

Page 1

Title Page
M
ICRO
-CS
COMMUNICATIONS SERVER FOR M
INSTALLATION GUIDE
MicroMMAC 22ES 10BASE-T HUB WITH LANVIEW®
PWR
CPU
RESETDISPLAY
COM 2
COM 1
CLN
ATTN STATUS
SETUP NET
PORT
7 6 5 4 3 2 1 M INT
RCV
LNK
12 11 10 9 8 7 6 5 4 3 2 1
TXD
765 432
RXD
DTR
CTS
DCD
E
1
12X 11X 10X 9X 8X 7X
Micro-CS
SETUP
1
6X 5X 4X 3X 2X 1X
ICRO
ETHERNET
MMAC
MODEM
EPIM-1
Page 2

Page 3

NOTICE
Cabletron Systems reserves the right to make changes in specifications and other
information contained in this document without prior notice. The reader should in all cases
consult Cabletron Systems to determine whether any such changes have been made.
The hardware, firmware, or software described in this manual is subject to change without
notice.
IN NO EVENT SHALL CABLETRON SYSTEMS BE LIABLE FOR ANY
INCIDENTAL, INDIRECT, SPECIAL, OR CONSEQUENTIAL DAMAGES
WHATSOEVER (INCLUDING BUT NOT LIMITED TO LOST PROFITS) ARISING
OUT OF OR RELATED TO THIS MANUAL OR THE INFORMATION CONTAINED
IN IT, EVEN IF CABLETRON SYSTEMS HAS BEEN ADVISED OF, KNOWN, OR
SHOULD HAVE KNOWN, THE POSSIBILITY OF SUCH DAMAGES.
© Copyright April 1997 by:
Cabletron Systems, Inc.
P.O. Box 5005
Rochester, NH 03866-5005
All Rights Reserved
Printed in the United States of America
Order number: 9032220 April 1997
MicroMMAC, CSMIM2, MODMIM
Cabletron Systems, Inc.
Annex, Annex Three, Annex3,
and
Remote Annex 2000
of Xylogics, Inc.
HST
Standard Fax
Speed Leveling (ASL)
Ethernet
LAT
UNIX
XENIX
is a registered trademark of U.S. Robotics, Inc.
,
Courier V.32 terbo Fax, Total Control
are trademarks of US Robotics, Inc.
is a trademark of Xerox Corporation.
and
ULTRIX
are trademarks of Digital Equipment Corporation.
is a registered trademark of UNIX System Laboratories, Inc.
is a trademark of Microsoft Corporation.
, and
Micro-CS
Courier HST Dual
are trademarks of
are trademarks
, and
Adaptive
Page 4

FCC NOTICE
This device complies with Part 15 of the FCC rules. Operation is subject to the following
two conditions: (1) this device may not cause harmful interference, and (2) this device
must accept any interference received, including interference that may cause undesired
operation.
NOTE
digital device, pursuant to Part 15 of the FCC rules. These limits are designed to provide
reasonable protection against harmful interference when the equipment is operated in a
commercial environment. This equipment uses, generates, and can radiate radio frequency
energy and if not installed in accordance with the operator’s manual, may cause harmful
interference to radio communications. Operation of this equipment in a residential area is
likely to cause interference in which case the user will be required to correct the
interference at his own expense.
WARNING
approved by the party responsible for compliance could void the user’s authority to
operate the equipment.
This equipment complies with FCC Rules Part 68. The FCC Registration Number and
Ringer Equivalence Number (REN) are also located on the MicroMMACchassis rear
panel . You must provide this information to the telephone company if requested.
FCC Registration Number
3N9USA-21775-MM-E
: This equipment has been tested and found to comply with the limits for a Class A
: Changes or modifications made to this device which are not expressly
Ringer Equivalence Number (REN)
0.4B
Micro-CS Installation Guide -ii
Page 5

SPECIAL REQUIREMENTS FOR CANADA
The Industry Canada Department’s label identifies certified equipment. This certification
means that the equipment meets certain telecommunications network protective,
operational and safety requirements. The Department does not guarantee the equipment
will operate to the user’s satisfaction.
Before installing this equipment, users should ensure that it is permissible to be connected
to the facilities of the local telecommunications company. The equipment must also be
installed using an acceptable method of connection. In some cases, the company’s inside
wiring associated with a single line individual service may be extended by means of a
certified connector assembly (telephone extension cord). The customer should be aware
that compliance with the above conditions may not prev ent de gradation of service in some
situations.
Repairs to certified equipment should be made by an authorized Canadian maintenance
facility designated by the supplier. Any repairs or alterations made by the user to this
equipment, or equipment malfunctions, may give the telecommunications company cause
to request the user to disconnect the equipment. For their own protection users should
ensure that the electrical ground connections of the power utility, telephone lines and
internal metallic water pipe system, if present, are connected together. This precaution
may be particularly important in rural areas.
CAUTION
contact the appropriate electric inspection authority or electrician.
: Users should not make installation connections themselves, but should
Load Number
The Load Number (LN) assigned to each terminal device denotes the percentage of the
total load to be connected to a telephone loop which is used by the device, to prevent
overloading. The termination on a loop can consist of any combination of devices subject
only to the requirement that the total of the LNs of all the devices does not exceed 100.
Industry Canada Certification Number
2179 6467A
LN =
4
Micro-CS Installation Guide -iii
Page 6
:
IC NOTICE
This digital apparatus does not exceed the Class A limits for radio noise emissions from
digital apparatus set out in the Radio Interference Regulations of the Industry Canada.
Le présent appareil numérique n’émet pas de bruits radioélectriques dépassant les limites
applicables aux appareils numériques de la class A prescrites dans le Règlement sur le
brouillage radioélectrique édicté par le ministère des Communications du Canada.
EXCLUSION OF WARRANTY
AND DISCLAIMER OF LIABILITY
1. EXCLUSION OF
Cabletron in writing, Cabletron makes no warranty , e xpressed or implied, concerning
the Program (including Its documentation and media).
CABLETRON DISCLAIMS ALL WARRANTIES, OTHER THAN THOSE
SUPPLIED TO YOU BY CABLETRON IN WRITING, EITHER EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO IMPLIED WARRANTIES OF
MERCHANTABLITY AND FITNESS FOR A PARTICULAR PURPOSE, WITH
RESPECT TO THE PROGRAM, THE ACCOMPANYING WRITTEN
MA TERIALS, AND ANY A CCOMPANYING HARDWARE.
2. NO LIABILITY FOR CONSEQ
CABLETRON OR ITS SUPPLIERS BE LIABLE FOR ANY DAMAGES
WHATSOEVER (INCLUDING, WITHOUT LIMITATION, DAMAGES FOR
LOSS OF BUSINESS, PROFITS, BUSINESS INTERRUPTION, LOSS OF
BUSINESS INFORMATION, SPECIAL, INCIDENTAL, CONSEQUENTIAL, OR
RELIANCE DAMAGES, OR OTHER LOSS) ARISING OUT OF THE USE OR
INABILITY TO USE THIS CABLETRON PRODUCT, EVEN IF CABLETRON
HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. BECAUSE
SOME STATES DO NOT ALLOW THE EXCLUSION OR LIMITATION OF
LIABILITY FOR CONSEQUENTIAL OR INCIDENTAL DAMAGES, OR ON
THE DURATION OR LIMITATION OF IMPLIED WARRANTEES IN SOME
INSTANCES THE ABOVE LIMITATIONS AND EXCLUSIONS MAY NOT
APPLY TO YOU.
WARRANTY. Except as may be specifically provided by
UENTIAL DAMAGES. IN NO EVENT SHALL
-iv Micro-CS Installation Guide
Page 7
SPECIAL INSTALLATION INSTRUCTIONS
MODEM ONLY
CAUTION
CERTIFIED/UL LISTED EQUIPMENT BY QUALIFIED SERVICE PERSONNEL.
CHECK THE EQUIPMENT OPERATING/INSTALLATION INSTRUCTIONS
AND/OR EQUIPMENT MANUFACTURER TO VERIFY/CONFIRM YOUR
EQUIPMENT IS SUITABLE FOR INSTALLED APPLICATION CARDS.
CAUTION
TELEPHONE PLUG/JACK) FROM THE TELEPHONE SYSTEM WHEN
INSTALLING UPGRADE OPTIONS OR WHEN THE COVERS ARE REMOVED
FROM THE HOST PRODUCT.
CAUTION
OUTSIDE OR THE INSIDE OF THE EQUIPMENT ENCLOSURE ADJACENT TO
THE MODEM CARD.
: THIS MODEM CARD IS INTENDED TO BE INSTALLED IN CSA
: ALWAYS DISCONNECT MODEM BOARD (THE ONE WITH THE
: APPLY THE ENCLOSED ADHESIVE WARNING LABEL TO THE
Micro-CS Installation Guide -v
Page 8

:
-vi Micro-CS Installation Guide
Page 9
CONTENTS
CHAPTER 1 INTRODUCTION
1.1 General........................................................................................1-1
1.2 Organization of this Document....................................................1-1
1.3 Document Conventions...............................................................1-2
1.4 Getting Help.................................................................................1-2
1.5 Micro-CS Overview......................................................................1-3
1.5.1 Remote Network Access ................................................1-3
1.5.2 Dial-Up Routing ..............................................................1-3
1.5.3 Terminal and Communications Access ..........................1-4
1.5.4 System Description.........................................................1-4
1.5.5 Micro-CS Front Panel .....................................................1-5
1.5.6 System Status LEDs.......................................................1-6
1.5.7 Modem Status LEDs.......................................................1-7
1.5.8 SETUP Switch ................................................................1-7
1.5.9 Port Activity Indicators ....................................................1-7
1.5.10 Console Port...................................................................1-8
1.5.11 Network Port...................................................................1-8
1.5.12 Modem Port ....................................................................1-8
1.6 Micro-CS Physical Characteristics ..............................................1-9
1.7 Environment ................................................................................1-9
1.8 Approvals.....................................................................................1-9
CHAPTER 2 MICRO-CS INSTALLATION
2.1 General........................................................................................2-1
2.2 Console Port Terminal.................................................................2-1
2.3 Serial Devices..............................................................................2-2
2.4 Power-up and Test......................................................................2-3
2.5 Auto-Initializing the ROMs...........................................................2-6
2.5.1 Retrieving Boot Information Using BOOTP ....................2-6
2.5.2 Retrieving Boot Information Using RARP.......................2-7
2.6 Software Installation Procedures.................................................2-8
Micro-CS Installation Guide i
Page 10

Contents
CHAPTER 3 ROM MONITOR COMMANDS
3.1 General ........................................................................................3-1
3.2 Commands...................................................................................3-3
3.2.1 addr.................................................................................3-3
3.2.2 boot .................................................................................3-6
3.2.3 config.............................................................................3-11
3.2.4 console-baud.................................................................3-11
3.2.5 erase .............................................................................3-13
3.2.6 help................................................................................3-14
3.2.7 image.............................................................................3-14
3.2.8 ipx..................................................................................3-15
3.2.9 lat_key...........................................................................3-16
3.2.10 mop ...............................................................................3-17
3.2.11 net .................................................................................3-17
3.2.12 option_key.....................................................................3-18
3.2.13 ping................................................................................3-18
3.2.14 ports ..............................................................................3-19
3.2.15 sequence.......................................................................3-21
3.2.16 slip.................................................................................3-22
3.2.17 stats...............................................................................3-24
CHAPTER 4 TROUBLESHOOTING PROCEDURES
4.1 General ........................................................................................4-1
4.2 Power-Up and Boot Procedures ..................................................4-1
4.2.1 Normal Mode...................................................................4-1
4.3 Boot Failures................................................................................4-5
4.4 Correcting Micro-CS Parameters.................................................4-8
4.5 Load Server Host Not Responding ..............................................4-9
4.6 Micro-CS Dumps........................................................................4-12
APPENDIX A PORT PIN/SIGNAL ALLOCATIONS
A.1 General ....................................................................................... A-1
A.2 Console Port ............................................................................... A-1
A.3 Serial Port ................................................................................... A-2
A.4 LAN Network Port ....................................................................... A-2
A.5 Modem Port ................................................................................ A-3
APPENDIX B CONNECTORS
B.1 General ....................................................................................... B-1
B.2 Additional Cabletron Cables and Connectors............................. B-2
ii Micro-CS Installation Guide
Page 11

Contents
APPENDIX C FLASH UPGRADE INSTRUCTIONS
C.1 General........................................................................................C-1
C.2 Contents of the Kit.......................................................................C-1
C.3 Required Tools............................................................................C-1
C.4 Installation Procedure..................................................................C-2
C.4.1 Installing the Flash Daughter Card..................................C-2
C.4.2 Changing the Boot Method .............................................C-3
APPENDIX D MICRO-CS UPGRADE INSTALLATION
D.1 General........................................................................................D-1
D.2 Locating The Configuration Jumpers...........................................D-1
D.3 Required Tools............................................................................D-2
D.4 Installation Procedure..................................................................D-3
D.5 Installing the Micro-CS Upgrade..................................................D-4
Micro-CS Installation Guide iii
Page 12
Contents
iv Micro-CS Installation Guide
Page 13

CHAPTER 1
INTRODUCTION
1.1 GENERAL
Welcome to the Cabletron Systems Micro-CS User’s Guide. Read
through this manual to gain an understanding of the features and
capabilities of the Micro-CS. A general knowledge of Ethernet and IEEE
802.3 type data communications networks and their physical layer
components will be helpful when installing the Micro-CS.
1.2 ORGANIZATION OF THIS DOCUMENT
Chapter 1,
describes Micro-CS features, installation requirements, network
guidelines, getting help, and operating specifications.
Chapter 2, Micro-CS
connections, attaching to the ports, power up and test information,
initializing the ROM, and preparing to load software.
Chapter 3,
commands and describes them in detail.
Chapter 4,
LANVIEW LED’s to troubleshoot problems.
Appendix A
Appendix B
Appendix C
Appendix D
Introduction
ROM Monitor Commands
T r oubleshooting Procedures
provides port pinout information.
lists cabling and connector specifications.
provides optional Flash Upgrade instructions.
gives Memory Upgrade instructions.
, outlines the contents of this manual, and
Installation
, contains instructions for network
, explains accessing the ROM
, describes how to use the
Appendix E
MicroMMAC.
Micro-CS Installation Guide 1-1
explains the installation of the Micro-CS into a
Page 14

