

Page 1

ACTIVE and
ACTIVE Cube
Modbus communication
with CM-232/CM-485/CM-485T
Frequency Inverter 230 V / 400 V
Page 2

Page 3
General Information about the Documentation
The present supplement of the operating instructions refers to the frequency inverters
of the ACT and ACU line. It contains necessary information for installation and use of
the communication modules CM-232 and CM-485.
In order to make it as easy as possible for the user to find his/her way through the
documentation, it is structured according to the customer-specific demands made of
the frequency inverter.
Brief Instructions
The Brief Instructions describe the basic steps required for mechanical and electrical
installation of the frequency inverter. The
guided commissioning supports you in the
selection of necessary parameters and the configuration of the frequency inverter by
the software.
Operating Instructions
The Operating Instructions describe and document all functions of the frequency in-
verter. The parameters required for adapting the frequency inverter to specific applications as well as the wide range of additional functions are described in detail.
Application Manual
The Application Manual contains additional information facilitating the installation and
commissioning of the frequency inverter, i.e. information on the different issues relating to the specific application realized by the frequency inverter.
Installation Instructions
Complementing the Brief Instructions and the Operating Instructions, the Installation
Instructions provide information on how to install and use the additional/optional
components.
If you need a copy of the documentation or additional information, contact your local
representative of BONFIGLIOLI.
The following pictograms and signal words are used in the documentation:
Danger!
Danger refers to an immediate threat. Non-compliance with the precaution described
will result in death, serious injury or material damage.
Warning!
Warning refers to a possible threat. Non-compliance with the warning may result in
death, serious injury or material damage.
Caution!
Caution refers to an immediate hazard. Non-compliance may result in personal or
material damage.
Attention!
Attention and the related text refer to a possible behavior or an undesired condition
which can occur during operation.
Note
Note and the related text provide useful information which supplements the corresponding part of the documentation.
Modbus Instruction manual 105/08
Page 4

Warning! The specifications and instructions contained in the documentation must
be complied with strictly during installation and commissioning. Only
qualified staff who has read the documentation and, in particular, the
safety instructions carefully is allowed to carry out installation or commissioning work or to operate the frequency inverters. The term „Qualified
Staff“ refers to anybody who is familiar with the installation, assembly,
commissionin
g and operation of the frequency inverter and has the
proper qualification for the job.
Modbus Instruction manual 05/082
Page 5

TABLE OF CONTENTS
1 General Safety Instructions and Information on Use.................................................... 5
1.1 General Information ................................................................................................ 5
1.2 Purpose of the Frequency Inverters ........................................................................ 5
1.3 Transport and Storage ............................................................................................. 6
1.4 Handling and Installation ........................................................................................ 6
1.5 Electrical Connection ............................................................................................... 6
1.6 Information on Use.................................................................................................. 7
1.7 Maintenance and Service......................................................................................... 7
2 Introduction ................................................................................................................... 8
3 Installation/Disassembly of the communication module.............................................. 9
3.1 Installation .............................................................................................................. 9
3.2 Disassembly ........................................................................................................... 10
4 Plug Assignment/Bus Termination/Cable ................................................................... 11
4.1 RS232 module CM-232 .......................................................................................... 11
4.2 RS485 module........................................................................................................ 12
4.2.1 RS485 module CM-485 DB9.................................................................................... 12
4.2.2 RS485 module CM-485 T........................................................................................ 12
4.2.3 Bus termination ..................................................................................................... 13
5 Startup ......................................................................................................................... 14
5.1 General Information on configuration .................................................................. 14
5.2 RS232 Module CM-232 .......................................................................................... 16
5.2.1 Setting the Modbus Baud Rate and Parity ................................................................ 16
5.2.2 Setting the Modbus Address ................................................................................... 16
5.3 RS485 Module CM-485 .......................................................................................... 17
5.3.1 Setting the Modbus Baud Rate and Parity ................................................................ 17
5.3.2 Setting the Modbus Node Address........................................................................... 17
6 Modbus over Serial Line Protocol................................................................................. 18
6.1 Master/Slaves Protocol Principle .......................................................................... 18
6.2 Addressing Rules ................................................................................................... 19
6.3 Message Description .............................................................................................. 19
6.4 Supported Function Codes..................................................................................... 20
6.4.1 Function Code 3, Read 16-bit Parameter.................................................................. 20
6.4.2 Function Code 6, Write 16-bit Parameter ................................................................. 22
6.4.3 Function Code 100, Read 32-bit Parameter ..............................................................23
6.4.4 Function Code 101, Write 32-bit Parameter.............................................................. 24
6.4.5 Function Code 8, Diagnostics.................................................................................. 25
6.5 Exception Responses ............................................................................................. 27
6.6 Exception Codes .................................................................................................... 27
6.7 The two serial Transmission Modes....................................................................... 29
6.7.1 RTU Transmission.................................................................................................. 29
6.7.1.1 Character Format ............................................................................................ 29
6.7.1.2 Frame Description ........................................................................................... 29
Modbus Instruction manual 305/08
Page 6

6.7.1.3 Modbus Message RTU Framing......................................................................... 30
6.7.1.4 CRC Checking .................................................................................................30
6.7.2 ASCII Transmission................................................................................................ 33
6.7.2.1 Character Format ............................................................................................ 33
6.7.2.2 Modbus Message ASCII Framing....................................................................... 33
6.7.2.3 LRC Checking.................................................................................................. 34
6.8 Monitoring Timing Function .................................................................................. 35
6.9 Watchdog............................................................................................................... 35
7 Handling of Data Sets/Cyclic Writing .......................................................................... 36
8 Modbus Message Examples.......................................................................................... 38
8.1 Modbus RTU-Message Examples ........................................................................... 38
8.1.1 Function Code 3, Read 16-bit Parameter.................................................................. 38
8.1.2 Function Code 6, Write 16-bit Parameter ................................................................. 39
8.1.3 Function Code 100, Read 32-bit Parameter ..............................................................40
8.1.4 Function Code 101, Write 32-bit Parameter.............................................................. 41
8.1.5 Function Code 8, Diagnostics.................................................................................. 42
8.2 Modbus ASCII-Message Examples ........................................................................ 43
8.2.1 Function Code 3, Read 16-bit Parameter.................................................................. 43
8.2.2 Function Code 6, Write 16-bit Parameter ................................................................. 44
8.2.3 Function Code 100, Read 32-bit Parameter ..............................................................45
8.2.4 Function Code 101, Write 32-bit Parameter.............................................................. 46
8.2.5 Function Code 8, Diagnostics.................................................................................. 47
9 ACT Inverter Control/Reference Value........................................................................ 48
9.1 Control ................................................................................................................... 50
9.1.1 Control via Contacts............................................................................................... 50
9.1.2 Control via Control Word of Statemachine................................................................ 53
9.1.2.1 Behavior in Case of Quick Stop......................................................................... 58
9.1.2.2 Behavior in state-transition 5............................................................................ 59
9.1.3 Control via Remote Contacts................................................................................... 60
9.2 Reference Value..................................................................................................... 63
9.2.1 Reference Frequency ............................................................................................. 63
9.2.2 Reference Percentage ............................................................................................ 65
10 ACU Inverter Control/Reference Value........................................................................ 66
10.1 Control via contacts/remote contacts................................................................ 68
10.2 Control via state machine................................................................................... 71
10.2.1 Behavior in quick stop............................................................................................ 74
10.2.2 Behavior in transition 5 .......................................................................................... 75
10.2.3 Reference value/actual value .................................................................................. 76
11 Parameter List.............................................................................................................. 78
11.1 Actual Value Menu (VAL).................................................................................... 78
11.2 Parameter Menu (PARA) .................................................................................... 78
12 Annex ........................................................................................................................... 80
12.1 Warning Messages.............................................................................................. 80
12.2 Error Messages ................................................................................................... 81
12.3 ASCII Tabelle (0x00 – 0x7F) .............................................................................. 83
Modbus Instruction manual 05/084
Page 7

1 General Safety Instructions and Information on Use
The present documentation was prepared with great care and it was subjected to
extensive and repeated reviews. For reasons of clarity, it was not possible to include
all details of all types of the product in the documentation. Neither was it possible to
consider all conceivable installation, operation or maintenance situations. If you require further information or if you meet with specific problems which are not dealt
with in sufficient detail in the documentation, contact your local BONFIGLIOLI a
We would also like to point out that the contents of this documentation do not form
part of any previous or existin
are they intended to supplement or replace such agreements, assurances or legal
relationships. The manufacturer's obligations are exclusively specified in the relevant
purchase contract. This contract also contains all and any warranty regulations which
may apply to the relevant scope of supply. These contractual warranty provisions are
neither extended nor limited by the specifications contained in this documentation.
The manufacturer reserves the right to correct or amend the specifications, product
information and omissions in these operating instructions without notice. The manufacturer shall not be liable for any damage, injuries or costs which may be caused by
the aforementioned reasons.
1.1 General Information
gent.
g agreement, assurance or legal relationship. Neither
Warning!
The DC-link circuit of the frequency inverter is charged during operation,
i.e. there is always the risk of contact with high voltage. Frequency inverters are used for drivin
surface during operation.
Any unauthorized removal of the necessary covers, improper use, wron
installation or operation may result in serious injuries or material damage.
In order to avoid such in
out the transport, installation, setup or maintenance work required. The
standards EN 50178, IEC 60364 (Cenelec HD 384 or DIN VDE 0100), IEC
60664-1 (Cenelec HD 625 or VDE 0110-1), BGV A2 (VBG 4) as well as the
applicable national regulations must be complied with. The term „Qualified Staff“ refers to anybody who is familiar with the installation, assembly, commissionin
possible hazards and has the proper qualification for the job.
1.2 Purpose of the Frequency Inverters
Warning!
The frequency inverters are electrical drive components intended for installation in industrial plants or machines. Commissioning and start of
operation is not allowed until it has been verified that the machine meets
the requirements of the EC Machinery Directive 98/37/EEC and EN 60204.
In accordance with the CE markin
comply with the Low Voltage Directive 72/23/EEC as well as EN 50178 /
DIN VDE 0160 and EN 61800-2. The user shall be responsible for making
sure that the requirements of the EMC Directive 89/336/EEC are met.
Frequency inverters are only available at specialized dealers and are exclusively intended for professional use as per EN 61000-3-2.
The frequency inverters are also marked with the UL label according to
UL508c, which proves that they also meet the requirements of the CSA
Standard C22.2-No. 14-95.
The technical data, connection specifications and information on ambient
conditions are indicated on the name plate and in the documentation and
must be complied with in any case. Anyone involved in any kind of work
at the device must have read the instructions carefully and understood
them before starting the work.
g moving parts and they may become hot at the
g
juries or damage, only qualified staff may carry
g and operation of the frequency inverter as well as the
g requirements, the frequency inverters
Modbus Instruction manual 505/08
Page 8

1.3 Transport and Storage
The frequency inverters must be transported and stored in an appropriate way. During
transport and storage the devices must remain in their original packaging. The units
may only be stored in dry rooms which are protected against dust and moisture and
are exposed to little temperature deviations only. Observe the climatic conditions according to EN 50178 and the markin
for more than one year without connecting them to the rated mains voltage.
1.4 Handling and Installation
Warning!
The frequency inverters are to be used in accordance with the documentation as well
as the applicable directives and standards. They must be handled carefully and protected against mechanical stress. Do not bend any components or chan
distances. Do not touch electronic components or contacts. The devices are equipped
with components which are sensitive to electrostatic energy and can easily be damaged if handled improperly. Any use of dama
considered as a non-compliance with the applicable standards. Do not remove any
warning signs from the device.
Damaged or destroyed components must not be put into operation because they may be a health hazard.
1.5 Electrical Connection
Warning!
When workin
A2 (VBG 4), VDE 0100 and other national directives. Comply with the electrical installation instructions given in the documentation as well as the relevant directives. Responsibility for compliance with and examination of the limit values of the EMC product norm EN 61800-3 for variable-speed electrical drive mechanisms is with the manufacturer of the industrial plant or machine.
The documentation contains information on EMC-conformin
connected to the frequency inverters may not be subjected to high-voltage insulation
tests unless appropriate circuitry measures are taken before. Otherwise the unit may
be damaged.
Before any assembly or connection work, discharge the frequency inverter. Verify that the frequency inverter is discharged.
Do not touch the terminals because the capacitors may still be charged.
Comply with the information
frequency inverter label.
g at the frequency inverters, comply with the applicable standards BGV
g on the packaging. The units must not be stored
ge the isolating
ged or destroyed components shall be
given in the operating instructions and on the
g installation. The cables
Modbus Instruction manual 05/086
Page 9

1.6 Information on Use
Warning!
The frequency inverter may be connected to power supply every 60 s.
Consider this for a jog operation of a mains contactor. For commissioning
or after an emergency stop, a non-recurrent, direct restart is permissible.
After a failure and restoration of the power supply, the motor may star
unexpectedly if the AutoStart function is activated. Install protective
equipment if personal injury or material damage is possible.
Before commissioning and start of the operation fix all covers and chec
the terminals. Check the additional monitoring and protective devices accordin
Machines Act, Accident Prevention Directives etc.).
No connection work may be performed, while the system is in operation.
1.7 Maintenance and Service
Warning!
Unauthorized opening and improper interventions can lead to personal
injury or material damage. Repairs on the frequency inverters may only be
carried out by the manufacturer or persons authorized by the manufacturer. Check protective equipment regularly.
g to EN 60204 and applicable the safety directives (e.g. Working
t
k
Modbus Instruction manual 705/08
Page 10

2 Introduction
This document describes the Modbus protocol of the communication modules CM-232
with RS232 port and CM-485 with RS485 port. This protocol can be used alternatively
to the VABus via the same hardware (CM-232/CM-485). Both protocols can not be
operated at the same time. The Modbus operation modes RTU and ASCII are available.
For the RS232 connection, the frequency inverter must be equipped with the RS232
communication module CM-232.
For the RS485 connection, the frequency inverter must be equipped with the RS485
communication module CM-485.
The communication modules CM-232 and CM-485 are separate components and must
be mounted to the frequency inverter by the user. This is described in detail in chapter "Assembly".
Note: This document only describes the communication modules CM-232 and
Note: In some chapters of these instructions, setting and display options via the
Attention! Via the RS232 port at CM-232 or the RS485 port at CM-485, a controller
RS485 connection:
Frequency inverters can be connected to a bus system by extension with CM-485
communication modules. The bus structure is linear and designed as a 2-wire line. Via
a bus master, up to 247 frequency inverters can be addressed.
The frequency inverters can be parameterized and controlled easily. Additionally, frequency inverter data can be polled and positionin
during operation via the bus system by means of a PC or a PLC.
RS232 connection:
The RS232 connection enables a peer-to-peer connection between two clients.
CM-485. It does not provide basic information on the serial interfaces
RS232 and RS485. Neither does it contain any basic information on the
operation of the frequency inverters.
Basic knowled
ge of the methods and function of the RS232 and RS485
serial interfaces and Modbus protocol is required in order to understand
and use the instructions contained in this document.
PC software VPlus are described as an alternative to the KP500 control
unit. In this case, VPlus communicates with the frequency inverter
− via the module CM-232 or CM-485 or
− via the interface adapter KP232.
If the serial interface of the module CM-232/CM-485 is connected to a
PLC, for example, VPlus cannot access the frequency inverter via this
interface directly.
In this case, the PC must be connected via the optional interface adapter
KP232.
can access all parameters of the frequency inverter.
Any chan
ge of parameters, the meaning of which is unknown to the user,
may result in the frequency inverter becoming inoperative.
g commands can be transmitted
Modbus Instruction manual 05/088
Page 11

3 Installation/Disassembly of the communication module
The communication module is pre-assembled in a case. Additionally, a PE spring is
3.1 Installation
enclosed for PE connection (shield).
Caution! The frequency inverter must be disconnected from power supply before
installation of the communication module.
Assembly under voltage is not permissible and will destroy the frequency
inverter and/or the communication module.
Do not touch the PCB visible on the back of the module, otherwise com-
Work steps:
ponents may be damaged.
• Disconnect the frequency inverter from mains voltage and protect it against being
energized unintentionally.
• Remove covers (1) and (2) of the frequency inverter. Slot B (4) for the commu-
nication module is now accessible.
• Mount the supplied PE spring (5) using the M4 screw (6) in the unit. The spring
must be aligned centrally.
• Insert the communication module in slot B (4) until it engages audibly.
• Fix the communication module by screwing the M2 screw (7) of the module to the
PE spring (5).
8
5
7
(M2)
6
(M4)
• In the upper cover (1), break out the pre-punched cutout (3) for the plug X310
(8).
• Mount the two covers (1) and (2).
Modbus Instruction manual 905/08
Page 12

