

Baldor NXE100-1608Dx, NXE100-1608Sx, NXE100-1612Dx, NXE100-1612Sx, NXE100-1616Dx Installation Manual
...Page 1

Page 2

Page 3

Contents i
MN1941
Contents
1 General Information 1-1.................................
2 Introduction 2-1........................................
2.1 NextMove e100 features 2-1.................................
2.2 Receiving and inspection 2-3................................
2.2.1 Identifying the catalog number 2-3....................................
2.3 Units and abbreviations 2-4..................................
3 Basic Installation 3-1....................................
3.1 Introduction 3-1............................................
3.1.1 Location requirements 3-1..........................................
3.1.2 Mounting the NextMove e100 3-2....................................
3.1.3 Other requirements for installation 3-3................................
4 Input / Output 4-1......................................
4.1 Introduction 4-1............................................
4.1.1 Connector locations 4-2............................................
4.2 Analog I/O 4-3.............................................
4.2.1 Analog inputs 4-3..................................................
4.2.2 Analog outputs 4-5.................................................
4.3 Digital I/O 4-7..............................................
4.3.1 Digital inputs 4-7..................................................
4.3.2 Digital outputs and relay 4-11.........................................
4.3.3 Stepper control outputs - models NXE100-16xxDx 4-13...................
4.3.4 Stepper control outputs - models NXE100-16xxSx 4-14...................
4.4 Other I/O 4-15..............................................
4.4.1 Encoder inputs 0-2 4-15.............................................
4.4.2 Node ID selector switches 4-17.......................................
4.5 USB and serial communication 4-20...........................
4.5.1 USB port 4-20.....................................................
4.5.2 Serial port 4-21.....................................................
4.5.3 Using RS232 4-21..................................................
4.5.4 Multidrop using RS485 / RS422 4-22..................................
4.5.5 Connecting serial Baldor HMI Operator Panels 4-23......................
4.6 Ethernet interface 4-24.......................................
4.6.1 TCP/IP 4-24.......................................................
4.6.2 ETHERNET Powerlink 4-25..........................................
4.6.3 Ethernet connectors 4-26............................................
Page 4

ii Contents
MN1941
4.7 CAN interface 4-27..........................................
4.7.1 CAN connector 4-27................................................
4.7.2 CAN wiring 4-27....................................................
4.7.3 CANopen 4-28.....................................................
4.8 Connection summary - minimum wiring (local axis) 4-30..........
4.9 Connection summary - minimum wiring (remote axis) 4-32........
5 Operation 5-1..........................................
5.1 Introduction 5-1............................................
5.1.1 Connecting the NextMove e100 to the PC 5-1..........................
5.1.2 Installing Mint Machine Center and Mint WorkBench 5-2.................
5.2 Starting the NextMove e100 5-3..............................
5.2.1 Preliminary checks 5-3.............................................
5.2.2 Power on checks 5-3...............................................
5.2.3 Installing the USB driver 5-3.........................................
5.2.4 Configuring the TCP/IP connection (optional) 5-4.......................
5.3 Mint Machine Center 5-5....................................
5.3.1 Starting MMC 5-7..................................................
5.3.2 Viewing remote nodes connected over Ethernet (optional) 5-8............
5.4 Mint WorkBench 5-9........................................
5.4.1 Help file 5-10......................................................
5.4.2 Starting Mint WorkBench 5-11........................................
5.5 Configuring axes 5-13........................................
5.5.1 Local axes, remote axes and profilers 5-13.............................
5.5.2 Configuring remote axes 5-14........................................
5.5.3 Configuring local axes 5-16..........................................
5.5.4 Selecting a scale 5-17...............................................
5.5.5 Setting the drive enable output (optional) 5-19...........................
5.5.6 Testing the drive enable output 5-21...................................
5.6 Local stepper axis - testing 5-22...............................
5.6.1 Testing the output 5-22..............................................
5.7 Local servo axis - testing and tuning 5-23.......................
5.7.1 Testing the demand output 5-23.......................................
5.7.2 An introduction to closed loop control 5-25..............................
5.8 Local servo axis - tuning for current control 5-28.................
5.8.1 Selecting servo loop gains 5-28.......................................
5.8.2 Underdamped response 5-30.........................................
5.8.3 Overdamped response 5-31..........................................
5.8.4 Critically damped response 5-32......................................
5.9 Local servo axis - tuning for velocity control 5-33................
5.9.1 Calculating KVELFF 5-33............................................
5.9.2 Adjusting KPROP 5-36..............................................
Page 5

Contents iii
MN1941
5.10 Local servo axis - eliminating steady-state errors 5-38............
5.1 1 Local digital input/output configuration 5-39.....................
5.11.1 Digital input configuration 5-39........................................
5.11.2 Digital output configuration 5-40.......................................
6 Troubleshooting 6-1....................................
6.1 Introduction 6-1............................................
6.1.1 Problem diagnosis 6-1..............................................
6.1.2 SupportMe feature 6-1.............................................
6.2 NextMove e100 indicators 6-2...............................
6.2.1 STATUS LED 6-2..................................................
6.2.2 CAN LEDs 6-2....................................................
6.2.3 ETHERNET LEDs 6-3..............................................
6.2.4 Communication 6-4................................................
6.2.5 Motor control 6-4..................................................
6.2.6 Mint WorkBench 6-5...............................................
6.2.7 Ethernet 6-6......................................................
6.2.8 CANopen 6-6.....................................................
7 Specifications 7-1......................................
7.1 Introduction 7-1............................................
7.1.1 Input power 7-1...................................................
7.1.2 Analog inputs 7-1..................................................
7.1.3 Analog outputs 7-1.................................................
7.1.4 Digital inputs 7-2..................................................
7.1.5 Digital outputs 7-2.................................................
7.1.6 Relay output 7-2...................................................
7.1.7 Stepper control outputs 7-3..........................................
7.1.8 Encoder inputs 7-3................................................
7.1.9 Serial port 7-3.....................................................
7.1.10 Ethernet interface 7-3..............................................
7.1.11 CAN interface 7-4.................................................
7.1.12 Environmental 7-4.................................................
7.1.13 Weights and dimensions 7-4........................................
Appendices
A Accessories A-1........................................
A.1 Cables A-1................................................
A.1.1 Feedback cables A-1...............................................
A.1.2 Ethernet cables A-1................................................
A.1.3 24 V power supplies A-2............................................
Page 6

iv Contents
MN1941
B CE Guidelines B-1......................................
B.1 Outline B-1................................................
B.1.1 EMC Conformity and CE marking B-1.................................
B.1.2 NextMove e100 compliance B-1......................................
B.1.3 Use of CE compliant components B-2.................................
B.1.4 EMC installation suggestions B-2.....................................
B.1.5 Wiring of shielded (screened) encoder cables B-2.......................
Page 7

www.baldormotion.com
General Information 1-1MN1941
LT0231A04 Copyright Baldor (c) 2009. All rights reserved.
This manual is copyrighted and all rights are reserved. This document or attached software may not, in
whole or in part, be copied or reproduced in any form without the prior written consent of BALDOR.
BALDOR makes no representations or warranties with respect to the contents hereof and specifically
disclaims any implied warranties of fitness for any particular purpose. The information in this document
is subject to change without notice.
BALDOR assumes no responsibility for any errors that may appear in this document.
Mintt is a registered trademark of Baldor.
Windows 2000, Windows XP and Windows Vista are registered trademarks of the Microsoft Corporation.
Limited Warranty:
For a period of two (2) years from the date of original purchase, BALDOR will repair or replace without
charge controls and accessories which our examination proves to be defective in material or
workmanship. This warranty is valid if the unit has not been tampered with by unauthorized persons,
misused, abused, or improperly installed and has been used in accordance with the instructions and/or
ratings supplied. This warranty is in lieu of any other warranty or guarantee expressed or implied.
BALDOR shall not be held responsible for any expense (including installation and removal),
inconvenience, or consequential damage, including injury to any person or property caused by items of
our manufacture or sale. (Some countries and U.S. states do not allow exclusion or limitation of incidental
or consequential damages, so the above exclusion may not apply.) In any event, BALDOR’s total liability,
under all circumstances, shall not exceed the full purchase price of the control. Claims for purchase price
refunds, repairs, or replacements must be referred to BALDOR with all pertinent data as to the defect, the
date purchased, the task performed by the control, and the problem encountered. No liability is assumed
for expendable items such as fuses. Goods may be returned only with written notification including a
BALDOR Return Authorization Number and any return shipments must be prepaid.
Baldor UK Ltd
Mint Motion Centre
6 Bristol Distribution Park
Hawkley Drive
Bristol, BS32 0BF
Telephone: +44 (0) 1454 850000
Fax: +44 (0) 1454 850001
E-mail: motionsupport.uk@baldor.com
Web site: www.baldormotion.com
See rear cover for other international offices.
1 General Information
1
Page 8
www.baldormotion.com
1-2 General Information MN1941
Safety Notice
Only qualified personnel should attempt to start-up, program or troubleshoot this equipment.
This equipment may be connected to other machines that have rotating parts or parts that are controlled
by this equipment. Improper use can cause serious or fatal injury.
Precautions
Do not touch any circuit board, power device or electrical connection before you first
ensure that no high voltage is present at this equipment or other equipment to which it is
connected. Electrical shock can cause serious or fatal injury. Only qualified personnel
should attempt to start-up, program or troubleshoot this equipment.
Be sure that you are completely familiar with the safe operation and programming of this
equipment. This equipment may be connected to other machines that have rotating parts
or parts that are controlled by this equipment. Improper use can cause serious or fatal
injury.
The stop input to this equipment should not be used as the single means of achieving a
safety critical stop. Drive disable, motor disconnect, motor brake and other means should
be used as appropriate.
Improper operation or programming may cause violent motion of the motor shaft and
driven equipment. Be certain that unexpected motor shaft movement will not cause injury
to personnel or damage to equipment. Peak torque of several times the rated motor
torque can occur during control failure.
The safe integration of this equipment into a machine system is the responsibility of the
machine designer. Be sure to comply with the local safety requirements at the place where
the machine is to be used. In Europe these are the Machinery Directive, the ElectroMagnetic
Compatibility Directive and the Low Voltage Directive. In the United States this is the National
Electrical code and local codes.
Electrical components can be damaged by static electricity. Use ESD (electrostatic
discharge) procedures when handling this equipment.
WARNING
WARNING
CAUTION
CAUTION
NOTICE
NOTICE
Page 9

www.baldormotion.com
Introduction 2-1MN1941
2.1 NextMove e100 features
NextMove e100 is a high performance multi-axis intelligent controller for servo and stepper
motors.
NextMove e100 features the Mint motion control language. Mint is a structured form of Basic,
custom designed for stepper or servo motion control applications. It allows you to get started
very quickly with simple motion control programs. In addition, Mint includes a wide range of
powerful commands for complex applications.
Standard features include:
H Control of up to 16 axes, including 4 stepper and 3 servo axes (on board), plus external axes
over the ETHERNET Powerlink connection.
H Point to point moves, software cams and gearing, complex path control, splines etc.
H 20 general purpose digital inputs, software configurable as level or edge triggered.
H 12 general purpose digital outputs and 1 relay output.
H 2 differential analog inputs with 12-bit resolution.
H 4 single-ended analog outputs with 12-bit resolution.
H USB 1.1 serial port (compatible with USB2.0).
H RS232 / RS485/422 serial port for programming or connection to an HMI operator panel.
H ETHERNET Powerlink & TCP/IP support: Twin Ethernet ports with integrated hub for
communication with host PC or other ETHERNET Powerlink devices.
H CANopen protocol for communication with Mint controllers and other third party devices.
H Programmable in Mint.
2 Introduction
2
Page 10
www.baldormotion.com
2-2 Introduction MN1941
Included with NextMove e100 is the Baldor Motion Toolkit CD. This contains a number of utilities
and useful resources to get the most from your Mint controller. These include:
H Mint WorkBench
This is the user interface for communicating with the NextMove e100. Installing Mint
WorkBench will also install firmware for NextMove e100.
H Mint Machine Center
This is used to view and configure a multi-axis network of connected controllers.
H PC Developer Libraries
Installing Mint WorkBench will install ActiveX interfaces that allow PC applications to be
written that communicate with the NextMove e100.
This manual is intended to guide you through the installation of NextMove e100.
The chapters should be read in sequence.
The Basic Installation section describes the mechanical installation of the NextMove e100.
The following sections require knowledge of the low level input/output requirements of the
installation and an understanding of computer software installation. If you are not qualified in
these areas you should seek assistance before proceeding.
Note: You can check that you have the latest firmware and Mint WorkBench releases by
visiting the website www.baldormotion.com/supportme
.
Page 11
www.baldormotion.com
Introduction 2-3MN1941
2.2 Receiving and inspection
When you receive your NextMove e100, there are several things you should do immediately:
1. Check the condition of the packaging and report any damage immediately to the carrier that
delivered your NextMove e100.
2. Remove the NextMove e100 from the shipping container and remove all packing material. The
container and packing materials may be retained for future shipment.
3. Verify that the catalog number of the NextMove e100 you received is the same as the catalog
number listed on your purchase order. The catalog/part number is described in the next
section.
4. Inspect the NextMove e100 for external damage during shipment and report any damage to
the carrier that delivered it.
5. If the NextMove e100 is to be stored for several weeks before use, be sure that it is stored
in a location that conforms to the storage humidity and temperature specifications shown in
section 3.1.1.
2.2.1 Identifying the catalog number
Different models of NextMove e100 are available. As a reminder of which product has been
installed, it is a good idea to write the catalog number in the space provided below.
NextMove e100 catalog number:
NXE100-16___D_ or NXE100-16___S_
Installed in: ________________________ Date: ______
A description of the catalog numbers are shown in the following table:
Catalog number
Description
NXE100-1608Dx 8 axes, RS422 differential stepper outputs.
NXE100-1608Sx 8 axes, open collector (single-ended) stepper outputs.
NXE100-1612Dx 12 axes, RS422 differential stepper outputs.
NXE100-1612Sx 12 axes, open collector (single-ended) stepper outputs.
NXE100-1616Dx 16 axes, RS422 differential stepper outputs.
NXE100-1616Sx 16 axes, open collector (single-ended) stepper outputs.
Note: The x represents a letter indicating the hardware revision. This does not affect the
capabilities of the NextMove e100 unless otherwise stated.
Page 12

www.baldormotion.com
2-4 Introduction MN1941
2.3 Units and abbreviations
The following units and abbreviations may appear in this manual:
V Volt (also VAC and VDC)...............
WWatt..............
A Ampere...............
Ω Ohm...............
mΩ milliohm.............
μF microfarad..............
pF picofarad..............
mH millihenry.............
Φ phase...............
ms millisecond..............
μs microsecond..............
ns nanosecond..............
mm millimeter.............
m meter...............
in inch...............
ft feet...............
lbf-in pound force inch (torque)............
N·m Newton meter (torque).............
ADC Analog to Digital Converter............
ASCII American Standard Code for Information Interchange...........
AWG American Wire Gauge............
CAL CAN Application Layer............
CAN Controller Area Network............
CDROM Compact Disc Read Only Memory.........
CiA CAN in Automation International Users and Manufacturers Group e.V..............
CTRL+E on the PC keyboard, press Ctrl then E at the same time..........
DAC Digital to Analog Converter............
DS301 CiA CANopen Application Layer and Communication Profile..........
DS401 CiA Device Profile for Generic I/O Devices..........
DS402 CiA Device Profile for Drives and Motion Control..........
DS403 CiA Device Profile for HMIs..........
EDS Electronic Data Sheet............
EMC Electromagnetic Compatibility............
EPL ETHERNET Powerlink............
HMI Human Machine Interface.............
ISO International Standards Organization.............
Kbaud kilobaud (the same as Kbit/s in most applications)...........
LCD Liquid Crystal Display............
Mbps megabits/s...........
MB megabytes.............
MMC Mint Machine Center............
(NC) Not Connected............
RF Radio Frequency..............
SSI Synchronous Serial Interface.............
TCP/IP Transmission Control Protocol / Internet Protocol
..........
UDP User Datagram Protocol............
Page 13
www.baldormotion.com
Basic Installation 3-1MN1941
3.1 Introduction
You should read all the sections in Basic Installation.
It is important that the correct steps are followed when installing the NextMove e100.
This section describes the mechanical installation of the NextMove e100.
3.1.1 Location requirements
You must read and understand this section before beginning the installation.
To prevent equipment damage, be certain that input and output signals are powered
and referenced correctly.
To ensure reliable performance of this equipment be certain that all signals to/from
the NextMove e100 are shielded correctly.
Avoid locating the NextMove e100 immediately above or beside heat generating
equipment, or directly below water steam pipes.
Avoid locating the NextMove e100 in the vicinity of corrosive substances or vapors,
metal particles and dust.
The safe operation of this equipment depends upon its use in the appropriate environment.
The following points must be considered:
H The NextMove e100 is designed to be mounted indoors, permanently fixed and located.
H The NextMove e100 must be secured by the slots in the metal base.
H The NextMove e100 must be installed in an ambient temperature of 0 °C to 45 °C (32 °F to
113 ° F ) .
H The NextMove e100 must be installed in relative humidity levels of less than 80% for
temperatures up to 31 °C (87 °F) decreasing linearly to 50% relative humidity at 45 °C
(113 °F), non-condensing.
H The NextMove e100 must be installed where the pollution degree according to IEC664 shall
not exceed 2.
H There shall not be abnormal levels of nuclear radiation or X-rays.
3 Basic Installation
3
NOTICE
NOTICE
NOTICE
NOTICE
Page 14
www.baldormotion.com
3-2 Basic Installation MN1941
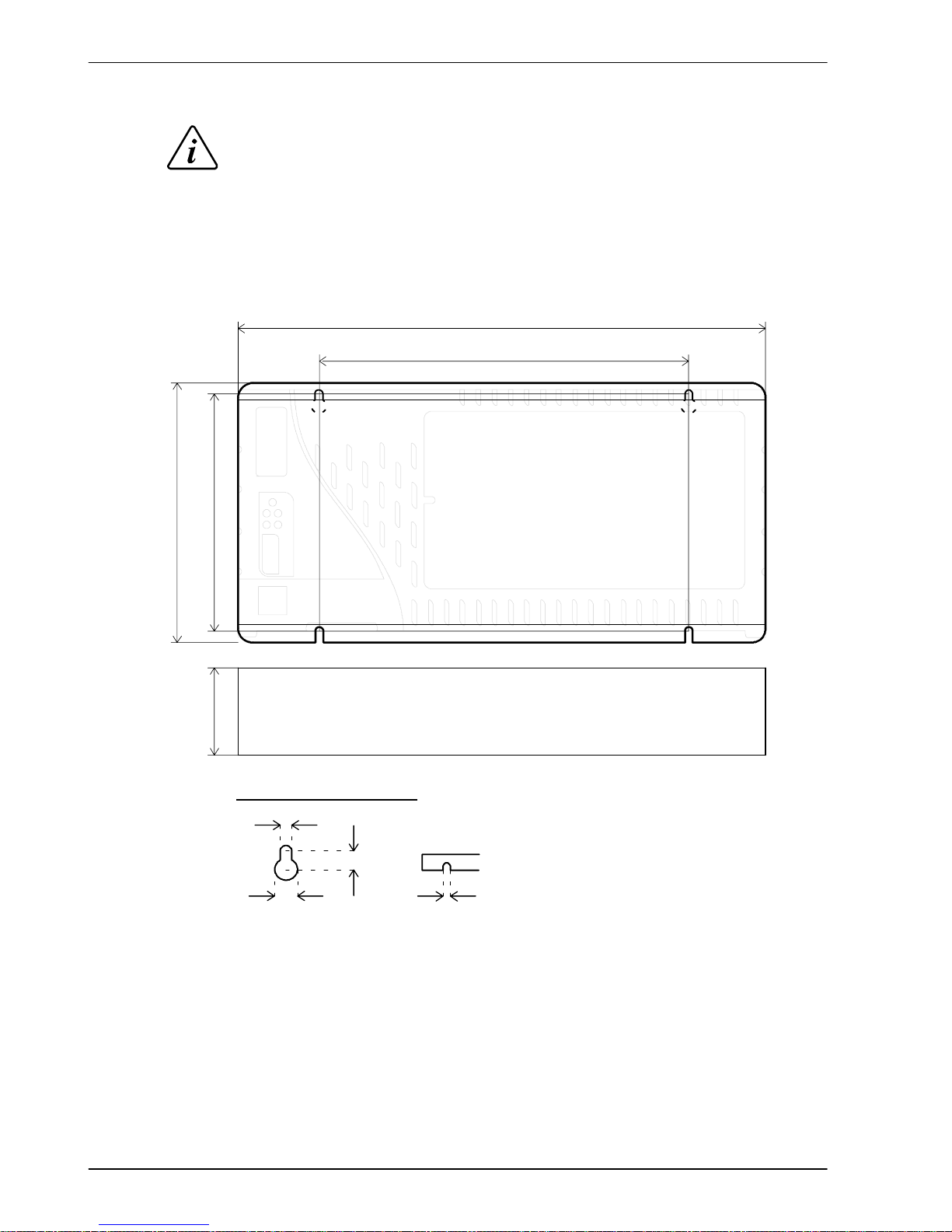
3.1.2 Mounting the NextMove e100
Before touching the unit be sure to discharge static electricity from your body and
clothing by touching a grounded metal surface. Alternatively, wear an earth strap
while handling the unit.
Ensure you have read and understood the location requirements in section 3.1.1. Mount the
NextMove e100 using the supplied M4 screws. For effective cooling, the NextMove e100 must
be mounted on a smooth non-flammable vertical surface. Orientation must be as shown in
Figure 1, with the two slots in the metal carrier / heat sink assembly at the bottom.
140 (5.51)
129 (5.08)
170 (6.69)
250 (9.84)
All dimensions shown as
mm (inches)
40.3 (1.59)
Mounting keyhole and slot detail
A
B
C
A 4.5 mm
B 10 mm
C 11 m m
A
Drawings not to scale
Figure 1 - Package dimensions
There must be at least 20 mm (0.8 in) clearance between the NextMove e100 and neighboring
equipment to allow sufficient cooling by natural convection. Remember to allow additional space
around the edges to accommodate the mating connectors and associated wiring. For example,
70 mm (2.8 in) clearance will be required for connection of the serial port cable.
NOTICE
Page 15
www.baldormotion.com
Basic Installation 3-3MN1941
3.1.3 Other requirements for installation
H The NextMove e100 requires a 24 VDC power supply capable of supplying 2 A continuously.
It is recommended that a separate fused 24 VDC supply is provided for the NextMove e100,
with the fuse rated at 4 A maximum. If digital outputs are to be used, a supply will be required
to drive them - see section 4.3.2.
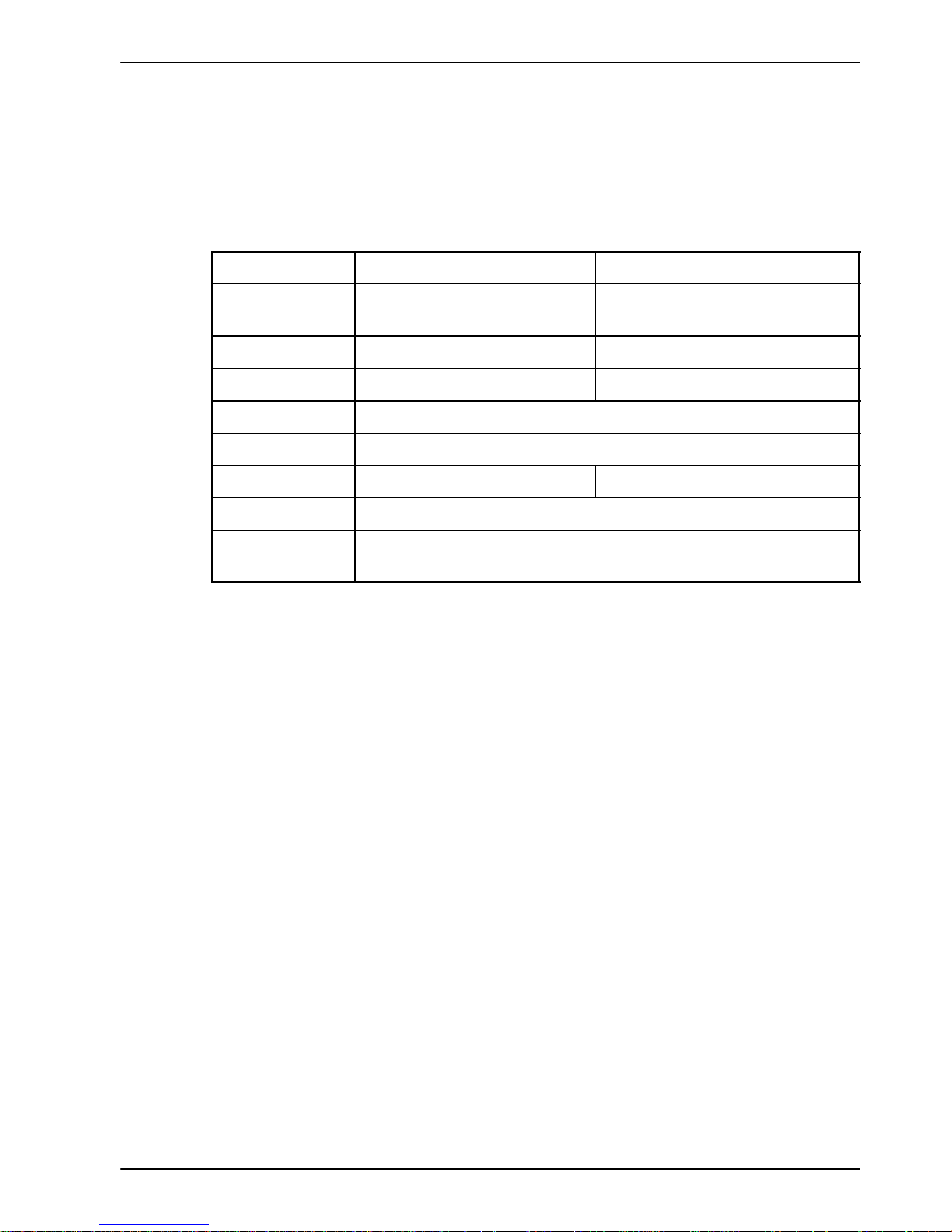
H A PC that fulfills the following specification:
Minimum specification Recommended specification
Processor Intel PentiumIII
500 MHz
Intel PentiumIII / 4 or equivalent
1 GHz or faster
RAM 128 MB 1GB
Hard disk space 50 MB 50 MB
CD-ROM ACD-ROMdrive
Communication USB port, RS232 / RS485/422 serial port, or Ethernet* port
Screen 1024 x 768, 16-bit color 1152 x 864, 16-bit color
Mouse A mouse or similar pointing device
Operating
system
Windows 2000, Windows XP or Windows Vista
* The Ethernet configuration used by a normal office PC is not suitable for direct
communication with the NextMove e100. It is recommended to install a separate dedicated
Ethernet adapter in the PC, which can be configured for use with the NextMove e100. See
section 5.2.4.
H A USB cable (supplied), or RS485/422 serial cable (not supplied).
H Your PC operating system user manual might be useful if you are not familiar with Windows.
Page 16

