

BONFIGLIOLI ACU 201-07, ACU 201-13, ACU 201-09, ACU 201-11, ACU 201-03 Operating Instructions Manual
...
ACTIVE CUBE
Operating Instructions
Frequency inverter 230 V / 400 V
0.25 kW ... 132 kW


TABLE OF CONTENTS
1 General information about the documentation ........................................................... 10
1.1 Instruction manuals .................................................................................. 10
1.2 This document........................................................................................... 12
1.3 Warranty and liability ............................................................................... 12
1.4 Obligation ................................................................................................. 13
1.5 Copyright .................................................................................................. 13
1.6 Storage ...................................................................................................... 13
2 General safety instructions and information on use .................................................... 14
2.1 Terminology .............................................................................................. 14
2.2 Designated use ......................................................................................... 15
2.3 Misuse ....................................................................................................... 15
2.3.1 Explosion protection ........................................................................................ 15
2.4 Residual risks ............................................................................................ 16
2.5 Safety and warning signs at frequency inverter ....................................... 16
2.6 Warning information and symbols used in the user manual .................... 17
2.6.1 Hazard classes ................................................................................................ 17
2.6.2 Hazard symbols............................................................................................... 17
2.6.3 Prohibition signs .............................................................................................. 17
2.6.4 Personal safety equipment ............................................................................... 18
2.6.5 Recycling ........................................................................................................ 18
2.6.6 Grounding symbol ........................................................................................... 18
2.6.7 ESD symbol .................................................................................................... 18
2.6.8 Information signs ............................................................................................ 18
2.7 Directives and guidelines to be adhered to by the operator .................... 19
2.8 Operator's general plant documentation .................................................. 19
2.9 Operator's/operating staff's responsibilities ............................................ 19
2.9.1 Selection and qualification of staff .................................................................... 19
2.9.2 General work safety ........................................................................................ 19
2.10 Organizational measures .......................................................................... 20
2.10.1 General .......................................................................................................... 20
2.10.2 Use in combination with third-party products ..................................................... 20
2.10.3 Transport and Storage ..................................................................................... 20
2.10.4 Handling and installation .................................................................................. 20
2.10.5 Electrical connections ...................................................................................... 20
2.10.5.1 The five safety rules ........................................................................................ 21
2.10.6 Safe operation ................................................................................................ 21
2.10.7 Maintenance and service/troubleshooting .......................................................... 22
2.10.8 Final decommissioning ..................................................................................... 22
2.11 Safety Instructions on Function „Safe Torque Off“ (STO) ........................ 23
3 Scope of Supply ............................................................................................................ 25
3.1 ACU 201 (up to 3.0 kW) and 401 (up to 4.0 kW) ...................................... 25
3.2 ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW) .................................. 26
3.3 ACU 401 (18.5 to 30.0 kW) ....................................................................... 27
3.4 ACU 401 (37.0 to 65.0 kW) ....................................................................... 28
3.5 ACU 401 (75.0 to 132.0 kW) ..................................................................... 29
06/13 Operating Instructions ACU 3
4 Technical Data .............................................................................................................. 30
4.1 General technical data .............................................................................. 30
4.2 Technical Data – Control Electronic Equipment ....................................... 31
4.3 ACU 201 (0.25 to 1.1 kW, 230 V) .............................................................. 32
4.4 ACU 201 (1.5 to 3.0 kW, 230 V) ................................................................ 33
4.5 ACU 201 (4.0 to 9.2 kW, 230 V) ................................................................ 34
4.6 ACU 401 (0.25 to 1.5 kW, 400 V) .............................................................. 35
4.7 ACU 401 (1.85 to 4.0 kW, 400 V) .............................................................. 36
4.8 ACU 401 (5.5 to 15.0 kW, 400 V) .............................................................. 37
4.9 ACU 401 (18.5 to 30.0 kW, 400 V) ............................................................ 38
4.10 ACU 401 (37.0 to 65.0 kW, 400 V) ............................................................ 39
4.11 ACU 401 (75.0 to 132.0 kW, 400 V) .......................................................... 40
4.12 Operation diagrams .................................................................................. 41
5 Mechanical Installation ................................................................................................ 42
5.1 ACU 201 (up to 3.0 kW) and 401 (up to 4.0 KW) ..................................... 43
5.2 ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW) .................................. 44
5.3 ACU 401 (18.5 to 30.0 kW) ....................................................................... 45
5.4 ACU 401 (37.0 to 65.0 kW) ....................................................................... 46
5.5 ACU 401 (75.0 to 132.0 kW) ..................................................................... 47
6 Electrical Installation ................................................................................................... 48
6.1 EMC Information ....................................................................................... 50
6.2 Block diagram ........................................................................................... 52
6.3 Optional Components ............................................................................... 53
6.4 Connection of Unit .................................................................................... 54
6.4.1 Dimensioning of conductor cross-section ........................................................... 54
6.4.1.1 Typical cross-sections ...................................................................................... 54
6.4.2 Mains Connection ............................................................................................ 56
6.4.3 Motor Connection ............................................................................................ 56
6.4.3.1 Length of motor cables, without filter ................................................................ 57
6.4.3.2 Motor cable length, with output filter dU/dt ....................................................... 57
6.4.3.3 Motor cable length, with sinus filter .................................................................. 57
6.4.3.4 Group drive .................................................................................................... 58
6.4.3.5 Speed sensor connection ................................................................................. 58
6.4.4 Connection of a Brake Resistor ......................................................................... 59
6.5 Connection of types .................................................................................. 60
6.5.1 ACU 201 (up to 3.0 kW) and 401 (up to 4.0 kW) ................................................ 60
6.5.2 ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW) ............................................ 62
6.5.3 ACU 401 (18.5 to 30.0 kW) .............................................................................. 64
6.5.4 ACU 401 (37.0 to 65.0 kW) .............................................................................. 66
6.5.5 ACU 401 (75.0 to 132.0 kW) ............................................................................ 68
6.6 Control Terminals...................................................................................... 70
6.6.1 External DC 24 V power supply ......................................................................... 72
6.6.2 Relay Output .................................................................................................. 72
6.6.3 Motor Thermo-Contact ..................................................................................... 73
6.6.4 Control terminals – Connection diagrams of configurations ................................. 73
6.7 Configurations overview ........................................................................... 74
6.7.1 Configuration 110 – Sensorless Control ............................................................. 75
6.7.2 Configuration 111 – Sensorless Control with Technology Controller ...................... 75
4 Operating Instructions ACU
06/13

6.7.3 Configuration 410 – Sensorless Field-Oriented Control ........................................ 76
6.7.4 Configuration 411 – Sensorless Field-Oriented Control with Technology Controller 77
6.7.5 Configuration 430 – Sensorless FOC, Speed and Torque Controlled ..................... 78
6.7.6 Configuration 210 – Field-Oriented Control, Speed Controlled ............................. 79
6.7.7 Configuration 211 – Field-Oriented Control with Technology Controller ............... 80
6.7.8 Configuration 230 – Field-Orientated Control, Speed and Torque Controlled ......... 80
6.7.9 Configuration 510 – FOC of Synchronous Machine, Speed Controlled ................... 81
6.7.10 Configuration 530 – FOC of a Synchronous Machine, Speed and Torque Controlled82
6.7.11 Configuration 610 – Sensorless FOC of Synchronous Machine, Speed Controlled ... 83
6.7.12 Configuration 611 – Sensorless FOC of a Synchronous Machine with Technology
Controller 84
6.7.13 Configuration 630 – Sensorless FOC of a Synchronous Machine, Speed and Torque
Controlled 85
6.7.14 Installation notes according to UL508c .............................................................. 86
7 Control Unit KP500 ...................................................................................................... 87
7.1 Menu Structure ......................................................................................... 88
7.2 Main Menu ................................................................................................. 88
7.3 Actual Value Menu (VAL) .......................................................................... 89
7.4 Parameter Menu (PARA) ........................................................................... 90
7.5 Copy Menu (CPY) ...................................................................................... 91
7.5.1 Reading the Stored Information ........................................................................ 91
7.5.2 Menu Structure ............................................................................................... 92
7.5.3 Selecting the Source ........................................................................................ 92
7.5.4 Selecting the Destination ................................................................................. 93
7.5.5 Copy Operation ............................................................................................... 93
7.5.6 Error Messages ............................................................................................... 94
7.6 Reading Data from Control Unit ............................................................... 95
7.6.1 Activation ....................................................................................................... 95
7.6.2 Data transfer .................................................................................................. 96
7.6.3 Resetting to Normal Operation ......................................................................... 97
7.7 Control Menu (CTRL) ................................................................................ 97
7.8 Controlling the Motor via the Control Unit ............................................... 98
8 Commissioning of the Frequency Inverter ................................................................. 101
8.1 Switching on Mains Voltage .................................................................... 101
8.2 Setup Using the Control Unit .................................................................. 101
8.2.1 Configuration ................................................................................................ 102
8.2.2 Data Set ....................................................................................................... 104
8.2.3 Motor Type ................................................................................................... 104
8.2.4 Machine Data ................................................................................................ 105
8.2.5 Plausibility check ........................................................................................... 106
8.2.6 Parameter identification ................................................................................. 107
8.2.7 Status messages during commissioning (SS…) ................................................. 108
8.2.8 Warnings during commissioning (SA…) ........................................................... 108
8.2.9 Error messages during commissioning (SF…) ................................................... 110
8.2.10 Application data ............................................................................................ 111
8.2.10.1 Acceleration and deceleration ......................................................................... 111
8.2.10.2 Set points at multi-functional input ................................................................. 111
8.2.11 Quitting commissioning .................................................................................. 112
8.2.12 Selection of an actual value for display ............................................................ 112
8.3 Check direction of rotation ..................................................................... 113
8.4 Speed sensor ........................................................................................... 114
8.4.1 Speed sensor 1 ............................................................................................. 115
8.4.2 Speed sensor 2 ............................................................................................. 115
06/13 Operating Instructions ACU 5

8.5 Set-up via the Communication Interface ............................................... 116
9 Inverter Data ............................................................................................................. 118
9.1 Serial Number ......................................................................................... 118
9.2 Optional Modules .................................................................................... 118
9.3 Inverter Software Version ...................................................................... 118
9.4 Set Password .......................................................................................... 118
9.5 Control Level ........................................................................................... 119
9.6 User Name ............................................................................................... 119
9.7 Configuration .......................................................................................... 119
9.8 Language ................................................................................................ 122
9.9 Programming .......................................................................................... 122
10 Machine Data ............................................................................................................. 123
10.1 Rated Motor Parameters ......................................................................... 123
10.2 Further motor parameters ...................................................................... 124
10.2.1 Stator Resistance .......................................................................................... 124
10.2.2 Leakage Coefficient ....................................................................................... 124
10.2.3 Magnetizing Current ...................................................................................... 125
10.2.4 Rated slip correction factor ............................................................................ 125
10.2.5 Voltage constant ........................................................................................... 126
10.2.6 Stator inductance .......................................................................................... 126
10.2.7 Peak current ................................................................................................. 126
10.2.8 Change sense of rotation ............................................................................... 127
10.3 Internal values ........................................................................................ 127
10.4 Speed Sensor 1 ....................................................................................... 128
10.4.1 Operation Mode Speed Sensor 1 ..................................................................... 128
10.4.2 Division marks, speed sensor 1 ....................................................................... 130
10.4.3 Gear factor speed sensor 1 ............................................................................ 131
10.4.4 Filter time constant speed sensor 1 ................................................................. 131
10.5 Sensor evaluation ................................................................................... 132
11 System Data ............................................................................................................... 133
11.1 Actual System Value ............................................................................... 133
11.2 Volume Flow and Pressure ...................................................................... 133
12 Operational Behavior ................................................................................................. 134
12.1 Starting Behavior .................................................................................... 134
12.1.1 Starting Behavior of Sensorless Control System ................................................ 134
12.1.1.1 Starting Current ............................................................................................ 136
12.1.1.2 Frequency Limit ............................................................................................ 136
12.1.1.3 Brake release time ........................................................................................ 136
12.1.2 Flux Formation .............................................................................................. 137
12.2 Stopping Behavior ................................................................................... 138
12.2.1 Switch-Off Threshold ..................................................................................... 140
12.2.2 Holding Time ................................................................................................ 140
12.3 Direct current brake ................................................................................ 140
12.4 Auto Start ................................................................................................ 141
12.5 Search Run .............................................................................................. 142
12.6 Positioning .............................................................................................. 144
12.6.1 Reference Positioning .................................................................................... 144
6 Operating Instructions ACU
06/13

12.6.2 Axle Positioning ............................................................................................. 147
13 Error and warning behavior ....................................................................................... 149
13.1 Overload Ixt ............................................................................................ 150
13.2 Temperature ........................................................................................... 150
13.3 Controller status ..................................................................................... 151
13.4 IDC Compensation Limit ......................................................................... 151
13.5 Frequency Switch-Off Limit .................................................................... 152
13.6 Motor Temperature ................................................................................. 152
13.7 Phase Failure ........................................................................................... 153
13.8 Automatic Error Acknowledgment .......................................................... 153
14 Reference Values........................................................................................................ 154
14.1 Frequency Limits ..................................................................................... 154
14.2 Slip Frequency ......................................................................................... 154
14.3 Percentage Value Limits ......................................................................... 154
14.4 Frequency reference channel .................................................................. 154
14.4.1 Block diagram ............................................................................................... 156
14.5 Reference percentage channel ............................................................... 158
14.5.1 Block diagram ............................................................................................... 159
14.6 Fixed reference values ............................................................................ 161
14.6.1 Fixed Frequencies ......................................................................................... 161
14.6.2 JOG frequency .............................................................................................. 162
14.6.3 Fixed Percentages ......................................................................................... 162
14.7 Frequency ramps .................................................................................... 163
14.8 Percentage Value Ramps ........................................................................ 166
14.9 Block Frequencies ................................................................................... 166
14.10 Motor Potentiometer .............................................................................. 167
14.10.1 Motorpoti (MP) .............................................................................................. 168
14.10.2 Motorpoti (KP) .............................................................................................. 168
14.10.3 Controlling the Motor via the Control Unit ........................................................ 169
14.11 PWM-/repetition frequency input .......................................................... 170
15 Control Inputs and Outputs ....................................................................................... 172
15.1 Multi-Function Input MFI1 ..................................................................... 172
15.1.1 Analog input MFI1A ....................................................................................... 172
15.1.1.1 Characteristic ................................................................................................ 172
15.1.1.2 Scaling ......................................................................................................... 174
15.1.1.3 Tolerance Band and Hysteresis ....................................................................... 174
15.1.1.4 Filter Time Constant ...................................................................................... 175
15.1.1.5 Error and warning behavior ............................................................................ 176
15.2 Multi-Function Output MFO1 .................................................................. 177
15.2.1 Analog output MFO1A .................................................................................... 177
15.2.1.1 Output Characteristic ..................................................................................... 178
15.2.2 Frequency Output MFO1F .............................................................................. 179
15.2.2.1 Scaling ......................................................................................................... 179
15.3 Digital Outputs ........................................................................................ 180
15.3.1 Digital Signal ................................................................................................ 183
15.3.2 Setting Frequency ......................................................................................... 184
15.3.3 Reference value reached ................................................................................ 185
15.3.4 Flux Forming finished .................................................................................... 186
06/13 Operating Instructions ACU 7

15.3.5 Brake release ................................................................................................ 186
15.3.6 Current Limitation ......................................................................................... 186
15.3.7 External Fan ................................................................................................. 186
15.3.8 Warning Mask ............................................................................................... 187
15.3.9 Application warning mask .............................................................................. 190
15.4 Digital inputs ........................................................................................... 191
15.4.1 Start command ............................................................................................. 196
15.4.2 3-wire control ............................................................................................... 196
15.4.3 Error Acknowledgment .................................................................................. 197
15.4.4 Timer ........................................................................................................... 197
15.4.5 Thermo contact ............................................................................................. 197
15.4.6 n-/M Control Change-Over ............................................................................. 197
15.4.7 Data Set Change-Over ................................................................................... 198
15.4.8 Fixed Value Change-Over ............................................................................... 199
15.4.9 Motor Potentiometer ...................................................................................... 199
15.4.10 Handshake Traverse Function ........................................................................ 200
15.4.11 User warning ................................................................................................ 200
15.4.12 External error ............................................................................................... 200
15.5 Function Modules .................................................................................... 201
15.5.1 Timer ........................................................................................................... 201
15.5.1.1 Timer – Time Constant .................................................................................. 202
15.5.2 Comparator .................................................................................................. 204
15.5.3 Function table ............................................................................................... 205
15.5.4 Multiplexer/Demultiplexer .............................................................................. 206
16 V/f-Characteristic ...................................................................................................... 208
16.1 Dynamic Voltage Pre-Control ................................................................. 209
17 Control Functions ....................................................................................................... 210
17.1 Intelligent current limits ........................................................................ 210
17.2 Voltage controller ................................................................................... 211
17.3 Technology Controller ............................................................................. 216
17.4 Functions of Sensorless Control.............................................................. 226
17.4.1 Slip compensation ......................................................................................... 226
17.4.2 Current limit value controller .......................................................................... 226
17.5 Functions of Field-Orientated Control .................................................... 227
17.5.1 Current Controller ......................................................................................... 227
17.5.2 Extended Current Controller ........................................................................... 229
17.5.3 Torque Controller .......................................................................................... 229
17.5.3.1 Torque Reference .......................................................................................... 230
17.5.3.2 Upper and lower limit of the frequency in Torque Control ................................. 230
17.5.3.3 Limit Value Sources ....................................................................................... 231
17.5.3.4 Switching over between speed control and torque control ................................. 231
17.5.4 Speed controller ............................................................................................ 232
17.5.4.1 Limitation of Speed Controller ........................................................................ 234
17.5.4.2 Limit Value Sources ....................................................................................... 235
17.5.4.3 Integral time speed synchronization ................................................................ 236
17.5.5 Acceleration Pre-Control ................................................................................ 236
17.5.6 Field Controller ............................................................................................. 237
17.5.6.1 Limitation of field controller ............................................................................ 238
17.5.7 Modulation Controller .................................................................................... 239
17.5.7.1 Limitation of Modulation Controller ................................................................. 239
18 Special Functions ....................................................................................................... 240
18.1 Pulse Width Modulation .......................................................................... 240
18.2 Fan .......................................................................................................... 241
8 Operating Instructions ACU
06/13

18.3 Bus controller .......................................................................................... 241
18.4 Brake Chopper and Brake Resistance ..................................................... 243
18.4.1 Dimensioning of Brake Resistor ...................................................................... 244
18.5 Motor Protection ..................................................................................... 245
18.5.1 Motor Protection Switch ................................................................................. 245
18.5.2 Motor Protection by I2t- Monitoring ................................................................ 248
18.6 V-belt Monitoring .................................................................................... 250
18.7 Functions of Field-Orientated Control .................................................... 251
18.7.1 Motor Chopper .............................................................................................. 251
18.7.2 Temperature Adjustment ............................................................................... 252
18.7.3 Speed Sensor Monitoring ............................................................................... 253
18.8 Traverse function .................................................................................... 254
18.9 Converter Profibus from/to Internal Notation ....................................... 256
19 Actual Values .............................................................................................................. 257
19.1 Actual Values of the Frequency Inverter ................................................ 257
19.1.1 STO Status ................................................................................................... 259
19.2 Actual Values of the Machine .................................................................. 260
19.3 Actual value memory .............................................................................. 261
19.4 Actual Values of the System ................................................................... 262
19.4.1 Actual System Value ...................................................................................... 262
19.4.2 Volume Flow and Pressure ............................................................................. 263
20 Error Protocol ............................................................................................................. 264
20.1 Error List ................................................................................................. 264
20.1.1 Error Messages ............................................................................................. 264
20.2 Error Environment .................................................................................. 269
21 Operational and Error Diagnosis ................................................................................ 271
21.1 Status Display ......................................................................................... 271
21.2 Status of Digital Signals .......................................................................... 271
21.3 Controller Status ..................................................................................... 272
21.4 Warning Status and Warning Status Application ................................... 273
22 Parameter List ............................................................................................................ 275
22.1 Actual Value Menu (VAL) ........................................................................ 275
22.2 Parameter Menu (PARA) ......................................................................... 278
Index ................................................................................................................................ 287
Functions of the control terminals (table) ....................................................................... 289
06/13 Operating Instructions ACU 9

For the series of devices ACU (ACTIVE Cube) is for the safety-related commissioning and
operation
(Position of ID de-
1 General information about the documentation
to be complied with the following documentation:
• This Operating instructions
• Application manual “Safe Torque Off ACU”
The present documentation refers to the frequency inverters ACTIVE Cube 201 and ACTIVE Cube 401
series. With their facto ry settings, both series of devices are suited for a wide range of applications.
The modular hardware and software structure enables customer-specific adaptation of the frequency
inverters. Applications with high functionality and dynamics requirements can be realized easily.
The ACTIVE Cube series can be recognized by its label on the case and the identification below the
top cover.
pends on device size)
1.1 Instruction manuals
For better clarity, the documentation is structured according to the customer-specific requirements
made on the frequency inverter.
Quick start guide
The Quick Start Guide describes the basic steps required for mechanical and electrical installation of
the frequency inverter. The guided commissioning supports you in the selection of necessary parameters and the configuration of the frequency inverter by the software.
Operating instructions
The Operating Instructions describe and document all functions of the frequency inverter. The parameters required for adapting the frequency inverter to specific applications as well as the wide range of
additional functions are described in detail.
Application manual
The application manual supplements the documentation for purposeful installation and commissioning
of the frequency inverter. Information on various subjects connected with the use of the frequency
inverter is described specific to the application.
If you need a copy of the documentation or additional information, contact your local representative
of BONFIGLIOLI.
10 Operating Instructions ACU
06/13

Operating Instructions
ACTIVE CUBE
Functions of the frequency inverter.
Quick Start Guide
ACTIVE CUBE
Installation and commissioning. Delivered with the device.
Manuals
CM-CAN: Manual CANopen
CM-EtherNet-I/P: Ethernet Module CM-EtherNet-I/P (i.P.)
Manuals
EM-ABS-01: Absolute Encoder Module
Application Safe Torque Off
Safety function STO.
Application manual PLC
Logic linking of digital signals. Functions for analog signals
such as comparisons and mathematical functions. Graphic
functional block programming.
Application manual Positioning
Positioning functions of configurations x40.
Application manual Electronic Gear
Using at least 2 drives as electronic gear with Slave in configuration x15 or x16.
Application manual Crane drives
Extended Brake control for Crane and Hoist drives.
The following instructions are available for the
ACTIVE CUBE
series:
Communication Interfaces
Expansion Modules
CM-PDP-V1: Manual Profibus DP-V1
CM-232/CM-485: Manual VABus (Serial protocol)
CM-232/CM-485 Modbus: Manual Modbus ASCII and RTU
CM-VABus/TCP: Ethernet Module CM-VABus/TCP (i.P.)
CM-ModbusTCP: Ethernet Module CM-Modbus/TCP (i.P .)
CM-EtherCAT
®
: Ethernet Module CM-EtherCAT®
CM-ProfiNet: Ethernet Module CM-ProfiNet (i.P.)
EM-ENC-01: Encoder Module
EM-ENC-02: Encoder Module
EM-ENC-03: Encoder Module
EM-ENC-04: Encoder Module
EM-ENC-05: Encoder Module
EM-IO-01: Expansion Module for Digital inputs/outputs
EM-IO-02: Expansion Module for Digital inputs/outputs
EM-IO-03: Expansion Module for Digital inputs/outputs
EM-IO-04: Expansion Module for Digital inputs/outputs
EM-RES-01: Resolver Module
EM-RES-02: Resolver Module
EM-RES-03: Resolver Module
EM-SYS: Systembus Module
The products for CANopen® communication comply with the specifications of the user organization
®
(CAN in Automation).
CiA
The products for EtherCAT® communication comply with the specifications of the user organization
ETG (EtherCAT Technology Group).
The present documentation was prepared with great care and it was subjected to extensive and re-
peated reviews. For reasons of clarity, it was not possible to include all details of all types of the product in the documentation. Neither was it possible to consider all conceivable installation, operation or
maintenance situations. If you require further information or if you meet with specific problems which
are not dealt with in sufficient detail in the documentation, contact your national BONFIGLIOLI agent.
We would also like to point out that the contents of this documentation do not form part of any previous or existing agreement, assurance or legal relationship. Neither are they intended to supplement or
replace such agreements, assurances or legal relationships. The manufacturer's obligations are exclusively specified in the relevant purchase contract. This contract also contains all and any warranty
regulations which may apply to the relevant scope of supply. These contractual warranty provisions
are neither extended nor limited by the specifications contained in this documentation.
The manufacturer reserves the right to correct or amend the specifications, product information and
omissions in these operating instructions without notice. The manufacturer shall not be liable for any
damage, injuries or costs which may be caused by the aforementioned reasons.
This documentation was written in german language. Other language versions are translated.
06/13 Operating Instructions ACU 11

