

Page 1

Bedienungshandbuch / User Manual / Manuel d'utilisation
Laser-Distanz-Sensor
Laser distance sensor
Capteur de distance laser
Serie / series / série
OADM 20I6....
OADM 21I6....
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
1/88
Baumer
Page 2

Deutsch
1
2
3
4
5
6
7
8
9
10
11
12
Allgemeine Hinweise ...................................................................................................................... 4
Funktionsprinzip............................................................................................................................. 5
Montage ........................................................................................................................................... 5
Anwendungshinweise .................................................................................................................. 11
Messbereich teachen ................................................................................................................... 13
Alarmausgang............................................................................................................................... 22
Synchronisationseingang ........................................................................................................... 22
Technische Daten ......................................................................................................................... 25
Anschluss und Steckerbelegung ................................................................................................ 28
Erdungskonzept ........................................................................................................................... 28
Wartungshinweise ........................................................................................................................ 28
Zubehör ......................................................................................................................................... 29
13
English
1
2
3
4
5
6
7
8
9
10
11
12
Fehlersuche: Was tun wenn... ..................................................................................................... 29
General notes................................................................................................................................ 32
Functional principle ..................................................................................................................... 33
Mounting instructions .................................................................................................................. 33
Application hints .......................................................................................................................... 39
Teaching the OADM...................................................................................................................... 41
Alarm output ................................................................................................................................. 50
Synchronization input .................................................................................................................. 50
Technical data ............................................................................................................................... 53
Connection diagram and pin assignment .................................................................................. 56
Grounding concept ...................................................................................................................... 56
Service notes ................................................................................................................................ 56
Accessories .................................................................................................................................. 57
13
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
Troubleshooting ........................................................................................................................... 57
2/88
Baumer
Page 3

Française
1
2
3
4
5
6
7
8
9
10
11
12
Indications d’ordre général ......................................................................................................... 60
Principe de fonctionnement ........................................................................................................ 61
Indications de montage ............................................................................................................... 61
Indications relatives aux applications ....................................................................................... 67
Apprentissage de la plage de mesure ........................................................................................ 69
Sortie d’alarme.............................................................................................................................. 79
Entrée de synchronisation .......................................................................................................... 79
Données techniques .................................................................................................................... 82
Raccordement et assignation des pins du connecteur ........................................................... 85
Concept de mise à la terre ........................................................................................................... 85
Indications pour l’entretien ......................................................................................................... 85
Accessoires .................................................................................................................................. 86
13
Recherche des fautes: que faire quand... .................................................................................. 86
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
3/88
Baumer
Page 4
1 Allgemeine Hinweise
Bestimmungsgemässer
Gebrauch
Inbetriebnahme
Montage
Laser Schutzmassnahmen
Dieses Produkt ist ein Präzisionsgerät und dient zur Erfassung von
Objekten, Gegenständen und Aufbereitung bzw. Bereitstellung von
Messwerten als elektrische Grösse für das Folge-system.
Sofern dieses Produkt nicht speziell gekennzeichnet ist, darf dieses
nicht für den Betrieb in explosionsgefährdeter Umgebung
eingesetzt werden.
Einbau, Montage und Justierung dieses Produktes dürfen nur durch
eine Fachkraft erfolgen..
Zur Montage nur die für dieses Produkt vorgesehenen
Befestigungen und Befestigungszubehör verwenden. Nicht
benutzte Ausgänge dürfen nicht beschaltet werden. Bei
Kabelausführungen mit nicht benutzten Adern, müssen diese
isoliert werden. Zulässige Kabel-Biegeradien nicht unterschreiten.
Vor dem elektrischen Anschluss des Produktes ist die Anlage
spannungsfrei zu schalten. Wo geschirmte Kabel vorgeschrieben
werden, sind diese zum Schutz vor elektromagnetischen Störungen
einzusetzen. Bei kundenseitiger Konfektion von Steckverbindungen
an geschirmte Kabel, sollen Steckverbindungen in EMV-Ausführung
verwendet und der Kabelschirm muss grossflächig mit dem
Steckergehäuse verbunden werden.
• Der im OADM eingebaute Diodenlaser sendet sichtbares, rotes Licht aus. Gemäss der Norm IEC 608251gehört dieser Laser zur Laserklasse 2.
• Max. mittlere Ausgangsleistung < 1 mW
• Laser Strahlung, nicht in den Strahl blicken!
• Es empfiehlt sich, den Strahl nicht ins Leere laufen zu lassen,
sondern mit einem matten Blech oder Gegenstand zu stoppen.
• Aus Lasersicherheitsgründen muss die Spannungsversorgung
dieses Sensors abgeschaltet werden, wenn die ganze Anlage
oder Maschine abgeschaltet wird.
• Die Angaben des Sicherheitskonzeptes und die Einsatzgrenzen der Verkaufsdokumentation sind zu
beachten.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
4/88
Baumer
Page 5
Abbilder auf der
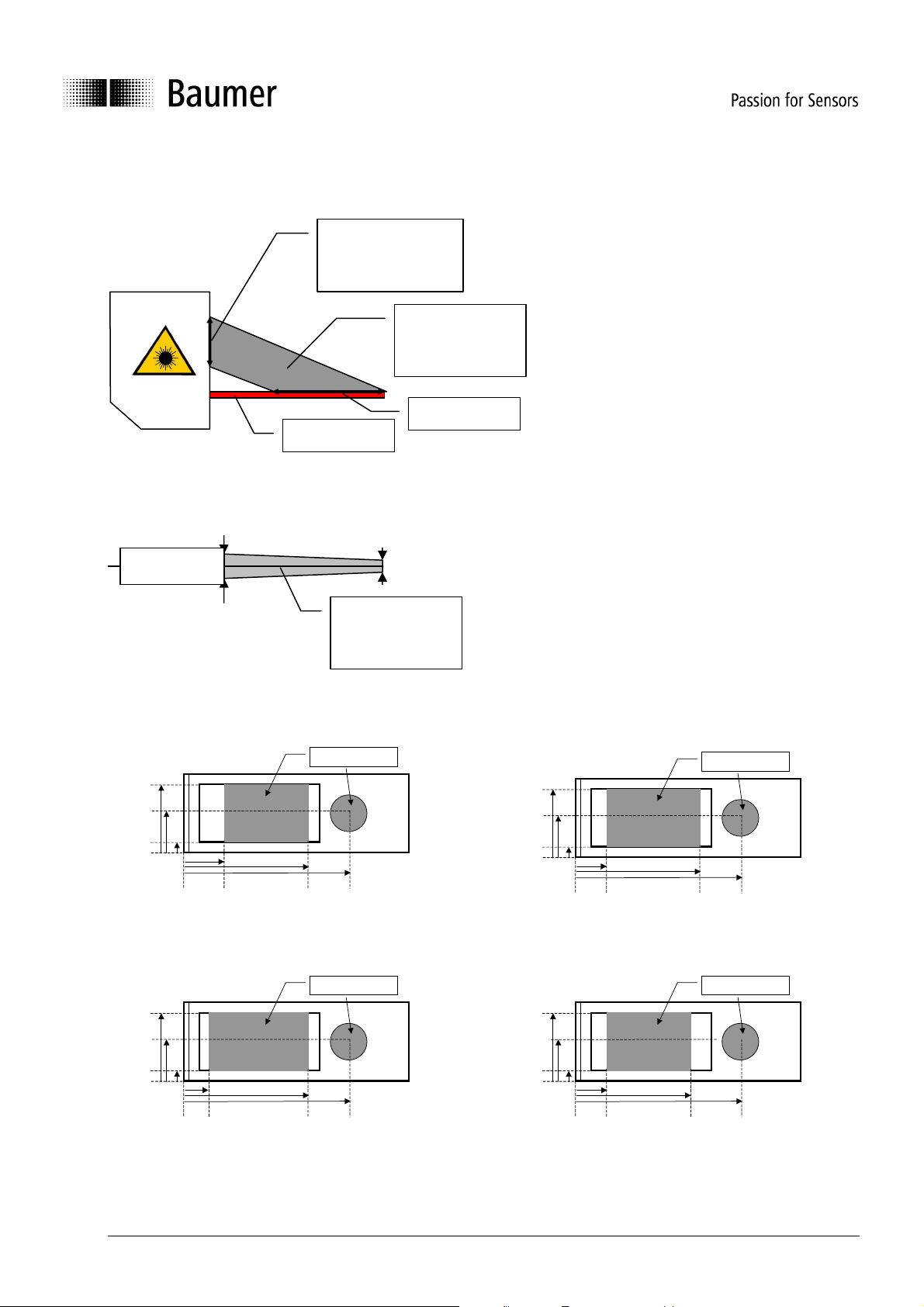
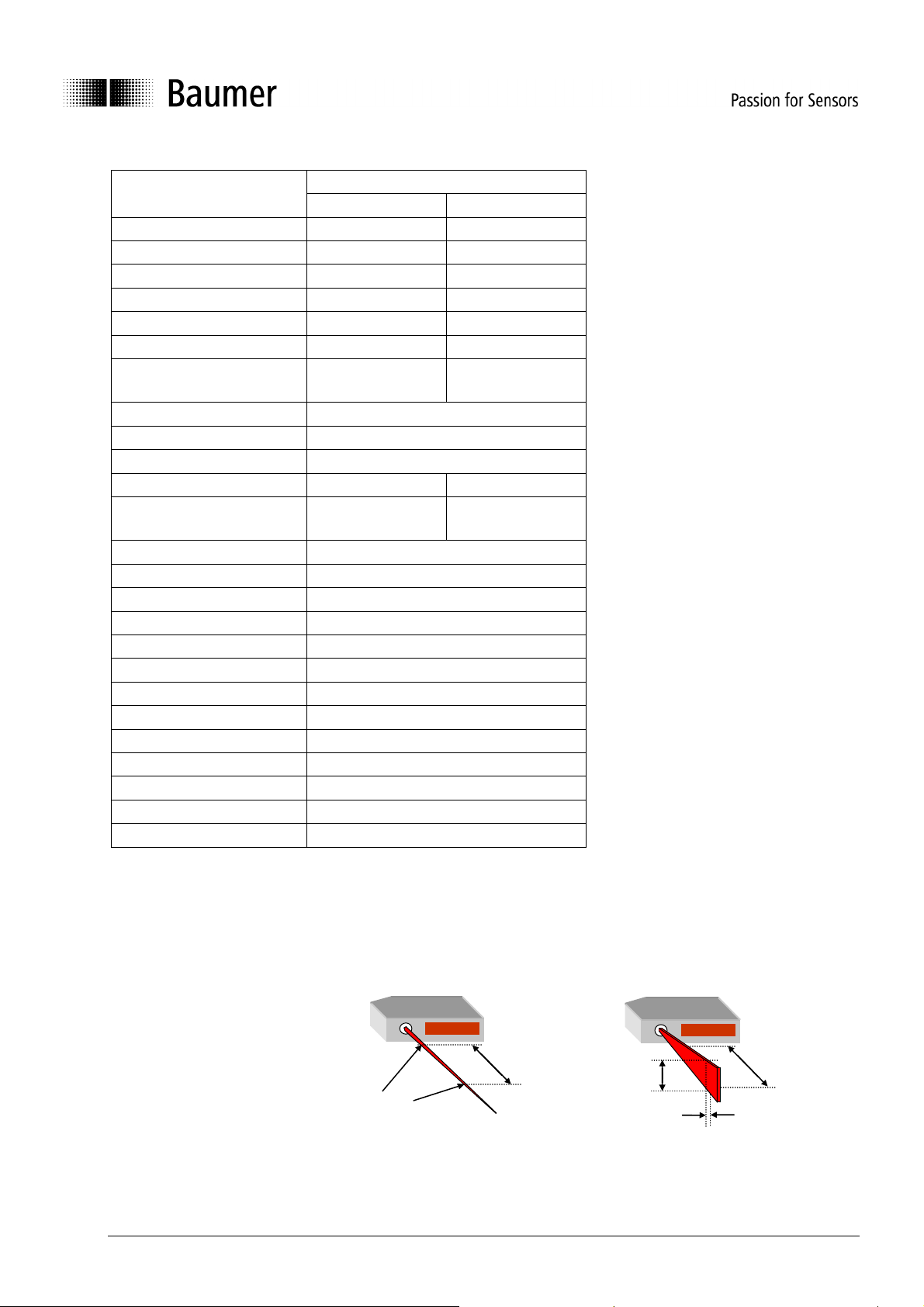
2 Funktionsprinzip
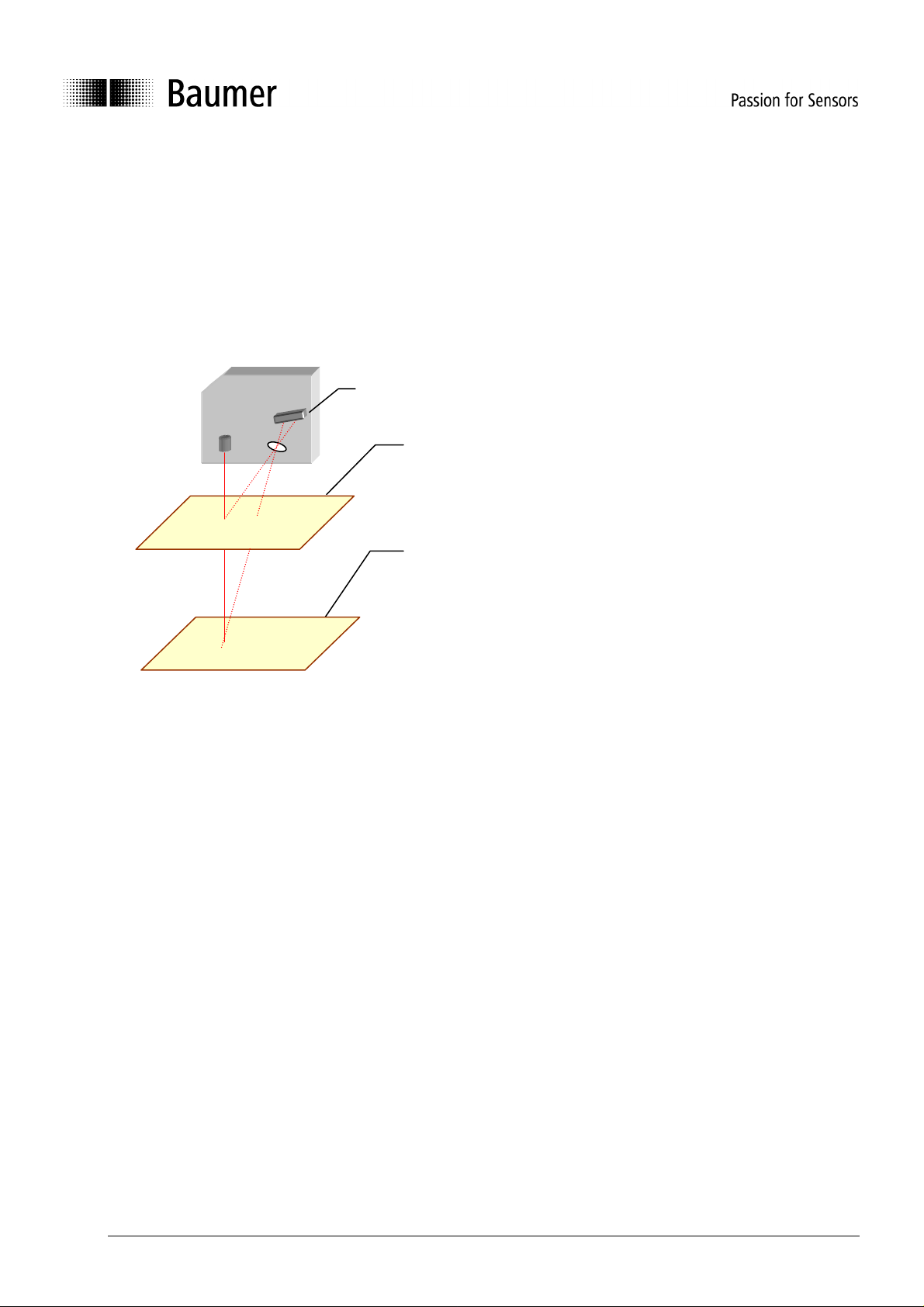
Die Distanzmessung basiert auf dem Triangulationsprinzip. Der Laserstrahl trifft als kleiner, sichtbarer Punkt
auf das Messobjekt und wird dort remittiert. Der Empfänger des Sensors, eine Fotodiodenzeile, detektiert die
Position dieses Punktes. Der Sensor misst den Einfallswinkel und berechnet die Distanz. Dieselbe
Distanzänderung erzeugt bei einer kleinen Messdistanz eine erheblich größere Winkeländerung als bei einer
grossen Messdistanz. Dieses nichtlineare Verhalten wird durch den Mikrocontroller korrigiert, so dass sich
das Ausgangssignal linear zur Distanz verhält.
Fotodiodenzeile
Nahes Messobjekt
Fernes Messobjekt
Der Sensor passt sich zudem automatisch an unterschiedliche Objektfarben an, indem er seine
Sendeintensität variiert und seine Belichtungsdauer optimiert. Das macht ihn nahezu unabhängig bezüglich
der Reflexionsfähigkeit des Objektes. Um die maximale Messgenauigkeit zu erreichen, ist es wichtig, dass
ein Messobjekt den ganzen Laserspot gleichmässig remittiert.
3 Montage
• Achten sie bei der Montage des Sensors darauf, dass die Unterlage eben ist und das empfohlene
Drehmoment der Befestigungsschrauben eingehalten wird.
• Aus EMV Gründen, den Sensor geerdet montieren und ein geschirmtes Anschlusskabel verwenden.
• Der Sensor besitzt einen um 90° schwenkbaren Ansch lussstecker. So kann das Anschlusskabel
nach unten, nach hinten oder seitlich weggeführt werden.
• Die maximale Reproduzierbarkeit erreicht der Sensor 15 Minuten nach dem Einschalten.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
5/88
Baumer
Page 6
☺
☺☺
☺
3.1 Montagehinweise
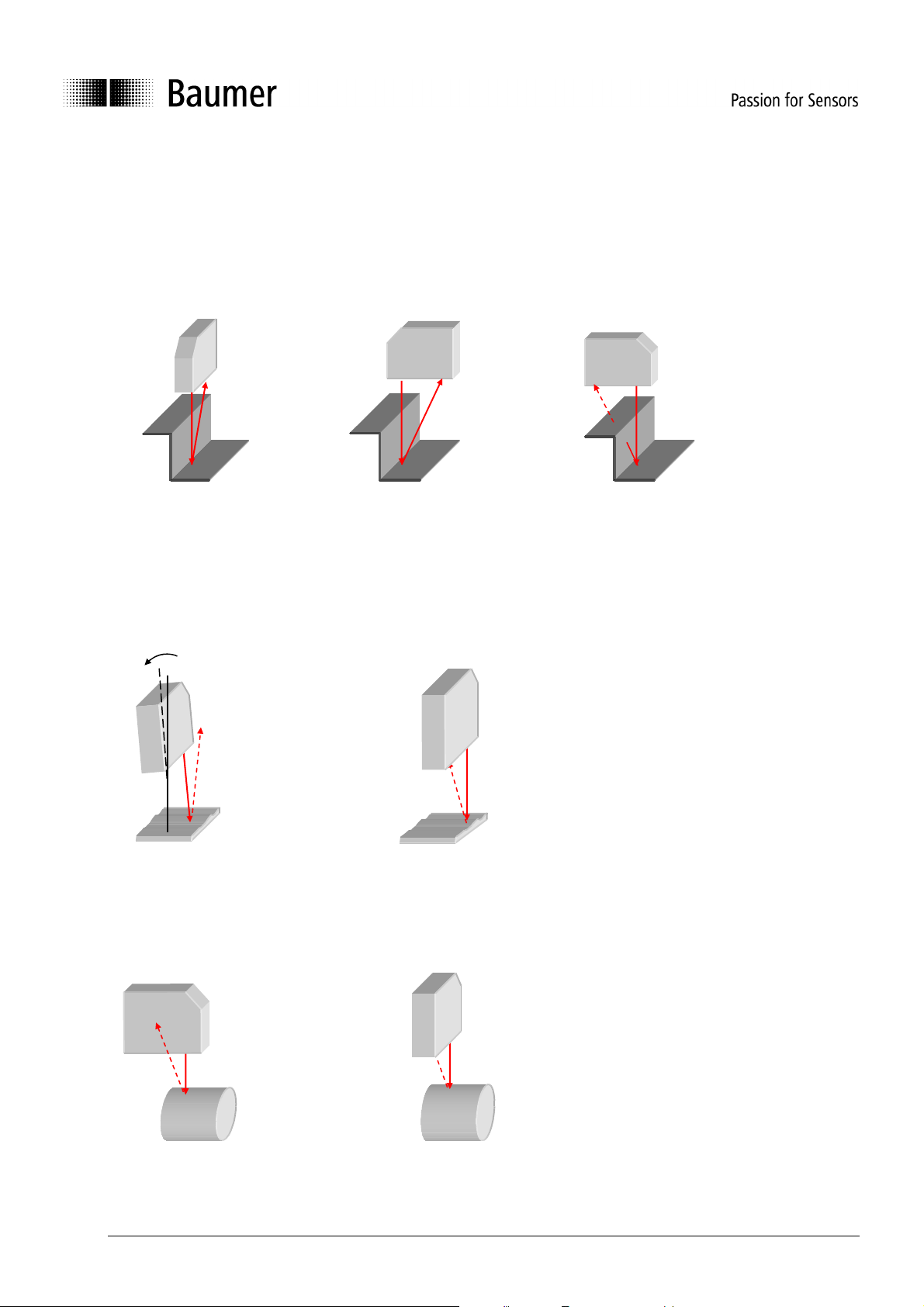
Stufen / Kanten:
Wird unmittelbar neben Stufen/Kanten gemessen, ist darauf zu achten, dass der Empfangsstrahl nicht durch
die Stufe/Kante abgedeckt wird. Dasselbe gilt, wenn die Tiefe von Löchern und Spalten gemessen wird.
☺
Glänzende Oberflächen:
Bei glänzenden Oberflächen ist darauf zu achten, dass der direkte Reflex nicht auf den Empfänger fällt.
Durch ein leichtes Abkippen des Sensors kann dies verhindert werden. Zur Kontrolle kann ein weisses
Papier auf die Scheibe des Empfängers gelegt werden, auf dem dann der direkte Reflex deutlich sichtbar
wird.
Runde, glänzende Oberflächen:
10 -15°
☺
☺
☺☺
☺
☺
☺☺
☺
☺☺
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
6/88
Baumer
Page 7
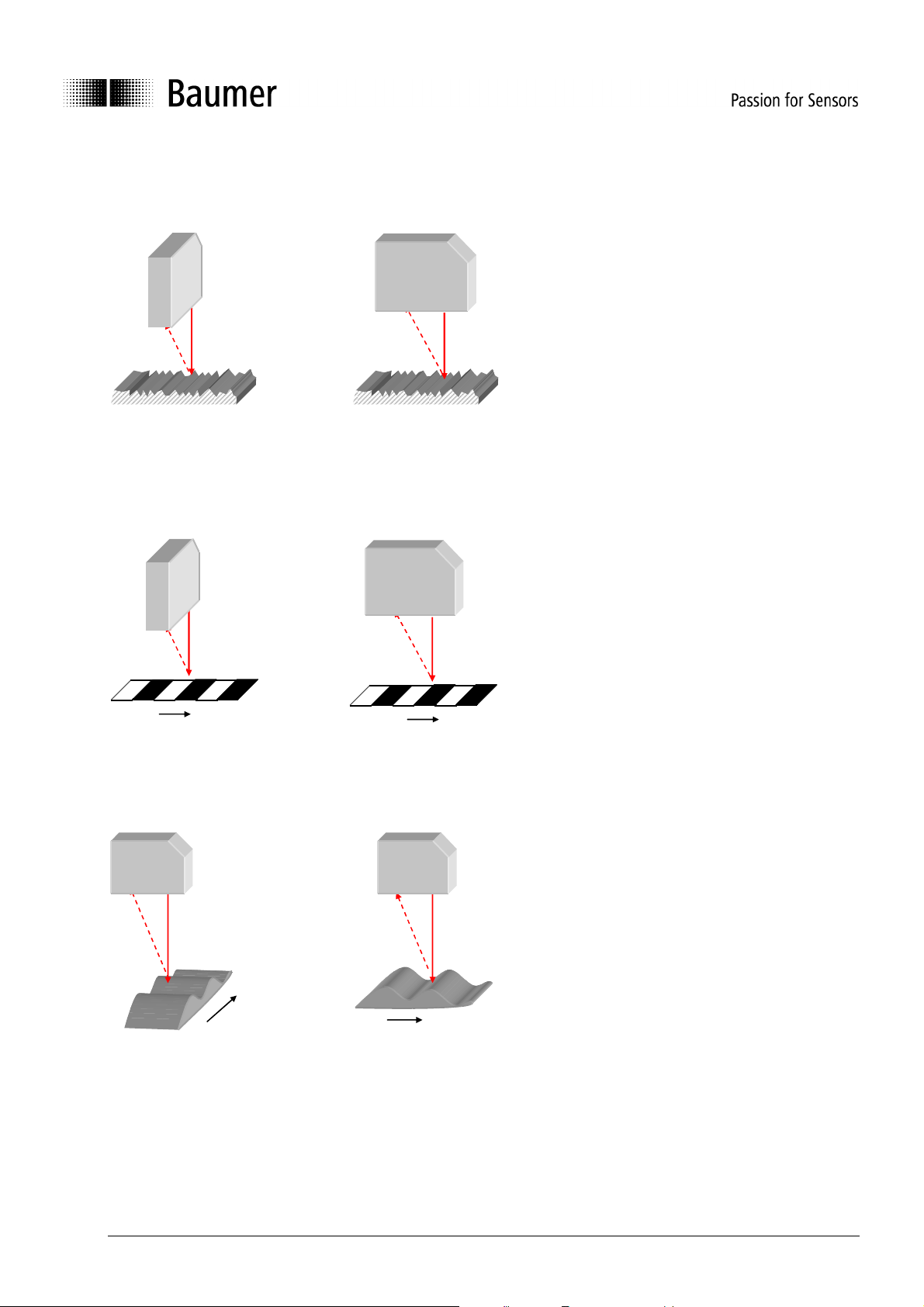
Glänzende Messobjekte mit gleichmässig ausgerichteter Struktur:
Besonders bei glänzenden Messobjekten, wie sie z.B. Drehteile, geschliffene Oberflächen, stranggepresste
Oberflächen und dergleichen, beeinflusst die Einbaulage das Messergebnis.
☺
☺
Messobjekte mit gleichmässig ausgerichteten Farbkanten:
In der richtigen Orientierung ist der Einfluss auf die Messgenauigkeit gering. In der falschen Orientierung
sind die Abweichungen abhängig vom Unterschied der Reflektivität der verschiedenen Farben.
Bewegte Messobjekte:
Wird die Kontur eines Objektes gemessen, ist darauf zu achten, dass sich das Objekt quer zum Sensor
bewegt, um Abschattungen und direkte Reflexe zum Empfänger zu vermeiden.
☺☺
☺
☺
☺☺
☺
☺
☺☺
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
7/88
Baumer
Page 8

