

Page 1
\BETRANL\E16x442e I E16x442 Rev: 00 26.11.2014 Page 1 of 73
D 71334 Waiblingen-Hegnach
Esslinger Str. 26
Tel.: +49 (0)7151/956230
Fax: +49 (0)7151/956250
E-Mail: info@braun-tacho.de
Internet: www.braun-tacho.de
Quality certified according ISO 9001
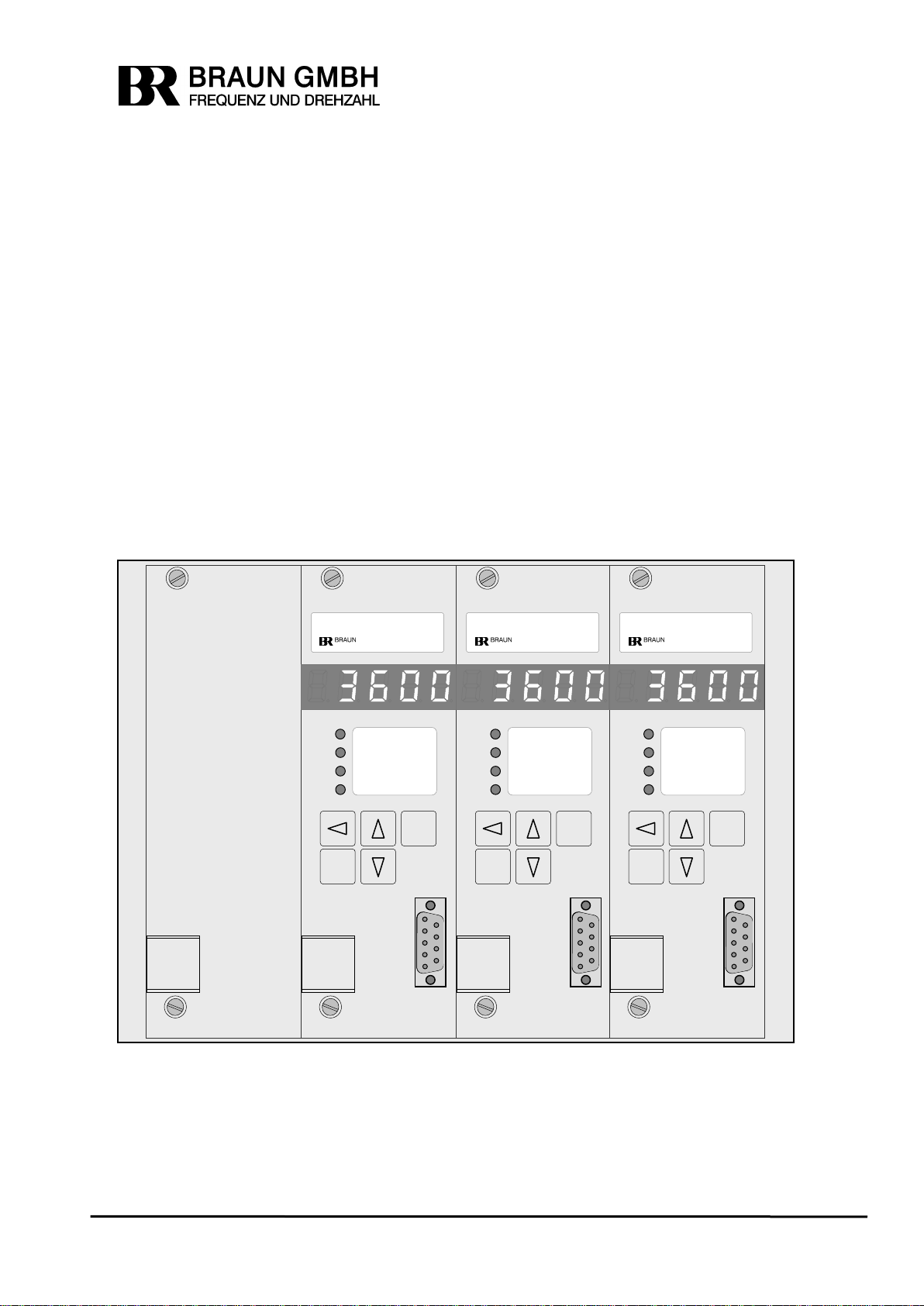
Monitor A
Monitor B
Monitor C
E1691
P
E
E1665
1
2
3
4
Trip
SP3
RPM
P
E
E1665
1
2
3
4
Trip
SP3
RPM
P
E
E1665
1
2
3
4
Trip
SP3
RPM
Monitor A
Monitor B
Monitor C
SIL2/IEC61508
SIL2/IEC61508
SIL2/IEC61508
Test Interface
Original Manual
of
Protection-System E16x442
with
Overspeed Protection
and
Voters for external Trip Release Conditions
IEC61508;SIL2 and A PI670 compliant
Figure 1: E16x442 System Front View
Page 2

I E16x442 Rev: 00 Page 2 of 73
Contents Page
1. General Informations ................................................................................................ 4
1.1. List of Figures .............................................................................................................. 4
1.2. List of Abbreviations .................................................................................................... 5
1.3. System Applications and Explanation .................................................................... 7
1.4. Key Features of System E16x442 ............................................................................. 7
1.5. Ordering Key for Systems E16x442.abc ................................................................. 8
1.6. Safety Data.................................................................................................................. 9
1.6.1. Safety Data IEC61508; SIL2 ....................................................................................... 9
1.7. External Tests ............................................................................................................. 9
1.7.1. External tests during normal operation by PLC or operator ........................................ 9
1.7.2. Test of 2oo3 solenoid valve block ............................................................................... 9
2. System Structure and I/Os ...................................................................................... 10
2.1. System Structure ....................................................................................................... 10
2.1.1. Speed Sensors .......................................................................................................... 10
2.1.2. System Components ................................................................................................. 10
2.1.3. System Design .......................................................................................................... 10
2.1.4. System Structure Diagrams ...................................................................................... 11
2.1.5. System Wiring Diagrams........................................................................................... 13
2.1.6. Connection of Sensors to the Speed Signal Inputs ................................................... 15
2.1.7. Position of Terminal Blocks with Version E16E442 ................................................... 16
2.1.8. Position of Terminal Blocks with version E16A442 .................................................. 17
2.2. Inputs of the System ................................................................................................. 18
2.2.1. Speed Signal Inputs .................................................................................................. 18
2.2.2. Direction Signal Inputs (F/R : Forward/Reverse) ....................................................... 18
2.2.3. Input Reset of Alarms ................................................................................................ 18
2.2.4. This chapter is left blank intentionally ....................................................................... 18
2.2.5. This chapter is left blank intentionally ....................................................................... 18
2.2.6. Inputs Test I, Test II, Test III ...................................................................................... 19
2.2.7. Inputs Starter (Override of SP2) ................................................................................ 19
2.2.8. Inputs SP1B valid ...................................................................................................... 19
2.2.9. This chapter is left blank intentionally ....................................................................... 19
2.2.10. Inputs for Voter 1 ....................................................................................................... 19
2.2.11. Inputs for Voters 2 … 6 ............................................................................................. 19
2.3. Outputs of the System ............................................................................................... 20
2.3.1. Output System Warning Alarm .................................................................................. 20
2.3.2. Speed Signal Repeater Outputs................................................................................ 20
2.3.3. Outputs Monitor Warning Alarm ................................................................................ 20
2.3.4. Outputs Speed Alarm SP3 ........................................................................................ 20
2.3.5. Analog Outputs for measured speed (Option)........................................................... 21
2.3.6. Outputs Direction Detection ...................................................................................... 21
2.3.7. Speed Trip Logic Output (2oo3 voted) ...................................................................... 21
2.3.8. Output Trip-Line IV, V, VI .......................................................................................... 21
2.3.9. Outputs Trip-Line I, II, III........................................................................................... 21
2.3.10. Logic Outputs LO1 through LO6 (voted 2oo3) .......................................................... 21
2.3.11. Trip Status of Monitors ............................................................................................. 22
2.4. Power Supply ............................................................................................................ 23
2.5. Data Interface ............................................................................................................ 23
2.5.1. Profibus Interface for Status and Diagnostics of the System .................................... 23
2.5.2. RS232 Interface with Interface Software IS-RS232-E16 (for OEM only) ................... 23
2.5.3. RS232 Interface with Interface Software IS-RS232-E16-L2 (for End User) .............. 23
3. Technical Specifications ........................................................................................ 24
3.1. Technical Data of Inputs ........................................................................................... 24
3.1.1. Technical Data of Speed Signal Inputs ..................................................................... 24
3.1.1.1. Hall Sensor Inputs ..................................................................................................... 24
3.1.1.2. Eddy Current Sensor Inputs resp. MPU Inputs ......................................................... 24
3.1.2. Technical Data of Direction Inputs ............................................................................ 24
3.1.3. Technical Data of Binary Inputs (excluding Voter 1) ................................................. 24
Page 3

I E16x442 Rev: 00 Page 3 of 73
3.1.4. Technical Data of Binary Inputs of Voter 1 ................................................................ 24
3.2. Technical Data of Outputs ......................................................................................... 25
3.2.1. Technical Data of Sensor Signal Repeater Outputs .................................................. 25
3.2.2. Technical Data of Analog Outputs............................................................................. 25
3.2.3. Technical Data of Opto-Relay Outputs ...................................................................... 25
3.2.4. Technical Data of Logic Outputs ............................................................................... 25
3.2.5. Technical Data of Trip-Lines IV, V, VI ....................................................................... 26
3.2.6. Technical Data of Trip-Lines I, II, III .......................................................................... 26
3.3. Technical Data of Power Supply ............................................................................... 27
3.4. Installation Conditions ............................................................................................... 27
3.5. Protection Grade ....................................................................................................... 27
3.6. Connectors ................................................................................................................ 27
3.7. Conformity to Standards............................................................................................ 27
3.8. Dimensions of system E16A442 ............................................................................... 28
3.9. Dimensions of system E16E442 ............................................................................... 29
3.10. Dimensions and Features of E16G442 Enclosure .................................................... 30
3.11. Weight of E16x442 .................................................................................................... 30
4. Safety Notes for Installation and Operation .......................................................... 31
4.1. Safety Notes for Installation ...................................................................................... 31
4.1.1. General Instructions .................................................................................................. 31
4.1.2. EMI ............................................................................................................................ 31
4.2. Safety Notes for Operation ........................................................................................ 31
4.2.1. Safety Notes for Commissioning ............................................................................... 31
5. Description of Monitor E1665 ................................................................................. 32
5.1. Display and Frontside Operational Elements ............................................................ 32
5.1.1. Front View of Monitor E1665 ..................................................................................... 32
5.1.2. Status-LEDs .............................................................................................................. 32
5.1.3. Display during Test Procedures ................................................................................ 32
5.1.4. Values accessible during normal operation .............................................................. 33
5.1.5. Special Display Mode 1 ............................................................................................. 34
5.1.6. Special Display Mode 2 ............................................................................................. 34
5.1.7. Frontside Reset of Alarms and Event Codes ............................................................ 34
5.1.8. Data Interface ............................................................................................................ 34
5.2. Functions of Monitor 1667 ...................................................................................... 35
5.2.1. Speed Measurement ................................................................................................. 35
5.2.2. Functions for Overspeed Protection .......................................................................... 35
5.2.3. Functions for External Trip by Voters ........................................................................ 35
5.2.4. Selftest of Monitor ..................................................................................................... 35
6. Description of Test Interface E1691 ...................................................................... 36
7. Programming of the Monitors ................................................................................ 37
7.1. Programming of the Monitors via Front Keyboard ..................................................... 37
7.2. Programming of the Modules via RS232-Interface ................................................... 38
7.3. Default Values ........................................................................................................... 38
8. Parameters of Monitor E1665 ................................................................................. 39
8.1. Summary of parameters and their default values...................................................... 39
8.2. Description of Parameters and their Settings of Monitor E1665 ............................... 43
9. This chapter is left blank intentionally .................................................................. 71
10. Event codes and Troubleshooting ........................................................................ 71
10.1. Event Codes on display of E1665 ............................................................................. 71
10.2. Troubleshooting if display of Monitor reads E.0.4.x.x ............................................... 72
11. Revision notes ......................................................................................................... 73
Page 4

I E16x442 Rev: 00 Page 4 of 73
1. General Informations
1.1. List of Figures
Figure 1: E16x442 System Front View 1
Figure 2: E16x442 System Structure Diagram 1 of 2 11
Figure 3: E16x442 System Structure Diagram 2 of 2 12
Figure 4: E16x442 System Wiring Diagram 1 of 3 13
Figure 5: E16x442 System Wiring Diagram 2 of 3 14
Figure 6: E16x442 System Wiring Diagram 3 of 3 15
Figure 7: Position of terminal blocks with version E16E442 16
Figure 8: Position of terminal blocks with version E16A442 17
Figure 9: Dimensions of System E16A442 28
Figure 10: Dimensions of System E16E442 29
Figure 11: Dimensions of E16G442 Enclosure 30
Figure 12: Front view of Monitor E1665 32
Figure 13: SP1 as a variable of the acceleration 51
Page 5
I E16x442 Rev: 00 Page 5 of 73
1.2. List of Abbreviations
Abbreviation
Meaning
altern.
alternative
API
Technical standards of the "American Petroleum Institute"
A5S
BRAUN GmbH Sensor series
AWG/kcmil
Code number according to the "American Wire Gauge" System
approx.
approximately
CCF
Common Cause Failure
CPU
Central Processing Unit
DCavg
Diagnostic Coverage average
DIN
Deutsches Institut für Normung (German Institute for Standardization)
dN/dt
Change of speed per time unit (Acceleration)
EEPROM
Electrically Erasable Programmable Read-Only Memory
EMV
Electro magnetic compatibility
EN
European Norm
F/R
Forward/Reverse (Forward/Backward)
HE
Height units
HFT
Hardware Failure Tolerance
IEC
International Electrotechnical Commission
incl.
inclusive
IPxx
Ingress Protection Number xx according to DIN EN 60529
ISO
International Organization for Standardization
LED
Light Emitting Diode
LOx
Logic Output x
max.
maximum
min.
minimum
MPU
Magnetic Pick Up
MTTFd
Mean Time To Failure dangerous
n
Short term for Speed
NEMAx
National Electrical Manufacturers Association Number x
PFDavg
Probability of Failure on Demand average
PELV
Protective Extra Low Voltage
RAM
Random Access Memory
RPM
Revolutions Per Minute
sec
second
SELV
Safety Extra Low Voltage
SFF
Safe Failure Fraction
SILx
Safety Integrity Level x
SPx
SetPoint x
SPVx
SetPoint Voter x
SP1var
SetPoint 1 variable
TE
Width unit
TMR
Triple Modular Redundant
Tproof
Proof Test Interval
UL/cUL
Acc. US Underwriter Laboratories resp. Canadian Underwriter Laboratories standards
Vdc
Volt direct current
Vpp
Volt peak-to-peak
resp.
respective
to be continued on next page
Page 6
I E16x442 Rev: 00 Page 6 of 73
Abbreviation
Meaning
1oo2
1 out of 2 voting logic
1oo3
1 out of 3 voting logic
2oo2
2 out of 2 voting logic
2oo3
2 out of 3 voting logic
Page 7

I E16x442 Rev: 00 Page 7 of 73
1.3. System Applications and Explanation
Protection of rotating machinery such as turbines, expanders, compressors and motors with
safety requirements SIL2/ IEC61508 and/or API 670 versus Overspeed and other Critical Conditions.
The E16x442 system incorporates one Test interface type E1691 and three Monitors (channels) A, B and C of type E1665 for the evaluation of speed signals and external trip signals.
The logic blocks for the evaluation of the external trip signals are named "Voter".
The logic results of the three channels are connected internally to form three 2oo3 trip circuits
I, II and III which are named "Trip-Lines".
The Trip-Lines can be connected to a 1oo2 or 2oo3 solenoid valve block.
A released trip status can be latched, this function is named "Trip-Lock".
Trip is released by shut down of the Trip Circuits (Trip-Lines) to the solenoid valve block if:
2oo3 monitors detect Overspeed condition
2oo3 sensor signals are detected as faulty by monitors
2oo3 monitors detect External Trip-Condition by their voters (1oo2, 2oo2, 2oo3 or 3oo3
logic selectable)
1.4. Key Features of System E16x442
Trip Release Function is SIL2/IEC61508 compliant as stand alone unit (without external
testing by DCS or by operator).
Total Response Time to Trip Condition : < 15 milliseconds
Maximum Safety at Maximum Availability by :
TMR (Triple Modular Redundancy) with three monitors E1665.
Triple speed measurement and evaluation by each monitor.
Variable overspeed setpoint depending on acceleration.
Monitoring versus Lowspeed as protection versus incorrect mounting or malfunction of
speed sensors.
Permanent monitoring of speed sensors.
Evaluation of external Trip-Condition signals by voters in each monitor. Response to sig-
nals selectable for each voter individually (logic function, low/high: trip, response time).
Each Trip Line (trip circuit) in 2oo3 technique.
Trip Lines I, II, III, IV, V, VI are formed by safety relays with force guided contact sets.
Trip-Line-Monitoring with Trip-Lock Function (selectable)
The outputs of the Trip Lines I, II and III are permanently monitored. If the Trip-Lock Func-
tion is engaged, a trip condition is detected and locked if 2oo3 trip lines are in trip condition.
By the (selectable) Trip-Lock Function a released trip is latched
Page 8
I E16x442 Rev: 00 Page 8 of 73
Additional features of the E16x442-System:
Remote test of solenoid valve block by test signals from DCS possible
Display in each module for measured values and diagnostics
Alarm outputs via opto-relays to DCS
Free extra alarm from each monitor
Up to 6 speed setpoints with 2oo3 logic outputs (if voters are not required)
Sensor signal repeater outputs, free floating and push/pull
Optional Analog Output (to represent the speed) 0/4..20 mamps for each monitor
Direction alarm (only with sensors type A5S with direction output)
Parameters may be set by front keys (protected by code-digit) or by
RS232-Interface (password protected)
1.5. Ordering Key for Systems E16x442.abc
E16x442.abc
c = 1 : Speed Signal Inputs and power supply for A5S sensors
c = 2 : Speed Signal Inputs and power supply for Eddy Current Sensors
c = 3 : Speed Signal Inputs for MPU (magnetic pick up)
b = 1 : 1 Voter in each Monitor for external trip release condition
b = 2 : 6 Voters in each Monitor for external trip release conditions
a = 0 : without Analog Output (to represent the speed)
a = 1 : 1 Analog Output in each Monitor A, B, C
a = 2 : 1 Analog Output rated SIL2 in each Monitor A, B, C
x = A : Surface Mount Version
x = E : 19-Inch Rack File
x = G : Nema 4 Version with front window (surface mount)
Example:
E16A442.021 : Surface Mount Version, without Analog Output, with 6 Voters,
Speed Signal Inputs for A5S sensors
E16A442.112 : Surface Mount Version, with Analog Output, with 1 Voter,
Speed Signal Inputs for eddy current sensors or MPU
E16A442.013 : Surface Mount Version, with 1 Voter,
Speed Signal Inputs for MPU
Page 9