WARNING
Compliance with the documentation is required to ensure safe operation of the frequency inverter. BONFIGLIOLI VECTRON GmbH shall not be held liable for any damage
caused by any non-compliance with the documentation.
In case any problems occur which are not covered by the documentation sufficiently,
please contact the manufacturer.
1.2 This document
The present documentation describes the frequency inverters of the
ACTIVE Cube
series. The modular
hardware and software structure enables customer-specific adaptation of the frequency inverter series. Applications with high functionality and dynamism can be realized easily.
The user manual contains important information on the installation and use of the in its specified application range. Compliance with this user manual contributes to avoiding risks, minimizing repair cost
and downtimes and increasing the reliability and service live of the frequency inverter.
For this reason, make sure you read the user manual carefully.
1.3 Warranty and liability
BONFIGLIOLI VECTRON GmbH would like to point out that the contents of this user manual do not
form part of any previous or existing agreement, assurance or legal relationship. Neither are they
intended to supplement or replace such agreements, assurances or legal relationships. Any obligations
of the manufacturer shall solely be based on the relevant purchase agreement which also includes the
complete and solely valid warranty stipulations. These contractual warranty provisions are neither
extended nor limited by the specifications contained in this documentation.
The manufacturer reserves the right to correct or amend the specifications, product information and
omissions in these operating instructions without notice. The manufacturer shall not be liable for any
damage, injuries or costs which may be caused by the aforementioned reasons.
In addition to that, BONFIGLIOLI VECTRON GmbH excludes any warranty/liability claims for any personal and/or material damage if such damage is due to one or more of the following causes:
• inappropriate use of the frequency inverter,
• non-compliance with the instructions, warnings and prohibitions contained in the documentation,
• unauthorized modifications of the solar inverter,
• insufficient monitoring of parts of the machine/plant which are subject to wear,
• repair work at the machine/plant not carried out properly or in time,
• catastrophes by external impact and Force Majeure.
12 Operating Instructions ACU
06/13

1.4 Obligation
This user manual must be read before commissioning and complied with. Anybody entrusted with
tasks in connection with the
• transport,
• assembly,
• installation of the frequency inverter and
• operation of the frequency inverter
must have read and understood the user manual and, in particular, the safety instructions in order to
prevent personal and material losses.
1.5 Copyright
In accordance with applicable law against unfair competition, this user manual is a certificate. Any
copyrights relating to it shall remain with
BONFIGLIOLI VECTRON GmbH
Europark Fichtenhain B6
47807 Krefeld
Germany
These user manual is intended for the operator of the frequency inverter. Any disclosure or copying of
this document, exploitation and communication of its contents (as hardcopy or electronically) shall be
forbidden, unless permitted expressly.
Any non-compliance will constitute an offense against the copyright law dated 09 September 1965,
the law against unfair competition and the Civil Code and may result in claims for damages. All rights
relating to patent, utility model or design registration reserved.
1.6 Storage
The documentation form an integral part of the frequency inverter. It must be stored such that it is
accessible to operating staff at all times. In case the frequency inverter is sold to other users, this user
manual must also be handed over.
06/13 Operating Instructions ACU 13

2 General safety instructions and information on use
The chapter "General safety instructions and information on use" contains general safety instructions
for the Operator and the Operating Staff. At the beginning of certain main chapters, some safety instructions are included which apply to all work described in the relevant chapter. Special work-specific
safety instructions are provided before each safety-relevant work step.
2.1 Terminology
According to the documentation, different activities must be performed by certain persons with certain
qualifications.
The groups of persons with the required qualification are defined as follows:
Operator
This is the entrepreneur/company who/which operates the frequency inverter and uses it as per the
specifications or has it operated by qualified and instructed staff.
Operating staff
The term Operating Staff covers persons instructed by the Operator of the frequency inverter and
assigned the task of operating the frequency inverter.
Qualified staff
The term Qualified Staff covers staff who is assigned special tasks by the Operator of the frequency
inverter, e.g. installation, maintenance and service/repair and troubleshooting. Based on their qualification and/or know-how, qualified staff must be capable of identifying defects and assessing functions.
Qualified electrician
The term Qualified Electrician covers qualified and trained staff who has special technical know-how
and experience with electrical installations. In addition, Qualified Electricians must be familiar with the
applicable standards and regulations, they must be able to assess the assigned tasks properly and
identify and eliminate potential hazards.
Instructed person
The term Instructed Person covers staff who was instructed and trained about/in the assigned tasks
and the potential hazards that might result from inappropriate behavior. In addition, instructed persons must have been instructed in the required protection provisions, protective measures, the applicable directives, accident prevention regulations as well as the operating conditions and verified their
qualification.
Expert
The term Expert covers qualified and trained staff who has special technical know-how and experience
relating to frequency inverter. Experts must be familiar with the applicable government work safety
directives, accident prevention regulations, guidelines and generally accepted rules of technology in
order to assess the operationally safe condition of the frequency inverter.
14 Operating Instructions ACU
06/13

2.2 Designated use
The frequency inverter is designed according to the state of the art and recognized safety regulations.
The frequency inverters are electrical drive components intended for installation in industrial plants or
machines. Commissioning and start of operation is not allowed until it has been verified that the machine meets the requirements of the EC Machinery Directive 2006/42/EC and DIN EN 60204-1.
The frequency inverters meet the requirements of the low voltage directive 2006/95/EEC and DIN
EN 61800-5-1. CE-labeling is based on these standa rds. Responsibility for compliance with the EMC
Directive 2004/108/EC lies with the operator. Frequency inverters are only available at specialized
dealers and are exclusively intended for commercial use as per EN 61000-3-2.
No capacitive loads may be con nected to the frequency inverter.
The technical data, connection specifications and information on ambient conditions are indicated on
the rating plate and in the documentation and must be complied with in any case.
2.3 Misuse
Any use other than that described in "Designated use" shall not be permissible and shall be considered as misuse.
For example, the machine/plant must not be operated
• by uninstructed staff,
• while it is not in perfect condition,
• without protection enclosure (e.g. covers),
• without safety equipment or with safety equipment deactivated.
The manufacturer shall not be held liable for any damage resulting from such misuse. The sole risk
shall be borne by the operator.
2.3.1 Explosion protection
The frequency inverter is an IP 20 protection class device. For this reason, use of the device in explosive atmospheres is not permitted.
06/13 Operating Instructions ACU 15

2.4 Residual risks
Residual risks are special hazards involved in handling of the frequency inverter which cannot be eliminated despite the safety-compliant design of the device. Residual risks are not obviously identifiable
and can be a potential source of injury or health hazard.
Typical residual hazards include:
Electrical hazard
Danger of contact with energized components due to a defect, opened covers or enclosures or im-
proper working on electrical equipment.
Danger of contact with energized components inside of the frequency inverter if no external disconnection device was installed by the operator.
Electrostatic charging
Touching electronic components bears the risk of electrostatic discharges.
Thermal hazards
Risk of accidents by hot machine/plant surfaces, e.g. heat sink, transformer, fuse or sine filter.
Charged capacitors in DC link
The DC link may have dangerous voltage levels even up to three minutes after shutdown.
Danger of equipment falling down/over, e.g. during transport
Center of gravity is not the middle of the electric cabinet modules.
2.5 Safety and warning signs at frequency inverter
• Comply with all safety instructions and d anger inform ation provided on the frequency inverter.
• Safety information and warnings on the frequency inverter must not be removed.
16 Operating Instructions ACU
06/13

risk of death or serious injury if not
risk of death or serious injury if
Symbol
Meaning
Symbol
Meaning
Symbol
Meaning
2.6 Warning information and symbols used in the user manual
2.6.1 Hazard classes
The following hazard identifications and symbols are used to mark particularly important information:
DANGER
Identification of immediate threat holding a high
avoided.
WARNING
Identification of immediate threat holding a medium
not avoided.
CAUTION
Identification of immediate threat holding a low risk of minor or moderate physical injury if not avoided.
NOTE
Identification of a threat holding a risk of material damage if not avoided.
2.6.2 Hazard symbols
General hazard
Electrical voltage
2.6.3 Prohibition signs
No switching; it is forbidden to switch
the machine/plant, assembly on
Suspended load
Hot surfaces
06/13 Operating Instructions ACU 17

Symbol
Meaning
Symbol
Meaning
Recycling, to avoid waste, collect all
Symbol
Meaning
Symbol
Meaning
ESD: Electrostatic Discharge (can
Symbol
Meaning
2.6.4 Personal safety equipment
Wear body protection
2.6.5 Recycling
materials for reuse
2.6.6 Grounding symbol
Ground connection
2.6.7 ESD symbol
damage components and assemblies)
2.6.8 Information signs
Tips and information making using the
frequency inverter easier.
18 Operating Instructions ACU
06/13

2.7 Directives and guidelines to be adhered to by the operator
The operator must follow the following directives and regulations:
• Ensure that the applicable workplace-related accident prevention regulations as well as other ap-
plicable national regulation are accessible to the staff.
• An authorized person must ensure, before using the frequency inverter, that the device is used in
compliance with its designated use and that all safety requirements are met.
• Additionally, comply with the applicable laws, regulations and directives of the country in which
the frequency inverter is used.
− Any additional guidelines and directives that may be required additionally shall be defined by
the operator of the machine/plant considering the operating environment.
2.8 Operator's general plant documentation
• In addition to the user manual, the operator should issue separate internal operating instructions
for the frequency inverter. The user manual of the frequency inverter must be included in the user
manual of the whole plant.
2.9 Operator's/operating staff's responsibilities
2.9.1 Selection and qualification of staff
• Any work on the frequency inverter may only be carried out by qualified technical staff. The staff
must not be under the influence of any drugs. Note the minimum age required by law. Define the
staff's responsibility in connection with all work on the frequency inverter clearly.
• Work on the electrical components may only be performed by a qualified electrician according to
the applicable rules of electrical engineering.
• The operating staff must be trained for the relevant work to be performed.
2.9.2 General work safety
• In addition to the user manual of the machine/plant, any applicable legal or other regulations
relating to accident prevention and environmental protection must be complied with. The staff
must be instructed accordingly.
Such regulations and/or requirements may include, for example, handling of hazardous media and
materials or provision/use of personal protective equipment.
• In addition to this user manual, issue any additional directives that may be required to meet spe-
cific operating requirements, including supervision and reporting requirements, e.g. directives relating to work organization, workflow and employed staff.
• Unless approved of expressly by the manufacturer, do not modify the frequency inverter in any
way, including addition of attachments or retrofits.
• Only use the frequency inverter if the rated connection and setup values specified by the manu-
facturer are met.
• Provide appropriate tools as may be required for performing all work on the frequency inverter
properly.
06/13 Operating Instructions ACU 19

2.10 Organizational measures
2.10.1 General
• Train your staff in the handling and use of the frequency inverter and the machine/plant as well
as the risks involved.
• Use of any individual parts or components of the frequency inverter in other parts of the opera-
tor's machine/plant is prohibited.
• Optional components for the frequency inverter must be used in accordance with their designated
use and in compliance with the relevant documentation.
2.10.2 Use in combination with third-party products
• Please note that BONFIGLIOLI VECTRON GmbH will not accept any responsibility for compatibility
with third-party products (e.g. motors, cables or filters).
• In order to enable optimum system compatibility, BONFIGLIOLI VECTRON GmbH office compo-
nents facilitating commissioning and providing optimum synchronization of the machine/plant
parts in operation.
• If you use the frequency invert er in combination with third-party products, you do this at your
own risk.
2.10.3 Transport and Storage
• The frequency inverters must be transported and stored in an appropriate way. During transport
and storage the devices must remain in their original packaging.
• The units may only be stored in dry rooms which are protected against dust and moisture and are
exposed to little temperature deviations only. The requirements of DIN EN 60721-3-1 for storage,
DIN EN 60721-3-2 for transport and labeling on the packaging must be met.
• The duration of storage without connection to the permissible nominal voltage may not exceed
one year.
2.10.4 Handling and installation
• Do not commission any damaged or destroyed components.
• Prevent any mechanical overloading of the frequency inverter. Do not bend any components and
never change the isolation distances.
• Do not touch any electronic construction elements and contacts. The frequency inverter is
equipped with components which are sensitive to electrostatic energy and can be damaged if
handled improperly. Any use of damaged or destroyed components will endanger the machine/plant safety and shall be considered as a non-compliance with the applicable standards.
• Only install the frequency inverter in a suitable operating environment. The frequency inverter is
exclusively designed for installation in industrial environments.
• If seals are removed from the case, this can result in the warranty becoming null and void.
2.10.5 Electrical connections
• The five safety rules must be complied with.
• Never touch live terminals. The DC link may have dangerous voltage levels even up to three
minutes after shutdown.
• When performing any work on/with the frequency inverter, always comply with the applicable
national and international regulations/laws on work on electrical equipment/plants of the country
when the frequency inverter is used.
• The cables connected to the frequency inverters may not be subjected to high-voltage insulation
tests unless appropriate circuitry measures are taken before.
• Only connect the frequency inverter to suitable supply mains.
20 Operating Instructions ACU
06/13

2.10.5.1 The five safety rules
When working on/in electrical plants, always follow the five safety rules:
1. Isolate
2. Secure to prevent restarting
3. Check isolation
4. Earth and short-circuit,
5. Cover or shield neighboring live parts.
2.10.6 Safe operation
• During operation of the frequency inverter, always comply with the applicable national and inter-
national regulations/laws on work on electrical equipment/plants.
• Before commissioning and the start of the operation, make sure to fix all covers and check the
terminals. Check the additional monitoring and protective devices according to the applicable national and international safety directives.
• During operation, never open the machine/plant
• Do not connect/disconnect any components/equipment during operation.
• The machine/plant holds high voltage levels during operation, is equipped with rotating parts
(fan) and has hot surfaces. Any unauthorized removal of covers, improper use, wrong installation
or operation may result in serious injuries or material damage.
• Some components, e.g. the heat sink or brake resistor, may be hot even some time after the ma-
chine/plant was shut down. Don't touch any surfaces directly after shutdown. Wear safety gloves
where necessary.
• The frequency inverter may hold dangerous voltage levels until the capacitor in the DC link is dis-
charged. Wait for at least 3 minutes after shutdown before starting electrical or mechanical work
on the frequency inverter. Even after this waiting time, make sure that the equipment is deenergized in accordance with the safety rules before starting the work.
• In order to avoid accidents or damage, only qualified staff and electricians may carry out the work
such as installation, commissioning or setup.
• In the case of a defect of terminals and/or cables, immediately disconnect the frequency inverter
from mains supply.
• Persons not familiar with the operation of frequency inverters must not have access to the fre-
quency inverter. Do not bypass nor decommission any protective facilities.
• The frequency inverter may be connected to power supply every 60 s. This must be considered
when operating a mains contactor in jog operation mode. For commissioning or after an emergency stop, a non-recurrent, direct restart is permissible.
• After a failure and restoration of the power supply, the motor may start unexpectedly if the Auto
Start function is activated.
If staff is endangered, a restart of the motor must be prevented by means of external circuitry.
• Before commissioning and the start of the operation, make sure to fix all covers and check the
terminals. Check the additional monitoring and protective devices according to EN 60204 and applicable the safety directives (e.g. Working Machines Act or Accident Prevention Directives).
06/13 Operating Instructions ACU 21

Electric scrap, electronic components, lubricants and other utility materials must be
treated as special waste and may only be disposed of
2.10.7 Maintenance and service/troubleshootin g
• Visually inspect the frequency inverter when carrying out the required maintenance work and
inspections at the machine/plant.
• Perform the maintenance work and inspections prescribed for the machine carefully, including the
specifications on parts/equipment replacement.
• Work on the electrical components may only be performed by a qualified electrician according to
the applicable rules of electrical engineering. Only use original spare parts.
• Unauthorized opening and improper interventions in the machine/plant can lead to personal injury
or material damage. Repairs on the frequency inverters may only be carried out by the manufacturer or persons authorized by the manufacturer. Check protective equipment regularly.
• Before performing any maintenance work, the machine/plant must be disconnected from mains
supply and secured against restarting. The five safety rules must be complied with.
2.10.8 Final decommissioning
Unless separate return or disposal agreements were made, recycle the disassembled frequency inverter components:
• Scrap metal materials
• Recycle plastic elements
• Sort and dispose of other component materials
by specialized companies.
In any case, comply with any applicable national disposal regulations as regards environmentally compatible disposal of the frequency inverter. For more details, contact
the competent local authorities.
22 Operating Instructions ACU
06/13

The function “Safe Torque Off” (STO) is a functional safety provision, i.e. it protects
staff from damage, provided that projecting, installation and operation are performed
properly. This function does not disconnect the plant from power supply.
To disconnect the plant from power supply (for example for service purposes) an
“Emergency Stop” circuit according to EN 60204 has to be installed.
For maintenance work, a provision must be provided for disconnecting the plant from
power supply.
Improper installation of the safety technique can cause an uncontrolled starting of the
60204 must be functioning in all operation modes
The drive is started again when the function STO is no longer triggered. In order to
ive
Without a mechanical brake, the drive might not stop immediately but coast to a
standstill. If this may result in personal or material damage, additional safety
Check the safety function at regular intervals according to the results of your risk
ds that the check is performed after
safe. No single fault or component failure can cause
a disabled drive to produce motor shaft torque. Only in extremely unlike combinations
tor, 180°/2) and produce torque. It must be checked if this behavior can cause a
the STO function is used, the special safety, installation and instructions on use
Comply with the Application manual „Safe Torque Off STO“, especially when the described safety relevant function is used.
2.11 Safety Instructions on Function „Safe Torque Off“ (STO)
WARNING
drive. This may cause death, serious injuries and significant material damage.
Safety functions may only be installed and commissioned by qualified staff.
The STO function is not suitable for emergency switch off as per EN 60204. An emer-
gency switch off can be realized by installing a mains contactor.
An emergency stop according to EN
of the frequency inverter. Resetting of an emergency stop must not result in uncontrolled starting of the drive.
comply with EN 60204, it must be ensured by taking external measures that the dr
does not start without prior confirmation.
measures must be taken.
If persons may be endangered after disconnection of the motor control by STO, ac-
cess to the hazard areas must be prevented until the drive has stopped.
assessment. BONFIGLIOLI VECTRON recommen
one year, at the latest.
The STO function is one fault failof component faults the motor shaft could move jerky with sudden acceleration (max-
imum 180°/number of pole pairs, for example jerky movement of 90° for 4-pole modangerous machine movement.
If
instructions shall be complied with.
06/13 Operating Instructions ACU 23

The safety function “Safe Torque Off” may only be used if mechanical work is to be
power supply, the DC link of the frequency
Even if power supply to the motor is disconnected, and the motor is coasting to a
standstill or has already stopped, high voltages may still be present on the motor
is triggered, the motor is not isolated from the
Warning! Dangerous voltage!
performed on the driven machines, not for work on live components.
After disconnection of an external DC 24 V
inverter is still connected to mains supply.
terminals.
Before working (e.g. maintenance) on live parts, the plant must always be discon-
nected from mains supply (main switch). This must be documented on the plant.
When the function “Safe Torque Off”
DC link of the frequency inverter. High voltage levels may be present at the motor.
Do not touch live terminals.
24 Operating Instructions ACU
06/13

Thanks to the modular hardware components, the frequency inverters can be inte-
in type connection terminals enable a safe function and quick and
easy assembly.
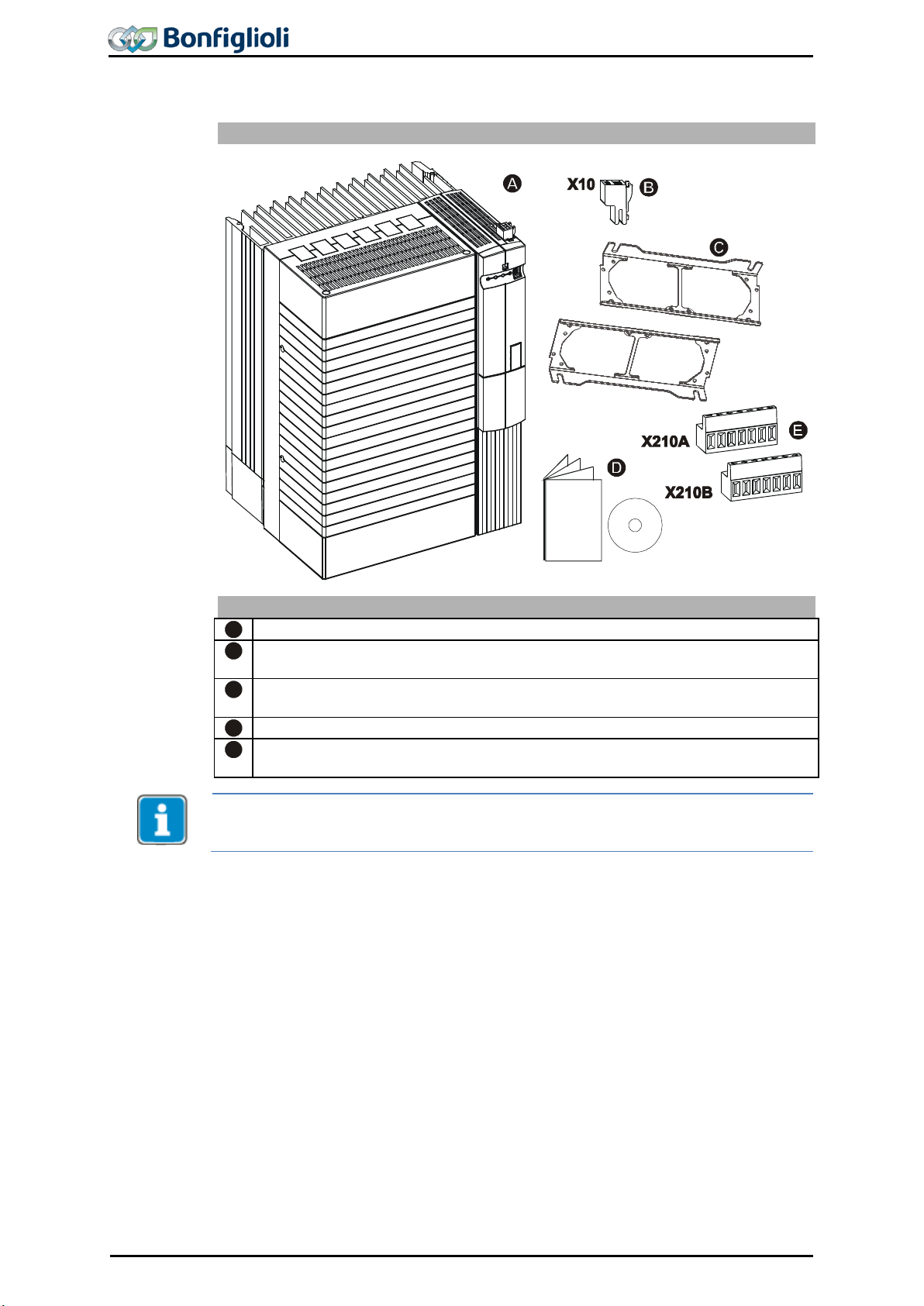
Scope of Supply
A
Frequency inverter
B
Terminal strip X1 (Phoenix ZEC 1,5/ST7,5)
Plug-in terminals for mains connection and DC linking
C
Terminal strip X10 (Phoenix ZEC 1.5/3ST5.0)
Plug-in terminals for the relay output
D
Standard fixtures for vertical assembly
E
Brief Instructions and Operating Instructions on CD ROM
F
Terminal strip X2 (Phoenix ZEC 1,5/ST7,5)
Plug-in terminal for brake resistor and motor connection
G
Control terminals X210A / X210B (Wieland DST85 / RM3.5)
Plug-in terminal for connection of the control signals
Please check incoming goods for quality, quantity and nature without delay. Obvious
defects such as exterior damage of the packing and/or the unit must be notified to the
sender within seven days for insurance reasons.
3 Scope of Supply
grated in the automation concept easily. The scope of delivery described can be supplemented by optional components and adapted to the customer-specific requirements. The plug-
3.1 ACU 201 (up to 3.0 kW) and 401 (up to 4.0 kW)
Scope of Supply
06/13 Operating Instructions ACU 25

Scope of Supply
Scope of Supply
A
Frequency inverter
B
Terminal strip X10 (Phoenix ZEC 1.5/3ST5.0)
Plug-in terminals for the relay output
C
Standard fittings with fitting screws (M4x20, M4x60)
for vertical assembly
D
Brief Instructions and Operating Instructions on CD ROM
E
Control terminals X210A / X210B (Wieland DST85 / RM3.5)
Plug-in terminal for connection of the control signals
Please check incoming goods for quality, quantity and nature without delay. Obvious
defects such as exterior damage of the packing and/or the unit must be notified to the
sender within seven days for insurance reasons.
3.2 ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW)
26 Operating Instructions ACU
06/13

