

Beijing Art Technology DAM-E3011 Service Manual
DAM - E3000 Data Acquisition Modules User’s Manual ( V6.1 0 )
1
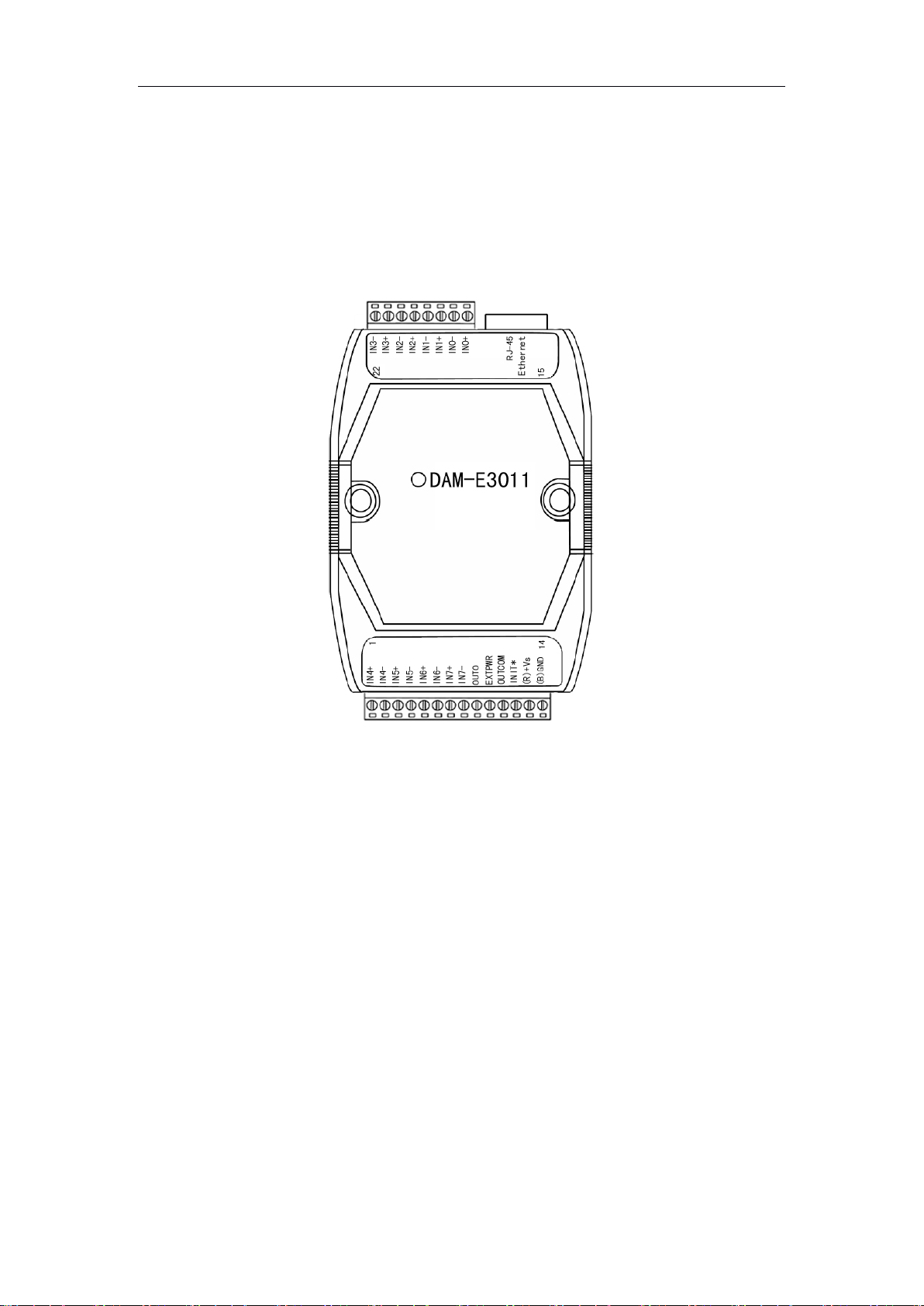
★ 端子分布图
DAM-E3011 说明书
★ 主要指标
8 路隔离数字量输入 和 1 路隔离 数 字量 输出模块
■ 通道: 9
■ I/O 类型: 8DI ( 差分 ) & 1DO
■ 输 入 电平
■ 输出:集电极开路 30V
■ 隔离电压: 3750V
■ 输入通道可作为 500Hz 计数器使用
:
(湿接点)
逻辑电平 0 : +1V (最大)
逻辑电平 1 : +4V ~ +30V
( 200mA 最大负载)
北京阿尔泰科技发展有限公司
DAM - E3000 Data Acquisition Modules User’s Manual ( V6.1 0 )
2
■ 输出通道可作为 500Hz 脉冲输出
