

Page 1

Instruction Manual
UNCK 09G8914/IO
UNCK 09G8914/KS35A/IO
UNDK 09G8914/IO
UNDK 09G8914/KS35A/IO
Page 2

en_BA_UNXK 09-IO-Link.doc 2/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
Instruction Manual for UNxK 09 with IO Link
Content
1 General Information .....................................................................................................................3
1.1 About this Document ......................................................................................................................3
1.2 General Information........................................................................................................................3
2 IO Link Introduction .....................................................................................................................4
2.1 SIO Mode........................................................................................................................................4
2.2 IO Link Communication Mode ........................................................................................................4
2.3 IODD (IO Link Device Description).................................................................................................5
3 Sensor in the SIO Mode ...............................................................................................................5
4 Sensor in the IO Link Communication Mode.............................................................................5
4.1 Process Data..................................................................................................................................5
4.1.1 Process Data Structure...................................................................................................................5
4.2 Parameters and Commands...........................................................................................................6
4.2.1 Product Information ........................................................................................................................6
4.2.2 Parameters.....................................................................................................................................6
4.2.3 Commands .....................................................................................................................................6
4.2.4 Saving Modifications.......................................................................................................................6
5 Explanation of the Sensor Configuration ..................................................................................7
5.1 Teaching a User-Specific Measuring Range ..................................................................................7
5.1.1 Parameter.......................................................................................................................................7
5.1.2 Commands .....................................................................................................................................7
5.1.3 Description......................................................................................................................................7
5.1.4 Error handling.................................................................................................................................9
5.2 Teach-in of user specific switching points.....................................................................................10
5.2.1 Parameter.....................................................................................................................................10
5.2.2 Commands ...................................................................................................................................10
5.2.3 Description....................................................................................................................................10
5.2.4 Hysteresis.....................................................................................................................................13
5.2.5 Error handling...............................................................................................................................13
5.3 Averaging......................................................................................................................................13
5.3.1 Parameter.....................................................................................................................................13
5.3.2 Description....................................................................................................................................13
5.4 Temperature compensation..........................................................................................................14
5.4.1 Parameter.....................................................................................................................................14
5.4.2 Description....................................................................................................................................14
5.5 Locking/releasing of Teach-in button............................................................................................14
5.5.1 Parameter.....................................................................................................................................14
5.5.2 Description....................................................................................................................................14
6 Overview of SPDUs ....................................................................................................................15
6.1 Table of General Information SPDUs ...........................................................................................15
6.2 Table of Parameter SPDUs ..........................................................................................................15
6.3 Table of System Commands.........................................................................................................16
6.4 Table of error Codes.....................................................................................................................16
6.5 Table of Factory Settings..............................................................................................................17
7 Mounting......................................................................................................................................17
7.1 Mounting options and installation hints.........................................................................................17
Page 3
en_BA_UNXK 09-IO-Link.doc 3/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
1 General Information
1.1 About this Document
These instructions contain information related to commissioning and communications with the Baumer
Series 14 photoelectric distance sensor equipped with the IO Link interface. They supplement the installation
instructions, already provided with each sensor.
These instructions apply to the following sensor versions:
UNCK 09G8914/IO
UNCK 09G8914/KS35A/IO
UNDK 09G8914/IO
UNDK 09G8914/KS35A/IO
1.2 General Information
Rules for proper
usage
This product is a precision measuring device which has been designed for the
detection of objects and parts. It generates and provides measured values issued
as electrical signals for following systems. Unless this product has not been
specifically marked it may not be used in hazardous areas.
Set-up
Installation, mounting and adjustment of this product may only be executed by
skilled employees.
Installation
Only mounting devices and accessories specifically provided for this product may
be used for installation. Unused outputs may not be connected. Unused strands
of hard-wired sensors must be isolated. Do not exceed the maximum permissible
bending radius of the cable. Before connecting the product electrically the system
must be powered down. Where screened cables are mandatory, they have to be
used in order to assure EMI protection. When assembling connectors and
screened cables at customer site the screen of the cable must be linked to the
connector housing via a large contact area.
Page 4