I E16x442 Rev: 00 Page 9 of 73
1.6. Safety Data
1.6.1. Safety Data IEC61508; SIL2
System Type B; HFT = 1; Architecture 2oo3, Service Time 20 years
PFDavg = 1,81*10
-4
at T1 (Proof Check Interval) = 20 years
1.7. External Tests
1.7.1. External tests during normal operation by PLC or operator
The trip release ability of a 2oo3 solenoid valve block can be verified by external.
1.7.2. Test of 2oo3 solenoid valve block
Test can only be performed if the Monitors are not in trip status.
The test is performed for each trip-line separately by control signals Test of
Trip-Line I, II, III. The response of the 2oo3 solenoid valve block must be checked by the PLC
resp. the operator.
Note:
Test of two or three trip-lines at the same time will release trip of the machine.
Page 10

I E16x442 Rev: 00 Page 10 of 73
2. System Structure and I/Os
2.1. System Structure
The structure of the system is shown in chapter 2.1.4. (figures 2 and 3).
The wiring of the system is shown in chapter 2.1.5. (figures 4, 5 and 6).
The indexes ”see 2.x.x” in these figures refer to the corresponding chapters 2.x.x. which describe the according functions.
2.1.1. Speed Sensors
With versions E16x442.xx1:
Three A5S Differential-Hall-effect sensors, with integrated signal amplifier are placed at the
machine shaft.
The Differential Hall-effect sensors A5S are not susceptible to uniform external magnetic
fields. Air gap variations between machine and sensor do not create false signals.
With versions E16x442.xx2:
Three Speed signals from Eddy Current Sensors or from MPUs are evaluated.
With versions E16x442.xx3:
Three Speed signals from MPU Sensors are evaluated.
2.1.2. System Components
The system comprises three Monitors E1665 for speed monitoring and for monitoring of the
external trip conditions and one Test Interface E1691 to process the trip-line test signals and
the trip status signals between Monitors and the PLC.
The Monitors and the Test Interface are connected via a backplane. The backplane does not
hold any active components.
2.1.3. System Design
The system is available as
19-Inch Rack File, 3HE 84TE (E16E442) or
for surface mounting (E16A442) or
as NEMA4 version (E16G442).
Page 11
I E16x442 Rev: 00 Page 11 of 73
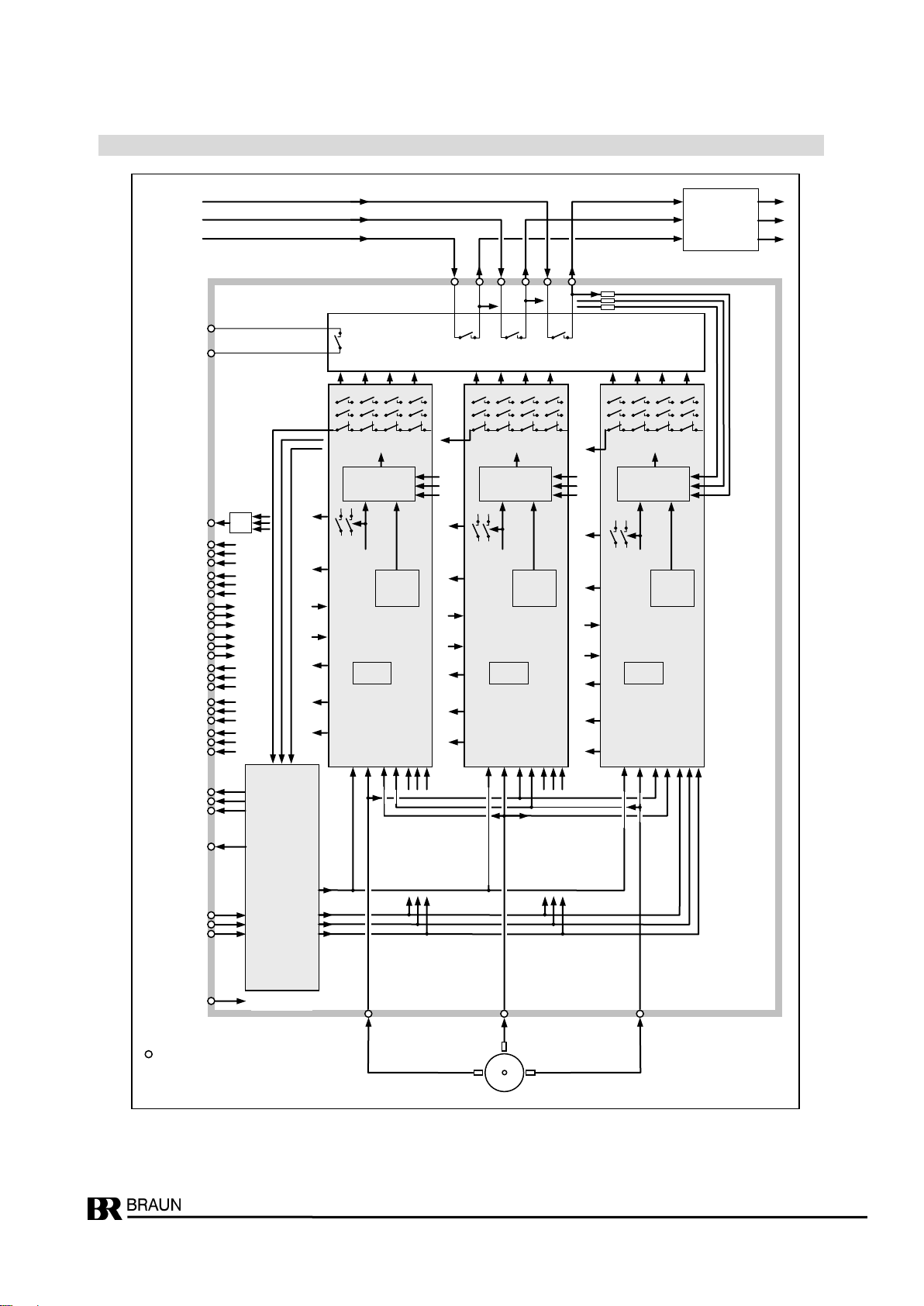
2.1.4. System Structure Diagrams
Speed Signals
see 2.2.1
Direction Signals
see 2.2.2
= terminal blocks
Speed-Trip
Logic Output
in 2oo3
see 2.3.7
Test I
Test II
Test IIII
see 2.2.6
Sensor Signal
Repeater
see 2.3.2
Alarm Reset
see 2.2.3
System
Warning Alram
see 2.3.1
Input
SP1B valid
see 2.2.8
Warning Alarm
of Monitor
see 2.3.3
Alarm SP3
see 2.3.4
Starter
Override of SP2
see 2.2.7
Direction
Alarm Output
see 2.3.6
optional
Analog Output
0/4 … 20 mamps
see 2.3.5
Trip IV
Trip V
Trip VI
in 2oo3
(only 1 of 3 trip
lines shown)
see 2.3.8
2oo3
Trip-Line III
Trip-Line II
Trip-Line I
L+
L+
L+
Trip-Line III
Trip-Line II
Trip-Line I
Trip Lines
see 2.3.9
I
II
III
Wiring of Trip Relay contacts on
System-Backplane forming six 2oo3 Trip Lines
fT
F/R
fB
F/R
fC
B
A
C
Pole Wheel
Sensor
to all modules
Test I
Test II
Test III
E1691
Testinterface
Test
Frequency fT
F/R
fC
Test III
F/R
fB
F/R
fA
fT
Test II
Test I
E1665
Monitor A
Feedback A
Feedback B
Feedback C
SP1B
Starter
I
II
III
IV
Trip- Relays
I
II
III
I
II
III
IV
Trip- Relays
I
II
III
IV
Trip- Relays
I
II
III
E1665
Monitor B
E1665
Monitor C
SP1B
SP1B
Starter
Starter
F/R
fC
Test III
F/R
fA
F/R
fB
fT
Test II
Test I
F/R
fB
Test III
F/R
fA
F/R
fC
fT
Test II
Test I
F/R
fA
Rev. 00 / 02.2012
spark extinguishing
DataInterface
DataInterface
DataInterface
Speed-
Trip
Trip by
Voter
(from
Diagram 2)
Monitoring
of Trip Lines with Trip-
Lock
Speed-
Trip
Trip by
Voter
(from
Diagram 2)
Monitoring
of Trip Lines with Trip-
Lock
Speed-
Trip
Trip by
Voter
(from
Diagram 2)
Monitoring
of Trip Lines with Trip-
Lock
V
V
V
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
to
PLC
2oo3
Solenoid
Valve Block
Trip-Status
of Monitors
see 2.3.11
Figure 2: E16x442 System Structure Diagram 1 of 2
Page 12
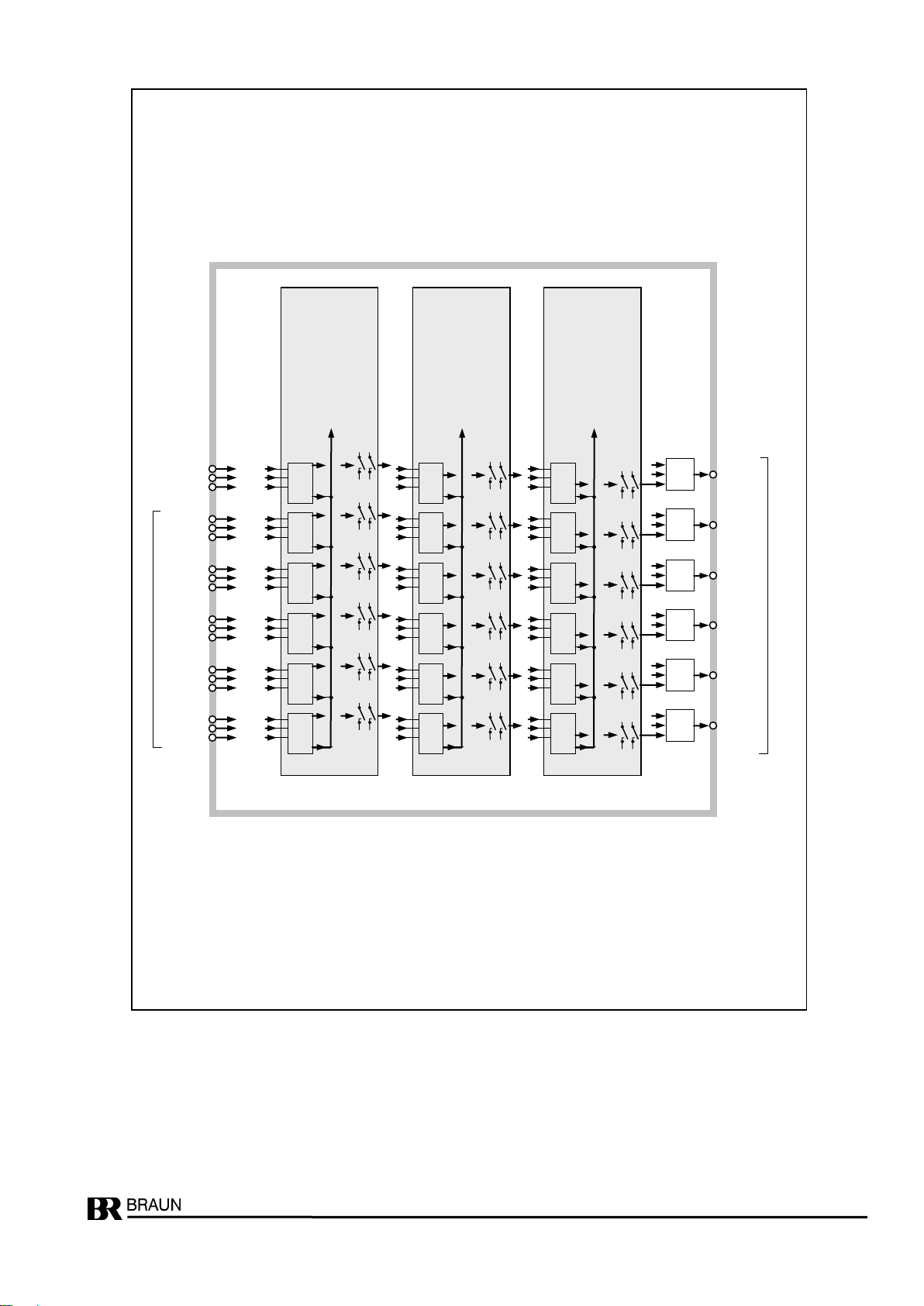
I E16x442 Rev: 00 Page 12 of 73
Input Signals
Voter 1
see 2.2.10
Trip by Voter
(to Diagram 1)
Part of
Monitor A
Part of
Monitor B
Part of
Monitor C
Trip by Voter
(to Diagram 1)
Trip by Voter
(to Diagram 1)
Input
Signals
Voter 2
Input
Signals
Voter 3
Input
Signals
Voter 4
Input
Signals
Voter 5
Input
Signals
Voter 6
Input Signals for Voters 2 … 6 . see 2.2.11
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
SoftwareVoter
1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2
3
Logic Outputs to DCS
If used as Output "Trip of Voter" : low = Trip
If used as Speed Alarm Output : low / high at 'n > SPV' selectable
see 2.3.10
2oo3
LO1
Trip
Voter 1
altern.
n > SPV1
2oo3
LO2
Trip
Voter 2
altern.
n > SPV2
2oo3
LO3
Trip
Voter 3
altern.
n > SPV3
2oo3
LO4
Trip
Voter 4
altern.
n > SPV4
2oo3
LO5
Trip
Voter 5
altern.
n > SPV5
2oo3
LO6
Trip
Voter 6
altern.
n > SPV6
Rev. 00 / 02.2012
Figure 3: E16x442 System Structure Diagram 2 of 2
Page 13
I E16x442 Rev: 00 Page 13 of 73
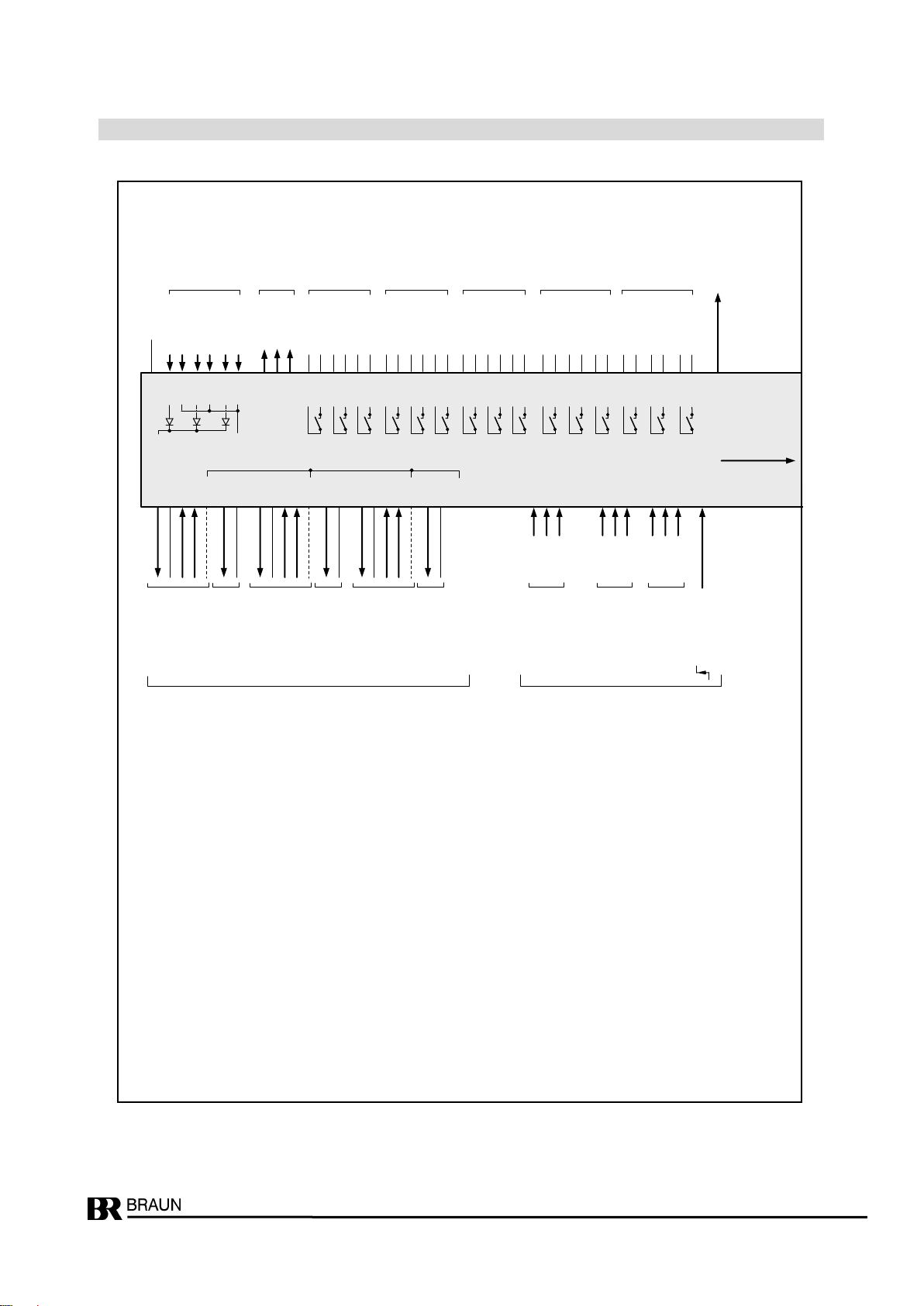
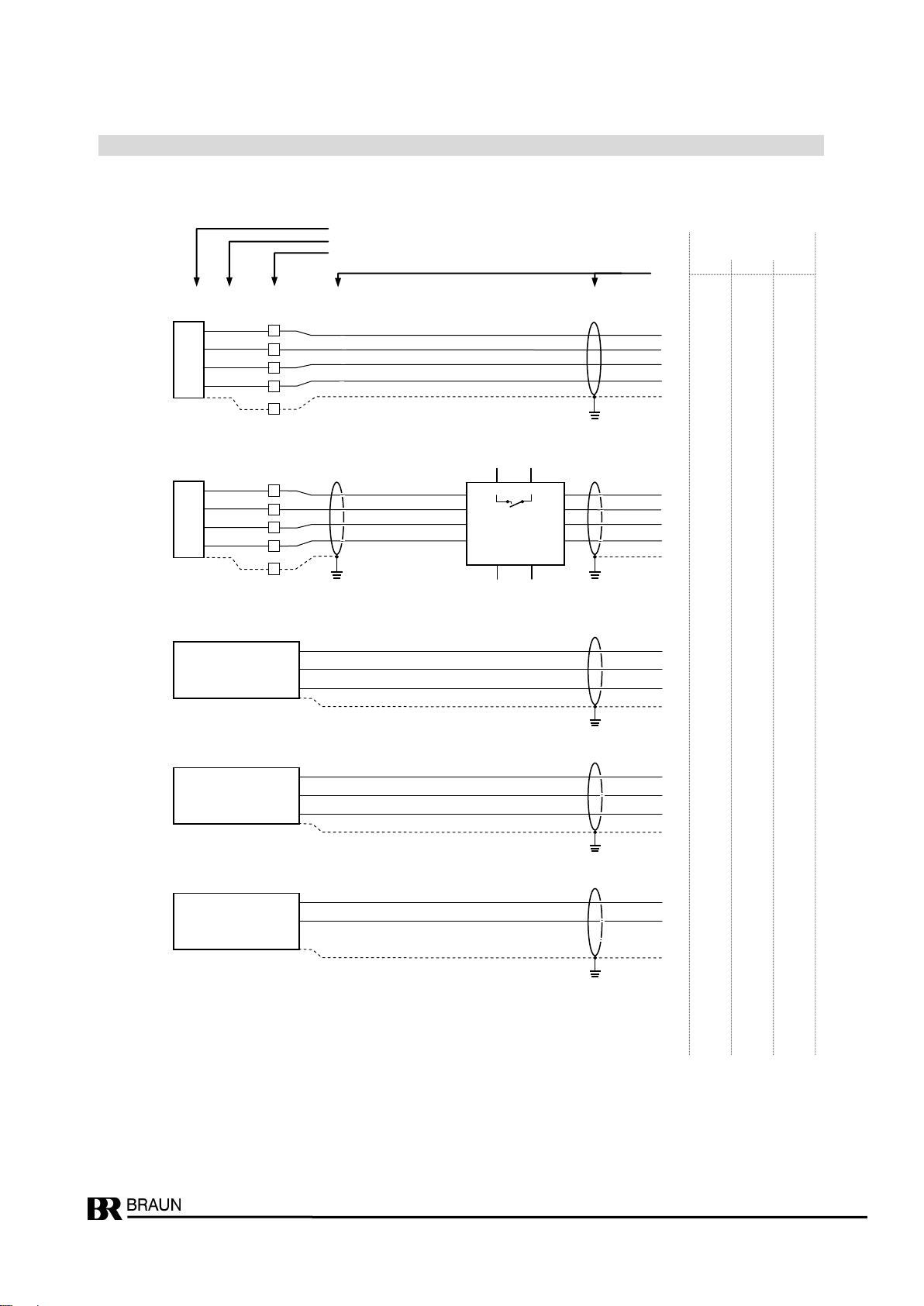
2.1.5. System Wiring Diagrams
all contacts are shown
in de-energized status
Outputs
Trip Line
I, II, III
see 2.3.9
Trip III
Trip I
Trip II
Outputs
Trip Line
IV, V, VI
see 2.3.8
Outputs
Direction Alarm
from monitor
see 2.3.6
Outputs
Speed Alarm SP3
from monitor
see 2.3.4
Outputs
Monitor
Warning Alarm
from monitor
see 2.3.3
Power Supply
24 volts dc
see 2.4 Monitor C Monitor A Monitor B Monitor C Monitor A Monitor B Monitor C Monitor A Monitor B
Monitor C
Monitor A
Monitor B
Speed Signals see 2.2.1
Direction Signals F/R see 2.2.2
Speed Sensor Signal Repeater Outputs see 2.3.3
Connection of sensors see next pages
Monitor A
Monitor B
Monitor C
high = Starter
(override SP2)
see 2.2.7 high =Test of
Trip-Line
see 2.2.6
Trip-Line I
Monitor C
Monitor A
Monitor B
Trip-Line II
Trip-Line III high =SP1B valid
see 2.2.8
= Reset of Alarms
see 2.2.3
PE
see 2.5
L+ N L+ N L+
N
Rev. 02 / 06.2013
Logic Signal Inputs
(Reference:
terminals 3.X1, 9.X1, 3.X15 of Power Supply)
1.X1_
2.X1_
3.X1_
8.X1_
9.X1_
14.X1_
15.X1_
4.X1_
5.X1_
