

Page 1

Collision Avoidance System CAS-M light
Manual
1 24/01/2019
Page 2

Content
Content
1 System Overview............................................................................................................................................................. 3
1.1 Function principle......................................................................................................................................................................................... 3
1.2 Hardware.......................................................................................................................................................................................................... 3
1.3 Wiring................................................................................................................................................................................................................ 4
1.4 CAN communication ................................................................................................................................................................................... 5
2 Installation Guide............................................................................................................................................................ 7
2.1 Mounting the radar sensor....................................................................................................................................................................... 7
2.2 Configuration of the sensor position.................................................................................................................................................... 8
2.3 Configuration of the system threshold values .................................................................................................................................. 9
3 Using the CAS-M light Information.............................................................................................................................. 10
3.1 Predefined messages .................................................................................................................................................................................. 10
3.1.1 Configuration distance ............................................................................................................................................................. 10
3.1.2 Configuration relative speed.................................................................................................................................................. 10
3.2 Using raw values ........................................................................................................................................................................................... 10
4 Available Packages ......................................................................................................................................................... 11
4.1 CAS-M light + connector (500 kBaud) ................................................................................................................................................. 11
4.2 CAS-M light + connector (1 MBaud) .................................................................................................................................................... 11
4.3 CAS-M light + DDU 9 (500 kBaud) ........................................................................................................................................................ 11
4.4 CAS-M light + DDU 9 (1 MBaud) ........................................................................................................................................................... 11
5 Loom Options.................................................................................................................................................................. 12
5.1 Open End ......................................................................................................................................................................................................... 12
6 Appendix.......................................................................................................................................................................... 13
6.1 Table 1............................................................................................................................................................................................................... 13
7 Revision History .............................................................................................................................................................. 24
ii/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 3

