

Page 1

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
POSI+ CANOPEN USER MANUAL
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
ABSOLUTE ROTARY ENCODER WITH CAN-BUS INTERFACE
POSI+ RANGE
USER MANUAL
Page 2

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
1. Introduction.............................................................................................................................................3
1.1 Absolute rotary encoder......................................................................................................................3
3
1.2 CANopen technology..........................................................................................................................3
1.3 CAN Communication Reference Model............................................................................................5
1.4 Definitions..............................................................................................................................................6
1.5 Troubleshooting ....................................................................................................................................7
2. Device Configuration.............................................................................................................................8
2.1. CANopen Data Transmission..............................................................................................................8
Data Transmission - COB-ID
2.2. Service data communication ............................................................................................................9
Request for parameter – Parameter to the encoder - Index / Sub-index - SDO examples:
Request of a value by the master from the slave
Writing of a value by the master into the slave
2.3 Process data communication........................................................................................................... 11
Synchronous- Cyclical (asynchronous) - Response to an RTR message -Transmission of the c urrent
position
3. Operational mode................................................................................................................................12
Init - Pre-operational mode - Operational m ode - Stopped mode - Reset of the absolute rotary
encoder
4.Communication objects 1000h to 1FFFh (DS 301)..............................................................................14
Object 1010h: Store parameters
Object 1011h: Restore Default parameters
Object 1800h: 1st Transmit PDO communication Parameter
Transmission mode
COB-ID Structure
Inhibit Time (Sub-index 3)
Event Timer (Sub-index 5)
Object 1801h: 2nd Transmit PDO communication Parameter
5. Manufacturer-specific Objects 2000h to 5FFFh.................................................................................20
Object 2002h: Speed
Object 2005h: PDO type
Object 2100h: Transmission Rate
Object 2101h: Node Number
6. Encoder-specific objects 6000h to 9FFFh (DS 406)............................................................................ 22
Object 6000h: Operating Parameters
Object 6001h: Measuring Units per revolution
Object 6002h: Total measuring range in measuring units
Object 6003h: Preset Value
Object 6004h: Position Value
Object 6200h: Cyclic Timer
Object 6500h: Operating Status
Object 6501h: Singleturn Resolution (Rotary)
Object 6502h: Number of Distinguishable Revolutions
Object 6503h: Alarms
Object 6504h: Supported Alarms
Object 6505h: Warnings
Object 6506h: Supported Warnings
Object 6507h: Profile and Software Version
Object 650Ah: Module identification
Object 650Bh: Serial Number
Appendix: Compatibility with with the old encoders SHM5/SHU9/CHU9/MHM5.............................. 31
CONTENTS
Page 2 Version 1.02
Page 3

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
1. Introduction
This manual describes the implementing and confi guration of an absolute rotary encoder with
CANopen interface. The device fullfills the requirements of a CANopen device regarding the
device specification DS406 of the CANopen user group.
1.1 Absolute rotary encoder
The basic principle of an absolute rotary encoder is the optical sampling of a transparent code
disc which is fixed with the driving shaft.
The absolute rotary encoder has a maximum resolution of 8192 steps per revolution (13 Bit). The
Multi-Turn version can detect up to 65536 revolutions (16Bit). Therefore the largest resulting
resolution is 29 Bit = 2
standard Multi-Turn version 29 Bit.
Open functions. The following modes can be programmed and ena bled or disabled:
- RTR Message (Polled mode)
- Cyclic Mode
- Sync Mode
The protocol supports the programming of the following addi tional functions:
- Code sequence (Complement)
- Resolution per revolution
- Total revolutions
- Preset value
- Two limit switches
- Baudrate
- Node number
The general use of absolute rotary encoders with CAN-Bus interface using the CAN Open
protocol is guaranteed.
1.2 CANopen technology
CAN stands for Controller Area Network and was developed by the company Bosch for
applications within the automobile are a. In the meantime CAN has become i ncreasi ngl y used for
industrial applications. CAN is a multi-masterable system, i.e. all users can access the bus at any
time as long as it is free. CAN doesn’t operate with addresses but with mess age identifiers. Access
to the bus is performed according to the CSMA /CA principle (carrier sense multipl e access with
collision avoidance), i.e. each user liste ns if the bus i s free, and i f so, is allowed to send messa ges.
If two users attempt to access the bus simultaneously, the one with the highest priority (lowest
identifier) receives the permi ssi on to send. Us ers with l ower pri ority interrupt their data tr ansfer and
will access the bus when it is free again. Messages can be received by every participant.
Controlled by an acceptance filter the participant accepts only messages that are intended for
it.
29
= 536.870.912 steps. The standard Single-Turn version has 13 Bit, the
Version 1.02 Page 3
Page 4
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
CANopen
Transmission Technology: Two-core cable
Baud rates: 10 kBaud up to 1 MBaud
Participants: maximum 127
Cable Length: 30 m for 1 MBaud
1000 m for 20 kBaud
The data communication is done via message telegram s. In general, telegrams can be spli t in a
COB-Identifier and up to 8 foll o wing byte s. Th e C OB-Identifier, which determines the priority of the
message, is made from the function code and the node number.
The node number is uniquely assi gned to each user. The function code vari es according to the
type of message transmitted:
- Administrative messages (LMT, NMT)
- Servi ce data objects (SDOs)
- Process da ta Objects (PDOs)
- pre-defined messages (synchronization, emergency messages)
PDOs (Process Data Objects) are needed for real time data exchange. Since this messages
possess a high priority, the function code and therefore the identi fier are low. SDOs (service data
objects) are necessary for the bus node configuration (e.g. transfer of device parameters).
Because these message telegrams are tranferred acyclicly (usually only while powering up the
network), the priority is low.
BEI IDEACOD rotary encoders with CANopen interface support all CANopen functions. The
following operating modes can be programmed:
- Response to a RTR message (Polled mode):
The position value is only given upon request
- Cyclic Mode:
The position value is written cyclicall y (interval adjustable) to the bus
- Sync mode:
After receiving a sync message by the host, the encoder answers with the current
process value. If a node is not requi red to ans wer after each sy nc message , a par ameter
sync counter can be programmed to skip a certain number of sync messages before
answering again
Further functions (direction of rotation, resolution,etc..) can be parameterized. BEI IDEACOD
rotary encoders correspond with the class 2 profile for encoder (
whereby the characteristics of rotary encoders with CANopen interface are defined. For
configuration and parameterization various sof tware tools are available from different prov iders.
With the help of the provided EDS file (electronic data shee t) si mpl e line-up and program mi ng ar e
possible.
DS 301 V4.0.2, DS 406 V3.1),
Page 4 Version 1.02
Page 5
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
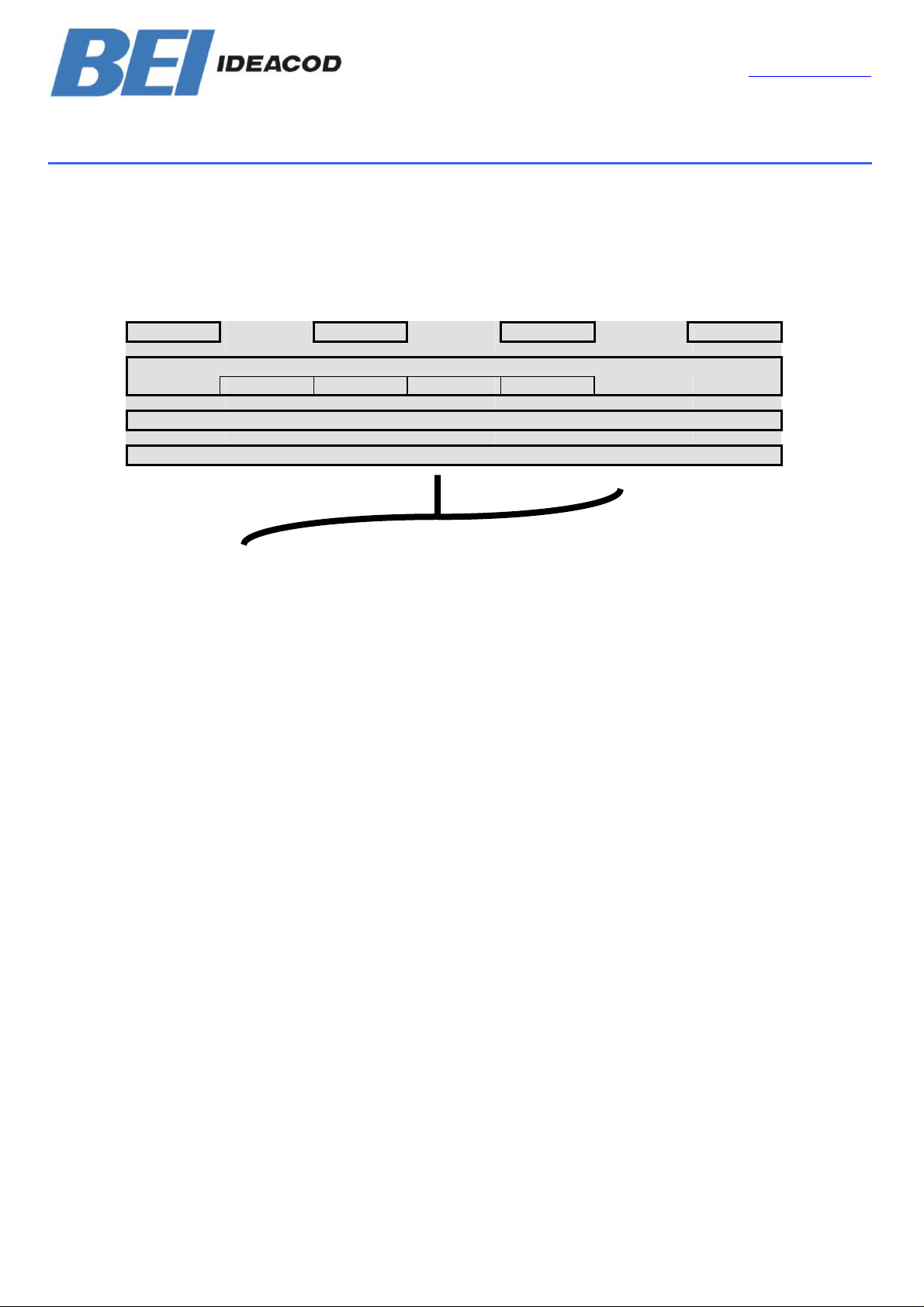
1.3 CAN Communication Reference Model
The communication concept can be descri bed similar to the ISO-OSI Reference Model:
Device A Device B Device C Device X
ISO/OSI Layer 7: CAL
NMT DBT LMT CMS
ISO/OSI Layer 2: Data Link Layer
ISO/OSI Layer 1: Physical Layer
CANbus
The communication model* supports s ynchronous and asynchronous messages. With respect to
the functionality four different message objects are provided:
Administrational Messages (LMT, NMT)
Service Data Messages (SDO)
Process Data Messages (PDO)
Pre-defined Messages (Synchronisation and Emergency Messages)
Further information is available at:
CAN in Automation (CiA) International Users and Manufac turers Group e.V.
Am Weichselgarten 26
D-91058 Erlangen
(*) Reference: CAN Application Layer for Industrial Applications
CiA Draft Standard 201 ... 207, Version 1.1
CAL-based Communication Profile for Industrial Systems
CiA Draft Standard 301
Version 1.02 Page 5
Page 6

