

Bardac PL, PLX Quick Start Guide
20)MOTOR 1,2 SELECT
MOTOR 1
19)EL1/2/3 RATED AC
460.0 VOLTS
18)RATED ARM VOLTS
500.0 VOLTS
6)DESIRED MAX RPM
1750 RPM
5)BASE RATED RPM
1750 RPM
2)RATED ARM AMPS
35.0 AMPS
4)RATED FIELD AMPS
1.35 AMPS
SPD% Iarm Ifld RJSC
0 0 0 0000
Sref Ilim –Ilim mode
0 150 -150 STOP
Bardac
drives
basic
PL/X Quick Start
This Quick Start is a supplement to
the standard product manuals
intended for use as a guide to get
your PL/X Drive up and running as
a basic speed controller in a safe and efficient manner. For
all other applications, refer to the PL/X Product and
Applications Manuals.
Only qualified personnel who thoroughly
understand the operation of the machine
on which the PL/X is installed and who
are familiar with electrical wiring and
safety standards should attempt to
commission this equipment.
With ALL Power OFF
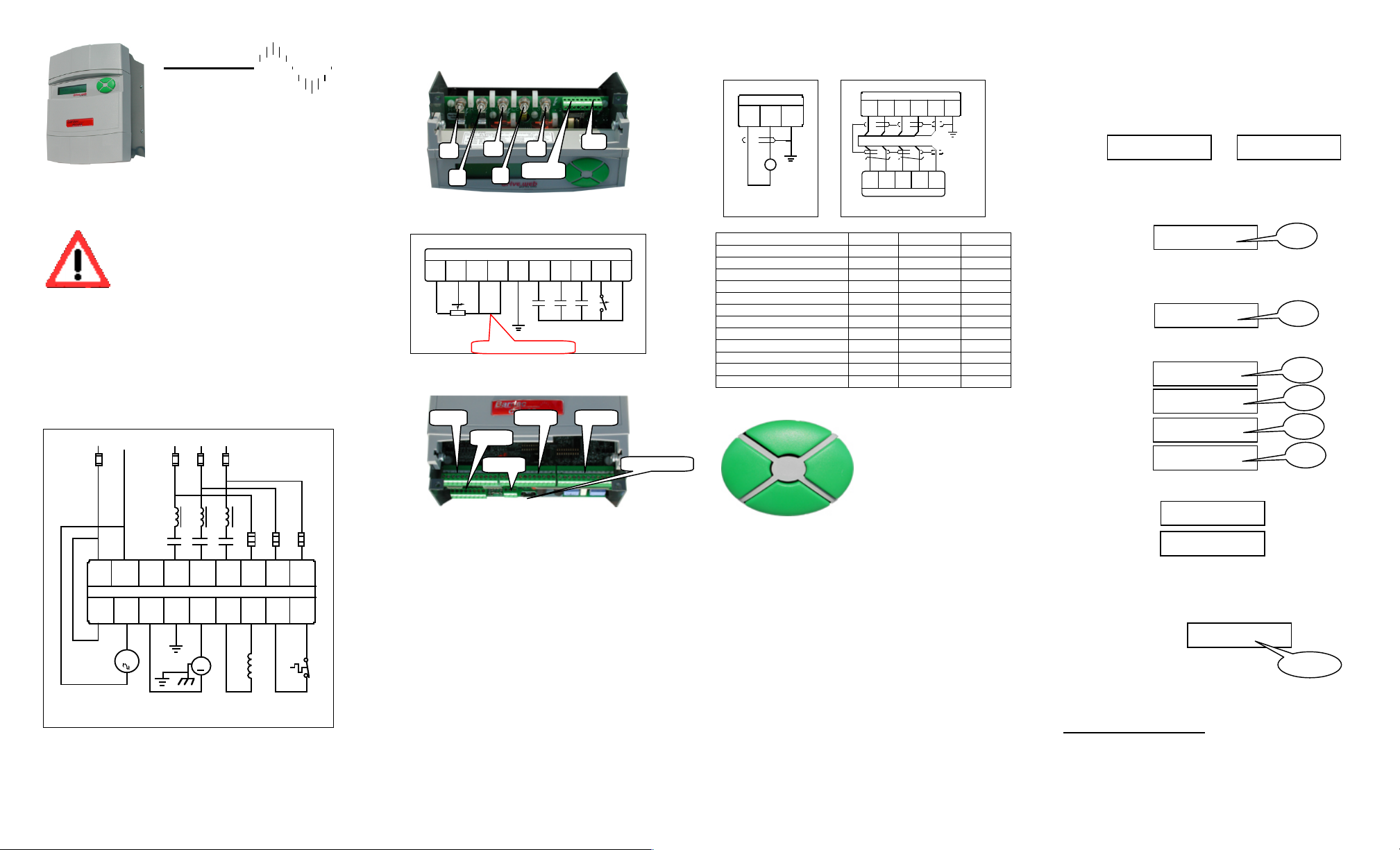
A. Connect up the drive
Hook your drive up according to the following diagrams.