1 System Overview
The CAS-M light helps the driver to focus on the track and warns him if a car is approaching from behind. The system provides information about relative speed and distance on
the CAN bus. The benefit is even more increased during nighttime or in bad weather conditions.
The interface is very intuitive and adaptable to the drivers liking – so there is no need in
special driver trainings.
1.1 Function principle
CAS-M light provides information for distance and relative speed of the closest vehicle
behind via two LEDs (left and right) in the driver display. Only the closest vehicle behind is
considered. All other objects are suppressed.
In large (green) and medium (yellow) distance both LEDs (left and right) are used in parallel to provide the available information. In close (red) distance a left/right determination is
done, and only the appropriate left or right LED is used to provide information about the
object behind the driver.
System Overview | 1
All distance and delta speed thresholds based on the physical raw values to control the
object detection and LED visualization can be adjusted individually via CAN (depending
on pilot and race category different settings may be required).
CAS-M light contains a pre-defined visualization concept to allow for a quick starting with
the system. The pre-defined thresholds are based on Bosch Motorsport know how and experience with the system.
1.2 Hardware
The CAS-M light system consists of a Bosch automotive mid range radar sensor, shown in
the following picture/drawing.
Illustration1: CAS-M light sensor
Bosch Motorsport Collision Avoidance System CAS-M light 3/28
Page 4
1 | System Overview
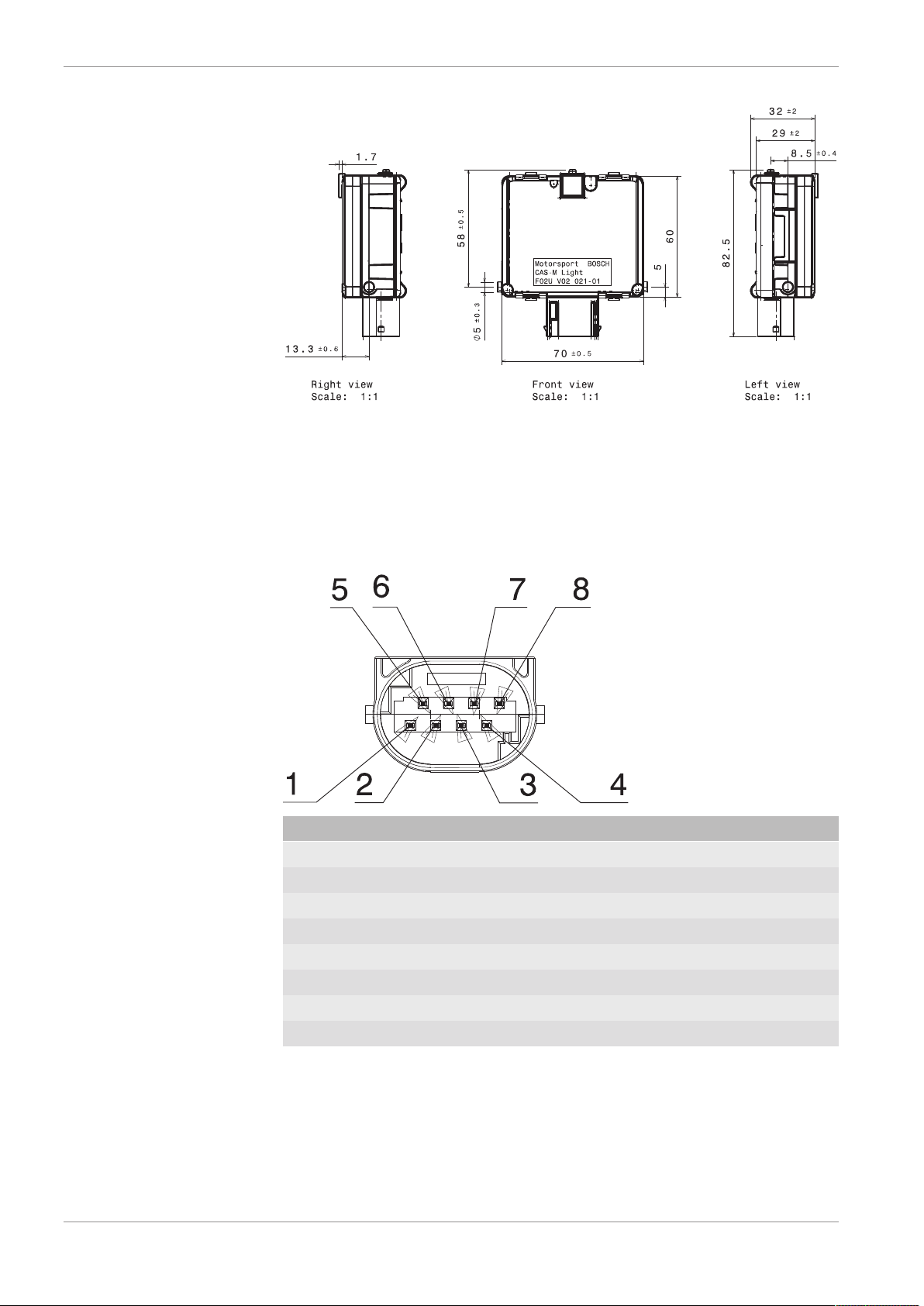
Illustration2: CAS-M light dimensions
1.3 Wiring
The sensor needs to be connected to the vehicle CAN bus (connection to display needed)
and supplied with 12 V from the supply system on board. For the speed calculation of the
approaching cars, the sensor needs to know the vehicle’s speed.
Pin Designation Description
1 GND Sensor Ground
2 CAN-H CAN High
3 CAN-L CAN Low
4 Not connected Not connected
