

Bettis Manual de referencia del Módulo de control Foundation Fieldbus Manuals & Guides [es]
Page 1
TM
Manual de referencia
DOC.RM.QC34.S Rev: A
Octubre, 2006
Actuador de válvulas FieldQ
QC34, Módulo de control Foundation Fieldbus
www.FieldQ.com
Page 2
TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
CONTENIDO
A INSTRUCCIONES ESENCIALES 3
A1 Antes de comenzar ..................................... 3
A2 Orientación (véase fig. A1) .......................... 3
A3 Módulos de control aplicables ..................... 3
A4 Documentos de referencia para la instalación,
operación y mantenimiento ......................... 3
A5 Medio operativo .......................................... 3
A6 Integridad del producto ................................ 3
A7 Áreas peligrosas ......................................... 4
A8 Advertencia ; Partes móviles ...................... 4
A9 Impida que la humedad penetre en el
actuador ...................................................... 4
A10 Advertencia ; Material magnético ................ 4
A11 Advertencia ; Rango de temperaturas ......... 4
1 Descripción del módulo 5
1.1 Módulo de control FieldQ™ Foundation
Fieldbus™ .................................................. 5
1.2 Comunicación con Foundation Fieldbus™ .. 6
1.3 Descripción y métodos del dispositivo ........ 6
1.4 Dirección del nodo ...................................... 6
1.5 Bloques de funciones de Foundation Field-
bus™ .......................................................... 6
1.6 Datos afines ............................................... 7
1.7 Especificaciones y hardware de Foundation
Fieldbus™ .................................................. 7
2 Instalación 8
2.1 Introducción ................................................ 8
2.2 Módulos de control aplicables ..................... 8
2.3 Observaciones preliminares ........................ 8
2.4 Conexiones neumáticas .............................. 8
2.5 Conexiones eléctricas ................................. 9
3 Puesta en marcha 11
3.1 Implementación del driver de dispositivos en
el sistema principal. .................................. 11
3.2 Inicialización ............................................. 11
3.3 Asignaciones de bloqueo de funciones ..... 13
3.4 Solución de fallas ..................................... 14
4 Configuración detallada 16
4.1 Bloqueo de recursos ................................. 16
4.2 Bloque de transductores ........................... 22
5 Operaciones y mantenimiento 35
5.1 Estado de falla.......................................... 35
5.2 Método de reinicio..................................... 35
5.3 Reinicio del módulo ................................... 35
Página 2
Page 3
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
A INSTRUCCIONES ESENCIALES
LEA ESTA SECCIÓN ANTES DE CONTINUAR
TM
A1 Antes de comenzar
• Los actuadores neumáticos FieldQ deben estar
aislados tanto neumática como eléctricamente
antes de (des)montarse.
• No se permite conectar un receptáculo de presión
con medios no reducidos al actuador neumático
FieldQ.
• Los actuadores FieldQ no deben conectarse a un
suministro de aire mayor de 8 bar g o 120 psig
• Este manual no proporciona instrucciones para
instalaciones en áreas peligrosas. Véanse las
secciones aplicables de la Guía de instalación
DOC.IG. QC34.1 o instalaciones en áreas
peligrosas.
• La instalación, así como el ajuste, puesta en
servicio, uso, montaje, desmontaje y mantenimiento
del actuador neumático deben ser realizados por
personal cualificado.
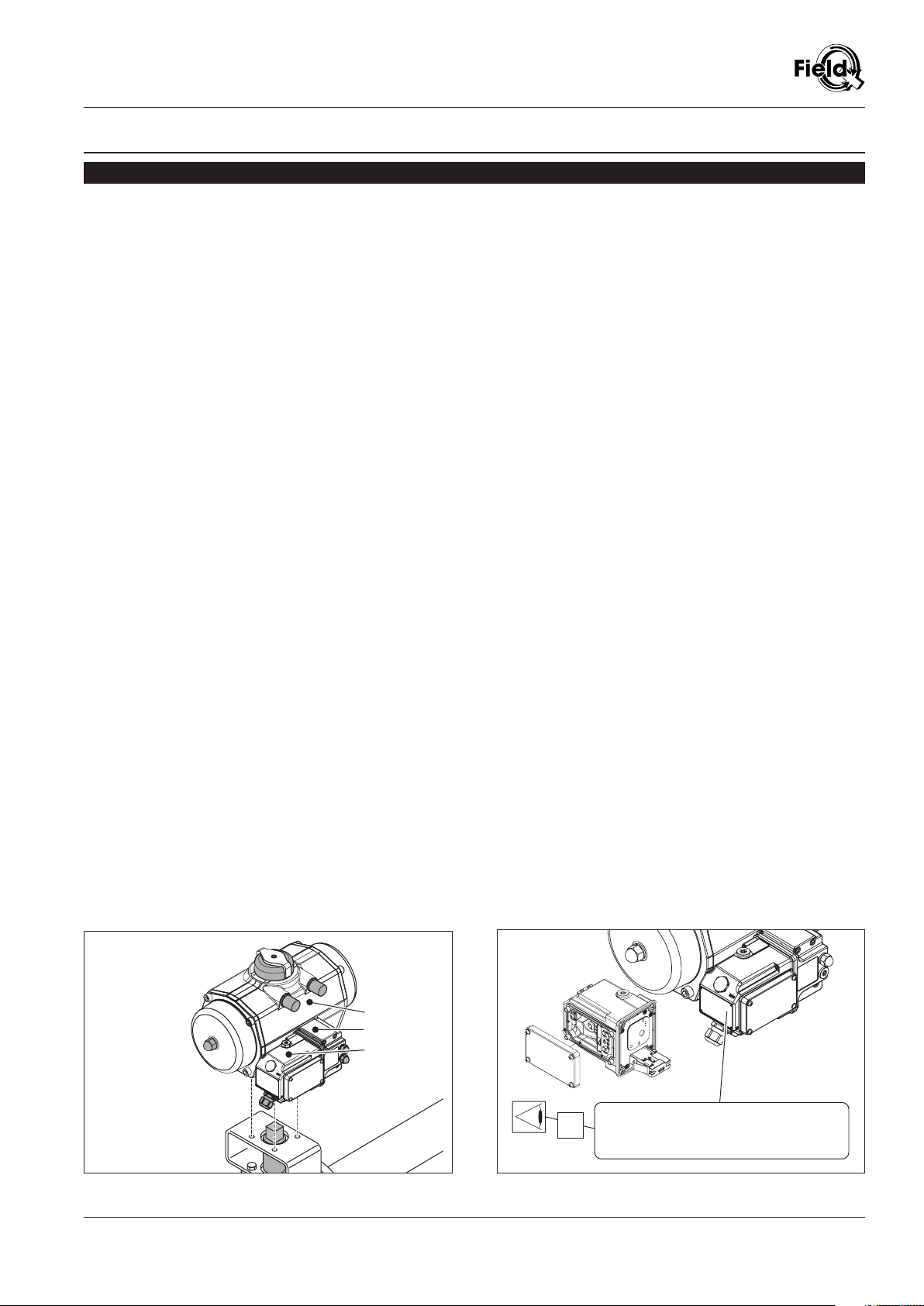
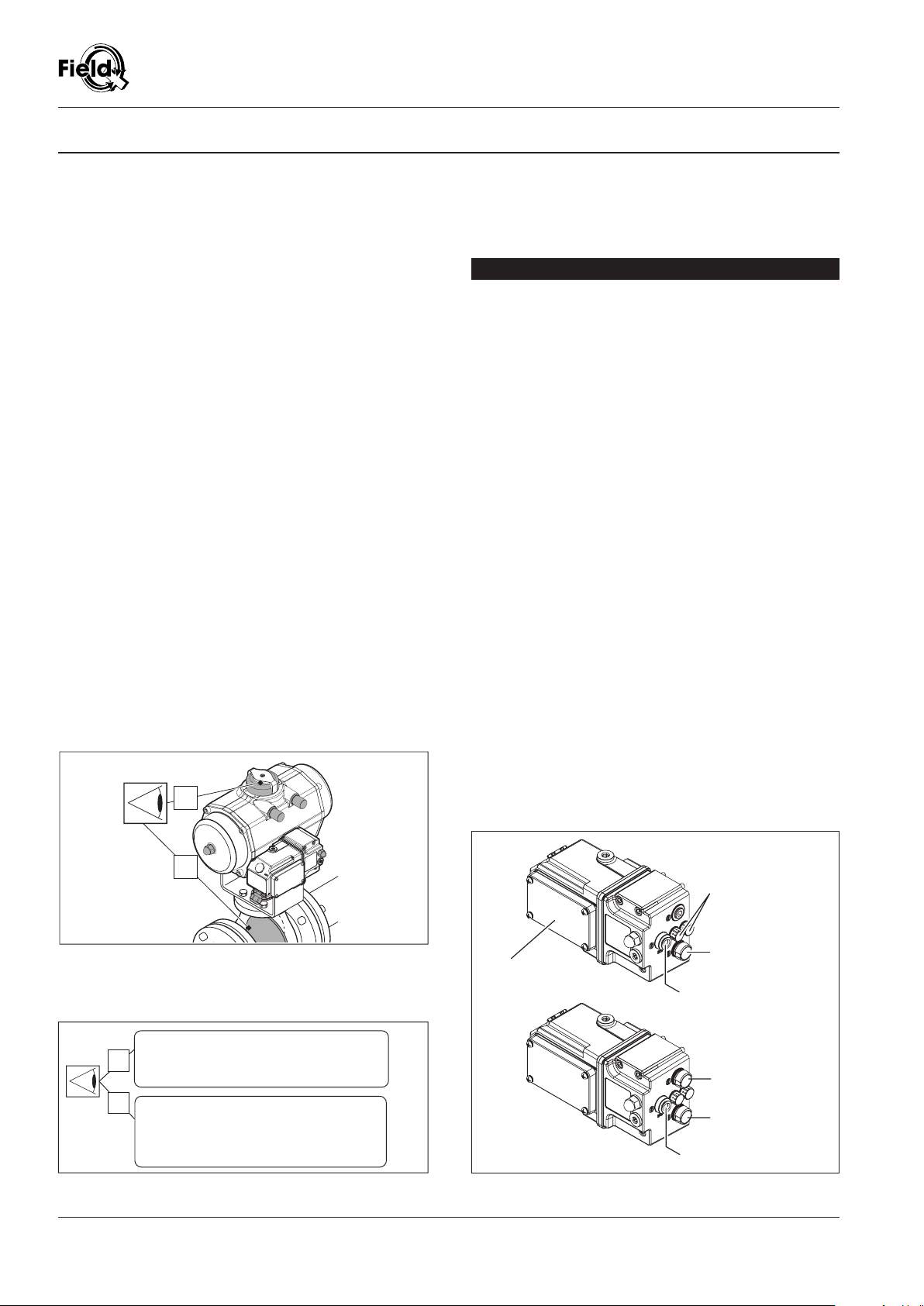
A2 Orientación (véase fig. A1)
El actuador FieldQ es un concepto integrado para la
automatización de amortiguadores, válvulas de un
cuarto de vuelta, u otras aplicaciones de cuarto de
vuelta. Consta de tres partes básicas:
1. Actuador neumático
2. Módulo neumático
3. Módulo de control
A3 Módulos de control aplicables
QC34 - FOUNDATION Fieldbus™
QC34 - FOUNDATION Fieldbus™ Antideflagrante
o Antichispa
QC34 - Foundation Fieldbus™ Intrínsecamente
seguro
Compruebe la etiqueta del módulo para elegir la
ejecución correcta.
A4 Documentos de referencia para la
instalación, operación y
mantenimiento
Antes de montar, instalar, poner en marcha o
(des)armar el actuador, consulte estos documentos:
- Todos los capítulos de este Manual de referencia y
- Guía de instalación del Módulo de control
suministrado
- Para la instalación en áreas peligrosas:
instrucciones de instalación de planos de control
para áreas peligrosas, incluidos con el Módulo de
control.
Todos estos elementos están disponibles en
www.FieldQ.com o a través del representante local de
Valve Automation).
A5 Medio operativo
• Aire o gases inertes.
• Aire filtrado a 5 micrones.
• Punto de condensación 10 K por debajo de la
temperatura de operación
• Para las aplicaciones bajo cero, tome las medidas
correspondientes.
A6 Integridad del producto
• Sólo se permite montar o desmontar para reemplazar
sellos y bandas guía (partes blandas).
• De acuerdo con la Directiva Europea para Equipos
de Presión, la conversión de actuadores sólo puede
ser realizada por empresas o personal autorizados
por Emerson Process Management .
1
2
3
Etiqueta de tipo de módulo de control =
OK!
QC34... = FOUNDATION Fieldbus™
Fig A.1 Orientación Fig A.2 Comprobación del módulo
Página 3
Page 4

