

Page 1
MN1258V4 08/2000
NextMove BX
Installation Manual for Mint v4
Issue 4.0
Page 2
NextMove BX Installation Manual for Mint™ v4
ii
MN1258V4 08/2000
Page 3
Copyright
MN1258V4 08/2000
iii
Copyright Baldor UK Ltd © 2000. All rights reserved.
This manual is copyrighted and all rights are reserved. This document or attached software may not, in whole or in part, be
copied or reproduced in any form without the prior written consent of Baldor UK.
Baldor Optimised Control makes no representations or warranties with respect to the contents hereof and specifically
disclaims any implied warranties of fitness for any particular purpose. The information in this document is subject to change
without notice. Baldor UK assumes no responsibility for any errors that may appear in this document.
MINT
™
is a registered trademark of Baldor UK Ltd.
Windows 95, Windows 98 and Windows NT are registered trademarks of the Microsoft Corporation.
Limited Warranty
For a period of one (1) year from the date of original purchase, BALDOR will repair or replace without charge controls
which our examination proves to be defective in material or workmanship. This warranty is valid if the unit has not been
tampered with by unauthorized persons, misused, abused, or improperly installed and has been used in accordance with the
instructions and/or ratings supplied. This warranty is in lieu of any other warranty or guarantee expressed or implied.
BALDOR shall not be held responsible for any expense (including installation and removal), inconvenience, or
consequential damage, including injury to any person or property caused by items of our manufacture or sale. (Some states
do not allow exclusion or limitation of incidental or consequential damages, so the above exclusion may not apply.) In any
event, BALDOR’s total liability, under all circumstances, shall not exceed the full purchase price of the control. Claims for
purchase price refunds, repairs, or replacements must be referred to BALDOR with all pertinent data as to the defect, the date
purchased, the task performed by the control, and the problem encountered. No liability is assumed for expendable items
such as fuses.
Goods may be returned only with written notification including a BALDOR Return Authorization Number and any return
shipments must be prepaid.
Baldor UK Ltd
Mint Motion Centre
6 Bristol Distribution Park
Hawkley Drive
Bristol
BS32 0BF
U.K.
Telephone: +44 (0) 1454 850 000
Fax: +44 (0) 1454 859 001
Web site: www.baldor.co.uk
Sales email: sales@baldor.co.uk
Support email: technical.support@baldor.co.uk
Baldor Electric Company
Telephone: +1 501 646 4711
Fax: +1 501 648 5792
email: sales@baldor.com
web site: www.baldor.com
Baldor ASR GmbH
Telephone: +49 (0) 89 90508-0
Fax: +49 (0) 89 90508-492
Baldor ASR AG
Telephone: +41 (0) 52 647 4700
Fax: +41 (0) 52 659 2394
Australian Baldor Pty Ltd
Telephone: +61 2 9674 5455
Fax: +61 2 9674 2495
Baldor Electric (F.E.) Pte Ltd
Telephone: +65 744 2572
Fax: +65 747 1708
Page 4
NextMove BX Installation Manual for Mint™ v4
iv
MN1258V4 08/2000
Page 5
Copyright
MN1258V4 08/2000
v
Safety Notice
:
Only qualified personnel should attempt the start-up procedure
or troubleshoot this equipment.
This equipment may be connected to other machines that have rotating parts or parts that are
controlled by this equipment. Improper use can cause serious or fatal injury. Only qualified
personnel should attempt to start-up, program or troubleshoot this equipment.
Precautions:
WARNING: Do not touch any circuit board, power device
or electrical connection before you first
ensure that no high voltage present at this
equipment or other equipment to which it is
connected. Electrical shock can cause
serious or fatal injury. Only qualified
personnel should attempt to start-up,
program or troubleshoot this equipment.
WARNING: Be sure that you are completely familiar with
the safe operation of this equipment. This
equipment may be connected to other
machines that have rotating parts or parts
that are controlled by this equipment.
Improper use can cause serious or fatal
injury. Only qualified personnel should
attempt to program, start-up or troubleshoot
this equipment.
WARNING: Be sure that you are completely familiar with
the safe programming of this equipment.
This equipment may be connected to other
machines that have rotating parts or parts
that are controlled by this equipment.
Improper programming of this equipment can
cause serious or fatal injury. Only qualified
personnel should attempt to program, startup or troubleshoot this equipment.
WARNING: Be sure all wiring complies with the National
Electrical Code and all regional and local
codes. Improper wiring may result in unsafe
conditions.
Page 6
NextMove BX Installation Manual for Mint™ v4
vi
MN1258V4 08/2000
WARNING: The stop input to this equipment should not
be used as the single means of achieving a
safety critical stop. Drive disable, motor
disconnect, motor brake and other means
should be used as appropriate. Only qualified
personnel should attempt to program, startup or troubleshoot this equipment.
WARNING: Improper operation or programming of the
control may cause violent motion of the
motor shaft and driven equipment. Be certain
that unexpected motor shaft movement will
not cause injury to personnel or damage to
equipment. Peak torque of several times the
rated motor torque can occur during control
failure.
WARNING: The motor shaft will rotate during the homing
procedure. Be certain that unexpected motor
shaft movement will not cause injury to
personnel or damage to equipment.
CAUTION: To prevent equipment damage, be certain that
the input power has correctly sized protective
devices installed.
CAUTION: To prevent equipment damage, be certain that
input and output signals are powered and
referenced correctly.
CAUTION: To ensure reliable performance of this
equipment be certain that all signals to/from
the controller are shielded correctly.
CAUTION: Avoid locating this equipment above or
beside heat generating equipment or below
water steam pipes.
CAUTION: Avoid locating this equipment in the vicinity
of corrosive substances or vapors, metal
particles and dust.
Page 7
Manual Revision History
MN1258V4 08/2000
vii
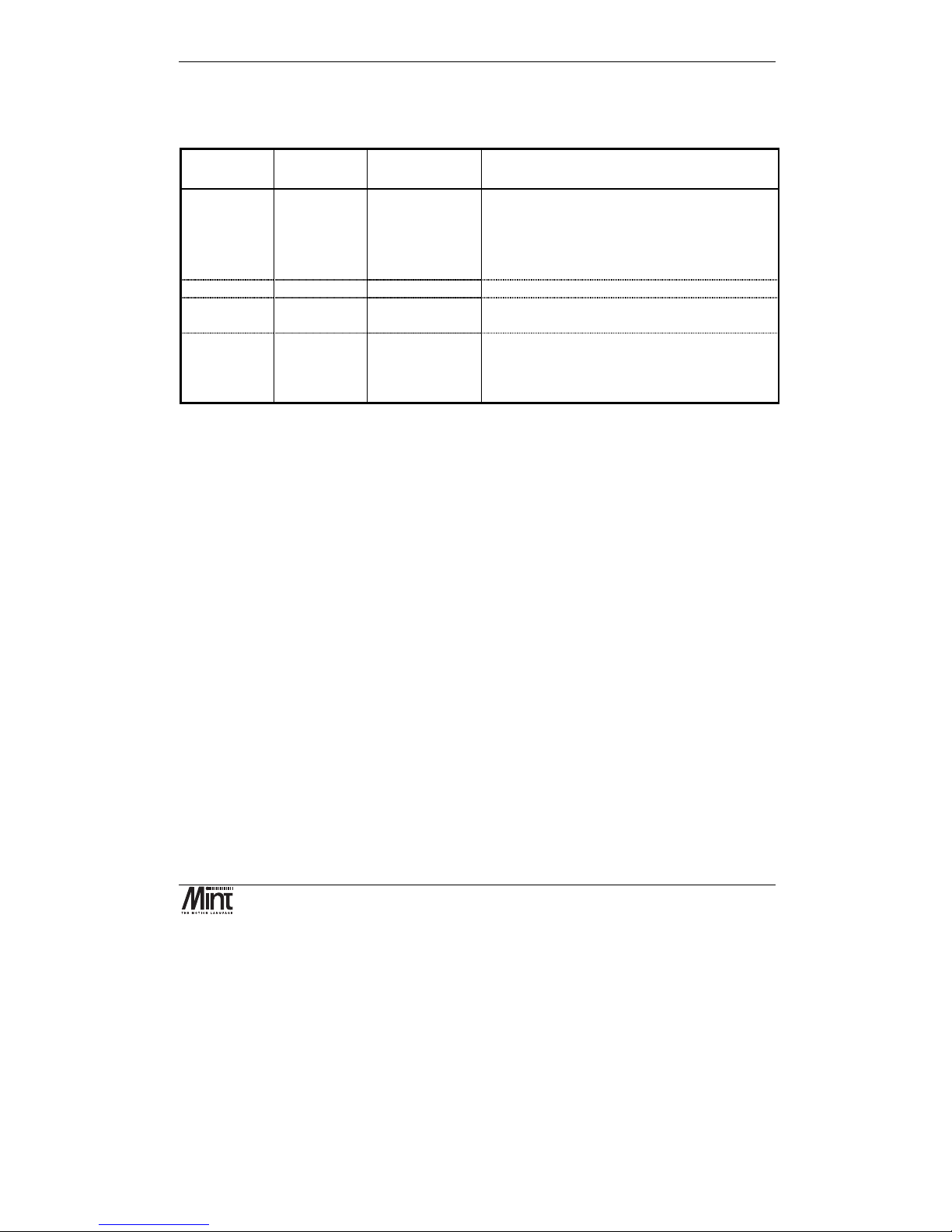
Manual Revision History
Issue Date BOCL
Reference
Comments
1.0 May 1998 MN00278-000 First release of Installation Manual comprising:
•
NextMove BX Overview
•
Getting Started Guide
• cTERM
for Windows User Guide
•
NextMove BX Hardware Guide
1.01 Sept 1998 MN00278-001 KeypadNode 4 information included.
1.02 Nov 1998 UM00507-000 New revision raised.
Format improvements made.
4.0 August 2000 UM00580-000 New version of manual to support Mint v4 on
NextMove BX. New BOCL reference
UM00580. Modified MN reference
MN1258V4.
Page 8
NextMove BX Installation Manual for Mint™ v4
viii
MN1258V4 08/2000
Page 9
Manual Revision History
MN1258V4 08/2000
ix
Read Me First ............................................................................. 1
1.1 Key to Symbols Used in this Manual.........................................................2
Product Overview ...................................................................... 3
Hardware Guide ......................................................................... 7
3.1 Operating Environment.............................................................................9
3.2 NextMove BX PCB Settings.....................................................................9
3.3 Power Connection ..................................................................................11
3.3.1 Front Panel Power Connection: J8.....................................................12
3.4 Digital I/O................................................................................................13
3.4.1 Digital Inputs: J1 and J2.....................................................................13
3.4.2 Fast Interrupts: J6..............................................................................15
3.4.3 Digital Outputs: J4..............................................................................16
3.5 Analog I/O ..............................................................................................19
3.5.1 Analog Inputs: J3 ...............................................................................19
3.5.2 Analog Outputs (Drive Command: J7)................................................20
3.6 Encoder Interface ...................................................................................21
3.7 Relay: J5.................................................................................................24
3.8 Serial Ports.............................................................................................24
3.8.1 RS232................................................................................................25
3.8.2 RS485................................................................................................26
3.8.3 RS485 Multi-Drop...............................................................................27
3.8.4 CAN Bus ............................................................................................28
3.9 Reset State.............................................................................................30
3.10 Battery Backup of Memory......................................................................31
3.10.1 Changing the Battery .........................................................................31
3.10.2 Charging the Battery ..........................................................................32
Page 10
NextMove BX Installation Manual for Mint™ v4
x
MN1258V4 08/2000
