

Page 1

MDL Series Programmable DC Electronic
Load
Models: MDL001, MDL002, MDL200, MDL252,
MDL305, MDL400, MDL505, MDL600
PROGRAMMING MANUAL
Page 2

Safety Summary
The following general safety precautions must be observed during all phases of operation of this
instrument. Failure to comply with these precautions or with specific warnings elsewhere in this
manual violates safety standards of design, manufacture, and intended use of the instrument. We
assume no liability for the customer’s failure to comply with these requirements.
ENVIRONMENTAL CONDITIONS
This instrument is intended for indoor use, pollution degree 2 environments. It is designed to operate
at a maximum relative humidity of 95% and at altitudes of up to 2000 meters. Refer to the
specifications tables for the AC mains voltage requirements and ambient operating temperature range.
BEFORE APPLYING POWER
Verify that all safety precautions are taken. Note the instrument's external markings described under
"Safety Symbols".
GROUND THE INSTRUMENT
This product is a Safety Class 1 instrument (provided with a protective earth terminal). To minimize
shock hazard, the instrument chassis and cover must be connected to an electrical ground. The
instrument must be connected to the AC mains power through a grounded power cable, with the
ground wire firmly connected to an electrical ground (safety ground) at the power outlet. Note: Any
interruption of the protective (grounding) conductor or disconnection of the protective earth terminal
will cause a potential shock hazard that could result in personal injury.
DO NOT OPERATE IN AN EXPLOSIVE ATMOSPHERE
Do not operate the instrument in the presence of fumes or flammable gases.
KEEP AWAY FROM LIVE CIRCUITS
Operating personnel must not remove instrument covers except as instructed in this guide for
installing or removing electronic load modules. Component replacement and internal adjustments
must be made only by qualified service personnel. Do not replace components with power cable
connected. Under certain conditions dangerous voltages may exist even with the power cable
removed. To avoid injuries, always disconnect power, discharge circuits, and remove external voltage
sources before touching components.
DO NOT SERVICE OR ADJUST ALONE
Do not try to do some internal service or adjustment unless another person capable of rendering first
aid resuscitation is present.
Page 3

Direct current
Safety Symbols
Alternating current
Both direct and alternating current
Protective earth (ground) terminal
Attention (refer to accompanying documents)
WARNING
The WARNING sign denotes a hazard. It calls attention to a procedure, practice, or the like, which,
if not correctly performed or adhered to, could result in personal injury. Do not proceed beyond a
WARNING sign until the indicated conditions are fully understood and met.
CAUTION
The CAUTION sign denotes a hazard. It calls attention to an operating procedure, or the like, which,
if not correctly performed or adhered to, could result in damage to or destruction of part or all of
the product. Do not proceed beyond a CAUTION sign until the indicated conditions are fully
understood and met.
Page 4

Compliance Statements
Disposal of Old Electrical & Electronic Equipment (Applicable in the European Union and other
European countries with separate collection systems)
This product is subject to Directive 2002/96/EC of the European Parliament and the Council of the
European Union on waste electrical and electronic equipment (WEEE), and in jurisdictions adopting
that Directive, is marked as being put on the market after August 13, 2005, and should not be disposed
of as unsorted municipal waste. Please utilize your local WEEE collection facilities in the disposition of
this product and otherwise observe all applicable requirements.
CE Declaration of Conformity
The DC electronic load meets the requirements of Low Voltage Directive 73/23/EEC and
Electromagnetic Compatibility Directive 89/336/EEC amended by 93/68/EEC.
Low Voltage Directive
- EN61010-1: 2001
EMC Directive
- EN50081-1
- EN50082-1
Page 5
Table of Contents
Safety Summary ......................................................................................... 2
Compliance Statements.............................................................................. 4
Chapter 1 ................................................................................................... 6
Introduction to Programming ..................................................................... 6
1.1 GPIB Capabilities of the Electronic Load ........................................................................................ 6
1.2 RS-232 Capabilities of the Electronic Load ..................................................................................... 7
1.3 USB-TMC Capabilities of the Electronic Load ................................................................................ 9
1.4 Programming the Status Registers .................................................................................................. 10
Chapter 2 ................................................................................................. 18
Introduction to SCPI ................................................................................. 18
2.1 Types of SCPI Commands .............................................................................................................. 18
2.2 Types of SCPI Messages ................................................................................................................ 21
2.3 SCPI Data Formats ......................................................................................................................... 23
2.4 SCPI Command Completion........................................................................................................... 25
Chapter 3 ................................................................................................. 27
SCPI Commands ....................................................................................... 27
3.1 Language Dictionary ....................................................................................................................... 27
3.2 Common Commands ...................................................................................................................... 28
3.3 Subsystem Commands .................................................................................................................... 35
Channel Commands .......................................................................................................................... 36
Trigger Commands ........................................................................................................................... 37
System Commands............................................................................................................................ 38
Trace Commands .............................................................................................................................. 45
Source Commands ............................................................................................................................ 48
List Commands ................................................................................................................................. 68
Measurement Commands.................................................................................................................. 71
Program Commands.......................................................................................................................... 74
Other Commands .............................................................................................................................. 79
3.4 SCPI Command Tree ...................................................................................................................... 80
Chapter 4 ................................................................................................. 88
Programming Examples ............................................................................ 88
4.1 Introduction ..................................................................................................................................... 88
4.2 Programming the Input ................................................................................................................... 89
4.3 Programming Lists .......................................................................................................................... 92
Chapter 5 ................................................................................................. 93
Error Messages ........................................................................................ 93
Page 6

Interface
Function
request condition.
In local mode, the electronic load is controlled from the front panel but
Group Execute
Trigger
Chapter 1
Introduction to Programming
This guide contains programming information for the B&K Precision MDL Series DC Electronic Load.
Models in this series include the MDL001, MDL002, MDL200, MDL252, MDL305, MDL400, MDL505,
and MDL600. Unless otherwise noted, this document will refer to all of these instruments as
“electronic load”.
1.1 GPIB Capabilities of the Electronic Load
All electronic load functions except for setting the communication parameters are programmable over
the GPIB. The IEEE 488.2 capabilities of the electronic load are described in the table below.
GPIB Capabilities
All electronic load functions except for setting the communication
Talker/Listener
Service Request
Remote/Local
Device Trigger The electronic load will respond to the device trigger function. DT1
parameters are programmable over the GPIB. The electronic load can
send and receive messages over the GPIB. Status information is sent
using a serial poll.
The electronic load sets the SRQ line true if there is an enabled service
will also execute commands sent over the GPIB. The electronic load
powers up in local mode and remains in local mode until it receives a
command over the GPIB. Once the electronic load is in remote mode,
the front panel REM annunciator turns on, all front panel keys (except
Shift + Local) are disabled, and the display is in normal metering mode.
Pressing Shift + Local on the front panel returns the electronic load to
local mode. This can be disabled using local lockout so that only the
controller or the power switch can return the electronic load to local
mode.
Response
AH1, SH1,
T6, L4
SR1
RL1
The electronic load will respond to the group execute trigger function.
GET
6
Page 7

The electronic load responds to the Device Clear (DCL) and
Selected Device Clear (SDC) interface commands. They cause the
Device Clear
GPIB Address
The electronic load operates from a GPIB address that is set from the front panel. To set the GPIB
address, press Shift + ⑦ (System menu) on the front panel and enter the address using the Entry keys.
The address can be set from 0 to 30. The GPIB address is stored in non-volatile memory.
electronic load to clear any activity that would prevent it from
receiving and executing a new command (including *WAI and
*OPC?). DCL and SDC do not change any programmed settings.
DCL,SDC
1.2 RS-232 Capabilities of the Electronic Load
Use a cable with two serial interfaces (DB9) to connect the electronic load and PC. It can be activated
by selecting <RS-232> in <Communication> of the System menu (Shift + ⑦ on the front panel). NOTE:
There are two serial interfaces on the rear panel of the MDL001: the left 9-pin COM interface is the RS232 communication interface and the right 9-pin COM serial port connection is not for use. All SCPI
commands are available through RS-232 programming. The EIA RS-232 standard defines the
interconnections between data terminal equipment (DTE) and data communications equipment (DCE).
The electronic load is designed to be a DTE and can be connected to another DTE such as a PC COM
port through a null modem cable.
NOTE: The RS-232 settings in your program must match the settings specified in the front panel System
menu. Press Shift + ⑦ on the front panel to enter the System menu if you need to change the
settings. You can break data transmissions by sending a ^C or ^X character string to the electronic load.
This clears any pending operation and discards any pending output.
RS-232 Data Format
The RS-232 data is a 10-bit word with one start bit and one stop bit.
The number of start and stop bits are not programmable. However, the following parameters are
selectable in the System menu using the front panel Shift + ⑦ key.
Parity=None Start Bit 8 Data Bits Stop Bit
7
Page 8

Baud Rate
The System menu (Shift + ⑦) lets you select one of the following baud rates, which are stored in nonvolatile memory: 4800, 9600, 19200, 38400, 57600, or 115200.
Parity
None - eight data bits without parity
Even - seven data bits with even parity
Odd - seven data bits with odd parity
RS-232 Flow Control
The RS-232 interface supports the following flow control options. For each case, the electronic load will
send a maximum of five characters after hold-off is asserted by the controller. The electronic load is
capable of receiving as many as fifteen additional characters after it asserts hold-off.
• The electronic load asserts its Request to Send (RTS) line to signal hold-off when its input buffer
is almost full, and it interprets its Clear to Send (CTS) line as a hold-off signal from the
controller.
• When the input queue of the electronic load becomes more than ¾ full, the instrument issues
an X-OFF command. The control program should respond to this and stop sending characters
until the electronic load issues the X-ON, which it will do once its input buffer has dropped
below half-full. The electronic load recognizes X_ON and X_OFF sent from the controller. An XOFF will cause the electronic load to stop outputting characters until it sees an X-ON.
• NONE: There is no flow control.
Flow control options are stored in non-volatile memory.
RS-232 Connections
The RS-232 serial port can be connected to the serial port of a controller (i.e., personal computer) using
a null modem RS-232 cable terminated with DB-9 connectors. Figure 1 shows the pinout for the
connector.
If your computer uses a DB-25 connector for the RS-232 interface, you will need a cable or adapter
with a DB-25 connector on one end and a DB-9 connector on the other. It must be a straight-through
(not null modem) cable.
Figure 1 - RS-232 Connector Pinout
8
Page 9

Pin Signal Description
1
NC
No Connection
2
TXD
Transmit Data
3
RXD
Receive Data
4
NC
No Connection
5
GND
Ground
6
NC
No Connection
7
CTS
Clear to Send
8
RTS
Ready to Send
9
NC
No Connection
RS-232 Troubleshooting
If you are having trouble communicating over the RS-232 interface, check the following:
• The computer and the electronic load must be configured for the same baud rate, parity,
number of data bits, and flow control options. Note that the electronic load is configured for 1
start bit and 1 stop bit (these values are fixed).
• The correct interface cables or adapters must be used, as described under the RS-232
connector. Note that even if the cable has the proper connectors for your system, the internal
wiring may be incorrect.
• The interface cable must be connected to the correct serial port on your computer (COM1,
COM2, etc.) and the correct 9-pin serial port on the mainframe.
1.3 USB-TMC Capabilities of the Electronic Load
All electronic load functions are programmable over the USB.
The USB488 interface capabilities of the electronic load are described below:
• The interface is IEEE 488.2 standard USB488 interface.
• The interface accepts REN_CONTROL, GO_TO_LOCAL, and LOCAL_LOCKOUT requests.
• The interface accepts MsgID = TRIGGER USBTMC command message and forwards TRIGGER
requests to the function layer.
The USB488 device capabilities of the electronic load are described below:
• The device understands all mandatory SCPI commands.
• The device is SR1 capable.
• The device is RL1 capable.
• The device is DT1 capable.
9
Page 10

1.4 Programming the Status Registers
You can use status register programming to determine the operating condition of the electronic load at
any time. For example, you may program the electronic load to generate an interrupt (assert SRQ)
when an event such as a current protection occurs. When the interrupt occurs, your program can then
act on the event in the appropriate fashion.
The following table defines the status bits. Figure shows the status register structure of the electronic
load. The Standard Event, Status Byte, and Service Request Enable registers and the Output Queue
perform standard GPIB functions as defined in the IEEE 488.2 Standard Digital Interface for
Programmable Instrumentation. The Operation Status and Questionable Status registers implement
functions that are specific to the electronic load.
Bit Configurations of Status Registers
Operation Status Group
Bit Signal Meaning
0 CAL Calibrating. The electronic load is computing new calibration constants.
5 TRG Waiting. The electronic load is waiting for a trigger.
Channel Status Group
Bit Signal Meaning
Voltage Fault. Either an overvoltage or a reverse voltage has occurred. This bit
0 VF
1 OC
2 RS Remote Sense. When the remote sense is connected, this bit is set.
reflects the active state of the FLT pin on the back of the unit. The bit remains
set until the condition is removed and INP:PROT:CLE is programmed.
Overcurrent. An overcurrent condition has occurred. This occurs if the current
exceeds 102% of the rated current or if it exceeds the user-programmed
current protection level. Removing the overcurrent condition clears the bit. If
the condition persists beyond the user programmable delay time, PS bit is also
set and the input is turned off. Both bits remain set until the condition is
removed and INP:PROT:CLE is programmed.
10
Page 11

Overpower. An overpower condition has occurred. This occurs if the unit
and PS bit are set and the input is turned off. Both bits remain set until the unit
ense terminals. Both this bit and VF bit are set. Removing the reverse voltage
it remains set until INP:PROT:CLE is
An overvoltage condition has occurred. Both this bit and VF bit 0
an overcurrent, overpower, or overtemperature condition. The bit remains set
exceeds the max power or it exceeds the user-programmed power protection
3 OP
4 OT
7 RUN List run or stop status. When list is running, this bit is set.
8 EPU Extended Power Unavailable. This bit is not used.
9 RRV
level. Removing the overpower condition clears the bit. If the condition
persists beyond the user programmable delay time, PS bit is also set and the
input is turned off. Both bits remain set until the condition is removed and
INP:PROT:CLE is programmed.
Overtemperature. An overtemperature condition has occurred. Both this bit
is cooled down and INP:PROT:CLE is programmed.
Remote Reverse Voltage. A reverse voltage condition has occurred on the
s
clears this bit but does not clear VF bit. VF b
programmed.
10 UNR
11 LRV
12 OV
13 PS
14 VON
Unregulated. The input is unregulated. When the input is regulated this bit is
cleared.
Local Reverse Voltage. A reverse voltage condition has occurred on the input
terminals. Both this bit and VF bit are set. Removing the reverse voltage clears
this bit but does not clear PS bit. PS bit remains set until INP:PROT:CLE is
programmed.
Overvoltage.
are set and the electronic loads are turned off. Both bits remain set until the
condition is removed and INP:PROT:CLE is programmed.
Protection Shutdown. The protection shutdown circuit has tripped because of
until INP:PROT:CLE is programmed.
Voltage of sink current on. When the voltage of input exceeds the userprogrammed Von level, this bit is set.
15 TBF Trace Buffer Full.
11
Page 12
Operation Complete. The load has completed all pending operations. *OPC
complete.
The output queue was read with no data present or the data was
Command Error. A syntax or semantic error has occurred or the load received
a <get> within a program message. Errors in the range of 199 through 100 can
set this bit.
Bit Signal Meaning
Questionable Status Group
Same as Channel Status Group
Standard Event Status Group
0 OPC
2 QYE
3 DDE
4 EXE
5 CME
7 PON
Bit Signal Meaning
must be programmed for this bit to be set when pending operations are
Query Error.
lost. Errors in the range of 499 through 400 can set this bit.
Device-Dependent Error. Memory was lost or self-test failed. Errors in the
range of 399 through 300 can set this bit.
Execution Error. A command parameter was outside its legal range,
inconsistent with the load's operation, or prevented from executing because
of an operating condition. Errors in the range of 299 through 200 can set this
bit.
Power-On. The unit has been turned off and then on since this bit was last
read.
Status Byte and Service Request Enable Registers
0 CSUM Channel Summary. Indicates if an enabled channel event has occurred.
2 EAV Error Available Summary. Indicates if the Error Queue contains data.
3 QUES
4 MAV Message Available Summary. Indicates if the Output Queue contains data.
5 ESB Event Status Summary. Indicates if an enabled standard event has occurred.
6 RQS/MSS
7 OPER Operation Status Summary. Indicates if an operation event has occurred.
Questionable Status Summary. Indicates if an enabled questionable event has
occurred.
Request Service. During a serial poll, RQS is returned and cleared.
Master Status Summary. For an *STB? query, MSS is returned without being
cleared.
12
Page 13
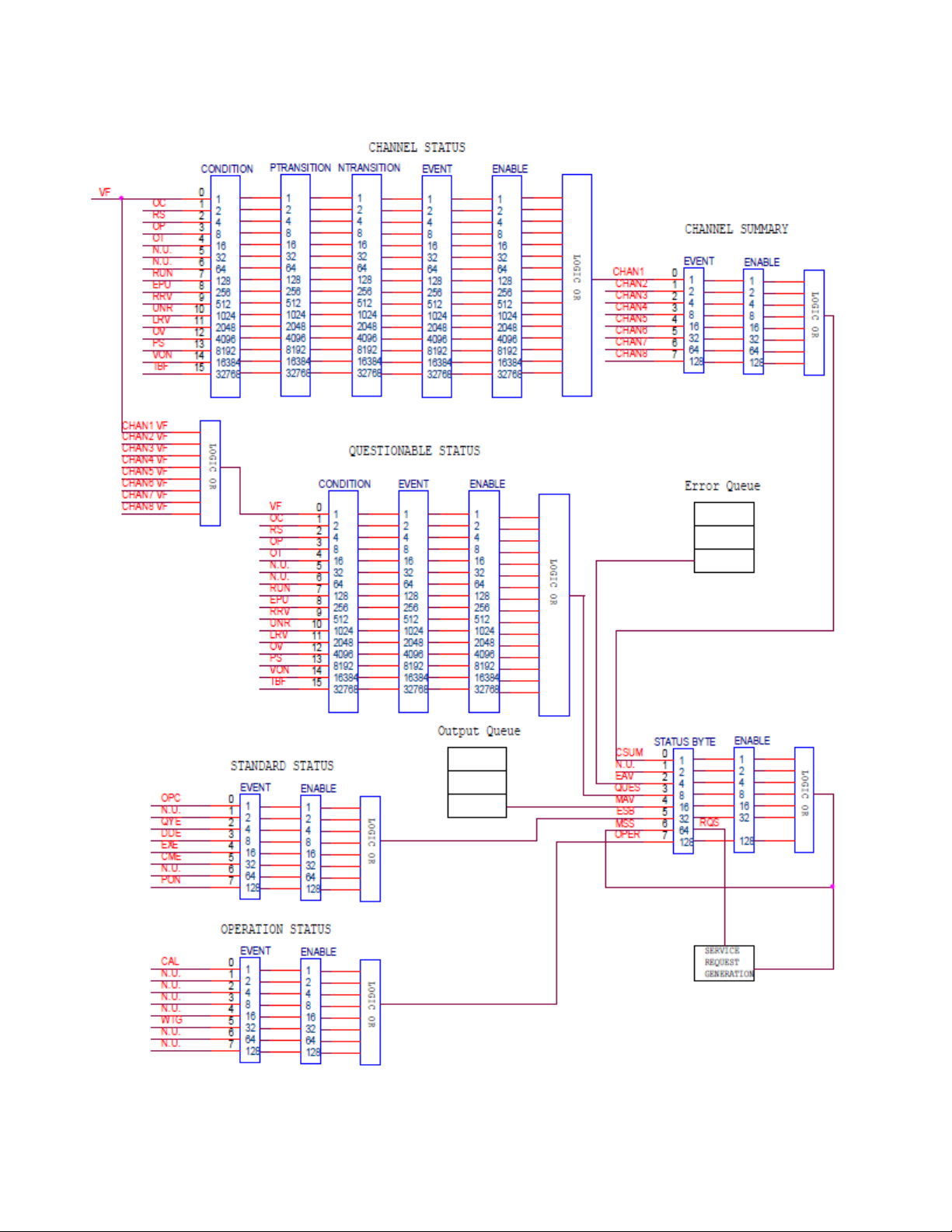
Figure 2 - Load Status Register Structure
13
Page 14

