

Page 1

Installation
manual
ER2
3K
Line voltage:
1 ~ 200 -
240 V
-
Output
: 3~ 0 -
240 V Power
: 0,18-
2,2 kW
Line voltage
3 ~ 380 -
500 V
-
Output:
3~ 0 -
500 V
Power:
0,37- 15,0 kW
Programming manual ER23K
COMPACT-LINE
Inverter
Line voltage: 1(3)~ 200 - 240 V - Output: 3~ 0 - 240 V Power: 0,18- 15,0 kW
Line voltage 3 ~ 525 - 600 V - Output: 3~ 0 - 600 V Power: 0,75- 15,0 kW
EN 61800-3
02/2010
Page 2

Page 3

Contents
Important information __________________________________________________________________________________________ 4
Before you begin______________________________________________________________________________________________ 5
Documentation structure________________________________________________________________________________________ 7
Steps for setting up the drive ____________________________________________________________________________________ 8
Setup - Preliminary Recommendations ____________________________________________________________________________ 9
Factory configuration _________________________________________________________________________________________ 10
Basic functions ______________________________________________________________________________________________ 11
Remote display terminal option, ER22 ____________________________________________________________________________ 13
Remote graphic display terminal option, ER40______________________________________________________________________ 14
Remote display terminal option, ER12 ____________________________________________________________________________ 18
Structure of the parameter tables________________________________________________________________________________ 19
Compatibility of functions ______________________________________________________________________________________ 20
List of functions that can be assigned to inputs/outputs_______________________________________________________________ 22
List of functions that can be assigned to the Network and Modbus control word bits ________________________________________ 24
Checklist ___________________________________________________________________________________________________ 25
Programming _______________________________________________________________________________________________ 26
[SPEED REFERENCE] (rEF-) menu _____________________________________________________________________________ 30
[SETTINGS] (SEt-) menu ______________________________________________________________________________________ 31
[MOTOR CONTROL] (drC-) menu _______________________________________________________________________________ 39
[INPUTS / OUTPUTS CFG] (I-O-) menu __________________________________________________________________________ 45
[COMMAND] (CtL-) menu______________________________________________________________________________________ 48
[COMMAND] (CtL-) menu______________________________________________________________________________________ 59
[APPLICATION FUNCT.] menu (FUn-) ___________________________________________________________________________ 60
[FAULT MANAGEMENT] (FLt-) menu ____________________________________________________________________________ 86
[COMMUNICATION] (COM-) menu ______________________________________________________________________________ 92
[MONITORING] (SUP-) menu __________________________________________________________________________________ 94
Migration ER22K/P - ER23K____________________________________________________________________________________ 99
Diagnostics and troubleshooting________________________________________________________________________________ 100
Index of functions ___________________________________________________________________________________________ 105
Index of parameter codes and customer settings___________________________________________________________________ 106
Wiring / evaluation of PTC ___________________________________________________________________________________ 120
3
Page 4

Important information
The addition of this symbol to a Danger or Warning safety label indicates that an electrical hazard exists, which will result in
personal injury if the instructions are not followed.
This is the safety alert symbol. It is used to alert you to potential personal injury hazards. Obey all safety messages that follow
this symbol to avoid possible injury or death.
NOTICE
Read these instructions carefully, and look at the equipment to become familiar with the device before trying to install, operate, or maintain
it. The following special messages may appear throughout this documentation or on the equipment to warn of potential hazards or to call
attention to information that clarifies or simplifies a procedure.
DANGER
DANGER indicates an imminently hazardous situation which, if not avoided, will result in death, serious injury or
equipment damage.
WARNING
WARNING indicates a potentially hazardous situation which, if not avoided, can result in death, serious injury or
equipment damage.
CAUTION
CAUTION indicates a potentially hazardous situation which, if not avoided, can result in injury or equipment damage.
CAUTION
CAUTION, used without the safety alert symbol, indicates a potentially hazardous situation which, if not avoided, can
result in equipment damage.
PLEASE NOTE
The word "drive" as used in this manual refers to the "controller portion" of the adjustable speed drive as defined by NEC.
Electrical equipment should be installed, operated, serviced, and maintained only by qualified personnel. No responsibility is assumed by
BLEMO for any consequences arising out of the use of this documentation.
© 2009 BLEMO. All rights reserved.
4
Page 5

Before you begin
Read and understand these instructions before performing any procedure with this drive.
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
• Read and understand this manual before installing or operating the ER23K drive. Installation, adjustment, repair, and maintenance
must be performed by qualified personnel.
• The user is responsible for compliance with all international and national electrical code requirements with respect to grounding of
all equipment.
• Many parts of this drive, including the printed circuit boards, operate at the line voltage. DO NOT TOUCH. Use only electrically
insulated tools.
• DO NOT touch unshielded components or terminal strip screw connections with voltage present.
• DO NOT short across terminals PA/+ and PC/– or across the DC bus capacitors.
• Before repairing the variable speed drive:
- Disconnect all power, including external control power that may be present.
- Place a “DO NOT TURN ON” label on all power disconnects.
- Lock all power disconnects in the open position.
- WAIT 15 MINUTES to allow the DC bus capacitors to discharge.
- Measure the voltage of the DC bus between the PA/+ and PC/– terminals to ensure that the voltage is less than 42 Vdc.
- If the DC bus capacitors do not discharge completely, contact your local BLEMO representative. Do not repair or operate
the drive
• Install and close all covers before applying power or starting and stopping the drive.
Failure to follow these instructions will result in death or serious injury.
DANGER
UNINTENDED EQUIPMENT OPERATION
• Read and understand this manual before installing or operating the ER23K drive.
• Any changes made to the parameter settings must be performed by qualified personnel.
Failure to follow these instructions will result in death or serious injury.
WARNING
DAMAGED EQUIPMENT
Do not install or operate any drive that appears damaged.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
5
Page 6

Before you begin
WARNING
LOSS OF CONTROL
• The designer of any wiring diagram must take account of potential control channel failure modes and, for certain critical control
functions, incorporate a way of achieving a safe state during and after a channel failure. Examples of critical control functions are
emergency stop and overtravel stop.
• Separate or redundant control channels must be provided for critical control functions.
• System control paths may include communication links. Consideration must be given to the implications of unanticipated transmission
delays or failures of the link.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
a) For additional information, refer to NEMA ICS 1.1 (latest edition), "Safety Guidelines for the Application, Installation, and Maintenance of
Solid State Control" and to NEMA ICS 7.1 (latest edition), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems".
a
6
Page 7

Documentation structure
The following ER23K technical documents are available on the BLEMO website (www.blemo.com).
Installation Manual
This manual describes how to install and connect the drive.
User manual
This manual describes the functions and parameters of the drive's terminals and how to use them.
Simplified manual
This manual is a simplified version of the installation and programming manuals. It is supplied with the drive.
Quick Start
This document describes how to connect and configure the drive so that the motor can be started both quickly and easily for basic
applications. This document is supplied with the drive.
Manuals for Modbus, CANopen, etc.
These manuals describe the installation process, the bus or network connections, signaling, diagnostics and the configuration of parameters
specific to communication.
They also describe the communication services of the protocols.
7
Page 8

Steps for setting up the drive
3. Configure:
•
The nominal frequency of the motor
[Standard mot. freq] (bFr) page 39 if this is
not 50 Hz,
•
The motor parameters in the [MOTOR
CONTROL] (drC-) menu, page 39, only if
the factory configuration of the drive is
not suitable,
•
The application functions in the
[INPUTS / OUTPUTS CFG] (I-O-) menu,
page 45, the [COMMAND] (CtL-) menu,
page 48, and the [APPLICATION
FUNCT.] (FUn-) menu, page 60, only if
the factory configuration of the drive
is not suitable.
4. In the [SETTINGS] (SEt-) menu,
adjust the following
parameters:
•
[Acceleration] (ACC), page 31 and
[Deceleration], (dEC) page 31,
•
[Low speed] (LSP), page 32 and [High
speed] (HSP), page 32,
•
[Mot. therm. current] (ItH), page 32.
2. Apply input power to the drive, but do not
give a run command.
Tips:
•
Before beginning programming, complete the customer
setting tables, page
106
.
•
Use the
[Restore config.] (FCS) parameter, page 44
,
to return to the factory settings at any time.
• To locate the description of a function quickly, use the index
of functions on page
105
.
• Before configuring a function, read carefully the "Function
compatibility" section on pages 20 and 21.
• Note:
The following operations must be performed for optimum
drive performance in terms of accuracy and response time:
-
Enter the values indicated on the (motor) rating plate in
the
[MOTOR CONTROL] (drC-)
menu, page 39.
-
Perform auto-tuning with the motor cold and connected
using the
[Auto-tuning] (tun)
parameter, page 41.
-
Adjust the
[FreqLoopGain] (FLG)
parameter, page 32
and the
[Fr.Loop.Stab] (StA)
parameter, page 33.
INSTALLATION
1. Please refer to the Installation Manual.
PROGRAMMING
5. Start the drive.
8
Page 9

Setup - Preliminary Recommendations
Before powering up the drive
DANGER
UNINTENDED EQUIPMENT OPERATION
Make sure that all logic inputs are inactive to avoid any unintended operation.
Failure to follow these instructions will result in death or serious injury.
Before configuring the drive
DANGER
UNINTENDED EQUIPMENT OPERATION
• Read and understand this manual before installing or operating the ER23K drive.
• Any changes made to the parameter settings must be performed by qualified personnel.
• Make sure that all logic inputs are inactive to avoid any unintended operation when parameters are being changed.
Failure to follow these instructions will result in death or serious injury.
Start-up
Note: When factory settings apply and during power-up/manual reset or after a stop command, the motor can only be powered once the
"forward", "reverse" and "DC injection stop" commands have been reset. If they have not been reset, the drive will display [Freewheel stop]
(nSt) but will not start. If the automatic restart function has been configured ([Automatic restart] (Atr) parameter in the [FAULT
MANAGEMENT] (FLt-) menu, page 86), these commands are taken into account without a reset (to zero) being necessary.
Line contactor
CAUTION
RISK OF DAMAGE TO DRIVE
• Frequent use of the contactor will cause premature ageing of the filter capacitors.
• Do not have cycle times less than 60 seconds.
Failure to follow these instructions can result in equipment damage.
Using a motor with a lower rating or dispensing with a motor altogether
• With the factory settings, motor output phase loss detection is active ([Output Phase Loss] (OPL) = [YES] (YES), page 89). To avoid
having to use a motor with the same rating as the drive when testing the drive or during a maintenance phase, deactivate motor output
phase loss detection ([Output Phase Loss] (OPL) = [No] (nO)). This can prove particularly useful if very powerful drives are being
used.
• Set the [U/F mot 1 selected] (UFt) parameter, page 42, on [Cst. torque] (L) in the [MOTOR CONTROL] (drC-) menu.
CAUTION
RISK OF DAMAGE TO MOTOR
Motor thermal protection will not be provided by the drive if the motor 's nominal current is 20% lower than that of the drive. Find an
alternative source of thermal protection.
Failure to follow these instructions can result in equipment damage.
9
Page 10

Factory configuration
Factory settings
The ER23K is factory-set for the most common operating conditions:
• Display: drive ready [Ready] (rdY) with motor stopped, and motor frequency with motor running.
• The LI5 and LI6 and logic inputs, AI3 analog input, AOC analog output, and R2 relay are unaffected.
• Stop mode when fault detected: freewheel
Code Description Value Page
bFr [Standard mot. freq] [50Hz IEC] 39
tCC [2/3 wire control] [2 wire] (2C): 2-wire control 29
UFt [U/F mot 1 selected] [SVC] (n): Sensorless flux vector control for constant torque applications 42
ACC
DEC
LSP [Low speed] 0 Hz 32
HSP [High speed] 50 Hz 32
ItH [Mot. therm. current] Nominal motor current (value depending on drive rating) 32
SdC1 [Auto DC inj. level 1] 0.7 x nominal drive current, for 0.5 seconds 33
SFr [Switching freq.] 4 kHz 38
rrS [Reverse assign.] [LI2] (LI2): Logic input LI2 46
PS2 [2 preset speeds] [LI3] (LI3): Logic input LI3 69
PS4 [4 preset speeds] [LI4] (LI4): Logic input LI4 69
Fr1 [Ref.1 channel] [AI1] (AI1) - Analog input AI1 28
SA2 [Summing ref. 2] [AI2] (AI2) - Analog input AI2 67
r1 [R1 Assignment]
brA [Dec ramp adapt.] [Yes] (YES): Function active (automatic adaptation of deceleration ramp) 62
Atr [Automatic restart] [No] (nO): Function inactive 86
Stt [Type of stop] [Ramp stop] (rMP): On ramp 63
CFG [Macro configuration] [Factory set.] (Std) (1) 43
[Acceleration]
[Deceleration]
3.00 seconds 61
[No drive flt] (FLt): The contact opens when a fault is detected or when the drive has
been switched off
47
Check whether the values above are compatible with the application. If necessary, the drive can be used without changing the settings.
(1)If you want to keep the drive's presettings to a minimum, select the macro configuration [Macro configuration] (CFG) = [Start/stop] (StS)
followed by [Restore config.] (FCS) = [Config. CFG] (InI) (page 44).
The [Start/stop] (StS) macro configuration is the same as the factory configuration, apart from the I/O assignment:
• Logic inputs:
- LI1, LI2 (reversing): 2-wire transition detection control, LI1 = run forward, LI2 = run reverse.
- LI3 to LI6: Inactive (not assigned).
• Analog inputs:
- AI1: Speed reference 0-10 V.
- AI2, AI3: Inactive (not assigned).
• Relay R1: The contact opens in the event of a detected fault (or drive off).
• Relay R2: Inactive (not assigned).
• Analog output AOC: 0-20 mA, inactive (not assigned).
10
Page 11

Basic functions
Time
(seconds)
Motor current/In drive
Drive thermal protection
Functions:
Thermal protection by PTC probe fitted on the heatsink or integrated in the power module.
Indirect protection of the drive against overloads by tripping in the event of an overcurrent. Typical tripping values:
- Motor current = 185% of nominal drive current: 2 seconds
- Motor current = 150% of nominal drive current: 60 seconds
Drive ventilation
The fan starts up when the drive is powered up then shuts down after 10 seconds if a run command has not been received.
The fan is powered automatically when the drive is unlocked (direction of operation + reference). It is powered down a few seconds after
the drive is locked (motor speed < 0.2 Hz and injection braking completed).
11
Page 12

Basic functions
Tripping time t
in seconds
Motor current/
[Mot. therm. current] (ItH)
Motor thermal protection
Function:
Thermal protection by calculating the I2t.
The protection takes account of self-cooled motors.
CAUTION
RISK OF DAMAGE TO MOTOR
External protection against overloads is required under the following circumstances:
• When the product is being switched on again, as there is no memory to record the motor thermal state
• When supplying more than one motor
• When supplying motors with ratings less than 0.2 times the nominal drive current
• When using motor switching
Failure to follow these instructions can result in equipment damage.
12
Page 13

Remote display terminal option, ER23K
4-character
display
Connector
Access locking switch:
• Position:
[MONITORING] (SUP-) and [SPEED
REFERENCE] (rEF-) menus can be
accessed.
[SETTINGS] (SEt-), [MONITORING]
(SUP-) and [SPEED REFERENCE]
(rEF-) can be accessed.
• Position:
• Position: All menus can be accessed
This terminal is a local control unit which can be mounted on the door of the wall-mounted or floor-standing enclosure. It has a cable with
connectors, which is connected to the drive serial link (see the manual supplied with the terminal). Its display capabilities are practically
identical to those of the ER23K. With this terminal, however, up and down arrows are used for navigation rather than a jog dial. There is
also an access locking switch for the menus. There are three buttons for controlling the drive (1):
• FWD/REV: Reversal of the direction of rotation
• RUN: Motor run command
• STOP/RESET: Motor stop command or reset
Pressing the button a first time stops the motor, and if DC injection standstill braking is configured, pressing it a second time stops this
braking.
View of the front panel:: View of the rear panel :
Note: Protection via customer confidential code has priority over the switch.
Note:
• The remote terminal access locking switch also locks access by the drive keys.
• When the remote display terminal is disconnected, any locking remains active for the drive keys.
• The remote display terminal will only be active if the [Modbus baud rate] (tbr) parameter in the [COMMUNICATION] (COM-) menu,
page 92, still has its factory setting: [19.2 Kbps] (19.2).
(1)To activate the buttons on the remote display terminal, you first have to configure [HMI command] (LCC) = [Yes] (YES), page 58.
Saving and loading configurations
Up to four complete configurations for ER23K drives without an option card can be stored on the remote display terminal. These
configurations can be saved, transported and transferred from one drive to another of the same rating. 4 different operations for the same
device can also be stored on the terminal.
See the [Saving config.] (SCS) and [Restore config.] (FCS) parameters in the [MOTOR CONTROL] (drC-) menu, pages 43 and 44, the
[INPUTS / OUTPUTS CFG] (I-O-) menu, pages 47 and 47, the [COMMAND] (CtL-) menu, pages 59 and 59, and the [APPLICATION
FUNCT.] (FUn-) menu, pages 85 and 85.
To transfer a configuration between an ER23K and an ER22, follow the procedure on page
85.
13
Page 14

Remote graphic display terminal option, ER40
1 Graphic display
2 Function keys:
F1: CODE
F2, F3: not used
F4: MODE
3 Button to stop/reset
4 Run button
5 Navigation button:
• Press (ENT): - To save the current value
- To enter the selected menu or parameter
• Turn CW/CCW: - To increase or decrease a value
- To go to the next or previous line
- To increase or decrease the reference if control via
the display terminal is activated
7
ESC button:cancels a value, a
parameter or a menu to return
to the previous selection
6
Button for reversing the direction
of rotation of the motor
Description of the terminal
Thanks to the screen size of this graphic display terminal, which works with FLASH V1.1IE19 or higher and is part of the ER40, it is possible
to display more detailed information than can be shown on an on-board display. It is connected in the same way as the ER23K remote
display terminal.
Note: Keys 3, 4, 5 and 6 can be used to control the drive directly, if control via the terminal is activated.
To activate the buttons on the remote display terminal, you first have to configure [HMI command] (LCC) = [Yes] (YES), page 58.
14
Page 15

Remote graphic display terminal option, ER40 (continued)
LANGUAGE
English
Français
Deutsch
Espanol
Italiano
Chinese
Russian
Turkish
ER23K
1.5kW/2HP 200/240V
MAIN MENU
DRIVE MENU
LANGUAGE
DRIVE MENU
SPEED REFERENCE
SETTINGS
MOTOR CONTROL
INPUTS / OUTPUTS CFG
COMMAND
Code Mode
APPLICATION FUNCT.
FAULT MANAGEMENT
COMMUNICATION
Powering up the graphic display terminal for the first time
When powering up the graphic display terminal for the first time, the user has to select the required language.
Display after the graphic display terminal has been
powered up for the first time.
Select the language and press ENT.
The drive's rating details will now appear.
3 seconds
or ENT
The [MAIN MENU]
follows automatically.
Automatically switches to the [DRIVE MENU]
menu after 3 seconds.
Select the menu and press ENT.
15
Page 16

Remote graphic display terminal option, ER40 (continued)
ER23K
1.5kW/2HP 200/240V
MAIN MENU
DRIVE MENU
LANGUAGE
DRIVE MENU
Standard mot. freq
2/3 wire control
Ref.1 channel
SPEED REFERENCE
SETTINGS
MOTOR CONTROL
INPUTS / OUTPUTS CFG
COMMAND
APPLICATION FUNCT.
FAULT MANAGEMENT
COMMUNICATION
DRIVE MENU
Ready
Code Mode
Powering up the drive for the first time
When powering up the drive for the first time, the user immediately accesses the 3 parameters below: [Standard mot. freq] (bFr), [Ref.1
channel] (Fr1), and [2/3 wire control] (tCC), page 29. .
Display after the drive has been powered up for the
first time.
The [MAIN MENU]
follows automatically.
3 seconds
ESC
Automatically switches to the [DRIVE MENU]
menu after 3 seconds.
Select the menu and press ENT.
The word "Ready" appears on the graphic display
terminal if you press the ESC key when in the
[DRIVE MENU].
16
Page 17

Remote graphic display terminal option, ER40 (continued)
ER23K
1.5kW/2HP 200/240V
MAIN MENU
DRIVE MENU
LANGUAGE
DRIVE MENU
SPEED REFERENCE
SETTINGS
MOTOR CONTROL
INPUTS / OUTPUTS CFG
COMMAND
Code Mode
APPLICATION FUNCT.
FAULT MANAGEMENT
COMMUNICATION
DRIVE MENU
Ready
Code Mode
Subsequent power-ups
Display after powering up.
The [MAIN MENU]
follows automatically.
3 seconds
ESC
Automatically switches to the [DRIVE MENU]
menu after 3 seconds.
Select the menu and press ENT.
The word "Ready" appears on the graphic display
terminal if you press the ESC key when in the
[DRIVE MENU].
17
Page 18

Remote display terminal option, ER12
1 Graphic display
2 MODE button (1): If [SPEED
REFERENCE] (rEF-) is displayed,
this will take you to the
[SETTINGS] (SEt-) menu. If not, it
will take you to the [SPEED
REFERENCE] (rEF-) menu.
3 ESC button
Used to quit a menu/parameter or
remove the currently displayed
value in order to revert
to the previous value
retained in the memory
4 RUN button
Executes the function
assuming it has been
configured
5 Navigation keys
6 ENT button
Used to save the current value or
access the selected menu/parameter
8 Button for reversing the direction
of rotation of the motor
7 STOP button
Used to stop the motor and
perform a reset
Description of the terminal
This terminal is a local control unit which can be mounted on the door of the wall-mounted or floor-standing enclosure. It has a cable with
connectors, which is connected to the drive serial link (see the manual supplied with the terminal). Its display capabilities are practically
identical to those of the ER23. With this terminal, up and down arrows are used for navigation rather than a jog dial.
(1) If the drive is locked by a code ([PIN code 1] (COd), page 97), pressing the Mode key enables you to switch from the [MONITORING]
(SUP-) menu to the [SPEED REFERENCE] (rEF-) menu and vice versa.
To activate the buttons on the remote display terminal, you first have to configure [HMI command] (LCC) = [Yes] (YES), page 58.
18
Page 19

