


The Neon
Hardware Reference Manual
BitFlow, Inc.
400 West Cummings Park, Suite 5050
Woburn, MA 01801
USA
Tel: 781-932-2900
Fax: 781-933-9965
Email: support@bitflow.com
Web: www.bitflow.com
Revision G.5

© 2016 BitFlow, Inc. All Rights Reserved.
This document, in whole or in part, may not be copied, photocopied, reproduced, translated or reduced to any other electronic medium or machine readable form without the
prior written consent of BitFlow, Inc.
BitFlow, Inc. makes no implicit warranty for the use of its products and assumes no
responsibility for any errors that may appear in this document, nor does it make a commitment to update the information contained herein.
BitFlow, Inc. retains the right to make changes to these specifications at any time without
notice.
All trademarks are properties of their respective holders.
Revision History:
Revision Date Comments
F.0 2007-02-01 First Revision
G.0 2008-04-25 Synchronized with SDK 5.00
G.1 2009-07-01 Synchronized with SDK 5.20
G.2 2009-09-10 Added NEO-PCE-CLD and NEO-PCE-CLB Revi-
sion 2
G.3 2010-11-18 Added NEO-PCE-CLQ
G.4 2016-04-18 Added NEO-PCE-DIF
G.5 2016-04-28 Minor corrections

P - Preface
Purpose NEO-P-1
Support Services NEO-P-1
Technical Support NEO-P-1
Sales Support NEO-P-1
Conventions NEO-P-2
1 - General Description and Architecture
The Neon NEO-1-1
NEO-PCE-CLB General Description NEO-1-2
NEO-PCE-CLD General Description NEO-1-4
NEO-PCE-CLQ General Description NEO-1-6
NEO-PCE-DIF General Description NEO-1-8
Virtual vs Hardware Frame Grabbers NEO-1-10
The Virtual Frame Grabber (VFG) NEO-1-10
Configuration Spaces NEO-1-10
Firmware, Camera Files and Downloads NEO-1-11
Table of Contents
Table of Contents
2 - Acquisition and Camera Control
Introduction NEO-2-1
BitFlow’s Flow-Thru Architecture NEO-2-2
Camera Specific Firmware for Camera Link Models (CL Models Only) NEO-2-7
Generation of Acquisition Windows NEO-2-9
The Horizontal Active Window, HAW NEO-2-9
The Vertical Active Window, VAW NEO-2-10
The Control Tables (CTABs) NEO-2-12
Vertical Control Table NEO-2-12
The VCTAB Functions NEO-2-13
Vertical Control Table Size NEO-2-15
Horizontal Control Table NEO-2-15
The HCTAB Functions NEO-2-17
Horizontal Control Table Size NEO-2-20
Synchronizing Acquisition, Camera, CTABs and External Signals NEO-2-21
Vertical Operations and Events NEO-2-21
Horizontal Operations and Events NEO-2-25
Acquisition Command and Status NEO-2-29
The Acquisition Bitfields NEO-2-29
Trigger Processing (CL & Dif Models Only) NEO-2-34
Encoder Processing (CL & Dif Models Only) NEO-2-35
The On-Board Signal Generator NEO-2-36
BitFlow, Inc.

Table of Contents
3 - New Timing Generator
Introduction NEO-3-1
Components and Control NEO-3-2
Periods and Frequencies NEO-3-2
Waveform polarity NEO-3-3
Triggering NEO-3-3
Output Signals NEO-3-3
Master/Slave Control NEO-3-3
Timing NEO-3-4
NTG Control Registers NEO-3-5
4 - Quadrature Encoder
Introduction NEO-4-1
Simple Encoder Mode NEO-4-1
Positive or Negative Only Acquisition NEO-4-1
Interval Mode NEO-4-2
Re-Acquisition Prevention NEO-4-2
Scan Step Mode NEO-4-2
Combining Modes NEO-4-2
Control Registers NEO-4-2
Observability NEO-4-3
Electrical Connections NEO-4-3
Understanding Stage Movement vs. Quadrature Encoder Modes NEO-4-4
CON15 Register NEO-4-6
CON16 Register NEO-4-10
CON22 Register NEO-4-12
CON51 Register NEO-4-14
5 - Encoder Divider
Introduction NEO-5-1
Encoder Divider Details NEO-5-2
Formula NEO-5-2
Example NEO-5-2
Restrictions NEO-5-2
PLL Locking NEO-5-3
Handling Encoder Slow Down or Stopping NEO-5-3
Encoder Divider Control Registers NEO-5-4
6 - Power Over Camera Link (PoCL)
Introduction NEO-6-1
PoCL Compatibility NEO-6-2
PoCL Safe Power NEO-6-3
PoCL Control Registers NEO-6-5
BitFlow, Inc.

7 - System Status
Introduction NEO-7-1
FACTIVE, FCOUNT NEO-7-2
PCOUNT, LCOUNT, FENCOUNT NEO-7-3
RD_TRIG_DIFF/TTL/OPTO, RD_ENC_DIFF/TTL/OPTO NEO-7-4
TRIG_QUALIFIED NEO-7-5
VCOUNT, HCOUNT, LINES_TOGO NEO-7-6
FIFO_EQ NEO-7-7
DEST_ADD NEO-7-8
8 - Camera Control Registers
Introduction NEO-8-1
Bitfield definitions NEO-8-2
Example Bitfield Definition NEO-8-2
Bitfield Definition Explanation. NEO-8-2
CON0 Register NEO-8-4
CON1 Register NEO-8-8
CON2 Register NEO-8-15
CON3 Register NEO-8-21
CON4 Register NEO-8-24
CON5 Register NEO-8-31
CON6 Register NEO-8-37
CON7 Register NEO-8-39
CON8 Register NEO-8-42
CON9 Register NEO-8-48
CON10 Register NEO-8-52
CON11 Register NEO-8-56
CON12 Register NEO-8-58
CON13 Register NEO-8-60
CON14 Register NEO-8-62
CON15 Register NEO-8-66
CON16 Register NEO-8-70
CON17 Register NEO-8-73
CON18 Register NEO-8-75
CON19 Register NEO-8-77
CON20 Register NEO-8-79
CON21 Register (Bayer Version) NEO-8-82
CON22 Register NEO-8-85
CON23 Register NEO-8-87
CON24 Register NEO-8-89
CON25 Register NEO-8-93
CON26 Register NEO-8-95
CON27 Karbon Register NEO-8-97
CON27 Neon-DIF Register NEO-8-99
CON36 Register NEO-8-101
CON37 Register NEO-8-103
CON38 Register NEO-8-105
Table of Contents
BitFlow, Inc.

CON40 Register NEO-8-108
CON41 Register NEO-8-110
CON42 Register NEO-8-112
CON43 Register NEO-8-118
CON44 Register NEO-8-120
CON51 Register NEO-8-122
9 - Karbon/Neon/Alta DMA
Introduction NEO-9-1
CON28 Register NEO-9-2
CON29 Register NEO-9-4
CON30 Register NEO-9-6
CON31 Register NEO-9-8
CON32 Register NEO-9-10
CON33 Register NEO-9-12
CON34 Register NEO-9-14
CON35 Register NEO-9-17
Scatter Gather DMA Instructions NEO-9-19
Destination Address NEO-9-20
Size of Transfer NEO-9-21
Next Quad Address NEO-9-22
Table of Contents
10 - Register and Memory Mapping
Introduction NEO-10-1
Memory Types NEO-10-2
Registers NEO-10-2
UART NEO-10-2
DPM NEO-10-2
CTABs NEO-10-2
Memory Map NEO-10-3
Downloading Firmware NEO-10-5
PCI Configuration Space and Model/Revision Information NEO-10-6
11 - Electrical Interfacing
Introduction NEO-11-1
Trigger NEO-11-2
Trigger Input Types NEO-11-2
The Optocoupled Trigger NEO-11-2
Encoder NEO-11-4
Encoder Input Types NEO-11-4
The Optocoupled Encoder NEO-11-4
General Purpose Inputs (GPIN) NEO-11-6
Introduction NEO-11-6
General Purpose Outputs (GPOUT) NEO-11-7
BitFlow, Inc.

Table of Contents
Introduction NEO-11-7
GPOUT Open Collector Drivers NEO-11-7
Camera Link Controls (CCs) NEO-11-10
12 - Specifications
Introduction NEO-12-1
Maximum Pixels Per Line NEO-12-3
Maximum Lines Per Frame NEO-12-4
Power Consumption NEO-12-5
13 - Mechanical
Introduction NEO-13-1
The NEO-PCE-CLB Revision 1 NEO-13-2
The NEO-PCE-CLB Revision 2 NEO-13-3
The NEO-PCE-CLD NEO-13-4
The NEO-PCE-CLQ NEO-13-5
The NEO-PCE-DIF NEO-13-7
The Neon Connectors NEO-13-8
The CL Connectors NEO-13-8
The I/O Connectors NEO-13-8
The Jumpers NEO-13-10
Switches NEO-13-11
Switch S1, All Neon models NEO-13-11
Switch S2, NEO-PCE-CLB Revision 2 Only NEO-13-11
Switches S3 and S6, NEO-PCE-CLB Revision 2 Only NEO-13-11
Switches S4 and S7, NEO-PCE-CLB Revision 2 Only NEO-13-12
Switch S5, NEO-PCE-CLB Revision 2 Only NEO-13-12
The Camera Link Connector Pinouts (CL1 to CL4) NEO-13-13
NEO-PCE-CLB Revision 1 I/O Connector, Standard Configuration (P10) NEO-13-14
NEO-PCE-CLB Revision 1 I/O Connector, Alternate Configuration (P10) NEO-13-15
NEO-PCE-CLB Revision 2 I/O Connector (P10) NEO-13-16
NEO-PCE-CLD I/O Connector Pinout (P1) NEO-13-17
NEO-PCE-CLQ I/O Connector Pinout (P3) NEO-13-19
NEO-PCE-DIF Main Connector Pinout (P7) NEO-13-22
NEO-PCE-DIF Auxiliary Connector Pinout (P2) NEO-13-25
NEO-PCE-DIF I/O Connector Pinout (P3) NEO-13-27
BitFlow, Inc.

-TOC-6 BitFlow, Inc. Version

Preface Purpose
Preface
Chapter P
P. 1 P u r p o s e
This Hardware Reference Manual is intended for anyone using the Neon family of
frame grabber. The purpose of this manual is two-fold. First, this manual completely
describes how the board works. Second, it is a reference manual describing in detail
the functionality of all of the board’s registers.
P.1.1 Support Services
BitFlow, Inc. provides both sales and technical support for the Neon family of products.
P.1.2 Technical Support
Our web site is www.bitflow.com.
Technical support is available at 781-932-2900 from 9:00 AM to 6:00 PM Eastern Standard Time, Monday through Friday.
For technical support by email (support@bitflow.com) or by FAX (781-933-9965),
please include the following:
Product name
Camera type and mode being used
Software revision number
Computer CPU type, PCI chipset, bus speed
Operating system
Example code (if applicable)
P.1.3 Sales Support
Contact your local BitFlow Sales Representative, Dealer, or Distributor for information
about how BitFlow can help you solve your most demanding camera interfacing
problems. Refer to the BitFlow, Inc. web site (www.bitflow.com) for a list of North
American representatives and worldwide distributors.
Version G.5 BitFlow, Inc. NEO-P-1

Purpose The Neon
P.1.4 Conventions
Table P-1 shows the conventions that are used for numerical notation in this manual.
Table P-1 Base Abbreviations
Base Designator Example
Binary b 1010b
Decimal None 4223
Hexidecimal h 12fah
Table P-2 shows the numerical abbreviations that are used in this manual.
Table P-2 Numeric Abbreviations
Abbreviation Value Example
K 1024 256K
M 1048576 1M
NEO-P-2 BitFlow, Inc. Version G.5

General Description and Architecture The Neon
General Description and Architecture
Chapter 1
1.1 The Neon
The purpose of this chapter is to explain, at a block diagram level, how the Neon family works, and what different versions are available. There are a few models in the
Neon family:
NEO-PCE-CLB, supports one base CL cameras (Revision 1 and Revision 2)
NEO-PCE-CLD, supports two base CL cameras
NEO-PCE-CLQ, supports four base CL cameras
NEO-PCE-DIF, supports one differential camera
Version G.5 BitFlow, Inc. NEO-1-1

NEO-PCE-CLB General Description The Neon
24 64
64
64
64
64
64
64
Camera Link
Interface
MUX
Video Pipeline,
Data Packer
PCI Interface,
Scatter-Gather
DMA Engine
Camera
Control,
CTABs
FIFO
I/O,
Triggers,
Encoders
UART
Serial
Interface
P10
Local Bus
PCI Express Bus
CL1
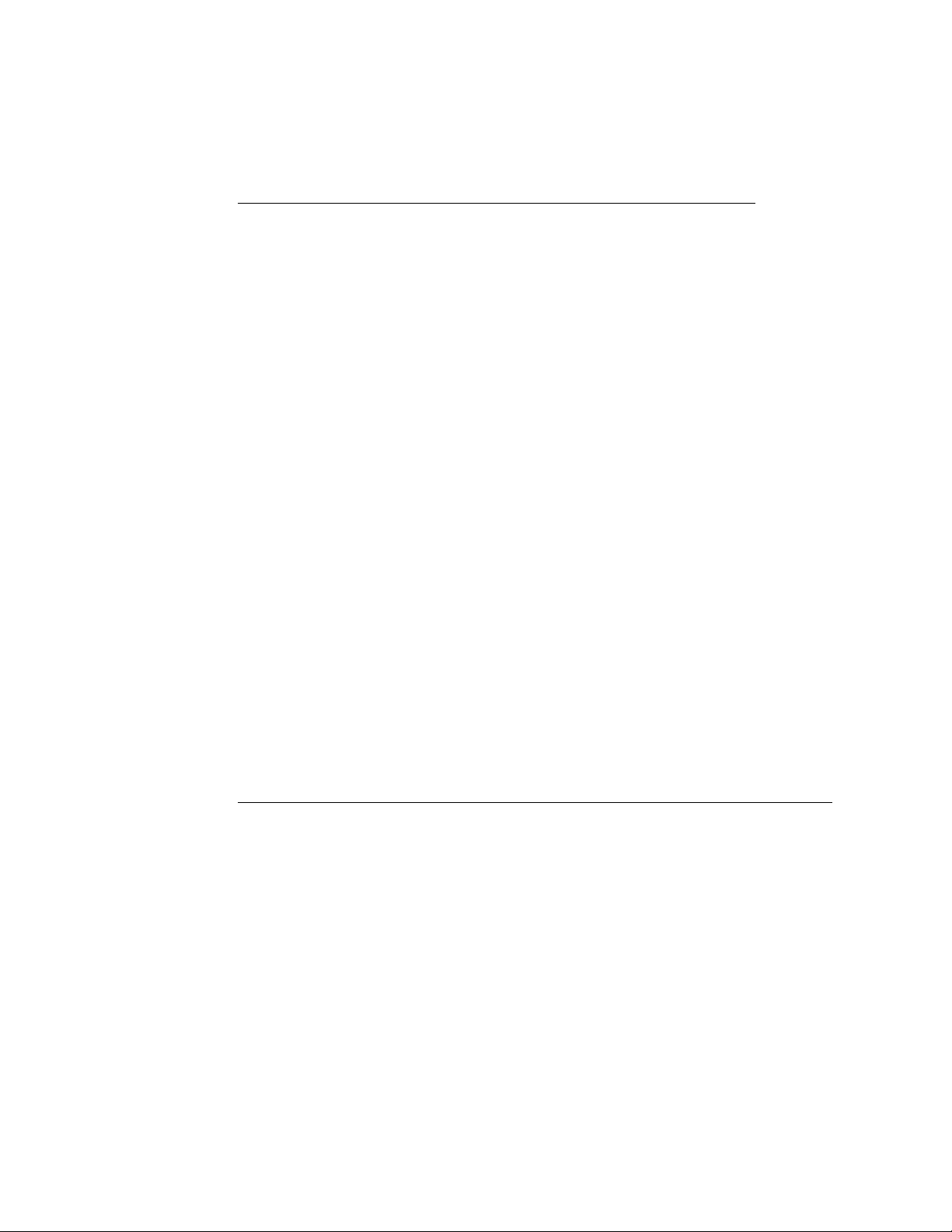
1.2 NEO-PCE-CLB General Description
Figure 1-1 illustrates the block diagram of the NEO-PCE-CLB.
Figure 1-1 NEO-PCE-CLB Block Diagram
The NEO-PCE-CLB implements the Camera Link base configuration, i.e. it can accept
a single camera putting out up to 24 bits of data.
The NEO-PCE-CLB can accept input data at up to 85 Mhz.
The following paragraphs are a short description of each block.
The Camera Link Interface block implements the CL base configuration This block has
the Channel Link IC, the Camera Control drivers and the serial communication transceivers.
The MUX block packs and assembles the data from the Camera Link block before it is
pushed into the FIFO. This block re-arranges on-the-fly the data from the camera’s
taps so that the data is written in raster scan format in the host memory.
NEO-1-2 BitFlow, Inc. Version G.5