en_BA_UNXK 09-IO-Link.doc 4/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
2 IO Link Introduction
In order to fully understand the various configuration options, these operating instructions describe the most
important aspects of the IO Link interface. More detailed information concerning IO Link, together with all
specifications, is available at www.IO-Link.com.
IO Link is a standard interface for sensors and actuators. Devices (sensors, actuators) are connected to an
IO Link master via point-to-point connections. Communications between the master and the device are
bidirectional, via the device switching line. This interface permits measuring values to be recorded. An option
to configure the sensor via the IO Link is also provided. There are two modes of sensor operation: the
standard input/output mode (SIO mode) and the IO Link communication mode.
The master switches the sensor to the IO Link communication mode. In this mode, process data
(measurement data) are now continuously transferred from the sensor to the master, while requirement data
(parameters, commands) are either written to the device or read from it.
2.1 SIO Mode
After start up, the sensor is automatically in the SIO mode. In this mode, the sensor operates as a standard
switching or measuring sensor. On the master side, the IO Link port is set as a normal digital input. The
sensor can be used like a standard sensor without IO Link. However, various functions can only be controlled
with the aid of IO Link.
2.2 IO Link Communication Mode
The sensor is switched to the “communication mode” by means of a so-called “wake up” signal sent by the
master. With this action, the master attempts to locate a connected device by means of a defined signal
transmitted along the switching line. If the sensor responds, communication parameters are exchanged, after
which the cyclic transmission of process data can begin.
The following can be performed in the IO Link communication mode:
Process data can be received;
Parameters (SPDUs) can be read from the sensor;
Parameters (SPDUs) can be written to the sensor;
Commands can be transmitted to the sensor (e.g., switching point teaching, resets to factory
settings, etc.).
The process data contain cyclic data such as measuring value; switch status or quality information which is
transferred to the higher level controller.
The master can exit the IO Link communication mode by using a “fall back”, after which the sensor once
again operates in the SIO mode until it receives the next “wake up”.
The sensor’s behavior in the SIO mode can be adjusted in the IO Link communication mode. This allows the
sensor to be easily adapted to the requirements of corresponding parameters, and to then continue
operating as a “normal” sensor, without the use of IO Link. Alternately, the sensor can also operate
continuously in the IO Link communication mode in order to fully utilize the entire functional scope provided
by the process data.
Page 5
en_BA_UNXK 09-IO-Link.doc 5/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
2.3 IODD (IO Link Device Description)
The IODD describes the IO Link device, and can be downloaded at www.baumer.com. It comprises a set of
XML and PNG files. An engineering or diagnostic tool reads a sensor’s IODD in order to determine the
following:
- Identification (manufacturer, designation, part number, etc.);
- Communication characteristics (communication speed, frame type, etc.);
- Parameters and commands;
- Process data;
- Diagnostic data (events).
The IODD determines who is permitted to review and modify which sensor data. How the data are presented
and how they are manipulated is defined by the sensor manufacturer and is therefore independent of the
sensor itself.
3 Sensor in the SIO Mode
In the SIO mode, the sensor operates in accordance with its factory settings or according to the settings
defined by the user via IO Link. The functional scope in the SIO mode is sensor specific.
4 Sensor in the IO Link Communication Mode
4.1 Process Data
With the sensor in the IO Link communication mode, data are periodically exchanged between the IO Link
master and the device. These data comprise process data and possibly commands and parameters for the
sensor. Process data transfer the current measuring value and status bits such as the switch status, quality
information, etc. to the master. The master does not need to explicitly request these process data.
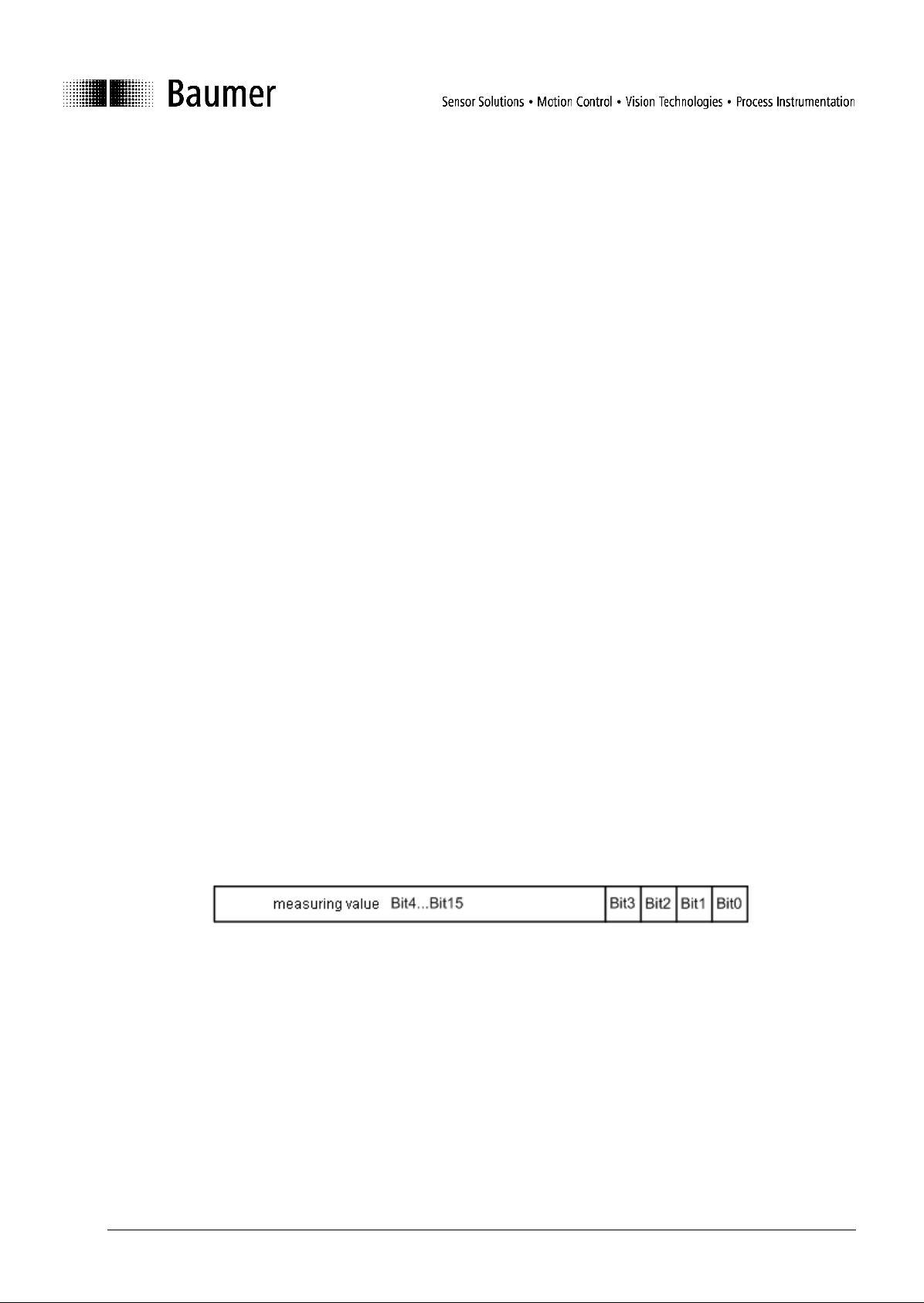
4.1.1 Process Data Structure
Figure 1 illustrates the structure of process data. The following provides a brief description of the individual
information.
Figure 1: Process data
4.1.1.1 Significance of the Measuring Value
The measuring value (Bit4…Bit15) has a range between 0…4095. The measuring value reflects the sensor’s
current measuring range. If the object being measured lies at the start of the measurement value range (e.g.,
30mm), a measuring value of 0 is output. If the object being measured lies at the end of the measurement
value range (e.g., 200mm) a measuring value of 4095 is output.
Page 6