5 Not connected Not connected
6 Not connected Not connected
7 Not connected Not connected
8 V+ Supply voltage for sensor (12 V)
4/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 5
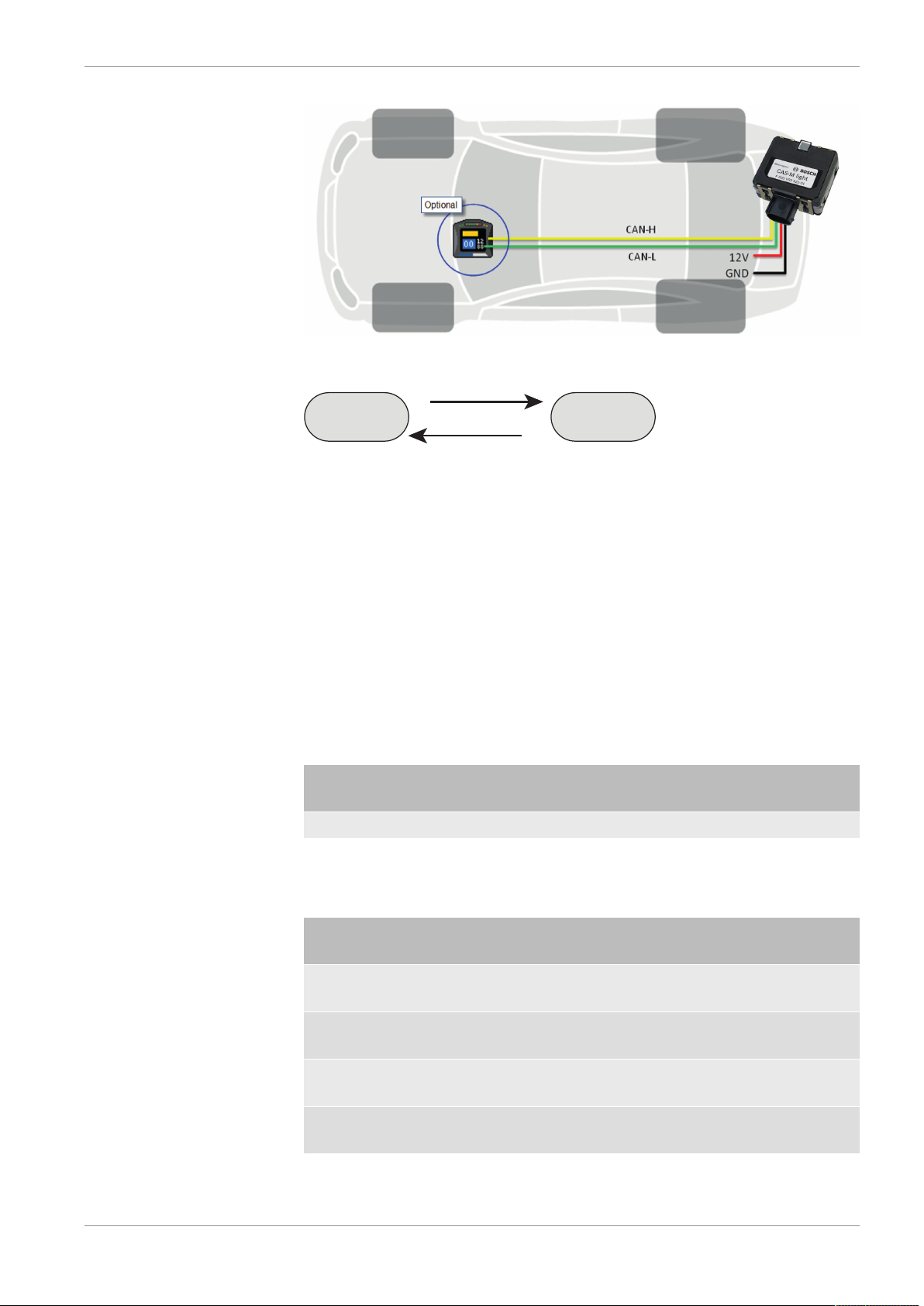
Car CAS-M
Vehicle speed,
configuration
LED status
Illustration3: Wiring schematic
System Overview | 1
1.4 CAN communication
Since the system provides the information on the CAN bus (car approaching left/right,
distances, relative speeds ...), it is mandatory to connect the sensor to it. In addition the
sensor needs to get the vehicle’s speed via CAN.
CAN Baud rate: 500 kBaud or 1 MBaud
CAN update rate of Sensor: 50 Hz
Vehicle Speed
Information that needs to be send from the car to the system:
Message CAN ID Byte
order
Speed 0x616 Intel Unsigned 24 16 0.1 0
Predefined Messages
Information that is send from the sensor to the car:
Message CAN ID Byte
order
Object_left_dist_
range
Object_left_approach_spd_range
Object_right_dist_
range
Object_right_approach_spd_range
0x3F3 Intel Unsigned 58 3 1 0
0x3F3 Intel Unsigned 61 3 1 0
0x3F5 Intel Unsigned 58 3 1 0
0x3F5 Intel Unsigned 61 3 1 0
Value
type
Value
type
Start bit Length
[bit]
Start bit Length
[bit]
Factor Offset
Factor Offset
Bosch Motorsport Collision Avoidance System CAS-M light 5/28
Page 6
1 | System Overview
Raw values
Information that is send from the sensor to the car:
Message CAN ID Byte or-
der
Object_left_dx 0x3F3 Intel Unsigned 0 12 0.0625 0
Object_left_vx 0x3F3 Intel Signed 12 12 0.0625 0
Object_left_dy 0x3F3 Intel Signed 24 14 0.015625 0
Object_right_dx 0x3F5 Intel Unsigned 0 12 0.0625 0
Object_right_vx 0x3F5 Intel Signed 12 12 0.0625 0
Object_right_dy 0x3F5 Intel Signed 24 14 0.015625 0
Value
type
Start
bit
Length
[bit]
Factor Offset
Important note
Do not use the messages 0xB9, 0x757 or 0x7C1 on the sensor CAN. These Messages are
not needed but if used the sensor will be affected.
The sensor sends the additional message 0xB9 on the CAN. This message is not needed
for the CAS-M light system but already used by the sensor.
6/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 7