Chapter 1:
Introduction
1.3 DOCUMENT CONVENTIONS
The following conventions are used throughout this document:
Note
symbol. Calls the reader’s attention to any item of
NOTE
information that may be of special importance.
!
CAUTION
Caution
damage to the equipment.
Electrical Hazard Warning
that could result in personal injury or death due to an electrical
hazard.
symbol. Contains information essential to avoid
symbol. Warns against an action
1.4 GETTING HELP
f you need additional support related to this device, or if you have any
questions, comments, or suggestions concerning this manual, contact
Cabletron Systems Technical Support:
Phone (603) 332-9400
A.M
Monday – Friday; 8
CompuServe GO CTRON from any ! prompt
Internet mail support@ctron.com
FTP ctron.com (134.141.197.25)
Login
Password
anonymous
your email address
BBS (603) 335-3358
Modem setting 8N1: 8 data bits, 1 stop bit, No parity
For additional information about Cabletron Systems products, visit our
World Wide Web site: http://www.cabletron.com/
. – 8 P.M. Eastern Time
1-2 Micro-CS Installation Guide
Page 15

Micro-CS Overview
Before calling Cabletron Systems Technical Support, have the following
information ready:
•
A description of the failure
•
A description of any action(s) already taken to resolve the problem
(e.g., changing mode switches, rebooting the unit, etc.)
•
A description of your network environment (layout, cable type, etc.)
•
Network load and frame size at the time of trouble (if known)
•
The serial and revision numbers of all Cabletron Systems products in
the network
•
The device history (i.e., have you returned the device before, is this a
recurring problem, etc.)
•
Any previous Return Material Authorization (RMA) numbers
1.5 MICRO-CS OVERVIEW
The Cabletron Micro-CS is a Xylogics Remote Annex 2000 compatible,
multi-port communication server designed to reside in the MicroMMAC
series of stand-alone hubs. The Micro-CS integrates a communication
server with remote dial-in/dial out access, dial-up routing, and terminal
and communications access capabilities into the MicroMMAC.
1.5.1 Remote Network Access
The Micro-CS provides network support for: TCP/IP, Novell Netware,
and AppleT alk.
1.5.2 Dial-Up Routing
The Micro-CS provides dial-up routing support for UNIX and Novell
networks. Using a Micro-CS, Network Administrators can connect tw o or
more networks over a standard telephone line.
Micro-CS Installation Guide 1-3
Page 16

Chapter 1:
Introduction
1.5.3 Terminal and Communications Access
The Micro-CS provides terminal and communications access to users on a
local area network. The Micro-CS can connect up to 7 asynchronous
serial devices to host computers on a LAN.
1.5.4 System Description
The Micro-CS is a powerful 32-bit de vice that comes with an Intel 80486
SXLC2 clock-doubled processor. The Micro-CS read-only memory
(ROM) contains firmw are for performing power-up self-tests and loading
operational code. A non-volatile EEPROM stores the configuration
parameters.
The ROM Monitor is an interacti ve command interpreter that accesses the
ROM’s functions. ROM Monitor commands are issued through a terminal
.
connected to the console port on the Micro-CS
commands, you can:
Using the ROM Monitor
•
Modify and display a set of EEPROM parameters.
•
Execute interactive diagnostic tests.
•
Receive information and statistics for the hardw are configuration and
the network.
•
Boot the Micro-CS manually.
The Micro-CS is a diskless device. It obtains operational code either ov er
the network from a host running Micro Annex Communication Software
Version 9.2.6 or above, another Micro-CS configured as a load server, or
from self-contained Flash Memory.
The Micro-CS has a watchdog timer that is reset by the software at
regular intervals. The watchdog timer reboots the Micro-CS in the
unlikely event of an internal software error. This feature allows the
Micro-CS to run for long periods of time without intervention.
A modem upgrade for the Micro-CS is available for added functionality.
It consists of a single daughter card, and can be user installed. The
upgrade kit can be purchased separately from Cabletron as part number
CSM-V.34-UGK.
1-4 Micro-CS Installation Guide
Page 17

Micro-CS Overview
LED indicators provide the user feedback on system activity. Each port
connector has an associated LED to indicate activity on the receive data
line. Several other LEDs indicate Netw ork Acti vity, diagnostic failure and
other fault connections.
1.5.5 Micro-CS Front Panel
The Micro-CS (Figure 1-1) front panel contains the following:
•
4 System Indicators
•
5 Modem status indicators
•
Modem port indicator (when optional modem is operating)
•
7 port LEDs
•
Internal connection indicator
•
SETUP Switch
MicroMMAC 22ES 10BASE-T HUB WITH LANVIEW®
PWR
CPU
RESETDISPLAY
COM 2
COM 1
CLN
ATTN STATUS
SETUP NET
PORT
7 6 5 4 3 2 1 M INT
RCV
LNK
12 11 10 9 8 7 6 5 4 3 2 1
Figure 1-1 Micro-CS front panel
TXD
765 432
RXD
DTR
CTS
DCD
E
1
12X 11X 10X 9X 8X 7X
Micro-CS
SETUP
1
6X 5X 4X 3X 2X 1X
ETHERNET
MODEM
EPIM-1
Micro-CS Installation Guide 1-5
Page 18

Chapter 1:
Introduction
1.5.6 System Status LEDs
The front panel LEDs provide information on system status and activity.
Table 1-1 : System LEDs
On
when Setup button has been pressed within
3 seconds of Setup, indicating Port 1 is now a
SETUP (green)
ATTN (amber)
STATUS (green)
NET (green)
INT (green)
PORT (green)
console port.
Flashing
NOTE: Both the SETUP and ATTN LED’ s will be
on when the Micro-CS is in Monitor mode.
On
attention.
Flashing
On
Flashing
Flashes
Ethernet.
On
selected.
Off
selected.
Flashes
(eight total, one per port including modem).
when the unit is in Setup.
when the Micro-CS requires operator
when the unit encounters a problem.
when the unit is loading or dumping.
when the unit is trying to initiate a load.
to show network activity on the
when the AUI port to the MicroMMAC is
when the front panel 10BASE-T port is
with activity from the numbered port
1-6 Micro-CS Installation Guide
Page 19

Micro-CS Overview
1.5.7 Modem Status LEDs
The modem LEDs provide information on modem activity
Table 1-2 : Modem LEDs
TxD (green)
RxD (green)
DTR (green)
CTS (green)
DCD (green)
Flashes
data to remote modem via dial up link.
Flashes
remote modem over dial up link.
On
Terminal Ready from the Micro-CS.
On
when transmit Data hardware flow control is
enabled. Always on during synchronous
connections.
On
Data Carrier Detect signal from a remote
modem, indicating that data transmission is
possible.
to indicate modem has transmitted
to indicate data received from
when optional modem receives Data
until the modem lowers Clear To Send
when optional modem receives a valid
1.5.8 SETUP Switch
The SETUP button allows you to change the operational mode of the
Micro-CS from Normal to Test. It also functions as a Reset button (see
Note below). The Micro-CS automatically powers up in normal mode. T o
enter test mode, press the SETUP button within three seconds of
powering-up.
Additionally, a Setup signal is provided from the MicroMMAC
motherboard. When this signal is acti ve, it will perform a cold start of the
Micro-CS.
1.5.9 Port Activity Indicators
The LED activity indicators associated with ports 1-7 blink to indicate
data either data transmitted to or received by that port. The “M” port
lights to indicate the modem is seeing activity. The 5 modem LED’ s blink
to indicate the modem is sending or receiving data from the WAN
network.
Micro-CS Installation Guide 1-7
Page 20

Chapter 1: Introduction
1.5.10 Console Port
The Micro-CS uses port 1 as a console port during SETUP. To access the
console port, press the Setup switch within 3 seconds of powering-up.
The console port provides access to the ROM Monitor commands when
the Micro-CS is in set up mode. After returning to normal mode, Port 1
functions as a serial port. Refer to Appendix B for console pinout
information.
1.5.11 Network Port
The Micro-CS can be connected to an Ethernet LAN either one of two
ways: through an RJ-45 connector to the MicroMMAC internal AUI, or
through an RJ-45 connector on the front panel between the network port
and a port on the MicroMMAC. The internal AUI is provided by the
Cabletron EPIM-3PS, provided with the Micro-CS. The Micro-CS
automatically sets up the connection, either internally to the
MicroMMAC, or e xternally to a 10B ASE-T port. Refer to Appendix B for
port pinout information.
1.5.12 Modem Port
If your Micro-CS is equipped with the optional modem card, the punch
out on the faceplate should have been remo ved to e xpose the modem port.
This port supports a V.34 modem with an RJ-11 connector allowing
modem network access.
If your Micro-CS does not have the optional modem, then connecting to
the port is futile. The modem card can be purchased by contacting
Cabletron Customer Support at (603) 332-9400 and ordering part number
CSM-V.34-UGK.
1-8 Micro-CS Installation Guide
Page 21

Micro-CS Physical Characteristics
1.6 MICRO-CS PHYSICAL CHARACTERISTICS
• Dimensions: Height: 1 inch (2.54 cm)
Width: 12.4 inch (31.5 cm)
Depth: 5.35 inch (13.6 cm)
• Weight: .91 lbs (.14 kg)
• Power: 3A @ 5V
1A @ 12V
1.7 ENVIRONMENT
Operating:
5° to 40°C (41° to 104° F)
5% to 90% relative humidity, non-condensing
Storage:
-30° to 73°C (-22° to 164° Fº)
1.8 APPROVALS
Safety:
This equipment meets the safety requirements of
UL 1950, CSA C22.2 No. 950, EN60950, IEC 950,
and 73/23/EEC.
Electromagnetic Compatability:
This equipment meets the requirements of FCC Part
15, EN 55022, VCCI V-3/93.01, CSA C108.8, EN
50082-1, and 89/336/EEC.
Telecom:
FCC Part 68, Industry Canada CS-02/CS-03
Micro-CS Installation Guide 1-9
Page 22

Chapter 1: Introduction
1-10 Micro-CS Installation Guide
Page 23

CHAPTER 2
MICRO-CS INSTALLATION
2.1 GENERAL
The Micro-CS comes factory installed in the MicroMMAC as a
MicroCS-T-22ES, or MicroCS-LT-22ES, or can be ordered seperately as
an upgrade kit, part number MICRO-CST-UGK or MICRO-CSLT-UGK.
If you have the upgrade kit, please refer to Appendix E for installation
instructions.
Installation procedures for the MicroCS follow those of the Cabletron
Systems MicroMMAC series. For installation and Local Management
instructions related to the Ethernet networking functionality of the
MicroCS, please refer to the MicroMMAC documentation.
This chapter explains the connection of serial devices, attaching to the
console port, power up and testing, and software installation of your new
Micro-CS. Please read through all the material before powering up to gain
an understanding of how to set up the system.
2.2 CONSOLE PORT TERMINAL
In order to access the ROM Monitor and boot the Micro-CS for the first
time, the Micro-CS must be connected to a terminal. Connect the console
terminal to port 1. Set the terminal to 9600 baud, eight data bits, no parity ,
one stop bit, and XON/XOFF flow control. The ROM Monitor assumes
that this terminal is CR T-based and displays the backspace (BS) character
accordingly .
Appendix A describes the console port’s signal/pin allocations.
Micro-CS Installation Guide 2-1
Page 24