10.X1_
11.X1_
16.X1_
17.X1_
6.X1_
7.X1_
12.X1_
13.X1_
18.X1_
19.X1_
2.X14
1.X14
10.X2_
14
9.X2_
8.X2_
14
7.X2_
6.X2_
14
5.X2_
11.X2_
14
12.X2_
14
13.X2_
14
14.X2_
14
15.X2_
14
16.X2_
14
1.X7
2.X7
3.X7
5.X7
6.X7
6.X9
6.X14
5.X9
4.X8
4.X7
Reference
Speed
Screen
F / R *
Speed
0 V
+ Supply
Sensor connections
Monitor A * = only with
sensors A5S3….
Speed Signal
Repeater Output Monitor A
1.X3
2.X3
3.X3
5.X3
4.X3
6.X3
7.X3
E16-System
Diagram 2
4.X14
3.X14
8.X14
7.X14
Trip VI
Trip IV
Trip V
Reference
Speed
Screen
F / R *
Speed
0 V
+ Supply
Sensor connections
Monitor B * = only with
sensors A5S3….
Speed Signal
Repeater Output Monitor B
1.X4
2.X4
3.X4
5.X4
4.X4
6.X4
7.X4
Reference
Speed
Screen
F / R *
Speed
0 V
+ Supply
Sensor connections
Monitor C * = only with
sensors A5S3….
Speed Signal
Repeater Output Monitor C
1.X5
2.X5
3.X5
5.X5
4.X5
6.X5
7.X5
20.X1
Output
System Alarm
see 2.3.1
Outputs
Monitor
Trip-Status
see 2.3.11
Monitor A
Monitor B
Monitor C
1.X2_
2.X2_
3.X2_
L+
E1691
N
E1691
1N
5060
4.X2_
Figure 4: E16x442 System Wiring Diagram 1 of 3
Page 14
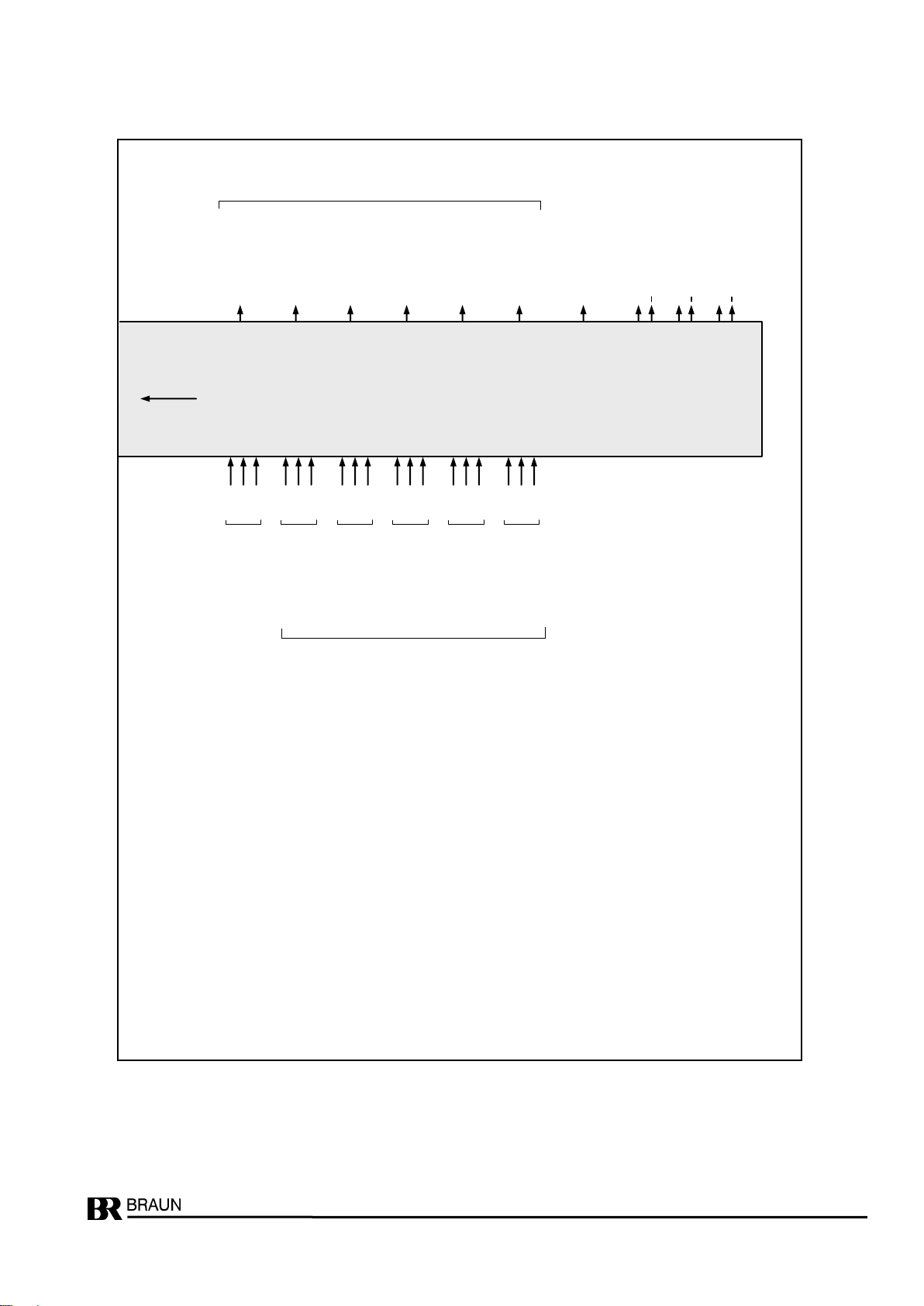
I E16x442 Rev: 00 Page 14 of 73
optional
Analog Outputs
0/4 … 20 mamps
see 2.3.5
(not with versions E16x442.0xx)
Logic Outputs
see 2.3.10
Signal Inputs
Voter 2 through 6
only with systems E16x442.x21
see 2.2.11
Signal Inputs
of Voter 1
see 2.2.10
Signal Inputs
of Voter 2
Signal Inputs
of Voter 3
Signal Inputs
of Voter 4
Signal Inputs
of Voter 5
Signal Inputs
of Voter 6
Speed Trip
Logic Output
see 2.3.7
Monitor A
Monitor B
Monitor C
Trip Voter 6
alternative
n > SP6
LO6
Trip Voter 5
alternative
n > SP5
LO5
Trip Voter 4
alternative
n > SP4
LO4
Trip Voter 3
alternative
n > SP3
LO3
Trip Voter 2
alternative
n > SP2
LO2
Trip Voter 1
alternative
n > SP1
LO1
Rev. 00 / 09.2012
1.X13
2.X13
3.X13
4.X13
5.X13
6.X13
5.X14
1.X15
2.X15
3.X15
4.X15
5.X15
6.X15
+ + +
4.X12
5.X12
6.X12
I
II
III
1.X12
2.X12
3.X12
I
II
III
4.X11
5.X11
6.X11
I
II
III
1.X11
2.X11
3.X11
I
II
III
4.X10
5.X10
6.X10
I
II
III
1.X10
2.X10
3.X10
I
II
III
E16-System
Diagram 1
Figure 5: E16x442 System Wiring Diagram 2 of 3
Page 15
I E16x442 Rev: 00 Page 15 of 73
- 24 volts dc
+ 24 volts dc
+ Sensor Supply
+ Sensor Supply
Alarm
2.1.6. Connection of Sensors to the Speed Signal Inputs
Rev. 00 / 09.2012
B
Terminals
Monitor
C A B
Eddy Current Sensor
with negative
power supply
1.X3
1.X4
1.X5
3.X3
3.X4
3.X5
2.X3
2.X4
2.X5
Reference 0 volts
Speed Signal
EC-
4.X3
4.X4
4.X5
Eddy Current Sensor
with positive
power supply
1.X3
1.X4
1.X5
3.X3
3.X4
3.X5
2.X3
2.X4
2.X5
Reference 0 volts
Speed Signal
EC+
4.X3
4.X4
4.X5
Reference 0 volts
Speed Signal
Direction – Signal *
C
A5S..
B A D S 1 3 4
2*
1.X3
1.X4
1.X5
2.X3
2.X4
2.X5
3.X3
3.X4
3.X5
5.X3
5.X4
5.X5
4.X3
4.X4
4.X5
brown
green
white
yellow or red
Cable screen must be connected to screen bar !
Marks for BRAUN cable leads. Mark D only with sensors equipped with direction detection
Lead colors of BRAUN cables
Pin Nos. of BRAUN Sensors A5S...
Reference 0 volts
Speed Signal
Direction – Signal **
C
A5S1..
+
D461
B A D S 1 3 4
2*
1.X3
1.X4
1.X5
2.X3
2.X4
2.X5
3.X3
3.X4
3.X5
5.X3
5.X4
5.X5
4.X3
4.X4
4.X5
L+ N
24 volts dc
13
10
11
23
25
24 8 6 2 1
D461.11U1
D461.21U1
12**
22 **
** only with D461.21 and
sensors with direction
brown
green
white
yellow or red
* only with sensors equipped with direction detection
Magnetic Pick-Up
3.X3
3.X4
3.X5
2.X3
2.X4
2.X5
Reference 0 volts
Speed Signal
MPU
4.X3
4.X4
4.X5
Figure 6: E16x442 System Wiring Diagram 3 of 3
Page 16
I E16x442 Rev: 00 Page 16 of 73
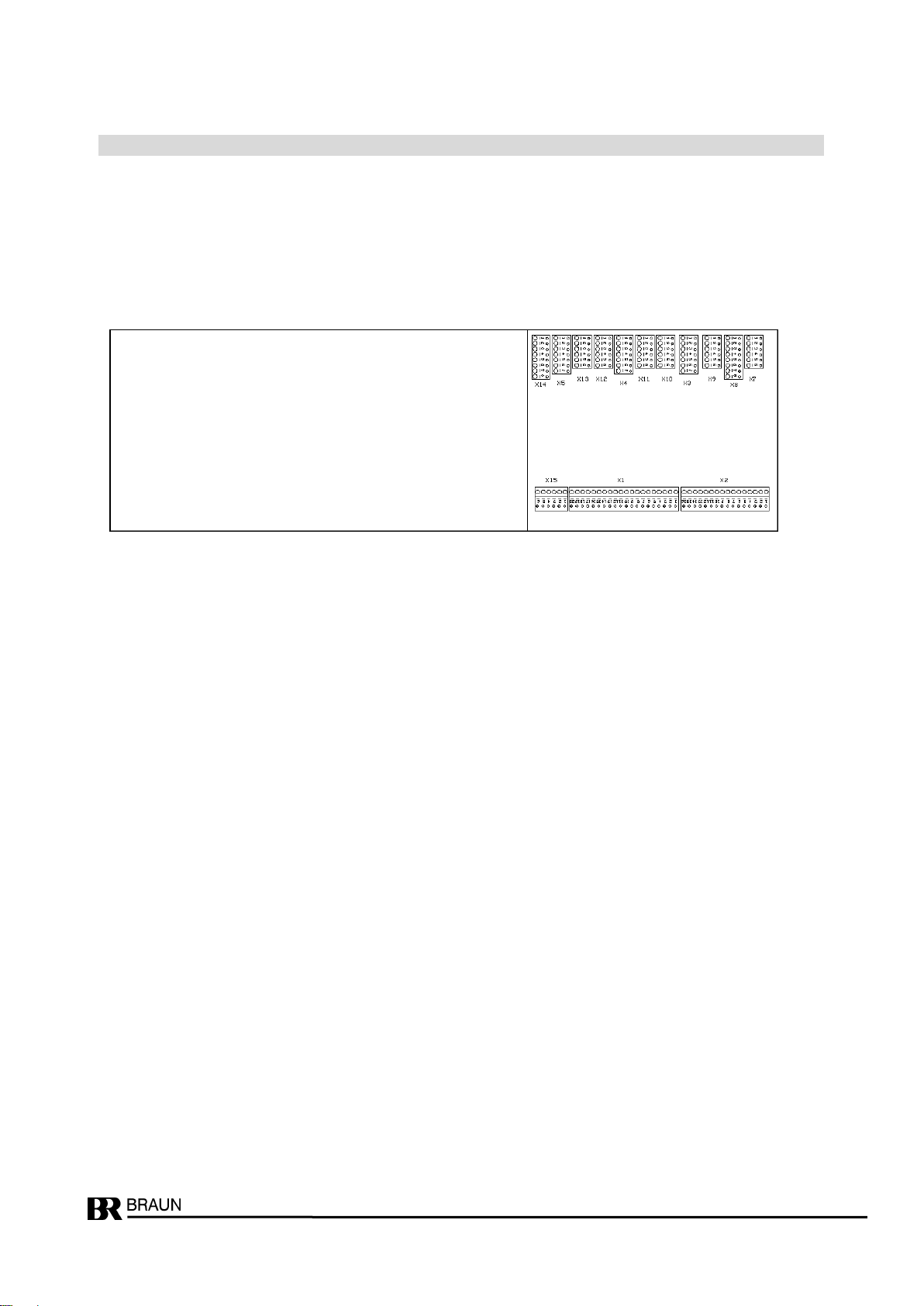
2.1.7. Position of Terminal Blocks with Version E16E442
Figure 7: Position of terminal blocks with version E16E442
Page 17
I E16x442 Rev: 00 Page 17 of 73
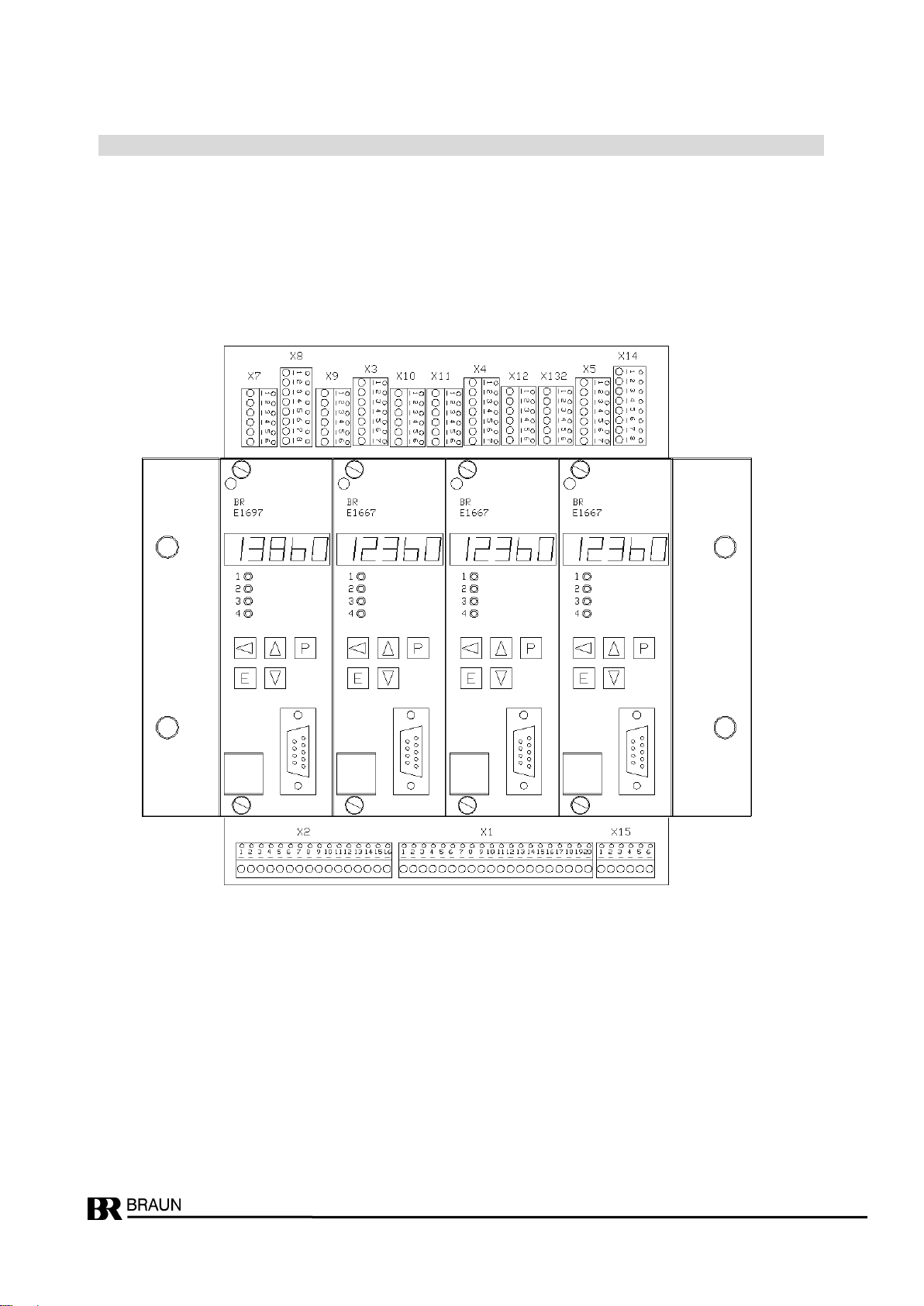
2.1.8. Position of Terminal Blocks with version E16A442
Figure 8: Position of terminal blocks with version E16A442
(shown is version E16A446)
Page 18
I E16x442 Rev: 00 Page 18 of 73
2.2. Inputs of the System
2.2.1. Speed Signal Inputs
The speed signals are internally wired to all three Monitors in parallel.
With versions E16x442.xx1:
The speed signal inputs match the values of sensors A5S…
The speed signal inputs are rated SIL2/IEC61508 if sensors of type A5S. (also via barriers
D461) are connected. For other sensors this is only valid, if the sensor supplier guarantees,
that the sensors will not give erratic speed signals due to a common cause failure. The instructions of the sensor supplier must be observed.
Technical Data of inputs see 3.1.1.1.
With versions E16x442.xx2:
The signal inputs match the values of eddy current sensors respective of MPUs.
The speed signal inputs are rated SIL2/IEC61508, if the sensor supplier guarantees, that the
sensors will not give erratic speed signals due to a common cause failure. The instructions of
the sensor supplier must be observed.
Technical Data of inputs see 3.1.1.2.
With versions E16x442.xx3:
The signal inputs match the values of MPUs.
The speed signal inputs are rated SIL2/IEC61508, if the sensor supplier guarantees, that the
sensors will not give erratic speed signals due to a common cause failure. The instructions of
the sensor supplier must be observed.
Technical Data of inputs see 3.1.1.2.
2.2.2. Direction Signal Inputs (F/R : Forward/Reverse)
The direction signal inputs match the values of the sensors A5S with direction signal.
The direction signals are internally wired to all three monitors in parallel.
The direction signal inputs are rated SIL2/IEC61508 (valid only for sensors A5S3..).
Technical Data of inputs see 3.1.2.
2.2.3. Input Reset of Alarms
The Reset signal is internally connected to all modules in parallel. It resets a no longer prevailing, but latched alarm or trip condition.
A signal transition from low to high will reset a latched alarm.
Minimum Time of Reset Signal: > 1 second to ensure correct reset of all modules.
The input “Reset of Alarms” is rated SIL2/IEC61508 provided that the signal source is rated
SIL2/IEC61508.
Technical Data of input see 3.1.3.
2.2.4. This chapter is left blank intentionally
2.2.5. This chapter is left blank intentionally
Page 19