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
1.4 Definitions
CAN Controller Area Network
CAL CAN Application Layer
CMS CAN Message Specification.
One of the service elements of the application layer in the CAN Reference Model.
COB Communication Object. (CAN message)
A unit of transportation in a CAN Network.
Data must be sent across a Network inside a COB.
COB-ID COB-Identfier. Identifies a COB uniquely in a Network. The i dentifier determines the
priority of that COB.
LMT Layer Management. One of the service elements of the application layer in the CAN
Reference Model. It serves to configure parameters of each layer in the CAN
Reference Model.
NMT Network Management. One of the service elements of the application layer in the CAN
Reference Model. It performs initialisation, configuration and error handling in a CAN
network.
SDO Service Data Object. A data object with low pri ority to configure a CAN node.
PDO Process Data Object. A data object with high priority to transmit data in synchron ous and
asynchronous modes.
Additionally, following abbreviations are used in the manual:
APV Absolute Position Value
CW Clockwise. Turning direction as seen on shaft.
CCW Counterclockwise. Turning direction as seen on shaft.
FC Function code. It determines the kind of message, which i s sent across the CAN
network.
NN Node number. It determines uniquely the CAN device.
PV Preset value
PCV Process value
Page 6 Version 1.02
Page 7
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
1.5 Troubleshooting
Malfunction of the position value during transmission
Problem:
During the transmission of the position value occasional malfunctions occurs.
Possible solution:
Check, if the last bus node has switched on the terminal resistor.
Too much ERROR-Frames
Problem:
The bus load is too high in case of too much error frames.
Possible solution:
Check if all bus node has the same baudrate. I f one node has another baudrate error frames
are produced automatically.
Installation hints
Both the cable shielding and the metal housi ngs of encoders and subse que nt el ectroni cs hav e a
shielding function. The housing must have the same potential and be connected to the main
signal ground over the machine chassi s or by means of a separate potenti al compensating line.
Potential compensating lines should have a minimum cross section of 6 mm2.
Do not lay signal cable in the di rect vicinity of interference sources (air clearance > 100 m m (4
in.).
A minimum spacing of 200 mm (8 in.) to inductors is usually required, for example in switch-mode
power supplies.
Configure the signal lines for minimum l ength and avoid the use of intermediate terminals.
In metal cable ducts, sufficient decoupling of signal lines from interference signal transmitting
cable can usually be achieved with a grounded partition.
Version 1.02 Page 7
Page 8
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
2. Device Configuration
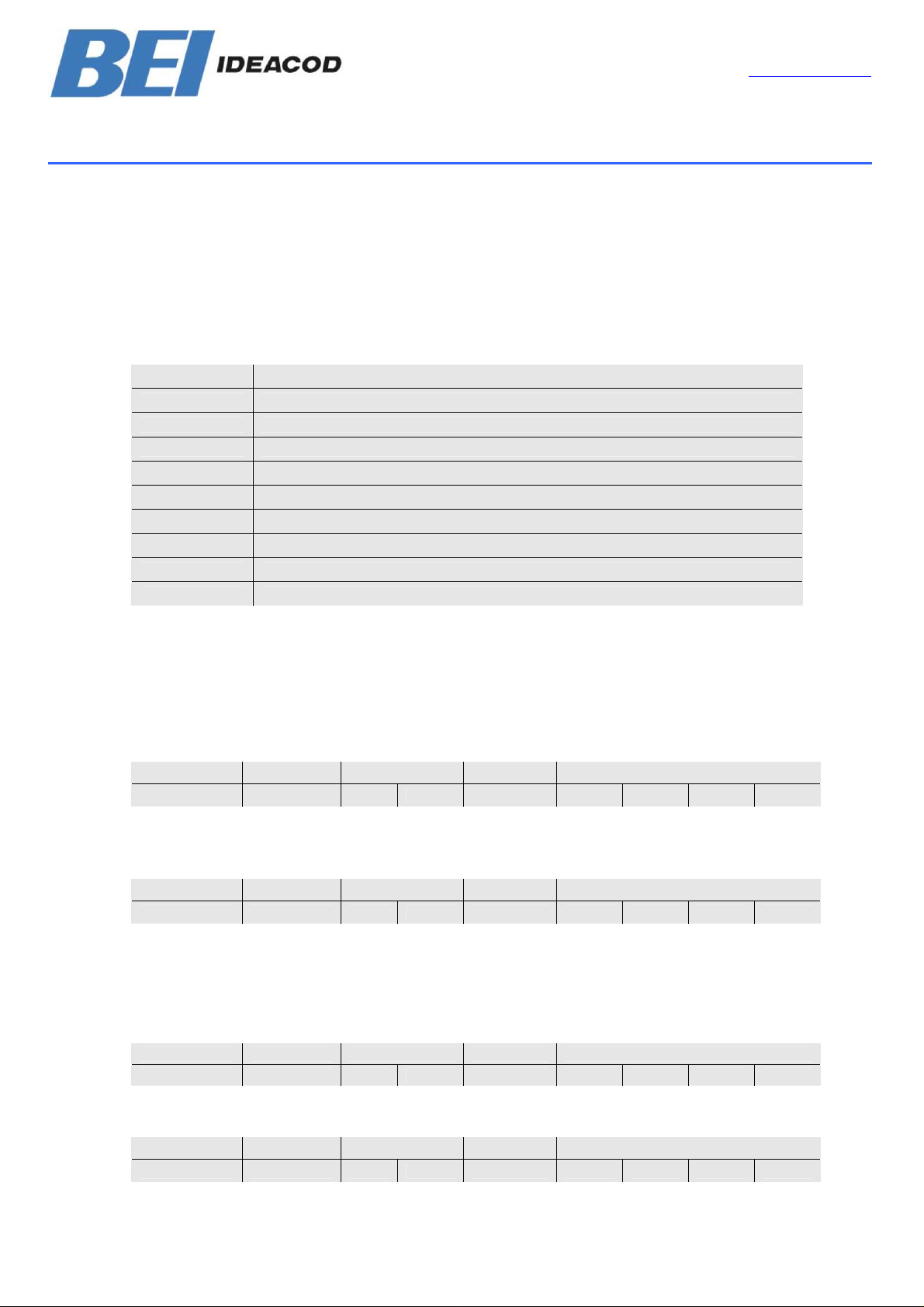
2.1. CANopen Data Transmission
Data Transmission
Data is transmitted in a CANopen network in the form of messages. These messages basically
consist of a COB-ID and 8 data bytes.
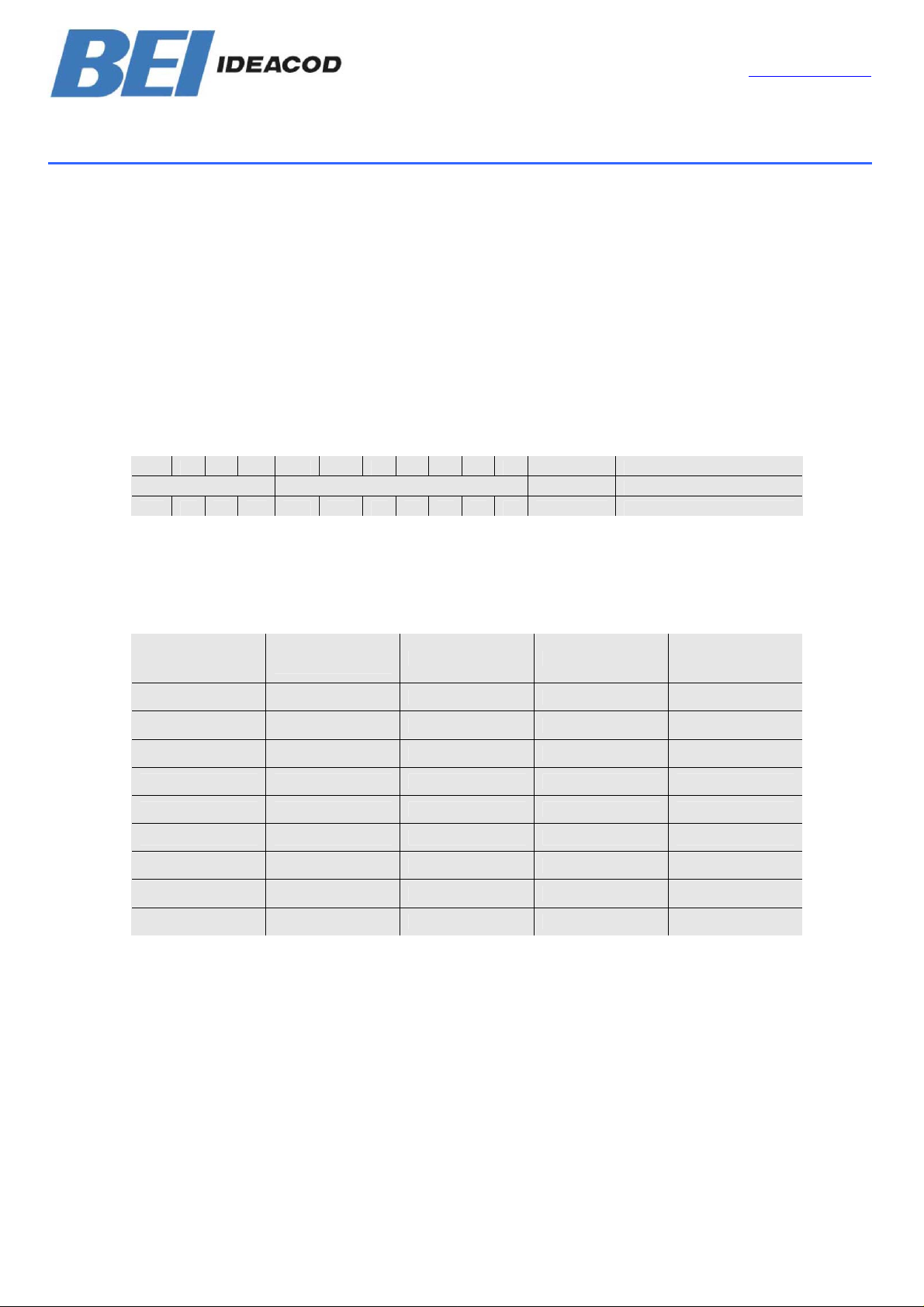
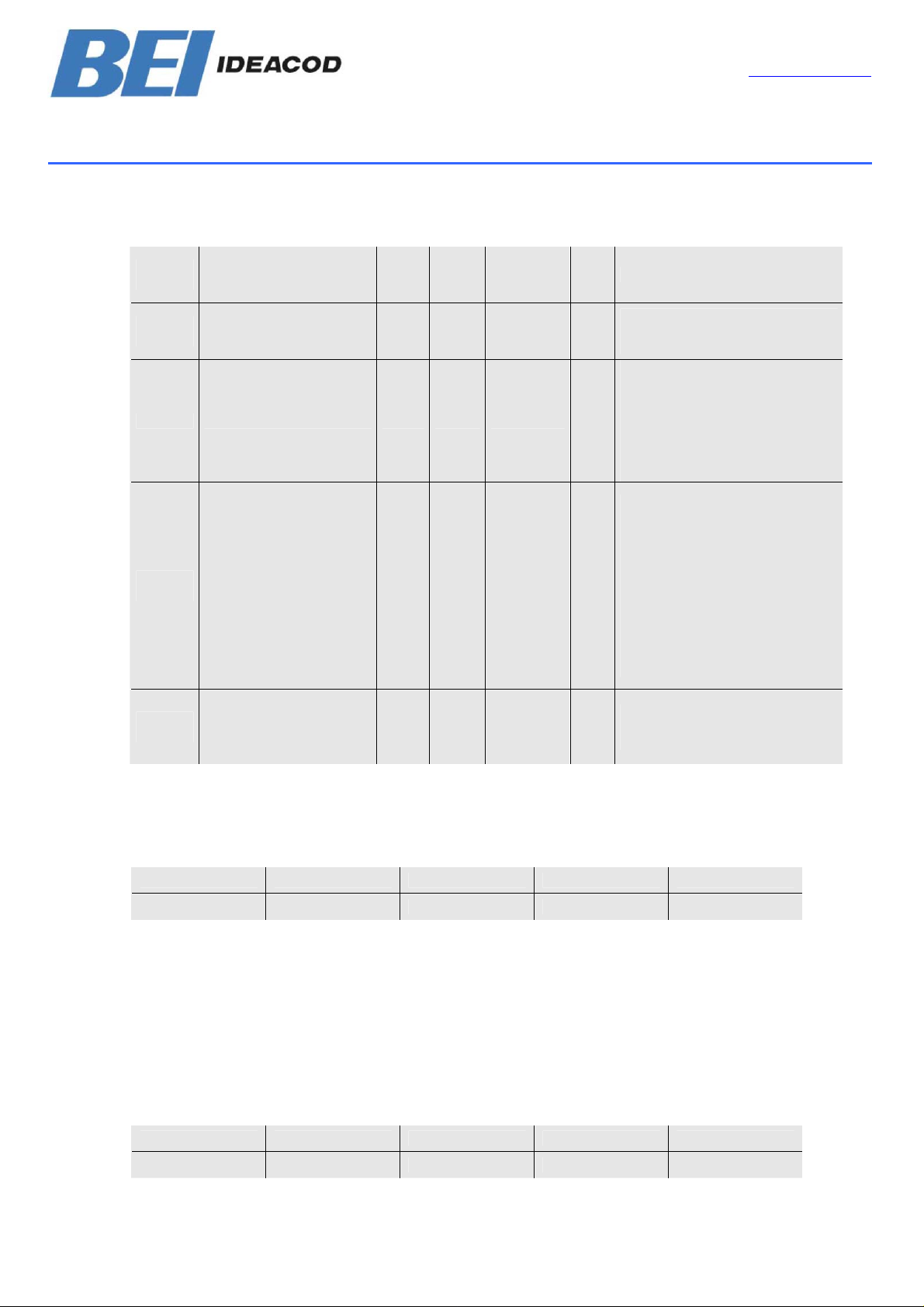
COB-ID The 11-bit COB-ID is made up as follows:
10 9 8 7 6 5 4 3 2 1 0
Function code Node number
X X X X X X X X X X X X free, to be selected
The COB-ID only determines the messag e object. It consists of a function code, which identi fies
the message class and the node number, which is the absolute encoder address. The node
number is fixed using the CAN interface.
The following function codes are avail abl e (rx and tx as viewed by the master):
Object
Function code
(binary)
COB-ID result Hex. Priority class*
NMT 0000 0 0
SYNC 0001 128 80 0
Emergency 0010 129-255 81-FF 0,1
PDO (tx) 0011 385-511 181-1FF 1,2
PDO (rx) 0100 513-639 201-27F 2
PDO (tx) 0101 641-767 281-2FF 2,3
PDO (rx) 0110 769-895 301-37F 3,4
SDO (tx) 1011 1409-1535 581-5FF 6
SDO (rx) 1100 1537-1663 601-67F 6,7
* Priority: 0= maximum priority, 7=minimum priority
Page 8 Version 1.02
Page 9