Condition registers
All status register sets have a condition register. A condition register is a real-time, read-only register
that constantly updates to reflect the current operating conditions of the instrument.
Use the :CONDition? query commands in the STATus Subsystem to read the condition registers. See
Chapter 3 for more information.
Event registers
Each status register set has an event register. An event register is a latched, read-only register whose
bits are set by the corresponding condition register. Once a bit in an event register is set, it remains set
(latched) until the register is cleared by a specific clearing operation. The bits of an event register are
logically ANDed with the bits of the corresponding enable register and applied to an OR gate. The
output of the OR gate is applied to the Status Byte Register.
Use the *ESR? Common Command to read the Standard Event Register. All other event registers are
read using the :EVENt? query commands in the STATus Subsystem. See Chapter 3 for more
information.
An event register is cleared when it is read. The following operations clear all event registers:
• Cycling power
• Sending *CLS
Enable registers
Each status register set has an enable register. An enable register is programmed by you and serves as
a mask for the corresponding event register. An event bit is masked when the corresponding bit in the
enable register is cleared (0). When masked, a set bit in an event register cannot set a bit in the Status
Byte Register (1 AND 0 = 0). To use the Status Byte Register to detect events (i.e., serial poll), you must
unmask the events by setting (1) the appropriate bits of the enable registers. To program and query
*
the Standard Event Status Register, use the
ESE and *ESE? Common Commands respectively. All other
enable registers are programmed and queried using the :ENABle and :ENABLe? commands in the
STATus Subsystem. See Chapter 3 for more information.
An enable register is not cleared when it is read. The following operations affect the enable registers:
• Cycling power clears all enable registers
• :STATus:PREset clears the following enable registers:
o Operation Event Enable Register
o Questionable Event Enable Register
o Channel Summary Event Enable Register
• *ESE 0 clears the Standard Event Status Enable Register.
Output queue
The output queue holds data that pertains to the normal operation of the instrument. For example,
when a query command is sent, the response message is placed on the output queue.
14
Page 15

When data is placed in the output queue, the Message Available (MAV) bit in the Status Byte Register
gets set. A data message is cleared from the output queue when it is read. The output queue is
considered cleared when it is empty. An empty output queue clears the MAV bit in the Status Byte
Register.
Error queue
The error queue holds error and status messages. When an error or status event occurs, a message
that defines the error/status is placed in the error queue. This queue will hold up to 10 messages.
When a message is placed in the error queue, the Error Available (EAV) bit in the Status Byte Register is
set. An error message is cleared from the Error/Status queue when it is read. The error queue is
considered cleared when it is empty. An empty error queue clears the EAV bit in the Status Byte
Register. Read an error message from the error queue by sending the following SCPI query command:
:SYSTem:ERRor?
Status Byte and Service Request (SRQ)
Service request is controlled by two 8-bit registers: the Status Byte Register and the Service Request
Enable Register.
Status Byte Register
The summary messages from the status registers and queues are used to set or clear the appropriate
bits (B0, B2, B3, B4, B5, and B7) of the Status Byte Register. These bits do not latch, and their states (0
or 1) are solely dependent on the summary messages (0 or 1). For example, if the Standard Event
Status Register is read, its register will clear. As a result, its summary message will reset to 0, which in
turn will clear the ESB bit in the Status Byte Register.
Bit B6 in the Status Byte Register is either:
• The Master Summary Status (MSS) bit, sent in response to the *STB? Command, indicates the
status of any set bits with corresponding enable bits set.
• The Request for Service (RQS) bit, sent in response to a serial poll, indicates which device was
requesting service by pulling on the SRQ line.
For a description of the other bits in the Status Byte Register, see “Common commands, *STB?” The
IEEE-488.2 standard uses the following common query command to read the Status Byte Register:
*STB?
When reading the Status Byte Register using the *STB? command, bit B6 is called the MSS bit. None of
the bits in the Status Byte Register are cleared when using the *STB? command to read it.
The IEEE-488.1 standard has a serial poll sequence that also reads the Status Byte Register and is better
suited to detect a service request (SRQ). When using the serial poll, bit B6 is called the RQS bit. Serial
15
Page 16

polling causes bit B6 (RQS) to reset. Serial polling is discussed in more detail later in this section
entitled “Serial Poll and SRQ.” Any of the following operations clear all bits of the Status Byte Register:
• Cycling power
• Sending the *CLS common command
Note: The MAV bit may or may not be cleared.
Service request enable register
This register is programmed by you and serves as a mask for the Status Summary Message bits (B0, B2,
B3, B4, B5, and B7) of the Status Byte Register. When masked, a set summary bit in the Status Byte
Register cannot set bit B6 (MSS/RQS) of the Status Byte Register. Conversely, when unmasked, a set
summary bit in the Status Byte Register sets bit B6.
A Status Summary Message bit in the Status Byte Register is masked when the corresponding bit in the
Service Request Enable Register is cleared (0). When the masked summary bit in the Status Byte
Register sets, it is ANDed with the corresponding cleared bit in the Service Request Enable Register.
The logic “1” output of the AND gate is applied to the input of the OR gate and, thus, sets the MSS/RQS
bit in the Status Byte Register. The individual bits of the Service Request Enable Register can be set or
cleared by using the following common command:
*SRE <NRf>
To read the Service Request Enable Register, use the *SRE? query command. The Service Request
Enable Register clears when power is cycled or a parameter (n) value of zero is sent with the *SRE
command (*SRE 0).
Serial poll and SRQ
Any enabled event summary bit that goes from 0 to 1 will set RQS and generate a service request
(SRQ). In your test program, you can periodically read the Status Byte Register to check if a service
request (SRQ) has occurred and what caused it. If an SRQ occurs, the program can, for example, branch
to an appropriate subroutine that will service the request. Typically, service requests (SRQs) are
managed by the serial poll sequence of the electronic load. If an SRQ does not occur, bit B6 (RQS) of
the Status Byte Register will remain cleared and the program will simply proceed normally after the
serial poll is performed. If an SRQ does occur, bit B6 of the Status Byte Register will set and the
program can branch to a service subroutine when the SRQ is detected by the serial poll. The serial poll
automatically resets RQS of the Status Byte Register. This allows subsequent serial polls to monitor bit
B6 for an SRQ occurrence generated by other event types. After a serial poll, the same event can cause
another SRQ, even if the event register that caused the first SRQ has not been cleared.
A serial poll clears RQS but does not clear MSS. The MSS bit stays set until all Status Byte event
summary bits are cleared.
16
Page 17

Trigger model operation
Once the instrument is taken out of idle, operation proceeds through the trigger model down to the
device action.
Control Source — As shown in Figure 3, a control source is used to hold up operation until the
programmed event occurs. The control source options are explained as follows:
• HOLD — Only the TRIG:IMM command will generate a trigger in HOLD mode. All other trigger
commands are ignored.
• MANual — Event detection is satisfied by pressing the TRIG key.
• TIMer — This generates triggers that are in synchronization with the electronic load's internal
oscillator as the trigger source. The internal oscillator begins running as soon as this command
is executed. Use TRIG:TIM to program the oscillator period.
• EXTernal — Event detection is satisfied when an input trigger via the TRIGGER LINK connector is
received by the electronic load.
• BUS — Event detection is satisfied when a bus trigger (GET or *TRG) is received by the
electronic load.
Delay — A programmable delay is available after the event detection. The delay can be manually set
from 0 to 999999.999 seconds.
17
Page 18

Chapter 2
Introduction to SCPI
SCPI (Standard Commands for Programmable Instruments) is a programming language for controlling
instrument functions over GPIB, RS-232, USB, and Ethernet interface. SCPI is layered on top of the
hardware portion of IEEE 488.2. The same SCPI commands and parameters control the same functions
in different classes of instruments.
Conventions Used in This Guide
Angle brackets < > Items within angle brackets are parameter abbreviations. For example,
<NR1> indicates a specific form of numerical data.
Vertical bar | Vertical bars separate alternative parameters. For example, NORM | TEXT
indicates that either "NORM" or "TEXT" can be used as a parameter.
Square Brackets [ ] Items within square brackets are optional. The representation [SOURce:]
VOLTage means that SOURce: may be omitted.
Braces { } Braces indicate parameters that may be repeated zero or more times. It is
used especially for showing arrays. The notation <A>{<,B>} shows that
parameter "A" must be entered, while parameter "B" may be omitted or may
be entered one or more times.
2.1 Types of SCPI Commands
SCPI has two types of commands, common and subsystem.
Common:
Common commands generally are not related to specific operation but to controlling overall
electronic load functions, such as reset, status, and synchronization. All common commands
consist of a three-letter mnemonic preceded by an asterisk (ex:*RST, *IDN?, *SRE 8).
Subsystem:
Subsystem commands perform specific electronic load functions. They are organized into an
inverted tree structure with the "root" at the top. The following figure shows a portion of a
subsystem command tree, from which you access the commands located along the various paths.
18
Page 19

Figure 4 - Partial Command Tree
Multiple Commands in a Message
Multiple SCPI commands can be combined and sent as a single message with one message terminator.
There are two important considerations when sending several commands within a single message:
• Use a semicolon to separate commands within a message.
• There is an implied header path that affects how commands are interpreted by the
electronic load.
The header path can be thought of as a string that gets inserted before each command within a
message. For the first command in a message, the header path is a null string. For each subsequent
command the header path is defined as the characters that make up the headers of the previous
command in the message up to and including the last colon separator. An example of a message with
two commands is:
CURR:LEV 3;PROT:STAT OFF
which shows the use of the semicolon separating the two commands, and also illustrates the header
path concept. Note that with the second command, the leading header "CURR" was omitted because
after the "CURR:LEV 3" command, the header path became defined as "CURR" and thus the instrument
interpreted the second command as:
CURR:PROT:STAT OFF
In fact, it would have been syntactically incorrect to include the "CURR" explicitly in the second
command, since the result after combining it with the header path would be:
CURR:CURR:PROT:STAT OFF
which is incorrect.
19
Page 20

Moving Among Subsystems
In order to combine commands from different subsystems, you need to be able to reset the header
path to a null string within a message. You do this by beginning the command with a colon (:), which
discards any previous header path. For example, you could clear the output protection and check the
status of the Operation Condition register in one message by using a root specifier as follows:
PROTection:CLEAr; :STATus:OPERation:CONDition?
The following message shows how to combine commands from different subsystems as well as within
the same subsystem:
POWer:LEVel 200; PROTection 28; : CURRent: LEVel 3; PROTection:STATe ON
Observe the use of the optional header LEVel to maintain the correct path within the voltage and
current subsystems, and the use of the root specifier to move between subsystems.
Including Common Commands
You can combine common commands with subsystem commands in the same message. Treat the
common command as a message unit by separating it with a semicolon (the message unit separator).
Common commands do not affect the header path; you may insert them anywhere in the message.
VOLTage 17.5;*TRG
OUTPut OFF;*RCL 2;OUTPut ON
Case Sensitivity
Common commands and SCPI commands are not case sensitive. You can use upper or lower case and
any case combination.
Example:
*RST = *rst
:DATA? = :data?
:SYSTem:PRESet = :system:preset
Long-form and Short-form Versions
A SCPI command word can be sent in its long-form or short-form version. The command subsystem
tables in Chapter 3 provide the long-form version. However, the short-form version is indicated by
upper case characters.
Example:
:SYSTem:PRESet (long-form)
:SYST:PRES (short form)
:SYSTem:PRES (long-form and short-form combination)
20
Page 21

Note: Each command word must be in long-form or short-form, and not something in between. For
example, :SYSTe:PRESe is illegal and will generate an error. The command will not be executed.
Using Queries
Observe the following precautions with queries:
• Set up the proper number of variables for the returned data. For example, if you are reading
back a measurement array, you must dimension the array according to the number of
measurements that you have placed in the measurement buffer.
• Read back all the results of a query before sending another command to the electronic load.
Otherwise a Query Interrupted error will occur and the unreturned data will be lost.
2.2 Types of SCPI Messages
There are two types of SCPI messages, program and response.
1) A program message consists of one or more properly formatted SCPI commands sent from
the controller to the electronic load. The message, which may be sent at any time, requests
the electronic load to perform some action.
2) A response message consists of data in a specific SCPI format sent from the electronic load
to the controller. The electronic load sends the message only when commanded by a
program message called a "query."
The following figure illustrates SCPI message structure:
Figure 5 - SCPI Message Structure
21
Page 22

Message Unit
The simplest SCPI command is a single message unit consisting of a command header (or keyword)
followed by a message terminator. The message unit may include a parameter after the header. The
parameter can be numeric or a string.
VOLTage 20<NL>
Headers
Headers, also referred to as keywords, are instructions recognized by the electronic load. Headers may
be either in the long-form or the short-form. In the long-form, the header is completely spelled out,
such as VOLTAGE, STATUS, and DELAY. In the short form, the header has only the first three or four
letters, such as VOLT, STAT, and DEL.
Query Indicator
Following a header with a question mark turns it into a query.
VOLTage?, CURRent:PROTection?
If a query contains a parameter, place the query indicator at the end of the last header.
CURRent:PROTection? MAX
Message Unit Separator
When two or more message units are combined into a compound message, separate the units with a
semicolon.
STATus:OPERation?;QUEStionable?
Root Specifier
When it precedes the first header of a message unit, the colon becomes the root specifier. It tells the
command parser that this is the root or the top node of the command tree.
Message Terminator
A terminator informs SCPI that it has reached the end of a message. Three permitted message
terminators are:
1. Newline (<NL>), which is ASCII decimal 10 or hex 0A.
2. End or identify (<END>).
3. Both of the above (<NL><END>).
In the examples of this guide, there is an assumed message terminator at the end of each message.
22
Page 23