■ 支持 10/100Mbps 以太网
■ 提供默认网页或可定制网页
■ 支持双看门狗
■ 电源: 未调理 +10 ~ +30 VDC
■ 功耗: 1.5W@24V
DC
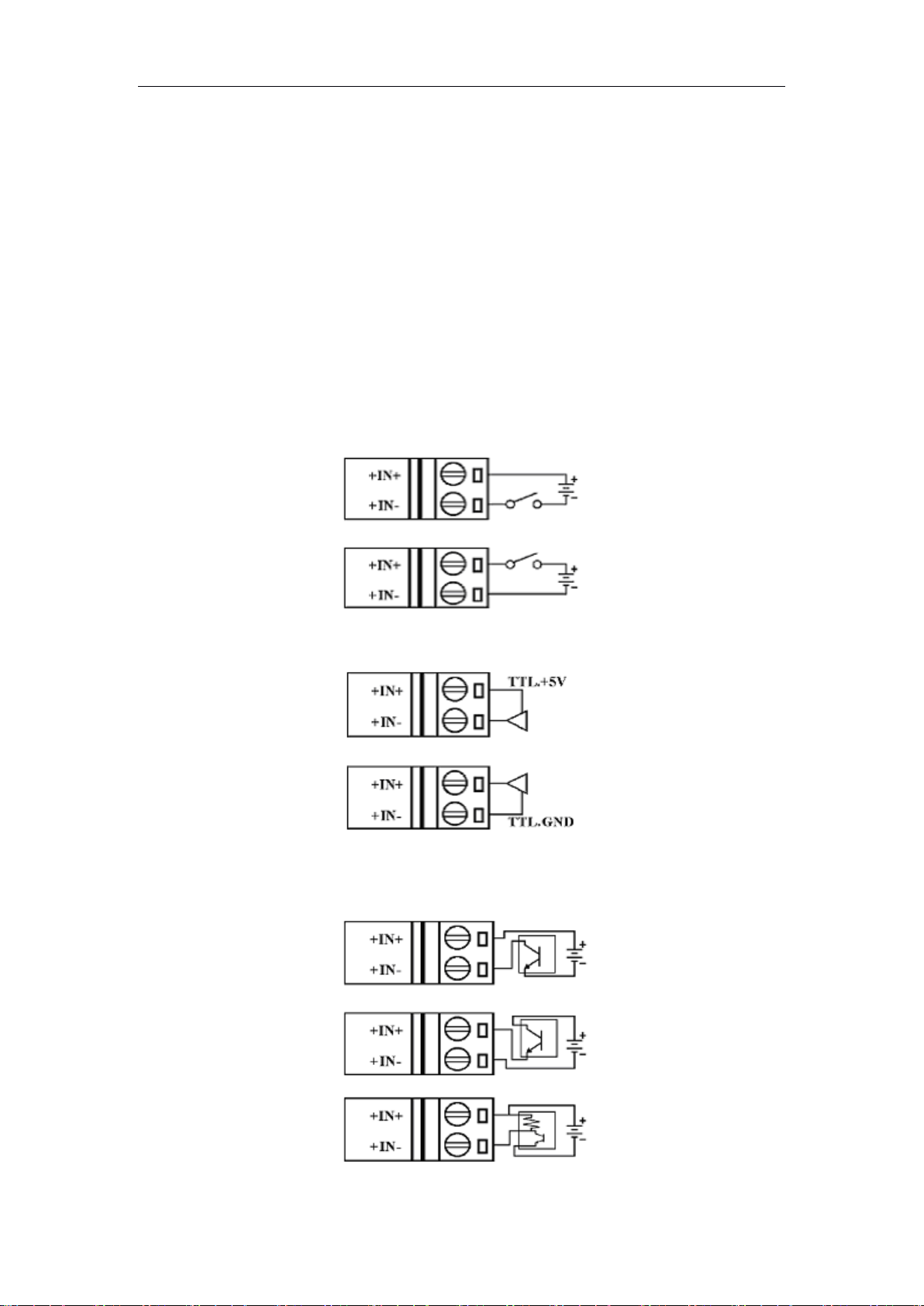
★ 接线图 (图的右侧为用户接线方式)
湿接点 信号输入
TTL/CMOS
TTL/CMOS
TTL/CMOS
信号输入
集电极开路信号输入
北京阿尔泰科技发展有限公司
DAM - E3000 Data Acquisition Modules User’s Manual ( V6.1 0 )
3
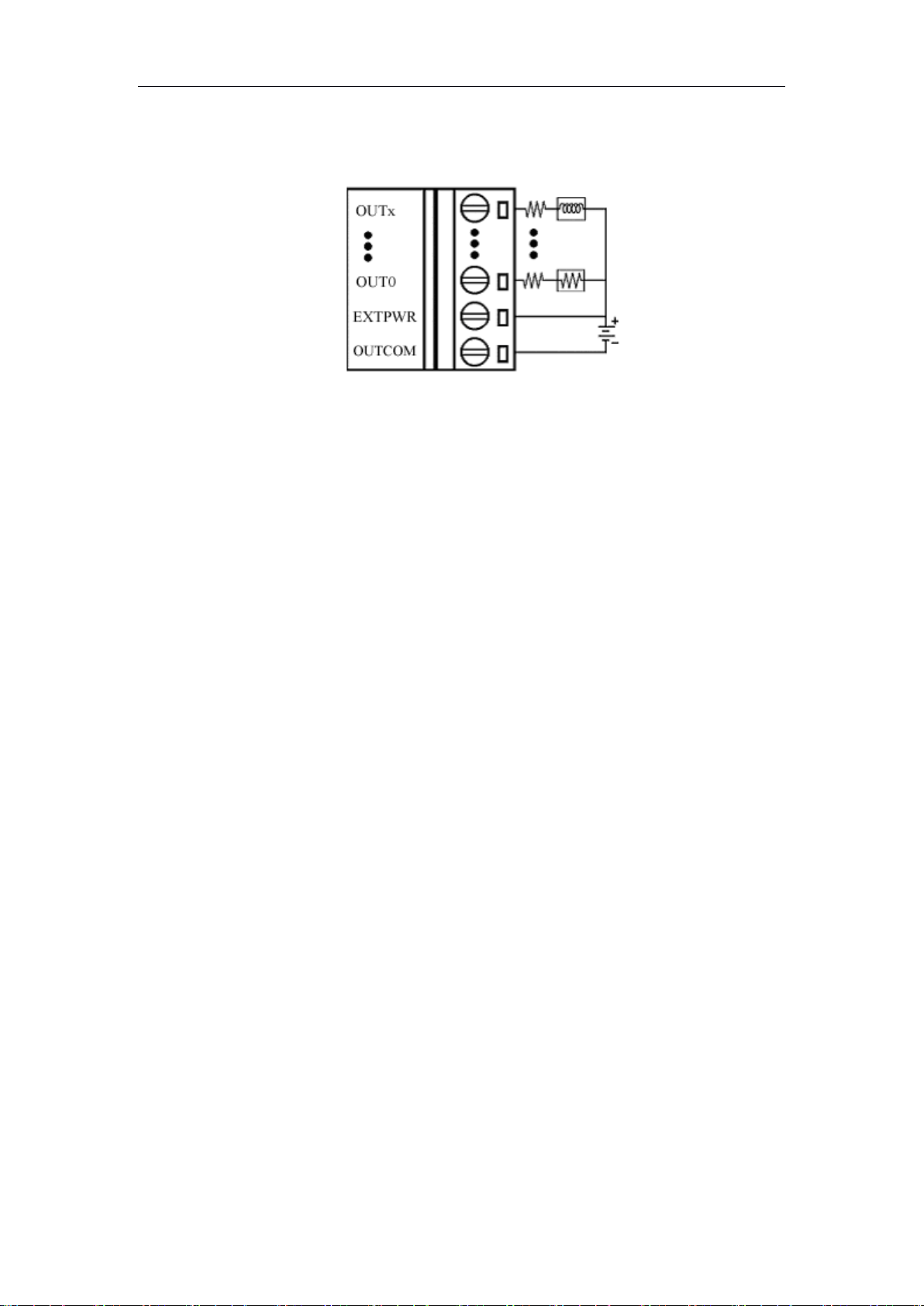
集电极开路输出
通信协议
1 MODBUS 简介
工业控制已从单机控制走向集中监控、 集散控制, 如今已进入网络时代, 工业控制器 连
网也为网络管理提供了方便。 M ODBUS 就是工业控制器的网络协议中的一种。
MODBUS 规约作为一个通讯协议是由 MODICON 公司在 1979 年首次提出的,它是一