Chapter 2: Micro-CS Installation
Press SETUP within 3 seconds of powering up to put the Micro-CS into
ROM Monitor mode. You can also reset the Micro-CS and enter the R OM
Monitor mode by pressing the SETUP switch for at least three seconds,
until the SETUP LED flashes indicating a reset. Release the switch and
all the port LEDs will turn on then off. Press the SETUP switch again
within 3 seconds after the PORT LEDs have turned off, and the SETUP
LED will be on indicating the Micro-CS is in setup mode. Once the
Micro-CS has successfully completed its start-up diagnostics, the ATTN
LED will turn on indicating ROM Monitor mode. Each subsequent
depression of the SETUP switch will toggle the Micro-CS SETUP LED
off and on. In order to return to Normal mode, the Micro-CS must be
re-booted.
The amber ATTN light is ON when the unit is in ROM Monitor
NOTE
state.
2.3 SERIAL DEVICES
The Micro-CS provides 7 total port connections. Port 1 is used for the
initial console connection, but reverts to an Annex serial port after
bootup.
To connect to serial devices, simply insert one end of the RJ45 cable into
one of the seven numbered ports on the front of the Micro-CS. Attach the
opposite end of the serial port cable to your serial device.
The Micro-CS serial cables conform to both the RS232 and RS423
specifications regarding the data signals (TxD, RxD). However, it is
possible to exceed the specifications’ cable limits given high quality
cables that are run in an electrically quiet environment, or a DTE
connecting device that uses RS423 drivers. Refer to the DTE manual for
information regarding the serial drivers supported. Cabletron only
guarantees operation with cables that conform to the appropriate
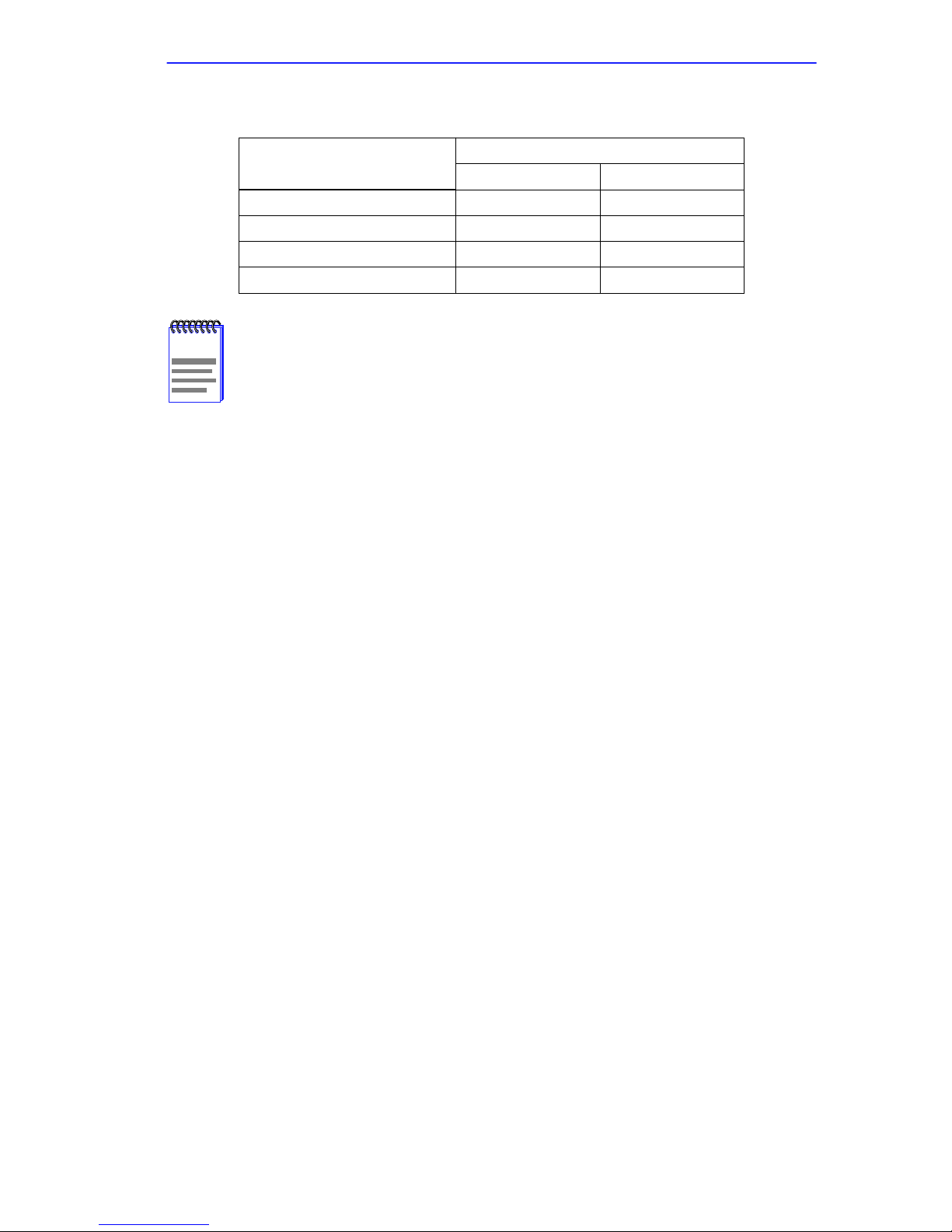
specification. Table 2-4 lists the maximum recommended cable lengths
when connecting to an RS232C compliant device.
The Micro-CS can incur damage if the cables conduct
!
CAUTION
2-2 Micro-CS Installation Guide
transients such as those induced by lightning strikes, etc.
Page 25
Power-up and Test
Table 2-1 Maximum Recommended Cable Lengths
Cable Length
NOTE
Line Speed
Feet Meters
50 to 19.2kbps 250 75
38.4kbps 200 60
57.6kbps 100 30
115.2kbps 50 15
If you exceed these recommended cable lengths, you must
compensate for any resulting problems by reducing the baud
rate, using low capacitance cable, etc. Exceed these distances
at your own risk.
2.4 POWER-UP AND TEST
1. Power up the MicroMMAC in accordance with the instruction found
in the MicroMMAC user documentation.
The Micro-CS now runs its ROM-resident power-up diagnostics. The
indicators momentarily light and then turn off, except for the NET
indicator.
2. Verify that the CPU light on the MicroMMAC is blinking/green, and
that the LCD reads out correctly (refer to your MicroMMAC
documentation for information).
3. Set the Micro-CS to ROM Monitor mode (SETUP and ATTN LEDs
on).
Press SETUP within 3 seconds of powering up to put the Micro-CS
into ROM Monitor mode. You can also reset the Micro-CS and enter
the ROM Monitor mode by pressing the SETUP switch for at least
three seconds, until the SETUP LED flashes indicating a reset.
Release the switch and all the port LEDs will turn on then off. Press
the SETUP switch again within 3 seconds after the PORT LEDs have
turned off, and the SETUP LED will be on indicating the Micro-CS is
in setup mode. Once the Micro-CS has successfully completed its
start-up diagnostics, the ATTN LED will turn on indicating ROM
Monitor mode.
Micro-CS Installation Guide 2-3
Page 26
Chapter 2: Micro-CS Installation
Next, the Micro-CS runs diagnostic tests causing the NET indicator to
flash. If the diagnostics complete successfully, the STATUS and
ATTN indicators light, and the ROM Monitor prompt (
monitor::)
appears on the terminal. The tests complete in approximately one
minute. If the prompt appears, go to Step 4.
If the STAT and ATTN indicators do not light within one minute or if
the indicators flash, a hardware failure has occurred. Contact
Cabletron Technical Support.
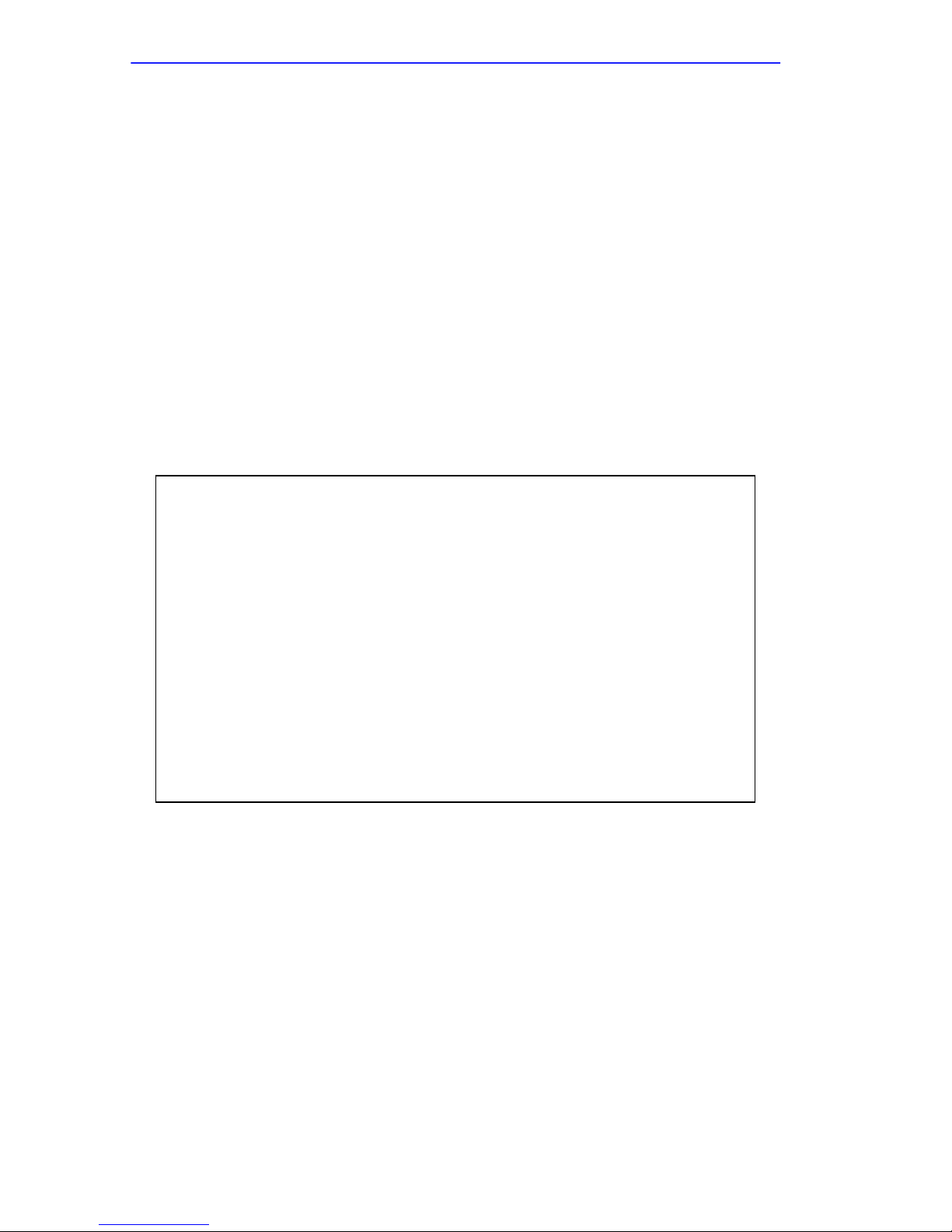
4. Verify the Micro-CS hardware configuration.
At the monitor prompt on the console, type config and press the
Return key. The following is a typical configuration display:
monitor:: config
REVISION/CONFIGURATION INFORMATION
ROM Software Rev: 0901
Board ID: 56 Board Type: Remote Annex 2000
CPU Type: 486SXLC2 Ethernet Address: 00-80-2D-00-C6-1E
Memory Size: 4 Meg
Flash Size: 2 Meg Flash ID: 8989
EEPROM Size: 32736
Installed Alternate Interface: ThinNet
ASYNC Config
Number of Ports: 16
Max Port Speed: 115.2 Kbps
2-4 Micro-CS Installation Guide
Page 27
Power-up and Test
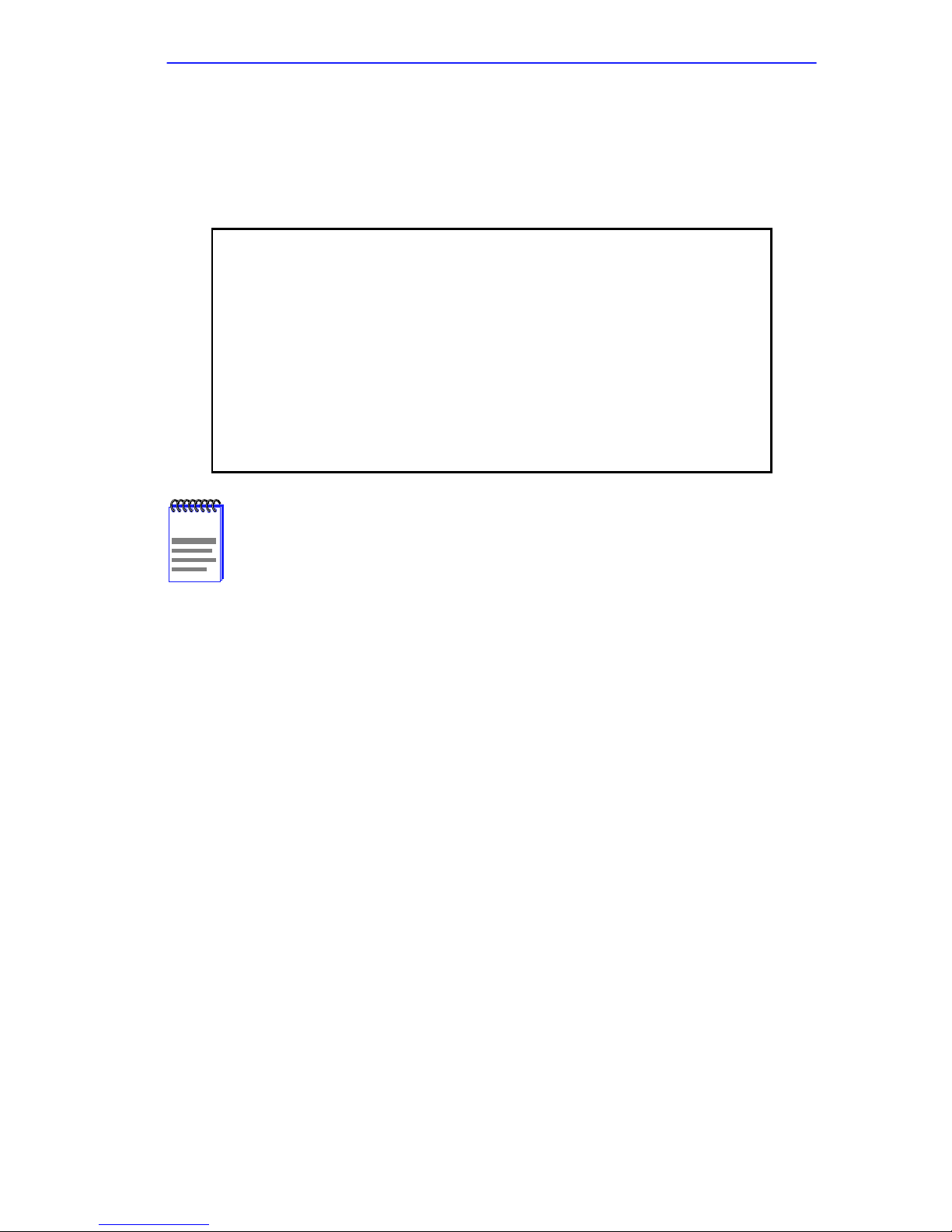
5. Record the Ethernet address of the Micro-CS for future reference.
At the monitor prompt, type addr -d and press the Return key. The
display looks like this:
monitor:: addr -d
Ethernet address (hex): 00-80-2D-00-18-B6
Internet address: <uninitialized>
Subnet mask: 255.255.0.0
Broadcast address: 0.0.0.0
Preferred Load Host address: <any host>
Preferred Dump Host address: 0.0.0.0
Load/Dump Gateway address: <uninitialized>
Type of IP packet encapsulation: <ethernet>
Load Broadcast: Y
You are prompted for the gateway address only if the internet
NOTE
address differs from the preferred load host address based on
the subnet mask. If these addresses are the same, the
Micro-CS assumes there is no gateway.
6. Perform the “net” test to verify your network connectivity.
Connect the Micro-CS to the Ethernet network either through the
internal AUI, or by connecting a jumper cable from the Ethernet port
on the Micro-CS to a MicroMMAC port. At the monitor:: prompt,
type “net”.
If the unit passes the test, the console displays “Passed”. If it fails, an
error message is displayed.
7. “Ping” the software load host, as well as the IP address of the
MicroMMAC. This will test the connectivity of the Micro-CS to a
remote device.
Micro-CS Installation Guide 2-5
Page 28

Chapter 2: Micro-CS Installation
At the monitor prompt, type “ping” and then specify the IP address of
the remote device. Specify the number of bytes per packet, and the
number of packets to be sent. The ping command display looks like
this:
monitor:: ping 134.141.72.165
PING 134.141.72.165: 64 data bytes
2.5 AUTO-INITIALIZING THE ROMS
The Micro-CS supports the BOOTP and RARP protocols. The ROMs use
these protocols to obtain boot information without requiring any manual
setup on the Micro-CS.
• BOOTP is a bootstrap protocol that allows a diskless client to
determine its Internet address, the Internet address of the server, and
the name of the file to be loaded into memory.
• RARP (Reverse Address Resolution Protocol) maps a hardware
address into an Internet address.
The ROMs invoke this system of acquiring boot information when a boot
is initiated and the Micro-CS’s Internet Address is not initialized. Under
this condition the Micro-CS first tries to get boot information via BOOTP;
if BOOTP fails, it tries to get boot information via RARP. If neither
protocol is successful, the Micro-CS either prompts the user for the
Internet address (if in SETUP mode) or it lights the ATTN LED to
indicate the Internet address is not set (if in Normal mode).
2.5.1 Retrieving Boot Information Using BOOTP
For a successful BOOTP retrieval a bootpd must be running on a host on
the same network as the Micro-CS and must have the appropriate
information in the bootptab file. The Micro-CS’s BOOTP
implementation adheres to rfc951, rfc1048, and rfc1084 specifications.
Below is a sample bootptab file entry used to initialize the Micro-CS
named terminator.
2-6 Micro-CS Installation Guide
Page 29