3.11 EEPROM................................................................................................32
3.12 System Watchdog ..................................................................................32
3.13 LED Status Display.................................................................................32
Operation and Setup................................................................ 35
4.1 Communicating with NextMove BX.........................................................36
4.2 Baldor Motion Toolkit CD........................................................................36
4.3 Configuring your System ........................................................................37
4.3.1 Minimum System Wiring Example......................................................38
4.3.2 Starting with the Mint Configuration Tool............................................40
4.4 Servo Setup............................................................................................42
4.4.1 Tuning a Servo Drive .........................................................................44
4.4.2 Selecting Servo Loop Gains...............................................................48
4.4.3 System Gains for Current Control by Empirical Method .....................51
4.4.4 System Gains for Velocity Control......................................................53
4.4.5 Eliminating Steady-State Errors .........................................................54
4.5 Methods of Programming .......................................................................55
4.6 Documentation .......................................................................................56
4.7 Mint.........................................................................................................57
4.7.1 The Configuration File........................................................................58
4.7.2 The Program File ...............................................................................63
4.8 Motion.....................................................................................................65
Options and Accessories ........................................................ 67
5.1 NextMove BX..........................................................................................68
5.2 CAN Nodes.............................................................................................68
5.3 Encoder Splitter/Buffer Board .................................................................69
Specifications and Product Data ............................................ 71
6.1 Machine Control I/O................................................................................72
Page 11
Contents
MN1258V4 08/2000
xi
6.2 Miscellaneous and Mechanical Specification ..........................................73
6.3 EMC & CE Marking.................................................................................. 74
6.3.1 Machinery Directive 89/392/EEC........................................................74
6.3.2 Low Voltage Directive 72/23/EEC ......................................................74
6.3.3 EMC Directive 89/336/EEC ................................................................74
6.4 EMC Performance of NextMove BX........................................................75
6.5 EMC Advice............................................................................................75
Troubleshooting Guide............................................................ 77
7.1 Trouble Shooting Guide..........................................................................78
Bibliography............................................................................. 81
Page 12
NextMove BX Installation Manual for Mint™ v4
xii
MN1258V4 08/2000
Page 13
Read Me First
MN1258V4 08/2000
1
1. Read Me First
1
This chapter provides an overview of the manual and symbols used
throughout this document.
Page 14
NextMove BX Installation Manual for Mint™ v4
2
MN1258V4 08/2000
This manual is intended for use with NextMove BX running Mint v4. If Mint v3 is being used, then
the NextMove BX installation manual MN1258 should be used in preference. The hardware details
are common between these manuals but the software references are different.
1.1 Key to Symbols Used in this Manual
Throughout this section various icons and conventions are used to indicate specific functions:
The screwdriver icon indicates that it is necessary to make a physical connection to
NextMove BX by way of the screw terminations on the front panel of the controller.
The disk icon together with filename is used to indicate that a MINT program (the motion
control language used to program NextMove BX) should be downloaded to the controller.
The filename indicates the name of the buffer.
The prompt icon indicates that the following commands should be typed in directly to the
terminal at the MINT P> or C> prompt.
[Ctrl]+[E]
Type
Ctrl
and E at the same time.
Page 15
Hardware Features
MN1258V4 08/2000
3
2. Product Overview
2
A brief overview of NextMove BX and the software tools available on the
Baldor Motion Toolkit.
Page 16
NextMove BX Installation Manual for Mint™ v4
4
MN1258V4 08/2000
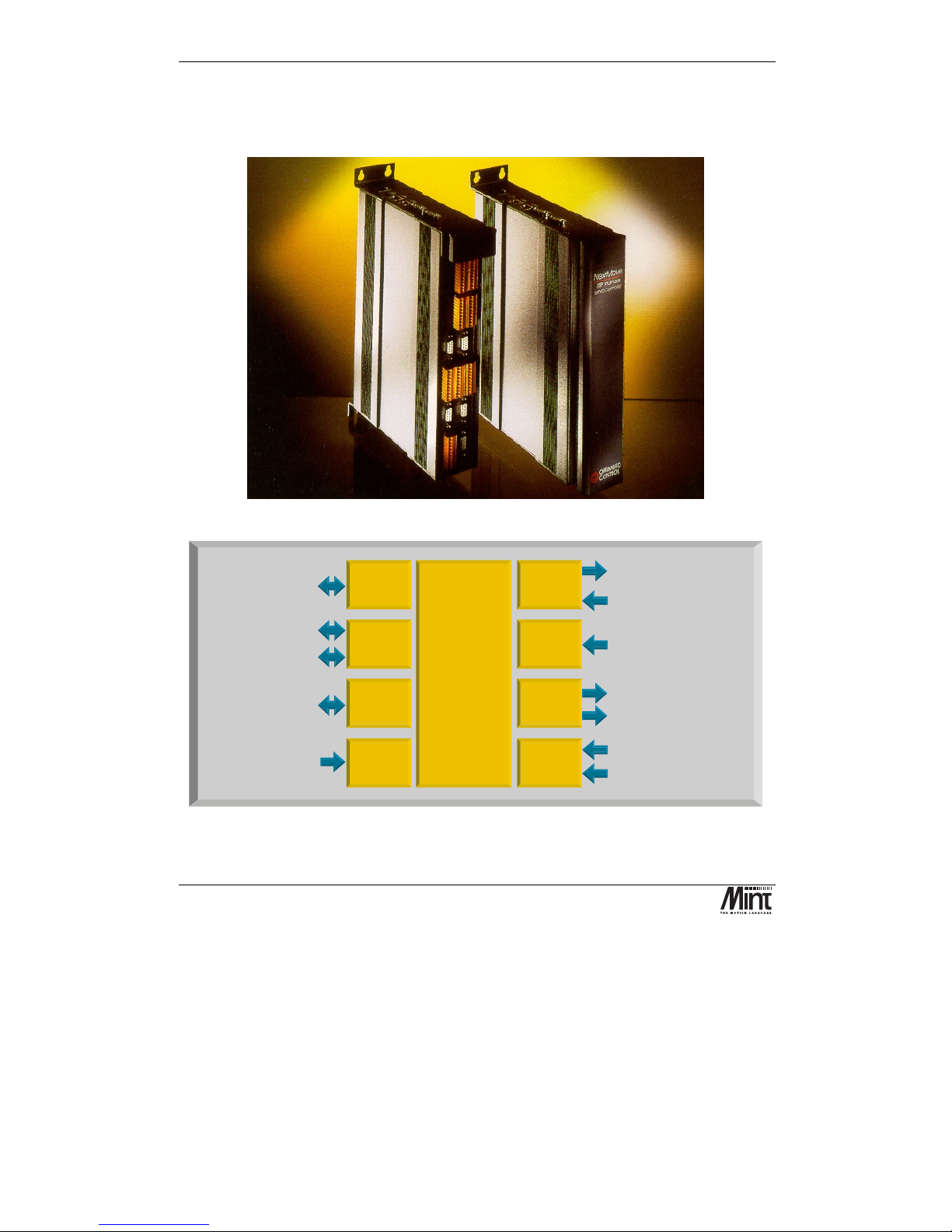
NextMove BX is an intelligent servo motion controller which supports up to four servo axes. It is
supplied in an metal enclosure for the convenience of those customers who do not wish to install a
rack system for a single card. For other situations the board is available in a 6U rack mounting
format (NextMove RK).
Figure 2-1: NextMove BX Controller
RS 485 serial port
Serial
Commun-
ications
A
nalogue inputs 8 x 12 bit
single ended or 4 x 12 bit
differential +/-10V or 0-5V
Drive enable relay
4 x Servo-amplifier demands
+/-10V, 12 bit
4 x incremental encoders,
3 channel, up to 8 million
counts per second.
4 Axes of
Servo
Control
NextMove BX
Motion Controller
4 fast interrupt inputs with
hardware position latches
CAN
Interface
2 x CAN bus 1MBaud in dustrial
Local Area Network for
connection to other intelligent
drives, I/O and key pad
Master
Encoder
Input
3 channel incremental encoder ,
up to 8 million counts per second
Digital
Outputs
8 x Digital outputs, opto-isolated
PNP or NPN, 12-24V, 350mA max .
Digital
Inputs
16 x Digital inputs, opto-isolated
PNP or NPN, 12-24V. User
configurable.
Power
Requirements
Logic supply
24 VoltsDC @ 0.7 A
A
nalogue
Inputs
32 bit floating point
Digital Signal
Processor system.
4 axes of
high performance
closed loop
servo control
MINT or C
programming
language.
512Kb RAM,
battery backed
512Kb FLASH ROM
RS 232 serial port
Figure 2-2: Technical Overview
Page 17
Hardware Features
MN1258V4 08/2000
5
NextMove BX features the MintTM v4 motion control language. Mint is a structured form of Basic,
custom designed for motion control applications, either stepper or servo. It allows users to quickly
get up and running with simple motion control programs. In addition, Mint includes a wide range of
powerful commands for complex applications.
Included with NextMove BX is the Baldor Motion Toolkit CD. This contains a number of utilities
and useful resources to get the most from you Mint controller. These include:
Mint Configuration Tool
is a rapid getting started and configuration utility designed for use with a
number of Mint v4 controllers. See the ‘Mint Configuration Tool Users Guide’ for details.
Mint WorkBench
is the IDE and user interface for communicating with a Mint controller. See the
‘Mint WorkBench Users Guide’ for details.
PC Developer Libraries
allow PC applications to be written that communicate with Mint
controllers. This includes C++ source and ActiveX interface. See the ‘Mint v4 PC Programming
Guide’ for details.
Embedded Developer Libraries
allow embedded C31 applications to be developed using the Texas
Instruments TMS320C3x compiler. See the ‘Mint v4 Embedded Programming Guide’ for details.
Mint Code Analyzer Tool
is a utility designed to help in the process of upgrading to Mint v4. The
utility will scan existing Mint and C application files and highlight the keywords and functions that
have been changed from older firmware versions. See the ‘Mint v4 Code Analyzer Tool’ manual for
details.
Page 18
NextMove BX Installation Manual for Mint™ v4
6
MN1258V4 08/2000
Page 19
Hardware Features
MN1258V4 08/2000
7
3. Hardware Guide
3
This chapter describes in detail the hardware interface to the NextMove
BX controller.
Page 20
NextMove BX Installation Manual for Mint™ v4
8
MN1258V4 08/2000
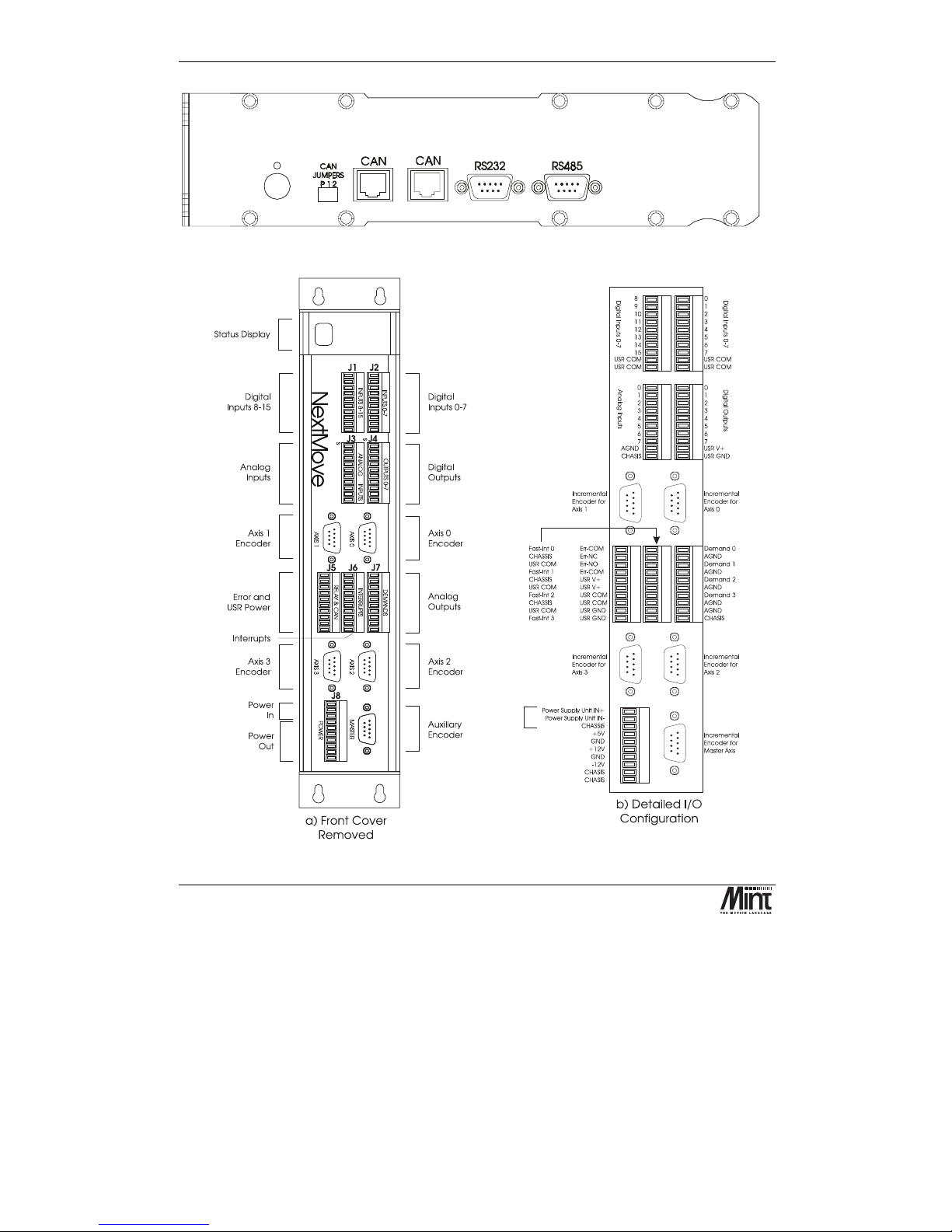
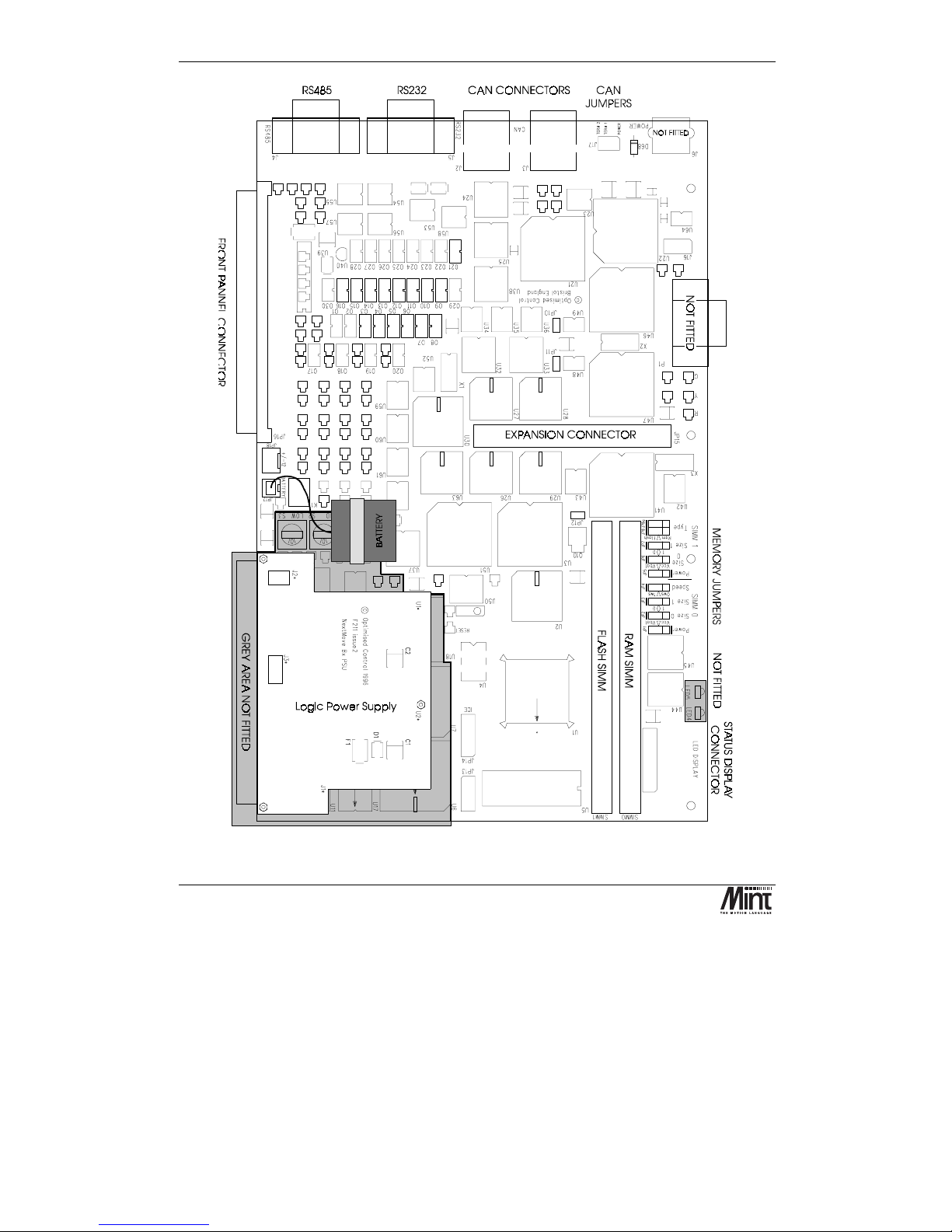
Figure 3-1: NextMove BX Top Panel
Figure 3-2: NextMove BX Hardware
Page 21
Hardware Features
MN1258V4 08/2000
9
3.1 Operating Environment
The safe operation of this equipment depends upon its use in the appropriate environment:
•
At an altitude of ≤ 2000m (6560ft) above sea level
•
In an ambient temperature of 0°C to 40°C (32°F to 104°F)
•
In relative humidity levels of 80% for temperatures up to 31°C (87°F) decreasingly linearly
to 50% relative humidity at 40°C (104°F), non-condensing
•
The pollution degree according to IEC664 shall not exceed 2
•
The 24V dc supplied to the unit to power the control circuit shall be isolated from the mains
using double or reinforced insulation so as to constitute a safety extra low voltage supply.
The inputs and outputs of control circuit shall also be confined to SELV circuits
•
The atmosphere shall not contain flammable gases or vapors
•
There shall not be abnormal levels of nuclear radiation or X-rays
•
The product shall be secured by the slots in the flange, the protective earth/ground stud
shall be bonded to a safety earth/ground by a 25A conductor.
3.2 NextMove BX PCB Settings