General Description and Architecture NEO-PCE-CLB General Description
The FIFO block decouples the camera from the DMA engine. It is implemented with
dual ported memories.
The Camera Control block handles both camera synchronization as well as external I/
O. The block contains the CTABs which are uses to synchronize acquisition with the
camera, determine which pixels/lines get acquired and which do not, generate control signals to the camera and to external devices. This block also handles start/stopping acquisition based on triggers and encoders.
The PCI interface block handles host reads/writes to/from the board. These reads/
writes are used to program the board, and to control its modes. This block is also
responsible for DMAing image data to the host memory (or other devices). The DMA
engine uses chaining scatter-gather DMA, which can DMA a virtually unlimited
amount of data to memory without using any CPU cycles.
There is an on-board UART, as required by the CL specification.
The IO connector block has transmitters/receivers to communicate with external
industrial equipment (triggers, encoders, light strobes etc.).
Version G.5 BitFlow, Inc. NEO-1-3

NEO-PCE-CLD General Description The Neon
CL
Connector
2
UART
PCI
Device
1
PCI
Device
0
Channel
Link
Chip
UART
Channel
Link
Chip
Acquisition
and
Control
Logic
Acquisition
and
Control
Logic
PCI Express Bus
CL2
CL
Connector
1
CL1
P1
1.3 NEO-PCE-CLD General Description
Figure 1-2 illustrates the block diagram of the NEO-PCE-CLD.
Figure 1-2 NEO-PCE-CLD Block Diagram
The NEO-PCE-CLD implements two completelys separate Camera Link base interfaces. Each interface is really a completely independent Virtual Frame Grabber (VFG).
Put another way, the NEO-PCE-CLD has two complete copies of the NEO-PCE-CLB as
shown in Figure 1-1. The main difference being that both VFGs share a common I/O
connector (P1).
Each VFG can accept up to 24 bits at up to 85 Mhz pixel clock frequency.
The following paragraphs are a short description of each block.
NEO-1-4 BitFlow, Inc. Version G.5

General Description and Architecture NEO-PCE-CLD General Description
The Camera Link Interface block implements the CL base configuration This block has
the Channel Link chip, the Camera Control drivers and the serial communication tranceivers. Note that each VFG has its own UART so that serial communications to both
cameras can happen simultaneously.
The MUX block packs and assembles the data from the Camera Link block before it is
pushed into the FIFO. This block re-arranges on-the-fly the data from the camera’s
taps so that the data is written in raster scan format in the host memory.
The FIFO block decouples the camera from the DMA engine. It is implemented with
dual ported memories.
The Camera Control block handles both camera synchronization as well as external I/
O. The block contains the CTABs which are uses to synchronize acquisition with the
camera, determine which pixels/lines get acquired and which do not, generate control signals to the camera and to external devices. This block also handles start/stopping acquisition based on triggers and encoders.
The PCI interface block handles host reads/writes to/from the board. These reads/
writes are used to program the board, and to control its modes. This block is also
responsible for DMAing image data to the host memory (or other devices). The DMA
engine uses chaining scatter-gather DMA, which can DMA a virtually unlimited
amount of data to memory without using any CPU cycles.
There is an on-board UART, as required by the CL specification.
The IO connector block has transmitters/receivers to communicate with external
industrial equipment (triggers, encoders, light strobes etc.).
Version G.5 BitFlow, Inc. NEO-1-5

NEO-PCE-CLQ General Description The Neon
PCI
Device
0
Acquisition
and
Control
Logic
CL
Connector
1
UART
Channel
Link
Chip
CL1
PCI
Device
1
Acquisition
and
Control
Logic
CL
Connector
2
UART
Channel
Link
Chip
CL2
PCI
Device
2
Acquisition
and
Control
Logic
CL
Connector
3
UART
Channel
Link
Chip
CL3
PCI
Device
3
Acquisition
and
Control
Logic
CL
Connector
4
UART
Channel
Link
Chip
CL4
P1
PCI Express Bus
1.4 NEO-PCE-CLQ General Description
Figure 1-3 illustrates the block diagram of the NEO-PCE-CLQ.
Figure 1-3 NEO-PCE-CLQ Block Diagram
The NEO-PCE-CLQ implements four completelys separate Camera Link base interfaces. Each interface is really a completely independent Virtual Frame Grabber (VFG).
Put another way, the NEO-PCE-CLQ has four complete copies of the NEO-PCE-CLB as
shown in Figure 1-1. The main difference being that all VFGs share a common I/O
connector (P1).
Each VFG can accept up to 24 bits at up to 85 Mhz pixel clock frequency.
NEO-1-6 BitFlow, Inc. Version G.5

General Description and Architecture NEO-PCE-CLQ General Description
The following paragraphs are a short description of each block.
The Camera Link Interface block implements the CL base configuration This block has
the Channel Link chip, the Camera Control drivers and the serial communication tranceivers. Note that each VFG has its own UART so that serial communications to both
cameras can happen simultaneously.
The MUX block packs and assembles the data from the Camera Link block before it is
pushed into the FIFO. This block re-arranges on-the-fly the data from the camera’s
taps so that the data is written in raster scan format in the host memory.
The FIFO block decouples the camera from the DMA engine. It is implemented with
dual ported memories.
The Camera Control block handles both camera synchronization as well as external I/
O. The block contains the CTABs which are uses to synchronize acquisition with the
camera, determine which pixels/lines get acquired and which do not, generate control signals to the camera and to external devices. This block also handles start/stopping acquisition based on triggers and encoders.
The PCI interface block handles host reads/writes to/from the board. These reads/
writes are used to program the board, and to control its modes. This block is also
responsible for DMAing image data to the host memory (or other devices). The DMA
engine uses chaining scatter-gather DMA, which can DMA a virtually unlimited
amount of data to memory without using any CPU cycles.
There is an on-board UART, as required by the CL specification.
The IO connector block has transmitters/receivers to communicate with external
industrial equipment (triggers, encoders, light strobes etc.).
Version G.5 BitFlow, Inc. NEO-1-7

NEO-PCE-DIF General Description The Neon
16
16
64
64
64
64
64
64
64
MUX
Video Pipeline,
Data Packer
PCI Interface,
Scatter-Gather
DMA Engine
Camera
Control,
CTABs
FIFO
UART
Serial
Interface
Local Bus
PCI Express Bus
P2
Bits 16 to 31
P7
Bits 0 to 15
1.5 NEO-PCE-DIF General Description
Figure 1-4 illustrates the block diagram of the NEO-PCE-DIF
The NEO-PCE-DIF supports one differential camera up to 32 bits.
Figure 1-4 NEO-PCE-DIF Block Diagram
The NEO-PCE-DIF can accept input data at up to 85 Mhz.
The following paragraphs are a short description of each block.
The MUX block packs and assembles the data from the Camera Link block before it is
pushed into the FIFO. This block re-arranges on-the-fly the data from the camera’s
taps so that the data is written in raster scan format in the host memory.
The FIFO block decouples the camera from the DMA engine. It is implemented with
dual ported memories.
NEO-1-8 BitFlow, Inc. Version G.5

General Description and Architecture NEO-PCE-DIF General Description
The Camera Control block handles both camera synchronization as well as external I/
O. The block contains the CTABs which are uses to synchronize acquisition with the
camera, determine which pixels/lines get acquired and which do not, generate control signals to the camera and to external devices. This block also handles start/stopping acquisition based on triggers and encoders.
The PCI interface block handles host reads/writes to/from the board. These reads/
writes are used to program the board, and to control its modes. This block is also
responsible for DMAing image data to the host memory (or other devices). The DMA
engine uses chaining scatter-gather DMA, which can DMA a virtually unlimited
amount of data to memory without using any CPU cycles.
There is an on-board UART which can be use with cameras that support serial communications.
The IO connector block has transmitters/receivers to communicate with external
industrial equipment (triggers, encoders, light strobes etc.).
Version G.5 BitFlow, Inc. NEO-1-9

Virtual vs Hardware Frame Grabbers The Neon
1.6 Virtual vs Hardware Frame Grabbers
It’s important to understand how this manual works. Some chapters of this manual discuss the NEO-PCE-CLD and NEO-PCE-CLQ as a hardware platforms (this chapter is a
good example). While other chapters discuss the details of the Virtual Frame Grabbers (VFG) that this hardware platform supports. The concept of the virtual frame
grabber is described below, but basically the idea is that one hardware platform can
support more than one device. In the case of the Karbon-CL, these devices are frame
grabbers.
Note that we are not using the word virtual here in the sense of “a software virtualization of a hardware device”, these VFGs are real hardware. The reason we using “virtual” is because the term “frame grabber” has more than one meaning. It can mean
the piece of hardware that you put in your computer, or it can mean the device that
the your software application is controlling and getting images from. For the purposes of this manual, “virtual frame grabber” means the device that your application
is interfacing to. While this might sound complicated, the implementation is simple.
Plug a NEO-PCE-CLD or NEO-PCE-CLQ frame grabber into your PC, and your application interacts with one or more VFGs available. Everything else is taken care of by
the BitFlow drivers.
1.6.1 The Virtual Frame Grabber (VFG)
The Karbon family was the first board from BitFlow that supports the concept of the
virtual frame grabber (VFG). The NEO-PCE-CLD and NEO-PCE-CLQ also use this concept. The idea behind the VFG is to separate the hardware platform (connectors, laminate, FPGAs, etc.) from the frame grabbing functionality that software applications
work with. The primary reason behind this separation is that the turn around time for
hardware is much longer than the turn around time for modifying virtual frame grabbers. To create a brand new virtual frame grabber, or to modify an existing one, simply requires writing new firmware or updating existing firmware.
The idea of modifying a frame grabber by making changes to its firmware is not new.
BitFlow has been doing this since its very first product. However, what is new about
the Karbon family, is the fact the entire frame grabber is written in firmware. The only
fixed hardware components are the interfaces to the outside world (e.g. the CL chips
on the front end). Everything else that makes up the board, camera control, data buffering, DMA engine, etc. is written in firmware. This gives the Karbon platform incredible levels of flexibility and opens the door to unlimited customization.
1.6.2 Configuration Spaces
The NEO-PCE-CLD supports two VFGs, the NEO-PCE-CLQ supports four VFGs. Each
VFG has its own configuration space (PCI interface) and will look like a separate
device to the operating system. Each VFG has its own CL interface chip. Figure 1-2
shows the block diagram of the entire board, while Figure 1-1 shows the block diagram of the individual VFG. In this case, each VFG looks like a separate instance of the
single base Neon.
NEO-1-10 BitFlow, Inc. Version G.5

General Description and Architecture Virtual vs Hardware Frame Grabbers
1.6.3 Firmware, Camera Files and Downloads
Note that all the devices present on a NEO-PCE-CLD and NEO-PCE-CLQ will appear
in SysReg as separate BitFlow Boards Found. The order that the VFGs appear in SysReg is determined by the operating system and is somewhat arbitrary. However, SysReg lists the connector(s) associated with each VFG, so that a connection can be
made between VFG and physical connector on the board.
Recall that, even though NEO-PCE-CLD appears like two frame grabbers (the NEOPCE-CLQ as four), there is only one actual hardware platform. For this reason the firmware of the of the VFGs on one board is linked. The selection of the master VFG,
determines the configurations of all of slave VFGs. For example, if you configure the
master VFG with a two-tap odd/even pixel camera, then the slave VFG will also have
to be configured for a two-tap odd/even pixel camera. In all other ways, however, the
two configurations do not have to match. If you have a requirement where this rule
must be broken, please contact BitFlow’s support department. Custom combinations
of firmware are available.
If there is a mismatch between the firmware required by one VFG’s camera file and
the firmware required by another VFG’s camera file, the master VFG’s firmware will
get priority. In practice this means that if you change the camera file for the master
VFG, and it requires different firmware than is already on the board, new firmware will
be downloaded next time you start an application. However, in the case of a slave
VFG, if different firmware is required than is on the board, an error message will pop
up indicating the problem. Thus all the camera files for a all the VFGs on one NEOPCE-CLD or NEO-PCE-CLQ should all require the same firmware. That said, if you
have a custom need for a particular arrangement of cameras, please let us know. We
can create custom firmware to solve almost any problem.
Version G.5 BitFlow, Inc. NEO-1-11

Virtual vs Hardware Frame Grabbers The Neon
NEO-1-12 BitFlow, Inc. Version G.5

Acquisition and Camera Control Introduction
Acquisition and Camera Control
Chapter 2
2.1 Introduction
This section covers acquisition and camera control for the R64-CL, Karbon-CL, NeonCL, Neon-Dif, Karbon-CXP and the Alta-AN families of frame grabbers.
Version G.5 BitFlow, Inc. NEO-2-1

BitFlow’s Flow-Thru Architecture The Neon
2.2 BitFlow’s Flow-Thru Architecture
The MUX component of the block diagrams for the Alta, Karbon, Neon and R64 is
composed of a chain of sub-blocks that make up the Flow-Thru Architecture (FTA).
Figure 2-1 shows the structure of the FTA for the Camera Link boards. Figure 2-2
shows the structure of the Alta family. All the data paths are 64-bit. The implementation of the individual blocks depends on the camera format, i.e. it is specific to the
firmware downloaded for each sensor architecture. There is a bitfield, FORMAT, which
indicates the currently downloaded firmware.
Below is a description of the individual blocks. For each block are shown the signals
that are defined by the user.
Data from the Camera Link or AFE is synchronized and assigned to data lanes according to the camera format. The user has no control over these operations. From this
block the data goes to a Barrel Shifter.
The Barrel Shifter is composed of four 16-bit barrel shifters. All shifters receive the
same command, Left/Right and the amount of shift, up to 15 bits. The main purpose
of the Barrel Shifter is for cameras that have more than 8 bits per pixel. The Barrel
Shifter can down-shift the data to 8-bit suitable for display. Any camera with up to four
taps can be accommodated.
There is a Video Delay Line (not shown) in the data path which can delay the video by
up to 8 clocks. This is useful for accurate alignment of the video on the display.
The Video Selector selects the data source: the video from the camera or the onboard generated synthetic video. The various patterns of synthetic video are useful
mainly for the on-board Built In Self Test (BIST).
The Mask is a 32-bit mask replicated over the upper and lower 32 bits of the 64-bit
data path. The purpose of this mask is to be able to set to zero any bit in the data path
(a one will pass the data as is, a zero will set that bit to zero).
The Clip is a clipping mechanism replicated on each one of the eight 8-bit data lanes.
If enabled, it will clip the 256 gray levels in each lane according to the formula:
If video > 245 then video = 245
If video <10 then video = 10
This mechanism is useful for displaying gray level data on a VGA that is set in 256color mode. In this mode the upper and lower 10 gray levels are dedicated to the
Windows graphics.
The Assembler will assemble and pack the video data before it is written in the FIFO.
This block does the raster scan re-arranging of the data. The packing is dependent on
the pixel depth, which is defined in the PIX_DEPTH bitfield in CON10. The DISPLAY
bit will force this block to assemble the data as 8-bit pixels, suitable for display. When
using this mode, the barrel shifters must be set to down-shift each pixel by the correct
amount. A 10-bit camera, for example, would need a 2-bit right shift.
The SWAP bit will swap between odd-even data streams for cameras that supply oddeven pixels.
NEO-2-2 BitFlow, Inc. Version G.5