www.baldormotion.com
3-4 Basic Installation MN1941
Page 17
www.baldormotion.com
Input / Output 4-1MN1941
4.1 Introduction
This section describes the input and output capabilities of the NextMove e100.
The following conventions will be used to refer to the inputs and outputs:
I/O Input / Output..............
DIN Digital Input.............
DOUT Digital Output...........
AIN Analog Input.............
AOUT Analog Output...........
Common electrical connections use the following abbreviations:
AGND Analog ground. Used by the analog input and output circuits...........
USR V+ User power supply V+. Provides power to the digital outputs..........
USR GND User power supply ground. Return connection for the user power supply........
CREFx Common reference. The common connection for a group of digital inputs...........
DGND Digital ground. Used by the stepper control outputs...........
4 Input / Output
4
Page 18
www.baldormotion.com
4-2 Input / Output MN1941
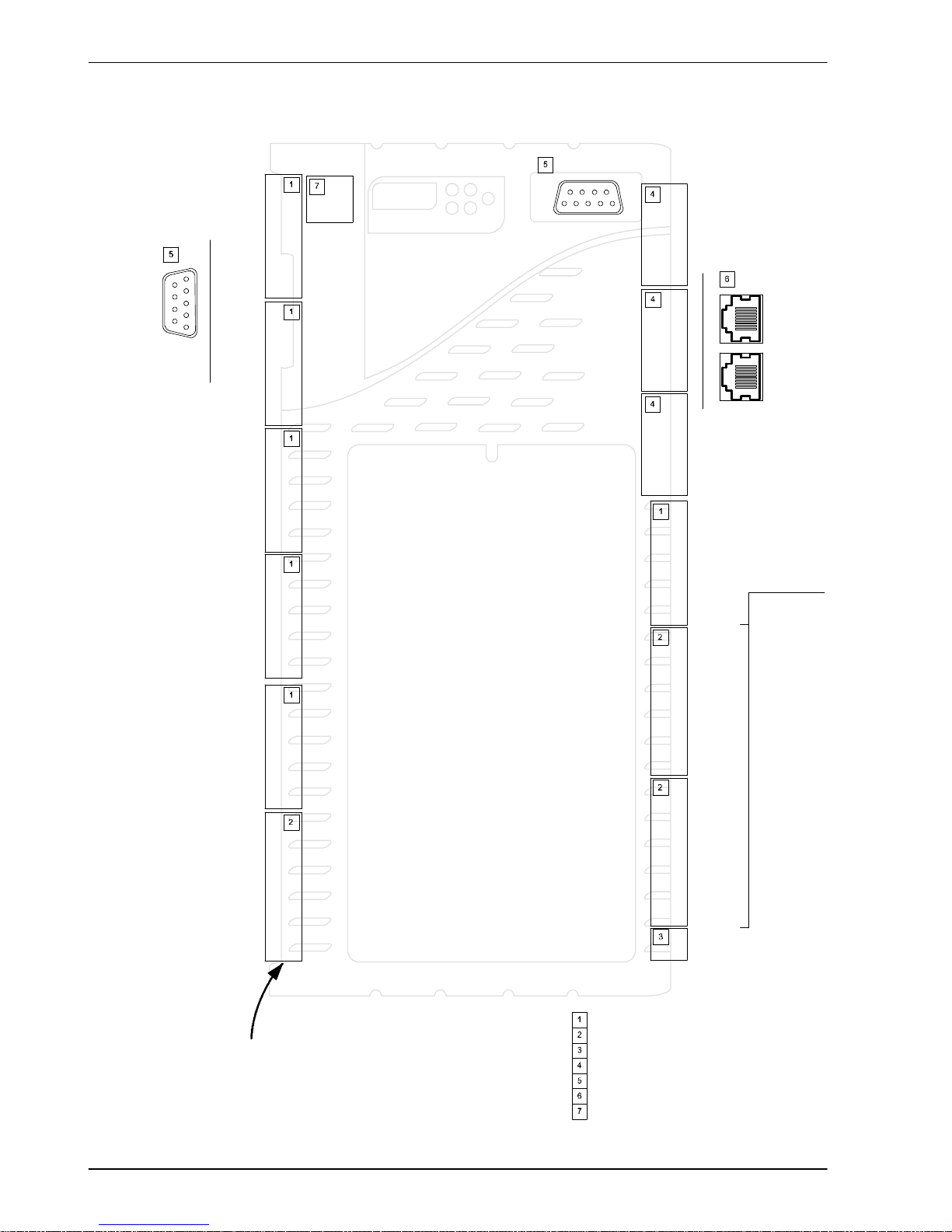
4.1.1 Connector locations
Tightening torque for terminal block
connections is 0.25 N·m (2.25 lb-in).
Use 60/75 or 75 °C copper (Cu) wire only.
(NC) = Not Connected
X12 AIN 0-1
& relay
X7 Encoder2
X6 Encoder1
X4 DOUT 8-11
X2 STEP 0-1
AIN0+
AIN0AGND
AIN1+
AIN1Shield
REL COM
REL NC
REL NO
REL COM
CREF2
CREF1
CREF0
USR V+
USR GND
USR V+
DOUT11
DOUT10
DOUT9
DOUT8
Mating connectors:
Sauro CTF10008
Sauro CTF12008
Sauro CTF02008
9-pinD-typeplug(male)
9-pin D-type socket (female)
RJ45 plug
USB type B plug
1
2
3
4
5
6
7
8
9
10
12
11
10
9
8
7
6
5
4
3
2
1
10
9
8
7
6
5
4
3
2
1
X11 DOUT 0-7
DOUT0
DOUT1
DOUT2
DOUT3
DOUT4
DOUT5
DOUT6
DOUT7
USR V+
USR GND
1
2
3
4
5
6
7
8
9
10
X10 DIN 0-3
(fast interrupts)
DIN3
Shield
CREF0
DIN2
Shield
CREF0
DIN1
Shield
CREF0
DIN0
1
2
3
4
5
6
7
8
9
10
X9 DIN 4-11
DIN11
DIN10
DIN9
DIN8
DIN7
DIN6
DIN5
DIN4
CREF1
Shield
1
2
3
4
5
6
7
8
9
10
X8 DIN 12-19
DIN19
DIN18
DIN17
DIN16
DIN15
DIN14
DIN13
DIN12
CREF2
Shield
1
2
3
4
5
6
7
8
9
10
X13 AOUT 0-3
(demands)
Demand0
AGND
Shield
Demand1
AGND
Shield
Demand2
AGND
Shield
Demand3
AGND
Shield
1
2
3
4
5
6
7
8
9
10
11
12
X3 STEP 2-3
12
11
10
9
8
7
6
5
4
3
2
1
X5 Encoder0
X1 +24V in
+24 V
0V
2
1
CAN
USB
Shield
DIR1+
DIR1STEP1+
STEP1DGND
Shield
DIR0+
DIR0STEP0+
STEP0DGND
Shield
DIR3+
DIR3STEP3+
STEP3DGND
Shield
DIR2+
DIR2STEP2+
STEP2DGND
Ethernet
Serial
For model
NXE100-16xxSx:
Shield
DIR1
+5 V
STEP1
(NC)
DGND
Shield
DIR0
+5 V
STEP0
(NC)
DGND
Shield
DIR3
+5 V
STEP3
(NC)
DGND
Shield
DIR2
+5 V
STEP2
(NC)
DGND
Page 19
www.baldormotion.com
Input / Output 4-3MN1941
4.2 Analo g I/O
The NextMove e100 provides:
H Two 12-bit resolution analog inputs.
H Four 12-bit resolution analog outputs.
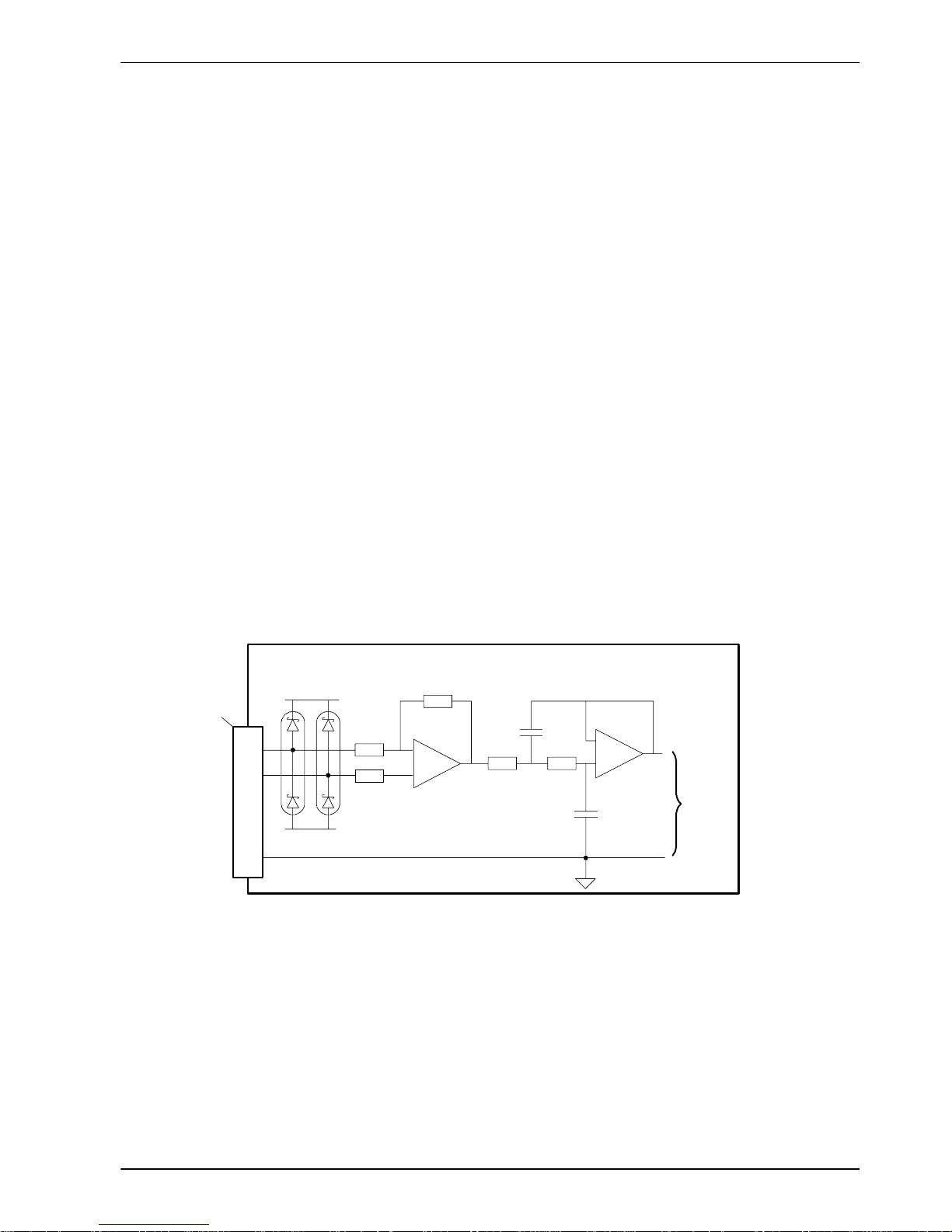
4.2.1 Analog inputs
The analog inputs are available on connector X12, pins 1 & 2 (AIN0) and 4 & 5 (AIN1).
H Differential inputs.
H Voltage range: ±10 V.
H Resolution: 12-bit with sign.
H Input impedance: 120 kΩ.
H Sampling frequency: 4 kHz maximum, 2 kHz if both inputs are enabled.
The analog inputs pass through a differential buffer and second order low-pass filter with a cut-off
frequency of approximately 1 kHz.
Both inputs are normally sampled at 2 kHz. However, an input can be disabled by setting
ADCMODE to 4 (_acOFF). With one input disabled, the remaining input will be sampled at 4 kHz.
In Mint, analog inputs can be read using the ADC keyword. See the Mint help file for full details of
ADC, ADCMODE and other related ADC... keywords.
NextMove e100
-
+
AIN0+
AIN0-
AGND
Mint
ADC(0)
-
+
2
3
1
+15 V
-15 V
‘X12’
Figure 2 - Analog input, AIN0 shown
For differential inputs connect input lines to AIN+ and AIN-. Leave AGND unconnected.
Page 20
www.baldormotion.com
4-4 Input / Output MN1941
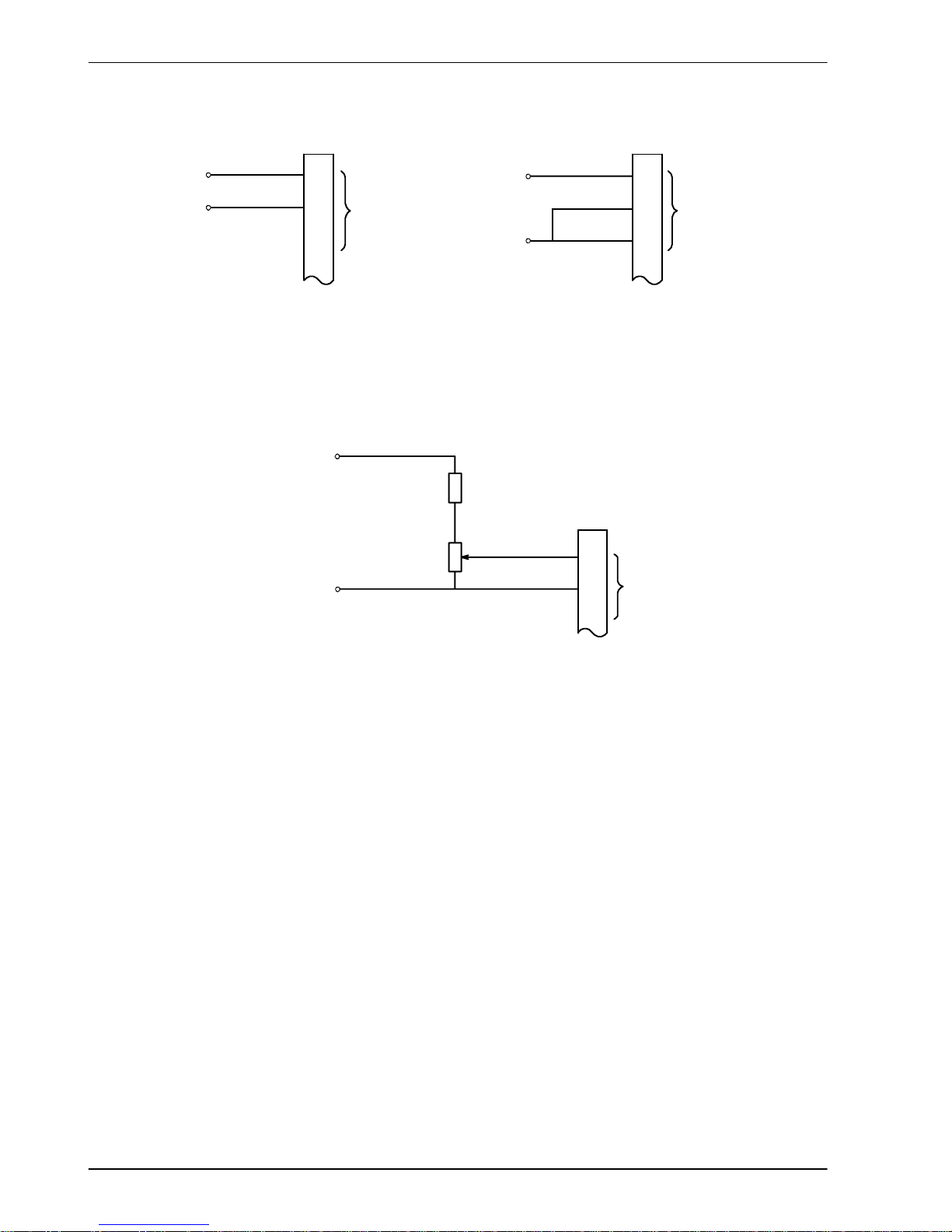
AIN0
ADC(0)
X12
AIN0
ADC(0)
1
2
3
X12
AIN0-
Differential connec tion Single ended connection
AIN0+
1
2
3
AIN0+
GND
Figure 3 - AIN0 analog input wiring
AIN0
1kΩ,0.25W
potentiometer
ADC(0)2
1
X12
1.5 kΩ,0.25W
0V
+24 VDC
3
Figure 4 - Typical input circuit to provide 0-10 V (approx.) input from a 24 V source
Page 21
www.baldormotion.com
Input / Output 4-5MN1941
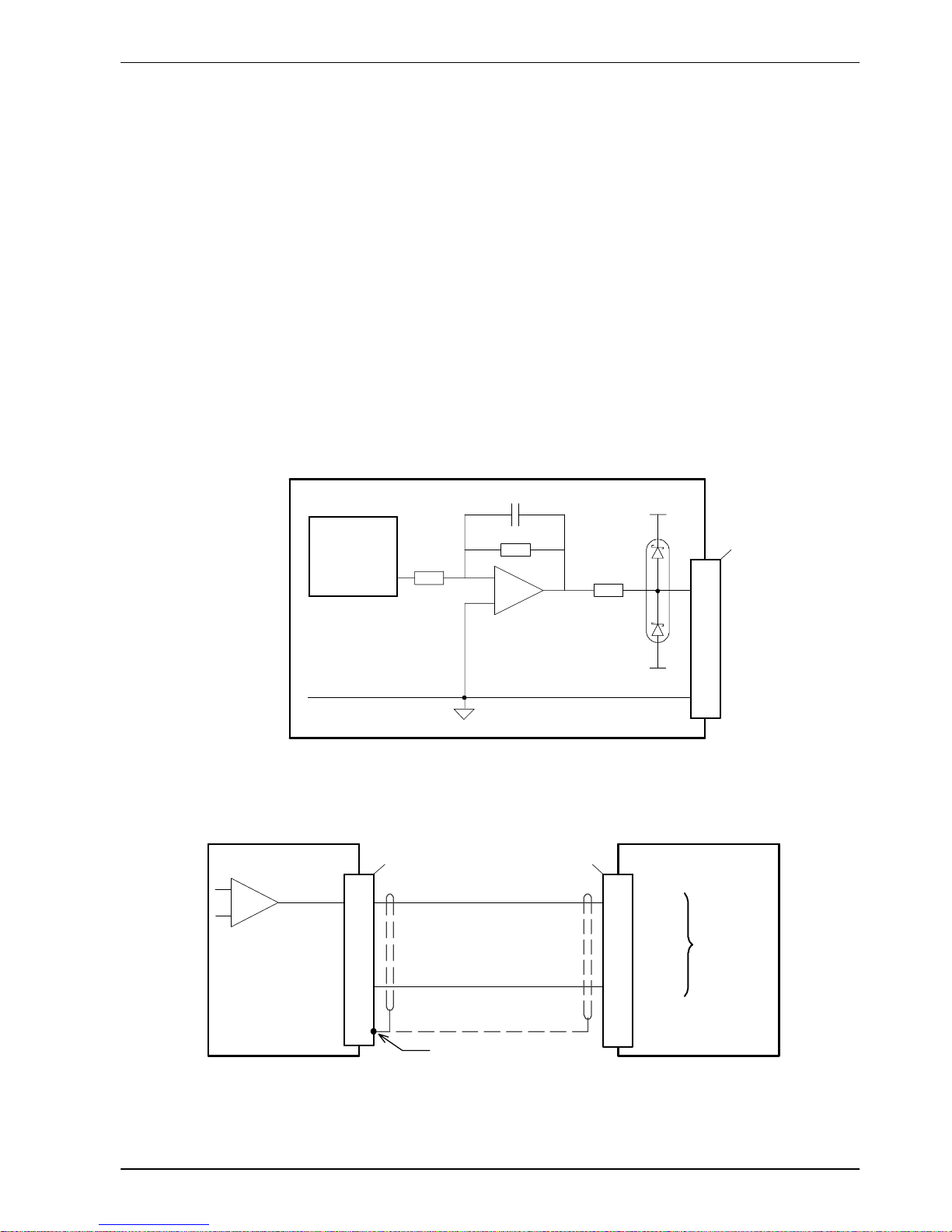
4.2.2 Analog outputs
The four analog outputs are available on connector X13, as shown in section 4.1.1.
H Four independent bipolar analog outputs.
H Output range: ±10 VDC (±0.1%).
H Resolution: 12-bit.
H Output current: 10 mA maximum.
H Update frequency: 1 kHz.
Mint and the Mint Motion Library use analog outputs Demand0 to Demand2 to control local drive
amplifiers. Demand outputs 0 to 2 are used by axes configured as servo (see section 5.5.3). All
of the outputs may be used as general purpose analog outputs, provided they have not been
assigned to an axis - see the DAC keyword in the Mint help file.
The analog outputs may be used to drive loads of 1 kΩ or greater. Shielded twisted pair cable
should be used. The shield connection should be made at one end only.
NextMove e100
Demand0
Demand
±100%
-
+
AGND
TL084
1
2
+15 V
-15 V
‘X13’
Figure 5 - Analog output - Demand0 shown
NextMove e100
Demand0
AGND
1
2
13
12
MicroFlex / servo amplifier
AIN0+
AIN0-
Connect overall shield at
one end only
3Shield
Servo
amplifier
±10 VDC
demand
input
-
+
‘X3’‘X13’
Figure 6 - Analog output - typical connection to a Baldor MicroFlex
Page 22
www.baldormotion.com
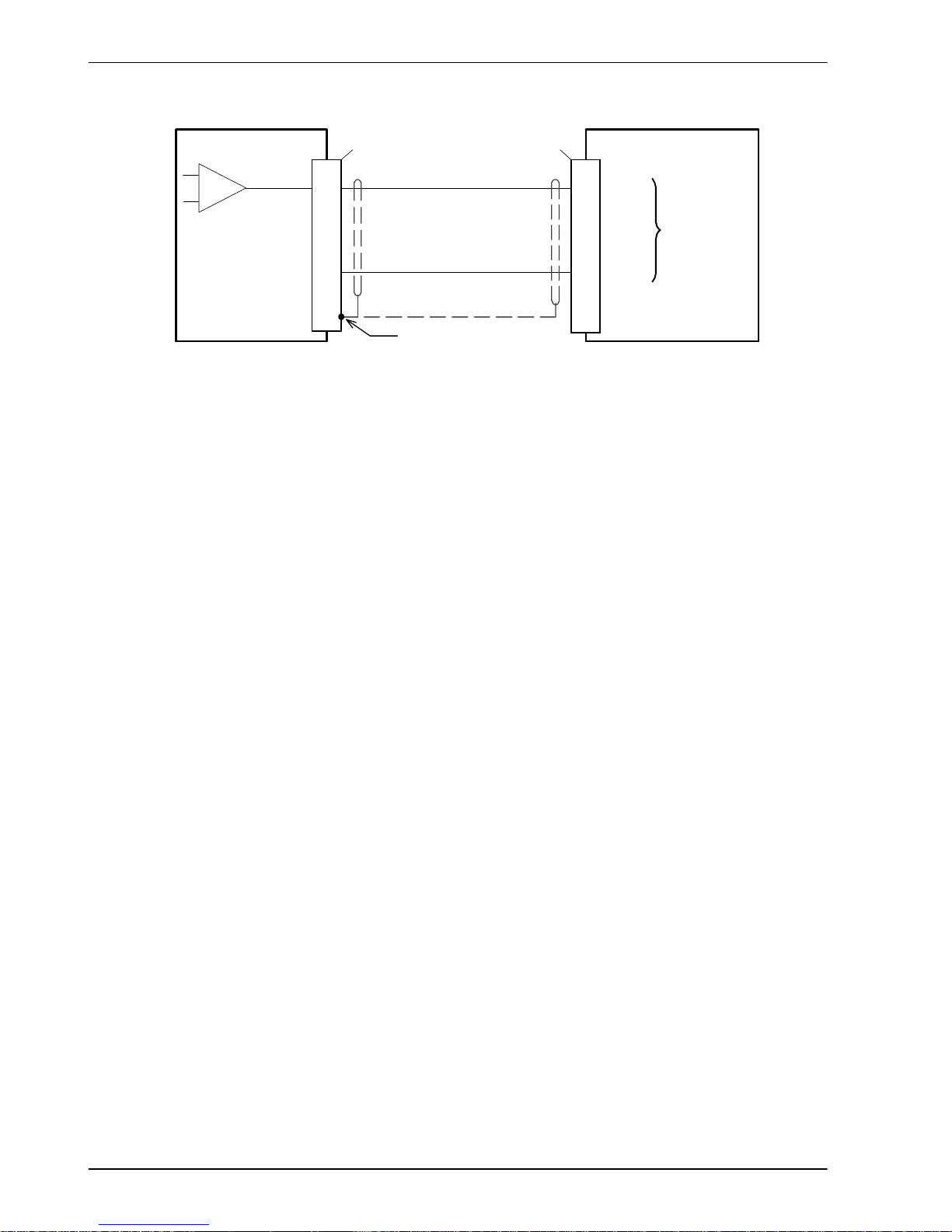
4-6 Input / Output MN1941
NextMove e100
Demand0
AGND
2
FlexDriveII/ servo amplifier
AIN0+
AIN0-
Connect overall shield at
one end only
3Shield
Servo
amplifier
±10 VDC
demand
input
-
+
1
2
1
‘X1’
‘X13’
Figure 7 - Analog output - typical connection to a Baldor FlexDriveII, Flex+DriveIIor MintDrive
II
Page 23
www.baldormotion.com
Input / Output 4-7MN1941
4.3 Digital I/O
The NextMove e100 provides:
H 20 general purpose digital inputs.
H 12 general purpose digital outputs.
H 1 general purpose relay output.
4.3.1 Digital inputs
Digital inputs are available on connectors X8, X9 and X10, as shown in section 4.1.1.
The digital inputs are arranged in three groups, each with their own common connection. This
allows each group to be configured independently for ‘active high’ or ‘active low’ operation (using
the Mint INPUTMODE keyword).
The general purpose digital inputs DIN0 - DIN19 can be shared between axes, and are
programmable in Mint (using a range of keywords beginning with the letters INPUT... ) to
determine their active level and if they should be edge triggered. The state of individual inputs can
be read directly using the INX and INSTATEX keywords. See the Mint help file.
A general purpose digital input can be assigned to a special purpose function such as a home,
limit, stop or error input. See the keywords HOMEINPUT, LIMITFORWARDINPUT,
LIMITREVERSEINPUT, STOPINPUT and ERRORINPUT in the Mint help file.
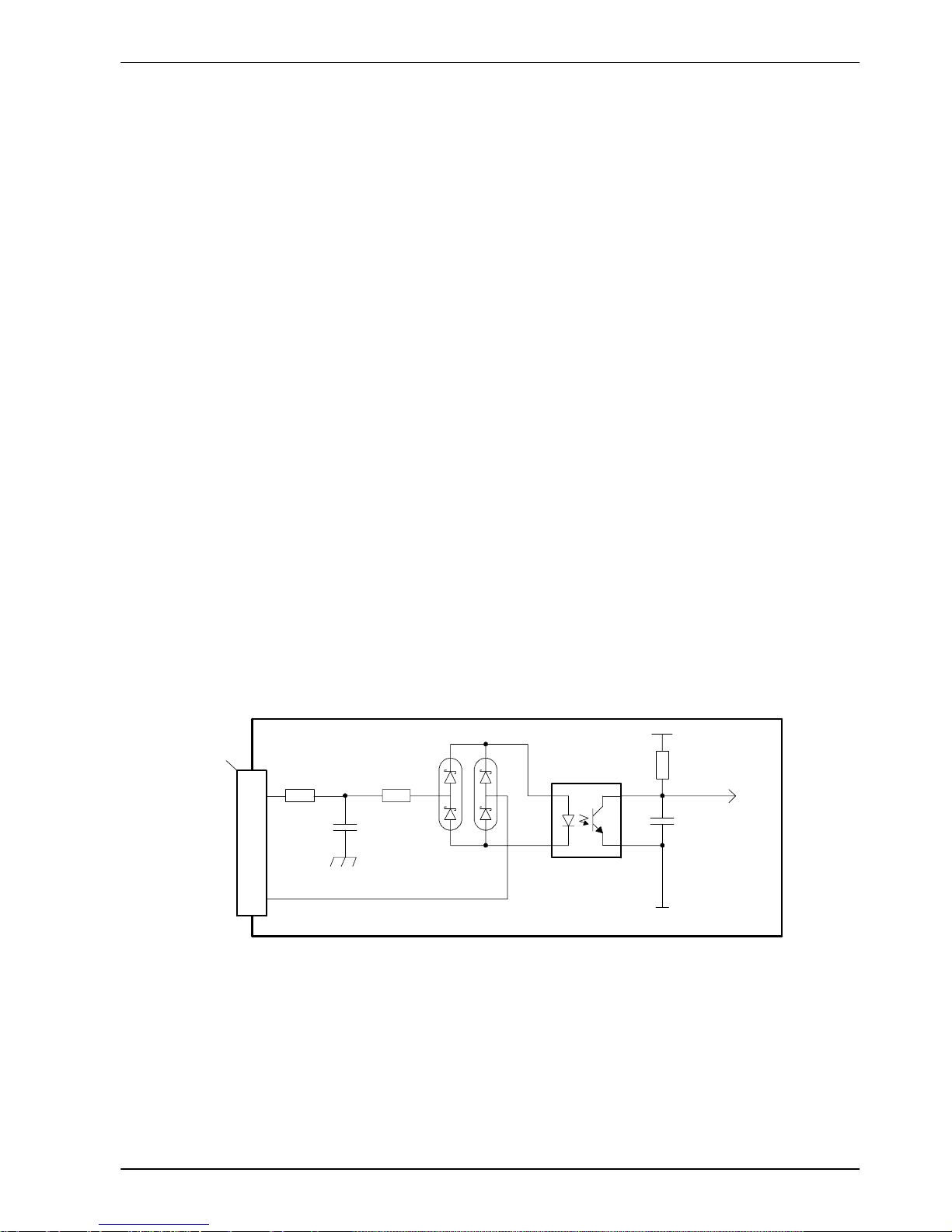
4.3.1.1 DIN0 - DIN3
Digital inputs DIN0 to DIN3 can be assigned as fast interrupts. These are used as high speed
position latches, allowing any combination of axes to be captured by the hardware. The latency
between input triggering and capture is 1 μs. Special Mint keywords (beginning with the letters
LATCH...) allow specific functions to be performed as a result of fast position inputs becoming
active. See the Mint help file for details.
DIN3
6k2
TLP115A
DGND
Mint
Vcc
NextMove e100
CREF0
100R
1
3
Shield 2
‘X10’
Figure 8 - Fast interrupt digital input - DIN3 shown
Digital inputs DIN0 to DIN3 use CREF0 as their common connection.
Note: The fast inputs are particularly sensitive to noise, so inputs must use shielded
twisted pair cable. Do not connect mechanical switches, relay contacts or other
sources liable to signal ‘bounce’ directly to the fast inputs. This could cause
unwanted multiple triggering.
Page 24
www.baldormotion.com
4-8 Input / Output MN1941
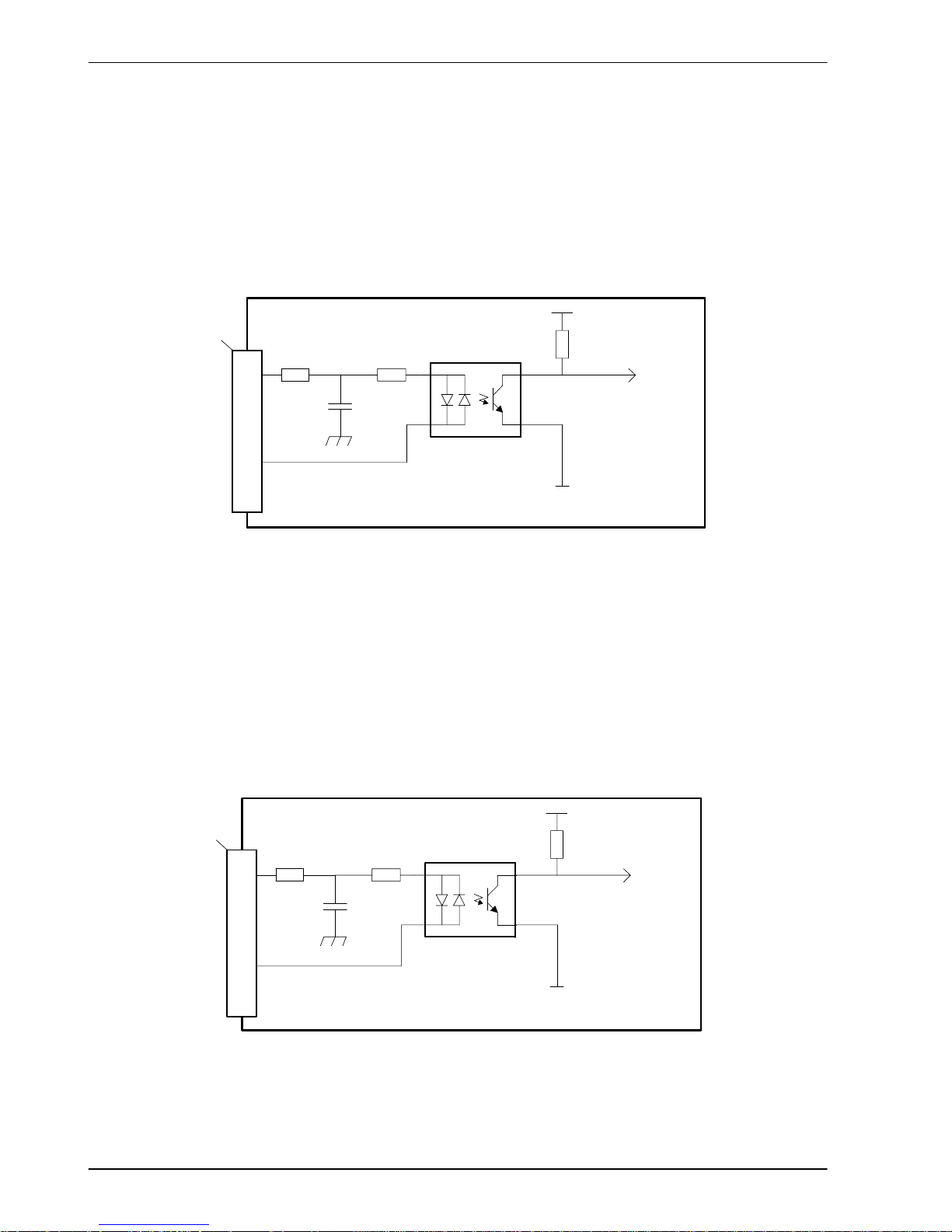
4.3.1.2 DIN4 - DIN11
Digital inputs DIN4 to DIN11 have a common specification:
H Opto-isolated digital inputs.
H Sampling frequency: 1 kHz.
Digital inputs DIN4 to DIN11 use CREF1 as their common connection.
DIN11
6k2
TLP281
DGND
Mint
INX(11)
Vcc
NextMove e100
CREF1
100R
1
9
Shield 10
‘X9’
Figure 9 - General purpose digital input - DIN11 shown
If an input is configured as edge triggered, the triggering pulse must have a duration of at least
1 ms (one software scan) to guarantee acceptance by Mint. The use of shielded cable for inputs
is recommended.