Auto-Initializing the ROMs
microcs default:\
:sm=255.255.255.0:gw=132.245.22.66:\
:hn:vm=auto:to=-18000:
terminator:\
:ht=1:ha=00802d004879:ip=132.245.22.6
:tc=microcsdefault:
In the previous example:
• sm is the subnet mask;
• gw is the load/ dump gateway address; ht is host type (1=Ethernet);
• ip is the Micro-CS’s Internet Address; ha is the Micro-CS’s hardware
address (Ethernet Address); and
• vm is the Vendor Magic Cookie.
When the Micro-CS receives a BOOTP response with the sm, gw, and ip
set, it sets the respective parameters: subnet_mask,
load_dump_gateway, and inet_addr. The Vendor Magic Cookie must
be set to auto. This indicates that bootpd should respond to the client
(Micro-CS in this case) with whatever format the client requests; the
Micro-CS (client) always requests in the decimal dot notation format
(99.130.83.99). The bootpd adds the address of the host on which it is
running as the Server Address in the bootp response message. The ROMs
use the Server Address as the preferred load host and store it in the
pref_load_addr parameter.
The bootpd must be running on the Micro-CS’s preferred load
NOTE
host.
2.5.2 Retrieving Boot Information Using RARP
If the Micro-CS does not receive a successful BOOTP response it uses
RARP to get the boot information. For a successful RARP retrieval,
TCP/IP must be running on a host that is on the same network as the
Micro-CS and the host’s ARP table must be initialized with the
Micro-CS’s Internet and Ethernet addresses (see the arp man page,
arp -s).
Micro-CS Installation Guide 2-7
Page 30

Chapter 2: Micro-CS Installation
The only boot information that RARP provides is the Micro-CS’ s Internet
address. The ROMs save this information in the inet_addr parameter.
The ROMs use default information for the subnet mask and preferred
load host. This means the ROMs will broadcast their request.
The host serving the Micro-CS its boot information must be running on
the same network as the Micro-CS because the Micro-CS only broadcasts
BOOTP and RARP queries.
2.6 SOFTWARE INSTALLATION PROCEDURES
The Micro-CS’s operational image can be installed from a UNIX host on
a network. To do this, the operational code must first be loaded on the
UNIX host. The Micro-CS may also be booted from software loaded on a
another Micro-CS or from Flash memory (see Chapter 3). When loading
the Micro-CS software for the first time, use the ROM Monitor
commands. At the monitor prompt:
1. Execute the erase command to clear the EEPROM. (See the erase
command in Chapter 3.)
2. Execute the addr command to:
Enter the Micro-CS’s Internet address.
Modify any other parameters that the Micro-CS may require for the
initial boot, i.e., the preferred load host’s Internet address and the
subnet mask. (See the addr command in Chapter 3.)
3. If you are booting the Micro-CS using a Serial Line Internet Protocol
(SLIP) network interface, you must:
2-8 Micro-CS Installation Guide
Page 31

Software Installation Procedures
Use the slip command to modify the port parameters for the SLIP
network interface (see the slip command in Chapter 3).
Use the sequence command to list the SLIP network interface in the
load/dump interface list (see the sequence command in Chapter 3).
4. Execute the boot command (see the boot command in Chapter 3).
After successful execution of the boot command, your Micro-CS should
display the Annex prompt. If the Micro-CS was booted from the monitor
mode, the SETUP button should be depressed once to turn off the SETUP
LED.
Micro-CS Installation Guide 2-9
Page 32

Chapter 2: Micro-CS Installation
2-10 Micro-CS Installation Guide
Page 33

CHAPTER 3
ROM MONITOR COMMANDS
3.1 GENERAL
This chapter describes the ROM Monitor commands. These commands
are accessed through a terminal connected to port 1 when the Micro-CS is
in SETUP mode. Pressing the SETUP switch within 3 seconds of
powering up puts the Micro-CS into Set Up mode.
The ROM Monitor commands allow you to set a number of EEPROM
parameters. Some of these parameters, like the unit’ s Internet address, are
required for booting the Micro-CS; some parameters, like the broadcast
address, are required if the network configuration differs from the
supplied defaults. Table 3-1 lists the ROM Monitor commands.
Other parameters, although not required, are recommended for the
Micro-CS’s initial boot. Setting these parameters rather than using the
assigned defaults minimizes errors during the initial boot. For example,
setting the parameter that defines the preferred load host enables the
Micro-CS to load by requesting assistance from a specific host rather than
by broadcasting that request to all hosts on the Ethernet.
You can define the same parameters using the Network Administrator
(na) program as you can using the ROM Monitor. ROM Monitor
commands generally provide data about current EEPROM parameters.
When appropriate, they also display a prompt that allows the operator to
change those parameters. Default or current values for parameters are
displayed in brackets. For example:
Enter broadcast address [132.245.6.255]:
At the prompt enter a different value or press the Return key <cr> to
leave the displayed value unchanged.
You can use unique abbreviations for all R OM Monitor commands except
erase. For example, enter boot as bo, and enter net as n. If you enter an
abbreviation that is not unique enough, an error message is displayed on
the console terminal.
Micro-CS Installation Guide 3-1
Page 34

Chapter 3: ROM Monitor Commands
Table 3-1 ROM Monitor Command
addr [-d]
boot [-v] [<file>]
boot [-l] [<file>]
config
Displays and sets EEPROM values relevant to network
addressing, including the Micro-CS’s Internet address.
Manually boots and loads the Micro-CS’s operating
code.
Erases the existing Flash memory and copies a new
image to Flash.
Displays the current hardware configuration and
revision levels.
console-baud Changes the console port’s baud rate.
erase Erases non-volatile memory.
help (or “?”) Display the list of ROM Monitor commands.
image [-d/<file>]
Displays and/or sets the load image and TFTP load
dump names.
ipx [-d] Sets IPX load/dump file server.
lat_key [-d] Sets LAT key.
mop [-d] Sets MOP load/dump address.
net
Executes an Ethernet stand-alone external loopback
test.
option_key [-d] Sets or displays the option key.
ping
ports [-d]
sequence
[-d | <list>]
Sends ICMP ECHO_REQUEST, host [data size]
[npackets].
Shows the current status of all ports and tests specified
port(s).
Displays and edits the load/dump interface list.
slip [-d] <port> Configures an SL/IP interface.
stats [-slip]
Displays current network statistics gathered by the
ROM.
3-2 Micro-CS Installation Guide
Page 35

Commands
3.2 COMMANDS
Following is an explanation of each of the ROM monitor commands,
syntax and other usage information.
3.2.1 addr
The addr command displays and sets several Micro-CS operating
parameters (EEPROM values) relevant to IP network addressing:
• Internet address.
• Subnet mask.
• Broadcast address.
• Preferred Load Host address.
• Preferred Dump Host address.
• Load/Dump Gateway address.
• Type of IP Packet encapsulation.
• Load Broadcast
The addr -d command also displays the unit’s ROM-resident Ethernet
address in hexadecimal notation (see the CSMIM/MicroCS
Administrator’s Guide for UNIX). The command syntax is:
addr [–d]
If you enter the addr command without the –d argument, the console
prompts you for each Internet address. Enter Internet addresses using the
standard decimal dot (.) notation.
The addr –d command displays the Micro-CS’s Ethernet address, IP
address, subnet mask, broadcast address, preferred load host address,
preferred dump host address, load/dump gateway address, IP
encapsulation type, and Load Broadcast. The addr -d command cannot
be used to make changes to any of the displayed parameters.
Micro-CS Installation Guide 3-3
Page 36

Chapter 3: ROM Monitor Commands
The addr command display looks like this:
monitor:: addr
Enter Internet address [<uninitialized>]:: 192.9.200.214
Internet address: 192.9.200.214
Enter Subnet mask [255.255.0.0]::
Enter Broadcast address [0.0.0.0]:: 192.9.200.0
Broadcast address: 192.9.200.0
Enter Preferred Load Host address [<any host>]:: 192.9.200.88
Preferred Load Host address: 192.9.200.88
Enter Preferred Dump Host address [0.0.0.0]:: 192.9.200.88
Preferred Dump Host address: 192.9.200.88
Enter Load/Dump Gateway address [<uninitialized>]:: 192.9.200.
Load/Dump Gateway address: 192.9.200.88
Select type of IP packet encapsulation (ieee802/ethernet)
[<ethernet>]::
Load Broadcast Y/N [Y]::
The addr -d command display looks like this:
monitor:: addr -d
Ethernet address (hex): 00-80-2D-00-C6-1E
Internet address: 192.9.200.214
Subnet mask: 255.255.0.0
Broadcast address: 192.9.200.0
Preferred Load Host address: 192.9.200.88
Preferred Dump Host address: 192.9.200.88
Load/Dump Gateway address: 192.9.200.10
Type of IP packet encapsulation: <ethernet>
Load Broadcast: Y
3-4 Micro-CS Installation Guide
Page 37

Commands
The Micro-CS must have an Internet (IP) address in its memory before it
can load its operational image across the Ethernet via the IP protocol.
Therefore, you must enter the IP address before booting the Micro-CS
from a UNIX load host. If you do not define an IP address for the
Micro-CS, it will attempt to learn the address using BOOTP or RARP. If
you do not define a subnet mask, the Micro-CS uses the generic mask for
the specified IP address.
The Micro-CS tries to boot from a preferred UNIX load host. If you do
not define a preferred load host, the Micro-CS broadcasts its load request
on the subnet and loads software from the first host that responds.
If the part of the IP address containing the network address differs from
the preferred load or dump host, that host must be reached through a
gateway. The addr command prompts you for this gateway’s IP address.
The Micro-CS uses the broadcast address parameter when loading a file.
If this parameter contains a specific address (for example,
132.245.6.255), the Micro-CS uses only that address for broadcast. If the
value is all zeroes (0.0.0.0), the ROM Monitor tries various combinations
of broadcast addresses and subnet or network broadcasts. The Micro-CS
broadcasts its request three times for each possible combination of
broadcast addresses.
You can specify the IP encapsulation type as either ethernet for Ethernet,
or ieee802 for IEEE 802.2/802.3. The default IP encapsulation is
ethernet. Many systems have hardware Ethernet interfaces that are IEEE
802.3 compliant, but very few actually do 802.3 IP packet encapsulation.
Do not change this parameter unless you know absolutely that
NOTE
your Ethernet does 802.2/802.3 IP packet encapsulation. An
incorrect IP encapsulation type prevents your Micro-CS from
booting.
Micro-CS Installation Guide 3-5
Page 38

Chapter 3: ROM Monitor Commands
3.2.2 boot
The boot command requests the loading of appropriate Micro-CS
operating software from the preferred load host. The command syntax is:
boot [–lv | filename]
The boot –l command is supported only if the self-boot option
NOTE
(Flash) is installed.
Typing the letter q or CONTROL-C interrupts the boot.
If you try to boot with a non-existent image file name, the
Micro-CS will hang as it searches for the image. You must
press the RESET button to recover.
A successful boot disables the Console and the ROM monitor.
The boot command accepts a file name for the Micro-CS’s image. If the
file name is not specified, boot displays the default file name and prompts
for one. If you do not provide a file name, or have not defined one for the
Micro-CS, boot requests the default file oper.56.enet. You can also enter
a file name using the image command.
The Micro-CS boots from the defined preferred load host (UNIX/IP,
Novell/IPX, or VAX VMS/MOP). If the preferred load host is not def ined
or does not respond, the Micro-CS broadcasts on the Ethernet and loads
from the first host that responds.
To initiate loading, the Micro-CS sends a load request message to the
selected host. After receiving a response, the Micro-CS loads its
operational code to RAM memory. When loading is complete, it transfers
control to the newly-loaded program. The Micro-CS displays a symbol on
the console for each data block received during the boot.
When the Micro-CS begins to boot, it displays the load server host’s IP
address. If the unit does not boot successfully after several attempts, it
displays a boot attempt failed message; if the unit has opened the boot file
and an error occurs during the boot process, it displays a boot error report
on the console and returns to the ROM Monitor. The boot error report can
help determine the cause of the boot failure.
3-6 Micro-CS Installation Guide
Page 39

Commands
During a boot, the console may display four possible status symbols: “.”
indicates received data blocks, “?” indicates unanswered requests, “*”
indicates transmission errors, and “! ~XXXX~” is a status word from the
Ethernet chip on the Micro-CS indicating a gross problem with the
Ethernet connection (if this symbol appears in your boot command
display, contact technical support).
The status word “! ~XXXX~”, where XXXX are four hexadecimal digits,
decodes as follows:
8000 = Command complete
4000 = Chip is busy
2000 = Command completed without error
1000 = Command aborted by an abort command
800 = Late collision detected
400 = Carrier lost
200 = CTS lost
100 = DMA underrun
80 = Transmission deferred because link was busy
40 = Collision detected during interframe spacing
(SQE/Heartbeat detected)
20 = Excessive collisions
10 = Reserved
The lowest nibble (bits 3 to 0) are a count of collisions during this
transmission. For example:
~8802~ = Complete, Late collision, 2 collisions
~8841~ = Complete, Late Collision, SQE detected, 1 collision
Micro-CS Installation Guide 3-7
Page 40

Chapter 3: ROM Monitor Commands
The boot command display (using bfs) looks like this:
monitor:: boot
Enter boot file name[(ip) “oper.56.enet”,\
(mop) “OPER_56_ENET.SYS”]::
Requesting default boot file “OPER_56_ENET.SYS” for MOP/VMS\
loads and “oper.56.enet” for all other protocols.
Unanswered requests shown as ‘?’,transmission errors as ‘*’.
Requesting boot from 192.9.200.88 via Ethernet...
Booting BFS file using open delay of 8
Booting BFS file from 192.9.200.88
Header received OK. Received data blocks shown as ‘.’.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. .. . . . . . . . . . . ? . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. * . . . . . . . . . . . . . . . . . . . . . . . . . . . . * .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . ? . . . . . . . . . . . . . . . .
. . . . . . . . . . EOF
The next example shows a boot using tftp. The Micro-CS always tries to
open a file using bfs first. If unsuccessful, the Micro-CS uses tftp to open
the file.
monitor:: boot
Enter boot file name [(ip) “oper.56.enet”, \
(mop) “OPER_56_ENET.SYS”]::
Requesting default boot file “OPER_56_ENET.SYS” for MOP/VMS\
loads and “oper.56.enet” for all other protocols.
Unanswered requests shown as ‘?’,transmission errors as ‘*’.
Requesting boot from 192.9.200.88 via Ethernet...
Booting BFS file using open delay of 8
?
Booting TFTP file using open delay of 8
Booting TFTP file from 192.9.200.88
Header received OK. Received data blocks shown as ’.’.
.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .. . . . . . . . . . . ? . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . * . . . . . . . . . . . . . . . . . . . . . . . . . . .
. * . . . . . . . . . . . . . . . . . . . ? . . . . . . . . . .
. . . . . . . . . . . . . . . . EOF
3-8 Micro-CS Installation Guide
Page 41

