

Page 1
Canada
Baumer Inc.
CA-Burlington, ON L7M 4B9
Phone +1 (1)905 335-8444
China
Baumer (China) Co., Ltd.
CN-201612 Shanghai
Phone +86 (0)21 6768 7095
Denmark
Baumer A/S
DK-8210 Aarhus V
Phone +45 (0)8931 7611
France
Baumer SAS
FR-74250 Fillinges
Phone +33 (0)450 392 466
Germany
Baumer GmbH
DE-61169 Friedberg
Phone +49 (0)6031 60 07 0
India
Baumer India Private Limited
IN-411038 Pune
Phone +91 20 2528 6833/34
Italy
Baumer Italia S.r.l.
IT-20090 Assago, MI
Phone +39 (0)2 45 70 60 65
Singapore
Baumer (Singapore) Pte. Ltd.
SG-339412 Singapore
Phone +65 6396 4131
Sweden
Baumer A/S
SE-56133 Huskvarna
Phone +46 (0)36 13 94 30
Switzerland
Baumer Electric AG
CH-8501 Frauenfeld
Phone +41 (0)52 728 1313
United Kingdom
Baumer Ltd.
GB-Watchfield, Swindon, SN6 8TZ
Phone +44 (0)1793 783 839
USA
Baumer Ltd.
US-Southington, CT 06489
Phone +1 (1)860 621-2121
www.baumer.com/worldwide
Baumer Electric AG · CH-8501 Frauenfeld
Phone +41 (0)52 728 1122 · Fax +41 (0)52 728 1144
11
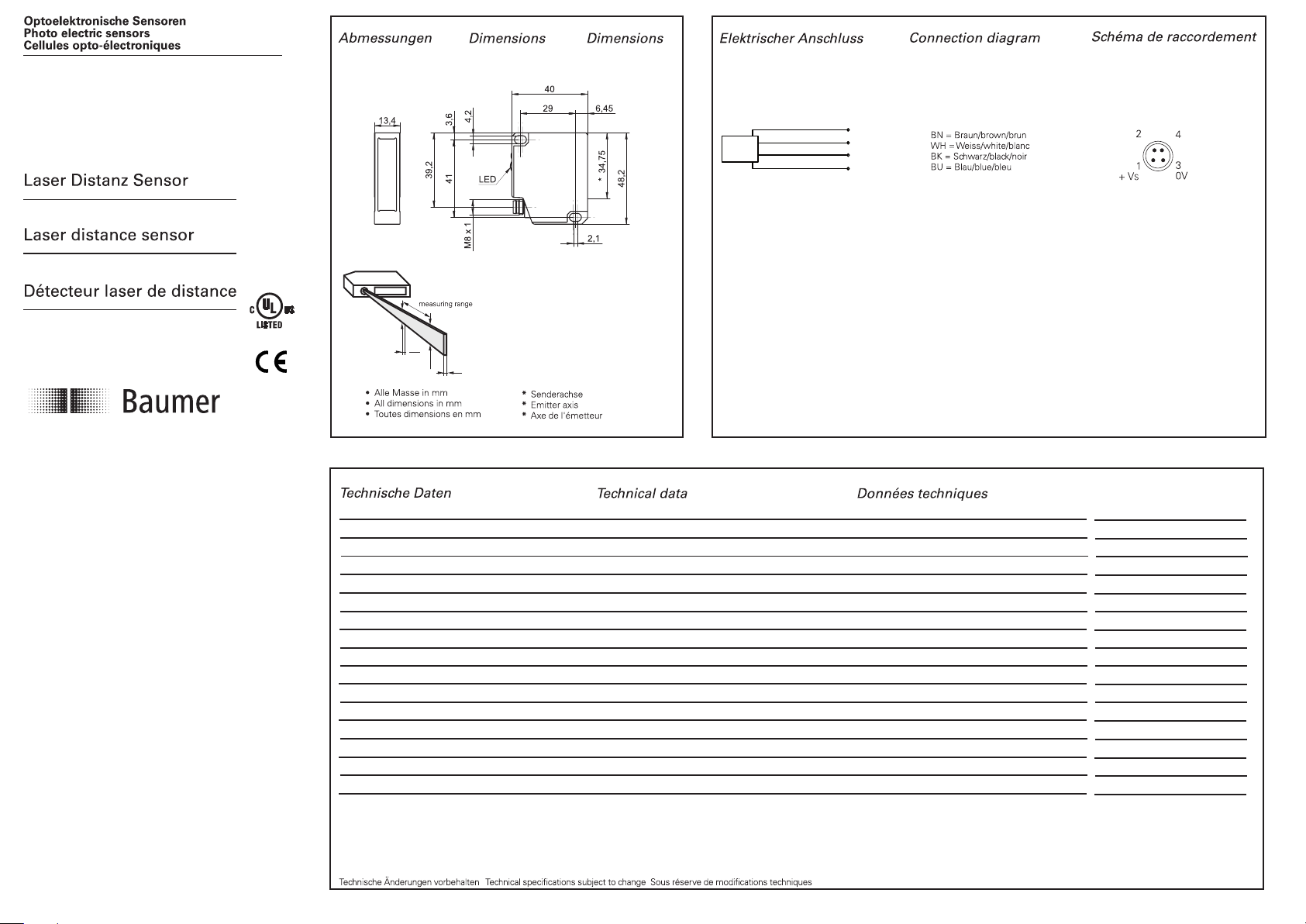
1
4
2
OADM 13S7580/S35A
BN (1)
Rx/Tx+
RS485
WH (2)
BK (4)
BU (3)
+Vs
Rx/Tx-
0 V
Rx/Tx-
Rx/Tx+
Messdistanz Measuring range Plage de mesure
Auflösung (matt weisse Keramik) Resolution (matt white ceramic) Résolution (céramique blanche mate)
Linearitätsabweichung (matt weisse Keramik) Linearity error (matt white ceramic) Déviation de linéarité (céramique blanche)
Lichtquelle Light source Source de lumière
Ansprechzeit Response time Temps d'activation
Störimpulsunterdrückung Disturbing puls suppression Réduction d'impulsion parasite
Alarm Alarm Alarme
Betriebsanzeige Power indicator Affichage de fonctionnement
Objektreflektivität Object reflectivity Réfléctivité objet
Verschmutzungsanzeige Soiled lens indicator Contrôle d'encrassement
Betriebsspannungsbereich Vs (UL-Class 2) Voltage supply range Vs (UL-Class 2) Plage de tension Vs (UL-Class 2)
max. Stromverbrauch max. supply current Consommation max.
Kurzschlussfest Short circuit protection Protégé contre courts-circuits
Verpolungsfest Reverse polarity protection Protégé contre inversion de polarité
Arbeitstemperaturbereich Operating temperature range Température en service
Schutzklasse Protection class Classe de protection
50 ... 550 mm
0,09 ... 1,15mm
±0,3 ... ±3,5 mm
pulsed red laser diode
1,5 ... 4,8 ms
< 30 ms
red LED
green LED
> 4 %
flashing red LED
12 ... 28 VDC
80 mA
ja / yes / oui
ja / yes / oui *
0 ... +50 °C
IP 67
* nur Betriebsspannung / voltage supply only / plage de tension
IND. CONT. EQ.