3.2 Disassembly
• Disconnect the frequency inverter from mains voltage and protect it against being
energized unintentionally.
• Remove covers (1) and (2) of the frequency inverter.
• Loosen the M2 screw (7) at the communication module
9
7
• Unplug the communication module from Slot B (4) by unlocking the locking hooks
(9) on the right and left side of the module from the case of the frequency in-
verter using a small screwdriver.
The looking hooks (9) are located at the place where the looking hooks (10) for
the upper cover (1) project from the case of the frequency inverter.
To do this, insert the screwdriver in the gap between the case of the module
•
and the frequency inverter carefully and push the locking hook inwards in the
direction of the arrow (
Õ). As soon as the right side is unlocked, pull out the
module a bit on the right side and hold it.
• Hold the module on the ri
side in the same way (
ght side while unlocking the locking hook on the left
Ö).
• Pull the module out of the slot by gently pulling on the right and left side al-
ternately.
• Disassemble the PE spring (5).
• Mount the two covers (1) and (2).
Modbus Instruction manual 05/0810
Page 13
4 Plug Assignment/Bus Termination/Cable
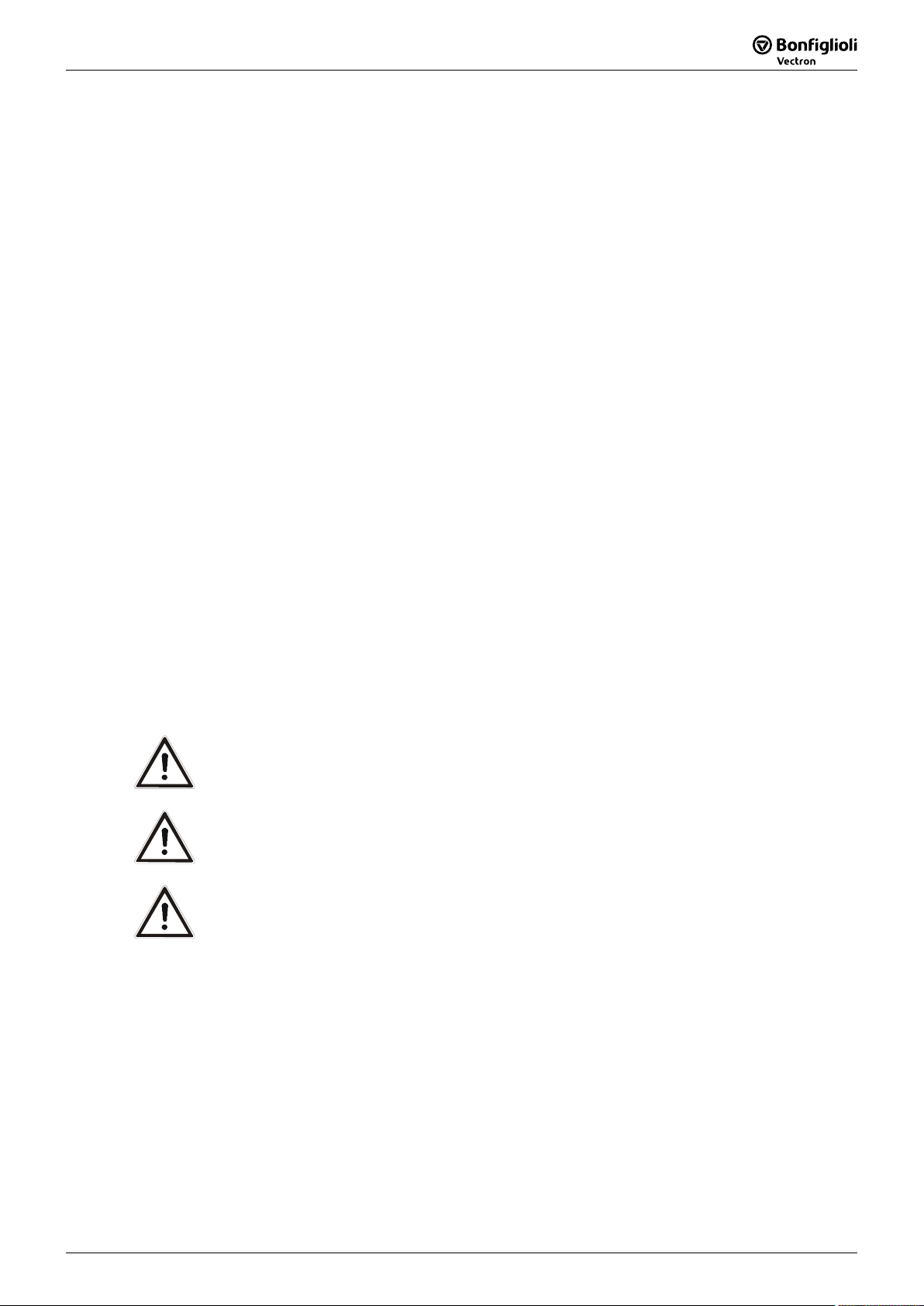
Bus Connector X310 CM-232 (9p Sub-D)
• If no pre-assembled connection cable is used for the RS232 connection, a twisted
4.1 RS232 module CM-232
The RS232 interface is connected to a PC or a
Part. no.
179 675-100
pin name function
Housing Shield connected with PE
1
2
3
4
5
6
7
8
9
– n. c.
RxD receive Data (input)
TxD transmit Data (output)
– n. c.
0 V Ground
– n. c.
– n. c.
– n. c.
– n. c.
and shielded cable is to be used
• 1:1 assignment of the pin contacts
• The shield must be a harness shield (not a foil shield)
• The shield is to be connected to PE properly on both sides
controller via the 9-pin D-Sub socket X310. The
gnment complies with the standard, thus a
assi
RS232 connection cable (1:1) is required for connection only.
X310
Modbus Instruction manual 1105/08
Page 14
4.2 RS485 module
• For the bus cable RS485, the twisted and shielded line is to be used
• The shield must be a harness shield (not a foil shield)
• The shield is to be connected to PE properly on both sides.
The pin assignment of the RS485 cable is different from that of the RS232 cable;
•
if you use the wrong cable, no communication is possible
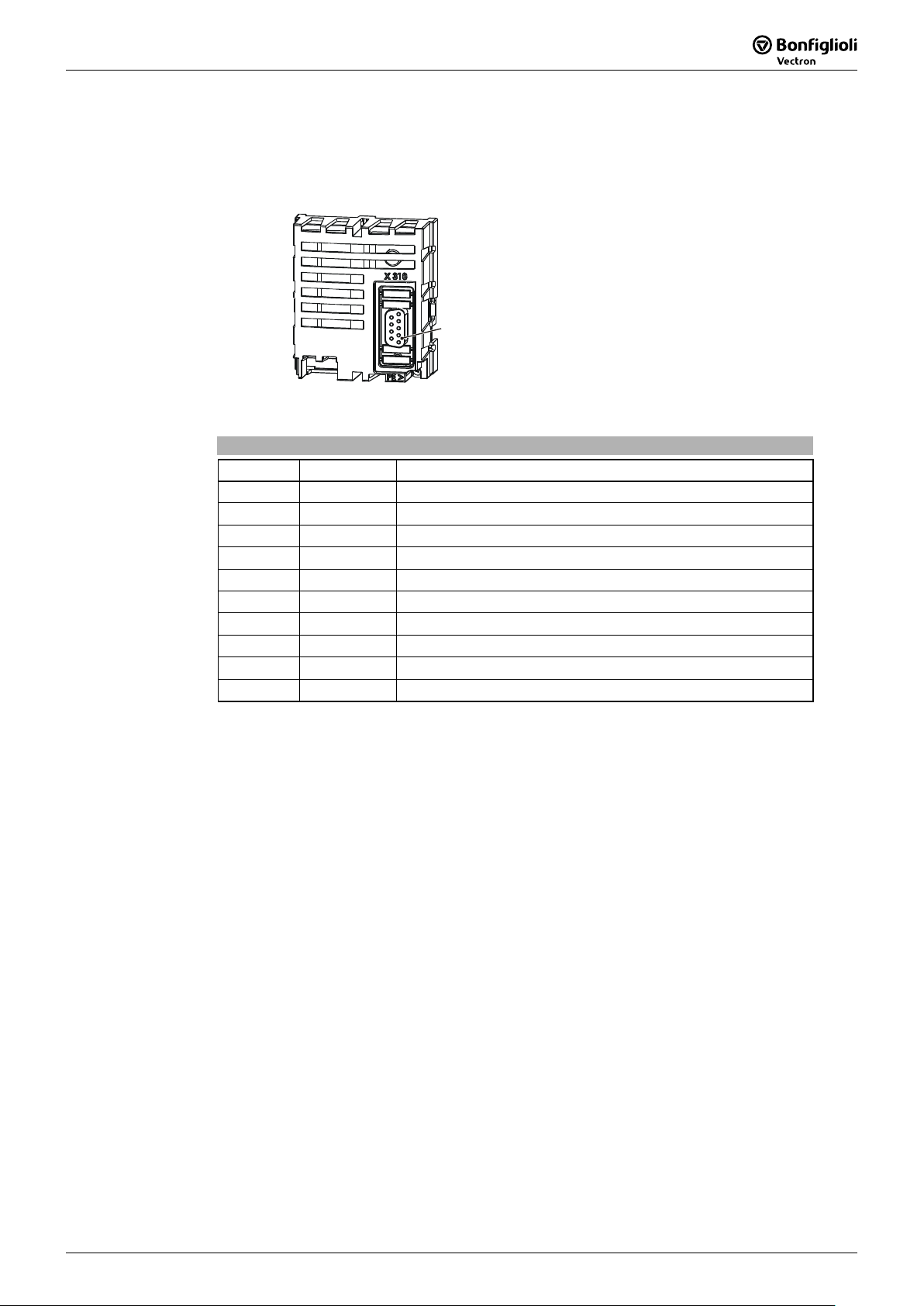
4.2.1 RS485 module CM-485 DB9
The RS485 interface is connected via the 9-pin
D-Sub socket X310.
For details on the pin assi
following table.
S1
Part. No.
179 675-110
O
N
Å
X310
Bus Connector X310 CM-485 DB9
pin name function
Housing Shield connected with PE
1
2
3
4
5
6
7
8
9
Data Line B short-circuit proof and functionally insulated; max. current 60 mA
Data Line B’ same as pin 1 – for cable network
0 V GND/earth
– n. c.
+5 V Supply voltage interface converter +5 V
– n. c.
Data Line A short-circuit proof and functionally insulated; max. current 60 mA
Data Line A’ same as pin 7 – for cable network
– n. c.
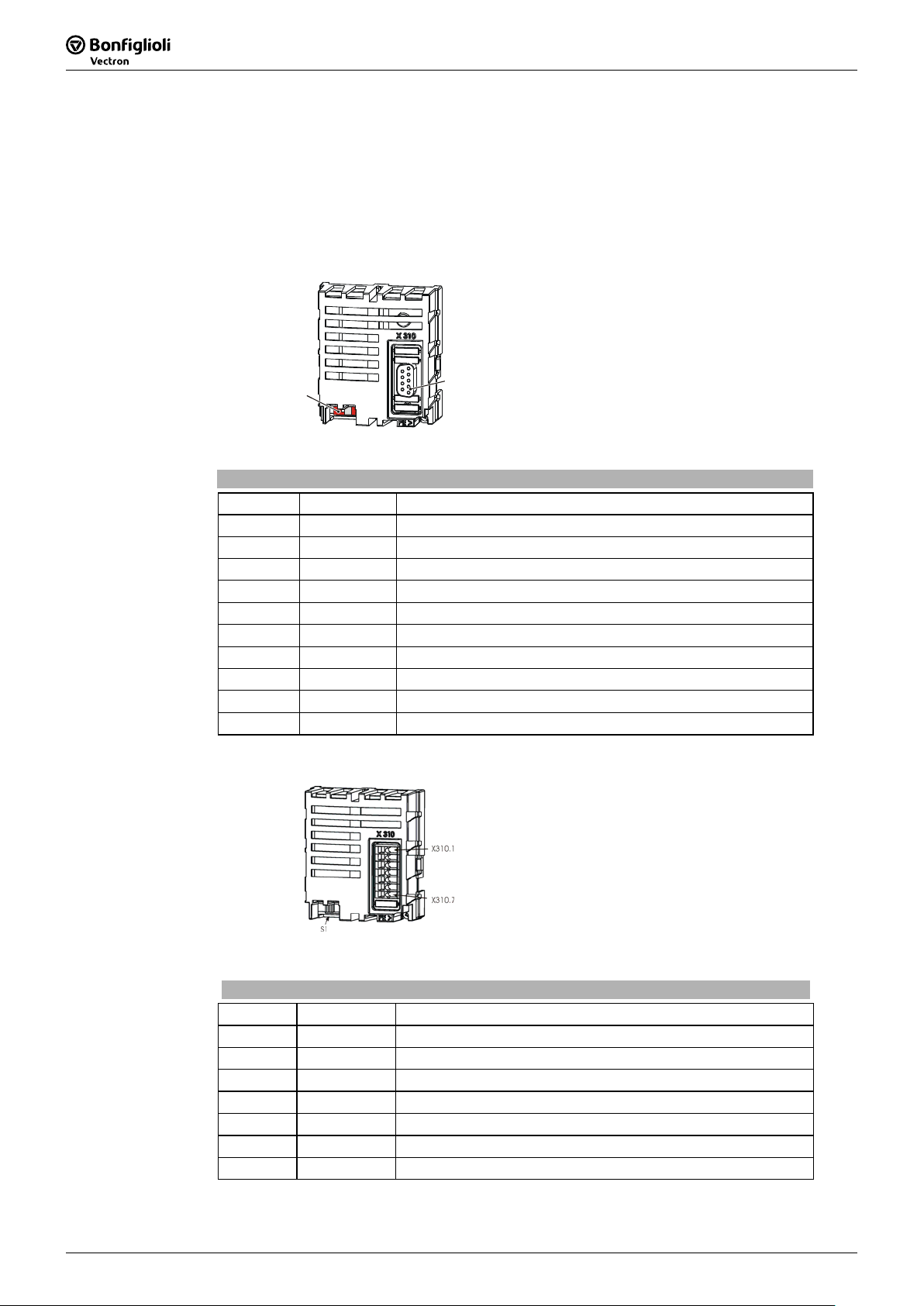
4.2.2 RS485 module CM-485 T
The RS485 interface is connected via the 7-pin
terminal socket X310
For details on the pin assignment, refer to the
following table.
gnment, refer to the
Part. no.
179 675-111
Busstecker X310 CM-485T (7p terminal)
terminal name function
1 Data Line A short-circuit proof and functionally insulated; max. current 60 mA
2 Data Line A’ same as terminal 1 – for cable network
3 Data Line B short-circuit proof and functionally insulated; max. current 60 mA
4 Data Line B’ same as terminal 3 – for cable network
5 +5 V Supply voltage interface converter +5 V
6 0 V GND/ earth
7 PE Shield/PE
Modbus Instruction manual 05/0812
Page 15

4.2.3 Bus termination
Attention! The passive bus termination (connection of a termination resistor) is
required at the physically first and last client. It can be activated by the
DIP Switch S1 of the CM-232 and CM-485.
By default, the bus termination is set to OFF.
It is important to realize the correct termination. If not, no communication is possible
by the RS485 interface!
As an alternative the active bus termination is possible via corresponding circuit:
The active termination is only allowed once each branch. The bus termination via an
external circuit and via DIP switch at the same time is not allowed.
Take care for the ground wiring; this will protect the communication bus for a high
noise level.
For easy wiring the signal terminals A and B have parallel contacts.
Example of wiring with different CM-485 modules:
max. 1200 - 2400m
12 78 3
BA
GND
BA
9pin D-Sub
GND
Inverter 1 Inverter (last)Master (PC)
termination OFF termination ONtermination ON
BA
7pin terminal
1234 6
GND
Modbus Instruction manual 1305/08
Page 16

5 Startup
By default, the parameters of the communication modules CM-232 and CM-485 are
set as follows:
No. Description Factory setting
395 Protocol Type 0 - VCB bus protocol
413 Watchdog Timer 0
No. Description Factory setting
10 Baud Rate 4 - 19200
1375 Modbus Parity 0 – EVEN
1376 Modbus Address 1
5.1 General Information on configuration
The CM-232 / CM-485 communication modules can be configured in different ways:
− Direct connection CM-232 to PC / PLC
Direct connection between the 9-pin Sub-D socket (X310) of the
− Direct connection CM-485 to PC / PLC
Direct connection between the 9-pin Sub-D socket (X310) of the
Attention! For connection of the CM-485 to the RS232 interface of the PC /
− Connection of interface adapter KP232 to PC
Connection of the interface adapter KP232 at slot A of the fre-
− Configuration via Control Unit KP500
Configuration via the pluggable control unit KP500 at slot A of the
Parameter Settings
Parameter Settings
CM-232 and the serial interface of a PC / PLC.
Configuration of the installed communication module via the control
software VPlus or the control unit KP500.
In the case of the CM-232 the connection to a PC / PLC is realized
via a RS232 connection cable (1:1).
CM-485 and the serial interface of a PC via an interface converter.
PLC, an appropriate interface converter must be installed in the signal line.
Configuration of the installed communication module via the control
software VPlus or the control unit KP500.
quency inverter. Connection to PC via a RS232 connection cable
(1:1). Configuration of the installed communication module via the
control software VPlus.
frequency inverter.
Modbus Instruction manual 05/0814
Page 17

Attention! The transmitter and receiver must be set to the same transmission rate
(Baud rate).
The setting of the Baud rate effects the communication of the modules CM-232 and
CM-485. The KP232 interface adapter adjusts the Baud rate automatically to the PC
or control transmission rate.
Work steps:
• Install module CM-232/CM-485 on the frequency inverter.
• In the case of module CM-232:
Connect CM-232 and PC/PLC via RS232 cable.
• In the case of module CM-485:
Connect CM-485 via RS485 cable with interface converter.
Connect the RS232 port of the interface converter with the PC/PLC.
• Plug in control unit KP500 or interface adapter KP232 to slot A of the frequency
inverter.
• In the case of KP232: Connect interface adapter KP232 to PC via a serial cable.
Protocol type settings
By default, the communication modules CM-232/CM-485 are set to the BONFIGLIOLI
VECTRON standard protocol (VCB-Bus). Communication with the VPlus control software is only possible with this protocol type.
Attention! If another protocol type or a wrong setting is selected, no communica-
tion is possible via CM-232/CM-485.
In this case, correct the protocol type using the control unit KP500.
For detailed information, see chapter
6 “Modbus over Serial Line Proto-
col”.
Note: The interface adapter KP232 operates with the BONFIGLIOLI VECTRON
standard protocol VCB-Bus independent of the communication module
CM-232 or CM-485 and can communicate with VPlus at any time.
Modbus Instruction manual 1505/08
Page 18

The transmission speed and parity of the CM-232 are set via parameters
5.2 RS232 Module CM-232
5.2.1 Setting the Modbus Baud Rate and Parity
Baud Rate 10 and Modbus Parity
1375.
The transmission speed of the CM-232 depends on various application-specific pa-
rameters. For example, the cable length limits the transmission speed due to signal
propagation delays.
Baud Rate 10 Function max. cable length
1 – 2400 Baud Transmission rate 2400 Baud 30 m
2 – 4800 Baud Transmission rate 4800 Baud 30 m
3 – 9600 Baud Transmission rate 9600 Baud 30 m
4 – 19200 Baud Transmission rate 19200 Baud 30 m
5 – 57600 Baud Transmission rate 57600 Baud 10 m
6 – 115200 Baud Transmission rate 115200 Baud 10 m
1)
The indicated cable lengths are recommended maximum values which depend,
1)
among other things, on the quality of the cable.
Modbus Parity 1375 Function
0 – EVEN EVEN Parity is used in transmission
1 – ODD ODD Parity is used in transmission
2 – None No Parity is used in transmission
Attention! Baud rate and parity changes are only active after a reset of the fre-
quency inverter via the software or Mains Off/On.
In the case of the software reset, proceed as follows:
• Via the control unit KP500 or the control software VPlus open parameter
Program(ming) 34.
• Set parameter value "123".
• Confirm by pressing "ENT".
After the reset, the frequency inverter is initialized and is ready for operation after a few seconds.
5.2.2 Setting the Modbus Address
The address of the CM-232 can be set via parameter Modbus Address 1376.
No. Description Min. Max. Fact. sett.
1376 Modbus Address 1 247 1
Parameter Settings
Note: Normally, it is not necessary to change the default setting (Address 1).
In the case of special operating conditions, the address can be adjusted.
Attention! An address change is effective immediately, i.e. without a restart of
the frequency inverter.
For details on addressing, see chapter 6.2 “Addressing Rules”.
Modbus Instruction manual 05/0816
Page 19