4.3.1.3 DIN12 - DIN19
Digital inputs DIN12 to DIN19 have the same electrical specification as DIN4-11, except that they
use CREF2 as their common connection.
DIN19
6k2
TLP281
DGND
Mint
INX(19)
Vcc
NextMove e100
CREF2
100R
1
9
Shield 10
‘X8’
Figure 10 - General purpose digital input - DIN19 shown
Page 25
www.baldormotion.com
Input / Output 4-9MN1941
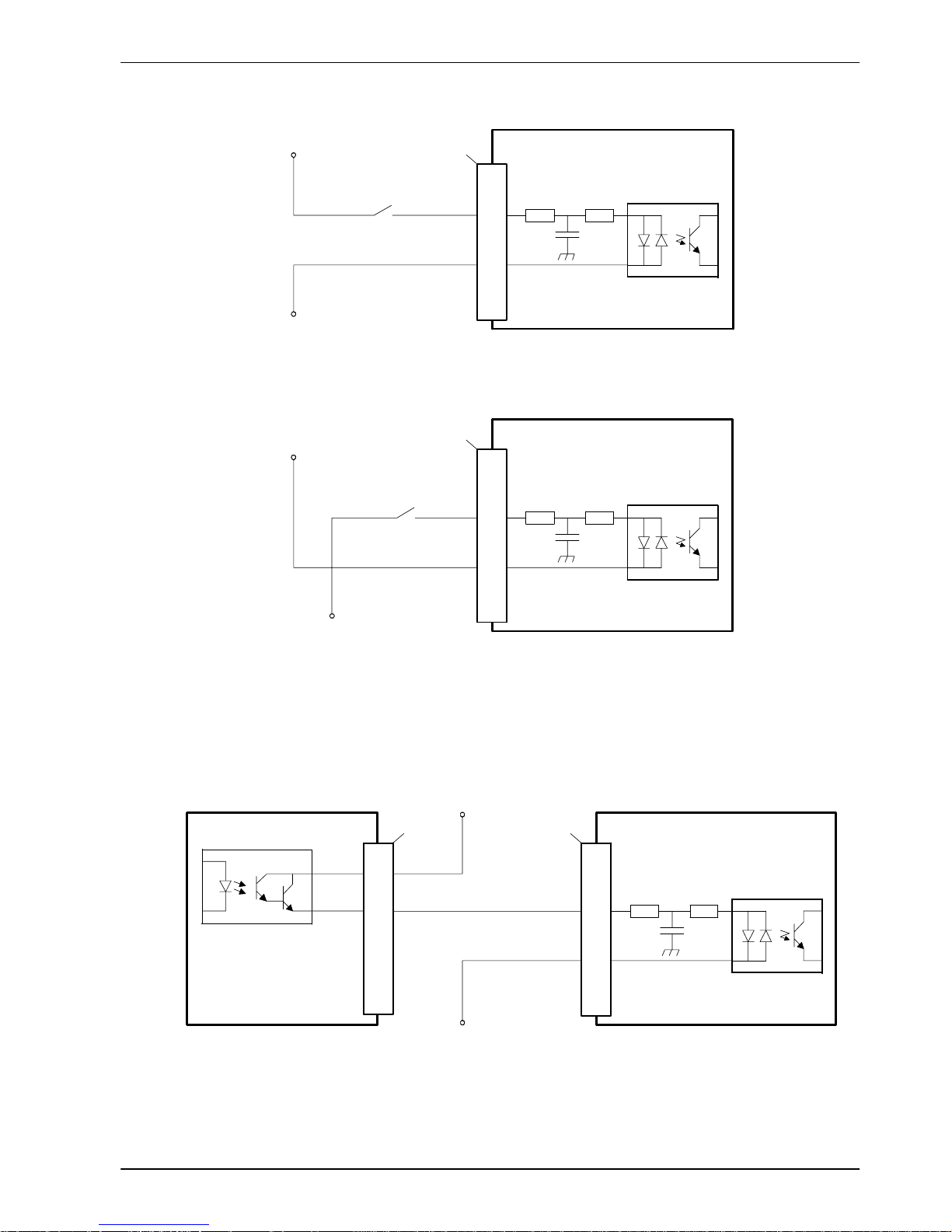
4.3.1.4 Typical digital input wiring
NextMove e100
8
9
DIN4
CREF1
TLP281
User
supply
GND
User
supply
24 V
‘X9’
6k2100R
Figure 11 - Digital input - typical ‘active high’ input connection using a switch
NextMove e100
8
9
DIN4
CREF1
TLP281
User
supply
GND
User
supply
24 V
‘X9’
6k2100R
Figure 12 - Digital input - typical ‘active low’ input connection using a switch
Note: The circuits shown in Figures 11 and 12 are not suitable for use with fast inputs DIN0
to DIN3. Using a mechanical switch, relay contacts or other source liable to signal
‘bounce’ could cause unwanted multiple triggering.
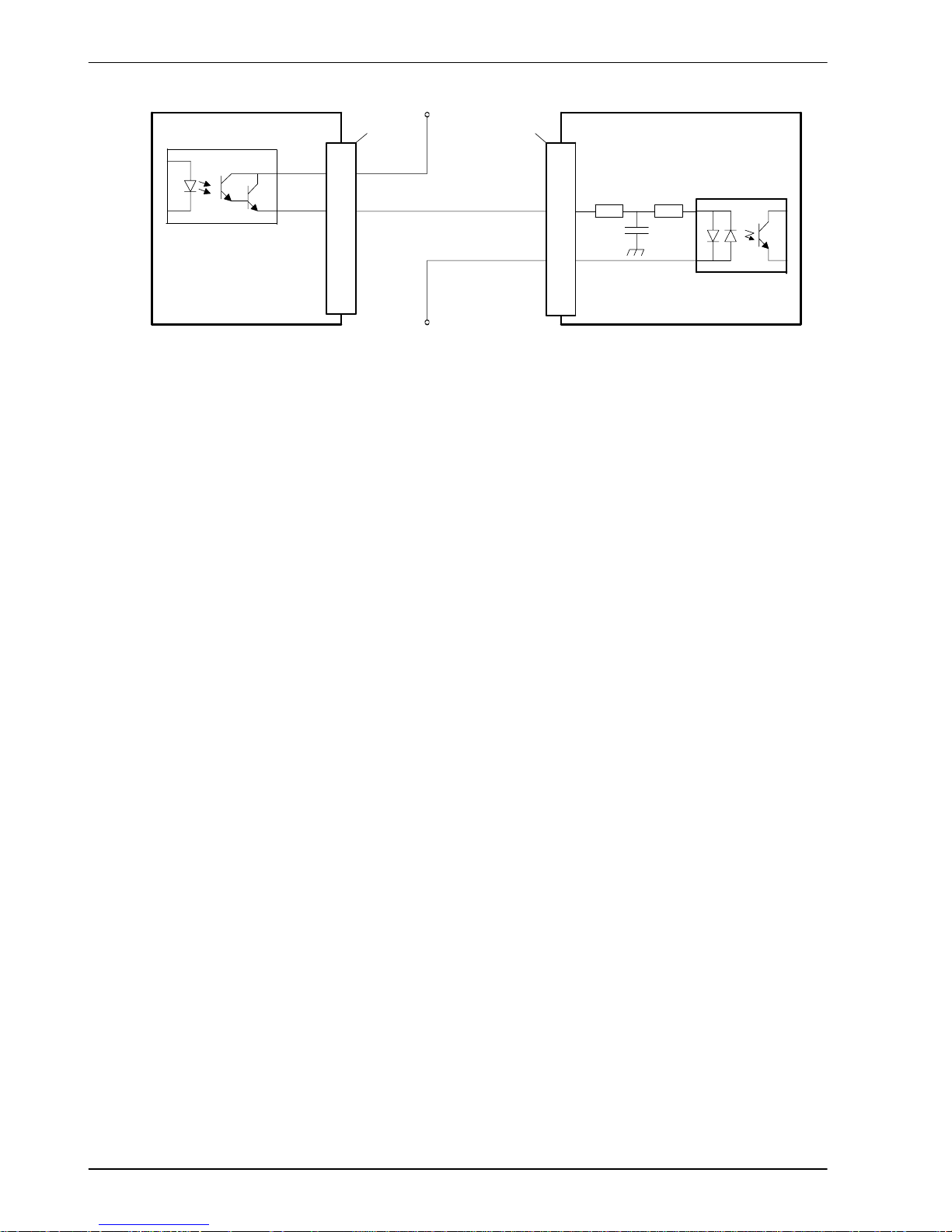
NextMove e100
Status+
Status-
8
9
MicroFlex e100 /
equipment output
DIN4
CREF1
TLP 127
TLP281
User
supply
GND
User
supply
24 V
11
1
‘X9’
‘X3’
6k2100R
Figure 13 - Digital input - typical connections from a Baldor MicroFlex e100
Page 26
www.baldormotion.com
4-10 Input / Output MN1941
NextMove e100
USR V+
DOUT0
8
9
FlexDriveII/ equipment output
NEC PS2562L-1
‘X1’
User
supply
GND
User
supply
24 V
6
18
DIN4
CREF1
‘X9’
TLP281
6k2100R
Figure 14 - Digital input - typical connections from a Baldor FlexDriveII,
Flex+Drive
II
or MintDrive
II
Page 27
www.baldormotion.com
Input / Output 4-11MN1941
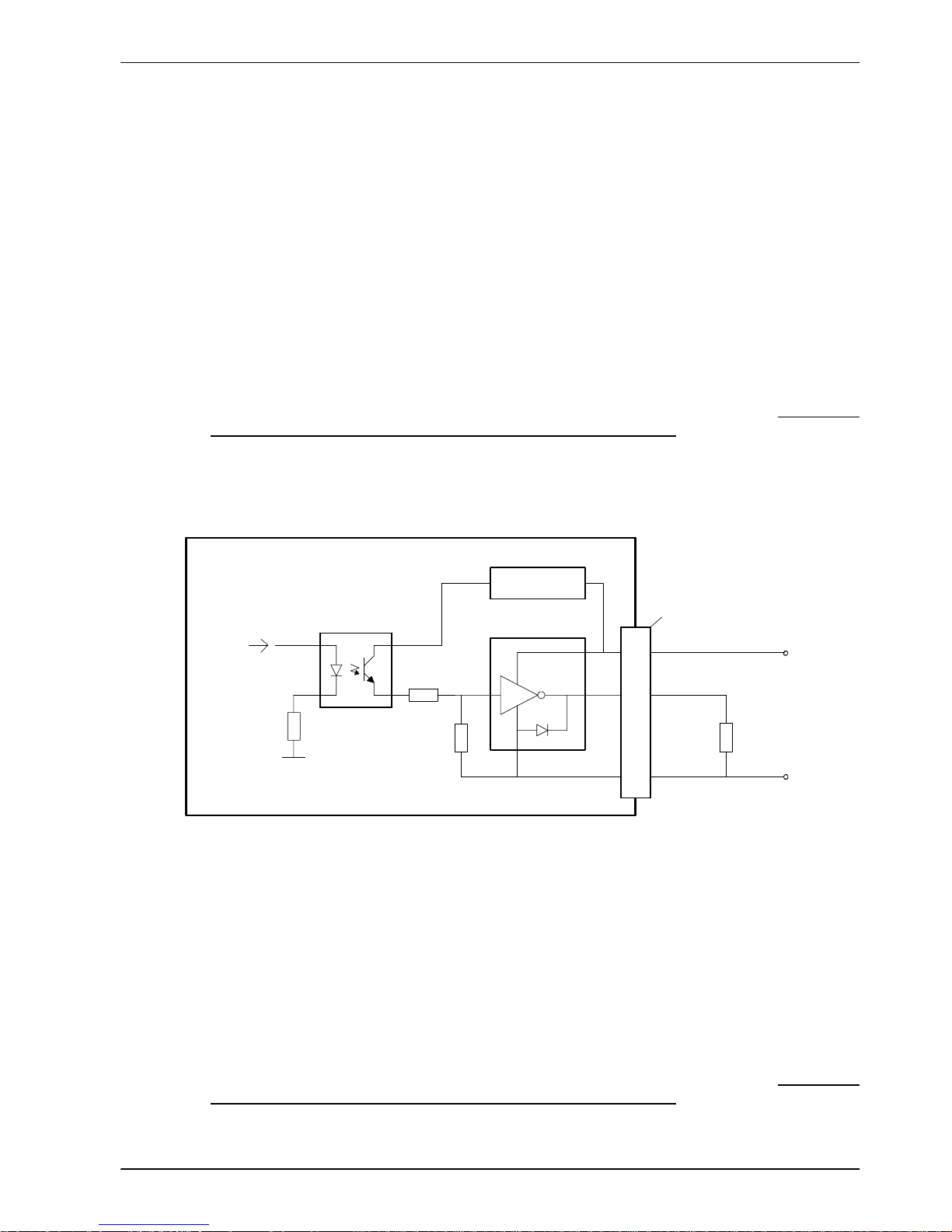
4.3.2 Digital outputs and relay
The digital outputs are available on connectors X4 and X11, as shown in section 4.1.1.
A digital output can be configured in Mint as a general purpose output, a drive enable output or
a global error output. Outputs can be controlled directly from Mint WorkBench, or by the Mint OUT
and OUTX keywords. Outputs can be shared between axes and can be configured using Mint
WorkBench (or the OUTPUTACTIVELEVEL keyword) to determine their active level.
4.3.2.1 DOUT0 - DOUT7
An external supply (typically 24 VDC) is used to power the UDN2982 output devices, as shown
in Figure 15. When an output is activated, current is sourced from the user supply through a
UDN2982 output driver.
H A total of 500 mA may be sourced by DOUT0 - DOUT7, providing an average 62.5 mA per
output when all outputs are on (100% duty cycle, 24 V supply). If the total current exceeds
1 A a self-resetting fuse will operate, which may take a few minutes to reset.
H An individual output can provide a maximum continuous current of 350 mA, but if
other
outputs are being used the total current must not exceed 500 mA
.
H The maximum allowable power dissipation for the UDN2982 driver is 1.5 W.
If an output is used to drive an inductive load such as a relay, a suitably rated diode must be fitted
across the relay coil, observing the correct polarity. The use of shielded cable is recommended.
TLP281
NextMove e100
Mint
OUTX(0)
DOUT0
USR GND
1
10
UDN2982
User
supply
24 V
User
supply
GND
Output
Load
USR V+
9
GND
Voltage
regulator
‘X11’
Figure 15 - Digital outputs (DOUT0-7) - DOUT0 shown
4.3.2.2 DOUT8 - DOUT11
DOUT8 - DOUT11 use the same type of output circuitry as DOUT0 - DOUT7, with their own
UDN2982 output driver. Because only four of the UDN2982’s eight outputs are being used, the
average current available on DOUT8 - DOUT11 is increased:
H A total of 500 mA may be sourced by DOUT8 - DOUT11, providing an average 125 mA per
output when all outputs are on (100% duty cycle, 24 V supply). If the total current exceeds
1 A a self-resetting fuse will operate, which may take a few minutes to reset.
H An individual output can provide a maximum continuous current of 350 mA, but if
other
outputs are being used the total current must not exceed 500 mA
.
H The maximum allowable power dissipation for the UDN2982 driver is 1.5 W.
Page 28
www.baldormotion.com
4-12 Input / Output MN1941
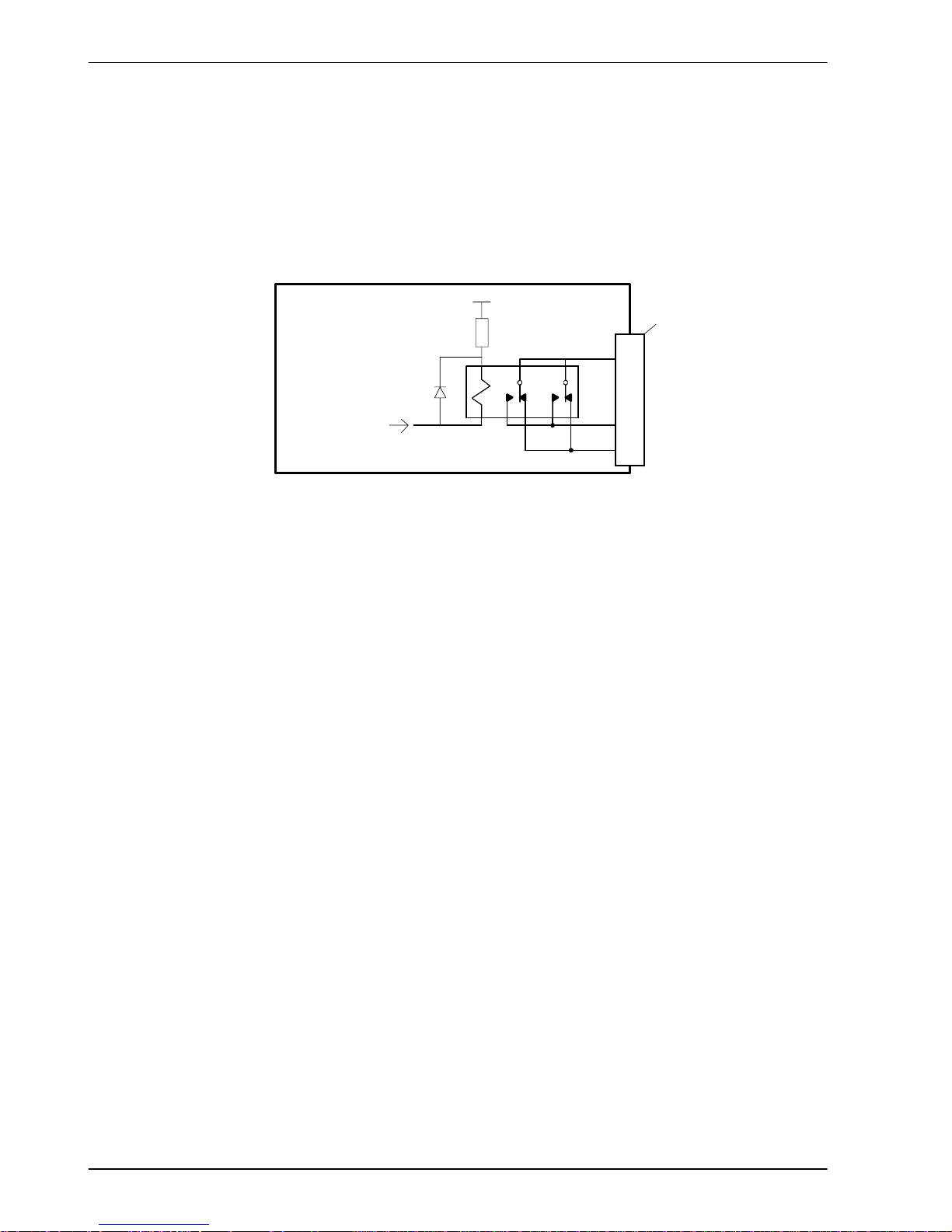
4.3.2.3 DOUT12 (relay) connections
The relay connections are available on connector X12, as shown in section 4.1.1. The relay
outputs are isolated from any internal circuits in the NextMove e100. In normal operation, while
there is no error, the relay is energized and REL COM is connected to REL NO. In the event of
an error or power loss, the relay is de-energized, and REL COM is connected to REL NC. For
control purposes the relay is considered to be another digital output (DOUT12), and can be
controlled directly using the Mint OUT or OUTX keywords. The relay can be configured as the
global error output by setting GLOBALERROROUTPUT to 12. See the Mint help file.
Relay
REL COM
REL NC
REL NO
7
9
‘X12’
8
Mint
GLOBALERROROUTPUT
or
DRIVEENABLEOUTPUT
+5 VNextMove e100
Figure 16 - Relay connections
Page 29
www.baldormotion.com
Input / Output 4-13MN1941
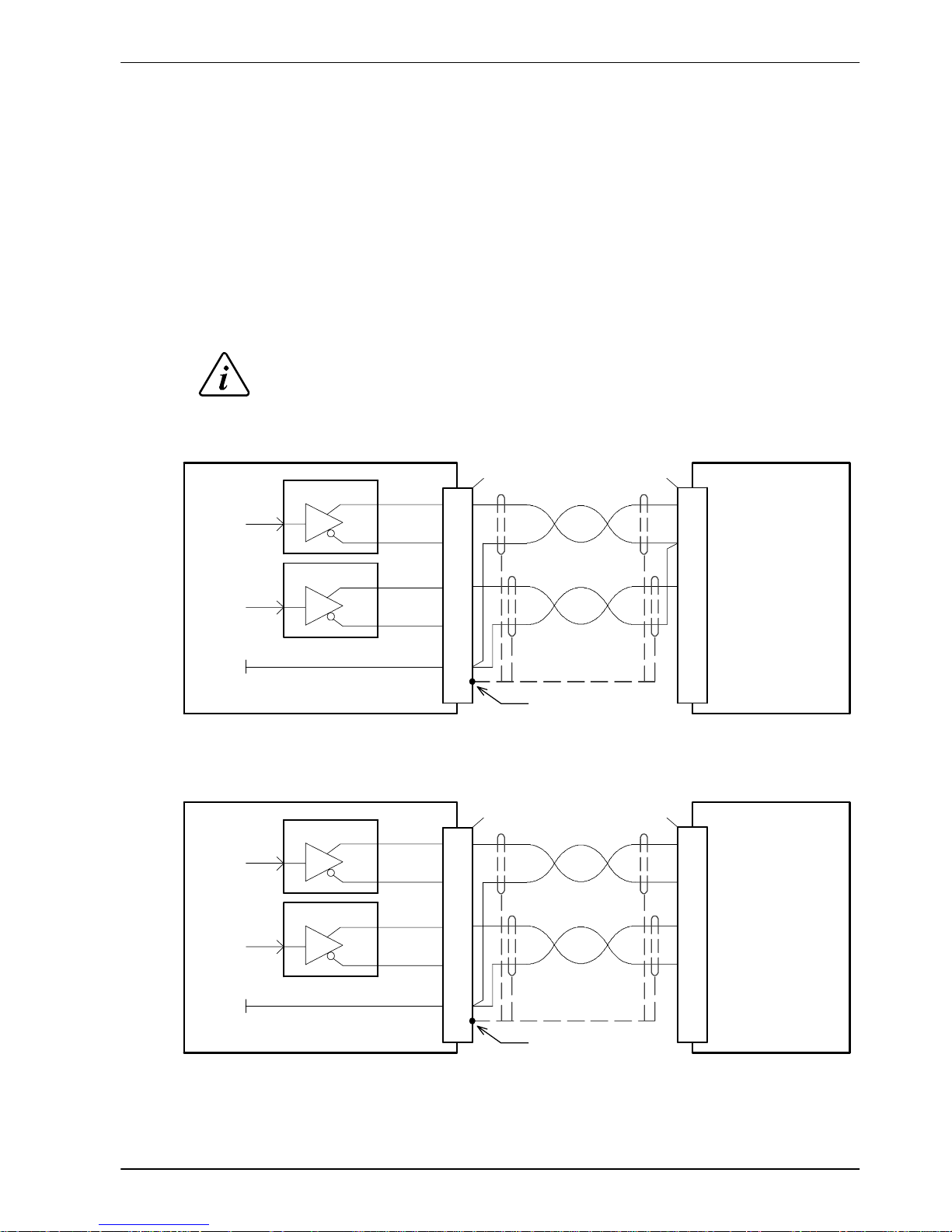
4.3.3 Stepper control outputs - models NXE100-16xxDx
The stepper control outputs are available on connectors X2 and X3, as shown in section 4.1.1.
There are four sets of stepper motor control outputs, operating in the range 60 Hz to 5 MHz. Each
of the step (pulse) and direction signals from the NextMove e100 is driven by DS26LS31 line
drivers, providing RS422 differential outputs. It is recommended to use separate shielded cables
for the step outputs. The shield should be connected at one end only.
The STEPPERDELAY keyword allows a 0 - 4.25 μs delay to be introduced between state
changes of the step and direction outputs. The FREQ keyword can be used to directly control the
output frequency, between 60 Hz and 5 MHz. Values less than 60 Hz will produce no output - see
the Mint help file.
The DS26LS31 drivers are static sensitive devices. Take appropriate ESD
precautions when handling the NextMove e100. When connecting the outputs to
single ended inputs as shown in Figures 17 and 18, do not connect the STEPx-or
DIRx- outputs to ground; leave them unconnected.
STEP0+
DGND
1
DS26LS31
STEP0-
3
NextMove e100
Step
Output
GND
MicroFlex / servo amplifier
DGND
Step
Connect shields at
one end only
6Shield
‘X3’
‘X2’
10
11
DIR0+
DS26LS31
DIR0-
5
Dir
Output
Twisted pairs
Dir
9
Figure 17 - Stepper output - typical connection to a Baldor MicroFlex
STEP0+
DGND
1
DS26LS31
STEP0-
3
NextMove e100
Step
Output
GND
Pulse
GND
Pulse+
Connect shields at
one end only
6Shield
‘X9’
‘X2’
1
6
DIR0+
DS26LS31
DIR0-
5
Dir
Output
Twisted pairs
Dir+
2
FlexDriveII/ servo amplifier
Dir
GND
7
Figure 18 - Stepper output - typical connection to a Baldor FlexDriveII,
Flex+Drive
II
or MintDrive
II
NOTICE
Page 30
www.baldormotion.com
4-14 Input / Output MN1941
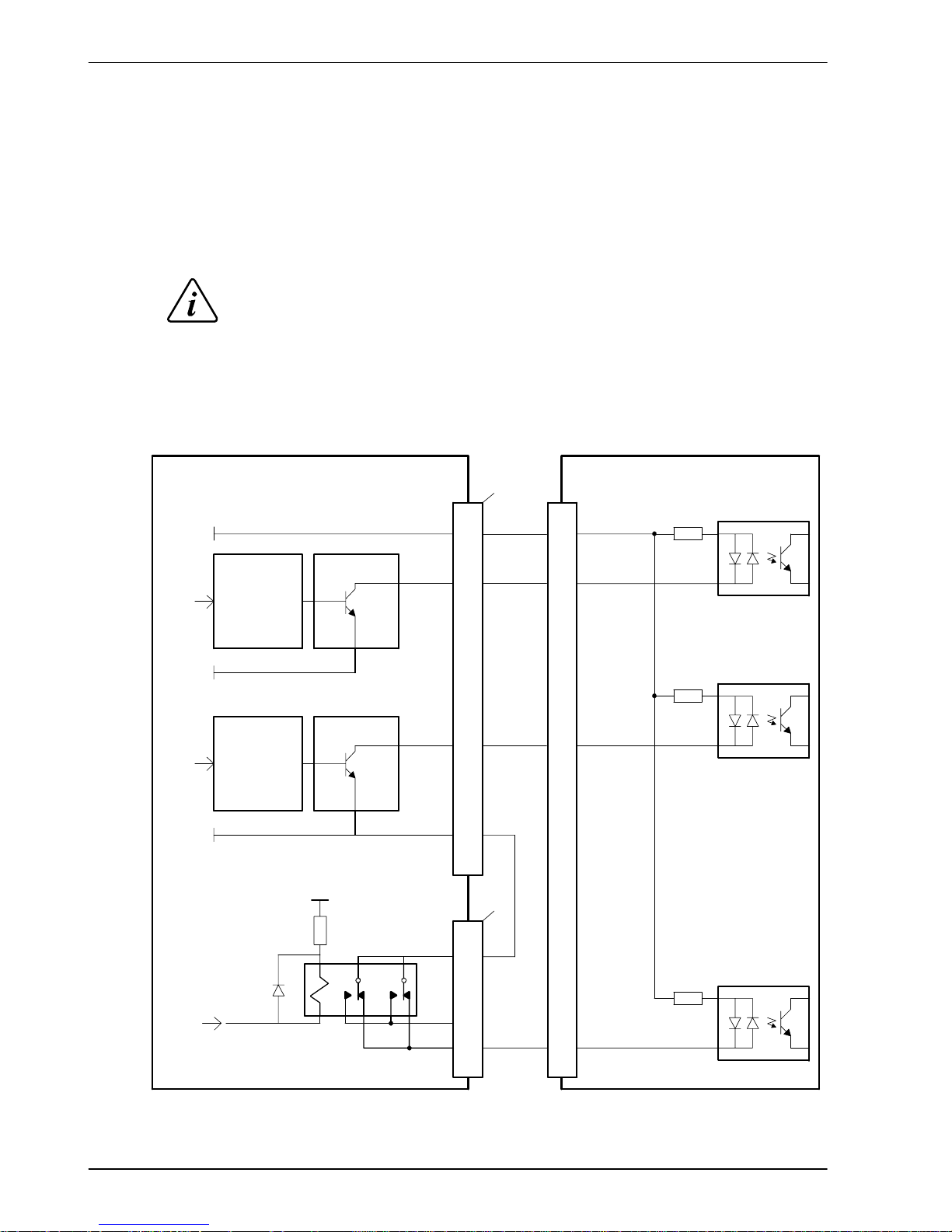
4.3.4 Stepper control outputs - models NXE100-16xxSx
The stepper control outputs are available on connectors X2 and X3, as shown in section 4.1.1.
There are four sets of stepper motor control outputs, operating in the range 60 Hz to 500 kHz.
Each of the step (pulse) and direction signals from the NextMove e100 is driven by a ULN2803
open collector Darlington output device. The STEPPERDELAY keyword allows a 0 - 4.25 μs delay
to be introduced between state changes of the step and direction outputs. The FREQ keyword
can be used to directly control the output frequency, between 60 Hz and 500 kHz. Values less
than 60 Hz will produce no output - see the Mint help file.
The ULN2003 drivers are static sensitive devices. Take appropriate ESD
precautions when handling the NextMove e100. A 5 V supply is provided on
connectors X2 and X3 for powering external circuits, as shown in Figure 19. The
same 5 V supply is also present on connectors X5, X6 and X7 for powering
encoders. Ensure that the total combined current demand of all 5 V outputs does not
exceed 600 mA. In situations where induced noise is affecting a step or direction
output, it may be necessary to connect a 5 kΩ or 10 kΩ pull-up resistor between the
output and the 5 V supply (pin 4).
NextMove e100
STEP0
ULN2803
Step
Output
74AHCT244
GND
3
Stepper drive opto-isolated inputs
Optocoupler
reference
Step clock
input
+5 V
4+5 V
DIR0
ULN2803
Direction
Output
74AHCT244
GND
5
CW/CCW
direction
input
REL NC
7
Enable input
‘X2’
‘X12’
+5 V
REL COM
1
DGND
8
Enable
Figure 19 - Connections to a typical stepper drive (e.g. Baldor DSM series)
NOTICE
Page 31