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
A7 Áreas peligrosas
Una instalación incorrecta en un área
peligrosa puede causar una explosión.
• El montaje, desmontaje y mantenimiento
debe realizarse fuera de áreas
potencialmente explosivas
• Para informarse sobre la instalación en un
área peligrosa, consulte las secciones
adecuadas de la Guía de instalación, que
se proporciona con el Módulo de control.
A8 Advertencia ; Partes móviles
• Si aplica presión al actuador o
• aplica una señal de control al Módulo de
control, puede hacer que se ponga en
marcha el conjunto actuador/válvula.
A9 Impida que la humedad penetre en el
actuador
Si penetra condensación o humedad en el
actuador, el Módulo neumático o el Módulo
de control, se pueden dañar esos
componentes y producirse fallas. Por este
motivo:
• Intente no montar el actuador con las
entradas del conducto o las entradas de
aire hacia arriba.
• Compruebe la integridad de juntas y
juntas tóricas
• Instale bucles de drenaje en el conducto
o el cable.
• Selle todas las entradas del conducto,
con independencia de si las usa o no.
A10 Advertencia ; Material magnético
* No ponga el FieldQ en contacto directo
con material magnético. Puede causar
daños o averías.
A11 Advertencia ; Rango de temperaturas
* No supere los límites de temperatura
indicados en este manual o en la Guía de
instalación DOC.IG.QC34.1.
Puede causar daños o averías.
Página 4
Page 5
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
1 Descripción del módulo
TM
1.1 Módulo de control FieldQ™ FOUNDATION Fieldbus
Este manual contiene información sobre la instalación,
operación y mantenimiento del módulo FieldQ
™
FOUNDATION Fieldbus™(Figura 1).
La instalación, la operación y el mantenimiento de
este módulo sólo debe estar a cargo de personal
calificado. Si tuviera alguna duda respecto a estas
instruccione o necesitara información que no está
contenida en este manual de instrucciones, póngase
en contacto con la oficina o el representantate de
ventas local de Valve Automation, para obtener mayor
información.
El FieldQ es un módulo interoperable, que controla
procesos y comunicaciones, y está basado en un
microprocesador. Además de su función primordial de
controlar la posición de la válvula, el módulo FieldQ,
mediante el protocolo de comunicaciones FOUNDA-
TION
Fieldbus™, permite el fácil acceso a información
crítica relacionada con la operación de procesos, así
como para el control de procesos. Puede obtener
información a partir del componente principal del
proceso, de la válvula de control en sí, utilzando una
PC o la consola del operador en la sala de control.
Empleando un dispositivo de configuración compatible
con Fieldbus, puede obtener información respecto a la
integridad del módulo y de los elementos de control
del actuador y de la válvula. Asimismo, puede obtener
información de activo sobre el módulo. Puede fijar los
parámetros de configuración de entrada y salida. Con
el protocolo FOUNDATION Fieldbus™, la información
proveniente del módulo se puede integrar fácilmente a
un sistema de control.
El módulo FieldQ en un conjunto dentro de un
encapsulado IP65/NEMA4X que provee señales de
entrada de salida para controlar y monitorear el
actuador FieldQ. El módulo es autónomo, por lo que
suministra control y retroalimentación de posición a
través de la interfaz de Fieldbus.
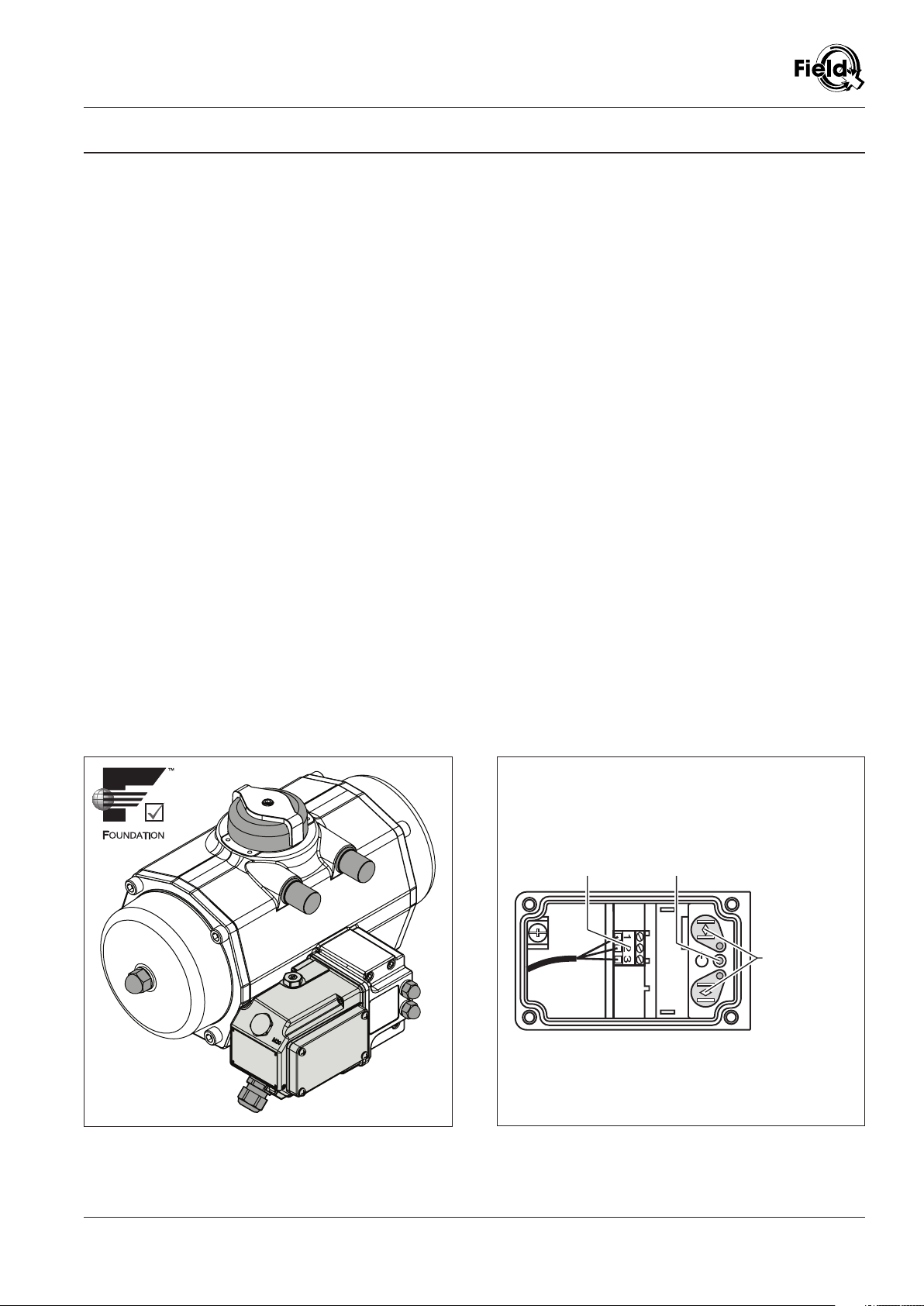
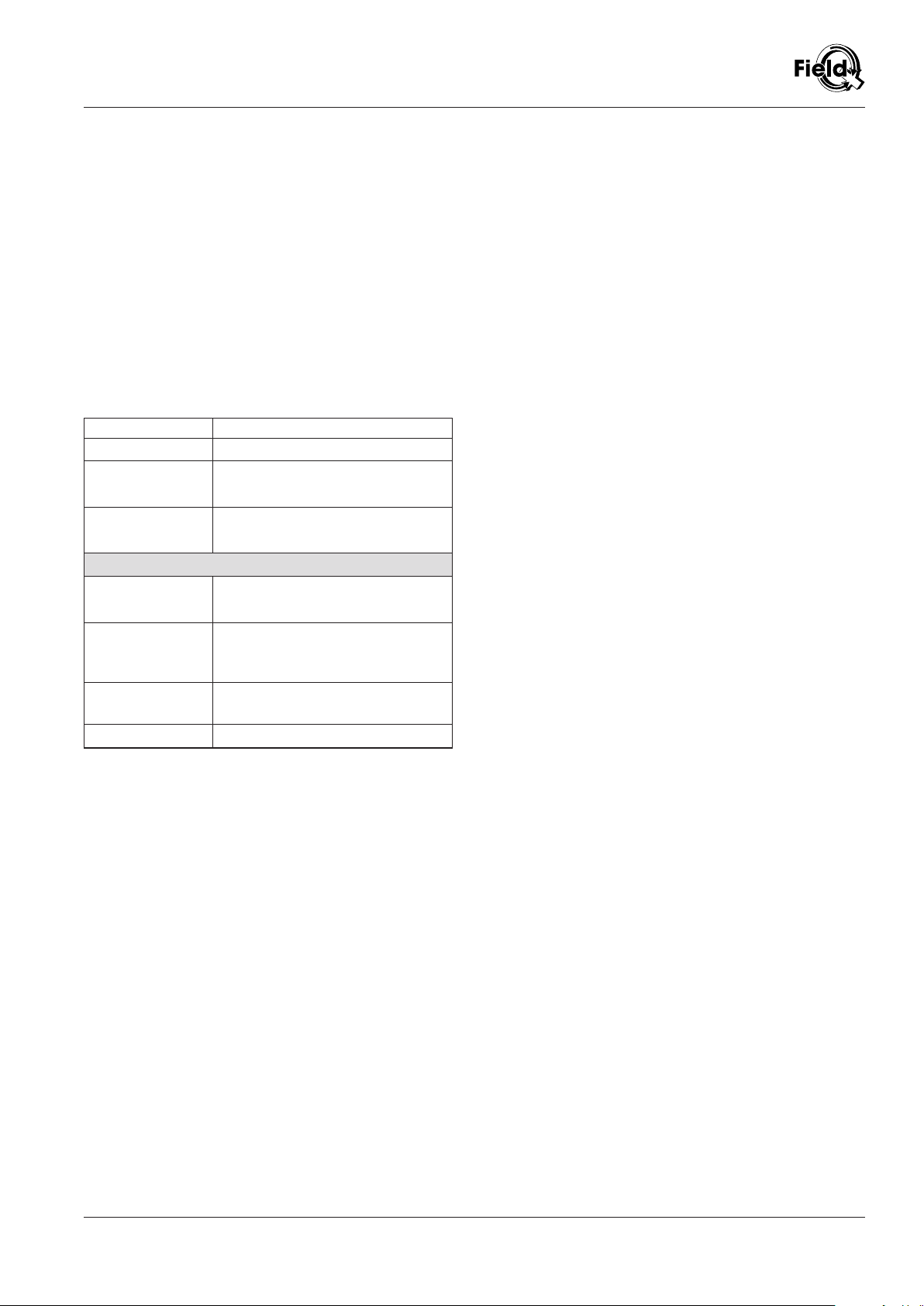
La figura 1.2 muestra una vista transversal del módulo
con indicación de los puntos de conexión clave. Para
conectar el módulo, quítele la cubierta, inserte el
cableado a través de las entradas eléctricas y
conecte cada uno de los cables a la ubicación
correspondiente de la placa de terminales.
Para mayor información sobre cómo conectar un
módulo, véase §2.5.
Luego de conectar el módulo, configure los
conmutadores limitadores del mismo mediante la
ejecución del procedimiento de inicialización que se
describe en la sección §4.2.4.
™
Terminales
de
cableado
LED de
estado
Botones de
reasignación
Fig 1.1 Módulo FieldQ Foundation Fieldbus™ Fig 1.2 Corte transversal del Módulo de control QC34
Página 5
Page 6

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
1.2 Comunicación con F
Fieldbus
™
OUNDATION
El módulo FieldQ QC34 usa el protocolo FOUNDATION Fieldbus™ para comunicarse con otros
dispositivos de campo y con el sistema principal.
FOUNDATION Fieldbus™ es un sistema bidireccional
en serie completamente digital que interconecta
equipo de campo, como transmisores, controladores
de válvulas y controladores de proceso. Fieldbus es
una red de área local (LAN) para dispositivos usada
en la automatización de procesos y de fabricación,
con capacidad integrada para distribuir la aplicación
de control por la red.
El entorno de Fieldbus es el grupo de nivel base de
las redes digitales en la jerarquía de las redes de
planta. El Fieldbus retiene las características
deseables de los sistemas analógicos, como:
y Una interfaz física estandarizada con el cable
y Dispositivos alimentados por bus con un solo par
de cables
y Opciones de seguridad intrínseca
Asimismo, el uso de FOUNDATION Fieldbus™
proporciona:
y Mayor capacidad gracias a unas comunicaciones
digitales completas
y Menor cableado y terminaciones de cable gracias al
uso de múltiples dispositivos con un solo par de
cables
y Mayor selección de proveedores gracias a su
interoperabilidad
y Carga reducida en el equipo de la sala de control
disponible gracias a la distribución de funciones de
control y de entrada/salida a dispositivos de campo
y Opciones de velocidad para el control de procesos
y las aplicaciones de fabricación
Para más información sobre el funcionamiento de
FOUNDATION Fieldbus™, consulte la documentación
de DeltaV y las especificaciones de FOUNDATION
Fieldbus™.
1.3 Descripción y métodos del
dispositivo
Este manual describe la configuración del dispositivo
mediante las Descripciones de dispositivo (DD)
especificadas por el protocolo FOUNDATION
Fieldbus™. El acceso y los métodos de los
parámetros también se describen en este manual.
FOUNDATION Fieldbus™ usa DD, bloques de funciones
y un archivo de capacidades para conseguir la
interoperabilidad entre el módulo y los componentes
de Fieldbus de otros fabricantes en los sistemas de
control que incluyen sistemas principales y otros
dispositivos. DD proporciona información para
describir la interfaz de datos al dispositivo, mientras
que el archivo de capacidades proporciona
información sobre el dispositivo para permitir la
creación de una estrategia de control sin un
dispositivo físico (configuración sin conexión).
Para dispositivos Fieldbus, además de proporcionar
definiciones de parámetros y otros datos requeridos
por el sistema de control para comunicarse con el
dispositivo, el DD también puede incluir métodos. Los
métodos pueden usarse para diversas funciones,
como el reinicio remoto del módulo de control. Los
métodos son una secuencia de pasos
predeterminada que usa un lenguaje de programación
estructurado y la definición de interfaz del módulo.
La forma en que el método pide información y
muestra mensajes es determinada por el sistema
principal. Para obtener información sobre el uso de
métodos en el sistema principal, véase el Apéndice
E y la documentación apropiada del sistema principal.
1.4 Dirección del nodo
La dirección por defecto del nodo del módulo FieldQ
QC34 es 247 (estado = reserva).
Utilice el sistema principal para poner en servicio el
módulo y asignarle una dirección de trabajo. Para
obtener información sobre el uso del sistema principal para poner en servicio el dispositivo y asignar
direcciones, consulte la documentación del sistema
principal.
1.5 Bloques de funciones de FOUNDATION
Fieldbus™
Los bloques de funciones, dentro de un dispositivo
Fieldbus, realizan las distintas funciones necesarias
para el control de procesos, como la entrada y salida
de variables de proceso y funciones de control como
funciones Proporcionales/Integrales/Derivativas
(PID). Los bloques de funciones estándar
proporcionan una estructura común para definir sus
entradas, salidas, parámetros de control, eventos,
alarmas y modos. A continuación, los bloques de
funciones pueden combinarse en un proceso que
puede ser implementado dentro de un solo
dispositivo o en varios dispositivos mediante la red
de Fieldbus.
Los siguientes bloques de función se implementan
en el módulo FieldQ.
y Bloque de recursos (RB)
y Bloque de transductores (TB)
y Bloque de funciones de entrada análoga (AI)
y Bloque de funciones para salida discreta (DO)
y 2 bloques de funciones de entrada discreta (DI)
y Bloque de funciones PID
Los parámetros y el uso de los bloques de funciones
se describen en la documentación del sistema
principal. Consulte esa documentación para recibir
información detallada sobre los bloques de
funciones.
Página 6
Page 7