Command Execution Rules
• Commands execute in the order that they are presented in the program message.
• An invalid command generates an error and is not executed.
• Valid commands that precede an invalid command in a multiple command program
message are executed.
• Valid commands that follow an invalid command in a multiple command program message
are ignored.
2.3 SCPI Data Formats
All data programmed to or returned from the electronic load is ASCII. The data may be numerical or a
character string.
Numerical Data Formats
Symbol Data Form
Talking Formats
<NR1>
<NR2>
<NR3>
Listening Formats
<NRf>
<NRf+>
<Bool>
Digits with an implied decimal point assumed at the right of the least-significant digit.
Example: 273
Digits with an explicit decimal point.
Example: .0273
Digits with an explicit decimal point and an exponent.
Example: 2.73E+2
Extended format that includes <NR1>, <NR2> and <NR3>.
Example: 273 273. 2.73E2
Expanded decimal format that includes <NRf> and MIN MAX DEF.
Example: 273 273. 2.73E2 MAX. MIN and MAX are the minimum and maximum limit
values that are implicit in the range specification for the parameter. DEF is the default
values for the parameter.
Boolean Data.
Example: 0 | 1 or ON | OFF
23
Page 24

Class
Suffix
Unit
Unit with Multiplier
Suffixes and Multipliers
Amplitude V volt MV (millivolt)
Current A amps MA (milliamp)
Power W watt MW (milliwatt)
Resistance OHM ohm MOHM (megohm)
R ohm MR(megohm)
Slew Rate A/uS amps/microsecond
Time S second MS (millisecond)
Common Multipliers
1E3 K kilo
1E-3 M milli
1E-6 U micro
Response Data Types
Character strings returned by query statements may take either of the following forms, depending on
the length of the returned string:
<CRD> Character Response Data. Permits the return of character strings.
<AARD> Arbitrary ASCII Response Data. Permits the return of undelimited 7-bit ASCII. This data
type has an implied message terminator.
<SRD> String Response Data. Returns string parameters enclosed in double quotes.
Response Messages
A response message is the message sent by the instrument to the computer in response to a query
command program message.
Sending a Response Message
After sending a query command, the response message is placed in the Output Queue. When the
electronic load is then addressed to talk, the response message is sent from the Output Queue to the
computer.
Multiple Response Messages
If you send more than one query command in the same program message (see the paragraph entitled,
“Multiple Command Messages”), the multiple response messages for all the queries is sent to the
computer when the electronic load is addressed to talk. The responses are sent in the order that the
query commands were sent and are separated by semicolons (;). Items within the same query are
separated by commas (,). The following example shows the response message for a program message
24
Page 25

that contains four single item query commands:
0; 1; 1; 0
Response Message Terminator (RMT)
Each response is terminated with an LF (line feed) and EOI (end or identify). The following example
shows how a multiple response message is terminated:
0; 1; 1; 0; <RMT>
Message Exchange Protocol
Two rules summarize the message exchange protocol:
Rule 1. You must always tell the electronic load what to send to the computer.
The following two steps must always be performed to send information from the
computer to the instrument:
1) Send the appropriate query command(s) in a program message.
2) Address the electronic load to talk.
Rule 2. The complete response message must be received by the computer before another
program message can be sent to the electronic load.
2.4 SCPI Command Completion
SCPI commands sent to the electronic load are processed either sequentially or in parallel. Sequential
commands finish execution before a subsequent command begins. Parallel commands allow other
commands to begin executing while the parallel command is still executing. Commands that affect
trigger actions are among the parallel commands.
The *WAI, *OPC, and *OPC? common commands provide different ways of indicating when all
transmitted commands, including any parallel ones, have completed their operations. The syntax and
parameters for these commands are described in Chapter 4. Some practical considerations for using
these commands are as follows:
*WAI This prevents the electronic load from processing subsequent commands until all pending
operations are completed.
*OPC? This places a 1 in the Output Queue when all pending operations have completed. Since it
requires your program to read the returned value before executing the next program
statement, *OPC? can be used to cause the controller to wait for commands to complete
before proceeding with its program.
25
Page 26

The trigger system must be in the Idle state in order for the status OPC bit to be true. Therefore,
*OPC This sets the OPC status bit when all pending operations have completed. Since your
program can read this status bit on an interrupt basis, *OPC allows subsequent commands
to be executed.
NOTE:
as far as triggers are concerned, OPC is false whenever the trigger system is in the Initiated state.
Using Device Clear
You can send a device clear at any time to abort a SCPI command that may be hanging up the GPIB
interface. The status registers, error queue, and all configuration states are left unchanged when a
device clear message is received. Device clear performs the following actions:
• The input and output buffers of the electronic load are cleared.
• The electronic load is prepared to accept a new command string.
The following statement shows how to send a device clear over the GPIB interface using GW BASIC:
CLEAR 705 IEEE-488 Device Clear
The following statement shows how to send a device clear over the GPIB interface using the GPIB
command library for C or QuickBASIC:
IOCLEAR (705)
26
Page 27

Chapter 3
listed because they are either directly related by function, or because reading
SCPI Commands
This chapter explains in detail the SCPI commands used by the electronic load. The electronic load
conforms to SCPI Version 1995.0.
3.1 Language Dictionary
This section describes the syntax and parameters for all the IEEE 488.2 SCPI subsystem and common
commands used by the electronic loads. Since the SCPI syntax remains the same for all programming
languages, the examples given for each command are generic.
Syntax definitions use the long form, but only short form headers (or
Syntax Forms
Parameters
"keywords") appear in the examples. Use the long form to help make your
program self-documenting.
Most commands require a parameter and all queries will return a parameter.
The range for a parameter may vary according to the model of electronic
load. Parameters for all models are listed in the Specifications table in the
User’s Guide.
Channel
Related Commands
Order of Presentation
Common Commands
Common commands begin with an * and consist of three letters (command) or three letters and a ?
(query). They are defined by the IEEE 488.2 standard to perform common interface functions. Common
commands and queries are categorized under System, Status, or Trigger functions and are listed at the
end of this chapter.
If a command only applies to individual channels of a mainframe, the entry
Channel Selectable will appear in the command description.
Where appropriate, related commands or queries are included. These are
about them will clarify or enhance your understanding of the original
command or query.
The dictionary is organized as follows:
• Subsystem commands, arranged by subsystem
• IEEE 488.2 common commands
27
Page 28

tion Complete bit in the Standard Event Status
Subsystem Commands
Subsystem commands are specific to functions. They can be a single command or a group of
commands. The groups are comprised of commands that extend one or more levels below the root.
The subsystem command groups are arranged according to function: Calibration, Channel, Input, List,
Measurement, Port, Status, System, Transient, and Trigger. Commands under each function are
grouped alphabetically under the subsystem. Commands followed by a question mark (?) take only the
query form. When commands take both the command and query form, this is noted in the syntax
descriptions.
3.2 Common Commands
Common commands begin with an * and consist of three letters (command) IEEE 488.2 standard to
perform some common interface functions. The electronic loads respond to the required common
commands that control status reporting, synchronization, and internal operations. The electronic loads
also respond to optional common commands that control triggers, power-on conditions, and stored
operating parameters.
Common commands and queries are listed alphabetically. If a command has a corresponding query
that simply returns the data or status specified by the command, then both command and query are
included under the explanation for the command. If a query does not have a corresponding command
or is functionally different from the command, then the query is listed separately. The description for
each common command or query specifies any status registers affected. Refer to Section 1.4
Programming the Status Registers, which explains how to read specific register bits and use the
information that they return.
Common Command Table
Mnemonic Name Description
*CLS Clear status Clears all event registers and Error Queue.
*ESE <NRf> Event enable command Program the Standard Event Enable Register.
*ESE? Event enable query Read the Standard Event Enable Register.
*ESR? Event status query Read the Standard Event Status Register and clear it.
*OPC
Operation complete
command
Set the Opera
Register after all pending commands have been executed.
28
Page 29
Common Command Table (cont.)
Command Syntax
*CLS
Parameters
None
Service request enable
Service request enable
Mnemonic Name Description
*OPC?
*RCL <NRf> Recall command
*RST Reset command
*SAV <NRf> Save command
*SRE <NRf>
*SRE?
*STB? Read status byte query Read the Status Byte register
*TRG Trigger command Send a trigger to the electronic load.
*TST? Self-test query Wait until all previous commands are executed.
Operation complete
query
command
query
Places an ASCII “1” into the output queue when all
pending selected device operations have been
completed.
Returns the electronic load to the setup configuration
stored in the specified memory location.
Returns the electronic load to the *RST default
conditions.
Saves the current setup to the specified memory
location.
Programs the Service Request Enable register.
Reads the Service Request Enable register.
*WAI
*RDT? Frame query Return the type of electronic frame.
*IDN? Identification query
Wait to continue
command
Wait until all previous commands are executed.
Return the manufacturer, model number, serial number,
and firmware revision levels of the unit.
*CLS — Clear Status
This command clears the bits of the following registers:
• Standard Event Status
• Operation Status Event
• Questionable Status Event
• Status Byte
• Error Queue
29
Page 30

Command Syntax
*ESE <NRf>
Parameters
0 to 255
Power-On Value
See *PSC
Example
*ESE 129
Query Syntax
*ESE?
Returned Parameters
<NR1>
Related Commands
*ESR? *PSC *STB?
Query Syntax
*ESR?
Parameters
None
Returned Parameters
<NR1> (register value)
Related Commands
*CLS *ESE *ESE? *OPC
Query Syntax
*IDN?
Parameters
None
Returned Parameters
<AARD>
Field
Information
B&K Precision
manufacturer
xxxxxx
model number
xxxxxxxxxxxxxxxxxx
serial number or 0
x.xx
firmware revision
Example: BK PRECISION, MDL001, 600150010677510002, 1.43
*ESE <NRf> — Event Enable
This command programs the Standard Event Status Enable register bits. The programming determines
which events of the Standard Event Status Event Register (see *ESR?) are allowed to set the ESB (Event
Summary Bit) of the Status Byte register. A "1" in the bit position enables the corresponding event. All
of the enabled events of the Standard Event Status Event register are logically ORed to cause the Event
Summary Bit (ESB) of the Status Byte Register to be set. See Section 1.4 Programming the Status
Registers for descriptions of the Standard Event Status registers. The query reads the Standard Event
Status Enable register.
*ESR?
This query reads the Standard Event Status register. Reading the register clears it. The bit configuration
of this register is the same as the Standard Event Status Enable register (see *ESE). See Section 1.4
Programming the Status Registers for a detailed explanation of this register.
*IDN?
This query requests the electronic load to identify itself. It returns the data in four fields separated by
commas.
30
Page 31

*RDT?
Query Syntax
*RDT?
Parameters
None
Returned Parameters
<AARD>
Example
MDL200, 0, MDL305, 0, 0, 0, 0, 0
Command Syntax
*OPC
Parameters
None
Query Syntax
*OPC?
Returned Parameters
<NR1>
Related Commands
*TRIG *WAI
This query requests the types of electronic load module. If channel does not exist, it returns 0. If
channel exists, it returns the type.
*OPC
This command causes the interface to set the OPC bit (bit 0) of the Standard Event Status register
when the electronic load has completed all pending operations. (See *ESE command for the bit
configuration of the Standard Event Status registers.) Pending operations are complete when:
• All commands sent before *OPC have been executed. This includes overlapped commands.
Most commands are sequential and are completed before the next command is executed.
Overlapped commands are executed in parallel with other commands. Commands that
affect trigger actions are overlapped with subsequent commands sent to the electronic
load. The *OPC command provides notification that all overlapped commands have been
completed.
• All triggered actions are completed and the trigger system returns to the Idle state.
*OPC does not prevent processing of subsequent commands but bit 0 will not be set until all pending
operations are completed. The query causes the interface to place an ASCII "1" in the Output Queue
when all pending operations are completed.
*RCL
This command restores the electronic load to a state that was previously stored in memory with a
*SAV command to the specified location. All states are recalled with the following exceptions:
• CAL:STATe is set to OFF
• The trigger system is set to the Idle state by an implied ABORt command (this cancels any
incomplete trigger actions)
31
Page 32
Command Syntax
*RCL <NRf>
Parameters
0 to 9
Example
*RCL3
Related Commands
*PSC *RST *SAV
NOTE: The device state stored in location 0 is automatically recalled at power turn-on.
*RST
This command resets ALL channels of the electronic load to the following factory-defined states:
CURR MIN RES:TRAN:BLEV MIN
CURR:MODE FIX RES:TRAN:BWID MIN
CURR:PROT:DEL 3 RES:TRAN:MODE CONT
CURR:PROT:LEV MAX SENS:AVER:COUN 8
CURR:PROT:STAT OFF SENS:AVER:STAT 1
CURR:RANG MAX SENS:FUNC:CURR DC
CURR:SLEW MAX SENS:NPLC 7
CURR:TRAN:ALEV MAX SENS:VOLT:RANG:AUTO ON
CURR:TRAN:AWID MIN TRAC:FEED TWO
CURR:TRAN:BLEV MIN TRAC:FEED:MODE NEV
CURR:TRAN:BWID MIN TRAC:POIN 2
CURR:TRAN:MODE CONT TRAN OFF
FUNC CURR TRIG:COUN 1
FUNC:MODE FIX TRIG:DEL 0
INP OFF VOLT MAX
INP:SHOR OFF VOLT:ON MIN
POW:CONF MAX VOLT:ON:LATC ON
POW:PROT:DEL 3 VOLT:RANG MAX
RES MAX VOLT:TRAN:ALEV MAX
RES:RANG MAX VOLT:TRAN:AWID MIN
RES:TRAN:ALEV MAX VOLT:TRAN:BWID MIN
RES:TRAN:AWID MIN VOLT:TRAN:MODE CONT
32
Page 33

NOTE:
Command Syntax
*RST
Parameters
None
Related Commands
*PSC *SAV
Command Syntax
*SAV <NRf>
Parameters
0 to 100
Example
*SAV 3
Related Commands
*PSC *RST *RCL
Command Syntax
*SRE <NRf>
Parameters
0 to 255
Default Value
See *PSC
Example
*SRE 128
Query Syntax
*SRE?
Returned Parameters
<NR1> (register binary value)
Related Commands
*ESE *ESR *PSC
• *RST does not clear any of the status registers or the error queue, and does not affect any
interface error conditions.
• *RST sets the trigger system to the Idle state.
• *RST clears the presently active list.
*SAV
This command stores the present state of the electronic load to a specified location in memory. Up to
101 states can be stored.
If a particular state is desired at power-on, it should be stored in location 0. It will then be recalled at
power-on if the power-on state is set to RCL0. Use *RCL to retrieve instrument states.
*SRE
This command sets the condition of the Service Request Enable register. This register determines
which bits from the Status Byte Register (see *STB for its bit configuration) are allowed to set the
Master Status Summary (MSS) bit and the Request for Service (RQS) summary bit. A 1 in any Service
Request Enable register bit position enables the corresponding Status Byte register bit and all such
enabled bits are then logically ORed to cause Bit 6 of the Status Byte Register to be set.
When the controller conducts a serial poll in response to SRQ, the RQS bit is cleared, but the MSS bit is
not. When *SRE is cleared (by programming it with 0), the electronic load cannot generate an SRQ to
the controller. The query returns the current state of *SRE.
33
Page 34