Anti-static pre-cautions must be taken before handling the printed
circuit board (PCB).
Access to jumpers, EEPROM and other components can be achieved via a slide-down cover on the
right hand side of the box. The cover is held in place by a set screw which should first be removed.
A screwdriver may then be required to ease the cover free.
Page 22
NextMove BX Installation Manual for Mint™ v4
10
MN1258V4 08/2000
Figure 3-3: Board Settings
Page 23
Hardware Features
MN1258V4 08/2000
11
3.3 Power Connection
The unit requires 24V dc ±20% at approximately 700mA (max.) for the logic power supply unit.
The unit also takes 12-24V dc ±20% at approximately 400mA (max.) for the isolated outputs and
12V to 24V dc or -12V to -24V dc ±20% at approximately 200mA for the isolated digital inputs and
fast interrupts.
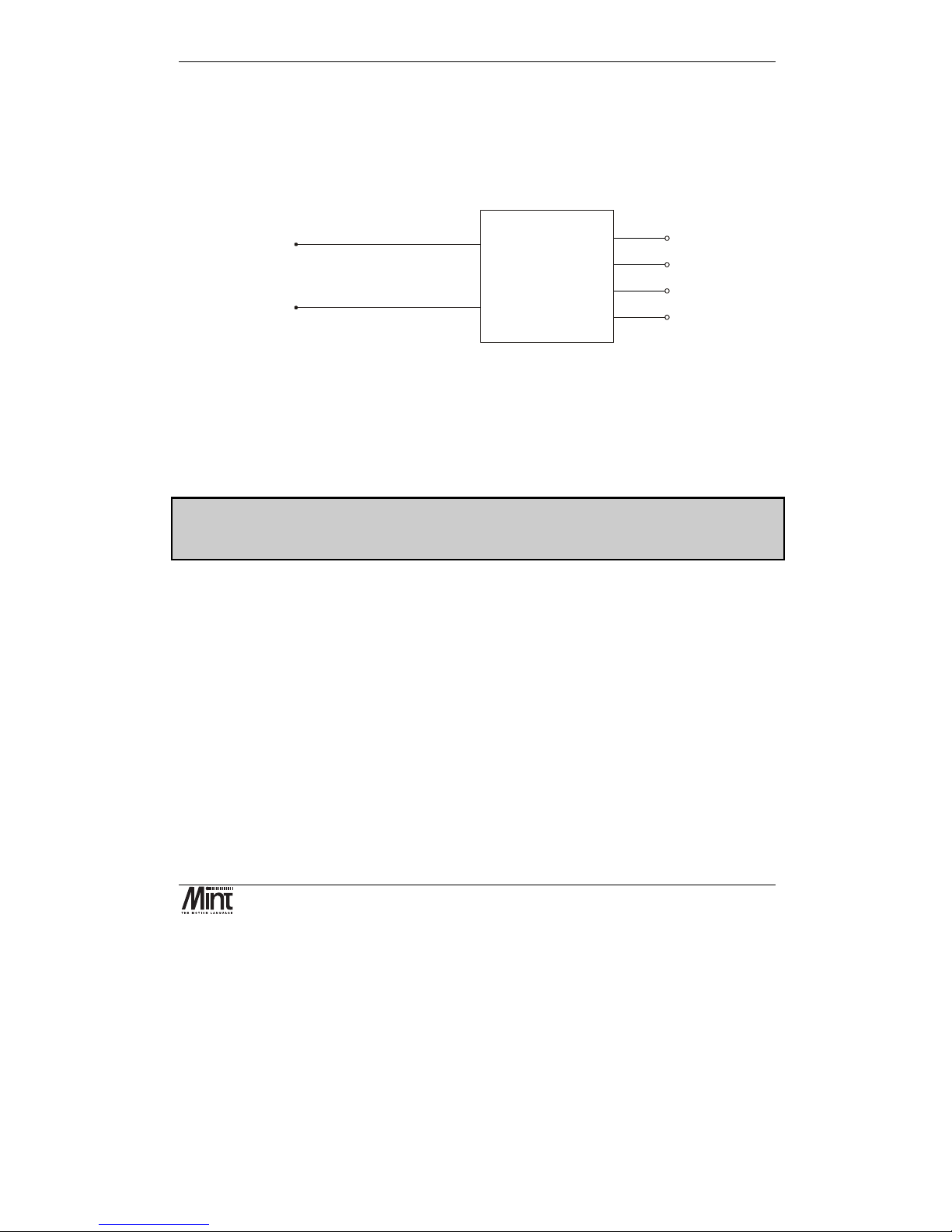
psu in +
Power Supply
Unit
+12V
+5V
0V
-12V
psu in -
Figure 3-4: NextMove BX Power Supply Unit
The unit has an on board power supply to provide the following:
•
5V regulated output for incremental encoders.
•
+/-12V output, 5V output for general use. Note that these must not be used for machine
I/O. Do not attempt to draw more than 200mA from the 12V rails and no more than
650mA from the 5V (including the encoders).
If the encoders require more than 650mA total, some of them (or all) must be powered from an
external 5V supply. This additional supply must NOT be connected to the NextMove BX 5V
supply.
Page 24
NextMove BX Installation Manual for Mint™ v4
12
MN1258V4 08/2000
3.3.1 Front Panel Power Connection: J8
Pin No Signal Function
1
psu in +
Power Input 24V dc (18-30V)
2
psu in -
Power Input 0V
3
chassis
Chassis ground for cable screen
4
+5V
Voltage output for analog circuitry @
100mA
5
gnd
Ground
6
+12V
Voltage output for analog circuitry @
50mA
7
gnd
Ground
8
-12V
Voltage output for analog circuitry @
50mA
9
chassis
Chassis ground for cable screen
10
chassis
Chassis ground for cable screen
Two dc-dc converters are used to generate the internal logic voltages from a dc input of 24V ±20%.
The logic power rails are brought out on the front panel for analog sensors and associated circuitry.
These rails should not be used for machine I/O,
usr-V+
and
usr-gnd
should be used instead.
The controller has opto-isolation between the microprocessor controller and the inputs and outputs to
provide noise immunity required for industrial environments. The power supply unit inputs (24V dc)
include isolated grounds.
Using a power supply of 24V dc at 2A is sufficient to drive all the outputs at 50mA and with all the
inputs on.
- WARNING -
Applying mains voltages to NextMove BX (110V/220V) will damage the unit. Ensure that the
power input voltages comply.
Page 25
Hardware Features
MN1258V4 08/2000
13
3.4 Digital I/O
There are a total of 16 general purpose digital inputs and 8 general purpose digital outputs. The
digital inputs are software configurable for any one of the following functions:
•
Forward
limit
(end of travel) input on axis of the axes.
•
Reverse
limit
input on any of the axes.
•
home
input on any of the axes.
•
drive error
input on any of the axes.
•
stop
input (controlled) on any of the axes.
The inputs can be programmed such that any of the axes can share the same input if necessary.
The inputs are also programmable in software for being edge triggered (positive and negative) or
level triggered (active high or low).
The digital outputs can be programmed as a
drive enable
output for any axis or
general error
output
. Again, axes can share the same output. The active level of the output is also software
programmable.
As well as the general purpose I/O, NextMove BX also supports four fast position latch inputs
(described in section 3.4.2).
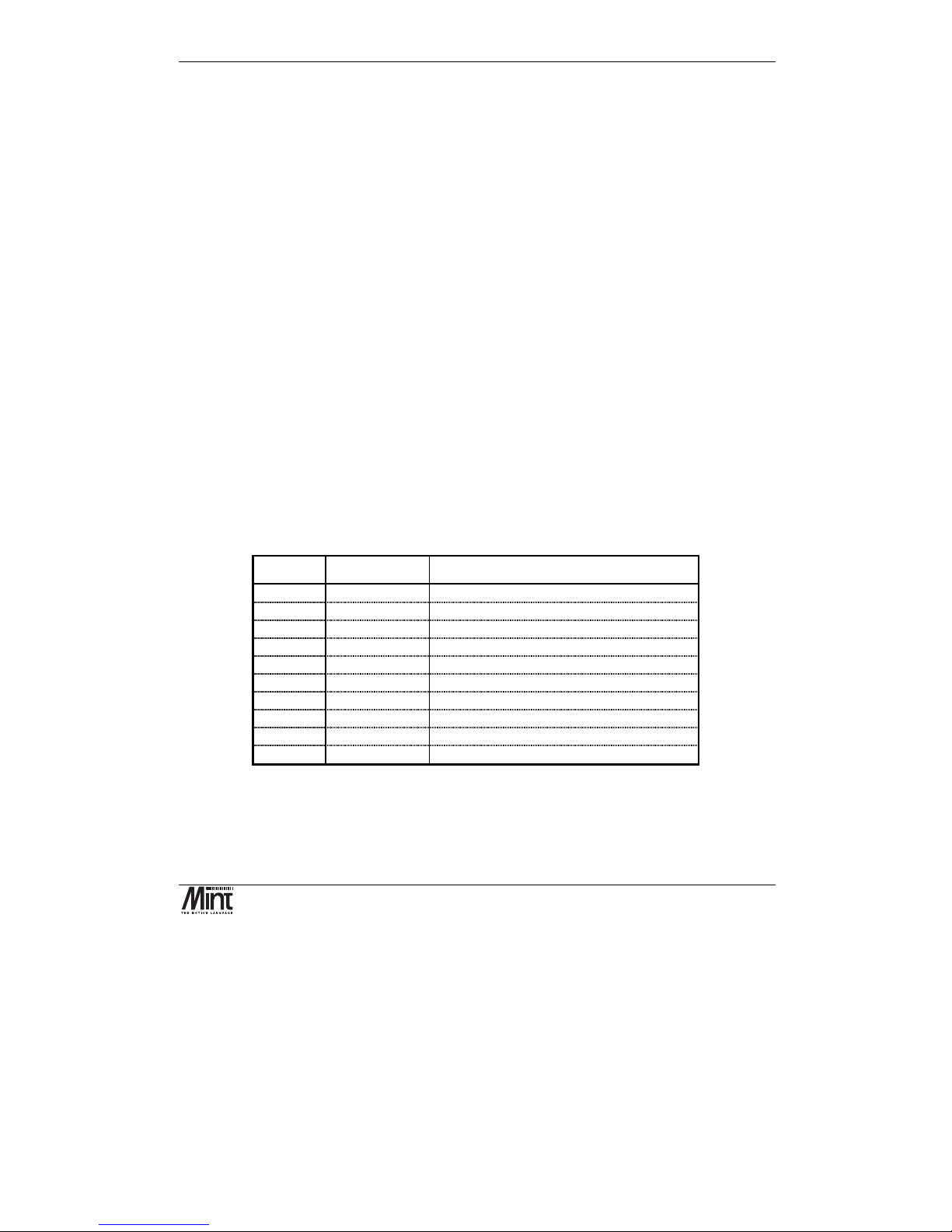
3.4.1 Digital Inputs: J1 and J2
Connector J2:
Pin No Signal Function
1
din 0
Digital input bit 0
2
din 1
Digital input bit 1
3
din 2
Digital input bit 2
4
din 3
Digital input bit 3
5
din 4
Digital input bit 4
6
din 5
Digital input bit 5
7
din 6
Digital input bit 6
8
din 7
Digital input bit 7
9
usr-com
Common reference for Inputs
10
usr-com
Common reference for Inputs
Page 26
NextMove BX Installation Manual for Mint™ v4
14
MN1258V4 08/2000
Connector J1:
Pin No Signal Function
1
din 8
Digital input bit 8
2
din 9
Digital input bit 9
3
din 10
Digital input bit 10
4
din 11
Digital input bit 11
5
din 12
Digital input bit 12
6
din 13
Digital input bit 13
7
din 14
Digital input bit 14
8
din 15
Digital input bit 15
9
usr-com
Common reference for Inputs
10
usr-com
Common reference for Inputs
Inputs may be 12 to 24V positive or negative with respect to
usr-com. usr-com
is shared with the
interrupt inputs.
The sixteen digital inputs are optically isolated using ac input isolators. One input pin of each device
is connected to the common reference. This common rail may be connected to a positive voltage,
e.g.
usr-V+,
for use with NPN drive transistors or low-side switches. Alternatively the common rail
may be connected to a negative voltage, e.g.
usr-gnd
, for use with PNP drive transistors or high-side
switches.
In either case the user provides an external supply which drives the inputs with a voltage in the range
12V to 24V ±20%.
The voltage applied to the inputs should be in the range 12 to 24V ±20% (9.6 to 28.8V) above or
below the
usr-com
rail to activate the inputs. If the voltage exceeds the maximum stated, the input
circuit may overheat and be damaged The voltage applied should be less than 3V above or below the
usr-com
rail to deactivate the inputs.
The inputs have low pass filters and Schmitt trigger buffers An input pulse must have a duration of at
least 2ms (one software scan) to guarantee acceptance by the application program. Pulses below 2ms
are not guaranteed to be ignored.
Figure 3-5: Digital Input Circuit
Page 27
Hardware Features
MN1258V4 08/2000
15
Associated MINT keywords are:
#INx, INPUTACTIVELEVEL, IN, INx, INPUTMODE, INPUTNEGTRIGGER,
INPUTPOSTRIGGER, INSTATE
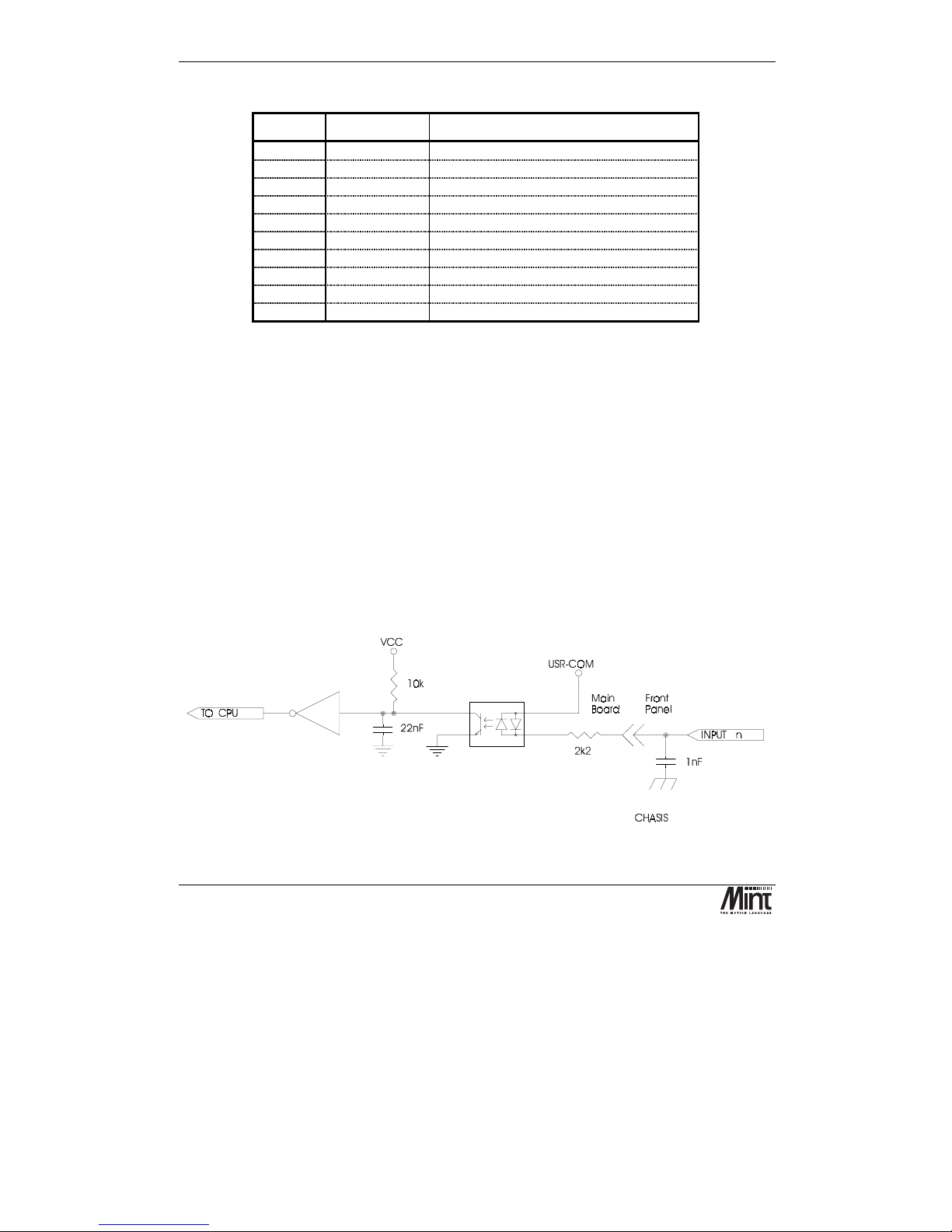
3.4.2 Fast Interrupts: J6
Pin No Signal Function
1
fast-int 0
Fast interrupt 0
2
chassis
Chassis ground for cable screen
3
usr-com
Common reference
4
fast-int 1
Fast interrupt 1
5
chassis
Chassis ground for cable screen
6
usr-com
Common reference
7
fast-int 2
Fast interrupt 2
8
chassis
Chassis ground for cable screen
9
usr-com
Common reference
10
fast-int 3
Fast interrupt 3
Interrupt inputs may be 12 to 24V positive or negative with respect to
usr-com. usr-com
is shared
with the digital inputs.
There is a facility for 4 high speed external interrupts on NextMove BX. These are isolated using
high speed opto-isolators and full bridge rectification. They are driven in the same way as the digital
inputs, see the digital input section for details on the voltage levels. The interrupt inputs can cause an
interrupt on both activating and deactivating edges of the signal. Fast interrupt 0 has a maximum
latency of 30µs. Fast interrupts 1 to 3 have a maximum latency of 1ms.
Because of the fast response time of the input circuitry (approx. 200ns)these inputs are more
susceptible to high frequency noise. Care must be taken with shielding/screening and routing of these
signals, i.e. do not route high speed interrupt cabling near motor drive cabling.
Figure 3-6: Fast Interrupt Input Circuit
See section ‘Fast Position Latch’ in the ‘Mint v4 Programming Guide’ for more details.
Page 28
NextMove BX Installation Manual for Mint™ v4
16
MN1258V4 08/2000
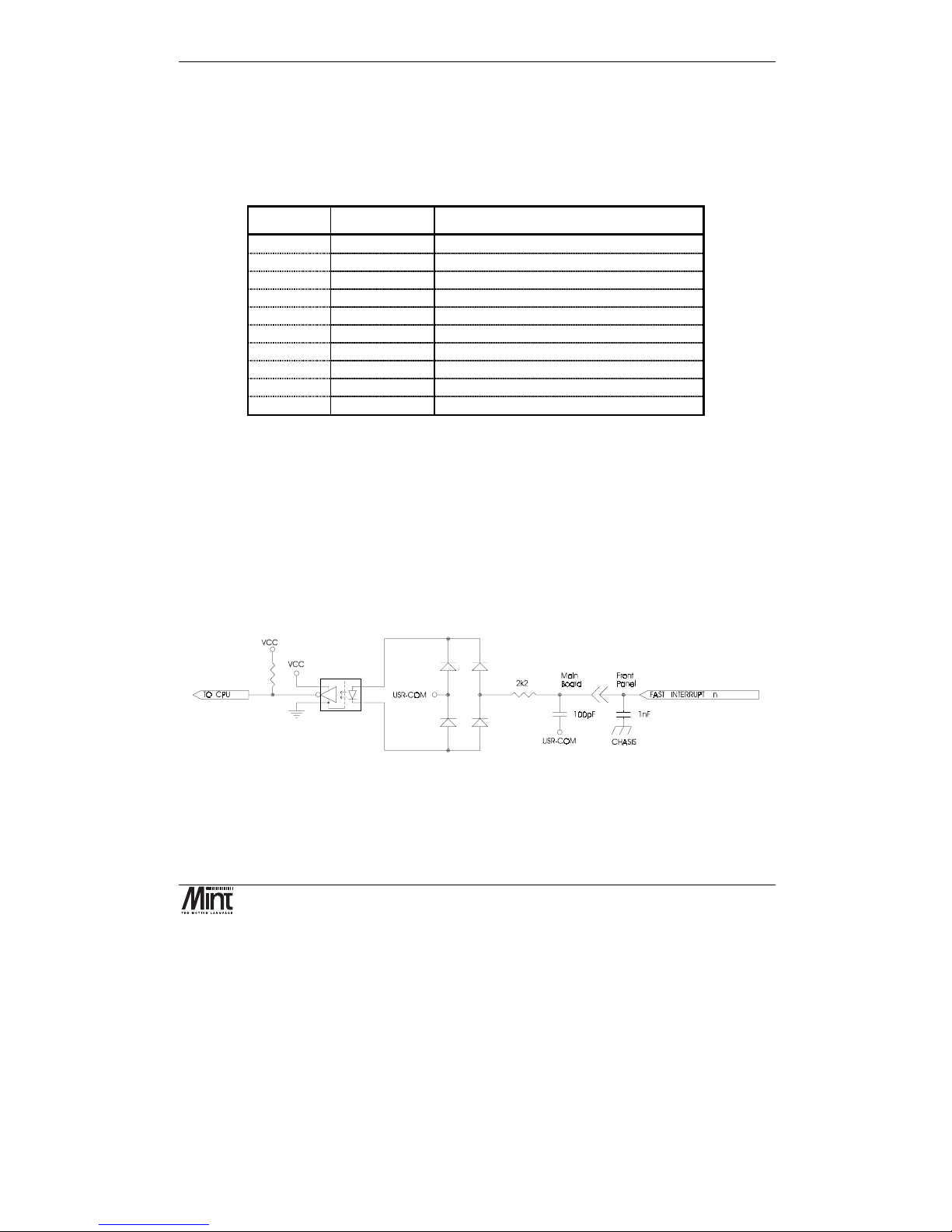
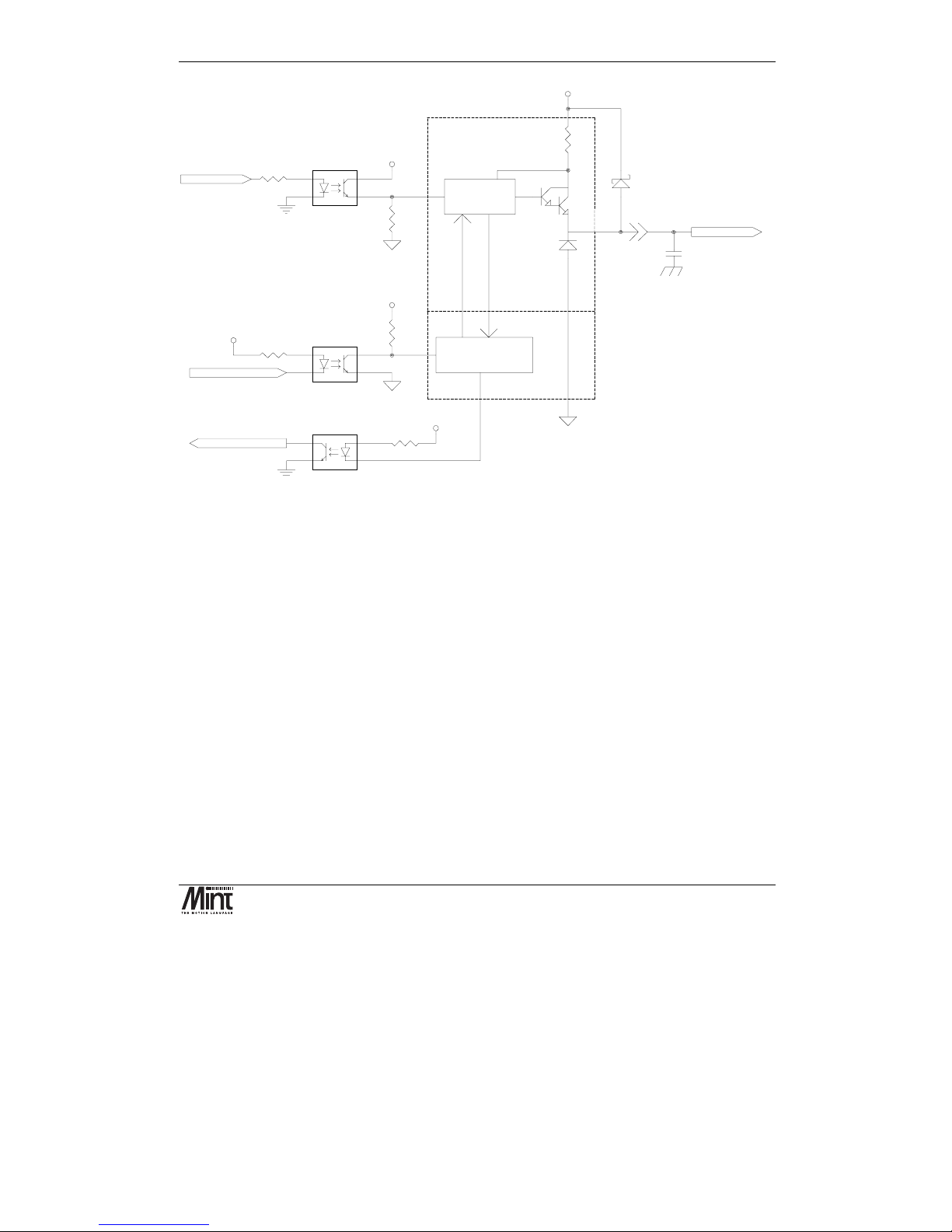
3.4.3 Digital Outputs: J4
Pin No Signal Function
1
out 0
Digital output bit 0
2
out 1
Digital output bit 1
3
out 2
Digital output bit 2
4
out 3
Digital output bit 3
5
out 4
Digital output bit 4
6
out 5
Digital output bit 5
7
out 6
Digital output bit 6
8
out 7
Digital output bit 7
9
usr-V+
Power for output driver
10
usr-gnd
0v reference for outputs
usr-V+
can be 12-24V +/20% relative to
usr-gnd
. Damage to the unit may occur if the voltage
exceeds 30V and the operation will be unpredictable below 8V
The eight digital outputs are opto-isolated. They are driven by a PNP open collector Darlington type
UDN2987A with internal over-current and over temperature protection. The over-current circuit
shuts down the faulty output and indicates the error to the processor and thus to the application
which, after corrective action, can reset the device. Note that there is a single
error
output and so
the program is unable to determine which output is at fault. Also there is a single
reset
input which
resets all of the outputs. Any outputs which are ON when the device is reset will go OFF during the
reset. This lasts approximately 10ms.
Page 29
Hardware Features
MN1258V4 08/2000
17
USR-V+
CURRENT
SENSE
OUTPUT n
OUT-5V
OUT-5V
10k
10k
CONTROL
LOGIC
RESET
AND
ERROR
LOGIC
COMMON
ONE OF
EIGHT
1nF
CHASIS
USR-G ND
Main
Board
Front
Panel
VCC
1k
OUTPUT RESET
FROMCPU
1k
OUTPUT ERROR
1k
OUT-5V
USR-GND
USR-G ND
Figure 3-7: Digital Output Circuit
If the device is reset too often during a short circuit condition (greater than twice per second) the
device will eventually overheat and will be damaged. Damage will also occur if the output is taken
above
usr-V+
, however transient excursions above
usr-V+
are clamped and therefore tolerated.
Each output has a freewheeling diode in parallel with the load. This allows inductive loads (such as
relays) to be used without damaging the output Darlington devices. The outputs can all switch
50mA continuously through a voltage of 12 to 24V. More current can be supplied, subject to a
power dissipation limit (shown on the graph in Figure 3-8). Further information is given in the
Allegro Semiconductors UDN2987 data sheet.
Page 30