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
TM
1.5.1 Bloque de recursos
El bloque de recursos contiene información de hardware y electrónica. No hay entradas ni salidas
enlazables al bloque de recursos.
1.5.2 Bloque de transductores
El bloque de transductores es la interfaz principal con
la función de control del dispositivo. Este bloque de
transductores contiene todos los parámetros
necesarios para configurar el dispositivo y definir
parámetros de diagnóstico.
1.5.3 Bloque de entrada análoga (AI)
El bloque de funciones de entrada análoga (AI)
procesa mediciones de dispositivo de campo y da
acceso a esos datos a otros bloques de funciones.
El bloque AI admite alarmas, escalado de señales,
filtro de señales, cálculo del estado de señales,
control de modo y simulación. El bloque AI es muy
usado para la funcionalidad de escalado.
1.5.4 Bloque para salida discreta (DO)
El bloque de funciones para salida discreta (DO)
procesa un punto de referencia discreto y a
continuación lo envía a un canal de entrada/salida
especificado para producir una señal de salida. El
bloque de funciones DO admite control de modo,
seguimiento de salida y simulación. No hay detección
de alarma de proceso en el bloque. Al funcionar, el
bloque de funciones DO determina su punto de
referencia, define la salida y, opcionalmente,
comprueba una señal de Readback del dispositivo de
campo para confirmar la operación de salida física.
1.5.5 Bloque para entrada discreta (DI)
El bloque de funciones para entrada discreta (DI)
procesa una sola entrada discreta de un dispositivo de
campo y la hace disponible para otros bloques de
funciones. El bloque de funciones DI admite control de
modo, propagación de señal de estado y simulación.
1.6 Datos afines
1.6.1 Pautas de instalación y cableado de
F
OUNDATION Fieldbus™
Generalidades técnicas de FOUNDATION Fieldbus™
(disponibles en la Fieldbus Foundation)
1.6.2 Datos afines
Entre los documentos que contienen información
relacionada con el Módulo de control FieldQ, se
encuentran:
1.604.02 Hoja de datos del Módulo de control
1.604.021 Hoja de datos de diagnóstico
DOC.IG.QC34.1 Guía de instalación de Módulo de
control QC34 con FOUNDATION
Fieldbus™
Estos documentos están disponibles para su
descarga gratuita en www.FieldQ.com;
alternativamente, puede obtenerlos del representante
local de FieldQ.
1.7 Especificaciones y hardware de
OUNDATION Fieldbus™
F
Entrada eléctrica
2 x M20 o 1/2” NPT
Entrada de electricidad, Interfaz del Fieldbus
Nivel de voltaje : de 9 a 32 voltios
Corriente nominal : 22 mA, (máximo)
Polaridad inversa : La unidad no es sensible a la
polaridad.
Protección
Se necesita externa : Restringir la fuente de
protección alimentación
corriente a <600mA.
Bloques de funciones disponibles
Entrada análoga (AI)
Entrada discreta (DI)
Salida discreta (DO)
PID a Proporcional/Integral/Derivativa
Protocolo de comunicación digital
Señal digital de codificación Manchester que cumple
las normas IEC 1158-2 y ISA 50.02
Límites de temperatura ambiente para
funcionamiento
-20°C a +50° C (-4° F a 122° F)
Conexiones eléctricas
Bloque de terminales
Conectores rápidos opcionales
Caja
Material : Aleación de aluminio
Acabado : Capa de polvo de poliéster no basada
en TGIC
Gabinete : IP65 / NEMA 4X
Página 7
Page 8
TM
2 Instalación
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
2.1 Introducción
El Módulo de control FieldQ FOUNDATION Fieldbus™ es
un dispositivo de dos cables alimentado por el bus.
Para varias guías de aplicación como las pautas de
instalación y cableado, compruebe:
www.fieldbus.org/About/FoundationTech/
Resources/
Las siguientes secciones proporcionan instrucciones
sobre las instalaciones neumática y eléctrica.
Encontrará instrucciones sobre la puesta en marcha
en el Capítulo 3.
2.2 Módulos de control aplicables
QC34 - FOUNDATION Fieldbus™
QC34 - FOUNDATION Fieldbus™ Antideflagrante
o Antichispa
QC34 - Foundation Fieldbus™ Intrínsecamente
seguro
2.3 Observaciones preliminares
* Asegúrese de que el actuador esté montado
correctamente en la válvula antes de conectar el
suministro de aire y el cableado eléctrico (véase el
Manual de instalación y operación del actuador de
válvulas FieldQ, DOC.IOM.Q.E)
* Vea la etiqueta del módulo, la cual indica la
ejecución correcta (fig. 2.2)
OK
* Vea el tipo de actuador: de acción simple o doble
(fig. 2.2)
2.4 Conexiones neumáticas
IMPORTANTE
* La combinación de actuador y válvula se puede mover
después de conectar el suministro de aire.
* Asegúrese de que el Módulo neumático y el Módulo de
control están montados correctamente en el actuador
para alcanzar un grado de protección de ingreso de
clasificación IP65 / NEMA4X antes de conectar el
suministro de aire.
* Compruebe la presión máxima Pmax = 8bar/116Psi
* Verifique que la mínima presión de suministro requerida
para la aplicación está disponible en el actuador.
* Si penetra condensación o humedad en el actuador, el
Módulo neumático o el Módulo de control, se pueden
dañar esos componentes y producirse fallas.
* Los orificios de ventilación del Módulo neumático (véase
la figura 3) incluyen de fábrica silenciadores/filtros de
categoría IP65 / NEMA4X.
* Si se necesita protección de ingreso IP65 / NEMA4X, los
orificios de escape Ra y Rb y las entradas eléctricas
deben equiparse con dispositivos de categoría IP65 /
NEMA4X o superior.
2.4.1 Medios operativos
* Aire o gases inertes.
* Aire filtrado a 5 micrones.
* Punto de condensación 10 K por debajo de la
temperatura de operación
* Para las aplicaciones bajo cero, tome las medidas
correspondientes.
OK
Fig. 2.1: Compruebe el montaje antes de conectar el
suministro de aire y el cableado eléctrico.
Etiqueta de tipo de módulo de control =
QC34... = FOUNDATION Fieldbus™
OK
OK
Etiqueta de tipo de actuador =
QS xxxx = Efecto simple (retorno del resorte)
QD xxxx = Efecto doble
Fig. 2.2 Identificación
Página 8
Efecto
simple
Tapa del
módulo de control
Efecto
doble
Ps : 1/4”BSP o 1/4”NPT
Ps : 1/4”BSP o 1/4”NPT
Fig. 2.3: Conexiones neumáticas
Orificios de
ventilación
Rb
Ra
Rb
Page 9
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
TM
2.4.2 Actuador de efecto simple (retorno
por resorte) o doble
1 Retire el conector libre del orificio de suministro de
aire (Ps).
2 Conecte el suministro de aire al puerto (Ps).
2.5 Conexiones eléctricas
2.5.1 Entrada de electricidad, Interfaz del
Fieldbus
Rango de voltaje * de 9 a 32 voltios
Corriente máxima 22 mA
Polaridad inversa La unidad no es sensible a la
protección polaridad.
Se necesita Restringir la fuente de alimentación
externa protección corriente a <600mA.
Condiciones ambientales:
Temperatura * -20°C a +50°C
(-4°F a +122°F)
Humedad 0 a 85% a 25°C(+77°F) degradado
a 50% por encima de 40°C (104°F)
(sin condensación).
Altitud Potencia completa disponible
hasta los 2000 metros (6000 pies).
Uso En interiores y exteriores.
2.5.2 Datos eléctricos de las ejecuciones
en áreas peligrosas
Los siguientes capítulos de la Guía de instalación
(DOC.IG.QC34.1) contienen datos eléctricos para el
caso de que el módulo de control deba utilizarse en
una ubicación peligrosa:
Antideflagrante/Antichispa
- QC34 FF (FNICO) Capítulo 10
Seguridad intrínseca
- QC34 FF Capítulo 11
- QC34 FF (FISCO) Capítulo 12
2.5.3 Dimensiones del cableado
Hilo sólido : 2,5 mm2 máx.
Hilo trenzado : 0,2-3,3 mm2 o 24-12 AWG
2.5.4 Herramientas
Herramientas para los
terminales : Destornillador de 0,6 x 3,5
Herramienta para
tornillos de tapa : Destornillador de cruz
tornillos Phillips ranurados
no. 2
* Si el Módulo de control se usa en ubicaciones
peligrosas, consulte los Planos de control del
Capítulo 4.2 para saber el rango de temperatura o
voltaje aplicable.
Página 9
Page 10
TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
ADVERTENCIA:
* No ponga el Módulo de control ni el Módulo
neumático en contacto directo con material
magnético. Puede causar daños o averías
en la retroalimentación de posición.
* Si el Módulo de control se usa de forma no
especificada por el fabricante, puede
reducirse la protección proporcionada por
el equipo.
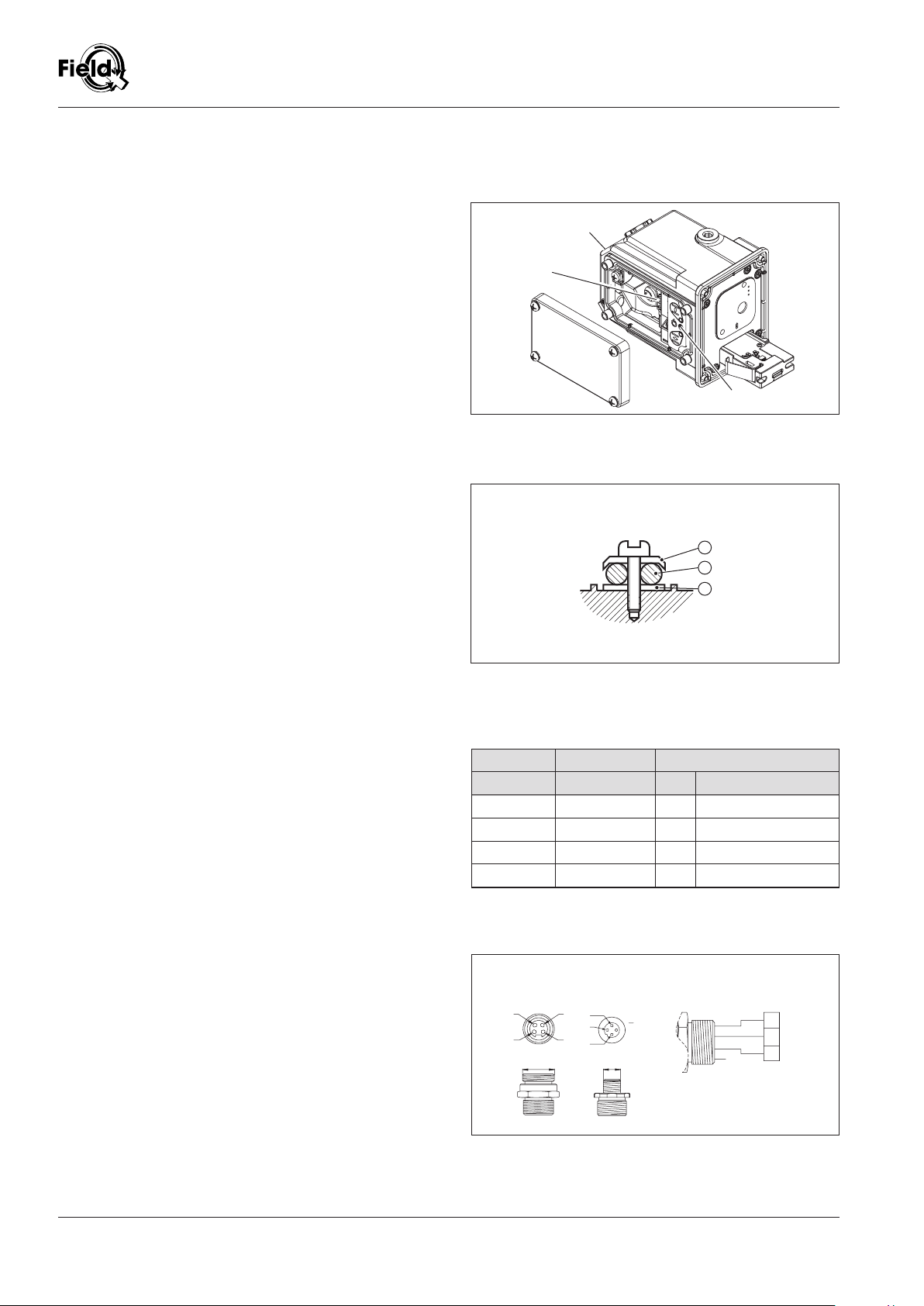
* Si es necesario, monte el hilo de tierra (1)
entre los anillos superior (2) e inferior (3)
de la conexión de hilo de tierra (véase la
figura 2.5.2).
2.5.5 Procedimiento
1 Retire la tapa del Módulo de control (véase la
figura 2.5.1)
2 Coloque los cables a través de las entradas
eléctricas.
- Use y monte los prensaestopas de cables como
requiera la legislación nacional o local.
- Si se necesita protección de ingreso IP65 /
NEMA4X, las entradas eléctricas deben
equiparse con prensaestopas de clasificación
IP65 / NEMA4X o superior.
3 Conecte la señal FOUNDATION™ Fieldbus a los
terminales correspondientes (véase figura 2.53).
- Para salidas de conector rápido de 7/8” o M12,
véase la figura 6.
- Para conexiones en áreas peligrosas, véanse los
planos de control tal como se indica en el
Capítulo 2.5.2.
4 Monte la cubierta del Módulo de control en la caja
(vea la figura 2.5.1) o continúe con el capítulo 3.
Asegúrese de que la junta de la cubierta esté
colocada para cumplir con las condiciones de
estanqueidad al polvo y al agua de la norma IP65/
NEMA4X.
2.5.6 Pautas de instalación y cableado de
OUNDATION Fieldbus™
F
Para varias guías de aplicación como las pautas de
instalación y cableado, compruebe:
www.fieldbus.org/About/FoundationTech/Resources/
Etiqueta de tipo de
módulo de control
Terminales
LED de estado
Fig. 2.5.1 Instalación de cables
2
1
3
Fig.2.5.2 Conexión de hilo de tierra
Conexiones eléctricas
Señal Interno Conector rápido
No. de terminal no. color
Señal FF - 1 2 Azul
Blindaje 2 4 Verde/amarillo
Señal FF + 3 1 Marrón
3 No conectado
Fig. 2.5.3 Conexiones de terminal y de conector rápido
Salidas de pines para conectores rápidos:
(conexión tipo macho)
1
3
4
3
2
1
4
2
M127/8" UNC
Conector
rápido
2
4
1
1
2
3
Terminal
Página 10
Fig. 2.5.4 Salidas de pines de conector rápido
Page 11
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
3 Puesta en marcha
TM
Para poner en marcha el módulo QC34 deben darse
tres pasos previos:
1 Implementación del driver de dispositivos en el
sistema principal.
2 Inicialización del módulo FieldQ QC34.
3 Asignación de bloques de funciones a canales.
3.1 Implementación del driver de
dispositivos en el sistema principal.
Hay dos versiones de drivers de DD disponibles para
el módulo QC34:
- QC34 Standard DD Rev 2 : archivos DD para su
uso con otros sistemas principales y herramientas
de Foundation FieldBus
- QC34 PlantWeb DD Rev 2: archivos DD adaptados
específicamente para su uso con Emerson
PlantWeb Systems (DeltaV).
Estos drivers de DD están disponibles para su
descarga en www.FieldQ.com.
Consulte la documentación de su sistema principal
para instalar estos drivers de dispositivos en su
sistema principal.
ADVERTENCIA:
* Durante la rutina de inicialización, la combinación de
actuador y válvula pasa por un ciclo varias veces.
* Antes de la inicialización, compruebe que el actuador y
la válvular tengan las mismas posiciones “Abierta” y
“Cerrada”.
* Compruebe que la carrera de la válvula no está obstruida
antes de iniciar la rutina de inicialización.
Desplazamientos de
topes mecánicos
Desplazamientos de
topes mecánicos
“Cerrar”
posición final
10˚
max
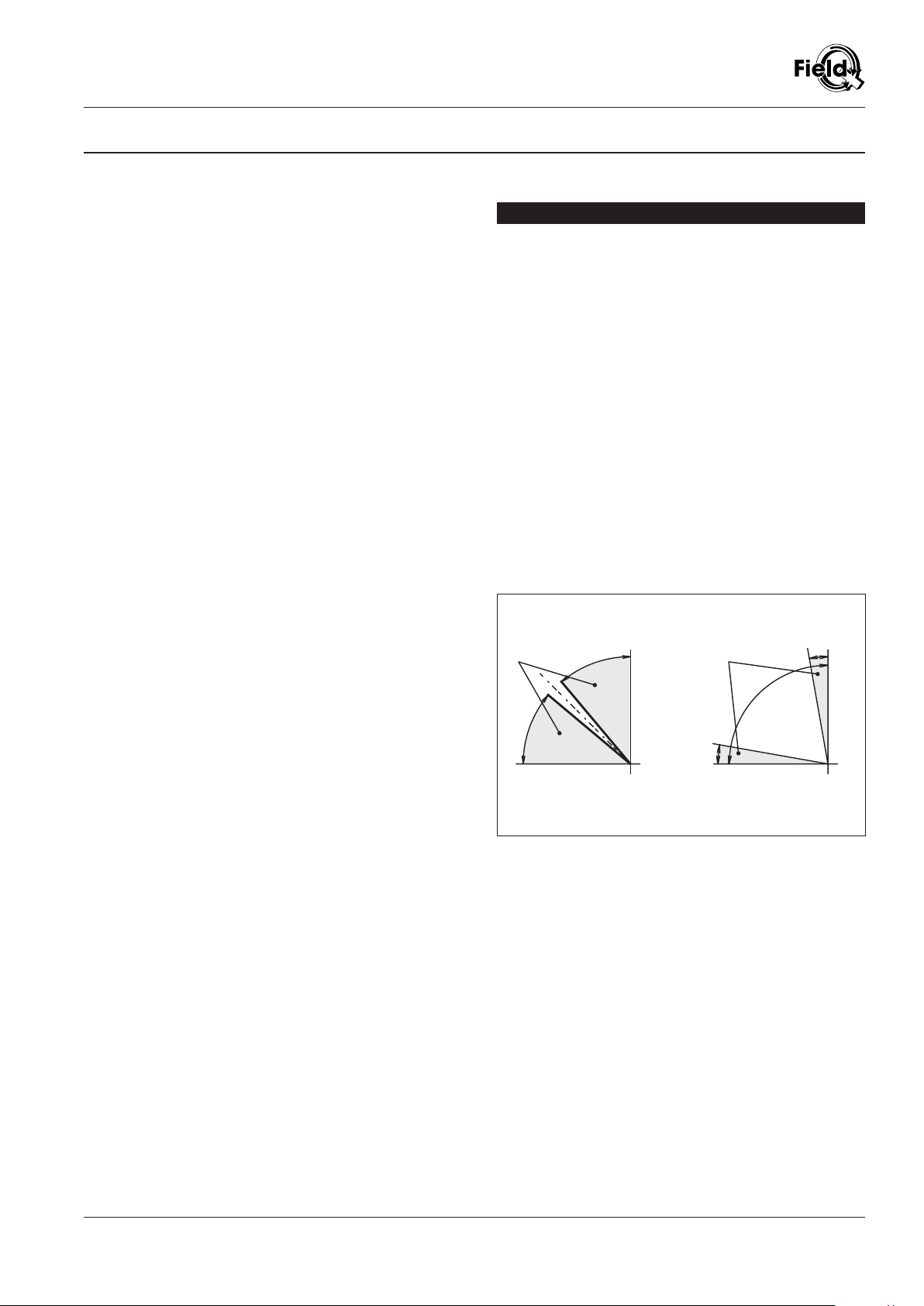
3.2 Inicialización
La inicialización detecta las posiciones finales del
actuador. A continuación se producirá la conmutación
en los desplazamientos de topes mecánicos de esas
posiciones finales. El modulo realiza este proceso
automáticamente. No obstante, el usuario debe
iniciarlo y los cables de la unidad deben estar
conectados según las instrucciones del
capítulo 2. El proceso de inicialización puede iniciarse
de dos modos:
1. Inicialización mediante los botones locales (véase
§3.2.1).
2. Inicialización mediante un comando de bus (véase
§3.2.2).
±40˚
±40˚
Configuraciones de
fábrica
10˚
max
“Abierta”
posición final
Especificación tras la
inicialización
Fig 3.1 Características de retroalimentación
Página 11
Page 12