www.baldormotion.com
Input / Output 4-15MN1941
4.4 Other I/O
4.4.1 Encoder inputs 0-2
Location X5, X6, X7
Mating connectors: 9-pin male D-type
Pin Name Description
1 CHA+ Channel A signal
2 CHB+ Channel B signal
3 CHZ+ Index channel signal
4 Shield Shield connection
5 DGND Digital ground
6 CHA- Channel A signal complement
7 CHB- Channel B signal complement
8 CHZ- Index channel signal complement
9 +5V out Power supply to encoder
Three incremental encoders may be connected to NextMove e100, each with complementary A,
B and Z channel inputs. Each input channel uses a MAX3095 differential line receiver with pull up
resistors and terminators. Encoders must provide RS422 differential signals. The use of
individually shielded twisted pair cable is recommended. A 5 V supply is provided on connectors
X5, X6 and X7 for powering the encoders. On models NXE100-16xxSx, the same 5 V supply is
also present on connectors X2 and X3 for powering external circuits (see section 4.3.4). Ensure
that the total combined current demand of all 5 V outputs does not exceed 600 mA. If the total
current exceeds 1 A a self-resetting fuse will operate, which may take a few minutes to reset.
4.4.1.1 Encoder input frequency
The maximum encoder input frequency is affected by the length of the encoder cables.
The theoretical maximum frequency is 20 million quadrature counts per second. This is
equivalent to a maximum frequency for the A and B signals of 5 MHz. However, the effect of
cable length is shown in Table 1:
A and B signal
Maximum cable length
AandBsignal
frequency
meters feet
1.3 MHz 2 6.56
500 kHz 10 32.8
250 kHz 20 65.6
100 kHz 50 164.0
50 kHz 100 328.1
20 kHz 300 984.2
10 kHz 700 2296.6
7kHz 1000 3280.8
Table 1 - Effect of cable length on maximum encoder frequency
The maximum recommended cable length is 30.5 m (100 ft).
5 1
9 6
Enc 0 Enc 1 Enc 3
Page 32