NextMove BX Installation Manual for Mint™ v4
18
MN1258V4 08/2000
Number Of Outputs On Simultaneously
0
50
100
150
200
250
300
350
0 102030405060708090100
8
7
6
5
4
3
2
Figure 3-8: Output Current
Power to the output circuit is protected with a 750mA PTC style self re-setting fuse and a 30V
transient suppressor. A 5V supply (
out-5V
) is generated from the user voltage to power the isolation
stage, allowing any user voltage to function with the same characteristics.
The digital outputs are inactive following system reset.
The digital inputs and outputs can share the same 24V power supply or machine power rail.
Opto-isolation is provided on these outputs to offer the user some flexibility in the
earthing/grounding scheme, but not to provide level translation. usr-gnd must be connected to
system ground - typically at a star point
Associated Mint keywords are:
OUTPUTACTIVELEVEL, OUT, OUTx
Page 31

Hardware Features
MN1258V4 08/2000
19
3.5 Analog I/O
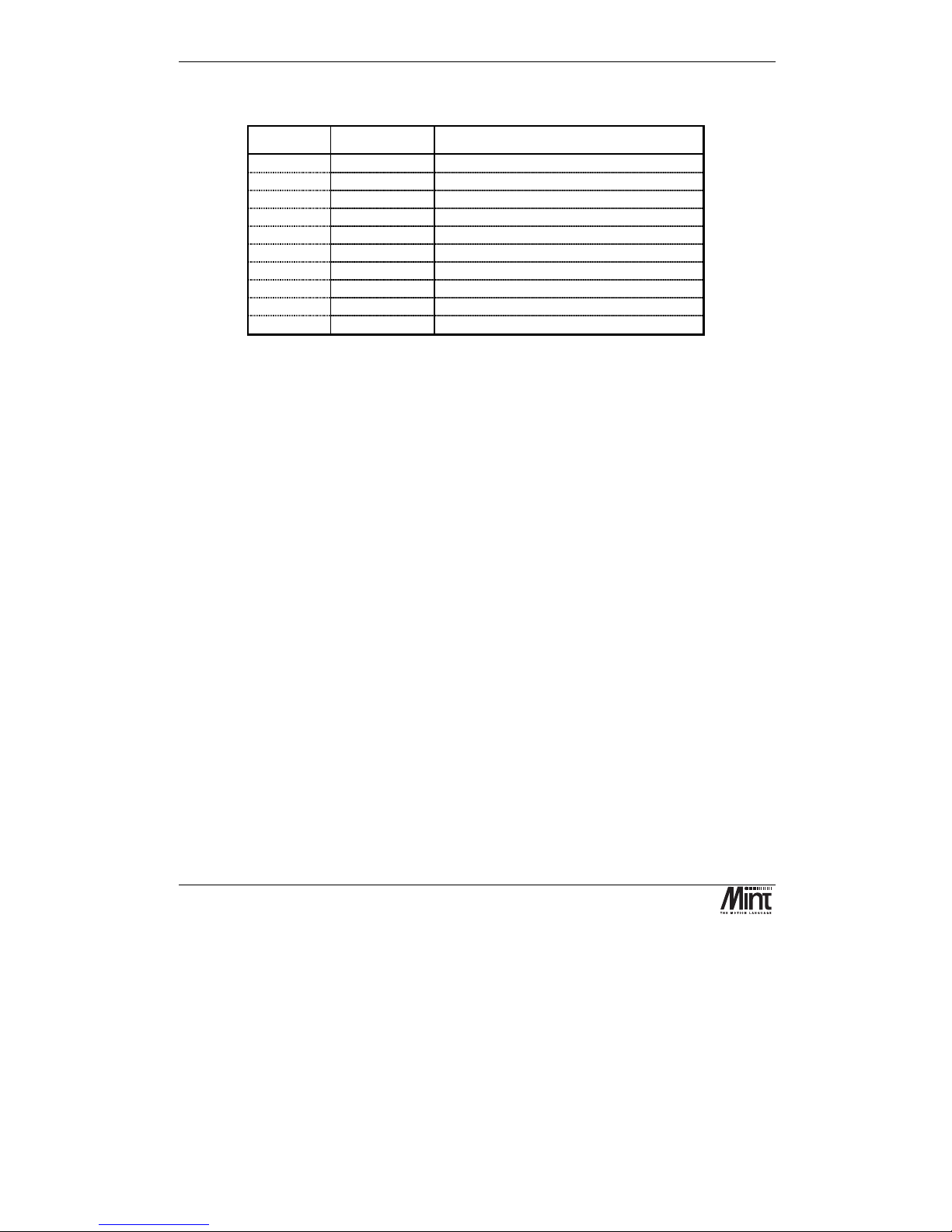
3.5.1 Analog Inputs: J3
Pin No Signal Function
1
ain 0
Analog Input 0 (differential input 0-)
2
ain 1
Analog Input 1 (differential input 0+)
3
ain 2
Analog Input 2 (differential input 1-)
4
ain 3
Analog Input 3 (differential input 1+)
5
ain 4
Analog Input 4 (differential input 2-)
6
ain 5
Analog Input 5 (differential input 2+)
7
ain 6
Analog Input 6 (differential input 3-)
8
ain 7
Analog Input 7 (differential input 3+)
9
agnd
0v reference for analog circuit
10
chassis
Chassis ground for cable screen
Analog ground (
agnd
) is at the same potential as digital ground (
gnd
). They are connected at the
DAC chip.
The analog inputs are led to a MAX180. This is an eight channel, 12 bit, multiplexed analog-todigital converter. The input circuit for each pair of inputs is as follows:-
Figure 3-9: Analog input circuit (1 pair)
Page 32

NextMove BX Installation Manual for Mint™ v4
20
MN1258V4 08/2000
NextMove BX uses a Data Acquisition Chip (Maxim MAX180). This device has:
•
12 bit resolution with ½ LSB linearity
•
Built in track and hold
•
A 2us sample window.
The chip can operate with either bipolar or unipolar input voltages, the selection of which is made
under software control.
Input buffers with an impedance of 20k and clamping diodes protect the device from voltage
extremes, and analog switches allow true differential measurement. The voltage range of the inputs
when used in single-ended mode is ±2.5V (bipolar) or 0-5V (unipolar), and when used in differential
mode is ±10V (bipolar only).
The input buffers do not have any filtering. Therefore any noise on the inputs will be reflected in the
value read.
When analog channel 0 (2, 4, 6) is switched to differential mode, channel 1(3, 5, 7) is switched to
feed back of analog output 0 (1, 2, 3).
Associated MINT keywords are:
ADCMODE, ADC
3.5.2 Analog Outputs (Drive Command: J7)
The controller provides up to four ±10V (±0.1%) analog outputs for motor
command
– one for each
servo axis. A 14 bit DAC is used which gives a resolution of 1.2mV/bit. The optimum cabling
arrangement is to use a separate shielded twisted pair cable, twist
command+
with
command-
and
connect the screen/shield to screen/shield at the controller end only.
Pin No Signal Function
1
demand 0
Demand/Command output for axis 0
2
agnd
Analog ground
3
demand 1
Demand/Command output for axis 1
4
agnd
Analog ground
5
demand 2
Demand/Command output for axis 2
6
agnd
Analog ground
7
demand 3
Demand/Command output for axis 3
8
agnd
Analog ground
9
agnd
Analog ground
10
chassis
Chassis ground for cable screen
Analog ground (
agnd
) is at the same potential as digital ground (
gnd
). They are connected at the
DAC chip.
There are four 14 bit resolution analog outputs implemented in an MP7611. The outputs have a
range of ± 10V, and revert to 0V during system reset. The outputs are referred to the system ground
(not opto-isolated) via a separate but connected analog ground plane.
Page 33