Structure of the parameter tables
APPLICATION FUNCT.] menu (Fun-)
Code Name/Description Adjustment
range
Factory
setting
PI-
•
[PI regulator]
Note: The "PI regulator" function is incompatible with several functions (see page 20). It can only
be configured if these functions are unassigned, in particular the summing inputs (set [Summing
ref. 2] (SA2) to [No] (nO), page 67) and the preset speeds (set [2 preset speeds] (PS2) and
[4 preset speeds] (PS4) to [No] (nO), page 69) which will have been assigned as part of the
factory settings.
PIF
• [PID feedback ass.]
[Non] (nO)
no
AI1
A12
A13
-
[Non] (nO): not assigned
-
[AI1] (AI1): analog input AI1
-
[AI2] (AI2): analog input AI2
-
[AI3] (AI3): analog input AI3
5
2
3
1
4
6
8
7
1. Name of menu on 4-digit 7-segment display
2. Submenu code on 4-digit 7-segment display
3. Parameter code on 4-digit 7-segment display
4. Parameter value on 4-digit 7-segment display
5. Name of menu on ER40 graphic display terminal
6. Name of submenu on ER40 graphic display terminal
7. Name of parameter on ER40 graphic display terminal
8. Value of parameter on ER40 graphic display terminal
The parameter tables contained in the descriptions of the various menus are organized as follows.
Example :
19
Page 20

Compatibility of functions
Incompatible functions
The following functions will be inaccessible or deactivated in the cases described below:
Automatic restart
This is only possible for the 2-wire level control type ([2/3 wire control] (tCC) = [2 wire] (2C) and [2 wire type] (tCt) = [Level] (LEL) or
[Fwd priority] (PFO)).
Catch on the fly
This is only possible for the 2-wire level control type ([2/3 wire control] (tCC) = [2 wire] (2C) and [2 wire type] (tCt) = [Level] (LEL) or
[Fwd priority] (PFO)).
This function is locked if automatic standstill injection has been configured as DC ([Auto DC injection] (AdC) = [Continuous] (Ct)).
Function compatibility table
The choice of application functions may be limited by the number of I/O and by the fact that some functions are incompatible with one
another. Functions which are not listed in this table are compatible.
If there is an incompatibility between functions, the first function configured will prevent the others being configured.
To configure a function, first check that functions which are incompatible with it are unassigned, especially those which are
assigned in the factory settings.
Summing inputs (factory setting)
+/- speed (1)
Management of limit switches
Preset speeds (factory setting)
PI regulator
Jog operation
Brake control
DC injection stop
Fast stop
Freewheel stop
Summing inputs (factory setting)
+/- speed (1)
Management of limit switches
Preset speeds (factory setting)
PI regulator
Jog operation
Brake control
DC injection stop
Fast stop
Freewheel stop
(1)Excluding special application with reference channel [Ref.2 channel] (Fr2) (see diagrams 51 and 53)
Incompatible functions Compatible functions Not applicable
Priority functions (functions which cannot be active at the same time):
f
Stop functions take priority over run commands.
Speed references via logic command take priority over analog references.
The function marked with the arrow takes priority over the other.
f
f f
f f
20
Page 21

Compatibility of functions
Logic and analog input application functions
Each of the functions on the following pages can be assigned to one of the inputs.
A single input can activate several functions at the same time (reverse and 2nd ramp for example). The user must therefore ensure that
these functions can be used at the same time.
The [MONITORING] (SUP-) menu ([[LOGIC INPUT CONF.]] (LIA-) parameter, page 98, and [[ANALOG INPUTS IMAGE]] (AIA-) parameter,
page 98) can be used to display the functions assigned to each input in order to check their compatibility.
Before assigning a reference, command or function to a logic or analog input, the user must check that this input has not already been
assigned in the factory settings and that no other input has been assigned to an incompatible or unwanted function.
• Example of incompatible function to be unassigned:
In order to use the "+speed/-speed" function, the preset speeds and summing input 2 must first be unassigned.
The table below lists the factory-set input assignments and the procedure for unassigning them.
Assigned input Function Code To unassign, set to: Page
LI2 Run reverse rrS nO 46
LI3 2 preset speeds PS2 nO 69
LI4 4 preset speeds PS4 nO 69
AI1 Reference 1 Fr1 Anything but AI1 56
LI1 Run forward tCC 2C or 3C 45
AI2 Summing input 2 SA2 nO 67
21
Page 22

List of functions that can be assigned to inputs/outputs
Logic inputs Page Code Factory setting
Not assigned - - LI5 - LI6
Run forward - - LI1
2 preset speeds 69 PS2 LI3
4 preset speeds 69 PS4 LI4
8 preset speeds 69 PS8
16 preset speeds 70 PS16
2 preset PI references 77 Pr2
4 preset PI references 78 Pr4
+ speed 74 USP
- speed 74 dSP
Jog operation 72 JOG
Ramp switching 62 rPS
2nd current limit switching 81 LC2
Fast stop via logic input 63 FSt
DC injection via logic input 63 dCI
Freewheel stop via logic input 64 nSt
Run reverse 46 rrS LI2
External fault 88 EtF
RESET 87 rSF
Forced local mode 93 FLO
Reference switching 57 rFC
Control channel switching 58 CCS
Motor switching 82 CHP
Forward limit switch 84 LAF
Reverse limit switch 84 LAr
Fault inhibition 91 InH
Analog inputs Page Code Factory setting
Not assigned - - AI3
Reference 1 56 Fr1 AI1
Reference 2 56 Fr2
Summing input 2 67 SA2 AI2
Summing input 3 67 SA3
PI regulator feedback 77 PIF
22
Page 23

List of functions that can be assigned to inputs/outputs
Analog/logic output Page Code Factory setting
Not assigned - - AOC/AOV
Motor current 46 OCr
Motor frequency 46 OFr
Motor torque 46 Otr
Power supplied by the drive 46 OPr
Drive detected fault (logic data) 46 FLt
Drive running (logic data) 46 rUn
Frequency threshold reached (logic data) 46 FtA
High speed (HSP) reached (logic data) 46 FLA
Current threshold reached (logic data) 46 CtA
Frequency reference reached (logic data) 46 SrA
Motor thermal threshold reached (logic data) 46 tSA
Brake sequence (logic data) 46 bLC
Relay Page Code Factory setting
Not assigned - - R2
Detected fault 47 FLt R1
Drive running 47 rUn
Frequency threshold reached 47 FtA
High speed (HSP) reached 47 FLA
Current threshold reached 47 CtA
Frequency reference reached 47 SrA
Motor thermal threshold reached 47 tSA
Brake sequence 47 bLC
LI1
to
Copy of the logic input 47
LI6
23
Page 24

List of functions that can be assigned to the Network and
Modbus control word bits
Bits 11 to 15 of the control word Page Code
2 preset speeds 69 PS2
4 preset speeds 69 PS4
8 preset speeds 69 PS8
16 preset speeds 70 PS16
2 preset PI references 77 Pr2
4 preset PI references 78 Pr4
Ramp switching 62 rPS
2nd current limit switching 81 LC2
Fast stop via logic input 63 FSt
DC injection 63 dCI
External fault 88 EtF
Reference switching 57 rFC
Control channel switching 58 CCS
Motor switching 82 CHP
24
Page 25

Checklist
Carefully read the information contained in the programming, installation and simplified manuals, as well as the information in the catalog.
Before starting to use the drive, please check the following points relating to mechanical and electrical installations.
For the full range of documentation, please visit www.blemo.com.
1. Mechanical installation (see the simplified and installation manuals)
• For details of the different installation types and recommendations concerning ambient temperature, please refer to the installation
instructions in the simplified or installation manuals.
• Install the drive vertically in accordance with the specifications. Please refer to the installation instructions in the simplified or
installation manuals.
• When using the drive, both the environmental conditions defined under standard 60721-3-3 and the levels defined in the catalog must
be respected.
• Install the required options for your application. Refer to the catalog for details.
2. Electrical installation (see the simplified and installation manuals)
• Ground the drive. See the sections on how to ground equipment in the simplified and installation manuals.
• Make sure the input supply voltage matches the nominal drive voltage and connect the line supply in accordance with the simplified
and installation manuals.
• Make sure you use appropriate input line fuses and circuit breakers. See the simplified and installation manuals.
• Arrange the cables for the control terminals as required (see the simplified and installation manuals). Separate the supply and control
cables in accordance with EMC compatibility rules.
• The ER23-...K and ER23-.../4K ranges include an EMC filter Using an IT jumper helps reduce leakage current. This is explained in
the paragraph about the internal EMC filter on the ER23-...K and the ER23-.../4K in the installation manual.
• Make sure the motor connections are right for the voltage (star, delta).
3. Using and starting up the drive
• Start the drive. [Standard mot. freq] (bFr), page 28, is displayed the first time the drive is powered up. Make sure the frequency defined
by frequency bFr (the factory setting is 50 Hz) matches the motor's frequency.
• When the drive is powered up for the first time, the [Ref.1 channel] (Fr1) parameter, page 28, and the [2/3 wire control] (tCC)
parameter, page 29, are displayed after [Standard mot. freq] (bFr). These parameters will need to be adjusted if you wish to control
the drive locally.
• When the drive is powered up subsequently, [Ready] (rdY) is displayed on the HMI.
• The [Restore config.] (FCS) function, page 44, is used to reinitialize the drive with the factory settings.
25
Page 26

Programming
• 4 x 7 segment display
• RUN button: Controls powering up
of the motor for forward running if
the [2/3 wire control] (tCC)
parameter in the [INPUTS /
OUTPUTS CFG] (I-O-) menu is set
to [Local] (LOC), page 45
• Jog dial - can be used for
navigation by turning it clockwise
or counter-clockwise - pressing
the jog dial enables the user to
make a selection or confirm
information.
• Used to quit a menu or parameter
or to clear the value displayed in
order to revert to the value in the
memory
STOP/RESET button
• Enables detected fault to be reset
• Can be used to control motor stopping
- If [2/3 wire control] (tCC) is not set to
[Local] (LOC), freewheel stop
- If [2/3 wire control] (tCC) is set to [Local]
(LOC), stop on ramp or freewheel stop
during DC injection braking
• 2 CANopen status LEDs
• MON LED, illuminated if
[MONITORING] (SUP-)
menu is active
• CONF LED, illuminated if the
[SETTINGS] (SEt-),
[MOTOR CONTROL]
(drC-),[INPUTS / OUTPUTS
CFG] (I-O-), [COMMAND]
(CtL-), [APPLICATION
FUNCT] (FUn-), [FAULT
MANAGEMENT] (FLt-)
or [COMMUNICATION]
(COM-) menus are active
Functions as a potentiometer if [Ref.1
channel] (Fr1-) in the [COMMAND]
(CtL-) menu is set to [Image input
AIV1] (AIV1)
• MODE button (1): If
[SPEED REFERENCE]
(rEF-) is displayed, this will
take you to the
[SETTINGS] (SEt-) menu.
If not, it will take you to the
[SPEED REFERENCE]
(rEF-) menu.
• Load LED
• REF LED, illuminated if
[SPEED REFERENCE]
(rEF-) menu is active
Description of the HMI
Functions of the display and the keys
Normal display, with no fault code displayed and no startup:
- : Displays the parameter selected in the [MONITORING] (SUP-) menu (default: motor frequency).
If the current is limited, the display flashes. In such cases, CLI will appear at the top left if an ER40 graphic display terminal is
connected to the drive.
- InIt: Initialization sequence
- rdY: Drive ready
- dCb: DC injection braking in progress
- nSt: Freewheel stop
- FSt: Fast stop
- tUn : Auto-tuning in progress
In the event of a detected fault, the display will flash to notify the user accordingly. If an ER40 graphic display terminal is
connected, the name of the detected fault will be displayed.
(1) If the drive is locked by a code ([PIN code 1] (COd), page 97), pressing the Mode key enables you to switch from the [MONITORING]
(SUP-) menu to the [SPEED REFERENCE] (rEF-) menu and vice versa.
26
Page 27

Programming
These three parameters are
only visible when the drive is
powered up for the first time.
The settings can be amended
subsequently in the menus:
[MOTOR CONTROL] (drC-)
for [Standard mot. freq] (bFr),
[COMMAND] (CtL-) for [Ref.1
channel] (Fr1)
[INPUTS / OUTPUTS CFG]
(I-O-) for [2/3 wire control]
(tCC)
[MOTOR CONTROL] (drC-)
[FAULT MANAGEMENT] (FLt)
[COMMUNICATION] (COM-)
[MONITORING] (SUP-)
[SETTINGS] (SEt-)
[INPUTS / OUTPUTS CFG]
(I-O-)
[COMMAND] (CtL-)
[APPLICATION FUNCT.] (FUn-)
[SPEED REFERENCE] (rEF-)
Structure of the menus
Powering up Parameter selection
On the 7-segment display, a dash after menu and submenu codes is used to differentiate them from parameter codes.
Examples: [APPLICATION FUNCT.] (FUn-) menu, [Acceleration] (ACC) parameter
27
Page 28

Programming
Configuring the [Standard mot. freq] (bFr), [2/3 wire control] (tCC), and
[Ref.1 channel] (Fr1) parameters
These parameters can only be modified when the drive is stopped and no run command is present.
Code Description Adjustment
range
bFr
50
60
Fr1
AI1
AI2
AI3
AIU1
UPdt
UPdH
LCC
Mdb
nEt
• [Standard mot. freq]
This parameter is only visible the first time the drive is powered up.
It can be modified at any time in the [MOTOR CONTROL] (drC-) menu.
[50Hz IEC] (50): 50 Hz
[60Hz NEMA] (60): 60 Hz
This parameter modifies the presets of the following parameters: [High speed] (HSP), page 32, [Freq.
threshold] (Ftd), page 37, [Rated motor freq.] (FrS), page 39, and [Max frequency] (tFr), page 42
• [Ref.1 channel]
-
[AI1] (AI1) - Analog input AI1
-
[AI2] (AI2) - Analog input AI2
-
[AI3] (AI3) - Analog input AI3
-
[Network AI] (AIV1) - In terminal control mode, the jog dial functions as a potentiometer.
If [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), the following additional assignments are possible:
-
[+/- SPEED] (UPdt): +/- speed reference via LI. See configuration page 74.
-
[+/-spd HMI] (UPdH): +/- speed reference by turning the jog dial on the ER23K keypad.
To use, display the frequency [Output frequency] (rFr), page 95. The +/- speed function via the keypad or the
terminal is controlled from the [MONITORING] (SUP-) menu by selecting the [Output frequency] (rFr)
parameter.
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following additional assignments are possible:
-
[HMI] (LCC) reference via the remote display terminal, [HMI Frequency ref.] (LFr) parameter in the
[SETTINGS] (SEt-) menu, page 31
-
[Modbus] (Mdb): Reference via Modbus
-
[Network] (nEt): Reference via network communication protocol
Factory
setting
[50Hz IEC] (50)
[AI1] (AI1)
28
Page 29

Programming
2 s
2 s
Code Description Adjustment
range
tCC
• [2/3 wire control]
DANGER
UNINTENDED EQUIPMENT OPERATION
When the [2/3 wire control] (tCC) parameter is changed, the [Reverse assign.] (rrS) parameter, page 46, and the
[2 wire type] (tCt) parameter, page 45, and all the assignments involving the logic inputs will revert to their default
values.
Check that this change is compatible with the wiring diagram used.
Failure to follow these instructions will result in death or serious injury.
Control configuration:
2C
3C
LOC
-
[2 wire] (2C): 2-wire control
-
[3 wire] (3C): 3-wire control
-
[Local] (LOC): Local control (RUN/STOP/RESET drive) (invisible if [ACCESS LEVEL] (LAC) = [Level 3] (L3),
page 56)
2-wire control: The open or closed state of the input controls running or stopping.
Wiring example:
LI1: Forward
LIx: Reverse
3-wire control (pulse control): A "forward" or "reverse" pulse is sufficient to control startup, a "stop" pulse is
sufficient to control stopping.
Wiring example:
LI1: Stop
LI2: Forward
LIx: Reverse
Factory
setting
[2 wire] (2C)
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
29
Page 30

[SPEED REFERENCE] (rEF-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
The [SPEED REFERENCE] (rEF-) menu displays [HMI Frequency ref.] (LFr), [Image input AIU1] (AIU1) or [Frequency ref.] (FrH) depending
on which control channel is active.
During local control, the HMI's jog dial functions as a potentiometer, making it possible to increase or reduce the reference value within
limits defined by the [Low speed] (LSP) and [High speed] (HSP) parameters.
When local control is deactivated, by the [Ref.1 channel] (Fr1) parameter, only the reference values are displayed. The value will be readonly and can only be changed via the jog dial (the speed reference is supplied by an AI or another source).
The reference displayed will depend on how the drive has been configured.
Code Description Factory setting
LFr
AIU1
FrH
• [HMI Frequency ref.]
This parameter only appears if the function has been enabled.
It is used to change the speed reference from the remote control.
ENT does not have to be pressed to enable a change of reference.
• [Image input AIU1]
Used to amend the speed reference via the jog dial
• [Frequency ref.]
This parameter is read-only. It enables you to display the speed reference applied to the motor, regardless of
which reference channel has been selected.
0 to 500 Hz
0 to 100%
LSP to HSP Hz
30
Page 31

[SETTINGS] (SEt-) menu
Speed reference via the display terminal
Scaling factor for the [Cust. output value] (SPd1) parameter
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
The adjustment parameters can be modified with the drive running or stopped.
Note: Changes should preferably be made with the drive stopped.
Code Description Adjustment range Factory setting
LFr
*
rPI
*
ACC
AC2
*
dE2
*
dEC
• [HMI Frequency ref.]
This parameter is displayed if [HMI command] (LCC) = [Yes] (YES), page 58 or if [Ref.1 channel] (Fr1)/[Ref.2
channel] (Fr2) = [HMI] (LCC) page 56, and if a remote display terminal is connected. In such cases, [HMI
Frequency ref.] (LFr) can also be accessed via the drive's keypad.
[HMI Frequency ref.] (LFr) is reinitialized to 0 when power is switched off.
• [Internal PID ref.]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
• [Acceleration]
Defined to accelerate from 0 to the nominal frequency [Rated motor freq.] (FrS) in the [MOTOR CONTROL]
(drC-) menu.
• [Acceleration 2]
Parameter can be accessed if [Ramp 2 threshold] (Frt) > 0, page 62, or if [Ramp switch ass.] (rPS) is assigned,
page 62.
• [Deceleration 2]
Parameter can be accessed if [Ramp 2 threshold] (Frt) > 0, page 62, or if [Ramp switch ass.] (rPS) is assigned,
page 62.
• [Deceleration]
Defined to decelerate from the nominal frequency [Rated motor freq.] (FrS) (parameter in the [MOTOR CONTROL]
(drC-)) menu to 0.
Check that the value for [Deceleration] (dEC) is not too low in relation to the load to be stopped.
0 to HSP -
0.0 to 100% 0%
In accordance with
Inr, page 61
In accordance with
Inr, page 61
In accordance with
Inr, page 61
In accordance with
Inr, page 61
3 s
5 s
5 s
3 s
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
31
Page 32

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
FLG low
FLG correct
FLG high
In this case,
reduce FLG.
Code Description Adjustment
range
tA1
*
tA2
*
tA3
*
tA4
*
LSP
HSP
ItH
• [Begin Acc round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [End Acc round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [Begin Dec round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [End Dec round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [Low speed]
Motor frequency at min. reference
• [High speed]
Motor frequency at max. reference: Ensure that this setting is appropriate for the motor and the application.
• [Mot. therm. current]
Set [Mot. therm. current] (ItH) to the nominal current indicated on the motor's rating plate.
If you wish to suppress thermal protection, see [Overload fault mgt] (OLL), page 89.
0 to 100 10
0 to (100-tA1) 10
0 to 100 10
0 to (100-tA3) 10
0 to HSP 0
LSP to tFr bFr
0.2 to 1.5 In (1) In accordance
Factory
setting
with the drive
rating
UFr
FLG
*
(1)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
*
32
• [IR compensation]
- For [U/F mot 1 selected] (UFt) = [SVC] (n) or [Energy sav.] (nLd), page 42: IR compensation
- For [U/F mot 1 selected] (UFt) = [Cst. torque] (L) or [Var. torque] (P), page 42: Voltage boost
Used to optimize the torque at very low speed (increase [IR compensation] (UFr) if the torque is insufficient).
Check that the value for [IR compensation] (UFr) is not too high when the motor is in a hot state otherwise some
instabilities can occur.
Note: Changing [U/F mot 1 selected] (UFt), page 42, will cause [IR compensation] (UFr) to return to its factory
setting (20%).
• [FreqLoopGain]
Parameter can only be accessed if [U/F mot 1 selected] (UFt) = [SVC] (n) or [Energy sav.] (nLd), page 42.
The FLG parameter adjusts the drive's ability to follow the speed ramp on the basis of the inertia of the machine
being driven.
Too high a gain may result in operating instability.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
these menus, on the pages indicated, to aid programming.
0 to 100% 20%
1 to 100% 20%
Page 33