www.baldormotion.com
4-16 Input / Output MN1941
CHA-
CHA+
to CPU
Vcc
NextMove e100
MAX3096
120R
10k
1
6
Shield4
Connect overall shield to
connector backshells /
shield connections.
Twisted pair
MicroFlex
FlexDrive
II
Flex+Drive
II
MintDrive
II
encoder output
5 DGND
Connect internal shield to DGND.
Do not connect other end.
CHA-
CHA+ 1
6
‘X7’
CHB-
CHB+
MAX3096
120R
2
7
Twisted pair
CHB-
CHB+ 2
7
CHZ-
CHZ+
MAX3096
120R
3
8
Twisted pair
CHZ-
CHZ+ 3
8
to CPU
to CPU
Vcc
10k
Vcc
10k
‘X5’
DGND
5
Figure 20 - Encoder input 0 - typical connection from a servo amplifier
(e.g. Baldor MicroFlex, FlexDrive
II
, Flex+DriveIIor MintDriveII)
Page 33

www.baldormotion.com
Input / Output 4-17MN1941
4.4.2 Node ID selector switches
The NextMove e100 has two selector switches which determine the unit’s
node ID on EPL networks. Each switch has 16 positions, allowing selection
of the hexadecimal values 0 - F. In combination, the two switches allow
values of 0 - 255 (hexadecimal FF) to be selected. The switch labeled ‘HI’
sets the high nibble (half byte), and the switch labeled ‘LO’ sets the low
nibble. The following table lists all node IDs from 0 to 255 with the equivalent
HI and LO switch settings:
Node ID HI LO Node ID HI LO Node ID HI LO Node ID HI LO
0 0 0 64 4 0 128 8 0 192 C 0
1 0 1 65 4 1 129 8 1 193 C 1
2 0 2 66 4 2 130 8 2 194 C 2
3 0 3 67 4 3 131 8 3 195 C 3
4 0 4 68 4 4 132 8 4 196 C 4
5 0 5 69 4 5 133 8 5 197 C 5
6 0 6 70 4 6 134 8 6 198 C 6
7 0 7 71 4 7 135 8 7 199 C 7
8 0 8 72 4 8 136 8 8 200 C 8
9 0 9 73 4 9 137 8 9 201 C 9
10 0 A 74 4 A 138 8 A 202 C A
11 0 B 75 4 B 139 8 B 203 C B
12 0 C 76 4 C 140 8 C 204 C C
13 0 D 77 4 D 141 8 D 205 C D
14 0 E 78 4 E 142 8 E 206 C E
15 0 F 79 4 F 143 8 F 207 C F
16 1 0 80 5 0 144 9 0 208 D 0
17 1 1 81 5 1 145 9 1 209 D 1
18 1 2 82 5 2 146 9 2 210 D 2
19 1 3 83 5 3 147 9 3 211 D 3
20 1 4 84 5 4 148 9 4 212 D 4
21 1 5 85 5 5 149 9 5 213 D 5
22 1 6 86 5 6 150 9 6 214 D 6
23 1 7 87 5 7 151 9 7 215 D 7
24 1 8 88 5 8 152 9 8 216 D 8
25 1 9 89 5 9 153 9 9 217 D 9
26 1 A 90 5 A 154 9 A 218 D A
27 1 B 91 5 B 155 9 B 219 D B
28 1 C 92 5 C 156 9 C 220 D C
29 1 D 93 5 D 157 9 D 221 D D
30 1 E 94 5 E 158 9 E 222 D E
31 1 F 95 5 F 159 9 F 223 D F
Page 34

www.baldormotion.com
4-18 Input / Output MN1941
HI LOHI Node IDLOHI Node IDLOHI Node IDLONode ID
32 2 0 96 6 0 160 A 0 224 E 0
33 2 1 97 6 1 161 A 1 225 E 1
34 2 2 98 6 2 162 A 2 226 E 2
35 2 3 99 6 3 163 A 3 227 E 3
36 2 4 100 6 4 164 A 4 228 E 4
37 2 5 101 6 5 165 A 5 229 E 5
38 2 6 102 6 6 166 A 6 230 E 6
39 2 7 103 6 7 167 A 7 231 E 7
40 2 8 104 6 8 168 A 8 232 E 8
41 2 9 105 6 9 169 A 9 233 E 9
42 2 A 106 6 A 170 A A 234 E A
43 2 B 107 6 B 171 A B 235 E B
44 2 C 108 6 C 172 A C 236 E C
45 2 D 109 6 D 173 A D 237 E D
46 2 E 110 6 E 174 A E 238 E E
47 2 F 111 6 F 175 A F 239 E F
48 3 0 112 7 0 176 B 0 240 F 0
49 3 1 113 7 1 177 B 1 241 F 1
50 3 2 114 7 2 178 B 2 242 F 2
51 3 3 115 7 3 179 B 3 243 F 3
52 3 4 116 7 4 180 B 4 244 F 4
53 3 5 117 7 5 181 B 5 245 F 5
54 3 6 118 7 6 182 B 6 246 F 6
55 3 7 119 7 7 183 B 7 247 F 7
56 3 8 120 7 8 184 B 8 248 F 8
57 3 9 121 7 9 185 B 9 249 F 9
58 3 A 122 7 A 186 B A 250 F A
59 3 B 123 7 B 187 B B 251 F B
60 3 C 124 7 C 188 B C 252 F C
61 3 D 125 7 D 189 B D 253 F D
62 3 E 126 7 E 190 B E 254 F E
63 3 F 127 7 F 191 B F 255 F F
Figure 21 - Decimal node IDs and equivalent HI / LO hexadecimal switch settings
Note: If the node ID selector switches are set to FF, the node’s firmware will not run on
power up. However, Mint WorkBench will still be able to detect the NextMove e100
and download new firmware.
Page 35

www.baldormotion.com
Input / Output 4-19MN1941
In many networking environments, the node ID may also be referred to as the address. On EPL
networks, limitations apply to the node IDs that may be selected:
H Node ID 0 (00) is reserved for special purposes and cannot be used.
H Node IDs 1 - 239 (01 - EF) cause the node to become a ‘controlled node’, a node that will
accept commands from the manager node.
H Node ID 240 (F0) causes the node to become the ‘manager node’, a node that will control the
timing and issue commands to controlled nodes. There must only be one manager node on
the network.
H Node IDs 241 - 255 (F1 - FF) are reserved for special purposes and cannot be used.
For all other communication channels such as CANopen, USB and serial, the node ID is set in
software. Each channel can have a different node ID, selected using the Mint WorkBench
Connectivity Wizard or the Mint BUSNODE keyword. See the Mint help file for details.
Page 36

www.baldormotion.com
4-20 Input / Output MN1941
4.5 USB and serial communication
4.5.1 USB port
Location USB
Mating connector: USB Type B (downstream) plug
Pin Name Description
1 VBUS USB +5 V
2 D- Data-
3 D+ Data+
4 GND Ground
The USB connector is used to connect the NextMove e100 to a PC running Mint WorkBench.
The NextMove e100 is a self-powered, USB 1.1 (12 Mbps) compatible device. If it is connected
to a slower USB1.0 host PC or hub, communication speed will be limited to the USB1.0
specification (1.5 Mbps). If it is connected to a faster USB2.0 (480 Mbps) host PC or hub,
communication speed will remain at the USB1.1 specification of the NextMove e100.
Ideally, the NextMove e100 should be connected directly to a USB port on the host PC. If it is
connected to a hub shared by other USB devices, communication could be affected by the
activity of the other devices. A 2 m (6.5 ft) standard USB cable is supplied. The maximum
recommended cable length is 5 m (16.4 ft).
142
3
Page 37

www.baldormotion.com
Input / Output 4-21MN1941
4.5.2 Serial port
Location Serial
Mating connector: 9-pin female D-type
Pin RS232 name RS485 / RS422 name
1 Shield (NC)
2 RXD RXB (input)
3 TXD TXB (output)
4 (NC) (NC)
5 DGND 0 V DGND
6 (NC) (NC)
7 RTS TXA (output)
8 CTS RXA (input)
9 DGND (NC)
NextMove e100 provides a selectable RS232 or
RS485/422 serial port for programming, connection to an
HMI operator panel, or for communication with other
devices such as PLCs or other Baldor servo drives. The
port is fully ESD protected to IEC 1000-4-2 (15 kV). When
the NextMove e100 is connected to Mint WorkBench, the
Connectivity Wizard can be used to configure the serial
port. The configuration can also be changed using the Mint
keyword SERIALBAUD (see the Mint help file for details).
The value is restored at power up. The port is capable of
operation at up to 115.2 Kbaud.
4.5.3 Using RS232
The NextMove e100 has a full-duplex RS232 serial port with the following preset configuration:
H 57.6 Kbaud
H 1startbit
H 8 data bits
H 1stopbit
H No parity
H Hardware handshaking lines RTS and CTS must be connected.
The RS232 port is configured as a DCE (Data Communications Equipment) unit so it is possible
to operate the controller with any DCE or DTE (Data Terminal Equipment). Full duplex
transmission with hardware handshaking is supported. Only the TXD, RXD and 0V GND
connections are required for communication, but since many devices will check the RTS and
CTS lines, these must also be connected. Pins 4 and 6 are linked on the NextMove e100. The
maximum recommended cable length is 3 m (10 ft) at 57.6 Kbaud (the factory preset rate). When
using lower baud rates, longer cable lengths may be used up to maximum of 15 m (49 ft) at 9600
baud.
1 5
6 9
RS232RS485/422
Page 38

www.baldormotion.com
4-22 Input / Output MN1941
NextMove e100
(DTE)
9-pin
Computer
COM Port
(DTE)
Serial
RXD 2
TXD 3
GND 5
2RXD
3TXD
5GND
RTS 7
CTS 8
7RTS
8CTS
COM
Connect overall shield
to connector backshell.
Figure 22 - RS232 serial port connections
4.5.4 Multidrop using RS485 / RS422
Multidrop systems allow one device to act as a ‘network master’, controlling and interacting with
the other (slave) devices on the network. The network master can be a controller such as
NextMove e100, a host application such as Mint WorkBench (or other custom application), or a
programmable logic controller (PLC). RS422 may be used for multi-drop applications as shown
in Figure 23. Four-wire RS485 may be used for single point-to-point applications involving only
one Baldor controller. If firmware is updated over RS485/RS422, it can only be downloaded to
the controller that was chosen in the Select Controller dialog in Mint WorkBench.
Master and final slave are shown
with terminating resistors, TR,
typical value 120 Ω.
Network slave
T
R
RXB
DGND
RXA
TXA
TXB RXB
DGND
RXA
TXA
TXB
RXB
DGND
RXA
TXA
TXB
Twisted pairs
T
R
Connect overall shield
to connector backshell.
Network slave
Network
master
Figure 23 - 4-wire RS422 multi-drop connections
Each transmit/receive (TX/RX) network requires a termination resistor at the final RX connection,
but intermediate devices must not be fitted with termination resistors. An exception is where
repeaters are being used which may correctly contain termination resistors. Termination
resistors are used to match the impedance of the load to the impedance of the transmission line
Page 39

www.baldormotion.com
Input / Output 4-23MN1941
(cable) being used. Unmatched impedance causes the transmitted signal to not be fully
absorbed by the load. This causes a portion of the signal to be reflected back into the
transmission line as noise. If the source impedance, transmission line impedance, and load
impedance are all equal, the reflections (noise) are eliminated. Termination resistors increase the
load current and sometimes change the bias requirements and increase the complexity of the
system.
4.5.5 Connecting serial Baldor HMI Operator Panels
Serial Baldor HMI Operator Panels use a 15-pin male D-type connector (marked PLC PORT),
but the NextMove e100 Serial connector uses a 9-pin male D-type connector. The
NextMove e100 may be connected as shown in Figure 24:
7RTS
8CTS
3TXD
2RXD
5GND
1
RXD 2
TXD 3
GND 5
Baldor HMI
PLC PORT
NextMove e100
Serial Port
Twisted pair
Figure 24 - RS232 cable wiring
Alternatively, the Baldor HMI panel may be connected using RS485/422, as shown in Figure 25:
8RXA
2RXB
7TXA
3TXB
5GND
1
RXA 15
RXB 7
GND 5
Baldor HMI
PLC PORT
TXA 14
TXB 6
Twisted pair
NextMove e100
Serial Port
Figure 25 - RS485/422 cable wiring
Page 40

www.baldormotion.com
4-24 Input / Output MN1941
4.6 Ethernet interface
The Ethernet interface provides TCP/IP and ETHERNET Powerlink networking capabilities.
4.6.1 TCP/IP
Transmission Control Protocol / Internet Protocol (TCP/IP) is a common set of protocols used to
transfer information between devices over a network, including the internet. TCP enables two
devices to establish a connection, and guarantees the delivery of packets (datagrams) of
information in the correct order. IP specifies the format of the individual packets (which includes
the destination address of the receiving device) but has no influence on whether the packet is
delivered correctly.
TCP/IP allows the NextMove e100 to support standard Ethernet communication with a host PC
running Mint WorkBench. The connection uses Baldor’s high level ICM (Immediate Command
Mode) protocol to allow Mint commands, Mint programs and even firmware to be sent to the
controller over the Ethernet network.
When operating in standard Ethernet mode, TCP/IP cannot be used to communicate with a
controller on a daisy-chained network. This is due to cumulative timing errors caused by each
controller.s internal hub. It is necessary to connect the host PC to the controller either directly or
via a switch or hub, as shown in Figure 26. A switch is preferable to a hub as it will provide faster
performance when there is a large amount of data being transmitted.
Host PC
Ethernet switch
MicroFlex e100 drivesNextMove e100
Figure 26 - Connecting to controllers using TCP/IP in standard Ethernet mode
When operating in EPL mode, in conjunction with an EPL compatible router, the host PC can use
TCP/IP to communicate with controllers on a daisy-chained network. In this situation, the router
will use TCP/IP only within EPL’s asynchronous time slots. See the Mint help file for further
details.
Host PC
ETHERNET Powerlink
compatible router
NextMove e100 MicroFlex e100 drives
Figure 27 - Connecting to daisy-chained controllers using TCP/IP and EPL mode
Page 41

www.baldormotion.com
Input / Output 4-25MN1941
4.6.2 ETHERNET Powerlink
NextMove e100 supports the deterministic ETHERNET Powerlink (EPL) protocol. This protocol
provides very precise and predictable ‘real-time’ communication over a 100 Mbit/s (100Base-T)
Fast Ethernet (IEEE 802.3u) connection. This makes it suitable for the transmission of control
and feedback signals between the NextMove e100 and other EPL enabled controllers such as
MicroFlex e100. The EPL protocol implemented in Mint is based on the CANopen DS402 Device
Profile for Drives and Motion Control.
NextMove e100 incorporates a built-in repeating hub, providing two ports for connection to other
equipment. This allows nodes to be connected as a ‘daisy-chain’ network of up to 10 nodes,
avoiding the need for additional hubs. If the network comprises more than 10 nodes, an external
hub must be used. The structure of the physical network is informal so does not need to reflect
the logical relationship between nodes. Ethernet switches must not be used in EPL networks as
their timing cannot be guaranteed.
NextMove e100
Manager Node
‘Daisy chained’ network
MicroFlex e100
Drive
MicroFlex e100
Drive
MicroFlex e100
Drive
MicroFlex e100
Drive
Figure 28 - Simple daisy-chained EPL network
NextMove e100
Manager Node
Machine 1
MicroFlex e100 Drives 1-9
External hub
Machine 1
MicroFlex e100 Drives 10-16
NextMove e100
Controlled Node
123 456789
11 12 13 14 15 16
17 18 19 20
Machine 2
MicroFlex e100 Drives 17-20
10
Figure 29 - Example multi-branch EPL network
Page 42

www.baldormotion.com
4-26 Input / Output MN1941
4.6.3 Ethernet connectors
Ethernet connections are made using the identical RJ45 Ethernet receptacles.
Location
E1 & E2
Pin Name Description
1 TX+ Transmit+
2 TX- Transmit-
3 RX+ Receive+
4 - (NC)
5 - (NC)
6 RX- Receive-
7 - (NC)
8 - (NC)
To connect the NextMove e100 to other EPL devices use CAT5e Ethernet cables - either S/UTP
(unshielded screened/foiled twisted pairs) or preferably S/FTP (fully shielded screened/foiled
twisted pairs). To ensure CE compliance, Ethernet cables longer than 3 m should be S/FTP
cables bonded to the metal backplane at both endes using conductive clamps (see section
B.1.5). Cables may be up to 100 m (328 ft) long. Two varieties of CAT5e cable are available;
‘straight’ or ‘crossed’. Straight cables have the TX pins of the connector at one end of the cable
wired to the TX pins of the RJ45 connector at the other end of the cable. Crossover cables have
the TX pins of the connector at one end of the cable wired to the RX pins of the RJ45 connector
at the other end of the cable.
Provided the network consists of only Baldor EPL controllers and drives (and any hub), straight
or crossed cables may be used. This is because many Ethernet devices, including hubs and all
Baldor EPL products, incorporate Auto-MDIX switching technology which automatically
compensates for the wiring of the straight cable. However, if other manufacturer’s EPL nodes are
included in the EPL network, crossover cables should be used as recommended by the
ETHERNET Powerlink Standardization Group (EPSG).
The NextMove e100 Ethernet interface is galvanically isolated from the rest of the
NextMove e100 circuitry by magnetic isolation modules incorporated in each of the Ethernet
connectors. This provides protection up to 1.5 kV. The connector/cable screen is connected
directly to the chassis earth of the NextMove e100. For additional noise immunity, especially
where Ethernet cables are frequently unplugged, it is recommended to clamp the outer shields
of Ethernet cables to an earth point. Termination components are incorporated in each of the
Ethernet connectors, so no further termination is required.
The EPL network supports the 100Base-TX (100 Mbit/s) system only, so attempting to connect
slower 10Base-T (10 Mbit/s) nodes will cause a network error.
18
Page 43

www.baldormotion.com
Input / Output 4-27MN1941
4.7 CAN interface
The CAN bus is a serial based network originally developed for automotive applications, but now
used for a wide range of industrial applications. It offers low-cost serial communications with
very high reliability in an industrial environment; the probability of an undetected error is
4.7x10
-11
. It is optimized for the transmission of small data packets and therefore offers fast
update of I/O devices (peripheral devices) connected to the bus.
The CAN protocol only defines the physical attributes of the network, i.e. the electrical,
mechanical, functional and procedural parameters of the physical connection between devices.
The higher level network functionality on NextMove e100 is defined by the CANopen protocol,
one of the most used standards for machine control.
4.7.1 CAN connector
Location CAN
Mating connector: 9-pin female D-type
Pin Name Description
1 - (NC)
2 CAN- CAN channel negative
3 CAN GND Ground/earth reference for CAN signals
4 - (NC)
5 Shield Shield connection
6 CAN GND Ground/earth reference for CAN signals
7 CAN+ CAN channel positive
8 - (NC)
9 CAN V+ CAN power V+ (12-24 V)
4.7.2 CAN wiring
A very low error bit rate over CAN can only be achieved with a suitable wiring scheme, so the
following points should be observed:
H The two-wire data bus line may be routed parallel, twisted and/or shielded, depending on
EMC requirements. Baldor recommend a twisted pair cable with the shield/screen
connected to the connector backshell, in order to reduce RF emissions and provide immunity
to conducted interference.
H The bus must be terminated at both ends only (not at intermediate points) with resistors of a
nominal value of 120 Ω. This is to reduce reflections of the electrical signals on the bus,
which helps a node to interpret the bus voltage levels correctly. If the NextMove e100 is at
the end of the network then ensure that a 120 Ω terminating resistor is fitted (normally inside
the D-type connector).
1 5
6 9
Page 44