Hardware Features
MN1258V4 08/2000
21
The outputs are buffered by op-amps suitable for driving a load resistance of ≥10kΩ, and are
brought out on the front panel. When connecting to a drive it is recommended that screened/shielded
twisted pair cable is used, with the demand signal twisted with
agnd
. This in turn should be
connected to the demand 'minus' input of the drive. The screen/shield should be connected to chassis
earth/ground at one end only.
Figure 3-10: Analogue Output Buffer
Associated MINT keywords are:
DACLIMITMAX, DAC, DACMODE, DACOFFSET
3.6 Encoder Interface
Up to five incremental encoders may be connected to the controller (four axis encoders and a master
encoder). These encoders must provide complementary signals. The input circuit is a differential
line receiver with open circuit protection and 120Ω termination. Each encoder channel has
chA
,
chB
and
index
plus their complements. The encoders should be powered from
+5V
, and are
referred to the controller GND.
If the encoders require more than 650mA total, some of them (or all) must be powered from an
external 5V supply. This additional supply must NOT be connected to the NextMove BX 5V
supply.
The encoders are the position sensors used by the controller to measure axis position and consist of
two pulse trains, 90 degrees out of phase. The controller uses the phase difference to determine
direction of motion and counts the encoder edges to determine position. The frequency of these
counted edges reflects the motor velocity.
The four axis encoders are labeled
AXIS 0
to
AXIS 3
and the master speed/position encoder is
labeled
AUXILIARY
.
Page 34

NextMove BX Installation Manual for Mint™ v4
22
MN1258V4 08/2000
The encoder must be wired to a 9 pin 'D' male plug, using good quality multicore/conductor screened/shielded cable, according to the diagram shown in
Error!
Reference source not found.
. Although there is a Screen/Shield pin, the cable
screen/shield should be connected to the connector shell. The pin is for use with not
metallic connector shells (not recommended). If the encoder does not have an index (Z)
output, leave the
index
and
!index
unconnected.
Figure 3-11: Encoder Connector
Pin Signal Function Cabling
1
Encoder V+
Power to the encoder
7
gnd
Power and signal ground
5
chA
Channel A true signal
9
!chA
Channel A complement signal
8
chB
Channel B true signal
3
!chB
Channel B complement signal
2
index
Index true signal (channel I or Z or C)
6
!index
Index complement signal (channel I or Z or C)
4
chassis
Chassis connection
Shell
chassis
Screen
The maximum input frequency the encoders can normally accept is 8 million quadrature counts per
second. This equates to a maximum frequency for the
chA
and
chB
signals of 2MHz. However this
maximum is limited to short cables, the following table shows recommended length vs. frequency for
differential signals.
Page 35

Hardware Features
MN1258V4 08/2000
23
Frequency Max. Length
1.3MHz 2m (6½ ft approx.)
500kHz 10m (33ft approx.)
250kHz 20m (65½ ft approx.)
100kHz 50m (164ft approx.)
50kHz 100m (328ft approx.)
20kHz 300m (984ft approx.)
10kHz 700m (2296ft approx.)
7kHz 1000m (3280ft approx.)
The input receiver circuit allows encoders with either single ended or differential line drivers to be
used. However, single-ended encoders provide inferior noise immunity and should only be used on
the shortest of cable runs (< 3m or approx. 9½ ft) away from sources of interference. The input
receiver circuit includes diode protection on the inputs to guard against noise spikes. The diodes
prevent any input from exceeding 5.6V or below -0.6V. The circuit is shown in Figure 3-12.
The encoder inputs are brought out to 9 pin 'D' type female sockets. The encoder should be wired to
a 9 pin 'D' male plug. Low profile hoods are available from ITT Canon (part no. DE-12107354).
Associated MINT keywords are:
ENCODER, ENCODERSCALE, ENCODERVEL, ENCODERWRAP, POS, SCALE, VEL
Figure 3-12: Encoder line receiver circuit
Page 36

NextMove BX Installation Manual for Mint™ v4
24
MN1258V4 08/2000
3.7 Relay: J5
The relay connections on the connector are shown as the shaded boxes.
Pin No Signal Function
1
err-com
Relay common contact
2
err-nc
Relay normally closed contact
3
err-no
Relay normally open contact
4
err-com
Relay common contact
5
usr-V+
Power rail for digital output driver
6
usr-V+
Power rail for digital output driver
7
usr-com
Common reference for digital inputs
8
usr-com
Common reference for digital inputs
9
usr-com
0v reference for digital output driver
10
usr-com
0v reference for digital output driver
A single pole, change-over relay is included on the card to provide a volt-free contact for the
enabling of other parts of the system, such as drives. The relay is controlled by a latch which is
cleared during reset of the unit. Reset occurs on power up or power down, watchdog error and 5V
under-voltage. The relay is energized only by software control. The relay is the default global error
output channel.
Because of the track rating on the PCB, the relay is limited to a rating of 500mA at 24V dc.
For this reason, the relay should be used for voltage free signal switching and should not be
used for power.
Associated MINT keywords are:
RELAY, DRIVEENABLEOUTPUT, GLOBALERROROUTPUT
3.8 Serial Ports
The unit is fitted with a DUART providing one RS232 port and one RS485 port. The serial ports are
set up for the following configuration by default:
•
9600 Baud
•
1 start bit
•
8 data bits
•
1 stop bit
•
No parity
•
RTS/CTS Hardware handshaking disabled (RS232 port only)
Page 37

Hardware Features
MN1258V4 08/2000
25
The baud rate of both ports is user-configurable with the RS232 capable of 19,200 and the RS485 up
to 9,600. Hardware handshaking (RTS / CTS) is permanently enabled. Both serial ports are brought
out on the top of the unit on 9 pin 'D'-type connectors.
3.8.1 RS232
The RS232 connections are brought out onto a male 9 pin D-type connector on the top panel of the
controller. The RS232 cable should be screened/shielded with the screen/shield connected to the
body of the connector at both ends to give overall protection. Twisted pair cable is
not
recommended since the signals do not have compliments. The cable should not exceed 20m (65ft) at
19,200 baud and 30m (98ft) at 9,600 baud.
The minimum requirement is for three wires
txd, rxd
and
gnd
. This will only function without
hardware handshaking.
The RS232 port is configured as a DTE (Data Terminal Equipment) unit so it is possible to operate
the controller with any DCE (Data Communications Equipment) or DTE equipment. Full Duplex
transmission with CTS/RTS handshaking is supported. Both the output and input circuitry are single
ended and operate between ±12V.
Figure 3-13: RS232 D-Type connector pin-out
Pin No. Signal Name Function Type
1
scrn
Cable screen/shield Input
2
rxd
Receive Data Input
3
txd
Transmit Data Output
4
dtr
Data Terminal Ready (Internal
connection to pin 6)
Output
5
gnd
Signal Ground
6
dsr
Data Set Ready (Internal Connection to
pin 4)
Input
7
rts
Request to Send Output
8
cts
Clear to Send Input
9
gnd
Signal Ground
Page 38

NextMove BX Installation Manual for Mint™ v4
26
MN1258V4 08/2000
The following table shows the wiring required for a standard PC 25 pin or 9 pin connector:
Controller
Pin No.
Signal Name Function Wire to:
25 Pin
Wire to:
9 Pin
1
scrn
Cable screen/shield - -
2
rxd
Receive Data 2 3
3
txd
Transmit Data 3 2
4
dtr
Data Terminal Ready (Internal
connection to pin 6)
66
5
gnd
Signal Ground 7 5
6
dsr
Data Set Ready (Internal
Connection to pin 4)
20 4
7
rts
Request to Send 5 8
8
cts
Clear to Send 4 7
9
gnd
Signal Ground 7 9
Associated MINT keywords are:
SERIALBAUD
3.8.2 RS485
The RS485 connections are brought out onto a male 9-way D-type connector on the top of the unit.
These signals are not isolated. The RS485 cable should be a screened/shielded twisted pair with at
least two pairs and ground. The screen should be connected to the body of the connector at both
ends to give overall protection. The maximum cable length is 1000m (3280ft) at 9,600 baud unterminated or 1200m (3937ft) with terminators.
The RS485 supports a full multi-drop protocol. Both the output and input signals are differential and
operate between 0 and 5V.
Page 39

Hardware Features
MN1258V4 08/2000
27
Figure 3-14: 9 Pin Connector
Pin No. Signal Function Type
1
scrn
Cable screen/shield Input
2
rxd
Receive Data Input
3
txd
Transmit Data Output
4Not
connected
5
gnd
Signal Ground
6Not
connected
7
!txd
Transmit Data Complement Output
8
!rxd
Receive Data Complement Input
9
gnd
Signal Ground
See section 4 in the Mint v4 Programmers Manual for details on default software configuration.
3.8.3 RS485 Multi-Drop
NextMove BX supports up to 15 cards using a four wire RS485 serial connection. This
configuration has a
transmit
wire pair carrying data from the host to all controllers and a
receive
wire
pair carrying data from all controllers to the host. Each card is distinguished by a unique address
which is set by software. This address value is stored in EEPROM within the NextMove BX and is
restored at power up. Software details on RS485 multi-drop can be found in the Mint v4
Programmers Manual. A multi-drop layout is shown in Figure 3-15.
Note that the
rxd
and
txd
pairs can be terminated with 120Ω resistors. This allows longer cable
lengths for the same data rate as mentioned above. Cable spurs to each controller should be as short
as possible.
The resisters R1 can be fitted as shown to prevent the receive lines picking up noise or cross-talk
from the transmit lines when all controllers have there transmitters disabled.
The RS485 port can also be used in two wire configuration when using one of the data packet
protocols by connecting the pairs (
txd
to
rxd
and
!txd
to
!rxd
). This is possible because the data
packet protocols are half duplex, and only one controller will respond to any packet. In normal
terminal mode the communication is full duplex and two wire connection schemes will not work.
Page 40

NextMove BX Installation Manual for Mint™ v4
28
MN1258V4 08/2000
Hardware disable of the transmitter after the last byte is sent allows high speed half duplex
transmission.
Figure 3-15: Multi-drop system
The rxd and txd lines should be terminated with 120
ΩΩΩΩ
resistors at the receiving end as shown.
3.8.4 CAN Bus
CAN (Controller Area Network) is a 1Mb/s local area network. NextMove BX has two CAN
communications channels for connection to other Baldor CAN nodes or for connection to other
networks such as
CAN
open
. CAN offers 125kbit/s serial communications over a two wire twisted
pair cable up to a maximum of 500m (approx. 1640ft) in length. CAN offers very high reliability of
communications in an industrial environment, the probability of an undetected error is 4.7x10
-11
.
A range of CAN based I/O expansion modules is available for NextMove BX. See section
5.2
for
further details.
Several CAN peripheral devices may be attached to the same controller via the CAN link using the
Baldor CAN protocol. 63 CAN peripheral devices of any assortment are allowed on the NextMove
BX CAN network. However only 4 enabled keypads are allowed at any one time.
The CAN is brought out to two RJ45 connectors located on the top panel of unit.
Page 41

Hardware Features
MN1258V4 08/2000
29
Figure 3-16: RJ45 Connector Pin Numbers
Pin Signal Function
1
can1+
CAN channel 1 negative
2
can1-
CAN channel 1 positive
3
n/c
Not used
4
gnd
Ground/earth reference for CAN signals
5
can-V+
CAN remote node power V+
6
n/c
Not used
7
can2+
CAN channel 2 positive
8
can2-
CAN channel 2 positive
Connection to the CAN networks is via two shielded RJ45 type connectors on the top of the unit,
each of which carries
both
CAN networks.
When NextMove BX is at the end of a CAN network, the terminator for that channel must be
activated. The terminators are activated by fitting a link on the jumpers located next to the RJ-45
connectors.
Figure 3-17: Top Panel
The power jumper connects 12V to the CAN-V+ net. This allows the controller to run with an
expansion unit without the need for extra power supplies or cabling. If more than one expansion unit
is connected, additional power is required and the power link should be removed. Units which
require 24V cannot be powered from the controller.
Page 42

NextMove BX Installation Manual for Mint™ v4
30
MN1258V4 08/2000
A very low error rate of CAN communication can only be achieved with a suitable wiring scheme.
The following points should be observed:
1. CAN must be connected via twisted pair cabling. The connection arrangement is normally
a simple multi-point drop. The CAN cables should have a characteristic impedance of
120Ω; and a delay of 5ns/m. Other characteristics depend upon the length of the cabling:
Cable length Max bit rate
Non Isolated
Max bit rate
Isolated
Specific
resistance
Conductor area
0-40m (0-157ft) 1 Mbit/s 500 kbit/s
70m
Ω
0.25-0.34mm
2
40m-300m
(157ft-1180ft)
200 kbit/s 100 kbit/s
<
60m
Ω
0.34-0.60 mm
2
300m-600m
(1180-2362ft)
100 kbit/s 50 kbit/s
<
40m
Ω
0.50-0.60 mm
2
600m-1000m
(2362ft-3937)
50 kbit/s 25 kbit/s
<
26m
Ω
0.75-0.80 mm
2
2. Terminators should be fitted at both ends of the network only.
3. To reduce RF emissions and more importantly, to provide immunity to conducted
interference, shielded twisted pair cabling should be used. If two CAN channels are
bundled in a cable then each requires a twisted pair.
Cable screens/shields should not be connected to 0V on connector sk4 and sk5 as this will cause
ground loop interference into the 0V plane on the processor board.
4. The 0V rails of all of the nodes on the network must be tied together through the CAN
cabling. This ensures that the CAN signal levels transmitted by a NextMove BX or CAN
peripheral devices are within the common mode range of the receiver circuitry of other
nodes on the network.
CAN cables are available. See the section 5.2 for details on CAN accessories.
See the Mint v4 CAN Programmers Guide for details on using CAN.
3.9 Reset State
The NextMove BX will go into
reset
if the power supply drops below approximately 4.75V in order
to prevent any uncontrolled operation of any of the integrated circuits during power down.
When NextMove BX is in
reset
for any reason, most of the controlled interfaces fall into known
states. This is explained further below.
Page 43

Hardware Features
MN1258V4 08/2000
31
Communications
During reset CAN controller will have no effect on the CAN bus. If a
reset
occurs during the
transmission of a message CAN errors are likely to occur.
When the controller goes into a reset state all serial communications will be terminated immediately,
this may result in incomplete or corrupted messages.
Digital Outputs
All of the digital outputs are inactive on power up regardless of their polarity. They will return to the
inactive state whenever
reset
occurs.
Analog Outputs
All analog outputs are set to 0V by hardware during power-up and will return to 0V on a
reset
.
However the output buffer circuit may have a small offset and so the actual voltage seen at the output
may not be zero.
3.10 Battery Backup of Memory
The RAM is backed up with a battery to prevent loss of data when the main power is removed.
Switching from the main power (V
CC
) to the battery power (V
BAT
) is done by the reset chip when
V
CC
falls below V
BAT
. The power consumption of this switch is 1µA maximum at room
temperature.
The backup battery is a 3 cell nickel metal hydride (NiMH) with a nominal voltage of 3.6V
(1.2V/cell) and a capacity of 280mAh. A standard low power 0.5Mbyte SIMM requires
approximately 1.2µA at 3.0V for data retention. This, coupled with the consumption of the battery
switch, gives a total consumption of 2.2µA. Theoretically this would give a data retention time of
14 years. However, the self discharge characteristics of the battery mean that it will drop to 60%
charge in 6 months at 20°C. Memory contents will be retained down to 95% discharge which takes
approximately 3 years. This self discharge is faster at higher temperatures, at 45°C the battery will
drop to approximately 45% charge in 1 month giving a data retention time of only 4 months. Should
the battery become very discharged, it is recommended that it be removed and fully recharged
outside the unit since its maximum capacity will have been reduced to about 80% of nominal.
3.10.1 Changing the Battery
Access to the battery is gained by removing the 2 screws at the bottom of the rear vertical extrusion
and the opposing screws at the top of the extrusion. The extrusion and the side plate can then be
removed giving access to the PCB. Once the PCB is exposed the battery can be removed by cutting
the restraining cable tie and disconnecting it from the main board. Replacement batteries and cable
ties can be obtained from.
When the battery is disconnected the program and other data held in RAM may be corrupted or lost.
It is therefore advisable to back up all data on the controller before changing the battery.
Never attempt to open the unit while it is powered.
Page 44