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
StA low
StA correct
StA high
In this case,
reduce StA.
Code Description Adjustment range Factory setting
StA
*
SLP
*
IdC
*
• [Fr.Loop.Stab]
Parameter can only be accessed if [U/F mot 1 selected] (UFt) = [SVC] (n) or [Energy sav.] (nLd), page 42.
Used to adapt the return to steady state after a speed transient (acceleration or deceleration), according to the
dynamics of the machine.
Gradually increase the stability to avoid any overspeed.
• [Slip compensation]
Parameter can only be accessed if [U/F mot 1 selected] (UFt) = [SVC] (n) or [Energy sav.] (nLd), page 42.
Adjusts the slip compensation around the value set by the nominal motor speed.
The speeds given on motor rating plates are not necessarily exact.
• If slip setting < actual slip: the motor is not rotating at the correct speed in steady state.
• If slip setting > actual slip: the motor is overcompensated and the speed is unstable.
• [DC inject. level 1]
Parameter can be accessed if [Type of stop] (Stt) = [DC injection] (dCI), page 63, or if [DC injection assign.] (dCI)
is not set to [No] (nO), page 63.
After 5 seconds, the injection current is limited to 0.5 [Mot. therm. current] (ItH) if set to a higher value.
1 to 100% 20%
0 to 150% 100%
(2) 0 to In (1) 0.7 In (1)
tdC
*
tdC1
*
SdC1
*
tdC2
*
SdC2
*
(1)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
(2)Note: These settings are not related to the "automatic standstill DC injection" function.
*
• [DC injection time 2]
Parameter can be accessed if [Type of stop] (Stt) = [DC injection] (dCI) , page 63.
• [Auto DC inj. time 1]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
• [Auto DC inj. level 1]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
Note: Check that the motor will withstand this current without overheating.
• [Auto DC inj. time 2]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
• [Auto DC inj. level 2]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
Note: Check that the motor will withstand this current without overheating.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
these menus, on the pages indicated, to aid programming.
(2) 0.1 to 30 s 0.5 s
0.1 to 30 s 0.5 s
0 to 1.2 In (1) 0.7 In (1)
0 to 30 s 0 s
0 to 1.2 In (1) 0.5 In (1)
33
Page 34

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment range Factory setting
JPF
JF2
JGF
*
rPG
*
rIG
*
FbS
*
PIC
YES
*
nO
• [Skip Frequency]
Helps to prevent prolonged operation at a frequency range of ± 1 Hz around [Skip Frequency] (JPF). This function
helps to prevent a critical speed which leads to resonance. Setting the function to 0 renders it inactive.
• [Skip Frequency 2]
Helps to prevent prolonged operation at a frequency range of ± 1 Hz around [Skip Frequency 2] (JF2). This
function helps to prevent a critical speed which leads to resonance. Setting the function to 0 renders it inactive.
• [Jog frequency]
Parameter can be accessed if [JOG] (JOG) is not set to [No] (nO), page 72.
• [PID prop. gain]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
It provides dynamic performance when PI feedback is changing quickly.
• [PID integral gain]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
It provides static precision when PI feedback is changing slowly.
• [PID fbk scale factor]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
For adapting the process.
• [PID correct. reverse]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
-
[No] (nO): Normal
-
[Yes] (YES): Reverse
0 to 500 Hz 0 Hz
1 to 500 Hz 0 Hz
0 to 10 Hz 10 Hz
0.01 to 100 1
0.01 to 100/s 1
0.1 to 100 1
[No] (nO)
rP2
*
rP3
*
rP4
*
SP2
*
*
• [Preset ref. PID 2]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77, and if [2 preset PID ref.]
(Pr2), page 77, has been enabled by the input selection.
• [Preset ref. PID 3]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77, and if [4 preset PID ref.]
(Pr4), page 78, has been enabled by the input selection.
• [Preset ref. PID 4]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77, and if [4 preset PID ref.]
(Pr4), page 78, has been enabled by the input selection.
• [Preset speed 2]
See page 70.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
these menus, on the pages indicated, to aid programming.
0 to 100% 30%
0 to 100% 60%
0 to 100% 90%
0 to 500 Hz 10 Hz
34
Page 35

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
SP3
*
SP4
*
SP5
*
SP6
*
SP7
*
SP8
*
SP9
*
• [Preset speed 3]
See page 70.
• [Preset speed 4]
See page 70.
• [Preset speed 5]
See page 70.
• [Preset speed 6]
See page 70.
• [Preset speed 7]
See page 70.
• [Preset speed 8]
See page 70.
• [Preset speed 9]
See page 70.
0 to 500 Hz 15 Hz
0 to 500 Hz 20 Hz
0 to 500 Hz 25 Hz
0 to 500 Hz 30 Hz
0 to 500 Hz 35 Hz
0 to 500 Hz 40 Hz
0 to 500 Hz 45 Hz
Factory setting
SP10
*
SP11
*
SP12
*
SP13
*
SP14
*
SP15
*
SP16
*
• [Preset speed 10]
See page 70.
• [Preset speed 11]
See page 71.
• [Preset speed 12]
See page 71.
• [Preset speed 13]
See page 71.
• [Preset speed 14]
See page 71.
• [Preset speed 15]
See page 71.
• [Preset speed 16]
See page 71.
0 to 500 Hz 50 Hz
0 to 500 Hz 55 Hz
0 to 500 Hz 60 Hz
0 to 500 Hz 70 Hz
0 to 500 Hz 80 Hz
0 to 500 Hz 90 Hz
0 to 500 Hz 100 Hz
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
35
Page 36

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
CLI
CL2
*
tLS
rSL
*
UFr2
*
• [Current Limitation]
Used to limit the torque and the temperature rise of the motor.
• [I Limit. 2 value]
Parameter is only visible if [Current limit 2] (LC2) is not set to [No] (nO), page 81.
• [Low speed time out]
After operating at [Low speed] (LSP) for a given time, the motor is stopped automatically. The motor restarts if
the frequency reference is greater than the [Low speed] (LSP) and if a run command is still present.
Note: Value 0 corresponds to an unlimited period.
• [PID wake up thresh.]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
If the "PI" and "Low speed operating time" [Low speed time out] (tLS) functions, page 36, are configured at the
same time, the PI regulator may attempt to set a speed lower than [Low speed] (LSP).
This results in unsatisfactory operation, which consists of starting, operating at [Low speed] (LSP), then
stopping, and so on.
The [PID wake up thresh.] (rSL) parameter (restart error threshold) is used to set a minimum PID error threshold
for restarting after a stop at prolonged [Low speed] (LSP).
The function is inactive if [Low speed time out] (tLS) = 0.
• [IR compensation 2]
For [U/F mot.2 selected] (UFt2) = [SVC] (n) or [Energy sav.] (nLd): IR compensation.
For [U/F mot.2 selected] (UFt2) = [Cst. torque] (L) or [Var. torque] (P): voltage boost.
Used to optimize the torque at very low speed (increase [IR compensation 2] (UFr2) if the torque is insufficient).
Check that the value for [IR compensation 2] (UFr2) is not too high when the motor is in a hot state otherwise
some instabilities can occur. Changing [U/F mot.2 selected] (UFt2) will cause [IR compensation 2] (UFr2) to
return to its factory setting (20%).
0.25 to 1.5 In (1) 1.5 In (1)
0.25 to 1.5 In (1) 1.5 In (1)
0 to 999.9 s 0 (no time limit)
0 to 100% 0%
0 to 100% 20%
Factory setting
(1) In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
36
Page 37

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
FLG2 low FLG2 correct
FLG2 high
In this case,
reduce FLG2.
StA2 low StA2 correct StA2 high
In this case,
reduce StA2
Code Description Adjustment
range
FLG2
• [FreqLoopGain 2]
Parameter can only be accessed if [U/F mot.2 selected] (UFT2) = [SVC] (n) or [Energy sav.] (nLd), page 83.
The [FreqLoopGain 2] (FLG2) parameter adjusts the drive's ability to follow the speed ramp on the basis of the
inertia of the machine being driven.
Too high a gain may result in operating instability.
0 to 100% 20%
*
StA2
• [Freq. loop stability 2]
Parameter can only be accessed if [U/F mot.2 selected] (UFT2) = [SVC] (n) or [Energy sav.] (nLd) , page 83.
Used to adapt the return to steady state after a speed transient (acceleration or deceleration), according to the dynamics
of the machine.
Gradually increase the stability to avoid any overspeed.
0 to 100% 20%
*
Factory setting
SLP2
*
Ftd
ttd
Ctd
(1)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
*
• [Slip compensation 2]
Parameter can only be accessed if [U/F mot.2 selected] (UFT2) = [SVC] (n) or [Energy sav.] (nLd), page 83.
Adjusts the slip compensation around the value set by the nominal motor speed.
The speeds given on motor rating plates are not necessarily exact.
• If slip setting < actual slip: The motor is not rotating at the correct speed in steady state.
• If slip setting > actual slip: The motor is overcompensated and the speed is unstable.
• [Freq. threshold]
Threshold beyond which the contact on the relay ([R1 Assignment] (r1) or [R2 Assignment] (r2) = [Freq.Th.att.]
(FtA)) closes or output AOV = 10 V ([Analog./logic output] (dO) = [Freq. limit] (FtA)).
• [Motor therm. level]
Threshold beyond which the contact on the relay ([R1 Assignment] (r1) or [R2 Assignment] (r2) = [Th.mot. att.]
(tSA)) closes or output AOV = 10 V ([Analog./logic output] (dO) = [Drv thermal] (tSA)).
• [Current threshold]
Threshold beyond which the contact on the relay ([R1 Assignment] (r1) or [R2 Assignment] (r2) = [I attained] (CtA))
closes or output AOV = 10 V ([Analog./logic output] (dO) = [Current limit] (CtA)).
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
these menus, on the pages indicated, to aid programming.
0 to 150% 100%
0 to 500 Hz bFr
1 to 118% 100%
0 to 1.5 In (1) In (1)
37
Page 38

[SETTINGS] (SEt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
[Scale factor display] (SdS) x [Output frequency] (rFr)
1000
Code Description Adjustment
range
SdS
• [Scale factor display]
0.1 to 200 30
Used to display a value in proportion to the output frequency [Output frequency] (rFr): the machine speed, the motor
speed, etc.
• If [Scale factor display] (SdS) y 1, [Cust. output value] (SPd1) is displayed (possible definition = 0.01)
• If 1 < [Scale factor display] (SdS) y 10, [Cust. output value] (SPd2) is displayed (possible definition = 0.1)
• If [Scale factor display] (SdS) > 10, [Cust. output value] (SPd3) is displayed (possible definition = 1)
• If [Scale factor display] (SdS) > 10 and [Scale factor display] (SdS) x [Output frequency] (rFr) > 9,999:
the display will show
[Cust. output value] (SPd3) = to 2 decimal places
example: for 24,223, display will show 24.22
- If [Scale factor display] (SdS) > 10 and [Scale factor display] (SdS) x [Output frequency] (rFr) > 65,535, display
locked at 65.54
Example: Display motor speed for
4-pole motor, 1,500 rpm at 50 Hz (synchronous speed):
[Scale factor display] (SdS) = 30
[Cust. output value] (SPd3) = 1,500 at [Output frequency] (rFr) = 50 Hz
SFr
• [Switching freq.]
(1)
2.0 to 16 kHz 4 kHz
Parameter can also be accessed in the [MOTOR CONTROL] (drC-) menu. The frequency can be adjusted to
reduce the noise generated by the motor.
If the frequency has been set to a value higher than 4 kHz, in the event of excessive temperature rise, the drive
will automatically reduce the switching frequency and increase it again once the temperature has returned to
normal.
Factory setting
(1)Parameter can also be accessed in the [MOTOR CONTROL] (drC-) menu.
38
Page 39

[MOTOR CONTROL] (drC-) menu
Standard motor frequency
Return to factory settings/Restore configuration
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
[Rated motor volt.] (UnS) (in volts)
[Rated motor freq.] (FrS) (in Hz)
With the exception of [Auto tuning] (tUn), which can power up the motor, parameters can only be changed in stop mode, with no run
command present.
On the optional ER23K remote display terminal, this menu can be accessed with the switch in the position.
Drive performance can be optimized by:
- Entering the values given on the motor rating plate in the Drive menu
- Performing an auto-tune operation (on a standard asynchronous motor)
Code Description Adjustment
range
bFr
50
60
UnS
FrS
nCr
(1)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
• [Standard mot. freq]
[50Hz IEC] (50): 50 Hz: IEC
[60Hz NEMA] (60): 60 Hz: NEMA
This parameter modifies the presets of the following parameters: [High speed] (HSP), page 32, [Freq.
threshold] (Ftd), page 37, [Rated motor freq.] (FrS), page 39, and [Max frequency] (tFr), page 42.
• [Rated motor volt.]
Nominal motor voltage given on the rating plate. When the line voltage is lower than the nominal motor voltage,
set [Rated motor volt.] (UnS) to the same value as the line voltage for the drive terminals.
ER23-...K: 100 to 240 V
ER23-.../3K: 100 to 240 V
ER23-.../4K: 100 to 500 V
ER23-.../6K: 100 to 600 V
• [Rated motor volt.]
Nominal motor frequency marked on the rating plate. The factory setting is 50 Hz, or 60 Hz if [Standard mot.
freq] (bFr) is set to 60 Hz.
Note: The ratio must not exceed the following values:
ER23-...K: 7 max.
ER23-.../3K: 7 max.
ER23-.../4K: 14 max.
ER23-.../6K: 17 max.
The factory setting is 50 Hz, or preset to 60 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
• [Rated mot. current]
Nominal motor current given on the rating plate.
In accordance
with the drive
rating
10 to 500 Hz 50 Hz
0.25 to 1.5 In (1) In accordance
Factory
setting
[50Hz IEC] (50)
In accordance
with the drive
rating
with the drive
rating
39
Page 40

[MOTOR CONTROL] (drC-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
100 - slip as a %
100
50 - slip in Hz
50
60 - slip in Hz
60
Code Description Adjustment range Factory setting
nSP
COS
rSC
nO
InIt
8888
• [Rated motor speed]
0 to 9,999 rpm then 10.00 to 32.76 krpm
If, rather than the nominal speed, the nameplate indicates the synchronous speed and the slip in Hz or as a
%, calculate the nominal speed as follows:
• Nominal speed = synchronous speed x
or
• Nominal speed = synchronous speed x (50 Hz motors)
or
• Nominal speed = synchronous speed x (60 Hz motors)
• [Motor 1 Cosinus Phi]
Motor Cos Phi given on the motor rating plate
• [Cold stator resist.]
-
[No] (nO): function inactive. For applications which do not require high performance or do not tolerate
automatic auto-tuning (passing a current through the motor) each time the drive is powered up.
-
[Init] (InIt): activates the function. To improve low-speed performance whatever the thermal state of the motor.
-
Value of cold state stator resistance used, in m
Note:
• It is strongly recommended that this function is activated for mechanical handling applications.
• The function should only be activated [Init] (InIt) when the motor is cold.
• When [Cold stator resist.] (rSC) = [Init] (InIt), the [Auto-tuning] (tUn) parameter is forced to [Power on] (POn).
At the next run command the stator resistance is measured with an auto-tune. The [Cold stator resist.] (rSC)
then changes to a value of (8888) and maintains it, [Auto-tuning] (tUn) is still forced to [Power on] (POn). The
[Cold stator resist.] (rSC) parameter remains at [Init] (InIt) as long as the measurement has not been
performed.
• Value 8888 can be forced or changed using the jog dial (1).
0 to 32,760 rpm In accordance
with the drive
rating
0.5 to 1 In accordance
with the drive
rating
[No] (nO)
Ω.
(1)Procedure:
- Check that the motor is cold.
- Disconnect the cables from the motor terminals.
- Measure the resistance between 2 of the motor terminals (U. V. W.) without modifying its connection.
- Use the jog dial to enter half the measured value.
- Increase the factory setting of [IR compensation] (UFr), page 32, to 100% rather than 20%.
Note: Do not use [Cold stator resist.] (rSC) if it is not set to [No] (nO) or = [Power on] (POn) with catch on the fly ([CATCH ON THE FLY]
(FLr-), page 88).
40
Page 41