☺
☺☺
☺
Fremdlicht:
Bei der Montage von optischen Sensoren ist darauf zu achten, dass kein starkes Fremdlicht im
Erfassungsbereich des Empfängers liegt.
☺
☺
Mehrere Sensoren ohne gegenseitige Beeinflussung:
Werden mehrere Sensoren angebaut, dann können sie sich gegenseitig beeinflussen. Bei der Montage ist
darauf zu achten, dass nur der eigene Laserspot im Erfassungsbereich des Empfängers liegt. Die Sensoren
bis zu einem Messbereich von 600 mm können aneinander gereiht werden, ohne dass sie sich gegenseitig
beeinflussen (Bild in der Mitte).
Falls eine gegenseitige Beeinflussung durch die Montage nicht vermieden werden kann, dann lassen sich
die Sensoren über den synch. Eingang asynchron betreiben.
☺
☺
☺☺
Messbereich
☺
☺
☺☺
☺☺
Messbereich
Gegenseitige
Beeinflussung
Messbereich
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
8/88
Baumer
Page 9
15 mm
Freie Fläche
13
mm
Freie Fläche
10
mm
Freie Fläche
12
mm
Freie Fläche
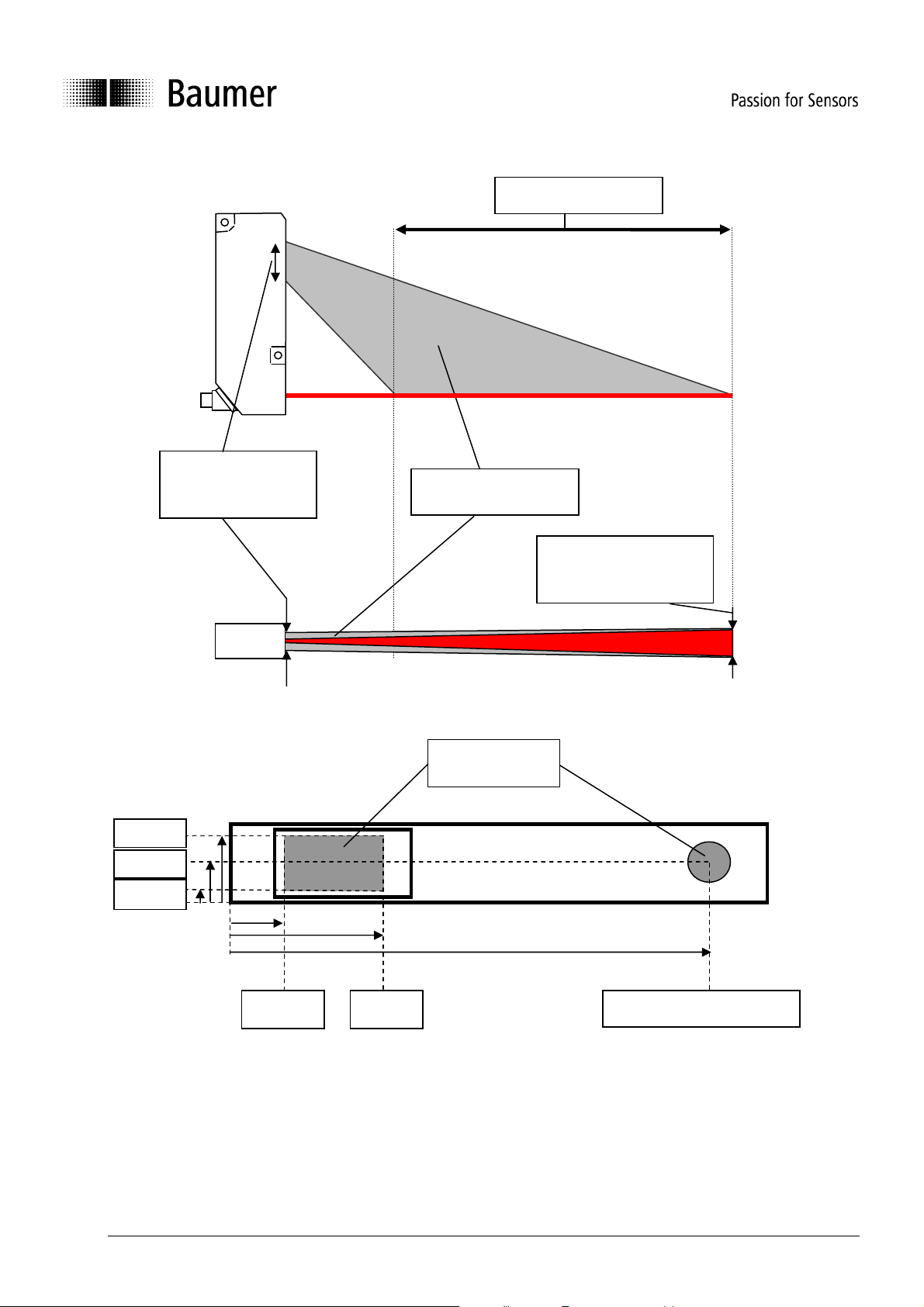
3.2 Definition des Messfeld
OADM 20:
+/ - 7 mm um die Mittelachse des Sensors
OADM 20I6441 OADM 20I6460
17 mm
10 mm
3 mm
0/0
OADM 20I6472 OADM 20I6480/81
17 mm
10 mm
3 mm
0/0
Länge und Lage der
freien Fläche siehe
Skizzen
Laserstrahl
Für Hindernisse
verbotener Bereich
35 mm
50 mm
Durchmesser 10
35 mm
50 mm
Durchmesser 10
Für Hindernisse
verbotener Bereich
Messbereich
Max. Laserstrahl Durchmesser (siehe Datenblatt)
17 mm
10 mm
3 mm
0/0
17 mm
10 mm
3 mm
0/0
35 mm
35 mm
50 mm
Durchmesser 10
50 mm
Durchmesser 10
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
9/88
Baumer
Page 10
verbotener Bereich
0/0
3 mm
17 mm
10 mm
OADM 21:
Länge der freien
Fläche (siehe
unten)
14 mm 34 mm
Messbereich
Für Hindernisse
Freie Flächen
Max. Laserstrahl
Durchmesser am
(siehe Datenblatt)
120 mm, diameter 10mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
10/88
Baumer
Page 11
4 Anwendungshinweise
Die Laser Distanz Sensoren der Serie OADM 20I6.. und OADM 21I6.. sind hochwertige, messende
Sensoren. Damit sie auch mit der maximalen Messgenauigkeit arbeiten können, gibt es einige Punkte zu
beachten.
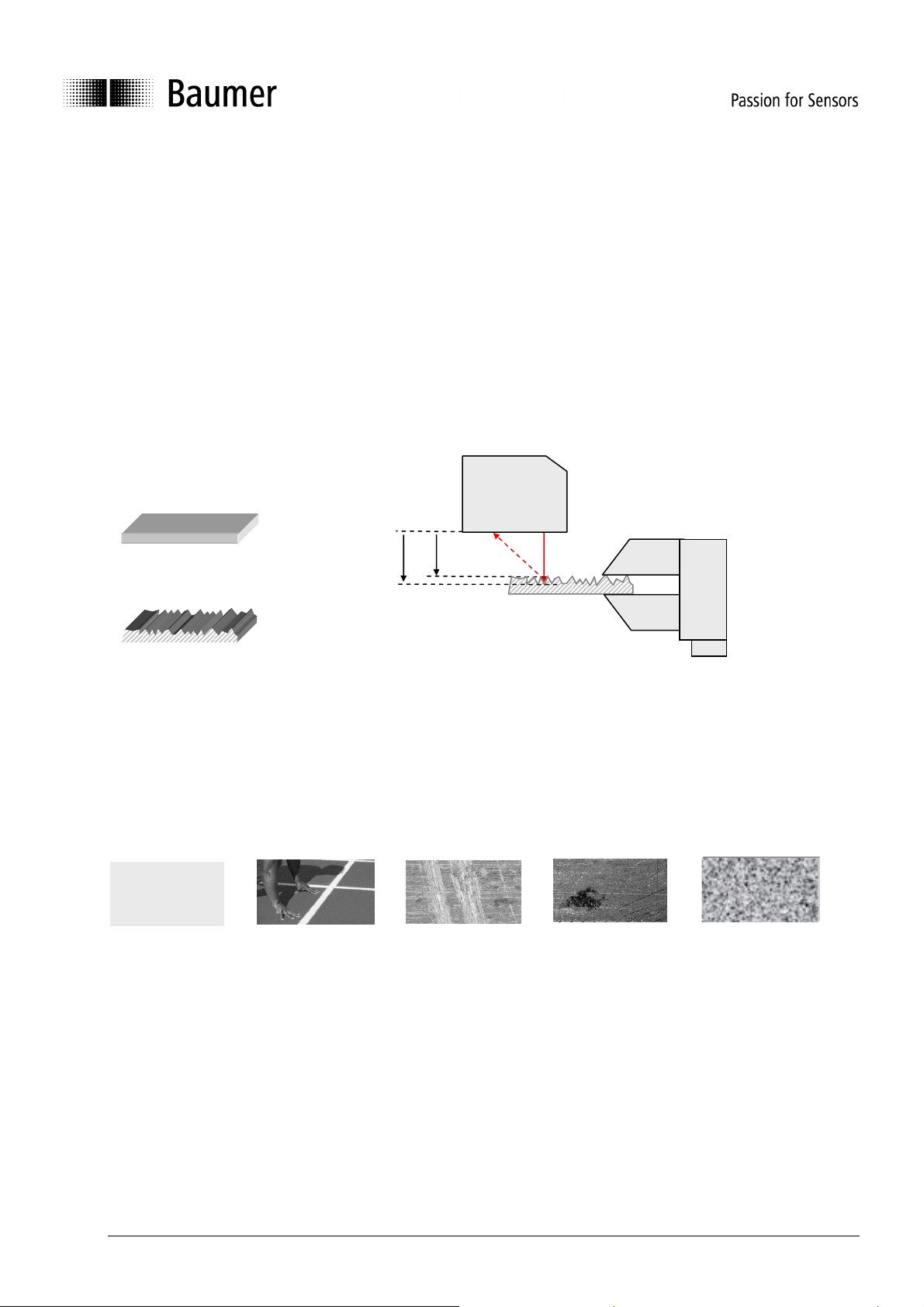
Messen auf rauen Oberflächen
In der Fertigung bei Baumer werden alle Sensoren exakt liniearisiert und kontrolliert. Um die Sensoren
genau abzugleichen, wird als Referenzoberfläche eine sehr ebene, weisse Keramik verwendet. Die ist für
einen exakten Abgleich im µm-Bereich nötig. In der Praxis besitzen sehr viele Messobjekte eine deutlich
rauere Oberfläche. Mit dem kleinen Laserspot wird die raue Struktur vom Messobjekt mitgemessen. So wird
im Beispiel unten, die minimale und maximale Distanz gemessen. Die Streuung ist somit grösser, als wenn
mit einer Schiebelehre gemessen wird.
Den Einsatz eines Sensors mit Laserlinie prüfen (OADM 2xI65xx/S14F).
Ebene Oberfläche
Raue Oberfläche !
Was tun bei Messobjekten mit unregelmässigen Farbübergängen?
In der Praxis treten immer wieder Messobjekte mit unregelmässigen Farbkanten auf.
Beispiele:
Texte !
Messen mit Laser
Sensoren
Werden solche Objekte quer zum Sensor bewegt, wird der Laserspot am Empfänger nicht überall
gleichmässig abgebildet. Das erzeugt an jedem Übergang von Dunkel (Matt) nach Hell (Glänzend) oder
umgekehrt eine Messabweichung ins Positive und dann ins Negative (oder umgekehrt).
Um auf solche Messobjekte mit unregelmässigen Strukturen möglichst genau zu messen, empfehlen wir,
über mehrere Messungen den Mittelwert zu bilden. Dies kann Hardwaremässig als Tiefpassfilter oder in der
Auswertesoftware ausführt werden. Die Anzahl der Messungen und die Dauer der Mittelung hängen stark
von den Strukturen des Messobjektes und der Verfahrensgeschwindigkeit ab.
Evt. den Einsatz mit Laserlinie prüfen (OADM 2xI65xx/S14F).
Fragen sie zum Thema „Messobjekte mit unregelmässigen Farbkanten“ ihren Baumer Berater.
☺
☺
☺☺
Bilder !
Distanz
max. min.
Rillen im Metall !
OADM
Roststellen !
Schiebelehre
Steinplatten!
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
11/88
Baumer
Page 12
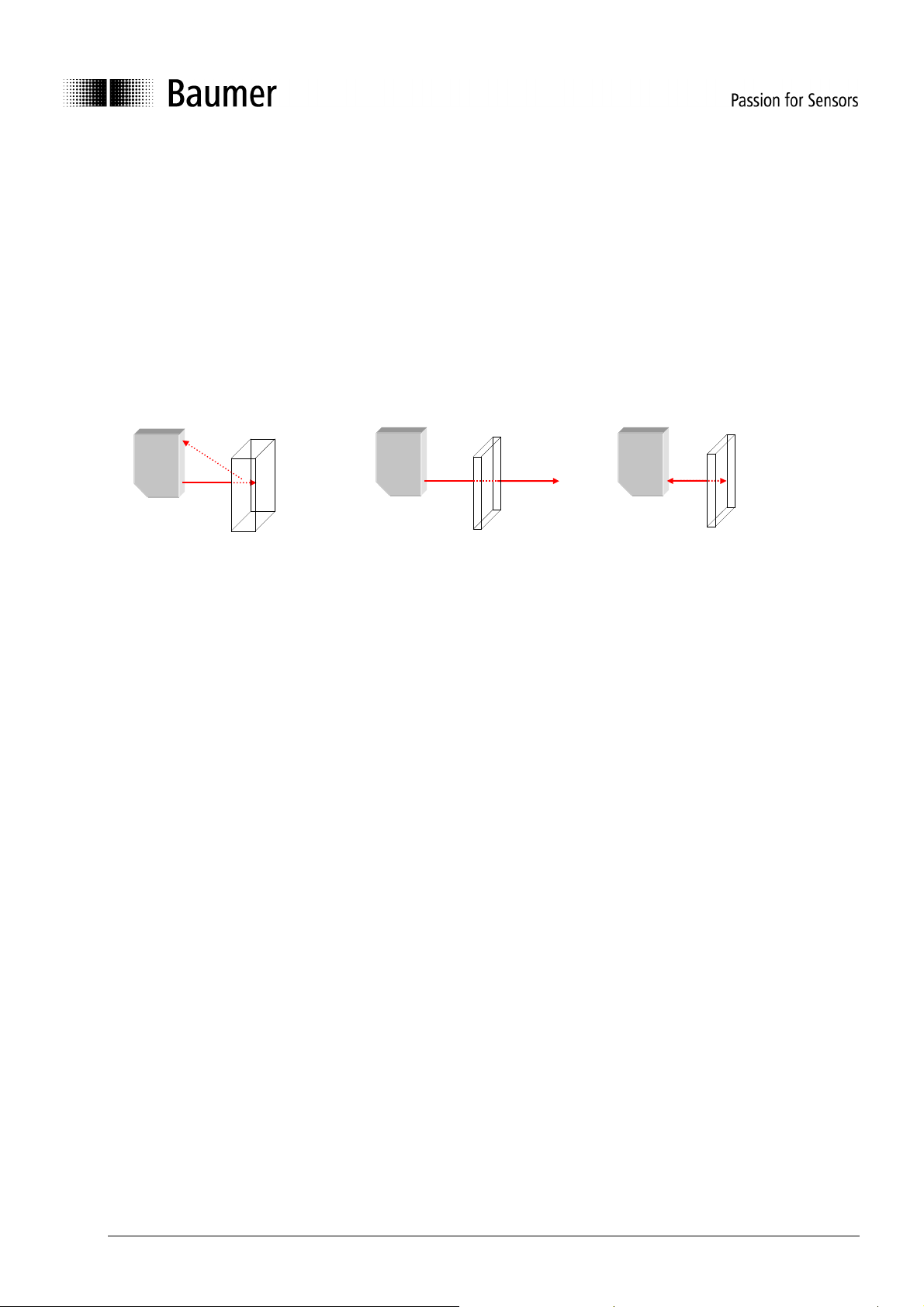
Teiltransparentes Messobjekt:
Glasklares Messobjekt:
Spiegelndes Messobjekt:
Was tun bei teiltransparenten, glasklaren und spiegelnden Messobjekten?
Das Messprinzip des Sensors basiert darauf, dass der Laserspot auf dem Messobjekt diffus reflektiert und
dann vom Empfänger gesehen wird.
• Bei teiltransparenten Messobjekten dringt der Laserspot ins Messobjekt ein. Deshalb wird der Laserspot
vom Empfänger weiter weg gesehen. Der Sensor gibt deshalb eine grössere Distanz an, als effektiv
vorhanden.
• Bei glasklaren Messobjekten gibt es an der Oberfläche vom Messobjekt keine diffuse Reflektion. Messen
ist so nicht möglich. Hier kann indirekt gemessen werden, z.B. über einen Aufkleber am Messobjekt.
• Bei spiegelnden Objekten, gibt es an der Oberfläche vom Messobjekt keine diffuse Reflektion. Der
Laserspot wird im selben Winkel, wie er eintrifft, auch zurückgeworfen. Auch hier muss indirekt gemessen
werden, z.B. über einen Aufkleber am Messobjekt.
Fragen sie zum Thema „Messen auf spiegelnde Objekte“ ihren Baumer Berater.
!
Der Laserspot dringt in das Messobjekt
ein. Der gemessene Abstand ist
grösser als der effektive Abstand.
Der Laserspot geht ohne diffuse
Reflexion durch das Messobjekt.
Messen ist so nicht möglich.
Der Laserspot wird direkt zum Sender
zurück gespiegelt.
Messen ist so nicht möglich.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
12/88
Baumer
Page 13
0 V / 4 mA
Analog out
Alarm / LED out
0 V / 4 mA
Analog out
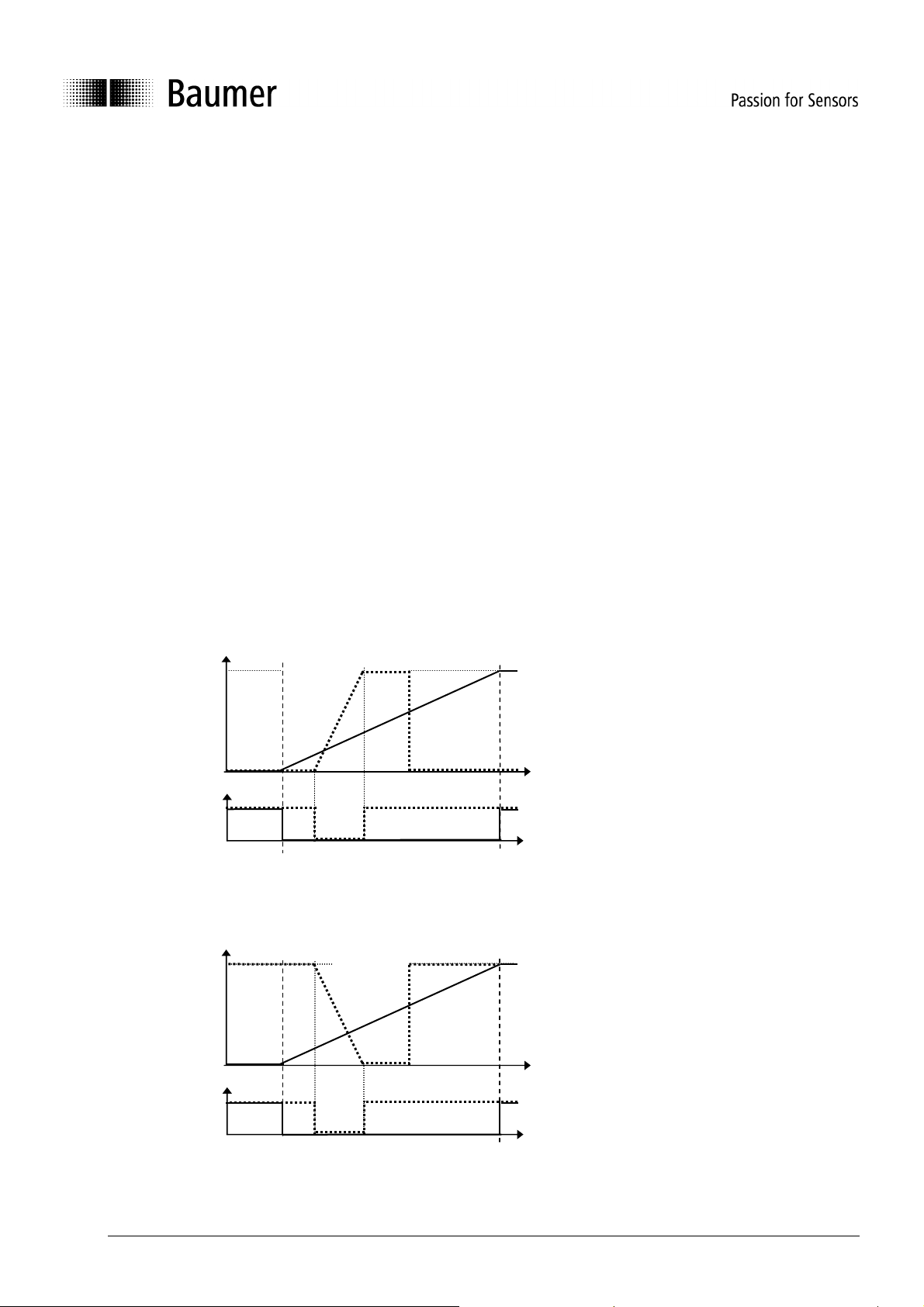
5 Messbereich teachen
Jeder Sensor wird mit dem im Datenblatt angegebenen Messbereich ausgeliefert. Das Teachen dient dazu,
den Messbereich auf kleinere Grenzen einzustellen und so die Auflösung und Linearität zu optimieren. Der
Strom-, resp. der Spannungsausgang erhält dadurch eine neue Kennlinie. Es werden immer 2 Abstände
geteacht.
• Der erste Abstand entspricht 0 V bzw. 4 mA, der zweite Abstand entspricht 10 V bzw. 20 mA.
• Die geteachten Punkte bestimmen den Anfang und das Ende des neuen Messbereiches (liegen
somit innerhalb des Messbereiches).
• Der Sensor kann mindestens 10'000 mal geteacht werden.
• Der Fabrikzustand kann jederzeit wieder hergestellt werden.
• Der Sensor kann über die eingebaute Taste oder über die Leitung geteacht werden.
• Beim Teachen werden die rote LED und der Alarmausgang für das Teach-Feedback benutzt.
• Die rote LED auf der Rückseite des Sensors und der Alarmausgang zeigen im Normalbetrieb an, ob
ein Objekt im Messbereich ist oder nicht.
Achtung:
Innerhalb von 5 Minuten nach dem Einschalten des Sensors lässt sich der Sensor mit Hilfe der gelben Taste
teachen. Nach dem Teachen beginnen die 5 Minuten von neuem. Nach 5 Minuten reagiert der Sensor nicht
mehr auf die Taste. Über die Teach-Leitung kann der Sensor jederzeit geteacht werden.
Beispiel für normal geteachte Kennlinie.
4 mA / 0 V im Nahpunkt, 20 mA /10 V im Fernpunkt.
10 V / 20 mA
Alarm / LED out
Normal
geteachte
Kennlinie
30 mm 130 mm
Beispiel für umgekehrt geteachte Kennlinie.
4 mA / 0 V im Fernpunkt, 20 mA / 10V im Nahpunkt
10 V / 20 mA
Umgekehrt
geteachte
Kennlinie
Standardkennlinie
Standardkennlinie
30 mm 130 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
13/88
Baumer
Page 14
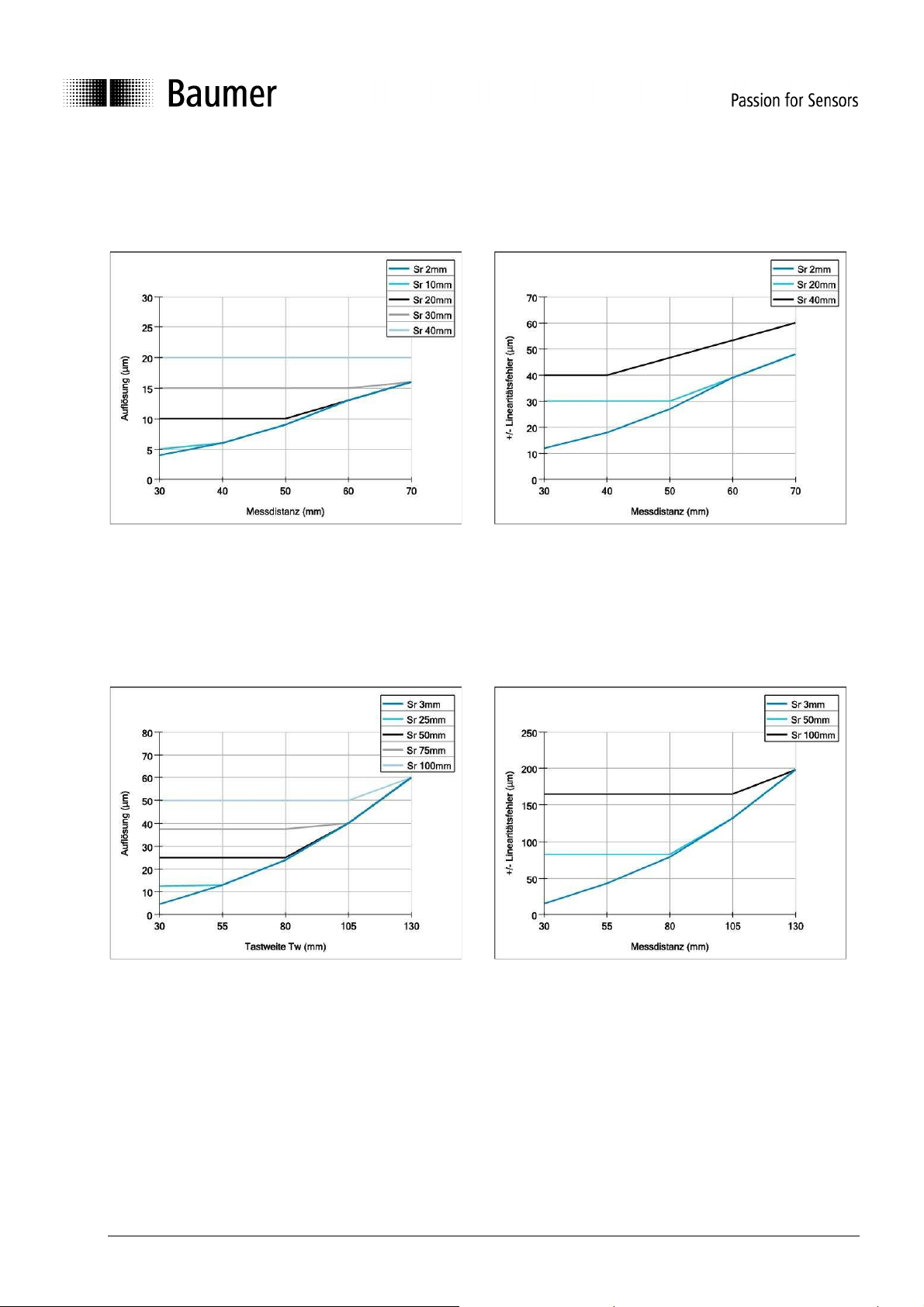
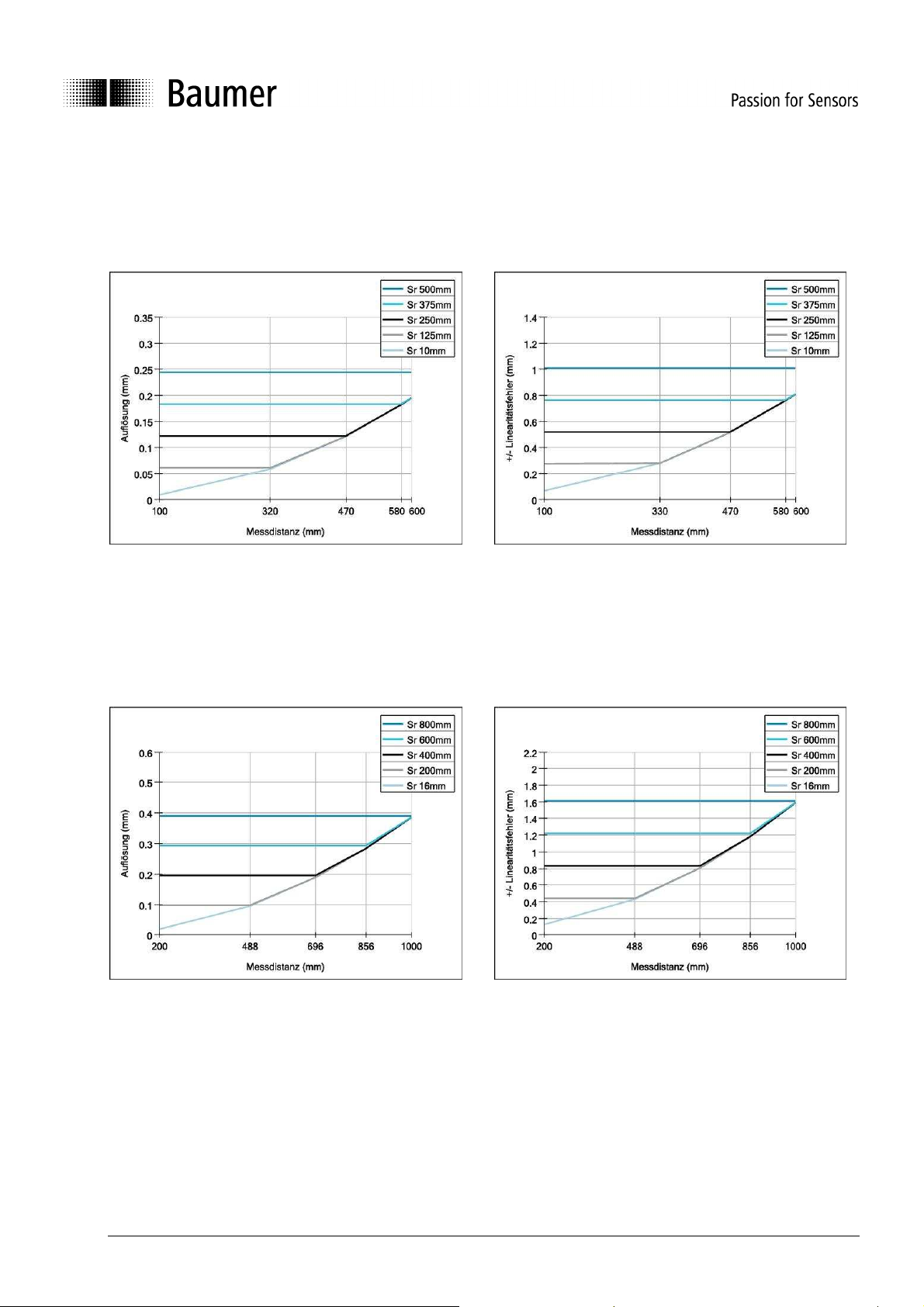
OADM 20I6x41/S14F
Typische Auflösung Typische Linearitätsabweichung
Sr = geteachter Messbereich Sr = geteachter Messbereich
OADM 20I6x60/S14F
Typische Auflösung Typische Linearitätsabweichung
Sr = geteachter Messbereich Sr = geteachter Messbereich
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
14/88
Baumer
Page 15
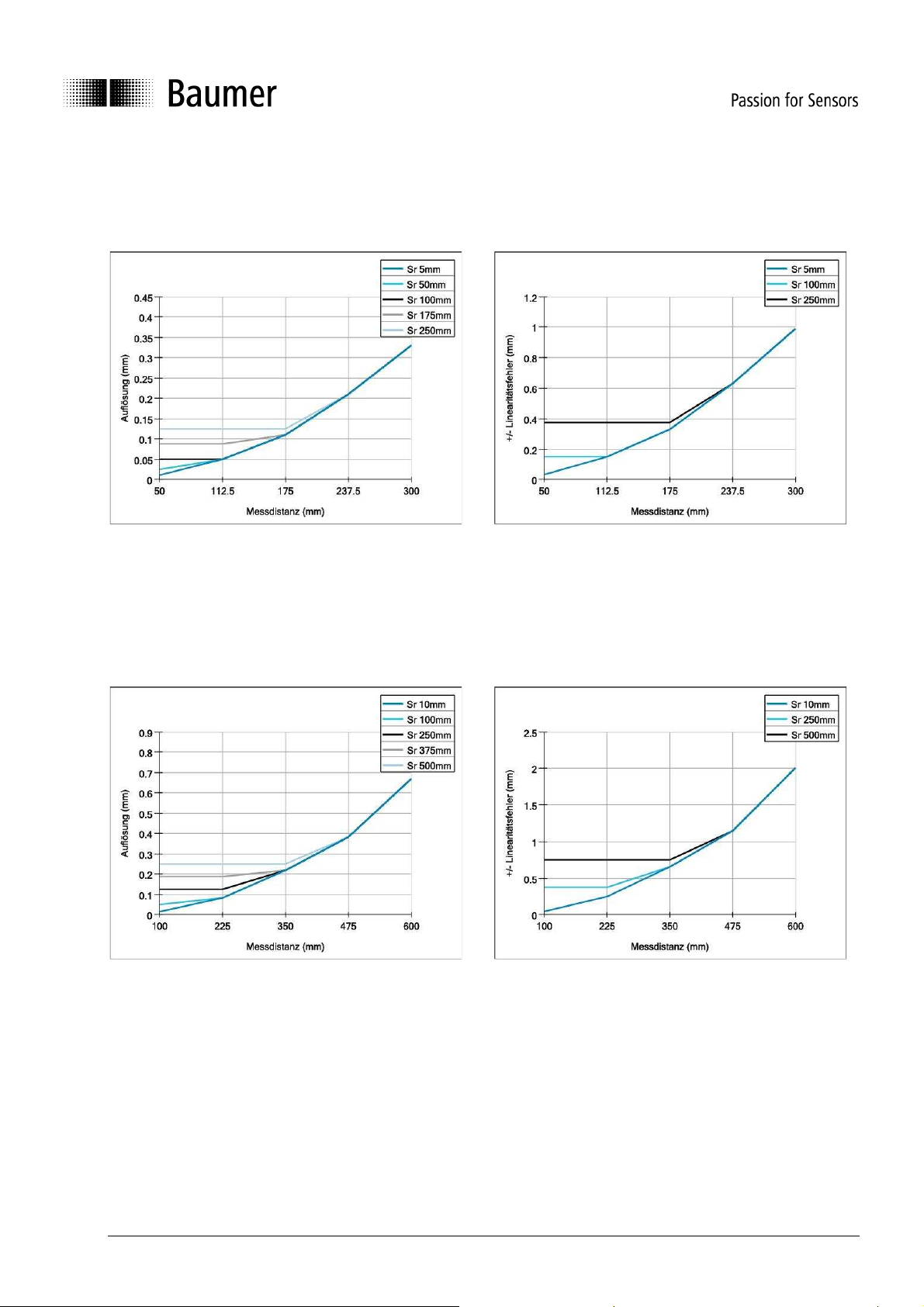
OADM 20I6x72/S14F
Typische Auflösung Typische Linearitätsabweichung
Sr = geteachter Messbereich Sr = geteachter Messbereich
OADM 20I6x80/S14F
Typische Auflösung Typische Linearitätsabweichung
Sr = geteachter Messbereich Sr = geteachter Messbereich
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
15/88
Baumer
Page 16
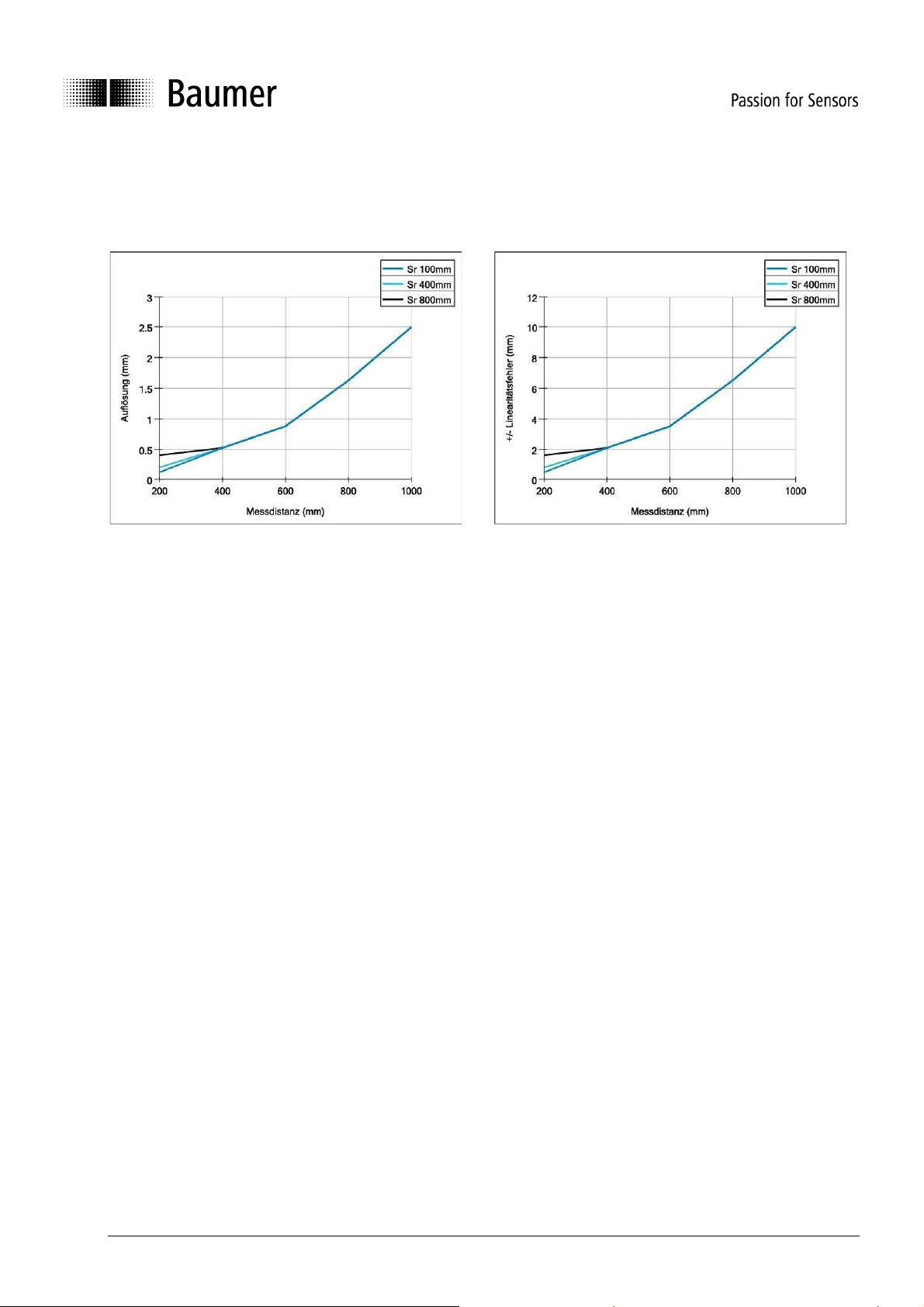
OADM 20I6x81/S14F
Typische Auflösung Typische Linearitätsabweichung
MB = geteachter Messbereich MB = geteachter Messbereich
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
16/88
Baumer
Page 17
OADM 21I6x80/S14F
Typische Auflösung Typische Linearitätsabweichung
Sr = geteachter Messbereich Sr = geteachter Messbereich
OADM 21I6x81/S14F
Typische Auflösung Typische Linearitätsabweichung
Sr = geteachter Meßbereich Sr = geteachter Messbereich
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
17/88
Baumer
Page 18
5.1 Messbereich teachen mit der Teach-Taste
Einstellen eines neuen Messbereichs:
Innerhalb von 5 Minuten nach dem Einschalten des Sensors lässt sich der Sensor mit Hilfe
der gelben Taste teachen. Nach dem Teachen beginnen die 5 Minuten von neuem. Nach
5 Minuten reagiert der Sensor nicht mehr auf die Taste.
1. Taste drücken; die rote LED geht an, wenn der Sensor noch teachbar ist.
2. Taste 5 Sekunden drücken, bis die rote LED zu blinken beginnt.
3. Taste loslassen.
4. Jetzt das Messobjekt auf die Grenze des Messbereichs setzen, bei welcher der
Sensor 0 V bzw. 4 mA ausgeben soll.
5. Taste kurz drücken; als Quittung leuchtet die rote LED für 3 Sekunden. Danach
blinkt sie gleichmässig weiter.
6. Jetzt das Messobjekt auf die Grenze des Messbereichs setzen, bei welcher der
Sensor 10 V bzw. 20 mA ausgeben soll.
7. Taste kurz drücken; als Quittung leuchtet die rote LED für 3 Sekunden. Danach geht
sie aus und blinkt noch einmal kurz auf. Der Sensor ist jetzt wieder betriebsbereit.
Der Messbereich ist jetzt neu eingestellt und die rote LED und der Alarmausgang gehen aus, wenn ein
Objekt innerhalb des neuen Messbereichs ist.
Falls eine der beiden neuen Grenzen ausserhalb des max. Messbereichs war, oder die beiden Grenzen zu
dicht beieinander waren, dann wird anstelle der 2.Quittung für 5 Sekunden ein Blinken ausgegeben. Der
Messbereich ist nicht geteacht. Er muss neu geteacht werden, wobei der minimale Teachbereich und der
Messbereich zu berücksichtigen sind.
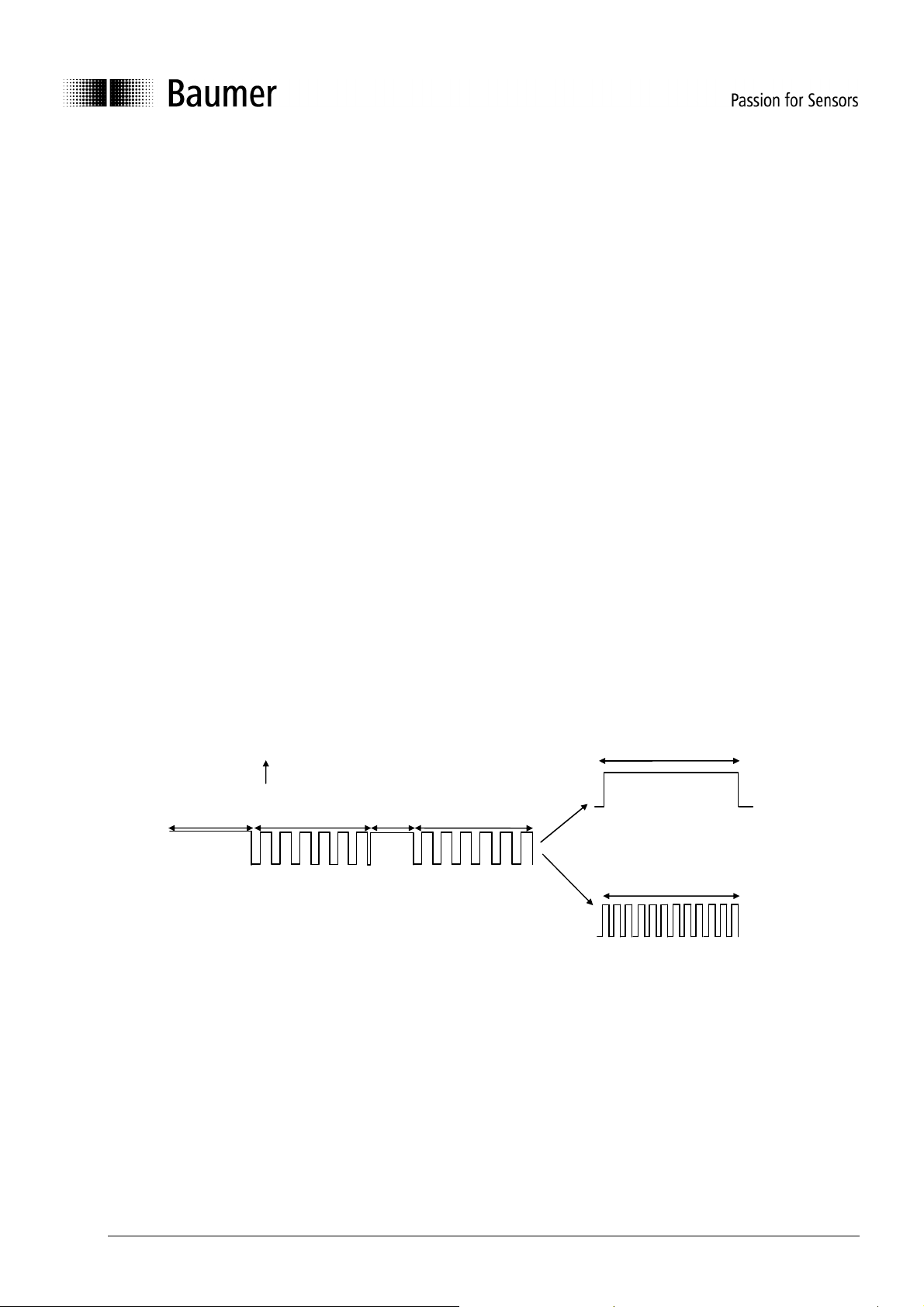
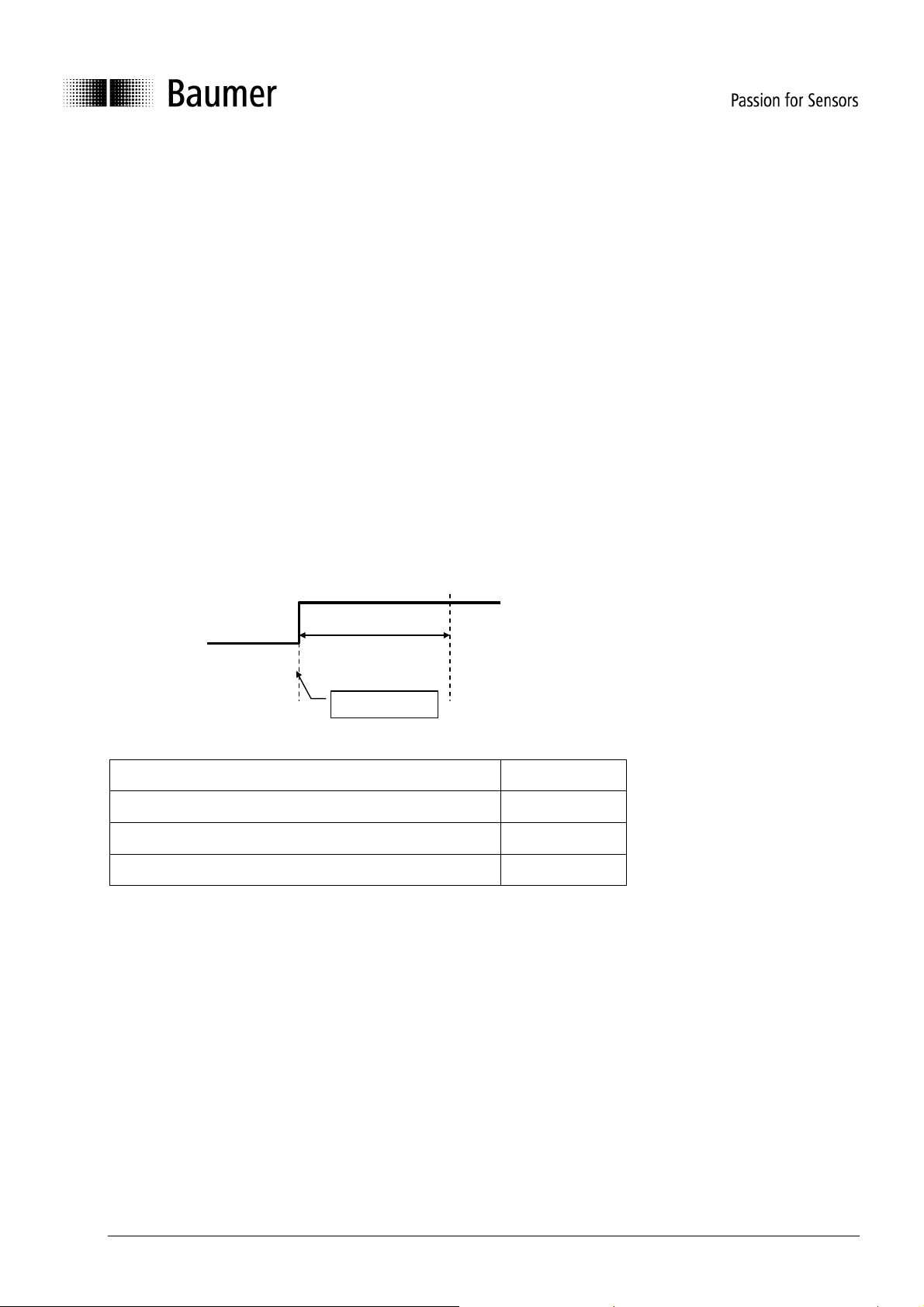
Zeitlicher Ablauf beim Messbereich teachen mit der Teach-Taste:
t6
rote LED
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
t1
t2
t3 t4
18/88
LED leuchtet, falls Teachen
☺
erfolgreich war.
t6
LED blinkt, falls Teachen
NICHT möglich war.
Baumer
Page 19
☺
Teachle
i
tung
☺
5.2 Fabrikzustand herstellen mit der Teach-Taste
Innerhalb von 5 Minuten nach dem Einschalten des Sensors lässt sich der Sensor mit Hilfe
der gelben Taste in den Fabrikzustand bringen. Nach jedem Teachen beginnen die 5 Minuten von neuem.
Nach 5 Minuten reagiert der Sensor nicht mehr auf die Taste.
1. Taste drücken; rote LED geht an, wenn der Sensor noch teachbar ist.
2. Taste 5 Sekunden drücken, bis die rote LED zu blinken beginnt. Taste NICHT loslassen. Weitere 10
Sekunden gedrückt halten, bis die rote LED dauernd leuchtet. Damit
ist der Fabrikzustand (Standardmessbereich) wieder hergestellt. Die zuvor geteachte Kennlinie
wurde mit den Fabrikdaten überschrieben.
3. Taste loslassen
t1
rote LED
t12
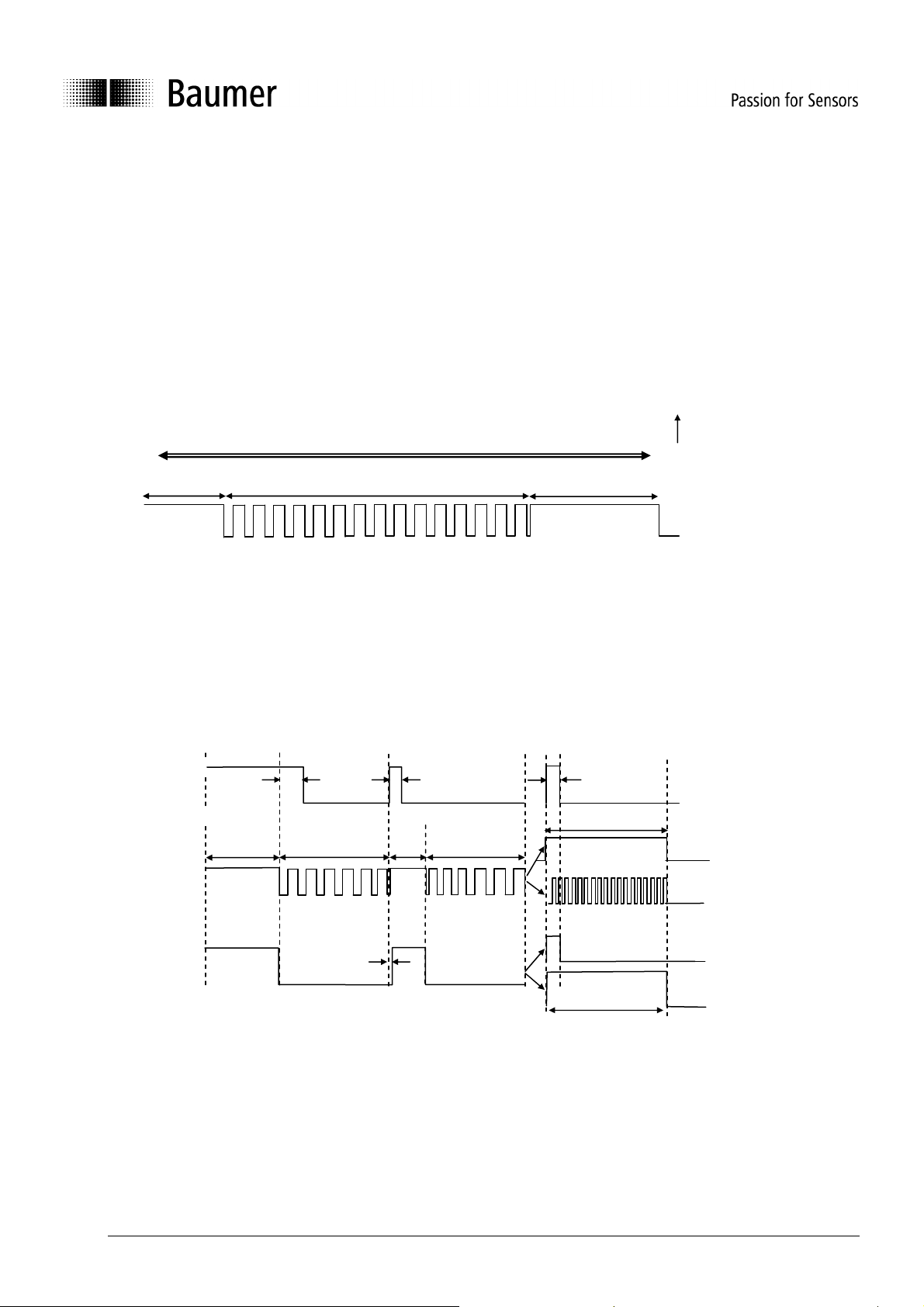
5.3 Messbereich teachen über die Teachleitung
Den Messbereich teachen über die Teachleitung lässt sich äquivalent zum Messbereich teachen mit der
Teach-Taste durchführen. Über die Leitung ist der Sensor immer teachbar. Für eine Maschinensteuerung
wird der Alarmausgang als Quittung genutzt.
12-28 V
t7 t8 t9
bis Taste losgelassen t13
0 V
t1
rote LED
Alarm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
t2
t3
t10
t4
19/88
t6
t6
Baumer
Page 20
Alarm
Alarm
Verzögerung zwischen Teachsignal und Quittierung am Alarmausgang:
Teachleitung
t10
t11
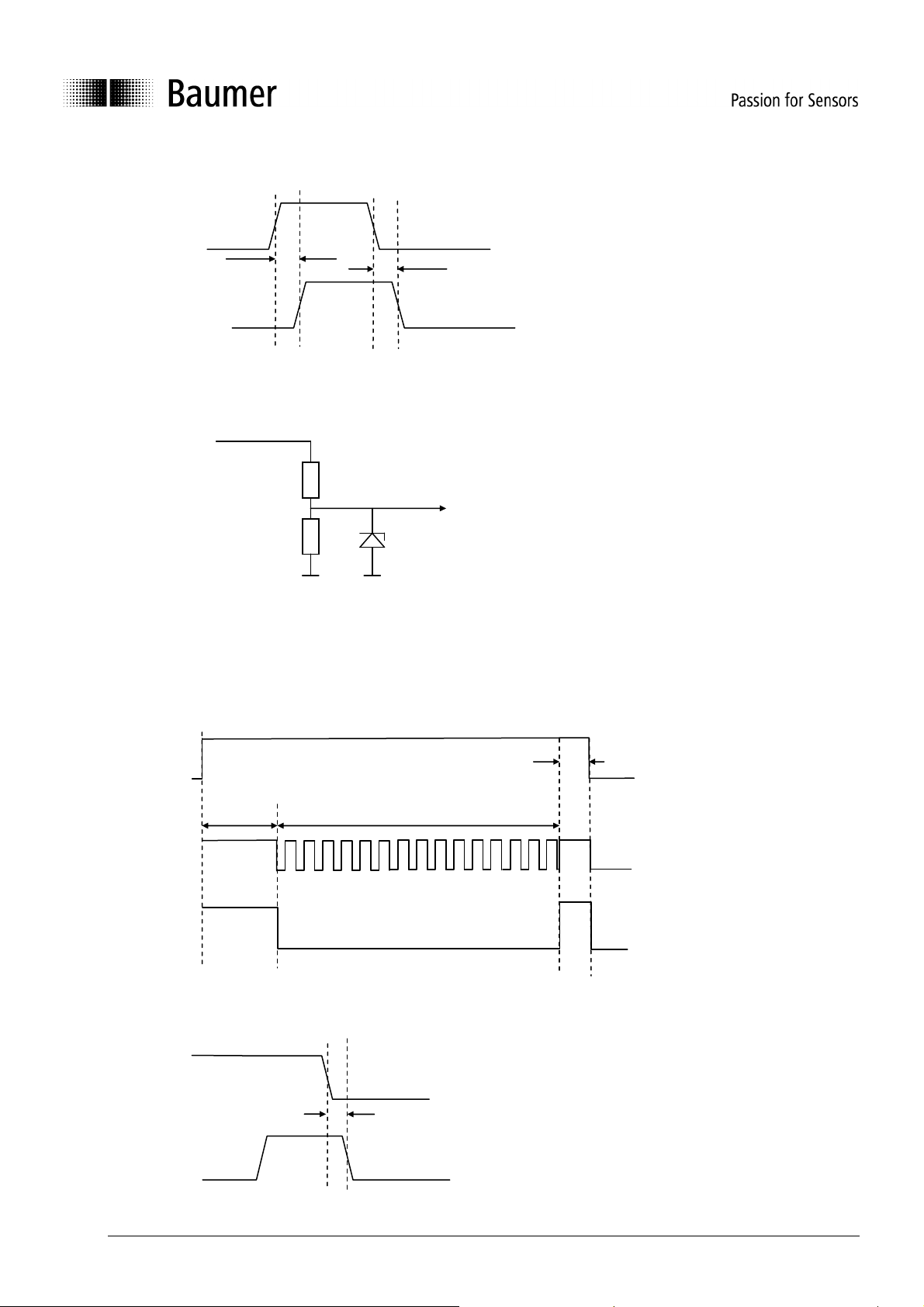
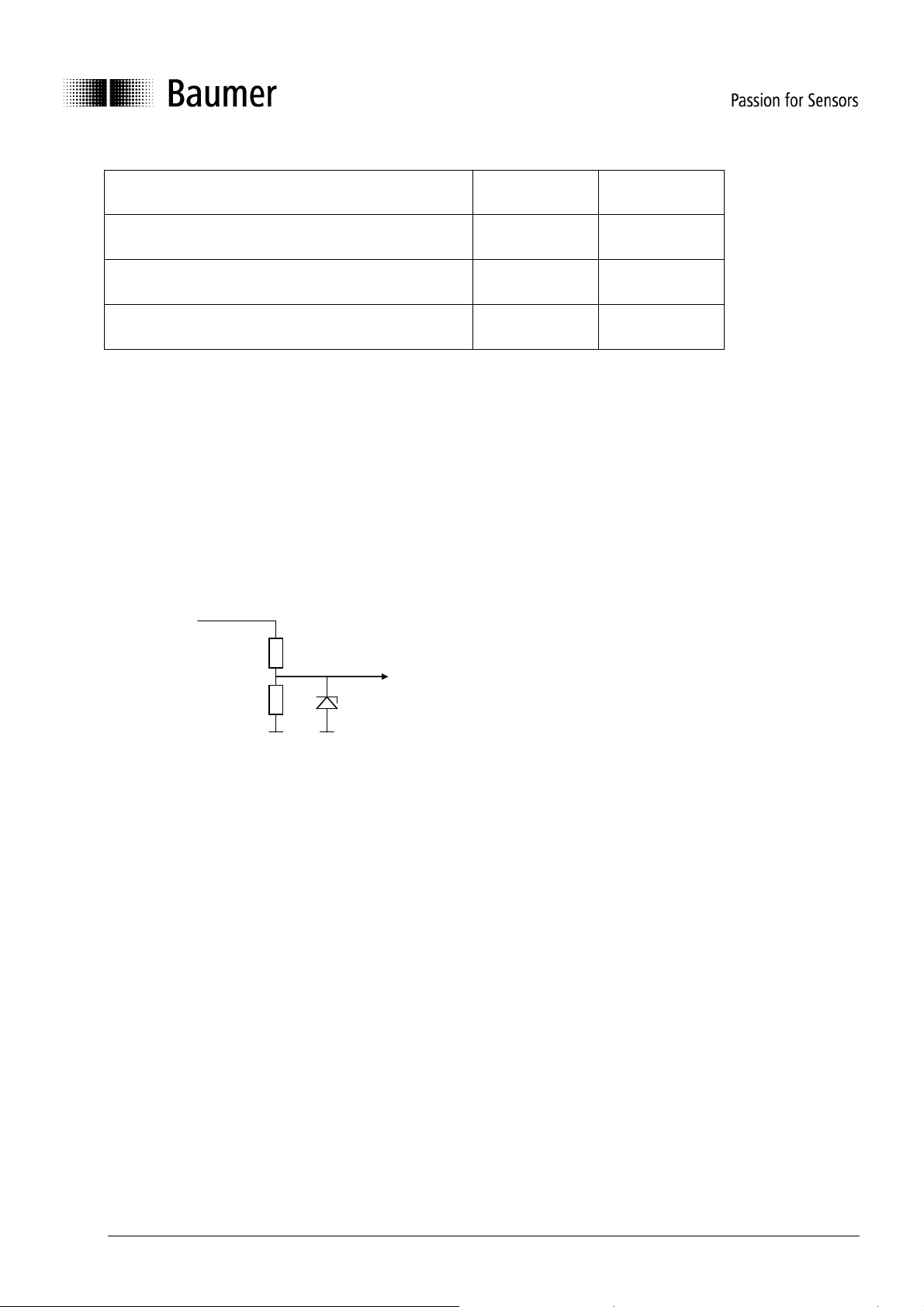
Eingangsschaltung:
Teach In
Low: 0 .. 2 V
High: 12 .. 28V
27kΩ
10kΩ
3V3
5.4 Fabrikzustand wieder herstellen über die Teachleitung
Den „Fabrikzustand wieder herstellen über die Teachleitung“ lässt sich äquivalent zum „Fabrikzustand wieder
herstellen mit der Teach-Taste“ durchführen. Über die Leitung kann der Fabrikzustand immer wieder
hergestellt werden. Für eine Maschinensteuerung wird der Alarmausgang als Quittung genutzt.
12-28 V
Teachleitung
0 V
t15
t1
rote LED
Alarm
t14
Verzögerung zwischen Teachsignal und Quittierung am Alarmausgang:
Teachleitung
t11
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
20/88
Baumer
Page 21
Zeit Beschreibung Wert Kommentar
Bei Betätigen der Taste nur in den ersten 5
t1 Mindestdauer Tastendruck 5 s
Minuten nach Einschalten des Sensors.
Bei Betätigung durch Teachleitung immer
funktionsfähig.
Maximale Wartezeit nach Aktivierung
t2
des ersten Teachvorgangs
< 20 s
Nach dieser Zeit ohne Tastendruck verlässt der
Sensor den Teachmodus ohne Veränderung
t3 LED an als Quittung ca. 3 s Quittung nach erstem Teachpunkt
Maximale Wartezeit nach Aktivierung
t4
des zweiten Teachvorgangs
LED als Quittung nach dem Teachen
t6
des zweiten Punktes
< 20 s
ca. 5 s
Nach dieser Zeit ohne Tastendruck verlässt der
Sensor den Teachmodus ohne Veränderung
Mindestabstand zwischen Fallen der
Alarmleitung und Fallen der
t7
Teachleitung zu Beginn des
1 ms
Teachvorgangs
Pulsdauer auf der Teachleitung,
t8
erster Teachpunkt
Pulsdauer auf der Teachleitung,
t9
zweiter Teachpunkt
30..2000 ms
30..2000 ms
Verzögerung zwischen Teachsignal
t10
und Quittung am Alarmausgang
< 20 ms
ansteigende Flanke
Verzögerung zwischen Teachsignal
t11
und Quittung am Alarmausgang
< 10 ms
abfallende Flanke
Mindestblinkdauer zur
t12
Wiedererstellung der
10 s
Fabrikeinstellungen
Blinkdauer zur Anzeige der
t13
Wiedererstellung der
Fabrikeinstellungen
> 0.2 s
Solange die Taste gedrückt oder der
Teacheingang auf High ist
Mindestblinkdauer bei
Wiederherstellung der
t14
Fabrikeinstellungen über
10 s
Teachleitung
Mindest Dauer des High Pegels der
Teachleitung nach Wiederanstieg
der Alarm Leitung bei
t15
Wiedererstellung der
0.2 s
Fabrikeinstellungen über
Teachleitung
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
21/88
Baumer
Page 22
12-28 V
6 Alarmausgang
Der Alarmausgang wird gesetzt, wenn das Objekt ausserhalb des Messbereiches liegt oder wenn der
Sensor mit dem empfangenen Messsignal keine Distanzbestimmung durchführen kann. In beiden Fällen
zeigt das analoge Ausgangssignal 4 mA / resp. 0 V.
Da der Sensor fehlende Messsignale nicht durch eine interne Holdfunktion überbrückt, kann es sein, dass
bei kritischen Applikationen (extrem glänzende Oberflächen) der Ausgang kurzzeitig auf 4 mA / resp. 0 V
abfällt, wenn das Messsignal verloren geht. Wird vor dem Auswerten des Messsignals der Alarmausgang
abgefragt, kann genau gesagt werden, ob es ein „echtes“ Messsignal ist oder nicht.
7 Synchronisationseingang
Hold Funktion / Laserdiode ON/OFF
Wird an den synch. Eingang 12-28 V angelegt, dann hält dieser den gerade erfassten Messwert und schaltet
die Laserdiode aus. Er wartet mit der nächsten Messung und mit dem aktualisieren des Messwertes, bis der
synch. Eingang wieder auf 0 V springt. Damit verfügt der Sensor über eine Holdfunktion.
In jedem Messzyklus prüft der Sensor den synch. Eingang. Wird der synch. Eingang auf High-Pegel gelegt,
dauert es maximal die Ansprechzeit T1, bis am Analogausgang das „Hold-Signal“ anliegt.
Synch. Eingang
0 V
T1
Schaltzeitpunkt
Sensor T1
OADM 20I6x41, OADM 20I6x60, OADM 20I6x72 0.9 ms
OADM 20I6x80, OADM 20I6x81 2.8 ms
OADM 21I6x80, OADM 21I6x81 4 ms
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
22/88
Baumer
Page 23