NextMove BX Installation Manual for Mint™ v4
32
MN1258V4 08/2000
3.10.2 Charging the Battery
The charge state of the backup battery will not be known when the unit is first delivered. To fully
recharge the battery using the built in trickle charge will take a maximum of approximately 80 hours.
3.11 EEPROM
NextMove BX has 8k bytes of EEPROM, most of which is used for the processor boot code. The
remaining space (about 2k bytes) is used for non-volatile storage of other parameters such as the
baud rate of the two serial ports, the card number in multi-card systems and the product count.
Access to this memory is via specific keywords within Mint and is not available for general
variables.
3.12 System Watchdog
The system watchdog is a hardware protection method so that in the event of a firmware or ‘C’
program malfunction, the controller is put into software reset.
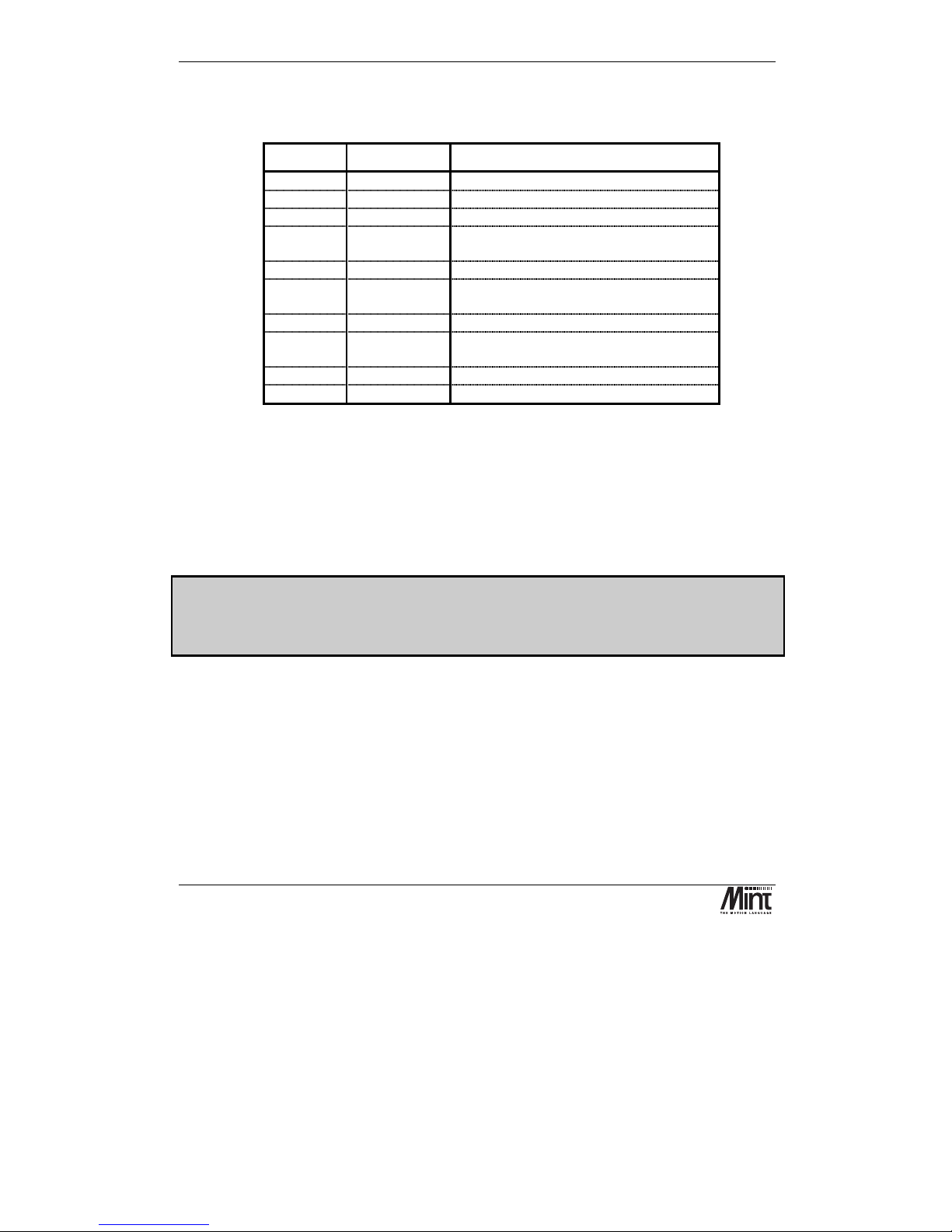
3.13 LED Status Display
The LED display on the front panel of the NextMove BX provides an indication of the status of the
controller. The following symbols will be seen during normal operation:
Display Meaning
1-F Running MINT, serial node number of the
controller is displayed in hex. (1 – 15).
M Running MINT, serial node number of the
controller is 0 or greater than 15.
When the controller is turned on, the following sequence will be seen:
Display Meaning
all segments Board in reset.
B Booting.
J Starting Mint firmware.
M or 1-F Firmware is running.
Page 45

Hardware Features
MN1258V4 08/2000
33
When updating firmware on the controller, the following sequence will be seen. When update is
complete, the boot sequence above should be seen.
Display Meaning
R Performing RAM test.
F Erasing FLASH memory.
L Updating firmware.
The following symbols are error conditions. Errors are denoted by the flashing of the ‘dot’ on the
display at approximately 10Hz. If the following conditions are seen, please contact technical
support.
Display Meaning
D DUART (serial driver) failure.
C CAN failure.
S Memory not detected correctly.
R Memory failed test.
F Failed to erase FLASH.
E Firmware update was not successful.
U Cannot detect firmware. Try updating firmware again.
Page 46

NextMove BX Installation Manual for Mint™ v4
34
MN1258V4 08/2000
Page 47

Getting Started
MN1258V4 08/2000
35
4. Operation and Setup
4
This chapter is step by step guide to setting up a NextMove BX servo
control system. Basic familiarity with PC’s and the Windows environment
is assumed.
Introduction to servo systems and tuning. Determining system gains and
fine-tuning.
Page 48

NextMove BX Installation Manual
36
MN1258V4 08/2000
4.1 Communicating with NextMove BX
In order to communicate with NextMove BX, a RS232 or RS485 connection must be made to an AT
style personal computer. The Baldor Motion Toolkit CD supports the following operating systems
only: Windows 95, Windows 98 and Windows NT version 4.
The RS232 or RS485 cable is used to connect the controller to a computer for programming and
system commissioning. A computer is not essential for operation of the controller, but is required
for programming. A standard serial cable should be used or built according to the wiring diagram in
section 3.8. An RS232 cable is available (order code CBL001-501).
Please note that the RS232 specification is a 'standard' that varies from manufacturer to
manufacturer and therefore not all RS232 cables will work with the controller.
4.2 Baldor Motion Toolkit CD
Place the Baldor Motion Toolkit CD in the CD drive of the PC. The CD will auto-run and display
the home page. If auto-run is disabled, browse the CD and double click the file ‘SETUP.HTM’.
Figure 4-1: Baldor Motion Toolkit - Home Page
Page 49

Getting Started
MN1258V4 08/2000
37
Select the NextMove link and then select the ‘NextMove BX’ option. This opens the page that
allows the various NextMove BX related applications to be installed.
Figure 4-2: Baldor Motion Toolkit – NextMove BX page
The
Mint WorkBench
is the IDE and user interface for communicating with a Mint controller.
The
Mint Configuration Tool
is a rapid getting started and configuration utility designed for use
with a number of Mint v4 controllers. The rest of this chapter makes use of both of these
applications and it is recommended that both of these are installed.
4.3 Configuring your System
This section shows you how to configure your system and check the system wiring. The Mint
Configuration Tool allows easy setup of NextMove BX and allows operational tests to be performed
on the system.
A typical closed loop positioning system can be broken down into three elements:
1.
Position controller
– performs real time positional control of the motor(s), stores the
application program and communicates with the user and other control equipment.
2.
Servo amplifier
– takes command signals from the position controller to control the torque
or speed of the motor/actuator.
Page 50

NextMove BX Installation Manual
38
MN1258V4 08/2000
3.
Motor/actuator
– translates electrical power from the servo amplifier into rotary or linear
movement. The motor is fitted with a position sensor that feeds the output position back to
the controller.
The controller works by sampling the position of the motor at regular intervals and comparing this
position with its target position. It then instructs the amplifier to drive the motor to correct any
positional error. This process is repeated typically 1000 times per second to ensure that the motor is
always in the correct position.
4.3.1 Minimum System Wiring Example
The following section is a guide to setting up a minimum system. A minimum system is one where
the controller and drives are configured to work with as little external wiring as possible. It is
recommended that motors are tested and set up ‘on the bench’ and not within the machine.
This step-by-step example covers setting-up a system with one servo axis. Figure 4-3 is a simplified
wiring diagram for the system mentioned above. It should be noted that this is not the only possible
configuration. It is important to read the associated text before attempting the set-up. For detailed
wiring information, see section
Error! Reference source not found.
.
Page 51

Getting Started
MN1258V4 08/2000
39
s
s
s
INPUTS
0-7
INPUTS
8-15
OUTPUTS
0-7
ANAL OG
INPUTS
AXI S 0
AXI S 1
DEMANDS
INTERRUPTS
RELAY
&
CAN
AXIS 2
AXIS 3
MASTER
POWER
s
s
s
NextMove
Servo Drive
Encoder
Output
from drive
or motor
Demand/Command
Demand/Command -
+
Enable
GND
Screened/Shielded
Twisted Pair Cabl e
Power In
+24
GND
Main Earth/
Ground Point
J1
J3
J5
Figure 4-3: Minimum configuration for a 1 axis system
Page 52

NextMove BX Installation Manual
40
MN1258V4 08/2000
4.3.2 Starting with the Mint Configuration Tool
Start the Mint Configuration Tool by clicking the icon of the same name which can be found in the
‘Mint v4’ program group.
Figure 4-4: Mint Configuration Tool Start Up Page
Select ‘Next’ and proceed to the ‘Controller Type Select’ page. NextMove BX should have been
found automatically and will appear in the ‘Controller Select’ dropdown. If NextMove BX does not
appear in the list then refer to trouble shooting in section
Error! Reference source not found.
.
Figure 4-5: MCT Select Controller Drop-down
Page 53

Getting Started
MN1258V4 08/2000
41
Clicking ‘Next’ will bring up the ‘Axes Selection’ page. From here, you can decide which axes you
wish to configure in the Mint Configuration Tool. This example assumes a 4 axis NextMove BX.
We will configure 1 axis.
Figure 4-6: MCT Axis Configuration
From the list given, axis 0 has been selected as a servo.
NextMove BX is available in a number of axis variants: 2, 3 or 4 axes. Axes are labeled from 0 to 3.
The axes selection screen will show the current configuration of each axis and the possible
configurations. The Mint keyword VIEW CONFIG can also be used to show similar information.
See the Mint v4 Advanced Programming Manual for further details on axis variants and mappings.
Click ‘Next’ to move to the ‘Scale Parameters’ page. Here you should set the scale factor for each
axis.
Figure 4-7: MCT Scale Settings
Page 54

NextMove BX Installation Manual
42
MN1258V4 08/2000
Mint defines all positional and speed related motion keywords in terms of encoder quadrature counts
for servo motors or steps for stepper motors. The scale factor allows the system to be scaled to your
own units to suit your application. The diagram below shows the effect of scaling on positional
information:
Figure 4-8: The Effect of Scaling on Positional Information
In an XY application, for example, you may want to define all positions in millimeters or inches.
For each servo axis, either manually enter a scale factor for ‘Counts per user unit’ or select ‘Counts
per revolution’ and select the number of lines on the encoder.
4.4 Servo Setup
Clicking ‘Next’ brings up the ‘Test Select’ screen. In order to perform some basic tests on the
system wiring, select ‘Perform Axes Configuration Test’.
The first test checks that the drive enable is correctly wired. By default NextMove BX does not
associate any physical output with a drive enable. In this example the relay will be used as the drive
enable channel. Select ‘Relay0’ from the drop down list.
Figure 4-9: MCT Drive Enable Channel Drop-down
The assigned drive enable channel allows NextMove PCI to shut down the drive in the event of an
error. Clicking the ‘Drive Enable’ button should enable the drive and the ‘Drive Disable’ button
should disable the drive. If this is not the case, then the wiring and drive set-up should be checked.
Page 55

Getting Started
MN1258V4 08/2000
43
Figure 4-10: MCT Drive Enable Test
The next test checks that the command and direction signals to the drive. A positive command
signal should result in a positive encoder change and a negative command signal should result in a
negative encoder change.
Figure 4-11: MCT Command Test
If the encoder runs in the opposite direction when a command voltage is applied then the system may
be re-wired. If the position does not change then check the following:
•
The encoder cable is connected to the correct encoder input.
•
The encoder has power and is correctly wired.
Page 56

NextMove BX Installation Manual
44
MN1258V4 08/2000
If the motor does not move, check the following:
•
The amplifier is enabled.
•
There is a voltage output from the
command+
output.
4.4.1 Tuning a Servo Drive
At the lowest level of control software, instantaneous axis position demands produced by the
controller software must be translated into motor demands. This is achieved by closed loop control
of the motor. The motor is controlled to minimize the error between demand and actual position
measured with an incremental encoder.
Every 1ms (or optionally 500us or 250us using the
LOOPTIME
keyword) the controller compares
desired and actual positions and calculates the correct demand for the motor. The corrective signal
is calculated by a PIDVFA (Proportional, Integral, Derivative, Velocity Feedback, Velocity Feed
forward and Acceleration Feed forward) algorithm.
Control could be achieved by applying a signal proportional to the error alone, but this is a rather
simplistic approach. Imagine that there is a small error between demanded and actual position. A
proportional controller will simply multiply the error by some constant and apply the result to the
motor via an amplifier. If the gain is too low, then the motor will not hold positional. As the gain is
increased, the motor will present more resistance to positional error, but oscillations will increase in
magnitude until the system becomes unstable.
Page 57

Getting Started
MN1258V4 08/2000
45
time
velocity
acceleration/deceleration rate
ACCEL
0
axis speed during move
SPEED
units of
measure
set by
SCALE
Ideal trapezoidal velocity profile
time
velocity
0
Typical actual velocity profile
Overshoot
Following error (positional lag)
Underdamped
Good
Ideal
Figure 4-12: Velocity Profiles
To reduce the onset of instability a damping term is incorporated in the servo loop algorithm, called
velocity feedback gain. Velocity feedback acts to resist rapid movement of the motor and hence
allows the proportional gain to be set higher before vibration sets in. (In some applications, the
velocity feedback is handled by the amplifier, called a velocity servo). The effect of too high
proportional gain, or too low velocity feedback gain is illustrated by the "Under damped" line in
Figure 4-12.
In NextMove BX, an alternative damping method is provided in the form of the derivative of the
error signal. Derivative action has the same effect as velocity feedback if the velocity feedback and
feedforward terms are equal. In torque controlled systems, derivative action is generally the
preferred term.
Below is a description of the servo loop terms and their effect on the response of an axis.
Proportional Gain
: This acts directly on the difference between the actual position of the axis
and the desired position (following error). The larger the proportional gain the faster the axis will
respond, however large values of proportional gain will introduce oscillation and result in a large
settling times or in a worse case instability of the axis. Conversely, a small value of proportional
gain will result in the axes responding slowly and never reaching the desired position.
Page 58