Query Syntax
*STB?
Parameters
None
Returned Parameters
<NR1> (register value)
Related Commands
*SRE *ESR *ESE
Command Syntax
*TRG
Parameters
None
Related Commands
ABOR INIT TRIG:IMM
Query Syntax
TST?
Parameters
None
Related Commands
<NR1>
0 indicates the electronic load has passed selftest. Non-zero indicates an error code.
*STB?
This query reads the Status Byte register, which contains the status summary bits and the Output
Queue MAV bit. Reading the Status Byte register does not clear it. The input summary bits are cleared
when the appropriate event registers are read (see Section 1.4 Programming the Status Registers for
more information). A serial poll also returns the value of the Status Byte register, except that bit 6
returns Request for Service (RQS) instead of Master Status Summary (MSS). A serial poll clears RQS, but
not MSS. When MSS is set, it indicates that the electronic load has one or more reasons for requesting
service.
*TRG
This command generates a trigger to any system that has BUS selected as its source (for example,
TRIG:SOUR BUS). The command has the same effect as the Group Execute Trigger (<GET>) command.
*TST?
This query causes the electronic load to do a self-test and report any errors.
*WAI
This command instructs the electronic load not to process any further commands until all pending
operations are completed. Pending operations are complete when:
• All commands sent before *WAI have been executed. This includes overlapped commands.
Most commands are sequential and are completed before the next command is executed.
Overlapped commands are executed in parallel with other commands. Commands that affect
input voltage or state, relays, and trigger actions are overlapped with subsequent commands
34
Page 35

sent to the electronic load. The *WAI command prevents subsequent commands from being
Command Syntax
WAI?
Parameters
None
Related Commands
*OPC
executed before any overlapped commands have been completed.
• All triggered actions are completed and the trigger system returns to the Idle state.
*WAI can be aborted only by sending the electronic load a GPIB DCL (Device Clear) command.
3.3 Subsystem Commands
The following is a list of the SCPI subsystem commands and the table number where each command is
summarized.
• Channel Commands
• Trigger Commands
• System Commands
• Status Commands
• Trace Commands
• Source Commands
• List Commands
• Measure Commands
• Sense Commands
• Calibrate Commands
General notes:
• Brackets ([ ]) are used to denote optional character sets. These optional characters do not have
to be included in the program message. Do not use brackets in the program message.
• Angle brackets (< >) are used to indicate parameter type. Do not use angle brackets in the
program message.
• The Boolean parameter (<b>) is used to enable or disable an instrument operation. 1 or ON
enables the operation and 0 or OFF disables the operation.
• Upper case characters indicate the short-form version for each command word.
• Default Parameter — Listed parameters are both the *RST and :SYSTem:PRESet defaults, unless
noted otherwise. Parameter notes are located at the end of each table.
35
Page 36

Command Syntax
CHANnel <NR1>
Parameters
1-8, 11-18
*RST Value
MINimum
Examples
CHAN 3
Query Syntax
CHANnel?
Returned Parameters
<NR1>
Query Syntax
CHANnel:ID?
Parameters
None
Returned Parameters
<AARD>
Field
Information
xxxxxx
model number
xxxxxxxxxxxxxxxxxx
serial number or 0
Verx.xx-x.xx
firmware revision
Example: MDL600, 600156010677530001, Ver1.35-1.20
Channel Commands
These commands program the channel selection capability of the electronic load. The CHANnel and
INSTrument commands are equivalent.
CHANnel
This command selects the multiple electronic load channels to which all subsequent channel-specific
commands will be directed. If the specified channel number does not exist or is outside the MIN/MAX
range, an error code is generated (see Chapter 5). Refer to the installation section of the User's Guide
for more information about channel number assignments. Channel 11-18 refers to channel 1-8 of
MDL002 extended mainframe.
CHANnel:ID?
Channel Specific
This query reads the model numbers of the modules installed in the mainframe. It returns the data in
comma-separated fields.
36
Page 37

Command Syntax
TRIGger:SOURce <CRD>
Parameters
BUS | EXTernal | HOLD | MANUal | TIMer
*RST Value
MANUal
Examples
TRIG:SOUR BUS TRIG:SOUR EXT
Query Syntax
TRIGger:SOURce?
Returned Parameters
<CRD>
Related Commands
ABOR TRIG TRIG:DEL
Command Syntax
TRIGger:TIMer <NRf+>
Parameters
1 to 999.99s | MINimum | MAXimum | DEFault
Unit
seconds
Trigger Commands
The trigger subsystem is made up of a series of commands and subsystems to configure the trigger
model.
TRIGger:SOURce
This command selects the trigger source. This command is not channel specific and applies to the
entire mainframe.
Accepts a GPIB <GET> signal or a *TRG command as the trigger source. This
BUS
selection guarantees that all previous commands are complete before the trigger
occurs.
EXTernal
HOLD
MANUal The event occurs when the Trig key is pressed.
TIMer
Selects the electronic load’s trigger input as the trigger source. This trigger is
processed as soon as it is received.
Only the TRIG:IMM command will generate a trigger in HOLD mode. All other
trigger commands are ignored.
This generates triggers that are in synchronization with the electronic load's
internal oscillator as the trigger source. The internal oscillator begins running as
soon as this command is executed. Use TRIG:TIM to program the oscillator period.
TRIGger:TIMer
This command specifies the period of the triggers generated by the internal trigger generator. This
command is not channel specific and applies to the entire mainframe.
37
Page 38

*RST Value
0.001
Examples
TRIG:TIM 0.25 TRIG:TIM MAX
Query Syntax
TRIGger:TIMer? [ MINimum | MAXimum | DEFault ]
Returned Parameters
<NR3>
Related Commands
ABOR TRIG TRIG:SOUR TRIG:DEL
Command Syntax
SYSTem:PRESet
Parameters
None
Command Syntax
SYSTem:POSetup <CRD>
Parameters
RST | SAV0
*RST Value
RST
Examples
SYST:POS RST
Query Syntax
SYSTem:POSetup?
Returned Parameters
<CRD>
Related Commands
*RST *SAV
Query Syntax
SYSTem:VERSion?
Parameters
None
System Commands
System commands control the system-level functions of the electronic load that are not directly
related to input control or measurement functions.
SYSTem:PRESet
This command returns the instrument to states optimized for front panel operation.
SYSTem:POSetup
This command is used to select the power-on defaults. With RST selected, the instrument powers up to
the *RST default conditions. With the SAV0 parameter selected, the instrument powers-on to the
setup that is saved in the specified location using the *SAV command.
SYSTem:VERSion?
This query returns the SCPI version number to which the electronic load complies. The value is of the
form YYYY.V, where YYYY is the year and V is the revision number for that year.
38
Page 39

Examples
SYST:VERS?
Returned Parameters
<NR2>
Query Syntax
SYSTem:ERRor?
Parameters
None
Examples
SYST:ERR?
Returned Parameters
<NR1>, <SRD>
Command Syntax
SYSTem:CLEar
Parameters
None
Examples
SYST:CLE
Related Commands
SYST:ERR?
Command Syntax
SYSTem:LOCal
Parameters
None
Examples
SYST:LOC
Related Commands
SYST:REM SYST:RWL
SYSTem:ERRor?
This query returns the next error number followed by its corresponding error message string from the
remote programming error queue. The queue is a FIFO (first-in, first-out) buffer that stores errors as
they occur. As it is read, each error is removed from the queue. When all errors have been read, the
query returns “0, No Error”. If more errors are accumulated than the queue can hold, the last error in
the queue is “-350, Too Many Errors”.
SYSTem:CLEar
This action command is used to clear the Error Queue of messages.
SYSTem:LOCal
This command places the electronic load in local mode during RS-232 operation. The front panel keys
are functional.
SYSTem:REMote
This command places the electronic load in remote mode during RS-232 operation. This disables all
front panel keys except the Local key. Pressing the Local key while in the remote state returns the front
panel to the local state.
39
Page 40

Command Syntax
SYSTem:REMote
Parameters
None
Examples
SYST:REM
Related Commands
SYST:LOC SYST:RWL
Command Syntax
SYSTem:RWLock
Parameters
None
Examples
SYST:RWL
Related Commands
SYST:REM SYST:LOC
Query Syntax
STATus:CHANnel[:EVENt]?
SYSTem:RWLock
This command places the electronic load in remote mode during RS-232 operation. All front panel keys
including the Local key are disabled. Use SYSTem:LOCal to return the front panel to the local state.
Status Commands
These commands program the electronic load’s status registers. The electronic load has five groups of
status registers:
1. Channel Status
2. Channel Summary
3. Questionable Status
4. Standard Event Status
5. Operation Status
Refer to Section 1.4 Programming the Status Registers for more information.
STATus:CHANnel?
Channel Specific
This query returns the value of the Channel Event register. The Event register is a read-only register,
which holds (latches) all events that are passed into it. Reading the Channel Event register clears it.
40
Page 41

Parameters
None
Examples
STAT:CHAN:EVEN?
Returned Parameters
<NR1> (register value)
Related Commands
*CLS
STATus:CHANnel:CONDition?
Query Syntax
STATus:CHANnel:CONDition?
Parameters
None
Examples
STAT:CHAN:COND?
Returned Parameters
<NR1> (register value)
Related Commands
STAT:CHAN?
Command Syntax
STATus:CHANnel:ENABle <NR1>
Parameters
0 to 65535
Examples
STAT:CHAN:ENAB 3
Query Syntax
STATus:CHANnel:ENABle?
Returned Parameters
<NR1> (register value)
Related Commands
*CLS
Query Syntax
STATus:CSUMmary[:EVENt]?
Parameters
None
Channel Specific
This query returns the value of the Channel Condition register. The particular channel must first be
selected by the CHAN command.
STATus:CHANnel:ENABle
Channel Specific
This command sets or reads the value of the Channel Enable register for a specific channel. The
particular channel must first be selected by the CHAN command.
STATus:CSUM?
This query returns the value of the Channel Event summary register. The bits in this register
correspond to a summary of the channel register for each input channel. Reading the Channel Event
summary register clears it. This command is not channel specific and applies to the entire mainframe.
41
Page 42

Examples
STAT:CSUM:EVEN?
Returned Parameters
<NR1> (register value)
Related Commands
*CLS
Command Syntax
STATus:CSUMmary:ENABle <NR1>
Parameters
0 to 255
Examples
STAT:CSUM:ENAB 3
Query Syntax
STATus:CSUMmary:ENABle?
Returned Parameters
<NR1> (register value)
Related Commands
*CLS
Query Syntax
STATus:OPERation[:EVENt]?
Parameters
None
Examples
STAT:OPER:EVEN?
Returned Parameters
<NR1> (register value)
Related Commands
*CLS
Query Syntax
STATus:OPERation:CONDition?
Parameters
None
STATus:CSUMmary:ENABle
This command sets or reads the value of the Channel Enable summary register. This command is not
channel specific and applies to the entire mainframe.
STATus:OPERation?
This query returns the value of the Operation Event register. The Event register is a read-only register
that holds (latches) all events that are passed by the Operation NTR and/or PTR filter. Reading the
Operation Event register clears it. This command is not channel specific and applies to the entire
mainframe.
STATus:OPERation:CONDition?
This query returns the value of the Operation Condition register. This is a read-only register that holds
the real-time (unlatched) operational status of the electronic load. This command is not channel
specific and applies to the entire mainframe.
42
Page 43

Examples
STAT:OPER:COND?
Returned Parameters
<NR1> (register value)
Related Commands
STAT:QUES:COND?
Command Syntax
STATus:OPERation:ENABle <NR1>
Parameters
0 to 65535
Default Value
0
Examples
STAT:OPER:ENAB 32 STAT:OPER:ENAB 1
Query Syntax
STATus:OPERation:ENABle?
Returned Parameters
<NR1> (register value)
Related Commands
STAT:OPER?
Query Syntax
STATus:QUEStionable[:EVENt]?
Parameters
None
Examples
STAT:QUES:EVEN?
Returned Parameters
<NR1> (register value)
Query Syntax
STATus:QUEStionable:CONDition?
STATus:OPERation:ENABle
This command and its query can be used to set and read the value of the Operation Enable register.
This register is a mask for enabling specific bits from the Operation Event register to set the operation
summary bit (OPER) of the Status Byte register. The operation summary bit is the logical OR of all
enabled Operation Event register bits. This command is not channel specific and applies to the entire
mainframe.
STATus:QUEStionable?
This query returns the value of the Questionable Event register. The Event register is a read-only
register that holds (latches) all events that pass into it. Reading the Questionable Event register clears
it. This command is not channel specific and applies to the entire mainframe.
STATus:QUEStionable:CONDition?
This query returns the value of the Questionable Condition register. This is a read-only register that
holds the real-time (unlatched) questionable status of the electronic load. This command is not
channel specific and applies to the entire mainframe.
43
Page 44

Parameters
None
Examples
STAT:QUES:COND?
Returned Parameters
<NR1> (register value)
Related Commands
STAT:OPER:COND?
Command Syntax
STATus:QUEStionable:ENABle <NR1>
Parameters
0 to 65535
Default Value
0
Examples
STAT:QUES:ENAB 32 STAT:QUES:ENAB 1
Query Syntax
STATus:QUEStionable:ENABle?
Returned Parameters
<NR1> (register value)
Related Commands
STAT:QUES?
Command Syntax
STATus:PRESet
Parameters
None
Examples
STAT:PRES
STATus:QUEStionable:ENABle
This command sets or reads the value of the Questionable Enable register. This register is a mask for
enabling specific bits from the Questionable Event register to set the questionable summary (QUES) bit
of the Status Byte register. This bit (bit 3) is the logical OR of all the Questionable Event register bits
that are enabled by the Questionable Status Enable register. This command is not channel specific and
applies to the entire mainframe.
STATus:PRESet
When this command is sent, the SCPI event registers are affected as follows: All bits of the following
registers are cleared to zero (0):
• Questionable Event Enable Register
• Channel summary Event Enable Register
• Operation Event Enable Register
NOTE: Registers not included in the list above are not affected by this command.
44
Page 45

Command Syntax
TRACe:CLEar
Parameters
None
Example
TRAC:CLE
Query Syntax
TRACe:FREE?
Returned Parameters
<NR1>, <NR1>
Examples
TRAC:FREE?
Command Syntax
TRACe:POINts <NRf+>
Trace Commands
The commands in this subsystem are used to configure and control data storage into the buffer.
TRACe:CLEar
Channel Specific
This action command is used to clear the buffer of readings. If you do not clear the buffer, a
subsequent store will overwrite the old readings. If the subsequent store is aborted before the buffer
becomes full, you could end up with some “old” readings still in the buffer.
TRACe:FREE?
Channel Specific
This command is used to read the status of storage memory. After sending this command and
addressing the electronic load to talk, two values separated by commas are sent to the computer. The
first value indicates how many bytes of memory are available, and the second value indicates how
many bytes are reserved to store readings.
TRACe:POINts
Channel Specific
This command is used to specify the size of the buffer.
45
Page 46

Parameters
0 to 1000 | MINimum | MAXimum | DEFault
*RST Value
1000
Examples
TRAC:POIN 10
Query Syntax
TRACe: POINts? [ MINimum | MAXimum | DEFault ]
Returned Parameters
<NR1>
Related Commands
TRAC:FEED
Command Syntax
TRACe:FEED <CRD>
Parameters
VOLTage | CURRent | TWO
*RST Value
TWO
Examples
TRAC:FEED VOLT
Query Syntax
TRACe:FEED?
Returned Parameters
<CRD>
Related Commands
TRAC:POIN
Command Syntax
TRACe:FEED:CONTrol <CRD>
Parameters
NEVer | NEXT
*RST Value
NEVer
Examples
TRAC:FEED:CONT NEXT
Query Syntax
TRACe: FEED:CONT?
Returned Parameters
<CRD>
Related Commands
TRAC:FEED
TRACe:FEED
Channel Specific
This command is used to select the source of readings to be placed in the buffer. With VOLTage
selected, voltage readings are placed in the buffer (TRAC:POIN maximum value is 1000). With CURRent
selected, current readings are placed in the buffer (TRAC:POIN maximum value is 1000). With TWO
selected, voltage and current are placed in the buffer when storage is performed (TRAC:POIN
maximum value is 500).
TRACe:FEED:CONTrol
Channel Specific
This command is used to select the buffer control. With NEVer selected, storage into the buffer is
disabled. When NEXT is selected, the storage process starts, fills the buffer and then stops. The buffer
size is specified by the :POINts command.
TRACe:DATA?
46
Page 47

Channel Specific
Query Syntax
TRACe:DATA?
Returned Parameters
{<NR3>, <NR3>…etc,} or {<NR3> <NR3>, <NR3> <NR3>
…etc} (if TRACe:FEED TWO is set)
Command Syntax
TRACe:FILTer[:STATe] <BOOL>
Parameters
0 | 1 | ON | OFF
*RST Value
OFF
Examples
TRAC:FILT 1
Query Syntax
TRACe:FILTer[:STATe]?
Returned Parameters
<NR1>
Command Syntax
TRACe:DELay <NRf>
Parameters
0 to 3600s | MINimum | MAXimum | DEFault
Unit
S (second)
*RST Value
0
Examples
TRAC:DEL 1
Query Syntax
TRACe:DELay? [MINimum | MAXimum | DEFault]
Returned Parameters
<NR3>
When this command is sent and the electronic load is addressed to talk, all the readings stored in the
buffer are sent to the computer.
TRACe:FILTer
Channel Specific
This command is used to select whether the data in buffer is filtered data.
TRACe:DELay
Channel Specific
This command is used to select the delay time for trigger in buffer.
TRACe:TIMer
Channel Specific
This command is used to select the interval for timer.
47
Page 48
Command Syntax
TRACe:TIMer <NRf>
Parameters
0.0002 to 3600s | MINimum | MAXimum | DEFault
Unit
S (second)
*RST Value
1
Examples
TRAC:TIM 0.1
Query Syntax
TRACe:TIMer? [MINimum | MAXimum | DEFault]
Returned Parameters
<NR3>
Command Syntax
[SOURce:]INPut:ALL[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
Examples
INP:ALL 1
Command Syntax
[SOURce:]INPut[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
OFF
Examples
INP 1
Query Syntax
INPut[:STATe]?
Returned Parameters
0 | 1
Related Commands
*RCL *SAV
Source Commands
These commands control the input of the electronic load. The INPut and OUTput commands are
equivalent. The CURRent, RESistance, and VOLTage commands program the actual input current,
resistance, and voltage.
[SOURce:]INPut:ALL
This command enables or disables all the inputs of the module. The state of a disabled input is a high
impedance condition.
[SOURce:]INPut
Channel Specific
This command enables or disables the electronic load inputs. The state of a disabled input is a high
impedance condition.
48
Page 49