2 Installation Guide
2.1 Mounting the radar sensor
A mounting frame with 4xM6 threaded bushings are delivered with the sensor. An individual concept for each car mounting situation must be developed by the car manufacturer. The following mounting restrictions must be fulfilled to secure a proper function of
the system.
– The radar sensor must be longitudinally and laterally leveled, aligned with the
vehicle’s longitudinal axis and mounted on the vehicle’s lateral centerline. Sensor
mounting height of 20 cm to 90 cm off the ground will ensure maximum range.
If a mounting in the vehicle centre line is not possible, the offset must be configured
via the appropriate CAN message (see chapter Configuration of the sensor position
[}8]).
– The sensor may be mounted flush mounted with the rear fascia.
– It is critical that the radar sensor has an unobstructed (or radar-transparent) view out
the rear of the vehicle. Optimum is a mounting without any material in front of the
sensor.
If it must be mounted behind, the plane in front of the sensor surface must be free of
conductive materials (e.g. a thin layer of vinyl, fiberglass or Kevlar).
The distance between sensor and surface depends on the used material and should
be approximately 5 mm.
Installation Guide | 2
Illustration4: CAS-M light frame
Bosch Motorsport Collision Avoidance System CAS-M light 7/28
Page 8
2 | Installation Guide
2.2 Configuration of the sensor position
Definition of sensor position and orientation
Message CAN ID Byte
order
Orientation 0x618 Intel Signed 28 2 1 0
Position_X 0x618 Intel Signed 30 10 0.01 0
Position_Y 0x618 Intel Signed 40 8 0.01 0
Position_Z 0x618 Intel Unsigned 48 8 0.01 0
The Message 0x618 has to be send to the sensor once after every power cycle. Otherwise
the default values are used by the sensor.
See appendix table 1 for assignment of signed integer values in hex.
Conversion of negative values into hex with two´s complement:
10bit: Hex value = Decimal to hex (Physical value / Factor + 1024)
8bit: Hex value = Decimal to hex (Physical value / Factor + 256)
Example for Position X (10Bit value) = -1m
Decimal value = -1 / 0,01 + 1024 = 954
Hex value = Decimal to hex (954) = 39C
Value type Start bit Length
[bit]
Factor Offset
Orientation
Description Value Default
Connector facing up -1 1
Connector facing down +1
Position_X
Description Comment Default
Sensor position in X direction Distance from rear axle in [m]
X-axis is positive if sensor behind
rear axle
+1
Position_Y
Description Comment Default
Sensor position in Y direction Distance from vehicle symmetry
axle [m]
Left is positive
0
Position_Z
Description Comment Default
Sensor position in Z direction Distance to ground [m] 0.5
8/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 9
Installation Guide | 2
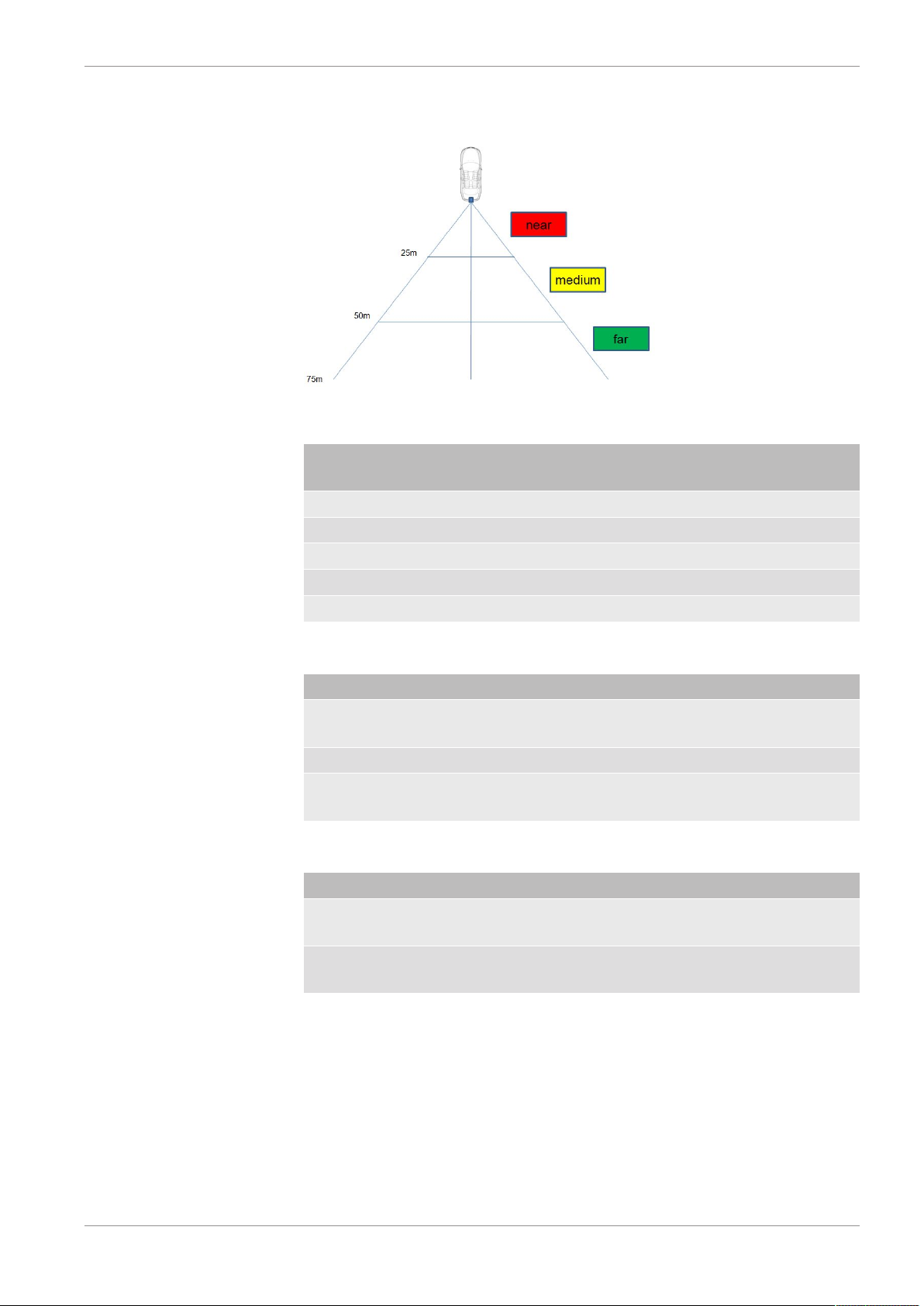
2.3 Configuration of the system threshold values
Illustration5: Distance schematic
Message CAN ID Byte
order
Distance_Near 0x620 Intel Unsigned 0 8 1 0
Distance_Medium 0x620 Intel Unsigned 8 8 1 0
Distance_Far 0x620 Intel Unsigned 16 8 1 0
Speed_medium 0x620 Intel Unsigned 24 8 1 0
Speed-high 0x620 Intel Unsigned 32 8 1 0
Value type Start bit Length
[bit]
Factor Offset
Distance thresholds
Description Comment Default
Distance_Near Threshold between near range and medium range
[m]
Distance_Medium Threshold between medium range and far range 30
Distance_Far Threshold between far range and out of range (no
warning)
12
75
Speed thresholds
Description Comment Default
Speed_medium Speed of approaching vehicle [km/h] for low fre-
quency flashing
Speed_high Speed of approaching vehicle [km/h] for high fre-
quency flashing
7.2
14.4
Bosch Motorsport Collision Avoidance System CAS-M light 9/28
Page 10