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
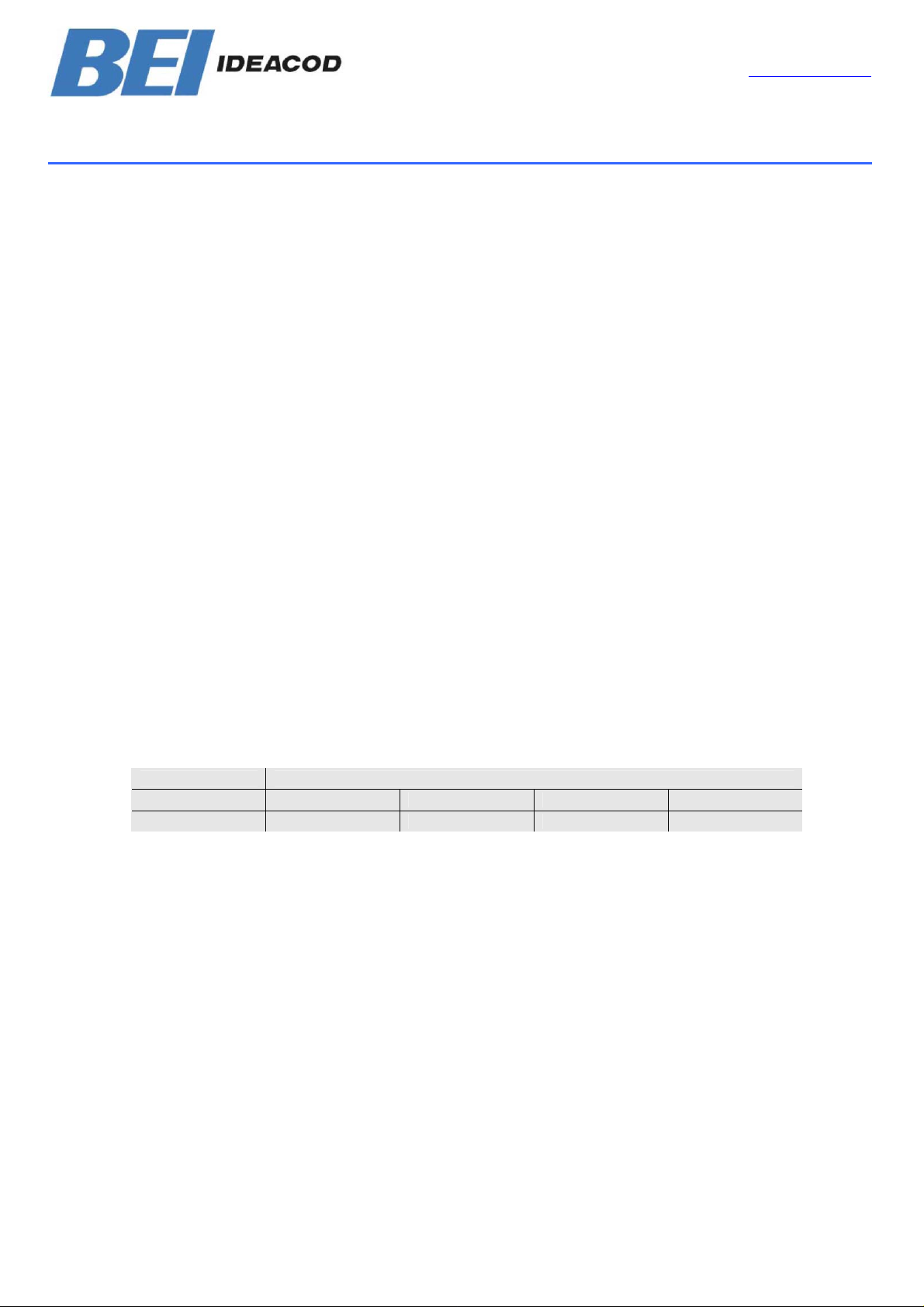
2.2. Service data communication
The service data objects correspond to the standards of the CiA. It is possible to access an objec t
via index and subindex. The data can be requested or where appli cabl e written into the object.
COB-ID Command Index Sub Index Service Data (Parameters)
11 bit Byte 0
Byte 1
(LSB)
Byte 2
(MSB)
Byte 3
Byte 4
(LSB)
Byte 5 Byte 6
Byte 7
(MSB)
COB-ID
An SDO-COB ID is composed as follows:
Master -> Encoder : 600h + Node ID
Encoder -> Master : 580h + Node ID
Request for parameter
Command Function Description
40h Master -> Encoder Request for parameter
43h Encoder -> Master Response 4 bytes (unsigned 32)
4Bh Encoder -> Master Response 2 bytes (unsigned 16)
4Fh Encoder -> Master Response 1 byte (unsigned 8)
80h Encoder -> Master Error
Parameter to the encoder
Command Function Description
23h Master -> Encoder Write 4 bytes (unsigned 32)
2Bh Master -> Encoder Write 2 bytes (unsigned 16)
2Fh Master -> Encoder Write 1 byte (unsigned 8)
60h Encoder -> Master Parameter received
80h Encoder -> Master Error
Version 1.02 Page 9
Page 10
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Index / Sub-index
Data is transmitted solely usi ng objects referenc ed by index. The o bjects are simpl e or composed
type. In this case, the index associated to the comp osed object will be subdivided into several
sub-index.The number of sub-index is specified into subindex 0, it can be from 1 to 254. Each
object is described into a object dictionary.
The organization of a standard object dictionary is shown in the following table:
Index (hex) Object
0000 Not used
0001-001F Static data types
0020-003F Complex data types
0040-005F Manufacturer specific data types
0060-0FFF Reserved
1000-1FFF Communication area (see Communication profile objects 1000h to 1FFFh (DS301)
2000-5FFF Manufacturer specific area (see Manufacturer-specific Zone Objects 2000h to 5FFFh)
6000-9FFF Device profile specific area (see Hardware Profile objects 6000h to 0FFFh (DS406)
A000-FFFF Reserved
SDO examples
Request of a value by the master from the slave
A frequent request will be a request for position Object 6004h
COB-ID Command Index Sub Index Service Data (Parameters)
600h+node ID 40h 04h 60h 00h X X X X
Response by the slave to the request for a value
The position is 4 bytes long, the precise values can be found under object 6004h.
COB-ID Command Index Sub Index Service Data (Parameters)
580h+node ID 43h 04h 60h 00h Pos0 Pos1 Pos2 Pos3
Writing of a value by the master into the slave
Position setting can be performed with preset. Object 6003h
COB-ID Command Index Sub Index Service Data (Parameters)
600h+node ID 22h 03h 60h 00h Pre0 Pre1 Pre2 Pre3
Slave’s response to the writing of a value
COB-ID Command Index Sub Index Service Data (Parameters)
580h+node ID 60h 03h 60h 00h 0 0 0 0
Page 10 Version 1.02
Page 11
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
2.3. Process data communication
Process data objects are used for real time data exchange for process data :position. PDOs can
be transmitted synchronously or cyclically (asynchronously). The encoder supports the PDO1
and the PDO2. Both PDOs supply the current position of the encoder and are defined in the
objects 1800h,1801h, 1A00h, 1A01.
Synchronous
In order to transmit the process data synchronously, a value bet ween 1 and F0h (=240) must be
written into the object 1800h / 1801h Subindex 2. If the value i s 3, the PDO is transmitted on ev ery
third sync telegram (if the value 1 is entered, transmission takes place on every sync tel egram)
In synchronous operation, the PDO is requested by the m aster via the Sync telegram (COB-ID =
80h).
Cyclical (asynchronous)
If you wish the PDOs to b e transmitted cyclically, the value FEh must be written i nto the object
1800h / 1801h Subindex 2. In addition, the cycle time in milliseconds must be entered in the same
object subindex 5. The entered time is rounded off to 1 ms. If the v al ue is stored for 0 ms, th e PDOs
are not transmitted. The function is switched off.
Response to an RTR message
by means of the remote frame = recessive RTR bit, precisely the message with the transferred
identifier will be requested
Transmission of the current position
The process value is sent on the CAN network with the following message:
COB-ID Process value
11 bits Byte 0 Byte 1 Byte 2 Byte 3
27 to 20 215 to 28 223 to 216 231 to 224
The COB-ID contains the node number and the correspondi ng PDO(tx). By default, the sended
process value use the COB-ID 0180h+Node-ID and, in response to the SYNC message, use the
COB-ID 0280h+Node ID.
The PDO COB-ID are defined in the object 1800h/1801h subindex 1.
Version 1.02 Page 11
Page 12

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
3. Operational mode
Principle The absolute rotary encoder accesse s the CA N network less one s econd af ter poweru p
in pre-operational mode.
Init
Following initalization, the encoder logs on to the CAN bus with a BootUp message. The enc oder
then goes automatically to the pre-opera tional mode status.
The COB ID of the BootUp message is made up of 700h and the node ID.
COB-ID Byte 0
700h+Node ID 00
Pre-operational mode
In the pre-operational mode, SDOs can be read and written.
Operational mode
In the operational mode, the encoder transm its the requested PDOs. In addition, SDOs can be
read and written.
Stopped mode
In the stopped mode, only NMT communication is possible. No SDO parameters can be read or
set.
Reset of the absolute rotary encoder
If a node is not operating correctly, it is advisable to carry out a Reset.
COB-ID
00h 81h 00h NMT Reset Remote Node, all Node
Command
(Byte 0)
Node Number
(Byte 1)
Description
00h 81h 01h..7Fh NMT Reset Remote Node node number
After Reset, the absolute rotary encoder accesses the bus in pre-op erational mode.
Page 12 Version 1.02
Page 13