Í?+$?=ÂÂ*Â$Î
11043129
1DD2
1/8
Page 2
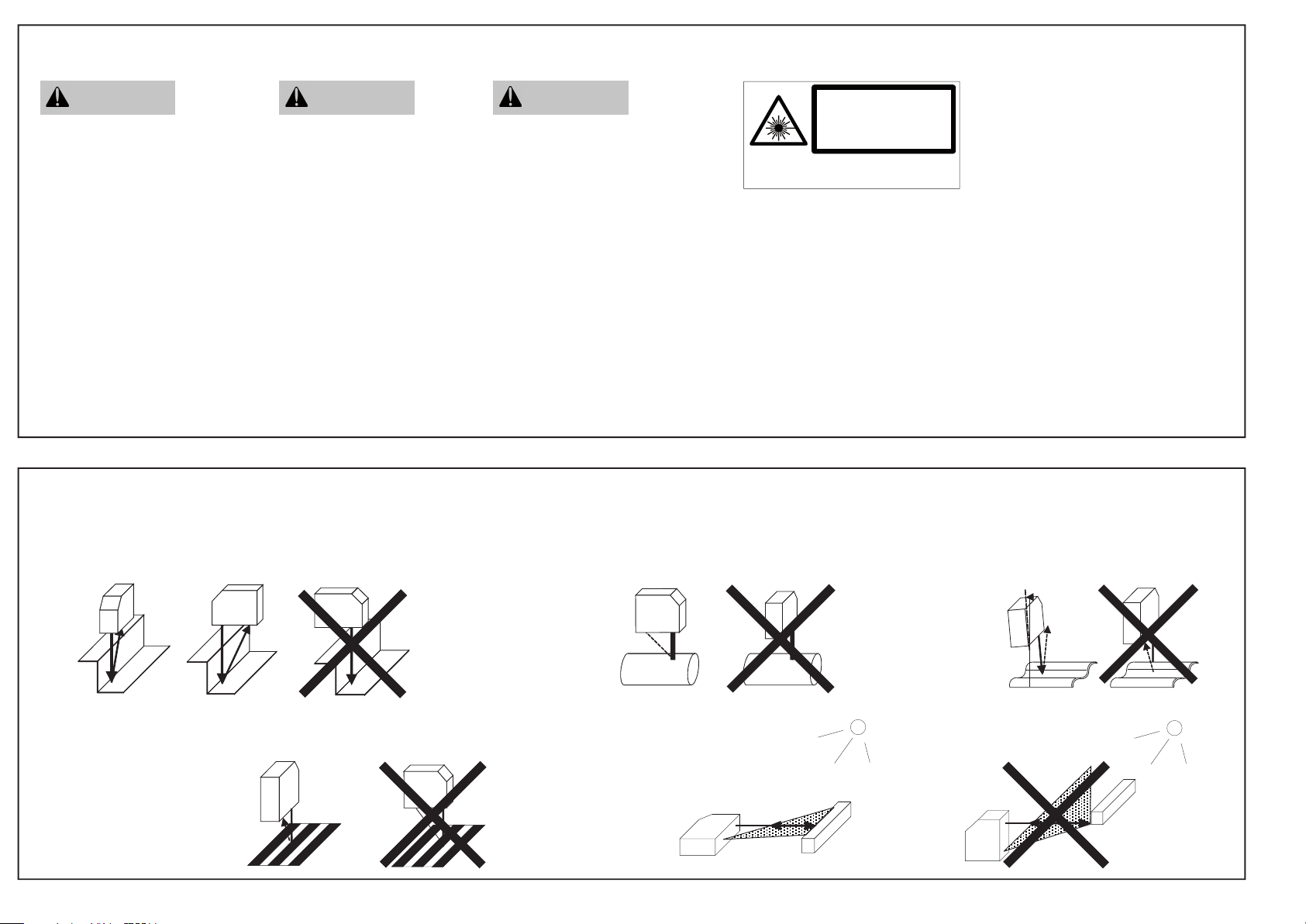
RED LED ON
Runde, glänzende Oberächen
Round glossy surfaces
Surfaces ronds brillantes
Glänzende Oberächen
Glossy surfaces
Surfaces brillantes
Gradins
Stufen
Steps
Einwirkung Fremdlicht
Eect of ambient light
Inuence lumiére ambiante
Surfaces dieremment rééchissantes
Unterschiedlich reektierende Oberächen
Dierent reection of surfaces
Allg. Sicherheitsbestimmungen
General safety instructions
Instructions générales de sécurité
Montage
Mounting
Montage
Hinweis zur Elektromagnetischen Verträglichkeit:
Sensor geerdet montieren und geschirmtes
Anschlusskabel verwenden.
Note to electromagnetic compatibility:
Connect the sensor housing to earth potential.
Use shielded connecting cables.
Note à la compatibilité électromagnétique:
Connecter le boîtier du détecteur au potentiel de terre.
Utiliser des câbles de raccordement blindés.
•Aus Lasersicherheitsgründen muss die Spannungsversorgung dieses Sensors abgeschaltet werden, wenn die ganze Anlage oder Maschine
abgeschaltet wird.
•Laser regulations require the power of the sensor to be switched o when turning o the whole system this sensor is part of.
•Pour des raisons de sécurité, l'alimentation de ce détecteur laser doit être coupée en cas d'arrêt total du système incorporan t ce détecteur.
Laserstrahl nie auf ein Auge richten.
Es empfiehlt sich, den Strahl nicht ins Leere
laufen zu lassen, sondern mit einem matten
Blech oder Gegenstand zu stoppen.
Do not point the laser beam towards
someone's eye. It is recommended to
stop the beam by a mat object or mat
metal sheet.
Ne dirigez jamais le faisceau vers un oeil.
Il est conseillé de ne pas laisser le faisceau
se propager librement mais de l'arrêter au
moyen d'un objet de surface mate.
LASER RADIATION
DO NOT STARE INTO BEAM
Wavelength: 620...680nm
Max. av. Output: < 1mW
IEC 60825-1, Ed. 2, 2007
CLASS 2 LASER PRODUCT
Complies with 21 CFR 1040.10 and 1040.11 except for deviations
pursuant to laser notice No. 50, dated June 24, 2007
VORSICHT
CAUTION
ATTENTION
2/8
Page 3
OADM 13S7580/S35A
Standard 38400 Baud
Start- / Stop-Bits 1
Datenlänge 8
Parity keine
Protokoll RS485 für OADM 13
1 Allgemeines
2 Aufbau der Kommandos
Alle Kommandos bestehen nur aus ASCII Zeichen.
2.1 Adresse
Adresse „0“ ist die Broadcast Adresse, die von jedem Sensor akzeptiert wird. Sie
kann benutzt werden, wenn nur ein Einzelsensor angeschlossen ist oder von
einem Kommando, das keine Antwort erwartet (z.B. Hold). Ansonsten gibt es
Adressen von 1 bis 8.
2.2 Telegram das die Steuerung zum Sensor sendet
Start of Frame (SOF) {
Adresse 1 Zahl 0..8 (8 Sensoren pro Bus + Broadcast Adresse 0)
Kommando 1 Buchstabe (A..Z)
Daten x Buchstaben (hängt vom Kommando ab)
End of Frame (EOF) }
• KEINE CHECKSUMME
2.3 Telegram vom Sensor
Start of Frame (SOF) {
Sensoradresse 1 Zahl 0..8 (8 Sensoren pro Bus + Broadcast Adresse 0)
Kommando 1 Buchstabe (A..Z)
Daten x Buchstaben (hängt vom Kommando ab)
Checksumme 2 Byte s. Anhang
End of Frame (EOF) }
3 Konfiguration des Sensors
Es gibt verschiedene Eigenschaften des Sensors die per Kommando einstellbar
sind. Sie sind als Konfiguration definiert.