3 | Using the CAS-M light Information
3.1 Predefined messages
3.1.1 Configuration distance
3 Using the CAS-M light Information
The system provides predefined CAN-messages with evaluated values for distance and relative speed.
Object_left/right_dist_range defines the distance of the car behind into a color for an LED.
Value Color Description
0x0 off inactive
0x1 green large distance
0x2 yellow medium distance
0x4 red close distance
3.1.2 Configuration relative speed
Object_left/right_approach_spd_range defines the relative speed of the car behind into a
blinking frequency for an LED.
Value LED-Status Description
0x0 off inactive
0x1 LED on low relative speed
0x2 LED flash low frequency medium relative speed
0x4 LED flash high frequency high relative speed
3.2 Using raw values
As an alternative to the predefined messages it is possible to use the raw values provided
by the system. Every value is provided for each side (left and right).
Object_left/right_dx
Distance to the car behind [m]
Object_left/right_vx
Relative speed of the car behind [m/s]
Object_left/right_dy
Position of the car behind (relating to the mid axis of the car) [m]
10/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 11

Available Packages | 4
4 Available Packages
4.1 CAS-M light + connector (500 kBaud)
The CAS-M light system can be ordered without loom and display. The system includes:
– CAS-M light sensor with 500 kBaud CAN speed & mating connector
Part number: F 02U V02 021-01
4.2 CAS-M light + connector (1 MBaud)
The CAS-M light system can be ordered without loom and display. The system includes:
– CAS-M light sensor with 1 MBaud CAN speed & mating connector
Part number: F 02U V02 220-01
4.3 CAS-M light + DDU 9 (500 kBaud)
The CAS-M light system can be ordered directly with a DDU 9. The set includes:
– CAS-M light sensor with 500 kBaud CAN speed + mating connector
– DDU 9
Part number: F 02U V02 591-01
4.4 CAS-M light + DDU 9 (1 MBaud)
The CAS-M light system can be ordered directly with a DDU 9. The set includes:
– CAS-M light sensor with 1 MBaud CAN speed + mating connector
– DDU 9
Part number: F 02U V02 592-01
Bosch Motorsport Collision Avoidance System CAS-M light 11/28
Page 12