The transmission speed and parity of the CM-485 are set via parameters
5.3 RS485 Module CM-485
5.3.1 Setting the Modbus Baud Rate and Parity
Baud Rate 10 and Modbus Parity
1375.
The transmission speed of the CM-485 depends on various application-specific pa-
rameters. For example, the cable length limits the transmission speed due to signal
propagation delays. In case of using very long cables, it is possible to take RS485
repeater units.
Baud Rates 10 Function max. line length
1 – 2400 Baud Transmission rate 2400 Baud 2400 m
2 – 4800 Baud Transmission rate 4800 Baud 2400 m
3 – 9600 Baud Transmission rate 9600 Baud 1200 m
4 – 19200 Baud Transmission rate 19200 Baud 1200 m
5 – 57600 Baud Transmission rate 57600 Baud 600 m
6 – 115200 Baud Transmission rate 115200 Baud 300 m
Attention! • All bus clients must be set to the same baud rate.
• Baud rate changes are only active after a reset of the frequency
inverter via the software or Mains Off/On.
In the case of the software reset, proceed as follows:
• Via the control unit KP500 or the control software VPlus open
parameter
Program(ming) 34.
• Set parameter value "123".
• Confirm by pressing "ENT".
After the reset, the frequency inverter is initialized and is ready for
operation after a few seconds.
Modbus Parity 1375 Function
0 – EVEN EVEN Parity is used in transmission
1 – ODD ODD Parity is used in transmission
2 – None No Parity is used in transmission
5.3.2 Setting the Modbus Node Address
The node address of the CM-485 is set via parameter Modbus Address 1376. Up to
247 frequency inverters can be used on the RS485 bus. The frequency inverters are
assigned unambiguous addresses in the range from 1 to 247.
No. Description Min. Max. Fact. sett.
1376 Modbus Address 1 247 1
Parameter Settings
Attention! − For operation with the CM-485 module, each client must be as-
signed an address.
− Bus addresses may only be assigned once, i.e. no double assignments.
− An address change is effective immediately, i.e. without a restart of
the frequency inverter.
For details on addressing, see 6.2.
Modbus Instruction manual 1705/08
Page 20

6 Modbus over Serial Line Protocol
The Modbus protocol described in the following has been incorporated into the stan-
dard ACT/ACU software of BONFIGLIOLI VECTRON. It defines and describes the
communication via the serial interfaces RS232/RS485 using the Modbus RTU and
ASCII transmission modes.
By default, the frequency inverters are set to the standard VCB bus protocol. The
Modbus protocol type can be set via parameter
Protocol 395 Function
0 - VCB Bus
1 - P-Bus
2 - Modbus RTU
3 - Modbus ASCII
Note
Attention ! − Changes of the parameter Protocol 395 are effective immedi-
The Modbus protocol enables the operation as a pure Master/Slave system. A PC, a
PLC or any type of computer system is the bus master.
6.1 Master/Slaves Protocol Principle
The Modbus Serial Line protocol is a Master-Slaves protocol. Only one master (at the
same time) is connected to the bus, and one or several (maximum 247) slave nodes
are also connected to the same serial bus. A Modbus communication is always initiated by the master. The slave nodes will never transmit data without receiving a
request from the master node. The slave nodes will never communicate with each
other. The master node initiates only one Modbus transaction at a time.
The master node issues a Modbus request to the slave nodes in two modes:
Protocol 395:
BONFIGLIOLI VECTRON standard protocol (default setting)
1)
Application-specific bus protocol
Modbus over serial line (with RTU Transmission Mode)
Modbus over serial line (with ASCII Transmission Mode)
1)
This bus protocol is only used for special applications. It cannot be
used for standard applications.
For more detailed information, refer to the application-specific instructions.
ately, i.e. without a restart of the frequency inverter.
− If the wrong protocol is selected, communication via CM-232/CM-
485 is not possible.
In this case, correct the protocol type using the control unit KP500
or KP232 and VPlus.
− In unicast mode, the master addresses an individual slave. After receiving and
processing the request, the slave returns a message (a 'response') to the master. In this mode, a Modbus transaction consists of 2 messages: a request from
the master, and a response from the slave. Each slave must have a unique address (from 1 to 247) so that it can be addressed independently from other
nodes.
− In broadcast mode, the master can send a request to all slaves. No response
is returned to broadcast requests sent by the master. The broadcast requests
are necessarily writing commands. All devices must accept the broadcast
for writing function. Address 0 is reserved to identify a broadcast exchange.
Modbus Instruction manual 05/0818
Page 21

6.2 Addressing Rules
Up to 247 frequency inverters can be used on a Modbus. These are assigned the
addresses 1…247. By address 0, all clients can be addressed simultaneously. Address
0 is also referred to as the Broadcast Address.
A Modbus over serial line message is made up of the following fields:
6.3 Message Description
Address Function Code Data
CRC (or LRC)
• On MODBUS Serial Line, the Address Field only contains the slave address.
Valid slave node addresses are in the range of 0 – 247 decimal. The individual
slave devices are assigned addresses in the range of 1 – 247. A master addresses a slave by placing the slave address in the address field of the message.
When the slave returns its response, it places its own address in the response
address field to let the master know which slave is responding.
• The
Function Code
function code can be followed by a
indicates to the inverter what kind of action to perform. The
Data
field that contains request parameters
(or, in the case of the inverter's response, the response parameters).
If no error occurs related to a correctly received Modbus request then the data
field contains the data requested. If an error occurs then the field contains an
Exception Code to indicate to the master that the request was unsuccessful. Exception Responses and Codes are described in detail in chapter
6.5.
If a request is not received correctly (communication error, checksum error)
then no response is sent. The inverter waits for the next request.
• The Error Checking Field is the result of a "Redundancy Checking" calculation
that is performed on the message contents. Two kinds of calculation methods
are used depending on the transmission mode that is being used (RTU or ASCII)
- see chapter
6.7, "The two serial Transmission Modes".
Modbus Instruction manual 1905/08
Page 22

Modbus definitions for reading/writing data in a device do not fit directly to parame-
6.4 Supported Function Codes
ter access of inverters (independent of inverter manufacturer). Modbus is defined for
reading/writing bits and registers in a different way. Furthermore, data access is
limited to 16 bit wide data.
To fulfill the Modbus requirements the data access to parameters in the devices (inverters) will use the following defined function codes:
- Function Code 3 Read ONE 16 bit wide data
- Function Code 6 Write ONE 16 bit wide data
(Read Holding Register)
(Write Single Register)
For data access to 32 bit wide data two new inverter specific function codes are
defined:
- Function Code 100 Read ONE 32 bit wide data
- Function Code 101 Write ONE 32 bit wide data
With the help of these two new functions (which are not defined by the Modbus
descriptions), data access to 32-bit “long” variables/parameters inside the inverters
is made possible.
For diagnostic purposes the Modbus function code "8" (
Diagnostics
) is also sup-
ported.
These function codes and their corresponding data fields are described in detail in
the following chapters.
Remark: In all data fields with more than one byte, the highest order byte is
transmitted first.
Message examples for all supported function codes in both RTU and ASCII transmis-
sion modes can be found in chapters
8.
6.4.1 Function Code 3, Read 16-bit Parameter
This function code is used to read the value of integer or unsigned integer parame-
ters in the inverter.
Request:
Function Code 1 Byte 0x03
Start Address (Data Set / Para-No.) 2 Bytes 0x0000 – 0x963F
No. of Registers 2 Bytes 0x0001 (always)
Response:
Function Code 1 Byte 0x03
Byte Count 1 Byte 0x02 (always)
Register Value (Parameter Value) 2 Bytes 0 – 0xFFFF
Exception Response:
Error Code 1 Byte 0x83
Exception code 1 Byte 2, 3 or 4
Modbus Instruction manual 05/0820
Page 23

Start Address
This field is used to store the parameter number and data set number. The parameter number ranges from 0 - 1599 and is stored in the lower 12bits; the data set
number ranges from 0 – 9 and is stored in the upper 4 bits.
Example: Parameter 372 (hex. 0x174), data set 2 (hex. 0x2) is stored as hex.
Start address
Data set Parameter number
0x2174
Bits 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
For the example above:
Hex. 0 0 1 0 0 0 0 1 0 1 1 1 0 1 0 0
Bin. 2 1 7 4
No. of Registers
This field is used to store the no. of parameters to be written. The value must always
be 1 as it is only possible to write one parameter at a time.
Byte Count
This field must be set to 2 as the parameter value always contains two bytes.
Register Value
This field is used to store the 16-bit parameter value.
Note:
Parameter Values
with decimal places are transferred without the decimal
point. Depending on the number of decimal places, the values are multiplied by 10, 100 or 1000.
Example:
A current value of 10.3A is to be transmitted. The numerical value actually transmit-
ted is 103, which corresponds to 0x67 in HEX format.
Exception Code
The following exception codes can occur:
2 ILLEGAL DATA ADDRESS • No. of Registers field not equal to 1.
• Parameter unknown
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE • Error on reading the parameter
• No. of bytes in the data field too small or too large
Exception Codes are described in detail in Chapter 6.6
Modbus Instruction manual 2105/08
Page 24

This function code is used to write the value of an integer or unsigned integer pa-
6.4.2 Function Code 6, Write 16-bit Parameter
rameter in the inverter.
Request:
Function Code 1 Byte 0x06
Start Address (Data Set / Para-No.) 2 Bytes 0x0000 – 0x963F
Register Value (Parameter Value) 2 Bytes 0 – 0xFFFF
Response:
Function Code 1 Byte 0x06
Start Address (Data Set / Para-No.) 2 Bytes 0x0000 – 0x963F
Register Value (Parameter Value) 2 Bytes 0 – 0xFFFF
Exception Response:
Error Code 1 Byte 0x86
Exception code 1 Byte 2, 3 or 4
Start Address
This field is used to store the parameter number and data set number. The parameter number ranges from 0 – 1599 and is stored in the lower 12 bits; the data set
number ranges from 0 – 9 and is stored in the upper 4 bits.
e.g.: Parameter 372 (hex. 0x174), data set 2 (hex. 0x2) is stored as hex. 0x2174
Start address
Data set Parameter number
Bits 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Register Value
This field is used to store the 16-bit parameter value.
Note:
Parameter Values
with decimal places are transferred without the decimal point. Depending on the number of decimal places, the values are
multiplied by 10, 100 or 1000.
Example:
A curent value of 10.3A is to be transmitted. The numerical value actually transmit-
ted is 103, which corresponds to 0x67 in HEX format.
Exception Code
The following exception codes can occur:
2 ILLEGAL DATA ADDRESS
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE • Error on writing the parameter
• Parameter unknown
• No. of bytes in the data field too small or too large
Exception Codes are described in detail in Chapter 6.6
Modbus Instruction manual 05/0822
Page 25

6.4.3 Function Code 100, Read 32-bit Parameter
Request:
Function Code 1 Byte 0x64
Start Address (Data Set / Para-No) 2 Bytes 0x0000 – 0x963F
Response:
Function Code 1 Byte 0x64
Register Value (Parameter Value) 4 Bytes 0 – 0x FFFF FFFF
Exception Response:
Error Code 1 Byte 0xE4
Exception code 1 Byte 2, 3 or 4
Start Address
This field is used to store the parameter number and data set number. The parameter number ranges from 0 – 1599 and is stored in the lower 12 bits; the data set
number ranges from 0 – 9 and is stored in the upper 4 bits.
e.g.: Parameter 372 (hex. 0x174), data set 2 (hex. 0x2) is stored as hex. 0x2174
Start address
Data set Parameter number
Bits 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Register Value
This field is used to store the 32-bit parameter value.
Note:
Parameter Values
with decimal places are transferred without the decimal point. Depending on the number of decimal places, the values are
multiplied by 10, 100 or 1000.
Example:
A frequency value of 100.25 Hz is to be transmitted. The numerical value actually
transmitted is 10025, which corresponds to 0x2729 in HEX format.
Exception Code
The following exception codes can occur:
2 ILLEGAL DATA ADDRESS
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE • Error on reading the parameter
• Parameter unknown
• No. of bytes in the data field too small or too large
Exception Codes are described in detail in Chapter 6.6
Modbus Instruction manual 2305/08
Page 26

6.4.4 Function Code 101, Write 32-bit Parameter
Request:
Function Code 1 Byte 0x65
Start Address (Data Set / Para-No) 2 Bytes 0x0000 – 0x963F
Register Value (Parameter Value) 4 Bytes 0 – 0xFFFF FFFF
Response:
Function Code 1 Byte 0x65
Start Address (Data Set / Para-No) 2 Bytes 0x0000 – 0x963F
Register Value (Parameter Value) 4 Bytes 0 – 0xFFFF FFFF
Exception Response:
Error Code 1 Byte 0xE5
Exception code 1 Byte 2, 3 or 4
Start Address
This field is used to store the parameter number and data set number. The parameter number ranges from 0 – 1599 and is stored in the lower 12 bits; the data set
number ranges from 0 – 9 and is stored in the upper 4 bits.
e.g.: Parameter 372 (hex. 0x174), data set 2 (hex. 0x2) is stored as hex. 0x2174
Start address
Data set Parameter number
Bits 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Register Value
This field is used to store the 32-bit parameter value.
Note:
Parameter Values
with decimal places are transferred without the decimal point. Depending on the number of decimal places, the values are
multiplied by 10, 100 or 1000.
Example:
Frequency Value:
A frequency value of 100.25 Hz is to be transmitted. The numerical value actually
transmitted is 10025, which corresponds to 0x2729 in HEX format.
Exception Code
The following exception codes can occur:
2 ILLEGAL DATA ADDRESS
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE • Error on writing the parameter
• Parameter unknown
• No. of bytes in the data field too small or too large
Exception Codes are described in detail in Chapter 6.6
Modbus Instruction manual 05/0824
Page 27

6.4.5 Function Code 8, Diagnostics
This function code is used to access the modbus diagnostic counters that are supported by the inverter. Each counter can be obtained by a sub function code bound
to the counter number. All of the counters can be cleared using the hexadecimal
sub-function code 0x0A.
The following sub function codes are supported:
Sub function Name Comments
0x0A Clear all counters Sets all counters to zero
0x0B Return Bus Message Count No. of valid messages received
0x0C Return Bus Communication Error Count No. of messages with CRC or Par-
0x0D Return Bus Exception Error Count No. of Exception Responses sent
0x0E Return Slave Message Count No. of messages received
0x0F Return Slave No Response Count No. of Broadcast messages received
0x10 Return Slave NAK Count not used, return value is always 0
0x11 Return Slave Busy Count not used, return value is always 0
0x12 Return Bus Character Overrun Count No. of messages with Overrun error
Request (Sub function 0x0A, Clear all Counters):
(with all addresses)
ity/Framing/Overrun error.
(with slave address)
Function Code 1 Byte 0x08
Sub function 2 Bytes 0x000A
Data 2 Bytes 0x0000
Response:
Function Code 1 Byte 0x08
Sub function 2 Bytes 0x000A
Data 2 Bytes 0x0000
Exception Response:
Error Code 1 Byte 0x88
Exception code 1 Byte 1, 3 or 4
Data
This field is always 0x0000.
Exception Code
1 ILLEGAL FUNCTION CODE
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE • Error on carrying out the function
• Sub function not supported
• No. of bytes in the data field too small or too large
• “data field” not equal to 0x0000
Exception Codes are described in detail in Chapter 6.6
Modbus Instruction manual 2505/08
Page 28

Request (Sub function 0x0B – 0x12, Return Counter Value):
Function Code 1 Byte 0x08
Sub function 2 Bytes 0x000B – 0x0012
Data 2 Bytes 0x0000
Response:
Function Code 1 Byte 0x08
Sub function 2 Bytes 0x000B – 0x0012
Data (Counter Value) 2 Bytes 0 – 0xFFFF
Exception Response:
Error Code 1 Byte 0x88
Exception code 1 Byte 1, 3 or 4
Data
This field is always set to 0x0000 in the request and contains the actual counter
value in the response.
Exception Code
The following exception codes can occur:
1 ILLEGAL FUNCTION CODE
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE • Error on Reading the Diagnostic Counter
• Sub function not supported
• No. of bytes in the data field too small or too large
• “data field” not equal to 0x0000
Exception Codes are described in detail in Chapter 6.6
Modbus Instruction manual 05/0826
Page 29
When the master device sends a request to the inverter it expects a normal re-
6.5 Exception Responses
sponse. One of four possible events can occur from the master’s query:
- If the inverter receives the request without a communication error and can handle the query normally, it returns a normal response.
- If the inverter does not receive the request due to a communication error, no
response is returned. The master will eventually process a timeout condition for
the request.
- If the inverter receives the request, but detects a communication error (parity,
LRC, CRC, ...), no response is returned. The master will eventually process a
timeout condition for the request.
- If the inverter receives the request without a communication error, but cannot
handle it (for example, if the request is to read an unknown parameter, the inverter will return an exception response informing the client of the nature of the
error.
The exception response message has two fields that differentiate it from a normal
response:
Function Code Field:
In a normal response, the inverter echoes the function code of the original request
in the function code field of the response. All function codes have a most–significant
bit (MSB) of 0 (their values are all below 0x80 hexadecimal). In an exception response, the inverter sets the MSB of the function code to 1. This makes the function
code value in an exception response exactly 0x80 hexadecimal higher than the value
would be for a normal response. With the function code’s MSB set, the master can
recognize the exception response and can examine the data field for the exception
code.
Data Field:
In a normal response, the inverter may return data or statistics in the data field (any
information that was requested in the request). In an exception response, the inverter returns an exception code in the data field. This defines the server condition
that caused the exception.
The Exception Codes generated by the inverter are listed below
6.6 Exception Codes
The following exception codes are generated by the inverter.
Code Modbus Name Cases when generated by the Inverter
1 ILLEGAL FUNCTION
2 ILLEGAL DATA ADDRESS
3 ILLEGAL DATA VALUE
4 SLAVE DEVICE FAILURE
• Function Code unknown
• Subfunction Code unknown (Diagnostics Function)
• No. of Registers field incorrect (must always be 0x01)
• Unknown Parameter or Parameter Data Type mismatch
• Error in dataset of frame
- No. of bytes too small or too large
- Certain fields not set to specific values
• Read or Write Parameter failed
The reason for the error can be obtained by reading out
Parameter
page).
VABus SST Error Register
11
(see next
Modbus Instruction manual 2705/08
Page 30

Error no. Meaning
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
VABus SST Error Register 11
no error
inadmissible parameter value
inadmissible data set
parameter not readable (write-only)
parameter not writable (read-only)
read error EEPROM
write error EEPROM
checksum error EEPROM
parameter cannot be written while the drive is running
values of the data sets differ from one another
wrong parameter type
unknown parameter
checksum error in received telegram
syntax error in received telegram
data type of parameter does not correspond to the number of bytes
in the telegram
unknown error
When the error register VABus SST Error Register 11 is read out, it is automatically
cleared at the same time.
Modbus Instruction manual 05/0828
Page 31

6.7 The two serial Transmission Modes
Two different serial transmission modes are defined: the RTU mode and the ASCII
mode. They define the bit contents of message fields transmitted serially on the
line. They determine how information is packed into the message fields and decoded.
The transmission mode (and serial port parameters) must be the same for all devices on a MODBUS Serial Line.
6.7.1 RTU Transmission
When devices communicate on a MODBUS serial line using the RTU (Remote Terminal Unit) mode, each 8–bit byte in a message contains two 4–bit hexadecimal characters. The main advantage of this mode is that its greater character density allows
better data throughput than ASCII mode for the same baud rate. Each message
must be transmitted in a continuous stream of characters.
6.7.1.1 Character Format
One character consists of 11 bits:
− 1 start bit
− 8 data bits, least significant bit sent first
− 1 parity bit
− 1 stop bit
Note If no parity is used then an extra stop bit is added.
Character format with parity checking:
Start B1 B2 B3 B4 B5 B6 B7 B8 Parity Stop
Character format without parity checking:
Start B1 B2 B3 B4 B5 B6 B7 B8 Stop Stop
6.7.1.2 Frame Description
Slave
Address
1 byte 1 byte 0 up to 252 bytes
The maximum size of a MODBUS RTU frame is 256 bytes.
Function
Code
Data CRC
2 bytes
(CRC-Lo, CRC-Hi)
Modbus Instruction manual 2905/08
Page 32