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
3.2.1 Inicialización mediante botones
locales
Para la “Inicialización mediante los botones locales”
no se necesita comunicación digital, pero sí fuente de
alimentación (9V a 32V DC).
1 Pulse los botones de reasignación “Abierto” y
“Cerrado” al mismo tiempo durante 4 segundos.
2 El LED de estado parpadeará.
3 El actuador completará 2 o 3 ciclos.
4 Al final de la rutina, el LED de estado queda
encendido de forma permanente, lo que indica que
la inicialización se ha realizado satisfactoriamente.
Tabla 3.1 Indicaciones del LED de estado
Estado Acción LED de estado
OK (Inicialización Encendido de forma constante
satisfactoria)
Inicializando Parpadeante (véase fig. 3.2)
Error de Intermitente (véase fig. 3.2)
inicialización
Predeterminado de Intermitente (véase fig. 3.2)
inicialización
Identificación Intermitente durante 5 minutos
Botón de
reasignación
de Cerrado
LED de estado
Oprimir
4 seg.
encendido
apagado
encendido
apagado
Tiempo
* La configuración predeterminada de los botones de
reasignación es: activados cuando la unidad está “Fuera de
servicio”.
* Los LED de ”abierto” y “cerrado” están inhabilitados.
Botón de
reasignación
de Abierto
LED = Intermitente
LED = Parpadeante
Fig. 3.2 Botones de reasignación (ubicados tras la
tapa frontal del módulo).
Tabla 3.2 Funcionalidad de tablero de botones
Acción Botones de reasignación
Restablecer Pulse ambos botones y
configuración manténgalos pulsados durante el
de fábrica encendido. Libere los botones
cuando la luz LED de estado
deje de parpadear.
Inicializar Con el dispositivo encendido, pulse
ambos botones hasta que el LED
de estado comience a parpadear
Notas:
- Si el LED de estado se enciende de modo
intermitente, significa que la rutina de inicialización
automática ha fallado; véase §3.4.2.
- Si la lectura de PLC o DCS está invertida,
véase §3.4.3.
- Si el dispositivo está en funcionamiento y tras
cierto tiempo se pierde la retroalimentación de
“Abierto” o “Cerrado”, consulte §3.4.4.
- Si la inicialización no puede comenzarse mediante
los botones pulsadores, véase §3.4.5.
Página 12
Page 13

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
TM
3.2.2 Inicialización mediante un comando
de bus
1 Defina el Bloque de transductores como “Fuera de
servicio”.
2 Defina el subparámetro “AUTO_INIT_COMMAND”
del parámetro AUTO_INITIALIZATION para que
comience la inicialización automática.
3 Con la inicialización en ejecución,
INITIALIZATION_STATUS indicará esa operación y
el LED de estado parpadeará.
4 El actuador completará 2 o 3 ciclos.
5 Una vez completada satisfactoriamente la
inicialización, INITIALIZATION_STATUS lo indicará
y el LED de estado mostrará una luz constante.
6 Defina el Bloque de transductores como “Auto”.
Nota:
- Si la inicialización automática ha fallado, el LED de
estado del módulo está en modo intermitente y el
estado del parámetro AUTO_INITIALIZATION indica
una posible causa, véase §3.4.2
- Tras la inicialización, compruebe si la
retroalimentación coincide con la posición real de la
válvula. Si la retroalimentación de posición de PLC
o DCS está invertida,véase §3.4.3.
- Si es necesario reajustar las posiciones sin hacer
pasar el actuador por un ciclo, véase §3.4.4
- Si no es posible completar la rutina de inicialización
automática, se pueden fijar los puntos de
conmutación siguiendo las instrucciones en §3.4.3
3.3 Asignaciones de bloqueo de
funciones
- La unidad debe haberse inicializado
satisfactoriamente (el estado del Bloque de
transductores AUTO_INITIALIZATION debe ser
correcto).
1 Defina el Bloque de transductores como “Fuera de
servicio”.
2 Defina el Bloque de funciones como “Fuera de
servicio”.
3 Defina el número de canal del Bloque de funciones
DO como 1
4 Descargue la configuración en el sistema.
4 Defina el Bloque de funciones en modo “Auto”.
6 Defina el parámetro “SP_D” como “abierto”.
7 El actuador se coloca en la posición “Abierto”.
8 Defina el parámetro “SP_D” como “cerrado”.
9 El actuador se coloca en la posición “Cerrado”.
10Defina el Bloque de transductores como “Auto”.
3.3.2 Reconocimiento de LED
Para reconocer un actuador FieldQ determinado en la
planta se puede activar la función “Reconocimiento de
LED” en el Bloque de transductores. Cuando se activa
esta función, el LED de estado parpadea 5 minutos.
Para iniciar el LED:
1 Defina el parámetro “FLASH_LED” como inicio.
2 El LED de estado de la unidad parpadeará 5
minutos.
3 Pasados 5 minutos el parámetro “FLASH_LED”
volverá al estado de finalizado.
1 Defina los Bloques de funciones necesarios como
“Fuera de servicio”.
2 Defina los números de canal necesarios. A
continuación se presenta la asignación básica de
canales que se debe usar al utilizar el Módulo de
control QC34 FF:
3 Asigne canales y señales a los bloques de
funciones apropiados (véase la tabla 3.3)
4 Descargue los Bloques de funciones al “sistema”.
5 Defina los Bloques de funciones como “Auto”.
3.3.1 Comprobar el funcionamiento
Antes de la prueba
de funcionamiento:
- Compruebe o defina “Bloque de recursos” como
“Auto”.
- La unidad debe estar conectada a un sistema
principal y la alimentación debe estar conectada
(véase el capítulo 3).
Tabla 3.3 Asignaciones de bloques de
funciones
Función Señal Canal
bloque
DO Comando para que el actuador 1
se abra o cierre
DI Retroalimentación del actuador; 2
indica abrir, cerrar, abriendo o
cerrando
El conmutador 2 (Abierto) del 3
actuador indica activo o inactivo
El conmutador 1 (Cerrado) del 4
actuador indica activo o inactivo
AI Temperatura de los componentes
electrónicos 5
(en°C de forma predeterminada).
Página 13
Page 14

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
3.4 Solución de fallas Para resolver este problema:
3.4.1 “Configuraciones predeterminadas
de fábrica”, con el tablero de
botones.
Para restablecer la configuración predeterminada de
fábrica del Módulo de control, haga lo siguiente;
1 Conecte la alimentación según se indica en el
Capítulo 4, y verifique que el LED de estado está
encendido o intermitente.
2 Desconecte la alimentación.
3 Presione ambos botones de reasignación.
4 Reconecte la alimentación.
5 Se encenderá el LED de estado.
6 Libere los botones de reasignación.
7 Observe que el LED de estado indica que la unidad
está en estado “predeterminado de inicialización”
(intermitente)
3.4.2 Si el procedimiento de inicialización
automática ha fallado
Si la inicialización automática ha fallado, el LED de
estado del módulo se pondrá en modo intermitente y
el estado del parámetro AUTO_INITIALIZATION
indicará una posible causa:
Tabla 3.4 Estado del procedimiento de
inicialización:
Error Solución
Mala repetibilidad Compruebe la presión del
aire en el actuador o el
dimensionamiento del
actuador.
En ejecución,
Cancelado Operador: reinicio
Indeterminado La diferencia entre la posición
abierta y la cerrada es
demasiado pequeña.
Compruebe que la carrera
de la unidad actuador/válvula
es correcta.
Tiempo de espera Lleva demasiado tiempo
encontrar las posiciones de
fin. Compruebe la presión del
aire en el actuador o el
dimensionamiento del
actuador.
Error de rango La diferencia entre la posición
de fin abierta y cerrada es
demasiado pequeña.
Compruebe la presión del
aire y que la válvula gira
correctamente.
Satisfactorio
No hay datos válidos No se ha inicializado,
comience inicialización
1 Consulte la tabla 3.4 y pruebe la solución
sugerida para resolver el problema.
2 Compruebe el código de montaje del actuador
(vea el Manual de instalación y operación del
actuador de válvulas FieldQ, DOC.IOM.Q.E)
3 Repita el procedimiento de inicialización (véase
§3.2).
4 Si el actuador no se mueve en 10 segundos, la
inicialización automática fallará.
Para evitarlo tiene dos opciones;
- siga el procedimiento de “configuración
predeterminada” (véase §3.4.1) y repita el
procedimiento de inicialización (véase §3.2), o
- defina los puntos de conmutación limitadores
individualmente por el bus (véase §3.4.4)
3.4.3 Si se invierte la retroalimentación
de posición.
1 Vaya al Bloque de transductores.
2 Para definir la posición “Abierto”;
Defina el subparámetro OPEN_END_POSITION
del parámetro CFG_SWITCH_POINTS como:
”definir en posición actual”.
La posición “Cerrado” cambiará automáticamente.
3 Para definir la posición “Cerrado”;
Defina el subparámetro OPEN_END_POSITION
del parámetro CFG_SWITCH_POINTS como:
”definir en posición actual”.
La posición “Abierto” cambiará automáticamente.
Nota:
- si se activa “Cierre” (véase 4.2.3.3), compruebe si
“Acción” sigue teniendo el valor “OK”.
Octubre, 2006
Página 14
Page 15

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
TM
3.4.4 Si se pierde la retroalimentación de
“Abierto” o “Cerrado”.
1 Compruebe que la unidad actuador/válvula funciona
correctamente.
2 Si es seguro hacer que el actuador pase por un
ciclo, siga el procedimiento de inicialización (véase
§3.2).
3 Si no es seguro hacer que el actuador pase por un
ciclo, siga este procedimiento:
1 Vaya al Bloque de transductores.
2 Si se pierde la posición “Abierto”:
Defina el subparámetro OPEN_END_POSITION
del parámetro CFG_SWITCH_POINTS como:
”definir en posición actual”.
3 Si se pierdela posición “Cerrado”:
Defina el subparámetro CLOSE_END_POSITION
del parámetro CFG_SWITCH_POINTS como:
”definir en posición actual”.
Nota:
- Si el problema persiste, aumente el desplazamiento
de los topes mecánicos (véase 4.2.3.2).
3.4.5 Si la inicialización no puede
comenzarse mediante los botones
pulsadores.
1 Compruebe que el dispositivo está “Fuera de
servicio”.
2 Asegúrese de que los botones están activados en
el Bloque de transductores (parámetro
BUTTONBOARD_ENABLE, índice 34).
Nota:
al devolver el dispositivo a su estado
predeterminado siempre se activan los botones
pulsadores, a condición de que el dispositivo se
encuentre “Fuera de servicio” (véase §3.4.1).
3 Asegúrese de que la unidad no está cerrada.
Compruebe el parámetro del Bloque de
transductores SHUTDOWN_STATUS, índice 32. Si
el dispositivo está en estado de cierre, consulte
3.4.6
3.4.6 Si el dispositivo está en estado de
cierre
Cuando el dispositivo está en estado de cierre
significa que se ha producido un fallo interno.
Si el fallo interno se resuelve, el estado de cierre del
actuador puede restablecerse manualmente.
1 Normalmente el parámetro SHUTDOWN_RESET
está inactivo. Para restablecer el parámetro de
estado de cierre, SHUTDOWN_RESET debe
definirse como Restablecer.
2 Cuando el restablecimiento se complete
satisfactoriamente, el parámetro
SHUTDOWN_STATUS será operativo en el FieldQ y
el parámetro SHUTDOWN_RESET volverá a ser
inactivo.
Si no desea restablecer manualmente el dispositivo,
puede configurarlo para recuperación automática tal
como se describe en 4.2.3.3.
Si el problema persiste, diríjase al representante local
de FieldQ.
Página 15
Page 16

TM
Manual de referencia del Módulo de control Foundation Fieldbus
4 Configuración detallada
DOC.RM.QC34.S Rev: A
Octubre, 2006
El Módulo FieldQ QC34 contiene los siguientes
bloques de funciones:
Bloque Índice
Recurso 1000
Transductor 1100
Entrada discreta (DI) 1200
Entrada discreta (DI) 1300
Salida discreta (DO) 1400
Entrada análoga (AI) 1500
PID 1600
Véase el Capítulo 3, tabla 3.3, para decidir a qué
bloque de funciones debe asignarse cada canal.
Esta sección contiene información más detallada para
la configuración de los parámetros de los Bloques de
recursos y de transductores a fin de configurar el
módulo. El acceso a cada parámetro depende del
software del sistema principal. Para obtener
información sobre el uso del sistema principal a fin de
modificar parámetros de bloque, véase el apéndice
apropiado y la documentación del sistema principal.
- Para leer o escribir parámetros de identificación,
abra el bloque de recursos.
- Para leer o escribir alertas y parámetros de
configuración, abra el bloque de transductores.
4.1 Bloqueo de recursos
El Bloque de recursos describe las características del
dispositivo Fieldbus, como el nombre y tipo del
dispositivo, el fabricante, el número de serie, la
cantidad de memoria disponible y el tiempo disponible.
Sólo hay un Bloque de recursos en el módulo.
Los parámetros para configurar el Bloque de recursos
se describen por grupos en las siguientes secciones.
4.1.1 Parámetros generales de Bloque de recursos
según el protocolo FOUNDATION FieldBus
4.1.2 Parámetros específicos de FieldQ™ para
descripción de instrumentos
4.1.3 Parámetros específicos de FieldQ™ que no
tienen influencia en el funcionamiento del
dispositivo.
- Para conocer todos los detalles sobre los
parámetros citados, véase la tabla 4.1.
- La documentación del sistema principal contiene
procedimientos para acceder a los parámetros
citados.
™
4.1.1 Parámetros generales de Bloque de
recursos según el protocolo
OUNDATION FieldBus
F
Los parámetros de Bloque de recursos con número de
índice 1 a 41 están configurados según el protocolo
FOUNDATION FieldBus™.
- Para ver su valor predeterminado y su rango
ajustable, consulte la tabla 4.1.
- Para informarse sobre el uso del parámetro RE-
START, consulte el Capítulo 5.
™
4.1.2 Parámetros específicos de FieldQ™
para descripción de instrumentos
Los siguientes parámetros son específicos para la
comunicación de FieldQ™ con FOUNDATION
FieldBus™:
Distribuidor [DISTRIBUTOR],
Índice 42
Distribuidor de etiquetas privadas. Identifica la
empresa responsable de la distribución de ese
dispositivo de campo a los clientes
Revisiones de software [SOFTWARE_REVISION]:
Índice 47
Muestra las revisiones de software de la tarjeta del
controlador y la tarjeta de interfaz FF
Revisión de hardware [HARDWARE_REV],
Índice 48
Revisión del hardware en que reside el Bloque de
recursos.
Número de serie electrónico [ELECTRONICS_SN]:
Índice 49
No se usa en el Módulo QC34.
Número de serie de fábrica [FACTORY_SN]:
Índice 50
Número de serie del Módulo QC34.
Número de serie de campo [FIELD_SN]:
Índice 51
Número de serie del Módulo QC34 que puede ser
definido por el cliente.
Página 16
Page 17