en_BA_UNXK 09-IO-Link.doc 6/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
4.1.1.2 Significance of the Status Information
Bit 0: Alarm
The alarm bit indicates whether an object lies within the measurement value range.
Bit0 = 0 → An object lies within the specified measuring range.
Bit0 = 1 → There is no object within the specified measuring range.
Bit 1: Switch bit
In the IO Link communication mode, the switch bit performs the function of a switching output.
Bit1 = 0 → There is no object within the switching range.
Bit1 = 1 → An object lies within the switching range.
Bit 2: Quality
This bit provides information about the quality of the sonic echo reflected by the object.
Bit2 = 0 → The amount of reflected sonic is OK.
Bit2 = 1 → The amount of reflected sonic is critical.
Bit3: Not used
4.2 Parameters and Commands
Parameters and commands are either written to the device or read from it using SPDU (Service Protocol
Data Unit) indices. The read and write function is provided by the IO Link master. The user can write a value
to an index, or can have a value read from it.
4.2.1 Product Information
Some parameters contain product information such as the manufacturer’s name, the product name and
number, together with a user-specific sensor designation (refer to Table 6, Table of General Information
SPDUs).
4.2.2 Parameters
For a description of parameters, refer to Table 6.2, Table of Parameter SPDUs.
4.2.3 Commands
Commands are written to SPDU Index 0x02 (system commands). Refer to Table 6.3 Table of System
Commands.
4.2.4 Saving Modifications
Modification of parameters either by direct overwriting or by a command don’t have to be saved explicitly.
They remain automatically valid also after a restart.
Page 7

