National Meteorological Service (see Section D.2 ).
Over the entire range of the sensor the relationship between the two calibrations is
broadly linear (see Figure D-1). The relationship is formed by two intersecting
linear functions with a steeper slope at low visibility. The resultant TMOR
calibration gives much higher visibility readings at visibilities lower than 2000
metres, which is a key measurement range for aviation.
The first three graphs below show the relationship of the whole sensor range
(Figure D-1), over 0-2000 metres (Figure D-2) and the ratio of the two outputs
Figure (D-3).
Figure D-1. TMOR plotted against MOR over the full 0-75 km range.
Page 75

CS120A and CS125 Visibility and Present Weather Sensors
D-2
Figure D-2. TMOR plotted against MOR over the 0-2000 m range.
Figure D-3 The ratio of TMOR to MOR over the full 0-75 km range.
Page 76

Appendix D. A comparison of the two alternate visibility calibrations
D-3
D.2. Validation of the TMOR calibration
The fitted TMOR function was used to validate the suitability of the sensor for
aviation use by following the process of comparison defined in the ICAO Manual
of Runway Visual Range Observing and Reporting Practices (Doc 9328, AN/908).
This procedure defines the selection and processing of the data from a sensor
under test and the method of comparison with a calibrated transmissometer. This
involves presenting the data as a form of box plot and checking the data does not
fall outside certain accuracy limits. An example plot of one sensor under test is
shown below (Figure D-4).
Figure D-4. A typical box plot showing the performance of the CS125
TMOR calibration in comparison to a test transmissometer.
Page 77
Limited warranty
Products manufactured by Campbell Scientific are warranted by Campbell
Scientific to be free from defects in materials and workmanship under normal
use and service for twelve months from the date of shipment unless otherwise
specified on the corresponding product webpage. See Product Details on the
Ordering Information pages at www.campbellsci.com. Other manufacturer's
products, that are resold by Campbell Scientific, are warranted only to the
limits extended by the original manufacturer.
Refer to www.campbellsc i.com/terms#warranty for more information.
CAMPBELL SCIENTIFIC EXPRESSLY DISCLAIMS AND
EXCLUDES ANY IMPLIED WARRANTIES OF MERCHANTABILITY
OR FITNESS FOR A PARTICULAR PURPOSE. Campbell Scientific
hereby disclaims, to the fullest extent allowed by applicable law, any and
all warranties and conditions with respect to the Products, whether
express, implied or statutory, other than those expressly provided herein.
Page 78

Assistance
Products may not be returned without prior authorization.
Products shipped to Campbell Scientific require a Returned Materials
Authorization (RMA) or Repair Reference number and must be clean and
uncontaminated by harmful substances, such as hazardous materials,
chemicals, insects, and pests. Please complete the required forms prior to
shipping equipment.
Campbell Scientific regional offices handle repairs for customers within their
territories. Please see the back page for the Global Sales and Support Network
or visit www.campbellsci.com/contact to determine which Campbell Scientific
office serves your country.
To obtain a Returned Materials Authorization or Repair Reference number,
contact your CAMPBELL SCIENTIFIC regional office. Please write the
issued number clearly on the outside of the shipping container and ship as
directed.
For all returns, the customer must provide a “Statement of Product Cleanliness
and Decontamination” or “Declaration of Hazardous Material and
Decontamination” form and comply with the requirements specified in it. The
form is available from your CAMPBELL SCIENTIFIC regional office.
Campbell Scientific is unable to process any returns until we receive this
statement. If the statement is not received within three days of product receipt
or is incomplete, the product will be returned to the customer at the customer’s
expense. Campbell Scientific reserves the right to refuse service on products
that were exposed to contaminants that may cause health or safety concerns for
our employees.
Page 79