6.7.1.3 Modbus Message RTU Framing
A MODBUS message is placed by the transmitting device into a frame that has a
known beginning and ending point. This allows devices that receive a new frame to
begin at the start of the message, and to know when the message is completed.
Partial messages must be detected and errors must be set as a result. In RTU mode,
message frames are separated by a silent interval of at least 3.5 character times
MODBUS Message
Start Address
>= 3.5 char 8 bits 8 bits N x 8 bits 16 bits >= 3.5 char
Function Data CRC End
The entire message frame must be transmitted as a contiguous stream of characters.
If a silent interval of more than 1.5 character times occurs between two characters,
the message frame is declared incomplete and is discarded by the inverter.
6.7.1.4 CRC Checking
The RTU mode includes an error–checking field that is based on a Cyclical Redundancy Checking (CRC) method performed on the message contents.
The CRC field checks the contents of the entire message. It is applied regardless of
any parity checking method used for the individual characters of the message.
The CRC field contains a 16–bit value implemented as two 8–bit bytes.
The CRC field is appended to the message as the last field in the message. It is appended in the sequence “low-order byte”, “high-order byte”. The CRC high–order
byte is the last byte to be sent in the message.
The CRC value is calculated by the sending device, which appends the CRC to the
message. The receiving device recalculates a CRC during receipt of the message,
and compares the calculated value to the actual value it received in the CRC field. If
the two values are not equal, an error results.
The CRC calculation is started by first pre-loading a 16–bit register to all 1’s
(0xFFFF). Then a process begins of applying successive bytes of the message to
the current contents of the register.
During generation of the CRC, each 8bit character is ExOR with the register contents. Then the result is shifted in the direction of the least significant bit (LSB), with a
zero filled into the most significant bit (MSB) position. The LSB is extracted and examined. If the LSB was a 1, the register is then ExOR with the fixed value 0xA001. If
the LSB was a 0, no ExOR takes place.
This process is repeated until eight shifts have been performed. After the last (eight)
shift, the next 8bit char is ExOR with the register’s current value, and the process
repeats for eight more shifts as described above. The final content of the register,
after all the bytes of the message have been applied, is the CRC value.
When the CRC is appended to the message, the low-order byte is appended first,
followed by the high-order byte.
Modbus Instruction manual 05/0830
Page 33

Example for CRC calculating for the frame : “0x02 0x07”
MSB LSB
Start CRC 1111 1111 1111 1111 0xFFFF
1.char 0000 0000 0000 0010 0x02
ExOR
CRC 1111 1111 1111 1101
1.shift right
0111 1111 1111 1110 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1101 1111 1111 1111
2.shift right
0110 1111 1111 1111
0xA001 1010 0000 0000 0001
ExOR
CRC 1100 1111 1111 1110
3.shift right
4.shift right
0110 0111 1111 1111 ⇒0 = no ExOR
0011 0011 1111 1111 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1001 0011 1111 1110
5.shift right
6.shift right
0100 1001 1111 1111 ⇒0 = no ExOR
0010 0100 1111 1111 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1000 0100 1111 1110
7.shift right
8.shift right
0100 0010 0111 1111 ⇒0 = no ExOR
0010 0001 0011 1111 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1000 0001 0011 1110
2.char 0000 0000 0000 0111 0x07
ExOR
CRC 1000 0001 0011 1001
1.shift right
0100 0000 1001 1100 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1110 0000 1001 1101
2.shift right
0111 0000 0100 1110 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1101 0000 0100 1111
3.shift right
0110 1000 0010 0111 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1100 1000 0010 0110
4.shift right
5.shift right
0110 0100 0001 0011 ⇒0 = no ExOR
0011 0010 0000 1001 ⇒1 = ExOR
0xA001 1010 0000 0000 0001
ExOR
CRC 1001 0010 0000 1000
6.shift right
7.shift right
8.shift right
result 1 2 4 1
0100 1001 0000 0100 ⇒0 = no ExOR
0010 0100 1000 0010 ⇒0 = no ExOR
0001 0010 0100 0001 ⇒0 = no ExOR
CRC = 0x41 0x12
Modbus Instruction manual 3105/08
Page 34

Example : program sequence (C#)
private int Modbus_CRC(string frame)
{
int poly = 0xA001; // polynomal
int CRC = 0xFFFF; // start CRC
for (int i = 0; i < (int)(frame.Length); i++) // for each sign
{
CRC ^= Convert.ToInt16(frame[i]); // ExOR
for (int j = 0; j < 8; j++) // eight times
{
if ((CRC & 0x01) == 0x01) // lsb == 1 ?
{
CRC >>= 1; // shift left
CRC ^= poly; // ExOR
}
else
{
CRC >>= 1; // shift left
}
}
}
return CRC;
}
Call the function for the frame : “0x02 0x07”
string temp_s = Convert.ToString((char)(0x2))+ Convert.ToString((char)(0x7));
Console.WriteLine(Modbus_CRC(temp_s));
Result : 4673 = 0x1241
CRC Low Byte = 0x41
CRC High Byte = 0x12
The Modbus CRC sequence is :
CRC Low Byte / High Byte 0x41 0x12
⇒
Modbus Instruction manual 05/0832
Page 35

6.7.2 ASCII Transmission
When devices are setup to communicate on a MODBUS serial line using 7-bit ASCII
(American Standard Code for Information Interchange) mode, each 8 bit character in
a message is sent as two ASCII characters. This mode is used when the physical
communication link or the capabilities of the device does not allow the conformance
with RTU mode requirements regarding timers management.
Remark: this mode is less efficient than RTU since each byte needs two characters.
Example: The byte 0x5B is encoded as two characters: 0x35 and 0x42 ( 0x35 ="5",
and 0x42 ="B" in ASCII ).
6.7.2.1 Character Format
One character consists of 10 bits:
− 1 start bit
− 7 data bits, least significant bit sent first (value = 0x00 .. 0x7F)
− 1 parity bit
− 1 stop bit
Note If no parity is used then an extra stop bit is added.
Character format with parity checking:
Start B1 B2 B3 B4 B5 B6 B7 Parity Stop
Character format without parity checking:
Start B1 B2 B3 B4 B5 B6 B7 Stop Stop
6.7.2.2 Modbus Message ASCII Framing
A MODBUS message is placed by the transmitting device into a frame that has a
known beginning and ending point. This allows devices that receive a new frame to
begin at the start of the message, and to know when the message is completed.
Partial messages must be detected and errors must be set as a result.
The address field of a message frame contains two characters.
In ASCII mode, a message is delimited by specific characters as Start-of-Frame and
End-of-Frame. A message must start with a trigger “colon”- character (“:” = ASCII
0x3A) and ends with a “carriage return/line feed” pair (ASCII 0x0D and 0x0A).
The allowable characters transmitted for all other fields are hexadecimal 0–9, A–F
(ASCII coded). The devices monitor the bus continuously for the colon character.
When this character is received, each device decodes the next character until it detects the End-of-Frame (EoF)-character.
Modbus Instruction manual 3305/08
Page 36

Intervals of up to one second may elapse between characters within the message.
Unless the user has configured a longer timeout, an interval greater than 1 second
means an error has occurred.
A typical message frame is shown below.
SoF Address
1 char : 2 chars 2 chars
Function Data LRC EoF
0 up to 2* 252 chars 2 chars 2 chars
6.7.2.3 LRC Checking
In ASCII mode, messages include an error–checking field that is based on a Longitudinal Redundancy Checking (LRC) calculation that is performed on the message
contents, exclusive of the beginning ‘colon’ and terminating CRLF pair characters. It
is applied regardless of any parity checking method used for the individual characters of the message.
The LRC field is one byte, containing an 8-bit binary value. The LRC value is calculated by the device that emits, which appends the LRC to the message. The device
that receives calculates an LRC during receipt of the message, and compares the
calculated value to the actual value it received in the LRC field. If the two values are
not equal, an error results.
CR, LF
The LRC is calculated by adding together successive each byte of the message and
then two’s complementing the result. It is performed on the ASCII message field
contents excluding the ‘colon’ character that begins the message, and excluding the
CRLF pair at the end of the message. In ASCII mode, the resulting LRC is ASCII
encoded into two bytes and placed at the end of ASCII mode frame prior to the
CRLF.
Example:
Field: SoF
ASCII
Hex
3A 30 31 38 33 30 32 37 41 0D 0A
Adr
: 0 1 8 3 0 2 7 A CR LF
Adr. 0x01 =
Fct.Code 0x83 =
Excep. 0x02 =
----------------------------Sum:
2’comp.
Fct.Code
LCR relevant
1
131
2
-------------- 134
122 = 0x7A
Excep.
Code
LRC
LRC
⇒
EoF
“7” = 0x37
“A” = 0x41
Modbus Instruction manual 05/0834
Page 37

The Modbus protocol defines a pure Master/Slave operation. If a frequency inverter
6.8 Monitoring Timing Function
is addressed by the bus master, other frequency inverters will only be addressed
after the protocol with the first frequency inverter has been completed or the Timeout time has expired.
After a frequency inverter has sent a message, a waiting time of 2 ms must be kept.
This time is needed by the frequency inverter in order to switch off the RS485
transmitter. The bus master may not send a new message before this time has
elapsed.
The frequency inverter replies 10 ms after receipt of a message, at the earliest. This
means that the bus master must have switched off its RS485 transmitter after 10
ms, at the latest.
If the bus master does not receive an answer from the frequency inverter within
500 ms, it can start a new transmission to any frequency inverter.
Attention! If the degree of utilization of the CPU is high (> 90%), the response
time can be more than 500 ms.
Note: The specified times are valid for operation with RS485 and RS232.
6.9 Watchdog
If the frequency inverter is operated via the serial interface (RS232, RS485), it may
be important to monitor the presence of the communication line. For example it may
be that the frequency inverter is switched on/off in Remote Mode, or it only receives
its reference value cyclically via the serial interface. If the communication fails, no or
faulty data are transmitted. This is recognized by the communication watchdog.
The watchdog function monitors the time in which no correct communication takes
place. This time can be adjusted via parameter
RS232/RS485 Watchdog Timer 413.
The adjusted value is the time in seconds (0...10000 seconds) within which at least
one correct exchange of data must have occurred.
If the adjusted monitoring time has elapsed, the frequency inverter signals a fault.
The fault message F2010 Watchdog RS232/RS485 is displayed.
No. Name/Meaning Min. Max. fact. sett.
413 RS232/RS485 Watchdog Timer [sec] 0 10000 0
Parameter Settings
Note: If parameter RS232/RS485 Watchdog Timer 413 is set to 0 (default),
the monitoring function is deactivated.
Modbus Instruction manual 3505/08
Page 38

7 Handling of Data Sets/Cyclic Writing
Access to the parameter values is carried out on the basis of the parameter number
and the required data set.
There are parameters which only have one data value (data set 0) as well as parameters which have four data values (data sets 1...4). These are used for data set
change-over.
If parameters with four data values are set via data set = 0, all four data sets are set
to the same value.
A read access with data set = 0 to such parameters is only successful if all four data
sets are set to the same value. If this is not the case an Exception Response with
exception code 4 "SLAVE DEVICE FAILURE" will be sent and parameter
Bus SST Error Register
another).
In this case, you must read out each data set separately for the relevant parameter.
The values are entered automatically into the EEPROM on the controller. If values
are to be written cyclically at a high repetition rate, there must be no entry into the
EEPROM as it only has a limited number of admissible writing cycles (about 1 million
cycles).
Caution! If the number of admissible writing cycles is exceeded, the EEPROM is
In order to avoid the destruction of the EEPROM, data which are to be written cycli-
Note: The data set for the parameter Control Word 410, Reference Frequency
cally can be entered exclusively into the RAM without a writing cycle to the EEPROM.
In this case, the data are volatile, i.e. they are lost when the supply voltage is
switched off (Mains Off). They must be written into the RAM again after the restart
(Mains On).
The RAM writing operation is activated by increasing the number of the target data
set by five.
Access to the data sets of the frequency inverter
Parameter EEPROM RAM
Data set 0 0 5
Data set 1 1 6
Data set 2 2 7
Data set 3 3 8
Data set 4 4 9
11 set to the value 9 (values of data sets differ from one
destroyed.
484 and Reference Percentage RAM 524 is always zero. Inter-
RAM
nally they are not written into the EEPROM.
VA-
Modbus Instruction manual 05/0836
Page 39
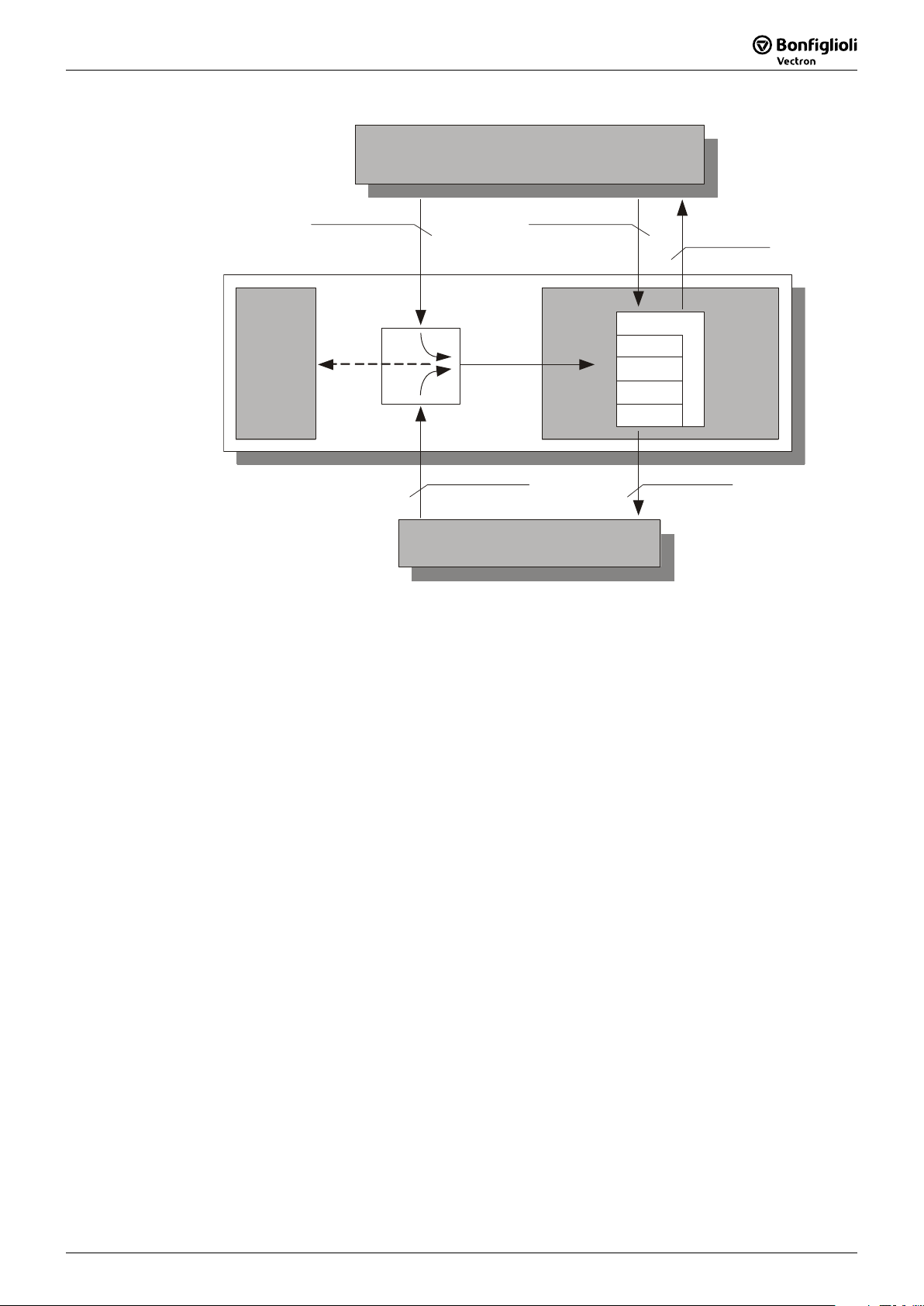
NVRam RAM
fieldbus : RS232 / 485, SystemBus ...
inverter
0 - 4 write
5 - 9 read
CPU function
dataset 1
save copy
dataset 2
dataset 3
dataset 4
0 - 4 write
VPlus + KP500
0 - 4 write
dataset 0
0 - 4 read
Modbus Instruction manual 3705/08
Page 40

8 Modbus Message Examples
8.1 Modbus RTU-Message Examples
8.1.1 Function Code 3, Read 16-bit Parameter
Example 1:
Reading parameter Rated Speed 372 (0x0174) in data set 2 from the frequency
inverter with address 1
Request: Master Î Frequency Inverter
Field: Addr. Func. DSet/Par-No. No. of Regs CRC
Hex
01 03 21 74 00 01 CE 2C
Response: Frequency Inverter Î Master
Field: Addr. Func. No.Bytes Par-Value CRC
Hex
The hexadecimal value sent is 0x056E = 1390. Parameter
decimal places.
Therefore, the rated speed is 1390 min
01 03 02 05 6E 3A F8
Rated Speed 372 has no
-1
.
Example 2:
Reading parameter Rated Speed 372 (0x0174) in data set 0 from the frequency
inverter with address 1 and No. of Regs field set to 2 (invalid value)
Request: Master Î Frequency Inverter
Field: Addr. Func. DSet/Par-No. No. of Regs CRC
Hex
01 03 01 74 00 02 85 ED
Error Response: Frequency Inverter Î Master
Field: Addr. Func. Except. CRC
Hex
01 83 02 C0 F1
The exception code sent is hexadecimal value 0x02 = ILLEGAL DATA ADDRESS.
Modbus Instruction manual 05/0838
Page 41

8.1.2 Function Code 6, Write 16-bit Parameter
Example 1:
Writing parameter Rated Mech. Power 376 (0x0178) in data set 4 to the frequency
inverter with address 3.
The rated mechanical power is to be set to 1.5 kW.
Parameter Rated Mech. Power 376 has one decimal place.
Therefore the value to be sent is 15 = 0x000F.
Request: Master Î Frequency Inverter
Field: Addr Func DSet/Par-No. Par-Value CRC
Hex
03 06 41 78 00 0F 5C 09
Response: Frequency Inverter Î Master
Field: Addr Func DSet/Par-No. Par-Value CRC
Hex
03 06 41 78 00 0F 5C 09
The response is an echo of the request message.
Example 2:
Writing out of range value 0 to parameter 376 (0x0178) in data set 2 to the frequency inverter with address 3
Request: Master Î Frequency Inverter
Field: Addr Func DSet/Par-No. Par-Value CRC
Hex
03 06 21 78 00 00 02 0D
Error Response: Frequency Inverter Î Master
Field:
Hex
Addr
03 86 04 E2 63
Func Except. CRC
The exception code sent is hexadecimal value 0x04 = SLAVE DEVICE FAILURE
Modbus Instruction manual 3905/08
Page 42

