

Page 1

Multi-Port Actuator
Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Release: Mar 2013
Page 2
WARNING:
Use caution when working on, with, or around valves and actuators. High pressures, forces, voltages, and
flammable media can be present.
WARNING
Read this manual in its entirety before installing, operating, or performing maintenance on the MPA valve
actuator.
WARNING
Failure to follow instructions for proper electrical wiring, storage, setup, and maintenance may cause
serious injury, damage equipment, or void the warranty. Refer to Manual E796 for instructions on storage,
electrical hook-up, and maintenance.
Ensure that the installation is carried out in accordance with EN 60079-14 and IEC 60079-14.
Regulatory information:
EEx d IIB T4 or EEx d IIB 120 degrees C (T4)
Tamb-20degress C to +60 degrees C
Revision N
Copyright © 2013
Emerson Process Management
All rights reserved.
II 2GD
Emerson Process Management
Valve Actuation LLC
13840 Pike Road
1-800-679-1561
(281) 499-1561 FAX (281) 499-8445
Page 3

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Table of Contents
Section 1: Introduction ........................................................ 1
Section 2: Features ...............................................................2
Section 3: Mechanical and Electrical Installation .................. 5
Section 4: Wiring ................................................................. 6
4.1 Power Wiring ................................................................................................ 6
4.2 Network Wiring ............................................................................................ 6
4.3 Monitor Relay Wiring..................................................................................... 6
4.4 Local ESD Wiring (Emergency Shutdown) ...................................................... 6
4.5 Optional Remote Display Module (RDM) Wiring ............................................ 7
Table of Contents
Mar 2013
Section 5: Local Display Module ........................................... 8
5.1 Description ................................................................................................... 8
5.2 Operation ..................................................................................................... 9
5.3 Local Operation ............................................................................................. 9
5.4 Operational Display ....................................................................................... 9
5.5 Display Blanking .......................................................................................... 10
5.6 Alarms Display ............................................................................................ 10
Section 6: Field Setup Using MPA Config Software .............. 12
6.1 CommSetUp ............................................................................................... 12
6.2 User Setup Menus ....................................................................................... 13
6.3 Selecting New Home Port (HP command using Control Knob setup) ........... 14
6.4 Home Port LED Function ............................................................................. 15
6.5 Home Port Calibration (HC command using Control Knob setup) ................ 15
6.6 Factory SetUp Menus .................................................................................. 16
6.7 Motor Type ................................................................................................. 16
6.8 Control Screen ............................................................................................ 18
Section 7: Field Setup Using Local Controls ......................... 20
7.1 Alarm History Display .................................................................................. 20
7.2 Setup Mode Display Sequence .................................................................... 20
Table of Contents
Section 8: Field Diagnostics ................................................ 23
8.1 Fd Fault Codes ............................................................................................. 23
Section 9: Remote Network Control ................................... 25
9.1 Modbus RTU ............................................................................................... 25
9.2 Foundation Fieldbus (FF) ............................................................................. 27
9.3 Probus DP Reduntant Networks with Redcom ........................................... 29
9.4 DeviceNet ................................................................................................... 30
I
Page 4

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Appendix A: EC Declaration of Conformity Certificate ......... 31
Appendix B: Wiring Diagrams ............................................ 32
B.1 Three Phase Power ...................................................................................... 32
B.2 Single Phase Power ......................................................................................33
B.3 24 VDC Power ............................................................................................. 34
Table of Contents
Mar 2013
II
Table of Contents
Page 5

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Section 1: Introduction
The Multi-Port Actuator is an single turn actuator for control of multi-port ow selectors
(MPFS) with 3 to 8 ports. A typical application is oil or gas well selection for well production
testing as shown in Figure 1. Typically the MPA is the actuator of a Multi-Port Flow Selector
as shown in Figure 2. There are applications in other processes where control of multi-port
valves is required.
Figure 1 Typical Well Test Application
Section 1: Introduction
Mar 2013
Figure 2 MPA mounted on 6"x16" MPFS
Introduction
1
Page 6
Section 2: Features
Low Voltage
Interfaces between
CPU and TBM
Electrical Enclosure with
Motor Starter, Control
Transformer, DC Power
Supplies, Power Entry,
Termination Panel, User
Wiring, I/O Interfaces,
Torque Encorder
Integral
Disconnect
BETTIS 3000 Ft-Lb Gearbox
Geared for 1.5 RPM
Position Encorder
Coupling to MPFS Stem
Local Display Module (LDM)
with Display & Status LEDs,
Selector & Control Knobs,
CPU Module,
Network Communications,
Position Encoder
Motor
(not shown)
Mar 2013
Section 2: Features
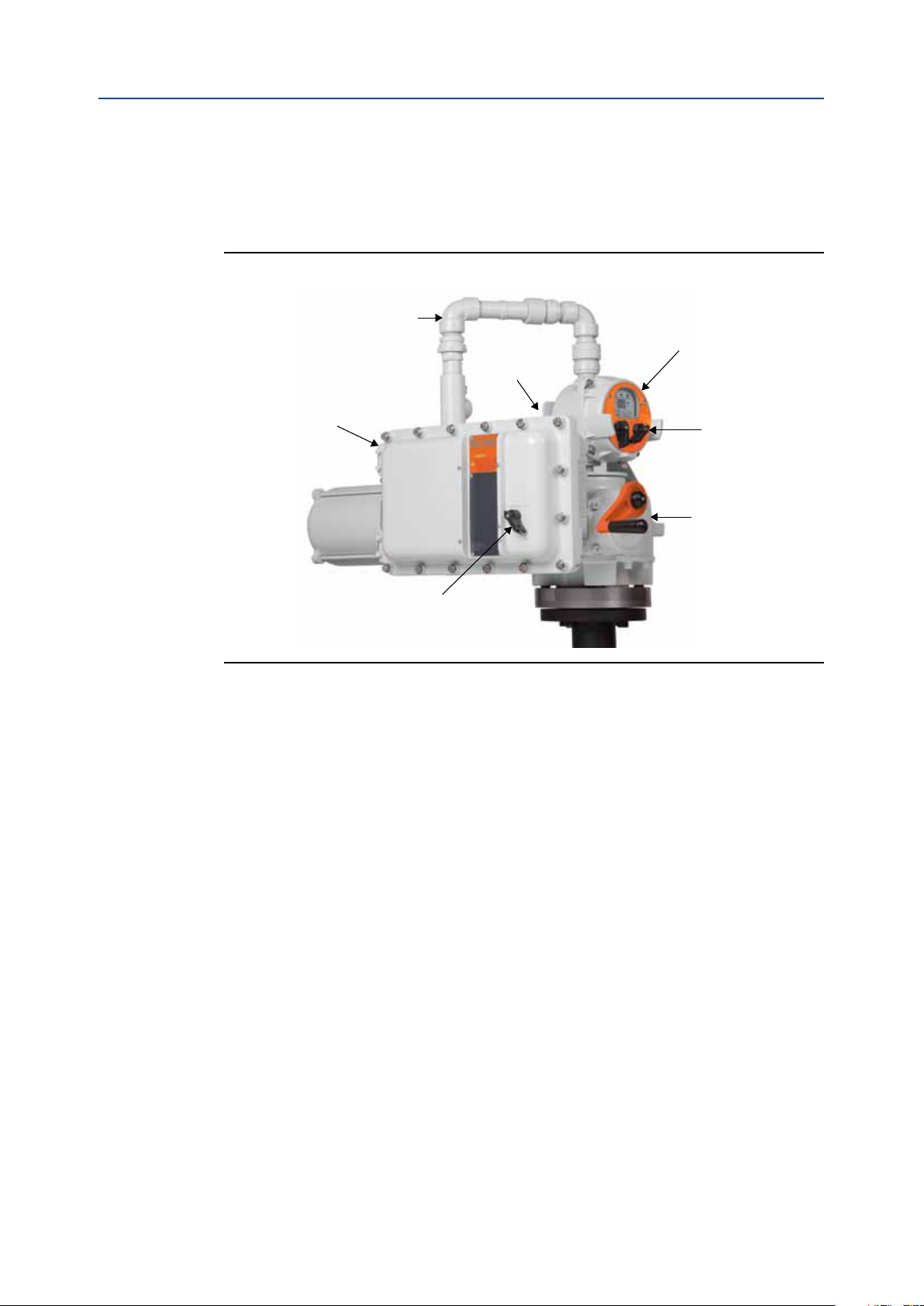
The actuator features several assemblies as shown in Figure 3. Unique features of the
actuator are listed below.
Figure 3 MPA Features
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
• MPA uses Bettis’s heavy duty gearbox with capacity of 3000’ lbsThreaded Valve
Stem
— Wide range of motors available for any voltage and torque
• Congurable for multi-port ow selectors from 3 to 8 ports
— Any port may be selected as home port and any port(s) may be skipped
— Actuator calibrated at factory for exact match to alignment of ow
selector ports
— Calibration parameters stored in nonvolatile memory and available to DCS
• 12-bit magnetic encoder coupled directly to valve stem for precision position
feedback
— Provides position measurement resolution of 0.088 degrees
• BETTIS’s exclusive solid-state motor starter and control software provides precise
positioning of ow selector within +1 degree of selected port
• High performance microcontroller updates motor control output every 4mS for
precision motor control
• 12-bit magnetic encoder coupled directly to torque pinion for torque feedback
— Provides torque measurement resolution of 0.146% of full torque
2
Features
Page 7