synch. Eingang S1
synch. Eingang S2
Mehrere Sensoren miteinander synchroniseren
Über einen externen Takt können mehrere Sensoren synchronisiert werden, wenn der Low-Pegel am synch.
Eingang T1 und die minimale Periodendauer T2 ist. Um zwei Sensoren nach dem Einschalten zu
synchronisieren, sind maximal 20 Zyklen am externen Takt nötig.
12-28 V
Synch. Eingang
0 V
T1
T2
Sensor T1 T2 T3
OADM 20I6x41, OADM 20I6x60
OADM 20I6x72
10 ... 250 µs > 1000 µs 5 µs ... 450 µs
OADM 20I6x80, OADM 20I6x81 10 ... 250 µs > 3 ms 15 µs ... 1800 µs
OADM 21I6x80, OADM 21I6x81 10 ... 250 µs > 4 ms 18 µs ... 1900 µs
Wenn die Sensoren auf diese Weise synchronisiert werden, so startet bei allen der Messzyklus zur selben
Zeit. Die Sensoren beginnen Licht zu sammeln. Die Länge des Belichtungsintervalls T3 (Verschlusszeit)
hängt von der Reflektivität der Oberfläche des Messobjektes ab.
Dies heisst, dass der aktuelle Messzeitpunkt um die ZeitT3 variieren kann. Weisse oder graue Objekte
reflektieren in der Regel gut, ihr Belichtungsintervall ist kleiner als die Hälfte der maximalen Zeit T3. Nur sehr
dunkle Objekte verlangen ein maximales Belichtungsintervall.
Mehrere Sensoren asynchron betreiben
Damit sich zwei oder mehrere OADM 2xI6xxx/S14F gegenseitig nicht beeinflussen, können sie über einen
externen Takt asynchron betrieben werden. Der synch. Eingang wird an Vcc 12-28 V gelegt und damit der
Laser abgeschaltet. Folgendes Timing muss dabei beachtet werden. Im folgenden Diagramm ist Sensor 1
als S1 und Sensor 2 als S2 bezeichnet.
12-28 V
0 V
20 mA
Analog Ausgang S1
4 mA
12-28 V
0 V
20 mA
Analog Ausgang S2
4 mA
t1
t2
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
23/88
Baumer
Page 24
Sensor t1 t2
OADM 20I6x41, OADM 20I6x6, OADM 20I6x72 < 0.9 ms 0.5 ... 2.7 ms
OADM 20I6x80, OADM 20I6x81 < 2.8 ms 0.5 ... 8.4ms
OADM 21I6x80, OADM 21I6x81 < 4 ms 1 ... 12 ms
Die maximale Zeit, nachdem der synch. Eingang von S1 auf High-Pegel gelegt wird, bis der S1 seinen
letzten analog Messwert ausgibt, dauert t1. Der Messwert vom S1 bleibt erhalten, so lange der synch.
Eingang vom S1 auf High-Pegel liegt. Die minimale Zeit zwischen S1 synch. Eingang auf High-Pegel und S2
synch. Eingang auf Low-Pegel, damit keine gegenseitige Beeinflussung möglich ist, dauert ebenfalls t1.
Der Zeitraum wo der synch. Eingang vom S2 auf Low-Pegel geschaltet wird, bis am Analog Ausgang ein
gültiger Messwert anliegt ist typisch t2 Minimum. Ist die Reflektivität vom Messobjekt von der einen zur
nächsten Messung sehr unterschiedlich, dann dauert es zwei, maximal drei Messzyklen, bis der gültige
Messwert am Ausgang anliegt. Das entspricht dem t2 Maximum.
Eingangsschaltung:
Teach In
Low: 0 .. 2 V
High: 12 .. 28 V
27kΩ
10kΩ
3V3
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
24/88
Baumer
Page 25
0.015...0.67 mm
8 Technische Daten
…6x41/S14F …6x60/S14F …6x72/S14F …6x80/S14F …6x81/S14F
OADM 20I…
Messbereich MB 30...70 mm 30...130 mm 50...300 mm 100...600 mm 200...1000 mm
Teach-in Bereich ≥ 2 mm ≥ 3 mm ≥ 5 mm ≥ 10 mm ≥ 20 mm
Auflösung *1) 4...20 µm 5...60 µm 0.01...0.33 mm
Linearitätsabweichung *2) ±12... ±60 µm
±15... ±200
µm
±0.03....±1.0
mm
±0.05....±2.0
mm
0.12...3.0 mm
±0.48... ±12.0
mm
Ansprechzeit *3) 300…900µs 300…900µs 300…900µs 300…2800µs 300…2800 µs
Fremdlicht *4) < 50k Lux < 40k Lux < 8k Lux < 10k Lux < 5k Lux
Typ. Temperatur
Koeffizient *5)
± 0.015%
v.MB/°C
± 0.03%
v.MB/°C
± 0.03%
v.MB/°C
± 0.03%
v.MB/°C
± 0.06%
v.MB/°C
Lichtquelle Laserdiode rot, gepulst
Laserklasse 2
Wellenlänge 650 nm
Laserpunkt *6) 1 .. 0.2 mm 2 .. 1 mm 2 mm 2 mm 2 mm
Laserlinie*7) Höhe
Breite
2 mm
1...0.2 mm
3...5 mm
2...1 mm
4...12 mm
2.5 mm
5.5...21 mm
2.5 mm
8.5...35 mm
2.5 mm
Analogausgänge 4 … 20 mA und 0 … 10 V
Lastwid. an U-Out > 100 kΩ
Lastwid. an I-Out < (+Vs – 6 V) / 0.02 A
Alarmausgang PNP / max. 100 mA
Betriebsspannung 12 ... 28 VDC
Stromverbrauch < 100 mA, (bei + 24V ~ 40mA)
Verpolungsfest ja (nur Speisung)
Kurzschlussfest ja
Gehäusematerial Zink Druckguss
Anzugsdrehmoment 1.0 Nm
Schutzklasse IP 67
Arbeitstemperatur 0°C .. +50°C (nicht kondensierend )
Lagertemperatur -20 ... +70°C
*1)
*2)
und
Auflösung und Linearitätsabweichungen gemessen auf weisse Keramik
*3)
Die Ansprechzeit des Sensors ist von der Reflektivität des Messobjektes abhängig
*4)
max. zulässiges Sonnenlicht auf weisses Messobjekt im Meßbereich
*5)
in % vom max. Meßbereich / °C
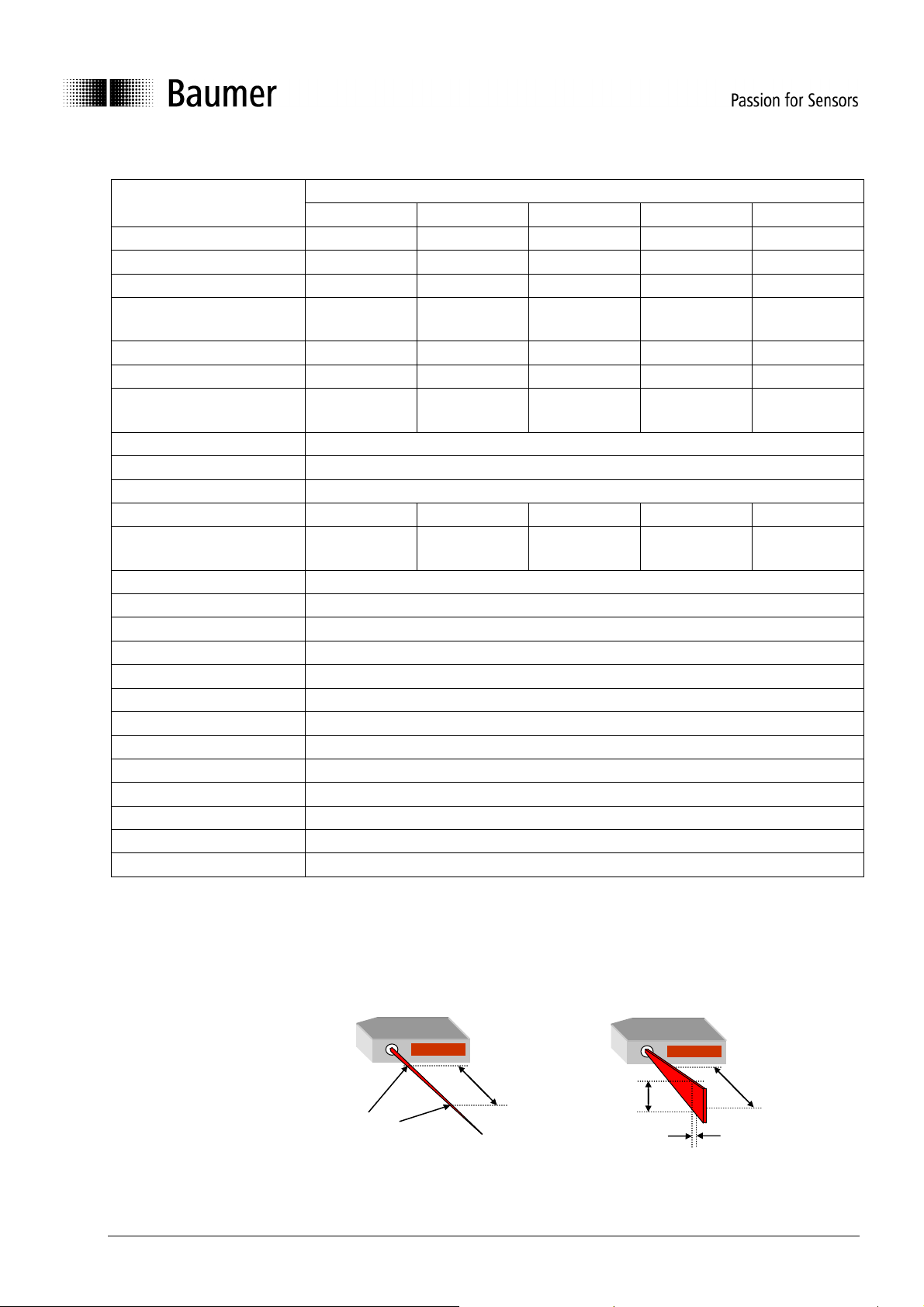
*6)
*7)
und
Senderabmessung: OADM 20I64xx/S14F (Ø – Strahl) OADM 20I65xx/S14F (Laserlinie: Höhe, Breite)
Messbereich
Ø – Strahl
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
25/88
Höhe
Breite
Messbereich
Baumer
Page 26
OADM 21I
Techn. Daten
6x80/S14F 6x81/S14F
Messbereich MB 100 ... 600 mm 200 ... 1000 mm
Teach-in Bereich ≥ 10 mm ≥ 10 mm
Auflösung *1) 0.01 ... 0.25 mm 0.02 ... 0.5 mm
Linearitätsabweichung *2) ± 0.07 ... ± 1.0 mm ± 0.11 ... ± 2.0 mm
Ansprechzeit *3) < 4 ms < 4 ms
Fremdlicht *4) < 10k Lux < 10k Lux
Typ. Temperatur
Koeffizient *5)
± 0.012%
vom MB/°C
± 0.02%
vom MB/°C
Lichtquelle Laserdiode rot, gepulst
Laserklasse 2
Wellenlänge 650 nm
Laserpunkt *6) 2 mm 2 mm
Laserlinie*7) Höhe
Breite
4...13 mm
2 mm
6...20 mm
2.5 mm
Analogausgänge 4 … 20 mA und 0 … 10 V
Lastwid. an U-Out > 100 kΩ
Lastwid. an I-Out < (+Vs – 6 V) / 0.02 A
Alarmausgang PNP / max. 100 mA
Betriebsspannung 12 ... 28 VDC
Stromverbrauch < 120 mA, (bei + 24V ~ 40mA)
Verpolungsfest ja (nur Speisung)
Kurzschlussfest ja
Gehäusematerial Aluminium
Anzugsdrehmoment 1.5 Nm
Schutzklasse IP 67
Arbeitstemperatur 0 .. +50°C (nicht kondensierend)
Lagertemperatur -20 ... +70°C
*1)
*2)
und
Auflösung und Linearitätsabweichungen gemessen auf weisse Keramik
*3)
Die Ansprechzeit des Sensors ist von der Reflektivität des Messobjektes abhängig
*4)
max. zulässiges Sonnenlicht auf weisses Messobjekt im Meßbereich
*5)
in % vom max. Meßbereich / °C
*6)
*7)
und
Senderabmessung: OADM 21I64xx/S14F (Ø – Strahl) OADM 21I65xx/S14F (Laserlinie: Höhe, Breite)
Messbereich
Ø – Strahl
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
26/88
Höhe
Breite
Messbereich
Baumer
Page 27
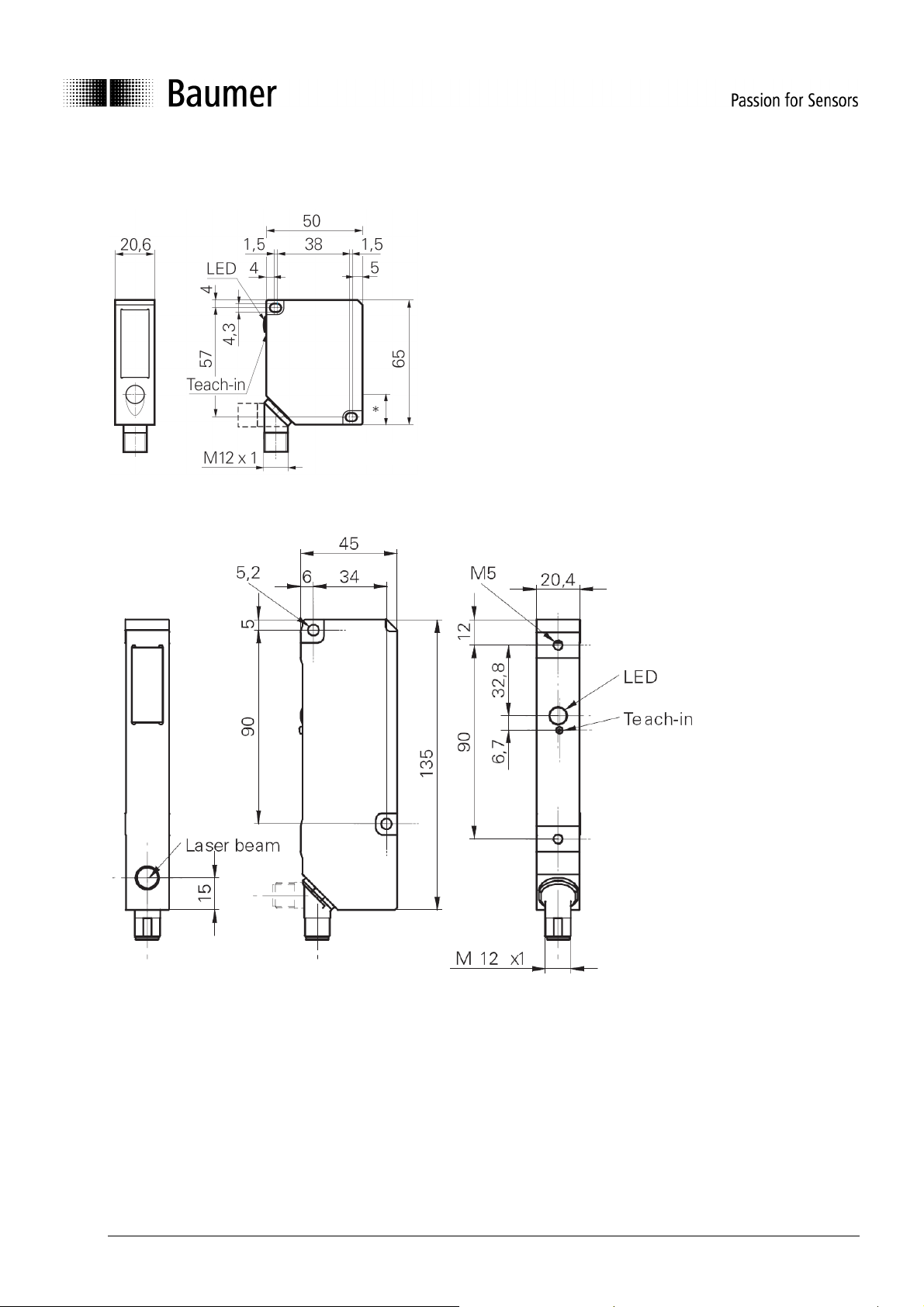
Abmessungen:
OADM 20I6xxx/S14F:
OADM 21I6xxx/S14F:
* Senderachse 16 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
27/88
Baumer
Page 28