Command Syntax
[SOURce:]INPut:SYNCon[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
ON
Examples
INP:SYNC 1
Query Syntax
INPut:SYNCon[:STATe]?
Returned Parameters
0 | 1
Related Commands
INP:ALL
Command Syntax
[SOURce:]INPut:SHORt[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
OFF
Examples
INP:SHOR 1
Query Syntax
INPut:SHORt:STATe?
Returned Parameters
0 | 1
Related Commands
INP
Command Syntax
[SOURce:]REMote:SENSe[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
0
Examples
REM:SENS 0
[SOURce:]INPut:SYNCon
Channel Specific
This command enables or disables to change the electronic load inputs when INP:ALL command is
received.
[SOURce:]INPut:SHORt
Channel Specific
This command programs the specified electronic load module to the maximum current that it can sink
in the present operating range.
[SOURce:]REMote:SENSe
Channel Specific
This command is used to select the remote measure mode for the load.
49
Page 50

Query Syntax
[SOURce:]REMote:SENSe[:STATe]?
Returned Parameters
<CRD>
Command Syntax
[SOURce:] FUNCtion <function>
Parameters
CURRent | RESistance | VOLTage | POWer | IMPEDANCE
*RST Value
CURRent
Examples
FUNC RES
Query Syntax
[SOURce:]FUNCtion?
Returned Parameters
<CRD>
Command Syntax
[SOURce:]FUNCtion:MODE <mode>
Parameters
FIXed | LIST
*RST Value
FIXed
Examples
FUNC:MODE FIX
Query Syntax
[SOURce:]FUNCtion:MODE?
Returned Parameters
<CRD>
Related Commands
FUNC
[SOURce:]FUNCtion
Channel Specific
This command selects the input regulation mode of the electronic load.
CURRent constant current mode
RESistance constant resistance mode
VOLTage constant voltage mode
POWer constant power mode
IMPEDANCE constant impedance mode
[SOURce:]FUNCtion:MODE
Channel Specific
This command determines whether the input regulation mode is controlled by values in a list or by the
FUNCtion command setting.
FIXed The regulation mode is determined by the FUNCtion or MODE command.
LIST The regulation mode is determined by the active list.
[SOURce:]TRANsient
50
Page 51

Channel Specific
Command Syntax
[SOURce:]TRANsient[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
OFF
Examples
TRAN 1
Query Syntax
[SOURce:]TRANsient[:STATe]?
Returned Parameters
0 | 1
Related Commands
CURR:TRAN:CURR:MODE CURR:TRAN:ALEV
Command Syntax
[SOURce:]INPut:PROTection:CLEar
Parameters
None
Examples
:PROT:CLE
Command Syntax
[SOURce:]INPut:TIMer[:STATe] <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
OFF
Examples
INP:TIM 1
Query Syntax
INPut:TIMer[:STATe]?
Returned Parameters
0 | 1
Related Commands
INP:TIM:DEL
This command turns the transient generator on or off.
[SOURce:]PROTection:CLEar
Channel Specific
This command clears the latch that disables the input when a protection condition such as overvoltage
(OV) or overcurrent (OC) is detected. All conditions that generated the fault must be removed before
the latch can be cleared. The input is then restored to the state it was in before the fault condition
occurred.
[SOURce:]INPut:TIMer
Channel Specific
These commands enable or disable the electronic load on timer.
[SOURce:]INPut:TIMer:DELay
Channel Specific
51
Page 52

Command Syntax
[SOURce:]INPut:TIMer <NRf+>
Parameters
1 to 60000s | MINimum | MAXimum | DEFault
Unit
seconds
*RST Value
10
Examples
INP:TIM:DEL 5
Query Syntax
[SOURce:]INPut:TIMer:DELay? [ MINimum | MAXimum |
DEFault ]
Returned Parameters
<NR3>
Related Commands
INP:TIM
Command Syntax
[SOURce:]CURRent[:LEVel][:IMMediate] <NRf+>
Parameters
0 through max rated current
Unit
A (amps)
*RST Value
MINimum
Examples
CURR 5 CURR:LEV 0.5
Query Syntax
[SOURce:]CURRent[:LEVel][:IMMediate]?
Returned Parameters
<NR3>
Related Commands
CURR:RANG
This command specifies the timer setting.
[SOURce:]CURRent
Channel Specific
This command sets the current that the load will regulate when operating in constant current mode.
[SOURce:]CURRent:RANGe
Channel Specific
This command sets the current range of the electronic load module. There are two current ranges, high
range (model dependent) and low range (model dependent).
When you program a range value, the load automatically selects the range that corresponds to the
value that you program. If the value falls in a region where ranges overlap, the electronic load selects
the range with the highest resolution.
NOTE: When this command is executed, the IMMediate, TRANsient, TRIGgered, and SLEW current
settings are adjusted as follows.
• If existing settings are within new range, no adjustment is made.
• If existing settings are outside new range, the levels are set to the maximum value of the new
range.
52
Page 53

Command Syntax
[SOURce:]CURRent:RANGe <NRf+>
Parameters
0 through max. Rated current
Unit
A (amps)
*RST Value
max. current (high range)
Examples
SOUR:CURR:RANGE 5
Query Syntax
[SOURce:]CURRent:RANGe
Returned Parameters
<NR3>
Related Commands
CURR CURR:SLEW
Command Syntax
[SOURce:]CURRent:SLEW[:BOTH] <NRf+>
Parameters
See specifications
Unit
A (amps per micro second)
Examples
CURR:SLEW MAX
Related Commands
CURR CURR:NEG CURR:SLEW:POS
Command Syntax
[SOURce:]CURRent:SLEW:POSitive <NRf+>
Parameters
See specifications
Unit
A (amps per micro second)
Examples
CURR:SLEW:POS 0.0001
Query Syntax
[SOURce:]CURRent:SLEW:POSitive?
Returned Parameters
<NR3>
Related Commands
CURR:SLEW
[SOURce:]CURRent:SLEW
Channel Specific
This command sets the slew rate for all programmed changes in the input current level of the
electronic load. This command programs both positive and negative slew rates. MAXimum sets the
slew to the fastest possible rate. MINimum sets the slew to the slowest rate.
[SOURce:]CURRent:SLEW:POSitive
Channel Specific
This command sets the slew rate of the current for positive transitions. MAXimum sets the slew to the
fastest possible rate. MINimum sets the slew to the slowest rate.
53
Page 54

Command Syntax
[SOURce:]CURRent:SLEW:NEGative <NRf+>
Parameters
see specifications
Unit
A (amps per micro second)
Examples
CURR:SLEW:NEG 0.0001
Query Syntax
[SOURce:]CURRent:SLEW:NEGative?
Returned Parameters
<NR3>
Related Commands
CURR:SLEW
Command Syntax
[SOURce:]CURRent:PROTection:STATe <Bool>
Parameters
0 | 1 | OFF | ON
*RST Value
OFF
Examples
CURR:PROT:STAT 1
Query Syntax
[SOURce:]CURRent:PROTection:STATe?
Returned Parameters
<NR3>
Related Commands
CURR:PROT
Command Syntax
[SOURce:]CURRent:PROTection:LEVel <NRf+>
Parameters
0 through max. Rated current
Unit
A (amps)
[SOURce:]CURRent:SLEW:NEGative
Channel Specific
This command sets the slew rate of the current for negative transitions. MAXimum sets the slew to the
fastest possible rate. MINimum sets the slew to the slowest rate.
[SOURce:]CURRent:PROTection:STATe
Channel Specific
This command enables or disables the overcurrent protection feature.
[SOURce:]CURRent:PROTection
Channel Specific
This command sets the soft current protection level. If the input current exceeds the soft current
protection level for the time specified by CURR:PROT:DEL, the input is turned off.
NOTE: Use CURR:PROT:DEL to prevent momentary current limit conditions caused by programmed
changes from tripping the overcurrent protection.
54
Page 55

Examples
CURR:PROT 2
Query Syntax
[SOURce:]CURRent:PROTection:LEVel?
Returned Parameters
<NR3>
Related Commands
CURR:PROT:DEL CURR:PROT:STAT
Command Syntax
[SOURce:]CURRent:PROTection[:DELay] <NRf+>
Parameters
0 to 60 seconds
Unit
seconds
*RST Value
0
Examples
CURR:PROT:DEL 5
Query Syntax
[SOURce:]CURRent:PROTection:DELay?
Returned Parameters
<NR1>
Related Commands
CURR:PROT CURR:PROT:STAT
Command Syntax
[SOURce:]CURRent:TRANsient:MODE <mode>
Parameters
CONTinuous | PULSe | TOGGle
*RST Value
CONTinuous
Examples
CURR:TRAN:MODE TOGG
Query Syntax
[SOURce:]CURRent:TRANsient:MODE?
Returned Parameters
<CRD>
Related Commands
CURR:TRAN:ALEV TRAN
[SOURce:]CURRent:PROTection:DELay
Channel Specific
This command specifies the time that the input current can exceed the protection level before the
input is turned off.
[SOURce:]CURRent:TRANsient:MODE
Channel Specific
This command selects the operating mode of the transient generator as follows in constant current
mode.
CONTinuous The transient generator puts out a continuous pulse stream after receipt of a trigger.
PULSe The transient generator puts out a single pulse upon receipt of a trigger.
TOGGle The transient generator toggles between two levels upon receipt of a trigger.
[SOURce:]CURRent:TRANsient:ALEVel
[SOURce:]CURRent:TRANsient:BLEVel
55
Page 56

Command Syntax
[SOURce:]CURRent:TRANsient:ALEVel <NRf+>
[SOURce:]CURRent:TRANsient:BLEVel <NRf+>
Parameters
0 through max. Rated current
Unit
A (amps)
Examples
CURR:TRAN:ALEV 5 CURR:TRAN:BLEV 0.5
Query Syntax
[SOURce:]CURRent:TRANsient:ALEVel?
[SOURce:]CURRent:TRANsient:BLEVel
Returned Parameters
<NR3>
Related Commands
CURR:
Command Syntax
[SOURce:]CURRent:TRANsient:AWIDth <NRf+>
[SOURce:]CURRent:TRANsient:BWIDth <NRf+>
Parameters
1 to 65535 us
Unit
S (seconds)
*RST Value
500uS
Examples
CURR:TRAN:AWID 0.001 CURR:TRAN:BLEV 0.02
Query Syntax
[SOURce:]CURRent:TRANsient:AWIDth?
[SOURce:]CURRent:TRANsient:BWIDth
Returned Parameters
<NR3>
Related Commands
CURR:
Command Syntax
[SOURce:]CURRent:HIGH <NRf+>
[SOURce:]CURRent:LOW <NRf+>
Parameters
see specifications for voltage range
Unit
V (volts)
Examples
CURR:HIGH 5
Channel Specific
These commands specify the transient level of the input current. The transient function switches
between level A and level B.
[SOURce:]CURRent:TRANsient:AWIDth
[SOURce:]CURRent:TRANsient:BWIDth
Channel Specific
These commands specify the transient pulse width of the input current.
[SOURce:]CURRent:HIGH
[SOURce:]CURRent:LOW
Channel Specific
These commands set the high and low voltage level when the load is in constant current mode.
56
Page 57

Query Syntax
[SOURce:]CURRent:HIGH? [SOURce:]CURRent:LOW?
Returned Parameters
<NR3>
Command Syntax
[SOURce:]VOLTage[:LEVel][:IMMediate] <NRf+>
Parameters
See specifications for range
Unit
V (volts)
Examples
VOLT 5
Query Syntax
[SOURce:]VOLTage[:LEVel][:IMMediate]?
Returned Parameters
<NR3>
Related Commands
VOLT:RANG
Command Syntax
[SOURce:] VOLTage:RANGe <NRf+>
Parameters
see specifications for range
Unit
V (volts)
Examples
VOLT:RANG 15
Query Syntax
[SOURce:]VOLTage:RANGe?
Returned Parameters
<NR3>
Related Commands
VOLT
Command Syntax
[SOURce:]VOLTage:RANGe:AUTO<bool>
Parameters
0 | 1 | ON | OFF
*RST Value
1
[SOURce:]VOLTage
Channel Specific
This command sets the voltage that the electronic load will regulate when operating in constant
voltage (CV) mode.
[SOURce:]VOLTage:RANGe
Channel Specific
This command sets the voltage range of the electronic load module. There is only one voltage range.
VOLTage:RANGe:AUTO
Channel Specific
This command sets the voltage auto range state of the electronic load module.
57
Page 58

Examples
VOLT:RANG:AUTO 1
Query Syntax
[SOURce:]VOLTage:RANGe:AUTO?
Returned Parameters
<NR1>
Command Syntax
[SOURce:]VOLTage[:LEVel]:ON <NRf+>
Parameters
0 through max. rated voltage.
Unit
V (volts)
Examples
VOLT 5
Query Syntax
[SOURce:]VOLTage[:LEVel]:ON?
Returned Parameters
<NR3>
Related Commands
VOLT:LATCh
Command Syntax
[SOURce:]VOLTage:LATCh[:STATe] <b>
Parameters
0 | 1 | ON | OFF
*RST Value
ON
Examples
VOLT:LATC 1
Query Syntax
[SOURce:] VOLTage:LATCh[:STATe]?
Returned Parameters
0 | 1
Related Commands
VOLT:ON
Command Syntax
[SOURce:]VOLTage:HIGH <NRf+>
[SOURce:]VOLTage:LOW <NRf+>
Parameters
0 to max. rated current.
Unit
A (amps)
[SOURce:]VOLTage:ON
Channel Specific
This command sets the voltage of sink current on.
[SOURce:]VOLTage:LATCh
Channel Specific
This command sets the action type of Von.
[SOURce:]VOLTage:HIGH
[SOURce:]VOLTage:LOW
Channel Specific
These commands set the high and low current limit when the load is in constant voltage mode.
58
Page 59

Examples
VOLT:HIGH 5
Query Syntax
[SOURce:]VOLTage:HIGH?
[SOURce:]VOLTage:LOW?
Command Syntax
[SOURce:]VOLTage:TRANsient:MODE <mode>
Parameters
CONTinuous | PULSe | TOGGle
*RST Value
CONTinuous
Examples
VOLT:TRAN:MODE PULS
Query Syntax
[SOURce:] VOLTage:TRANsient:MODE?
Returned Parameters
<CRD>
Related Commands
VOLT:TRAN:ALEV TRAN
Command Syntax
[SOURce:]VOLTage:TRANsient:ALEVel <NRf+>
[SOURce:]VOLTage:TRANsient:BLEVel <NRf+>
Parameters
0 to max. rated voltage
Unit
V (volts)
Examples
VOLT:TRAN:ALEV 5 VOLT:TRAN:BLEV 0.5
Query Syntax
[SOURce:]VOLTage:TRANsient:ALEVel?
[SOURce:]VOLTage:TRANsient:BLEVel?
Returned Parameters
<NR3>
Related Commands
VOLT
[SOURce:]VOLTage:TRANsient:MODE
Channel Specific
This command selects the operating mode of the transient generator as follows in constant voltage
mode.
CONTinuous The transient generator puts out a continuous pulse stream after receipt of a trigger.
PULSe The transient generator puts out a single pulse upon receipt of a trigger.
TOGGle The transient generator toggles between two levels upon receipt of a trigger.
[SOURce:]VOLTage:TRANsient:ALEVel
[SOURce:]VOLTage:TRANsient:BLEVel
Channel Specific
These commands specify the transient level of the input voltage. The transient function switches
between level A and level B.
[SOURce:]VOLTage:TRANsient:AWIDth
59
Page 60