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
• MPA supports all network protocols available with all other Bettis actuators
• I/O and alarm monitoring include:
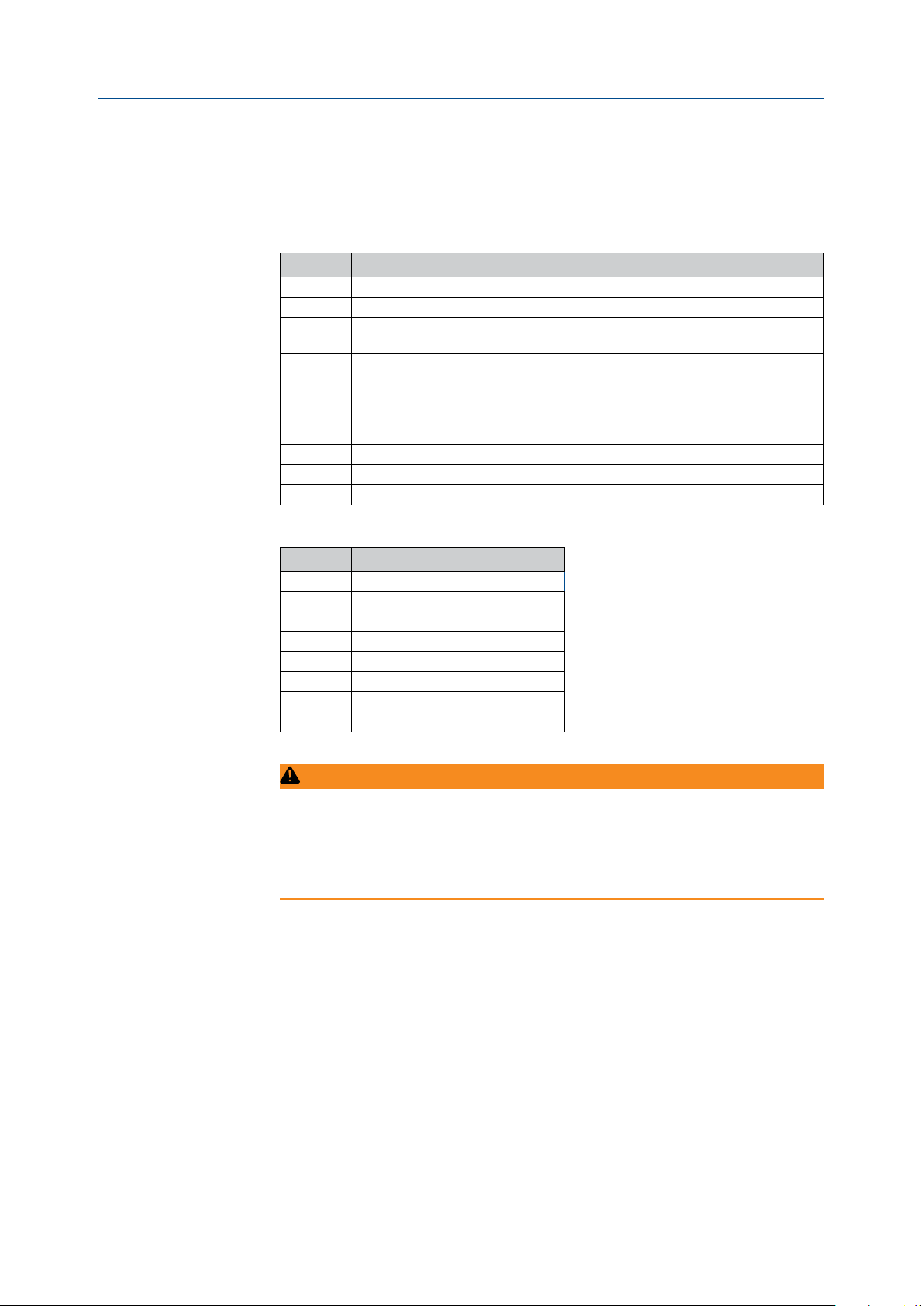
• Four models support ve 8-port MPFS (Also see motor type, Table 4)
Section 2: Features
Mar 2013
— Modbus RS485 Bus or E>Net ring available
— Probus Redundancy with Redcom
— Foundation Fieldbus
— DeviceNet
— Ethernet Modbus TCP/IP
— Integral circuit breaker/disconnect
— Motor overload and motor thermal
— Loss of control voltage
— Encoder failure
— Stall detection and alarming (detects mechanical faults)
— 3-Phase monitoring and phase correction to insure correct motor rotation
— ESD to send selector to home port (also goes to home port on fault)
— Monitor relay for hardwired relay contact status on fault
Table 1. Four models support five 8-port MPFS
Model MPFS
MPA 150 2x4 150 203 1.0 1.0 1.0 0.79
MPA 650 3x6 650 881 0.7 1.0 0.5 0.49
MPA 800 4x8 & 4x10 800 1085 0.6 0.9 0.5 0.40
MPA1500 6x16 1500 2034 0.3 0.5 0.3 0.26
Note: Accuracy based on worst case tests at 38% of maximum torque.
Capacity RPM Accuracy
Lb/Ft Nm 1Ph 3Ph DC Degrees
• MPA includes local display module (LDM) standard
— Uses rugged, high visibility LED display for port number, torque, and
alarms (also displays setup menus and setup parameters)
— Multiple color LEDs display
— Port position within 1° of port
— Port position within 2° of port
— Motor running
— Over torque
— Position within 0.25° of home port
— Local mode |
Features
— Off mode | Combined detection logic for two
selector switches
— Remote mode |
— Includes Local Off Remote selector switch
— Local control knob for Port selection and Jog control when enabled by
User
3
Page 8
Section 2: Features
Mar 2013
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
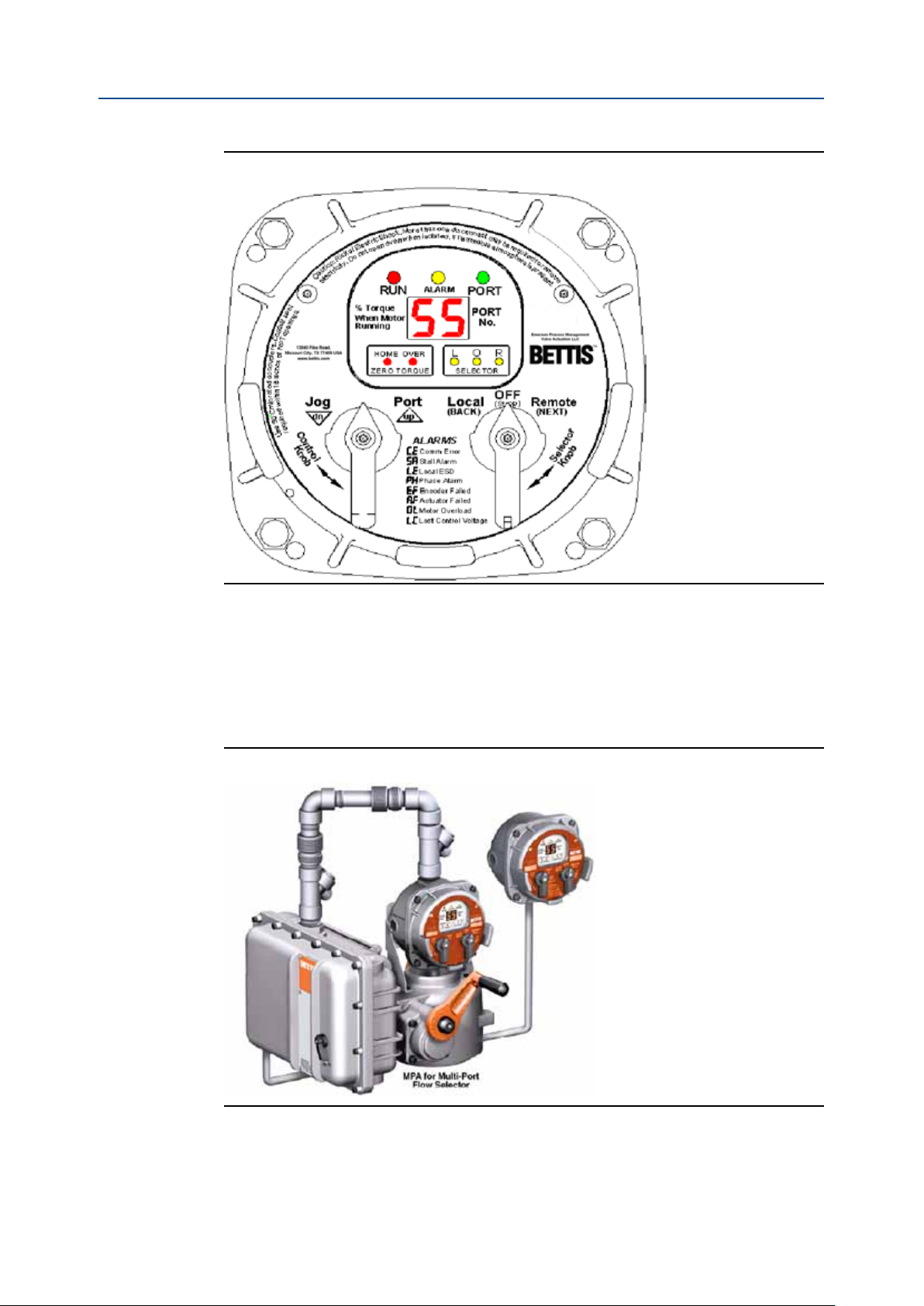
Figure 4 Local Display Module (LDM)
• Remote display module (RDM) option available
— RDM displays identical information and performs identical control as LDM
— BETTIS’s patented combined switch logic allows detection of selector
switch position on LDM and RDM
— Allows remote control up to 4,000 feet (1,220 meters) away
— Alarming includes loss of communication with RDM
Figure 5 MPA with Remote Display Module (RDM)
4
Features
Page 9