Scope of Supply
Scope of Supply
A
Frequency inverter
B
Terminal strip X10 (Phoenix ZEC 1.5/3ST5.0)
Plug-in terminals for the relay output
C
Standard fittings with fitting screws (M4x20, M4x70)
for vertical assembly
D
Brief Instructions and Operating Instructions on CD ROM
E
Control terminals X210A / X210B (Wieland DST85 / RM3.5)
Plug-in terminal for connection of the control signals
Please check incoming goods for quality, quantity and nature without delay. Obvious
defects such as exterior damage of the packing and/or the unit must be notified to the
sender within seven days for insurance reasons.
3.3 ACU 401 (18.5 to 30.0 kW)
06/13 Operating Instructions ACU 27
Scope of Supply
Scope of Supply
A
Frequency inverter
B
Terminal strip X10 (Phoenix ZEC 1.5/3ST5.0)
Plug-in terminals for the relay output
C
Standard fittings with fitting screws (M5x20)
for vertical assembly
D
Brief Instructions and Operating Instructions on CD ROM
E
Control terminals X210A / X210B (Wieland DST85 / RM3.5)
Plug-in terminal for connection of the control signals
Please check incoming goods for quality, quantity and nature without delay. Obvious
defects such as exterior damage of the packing and/or the unit must be notified to the
sender within seven days for insurance reasons.
3.4 ACU 401 (37.0 to 65.0 kW)
28 Operating Instructions ACU
06/13
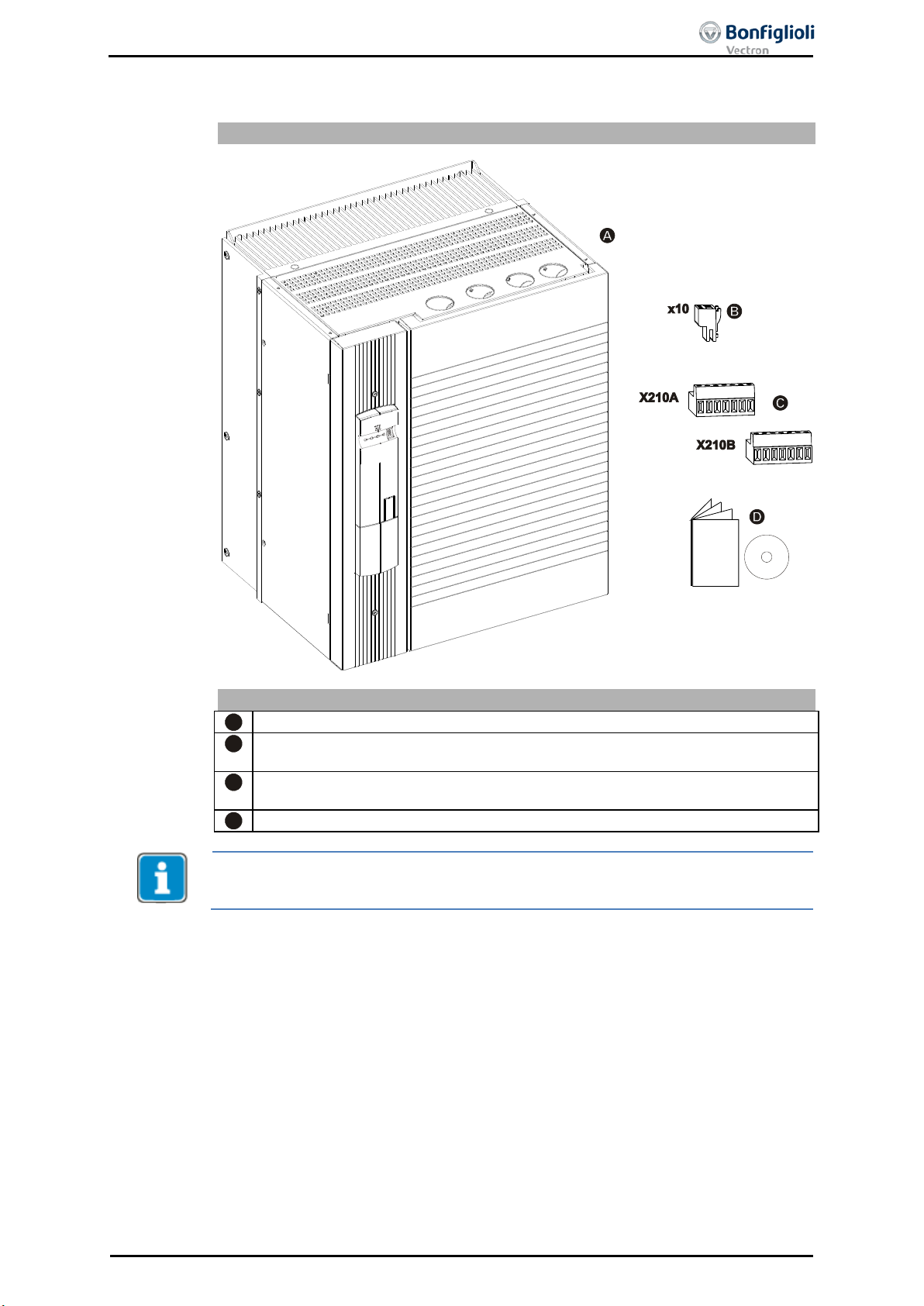
Scope of Supply
A
Frequency inverter
B
Terminal strip X10 (Phoenix ZEC 1.5/3ST5.0)
Plug-in terminals for the relay output
C
Control terminals X210A / X210B (Wieland DST85 / RM3.5)
Plug-in terminal for connection of the control signals
D
Please check incoming goods for quality, quantity and nature without delay. Obvious
defects such as exterior damage of the packing and/or the unit must be notified to the
sender within seven days for insurance reasons.
3.5 ACU 401 (75.0 to 132.0 kW)
Scope of Supply
Brief Instructions and Operating Instructions on CD ROM
06/13 Operating Instructions ACU 29

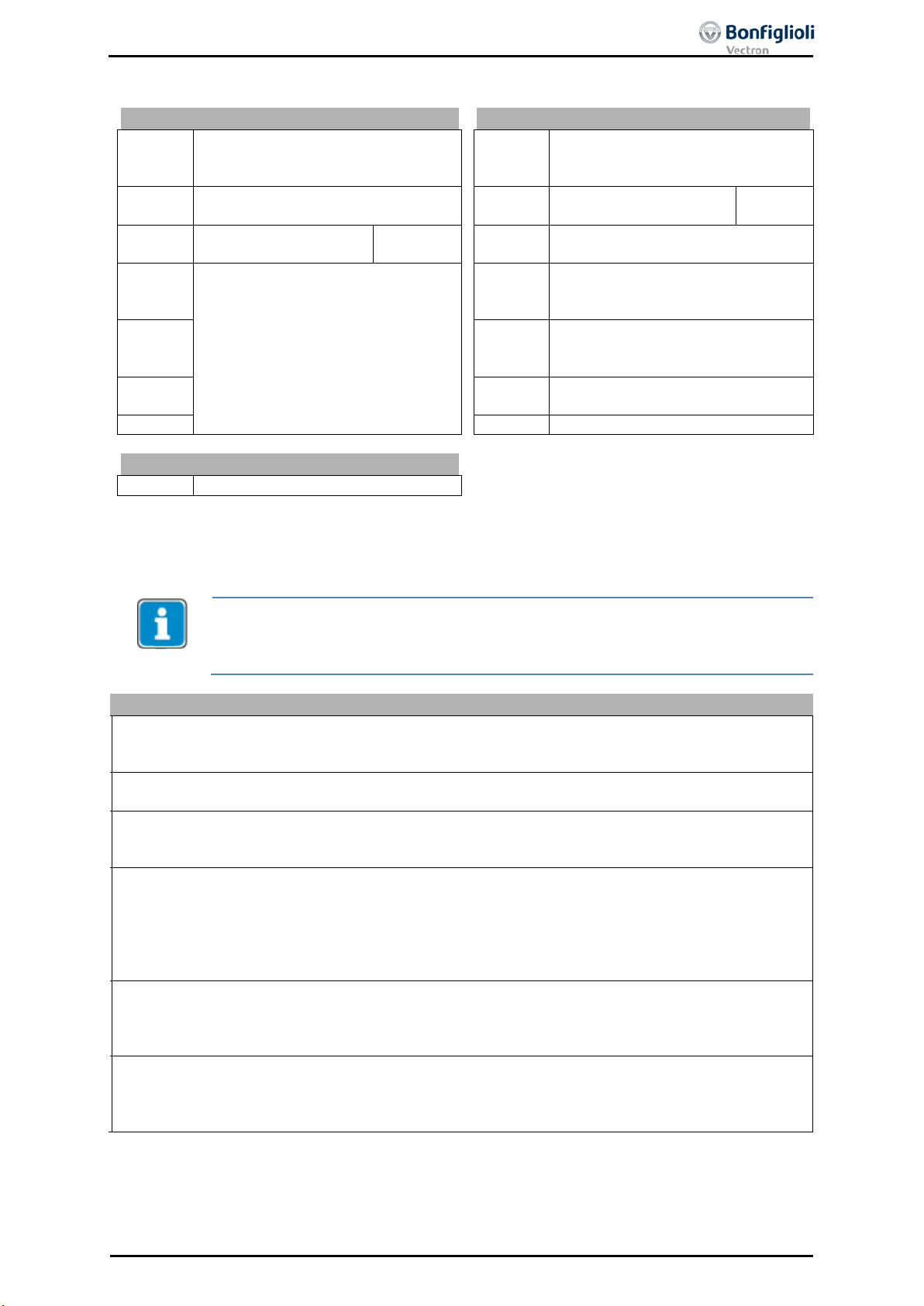
CE conformity
The frequency inverters ACU meet the requirements of the low voltage directive
2006/95/EEC and EN 61800-5-1.
EMC directive
For proper installation of the frequency inverter in order to meet the requirements of EN
please comply with the installation instructions in these
operating instructions.
Interference
immunity
The frequency inverters ACU meet the requirements of EN 61800-3 for use in
industrial environments.
UL Approval
The frequency inverters marked with the UL label according to UL508c also meet
the requirements of
UL approved are the device series ACU401 in sizes 1 to 7 and ACU201 devices in
sizes 1 and 2.
Safety function
The function is described in the application manual “Safe Torque Off”.
Ambient
temperature
Operation: 0…55 °C; as from 40 °C power reduction has to be considered.
Environmental
class
Operation: 3K3 (EN60721-3-3)
Relative humidity 15…85 %, no water condensation.
Degree
of protection
IP20 if covers and connection terminals are used properly.
Altitude
of installation
Up to 1000 m at rated specifications.
Up to 4000 m at reduced power.
Storage
Storage according to EN 50178.
BONFIGLIOLI VECTRON recommends that the unit be connected to mains voltage for 60 minutes after one year, at the latest.
Overload capability
Continuous Operation: 100 % IN
Up to 150 % I
Up to 200 % IN for 1 s
Devices
(0.25 & 0.37 kW):
Up to 200 % I
Up to 200 % IN for 1 s
The overload capability can be used once in a time cycle of 10 minutes.
Functions
− Control methods adjusted to motors and application (configuration).
−
−
−
−
−
−
−
−
−
−
data set backup, diagnosis with Scope).
Parameterization
− Freely programmable digital inputs and outputs.
−
− Four separate data sets incl. motor parameter.
4 Technical Data
4.1 General technical data
61800-3,
the CSA Standard C22.2-No. 14.
for 60 s
N
Adjustable speed /tor que control.
Various control functions for motor and frequency inverter.
Positioning absolute or relative to a reference point.
Search Run.
Special brake control and load detection for lifting gear.
S-ramps for jerk limitation during acceleration and deceleration.
Technology (PI) controller.
Parameterizable Master-Slave operation via system bus.
Error memory.
Simplified and extended control via PC (commissioning, parameterization,
Various logic modules for linking and processing of signals.
30 Operating Instructions ACU
-01, -03
for 60 s
N
06/13
X210A.1
DC 20 V output (I
=180 mA)
external power supply
X210B.1
Digital input 1)
X210A.2
GND 20 V/ GND 24 V (ext.)
X210B.2
Digital input STOB (second shutdown path)
safety
relevant
X210A.3
Digital input STOA
(first shutdown path)
safety
relevant
X210B.3
Digital output 1)
X210A.4
Digital inputs 1)
X210B.4
Multifunction output
1)
(voltage sig-
factory settings)
X210A.5
X210B.5
Supply voltage DC 10 V for refer(I
max
= 4 mA)
X210A.6
X210B.6
Multifunction input 1) (reference
speed 0 … +10 V, factory settings)
X210A.7
X210B.7
Ground 10 V
Relay output X10
S3OUT.1
Inverted Error Signal 1)
1)
Control terminals are freely configurable.
• Control „Safe Torque Off “: Contacts on X210A.3 and X210B.2 open.
• Release of frequency inverter: Contacts on X210A.3 and X210B.2 closed.
By default, the different configurations occupy the control terminals with certain settings. These settings can be adjusted to the specific application, and various functions
can be assigned freely to the control terminals. An overview of the settings is displayed
at the last but one page of these operating instructions.
Technical data of control terminals
Digital inputs (X210A.3 … X210B.2): Low Signal: DC 0…3 V, High Signal: DC 12…30 V,
Input resistance: 2.3
X210A.6 and X210A.7 additionally: Frequency signal: DC 0 V...30 V, 10 mA at DC 24 V, f
max
=150 kHz
Digital output (X210B.3): Low Signal: DC 0…3 V, High Signal: DC 12…30 V,
maximum output current: 50 mA, PLC compatible
Relay output (X10): Change-over contact, response time approx. 40 ms,
break-contact AC 3 A / 240 V, DC 1 A (ohmic) / 24 V
Multifunction output (X210B.4):
analog signal: DC 19…28 V, maximum output current: 50
Digital signal: Low Signal: DC 0…3 V, High Signal: DC 12…30 V, output current: 50 mA,
PLC compatible,
Frequency signal: Output voltage: DC 0…24 V, maximum output current: 40 mA,
maximum output frequency: 150 kHz
Multifunction input (X210B.6):
analog signal: Input voltage: DC 0… 10 V (R
Digital signal: Low
ble
Cable size:
The signal terminals are suitable for the following cable sizes:
with ferrule: 0.25…1.0 mm²
without ferrule: 0.14…1.5 mm²
4.2 Technical Data – Control Electronic Equ ip ment
Control terminal X210A
max
or DC 24 V ±10% input for
Control terminal X210B
nal, proportional act. frequency,
ence value potentiometer,
kΩ, response time: 2 ms (STOA and STOB: 10 ms), PLC compatible,
− make-contact AC 5 A / 240 V, DC 5 A (ohmic) / 24 V
mA, pulse-width modulated (f
= 116 Hz),
PWM
=70 kΩ), input current: DC 0…20 mA (Ri=500 Ω),
i
Signal: DC 0…3 V, High Signal: DC 12 V…30 V, response time: 4 ms, PLC compati-
06/13 Operating Instructions ACU 31

Type
ACU 201
-01
-03
-05
-07
-09
Construction Size
1
Output, motor side
Recommended motor shaft power
P
kW
0.25
0.37
0.55
0.75
1.1
Output current
I A 1.6
2.5
3.0
4.0
5.4 5)
Long-term overload current (60 s)
I A 3.2
5.0
4.5
6.0
7.3
Short-time overload current (1 s)
I A 3.2
5.0
6.0
8.0
8.0
Output voltage
U
V
Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Output, brake resistor
Min. brake resistance
R Ω 100
100
100
100
100
Recommended brake resistor
(U
dBC
= 385 V)
Input, mains side
Mains current 3) 3ph/PE
1ph/N/PE; 2ph/PE
1.6
2.9
2.5
4.5 3 5.4 4 7.2
5.5 1)
9.5 2)
Mains voltage
U
V
184 ... 264
Mains frequency
f
Hz
45 ... 66
Fuse 3ph
1ph/N; 2ph
6
6
6
10
10
16
UL type 250 VAC RK5, 3ph
1ph/N; 2ph
6
6
6
10
10
15
Mechanics
Dimensions
HxWxD
mm
190 x 60 x 175
Weight (approx.)
m
kg
1.2
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
0.2 ... 1.5
Form of assembly
-
-
Vertical
Ambient conditions
Energy dissipation (2 kHz switching
frequency)
Coolant temperature
Tn
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
TL
°C
-25 ... 55
Transport temperature
TT
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85; not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
6)
Switching frequency
0.25 kW
1.6 A
1.6 A
1.6 A
1.3 A
1.1 A
0.37 kW
2.5 A
2.5 A
2.5 A
2.1 A
1.7 A
0.55 kW
3.0 A
3.0 A
3.0 A
2.5 A
2.0 A
0.75 kW
4.0 A
4.0 A
4.0 A
3.4 A
2.7 A
1.1 kW
5.4 A
2)
5.4 A
2) 5)
5.4 A
2) 5)
4.5 A
2) 5)
3.7 A
5)
1) Three-phase connection requires a commutating choke.
2) One- and two-phase connection requires a commutating choke.
3) Mains current with relative mains impedance ≥ 1% (see chapter ”Electrical installation“)
4) Maximum output current = 9.5 A with single-phase and two-phase connection
5) Reduction of switching frequency in thermal limit range
6) Maximum current in continuous operation
7) The device for single phase connection is not listed in the product catalogue and only available on request.
4.3 ACU 201 (0.25 to 1.1 kW, 230 V)
Switching frequency
f kHz
R Ω 430 300 230 160 115
I A
I A
I A
P W 32 38 43 53 73
2, 4, 8, 12, 16
Frequency inverter nominal power
32 Operating Instructions ACU
2 kHz
4 kHz
8 kHz
12 kHz
16 kHz
06/13

Type
ACU 201 -11
-13
-15
Construction Size
2
Output, motor side
Recommended motor shaft power
P
kW
1.5
2.2
3.0 4)
Output current
I A 7.0
9.5
12.5 4) 5)
Long-term overload current (60 s)
I A 10.5
14.3
16.2
Short-time overload current (1 s)
I A 14.0
19.0
19.0
Output voltage
U
V
Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Output, brake resistor
Min. brake resistance
R Ω 37
37
37
Recommended brake resistor
(U
dBC
= 385 V)
Input, mains side
Mains current 3) 3ph/PE
1ph/N/PE; 2ph/PE
7
13.2
9.5
16.5 2)
10.5 1)
16.5
Mains voltage
U
V
184 ... 264
Mains frequency
f
Hz
45 ... 66
Fuse 3ph
1ph/N; 2ph
10
16
16
20
16
20
UL type 250 VAC RK5, 3ph
1ph/N; 2ph
10
15
15
20
15
20
Mechanics
Dimensions
HxWxD
mm
250 x 60 x 175
Weight (approx.)
m
kg
1.6
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
0.2 ... 1.5
Form of assembly
-
-
Vertical
Ambient conditions
Energy dissipation (2 kHz switching
frequency)
Coolant temperature
Tn
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
TL
°C
-25 ... 55
Transport temperature
TT
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85; not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
6)
Switching frequency
1.5 kW
7.0 A
7.0 A
7.0 A
5.9 A
4.8 A
2.2 kW
9.5 A
2)
9.5 A
2)
9.5 A
2)
8.0 A
2)
6.5 A
3.0 kW
2) 4)
12.5 A
1)
12.5 A
1) 5)
12.5 A
1) 5)
10.5 A
1) 5)
8.5 A
5)
1) Three-phase connection requires a commutating choke.
2) One- and two-phase connection requires a commutating choke.
3) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
4) Maximum output current = 9.5 A with single-phase and two-phase connection
5) Reduction of switching frequency in thermal limit range
6) Maximum current in continuous operation
7) The device for single phase connection is not listed in the product catalogue and only available on request.
4.4 ACU 201 (1.5 to 3.0 kW, 230 V)
Switching frequency
f kHz
R Ω 75 55 37
I A
I A
I A
P W 84 115 170
2, 4, 8, 12, 16
2) 4) 7)
Frequency inverter nominal power
2 kHz
4 kHz
8 kHz
12 kHz
06/13 Operating Instructions ACU 33
16 kHz

Type
ACU 201 -18
-19
-21
-22
Construction Size 3
4
Output, motor side
Recommended motor shaft power
P
kW
4.0
5.54)
7.5 4)
9.2 4)
Output current
I A 18.0
22.0
32.0
35.0
Long-term overload current (60 s)
I A 26.3
30.3
44.5
51.5
Short-time overload current (1 s)
I A 33.0
33.0
64.0
64.0
Output voltage
U
V
Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Output, brake resistor
Min. brake resistance
R Ω 24
24
12
12
Recommended brake resistor
(U
dBC
= 385 V)
Input, mains side
Mains current 3) 3ph/PE
1ph/N/PE; 2ph/PE
18
28
20
1)
- 4)
28.2
1)
- 4)
35.6
1)
- 4)
Mains voltage
U
V
184 ... 264
Mains frequency
f
Hz
45 ... 66
Fuse 3ph
1ph/N; 2ph
25
35
25
- 4)
35
- 4)
50
- 4)
Mechanics
Dimensions
HxWxD
mm
250 x 100 x 200
250 x 125 x 200
Weight (approx.)
m
kg
3.0
3.7
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
0.2 … 6
0.2 … 16
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
T
°C
Rel. air humidity
-
%
15 ... 85; not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
6)
Switching frequency
2 kHz
4 kHz
8 kHz
12 kHz
16 kHz
4.0 kW
18.0 A
2)
18.0 A
2)
18.0 A
2)
15.1 A
2)
12.2 A
5.5 kW
4)
23.0 A
1)
22.7 A
1), 5)
22.0 A
1), 5)
18.5 A
5)
15.0 A
5)
7.5 kW
4)
32.0 A
1)
32.0 A
1)
32.0 A
1)
26.9 A
1)
21.8 A
9.2 kW
4)
40.0 A
1)
38.3 A
1), 5)
35.0 A
1), 5)
29.4 A
1), 5)
23.8 A
5)
1) Three-phase connection requires a commutating choke.
2) One- and two-phase connection requires a commutating choke.
3) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
4) Three-phase connection permissible only.
5) Reduction of switching frequency in thermal limit range
6) Maximum current in continuous operation
7) The device for single phase connection is not listed in the product catalogue and only available on request.
4.5 ACU 201 (4.0 to 9.2 kW, 230 V)
Switching frequency
Transport temperature
f kHz
2, 4, 8, 12, 16
R Ω 30 24 16 12
I A
2) 7)
I A
P W 200 225 310 420
T
-25 ... 70
Frequency inverter nominal power
34 Operating Instructions ACU
06/13

Type
ACU 401
-01
-03
-05
-07
-09
-11
Construction Size
1
Output, motor side
Recommended motor shaft power
P
kW
0.25
0.37
0.55
0.75
1.1
1.5
Output current
I A 1.0
1.6
1.8
2.4
3.2
3.8 3)
Long-term overload current (60 s)
I A 2.0
3.2
2.7
3.6
4.8
5.7
Short-time overload current (1 s)
I A 2.0
3.2
3.6
4.8
6.4
7.6
Output voltage
U
V
Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Output, brake resistor
Min. brake resistance
R Ω 300
300
300
300
300
300
Recommended brake resistor
(U
dBC
= 770 V)
Input, mains side
Mains current 2) 3ph/PE
I A 1.0
1.6
1.8
2.4
2.8 1)
3.3 1)
Mains voltage
U
V
320 ... 528
Mains frequency
f
Hz
45 ... 66
I A
UL type 600 VAC RK5
I
A
6
Mechanics
Dimensions
HxWxD
mm
190 x 60 x 175
Weight (approx.)
m
kg
1.2
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
0.2 ... 1.5
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
Transport temperature
T
T
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85, not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
4)
Switching frequency
2 kHz
4 kHz
8 kHz
12 kHz
16 kHz
0.25 kW
1.0 A
1.0 A
1.0 A
0.8 A
0.7 A
0.37 kW
1.6 A
1.6 A
1.6 A
1.3 A
1.1 A
0.55 kW
1.8 A
1.8 A
1.8 A
1.5 A
1.2 A
0.75 kW
2.4 A
2.4 A
2.4 A
2.0 A
1.6 A
1.1 kW
3.2 A
1)
3.2 A
1)
3.2 A
1)
2.7 A
1)
2.2 A
1.5 kW
1)
3.8 A
3.8 A
3)
3.8 A
3)
3.2 A
3)
2.6 A
3)
1) Three-phase connection requires a commutating choke.
2) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
3) Reduction of switching frequency in thermal limit range
4) Maximum current in continuous operation
4.6 ACU 401 (0.25 to 1.5 kW, 400 V)
Switching frequency
Fuses
f kHz
R Ω 930 930 930 634 462 300
P W 30 35 40 46 58 68
2, 4, 8, 12, 16
6
Frequency inverter nominal power
06/13 Operating Instructions ACU 35

Type
ACU 401 -12
-13
-15
-18
Construction Size
2
Output, motor side
Recommended motor shaft power
P
kW
1.85
2.2
3.0
4.0
Output current
I A 4.2
5.8
7.8
9.0 3)
Long-term overload current (60 s)
I A 6.3
8.7
11.7
13.5
Short-time overload current (1 s)
I A 8.4
11.6
15.6
18.0
Output voltage
U
V
Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Output, brake resistor
Min. brake resistance
R Ω 136
136
136
92
Recommended brake resistor
(U
dBC
= 770 V)
Input, mains side
Mains current 2) 3ph/PE
I A 4.2
5.8
6.8 1)
7.8 1)
Mains voltage
U
V
320 ... 528
Mains frequency
f
Hz
45 ... 66
Fuses
I A 6
10
UL type 600 VAC RK5
I A 6
10
Mechanics
Dimensions
HxWxD
mm
250 x 60 x 175
Weight (approx.)
m
kg
1.6
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
0.2 ... 1.5
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
Transport temperature
T
T
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85, not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
4)
Switching frequency
2 kHz
4 kHz
8 kHz
12 kHz
16 kHz
1.85 kW
4.2 A
4.2 A
4.2 A
3.5 A
2.9 A
2.2 kW
5.8 A
5.8 A
5.8 A
4.9 A
3.9 A
3.0 kW
7.8 A
1)
7.8 A
1)
7.8 A
1)
6.6 A
1)
5.3 A
4.0 kW
9.0 A
1)
9.0 A
1) 3)
9.0 A
1) 3)
7.6 A
1) 3)
6.1 A
3)
1) Three-phase connection requires a commutating choke.
2) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
3) Reduction of switching frequency in thermal limit range
4) Maximum current in continuous operation
4.7 ACU 401 (1.85 to 4.0 kW, 400 V)
Switching frequency
f kHz
R Ω 300 220 148 106
P W 68 87 115 130
2, 4, 8, 12, 16
Frequency inverter nominal power
36 Operating Instructions ACU
06/13