Commands
The boot –l command downloads and saves the operational image to
non-volatile memory, erases the existing Flash memory, copies the new
image from non-volatile memory to Flash memory, and then executes the
image.
The boot –l command is supported only if the self-boot option
NOTE
is installed.
After executing a boot –l, the ls command may not show the
newly-loaded image.
The boot –l command display looks like this:
monitor:: boot –l
Enter boot file name [(ip) “oper.56.enet”, \
(mop) “OPER_56_ENET.SYS”]::
Requesting default boot file “OPER_56_ENET.SYS” for \
MOP/VMS loads and “oper.56.enet” for all other protocols.\
Unanswered requests shown as ‘?’, transmission errors as\ ‘*’.
Requesting boot from 192.9.200.88 via Ethernet...
Booting BFS file using open delay of 8
Booting from 192.9.200.88
Header received OK. Received data blocks shown as ‘.’.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..
. . . . . . . . . . . . . . . . . . . .EOF
Saving image into storage device ...
Erasing device
|----------------------------|
..............................
Erase completed
Storing image .............
Storage completed
Beginning execution of image...
Annex Command Line Interpreter * Copyright 1993, 1995\ Xylogics,
Inc.
annex:
Micro-CS Installation Guide 3-9
Page 42

Chapter 3: ROM Monitor Commands
4
4
4
6
4
4
4
Only use the boot -l command when reloading your Flash
NOTE
memory (e.g., when upgrading to a new version of software).
Make sure that you have a properly configured load host
available or you will erase your image from Flash and will not
be able to load a new one.
The boot –v command displays the boot in verbose mode. This output
includes the turnaround time in milliseconds for each request. This value
equals the time lapse between sending the request and receiving the
proper reply from the host.
When the boot is complete, verbose output includes a display of network
statistics:
monitor:: boot –v
Enter boot file name [(ip) “oper.56.enet”, \
(mop) “OPER_56_ENET.SYS”]::
Requesting default boot file “OPER_56_ENET.SYS” for MOP/VMS\
loads and “oper.56.enet” for all other protocols.
Unanswered requests shown as ‘?’, transmission errors as ‘*’.
Requesting boot from 192.9.200.88 via Ethernet...
Booting from 192.9.200.88 (42 msec)
Header received OK. Received data blocks shown as msec
turnaround time.
4 4 6 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 4 4 4 4
4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 4 4 4 4 4 4 4 4 4 4 4 4 4 5 4
4 4 4 4 4 6 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 4
4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 4 24 4 4 6 4 10 4
73 4 4 5 4 4 4 4 4 9 4 4 11 4 4 4 4 4 4 4 4 4 4 4 4 4 3 4 4 4 4
4 4 6 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 11 6 4 4 4 4
4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4
4 4 4 4 4 6 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 4
4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 6 EOF
Ethernet Statistics
Frames Received: 1031 Frames Sent: 1031
CRC Errors: 0 Carrier Sense Losses: 0
Alignment Errors: 0 Clear to Send Losses: 0
Resource Drops: 9 Collisions Detected: 9
Bus Wait Drops: 0 Excessive Collision Losses: 0
Bad Types/Lengths: 0
3-10 Micro-CS Installation Guide
Page 43

Commands
3.2.3 config
The config command displays the Micro-CS’s total number of ports, total
amount of memory, the ID number, the serial number, the major and
minor hardware revision numbers, and the ROM software revision
number . The config command display contains information describing
whether or not Flash ROM is installed. The command syntax is:
config
The config command display looks like this:
monitor:: config
REVISION/CONFIGURATION INFORMATION
ROM Software Rev: 0901
Board ID: 56 Board Type:
CPU Type: 486SXLC2 Ethernet Address: 00-80-2D-00-C6-1E
Memory Size: 4 Meg
Flash Size: 2 Meg Flash ID: 8989
EEPROM Size: 32736
Micro-CS
Installed Alternate Interface: ThinNet
ASYNC Config
Number of Ports: 16
Max Port Speed: 115.2 Kbps
3.2.4 console-baud
The console-baud command changes the console port’s baud rate. Thus,
the console port can interface with any modem to which it is connected.
When the baud rate is entered as auto, the Micro-CS detects the baud rate
of the incoming line and adjusts its baud rate accordingly. This command
provides support for remote troubleshooting. The command syntax is:
console-baud
Micro-CS Installation Guide 3-11
Page 44

Chapter 3: ROM Monitor Commands
The command display looks like this:
monitor:: console-baud
Remote Diagnostic Test Mode
In order to use the remote diagnostic functionality, you
must first connect a modem to the console port of the
Annex. The modem should be configured such that DTR is
forced on, carrier detect and DSR are set normal, and
auto-answer is enabled. Once this is done, contact your
service representative for remote diagnostic maintenance.
To enter “Autobaud Mode”, please type “Auto”. To
“manually” configure the Annex console port, please type
in the desired baud rate. To return to the “monitor::”
prompt strike the “carriage return <CR>” key.
[Baudrate Range: 50-9600 BAUD]
Select Baudrate []::
This command has no effect on the port’s baud rate after the
NOTE
Micro-CS is booted
To provide remote access to the Micro-CS ROMs:
1. From a site local to the Micro-CS:
• Set the Micro-CS into test mode so the monitor prompt appears on
the console.
• Set the modem into auto-answer mode.
2. From the Micro-CS console port:
• At the monitor prompt, enter console-baud.
• At the Select baud rate prompt, enter the appropriate baud rate or
auto.
• Connect the modem to the Micro-CS’s console port.
3-12 Micro-CS Installation Guide
Page 45

3. From the remote site:
• Dial into the modem connected to the Micro-CS.
Commands
• Type
RETURN until the monitor prompt appears.
3.2.5 erase
The erase command erases the contents of non-volatile memory,
including the Micro-CS’s IP address. This command also restores the
parameters to their factory defaults. The syntax is:
erase
If the self-boot option is installed, the erase command prompts for which
non-volatile memory to erase: EEPROM or FLASH. Entering 1 at the
prompt causes the Micro-CS to erase the EEPROM memory
(configuration information); entering 2 at the prompt causes the
Micro-CS to erase the Flash memory (self-boot image).
The erase command display looks like this:
monitor:: erase
1) EEPROM (i.e. configuration information)
2) FLASH (i.e. self boot image)
Enter 1 or 2 :: 1
Erase all non-volatile EEPROM memory? (y/n) [n]:: y
Erasing <16352 or 8160 bytes> of non-volatile memory.
Please wait . . .
16K->|Data 0xff
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16K->|Data 0x0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Initialized checksum record installed
.
.
.
Micro-CS Installation Guide 3-13
Page 46

Chapter 3: ROM Monitor Commands
If the self-boot option is not installed, the command display looks
like this:
monitor:: erase
Erase all non-volatile EEPROM memory? (y/n) [n]:: y
Erasing <16352 or 8160 bytes> of non-volatile memory.
Please wait . . .
16K->|Data 0xff
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16K->|Data 0x0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Initialized checksum record installed
The erase command does not erase the Ethernet address.
NOTE
Since the erase command erases the IP address, you
use the addr command to re-enter the Micro-CS’s IP address
before reloading any software.
must
3.2.6 help
Entering help, or ?, displays brief descriptions of the Micro-CS ROM
Monitor commands.
3.2.7 image
The image command sets and displays the name of the image file
containing the Micro-CS’s software. The command syntax is:
image [–d | filename]
The filename argument permits up to 100 characters. To return the image
name to its default, enter a pair of double-quote characters (""). The
default image name is oper.56.enet. The image command display looks
like this:
monitor:: image
Enter Image name: [(ip) "oper.56.enet", (mop)
"OPER_56_ENET.SYS"]::
Enter TFTP Load Directory [""]::
Enter TFTP Dump path/filename ["dump.192.9.200.88"]::
3-14 Micro-CS Installation Guide
Page 47

The image –d command display looks like this:
monitor:: image -d
Image name: Default (ip): "oper.56.enet"
Default (mop): "OPER_56_ENET.SYS"
TFTP Load Directory: ""
TFTP Dump path/filename: "dump.192.9.200.88"
SELF image name: "oper.56.enet"
The
NOTE
SELF image name
is loaded.
appears only if the self-boot image
If the image file name contains more than 16 characters, it is
truncated when MOP is attempted.
3.2.8 ipx
Commands
The ipx command sets several parameters associated with IPX booting
and dumping. This is useful when loading the Micro-CS’s operational
image from a Novell file server. The command syntax is:
ipx [–d]
The ipx command display looks like this:
monitor:: ipx
Enter IPX file server name [<uninitialized>]::mars
Enter Frame type, 0=802.3 1=Ethernet II 2=802.2 3=SNAP\
[802.3]::
Enter IPX dump user name [<uninitialized>]::susans
Enter IPX dump password [<uninitialized>]::********
Verify IPX dump password []::********
Enter IPX dump path [<uninitialized>]::SYS:\user\susans\
Micro-CS Installation Guide 3-15
Page 48

Chapter 3: ROM Monitor Commands
The ipx –d command displays the current settings for all of the entries.
The command display looks like this:
monitor:: ipx -d
IPX preferred load file server: "MARS"
IPX Frame type: “802.3”
IPX dump user name: "SUSANS"
IPX dump password: <SET>
IPX dump path name: "SYS:\user\susans\"
3.2.9 lat_key
The lat_key command allows you to set the LAT key from the ROM
monitor.
The lat_key command is optional and may be purchased
NOTE
separately.
The command syntax is:
lat_key [–d]
The lat_key command display looks like this:
monitor:: lat_key
Enter LAT_KEY: [<uninitialized>]::
The
lat_key –d command displays the current LAT key setting:
monitor:: lat_key -d
LAT_KEY: <uninitialized>
3-16 Micro-CS Installation Guide
Page 49

Commands
3.2.10 mop
The mop command sets the MOP load/dump address. This is useful when
the loading the Micro-CS’s operational image from a VAX VMS load
host. The command syntax is:
mop [–d]
The mop command display looks like this:
monitor:: mop
Enter preferred MOP load/dump address [<uninitialized>]::
Load Broadcast Y/N [Y]::
The
mop –d command displays the current MOP settings:
monitor:: mop -d
MOP preferred load/dump address <uninitialized>
Load Broadcast: Y
3.2.11 net
The net command executes an Ethernet transceiver loopback test on the
local area network. The command syntax is:
net
The net command display looks like this:
monitor:: net
Network test – PASSED
This transciever loopback test sends out a short test packet from the
Micro-CS through the MicroMMAC to test the integrity of the network.
One of the Ethernet connections (internal AUI or external connection)
must be valid for this test to pass.
Micro-CS Installation Guide 3-17
Page 50

Chapter 3: ROM Monitor Commands
If the unit passes this test, the console displays PASSED. If the Micro-CS
fails, the console displays an error message. Failing this test indicates that
the Micro-CS failed to communicate with the MicroMMAC. Contact
Cabletron Systems Technical Support.
3.2.12 option_key
The option_key command loads an option key from the ROM monitor.
The command syntax is:
option_key [–d ]
The option_key command display looks like this:
monitor:: option_key
Enter option_key [<uninitialized>]::
The option_key –d command displays the current settings:
monitor:: option_key -d
option_key: <uninitialized>
3.2.13 ping
The ping command sends an Internet Control Message Protocol (ICMP)
mandatory ECHO_REQUEST datagram to elicit an ICMP
ECHO_RESPONSE from a host or gateway. ECHO_REQUEST
datagrams (pings) have an IP and ICMP header, followed by a structured
time value and an arbitrary number of pad bytes that fill out the packet.
The syntax for this command is:
ping host_ip_address [data_size] [npackets]
The host_ip_address entry is the Internet address of the host or gateway
from which you wish to elicit a response.
The optional data_size entry is the number of bytes sent in a datagram
packet. The default value is 64 and the maximum value is 1024.
3-18 Micro-CS Installation Guide
Page 51

Commands
The optional npackets entry is the number of packets to transmit. If you
specify npackets, then you must also specify a data_size.
The ping command display looks something like this:
monitor:: ping 132.245.33.69
PING 132.245.33.69: 64 data bytes
To exit out of
point, type
ping either wait for npackets to be transmitted or, at any
q. The ping statistics display upon exit.
3.2.14 ports
The ports command tests serial line ports, exercising both the data lines
and the control lines for each serial port specified. The syntax for this
command is:
ports [–d]
Each serial port to be tested must be looped-back with a loopback plug to
test both the data lines and the control lines (the accessory kit provides a
loopback plug). Connect this plug to the connector on the Micro-CS that
corresponds to the port to be tested.
Do not run the ports command for a port to which a device is
NOTE
connected. The test will transmit data to the device and toggle
its control lines.
When invoked, the command displays a menu of options.
Micro-CS Installation Guide 3-19
Page 52

Chapter 3: ROM Monitor Commands
monitor:: ports
Individual Port Tests (Data and Control Lines)
Some important notes:
- All Serial Ports (1-7) which are to be tested require a
loopback plug in order to pass the Data Line and Control Line
loopback tests.
WARNING. If there is a device instead of a loopback plug
connected to the port being tested, the device will have data
transmitted to it and its Control Line toggled.
Ports with faulty Control Lines:
Ports with faulty Data Lines:
Enter port number or range of ports to test (Return to exit):: 3
Enter the number of times to loop on this test [1]::
Testing data lines on channel 3
ERROR -- Data line loopback failure on port 3 Testing modem
signals on channel 3
ERROR -- No RTS/CTS turning (ON) loopback interrupt sensed on
Chan 3 !
Pressing the RETURN key after the prompt Selection (Return to exit)
returns you to the monitor prompt.
If you enter the ports –d command, only the data lines are tested. The
outgoing control lines are asserted during this test.
monitor:: ports -d
Individual Port Tests (Data Lines)
Some important notes:
- All Asynch Serial Ports (2-16) which are to be tested require a
loopback plug in order to pass the Data Line loopback tests.
WARNING. If there is a device instead of a loopback plug
connected to the port being tested, the device will have data
transmitted to it.
You may enter a list of ports to test separated by spaces/commas.
You may also enter ranges of ports, such as 2-16.
Ports with faulty Data Lines: 3
Enter port number or range of ports to test (Return to exit)::
3-20 Micro-CS Installation Guide
Page 53