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
4.1.3 Parámetros específicos de FieldQ™
que no tienen influencia en el
funcionamiento del dispositivo.
Los siguientes parámetros de Bloque de recursos no
tienen influencia directa sobre el funcionamiento del
dispositivo.
Número de
índice Nombre
43 DEV_STRING
44 FB_OPTIONS
45 DIAG_OPTIONS
46 MISC_OPTIONS
52 DETAILED_STATUS
Para conocer el estado detallado,
véase el Bloque de transductores
TM
Página 17
Page 18

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.1 Bloque de recursos del FieldQ™
No. de
índice
1 ST_REV Revisión de datos estáticos. Se actualiza cuando se cambian
2 TAG_DESC Descripción exclusiva del bloque de recursos dentro de un
3 STRATEGY Usado por el administrador del sistema principal para agrupar
4 ALERT_KEY ID de unidad de planta, para que el operador del sistema
5 MODE_BLK Los modos de des tino, real y permitido para el bloque
6 BLOCK_ERR Estado de error asociado con el hardware o software del
7 RS_STATE Estado del recurso 1 a 6 5 Sólo lectura
8 TEST_RW Parámetro de prueba de lectura y esc ritura para pruebas de
9 DD_RESOURCE Cadena de ID de etiqueta que identifica el recurso DD sólo
10 MANUFAC_ID Número de identificación de fabricación, usado por un
11 DEV_TYPE Número de modelo del fabricante 0xD3A0 = FieldQ - Actuador
12 DEV_REV Usado para localizar el archivo DD, establecido como: 2 2 2 Sólo lectura
13 DD_REV Número de revisión DD mínimo compatible asociado con este
14 GRANT_DENY Control de acceso al sistema informático principal. Valores válidos: 0
15 HARD_TYPES Los tipos de hardware disponibles como números de canal en
16 RESTART Muestra el estado actual y permite iniciar e implementar como
Nomb re Descripción Gama válid a Valor inicial Permiso
los datos estáticos.
sistema, modificable por el operador del sistema principal.
bloques a fin de identificar fácilmente su ubicac ión.
principal clasifique alarmas
TARGET OOS, IMAN,
ACTUAL N/D Sólo lectura
PERMITTED TO DO Lec tura y
NORMAL AUTO Lectura y
bloque de recursos
0: Other
1: Block c onfig error (not used)
2: Link configuration error
3: Simulate Ac tive: Based on switch
4: Local override (not used)
5: Device Fail safe s et
6: Device needs Maintenance Soon
7: Input failure (not us ed)
8: Output failure (not used)
9: Memory Failure (FF card)
10: Lost s tatic data (FF card)
11:Los t NV data (FF c ard)
12: Readbac k chec k failed (not used)
13: Device needs Maintenance Now
14: Power-up (not used)
15: O ut-of-Service
1: Start restart
2: Initialization, ac tual mode = IMAN
3: O nline link ing
4: Online, actual mode = Auto
5: Standby
6: Failure
interoperabilidad
con fines informativos
dispositivo de interfaz para localizar el arc hivo DD del recurso.
Debe aparecer como automatización de válvula
neumático para válvulas
dispositivo
GRANT
DENY
este recurso
método con advertencias un reinicio manual.
1 Run - Operación normal
2 Resource - Reiniciar recurso FF y mantener configuración.
0 a 65535 0 Sólo lectura
espac ios Lectura y
ASCII de 7 bits 0 Lectura y
1 a 255 0 Lectura y
AUTO
0 a F N/D Sólo lec tura
No aplicable No aplicable No aplicable
espac ios Sólo lectura
0xA2C1 0xA2C1 Sólo lectura
0xD3A0 0xD3A0 Sólo lectura
2 2 Sólo lec tura
Programa, 1
Ajustar, 2 Alarma,
3 Local
0 Entrada escalar,
1 Salida escalar, 2
Entrada discreta, 3
Salida discreta
1 a 6 1 Sólo lec tura
AUTO Lectura y
0x00 Lectura y
Sólo lec tura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
Página 18
3 Defaults - Reiniciar recurso FF con valor predeterminado.
4 Processor - Reiniciar recurso FF.
5 Actuator defaults - Reiniciar módulo de control con
configuraciones de fábrica
6 Actuator processor - Reiniciar módulo de control y mantener
configuración.
Page 19

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.1 Bloque de recursos del FieldQ™ (Continuación)
Nombre Descripción G ama válida Valor inicial Permiso
No. de
índice
17 FEATURES Muestra las opciones de bloque de recurs os admitidas 1 a 4 0x1E Sólo lectura
18 FEATURE_SEL Muestra las opciones de bloque de recursos seleccionadas 1 a 4 0x1E
19 CYCLE_TYPE Indica rutinas de ejecución de bloque de funciones
20 CYCLE_SEL Indica las rutinas de ejecución de bloque de funciones
21 MIN_CYCLE_T Indica el ciclo más corto de que es capaz el recurso Establecido por
22 MEMORY_SIZE Memoria disponible en el recurso vac ío (Mcore). Establecido por
23 NV_CYCLE_T Intervalo de tiempo mínimo necesario para escribir
24 FREE_SPACE Memoria disponible para la configuración posterior en la tarjeta FF0 a 100% 0 Sólo lectura
0: Unicode strings
1: Reports
2: Faultstate
3: Soft W Lock
4: Out readback
Sólo lectura
(TODAS)
0: Unicode strings N/A
1: Reports
2: Faultstate
3: Soft W Lock
4: Out readback
0 a 2 0 Sólo lec tura
dis ponibles.
0: Scheduled
1: Completion of Block Execution N/A
2 : Manufacturer specific N/A
0 a 2 0 Sólo lec tura
seleccionadas.
0: Scheduled
1: Completion of Block Execution N/A
2 : Manufacturer specific N/A
3200 Sólo lectura
FCS
0 Sólo lectura
FCS
>=0 Sólo lectura
parámetros inter nos en la memor ia no volátil 0 s ignifica s ólo
escritura externa
TM
25 FREE_TIME Tiempo de procesamiento de bloques disponible para bloques
adicionales.
26 SHED_RCAS Duración de tiempo tras la cual se renunciará a la escritura del
sistema en ubicaciones RCas de bloques de funciones.
27 SHED_ROUT Duración de tiempo tras la cual se renunciará a la escritura del
sistema en ubicaciones ROut de bloques de funciones.
28 FAULT_STATE Hace que los bloques de funciones pas en al estado
FAULT_STATE si se activa.
1: borrar, 2: activo
29 SET_FSTATE Si se ac tiva es te parámetro, FAULT _STATE se iniciará
manualmente
1: off
2: set
30 CLR_FSTATE Si se activa este parámetro FAULT_STATE se borrará
1: off
2: clear
31 MAX_NOTIFY Número máx imo absoluto posible de mensajes de notificación
sin confirmación.
32 LIM_NOTIFY Número máximo seleccionado posible de alertas de
notificación sin confirmación.
33 CONFIRM_TIME Tiempo de espera antes de reintentar. 0 = no hay reintento >=0 640000 Lec tura y
34 WRITE_LOCK Si se activa no se aceptan ac ciones de escritura para
deshac er bloqueo
1: sin bloqueo
2: bloqueado
35 UPDATE_EVT Alerta generada por cualquier cambio en los datos estáticos
UNACKNOWLEDGED: 0 sin definir, 1 confirmado, 2 no
confirmado
UPDATE STATE: 0 sin definir, 1 Actualizac ión notificada, 2
Actualización no notificada
TIME STAMP tiempo 0:00:00 Sólo lectura
STATIC REVISIO N N/D 0 Sólo lec tura
RELATIVE INDEX N/D 0 Sólo lectura
0 a 100% 0 Sólo lectura
>=0 640000 Sólo lectura
>=0 640000 Sólo lectura
1 a 2 1 Sólo lec tura
1 a 2 1 Lectura y
escritura,
acceso
controlado por
el operador
1 a 2 1 Lectura y
escritura,
acceso
controlado por
el operador
5 5 Sólo lectur a
0 a MAX_NOTIFY MAX_NOTIFYLectura y
escritura
escritura
1 a 2 1 Lectura y
escritura,
acceso
controlado por
el operador
0 a 2 0 Lectura y
escritura
0 a 2 0 Sólo lec tura
Página 19
Page 20

TM
-
-
Manual de referencia del Módulo de control Foundation Fieldbus
Tabla 4.1 Bloque de recursos del FieldQ™ (Continuación)
No. de
índice
36 BLOCK_ALM La alarma de bloque se usa para todas las c onfiguraciones,
37 ALARM_SUM El estado general y los estados de las alarmas asociadas con
Nombre Descripción Gama válida Valor inicial Permiso
los fallos de conexión de hardware y los problemas del
sistema en el bloque. La causa de la alerta se introduce en el
subc ódigo.
UNACKNOWLEDGED: 0 sin definir, 1 confirmado, 2 no
confirmado
ALARM_STAT E 0:Sin definición 0 1:Borrar- Notificado 2:Bor rar
No notificado 3:Activo- Notificado 4:Activo- No notificado
TIME_STAMP tiempo Sólo lectura
SUB_CODE = BLOCK_ERR Sólo lectura
VALUE- El cliente puede añadir un valor para configurar
alarmas
el bloque
CURRENT- estado actual
UNACKNOWLEDGED - muestra las alarmas no confirmadas
DOC.RM.QC34.S Rev: A
Octubre, 2006
0 a 2 Lectura y
0 a 4 Sólo lectur a
Sólo lectur a
0: Alarma discreta
activada cuando el
bloqueo de
escritura se
desactiva 7:
Alarma de bloque
0 Sólo lectura
escritura
UNREPORTED - muestra las alarmas no notificadas
38 ACK_OPTION Si se activa, el dispositivo confirma automáticamente las
39 WRITE_PRI Prioridad de la alarma generada al borrar el bloqueo de
40 WRITE_ALM Se genera si se borra el bloqueo de escritura
41 ITK_VER Indica el principal número de revisión del caso de prueba de
42 DISTRIBUTOR Distribuidor de etiquetas privadas. Identifica la empresa
43 DEV_STRING No se usa actualmente
44 FB_OPTIONS No se usa actualmente
45 DIAG_OPTIONS No se usa actualmente
46 MISC_OPTIONS No se us a actualmente
47 SOFTWARE_REVISION Revisiones de software de la tarjeta FF y la tarjeta de
DISABLED - mues tra las alarmas desactivadas
alertas enviadas al sistema principal
1 : Confirmación automática desactivada
2 : Confirmación automática ac tivada
escritura
UNACKNOWLEDGED: 0 sin definir, 1 confirmado, 2 no
confirmado
ALARM_STAT E 0:Sin definición 0 1:Borrar- Notificado 2:Bor rar
No notificado 3:Activo- Notificado 4:Activo- No notificado
TIME_STAMP tiempo 0 Sólo lectura
SUB_CODE - indica qué alarma 0 Sólo lectura
VALUE- El cliente puede añadir un valor para configurar
alarmas
interoperabilidad usado para certificar este dispositivo como
interoperable
responsable de la distribución de ese dispositivo de campo a
los clientes
controlador
RB_SFTWR_REV_MAJOR 0 a 255 N/D Sólo lectura
RB_SFTWR_REV_MINOR 0 a 255 N/D Sólo lectura
RB_SFTWR_REV_BUILD 0 a 255 N/D Sólo lectura
CTRL_CRD_SWARE_REV interpret MSB.LSB 0 a 255 N/D Sólo lectura
1 a 2 1 Lectura y
0 a 15 0 Lectura y
0 a 2 0 Lectura y
0 a 4 0 Sólo lectura
0 Sólo lectura
Establecido por FF 4 Sólo lectura
0x564144 Sólo lectura
escritura
escritura
escritura
Página 20
Page 21

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.1 Bloque de recursos del FieldQ™ (Continuación)
No. de
Nombre Descripción Gama válida Valor inicial Permiso
índice
48 HARDWARE_REV Revisión del hardware 0 a 255 N/D Sólo lectura
49 ELECTRONICS_SN Establec ido en fábric a 0 a 255 N/D Sólo lectura
50 FACTORY_SN Establecido en fábrica N/D N/D Sólo lectura
51 FIELD_SN Establecido por el cliente N/D Todo
52 DETAILED_STATUS
NV Writes Deferred
Se ha detectado un elevado número de escrituras en la
memoria no volátil. Para evitar fallos prematuros en la
memoria, se han diferido las operaciones de escritura. Los
datos se guardarán en ciclos de 6 horas. Esta situación suele
producirse porque se ha escrito un programa que escribe en
parámetros de bloque de funciones que no suelen ser objeto
de esc ritura de forma cíclica. Tales secuencias automáticas
de esc ritura deben modificarse para escribir los parámetros
sólo cuando sea necesario. Se recomienda limitar el número
de escrituras periódicas en todos los parámetros estáticos o
no volátiles, como HI_HI_LIM, LOW_CUT, SP, TRACK_IN_D,
OUT, IO_OPTS, BIAS, STATUS_O PTS, SP_HI_LIM etc.
N/D N/D Sólo lectura
espac ios
Lectura y
escritura
TM
Lost Deferred NV Data
Se ha apagado y enc endido el dispositivo mientras se diferían
escrituras no volátiles para evitar un fallo de memoria
prematuro. Esto ha resultado en la pérdida de datos estáticos
o no volátiles antes de que pudieran guardarse en la memoria
no volátil.
1. Compruebe la configuración del dispositivo para detectar
cambios en los valores de los parámetros de bloques.
2. Restablezca el dispositivo para eliminar el error.
3. Consulte la ayuda sobre escrituras no v olátiles diferidas
para saber más sobre cómo evitar este problema en el futuro.
ROM (Flash) Integrity Error
NV Integrity Error
Manufacturing Block Integrity Error
Página 21
Page 22