8.1.3 Function Code 100, Read 32-bit Parameter
Example 1:
Reading parameter Fixed Frequency 2 481 in data set 0 from the frequency inverter
with address 1
Request: Master Î Frequency Inverter
Field: Adr Funct. DSet/Par-No. CRC
Hex
Response: Frequency Inverter Î Master
Field:
01 64 01 E1 81 DF
Adr
Funct.
Par-Value CRC
Hex
01 64 00 00 03 E8 70 BC
The hexadecimal value sent is 0x000003E8 = 1000.
Parameter Fixed Frequency 2 481 has two decimal places.
Therefore, fixed frequency 2 = 10.00 Hz.
Example 2:
Reading unknown parameter 1600 (0x0640) in data set 2 from the frequency inverter with address 1.
Request: Master Î Frequency Inverter
Field: Adr Funct. DSet/Par-No. CRC
Hex
01 64 26 40 5B 97
Error Response: Frequency Inverter Î Master
Field: Adr Funct. Except. CRC
Hex
01 E4 04 6A C3
The exception code sent is hexadecimal value 0x04 = SLAVE DEVICE FAILURE.
Modbus Instruction manual 05/0840
Page 43

8.1.4 Function Code 101, Write 32-bit Parameter
Example 1:
Writing parameter Rated Frequency 375 (0x0177) in data set 2 from the frequency
inverter with address 1
The rated frequency is to be set to 10.00Hz.
Parameter Rated Frequency 375 has two decimal places.
Therefore the value to be sent is 1000 = 0x03E8.
Request: Master Î Frequency Inverter
Field: Adr Funct. DSet/Par-No. Par-Value CRC
Hex
01 65 21 77 00 00 03 E8 46 C5
Response: Frequency Inverter Î Master
Field: Adr Funct. DSet/Par-No. Par-Value CRC
Hex
01 65 21 77 00 00 03 E8 46 C5
The response is an echo of the request message.
Example 2:
Writing out of range value 9.00 Hz to parameter 375 in data set 2 from the frequency inverter with address 1.
As 376 has 2 decimal places the value to be sent is 900 = 0x0384
Request: Master Î Frequency Inverter
Field: Adr Funct. DSet/Par-No. Par-Value CRC
Hex
01 65 21 77 00 00 03 84 46 E8
Error Response: Frequency Inverter Î Master
Field: Adr Funct. Except CRC
Hex
01 E5 04 6B 53
The exception code sent is hexadecimal value 0x04 = SLAVE DEVICE FAILURE.
Modbus Instruction manual 4105/08
Page 44

8.1.5 Function Code 8, Diagnostics
Example 1a:
Clearing all Diagnostic Counters (Sub function 0x0A) in the frequency inverter with
address 1.
Request: Master Î Frequency Inverter
Field: Adr Funct. Sub function Data CRC
Hex
01 08 00 0A 00 00 C0 09
Response: Frequency Inverter Î Master
Field: Adr Funct. Sub function Data CRC
Hex
01 08 00 0A 00 00 C0 09
The response is an echo of the request. All counters are now set to zero.
Example 1b:
With all counters set to zero, read Diagnostic Counter 4, "Slave Message Count" (Sub
function 0x0E) from the frequency inverter with address 1.
Request: Master Î Frequency Inverter
Field: Adr Funct. Sub function Data CRC
Hex
01 08 00 0E 00 00 81 C8
Response: Frequency Inverter Î Master
Field: Adr Funct. Sub function Data CRC
Hex
The counter value is 1(as this is the 1st message received after setting all counters
to zero).
01 08 00 0E 00 01 40 08
Example 2:
Reading unknown Diagnostic Counter 8 (Sub function 0x13) from the frequency inverter with address 1
Request: Master Î Frequency Inverter
Field: Adr Funct. Sub function Data CRC
Hex
01 08 00 13 00 00 11 CE
Error Response: Frequency Inverter Î Master
Field: Adr Funct. Except. CRC
Hex
01 88 01 87 C0
The exception code sent is hexadecimal value 0x01 = ILLEGAL FUNCTION.
Modbus Instruction manual 05/0842
Page 45
8.2 Modbus ASCII-Message Examples
8.2.1 Function Code 3, Read 16-bit Parameter
Example 1:
Reading of parameter Rated Speed 372 (0x0174) in data set 2 from the frequency
inverter with address 1
Request: Master Î Frequency Inverter
Field SoF Adr Fct.Code DSet/Par-No. No. of Regs LRC EoF
ASC
Hex
: 0 1 0 3 2 1 7 4 0 0 0 1 6 6 CR LF
3A 30 31 30 33 32 31 37 34 30 30 30 31 36 36 0D 0A
Response: Frequency Inverter Î Master
Field: SoF Adr Fct.Code no.Bytes Par-Value LRC EoF
ASC
Hex
: 0 1 0 3 0 2 0 5 6 E 8 7 CR LF
3A 30 31 30 33 30 32 30 35 36 45 38 37 0D 0A
The hexadecimal value sent is 0x056E = 1390.
Parameter Rated Speed 372 has no decimal places.
Therefore, the rated speed is 1390 min
-1
.
Example 2:
Reading parameter Rated Speed 372 (0x0174) in data set 0 from the frequency inverter with address 1 and No. of Regs field set to 2 (invalid value)
Field: SoF Adr Fct.Code DSet/Par-No. No. of Regs LRC EoF
ASC
Hex
: 0 1 0 3 0 1 7 4 0 0 0 2 8 5 CR LF
3A 30 31 30 33 30 31 37 34 30 30 30 32 38 35 0D 0A
Error Response: Frequency Inverter Î Master
Field: SoF Adr Fct.Code
ASC
: 0 1 8 3 0 2 7 A CR LF
Excep.
Code
LRC EoF
Hex
3A 30 31 38 33 30 32 37 41 0D 0A
The sent exception code is hexadecimal value 0x02 = ILLEGAL DATA ADDRESS.
Modbus Instruction manual 4305/08
Page 46
8.2.2 Function Code 6, Write 16-bit Parameter
Example 1:
Writing parameter Rated Mech. Power 376 (0x0178) in data set 4 to the frequency
inverter with address 3.
The rated mechanical power is to be set to 1.5 kW.
Parameter Rated Mech. Power 376 has one decimal place.
Thus the value to be sent is 15 = 0x000F.
Request: Master Î Frequency Inverter
Field: SoF Adr Fct.Code DSet/Par-No. Para-Value LRC EoF
ASC
Hex
: 0 3 0 6 4 1 7 8 0 0 0 F 2 F CR LF
3A 30 33 30 36 34 31 37 38 30 30 30 46 32 46 0D 0A
Response: Frequency Inverter Î Master
Field: SoF Adr Fct.Code DSet/Par-No. Para-Value LRC EoF
ASC
Hex
: 0 3 0 6 4 1 7 8 0 0 0 F 2 F CR LF
3A 30 33 30 36 34 31 37 38 30 30 30 46 32 46 0D 0A
The response is an echo of the request message.
Example 2:
Writing out of range value 0 to parameter 376 (0x0178) in data set 2 to the frequency inverter with address 3
Request: Master Î Frequency Inverter
Field: SoF Adr Fct.Code DSet/Par-No. Para-Value LRC EoF
ASC
Hex
: 0 3 0 6 2 1 7 8 0 0 0 0 5 E CR LF
3A 30 33 30 36 32 31 37 38 30 30 30 30 35 45 0D 0A
Error Response: Frequency Inverter Î Master
Field: SoF Adr Fct.Code
ASC
: 0 3 8 6 0 4 7 3 CR LF
Excep.
Code
LRC EoF
Hex
3A 30 33 38 36 30 34 37 33 0D 0A
The sent exception code is hexadecimal value 0x04 = SLAVE DEVICE FAILURE
Modbus Instruction manual 05/0844
Page 47
8.2.3 Function Code 100, Read 32-bit Parameter
Example 1:
Reading parameter Fixed Frequency 2 481 in data set 0 from the frequency inverter
with address 1
Request: Master Î Frequency Inverter
Field: SoF Adr Fct.Code DSet/Par-No. LRC EoF
ASC
Hex
: 0 1 6 4 0 1 E 1 B 9 CR LF
3A 30 31 36 34 30 31 45 31 42 39 0D 0A
Response: Frequency Inverter Î Master
Field: SoF Adr Fct.Code Para-Value LRC EoF
ASC
Hex
: 0 1 6 4 0 0 0 0 0 3 E 8 B 0 CR LF
3A 30 31 36 34 30 30 30 30 30 33 45 38 42 30 0D 0A
The hexadecimal value sent is 0x000003E8 = 1000.
Parameter Fixed Frequency 2 481 has 2 decimal places.
Therefore, fixed frequency 2 = 10.00 Hz.
Example 2:
Reading unknown parameter 1600 (0x0640) in data set 2 from the frequency inverter with address 1
Request: Master Î Frequency Inverter
Field: SoF Adr Fct.Code DSet/Par-No. LRC EoF
ASC
: 0 1 6 4 2 6 4 0 3 5 CR LF
Hex
3A 30 31 36 34 32 36 34 30 33 35 0D 0A
Error Response: Frequency Inverter Î Master
Field: SoF Adr Fct.Code
ASC
Hex
: 0 1 E 4 0 2 1 9 CR LF
3A 30 31 45 34 30 34 31 37 0D 0A
Excep.
Code
LRC EoF
The exception code sent is hexadecimal value 0x04 = SLAVE DEVICE FAILURE.
Modbus Instruction manual 4505/08
Page 48

8.2.4 Function Code 101, Write 32-bit Parameter
Example 1:
Writing parameter Rated Frequency 375 (0x0177) in data set 2 to frequency inverter with address 1
The rated frequency is to be set to 10.00Hz.
Parameter Rated Frequency 375 has two decimal places.
Therefore the value to be sent is 1000 = 0x03E8.
Request: Master Î Frequency Inverter
SoF
Fld
Adr Fct.Cd DSet/Par-No. Para-Value LRC EoF
ASC
: 0 1 6 5 2 1 7 7 0 0 0 0 0 3 E 8 1 7 CR LF
Hex
3A 30 31 36 35 32 31 37 37 30 30 30 30 30 33 45 38 31 37 0D 0A
Response: Frequency Inverter Î Master
SoF
Fld
ASC
Hex
Adr Fct.Cd DSet/Par-No. Para-Value LRC EoF
: 0 1 6 5 2 1 7 7 0 0 0 0 0 3 E 8 1 7 CR LF
3A 30 31 36 35 32 31 37 37 30 30 30 30 30 33 45 38 31 37 0D 0A
The response is an echo of the request message.
Example 2:
Writing out of range value to 9.00 Hz to parameter 375 (0x0177) in data set 2 from
the frequency inverter with address 1
As 375 has 2 decimal places the value to be sent is 900 = 0x0384
Request: Master Î Frequency Inverter
SoF
Fld
ASC
Hex
Adr Fct.Cd DSet/Par-No. Para-Value LRC EoF
: 0 1 6 5 2 1 7 7 0 0 0 0 0 3 8 4 7 B CR LF
3A 30 31 36 35 32 31 37 37 30 30 30 30 30 33 38 34 37 42 0D 0A
Error Response: Frequency Inverter Î Master
Field
ASC
SoF
Adr Fct.Code
: 0 1 E 5 0 4 1 6 CR LF
Excep.
Code
LRC EoF
Hex
3A 30 31 45 35 30 34 31 36 0D 0A
The exception code sent is hexadecimal value 0x04 = SLAVE DEVICE FAILURE.
Modbus Instruction manual 05/0846
Page 49

8.2.5 Function Code 8, Diagnostics
Example 1a:
Clearing all Diagnostic Counters (Sub function 0x0A) in the frequency inverter with
address 1
Request: Master Î Frequency Inverter
Field:
SoF
Adr Fct.Code Subfunction Data LRC EoF
ASC
Hex
: 0 1 0 8 0 0 0 A 0 0 0 0 E D CR LF
3A 30 31 30 38 30 30 30 41 30 30 30 30 45 44 0D 0A
Response: Frequency Inverter Î Master
Field:
ASC
Hex
SoF
Adr Fct.Code DSet/ Para-No. No. of Regs LRC EoF
: 0 1 0 8 0 0 0 A 0 0 0 0 E D CR LF
3A 30 31 30 38 30 30 30 41 30 30 30 30 45 44 0D 0A
The response is an echo of the request. All counters are now set to zero.
Example 1b:
With all counters set to zero, read Diagnostic Counter 4, "Slave Message Count" (Sub
function 0x0E) from the frequency inverter with address 1
Field:
ASC
Hex
SoF
3A 30 31 30 38 30 30 30 45 30 30 30 30 45 39 0D 0A
Adr Fct.Code Subfunction Data LRC EoF
: 0 1 0 8 0 0 0 E 0 0 0 0 E 9 CR LF
Response: Frequency Inverter Î Master
Field:
SoF
Adr Fct.Code Subfunction Data LRC EoF
ASC
Hex
: 0 1 0 8 0 0 0 E 0 0 0 1 E 8 CR LF
3A 30 31 30 38 30 30 30 45 30 30 30 31 45 38 0D 0A
Example 2:
Read unknown Diagnostic Counter 8 (Sub function 0x13) from frequency inverter
with address 1
Request: Master Î Frequency Inverter
Field:
ASC
Hex
SoF
3A 30 31 30 38 30 30 31 33 30 30 30 30 45 34 0D 0A
Adr Fct.Code Subfunction Data LRC EoF
: 0 1 0 8 0 0 1 3 0 0 0 0 E 4 CR LF
Error Response: Frequency Inverter Î Master
Field:
ASC
Hex
SoF
: 0 1 8 8 0 1 7 6 CR LF
3A 30 31 38 38 30 31 37 36 0D 0A
Adr Fct.Code
Excep.
Code
LRC EoF
The exception code sent is hexadecimal value 0x01 = ILLEGAL FUNCTION.
Modbus Instruction manual 4705/08
Page 50

9 ACT Inverter Control/Reference Value
The frequency inverter can be controlled completely via the serial interface. The fol-
lowing parameters and actual values are used for this:
No. Name/Meaning min. max. fact. sett. type
Control Word 0x0000
410
Status Word
411
Reference Frequency RAM [Hz]
484
Reference Percentage RAM [%]
524
With the Control Word 410 (data type uInt), control commands are sent to the fre-
quency inverter, with the
Reference Percentage RAM 524 (data type Long [%]), the reference line value is
sent. Via the
read out.
Parameter Settings
0xFFFF – uInt
0x0000 0xFFFF – uInt
-999.99 999.99 0.00 Long
-300.00 300.00 0.00 Long
Reference Frequency RAM 484 (data type Long [Hz]) or
Status Word 411 (data type uInt), the status of the frequency inverter is
Frequency inverter
Master
(e.g. PC)
R S 2 3 2 / R S 4 8 5
Note: Control Word 410, Reference Frequency RAM 484 and Reference Per-
centage RAM
generally addressed via data set 0.
Note: External release:
− With the ACT-inverter the external release is done with a high logic
− This digital input has the highest priority and has to be hardwired.
control word,
frequency reference,
percentage reference
status word,
motor speed,
motor frequency
reference
C M - 2 3 2 / C M - 4 8 5
controller release
524 are stored in the RAM of the frequency inverter. This is
signal at the input S1IND.
&
external release
control
logic
inverter
release
M
~
Modbus Instruction manual 05/0848
Page 51

The frequency inverter can be controlled via three different operation modes. These
operation modes set via parameter
Note:
Local/Remote 412 Supported Operation Modes
Control via Con-
0 -
tacts
Control via State-
1 -
machine
Control via Remote
2 -
Contacts
1)
Statemachine is a standardized software module within the controller of
The Start and Stop commands as well as the direction of rotation are controlled via digital signals.
The Start and Stop commands as well as the direction of rotation are controlled via the DRIVECOM Statemachine
communication interface.
The Start and Stop commands as well as the direction of rotation are controlled via virtual digital signals through the communication protocol.
Local/Remote 412.
1)
of the
the frequency inverter. The Statemachine maps specified operating
statuses and the controller within the frequency inverter.
Note: − For operation via the serial interface, settings 0, 1 and 2 are relevant.
Further possible operation modes
Local/Remote 412 are described in
the frequency inverter operating instructions. These relate to the control via the control unit KP500 and the control via digital signals.
− Parameter
Local/Remote 412 is data set related, i.e. by selecting a
data set, you can switch over between the different operation modes.
For example, it is possible to control the frequency inverter via the serial interface and
to activate a local emergency operation mode if the controller fails. This switch-over is
also visible via the status word in bit "Remote".
The data set switch-over can be effected via control contacts at the digital inputs of
the frequency inverter or via the bus. For data set change-over via the bus, parameter
Data Set Selection 414 is used.
No. Name/Meaning Min. Max. Fact. Set.
414 Data Set Selection 0 4 0
With the default setting Data Set Selection 414 = 0, the data set change-over is done
via the digital inputs.
Data Set Selection 414 is set to 1, 2, 3 or 4, the selected data set is activated via
If
the bus. At the same time, data set change-over via the digital inputs is deactivated.
Via parameter Active Data Set 249, the currently selected data set can be read out.
This is independent of whether the data set change-over was done via the digital inputs or via
Parameter Settings
Data Set Selection 414.
Modbus Instruction manual 4905/08
Page 52

In the operation mode "Control via Contacts" (Local/Remote 412 = 0), the frequency
9.1 Control
9.1.1 Control via Contacts
inverter is addressed via the digital inputs S1IND ... S6IND, the multifunction input
MFI1D as well as the additional inputs EM-S1IND … EM-S3IND (optional expansion
modules).
The function of these inputs is described in the frequency inverter operating instructions and the expansion module operating instructions.
Note: If the frequency inverter is addressed via digital inputs S1IND … S6IND,
addressing via the
Control Word 410 is not used in this operation mode.
Sequence in Statemachine:
Power-On
Initialization
Fault
Release
On
Switched On
0x23
Operation
released
0x27
Acknowledge
Release
Off
Fault
0x08
from any
status
The numbers indicated in the individual operating statuses (e.g. 0x23) signal the
corresponding feedback (e.g. switched on) via the status word (bit 0...6).
Modbus Instruction manual 05/0850
Page 53

The parameter
Status Word 411 has a length of 16 bits. The set bits have the follow-
ing meaning:
Bit no. Function
Ready for being switched on
0
Switched on
1
Operation - released
2
Error
3
Voltage - disabled
4
Quick stop
5
Starting lock-out
6
Warning
7
–
8
Remote
9
10
11
12
13
14
15
Reference value reached
Limit value reached
–
–
–
Warning2
Status word 411
The status word reflects the operation state.
Status word HEX
Switched on
Operation released
Error
1)
without consideration of bits 7 … 15!
2)
"X" means any value ("0" or "1")
1)
Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0
0x23 0 1 0 0 1 1
0x27 0 1 0 1 1 1
0x08 0 X
2)
1 0 0 0
If a fault occurs, the fault status is activated.
Note: A fault can only be acknowledged 15 seconds after the occurrence of the
fault, i.e. after the internal blocking time has elapsed.
If a fault has occurred, the cause of the fault can be read out via parameter Cur-
rent Error
260.
Modbus Instruction manual 5105/08
Page 54