Acquisition and Camera Control BitFlow’s Flow-Thru Architecture
The amount of data written in the FIFOs is controlled by the Acquisition Window. The
vertical and horizontal size of this window is programmed in the ALPF and the ACLP
registers respectively (see Section 2.4). The timing of this window is determined by
the camera and the acquisition state machine.
Version G.5 BitFlow, Inc. NEO-2-3

BitFlow’s Flow-Thru Architecture The Neon
24 24 16
24 24 16
16 16 16 16
16 16 16 16
32 32
8 8 8 8 8 8 8 8
8 8 8 8 8 8 8
64
8
Channel
Link Chip
X
Channel
Link Chip
Z
Channel
Link Chip
Y
Channel X
Equalizer
FIFO
Channel Y
Equalizer
FIFO
Channel Z
Equalizer
FIFO
Camera Link Pixel
Data Descrambler
Synthetic
Video
VID_SOURCE
PIX_DEPTH
VIDEO_MASK
CLIP
FORMAT,DISPLAY,
PIX_DEPTH
SHIFT_RAW, SHIFT_DSP,
SHIFT_RAW_LEFT,
SHIFT_DISP_LEFT,
SHIFT_DISP_SELECT
Barrel
Shifter
Barrel
Shifter
Barrel
Shifter
Barrel
Shifter
2:1 MUX
32-Bit
Mask
32-Bit
Mask
Raster Scan Line
Reformatter
8-Bit
Clip
8-Bit
Clip
8-Bi
t
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
Figure 2-1 Flow Thru Architecture - R64, Karbon and Neon
NEO-2-4 BitFlow, Inc. Version G.5

Acquisition and Camera Control BitFlow’s Flow-Thru Architecture
8 8 8
16 16 16 16
16 16 16 16
32 32
8 8 8 8 8 8 8 8
8 8 8 8 8 8 8
64
8
A-to-D
2
Camera Link Pixel
Data Descrambler
Synthetic
Video
VID_SOURCE
PIX_DEPTH
VIDEO_MASK
CLIP
FORMAT,DISPLAY,
PIX_DEPTH
SHIFT_RAW, SHIFT_DSP,
SHIFT_RAW_LEFT,
SHIFT_DISP_LEFT,
SHIFT_DISP_SELECT
Barrel
Shifter
Barrel
Shifter
Barrel
Shifter
Barrel
Shifter
2:1 MUX
32-Bit
Mask
32-Bit
Mask
Raster Scan Line
Reformatter
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
A-to-D
1
A-to-D
0
Figure 2-2 Flow Thru Architecture - Alta
Version G.5 BitFlow, Inc. NEO-2-5

BitFlow’s Flow-Thru Architecture The Neon
64
16 16 16 16
16 16 16 16
32 32
8 8 8 8 8 8 8 8
8 8 8 8 8 8 8
64
8
Pixel Data Descrambler
CoaXPress Data Packet Router
Synthetic
Video
VID_SOURCE
PIX_DEPTH
VIDEO_MASK
CLIP
FORMAT,DISPLAY,
PIX_DEPTH
SHIFT_RAW, SHIFT_DSP,
SHIFT_RAW_LEFT,
SHIFT_DISP_LEFT,
SHIFT_DISP_SELECT
Barrel
Shifter
Barrel
Shifter
Barrel
Shifter
Barrel
Shifter
2:1 MUX
32-Bit
Mask
32-Bit
Mask
Raster Scan Line
Reformatter
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
8-Bit
Clip
Figure 2-3 Flow Thru Architecture - Karbon-CXP
NEO-2-6 BitFlow, Inc. Version G.5

Acquisition and Camera Control Camera Specific Firmware for Camera Link Models (CL Models Only)
2.3 Camera Specific Firmware for Camera Link Models (CL Models Only)
The Flow-Thru architecture is flexible and can be adapted to different cameras architectures. The main intelligence is in the firmware that gets downloaded into the onboard Field Programmable Gate Arrays (FPGAs). This firmware is different for every
camera architecture. The firmware is called out in the camera file. On initialization, the
driver will download into the FPGAs the firmware called-out in the camera file.
The type of the firmware is hard-coded in the FORMAT field in register CON10. The
list of the formats is shown in Table 2-1
Note: Not all models support all formats. Only formats that are possible are supported.
For example, the Neon, which is Base Camera Link only, will not support the MUX_8TS
format as the is a Full Camera Link format.
Table 2-1 Firmware Options
FORMAT Firmware Name Format Description
0MUX 1 tap cameras
1 MUX_2TOEP 2 taps, odd-even pixels
2 MUX_2TOEL 2 taps, odd-even lines
3 MUX_2TS 2 taps, segmented
4 MUX_2TS1RI 2 taps, segmented, right inverted
5 MUX_4TS 4 taps, segmented
6 MUX_4T2S2RIOEP 4 taps, odd-even pixels, right taps inverted
7 MUX_4TQ2RI2BU 4 quads, right quads inverted, bottom
quads upside down
8 MUX_2CAM 2 cameras: 1 tap each
9 MUX_2CAM_2TOEP 2 cameras: 2 taps, odd-even pixels
10 MUX_2CAM_2TS1RI 2 cameras: 2 taps, segmented, right-
inverted
11 MUX_2CAM_2TS 2 cameras: 2 taps, segmented
12 MUX_2CAM_2TOEL 2 cameras: 2 taps, odd-even lines
13 MUX_8TS 8 taps, segmented
14 MUX_BAY Bayer decoder, 1 tap 8 bit
15 MUX_BAY_OE Bayer decoder, 2 taps, odd-even pixels
16 MUX_BAY_2TS Bayer decoder, 2 taps, segmented
17 MUX_4WI 4 taps, 4-way interleaved
18 MUX_2TOEPI 2 taps, odd-even pixels, both inverted
19 MUX_1TI 1 tap, inverted
Version G.5 BitFlow, Inc. NEO-2-7

Camera Specific Firmware for Camera Link Models (CL Models Only) The Neon
Table 2-1 Firmware Options
FORMAT Firmware Name Format Description
20 MUX_8WI 8 taps, 8-way interleaved
21 MUX_BAY_2TS_RI Bayer decoder, 2 taps, segmented, right
inverted
22 MUX_4TS2RI Four taps, segmented, right two taps
inverted
23 MUX_8TSOEP4RI Eight taps, segments, odd/even pixel, for
right taps inverted
24 MUX_10WI Ten taps, interleaved
NEO-2-8 BitFlow, Inc. Version G.5

Acquisition and Camera Control Generation of Acquisition Windows
2.4 Generation of Acquisition Windows
2.4.1 The Horizontal Active Window, HAW
The Horizontal Active Window (HAW) is a square wave that defines the portion of the
line that will be acquired horizontally. HAW can span less than the whole camera line,
if we want to acquire only a portion of that line. The size of the HAW is determined by
a single number, the Active Clocks Per Line (ACPL). The ACPL is defined as the number of clocks during which the HAW is active. The ACPL field is programmed in
CON10. The 17 bits define the maximum HAW as minimum 128K pixels.
The total number of pixels per line that will be acquired can be different than the
ACPL. For a dual tap camera that supplies odd-even pixels for example, the total number of pixels acquired will be twice the ACPL, as for every clock the camera supplies
two pixels. Note that the ACPL is not a function of the bits per pixel. The relationship
between the number of pixels per line and the number of clocks per line is controlled
by the firmware currently downloaded to the board. The FORMAT register will indicate which firmware is currently downloaded. Each tap configuration requires a different firmware file be downloaded. The correct firmware is automatically downloaded
based on the information contained in the camera configuration file.
The size of the HAW is on an arbitrary boundary. The start in time of the HAW can
come from two sources, depending on the setting of the HAW_START bit:
The HSTART bit in the HCTAB, if HAW_START = 1.
The start of LEN, if HAW_START = 0.
In both modes, the start of the HAW can be delayed 0-7 clocks relative to the start
function (HSTART or LEN). This is done by the TRIM bits in CON9.
In both modes, the start of the HAW can be advanced 0-7 clocks relative to the start
function (HSTART or LEN). This is done by the DELAY bits in CON14.
The HCTAB is the Horizontal Control Table that generates the HSTART, see section on
CTABs.
Figure 2-4 shows the controls that generate the HAW.
Version G.5 BitFlow, Inc. NEO-2-9

Generation of Acquisition Windows The Neon
Horizontal
CTAB
2:1
MUX
HAW
Generator
ACPL, TRIM
LEN
HAW_START
HSTART HAW
Figure 2-4 Generation of the Horizontal Active Window, HAW
2.4.2 The Vertical Active Window, VAW
The Vertical Active Window (VAW) is a square wave that defines the portion of the
frame that will be acquired vertically. VAW can span less than the whole camera
frame, if we want to acquire only a portion of that frame. The size of the VAW is determined by a single number, the Active Lines Per Frame (ALPF). The ALPF is defined as
the number of HAW periods during which the VAW is active. The ALPF field is programmed in CON17. The 17 bits define the maximum VAW as minimum 128K lines.
The total number of lines per frame that will be acquired can be different than the
ALPF. For a dual tap camera that supplies odd-even lines for example, the total number of lines acquired will be twice the ALPF as in the period of one HAW the camera
supplies two lines.
The size of the VAW is on an arbitrary boundary. The start in time of the VAW can
come from two sources, depending on the setting of the VAW_START bit:
The VSTART bit in the VCTAB, if VAW_START = 1.
The start of FEN, if VAW_START = 0.
Data will be acquired in the window defined by the HAW and the VAW
Figure 2-5 shows the controls that generate the VAW.
NEO-2-10 BitFlow, Inc. Version G.5

Acquisition and Camera Control Generation of Acquisition Windows
Vertical
CTAB
2:1
MUX
VAW
Generator
ALPF
FEN
VAW_START
VSTART VAW
Figure 2-5 Generation of the Vertical Active Window, VAW
Version G.5 BitFlow, Inc. NEO-2-11

The Control Tables (CTABs) The Neon
17
INCREMENT
LOGIC
LOAD
LOGIC
RESET
LOGIC
RESET_V
LOAD_V
INC_V
ADDRESS
VCOUNT (COUNTER)
VCTAB (SRAM)
VCOUNT
CLOCK_V
VSTART
VRESET
ENVLOAD
IRQ
GPV0
GPV1
GPV2
GPV3
END_OF_LINE
2.5 The Control Tables (CTABs)
The CTABs are two memories that are programmed by the host computer and read
by the board’s acquisition circuitry. The read-out is done in a sequential fashion, i.e.
the memories’ addresses are scanned sequentially. There is a vertical memory
(VCTAB) and a horizontal memory (HCTAB). The vertical and horizontal memory each
has an associated counter which scans its addresses, VCOUNT and HCOUNT respectively. The concept here is similar to how a CPU runs a program. There is a PC which
works it’s way through memory, processing each instruction in turn. Each bit in the
CTAB corresponds to a different operation. For example, one bit might control the
level of a signal going to the camera. In this case the CTABs can be thought of as programmable waveform generators. Another bit might cause an interrupt to occur on
the PCI bus, yet another bit might force the HCOUNT to go to zero. The CTABs are
fully programmable by software. The details of the CTABs are described in this section.
2.5.1 Vertical Control Table
Figure 2-6 depicts the structure of the Vertical Control Table (VCTAB). For clarity, the
address and data path that allow the host to program the VCTAB are not shown.
NEO-2-12 BitFlow, Inc. Version G.5
Figure 2-6 Vertical Control Table
The Vertical Control Table is made up of the following blocks:

Acquisition and Camera Control The Control Tables (CTABs)
VCOUNT - a synchronous counter that can be incremented, loaded and reset. The
clock that drives VCOUNT is derived from the HCTAB, see below. VCOUNT is
17-bit wide and is connected to the address input of the VCTAB.
Logic for generating INC_V - the increment control signal to the VCOUNT.
Logic for generating LOAD_V - the load control signal to the VCOUNT. When
LOAD_V is asserted, VCOUNT is loaded with the value of 8000h (32,768 in
decimal).
Logic for generating RESET_V - the reset control signal to the VCOUNT. When
RESET_V is asserted, VCOUNT is reset to 0.
Logic for generating CLOCK_V - the clock to the VCOUNT.
VCTAB - a static memory (SRAM) that outputs eight VCTAB control signals. The
address of this SRAM is driven by VCOUNT.
If RESET_V and LOAD_V are asserted simultaneously, RESET_V overrides.
As the VCOUNT increments, it scans the addresses of the VCTAB in ascending order.
The output of the VCTAB depends on the data that has been written in the VCTAB by
the host. If the VCOUNT is free running, it will cyclically scan all the VCTAB’s
addresses. Any arbitrary cyclic waveform can be implemented by programming the
VCTAB with the adequate data.
The LOAD_V and RESET_V will enable the synchronization between external events
and the waveforms generated by the VCTAB. LOAD_V and RESET_V will force the
VCOUNT to known values, 8000h and 0 respectively.
The INC_V signal will allow for stopping the counter from incrementing. In that case,
the output of the VCTAB will be constant. While the VCOUNT is not incrementing, it
can still be loaded or reset, see the logic below.
2.5.2 The VCTAB Functions
The functions assigned to the columns in the VCTAB are shown in Table 2-2.
Bit Name Function
0VSTARTStart of VAW
1 VRESET Vertical Reset
2 ENVLOAD FEN Mask, enable load
3 IRQ CTAB Interrupt
4 GPV0 General purpose vertical function 0
Table 2-2 The VCTAB Functions
5 GPV1 General purpose vertical function 1
6 GPV2 General purpose vertical function 2
7 GPV3 General purpose vertical function 3
Version G.5 BitFlow, Inc. NEO-2-13

The Control Tables (CTABs) The Neon
VSTART defines the start of the Vertical Acquisition Window (VAW), if the start is provided by the VCTAB, see previous section.
VRESET defines the reset of the VCOUNT, in case this function is programmed in the
VCTAB.
ENVLOAD enables the FEN to load the VCOUNT. The rationale behind the ENVLOAD
column from the VCTAB is that some cameras might not give a FEN, but only two
pulses: the start and end of FEN. With the ENVLOAD, we can mask out the unwanted
one.
IRQ provides an interrupt to the host, allowing an interrupt to occur at any point on
the vertical axis.
GPV are general purpose vertical functions, see usage below.
Note: If a VRESET pulse happens coincident with a LOAD, the LOAD is overriding.
The CLOCK_V Control
CLOCK_V is the clocking of the VCOUNT is generated by the end of the line (horizontal reset).
The INC_V Control
INC_V is the logic for incrementing VCOUNT.
There are only two instances when we want to inhibit the incrementing of VCTAB. The
first instance is when VCOUNT reaches 0000h, the “Stop at Zero” case. The other
instance is when VCOUNT reaches 7FF0h, the “Vertical Stick” case.
Stop at Zero
Usually, VCOUNT will reach zero because of a RESET_V signal. After VCOUNT is reset,
there are programmable options defined by VCNT_RLS_ZERO. Depending on this
bitfield, VCOUNT can continue to count or wait at zero till some event occurs, usually
the assertion of the TRIGGER.
This operating mode is especially useful for synchronizing cameras to external events.
TRIGGER is usually the output of a part-in-place signal. Until this signal is asserted, the
VCOUNT waits at address 0000h. After the TRIGGER is asserted, VCOUNT starts
counting, i.e., scanning the VCTAB in ascending order. At some address we will program a sync signal to be sent to the camera, usually through GPV0. In response to this
sync signal, the camera will give back a frame, and it will assert FEN. The FEN will load
address 8000h into VCOUNT. In the VCTAB, we will program the vertical acquisition
window to start after address 8000h. At the end of the vertical acquisition window the
RESET_V will be asserted, which in turn will reset the VCOUNT. VCOUNT will wait at
address 0000h until TRIGGER is asserted.
NEO-2-14 BitFlow, Inc. Version G.5