Type
ACU 401
-19
-21
-22
-23
-25
Construction Size
3
4
Output, motor side
Recommended motor shaft power
P
kW
5.5
7.5
9.2
11.0
15.0
Output current
I A 14.0
18.0
22.0 3)
25.0
32.0
Long-term overload current (60 s)
I A 21.0
26.3
30.3
37.5
44.5
Short-time overload current (1 s)
I A 28.0
33.0
33.0
50.0
64.0
Output voltage
U V Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Output, brake resistor
Min. brake resistance
R Ω 48
48
48
32
32
Recommended brake resistor
(U
dBC
= 770 V)
Input, mains side
Mains current 2) 3ph/PE
I A 14.2
15.8 1)
20.0 1)
26.0
28.2 1)
Mains voltage
U
V
320 ... 528
Mains frequency
f
Hz
45 ... 66
I A
UL type 600 VAC RK5
I
A
20
30
40
Mechanics
Dimensions
HxWxD
mm
250 x 100 x 200
250 x 125 x 200
Weight (approx.)
m
kg
3.0
3.7
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
0.2 ... 6
0.2 ... 16
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
T
°C
Rel. air humidity
-
%
15 ... 85, not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
4)
Switching frequency
2 kHz
4 kHz
8 kHz
12 kHz
16 kHz
5.5 kW
14.0 A
14.0 A
14.0 A
11.8 A
9.5 A
7.5 kW
18.0 A
1)
18.0 A
1)
18.0 A
1)
15.1 A
1)
12.2 A
9.2 kW
1)
23.0 A
22.7 A
3)
22.0 A
3)
18.5 A
3)
15.0 A
3)
11 kW
25.0 A
25.0 A
25.0 A
21.0 A
17.0 A
1)
1)
1)
1)
1)
Three-phased connection demands mains commutating choke
2)
Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
3)
Reduction of switching frequency in thermal limit range
4)
Maximum current in continuous operation
4.8 ACU 401 (5.5 to 15.0 kW, 400 V)
Switching frequency
Fuses
Transport temperature
f kHz
R Ω 80 58 48 48 32
16 25 35
P W 145 200 225 240 310
T
2, 4, 8, 12, 16
-25 ... 70
Frequency inverter nominal power
15 kW
32.0 A
32.0 A
32.0 A
26.9 A
06/13 Operating Instructions ACU 37
21.8 A

Type
ACU 401 -27
-29
-31
Construction Size
5
Output, motor side
Recommended motor shaft power
P
kW
18.5
22.0
30.0
Output current
I A 40.0
45.0
60.0
Long-term overload current (60 s)
I A 60.0
67.5
90.0
Short-time overload current (1 s)
I A 80.0
90.0
120.0
Output voltage
U V Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Switching frequency
f
kHz
2, 4, 8
Output, brake resistor
Min. brake resistance
R
Ω
16
Recommended brake resistor
(U
dBC
= 770 V)
Input, mains side
Mains current 2) 3ph/PE
I A 42.0
50.0
58.0 1)
Mains voltage
U
V
320 ... 528
Mains frequency
f
Hz
45 ... 66
Fuses I A
50
63
UL type 600 VAC RK5
I
A
50
60
Mechanics
Dimensions
HxWxD
mm
250x200x260
Weight (approx.)
m
kg 8
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
up to 25
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
Transport temperature
T
T
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85, not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
3)
Switching frequency
2 kHz
4 kHz
8 kHz
18.5 kW
40.0 A
40.0 A
40.0 A
22 kW
45.0 A
45.0 A
45.0 A
30 kW
60.0 A
1)
60.0 A
1)
60.0 A
1)
1) Three-phase connection requires a commutating choke.
2) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
3) Maximum current in continuous operation
4.9 ACU 401 (18.5 to 30.0 kW, 400 V)
R Ω 26 22 16
Frequency inverter nominal power
P W 445 535 605
38 Operating Instructions ACU
06/13

Type
ACU 401 -33
-35
-37
-39
Construction Size
6
Output, motor side
Recommended motor shaft power
P
kW
37.0
45.0
55.0
65.0
Output current
I A 75.0
90.0
110.0
125.0
Long-term overload current (60 s)
I A 112.5
135.0
165.0
187.5
Short-time overload current (1 s)
I A 150.0
180.0
220.0
250.0
Output voltage
U V Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Switching frequency
f
kHz
2, 4, 8
Output, brake resistor
5)
Min. brake resistance
R
Ω
7.5
Recommended brake resistor
(U
dBC
= 770 V)
Input, mains side
Mains current 2) 3ph/PE
I A 87.0
104.0
105.0 1)
120.0 1)
Mains voltage
U
V
320 ... 528
Mains frequency
f
Hz
45 ... 66
Fuses I A
100
125
125
125
UL type 600 VAC RK5
I A 100
125
125
125
Mechanics
Dimensions
HxWxD
mm
400x275x260
Weight (approx.)
m
kg
20
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
up to 70
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
Transport temperature
T
T
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85, not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
4)
Switching frequency
2 kHz
4 kHz
8 kHz
37 kW
75.0 A
75.0 A
75.0 A
45 kW
90.0 A
90.0 A
90.0 A
55 kW
110.0 A
1)
110.0 A
1)
110.0 A
1)
65 kW
125.0 A
1) 3)
125.0 A
1) 3)
125.0 A
1) 3)
1) Three-phase connection requires a commutating choke.
2) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
3) Reduction of switching frequency in thermal limit range
4) Maximum current in continuous operation
5) Optional the frequency inverter of this size is purchasable without brake transistor.
4.10 ACU 401 (37.0 to 65.0 kW, 400 V)
R Ω 13 11 9 7.5
Frequency inverter nominal power
P W 665 830 1080 1255
06/13 Operating Instructions ACU 39

Type
ACU 401
-43
-45
-47
-49
Construction Size
7
Output, motor side
Recommended motor shaft power
P
kW
75
90
110
132
Output current
I A 150
180
210
250
Long-term overload current (60 s)
I A 225
270
315
332
Short-time overload current (1 s)
I A 270
325
375
375
Output voltage
U V Maximum input voltage, three-phase
Protection
-
-
Short circuit / earth fault proof
Rotary field frequency
f
Hz
0 ... 1000, depending on switching frequency
Switching frequency
f
kHz
2, 4, 8
Output, brake resistor
5)
Min. brake resistance
R
Ω
4.5
3.0
Recommended brake resistor
(U
dBC
= 770 V)
Input, mains side
Mains current 2) 3ph/PE
I A 143 1)
172 1)
208 1)
249 1)
Mains voltage
U
V
320 ... 528
Mains frequency
f
Hz
45 ... 66
Fuses 3ph
I A 160
200
250
315
Fuses according to UL6)
Cooper Bussmann
Mechanics
Dimensions
HxWxD
mm
510 x 412 x 351
Weight (approx.)
m
kg
45
Degree of protection
-
-
IP20 (EN60529)
Terminals
A
mm
2
up to 2 x 95
Form of assembly
-
-
vertical
Ambient conditions
Energy dissipation
(2 kHz switching frequency)
Coolant temperature
T
n
°C
0 ... 40 (3K3 DIN IEC 721-3-3)
Storage temperature
T
L
°C
-25 ... 55
Transport temperature
T
T
°C
-25 ... 70
Rel. air humidity
-
%
15 ... 85, not condensing
If required by the customer, the switching frequency may be increased if the output current is reduced at the
same time. Comply with the applicable standards and regulations for this operating point.
Output current
4)
Switching frequency
2 kHz
4 kHz
8 kHz
75 kW
150 A
150 A
150 A
90 kW
180 A
180 A
180 A
110 kW
210 A
210 A
210 A
3)
132 kW
250 A
250 A
250 A
3)
1) Three-phase connection requires a commutating choke.
2) Mains current with relative mains impedance ≥ 1% (see chapter „Electrical installation“)
3) Reduction of switching frequency in thermal limit range
4) Maximum current in continuous operation
5) Optional the frequency inverter of this size is purchasable without brake transistor.
6) For the UL conform fuse protection the mentioned fuses of the compan y Cooper Bussmann must be used.
Other fuses must not be used for the UL conform fuse protection.
4.11 ACU 401 (75.0 to 132.0 kW, 400 V)
R Ω 6.1 5.1 4.1 3.8
Type FWH-250A FWH-300A FWH-350A FWH-400A
Frequency inverter nominal power
P W 1600 1900 2300 2800
40 Operating Instructions ACU
06/13

The technical data of the frequency inverters refer to the nominal point which was
ing (derating) of the frequency inverters is possible based on the following diagrams.
Installation height
100
85
60
40
20
55
45
3000
1000
2000 4000
3000
1000
2000
4000
Power reduction (Derating),
5%/1000 m above sea level,
h = 4000 m
max
max. coolant temperature,
3.3 °C/1000 m above sea level,
Mounting altitude in m above sea level Mounting altitude in m above sea level
Output current in %
Coolant temperature in °C
Coolant temperature
100
80
63
40
20
0 10
20
30
40 50 55
Power reduction (Derating)
2.5%/K upper 40 °C, T = 55 °C
max
Output current in %
Coolant temperatur e in °C
Mains voltage
100
83
63
40
20
0 400
420
440
460
480
Out
put
cur
ren
t in
%
Mains voltage equal output voltage in V
Reduction of output current at constant output power (Derating)
0.22%/ V upper 400 V, U = 480 V
max
4.12 Operation diagrams
selected to enable a wide range of applications. A functionally and efficient dimension-
06/13 Operating Instructions ACU 41

The frequency inverters of degree of protection IP20 are designed, as a standard, for
installation in electrical cabinets.
• During installation, both the installation and the safety instructions as well as the
device specifications must be complied with.
To avoid serious physical injuries or major material damage, only qualified persons
During assembly, make sure that no foreign particles (e.g. chips, dust, wires, screws,
Mount the devices with sufficient clearance to other components so that the cooling
air can circulate freely. Avoid soiling by grease and air pollution by dust, aggressive
5 Mechanical Installation
WARNING
are allowed to work on the devices.
WARNING
tools) can get inside the frequency inverter. Otherwise there is the risk of short circuits and fire.
The frequency inverters comply with protection class IP20 only if the covers and terminals are mounted properly.
Overhead Installation or installation in horizontal position is not permissible.
NOTE
gases, etc.
42 Operating Instructions ACU
06/13
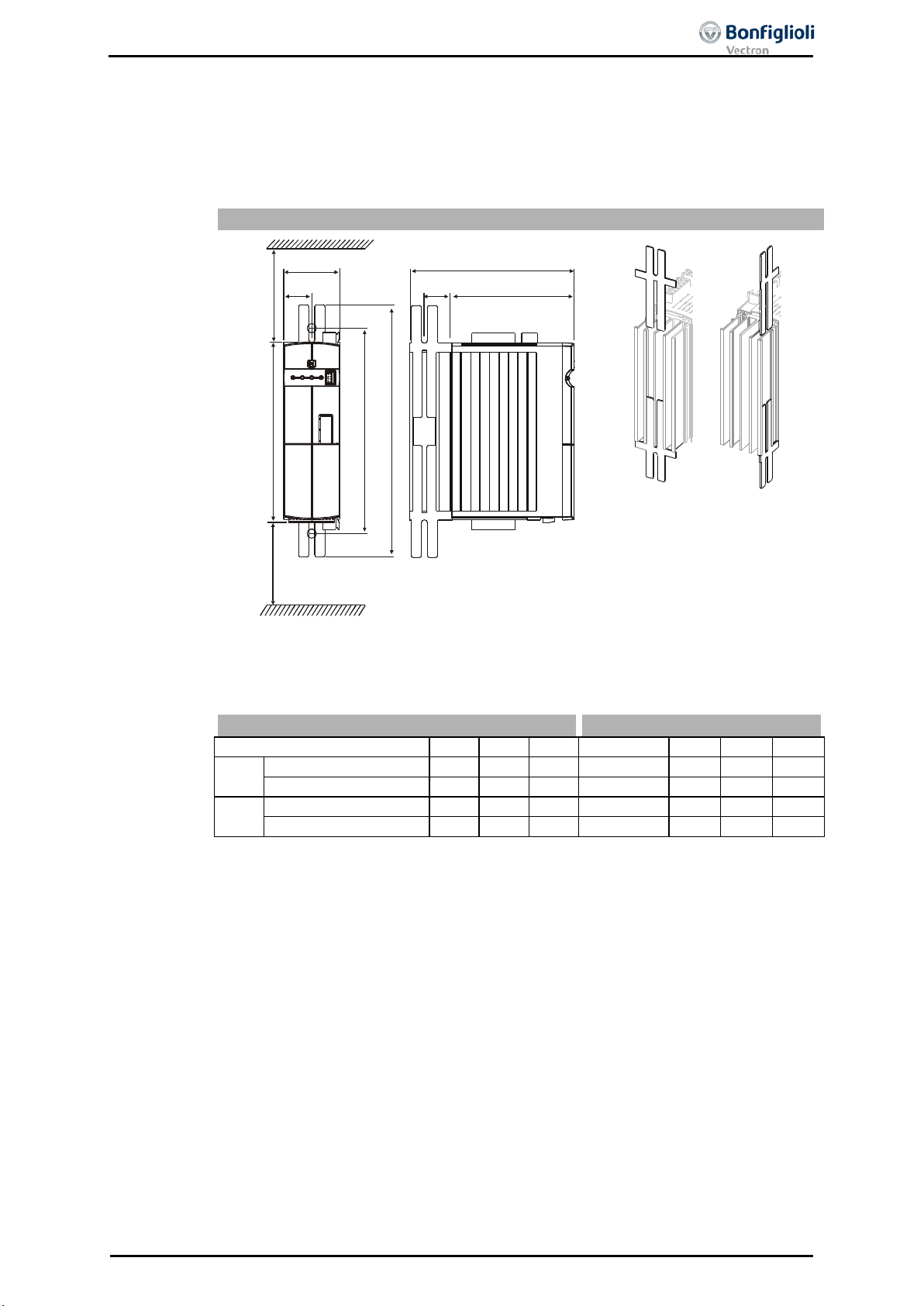
The frequency inverter is mounted in a vertical position on the assembly panel by
The following illustration shows the different mounting possibilities.
Standard installation
b
b1
a1
a a2
c
c1
x
x
x 100 mm≥
b1
Assembly is affected by inserting the long side of the fixing plate in the heat sink and
and the installation dimensions are those of the standard
device without optional components and are given in millimeters.
Dimensions [mm]
Installation dimensions [mm]
ACU a b c a1
a2
b1
c1
0.25 kW ... 1.1 kW
190
60
178
210 ... 230
260
30
133 1.5 kW ... 3.0 kW
250
60
178
270 ... 290
315
30
133
0.25 kW ... 1.5 kW
190
60
178
210 ... 230
260
30
133
1.85 kW ... 4.0 kW
250
60
178
270 ... 290
315
30
133
5.1 ACU 201 (up to 3.0 kW) and 401 (up to 4.0 KW)
means of the standard fittings.
screwing it to the mounting plate.
The dimensions of the device
201
401
06/13 Operating Instructions ACU 43
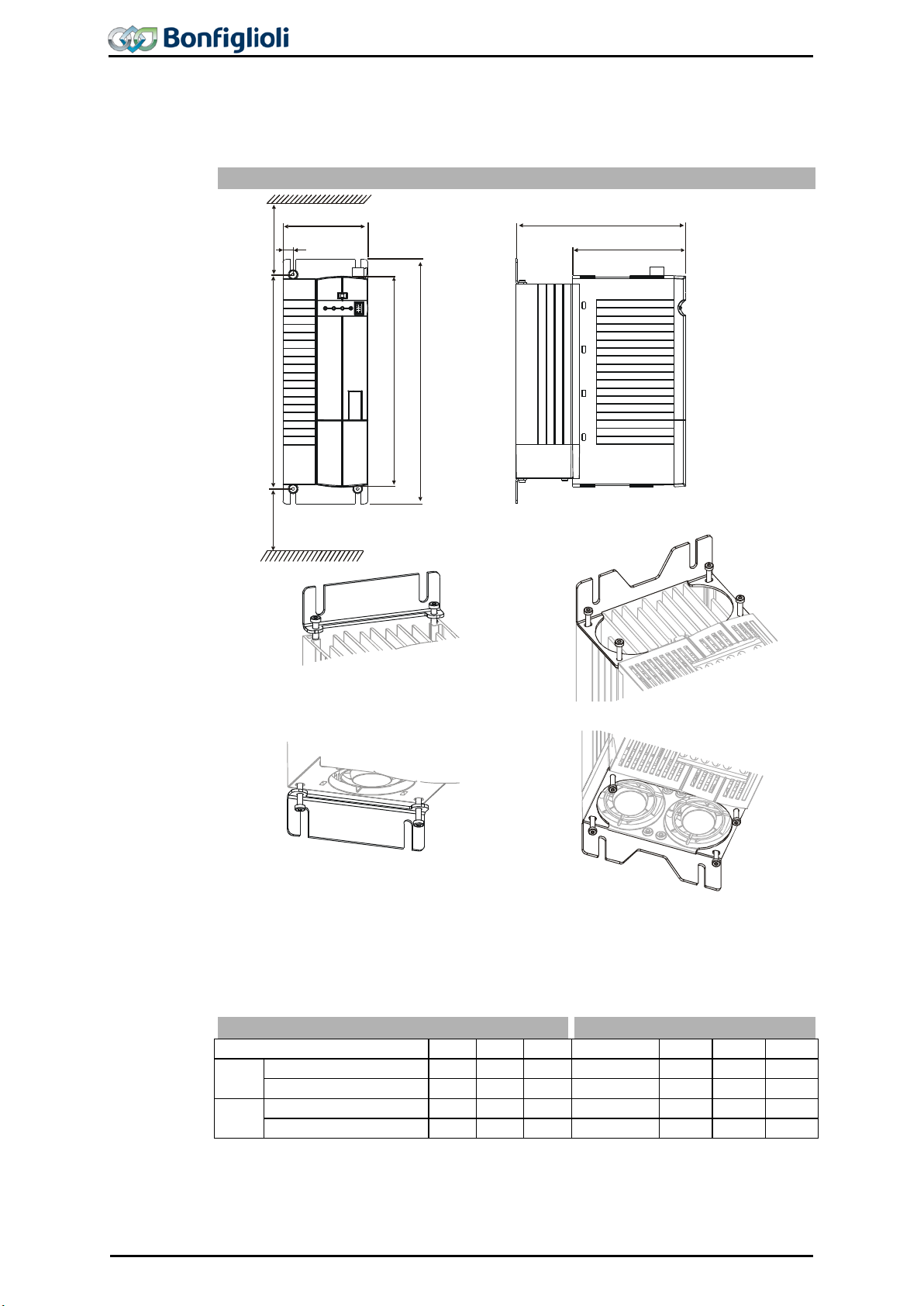
The frequency inverter is mounted in a vertical position on the assembly panel by
means of the standard fittings. The following illustration shows the standard fitting.
Standard installation
b
b1
a
a1 a2
c
x
x
c1
x 100 mm≥
fixing bracket bottom
(fixing with screws ) M4x60
fixing bracket top
(fixing with screws ) M4x20
Assembly is done by screwing the two fixing brackets to the heat sink of the frequenThe frequency inverters are provided with fixing brackets, which are fitted using four
screws. The dimensions of the device and the installation dimensions
meters.
Dimensions [mm]
Installation dimensions [mm]
ACU a b c a1
a2
b1
c1
4.0 … 5.5 kW
250
100
200
270 ... 290
315
12
133 7.5 … 9.2 kW
250
125
200
270 ... 290
315
17.5
133
5.5 ... 9.2 kW
250
100
200
270 ... 290
315
12
133 11.0 … 15.0 kW
250
125
200
270 ... 290
315
17.5
133
5.2 ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW)
cy inverter and the assembly panel.
thread-cutting
are those of the standard device without optional components and are given in milli-
201
401
44 Operating Instructions ACU
06/13
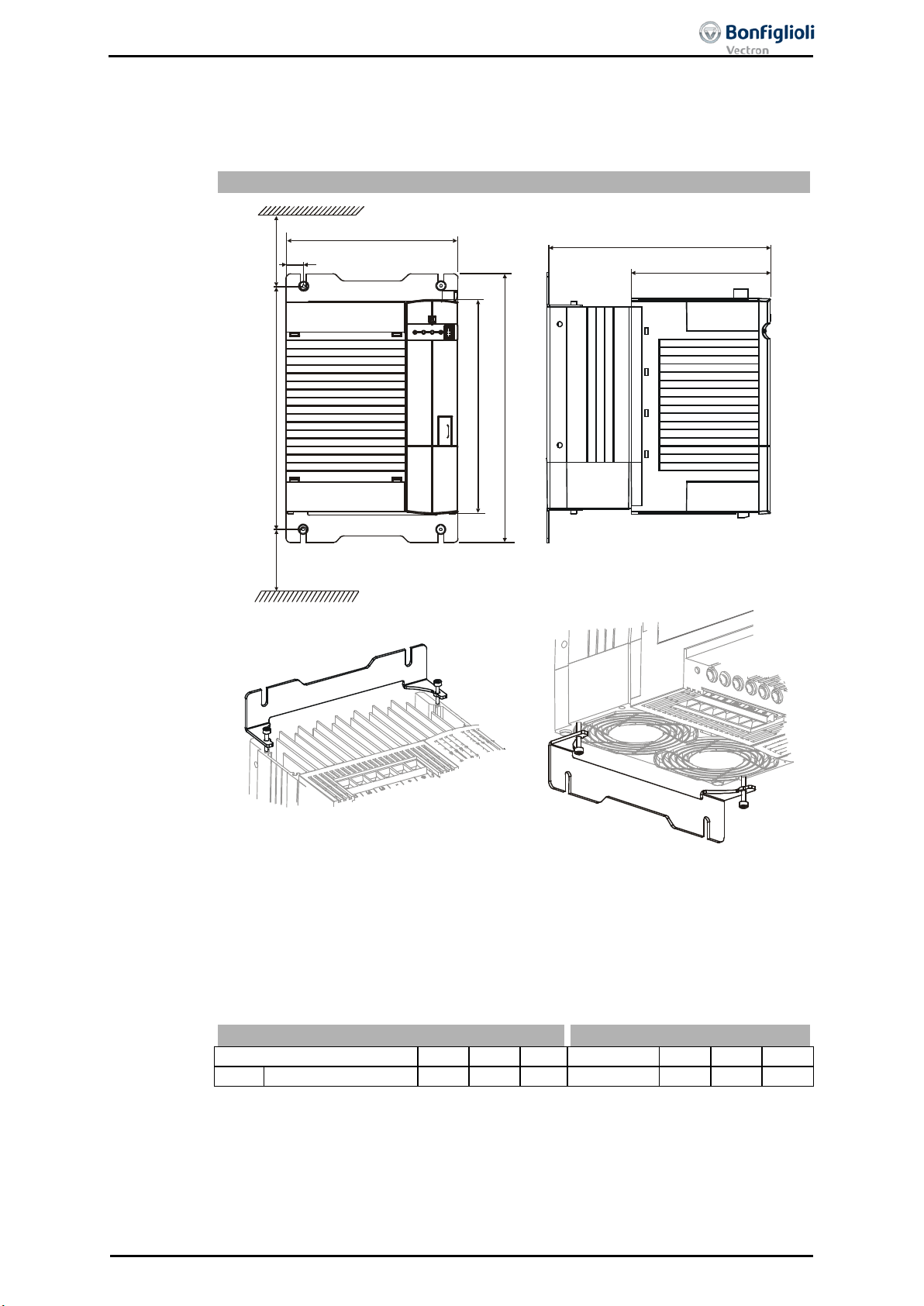
The frequency inverter is mounted in a vertical position on the assembly panel by
means of the standard fittings. The following illustration shows the standard fitting.
c
c1
x 100 mm≥
x
a
a1
a2
b
b1
x
fixing bracket top
(fixing with screws ) M4x20
fixing bracket bottom
(fixing with screws ) M4x70
Assembly is done by screwing the two fixing brackets to the heat sink of the frequen-
four
cutting screws. The dimensions of the device and the installation dimensions
meters.
Dimensions [mm]
Installation dimensions [mm]
ACU a b c a1
a2
b1
c1 401
18.5...30.0 kW
250
200
260
270 … 290
315
20
160
5.3 ACU 401 (18.5 to 30.0 kW)
Standard installation
cy inverter and the assembly panel.
The frequency inverters are provided with fixing brackets, which are fitted using
threadare those of the standard device without optional components and are given in milli-
06/13 Operating Instructions ACU 45