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Section 3: Mechanical and Electrical Installation
Section 3: Mechanical and Electrical
Installation
Do not connect power until you have gone through the following checklist
1. Does the information given on the nameplate correspond with the application?
2. Have all wire terminations and the equipotential bonding system been connected
correctly?
3. EEx d applications: are the cable entries, plugs and adaptors EEx d approved?
4. Are all cable entries of the correct internal diameter providing a good seal around
the cable?
5. Do the ambient and process temperatures correspond to the ratings on the
nameplate as shown below?
Mar 2013
Mechanical and Electrical Installation
5
Page 10

Section 4: Wiring
Mar 2013
Section 4: Wiring
All user wiring terminations are made inside the Electrical Enclosure shown in Figure 3 on
Page 2. Refer to wiring diagram located at the back of this manual for wiring connections.
High voltage power connections are made to the disconnect/circuit breaker located inside
the electrical enclosure. All low voltage connections, including network wiring, are made
to the Termination Board Module (TBM) located inside the electrical enclosure. Use conduit
and seals in accordance with National Electric Code (NEC) and local codes for all wiring
entering the electrical enclosure.
4.1 Power Wiring
Connect power voltage leads to the circuit breaker located in the main electrical enclosure.
Power wires must enter the electrical enclosure at the conduit entry on the lower right side
of the enclosure to prevent water from entering. The controller provides automatic phase
correction in case three-phase power is connected in the wrong phase rotation.
4.2 Network Wiring
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
If a single bus network connection, such as Foundation Fieldbus, is being made,
connect to Network Port A at TBM terminals 24 (-) and 25 (+). If the cable is shielded,
connect shield to TBM terminal 23. If redundant or repeater network connections such
as Bettis E>Net are being made, connect the second network to Network Port B at TBM
terminals 23 (+) and 24 (-). Connect cable shield of Port B to TBM terminal 25. Cable
shields are isolated from earth in the actuator. Connect shields to only one earth ground
point in the network, normally the host location.
4.3 Monitor Relay Wiring
The Monitor Relay is used for hard-wiring an indication of availability of the actuator for
remote control. When the selector switch is placed in the Remote mode and if there are no
alarms present that prevent operation, the Monitor Relay is energized. If an alarm occurs
or the selector switch is moved from the Remote position, the relay is de-energized. The
Monitor Relay is a Form C relay with both normally open (N.O.) and normally closed (N.C.)
contacts. Wire to either TBM terminals 31 and 32 if N.O. contacts are desired. Wire to TBM
terminals 32 and 33 if N.C. contacts are desired. The relay is shown on the wiring diagram
in the de-energized state, meaning that the actuator is not available for remote control.
4.4 Local ESD Wiring (Emergency Shutdown)
Remove jumper between TBM terminals 27 and 28. Connect Normally Closed (N.C.) dry
contacts to terminals 27 and 28. When the contacts open, ESD is activated, causing the
actuator to go to Home Port. The actuator will remain at the Home Port until the ESD
contacts are closed and a new command is received from either Local or Remote control.
The ESD circuit is a closed loop failsafe circuit. It the circuit is opened for any reason, broken
wire, bad contact, 24VDC power supply failure, etc., the ESD function is activated. The
closed loop circuit is powered by 24VDC from the actuator.
6
Wiring
Page 11

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Section 4: Wiring
Mar 2013
4.5 Optional Remote Display Module (RDM) Wiring
Connect twisted pair RS485 cable from the RDM to TBM terminals 18 (-) and 19 (+). If
the RDM is being powered from the actuator 12VDC supply, wire the power wires from
the RDM to TBM terminals 16 (-) and 17 (+). The RDM is polarity protected, preventing
damage, but will not operate if polarity is reversed.
Wiring
7
Page 12
Section 5: Local Display Module
Mar 2013
Operation and Maintenance
Section 5: Local Display Module
5.1 Description
Contains microprocessor controller, position encoder, and network interface. This is the
main controller used to setup and operate the actuator.
This module displays operating parameters, port position, torque, and alarms. It also
provides a means to congure the actuator by using the local controls.
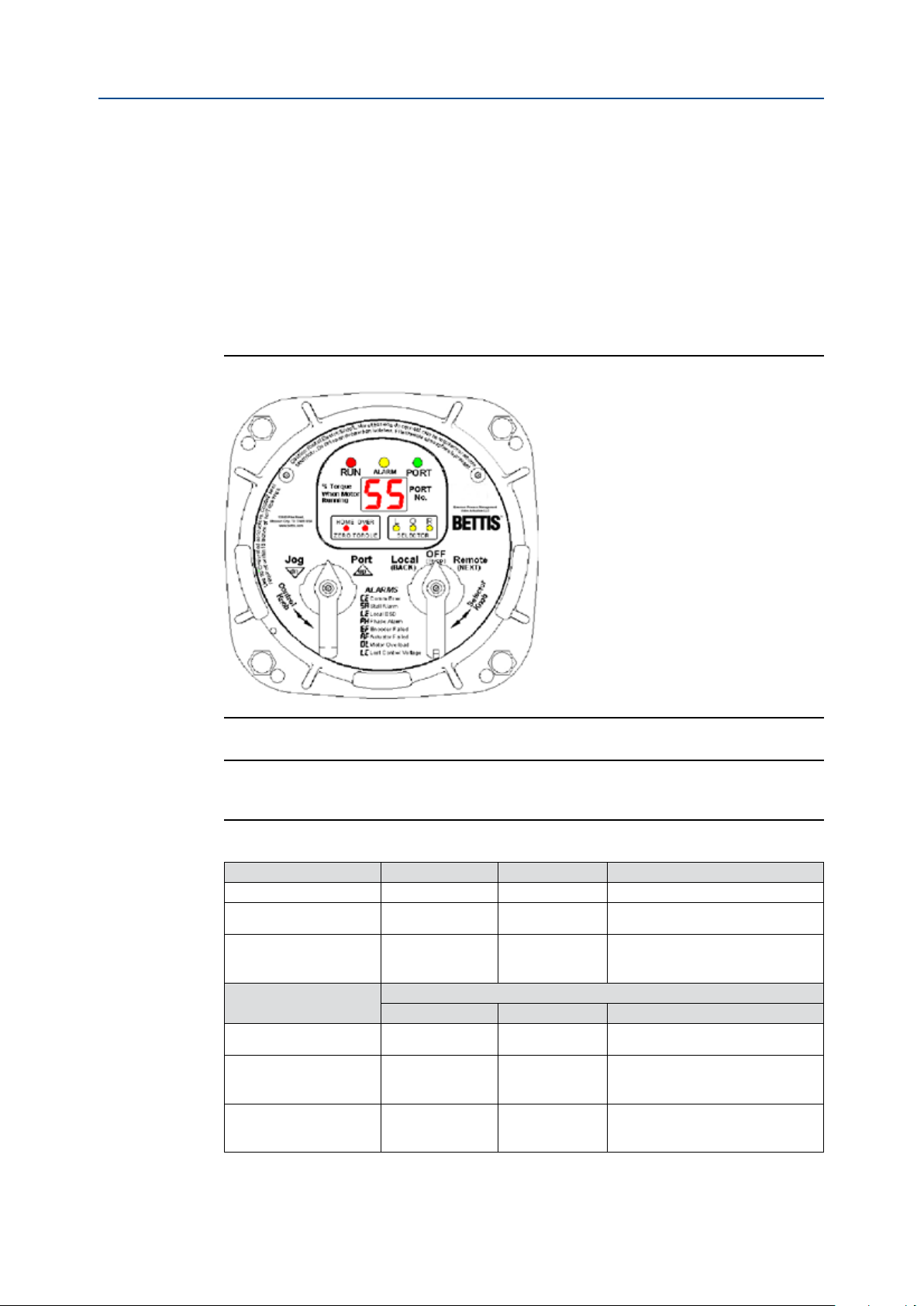
Figure 6 Local Display Module
Part Number: MPA-0400-0313, Rev. N
To use the Local Control and Selector Knobs refer to Table 2.
NOTE:
Actuator moves in only the counterclockwise direction.
Table 2. Selector/Control Knob Function
Selector Knob (right) Rotate Function Results
OFF (Stop) [return position] Stop movement Prevents motor operation.
REMOTE (Auto) Clockwise Remote control
LOCAL (Hand) Counter-clockwise Hand Operation
Control
Knob (left)
Spring return Neutral position No operation
PORT (up) Clockwise
Jog (dn) Counter-clockwise
(while selector is in LOCAL (Hand) mode)
Rotate Function Results
Local command
to go to next
port
Local command
to micro-step
Allows control from remote
location.
Allows from the local control knob
or the control knob of the RDM, if
connected.
Releases a local command when
Local control is used.
Commands actuator to move to
the next port. Momentary knob
control.
Commands actuator to move only
whileknob is being held, i.e. maintained knob control.
8
Local Display Module
Page 13