en_BA_UNXK 09-IO-Link.doc 7/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
5 Explanation of the Sensor Configuration
Parameters and commands can be used to configure the sensor functionalities. The following sections
provide a detailed description of the various configuration options.
5.1 Teaching a User-Specific Measuring Range
5.1.1 Parameter
Measuring range work: This parameter covers the currently used beginning and end values for the
measuring range. The beginning and end values can either be entered directly
into the parameter (numerical teaching), or they can be automatically set via
the interim register to teach an object the parameter comprises two 16 bit
components: Measuring range limit A and Measuring range limit B.
- Unit: 0.1mm
- Factory setting: 30 ... 200mm
Measuring range interim: This parameter serves as a supplemental register to teach the measuring
range for an object.
- Unit: 0.1mm
5.1.2 Commands
Teach-in measuring range limit A: Command used to teach measuring range limit A. The taught value is
transferred to the interim register, Measuring range interim.
Teach-in measuring range limit B: Command used to teach measuring range limit B. The taught value is
transferred to the interim register, Measuring range interim.
Transfer measuring range: The measuring range learned in the interim register, Measuring
range interim, is transferred to the Measuring range work register
and is set to active.
5.1.3 Description
There are two methods which the user can employ to adjust the measuring range of the UNxK 09:
Numerical teaching: The beginning and end values of the measuring range are written directly to the
Measuring range work parameter;
Teaching an object: the beginning and end values of the measuring range are learned for an object
by applying the corresponding measuring commands. If the object lies outside the original measuring
range, the minimum or maximum measuring distance are learned.
The measuring value between measuring value limits A and B is output as a relative value between 0 and
4095. Measuring value limits A and B are output as absolute distances from the leading sensor edge in 0.1
millimeter increments. Figure 2 illustrates possible characteristic measuring value curves.
Page 8

en_BA_UNXK 09-IO-Link.doc 8/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
Figure 2: Possible characteristic measuring value curves
5.1.3.1 Example numerical Teach-in:
1) The measuring range shall be defined from 50mm (A) to 180mm (B) -> (curve 2).
Point A absolute in tenth of mm: 500 01F4 hex (= Measuring range limit A)
Point B absolute in tenth of mm: 1800 0708 hex (= Measuring range limit B)
Parameter to be written:
Measuring range work: 01F40708 hex
2) The output signal shall be inverted; measuring range is from 60mm (B) to 120mm (A) -> (curve 3).
Point A absolute in tenth of mm: 1200 04B0 hex (= Measuring range limit A)
Point B absolute in tenth of mm: 600 0258 hex (= Measuring range limit B)
Parameter to be written:
Measuring range work: 04B00258 hex
30mm
200mm
Page 9