Zur Konfiguration zählen:
• Die Skalierung der Ausgangsdaten z.B. in µm, mm, cm, Rohdaten
• Ausgabeformat bei „kontinuierlichem Datenstrom“ auf ASCII oder Binär
• Pause zwischen Messungen in „kontinuierlichem Datenstrom“
• Ausgabezusammensetzung (und/oder: Messwert, Abschwächung)
• Baudrate
• Adresse
Es gibt 3 Arten von Konfigurationen des Sensors:
1. Fabrikkonfiguration: Sie ist im Sensor gespeichert und kann nicht vom Benutzer
geändert werden.
2. Arbeitskonfiguration: Sie ist im Sensor Flash gespeichert und wird beim Einschalten automatisch verwendet.
3. Temporäre Konfiguration: Wird per Kommando ein Teil der Konfiguration geändert, dann ist diese Änderung sofort verwendbar, aber noch nicht im Sensor
gespeichert. Nach dem Aus- und Einschalten ist die Temporäre Konfiguration verloren.
Bei der Anwendung dieser beiden Kommandos werden Werte im Flash Speicher
des Sensors abgelegt. Dieser Vorgang kann min. 20'000 mal ausgeführt werden.
• Es gibt ein Kommando, das die temporäre Konfiguration als neue Arbeits konfiguration im Sensor speichert.
• Es gibt ein Kommando, das den Fabrikzustand der Konfiguration wieder herstellt
und als Arbeitskonfiguration einsetzt.
Protocole RS485 pour OADM 13
1 Généralités
Standard 38400 Bauds
Start- / Stop-Bits 1
Longueur trame de données 8
Parité sans
2 Structure des ordres de commande
Toutes les instructions sont seulement composées de caractères ASCII
2.1 Adresse
L’adresse „0“ est l’adresse Broadcast qui est acceptée par chaque détecteur. Elle
peut être utilisée quand un seul détecteur est connecté ou pour un ordre de
commande qui n’attend pas de réponse (p.ex. Hold). Autrement, ce sont les
adresses de 1 jusqu’à 8 qu’il faut prendre en considération.
2.2 Télégramme envoyé par le dispositif de commande au détecteur
Start of Frame (SOF) {
Adresse 1 Chiffre 0...8 (8 détecteurs par Bus + adresse Broadcast 0)
Ordre de commande 1 Lettre (A..Z)
Données x Lettres (dépend de l’ordre de commande)
End of Frame (EOF) }
• PAS DE SOMME DE CONTROLE
2.3 Télégramme en provenance du détecteur
Start of Frame (SOF) {
Adresse du détecteur 1 Chiffre 0...8 (Adresse Broadcast 0)
Ordre de commande 1 Lettre (A..Z)
Données x Lettres (dépend de l’ordre de commande)
Somme de contrôle 2 octets voir paragraphe: Somme de contrôle
End of Frame (EOF) }
3 Configuration du détecteur
Il existe plusieurs propriétés du détecteur qui peuvent être activées par un ordre de
commande. Elles sont reprises sous le terme configuration.
Font partie de la configuration :
• La mise à l’échelle de l’édition des données, par ex.,en µm, mm, cm,données brutes
• Format d’édition pour „Flux de données“ en ASCII ou Binaire
• Pause entre les mesures en „Flux de données“
• Structure d’édition (et/ou: Valeur de mesure, Affaiblissement)
• Débit en Bauds
• Adresses
Il existe 3 sortes de configuration différentes du détecteur:
1. Configuration d’usine: elle est mémorisée dans le détecteur et ne peut
être modifiée par l’utilisateur.
2. Configuration de travail: elle est mémorisée dans la mémoire Flash du
détecteur et est utilisée automatiquement lors de l’enclenchement.
3. Configuration temporaire: si par un ordre de commande une partie de la configuration est modifiée, cette modification est immédiatement utilisable sans pour cela
être mémorisée dans le détecteur. Après le déclenchement suivi d’un enclenchement,
la configuration temporaire est définitivement perdue.
En appliquant ces deux commandes, les valeurs seront stockées dans la mémoire
flash du détecteur. Cette procédure peut être effectué au moins 20'000 fois.
• Il existe un ordre de commande qui permet la mémorisation de la
configuration temporaire comme nouvelle configuration de travail dans
le détecteur.
• Il existe un ordre de commande qui permet de reconstituer l’état de la
configuration d’usine et de l’utiliser ensuite comme configuration de travail.
Standard 38400 Baud
Start- / Stop-Bits 1
Length of data string 8
Parity none
Protokol RS485 for OADM 13
1 General
2 Architecture of commands
All commands consist of ASCII characters only.
2.1 Address
Address „0“ is the broadcast address which is accepted by every sensor. It may be
used provided there is only one sensor connected or for commands not requiring
an answer (e.g. Hold). Apart from that available addresses are from 1 to 8.
2.2 Telegram sent to the sensor by the control
Start of Frame (SOF) {
Address 1 number 0..8 (8 sensors per Bus + broadcast address 0)
Command 1 letter (A..Z)
Data x letters (depending on the command)
End of Frame (EOF) }
• NO CHECKSUM
2.3 Telegram sent by the Sensor
Start of Frame (SOF) {
Sensor address 1 number 0..8 (8 sensors per Bus + broadcast address 0)
Command 1 letter (A..Z)
Data x letters (depending on the command)
Checksum 2 Byte see appendix
End of Frame (EOF) }
3 Configuration of sensor
Several sensor characteristics can be set by command. A set of characteristics
is defined as a “configuration”.
Following characteristics can be configured:
• The scaling of the data output for instance in µm, mm, cm, raw data
• Data format of „data-stream, ASCII or binary
• Pause between measurements in „data-stream“
• Structure of data provided (and/or: measured value, attenuation)
• Baud-rate
• Address
There are 3 different kinds of sensor configurations:
1. Factory configuration: such has been stored in the sensor and cannot be changed
by the user.
2. Working configuration: such has been stored in the sensor’s flash memory and is
automatically used when power is applied.
3. Temporary configuration: is part of a configuration changed by command. The
modification is of immediate effect. But it is not saved in the sensor’s flash memory.
Temporary configurations are lost in a power-down situation.
In applying these two commands, values will be stored in flash memory of the
sensor. This procedure can be performed min. 20'000 times
• There is a command for saving a temporary configuration as the new
working configuration.
• There is a command replacing the working configuration by the factory
configuration (default to factory configuration).
3/8
Page 4

OADM 13S7580/S35A
Prinzip
Man setzt zunächst mit Hilfe der Konfigurationskommandos fest, welche Formate,
Skalierung oder welche Zusatzinformationen (z.B. Abschwächung) man haben will.