9 Anschluss und Steckerbelegung
Anschlussbelegung Steckerbelegung
Wird der externe Teach-In Eingang nicht verwendet, muss er auf GND gelegt werden.
10 Erdungskonzept
Um einen optimalen EMV-Schutz und damit einen störungsfreien Betrieb zu gewährleisten, müssen
Anschlussleitungen mit Abschirmung eingesetzt werden. Der Sensor muss geerdet betrieben werden, dafür
gibt es unterschiedliche Methoden. In der Zeichnung unten ist unsere Vorzugsvariante aufgeführt. Der
Sensor wird über eine Zahnscheibe unter der Befestigungsschraube geerdet.
● = elektrische Verbindung.
Power-supply
OADM
Falls ein anderes Erdungskonzept gewünscht wird, kontaktieren Sie bitte Baumer.
A/D Converter
11 Wartungshinweise
Der OADM benötigt keine Wartung, ausser dass die Frontfenster sauber gehalten werden müssen. Staub
und Fingerabdrücke können die Sensorfunktion beeinträchtigen. Normalerweise genügt es,
die Fenster mit einem sauberen (!), weichen Tuch abzureiben. Bei stärkerer Verschmutzung kann Alkohol
oder Seifenwasser verwendet werden.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
28/88
Baumer
Page 29