Status Word Bit 7 to Bit 15
Bit 7, "Warning bit"
The warning bit "7" can signal an internal warning and results in the frequency
inverter being switched off, depending on the cause.
The evaluation of the warning is done by reading out the warning status via parame-
Warnings 270.
ter
Bit 9, "Remote"
The remote bit is always set to 0 in the case of the control via contacts.
Bit 10, "Reference value reached"
The bit "Reference value reached" is set when the specified reference value is
reached. In the special case of power failure re
power failure regulation reaches the frequency 0 Hz (see frequency inverter operating
instructions).
For "Reference value reached“ there is a hysteresis (tolerance ran
via the parameter
Max. Control Deviation 549 (see frequency inverter operating
instructions).
Bit 11 "Limit active"
The bit Limit value active indicates that an internal limit is active. This may be the
current limit, the torque limit or the overvoltage control. All functions result in the
reference value being left or not reached.
Bit 15 "Warnung2"
The bit "Warning2" extends bit 7 "Warning bit" by the following information:
Bit 15 signals a critical operating state which will result in a fault switch-off of the
frequency inverter within a short time. This bit is set if there is a delayed warnin
relating to the motor temperature, heat sink/inside temperature, Ixt monitoring or
mains phase failure.
If bit 15 is set, bit 7 is set, too.
gulation, the bit is also set when the
ge) which can be set
g
Modbus Instruction manual 05/0852
Page 55

9.1.2 Control via Control Word of Statemachine
In this operation mode (Local/Remote 412 = 1), the frequency inverter is addressed
via the control word of the Statemachine. The possible states and transitions are
shown in the diagram.
The states and transitions are marked by squares and arrows, respectively.
The numbers at the arrows identify the transitions between the states. The codes
0xnn at the transitions are the corresponding control word required (bit 0 … 7).
The codes 0xnn indicated in the states, indicated the content of the status word
(bit 0 ... bit 7).
Sequence in Statemachine:
0
13
Fault reaction active
14
9
0x00
8
0x06
Not ready
for being switched on
(Initialization)
1
Starting lock-out
0x40
2
0x06
Ready for
being switched on
0x21
3
0x07
Ready for
being switched on
0x23
4
0x0F
Operation released
(Drive working)
0x27
7
0x00
6
0x06
5
0x07
15
0x80
10
0x00
11
0x08
4
0x0F
Fault
0x08
12
0x00 or
internal
Quick Stop
0x07
Modbus Instruction manual 5305/08
Page 56

After mains on (Reset), the inverter is in the state "Starting lock-out" (0x40).
With transitions 4 and 5, there is a change between "Operation released“ (0x27, output stages released, drive working) and "Switched on“ (0x23, output stages disabled).
The release (transition 4) is only possible if the controller release signal and the corre-
sponding control command are present at digital external release AND (S2IND O
S3IND). They can be firmly wired or also firmly linked to the logic states On or Off via
the configuration of the digital inputs. If the control signal at the external release is
withdrawn, the output stages can be disabled at any time. The drive then coasts to a
standstill. In this case, there is a transition to "Switched on" (0x23, output stages disabled).
Note: External release has top priority for the controller release and is to be
hard-wired.
The behavior of Transition 5 can be set via parameter state-transition 5 392. Here,
you can use coasting, shut-off via ramp (reversible) or DC braking (depending on the
selected configuration, see Chapter 9.1.2.2, “ Behavior in state-transition 5”).
Parameter Control Word 410 has a length of 16 bits. The set bits have the following
meaning:
Bit no. Function / name
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Control Word 410
Switch on
Voltage - disable
Quick stop
Operation - released
–
–
–
Reset fault
–
–
–
–
–
–
–
–
R
Modbus Instruction manual 05/0854
Page 57

Control Commands
The device control commands are triggered by the following bit combinations in pa-
rameter
Shutdown
Switch on
Voltage - disable
Quick stop
Operation - disable
Operation - released 0x0F
Reset fault
1)
Control Word 410:
Control Commands
Command
"X" means any value ("0" or "1")
HEX Bit 7 Bit 3 Bit 2 Bit 1 Bit 0
0x06 X
0x07 X X 1 1 1 3
0x00 X X X 0 X 7, 9, 10
0x02 X X 0 1 X 11
0x07 X 0 1 1 1 5
0x80 0 Ö 1 X X X X 15
Control word
Transition
1)
X 1 1 0 2, 6, 8
X 1 1 1 1 4
In order to facilitate the operation of the device, an additional feature was imple-
mented in the extension to the state machine defined under DRIVECOM. There is an
additional transition 4 (0x0F) from "Starting lock-out" (0x040) to "Operation released"
(0x27). Transition 4 is marked in the flow chart by a thick arrow.
The shaded areas show the commands relevant to the simplified Statemachine.
If a fault occurs, the "Fault" state is activated.
Note: If the command "Reset Fault" is executed, transition 15 takes place upon
a positive edge of bit 7!
A fault can only be acknowledged 15 seconds after the occurrence of the
fault, i.e. after the internal blocking time has elapsed.
Modbus Instruction manual 5505/08
Page 58

The parameter
Status Word 411 has a length of 16 bits. The set bits have the follow-
ing meaning:
Bit no. Function
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Status word 411
Ready for being switched on
Switched on
Operation - released
Error
Voltage - disabled
Quick stop
Starting lock-out
Warning
–
Remote
Reference value reached
Limit value reached
–
–
–
Warning2
The status word reflects the operation state.
Not ready for being switched on
Starting lock-out
Ready for being switched on
Quick stop
Switched on
Operation released
Error
Fault reaction active
1)
without consideration of bits 7…15!
2)
Status word
"X" means any value ("0" or "1")
1)
HEX
0x00 0 X
0x40 1 X 0 0 0 0
0x21 0 1 0 0 0 1
0x07 0 0 0 1 1 1
0x23 0 1 0 0 1 1
0x27 0 1 0 1 1 1
0x08 0 X 1 0 0 0
0x0F 0 X 1 1 1 1
Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0
2)
0 0 0 0
The shaded areas show the commands relevant to the simplified Statemachine.
Modbus Instruction manual 05/0856
Page 59

Status Word Bit 7 to Bit 15
Bit 7, "Warning bit"
The warning bit "7" can come at any time. It signals an internal warning and results
in the frequency inverter being switched off, depending on the cause.
The evaluation of the warning is done by reading out the warning status via parame-
Warnings 270.
ter
Bit 9, "Remote"
The remote bit is set if the operation mode "Control via control word of Statemachine" (
Local/Remote 412 = 1) is set and the controller release signal is present at
external release and the start command is present at digital input S2IND or S3IND.
Logic link:
external release AND (S2IND/"Start clockwise" OR S3IND/"Start anticlockwise")
Note: The frequency inverter can only be addressed via the control word if the
hardware release is set and the remote bit
Local/Remote 412 = 1 is set.
Bit 10, "Reference value reached"
The bit "Reference value reached" is set when the specified reference value is
reached. In the special case of power failure re
gulation, the bit is also set when the
power failure regulation reaches the frequency 0 Hz (see frequency inverter operating
instructions).
For "Reference value reached“ there is a hysteresis (tolerance range) which can be set
via the parameter
Max. Control Deviation 549 (see frequency inverter operating
instructions).
Bit 11 "Limit active"
The bit Limit value active indicates that an internal limit is active. This may be the
current limit, the torque limit or the overvolta
ge control. All functions result in the
reference value being left or not reached.
Bit 15 "Warning2"
The bit "Warning2" extends bit 7 "Warning bit" by the following information:
Bit 15 signals a critical operating state which will result in a fault switch-off of the
frequency inverter within a short time. This bit is set if there is a delayed warnin
relating to the motor temperature, heat sink/inside temperature, Ixt monitoring or
mains phase failure.
If bit 15 is set, bit 7 is set, too.
g
Modbus Instruction manual 5705/08
Page 60

9.1.2.1 Behavior in Case of Quick Stop
In this case, the parameters Switch-Off Threshold 637 (percentage of parameter
Maximum Frequency 419) and Holding Time 638 (holding time after the value drops
below the switch-off limit) are relevant.
In a quick stop, the drive is brou
Emergency Stop Clockwise 424 or Emergency Stop Anticlockwise 425).
(
f
s
ght to a standstill via the emergency stop ramps
Quick Stop
Switch-Off Threshold
Emergency Stop Clockwise
/
Emergency Stop Anticlockwise
Holding Time
637
424
425
638
t
Off
If frequency/speed reaches the value zero during the switch-off time, the drive con-
tinues to be supplied with current until the switch-off time has elapsed. This ensures
that the drive is at a standstill when the state changes.
Change of Status
Modbus Instruction manual 05/0858
Page 61
9.1.2.2 Behavior in state-transition 5
(from "Operation released" to "Switched on")
The behavior in transition 5 (from “Operation released” to “Switched on”) can param-
eterized via parameter
state-transition 5 392 function
0 – Coast to Stop
1 – DC-Brake
2 – Ramp
state-transition 5 392.
Immediate transition from "Operation released" to
"Switched on", drive coasts to a standstill
Activation of DC brake, at the end of DC deceleration, there
is the change from "Operation released" to "Switched on"
Transition at normal ramp, when the drive has come to a
standstill, there is the change from "Operation released" to
"Switched on"
Note: Setting 1 "DC-Brake" is only possible with applications with sensorless
control (e.g. configuration 110). Other configurations do not support this
operation mode.
If the frequency inverter is operated with a configuration which does not
support the operation mode DC-Brake (e.g. configuration 210, fieldoriented control), value "1" cannot be used.
In this case, the operation mode is not offered in the selection menus of
the control unit KP500 and the control software VPlus.
The default value for state-transition 5 392 is operation mode 2 (ramp). For configu-
rations with torque control, the default value is 0 (coasting).
If the configuration is changed, the value set for
state-transition 5 392 is also
changed, if necessary.
Note: If state-transition 5 392 was triggered with value 1 "Direct current
brake", a new control word will only be accepted after the transition
process is complete. The change of state from "Operation released“ to
"Switched on“ is done after the
Braking Time 632 parameterized for the
DC brake has elapsed.
If parameter state-transition 5 392 = 2 "ramp" is set, the control word can be set to
0x0F again, while the drive is decelerating. In this way, the drive accelerates to its set
reference value again and remains in the state "Operation released".
The change of state from "Operation released" to "Switched on" is done after the
value has dropped below the set switch-off threshold and the set holding time has
elapsed (equivalent to the behavior in the case of a quick stop). In this case, the
parameters
mum Frequency
Switch-Off Threshold 637 (percentage of parameter Maxi-
419) and Holding Time stop function 638 (holding time after the
value drops below the switch-off limit) are relevant.
Modbus Instruction manual 5905/08
Page 62

9.1.3 Control via Remote Contacts
In the operation mode Control via remote contacts (
quency inverter is addressed via parameter
The digital inputs S1IND … S6IND and the multifunction input MFI1D of the frequenc
inverter as well as inputs EM-S1IND … EM-S3IND of the optional expansion modules
are emulated through Bit 0 … Bit 9 of parameter
If the remote contacts are used, the inverter behaves in the same way as in the case
of addressing via the di
gital inputs. For the function and the parameterization of these
inputs, refer to the frequency inverter operating instructions.
Note: A release is possible only if
− bit 0 of the control word is set to "1" and
− the release via hardware is set to “1”
Controller release via the software alone is not possible.
Sequence in Statemachine:
Power-On
Initialization
Local/Remote 412 = 2), the fre-
Control Word 410.
y
Control Word 410.
Fault
Release
On
Switched On
0x23
Operation
released
0x27
Acknowledge
Release
Off
Fault
0x08
from any
status
The numbers indicated in the individual operating statuses (e.g. 0x23) signal the
corresponding feedback via the status word (bit 0...6).
Note: Inputs which are set via the control word can be monitored via the control
unit KP500 or the control software VPlus by means of parameter
tal Inputs
250.
Digi-
Digital inputs are indicated as set only if the controller release signal is
present and if bit 0 in the control word is set to "1".
Note: If data set change- over is used, make sure that the parameter Lo-
cal/Remote
412 is set to "2" (control via remote contacts) in all assigned
data sets.
Modbus Instruction manual 05/0860
Page 63
Note: With the use of remote contacts the signal sources* are taken over from
the control word 410. Signals at the hardware contacts (terminals) are not
evaluated by the standard operation modes (e.g. 71 for S2IND).
For the evaluation of terminal signals special operation modes are available. They are denoted with the additional term “(Hardware)” and numbered from 526 to 546.
Exception: The controller release via the hardware contact S1IND (terminal X210A.3) and Bit 0 “S1IND” of the
controlword
must be set.
It is not possible to release the controller only via software.
Signal sources are:
- S1IND ... S6IND,
- MFI1D,
- EM-S1IND ... EM-S3IND
Assignment of parameter
Bit no. Bit no.
* The logic state is “0” for ACT devices.
Control Word 410
S1IND
0
1 S2IND 1
2 S3IND 2
3 S4IND 3
4 S5IND 4
5 S6IND 5
6 MFI1D 6
7 EM-S1IND 7
8 EM-S2IND 8 –
9 EM-S3IND 9 Remote
10 – 10
11 – 11
12 – 12 –
13 – 13 –
14 – 14 –
15 – 15
Control Word 410 and actual value Status Word 411:
0
Bit no. Bit no.
Status Word 411
Ready for being switched on
Switched on
Operation - released
Error
Voltage – disabled*
Quick stop
Starting lock-out
Warning
Reference value reached
Limit value reached
Warning2
Modbus Instruction manual 6105/08
Page 64

The status word reflects the operation state.
Status word
Switched on
Operation released
Error
1)
without consideration of bits 7 … 15!
2)
"X" means any value ("0" or "1")
1
HEX
) Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0
0x23 0 1 0 0 1 1
0x27 0 1 0 1 1 1
0x08 0 X
2)
1 0 0 0
If a fault occurs, the fault status is activated.
Note: A fault can only be acknowledged 15 seconds after the occurrence of the
fault, i.e. after the internal blocking time has elapsed.
If a fault has occurred, the cause of the fault can be read out via parameter Cur-
rent Error
260.
Status Word Bit 7 to Bit 15
Bit 7, "Warning bit"
The warning bit "7" can signal an internal warning and results in the frequency
inverter being switched off, depending on the cause.
The evaluation of the warning is done by reading out the warning status via parame-
Warnings 270.
ter
Bit 9, "Remote"
The "Remotebit" is set if the "Operation mode Control via remote contacts" is set
Local/Remote 412 = 2) and the external controller release is present. Only then can
(
the frequency inverter be controlled via the control word.
Bit 10, "Reference value reached"
The bit "Reference value reached" is set when the specified reference value is
reached. In the special case of power failure regulation, the bit is also set when the
power failure re
gulation reaches the frequency 0 Hz (see frequency inverter operating
instructions).
For "Reference value reached“ there is a hysteresis (tolerance range) which can be set
via the parameter
Max. Control Deviation 549 (see frequency inverter operating
instructions).
Bit 11 "Limit active"
The bit Limit value active indicates that an internal limit is active. This may be the
current limit, the torque limit or the overvolta
ge control. All functions result in the
reference value being left or not reached.
Bit 15 "Warning2"
The bit "Warning2" extends bit 7 "Warning bit" by the following information:
Bit 15 signals a critical operating state which will result in a fault switch-off of the
frequency inverter within a short time. This bit is set if there is a delayed warnin
relating to the motor temperature, heat sink/inside temperature, Ixt monitoring or
mains phase failure.
If bit 15 is set, bit 7 is set, too.
g
Modbus Instruction manual 05/0862
Page 65
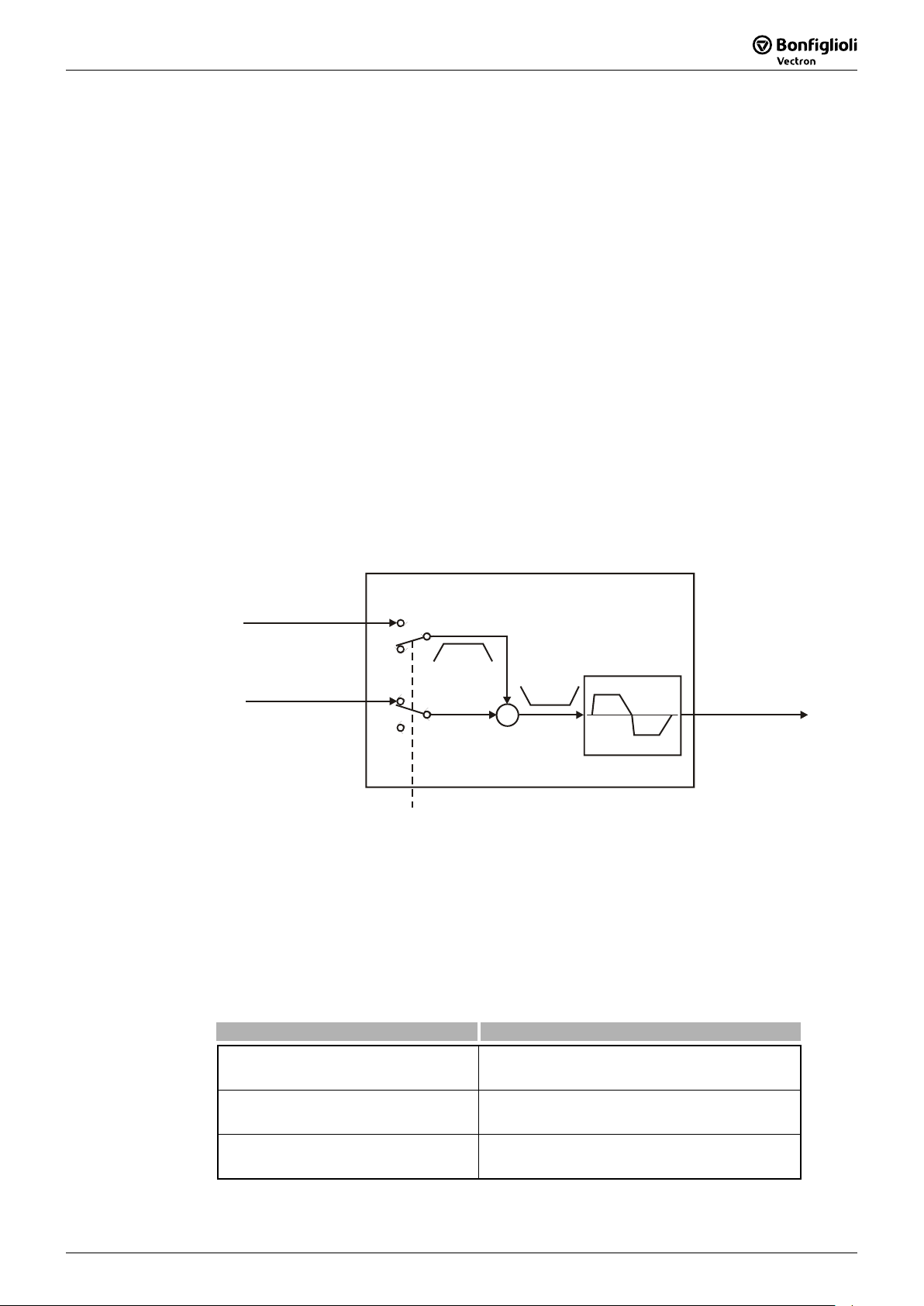
9.2 Reference Value
The following signal sources are available for determining the reference frequency:
9.2.1 Reference Frequency
− External reference value as reference line value from bus
− Internal reference value from the reference frequency channel
The reference line value with the parameter name Reference Frequency RAM 484 is
sent to the frequency inverter via the bus.
The internal reference value reaches the frequency inverter via the reference frequency channel. The reference frequency channel is configured via parameter
ence Frequency Source
475.
Refer-
The actual value can be read back vie different parameters. The selection depends on
the control method used and the application. The following parameters are possible,
− Stator Frequency 210 (data type long, Hz)
for example:
− Encoder 1 Frequency 217
(Speed Sensor 1 Frequency)
− Encoder 1 Speed 218
(Speed Sensor 1 Speed)
ramp function
(data type long, Hz)
(data type int, rpm).
Reference line value
from Bus
Reference Frequency
RAM
484
Internal reference
value of
reference frequency
channel
0
0
Operation Mode
fmin
+
+
Ramp Setpoint
434
fmax
Ramp
Reference Ramp
Frequency
283
The internal reference value from the reference frequency channel and the reference
line value (line setpoint) can be fed to the ramp individually or as an added variable.
The result is available at the output of the ramp function as
ence Ramp Frequency
283.
Refer-
The operation mode of the ramp function is set via the data set related parameter
Ramp Setpoint 434.
For information on the reference frequency channel, refer to the frequency inverter
operating instructions.
Ramp Setpoint 434 Function
1 – Internal Setpoint
2 – Line Setpoint
3 – Internal + Line Setpoint
The internal reference frequency is determined
from the reference frequency channel.
The reference value is supplied externally via the
bus
Addition (considering the sign) of internal reference frequency and reference line value
Modbus Instruction manual 6305/08
Page 66