TM
Manual de referencia del Módulo de control Foundation Fieldbus
4.2 Bloque de transductores
El Bloque de transductores gestiona los datos que se
mueven entre un Bloque de funciones y el dispositivo
de entrada y salida, como los sensores y los
conmutadores de posición que proporcionan datos de
proceso para el control automatizado de procesos.
Los Bloques de transductores controlan el acceso a
dispositivos de entrada y salida mediante una interfaz
independiente de dispositivos y parámetros
específicos del fabricantes definidos para su uso por
Bloques de función. Los Bloques de transductores
también realizan ciertas funciones sobre los datos de
entrada y salida, tales como calibrado y linearización,
para convertirlos en una representación independiente
de dispositivos. La interfaz de Bloque de
transductores a Bloques de funciones se define como
uno o más canales independientes de
implementación.
Los parámetros para configurar el Bloque de
transductores se describen por grupos en las
siguientes secciones.
- Para conocer todos los detalles sobre los
parámetros citados, véase la tabla 4.1.
- La documentación del sistema principal contiene
procedimientos para acceder a los parámetros
citados.
4.2.1 Parámetros generales de Bloque de
transductores según el protocolo FOUNDATION FieldBus
4.2.2 Parámetros de estado de posición de
dispositivo
4.2.3 Configuración de dispositivo (puntos de
conmutación y cierre).
4.2.4 Configuración de diagnóstico (temporizadores,
contadores)
4.2.5 Alertas.
™
DOC.RM.QC34.S Rev: A
Octubre, 2006
4.2.1 Parámetros generales de Bloque de
transductores según el protocolo
OUNDATION FieldBus
F
Los parámetros de Bloque de transductores con
número de índice 1 a 24 están configurados según el
protocolo FOUNDATION FieldBus™. Para ver su valor
predeterminado y su rango ajustable, consulte la
tabla 4.2.
™
4.2.2 Parámetros de estado de posición de
dispositivo
Hay 3 parámetros que dan información sobre el
estado de posición del dispositivo.
Número de índice Nombre
25 DISCRETE_POSITION
26 OPEN_STATE
27 CLOSE_STATE
Para ver su valor predeterminado y su rango ajustable,
consulte la tabla 4.2.
4.2.3 Configuración de dispositivo.
Los cinco parámetros siguientes están
disponibles para configurar el módulo QC34 para su
funcionamiento normal:
Número de índice Nombre
28 AUTO_INITIALIZATION
29 CFG_SWITCH_POINTS
32 SHUTDOWN-CFG
33 ZERO_PWR_COND
34 BUTTONBOARD_ENABLE
4.2.3.1 AUTO_INITIALIZATION
La inicialización define las posiciones finales para la
retroalimentación de posición del actuador. Los
procedimientos de inicialización se describen en
detalle en el Capítulo 3. Para informarse sobre el valor
predeterminado y el rango ajustable, consulte la tabla
4.2. índice 28.
Página 22
Page 23

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
4.2.3.2 CFG_SWITCH_POINTS
El Módulo de control FieldQ™ QC34 se enviará con la
característica de retroalimentación predeterminada,
como se muestra en la figura 4.1. Esta característica
de retroalimentación es operativa tras la inicialización
(véase el Capítulo 3) y es apropiada para la mayoría
de las aplicaciones.
Valor predeterminado
tras la inicialización
Desplazamientos
de topes
mecánicos
Rango
10˚max
Posición
final
10˚max
Posición
final
ajustable
5˚
30˚
30˚
5˚
Fig. 4.1 Características de la retroalimentación
Si la configuración predeterminada no es suficiente
para su aplicación, pueden configurarse los puntos de
conmutación.
Para el Módulo QC34, hay tres temas relativos a la
configuración de los puntos de conmutación.
1 Topes limitadores mecánicos.
Normalmente los topes limitadores mecánicos
limitan la carrera del actuador. (Para ajustar los
topes limitadores mecánicos consulte
DOC.IOM.Q.1 Capítulo 3).
Si se cambia el ajuste del tope limitador mecánico,
o si la válvula no alcanza las posiciones de
apertura o cierre completos (debido al desgaste de
la válvula), las posiciones finales de apertura y
cierre deben reconfigurarse para garantizar la
retroalimentación de posición.
2 Posiciones finales “Abierto” y “Cerrado”.
Hay dos procedimientos para reconfigurar las
posiciones finales:
1 Si es seguro hacer que el actuador pase por un
ciclo, siga el procedimiento de inicialización
(véase §3.2).
2 Si no es seguro hacer que el actuador pase por
un ciclo, siga este procedimiento de reasignación:
1 Vaya al Bloque de transductores.
2 Si la posición “Abierto” necesita una
actualización:
Defina el subparámetro
OPEN_END_POSITION del parámetro
CFG_SWITCH_POINTS como:
”definir en posición actual”.
3 Si la posición “Cerrado” necesita una
actualización:
Defina el subparámetro
CLOSED_END_POSITION del parámetro
CFG_SWITCH_POINTS como:
“definir en posición actual”.
3 Desplazamiento de tope “Abierto” y “Cerrado”.
El valor de desplazamiento “Abierto” o “Cerrado” es
el número de grados antes del fin de la carrera
dentro del cual se activarán o desactivarán los
conmutadores. Los valores predeterminados para
ambas posiciones son (véase la figura 4.1):
- Desplazamiento 10° antes del fin de la
predeterminado carrera.
- Rango ajustable 5° a 30° antes del fin de la
Los subparámetros OPEN_STOP_OFFSET y
CLOSED_STOP_OFFSET pueden ser utilizados
para cambiar los desplazamientos de topes
mecánicos, y pueden definirse por ° (grados)
TM
carrera
Página 23
Page 24

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
4.2.3.3 SHUTDOWN-CFG
La configuración de cierre controla el funcionamiento
del actuador FieldQ™ si se produce un fallo interno de
comunicaciones en el módulo QC34. Esto es
independiente de la comunicación FF sobre la línea
del bus.
Este conjunto de parámetros puede prevalecer sobre
los modos de fallo del actuador básico, tal como se
describe en el Manual de IOM del FieldQ™, Capítulo
2.2 (DOC.IOM.Q1).
1 Funcionamiento general de la configuración de
cierre.
La configuración de cierre puede funcionar en tres
modos, según lo definido en el parámetro
SHUTDOWN_ENABLE:
- activar, recuperación automática
- activar, recuperación manual
- desactivar.
Activar: Tras un fallo interno, se ejecutará el valor del
parámetro SHUTDOWN_ACTION.
Recuperación automática: Una vez resuelto el fallo
interno, el actuador pasará automáticamente a su
posición de punto de referencia actual.
Recuperación manual: Una vez resuelto el fallo
interno, el estado de cierre del actuador debe
restablecerse manualmente.
Normalmente el parámetro SHUTDOWN_RESET está
inactivo. Para restablecer el parámetro de estado de
cierre, ese parámetro debe definirse como
Restablecer. Cuando el restablecimiento se complete
satisfactoriamente, el parámetro
SHUTDOWN_STATUS será operativo en el FieldQ y el
parámetro SHUTDOWN_RESET volverá a ser
inactivo.
Desactivar: La funcionalidad de cierre no es operativa,
el actuador permanecerá en su última posición tras un
fallo interno.
El parámetro SHUTDOWN_DELAY_TIME define un
tiempo de retraso (hasta 4 minutos y 15 segundos)
entre el momento en que el fallo interno es detectado
por el parámetro de bloque de transductores
XD_ERROR (fallo de entrada/salida) y el momento en
que se cierra la unidad.
La secuencia de eventos para 2 configuraciones de
cierre se muestra en las figuras 4.3 y 4.4.
2 Configuración de cierre predeterminada de
fábrica (véase la figura 4.4):
SHUTD-ENABLE : Activar, recuperación
manual
SHUTDOWN_ACTION : Cerrar
SHUTDOWN_DELAY_TIME : 4 segundos
Fallo de
entrada/
salida
SHUTDOWN_STATUS
Cambia a
cierre de FieldQ
SHUTDOWN_ACTION =
- abrir
- cerrar
- mantener
XD_ERROR = “Fallo de
entrada/salida”
Tiempo de retraso definido en
SHUTDOWN_DELAY_TIME
SHUTD-ENABLE =
‘Activar, Recuperación
automática’
Una vez restablecida la
comunicación interna, la
unidad actuador/válvula
pasará automáticamente a su
punto de referencia actual.
Fig 4.3 Configuración de cierre, activación y
recuperación automática
Fallo de entrada/salida
SHUTDOWN_STATUS
Cambia a
cierre de FieldQ
SHUTDOWN_ACTION =
- abrir
- cerrar
- mantener
XD_ERROR = “Fallo de
entrada/salida”
Tiempo de retraso definido en
SHUTDOWN_DELAY_TIME
SHUTD-ENABLE =
‘Activar, Recuperación
manual’
SHUTDOWN_RESET
Una vez restablecidas las
comunicaciones internas, debe
restablecerse manualmente el
estado de cierre mediante el
parámetro
SHUTDOWN_RESET.
Fig. 4.4 Configuración de cierre, activación y
recuperación manual
Configuración de cierre peterminada
* Significa que, 4 segundos después de detectarse un
fallo interno, los actuadores de EFECTO DOBLE Y DE
RETORNO POR RESORTE (efecto simple) pasarán a la
posición cerrada, cuando haya presión disponible en el
actuador,
y
* Una vez restablecidas las comunicaciones internas, debe
restablecerse el estado de cierre.
Importante
* Si se invierte la retroalimentación, la posición
predeterminada de “SHUTDOWN_ACTION” no se invierte
automáticamente
Página 24
Page 25

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
4.2.3.4 ZERO_PWR_COND
Este parámetro ayuda a identificar si la configuración
de dispositivo se corresponde con la configuración
mecánica real del actuador;
- Falla cerrada o Falla abierta para actuadores de
efecto simple.
Este parámetro indica la posición a la que pasará la
unidad actuador/válvula si no hay alimentación (debe
haber presión de aire para DA).
- El valor es definido durante la inicialización y la
reasignación de posición, y es válido para
aplicaciones de válvula que se cierran tras una
rotación a la derecha (Dcha); el funcionamiento de
la válvula puede ser Falla cerrada o Falla abierta.
- Para aplicaciones que se cierran tras una rotación a
la izquierda (Izq.), la indicación se invertirá tras la
inicialización. Esto puede corregirse reasignando
las posiciones finales tal como se describe en
§3.4.3.
4.2.3.5 BUTTONBOARD_ENABLE
El tablero de botones puede adoptar estos valores:
- Activado cuando se encuentre en OOS
(predeterminado de fábrica)
- No activado nunca
4.2.4 Configuración de diagnóstico
Esta sección describe los parámetros de contador y
temporizador. Puede encontrar instrucciones para
definir alertas y generar las acciones recomendadas
en §4.2.5.
4.2.4.1 Contadores
Hay cuatro parámetros de contador disponibles para
contar los ciclos de:
1 Módulo de control
2 Reconocimiento
3 Módulo neumático
4 Válvula.
El contador del Módulo de control (funciones) es el
contador maestro y es de sólo lectura. Cada uno de
los otros tres contadores puede restablecerse
independientemente cuando se necesite (p.ej., para
sustituciones)
Estos parámetros de contador tienen:
- un subparámetro que registra los ciclos.
- un subparámetro para definir un valor límite.
Cuando se supere uno de los límites definidos, se
generarán una alerta y un mensaje de acción
recomendada como se indica en la tabla 4.3 y como
indica el valor de la alerta (véase §4.2.5).
Para conocer el valor predeterminado y el rango
ajustable, consulte la tabla 4.2. índice 36, 37, 38 y 39.
4.2.4.2 Temporizadores
Hay 3 temporizadores disponibles en este dispositivo:
1 Tiempo en posición (TIME_IN_POSITION)
- Registra el tiempo desde el último movimiento.
Se restablece a cero cuando se apaga la
alimentación.
- En el subparámetro TIME_IN_POSITION_HI_LIM
puede definirse un límite.
2 Tiempo de carrera abierto
(OPEN_TRAVEL_TIME)
- Indica el tiempo entre:
Cuando se cambia la posición de la válvula piloto
y cuando se alcanza la posición de viaje abierto.
- En los parámetros
OPEN_TRAVEL_TIME_HI_LIM y
OPEN_TRAVEL_TIME_LO_LIM, pueden definirse
límites superior e inferior.
- El parámetro OPEN_TRAVEL_TIME_AVG calcula
el tiempo promedio de carrera de las 30 últimas
carreras.
- En los parámetros OPEN_TRAVEL_AVG_HI_LIM
y OPEN_TRAVEL_AVG_LO_LIM, pueden
definirse límites superior e inferior.
3 Tiempo de carrera cerrado
(CLOSE_TRAVEL_TIME)
- Indica el tiempo entre:
Cuando se cambia la posición de la válvula piloto
y cuando se alcanza la posición de viaje cerrado.
- En los subparámetros
CLOSE_TRAVEL_TIME_HI_LIM y
CLOSE_TRAVEL_TIME_LO_LIM, pueden
definirse límites superior e inferior.
- El parámetro CLOSE_TRAVEL_TIME_AVG
calcula el tiempo promedio de carrera de las 30
últimas carreras.
- En los parámetros
CLOSE_TRAVEL_AVG_HI_LIM y
CLOSE_TRAVEL_AVG_LO_LIM, pueden definirse
límites superior e inferior.
Cuando se superen los límites mencionados y las
alertas estén activadas, se generarán alertas y
mensajes de acción recomendada tal como se indica
en la tabla 4.3 y como indica el valor de la alerta
(véase §4.2.5).
TM
Página 25
Page 26

TM
Manual de referencia del Módulo de control Foundation Fieldbus
4.2.5 Alertas
El Módulo de control FieldQ™ QC34 con comunicación
por Foundation Fieldbus™ incluye funciones de
diagnóstico combinadas con alertas PlantWeb™.
El Módulo de control FieldQ™ QC34 genera una acción
recomandada cuando:
- Se produce un error interno.
- Se superan los límites de temporizadores o
contadores.
- Falla la inicialización.
Encontrará una lista completa de Alertas y acciones
recomendadas combinadas la configuración
predeterminada de la alerta en la tabla 4.3.
4.2.5.1 Gestión de alertas
El Bloque de transductores actuará como coordinador/
recopilador de alertas (PlantWeb™).
Aunque las alertas tienen valores predeterminados
(véase la tabla 4.3), el cliente puede cambiar esos
niveles según sus necesidades.
Hay tres niveles de alertas disponibles:
1 Alertas de fallo
Una alerta de fallo indica un fallo en un dispositivo
que inutilizará éste total o parcialmente.
Esto significa que es necesario reparar el
dispositivo y la reparación debe realizarse
inmediatamente.
Esta alerta tiene los cinco parámetros siguientes:
1 FAILED_ENABLE: Activa la indicación y la
generación de informes
2 FAILED_MASK : Suprime la generación de
informes
3 FAILED_PRI : Designa la prioridad
4 FAILED_ACTIVE : Muestra qué estados de la
alerta están activos.
5 FAILED_ALM : Informa del estado de fallo
concreto al sistema principal.
DOC.RM.QC34.S Rev: A
Octubre, 2006
2 Alertas de mantenimiento
Una alerta de mantenimiento indica un estado en
un dispositivo que, si no se resuelve en el futuro
cercano (el tipo de alerta define el periodo de
tiempo que se entiende por “futuro cercano”)
inutilizará el dispositivo total o parcialmente.
Esto significa que es necesario reparar el
dispositivo y la reparación debe realizarse tan
pronto como sea posible.
Esta alerta tiene los cinco parámetros siguientes:
1 MAINT_ENABLE : Activa la indicación y la
generación de informes
2 MAINT_MASK : Suprime la generación de
informes
3 MAINT_PRI : Designa la prioridad
4 MAINT_ACTIVE : Muestra qué estados de la
alerta están activos.
5 MAINT_ALM : Informa del estado de fallo
concreto al sistema principal.
3 Alertas de aviso
Una alerta de aviso indica un estado de tipo
informativo en un dispositivo. La alerta se usa para
notificar al sistema principal que el dispositivo ha
detectado un estado que no es crítico ni causará
fallos si no se gestiona, pero que debe notificarse
al sistema principal para su conocimiento y toma
de posibles medidas.
Esta alerta tiene los cinco parámetros siguientes:
1 ADVISE_ENABLE : Activa la indicación y la
generación de informes
2 ADVISE_MASK : Suprime la generación de
informes
3 ADVISE_PRI : Designa la prioridad
4 ADVISE_ACTIVE : Muestra qué estados de la
alerta están activos.
5 ADVISE_ALM : Informa del estado de fallo
concreto al sistema principal.
Nivel 1 Nivel 2 Nivel 3
Aviso
Alerta
Prioridades
Aviso
Aviso
Alertas
Alertas
Alertas
el dispositivo ha
detectado un estado
en el dispositivo que
no es crítico
Fig 4.5 Niveles y prioridades de alerta
Página 26
Alerta
Prioridades
Mantenimiento
Mantenimiento
Mantenimiento
Alertas
Alertas
Alertas
es necesario reparar
el dispositivo y la
reparación debe
realizarse lo antes
posible.
Alerta
Prioridades
Fallo
Fallo
Fallo
Alertas
Alertas
Alertas
es necesario reparar
el dispositivo y la
reparación debe
realizarse
inmediatamente.
Page 27