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
5.2 Operation
Place the “Selector Knob” in the desired operating position
1. LOCAL – hands on operation at the actuator by manipulation of Control Knob.
2. REMOTE – used within the context of plant operation, i.e. Remote Control Panel,
PLC, DCS, etc. See wiring diagram for typical user wiring for remote control.
3. OFF (Stop) – to prevent local or remote operation.
Figure 7
Section 5: Local Display Module
Mar 2013
5.3 Local Operation
Place the “Selector Knob” in the “Local” position. If a remote display is connected, the
remote selector switch must not be in the “Off” position. Verify that the selector “L” amber
light is on. The actuator may now be operated using the port and jog Control Knobs. Jog
control is normally disabled and must be enabled in the setup menu.
To jog or micro-step the actuator toward the next port, rotate the control knob in the
counterclockwise direction. Jog to position and release when the desired position is
reached. When using jog for calibrating the actuator, always stop short of the desired port
and use the hand wheel to complete accurate positioning to center of the port.
To move only to the next port, momentarily rotate the control knob in the clockwise
direction to the Port position and release.
To Stop or prevent actuator movement, move Selector knob to the OFF (Stop) position.
5.4 Operational Display
Operational indicators for RUN / ALARM / PORT position use long lasting LED’s. Run torque
and port position are shown on the digital readout during normal operation. Torque in
percent of maximum is displayed as a 2-digit number only while the motor is running. Port
position is displayed as a single digit when the motor stops. If the actuator stops between
two ports, the two corresponding port numbers will alternate. Torque less than 10% is
displayed as 0% because torque between 0 and 10% cannot be accurately measured.
Local Display Module
9
Page 14

Section 5: Local Display Module
Mar 2013
1. RUN LED ashes Green while the actuator is moving to the next port and ashes
Red while running within 2° of the selected port position.
2. PORT LED ashes Green when the actuator is within 2° and outside 1° prior to the
setpoint of the selected port. The port LED ashes Red when within 2° and outside
1o beyond the setpoint. The port LED illuminates steady Green while within 1° of
the selected port position.
3. ALARM (Yellow) LED ashes when any alarm is present, otherwise it remains off.
4. OVER TORQUE alarm condition is indicated when a torque alarm occurs in mid-
travel. The over torque LED will ash so long as the over torque condition exists.
5. HOME PORT LED will light when the actuator is within 0.25° of the user selected
Home Port position.
Selector switch LEDs are also made available for operational use in the bottom right corner.
The selector LEDs are important when using a Remote Display Module (RDM) because
these LEDs indicate the combined logic of the two selector switches, i.e. the selected mode
of operation of the actuator. All three LOR LEDs ash while the actuator is in setup mode.
5.5 Display Blanking
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
The user has the option to have the display blank out (turn off) when not in use. This is
a very important feature for solar power applications because power consumption is
minimized. Option to enable or disable display blanking timeout is available by setup using
MPA Cong or the control knobs. See the eld setup section for selecting the option. When
control knobs are used for setup, the parameter is C9 as shown in the table on Page 21. The
default setting is display blanking timeout enabled for 24VDC versions and disabled for AC
versions. If display blanking is enabled, the display will blank out after 60 seconds when left
unattended while the selector switch is in Remote mode. The display will blank out after 3
minutes when left unattended while the selector switch is in Local mode. The display will
not blank out while in setup mode. When selected, display blanking applies to both local
(LDM) and remote (RDM) displays.
5.6 Alarms Display
When an alarm occurs, it is automatically displayed by the two character LED display.
The yellow ALARM LED will ash while any alarm is present. The display will alternate
between the current port position and the active alarm(s) except when stopped between
parts. If more than one alarm is active, the display will cycle through a sequence of Port
Position, newest alarm, Port Position, next oldest alarm and so on until all active alarms
are displayed. The cycle is continuously repeated until all alarms are cleared. Each alarm
is recorded in an Alarm History. The alarm history may be viewed by entering setup mode
(see next section).
All possible alarms that may be displayed are listed on the name plate of the Local Display
Module (LDM). Following are denitions of the listed alarms.
10
Local Display Module
Page 15

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Table 3. Alarm List
Alarm Definition Details
CE Communication Error
SA Stall Alarm
LE Local ESD Hardwired Local Emergency Shut Down is active.
PH Phase Alarm Loss of one phase when congured for 3-Phase.
EF Encoder Failed Failure of either the position or torque encoders.
AF Actuator Failed
OL Motor Overload Motor thermals or motor overload relay has tripped.
LC Lost Control Voltage
NOTE:
Over torque alarm is displayed by dedicated LED. See Operational Display section above.
Section 5: Local Display Module
Mar 2013
Lost communication with the Remote Display Module (RDM) when
congured.
Actuator failed to move within 8 seconds after commanded by
either local or remote controls.
A fault is detected by hardware electronics fault monitor. This is a
non-recoverable condition that requires actuator service.
Loss of power to the motor control circuits. The control voltage
supply has an automatic resetting fuse.
Local Display Module
11
Page 16

Section 6: Field Setup Using MPA Config Software
Mar 2013
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
Section 6: Field Setup Using MPA Cong
Software
MPA Cong is a Windows application for conguration, calibration, test, and operation of
the MPA. MPA Cong is compatible with Windows XP, Windows 7, and Vista. Connection
to the MPA requires a RS485 link. It may be necessary to use a USB to RS485 converter
for connection of a PC to the RDM port of the actuator. RDM port is TBM terminals 18 (-)
and 19 (+). Load the software to a laptop or other compatible PC device and connect the
RS485 link to the TBM in the electrical enclosure. If opening the enclosure is undesirable,
conguration may be performed using the local control knobs of the actuator as
described in the next section of this manual. If the system is congured for Modbus
networking, the PC may be connected to the local area network at any location in the
network. The MPFS factory uses this software to congure and calibrate the MPA and
saves the conguration to a “.mpa” le by MPFS serial number. Should loss of factory
conguration or port calibration occur due to failure of a CPU module or user error, a copy
of the le may be obtained from the MPFS factory and loaded to the actuator using MPA
Cong Software.
6.1 CommSetUp
First select the CommSetUp screen shown in Figure 8 to congure the network
communication link.
Figure 8
12
If connected to the RDM port, set the computer Baud Rate to 9600, Parity None and Stop
Bits to 1. Set the Slave Address to 254. The RDM port conguration of the MPA is x at
9600,N,8,1, address 254 and may not be changed by the user.
Field Setup Using MPA Config Software
Page 17

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
If connected to a Modbus local area network, the baud rate and slave address congured
for the actuator must be known in order to setup the computer communication port.
Default conguration for the MPA network port is 19,200 baud and slave address 254.
There are two universal addresses of 99 and 254. Addresses 1-98 and 100-254 are unique.
HELP: Clicking the ? button at the top of the screen and then passing the cursor across
each button will cause a description of that button to be displayed.
6.2 User Setup Menus
To congure the actuator, select the User Setup Menus tab shown in Figure 9.
Figure 9
Section 6: Field Setup Using MPA Config Software
Mar 2013
From this screen Alarm History of the last eight accumulated alarms may be
viewed. Conguration may also be viewed without a passcode. In order to change
conguration, a valid passcode must be entered. Click on “Enter User Password” button
near the bottom of the screen and the screen shown in Figure 9 will display. Enter the 4-
digit passcode and click Enter. You may now edit conguration, including a new passcode
as shown in Figure 9. If the passcode is changed, be sure it is recorded and kept in a safe
place. The default passcode is 0000.
Figure 10
Field Setup Using MPA Config Software
13
Page 18