For
Ramp Setpoint 434 = 3, the sign of the overall reference value is obtained from
the addition of the reference frequency + the reference line value.
Note: If Ramp Setpoint 434 = 2 (reference line value only), this reference line
value is limited to fmin.
In this case, consider that the si
gn in front of fmin with reference value =
0 is derived from the sign in front of the last reference line value which
was not 0.
After Mains On, the reference line value is limited to +fmin (motor clockwise).
The reference values can be controlled at the frequency inverter via the control unit
KP500 or the control software VPlus via the following parameters:
- Internal Reference Frequency 228
- Reference Bus Frequency 282
- Reference Ramp Frequency 283
= internal ref. value from ref. freq. channel
= reference line value from serial interface
= sum of internal reference frequency +
reference line value
Note: If the serial interface of the communication module CM-232 / CM-485 is
connected to a PLC, for example, VPlus cannot access the frequency inverter via this interface directly.
In this case, the PC must be connected via the optional interface adapte
KP232.
For information on the reference frequency channel, refer to the frequency inverter
operating instructions.
r
Modbus Instruction manual 05/0864
Page 67

The following signal sources are available for determining the reference percentage:
− External reference value as reference line value from bus
9.2.2 Reference Percentage
− Internal reference value from the reference percentage channel
The reference line value with the parameter name Reference Percentage RAM 524 is
sent to the frequency inverter via the bus.
The internal reference value reaches the frequency inverter via the reference percentage channel. The reference percentage channel is configured via parameter
Percentage Source
The parameter
Reference line value
of Bus
Reference Percentage
524
RAM
476.
Reference Percentage Value 229 can be read back as an actual value.
Rampfunction
Ramp
Reference
Reference percentage
channel
229
Internal reference
value of reference
percentage channel
%max
+
+
The internal reference value from the reference percentage channel and the reference
line value are fed to the ramp as an added variable. The sum of the two variables has
a positive or a negative sign according to the mathematical operation.
For information on the reference percentage channel, refer to the frequency inverter
operating instructions.
Note: − The actual value parameter Reference percentage 229 can be checked
at the frequency inverter via the control unit KP500 or the control
software VPlus.
− For example, the
Reference Percentage Value 229 is processed in the
frequency inverter via the functions "Technology Controller" or
"Torque Controller" (e.g. speed controller for torque limitation. For
more information refer to the frequency inverter operating instructions.
Note: If the serial interface of the module CM-232/CM-485 is connected to a
PLC, for example, VPlus cannot access the frequency inverter via this interface directly.
In this case, the PC must be connected via the optional interface adapte
r
KP232.
Modbus Instruction manual 6505/08
Page 68

10 ACU Inverter Control/Reference Value
The frequency inverter can be controlled completely via the serial interface. The fol-
lowing parameters and actual values are used for this:
No. Name/Meaning min. max. fact. sett. type
Control Word 0x0000
410
Status Word
411
Reference Frequency RAM [Hz]
484
Reference Percentage RAM [%]
524
With the Control Word 410 (data type uInt), control commands are sent to the fre-
quency inverter, with the
Reference Percentage RAM 524 (data type Long [%]), the reference line value is
sent. Via the
read out.
Parameter Settings
0xFFFF – uInt
0x0000 0xFFFF – uInt
-999.99 999.99 0.00 Long
-300.00 300.00 0.00 Long
Reference Frequency RAM 484 (data type Long [Hz]) or
Status Word 411 (data type uInt), the status of the frequency inverter is
Frequency inverter
Master
(e.g. PC)
R S 2 3 2 / R S 4 8 5
Note: Control Word 410, Reference Frequency RAM 484 and Reference Per-
centage RAM
generally addressed via data set 0.
Note: External release:
− The ACU inverter inputs STOA (S1IND) and STOB (S7IND) must be
− These digital inputs have the highest priority and have to be hard-
control word,
frequency reference,
percentage reference
status word,
motor speed,
motor frequency
524 are stored in the RAM of the frequency inverter. This is
enabled.
wired.
reference
C M - 2 3 2 / C M - 4 8 5
controller release
&
external release
control
logic
inverter
release
M
~
Modbus Instruction manual 05/0866
Page 69

The control of the frequency inverter can be done in principle with three operation
modes. They are set via the data set change-over capable parameter
cal/Remote
412.
Lo-
No. Description Min. Max. Fact. sett.
412 Local/Remote 0 44 44
For operation, only the settings 0, 1 and 2 are relevant. The further settings relate to
the possibilities of control via the KP500 control unit.
Note: The parameter Local/Remote 412 is data set change-over capable. Thus,
The data set change-over can be done locally at the frequency inverter via di
inputs or via the bus. For the data set change-over via the bus, the parameter
Control mode Function
Control via digital in-
0 -
puts
Control via
1 -
state machine
Control via
2 -
remote digital inputs
set selection
Parameter Setting
The Start and Stop command as well as the statement
of the direction of rotation are via digital input signals.
The inverter is controlled by the
Only in this control mode the motion control functions
are supported by
The Start and Stop command as well as the statement
of the direction of rotation are via digital input signals
emulated by the bits of the
switching over between various control modes via the data set selection is
possible.
controlword
controlword
and
modes of operation
controlword
.
.
.
gital
Data
414 is used.
No. Description Min. Max. Fact. sett.
414 Data set selection 0 4 0
With Data set selection 414 = 0, the data set switch-over via digital inputs is active.
Data set selection 414 has been set to 1, 2, 3, or 4, the data set selected in this
If
way has been activated. The data set switch-over via the digital inputs is then disabled.
Via the parameter Active data set 249 the data set currently selected can be read out.
Parameter Setting
Active data set 249 states the activated data set with the value 1, 2, 3 or 4. This is
independent of whether the data set change-over has been done via digital inputs or
Data set selection 414.
via
Modbus Instruction manual 6705/08
Page 70

10.1 Control via contacts/remote contacts
In the operation mode control via digital inputs or remote digital inputs (parameter
Local/Remote 412 = 0 or 2) the frequency inverter is controlled via the digital inputs
Bit No. Name Bit No. Name
0 S1IND 0 Ready to switch on
1 S2IND 1 Switched on
2 S3IND 2 Operation enabled
3 S4IND 3 Fault
4 S5IND 4 Voltage enabled
5 S6IND 5 Quick stop
6 MFI1D 6 Switch on disabled
7 EM-S1IND 7 Warning
8 EM-S2IND 8 -
9 EM-S3IND 9 Remote
10 - 10 Target reached
11 - 11 Internal limit active
12 - 12 -
13 - 13 -
14 - 14 -
15 - 15 Warning 2
Note: When using the control mode “control via remote digital inputs” the control-
Note: ACTIVE CUBE inverters support an external 24V supply for control logic. Even
S1IND, S2IND to S6IND directly or by digital input emulation with help of the single
bits in the
controlword
. The meaning of these inputs can be seen from the operating
instructions.
Controlword
Stateword
(Local/Remote 412= 2)
ler release via STOA (terminal X210A.3) and STOB (terminal X210B.2) must
be set AND bit 0 of
controlword
must be set to get the drive started.
The two control modes digital inputs and remote digital inputs facilitate the
mode of operation
“velocity mode” only.
if the mains are not switched on the communication between PLC and inverter can be established.
The bit 4 “Voltage enabled” of the
statusword
displays the current state of
the mains power supply.
Bit 4 “Voltage enabled” = 0 signals “no mains voltage” and the drive start is
disabled.
Bit 4 “Voltage enabled” = 1” signals “mains voltage switched on” and the
drive is ready to start.
Modbus Instruction manual 05/0868
Page 71

Note: With the use of remote contacts the signal sources* are taken over from
the control word 410. Signals at the hardware contacts (terminals) are not
evaluated by the standard operation modes (e.g. 71 for S2IND).
For the evaluation of terminal signals special operation modes are available. They are denoted with the additional term “(Hardware)” and numbered from 526 to 546.
Exception: The controller release via the hardware contacts STOA (termi-
“S1IND”
Signal sources are:
- S1IND ... S6IND,
- MFI1D,
- EM-S1IND ... EM-S3IND
nal X210A.3) and STOB (terminal X210B.2) must be set and Bit 0
controlword
of the
It is not possible to release the controller only via software.
must be set.
Modbus Instruction manual 6905/08
Page 72

State machine:
not ready to
1
swi tch on
quitt fault
stop dri ve
8
fault
start drive
4
swi tch ed on
5
operation
enabled
Stateword Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Switched on 1 0 0 0 1 1
Operation enabled 1 1 0 1 1 1
Fault x x 1 x x x
Note: Bits marked “x” are don’t care.
The Warning bit "Bit No. 7" can signal an internal warning and results in the fre-
quency inverter being switched off, depending on the cause.
The evaluation of the warning is done by reading out the warning status via parame-
Warnings 270.
ter
The bit Target reached "Bit No. 10" is set when the reference value specified has
been reached. In the special case of power failure regulation, the bit is also set if the
power failure regulation has reached the frequency 0 Hz (see operating instructions).
For "Reference value reached“ there is a hysteresis (tolerance range), which can be
set via the parameter
max. Control deviation 549 (see operating instructions).
The bit Internal limit active "Bit No. 11" displays that an internal limit is active.
This can, for example, be the present current limit, the torque limit or the overvoltage limit. All the functions lead to the reference value being quit or not reached.
The bit Warning 2 "Bit No. 15" reports a warning which leads to a fault switch-off
of the frequency inverter within a short time. This bit is set if there is a warning for
motor temperature, heat sink/inside temperature, Ixt monitoring or mains phase failure.
Modbus Instruction manual 05/0870
Page 73

In the operation mode “control via state machine” (parameter Local/Remote 412 = 1)
The behavior of transition 5 can be set via the parameter State transition 5 392.
Control word 410 Status word 411
Bit Meaning Bit Meaning
0 Switch on 0 Ready to switch on
1 Enable voltage 1 Switched on
2 Quick stop 2 Operation enabled
3 Enable operation 3 Fault
4
5
6
7 Fault reset 7 Warning
8
9
10
11
12
13
14
15
Bits 9 … 15 unused Bit 14 unused
Note: ACTIVE CUBE inverters support an external 24V supply for control logic. Even
10.2 Control via state machine
the frequency inverter is controlled via
State transition 4 to state “Operation enabled” is only possible when:
Motion control configuration (
Î controller release at STOA and STOB is set.
In other configurations (non motion control,
Î controller release at STOA and STOB is set AND (S2IND OR S3IND)
(S2IND = start clockwise/S3IND = start anticlockwise)
Here, free stopping, shutdown via ramp (reversible) or DC braking (see Chapter
"Behavior in transition 5") can be used.
Operation mode specific
Operation mode specific
Operation mode specific
Halt
Operation mode specific
Reserved
Manufacturer specific
Manufacturer specific
Manufacturer specific
Manufacturer specific
Manufacturer specific
Controlword
control configurations (
Statusword
tions (
bits 12 + 13
Configuration 30 = x40) only.
if the mains are not switched on the communication between PLC and inverter
can be established.
The bit 4 “Voltage enabled” of the
the mains power supply.
Bit 4 “Voltage enabled” = 0 signals “no mains voltage” and the state tran-
sision “Ready to switch on” Î “Switched on” is not possible.
Bit 4 “Voltage enabled” = 1” signals “mains voltage switched on” and the
state transition “Ready to switch on” Î “Switched on” is possible.
bits 4, 5, 6
Configuration 30 = x40) only.
controlword
Configuration 30 = x40):
Configuration 30 ≠ x40):
4 Voltage enabled
5 Quick stop
6 Switch on disabled
8 Manufacturer specific
9 Remote
10 Target reached
11 Internal limit active
12
13
14
15
operation mode specific
operation mode specific
statusword
.
Operation mode specific
Operation mode specific
Manufacturer specific
Manufacturer specific
and bit 8
are used in motion control configura-
halt
displays the current state of
Warning2
are used in motion
Modbus Instruction manual 7105/08
Page 74

State machine:
Entry in state machine
0
Not ready to
1
switch on
from all state
Fault reaction
7
s
13
active
14
Enable
operation
4’
9
Disab le
volta ge
Shutdown
Shutdown
Swi tch on
8
Ena ble
opera tion
Swi tch on
2
2 7
Ready to
3
switch on
3
4
Switched on
4
Operation
5
1
disabled
enabled
Dis able v oltage
or Quick stop
Dis able v oltage
or Quick stop
Shutdown
6
Disab le
5
opera tion
Fault reset
Qui ck st op
11
15
10
8
6
Faul t
12
Quic k stop
active
The device control commands are triggered by the following bit pattern in the
:
word
control-
Command
Bit 7 Bit 3 Bit 2 Bit 1 Bit 0
Fault
reset
Controlword
Enable
operation
Quick
stop
Enable
voltage
Switch on
Transitions
Shutdown X X 1 1 0 2, 6, 8
Switch-on X 0 1 1 1 3
Switch on X 1 1 1 1 3
Disable voltage X X X 0 X 7, 9, 10, 12
Quick stop X X 0 1 X 7, 10, 11
Disable operation X 0 1 1 1 5
Enable operation X 1 1 1 1 4
Fault reset 0 Ö 1 x x x x 15
Bits marked X are irrelevant
Note: The state transition 3 (command “Switch on”) is processed only if bit no. 4
“Voltage enabled” of the
statusword
is set.
The state transition 4’ is only available for non motion control configura-
Configuration 30 ≠ x40) and is processed only if bit no. 4 “Voltage
tions (
enabled” of the
statusword
is set. This function is for downward compati-
bility to older software versions.
Modbus Instruction manual 05/0872
Page 75

The
statusword
Switch on disabled 1 X 0 0 0 0
Ready to switch on 0 1 0 0 0 1
displays the operation state.
Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0
Switch on
state
disabled
Statusword
Quick stop Fault Operation
enabled
Switched onReady to
switch on
Switched on 0 1 0 0 1 1
Operation enabled 0 1 0 1 1 1
Quick stop active 0 0 0 1 1 1
Fault reaction active 0 X 1 1 1 1
Fault 0 X 1 0 0 0
Bits marked X are irrelevant
The Warning bit "Bit No. 7" can be set at any time. It displays a device-internal
warning message. The evaluation of the warning reason is done by readin
warning status with the parameter
Warnings 270.
g out the
The Remote bit "Bit No. 9" is set if the operation mode control via state machine
Local/Remote 412 = 1) has been set and the hardware release is available.
(
Logic linking of the digital control signals:
STOA AND STOB AND (Start clockwise OR Start anticlockwise)
Only if the lo
for Start clockwise / Start anticlockwise can be connected directly
68, Start Aniclockwise.69).
wise
gic linking is true the inverter can be controlled via the. The logic inputs
to ON (Start Clock-
Note: For motion control configurations (
Configuration 30 = x40) only the digital
input S1IND must be set. Start clockwise and start anticlockwise have no
function in motion control configurations.
The bit Target reached reached "Bit No. 10" is set when the reference value
specified has been reached.
In non motion control configurations (
related to the reference speed object 0x6042
Configuration 30 ≠ x40) target reached is
target velocity
. In the special case of
power failure regulation, the bit is also set if the power failure regulation has reached
the frequency 0 Hz (see operating instructions). For "Target reached“ there is a hysteresis (tolerance range), which can be set via the parameter
max. Control deviation
549 (see operating instructions).
The bit Internal limit active “Bit No. 11” displays that an internal limit is active.
This can, for example, be the present current limit, the torque limit or the overvoltage limit. All the functions lead to the reference value being quit or not reached.
The bit Warning 2 “Bit No. 15” reports a warning which leads to a fault switch-off
of the frequency inverter within a short time. This bit is set if there is a warning for
motor temperature, heat sink/inside temperature, Ixt monitoring or mains phase failure.
Modbus Instruction manual 7305/08
Page 76

10.2.1 Behavior in quick stop
In this, the parameters Switch-off threshold 637 (percent of fmax) and Holding
638 (holding time after falling short of the switch-off threshold) are relevant. In
time
a quick stop, the drive is shutdown via the emergency stop ramps (
clockwise
424 or Emergency stop anti-clockwise 425).
Emergency stop
f
s
Start quick stop
Emergency stop anticlockwise
Emergency stop clockwise
424
425
Switch-off threshold.
Holding time
637
638
t
OFF,
status changed
If frequency/speed zero has been reached during the holding time, the drive contin-
ues to be supplied with direct current until the switch-off time has expired. With this
measure, there is an assurance that the drive is stationary in a change of state.
Note: The “behavior in quick stop” is only relevant for non motion control con-
figurations (
Configuration 30 ≠ x40).
Modbus Instruction manual 05/0874
Page 77