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
4.2.5.2 Descripción de parámetros de alerta.
1 Alertas - Activadas
Estos parámetros se usan para activar la indicación
y generación de informes de cada alerta
correspondiente. Cuando se desactiva una alerta, el
dispositivo no detectará esa alerta en concreto, que
tampoco se indicará en los parámetros
(FAILED_ACTIVE, MAINT_ACTIVE o
ADVISE_ACTIVE ni se reportará mediante alertas
de fallo, de mantenimiento o de aviso,
respectivamente.
Si un parámetro de activación de alerta se cambia
a ‘desactivado’ mientras la alerta está activa, el
parámetro suprimirá la alerta y la reevaluará.
(Admite escritura, sólo afecta al estado aplicable
modificado. El estado no se indicará ni notificará al
definirse).
2 Alertas - con máscara:
Estos parámetros enmascararán cualquiera de los
estados de fallo de la lista, respectivamente
alertas de fallo, alertas de mantenimiento o
alertas de aviso.
Si se define un bit como verdadero, la alerta
correspondiente se indicará en los parámetros
(FAILED_ACTIVE, MAINT_ACTIVE o
ADVISE_ACTIVE , pero no se notificará al sistema
principal mediante alertas de fallo, alertas de
mantenimiento o alertas de aviso.
Si la máscara de una alerta se cambia mientras la
alerta está activa, la alerta se suprimirá y se
reevaluarán todos los estados. (Admite escritura,
sólo afecta al estado aplicable modificado. El
estado se indicará al definirse, pero no se
notificará).
3 Alertas - Prioridad:
Designa la prioridad de las alertas de fallo,
mantenimiento o aviso. El valor predeterminado es
2 y el valor recomendado está entre 10 y 15.
(Admite escritura, cambia la prioridad de la alerta
aplicable).
4 Alertas - Activas:
Estos parámetros muestran cuál de los estados de
las alertas de fallo, mantenimiento o aviso está
activo. Cuando un dispositivo detecta que un
estado está activo, define el bit correspondiente en
los parámetros activos de la alerta de fallo,
mantenimiento o aviso. Si no se suprime, informa
de él mediante el parámetro de alerta asociado.
(Sólo lectura)
5 Alarma de alerta:
Estos parámetros se usan para informar del estado
de fallo específico al sistema principal. (Sólo
lectura). La estructura de los parámetros se
muestra en la tabla 4.2.
TM
Página 27
Page 28

TM
p
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.2 Bloque de transductores del FieldQ™
No. de
Nombre Descripción Gama válida Valor inicial Permiso
índice
1 ST_REV Revisión de datos estáticos. Se actualiza cuando se
General Transducer Block
cambian los datos estáticos.
2 TAG_DESC Descripción exclusiva del bloque de transductores dentro
de un sistema, modificable por el operador del sistema
principal.
3 STRATEGY Usado por el administrador del sistema principal para
agrupar bloques a fin de identificar fácilmente su
ubicación.
4 ALERT_KEY ID de unidad de planta, para que el operador del sistema
principal clasifique alarmas
5 MODE_BLK Los modos de destino, real y permitido para el bloque
TARGET 7: OOS, 3:
ACTUAL N/D Sólo lectur a
PERMITTED TODO Lectur a y
NORMAL AUTO Lectura y
6 BLOCK_ERR Estado de error asociado con el hardware o software del
bloque de recursos (enumeración)
0: Other
1: Block config error (not us ed)
2: Link configuration error
3: Simulate Active: Based on switch
4: Local override (not used)
5: Device Fail safe set
6: Device needs Maintenance Soon
7: Input failure (not used)
8: Output failure (not used)
9: Memory Failure (FF card)
10: Lost static data (FF card)
11:Lost NV data (FF card)
12: Readback check failed (not used)
13: Device needs Maintenance Now
14: Power-up (not used)
15: Out-of-Serv ice
7 UPDATE_EVT Alerta generada por un cambio en datos estáticos. Sólo lectura
UNACKNOWLEDGED:
0 sin definir, 1 confirmado, 2 no confirmado
ALARM_STATE
0:Undefined 0
1:Clear- Reported
2:Clear- Not reported
3:Active- Reported
4:Active- Not reported
TIME_STAMP
SUB_CODE
RELATIVE INDEX
8 BLOCK_ALM La alarma de bloque se usa para todas las
configuraciones, los fallos de conexión de hardware y los
problemas del sistema en el bloque. La causa de la alerta
se introduce en el subcódigo.
UNACKNOWLEDGED:
0 sin definir, 1 confirmado, 2 no confirmado
ALARM_STATE
0:Undefined 0
1:Clear- Reported
2:Clear- Not reported
3:Active- Reported
4:Active- Not reported
TIME_STAMP tiempo Sólo lectura
SUB_CODE La alarma se muestra aquí (sólo valor de
dispositivo a prueba de averías y OOS)
VALUE- El cliente puede añadir un valor para configurar
alarmas
arameters
0 a 65535 0 Sólo lectura
espacios Lectura y
ASCII de 7 bits 0 Lectura y
1 a 255 0 Lectura y
OOS Lectura y
AUTO
0 a 15 N/D Sólo lectura
0 a 2 Lectura y
0 a 4 Sólo lectura
Sólo lec tura
Sólo lec tura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
Página 28
Page 29

Manual de referencia del Módulo de control Foundation Fieldbus
)
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.2 Bloque de transductores del FieldQ™ (continuación)
No. de
Nombre Descripción Gama válida Valor inicial Permiso
índice
9 TRANSDUCER_DIRECTORY Matriz que contiene las definiciones de transductores
10 TRANSDUCER_TYPE Identifica el tipo de bloque de transductores. Posicionador
11 XD_ERROR Extensiones de error de bloque indicadas por la
12 COLLECTION_DIRECTORY Directorio que especifica el número, índices iniciales e ID
13 FINAL_VALUE_D Muestra la posición de válvula y el estado solicitados,
14 ACT_FAIL_ACTION Definido por Foundation Fieldbus,
15 ACT_MAN_ID ID del fabricante del actuador en las unidades de ID de
16 ACT_MODEL_NUM Número de modelo del actuador. Depende de dónde esté
17 ACT_SN Número de serie del actuador.
18 VALVE_MAN_ID ID del fabricante de la válvula en las unidades de ID de
19 VALVE_MODEL_NUM Indica rutinas de ejecuc ión de bloque de funciones
20 VALVE_SN Número de serie de la válvula.
21 VALVE_TYPE Tipo de válvula. Puede ser definido por el cliente, pero no
22 XD_CAL_LOC Ubicación en que el dispositivo se inicializó por última
23 XD_CAL_DATE Fecha en que s e c alibró/inicializó la unidad.
24 XD_CAL_WHO P
Parámetros generales de bloque de transductores (continuación
(vacía)
activación del "Otro" bit 0 (enumeración)
16: unspecified error
17: General error (not used)
18: Calibration error
19: configuration error (not used)
20: Electronics failure
21: Mechanical failure (not used)
22: I/O Failure
23: Data Integrety error (not used)
24: Software error
25: Algorithm error (not used)
de elemento DD de los conjuntos de datos en cada
transductor dentro de un Bloque de transductores.
escritos por un bloque de funciones discreto (punto
configurado)
STATUS Sólo lectura
VALUE posición solicitada 0: cerrada, 1: abierta 0 a 1 0 Sólo lectura
dispositivo!
0: sin definir (DA), 1 Con autocierre (SA), 2 Con
autoapertura (SA)
Foundation Manufacturing.
Es: División de Automatización de Válvulas de Emerson
Process Management
montado.
Puede ser definido por el cliente.
Puede ser definido por el cliente.
Foundation Manufacturing.
Puede ser definido por el cliente.
disponibles.
Puede ser definido por el cliente.
es utilizado por el dispositivo.
0: sin definir, 1: Vástago deslizante, 2: Giratorio
vez.
Puede ser definido por el cliente.
Puede ser definido por el cliente.
e
rsona que realizó la calibración.
Puede ser definido por el cliente.
¡no afecta a nuestro
0,0 0,0 Sólo lectura
discreto
estándar
0 = no hay
error
00Sólo lectura
2 Sólo lectura
0 a 3 0 Lectura y
0x564144 0x564144 Sólo lectura
todo espacios Lectura y
todo espacios Lectura y
0 Lectura y
todo espacios Lectura y
todo espacios Lectura y
0 a 2 2 Lectura y
todo espacios Lectura y
Lectura y
todo espacios Lectura y
Posicionador
discreto
estándar
0 = no hay
error
TM
Sólo lectura
Sólo lectura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
Página 29
Page 30

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Tabla 4.2 Bloque de transductores del FieldQ™ (continuación)
No. de
Nombre Descripción Gama válida Valo r inicial Permiso
índice
25 DISCRETE_POSITION
26 OPEN_STATE
27 CLOSE_STAT E
28 AUTO_INITIALIZATION
29 CFG_SWITCH_POINTS
32
SHUTDOWN_CFG
Parámetros de estado de posición de dispositivo
Señal simple que indica la posición discreta ac tual
STATUS Sólo lectura
VALUE
0 = cerrada,
1 = abierta,
2 = cerrando (basado en que no es 0 ni 1 y en la solicitud
de posición actual)
3 = abriendo (basado en que no es 0 ni 1 y en la solicitud
de posición actual)
Retroalimentación de posición discreta
0: falso, 1: verdadero
STATUS (malo cuando una tarjeta de E/S floja comunica
error de bloque, indeterminado cuando hay problemas
con el sens or)
VALUE
0 falso, 1: verdadero
Retroalimentación de posición discreta
0: falso, 1: verdadero
STATUS (malo cuando una tarjeta de E/S floja comunica
error de bloque, indeterminado cuando hay problemas
con el sens or)
VALUE
0 falso, 1: verdadero
Controla el procedimiento para encontrar las posiciones
de fin.
AUTO_INIT_COMMAND 0: no action,
1: start auto init
2: start Z ero point adjustment,
3: stop auto init
Estado del procedimiento de inicialización
- Undetermined, bad repeatability -> increase limit stop
offset
- Running,
- Aborted, -> detenido, por el usuario
- Undetermined, la diferencia entre la posición abierta y la
cerrada es demasiado pequeña
- Time Out, -> se ha tardado demasiado en buscar las
posiciones de fin -> compruebe la presión del aire y el
dimensionamiento del actuador
- Range Error -> La diferencia entre la posición de fin
abierta y la cerrada es demasiado pequeña. ->
compruebe la presión del aire y que la válvula gira
correctamente.
- Successful
- No Valid Data. -> valor tras predeterminado (sin
inic ializ ar)
Definir puntos de conmutación desde posición de fin
OPEN_END_POSITION usar la posición actual como
posición de fin abierta 0: normal, 1: establecer
CLOSED_END_POSITION usar la posición actual c omo
posición de fin cerrada 0: normal, 1: establecer
OPEN_STO P_O FFSET - distancia a la posición de fin
(en ° antes de la posición de fin) Puede definirse por °
(grados)
CLOSE_STOP_OFFSET - distancia a la posición de fin
(en ° antes de la posición de fin) Puede definirse por °
(grados)
Configura qué ac ciones se ejecutarán s i se pierde la
comunicación interna.
SHUTDOWN_ENABLE -
0: activar recuperación automática, 1: activar
recuperación manual, 2: desactivar
SHUTDOWN_ACTION -
0: cerrada, 1: abierta, 2: mantener
SHUTDOWN_DELAY_TIME -
que se ejecute la acción tras el evento
SHUTDOWN_RESET SHUTDOWN_STATUS
tenga el valor de rec uperación manual. En ese cas o la
recuperación manual requerirá que este bit tenga valor 0
Configuración del dispositivo
Tiempo (en seg.) antes de
Normalmente 0, a menos que
sea 1 y
SHUTDOWN_ENABLE
0 a 3 0 Sólo lectura
verdadero/falso FALSO
Sólo lectura
0 a 1 0 Sólo lectura
verdadero/falso FALSO
Sólo lectura
0 a 1 0 Sólo lectura
0 a 2 Lectura y
0 Sólo lectura
0 a 1 0 Lectura y
0 a 1 0 Lectura y
5° a 30° 10° Lec tura y
5° a 30° 10° Lec tura y
0 a 2 1 Lectura y
0 a 2 0 Lectura y
1 a 255 4 Lectura y
0 a 1 0 Lectura y
Octubre, 2006
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
Página 30
SHUTDOWN_STATUS -
sistema está cerrado, si no como 0
Definir como 1 cuando el
0 a 1 N/D Sólo lectura
Page 31

Manual de referencia del Módulo de control Foundation Fieldbus
g
)
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.2 Bloque de transductores del FieldQ™ (continuación)
No. de
Nombre Descripción Gama válida Valor inicial Permiso
índice
Confi
33 ZERO _PWR_COND Posición que adoptará la válvula si no hay alimentac ión
uración del dispositivo (continuación
(debe haber presión del aire para DA)
cerrada, abierta
34 BUTTONBOARD_ENABLE Activa y desactiva el tablero de botones para la
inicialización. Si se define c omo predeterminado siempre
será posible.
Sólo puede activarse en estado OOS. Si no se encuentra
en OOS, vuelve automáticamente a falso, para regresar
a su valor original cuando se encontraba en OO S. La
tarjeta FF debe cambiar es te valor en la tarjeta del
sens or.
Configuración de diagnóstico
36 FM_COUNTER Cuenta los ciclos de posición de fin ejecutado por el
módulo de control.
FM_CNT_VALUE (read only) 0 - 4294967295 N/D Sólo lectura
cerrada, abierta cerrado Sólo lectura
- activar
cuando se
encuentre en
OOS
- Nunc a en
OOS
activar cuando
se encuentre
en OOS
TM
Lectura y
escritura
FM_CNT_LIMIT [2] 0 -
37 PM_COUNTER Cuenta los ciclos de pos ición de fin ejecutados por el
módulo de neumático.
PM_CNT_VALUE 0 - 4294967295 N/D Lectura y
PM_CNT_LIMIT [2] 0 -
38 ACT_COUNTER Cuenta los ciclos de posición de fin ejecutados por el
actuador.
ACT_CNT_VALUE 0 - 4294967295 N/D Lectura y
ACT_CNT_LIMIT [2] 0 -
39 VALVE_COUNTER Cuenta los ciclos de posición de fin ejecutados por la
válvula.
VLV_CNT_VALUE 0 - 4294967295 N/D Lectura y
VLV_CNT_LIMIT [2] 0 -
40 TIMERS (units are seconds). TIME_IN_POSITION - Mantiene el tiempo en la posición
actual
Restablece a cero cuando se desconecta la alimentación
TIME_IN_POSITION_HI_LIM - Establece un límite para
una alerta para el tiempo en posición
OPEN_TIMERAVEL_TIME Indica el tiempo entre:
- La posición piloto ordenada y
- La posición de viaje abierto alcanzada.
OPEN_TRAVEL_TIME_HI_LIM [2] 0 a 65536 0 Lec tura y
OPEN_TRAVEL_TIME_LO _LIM [2] 0 a 65536 0 Lec tura y
OPEN_TRAVEL_TIME_AVG (media de 30 carrer as ) 0 a 65536 0 Sólo lectura
OPEN_TRAVEL_AVG_HI_LIM [2] 0 a 65536 0 Lectura y
OPEN_TRAVEL_AVG_LO_LIM [2] 0 a 65536 0 Lec tura y
CLOSE_TRAVEL_T Indica el tiempo entre: - La posición
piloto ordenada y - La posición de viaje cerrado
alcanzada.
CLOSE_TRAVEL_TIME_HI_LIM [2] 0 a 65536 0 Lectura y
CLOSE_TRAVEL_TIME_LO _LIM [2] 0 a 65536 0 Lectura y
CLOSE_TRAVEL_TIME_AVG (media de 30 carreras) 0 a 65536 0 Sólo lectura
CLOSE_TRAVEL_AVG_HI_LIM [2] 0 a 65536 0 Lectura y
CLOSE_TRAVEL_AVG_LO_LIM [2] 0 a 65536 0 Lectura y
4294967295
4294967295
4294967295
4294967295
0 a
4294967295
[2] 0 a
4294967295
0 a 65536 0 Sólo lectura
0 a 65536 0 Sólo lectura
1,000,000 Lectura y
escritura
escritura
1,000,000 Lectura y
escritura
escritura
1,000,000 Lectura y
escritura
escritura
1,000,000 Lectura y
escritura
0 Sólo lectura
0 Lectura y
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
escritura
Página 31
Page 32