en_BA_UNXK 09-IO-Link.doc 9/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
5.1.3.2 Example Teach-in on object
The measuring range has to be taught against an object (curve 2).
Figure 3: Teach-in of output curve
In order to obtain an inverted output signal (curve 3) the distance from the sensor to the Measuring range
limit A must be bigger than the one to the Measuring range limit B.
5.1.4 Error handling
The measuring range limits taught lie beyond the sensor’s max. measuring range (Consult sensor
specification sheet for applicable range):
Numerical Teach-in: writing of Measuring range work not possible, error message Parameter
value out of range.
Teach-in on object: measured value in Measuring range interim is set to FFFF hex, error message
Parameter value out of range. Transfer of data from the interim register to the work register is not
possible, error message Parameter value out of range.
Position the object at the start of
measuring range.
Read the measured value with
command
Teach-in measuring
range limit A
in the interim register
Placing the object at the end of the
measuring range
Read the measured value with
command
Teach-in measuring
range limit B
in the interim
register
Transferring and activating the
measured values from interim
register to work register by the
command Transfer measuring
range
The interim register Measuring
range interim can be read at any
time for checking the teached
values
The interim register will be setting
to FFFF FFFF after transferring the
values to work register
Page 10

en_BA_UNXK 09-IO-Link.doc 10/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
5.2 Teach-in of user specific switching points
5.2.1 Parameter
Switching- /
Teach function: Using this parameter the function of the digital output can either be set to a
single switching point or the two trigger points of a window can be set.
- Values ranges: 0 (switching point), 1 (window)
- Factory setting: 0
Switching points work: This parameter contains the currently set ON and OFF trigger points of the
digital output. The parameter can directly be written on with the required ON
and OFF trigger thresholds (numerical Teach-in), or it is automatically set via
the interim register when teaching against an object. The parameter is
composed of the two 16Bit parameters Switching point A and Switching
point B.
- unit: 0.1mm
- factory setting: switching point A = FFFF hex, switching point B = 200mm
Switching points interim: This parameter acts as a helping register when teaching the switching points
against an object.
- unit: 0.1mm
5.2.2 Commands
Teach-in switching point A: Command for teaching in the switching point A. The taught value is
transferred to the interim register Switching points interim.
Teach-in switching point B: Command for teaching in the switching point B. The taught value is
transferred to the interim register Switching points interim.
Transfer switching points: The Switching points interim held by the interim register are transferred
to the work register and are then activated.
5.2.3 Description
Ex works the sensor has been programmed to have only one switching point like most standard digital
sensors. With the parameter Switching- / Teach function the switching function can be extended to window
function. By changing the switching function both the Teach-in procedure via the Teach-in button and also via
the Teach-in input in SIO mode are changed. The same applies for teaching in the switching points in the IOlink communication mode.
The UNXK 09 can be adjusted by the user in two ways:
Numerical Teach-in:ON and OFF thresholds are written directly into the Switching points work.
Teach-in against object: ON and OFF thresholds are written with the applicable commands for
measuring against an object.
The thresholds A and B define the switching pattern which again defines the state of the switching bit. Both
thresholds, A and B, are indicated as an absolute value, measured from the front edge of the sensor
enclosure, in tenth of mm.
Page 11