Command Syntax
[SOURce:]VOLTage:TRANsient:AWIDth <NRf+>
[SOURce:]VOLTage:TRANsient:BWIDth <NRf+>
Parameters
1 to 65535 us
Unit
S (second)
*RST Value
500uS
Examples
VOLT:TRAN:AWID 0.001 VOLT:TRAN:BWID 0.02
Query Syntax
[SOURce:] VOLTage:TRANsient:AWIDth?
[SOURce:]VOLTage:TRANsient:BWIDth?
Returned Parameters
<NR3>
Related Commands
VOLT
Command Syntax
[SOURce:]RESistance[:LEVel][:IMMediate] <NRf+>
Parameters
0 to max. rated resistance
Unit
Ω (ohms)
Examples
RES 5 RES:LEV 3.5
Query Syntax
[SOURce:]RESistance[:LEVel][:IMMediate]?
Returned Parameters
<NR3>
Related Commands
RES:RANG
[SOURce:]VOLTage:TRANsient:BWIDth
Channel Specific
This command specifies the transient pulse width of the input voltage.
[SOURce:]RESistance
Channel Specific
This command sets the resistance of the electronic load when operating in constant resistance mode.
[SOURce:]RESistance: RANGe
Channel Specific
This command sets the resistance range of the electronic load module. This limits the value the
resistance can be set to.
When you program a range value, the electronic load automatically selects the range that corresponds
to the value that you program. If the value falls in a region where ranges overlap, the electronic load
selects the range with the highest resolution.
NOTE: When this command is executed, the IMMediate, TRANsient, TRIGgered, and SLEW resistance
60
Page 61

settings are adjusted as follows.
Command Syntax
[SOURce:]RESistance:RANGe <NRf+>
Parameters
0 to max. rated resistance
Unit
Ω (ohms)
Examples
RES:RANG 15 SOUR:RES:RANGE 20
Query Syntax
[SOURce:]RESistance:RANGe?
Returned Parameters
<NR3>
Related Commands
RES RES:SLEW
If existing settings are within new range, no adjustment is made.
If existing settings are outside new range, the levels are set to either the maximum or minimum value
of the new range, depending on which they are closest to.
61
Page 62

Command Syntax
[SOURce:]RESistance:HIGH <NRf+>
[SOURce:]RESistance:LOW <NRf+>
Parameters
0 to max. rated voltage
Unit
V (volts)
Examples
RES:HIGH 5
Query Syntax
[SOURce:]RESistance:HIGH?
[SOURce:]RESistance:LOW?
Returned Parameters
<NR3>
Command Syntax
[SOURce:]RESistance:TRANsient:MODE <mode>
Parameters
CONTinuous | PULSe | TOGGle
*RST Value
CONTinuous
Examples
RES:TRAN:MODE PULS
Query Syntax
[SOURce:]RESistance:TRANsient:MODE?
Returned Parameters
<CRD>
Related Commands
RES:TRAN:ALEV TRAN
[SOURce:]RESistance:HIGH
[SOURce:]RESistance:LOW
Channel Specific
This command is used to set the voltage high and low limit determined when the load is in constant
resistance mode.
[SOURce:]RESistance:TRANsient:MODE
Channel Specific
This command selects the operating mode of the transient generator as follows in constant resistance
mode.
CONTinuous The transient generator puts out a continuous pulse stream upon receipt of a trigger.
PULSe The transient generator puts out a single pulse upon receipt of a trigger.
TOGGle The transient generator toggles between two levels upon receipt of a trigger.
62
Page 63

[SOURce:]RESistance:TRANsient:ALEVel
Command Syntax
[SOURce:]RESistance:TRANsient:ALEVel <NRf+>
[SOURce:]RESistance:TRANsient:BLEVel <NRf+>
Parameters
0 to max. rated resistance.
Unit
Ω (ohms)
Examples
RES:TRAN:ALEV 5 RES:TRAN:BLEV 0.5
Query Syntax
[SOURce:]RESistance:TRANsient:ALEVel?
[SOURce:]RESistance:TRANsient:BLEVel?
Returned Parameters
<NR3>
Related Commands
RES
Command Syntax
[SOURce:]RESistance:TRANsient:AWIDth <NRf+>
[SOURce:]RESistance:TRANsient:BWIDth <NRf+>
Parameters
1 to 65535 us
Unit
S (second)
*RST Value
500 uS
Examples
RES:TRAN:AWID 0.001 RES:TRAN:BWID 0.02
Query Syntax
[SOURce:]RESistance:TRANsient:AWIDth?
[SOURce:]RESistance:TRANsient:BWIDth?
Returned Parameters
<NR3>
Related Commands
RES
[SOURce:]RESistance:TRANsient:BLEVel
Channel Specific
This command specifies the transient level of the input resistance. The transient function switches
between level A and level B.
[SOURce:]RESistance:TRANsient:AWIDth
[SOURce:]RESistance:TRANsient:BWIDth
Channel Specific
This command specifies the transient pulse width of the input resistance.
[SOURce:]POWer
Channel Specific
This command sets the power of the load when operating in constant power mode.
63
Page 64

Command Syntax
[SOURce:]POWer[:LEVel][:IMMediate] <NRf+>
Parameters
0 to max. rated power
Unit
W (power)
*RST Value
MINimum
Examples
POW 5 POW:LEV 3.5
Query Syntax
[SOURce:]POWer[:LEVel][:IMMediate]?
Returned Parameters
<NR3>
Related Commands
POW:RANG
Command Syntax
[SOURce:]POWer:RANGe <NRf+>
Parameters
0 to max. rated power.
Unit
W (power)
Examples
POW:RANG 15 SOUR:POW:RANGE MIN
Query Syntax
[SOURce:]POWer:RANGe?
Returned Parameters
<NR3>
Command Syntax
[SOURce:]POWer:HIGH <NRf+>
[SOURce:]POWer:LOW <NRf+>
Parameters
0 to max. rated voltage
Unit
V (volts)
Examples
POW:HIGH 5
Query Syntax
[SOURce:]POWer:HIGH? [SOURce:]POWer:LOW?
Returned Parameters
<NR3>
[SOURce:]POWer:RANGe
Channel Specific
This command sets the power range of the load. This limits the settable range for power.
[SOURce:]POWer:HIGH
[SOURce:]POWer:LOW
Channel Specific
This command sets the voltage high and low limit determined when in constant power mode.
64
Page 65

[SOURce:]POWer:PROTection
Command Syntax
[SOURce:]POWer:PROTection[:LEVel] <NRf+>
Parameters
0 to max. rated power
Unit
W (power)
*RST Value
MAXimum
Examples
POW:PROT 100
Query Syntax
[SOURce:]POWer:PROTection[:LEVel]?
Returned Parameters
<NR3>
Related Commands
POW:PROT:DEL
Command Syntax
[SOURce:]POWer:PROTection:DELay] <NRf+>
Parameters
0 to 60 seconds
Unit
seconds
*RST Value
0
Examples
POW:PROT:DEL 5
Query Syntax
[SOURce:]POWer:PROTection:DELay?
Returned Parameters
<NR1>
Related Commands
POW:PROT
Channel Specific
This command sets the soft power protection level. If the input power exceeds the soft power
protection level for the time specified by POW:PROT:DEL, the input is turned off.
NOTE: Use POW:PROT:DEL to prevent momentary power limit conditions caused by programmed
changes from tripping the overpower protection.
[SOURce:]POWer:PROTection:DELay
Channel Specific
This command specifies the time that the input power can exceed the protection level before the input
is turned off.
[SOURce:]POWer:CONFig
Channel Specific
This command sets the hard power protection level.
65
Page 66

Command Syntax
[SOURce:]POWer:CONFig[:LEVel] <NRf+>
Parameters
0 through max. Rated power
Unit
W (power)
Examples
POW:CONFig 100
Query Syntax
[SOURce:]POWer:CONFig[:LEVel
Returned Parameters
<NR3>
Related Commands
POW:PROT
Command Syntax
[SOURce:]IMPedance[:LEVel][:IMMediate] <NRf+>
Parameters
0 to 7500 ohms.
Unit
R (ohms)
*RST Value
MAXimum
Examples
IMP 5 IMP:LEV 3.5
Query Syntax
[SOURce:]IMPedance[:LEVel][:IMMediate]?
Returned Parameters
<NR3>
Related Commands
IMP:RANG
Command Syntax
[SOURce:]IMPedance:RANGe <NRf+>
Parameters
0 to 7500 ohms.
Unit
R (ohms)
Examples
IMP:RANG 15 SOUR:IMP:RANGE MIN
Query Syntax
[SOURce:]IMPedance:RANGe?
Returned Parameters
<NR3>
[SOURce:]IMPedance
Channel Specific
This command sets the resistance value when in CZ mode.
[SOURce:]IMPedance:RANGe
Channel Specific
This command is used to set the resistance range when the load is in CZ mode. This limits the settable
resistance.
[SOURce:]IMPedance:RESistance
Channel Specific
66
Page 67

This command is used to set series resistance when the load is in CZ mode.
Command Syntax
[SOURce:]IMPedance:RESistance <NRf+>
Parameters
0 through 7500 ohms
Unit
R (ohms)
*RST Value
0
Examples
IMP:RES 5
Query Syntax
[SOURce:]IMPedance:RESistance?
Returned Parameters
<NR3>
Command Syntax
[SOURce:]IMPedance:INDuction <NRf+>
Parameters
0 through 65000uH
Unit
uH
*RST Value
0
Examples
IMP:IND 5
Query Syntax
[SOURce:]IMPedance:INDuction?
Returned Parameters
<NR3>
Command Syntax
[SOURce:]IMPedance:CAPacitance <NRf+>
Parameters
20 through 65000uF
Unit
uF
Examples
IMP:CAP 5
Query Syntax
[SOURce:]IMPedance:CAPacitance?
Returned Parameters
<NR3>
[SOURce:]IMPedance:INDuction
Channel Specific
This command is used to set the series inductance when the load is in CZ mode.
[SOURce:]IMPedance:CAPacitance
Channel Specific
This command is used to set the parallel capacitance value when the load is in CZ mode.
[SOURce:]IMPedance:HIGH
[SOURce:]IMPedance:LOW
This command is used to set the high and low voltage determined when the load is in CZ mode.
67
Page 68

Command Syntax
[SOURce:]IMPedance:HIGH <NRf+>
[SOURce:]IMPedance:LOW <NRf+>
Parameters
0 to max. rated voltage
Unit
V (volts)
Examples
IMP:HIGH 5
Query Syntax
[SOURce:]IMPedance:HIGH?
[SOURce:]IMPedance:LOW?
Returned Parameters
<NR3>
Command Syntax
[SOURce:]LIST:RANGe <NRf>
Parameters
0 to max. rated current.
Unit
None
Examples
LIST:RANGE 30
Query Syntax
[SOURce:]LIST:RANGe?
Returned Parameters
<NR3>
Related Commands
LIST:LEV
List Commands
List commands allow you to program complex sequences of input changes with rapid, precise timing,
and synchronized with trigger signals. Each function for which lists can be generated has a list of values
that specify the input at each list step.
[SOURce:]LIST:RANGe
Channel Specific
This command sets the current range for list mode. It also limits the maximum settable current.
Depending on the value, range will automatically switch between high or low depending on which
gives the best resolution and accuracy.
[SOURce:]LIST:COUNt
Channel Specific
68
Page 69

This command sets the number of times that the list is executed before it is completed. The command
Command Syntax
[SOURce:]LIST:COUNt <NRf+>
Parameters
1 to 65536
Examples
LIST:COUN 3
Query Syntax
[SOURce:]LIST:COUNt?
Returned Parameters
<NR3>
Related Commands
LIST:STEP
Command Syntax
[SOURce:]LIST:STEP <NRf+>
Parameters
2 to 84
Examples
LIST:STEP 5
Query Syntax
[SOURce:]LIST:STEP?
Returned Parameters
<NR3>
Related Commands
LIST:LEV
Command Syntax
[SOURce:]LIST:LEVel <NR1>, <NRf>
Parameters
1 to max. rated current.
Unit
None, None
Examples
LIST:LEV 1, 10 LIST:LEV 2, 15.2
Query Syntax
[SOURce:]LIST:LEVel? <NR1>
<NR1> is step number
Returned Parameters
<NR3>
Related Commands
LIST:RANG
accepts parameters in the range 1 through 65536, but 65536 is interpreted as infinity.
[SOURce:]LIST:STEP
Channel Specific
This command sets the total number of steps in the list.
[SOURce:]LIST:LEVel?
Channel Specific
This command specifies the level value
69
Page 70

Command Syntax
[SOURce:]LIST:SLEW <NR1>, <NRf>
Parameters
See specifications for range
Unit
None, None
Examples
LIST:SLEW 1, 1.5 LIST:SLEW 2, MAX
Query Syntax
[SOURce:]LIST:SLEW? <NR1>
<NR1> is step number
Returned Parameters
<NR3>
Related Commands
CURR:SLEW
Command Syntax
[SOURce:]LIST:WIDth <NR1>, <NRf>
Parameters
20 us to 3600 s
Unit
s (seconds)
Examples
LIST:WID 1, 0.02 LIST:WID 2, 0.5
Query Syntax
[SOURce:]LIST:WIDth? <NR1>
<NR1> is step number
Returned Parameters
<NR3>
Command Syntax
[SOURce:]LIST:SAV <NR1>
[SOURce:]LIST:SLEW
Channel Specific
This command sets the slew rate for each step. This command programs both positive and negative
going slew rates. MAXimum sets the slew to its fastest possible rate. MINimum sets the slew to its
slowest rate.
[SOURce:]LIST:WIDth
Channel Specific
This command sets the sequence of list dwell times. Each value represents the time in seconds that the
input will remain at the particular list step point before completing the step. If times exceed 16383S,
the input remains at the present level until a trigger sequences the next point in the list. Else At the
end of the dwell time, the input automatically changes to the next point in the list.
[SOURce:]LIST:SAV
Channel Specific
This command stores the present list file of the electronic load to a specified location in memory. Up to
5 files can be stored. Files saved in locations 1-7 are nonvolatile and the data will be saved when power
is removed.
70
Page 71

Parameters
1 to 7
Examples
LIST:SAV 3
Related Commands
LIST:RCL
Command Syntax
[SOURce:]LIST:RCL <NR1>
Parameters
1 to 7
Examples
LIST:RCL 3
Related Commands
LIST:SAV
[SOURce:]LIST:RCL
Channel Specific
This command restores a list file that was previously stored in memory with a LIST:SAV command to
the specified location.
Measurement Commands
The signal-oriented measurement commands are used to acquire readings. You can use these highlevel instructions to control the measurement process.
Making Measurements
The electronic load has the ability to make several types of voltage or current measurements. The
measurement capabilities of the electronic load are particularly useful with applications that draw
current in pulses.
All measurements are performed by digitizing the instantaneous input voltage or current for a defined
number of samples and sample interval, storing the results in a buffer, and then calculating the
measured result. Many parameters of the measurement are programmable. These include the number
of samples, the time interval between samples, and the method of triggering. Note that there is a
tradeoff between these parameters and the speed, accuracy, and stability of the measurement in the
presence of noise.
There are two ways to make measurements:
1) Use the MEASure commands to immediately start acquiring new voltage or current data,
and return measurement calculations from this data as soon as the buffer is full. This is the
easiest way to make measurements, since it requires no explicit trigger programming.
2) Use an acquisition trigger to acquire the data. Then use the FETCh commands to return
calculations from the data that was retrieved by the acquisition trigger. This method gives
71
Page 72

you the flexibility to synchronize the data acquisition with a trigger. FETCh commands do
not trigger the acquisition of new measurement data, but they can be used to return many
different calculations from the data that was retrieved by the acquisition trigger.
Making triggered measurements with the acquisition trigger system is discussed in the User Manual.
NOTE: For each MEASure form of the query, there is a corresponding query that begins with the
header FETCh. FETCh queries perform the same calculation as their MEASure counterparts, but do not
cause new data to be acquired. Data acquired by an explicit trigger or a previously programmed
MEASure command are used.
:FETCh:VOLTage?
:FETCh:CURRent?
:FETCh:POWer[:DC]?
Channel Specific
These query commands request the latest post-processed readings stored in the sample buffer. After
sending this command and addressing the electronic load to talk, the readings are sent to the
computer. This command does not affect the instrument setup. This command does not trigger sourcemeasure operations; it simply requests the last available readings. Note that this command can
repeatedly return the same readings. Until there are new readings, this command continues to return
the old readings.
For example, assume that the electronic load performed 20 measure operations. The :FETCh:VOLTage?
command will request the readings for those 20 measure operations. If :FETCh:VOLTage? is sent while
performing measure operations (ARM annunciator on), it will not be executed until the electronic load
goes back to the idle state.
:MEASure:VOLTage[:DC]?
:MEASure:CURRent[:DC]?
Channel Specific
These commands combine other signal-oriented measurement commands to perform a “one-shot”
measurement and acquire the reading. Note that if a function is not specified, the measurement will
be done on the function that is presently selected.
72
Page 73