Section 6: Field Setup Using MPA Config Software
Mar 2013
The Network SetUp changes conguration only for the network ports. It does not affect
the RDM port. If a pipeline is not connected to any one or more ports, or if it is desirable to
skip any one or more ports, click on the “Delete Port” number. The deleted ports will be
skipped when a next port command is issued in either local or remote control modes.
NOTICE:
When conguration changes are made, click the “Write” button at the bottom of the
screen to transfer the new parameters to the actuator. The “Read” button may be used
to refresh the screen to verify the parameters have been properly written and stored in
the actuator. To ensure the new conguration values are written to EEPROM, click on the
Factory tab and then click Force EEPROM Write. Within several seconds the three LOR
LEDs will simultaneously ash slowly. This slow ash is a signal that all new values were
successfully written to EEPROM.
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
6.3 Selecting New Home Port (HP command using
Control Knob setup)
The User may select any port as the new “Home Port” in the eld. When a new home
port is selected, the new home port is identied as Port 0 or 8 and the MPA reassigns all
other port numbers (1-7) in a counterclockwise sequence around the MPFS. The MPA
recalculates the exact calibrated port position based on factory calibration values so no
accuracy is lost.
To select a new home port, click on the “Set Home Port” button shown in Figure 11. The
Pop-Up shown in Figure 9 will appear. Enter the new home port number 1-7 relative to the
factory calibrated port assignments and click “Enter”.
Figure 11
14
Field Setup Using MPA Config Software
Page 19

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
NOTE:
When a new home port is selected, it must be a port without piping connected and
must be tted with a blind cover to allow for future seal inspection and visual port
alignment. Selecting a new home port will cause the MPA to recalculate all calibration
parameters based on the factory calibration and store the new values to EEPROM.
Section 6: Field Setup Using MPA Config Software
6.4 Home Port LED Function
The home port LED on the LDM will now identify the newly selected home port position.
This LED is on when the actuator is within 0.25 degrees of the selected home port. When
the blind cover of the home port is removed in the eld to inspect the seals, the home zero
may be veried and corrected if an error is detected.
6.5 Home Port Calibration (HC command using
Control Knob setup)
Mar 2013
If maintenance is performed on the actuator that can cause loss of calibration, the home
port must be re-calibrated. Examples of maintenance that affect calibration are removal of
the actuator from the MPFS and replacement of the position encoder. If a MPA is removed
from one MPFS and installed on another or if a CPU module is replaced, the factory
conguration (.mpa) le for the MPFS must be loaded to the new actuator and the selected
home port calibrated. To calibrate the home port position, remove the blind cover from
the selected home port. Use the hand wheel of the MPA to position the plug seal over the
port as precisely as possible. Click on the “Cal Home Port” button shown in Figure 9. To
avoid accidental setting of a new home port, the user is required to enter a passcode of 43
to gain access. A Pop-Up will appear as shown in Figure 12, providing a warning and allow
entry of the passcode.
Figure 12
Field Setup Using MPA Config Software
15
Page 20

Section 6: Field Setup Using MPA Config Software
Mar 2013
Operation and Maintenance
6.6 Factory SetUp Menus
All factory settings may be viewed but some items in Factory Setup require a Factory
Password to change them. The protected items are, RDM Required, Motor Type, Reset User
Password, and Calibrate Ports. The user may load or save a “.mpa” conguration le from
or to a PC.
Figure 13
Part Number: MPA-0400-0313, Rev. N
For precise MPFS port alignment, the factory calibrates each actuator to each of the
ports of the mated MPFS. The calibrated values are displayed on this screen and may be
compared to the current position (Encoder Feedback) to determine accuracy. When a new
home port is selected by the user, these calibration values are recalculated and stored to
EEPROM.
6.7 Motor Type
Motor Type is entered at the factory for the type of MPFS, power supply and motor horse
power rating as shown in the table below. Motor type is displayed on the MPA Confg
Factory Setup Menu for information only and cannot be edited.
Table 4. Motor Type
Motor
MPFS
2X4 1/12 2 6 10 14 18 22 26 -------2x4 1/6 --------- --------- --------- --------- --------- --------- --------- 30
3X6 1/6 3 7 11 15 19 23 27 31
4X8 1/6 4 8 12 16 20 24 28 32
6X16 1/6 5 9 13 17 21 25 29 33
6X16 1.5 --------- --------- --------- --------- 1 --------- --------- --------
HP
1 PH
115
VAC
1 PH
230
VAC
3 PH
220/230
VAC
3 PH
380
VAC
3 PH
415
VAC
3 PH
460
VAC
3 PH
575
VAC
24
VDC
16
Field Setup Using MPA Config Software
Page 21

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
NOTE:
The user is not required to select motor type unless qualied to download rmware
upgrade to the MPA. If a new HEX le for rmware upgrade is loaded to the MPA in the
eld, the motor type must be congured before the actuator will operate. When power
is rst applied to the MPA after a rmware upgrade, in order to know how to initialize
the electronics, the Motor Type stored in the EEPROM will be examined. If a new HEX le
was just downloaded, it will not yet have a Motor Type (it will be ZERO). When rmware
sees that the Motor Type is ZERO, rmware will immediately go to the display entry in the
Factory Setup Menu for Motor Type. The user will NOT have to move the left control knob
back and forth to go to Setup Mode or enter a passcode. The user will see alternate display
of "F1" and "0". The "F1" is the abbreviation for Motor Type in the factory setup menu, and
the current value is 0. Then the user (who just now completed the hex le download) will
have to use the left hand control knob to increment the display number to the correct
Motor Type (from 1 to 33 shown in the Table 4). Then a move of the right hand selector
knob either left or right will force an exit out of the Setup Menu in this unusual one-time
circumstance after a HEX le download.
Now the rmware will examine the Motor Type and know how to initialize the electronics.
Section 6: Field Setup Using MPA Config Software
Mar 2013
Normally when power is applied to the MPA, if it is NOT after a new download of the HEX
le, the Motor Type will already be non-ZERO so the rmware will know how to initialize the
electronics without forcing the user to use the knobs.
Field Setup Using MPA Config Software
17
Page 22

Section 6: Field Setup Using MPA Config Software
Mar 2013
6.8 Control Screen
The control screen (see Figure 14) is a valuable tool for commissioning the system. All
functions of the system may be tested prior to commissioning with the DCS. This screen
may be used to troubleshoot any problems should they occur. Field diagnostic
messages are displayed in the “Field Diagnostics Information” box. All active alarms may
be viewed at a glance in the “Alarms” section of the Control Screen.
Figure 14
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
1. “Mode” displays the mode selected by the selector switch of the LDM or
combined logic of both LDM and RDM selector switches.
2. “Status” displays Running or Stop state of the actuator.
3. “At Port” displays the port number position of the actuator and whether the MPA
is at the port within 1 degree or within 2 degrees.
4. “Torque” is displayed as percentage of the full torque rating of the actuator. Torque
is displayed from 10% to 99% in 1% increments. Torque less than 10% is displayed
as zero because torque between 0% and 10% cannot be accurately measured.
5. “Encoder Value” is the 12-bit raw data from the position encoder in the range of
0 to 4095. This value is also displayed on the Factory Setup screen so it can be
compared to port calibration value of each port.
6. “Valve Control” allows commanding the actuator to go to the next port or go
to a desired port number. “Go to Port” is the new setpoint in the range of 0 to
7. “Current Setpoint” is the last commanded value stored in the actuator. Each
time the actuator is powered up or it torques out while moving, it loads an
invalid setpoint of 255 to the “Current Setpoint”. This prevents the actuator from
moving until a valid setpoint from 0 to 7 is entered in the “Go to Port” and sent to
the actuator. If “Next Port” button is clicked while 255 is in the “Current Setpoint”,
then the next higher port number from the current position will be loaded to the
current setpoint.
18
Field Setup Using MPA Config Software
Page 23

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Section 7: Field Setup Using Local Controls
Section 7: Field Setup Using Local Controls
Use the Local Control (left) knob and Selector (right) knob to enter setup mode and to
execute Setup functions. The table below (see Table 5) outlines the knob functions for
Setup mode.
To access the Field SETUP mode of operation ensure the Selector Knob is placed in the
OFF (Stop) position. Once set, rotate the Control Knob to the “UP” & then to the “DOWN”
position in right to left succession three times. Keep the knob in each position for at least
½ second but not more than 3 seconds. The display module will ash the (3) amber LOR
selector LED’s when the SETUP mode is enabled.
Figure 15
Mar 2013
Table 5. Selector / Control Knob Setup Function
Selector Knob (right) Setup Function Results
Allows entry to SETUP mode.
OFF (Stop) [return position] neutral position
Clockwise (REMOTE) (Auto) NEXT
Counter-clockwise (LOCAL)
(Hand)
BACK Backs up to the last menu item.
Completes NEXT, or BACK entry
cycle, except when knob is held for
scrolling through various menus.
Advances to the next menu item.
Displayed data is accepted.
Control Knob (left) Setup Function Results
Completes UP or Down entry Cycle
Spring Return to Center neutral position
Clockwise (CLOSE) UP Increments displayed data.
Counter-clockwise (OPEN) DOWN Decrements displayed data.
except when knob is held for
continuous data entry update.
Field Setup Using Local Controls
19
Page 24