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Mode: Preoperational
To set a node to pre-operational mode, the master must send the following message:
COB-ID
00h 80h 00h NMT Preoperational, all Node
00h 80h 01h..7Fh NMT Preoperational node number
Mode: Start
For 1 or all the nodes to switch to operational mode, the master sends the fol lowing message:
COB-ID
00h 01h 00h NMT Start, all Node
Command
(Byte 0)
Command
(Byte 0)
Node Number
(Byte 1)
Node Number
(Byte 1)
Description
Description
00h 01h 01h..7Fh NMT Start node number
Mode: STOP
For 1 or all the nodes to switch off operational mode, the master sends the fol lowing message:
COB-ID
00h 02h 00h NMT Stop, all Node
00h 02h 01h..7Fh NMT Stop node number
Command
(Byte 0)
Node Number
(Byte 1)
Description
Version 1.02 Page 13
Page 14

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
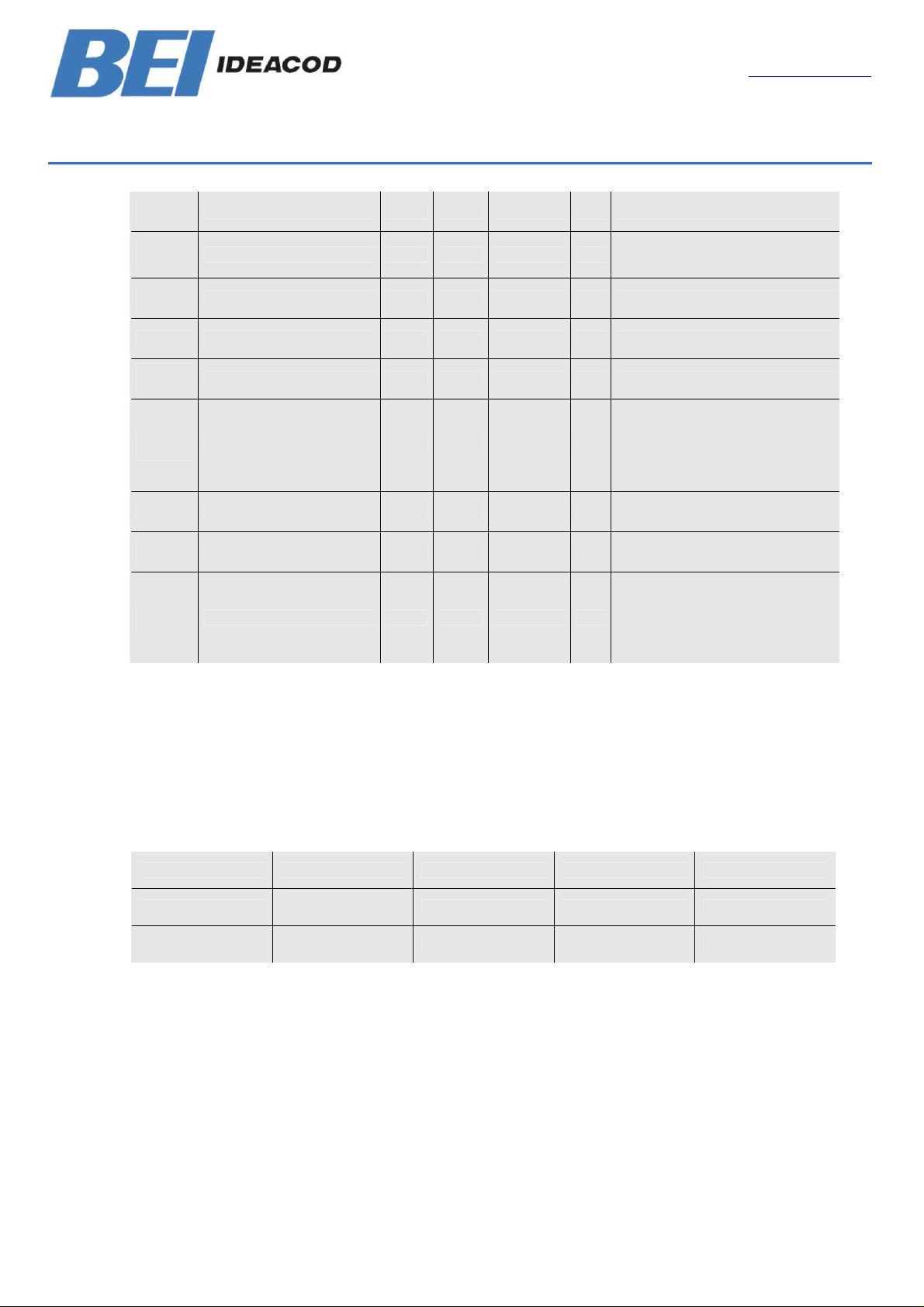
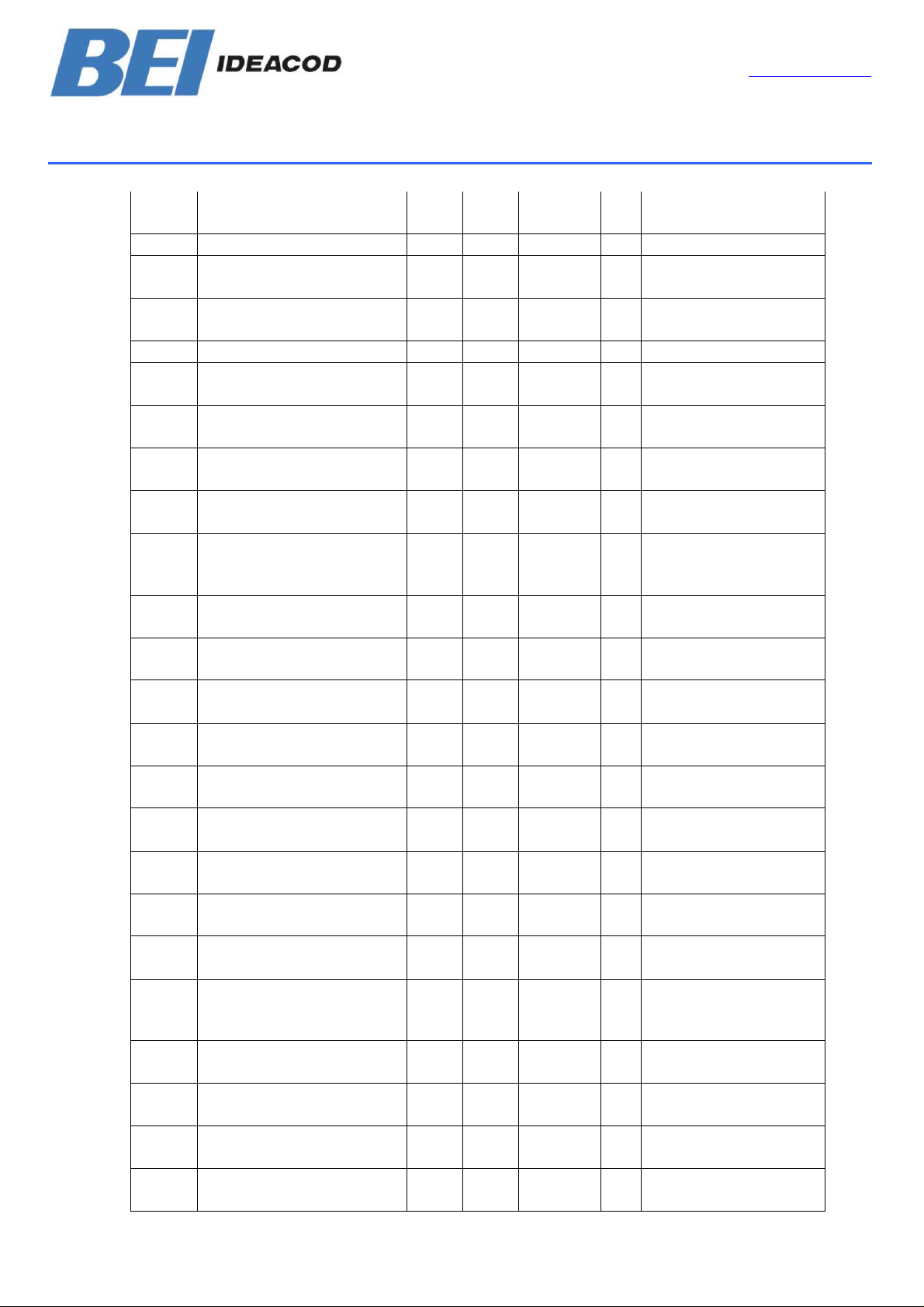
4. Communication objects 1000h to 1FFFh (DS 301)
Introduction This section li sts the objects relating to the communication. Each object, with all its
technical characteristics, is described according to th e CANopen standard.
EDS File : PHM5V102.EDS Standard Encoder, Device Name (1008h) = POSI+
(EDS File : PHM5SFV102.EDS for the compatibility with old encoder SHM 5,SHU9 ,MHM5
Device Name = POSI+SF, not for new designs, objects description i n Appendix)
Format:
U8 : Unsi g ned 8 bi ts
U16 : Unsigned 16 bits
U32 : Unsigned 32 bits
Access:
RO : Read Only
RW : Read Write
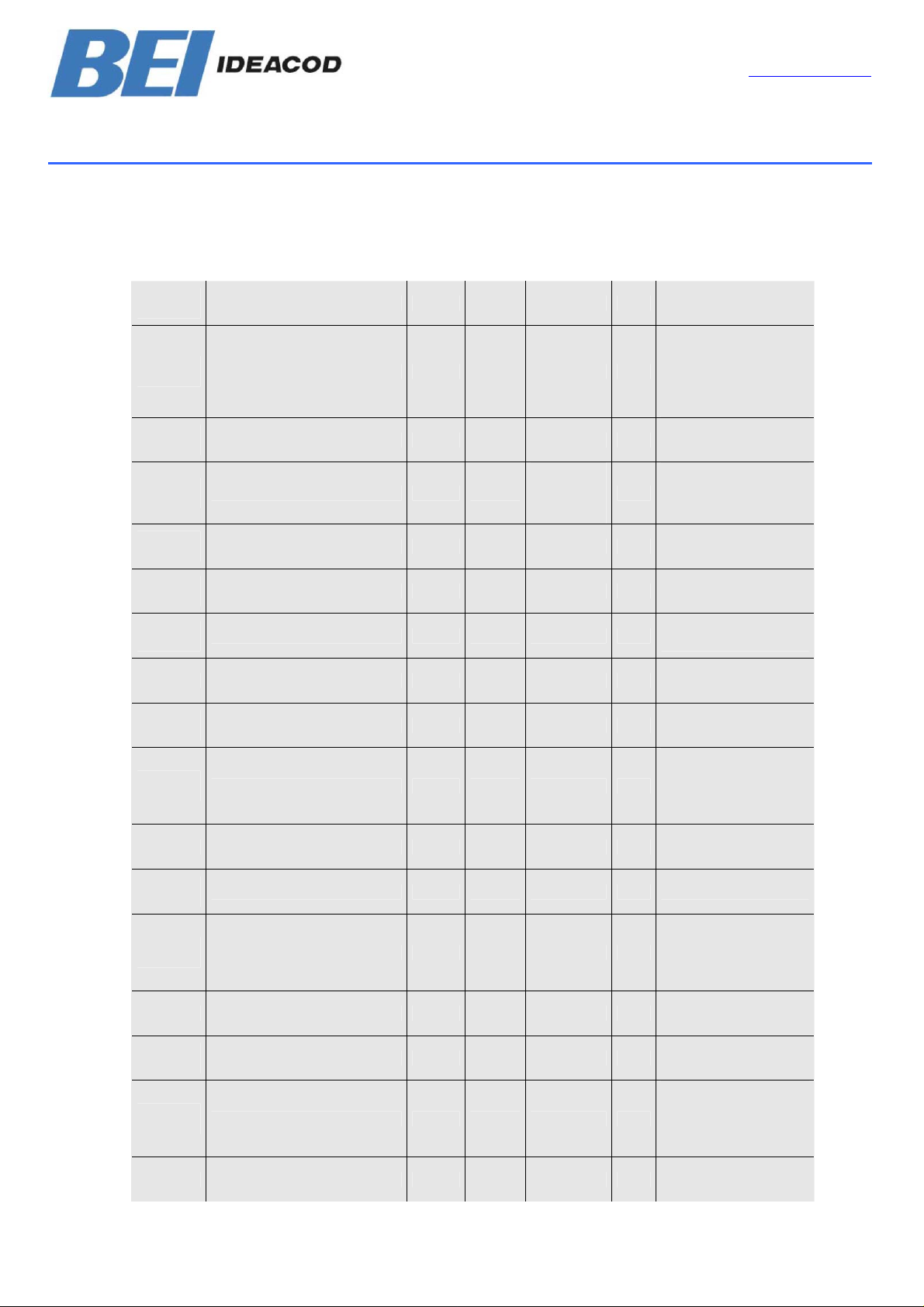
Object
SubIndex
1000
0
1001
0
Name Format Access Default Save Description
multiturn
DeviceType U32 RO
ErrorRegister U8 RO 00h
00020196h
monoturn
00010196h
Encoder type: Bytes 0,1
0001:Monoturn 0002:Multiturn Profil
Bytes 2,3: 0196h=406
Bit0 = Generic error
Bit4 = Communication error
1003 pre-defined error field Contains the last error
1003
0
1003
1
1005
0
1008
0
100C
0
100D
0
1010 StoreParameters Save parameters to encoder
1010
0
1010
1
1011 RestoreDefaultParameters
1011
0
Number of actual errors U8 RW 00h
New, actual error U32 RO ########
COB-ID SYNC Message U32 RW 00000080h Yes COB ID of the sync object
DeviceName STR CONST POSI+
GuardTime U16 RW 0000h Yes Timer for nodeguarding
LifeTimeFactor U8 RW 00h Yes Multiplication of Guard time
LargestSupportedSubindex U8 RO 01h No. of save possibilities 1
SaveAllParameters U32 RW 00000001h ="evas " (0x65766173) to save
LargestSupportedSubindex U8 RO 01h No. of restore possibilities = 1
Number of stored messages 0 or 1
Write 0 to reset the counter
Last Error
1000h Generic error
8130h Life Guard error or Heartbeat
error
Name : POSI+ (standard)
Name : POSI+ SF for compatibility
with SHM5/MHM5 see Appendix
Restore default parameters from
the encoder
Page 14 Version 1.02
Page 15