[MOTOR CONTROL] (drC-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
tUn
• [Auto tuning]
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
• During auto-tuning the motor operates at nominal current.
• Do not work on the motor during auto-tuning.
Failure to follow these instructions will result in death or serious injury.
DANGER
UNINTENDED EQUIPMENT OPERATION
• It is essential that the [Rated motor volt.] (UnS), [Rated motor freq.] (FrS), [Rated motor freq.] (nCr), [Rated motor
speed] (nSP) , and [Rated motor power] (nPr) or [Motor 1 Cosinus Phi.] (COS) parameters are configured
correctly before starting auto-tuning.
• When one or more parameters have been changed after auto-tuning has been performed, [Auto-tuning] (tUn)
will return [No] (nO) and the procedure will have to be repeated.
Failure to follow these instructions will result in death or serious injury.
nO
YES
dOnE
rUn
POn
LI1
to
LI6
-
[No] (nO): Auto-tuning not performed
-
[Yes] (YES): Auto-tuning is performed as soon as possible, then the parameter automatically changes to
[Done] (dOnE) or [No] (nO) in the event that Auto-tuning is not successful [AUTO TUNING FAULT] (tnF)
is displayed if [Autotune fault mgt] (tnL) = [Yes] (YES), page 90).
-
[Done] (dOnE): Use of the values given the last time auto-tuning was performed
-
[Drv running] (rUn): Auto-tuning is performed every time a run command is sent.
-
[Power on] (POn): Auto-tuning is performed on every power-up.
-
[LI1] to [LI16] (LI1) to (LI6): Auto-tuning is performed on the transition from 0 V 1 of a logic input assigned
to this function.
Note:
[Auto-tuning] (tUn) is forced to [Power on] (POn) if [Cold stator resist.] (rSC) = [Init] (InIt).
Auto-tuning is only performed if no command has been activated. If a "freewheel stop" or "fast stop"
function is assigned to a logic input, this input must be set to 1 (active at 0).
Auto-tuning may take 1 to 2 seconds. Do not interrupt the process. Wait for the display to change to [Done]
(dOnE) or [No] (nO).
Factory setting
[No] (nO)
tUS
tAb
PEnd
PrOG
FAIL
dOnE
Strd
• [Auto tuning state]
(For information only, cannot be modified)
-
[Not done] (tAb): The default stator resistance value is used to control the motor.
-
[Pending] (PEnd): Auto-tuning has been requested but not yet performed.
-
[In Progress] (PrOG): Auto-tuning in progress.
-
[Failed] (FAIL): Auto-tuning was unsuccessful.
-
[Done] (dOnE): The stator resistance measured by the auto-tuning function is used to control the motor.
-
[Entered R1] (Strd): The cold state stator resistance ([Cold stator resist.] (rSC) which is not set to [No]
(nO)) is used to control the motor.
[Not done] (tAb)
41
Page 42
[MOTOR CONTROL] (drC-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Voltage
Frequency
Code Description Adjustment
range
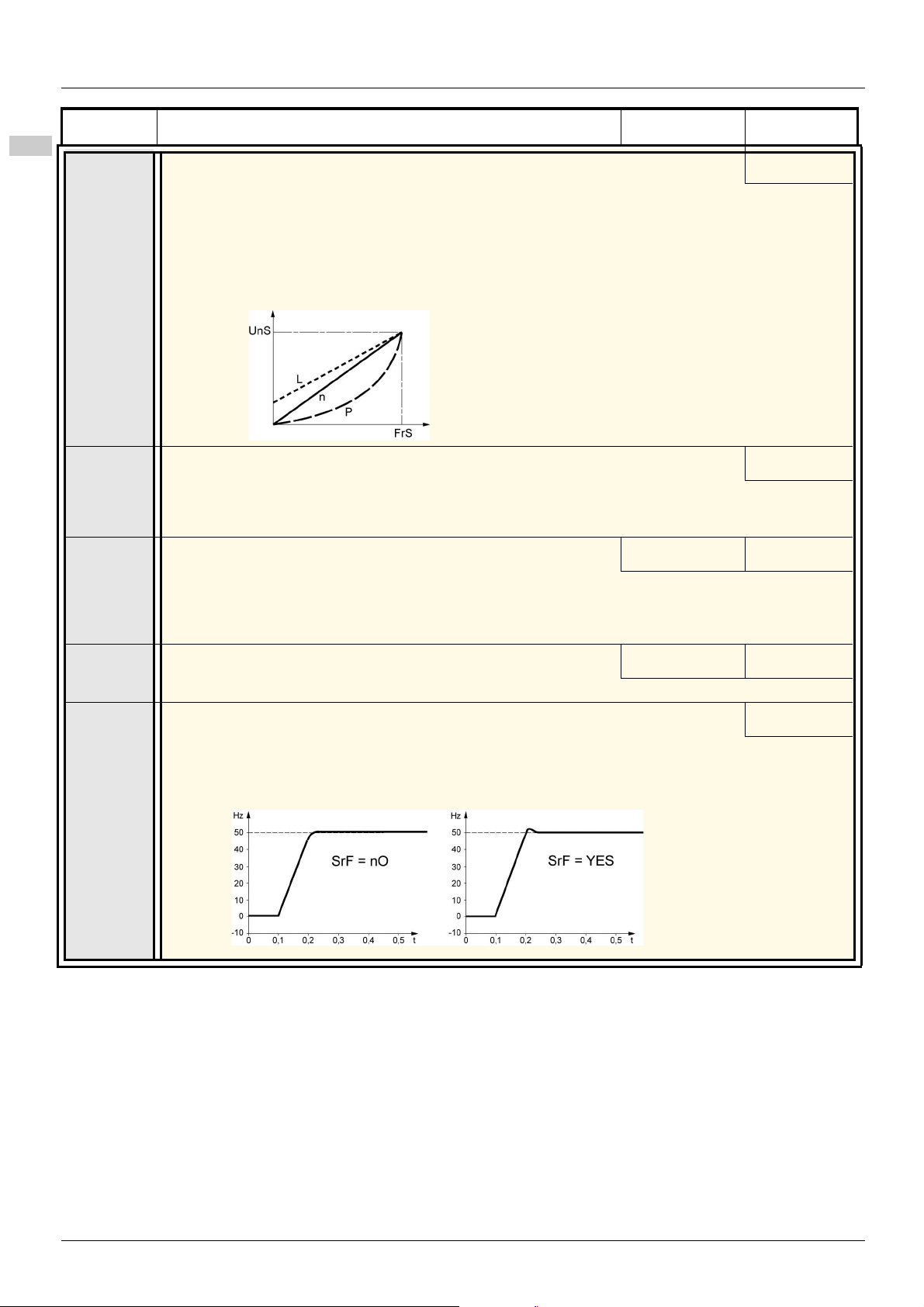
UFt
L
P
n
nLd
nrd
YES
nO
SFr
• [U/F mot 1 selected]
-
[Cst. torque] (L): Constant torque for motors connected in parallel or special motors.
-
[Var. torque] (P): Variable torque for pump and fan applications.
-
[SVC] (n): Sensorless flux vector control for constant torque applications.
-
[Energy sav.] (nLd): Energy saving, for variable torque applications not requiring high dynamics (behaves
in a similar way to the [Var. torque] (P) ratio with no load and the [SVC] (n) ratio on load).
• [Noise reduction]
-
[Yes] (YES): Frequency with random modulation.
-
[No] (nO): Fixed frequency.
Random frequency modulation helps to prevent any resonance which may occur at a fixed frequency.
• [Switching freq.]
The frequency can be adjusted to reduce the noise generated by the motor.
If the frequency has been set to a value higher than 4 kHz, in the event of excessive temperature rise, the
drive will automatically reduce the switching frequency and increase it again once the temperature has
returned to normal.
(1) 2.0 to 16 kHz 4 kHz
Factory setting
[SVC] (n)
[Yes] (YES)
tFr
SrF
nO
YES
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
• [Max frequency]
The factory setting is 60 Hz, or preset to 72 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
• [Speed loop filter]
-
[No] (nO): The speed loop filter is active (helps to prevent the reference being exceeded).
-
[Yes] (YES): The speed loop filter is suppressed (in position control applications, this reduces the response
time and the reference may be exceeded).
10 to 500 Hz 60 Hz
[No] (nO):
42
Page 43
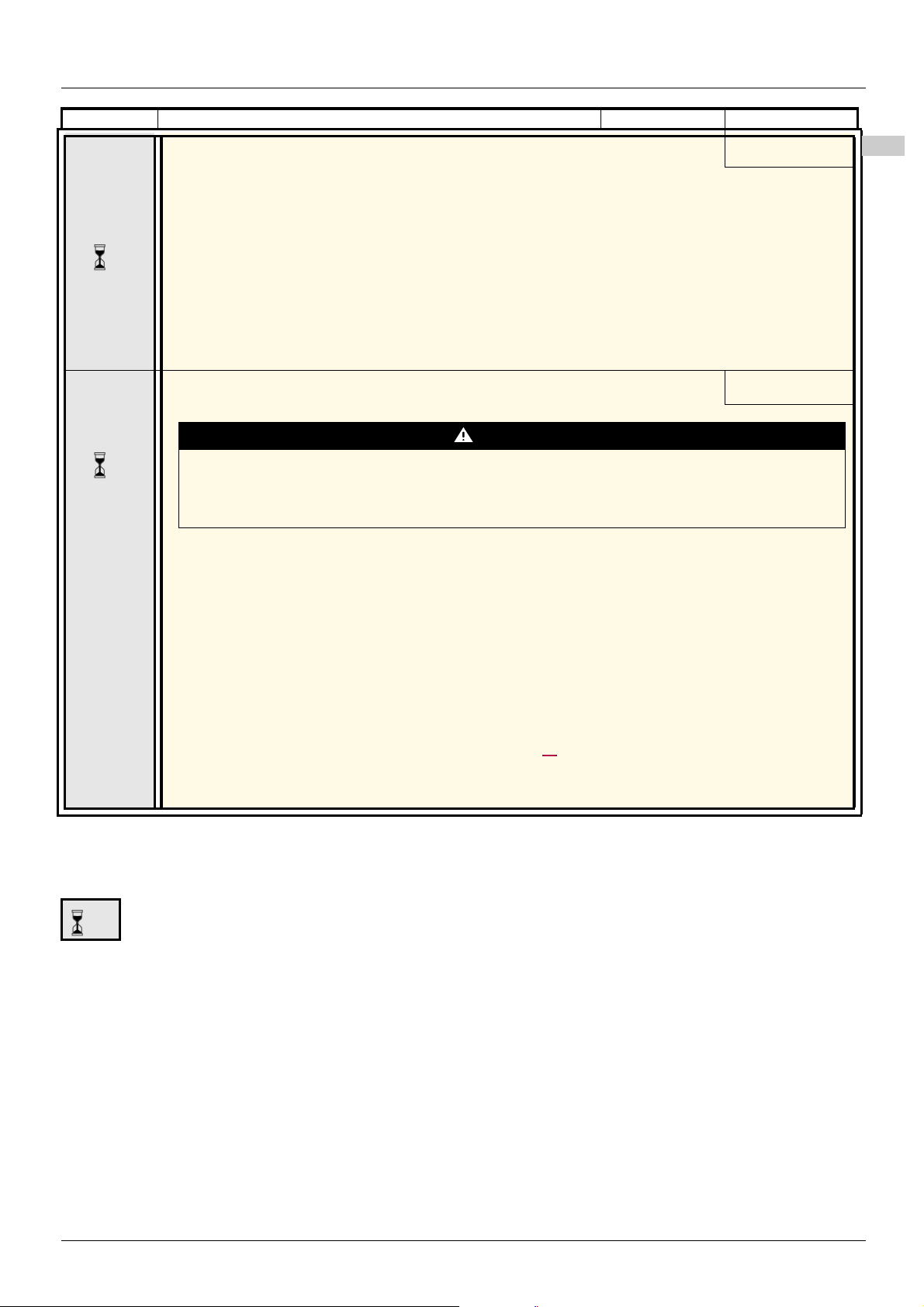
[MOTOR CONTROL] (drC-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
2 s
Code Description Adjustment range Factory setting
SCS
CFG
nO
StrI
StS
Std
• [Saving config.]
-
[No] (nO): Function inactive
-
[Config 1] (Str1): Saves the current configuration (but not the result of auto-tuning) to EEPROM. [Saving
config.] (SCS) automatically switches to [No] (nO) as soon as the save has been performed. This function
is used to keep another configuration in reserve, in addition to the current configuration.
When drives leave the factory the current configuration and the backup configuration are both initialized
with the factory configuration.
• If the ER23K remote display terminal option is connected to the drive, the following additional selection
options will appear: [File 1] (FIL1), [File 2] (FIL2), [File 3] (FIL3), [File 4] (FIL4) (files available in the
remote display terminal's EEPROM memory for saving the current configuration). They can be used to
store between 1 and 4 different configurations which can also be stored on or even transferred to other
drives of the same rating.
[Saving config.] (SCS) automatically switches to [No] (nO) as soon as the save has been performed.
• [Macro configuration]
(1) [No] (nO)
(1) [Factory set.] (Std)
DANGER
UNINTENDED EQUIPMENT OPERATION
Check that the selected macro configuration is compatible with the wiring diagram used.
Failure to follow these instructions will result in death or serious injury.
Choice of source configuration.
-
[Start/Stop] (StS): Start/stop configuration
Identical to the factory configuration apart from the I/O assignments:
• Logic inputs:
- LI1, LI2 (reversing): 2-wire transition detection control, LI1 = run forward, LI2 = run reverse
- LI3 to LI6: Inactive (not assigned)
• Analog inputs:
- AI1: Speed reference 0-10 V
- AI2, AI3: Inactive (not assigned)
• Relay R1: The contact opens in the event of a detected fault (or drive off).
• Relay R2: Inactive (not assigned)
• Analog output AOC: 0-20 mA, inactive (not assigned)
-
[Factory set.] (Std): Factory configuration (see page 10).
Note: The assignment of [Macro configuration] (CFG) results directly in a return to the selected
configuration.
(1)[Saving config.] (SCS), [Macro configuration] (CFG), and [Restore config.] (FCS) can be accessed from several configuration menus,
but they apply to all menus and parameters.
(2)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
43
Page 44

[MOTOR CONTROL] (drC-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
Code Description Adjustment range Factory setting
FCS
nO
rECI
InI
• [Restore config.]
(1) [No] (nO)
DANGER
UNINTENDED EQUIPMENT OPERATION
Check that the changes made to the current configuration are compatible with the wiring diagram used.
Failure to follow these instructions will result in death or serious injury.
-
[No] (nO): Function inactive.
-
[Internal] (rEC1): The current configuration becomes identical to the backup configuration previously
saved by [Saving config.] (SCS) = [Config 1] (Str1).
[Internal] (rEC1) is only visible if the backup has been carried out. [Restore config.] (FCS) automatically
switches to [No] (nO) as soon as this action has been performed.
-
[Config. CFG] (InI): The current configuration is replaced by the configuration selected by the [Macro
configuration] (CFG) parameter (2). [Restore config.] (FCS) automatically switches to [No] (nO) as soon
as this action has been performed.
If the ER23K remote display terminal option is connected to the drive (3), the following additional selection
options appear, as long as the corresponding files in the remote display terminal's EEPROM memory
have been loaded (0 to 4 files): [File 1] (FIL1), [File 2] (FIL2), [File 3] (FIL3), [File 4] (FIL4). They enable
the current configuration to be replaced with one of the 4 configurations that may be loaded on the remote
display terminal.
[Restore config.] (FCS) automatically switches to [No] (nO) as soon as this action has been performed.
Note: If nAd appears on the display briefly before the parameter switches to [No] (nO), this means that
the configuration transfer is not possible and has not been performed (different drive ratings, for
example). If ntr appears on the display briefly before the parameter switches to [No] (nO), this means that
an invalid configuration transfer has occurred and that the factory settings will need to be restored using
[Config. CFG] (InI).
In both cases, check the configuration to be transferred before trying again.
(1)[Saving config.] (SCS), [Macro configuration] (CFG), and [Restore config.] (FCS) can be accessed from several configuration menus,
but they apply to all menus and parameters.
(2)The following parameters are not modified by this function; they retain their configuration:
- [Standard mot. freq] (bFr), page 39
- [HMI command] (LCC), page 58
- [PIN code 1] (COd), (terminal access code), page 97
- The parameters in the [COMMUNICATION] (COM-) menu
- The parameters in the [MONITORING] (SUP-) menu
(3)Options [File 1] (FIL1) to [File 4] (FIL4) continue to be displayed on the drive, even after the ER23K remote terminal has been
disconnected.
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
44
Page 45

[INPUTS / OUTPUTS CFG] (I-O-) menu
2-wire/3-wire control
Return to factory settings/Restore configuration
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
The parameters can only be modified when the drive is stopped and no run command is present.
On the optional ER23K remote display terminal, this menu can be accessed with the switch in the position.
Code Description Adjustment range Factory setting
tCC
tCt
• [2/3 wire control]
See page 29.
• [2 wire type]
DANGER
UNINTENDED EQUIPMENT OPERATION
Check that the changes made to 2-wire control are compatible with the wiring diagram used.
Failure to follow these instructions will result in death or serious injury.
Parameter can be accessed if [2/3 wire control] (tCC) = [2 wire] (2C), page 45.
LEL
trn
PFO
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
-
[Level] (LEL): State 0 or 1 is taken into account for run or stop.
-
[Transition] (trn): A change of state (transition or edge) is necessary to initiate operation, in order to help
prevent accidental restarts after a break in the power supply.
-
[Fwd priority] (PFO): State 0 or 1 is taken into account for run or stop, but the "forward" input takes priority
over the "reverse" input.
[2 wire] (2C)
[Transition] (trn)
45
Page 46

[INPUTS / OUTPUTS CFG] (I-O-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Frequency
Frequency
Example:
20 - 4 mA
Code Description Adjustment
range
rrS
nO
LI1
LI2
LI3
LI4
LI5
LI6
CrL3
CrH3
• [Reverse assign.]
If [Reverse assign.] (rrS) = [No] (nO), run reverse remains active by means of negative voltage on AI2, for
example.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2 can be accessed if [2/3 wire control] (tCC) = [2 wire] (2C), page 45.
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
• [AI3 min. value]
• [AI3 max. value]
These two parameters are used to configure the input for 0-20 mA, 4-20 mA, 20-4 mA, etc.
0 to 20 mA 4 mA
4 to 20 mA 20 mA
Factory setting
[LI2] (LI2)
46
AO1t
dO
0A
4A
10U
nO
OCr
OFr
Otr
OPr
FLt
rUn
FtA
FLA
CtA
SrA
tSA
bLC
APL
• [AO1 Type]
This parameter is not visible when a communication card is connected to the product.
-
[Current] (0A): 0 - 20 mA configuration (use terminal AOC)
-
[Cur. 4-20] (4A): 4 - 20 mA configuration (use terminal AOC)
-
[Voltage] (10U): 0 - 10 V configuration (use terminal AOV)
• [Analog./logic output]
This parameter is not visible when a communication card is connected to the product.
-
[No] (nO): Not assigned
-
[I motor] (OCr): Motor current. 20 mA or 10 V corresponds to twice the nominal drive current.
-
[Motor freq.] (OFr): Motor frequency. 20 mA or 10 V corresponds to the maximum frequency [Max
frequency] (tFr), page 42.
-
[Motor torq.] (Otr): Motor torque. 20 mA or 10 V corresponds to twice the nominal motor torque.
-
[P. supplied] (OPr): Power supplied by the drive. 20 mA or 10 V corresponds to twice the nominal drive
power.
Making the following assignments (1) will transform the analog output to a logic output (see diagram in the
Installation Manual):
-
[Drive fault] (FLt): Fault detected
-
[Drv running] (rUn): Drive running
-
[Freq. limit] (FtA): Frequency threshold reached ([Freq. threshold] (Ftd) parameter in the [SETTINGS] (SEt-)
menu, page 37)
-
[HSP limit] (FLA): [High speed] (HSP) reached
-
[I attained] (CtA): Current threshold reached ([Current threshold] (Ctd) parameter in the
[SETTINGS] (SEt-) menu, page 37)
-
[Freq. ref.] (SrA): Frequency reference reached
-
[Drv thermal] (tSA): Motor thermal threshold reached ([Motor therm. level] (ttd) parameter in the
[SETTINGS] (SEt-) menu, page 37)
-
[Brake seq] (bLC): Brake sequence (for information, as this assignment can only be activated or deactivated
from the [APPLICATION FUNCT.] (FUn-) menu, page 80)
-
[No 4-20mA] (APL): Loss of 4-20 mA signal, even if [4-20mA loss] (LFL) = [No] (nO), page 90
The logic output is in state 1 (24 V) when the selected assignment is active, with the exception of [Drive
fault] (FLt) (state 1 if the drive operation is normal).
Note: (1) With these assignments, configure
[Current](0A)
[No] (nO)
[AO1 Type] (AO1t) = [Current] (OA).
Page 47

[INPUTS / OUTPUTS CFG] (I-O-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
2 s
2 s
Code Description Adjustment range Factory setting
r1
nO
FLt
rUn
FtA
FLA
CtA
SrA
tSA
APL
LI1
to
LI6
r2
nO
FLt
rUn
FtA
FLA
CtA
SrA
tSA
bLC
APL
LI1
to
LI6
• [R1 Assignment]
This parameter is not visible when a communication card is connected to the product.
-
[No] (nO): Not assigned
-
[No drive flt] (FLt): No drive detected fault
-
[Drv running] (rUn): Drive running
-
[Freq.Th.att.] (FtA): Frequency threshold reached ([Freq. threshold] (Ftd) parameter in the [SETTINGS]
(SEt-) menu, page 37)
-
[HSP attain.] (FLA): [High speed] (HSP) reached
-
[I attained] (CtA): Current threshold reached ([Current threshold] (Ctd) parameter in the
[SETTINGS] (SEt-) menu, page 37)
-
[Freq.ref.att] (SrA): Frequency reference reached
-
[Th.mot. att.] (tSA): Motor thermal threshold reached ([Motor therm. level] (ttd) parameter in the
[SETTINGS] (SEt-) menu, page 37)
-
[4-20mA] (APL): Loss of 4-20 mA signal, even if [4-20mA loss] (LFL) = [No] (nO), page 90
-
[LI1] to [LI6] (LI1) to (LI6): Returns the value of the selected logic input
The relay is energized when the selected assignment is active, with the exception of [No drive flt] (FLt)
(energized if the drive has not detected a fault).
• [R2 Assignment]
-
[No] (nO): Not assigned
-
[No drive flt] (FLt): No drive detected fault
-
[Drv running] (rUn): Drive running
-
[Freq.Th.att.] (FtA): Frequency threshold reached ([Freq. threshold] (Ftd) parameter in the [SETTINGS]
(SEt-) menu, page 37)
-
[HSP attain.] (FLA): [High speed] (HSP) reached
-
[I attained] (CtA): Current threshold reached ([Current threshold] (Ctd) parameter in the
[SETTINGS] (SEt-) menu, page 37)
-
[Freq.ref.att] (SrA): Frequency reference reached
-
[Th.mot. att.] (tSA): Motor thermal threshold reached ([Motor therm. level] (ttd) parameter in the
[SETTINGS] (SEt-) menu, page 37)
-
[Brk control] (bLC): Brake sequence (for information, as this assignment can only be activated or
deactivated from the [APPLICATION FUNCT.] (FUn-)- menu, page 80)
-
[4-20mA] (APL): Loss of 4-20 mA signal, even if [4-20mA loss] (LFL) = [No] (nO), page 90
-
[LI1] to [LI6] (LI1)to (LI6): Returns the value of the selected logic input
The relay is energized when the selected assignment is active, with the exception of [No drive flt] (FLt)
(energized if the drive has not detected a fault).
[No drive flt]
(FLt)
[No] (nO)
SCS
CFG
FCS
(1)[Saving config.] (SCS), [Macro configuration] (CFG), and [Restore config.] (FCS) can be accessed from several configuration menus,
but they apply to all menus and parameters.
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
• [Saving config.]
See page 43.
(1)
• [Macro configuration]
See page 43.
• [Restore config.]
See page 44.
(1)
(1)
nO
Std
nO
47
Page 48

[COMMAND] (CtL-) menu
Function access level
Return to factory settings/Restore configuration
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
The parameters can only be modified when the drive is stopped and no run command is present.
On the optional remote display terminal, this menu can be accessed with the switch in the position.
Control and reference channels
Run commands (forward, reverse, etc.) and references can be sent using the following channels:
Command CMD Reference rFr
tEr: Terminals (LI.) AIx: Terminals
LCC: Remote display terminal (RJ45 socket) LCC: ER23K keypad or remote display terminal
LOC: Control via the keypad AIU1: Jog dial
Mdb: Modbus (RJ45 socket) Mdb: Modbus (RJ45 socket)
nEt: Network nEt: Network
WARNING
LOSS OF CONTROL
The stop buttons on the ER23K (integrated into the drive and on the remote terminals) can be programmed as non-priority buttons. A stop
button can only have priority if the [Stop Key priority] (PSt) parameter in the [COMMAND] (CtL-) menu, page 59, is set to [Yes] (YES).
Failure to follow these instructions can result in death, serious injury, or equipment damage.
The [ACCESS LEVEL] (LAC) parameter in the [COMMAND] (CtL-) menu, page 56, can be used to select priority modes for the control and
reference channels. It has 3 function levels:
• [ACCESS LEVEL] (LAC) =
[Level 1] (L1):
• [ACCESS LEVEL] (LAC) =
[Level 2] (L2):
• [ACCESS LEVEL] (LAC) =
[Level 3] (L3):
Basic functions. The channels are managed in order of priority.
Provides the option of additional functions compared with [Level 1] (L1):
- +/- speed (motorized jog dial)
- Brake control
- 2nd current limit switching
- Motor switching
- Management of limit switches
Same functions as with [Level 2] (L2). Management of the control and reference channels is
configurable.
48
Page 49

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Terminals/Keypad
Remote display terminal
Forced local mode
Control and reference
Selection of reference channel:
[Ref.1 channel] (Fr1) parameter
The control channel is
connected to the same
source.
Selection of reference
channel:
[Ref.2 channel] (Fr2)
parameter
The control channel is
connected to the same source.
These channels can be combined in order of priority if [ACCESS LEVEL] (LAC) = [Level 1] (L1) or
[Level 2] (L2).
Highest priority to lowest priority: Forced local mode, Network, Modbus, Remote display terminal, Terminals/Keypad (from right to left in the
diagram below)
See the detailed block diagrams on pages 51 and 52.
• On ER23K drives, in factory settings mode, control and reference are managed by the terminals.
• With a remote terminal display, if [HMI command] (LCC) = [Yes] (YES) ([COMMAND] (CtL-) menu), control and reference are managed
by the remote terminal display (reference via [HMI Frequency ref.] (LFr) in the [SETTINGS] (SEt-) menu).
The channels can be combined by configuration if [ACCESS LEVEL] (LAC) = [Level 3] (L3).
Combined control and reference ([Profile] (CHCF) parameter = [Not separ.] (SIM)):
The [Ref. 2 switching] (rFC) parameter can be used to select the [Ref.1 channel] (Fr1) or [Ref.2 channel] (Fr2) channel, or to configure a
logic input or a control word bit for remote switching of either one.
See the detailed block diagrams on pages 53 and 55.
49
Page 50