Section 7: Field Setup Using Local Controls
Mar 2013
When the actuator LDM is placed in SETUP mode of operation it rst displays the Field
Diagnostics (Fd) menu item. The second menu item Alarm History (AH) menu. The eld
diagnostics and alarm history may be viewed without entering a passcode (See Field
Diagnostics and Alarm History Display section).
NOTE:
On any setup menu, use up/down to change a parameter and back/next to accept the
displayed parameter. All menus and all parameters are wrap around, meaning they will
advance from the highest or last value to the lowest or rst value.
To view or change setup parameters of the actuator, Rotate the Selector Knob to the
right or NEXT position to cycle through the alarm history display A1 through A8 until
P1is displayed. Alarm history (A1-A8) may be skipped by changing AH(1) to AH(0) and go
directly to passcode menu. Passcode menu is displayed as two, 2-digit entries, P1 and P2.
The actuator is shipped from the factory with the passcode disabled, meaning that the
passcode is 00 00. Until the passcode is changed by the user, the passcode of 00 00 may be
accepted by using the NEXT selector knob sequence to accept the passcode and continue
to the setup menus. You will now be able to display and/or edit setup data. If you forget
your congured passcode, factory trained technicians can reset the passcode back to 00
00.
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
NOTE:
While in the SETUP mode the actuator will not turn on the motor control circuits & disables
all control of discrete outputs until exiting the Setup Mode.
7.1 Alarm History Display
Setup always enters the main menu at the Field Diagnostics (Fd) and the next menu
item is Alarm History (AH). The user may view the alarm history without having to enter
a passcode. The AH menu will alternately display a value of 0 or 1. Use the Control Knob
up or down to change the selection from 0 to 1 or 1 to 0. If display of the alarm history is
desired, then the value must be 1. When AH with a value of 1 is displayed, use the Selector
Knob REMOTE (NEXT) to advance through the alarms. If it is desirable to skip the alarm
history and advance to the setup menus, use the control knob to select a value of 0 and
then the Selector Knob Remote (Next) to advance directly to the P1 passcode entry. Alarms
are displayed by a sequence number A1 through A8. The display alternates between the
alarm sequence number (A1-A8) and the recorded alarm. A1 is the newest alarm and A8 is
the oldest alarm. Use the NEXT and BACK selector positions to cycle through the alarms.
Blanks are displayed for fewer than 8 alarms. The alarm history is cleared by cycling power
to the actuator. If it is desirable to only display alarm history and not go into setup, use the
LOCAL(BACK) selection repeatedly to back out of the alarm history and return to normal
operating mode.
7.2 Setup Mode Display Sequence
20
The three (3) amber LED’s for the LOR section ash to indicate Setup Mode. When in setup
mode, the user must enter the REMOTE (NEXT) or LOCAL (BACK) within 120 seconds or the
display will revert back to the normal display mode.
Setup data may be changed by using the UP & Down entries of the Control Knob. The
UP and Down entries are active only after a valid pass-code is entered and the Selector
Switch is in the STOP position. The default pass-code is P1 00 and P2 00. Once the correct
passcode is entered and accepted at the actuator controls, the user will then be able to
Field Setup Using Local Controls
Page 25

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
advance thru the displays shown in the Main Menu table on the following page.
The table on the following page (see Table 6) shows the sequence of the setup menus.
It also shows the selections, units, and defaults. Each time the REMOTE (NEXT) selector
knob is selected, the display advances to the next menu item. Each time the LOCAL (BACK)
selector knob is selected, the display backs up to the previous menu item. The UP and
DOWN control knob is used to increment or decrement the value shown in the table.
Following is an example for changing the Torque Limit. In this example the current torque
value is the default value of 60%.
1) Enter setup mode – Selector knob Off – Rock control knob back and forth until
3 selector LEDs begin to ash and Fd is displayed. When using the selector knob
to advance to the next menu or back to the previous menu, always return the
selector to the Off position to complete the cycle.
2) Use control knob to change the value of AH to 0 – Rotate selector knob clockwise
to Remote (Next) to display P1 (1st passcode). The display will alternate between
P1 and the value (default is 00). If the passcode has been changed, rotate the
control knob clockwise to advance the display to the correct 1st passcode. Rotate
the selector knob clockwise to advance to the next display, P2. The display will
alternate between P2 and value of the 2nd passcode (default is 00). If the passcode
has been changed, rotate the control knob clockwise to increment the display to
the correct 2nd passcode.
3) Repeatedly cycle the selector knob clockwise to advance to the next menu item
until C2 is displayed. This is the torque limit setting as shown in the following table.
The display will alternate between C2 and the value of C2 which we have assumed
to be 60.
4) Rotate the control knob clockwise to the “up” position to increase the torque limit
setting. Rotate the control knob counterclockwise to the “dn” position to decrease
the torque limit setting.
5) Repeatedly cycle the selector knob to the Remote (Next) position and the Off
position to advance though the remaining menu items until the EP (Exit Program)
is displayed.
6) If it is desirable to exit, use the control knob “up” to display a 1 value. Use the
selector knob Remote (Next) to select exit. The system and display will return to
normal operating mode.
Section 7: Field Setup Using Local Controls
Mar 2013
NOTE:
Use Selector Knob to select Menu and Use Control Knob to select Units.
Table 6. Setup Mode Parameter Values
Menu Parameter Value Units Default
Fd Field diagnostics 0-27 Fault code 0
AH Display Alarm History? 0-1
A1 1st latest alarm Alarm None
A2 2nd older alarm Alarm None
A3 3rd older alarm Alarm None
A4 4th older alarm Alarm None
A5 5th older alarm Alarm None
A6 6th older alarm Alarm None
A7 7th older alarm Alarm None
A8 8th older alarm Alarm None
P1 1st passcode 00-99 None 00
Field Setup Using Local Controls
0=No, Skip to 1st Passcode
1=Yes, Display History
21
Page 26

Section 7: Field Setup Using Local Controls
Mar 2013
P2 2nd passcode 00-99 None 00
Table 6 continued......
Menu Parameter Value Units Default
C0 Control Mode 0-1
C1 ESD Action 0-1
C2 Torque Limit 15-99 Torque in % 27
C3 Network Node Address 1-99
C4 Network Baudrate 0-3
C5 Network Parity 0-2
C6 Network Stop Bits 1-2
C7
C8 Disable Jog Control 0-1 0=No, 1=Yes 1
C9 Disable Display Timeout 0-1 0=No, 1=Yes 1
CA Home Port Number (0 or 8) 0-1 0=0, 1=8 0
HP
HC Accept Home Port Calibration 0 or 43 0=No, 43=Yes 0
d1 Delete port 1 0-1 0=No, 1=Yes 0
d2 Delete port 2 0-1 0=No, 1=Yes 0
d3 Delete port 3 0-1 0=No, 1=Yes 0
d4 Delete port 4 0-1 0=No, 1=Yes 0
d5 Delete port 5 0-1 0=No, 1=Yes 0
d6 Delete port 6 0-1 0=No, 1=Yes 0
d7 Delete port 7 0-1 0=No, 1=Yes 0
E1 Edit 1st Passcode 00-99 None 00
E2 Edit 2nd Passcode 00-99 None 00
EP Exit Program? 0-1
Calibrate Motor
Characteristics
Home Port
(User selected)
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
0=Discrete
1=Network
0=Stop/Stayput
1=Go to Home Port
99 = selection of default address
254 for other protocol CAM
modules
0=4800 1=9600
2=19200 3=38400
0=None
1=Odd
2=Even
1=1 Stop bit
2=2 Stop bits
0-1 None 81
0-7 Port No. 1-7 0
0=No, Return to last menu
1=Yes, Exit
1
1
99
2
0
1
22
NOTE:
RDM port conguration is xed at 9600,N,8,1 address 254 and may not be changed by the
user. Only the network port conguration may be changed. The address programmed for
the network port will be accepted by the RDM port in addition to address 254.
Field Setup Using Local Controls
Page 27