Dann kann man die Messdaten abrufen und erhält mit jeder Messdatenanfrage
genau die Daten, die man konfiguriert hat. Ist die Konfiguration für das weitere
Vorgehen brauchbar, dann wird durch ein Kommando die bis dahin temporäre
Konfiguration als Arbeitskonfiguration übernommen. Nun bleibt genau diese Konfiguration erhalten, auch nach dem Aus- und wieder Einschalten. Eine nochmalige
Konfiguration nach dem Einschalten ist nicht mehr nötig.
4 Kommandos
(ßß stellt die Checksumme dar, hier wird immer die Adresse 0 verwendet)
Name
Kommando
Syntax
Antwort des
Sensors
Parameter
Kommentar
Reset R {0R} {0RV000608ßß} Keine Dieses Kommando stoppt alle
periodischen Ausgaben.
Der Sensor antwortet mit seiner
Softwareversion (z.B. 000608)
und mit seiner Adresse (hier 0)
Konfiguration
Setze
Fabrikkonfigura
tion als Arbeitskonfiguration
D {0D} {0Dßß} Die Fabrikkonfiguration wird
geladen und als neue
Arbeitskonfiguration gespeichert.
Antwort mit der alten Baudrate
nicht mit der Fabrikbaudrate, falls
diese eine andere ist.
Speichere
aktuelle
Konfiguration
als Arbeitskonfiguration
K {0K} {0Kßß} Die so gespeicherte Konfiguration
wird auch nach Aus- und
Einschalten wieder hergestellt.
Skaliert die Ausgabe (immer ohne
Dezimalpunkt in verschiedenen
Einheiten)
Werte von X:
U: Wert in 1 µm ,
H: Wert in 0.01 mm
Z: Wert in 0.1 mm
M: Wert in 1 mm
S: Wert in Sensoreinheiten
(0..8191)
R: Rohdaten (nicht linear, 0..8191)
Setze Messwert
Skalierung
S {0SX} {0SXßß} X
Falls der Messbereich des Sensors
mit der gewählten Skalierung nicht
in das Ausgabeformat passt, gibt
es keine Antwort.
Setze Ausgabe
Format für
permanente
periodische
Ausgabe
F {0FX} {0Fxßß} X X
A: ASCII (gibt das aus, was im
Messdatensatz festgelegt wurde)
B: Binär
Definition der Datenpakete s.u.
Wartezeit bei
permanenter
periodischer
Ausgabe
W {0Wx} {0Wxßß} X Bei der permanent periodischen
Ausgabe wird zwischen 2
Messungen eine Wartezeit von
x
*
0.1 ms eingesetzt. (x: 0..9)
Principe
Au moyen d’un ordre de commande de configuration, on fixe d’abord le format, la
mise à l’échelle ou encore la fonction supplémentaire (par ex. affaiblissement) qui
doit être retenu. Ensuite, on peut solliciter les données de mesure et on reçoit, après
chaque demande de données de mesure, exactement les données précédemment
configurées. Si la configuration pour la procédure suivante est valable, la
configuration jusqu’ici temporaire est alors acceptée comme configuration de travail
suite à un ordre de commande. Maintenant, c’est exactement cette configuration qui
restera sauvegardée même après un déclenchement suivi d’un nouvel
enclenchement. Une nouvelle configuration après l’enclenchement n’est plus
nécessaire.
4 Ordres de commande
(ßß représente la somme de contrôle, ici on utilise toujours l’adresse 0)
Nom
Ordres
Syntaxe
Réponse du
détecteur
Paramètres
Commentaire
Reset R {0R}
{0RV000608ßß}
Aucun
Cet ordre de commande arrête
toutes les éditions de données
périodiques.
Le détecteur répond par la version
de son logiciel (p.ex. 000608) et
par son adresse (ici 0).
Configuration
Valide
la configuration
d’usine comme
configuration de
travail
D
{0D}
{0Dßß} La configuration d’usine est
chargée et mémorisée en tant que
nouvelle configuration de travail.
Réponse avec l’ancien débit en
Bauds et non avec celui d’usine
dans le cas où ce dernier n’est pas
le même.
Mémorise la
configuration
actuelle comme
configuration de
travail
K
{0K}
{0Kßß} La configuration ainsi mémorisée
est également rétablie à
l’enclenchement après un
déclenchement.
Formate l’édition des données à
l’échelle (toujours sans point
décimal pour les diverses unités)
Valeurs de X:
U: Valeur en 1 µm,
H: Valeur en 0.01 mm
Z: Valeur en 0.1 mm
M: Valeur en 1 mm
S: Valeur en unités du détecteur
(0..8191)
R: Données brutes (non linéaire,
0..8191)
Valide
la mise à
l’échelle de la
valeur de
mesure
S
{0SX}
{0SXßß}
X
Au cas où l’échelle choisie pour la
plage de mesure du détecteur ne
correspond pas au format d’édition
des données, il ne donne aucune
réponse
Valide
le format
d’édition des
données pour
l’édition
périodique
permanente
F
{0FX}
{0Fxßß}
X
X
A: ASCII (affiche ce qui a été défini
pour le bloc des données de
mesure)
B: Binaire
Définition des paquets de données
voir ci-dessous
Intervalle de
temps pour
l’édition
périodique
permanente
W {0Wx} {0Wxßß} X
Pour l’édition périodique
permanente, on fixe entre 2
mesures un intervalle de temps
x
*
0.1 ms. (x: 0…9)
Configuration procedure
First the required formats, scale or type of additional information requested (e.g.
attenuation) are set by configuration commands. Once this has been completed,
measured data can be retrieved. With every request for data, the sensor will now
provide precisely the data and format as previously configured.
If this configuration, which is still temporary, is OK for further use, it can be saved as
the working configuration by an additional command. This working configuration is
stored in a non-volatile memory. It is therefore unaffected by a power down situation.
No new configuration is required after power up.
4 Commands
(
ßß represents the checksum, address 0 is always used in this case)
Name
Command
Syntax
Sensor
response
Parameter
Comments
Reset R {0R} {0RV000608ßß} None This command stops all periodic data
output.
The sensor responds with its software
version (e.g. 000608)
and with its address (0 in this case)
Configuration
Set factory
configuration as
working
configuration
D {0D} {0Dßß} The factory configuration is loaded
and saved as the new working
configuration. The sensor sends the
response still using the old Baud rate,
not yet the factory Baud rate,
provided they differ.
Save current
configuration as
working
configuration
K {0K} {0Kßß} Any configuration saved in this way is
restored after every power-down,
power-up cycle.
Scaling of output signal (always
without decimal point for all units).
Value of X:
U: Value in 1 µm ,
H: Value in 0.01 mm
Z: Value in 0.1 mm
M: Wert in 1 mm
S: Value in sensor units (0..8191)
R: Raw data (non linear, 0..8191)
Set scale of
measured value
S {0SX} {0SXßß} X
There is an error message in case of
the sensor’s measuring range
combined with the scale set do not
correspond with the output format.
Set output
format to
permanent
periodical
signal output
F {0FX} {0Fxßß} X X
A: ASCII (provides the format as
specified for measured data record)
B: binary
Definition of data packet see below
Waiting time in
permanent
periodical
signal output
mode
W {0Wx} {0Wxßß} X
In the permanent periodical signal
output mode there is a waiting time of
x
*
0.1 ms between 2 measurements
(x: 0..9).