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Reference
Selection of reference
channel:
[Ref.1 channel] (Fr1)
parameter
Selection of reference
channel:
[Ref.2 channel] (Fr2)
parameter
Selection of control
channel: [Cmd channel 1]
(Cd1) parameter
Selection of control
channel:
[Cmd channel 2] (Cd2)
parameter
Control
Separate control and reference ([Profile] (CHCF) parameter = [Separate] (SEP)):
Reference
The [Ref. 2 switching] (rFC) parameter can be used to select the [Ref.1 channel] (Fr1) or [Ref.2 channel] (Fr2) channel, or to configure a
logic input or a control word bit for remote switching of either one.
Control
The [Cmd switching] (CCS) parameter, page 58, can be used to select the [Cmd channel 1] (Cd1) or [Cmd channel 2] (Cd2) channel, or
to configure a logic input or a control bit for remote switching of either one.
See the detailed block diagrams on pages 53 and 54.
50
Page 51

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
+
speed
speed
+
speed
speed
Preset speeds
PI function
see page 75
Jog
operation
PI not assigned
PI assigned
Channel 1
Channel 2
Remote display
terminal
Ramps
Function can be accessed for
[ACCESS LEVEL] (LAC) = [Level 2] (L2)
"Modbus" or "Network" is selected online by
writing the appropriate control word (see the
specific bus documentation).
Note: In order to configure the +/- speed command ([Ref.1 channel]
(Fr1) = [+/- SPEED] (UPdt) or [+/-spd HMI] (UPdH)), the SA2/SA3
summing inputs and the preset speeds must be deconfigured
beforehand.
Reference A
Reference B
Network
Parameter:
The black square represents the
factory setting assignment.
Key:
Forced local mode
Reference channel for [ACCESS LEVEL] (LAC) = [Level 1] (L1) or [Level 2] (L2)
51
Page 52

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
(Stop Key
Remote display
Parameter:
The black square represents
the factory setting assignment
Remote display
Keypad
Keypad
Forward
Reverse
Key:
Network
Control channel for [ACCESS LEVEL] (LAC) = [Level 1] (L1) or [Level 2] (L2)
The [Forced local assign.] (FLO) parameter, page 93, the [HMI command] (LCC) parameter, page 58, and the selection of the Modbus bus
or network are common to the reference and control channels.
Example: If [HMI command] (LCC) = [Yes] (YES), the command and reference are given by the remote display terminal.
52
Page 53

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
+
speed
speed
+
speed
speed
Preset speeds
PI function
see page 75
Jog
operation
PI not assigned
Forced local mode
Ramps
Parameter:
The black square represents the
factory setting assignment.
PI assigned
Remote
display
terminal
Remote
display
terminal
Key:
Channel 1Channel 2
Note: In order to configure the +/- speed command ([Ref.1 channel] (Fr1) = [+/- SPEED]
(UPdt) or [+/-spd HMI] (UPdH)), the SA2/SA3 summing inputs and the preset speeds must
be deconfigured beforehand.
Note:
Jog operation is only
active when the
reference and control
are managed by the
terminals (ALp and LIp).
Reference A
Reference B
Remote
display
terminal
Remote
display
terminal
Reference channel for [ACCESS LEVEL] (LAC) = [Level 3] (L3)
53
Page 54

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
(Stop Key priority)
Forced local mode
Parameter:
The black square represents
the factory setting assignment.
Forward
Reverse
STOP
Remote display terminal
Keypad
Remote display
terminal
Keypad
Remote display terminal
Keypad
Key:
Control channel for [ACCESS LEVEL] (LAC) = [Level 3] (L3)
Combined reference and control
The [Ref.1 channel] (Fr1) parameter, page 56, the [Ref.2 channel] (Fr2) parameter, page 56, the [Ref. 2 switching] (rFC) parameter, page
57, the [Forced local assign.] (FLO) parameter, page 93, and the [Forced local Ref.] (FLOC) parameter, page 93, are common to reference
and control. The control channel is therefore determined by the reference channel.
Example: If the [Ref.1 channel] (Fr1) reference = [AI1] (AI1) (analog input at the terminals), control is via LI (logic input at the terminals).
54
Page 55

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
(Stop Key
priority)
Forced local
mode
Parameter:
The black square represents
the factory setting assignment.
Forward
Reverse
STOP
Remote display terminal
Keypad
Remote display terminal
Keypad
Remote display terminal
Keypad
Key:
Control channel for [ACCESS LEVEL] (LAC) = [Level 3] (L3)
Mixed mode (separate reference and control)
The [Forced local assign.] (FLO) parameter, page 93, and the [Forced local Ref.] (FLOC) parameter, page 93, are common to reference
and control.
Example: If the reference is in forced local mode via [AI1] (AI1) (analog input at the terminals), control in forced local mode is via LI (logic
input at the terminals).
55
Page 56

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
Note: There may be an incompatibility between functions (see the incompatibility table, page 20). In this case, the first function configured
will prevent the remainder being configured.
Code Description Adjustment
range
LAC
• [ACCESS LEVEL]
DANGER
UNINTENDED EQUIPMENT OPERATION
• Assigning [ACCESS LEVEL] (LAC) to [Level 3] (L3) will restore the factory settings of the [Ref.1 channel] (Fr1)
parameter, page 56, the [Cmd channel 1] (Cd1) parameter, page 57, the [Profile] (CHCF) parameter, page 57, and
the [2/3 wire control] (tCC) parameter, page 45.
• [Level 3] (L3) can only be restored to [Level 2] (L2) or [Level 1] (L1), and [Level 2] (L2) can only be restored to [Level
1] (L1) by means of a "factory setting" via [Restore config.] (FCS), page 44.
• Check that this change is compatible with the wiring diagram used.
Failure to follow these instructions will result in death or serious injury.
L1
L2
L3
Fr1
-
[Level 1] (L1): Access to standard functions and channel management in order of priority.
-
[Level 2] (L2):Access to advanced functions in the [APPLICATION FUNCT.] (FUn-) menu:
- - +/- speed (motorized jog dial)
- Brake control
- 2nd current limit switching
- Motor switching
- Management of limit switches
-
[Level 3] (L3): Access to advanced functions and management of mixed control modes
• [Ref.1 channel]
See page 28.
Factory setting
[Level 1] (L1)
[AI1] (AI1)
Fr2
nO
AI1
AI2
AI3
AIU1
UPdt
UpdH
LCC
Ndb
nEt
(1)NOTE:
• It is not possible to simultaneously assign [+/- SPEED] (UPdt) to [Ref.1 channel] (Fr1) or [Ref.2 channel] (Fr2), and [+/-spd HMI]
(UPdH) to [Ref.1 channel] (Fr1) or [Ref.2 channel] (Fr2). Only one of the [+/- SPEED] (UPdt)/[+/-spd HMI] (UPdH) assignments is
permitted on each reference channel.
• The +/- speed function in [Ref.1 channel] (Fr1) is incompatible with several functions (see page 20). It can only be configured if these
functions are unassigned, in particular the summing inputs (set [Summing ref. 2] (SA2) to [No] (nO), page 67) and the preset speeds
(set [2 preset speeds] (PS2) and [4 preset speeds] (PS4) to [No] (nO), page 69) which will have been assigned as part of the factory
settings.
• In [Ref.2 channel] (Fr2), the +/- speed function is compatible with the preset speeds, summing inputs, and the PI regulator.
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
• [Ref.2 channel]
-
[No] (nO): Not assigned
-
[AI1] (AI1): Analog input AI1
-
[AI2] (AI2): Analog input AI2
-
[AI3] (AI3): Analog input AI3
-
[Network AI] (AIU1): Jog dial
If [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), the following additional assignments are
possible:
-
[+/-Speed] (UPdt): (1) +/- speed reference via LI. See configuration page 74.
-
[+/-spd HMI] (UPdH): (1) +/- speed reference via the jog dial on the ER23K keypad.
To use, display the frequency [Output frequency] (rFr), page 95. The +/- speed function via the keypad or
the terminal is controlled from the [MONITORING] (SUP-) menu by selecting the [Output frequency] (rFr)
parameter.
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following additional assignments are possible:
-
[HMI] (LCC): Reference via the remote display terminal, [HMI Frequency ref.] (LFr) parameter in the
[SETTINGS] (SEt-) menu, page 31.
-
[Modbus] (Mdb): Reference via Modbus
-
[Network] (nEt): Reference via network
[No] (nO)
56
Page 57

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
rFC
Fr1
Fr2
LI1
LI2
LI3
LI4
LI5
LI6
C111
C112
C113
C114
C115
C211
C212
C213
C214
C215
• [Ref. 2 switching]
The [Ref. 2 switching] (rFC) parameter can be used to select the [Ref.1 channel] (Fr1) or [Ref.2 channel] (Fr2)
channel, or to configure a logic input or a control word bit for remote switching of [Ref.1 channel] (Fr1) or [Ref.2
channel] (Fr2).
-
[ch1 active] (Fr1): Reference = reference 1
-
[ch1 active] (Fr2): Reference = reference 2
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following additional assignments are possible:
-
[C111] (C111): Bit 11 of Modbus control word
-
[C112] (C112): Bit 12 of Modbus control word
-
[C113] (C113): Bit 13 of Modbus control word
-
[C114] (C114): Bit 14 of Modbus control word
-
[C115] (C115): Bit 15 of Modbus control word
-
[C211] (C211): Bit 11 of network control word
-
[C212] (C212): Bit 12 of network control word
-
[C213] (C213): Bit 13 of network control word
-
[C214] (C214): Bit 14 of network control word
-
[C215] (C215): Bit 15 of network control word
Factory setting
[ch1 active] (Fr1)
CHCF
Cd1
*
LOC
LCC
Cd2
*
LOC
LCC
*
The reference can be switched with the drive running.
[Ref.1 channel] (Fr1) is active when the logic input or control word bit is at state 0.
[Ref.2 channel] (Fr2) is active when the logic input or control word bit is at state 1.
• [Profile]
(control channels separated from reference channels)
Parameter can be accessed if [ACCESS LEVEL] (LAC) = [Level 3] (L3), page 56.
SIN
SEP
-
[Not separ.] (SIM): Combined
-
[Separate] (SEP): Separate
• [Cmd channel 1]
Parameter can be accessed if [Profile] (CHCF) = [Separate] (SEP), page 57, and [ACCESS LEVEL] (LAC) =
tEr
Ndb
nEt
[Level 3] (L3), page 56.
-
[Terminal] (tEr): Control via terminals
-
[Local] (LOC): Control via keypad
-
[Remot. HMI] (LCC): Control via remote display terminal
-
[Modbus] (Mdb): Control via Modbus
-
[Network] (nEt): Control via the network
• [Cmd channel 2]
Parameter can be accessed if [Profile] (CHCF) = [Separate] (SEP), page 57, and [ACCESS LEVEL] (LAC) =
tEr
Ndb
nEt
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
these menus, on the pages indicated, to aid programming.
[Level 3] (L3), page 56.
-
[Terminal] (tEr): Control via terminals
-
[Local] (LOC): Control via keypad
-
[Remot. HMI] (LCC): Control via remote display terminal
-
[Modbus] (Mdb): Control via Modbus
-
[Network] (nEt): Control via the network
[Not separ.] (SIM)
[Terminal] (tEr)
[Modbus] (Mdb)
57
Page 58

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment range Factory setting
CCS
*
Cd1
Cd2
LI1
LI2
LI3
LI4
LI5
LI6
C111
C112
C113
C114
C115
C211
C212
C213
C214
C215
• [Cmd switching]
Parameter can be accessed if [Profile] (CHCF) = [Separate] (SEP), page 57, and [ACCESS LEVEL] (LAC)
= [Level 3] (L3), page 56.
The [Cmd switching] (CCS) parameter can be used to select the [Cmd channel 1] (Cd1) or [Cmd channel
2] (Cd2) channel, or to configure a logic input or a control word bit for remote switching of [Cmd channel 1]
(Cd1) or [Cmd channel 2] (Cd2).
-
[ch1 active] (Cd1): Control channel = channel 1
-
[ch2 active] (Cd2): Control channel = channel 2
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
-
[C111] (C111): Bit 11 of Modbus control word
-
[C112] (C112): Bit 12 of Modbus control word
-
[C113] (C113): Bit 13 of Modbus control word
-
[C114] (C114): Bit 14 of Modbus control word
-
[C115] (C115): Bit 15 of Modbus control word
-
[C211] (C211): Bit 11 of network control word
-
[C212] (C212): Bit 12 of network control word
-
[C213] (C213): Bit 13 of network control word
-
[C214] (C214): Bit 14 of network control word
-
[C215] (C215): Bit 15 of network control word
Channel 1 is active when the input or control word bit is at state 0,
Channel 2 is active when the input or control word bit is at state 1.
[ch1 active]
(Cd1)
COp
LCC
nO
SP
Cd
ALL
nO
YES
• [Copy channel 1<>2]
(copy only in this direction)
Parameter can be accessed if [ACCESS LEVEL] (LAC) = [Level 3] (L3), page 56.
-
[No] (nO): No copy
-
[Reference] (SP): Copy reference
-
[Command] (Cd): Copy control
-
[Cmd + ref.] (ALL): Copy control and reference
• If channel 2 is controlled via the terminals, channel 1 control is not copied.
• If the channel 2 reference is set via AI1, AI2, AI3 or AIU1, the channel 1 reference is not copied.
• The reference copied is [Frequency ref.] (FrH) (before ramp), unless the channel 2 reference is set
via +/- speed.
In this case, the reference copied is [Output frequency] (rFr) (after ramp).
Note: Copying the control and/or reference can change the direction of rotation.
• [HMI command]
Parameter can only be accessed using a remote display terminal, and for [ACCESS LEVEL] (LAC) = [Level
1] (L1) or [Level 2] (L2), page 56.
-
[No] (nO): Function inactive
-
[Yes] (YES): Enables control of the drive using the STOP/RESET, RUN and FWD/REV buttons on the
display terminal. Here, the speed reference is given by the [HMI Frequency ref.] (LFr) parameter in the
[SETTINGS] (SEt-) menu. Only the freewheel stop, fast stop and DC injection stop commands remain active
on the terminals. If the drive/terminal connection is cut or if the terminal has not been connected, the drive
detects a fault and locks in [MODBUS FAULT] (SLF).
[No] (nO)
[No] (nO)
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
58
Page 59

[COMMAND] (CtL-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
2 s
2 s
2 s
Code Description Adjustment
range
PSt
• [Stop Key priority]
This parameter can be used to activate or deactivate the stop button on the drive and the remote terminals. The
stop button will be deactivated if the active control channel is different from that on the integrated display terminal or
remote terminals.
WARNING
LOSS OF CONTROL
Only set [Stop Key priority] (PSt) to [No] (nO) if there is an external method of stop control.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
nO
YES
rOt
dFr
drS
bOt
SCS
-
[No] (nO): Function inactive
-
[Yes] (YES): STOP key priority
• [Rotating direction]
This parameter is only visible if [Ref.1 channel] (Fr1), page 28, or [Ref.2 channel] (Fr2), page 56, are
assigned to LCC or AI1.
Direction of operation authorized for the RUN key on the keypad or the RUN key on the remote display
terminal.
-
[Forward] (dFr): Forward
-
[Reverse] (drS): Reverse
-
[Both] (bOt): Both directions are authorized.
• [Saving config.]
(1)
Factory setting
[Yes] (YES)
[Forward] (dFr)
nO
See page 43.
CFG
FCS
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
(1)[Saving config.] (SCS), [Macro configuration] (CFG), and [Restore config.] (FCS) can be accessed from several configuration menus,
but they apply to all menus and parameters.
• [Macro configuration]
See page 43.
• [Restore config.]
See page 44.
(1)
(1)
Std
nO
59
Page 60

[APPLICATION FUNCT.] (FUn-) menu
Submenu
Submenu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
PSS-
GV
t
0
t2
t1
f (Hz)
GV
t
0
t2
t1
f (Hz)
GV
t
0
tA1 tA2 tA3 tA4
ACC ou AC2
f (Hz)
GV
t
0
dEC ou dE2
f (Hz)
GV
t
0
t2
t1
f (Hz)
GV
t
0
t2
t1
f (Hz)
U ramps
Customized ramps
The parameters can only be modified when the drive is stopped and no run command is present.
On the optional remote display terminal, this menu can be accessed with the switch in the position.
Some functions have numerous parameters. In order to clarify programming and avoid having to scroll through endless parameters, these
functions have been grouped in submenus.
Like menus, submenus are identified by a dash after their code: for example.
Note: There may be an incompatibility between functions (see the incompatibility table, page 20). In this case, the first function configured
will prevent the remainder being configured.
Code Name/Description Adjustment range Factory setting
rPC-
rPt
•
[RAMPS]
• [Ramp type]
[Linear] (LIn)
Defines the shape of the acceleration and deceleration ramps
LIn
S
U
CUS
-
[Linear] (LIn): Linear
-
[S ramp] (S): S ramp
-
[U ramp] (U): U ramp
-
[Customized] (CUS): Customized
S ramps
The rounding coefficient is fixed,
where t2 = 0.6 x t1
and t1 = set ramp time.
The rounding coefficient is fixed,
where t2 = 0.5 x t1
and t1 = set ramp time.
60
tA1: Adjustable from 0 to 100% (of ACC or AC2)
tA2: Adjustable from 0 to (100% - tA1) (of ACC or AC2)
tA3: Adjustable from 0 to 100% (of dEC or dE2)
tA4: Adjustable from 0 to (100% - tA3) (of dEC or dE2)
Page 61

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment range Factory
setting
rPC-
tA1
*
tA2
*
tA3
*
tA4
*
Inr
0.01
0.1
•
1
[RAMPS]
(continued)
• [Begin Acc round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [End Acc round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [Begin Dec round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [End Dec round]
Parameter can be accessed if the [Ramp type] (rPt) = [Customized] (CUS), page 60.
• [Ramp increment]
-
[0.01] (0.01): Ramp can be set between 0.05 s and 327.6 s.
-
[0.1] (0.1): Ramp can be set between 0.1 s and 3,276 s.
-
[1] (1): Ramp can be set between 1 s and 32,760 s (1).
This parameter applies to the [Acceleration] (ACC), [Deceleration] (dEC), [Acceleration 2] (AC2), and
[Deceleration 2] (dE2) parameters.
Note: Changing the [Ramp increment] (Inr) parameter causes the settings for the [Acceleration] (ACC),
[Deceleration] (dEC), [Acceleration 2] (AC2), and [Deceleration 2] (dE2) parameters to be modified as well.
0 to 100 10
0 to (100-tA1) 10
0 to 100 10
0 to (100-tA3) 10
0.01 - 0.1 - 1 0.1
ACC
dEC
(1)When values higher than 9,999 are displayed on the drive or on the remote display terminal, a point is inserted after the thousands digit.
Note:
This type of display can lead to confusion between values which have two digits after a decimal point and values higher than 9,999. Check
the value of the [Ramp increment] (Inr) parameter.
Example:
- If [Ramp increment] (Inr) = 0.01, the value 15.65 corresponds to a setting of 15.65 s.
- If [Ramp increment] (Inr) = 1, the value 15.65 corresponds to a setting of 15,650 s.
(2)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Acceleration]
• [Deceleration]
Defined to accelerate/decelerate between 0 and the nominal frequency [Rated motor freq.] (FrS)
(parameter in the [MOTOR CONTROL] (drC-) menu).
Check that the value for [Deceleration] (dEC) is not too low in relation to the load to be stopped.
(2) In accordance with
Inr, page 61
3 s
3 s
61
Page 62

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
LI or bit Frequency Ramp
0
0
1
1
<Frt
>Frt
<Frt
>Frt
ACC, dEC
AC2, dE2
AC2, dE2
AC2, dE2
Code Name/Description Adjustment range Factory
setting
rPC-
rPS
Frt
nO
LI1
LI2
LI3
LI4
LI5
LI6
Cd11
Cd12
Cd13
Cd14
Cd15
•
[RAMPS]
(continued)
• [Ramp switch ass.]
This function remains active regardless of the control channel.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
[Acceleration] (ACC) and [Deceleration] (dEC) are enabled when the logic input or control word bit is at state 0.
[Acceleration 2] (AC2) and [Deceleration 2] (dE2) are enabled when the logic input or control word bit is at
state 1.
• [Ramp 2 threshold]
The 2nd ramp is switched if [Ramp 2 threshold]] (Frt) is not 0 (the value 0 corresponds to the inactive
function) and the output frequency is higher than [Ramp 2 threshold]] (Frt).
Threshold ramp switching can be combined with switching via LI or bit as follows:
[No] (nO)
0 to 500 Hz 0 Hz
AC2
*
dE2
*
brA
nO
YES
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
62
• [Acceleration 2]
Parameter can be accessed if [Ramp 2 threshold] (Frt) > 0, page 62, or if [Ramp switch ass.] (rPS) is
assigned, page 62.
• [Deceleration 2]
Parameter can be accessed if [Ramp 2 threshold] (Frt) > 0, page 62, or if [Ramp switch ass.] (rPS) is
assigned, page 62.
• [Dec ramp adapt.]
Activating this function automatically adapts the deceleration ramp, if this has been set at too low a value
for the inertia of the load.
-
[No] (nO): Function inactive
-
[Yes] (YES): Function active. The function is incompatible with applications requiring:
• Positioning on a ramp
• The use of a braking resistor (the resistor would not operate correctly)
[Dec ramp adapt.] (brA) is forced to [No] (nO) if brake control [Brake assignment] (bLC) is assigned, page 80.
(1) In accordance with
Inr, page 61
(1) In accordance with
Inr, page 61
5
5
[Yes] (YES)
Page 63