Acquisition and Camera Control The Control Tables (CTABs)
Vertical Stick
Using the previous example, assume that after we asserted the sync signal to the camera, we expect the camera to give us a frame, i.e., assert FEN. While we expect the
camera to assert FEN, VCOUNT is still being incremented. If it takes too long for the
camera to respond, VCOUNT will eventually reach and pass beyond 8000h. A vertical
acquisition window will be asserted, even though the camera did not assert FEN. To
avoid such a situation, just before address 8000h, when VCOUNT reaches 7FF0h, it
will stop. It will stay at 7FF0h until FEN is asserted. Then, VCOUNT will be loaded with
8000h.
The Vertical Stick will occur according to the setting of VCNT_RLS_STK.
The LOAD_V Control
LOAD_V is the logic of loading VCOUNT. In other words, loading VCOUNT means it
jump to a new address.
VCOUNT will be loaded with the value 8000h by the rising/falling edge of FEN, if
ENVLOAD is asserted. FEN usually marks the start of a valid frame. The start of the vertical acquisition window can be placed starting at address 8000h.
ENVLOAD is a column in the VCTAB. There are cameras that do not assert FEN. Some
other type of cameras assert only the start and stop of a frame. In this case, ENVLOAD
can mask out the unwanted signals.
Operation on the rising/falling edge of FEN is selected by FENPOL, see CON14
The RESET_V Control
RESET_V is the logic of resetting VCOUNT.
VCOUNT can be reset from different sources, under different conditions. The resetting of the VCOUNT is controlled by the VCNT_RST bitfield.
2.5.3 Vertical Control Table Size
The Vertical Control Table has 20000h (131,972) entries.
2.5.4 Horizontal Control Table
The Horizontal Control Table (HCTAB) is 8 bits wide. The function of each bit is show
in the following table.
Figure 2-7 depicts the structure of the HCTAB. For clarity, the address and data path
that allow the host to program the HCTAB are not shown
Version G.5 BitFlow, Inc. NEO-2-15

The Control Tables (CTABs) The Neon
15
1:8
INCREMENT
LOGIC
LOAD
LOGIC
RESET
LOGIC
RESET_H
LOAD_H
INC_H
ADDRESS
HCOUNT (COUNTER)
HCTAB (SRAM)
HCOUNT
CLOCK_H
HSTART
HRESET
ENHLOAD
Reserved
GPH0
GPH1
GPH2
GPH3
PCLK
Figure 2-7 Horizontal Control
The Horizontal Control Table is made up of the following blocks:
HCOUNT - a synchronous counter that can be incremented, loaded and reset.
The clock that drives HCOUNT is a free running clock, PCLK/8, i.e., the pixel
clock divided by eight. HCOUNT is 15 bits wide and is connected to the
address input of the HCTAB.
The 15 bit HCOUNT with the PCLK/8 can generate functions up to 256K PCLKs
long, on boundaries of 8 PCLKs.
The ACPL is 17 bit, and that can generate an HAW of up to 128K PCLKs.
Logic for generating INC_H - the increment control signal to the HCOUNT.
Logic for generating LOAD_H - the load control signal to the HCOUNT. When
LOAD_H is asserted, HCOUNT is loaded with the value of 2000h.
Logic for generating RESET_H - the reset control signal to the HCOUNT. When
RESET_H is asserted, HCOUNT is reset to 0.
HCTAB - a static memory (SRAM) that outputs eight HCTAB control signals. The
Note: If RESET_H and LOAD_H are asserted simultaneously, RESET_H overrides.
As the HCOUNT increments, it scans the address of the HCTAB in ascending order.
The output of the HCTAB depends on the data that has been written in the HCTAB by
the host. If the HCOUNT is free running, it will cyclically scan all the HCTAB’s
addresses. Any arbitrary cyclic waveform can be implemented by programming the
HCTAB with the adequate data.
address of this SRAM is driven by HCOUNT.
Logic for generating CLOCK_H - the clock to the HCOUNT. This is a frequency
divider. CLOCK_H is PCLK, the pixel clock divided by eight.
NEO-2-16 BitFlow, Inc. Version G.5

Acquisition and Camera Control The Control Tables (CTABs)
The LOAD_H and RESET_H will enable the synchronization between external events
and the waveforms generated by the HCTAB. LOAD_H and RESET_H will force the
HCOUNT to fixed values, 2000h and 0 respectively.
The INC_H signal will allow for stopping the counter from incrementing. In that case,
the output of the HCTAB will be constant. While the HCOUNT is not incrementing, it
can still be loaded or reset, see the logic below.
2.5.5 The HCTAB Functions
The functions assigned to the columns in the HCTAB are shown in Table 2-3.
Table 2-3 The HCTAB Functions
HCTAB Name Function
D0 HSTART Start of HAW
D1 HRESET Reset HCOUNT and increment the
VCOUNT
D2 ENHLOAD LEN Mask, enable horizontal load
D3 reserved
D4 GPH0 General purpose horizontal function 0
D5 GPH1 General purpose horizontal function 1
D6 GPH2 General purpose horizontal function 2
D7 GPH3 General purpose horizontal function 3
HSTART marks the start of the Horizontal Acquisition Window, HAW. Video will be
acquired only while the HAW is active.
HRESET will reset the HCOUNT.
ENHLOAD will allow the loading of the HCOUNT. A location that has 1 will allow the
loading of the HCOUNT. A 0 will inhibit the loading of the HCOUNT.
GPH are general purpose horizontal functions. See usage below.
The INC_H Control
INC_H is the logic for incrementing HCOUNT.
There are only two instances when we want to inhibit the incrementing of HCTAB. The
first instance is when HCOUNT reaches 0000h, “Stop at Zero” case. The other instance
is when HCOUNT reaches 1FF1h, the “Horizontal Stick” case.
Version G.5 BitFlow, Inc. NEO-2-17

The Control Tables (CTABs) The Neon
The “Stop at Zero” Case
Usually, HCOUNT will reach zero because of a RESET_H signal. After HCOUNT is
reset, there are two programmable options:
HCOUNT keeps on counting.
HCOUNT stays at zero until ENCODER is asserted.
The selection between the two options is done by the HCNT_RLS_ZERO bitfield, see
next section on camera synchronization.
This operating mode is especially useful for synchronizing line scan cameras to external events. ENCODER is usually the output of an encoder or a tachometer signal. Until
this signal is asserted, the HCOUNT waits at address 0000h. After the ENCODER is
asserted, HCOUNT starts counting, i.e., scanning the HCTAB in ascending order. At
some address we will program a sync signal to be sent to the scan camera, usually
through GPH0. In response to this sync signal, the camera will give back a line, and it
will assert LEN. The LEN will load address 2000h into HCOUNT. In the HCTAB, we will
program the horizontal acquisition window after address 2000h. At the end of the
horizontal acquisition window the RESET_H will be asserted, which in turn will reset
the HCOUNT. HCOUNT will wait at address 0000h until ENCODER is asserted.
Horizontal Stick
Using the previous example, assume that after we asserted the sync signal to the camera, we expect the camera to give us a line, i.e., assert LEN. While we expect the camera to assert LEN, HCOUNT is still being incremented. If it takes too long for the
camera to respond, HCOUNT will eventually reach and pass beyond 2000h. A horizontal acquisition window will be asserted even though the camera did not assert
LEN. To avoid such a situation, just before address 2000h, when HCOUNT reaches
1FF0h, it will stop. It will stay at 1FF0h until LEN is asserted. Then, HCOUNT will be
loaded with 2000h.
The LOAD_H Control
LOAD_H is the logic of loading HCOUNT.
HCOUNT will be loaded with the value 2000h by the rising/falling edge of LEN, if
ENHLOAD is asserted. LEN usually marks the start of valid data in a line. The Horizontal Acquisition Window can be placed starting at address 2000h.
ENHLOAD is a column in the HCTAB that enables the LEN. There are cameras that do
not assert LEN. In that case, the LEN input must be disabled, otherwise its behavior is
unpredictable.
Operation on the rising/falling edge of LEN is selected by LENPOL, see CON14.
The RESET_H Control
RESET_H is the logic of reset HCOUNT.
HCOUNT can be reset from several sources, according to HCNT_RST bitfield, see next
section on camera synchronization.
NEO-2-18 BitFlow, Inc. Version G.5

Acquisition and Camera Control The Control Tables (CTABs)
Example
Lets look at a simple example to clarify the concept of the HCTAB. Assume we want to
program a free running horizontal window of 32 pixels active area. Just before the
active area we want to fire a strobe using GPH0. D0 (HSTART) defines the start of the
HAW. Bit D1 defines the reset of the HCOUNT. D4, GPH0, is the strobe pulse. The size
of the HAW is programmed in ACLP register.
Taking into account that the address counter is clocked by 1/8 the pixel clock, the
HCTAB memory map will be as shown in Table 2-4.
Table 2-4 HCTAB Example
HCTAB
Address
0 0 0 0 You got here from address 9
1 0 0 0
2 0 0 0
3 0 0 1 Fire the strobe
4 0 1 0 Start Horizontal Acquisition
5 0 0 0 Acquire
6 0 0 0 Acquire
7 0 0 0 Acquire
8 0 0 0 Acquire
9 1 0 0 Assert RESET_H
10 0 0 0
The CT Functions
HRESET HSTART GPH0 Comments
Window
The CT’s are four functions derived from the HCTAB and the VCTAB. Those functions
can define an arbitrary horizontal and/or vertical waveform. The definition of the CT’s
is given below:
CT[0] = GPV[0] AND GPH[0]
CT[1] = GPV[1] AND GPH[1]
CT[2] = GPV[2] AND GPH[2]
CT[3] = GPV[3] AND GPH[3]
Each CT has a vertical and a horizontal component. Both components are programmed in the CTABs. The minimum horizontal pulse is 8 PCLKs. The minimum vertical pulse is one line.
The CT’s can be steered to the Camera Controls (on the CL connectors) and to the
GPOUTs, on the IO connector.
Version G.5 BitFlow, Inc. NEO-2-19

The Control Tables (CTABs) The Neon
2.5.6 Horizontal Control Table Size
The Horizontal Control Table has 8000h (32,768) entries.
NEO-2-20 BitFlow, Inc. Version G.5

Acquisition and Camera Control Synchronizing Acquisition, Camera, CTABs and External Signals
2.6 Synchronizing Acquisition, Camera, CTABs and External Signals
These boards have extremely flexible camera interfaces. They have been designed to
acquire from almost any Camera Link camera and to synchronize with almost all
industrial signals. There are two layers of synchronization. The first layer is to synchronize to signals coming from the industrial environment. For example triggers and
encoders. The second layer is to synchronize to the camera. This requires both sending signals to the camera (e.g. exposure control) and receiving signals from the camera (e.g. Pixel Clock, Line Enable and Frame Enable). All of these synchronization
problems are solved by the Control Tables (CTABs) and Vertical/Horizontal Operations. See previous section for detailed operation on the CTABs.
The Vertical and Horizontal Operations describe different state changes that the
board goes through. For example one operation might be to begin acquiring pixels,
another might be to reset the VCOUNT back to zero. Generally these state changes
are caused by one or more events. There are a number of events, both horizontal and
vertical, that the board can react to. These events are tied to operations by a set of
programmable bitfields. The details of these events are outlined in this section.
2.6.1 Vertical Operations and Events
The vertical operations are related to the vertical axis of an image (in memory or on
the display) or frame timing (of a camera). The operations are mainly commands to
VCOUNT and acquisition commands. Each operation can be initiated by some event.
The selection of the event that will initiate the specific operation is done by a set of
three control bits related to each operation.
Table 2-5 is a list of the vertical operations and their related control bits.
Table 2-5 Vertical Operations
Vertical operation Control bits
VCOUNT frozen/released from 0000h VCNT_RLS_ZERO
VCOUNT reset to 0000h VCNT_RST
VCOUNT load with 8000h VCNT_LD
VCOUNT frozen/released from 7FF0h VCNT_RLS_STK
VCOUNT increment VCNT_INC
Acquire (SNAP, GRAB, CONTINUOUS) ACQ_CON
FREEZE acquisition FREEZE_CON
ABORT acquisition ABORT_CON
START vertical acquisition window VAW_START
Version G.5 BitFlow, Inc. NEO-2-21
Synchronizing Acquisition, Camera, CTABs and External Signals The Neon
Table 2-6 is a list of the events that initiate the vertical operations:
Table 2-6 Vertical Events
Event description Event Name
TRIGGER asserted TRIG_ASRT
TRIGGER de-asserted TRIG_DASRT
FEN asserted FEN_ASRT
FEN de-asserted FEN_DASRT
TRIGGER is HI TRIG_HI
TRIGGER is LO TRIG_LO
RESET from VCTAB RST_VCTAB
RESET from SW RST_SW
Host writes acquisition command HOST_WCMD_GRAB/SNAP
Acquisition frame counter reaches programmed value
What follows is a list of each operation and the corresponding events that can be
used to cause the operation. Included is the bitfield settings for each operations. It is
important to understand that each operation is independent and can be programmed without regard for how the other events are programmed. However, some
combinations might not make sense.
VCOUNT Release From Zero
This operation controls the behavior of VCOUNT when it reached zero. See Table 2-7.
AQ_COUNT
Table 2-7 VCNT_RLS_ZERO
Initiator VCNT_RLS_ZERO Comments
None 0 Normal operation mode, no stop at
0000h
TRIG_ASRT 1 Edge Mode (aka Letter Mode), always stay
at 0000h, release on TRIG_ASRT
TRIG_HI 2 Level Mode (aka Luggage Mode), stay at
0000h if TRIG_LO, release on TRIG_ASRT
NEO-2-22 BitFlow, Inc. Version G.5

Acquisition and Camera Control Synchronizing Acquisition, Camera, CTABs and External Signals
VCOUNT Reset To Zero
This operation controls how VCOUNT is reset to zero. See Table 2-8.
Table 2-8 VCNT_RST
Initiator VCNT_RST Comments
End_of_VAW 0 Default operation, reset at end of VAW
TRIG_DASRT or End_
of_VAW
RST_VCTAB 2 Reset from VCTAB
FEN asserted or 3 Reset from start of FEN
TRIG_DASRT or RST_
VCTAB
TRIG_DASRT 5 Triggered termination
Note: The VCOUNT is always reset by the RST_SW (sofware reset ) and by the HOST_
WCMD_ABORT (host writes ABORT command).
VCOUNT Release From Stick Point (7FF0h)
This operation controls the behavior of VCOUNT when it hits the stick point. The purpose of the stick point is to allow for very long periods of time between frames. The
stick point is located at 7ff0h. See Table 2-9.
1 Triggered termination
4 Triggered termination
Table 2-9 VCNT_RLS_STK
Initiator VCNT_RLS_STK Comments
None 0 Normal operation mode, no stop at
7FF0h
VLOAD or VRESET 1 Stick at 7FF0h till load (usually FEN)
or reset asserted
Version G.5 BitFlow, Inc. NEO-2-23

Synchronizing Acquisition, Camera, CTABs and External Signals The Neon
VCOUNT Load To 8000h
This operation controls how and when VCOUNT loads (jumps to) 8000h. See Table 2-
10.
Table 2-10 VCNT_LD
Initiator VCNT_LD Comments
None 0 No load
FEN_ASRT and ENVLOAD
FEN_ASRT 2 Assertion of FEN only
TRIG_ASRT 3 Assertion of TRIGGER
Acquisition Command Control
This operations controls how the acquisition commands get initiated. There are two
major acquisition commands. The SNAP command, which only acquires one frame.
The GRAB command, which continuously acquires frames until a freeze or abort command is issued. In addition, the board has a continuous data mode which is not frame
oriented. In continuous data mode, the board will acquire data based only on the
clock and data qualifying signals. There are no acquisition commands in this mode.
See Table 2-11.
1 Assertion of FEN qualified with ENV-
LOAD
Table 2-11 ACQ_CON
Initiator ACQ_CON Comments
HOST_WCMD_GRAB/
SNAP
TRIG_ASRT 1 Triggered initiated GRAB/SNAP/
0 normal, host initiated GRAB/SNAP/
FREEZE
FREEZE
TRIG_ASRT and HOST_
WCMD_GRAB
TRIG_HI 3 Continuous data, wo. CTABs
Note: See also Section 2.7 for more details on the how the acquisition commands
work.
NEO-2-24 BitFlow, Inc. Version G.5
2 Triggered SNAP