en_BA_UNXK 09-IO-Link.doc 11/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
Figure 4 shows all possible switching patterns.
Messdistanz
Schaltbit/Schaltausgang
30mm
200mm
0
1
A
B
Werkskennlinie
(Kennlinie 1)
0
1
Invertierte Kennlinie
(Kennlinie 2)
A
0
1
Kennlinie Schaltfenster
(Kennlinie 3)
B
B
0
1
A
Invertierte Kennlinie Schaltfenster
(Kennlinie 4)
Figure 4: all possible switching patterns
5.2.3.1 Examples for numerical Teach-in:
1) An “ON” threshold shall be set at 130mm distance (B) -> (characteristic 1).
Setting the switching function:
Switching- / Teach function: 0
Point A absolute in tenth of mm: 65535 FFFF hex (= Switching point A)
(Must be set to 65535 since only one switching point required)
Point B absolute in tenth of mm: 1300 0514 hex (= Switching point B)
Parameter to be written:
Switching points work: FFFF0514 hex
2) An “OFF” threshold shall be set at 70mm distance (A) -> (characteristic 2).
Setting the switching function:
Switching- / Teach function: 0
Point A absolute in tenth of mm: 700 02BC hex (= Switching point A)
Point B absolute in tenth of mm: 65535 FFFF hex (= Switching point B)
(Must be set to 65535 since only one switching point required)
Parameter to be written:
Switching points work: 02BCFFFF hex
factory characteristic
(characteristic 1)
inverted characteristic
(characteristic 2)
Switching window characteristic
(characteristic 3)
Inverted switching window
characteristic
(characteristic 4)
Measuring distance
switching bit / switching output
Page 12

en_BA_UNXK 09-IO-Link.doc 12/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
3) Two window thresholds shall be set at 40mm (A) and at 60mm (B) -> (characteristic 3).
Setting the window function:
Switching- / Teach function: 1
Point A absolute in tenth of mm: 400 0190 hex (= Switching point A)
Point B absolute in tenth of mm: 600 0258 hex (= Switching point B)
Parameter to be written:
Switching points work: 01900258 hex
5.2.3.2 Example Teach-in on object
The switching points are taught against an object.
Figure 5: Teaching the switching points
In order to obtain an inverted switching (characteristic 4) the distance from the sensor to Switching point A
must be bigger than the one to Switching point B.
Assigning of parameter
Switching-/Teach function
to a switching point or a
window threshold
Position the object at the
switching point.
Switching point
Window threshold
Position the object at the
switch-on point.
Teach switching point in interim
register using command
Teach-in switching point A.
Position the object at the switchoff point.
Teach switching point in interim
register using command
Teach-in switching point A or
Teach-in switching point B.
Interim register switching
points interim enables
reading and verification of
taught values at all times.
Teach switching point in interim
register using command
Teach-in switching point B.
Transfer switching points from
interim register to work register
using command Transfer
switching points and switch
to active.
Transfer switching points from
interim register to work register
using command Transfer
switching points and switch to
active.
After value export to work
register, the interim register will
be restored to FFFF FFFF hex.
Page 13

en_BA_UNXK 09-IO-Link.doc 13/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
5.2.4 Hysteresis
Switching point:
When moving towards the sensor/trigger point the sensor commutates exactly at the trigger point taught.
When moving away from the sensor’s trigger point the hysteresis is added (see figure 6).
Figure 6: Hysteresis of switching point
Switching window:
When moving towards the window trigger points from either direction the sensor commutates exactly at the
trigger points taught. Once the target is „leaving“ the window a hysteresis is added to either one of the two
trigger points (see: figure 7).
Figure 7: Hysteresis of switching window trigger points
5.2.5 Error handling
The measuring range limits taught lie beyond the sensor’s max. measuring range (Consult sensor
specification sheet for applicable range):
Numerical Teach-in: writing of Switching points work not possible, error massage Parameter
value out of range
Teach-in on object: measured value in Switching points interim is set to FFFF hex, error massage
Parameter value out of range. Transfer of data from the interim register to the work register is not
possible, error message Parameter value out of range.
5.3 Averaging
5.3.1 Parameter
Average: Number of measurements across which the measured value is being averaged.
- Range of values: 0, 2, 4, 8, 16, 32, 64
- Factory setting: 4
5.3.2 Description
By averaging an adjustable number of measured values the white noise in a measuring set-up can be
minimized resulting in increased sensor repeat accuracy and resolution. Signal averaging reduces the
response time whilst the measuring speed is unaffected by this method.
Averaging algorithm: Floating average (single sided floating average value)
Averaged value x: Y_n = (Yn + Yn-1 + Yn-2 +...+ Yn-x)/x
switching bit / switching output
measuring distance
Page 14