Ensure power and control wiring are routed in separate
conduit/cable trays and wiring meets applicable national
and local electrical codes.
Power Wiring Diagram
PL/X POWER WIRING
51
EARTH
53
CNTRL
L
52
CNTRL
N
L1
MAIN
POWER
L2
MAIN
POWER
L3
MAIN
POWER
EL1
AUX
SPPLY
EL2
AUX
SPPLY
EL3
AUX
SPPLY
FIELD
(+)
F+
FIELD
(-)
F-
ARM
(+)
A+
EARTH
GND
G
ARM
(-)
A-
THERM
IP
30
0V
COM
36
CON145CON2
46
LR
FIELD
300V+1.3/0.8 A
M
500V
20 HP
+
1750RPM
36A THERM
CON
F4 F5 F6
F1 F2 F3
CONCON
CON
CRA1A2
F8
See Product Manual for fuse specifications.
Power Terminals
Control Wiring Diagram
PL/X CONTROL WIRING
SIG
COM
1
RAMP
IP
4
START
33
JOG
32
MAIN
I CLAMP
6
+10VDC
REF
27
CONTROL
COM
13
RUN
SCR ENA
31
CSTOP34+24VDC
35
POT
1K THRU 10K
SPEED
ENA JOG
CSO
STRT
Control Terminals
Contact Descriptions (All are maintained-type)
CSO (Coast Stop Override): Must be closed prior to all
other control signals for proper sequencing. When opened,
the drive immediately stops generating armature current
and the contactor drops out. Motor coasts to stop.
ENA (Enable): Electronic inhibit for all modes of operation.
When closed, the drive may generate current. If open, no
armature current will generated. May be jumpered to
Terminal 35 in most applications.
JOG: When closed, the drive’s contactor comes in and the
motor will run at the Jog Speed 1 setting (Default 5%
speed). When opened, the drive ramps to zero and
contactor opens after a delay (Default = 2 secs).
STRT (Start): When closed, the drive’s contactor comes in
and the motor will run at potentiometer speed setting.
When opened, the drive ramps to zero and contactor
opens after a delay (Default = 2 secs).
As programmed from the factory, after removal of the
control input, the motor field current will be present until
the field quench delay is completed (Default = 10 secs).
Optional Feedback Devices
DC Tachometer Encoder
TACHOMETER
50V/1000RPM
+
DC
EARTH
GND
G
TACH
IP
26
TACH
COM
25
TACH FEEDBACK
EARTH
GND
G
ENCODER FEEDBACK
+24 VDC35COM
25
ENC
Z
15
ENC
B
16
ENC
A
17
21 3 4
SUPPLY
COM
(-)
CHNL
A
OUT
CHNL
B
OUT
SUPPLY
24 VDC
(+)
MRKR
Z
OUT
ENCODER 1024 PPR
5
TWISTED SHIELDED PAIRS
54321
MARKER Z OPTIONAL (WIRE NO. 5)
A. Get the supply and motor nameplate data
Description
Typical
Actual
Units
Supply Voltage (VL)
480
VAC
Armature Volts (VA)
500
VDC
Armature Current (IA)
35
ADC
Base Speed (BS)
1750
RPM
Maximum Speed (MS)
2300
RPM
Field Volts (VF)
300
VDC
Field Current @ BS (IFb)
1.35
ADC
Field Current @ MS (IFm)
0.8
ADC
Feedback Device
DC Tachometer (TV)
50
V/1000
Encoder (PPR)
1024
PPR
Supply Volts (EV)
5 - 24
VDC
Navigating through the menus
The green keys are used to
setup the drive. In this Quick
Start, the required key
sequences are displayed to
the left of each parameter to
be modified. When executed
correctly, the display on the
drive should match the one
shown.
Legend of abbreviations used for keystrokes:
L,R,U,D = Press the specified button EXACTLY once.
8xU = Press the Up button 8 times.
U/D = Use the Up button to increase the value, use
the Down button to decrease the value.
Final Power OFF Checks
Recheck all your wiring, especially the drive’s chassis
ground. Also, use your multimeter to check the L1, L2, L3,
F+, F-, A+, and A- Terminals for short circuits to ground.
All readings should be greater than 1 MΩ. Correct any low
resistances prior to applying power.
It is essential to perform all of the following
steps in their entirety and in the proper
sequence! If in doubt, call 1-888-667-7333
(International 410-604-3400).