5 | Loom Options
5 Loom Options
5.1 Open End
The open end loom can be used to connect the sensor to an existing display unit. The
loom is compatible with the CAS-M light packages F 02U V02 021-01 and F 02U V02
220-01.
The loom includes:
– Sensor matting connector F 037 B00 168-01
– Removable 120 Ω terminating resistor
– Open end loom for display unit
Part number: F 02U V02 105-01
12/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 13

6 Appendix
6.1 Table 1
Orientation
Decimal Hex Physical
-1 3 -1
1 1 1
Position X
Decimal Hex Physical [m]
-150 36A -1,5
-149 36B -1,49
-148 36C -1,48
-147 36D -1,47
-146 36E -1,46
-145 36F -1,45
-144 370 -1,44
-143 371 -1,43
-142 372 -1,42
-141 373 -1,41
-140 374 -1,4
-139 375 -1,39
-138 376 -1,38
-137 377 -1,37
-136 378 -1,36
-135 379 -1,35
-134 37A -1,34
-133 37B -1,33
-132 37C -1,32
-131 37D -1,31
-130 37E -1,3
-129 37F -1,29
-128 380 -1,28
-127 381 -1,27
-126 382 -1,26
-125 383 -1,25
-124 384 -1,24
-123 385 -1,23
-122 386 -1,22
-121 387 -1,21
Appendix | 6
Bosch Motorsport Collision Avoidance System CAS-M light 13/28
Page 14

6 | Appendix
-120 388 -1,2
-119 389 -1,19
-118 38A -1,18
-117 38B -1,17
-116 38C -1,16
-115 38D -1,15
-114 38E -1,14
-113 38F -1,13
-112 390 -1,12
-111 391 -1,11
-110 392 -1,1
-109 393 -1,09
-108 394 -1,08
-107 395 -1,07
-106 396 -1,06
-105 397 -1,05
-104 398 -1,04
-103 399 -1,03
-102 39A -1,02
-101 39B -1,01
-100 39C -1
-99 39D -0,99
-98 39E -0,98
-97 39F -0,97
-96 3A0 -0,96
-95 3A1 -0,95
-94 3A2 -0,94
-93 3A3 -0,93
-92 3A4 -0,92
-91 3A5 -0,91
-90 3A6 -0,9
-89 3A7 -0,89
-88 3A8 -0,88
-87 3A9 -0,87
-86 3AA -0,86
-85 3AB -0,85
-84 3AC -0,84
-83 3AD -0,83
-82 3AE -0,82
-81 3AF -0,81
-80 3B0 -0,8
-79 3B1 -0,79
14/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 15

-78 3B2 -0,78
-77 3B3 -0,77
-76 3B4 -0,76
-75 3B5 -0,75
-74 3B6 -0,74
-73 3B7 -0,73
-72 3B8 -0,72
-71 3B9 -0,71
-70 3BA -0,7
-69 3BB -0,69
-68 3BC -0,68
-67 3BD -0,67
-66 3BE -0,66
-65 3BF -0,65
-64 3C0 -0,64
-63 3C1 -0,63
-62 3C2 -0,62
-61 3C3 -0,61
-60 3C4 -0,6
-59 3C5 -0,59
-58 3C6 -0,58
-57 3C7 -0,57
-56 3C8 -0,56
-55 3C9 -0,55
-54 3CA -0,54
-53 3CB -0,53
-52 3CC -0,52
-51 3CD -0,51
-50 3CE -0,5
-49 3CF -0,49
-48 3D0 -0,48
-47 3D1 -0,47
-46 3D2 -0,46
-45 3D3 -0,45
-44 3D4 -0,44
-43 3D5 -0,43
-42 3D6 -0,42
-41 3D7 -0,41
-40 3D8 -0,4
-39 3D9 -0,39
-38 3DA -0,38
-37 3DB -0,37
Appendix | 6
Bosch Motorsport Collision Avoidance System CAS-M light 15/28
Page 16