Commands
3.2.15 sequence
The sequence command edits the load/dump interface list. This list
determines the order of the network interfaces, and either the local area
network (LAN) or the SLIP interface the Micro-CS will use for loading
and dumping. The default, net, uses the LAN interface. The list can
contain up to four interfaces. If the Micro-CS fails to boot using the first
interface, it will try the next, and then the next interface, and then repeat
the sequence. The command syntax is:
sequence [–d] | [interface[,interface]. . .]
Specify the LAN interface by selecting net; specify each SLIP interface
as slnn, where nn is a port number; and specify self-boot by selecting self.
Separate each interface with a comma or a space. Enter the interface list
as an argument to the command; otherwise, the console displays a list of
available interfaces and prompts for a new list.
In the following example, interfaces are assigned to the load/dump
sequence list. Ports 12, 14, and 15 can be added to the list because they
were configured earlier as SLIP interfaces:
monitor:: sequence
Enter a list of 1 to 4 interfaces to attempt to use for
downloading code or upline dumping. Enter them in the order
they should be tried, separated by commas or spaces. Possible
interfaces are:
Ethernet: net
SL/IP: sl12,sl14,s115
SELF: self
Enter interface sequence [net]:: sl12, net
Interface sequence: sl12,net
The
SELF
NOTE
option appears only if the self-boot image is loaded.
Micro-CS Installation Guide 3-21
Page 54

Chapter 3: ROM Monitor Commands
If you enter the command with the –d argument, the console displays the
current load/dump interface list. You cannot specify both the –d argument
and the interface list with the same command. The sequence –d
command display looks like this:
monitor:: sequence -d
Interface sequence: sl12,net
Entering a number for a port that has not been configured properly for
SLIP causes the Port nn is not configured for SL/IP message to display,
where nn is the port number.
The Micro-CS can slip boot over any port except Port 1.
NOTE
3.2.16 slip
The slip command defines a serial port as a Serial Line Internet Protocol
(SLIP) interface. This command defines a number of port parameters.
The command syntax is:
slip [–d] [port]
After entering the command, you are prompted for each parameter. The
port is the number of the serial port to be configured with this command.
If you do not enter a port number, you will be prompted for one. Table
3-2 lists the information for which the slip command prompts.
Entering slip –d causes the command to display all the current settings.
3-22 Micro-CS Installation Guide
Page 55

Table 3-2 . The slip Command Prompts
Prompt Description
Modifies the port’s mode. A y response changes
the port to a SLIP interface. An n response changes
Allow SLIP on this port
the port’s mode to CLI. The port is not available as
a SLIP interface and the SLIP parameters are
ignored. The default is n.
Commands
Enter local endpoint
address
Enter remote
endpoint address
Enter remote
load/dump host
address
Should this interface
be used for memory
dumps
Enter the baud rate
Enter the number of
stop bits
Specifies the Micro-CS IP address for this SLIP
interface. The Micro-CS boots over the SLIP
interface only if this address is set.
Specifies the IP address of the remote end of the
SLIP interface.
Specifies the IP address of the remote host to
which load and dump requests are sent. This
address is required only if the remote host is a
gatewa y and not the load host. By def ault, this is the
same as the remote end-point address.
Enables the Micro-CS to use a SLIP interface for
memory dumps. The default is y.
Specifies the baud rate of the serial interface. The
default is 9600.
Pressing the
(one). Generally, SLIP implementations require
the default.
RETURN key accepts the default
Enter the parity
Micro-CS Installation Guide 3-23
Pressing the
(none). Generally, SLIP implementations require
the default.
RETURN key accepts the default
Page 56

Chapter 3: ROM Monitor Commands
The slip command automatically sets the number of data bits to 8 for all
SLIP interfaces. The number of data bits does not include the start, stop,
or parity bits. The slip command display looks like this:
monitor:: slip
Line number (1-16):: 6
Allow SL/IP on this port? (y/n) [n]:: y
Enter local endpoint address [0.0.0.0]:: 192.9.200.214
Local endpoint address: 192.9.200.214
Enter subnet mask [255.255.255.0]::
Constructed new subnet mask.
Enter remote endpoint address [0.0.0.0.]:: 192.9.200.0
Remote endpoint address: 192.9.200.0
Enter remote load/dump host address [default 192.9.200.88]::
Using remote endpoint address: 192.9.200.88
Should this interface be used for memory dumps? (y/n) [y]::
Enter the baud rate [9600]::
Enter the number of stop bits (1,1.5,2) [1]::
Enter the parity (none,even,odd) [none]::
Pressing CONTROL + C interrupts the slip command; the
NOTE
parameters remain unchanged until the command completes
normally.
3.2.17 stats
The stats command displays current network statistics gathered by the
ROM. Use stats along with the boot command to help isolate problems.
Table 3-3 describes the network statistics displayed by the stats
command. The syntax is:
stats [-slip]
3-24 Micro-CS Installation Guide
Page 57

Commands
The stats command display looks like this:
monitor:: stats
Ethernet Statistics
Frames Received: 398 Frames Sent: 3
CRC Errors: 0 Carrier Sense Losses: 0
Alignment Errors: 0 Clear to Send Losses: 0
Resource Drops: 0 Collisions Detected: 0
Bus Wait Drops: 0 Excessive Collision Losses 0
Bad Types/Lengths: 0
Table 3-3 . Network Statistics
Statistic Description
Frames Received The number of frames received.
CRC Errors The number of CRC checksum errors detected.
Alignment Errors
The number of frames received misaligned with a CRC
error.
The number of packets dropped because the ROM
code could not buffer them quickly enough. The ROM
Resource Drops
code cannot always handle back-to-back incoming
packets. The Micro-CS accepts the first response it
receives and drops all others. Dropped packets are
normal.
Bus Wait Drops
The number of packets dropped due to waiting too
long for a bus to become available.
The number of unknown packet types if Ethernet IP
Bad Types/
Lengths
encapsulation is being used. The number of packets
with illegal lengths if IEEE 802.2/802.3 IP
encapsulation is being used.
Frames Sent The number of frames sent.
Carrier Sense
Losses
Micro-CS Installation Guide 3-25
The number of times packets could not be transmitted
because the Micro-CS lost the Carrier Sense signal –
usually the result of excessive traffic on the Ethernet.
Page 58

Chapter 3: ROM Monitor Commands
Table 3-3 . Network Statistics (Continued)
Statistic Description
Clear to Send
Losses
Collisions Detected
Excessive Collision
Losses
The number of times packets could not be transmitted
because the Micro-CS lost the Clear to Send signal –
usually the result of excessive traffic.
The number of times the Micro-CS had to retry
transmissions automatically – usually the result of
normal Ethernet traffic. These retries do not cause the
boot command to display ‘‘*.”
The number of times the Micro-CS could not transmit
packets because there were too many collisions –
usually the result of excessive traffic on the Ethernet.
The boot command displays these retries as “*.”
3-26 Micro-CS Installation Guide
Page 59

CHAPTER 4
TROUBLESHOOTING PROCEDURES
4.1 GENERAL
The Micro-CS’s front panel displays 4 system indicators and 9 status
indicators. The system indicators are labeled STATUS, NET, ATTN,
and SETUP. The status indicators are labeled 1 through 7, M(odem), and
INT.
The system indicators provide information about normal operations and
about problems that occur. Use these indicators and the ROM Monitor
commands to diagnose problems.
The status indicators display port activity during normal operations; each
indicator supports 1 port.
During power-up and booting it is more complicated to diagnose
problems because they can originate in the Micro-CS or the load server
host. However, the indicators provide both a progress report and an error
display to assist you in troubleshooting.
4.2 POWER-UP AND BOOT PROCEDURES
The Micro-CS has two modes of operation: normal and SETUP. Normal
mode is the standard operational mode. Set Up mode provides access to
the ROM Monitor commands. Pressing the SETUP switch on the front
panel within 3 seconds of powering–up puts the Micro-CS into SETUP
mode. When the Micro-CS is in SETUP mode the SETUP indicator
lights.
During the power-up and boot sequence the Micro-CS performs a set of
diagnostics. The system indicators display the diagnostics status. The
Micro-CS stops when it detects one of two error conditions (see Table
4-2). The pattern of the system indicators identifies the error condition.
4.2.1 Normal Mode
Upon power-up or reset the Micro-CS enters normal mode. The following
subsections describe both the possible error and error-free conditions that
can occur during power-up and booting in normal mode.
Micro-CS Installation Guide 4-1
Page 60

Chapter 4: Troubleshooting Procedures
4.2.1.1 Normal Mode Error-free Sequence
Table 4-1 summarizes the indicator display sequences during error-free
power-up in normal mode.
Table 4-1 Normal Mode Error-free Indicator States
Key:
Activity
N1: Indicators OK
N2: Hardware OK
STAT
green
● ● ●
● ✕ ■
● = On continuously✕ = Off■ = Flashing irregularly
ATTN
amber
NET
green
◆ = Flashing regularly (about 1Hz)
Activity N1: Testing Indicators
All front panel indicators light for a few seconds then all turn off,
confirming that all indicators are operational.
Activity N2: Testing the Hardware
During the power-up sequence the Micro-CS runs a series of self-test
diagnostics. These diagnostics test internal hardware functions. If a test
fails, the ATTN and STATUS LEDs flash and an error message is
displayed, if the console port is selected. The NET indicator flashes
during the power-up self-tests. After the tests are complete, only the
STATUS LED stays on.
4.2.1.2 Normal Mode Error States
Table 4-2 shows the state of the indicators when an error occurs at given
stages of the start-up process. For example, if the Micro-CS fails during
the testing hardware state (N2), the error condition is hardware failure
NE2. A description of possible causes and solutions for each error
condition follows Table 4-2.
4-2 Micro-CS Installation Guide
Page 61

Power-Up and Boot Procedures
Table 4-2 Normal Mode Error Indicator States
Activity
NE2: Hardware failure
NE5: Booted wrong image
STATUS
green
◆ ◆ ✕
● ◆ ✕
ATTN
amber
NET
green
Key: ● = On continuously✕ = Off■ = Flashing irregularly
◆ = Flashing regularly (about 1Hz)
Activity NE2: Hardware Failure
The ROM diagnostics detected a Micro-CS hardware problem requiring
service. Call technical support.
Activity NE5: Booted Wrong Image
The Micro-CS has just loaded an inappropriate image. Pressing the
SETUP switch for approximately 3 seconds to generate a reset clears this
error. The Micro-CS loads inappropriate images if one of the following
operator errors occur:
• Configuring the Micro-CS with an incorrect file name or renaming or
copying the image file to the wrong name.
• Supplying the wrong name to any of the boot commands (na boot,
dumpboot, or the superuser CLI boot).
If you are uncertain as to why the Micro-CS booted the wrong image,
enter Set Up mode and issue an image -d command. This command
shows which host file the Micro-CS is trying to load.
SETUP Mode
Pressing the SETUP switch within 3 seconds of either a reset or cycling
on power puts the Micro-CS into Set Up mode. The SETUP indicator is
on after pressing the SETUP switch.
Micro-CS Installation Guide 4-3
Page 62

Chapter 4: Troubleshooting Procedures
4.2.1.3 SETUP Mode Error-Free Sequence
Table 4-3 summarizes the indicator sequences that display in SETUP
mode during an error-free start-up. A description of each sequence
follows Table 4-3.
Table 4-3 SETUP Mode Error-Free Indicator States
Key:
Activity
T1: Testing Indicators
T2: Testing hardware
T3: At monitor prompt
STATUS
green
● ● ●
● ✕ ■
● ● ■
● = On continuously✕ = Off ■ = Flashing irregularly
ATTN
amber
NET
green
◆ = Flashing regularly (about 1Hz)
Activity T1: T esting Indicators
All front panel indicators except the non-selected segment LEDs, light for
a few seconds, then all indicators turn of f. This sequence confirms that all
indicators are operational. At this point the Micro-CS is in normal mode.
Press the SETUP switch to put the Micro-CS into monitor mode.
Activity T2: T esting the Hardware
During power-up the Micro-CS runs self-tests that execute CPU
diagnostics, ROM and E2 PROM, flash checksums, refresh, internal
serial port and LAN loopbacks, and RAM tests. The NET indicator
flashes during the tests. After completing the power-up self-tests the
STATUS indicator remains on.
Activity T3: At the Monitor Prompt
When the STAT and ATTN indicators are on, the ROM Monitor prompt
displays on the console terminal. Enter the boot command at the prompt.
If you did not enter a file name with the command, a prompt asks you for
one.
4-4 Micro-CS Installation Guide
Page 63

Boot Failures
4.2.1.4 Set Up Mode Error States
Table 4-4 describes the state of the indicators if errors occur at different
stages of the start-up process. For example, if the Micro-CS fails while
testing the hardware (state T2), the error condition is hardware failure
TE2. A description of each error condition follows Table 4-4.
Table 4-4 SETUP Mode Error Indicator States
Activity
TE2: Hardware failure
TE7: Booted wrong image
Key:
● = On continuously✕ = Off■ = Flashing irregularly
STATUS
green
◆ ◆ ✕
● ◆ ✕
ATTN
amber
NET
green
◆ = Flashing regularly (about 1Hz)
Activity TE2: Hardware Failure
The ROM diagnostics detected a Micro-CS hardware problem requiring
service. Call technical support.
Activity TE7: Booted Wrong Image
The Micro-CS loaded an inappropriate image. Pressing the SETUP
switch approximately 3 seconds to generate a reset clears this error. The
Micro-CS loads inappropriate images if one of the following operator
errors occurs:
• Configuring the Micro-CS with an incorrect file name or renaming or
copying the image file to the wrong name.
• Supplying the wrong name to the boot command.
4.3 BOOT FAILURES
The procedures for troubleshooting a power-up failure established that
• the hardware is functional
• the Ethernet interface is functional
• the Micro-CS can communicate with the Ethernet
If the Micro-CS still is not booted, you must pinpoint the problem. The
boot error report can help in this process.
Micro-CS Installation Guide 4-5
Page 64