I E16x442 Rev: 00 Page 19 of 73
2.2.6. Inputs Test I, Test II, Test III
If the input is high, the corresponding Trip-Line will switch to trip condition.
The inputs are not inhibited versus each other.
The input “Test I, II, III” are rated SIL2/IEC61508 provided that the signal source is rated
SIL2/IEC61508.
Technical Data of inputs see 3.1.3.
2.2.7. Inputs Starter (Override of SP2)
Each monitor has one input for the starter condition. As long as the input is high, the starter
condition is true.
During starter condition the monitoring versus Lowspeed (SP2) is disabled.
The inputs “Starter” are rated SIL2/IEC61508 provided that the signal source is rated
SIL2/IEC61508.
Technical Data of inputs see 3.1.3.
2.2.8. Inputs SP1B valid
Each monitor has one input to select SP1B as trip setpoint.
As long as the input is high, setpoint value SP1B (see step P03.03 of E1665) is true.
With open input (low), setpoint value SP1A (see P03.00 of E1665) is true. The inputs “SP!B
valid” are rated SIL2/IEC61508 provided that the signal source is rated SIL2/IEC61508.
Technical Data of inputs see 3.1.3.
2.2.9. This chapter is left blank intentionally
2.2.10. Inputs for Voter 1
The input signals for Voter 1 are internally connected to all monitors in parallel.
The input load of Voter 1 meets the requirements for the redundant outputs of a failsafe PLC
(load > 45 ma per input).
The signal truth level (high or low as trip condition), the voting principle (1oo2, 2oo2, 2oo3,
3oo3) and the response time is selectable. Configuration of the voter is done in steps P10.xx
of E1665.
The inputs “Voter 1” are rated SIL2/IEC61508 provided that the signal source is rated
SIL2/IEC61508.
Technical Data of inputs for Voter 1 see 3.1.4.
2.2.11. Inputs for Voters 2 … 6
The input signals for Voters 2 … 6 are internally connected to all monitors in parallel.
The signal truth level (high or low : trip condition), the voting principle (1oo2, 2oo2, 2oo3,
3oo3) and the response time is selectable for each voter individually. Configuration of voters is
done in steps P11.xx to P15.xx of E1665.
Technical Data of inputs for Voter 2 … 6 see 3.1.3.
The inputs “Voter 2…6” are rated SIL2/IEC61508 provided that the signal source is rated
SIL2/IEC61508.
Technical Data of inputs for Voter 2 … 6 see 3.1.3.
Note:
Systems E16x442.x1x do not have inputs for Voters 2 … 6 .
Page 20

I E16x442 Rev: 00 Page 20 of 73
2.3. Outputs of the System
2.3.1. Output System Warning Alarm
Output System Warning Alarm is released if
minimum one Monitor signalizes a nonconformity at its voter inputs
minimum one Monitor is faulty
minimum one Monitor is in trip status
Note:
The System Warning Alarm has a delay of approx. 10 seconds versus the releasing monitor.
Technical Data of output see 3.2.4
The output “System Warning Alarm” is rated SIL2/IEC61508.
Technical Data of output see 3.2.4.
2.3.2. Speed Signal Repeater Outputs
Each Monitor repeats the speed signal of its main sensor (Monitor A repeats sensor signal A)
to the periphery.
The Speed Signal Repeater Outputs are rated SIL2/IEC61508.
Technical Data of outputs see 3.2.1.
2.3.3. Outputs Monitor Warning Alarm
The Monitor Warning Alarm (for each Monitor individually) is released if at least one of the following conditions is true:
Monitor releases trip (due to overspeed resp. voter), if selected
Selection in step P02.11 of E1665
Deviation of its own sensors versus both sensors of neighbor Monitors, if monitored
Selection in steps P02.07 through P02.09 of E1665
Measured speed lower than SP2 (after starter condition), if monitored
Selection in step P02.06 of E1665
Sensor Circuit Fault, if monitored
Selections in steps P02.04 and P02.05 of E1665
If starter condition is still true and speed exceeds 50% of nominal speed (as set in step
P01.03), if selected in step P02.06
Note:
The Monitor Warning Alarm is not released, if the Monitor detects a nonconformity at its voter
inputs. This status is forwarded to the Test Interface E1691 which then releases the System
Warning Alarm.
The outputs “Monitor Warning Alarm” are rated SIL2/IEC61508.
Technical Data of outputs see 3.2.3.
2.3.4. Outputs Speed Alarm SP3
Each Monitor has a free adjustable speed alarm output SP3.
Configuration of SP3 in steps P05.xx of E1665.
The outputs “Speed Alarm SP3” are rated SIL2/IEC61508.
Technical Data of outputs see 3.2.3.
Page 21

I E16x442 Rev: 00 Page 21 of 73
2.3.5. Analog Outputs for measured speed (Option)
The (optional) analog outputs have a range of 0/4 .. 20 mamps.
Configuration of the analog output in steps P08.xx of E1665.
The analog outputs of versions E16x442.1xx are rated SIL2/IEC61508.
The analog outputs of Monitors E16x442.2xx are rated SIL2/IEC61508.
Technical Data of outputs see 3.2.2.
2.3.6. Outputs Direction Detection
If operated with sensors A5S with incorporated direction signal output, the sense of direction is
signalized.
Each Monitor votes the direction input signals 2oo3. Each Monitor has a direction alarm output.
The outputs “Direction Detection” are rated SIL2/IEC61508.
Technical Data of outputs see 3.2.3.
2.3.7. Speed Trip Logic Output (2oo3 voted)
Speed Trip Logic Output is released, if minimum 2 of the 3 monitors detect overspeed condition. If overspeed status is latched, the alarm will persist until reset.
Output high: no speed trip
Output low: speed trip
The Speed Trip Logic Output is rated SIL2/IEC61508.
Technical Data of output see 3.2.4.
2.3.8. Output Trip-Line IV, V, VI
The Trip-Lines IV, V, VI are 2oo3-circuits formed by contacts of safety trip relays IV and V of
Monitors A,B,C.
Trip is released if minimum two Monitors E1665 are in trip status.
Trip-Lines IV, V, VI are intended to signalize the trip to a DCS or PLC.
Trip-Lines IV, V, VI are rated SIL2/IEC61508.
Technical Data of output see 3.2.5.
2.3.9. Outputs Trip-Line I, II, III
The Trip-Lines I, II, III are 2oo3-circuits formed by the contacts of safety trip relays I resp. II,
resp. III of Monitors A,B,C.
Trip is released if minimum two monitors E1665 are in trip status.
Trip-Lines I, II, III are intended to supply shutdown solenoid valves.
Trip-Lines I, II, III are rated SIL2/IEC61508.
Technical Data of output see 3.2.6.
2.3.10. Logic Outputs LO1 through LO6 (voted 2oo3)
The logic outputs LO may be assigned to signalize a voter trip or to a speed setpoint.
If assigned to Voter Trip: Output high: no trip of Voter
Output low: trip of Voter
If assigned to speed alarm: Output high/low if n > SP is selectable.
The Logic Outputs LO1 through LO6 are rated SIL2/IEC61508.
Technical Data of outputs see 3.2.4.
Page 22

I E16x442 Rev: 00 Page 22 of 73
2.3.11. Trip Status of Monitors
Each Monitor reflects its trip status via the Test Interface as a logic signal to the periphery.
Output high: no trip
Output low: trip
Note:
The outputs have a delay of approx. 10 seconds versus the trip of the monitor.
The Outputs "Trip Status of Monitor" are rated SIL2/IEC61508.
Technical Data of output see 3.2.4
Page 23

I E16x442 Rev: 00 Page 23 of 73
2.4. Power Supply
Each Monitor must be supplied with 24 volts dc (18..40 volts) from a power supply with protective separation, conforming to IEC 61131-2 requirements.
The Test Interface E1691 is fed by an internal power rail.
Technical Data see 3.3.
2.5. Data Interface
Each of the Monitors E1665 carry a 9pole Sub-D-connector ( female). Implemented on this
connector are a Profibus-Interface (with standard-pinning) and a RS232-Interface (non standard pinning).
2.5.1. Profibus Interface for Status and Diagnostics of the System
The Profibus Interface reflects the standard Profibus DP and serves for the upload of status
and diagnostics of the system to a PLC or DCS.
2.5.2. RS232 Interface with Interface Software IS-RS232-E16 (for OEM only)
The RS232 Interface in conjunction with the Interface-Software IS-RS232-E16 (available for
OEM only) serves
to edit parameters
to configure parameter settings as *.brp files
to upload parameter settings from Monitors as *.brv files
to download parameter settings from *.brp or *.brv files to the Monitors
2.5.3. RS232 Interface with Interface Software IS-RS232-E16-L2 (for End User)
The RS232 Interface in conjunction with the Interface-Software IS-RS232-E16-L2 (available for
End Users) serves
to upload parameter settings from Monitors as *.brv files
to download parameter settings from *.brv files to spare part Monitors
Note: Parameter settings cannot be changed.
Page 24