4/8
Page 5

OADM 13S7580/S35A
Setze Aufbau
des
Messdatensatz
es
Z {0Zxy} {0Zxyßß) Xy X und y stehen für mögliche
Ausgabewerte
‚M’: Messwert
‚A’: Abschwächung
Die Reihenfolge spielt keine Rolle
Setze
Baudrate
X {0Xb} {0Xbßß} b: 1..5 1: 9600
2: 19200
3: 38400
4: 57600
5: 115200
Antwort mit der alten Baudrate.
Adresse
zuweisen
A {0Ax} {0Axßß} X Der Sensor erhält eine neue
Adresse (x=0..8)
Get
Konfiguration
V {0V} {0V……..ßß} Liefert die gespeicherten
Einstellungen:
Ausgabe Skalierung (mm,µm..)
Ausgabeformat (Binär, ASCII)
Wartezeit für
permanentperiodische Ausgabe
Software Version
Hardware Version
Produktionsdatum
Messdatensatz Aufbau
Messen
Get
Messdatensatz
M {0M} {0M…..ßß} Aufbau s. unten
Hold set H {0H}
{1H} {1Hßß}
Set: Halte den letzten gemessenen
Wert in Holdregister
Keine Antwort wenn Hold
Kommando auf Broadcast Adresse
gesendet wurde.
Hold get G {0G} {0G…..ßß} Get Messdatensatz vom
Holdregister. Format wie bei Get
Messdatensatz.
Laser an/aus L {0L0} {0L0ßß} 0 1: Laser aus mit Parameter 0
{0L1} {0L1ßß} 1
0: Laser ein mit Parameter 1
Starte
permanente
periodische
Ausgabe
P {0P} {0P…….ßß} Skalierung durch Kommando „S“
definiert. 2 oder 4 Byte pro
Messwert, falls Binär ausgewählt
war (s.u.) Skalierung
Sensoreinheiten.
Falls ASCII ausgewählt ist die
Antwort wie bei „M“
Besonderheiten s.u.
Valide
la structure du
bloc des
données de
mesure
Z
{0Zxy}
{0Zxyßß)
Xy
X et y représentent ici les valeurs
d’édition possibles
‚M’: Valeurs de mesure
‚A’: Affaiblissement
L’ordre de succession n’a pas
d’importance.
Valide
le débit en
Bauds
X
{0Xb}
{0Xbßß}
b: 1…5
1: 9600
2: 19200
3: 38400
4: 57600
5: 115200
Réponse avec l’ancien débit en
Bauds
Attribuer une
adresse
A
{0Ax}
{0Axßß}
X
Le détecteur reçoit une nouvelle
adresse (x = 0…8
Get
Configuration
V
{0V}
{0V……..ßß}
Délivre les réglages mémorisés:
Echelle sortie des données (mm,
µm…)
Format d’édition des données
(Binaire, ASCII)
Intervalle de temps pour l’édition
périodique permanente
Version logiciel
Version Hardware
Date de production
Structure du bloc des données de
mesure
Mesurer
Get
Bloc des
données de
mesure
M
{0M}
{0M…..ßß}
Structure voir ci-dessous
Hold set
H
{0H}
Set: conserve la dernière valeur
mesurée dans le registre tampon
(Holdregister)
Pas de réponse quand l’ordre Hold
est envoyé sur l’adresse Broadcast
Hold get
G
{0G}
{0G…..ßß}
Get: (lire) bloc de données de
mesure du registre tampon
(Holdregister). Format comme pour
bloc des données de mesure Get
Laser ON/OFF
L
{0L0}
{0L1}
{0L0ßß}
{0L1ßß}
0 1 Laser OFF avec paramètre 0
Laser ON avec paramètre 1
Démarre
édition
périodique
permanente
P
{0P}
{0P…….ßß}
Mise à l’échelle définit par ordre de
commande „S“. 2 ou 4 octets par
valeur de mesure au cas où Binaire
a été choisi (voir ci-dessous).
Mise à l’échelle unités du
détecteur.
Si ASCII a été choisi, réponse
comme pour „M“
Spécialités: voir ci-dessous
Set structure of
measured data
record
Z {0Zxy} {0Zxyßß) Xy X and y stand for any output value
provided
‚M’: measured data
‚A’: Attenuation
The order of ‘A’ and ‘M’ has no effect.
Set Baud-rate X {0Xb} {0Xbßß}
b: 1..5 1: 9600
2: 19200
3: 38400
4: 57600
5: 115200
Responds with the old Baud-rate.
Assign address A {0Ax} {0Axßß} X
A new address is assigned to the
sensor (x=0..8)
Get
Configuration
V {0V} {0V……..ßß} Provides inform ation on the actual
configurations set:
Output scale (mm, µm..)
Output format (Binary, ASCII)
Waiting time for permanent periodical
data mode
Software version
Hardware version
Manufacturing date
Structure of measured data record
Measuring
Get measured
data record
M {0M} {0M…..ßß} Configuration see below
Hold set H {0H}
{1H}
{1Hßß}
Set: hold the last value measured
in the hold register.
No answer when hold command
was sent to broadcast address.
Hold get G {0G} {0G…..ßß} Get measured data record from the
hold register. Format identical Get
measured data record
Laser on/off L {0L0} {0L0ßß} 1 / 0 Laser on with parameter 1
Laser off with parameter 0
Start permanent
periodical data
output
P {0P} {0P…….ßß} Scaling is defined by command „S“.
2 or 4 Byte per measured value,
provided binary has been chosen.
(see be low) Scaling of sensor units.
Provided ASCII has been chosen
the answer is identical to „M“
Particular features see below
5/8
Page 6

OADM 13S7580/S35A
5 Anhang
5.1 Sensoreinheiten
Die Sensoreinheiten sind immer: 1 Einheit = 1/8192 des nominalen Messbereichs.
5.2 Ungültiger Messwert
Wenn das Objekt hinter der maximalen Messdistanz liegtund noch erfasst werden
kann, dann wird der Wert 99999 (ASCII), FF 7F (Binär) ausgegeben. Hat der Sensor
kein Objekt im Erfassungsbereich, gibt er den Wert 0 aus.
5.3 Abschwächung
Die „Abschwächung“ zeigt an wie stark das Licht vom Sensor zum Objekt und
wieder zurück abgeschwächt wird. Ein großer Wert bedeutet eine starke Abschwächung, also z.B. dunkle Objekte. Der Wert für die Abschwächung ist ein
relativer Wert der je nach Typ bis zu 8192 als Maximalwert erreicht.
Ist der Maximalwert erreicht, dann führt eine weitere Verringerung der Lichtmenge
durch dunklere Objekte oder Verschmutzung zu einem ungültigen Messwert.
5.4 Binäres Format
Das binäre Format wird nur in der permanenten periodischen Ausgabe verwendet
um die Messdaten mit maximaler Datenrate zu übertragen. Aus diesem Grund
ist das binäre Format sehr kompakt und mit minimalem Overhead versehen.
Das Datenformat der Messwerte ist immer: Sensoreinheiten.