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Section 8: Field Diagnostics
Should trouble occur, the Field Diagnostics feature may be used to help diagnose the
problem. Field diagnostics provides more detailed and denitive feedback than the alarms,
i.e. possible root cause(s) for the alarm. For example, there may be many causes for an
Actuator Fail alarm. Field diagnostics may be displayed by MPA Cong as shown in Figure
16 (highlighted in yellow).
Figure 16
Section 8: Field Diagnostics
Mar 2013
Field diagnostic may be displayed by the local display by entering setup mode. In Setup
Mode, the rst entry is Field Diagnostics having visible code “Fd”. Its value is 0 if there is no
fault. If there is a fault, its code is from 1 to 28. If there are multiple faults, only the rst of
those faults in the following list will be seen. When that fault is corrected, the next fault will
display if present.
8.1 Fd Fault Codes
1. MCP23 Chip will not initialize (pertains to a three phase AC motor type)
2. Motor is wired to turn in the wrong direction
3. Self-detected wiring fault (Emergency Shut Down - LE)
4. Host transmitted ESD command (Emergency Shut Down - LE)
5. Lost Phase, pertains to a three phase AC motor type - PH
6. Motor has over-heated (Motor overload - OL)
7. Stall Alarm. No motor movement after excess time of power applied - SA
8. Lost Control Voltage (Loss of power for motor control - LC)
9. Contactor is engaged, but there is no AUX feedback (= Control Failure)
Field Diagnostics
23
Page 28

Section 8: Field Diagnostics
Mar 2013
10. SPI communication failure for GPA chip
11. AUX feed-back alarm (= Incorrect AUX feedback from contactor)
12. Three consecutive overshoots of the port
13. RDM is not communicating and is required (Communication Error - CE)
14. No input from Torque Encoder. Check for cable connection problems or encoder
15. Torque OCF bit is low. Power supply to the Torque Encoder is likely at fault
16. Encoder reports that Torque Encoder value is invalid
17. Torque Encoder Parity error
18. Torque Encoder Magnet is out of range
19. Over-Torque. Torque value is greater than the Torque Limit
20. Value from the Torque Encoder is out of range (invalid instead of over-torque)
21. No input from Position Encoder. Check for cable connection problems or encoder
22. Position OCF bit is low. Power supply to the Position Encoder is likely at fault
23. Encoder reports that Position Encoder value is invalid
24. Position Encoder Parity error
25. Position Encoder Magnet is out of range
26. Encoder Position inconsistent consecutive times. Expect Position Encoder problem
27. Stopped between ports (non-critical)
28. Home Port is the last port reached (stopped at Home Port, non-critical and may be
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
failure
failure
normal operation)
24
Field Diagnostics
Page 29

Operation and Maintenance
Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Part Number: MPA-400-0711, Rev. N
Section 9: Remote Network Control
Section 9: Remote Network Control
9.1 Modbus RTU
The native language of the MPA is Modbus RTU. If other network protocols such as
Foundation Fieldbus are used, a Communication Adapter Module (CAM) module is installed
to translate between the selected protocol and Modbus. The controller supports Modbus
function codes 01,02,03,04,05,06,15,16. Following are the memory maps for discrete I/O
and unsigned 16-bit Holding registers used in this application. All memory maps shown are
zero based, i.e. register 1 = holding register 40002. reading Input Bit 0 using FC02 = 10001.
9.1.1 Discrete Input Map (Valve Status) and Alarms
Table 7. Discrete Input Map (Valve Status) and Alarms
Bit Input Detail
0 16 At commanded port within 1 degree
1 17 At commanded port within 2 degrees
2 18 Flow selector moving
3 19 Wrong direction alarm
4 20 Selector switch Local/Manual Mode
5 21 Selector switch Remote/Auto Mode
6 22 Over torque alarm
7 23 Stop between ports alarm
8 24 Flow selector stall alarm
9 25 Power monitor alarm
A 26 Motor thermal overload alarm
B 27 Phase monitor alarm
C 28 Local ESD alarm
D 29 Actuator fail alarm
E 30 No input (always zero)
F 31 Unit alarm (above alarms are OR’ed)
Mar 2013
Remote Network Control
These same status and alarm bits are duplicated in Modbus Registers 01, 06, 09
(40002, 40007, 40010) in the same bit sequence shown above.
9.1.2 Coil Map (Discrete Network Control)
There are only two coils used for discrete network control as follows. When Coil 10
is set by the host, the actuator resets the coil automatically when the command is
executed. When Coil 11 is set, the host must reset the coil before the actuator will
respond to any other command.
Table 8. Coil Map (Discrete Network Council)
Coil Detail
10 Go to next port
11 Host ESD command, Go to Home Port
2525
Page 30
Section 9: Remote Network Control
Mar 2013
9.1.3 Holding Register Map
These are the recommended registers to use. Other registers are active but the
user is cautioned not to use the data or write to any other registers.
Table 9. Monitor and Control Registers
Register Detail
01 Actuator status and alarms in the bit sequence shown for the input map
06 Actuator status and alarms in the bit sequence shown for the input map
07
09 Actuator status and alarms in the bit sequence shown for the input map
11
13 Raw 12-bit position encoder value (0-4095)
14 Port position (0-4095)
15 Torque (0-4095)
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
Last Port position reached (0-7 or 1-8)
(See CA Home port number on Page 22)
Port position Setpoint (0-7 or 1-8)
(Data must be a single digit between 0 and 7 or 1 and 8 depending on Home
conguration) (See CA Home port number on Page 22) (MPA returns 255
(0xFF) in register 11 when the commanded port is reached)
Table 10. Configuration and Calibration Registers
Register Detail
211 Port 0 calibration value (0-4095)
212 Port 1 calibration value (0-4095)
213 Port 2 calibration value (0-4095)
214 Port 3 calibration value (0-4095)
215 Port 4 calibration value (0-4095)
216 Port 5 calibration value (0-4095)
217 Port 6 calibration value (0-4095)
218 Port 7 calibration value (0-4095)
Note: After the HC command is executed,
Register 211 will be zero and remain zero.
WARNING
Extreme caution must be used when writing port calibration values to registers
211 through 218 (40212 thru 40219). Only values read from these registers shall
be written to them. The purpose of these registers is to allow the network host to
store the port calibration values and then write them back to the actuator in case
of replacement of the CPU module.
2626
Remote Network Control
Page 31

Operation and Maintenance
Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Part Number: MPA-400-0711, Rev. N
9.2 Foundation Fieldbus (FF)
The MPA uses a CAM18 to convert between Modbus and Foundation Fieldbus. Refer to
M2CP CAM18 & TEC2000 CAM218 Installation, Operation and Instruction Manual for
installation and setup of the FF link. Relations between the Modbus and FF maps are
identied as follows:
Foundation Fieldbus
Modubus Discrete Input
Map
Input DI PV / Out_D
16 At port within 1 degree 1
17 At port within 1 degree 2
18 Flow selector moving 4
19 Wrong direction alarm 5
Modubus Discrete Input Map Actuator Status (Channel 5)
Note: Channel 5 has only 1 discrete value and depends upon Selector Switch
position.
Input AUTO OFF LOCAL
SS Local/Manual 3
20
Selector Switch Off 2
21 SS Remote/Auto 0
22 Over torque alarm 56 58 59
23 Stop between ports alarm 52 54 55
24 Flow selector stall alarm 9 11 12
25 Power monitor alarm 12 14 15
26 Motor thermal overload alarm 20 22 23
27 Phase monitor alarm 76 78 79
28 Local ESD alarm 40 42 43
29 Actuator fail alarm 44 46 47
Actuator Readback (Channel 2)
Note: Channel 2 has only 1 value
DI PV / Out_D
Section 9: Remote Network Control
Mar 2013
Remote Network Control
Coil Map (Discrete Network Control) Actuator Command (Channel 1)
Coil DO SP / Out_D
10 Go to Next Port 1
Coil Map (Discrete Network Control) ESD Command (Channel 10)
Coil DO SP / Out_D
11 Host ESD Command 1
Monitor and Control Registers Analog input / Output Channels
Register
11 Port Position Setpoint (0-7 or 1-8) Setpoint AO (Channel 3) SP / OUT
14 Port position (0-4095) Position AI (Channel 4) SP / OUT
15 Torque (0-99%) Torque AI (Channel 18) SP / OUT
2727
Page 32