I E16x442 Rev: 00 Page 24 of 73
3. Technical Specifications
3.1. Technical Data of Inputs
3.1.1. Technical Data of Speed Signal Inputs
3.1.1.1. Hall Sensor Inputs
Maximum Input Frequency : 50 kHz
Maximum Signal Voltage : 30 volts
Input low at : < 3 volts
Input high at : > 7 volts
Impedance : approx. 5 kohms
Sensor Supply : approx. 13 volts, maximum 80 mamps
The sensor inputs have the same common, but are free floating versus other potentials.
They are powered by an internal power supply.
3.1.1.2. Eddy Current Sensor Inputs resp. MPU Inputs
Maximum Input Frequency : 30 kHz
Maximum Signal Voltage : 30 volts
Trigger Hysteresis : 0.07 to 2.5 Vpp
Impedance : approx. 47 kohms
Sensor Supply: (only with versions E16x442.xx2): approx. 24 volts, maximum 120 mamps
Inputs are free floating.
The sensor inputs have the same common, but are free floating versus other potentials.
They are powered by an internal power supply.
3.1.2. Technical Data of Direction Inputs
Maximum Signal Voltage : 30 volts
Input low at : < 3 volts
Input high at : > 7 volts
Impedance : approx. 22 kohms
Same Reference as Speed Signal Inputs.
3.1.3. Technical Data of Binary Inputs (excluding Voter 1)
Input high : 18..48 volts (nominal current at 24 volts: 6 mamps)
Input low : < 3 volts or open input
Reference : negative pole of power supply
3.1.4. Technical Data of Binary Inputs of Voter 1
Input high : 18..30 volts (nominal current at 24 volts: 45 mamps)
Input low : < 3 volts or open input
Reference : negative pole of power supply
Page 25

I E16x442 Rev: 00 Page 25 of 73
3.2. Technical Data of Outputs
3.2.1. Technical Data of Sensor Signal Repeater Outputs
High-Level : > 20 volts with max. load, (maximum 26 volts without load)
Low-Level : < 2 volts, with max. load
Maximum load: 1 kohms
Outputs are short-circuit proof and free floating (also versus each other).
Outputs are supplied by free floating power sources within the monitors.
3.2.2. Technical Data of Analog Outputs
Range : 0/4…20 mamps
Resolution : 12 Bit
Maximum load : 500 ohms
Linearity error : < 0.1%
Temperature stability : ±0,02 %/°C within a range of 0...60°C.
Outputs are short-circuit proof and free floating (also versus each other).
3.2.3. Technical Data of Opto-Relay Outputs
Maximum rating : 50 volts dc / 50 mamps.
Outputs are passive, short-circuit proof and free floating (also versus each other). They must
be supplied externally.
Note:
In case of short circuit the output is latched to tristate until power supply of the monitor has
been switched off and on.
3.2.4. Technical Data of Logic Outputs
The outputs are fed from the system power supply.
Reference : N (negative pole of power supply).
High-Level : Power supply L+ minus 2 volts
Low-Level : < 3 volts
Maximum output current : 50 milliamps
Outputs are short-circuit proof.
Note:
In case of short circuit the output is latched to tri state until power supply of the monitor has
been switched off and on.
Page 26

I E16x442 Rev: 00 Page 26 of 73
3.2.5. Technical Data of Trip-Lines IV, V, VI
Maximum rating : 50 volts dc / 300 mamps.
Outputs are passive, short-circuit proof and free floating. They must be supplied externally.
3.2.6. Technical Data of Trip-Lines I, II, III
Maximum rating : 50 volts dc / 3 amps / 75 watts
Maximum rating for DC13-applications : 24 volts / 3 amps
Outputs are not short-circuit proof (permanent currents exceeding 8 amps will destroy outputs).
Impedance : 10 kohms versus L- (negative pole of power supply)
For inductive type loads, external spark extinguishing means must be provided.
Total response time (trip relays de-energize to trip) from trip event until trip circuits are in trip
condition : < 15 milliseconds.
Page 27

I E16x442 Rev: 00 Page 27 of 73
3.3. Technical Data of Power Supply
3x 24 volts dc / 0.5 amps (18…40 volts) from a power supply with protective separation, conforming to IEC 61131-2 requirements.
Maximum consumption of system : 20 watts
3.4. Installation Conditions
Ambient temperature in operation : 0° C..+55° C
Ambient temperature in storage: -20° C..+85° C
Relative humidity: 10 % to 95 %, non condensing
To be installed in dry cabinets in air-conditioned rooms
3.5. Protection Grade
Insulation Class III
Version E16A442 and E16E442 : IP20
Version E16G442: IP65 resp. NEMA4
3.6. Connectors
Plug-In Cage-Clamp Connectors, type Phoenix Combicon FK-MLP1,5/…ST-3,5,
fitting for:
Conductor cross section solid min.: 0.2 mm²
Conductor cross section solid max.: 1.5 mm²
Conductor cross section stranded min.: 0.2 mm²
Conductor cross section stranded max.: 1.5 mm²
Conductor cross section stranded, with ferrule without plastic sleeve min.: 0.25 mm²
Conductor cross section stranded, with ferrule without plastic sleeve max.: 1.5 mm²
Conductor cross section stranded, with ferrule with plastic sleeve min.: 0.25 mm²
Conductor cross section stranded, with ferrule with plastic sleeve max.: 0.75 mm²
Conductor cross section acc. to AWG/kcmil min.: No. 24
Conductor cross section acc. to AWG/kcmil max: No. 16
Minimum AWG according to UL/CUL: 28
Maximum AWG according to UL/CUL: 16
3.7. Conformity to Standards
2006/42/EU
SIL2/IEC61508, DIN EN ISO 13849-1:2008 Cat 3 PL e, API 670, API 672
2006/95/EU, EN 61010-1,
2004/108/EU, EN 61000-6-2, EN 61000-6-4, IEC 611311-2
Page 28

I E16x442 Rev: 00 Page 28 of 73
3.8. Dimensions of system E16A442
front view
Height incl. backplane + terminals
all dimensions in mm
Drawing not to scale
wiring from
top and bottom
Ø 13
88
220
201.5
109.3
21.3
21
133
195
20
6.4
Detail
Mounting holes
to hang the racks to
premounted screws
total depth (incl. Profibus plug with 35° cable outlet)
wiring
side view
wiring
premounted screws or
bolts with nuts
pluggable
terminal
blocks
265
220
Figure 9: Dimensions of System E16A442
Page 29

I E16x442 Rev: 00 Page 29 of 73
3.9. Dimensions of system E16E442
all dimensions in mm
Drawing not to scale
wiring from rear side
top view
connectors
depth incl. connectors (excl. wiring space)
mounting holes in rack
for screws or bolts
with Ø 6 mm
mounting
holes
483 (incl. mounting lugs)
Dimensions sheet of 19'' rack, 3HE, 84TE for rack or panel mounting
57.1
456.1
448 +4
133
+2
446
218
dimensions for
panel cutout
Figure 10: Dimensions of System E16E442
Page 30

I E16x442 Rev: 00 Page 30 of 73
3.10. Dimensions and Features of E16G442 Enclosure
Overall Dimensions (including mounting lugs):
Height: 510 mm
Width: 410 mm
Depth: 270 mm
Glazed Window with size 360 by 410 mm
Material: Fiberglass reinforced plastic
3.11. Weight of E16x442
E16A442 : 3,0 kg
E16E442 : 3,7 kg
E16G442: 13,0 kg
Figure 11: Dimensions of E16G442 Enclosure
Page 31

I E16x442 Rev: 00 Page 31 of 73
4. Safety Notes for Installation and Operation
4.1. Safety Notes for Installation
This unit has been designed and inspected according to standards DIN EN 61010-1 (VDE
0411-1).
Observe these instructions and wiring diagrams carefully, to ensure this standards and safe
operation of the machine.
The installation must be done only by adequately qualified personnel and with power supply
switched off.
4.1.1. General Instructions
Specifically, connect the PE terminal 1.X1 to a safe ground potential.
Do not open the instrument. Connections and all programming are done from outside. When
removing it from its enclosure however, from whatever reason, make sure that power is
switched off.
The instrument may be installed in any position, but not in the immediate neighborhood of interfering sources.
Speed signal leads must be carefully shielded, and should not be run in bundles with power or
relay control leads.
Each speed signal must have its own screen.
4.1.2. EMI
The unit complies with all relevant regulations, as determined by the Policy of the European
Committee for Electrotechnical Standardization (CENELEC), for the Electromagnetic Compatibility (2004/108/EU). Testing and inspection has been performed according to Standards
IEC 61000-4-2 and IEC 61326-3-2. Thereby, the product meets all requirements to be marked
by the CE sign.
Specifically to be observed:
Terminals must be kept off all undue access.
Terminals must be protected against electrostatic discharge.
Power supply and all input and output leads must be protected overvoltage.
4.2. Safety Notes for Operation
4.2.1. Safety Notes for Commissioning
The commissioning must be done only by adequately qualified personnel and with power supply switched off.
On initial operation of the monitored machine the operator must ensure proper function of the
measurement chains.
This includes checking of the correct speed display and of the trip release due to a real overspeed condition.
If voter inputs are used the correct trip release due to external trip condition must be verified.
The parameter settings must be documented and protected against unauthorized changes.
Page 32

I E16x442 Rev: 00 Page 32 of 73
5. Description of Monitor E1665
5.1. Display and Frontside Operational Elements
5.1.1. Front View of Monitor E1665
Figure 12: Front view of Monitor E1665
5.1.2. Status-LEDs
LED1 steady on: Trip
LED2 steady on: no Trip, SP1A is valid
blinking: SP1B is valid
LED3 steady on: n < SP3
blinking: one only of three input channels measures zero speed
LED4 steady on: n > SP3
5.1.3. Display during Test Procedures
FC-2 : External Trip-Release via Voter active
FC-3.1 : Trip-Line I is tested (Relay I to Trip-Condition)
FC-3.2 : Trip-Line II is tested (Relay II to Trip-Condition)
FC-3.4 : Trip-Line III is tested (Relay III to Trip-Condition)
SELF : Monitor self-test
5-digit display
Input keyboard
4 LEDs for status indication
Data Interface
9-pole Sub-D
P
E
E1665
1
2
3
4
Trip
SP3
RPM
Page 33

I E16x442 Rev: 00 Page 33 of 73
5.1.4. Values accessible during normal operation
Values accessible during normal operation (Standard Display Mode):
with key the value of SP1
with key the value of SP2
with key and
together: maximum stored speed value
with key and
together: minimum stored speed value
Note:
with key Reset of stored minimum/maximum value
with key and together: Reset of latched (and not persistent) alarms, if enabled
with key and together: Toggle between
Standard-Display Mode and Special Display Mode 1
with key and together: Toggle between
Standard-Display Mode and Special Display Mode 2
Page 34

I E16x442 Rev: 00 Page 34 of 73
5.1.5. Special Display Mode 1
Toggle between Standard and Special Display Mode 1 by pressing keys and
together.
In Special Display Mode 1 the measured speed values of sensors A, B, C can be shown individually as well as the signal level of the main sensor.
Toggle between the four values with
.
The LED assigned to the specific speed value is blinking (see table).
Note :
If signal level (LED4 blinking) is selected, without a key pressed the median signal value is
displayed.
The maximum measured signal level is then displayed with key
.
The minimum measured signal level is then displayed with key
.
Minimum, maximum and median values are dynamically updated with a sample rate of approx.
1 second.
5.1.6. Special Display Mode 2
Toggle between Standard and Special Display Mode 2 by pressing keys and
together.
In Special Display Mode 2 LED1 and LED4 are blinking.
This display mode is only used for trouble shooting, if external signals are missing and the monitor displays the Event code E.0.4.0.0 .
5.1.7. Frontside Reset of Alarms and Event Codes
Resetting of (no longer valid) alarms and event codes is done by pressing keys and (if
enabled in step P00.02).
5.1.8. Data Interface
9pole Sub-D for PROFIBUS and RS232.
Notes:
- RS232-Data interface only available for systems with serial nos. exceeding 193850.
- For RS232, adapter L3D02 must be used
with Monitor
LED assigned to
speed value of sensor:
LED1 LED2 LED3
signal level (in xx.x volts)
LED4
A
A C B
A
B
B A C
B
C
C B A
C
Page 35

I E16x442 Rev: 00 Page 35 of 73
5.2. Functions of Monitor 1667
For a detailed description of the individual functions refer to chapter 8.
5.2.1. Speed Measurement
Each monitor receives the signal from the three sensors and calculates the speed from each
signal. For the further evaluation it selects (depending on parameter settings) the calculated
speed value derived of its own sensor or the mean value of all three speed values.
Speed calculation is done by measuring the time in between the pulses. The minimum measurement time is 5 milliseconds.
To compensate for an imperfect gear, a predivider may be introduced to reduce the signal frequency to 1 pulse per revolution.
5.2.2. Functions for Overspeed Protection
Overspeed protection is done by :
Monitoring of Sensors
Monitoring versus Lowspeed as protection versus incorrect mounting or fault of speed
sensors.
Monitoring versus overspeed
5.2.3. Functions for External Trip by Voters
Trip is released, if one of the voters detects an external trip condition.
Voters may be configured as 1oo2, 2oo2, 2oo3 or 3oo3. High or low Input-Level as trip condition and response time is selectable.
5.2.4. Selftest of Monitor
Selftest is performed at an interval of 2 hours. Execution of Selftest is signalized on display
with message SELF. Selftest of the monitors are inhibited versus each other.
The Selftest routine includes
CPU RAM-Test
CPU EEPROM-Test
CPU Command-Test
CPU Register-Test
Voter Signal-input-Test
If the Selftest detects a malfunction, the monitor is set to trip-status.
Page 36

I E16x442 Rev: 00 Page 36 of 73
6. Description of Test Interface E1691
The Test Interface E1691 processes the signals trip-line test from the PLC to the Monitors and
the trip status from the Monitors to the PLC.
The Test Interface supplies a constant test frequency to the Monitors, which use this frequency
for their self test function.
The Test Interface releases the System Warning Alarm if:
Minimum one Monitor detects a discrepancy at its voter inputs
Minimum one Monitor detects a failed speed signal
Minimum one Monitor has a malfunction
Malfunction of Test Interface
The frontside LED is steady on if the power supply of the Test Interface is ok.
Page 37

I E16x442 Rev: 00 Page 37 of 73
7. Programming of the Monitors
7.1. Programming of the Monitors via Front Keyboard
Principle:
Select a parameter via its ‚name’ Pgg.ss,
in that gg : Parameter-group number and
ss : Step-number within the group,
then display the value and alter if required.
Procedure:
Initiate programming phase by pressing keys and together; instead of the normal display P00.00. appears
Select the group or step number with keys , .
Switch between Groups and Step Fields with the . key
Current value of the Parameters is displayed with key .
Select active position with the . key
Adjust the number in the active field with keys , .
Acknowledge and set with key , Discard (original value remains) with key .
Return to operational mode with the key. The display then returns to the current ‘is’ speed (with E1665) resp.
to the current test-speed (with E1697)
See example below: Change parameter P01.01 from 2386 to 2387 or 2385.
Move
active
digit with
Normal Display While Programming
Display active digit(s) blinking (shown underlined here)
Select Select Change
Toggle Group Toggle Step-No. Toggle Parameter Value
with with with
key(s) Key Key
+
P P E
E
E
: Enter
or
: Cancel
P
Enter : new, changed value is valid
Cancel : original value still valid
P
P
Page 38

I E16x442 Rev: 00 Page 38 of 73
7.2. Programming of the Modules via RS232-Interface
1. adapter L3D02 with cable L3D03 by BRAUN
Note:
- Adapter L3D02 has male connectors on both sides.
- Cable L3D03 has female connectors to L3D02 and to PC.
or
2. customized cable with connections PC (female connector) to E16 (male connector):
PC pin 2 to E16 pin 2
3 to 7
5 to 5 (of 9 pole Sub-D connectors)
Note:
- The RS232-Interface serves only for parameter programming purposes, not for transmission
of current data. States, alarms and measurement data are transmitted via PROFIBUSInterface only.
7.3. Default Values
If not specified otherwise, the unit is supplied with default values as listed in the summary of
parameters. In process of installation, the setting of its parameters inevitably must be adapted
to the correct values according its application.
Page 39