www.baldormotion.com
4-28 Input / Output MN1941
H All cables and connectors should have a nominal impedance of 120 Ω. Cables should have
a length related resistance of 70 mΩ/m and a nominal line delay of 5 ns/m.
H The maximum bus length depends on the bit-timing
configuration (baud rate). The table opposite shows
the approximate maximum bus length (worst-case),
assuming 5 ns/m propagation delay and a total
effective device internal in-out delay of 210 ns at
1 Mbit/s, 300 ns at 500 - 250 Kbit/s, 450 ns at
125 Kbit/s and 1.5 ms at 50 - 10 Kbit/s.
(1)
For bus lengths greater than about 1000 m,
bridge or repeater devices may be needed.
H The compromise between bus length and CAN baud
rate must be determined for each application. The
CAN baud rate can be set using the BUSBAUD keyword. It is essential that all nodes on the
network are configured to run at the same baud rate.
H The wiring topology of a CAN network should be as close as possible to a single line/bus
structure. However, stub lines are allowed provided they are kept to a minimum (<0.3 m at
1 Mbit/s).
H The 0 V connection of all of the nodes on the network must be tied together through the CAN
cabling. This ensures that the CAN signal levels transmitted by NextMove e100 or CAN
peripheral devices are within the common mode range of the receiver circuitry of other nodes
on the network.
4.7.2.1 Opto-isolation
On the NextMove e100, the CAN channel is opto-isolated. A voltage in the range 12-24 V must
be applied between pin 9 (+24 V) and pin 3 or 6 (0 V) of the CAN connector. From this supply,
an internal voltage regulator provides the 5 V at 100 mA required for the isolated CAN circuit.
A connector such as the Phoenix Contact SUBCON-PLUS F3 (Phoenix part 2761871) provides
a 9-pin D-type female connector with easily accessible terminal block connections. CAN cables
supplied by Baldor are ‘category 5’ and have a maximum current rating of 1 A, so the maximum
number of NextMove e100 units that may be used on one network is limited to ten.
4.7.3 CANopen
Baldor have implemented a CANopen protocol in Mint (based on the ‘Communication Profile’ CiA
DS-301) which supports both direct access to device parameters and time-critical process data
communication. The NextMove e100 complies with CANopen slave device profile DS402, and
can be a DS401 or DS403 master device. It is able to support and communicate with a variety of
devices including:
H Any third party digital and analog I/O device that is compliant with the ‘Device Profile for
Generic I/O Modules’ (CiA DS-401).
H Baldor HMI (Human Machine Interface) operator panels, which are based on the ‘Device
Profile for Human Machine Interfaces’ (DS403).
H Other Baldor controllers with CANopen support for peer-to-peer access using extensions to
the CiA specifications (DS301 and DS302).
The functionality and characteristics of all Baldor CANopen devices are defined in individual
standardized (ASCII format) Electronic Data Sheets (EDS) which can be found on the Baldor
Motion Toolkit CD supplied with your product, or downloaded from
www.baldormotion.com/supportme
.
CAN Maximum
Baud Rate Bus Length
1 Mbit/s 25 m
500 Kbit/s 100 m
250 Kbit/s 250 m
125 Kbit/s 500 m
100 Kbit/s 600 m
50 Kbit/s 1000 m
20 Kbit/s 2500 m
(1)
10 Kbit/s 5000 m
(1)
Page 45

www.baldormotion.com
Input / Output 4-29MN1941
Figure 30 shows a typical CANopen network with two NextMove e100 units and a Baldor HMI
operator panel:
7
2
6
9
NextMove e100
D-type
7
2
BaldorHMI
Operator Panel
Twisted pair
Twi ste d pa irs
T
R
T
R
End
node
7
2
6
9
7
2
6
9
NextMove e100
D-type
6
5
CANopen
D-type
55
2
1
‘X1’
24 V
0V
Phoenix
SUBCON-PLUS F3
Figure 30 - Typical CANopen network connections
Note: The NextMove e100 CAN channel is opto-isolated, so a voltage in the range
12-24 V must be applied between pin 9 and pin 6 of the CAN connector.
The configuration and management of a CANopen network must be carried out by a single node
acting as the network master. This role can be performed by the NextMove e100 when it is
configured to be the Network Manager node (node ID 1), or by a third party CANopen master
device.
Up to 126 CANopen nodes (node IDs 2 to 127) can be added to the network by a NextMove e100
Manager node using the Mint NODESCAN keyword. If successful, the nodes can then be
connected to using the Mint CONNECT keyword. Any network and node related events can then
be monitored using the Mint BUS1 event.
Note: All CAN related Mint keywords are referenced to CANopen using the ‘bus’ dot
parameter. For CANopen the ‘bus’ dot parameter must be set to 1.
Please refer to the Mint help file for further details on CANopen, Mint keywords and dot
parameters.
Page 46

www.baldormotion.com
4-30 Input / Output MN1941
4.8 Connection summary - minimum wiring (local axis)
As a guide, Figure 31 shows an example of the typical minimum wiring required to allow the
NextMove e100 and a single axis servo amplifier to work together. Details of the connector pins
are shown in Table 2.
Servo amplifier
(axis 0)
Encoder output from
drive (or motor)
Gnd
Enable
Demand -
Demand +
Host PC
+24 V
control
supply
+24V
0V
X13
X5
X1
NextMove e100
1
2
3
9
10
X12
Common
earth/ground
USB connection
USB
Figure 31 - Example minimum system wiring
Page 47

www.baldormotion.com
Input / Output 4-31MN1941
NextMove e100
connector
Pin Name of
signal
Function Connection on amplifier
(Note: connections may
be labeled differently)
X1 1 0V Control supply ground
2 +24 V Control supply +24 V input
X5 Encoder0 Encoder0 feedback input Encoder output
X12 9 REL NO Normally open relay contact
(closed to enable drive)
Enable +24 V
10 REL COM Common relay connection Enable GND
X13 1 Demand0 Demand output 0 Demand+
2 AGND Analog GND Demand-
3 Shield Shield connection (Do not connect)
Table 2 - Connector details for minimum system wiring shown in Figure 31
Page 48

www.baldormotion.com
4-32 Input / Output MN1941
4.9 Conn ectio n summary - minimum wiring (remote axis)
As a guide, Figure 32 shows an example of the typical minimum wiring required to allow the
NextMove e100 and a single axis EPL servo amplifier (e.g. MicroFlex e100) to work together.
Details of the connector pins are shown in Table 3.
Remote (EPL)
servo amplifier
(MicroFlex e100)
Drive
Enable
Host PC
+24 V
control
supply
+24V
0V
E1 / E2
Ethernet
X1
NextMove e100
9
10
X12
Common
earth/ground
USB connection
USB
Ethernet
Figure 32 - Example minimum system wiring
Page 49

www.baldormotion.com
Input / Output 4-33MN1941
NextMove e100
connector
Pin Name of
signal
Function Connection on amplifier
(Note: connections may
be labeled differently)
X1 1 0V Control supply ground
2 +24 V Control supply +24 V input
X12 9 REL NO Normally open relay contact
(closed to enable drive)
Drive Enable +
10 REL COM Common relay connection Drive Enable -
E1 / E2 Ethernet Ethernet / EPL communication E1 / E2
Table 3 - Connector details for minimum system wiring shown in Figure 32
Page 50

www.baldormotion.com
4-34 Input / Output MN1941
Page 51

www.baldormotion.com
Operation 5-1MN1941
5.1 Introduction
Before powering the NextMove e100 you will need to connect it to the PC using a USB or
Ethernet cable and install the supplied Mint Machine Center software. This software includes a
number of applications and utilities to allow you to configure and program the NextMove e100. If
you do not have experience of software installation or Windows applications you may need
further assistance for this stage of the installation. The Baldor Motion Toolkit CD containing the
software can be found separately within the packaging.
5.1.1 Connecting the NextMove e100 to the PC
The NextMove e100 can be connected to the PC using either USB, TCP/IP , RS232, or
RS485/422.
To use USB, connect a USB cable between a PC USB port and the NextMove e100 USB port.
Your PC must be using Windows 2000, Windows XP or Windows Vista.
To use TCP/IP, connect a CAT5e Ethernet cable between the PC and one of the NextMove e100
Ethernet ports.
You cannot connect an ordinary office PC to the NextMove e100 without first altering
the PC’s Ethernet adapter configuration. However, if you have installed a second
Ethernet adapter dedicated for use with the NextMove e100, then this adapter’s
configuration can be altered without affecting the PC’s office Ethernet connection. If
you are unsure about making changes to your PC’s Ethernet adapter configuration,
or are prevented by user permission levels, ask your I.T. administrator to assist you.
If there is a EPL manager node (node ID 240) on the Ethernet network, then the
network will be operating in EPL mode. This means any TCP/IP connection from the
PC must pass through an EPL compatible router.
To use RS232 or RS485/422, connect an appropriate serial cable between the PC and the
NextMove e100 serial port. If you are using an intermediate RS485 to RS232 converter, connect
this as specified by the manufacturer. Mint WorkBench can scan all the PC’s COM ports, so you
can use any port.
5 Operation
5
NOTICE
NOTICE
Page 52

www.baldormotion.com
5-2 Operation MN1941
5.1.2 Installing Mint Machine Center and Mint WorkBench
You need to install the Mint Machine Center (MMC) and Mint WorkBench. Any previous versions
of MMC or Mint WorkBench must be uninstalled before proceeding with this installation:
1. Insert the CD into the drive.
2. After a few seconds the setup wizard should start automatically. If the setup wizard does not
appear, select Run... from the Windows Start menu and type
d:\start
where d represents the drive letter of the CD device.
Follow the on-screen instructions to install MMC (including Mint WorkBench). The setup
wizard will copy the files to appropriate folders within the C:\Program Files folder, and place
shortcuts on the Windows Start menu.
Page 53

www.baldormotion.com
Operation 5-3MN1941
5.2 Starting the NextMove e100
If you have followed the instructions in the previous sections, you should have now connected
the power sources, inputs and outputs and the USB, serial, or Ethernet cable linking the PC to the
NextMove e100.
5.2.1 Preliminary checks
Before you apply power for the first time, it is very important to verify the following:
H Disconnect the load from the motor until instructed to apply a load.
H Inspect all power connections for accuracy, workmanship and tightness.
H Verify that all wiring conforms to applicable codes.
H Verify that the NextMove e100 is properly earthed/grounded.
H Check all signal wiring for accuracy.
5.2.2 Power on checks
1. Turn on the 24 VDC control supply.
2. Within approximately 20-30 seconds or less, the test sequence should complete and the
Status LED should start to flash green. If the Status LED is not lit then re-check the power
supply connections. If the Status LED flashes red, this indicates that the NextMove e100 has
detected a fault - see section 6.
5.2.3 Installing the USB driver
If you have connected the NextMove e100 to the PC using the USB connection, it will be
necessary to install the USB driver. When the NextMove e100 is powered, Windows will
automatically detect the controller and request the driver. The driver consists of two files,
USBmotion.inf and USBmotion.sys. Both files must be present for installation.
1. Follow the on-screen instructions to select and install the driver. The driver files are available
on the supplied Baldor Motion Toolkit CD. If you are using a copy of the driver located on the
hard disk, a floppy disk or another CD, the two driver files must be in the same folder.
2. During installation, Windows may report that the driver is ‘unsigned’. This is normal for the
NextMove e100 driver, so click the Continue Anyway button to continue with the installation.
When installation is complete, a new USB Motion Controller device will be listed in the
Universal Serial Bus controllers section of Windows Device Manager.
The NextMove e100 is now ready to be configured using MMC and Mint WorkBench.
Note: If the NextMove e100 is later connected to a different USB port on the host
computer, Windows may report that it has found new hardware. Either install the
driver files again for the new USB port, or connect the NextMove e100 to the original
USB port where it will be recognized in the usual way.
Page 54

www.baldormotion.com
5-4 Operation MN1941
5.2.4 Configuring the TCP/IP connection (optional)
If you have connected the NextMove e100 to the PC using the Ethernet connection, it will be
necessary to alter the PC’s Ethernet adapter configuration to operate correctly with the
NextMove e100.
You cannot connect an ordinary office PC to the NextMove e100 without first altering
the PC’s Ethernet adapter configuration. However, if you have installed a second
Ethernet adapter dedicated for use with the NextMove e100, then this adapter’s
configuration can be altered without affecting the PC’s office Ethernet connection. If
you are unsure about making changes to your PC’s Ethernet adapter configuration,
or are prevented by user permission levels, ask your I.T. administrator to assist you.
Ensure that the NextMove e100 is not set to node ID 240 (hex F0).
The following explanation assumes the PC is connected directly to the NextMove e100, and not
across an intermediate Ethernet network. If you wish to attempt the connection through an
intermediate Ethernet network, then the network administrator must be consulted to ensure that
the necessary IP addresses will be allowed and are not already allocated on the network. The
NextMove e100 has a fixed IP address of the format 192.168.100.xxx. The last number, xxx,is
the decimal value defined by the NextMove e100’s node ID selector switches (see section 4.4.2).
1. On the Windows Start menu, select Settings, Network Connections.
2. In the Network Connections Window, right-click the ‘Local Area Connection’ entry for the
required Ethernet adapter and choose Properties.
3. In the Local Area Connection Properties dialog, in the ‘This connection uses the following
items’ list, select the ‘Internet Protocol (TCP/IP)’ entry and click Properties.
4. In the Internet Protocol (TCP/IP) Properties dialog, on the General tab, make a note of the
existing settings. Click Advanced... and make a note of any existing settings. Click the
Alternate Configuration tab and make a note of any existing settings.
5. On the General tab, choose the ‘Use the following IP address’ option.
6. In the IP address box, enter the IP address 192.168.100.241. This is the IP address that will
be assigned to the Ethernet adapter. The value 241 is deliberately chosen as it is outside the
range that can be used by NextMove e100, so avoiding possible conflicts.
7. In the Subnet mask box, enter 255.255.255.0 and click OK.
Click OK to close the Local Area Connection Properties dialog.
8. On the Windows Start menu, select Command Prompt (often found under Accessories).
9. In the Command Prompt window, type PING 192.168.100.16, where the final value (16 in this
example) is the value selected by the NextMove e100’s node ID selector switches. In this
example, the NextMove e100’s switches would be set to HI=1 LO=0, which represents
hexadecimal 10, equivalent to decimal 16 (see section 4.4.2 for a list of hexadecimal /
decimal equivalents). A reply message should be returned.
10. It should now be possible to run Mint WorkBench and connect to the NextMove e100 using
the Ethernet / TCP/IP connection.
NOTICE
NOTICE
Page 55

www.baldormotion.com
Operation 5-5MN1941
5.3 Min t Machine Center
The Mint Machine Center (MMC) is used to view the network of connected controllers in a
system. Individual controllers and drives are configured using Mint WorkBench.
Note: If you have only a single NextMove e100 connected to your PC, then MMC is
probably not required. Use Mint WorkBench (see section 5.4) to configure the
NextMove e100.
Controller pane
Menu system
Toolbars
Information pane
Figure 33 - The Mint Machine Center software
The Mint Machine Center (MMC) provides an overview of the controller network currently
accessible by the PC. The MMC contains a controller pane on the left, and an information pane
on the right. In the controller pane select the Host item, then in the information pane click Scan.
This causes MMC to scan for all connected controllers. Clicking once on a controller’s name
causes various options to be displayed in the information pane. Double-clicking on a controller’s
name launches an instance of Mint WorkBench that is automatically connected to the controller.
Application View allows the layout and organization of controllers in your machine to be modelled
and described on screen. Controllers can be dragged onto the Application View icon, and
renamed to give a more meaningful description, for example “Conveyor 1, Packaging Controller”.
Drives that are controlled by the NextMove e100 can be dragged onto the NextMove e100 icon
itself, creating a visible representation of the machine. A text description for the system and
associated files can be added, and the resulting layout saved as an “MMC Workspace”. When
you next need to administer the system, simply loading the workspace automatically connects to
all the required controllers. See the Mint help file for full details of MMC.
Page 56

www.baldormotion.com
5-6 Operation MN1941
NextMove e100
Mint Machine Center
USB
RS232
RS485/422
MintDrive
II
MicroFlex e100
MintDrive
II
MicroFlex e100
USB
Mint WorkBench
Ethernet
Mint WorkBench
Mint WorkBench
Mint WorkBench
Mint WorkBench
Host PC
Figure 34 - Typical network visibility provided by Mint Machine Center
Page 57

www.baldormotion.com
Operation 5-7MN1941
5.3.1 Starting MMC
1. On the Windows Start menu, select Programs, Mint Machine Center, Mint Machine Center.
2. In the controller pane, ensure that Host is
selected. In the information pane, click
Scan.
3. When the search is complete, click once
on ‘NextMove e100’ in the controller pane
to select it, then double click to open an
instance of Mint WorkBench. The
NextMove e100 will be already connected
to the instance of Mint WorkBench, ready
to configure.
Go straight to section 5.5 to continue the
configuration in Mint WorkBench.
Page 58

www.baldormotion.com
5-8 Operation MN1941
5.3.2 Viewing remote nodes connected over Ethernet (optional)
When a remote node such as MicroFlex e100 is connected to the NextMove e100 using Ethernet,
it is possible to view the connection in MMC. The PC is able to connect to the remote node, even
though the PC only has a physical USB connection to the NextMove e100. This feature is known
as ‘redirection’, and simplifies configuration of multiple controllers on an Ethernet / EPL network.
For the following procedure, it is essential that the NextMove e100’s node ID selector switches
are not set to F0. Although F0 is the correct node ID to make the NextMove e100 an EPL manager
node, the remote nodes have not yet been configured for EPL operation so will be ignored if the
NextMove e100 is operating as a manager node. In this example, communications will use
standard Ethernet, not EPL.
1. In the controller pane, ensure that Host is
selected. In the information pane, click
Scan.
2. When the search is complete, click once
on the ‘Ethernet’ entry underneath the
‘NextMove e100’ entry.
3. In the information pane, select the Scan
for single node option.
Enter the remote node’s node ID in the
adjoining box.
Click Refresh.
4. In the controller pane, the remote node
should now be displayed on the
NextMove e100’s Ethernet connection.
Page 59

www.baldormotion.com
Operation 5-9MN1941
5.4 Min t WorkBench
Mint WorkBench is a fully featured application for programming and controlling the
NextMove e100. The main Mint WorkBench window contains a menu system, the Toolbox and
other toolbars. Many functions can be accessed from the menu or by clicking a button - use
whichever you prefer. Most buttons include a ‘tool-tip’; hold the mouse pointer over the button
(don’t click) and its description will appear.
Mint WorkBench can be started directly from the Windows Start menu, or automatically by
double-clicking on a controller in the MMC’s controller pane (see section 5.3.1).
Toolbox
Menu system
Toolbars
Control and
test area
Figure 35 - The Mint WorkBench software
Page 60

www.baldormotion.com
5-10 Operation MN1941
5.4.1 Help file
Mint WorkBench includes a comprehensive help file that contains information about every Mint
keyword, how to use MMC and Mint WorkBench, and background information on motion control
topics. The help file can be displayed at any time by pressing F1. On the left of the help window,
the Contents tab shows the tree structure of the help file; each book
contains a number of
topics
. The Index tab provides an alphabetic list of all topics in the file, and allows you to
search for them by name. The Search tab allows you to search for words or phrases appearing
anywhere in the help file. Many words and phrases are underlined and highlighted with a color
(normally blue) to show that they are links. Just click on the link to go to an associated keyword.
Most keyword topics begin with a list of relevant See Also links.
Figure 36 - The Mint WorkBench help file
For help on using Mint WorkBench, click the Contents tab, then click the small plus sign
beside the Mint WorkBench book icon. Double click a topic name to display it.
Page 61

www.baldormotion.com
Operation 5-11MN1941
5.4.2 Starting Mint WorkBench
Note: If you have already used MMC to start an instance of Mint WorkBench then the
following steps are unnecessary. Go to section 5.5 to continue configuration.
1. On the Windows Start menu, select Programs, Mint Machine Center, Mint WorkBench.
2. In the opening dialog box, click Start New Project...
Page 62

www.baldormotion.com
5-12 Operation MN1941
3. In the Select Controller dialog, go to the drop down box near the top and select the PC serial
port to which the NextMove e100 is connected. If you are unsure which PC serial port is
connected to the NextMove e100, increase the value in the Search up to serial node address
box. If the NextMove e100 is connected using USB, it will be scanned automatically.
Click Scan to search for the NextMove e100.
When the search is complete, click ‘NextMove e100’ in the list to select it, and then click
Select.
Note: If the NextMove e100 is not listed, check the USB or serial cable between the
NextMove e100 and the PC. Check that the NextMove e100 is powered correctly,
and has completed its startup sequence (indicated by the slowly flashing green
Status LED). Click Scan to re-scan the ports.
4. A dialog box may be displayed to tell you that Mint WorkBench has detected new firmware.
Click OK to continue. Mint WorkBench reads back data from the NextMove e100. When this
is complete, Edit & Debug mode is displayed. This completes the software installation.
Page 63

www.baldormotion.com
Operation 5-13MN1941
5.5 Conf iguring axes
The NextMove e100 is capable of controlling its own 4 stepper and 3 servo axes, plus further
‘remote’ axes over ETHERNET Powerlink (EPL). Each axis must be assigned a unique axis
number. The axis number is used throughout Mint WorkBench and the NextMove e100’s Mint
programs to identify a particular axis. This section describes how to configure each type of axis.
5.5.1 Local axes, remote axes and profilers
The NextMove e100 is capable of simultaneously ‘profiling’ up to 16 axes. A profiler is a
calculator used by the NextMove e100 to constantly update the required axis position during a
move’s progress. Axes that require a profiler include each of the 7 local axes, and each manager
node profiled remote axis (see 5.5.1.2 below). The profilers can be used to control independent
axes or to coordinate synchronized motion on up to 16 axes. For example, the NextMove e100
could profile its 7 local axes plus 9 independent manager node profiled remote axes, 4 groups of
4 synchronized axes, or any other combination. If none of the local axes are required, all 16
profilers could be used for remote manager node profiled remote axes.
5.5.1.1 Local axes
The NextMove e100 has 7 ‘local’ axes, each of which requires one profiler (if in use). The local
axes are the 4 stepper axes and 3 servo axes for which electrical connections are provided on
the NextMove e100’s edge connectors (STEP & DIR for stepper axes, Demand and ENC for
servo axes).
5.5.1.2 Remote axes
In addition to the 7 local axes, the NextMove e100 can also control several ‘remote’ axes.
Remote axes are drive amplifiers, such as MicroFlex e100, connected to the NextMove e100
over the EPL connection. There are three ways for the NextMove e100 (the manager node) to
control a remote axis (a controlled node):
H NextMove e100 can profile moves on behalf of the drive, sending continuously updated
incremental demands to the drive (‘manager node profiled’). Each remote axis of this type
consumes one profiler on the NextMove e100.
H NextMove e100 can send a single demand to the drive, and then allow the drive to profile
themoveitself(‘controlled node profiled’). After sending the demand the NextMove e100
takes no further part in controlling the move, so this type of remote axis does not consume
aprofilerontheNextMovee100.
H NextMove e100 can simply monitor the feedback from the drive, sending no demand
signals. This type of remote axis does not consume a profiler on the NextMove e100.
When controlling a remote axis, the NextMove e100 controller sends demand signals and/or
receives position information from the e100 drives over the EPL network. However, since the
e100 system uses intelligent positioning drives, the controller / drive combination does not form
a traditional feedback system. Instead, the position, speed and torque loops are closed locally by
the e100 drive for higher performance. Since the e100 drive / motor combination can be
autotuned, setup is much simpler than traditional systems.
Page 64