Acquisition and Camera Control Synchronizing Acquisition, Camera, CTABs and External Signals
Freeze Command Control
This operation is used to stop acquisition when the board is in GRAB mode. Acquisition will stop immediately if the board is between frames, or at the end of the current
frame, if the board is in the middle of a frame. See Table 2-12.
Table 2-12 FREEZE_CON
Initiator FREEZE_CON Comments
HOST_WCMD_
FREEZE
AQ_COUNT or
HOST_WCMD_
FREEZE
TRIG_DASRT 2 Trigger de-asserted
Abort Command Control
This operations terminates the current acquisition immediately. This operation will terminate both a SNAP and a GRAB command. If the board is in the middle of a frame,
only part of the frame will be acquired. See Table 2-13.
0 Normal, host initiated
1 Acquisition counter reaches number of
frames programmed in the AQ_COUNT
register
Table 2-13 ABORT_CON
Initiator ABORT_CON Comments
HOST_WCMD_
ABORT
TRIG_DASRT or
HOST_WCMD_
ABORT
0 Normal, host initiated
1 Abort on falling edge TRIG or host com-
mand.
2.6.2 Horizontal Operations and Events
The horizontal operations and events are related to the horizontal axis (of an image in
memory or on the display) or line timing (of a camera). The operations are mainly
commands to HCOUNT. Each operation can be initiated by some event. The selection
of the event that will initiate the specific operation is done by a set of three control bits
related to each operation.
Version G.5 BitFlow, Inc. NEO-2-25

Synchronizing Acquisition, Camera, CTABs and External Signals The Neon
Table 2-14 lists the horizontal events.
Table 2-14 Horizontal Operations
Horizontal operation Control bits
HCOUNT released from zero HCNT_RLS_ZERO
HCOUNT reset to zero HCNT_RST
HCOUNT load with 2000h HCNT_LD
HCOUNT release from 1FF0h HCNT_RLS7F0
HCOUNT increment HCNT_INC
Start horizontal active window HAW_START
The events that can initiate the horizontal operations are listed in Table 2-15.
Table 2-15 Horizontal Events
Event description Event Name
ENCODER asserted ENC_ASRT
ENCODER de-asserted ENC_DASRT
LEN asserted LEN_ASRT
LEN de-asserted LEN_DASRT
ENCODER is HI ENC_HI
ENCODER is LO ENC_LO
RESET from HCTAB RST_HCTAB
RESET from SW RST_SW
FEN asserted FEN_ASRT
The sections below enumerate all of the horizontal operations and how the various
events can initiate them. The control of each operation is independent from all of the
others.
NEO-2-26 BitFlow, Inc. Version G.5

Acquisition and Camera Control Synchronizing Acquisition, Camera, CTABs and External Signals
HCOUNT Release From Zero
This operation controls the behavior of HCOUNT when it reached zero (see Table 2-
16).
Table 2-16 HCNT_RLS_ZERO
Initiator HCNT_RLS_
ZERO
None 0 Normal operation mode, no stop at zero
ENC_ASRT 1 One-shot mode, wait for encoder for
HCOUNT Reset To Zero
This operation controls how HCOUNT is reset to zero (see Table 2-17).
Comments
release
Table 2-17 HCNT_RST
Initiator HCNT_RST Comments
END_OF_HAW 0 Default operation, end of HAW
FEN_ASRT or RST_
HCTAB
RST_HCTAB 2 Reset from HCTAB
Note: The HCOUNT can always be reset by RST_SW or HOST_WCMD_ABORT
1 Reset on FEN_ASRT, Random FEN mode
HCOUNT Release From Stick Point (1FF0h)
This operation controls the behavior of HCOUNT when it hits the stick point. The purpose of the stick point is to allow for very long periods of time between lines. The stick
point is located at 1ff0h. See Table 2-18.
Table 2-18 HCNT_RLS_STK
Initiator HCNT_RLS_STK Comments
None 0 Normal operation mode, no stop at
1FF0h
HLOAD or HRESET 1 Stay at x1FF0 till load (usually LEN) or
reset asserted
Version G.5 BitFlow, Inc. NEO-2-27

Synchronizing Acquisition, Camera, CTABs and External Signals The Neon
HCOUNT Load To 2000h
This operation controls how and when HCOUNT loads (jumps to) 2000h (see Table 2-
19).
Table 2-19 HCNT_LD
Initiator HCNT_LD Comments
None 0 No load
LEN_ASRT 1 Load on LEN assert, qualified with
ENHLOAD column
ENC_ASRT 2 Load on ENCODER assert, qualified with
ENHLOAD column
NEO-2-28 BitFlow, Inc. Version G.5

Acquisition and Camera Control Acquisition Command and Status
2.7 Acquisition Command and Status
This section describes how the acquisition state machine works. This state machine
controls which frames from the camera are acquired and which are ignored. As the
commands can be issued asynchronous to the camera’s timing, the acquisition state
machine will remember the command and execute it starting at the beginning of the
frame. That will guarantee that whole frames will be acquired. Note that the acquisition state machine only marks the frames to be acquired. The amount of pixels/line
and lines/frame to be acquired in the marked frame is determined by the HAW and
VAW, see section Section 2.4.
The acquisition state machine is controlled by the following signals:
AQCMD, the acquisition command bitfield
VACTIVE, the camera’s vertical active timing (usually FEN for area scan cameras)..
TRIGGER, the selected trigger.
ACQ_CON, a bitfield that defines special acquisition modes for the state machine.
The current state of the machine can be observed by the AQCMD and AQSTAT bitfields described below.
2.7.1 The Acquisition Bitfields
The acquisition command bits, AQCMD describe the command to be performed in
the next frame. The acquisition status bits, AQSTAT, describe the current command
that is performed. The four acquisition commands are described in the Table 2-20.
AQCMD Command Comment
0 (00b) FREEZE Stop acquiring at end of current frame
1 (01b) ABORT Stop acquiring immediately, unconditionally
2 (10b) SNAP Acquire one frame
3 (11b) GRAB Acquire continuously
The following list details the behaviors of these bitfields.
The AQSTAT bits are set at the beginning of the VACTIVE. The last instance a com-
mand can be issued is about 4 LCLKs before the start of the VACTIVE.
For a SNAP command, when the SNAP starts, the AQCMD bits are cleared. Note
that for SNAP, the AQCMD bits are written by the host and cleared by the
state machine.
If during a SNAP/GRAB operation another SNAP/GRAB command is issued, it is
ignored.
Table 2-20 ACQCMD
Version G.5 BitFlow, Inc. NEO-2-29

Acquisition Command and Status The Neon
Sn a p c o mman d w r i tten
AQCMD reset andAQSTAT set
AQSTAT reset
VACTIVE
AQCMD 2
AQSTAT 20
0
0
0
Table 2-11 below describes the acquisition modes for ACQ_CON
Table 2-21 ACQ_CON
ACQ_CON Mode Description
0 (000b) Host command performed on next frame
1 (001b) Host command issued when TRIGGER asserted
2 (010b) As long as GRAB command is on, a single frame will be SNAPped
at every assertion of the TRIGGER.
3 (011b) Continuous acquisition mode. Host commands are ignored. Data
will be acquired continuously as long as the TRIGGER is asserted.
Figure 2-8 shows a timing diagram of the SNAP command, with ACQ_CON = 0. The
command is written by the host during the active frame. The acquisition will start at
the beginning of the next frame.
Figure 2-8 Snap Command Timing
NEO-2-30 BitFlow, Inc. Version G.5
Figure 2-9 shows the timing of the GRAB operation with ACQ_CON=0. Figure 2-10
shows the timing of the ABORT operation with ACQ_CON=0. Note that the ABORT
command will cut off part of the frame. This command is useful for resetting the board
without having to wait for the end of the frame. Figure 2-11 shows a SNAP operation
with ACQ_CON=1. In this mode, after the TRIGGER has been asserted and the command executed, the host must write a new command in the AQCMD field. Figure 2-12
shows acquisition in ACQ_CON=2 mode. Here, as long as the GRAB command is on,
a frame will be acquired for every assertion of the TRIGGER. In this mode, there is no
need for the host to write a new command.

Acquisition and Camera Control Acquisition Command and Status
Grab command written
AQSTAT set, grabbing starts
Freeze command written
AQSTAT reset, grabbing ends
VACTIVE
AQCMD 3
AQSTAT 30
0
0
0
VACTIVE
AQCMD 3
AQSTAT 30
0
0
01
Grab command written
AQSTAT set, grabbing starts
Abort command written
AQCMD reset, AQSTAT reset, grabbing ends
Figure 2-9 Grab Command Timing
Figure 2-10 Abort Command Timing
Version G.5 BitFlow, Inc. NEO-2-31

Acquisition Command and Status The Neon
Trigger asserts
Snap command written
AQCMD reset and AQSTAT set
AQSTAT reset
VACTIVE
AQCMD 2
AQSTAT
TRIG
200
00
Figure 2-11 Snap Command Timing with ACQ_CON = 2
NEO-2-32 BitFlow, Inc. Version G.5

Acquisition and Camera Control Acquisition Command and Status
Trigger asserts
Grab command written
AQSTAT set
AQSTAT reset
AQSTAT set
AQSTAT reset
VACTIVE
AQCMD
AQSTAT
TRIG
220
0
0
33
Figure 2-12 Grab Command Timing with ACQ_CON = 2
Version G.5 BitFlow, Inc. NEO-2-33

Trigger Processing (CL & Dif Models Only) The Neon
4:1
MUX
DELAY
LINE
TRIGGER_TTL
TRIGGER_DIF
TRIGGER_OPTO
FEN
XOR
OR
TRIGGER_DELAY
EN_TRIGGER
SW_TRIG
SEL_TRIG
TRIGPOL
TRIGGER
2.8 Trigger Processing (CL & Dif Models Only)
Note: BitFlow CoaXPress models have a different triggering system. Please see the
chapter on the CoaXPress I/O system for more information. This section only applies to
Camera Link and Analog models.
Note: The Alta only has one trigger input: TRIGGER_TTL.
This section describes how the trigger circuit works. The trigger is used to initiate a
vertical operation (for example, capturing one frame). There are three possible external hardware inputs to the trigger circuit and a software input. Assertion of the trigger
can be delayed by up to 8192 lines (granularity is 8 lines). This delay works only with
the external hardware trigger. Figure 2-13 illustrates the trigger circuit.
Figure 2-13 Trigger Circuit
NEO-2-34 BitFlow, Inc. Version G.5

Acquisition and Camera Control Encoder Processing (CL & Dif Models Only)
3:1
MUX
$
)
6
)
$
%
2
ENCODER_TTL
ENCODER_DIF
ENCODER_OPTO
XOR
OR
ENC_DIV
EN_ENCODER
SW_ENC
ENCODER
SELENC
ENCPOL
2.9 Encoder Processing (CL & Dif Models Only)
Note: BitFlow CoaXPress models have a different triggering system. Please see the
chapter on the CoaXPress I/O system for more information. This section only applies to
Camera Link and Analog models.
Note: The Alta does not have any encoder inputs.
This section describes how the encoder circuit works. The encoder is used to initiate a
horizontal operation (for example, capturing one line). There are three possible external hardware inputs to the encoder circuit and a software input. The selected external
encoder can be divided by the value in the ENC_DIV register. Figure 2-14 illustrates
the encoder circuit.
Figure 2-14 Encoder Circuit
Version G.5 BitFlow, Inc. NEO-2-35

The On-Board Signal Generator The Neon
2.10 The On-Board Signal Generator
The on-board signal generator has been replaced by the New Timing Generator
(NTG). Please see Section 3.1 for more information.
NEO-2-36 BitFlow, Inc. Version G.5

New Timing Generator Introduction
New Timing Generator
Chapter 3
3.1 Introduction
This section covers the new timing generator (NTG) which can control cameras connected to the Karbon, Neon and Alta. The purpose of this timing generator is to provide a simple system of controlling a camera’s exposure time and line/frame rate from
the frame grabber. The NTG is fully programmable and is easily controlled from software and/or from camera configuration files.
The NTG is based on a completely independent timing generator that is unrelated to
acquisition and the CTabs. This timing generator is easy to program, does not
depend on camera architecture or triggering modes, and offers the granularity and
range that customers need. There is no connection between the NTG and the acquisition state machine, the CTabs, the VAW/HAW or the camera connected.
The New Timing Generator supports both triggered and free running modes. For triggered modes it supports both the trigger signal for area cameras or the encoder signal for line cameras.
The NTG requires that the camera be put in one of two modes. If the NTG is going to
control just the line/frame rate, then the camera should be programmed into a “triggered” mode. In this case, the exposure is controlled by the camera. IF the NTG is to
control both the line/frame rate as well as the exposure time, then the camera must
be put into a “pulse width control” mode. In this case, neither the line/frame rate nor
the exposure time are controlled by the camera. They are both completely controlled
by the NTG.
Note: The NTG replaces the on-board timing generator that was prevouisly available
on all boards. The NTG is much more flexible and easier to use. Please contact BitFlow
if you have been using the previous on-board timing generator.
Version G.5 BitFlow, Inc. NEO-3-1

Components and Control The Neon
3.2 Components and Control
3.2.1 Periods and Frequencies
The NTG consists of a programmable signal generator based on a crystal controlled
clock. This clock is always running and is unrelated to the camera connected or how
other parts of the board are programmed. The base frequency of the clock is
designed to handle any line scan camera system. For area scan cameras the clock can
be divided 128 to increase the time range if very slow frame rates and/or line exposures are needed. To use the divided clock, program the bit NTG_TIME_MODE to 1.
The frequency of the clock is different for the different frame grabber families as
shown in Table 3-1.
Table 3-1 NTG Base Frequencies
Family Base frequency Reduced frequency
Karbon, Neon 7.3728 MHz 57.6000 KHz
Alta-AN 5 MHz 39.0625 KHz
The are two main timing registers: NTG_RATE, which controls the line/frame rate
period, and NTG_EXPOSURE, which controls the exposure period. These are both 28
bits, which should be enough to support almost all applications. Table 3-2 shows the
resulting ranges
Table 3-2 NTG Period Ranges
Family Mode Granularity (1 clock period) Max Period
Karbon, Neon Area ~17.4 microsecond ~77 minutes
Line ~136 nanoseconds ~36 seconds
Alta-AN Area 25.6 microseconds ~114 minutes
Line 200 nanoseconds ~ 53 seconds
The NTG uses a counter internally to create the programmed waveforms. Because the
NTG registers can be set for very long times, reprogramming the NTG can be time
consuming. In order to speed up modifications to the NTG parameters, the register
NTG_RESET can be used. Poke this bit to a 1 resets the NTG counter to zero, and
starts a new cycle with the latest register values.
Note: Use the base frequency when a high resolution timer is needed (fine
granularity). Use the reduced frequency when long exposure periods and/or slow
frame rates are needed (course granularity) You can use which ever mode suits your
application regardless of whether you are using a line scan or an area scan camera..
NEO-3-2 BitFlow, Inc. Version G.5

New Timing Generator Components and Control
3.2.2 Waveform polarity
There is also a register that inverts the waveform generated, NTG_INVERT. This is different than the old signal generator on the R64, which supports asserted-low signals
by increasing the high time to be one-over-the-low time. The NTG system is much
simpler, poke NTG_INVERT to a 1 and the waveform goes from asserted high to
asserted low.
3.2.3 Triggering
The NTG has two modes of operation, free-running and one-shot mode. The bit that
controls this mode is, NTG_ONESHOT. In free-run mode, both NTG_RATE and NTG_
EXPOSURE are used. In one shot mode, only NTG_EXPOSURE is used, and the rate is
controlled by the encoder/trigger.
Either the trigger input or the encoder input can be used to control the NTG in oneshot mode. This setting is controlled by the bit NTG_TRIG_MODE.
3.2.4 Output Signals
The waveform of the NTG can be routed to almost any of the board’s output signals.
The waveform can be send to the CC lines on the CL connector, or the GPOUT lines
on the I/O connector. The CCx_CON bitfields can be used route the NTG signal to the
CCs output. For example, program CC1_CON to 3 to get the NTG output on CC1.
Similarly, the GPOUTx_CON bitfields can be used to route the NTG signals to the
GPOUTx outputs. For example, to put the NTG output on GPOUT1, program
GPOUT1_CON to 6. The NTG waveform can be sent simultaneously to any and all of
these outputs.
3.2.5 Master/Slave Control
On boards that support more than one VFG there is the option to make the slave
VFGs have the same timing as the master VFG, or to run each slave VFG’s timing generator independently. The master VFGs always has its own timing. The selection is
made by programming the NTG_SLAVE bit. On a given VFG, if this bit is set to 0, the
VFG generates its own independent timing. If this bit is set to 1, the VFG’s timing is the
same as that of the master VFG.
Note: On multi-VFG boards, there is always a master and one or more slaves for
programming purpose. The master VFG must always have the bit NTG_SLAVE set to 0.
The slave VFGs can either be indpendent (NTG_SLAVE = 0) or the same as the master
VFG (NTG_SLAVE = 1).
Version G.5 BitFlow, Inc. NEO-3-3

Timing The Neon
NTG
NTG
NTG_RATE
NTG_EXPOSURE
NTG_EXPOSURE
Free-Running
Trigger
Reset counter,
Wait for next
trigger pulse
One-shot
3.3 Timing
The following diagram illustrates all of the relevant parameters of the NTG.
Note: In the diagrams below NTG_INVERT is set to 0. If it were set to 1, these diagrams
would be inverted.
NEO-3-4 BitFlow, Inc. Version G.5
Figure 3-1 NTG Timing
In free running mode, the NTG counter will start at zero, one clock later it will assert
the output. It will then count up to NTG_EXPOSURE clocks, then de-assert the output.
It will then continue to count to NTG_EXPOSURE clocks then reset itself and start over.
In one-shot mode, the NTG clock will wait at zero and until the trigger is asserted, it
will then start counting. On the first clock after the trigger is asserted it will assert its
output. It will then count up to NTG_EXPOSURE clocks then de-assert its output. Next
it will reset itself and wait for another trigger.