I E16x442 Rev: 00 Page 39 of 73
8. Parameters of Monitor E1665
8.1. Summary of parameters and their default values
Param.
No.
Default
Value
Parameter Function
P00.xx
Code figure, Parameter Lock
P00.00
0000
Code figure
.01
0000
New code figure
.02
0
Parameter Lock : 0: locked / 1: enabled
.03
0
Front side Reset: 0: not possible / 1: possible
P01.xx
Input, Scaling
P01.00
0
Reserved for future applications
.01
10000
Value of nominal input frequency in Hz
.02
0
Decimals of speed value for SP2, SP3 PROFIBUS-Output
.03
10000
Nominal speed in RPM
.04
00001
Lower limit of the speed range
.05
001
Predivider (range 001 - 255)
.06
0
Reserved for future applications
.07
0
Decimals for acceleration
.08
01000
Maximum acceleration in XXXX or XXX.X RPM/sec
.09
1
No. of acceleration measurements included in calculation of SP1var
P02.xx
Display, Starter, Tests
P02.00
0
Reserved for future applications
.01
0.3
Display updating sequence (in x.x sec)
.02
000
Time elapse of starter phase (in xxx sec)
.03
1
Reserved for future application
.04
4
Sensor monitoring: 0: off / 1: on / 2: on, latched / 4: on, no trip
.05
1
Mode of sensor monitoring: 0 ... 7 (see table)
.06
1
Lowspeed Monitoring "n < SP2": 0 ... 4 (see table)
.07
5
Speed comparison test : 0 ... 5 (see table)
.08
030
Permissible Speed Difference between Sensors (in xxx RPM)
.09
05
Number of errors before reporting
.10
1
Monitor Warning Alarm at Trip: 0 ... 4 (see table)
.11
1
Latch Monitor Warning Alarm: 0: no / 1: yes, all alarms / 2: yes, first one only
P03.xx
Overspeed Alarm SP1
P03.00
00010
Setpoint SP1A in RPM
.01
05.0
Hysteresis bandwidth (XX.X % of. SP1)
.02
0
Alarm to be latched / energized or de-energized to trip:
0: no, de-energize / 1: yes, de-energize / 2: no, energize / 3: yes, energize
.03
00001
Setpoint SP1B in RPM
.04
0
Setpoint SP1var : 0: not active / 1: active
Continued on next page
Page 40

I E16x442 Rev: 00 Page 40 of 73
Param.
No.
Default
Value
Parameter Function
P04.xx
Low Speed Alarm SP2
P04.00
00015
Setpoint SP2 in RPM
.01
05.0
Hysteresis bandwidth (XX.X % of SP2)
.02
0
Fix value = 0, do not change
P05.xx
Alarm SP3
P05.00
00003
Setpoint SP3 in RPM
.01
05.0
Hysteresis bandwidth (XX.X % of SP3)
.02
1
Hysteresis position: 0: above / 1: below
.03
1
Relay state at "n > SP3" : 0 … 3 (see table)
.04
0
Alarm state at sensor fault: 0: acc. to speed / 1: "n < SP" / 2: "n > SP"
.05
1
Setting of LEDs to status "n > SP3" : 0: LED3 on / 1: LED4 on
P06.xx
Eddy sensor
P06.00
00100
Reserved for future application
.01
00.0
Eddy sensor input check: input voltage upper limit in xx.x volts
.01
00.0
input voltage lower limit in xx.x volts
.03
00.0
current drain upper limit in xxx m
.04
00.0
current drain lower limit in xxx m
.05
0.0
Eddy sensor input hysteresis in x.x volts
P07.xx
Trip-Lines, Forward / Reverse Detection
P07.00
0
Trip-Lines Monitoring: 0: no / 1: yes
.01
0
Signal level Trip-Feedback: 0: low = Trip / 1: high = Trip
.02
1
Forward / Reverse Detection Input level: 0: low = forward / 1: high = forward
.03
1
Forward / Reverse relay state: 0: de-energized = forward / 1: energized = forward
.04
0
Reserved for future application
P08.xx
Analog Output
P08.00
10000
High end speed value
.01
00000
Low end speed value
.02
1
Zero level: 0: dead zero / 1: live zero
.03
0
Output level at sensor fault: 0: no change / 1: min / 2: max
.04
0
Output direction: 0: 0/4 … 20 ma / 1: 20 ... 4/0 ma
.05
1
Output response to test-speed: 0: test-speed / 1: frozen
.06
0
Test of Analog Output value: 0: no / 1: yes
P09.xx
Reserved for future application
P09.00
0
Reserved for future application
P10.xx
Voter No. 1 and LO1
P10.00
0
Operation Mode: 0 ... 5 (see table)
.01
0
Input Truth Level: 0: high = Trip / 1: low = Trip
.02
0
Voting logic: 0: 1oo2 / 1: 2oo2 / 2: 2oo3 / 3: 3oo3
.03
0
Truth Time until Trip: 0 ... 11 (see table)
.04
0
Trip latched: 0: no / 1: yes
.05
0
Delay of Antivalence Alarm: 0 ... 9 (see table)
.06
00110
Value for setpoint SPV1
Continued on next page
Page 41

I E16x442 Rev: 00 Page 41 of 73
Param.
No.
Default
Value
Parameter Function
P11.xx
Voter 2 and LO2
P11.00
0
Operation Mode: 0 ... 5 (see table)
.01
0
Input Truth Level: 0: high = Trip / 1: low = Trip
.02
0
Voting logic: 0: 1oo2 / 1: 2oo2 / 2: 2oo3 / 3: 3oo3
.03
0
Truth Time until Trip: 0 ... 11 (see table)
.04
0
Trip latched: 0: no / 1: yes
.05
0
Delay of Antivalence Alarm: 0 ... 9 (see table)
.06
00120
Value for setpoint SPV2
P12.xx
Voter 3 and LO3
P12.00
0
Operation Mode: 0 ... 5 (see table)
.01
0
Input Truth Level: 0: high = Trip / 1: low = Trip
.02
0
Voting logic: 0: 1oo2 / 1: 2oo2 / 2: 2oo3 / 3: 3oo3
.03
0
Truth Time until Trip: 0 ... 11 (see table)
.04
0
Trip latched: 0: no / 1: yes
.05
0
Delay of Antivalence Alarm: 0 ... 9 (see table)
.06
00130
Value for setpoint SPV3
P13.xx
Voter 4 and LO4
P13.00
0
Operation Mode: 0 ... 5 (see table)
.01
0
Input Truth Level: 0: high = Trip / 1: low = Trip
.02
0
Voting logic: 0: 1oo2 / 1: 2oo2 / 2: 2oo3 / 3: 3oo3
.03
0
Truth Time until Trip: 0 ... 11 (see table)
.04
0
Trip latched: 0: no / 1: yes
.05
0
Delay of Antivalence Alarm: 0 ... 9 (see table)
.06
00140
Value for setpoint SPV4
P14.xx
Voter 5 and LO5
P14.00
0
Operation Mode: 0 ... 5 (see table)
.01
0
Input Truth Level: 0: high = Trip / 1: low = Trip
.02
0
Voting logic: 0: 1oo2 / 1: 2oo2 / 2: 2oo3 / 3: 3oo3
.03
0
Truth Time until Trip: 0 ... 11 (see table)
.04
0
Trip latched: 0: no / 1: yes
.05
0
Delay of Antivalence Alarm: 0 ... 9 (see table)
.06
00150
Value for setpoint SPV5
P15.xx
Voter 6 and LO6
P15.00
0
Operation Mode: 0 ... 5 (see table)
.01
0
Input Truth Level: 0: high = Trip / 1: low = Trip
.02
0
Voting logic: 0: 1oo2 / 1: 2oo2 / 2: 2oo3 / 3: 3oo3
.03
0
Truth Time until Trip: 0 ... 11 (see table)
.04
0
Trip latched: 0: no / 1: yes
.05
0
Delay of Antivalence Alarm: 0 ... 9 (see table)
.06
00160
Value for setpoint SPV6
Continued on next page
Page 42

I E16x442 Rev: 00 Page 42 of 73
Param.
No.
Default
Value
Parameter Function
P16.xx
Reserved for future application
P16.00
0
Reserved for future application
.01
0
Reserved for future application
.02
0
Reserved for future application
.03
0
Reserved for future application
.04
0
Reserved for future application
.05
0
Reserved for future application
.06
00000
Reserved for future application
P17.xx
Data Interface
P17.00
016
PROFIBUS-Interface Device no.
Page 43

I E16x442 Rev: 00 Page 43 of 73
8.2. Description of Parameters and their Settings of Monitor E1665
Parameter Group P00.xx of Monitor E1665
Code Figure, Parameter Lock, Frontside Reset of Alarms
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P00.00
Code Figure
Range: 0000 .. 9999
If the parameters are locked (see P00.02), the code figure must be entered
prior to any change of other parameters.
If the code figure is not correct, -E 1- is displayed.
Without code figure and P00.02 : 0 the values of all parameters may be inspected, but not changed.
P00.01
New Code Figure
Range: 0000 .. 9999
A new code figure may be set in P00.01. Then it replaces the previous one.
P00.02
Parameter Lock
Range: 0 .. 1
Setting
0 : Parameters are locked, change only possible with code figure
1 : Parameters unlocked, change of parameter values possible
P00.03
Frontside Reset of Alarms
Range: 0 .. 1
Setting
0 : Frontside reset of alarms not possible
1 : Frontside reset of alarms possible with keys and .
Page 44

I E16x442 Rev: 00 Page 44 of 73
Parameter Group P01.xx of Monitor E1665
Input Scaling and Measurement Configuration
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P01.00
Reserved for future applications
Description of Scaling:
Scaling defines the relationship between the input signal frequency (in terms
of Hz), and the corresponding display (in terms of RPM).
Of course, they must refer to the same operation level. This reference point
is recommended close to the high end of the intended operation range. In
later operation, however, it may be overrun without error.
Example:
1500 Hz corresponds to 3000 RPM :
Step P01.01 : setting 01500
Step P01.03 : setting 03000
P01.01
Nominal Input Frequency [Hz]
Range: 00001 .. 99999
See description of Scaling.
P01.02
Decimals for P01.04, P04.00,
P05.00 and for
PROFIBUS Speed Data Output
Range: 0 .. 1
Setting
0 : Setting range for P01.04, P04.00, P05.00 : 00001 to 99999 RPM
1 : Setting range for P01.04, P04.00, P05.00 : 0000.1 to 9999.9 RPM
P01.03
Nominal speed [RPM]
Range: 00001 .. 99999
See description of Scaling.
P01.04
Lower Limit of the Speed
Range
Range as defined in P01.02
If the monitored speed falls below the value entered here the measured value is given as 0 both for the display and the alarms. The lower limit of the
speed range is entered in units of RPM.
Page 45

I E16x442 Rev: 00 Page 45 of 73
Parameter Group P01.xx (continued) of Monitor E1665
Measurement Configuration
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P01.05
Predivider
Range: 001 .. 255
The predivider is used only if the variable setpoint SP1var is active (P03.04
= 1).
The predivider must then be set to the number of teeth of the gear wheel.
The acceleration measurement is extended over one full rotation of the machine.
Note:
The predivider applies only to the primary measurement input.
The two other measurement channels are not affected by the predivider.
P01.06
Reserved for future application
P01.07
Decimals for acceleration
Range: 0 .. 1
Setting
0 : setting of acceleration in XXXX RPM/sec
1 : setting of acceleration in XXX.X RPM/sec
P01.08
Maximum acceleration of the
machine [RPM/sec]
Range: 00001 .. 99999 resp.
0000.1 .. 9999.9
Setting is done in RPM/sec.
Value must be set to the maximum possible acceleration (dN/dt max) of the
machine in the worst case scenario.
See also description of step P03.04.
P01.09
No of acceleration measurements included in calculation
of SP1var
Range: 1 .. 5
Recommended value is 1 or 2 measurements (equals to a measurement
time of 20 or 40 milliseconds at a speed of 3000 RPM).
More measurements included will improve the stability of the calculated setpoint SP1var, but also result in a delayed update rate.
Page 46

I E16x442 Rev: 00 Page 46 of 73
Parameter Group P02.xx of Monitor E1665
Display, Starter time, Sensor Failure Monitoring
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P02.00
Reserved for future application
P02.01
Display updating sequence
Range: 0.1 .. 9.9 [sec]
The display may have its own independent up-dating sequence, different
from the response time used by other functions - again in the interests of
stabilized and legible readings. Set the parameter to the time required in
steps of 0.1 sec. Recommended value is 0.3 sec.
The display value is determined by the duration of a cycle sequence.
The rapid response of the alarms is not influenced by this procedure.
P02.02
Starter time period
Range: 000 .. 999 [sec]
This step sets the starter time period (duration). The starter phase state for
SP2 lasts from the beginning of the external starter signal plus the programmed time elapse following its end.
P02.03
Reserved for future application
P02.04
Sensor Monitoring
(Current and Signal Level)
Range: 0 .. 4
A sensor fault will be reported according to the designated parameters and,
if configured, latched until the reset is activated.
Setting
0 : Monitoring disabled
1 : Fault reported + Trip release, till error resolved
2 : Fault reported + Trip release, latched till reset
3 : Not permissible
4 : Fault reported without trip release (recommended setting)
P02.05
Mode of Sensor Monitoring
Range: 0 .. 3
Setting
0 : Without monitoring (see Note 3)
1 : Checks sensor current drain
2 : Checks signal voltage level at stand still (see Note 1)
3 : Current drain and voltage level
4 : Inductive sensor (MPU)
5 : Reserved for future use
6 : Eddy sensor voltage level (see Note 2)
7 : Eddy sensor voltage level and current drain (see Note 2)
Note 1: The voltage level check is only possible with Braun-sensor type
A5S... . In this instance even at stand still a defective sensor or
supply cable can be detected.
Note 2: The signal voltage level (and current drain) is compared versus
max/min-values as set in P06.01 to P06.04.
Note 3: Selection of Setting 0 makes Step P02.04 meaningless.
Page 47

I E16x442 Rev: 00 Page 47 of 73
Parameter Group P02.xx (continued) of Monitor E1665
Sensor Failure Monitoring
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P02.06
Lowspeed Monitoring
"n < SP2"
Range: 0 .. 4
Safety Note:
The Lowspeed Monitoring "n < SP2" is the only comprehensive protection versus a systematic fault of any type of
speed sensor (no speed signal from sensor at running
machine).
Setting of P02.06 = 0 is only allowed for test purposes during start-up of the machine. In normal operation P02.06
must be set to a value of 1 or 2 or 3 or 4.
Function of Lowspeed Monitoring "n < SP2":
Following the end of the Starter phase (Start-Up Bridging) the measured
speed must exceed the value set for SP2. If the measured speed n is then
lower than SP2, trip is released.
Function of Starter Plausibility Check:
If
starter condition is true
and plausibility check is on
and speed exceeds 50% of overspeed setpoint SP1A
then
Monitor Warning Alarm is released by plausibility check and error code
E.3.0.1.0 is displayed.
Setting
0 : Monitoring switched off (not permissible, see safety note above)
1 : Trip and Alarm till rectified, starter plausibility check on
2 : Trip and Alarm latched, starter plausibility check on
3 : Trip and Alarm, till rectified / starter plausibility check off
4 : Trip and Alarm latched / starter plausibility check off
Page 48

I E16x442 Rev: 00 Page 48 of 73
Parameter Group P02.xx (continued) of Monitor E1665
Sensor Failure Monitoring
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P02.07
Speed Comparison
Evaluation Mode
Range: 0 .. 5
Speed comparison of the 3 sensors enables:
Detection of incorrect installation of the sensor (distance from the
tooth wheel too large or wrong position) even during the start-up bridging phase.
Detection of a fading function of a sensor during normal operation.
Functionality:
Each Monitor has three measuring channels and receives the signals of all
three sensors.
Setting
0 : only the primary sensor will be evaluated; no redundancy
1 : Trip is released if primary sensor fault is detected
2 : only error message is released if primary sensor fault is detected, but
only speed value of primary sensor is used for further evaluation
3 : not permissible
4 : only error message is released if primary sensor fault is detected, but
the mean value of the three speed values is used for further evaluation
5 : same as setting 4, but a trip released due to deviation is latched
Setting 1 or 2 or 4 or 5 :
During machine operation each Monitor compares its sensor input with
those of its two neighbors. If the measured speed value of its own
(primary) sensor in comparison with its two neighbors produces a dis-
crepancy exceeding the tolerance level set at P02.08, the monitor’s
primary sensor will be reported as faulty.
However, should all three measured speed values deviate from each
other for more than the specified tolerance, the monitor will release
trip.
Note:
Settings P02.07 = 4 or 5 avoids a trip release caused by a sensor fault
during the automatic test procedure and are recommended settings.
Example:
Monitor A is tested for overspeed, at the same time the signal from sensor B
drops out. Monitor B reports an error, but continues to evaluate the signals
from sensors A and C.
Page 49

I E16x442 Rev: 00 Page 49 of 73
Parameter Group P02.xx (continued) of Monitor E1665
Sensor Failure Monitoring
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P02.08
Permissible Speed Difference
between Sensors [RPM]
Range: 001 .. 999
Value for the permissible difference in RPM between the speed measurement of the primary sensor and that of the other two sensors before a fault is
detected.
Note: Primary sensor is the sensor the monitor supplies with power.
P02.09
Number of tests until alarm
Range: 01 .. 99
Number of consecutively failed speed comparison tests which may occur before an error message is issued.
Note:
At speeds lower than 50% of the nominal speed, the number of tests is automatically increased to avoid incorrect alarms during acceleration phase of
the machine.
Example for Setting of P02.07 = 4:
P02.08 = 030 (permissible difference between measured values = 30 RPM)
P02.09 = 5 (Number of consecutive errors till error message issued)
With the example above an error message will be issued when the speed
value of the primary sensor deviates by 30 RPM from the two other measured sensors five measurements in succession.
When all three measurements of one monitor between themselves differ by
more than 30 RPM (measurement of sensor A = 6031 RPM, of sensor B =
6000 RPM, of sensor C = 5969 RPM), the monitor will release trip.
P02.10
Monitor Warning Alarm also
at Trip Condition
Range: 0 .. 4
Setting depends on how the alarm is used according the specific application
for detection of SOE (sequence of events).
Setting
Alarm at
Overspeed-
Trip
Alarm at
Voter-Trip
Alarm at Trip
due to Trip-
Line-Monitoring
Alarm at
Lowspeed-
Trip
0
No
No
Yes
Yes
1
Yes
Yes
Yes
Yes
2
No
No
No
Yes
3
Yes
Yes
No
Yes 4 No
No
No
No
Note: The Monitor Warning Alarm is always released in case of detected
sensor fault.
P02.11
Latching of Monitor Warning
Alarm and Event Display
Range: 0 .. 2
The Monitor Warning Alarm and the Event Display can be latched.
Setting
0 : no
1 : yes, in this case all occurring event are shown in the display as combinations
2 : yes, in this case only the first occurring event is displayed
Page 50