The frequency inverter is mounted in a vertical position on the assembly panel by
means of the standard fittings. The following illustration shows the standard fitting.
fixing braket top
(fixing with screws ) M5x20
fixing braket bottom
(fixing with screws )M5x20
a
a1
a2
x
x 100 m m
≥
b
b1
x
c
c1
Assembly is done by screwing the two fixing brackets to the heat sink of the frequenThe frequency inverters are provided with fixing brackets, which are fitted using four
cutting screws. The dimensions of the device and the installation dimensions
meters.
Dimensions [mm]
Installation dimensions [mm]
ACU a b c a1
a2
b1
c1
401
37...65 kW
400
275
260
425 … 445
470
20
160
5.4 ACU 401 (37.0 to 65.0 kW)
Standard installation
cy inverter and the assembly panel.
thread-
are those of the standard device without optional components and are given in milli-
46 Operating Instructions ACU
06/13

The frequency inverter is mounted in a vertical position on the assembly panel. The
following illustration shows the standard fitting.
The diameter of the fixing holes is 9 mm.
Assembly is done by screwing the back wall of the frequency inverter to the assembly
ard device without optional components and are given in millimeters.
Dimensions [mm]
Installation dimensions in mm
ACU a b c a1
b1
b2
b3
c1
c2
c3 401
75...132 kW
510
412
351
480
392
382
342
338
305
110
a
b
c
c1
c2
c3
b1
b2
b3
a1
x
x
x
300 mm
x
300 mm
5.5 ACU 401 (75.0 to 132.0 kW)
Standard installation
panel.
The dimensions of the device and the installation dimensions are those of the stand-
06/13 Operating Instructions ACU 47

The electrical installation must be carried out by qualified electricians according to the
connection work, discharge the frequency inverter. Verify that
er
The connecting cables must be protected externally, considering the maximum volt-
sections are to
inverter is
suitable for operation at a supply network of a maximum of 480 VAC which delivers a
maximum symmetrical current of 5000 A (effective value) if protected by fuses of
class RK5. Only use copper cables with a temperature range of 60/75 °C.
The frequency inverters are to be grounded properly, i.e. large connection area and
with good conductivity. The leakage current of the frequency inverters may be > 3.5
mA. According to EN 50178 a permanent connection must be provided. The protective
spond to the recommended cross-section of the wire.
Degree of protection IP20 is only achieved with terminals plugged and properly
Connection conditions
• The frequency inverter is suited for connection to the public or industrial supply
impedance ≥ 1%.
• It must be checked, based on the specifications of EN 61000-3-2, if the devices
ly available for the series of devices.
• Operation on unearthed mains (IT mains) is admissible after disconnection of the
Y capacitors in the interior of the device.
6 Electrical Installation
WARNING
general and regional safety and installation directives.
The documentation and device specification must be complied with during installa-
tion.
Before any assembly or
the frequency inverter is discharged.
Do not touch the terminals because the capacitors may still be charged.
Only connect suitable voltage sources. The nominal voltage of the frequency invert
must correspond to the supply voltage.
The frequency inverter must be connected to ground potential.
If voltage supply is switched on, no covers of the frequency inverter may be re-
moved.
age and current values of the fuses. The mains fuses and cable crossbe selected according to EN 60204-1 and DIN VDE 0298 Part 4 for the nominal operating point of the frequency inverter. According to UL/CSA, the frequency
conductor cross-section required for grounding the fixing plate must be selected according to the size of the unit. In these applications, the cross-section must corre-
CAUTION
mounted covers.
mains according to the technical data. If the transformer output of the supply
mains is ≤ 500 kVA, a mains commutation choke is only necessary for the frequency inverters identified in the technical data. The other frequency inverters are
suitable for connection without a mains commutating choke with a relative mains
can be connected to the public supply means without taking additional measures.
The frequency inverters ≤ 9.2 kW with integrated EMC filter comply with the
emission limits of the product standard EN 61800-3 up to a motor cable length of
10 m, without additional measures being required. Increased requirements in
connection with the specific application of the frequency inverter are to be met by
means of optional components. Commutating chokes and EMC filters are optional-
48 Operating Instructions ACU 06/13

• Interference-free operation with residual current device is guaranteed at a trip-
capacitive components between the mains or motor cables and PE.
ping current ≥ 30 mA if the following points are observed:
− one-phase power supply (L1/N): Pulse current and alternating current sensitive residual current devices (Type A to EN 50178)
− two-phase power supply (L1/L2) or
three-phase power supply (L1/L2/L3):
All-current sensitive residual current devices (Type B to EN 50178)
− Use EMC filters with reduced leakage current or, if possible, do not use EMC
filters at all.
− The length of the shielded motor cable is ≤ 10 m and there are no additional
06/13 Operating Instructions ACU 49

The frequency inverters are designed according to the requirements and limit values
3 with an interference immunity factor (EMI) for operation
avoided by expert
installation and observation of the specific product information.
Measures
• Install the frequency inverters and commutating chokes on a metal mounting
panel. Ideally, the mounting panel should be galvanized, not painted.
• Provide proper equipotential bonding within the system or the plant. Plant comconnected by means of PE cables.
• The shield of the control cables is to be connected to ground potential properly,
cable shields close to the unit.
• Connect the frequency inverter, the commutating choke, external filters and other components to an earthing point via short cables.
• Keep the cables as short as possible, make sure that cables are installed properly
using appropriate cable clamps, etc.
• Contactors, relays and solenoids in the electrical cabinet are to be provided with
suitable interference suppression components.
1 fuse
6.1 EMC Information
of product norm EN 61800in industrial applications. Electromagnetic interference is to be
ponents such as control cabinets, control panels, machine frames, etc. must be
i.e. with good conductivity, on both sides (shield clamp). Mount shield clamps for
2 circuit breaker
3 line choke (optional)
4 input filter (optional)
5 cable shield
6 brake resistor (optional)
7 output filter (optional)
50 Operating Instructions ACU 06/13

A
B
C
D
A
Mains Connection
The length of the mains supply cable is not limited. However, it must be installed separate from
the control, data and motor cables.
B
DC link connection
The frequency inverters are to be connected to
direct
voltage source. Cables longer than 300 mm are
to be shielded. The shield must be connected to
the mounting panel on both sides.
C
Control Connection
Keep control and signal cables physically sepa-
the power cables. Analog signal lines
nected to the shield potential on
one side. Install sensor cables separate from
motor cables.
D
Motor and brake resistor
The shield of the motor cable is to be connected
to ground potential properly on both sides. On
the motor side use a metal compression gland.
On the frequency inverter side an appropriate
shield clamp is to be used. The signal cable used
for monitoring the motor temperature must be
from the motor cable. Connect the
tor is used, the connection cable must also be
shielded, and the shield is to be connected to
earth potential on both sides.
Line choke
harmonics and reactive power. Additional the increase of
product life is possible. Consider the reduction of the maximum output voltage if a
Input filter
frequency interference voltage. The input
The frequency inverters meet the requirements of the low-voltage direc-tive
3 relates to the drive system. The documentation provides
er is a component of the drive system. The declaration of conformity is to be issued
the same mains potential or a common
rate from
are to be con
kept separate
shield of this line on both sides. If a brake resis-
Line chokes reduce mains
line choke is installed.
The line choke must be installed between mains connection and input filter.
Input filters reduce the conducted radiofilter must be installed upstream on mains side of the frequency inverter.
CAUTION
2006/95/EC and the requirements of the EMC directive 2004/108/EC. The EMC product standard EN 61800information on how the applicable standards can be complied if the frequency invert-
by the supplier of the drive system.
06/13 Operating Instructions ACU 51

A
Relay connection S3OUT
Change-over contact, response time approx. 40 ms,
− break-contact AC 3 A / 240 V, DC 1 A (ohmic) / 24 V
B
Voltage output/input
Bidirectional, DC 20 V voltage output (I
=180 mA) or input for external power sup-
ply DC 24 V ±10%
C
Digital input S1IND/STOA
Digital signal, STOA (1st shutdown path for safety function STO – „Safe Torque Off“),
PLC compatible
D
Digital inputs S2IND ... S6IND
Digital signal: response time approx. 2 ms, U
= DC 30 V, 10 mA at 24 V, PLC com-
patible, frequency signal: DC 8...30 V, 10 mA at DC 24 V, f
max
= 150 kHz
E
Digital input S7IND/STOB/STOB
Digital signal, STOB (2nd shutdown path for safety function STO – „Safe Torque
10 mA at DC 24 V, PLC compatible
F
Digital output S1OUT
Digital signal, DC 24 V, I
= 50 mA, PLC compatible, overload and short-circuit
proof
Analog signal: DC 24 V, I
= 50 mA, pulse-width modulated, f
= 116 Hz,
overload and short-circuit proof
Analog signal: resolution 12 Bit, 0...10 V (Ri = 70 kΩ), 0…20 mA (Ri = 500 Ω),
patible
+10 V / 4 mA
MFI1
GND 10 V
6
X210A
+20 V / 180 mA
24 V
S7IND
S4IND
X210B
5
6
7
1
2
3
S3OUT
X10
A
D
5
S3IND
4
S2IND
2
S1IND
7
S5IND
3
1
1
S6IND
GND 20 V
2
4
MFO1
S1OUT
3
+
-
L2
L3L1
X1
V
W
U
Rb1
X2
+
-
Rb2
I
U, I
A
B
C
D
E
F
G
H
6.2 Block diagram
− make-contact AC 5 A / 240 V, DC 5 A (ohmic) / 24 V
max
response time: approx. 10 ms (On), 10 μs (Off), U
max
= DC 30 V, 10 mA at DC 24 V,
max
Off“), response time: approx. 10 ms (On), 10 μs (Off), U
max
Multi-Function Output MFO1
max
Digital signal: DC 24 V, I
Frequency signal: DC 0...24 V, I
= 50 mA, PLC compatible,
max
= 40 mA, f
max
max
= 150 kHz,
Multi-Function Input MFI1
Digital signal: response time approx. 4 ms, U
= DC 30 V, 4 mA at 24 V, PLC com-
max
= DC 30 V,
max
PWM
52 Operating Instructions ACU 06/13

Thanks to the modular hardware components, the frequency inverters can be inte-
ules, refer to the corresponding documentation.
The hardware modules at slots B and C may only be assembled and disassembled
after the frequency inverter has been disconnected safely from power supply. Wait
before starting the
A
B
C
A
Control Unit KP500
Connection of the optional control unit KP500 or an interface
adapter KP232.
B
Communication module CM
Plug-in section for connection to various communication
− CM-CAN: CANopen interface
C
Expansion module EM
Slot for customer-specific adaptation of the control inputs
cation module upon request)
If two optional components with CAN-Protocol controller are installed, the system bus
6.3 Optional Components
grated in the automation concept easily. The standard and optional modules are recognized during the initialization, and the controller functionality is adjusted automatically. For the information required for installation and handling of the optional mod-
WARNING
for some minutes until the DC link capacitors have discharged
work.
The unit may only be connected with the power supply switched off.
Make sure that the frequency inverter is discharged.
Hardware modules
protocols:
− CM-232: RS232 interface
− CM-485: RS485 interface
− CM-PDP: Profibus-DP interface
and outputs to various applications:
− EM-ENC: exte nded speed sensor evaluation
− EM-RES: resolver evaluation
− EM-IO: analog and digital inputs and outputs
− EM-SYS: system bus
(system bus in combination with CM-CAN communi-
CAUTION
interface in the EM expansion module is deactivated!
06/13 Operating Instructions ACU 53

The cable dimensions should be selected according to the current load and voltage
section of the cables such that the voltage
sible. If the voltage drop is too great, the motor will not reach
tions and the separate UL instructions. For typical mains fuses, refer to chapter
“Technical Data”.
According to EN61800-5-1, the cross sections of the PE conductor shall be dimen-
Mains cable
Protective conductor
Mains cable up to 10 mm²
Install two protective conductors of
10 mm².
Mains cable 10…16 mm²
Install one protective conductor of the
same size as the mains cable.
Mains cable 16…35 mm²
Install one protective conductor of a
size of 16 mm²
Mains cable > 35 mm²
Install one protective conductor of half
the size of the mains cable.
The following tables provide an overview of typical cable cross-sections (copper cable
mains current max.
ate from these values due to actual operating conditions.
230 V: One-phase (L/N) and two-phase (L1/L2) connection
201
Mains cable
PE-conductor
Motor cable
-01
-09
0.25 kW
0.37 kW
1.1 kW
-11
-15
1.5 kW
3 kW
2x4 mm² or
1x10 mm²
6.4 Connection of Unit
6.4.1 Dimensioning of conductor cross-section
drop to be expected. Select the cable crossdrop is as small as pos
its full torque. Also comply with any additional national and application-specific regula-
sioned as follows:
the same size as the mains cable, or
one protective conductor of a size of
6.4.1.1 Typical cross-sections
with PVC insulation, 30 °C ambient temperature, and continuous
100% rated input current). Actual mains cable cross-section requirements may devi-
-03
-05
-07
-13
-18
0.55 kW
0.75 kW
2.2 kW
4 kW
4 mm²
1.5 mm²
2.5 mm²
2x1.5 mm² or
1x10 mm²
2x2.5 mm² or
1x10 mm²
1.5 mm²
1.5 mm²
4 mm²
54 Operating Instructions ACU 06/13

230 V: Three-phase connection (L1/L2/L3)
201
Mains cable
PE-conductor
Motor cable
-01
-15
0.25 kW
0.37 kW
3 kW
-18
-19
4 kW
5.5 kW
2x4 mm² or
1x10 mm²
2x6 mm² or
1x10 mm²
-22
9.2 kW
10 mm²
1x10 mm²
10 mm²
400V: Three-phase connection (L1/L2/L3)
401
Mains cable
PE-conductor
Motor cable
-01
-18
0,25 kW
0,37 kW
4 kW
-19
-21
5,5 kW
7,5 kW
2x2,5 mm² or
1x10 mm²
-22
-23
9,2 kW
11 kW
2x4 mm² or 1x10
mm²
2x6 mm² or 1x10
mm²
-27
18,5 kW
10 mm²
1x10 mm²
10 mm²
-29
-31
22 kW
30 kW
-33
37 kW
35 mm²
1x16 mm²
25 mm²
-35
45 kW
50 mm²
1x25 mm²
35 mm²
-37
55 kW
50 mm²
1x25 mm²
50 mm²
-39
65 kW
70 mm²
1x35 mm²
70 mm²
-43
75 kW
70 mm²
1x50 mm²
95 mm²
-45
90 kW
95 mm²
1x70 mm²
2x70 mm²
-47
110 kW
2x70 mm²
1x70 mm²
2x70 mm²
-49
132 kW
2x70 mm²
1x70 mm²
2x70 mm²
-03
-05
-07
-09
-11
-13
0.55 kW
0.75 kW
1.1 kW
1.5 kW
2.2 kW
1.5 mm²
2x1.5 mm² or
1x10 mm²
1.5 mm²
-21
-03
-05
-07
-09
-11
-12
-13
-15
-25
7.5 kW
6 mm²
0,55 kW
0,75 kW
1,1 kW
1,5 kW
1,85
2,2 kW
3 kW
15 kW
4 mm²
1,5 mm²
2,5 mm²
4 mm²
6 mm²
2x1,5 mm² or
1x10 mm²
4 mm²
6 mm²
1,5 mm²
2,5 mm²
4 mm²
6 mm²
16 mm² 1x16 mm² 16 mm²
06/13 Operating Instructions ACU 55

Wait for some minutes until the DC link capacitors have discharged before starting to
link
voltage
Disconnect the frequency inverter from mains voltage and protect it against being
Wait for some minutes until the DC link capacitors have discharged before starting to
link
BONFIGLIOLI VECTRON recommends using shielded cables for the connection of the
motor and the brake resistor to the frequency inverter. The shield is to be connected
to PE potential properly, i.e. with good conductivity, on both sides. The control, mains
d motor lines must be kept physically separate from one another. The user must
comply with the applicable limits stipulated in the relevant national and international
directives as regards the application, the length of the motor cable and the switching
frequency.
6.4.2 Mains Connection
DANGER
Disconnect the frequency inverter from mains voltage and protect it against being energized unintentionally.
Verify that the frequency inverter is discharged.
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
The mains fuses and cable cross-sections are to be selected according to EN 60204-1 and DIN VDE
0298 Part 4 for the nominal operating point of the frequency inverter. According to UL/CSA, approved
Class 1 copper lines with a temperature range of 60/75°C and matching mains fuses are to be used
for the power cables. The electrical installation is to be done according to the device specifications and
the applicable standards and directives.
CAUTION
The control, mains and motor lines must be kept physically separate from one another.
The cables connected to the frequency inverters may not be subjected to high-
insulation tests unless appropriate circuitry measures are taken before.
6.4.3 Motor Connection
DANGER
energized unintentionally.
Verify that the frequency inverter is discharged.
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
an
56 Operating Instructions ACU 06/13

Permissible length of motor cable without output filter
Frequency inverter
unshielded cable
shielded cable
0.25 kW … 1.5 kW
50 m
25 m
1.85 kW … 4.0 kW
100 m
50 m
5.5 kW … 9.2 kW
100 m
50 m
11.0 kW … 15.0 kW
100 m
50 m
18.5 kW … 30.0 kW
150 m
100 m
37.0 kW … 65.0 kW
150 m
100 m
75.0 kW … 132.0 kW
150 m
100 m
The specified lengths of the motor cables must not be exceeded if no output filter is
installed.
The frequency inverters ≤ 9.2 kW with integrated EMC filter comply with the emission
limits of the product standard EN 61800-3 up to a motor cable length of 10 m. The
frequency inverters ≤ 9.2 kW with integrated EMC filter comply with the emission limits
stipu
specific
requirements can be met by means of an optional filter.
Longer motor cables can be used after taking appropriate technical measures, e.g.
mended values for the use of output filters.
Motor cable length with output filter
Frequency inverter
unshielded cable
shielded cable
0.25 kW … 1.5 kW
upon request
upon request
1.85 kW … 4.0 kW
150 m
100 m
5.5 kW … 9.2 kW
200 m
135 m
11.0 kW … 15.0 kW
225 m
150 m
18.5 kW … 30.0 kW
300 m
200 m
37.0 kW … 65.0 kW
300 m
200 m
75.0 kW … 132.0 kW
300 m
200 m
Motor cables can be much longer if sinus filters are used. By conversion in sinustered out. Also consider the voltage drop across the cable length and the resulting
voltage drop at the sinus filter. The voltage drop results in an increase of the output
is
If the motor cable length exceeds 300 m, please consult BONFIGLIOLI.
6.4.3.1 Length of motor cab les, without filter
lated in EN 61800-3 if the motor cable is not longer than 20 m. Customer-
6.4.3.2 Motor cable length , with output filter dU/dt
use of low-capacitance cables and output filters. The following table contains recom-
6.4.3.3 Motor cable length, with sinus filter
shaped currents, high-frequency portions which might limit the cable length are fil-
current. Check that the frequency inverter can deliver the higher output current. Th
must be considered in the projecting phase already.
06/13 Operating Instructions ACU 57

In the case of a group drive (several motors at one frequency inverter), the total
length shall be divided across the individual motors according to the value given in the
table. Please note that group drive with synchronous servomotors is not possible.
Use a thermal monitoring element on each motor (e.g. PTC resistor) in order to avoid
damage.
Install sensor cables physically separate from motor cables. Comply with the sensor
sary minimum.
6.4.3.4 Group drive
6.4.3.5 Speed sensor connection
manufacturer's specifications.
Connect the shield close to the frequency inverter and limit the length to the neces-
58 Operating Instructions ACU 06/13
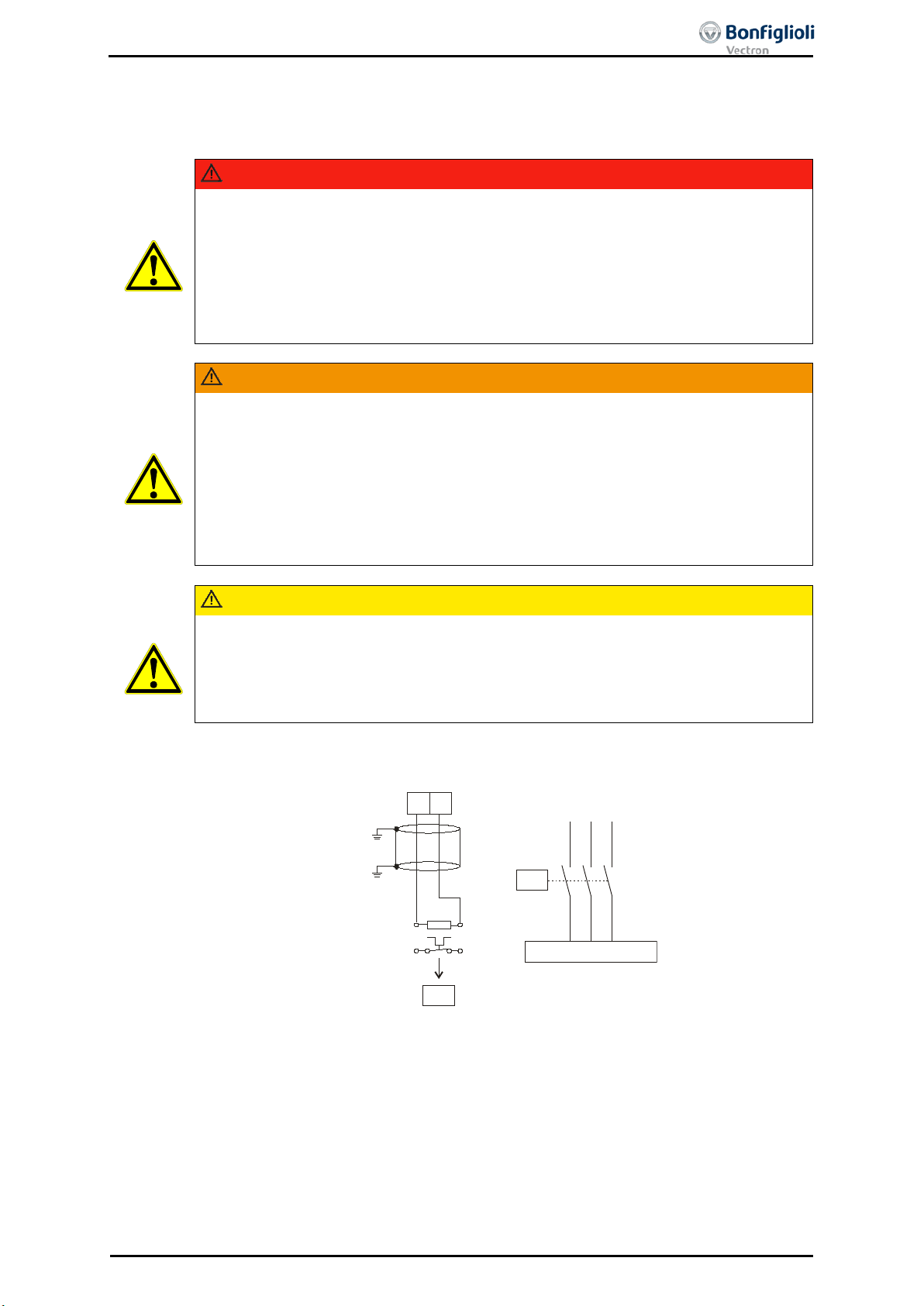
capacitors have discharged before starting to
link
During operation, the surface of the brake resistor can reach high temperatures. The
surface can keep high temperatures after operation for a certain time. Do not touch the
ed
ch is integrated as a standard or optional available. The
frequency inverter from mains supply if the brake
Connection of a brake resistor is done via terminal X2.
Limit the length of the brake resistor cables to the necessary minimum.
L1
L2
L3
K1
K1
R
b
T1
Rb1 Rb2
T2
Rb2Rb1
X2
X1
6.4.4 Connection of a Brake Resistor
Install a brake resistor if feedback of generator energy is expected. Overvoltage shutdowns can be
avoided by this.
DANGER
Disconnect the frequency inverter from mains voltage and protect it against being energized unintentionally.
Verify that the frequency inverter is discharged.
Wait for some minutes until the DC link
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
WARNING
brake resistor during operation or operational readiness of the frequency inverter. Noncompliance may result in skin burn.
Install a safeguard for protection against contact or fix warning labels.
Do not install the brake resistor in the proximity to flammable or heat-sensitive materi-
als.
Do not cover the brake resistor.
CAUTION
Bonfiglioli Vectron recommends using a temperature switch. Depending on the select
resistor the temperature swit
temperature switch disconnects the
resistor is overloaded.
Using Brake resistors without temperature switches can result in critical states.
06/13 Operating Instructions ACU 59