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
StC-
Stt
rMP
FSt
Cd11
Cd12
Cd13
Cd14
Cd15
FSt
nSt
dCI
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[STOP MODES]
• [Type of stop]
Stop mode on disappearance of the run command or appearance of a stop command.
-
[Ramp stop] (rMP): On ramp
-
[Fast stop] (FSt): Fast stop
-
[Freewheel] (nST): Freewheel stop
-
[DC injection] (dCI): DC injection stop
• [Fast stop]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
Factory
setting
[Ramp stop]
(rMP)
[No] (nO)
The stop is activated when the logic state of the input changes to 0 and the control word bit changes to 1.
The fast stop is a stop on a reduced ramp via the [Ramp divider] (dCF) parameter. If the input falls back
to state 1 and the run command is still active, the motor will only restart if 2-wire level control has been
configured [2/3 wire control] (tCC) = [2 wire] (2C), and [2 wire type] (tCt) = [Level] (LEL) or [Fwd priority]
(PFO), page 45). In other cases, a new run command must be sent.
dCF
*
dCI
nO
LI1
LI2
LI3
LI4
LI5
LI6
Cd11
Cd12
Cd13
Cd14
Cd15
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Ramp divider]
Parameter can be accessed where [Type of stop] (Stt) = [Fast stop] (FSt), page 63, and where [Fast stop]
(FSt) is not [No] (nO), page 63.
Ensure that the reduced ramp is not too low in relation to the load to be stopped.
The value 0 corresponds to the minimum ramp.
• [DC injection assign.]
Note: This function is incompatible with the "Brake control" function (see page 20).
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
Braking is activated when the logic state of the input or control word bit is at 1.
0 to 10 4
[No] (nO)
63
Page 64

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
StC-
IdC
*
tdC
*
nSt
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
(2)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
(3)Note: These settings are not related to the "automatic standstill DC injection" function.
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[STOP MODES]
• [DC inject. level 1]
Parameter can be accessed if [Type of stop] (Stt) = [DC injection] (dCI), page 63, or if [DC injection assign.]
(dCI) is not set to [No] (nO), page 63.
After 5 seconds, the injection current is limited to 0.5 [Mot. therm. current] (ItH) if set to a higher value.
• [DC injection time 2]
Parameter can be accessed if [Type of stop] (Stt) = [DC injection] (dCI) , page 63.
• [Freewheel stop ass.]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
The stop is activated when the logic state of the input is at 0. If the input falls back to state 1 and the run
command is still active, the motor will only restart if 2-wire level control has been configured. In other cases,
a new run command must be sent.
(continued)
(1)(3) 0 to In (2) 0.7 In (2)
(1)(3)
0.1 to 30 s 0.5 s
Factory
setting
[No] (nO)
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
WARNING
NO HOLDING TORQUE
• DC injection braking does not provide any holding torque at zero speed.
• DC injection braking does not work when there is a loss of power or when the drive detects a fault.
• Where necessary, use a separate brake to maintain torque levels.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
CAUTION
RISK OF DAMAGE TO MOTOR
• Long periods of DC injection braking can cause overheating and damage the motor.
• Protect the motor by avoiding long periods of DC injection braking.
Failure to follow these instructions can result in equipment damage.
64
Page 65

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
AdC-
AdC
•
[AUTO DC INJECTION]
• [Auto DC injection]
If set to [Continuous] (Ct), this parameter causes injection current to be generated, even when there is no run
command. This parameter can be changed at any time.
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Do not work on the motor during DC injection.
Failure to follow these instructions will result in death or serious injury.
nO
YES
Ct
tdC1
*
SdC1
*
-
[No] (nO): No injection
-
[Yes] (YES): Standstill injection for adjustable period
-
[Continuous] (Ct): Continuous standstill injection
• [Auto DC inj. time 1]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
• [Auto DC inj. level 1]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
Note: Check that the motor will withstand this current without overheating.
(1) 0.1 to 30 s 0.5 s
(1)
0 to 1.2 In (2) 0.7 In (2)
Factory
setting
[Yes] (YES)
tdC2
*
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
(2)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Auto DC inj. time 2]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
(1) 0 to 30 s 0 s
65
Page 66

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
AdC SdC2 Operation
YES x
Ct
≠
0
Ct = 0
Run command
Speed
Code Name/Description Adjustment
range
AdC-
SdC2
*
•
[AUTO DC INJECTION] (continued)
• [Auto DC inj. level 2]
Parameter can be accessed if [Auto DC injection] (AdC) is not set to [No] (nO), page 65.
Note: Check that the motor will withstand this current without overheating.
(1) 0 to 1.2 In (2) 0.5 In (2)
Factory
setting
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
(2)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
66
Page 67

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Note:
AI2 is a ± 10 V input which can be used for subtraction by summing
a negative signal.
Code Name/Description Adjustment
range
SAI-
SA2
AIU1
LCC
SA3
AIU1
nO
AI1
AI2
AI3
Ndb
nEt
nO
AI1
AI2
AI3
•
[SUMMING INPUTS]
Can be used to sum one or two inputs to the [Ref.1 channel] (Fr1) reference only.
Note: The "Summing inputs" function may be incompatible with other functions (see page 20).
• [Summing ref. 2]
-
[No] (nO): Not assigned
-
[AI1] (AI1): Analog input AI1
-
[AI2] (AI2): Analog input AI2
-
[AI3] (AI3): Analog input AI3
-
[Network AI] (AIU1): Jog dial
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[HMI] (LCC): Reference via the remote display terminal, [HMI Frequency ref.] (LFr) parameter in the
[SETTINGS] (SEt-) menu, page 31.
-
[Modbus] (Mdb): Reference via Modbus
-
[Network] (nEt): Reference via network
• [Summing ref. 3]
-
[No] (nO): Not assigned
-
[AI1] (AI1): Analog input AI1
-
[AI2] (AI2): Analog input AI2
-
[AI3] (AI3): Analog input AI3
-
[Network AI] (AIU1): Jog dial
Factory
setting
[AI2] (AI2)
[No] (nO)
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
LCC
Ndb
nEt
-
[HMI] (LCC): Reference via the remote display terminal, [HMI Frequency ref.] (LFr) parameter in the
[SETTINGS] (SEt-) menu, page 31.
-
[Modbus] (Mdb): Reference via Modbus
-
[Network] (nEt): Reference via network
Summing inputs
See the complete block diagrams on pages 51 and 53.
67
Page 68

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Preset speeds
2, 4, 8 or 16 speeds can be preset, requiring 1, 2, 3 or 4 logic inputs respectively.
The following assignment order must be observed: [2 preset speeds] (PS2), then [4 preset speeds] (PS4), then [8 preset speeds] (PS8),
then [16 preset speeds] (PS16).
Combination table for preset speed inputs
16 speeds
LI (PS16)
8 speeds
LI (PS8)
4 speeds
LI (PS4)
2 speeds
LI (PS2)
Speed reference
0 0 0 0 Reference (1)
0 0 0 1 SP2
0 0 1 0 SP3
0 0 1 1 SP4
0 1 0 0 SP5
0 1 0 1 SP6
0 1 1 0 SP7
0 1 1 1 SP8
1 0 0 0 SP9
1 0 0 1 SP10
1 0 1 0 SP11
1 0 1 1 SP12
1 1 0 0 SP13
1 1 0 1 SP14
1 1 1 0 SP15
1 1 1 1 SP16
(1)See the block diagrams on page 51 and page 53: Reference 1 = (SP1).
68
Page 69

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
PSS-
PS2
Cd11
Cd12
Cd13
Cd14
Cd15
PS4
nO
LI1
LI2
LI3
LI4
LI5
LI6
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[PRESET SPEEDS]
Note: The "Preset speeds" function may be incompatible with other functions (see page 20).
• [2 preset speeds]
Selecting the assigned logic input activates the function.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
• [4 preset speeds]
Selecting the assigned logic input activates the function.
Ensure that [2 preset speeds] (PS2) has been assigned before assigning [4 preset speeds] (PS4).
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
Factory setting
[LI3] (LI3)
[LI4] (LI4)
PS8
Cd11
Cd12
Cd13
Cd14
Cd15
nO
LI1
LI2
LI3
LI4
LI5
LI6
Cd11
Cd12
Cd13
Cd14
Cd15
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
• [8 preset speeds]
Selecting the assigned logic input activates the function.
Ensure that [4 preset speeds] (PS4) has been assigned before assigning [8 preset speeds] (PS8).
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
[No] (nO)
69
Page 70

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
PSS-
PS16
Cd11
Cd12
Cd13
Cd14
Cd15
SP2
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[PRESET SPEEDS]
• [16 preset speeds]
Selecting the assigned logic input activates the function.
Ensure that [8 preset speeds] (PS8) has been assigned before assigning [16 preset speeds] (PS16).
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
• [Preset speed 2]
(continued)
(1)
0.0 to 500.0 Hz (2) 10 Hz
*
SP3
• [Preset speed 3]
(1)
0.0 to 500.0 Hz (2) 15 Hz
*
Factory
setting
[No] (nO)
SP4
• [Preset speed 4]
(1)
0.0 to 500.0 Hz (2) 20 Hz
*
SP5
• [Preset speed 5]
(1)
0.0 to 500.0 Hz (2) 25 Hz
*
SP6
• [Preset speed 6]
(1) 0.0 to 500.0 Hz (2) 30 Hz
*
SP7
• [Preset speed 7]
(1)
0.0 to 500.0 Hz (2) 35 Hz
*
SP8
• [Preset speed 8]
(1)
0.0 to 500.0 Hz (2) 40 Hz
*
SP9
• [Preset speed 9]
(1)
0.0 to 500.0 Hz (2) 45 Hz
*
SP10
• [Preset speed 10]
(1)
0.0 to 500.0 Hz (2) 50 Hz
*
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu. This parameter will depend on how many speeds have been
configured.
(2)Reminder: The speed remains limited by the [High speed] (HSP) parameter, page 32.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
70
Page 71

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
PSS-
SP11
•
[PRESET SPEEDS]
• [Preset speed 11]
(continued)
(1) 0.0 to 500.0 Hz (2) 55 Hz
Factory
setting
*
SP12
• [Preset speed 12]
(1) 0.0 to 500.0 Hz (2) 60 Hz
*
SP13
• [Preset speed 13]
(1)
0.0 to 500.0 Hz (2) 70 Hz
*
SP14
• [Preset speed 14]
(1)
0.0 to 500.0 Hz (2) 80 Hz
*
SP15
• [Preset speed 15]
(1)
0.0 to 500.0 Hz (2) 90 Hz
*
SP16
• [Preset speed 16]
(1)
0.0 to 500.0 Hz (2) 100 Hz
*
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu. This parameter will depend on how many speeds have been
configured.
(2)Reminder: The speed remains limited by the [High speed] (HSP) parameter, page 32.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
71
Page 72

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Ramp forced to 0.1 s
Reference
JGF reference
JGF reference
LI (JOG)
Forward
Reverse
Ramp dEC/dE2Motor
frequency
u
0.5 s
Code Name/Description Adjustment
range
JOG-
JOG
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[JOG]
• [JOG]
Note: The "Jog operation" function may be incompatible with other functions (see page 20).
Selecting the assigned logic input activates the function.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
Example: 2-wire control operation ([2/3 wire control] (tCC) = [2 wire] (2C))
Factory setting
[No] (nO)
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
72
JGF
*
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Jog frequency]
Parameter can be accessed if [JOG] (JOG) is not set to [No] (nO), page 72.
(1)
0 to 10 Hz 10 Hz
Page 73

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
ER23K
control terminals
Motor frequency
LSP
Forward
0
2nd press
1st press
Reverse
0
2nd press
1st press
0
LSP
+/- speed
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), page 56.
Two types of operation are available.
1. Use of single action buttons: Two logic inputs are required in addition to the direction(s) of operation.
The input assigned to the "+ speed" command increases the speed, the input assigned to the "- speed" command decreases
the speed.
Note:
If the "+ speed" and "- speed" commands are activated at the same time, "- speed" will be given priority.
2. Use of double action buttons: Only one logic input assigned to "+ speed" is required.
+/- speed with double action buttons:
Description: 1 button pressed twice for each direction of rotation. Each action closes a contact.
Released
(- speed)
1st press
(speed maintained)
2nd press
(+ speed)
Forward button – a a and b
Reverse button – c c and d
Wiring example:
LI1: Forward
LIx: Reverse
LIy: + speed
This type of +/- speed is incompatible with 3-wire control.
Whichever type of operation is selected, the max. speed is set by the [High speed] (HSP) parameter, page 32.
Note:
If the reference is switched via [Ref. 2 switching] (rFC), page 57, from one reference channel to any other reference channel with "+/- speed",
the value of the [Output frequency] (rFr) reference (after ramp) is copied at the same time. This prevents the speed being incorrectly reset
to zero when switching takes place.
73
Page 74

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
UPd-
USP
*
dSP
*
nO
LI1
LI2
LI3
LI4
LI5
LI6
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[+/- SPEED]
(motorized jog dial)
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), and [+/-spd HMI]
(UPdH) or [+/- SPEED] (UPdt) selected, page 56.
Note: The "+/- speed" function is incompatible with several functions (see page 20). It can only be configured
if these functions are unassigned, in particular the summing inputs (set [Summing ref. 2] (SA2) to [No] (nO),
page 67) and the preset speeds (set [2 preset speeds] (PS2) and [4 preset speeds] (PS4) to [No] (nO),
page 69) which will have been assigned as part of the factory settings.
• [+ speed assignment]
Parameter accessible for [+/- SPEED] (UPdt) only. Selecting the assigned logic input activates the
function.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
• [-Speed assignment]
Parameter accessible for [+/- SPEED] (UPdt) only. Selecting the assigned logic input activates the
function.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
Factory
setting
[No] (nO)
[No] (nO)
Str
*
nO
rAN
EEP
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Reference saved]
Associated with the "+/- speed" function, this parameter can be used to save the reference:
• When the run commands disappear (saved to RAM)
• When the line supply or the run commands disappear (saved to EEPROM)
Therefore, the next time the drive starts up, the speed reference is the last reference saved.
-
[No] (nO): No saving
-
[RAM] (rAM): Saving in RAM
-
[EEprom] (EEP): Saving in EEPROM
[No] (nO)
74
Page 75

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Internal
Referenc
e A
Pages 51 and
Reference B
Pages 51 and 53
Preset PI
Error
Restart error
Gains
Ramps
Parameter:
The black rectangle
represents the factory
setting assignment.
Key:
PI
feedback
PI regulator
Block diagram
The function is activated by assigning an analog input to the PI feedback (measurement).
PI feedback:
PI feedback must be assigned to one of these analog inputs, AI1, AI2, or AI3.
PI reference:
The PI reference can be assigned to the following parameters in order of priority:
Combination table for preset PI references
LI (Pr4) LI (Pr2) Pr2 = nO Reference
Parameters can also be accessed in the [SETTINGS] (SEt-) menu:
• [Internal PID ref.] (rPI), page 31
• [Preset ref. PID 2] (rP2), [Preset ref. PID 3] (rP3), and [Preset ref. PID 4] (rP4), page 34
• [PID prop. gain] (rPG), page 34
• [PID integral gain] (rIG), page 34
• [PID fbk scale factor] (FbS), page 34:
• [PID wake up thresh.] (rSL), page 36:
• [PID correct. reverse] (PIC), page 34: If [PID correct. reverse] (PIC) = [No] (nO), the speed of the motor will increase when the error
- Preset references via logic inputs, [Preset ref. PID 2] (rP2), [Preset ref. PID 3] (rP3), and [Preset ref. PID 4] (rP4), page 78
- Internal reference [Internal PID ref.] (rPI), page 78
- Reference [Ref.1 channel] (Fr1), page 56
rPI or Fr1
0 0 rPI or Fr1
0 1 rP2
1 0 rP3
1 1 rP4
The [PID fbk scale factor] (FbS) parameter can be used to scale the reference according to the variation range for PI feedback (sensor
rating).
Example: Regulating pressure
PI reference (process) 0-5 bar (0-100%)
Rating of pressure sensor 0-10 bar
[PID fbk scale factor] (FbS) = max. sensor scaling/max. process
[PID fbk scale factor] (FbS) = 10/5= 2
Can be used to set the PI error threshold above which the PI regulator will be reactivated (wake-up) after a stop due to the max. time
threshold being exceeded at low speed [Low speed time out] (tLS)
is positive (example: pressure control with a compressor). If [PID correct. reverse] (PIC) = [Yes] (YES), the speed of the motor will
decrease when the error is positive (example: temperature control using a cooling fan).
75
Page 76

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Regulated
value
Proportional
gain
rPG high
Overshoot
Stabilization time
rPG low
Static error
Rise time
Time
Integral
gain
rIG high
rIG low
rPG and rIG correct
Time
Time
Reference
Reference
Reference
"Manual - Automatic" operation with PI
This function combines the PI regulator and [Ref. 2 switching] (rFC) reference switching, page 57. The speed reference is given by
[Ref.2 channel] (Fr2) or by the PI function, depending on the state of the logic input.
Setting up the PI regulator
1. Configuration in PI mode
See the block diagram on page 75.
2. Perform a test in factory settings mode (in most cases, this will be sufficient).
To optimize the drive, adjust [PID prop. gain.] (rPG) or [PID integral gain] (rIG) gradually and independently, and observe the effect on
the PI feedback in relation to the reference.
3. If the factory settings are unstable or the reference is incorrect:
Perform a test with a speed reference in manual mode (without PI regulator) and with the drive on load for the speed range of the system:
- In steady state, the speed must be stable and comply with the reference, and the PI feedback signal must be stable.
- In transient state, the speed must follow the ramp and stabilize quickly, and the PI feedback must follow the speed.
If this is not the case, see the settings for the drive and/or sensor signal and cabling.
Switch to PI mode.
Set [Dec ramp adapt.] (brA) to no (no auto-adaptation of the ramp).
Set the [Acceleration] (ACC) and [Deceleration] (dEC) speed ramps to the minimum level permitted by the mechanics without triggering an
[OVERBRAKING] (ObF) fault.
Set the integral gain [PID integral gain] (rIG) to the minimum level.
Observe the PI feedback and the reference.
Switch the drive ON/OFF repeatedly or quickly vary the load or reference a number of times.
Set the proportional gain [PID prop. gain] (rPG) in order to ascertain a good compromise between response time and stability in transient
phases (slight overshoot and 1 to 2 oscillations before stabilizing).
If the reference varies from the preset value in steady state, gradually increase the integral gain [PID integral gain] (rIG), reduce the
proportional gain [PID prop. gain] (rPG) in the event of instability (pump applications), and find a compromise between response time and
static precision (see diagram).
Perform in-production tests over the whole reference range.
The oscillation frequency depends on the system dynamics.
Parameter Rise time Overshoot
[PID prop. gain] (rPG)
[PID integral gain] (rIG)
76
Stabilization
time
=
Static error
Page 77

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
PI-
PIF
rPG
*
rIG
*
FbS
*
nO
AI1
AI2
AI3
•
[PI REGULATOR]
Note: The "PI regulator" function is incompatible with several functions (see page 20).
It can only be configured if these functions are unassigned, in particular the summing inputs (set [Summing
ref. 2] (SA2) to [No] (nO), page 67) and the preset speeds (set [2 preset speeds] (PS2) and [4 preset speeds]
(PS4) to [No] (nO), page 69) which will have been assigned as part of the factory settings.
• [PID feedback ass.]
-
[No] (nO): Not assigned
-
[AI1] (AI1): Analog input AI1
-
[AI2] (AI2): Analog input AI2
-
[AI3] (AI3): Analog input AI3
• [PID prop. gain]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
It provides dynamic performance when PI feedback is changing quickly.
• [PID integral gain]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
It provides static precision when PI feedback is changing slowly.
• [PID fbk scale factor]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
For adapting the process.
(1)
(1)
(1)
0.01 to 100 1
0.01 to 100 1
0.1 to 100 1
Factory
setting
[No] (nO)
PIC
*
nO
YES
Pr2
*
nO
LI1
LI2
LI3
LI4
LI5
LI6
Cd11
Cd12
Cd13
Cd14
Cd15
(1)Parameter(s) can also be accessed in the [SETTINGS] (SEt-) menu.
• [PID correct. reverse]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
-
[No] (nO): Normal
-
[Yes] (YES): Reverse
• [2 preset PID ref.]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
Selecting the assigned logic input activates the function.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
[No] (nO)
[No] (nO)
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
77
Page 78

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
PI-
Pr4
*
Cd11
Cd12
Cd13
Cd14
Cd15
rP2
*
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[PI REGULATOR]
• [4 preset PID ref.]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
Selecting the assigned logic input activates the function.
Make sure that [2 preset PID ref.] (Pr2), page 77, has been assigned before assigning [4 preset PID ref.]
(Pr4).
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
• [Preset ref. PID 2]
See page 34.
(continued)
(1)
0 to 100% 30%
Factory
setting
[No] (nO)
rP3
*
rP4
*
rSL
*
PII
*
nO
YES
rPI
*
(1)Parameter(s) can also be accessed in the [SETTINGS] (SEt-) menu.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Preset ref. PID 3]
See page 34.
• [Preset ref. PID 4]
See page 34.
• [PID wake up thresh.]
If the "PI" and "Low speed operating time" [Low speed time out] (tLS) (page 36) are configured at the same
time, the PI regulator may attempt to set a speed lower than[Low speed] (LSP).
This results in unsatisfactory operation, which consists of starting, operating at [Low speed] (LSP), then
stopping, and so on.
The rSL (restart error threshold) parameter can be used to set a minimum PI error threshold
for restarting after a stop at prolonged [Low speed] (LSP).
The function is inactive if [Low speed time out] (tLS) = 0.
• [Act. internal PID ref.]
-
[No] (nO): The reference for the PI regulator is [Ref.1 channel] (Fr1), except for [+/-spd HMI] (UPdH) and
[+/- SPEED] (UPdt) (+/- speed cannot be used as a reference for the PI regulator).
-
[Yes] (YES): The reference for the PI regulator is provided internally via the [Internal PID ref.] (rPI)
parameter.
• [Internal PID ref.]
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
(1) 0 to 100% 60%
(1) 0 to 100% 90%
(1) 0 to 100% 0%
[No] (nO)
(1) 0 to 100% 0%
78
Page 79