Chapter 4: Troubleshooting Procedures
The Micro-CS generates a boot error report only if it opens the
NOTE
boot file and an error occurs during the boot process.
Generally, two problems cause boot failures: the Micro-CS is not
configured properly, or the load server host is not responding. The
Micro-CS requests a boot either from a pre-defined load host, or by
broadcasting its boot request. When a host responds, the Micro-CS loads
its operational code.
The Micro-CS requires setting certain configuration parameters. Enter
these parameters with ROM Monitor commands for the initial boot
sequence. See Chapter 3 for more information on these commands.
If the problem is a non-responsive host the boot error report displays that
information under the Rsp T/O’s: field. This field indicates that the
Micro-CS timed out while waiting for a response to its boot request; if
this field is empty, check the Micro-CS’s configuration parameters.
Boot Error Report
If an error occurs, a boot error report is generated only if the Micro-CS
has opened the boot file. The report uses the following format:
BOOT ERROR REPORT (for BFS files only)
Boot attempt from host nn.nn.nn.nn:
Errors from Last Open Request:
0 ARP errors 0 ERPC layer errors 0 Aborts rx’d
Errors from Last Read Request:
0 Msgs w/ wrong size 0 ERPC layer errors 0 Aborts rxd
Errors from Last ERPC Layer Invocation:
0 H/W errors 1 Msgs from wrong host 0 Rsp T/O’s 0 Msgs of wrong type
TFTP error reporting complies with the standard, pre-defined
NOTE
The Micro-CS generates a boot error report for the Internet address from
which it tried and failed to boot. Table 4-5 describes the Errors from Last
Open Request; Table 4-6 describes the Errors from Last Read Request;
and Table 4-7 describes the Errors from Last ERPC Layer Invocation.
TFTP error codes.
4-6 Micro-CS Installation Guide
Page 65

Boot Failures
The error count pinpoints the error that caused the boot failure. For
example, if the boot failed during a Read Request due to excessive
Expedited Remote Procedure Call (ERPC) layer errors, the Errors from
Last ERPC Layer Invocation lists only errors that occurred during the
failed Read Request. The report does not list errors that occurred during
any other Read Request or during the Open Request.
The Open Request and the Read Request layers communicate with the
block file server (BFS) on the host. The ERPC layer resides below the
Open Request and the Read Request layers. It is responsible for sending a
given message to a specific host UDP port and for receiving the correct
response to that message from the port.
Table 4-5 Errors from Last Open Request
Address Resolution Protocol (ARP) errors indicate that
the Micro-CS is configured to boot from a specified
ARP errors
ERPC layer errors See Errors from Last ERPC Layer Invocation below.
Aborts rx’d
host, but the host would not transmit its Ethernet
address to the Micro-CS. Possibly, the Micro-CS
configuration includes the wrong IP encapsulation.
The host’s BFS tr ansmitted an abort in response to the
Micro-CS’s Open Request. This often means that the
requested file does not exist on that server. Run
erpcd -D on the host to obtain more information.
Table 4-6 Errors from Last Read Request
Msgs with wrong
size
ERPC layer errors See Errors from Last ERPC Layer Invocation below.
Aborts rx’d
The correct host responded to the Read Request, but
the data size is incorrect.
The host’s BFS tr ansmitted an abort in response to the
Micro-CS’s Read Request. Run erpcd -D on the host
to obtain more information.
Micro-CS Installation Guide 4-7
Page 66

Chapter 4: Troubleshooting Procedures
Table 4-7 Errors from Last ERPC Layer Invocation
The Micro-CS sensed a hardware error during
message transmission or reception. This error
H/W errors
Msgs from wrong host
Rsp T/O’s
Msgs of wrong type
indicates a fault with the Micro-CS network
interface. Use the net command to isolate the
problem (see Chapter 3).
The Micro-CS received a message from an
incorrect host. This indicates that the
Micro-CS received, and ignored, an
unsolicited packet.
The Micro-CS never received a correctly
formatted response from the correct host, or
any response from any load server hosts.
The correct host sent a message to the
Micro-CS, but the message was not a
correctly formatted response to the
transmitted request.
4.4 CORRECTING MICRO-CS PARAMETERS
The following parameters must accurately reflect both the Micro-CS and
the network environment in which it operates:
• Verify the Micro-CS’s Internet address using the addr command.
• If your network configuration does not support the factory defaults,
verify the following parameters using the addr command:
- The broadcast address.
- The subnet mask.
- The load/dump gateway address (which must be specified if the
preferred load server host is located on another network or
subnet).
- The IP encapsulation type. Many systems hav e hardware Ethernet
interfaces that are IEEE 802.3 compliant but very few actually do
802.3 IP packet encapsulation. Use the default, Ethernet, unless
you know absolutely that your LAN does 802.2/802.3 IP packet
encapsulation.
4-8 Micro-CS Installation Guide
Page 67

Load Server Host Not Responding
• Unless otherwise stated, if you are using a SLIP interface to boot the
Micro-CS, verify the following using the slip command:
- The port is configured as a SLIP interface.
- The Internet address for the SLIP network interface.
- The Internet address for the remote end of the SLIP connection.
- The Internet address for the load/dump host (this must be specified
if the remote end is a gateway and not a load host).
- The SLIP network interface is included in the load/dump interface
list (use the sequence command).
Both the name of the image file containing the Micro-CS’s software and
the address of the preferred load server host can be defaulted. If the value
for the image name is incorrect, the Micro-CS cannot boot. Correct the
name using the image command. If the address for the preferred load
server host is incorrect, the boot takes longer, since the Micro-CS has to
broadcast for a host. Correct the load host’s address using the addr
command.
Confirm that the Micro-CS boot parameters are correct by using the
appropriate ROM Monitor commands. Modify any boot parameters that
are incorrect or missing. Boot the Micro-CS either by entering the boot
command at the console, or by pressing the SETUP switch approximately
3 seconds to generate a reset, followed by an automatic boot.
4.5 LOAD SERVER HOST NOT RESPONDING
The Micro-CS can boot from one of four types of hosts acting as a load
server host:
• A UNIX host on the local area network.
• A UNIX host at the end of a SLIP interface.
• Another Micro-CS.
• Any host (UNIX or non-UNIX, using tftp).
The following sections discuss troubleshooting for each of these load
server hosts.
Micro-CS Installation Guide 4-9
Page 68

Chapter 4: Troubleshooting Procedures
UNIX Host on the LAN
When troubleshooting a UNIX host on the LAN, make sure
• The host is booted and functioning properly.
• The host can communicate with other network nodes using standard
UNIX networking features and utilities.
• All Micro-CS software is installed properly on the host. (See the
CSMIM2 Installation Notes.)
• The erpcd daemon or tftp server, which loads the operational image
to the Micro-CS, is running.
In SETUP mode, Micro-CS displays the boot progress report on the
console.
• To place the Micro-CS into SETUP mode, press the SETUP switch
after a reset and wait for monitor prompt.
• To place erpcd on the load server host into test mode, kill the erpcd
program (requires superuser privileges) and restart it using the -D
option:
# /etc/erpcd -D
When the Micro-CS boots in SETUP mode the console displays the load
server host’s Internet address and indicates whether it receives a response
to its Open File Request and to any of its Read File Requests.
The host’s progress report indicates receipt of any File Server Requests
and its responses to such requests. The host displays erpc_return 0 if it
successfully receives a request and is sending out an af firmati v e response.
If any Micro-CS related files are missing or cannot be installed, contact
technical support.
4-10 Micro-CS Installation Guide
Page 69

Load Server Host Not Responding
UNIX Host on a SLIP Interface
When troubleshooting a UNIX host at the end of a SLIP network
interface, make sure
• The host is booted and functioning properly.
• The SLIP link is connected correctly.
• The Internet addresses are correct for both sides of the SLIP link.
• All Micro-CS software is installed properly on the host. See the
CSMIM2 Installation Notes.
• The erpcd daemon or tftp server, which loads the operational image
to the Micro-CS, is running.
A PC host running the XENIX operating system has both the erpcd and
slipd daemons (provided with the distribution and installed in the file
/etc) running in the background on the PC. Set the Micro-CS and the
erpcd on the load host into Set Up mode:
• For the Micro-CS, press SETUP following a reset and wait for the
monitor prompt.
• For erpcd on the load server host, as superuser , kill the erpcd program
and restart it using the -D option:
# /etc/erpcd -D
Another Micro-CS
When troubleshooting a Micro-CS configured as a load server host
• Use the CLI telnet command to access the unit and verify that it is up
and running.
• Communicate with the unit on the Ethernet using the superuser CLI
ping command. Ping is also available through the monitor command.
• Verify the unit’s configuration using na or the admin command.
The CSMIM Network Administrator’s Guide provides more information
on these commands.
Micro-CS Installation Guide 4-11
Page 70

Chapter 4: Troubleshooting Procedures
Be aware that the Micro-CS can only boot another Micro-CS that has the
same configuration. Thus, a Micro-CS with only 2MB of RAM and no
option keys enabled cannot boot a Micro-CS with 4 MB of RAM and the
IPX option enabled.
A Micro-CS that has been reconfigured as a load server host, but not
rebooted, cannot boot another Micro-CS on the network. Rebooting the
Micro-CS load server host ensures that the parameters are set.
4.6 MICRO-CS DUMPS
The Micro-CS dumps its memory image to a host running load server
software when certain software or hardware events occur. Events that
trigger Micro-CS dumps are
• Non-recoverable hardware or software errors.
• Software fails to reset the Micro-CS’s watchdog timer.
• Software fails one or more internal consistency checks.
• Hardware detects an internal fault.
Dump files are generated for use by technical support
NOTE
Key:
personnel only.
Table 4-8 Indicator States during a Dump
Activity
Dump
STATUS
green
● ● ■
ATTN
amber
● = On continuously ■ = Flashing irregularly
NET
green
The Micro-CS sends a dump file to a preferred load dump host. If you do
not define this host by specifying an address, the Micro-CS broadcasts a
request and dumps to the first host running erpcd daemon that responds.
The dump creates a file in the dump host’s directory, named
/usr/spool/erpcd/bfs, and assigns a unique file name for each Micro-CS
but not for each crash dump. For each dump, the Micro-CS overwrites the
existing file.
4-12 Micro-CS Installation Guide
Page 71

Micro-CS Dumps
The assigned name depends on the number of characters per file name
that the dump host supports. For hosts supporting file names longer than
14 characters (e.g., BSD hosts), dump files are named dump.addr. The
file extension addr is the Micro-CS’s Internet address.
For hosts that limit file names to 14 characters (e.g., System V hosts), a
dump creates two additional directories under /usr/spool/erpcd/bfs. The
name of the first directory is dump; the second directory uses the
Micro-CS’s Internet network address as its name. The dump file uses the
Micro-CS’s Internet host address as its name.
Each dump file contains a complete image of the Micro-CS RAM
memory and hardware state. The amount of space required for a dump file
varies according to the port configuration. The ROM Monitor config
command displays the amount of memory for the Micro-CS. Table 4-9
shows sample dump file names. All pathnames are relative to the file
/usr/spool/erpcd/bfs.
Table 4-9 Dump File Naming Conventions
Micro-CS
Address
63.0.0.75 63 dump.63.0.0.75 dump/63/0.0.75
131.140.23.1 131.140 dump.131.140.23.1 dump/131.140/23.1
195.46.2.15 195.46.2 dump.195.46.2.15 dump/195.46.2/15
Network
Address
BSD
Filename
System V
Pathname
The tftp dump names are user-defined. If a name is not
NOTE
specified, the Micro-CS uses the bfs convention.
Micro-CS Installation Guide 4-13
Page 72

Chapter 4: Troubleshooting Procedures
4-14 Micro-CS Installation Guide
Page 73

APPENDIX A
PORT PIN/SIGNAL ALLOCATIONS
A.1 GENERAL
This appendix identifies the signals and the associated pins used by the
following Micro-CS ports:
• Console
• Serial
Port 1 of the Micro-CS serves as a console port only during Set
NOTE
Up. At all other times, port 1 acts as a serial port.
A.2 CONSOLE PORT
When the Micro-CS is in SETUP mode, port 1 becomes the console port.
The cable shipped with the Annex Communication Software can be used
as the console cable.
Table 1-1 RJ45 Console Port Pin/Signal Allocations
RJ45 Pin Signal
1RTS
2 DTR
3 TXD
4CD
5 RXD
6 GND
7 DSR
Micro-CS Installation Guide A-1
8 CTS
Page 74

Appendix A: Port Pin/Signal Allocations
1 8
Front view
Figure A-1 RJ45 Console Port Receptacle
A.3 SERIAL PORT
The following table provides pinout information for the Micro-CS serial
ports.
Table A-2 RJ45 Serial Port Pin/Signal Allocations
RJ45 Pin Signal
1RTS
2 DTR
3 TXD
4 DCD
5 RXD
6 GND
7 DSR
8 CTS
A.4 LAN NETWORK PORT
There are two ways to connect to the network with the Micro-CS:
Through an RJ45 connector to the MicroMMAC internal AUI, or through
an RJ45 mounted on the front panel.
A-2 Micro-CS Installation Guide
Page 75

Table A-3 Internal AUI RJ45
Pin Signal Direction Signal T ype
1 DI+ IN Data+
2 DI- IN Data3 DO+ OUT Data+
4 DO- OUT Data5 CI+ IN Collision
6 CI- IN Collision
7 LINKUP IN Control
8 LINKDN OUT Control
Table A-4 Front Panel 10BASE-T RJ45
Modem Port
Pin Signal Direction Signal Type
1 TD+ OUT Data+
2 TD- OUT Data3 RD+ IN Data+
4
5
6 RD- IN Data7
8
A.5 MODEM PORT
The modem network interface supports an RJ11 connector with the
following pinout:
Table A-5 Modem Port Pinouts
Micro-CS Installation Guide A-3
RJ11 Pin Signal
1A
2 Ring
Page 76

Appendix A: Port Pin/Signal Allocations
Table A-5 Modem Port Pinouts
RJ11 Pin Signal
3 Tip
4A1
A-4 Micro-CS Installation Guide
Page 77

APPENDIX B
CONNECTORS
B.1 GENERAL
This appendix describes the wiring for the following connectors:
• DTE (Cabletron part number 9372074) for DB25 female
• DTE (Cabletron part number 9372082) for DB25 male
• DTE (Cabletron part number 9372076) for DB9 female
• DCE (Cabletron part number 9372083) for DB25 female
• DCE (Cabletron part number 9372075) for DB25 male
RJ45
Pin
1 RTS OUT 5 4 8
2 DTR OUT 8 + 6 20 6+1 6 DSR
3 TxD OUT 3 2 2 5 RXD
4 DCD IN 20 8 4 1 DTR
5 RxD IN 2 3 3 2 TXD
6 GND GND 7 7 5 3+4 GND
7 DSR IN 20 6 4
8 CTS IN 4 5 7
Signal Direction
DTE
DB25
DCE
DB25
DTE
DB9
MMJ
(RS423)
Use these adapters with Cabletron part number 9360005-X or a
straight-through cable.
Part Numbers 9360005-X, 9372074, and 9372076 are shipped with the
software package.
Micro-CS Installation Guide B-1
Page 78