The mains connection of the frequency inverter is via plug-in terminal X1. The conminal X2. Degree of protection IP20 (EN60529) is only guaranteed with the terminals
plugged.
Disconnect the frequency inverter from mains voltage and protect it against being
capacitors have discharged before starting to
link
in
Mains connection ACU 201 (up to 3.0 kW) and 401 (up to 4.0 kW)
1
With a mains current above 10 A, the mains power connection 230 V 1ph/N/PE
nals.
X1
1ph / 230V AC
+
-
L1
L2 L3
L1
N PE
3ph / 230V AC
3ph / 400V AC
+
-
L1
L2 L3L1
L2 L3 PE
2ph / 230V AC
+
-
L1 L2 PE
L2 L3
L1
250 W ... 1.1 kW
Phoenix ZEC 1,5/ .. ST7,5
0.2 ... 1.5 mm
AWG 24 ... 16
2
0.2 ... 1.5 mm
AWG 24 ... 16
2
0.25 ... 1.5 mm
AWG 22 ... 16
2
0.25 ... 1.5 mm
AWG 22 ... 16
2
2ph / 230V AC1ph / 230V AC
1.5 kW ... 3.0 kW
L1 N PE
+
-
L1 L2 L3L1
3ph / 230V AC
3ph / 400V AC
PE
1.5 kW ... 3.0 kW 1.5 kW ... 4.0 kW
+
-
L1 L2 L3L1
L1 L2 PE L1
+
-
L1 L2 L3L1
L2 L3
6.5 Connection of types
6.5.1 ACU 201 (up to 3.0 kW) and 401 (up to 4.0 kW)
nection of motor and brake resistor to the frequency inverter is done via plug-in ter-
DANGER
energized unintentionally.
Verify that the frequency inverter is discharged.
Wait for some minutes until the DC link
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
Switch off power supply before connecting or disconnecting the keyed plug-
terminals X1 and X2.
60 Operating Instructions ACU 06/13
and the mains power connection 230 V 2ph/N/PE are to be done on two termi-

Motor connection ACU 201 (up to 3.0 kW) and 401 (up to 4.0 kW)
Phoenix ZEC 1,5/ .. ST7,5
0.2 … 1.5 mm
AWG 24 … 16
2
0.2 … 1.5 mm
AWG 24 … 16
2
0.25 … 1.5 mm
AWG 22 … 16
2
0.25 … 1.5 mm
AWG 22 … 16
2
X2
Star connection
V W
U
Delt a connecti on
V W
U
V WU
Rb2Rb1
M
3~
Connection of brake resistor with temperature switch
X2
V W
U
Rb2Rb1
R
b
T1
Rb1 Rb2
T2
X2
Phoenix ZEC 1,5/ .. ST7,5
0.2 … 1.5 mm
AWG 24 … 16
2
0.2 … 1.5 mm
AWG 24 … 16
2
0.25 … 1.5 mm
AWG 22 … 16
2
0.25 … 1.5 mm
AWG 22 … 16
2
06/13 Operating Instructions ACU 61

Disconnect the frequency inverter from mains voltage and protect it against being
Wait for some minutes until the DC link capacitors have discharged before starting to
link
before connecting or disconnecting the mains cable
Mains connection ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW)
ACU 201-18 (4.0 kW): one- and three-phase connection possible
ACU 201-19 (5.5 kW) and higher: three-phase connection possible
0.2 … 6 mm
AWG 24 … 10
2
4.0 kW … 9.2 kW
6qmm / RM7,5
0.2 … 6 mm
AWG 24 … 10
2
0.25 … 4 mm
AWG 22 … 12
2
0.25 … 4 mm
AWG 22 … 16
2
X1
0.2 … 16 mm
ACTIVE Cube 201-18 (4.0 kW):
AWG 24 … 6
2
11 kW … 15 kW
16qmm / RM10+15
0.2 … 16 mm
AWG 24 … 6
2
0.25 … 10 mm
AWG 22 … 8
2
0.25 … 10 mm
AWG 22 … 8
2
+
-
L1
L2 L3
L1
L2
L3 PE
3ph / 230V AC
3ph / 400V AC
X1
+
-
L1
L2 L3
L1
N
PE
1ph / 230V AC
X1
6.5.2 ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW)
DANGER
energized unintentionally.
Verify that the frequency inverter is discharged.
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
Switch off power supply
to/from terminal X1, the motor cables and the brake resistor to/from terminal X2.
62 Operating Instructions ACU 06/13

Motor connection ACU 201 (4.0 to 9.2 kW) and 401 (5.5 to 15.0 kW)
Connection of brake resistor with temperature switch
Star connection
VWU
Delta connection
V WU
4.0 kW … 9.2 kW
6qmm / RM7,5
0.2 … 6 mm
AWG 24 … 10
2
0.2 … 6 mm
AWG 24 … 10
2
0.25 … 4 mm
AWG 22 … 12
2
0.25 … 4 mm
AWG 22 … 16
2
11.0 kW … 15.0 kW
16qmm / RM10+15
0.2 … 16 mm
AWG 24 … 6
2
0.2 … 16 mm
AWG 24 … 6
2
0.25 … 10 mm
AWG 22 … 8
2
0.25 … 10 mm
AWG 22 … 8
2
X2
X2
V W
U
Rb2
Rb1
M
3~
X2
R
b
T1
Rb1 Rb2
T2
V WU
Rb2Rb1
X2
4.0 kW … 9.2 kW
6qmm / RM7,5
0.2 … 6 mm
AWG 24 … 10
2
0.2 … 6 mm
AWG 24 … 10
2
0.25 … 4 mm
AWG 22 … 12
2
0.25 … 4 mm
AWG 22 … 16
2
11.0 kW … 15.0 kW
16qmm / RM10+15
0.2 … 16 mm
AWG 24 … 6
2
0.2 … 16 mm
AWG 24 … 6
2
0.25 … 10 mm
AWG 22 … 8
2
0.25 … 10 mm
AWG 22 … 8
2
06/13 Operating Instructions ACU 63

Disconnect the frequency inverter from mains voltage and protect it against being
Wait for some minutes until the DC link capacitors have discharged before starting to
link
before connecting or disconnecting the mains cable
• The unit may only be connected with the power supply switched off.
• Make sure that the frequency inverter is discharged.
Mains connection ACU 401 (18.5 to 30.0 kW)
0.5 … 35 m m
AWG 20 … 2
2
18.5 kW … 30. 0 kW
PHOENIX MKDSP 25/ 6-15,00-F
0.5 … 25 m m
AWG 20 … 4
2
1.00 … 25 m m
AWG 18 … 4
2
1.5 … 25 m m
AWG 16 … 4
2
+
-
L1
L2 L3
L1
L2
L3
PE
3ph / 400V AC
X1
X1
2.5 Nm
22.1 lb- in
6.5.3 ACU 401 (18.5 to 30.0 kW)
DANGER
energized unintentionally.
Verify that the frequency inverter is discharged.
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
Switch off power supply
to/from terminal X1, the motor cables and the brake resistor to/from terminal X2.
64 Operating Instructions ACU 06/13

Motor connection ACU 401 (18.5 to 30.0 kW)
Connection of brake resistor with temperature switch
Star connection
V WU
Delta connection
V W
U
0.5 … 35 mm
AWG 20 … 2
2
18.5 kW … 30 kW
25/ 6-15,00
0.5 … 25 mm
AWG 20 … 4
2
1.00 … 25 mm
AWG 18 … 4
2
1.5 … 25 mm
AWG 16 … 4
2
X2
V W
U
Rb2
Rb1
M
3~
X2
2.5 Nm
22.1 lb-in
0.5 … 35 mm
AWG 20 … 2
2
18.5 kW … 30 kW
25/ 6-15,00
0.5 … 25 mm
AWG 20 … 4
2
1.00 … 25 mm
AWG 18 … 4
2
1.5 … 25 mm
AWG 16 … 4
2
X2
2.5 Nm
22.1 lb-in
R
b
T1
Rb1 Rb2
T2
V WU
Rb2Rb1
X2
06/13 Operating Instructions ACU 65

Disconnect the frequency inverter from mains voltage and protect it against being
Wait for some minutes until the DC link capacitors have discharged before starting to
link
before connecting or disconnecting the mains cable
Mains connection ACU 401 (37.0 to 65.0 kW)
wire cr os s s ec t ion up to 70 mm
37.0 kW … 65. 0 kW
th readed bolt M8x25
+
-
L1
L2
L3
L1
L2
L3
PE
3ph / 400V AC
X1
X1
8 Nm
70.8 lb- in
2
6.5.4 ACU 401 (37.0 to 65.0 kW)
DANGER
energized unintentionally.
Verify that the frequency inverter is discharged.
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
Switch off power supply
to/from terminal X1, the motor cables and the brake resistor to/from terminal X2.
66 Operating Instructions ACU 06/13

Motor connection ACU 401 (37.0 to 65.0 kW)
Star connection
V WU
D elta co nnect ion
V WU
wire cr os s s ec t ion up to 70 mm
2
37.0 kW … 65. 0 kW
th readed bolt M8x25
X2
V WU
Rb2Rb1
M
3~
X2
8 Nm
70.8 lb- in
Connection of brake resistor with temperature switch
Wir e c r os s s ection up to 70 m m
2
37.0 kW … 65. 0 kW
th readed bolt M8x25
X2
8 Nm
70.8 lb- in
R
b
T1
Rb1 Rb2
T2
V W
U
Rb2Rb1
X2
Optional, the inverters in this size can be purchased without brake chopper and are
then not provided with the terminal Rb2 for a brake resistor connection.
06/13 Operating Instructions ACU 67
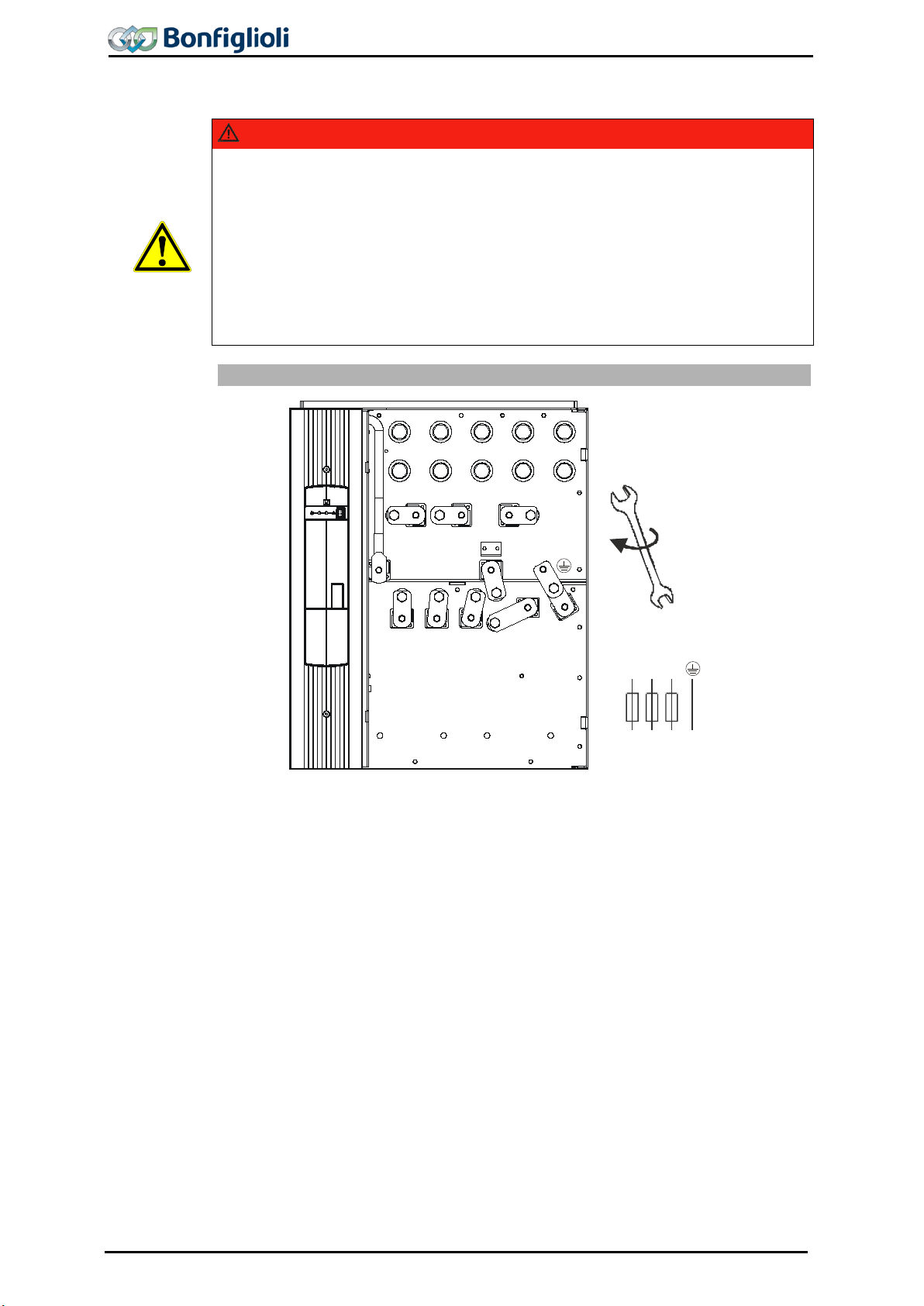
Disconnect the frequency inverter from mains voltage and protect it against being
Wait for some minutes until the DC link capacitors have discharged before starting to
link
before connecting or disconnecting the mains cable
Mains connection ACU 401 (75.0 to 132 kW)
Threaded bolt M8x20
10 Nm
88.5 lb-in
U
V W
L1
L2
L3
Rb2
ZK+
ZK-
L1
L2L3L1
L2 L3 PE
3ph / 400V AC
6.5.5 ACU 401 (75.0 to 132.0 kW)
DANGER
energized unintentionally.
Verify that the frequency inverter is discharged.
work at the unit.
When the frequency inverter is disconnected from power supply, the mains, DC-
voltage and motor terminals may still be live for some time.
Switch off power supply
to/from terminal X1, the motor cables and the brake resistor to/from terminal X2.
68 Operating Instructions ACU 06/13

Motor connection ACU 401 (75.0 to 132 kW)
Threaded bolt M8x20
Connection of brake resistor with temperature switch
Threaded bolt M8x20
Optional, the inverters in this size can be purchased without brake chopper and are
then not provided with the terminal Rb2 for a brake resistor connection.
10 Nm
88.5 lb-in
U
V W
L1
L2
L3
Rb2
ZK+
ZK-
V WU
V
W
U
V W
U
M
3~
10 Nm
88.5 lb-in
U
V W
L1
L2
L3
Rb2
ZK+
ZK-
R
b
T1
ZK+ Rb2
T2
Rb2
ZK+
06/13 Operating Instructions ACU 69
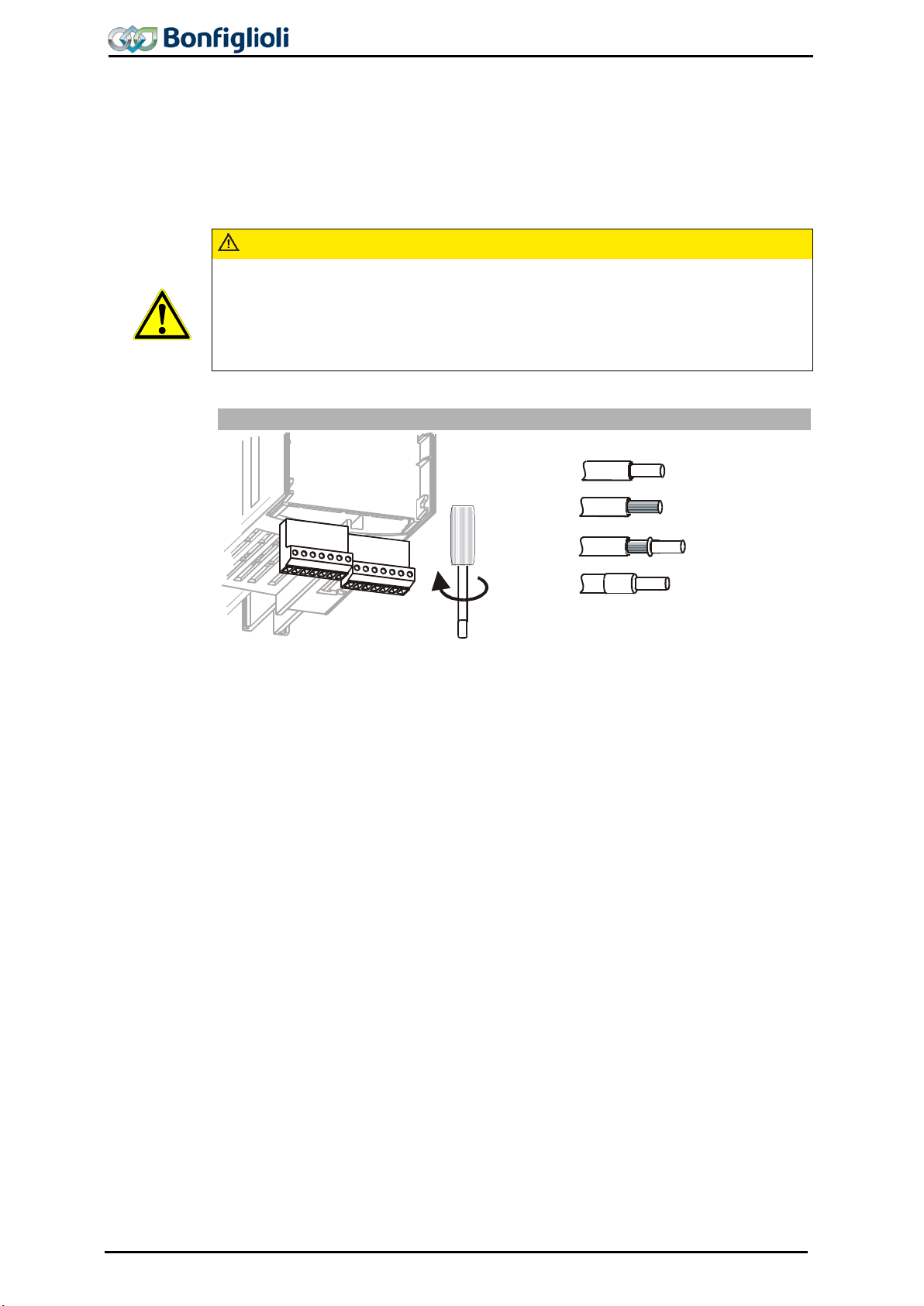
The control and software functionality can be configured as required to ensure a
tion. The operating instructions describe the factory
as well as the
software parameters to be set up.
Switch off power supply before connecting or disconnecting the control inputs and
outputs. Verify that the keyed control inputs and outputs are deenergized before
Control Terminals
0.14 … 1.5 mm
AWG 30 … 16
2
Wieland D ST85 / RM3,5
0.14 … 1.5 mm
AWG 30 … 16
2
0.25 … 1.0 mm
AWG 22 … 18
2
0.25 … 0.75 mm
AWG 22 … 20
2
0.2 … 0.3 Nm
1.8 … 2.7 lb-in
6.6 Control Terminals
reliable and economical opera
settings of the standard connections in the relevant Configuration 30
CAUTION
The unit may only be connected with the power supply switched off.
Verify that the frequency inverter is discharged.
connecting or disconnecting them. Otherwise, components may be damaged.
70 Operating Instructions ACU 06/13
Control terminal X210A
Ter.
Description
1 - Voltage output 20 V, I
=180 mA
1)
or
- input for external power supply DC 24 V ±10%
2 GND 20 V and GND 24 V (ext.)
3 Digital signal, STOA (1st shutdown path for safety function STO – „Safe Torque
ble, response time approx. 10 ms
4 Digital input S2IND, U
=30 V, 10 mA at DC 24 V,
Input resistance: 2.3 kΩ, PLC compatible, response time approx. 2 ms
5 Digital input S3IND, U
=30 V, 10 mA at DC 24 V,
Input resistance: 2.3 kΩ, PLC compatible, response time approx. 2 ms
6 Digital input S4IND, U
=30 V, 10 mA at DC 24 V,
frequency signal: 0...30 V, 10 mA at 24 V, f
max
= 150 kHz
7 Digital input S5IND, U
=30 V, 10 mA at DC 24 V,
frequency signal: 0...30 V, 10 mA at 24 V, f
max
= 150 kHz
Control terminal X210B
Ter.
Description
1 Digital input S6IND, U
=30 V, 10 mA at 24 V, input resistance: 2.3 kΩ, PLC
compatible, response time approx. 2 ms
2 Digital input STOB (2nd shutdown path for function "Safe Torque Off “),
PLC-compatible, response time approx. 10 ms
3 Digital output S1OUT, U=24 V, I
max
=50 mA, overload and short-circuit proof
4 Multi-function output MFO1,
frequency signal: 0...24 V, I
max
=50 mA, f
max
=150 kHz
5 Reference output 10 V, I
max
=4 mA
6 Multi-Function Input MFI1,
PLC compatible
7 Ground / GND 10 V
1)
The power output on terminal X210A.1 may be loaded with a maximum current of
duced by the digital output
S1OUT and multifunctional output MFO1.
Level:
Digital inputs (X210A.3 … X210B.2)
Digital output (X210B.3)
max
Off “), U
=DC 30 V, 10 mA at DC 24 V, input resistance: 2.3 kΩ, PLC compati-
max
max
max
max
Input resistance: 2.3 kΩ, PLC compatible,
max
Input resistance: 2.3 kΩ, PLC compatible,
max
U
=30 V, 10 mA at 24 V, input resistance: 2.3 kΩ,
max
analog signal: U=24 V, I
Digital signal: U=24 V, I
=50 mA, pulse-width modulated, f
max
=50 mA, overload and short-circuit proof
max
=116 Hz
PWM
Analog signal: resolution 12 Bit, 0...+10 V (Ri = 70 kΩ), 0…20 mA (Ri= 500 Ω),
Digital signal: response time approx. 4 ms, U
I
= 180 mA. The maximum current available is re
max
= 30 V, 4 mA at 24 V,
max
Low: 0 V … 3 V, High: 12 V … 30 V
06/13 Operating Instructions ACU 71

The bidirectional control terminals X210A.1/ X210A.2 can be used as a voltage output
tion can be maintained.
Requirements to be met by external power supply
Input voltage range
DC 24 V ±10%
Rated input current
Max. 1.0 A (typical 0.45 A)
Peak inrush current
Typical: < 20 A
External fuse
Via standard fuse elements for rated current, characteristic: slow
Safety
Safety extra low voltage (SELV) according to
EN 61800-5-1
The digital inputs and the DC 24 V terminal of the electronic control equipment can
Use suitable external power supply units with a maximum output current of DC 30 V
Comply with the application manual “Safe Torque Off – STO”, especially if you apply
this safety
By default, the freely programmable relay output is linked to the monitoring function
ured via the
software parameters. Connection of the relay output is not absolutely necessary for
the function of the frequency inverter.
1
2
3
0.2 … 1.5 mm
AWG 24 … 16
2
Phoeni x ZEC 1,5/3ST5,0
0.2 … 1.5 mm
AWG 24 … 16
2
0.25 … 1.5 mm
AWG 22 … 16
2
0.25 … 1.5 mm
AWG 22 … 16
2
S3OUT
X10
X10
Control terminal X10
Ter.
Description
1 ... 3
Relay output, floating change-over contact, response time approx. 40 ms,
− break-contact: AC 3 A / 240 V, DC 1 A (ohmic) / 24 V
6.6.1 External DC 24 V power supply
or voltage input. By connecting an external power supply of DC 24 V ±10% to terminals X210A.1/X210A.2, the function of inputs and outputs as well as the communica-
NOTE
withstand external voltage up to DC 30 V. Higher voltages may destroy the unit.
or use appropriate fuses to protect the unit.
-related function.
6.6.2 Relay Output
(factory setting). The logic link to various functions can be freely config
Relay Output
maximum contact load:
− make contact: AC 5 A / 240 V, DC 5 A (ohmic) / 24 V
72 Operating Instructions ACU 06/13

The ACU frequency inverters can evaluate the thermal switch of motor. By default,
terminal X210B.1 (S6IND) is configured as an input for this evaluation. Connect the
ration, refer to sections 13.6 “Motor Temperature” and 15.4.5 “Thermo contact”.
The control hardware and the software of the frequency inverter are freely configurable to a great extent. Certain functions can be assigned to the control terminals,
and the internal logic of the software modules can be freely selected.
Thanks to the modular design, the frequency inverter can be adapted to a great
range of different driving tasks.
The demands made of the control hardware and software are well known in the case
. The configurations are
described in the following section.
The ACU units of the ACTIVE Cube series feature the function STO („Safe Torque Off“).
If this function is not required, the “Controller release” signal must be connected to
inputs S1IND/STOA and S7IND/STOB.
Inputs S1IND/STOA and S7IND/STOB are connected in series.
If the same signal is used for the digital inputs S1IND/STOA and S2IND, safe disconnection of power supply to the motor according to safety function STO („Safe Torque
Off “) is not guaranteed.
6.6.3 Motor Thermo-Contact
thermal switch to the digital input and the DC 24 V supply unit X210A.1. For configu-
6.6.4 Control terminals – Connection diagrams of configurations
of standard driving tasks. This control terminal logic and internal function assignments of the software modules are available in standard configurations. These assignments can be selected via parameter
Configuration 30
WARNING
06/13 Operating Instructions ACU 73