Im ersten Byte ist Bit 7 = 1 Markierung für Start des Datensatzes
Bit 0..Bit 6 sind Bit 7 .. 13 des Messwertes
Im zweiten Byte ist Bit 7 = 0,
Bit 0..Bit 6 sind Bit 0..6 des Messwertes
Falls die Abschwächung auch für die Ausgabe gewählt war, dann folgen 2 weitere
Bytes
Im dritten Byte ist Bit 7 = 0,
Bit 0..Bit 6 sind Bit 7..13 des Abschwächungswerts
Im vierten Byte ist Bit 7 = 0,
Bit 0..Bit 6 sind Bit 0..6 des Abschwächungswertes
Bespiel: nur Messwert
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 1 1 0 1 0 1 1 1 1
Byte 2 0 1 1 1 0 1 1 0
Resultat Messwert:
Binär 01 0111 1111 0110
Dezimal 6134
Hexadezimal 0x17F6
Bespiel: Messwert und Abschwächung
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 1 1 0 1 0 1 1 1 1
Byte 2 0 1 1 1 0 1 1 0
Byte 3 0 0 0 0 1 0 1 1
Byte 4 0 1 1 1 0 0 1 0
Resultat Messwert:
Binär 01 0111 1111 0110
Dezimal 6134
Hexadezimal 0x17F6
Resultat Abschwächung:
Binär 00 0101 1111 0010
Dezimal 1522
Hexadezimal 0x5F2
5 Annexe
5.1 Unités du détecteur
Les unités du détecteur correspondent toujours à: 1 unité = 1/8192 de la plage
nominale de mesure.
5.2 Valeur de mesure non valable
Lorsque l’objet se trouve en dehors de la distance de mesure maximale, la valeur
99999 (ASCII), FF 7F (Binaire) est affichée. Si aucun objet ne se trouve à l’intérieur
de la plage de mesure, c’est alors la valeur 0 qui est affichée.
5.3 Affaiblissement
„L’affaiblissement“ indique de combien la lumière émise par le détecteur sur l’objet
et renvoyée vers le détecteur est affaiblie. Une grande valeur signifie un fort
affaiblissement, par exemple, en présence d’objets foncés. La valeur pour
l’affaiblissement est une valeur relative qui se situe selon le type entre 1 et 8192
comme valeur maximale. Lorsque la valeur maximale est atteinte, il faut s’attendre
à des valeurs de mesure incorrectes dans le cas d’une réduction supplémentaire de
la quantité de lumière par des objets plus sombres ou en présence d’encrassement.
5.4 Format binaire
Le format binaire est seulement utilisé pour l’édition périodique permanente afin de
transmettre les données de mesure avec un taux de transfert des données maximal.
Pour cette raison, le format binaire est très compact. Le format des données des
valeurs de mesure est toujours: Unités du détecteur.
Pour le premier octet, on a: Bit 7 = 1 Marquage pour le démarrage du bloc de
données
Bit 0..Bit 6 sont les Bit 7 .. 13 de la valeur de mesure
Pour le deuxième octet, on a: Bit 7 = 0,
Bit 0..Bit 6 sont les Bit 0..6 de la valeur de mesure
Si l’affaiblissement a aussi été choisi pour l’édition des données, 2 octets
supplémentaires suivent:
Pour le troisième octet, on a: Bit 7 = 0,
Bit 0..Bit 6 sont les Bit 7..13 de la valeur de
l’affaiblissement
Pour le quatrième octet, on a: Bit 7 = 0,
Bit 0..Bit 6 sont les Bit 0..6 de la valeur de
l’affaiblissement
Exemple: seulement valeur de mesure
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Octet1 1 0 1 0 1 1 1 1
Octet2 0 1 1 1 0 1 1 0
Résultat valeur de mesure:
Binaire 01 0111 1111 0110
Décimale 6134
Hexadécimale 0x17F6
Exemple: valeur de mesure et affaiblissement
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Octet1 1 0 1 0 1 1 1 1
Octet2 0 1 1 1 0 1 1 0
Octet3 0 0 0 0 1 0 1 1
Octet4 0 1 1 1 0 0 1 0
Résultat valeur de mesure: Résultat affaiblissement
Binaire 01 0111 1111 0110 Binaire 00 0101 1111 0010
Décimale 6134 Décimale 1522
Hexadécimale 0x17F6 Hexadécimale 0x5F2
5 Appendix
5.1 Sensor units
The sensor units are always: 1 unit = 1/8192 of the nominal measuring range.
5.2 Invalid measured value
Provided the object is farther away than the maximum measuring distance and it is
still being detected by the sensor, the value 99999 (ASCII), FF 7F (binary) is sent. If
there is no object at all within the sensor’s measuring range or the object is too far
away to be detected, the output is 0.
5.3 Attenuation
The „attenuation“ indicates how strongly the light has been attenuated on its way
from the sensor to the object and back to the receiver. A high value suggests a
strong attenuation e.g. as encountered when looking at dark objects. The attenuation
value is a relative figure reaching maximum values of up to 8192 depending on the
type of sensor. When the maximum value has been reached any further reduction of
the light intensity, induced by either darker objects or by soiled conditions, will result
in an invalid measured value.
5.4 Binary format
The binary format is only used in the permanent periodical signal output mode in
order to transmit the measured data with the highest possible data rate. For that
reason the binary format is very compact with only minimal overhead. The data format
of the measured data is always: sensor units.
The first Byte contains Bit 7 = 1 as marker for the start of the dataset
Bit 0..Bit 6 are Bit 7 .. 13 of the measured data
The 2nd Byte contains Bit 7 = 0,
Bit 0..Bit 6 are Bit 0..6 of the measured data
Provided the attenuation has also been chosen for data output, then 2 further
Bytes are to follow
The 3rd Byte contains Bit 7 = 0,
Bit 0..Bit 6 are Bit 7..13 of the attenuation value
The 4th Byte contains Bit 7 = 0,
Bit 0..Bit 6 are Bit 0..6 of the attenuation value
Example: Only measured data:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 1 1 0 1 0 1 1 1 1
Byte 2 0 1 1 1 0 1 1 0
Result of measured data:
Binär 01 0111 1111 0110
Dezimal 6134
Hexadezimal 0x17F6
Example: measured data and attenuation
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 1 1 0 1 0 1 1 1 1
Byte 2 0 1 1 1 0 1 1 0
Byte 3 0 0 0 0 1 0 1 1
Byte 4 0 1 1 1 0 0 1 0
Result of measured data: Result attenuation:
Binary 01 0111 1111 0110 Binär 00 0101 1111 0010
Decimal 6134 Dezimal 1522
Hexadecimal 0x17F6 Hexadezimal 0x5F2
6/8
Page 7

OADM 13S7580/S35A
5.5 Besonderheiten permanent periodische Ausgabe
Die Ausgabe wird durch das Ausschalten des Sensors abgebrochen. Nach dem
Einschalten sendet der Sensor nicht mehr periodisch.
Die Adresse des Sensors muss 0 sein. Ausserdem ist dieser Modus NICHT durch
ein Kommando abzubrechen, da der Bus permanent vom Sensor benötigt wird,
um die maximale Datenrate zu transportieren, daher kann die Steuerung den Bus
nicht verwenden.
5.6 Format der Ausgabe von „Get Konfiguration“
Ausgabe Skalierung (mm,µm..) 1 Byte
Ausgabeformat (Binär, ASCII) 1 Byte
Wartezeit für permanentperiodische Ausgabe 1 Byte
Softwareversion 6 Byte( XXYYZZ)
Hardwareversion 2 Byte (XY)
Produktionsdatum 6 Byte (TTMMJJ)
5.7 Messdatensatz
Der Messdatensatz kann 2 verschiedene Werte enthalten
- Messwert
- Abschwächung
Je nach Aufbau des Messdatensatzes (s. Kommando „Z“) werden die Daten
nacheinander übertragen. Vor dem Messwert steht ein „M“, danach der Messwert
in der festegelegten Skalierung (festgelegt mit „S“- Kommando), immer 5-stellige Zahl.