:MEASure:ALLVoltage?
Command Syntax
SENSe:AVERage:COUNt <NRf+>
Parameters
2 to 16
*RST Value
8
Examples
SENS:AVER:COUN 10
Query Syntax
SENSe:AVERage:COUNt?
Returned Parameters
<NR1>
Related Commands
SENS:AVER
:MEASure:ALLCurrent?
These commands combine the voltage or current measured at the input of all electronic load modules.
:FETch :ALLVoltage?
:FETch:ALLCurrent?
These commands combine the real-time voltage or current measured at the input of all electronic load
modules.
Sense Commands
The Sense subsystem is used to configure and control the measurement functions of the electronic
load. A function does not have to be selected before you program its various configurations. A function
can be selected any time after it has been programmed. Whenever a programmed function is selected,
it assumes the programmed states.
SENSe:AVERage:COUNt
Channel Specific
The command is used to specify the filter count. In general, the filter count is the number of readings
that are acquired and stored in the filter buffer for the averaging calculation. The larger the filter
count, the more filtering that is performed.
SENSe:VOLTage[:DC]:RANGe:AUTO
Channel Specific
73
Page 74
Command Syntax
SENSe:VOLTage[:DC]:RANGe:AUTO <bool>
Parameters
0 | 1 | OFF | ON
*RST Value
ON
Examples
SENS:VOLT:RANG:AUTO 1
Query Syntax
SENSe:VOLTage[: DC]:RANGe:AUTO?
Returned Parameters
0 | 1
Related Commands
SENS:VOLT:RANG
Command Syntax
PROGram:ACTive:CHANnel <NRf+>
Parameters
0 – 65535
Bit
15
14
13
12
11
10 9 8 7 6 5 4 3 2 1 0
Channel
18
17
16
15
14
13
12
11 8 7 6 5 4 3 2 1
Examples
PROG:ACT:CHAN 683
Sets channel 3 and 7 active.
This command is used to control auto ranging for voltage. With auto ranging enabled, the instrument
automatically goes to the most sensitive range to perform the measurement.
The auto range command (:RANGe:AUTO) is coupled to the command that manually selects the
measurement range (:RANGe <n>). When auto range is enabled, the parameter value for :RANGe <n>
changes to the automatically selected range value. Thus, when auto range is disabled, the instrument
remains at the automatically selected range. When a valid:RANGe <n> command is sent, auto ranging
disables.
Program Commands
The program subsystem is used to control the parameters of the built-in automatic test function.
:PROGram:ACTive:CHANnel
The command is used to specify the active channels for the automatic test function. When a channel is
active, some parameters for the program setup and selec the channel for the test.
The value, in decimal, is based on the binary
representation of the active channels which are
represented by the bits, according to the following table.
Note: Channel 18-11 represents channels 8 to 1 for
MDL002 extended mainframe.
1 – channel is active.
0 – channel is not active.
683 = 1000100
74
Page 75
Query Syntax
PROG:ACT:CHAN?
Returned Parameters
<NR1>
Command Syntax
PROGram:ACTive:SEQuence <NRf+>
Parameters
0 – 512
Bit Value in
decimal
512
256
128
64
32
16 8 4 2 1
Bit
9 8 7 6 5 4 3 2 1
0
Sequence
10 9 8 7 6 5 4 3 2
1
Examples
PROG:ACT:SEQ 384
Enables sequence 8 and 9.
Query Syntax
PROG:ACT:SEQ?
Returned Parameters
<NR1>
Command Syntax
PROGram:SEQuence:SHORt <n>, <NRf+>
Parameters
<n> - Sequence number, 1 to 10.
by the bits, according to the following table. Note:
:PROGram:ACTive:SEQuence
The command is used to specify the sequence to enable for the program. The sequence number is
linked to the instrument settings saved in the internal storage memory. Each sequence number in
each programs are linked to one of the instrument settings storage locations.
Sequence 1 to 10 of program 1 is linked (in order) to storage locations 1-10.
Sequence 1 to 10 of program 2 is linked (in order) to storage locations 11-20.
….
Sequence 1 to 10 of program 10 is linked (in order) to storage locations 91-100.
The value, in decimal, is based on the binary
representation of the sequence number which are
represented by the bits, according to the following table.
1 – Selects that sequence number.
0 – Not selected.
:PROGram:SEQuence:SHORt
The command is used to specify the short sequence for the program. When a sequence is selected for
short, all channels for that sequence will be shorted for testing.
75
384 = 110000000
<NRf+> - 0 – 65535
The value, in decimal, is based on the binary
representation of the channels to which are represented
Page 76

Channel 18-11 represents channels 8 to 1 for MDL002
Bit
15
14
13
12
11
10 9 8 7 6 5 4 3 2 1 0
Channel
18
17
16
15
14
13
12
11 8 7 6 5 4 3 2 1
Examples
PROG:SEQ:SHOR 683
Sets channel 3 and 7 for short testing.
Query Syntax
PROG:SEQ:SHOR? <n>
Returned Parameters
<NRf+>
Command Syntax
PROGram:SEQuence:ONTime <n>, <NRf>
Parameters
<n> - Sequence number, 1 to 10.
<NRf> - On time, 0.01 to 60.0 seconds.
Examples
PROG:SEQ:ONT 4, 5
Sets sequence 4 ON time to 5 seconds.
Query Syntax
PROG:SEQ:ONT? <n>
Returned Parameters
<NR1>
Command Syntax
PROGram:SEQuence:OFFTime <n>, <NRf>
Parameters
<n> - Sequence number, 1 to 10.
<NRf> - Off time, 0.01 to 60.0 seconds.
Examples
PROG:SEQ:OFFT 4, 5
Sets sequence 4 OFF time to 5 seconds.
Query Syntax
PROG:SEQ:OFFT? <n>
Returned Parameters
<NR1>
extended mainframe.
1 – channel will be shorted.
0 – channel will not be shorted.
683 = 1000100
:PROGram:SEQuence:ONTime
The command is used to specify the input ON time for the selected sequence, which controls how long
to enable the inputs for the selected sequence.
:PROGram:SEQuence:OFFTime
The command is used to specify the input OFF time for the selected sequence, which controls how long
to disable the inputs for the selected sequence.
76
Page 77
:PROGram:SEQuence:PFDTime
Command Syntax
PROGram:SEQuence:PFDTime <n>, <NRf>
Parameters
<n> - Sequence number, 1 to 10.
<NRf> - Pass/Fail Delay, 0.01 to 60.0 seconds.
Examples
PROG:SEQ:PFDT 4, 5
Sets sequence 4 with pass/fail delay time to 5 seconds.
Query Syntax
PROG:SEQ:PFDT? <n>
Returned Parameters
<NR1>
Command Syntax
PROGram:SEQuence:PAUSe <NRf+>
Parameters
0 – 512
Bit Value in
decimal
512
256
128
64
32
16 8 4 2 1
Bit
9 8 7 6 5 4 3 2 1 0 Sequence
10 9 8 7 6 5 4 3 2
1
Examples
PROG:SEQ:PAUS 384
Sequence 8 and 9 will be paused during the test.
Query Syntax
PROG:SEQ:PAUS?
Returned Parameters
<NR1>
Command Syntax
PROGram:STOP:CONDition <COMPletion|FAILure>
Parameters
COMPlete
FAILure
The command is used to specify the pass/fail delay time for the selected sequence, which controls the
delay allowed before checking if the settings passed or failed for a pass/fail test.
:PROGram:SEQuence:PAUSe
The command is used to specify the pause sequence for the program. The selected sequence will be
paused during the program. The program will remain paused until it is unpaused.
The value, in decimal, is based on the binary
representation of the sequence number which are
represented by the bits, according to the following table.
1 – Selects that sequence number for pausing.
0 – Not selected.
:PROGram:STOP:CONDition
The command is used to specify the stop condition of the program. Users can select either the stop
after completion of the program or stop when a failure occurs in the test.
77
384 = 110000000
Page 78

Examples
PROG:STOP:COND COMP
Sets the program to stop on completion.
Query Syntax
PROG:STOP:COND?
Returned Parameters
COMPletion, FAILure
Command Syntax
PROGram:CHAin <n>
Parameters
<n> - Program number, 1 to 10.
the current program.
Examples
PROG:CHA 3
program finishes.
Query Syntax
PROG:CHA? <n>
Returned Parameters
<n>
Command Syntax
PROGram:SAVe <n>
Parameters
<n> - Program number, 1 to 10.
Examples
PROG:SAV 2
Saves the configurations to program 2 location.
Command Syntax
PROGram:RCL <n>
Parameters
<n> - Program number, 1 to 10.
Examples
PROG:RCL 2
Recall program 2 from memory.
:PROGram:CHAin
The command is used to specify the program chain parameter. This specifies the next program to run
automatic testing after the current program finishes. If set to 0, no further programs will be tested and
test will end.
Set to 0 if no programs will be tested after completion of
Configures program 3 to be run following after the current
:PROGram:SAVe
The command is used to save the configurations to a program location in memory.
:PROGram:RCL
The command is used to recall a specified program from memory.
78
Page 79

Other Commands
Command Syntax
FAC:MAC?
Return String
XX.XX.XX.XX.XX.XX
Where XX are alphanumeric characters.
FAC:MAC?
This query command returns the MAC address for the Ethernet interface.
79
Page 80

Channel
Specific
Select source of readings (VOLTage, CURRent,
TWO).
Channel
Specific
3.4 SCPI Command Tree
TRACe Command Summary
Commands Description Default
:TRACe
:CLEar Clear readings from buffer. Y
:FREE? Query points available and points in use. Y
:POINts <n> Specify size of buffer (2 to 1024). 2 Y
:POINts? Query buffer size. Y
:FEED <name>
:CONTrol <name> Select buffer control mode (NEVer or NEXT). NEVer Y
:CONTrol? Query buffer control mode. Y
:FEED? Query source of readings for buffer. Y
:FILTer
[:STATe] Select the type of buffer data OFF
[:STATe]? Query the type of buffer data
:DELay <n> Set the trigger delay time 0
:DELay? Query the trigger delay time
:TIMer <n> Set the timer interval 1
:TIMer? Query the timer interval
:DATA? Read all data in the buffer.
TWO Y
CHANnel Command Summary
Commands Description Default
:CHANnel <n> Select the electronic load channel. 1
:CHANel:ID?
This query reads the model numbers of the
modules installed in the mainframe.
Y
80
Page 81

SOURce Command Summary
Channel
Specific
Set electronic load’s regulation mode
IMPEDANCE).
Set electronic load’s input mode (FIXed or
LIST).
Enable or disable transition mode.
Commands Description Default
[:SOURce]
:INPut
[:STATe] <b> Set selected channel’s input state. OFF Y
[:STATe]? Query selected channel’s input state. Y
:ALL <b> Set all channels’ input states. N
:SHORt <b> Set selected channel’s load short state. OFF Y
:SHORt? Query selected channel’s load short state. Y
:SYNCon <b> Set the ON/OFF state for trace mode. Y
:SYNCon? Query the ON/OFF state for trace mode. Y
:TIMer
[:STATe] Set the timer ON/OFF state. Y
[:STATe]? Query the timer ON/OFF state. Y
:DELay Set the delay time for timer. Y
:DELay? Query the delay time for timer. Y
:REMote
:SENSe Set the remote sense ON/OFF state. Y
:SENSe? Query the remote sense ON/OFF state. Y
:FUNCtion <name>
:MODE <name>
:MODE? Query electronic load’s input mode. Y
:FUNCtion? Query electronic load’s regulation mode. Y
:TRANsient
[:STATe] <b>
(VOLTage, CURRent, RESistance, POWer,
CURRent Y
FIXed Y
OFF Y
[:STATe]? Query electronic load’s transition mode. Y
:CURRent
81
Page 82

Set both positive and negative slew rate for
current
Set current transiton mode (CONTinuous,
PULSe, or TOGGle)
[:LEVel]
:RANGe <NRf> Set constant current range. MAX Y
:RANGe? Query constant current range. Y
:SLEW Y
[:BOTH] <NRf>
:POSitive <NRf> Set positive slew rate for current MAX Y
:POSitive? Query positive slew rate for current Y
:NEGative <NRf> Set negative slew rate for current Y
:NEGative? Query negative slew rate for current Y
:PROTection
[:STATe] <b> Disable or enable current protection ON
[:STATe]? Query current protection state
:LEVel <NRf> Set current protection level MAX
:LEVel? Query current protection level
:DELay <NRf> Set current protection delay time 3
:DELay? Query current protection delay time
:TRANsient
MAX Y
:MODE <name>
:MODE?
:ALEVel <NRf> Set current transition level A MAX
:ALEVel? Query current transition level A
:AWIDth <NRf> Set current transition width A 500uS
:AWIDth? Query current transiton width A
:BLEVel <NRf> Set current transition level B MIN
:BLEVel?
:BWIDth <NRf> Set current transition width B 500uS
:BWIDth? Query current transiton width B
:HIGH <NRf> Set the voltage specification of upper limit
Query current transition mode
Query current transition level B
CONTinuous
82
Page 83

:HIGH? Query the voltage specification of upper limit
:LOW <NRf> Set the voltage specification of lower limit
:LOW? Query the voltage specification of lower limit
:VOLTage
[:LEVel]
:ON <Nrf> Set VON level MAX
:ON? Query VON level
:RANGe <NRf> Set constant voltage range MIN
:RANGe? Query constant voltage range
:AUTO Set the auto range mode for the voltmeter MAX
:AUTO? Query the auto range mode for the voltmeter
:LATCh <b> Enable or disable Von in latch mode ON
:LATCh? Query Von latch mode
:HIGH <NRf> Set the current specification of upper limit ON
:HIGH? Query the current specification of upper limit
:LOW <NRf> Set the current specification of lower limit
:LOW? Query the current specification of lower limit
:RESistance
[:LEVel]
:RANGe <NRf> Set constant resistance range MAX
:RANGe? Query constant resistance range
:HIGH <NRf> Set the voltage specification of upper limit MAX
:HIGH? Query the voltage specification of upper limit
:LOW <NRf> Set the voltage specification of lower limit
:LOW? Query the voltage specification of lower limit
:POWer
[:LEVel]
:RANGe <NRf> Set power protection delay time 3
:RANGe? Query power protection delay time
83
Page 84

:PROTection
:LEVel <NRf> Set hardware power protection level
:LEVel? Query hardware power protection level
:DELay <NRf> Set the delay time after power protection.
:DELay? Query the delay time after power protection.
:CONFig Set the hard power protection level.
:CONFig? Query the hard power protection level.
:IMPedance
[:LEVel]
[:IMMediate] <NRf> Set constant IMPedance level
[:IMMediate]? Query constant IMPedance level
:RANGe <NRf> Set constant resistance range
:RANGe? Query constant resistance range
:RESistance Set constant resistance level
:RESistance Query constant resistance level
:CAPacitance Set constant capacitance level
:CAPacitance? Query constant capacitance level
:INDuction Set constant induction level
:INDuction? Query constant induction level
:HIGH <NRf> Set the voltage specification of upper limit
:HIGH? Query the voltage specification of upper limit
:LOW <NRf> Set the voltage specification of lower limit
:LOW? Query the voltage specification of lower limit
:LIST
:RANGe <NRf> Set list range
:RANGe? Query list range
:COUNt <n> Set list cycle (1 to 65536)
:COUNt? Query list cycle
:STEP <n> Set total list step (2 to 84)
84
Page 85

:STEP? Query list step
Channel
Specific
Channel
Specific
:LEVel <NRf>,<NRf> Set list step level
:LEVel? <NRf> Query list step level
:SLEW
[:BOTH] <NRf> Set list step slew rate
[:BOTH]? Query list step slew rate
:WIDth <NRf>,<NRf> Set list step width
:WIDth <NRf> Query list step width
:SAV <name> Save list file to specify filename (1 to 5)
:RCL <name> Recall list file
:PROTection:CLEar Clear protection
SENSe Command Summary
Commands Description Default
:SENSe
:AVERage
:COUNt <n> Set filter count (1 to 100). 8 Y
:COUNt? Query filter count. Y
MEASure, FETch Command Summary
Commands Description Default
:MEASure
:VOLTage
:CURRent
:FETch
:VOLTage
:CURRent
85
Page 86

Channel
Specific
Channel
Specific
Take load out of remote and restore operation
of front panel controls.
Channel
Specific
:POWer? Fetch the last measured power Y
TRIGger Command Summary
Commands Description Default
:TRIGger Path to program trigger layer.
[:IMMediate] Generates a trigger signal. N
:TIMer <NRf> Set timer interval (0.01 to 999.99sec). 0.1 N
:TIMer? Query the programmed timer interval. N
SYSTem Command Summary
Commands Description Default
:SYSTem
:PRESet Return to :SYST:PRESet defaults. N
:POSetup <name> Select power-on setup: (RST or SAV0). RST N
:POSetup? Query power-on setup. N
:VERsion? Query rev level of SCPI standard. N
:ERRor? Query (read) Error Queue. N
:CLEar Clears messages from the Error Queue. N
:LOCal
:REMote Place load in remote control. N
:RWLock Lockout front panel controls. N
N
STATus Command Summary
Commands Description Default
:STATus (note 1)
:CHANnel Path to control channel status registers. Y
[:EVENt]? Read the event register. (note 2) Y
:ENABle <n> Program the enable register. (note 3) Y
86
Page 87