I E16x442 Rev: 00 Page 50 of 73
Parameter Group P03.xx of Monitor E1665
Overspeed Alarm SP1
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P03.00
Overspeed Setpoint SP1A
Range: 00001 .. 99999
The numerical value for the setpoint is set in terms of RPM.
P03.01
Alarm Hysteresis Width
Range: 00.1 .. 99.9
Hysteresis of Overspeed Setpoint
The hysteresis is the margin between condition "excess" (>) and
"no excess" (<), defined by its bandwidth.
Width of the hysteresis
The width of hysteresis is set as a percentage of the switching point.
The position of the hysteresis for SP1 is determined beneath the setpoint.
Example:
With 5% Hysteresis and a setpoint of 10000 RPM an overspeed alarm is issued once 10000 RPM is exceeded and ceases should the speed drop below 9500 RPM.
Note:
The hysteresis is always calculated for SP1A.
If SP1B is used and the alarm is not latched, hysteresis must be chosen that
it is big enough to include SP1B to avoid bouncing of the trip relays
it is small enough to that the return point is not lower that normal
operating speed.
Example:
SP1A=3240 RPM, SP1B=3090 RPM, normal operating speed=3000 RPM.
Then hysteresis must be minimum (3240-3090)/3240 = 4.7% and
maximum (3240-3000)/3000 = 7.9%.
P03.02
Latching of Overspeed Alarm/
Energize or de-energize to Trip
Range: 0 .. 3
The overspeed alarm can be latched until externally reset.
The trip relays can be programmed to energize or to de-energize to trip (released by Overspeed or externally via Voter) condition.
Setting
0 : alarm not latched, trip relays de-energize to trip
1 : alarm latched, trip relays de-energize to trip
2 : alarm not latched, trip relays energize to trip
3 : alarm latched, trip relays energize to trip
P03.03
Overspeed Setpoint SP1B
Range: 00001 .. 99999
The numerical value for the setpoint is set in terms of RPM.
SP1B is always valid as long as the input „SP1B valid" is true.
Page 51

I E16x442 Rev: 00 Page 51 of 73
Parameter Group P03.xx (continued) of Monitor E1665
Overspeed Alarm SP1
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P03.04
Overspeed Setpoint SP1var
not active / active
Range: 0 .. 1
Attention:
If P03.04 = 1: The value of SP1A
(P03.00) must not be lower than
the value of SP1B (P03.03), else
SP1B will always be valid during acceleration phase.
Setting
0 : overspeed setpoint SP1var is not active
1 : overspeed setpoint SP1var is active
If the overspeed setpoint SP1var is not active, then SP1A is valid (respective
SP1B as long as the input "SP1B valid" is true).
If the overspeed setpoint SP1var is active, it is calculated depending on the
measured acceleration in between the limits of SP1A and SP1B.
If acceleration dN/dt = 0 , then SP1var = SP1A.
If acceleration dN/dt = dN/dt max , then SP1var = SP1B.
Example for values of SP1var:
dN/dt max = 300 RPM/sec
SP1A = 3240 RPM (at acceleration rate of 0 RPM/sec)
SP1B = 3090 RPM (at acceleration rate of 300 RPM/sec)
measured acceleration
calculated value SP1var
300 RPM/sec
3090 RPM
240 RPM/sec
3120 RPM
180 RPM/sec
3150 RPM
120 RPM/sec
3180 RPM
60 RPM/sec
3210 RPM
0 RPM/sec
3240 RPM
See also graph below
0
acceleration
dN/dt
dN/dt max
SP1B
SP1A
0
SP1var
Value
Figure 13:
SP1 as a variable
of the acceleration
Page 52

I E16x442 Rev: 00 Page 52 of 73
Parameter Group P04.xx of Monitor E1665
Lowspeed Alarm SP2
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P04.00
Lowspeed Setpoint SP2
Range: 00001 .. 99999
The numerical value for the setpoint is expressed as RPM.
P04.01
Alarm Hysteresis Width
Range: 00.1 .. 99.9
The hysteresis is the margin between condition "excess" (>) and "no excess"
(<), defined by its bandwidth.
The width of hysteresis is set as a percentage of the switching point.
The position of the hysteresis of SP2 is determined above the setpoint.
Example:
With 5% Hysteresis and a setpoint of 100 RPM a Lowspeed alarm is issued
once speed drops below 100 RPM and ceases once speed exceeds 105
RPM.
P04.02
Fix value = 0, do not change
Page 53

I E16x442 Rev: 00 Page 53 of 73
Parameter Group P05.xx of Monitor E1665
Alarm SP3
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P05.00
Setpoint SP3
Range: 00001 .. 99999
The numerical value for the setpoint is expressed as RPM.
P05.01
Alarm Hysteresis Width
Range: 00.1 .. 99.9
The hysteresis is the margin between condition "excess" (>) and "no excess"
(<), defined by its bandwidth.
The width of hysteresis is set as a percentage of the switching point.
P05.02
Hysteresis position
Range: 0 .. 1
The hysteresis band for SP3 may be placed above or below setpoint.
Setting
0 : Hysteresis above SP3
1 : Hysteresis below SP3
P05.03
Relay State at n > SP3
Range: 0 … 3
Setting
0 : Relay energized if n > SP3
1 : Relay de-energized if n > SP3
2 : Relay energized if n > SP3, output frozen at test
3 : Relay de-energized if n > SP3, output frozen at test
P05.04
Alarm State at
Sensor Error Condition
Range: 0 .. 2
If a sensor fault is detected, alarm SP3 can be forced into a defined state.
Setting
0 : Alarm SP3 according to measured rotational speed
1: Alarm SP3 forced to state n < SP3
2: Alarm SP3 forced to state n > SP3
P05.05
Status of LEDs 3 and 4 for
Alarm n > SP3
Range: 0 .. 1
Assignment LED (red or green) to alarm state n > SP3.
Setting
0 : LED3 (green) on at n > SP3
1 : LED4 (red) on at n > SP3
2 : LED3 (green) on at n > SP3 and LED4 blinking at reverse rotation
3 : LED4 (red) on at n > SP3 but LED4 blinking at reverse rotation
Page 54

I E16x442 Rev: 00 Page 54 of 73
Parameter Group P06.xx of Monitor E1665
Eddy sensor input and MPU input
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P06.00
Reserved for future application
Eddy sensors must not be operated outside (manufacturer) specified limits
of voltage level and supply current. These limits can be checked (see parameter P02.05).
P06.01
Input voltage upper limit
Range: 00.0 to 99.9
Input check: input voltage upper limit in xx.x volts
P06.02
Input voltage lower limit
Range: 00.0 to 99.9
input voltage lower limit in xx.x volts
P06.03
Current drain upper limit
Range: 000 to 999
current drain upper limit in xxx mamps
P06.04
Current drain lower limit
Range: 000 to 999
current drain lower limit in xxx mamps
P06.05
Signal input hysteresis
Range: 0.0 to 2.5
Signal input hysteresis (sensitivity level) is set in x.x volts.
The signal must be higher than the hysteresis to detect the speed.
Note:
The hysteresis must be larger than the possible noise on the signal line
in order to achieve a proper speed measurement.
Note:
with setting 0.0 hysteresis is approx 70 millivolts
Page 55

I E16x442 Rev: 00 Page 55 of 73
Parameter Group P07.xx of Monitor E1665
Trip-Line-Monitoring, Rotational Direction Output
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P07.00
Trip-Line-Monitoring
Range: 0 .. 1
If activated the Monitor checks the output of the Trip-Lines.
If two or three Trip-Lines indicate trip condition the monitor moves to trip status (Trip Lock Function).
Following the reset signal the monitor releases the trip state for one second.
Within this time the feedback signal must respond correctly, otherwise the
monitor returns to trip status.
Setting
0 : Trip-Line-Monitoring not active
1 : Trip-Line-Monitoring active, with response time until trip = 50 msec
2 : Trip-Line-Monitoring active, with response time until trip = 3 msec
P07.01
Trip-Line Level at Trip-Status
Range: 0 .. 1
Setting
0 : Low Level at Trip-Status (relays de-energized to Trip)
1 : High-Level at Trip-Status (relays energized to Trip)
P07.02
Signal-Input Level for Rotational Direction Detection
Range: 0 .. 1
Setting
0 : Signal level low is assigned to forward motion
1 : Signal level high is assigned to forward motion
P07.03
Relay State for status forward
motion
Range: 0 .. 1
Setting
0 : Relay de-energized at status forward motion
1 : Relay energized at status forward motion
P07.04
Reserved for future application.
Fix value 0
Page 56

I E16x442 Rev: 00 Page 56 of 73
Parameter Group P08.xx of Monitor E1665
Analog Output
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P08.00
High End of Analog Output
Range: 00001 .. 99999
The high end defines the speed (in terms of RPM) at which the analog output delivers 20 mamps (with P08.04 = 0) (resp. 0 / 4 mamps with
P08.04 = 1).
P08.01
Low End of Analog Output
Range: 00000 .. 99999
The low end defines the speed (in terms of RPM) at which the analog output
delivers 0 resp. 4 mamps (with P08.04 = 0) (resp. 20 mamps with
P08.04 = 1).
P08.02
Analog Output Zero Level
Range: 0 .. 1
Setting
0 : without live zero (0..20 mamps)
1 : with live zero (4..20 mamps)
P08.03
Output Level at Sensor Fault
Range: 0 .. 1
Setting
0 : no change of output
1 : output goes to < 0 mamps
2 : output goes to >20,8 mamps
P08.04
Direction of Analog Output
Range: 0 .. 1
Setting
0 : output is increasing with increasing speed (0/4 …20 mamps)
1 : output is decreasing with increasing speed (20….4/0 mamps)
P08.05
Output Response at
Test-speed
Range: 0 .. 1
Setting
0 : output follows test-speed
1 : output is frozen (on last value before test starts) during test-speed
P08.06
Test of Analog Output Value
Range: 0 .. 1
Analog output may be checked for short circuit or no load or its correct output, detected via integrated control feedback.
Setting
0 : output value is not tested (mandatory with versions E1665.0xx
respective E1665.1xx)
1 : value of output is tested (only possible with versions E1665.2xx)
With setting 1 the analog output is rated SIL2/IEC61508.
If a fault is detected, the analog output circuit is switched to high ohmic
state, event code E.3.0.2.0 (at external fault) or E.3.0.2.1 (at internal fault =
monitor must be replaced) is displayed and Monitor Warning Alarm signalized.
Page 57

I E16x442 Rev: 00 Page 57 of 73
Parameter Group P09.xx of Monitor E1665
Reserved for future application
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P09.00
Reserved for future application
Page 58

I E16x442 Rev: 00 Page 58 of 73
Parameter Group P10.xx of Monitor E1665
Voter 1 and Logic Output LO1
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P10.00
Operation mode
Range: 0 .. 5
Setting
0 : Voter inactive
1 : Voter always active (over entire speed range)
2 : Voter only active, if n > SPV1
3 : Voter only active, if n < SPV1
4 : Voter inactive, output LO1 low, if n > SPV1
5 : Voter inactive, output LO1 high, if n > SPV1
P10.01
Input Truth Level
Range: 0 .. 1
Setting
0 : high level at inputs is assigned to trip condition
1 : low level at inputs is assigned to trip condition
P10.02
Voting Logic
Range: 0 .. 3
Selectable Voting Logics are:
1oo2 : trip is released if 1of 2 inputs signalizes trip condition
2oo2 : trip is released if 2 of 2 inputs signalize trip condition
2oo3 : trip is released if 2 of 3 inputs signalize trip condition
3oo3 : trip is released if 3 of 3 inputs signalize trip condition
Setting
0 : 1oo2 (only inputs 1 and 2 of voter 1 are monitored)
1 : 2oo2 (only inputs 1 and 2 of voter 1 are monitored)
2 : 2oo3 (all three inputs of voter 1 are monitored)
3 : 3oo3 (all three inputs of voter 1 are monitored)
P10.03
Truth Time until Trip
Range: 0 .. 11
If the trip signal is shorter than the
minimum truth time, the signal is
not valid (anti bouncing filter). If the
signal is longer than the maximum
truth time, the signal is valid and
trip is released.
Note:
Signal truth times in between min.
and max. may release trip.
Maximum response time until output of Trip-Lines go to trip status is
maximum truth time + 3 milliseconds.
Setting
Trip after
min.
max.
0
3 msec
5 msec
1
6 msec
9 msec
2
12 msec
16 msec
3
24 msec
28 msec
4
48 msec
52 msec
5
96 msec
102 msec
6
192 msec
202 msec
7
384 msec
400 msec
8
768 msec
800 msec
9
1.570 sec
1.600 sec
10
3.140 sec
3.200 sec
11
6.280 sec
6.400 sec
P10.04
Trip by Voter 1 latched
Range: 0 .. 1
Setting
0 : trip by voter 1 is not latched
1 : trip by voter 1 is latched until reset
Page 59

I E16x442 Rev: 00 Page 59 of 73
P10.05
Delay of Antivalence Alarm
Range: 0 .. 9
To avoid unnecessary Antivalence Alarms due to shifted trip release signals
at the voter inputs a delay may be introduced.
Antivalence alarm will then be released only if the time shift between the
signals exceeds the set delay.
Setting
0 : no delay
1 : delay = 100 milliseconds
2 : delay = 500 milliseconds
3 : delay = 1 second
4 : delay = 2 seconds
5 : delay = 3 seconds
6 : delay = 5 seconds
7 : delay = 15 seconds
8 : delay = 30 seconds
9 : delay = 60 seconds
P10.06
Setpoint SPV1
Range: 00001 .. 99999 [RPM]
Depending on setting of P10.00, SPV1 controls the activity of voter 1 or controls directly the output LO1.
SPV1 is set in terms of RPM.
Page 60

I E16x442 Rev: 00 Page 60 of 73
Parameter Group P11.xx of Monitor E1665
Voter 2 and Logic Output LO2
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P11.00
Operation mode
Range: 0 .. 5
Setting
0 : Voter inactive
1 : Voter always active (over entire speed range)
2 : Voter only active, if n > SPV2
3 : Voter only active, if n < SPV2
4 : Voter inactive, output LO2 low, if n > SPV2
5 : Voter inactive, output LO2 high, if n > SPV2
P11.01
Input Truth Level
Range: 0 .. 1
Setting
0 : high level at inputs is assigned to trip condition
1 : low level at inputs is assigned to trip condition
P11.02
Voting Logic
Range: 0 .. 3
Selectable Voting Logics are:
1oo2 : trip is released if 1of 2 inputs signalizes trip condition
2oo2 : trip is released if 2 of 2 inputs signalize trip condition
2oo3 : trip is released if 2 of 3 inputs signalize trip condition
3oo3 : trip is released if 3 of 3 inputs signalize trip condition
Setting
0 : 1oo2 (only inputs 1 and 2 of voter 2 are monitored)
1 : 2oo2 (only inputs 1 and 2 of voter 2 are monitored)
2 : 2oo3 (all three inputs of voter 2 are monitored)
3 : 3oo3 (all three inputs of voter 2 are monitored)
P11.03
Truth Time until Trip
Range: 0 .. 11
If the trip signal is shorter than the
minimum truth time, the signal is
not valid (anti bouncing filter). If the
signal is longer than the maximum
truth time, the signal is valid and
trip is released.
Note:
Signal truth times in between min.
and max. may release trip.
Maximum response time until output of Trip-Lines go to trip status is
maximum truth time + 3 milliseconds.
Setting
Trip after
min.
max.
0
3 msec
5 msec
1
6 msec
9 msec
2
12 msec
16 msec
3
24 msec
28 msec
4
48 msec
52 msec
5
96 msec
102 msec
6
192 msec
202 msec
7
384 msec
400 msec
8
768 msec
800 msec
9
1.570 sec
1.600 sec
10
3.140 sec
3.200 sec
11
6.280 sec
6.400 sec
P11.04
Trip by Voter 2 latched
Range: 0 .. 1
Setting
0 : trip by voter 2 is not latched
1 : trip by voter 2 is latched until reset
Page 61

I E16x442 Rev: 00 Page 61 of 73
P11.05
Delay of Antivalence Alarm
Range: 0 .. 9
To avoid unnecessary Antivalence Alarms due to shifted trip release signals
at the voter inputs a delay may be introduced.
Antivalence alarm will then be released only if the time shift between the
signals exceeds the set delay.
Setting
0 : no delay
1 : delay = 100 milliseconds
2 : delay = 500 milliseconds
3 : delay = 1 second
4 : delay = 2 seconds
5 : delay = 3 seconds
6 : delay = 5 seconds
7 : delay = 15 seconds
8 : delay = 30 seconds
9 : delay = 60 seconds
P11.06
Setpoint SPV2
Range: 00001 .. 99999 [RPM]
Depending on setting of P11.00, SPV2 controls the activity of voter 2 or controls directly the output LO2.
SPV2 is set in terms of RPM.
Page 62