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
State of brake Engaged Released Engaged
Motor speed
Speed reference
Speed reference
Motor frequency
Motor current
Relay R2 or logic output AOC
LI forward or reverse
Settings which can be accessed in the
application functions [APPLICATION
FUNCT.] (FUn-) menu:
• Brake release frequency [Brake
release freq] (brL)
• Brake release current
[Brake release I FW] (Ibr)
• Brake release time delay [Brake
Release time] (brt)
• Brake engage frequency [Brake
engage freq] (bEn)
• Brake engage time delay [Brake
engage time] (bEt)
• Brake release pulse [Brake
impulse] (bIP)
Brake control
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3) (page 51).
This function, which can be assigned to relay R2 or logic output AOC, enables the drive to manage an electromagnetic brake.
Principle
Synchronize brake release with the build-up of torque during startup and brake engage at zero speed on stopping, to help prevent jolting.
Brake sequence
Recommended brake control settings:
1. [Brake release freq] (brL), page 80:
2. [Brake release I FW] (Ibr), page 80:
3. [Brake Release time] (brt), page 80:
Adjust according to the type of brake. It is the time required for the mechanical brake to release.
4. [Brake engage freq] (bEn), page 80:
5. [Brake engage time] (bEt), page 80:
Adjust according to the type of brake. It is the time required for the mechanical brake to engage.
6. [Brake impulse] (bIP), page 80:
- Horizontal movement: Set to 0.
- Vertical movement: Set to a frequency equal to the nominal motor slip in Hz.
- Horizontal movement: Set to 0.
- Vertical movement: Preset the nominal current of the motor then adjust it in order to help prevent jolting on start-up, making sure
that the maximum load is held when the brake is released.
- Horizontal movement: Set to 0.
- Vertical movement: Set to a frequency equal to the nominal motor slip in Hz. Note: Max. [Brake engage freq] (bEn) = [Low speed]
(LSP); this means an appropriate value must be set in advance for [Low speed] (LSP).
- Horizontal movement: Set to
[No] (nO).
- Vertical movement: Set to [Yes] (YES) and check that the motor torque direction for "run forward" control corresponds to the
upward direction of the load. If necessary, reverse two motor phases. This parameter generates motor torque in an upward
direction regardless of the direction of operation commanded in order to maintain the load whilst the brake is releasing.
79
Page 80

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
bLC-
bLC
brL
*
Ibr
*
nO
dO
•
[BRAKE LOGIC CONTROL]
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), page 56.
Note: This function may be incompatible with other functions (see page 20).
• [Brake assignment]
-
[No] (nO): Not assigned
r2
-
[R2] (r2): Relay R2
-
[DO] (dO): Logic output AOC
If [Brake assignment] (bLC) is assigned, the [Catch on the fly] (FLr) parameter, page 88, and the [Dec ramp
adapt.] (brA) parameter, page 62, are forced to [No] (nO), and the [Output Phase Loss] (OPL) parameter,
page 89, is forced to [Yes] (YES).
[Brake assignment] (bLC) is forced to [No] (nO) if [Output Phase Loss] (OPL) = [Output cut] (OAC), page 89.
• [Brake release freq]
Brake release frequency.
• [Brake release I FW]
Brake release current threshold for ascending or forward movement.
0.0 to 10.0 Hz In accordance
0 to 1.36 In (1) In accordance
Factory
setting
[No] (nO)
with the drive
rating
with the drive
rating
brt
*
LSP
*
bEn
• [Brake Release time]
Brake release time delay.
• [Low speed]
Motor frequency at min. reference.
This parameter can also be changed in the [SETTINGS] (SEt-) menu, page 32.
• [Brake engage freq]
0 to 5 s 0.5 s
0 to HSP
(page 32)
nO - 0 to LSP nO
*
nO
0
to
LSP
bEt
*
bIP
nO
YES
*
(1)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
-
Not set
-
Adjustment range in Hz
If [Brake assignment] (bLC) is assigned and [Brake engage freq] (bEn) remains set to [No] (nO), the drive
will lock in [BRAKE CONTROL FAULT] (bLF) mode on the first run command.
• [Brake engage time]
Brake engage time (brake response time).
• [Brake impulse]
-
[No] (nO): Whilst the brake is releasing, the motor torque direction corresponds to the direction of rotation
commanded.
-
[Yes] (YES): Whilst the brake is releasing, the motor torque direction is forward, regardless of the direction
of operation commanded.
Note: Check that the motor torque direction for "run forward" control corresponds to the upward direction of
the load. If necessary, reverse two motor phases.
0 to 5 s 0.5 s
0 LSP
[No] (nO)
80
Page 81

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Name/Description Adjustment
range
LC2-
LC2
Cd11
Cd12
Cd13
Cd14
Cd15
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[CURRENT LIMITATION 2]
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), page 56.
• [Current limit 2]
Selecting the assigned logic input activates the function.
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
[Current Limitation] (CLI) is enabled when the logic input or control word bit is at state 0 ([SETTINGS]
(SEt-) menu, page 36).
[I Limit. 2 value] (CL2) is enabled when the logic input or control word bit is at state 1.
Factory
setting
[No] (nO)
CL2
*
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
(2)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [I Limit. 2 value]
See page 36.
(1) 0.25 to 1.5 In (2) 1.5 In (2)
81
Page 82

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
[Rated motor volt.] (UnS) (in volts)
[Rated motor freq.] (FrS) (in Hz)
Code Name/Description Adjustment
range
CHP-
CHP
Cd11
Cd12
Cd13
Cd14
Cd15
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[SWITCHING MOTOR]
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), page 56.
• [Motor switching]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
LI or bit = 0: Motor 1
LI or bit = 1: Motor 2
Note:
• If this function is used, the auto-tuning function, page 41, is not active on motor 2.
• Changes to parameters are only taken into account when the drive is locked.
Factory setting
[No] (nO)
CAUTION
RISK OF DAMAGE TO MOTOR
The motor switching function disables motor thermal protection.
The use of external overload protection is required when using motor switching.
Failure to follow these instructions can result in equipment damage.
UnS2
*
FrS2
*
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Nom. mot. 2 volt.]
ER23-...K: 100 to 240 V
ER23-.../3K: 100 to 240 V
ER23-.../4K: 100 to 500 V
ER23-.../6K: 100 to 600 V
• [Nom. motor 2 freq.]
Note:
The ratio must not exceed the following values:
ER23-...K: 7 max.
ER23-.../3K: 7 max.
ER23-.../4K: 14 max.
ER23-.../6K: 17 max.
The factory setting is 50 Hz, or preset to 60 Hz if [Standard mot. freq] (bFr) is set to 60 Hz.
In accordance
with the drive
rating
10 to 500 Hz 50 Hz
In accordance
with the drive
rating
82
Page 83

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
100 - slip as a %
100
50 - slip in Hz
50
60 - slip in Hz
60
L
UnS
FrS
n
P
Voltage
Frequency
Code Name/Description Adjustment
range
CHP-
nCr2
*
nSP2
*
COS2
*
•
[SWITCHING MOTOR]
• [Nom. mot. 2 current]
Nominal motor 2 current given on the rating plate.
• [Nom. mot. 2 speed]
0 to 9,999 rpm then 10.00 to 32.76 krpm
If, rather than the nominal speed, the nameplate indicates the synchronous speed and the slip in Hz or as
a %, calculate the nominal speed as follows:
• Nominal speed = synchronous speed x
or
• Nominal speed = synchronous speed x (50 Hz motors)
or
• Nominal speed = synchronous speed x (60 Hz motors)
• [Motor 2 Cosinus Phi]
Cos Phi given on the rating plate of motor 2.
(continued)
0.25 to 1.5 In
(2)
0 to 32,760 rpm In accordance
0.5 to 1 In accordance
Factory setting
In accordance
with the drive
rating
with the drive
rating
with the drive
rating
(1)Parameter can also be accessed in the [SETTINGS] (SEt-) menu.
(2)In corresponds to the nominal drive current indicated in the Installation Manual and on the drive nameplate.
UFt2
UFr2
FLG2
StA2
SLP2
*
[SVC] (n)
nLd
• [U/F mot.2 selected]
L
P
n
-
[Cst. torque] (L): Constant torque for motors connected in parallel or special motors
-
[Var. torque] (P): Variable torque for pump and fan applications
-
[SVC] (n): Sensorless flux vector control for constant torque applications
-
[Energy sav.] (nLd): Energy saving, for variable torque applications not requiring high dynamics (behaves
in a similar way to the P ratio at no load and the n ratio on load)
*
• [IR compensation 2]
*
See page 36.
• [FreqLoopGain 2]
*
See page 37.
• [Freq. loop stability 2]
*
See page 37.
• [Slip compensation 2]
*
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
these menus, on the pages indicated, to aid programming.
See page 37.
(1) 0 to 100% 20%
(1)
(1)
(1)
1 to 100% 20%
1 to 100% 20%
0 to 150% 100%
83
Page 84

[APPLICATION FUNCT.] (FUn-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Management of limit switches
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), page 56.
This function can be used to manage the operation of one or two series limit switches (non-reversing or reversing).
- Assignment of one or two logic inputs (forward limit switch, reverse limit switch)
- Selection of the stop type (on ramp, fast or freewheel)
Following a stop, the motor is permitted to restart in the opposite direction only.
- The stop is performed when the input is in state 0. The direction of operation is authorized in state 1.
Restarting after stop caused by a limit switch
• Send a run command in the other direction (when control is via the terminals, if [2/3 wire control] (tCC) = [2 wire] (2C) and [2 wire
type] (tCt) = [Transition] (trn), first remove all the run commands).
or
• Invert the reference sign, remove all the run commands then send a run command in the same direction as before the stop caused
by a limit switch.
Code Name/Description Adjustment
range
LSt-
LAF
LAr
nO
LI1
LI2
LI3
LI4
LI5
LI6
•
[LIMIT SWITCHES]
Function can only be accessed if [ACCESS LEVEL] (LAC) = [Level 2] (L2) or [Level 3] (L3), page 56.
Note: This function is incompatible with the "PI regulator" function (see page 20).
• [Stop FW limit sw.]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
• [Stop RV limit sw.]
*
nO
LI1
LI2
LI3
LI4
LI5
LI6
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
Factory
setting
[No] (nO)
[No] (nO)
LAS
*
rMP
FSt
nSt
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
84
• [Stop type]
Parameter can be accessed if [Stop FW limit sw.] (LAF), page 84, or [Stop RV limit sw.] (LAr), page 84, is
assigned.
-
[Ramp stop] (rMP): On ramp
-
[Fast stop] (FSt): Fast stop
-
[Freewheel] (nSt): Freewheel stop
[Freewheel]
(nSt)
Page 85

[APPLICATION FUNCT.] (FLt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
2 s
2 s
Code Name/Description Adjustment
range
ArE
nO
31E
31A
SCS
CFG
• [Select ER22 conf.]
This parameter is invisible if a communication option is present. It is only used to transfer a configuration
via a loader tool or an ER22 remote terminal.
[Select ER22K conf.] (ArE) can be used during a transfer between an ER23K and ER22 to specify the type
of ER22 (ER22K/G or ER22P).
-
[No] (nO): Transfer between two ER23K
-
[ER22 std] (31E): Transfer from an ER22K/G to an ER23K. Set ARE = 31E to download a configuration
from a European ER22.
-
[ER22P] (31A): Transfer from an ER22P to an ER23K. Set ARE = 31A to download a configuration from
an Asian ER22P.
Procedure for transferring a configuration:
• Set [Select ER22 conf.] (ArE) to the required value.
• Perform the configuration transfer.
• Once the transfer is complete, turn the drive off.
• Power the drive up again to initialize the configuration.
• The parameter is restored to its factory setting.
• [Saving config.]
See page 43.
• [Macro configuration]
See page 43.
(1) [No] (nO)
(1) [Factory set.] (Std)
Factory setting
[No] (nO)
FCS
(1) [Saving config.] (SCS), [Macro configuration] (CFG), and [Restore config.] (FCS) can be accessed from several configuration menus,
but they apply to all menus and parameters.
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
• [Restore config.]
See page 44.
(1) [No] (nO)
85
Page 86

[FAULT MANAGEMENT] (FLt-) menu
Automatic restart
Operating time reset to zero
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
The parameters can only be modified when the drive is stopped and no run command is present.
On the optional remote display terminal, this menu can be accessed with the switch in the position.
Code Description Adjustment
range
Atr
• [Automatic restart]
DANGER
UNINTENDED EQUIPMENT OPERATION
• The automatic restart can only be used on machines or installations which do not pose any danger to either
personnel or equipment.
• If the automatic restart is activated, R1 will only indicate a fault has been detected once the time-out period for the
restart sequence has expired.
• The equipment must be used in compliance with national and regional safety regulations.
Failure to follow these instructions will result in death or serious injury.
The motor's automatic restart function will only be active in 2-wire level control ([2/3 wire control] (tCC) =
[2 wire] (2C), and [2 wire type] (tCt) = [Level] (LEL) or [Fwd priority] (PFO)).
nO
YES
-
[No] (nO): Function inactive
-
[Yes] (YES): Automatic restart if the fault has been cleared and the other operating conditions permit the
restart. The restart is performed by a series of automatic attempts separated by increasingly longer waiting
periods: 1 s, 5 s, 10 s, then 1 min for subsequent ones.
If the restart has not taken place once the [Max. restart time] (tAr) configurable time has elapsed, the
procedure is aborted and the drive remains locked until it is turned off and then on again.
This function is possible with the following conditions:
[NETWORK FAULT] (CnF): Communication detected fault on the communication card
[CANopen com.] (COF): CANopen communication detected fault
[External] (EPF): External fault
[4-20mA] (LFF): 4-20 mA loss
[Overbraking] (ObF): DC bus overvoltage
[Drive overheat] (OHF): Drive overheating
[Motor overload] (OLF): Motor overload
[Mot. phase] (OPF): Motor phase loss
[Mains overvoltage] (OSF): Line supply overvoltage
[Mains phase loss] (PHF): Line phase loss
[MODBUS FAULT] (SLF): Modbus communication
Factory
setting
[No] (nO)
Relay R1 remains activated if this function is active. The speed reference and the operating direction must
be maintained.
86
Page 87

[FAULT MANAGEMENT] (FLt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
tAr
*
5
10
30
1h
2h
3h
Ct
rSF
nO
LI1
LI2
LI3
LI4
LI5
LI6
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Max. restart time]
Parameter is only visible if [Automatic restart] (Atr) = [Yes] (YES).
It can be used to limit the number of consecutive restarts in the event of a recurrent detected fault.
-
[5 min] (5): 5 minutes
-
[10 min] (10): 10 minutes
-
[30 min] (30): 30 minutes
-
[1 hour] (1h): 1 hour
-
[2 hours] (2h): 2 hours
-
[3 hours] (3h): 3 hours
-
[Unlimited] (Ct): Unlimited (except for [MOTOR PHASE LOSS] (OPF) and [INPUT PHASE LOSS] (PHF);
the max. duration of the restart process is limited to 3 hours)
• [Fault reset]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
Factory
setting
[5 min] (5)
[No] (nO)
87
Page 88

[FAULT MANAGEMENT] (FLt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
FLr
nO
YES
EtF
nO
LI1
LI2
LI3
LI4
LI5
LI6
• [Catch on the fly]
Used to enable a smooth restart if the run command is maintained after the following events:
- Loss of line supply or simple power off
- Reset of current drive or automatic restart
- Freewheel stop
The speed given by the drive resumes from the estimated speed of the motor at the time of the restart, then
follows the ramp to the reference speed.
This function requires 2-wire control ( [2/3 wire control] (tCC) = [2 wire] (2C)) with [2 wire type] (tCt) = [Level]
(LEL) or [Fwd priority] (PFO).
-
[No] (nO): Function inactive
-
[Yes] (YES): Function active
When the function is operational, it activates at each run command, resulting in a slight delay
(1 second max.).
[Catch on the fly] (FLr) is forced to [No] (nO) if brake control [Brake assignment] (bLC) is assigned, page 80.
• [External fault ass.]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
Factory
setting
[No] (nO)
[No] (nO)
LEt
EPL
Cd11
Cd12
Cd13
Cd14
Cd15
LO
HIG
nO
YES
rNP
FSt
If [ACCESS LEVEL] (LAC) = [Level 3] (L3), the following assignments are possible:
-
[CD11] (CD11): Bit 11 of the control word from a communication network
-
[CD12] (CD12): Bit 12 of the control word from a communication network
-
[CD13] (CD13): Bit 13 of the control word from a communication network
-
[CD14] (CD14): Bit 14 of the control word from a communication network
-
[CD15] (CD15): Bit 15 of the control word from a communication network
• [External fault config]
-
[Active low] (LO): The external fault is detected when the logic input assigned to [External fault ass.] (EtF)
changes to state 0.
Note: In this case, [External fault ass.] (EtF) cannot be assigned to a control word bit from a communication
network.
-
[Active high] (HIG): The external fault is detected when the logic input or the bit assigned to [External fault
ass.] (EtF) changes to state 1.
Note: Where [External fault config] (LEt) = [Active high] (HIG), [External fault ass.] (EtF) is assigned to a
control word bit from a communication network, and where there is no [External fault ass.] (EtF) fault
detection, switching to [External fault config] (LEt) = [Active low] (LO) triggers [External fault ass.] (EtF) fault
detection. In this case, it is necessary to turn the drive off and then back on again.
• [External fault mgt]
-
[Ignore] (nO): Ignore
-
[Freewheel] (YES): Detected fault management with freewheel stop
-
[Ramp stop] (rMP): Detected fault management with stop on ramp
-
[Fast stop] (FSt): Detected fault management with fast stop
[Active high]
(HIG)
[Freewheel]
(YES)
88
Page 89

[FAULT MANAGEMENT] (FLt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
OPL
nO
YES
OAC
IPL
nO
YES
OHL
nO
YES
rNP
FSt
OLL
nO
YES
rNP
FSt
• [Output Phase Loss]
-
[No] (nO): Function inactive
-
[Yes] (YES): Tripping on the [MOTOR PHASE LOSS] (OPF)
-
[Output cut] (OAC): No tripping on a [MOTOR PHASE LOSS] (OPF), but management of the output voltage
in order to avoid an overcurrent when the link with the motor is re-established and catch on the fly performed
even if [Catch on the fly] (FLr) = [No] (nO). To be used with output contactor.
[Output Phase Loss] (OPL) is forced to [Yes] (YES) if [Brake assignment] (bLC) is not set to [No] (nO),
page 80.
• [Input phase loss]
This parameter is only accessible on 3-phase drives.
-
[No] (nO): Ignore
-
[Yes] (YES): Detected fault management with fast stop
• [Overtemp fault mgt]
-
[Ignore] (nO): Ignore
-
[Freewheel] (YES): Detected fault management with freewheel stop
-
[Ramp stop] (rMP): Detected fault management with stop on ramp
-
[Fast stop] (FSt): Detected fault management with fast stop
• [Overload fault mgt]
-
[Ignore] (nO): Ignore
-
[Freewheel] (YES): Detected fault management with freewheel stop
-
[Ramp stop] (rMP): Detected fault management with stop on ramp
-
[Fast stop] (FSt): Detected fault management with fast stop
Factory setting
[Yes] (YES)
[Yes] (YES)
[Freewheel]
(YES)
[Freewheel]
(YES)
SLL
nO
YES
rNP
FSt
• [Modbus fault mgt]
[Fast stop]
(FSt)
WARNING
LOSS OF CONTROL
If [Modbus fault mgt] (SLL) = [Ignore] (n0), communication control will be inhibited. For safety reasons, inhibiting
the communication fault detection should be restricted to the debug phase or to special applications.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
-
[Ignore] (nO): Ignore
-
[Freewheel] (YES): Detected fault management with freewheel stop
-
[Ramp stop] (rMP): Detected fault management with stop on ramp
-
[Fast stop] (FSt): Detected fault management with fast stop
This parameter does not apply to software.
89
Page 90

[FAULT MANAGEMENT] (FLt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
COL
• [CANopen fault mgt]
WARNING
LOSS OF CONTROL
If [CANopen fault mgt] (COL) or [Network fault mgt] (CLL) = [Ignore] (n0), communication control will be inhibited.
For safety reasons, inhibiting the communication fault detection should be restricted to the debug phase or to
special applications.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
nO
YES
rNP
FSt
tnL
nO
YES
-
[Ignore] (nO): Ignore
-
[Freewheel] (YES): Detected fault management with freewheel stop
-
[Ramp stop] (rMP): Detected fault management with stop on ramp
-
[Fast stop] (FSt): Detected fault management with fast stop
• [Autotune fault mgt]
This parameter can be used to manage drive behavior in the event that auto-tuning is unsuccessful [AUTO
TUNING FAULT] (tnF)
-
[No] (nO): Ignored (the drive reverts to the factory settings)
-
[Yes] (YES): Detected fault management with drive locked
If [Cold stator resist.] (rSC), page 40, is not set to [No] (nO), [Autotune fault mgt] (tnL) is forced to [Yes]
(YES).
Factory setting
[Fast stop] (FSt)
[Yes] (YES)
LFL
LFF
nO
YES
LFF
rLS
rNP
FSt
• [4-20mA loss]
-
[Ignore] (nO): Ignored (only possible value if [AI3 min. value] (CrL3) y 3 mA, page 46)
-
[Freewheel] (YES): Detected fault management with freewheel stop
-
[fallback spd] (LFF): The drive switches to the fallback speed ([fallback spd] (LFF) parameter).
-
[Spd maint.] (rLS): The drive maintains the speed at which it was operating when the loss was detected.
This speed is saved and stored as a reference until the fault has disappeared.
-
[Ramp stop] (rMP): Detected fault management with stop on ramp
-
[Fast stop] (FSt): Detected fault management with fast stop
Note: Before setting [4-20mA loss] (LFL) to [fallback spd] (LFF) check the connection of input AI3.
If [4-20mA loss] (LFL) = [fallback spd] (LFF) or [Spd maint.] (rLS), no code is displayed.
• [Fallback speed]
Fallback speed setting in the event of a [4-20mA loss] (LFL).
[Freewheel]
(YES)
0 to 500 Hz 10 Hz
90
Page 91