TM
Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.2 Bloque de transductores del FieldQ™ (continuación)
No. de
Nomb re Descripció n Gama válid a Valo r inicial Permiso
índice
35 INTERNAL_ALERTS Bad position sensor N/D Sólo lectura
Bad temperature sensor
System temperature exceeded
Software error IO card
Travel deviation alert
Device shutdown
Unknown error
41 RECOMMENDED_ACTION Lista enumerada de acc iones recomendadas del
dispositivo, mostrada con una alerta de dispositivo
(puede ser múltiple, véase la tabla siguiente)
véas e la tabla
42 FAILED_PRI Designa la prioridad de alarmas de FAILED_ALM.
Gestión definida por FF.
0: Todas las alertas FALLIDAS desac tivadas
1: Todas las alertas fallidas suprimidas
2: Alertas de fallo de proceso s uperiores
43 FAILED_ENABLE véase tabla de alertas N/D
44 FAILED_MASK véase tabla de alertas
45 FAILED_ACTIVE véase tabla de alertas N/D Sólo lectura
46 FAILED_ALM Alarma indicativa de un fallo dentro de un dispositivo que
deja a éste fuera de servicio.
UNACKNOWLEDGED:
0: Sin definir, 1: Confirmado, 2: Sin confirmar
ALARM_STAT E
0:Undefined 0
1:Clear- Reported
2:Clear- Not reported
3:Active- Reported
4:Active- Not reported
TIME_STAMP Sólo lectura
SUBCODE el valor debe concordar con la alerta
mostrada bajo FAILED_ENABLE
VALUE Sólo lectura
47 MAINT_PRI Véase índice 42 FAILED_PRI 0 a 15 2 Lectura y
48 MAINT_ENABLE véase tabla de alertas N/D
49 MAINT_MASK véase tabla de alertas
50 MAINT_ACTIVE véase tabla de alertas Sólo lectura
51 MAINT_ALM Véase índice 46 FAILED_ALM
52 ADVISE_PRI Véase índice 42 FAILED_PRI 0 a 15 2 Lectura y
53 ADVISE_ENABLE véase tabla de alertas N/D Lectura y
54 ADVISE_MASK véase tabla de alertas Lectura y
55 ADVISE_ACTIVE véase tabla de alertas Sólo lectura
56 ADVISE_ALM Véase índice 46 FAILED_ALM
31 INSTRUMENT_TEMP Indica la temperatura interna del instrumento N/D N/D Sólo lectura
STATUS
VALUE Indica la temperatura interna del dispositivo en
grados Celsius
57 HEALTH_INDEX Parámetro que representa la salud general del
dispositivo.
100 es perfecta y 1 fuera de servicio.
no alerts -> 100
ADVISE_ACTIVE -> -10 per advice
MAINT_ACTIVE -> - 40 per advise
FAIL_ACTIVE -> = 10 (10 also lowest v alue)
30 FLASH_LED For identification blink status led (5 min.)
0: finalizado
1:inicio
58 FF_CO MM_STAT Indica la calidad de las comunicac iones FF
FF_COMM_ATTEMPTS - Muestra el número de intentos.
Si llega al máximo, ¡restablezca a cero para los mensajes
de tiempo de espera agotado también!
Alertas
N/D 0 Sólo lectura
0 a 15 2 Lectura y
escritura
Sólo lectura
Sólo lectura
Sólo lectura
escritura
escritura
escritura
escritura
10 a 100 100 Sólo lectura
Otros
0 a 1 N/D Lectura y
escritura
0 a 65535 0 Sólo lectura
FF_COMM_T IME_O UT - Muestra cuántos de los
intentos agotaron el tiempo de espera
59 PWA_SIMULATE Protegido por contraseña y desactivado cuando se
apaga y enciende el aparato. Si se establece en 2 todos
los parámetros de alerta serán modificables 1: simulación
desactivada, 2 simulación activada
Página 32
0 a 65535 0 Sólo lectura
1 y 2 1 Lectura y
escritura
Page 33

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
Tabla 4.3 FieldQ™ Alertas y acciones recomendadas
Alertas
TM
Valor predeterminado de alerta
MantenimientoAviso Fallo
Nombre de parámetro Texto DeltaV Acciones recomendadas
Alertas internas
bad_position_sensor Bad Position Sensor Feedback problem, replace Control module
bad_temperature_sensor Bad Temperature
Sensor
system_temperature_exceeded System
Temperature
Exceeded
software_error Software Error Software error has been detected, replace
travel_deviation Travel Deviation Lost position, Check air pressure y y n n n n
shutdown_is_set Shutdown Is Set Internal communications problem, check
undefined_error Undefined Error Error is undefined, replace control module
cm_life_exceeded Control Module Life
Cycle Exceeded
pm_life_exceeded Pneumatic Module
Life Cycle
Exceeded
act_life_exceeded Actuator Life Cycle
Exceeded
valve_life_exceeded Valve Life Cycle
Exceeded
time_in_position_exceeded Time in position
exceeded
open_travel_time_exceeded Close travel timer
exceeded
close_travel_time_exceeded Close travel timer
exceeded
initialization_failed Initialization Failure Device failed initialization; Check
when possible
Temperature sensor problem, replace
Control module when possible
Take corrective actions to bring
temperature within specified range.
control module when possible.
shutdown configuration for restart, Replace
Control module.
when possible
Alertas de contador
Control module life cycle exceeded,
replace control module
Pneumatic module life cycle exceeded,
replace pneumatic module.
Actuator life cycle exceeded, replace
actuator.
Valve life cycle exceeded,valve requires
maintenance.
Alertas de temporizador
Time in position exceeded, take
appropriate action.
Open travel timer exceeded, check valve
system.
Close travel timer exceeded, check valve
system.
Alerta de inicialización
airpressure, check actuator sizing, check
valve system
activar
nn y y nn
nn y y nn
nn y y nn
nn y n nn
nn n n yy
nn y n nn
nn y y nn
nn n n nn
nn n n nn
nn n n nn
nn n n nn
nn n n nn
nn n n nn
yy n n nn
activar
(mostrar)
enmascarar
enmascarar
activar
(mostrar)
(mostrar)
enmascarar
Página 33
Page 34

TM
Manual de referencia del Módulo de control Foundation Fieldbus
Tabla 4.3 FieldQ™ Alertas y acciones recomendadas (continuación)
Alertas
DOC.RM.QC34.S Rev: A
Octubre, 2006
Valor predeterminado de alerta
Aviso Mantenimiento Fallo
Nombre de parámetro Texto DeltaV Acciones recomendadas
io_failure Internal Io Failure Se ha perdido la comunicación interna, el
rb_NV_write_deferred Output Board NV
Memory Failure
PWA_simulate_active PWA Simulate
Active
rb_nv_memory_failure Output Board NV
Memory Failure
Alerta de fallo de E/S interno
dispositivo actuará según la configuración
de cierre.
NV Write Deferred:
Se ha detectado un elevado número de
escrituras en la memoria no volátil. Para
evitar fallos prematuros en la memoria, se
han diferido las operaciones de escritura.
Los datos se guardarán cada 3 horas
aproximadamente.
Esta situación suele producirse porque se
ha escrito un programa que escribe en
parámetros de bloque de control que no
suelen ser objeto de escritura de forma
cíclica. Tales secuencias automáticas de
escritura deben modificarse para escribir
los parámetros sólo cuando sea necesario.
Se recomienda limitar el número de
escrituras periódicas en todos los
parámetros estáticos o no volátiles, como
HI_HI_LIM, LOW_CUT, SP, TRACK_IN_D,
OUT, IO _OPTS, BIAS, STATUS_OPTS,
SP_HI_LIM etc.
Si se ha activado el modo de simulación
PWA. Ahora los parámetros ac tivos PWA
pueden escribirse junto con los parámetros
de estado detallado de bloque de recursos
y las alertas internas en el Bloque de
transductores en que se originaron las
alarmas activas PWA.
Output Board NV Memory Failure:
"Detectada corrupción de datos EEPROM
no volátiles en la placa electrónica
Fieldbus. Se han cargado los valores
predeterminados en el bloque defectuoso.
1. Compruebe la configuración del
dispositivo para detectar cambios en los
valores de los parámetros de bloques.
2. Restablezca el dispositivo para eliminar
el error.
3. Descargue una configuración de
dispositivo.
si el fallo se repite, puede deberse
NOTA:
a un chip de memoria EEPROM
defectuoso.
activar
enmascarar
yy n n nn
nn n n yy
nn n n yy
yy n n nn
activar
(mostrar)
enmascarar
activar
(mostrar)
(mostrar)
enmascarar
rb_nv_electronics _failure Output Board
Electronics Failure
diag_opt_PWA_simulate PWA Simulate
func_opt_simulate Simulate Switch Como puede ser difícil acceder al
misc_opt_base_record Base Record Cuando se activa la opción de registro
Output Board Electronics Failure:
El dispositivo ha detectado un fallo en un
componente eléctrico del conjunto del
módulo electrónico Fieldbus. Sustituya el
dispositivo.
conmutador de simulación del hardware,
se proporcionará una opción de software.
base, el operador puede leer y escribir en
parámetros de la tarjeta del sensor que no
están disponibles mediante la lista de
parámetros FF.
Página 34
yy n n nn
Page 35

Manual de referencia del Módulo de control Foundation Fieldbus
DOC.RM.QC34.S Rev: A
Octubre, 2006
5 Operaciones y mantenimiento
TM
5.1 Estado de falla
El parámetro de estado de falla, cuando se encuentra
activo, indica una pérdida de comunicación con un
bloque de salida, una falla promovida a un bloque de
salida o una pérdida de contacto físico. Si el estado de
falla es activo, la función de salida bloquea sus
acciones de estado de falla. Si selecciona la
característica estado de falla podrá definir y borrar
manualmente el estado de falla del dispositivo. Si
define el parámetro Definir estado de falla como
“Definir” pondrá el instrumento en estado de falla
manualmente. Si define el parámetro Borrar estado
de falla como “Borrar”, borrará el estado de falla del
dispositivo si no hay fallas activas en ese momento.
Puede comprobar las acciones que realizarán los
bloques de salida definiendo manualmente como
activo el estado de falla.
5.2 Método de reinicio
El siguiente método se incluye con la descripción del
dispositivo del módulo FieldQ:
y Reinicio
Descripción del método:
y Restablecer maestro: disponible a través del
Bloque de recursos, el método Restablecer maestro
es necesario para reiniciar la caja de conmutadores
sin cerrar la alimentación. También permite al
usuario definir los datos dentro de la caja de
conmutadores en su estado predeterminado.
Además de reiniciar la caja de conmutadores, este
método también realiza pruebas de integridad en
ella para verificar que es aceptable reiniciarla. Este
método sólo está disponible mediante el Bloque de
recursos y se describe en detalle en la sección de
configuración detallada (sección 4.1).
5.3 Reinicio del módulo
Puede reiniciar el módulo mediante distintos
mecanismos. Dependiendo de la opción de reinicio
utilizada, los enlaces de comunicación, los
parámetros estáticos, etc. pueden verse afectados. No
obstante, debido al efecto que un reinicio puede tener
sobre el módulo, y por tanto el proceso, es
aconsejable usar esa función con precaución.
ADVERTENCIA
El reinicio del FieldQ puede causar
la pérdida del control del proceso.
5.3.1 Reinicio del software
Hay varias opciones de reinicio, como se describe a
continuación. Esto puede hacerse mediante el
parámetro RESTART (índice 16) en el Bloque de
recursos. A continuación se da una breve descripción
de cada una de las opciones de reinicio:
y Recurso: el reinicio de “recurso” restablece las
variables dinámicas de los Bloques de función y no
tiene efectos observables sobre el módulo. No
obstante, el restablecimiento de las variables
dinámicas del módulo puede causar una
“irregularidad” en el proceso.
y Procesador: el “reinicio de procesador” tiene el
mismo efecto que el cierre de la alimentación del
módulo y su posterior reconexión. Suele usarse
para reiniciar la tarjeta de interfaz Foundation
Fieldbus cuando ésta dicha tarjeta should the
Interface Card and the Module I/O card get out of
sync due to incorrect power application.
y Valores predeterminados: el “reinicio con valores
predeterminados” debe realizarse con precaución.
Este reinicio establece los parámetros estáticos de
los bloques de funciones del módulo en su estado
predeterminado. También desconecta todos los
enlaces dentro del módulo. Tras realizar un “reinicio
con valores predeterminados”, debe ejecutarse un
“reinicio de procesador”. En la serie de módulos
FieldQ, la opción “reinicio con valores
predeterminados” es la única que leerá ciertos
datos del tablero de comunicaciones de FieldQ.
y Procesador de actuador: el “reinicio de procesador
de actuador” tiene el mismo efecto que el cierre de
la alimentación de la parte de control del módulo y
su posterior reconexión. Suele utilizarse para
reiniciar la parte de control del módulo.
y Valores predeterminados de actuador: el reinicio
con “valores predeterminados de actuador” debe
realizarse con precaución. Este reinicio devuelve el
punto de conmutación a su valor predeterminado
(véase §3.2).
Página 35
Page 36

EUROPA, ORIENTE MEDIO Y ÁFRICA ÁFRICA DEL SUR
P.O. Box 223 P.O. Box 979
7550 AE Hengelo (O) Isando
Asveldweg 11 1600
7556 BT Hengelo (O) 2 Monteer Road
Países Bajos Isando
Tel. +31 74 256 10 10 África del Sur
Fax. +31 74 291 09 38 Tel. +27 11 974 3336
Info.ValveAutomation-EMA@EmersonProcess.com Fax. +27 11 974 7005
Info.ValveAutomation-SA@EmersonProcess.com
ALEMANIA
Postfach 500155 NORTE Y SUR AMÉRICA
D-47870 Willich 9009 King Palm Drive
Siemensring 112 Tampa
D-47877 Willich Florida
Alemania 33619
Tel. +49 2154 499660 Estados Unidos de América
Fax. +49 2154 499 66 13 Tel. +1 936 372 5575
Info.ValveAutomation-BRD@EmersonProcess.com Fax. + 1 281 463 5106
Info.ValveAutomation-USA@EmersonProcess.com
REINO UNIDO
6 Bracken Hill SINGAPUR
South West Industrial Estate 19 Kian Teck Crescent
Peterlee Singapur 628885
Co Durham Tel. +65 626 24 515
SR8 2LS Fax. +65 626 80 028
Reino Unido Info.ValveAutomation-AP@EmersonProcess.com
Tel +44 (0) 191 5180020
Fax +44 (0) 191 5180032 Visite nuestro sitio web para obtener datos
actualizados sobre los productos.
Info.ValveAutomation-UK@EmersonProcess.com www.FieldQ.com
Reservados todos los derechos.
Nos reservamos el derecho de modificar o mejorar los diseños o especificaciones de los productos mencionados en este manual en cualquier momento y sin previo aviso. Emerson Process
Management no asume responsabilidad por la selección, uso o mantenimiento de ningún producto. La responsabilidad por la selección, uso y mantenimiento adecuados de cualquier producto de
Emerson Process Management permanece únicamente con el comprador.
©2006 Emerson Electric Co.
TM
www.FieldQ.com
 Loading...
Loading...