en_BA_UNXK 09-IO-Link.doc 14/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
5.4 Temperature compensation
5.4.1 Parameter
Temperature
compensation: With this parameter the temperature compensation can be switched on and off.
- Range of values: 0, 1
- Factory setting: 0 (off)
5.4.2 Description
The temperature compensation is used to compensate the speed of sound’s dependency on air temperature.
Provided the temperature compensation is active changes in the ambient temperature is compensated to 2%
of So (distance sensor to object). Note: the temperature compensation becomes active not until 15 minutes
after power-on. When temperature compensation is off the sensor provides correct measurements
immediately after power-on. But changing ambient temperature induces a measuring error of 0.18 % Sde/K.
5.5 Locking/releasing of Teach-in button
5.5.1 Parameter
Teach-in lock: With this parameter it can be configured if and when the Teach-in button is
locked.
- Range of values: 0 (Button always locked)
1 (Button always unlocked)
2 (Button locked 5 min after Power-On)
- Factory setting: 2 (Button locked 5 min after Power-On)
5.5.2 Description
The Teach-in button, which is required to teach the switching point and/or the two thresholds of the switching
window in SIO mode, has been factory set to lock automatically 5 minutes after power-on. This is to prevent
any accidental changes to the sensors’ settings being executed. Whether and when the Teach-in button has
to be locked is configurable in the IO-Link communication mode. Teach-in via Teach-in wire is remains
unlocked. Note: both ways of teaching - via button and via wire - are possible only provided the sensor is in
the SIO mode. Teach-in is not possible as long as the sensor remains in the IO-Link Communication mode.
Page 15

en_BA_UNXK 09-IO-Link.doc 15/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
6 Overview of SPDUs
6.1 Table of General Information SPDUs
SPDU name
SPDU index
Number of Bytes
Format
Range of values
R/W
Comments
General information on sensors
Vendor Name
0X1018String
ASCII
R
“Baumer Electric AG“ for all sensors
Product Name
0X1222String
ASCII
R
Corresponds with Baumer article
description
Product ID
0X138String
ASCII
R
Corresponds with Baumer article number
Serial Number
0X154String
ASCII
R
Baumer P-Code
Firmware Revision
0X178String
ASCII
R
Baumer Firmware Revision
Application Specific
Name
0X188--R/W
8 Byte at customer disposal
6.2 Table of Parameter SPDUs
SPDU name
SPDU index
Number of Bytes
Format
Range of values
R/W
Comments
Measuring range and switching points
Switching points
work
0X404Switching point A (HB, LB)
Switching point B (HB, LB)
300…2000,
65535
R/W
Distance information on switching points
Switching points
interim
0X414Switching point A (HB, LB)
Switching point B (HB, LB)
300…2000,
65535
R
Distance information on switching points
Measuring range
work
0X424Measuring range limit A (HB, LB)
Measuring range limit B (HB, LB)
300…2000
R/W
Distance information on measuring range
limits
Measuring range
interim
0X434Measuring range limit A (HB, LB)
Measuring range limit B (HB, LB)
300…2000,
65535
R
Distance information on measuring range
limits
Sensor functions
Average
0X501-
0,1,2,4,8,
16, 32, 64
R/W
Number of measuring cycles across which
it is being averaged.
Average value = 0 or 1: Average is
switched off.
Temperature
compensation
0X511-
0,1
R/W
Temperature compensation on/off
respectively.
0 = Temperature compensation off
1 = Temperature compensation on
Switching- / Teach
function
0X601-
0,1
R/W
Selection of switching function and Teach
mode
0 = one switching point
1 = window function
Page 16