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
POSI+ CANOPEN USER MANUAL
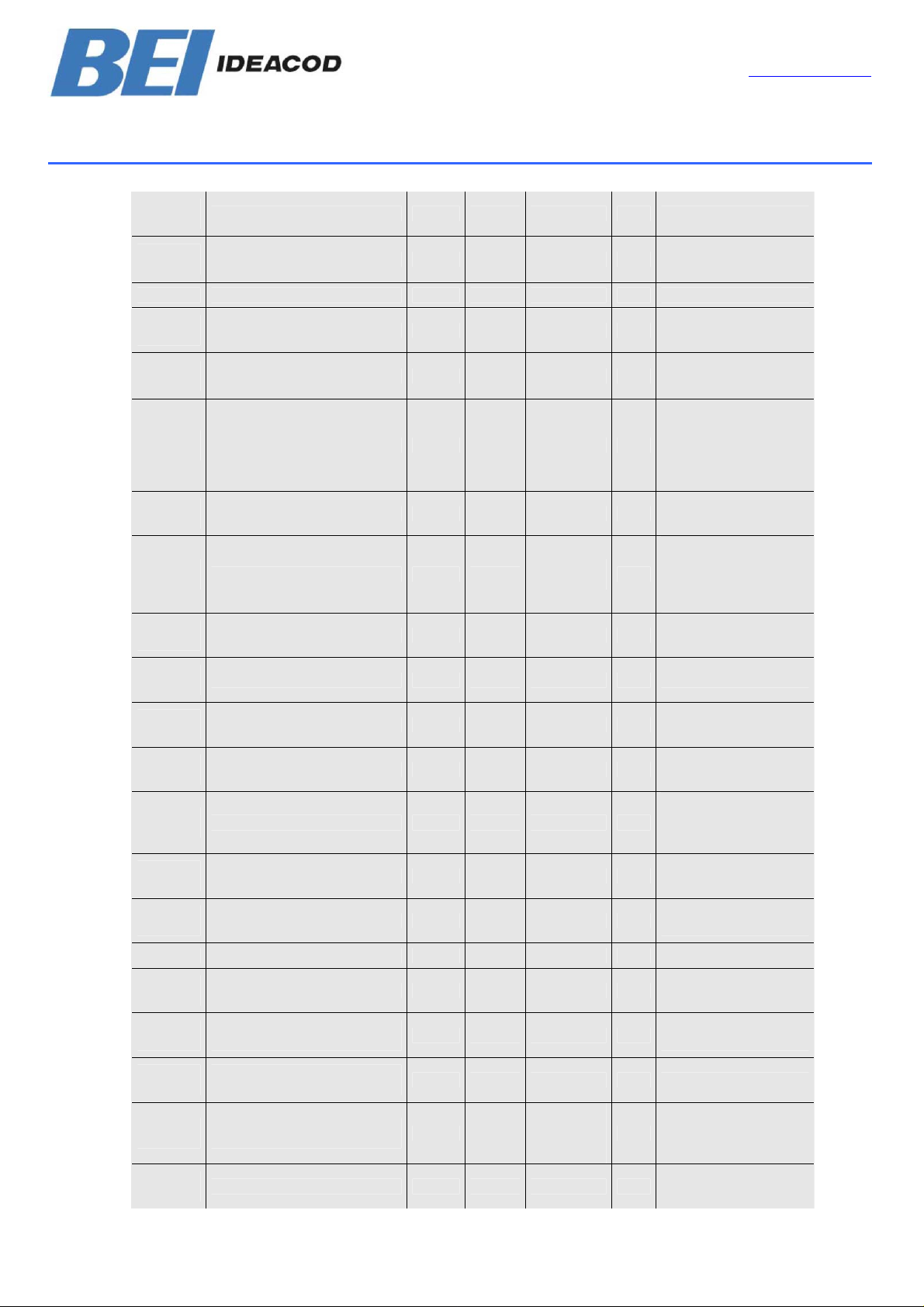
1011
1014
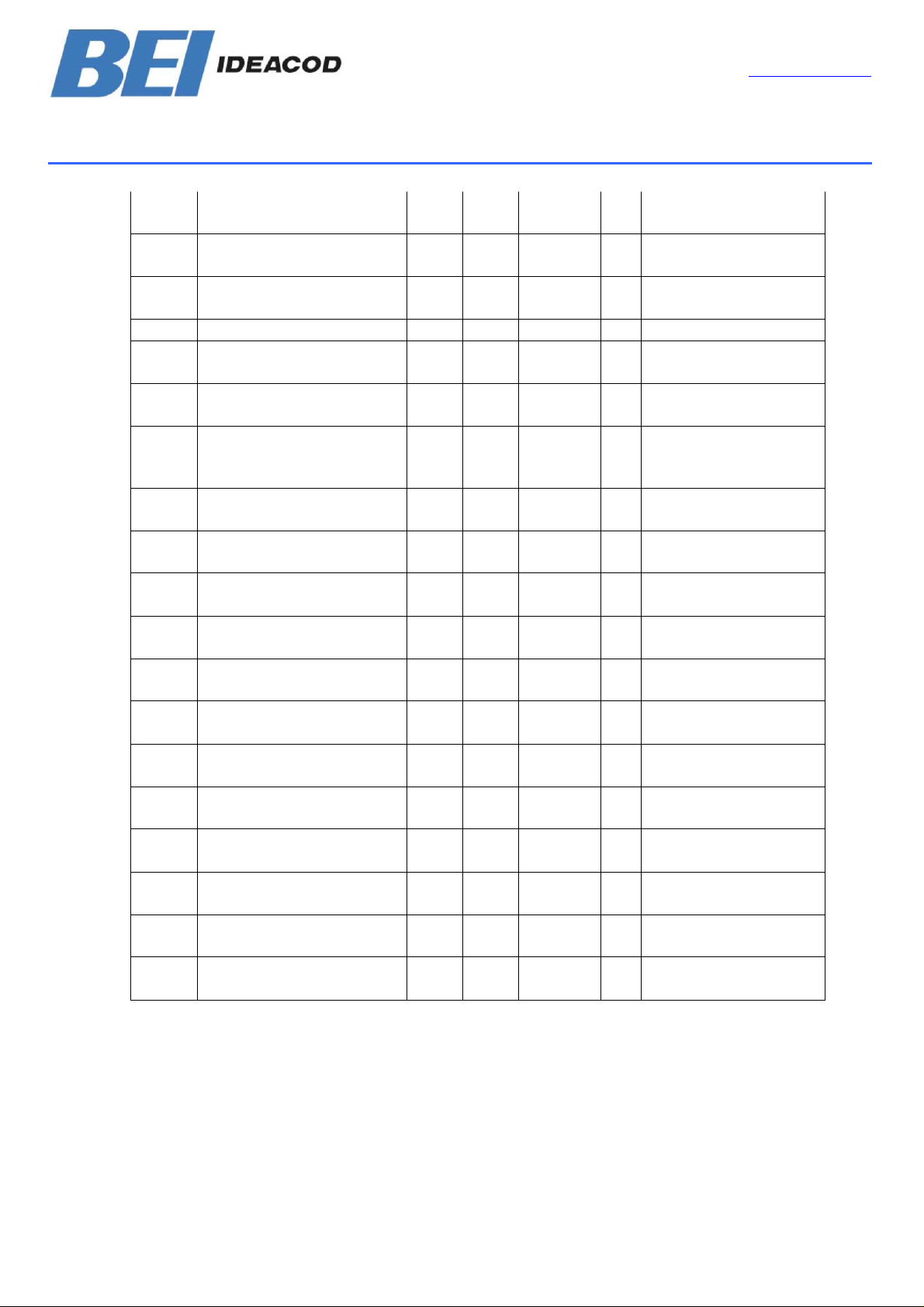
1016 Consumer Heartbeat Time
RestoreAllDefaultParameters U32 RW 00000001h ="daol" (0x64616F6C) to load
1
0
COB-ID EMCY U32 RO 00000081h
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
COB ID of the emergency object
80h + Node ID
1016
0
1016
1
1017
0
1018 Identity Object
1018
0
1018
1
1018
2
1018
3
1018
4
1200 Server SDO Parameter 0
1200
0
1200
1
1200
2
1800
1800
0
1800
1
1800
2
1800
3
1800
5
1801
1801
0
1801
1
Number of entries U8 RO 01h
Consumer Heartbeat Time 1 U32 RW 00000000h Yes
Producer HeartBeat Time U16 RW 0000h Yes Producer heartbeat time in ms
LargestSupportedSubindex U8 RO 04h
Vendor ID U32 RO 00000184h Vendor no. issued by CiA
Product code U32 RO 354D4850h
Revision number U32 RO 00010000h Current revision number
Serial number U32 RO xxxxxxxxh Unique consecutive serial number
Number of entries U8 RO 02h
COB-ID Client -> Server U32 RO 00000601h 600h+Node ID
COB-ID Server -> Client U32 RO 00000581h 580h+Node ID
Transmit PDO1
Communication Parameter
NrOfEntries U8 RO 05h
COB-ID U32 RW 00000181h Yes PDO ID = 180h + node ID
TransmissionType U8 RW FEh Yes FEh=User defined, cyclical
InhibitTime U16 RW 0000h Yes
Event Time r U16 RW 0000h Yes Cycle time in ms
Transmit PDO2
Communication Parameter
NrOfEntries U8 RO 05h
COB-ID U32 RW 00000281h Yes PDO ID = 280h + node ID
Bit0..15 Consumer heartbeat in ms
Bit16..23 Node-ID
minimum interval for PDO
transmission
multiple of 100µs.
Version 1.02 Page 15
Page 16
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
1801
2
1801
3
1801
5
1A00 Transmit PDO1 Mapping
TransmissionType U8 RW 01h Yes 01h= synchronous operation
minimum interval for PDO
InhibitTime U16 RW 0000h Yes
Event Time r U16 RW 0000h Yes Cycle time in ms
transmission
multiple of 100µs.
1A00
0
1A00
1
1A01 Transmit PDO2 Mapping
1A01
0
1A01
1
NrOfEntries U8 RO 01h
mapping for th e PDO1 the device is
Mapped Object U32 RO 60040020h
NrOfEntries U8 RO 01h
mapping for th e PDO2 the device is
Mapped Object U32 RO 60040020h
able to transmit
b0..b7 : object length
20h = Unsigned32
b8..b15 : sub-index (00h)
b16..b31 : Index (6004h)
able to transmit
b0..b7 : object length
20h = Unsigned32
b8..b15 : sub-index (00h)
b16..b31 : Index (6004h)
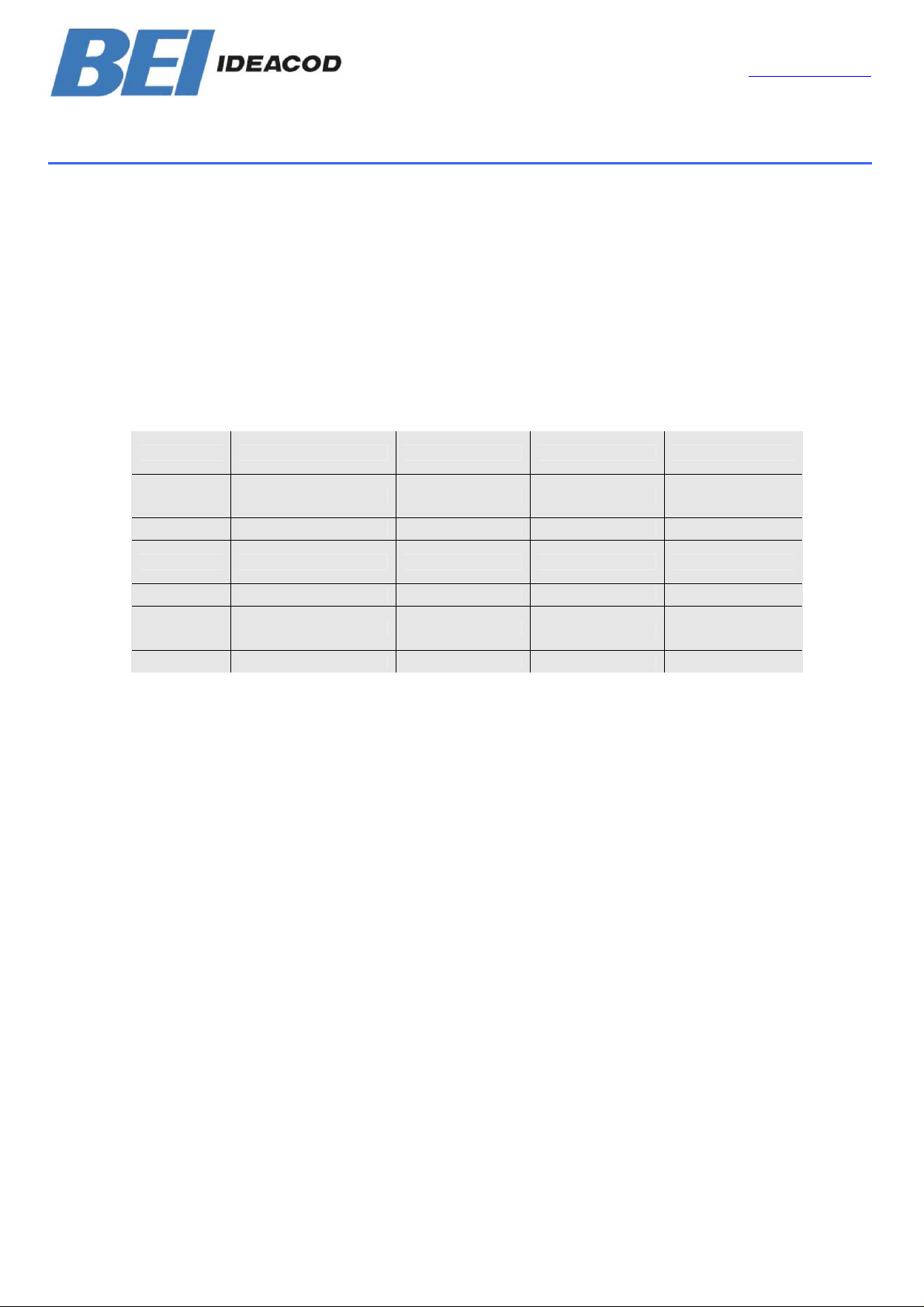
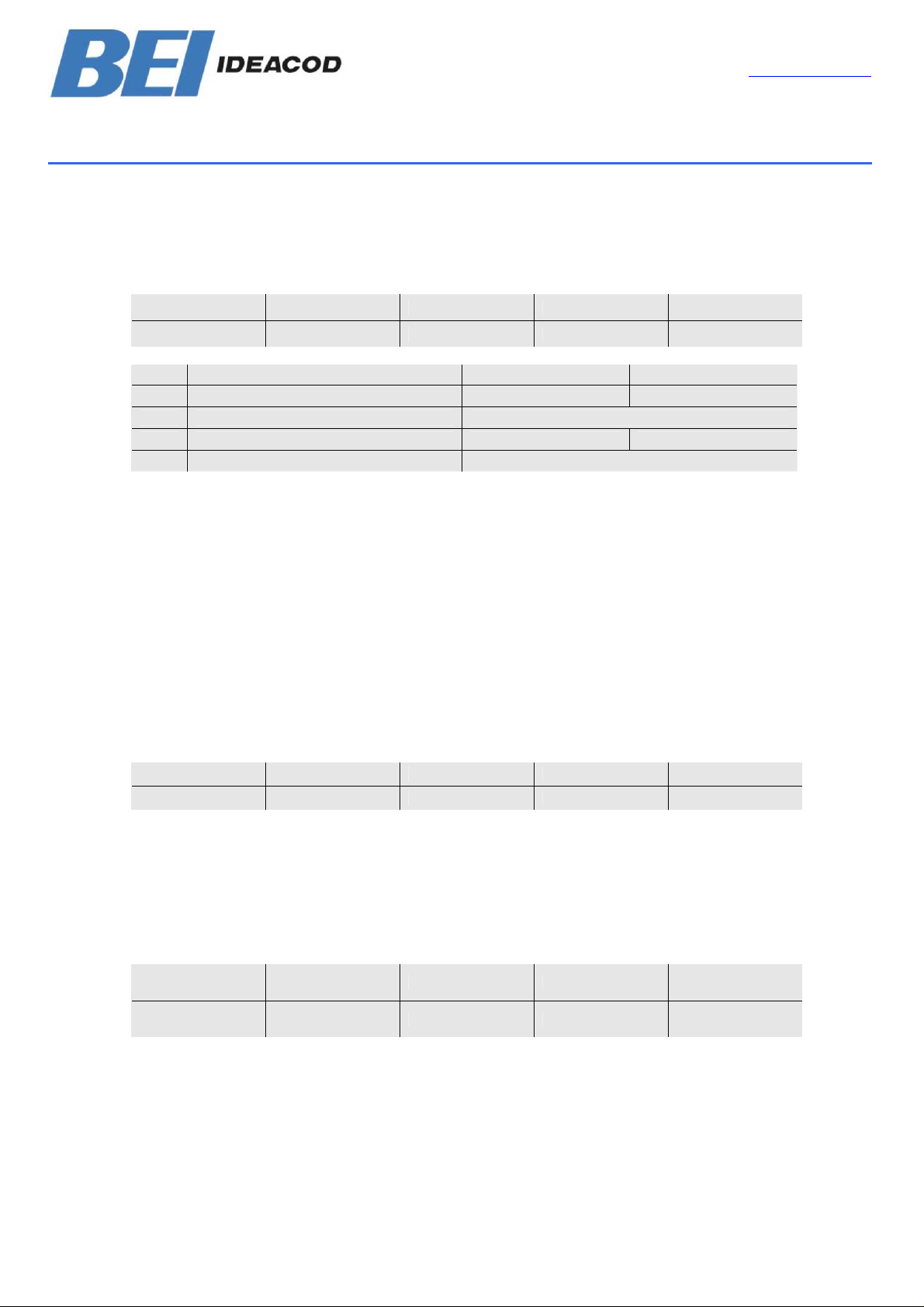
Object 1010h: Store parameters
Description This object supports the saving of parameters in non volatile memory.
In order to avoid storage of parameters by mistake, storage i s only executed when the specific
signature “save” is written to the S u b-Index
Characteristics The characteristics of this object are outlined in the following table:
Sub-index Desciption Dtat type Default value Access
0
1 Store all parameters UNSIGNED32 - rw
Number of subindexes
UNSIGNED8 1 Ro
Operation To save the parameters, the "save" character string (6576 6173h) must be written
in the corresponding index:
Information on storage functionality is read from a sub-index. The result obtained, 0000 0001h,
indicates that the module saves parameters only when it receives the command to do so.
Page 16 Version 1.02
Page 17