NextMove BX Installation Manual
46
MN1258V4 08/2000
Derivative Gain
: This acts on the rate of change of following error. This term will speed
up the response of an axis to the initial change in demand and reduce overshoot. As this term acts on
the rate of change of following error when the axis is stationary the control effort generated by the
derivative term should be zero. However in reality as servo axes are never truly at rest a large value
of derivative gain will cause the axis to oscillate. In a worse case, the derivative term can introduce
oscillation during motion which can lead to instability in the axis.
Integral Gain
: This acts on the accumulated following error so that the steady state following
error of an axis may be reduced to zero. This term is generally slow to respond as accumulated
following error takes time to become large enough to be significant in the servo loop. Using a large
value of integral gain will cause oscillation and instability in the axis. Most servo axes are very
sensitive to integral gain and generally can only cope with a very small value. Because of this, the
size of the demand caused by the integral term can be limited which allows a larger value to be used
without fear of introducing instability during motion.
Velocity Feedback
: This acts on the actual velocity of the axis. This term provides damping
and will slug the response of the axis. This helps in reducing overshoot. If the effect of the velocity
feedback term is dominant in the control law this will lead to instability in the axis.
Velocity Feedforward
: This acts on the demand velocity as generated by the profiler. As such
this term cannot introduce steady state instability. This term can be used to pull in any following
error when the axis is moving at a constant velocity.
Acceleration Feedforward
: This acts on the demand acceleration as generated by the
profiler. As with velocity feedforward this term cannot introduce steady state instability. This term
can be used to pull in any following error when the axis is moving at a constant acceleration.
Two types of servo amplifiers may be used with the controller:
1. Current or torque amplifiers use the demand signal to control the current flowing in the motor
armature and hence the torque of the motor.
2. Velocity controlled amplifiers (velocity servo) use the demand signal as a servo speed reference.
For general purpose applications, the torque amplifier is cheaper and simpler to set up, but the
velocity servo gives better control, especially in high performance applications. For torque
amplifiers, velocity feedback must be used to stabilize the system, but this is not normally required
for a velocity servo since it incorporates its own internal velocity feedback.
A block diagram of the complete control loop, showing controller, amplifier, motor and gearbox is
presented below. The amplifier / servo may be a simple current amplifier, or incorporate internal
velocity feedback via a tachometer.
Page 59

Getting Started
MN1258V4 08/2000
47
Figure 4-13: Servo Loop Block Diagram
The controller has six terms incorporating proportional, derivative, velocity feedback/feed forward,
integral and acceleration feed forward gains. The equation of the loop closure algorithm is as
follows:
Command = KP.e + KD.
∆∆∆∆e/∆∆∆∆ττττ
- KV.v + KF.V + KI.
ΣΣΣΣ
e + KA.A
Terms Description
KP
Proportional servo loop gain
KD
Derivative of error
KV
Velocity feedback gain
KF
Velocity feed forward gain
KI
Integral gain
KA
Acceleration feed forward gain
e
Following error (quad counts)
v
Actual axis velocity (quad counts/sample time)
ττττ
Servo update period (sample time)
V
Demand axis velocity (quad counts/sample time)
A
Demand axis acceleration (quad counts/sample time
2
)
Tuning the closed loop involves selecting values for some or all of the terms KP, KD, KI,
KV, KF
and
KA
to provide the best performance for a particular motor/encoder combination and load
inertia. In view of the diversity of applications, these values all default to zero.
Two other functions, the
KINTLIMIT
and
DACLIMITMAX
are used to control the
command
output.
KINTLIMIT
determines the maximum value of the effect of integral action, KI.
ΣΣΣΣ
e. This is specified
as a percentage (%) of the full scale demand output in the range of ±10V. Therefore if the
integration limit = 25, the maximum effect of integral action is ±2.5V.
KVELFF
Velocity
Feedforw ard
Profile Generator
KACCEL
Acceleration
Feedforw ard
KPROP
Proport ional
Gain
KINT
Integral Gain
KDERIV
Derivati ve Gain
DACLIMITMAX
Clip DAC output
+
Power Amp
Servo Motor
KVEL
Velocity Feedback
-
-
+
+
+
+
+
+
+
Measured Velocity
Demand Position
Demand Velocity
Demand Acceleration
Measured Position
Page 60

NextMove BX Installation Manual
48
MN1258V4 08/2000
DACLIMITMAX
determines the maximum value of the demand output as a percentage of the full scale
demand. Therefore if
DACLIMITMAX = 50
, the maximum demand output will be ±5V.
Tuning terms can be controlled in Mint using the following keywords:
Keyword Abbreviation Description
DACLIMITMAX DCX
Limit maximum DAC output
KPROP KP
Proportional gain
KDERIV KD
Derivative gain
KINT KI
Integral servo loop gain
KINTMODE KIM
Integration mode during motion
KINTLIMIT KIL
Range limit for integrator % of max DAC output
KVEL KV
Velocity feedback gain
KVELFF KF
Velocity feedforward gain
KACCEL KA
Acceleration feedforward gain
4.4.2 Selecting Servo Loop Gains
All servo loop parameters default to zero, so the motor will have no power applied to it on power up.
Most servo amplifiers can be set up in either current (torque) control mode or velocity control mode.
The procedure for setting system gains differs slightly for each.
In order to check that the encoder and motor are wired up correctly, it is recommended that the
motor is tested and commissioned ‘on the bench’ and not in the machine (the motor or gearbox shaft
should be in free air).
The Mint Configuration Tool allows online tuning of the position loop. Continuing the example
setup from section 4.4, proceed to the ‘Servo Tuning’ page. The ‘Position Loop Tuning’ tab allows
tuning terms to be entered and a sample move performed. Once the move is complete, motion data
is uploaded from the controller which allows the response of the axis to be seen.
The ‘Following Error Fatal’ value is the maximum permissible error between the axis desired
position and the axis measured position. If an axis becomes unstable, when it exceeds the maximum
following error, it will be disabled. Because of this, the maximum following error should be set at a
safe value. If an error occurs, the ‘Clear Errors’ button needs to be pressed.
Figure 4-14: MCT Setting Fatal Following Error Limit
Page 61

Getting Started
MN1258V4 08/2000
49
Figure 4-15: MCT Tuning Terms are Entered in the ‘Gain Parameters’ Area
Figure 4-16: MCT Tuning Move
The 'rules of thumb' presented in the following sections for setting system gains, while adequate to
get the system moving, will not provide the optimum response without further fine tuning of the
system gains. Due to the number of parameters involved in tuning motors it is necessary to have a
‘feel’ for the effect that changing each gain term will have on the performance of an axis. In order to
achieve an acceptable dynamic response, high gain values may be required, but these same values
may cause the motor to hunt (a buzzing noise due to the motor vibrating on one encoder edge) when
stationary. This can cause the machine to vibrate when at rest, especially if there is elasticity in the
transmission such as a belt drive.
Further tuning may be carried out using the Mint WorkBench which provides a similar tuning
interface to the Mint Configuration Tool.
Page 62

NextMove BX Installation Manual
50
MN1258V4 08/2000
Figure 4-17: Mint WorkBench Tuning
After initial tuning has been completed, click ‘Next’ to proceed to the ‘Jog and Direction Test’ page.
This allows a final check of system operation by jogging axis in either direction at selectable speeds,
acceleration and deceleration rates.
Page 63

Getting Started
MN1258V4 08/2000
51
Figure 4-18: MCT Jog Test
4.4.3 System Gains for Current Control by Empirical
Method
After having confirmed that the encoder and motor are correctly wired, start applying some velocity
feedback,
KVEL
. Start with a value of 1 and increase it until you feel some resistance in the motor.
For some motors it may be necessary to apply fractional gains; all gain terms are floating point
numbers. Once the feedback gain has been set, apply some proportional gain,
KPROP
. Start off with
a value which is a quarter of the feedback gain. Select a tuning move such as the step response and
view the results of the motion.
Page 64

NextMove BX Installation Manual
52
MN1258V4 08/2000
Figure 4-19: MCT Step Move Plot
If the motor starts to vibrate, increase the velocity feedback gain (damping),
KVEL
, or decrease the
proportional gain,
KPROP
. Increase proportional gain,
KPROP
, until the motor shaft becomes stiff.
Finally, set the velocity feed forward gain,
KVELFF
, to the same value as the velocity feedback gain,
KVEL
.
An alternative to using
KVEL
and
KVELFF
is to use the derivative term,
KDERIV
.
KDERIV
has exactly
the same effect on the system dynamics as
KVEL
when
KVEL=KVELFF
.
Figure 4-20: MCT Sinusoidal Move Plot
Page 65

Getting Started
MN1258V4 08/2000
53
4.4.4 System Gains for Velocity Control
Velocity controlled drives incorporate the velocity feedback term in the amplifier which provides
system damping and therefore it is usually sufficient to have
KVEL = KDERIV = 0
on the
controller. Usually, the value of the proportional gain,
KPROP
, will be less than with an equivalent
current controlled system. Often a fractional value of proportional gain gives the best response. For
example
KPROP=0.1
compared with 2 for current controlled drives.
Correct setting of the velocity feed forward gain,
KVELFF
, is important to get maximum response
from the system. This is best performed using a storage oscilloscope (or the NextMove WorkBench)
to record the tachometer output for fast point-to-point moves. This enables velocity/time profile for
the motor to be seen in order to monitor actual acceleration and overshoot.
Referring to the servo loop block diagram, the velocity feed forward term is a block, which takes the
instantaneous speed demand from the profile generator and adds this to the output block. Because
KVELFF
is a feed forward term, a very important difference between this and the other terms exists.
KVELFF
is outside the closed loop and therefore does not have an effect on system stability. This
means that the term can be increased to maximum without causing the motor to oscillate, provided
that the other terms are set-up correctly.
In practice however, a very high value of
KVELFF
is of no benefit to system performance. Instead, it
should be set such that a demand of
x
RPM from the profile generator results in a demand output to
the velocity drive, which gives x RPM on the motor shaft (a 1:1 relationship).
When set-up correctly,
KVELFF
will cause the motor to move at the demand speed from the profile
generator. This is true without the PID terms in the closed loop doing anything except compensating
for small errors in the position of the motor due to analog drift. This gives faster response to
changes in demand speed, with lower following errors.
Example calculation of KVELFF:
In order to calculate the correct value for
KVELFF
, you need to consider the workings of the servo
loop closure algorithms. In the servo loop, speeds are expressed in quadrature counts/servo loop
closure time. For instance, a speed of 100 is 100 counts every 1ms with NextMove PCI (note that
the default loop closure time is 1ms).
In this example the velocity of the servo is 3000RPM with a +10V input, and the encoder has 1000
counts per revolution.
At 3000RPM we require an analog voltage of +10V. 3000RPM relates to:
3000
60
50= revs per second
Page 66

NextMove BX Installation Manual
54
MN1258V4 08/2000
Now the number of quadrature counts per loop closure time can be calculated by using the
expression:
speed in rev per sec * encoder line count * 4
number of loop closures per second
The factor of 4 is included since the controller counts every edge of the pulse train coming from the
encoder A and B channels, which gives four times better resolution than the number of lines.
50 1000 4 1000 200**/
=
quadrature counts per servo lop closure time
The DAC output has a resolution of 12 bits over the range -10V to +10V, therefore +10V = 2048
counts.
The feed forward term is therefore given by:
KVELFF
==
2048
200
10 24.
Increasing
KVELFF
above the calculated value will cause the controller to have a following error
ahead of the desired position. Decreasing
KVELFF
below this value will cause the controller to have
a more normal following error behind the desired position. The calculated value above should give
zero following error in normal running.
It is possible to investigate the effect of velocity feed forward gain by jogging the motor at constant
speed and monitoring the axis following error for different values of
KVELFF
. When attempting this,
make sure that there is zero integral gain since this will cause the following error to tend to zero
under steady state conditions, thereby negating the effect of changes in
KVELFF
.
4.4.5 Eliminating Steady-State Errors
In systems where precise positioning accuracy is required, it is often necessary to position to within
one encoder count. Proportional gain,
KPROP
, is not normally able to achieve this because a very
small following error will only produce a small demand for the amplifier which may not be enough
to overcome mechanical friction (this is particularly so for current controlled systems). This error
can be overcome by applying some integral gain.
The integral gain,
KINT
, works by accumulating following error over time to produce a demand
sufficient to move the motor into the zero following error position.
KINT
can therefore also
overcome errors caused by gravitational effects, such as vertically moving linear tables, where with
current controlled drives, a non-zero
command
output is required to achieve zero following error.
Particular care is required when setting
KINT
since a high value can cause instability during moves.
The effect of
KINT
should be limited by setting the maximum range of the integration (
KINTLIMIT
)
to the minimum value that is sufficient to overcome friction or static loads.
Page 67

Getting Started
MN1258V4 08/2000
55
Typical values are:
KINTLIMIT = 5
KINT = 0.1
where
KINTLIMIT
limits the integral term to 5% of the full DAC output range.
KINT
is usually a
factor of 10 less than proportional gain,
KPROP
. With NextMove PCI, the integrator can be set to
operate in various modes:
1. The integrator is always applied.
2. The integrator is only applied during periods of constant velocity.
3. The integrator is only applied when the axis is at rest.
This functionality is set using the
KINTMODE
keyword.
4.5 Methods of Programming
NextMove BX can be programmed using several different languages. These are:
Language Location of Program Description
Mint On Controller Basic style language supplied with
controller.
Embedded C On Controller ANSI C compiled and linked using the
Texas Instruments C31 compiler to
libraries supplied by Baldor.
Visual C/C++ On Host PC Microsoft Visual C/C++ compiled in
conjunction with source code or COM
server supplied by Baldor.
Visual Basic On Host PC Microsoft Visual Basic using COM
server supplied by Baldor.
Delphi On Host PC Inprise Delphi using COM server
supplied by Baldor.
All methods of programming are based around the same command set. In general all commands may
be called from any language, thus giving the user maximum programming flexibility.
For example, to load a move of 10 user units on axis zero:
Language Command
Mint
MOVEA.0 = 10
Embedded C
setMoveA (0,10);
Visual C/C++
myPCI.setMoveA (0, 10);
Visual Basic
myPCI.setMoveA 0, 10
Page 68

NextMove BX Installation Manual
56
MN1258V4 08/2000
For the host PC to communicate with NextMove BX the controller must be running either Mint or an
embedded application. The controller can only run one application at a time (either Mint or an
embedded application).
For further details on programming the controller in any of the above languages see the ‘Mint v4 PC
Programming Guide’.
4.6 Documentation
All NextMove BX documentation is available on the Baldor Motion Toolkit CD. Documents are in
Adobe Acrobat format (PDF). The Acrobat viewer may also be installed from the CD.
Figure 4-21: Baldor Motion Toolkit – NextMove Documentation Page
Page 69

Getting Started
MN1258V4 08/2000
57
4.7 Mint
Mint is a structured form of Basic which has been custom designed for motion control applications.
The Mint language has been written to allow users to get started quickly with simple motion
programs and also provides a wide range of more powerful commands for complex applications.
Mint is used in thousands of applications worldwide, servicing many high demand industries such as
textiles and packaging. Applications range from simple single axis applications to complex multiaxis, multi-controller applications via a host-controlled link. It is Mint's flexible and powerful
command set that is able to provide a solution to the vast number of industrial motion control
applications.
In addition to usual Basic type commands such as
PRINT, FOR..NEXT
and
IF..THEN
, Mint
has a number of keywords dedicated to motion control and input/output.
Mint also provides full control over basic motor control parameters such as servo loop gains in
addition to all the digital and analog I/O on the controller.
Mint splits motion keywords into 2 categories; motion variables and motion commands. Motion
variables are keywords that set axis parameters. These can be read or written (although not
necessarily both). Motion commands initiate motion. For example:
SPEED[0,1] = 10,20 : REM Set slew speed on axes 0 and 1
ACCEL[0,1] = 100,200 : REM Set acceleration on axes 0 and 1
MOVER[0,1] = 50,100 : REM Load positional moves
GO[0,1] : REM Start motion
The use of the square brackets controls 2 axes in the system, where axis 0 is the first axis followed
by axis 1 and so on. The use of the square brackets is optional as Mint is very flexible in its multiaxis syntax. In this example, axis 0 is set up with a speed of 10 units/s, acceleration of 100 units/s
2
and a relative move of 50 units. Axis 1 is set up with a speed of 20 units/s, acceleration of 200
units/s
2
and a relative move of 100 units.
SPEED, ACCEL
and
MOVER
are all motion variables. The
motion command GO is used to initiate motion. Most motion keywords can be abbreviated to 2 or 3
letters, for example,
SPEED
can be replaced with SP and
MOVER
replaced with MR. This saves both
on code space and typing. The example above could be abbreviated to:
SP[0,1]=10,20 : REM Set slew speed on axes 0 and 1
AC[0,1]=100,200 : REM Set acceleration on axes 0 and 1
MR[0,1]=50,100 : REM Load positional moves
GO[0,1] : REM Start motion
The utility called Squash within Mint WorkBench enables programs to be compressed by replacing
keywords with their abbreviated counterparts.
At any time during motion, the position of the motor can be printed using:
PRINT POS.0 : REM Print position of axis 0
Position can also be monitored using the WatchWindow in the Mint WorkBench.
See the Mint v4 Programming Guide for more details on Mint syntax.
Page 70