6 | Appendix
-36 3DC -0,36
-35 3DD -0,35
-34 3DE -0,34
-33 3DF -0,33
-32 3E0 -0,32
-31 3E1 -0,31
-30 3E2 -0,3
-29 3E3 -0,29
-28 3E4 -0,28
-27 3E5 -0,27
-26 3E6 -0,26
-25 3E7 -0,25
-24 3E8 -0,24
-23 3E9 -0,23
-22 3EA -0,22
-21 3EB -0,21
-20 3EC -0,2
-19 3ED -0,19
-18 3EE -0,18
-17 3EF -0,17
-16 3F0 -0,16
-15 3F1 -0,15
-14 3F2 -0,14
-13 3F3 -0,13
-12 3F4 -0,12
-11 3F5 -0,11
-10 3F6 -0,1
-9 3F7 -0,09
-8 3F8 -0,08
-7 3F9 -0,07
-6 3FA -0,06
-5 3FB -0,05
-4 3FC -0,04
-3 3FD -0,03
-2 3FE -0,02
-1 3FF -0,01
0 0 0
1 1 0,01
2 2 0,02
3 3 0,03
4 4 0,04
5 5 0,05
16/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 17

6 6 0,06
7 7 0,07
8 8 0,08
9 9 0,09
10 A 0,1
11 B 0,11
12 C 0,12
13 D 0,13
Position Y
Decimal Hex Physical [m]
-128 80 -1,28
-127 81 -1,27
-126 82 -1,26
-125 83 -1,25
-124 84 -1,24
-123 85 -1,23
-122 86 -1,22
-121 87 -1,21
-120 88 -1,2
-119 89 -1,19
-118 8A -1,18
-117 8B -1,17
-116 8C -1,16
-115 8D -1,15
-114 8E -1,14
-113 8F -1,13
-112 90 -1,12
-111 91 -1,11
-110 92 -1,1
-109 93 -1,09
-108 94 -1,08
-107 95 -1,07
-106 96 -1,06
-105 97 -1,05
-104 98 -1,04
-103 99 -1,03
-102 9A -1,02
-101 9B -1,01
-100 9C -1
-99 9D -0,99
Appendix | 6
Bosch Motorsport Collision Avoidance System CAS-M light 17/28
Page 18

6 | Appendix
-98 9E -0,98
-97 9F -0,97
-96 A0 -0,96
-95 A1 -0,95
-94 A2 -0,94
-93 A3 -0,93
-92 A4 -0,92
-91 A5 -0,91
-90 A6 -0,9
-89 A7 -0,89
-88 A8 -0,88
-87 A9 -0,87
-86 AA -0,86
-85 AB -0,85
-84 AC -0,84
-83 AD -0,83
-82 AE -0,82
-81 AF -0,81
-80 B0 -0,8
-79 B1 -0,79
-78 B2 -0,78
-77 B3 -0,77
-76 B4 -0,76
-75 B5 -0,75
-74 B6 -0,74
-73 B7 -0,73
-72 B8 -0,72
-71 B9 -0,71
-70 BA -0,7
-69 BB -0,69
-68 BC -0,68
-67 BD -0,67
-66 BE -0,66
-65 BF -0,65
-64 C0 -0,64
-63 C1 -0,63
-62 C2 -0,62
-61 C3 -0,61
-60 C4 -0,6
-59 C5 -0,59
-58 C6 -0,58
-57 C7 -0,57
18/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 19

-56 C8 -0,56
-55 C9 -0,55
-54 CA -0,54
-53 CB -0,53
-52 CC -0,52
-51 CD -0,51
-50 CE -0,5
-49 CF -0,49
-48 D0 -0,48
-47 D1 -0,47
-46 D2 -0,46
-45 D3 -0,45
-44 D4 -0,44
-43 D5 -0,43
-42 D6 -0,42
-41 D7 -0,41
-40 D8 -0,4
-39 D9 -0,39
-38 DA -0,38
-37 DB -0,37
-36 DC -0,36
-35 DD -0,35
-34 DE -0,34
-33 DF -0,33
-32 E0 -0,32
-31 E1 -0,31
-30 E2 -0,3
-29 E3 -0,29
-28 E4 -0,28
-27 E5 -0,27
-26 E6 -0,26
-25 E7 -0,25
-24 E8 -0,24
-23 E9 -0,23
-22 EA -0,22
-21 EB -0,21
-20 EC -0,2
-19 ED -0,19
-18 EE -0,18
-17 EF -0,17
-16 F0 -0,16
-15 F1 -0,15
Appendix | 6
Bosch Motorsport Collision Avoidance System CAS-M light 19/28
Page 20