个标准的、真正开放的、在工业自动化领域应用最广泛的网络通讯协议。通过此协议, 控 制
器相互之间、控制器经由网络 (例如以太网)和其它设备之间可以通信。 它已经成为一通 用
工业标准。通过这一协议,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
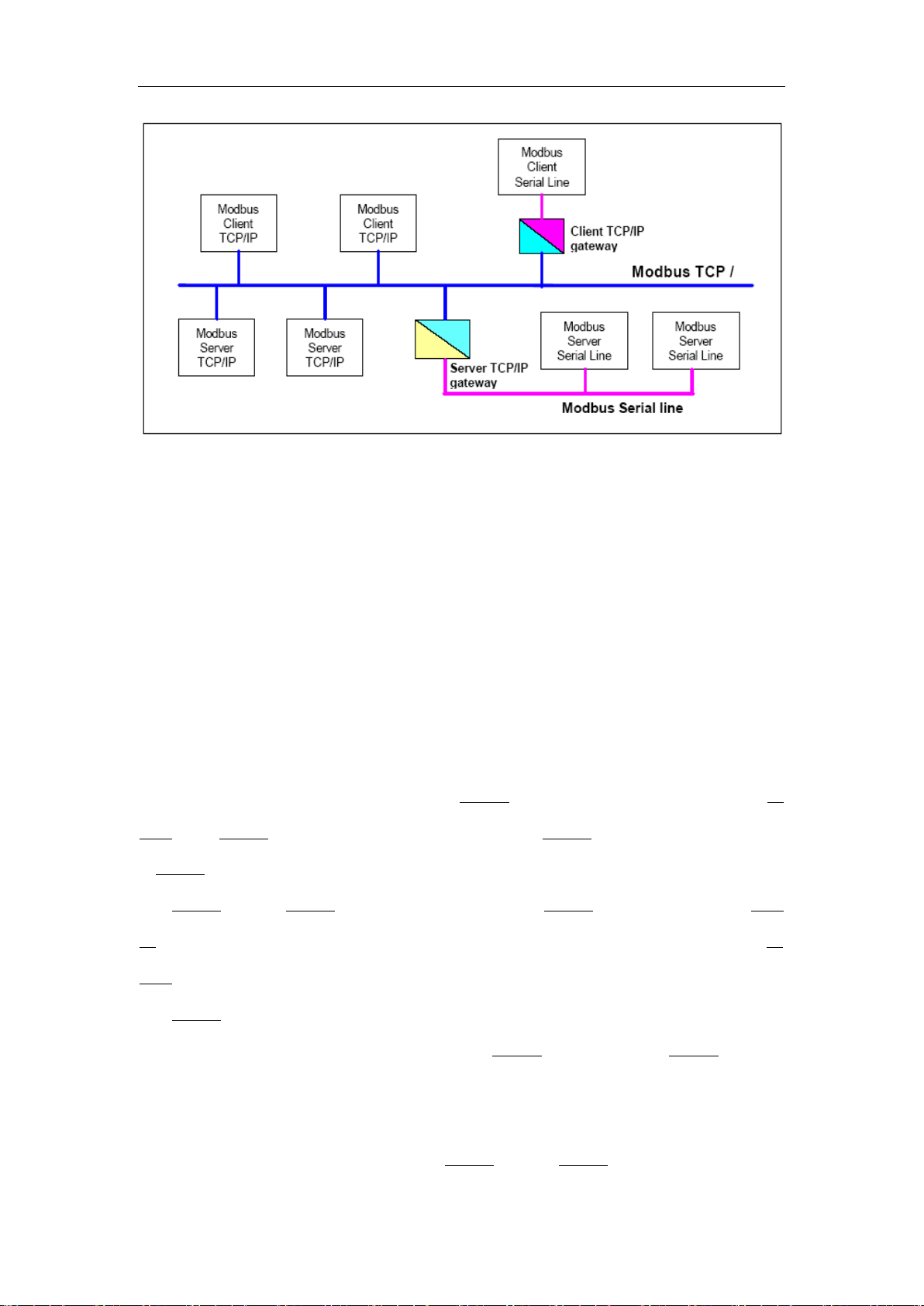
Modbus TCP 协议是 MODBUS 协议另一版本,它于 1999 年被开发出来以允许 Internet
用户访问以太网设备。由于没有任何商业利益驱使, Modbus TCP 协议的开放性及用户对 它
的熟悉程度再加上其应用的简单易学, 现在 Modbus TCP 已经成为世界领先的工业以太网 协
议。
北京阿尔泰科技发展有限公司
DAM - E3000 Data Acquisition Modules User’s Manual ( V6.1 0 )
4