I E16x442 Rev: 00 Page 62 of 73
Parameter Group P12.xx of Monitor E1665
Voter 3 and Logic Output LO3
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P12.00
Operation mode
Range: 0 .. 5
Setting
0 : Voter inactive
1 : Voter always active (over entire speed range)
2 : Voter only active, if n > SPV3
3 : Voter only active, if n < SPV3
4 : Voter inactive, output LO3 low, if n > SPV3
5 : Voter inactive, output LO3 high, if n > SPV3
P12.01
Input Truth Level
Range: 0 .. 1
Setting
0 : high level at inputs is assigned to trip condition
1 : low level at inputs is assigned to trip condition
P12.02
Voting Logic
Range: 0 .. 3
Selectable Voting Logics are:
1oo2 : trip is released if 1of 2 inputs signalizes trip condition
2oo2 : trip is released if 2 of 2 inputs signalize trip condition
2oo3 : trip is released if 2 of 3 inputs signalize trip condition
3oo3 : trip is released if 3 of 3 inputs signalize trip condition
Setting
0 : 1oo2 (only inputs 1 and 2 of voter 3 are monitored)
1 : 2oo2 (only inputs 1 and 2 of voter 3 are monitored)
2 : 2oo3 (all three inputs of voter 3 are monitored)
3 : 3oo3 (all three inputs of voter 3 are monitored)
P12.03
Truth Time until Trip
Range: 0 .. 11
If the trip signal is shorter than the
minimum truth time, the signal is
not valid (anti bouncing filter). If the
signal is longer than the maximum
truth time, the signal is valid and
trip is released.
Note:
Signal truth times in between min.
and max. may release trip.
Maximum response time until output of Trip-Lines go to trip status is
maximum truth time + 3 milliseconds.
Setting
Trip after
min.
max.
0
3 msec
5 msec
1
6 msec
9 msec
2
12 msec
16 msec
3
24 msec
28 msec
4
48 msec
52 msec
5
96 msec
102 msec
6
192 msec
202 msec
7
384 msec
400 msec
8
768 msec
800 msec
9
1.570 sec
1.600 sec
10
3.140 sec
3.200 sec
11
6.280 sec
6.400 sec
P12.04
Trip by Voter3 latched
Range: 0 .. 1
Setting
0 : trip by voter 3 is not latched
1 : trip by voter 3 is latched until reset
Page 63

I E16x442 Rev: 00 Page 63 of 73
P12.05
Delay of Antivalence Alarm
Range: 0 .. 9
To avoid unnecessary Antivalence Alarms due to shifted trip release signals
at the voter inputs a delay may be introduced.
Antivalence alarm will then be released only if the time shift between the
signals exceeds the set delay.
Setting
0 : no delay
1 : delay = 100 milliseconds
2 : delay = 500 milliseconds
3 : delay = 1 second
4 : delay = 2 seconds
5 : delay = 3 seconds
6 : delay = 5 seconds
7 : delay = 15 seconds
8 : delay = 30 seconds
9 : delay = 60 seconds
P12.06
Setpoint SPV3
Range: 00001 .. 99999 [RPM]
Depending on setting of P12.00, SPV3 controls the activity of voter 3 or controls directly the output LO3.
SPV3 is set in terms of RPM.
Page 64

I E16x442 Rev: 00 Page 64 of 73
Parameter Group P13.xx of Monitor E1665
Voter 4 and Logic Output LO4
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P13.00
Operation mode
Range: 0 .. 5
Setting
0 : Voter inactive
1 : Voter always active (over entire speed range)
2 : Voter only active, if n > SPV4
3 : Voter only active, if n < SPV4
4 : Voter inactive, output LO4 low, if n > SPV4
5 : Voter inactive, output LO4 high, if n > SPV4
P13.01
Input Truth Level
Range: 0 .. 1
Setting
0 : high level at inputs is assigned to trip condition
1 : low level at inputs is assigned to trip condition
P13.02
Voting Logic
Range: 0 .. 3
Selectable Voting Logics are:
1oo2 : trip is released if 1of 2 inputs signalizes trip condition
2oo2 : trip is released if 2 of 2 inputs signalize trip condition
2oo3 : trip is released if 2 of 3 inputs signalize trip condition
3oo3 : trip is released if 3 of 3 inputs signalize trip condition
Setting
0 : 1oo2 (only inputs 1 and 2 of voter 4 are monitored)
1 : 2oo2 (only inputs 1 and 2 of voter 4 are monitored)
2 : 2oo3 (all three inputs of voter 4 are monitored)
3 : 3oo3 (all three inputs of voter 4 are monitored)
P13.03
Truth Time until Trip
Range: 0 .. 11
If the trip signal is shorter than the
minimum truth time, the signal is
not valid (anti bouncing filter). If the
signal is longer than the maximum
truth time, the signal is valid and
trip is released.
Note:
Signal truth times in between min.
and max. may release trip.
Maximum response time until output of Trip-Lines go to trip status is
maximum truth time + 3 milliseconds.
Setting
Trip after
min.
max.
0
3 msec
5 msec
1
6 msec
9 msec
2
12 msec
16 msec
3
24 msec
28 msec
4
48 msec
52 msec
5
96 msec
102 msec
6
192 msec
202 msec
7
384 msec
400 msec
8
768 msec
800 msec
9
1.570 sec
1.600 sec
10
3.140 sec
3.200 sec
11
6.280 sec
6.400 sec
P13.04
Trip by Voter 4 latched
Range: 0 .. 1
Setting
0 : trip by voter 4 is not latched
1 : trip by voter 4 is latched until reset
Page 65

I E16x442 Rev: 00 Page 65 of 73
P13.05
Delay of Antivalence Alarm
Range: 0 .. 9
To avoid unnecessary Antivalence Alarms due to shifted trip release signals
at the voter inputs a delay may be introduced.
Antivalence alarm will then be released only if the time shift between the
signals exceeds the set delay.
Setting
0 : no delay
1 : delay = 100 milliseconds
2 : delay = 500 milliseconds
3 : delay = 1 second
4 : delay = 2 seconds
5 : delay = 3 seconds
6 : delay = 5 seconds
7 : delay = 15 seconds
8 : delay = 30 seconds
9 : delay = 60 seconds
P13.06
Setpoint SPV4
Range: 00001 .. 99999 [RPM]
Depending on setting of P13.00, SPV4 controls the activity of voter 4 or controls directly the output LO4.
SPV4 is set in terms of RPM.
Page 66

I E16x442 Rev: 00 Page 66 of 73
Parameter Group P14.xx of Monitor E1665
Voter 5 and Logic Output LO5
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P14.00
Operation mode
Range: 0 .. 5
Setting
0 : Voter inactive
1 : Voter always active (over entire speed range)
2 : Voter only active, if n > SPV5
3 : Voter only active, if n < SPV5
4 : Voter inactive, output LO5 low, if n > SPV5
5 : Voter inactive, output LO5 high, if n > SPV5
P14.01
Input Truth Level
Range: 0 .. 1
Setting
0 : high level at inputs is assigned to trip condition
1 : low level at inputs is assigned to trip condition
P14.02
Voting Logic
Range: 0 .. 3
Selectable Voting Logics are:
1oo2 : trip is released if 1of 2 inputs signalizes trip condition
2oo2 : trip is released if 2 of 2 inputs signalize trip condition
2oo3 : trip is released if 2 of 3 inputs signalize trip condition
3oo3 : trip is released if 3 of 3 inputs signalize trip condition
Setting
0 : 1oo2 (only inputs 1 and 2 of voter 5 are monitored)
1 : 2oo2 (only inputs 1 and 2 of voter 5 are monitored)
2 : 2oo3 (all three inputs of voter 5 are monitored)
3 : 3oo3 (all three inputs of voter 5 are monitored)
P14.03
Truth Time until Trip
Range: 0 .. 11
If the trip signal is shorter than the
minimum truth time, the signal is
not valid (anti bouncing filter). If the
signal is longer than the maximum
truth time, the signal is valid and
trip is released.
Note:
Signal truth times in between min.
and max. may release trip.
Maximum response time until output of Trip-Lines go to trip status is
maximum truth time + 3 milliseconds.
Setting
Trip after
min.
max.
0
3 msec
5 msec
1
6 msec
9 msec
2
12 msec
16 msec
3
24 msec
28 msec
4
48 msec
52 msec
5
96 msec
102 msec
6
192 msec
202 msec
7
384 msec
400 msec
8
768 msec
800 msec
9
1.570 sec
1.600 sec
10
3.140 sec
3.200 sec
11
6.280 sec
6.400 sec
P14.04
Trip by Voter 5 latched
Range: 0 .. 1
Setting
0 : trip by voter 5 is not latched
1 : trip by voter 5 is latched until reset
Page 67

I E16x442 Rev: 00 Page 67 of 73
P14.05
Delay of Antivalence Alarm
Range: 0 .. 9
To avoid unnecessary Antivalence Alarms due to shifted trip release signals
at the voter inputs a delay may be introduced.
Antivalence alarm will then be released only if the time shift between the
signals exceeds the set delay.
Setting
0 : no delay
1 : delay = 100 milliseconds
2 : delay = 500 milliseconds
3 : delay = 1 second
4 : delay = 2 seconds
5 : delay = 3 seconds
6 : delay = 5 seconds
7 : delay = 15 seconds
8 : delay = 30 seconds
9 : delay = 60 seconds
P14.06
Setpoint SPV5
Range: 00001 .. 99999 [RPM]
Depending on setting of P14.00, SPV5 controls the activity of voter 5 or controls directly the output LO5.
SPV5 is set in terms of RPM.
Page 68

I E16x442 Rev: 00 Page 68 of 73
Parameter Group P15.xx of Monitor E1665
Voter 6 and Logic Output LO6
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P15.00
Operation mode
Range: 0 .. 5
Setting
0 : Voter inactive
1 : Voter always active (over entire speed range)
2 : Voter only active, if n > SPV6
3 : Voter only active, if n < SPV6
4 : Voter inactive, output LO6 low, if n > SPV6
5 : Voter inactive, output LO6 high, if n > SPV6
P15.01
Input Truth Level
Range: 0 .. 1
Setting
0 : high level at inputs is assigned to trip condition
1 : low level at inputs is assigned to trip condition
P15.02
Voting Logic
Range: 0 .. 3
Selectable Voting Logics are:
1oo2 : trip is released if 1of 2 inputs signalizes trip condition
2oo2 : trip is released if 2 of 2 inputs signalize trip condition
2oo3 : trip is released if 2 of 3 inputs signalize trip condition
3oo3 : trip is released if 3 of 3 inputs signalize trip condition
Setting
0 : 1oo2 (only inputs 1 and 2 of voter 6 are monitored)
1 : 2oo2 (only inputs 1 and 2 of voter 6 are monitored)
2 : 2oo3 (all three inputs of voter 6 are monitored)
3 : 3oo3 (all three inputs of voter 6 are monitored)
P15.03
Truth Time until Trip
Range: 0 .. 11
If the trip signal is shorter than the
minimum truth time, the signal is
not valid (anti bouncing filter). If the
signal is longer than the maximum
truth time, the signal is valid and
trip is released.
Note:
Signal truth times in between min.
and max. may release trip.
Maximum response time until output of Trip-Lines go to trip status is
maximum truth time + 3 milliseconds.
Setting
Trip after
min.
max.
0
3 msec
5 msec
1
6 msec
9 msec
2
12 msec
16 msec
3
24 msec
28 msec
4
48 msec
52 msec
5
96 msec
102 msec
6
192 msec
202 msec
7
384 msec
400 msec
8
768 msec
800 msec
9
1.570 sec
1.600 sec
10
3.140 sec
3.200 sec
11
6.280 sec
6.400 sec
P15.04
Trip by Voter 6 latched
Range: 0 .. 1
Setting
0 : trip by voter 6 is not latched
1 : trip by voter 6 is latched until reset
Page 69

I E16x442 Rev: 00 Page 69 of 73
P15.05
Delay of Antivalence Alarm
Range: 0 .. 9
To avoid unnecessary Antivalence Alarms due to shifted trip release signals
at the voter inputs a delay may be introduced.
Antivalence alarm will then be released only if the time shift between the
signals exceeds the set delay.
Setting
0 : no delay
1 : delay = 100 milliseconds
2 : delay = 500 milliseconds
3 : delay = 1 second
4 : delay = 2 seconds
5 : delay = 3 seconds
6 : delay = 5 seconds
7 : delay = 15 seconds
8 : delay = 30 seconds
9 : delay = 60 seconds
P15.06
Setpoint SPV6
Range: 00001 .. 99999 [RPM]
Depending on setting of P15.00, SPV6 controls the activity of voter 6 or controls directly the output LO6.
SPV6 is set in terms of RPM.
Page 70

I E16x442 Rev: 00 Page 70 of 73
Parameter Group P16.xx of Monitor E1665
Reserved for future application
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P16.00
Reserved for future application
P16.01
Reserved for future application
P16.02
Reserved for future application
P16.03
Reserved for future application
P16.04
Reserved for future application
P16.05
Reserved for future application
P16.06
Reserved for future application
Parameter Group P17.xx of Monitor E1665
PROFIBUS
Parameter No.
Meaning of Parameter
Setting Range of Parameter
Description of Parameters and their Settings
P17.00
Device No for PROFIBUS
Range: 001 .. 125
All members of the PROFIBUS-Communication must have different device
nos.
Page 71

I E16x442 Rev: 00 Page 71 of 73
9. This chapter is left blank intentionally
10. Event codes and Troubleshooting
10.1. Event Codes on display of E1665
The Event Codes are shown in format E.0.x.x.x .
Depending on setting of P02.11 only the first occurred fault or all faults are displayed (combination of faults is possible).
Display
Explanation of Event Code
E.0.0.0.0
Overspeed trip (if P03.02 = 0)
E.0.x.x.1
Sensor failure (current or voltage), refer to P02.05
E.0.x.x.2
Deviation of primary sensor versus neighbor sensors, refer to P02.07
E.0.x.x.3
E.x.x.x.1 + E.x.x.x.2
E.0.x.x.4
Speed < SP2
E.0.x.x.5
E.x.x.x.1 + E.x.x.x.4
E.0.x.x.6
E.x.x.x.2 + E.x.x.x.4
E.0.x.x.7
E.x.x.x.1 + E.x.x.x.2 + E.x.x.x.4
E.0.x.1.x
Generator tests with zero speed
E.0.x.2.x
Trip by Voter
E.0.x.4.x
Internal relay fault
E.0.1.x.x
Failure detection during internal self test
E.0.2.x.x
Overspeed trip (if P03.02 = 1)
E.0.3.x.x
E.x.1.x.x + E.x.2.x.x
E.0.4.0.0
Alarm caused by missing external signals (Trip-Lines)
(for troubleshooting refer to next page)
E.0.4.2.0
Trip by voter ( with non-coincidence at inputs of voter)
E.0.6.x.x
E.x.2.x.x + E.x.4.x.x
E.0.8.0.0
Trip-Line Monitoring has caused trip
E.0.A.0.0
Trip due to Overspeed (and P07.00 = 1 or 3)
E.0.c.0.0
Trip-Line Monitoring has caused trip plus antivalence of signals for Trip-Line-Monitoring
(for troubleshooting refer to next page)
E.3.0.1.0
Starter Input is active at speed > 50% of SP1A (only if P02.06 = 1 or 2)
E.3.0.2.0
External Analog output error ( 'no load' or fault of connected device )
E.3.0.2.1
Internal Analog output error (fault on monitor board)
-E1-
Wrong code figure in step P00.00
Page 72

I E16x442 Rev: 00 Page 72 of 73
10.2. Troubleshooting if display of Monitor reads E.0.4.x.x
Display E.0.4.x.x signalizes a fault (not all signals are identical) from the input signals for the
voters or for Trip-Line-Monitoring (resp. feedbacks from 2oo3-solenoid).
The actual status of the signal inputs is shown in Special Display Mode 2.
Switching between Standard and Special Display Mode 2 by pressing keys and together.
Special Display Mode 2
In Special Display Mode 2 LED1 and LED4 are blinking.
Steps of Special Display Mode 2 : 0._x.x.x
1._x.x.x
2._x.x.x
3._x.x.x
4._x.x.x
Steps of Special Display Mode 2 are selected with key (next step) resp.
key (previous step).
For troubleshooting only steps 3. _x.x.x and 4. _x.x.x are relevant.
The status of signal inputs for Trip-Line-Monitoring are shown in step 3 .
Display of:
3._x.x.1 : Feedback signal from Trip-Line I is true
3._x.x.2 : Feedback signal from Trip-Line II is true
3._x.x.4 : Feedback signal from Trip-Line III is true
resp. all combinations hereof, for example:
3._x.x.7 : all Feedback signal from Trip-Lines are true
The voter signal inputs are shown in step 4._x.x.x
Display of:
4.n.0.0.1 : Voter n, input 1 active n = 1 - 6 (7 reserved)
4.n.0.0.2 : Voter n, input 2 active
4.n.0.0.4 : Voter n, input 3 active
resp. all combinations hereof, for example:
4.3.0.0.5 : Voter 3, inputs 1 und 3 active, input 2 not active.
While key is pressed, the input status latched at error will be shown, else the current input status.
Switch the input status of voter 1 to 6 with key
.
Page 73

I E16x442 Rev: 00 Page 73 of 73
11. Revision notes
Date
Rev.
Modification
26.11.2014
00
First release
 Loading...
Loading...