New Timing Generator NTG Control Registers
3.4 NTG Control Registers
The following table summarizes the registers:
Table 3-3 NTG Control Registers
Name Locations Purpose
NTG_RATE CON17[27..0] The line/frame rate period in units of one NTG clock (see
Table 3-2 for values).
NTG_ONESHOT CON17[30] 0 = Free-run mode, 1= one-shot mode, waits for either the
trigger or the encoder pules (depending on NTR_TRIG_
MODE).
NTG_TRIG_MODE CON17[31] 1 = Encoder for NTG trigger,0 = Trigger for NTG trigger
NTG_INVERT CON18[30] 0 = NTG asserted high, 1 = NTG asserted low
NTG_TIME_MODE CON18[31] 0 = Base NTG clock, 1= Base NTG clock / 128 (see Table 3-1
for values)
NTG_EXPOSURE CON26[27..0] The exposure time in units of one NTG clock.
NTG_RESET CON26[30] Writing a 1 resets the NTG counter
NTG_SLAVE CON26[31] 0 = NTG master, 1 = NTG timing slaved to master
Version G.5 BitFlow, Inc. NEO-3-5

NTG Control Registers The Neon
NEO-3-6 BitFlow, Inc. Version G.5

Quadrature Encoder Introduction
Quadrature Encoder
Chapter 4
4.1 Introduction
This section discusses support for quadrature encoders. A quadrature encoder is an
encoder that outputs two signals A and B. Both signals are used as a line trigger. However, the signals are 90 degrees out of phase. By comparing the A and B signals, the
direction of the encoder motion can be determined. There are a number of ways that
quadrature encoders can be used to control acquisition. The following sections cover
all of the support methods.
Most of the quadrature encoder system is based around a 24-bit counter. This normally starts at zero and then counts up or down every time the encoder moves. The
counter can be observed at any time via the QENC_COUNT register. This registers is
the heart of the encoder system. For example, triggers values can be programmed to
start and end acquisition of lines. Also, as the counter tracks the motion of the stage
attached to the encoder exactly, the system can be programmed to only acquire forward only or backward only stage movements. The system can be be programmed to
only acquire one line for each encoder count that corresponds to a physical location
on the stage. The encoder counter can be used in many different ways, described in
more details below.
4.1.1 Simple Encoder Mode
The most basic method of using a quadrature encoder is to use it like a standard signal phase encoder. In this mode, the quadrature encoder provides a higher resolution
signal, as both the A and B signals can be used to trigger lines. Also, by setting
QENC_DECODE = 1, both the rising and the falling edges of both the A and B signals
are used to trigger lines, providing a 4x increase in resolution over a signal phase
encoder.
In this mode, every encoder edge triggers a line, the direction information from the
encoder is ignored.
4.1.2 Positive or Negative Only Acquisition
The board can be programmed to only acquired lines when the encoder moves forward (increase the encoder count in a positive direction) or moves backwards
(decrease the encoder count in a negative direction). This mode is useful in situations
where a stage is moving back and forth, and lines need only be acquired if the stage
is moving in one direction only. The direction of acquisition is controlled by the
QENC_AQ_DIR register.
Version G.5 BitFlow, Inc. NEO-4-1

Introduction The Neon
4.1.3 Interval Mode
Often in situations when a stage is moving back and forth, acquisition is only required
over a subsection of the total stage range. Interval mode has been designed for these
situations. When the board is in interval mode, it only acquires lines when the
encoder counter is between a lower limit and an upper limit. If the counter is outside
these limits, lines are not acquired.
To use interval mode, set QENC_INTRVL_MODE = 1, and program QENC_INTRVL_LL
and QENC_INTRVL_UL to the encoder ranges that bracket the section of your stage
range that you wish to acquire. Interval mode can be used in conjunction with QENC_
AQ_DIR to acquire lines passing over the interval in the positive direction, the negative direction or both directions.
4.1.4 Re-Acquisition Prevention
Encoders are usually connected to mechanical systems which do not always move
smoothly. Because of these imperfections, there can be “jitter” in the quadrature
encoder signal. This jitter is not an electrical imperfection, but represent the reality of
the mechanical system vibrating, jumping, bouncing, etc. If these imperfections occur
during the period of time where lines are being acquired, the image will be distorted.
Lines on the object can be acquired more than once as the stage jitters. To prevent reacquisition of lines, a circuit has been added to the quadrature encoder system that
can prevent any line from being acquired more than once. To enable this mode, set
QENC_NO_REAQ = 1.
4.1.5 Scan Step Mode
The encoder can also be used to trigger acquisition of full frames from an area scan
camera. The idea is that every N lines, a trigger is issued to the board, which causes
acquisition of a frame. This can be used, for example, with a linear stage, where an
image is needed in steps across the range of the stage. This mode is enable by setting SCAN_STEP_TRIG = 1, and programming SCAN_STEP to the number of encoder
counts per trigger.
4.1.6 Combining Modes
All of the modes above can be combined to support complicated encoder requirements. For example, the board can be programmed to acquire an interval in the positive direction only, with no lines being reacquired. Many combinations are possible.
4.1.7 Control Registers
Starting with Section 4.3 all of the registers needed to control the qudrature encoder
system are explained.
NEO-4-2 BitFlow, Inc. Version G.5

Quadrature Encoder Introduction
4.1.8 Observability
The status of the quadrature encoder system can be observed at any time. Shown in
Table 4-1are all the registers that can be used.:
Table 4-1 Observability Registers.
Register Meaning
QENC_COUNT Encoder counter
QENC_PHASEA Phase of input A
QENC_PHASEB Phase of input B
QENC_DIR Direction of encoder
QENC_INTRVL_IN Interval status
QENC_NEW_LINES Indicates new lines are being acquired
4.1.9 Electrical Connections
Both TTL and LVDS (differential) quadrature encoders are supported. TTL connections
are shown in Table 4-2 and LVDS connections are shown in Table 4-3.
Table 4-2 TTL Quadrature Encoder Connections
Encoder Frame Grabber
A VFGx_ENCODER_TTL
B VFGx_ENCODER_B_TTL
Ground GND
Table 4-3 LVDS Quadrature Encoder Connections
Encoder Frame Grabber
A+ VFGx_ENCODER+
A- VFGx_ENCODER-
B+ VFGx_ENCODER_B+
B- VFGx_ENCODER_B-
Note: VFGx - refers to the VFG number that you wish to connect to. For example, if you
want to connect a TLL A output to VFG 0, then you would use VFG0_ENCODER_TTL.
Version G.5 BitFlow, Inc. NEO-4-3

Understanding Stage Movement vs. Quadrature Encoder Modes The Neon
Time
Encoder
Counter
These lines are acquired
These lines are not acquried
Corresponding Encoder Count vs. Time
Stage Movement
Stage
Direction
of Motion
4.2 Understanding Stage Movement vs. Quadrature Encoder Modes
The quadrature encoder system has many modes that can be used in various combinations. These combinations are easier to understand through a few simple illustrations. Figure 4-1 shows the basic Encoder Count vs. Time graph and how it
corresponds to stage movement. Keep in mind that the encoder could be attached to
any mechanical system, however, a back and forth stage is a simple way to illustrate
these modes.
In Figure 4-1 you can see as the stage moves back and forth, the encoder counts up
and down. Further, in this example we assume QENC_AQ_DIR = 1, which tells the system to only acquire when the encoder counter is moving in the positive direction. This
is illustrated by solid lines in the positive direction and dashed lines in the negative
direction.
Figure 4-1 Encoder Count vs Time
NEO-4-4 BitFlow, Inc. Version G.5

Positive Negative Both
Acquisition Direction
Simple No Re-AcquireInterval
Not Valid
Zoom In
Mode
Quadrature Encoder Understanding Stage Movement vs.
Quadrature Encoder Modes
Figure 4-2 shows all of the major quadrature encoder modes.
Version G.5 BitFlow, Inc. NEO-4-5
Figure 4-2 Quadrature Encoder Modes vs. Acquisition

CON15 Register The Neon
4.3 CON15 Register
Bit Name
0 QENC_INTRVL_LL
1 QENC_INTRVL_LL
2 QENC_INTRVL_LL
3 QENC_INTRVL_LL
4 QENC_INTRVL_LL
5 QENC_INTRVL_LL
6 QENC_INTRVL_LL
7 QENC_INTRVL_LL
8 QENC_INTRVL_LL
9 QENC_INTRVL_LL
10 QENC_INTRVL_LL
11 QENC_INTRVL_LL
12 QENC_INTRVL_LL
13 QENC_INTRVL_LL
14 QENC_INTRVL_LL
15 QENC_INTRVL_LL
16 QENC_INTRVL_LL
17 QENC_INTRVL_LL
18 QENC_INTRVL_LL
19 QENC_INTRVL_LL
20 QENC_INTRVL_LL
21 QENC_INTRVL_LL
22 QENC_INTRVL_LL
23 QENC_INTRVL_LL
24 QENC_DECODE
25 QENC_AQ_DIR
26 QENC_AQ_DIR
27 QENC_INTRVL_MODE
28 QENC_NO_REAQ
29 QENC_DUAL_PHASE
30 SCAN_STEP_TRIG
31 QENC_RESET
NEO-4-6 BitFlow, Inc. Version G.5

Quadrature Encoder CON15 Register
QENC_INTRVL_LLR/WR/W, CON15[23..0], Karbon, Neon
This register contains the lower limit value that is used to start acquisition when the
system is in interval mode (see QENC_INTRVL_MODE).
QENC_DECODE R/W, CON15[24], Karbon, Neon
This bit determines how often the quadrature counter is incremented.
QENC_DECODE Meaning
0 Counter increments on the rising edge of input A
and the rising edge of input B. This is also called “2x”
modes.
1 Counter increments on both the rising and falling
edge of A and both the rising and falling edge of B.
This is also called “4x” mode.
QENC_AQ_DIR R/W, CON15[26..25], Karbon, Neon
This bit controls which quadrature encoder direction is used for acquisition.
QENC_AQ_DIR Meaning
0 (00b) Lines are acquired in both directions
1 (01b) Lines are acquired only in the positive direction.
2 (10b) Lines are acquired only in the negative direction.
3 (11b) Reserved
QENC_INTRVL_
R/W, CON15[27], Karbon, Neon
MODE
When this bit is 1, interval mode is turned on. When interval mode is on, lines are only
captured when the encoder counter is between the lower limit (set by QENC_
INTRVL_LL) and the upper limit (set by QENT_INTRVL_UL). If the counter is outside of
this range, lines are not acquired. Whether lines are acquired as the counter increments through the interval, or decrements through the interval, or in both directions
are controlled by QENC_AQ_DIR.
QENC_NO_
R/W, CON15[28], Karbon, Neon
REAQ
This bit controls how the quadrature encoder system handles the situation where the
encoder does not smoothly increase (or decrease if QENC_AQ_DIR = 1). If there is
“jitter” in the encoder signal, often caused by problems with the mechanical systems,
it is possible for the board to acquire the same line or lines more than once as the
Version G.5 BitFlow, Inc. NEO-4-7

CON15 Register The Neon
mechanical system backs up and moves forward (jitter). This re-acquisition can cause
problems as the resulting images will have distortions and will not accurately represent the object in front of the camera.
Programming this bit to a 1 turns on the no-reacquisition circuit. This circuit eliminates
this problem as each line in the image will only be acquired once, regardless of how
much jitter occurs in the quadrature encoder input. The circuit does this by making
sure that only one line is acquired for each encoder counter value. If the quadrature
encoder backs up, and then moves forward, the board will not acquire lines until a
new encoder counter value is reached.
This system handles any amount of jitter, regardless of how many times the counter
passes through a value, or to what extremes the counter goes. New lines will only be
acquired when new values are reached.
Once the entire frame has been acquired, the system must be reset. The system can
always be reset by poking QENC_RESET to 1. There are also ways that the system can
automatically be reset, see QENC_RESET_MODE.
QENC_NO_REAQ Meaning
0 Lines are acquired every change in the encoder
counter (as controlled by QENC_AQ_DIR)
QENC_DUAL_
PHASE
SCAN_STEP_
TRIG
1 Lines are only acquired when the encoder counter
reaches new values (also controlled by QENC_AQ_
DIR)
R/W, CON15[29], Karbon, Neon
This bit controls which type of encoder is attached.
QENC_DUAL_PHASE Meaning
0 A single phase encoder is attached
1 A quadrature encoder is attached
R/W, CON15[30], Karbon, Neon
The scan step circuit uses the encoder to generate a trigger to the system. The scan
step trigger generates a trigger every N lines (N is set in the SCAN_STEP register).
SCAN_STEP_TRIG Meaning
0 Trigger comes of the normal source
1 Trigger comes from the scan step circuit
NEO-4-8 BitFlow, Inc. Version G.5

Quadrature Encoder CON15 Register
QENC_RESET WO, CON15[31], Karbon, Neon
Poking this bit to a 1 resets the entire quadrate encoder system.
Version G.5 BitFlow, Inc. NEO-4-9