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 1011h: Restore Default parameters
Description This object is used to restore the encoder default parameters.
In order to avoid the restoring of default parameters by mistake, restori ng is only executed when
the specific signature “load“ (6461 6F6Ch) is written to the appropriate sub-index.
Characteristics The characteristics of this object are outlined in the following table:
Sub-Index Description Data type Default value Access
0
1
Number of subindexes
Restore all default
parameters
Unsigned8 1 Ro
Unsigned32 - rw
Note: The restoration of parameters will only be taken into account after a power up or NMT Reset.
After the power on or the NMT Reset, the transmission Rate and the node number are the default
values
Operation To restore the parameters, the corresponding index must be written in the "load"
character string (6461 6F6Ch):
Most significant word Least Significant word
ISO 8859 (ASCII)
signature
d a o l
Hex value 64h 61h 6Fh 6Ch
Information on whether it is possible to restore the m odule's factory parameters is read from a
sub-index. The result obtained, 00000001h, indicates that the factory parameters can only be
restored when the module receives the command to do so.
Object 1800h: 1st Transmit PDO communication Parameter
Description This object contains the Transmit PD O comm unication parameter.
Characteristics The characteristics of this object are outlined in the following table:
Sub-Index Description Data type Default value Access
0
1 COB-ID Unsigned32 180h + Node ID rw
Number of subindexes
Unsigned8 5 ro
2 Transmission mode Unsigned8 FEh rw
3 Inhibit time Unsigned32 0 rw
4 Not available
5 Event timer Unsigned32 0 rw
Version 1.02 Page 17
Page 18