此协议定义了一个控制器能认识使用的消息结构 , 而不管它们是经过何种网络进行通信
的。 它描述了控制器请求访问其它设备的过程, 如果回应来自其它设备的请求, 以及怎样 侦
测错误并记录。它制定了消息域格局和内容的公共格式。
当在 Modbus 网络上通信时,此协议决定了每个控制器须要知道它们的设备地址, 识 别
按地址发来的消息,决定要产生何种行动。如果需要回应,控制器将生成反馈信息并用
Modbus 协议发出。在其它网络上,包含了 Modbus 协议的消息转换为在此网络上使用的帧
或包结构。这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
标准的 Modbus 口是使用 RS-232C 兼容串行接口, 它定义了连接口的针脚、 电缆、 信 号
位、传输波特率、奇偶校验。控制器能直接或经由 Modem 组网。
控制器通信使用主 — 从技术, 即仅设备 ( 主设备
)能初始化传输(查询) 。其它设备 (
设备 ) 根据 主设备 查询提供的数据做出相应反应。 典型的 主设备 : 主机和可编程仪表。典 型
的 从设备 :可编程控制器。
主设备 可单独和 从设备 通信, 也能以广播方式和所有 从设备 通信。 如果单独通信, 从 设
备 返回消息作为回应,如果是以广播方式查询的,则不作任何回应。 Modbus 协议建立了 主
设备 查询的格式:设备(或广播)地址、功能代码、所有要发送的数据、错误检测域。
从设备 回应消息也由 Modbus 协议构成,包括确认要行动的域、任何要返回的数据、 和
错误检测域。 如果在消息接收过程中发生错误, 或 从设备 不能执行其命令, 从设备 将建立 错
误消息并把它作为回应发送出去。
在其它网络上,控制器使用对等技术通信,故任何控制都能初始和其它控制器的通信。
这样在单独的通信过程中, 控制器既可作为 主设备 也可作为 从设备 。 提供的多个内部通道 可
北京阿尔泰科技发展有限公司
从
DAM - E3000 Data Acquisition Modules User’s Manual ( V6.1 0 )
5
允许同时发生的传输进程。
地址功能代码数据数量数
据 1
...