www.baldormotion.com
5-14 Operation MN1941
5.5.2 Configuring remote axes
When configuring a remote axis on the NextMove e100, there is no requirement to determine the
type of axis, for example servo or stepper. Basic configuration requires only a node ID and an
axis number to be selected. In Mint WorkBench, the System Configuration Wizard is used to
assign the node IDs and axis numbers.
1. In the Toolbox, click the System
Configuration icon.
2. On the EPL Devices page, click
Add Device... .
3. In the central drop down box, select the
type of EPL device, for example
MicroFlex e100.
At the top of the window, select the node ID
of the EPL device. The node ID allows the
NextMove e100 to uniquely identify the
EPL device on the network.
Click OK.
The Resource Mapping window is displayed.
4. Click on the Axis 0 entry and click Map...
The Axis resource mapping window is
displayed.
Page 65

www.baldormotion.com
Operation 5-15MN1941
5. In the Map to manager resource drop down
box, select one of the available axis
numbers and click OK. This is the axis
number that NextMove e100 will use to
reference the EPL device’s axis hardware.
The three radio button options refer to the
way the remote axis will be controlled - see
section 5.5.1.
In this example, the remote axis has been
assigned axis number 5. This means that when a Mint program running on the
NextMove e100 contains a statement such as MOVER(5)=20,theNextMovee100 will send
a demand to the remote axis (5)tomove20 units.
6. Click Close in the Resource Mapping
window. The EPL device is now listed in
the EPL Devices page.
Note: As shown in the preceding example, the EPL device’s assigned axis number (5)
and node ID (8) do not have to be the same. However, in small networks it may be
beneficial to assign the same node ID and axis number to simplify identification of
a particular node / axis.
See the Mint WorkBench help file for full details of the device mapping process, and also
examples of Mint basic code that can perform the network configuration at startup.
Page 66

www.baldormotion.com
5-16 Operation MN1941
5.5.3 Configuring local axes
A local axis can be configured as either a servo, stepper or virtual axis. The factory preset
configuration sets all axes as unassigned (off), so it is necessary to configure an axis as either
stepper, servo or virtual before it can be used. The number of servo and stepper hardware
channels defines how many servo and stepper axes may be configured. The Control Rate
defines the accuracy with which moves on the axis will be performed. In the following example,
Mint WorkBench’s System Configuration Wizard will be used to configure the local axes:
1. In the Toolbox, click the System
Configuration icon to start the System
Configuration Wizard.
2. Click Next > to go to the (local) Axis Config
page.
3. On the Axis Config page, click Add Local
Axis... to display the Configure Local Axis
window.
4. In the Configure Local Axis window, select
one of the available axis numbers. This is
the axis number that will be assigned to the
local axis.
To create a servo axis:
Select the Servo radio button. In the Servo
frame, choose which encoder input(s) will
be used as the feedback input(s), and
which DAC output (Demandx output) will
be used for the axis.
To create a stepper axis:
Select the Stepper radio button. In the
Stepper frame, choose which pulse and
direction outputs (STEPx and DIRx
outputs) will be used for the axis.
To create a virtual axis:
Select the Virtual radio button. Setting an
axis to Virtual means that it can be used to
simulate motion within the controller, but
uses no physical outputs.
5. Click OK to close the Configure Local Axis
window. The axis is now listed in the Axis
Config page.
Click Next > to continue to the end of the
System Configuration Wizard, where the
configuration will be downloaded and
stored on the NextMove e100.
Page 67

www.baldormotion.com
Operation 5-17MN1941
5.5.4 Selecting a scale
Mint defines all positional and speed related motion keywords in terms of encoder quadrature
counts (for servo motors) or steps for stepper motors. The number of quadrature counts (or
steps) is divided by the SCALEFACTOR allowing you to use units more suitable for your
application. The unit defined by setting a value for SCALEFACTOR is called the user unit (uu).
Consider a servo motor with a 1000 line encoder. This provides 4000 quadrature counts for each
revolution. If SCALEFACTOR is not set, a Mint command that involves distance, speed, or
acceleration may need to use a large number to specify a significant move. For example
MOVER(0)=16000 (Move Relative) would rotate the motor by 16000 quadrature counts - only
four revolutions. By setting a SCALEFACTOR of 4000, the user unit becomes revolutions. The
more understandable command MOVER(0)=4 could now be used to move the motor four
revolutions.
The same concept applies to stepper motors, where the scale can be set according to the
number of steps per revolution. Typically, this would be 200 for a motor with a 1.8° step angle, or
400 if driven in half step mode. By setting a SCALEFACTOR of 200 (or 400 if driven in half step
mode), the user unit becomes revolutions. In applications involving linear motion a suitable value
for SCALEFACTOR would allow commands to express values in linear distance, for example
millimeters, inches or feet.
When setting a SCALEFACTOR for a remote axis, the value is not sent to the remote axis. The
scale factor operates for commands and programs running on the NextMove e100, and should
be appropriate for the remote axis’ motor feedback device. The actual positional data transmitted
between the NextMove e100 and the remote axis is converted into ‘raw’ encoder counts. This
means that no matter what SCALEFACTOR has been set on the remote axis (if at all), positional
commands sent by the NextMove e100 are always received and interpreted correctly by the
remote axis.
1. In the Toolbox, click the Parameters icon.
2. In the parameters tree, scroll to the entry
for the chosen axis. This is found in the
Axis/Channel/Bank folder, under the Axis
sub heading.
3. The adjacent table will list the parameters
for the chosen axis.
Scroll to the entry for ScaleFactor.
Page 68

www.baldormotion.com
5-18 Operation MN1941
Click in the Active column and enter a value for the scale factor. This immediately sets
the scaling factor for the selected axis, which will remain in the NextMove e100 until
another scale is defined or power is removed. A yellow ‘C’ icon will appear to the left of
the ScaleFactor entry to indicate that the value has been changed. Other parameters that
depend on the scale factor may also change automatically to maintain their relative value;
these will also be indicated by a yellow ‘C’ icon. See the Mint help file for full details of the
Parameters tool.
Note: The parameter list also contains entries for PosScaleFactor, VelScaleFactor and
AccelScaleFactor. These parameters are provided to comply with the CANopen
DS402 Device Profile for Drives and Motion Control, which specifies separate
scaling for position, velocity and acceleration. Each can be set to different values so
that, for example, position could be specified in mm, velocity in m/s
2
and
acceleration in g. However, in most cases all scaling will be required to use the
same type of unit, for example meters for position, m/s for velocity and m/s
2
for
acceleration. For this reason, setting the general purpose ScaleFactor parameter
will automatically set PosScaleFactor, VelScaleFactor and AccelScaleFactor to the
same values. See the Mint help file for further details.
Page 69

www.baldormotion.com
Operation 5-19MN1941
5.5.5 Setting the drive enable output (optional)
Note: In many applications, a drive amplifier will have its drive enable input activated by
other circuitry (often including an emergency stop switch) so a physical drive
enable signal from the NextMove e100 is not required.
A drive enable output allows NextMove e100 to enable the external drive amplifier to allow
motion, or disable it in the event of an error. Each axis can be configured with its own drive enable
output, or can share an output with other axes. If an output is shared, an error on any of the axes
sharing the output will cause all of them to be disabled. The drive enable output can be either the
relay or a digital output.
For a remote axis (e.g. MicroFlex e100), a physical drive enable connection from the
NextMove e100 may not be required. The remote axis’ drive enable input can be wired to
external safety stop circuits to provide a fail-safe method for disabling the drive, while in normal
operation commands over the EPL network can be used to enable/disable the drive.
1. In the Toolbox, click the Digital I/O icon.
2. At the bottom of the Digital I/O screen, click
the Digital Outputs tab.
The left of the screen shows yellow High and
Low icons. These describe how the output
should behave when activated (to enable the
axis).
3. If you are going to use the relay, ignore this
step and go straight to step 4.
If you are going to use a digital output, the
active level must be set. Drag the appropriate
yellow icon to the grey OUT icon that will be
used as the drive enable output.
In this example, OUT1 is being used, and is
being configured as active high.
The icon’s color will change to bright blue.
Page 70

www.baldormotion.com
5-20 Operation MN1941
4. If you are going to use
the relay, drag the
OUT12icon(therelay
output) to the grey
Drive Enable OP icon
on the right of the
screen.
To configure multiple axes to use the relay output, repeat this step for the other axes.
If you are going to use
a digital output, drag
the bright blue OUT
icon to the grey Drive
Enable OP axis icon on
the right of the screen.
To configure multiple
axes with the same drive enable output, repeat this step for the other axes.
5. Click Apply at the bottom of the screen. This
sends the output configuration to the
NextMove e100.
Page 71

www.baldormotion.com
Operation 5-21MN1941
5.5.6 Testing the drive enable output
1. On the main Mint WorkBench toolbar, click
the Axes button. In the Select Default Axes
dialog, select the axes to be controlled. Click
OK to close the dialog.
2. On the main Mint WorkBench toolbar, click
the Drive enable button. Click the button
again. Each time you click the button, the
drive enable output(s) for the selected axes
are toggled.
When the button is in the pressed (down)
position the drive amplifier should be
enabled. When the button is in the raised (up)
position the drive amplifier should be
disabled.
If this is not working, or the action of the button is reversed, check the electrical connections
between the NextMove e100 and drive amplifier. If you are using the relay, check that you
are using the correct normally open (REL NO) or normally closed (REL NC) connections. If
you are using a digital output, check that it is using the correct high or low triggering method
expected by the drive amplifier.
Page 72

www.baldormotion.com
5-22 Operation MN1941
5.6 Lo cal stepper axis - testing
This section describes the method for testing a local stepper axis. The stepper control is an open
loop system so no tuning is necessary. See section 5.5.3 for details about creating a stepper
axis.
5.6.1 Testing the output
This section tests the operation and direction of the output. It is recommended that the system is
initially tested with the motor shaft disconnected from other machinery.
1. Check that the Drive enable button is
pressed (down).
2. In the Toolbox, click the Edit & Debug icon.
3. Click in the Command window.
4. Type:
JOG(0)=2
where 0 is t he axis to be tested and 2 is the
speed.
The JOG command s pec if ies the speed in
user units per s ec ond, so the s peed is
affected by SCALEFACTOR (section 5.5.4). I f you hav e not s elec t ed a s c ale, the
command JOG(0)=2 will caus e rotation at only 2 half steps per second, so it may be
necess ar y to inc r eas e this figure signific antly, to 200 f or example. If you have selected
a scale that provides user units of revolutions (as descr ibed in section 5.5.4), JOG(0)=2
will cause r otation at 2 rev olutions per s ec ond. If there appears to be no step or direction
output, c hec k the elec t ric al connec tions to the axis’ as signed STE Px and D IR x outputs.
5. To repeat the tests for reverse moves, type:
JOG(0)=-2
6. To remove the demand and stop the test, type:
STOP(0)
Page 73

www.baldormotion.com
Operation 5-23MN1941
5.7 Lo cal servo axis - testing and tu n ing
This section describes the method for testing and tuning a local servo axis. The drive amplifier
must already have been tuned for basic current or velocity control of the motor. See section 5.5.3
for details about creating a servo axis.
5.7.1 Testing the demand output
This section tests the operation and direction of the demand output for axis 0. The example
assumes that axis 0 has already been configured as a servo axis, using the default hardware
channel 0 (see section 5.5.3). It is recommended that the motor is disconnected from the load for
this test.
1. Check that the Drive enable button is
pressed (down).
2. In the Toolbox, click the Edit & Debug icon.
3. Click in the Command window.
4. Type:
TORQUEREF(0)=5
where 0 is the axis to be tested. In this
example, this should cause a demand of +5%
of maximum output (0.5 V) to be produced at
the DEMAND0 output (connector X13, pin 1).
In Mint WorkBench, look at the Spy window
located on the right of the screen. In the Axis selection box at the top, select Axis 0.
The Spy window’s Command display should show 5 percent (approximately). If there seems
to be no demand output, check the electrical connections to X13.
The Spy window’s Velocity display should show a positive value. If the value is negative check
that the DEMAND0 output, and the Encoder0 A and B channels, have been wired correctly.
If necessary, the ENCODERMODEkeyword can be used toswap the encoder Aand B channels,
thus reversing the encoder count - see the Mint help file.
See section 4.2.2 for details of the demand outputs.
Page 74

www.baldormotion.com
5-24 Operation MN1941
5. To repeat the tests for negative (reverse) demands, type:
TORQUEREF(0)=-5
This should cause a demand of -5% of maximum output (-0.5 V) to be produced at the
DEMAND0 output. Correspondingly, the Spy window’s Velocity display should show a
negative value.
6. To remove the demand and stop the test, type:
STOP(0)
This should cause the demand produced at
the DEMAND0 output to become 0 V.
If it is necessary for the motor to turn in the opposite direction for a positive demand, then the
DACMODE and ENCODERMODE keywords should be used. The DACMODE keyword is used to
invert the demand output voltage. The ENCODERMODE keyword must then also be used to
reverse the incoming feedback signal, to correspond with the inverted demand output. Note that
if ENCODERMODE had already been used to compensate for a reversed encoder count (as
described in step 4. above), it will be necessary to change it back to its original setting to
correspond with the inverted demand output set using DACMODE. Whichever keywords are used,
for the control system to operate correctly, a positive demand must result in a positive change in
position and a negative demand must result in a negative change in position.
See the Mint help file for details of each keyword.
Page 75

www.baldormotion.com
Operation 5-25MN1941
5.7.2 An introduction to closed loop control
This section describes the basic principles of closed loop control. If you are familiar with closed
loop control go straight to section 5.8.1.
When there is a requirement to move an axis, the NextMove e100 control software translates this
into a demand output voltage (or just a numerical value over EPL). This is used to control the
drive amplifier which powers the motor. An encoder or resolver on the motor is used to measure
the motor’s position. At specified intervals* the NextMove e100 compares the demanded and
measured positions. It then calculates the demand needed to minimize the difference between
them, known as the following error.
This system of constant measurement and correction is known as closed loop control.
[For the analogy, imagine you are in your car waiting at an intersection. You are going to go
straight on when the lights change, just like the car standing next to you which is called Demand.
You’re not going to race Demand though - your job as the controller (NextMove e100) is to stay
exactly level with Demand, looking out of the window to measure your position].
The main term that the NextMove e100 uses to correct the error is called Proportional gain
(KPROP). A very simple proportional controller would simply multiply the amount of error by the
Proportional gain and apply the result to the motor [the further Demand gets ahead or behind you,
the more you press or release the gas pedal ].
If the Proportional gain is set too high overshoot will occur, resulting in the motor vibrating back
and forth around the desired position before it settles [you press the gas pedal so hard you go
right past Demand. To try and stay level you ease off the gas, but end up falling behind a little. You
keep repeating this and after a few tries you end up level with Demand, traveling at a steady
speed. This is what you wanted to do but it has taken you a long time].
If the Proportional gain is increased still further, the system becomes unstable [you keep
pressing and then letting off the gas pedal so hard you never travel at a steady speed ].
To reduce the onset of instability, a term called Velocity Feedback gain (KVEL) is used. This
resists rapid movement of the motor and allows the Proportional gain to be set higher before
vibration starts. Another term called Derivative gain (KDERIV) can also be used to give a similar
effect.
With Proportional gain and Velocity Feedback gain (or Derivative gain) it is possible for a motor
to come to a stop with a small following error [Demand stopped so you stopped too, but not quite
level ]. The NextMove e100 tries to correct the error, but because the error is so small the
amount of torque demanded might not be enough to overcome friction.
This problem is overcome by using a term called Integral gain (KINT). This sums the error over
time, so that the motor torque is gradually increased until the positional error is reduced to zero
[like a person gradually pushing harder and harder on your car until they’ve pushed it level with
Demand].
However, if there is large load on the motor (it is supporting a heavy suspended weight for
example), it is possible for the output to increase to 100% demand. This effect can be limited
using the KINTLIMIT keyword which limits the effect of KINT to a given percentage of the
demand output. Another keyword called KINTMODE can even turn off integral action when it’s not
needed.
* The sampling interval can be changed using the CONTROLRATE keyword - see the Mint help
file.
Page 76

www.baldormotion.com
5-26 Operation MN1941
The remaining gain terms are Velocity Feed forward (KVELFF) and Acceleration Feed
forward (KACCEL) described below.
In summary, the following rules can be used as a guide:
H KPROP: Increasing KPROP will speed up the response and reduce the effect of
disturbances and load variations. The side effect of increasing KPROP is that it also
increases the overshoot, and if set too high it will cause the system to become unstable. The
aim is to set the Proportional gain as high as possible without getting overshoot, instability or
hunting on an encoder edge when stationary (the motor will buzz).
H KVEL: This gain has a damping effect on the whole response, and can be increased to
reduce any overshoot. If KVEL becomes too large it will amplify any noise on the velocity
measurement and introduce oscillations.
H KINT: This gain has a de-stabilizing effect, but a small amount can be used to reduce any
steady state errors. By default, KINTMODE is always on (mode 1).
H KINTLIMIT: The integration limit determines the maximum value of the effect of integral
action. This is specified as a percentage of the full scale demand.
H KDERIV: This gain has a damping effect dependent on the rate of change of error, and so is
particularly useful for removing overshoot.
H KVELFF: This is a feed forward term and as such has a different effect on the servo system
than the previous gains. KVELFF is outside the closed loop and therefore does not have an
effect on system stability. This gain allows a faster response to demand speed changes with
lower following errors, for example you would increase KVELFF to reduce the following error
during the slew section of a trapezoidal move. The trapezoidal test move can be used to
fine-tune this gain. This term is especially useful with velocity controlled servos
H KACCEL: This term is designed to reduce velocity overshoots on high acceleration moves.
Page 77

www.baldormotion.com
Operation 5-27MN1941
Figure 37 - The NextMove e100 servo loop
Page 78

www.baldormotion.com
5-28 Operation MN1941
5.8 Lo cal servo axis - tuning for current control
5.8.1 Selecting servo loop gains
All servo loop parameters default to zero, meaning that the demand output will be zero at power
up. Most drive amplifiers can be set to current (torque) control mode or velocity control mode;
check that the drive amplifier will operate in the correct mode. The procedure for setting system
gains differs slightly for each. To tune an axis for velocity control, go straight to section 5.9. It is
recommended that the system is initially tested and tuned with the motor shaft disconnected from
other machinery. Confirm that the encoder feedback signals from the motor or drive amplifier
have been connected, and that a positive demand causes a positive feedback signal.
Note: The method explained in this section should allow you to gain good control of the
motor, but will not necessarily provide the optimum response without further
fine-tuning. Unavoidably, this requires a good understanding of the effect of the gain
terms.
1. In the Toolbox, click the Fine-tuning icon.
The Fine-tuning window is displayed at the
right of the screen. The main area of the Mint
WorkBench window displays the Capture
window. When tuning tests are performed,
this will display a graph representing the
response.
2. In the Fine-tuning window, click in the Axis
selection box at the top and select Axis 0
(assuming axis 0 has already been
configured as a servo axis - see section
5.5.3).
Click in the KDERIV box and enter a starting
value of 1.
Click Apply and then turn the motor shaft by
hand. Repeat this process, slowly increasing
the value of KDERIV until you begin to feel
some resistance in the motor shaft. The
exact value of KDERIV is not critical at this
stage.
Page 79

www.baldormotion.com
Operation 5-29MN1941
3. Click in the KPROP box and enter a value
that is approximately one quarter of the value
of KDERIV . If the motor begins to vibrate,
decrease the value of KPROP or increase
the value of KDERIV until the vibration stops.
Small changes may be all that is necessary.
4. In the Move Type drop down box, check that
the move type is set to Step.
5. Click in the Distance box and enter a distance
for the step move. It is recommended to set
a value that will cause the motor to turn a
short distance, for example one revolution.
Note: The distance depends on the scale set in section 5.5.4.
If you set a scale so that units could be expressed in revolutions (or other unit of your
choice), then those are the units that will be used here. If you did not set a scale, the
amount you enter will be in encoder counts.
6. Click in the Duration box and enter a duration
for the move, in seconds. This should be a
short duration, for example 0.15 seconds.
7. Click Go.
The NextMove e100 will perform the move and the motor will turn. As the soon as the move
is completed, Mint WorkBench will upload captured data from the NextMove e100. The data
will then be displayed in the Capture window as a graph.
Note: The graphs that you see will not look exactly the same as the graphs shown here!
Remember that each motor has a different response.
8. Below the graph, click on the trace titles to
turn off traces that are not required, leaving
Demand position and Measured position
turned ON.
Page 80

www.baldormotion.com
5-30 Operation MN1941
5.8.2 Underdamped response
If the graph shows that the response is underdamped (it overshoots the demand, as shown in
Figure 38) then the value for KDERIV should be increased to add extra damping to the move. If
the overshoot is excessive or oscillation has occurred, it may be necessary to reduce the value
of KPROP.
Measured position
Demand position
Figure 38 - Underdamped response
9. Click in the KDERIV and/or KPROP boxes
and make the required changes. The ideal
response is shown in section 5.8.4.
Page 81

www.baldormotion.com
Operation 5-31MN1941
5.8.3 Overdamped response
If the graph shows that the response is overdamped (it reaches the demand too slowly, as shown
in Figure 39) then the value for KDERIV should be decreased to reduce the damping of the move.
If the overdamping is excessive, it may be necessary to increase the value of KPROP.
Measured position
Demand
position
Figure 39 - Overdamped response
10. Click in the KDERIV and/or KPROP boxes
and make the required changes. The ideal
response is shown in section 5.8.4.
Page 82

www.baldormotion.com
5-32 Operation MN1941
5.8.4 Critically damped response
If the graph shows that the response reaches the demand quickly and only overshoots the
demand by a small amount, this can be considered an ideal response for most systems.
See Figure 40.
Measured position
Demand position
Figure 40 - Critically damped (ideal) response
Page 83