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
POSI+ CANOPEN USER MANUAL
Transmission mode
The PDO transmission mode can be configured as desc ribed in the table below.
Tranfer
code
0 x x
1 to
240
241 to
251
252 x x
253 x x
Transmission code
Cyclic Acylic Synchronous Asynchronous RTR only
x x
Reserved -
Notes
Send PDO on first Sync
message following an event
Send PDO every n (n=0…240)
Sync messages
Update data immediately
after Remote request and
send PDO on next SYNC
message
Update data and send PDO
on Remote Request
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
254 x
255 x Send PDO on encoder -event
Send PDO on manufacturerevent
COB-ID Structure
The structure of a COB-ID for CAN2.0 is shown in the following table:
Bit No. Value Meaning
31 (MSB)
30
29 0 11-bit ID (CAN 2.0A)
28-11 0 If bit 29 = 0
10-0 (LSB) X Bit 10-0 of the identifier
0 The PDO object exists
1 The PDO object doesn’t exis t
0 RTR mechanism authorized
1 RTR mechanism unauthorized
Inhibit Time (Sub-index 3)
For "Transmit PDOs", the "inhibit time" for PDO transm issions can be entered in this 16 bit field. If
data is changed, the PDO sender checks whether an "inhibit time" has expired since the last
transmission. A new PDO transmission can only take place if the "inhibit time" has expired. The
"inhibit time" is useful for asynchronous transmission (transmission mode 254, 255), to avoid
overloads on the CAN bus. The "inhibit time" is a multiple of 100µs of object 1800sub03/1801sub03.
Page 18 Version 1.02
Page 19
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Event Timer (Sub-index 5)
In mode 254/255, if a value > 0 is written in thi s 16-bi t field, the TPDO is al ways sent after the "event
timer" expires. The value written i n 1800sub05 and 1801sub05 corresponds to the "event timer" in
ms.
Object 1801h: 2nd Transmit PDO communication Parameter
Description This object contains the Transmit PD O comm unication parameter.
Characteristics The characteristics of this object are outlined in the following table:
Sub-Index Description Data type Default value Access
0 Number of sub-indexes UNSIGNED8 5 Ro
1 COD-ID UNSIGNED32 280h+node ID Rw
2 Transmission mode UNSIGNED8 1 Rw
3 Inhibit time UNSIGNED16 0 Rw
4 Not available
5 Event timer UNSIGNED16 0 Rw
Version 1.02 Page 19
Page 20
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
POSI+ CANOPEN USER MANUAL
5 Manufacturer-specific objects 2000h to 5FFFh
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
Object
SubIndex
2002
0
2005 PDO-Type U8 RW 00h
2100
0
2101
0
Name Format Access Default Save Description
Speed I16 RO No
Transmission Rate U8 RW 01h Yes
Node Number U8 RW 01h Yes
Yes
(1.02)
Speed of the encoder shaft
Number of physical impulses with a
time period of 5 ms
Types for PDO1 and PDO2
Bit 3..0 = PDO1 Bit 7..4=PDO 2
0 (Default):Byte 0 .. Byte3 of PDO =
Value of position
2 (Type 2):Byte 0 .. Byte3 of PDO =
Value of position
Byte 4 .. 5 of PDO = Speed
Byte 6 .. 7 of PDO = 0x00 0x00
After setting the baud rate, the
EEPROM must be saved and
reinitialized
0=10 kBit/s
1=20 kBit/s (default)
2=50 kBit/s
3=100 kBit/s
4=125 kBit/s
5=250 kBit/s
6=500 kBit/s
7=800 kBit/s
8=1000 kBit/s
Node number 1..127 possible After
setting the baud rate, the EEPROM
must be saved and reinitialized.
Object 2002h: Speed
Only for standard encoder with software version >=1.01 : DeviceName (1008h) = « POSI+ » ,
Software Version (6507h) >= 0x0101
CMS Index Default value Value range Data length
SDO 2002h Signed 16
Description To measure the rotati onal speed of the encoder shaft, the difference betwee n two
physical (unscaled) values of position with a time period of 5 ms is calculated. The difference
between the two values will be read out as a signed 16 bits value (positive value = clockwise
direction of rotation ).
The output of the speed by means of PDO is made possible by setti ng the desired PDOs to typ e 2
(see object 2005h).
Object 2005h: PDO Type
Only for standard encoder with software version >=1.01 : DeviceName (1008h) = « POSI+ » ,
Software Version (6507h) >= 0x0101
CMS Index Default value Value range Data length
SDO 2005h 00h Unsigned 8
This object helps to determine the types for PDO1 and PDO2.
Page 20 Version 1.02
Page 21

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
The COB ID and the transfer type for the PDOs is determined in the objects 1800h and1802h.
With the software version = 1.01, this value cannot be stored in the EEPROM and has to be
transferred again after each activation (Reset or Power-On).
With the software version >=1.02, this value can be stored in the EEPROM.
Data Bit 7 .. 4 = PDO2 Bit 3 .. 0 = PDO1
00h Default Default
02h Default Type2
20h Type2 Default
22h Type2 Type2
Standard: PDO1 and PDO2 set to type Default (00h)
COB-ID Process data (PDO)
11 bit Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
Default Value of position
Type 2 Value of position Speed 00h 00h
Object 2100h: Transmission Rate
Only for standard encoder : DeviceName (1008h) = « POSI+ »
Description This object contains the baud rate, see table above for the values.
Default = 20kbit/s
Object 2101h: Node Number
Only for standard encoder : DeviceName (1008h) = « POSI+ »
Description This object contains the Node Number.
Default = 1
Note: After setting the baud rate or the node number, the parameters must be saved in the
EEPROM with “StoreParameters” (Object 1010h) and the new values are set valid after the device
is reset (NMT reset node ) or power cycled.
Version 1.02 Page 21
Page 22
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
6. Encoder-specific objects 6000h to 9FFFh (DS 406)
Introduction This section lists the encoder-specific objects. Each object, with all its technical
characteristics, is described according to the CANopen standard.
Object
SubIndex
6000
0
6001
0
6002
0
6003
0
Operating Parameters U16 RW 0004h Yes
Measuring Units per Revolution U32 RW 00002000h Yes
Total Measuring Range U32 RW
Name Format Access Default Save Description
Bit0 = Position increasing
Bit2 = 0 Scaling function
revolution: 13 bits
Multi:
20000000h
Mono:
00002000h
Preset Value U32 RW 00000000h Yes Preset in increments
Yes
0 CW
1 CCW
disabled 1 Scaling
function enabled
Resolution in steps /
Overall measuring
range in increments
29Bit = multiturn
13Bit = singleturn
6004
0
6200
0
6300 Cam state register
6300
0
6300
1
6301 Cam enable
6301
0
6301
1
6302 Cam polarity
Position Value U32 RO 00000ECBh Position value
Cyclic timer U16 RW 0000h Yes
NrOfAvailableChannel U8 RO 01h only CAM1
Cam state channe l 1 U8 RO 00h
NrOfAvailableChannel U8 RO 01h only CAM1
Cam enable channel 1 U8 RW 00h Yes
In ms, identical object
1800h, subindex 5
status bit of the cam in
a cam channel
Bit0 = CAM1
0 = CAM Inactive
1 = CAM active
Bit0 = CAM1
0 = cam disable
1 = cam state
calculated by the
device
6302
0
6302
1
6310 Cam1 low limit
Page 22 Version 1.02
NrOfAvailableChannel U8 RO 01h
Bit0 = CAM1
Cam polarity channel 1 U8 RW 00h Yes
0 = cam state not
inverted
1 = cam state not
inverted
Page 23
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
6310
0
6310
1
6320 Cam1 high limit
NrOfAvailableChannel U8 RO 01h only CAM1
Cam1 low limit channel 1 U32 RW 00000000h Yes
switch point for the
lower limit setting for
CAM1
6320
0
6320
1
6500
0
6501
0
6502
0
6503
0
6504
0
6505
0
6506
0
6507
0
6508
0
NrOfAvailableChannel U8 RO 01h only CAM1
Cam1 high limit channel 1 U32 RW 00000000h Yes
Operating Status U16 RO 0004h
Single Turn Resolution U32 RO 00002000h
Number of Revolutions U16 RO
Alarms U16 RO 0000h Alarms
Supported Alarms U16 RO 0000h Supported Alarms
Warnings U16 RO 0000h Warnings
Supported Warnings U16 RO 0000h Supported Warnings
Profile & Software Version U32 RO 01020301h
Operating Time U32 RO FFFFFFFFh not used
Multi FFFFh
Mono 0001h
switch point for the
higher limit setting for
CAM1
Bit0 = Position increasing
Bit2 = 0 Scaling function
Max. Resolution in steps
/ revolution: 13 bits
Byte 0,1:Profile version
version = 1.02 = 0102h
0 CW
1 CCW
disabled 1 Scaling
function enabled
Number of
distinguishable
revolutions
Multiturn = FFFFh
Monoturn = 1
=3.1 = 0301h
Byte 2,3: Software
6509
0
650A Module Identification
650A
0
650A
1
650A
2
650A
3
650B
0
Version 1.02 Page 23
Calculated Offset Value INT32 RO
NrOfEntries U8 RO 03h
manufacturer_offset_value
Manufacturer_Min_Position_Val
ue
Manufacturer_Max_Position_Va
lue
Serial Number U32 RO
U32 RO 00000000h
U32 RO 00000000h Minimum position value
Multi:
U32 RO
1FFFFFFFh
Mono:
00001FFFh
Offset calculated from
preset 6003h
Manufacturer offset
value
Maximum position value
Linked with serial
number object 1018-4
Page 24
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 6000h: Operating Parameters
Presentation The code sequence (Complement) can be selected as the operating parameter.
CMS Index Default value Value range Data length
SDO 6000h 0h 0h-FFFFh Unsigned 16
Bit Function Bit = 0 Bit = 1
0 Code Sequence CW CCW
1 Commissionning Diagnostic control Not used
2 Scaling function control Disabled Enabled
3 Measuring direction Not used
CODE SEQUENCE: The code sequence defines whether i ncreasing or decreasing position values
are output when the encoder shaft rota tes clockwise or counterclockwise as seen on the shaft.
SCALING FUNCTION CONTROL: With the scaling function the encoder numerical value is
converted in software to change the physical resol ution of the e ncoder.
The measuring units per revolution object (6001h) and total measuring rang e in measuring units
object (6001h) are the scaling parameters. The scaling function bit is set in the operating
parameters. If the scaling function bit is set to zero, the scaling function is disabled.
Object 6001h: Measuring Units per revolution
Presentation The Measuring Units per revolution parameter is used to program the required
number of steps per revolution. Choose a value between 2 and 8192:
CMS Index Default value Value range Data length
SDO 6001h - 0h – 2000h Unsigned 16
Object 6002h: Total measuring range in measuring units
Presentation Thi s parameter is used to program the requi red number of measuring units from th e
global measuring range. This value mu st not exceed that of the total resolution of the absolute
rotary encoder
CMS Index Default value Value range Data length
SDO 6002h
2000 0000h 2 - 2000 0000h
Unsigned 32
Total measuring range (total resolution) = Number of revolutions x ·Measuring Units per resolution
Page 24 Version 1.02
Page 25
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 6003h: Preset Value
Presentation The preset value is the req uired position value to be reached at a certai n physical
location of the axis. The position value is fixed as being the process value required by the
presetting of the parameters.
To avoid execution time errors, the preset value must not exceed the total measuring range (total
resolution) -1 of the parameters.
CMS Index Default value Value range Data length
SDO 6003h - 0 – (total resolution-1) Unsigned 32
Object 6004h: Position Value
Description This object is used to define the position of the encoder.
CMS Index Default value Value range Data length
SDO 6004h - 0 – (total resolution-1) Unsigned 32
Object 6200h: Cyclic Timer
Cyclic mode The absolute rotary encoder transmits the current process value cyclically – without
being polled by the host. The cycle time can be programmed i n milliseconds for valu es between
1 ms and 65535 ms. (For example: 64h = 100 ms).
CMS Index Default value Value Range Data l ength
SDO 6200h 0h 0h – FFFFh Unsigned 16
This parameter is identical “Event Timer” of the transmit PDO1 Index 1800h, Sub Index 05h.
See description of the object “Transmit PDO1” (1800h) for the use of the cyclic timer.
If the value is 0, the cyclic timer is disabled and the position is never sent.
Note: After setting the encoder parameters, they must be saved in the EEPROM with
“StoreParameters” (Object 1010h). If the encoder parameters are not saved, the configuration will
be lost at the next power up.
Version 1.02 Page 25
Page 26

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 6500h: Operating Status
Description This object contai ns the operating status of the encoder. It provides informatio n on
the encoder internal parameters.
Values The values of this object are outlined in the fol lowing table:
Bit Function Value = 0 Value = 1
0 Code sequence CW CCW
1
2 Scaling function control Disabled Enabled
Commissionning
Diagnostic Control
Not supported Supported
3 Measuring direction Not used
4…11 Reserved
12
13
14
15
Manufacturer specific
alarm
Manufacturer specific
alarm
Manufacturer specific
alarm
Manufacturer specific
alarm
Not used
Not used
Not used
Not used
CMS Index
SDO 6500h 00h - - Unsigned 16 ro
Sub
Index
Default value Value range Data length Access
Object 6501h: Singleturn Resolution (Rotary)
Description This object indcates the number of s teps per revolution according to the position of
the encoder. The maximum encoder resolution is 8192.
CMS Index
SDO 6501h 00h 2000h - Unsigned 32 ro
Sub
Index
Default value Value range Data length Access
Object 6502h: Number of Distinguishable Revolutions
Description This obj ect indicates the number of revolutions that the encoder can execute. The
maximum number of revolutions of the encoder is 65536.
CMS Index
SDO 6502h 00h FFFFh - Unsigned 16 ro
Sub
Index
Default value Value range Data length Access
Page 26 Version 1.02
Page 27