Refer to following table in order to learn which combinations of functions and control
methods are possible. Configurations „Standard“, „Technology Controller“ and
refer to the corresponding
application manuals.
Configurations:
vector
controlled
less Servo
Standard
110
410
210
510
610
Technology Controller
111
411
211
611
Electronic gear with
position controller 1)
115
415
215
515
Electronic gear +
index controller 1)
Torque control
430
230
530
630
Positioning 2)
440
240
540
640
Brake control 3)
160
460
260
560
1)
Application Manual: Electronic Gear, Position Control and Index Control
2)
Application Manual: Positioning
3)
Application Manual: Lifting Gear Drives and Load Estimation
Note:
The control methods 2xx can be used with HTL sensors (with or without reference track) connected to the basic device or to an expansion
quired for operation of a synchronous machine (control method 5xx).
The control methods 2xx can be used with HTL sensors (with or without reference
track) connected to the basic device or to an expansion module.
The control methods 2xx with
An expansion module EM
ation of a synchronous machine (control method 5xx)
An expansion module EM
r-
face, EnDat2.1, SSI).
6.7 Configurations overview
„Torque Control“ will be described in the following sections. For configurations „Electronic Gear“, „Positioning“ and „Brake Control“, please
Function
Please also comply with the following manuals:
V/f Sensorless
Speed
Servo Sensor-
116 216 516
module.
The control methods 2xx with TTL sensors require an expansion module.
An expansion module EM-RES for evaluation of resolver signals is re-
TTL sensors require an expansion module.
-RES for evaluation of resolver signals is required for oper
.
-ABS is required for evaluation of Absolute encoders (Hipe
74 Operating Instructions ACU 06/13

Configuration 110 contains the functions for variable-speed control of a 3-phase machine in a wide range of standard applications. The motor speed is set according to
the selected ratio of the reference frequency to the necessary voltage.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
Start of anticlockwise operation
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V
X210B.7
Ground 10 V
Configuration 111 extends the functionality of the sensorless control by software
tions. The Technology Controller enables flow rate, pressure, level or speed control.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Fixed percentage value changeover 1
X210A.5
Fixed percentage value changeover 2
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V
X210B.6
Actual percentage value 0 ...+10 V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/ 4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
-
+
STOA
STOB
24 V
ext.
6.7.1 Configuration 110 – Sensorless Control
external power supply DC 24 V
6.7.2 Configuration 111 – Sensorless Control wit h Te ch n ology Controller
functions for easier adaptation to the customer's requirements in different applica-
external power supply DC 24 V
06/13 Operating Instructions ACU 75
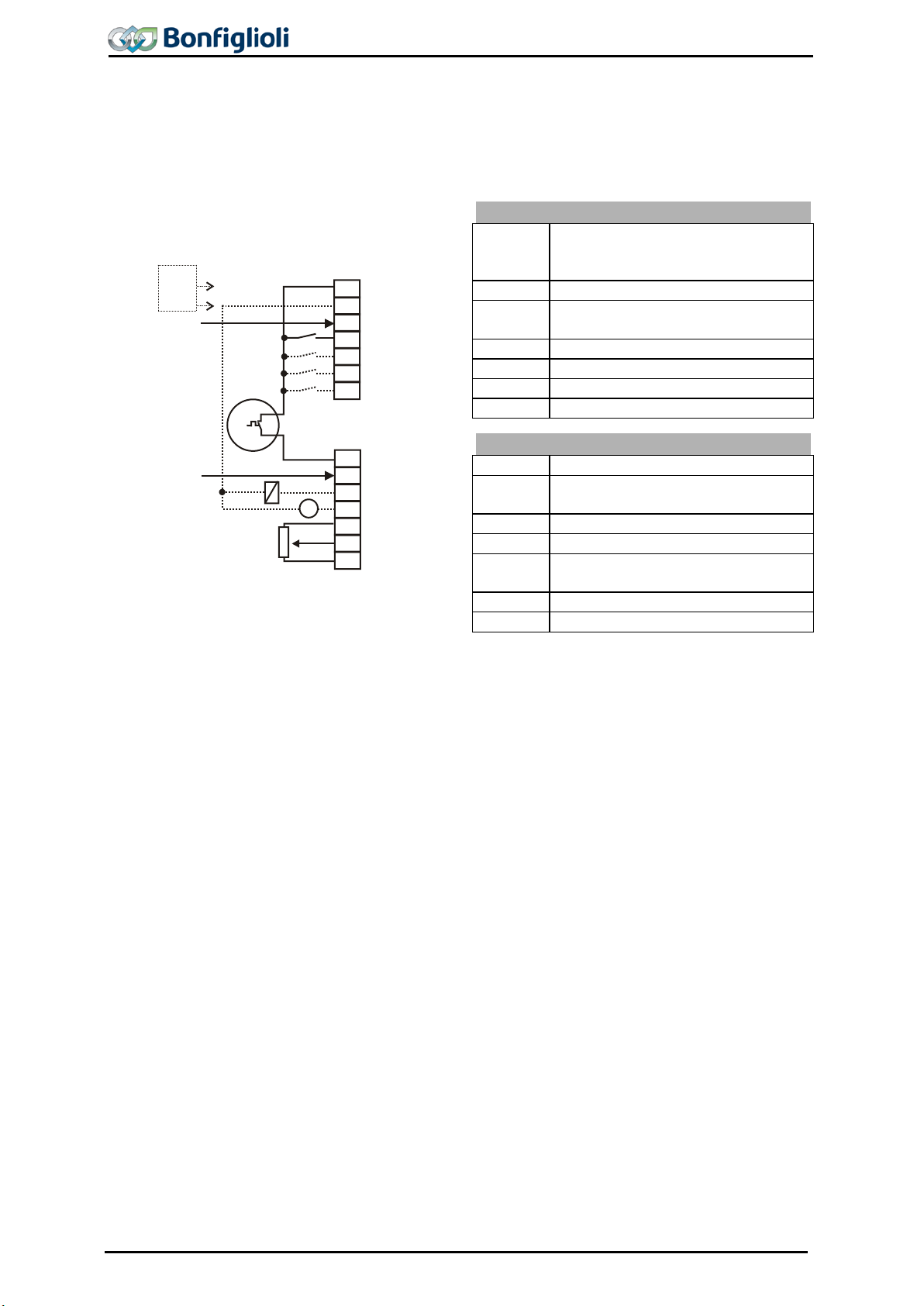
Configuration 410 contains the functions for sensorless, field-oriented control of a 3-
rents
in combination with the machine parameters. Separate control of torque
and flux-forming current enables a high drive dynamics at a high load moment.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
Start of anticlockwise operation
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
6.7.3 Configuration 410 – Sensorless Field-Oriented Control
phase machine. The current motor speed is determined from the present cur
and voltages
external power supply DC 24 V
76 Operating Instructions ACU 06/13

Configuration 411 extends the functionality of the sensorless field-oriented control of
Configuration 410 by a Technology Controller. The Technology Controller enables a
control based on parameters such as flow rate, pressure, filling level or speed.
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Fixed percentage value changeover 1
X210A.5
no function assigned
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V
X210B.6
Actual percentage value 0 ...+10 V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
-
+
STOA
STOB
24 V
ext.
6.7.4 Configuration 411 – Sensorless Field-Orie n ted Control with Technology Controller
Control terminal X210A
external power supply DC 24 V
06/13 Operating Instructions ACU 77

Configuration 430 extends the functionality of the sensorless field-oriented control of
410 by a Torque Controller. The reference torque is represented as a
percentage and it is transmitted into the corresponding operational performance of
dependent
control is done jerk-free during operation.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
n-/M change-over control function
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10 V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V or reference torque as percentage value
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/ 4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
6.7.5 Configuration 430 – Sensorless FOC, Speed and Torque Controlled
Configuration
the application. Change-over between variable-speed control and torque-
external power supply DC 24 V
78 Operating Instructions ACU 06/13

The control methods 2xx can be used with HTL sensors (with or without reference
track) connected to the basic device or to an expansion module.
The control methods 2xx with
An expansion module EM
r-
face, EnDat2.1, SSI).
Configuration 210 contains the functions for speed-controlled, field-oriented control
phase machine with speed sensor feedback. The separate control of torque
forming current enables high drive dynamics with a high load moment. The
necessary speed sensor feedback results in a precise speed and torque performance.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
Start of anticlockwise operation
X210A.6
Speed sensor track B
X210A.7
Speed sensor track A
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
A
B
+
-
STOA
STOB
24 V
ext.
6.7.6 Configuration 210 – Field-Oriented Control, Speed Controlled
of a 3and flux-
TTL sensors require an expansion module.
-ABS is required for evaluation of Absolute encoders (Hipe
external power supply DC 24 V
06/13 Operating Instructions ACU 79

Configuration 211 extends the functionality of the speed-controlled, field-oriented
enables a control based
on parameters such as flow rate, pressure, filling level or speed.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Fixed percentage value changeover 1
X210A.5
no function assigned
X210A.6
Speed sensor track B
X210A.7
Speed sensor track A
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V
X210B.6
Actual percentage value 0 ...+10 V
X210B.7
Ground 10 V
Configuration 230 extends the functionality of Configuration 210 by functions for
oriented control. The reference torque is represented as a
percentage and it is transmitted into the corresponding operational performance of
dependent
control is done jerk-free during operation.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
n-/M change-over control function
X210A.6
Speed sensor track B
X210A.7
Speed sensor track A
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10 V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V or reference torque as percentage value
X210B.7
Ground 10 V
-
+
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
A
B
+
-
STOA
STOB
24 V
ext.
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
A
B
+
-
STOA
STOB
24 V
ext.
6.7.7 Configuration 211 – Field-Oriented Control with Technology Controller
control of Configuration 210 by a Technology Controller. This
external power supply DC 24 V
6.7.8 Configuration 230 – Field-Orientated Control, Speed and Torque Controlled
torque-dependent, fieldthe application. Change-over between variable-speed control and torque-
external power supply DC 24 V
80 Operating Instructions ACU 06/13
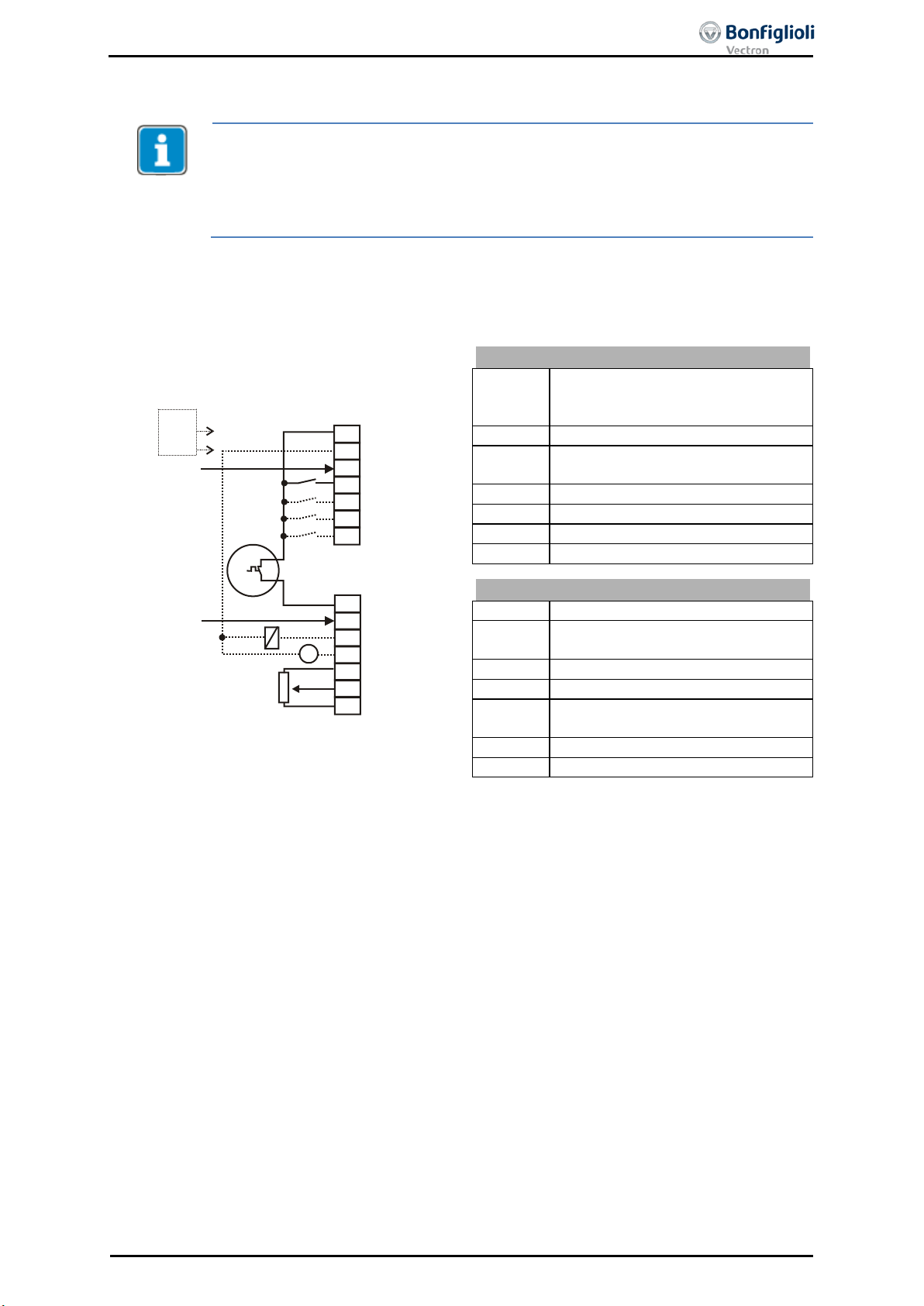
An expansion module EM-RES for evaluation of resolver signals is required for operation of a synchronous machine (control method
An expansion module EM
rface, EnDat2.1, SSI).
Comply with the operating instructions for the expansion module for the connection of
the resolver or absolute encoder.
Configuration 510 contains the functions for speed-controlled, field-oriented control
of a synchronous machine with resolver feedback. The separate control of torque and
essary resolver feedback results in a precise speed and torque performance.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
Start of anticlockwise operation
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
6.7.9 Configuration 510 – FOC of Synchronous Machine, Speed Controlled
5xx).
flux-forming current enables high drive dynamics with a high load moment. The nec-
-ABS is required for evaluation of Absolute encoders (Hipe
external power supply DC 24 V
Control terminal X210B
06/13 Operating Instructions ACU 81

Configuration 530 extends the functionality of Configuration 510 by functions for
oriented control. The reference torque is represented as a
percentage and it is transmitted into the corresponding operational performance of
dependent
control is done jerk-free during operation.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
n-/M change-over control function
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10 V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V or reference torque as percentage value
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
6.7.10 Configuration 530 – FOC of a Synchronous Machine, Speed and Torque Controlled
torque-dependent, fieldthe application. Change-over between variable-speed control and torque-
external power supply DC 24 V
82 Operating Instructions ACU 06/13
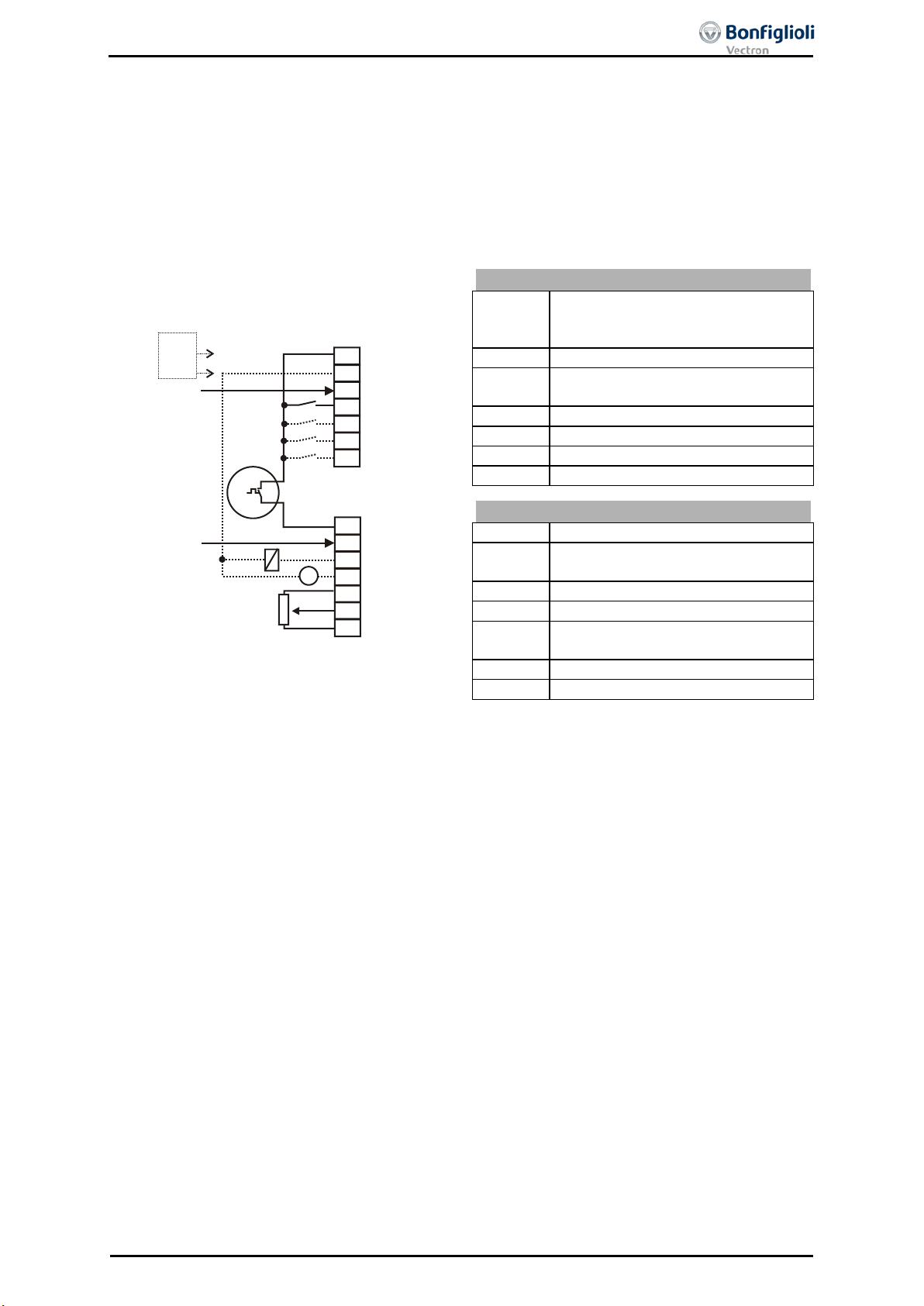
Configuration 610 contains the functions for speed-controlled, field-oriented control
of a synchronous machine without resolver feedback. The separate control of torque
missing resolver feedback compared to configuration 510 results in a small loss of
dynamic and speed performance.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
Start of anticlockwise operation
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
6.7.11 Configuration 610 – Sensorless FOC of Syn ch ronous Machine, Speed Controlled
and flux-forming current enables high drive dynamics with a high load moment. The
external power supply DC 24 V
06/13 Operating Instructions ACU 83

Configuration 611 extends the functionality of the sensorless field-oriented control of
by a Technology Controller. The Technology Controller enables a
control based on parameters such as flow rate, pressure, filling level or speed.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Fixed percentage value changeover 1
X210A.5
no function assigned
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10V
X210B.6
Actual percentage value 0 ...+10 V
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
-
+
STOA
STOB
24 V
ext.
6.7.12 Configuration 611 – Sensorless FOC of a Synchronous Machine with Technology Controller
Configuration 610
external power supply DC 24 V
84 Operating Instructions ACU 06/13

Configuration 630 extends the functionality of the sensorless field-oriented control of
610 by a Torque Controller. The reference torque is represented as a
percentage and it is transmitted into the corresponding operational performance of
dependent
control is done jerk-free during operation.
Control terminal X210A
X210A.1
Voltage output +20 V or input for
±10%
X210A.2
GND 20 V/ GND 24 V (ext.)
X210A.3
Digital input STOA (1st shutdown
path of safety function STO)
X210A.4
Start of clockwise operation
X210A.5
n-/M change-over control function
X210A.6
Data set change-over 1
X210A.7
Data set change-over 2
Control terminal X210B
X210B.1
Motor thermal contact
X210B.2
Digital input STOB (2nd shutdown
path of safety function STO)
X210B.3
Run Signal
X210B.4
Analog signal of actual frequency
X210B.5
Supply voltage +10 V for reference
value potentiometer
X210B.6
Reference speed 0 ...+10 V or reference torque as percentage value
X210B.7
Ground 10 V
S7IND
S1OUT
MFO1A
+10 V/ 4 mA
MFI1A
GND 10 V
1
2
3
4
5
6
7
X210A
+20 V/180 mA
GND 20 V
S1IND
S2IND
S3IND
S4IND
S5IND
S6IND
X210B
1
2
3
4
5
6
7
M
V
+
+
-
STOA
STOB
24 V
ext.
6.7.13 Configuration 630 – Sensorless FOC of a S y n ch r on ou s Machine, Speed and Torque Controlled
Configuration
the application. Change-over between variable-speed control and torque-
external power supply DC 24 V
06/13 Operating Instructions ACU 85

6.8 Installation notes according to UL508c
The thermal motor protection according to UL508c can be realized in devices that are marked with
“TM included” below the nameplate. For devices without the mark “TM included” note according to
UL508c: Motor overtemperature sensing is not provided by the drive.
The connection and the parameter settings for the temperature motor supervision is described in
chapter 13.6 “Motor Temperature”, 15.4.5 “Thermo contact” and 18.5 “Motor Protection”.
For an installation according to UL508c only allowed fuses can be used for mains protection. The allowed fuses are described in chapter 4 “Technical Data”.
For an installation according to UL508c the in chapter 4 “Technical Data” described maximum temper-
atures must not be exceeded.
For an installation according to UL508c only 60/75°C copper conductors are allowed to be used.
For an installation according to UL508c the devices are only allowed to be used in environments ac-
cording to Pollution Degree 2.
According to UL508c Warn- or Marking labels are not allowed to be removed.
86 Operating Instructions ACU 06/13

The optional KP500 control unit is a practical tool for controlling the frequency invert-
er and can be plugged on when required.
A
B
C
D
E
F
G
H
I
J
Keys
A
RUN
Used for starting the drive and opening the CTRL menu.
Press the RUN key to open the motor potentiometer function.
STOP
Used for opening the CTRL menu, stopping the drive and acknowledging faults.
J
▲ ▼
Used for navigating in the menu structure and selecting parameters.
Increasing/decreasing of parameter values.
ENT
Used for opening parameters or switching to another menu within the
Confirmation of the selected function or the set parameter.
ESC
Used for aborting parameters or switching back to the previous menu
rameter value.
FUN
Used for switching over the key function, access to special functions.
Display
B
Three-digit 7-segment display to show the parameter number.
C
One-digit 7-segment display for display of the active data record, direction of
rotation etc.
D
Display of the selected menu branch:
VAL
Display actual values.
PARA
Select parameters and adjust parameter values.
CTRL
Select a function for adjustment and/or display via the operating unit:
CtrL motor potentiometer and jog function.
CPY
Copy parameters via the control unit:
FOr Control unit memory is formatted and deleted.
E
Status and operating messages:
WARN
Warning about a critical operating behavior.
FAULT
Message indicating that the unit was switched off due to a fault.
RUN
Flashing: signals readiness for operation.
is
enabled.
REM
Active remote control via interface connection.
F
Function switch-over with the FUN key.
F
Five-digit 7-segment display for display of parameter value and sign.
G
Physical unit of the parameter value displayed.
H
Active acceleration or deceleration ramp.
I
Current direction of rotation of the drive.
7 Control Unit KP500
er and setting and displaying the frequency inverter parameters.
The control unit is not absolutely necessary for the operation of the frequency invert-
menu structure.
within the menu structure. Canceling the function or resetting the pa-
SEtUP guided commissioning.
ALL All the parameter values are copied.
Act Active parameter values are copied only.
Lights up: signals that the unit is operating and the output stage
06/13 Operating Instructions ACU 87

The menu structure of the control unit is arranged as shown in the following illust ration. Use the arrow keys as well as ESC and ENT to navigate through the menu. The
ter setting and control options.
The various parameters and information of the frequency inverter can be displayed
by means of the control unit. The different functions and parameters are grouped
turn to the main menu by pressing the ESC key either continuously or repeatedly.
Note:
In the following description of the key functions, a plus (+) between the
A comma (,) between the key symbols indicates that the keys have to be
pressed one after the other.
Menu branch VAL
Display of actual values
Menu branch PARA
Display and edit parameters
Menu branch CPY
Copy parameters
Menu branch CTRL
Select control and test functions
Use the arrow keys to select the required menu branch. The selected menu branch is
rameter or the first
Keys
▲ ▼
Navigate through the menu structure and select a menu branch.
ENT
Open the selected menu branch.
ESC
Cancel the current menu branch and return to the main menu.
7.1 Menu Structure
software contains the full set of information and enables a flexible use of the parame-
7.2 Main Menu
together in four menu branches. From any point in the menu structure you can re-
key symbols indicates that the keys have to be pressed at the same time.
displayed (flashing).
Select the menu branch by pressing the ENT key. The first pa
function in the selected menu branch will be displayed.
If you press the ESC key you will return to the main menu of the control unit.
88 Operating Instructions ACU 06/13