6 | Appendix
-14 F2 -0,14
-13 F3 -0,13
-12 F4 -0,12
-11 F5 -0,11
-10 F6 -0,1
-9 F7 -0,09
-8 F8 -0,08
-7 F9 -0,07
-6 FA -0,06
-5 FB -0,05
-4 FC -0,04
-3 FD -0,03
-2 FE -0,02
-1 FF -0,01
0 0 0
1 1 0,01
2 2 0,02
3 3 0,03
4 4 0,04
5 5 0,05
6 6 0,06
7 7 0,07
8 8 0,08
9 9 0,09
10 A 0,1
11 B 0,11
12 C 0,12
13 D 0,13
14 E 0,14
15 F 0,15
16 10 0,16
17 11 0,17
18 12 0,18
19 13 0,19
20 14 0,2
21 15 0,21
22 16 0,22
23 17 0,23
24 18 0,24
25 19 0,25
26 1A 0,26
27 1B 0,27
20/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 21

28 1C 0,28
29 1D 0,29
30 1E 0,3
31 1F 0,31
32 20 0,32
33 21 0,33
34 22 0,34
35 23 0,35
36 24 0,36
37 25 0,37
38 26 0,38
39 27 0,39
40 28 0,4
41 29 0,41
42 2A 0,42
43 2B 0,43
44 2C 0,44
45 2D 0,45
46 2E 0,46
47 2F 0,47
48 30 0,48
49 31 0,49
50 32 0,5
51 33 0,51
52 34 0,52
53 35 0,53
54 36 0,54
55 37 0,55
56 38 0,56
57 39 0,57
58 3A 0,58
59 3B 0,59
60 3C 0,6
61 3D 0,61
62 3E 0,62
63 3F 0,63
64 40 0,64
65 41 0,65
66 42 0,66
67 43 0,67
68 44 0,68
69 45 0,69
Appendix | 6
Bosch Motorsport Collision Avoidance System CAS-M light 21/28
Page 22

6 | Appendix
70 46 0,7
71 47 0,71
72 48 0,72
73 49 0,73
74 4A 0,74
75 4B 0,75
76 4C 0,76
77 4D 0,77
78 4E 0,78
79 4F 0,79
80 50 0,8
81 51 0,81
82 52 0,82
83 53 0,83
84 54 0,84
85 55 0,85
86 56 0,86
87 57 0,87
88 58 0,88
89 59 0,89
90 5A 0,9
91 5B 0,91
92 5C 0,92
93 5D 0,93
94 5E 0,94
95 5F 0,95
96 60 0,96
97 61 0,97
98 62 0,98
99 63 0,99
100 64 1
101 65 1,01
102 66 1,02
103 67 1,03
104 68 1,04
105 69 1,05
106 6A 1,06
107 6B 1,07
108 6C 1,08
109 6D 1,09
110 6E 1,1
111 6F 1,11
22/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 23

112 70 1,12
113 71 1,13
114 72 1,14
115 73 1,15
116 74 1,16
117 75 1,17
118 76 1,18
119 77 1,19
120 78 1,2
121 79 1,21
122 7A 1,22
123 7B 1,23
124 7C 1,24
125 7D 1,25
126 7E 1,26
127 7F 1,27
Appendix | 6
Bosch Motorsport Collision Avoidance System CAS-M light 23/28
Page 24

7 | Revision History
7 Revision History
No. Page Revision Date BEG/MSD4
01 - First Edition 12.11.2014 Arnold, Germund
02 4, 5, 9 CAN description, schematics, ty-
pos, packages
03 6 CAN speed start bit 27.03.2015 Arnold
04 6 CAN baud rate 30.03.2015 Arnold
05 8 Position Z 16.04.2015 Arnold
06 6, 12, 14 1 MBaud version, new part no.,
Loom options
07 7 Byte order vehicle speed 29.06.2015 Schick
08 1.4 CAN update rate 02.10.2015 Schick
09 1.4, 2.2.,
2.3
10 2.2, 4, 5,6Hex values for signed integer,
Date values, CAN cycles, CAN
messages
DDU 9 replaces DDU 7
19.01.2015 Arnold
11.05.2015 Schick
13.10.2015 Schick
30.01.2017 Schick
24/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 25

Bosch Motorsport Collision Avoidance System CAS-M light 25/28
Page 26

26/28 Collision Avoidance System CAS-M light Bosch Motorsport
Page 27

Bosch Motorsport Collision Avoidance System CAS-M light 27/28
Page 28

Bosch Engineering GmbH
Motorsport
Robert-Bosch-Allee 1
74232 Abstatt
Germany
www.bosch-motorsport.com
 Loading...
Loading...