Vor der Abschwächung stehe ein „A“, danach eine 4-stellige Zahl.
Die Reihenfolge ist immer: zuerst der Messwert, falls er mit „Z“ ausgewählt wurde,
dann die Abschwächung, falls diese ausgewählt wurde.
Beispiel: {0MM12345A012364} Checksumme ist hier 64
5.8 Checksumme
Die Checksumme (CS) ist die einfache Summe aller Werte der ASCII Zeichen, von
dieser Summe werden die letzten beiden Stellen verwendet.
Beispiel:
Laser OFF Adresse 1
Kommando 1 L 0
Checksumme (ASCII Werte): 49+ 76+ 48 = 173, die letzten beiden
Stellen sind 73
Kommandoantwort mit Checksumme: {1L073}
5.5 Particularités pour l’édition des données périodique permanente
L’édition des données est interrompue lors du déclenchement du détecteur. Après un
nouvel enclenchement, le détecteur n’émet plus de façon périodique. L’adresse du
détecteur doit être 0. Par ailleurs, cet ordre de commande ne peut être interrompu
par un ordre de commande vu que le détecteur a besoin en permanence du Bus de
façon à pouvoir transporter le taux de données maximum; pour cette raison, la
commande ne peut utiliser le Bus.
5.6 Format d’édition de „Get Configuration“
Edition de la mise à l’échelle (mm,µm..) 1 octet
Format de l’édition (Binaire, ASCII) 1 octet
Intervalle de temps pour édition périodique permanente 1 octet
Version logiciel 6 octets ( XXYYZZ)
Version Hardware 2 octets (XY)
Date de production 6 octets (TTMMJJ)
5.7 Bloc de données de mesure
Le bloc de données de mesure peut comporter 2 valeurs différentes
- Valeur de mesure
- Affaiblissement
Selon la structure du bloc de données de mesure (voir Ordre de commande „Z“) les
données sont transmises l’une après l’autre. Avant la valeur de mesure se trouve
un „M“, ensuite la valeur de mesure dans l’échelle sélectionnée (définie par l’ordre
de commande „S“, toujours un nombre de 5 chiffres.
Avant la valeur de mesure de l’affaiblissement se trouve un „A“, ensuite un nombre
de 4 chiffres. L’ordre de succession est toujours le même: tout d’abord la valeur de
mesure au cas où elle a été sélectionnée avec „Z“, ensuite l’affaiblissement au cas
où ce dernier a été aussi sélectionné.
Exemple: {0MM12345A012364} la somme de contrôle est ici de 64
5.8 Somme de contrôle
La somme de contrôle (CS) est tout simplement la somme de toutes les valeurs des
caractères ASCII dont on retient de cette somme seulement les deux derniers
chiffres.
Exemple:
Laser OFF Adresse 1
Ordre de commande 1 L 0
Somme de contrôle (Valeurs ASCII): 49+ 76+ 48 = 173, les deux derniers
chiffres sont 73
Réponse ordre de commande avec somme de contrôle: {1L073}
5.5 Particular features of the permanent periodical signal output mode
The sensor address must be 0 !
Please note: this mode CANNOT be interrupted by any command since the sensor
requires permanent access to the bus in order to transmit the maximum data rate.
For this reason the control cannot use the bus either.
The data output is interrupted by switching the sensor off. After power-on the sensor
does not send periodically anymore.
5.6 Data format of „Get configuration“
Scale of output (mm, µm..) 1 Byte
Data output format (Binary, ASCII) 1 Byte
Waiting time for permanent periodical data output 1 Byte
Software version 6 Byte (XXYYZZ)
Hardware version 2 Byte (XY)
Manufacturing date 6 Byte (TTMMJJ)
5.7 Set of measured data
The set of measured data can contain 2 different values
- Measured value
- Attenuation
Depending on the structure of the measured data record (see command „Z“) the
data is transmitted sequentially.
Before the measured value there is a „M“, followed by the measured value in the
scale chosen (defined with the „S“- command), always 5 digits.
Before the attenuation there is an „A“, followed by a 4-digit number.
The sequence is always: first the measured value, if it has been chosen with „Z“,
followed by the attenuation, provided it has been selected.
Example: {0MM12345A012364} checksum is 64
5.8 Checksum
The checksum (CS) represents the sum of all values of the ASCII characters, the
last two digits of which are used.
Example:
Laser OFF address 1
Command 1 L 0
Checksum (ASCII values): 49+ 76+ 48 = 173, the last two digits
are 73
Command answer with checksum: {1L073}
7/8
Page 8

OADM 13S7580/S35A
7 Problemlösungen (FAQ)
7.1 Rücksetzen in den Fabrikmodus
Auch für dieses Konfigurationskommando gilt:
Zunächst die Konfiguration einstellen (hier mit {0D} ) und auf die Antwort
warten. Dann die Konfiguration übernehmen mit „Speichere aktuelle
Konfiguration“ {0K} und auch auf diese Antwort warten. Jetzt ist der Sensor
auch nach dem Aus- und Einschalten im Fabrikmodus.
7.2 Sensor antwortet nicht
Es kann sein:
• Falsche Baudrate, Abhilfe: Durchprobieren
• Falsche Adresse, Abhilfe mit {0R} einen Einzelsensor ansprechen,
er antwortet mit seiner eigenen Adresse.
• Unbekanntes oder unvollständiges Kommando
• Zeit zwischen 2 Zeichen überschreitet 0.5 s (Timeout)
• Anzahl der Zeichen nicht zum Kommando passt.
• Falsche Parameter im Kommando
• RX/TX+ und RX/TX- vertauscht, die andere Möglichkeit testen.
• Die RS485 Leitung muss nach dem Senden eines Kommandos freigegeben
werden, damit der Sensor antworten kann. Diese Freigabe muss sofort nach
dem letzten Byte des Kommandos erfolgen, damit der Sensor senden kann.
7.3 Was ist zu tun, wenn weder die Adresse noch die Baudrate des
Sensors unbekannt ist.
In diesem Fall, einen einzigen Sensor anschließen (kein Busbetrieb). Mit dem
Kommando {0R} diesen Ansprechen und die möglichen Baudraten durchtesteten.
Bei der richtigen Baudrate erfolgt z.B. die Antwort {1RV00000106} für einen Sensor
mit der Adresse 1. Damit ist sowohl die Baudrate, als auch richtige Adresse bekannt.
Kommando Gesendet Empfangen Inhalt
}50100000VR0{ }R0{ teseR
}61D0{ }D0{ noitarugifnokkirbaF ezteS
Speichere aktuelle
Konfiguration
}32K0{ }K0{
1 fua ezteS }80MS0{ }MS0{ gnureilakS trewsseM ezteS mm
Setze Ausgabe Format für
permanente periodische
Ausgabe
IICSA fua ezteS }38AF0{ }AF0{
Wartezeit bei permanenter
periodischer Ausgabe
sm 2.0 fua yaleD }582W0{ }2W0{
Setze Aufbau des
Messdatensatzes
dnu trewsseM }08AMZ0{ }AMZ0{
Abschwächung
duaB 00483 }783X0{ }3X0{ etarduaB ezteS
Get Konfiguration {0V} {0VMA200000101080109MA60} Konfiguration:
M mm Format
A ASCII für perm. period.