In the VAL menu branch, the control unit displays a variety of actual values, depending on the configuration selected and the options installed. The parameters and basic
software functions linked to the corresponding actual value are documented in the
operating instructions.
ENT
ESC
ENT
ESC
A
B
C
D
E
A
Use the arrow keys to select the required number from the actual values dis-
key displays the
key displays the
Keys
▲ + ▼
Display the actual value parameter upon switch-on.
FUN , ▲
Display last actual value parameter (highest number).
FUN , ▼
Display first actual value parameter (lowest number).
B
Use the ENT key to select the actual value. The parameter is displayed including its current value, unit and the active data set.
C
During commissioning, operation and error analysis, it is possible to monitor
Some of the actual value parameters are arranged in the four available data
sets. If the parameter values in the four data records are identical, the actual
alue is displayed in data record 0. If the actual values in the four data sets are
Keys
▲ , ▼
Switch to another of the data set in the case of related actual
values.
FUN , ▲
Determine minimum value and display it permanently.
FUN , ▼
Determine and display minimum actual value permanently.
FUN , ENT
Display of mean value of the actual value during the
monitoring period.
D
Use the ENT key to save the selected actual value as a parameter displayed at
on. The message SEt (with parameter number) is displayed for a short
time. When the frequency inverter is switched on the next time, this actual
value will be displayed automatically.
E
After saving the parameter, you can monitor and display the value again. Use
the ESC key to switch to the parameter selection of the VAL menu branch.
7.3 Actual Value Menu (VAL)
played in numerical order.
If the highest parameter number is achieved, actuating the ▲-
lowest parameter number.
If the lowest parameter number is achieved, actuating the ▼-
highest parameter number.
In the current data set, the data set related actual value parameters are displayed, including the corresponding data set number. The seven-segment display shows data record 0 if the actual values in the four data sets are identical.
each actual value parameter specifically.
v
different, diFF is displayed in data set 0.
switch-
06/13 Operating Instructions ACU 89
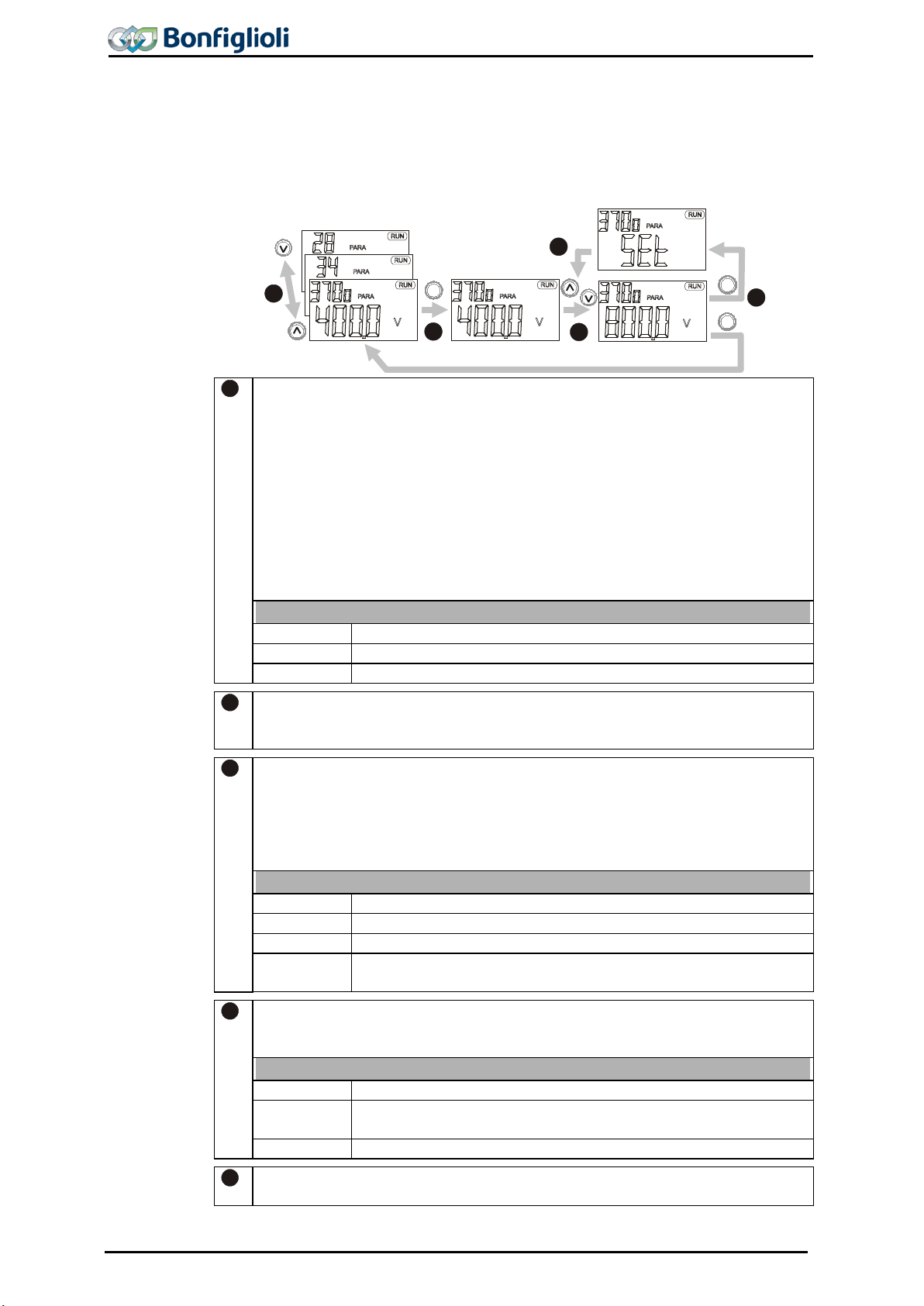
The parameters to be configured during the guided commissioning procedure were
selected from common applications and can be supplemented as required by further
settings in the PARA menu branch. The parameters and basic software functions
tions.
A
Use the arrow keys to select the required number from the parameters displayed in numerical order. The parameter number is displayed with the active
key displays the
key displays the
hexadecimal at the leading digit (999,
In the current data set, the related parameters are displayed, including the
segment display shows data set 0 if
the parameter values in the four data sets are identical.
▲ + ▼
Change to the last parameter edited.
FUN , ▲
Display of last parameter (highest number).
FUN , ▼
Display of first parameter (lowest number).
B
Use the ENT key to select the parameter. The parameter is displayed including
its value, unit and the active data set. If settings are edited in data set 0, the
parameter values are changed in the four data sets.
C
Use the arrow keys to adjust the parameter value or to select an operation
Keep the arrow keys pressed for a while to change the displayed values quickly.
peed at which the values change is reduced
again. If the parameter value starts to flash, the speed at which the values
change is reset to the initial value again.
Keys
▲ + ▼
Set parameter to factory setting.
FUN , ▲
Set parameter to highest value.
FUN , ▼
Set parameter to smallest value.
FUN , ENT
Change of the data set in the case of data set related parameters.
D
Use the ENT key to save the parameter. For a short time, the message SEt
parameter number and the data set is displayed. To leave the
parameter unchanged, press the ESC key.
Err1: EEPrO
Parameter has not been saved.
Err2: StOP
Parameter can only be read (i.e. not edited) when the unit is in
operation.
Err3: Error
Other error.
E
After saving the parameter, you can edit the value again or return to the parameter selection menu by pressing the ESC key.
ENT
ENT
ESC
A
B
C
D
E
7.4 Parameter Menu (PARA)
linked to the corresponding actual value are documented in the operating instruc-
data set (flashes).
If the highest parameter number is achieved, actuating the ▲-
lowest parameter number.
If the lowest parameter number is achieved, actuating the ▼-
highest parameter number.
Parameter numbers > 999 are displayed
A00 … B5 … C66).
corresponding data set number. The seven-
Keys
mode. The adjustment possibilities you have depend on the parameter.
If you release the keys again, the s
including the
Messages
90 Operating Instructions ACU 06/13

With the copy function of the control unit you can copy parameter values from the
volatile memory of the control unit (upload) and store
(download) them to a frequency inverter again.
The copy function makes the parameterization of recurring applications much easier.
The function archives all parameter values, regardless of access control and value
range. The memory space available in the control unit for the files is dynamically
scaled to match the scope of the data.
The Copy Menu (CPY) is accessible in control level 3. The control level can be adjusted,
if necessary, via parameter
When you open the CPY menu branch, the data stored in the
control unit are read out. This process takes a few seconds.
and a progress indicator are displayed.
After the initialization in the copy menu, the function can be
selected.
If the information stored in the control unit is not valid, the
as follows:
• Use the ENT key to confirm the error message.
• Use the arrow keys to select the function FOr.
dicator are displayed.
The process takes a few seconds. When the process is
complete, the message rdY is displayed.
• Confirm the message by pressing the ENT key.
Now, you can select the copy function as described in the fol-
7.5 Copy Menu (CPY)
frequency inverter to a non-
Control Level 28.
7.5.1 Reading the Stored Information
During this time, init
initialization is stopped and an error message is displayed.
In this case, the memory in the control unit must be formatted
• Use the ENT key to confirm the selection.
During the formatting process, FCOPY and a progress in-
lowing.
06/13 Operating Instructions ACU 91

The copy menu CPY contains three main functions. Use the arrow keys to select the
destination for the process. The memory
volatile memory of the control unit is displayed on the
three-digit seven-segment display as a percentage value.
Function – FOr
sary if a new control unit is
used for the first time.
Function – ALL
ue by selecting the source.
Function – Act
ied to the control unit only. The number of active parameter
configuration of the
When copying the data from the control unit to the frequency
inverter, all stored parameter values are transmitted, like in
by pressing the ENT key and
continue by selecting the source.
The parameters of the ALL and Act sub-function in the CPY menu branch can be parameterized to meet the requirements of the specific application. The available
load). The data sets of the frequency inverter (Src. x) or the files of the control
lecting the target.
Display
Description
Src.
2
The data of data set 2 of the frequency inverter are copied.
Src.
3
The data of data set 3 of the frequency inverter are copied.
Src.
4
The data of data set 4 of the frequency inverter are copied.
Src.
E
An empty data set for deletion of a file in the control unit.
Src.
F1
File 1 is transferred from the memory of the control unit. 1)
Src.
F2
File 2 is transferred from the memory of the control unit. 1)
Src.
F3
File 3 is transferred from the memory of the control unit. 1)
Src.
F7
File 7 is transferred from the memory of the control unit. 1)
Src.
F8
File 8 is transferred from the memory of the control unit. 1)
1) Empty files not yet filled with data will not be offered as signal source. The
Copy Menu
(CPY)”).
7.5.2 Menu Structure
required function. Select the source and the
space available in the non-
Use the function For to format and delete the memory in the
control unit. This may be neces
All readable and writable parameter values are transferred.
• Confirm this select ion by pressing the ENT key and contin-
The active parameter values of the frequency inverter are copvalues depends in the current or selected
frequency inverter.
the case of the ALL function.
• Confirm the selection Act
7.5.3 Selecting the Source
memory space of the control unit is shown on the seven-segment display.
• Use the arrow keys to select the data source (Src.) for the copy operation (upunit (Src. Fy) can be used as the data source.
• Confirm the data source selected by pressing the ENT key and continue by se-
Src. 0 The data of the four data sets of the frequency inverter are copied.
Src. 1 The data of data set 1 of the frequency inverter are copied.
Src. F4 File 4 is transferred from the memory of the control unit. 1)
Src. F5 File 5 is transferred from the memory of the control unit. 1)
Src. F6 File 6 is transferred from the memory of the control unit. 1)
memory of the control unit is managed dynamically (Chapter 7.5 “
92 Operating Instructions ACU 06/13

Select the destination (dSt.) of the copy operation (application-specific). The data
Confirm your selection by pressing the ENT key. The copy operation will start and
COPY will be displayed.
dSt.
0
The four data sets of the frequency inverter are overwritten.
dSt.
1
The data are copied to data set 1 of the frequency inverter.
dSt.
2
The data are copied to data set 2 of the frequency inverter.
dSt.
3
The data are copied to data set 3 of the frequency inverter.
dSt.
4
The data are copied to data set 4 of the frequency inverter.
dSt.
F4
The data are copied to file 4 of the control unit. 1)
dSt.
F5
The data are copied to file 5 of the control unit. 1)
dSt.
F6
The data are copied to file 6 of the control unit. 1)
dSt.
F7
The data are copied to file 7 of the control unit. 1)
dSt.
F8
The data are copied to file 8 of the control unit. 1)
1) Already existing files will not be offered as copy target.
Before the parameter settings are transferred to the frequency inverter, the individual
parameter values are checked.
The value range and the parameter settings can differ according to the power range of
the frequency inverter. Parameter values which are outside of the value range will trigger a copy error message. If through the changing of parameters via copying a device
fault is triggered, this device fault is displayed after the copying of the parameters is
finished.
While the copy operation is in process, the message COPY
In the case of the Act function, the active parameter values
are copied only. Using the ALL function, parameters which are
not relevant to the selected configuration are copied, too.
Depending on the configuration selected (ALL or Act), the copy
operation will be completed after approx. 100 seconds and the
Press the ENT key to switch to the copy menu. Use the ESC
key to switch to the target selection menu.
If the ESC key is pressed during the copy operation, the copy
operation is aborted before the transmission of the data is
the selection in the copy menu.
Use the ESC key to switch to the target selection menu.
7.5.4 Selecting the Destination
source is transferred to the selected target (download).
• Use the arrow keys to select the destination (dSt.) of the copied data (download). Depending on the data source selected, either the data sets of the frequency inverter (dSt. x) or still empty files of the control unit (dSt. F y) are available as the target.
•
Display Description
dSt. F1 The data are copied to file 1 of the control unit. 1)
dSt. F2 The data are copied to file 2 of the control unit. 1)
dSt. F3 The data are copied to file 3 of the control unit. 1)
7.5.5 Copy Operation
and, as a progress indicator, the number of the currently copied parameter will be displayed.
message rdY will be displayed.
complete. The message Abr and the number of the last parameter which was copied are displayed.
Press the ENT key to return to
06/13 Operating Instructions ACU 93

The copy function archives all parameters, regardless of the
access control and the value range. Some of the parameters
The controller enable input (S1IND/STOA, S7IND/STOB) may
he data
and the number of
eration is continued.
The data transmission from the selected source to the destination is continuously monitored by the copy function. If an error
and an error code are displayed.
Code
Meaning
0
1
Write error in memory of control unit;
the memory.
2
Read error in memory of control unit;
the memory.
3
The size of the memory of the control unit was not determined correctIf this error occurs repeatedly, replace the control unit.
4
Not enough memory; the data are incomplete.
unit.
5
The communication has been disturbed or interrupted;
repeat the copy function, delete the incomplete file if necessary.
1
0
Invalid identification of a file in the operating unit;
delete faulty file and format memory if necessary.
2
The memory space of the selected target file is occupied;
delete file or use different target file in the operating unit.
3
The source file to be read in the control unit is empty;
only files containing reasonable data should be selected as a source.
4
Defective file in the control unit;
delete defective file and format memory if necessary.
2 0 The memory in the control unit is not formatted;
format the memory via the FOr function in the copy menu.
3
0
Error during reading of a parameter from the frequency inverter;
and repeat reading operation.
1
Error during writing of a parameter in the frequency inverter;
and repeat the writing operation.
2
Unknown parameter type;
delete faulty file and format memory if necessary.
4 0 The communication has been disturbed or interrupted;
repeat the copy function, delete the incomplete file if necessary.
7.5.6 Error Messages
are only writable if the frequency inverter is not in operation.
not be activated during the copy operation, otherwise t
transmission is aborted. The message StO
the last parameter which was copied are displayed. If the controller enable input is deactivated again, the aborted copy op-
occurs, the copy operation is aborted and the message Err
Error Messages
repeat the copy operation. If error message is displayed again, format
repeat the copy operation. If error message is displayed again, format
ly.
Delete the incomplete file and date no longer needed from the control
check connection between the control unit and the frequency inverter
Check connection between the control unit and the frequency inverter
94 Operating Instructions ACU 06/13

“Parameter transmission” enables the transmission of parameter values from the
bled, except for the COPY function. Transmission
from the frequency inverter to the control unit is also disabled.
Activation of the control unit KP 500 for parameter transfer is prepared via parameter
be connected to the frequency
inverter.
Program(ming) 34
Function
Control unit P 500 is prepared for parameter transdata from the control unit.
Resetting of control unit KP 500 to standard operation
mode.
Parameter transmission mode can be activated on the control unit KP 500 only if at
least 1 file is stored in the control unit. Otherwise, the error message
will be
displayed as soon as activation is attempted.
The control unit KP 500 can be configured both via the keys of the KP 500 and via
any available CM communication module. For configuration and activation of the
KP 500 control unit, proceed as follows:
Activation via keyboard of control unit
• In the parameter menu PARA, use the arrow keys to select parameter Pro-
gram(ming) 34, and confirm your selection by pressing the ENT key.
• Use the arrow keys to set value 111 – Parameter transmission and confirm your
Now the control unit is ready for activation.
Before data transmission, the control unit must be initialized:
• Unplug the control unit from the frequency inverter and connect again to the
and a progress
indicator are displayed. After initialization, the control unit KP 500 is ready for
transfer of data to the frequency inverter.
Adjustment of parameter Program(ming) 34 to the value - Parameter transmission,
can be undone via the control unit, provided that the control unit has not been initialized yet.
•
r-
mal operation again and confirm by pressing the ENT key.
7.6 Reading Data from Control Unit
control unit KP 500 to the frequency inverter. In this operation mode, all other functions of the control unit are disa
Program(ming) 34. The control unit KP 500 must
111 -
Parameter transmission
110 - Standard operation
7.6.1 Activation
selection by pressing the ENT key.
mission. A connected frequency inverter can receive
“F0A10”
same or another frequency inverter.
The initialization is started. During the time of initialization, init
In parameter Program(ming) 34, use the arrow keys to set the value 110 – No
06/13 Operating Instructions ACU 95

Activation via communication module CM
Activation of the control unit through a communication connection is possible only if
the frequency inverter is fitted with an optional communication module CM, and communication takes place via this module. The control unit must be connected to the
frequency inverter.
• Establish connection to frequency inverter.
• Start communication and select parameter Program(ming) 34 via the communi-
cation interface.
• Via the communication interface enter value 111 in parameter Program(ming)
34 and confirm this value.
• Via the communication interface enter value 123 in parameter Program(ming)
SEt". After that, the unit is initialized.
In order to transmit a file from the control unit to the frequency inverter, proceed as
follows:
• Connect control unit KP 500 to the frequency inverter.
After initialization, the data sources available for transmission are displayed.
• Use the arrow keys to select the data source (Src. Fy) for the transmission to the
The files stored in the control unit are available as data sources.
The files stored in the control unit contain all information and parameters stored according to the selected copy function ALL or Act (see Chapter "Copy Menu“) in the
control unit.
• Confirm your selection by pressing the ENT key.
and,
as a progress indicator the number of the currently processed parameter will be
displayed.
As soon as the copy operation is complete, the control unit will be re-initialized.
34 and confirm this value.
The frequency inverter is re-initialized. The display of the control unit reads "rE-
7.6.2 Data transfer
frequency inverter.
The copy process is started. While the copy operation is in process, COPY
96 Operating Instructions ACU 06/13
A control unit KP 500 activated for parameter transmission can be reset to full functionality (standard operation) via a specific key code on the control unit or via each
available communication module CM.
Resetting on control unit
• Press RUN and STOP keys on contro l unit simultaneously for approx. 1 second.
Then the top
menu level of the control unit is available.
In the parameter menu PARA, use the arrow keys to select parameter Pro-
gram(ming)
• Use the arrow keys to s et value 110 – Normal operation and confirm your selec-
The control unit is set to normal operation.
Resetting via communication module CM and/or using control software
VPlus
Resetting of the control unit through a communication connection is possible only if the
frequency inverter is fitted with an optional communication module CM, and communication takes place via this module.
• Establish connection to frequency inverter.
• Start communication and sele ct parameter Program(ming) 34 via the communi-
cation connection.
• Via the communication connection, enter value 110 in para meter Program(ming)
34 and confirm this value.
• Via the communication connection enter value 123 in parameter Program(ming)
After resetting, the control unit is available again with full functionality.
In order to be able to control the drive via the control unit, the digital inputs
S1IND/STOA and S7IND/STOB must be connected for enabling the output.
Switch off power supply before connecting or disconnecting the control inputs and
that the keyed control inputs and outputs are deenergized before
7.6.3 Resetting to Normal Operation
When the process is complete, – – – – – is displayed briefly.
•
34, and confirm your selection by pressing the ENT key.
tion by pressing the ENT key.
34 and confirm this value by pressing Enter.
The frequency inverter is reset. The display of the control unit reads "rESEt".
7.7 Control Menu (CTRL)
CAUTION
The unit may only be connected with the power supply switched off.
Verify that the frequency inverter is discharged.
outputs. Verify
connecting or disconnecting them. Otherwise, components may be damaged.
06/13 Operating Instructions ACU 97

In the CTRL menu branch, various functions are available which make commissioning
easier and enable the control of the inverter via the control unit.
The frequency inverters can be controlled by means of the control unit and/or a
communication module.
If you want to control the frequency inverter via an optional communication module,
. Via this
ions
Local/Remote
The control unit enables controlling the connected motor in accordance with the selected operation mode of parameter Local/Remote 412.
In order to be able to control the drive via the control unit, the digital inputs
S1IND/STOA and S7IND/STOB must be connected for enabling the output.
Switch off power supply before connecting or disconnecting the control inputs and
that the keyed control inputs and outputs are deenergized before
: When the RUN key was pressed, the drive was in operation already.
the necessary adjustments can be made via parameter Local/Remote 412
parameter, you can specify which functions will be available to the controller. Depending on the operation mode selected, only some of the control menu funct
are available. Refer to chapter 18.3 “Bus controller” for a detailed description of parameter
412.
7.8 Controlling the Motor via the Control Unit
CAUTION
The unit may only be connected with the power supply switched off.
Verify that the frequency inverter is discharged.
outputs. Verify
connecting or disconnecting them. Otherwise, components may be damaged.
98 Operating Instructions ACU 06/13

The CTRL menu branch can be accessed via the navigation
functions which are displayed according to the operating point
Pressing the RUN key leads to a direct change from anywhere
If the drive is already running, the display reads intF (forward,
ence sources in the reference frequency channel. The function
Motor potentiometer function Pot
Using the arrow keys, you can adjust the output frequency of
. The acceleration corresponds to
are taken into account with
lower acceleration figures.
Internal reference value int
.e. output signals are present at the
frequency inverter and the current actual value is displayed.
tor potentiometer function Pot.
Function Motorpoti (KP) inP
Using the arrow keys, you can adjust the output frequency of
. The frequency value adjusted via the
control unit can be linked to other reference values via the
cy source“ and „Motorpoti (KP)“).
JOG frequency JOG
function is useful for manual setup and positioning of a
Press FUN key to switch from the internal reference value
to parameter
While keeping the FUN key pressed, press the arrow keys
. or
inP if function „Motorpoti (KP)“ is activated).
within the menu structure. The CtrL function contains subof the frequency inverter.
within the menu structure to the motorpoti function PotF for
clockwise rotation or Potr for anticlockwise rotation.
clockwise) / intr (reverse, anticlockwise) for the function internal reference value or inP
F (forward, clockwise) / inPr
(reverse, anticlockwise) for the function „Motorpoti (KP)“.
The function „Motorpoti (KP)“ enables linking to other refer-
is described in chapter „Reference values, Motorpoti (KP)“.
the frequency inverter from the minimum frequency 418 to
the
maximum frequency 419
the factory setting (2 Hz/s) for the parameter Ramp Keypad-
Motorpoti
and
473. The parameters Acceleration (clockwise) 420
Deceleration (clockwise)
421
The drive is in operation, i
Press an arrow key to switch to the motor potentiometer func-
tion Pot. The current frequency value is taken over in the mo-
the frequency inverter from Minimum frequency 418 to Max-
imum frequency
419
Reference frequency source 475 (Chapter „Reference frequen-
This
machine. The frequency of the output signal is set to the entered value if the FUN key is pressed.
•
int o r the motor potentiometer function Pot
JOG frequency 489.
•
06/13 Operating Instructions ACU 99
to adjust the required frequency.
• (The frequency value last adjusted is saved as the JOG
frequency
489.)
• Release the FUN key to stop the drive.
• (The display returns to the previous function Pot or int

ENT
Reversal of the sense of rotation independent of the control signal on the
terminals Clockwise S2IND or Anticlockwise S3IND.
ESC
Cancel function and return to the menu structure.
FUN
Switch from internal set point int or motor potentiometer function Pot to
Release the key to switch to the sub-function and stop the drive.
RUN
Start drive; alternative to control signal S2IND or S3IND.
STOP
Stop drive; alternative to control signal S2IND or S3IND.
If you press the ENT key, the sense of rotation is changed independent of the
of
the motor changes as soon as the sign of the reference frequency value changes.
Key functions
JOG frequency; the drive starts.
CAUTION
signal on the terminals Clockwise S2IND or Anticlockwise S3IND.
If the minimum frequency 418 has been set to 0.00 Hz, the sense of rotation
100 Operating Instructions ACU 06/13
 Loading...
Loading...