CON16 Register The Neon
4.4 CON16 Register
Bit Name
0 QENC_INTRVL_UL
1 QENC_INTRVL_UL
2 QENC_INTRVL_UL
3 QENC_INTRVL_UL
4 QENC_INTRVL_UL
5 QENC_INTRVL_UL
6 QENC_INTRVL_UL
7 QENC_INTRVL_UL
8 QENC_INTRVL_UL
9 QENC_INTRVL_UL
10 QENC_INTRVL_UL
11 QENC_INTRVL_UL
12 QENC_INTRVL_UL
13 QENC_INTRVL_UL
14 QENC_INTRVL_UL
15 QENC_INTRVL_UL
16 QENC_INTRVL_UL
17 QENC_INTRVL_UL
18 QENC_INTRVL_UL
19 QENC_INTRVL_UL
20 QENC_INTRVL_UL
21 QENC_INTRVL_UL
22 QENC_INTRVL_UL
23 QENC_INTRVL_UL
24 QENC_REAQ_MODE
25 QENC_REAQ_MODE
26 QENC_RESET_REAQ
27 N/A
28 N/A
29 N/A
30 N/A
31 N/A
NEO-4-10 BitFlow, Inc. Version G.5
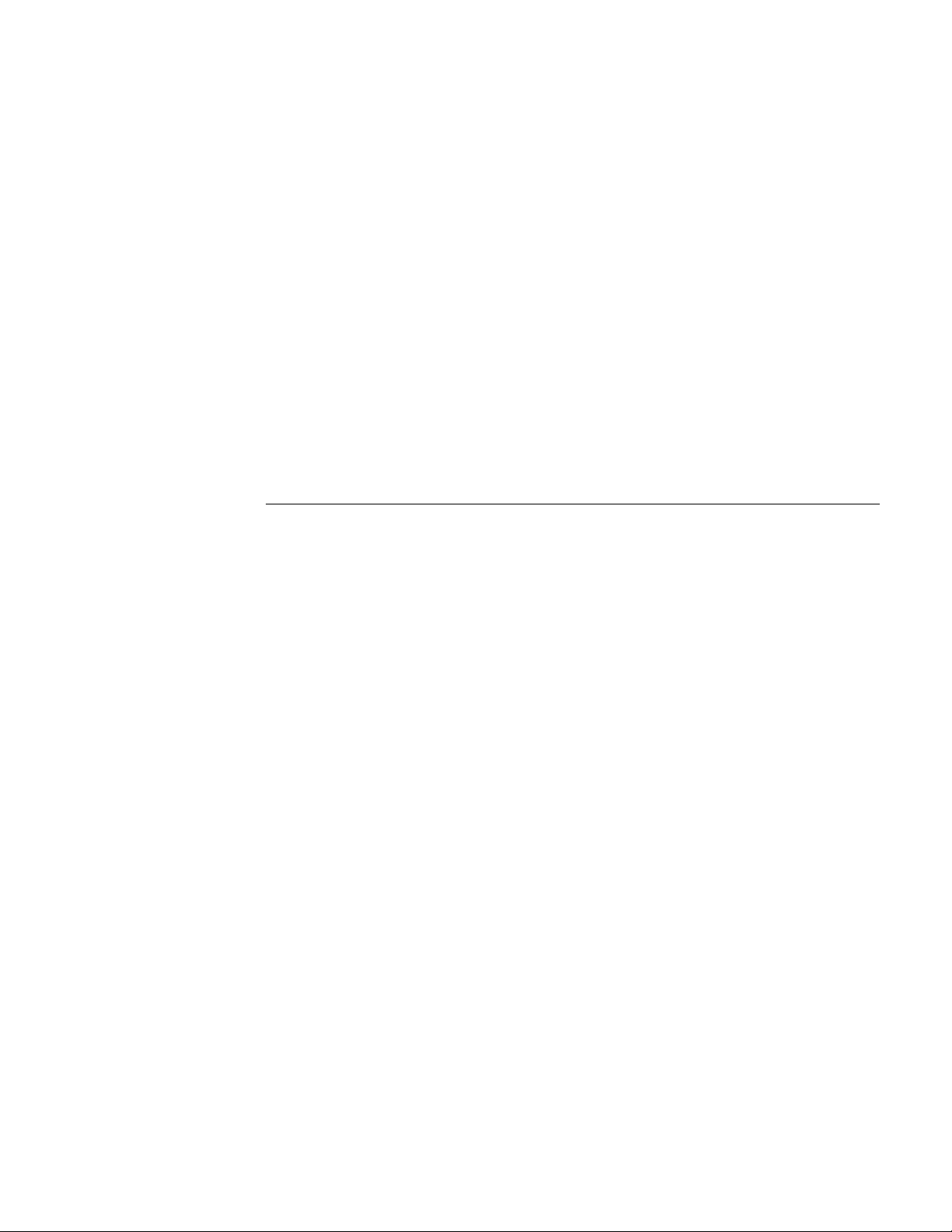
Quadrature Encoder CON16 Register
QENC_INTRVL_ULR/W, CON16[23..0], Karbon, Neon
This register contains the upper limit value that is used to start acquisition when the
system is in interval mode (see QENC_INTRVL_MODE).
QENC_REAQ_
MODE
R/W, CON16[25..24], Karbon, Neon
This bit controls how the circuit that prevents re-acquisition from encoder jitter is
reset. Re-acquisition is prevented by keeping a list of lines that have been acquired,
and making sure that only lines that are not on the list are acquired. Once the entire
frame is acquired, there must be some way to reset the list, otherwise no new lines will
ever be acquired See QENC_NO_REAQ for more information.
The reset can be either automatic or manual. Manual modes require that the host
application software poke the QENC_RESET_REAQ bit when the reset is desired.
Automatic modes do not require host interaction, the reset will occur automatically
when the specified conditions are met.
QENC_REAQ_MODE Mode Meaning
0 (00b) Manual Reset the list of acquired lines when
QENC_RESET_REAQ is poked to 1.
1 (01b) Automatic Reset the list of lines when the
encoder counter is outside of the
interval set by the upper limit and
lower limit. Whether the reset occurs
above the upper limit or below the
lower limit depends on the QENC_
AQ_DIR register.
QENC_RESET_
REAQ
2 (10b) Reserved
3 (11b) Reserved
WO, CON16[26], Karbon, Neon
This register is used to reset the circuit that prevents the re-acquisition of lines when
QENC_NO_REAQ is set to 1. Writing a 1 to this register deletes the list of acquired
lines, thus next time the lines are passed over, they will be acquired again. Writing to
this bit always resets the no re-acquistion circuit, regardless of the mode set by the
QENC_REAQ_MODE. However, the register QENC_REAQ_MODE can be used to set
the board in a mode where the no re-aquisition circuit is reset automatically every
pass over the image.
Version G.5 BitFlow, Inc. NEO-4-11

CON22 Register The Neon
4.5 CON22 Register
Bit Name
0 Reserved
1 Reserved
2 Reserved
3 Reserved
4 Reserved
5 Reserved
6 Reserved
7 Reserved
8 Reserved
9 Reserved
10 Reserved
11 Reserved
12 Reserved
13 Reserved
14 Reserved
15 Reserved
16 SCAN_STEP
17 SCAN_STEP
18 SCAN_STEP
19 SCAN_STEP
20 SCAN_STEP
21 SCAN_STEP
22 SCAN_STEP
23 SCAN_STEP
24 SCAN_STEP
25 SCAN_STEP
26 SCAN_STEP
27 SCAN_STEP
28 SCAN_STEP
29 SCAN_STEP
30 SCAN_STEP
31 SCAN_STEP
NEO-4-12 BitFlow, Inc. Version G.5

Quadrature Encoder CON22 Register
SCAN_STEP R/WO, CON22[31..16], Karbon, Neon
This bitfield controls the number of encoder pulses that must occur before a trigger is
issued to the system. See SCAN_STEP_TRIG for more information. The Scan Step circuit takes into account the interval and re-acquisition functions.
Version G.5 BitFlow, Inc. NEO-4-13
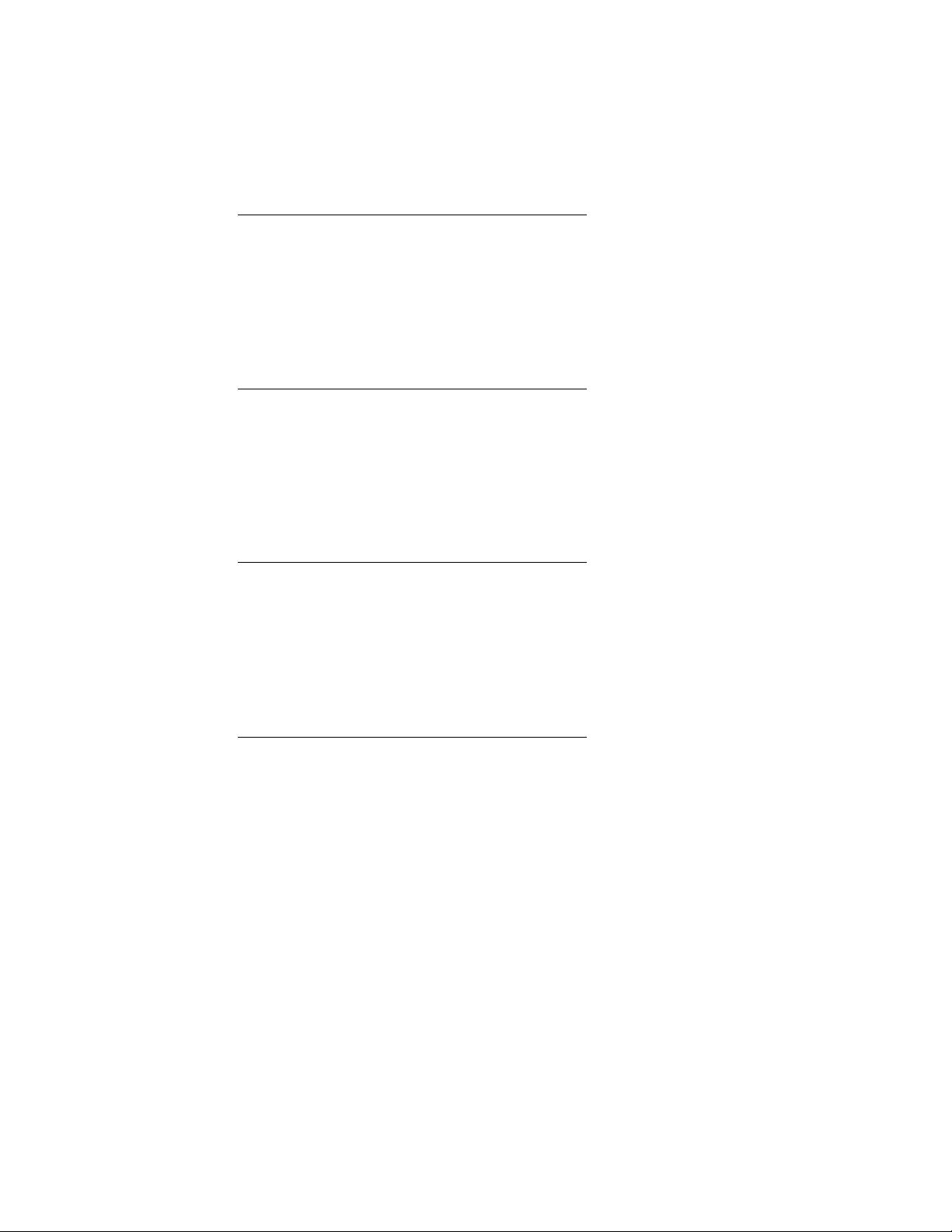
CON51 Register The Neon
4.6 CON51 Register
Bit Name
0QENC_COUNT
1QENC_COUNT
2QENC_COUNT
3QENC_COUNT
4QENC_COUNT
5QENC_COUNT
6QENC_COUNT
7QENC_COUNT
8QENC_COUNT
9QENC_COUNT
10 QENC_COUNT
11 QENC_COUNT
12 QENC_COUNT
13 QENC_COUNT
14 QENC_COUNT
15 QENC_COUNT
16 QENC_COUNT
17 QENC_COUNT
18 QENC_COUNT
19 QENC_COUNT
20 QENC_COUNT
21 QENC_COUNT
22 QENC_COUNT
23 QENC_COUNT
24 QENC_PHASEA
25 QENC_PHASEB
26 QENC_DIR
27 QENC_INTRVL_IN
28 QENC_NEW_LINES
29 Reserved
30 Reserved
31 Reserved
NEO-4-14 BitFlow, Inc. Version G.5

Quadrature Encoder CON51 Register
QENC_COUNT RO, CON51[23..0], Karbon, Neon
This bitfield displays the current quadrature encoder count.
QENC_PHASEA RO, CON51[24], Karbon, Neon
This bit displays the current logic level of the A quadrature encoder phase.
QENC_PHASEB RO, CON51[25], Karbon, Neon
This bit displays the current logic level of the B quadrature encoder phase.
QENC_DIR RO, CON51[26], Karbon, Neon
This bit displays the current quadrature encoder direction.
QENC_DIR Meaning
0 Direction is negative
1 Direction is positive
QENC_INTRVL_INRO, CON51[27], Karbon, Neon
This bit indicates the current status of the quadrature encoder if the system is in interval mode (see QENC_INTRVL_MODE).
QENC_INTRVL_IN Meaning
0 System is not inside the interval. Encoder counter is
not between QENC_INTRVL_LL and QENC_INTRVL_
UL. Lines are not being acquired.
1 System is inside the interval. Encoder counter is
between QENC_INTRVL_LL and QENC_INTRVL_UL.
Lines are being acquired.
Version G.5 BitFlow, Inc. NEO-4-15

CON51 Register The Neon
QENC_NEW_
LINES
RO, CON51[28], Karbon, Neon
This bit indicates if the system is at an encoder count that corresponds to a new line.
When QENC_NO_REAQ = 1, only lines that have not yet been scanned are acquired.
This bit can be used to determine of new lines are being traversed, or if the system
has backed up, and is revisiting old lines.
QENC_NEW_LINES Meaning
0 The system is traversing lines that have already been
visited. If QENC_NO_REAQ = 1, lines are not being
acquired.
1 The system is traversing new lines. Lines are being
acquired.
NEO-4-16 BitFlow, Inc. Version G.5

Encoder Divider Introduction
Encoder Divider
Chapter 5
5.1 Introduction
This section covers the encoder divider which supported on the Karbon and the Neon
Families. The purpose of Encoder Divider is to provide the ability to use an encoder
running at one rate to drive a line scan camera at a different rate. This circuit is only
useful for line scan cameras. The Encoder Divider can scale up or down the incoming
encoder frequency. The encoder divider is fully programmable and is easily controlled from software and/or from camera configuration files.
The factor used to scaled the incoming encoder frequency does not have to be a
whole number. For example, the encoder could be scaled by 0.03448 or 4.2666). Of
course not all ration numbers in the available scaling range can be selected (there are
an infinite number of them). However, a useful selection of values is available which
should support most applications.
The Encoder Divider circuit takes as its input the selected encoder input (controlled
by the register SELENC). The output of the encoder divider drives the same parts of
the board the normal encoder usually does. The actual circuit(s) being driven
depends on how the board is programmed. However, the Encoder Divider circuit can
drive any of the following:
Horizontal CTAB (HCNT_RLS_ZERO = 1)
NTG (NTG_ONESHOT = 1, NTG_TRIG_MODE = 1)
Note: The Encoder Divider circuit described in this chapter replaces the previous
circuit which could only divide the incoming encoder by an integer value and could
not increase the encoder frequncy. Please contact BitFlow if you have been using the
previous on-board encoder divider.
Version G.5 BitFlow, Inc. NEO-5-1

Encoder Divider Details The Neon
F
out
F
in
2
N
M
-------
=
5.2 Encoder Divider Details
5.2.1 Formula
The following formula shows the equation used to scale the encoming encoder rate
into the camera’s line rate:
Where:
Fout = The frequency used to driver the camera or the NTG or the CTabs
Fin = The encoder (input) frequency
N = An integer between 0 and 6 (set by the register ENC_DIV_N)
M = An integer between 1 and 1023 (set by the register ENC_DIV_M)
5.2.2 Example
5.2.3 Restrictions
The above formula provides an effective scaling factor from 0.001 (N = 0, M =1023) to
64 (N = 6, M = 1). Not every scaling factor can be acheived between these two
extremes, and the scaling factors are not evenly distributed. However, a scaling factor
can be generally found that meets the requirments of most applications.
Let’s assume that the encoder frequency (Fin) is 10 KHz and that we need an output
(Fout) of ~30 KHz. This means that we need to multiply by 3. Set N = 6 and M = 21.
This will a scaling factor of 3.048. The result is an effective line rate of 30.48 KHz.
Because the encoder divider uses a digital PLL run by a 50 MHz clock, not all encoder
input frequencies can be accurately scaled. The PLL has been designed to work in
most machine visions applications. Support, therefore, is provided for the following
inpute frequency range:
Minimum input encoder frequency: 1.6 KHz
Maximum input encoder frequency: 300 KHz
NEO-5-2 BitFlow, Inc. Version G.5