Power ON Checks
1. Apply Control Power and Calibrate
Apply 100-240 VAC control power to T53 (Line) and T52
(Neutral).
2. Calibrate the Drive to the Motor
At power up, the Diagnostic Summary Screens are
displayed. By pressing the Left key at least 5 times, you
will return you to these screens from any menu level.
5xL
When at the top level, the display toggles between the
Diagnostic Summaries about every 5 seconds.
Press the keys in the sequence below to set the rated
armature current from the nameplate data you recorded.
R,R,U,R,R – U/D
Use the up and down keys to change the values.
Now, to move to the rated field current:
L,D,D,R – U/D
Repeat these steps for the following:
L,D,R - U/D
L,D,R - U/D
L,9xD,R - U/D
L,D,R - U/D
Also check the following to ensure they have not been
modified from the factory default settings:
L,D,R - U/D
L,8xU,R - U/D Then 4xL
Although the drive regulates field current by default, set the
field voltage clamp as a percentage of AC supply volts.
FV % = (FV ÷ VL) x 100
R,R,7xD,R,D,R – U/D Then 4xL
Feedback calibration
If you do not have a DC tachometer or encoder, skip this
section and go to Step 3.
DC Tachometer Calibration
For a tachometer, initially calibrate the drive for the
expected DC voltage at base speed.
TVb = (BS ÷ 1000) x TV
100)FIELD VOLTS OP %
65.00 %
IA
IFb
BSBSVAVLFV%
T 1-12
T 13-24
T 25-36
T 41-48
T 51-53
A+
A-
L2
L1
L3
EL1,2,3
F-,+
Ground Lug
9)SPEED FBK TYPE
ARMATURE VOLTS
U
DRL
Note: Jumper T6 to T27
Caution:
TVb must not exceed 200 VDC.
R,R,U,R,6xD,R – U/D Then 4xL
Encoder Calibration
Ensure quadrature is enabled and enter the PPR.
R,R,U,R,8xD,R,R – U/D
L,D,R – U/D Then 4xL
3. Save Parameters
To save your work thus far, from the Diagnostic Screens:
R,U,R
U
When done Then 2xL
4. Check Control Terminals
The next few checks are to ensure the drive contactor is
sequenced properly prior to applying three phase power.
The value under the letters TRJSC in the display indicate
the actual Control Input (CIP) terminal status.
Letter
Terminal
Contact
Thermistor
30
THERM
Run31ENA
Jog32JOG
Start33STRT
Coast Stop
34
CSO
From the Diagnostic Screens, go to the CIP Diagnostic.
R,D,R,4xD,R,D,D,R
Leaving the CSO contact of your control wiring open (a 0
under the C), close the other control contacts. Check to
see if the digit under the appropriate letter changes as you
cycle of the contact. Generally, 1 = ON while 0 = OFF (for
the thermistor T, 0 = OK while 1 = Motor Overtemp).
Once satisfied with the operation of the T,R,J, and S
control inputs, leave R,J, and S OFF and check the C
control input for proper operation.
5. Apply Main Three Phase Power
6. Autotune the PL/X
Prior to running the motor, the current loop of the drive
must be tuned to the motor and cabling (PIN’s 93,94,& 95).
a) Ensure the drive is in a normal stop condition. The
CIP’s should match TRJSC below:
Still from Step 4 Then 4xL
b) Enable the autotune mode.
R,R,6xD,R,7xD,R – U Then 4xL
c) Start the drive by energizing the Start Input (T33).
R,D,R,4xD,R,D,D,R Then 4xL
The contactor will close and an autotune will be performed
(takes 10 - 60 seconds). When complete, the drive’s
contactor will open. Turn off the Start Input (T33).
Now, SAVE PARAMETERS as described in Step 3.
7. Motor Rotational Checks
Ideally, you would like to perform these running checks
with the motor disconnected from the gear box and the
machine.
As an additional precaution, restrict the available current to
the drive by reducing the Current Limit to just enough
current to turn the motor (usually 5 to 10%).
R,R,U,R,D,R - D
Check operation of the speed potentiometer by monitoring
the Ramp Input. Leave the reference at zero after checking
for proper operation.
L,L,D,R,5xD,R Then 4xL
Start the drive by energizing the Start Input (T33). Check
the field voltage at the F+ and F-. When the motor is cold,
you will measure somewhat less than the rated field
voltage (approximately 240 VDC for a 300 VDC rated
field).
Confirm the field current matches the IFb nameplate data.
R,D,R,D,D,R,D,D,R Then 4xL
Increase the potentiometer setting until the motor is turning
slowly. Check motor rotation. If backwards, stop, turn off
ALL power to the drive, and swap the field leads (F+, F-).
Recheck after changes.