en_BA_UNXK 09-IO-Link.doc 16/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
SPDU name
SPDU index
Number of Bytes
Format
Range of values
R/W
Comments
Teach-in lock
0X611-
0,1,2
R/W
Teach-in button lock/unlock respectively
0 = Teach-in button always locked.
1 = Teach-in button always unlocked.
2 = Teach-in button locked 5 min after
Power-On.
6.3 Table of System Commands
Name of
Command
SPDU Index
CMD Value
Comments
Restore factory setting
0X02
0X82
Restores all original factory settings of the sensor
Teach-in
switching point A
0X02
0XA0
Teach-in of switching point A. The measured distance is written into the interim switching
points register.
Teach-in
switching point B
0X02
0XA1
Teach-in of switching point B. The measured distance is written into the interim switching
points register.
Transfer
switching points
0X02
0XA2
Transfer of the switching points from the interim register to the working register.
Teach-in measuring
range limit A
0X02
0XA3
Teach-in of measuring range limit A. The measured distance is written into the measuring
range interim register
Teach-in measuring
range limit B
0X02
0XA4
Teach-in of measuring range limit B. The measured distance is written into the measuring
range interim register.
Transfer
measuring range
0X02
0XA5
Transfer of the measuring range from the interim register to the working register
6.4 Table of error Codes
Error Case
Error Code 1
Error Code 2
Description of
Error Codes
Communication error
(Checksum, …)
0x10
0x00
Communication error, No details
Length of written SPDU is wrong
0x10
0x00
Communication error, No details
Reading an unimplemented SPDU
0x80
0x11
Device error, Index not available
Writing to an unimplemented SPDU
0x80
0x11
Device error, Index not available
Reading Index 2
0x80
0x23
Device error, Access denied
Writing to a read only SPDU
0x80
0x23
Device error, Access denied
Writing an unimplemented System Command
0x80
0x23
Device error, Access denied
Written parameter out of defined range
0x80
0x30
Device error, Parameter value out of range
Page 17

en_BA_UNXK 09-IO-Link.doc 17/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
6.5 Table of Factory Settings
SPDU name
SPDU index
Default value
Application Specific Name
0X18
empty
Switching points work
0X40
Switching point A: FFFF hex
Switching point B: 200mm
Measuring range work
0X42
Measuring range limit A: 30mm
Measuring range limit B: 200mm
Average
0X50
4
Temperature compensation
0x51
0 (off)
Switching- / Teach function
0x60
0 (one switching point)
Teach-in lock
0X61
2 (locked 5 min after Power-On)
7 Mounting
7.1 Mounting options and installation hints
UNDK 09
Figure 8: Mounting options and installation hints for UNDK 09
UNCK 09
Figure 9: Mounting options and installation hints UNDK 09
Page 18

en_BA_UNXK 09-IO-Link.doc 18/18 Baumer Electric AG
24.04.2012/haa Frauenfeld, Switzerland
Baumer worldwide
Brasil
Baumer do Brasil Ltda
BR-04726-001 São Paulo-Capital
Phone +55 11 56410204
Canada
Baumer Inc.
CA-Burlington, ON L7M 4B9
Phone +1 (1)905 335-8444
China
Baumer (China) Co., Ltd.
CN-201612 Shanghai
Phone +86 (0)21 6768 7095
Denmark
Baumer A/S
DK- 8210 Aarhus V.
Phone +45 (0)8931 7611
France
Baumer SAS
FR-74250 Fillinges
Phone +33 (0)450 392 466
Germany / Austria
Baumer GmbH
DE-61169 Friedberg
Phone +49 (0)6031 60 070
India
Baumer India Private Ltd.
IN-411038 Pune
Phone +91 (0)20 2528 6833
Italy
Baumer Italia S.r.l.
IT-20090 Assago, MI
Phone +39 (0)245 70 60 65
USA
Baumer Ltd.
US-Southington , CT 06489
Phone +1 (1)860 621-2121
United Kingdom
Baumer Ltd.
GB-Watchfield, Swindon, SN6 8TZ
Phone +44 (0)1793 783 839
Singapore
Baumer (Singapore) Pte. Ltd.
SG-339412 Singapore
Phone +65 6396 4131
Sweden
Baumer A/S
SE-56122 Huskvarna
Phone +46 (0)36 13 94 30
Switzerland
Baumer Electric AG
CH-8501 Frauenfeld
Phone +41 (0)52 728 1122
Headquarters
Baumer Electric AG
CH-8501 Frauenfeld
Phone +41 (0)52 728 1122
www.baumer.com/worldwide
Technische Änderungen und Irrtum vorbehalten.
Technical data has been fully checked, but accuracy of printed matter not guaranteed.
 Loading...
Loading...