Section 9: Remote Network Control
Mar 2013
Modbus Foundation Fieldbus
Configuration and Calibration Registers MAO (Channel 19) MAI (Channel 20)
Register Parameter Parameter
211 Port 0 calibration IN_1 OUT_1
212 Port 1 calibration IN_2 OUT_2
213 Port 2 calibration IN_3 OUT_3
214 Port 3 calibration IN_4 OUT_4
215 Port 4 calibration IN_5 OUT_5
216 Port 0 calibration IN_6 OUT_6
217 Port 0 calibration IN_7 OUT_7
218 Port 0 calibration IN_8 OUT_8
NOTE:
Input and Output parameters are the number of hardware registers that are connected to
the I/O block. They dene the transducers to be used going to or from the physical world.
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
WARNING
Extreme caution must be used when writing port calibration values to registers 211
through 218. Only values read from these registers shall be written to them. The purpose
of these registers is to allow the network host to store the port calibration values and then
write them back to the actuator in case of replacement of the CPU module.
NOTE:
The network host may write a Port Position Setpoint to Channel 3 (SP/OUT) as a 12-bit
unsigned integer analog value corresponding to 0% to 8% where the percentage relates to
the port number 0 to 8. The analog value is calculated as absolute value of Port Number /
100 * 4095. Example: Analog value for Port 6 = 6/100*4095=245.7 = 245. The actuator will
accept the percentage analog value within a tolerance as shown below:
Port 0 = 0 If CA is congured as 1 for Home Port = 8,
Port 1 = 39 – 42 the MPA will accept either 0 or 327 for setpoint
Port 2 = 79 – 82 of Home Port. The acceptable range for Port 8
Port 3 = 120 – 123 is 325 to 329. (see Page 22 for CA conguration)
Port 4 = 162 – 165
Port 5 = 203 – 206
2828
Port 6 = 244 – 247
Port 7 = 284 – 288
Remote Network Control
Page 33

Operation and Maintenance
Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Part Number: MPA-400-0711, Rev. N
Section 9: Remote Network Control
Mar 2013
9.3 Profibus DP Reduntant Networks with Redcom
The MPA uses CAM20 to convert between Mosbus RTU and Probus DP. This section
describes the data mapping between the Probus DP host and MPA Modbus map. The
mapping allows the Probus DP host to control the Flow Selector and monitor the actuator
status. The control information is mapped directly to words in the Probus Output data
and status information is mapped directly to words in the Probus Input data.
Table 11. Output Data
Location Bit
Word Byte 7 6 5 4 3 2 1 0
1 1
1 2
2 3
2 4
3 5
3 6
Not
used
Not
used
Not used
Not
used
Not
used
Flow Selector Port Position Setpoint (0-7) Single Bit
Not
used
Host ESD
Command
Not used
Go to
Next Point
Not
used
Not
used
Table 12. Input Data
Location Bit
Word Byte 7 6 5 4 3 2 1 0
1 1
1 2 Not used
2 3
2 4
3 5
3 6
4 7
4 8
5 9
5 10
6 11
6 12
Not
used
Unit
Alarm
Stopped
Between
Ports
Not
used
Not used
Over
Torque
Alarm
Not
used
Not
used
Selector
Remote /
Auto
Flow Selector Position (0-7) Single Bit
Not
used
Not
used
Local ESD
Alarm
Selector
Local /
Manual
Torque (0-99%)
Not used
Not used
Not used
Host ESD
Monitor
Phase
Monitor
Alarm
Wrong
Direction
Alarm
Motor
Thermal
Alarm
Flow
Selector
Moving
Not used
Power
Monitor
Alarm
Within 2
degrees
of port
Actuator
Fail Alarm
Selector
Stall Alarm
Within 1
degree of
Flow
port
Remote Network Control
2929
Page 34

Section 9: Remote Network Control
Mar 2013
9.4 DeviceNet
The MPA uses CAM09 to convert between Modbus and DeviceNet. This section describes
the data mapping between the DeviceNet host and MPA Modbus map. The mapping
allows the DeviceNet host to control the Flow Selector and monitor actuator status. The
control information is mapped directly to words in the DeviceNet Output data and status
information are mapped directly to words in the DeviceNet Input data.
Table 13. Output Data
Location Bit
Word Byte 7 6 5 4 3 2 1 0
1
2
3
1 Not used
2 Not used
3
4
5
6
Operation and Maintenance
Part Number: MPA-0400-0313, Rev. N
Host ESD
Command
Flow Selector Port Position Setpoint (0-7) Single Bit
Not used
Go to
Next Point
Not used
Table 14. Input Data
Location Bit
Word Byte 7 6 5 4 3 2 1 0
0 Not used Not used Not used Not used Not used Not used Not used
1
1 Not used Not used Not used Not used Not used
Stopped
2
Between
Ports
2
Unit
3
Alarm
4
3
5
6
4
7
8
5
9
10
6
11
Over
Torque
Alarm
Not used
Selector
Remote /
Auto
Actuator
Fail Alarm
Flow Selector Position (0-7) Single Bit
Selector
Local /
Manual
Local ESD
Alarm
Torque (0-99%)
Not used
Not used
Wrong
Direction
Alarm
Phase
Monitor
Alarm
Flow
Selector
Moving
Motor
Thermal
Alarm
Within 2
Degrees
of port
Power
Monitor
Alarm
Within 1
Degree of
Selector
Alarm
port
Flow
Stall
3030
Remote Network Control
Page 35

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
Appendix
Mar 2013
Appendix A: EC Declaration of Conformity
Certicate
Appendix
31
Page 36

Appendix
Mar 2013
Appendix B: Wiring Diagrams
B.1 Three Phase Power
Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
32
Appendix
Page 37

Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
B.2 Single Phase Power
Appendix
Mar 2013
Appendix
33
Page 38

Appendix
Mar 2013
B.3 24VDC Power
Operation and Maintenance
Part Number: MPA-400-0313, Rev. N
34
Appendix
Page 39

Contact Us: Emerson Process Management, Valve Automation facilities at your nearest location:
North & South AmericA
19200 Northwest Freeway
Houston, TX 77065
T +1 281 477 4100
F +1 281 477 2801
2500 Park Avenue West
Mansfield, OH 44906
USA
T +1 419 529 4311
F +1 419 529 3688
13840 Pike Road
Missouri City, Texas 77489
USA
T +1 281 499 1561
F +1 281 499 8445
Av. Hollingsworth,
325, Iporanga Sorocaba,
SP 18087-105
Brazil
T +55 15 3238 3788
F +55 15 3228 3300
middle eASt & AfricA
P. O. Box 17033
Dubai
United Arab Emirates
T +971 4 811 8100
F +971 4 886 5465
P. O. Box 105958
Abu Dhabi
United Arab Emirates
T +971 2 697 2000
F +971 2 555 0364
P. O. Box 3911
Al Khobar 31952
Saudi Arabia
T +966 3 814 7560
F +966 3 814 7570
P. O. Box 10305
Jubail 31961
Saudi Arabia
T +966 3 340 8650
F +966 3 340 8790
P. O. Box 32281
Doha
Qatar
T +974 4 576777
F +974 4 315448
24 Angus Crescent
Longmeadow Business Estate
East P.O. Box 6908;
Greenstone; 1616
Modderfontein, Extension 5
South Africa
T +27 11 451 3700
F +27 11 451 3800
europe
Asveldweg 11
7556 BR Hengelo (O)
The Netherlands
T +31 74 256 1010
F +31 74 291 0938
Siemensring 112
47877 Willich
Germany
T +49 2154 499 660
F +49 2154 499 6613
25, Rue de Villeneuve
Silic – BP 40434
94583 Rungis
France
T +33 1 49 79 73 00
F +33 1 49 79 73 99
Via Montello 71/73
20038 Seregno (Milan)
Italy
T +39 0362 2285 207
F +39 0362 2436 55
6 Bracken Hill
South West Industrial Estate
Peterlee SR8 2LS
United Kingdom
T +44 191 518 0020
F +44 191 518 0032
2A Szturmowa Str
02-678 Warsaw
Poland
T +48 22 45 89 237
F +48 22 45 89 231
C/ Francisco Gervás, 1
28108 Alcobendas – Madrid
Spain
T +34 0913 586 000
F +34 0913 589 145
Letnikovskaya Str. 10-2
115114 Moscow
Russia and FSU
T +7 495 981 98 11
F +7 495 981 98 10
ASiA pAcific
No. 9 Gul Road
#01-02 Singapore 629361
T +65 6501 4600
F +65 6268 0028
9/F Gateway Building
No. 10 Ya Bao Road
Chaoyang District
Beijing 100020
P.R.China
T +86 10 8572 6666
F +86 10 8572 6888
No.1 Lai Yuan Road
Wuqing Development Area
Tianjin 301700
P.R.China
T +86 22 8212 3300
F +86 22 8212 3308
Lot 13112, Mukim Labu
Kawasan Perindustrian Nilai
71807 Nilai, Negeri Sembilan
Malaysia
T +60 6 799 2323
F +60 6 799 9942
471 Mountain Highway
Bayswater, Victoria 3153
Australia
T +61 3 9721 0200
F +61 3 9720 0588
Delphi B Wing, 601 & 602
6th Floor, Central Avenue
Powai, Mumbai – 400 076
India
T +91 22 6662 0566
F +91 22 6662 0500
Please visit our web site for up to date product data.
www.bettis.com
All Rights Reserved.
We reserve the right to modify or improve the designs or specifications of the products mentioned in this manual at any time without
notice. Emerson Process Management does not assume responsibility for the selection, use or maintenance of any product. Responsibility
for proper selection, use and maintenance of any Emerson Process Management product remains solely with the purchaser.
©2013 Emerson Electric Co.
 Loading...
Loading...