Safety
DANGER — MANY HAZARDS ARE ASSOCIATED WITH INSTALLING, USING, MAINTAINING, AND WORKING ON OR AROUND
TRIPODS, TOWERS, AND ANY ATTACHMENTS TO TRIPODS AND TOWERS SUCH AS SENSORS, CROSSARMS, ENCLOSURES,
ANTENNAS, ETC. FAILURE TO PROPERLY AND COMPLETELY ASSEMBLE, INSTALL, OPERATE, USE, AND MAINTAIN TRIPODS,
TOWERS, AND ATTACHMENTS, AND FAILURE TO HEED WARNINGS, INCREASES THE RISK OF DEATH, ACCIDENT, SERIOUS
INJURY, PROPERTY DAMAGE, AND PRODUCT FAILURE. TAKE ALL REASONABLE PRECAUTIONS TO AVOID THESE HAZARDS.
CHECK WITH YOUR ORGANIZATION'S SAFETY COORDINATOR (OR POLICY) FOR PROCEDURES AND REQUIRED PROTECTIVE
EQUIPMENT PRIOR TO PERFORMING ANY WORK.
Use tripods, towers, and attachments to tripods and towers only for purposes for which they are designed. Do not exceed design limits. Be familiar and
comply with all instructions provided in product manuals. Manuals are available at www.campbellsci.com. You are responsible for conformance with
governing codes and regulations, including safety regulations, and the integrity and location of structures or land to which towers, tripods, and any
attachments are attached. Installation sites should be evaluated and approved by a qualified engineer. If questions or concerns arise regarding installation,
use, or maintenance of tripods, towers, attachments, or electrical connections, consult with a licensed and qualified engineer or electrician.
General
• Protect from over-voltage.
• Protect electrical equipment from water.
• Protect from electrostatic discharge (ESD).
• Protect from lightning.
• Prior to performing site or installation work, obtain required approvals and permits. Comply with all
governing structure-height regulations.
• Use only qualified personnel for installation, use, and maintenance of tripods and towers, and any
attachments to tripods and towers. The use of licensed and qualified contractors is highly recommended.
• Read all applicable instructions carefully and understand procedures thoroughly before beginning work.
• Wear a hardhat and eye protection, and take other appropriate safety precautions while working on or
around tripods and towers.
• Do not climb tripods or towers at any time, and prohibit climbing by other persons. Take reasonable
precautions to secure tripod and tower sites from trespassers.
• Use only manufacturer recommended parts, materials, and tools.
Utility and Electrical
• You can be killed or sustain serious bodily injury if the tripod, tower, or attachments you are installing,
constructing, using, or maintaining, or a tool, stake, or anchor, come in contact with overhead or
underground utility lines.
• Maintain a distance of at least one-and-one-half times structure height, 6 meters (20 feet), or the distance
required by applicable law, whichever is greater, between overhead utility lines and the structure (tripod,
tower, attachments, or tools).
• Prior to performing site or installation work, inform all utility companies and have all underground utilities
marked.
• Comply with all electrical codes. Electrical equipment and related grounding devices should be installed by a
licensed and qualified electrician.
• Only use power sources approved for use in the country of installation to power Campbell Scientific devices.
Elevated Work and Weather
• Exercise extreme caution when performing elevated work.
• Use appropriate equipment and safety practices.
• During installation and maintenance, keep tower and tripod sites clear of un-trained or non-essential
personnel. Take precautions to prevent elevated tools and objects from dropping.
• Do not perform any work in inclement weather, including wind, rain, snow, lightning, etc.
Maintenance
• Periodically (at least yearly) check for wear and damage, including corrosion, stress cracks, frayed cables,
loose cable clamps, cable tightness, etc. and take necessary corrective actions.
• Periodically (at least yearly) check electrical ground connections.
Internal Battery
• Be aware of fire, explosion, and severe-burn hazards.
• Misuse or improper installation of the internal lithium battery can cause severe injury.
• Do not recharge, disassemble, heat above 100 °C (212 °F), solder directly to the cell, incinerate, or expose
contents to water. Dispose of spent batteries properly.
WHILE EVERY ATTEMPT IS MADE TO EMBODY THE HIGHEST DEGREE OF SAFETY IN ALL CAMPBELL SCIENTIFIC PRODUCTS, THE
CUSTOMER ASSUMES ALL RISK FROM ANY INJURY RESULTING FROM IMPROPER INSTALLATION, USE, OR MAINTENANCE OF
TRIPODS, TOWERS, OR ATTACHMENTS TO TRIPODS AND TOWERS SUCH AS SENSORS, CROSSARMS, ENCLOSURES, ANTENNAS,
ETC.
Page 80

Campbell Scientific regional offices
Australia
Location:
Phone:
Email:
Website:
Brazil
Location:
Phone:
Email:
Website:
Canada
Location:
Phone:
Email:
Website:
China
Location:
Phone:
Email:
Website:
Garbutt, QLD Australia
61.7.4401.7700
info@campbellsci.com.au
www.campbellsci.com.au
São Paulo, SP Brazil
11.3732.3399
vendas@campbellsci.com.br
www.campbellsci.com.br
Edmonton, AB Canada
780.454.2505
dataloggers@campbellsci.ca
www.campbellsci.ca
Beijing, P. R. China
86.10.6561.0080
info@campbellsci.com.cn
www.campbellsci.com.cn
France
Location:
Phone:
Email:
Website:
Vincennes, France
0033.0.1.56.45.15.20
info@campbellsci.fr
www.campbellsci.fr
Germany
Location:
Phone:
Email:
Website:
Bremen, Germany
49.0.421.460974.0
info@campbellsci.de
www.campbellsci.de
India
Location:
Phone:
Email:
Website:
New Delhi, DL India
91.11.46500481.482
info@campbellsci.in
www.campbellsci.in
South Africa
Location:
Phone:
Email:
Website:
Stellenbosch, South Africa
27.21.8809960
sales@campbellsci.co.za
www.campbellsci.co.za
Thailand
Location:
Phone:
Email:
Website:
UK
Location:
Phone:
Email:
Website:
USA
Location:
Phone:
Email:
Website:
Bangkok, Thailand
66.2.719.3399
info@campbellsci.asia
www.campbellsci.asia
Shepshed, Loughborough, UK
44.0.1509.601141
sales@campbellsci.co.uk
www.campbellsci.co.uk
Logan, UT USA
435.227.9120
info@campbellsci.com
www.campbellsci.com
Costa Rica
Location:
Phone:
Email:
Website:
San Pedro, Costa Rica
506.2280.1564
info@campbellsci.cc
www.campbellsci.cc
Spain
Location:
Phone:
Email:
Website:
Barcelona, Spain
34.93.2323938
info@campbellsci.es
www.campbellsci.es
 Loading...
Loading...