Encoder Divider Encoder Divider Details
F
out
F
in
4M
---------
=
5.2.4 PLL Locking
The encoder divider achieves its scaling using a PLL. By default the output waveform
is locked to the input waveform. However, this locking can result in a small amount of
jitter. To reduce the jitter, the output waveform can be run open loop. This mode is
accessed by setting the register ENC_DIV_OPEN_LOOP to 1.
5.2.5 Handling Encoder Slow Down or Stopping
On some machine vision systems, the encoder is attached to a mechanism that may
slow and/or stop. Any PLL has a limited range that it can track (based on the PLL master clock), outside of this range, the output signal can become unpredictable. The
Encoder Divider circuit’s master clock is 50 MHz, which makes the minimum frequency that it can accurately track around 1.6 KHz. In order to avoid this situation and
handle encoder slow down/stop gracefully, the encoder divider has has limiting circuit that can be run in one of two different mode described in the following two sections.
Slow Tracking Mode (ENC_DIC_FORCE_DC = 0)
In this mode, when the input frequency goes below the minimum of 1.6 KHz, the
Encoder Divider circuit’s output will continue to track the input, but the output frequency will become simple divider on the input freqency. In this mode the output will
track the input using the following formula (the variables are the same as in Section
5.2.1)
DC Mode (ENC_DIV_FORCE_DC = 1)
In this mode, the Fin goes below 1.6 KHz, Fout will goes to DC. This means that when
the input frequency goes below the minium, the camera will be frozen, acquisition
will stop. The board will stay in this state until Fin goes above 1.6 KHz. This is useful
when the encoder is being driven by a stage that is travelling back and forth. At both
ends of travel when the stage changes directions, the board will not acquire.
Version G.5 BitFlow, Inc. NEO-5-3

Encoder Divider Control Registers The Neon
5.3 Encoder Divider Control Registers
The following table summarizes the registers:
Table 5-1 Encoder Divider Registers
Name Locations Purpose
ENC_DIV_M CON6[27..18] This controls the M factor in the Encoder Divider equation
(see Section 5.2.1
ENC_DIV_N CON19[18..17] The controls the N factor the Encoder Divider equation
ENC_DIV_FORCE_DC CON16[27] Controls the behavior when Fin falls below the minimum.
0 = Output runs in simple divider mode. 1 = Output goes
to DC.
ENC_DIV_OPEN_LOOP CON16[28] Controls whether the output signal phase of the Encoder
Divider is lock to the intput or is allowed to free run. 0 =
Output phased locked to input. 1 = Ouput runs open
loop.
ENC_DIV_FCLK_SEL CON16[31..29] Reserved for future support for alternate Encoder Divider
PLL Master clock frequencies. Currently must be set to 0,
which selects 50 MHz clock.
NEO-5-4 BitFlow, Inc. Version G.5

Power Over Camera Link (PoCL) Introduction
Power Over Camera Link (PoCL)
Chapter 6
6.1 Introduction
This chapter describes the Power Over Camera Link (PoCL) support of the Neon-CL
frame grabber. PoCL is a Camera Link standard designed to provide power to the
camera from the frame grabber over the camera link cable. In order for this to work,
all of the following must be true:
The frame grabber must be PoCL capable
The camera must be a PoCL camera
The cable must be PoCL compliant
If any of the above are not true, the camera will not be powered, and acquisition will
not be possible.
The PoCL standard is described in version 1.2 and later of the Camera Link Specification. The standard is available from the Automated Imaging Association. Please see
their web site for more information.
The PoCL standard is designed to be backwards compatible with existing equipment.
See Section Table 6-1 for more information.
The PoCL standard provides 12 volts of power at up to 0.5 amps. Overcurrent protection is provided, as well as a variety of other safety features designed to protect all
equipment in the system. See Section 6.3 for more information on equipment protection.
There are a number of registers on the Neon that are part of the PoCL system. Some
of the registers provide control over PoCL and other provide feedback on the status
of the PoCL system. See Section 6.4 for more information.
Version G.5 BitFlow, Inc. NEO-6-1

PoCL Compatibility The Neon
6.2 PoCL Compatibility
PoCl is designed to be backward compatible with existing equipment. PoCL backwards compatibility is designed to provide previous existing functionality, however, it
should be obvious that power cannot be provided using non-PoCL equipment. Table
6-1 provides more information on compatibility.
Table 6-1 PoCL Compatibility
PoC L Camera Non-PoCL
Camera
PoCL frame grabber +
PoCL Cabl e
PoCL frame grabber +
Non-PoCL Cable
Non-PoCL frame grabber +
PoCL Cabl e
Non-PoCL frame grabber +
Non-PoCL Cable
Note: In the table above “Yes” means the combination will work and images will be
acquired. “No” means the combination will not work and no images will be acquired,
but no damage will occur to any of the equipment. Please see Section 6.3 for more
information.
In summary, the only way to use a PoCL camera is with a PoCL frame grabber and
PoCL cable. However, with non-PoCL cameras, any combination will work. Finally,
even if the particular combination does not work, nothing will be damaged should
the combination be plugged in.
Yes Yes
No Yes
No Yes
No Yes
NEO-6-2 BitFlow, Inc. Version G.5

Power Over Camera Link (PoCL) PoCL Safe Power
6.3 PoCL Safe Power
The PoCL specification is fairly simple in that it only described the amount of power
that should be provided, which CL cable lines the power should be applied and that
an over current protection device should be used on the power lines. It was quickly
realized, however, that this specification was inadequate for the real world. This simple specification could lead to many different kinds of problems if proper frame grabber/cable/camera combinations were not always used. In the real world, engineers
use whatever resource they have at hand to solve problems. With PoCL specification
as it stood, many combinations could result in damage equipment.
The camera link committee decided to add a optional component to the specification
called “Safe Power”. The safe power system would take an active role in testing any
equipment connected and make sure everything was PoCL compliant before applying power. The goal being if any legacy equipment was plugged into a PoCL frame
grabber, the power would never be applied because the frame grabber could detect
that the equipment was not PoCL compliant.
The Safe Power system uses a state machine which proceeds though a number of
tests before applying power. If any of the tests fail, the power is not applied. Also, if a
power camera is removed, the safe power system detects this situation and goes back
to a non-powered state. Figure 6-1 shows the state of the PoCL safe power system.
It is important to understand the board powers up with the PoCL system turned off.
The PoCL system will not start up, and no power will be applied to any connector until
the register POCL_EN is set to 1. This is an extra safety feature that gives the user complete control PoCL system. Also, this lets the board act as a normal CL frame grabber
in situations where non-PoCL camera is being used.
The principle of safe power is that the state machine (once it is turned on) first tries to
detect if a PoCL camera is attached or not. This is done by detecting the impedance of
the camera with a very small voltage. Non-PoCL equipment will test one way and
PoCL equipment will test another way. Once it is determined that a PoCL camera is
attached, the frame grabber applies power. There is a small waiting time while the
camera boots, then the state machine look for the clock coming back from the camera. If the clock is detected, the state machine goes into running mode. If at any point
in time, the clock is lost (e.g. the camera is disconnected), the system falls back to the
Sense state, looking for a camera. There is a over current circuit which acts like a fuse,
if too much current is detected, the system shuts down power, and the board exits the
PoCL normal state (resets POCL_EN). In order to recover from an over current event,
the POCL_EN bit must be set to 1 again.
Version G.5 BitFlow, Inc. NEO-6-3

PoCL Safe Power The Neon
Power
on
Check
Mode
PoCL =
GND
POCL_EN_ = 0
Sense
POCL_EN = 1
PoCL =
Power
PoCL Camera Detected
Wait for
surge
(0.5 S)
Wait for
clock
(3.0 S)
Check
for
clock
No Clock
Running
PoCL =
Power
Clock Detected
No Clock
PoCL =
GND
Legacy Camera/Cable
POCL_EN = 1
Check
for
clock
No Clock
Running
PoCL =
GND
Clock Detected
No Clock
EN_PO
WER =
0
Fuse Blows
POCL_EN = 0
Fuse Blows
Wait for
clock
(3.0 S)
Fuse Blows
Figure 6-1 PoCL State Diagram
NEO-6-4 BitFlow, Inc. Version G.5

Power Over Camera Link (PoCL) PoCL Control Registers
6.4 PoCL Control Registers
The following registers are used as part of the PoCL state machine:
POCL_EN - this register turns on or off the PoCL state machine
POCL_POWER_ON - indicates the PoCL power is turned on
POCL_GND_ON - indicates the PoCL lines have been grounded
POCL_CLOCK_WAIT - indicates that the PoCL state machine waiting for the clock
from the camera
POCL_SENSE - indicates that the PoCL state machine is looking to sense PoCL
equipment
POCL_CLK_DETECTED - indicates that the clock has been detected coming back
from the camera
POCL_DETECTED - indicates that the PoCL camera has been detected.
Only the register POCL_EN is a user programmable bit. The other registers are useful
for determining the current state of the PoCL state machine.
The bitfield POCL_EN is located the CON0 register. The other bitfields are all located
in the CON38 register.
Version G.5 BitFlow, Inc. NEO-6-5

PoCL Control Registers The Neon
NEO-6-6 BitFlow, Inc. Version G.5

System Status Introduction
System Status
Chapter 7
7.1 Introduction
This chapter describes the system status report that the board supplies through its
registers. The system status will help the users in setting up their system: the camera,
the frame grabber, the cabling, the I/O and the software. The list of the status bits is
given in the Table 7-1. If more information is available for a given specification there
will be an entry in the column marked “Details”. In addition, all of these registers are
also described in Register Map chapter of this manual.
Table 7-1 Status Bits
Status Bits Function and Relationship Register Details
AQSTAT Acquisition status CON3 Section 8.6
FACTIVE Acquisition status, vertical
active
FCOUNT Acquisition status, 3-bit frames
counter
LCOUNT Camera status, LEN is toggling CON4 Section 7.3
PCOUNT Camera status, PCLK is toggling CON4 Section 7.3
FENCOUNT Camera status, FEN is toggling CON4 Section 7.3
RD_TRIG_DIFF/TTL/OPTO Trigger status CON5 Section 7.4
RD_ENC_DIFF/TTL/OPTO Encoder status CON5 Section 7.4
TRIG_QUALIFIED Selected trigger status CON6 Section 7.5
VCOUNT Acquisition status, VCTAB
cycling
HCOUNT Acquisition status, HCTAB
cycling
LINES_TOGO Acquisition status, current line
in frame
FIFO_EQ Camera status, video value CON20 Section 7.7
CON3 Section 7.2
CON3 Section 7.2
CON6 Section 7.6
CON6 Section 7.6
CON19 Section 7.6
DEST_ADD DMA running CON22 Section 7.8
Version G.5 BitFlow, Inc. NEO-7-1

FACTIVE, FCOUNT The Neon
7.2 FACTIVE, FCOUNT
FACTIVE is 1 during the active vertical. It works for both area scan and line scan
comeras. For both line scan and area scan cameras there is always a vertical size
defined by ALPF.
FCOUNT is a 3-bit frame counter that is incremented by the rising edge of FACTIVE. It
can be used to track acquisition, especially in triggered modes. FCOUNT works for
both area scan and line scan cameras.
NEO-7-2 BitFlow, Inc. Version G.5

System Status PCOUNT, LCOUNT, FENCOUNT
7.3 PCOUNT, LCOUNT, FENCOUNT
These three registers give an indication of the status the camera connected to the
main connector:
PCOUNT is a 2-bit counter clocked by the camera’s PCLK. Reading a constant value
from this register indicates that the camera’s clock does not reach the acquisition circuitry.
LCOUNT is a 2-bit counter clocked by the camera’s LEN. Reading a constant value
from this register indicates that the camera’s LEN does not reach the acquisition circuitry.
FENCOUNT is a 2-bit counter clocked by the camera’s FEN. Reading a constant value
from this register indicates that the camera’s FEN does not reach the acquisition circuitry.
Version G.5 BitFlow, Inc. NEO-7-3

RD_TRIG_DIFF/TTL/OPTO, RD_ENC_DIFF/TTL/OPTO The Neon
7.4 RD_TRIG_DIFF/TTL/OPTO, RD_ENC_DIFF/TTL/OPTO
The level of all trigger and encoder inputs can be read at any time. This helps establish connection with external industrial equipment.
NEO-7-4 BitFlow, Inc. Version G.5

System Status TRIG_QUALIFIED
7.5 TRIG_QUALIFIED
The bit TRIG_QUALIFIED is the current active state of the current selected trigger. The
trigger is selected by the SEL_TRIG register. Each individual input can be monitored
via the corresponding RD_TRIG_XXX bit, but the TRIG_QUALIFIED always reports the
state of the trigger input that is current being used by the acquisition circuitry.
Version G.5 BitFlow, Inc. NEO-7-5

VCOUNT, HCOUNT, LINES_TOGO The Neon
7.6 VCOUNT, HCOUNT, LINES_TOGO
These three registers give feedback about the operation of the horizontal and vertical
CTABs. VCOUNT is the address counter of the VCTAB. This register indicates the current VCTAB address.
HCOUNT is the 2 LSB of the HCTAB address counter. This register indicates only if the
HCTAB is cycling. Reading a constant value on HCOUNT indicates that the HCTAB
address is stuck.
LINES_TOGO specifies how more many lines there are till the end of the frame.
NEO-7-6 BitFlow, Inc. Version G.5

System Status FIFO_EQ
7.7 FIFO_EQ
This register gives the 8-bit value of the video from the first eight bits of the main connector. It is helpful to determine if the camera is reacting to light. Covering the camera’s lens will yield a low value in this register. Pointing the camera to a light source
will yield a high value in this register.
Note: This register is not available on all models.
Version G.5 BitFlow, Inc. NEO-7-7

DEST_ADD The Neon
7.8 DEST_ADD
This register gives the DMA destination address. During acquisition, this register
should change. Reading a constant value from this register suggests that the DMA
operation is not progressing.
NEO-7-8 BitFlow, Inc. Version G.5

Camera Control Registers Introduction
Camera Control Registers
Chapter 8
8.1 Introduction
This section enumerates all of the bitfields in all of the registers used to control the
acquisition and external I/O. If you compare the Alta, Karbon, Neon and R64 manuals
you will see that almost all of these registers are the same. There are only a few bits
that are different between these two models, these will be indicated in the bitfield
definitions. Registers that are related to DMA operations have their own chapters.
All of the registers are 32 bits wide. These wide registers are named CON0, CON1,
etc. Each registers is broken into one or more bitfields. Bitfields can be from one to 32
bits wide. Each bitfield controls a specific function on the board.
Version G.5 BitFlow, Inc. NEO-8-1

Bitfield definitions The Neon
8.2 Bitfield definitions
8.2.1 Example Bitfield Definition
Here is what each bitfield definition looks like:
BITFIELD R/W, CON0[7..0], Alta, Karbon-CL, Karbon-CXP, Neon, R64
Bitfield discussion.
8.2.2 Bitfield Definition Explanation.
The definitions is broken into three sections (see Table 8-1).
Table 8-1 Bitfield Sections.
Section Meaning
Bitfield name This is the name of the bitfield. This name is use to program
this bitfield from software or from within and camera configuration file. When programming bitfields from software
using a Peek or Poke function, the bitfield is preceded with
“REG_”. For example the bitfield CFREQ is referred to in
software as REG_CFREQ.
Bitfield details This section describes how the bitfield is accessed. The first
part describes the how the bits can be accessed. For example R/W means the register can be both read and writen.
See theTable 8-2 for details.The second part is the wide register that the bitfield is located in. In the example above this
bitfield is in CON0. Following the wide register name is a
bitfield location description, in hardware engineering format. For example, [7..0], means the bitfield has 8 bits, location in positions 0 to 7. Finally this section also indicates if
the register is specific to only one product family.
Bitfield discussion This section explains the purposed of the bitfield in detail.
Usually meaning of every possible value of the bitfield is
listed.
NEO-8-2 BitFlow, Inc. Version G.5
 Loading...
Loading...