12 Zubehör
Anschlusskabel gerade ESG 34FH0200G, 8-Pol, Länge 2 m, abgeschirmt
ESG 34FH0500G, 8-Pol, Länge 5 m, abgeschirmt
ESG 34FH1000G, 8-Pol, Länge 10 m, abgeschirmt
Befestigungswinkel Art.-Nr. 10131521, Befestigungswinkel aus Metal für OADM 20
Frontscheibe Art.-Nr. 10156878, Schutzscheibe aus Acrylglas (PMMA), optimiert den Schutz
der Sensorfront vor glühenden Schweiss-Spritzern, kann bei Bedarf ersetzt
werden
13 Fehlersuche: Was tun wenn...
Fehler Mögliche Ursache Korrekturmassnahmen
Der Sensor misst nicht Der synch. Eingang oder die Teach-in
Leitung ist an +Vs angeschlossen
Empfangsstrahl abgedeckt Stellen sie sich hinter den Empfänger und
Objekte mit kritischen Oberflächen
(Transparent, spiegelnd)
Der Sensor misst
zeitweise falsch
Der Sensor misst
ungenau
Beeinflussung durch einen weiteren
Sensor prüfen
Beeinflussung durch ein starkes
Fremdlicht prüfen.
Ist das Messobjekt teiltransparent,
glasklar oder spiegelnden?
Raue Oberfläche Verwenden Sie einen Sensor mit Laser
Farbkanten Beachten Sie die Ausrichtung des Sensors
Wie genau ist die eingesetzte
Messdatenerfassung?
Der synch. Eingang oder die Teach-in
Leitung an 0 V anschliessen
schauen sie den Laserspot am Messobjekt
an. Ist der Laserspot auf dem Messobjekt
gut sichtbar?
Stellen sie sicher daß die Oberfläche
diffuse reflektiert
Umliegende Sensoren die im
Erfassungsbereich vom Empfänger liegen
abschalten
Den Sensor vor Fremdlicht abschatten
Stellen sie sicher daß die Oberfläche
diffuse reflektiert
Linie
Im Manual des Herstellers nachschlagen.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
29/88
Baumer
Page 30

BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
30/88
Baumer
Page 31

User Manual
Laser distance sensor
series
OADM 20I6....
OADM 21I6....
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
31/88
Baumer
Page 32

1 General notes
Rules for proper usage This product is a precision device which has been designed for the
detection of objects and parts. It generates and provides measured
values issued as electrical signals for following systems. Unless this
product has not been specifically marked it may not be used in
hazardous areas.
Set-up Installation, mounting and adjustment of this product may only be
executed by skilled employees.
Installation Only mounting devices and accessories specifically provided for this
product may be used for installation.
Unused outputs may not be connected. Unused strands of hardwired sensors must be isolated. Do not exceed the maximum
permissible bending radius of the cable. Before connecting the
product electrically the system must be powered down. Where
screened cables are mandatory, they have to be used in order to
assure EMI protection. When assembling connectors and screened
cables at customer site the screen of the cable must be linked to the
connector housing via a large contact area.
Laser safety
• The laser diode installed in the OADM emits visible red laser lights. This laser belongs to the Class 2 laser
standard specified by the IEC 60825-1
• Max. average output power < 1 mW
• Laser radiation, do not stare into beam
• To avoid uncontrolled laser exposure we recommended stopping the beam with a matte object.
• For laser safety reasons, the voltage supply of the sensors must be turned off when the whole system or
the machine is turned off.
• Safety concept information and limiting parameters as published in the sales documentation apply at all
times.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
32/88
Baumer
Page 33

2 Functional principle
The distance measured is based on the triangulation principle. The emitted laser beam falls on the object as
a small light spot and will be reflected diffusely. The position of the received light spot on the receiver (a
diode line) defines the receiving angle. This angle corresponds to the distance and is the base for the
internal calculations.
A distance change close to the sensor effects a large change in angle; the same distance change at the end
of the measuring range has a much smaller effect to the angle. This non-linearity feature is linearized by the
microcontroller. The analog output signal is linear to the distance.
Diode line with
receiving light spot
Object close to sensor
Object far away
The sensor adapts automatically to different object colors by varying the emitting laser intensity and
optimizing the exposure time. The result is a sensor that is nearly independent on different reflections
(different colors, shiny surfaces, dark objects). The sensor reaches its highest accuracy if the object reflects
diffusely.
3 Mounting instructions
• For a proper mounting, the mounting surface has to be flat. Be aware of the max. tightening torque.
• In case of EMC, the sensor has to be grounded and a shielded cable has to be used.
• The 90° rotating connecter allows wiring the senso r from the bottom side or from the rear.
• The max. accuracy will be reached >15 minutes after power on.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
33/88
Baumer
Page 34

Steps / edges:
When measuring right next to steps / edges, it is important that the receiving beam is not covered by the
steps / edges. This also applies to depth measurements of holes or valleys.
Mounting above shiny surfaces:
On shiny surfaces, it is important that no direct reflection can get to the receiving optics. The reflection could
blind the sensor and produce poor results. To prevent this, the sensor may be slightly tilted. The direct
reflection can be seen on a white piece of paper when held in front of the receiver.
Mounting above round, shiny surfaces:
10 -15°
☺
☺
☺☺
☺
☺
☺☺
☺
☺
☺☺
☺
☺
☺☺
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
34/88
Baumer
Page 35

☺
☺☺
☺
Shiny objects with a constant structure
Especially shiny objects with a constant structure (lathed or scuffed objects, extruded aluminum profiles, etc.)
could have a negative effect on the measuring result.
Objects with color edges in the same direction:
When color edges are orientated in the right direction, the effect to the measuring result will be minor. If the
color edges are in the wrong direction, the effect will depend on the reflectivity of the different colors.
Profile measurement:
For profile measurements, the sensor axes should be perpendicular to the moving direction.
☺
☺
☺☺
☺
☺
☺☺
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
35/88
Baumer
Page 36

☺
☺☺
☺
☺
☺☺
☺
Ambient light:
Be careful that no strong light source faces the receiving field.
Several sensors without mutual optical interferences:
Several sensors, when mounted next to the other, can affect each other. When mounting a sensor, be aware
that no laser spot from another sensor is in the receiving field.
When mounted side by side (as shown in the picture in the middle), sensing distances up to 600 mm can be
achieved..
If it is not possible to mount the sensors the correct way, use the sync input and choose the asynchronous
function.
Measuring range
☺
☺
☺☺
Measuring range
☺
☺
☺☺
Mutual optical
interferences
Measuring range
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
36/88
Baumer
Page 37

Measuring range
3.1 Measuring field OADM 20
+/ - 7 mm around the optical axis
OADM 20x6441/S14F OADM 20x6460/S14F
Size and position
of the clear area,
see below
No disturbing
objects in this
area
Laser beam
max. laser beam diameter (see data sheet)
No disturbing
objects in this
area
clear area
clear area
17 mm
10 mm
3 mm
0/0
15 mm
35 mm
50 mm
diameter 10 mm
17 mm
10 mm
3 mm
0/0
13 mm
35 mm
50 mm
diameter 10 mm
OADM 20x6472/S14F OADM 20x6480/S14F, OADM 20x6481/S14F
clear area
17 mm
10 mm
3 mm
0/0
10 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
35 mm
50 mm
diameter 10 mm
37/88
17 mm
10 mm
3 mm
0/0
12 mm
35 mm
clear area
50 mm
diameter 10 mm
Baumer
Page 38

0/0
14 mm
34 mm
3 mm
unobstructed
3.2 Measuring field OADM 21
Measuring range
Length of free
areas (see below)
No obstacles
in this area
Max. laser
beam diameter
(see data
sheet)
Must remain
120 mm, diameter 10mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
38/88
Baumer
Page 39

4 Application hints
To reach the maximum accuracy of OADM 2xI6xxx/S14F series laser distance sensors, keep an eye on the
following points:
Measuring on rough surfaces
All laser distance sensors are adjusted and linearized on a reference object. The object is a white ceramic
sheet with an absolutely flat surface. Many objects have a surface structure that is within the resolution of the
sensor or rougher. In such a case, the sensor with its small laser spot measures the distance including the
structure in contrast to a slide gauge that measures an average. For such applications, we recommend to
use a laser distance sensor with a laser line (OADM 2xI65xx/S14F).
Flat surface
Rough surface !
What can you do if you have color edges?
Often objects have several color edges on the surface.
for example:
text !
Measure with
Laser Sensors
In the field, you have no guarantee that the spot is not falling on just a color edge that can cause a
measuring fault.
Also, when the object moves, you may get an incorrect signal for each color edge (it appears that the signal
is unstable or has spikes)
In such cases, we suggest to move the object (or sensor), take several measurement values and calculate
the average. The quantity of measurement values depends on the structure, the moving speed and the
accuracy you desire.
Other possible solutions:
use a sensor with the laser line (OADM 2xI65xx/S14F)
contact the Baumer electric staff
☺
☺
☺☺
distance
max. min.
pictures !
grooves !
OADM
rust !
Slide gauge
marble!
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
39/88
Baumer
Page 40

Semi transpa
rent objects:
Transparent objects:
Highly reflective objects:
What can you do if you have transparent, semi-transparent and highly reflective objects?
The measuring principle desires an object that reflects the light diffusely. Semi-transparent, transparent and
highly reflective objects do not have this feature.
• When measuring on semi-transparent objects, the light enters the object and so the measured distance is
larger than the actual distance is.
• Light will pass through a transparent object so a measuring signal is not available.
• A highly reflective object only has a direct reflection and it is not possible to work with it. For such an
application, ask the Baumer electric sales staff.
to measure these objects, it is only possible if you place a diffuse reflecting surface on the object (sticker,
etc.)
!
the light enters the object.
the measured distance is larger than the
real distance
The light passes the object without a
diffuse reflection.
No measurement is possible
Only direct reflection
No measurements possible
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
40/88
Baumer
Page 41

Analog out
t
LED
Analog out
Alarm out
LED
5 Teaching the OADM
Every sensor is delivered with the factory setup (max. measuring range). The teach-in feature was designed
to choose a smaller range within the nominal measuring range for optimizing the resolution and linearity.
Output current, voltage and alarm output adapt to the new range. Two positions must be taught.
• The first teach-in position aligns with 0 V (or 4 mA), the second position aligns with 10 V (or 20 mA)
• These teach-in positions are always just at the border of the new range (inside the measuring range)
• The sensor may be taught more than 10,000 times in its lifetime
• The sensor can always be reset to the factory settings
• The sensor may be taught with the teach button or via the external teach input
• During the teach-in process, the red LED and the alarm output provides a feedback
• The red LED on the back side of the sensor and the alarm output indicate “run” mode if an object is within
the measuring range.
Attention:
Within 5 minutes after power on, the sensor can be taught via the button or the teach-in wire. After 5 minutes,
the teach-in button will be locked preventing accidental adjustment. The teach-in wire is active all the time.
Example of a taught measuring range:
10V / 20 mA
Example
of a
taught
output
curve
Standard output
curve
0V / 4mA
30 mm 130 mm
Example of a reverse taught measuring range:
10V / 20mA
0V / 4mA
Alarm ou
30 mm 130 mm
Example of
a reversed
output
curve
Standard output
curve
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
41/88
Baumer
Page 42

OADM 20I6x41/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
OADM 20I6x60/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
42/88
Baumer
Page 43

OADM 20I6x72/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
OADM 20I6x80/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
43/88
Baumer
Page 44

OADM 20I6x81/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
44/88
Baumer
Page 45

OADM 21I6x80/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
OADM 21I6x81/S14F
Typical resolution: Typical linearity error:
Sr = taught measuring range Sr = taught measuring range
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
45/88
Baumer
Page 46

5.1 How to teach a new range using the teach button
Teaching a new measuring range:
Within 5 minutes after power-up, the button may be used to teach a new range. After finishing a teach
procedure, the 5 minutes starts again. After the 5 minutes, the sensor does not respond to pressing the
button. Seven steps to teaching a new measuring range:
1. Press (and hold) the button. The red LED will turn on, if the sensor can be taught.
2. Hold down the button for 5 more sec. The LED will start to blink.
3. Release the button.
4. Place a target at the first new position of the measuring range. This is the position that will later produce 0
V (or 4 mA).
5. Briefly press the button again. The LED will stop blinking and will stay on for about 3 sec to indicate that
the first position has been stored. Then the LED will blink again.
6. Now place the target at the second position (the other end of the new range), which will produce 10 V (or
20 mA).
7. Briefly press the button again. The LED will stop blinking and will stay on for about 3 sec to indicate that
the second position has been stored. The LED will then turn off and blink once more. Now the sensor is
ready to measure.
The new, smaller operating range is now set. The red LED now indicates whether an object is within the new
range (LED OFF) or not (LED ON)
If one of the new borders of the range was outside the standard range or the two positions were too close to
each other, then the new settings are not valid. The sensor will respond with an extended blinking at the end
of the teach procedure. The previous settings are still valid and the new settings are lost.
Timing of the teach procedure
t6
red LED
t1
t2 t3
t4
If teaching was successful,
the LED will be on
☺
t6
If the teaching was not
possible, the LED will flash
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
46/88
Baumer
Page 47

☺
Teach wire
☺
5.2 How to reset the factory settings using the teach button
Within 5 minutes after power up, the button may be used to reset the sensor back to the factory settings.
After finishing a teach procedure, the 5 minutes starts again. After the 5 minutes, the sensor does not
respond to the button.
1. Push the button. The red LED will turn on, if the sensor can be taught.
2. Hold down the button further 5 sec. The LED will start to blink. DO NOT RELEASE the button now. Wait
another 10 sec until the LED is ON without blinking. Factory settings have been restored to the sensor.
3. Release the button.
t1
Red LED
t12
5.3 How to teach a new range using the external teach input
Teaching the sensor via the external teach input is equivalent to the teaching procedure via the button. There
is no 5 min. time limit. The sensor may be taught at any time. In addition to the LED, the alarm output is used
to indicate the state of the sensor for an external digital controller.
12-28 V
t7 t8 t9
0 V
Red LED
t1
t2
t3
t4
Until button has been
released (t13)
t6
Alarm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
t10
47/88
t6
Baumer
Page 48

Delay between teach signal and response on alarm output:
external teach input
t10
alarm output
t11
Input circuit:
teach-in
low: 0 .. 2V
high: 12 .. 28V
27kΩ
10kΩ
3V3
5.4 How to reset the factory settings using the external teach input
Teaching the sensor via the external teach input is equivalent to the teaching procedure via the button. There
is no 5 min. time limit. The sensor may be taught at any time. The alarm output can be used as an
acknowledge signal for a control system.
12-28 V
Teach-in wire
0 V
t1
red LED
Alarm output
t14
Delay between teach signal and response on alarm output:
external teach input
t11
alarm output
t15
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
48/88
Baumer
Page 49

Time Description of timing functions Value Comment
Using the button, this feature can only be used
Minimum button hold time to enter
t1
teach mode
5 s
within 5 minutes after power-up. Using the
external teach input, it may be used at any
time.
Maximum waiting time after teaching
t2
the first position.
LED on as response for the first
t3
position.
Maximum waiting time after teaching
t4
the second position. < 20 s
< 20 s
approx 3 s
If the button has not been pushed during this
interval, the sensor will leave the teach mode
without any changes.
If the button has not been pushed during this
interval, the sensor will leave the teach mode
without any changes.
LED Blinking for “NOT OK response”
t6
after teaching the second position.
Minimal time between high/low
transition of alarm output high/low
t7
transition of the external teach input
approx 5 s
1 ms
at the beginning of the teach.
Pulse lengths on external teach input
t8
for first position.
Pulse lengths on external teach input
t9
for second position.
Delays between teach signal and
t10
response on alarm output at the
30..2000 ms
30..2000 ms
< 20 ms
rising edge of the signal.
Delay between teach signal and
t11
response on alarm output at the
< 10 ms
falling edge of the signal
Minimum blinking time for the reset
t12
to factory settings with button.
Blinking time after reset to factory
t13
settings
10 s
> 0.2 s
As long as the button is down or the external
teach input is high.
Minimum blinking time for the reset
t14
to factory settings with external
10 s
teach input.
Minimum high time of the external
teach input after the alarm output
t15
has been set at the end of the
0.2 s
setting of the factory settings.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
49/88
Baumer
Page 50

synch si
g
nal
12-28 V
6 Alarm output
The alarm output indicates when an object is outside the measuring range or when the received signal
cannot be used for measuring distance. In this case, the output shows 0 V (4 mA).
The sensor has no internal hold function if measured values are missing. It provides real time measuring.
In some critical applications (poorly reflective objects), the sensor sometimes loses the signal and the output
signal drops down to 0 V (4 mA). For such applications, we recommend to use the alarm output. Before
reading the analog signal, observe the alarm output; if it is active, the analog signal must be invalid.
7 Synchronization input
Hold function of the analog output / switching off the laser diode
If 12-28 V is being applied to the sync input, then the sensor will hold the value of the current measurement
and will switch off the laser diode. It will wait until the sync input goes back to low (0 V) before it starts a new
measurement.
After every measuring cycle, the sensor will test the sync input again. After the high signal on the synch.
Input, it takes one cycle T1 until the hold situation is reached.
0V
T1
Low/high edge of sync
Sensor T1
OADM 20I6x41, OADM 20I6x60, OADM 20I6x72 0.9 ms
OADM 20I6x80, OADM 20I6x81 2.8 ms
OADM 21I6x80, OADM 21I6x81 4 ms
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
50/88
Baumer
Page 51

synch. input S1
synch. input S2
Synchronizing several sensors
Several sensors may be synchronized using an external clock. The clock cycle must be low for T1. The total
time of a cycle must be at least T2. Within 20 cycles all sensors will be synchronized.
12-28V
sync. signal
0V
T1
T2
Sensor T1 T2 T3
OADM 20I6x41, OADM 20I6x60,
OADM 20I6x72
10...250 µs > 1 ms 5 µs...450 µs
OADM 20I6x80, OADM 20I6x81 10...250 µs > 3 ms 15 µs...1800 µs
OADM 21I6x80, OADM 21I6x81 10...250 µs > 4 ms 18 µs...1900 µs
If sensors are being synchronized this way, they all start their cycles at the same time. This means they start
to sample light together. The length of the sampling interval T3 or shutter time depends on the surface. It
may range from T3. White or gray objects reflect well enough to enable a less than half the sampling of
interval T3 max. Only very dark objects actually need the maximum sampling interval.
Several sensors in non-synchronous use
To prevent a negative mutual influence, using several OADM 2xI6xxx/S14F, the sensor can be used with a
non-synchronous trigger pulse. 12-28 V must be applied to the sync input, so that the laser will be turned off.
The following timing has to be obtained (S1 = sensor 1, S2 = sensor 2).
12-28 V
0 V
20 mA
t1
analog output S1
4 mA
12-28 V
0 V
t2
20 mA
analog output S2
4 mA
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
51/88
Baumer
Page 52

Sensor
OADM 20I6x41, OADM 20I6x60,
OADM 20I6x72
t1 t2
< 0.9 ms 0.5...2.7 ms
OADM 20I6x80, OADM 20I6x81 < 2.8 ms 0.5...8.4ms
OADM 21I6x80, OADM 21I6x81 < 4 ms 1...12 ms
t1 is the max. time after a high signal on the synch. input of S1 until the analog value will be held. This value
will be held as long the signal on the synch. input is high.
The min. time between the high signal of S1 and the low signal of S2 is t1, also. In this case, an optical
influence between the sensors is not possible.
t2 is the time until the analog signal is ready after a low signal on the synch. input of S2. This time depends
on the reflectivity of the object and if the reflectivity changes during the hold time.
Input circuit
sync in
low: 0 .. 2V
high: 12 .. 28V
27kΩ
10kΩ
3V3
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
52/88
Baumer
Page 53