2 x 0.1 ms Wartezeit
000001 Software Version
01 Hardware Version
080109 Prod. Datum
M Messwert ausgeben
A Abschwächung ausg.
Get Messdatensatz {0M} {0MM00691A085028}
M Messwert 00691
A Abschwächung 0850
trowtnA enieK }H0{ teS dloH
}523480A29600MG0{ }G0{ teG dloH
M Messwert 00692
A Abschwächung 0843
}371L0{ }1L0{ nO resaL
}270L0{ }0L0{ FFO resaL
Starte permanente periodische
Ausgabe
,trowtnA etsre eid tsi saD }82P0{ }P0{
danach folgen die Daten
6 Beispiele
6.1 Kommandos
6 Exemples
6.1 Ordres de commande
Ordres de commande
Emis
Reçu
Contenu
Reset
{0R}
{0RV00000105}
Valide configuration d’usine
{0D}
{0D16}
Mémorise configuration actuelle
{0K}
{0K23}
Valide l’échelle pour valeur de
mesure
{0SM}
{0SM08}
Valide pour 1 mm
Valide l’édition du format pour
édition périodique permanente
{0FA}
{0FA83}
Valide pour ASCII
Intervalle de temps pour édition
périodique permanente
{0W2}
{0W285}
Retardement de 0.2 ms
Valide structure du bloc de
données de mesure
{0ZMA}
{0ZMA80}
Valeur de mesure et
Affaiblissement
Valide débit Bauds
{0X3}
{0X387}
38400 Bauds
Get Configuration
{0V}
{0VMA200000101080109MA60}
Configuration:
M mm Format
A ASCII pour period.
perm.
2 x 0.1 ms Intervalle temps
000001 Version logiciel
01 Version Hardware
080109 Date production
M Emettre Valeur mesure
A Emettre Affaiblissement.
Get bloc de données de
mesure
{0M}
{0MM00691A085028}
M Valeur mesure 00691
A Affaiblissement 0850
Hold Set
{0H}
Pas de réponse
Hold Get
{0G}
{0GM00692A084325}
M Valeur mesure 00692
A Affaiblissement 0843
Laser On
{0L1}
{0L173}
Laser OFF
{0L0}
{0L072}
Démarre édition périodique
permanente
{0P}
{0P28}
Ceci est la première
réponse, ensuite les
données suivent
7 Solutions des problèmes (FAQ)
7.1 Réinitialisation dans le mode d’usine
Egalement pour cet ordre de commande, il faut : tout d’abord, régler la configuration
(ici, avec {0D} ) et attendre la réponse; ensuite valider la configuration avec l’ordre
Mémorise la configuration actuelle {0K} et attendre aussi la réponse. Le détecteur
reste maintenant même après un déclenchement et un nouvel enclenchement dans
le mode usine.
7.2 Le détecteur ne répond pas
Cela peut être dû à :
• Débit en Bauds faux, solution: continué à essayer
• Fausse adresse, solution avec {0R} en sollicitant un détecteur en particulier, il
répond avec sa propre adresse
• Ordre de commande inconnu ou incomplet
• Temps entre 2 signes consécutifs supérieur à 0,5 s (Time out)
• Nombre de signes incompatible avec l’ordre de commande.
• Faux paramètre dans l’ordre de commande
• RX/TX+ et RX/TX-.intervertis, essayer l’autre possibilité
• Après l’émission d’un ordre de commande, la ligne RS485 doit être libérée de
façon à ce que le détecteur puisse envoyer sa réponse. Cette libération doit être
active immédiatement après le dernier octet de l’ordre de commande de façon à ce
que le détecteur puisse émettre son signal.
7.3 Que faut-il faire quand l’adresse ainsi que le débit en Bauds du détecteur
sont inconnus.
Dans ce cas, connecter un seul détecteur (pas de service Bus). Avec l’ordre de
commande {0R}, solliciter ce détecteur et essayer les débits en Bauds admissibles.
Lors d’un débit en Bauds correct, il s’ensuit, par exemple, la réponse
{1RV00000106} pour un détecteur avec l’adresse 1.
De cette façon, on peut en déduire le débit en Bauds aussi bien que l’adresse exacte
du détecteur.
6 Examples
6.1 Commands
Command Sent Received Content
Reset {0R} {0RV00000105}
Set factory configuration {0D} {0D16}
Save current configuration {0K} {0K23}
Set scale of measured value {0SM} {0SM08} Set to 1 mm
Set output format for
permanent periodical signal
output
{0FA} {0FA83} Set to ASCII
Waiting time for permanent
periodical signal output format
{0W2} {0W285} Delay at 0.2 ms
Set structure of data set of
measured data
{0ZMA} {0ZMA80} Measured data and
attenuation
Set Baud rate {0X3} {0X387} 38400 Baud
Get configuration {0V} {0VMA200000101080109MA60} Configuration:
M mm format
A ASCII for perm. period.
2 x 0.1 ms waiting time
000001 Software version
01 Hardware version
080109 Manufact. date
M Show measured value
A Show attenuation
Get set of measured data {0M} {0MM00691A085028}
M Measured value 00691
A Attenuation 0850
Hold Set {0H} No answer
Hold Get {0G} {0GM00692A084325}
M Measured value 00692
A Attenuation 0843
Laser On {0L1} {0L173}
Laser OFF {0L0} {0L072}
Start permanent periodical data
output
{0P} {0P28} This is he first answer
followed by data
7 Solutions to problems encountered (FAQ)
7.1 Setting back into factory mode
Setting the factory mode is handled with the same sequence as other configuration
mode commands: Set factory configuration (here with {0D}) and wait for the answer
(its only temporary at this point) Then make this the working configuration with
“safe current configuration” {0K} and, too, wait for this answer. Now the sensor is
safely set back into factory mode even after a power down situation.
7.2 Error messages
The sensor does not send error messages on its own, because these could lead to
data conflicts with data from other sensors, thereby creating new errors.
7.3 Sensor does not respond
Possible reasons:
• Incorrect Baud rate. Remedy: Try out (see also 7.3)
• Wrong address, Remedy {0R} address a single sensor (disconnect all others) and it
will respond with its own address (see also 7.3)
• Unknown or incomplete command
• Time between 2 characters exceeds 0.5 s (Timeout)
• Number of characters does not correspond with the command.
• Command contains wrong parameters
• RX/TX+ and RX/TX- are inverted. Test the second possibility.
• Immediately after the last Byte of the command has been sent the RS485 line must
be released by the control. Such enables the sensor to send its response correctly.
7.4 What has to be done when neither the address nor the Baud rate of the
sensor is known?
In such a case connect a single sensor only (not in Bus mode). Address the sensor
with the command {0R} and go through all allowed Baud rates. When the correct Baud
rate is hit the sensor with address 1 will respond with the answer {1RV00000106}, a
sensor with address 2 with {2RV00000106} etc. Hence the applicable Baud rate as
well as the correct sensor address has been found.
8/8
 Loading...
Loading...