数
据 n
CRC 高字
节
CRC 低字
节
在消息位, Modbus 协议仍提供了主 — 从原则,尽管网络通信方法是 “ 对等
器发送消息,它只是作为 主设备 ,并期望从 从设备 得到回应。同样,当控制器接收到消息,
它将建立一 从设备 回应格式并返回给发送的控制器。
主设备 查询
查询消息中的功能代码告之被选中的 从设备 要执行何种功能。 数据段包含了 从设备 要 执
行功能的任何附加信息。例如功能代码 03 是要求 从设备 读保持寄存器并返回它们的内容。
数据段必须包含要告之 从设备 的信息: 从何寄存器开始读及要读的寄存器数量。 错误检测 域
为 从设备 提供了一种验证消息内容是否正确的方法。
从设备 回应
如果 从设备 产生正常的回应, 在回应消息中的功能代码是在查询消息中的功能代码的 回
应。数据段包括了 从设备 收集的数据:像寄存器值或状态。如果有错误发生, 功能代码将 被
修改以用于指出回应消息是错误的, 同时数据段包含了描述此错误信息的代码。 错误检测 域
”
。如果控 制
允许 主设备 确认消息内容是否可用。
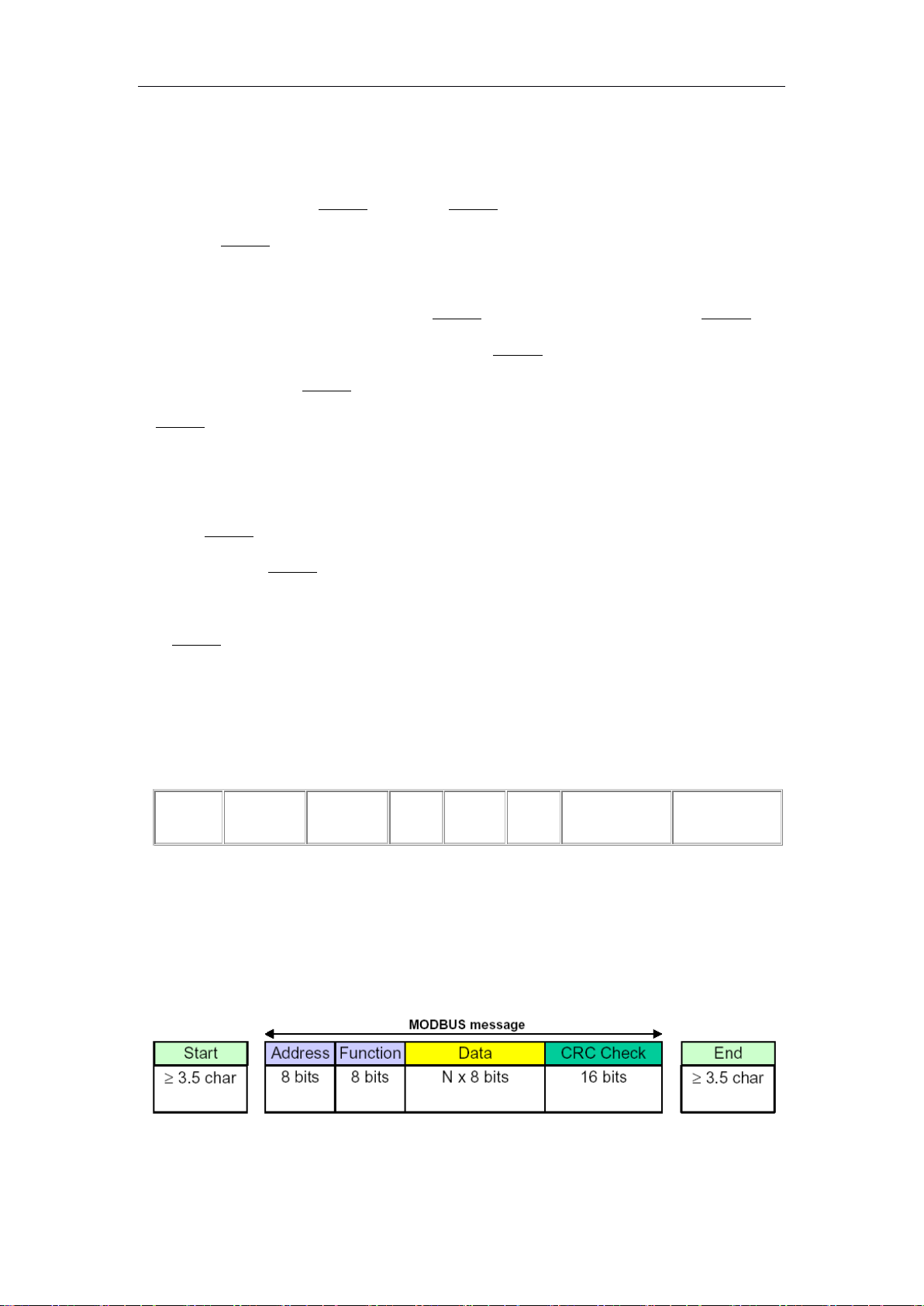
每个 MODBUS 帧都包括 地址域 功能域 数据域 错误检测域
2 工作方式
2.1 MODBUS RTU 方式
地址域 功能域 数据域 错误检测域
帧定界 : 在 MODBUS RTU 方式下, 每两个字符之间发送或者接收的时间间隔不能超 过
1.5 倍字符传输时间。如果两个字符时间间隔超过了 3.5 倍字符传输时间,就认为一帧数据
已经接收完成,新的一帧数据传输开始。
错误检测域
错误检测域
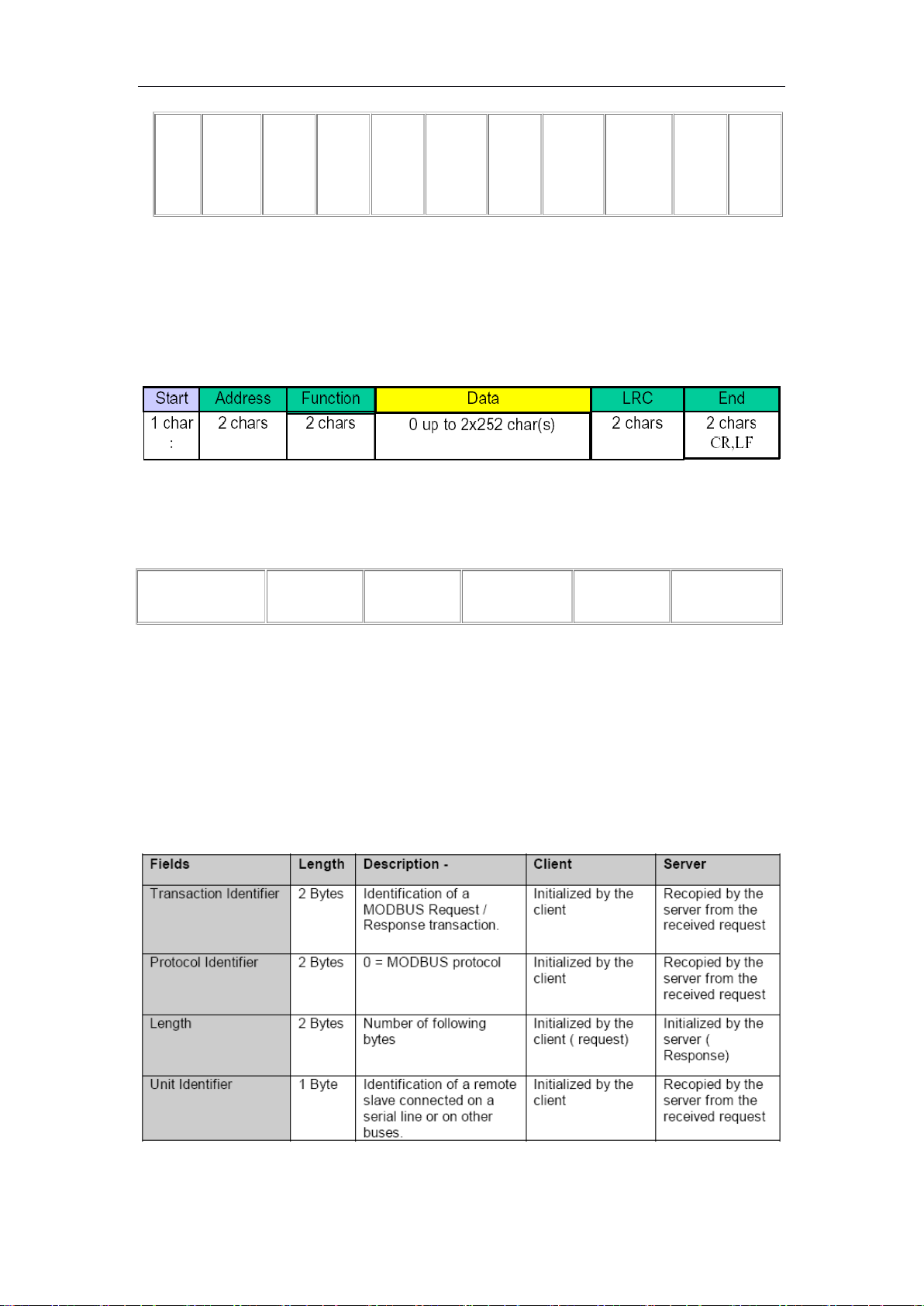
2.2 MODBUS ASCII 方式
北京阿尔泰科技发展有限公司
DAM - E3000 Data Acquisition Modules User’s Manual ( V6.1 0 )
6
地址域 功能域 数据域 错误检测域
:
地
址
功
能
代
码
数
据
数
量
数
据
1
...数据
n
LRC
高
字节
LRC
低
字节
回车换
行
MBAP
Header
功能代
码
数据数
量
数据 1
...
数据 n
错误检测域
错误检测域
帧定界
如 16 进制的 0x3A 用字符 “ 3 ” 和字符 “ A ” 表示。其中 “
示帧的结束。
:
在 MODBUS ASCII 方式下,一个 8 位的数据使用两个 ASCII 字符来表示。 比
:
”
表示帧的起始,
“ CR LF ” 表
2.3 MODBUS TCP 方式
协议头 功能域 数据域
帧定界 : 在 MODBUS TCP 方式 下,由于模块的地址由 IP 地址确定,所以不再有地址
域内容,考虑到 TCP 网络是可靠的数据传输网络,故不再有校验数据。但是考虑到在 IP 网
上数据到达的顺序可能与我们预期的数据不一致,故增加了一个数据序号,考虑到在
MODBUS TCP 协议上承载 MODBUS 协议,还在头部数据中增加了一个地址域。
MBAP
MBAP
MBAP
北京阿尔泰科技发展有限公司
Header
Header
Header
 Loading...
Loading...