:ENABle? Read the enable register. Y
Channel
Specific
:CONDition? Read the condition register. Y
:CSUMary Path to control channel summary status.
[:EVENt]? Read the event register. (note 2) N
:ENABle <n> Program the enable register. (note 3) N
:ENABle? Read the enable register. N
:OPERation Path to control operation status register.
[:EVENt]? Read the event register. (note 2) N
:ENABle <n> Program the enable register. (note 3) N
:ENABle? Read the enable register. N
:CONDition? Read the condition register. N
:QUEStionable Path to control questionable status register.
[:EVENt]? Read the event register. (note 2) N
:ENABle <n> Program the enable register. (note 3) N
:ENABle? Read the enable register. N
:CONDition? Read the condition register. N
:PRESet Return status register to default states. N
PROGram Command Summary
Commands Description Default
:PROGram
:ACTive Subsystem to ACTive
:CHANnel <n> Set the active channel for test N
:CHANnel? Query the active channel for test N
:SEQuence <n> Set the active sequence for test N
:SEQuence? Query the active channel for test N
:SEQuence Subsystem to SEQuence
87
Page 88

:SHORt <n>, <n> Set the short channel for the selected seq. N
:SHORt? <n> Query the short channel for the selected seq. N
:ONTime <n>,<NRf> Set the on time for the selected seq. N
:ONTime?<n> Query the on times for the selected seq. N
:OFFTime <n>,<NRf> Set the off times for the selected seq. N
:OFFTime? <n> Query the off times for the selected seq. N
:PFDTime <n>,<NRf> Set the pass/fail delay time N
:PFDTime? <n> Query the pass/fail delay time N
:PAUSe <n> Set the pause sequence. N
:PAUSe? Query the pause sequence. N
:STOP
:CONDition <cond> Set the stop condition for test. N
:CONDition? Query the stop condition for test. N
:CHAin <n> Set the chain file for this program file. N
:CHAin? Query the chain for this program file. N
:SAVe <n> Save this program file. N
:RCL <n> Recall this program file. N
Notes:
1. Commands in the STATus subsystem are not affected by *RST and :SYSTem:PRESet. The effects of
cycling power, *CLS and :STATus:PRESet are explained by the following notes.
2. Event Registers: Power-up and *CLS clears all bits of the registers. :STATus:PRESet has no effect.
3. Enable Registers: Power-up and :STATus:PRESet clears all bits of the registers. *CLS has no effect.
Chapter 4
Programming Examples
4.1 Introduction
This chapter contains examples on how to program your electronic load. Simple examples show you
how to program:
• Input functions such as voltage, current, and resistance
88
Page 89

• Measurement functions
• Status and protection functions
• Transient functions, including lists
NOTE: The examples in this chapter show which commands are used to perform a particular function,
but do not show the commands being used in any particular programming environment.
4.2 Programming the Input
Power-on Initialization
When the electronic load is first turned on, it wakes up with the input state set OFF. The following
commands are given implicitly at power-on:
• *RST or *RCL 0
• *CLS
• *SRE 0
• *ESE 0
*RST is a convenient way to program all parameters to a known state. Refer to the *RST command in
Section 3.2 Common Commands to see how each programmable parameter is set by *RST. Refer to
the *PSC command in Section 3.2 Common Commands for more information on the power-on
initialization of the *ESE and the *SRE registers.
Enabling the Input
To enable the input, use the command:
INPut ON
Input Voltage
The input voltage is controlled with the VOLTage command. For example, to set the input voltage to 25
volts, use:
VOLTage 25
Input Current
89
Page 90
parameters associated with transient operation. At *RST all transient functions are set to OFF.
All models have a programmable current function. The command to program the current is:
CURRent <n>
where <n> is the input current in amps.
Overcurrent Protection
The electronic load can also be programmed to turn off its input if the current protection level is
reached.
As explained in Section 3.3 Subsystem Commands, this protection feature is implemented by the
following command:
CURRent:PROTection:STATe ON | OFF
NOTE: Use CURRent:PROTection:DELay to prevent momentary current limit conditions caused by
programmed input changes from tripping the overcurrent protection.
Generating Triggers
You can generate a single trigger by sending the following command over the GPIB:
TRIGger:IMMediate
Note that this command will always generate a trigger. Use the TRIGger:SOURce command to select
other trigger sources such as the mainframe's external trigger input.
Programming Transients
Transient operation is used to synchronize input changes with internal or external trigger signals, and
simulate loading conditions with precise control of timing, duration, and slew. The following transient
modes can be generated:
Continuous Generates a repetitive pulse stream that toggles between two load levels.
Pulse Generates a load change that returns to its original state after some time period.
Toggled Generates a repetitive pulse stream that toggles between two load levels. Similar to
Continuous mode except that the transient points are controlled by explicit triggers
instead of an internal transient generator.
NOTE: Before turning on transient operation, set the desired mode of operation as well as all of the
90
Page 91
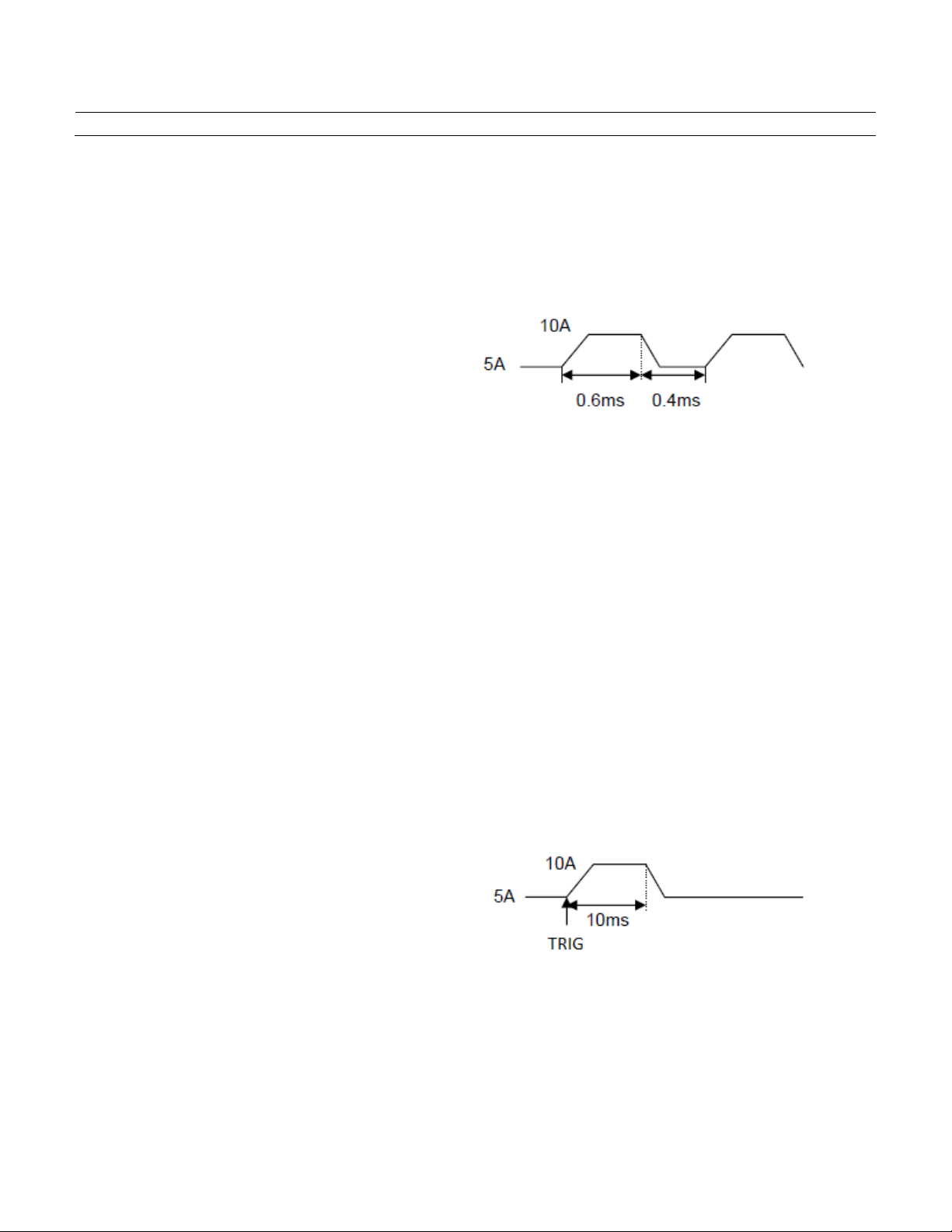
Continuous Transients
In continuous operation, a repetitive pulse train switches between two load levels. The rate at which
the level changes is determined by the slew rate. In addition, use the following commands to program
continuous transients:
CURRent:TRANsient:MODE CONTinuous
CURRent:TRANsient:ALEVel 5
CURRent:TRANsient:AWIDth 0.4 mS
CURRent:TRANsient:BLEVel 10
CURRent:TRANsient:BWIDth 0.6 mS
TRANsient ON
TRIGger:IMMediate
This example assumes that the CC mode is active and the slew rate is at the default setting (maximum
rate). The electronic load module starts conduction at the main level (in this case 5 amps). When
transient operation is turned on, the module’s input current will slew to and remain at 10 amps for
60% of the period (600 us). The input current will then slew to and remain at 5 amps for the remaining
40% (400 us) of that cycle.
Pulse Transients
Pulsed transient operation generates a load change that returns to level B state after some time
period. It is similar to continuous operation with the following exceptions:
a. To get a pulse, an explicit trigger is required. To specify the trigger source, use
TRIGger:SOURce.
b. One pulse results from each trigger. Therefore, frequency cannot be programmed. Use the
following commands to program pulsed transients:
CURRent:TRANsient:MODE PULSe
CURRent:TRANsient:ALEVel 5
CURRent:TRANsient:BLEVel 10
CURRent:TRANsient:BWIDth 10 mS
TRANsient ON
TRIGger:IMMediate
This example assumes that the CC mode is active, the slew rate is at the factory default setting
(maximum rate), and a trigger signal is connected to the mainframe's external trigger input. The
electronic load module starts conduction at the transient level A setting (5 amps). When the transient
mode is turned on and an external trigger signal is received (or TRIGger:IMMediate is received), the
input level starts increasing at a rate determined by the slew rate. When the value specified by the
91
Page 92

transient level setting (5 amps) is reached, it stays there for the remainder of the time determined by
the pulse width setting (10 ms). After this time has elapsed, the input level decreases to the main level
again at the rate specified by the slew setting and remains there until another trigger is received. Any
triggers that occur during the time the transient level is in effect will re-trigger the pulse, extending the
pulse by another pulse-width value.
Toggled Transients
Toggled transient operation causes the module input to alternate between two pre-defined levels as in
continuous operation except that the transient transitions are controlled by explicit triggers instead of
the internal transient generator. Use the following commands to program toggled transients:
TRIGger:SOURce EXTernal
CURRent:TRANsient:MODE TOGGle
CURRent:TRANsient:ALEVel 5
CURRent:TRANsition:BLEVel 10
TRANsient ON
This example assumes that CC mode is active, the slew rate is at the factory default setting (maximum
rate) and a trigger signal is connected to the mainframe's external trigger input. Toggled transient
operation is similar to that described for continuous and pulse operation, except that each time a
trigger is received the input alternates between the level A and level B current levels.
4.3 Programming Lists
List mode lets you generate complex sequences of input changes with rapid, precise timing, which may
be synchronized with internal or external signals. This is useful when running test sequences with a
minimum amount of programming overhead. You can program up to 84 steps in the list, the time
interval that each setting is maintained, the number of times that the list will be executed, and how the
settings change in response to triggers. All list data can be stored in nonvolatile memory using the
LIST:SAV command. This means that the programmed data for any list will be retained when the
electronic load is turned off. Use the LIST:RCL command to recall the saved state.
4-Step Current Change List Example
The following example procedure shows how to generate and save a simple 4-step list of current
changes. When programming, be sure to verify all parameters are within the module’s specifications.
1. Set the current range of the list.
LIST:RANGe 40
2. Set the list cycle.
LIST:COUNt 10000
3. Specify the number of steps in the list.
LIST:STEP 4
4. Specify the current setting for step 1.
LIST:LEVel 1,5
5. Set the current slew rate for step 1.
LIST:SLEW 1,1
6. Set the width for step 1.
92
Page 93

LIST:WIDth 1,10ms
7. Specify the current setting for step 2.
LIST:LEVel 2,10
8. Set the current slew rate for step 2.
LIST:SLEW 2,1
9. Set the width for step 2.
LIST:WIDth 2,10ms
10. Specify the current setting for step 3.
LIST:LEVel 3,20
11. Set the current slew rate for step 3.
LIST:SLEW 3,1
12. Set the width for step 3.
LIST:WIDth 3,10ms
13. Specify the current setting for step 4.
LIST:LEVel 4,15
14. Set the current slew rate for step 4.
LIST:SLEW 4,1
15. Set the width for step 4.
LIST:WIDth 4,10ms
16. Save the list to memory location 2.
LIST:SAV 2
17. Set the input regulation mode to be
controlled by values in a list.
FUNCtion:MODE LIST
18. Set trigger source to BUS
TRIG:SOUR BUS
19. Run the list file
*TRG
Chapter 5
Error Messages
Error Number List
This appendix gives the error numbers and descriptions that are returned by the electronic load. Error
numbers are returned in two ways:
1) Error numbers are displayed on the front panel.
2) Error numbers and messages are read back with the SYSTem:ERRor? query. SYSTem:ERRor?
returns the error number into a variable and returns two parameters, an NR1 and a string.
The following table lists the errors that are associated with SCPI syntax errors and interface problems.
It also lists the device dependent errors. Information inside the brackets is not part of the standard
error message, but is included for clarification. When errors occur, the Standard Event Status register
records them in bit 2, 3, 4, or 5:
93
Page 94
Table 1 - Error Numbers
Error Error String [Description/Explanation/Examples]
Command Errors 100 through 199 (sets Standard Event Status Register bit #5 CME)
101 DESIGN ERROR: Too many numeric suffices in Command Spec
110 No Input Command to parse
114 Numeric suffix is invalid value
116 Invalid value in numeric or channel list, e.g. out of range
117 Invalid number of dimensions in a channel list
120 Parameter of type Numeric Value overflowed its storage
130 Wrong units for parameter
140 Wrong type of parameter(s)
150 Wrong number of parameters
160 Unmatched quotation mark (single/double) in parameters
165 Unmatched bracket
170 Command keywords were not recognized
180 No entry in list to retrieve (number list or channel list)
190 Too many dimensions in entry to be returned in parameters
191 Too many char
Execution Errors –200 through –299 (sets Standard Event Status Register bit #4 EXE)
-200 Execution error [generic]
-221 Settings conflict [check current device state]
-222 Data out of range [e.g., too large for this device]
-223 Too much data [out of memory; block, string, or expression too long]
-224 Illegal parameter value [device-specific]
-225 Out of memory
-270 Macro error
-272 Macro execution error
-273 Illegal macro label
-276 Macro recursion error
94
Page 95
-277 Macro redefinition not allowed
System Errors –300 through –399 (sets Standard Event Status Register bit #3 DDE)
-310 System error [generic]
-350 Too many errors [errors beyond 9 lost due to queue overflow]
Query Errors -400 through -499 (sets Standard Event Status Register bit #2)
-400 Query error [generic]
-410 Query INTERRUPTED [query followed by DAB or GET before response complete]
-420 Query UNTERMINATED [addressed to talk, incomplete programming message received]
-430 Query DEADLOCKED [too many queries in command string]
-440 Query UNTERMINATED [after indefinite response]
Self-test Errors 0 through 99 (sets Standard Event Status Register bit #3)
0 No error
1 Module Initialization Lost
2 Mainframe Initialization Lost
3 Module Calibration Lost
4 Non-volatile RAM STATE section checksum failed
5 Non-volatile RAM RST section checksum failed
10 RAM selftest
11 CVDAC selftest 1
12 CVDAC selftest 2
13 CCDAC selftest 1
14 CCDAC selftest 2
15 CRDAC selftest 1
16 CRDAC selftest 2
20 Input Down
40 Flash write failed
41 Flash erase failed
80 Digital I/O selftest error
95
Device-Dependent Errors 100 through 32767 (sets Standard Event Status Register bit #3)
Page 96

213 RS-232 buffer overrun error
216 RS-232 receiver framing error
217 RS-232 receiver parity error
218 RS-232 receiver overrun error
220 Front panel UART overrun
221 Front panel UART framing
222 Front panel UART parity
223 Front panel buffer overrun
224 Front panel timeout
225 Front CRC check error
226 Front cmd Error
401 CAL switch prevents calibration
402 CAL password is incorrect
403 CAL not enabled
404 Computed readback cal constants are incorrect
405 Computed programming cal constants are incorrect
406 Incorrect sequence of calibration commands
407 CV or CC status is incorrect for this command
603 FETCH of data that was not acquired
604 Measurement overrange
96
Page 97

22820 Savi Ranch Parkway
Yorba Linda, CA 92887
www.bkprecision.com
© 2013 B&K Precision Corp.
Printed in China v070213
97
 Loading...
Loading...