www.baldormotion.com
Operation 5-33MN1941
5.9 Lo cal servo axis - tuning for velocity co n t rol
Drive amplifiers designed for velocity control incorporate their own velocity feedback term to
provide system damping. For this reason, KDERIV (and KVEL) can often be set to zero.
Correct setting of the velocity feed forward gain KVELFF is important to get the optimum
response from the system. The velocity feed forward term takes the instantaneous velocity
demand from the profile generator and adds this to the output block (see Figure 37).
KVELFF is outside the closed loop and therefore does not have an effect on system stability.
This means that the term can be increased to maximum without causing the motor to oscillate,
provided that other terms are setup correctly.
When setup correctly, KVELFF will cause the motor to move at the speed demanded by the
profile generator. This is true without the other terms in the closed loop doing anything except
compensating for small errors in the position of the motor. This gives faster response to changes
in demand speed, with reduced following error.
Before proceeding, confirm that the encoder feedback signals from the motor or drive amplifier
have been connected, and that a positive demand causes a positive feedback signal.
5.9.1 Calculating KVELFF
To calculate the correct value for KVELFF, you will need to know:
H The speed, in revolutions per minute, produced by the motor when a maximum demand
(+10 V) is applied to the drive amplifier.
H The axis’ position loop update rate (the Control Rate setting selected in the Config Local Axis
dialog - see section 5.5.3).
H The resolution of the encoder input.
The servo loop formula uses speed values expressed in quadrature counts per servo loop.To
calculate this figure:
1. First, divide the speed of the motor, in revolutions per minute, by 60 to give the number of
revolutions per second. For example, if the motor speed is 3000 rpm when a maximum
demand (+10 V) is applied to the drive amplifier:
Revolutions per second = 3000 / 60
=
50
2. Next, calculate how many revolutions will occur during one servo loop. The factory preset
position loop update rate is 1 kHz (0.001 seconds), so:
Revolutions per servo loop = 50 x 0.001 seconds
=
0.05
3. Now calculate how many quadrature encoder counts there are per revolution. The
NextMove e100 counts both edges of both pulse trains (CHA and CHB) coming from the
encoder, so for every encoder line there are 4 ‘quadrature counts’. With a 1000 line encoder:
Quadrature counts per revolution = 1000 x 4
=
4000
4. Finally, calculate how many quadrature counts there are per servo loop:
Quadrature counts per servo loop = 4000 x 0.05
=
200
Page 84

www.baldormotion.com
5-34 Operation MN1941
The analog demand output is controlled by a 12-bit DAC, which can create output voltages in the
range -10 V to +10 V. This means a maximum output of +10 V corresponds to a DAC value of
2048. The value of KVELFF is calculated by dividing 2048 by the number of quadrature counts
per servo loop, so:
KVELFF = 2048 / 200
=
10.24
5. Click in the KVELFF box and enter the value.
The calculated value should give zero
following error at constant velocity. Using
values greater than the calculated value will
cause the controller to have a following error
ahead of the desired position. Using values
less than the calculated value will cause the
controller to have following error behind the
desired position.
6. In the Move Type drop down box, check that
the move type is set to Trapezoid.
7. Click in the Distance box and enter a distance
for the step move. It is recommended to set
a value that will cause the motor to make a
few revolutions, for example 10.
Note: The distance depends on the scale set in section 5.5.4. If you set a scale so that
units could be expressed in revolutions (or other unit of your choice), then those are
the units that will be used here. If you did not set a scale, the amount you enter will
be in encoder counts.
8. Click Go.
The NextMove e100 will perform the move and the motor will turn. As the soon as the move
is completed, Mint WorkBench will upload captured data from the NextMove e100. The data
will then be displayed in the Capture window as a graph.
Note: The graph that you see will not look exactly the same as the graph shown here!
Remember that each motor has a different response.
Page 85

www.baldormotion.com
Operation 5-35MN1941
9. Using the check boxes below the graph,
select the Measured velocity and Demand
velocity traces.
Measured velocity
Demand velocity
Figure 41 - Correct value of KVELFF
It may be necessary to make changes to the calculated value of KVELFF. If the trace for
Measured velocity appears above the trace for Demand velocity, reduce the value of KVELFF. If
the trace for Measured velocity appears below the trace for Demand velocity, increase the value
of KVELFF. Repeat the test after each change. When the two traces appear on top of each other
(approximately), the correct value for KVELFF has been found as shown in Figure 41.
Page 86

www.baldormotion.com
5-36 Operation MN1941
5.9.2 Adjusting KPROP
The KPROP term can be used to reduce following error. Its value will usually be much smaller
than the value used for an equivalent current controlled system. A fractional value, for example
0.1, will probably be a good starting figure which can then be increased slowly.
1. Click in the KPROP box and enter a starting
value of 0.1.
2. Click Go.
The NextMove e100 will perform the move and the motor will turn. As the soon as the move
is completed, Mint WorkBench will upload captured data from the NextMove e100. The data
will then be displayed in the Capture window as a graph.
Note: The graph that you see will not look exactly the same as the graph shown here!
Remember that each motor has a different response.
3. Using the check boxes below the graph,
select the Measured position and Demand
position traces.
Page 87

www.baldormotion.com
Operation 5-37MN1941
Measured position
Demand position
Figure 42 - Correct value of KPROP
The two traces will probably appear with a small offset from each other, which represents the
following error. Adjust KPROP by small amounts until the two traces appear on top of each other
(approximately), as shown in Figure 42.
Note: It may be useful to use the zoom function to magnify the end point of the move.
In the graph area, click and drag a rectangle around the end point of the traces.
To zoom out, right-click in the graph area and choose Reset Zoom.
Page 88

www.baldormotion.com
5-38 Operation MN1941
5.10 Local servo axis - eliminating steady-state errors
In systems where precise and accurate positioning is required, it is often necessary to position
within one encoder count. Proportional gain, KPROP, is not normally able to achieve this
because a very small following error will only produce a small demand for the drive amplifier
which may not be enough to overcome mechanical friction (this is particularly true in current
controlled systems). This error can be overcome by applying integral gain. The integral gain,
KINT, works by accumulating following error over time to produce a demand sufficient to move
the motor into the required position with zero following error. KINT can therefore overcome errors
caused by gravitational effects such as vertically moving linear axes. With current controlled
drive amplifiers a non-zero demand output is required to hold the load in the correct position, to
achieve zero following error.
Care is required when setting KINT since a high value will cause instability during moves.
A typical value for KINT would be 0.1. The effect of KINT should also be limited by setting the
integration limit, KINTLIMIT, to the smallest possible value that is sufficient to overcome friction
or static loads, for example 5. This will limit the contribution of the integral term to 5% of the full
demand output range.
1. Click in the KINT box and enter a small
starting value, for example 0.1.
2. Click in the KINTLIMIT box and enter a value
of 5.
With NextMove e100, the action of KINT and KINTLIMIT can be set to operate in various
modes:
H Never - the KINT term is never applied
H Always - the KINT term is always applied
H Smart - the KINT term is only applied when the demand speed is zero or constant.
H Steady State - the KINT term is only applied when the demand speed is zero.
This function can be selected using the KINTMODE drop down box.
Page 89

www.baldormotion.com
Operation 5-39MN1941
5.11 Local digital input/output configuration
The Digital I/O window can be used to setup other digital I/O on the NextMove e100.
5.11.1 Digital input configuration
The Digital Inputs tab allows you to define how each digital input will be triggered, and if it should
be assigned to a special purpose function such as a Home or Limit input. There is one <- Axis x
row for each local axis configured in section 5.5.3. In the following example, digital input 1 will be
set to trigger on an active low input, and allocated to the forward limit input of axis 0:
1. In the Toolbox, click the Digital I/O icon.
2. At the bottom of the Digital I/O screen, click
the Digital Inputs tab.
The left of the screen shows a column of
yellow icons - High, Low, Rising, Falling and
Rise/Fall. These describe how the input will
be triggered.
3. Drag the Low icon
onto the IN1 icon . This will setup IN1 to respond to a low input.
Page 90

www.baldormotion.com
5-40 Operation MN1941
4. Now drag the IN1 icon onto the Fwd Limit icon .
This will setup IN1 as the Forward Limit input of axis 0.
5. Click Apply to send the changes to the NextMove e100.
Note: If required, multiple inputs can be configured before
clicking Apply.
5.11.2 Digital output configuration
The Digital Outputs tab allows you to define how each digital output will operate and if it is to be
configured as a drive enable output (see section 5.5.5). Remember to click Apply to send the
changes to the NextMove e100.
Page 91

www.baldormotion.com
Troubleshooting 6-1MN1941
6.1 Introduction
This section explains common problems and their solutions. If you want to know the meaning of
the LED indicators, see section 6.2.
6.1.1 Problem diagnosis
If you have followed all the instructions in this manual in sequence, you should have few
problems installing the NextMove e100. If you do have a problem, read this section first.
In Mint WorkBench, use the Error Log tool to view recent errors and then check the help file.
If you cannot solve the problem or the problem persists, the SupportMe feature can be used.
6.1.2 SupportMe feature
The SupportMe feature is available from the Help menu, or by clicking the button on the
motion toolbar. SupportMe can be used to gather information which can then be e-mailed, saved
as a text file, or copied to another application. The PC must have e-mail facilities to use the e-mail
feature. If you prefer to contact Baldor technical support by telephone or fax, contact details are
provided at the front of this manual. Please have the following information ready:
H The serial number of your NextMove e100 (if known).
H Use the Help, SupportMe menu item in Mint WorkBench to view details about your system.
H The type of servo amplifier and motor that you are using.
H A clear description of what you are trying to do, for example performing fine-tuning.
H A clear description of the symptoms that you can observe, for example the Status LED, error
messages displayed in Mint WorkBench, or errors reported by the Mint error keywords
ERRORREADCODE or ERRORREADNEXT.
H The type of motion generated in the motor shaft.
H Give a list of any parameters that you have setup, for example the gain settings you have
entered.
6 Troubleshooting
6
Page 92

www.baldormotion.com
6-2 Troubleshooting MN1941
6.2 NextMove e100 indicators
6.2.1 STATUS LED
The STA TUS LED displays the overall condition of the NextMove e100.
Further details about error codes can be found in the Mint WorkBench
help file. Press F1 and locate the Error Handling book.
Solid green:
Initialization OK, controller enabled (normal operation).
Flickering green (very fast flashing):
Firmware download in progress.
Solid red:
Initialization in progress.
Flashing red:
Initialization error. The NextMove e100 has detected a serious hardware or
firmware error and cannot be used. Contact Baldor.
6.2.2 CAN LEDs
The CAN LEDs display the overall condition of the CANopen interface
once the startup sequence has completed. The LED codes conform to
the CAN in Automation (CiA) DR303_3 indicator standard. The green
LED indicates the state of the node’s internal CANopen ‘state machine’.
The red LED indicates the state of the physical CANopen bus.
Green (run)
X
Off: Node initializing or not powered.
1 flash: Node in STOPPED state.
3 flashes: Software is being downloaded to the node.
Continuous flashing: Node in PRE-OPERATIONAL state.
Flickering (very fast flashing): Auto-baudrate detection or LSS services in
progress; flickers alternately with red LED.
Continuously illuminated, not flashing: Node in OPERATIONAL state.
Red (error)
X
Off: The node is working correctly.
1 flash: Warning - too many error frames.
2 flashes: Guard event or heartbeat event has occurred.
3 flashes: The SYNC message has not been received within the timeout period.
Flickering (very fast flashing): Auto-baudrate detection or LSS services in
progress; flickers alternately with green LED.
Continuously illuminated, not flashing: The node’s CAN controller is in the BUS
OFF state, preventing it from taking part in any CANopen communication.
STATUS
CAN
Page 93

www.baldormotion.com
Troubleshooting 6-3MN1941
6.2.3 ETHERNET LEDs
The ETHERNET LEDs display the overall condition of the Ethernet
interface once the startup sequence has completed. The LED codes
conform to the ETHERNET Powerlink Standardization Group (EPSG)
standard at the time of production.
Green (status)
X
Off: Node in NOT ACTIVE state. If the NextMove e100 is the manager node, it is
checking there is no other EPL manager node already operating. If the
NextMove e100 is a controlled node, it is waiting to be triggered by the manager
node.
1 flash: Node in PRE-OPERATIONAL1 state. EPL mode is starting.
2 flashes: Node in PRE-OPERATIONAL2 state. EPL mode is starting.
3 flashes: Node in READY TO OPERATE state. The manager node is starting to
transmit to controlled nodes that are ready. A controlled node is signalling its
readiness to operate.
Blinking (continuous flashing): Node in STOPPED state. A controlled node has
been deactivated.
Flickering (very fast flashing): Node in BASIC ETHERNET state (EPL is not
operating, but other Ethernet protocols may be used).
Continuously illuminated, not flashing: Node in OPERATIONAL state. EPL is
operating normally.
Red (error)
X
Off: EPL is working correctly.
Continuously illuminated: An error has occurred.
ETHERNET
Page 94

www.baldormotion.com
6-4 Troubleshooting MN1941
6.2.4 Communication
If the problem is not listed below please contact Baldor technical support.
Status LED is off:
H Check that the 24 VDC control circuit supply is connected correctly to connector X1 and is
switched on.
Mint WorkBench fails to detect the detect NextMove e100:
H Ensure that the NextMove e100 is powered and the Status LED is illuminated (see section
6.2).
H Check that the Ethernet or USB cable is connected between the PC and NextMove e100.
H For serial connections, check that the serial cable is wired correctly and properly connected.
Check that no other application, for example a mouse driver or other serial device is
attempting to use the same serial port. If the “Only scan COMx” option is selected in Mint
WorkBench, check that the correct COM port is selected. Check that the selected baud rate
is supported by the PC and NextMove e100.
H For USB connections, check that the cable is properly connected. Check the USB connector
socket pins for damage or sticking. Check that the USB device driver has been installed; a
‘USB Motion Controller’ device should be listed in Windows Device Manager.
H For Ethernet connections, check that the node ID is not set to 240 (hex F0). Check that the
PC’s Ethernet port has been correctly configured for TCP/IP operation (see section 5.2.4).
H In the “Search up to Nodexx“ option in Mint WorkBench’s Select Controller dialog, check that
the NextMove e100’s node ID for the bus is not higher than this value, or search up to a
greater node ID.
Cannot communicate with the controller:
H Verify that Mint WorkBench is loaded and that NextMove e100 is the currently selected
controller.
Cannot communicate with the controller after downloading firmware:
H After firmware download, always power cycle the controller (remove 24 V power and then
reconnect).
6.2.5 Motor control
Controller appears to be working but will not cause motor to turn:
H Check that the connections between motor and drive are correct. Use Mint WorkBench to
perform the basic system tests (see section 5.7 or 5.6).
H Confirm that the drive enable output has been configured (see section 5.5.5).
H Ensure that while the NextMove e100 is not in error the drive is enabled and working. When
the NextMove e100 is first powered up the drive should be disabled if there is no program
running (there is often an LED on the front of the drive to indicate status).
H (Local servo outputs only) Check that the servo loop gains are setup correctly - check the
Fine-tuning window. See sections 5.7.2 to 5.10.
Motor runs uncontrollably when controller is switched on:
H Verify that the NextMove e100 and drive are correctly grounded to a common ground.
H (Local servo outputs only) Check that the correct encoder feedback signal is connected to
the encoder input, the encoder has power (if required, see sections 4.4.1 and 7.1.8) and is
functioning correctly.
H Check that the drive is connected correctly to the NextMove e100 and that with zero demand
there is 0 V at the drive’s demand input. See section 5.7.1.
Page 95

www.baldormotion.com
Troubleshooting 6-5MN1941
Motor runs uncontrollably when controller is switched on and servo loop gains are
applied or when a move is set in progress. Motor then stops after a short time:
H (Local servo outputs only) Check that the encoder feedback signal(s) are connected to the
correct encoder input(s). Check the demand to the drive is connected with the correct
polarity.
H Check that for a positive demand signal, a positive increase in axis position is seen. The
ENCODERMODE keyword can be used to change encoder input direction. The DACMODE
keyword can be used to reverse DAC output polarity.
H Check that the maximum following error is set to a reasonable value. For configuration
purposes, following error detection may be disabled by setting FOLERRORMODE=0.
Motor is under control, but vibrates or overshoots during a move.
H (Local servo outputs only) Servo loop gains may be set incorrectly. See sections 5.7.2 to
5.10.
Motor is under control, but when moved to a position and then back to the start it does not
return to the same position:
H Verify that the NextMove e100 and drive are correctly grounded to a common ground point.
H (Local servo outputs only) Check:
- all encoder channels are free from electrical noise;
- they are correctly wired to the controller;
- when the motor turns, the two square wave signals are approximately 90 degrees out of
phase. Also check the complement signals.
H Ensure that the encoder cable uses shielded twisted pair cable, with the outer shield
connected at both ends and the inner shields connected only at the NextMove e100 end.
H (Local stepper outputs only) The motor is not maintaining synchronization with the
NextMove e100 drive output signals due to excessive acceleration, speed or load demands
on the motor.
H Check that the acceleration, speed and load are within the capabilities of the motor.
6.2.6 Mint WorkBench
The Spy window does not update:
H The system refresh has been disabled. Go to the Tools, Options menu item, select the
System tab and then choose a System Refresh Rate (500 ms is recommended).
Firmware download fails:
H Confirm that you have the correct version of firmware. Obtain the latest version of firmware
from www.baldormotion.com/supportme
.
Cannot communicate with the controller after downloading firmware:
H After firmware download, always power cycle the controller (remove 24 V power and then
reconnect).
Mint WorkBench loses contact with NextMove e100 while connected using USB:
H Check that the NextMove e100 is powered.
H Check that a ‘USB Motion Controller’ device is listed in Windows Device Manager. If not,
there could be a problem with the PC’s USB interface.
Page 96

www.baldormotion.com
6-6 Troubleshooting MN1941
6.2.7 Ethernet
Cannot connect to the controller over TCP/IP:
H Check that there is not an EPL manager node (for example NextMove e100 with node ID
240) on the network. If there is a manager node on the network, then an EPL compatible
router must be used to allow TCP/IP communication on the EPL network.
H Check that the PC’s Ethernet adapter has been correctly configured, as described in section
5.2.4.
The ETHERNET Powerlink network does not seem to be operating correctly:
H Confirm that only one device on the network is set to be the ETHERNET Powerlink manager
node (node ID 240, selector switches LO = F, HI = 0).
H Confirm that the reference source on all controlled nodes has been set to EPL in the Mint
WorkBench Operating Mode Wizard, and that the manager node has been configured
correctly. For a NextMove e100 manager node, this requires the System Configuration
Wizard to be used in Mint WorkBench.
H Confirm that each device on the network has a different node ID.
H Confirm that there are no more than 10 ‘daisy-chained’ devices on each branch of the
network.
6.2.8 CANopen
The CANopen bus is ‘passive’:
This means that the internal CAN controller in the NextMove e100 is experiencing a number of
Tx and/or Rx errors, greater than the passive threshold of 127. Check:
H 12-24 V is being applied between pin 9 (+24 V) and pin 6 or 3 (0 V) of the CAN connector, to
power the opto-isolators.
H There is at least one other CANopen node in the network.
H The network is terminated only at the ends, not at intermediate nodes.
H All nodes on the network are running at the same baud rate.
H All nodes have been assigned a unique node ID.
H The integrity of the CAN cables.
The NextMove e100 should recover from the ‘passive’ state once the problem has been rectified
(this may take several seconds).
The CANopen bus is ‘off’:
This means that the internal CAN controller in the NextMove e100 has experienced a fatal
number of Tx and/or Rx errors, greater than the off threshold of 255. At this point the node will
have switched itself to a state whereby it cannot influence the bus. Check:
H 12-24 V is being applied between pin 9 (+24 V) and pin 6 or 3 (0 V) of the CAN connector, to
power the opto-isolators.
H There is at least one other CANopen node in the network.
H The network is terminated only at the ends, not at intermediate nodes.
H All nodes on the network are running at the same baud rate.
H All nodes have been assigned a unique node ID.
H The integrity of the CAN cables.
To recover from the ‘off’ state, the source of the errors must be removed and bus then reset. This
can be done using the Mint BUSRESET keyword, or by resetting the NextMove e100.
Page 97

www.baldormotion.com
Troubleshooting 6-7MN1941
The Manager node cannot scan/recognize a node on the network using the Mint
NODESCAN keyword:
Assuming that the network is working correctly (see previous symptoms) and the bus is in an
‘Operational’ state, check:
H Only nodes that conform to DS401, DS403 and other Baldor CANopen nodes are
recognized by the Mint NODESCAN keyword. Other types of node will be identified with a type
“unknown” (255) when using the Mint NODETYPE keyword.
H Check that the node in question has been assigned a unique node ID.
H The node must support the node guarding process. NextMove e100 does not support the
Heartbeat process.
H Try power-cycling the node in question.
If the node in question does not conform to DS401 or DS403 and is not a Baldor CANopen node,
communication is still possible using a set of general purpose Mint keywords. See the Mint help
file for further details.
The node has been successfully scanned / recognized by the Manager node, but
communication is still not possible:
For communication to be allowed, a connection must be made to a node after it has been
scanned:
H Baldor controller nodes are automatically connected to after being scanned.
H Nodes that conform to DS401, DS403 must have the connections made manually using the
Mint CONNECT keyword.
If a connection attempt using CONNECT fails then it may be because the node being connected
to does not support an object which needs to be accessed in order to setup the connection.
Page 98

www.baldormotion.com
6-8 Troubleshooting MN1941
Page 99

www.baldormotion.com
Specifications 7-1MN1941
7.1 Introduction
This section provides technical specifications of the NextMove e100.
7.1.1 Input power
Description Value
Input power
Nominal input voltage
Power consumption
24 VDC (±20%)
50 W (2 A @24 V)
7.1.2 Analog inputs
Description Unit Value
Type Differential
Common mode voltage range VDC ±10
Input impedance kΩ 120
Input ADC resolution bits 12 (includes sign bit)
Equivalent resolution (±10 V input) mV ±4 .9
Sampling interval μs 500 (both inputs enabled)
250 (one input disabled)
7.1.3 Analog outputs
Description Unit Value
Type Bipolar
Output voltage range VDC ±10
Output current (maximum) mA 10
Output DAC resolution bits 12
Equivalent resolution mV ±4.9
Update interval ms 1
7 Specifications
7
Page 100

www.baldormotion.com
7-2 Specifications MN1941
7.1.4 Digital inputs
Description Unit Value
Type Opto-isolated
USR V+ supply voltage
Nominal
Minimum
Maximum
VDC
24
12
30
Input voltage
Active
Inactive
VDC
>12
<2
Input current
(maximum per input, USR V+ = 24 V)
mA 7
Sampling interval ms 1
7.1.5 Digital outputs
Description Unit Value
USR V+ supply voltage
Nominal
Minimum
Maximum
VDC
24
12
30
Output current
Max. source per output, one output on
Max. source per output, all outputs on
Maximum total output current
mA DOUT0-7 DOUT8-11
350 350
62.5 125
500 500
Update interval (Mint) Immediate
Switching time
No load on output
With 7 mA or greater load
100 ms
10 μs
7.1.6 Relay output
All models Unit All models
Contact rating (resistive) 1A@24VDC
or
0.25 A @ 30 VAC
Operating time (max) ms 5
 Loading...
Loading...