Appendix B: Connectors
B.2 ADDITIONAL CABLETRON CABLES AND
CONNECTORS
Micro-CS to Micro-CS Rollover Cable: part number 9360167-XX
Micro-CS to RJ45 Console Connector: part number 9360166-XX
Micro-CS to DB9 Console Connector: part number 9372087
B-2 Micro-CS Installation Guide
Page 79

APPENDIX C
FLASH UPGRADE INSTRUCTIONS
C.1 GENERAL
The Micro-CS flash upgrade kit allows you to add flash memory to your
existing Micro-CS by adding a flash daughter card. These installation
instructions provide the following:
• Kit contents
• Required tools
• Installation instructions
C.2 CONTENTS OF THE KIT
Table C-1 lists the contents of the Micro-CS upgrade kit.
Table C-1 Micro-CS Upgrade Kit Contents
Item Qty. Description/Part No.
1 1 Flash Daughter Card
2 2 Standoff, 1/2”, nylon
3 1 Retainer, snap in
4 1 Disposable wrist strap
5 1 9372074 25 pin DTE female
6 1 9372076 9 pin DTE female
7 1 9360005-10 10’ cable
C.3 REQUIRED T OOLS
The only required tool is a Phillips screwdriver.
Micro-CS Installation Guide C-1
Page 80

Appendix C: Flash Upgrade Instructions
C.4 INSTALLATION PROCEDURE
Observe all anti-static procedures when handling electronic
!
CAUTION
equipment.
C.4.1 Installing the Flash Daughter Card
1. Install the two (2) snap-in nylon standoffs through the holes in each
corner of the flash daughter card.
2. Align the connector of the flash daughter card with the J12 connector
on the Micro-CS (see Figure C-1) and seat firmly ensuring that the
nylon standoffs snap into their mating holes on the board.
Nylon standoffs
Snap In Retainer
FLASH CARD
J12
Figure C-1 Flash Card Installation
Please note that although the hardware configuration of the FLASH card
is the same for the Micro-CS, CSMIM2, and MODMIM, the image is not.
The Micro-CS uses “oper.52.enet” and the CSMIM2/MODMIM use
“oper.42.enet”. It is possible to use the FLASH card on either platform,
but the image loaded must be the correct one for the application.
C-2 Micro-CS Installation Guide
Page 81

Installation Procedure
C.4.2 Changing the Boot Method
1. Attach a VT-100 type console terminal to port 1. Set this terminal to
9600, no parity, 8 data, 1 stop.
2. Power-up the MicroMMAC with the Micro-CS installed. Immediately
following the LED test (all turn on and then off), depress the SETUP
switch on the Micro-CS using a thin tool and note that the SETUP
indicator turns on.
3. After approximately one minute the console displays the monitor
prompt (monitor::). At this prompt, enter:
seq <cr>
4. The console responds with the prompt
Enter interface sequence {net}::
5. At this prompt, enter:
self <cr>
6. Now check for a bootable image in the flash PROM. At the monitor
prompt, enter:
image -d <cr>
7. The last line of the response should read:
SELF image name: “oper.52.enet”
8. If this name is missing, the Micro-CS did not find a bootable image in
the newly-installed Flash PROM. Contact Technical Support for
assistance.
9. At the monitor prompt, execute the boot command by entering:
boot <cr>
In the unlikely event that you should ever have to return the
NOTE
Micro-CS Installation Guide C-3
Micro-CS to Cabletron for repair, please remove and save the
flash upgrade for use on the replacement board supplied by
Cabletron. If you are unable to remove the Flash, contact your
Cabletron Customer Support Representative so that they can
document that the board was returned with the Flash still
installed.
Page 82

Appendix C: Flash Upgrade Instructions
C-4 Micro-CS Installation Guide
Page 83

APPENDIX D
MICRO-CS UPGRADE INSTALLATION
D.1 GENERAL
In most cases, the Micro-CS will come factory installed and
preconfigured. However, because it is also available as an upgrade, this
section details the installation of a Micro-CS into a MicroMMAC. See the
appropriate appendices for the installation of additional memory and/or
Flash upgrades. After completing the physical installation, please return
to Chapter 2 for setup information.
D.2 LOCATING THE CONFIGURATION JUMPERS
The Micro-CS has 5 jumpers. Figure E-1 shows the locations of the
jumpers. Please note that the pins on the Micro-CS are to be read from left
to right.
J18
J10
J2
SIMM CARDS
J16
J25
1
2
3
1 2 3 1 2 3
Figure D-1 Jumper Locations
Micro-CS Installation Guide D-1
Page 84

Appendix D: Micro-CS Upgrade Installation
The configuration of your Micro-CS will determine how the jumpers
should be set. Table E-1 shows possible configurations and jumper
positions.
Table 4-1 Jumper Configuration
Jumper Position Description
1-2 SIMM upgrade has been installed
J2
2-3 SIMMs are not present
1-2 Modem card is not installed
J10
2-3 Modem is installed
J16 No jumper should be present. DO NOT use jumper.
1-2 Installed SIMMs are 4Mx8
J18
2-3
1-2
J25
2-3
Installed SIMMs are 1Mx8, OR if no SIMMS are
present
Modem uses ROM for configuration data The
modem uses Power On and ATZ Reset Software
factory default settings from read only memory
(ROM). If the user uses the modem's dial security
password (not recommended) and forgets the
password, then this jumper setting is used to regain
access to the modem, and then change the
password.
Modem uses NVRAM for configuration data
(default)The modem uses Power On and ATZ
Reset Software defaults from the user configurable
nonvolatile memory (NVRAM). This is the default
and preferred setting which allows normal
operation of the Micro-CS
D.3 REQUIRED T OOLS
The only required tool is a phillips screwdriver.
D-2 Micro-CS Installation Guide
Page 85

Installation Procedure
D.4 INSTALLATION PROCEDURE
Please read all the installation instructions prior to performing the install
to determine the correct steps for your configuration. Since the
MicroMMAC can be configured with 24 ports, 2 EPIMs and a BRIM,
some components may have to be removed in order to facilitate
installation of the Micro-CS.
Observe all antistatic precautions when handling electronic
!
CAUTION
Item Qty. Description/Part No.
1 1 Micro-CS / 8910394
components.
Table 4-2 Micro-CS Upgrade Kit Contents
2 1 Wrist Strap / (part of 8910394)
3 1 Overlay Label / (part of 8910394)
4 4 1” Stand off (only 2 needed) / 8020076
5 1 6 inch cable / 9360171-6”
6 1 EPIM-3PS and manual
7 1 Micro-CS User’s Guide (this manual) / 9031431
8 4 Screw, 6-32x5/16” (only 2 needed)
9 4 Washer, flat #6 (only 2 needed)
10 1 FCC Compliance Label
Micro-CS Installation Guide D-3
Page 86

Appendix D: Micro-CS Upgrade Installation
D.5 INSTALLING THE MICRO-CS UPGRADE
Ensure that the power cord is removed from the unit before
removing the cover. Do not remove any screws other than
those necessary for this installation. Failure to follow these
warnings may result in the presence of an electrical hazard.
1. Remove the cover from the MicroMMAC.
Chassis Cover
Chassis
BRIM Slot
Cover Screw (7)
NVRAM Switch
Figure D-2 : Cover Removal
Depending on the configuration of your MicroMMAC, you may have to
remove certain components at this time.
2. Remove the upper port cutout blank, or the 12 port daughter card from
the MicroMMAC.
D-4 Micro-CS Installation Guide
Page 87

Installing the Micro-CS Upgrade
screws
MicroMMAC TOP VIEW
Front Panel
screws
Figure D-3: Screw Locations
Blank
a. Remove screws securing the blank or the daughterboard to the
motherboard. If you are removing the blank there are two scre ws.
If you are removing the daughterboard, there are four screws (see
Figure D-3).
b. For the MicroMMAC-22E you will have to remove the two
screws on either side of JP2 and replace with 1” standoffs.
3. Install the EPIM-3PS with the RJ45 cable connected to it, into slot 1
of the MicroMMAC now.
4. Carefully align the pins on the Micro-CS with the connector JP2 on the
MicroMMAC (see Figure D-4).
5. Press the Micro-CS into place on the MicroMMAC.
Micro-CS Installation Guide D-5
Page 88

Appendix D: Micro-CS Upgrade Installation
Figure D-4 : Micro-CS Installation
J3
6. Connect the RJ45 cable from the EPIM-3PS (or the BRIM) to the J3
jack on the Micro-CS.
7. Check the alignment of the ports on the front panel.
8. Insert screws through holes in the Micro-CS to the standoffs in the
MicroMMAC and tighten.
9. Locate the mylar replacement faceplate for the MicroMMAC and
carefully attach it now.
The mylar faceplate for the MicroMMAC is very sticky. You may
TIP
only have one chance to get it on right. It is easier if you start
from the right side of the MicroMMAC and align the corners.
Ensure that the cover is in place before connecting the power
cord.
10. Attach FCC Compliance Label to the rear of the MicroMMAC
chassis.
11. Replace the cover on the MicroMMAC, and apply power.
Please return to Chapter 2 for information regarding Setup, Commands,
and Software Installation.
D-6 Micro-CS Installation Guide
Page 89

INDEX
A
addr command 3-3
examples 3-4
Auto-initializing the ROMs 2-6
B
boot command 3-6
examples 3-10
boot error report 4-6
field descriptions 4-6
boot failures
correcting boot parameters 4-8
error report 4-6
file server hosts not responding
CSMIM 4-11
over SLIP 4-11
UNIX 4-10
troubleshooting procedures 4-5
boot -l command 3-9
booting
sequence 4-1
BOOTP 2-6
broadcast address
setting 3-5
C
Cables
maximum lengths 2-2
cables and connectors B-1
config command 3-11
Configuration Jumpers D-1
Connecting CSMIM
to console 2-1
to serial devices 2-2
Console Port A-1
Console port
description of 1-8
console port 1-8, 2-1
Console terminal
description 2-1
console-baud command 3-11
D
dumps 4-12
files 4-12
E
environmental requirements 1-9
erase command 3-13
Ethernet
transceiver loopback test 3-17
Ethernet address
displaying 3-3
during power-up 2-5
F
FCC Notice ii
front panel
description of 1-6
H
hardware configuration
displaying 3-11
during power-up 2-4
help command 3-14
I
IC Notice iv
image command 3-14, 3-15
examples 3-14, 3-15, 3-16, 3-17,
3-18
image -d command 3-16
image name
default 3-6, 3-14
indicator states
normal mode error states 4-2
Industry Canada Certification
Number iii
initial boot parameters
setting addresses 3-3
Micro-CS Installation Guide -1
Page 90

Index
Installation D-1
Installation Procedure D-3
Internet address
setting 3-5
IP encapsulation
setting 3-5
J
jumper positions D-2
L
lat -d command 3-16
lat_key command 3-16
Load Number iii
load/dump gateway
setting 3-5
M
manual booting
description 3-6
Micro-CS upgrade D-1
mop command 3-17
mop -d command 3-17
N
net command 3-17
normal mode
error indicator states 4-2
error-free sequence 4-2
power-up and booting sequence 4-1
power-up error states 4-2
O
option_key command 3-18
option_key -d command 3-18
P
ping command 3-18
port pin/signal allocations A-1
port upgrade
instructions 2-1, C-1
ports command 3-19
power-up
applying power 2-3
failures during 2-4
in normal mode 4-1
in SETUP mode 4-3
instructions 2-3
running self-tests 2-4
self-testing procedures during 2-3
sequence 4-1
setting to test mode 2-3
power-up and boot sequence 4-1
preferred load host
setting 3-5
R
RARP 2-6
ROM Monitor
command syntax 3-1
commands 3-1
description of 1-4
list of commands 3-1
S
sequence command 3-21
examples 3-21
Serial Devices 2-2
setting
boot sequence 3-21
broadcast address 3-5
Internet address 3-5
IP encapsulation 3-5
load/dump gateway address 3-5
preferred load host address 3-5
SLIP parameters 3-22
subnet mask 3-5
SETUP Mode 4-3
SETUP mode
error-free power-up sequence 4-4
size 1-9
SLIP
parameters 3-23
slip command 3-22
example 3-24
-2 Micro-CS Installation Guide
Page 91

software installation
executing boot command 2-9
procedures 2-8
setting boot sequence 2-9
setting initial boot parameters 2-8
setting Internet address 2-8
setting SLIP parameters 2-9
stats command 3-24
example 3-25
status indicators
description of 1-7
subnet mask
setting 3-5
System Description 1-4
T
test
Ethernet transceiver loopback 3-17
printer port 3-19
serial line ports 3-19
test mode
entering 4-3
entering during power-up 2-3
power-up and booting sequence 4-3
power-up error states 4-5
Test switch 1-7
TFTP 3-8
troubleshooting
during power-up and booting 4-1
procedures 4-1
Index
U
Upgrades
MicroCS 2-1
Modem 1-4
Micro-CS Installation Guide -3
Page 92

Index
-4 Micro-CS Installation Guide
Page 93

POWER SUPPLY CORD
The mains cord used with this equipment must be a 2 conductor plus ground type
with minimum 0.75 mm square conductors and must incorporate a standard IEC
appliance coupler on one end and a mains plug on the other end which is suitable
for the use and application of the product and that is approved for use in the
country of application.
GERMAN:
Die Netzleitung, die mit diesem Geraet benuetzt wird, soll einen zwei Leiter mit
Erdleiter haben, wobei die Leiter mindestens 0.75 mm sind, mit einer normalen
IEC Geraetesteckdose an einem Ende und einem Geraetestecker am anderen Ende
versehen sind, der fuer den Gebrauch und die Anwendung des Geraetes geeignet
und der zum Benuetzen im Lande der Anwendung anerkannt ist.
SPANISH:
El cable principal de la red eléctrica utilizado con este equipo debe tener 2
conductores y 1 toma de tierra con un mínimo de 0.75 mm2 cada uno y necesita
tener un aparato de acoplamiento standard IEC en un extremo y un enchufe para
el cable principal de la red eléctrica en el otro extremo, lo cual sea adecuado para
el uso y applicación del producto y lo cual sea aprobado para uso en el pais de
applicación.
FRENCH:
Le cordon d' alimentation reliant cet appareil au secteur doit obligatoirement avoir
deux fils conducteurs de 0.75 mm2 minimum et un fil de terre. It doit également
être équipé du côté appareil d'une fiche agrée IEC et du côte secteur, d'une prise
adaptée à l'usage du produit et aux normes du pays où l'appareil est utilisé.
 Loading...
Loading...