Now, slowly bring the motor up to full speed while checking
the voltage on the A+ and A- terminals.
R,D,R,R,3xD,R
If you have neither a tachometer nor encoder, skip to Step
9. If using a tachometer or encoder, check to ensure the
speed reference is positive (+).
3xU
Then, check the sign of the feedback, as follows:
Tachometer Feedback
6xD Then 4xL
If positive (+), skip to Step 8. If negative (-), stop, power off
the drive, then swap the tachometer leads on T25 and T26
and recheck.
Encoder Feedback
2xU Then 4xL
If positive (+), skip to Step 8. If negative (-), stop the drive
and invert the encoder sign and recheck.
R,R,U,R,8xD,R,3xD,R - D 5xL
8. Switching Feedback Type
Now, stop the drive and select the appropriate feedback.
Tachometer Feedback
R,R,U,R,7xD,R - U Then 4xL
Encoder Feedback
R,R,U,R,7xD,R – 2xU Then 4xL
Again, start the drive and ensure maximum speed can be
obtained and the armature voltage does not exceed the
nameplate VA.
9. Increase the Current Limit to Rated Value
At this point, the Current Limit may be returned to 150%.
R,R,U,R,D,R - U Then 4xL
Now, SAVE PARAMETERS as described in Step 3.
10. Adjusting the Speed Calibration at Base Speed
Gradually, increase your potentiometer to the maximum
position and then adjust the final speed of the motor.
Depending on the final feedback type, different parameters
(PIN’s 16, 17,& 6) are used for speed calibration.
Do NOT exceed the base speed (BS) value while adjusting
these parameters. These calibration parameters may be
adjusted while the drive is running.
Armature Voltage
R,R,U,R,5xU,R – U Then 4xL
Increase this value to reduce the armature voltage. If this
parameter does not provide enough adjustment , stop and
readjust PIN 18 - Rated Arm Volts from Step 2.
Tachometer Feedback
R,R,U,R,4xU,R – U Then 4xL
Increase this value to reduce the motor speed. If this
parameter does not provide enough adjustment, stop and
readjust PIN 8 - Analog Tacho Volts from Step 2.
Encoder Feedback
R,R,U,R,4xD,R – U/D Then 4xL
Change this value to achieve the desired motor speed.
Again, SAVE PARAMETERS.
11. Setting Up Field Weakening
When using either tachometer or encoder feedback, field
weakening may be enabled for a motor which supports an
extended speed range.
a) First, stop the drive and enable the field weakening
mode.
R,R,7xD,R,4xD,R,R - U
b) Next, set the minimum field expected (with a 10%
safety margin).
Min Field % = (Ifm ÷ Ifb) x 90
L,7xD,R – U/D Then 4xL
Finally, adjust the maximum speed as described in Step
10. Again, do NOT exceed the maximum speed (MS)
value noted on the motor nameplate.
Again, SAVE PARAMETERS as described in Step 3.
Congratulations, you have successfully commissioned
your Bardac PL/X Digital DC Drive.
If you have any questions or do not understand a portion of
this Quick Start Manual, please contact us:
Bardac Corporation
40 Log Canoe Circle
Stevensville MD 21666 USA
Phone: 888-ON-SPEED (888-667-7333)
International: 410-604-3400
FAX: 410-604-3500
Website: www.bardac.com
Email: info@bardac.com
HG501504; Issue 3
8)ANALOG TACHO VOLTS
87.50 VOLTS
10)QUADRATURE ENABLE
ENABLED
11)ENCODER LINES
1024
164)DOP 123TRJSC CIP
10100000
164)DOP 123TRJSC CIP
10101001
164)DOP 123TRJSC CIP
10101011
92)AUTOTUNE ENABLE
ENABLED
3)CURRENT LIMIT(%)
5.00 %
26)RAMP INPUT
75.14 %
145)FLD CUR AMPS MON
1.35 AMPS
126)ARM VOLTS MON
500.0 VOLTS
129)TACHO VOLTS MON
-23.19 VOLTS
13)ENCODER SIGN
INVERT
9)SPEED FBK TYPE
ANALOG TACHO
9)SPEED FBK TYPE
ENCODER
16)ARM VOLTS TRIM
1.0000
17)ANALOG TACHO TRIM
1.0000
6)DESIRED MAX RPM
1750 RPM
3)CURRENT LIMIT(%)
150.00 %
103)FLD WEAK ENABLE
ENABLED
110)MIN FLD CURRENT
53.33 %
TVb
PPR
PARAMETER SAVE 2
UP KEY TO CONTINUE
PARAMETER SAVE 2
SAVING
PARAMETER SAVE 2
FINISHED
123)TOTAL SPD REF MN
26.50 %
132)ENCODER RPM MON
-464 RPM
 Loading...
Loading...