[FAULT MANAGEMENT] (FLt-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
2 s
2 s
2 s
Code Description Adjustment
range
drn
nO
YES
• [Derated operation]
Lowers the tripping threshold of [Undervoltage] (USF): in order to operate on line supplies with 50%
voltage drops.
-
[No] (nO): Function inactive
-
[Yes] (YES): Function active
In this case, drive performance is derated.
CAUTION
RISK OF DAMAGE TO DRIVE
When [Derated operation] (drn) = [Yes] (YES), use a line choke (see catalog).
Failure to follow these instructions can result in equipment damage.
StP
nO
NNS
rMP
FSt
• [UnderV. prevention]
This function can be used to control the type of stop where there is a loss of line supply.
-
[No] (nO): Locking of the drive and freewheel stopping of the motor
-
[DC Maintain] (MMS): This stop mode uses the inertia to maintain the drive power supply as long as
possible.
-
[Ramp stop] (rMP): Stop according to the valid ramp ([Deceleration] (dEC) or [Deceleration 2] (dE2))
-
[Fast stop] (FSt): Fast stop, the stopping time depends on the inertia and the braking ability of the drive.
Factory
setting
[No] (nO)
[No] (nO)
InH
• [Fault inhibit assign.]
DANGER
LOSS OF PERSONNEL AND EQUIPMENT PROTECTION
• Enabling the fault inhibition parameter (inH) will disable the drive controller protection features.
• InH should not be enabled for typical applications of this equipment.
• InH should be enabled only in extraordinary situations where a thorough risk analysis demonstrates that the
presence of adjustable speed drive protection poses a greater risk than personnel injury or equipment damage.
Failure to follow these instructions will result in death or serious injury.
This function disables drive protection for the following detected faults:
CFF, CFI, SLF, CnF, EPF, OCF, CrF, LFF, OHF, OBF, OLF, OSF, OPF, PHF, USF, SOF, tnF, IF1, IF2,
nO
LI1
LI2
LI3
LI4
LI5
LI6
rPr
nO
rtH
rp
nO
YES
The jog dial (ENT) needs to be pressed and held down (for 2 s) to change the assignment for this parameter.
• [Operating t. reset]
• [Product reset]
IF3, IF4, EEF, COF, bLF
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
The logic inputs are active in the high state.
-
[No] (nO): No
-
[rst. runtime] (rtH): Operating time reset to zero
The [Operating t. reset] (rPr) parameter automatically returns to [No] (nO) after resetting to 0.
-
[No] (nO): No
-
[Yes] (YES): Yes
[No] (nO)
[No] (nO)
[No] (nO)
91
Page 92

[COMMUNICATION] (COM-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
The parameters can only be modified when the drive is stopped and no run command is present. Modifications to the [Modbus Address]
(Add), [Modbus baud rate] (tbr), [Modbus format] (tFO), [CANopen address] (AdCO), and [CANopen bit rate] (bdCO) parameters are not
taken into account until the drive has been switched off and back on again.
On the optional ER23K remote display terminal, this menu can be accessed with the switch in the position.
Code Description Adjustment
range
Add
tbr
tFO
ttO
AdCO
4.8
9.6
19.2
8O1
8E1
8n1
8n2
• [Modbus Address]
Modbus address for the drive.
• [Modbus baud rate]
Modbus transmission speed
-
[4.8 Kbps] (4.8): 4,800 bits/second
-
[9.6 Kbps] (9.6): 9,600 bits/second
-
[19.2 Kbps] (19.2): 19,200 bits/second (Note: This is the only value which supports the use of the remote
display terminal.)
• [Modbus format]
-
[8-O-1] (8O1): 8 data bits, odd parity, 1 stop bit
-
[8-E-1] (8E1): 8 data bits, even parity, 1 stop bit (Note: This is the only value which supports the use of the
remote display terminal.)
-
[8-N-1] (8n2): 8 data bits, no parity, 1 stop bit
-
[8-N-2] (8n2): 8 data bits, no parity, 2 stop bits
• [Modbus time out]
• [CANopen address]
CANopen address for the drive.
1 to 247 1
0.1 to 10 s 10 s
0 to 127 0
Factory
setting
19,200 bps
[8-E-1] (8E1)
bdCO
10.0
20.0
50.0
125.0
250.0
500.0
1000
ErCO
0
1
2
3
4
92
• [CANopen bit rate]
Modbus transmission speed
-
[10 kbps] (10.0): 10 kbps
-
[20 kbps] (20.0): 20 kbps
-
[50 kbps] (50.0): 50 kbps
-
[125 kbps] (125.0): 125 kbps
-
[250 kbps] (250.0): 250 kbps
-
[500 kbps] (500.0): 500 kbps
-
[1 Mbps] (1000): 1000 kbps
• [Error code]
-
No error
-
Bus off
-
Life time
-
CAN overrun
-
Heartbeat
125 bps
-
Page 93

[COMMUNICATION] (COM-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Adjustment
range
FLO
nO
LI1
LI2
LI3
LI4
LI5
LI6
FLOC
*
AI1
AI2
AI3
AIU1
LCC
• [Forced local assign.]
-
[No] (nO): Not assigned
-
[LI1] (LI1): Logic input LI1
-
[LI2] (LI2): Logic input LI2
-
[LI3] (LI3): Logic input LI3
-
[LI4] (LI4): Logic input LI4
-
[LI5] (LI5): Logic input LI5
-
[LI6] (LI6): Logic input LI6
In forced local mode, the terminals and the display terminal regain control of the drive.
• [Forced local Ref.]
Parameter can only be accessed if [ACCESS LEVEL] (LAC) = [Level 3] (L3), page 56.
In forced local mode, only the speed reference is taken into account. PI functions, summing inputs, etc. are
not active.
See the diagrams on pages 53 to 55.
-
[AI1] (AI1): Analog input AI1, logic inputs LI
-
[AI2] (AI2): Analog input AI2, logic inputs LI
-
[AI3] (AI3): Analog input AI3, logic inputs LI
-
[Network AI] (AIV1): Jog dial, RUN/STOP buttons
-
[HMI] (HMI): Remote display terminal: [HMI Frequency ref.] (LFr) reference, page 31, RUN/STOP/FWD/
REV buttons
Factory
setting
[No] (nO)
[AI1] (AI1)
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
93
Page 94

[MONITORING] (SUP-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Submenu
LIA-
The parameters can be accessed with the drive running or stopped.
On the optional remote display terminal, this menu can be accessed with the switch in any position.
Some functions have numerous parameters. In order to clarify programming and avoid having to scroll through endless parameters, these
functions have been grouped in submenus.
Like menus, submenus are identified by a dash after their code: for example.
When the drive is running, the value displayed is that of one of the monitoring parameters. By default, the value displayed is the output
frequency applied to the motor ([Output frequency] (rFr) parameter).
While the value of the new monitoring parameter required is being displayed, press and hold down the jog dial (ENT) again (for 2 seconds)
to confirm the change of monitoring parameter and store it. From then on, it is the value of this parameter that will be displayed during
operation (even after powering down).
"Unless the new choice is confirmed by pressing and holding down ENT again, the display will revert to the previous parameter after
powering down.
Note: After the drive has been turned off or following a loss of line supply, the parameter displayed is the drive status ([Ready] (rdY), for
example).
The selected parameter is displayed following a run command.
94
Page 95

[MONITORING] (SUP-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Variation range
LFr
*
rPI
*
FrH
rFr
SPd1
or
SPd2
or
SPd3
LCr
• [HMI Frequency ref.]
Frequency reference for control via built-in display terminal or remote display terminal.
• [Internal PID ref.]
Internal PID reference
Parameter is only visible if [PID feedback ass.] (PIF) is not set to [No] (nO), page 77.
• [Frequency ref.]
Frequency reference before ramp (absolute value).
• [Output frequency]
This parameter is also used for the +/- speed function using the jog dial on the keypad or display terminal.
It displays and validates operation (see page 56). In the event of a loss of line supply, [Output frequency]
(rFr) is not stored and the +/- speed function must be re-enabled in [MONITORING] (SUP-) and [Output
frequency] (rFr).
0 to 500 Hz
0 to 100%
0 to 500 Hz
- 500 Hz to + 500 Hz
• [Cust. output value]
[Cust. output value] (SPd1), [Cust. output value] (SPd2) or [Cust. output value] (SPd3) depending on the
[Scale factor display] (SdS) parameter, page 38 ([Cust. output value] (SPd3) in the factory setting)
• [Motor current]
Estimation of current in the motor
Opr
ULn
tHr
tHd
These parameters only appear if the corresponding function has been selected in another menu. When the parameters can
also be accessed and set from within the configuration menu for the corresponding function, their description is detailed in
*
these menus, on the pages indicated, to aid programming.
• [Motor power]
100% = nominal motor power, calculated using the parameters entered in the [MOTOR CONTROL]
(drC-) menu
• [Mains voltage]
This parameter gives the line voltage via the DC bus, both in motor mode or when the motor is stopped.
• [Motor thermal state]
100% = nominal thermal state
118% = "OLF" threshold (drive overload)
• [Drv. Therm att.]
100% = nominal thermal state
118% = "OHF" threshold (drive overheating)
95
Page 96

[MONITORING] (SUP-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Variation range
LFt
bLF
CFF
CFI
CnF
COF
CrF
EEF
EPF
IF1
IF2
IF3
IF4
LFF
nOF
ObF
OCF
OHF
OLF
OPF
OSF
PHF
SCF
SLF
SOF
tnF
USF
• [Last fault occurred]
-
[Brake control] (bLF): Brake control detected fault
-
[Incorrect config.] (CFF): Incorrect configuration (parameters)
-
[Invalid config.] (CFI): Invalid configuration (parameters)
-
[NETWORK FAULT] (CnF): Communication detected fault on the communication card
-
[CANopen com.] (COF): Communication detected fault line 2 (CANopen)
-
[Capa.charg] (CrF): Capacitor precharge detected fault
-
[EEPROM] (EEF): EEPROM memory detected fault
-
[External] (EPF): External fault
-
[INTERNAL FAULT] (IF1): Unknown rating
-
[INTERNAL FAULT] (IF2): HMI card not recognized or incompatible/display absent
-
[INTERNAL FAULT] (IF3): EEPROM detected fault
-
[INTERNAL FAULT] (IF4): Industrial EEPROM detected fault
-
[4-20mA] (LFF): 4-20 mA loss
-
[No fault] (nOF): No fault code saved
-
[Overbraking] (ObF): DC bus overvoltage
-
[Overcurrent] (OCF): Overcurrent
-
[Drive overheat] (OHF): Drive overheating
-
[Motor overload] (OLF): Motor overload
-
[Mot. phase] (OPF): Motor phase loss
-
[Mains overvoltage] (OSF): Line supply overvoltage
-
[Mains phase loss] (PHF): Line phase loss
-
[Mot. short circuit] (SCF): Motor short-circuit (phase, ground)
-
[Modbus] (SLF): Modbus communication detected fault
-
[Overspeed] (SOF): Motor overspeed
-
[Auto-tuning] (tnF): Auto-tuning detected fault
-
[Undervoltage] (USF): Line supply undervoltage
Otr
rtH
• [Motor torque]
100% = nominal motor torque, calculated using the parameters entered in the [MOTOR CONTROL]
(drC-) menu.
• [Run time]
Total time the motor has been powered up: 0 to 9,999 (hours), then 10.00 to 65.53 (kilo-hours).
Can be reset to zero by the [Operating t. reset] (rPr) parameter in the [FAULT MANAGEMENT] (FLt-)
menu, page 91.
0 to 65,530 hours
96
Page 97

[MONITORING] (SUP-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
Code Description Variation range
COd
tUS
0FF
On
8888
tAb
PEnd
PrOG
FAIL
dOnE
Strd
• [PIN code 1]
Enables the drive configuration to be protected using an access code.
When access is locked by means of a code, only the parameters in the [MONITORING]
(SUP-) and [SPEED REFERENCE] (rEF-) menus can be accessed. The MODE button can be used to
switch between menus.
Note: Before entering a code, do not forget to make a careful note of it.
-
[OFF] (OFF): No access locking codes
• To lock access, enter a code (2 to 9,999). The display can be incremented using the jog dial. Then
press ENT. [ON] (On) appears on the screen to indicate that access has been locked.
-
[ON] (On): A code is locking access (2 to 9,999).
• To unlock access, enter the code (incrementing the display using the jog dial) and press ENT. The
code remains on the display and access is unlocked until the next time the drive is turned off. Access
will be locked again the next time the drive is turned on.
• If an incorrect code is entered, the display changes to [ON] (On), and access remains locked.
-
Access is unlocked (the code remains on the screen).
• To reactivate locking with the same code when access has been unlocked, return to [ON] (On)
using the jog dial and then press ENT. [ON] (On) remains on the screen to indicate that access has
been locked.
• To lock access with a new code when access has been unlocked, enter the new code (increment
the display using the jog dial) and then press ENT. On appears on the screen to indicate that access
has been locked.
• To clear locking when access has been unlocked, return to [OFF] (OFF) using the jog dial and then
press ENT. [OFF] (OFF) remains on the display. Access is unlocked and will remain so until the next
restart.
• [Auto tuning state]
-
[Not done] (tAb): The default stator resistance value is used to control the motor.
-
[Pending] (PEnd): Auto-tuning has been requested but not yet performed.
-
[In Progress] (PrOG): Auto-tuning in progress.
-
[Failed] (FAIL): Auto-tuning was unsuccessful.
-
[Done] (dOnE): The stator resistance measured by the auto-tuning function is used to control the motor.
-
[Entered R1] (Strd): The cold state stator resistance ([Cold stator resist.] (rSC) which is not set to [No]
(nO)) is used to control the motor.
UdP
O1Ct
CnF
nO
dnt
PbS
• [Drv.Soft.Ver]
This parameter gives the software version for the drive.
Example: 1102 = V1.1 IE02
• [OPT1 card type]
This parameter is only visible if an option card is present.
It is used to visualize the name of the option currently present.
No card, CANopen card or DaisyChain card (these cards are unable to send their names to the ER23K)
DeviceNet card
Profibus card
• [Network fault]
Option card fault code
This parameter is read-only and is only visible if an option card is present.
The fault code remains saved in the parameter, even if the cause disappears. The parameter is reset
after the drive is disconnected and then reconnected. The values of this parameter depend on the
network card. Consult the manual for the corresponding card.
97
Page 98

[MONITORING] (SUP-) menu
rEF-
SEt-
drC-
I-0-
CtL-
FUn-
FLt-
COM-
SUP-
State 1
State 0
LI1 LI2 LI3 LI4 LI5 LI6
Code Name/Description Adjustment
range
LIA-
LI1A
LI2A
LI3A
LI4A
LI5A
LI6A
LIS
AIA-
AI1A
AI2A
AI3A
•
[LOGIC INPUT CONF.]
Can be used to display the functions assigned to each input. If no functions have been assigned, [No] (nO)
is displayed. The jog dial can be used to scroll through all the functions. If a number of functions have been
assigned to the same input, check that they are compatible.
Can be used to display the state of logic inputs (display segment assignment: high = 1, low = 0)
Example above: LI1 and LI6 are at 1; LI2 to LI5 are at 0.
•
[ANALOG INPUTS IMAGE]
Can be used to display the functions assigned to each input. If no functions have been assigned, [No] (nO)
is displayed. The jog dial can be used to scroll through all the functions. If a number of functions have been
assigned to the same input, check that they are compatible.
Factory
setting
98
Page 99

Migration ER22K/P - ER23K
The ER23K is compatible with the ER22K.
To retrieve the configuration of the ER22K, simply transfer the configuration from the ER22K to the ER23K.
Dimensions
For all sizes, the ER23K is 6 mm less deep than the ER23P.
Replacing an ER22P with an ER23K
Note: Position of the logic input switch
On the ER22P, the logic input switch was set to "Sink" in the factory setting.
On the ER23K, it is set to "Source" in the factory setting.
Set the switch to match the setting on the product being replaced. For more information, see the "Control terminals" chapter in the
Installation Manual.
Note: Position of the IT jumper
There was no integrated EMC filter on the ER22P. For details on how to deactivate the integrated EMC filter on the ER23K, see the
"Operation with IT connection" chapter in the Installation Manual.
When the drive is powered up for the first time, the two parameters shown below appear after [Standard mot. freq] (bFr). They need to be
set as follows:
[Ref.1 channel] (Fr1), page 28, to [Network AI] (AIV1)
[2/3 wire control] (tCC), page 29, to [Local] (LOC)
The following parameters can be used subsequently to return to the other HMI version:
[Ref.1 channel] (Fr1) in the [COMMAND] (CtL-) menu
[2/3 wire control] (tCC) in the [INPUTS / OUTPUTS CFG] (I-O-) menu
Factory settings
As well as the differences in terms of control by potentiometer, the following differences apply between the factory settings for the ER22P
and those of the ER23K:
Parameter ER23P ER23K
[2/3 wire control] (tCC) Local control LOC [2 wire] (2C)
[Ref.1 channel] (Fr1) Analog input AIP AI1
[Cmd channel 1]
[Reverse assign.] (rrS) [No] (nO) (if [2/3 wire control] (tCC) = [Local] (LOC)) LI2
[Forced local Ref.] (FLOC) AIP jog dial AIU1
[Select ER22 conf.] (ArE) Parameter does not exist on the ER23K [No] (nO)
(Cd1) Local control LOC tEr
Configuration transfer between an ER22K/P and an ER23K (using the ER23K remote
terminal or a loader tool)
A new [Select ER23K conf.] (ArE) parameter has been added to the [APPLICATION FUNCT.] (FUn-) menu.
It can be used to specify the ER23K type (ER22K/G or ER22P) during transfers between an ER22K and ER23K.
Values of the [Select ER22K conf.] (ArE) parameter:
• [No] (nO), factory setting, transfer between two ER23K
• [ER22K/P] (31A), transfer from ER22P to ER23K
• [ER22K std] (31E), transfer from ER22K to ER23K
To perform a configuration transfer, see the procedure on page 85.
99
Page 100

Diagnostics and troubleshooting
Drive does not start, no code displayed
• If the display does not light up, check the power supply to the drive and check the wiring of inputs AI1 and AI2 and the connection to
the RJ45 connector.
• The assignment of the "Fast stop" or "Freewheel stop" functions will prevent the drive from starting if the corresponding logic inputs
are not powered up. The ER23K then displays [Freewheel stop] (nSt) or [Fast stop] (FSt). This is normal since these functions are
active at zero so that the drive will be stopped if there is a wire break.
• Check that the run command input(s) have been actuated in accordance with the chosen control mode (the [2/3 wire control] (tCC)
parameter in the [INPUTS / OUTPUTS CFG] (I-O-) menu, page 45).
• If an input is assigned to the limit switch function and this input is at zero, the drive can only be started up by sending a command for
the opposite direction (see page 84).
• If the reference channel (page 51) or the control channel (page 52) is assigned to a communication network, when the power supply
is connected, the drive will display [Freewheel stop] (nSt) and remain in stop mode until the communication bus sends a command.
• If the LED on the DC bus is lit and nothing appears on the display, check that there is no short-circuit on the 10 V power supply.
• If the drive displays [Ready] (rdy) and refuses to start, check that there is no short-circuit on the 10 V power supply and check the
wiring of inputs AI1 and AI2 and the connection to the RJ45 connector.
• In the factory setting, the "RUN" button is inactive. Set the [Ref.1 channel] (Fr1) parameter, page 28 , and the [Cmd channel 1] (Cd1)
parameter, page 57, to control the drive locally.
Fault detection codes which require a power reset after the fault is cleared
The cause of the fault must be removed before resetting by cycling power to the drive.
[PRECHARGE FAULT] (CrF), [OVERSPEED] (SOF), [AUTO-TUNING FAULT] (tnF), and [BRAKE CONTROL FAULT] (bLF) can also be
reset remotely using a logic input (the [Fault reset] (rSF) parameter in the [FAULT MANAGEMENT] (FLt-) menu, page 87).
Code Name Probable cause Remedy
bLF [BRAKE CONTROL
FAULT]
[PRECHARGE
CrF
FAULT]
EEF
[EEPROM FAULT] • Internal memory • Check the environment (electromagnetic
[INTERNAL
IF1
FAULT]
[INTERNAL
IF2
FAULT]
[INTERNAL
IF3
FAULT]
[INTERNAL
IF4
FAULT]
• Brake release current not reached
• Brake engage frequency threshold
[Brake engage freq] (bEn) = [No]
(nO) (not set) whereas the brake
control [Brake assignment] (bLC) is
assigned
• Precharge relay control or damaged
precharge resistor
• Unknown rating • Replace the drive.
• HMI card not recognized
• HMI card incompatible
• No display present
• EEPROM
• Industrial EEPROM
• Check the drive/motor connection.
• Check the motor windings.
• Check the [Brake release I FW] (Ibr) setting in the
[APPLICATION FUNCT.] (FUn-) menu, page 80.
• Apply the recommended settings for [Brake engage
freq] (bEn), pages 79 and 80.
• Replace the drive.
compatibility)
• Replace the drive.
• Restart the drive.
• Contact a BLEMO representative.
100
 Loading...
Loading...