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 6503h: Alarms
Description This object contains the various alarm messages. An alarm will be displayed if a
malfunction of the encoder cause a posi tion error. The al arm bit remains enabled unti l the alarm
is cleared and the encoder is able to provide a correct position value.
Values The values of this
Bit Function Value = 0 Value = 1
0 Position error No Yes
1
2…11 Reserved
12
13
14
15
Object 6504h: Supported Alarms
Description This object indicates the alarms suppor ted by the encoder.
Values The values of this object are outlined in the fol lowing table:
Bit Function Value = 0 Value = 1
object are outlined in the following table:
Commissionning
diagnostics
Manufacturer specific
alarm
Manufacturer specific
alarm
Manufacturer specific
alarm
Manufacturer specific
alarm
Not supported Supported
Disabled Enabled
Disabled Enabled
Disabled Enabled
Disabled Enabled
0 Position error No Yes
1
2…11 Reserved
12
13
14
15
Commissionning
diagnostics
Manufacturer specific
alarm
Manufacturer specific
alarm
Manufacturer specific
alarm
Manufacturer specific
alarm
No Yes
No Yes
No Yes
No Yes
No Yes
Version 1.02 Page 27
Page 28

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 6505h: Warnings
Description Thi s object indicates if the tolerances of certain encoder internal parameters have
been exceeded
Values The values of this object are outlined in the fol lowing table:
Bit Function Value = 0 Value = 1
0 Position error No Yes
1 Ligth control reverse Not reached Error
2 CPU watchdog status OK Reset
3
4 Battery charge OK Too slow
Operating time limit
warning
No Yes
5 Reference point Reached Not reached
6…11 Reserved
12
13
14
15
Manufacturer specific
warning
Manufacturer specific
warning
Manufacturer specific
warning
Manufacturer specific
warning
N/A N/A
N/A N/A
N/A N/A
N/A N/A
Object 6506h: Supported Warnings
Description This object indicates the warnings supported by the encoder.
Values The values of this object are outlined in the fol lowing table:
Bit Function Value = 0 Value = 1
0 Frequency exceed Not supported Supported
1 Light cont rol rev erse Not supported Supported
2 CPU watchdog status Not supported Supported
3
4 Battery charge Not supported Supported
Operating time limit
warning
Not supported Supported
5 Reference point Not supported Supported
6…11 Reserved Not supported Supported
12
13
14
15
Manufacturer-specific
warning
Manufacturer-specific
warning
Manufacturer-specific
warning
Manufacturer-specific
warning
Not supported Supported
Not supported Supported
Not supported Supported
Not supported Supported
Page 28 Version 1.02
Page 29

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Object 6507h: Profile and Software Version
Description This object indicates the encoder hardware profile versi on and software v ersi on.
Object 6508h: Operating Time
Description This object indicates the encoder operating time. The operating time i s recorded in
the EEPROM memory as long as the encoder is powered up.
This function is not available for this encoder. The delivered value is FFFFFFFFh.
Object 6509h: Offset Value
Description This object indicates the offset value. The offset value is calculated by the Preset
value function (see Object 6003h: Pres et Valu e, p. 83 ). It is then used by the encoder to offset the
position value.
The offset value is recorded and can be read in the encoder.
Object 650Ah: Module identification
Description This object indicates the manufacturer-speci fic offset value, as well as the minimum
and maximum position values.
The offset value is stored in sub-index 1.
The minimum and maximum position values are stored in sub-indices 2 and 3 respectively.
Characteristics The characteristics of this object are outlined in the following table:
Sub-Index Dscription Data type Default value Access
0 Number of inputs Unsigned 32 ro
1
2
3
Object 650Bh: Serial Number
Description This object indicates the encoder serial number.
Linked with serial number object 1018-4.
Manufacturer
offset value
Manufacturer
minimum value
Manufacturer
maximum position
value
Unsigned 32 Oh Ro
Unsigned 32 Ro
Unsigned 32 ro
Version 1.02 Page 29
Page 30

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Encoder Cam1 :
Only for standard encoder : DeviceName (1008h) = « POSI+ »
Only one CAM is available.
Cam1 has parameters for the minimum switch point, the maximum switch point.
The encoder calculates the cam state if the bi t0 of the Object “Cam Enable” channel 1 (Index
6301h Sub Index 01h) is set to 1.
Low limit of CAM1 : Object “Cam1_low_limit_channel_1” (Index 6310h Sub Index 01h)
High limit of CAM1 : Object “Cam1_high_limit_channel_1” (Index 6320h Sub Index 01h)
Polarity of CAM1 : bit0 Index 6302h Sub Index 01h
If the polarity bit is set t o 1 , the c am s ta te of an a cti ve cam shall signal by setti ng the r el ated c am
state bit to zero. In the other case the cam state of the related cam shall not be inverted.
State of CAM1 : Object “Cam_state_channel_1” Index 6300h Sub Index 01h
The status bit set to 1 shall defi ne “cam activ e“. The sta tus bi t set to 0 shal l defi ne “cam i nacti ve“.
If the polarity bit of a cam is set (refer to index 6302h Sub Index01h) the actual cam state will be
inverted.
Cam state
register
(6300h -01h)
Cam state
register
(6300h -01h)
polarity bit is set to 1 ( 6302h -01 )
Nota: The ESD can be downloaded free of charge from our Homepage www.bei-ideacod.com.
We do not assume responsibility for technical inaccuracies or omissi ons. S pecifications are subject
to change without notice.
polarity bit is set to 0 ( 6302h -01 )
Page 30 Version 1.02
Page 31

BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
Appendix
Software for the compatibility with with the old encoders SHM5/ S HU9/CHU9/MHM5
Do not use this version for the new designs only to replace old encoders.
EDS File: PHM5SFV102.EDS
Device Name (0x1008) = “POSI+ SF” for this version and the following objects are supported
See the SHM5 / MHM5 Manual for the complete description of these objects.
Object
SubIndex
1000
0
1001
0
1018
1018
0
1018
1
1018
2
1018
3
1018
4
1003
1003
0
1003
1
1004
Name Format Access Default Save Description
multiturn
DeviceType U32 RO
ErrorRegister U8 RO 00h
Identity Object
LargestSupportedSubindex U8 RO 04h
Vendor ID U32 RO 00000184h
Product code U32 RO 354D4850h
Revision number U32 RO 00010000h
Serial number U32 RO xxxxxxxxh
pre-defined error field
Number of actual errors U8 RW 00h
New, actual error U32 RO ########
Number of PDOs supported
00020196h
monoturn
00010196h
1004
0
1004
1
1004
2
1005
0
1008
0
100C
0
100D
0
100F
0
Version 1.02 Page 31
Number of PDOs supported U32 RO 00000002h
Number of synchronous PDOs U32 RO 00000001h
Number of asynchronous PDOs U32 RO 00000001h
COB-ID SYNC Message U32 RW 00000080h Yes
DeviceName STR CONST POSI+ SF
GuardTime U16 RW 0000h Yes
LifeTimeFactor U8 RW 00h Yes
number of SDOs supported U32 RO 00000001h
Page 32

1010
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
POSI+ CANOPEN USER MANUAL
StoreParameters
1010
0
1010
1
1011
1011
0
1011
1
1014
0
1016
1016
0
1016
1
1017
0
1200
1200
0
1200
1
LargestSupportedSubindex U8 RO 01h
SaveAllParameters U32 RW 00000001h
RestoreDefaultParameters
LargestSupportedSubindex U8 RO 01h
RestoreAllDefaultParameters U32 RW 00000001h
COB-ID EMCY U32 RO 00000081h
Consumer Heartbeat Time
Number of entries U8 RO 01h
Consumer Heartbeat Time 1 U32 RW 00000000h Yes
Producer HeartBeat Time U16 RW 0000h Yes
Server SDO Parameter 0
Number of entries U8 RO 02h
COB-ID Client -> Server U32 RO 00000601h
1200
2
1800
1800
0
1800
1
1800
2
1800
3
1800
5
1801
1801
0
1801
1
1801
2
1801
3
COB-ID Server -> Client U32 RO 00000581h
Transmit PDO1 Communication
Parameter
NrOfEntries U8 RO 05h
COB-ID U32 RW 00000181h Yes
TransmissionType U8 RW FEh Yes
InhibitTime U16 RW 0000h Yes
Event Timer U16 RW 0000h Yes
Transmit PDO2 Communication
Parameter
NrOfEntries U8 RO 05h
COB-ID U32 RW 00000281h Yes
TransmissionType U8 RW 01h Yes
InhibitTime U16 RW 0000h Yes
Page 32 Version 1.02
Page 33
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
POSI+ CANOPEN USER MANUAL
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
1801
5
1A00
1A00
0
1A00
1
1A01
1A01
0
1A01
1
6000
0
6001
0
6002
0
6003
0
6004
0
Event Timer U16 RW 0000h Yes
Transmit PDO1 Mapping
NrOfEntries U8 RO 01h
Mapped Object U32 RO 60040020h
Transmit PDO2 Mapping
NrOfEntries U8 RO 01h
Mapped Object U32 RO 60040020h
Operating Parameters U16 RW 0004h Yes
Measuring Units per Revolution U32 RW 00002000h Yes
Multi:
Total Measuring Range U32 RW
Preset Value U32 RW 00000000h Yes
Position Value U32 RO 1FFFFDE6h
20000000h
Mono:
00002000h
Yes
6005
0
6006
0
6100
0
6101
0
6200
0
6500
0
6501
0
6502
0
6503
0
6504
0
6505
0
Limit Switch Min U32 RW 00000000h Yes
Limit Switch Max U32 RW 00000000h Yes
Transmission Rate U16 RW 0002h Yes
Node Number U16 RW 0001h Yes
Cyclic timer U16 RW 0000h Yes
Operating Status U16 RO 0004h
Single Turn Resolution U32 RO 00002000h
Multi
Number of Revolutions U16 RO
Alarms U16 RO 0000h
Supported Alarms U16 RO 0000h
Warnings U16 RO 0000h
FFFFh
Mono
0001h
6506
0
Version 1.02 Page 33
Supported Warnings U16 RO 0000h
Page 34
BEI IDEACOD SAS
Espace Européen de l’Entreprise
9, rue de Copenhague
B.P. 70044 Schiltigheim
F 67013 Strasbourg Cedex
POSI+ CANOPEN USER MANUAL
Tél : +33 (0)3 88 20 80 80
Fax : +33 (0)3 88 20 87 87
Mail : info@bei-ideacod.com
Web : www.bei-ideacod.com
6507
0
6508
0
6509
0
650A
650A
0
650A
1
650A
2
650B
0
2000
0
2100
0
2101
0
Profile Version U32 RO 01020301h
Operating Time U32 RO FFFFFFFFh
Calculated Offset Value INT32 RO 00000000h
Module Identification
Manufacturer Offset Value INT32 RO 00000000h
Manufacturer Minimum Position
Value
Manufacturer Maximum Position
Value
Serial Number U32 RO 12345678h
Process Value U32 RO 1FFFFDE6h
Operating Parameter U16 RW 0000h Yes
Resolution per Revolution U16 RW 2000h Yes
INT32 RO 00000000h
Multi:
INT32 RO
1FFFFFFFh
Mono:
00001FFFh
2102
0
2103
0
2104
0
2105
0
2200
0
2300
0
3000
0
3001
0
Total Resolution U32 RW 20000000h Yes
Preset Value U32 RW 00000000h Yes
Limit Switch Min U32 RW 00000000h Yes
Limit Switch Max U32 RW 00000000h Yes
Cyclic Time U16 RW 0000h Yes
Save Parameter U32 WO ########
C5 Node number U8 RW 01h Yes
C5 Baud Rate U8 RW 00h Yes
Page 34 Version 1.02
 Loading...
Loading...