8 Technical data
6x41/S14F 6x60/S14F 6x72/S14F 6x80/S14F 6x81/S14F
OADM 20I
Measuring range MR 30...70 mm 30...130 mm 50...300 mm 100...600 mm 200...1000 mm
Min Teach-in range ≥ 2 mm ≥ 3 mm ≥ 5 mm ≥ 10 mm ≥ 20 mm
Resolution *1) 4…20 µm 5…60 µm 0.01…0.33 mm 0.015...0.67mm 0.12...3.0 mm
Linearity error *2) ±12..±60 µm ±15..±200 µm ±0.03..±1.0 mm ±0.05..±2.0 mm ±0.48..±12.0 mm
Response time *3) 300...900µs 300...900µs 300...900µs 300...2800µs 300…2800µs
Ambient light *4) < 50k Lux < 40k Lux < 8k Lux < 10k Lux < 5k Lux
Typ. Temperature coefficient *5)
± 0.015%
of MR/°C
± 0.03%
of MR /°C
± 0.03%
of MR/°C
±0.03%
of MR/°C
± 0.06%
of MR/°C
Light source Laser diode red, pulsed
Laser class 2
Wave length 650 nm
Laser spot *6) 1 .. 0.2 mm 2 .. 1 mm 2 mm 2 mm 2 mm
Laser line*
width
7)
high
2 mm
1...0.2 mm
3...5 mm
2...1 mm
4...12 mm
2.5 mm
5.5...21 mm
2.5 mm
8.5...35 mm
2.5 mm
Analog output 4 – 20 mA and 0 – 10 V
Load resistor U
Load resistor I
> 100 kΩ
Out
< (+Vs – 6 V) / 0.02 A
Out
Alarm output PNP / max. 100 mA
Voltage supply range 12 – 28 VDC
Supply current < 100 mA, (bei + 24V ~ 40mA)
Reverse polarity protection yes (voltage supply only)
Short circuit protection yes
Housing material Die-cast zinc
Tightening torque 1.0 Nm
Protection class IP 67
Temperature range 0°C .. +50°C (non condensing)
Storage temperature -20°C .. +70°C
1)
2)
*
and *
measured on white ceramic sheet
3)
*
the response time depends on the reflectivity of the object
*4)
max. sunlight on a white measuring surface
*5)
xx% of full scale measuring range / °C
6)
7)
*
and *
dimension of laser beam: OADM 20I64xx/S14F diameter OADM 20I65xx/S14F size laser beam
measuring
range
height
measuring
range
Ø – beam
width
BA_OADM20I6_21I6_most.doc
53/88
Baumer
26.03.13 Frauenfeld, Switzerland
Page 54

Out
Out
Measuring range MR 100...600 mm 200...1000 mm
Min Teach-in range ≥ 10 mm ≥ 10 mm
Resolution *1) 0.01...0.25 mm 0.02...0.5 mm
Linearity error *2) ±0.07..±1.0 mm ±0.11..±2.0 mm
Response time *3) < 4 ms < 4 ms
Ambient light *4) < 10k Lux < 10k Lux
Typ. Temperature coefficient *5)
Light source Laser diode red, pulsed
Laser class 2
Wave length 650 nm
Laser spot *6) 2 mm
Laser line*
width
Analog output 4 – 20 mA and 0 – 10 V
Load resistor U
Load resistor I
Alarm output PNP / max. 100 mA
Voltage supply range 12 – 28 VDC
Supply current < 100 mA, (bei + 24V ~ 40mA)
Short circuit protection yes
Housing material Aluminum
Tightening torque 1.5 Nm
Protection class IP 67
Temperature range 0°C .. +50°C (non condensing)
Storage temperature -20°C .. +70°C
1)
*
and *
3)
*
the response time depends on the reflectivity of the object
*4)
max. sunlight on a white measuring surface
*5)
xx% of full scale measuring range / °C
6)
*
and *
7)
high
> 100 kΩ
< (+Vs – 6 V) / 0.02 A
2)
measured on white ceramic sheet
7)
dimension of laser beam: OADM 21I64xx/S14F diameter OADM 21I65xx/S14F size laser beam
6x80/S14F 6x81/S14F
± 0.012%
of MR/°C
OADM 21I
Ø – beam
± 0.02%
of MR/°C
6...20 mm
2.5 mm
measuring
range
height
measuring
range
width
BA_OADM20I6_21I6_most.doc
54/88
Baumer
26.03.13 Frauenfeld, Switzerland
Page 55

Dimensions
OADM 20I6xxx/S14F
OADM 21I6xxx/S14F
*emitter axis 16 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
55/88
Baumer
Page 56

9 Connection diagram and pin assignment
Connection diagram Pin assignment
If external Teach-In option is not used, the Teach-In wire must be attached to GND.
10 Grounding concept
For maximum EMC protection and reliable application, use a shielded cable. Also, the sensor has to be
grounded.
We recommend the grounding concept as shown in the picture. Ground the sensor with a toothed washer
between the screw head and the sensor.
● = electrical connection
Power-supply
OADM
If you prefer another grounding concept please contact your Baumer electric sales staff.
A/D Converter
11 Service notes
The OADM requires no maintenance apart from keeping the front windows clean. Dust or fingerprints can
impair the sensor function. It is normally sufficient to wipe the windows dry with a clean (!), soft cloth. Alcohol
or soapy water may be used for heavy soiling.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
56/88
Baumer
Page 57

12 Accessories
Connecting cable, straight ESG 34FH0200G, 8-Pol, length 2 m, shielded
ESG 34FH0500G, 8-Pol, length 5 m, shielded
ESG 34FH1000G, 8-Pol, length 10 m, shielded
Please note: For the four above connecting cables, the shielding wires are all terminated in the
connector. If you prefer to not have them terminated, please consult the factory.
Mounting bracket part no. 10131521
Protective cover part no. 10156878, material is acrylic glass (PMMA)
The protection cover can be easily mounted on the sensor’s face. It protects the
glass front cover against welding splashes.
13 Troubleshooting
Error Possible reason Correction
The sensor does not
measure
The sensor has
incorrect measuring
values
The sensor does not
reach the accuracy
The sync. input or the teach-in
wire is connected to +Vs
The receiving beam is covered by
an object / edge / step
No receiving signal (transparent or
highly reflective object)
Mutual optical interferences
between two or more sensors
Strong ambient light. Prevent ambient light with a shield
Semi transparent, transparent or
highly reflective objects
Rough surface Possibly use a sensor with laser line
Color edges Mount the sensor the correct way
Resolution of the A/D converter in
the control unit
Connect sync. input or the teach-in wire to 0 V
Make sure that no object is in the receiving
field
Make sure that the laser spot falls on a diffuse
reflecting surface
Make sure that no other light spot is within the
receiving field of the sensor
Make sure that the laser spot falls on a diffuse
reflecting surface
Read the manual of the control unit
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
57/88
Baumer
Page 58

BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
58/88
Baumer
Page 59

Manuel d'utilisation
Capteur de distance laser
serié
OADM 20I6....
OADM 21I6....
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
59/88
Baumer
Page 60

1 Indications d’ordre général
Affectation Ce produit est un appareil de précision. Il sert à la détection
d¹objets, de pièces, ainsi qu¹au traitement et à la transmission de
valeurs de mesure sous forme d¹une grandeur électrique. Si ce
produit n¹est pas spécialement désigné, il ne peut être utilisé dans
des environnements présentant un risque d¹explosion.
Mise en service L¹installation, le montage et le réglage de ce produit ne peut être
effectué que par une personne spécialisée.
Montage Pour le montage, n¹utiliser que les fixations et les accessoires
prévus pour ce produit. Les sorties non utilisées ne doivent pas être
raccordées. Dans le cas d¹exécutions avec câble, les fils non
utilisés doivent être isolés.
Ne pas dépasser le rayon de courbure autorisé pour le câble.
Mettre impérativement l¹installation hors tension avant de procéder
au raccordement du produit. Dans les cas où des câbles blindés
sont demandés, ils doivent être absolument utilisés afin d¹éviter les
perturbations d¹ordre électromagnétiques. Dans le cas où des
câbles blindés avec connecteurs sont confectionnés par le client, il
faut utiliser des connecteurs conformes CEM et le blindage du
câble doit être relié au connecteur.
Mesures de précautions relatives au laser
• La diode laser montée dans le détecteur OADM émet une lumière rouge visible. Selon les normes IEC
60825-1, ce laser appartient à la classe laser 2.
• Puissance de sortie moyenne maximum < 1 mW
• Rayonnement laser, ne pas regarder directement le rayon lumineux.
• Il est conseillé de ne pas laisser le rayon laser vagabonder dans le vide mais de l’arrêter au moyen d’une
tôle matte ou d’un objet quelconque.
• Pour des raisons de sécurité relatives à la technique laser, la tension d’alimentation de ce laser doit être
coupée lorsque la totalité de l’installation ou de la machine est déconnectée.
• Les informations concernant le concept de sécurité et les limites d’utilisation mentionnés dans la
documentation commerciale doivent être respectées.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
60/88
Baumer
Page 61

2 Principe de fonctionnement
La mesure de la distance est basée sur le principe de la triangulation. Le rayon laser atteint l’objet à mesurer
sous la forme d’un petit point visible pour être ensuite renvoyé. Le récepteur du détecteur, une photodiode,
détecte la position de ce point. Le détecteur mesure l’angle d’incidence et calcule la distance. La même
modification de la distance génère, pour une petite mesure de distance, une variation beaucoup plus grande
de l’angle d’incidence que pour une grande mesure de distance. Ce comportement non linéaire est corrigé
par le microcontrôleur de façon à fournir un signal de sortie linéaire en fonction de la distance.
Images sur la
photodiode
Objet de mesure près
Objet de mesure éloigné
De plus, le détecteur s’adapte automatiquement aux différentes couleurs des objets par variation de
l’intensité de son émetteur et par optimisation de la durée de son temps d’exposition. Cela le rend presque
totalement indépendant à la capacité de réflexion de l’objet. Afin d’obtenir la précision de mesure maximale,
il est important que l’objet de mesure renvoie le spot entier du laser de façon uniforme.
3 Indications de montage
• Lors du montage du détecteur, faire attention à ce que la surface de pose soit bien plane et que le
couple de serrage recommandé pour les vis de fixation soit respecté.
• Pour des raisons de compatibilité électromagnétiques (CEM), le détecteur sera relié à la terre et on
utilisera un câble de raccordement blindé.
• Le détecteur possède un connecteur pivotant sur 90°. Il est ainsi possible de diriger le câble de
raccordement vers le bas, vers l’arrière ou latéralement.
• Le détecteur atteint sa reproductibilité maximale 15 minutes après sa mise sous tension.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
61/88
Baumer
Page 62

☺
☺☺
☺
Gradins / bords:
Si la mesure est faite à proximité de gradins ou de bords, il faut s’assurer que le rayon récepteur ne soit pas
entravé dans sa progression par un gradin ou un bord. Ceci vaut également lors de la mesure de la
profondeur des trous et des fentes.
☺
☺
☺
☺
☺☺
☺☺
Surfaces brillantes:
En présence de surfaces brillantes, il faut faire attention à ce que la réflexion directe ne vienne pas se
réfléchir directement sur le récepteur. Ce phénomène peut être aisément éliminé en inclinant légèrement le
détecteur. Pour le contrôler, il suffit de masquer le verre du récepteur avec un papier blanc sur lequel la
position du rayon directement réfléchi peut être facilement repérée.
Surfaces rondes, brillantes:
10 -15°
☺
☺
☺☺
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
62/88
Baumer
Page 63

Objets de mesure brillants avec structure à orientation régulière:
Spécialement pour des objets de mesure brillants comme, par exemple, les pièces décolletées, les surfaces
rectifiées, les surfaces d’objets sortis d’une extrudeuse ou d’objets semblables, la position de montage a une
influence sur le résultat des mesures.
Objets de mesure avec des bords de couleur à orientation régulière:
Pour une orientation correcte, l’influence sur la précision de la mesure est négligeable. Pour une orientation
incorrecte, les différences dépendent de la différence de réflectivité des différentes couleurs.
Objets de mesure en mouvement:
S’il faut mesurer le contour d’un objet, il faut s’assurer que l’objet se déplace transversalement par rapport
au détecteur de façon à éviter les zones d’ombres et les réflexions directes en direction du récepteur.
☺
☺
☺☺
☺
☺
☺☺
☺
☺
☺☺
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
63/88
Baumer
Page 64

☺
☺☺
☺
☺
☺☺
☺
☺
☺☺
☺
Lumière ambiante:
Lors du montage des détecteurs optiques, il faut faire éviter qu’une forte lumière ambiante ne se trouve dans
la zone de détection du récepteur.
Plusieurs détecteurs sans influence réciproque:
Lorsque plusieurs détecteurs sont montés les uns à côté des autres, ils peuvent s’influencer réciproquement.
Lors du montage, il faut s’assurer que seulement le propre spot du laser se trouve dans la zone de détection
du récepteur. Les détecteurs avec une plage de mesure jusqu’à 600 mm peuvent être montés côte à côte
sans devoir à craindre une quelconque influence réciproque (Illustration du milieu).
Dans le cas où, suite au montage, une influence réciproque ne peut être évitée, les détecteurs peuvent alors
être exploités en utilisant l’entrée synch.
Plage de mesure
☺
☺
☺☺
Plage de mesure
Plage de mesure
Influence
réciproque
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
64/88
Baumer
Page 65

15 mm
Freie Fläche
13
mm
Freie Fläche
10
mm
Freie Fläche
12
mm
Freie Fläche
3.1 Définition du champ de mesure
OADM 20:
+/ - 7 mm autour de l'axe central de la capteur
OADM 20I6441 OADM 20I6460
17 mm
10 mm
3 mm
0/0
OADM 20I6472 OADM 20I6480/81
17 mm
10 mm
3 mm
0/0
Longueur et
l'emplacement de
l'espace ouvert voir
croquis
rayon laser
Zone interdite pour
les obstacles
35 mm
50 mm
Durchmesser 10
35 mm
50 mm
Durchmesser 10
Zone interdite pour
les obstacles
Plage de mesure
Diamètre du rayon laser maximale (voir fiche technique)
17 mm
10 mm
3 mm
0/0
17 mm
10 mm
3 mm
0/0
35 mm
35 mm
50 mm
Durchmesser 10
50 mm
Durchmesser 10
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
65/88
Baumer
Page 66

croquis
0/0
3 mm
17 mm
10 mm
OADM 21:
Longueur et
l'emplacement de
l'espace ouvert voir
14 mm 34 mm
Plage de mesure
Zone interdite pour les
obstacles
Diamètre du rayon laser
maximale (voir fiche
technique)
Surfaces libres
120 mm, diamètre 10 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
66/88
Baumer
Page 67

4 Indications relatives aux applications
Les détecteurs laser pour la mesure des distances de la Série OADM 20I6.. et OADM 21I6, sont des
détecteurs de mesure de haute qualité. De façon à ce qu’ils travaillent avec une précision de mesure
maximale, il faut tenir compte de quelques spécificités.
Mesure sur des surfaces rugueuses
En cours de production, tous les détecteurs Baumer sont contrôlés et linéarisés avec exactitude. Afin
d’étalonner les détecteurs avec précision, on utilise comme surface de référence une céramique blanche
extrêmement plane. Ceci est indispensable pour un étalonnage exact dans le domaine des µm. Dans la
pratique, de nombreux objets présentent une surface nettement plus rugueuse. Avec le petit spot laser, la
structure rugueuse de l’objet est également prise en considération. Pour l’exemple ci-dessous, la distance
minimale et maximale est mesurée. L’ensemble des résultats de mesure est de ce fait plus important que si
la mesure était réalisée au moyen d’un pied à coulisse.
Examiner l’utilisation d’un détecteur avec ligne laser (OADM 2xI65xx/S14F).
Surface plane
Surface rugueuse!
Que faire en présence d’objets de mesure avec des transitions irrégulières de couleurs?
En pratique, on rencontre toujours des objets de mesure avec des bords de couleur irréguliers.
Exemples:
Texte
Messen mit Laser
Sensoren
Lorsque de tels objets se déplacent transversalement par rapport au détecteur, le spot laser n’est pas
partout restitué régulièrement au récepteur. Ceci a pour effet de générer à chaque passage du sombre (mat)
au clair (brillant) ou inversement une différence de mesure positive puis négative (ou inversement).
Afin de pouvoir mesurer le plus précisément possible sur de tels objets avec des structures irrégulières, nous
conseillons de former la valeur moyenne de plusieurs mesures. Ceci peut être réalisé matériellement au
moyen d’un filtre passe-bas ou par le biais du logiciel d’évaluation. Le nombre des mesures et la durée pour
la formation de la moyenne dépendent principalement de la structure de l’objet de mesure et de la vitesse du
processus.
Eventuellement examiner l’utilisation d’un laser ligne (OADM 2xI65xx/S14F).
Demandez les conseils d’un collaborateur Baumer si vous devez réaliser des mesures sur des objets avec
des bords de couleur irréguliers.
☺
☺
☺☺
Distance
max. min.
Photos
Images
Rainures dans le
métal
OADM
Surfaces
rouillées
Pied à coulisse
Dalles
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
67/88
Baumer
Page 68

Objet de mesure en partie
que la distance effective.
Objet de mesure complètement
Objet bde mesure réfléchissant:
Que faut-il faire en présence d’objets de mesure en partie transparents, complètement transparents
et réfléchissants?
Le principe de mesure du détecteur est basé sur le fait que le spot laser est réfléchi de façon diffuse par
l’objet à mesurer pour être finalement perçu par le récepteur.
• Pour les objets de mesure en partie transparents, le spot laser pénètre à l’intérieur de l’objet de mesure.
Pour cette raison, le spot laser est perçu plus loin par le récepteur. Le détecteur fournit ainsi une distance
plus grande que la distance effective.
• Pour les objets de mesure complètement transparents, la surface de l’objet de mesure ne réfléchit aucune
lumière diffuse. Ici, une mesure indirecte s’impose, par exemple, en plaçant un autocollant sur l’objet à
mesurer.
• Pour les objets réfléchissants, la surface de l’objet de mesure ne réfléchit aucune lumière diffuse. Le spot
laser est renvoyé vers l’émetteur sous le même angle que le spot émis. Ici aussi, il faut procéder à une
mesure indirecte en plaçant, par exemple, un autocollant sur l’objet à mesurer.
Demandez les conseils d’un collaborateur Baumer si vous devez réaliser des mesures sur des objets
réfléchissants.
!
transparent:
Le spot laser pénètre à l’intérieur de
l’objet de mesure. Le détecteur
fournit ici une distance plus grande
transparent:
Le spot laser traverse l’objet de mesure
sans aucune réflexion diffuse..
La mesure est ainsi impossible.
Le spot laser est renvoyé directement
vers l’émetteur.
La mesure est ainsi impossible.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
68/88
Baumer
Page 69

0 V / 4 mA
Analog out
Alarme / LED out
0 V / 4 mA
normale
5 Apprentissage de la plage de mesure
Chaque détecteur est livré accompagné d’une fiche technique où la plage de mesure est indiquée.
L’opération d’apprentissage sert à régler les limites de la plage de mesure sur des valeurs inférieures aux
valeurs définies afin d’optimiser la résolution et la linéarité. La sortie en courant, respectivement la sortie en
tension, se voit attribuer une novelle courbe caractéristique. 2 distances sont toujours apprises.
• La première distance correspond à 0V resp. 4 mA, la seconde distance à 10 V resp. 20 mA.
• Les seuils ainsi appris déterminent le début et la fin de la nouvelle plage de mesure (et se trouvent ä
l’intérieur de la plage de mesure).
• L’apprentissage du détecteur peut se faire, au moins, 10'000 fois.
• L’état d’usine peut être rétabli en tout temps.
• L’apprentissage du détecteur peut se faire au moyen de la touche intégrée au détecteur ou de la
connexion externe Teach.
• Lors de l’opération d’apprentissage, la LED rouge et la sortie d’alarme sont utilisés pour les
informations en retour de l’apprentissage (Teach-Feedback).
• La LED rouge située à l’arrière du détecteur et la sortie d’alarme indiquent, en service normal, si un
objet ou non est présent à l’intérieur de la plage de mesure.
Attention:
Endéans une période de 5 minutes après l’enclenchement du détecteur, l’apprentissage peut se faire au
moyen de la touche jaune. Après l’opération d’apprentissage, une nouvelle période de 5 minutes
recommence. Enfin, après 5 minutes, le détecteur ne réagit plus aux pressions de la touche. Par contre,
l’apprentissage du détecteur peut se faire, en tout temps, au moyen de la connexion externe Teach.
Exemple d’apprentissage d’une courbe caractéristique normale.
4 mA / 0 V point le plus près, 20 mA /10 V point le plus loin.
Analog out
10 V / 20 mA
Courbe
caract.
apprise
Courbe
Alarme / LED out
30 mm 130 mm
Exemple d’apprentissage d’une courbe caractéristique inversée.
4 mA / 0 V point le plus loin, 20 mA / 10V point le plus près
10 V / 20 mA
30 mm 130 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
Courbe caract.
apprise
inversée
Courbe
69/88
Baumer
Page 70

OADM 20I6x41/S14F
Résolution typique Différence typique de linéarité
Sr = plage de mesure apprise Sr = plage de mesure apprise
OADM 20I6x60/S14F
Résolution typique Différence typique de linéarité
Sr = plage de mesure apprise Sr = plage de mesure apprise
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
70/88
Baumer
Page 71

OADM 20I6x72/S14F
Résolution typique Différence typique de linéarité
Sr = plage de mesure apprise Sr = plage de mesure apprise
OADM 20I6x80/S14F
Résolution typique Différence typique de linéarité
Sr = plage de mesure apprise Sr = plage de mesure apprise
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
71/88
Baumer
Page 72

OADM 20I6x81/S14F
Résolution typique Différence typique de linéarité
MB = plage de mesure apprise MB = plage de mesure apprise
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
72/88
Baumer
Page 73

OADM 21I6x80/S14F
Résolution typique Différence typique de linéarité
Sr = plage de mesure apprise Sr = plage de mesure apprise
OADM 21I6x81/S14F
Résolution typique Différence typique de linéarité
Sr = plage de mesure apprise Sr = plage de mesure apprise
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
73/88
Baumer
Page 74