The behavior in transition 5 from "Operation enabled" to "Switched on" can be param-
10.2.2 Behavior in transition 5
eterized. The behavior is set via parameter
Parameter Setting
State transition 5 392.
No. Description Min. Max. Fact. sett.
392 State transition 5 0 2 2
Operation mode Function
0 - Coast to stop
1 - DC brake
immediate transition from "Operation enabled“ to
"Switched on“, free stoppage of the drive
activation of DC brake, with the end of DC braking, there
is the change from "Operation enabled“ to "Switched on“
transmission with normal stop ramp, after reaching stand-
2 - Ramp
still, there is a change from "Operation enabled“ to
"Switched on“
Note: Setting operation mode "1 - DC brake“ is only possible in applications with
v/f characteristic (e.g. configuration 110), as other applications do not
know such an operation mode.
If the frequency inverter is operated with a confi
guration which does not
know the DC braking operation mode (e.g. configuration 210, fieldorientation speed controlled), value "1" cannot be set. It is also not offered in the selection menus of the KP500 control unit or the VPlus program.
Note: The default value for the parameter State transition 5 392 is operation
mode "2 – Ramp". For configurations with torque control, the default
value is operation mode "0 - Coast to stop". In a switch-over of the configuration, the setting value for
State transition 5 392 is also altered if
necessary.
Note: The “behavior in transition 5” is only relevant for non motion control con-
figurations (
Configuration 30 ≠ x40).
If transition 5 has been triggered with State transition 5 392 = "1 - DC brake“, a new
control word is only accepted after the completion of the transition process. The
change of state from "Operation enabled“ to "Ready“ is done after the expiry of the
Braking time 632 parameterized for the DC brake.
time
If the parameter State transition 5 392 = "2 - Ramp“ has been set, the
controlword
can be set back to “Enable operation” during the stoppage of the drive. In this way,
the drive runs back up to its set reference value and remains in the state "Operation
enabled“.
The change of state from "Operation enabled“ to "Switched on“ is done after the set
switch-off threshold has been reached and expiry of the set holding time (equivalent
to the behavior in a quick stop). In this, the parameters
(percent of fmax) and
Holding time 638 (holding time after switch-off threshold
Switch-off threshold
637
reached) are relevant.
Modbus Instruction manual 7505/08
Page 78

10.2.3 Reference value/actual value
The control (PLC) can set the frequency reference value for the frequency inverter via
the parameter
The control (PLC) can set the percentage reference value for the frequency inverter
via the parameter
The value of the control will always be added to the local source value of
Percentage Source
Note: The Parameters Reference Frequency RAM 484 and Reference Percentage
Reference Frequency RAM 484.
Reference Percentage RAM 524.
476.
524 can only be written. Read access is not possible.
RAM
Reference
The use of the reference/actual value channel depends on the set configuration (con-
trol system). The actual value is generated from the correct source depending on the
control system used.
The actual value can be read out via parameter Actual Frequency 241. In addition,
the internal reference frequencies can be read out.
Ramp set-point
operation mode
434
please read the note !
reference
line value
internal reference
frequency
0
1
fmin
frequency
ramp
fmax
+
The internal reference value from the reference frequency value channel and the ref-
erence line value can be fed to the ramp individually or as an added variable. Setting
is done via the data set change-over capable parameter
Parameter Setting
No. Description Min. Max. Fact. sett.
434 Ramp set-point 1 3 3
1 - Internal setpoint (refer-
2 - Line setpoint (reference
Operation mode Function
Reference value from the sources of the percentage of
ence frequency value)
reference frequency value channel
Reference value via a communication interface
line value)
3 - Internal + line setpoint Sum of internal reference frequency value and refer-
ence line value
Note: This function is only relevant for non motion control configurations (Con-
figuration
30 ≠ x40).
Ramp set-point 434.
Modbus Instruction manual 05/0876
Page 79

Note: If Ramp set-point 434 = 2 (only reference line value), this reference line
value is limited to fmin. Please consider that the sign in front of fmin at
reference value = 0 is derived from the sign in front of the last reference
line value ≠ 0.
After Power On, the reference line value is limited to +fmin!
For Ramp set-point 434 = 3, the sign in front of the overall reference
value results from the sum of internal reference frequency value
and reference line value.
The reference values can be read out on the frequency inverter with the help of the
KP500 control unit or VPlus operating software.
Parameter Contents Format
Internal reference fre-
quency
228
Reference bus frequency
Actual values
Internal reference value from frequency ref-
xxx.xx Hz
erence value channel
Reference line value. xxx.xx Hz
282
Reference ramp fre-
quency
283
Sum of internal + reference line value xxx.xx Hz
Modbus Instruction manual 7705/08
Page 80

No. Name/Meaning Unit Display range Chapter
No. Name/Meaning Unit Setting range Chapter
11 Parameter List
The following tables contain parameters which are relevant to the CM-232 and CM-485
communication modules. For the other parameters, refer to the frequency inverter
parameters.
The parameter is available in the four data sets.
The parameter value is set by the SETUP routine.
This parameter cannot be written when the frequency inverter is in operation.
For better clarity, the parameters have been marked with pictograms:
This parameter is not accessible via the control unit KP500 and the control soft-
ware VPlus; it is only accessible via the communication channel.
I
FUN, UFUN, PFUN
11.1 Actual Value Menu (VAL)
: rated values of the frequency inverter, ü: overload capacity of frequency inverter
Actual Values of the Frequency Inverter
Internal Reference Frequency
228
Reference Percentage Value
229
Active Data Set
249
Digital Inputs
250
Hz -1000.00 ... 1000.00 9.2.1, 10.2.3
% ± 300.00 9.2.2
– 1 ... 4 9, 10
– 0 ... 255 9.1.3
260
270
11.2 Parameter Menu (PARA)
Current Error
Warnings
Ref. Bus Frequency
282
Ref. Ramp Frequency
283
Status Word
411
10
Baud Rate
11
34
VABus SST Error Register
Program(ming)
State-transition 5
392
394 RS232/RS485 NodeID – 1 ... 30 5.2, 5.3
Protocol
395
412
410
Control Word
Local/Remote
– 0 ... 0xFFFF 9.1; 12.2
– 0 ... 0xFFFF (bit coded) 9.1; 12.1
Hz -1000.00 ... 1000.00 9.2.1, 10.2.3
Hz -1000.00 ... 1000.00 9.2.1, 10.2.3
– 0 .... 0xFFFF 9; 9.1
RS232 / RS485
– 1 ... 6 5.2, 5.3
Inverter Data
– 6.6
– 0 ... 9999 5.2, 5.3
Bus controller
– 0 ... 2
RS232 / RS485
– 0 … 3 6
Bus controller
– 0 ... 0xFFFF 9; 9.1
– 0 ... 44 9; 9.1,10, 10.1
9.1.2.2, 10.2,
10.2.2
Modbus Instruction manual 05/0878
Page 81

No. Name/Meaning Unit Setting range Chapter
413 RS232/RS485 Watchdog Timer s 0 ... 10000 6.8
RS232 / RS485
Data Set Change-Over
414
424
425
434
484
524
549
632
Data Set Selection
– 0 ... 4 9, 10
Frequency Ramps
Emergency Stop Clockwise
Emergency Stop Anticlockwise
Ramp Setpoint
Hz/s 0.01 ... 9999.99 9.1.2.1, 10.2.1
Hz/s 0.01 ... 9999.99 9.1.2.1, 10.2.1
– 1 ... 3 9.2.1, 10.2.3
Fixed Frequencies
Reference Frequency RAM
Hz -999.99 ... 999.99 9.2.1
Fixed Percentages
Reference Percentage RAM
% ± 300.00 9.2.2
Digital Outputs
Max. Control Deviation
% 0.01 ... 20.00 9.1, 10.1
Direct current brake
Braking Time
s 0.0 … 200.0
9.1.2.1, 9.1.2.2
Stopping Behavior
Switch-Off Threshold
637
Holding Time
638
% 0.0 ... 100.0
s 0.0 ... 200.0
9.1.2.1, 9.1.2.2,
10.2.1
9.1.2.1, 9.1.2.2,
10.2.1, 10.2.2
Modbus
1375
1376
Modbus Parity
Modbus Address
- 0 … 2
- 1 … 247
5.2.1, 5.3.1
5.2.2, 5.3.2
Modbus Instruction manual 7905/08
Page 82
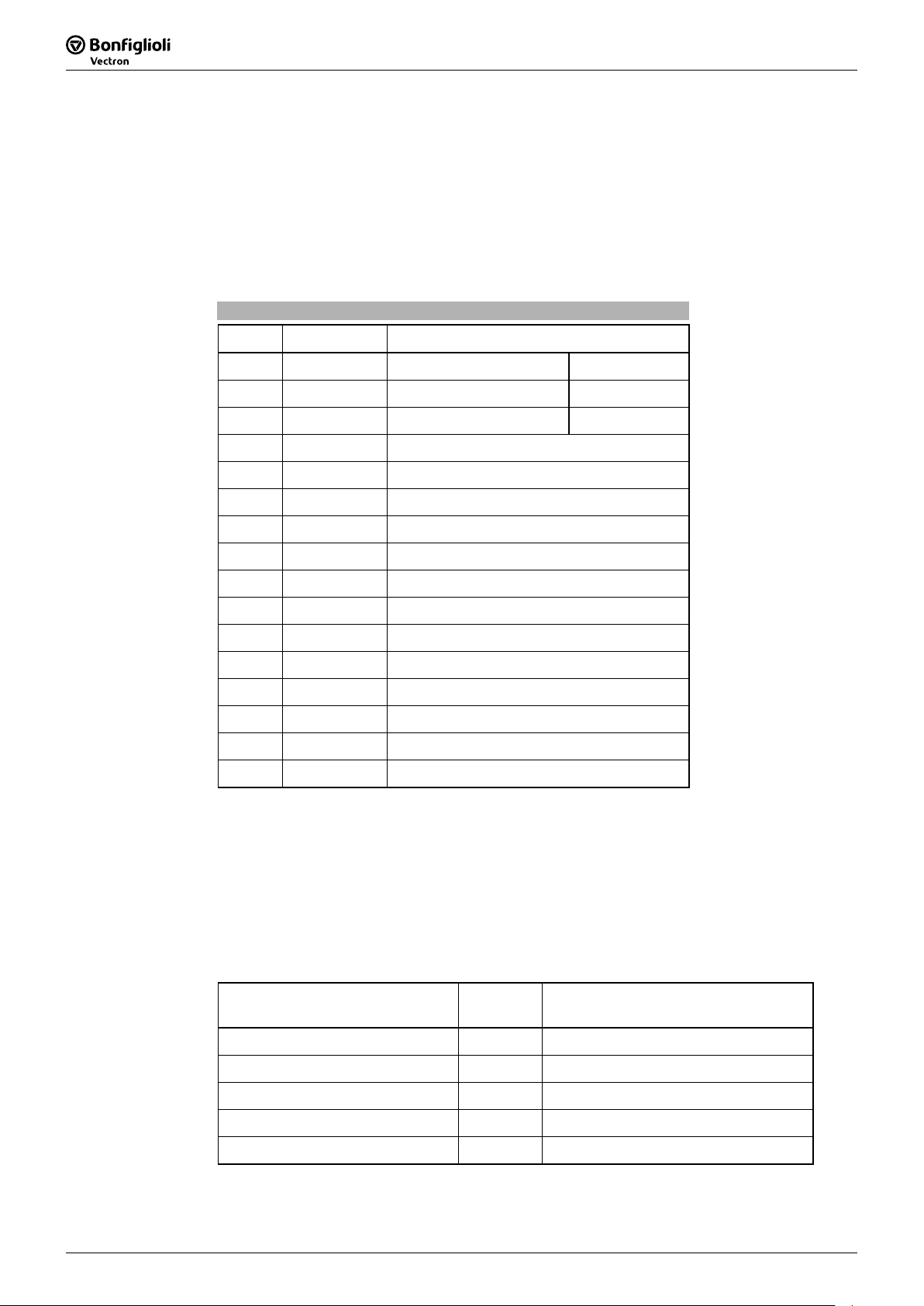
12 Annex
The various control methods and the hardware of the frequency inverter include func-
12.1 Warning Messages
tions which continuously monitor the application. In addition to the messages documented in the frequency inverter operating instructions, further warnin
activated by the RS232/RS485 communication modules CM-232/CM-485.
The bit-coded warning reports are issued via parameter
the following pattern:
Bit no. Warning code Description
0
1 0x0002
2 0x0004
3 0x0008
4
5 0x0020
6 0x0040
7 0x0080
8 0x0100
9 0x0200
10 0x0400
11 0x0800
12 0x1000
13 0x2000
14 0x4000
15 0x8000
1) 2)
Bit 0 "Warning Ixt" is always set
− if bit 1 "Warning Short-Term Ixt“ or
− if bit 2 "Warning Long-Term Ixt" is set.
Note: The individual warnings are described in detail in the frequency inverter
operating instructions.
Note: In parameter
same time.
Example:
Warning Ixt
Short-Term Ixt
Warning Limit Heat Sink Temperature
Warning Motor Temperature
Warnings 270 according to
Warning Messages
0x0001 Warning Ixt
Warning Short-Term Ixt
Warning Long-Term Ixt
Warning Heat Sink Temperature Tk
0x0010 Warning Inside Temperature Ti
Warning I-limit
Warning Init
Warning Motor Temperature
Warning Phase Failure
Warning Motor Protection Switch
Warning Fmax
Warning Analog Input MFI1A
Warning Analog Input A2 (EM-S1INA)
Warning System Bus Slave Failure
Warning Udc
Warning V-belt
1) 2)
1)
2)
Warnings 270 several warnings can be displayed at the
Message Warning
code
Is set in Short-Term Ixt or Long-Term Ixt
Total
0x0001
0x0002
0x0008
0x0080
0x008B
g messages are
Remarks
Modbus Instruction manual 05/0880
Page 83

Fault messages can be read out via parameter Current Error 260. The error code
12.2 Error Messages
stored following a fault comprises the error group FXX (high-byte, hexadecimal) and
the code YY (low-byte, hexadecimal).
General Fault Message
Code Meaning
F00
No fault has occurred.
00
Overload
Code Meaning
Frequency inverter overloaded.
F01
00
Frequency inverter overloaded (60 sec), check load behavior.
02
Short-term overload (1 sec), check motor and application parameters.
03
Heat Sink
Code Meaning
F02
Heat sink temperature too high, check cooling and fan.
00
Temperature sensor defective or ambient temperature too low.
01
Inside
Code Meaning
F03
Inside temperature too high, check cooling and fan.
00
Inside temperature too low, check electrical cabinet heating.
01
Motor Connection
Code Meaning
F04
Motor temperature too high or sensor defective, check connection
00
S6IND.
Motor circuit breaker tripped, check drive.
01
The V-belt monitoring reports no load on the drive.
02
Phase failure, check motor and wiring.
03
Output Current
Code Meaning
F05
Overloaded, check load situation and ramps.
00
Short circuit or earth fault, check motor and wiring.
03
Overloaded, check load situation and current value limit controller.
04
Asymmetric motor current, check current and wiring.
05
Motor phase current too high, check motor and wiring.
06
Message from phase monitoring, check motor and wiring.
07
Modbus Instruction manual 8105/08
Page 84

Code Meaning
F07
Code Meaning
F08
Code Meaning
F11
Code Meaning
F13
Code Meaning
F14
Code Meaning
F20
DC link voltage too high, check deceleration ramps and connected brake
00
Resistor.
DC link voltage too low, check mains voltage.
01
Power failure, check mains voltage and circuit.
02
Phase failure, check mains fuses and circuit.
03
Reference DC-Link Limitation 680 too low, check mains voltage.
04
Brake chopper
05
Motor chopper
06
DC link voltage
Trigger Threshold 506 too low, check mains voltage.
Trigger Threshold 507 too low, check mains voltage.
Electronics voltage
Electronics voltage 24 V too low, check control terminal.
01
Electronics voltage too high, check wiring of control terminals.
04
Output frequency
Output frequency too high, check control signals and settings.
00
Max. frequency reached by control, check deceleration ramps and
01
connected brake resistor.
Motor Connection
Earth fault on output, check motor and wiring.
00
IDC Compensation Limit 415 reached, check motor and cabling,
Set
01
increase limit, if necessary.
Minimum current monitoring, check motor and wiring.
10
Control Connection
Reference value on multifunctional input 1 faulty, check signal.
01
Overcurrent on multifunctional input 1, check signal.
07
Speed sensor signal defective, check connections S4IND and S5IND.
30
One track of the speed sensor signal is missing, check connections.
31
Direction of rotation of speed sensor wrong, check connections.
32
Communication
Communication watchdog RS232/RS485.
10
Note: In addition to fault messages mentioned, there are further fault mes-
sages. However these messages are only used for internal purposes and
are not listed here. If you receive fault messages which are not listed
here, please contact us !
Modbus Instruction manual 05/0882
Page 85

0 00 NUL 43 2B + 86 56 V
1 01 44 2C , 87 57 W
2 02 STX 45 2D - 88 58 X
3 03 ETX 46 2E . 89 59 Y
4 04 EOT 47 2F / 90 5A Z
5 05 ENQ 48 30 0 91 5B [
6 06 ACK 49 31 1 92 5C \
7 07 BEL 50 32 2 93 5D ]
8 08 BS 51 33 3 94 5E ^
9 09 TAB 52 34 4 95 5F _
10 0A LF 53 35 5 96 60 `
11 0B VT 54 36 6 97 61 a
12 0C FF 55 37 7 98 62 b
13 0D CR 56 38 8 99 63 c
14 0E 57 39 9 100 64 d
15 0F 58 3A : 101 65 e
16 10 59 3B ; 102 66 f
17 11 60 3C < 103 67 g
18 12 61 3D = 104 68 h
19 13 62 3E > 105 69 i
20 14 63 3F ? 106 6A j
21 15 NAK 64 40 @ 107 6B k
22 16 65 41 A 108 6C l
23 17 66 42 B 109 6D m
24 18 67 43 C 110 6E n
25 19 68 44 D 111 6F o
26 1A 69 45 E 112 70 p
27 1B ESC 70 46 F 113 71 q
28 1C 71 47 G 114 72 r
29 1D 72 48 H 115 73 s
20 1E 73 49 I 116 74 t
31 1F 74 4A J 117 75 u
32 20 SPACE 75 4B K 118 76 v
33 21 ! 76 4C L 119 77 w
34 22 „ 77 4D M 120 78 x
35 23 # 78 4E N 121 79 y
36 24 $ 79 4F O 122 7A z
37 25 % 80 50 P 123 7B {
38 26 & 81 51 Q 124 7C |
39 27 ' 82 52 R 125 7D }
40 28 ( 83 53 S 126 7E ~
41 29 ) 84 54 T 127 7F DEL
42 2A * 85 55 U
Note: Often used values are marked gray.
12.3 ASCII Tabelle (0x00 – 0x7F)
Dec. Hex. Char. Dec. Hex. Char. Dec. Hex. Char.
Modbus Instruction manual 8305/08
Page 86

Page 87

Page 88

Bonfiglioli has been designing and developing innovative
and reliable power transmission and control solutions
for industry, mobile machinery and renewable energy
applications since 1956.
www.bonfiglioli.com
Bonfiglioli Riduttori S.p.A.
Via Giovanni XXIII, 7/A
40012 Lippo di Calderara di Reno
Bologna, Italy
tel: +39 051 647 3111
fax: +39 051 647 3126
bonfiglioli@bonfiglioli.com
www.bonfiglioli.com
VEC 383 R2
 Loading...
Loading...