5.1 Apprentissage de la plage de mesure avec la touche Teach
Réglage d’une nouvelle plage de mesure:
Pendant une période de 5 minutes après l’enclenchement du détecteur, l’apprentissage peut se faire au
moyen de la touche jaune. Après l’opération d’apprentissage, une nouvelle période de 5 minutes
recommence. Lorsque ces 5 minutes sont écoulées, le détecteur ne réagit plus aux pressions de la touche.
8. Presser sur la touche; la LED rouge s’allume lorsque l’apprentissage du détecteur est encore
possible.
9. Presser sur la touche pendant 5 secondes jusqu’à ce que la LED rouge commence à clignoter.
10. Relâcher la touche.
11. Placer maintenant l’objet de mesure à la limite de la plage de mesure pour laquelle le détecteur doit
afficher une valeur de 0V respectivement 4 mA.
12. Presser brièvement sur la touche; la LED rouge s’allume pendant 3 secondes comme confirmation.
Ensuite, elle se remet à clignoter de façon régulière.
13. Maintenant, placer l’objet de mesure à la limite de la plage de mesure pour laquelle le détecteur doit
afficher une valeur de 10V respectivement 20 mA.
14. Presser brièvement sur la touche; la LED rouge s’allume pendant 3 secondes comme confirmation.
Ensuite, elle s’éteint pour clignoter encore une fois brièvement. Le détecteur est maintenant à
nouveau opérationnel.
La plage de mesure est maintenant réglée sur les nouvelles valeurs limites et la LED rouge ainsi que la
sortie d’alarme s’éteignent dès qu’un objet se trouve à l’intérieur de la nouvelle plage de mesure.
Dans le cas où l’une des deux nouvelles limites se trouvait à l’extérieur de la plage de mesure maximum ou
encore, si les deux limites avaient été choisies trop près l’une de l’autre, la LED rouge se met à clignoter
pendant 5 secondes à la place de la seconde confirmation. La plage de mesure n’a pas été apprise. Il faut
alors procéder à un nouvel apprentissage tout en respectant la plage d’apprentissage minimale et la plage
de mesure.
Déroulement chronologique du processus d’apprentissage de la plage de mesure avec la touche
Teach:
t6
t1 t2 t3 t4
LED rouge
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
74/88
La LED s’allume si
☺
l’apprentissage a été réussi.
t6
La LED clignote si
l’apprentissage n’est pas
Baumer
Page 75

jusqu’à ce que la touche est re
☺
Connexion Teach
☺
5.2 Réinstaurer l’état départ d’usine avec la touche Teach
Pendant 5 minutes après l’enclenchement du détecteur, celui-ci se laisse configurer comme au départ de
l’usine au moyen de la touche jaune. Après chaque processus d’apprentissage, une nouvelle période de 5
minutes recommence. Lorsque ces 5 minutes sont écoulées, le détecteur ne réagit plus aux pressions de la
touche.
4. Presser sur la touche; la LED rouge s’allume lorsqu’un apprentissage du détecteur est encore
possible.
5. Presser sur la touche pendant 5 secondes jusqu’à ce que la LED rouge commence à clignoter. Ne
pas relâcher la touche. Maintenir la touche enfoncée pendant encore 10 secondes jusqu’à ce que la
LED reste constamment allumée. A la fin de cette procédure, l’état du détecteur au départ de l’usine
a été rétabli (plage de mesure standard). La courbe caractéristique précédemment apprise a été
remplacée par les valeurs d’usine.
6. Relâcher la touche.
t1
t12
lâchée t3
LED rouge
5.3 Apprentissage de la plage de mesure avec la connexion Teach
L’apprentissage de la plage de mesure au moyen de la connexion Teach se fait de la même façon qu’avec la
touche Teach. Au moyen de la connexion Teach, l’apprentissage du détecteur est toujours possible. Pour
une commande de machine, la sortie d’alarme est utilisée pour la confirmation.
LED rouge
Alarme
12-28 V
0 V
t1
t7 t8 t9
t2
t3
t10
t4
t6
t6
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
75/88
Baumer
Page 76

LED
rouge
Alarme
Temporisation entre le signal Teach et la confirmation à la sortie d’alarme:
Connexion Teach
t10
t11
Circuit d’entrée:
Teach In
Low: 0 .. 2 V
High: 12 .. 28V
27kΩ
10kΩ
3V3
5.4 Réinstaurer l’état départ d’usine avec la connexion Teach
La restauration de “l’état départ d’usine“ au moyen de la connexion Teach se fait de la même façon que pour
la restauration de “l’état départ d’usine“ avec la touche Teach. Au moyen de la connexion Teach, il est
toujours possible de réinstaurer l’état départ d’usine. Pour une commande de machine, la sortie d’alarme
est utilisée pour la confirmation.
12-28 V
Connexion
0 V
t15
t1
Alarme
t14
Temporisation entre le signal Teach et la confirmation à la sortie d’alarme
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
76/88
Baumer
Page 77

Alarme
Connexion Teach
t11
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
77/88
Baumer
Page 78

Temps Description Valeur Commentaire
Seulement lors de la pression sur la touche
Durée minimum de pression sur la
t1
touche
5 s
pendant les 5 premières minutes après
l’enclenchement du détecteur.
Toujours opérationnel avec la connexion Teach
Temps d’attente max. après
t2
activation de la première séquence
< 20 s
d’apprentissage
t3 LED EN comme confirmation environ 3 s
Délai d’attente max. après
t4
l’activation du deuxième seuil
< 20 s
d’apprentissage
LED comme confirmation après
t6
l’apprentissage du deuxième seuil
environ 5 s
Après cette période de temps sans action sur
la touche, le détecteur quitte le mode
d’apprentissage sans aucune modification.
Confirmation après l’apprentissage du premier
seuil
Après cette période de temps sans action sur
la touche, le détecteur quitte le mode
d’apprentissage sans aucune modification
Distance minimum entre le flanc
négatif de la connexion d’alarme
t7
et le flanc négatif de la connexion
1 ms
Teach au début du processus
d’apprentissage
Durée d’impulsion sur la connexion
t8
Teach, premier seuil
30..2000 ms
d’apprentissage
Durée d’impulsion sur la connexion
t9
Teach, second seuil
30..2000 ms
d’apprentissage
Temporisation entre le signal Teach
t10
et le flanc positif de la confirmation
< 20 ms
à la sortie d’alarme
Temporisation entre le signal Teach
t11
et le flanc négatif de la confirmation
< 10 ms
à la sortie d’alarme
Durée de clignotement minimum
t12
pour le rétablissement des
10 s
réglages d’usine
t13
Durée de clignotement pour le
rétablissement des réglages
d’usine
> 0.2 s
Aussi longtemps que la touche est pressée ou
que l’entrée Teach se trouve au potentiel High
Durée de clignotement minimum
t14
lors du rétablissement des
réglages d’usine via la connexion
10 s
Teach
each après la remontée
t15
0.2 s
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
78/88
Baumer
Page 79

12-28 V
6 Sortie d’alarme
La sortie d’alarme est active dès que l’objet se trouve à l’extérieur de la plage de mesure ou lorsque le
détecteur n’est pas à même de déterminer une distance avec le signal de mesure reçu. Dans les deux cas,
le signal de sortie analogique affiche une valeur de 4 mA / resp. 0 V.
Etant donné que le détecteur n’est pas en mesure de compenser l’absence d’un signal de mesure par une
fonction interne Hold, il est possible que, pour des applications critiques (surfaces extrêmement brillantes), la
sortie passe brièvement à 4 mA / resp. 0 V lorsque le signal manque. Si, avant d’évaluer le signal de
mesure, on tient compte de l’état de la sortie d’alarme, il est possible de dire exactement, s’il s’agit ou non
d’un „véritable“ signal de mesure.
7 Entrée de synchronisation
Fonction Hold / Diode laser ON/OFF
Si on applique une tension entre 12 er 28V à l’entrée synch., le détecteur conserve la valeur de mesure
venant juste d’être saisie et la diode laser s’éteint. Le détecteur attend, pour la mesure suivante et pour
l’actualisation de la valeur de mesure, jusqu’à ce que l’entrée synch. reprenne à nouveau la valeur 0 V. De
ce fait, le détecteur dispose d’une fonction Hold.
A chaque cycle de mesure, le détecteur contrôle l’entrée synch. Si l’entrée synch. est commutée sur le
niveau High, le „ Signal-Hold “ est présent à la sortie analogique après, au maximum, une période de temps
équivalente au temps d’activation T1.
Entrée Synch.
0 V
Détecteur T1
T1
Seuil temps de
commutation
OADM 20I6x41, OADM 20I6x60, OADM 20I6x72 0.9 ms
OADM 20I6x80, OADM 20I6x81 2.8 ms
OADM 21I6x80, OADM 21I6x81 4 ms
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
79/88
Baumer
Page 80

Entrée synch. S1
Entrée synch. S2
Synchroniser ensemble plusieurs détecteurs
Au moyen d’impulsions d’horloge externe, il est possible de synchroniser plusieurs détecteurs lorsque
l’entrée synch. est commutée sur le niveau Low durant T1 et pour la durée d’une période minimale T2. Pour
synchroniser deux détecteurs après l’enclenchement, 20 cycles d’impulsions d’horloge externe sont
nécessaire au maximum.
12-28 V
Entrée Synch.
0 V
T1
T2
Détecteur T1 T2 T3
OADM 20I6x41, OADM 20I6x60
OADM 20I6x72
10 ... 250 µs > 1000 µs 5 µs ... 450 µs
OADM 20I6x80, OADM 20I6x81 10 ... 250 µs > 3 ms 15 µs ... 1800 µs
OADM 21I6x80, OADM 21I6x81 10 ... 250 µs > 4 ms 18 µs ... 1900 µs
Lorsque les détecteurs sont synchronisés de cette manière, le cycle de mesure pour tous les détecteurs
commence au même moment. Les détecteurs commencent par collecter la lumière. La durée de l’intervalle
d’exposition T3 (Temps de pose) dépend du pouvoir réfléchissant de la surface de l’objet de mesure.
Ceci veut dire que le moment actuel de mesure peut varier d’un temps égal à T3. Les objets blancs ou gris
réfléchissent relativement bien, leur intervalle d’’exposition est plus petit que la moitié du temps maximum
T3. Seulement les objets très foncés exigent un intervalle d’exposition maximum.
Exploiter plusieurs détecteurs de manière asynchrone
De façon à ce que deux ou plusieurs OADM 2xI6xxx/S14F ne s’influencent pas réciproquement, ils peuvent
être exploités de manière asynchrone au travers d’une impulsion d’horloge externe. A cette fin, l’entrée
synch. est raccordée avec Vcc 12 – 28 V déclenchant ainsi le laser. Le timing suivant doit être respecté.
Sur le diagramme suivant, le détecteur 1 est désigné par S1 et le détecteur 2 par S2.
12-28 V
0 V
20 mA
Sortie analogique S1
4 mA
12-28 V
0 V
20 mA
Sortie analogique S2
4 mA
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
t1
t2
80/88
Baumer
Page 81

Détecteur t1 t2
OADM 20I6x41, OADM 20I6x6, OADM 20I6x72 < 0.9 ms 0.5 ... 2.7 ms
OADM 20I6x80, OADM 20I6x81 < 2.8 ms 0.5 ... 8.4ms
OADM 21I6x80, OADM 21I6x81 < 4 ms 1 ... 12 ms
Le temps maximum après que l’entrée synch. de S1 ait été placée au niveau High jusqu’à ce que S1
transmette sa dernière valeur de mesure analogique est égal à t1. La valeur de mesure de S1 reste
préservée aussi longtemps que l’entrée synch. de S1 reste au niveau High. De façon à ce qu’ils ne puissent
s’influencer réciproquement, le temps minimum après avoir connecté l’entrée S1 synch. au niveau High et
l’entrée synch.S2 au niveau Low est aussi égal à t1 La période de temps où l’entrée synch. de S2 est
commutée sur le niveau Low jusqu’à ce qu’une valeur de mesure valable apparaisse à la sortie analogique
est de t2 minimum, valeur typique. Si lors de deux mesures consécutives, le pouvoir réfléchissant de l’objet
de mesure varie très fortement, il faut compter sur 2, au maximum 3 cycles de mesure jusqu’à ce qu’une
valeur de mesure valable soit affichée à la sortie. Cela correspond à t2 maximum.
Circuit d’entrée:
Teach In
Low: 0 .. 2 V
High: 12 .. 28 V
27kΩ
10kΩ
3V3
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
81/88
Baumer
Page 82

8 Données techniques
…6x41/S14F …6x60/S14F …6x72/S14F …6x80/S14F …6x81/S14F
Plage de mesure MB 30...70 mm 30...130 mm 50...300 mm 100...600 mm 200...1000 mm
Plage Teach-in ≥ 2 mm ≥ 3 mm ≥ 5 mm ≥ 10 mm ≥ 20 mm
Résolution *1) 4...20 µm 5...60 µm 0.01...0.33 mm 0.015...0.67 mm 0.12...3.0 mm
Différence de linéarité *2) ±12... ±60 µm ±15... ±200 µm ±0.03....±1.0 mm ±0.05....±2.0 mm ±0.48... ±12.0 mm
Temps d’activation *3) 300…900µs 300…900µs 300…900µs 300…2800µs 300…2800 µs
Lumière ambiante*4) < 50k Lux < 40k Lux < 8k Lux < 10k Lux < 5k Lux
Coefficient température typ. *5)
± 0.015%
v.MB/°C
± 0.03%
v.MB/°C
Source de lumière Diode laser rouge, pulsée
Classse laser 2
Longueur d’ondes 650 nm
Point laser *6) 1 .. 0.2 mm 2 .. 1 mm 2 mm 2 mm 2 mm
Ligne laser*7) Hauteur
Largeur
2 mm
1...0.2 mm
3...5 mm
2...1 mm
Sorties analogiques 4 … 20 mA et 0 … 10 V
Résistance de charge à U-Out > 100 kΩ
Résistance de charge à I-Out < (+Vs – 6 V) / 0.02 A
Sortie d’alarme PNP / max. 100 mA
Tension de service 12 ... 28 VDC
Consommation en courant < 100 mA, (pour + 24V ~ 40mA)
Protégé contre inversion polarité oui (seulement l’alimentation)
Protégé contre courts circuits oui
Matériau du boîtier Zinc moulé sous pression
Couple de serrage 1.0 Nm
Classe de protection IP 67
Température de service 0°C .. +50°C (sans condensation)
Température de stockage -20°C ... +70°C
*1) et *2)
Résolution et différences de linéarité mesurées sur céramique blanche
*3)
Le temps de réaction du détecteur est dépendant du pouvoir de réflexion de l’objet à mesurer
*4)
lumière solaire admissible sur objet de mesure blanc à l’intérieur de la plage de mesure
*5)
en % de la plage de mesure max. / °C
*6)
*7)
et
Dimension émetteur: OADM 20I64xx/S14F (Ø – rayon) OADM 20I65xx/S14F (Ligne laser: hauteur, largeur)
OADM 20I…
± 0.03%
v.MB/°C
4...12 mm
2.5 mm
± 0.03%
v.MB/°C
5.5...21 mm
2.5 mm
± 0.05%
v.MB/°C
8.5...35 mm
2.5 mm
Plage de mesure
Hauteur
Plage de
mesure
Ø - Rayon
Largeur
BA_OADM20I6_21I6_most.doc
82/88
Baumer
26.03.13 Frauenfeld, Switzerland
Page 83

mesure
OADM 21I
Données techniques
Plage de mesure MB 100 ... 600 mm 200 ... 1000 mm
Plage Teach-in ≥ 10 mm ≥ 10 mm
Résolution *1) 0.01 ... 0.25 mm 0.02 ... 0.5 mm
Différence de linéarité *2) ± 0.07 ... ± 1.0 mm ± 0.11 ... ± 2.0 mm
Temps d’activation *3) < 4 ms < 4 ms
Lumière ambiante*4) < 10k Lux < 10k Lux
Coefficient température typ. *5)
Source de lumière Diode laser rouge, pulsée
Classse laser 2
Longueur d’ondes 650 nm
Point laser *6) 2 mm 2 mm
Ligne laser*7) Hauteur
Largeur
Sorties analogiques 4 … 20 mA et 0 … 10 V
Résistance de charge à U-Out > 100 kΩ
Résistance de charge à I-Out < (+Vs – 6 V) / 0.02 A
Sortie d’alarme PNP / max. 100 mA
Tension de service 12 ... 28 VDC
Consommation en courant < 120 mA, (pour + 24V ~ 40mA)
Protégé contre inversion polarité oui (seulement l’alimentation)
Protégé contre courts circuits ja
Matériau du boîtier Aluminium
Couple de serrage 1.5 Nm
Classe de protection IP 67
Température de service 0 .. +50°C (sans condensatio n)
Température de stockage -20 ... +70°C
*1) et *2)
Résolution et différences de linéarité mesurées sur céramique blanche
*3)
Le temps de réaction du détecteur est dépendant du pouvoir de réflexion de l’objet à mesurer
*4)
lumière solaire admissible sur objet de mesure blanc à l’intérieur de la plage de mesure
*5)
en % de la plage de mesure max. / °C
*6)
*7)
et
dimensions de l’émetteur OADM 21I64xx/S14F (Ø – Rayon) OADM 21I65xx/S14F (Laser ligne:hauteur, largeur)
6x80/S14F 6x81/S14F
± 0.012%
de MB/°C
4...13 mm
2 mm
± 0.02%
de MB/°C
6...20 mm
2.5 mm
Plage de
Hauteur
Plage de
mesure
Ø – Rayon
BA_OADM20I6_21I6_most.doc
83/88
Largeur
Baumer
26.03.13 Frauenfeld, Switzerland
Page 84

Dimensions:
OADM 20I6xxx/S14F:
OADM 21I6xxx/S14F:
* Axe émetteur 16 mm
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
84/88
Baumer
Page 85

9 Raccordement et assignation des pins du connecteur
Configuration du raccordement Assignation des pins du connecteur
Dans le cas ou le Teach-in externe n’est pas utilisé, il faut le raccorder avec GND.
10 Concept de mise à la terre
Afin d’obtenir une protection optimale au niveau des champs électromagnétiques et, de ce fait, d’assurer un
service sans perturbations, des câbles de raccordement blindés doivent être utilisés. Le détecteur doit être
utilisé avec une liaison à la terre; pour ce faire, il existe différentes méthodes. Notre variante favorite est mise
en évidence sur le dessin ci-dessous. Le détecteur est mis à la terre via une rondelle crantée sous la vis de
fixation.
● = liaison électrique
Power-supply
OADM
Pour le cas où un autre concept de mise à la terre est souhaité, nous vous prions de contacter Baumer.
A/D Converter
11 Indications pour l’entretien
Le détecteur OADM ne nécessite aucun entretien; seule la fenêtre frontale doit être maintenue propre. La
poussière et des traces de doigts peuvent entraver le bon fonctionnement du détecteur. Normalement, il
suffit de nettoyer la fenêtre avec un chiffon doux et propre ( !). Lorsque l’encrassement est plus important, on
peut utiliser de l’alcool ou de l’eau savonneuse.
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
85/88
Baumer
Page 86

12 Accessoires
Câble de raccordement ESG 34FH0200G, 8-Pol, Longueur 2 m, blindé
droit ESG 34FH0500G, 8-Pol, Longueur 5 m, blindé
ESG 34FH1000G, 8-Pol, Longueur 10 m, blindé
Equerre de fixation Art.-Nr. 10131521, Equerre de fixation en métal pour OADM 20
Verre frontal Art.-Nr. 10156878, Verre acrylique de protection (PMMA), optimise la
protection de la face frontale du détecteur contre les projections des étincelles
de soudure incandescentes; peut être remplacé en cas de besoin
13 Recherche des fautes: que faire quand...
Faute Cause possible Mesures de correction
Le détecteur ne
mesure pas
Le détecteur donne
quelquefois des
mesures fausses
Le détecteur mesure
de façon imprécise
L’entrée synch. ou la connexion Teachin est raccordée à +Vs
Rayon récepteur masqué Placez-vous derrière le récepteur et
Objets avec surfaces critiques
(Transparentes, réfléchissantes)
Contrôler l’influence possible d’un
autre détecteur
Contrôler l’influence possible d’une
forte lumière ambiante
L’objet de mesure est-il en partei
transparent, complètement transparent
ou réfléchissant?
Surfaces rugueuses Utilisez un détecteur avec laser ligne
Bords de couleur Contrôlez l’alignement du détecteur
Avec quelle précision travaille le
système d’acquisition des données?
Raccorder l’entrée synch. ou la connexion
Teach-in à 0 V
regardez le spot laser sur l’objet de
mesure. Est-ce que le spot laser est bien
visible sur l’objet de mesure?
Assurez-vous que la surface réfléchisse de
façon diffuse
Déclencher les détecteurs environnants se
trouvant dans la plage de détection du
récepteur.
Préserver le détecteur de l’influence de la
lumière ambiante
Assurez-vous que la surface réfléchisse de
façon diffuse
Consultez le manuel du constructeur
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
86/88
Baumer
Page 87

Brasil
Baumer do Brasil Ltda
BR-04726-001 São Paulo-Capital
Phone +55 11 56410204
Denmark
Baumer A/S
DK-8210 Aarhus V
Phone +45 (0)8931 7611
India
Baumer India Private Ltd.
IN-411038 Pune
Phone +91 (0)20 2528 6833
United Kingdom
Baumer Ltd.
GB-Watchfield, Swindon, SN6 8TZ
Phone +44 (0)1793 783 839
Switzerland
Baumer Electric AG
CH-8501 Frauenfeld
Phone +41 (0)52 728 1122
Canada
Baumer Inc.
CA-Burlington, ON L7M 4B9
Phone +1 (1)905 335-8444
France
Baumer SAS
FR-74250 Fillinges
Phone +33 (0)450 392 466
Italy
Baumer Italia S.r.l.
IT-20090 Assago, MI
Phone +39 (0)245 70 60 65
Singapore
Baumer (Singapore) Pte. Ltd.
SG-339412 Singapore
Phone +65 6396 4131
China
Baumer (China) Co., Ltd.
CN-201612 Shanghai
Phone +86 (0)21 6768 7095
Germany / Austria
Baumer GmbH
DE-61169 Friedberg
Phone +49 (0)6031 60 070
USA
Baumer Ltd.
US-Southington , CT 06489
Phone +1 (1)860 621-2121
Sweden
Baumer A/S
SE-56122 Huskvarna
Phone +46 (0)36 13 94 30
Headquarter
Baumer Electric AG
CH-8501 Frauenfeld
Phone +41 (0)52 728 1122
www.baumer.com/worldwide
Technische Änderungen und Irrtum vorbehalten.
Technical data has been fully checked, but accuracy of printed matter not guaranteed.
Sous réserve de modifications techniques ou d'erreurs
Printed in Switzerland 3/13 Nr. 10158621
BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
87/88
Baumer
Page 88

BA_OADM20I6_21I6_most.doc
26.03.13 Frauenfeld, Switzerland
88/88
Baumer
 Loading...
Loading...