NextMove BX Installation Manual
58
MN1258V4 08/2000
Engineering units can be applied to an axis. In a linear table for example, there may be 1000
encoder counts per mm. The keyword
SCALE
(or SF for short) can be used to set the new scale
factor of the axis:
SCALE = 1000
This enables positions to be specified in mm and speeds in mm/s.
Mint programs consist of two files. The Configuration Buffer stores information relating to the
machine set-up, for instance the servo loop gains. The Program Buffer stores the actual motion
control program. The two files can contain the same instructions, except that the Configuration
Buffer is only 8K maximum size, while the Program Buffer can be up to 1Mb.
4.7.1 The Configuration File
The Configuration buffer is used to store information about a system such as IO configuration, motor
tuning values and scale factors. If a part of the system is modified, then only the Configuration
Buffer should require modification.
The Mint WorkBench has a built in editor which can be used to edit both Configuration and Program
files. To create a new configuration file select ‘New…Config’ from the ‘File’ menu. This will open
up an editor window into which you can type.
Figure 4-22: Mint WorkBench – Configuration File Editor
Page 71

Getting Started
MN1258V4 08/2000
59
The configuration editor will syntax highlight all Mint keywords as they are typed. The correct
syntax for the firmware being used can be uploaded from the controller by selecting the ‘Load
Syntax’ option from the ‘Edit’ menu.
Figure 4-23: Download Button
In order to execute the configuration file in the editor window it must be downloaded to the
controller by pressing the ‘download’ button.
Once the program has been downloaded to the controller it can be executed by either typing
RUN
at
the Mint command line or pressing the ‘play’ button.
Whenever a Mint program is
RUN
, the Configuration Buffer is executed first followed by the
Program Buffer. The Configuration or Program Buffer can be executed individually by typing:
RUN CON
(for the
Configuration Buffer
)
or
RUN PROG
(for the
Program Buffer
)
The following list of parameters is normally set-up in the Configuration Buffer:
•
Servo loop gains
- to tune the system response.
•
Scale factor
- to set the units of measure of the application.
•
Maximum following error
- to set a safe maximum difference between actual and desired
positions.
•
Default speeds accelerations and decelerations for the system
- to determine the shape
of the trapezoidal velocity profile.
•
Error features such as hardware and software limits, stop inputs and error input.
The parameters in the Configuration Buffer are generally to be set-up only once for an application,
but can at any time be altered in the Program Buffer.
The Mint Configuration Tool provides a graphical method for setting common parameters that
would be placed in a configuration file. Having completed the Start Up Wizard, the Mint
Configuration Tool can be started in wizard or manual modes. The wizard mode steps through each
of the configuration screens for each axis selected during the Start Up Wizard.
Digital Inputs
Each of the digital input channels may be configured to be level (active high or low) or edge
triggered (positive, negative or both edges). Digital inputs may also be assigned to axes for use as
limit switch inputs etc.
Page 72

NextMove BX Installation Manual
60
MN1258V4 08/2000
Figure 4-24: MCT Digital Input Setup
Digital Outputs
Each of the digital output channels may be configured to be active high or low. Digital outputs may
also be assigned for use as drive enable channels or as a global error output signal.
Figure 4-25: MCT Digital Output Setup
Page 73

Getting Started
MN1258V4 08/2000
61
Analog Inputs
Each analog input channel can be configured to read a number of voltage ranges and as single ended
or differential inputs.
Figure 4-26: MCT Analog Input Setup
Axis Params
This page allows basic axis parameters to be setup such as speed and acceleration. You may also
specify if a datum cycle is to be included in the configuration file.
Figure 4-27: MCT Axis Parameters
Page 74

NextMove BX Installation Manual
62
MN1258V4 08/2000
Axis Errors
This page allows the error modes to be set for each error type. When an error occurs, the action
specified will occur.
Figure 4-28: MCT Axis Errors
Miscellaneous
This page allows the auxiliary encoder parameters to be set and the state of the Mint command line
ECHO
keyword.
Figure 4-29: MCT Miscellaneous Parameters
Page 75

Getting Started
MN1258V4 08/2000
63
Create Config
This page allows you to select whether to generate a Mint Configuration file or C source code
suitable for use in an embedded application.
Figure 4-30: MCT Create Configuration File
4.7.2 The Program File
The Mint WorkBench has a built in editor which can be used to edit both Configuration and Program
files. To create a new configuration file select ‘New…Program’ from the ‘File’ menu. This will
open up an editor window into which you can type.
Page 76

NextMove BX Installation Manual
64
MN1258V4 08/2000
Figure 4-31: Mint WorkBench - Program Editor
As with the Configuration file, in order to execute the Program file, it must be downloaded to the
controller.
Once the program has been downloaded to the controller it can be executed by either typing
RUN
at
the Mint command line or pressing the ‘play’ button on the Mint WorkBench Toolbar.
Page 77

Getting Started
MN1258V4 08/2000
65
4.8 Motion
NextMove BX supports a wide range of motion:
Type of Motion Description Associated Mint
Keywords
Constant torque Constant torque output.
TORQUE
Constant velocity Constant velocity with imposed acceleration
and deceleration ramps.
JOG
Homing Datum to a known starting point.
HOME
Point to point Absolute and relative position moves with a
trapezoidal velocity profile.
MOVEA, MOVER, GO
Vector Multi-axis absolute and relative position
moves with a trapezoidal velocity profile.
VECTORA, VECTORA, GO
Circle Circular motion.
CIRCLEA, CIRCLER, GO
Incremental Positional move with a changing target
position.
INCA, INCR, GO
Analogue based Axis velocity based on error between
analogue measured and desired values.
HTA, GO
Synchronized
motion
Master / Slave following with imposed
ratios.
FOLLOW, FLY
Software variable
gearbox.
User definable software CAM profile.
CAM, GO
Spline User definable cubic spline motion.
SPLINE, GO
For more details on motion keywords see the Mint v4 Programming Guide.
Page 78

NextMove BX Installation Manual
66
MN1258V4 08/2000
Page 79

Options and Accessories
MN1258V4 08/2000
67
5. Options and Accessories
5
This chapter describes the option and accessories for NextMove BX.
Page 80

NextMove BX Installation Manual
68
MN1258V4 08/2000
5.1 NextMove BX
NextMove BX is supplied with a
software license
to control 2,3 or 4 axes. This license cannot be
upgraded in the field.
Item Order Code Description
Card Type
No. of axes
NextMove BX 2 NMX004-501
NextMove BX 3 NMX004-502
NextMove BX 4 NMX004-503
NextMove BX
standalone controller.
Item Order Code Description
NextMove BX Installation
Manual
MN1258V4 Includes Baldor Motion Toolkit CD.
Mint v4 Programmer’s Manual MN1262 How to use Mint v4.
Baldor Motion Toolkit CD SW1275 Mint WorkBench, Mint Configuration Tool
and Libraries for developers.
5.2 CAN Nodes
Figure 5-1: ioNODE Product Family
Page 81

Options and Accessories
MN1258V4 08/2000
69
Digital I/O can be expanded easily on NextMove BX using the Baldor CAN bus interface. This
provides a high speed secure serial bus interface to a range of I/O devices as described:
• inputNode 8
: 8 opto isolated digital inputs.
• outputNode 8
: 8 opto isolated digital outputs with short circuit and over current protection.
• relayNode 8
: 8 relay outputs.
• ioNode 24/24
: 24 opto isolated input and 24 opto isolated outputs.
• keypadNode
: General purpose operator panel (3 and 4 axis versions).
Item Order Code Description
CAN Operator Panel – 3 Axes
(keypadNode)
KPD002-502 27 key keypad and 4 line LCD display.
Runs on Baldor CAN bus.
CAN Operator Panel – 4 Axes
(keypadNode)
KPD002-505 41 key keypad and 4 line LCD display.
Runs on Baldor CAN bus.
inputNode 8 ION001-503 8 digital inputs. Runs on Baldor CAN bus.
outputNode 8 ION003-503 8 digital outputs. Runs on Baldor CAN bus.
relayNode 8 ION002-503 8 relay outputs. Runs on Baldor CAN bus.
ioNode 24/24 ION004-503 24 digital inputs and 24 digital outputs.
Runs on Baldor CAN bus.
5.3 Encoder Splitter/Buffer Board
This is a stand alone PCB that takes an encoder signal, either single ended or differential and gives
differential outputs. This is useful for 'daisy chaining' an encoder signal from a master across a
number of controllers.
Item Order Code Description
2-way encoder splitter OPT008-501 Allows a single-ended or differential encoder
pulse train to be shared between two devices
4-way encoder splitter OPT029-501 Allows a single-ended or differential encoder
pulse train to be shared between four devices
Page 82

NextMove BX Installation Manual
70
MN1258V4 08/2000
Page 83

Options and Accessories
MN1258V4 08/2000
71
6. Specifications and Product Data
6
This chapter provides a product summary and describes the basis for
CE
marking and describes how to avoid common EMC problems when using
NextMove BX.
Page 84

NextMove BX Installation Manual
72
MN1258V4 08/2000
6.1 Machine Control I/O
User Digital
Inputs:
•
16 input lines.
•
PNP or NPN opto-isolated relative to common.
•
12 to 24V ±20% on, 3V max off.
•
Software programmable as
limit, home, stop
or
error
inputs for any axis.
User Digital
Outputs:
•
8 digital outputs driven through a Darlington array.
•
Software programmable as
drive enable
output for any axis.
•
50mA continuous source on all channels.
•
Max. 350mA on any channel 750mA total @ 25°C.
Fast
Interrupt:
•
One fast plus three ‘slow’ fast inputs per controller.
•
Latches position of programmed axes within 30 microseconds / 1 millisecond
on a falling edge.
Relay
Output:
•
Voltage free change over relay rated at 500mA @ 24V dc.
•
Contact sensitivity 10µA @ 10mV DC
•
1 output per controller, software programmable.
•
Fail safe operation: relay de-energized on loss of power.
•
Software programmable to de-energize on an error.
Analog
Inputs:
•
8 independent analog channels. Configurable as 8 single ended or 4
differential pairs.
•
12 bit resolution.
•
Software selectable for ±10V (differential) or 0-5/±2.5V single ended
operation.
Analog
Outputs:
•
1 output per axis for motor
command
signal (software configurable).
•
±
10V output (±0.1%).
•
14 bit resolution (1.21mV per bit).
Encoder
Inputs:
•
Encoder input per axis for positional feedback via incremental encoder.
•
Operates with differential (TTL or RS422) output type.
•
Accepts three channel incremental encoders (A, B and Z). A and B channels
are quadrature decoded.
•
Minimum requirement: Channel A and B .
•
Maximum encoder frequency: 7.3MHz quadrature count.
Page 85

Options and Accessories
MN1258V4 08/2000
73
6.2 Miscellaneous and Mechanical Specification
Power Input
•
+24V DC (±20%) @ 700mA.
•
User Power: +12V to 24V ±20% at 850mA.
Internal
Battery
•
3.6V 3 cell nickel metal hydride (NiMH) with 280mAh capacity & 5 year life.
•
Non-volatile RAM contents retained for 12 months when fully charged.
Dimensions
•
280mm (316mm including flanges) x 236mm x 59mm.
•
11 in (12.45 including flanges) x 9.3 in x 2.32 in.
Weight
•
Approximately 1.86kg / 4.1lb
Operating
Temperature
•
0 - 40°C / 32° - 104°F Ambient.
Humidity
•
10% to 90% non condensing at sea level to 2000m/6560ft.
Bookcase Format Motion Controller
Overall Dimensions
NextMove
Baldor
DSP multi-axis
servo controller
315 mm
12.4"
302mm
11.9"
59 mm
2.3"
40mm
1.5"
236mm
9.3"
Figure 6-1: NextMove BX Bookcase Format Overall Dimensions
Page 86

NextMove BX Installation Manual
74
MN1258V4 08/2000
6.3 EMC &
CE
CECE
CE
Marking
6.3.1 Machinery Directive 89/392/EEC
This relates to the safety of machinery. Any machine having a moving part has to comply with the
essential requirements of this directive. This also applies to some mechanical sub-systems, such as
fans. Electronic sub-systems, such as NextMove BX , do not fall within its scope. It should be
noted that to meet the safety requirements of this directive, the primary machine safety system cannot
be based on controller software. The paying of a notified body to audit the software and provide a
safety case is prohibitively expensive. A hard-wired system using guard switches (to protect
personnel or equipment) should be used.
6.3.2 Low Voltage Directive 72/23/EEC
Applies to equipment powered from 75V dc to 1500V dc or 50V ac to 1000V ac. Therefore this
directive does not apply to NextMove BX .
6.3.3 EMC Directive 89/336/EEC
This directive applies to all 'apparatus liable to cause disturbance or the performance of which is
liable to be affected by such disturbance'. The expression 'apparatus' is defined for the purpose of
the regulations as '..an electrical or electronic appliance or system consisting of a finished product or
products having an intrinsic function which is intended for the end user, and is supplied or intended
for supply or taken into service or intended to be taken into service as a single commercial unit'.
This wording brings automated machines within the scope of the directive but not necessarily their
electronic sub-systems. This is because of their lack of intrinsic function to the end user.
Page 87

Troubleshooting Guide
MN1258V4 08/2000
75
6.4 EMC Performance of NextMove BX
It should be noted that the equipment is suitable for light or heavy industrial use. The text from the
full report is appended.
Test Standard Comments
Generic
emissions, light
industrial
Radiated Emissions
EN 55081-1:1992
Connections to all ports as recommended in this
manual, with the exception of connections to +5V,
+
12V
, -
12V, 0V
. Passed the B limit.
Generic
immunity, heavy
industrial
ESD EN 50082-1:1995
EN 61000-4-2:1995
4kV contact to case, had no effect. No contact to
connector pins.
Radiated immunity EN
55082-2:1995 EN
61000-4-3:1995 ENV
50204:1995
Connections to all ports as recommended in this
manual, except no connections to +5V, +
12V
, -
12V, 0V
, serial port operated in RS232 mode. Test
covered 10V/m 26-80MHz, 10V/m 80-1000MHz
with 80% 1kHz modulation, equipment functioned
correctly throughout.
Fast burst transients
IEC801-4
2kV via clamp to
CAN
,
demand/command, Din
,
Dout
, RS232, RS485, Fast Interrupt. Equipment
functioned correctly throughout. 2kV to power
inputs.
6.5 EMC Advice
The apparatus shall be connected in accordance with the recommendations of this manual. There are
certain restrictions regarding the length and type of cable:
Cable type Ports
Unrestricted
usr-V+, usr-gnd
, user inputs, user outputs,
home, limit, drive
error, power
input,
drive enable
relay. The 24v to the PSU
must be isolated.
Unrestricted but
screening/shielding is advised
demand/command
, analog inputs
must be screened/shielded serial cables
Screened/shielded twisted pair
encoders,
CAN
< 2.9m (10ft) long
+5V, +
12V
, -
12V, 0V
Page 88

NextMove BX Installation Manual
76
MN1258V4 08/2000
Page 89

Troubleshooting Guide
MN1258V4 08/2000
77
7. Troubleshooting Guide
7
This chapter covers common problems found when using the NextMove BX
controller.
Page 90

NextMove BX Installation Manual
78
MN1258V4 08/2000
7.1 Trouble Shooting Guide
Symptom Check
Cannot detect NextMove BX in
the Mint WorkBench of the Mint
Configuration Tool.
•
The NextMove BX must be running a version of Mint v4
to be detected. If upgrading from Mint v3 firmware then
the select ‘controller with no firmware’ from the Mint
WorkBench and ‘update firmware’ to Mint v4.
•
Check that the correct serial port is in use and that the
lead is plugged in at both ends.
•
Check wiring for the RS232 lead.
Status display blank and
controller not functioning
•
Check the power supply (24V dc) is connected and
switched on.
Cannot communicate with
controller. (cannot get P> or
C>
prompt by pressing return).
•
Check that there is not a program already running on the
controller (type
[Ctrl] + [E]
to abort the program).
•
Check that the terminal mode. Select ‘Tools’ and
‘Terminal Mode’ from the Mint WorkBench.
Controller appears to be poweredup and working but will not cause
motors to turn over.
•
Check that the connections between motor and controller
are correct. Use the Mint Configuration Tool to perform
the basic system wiring tests described in section 4.4.
•
Ensure that the amplifier is enabled and working when the
controller is not in error. (When the controller is first
powered up the amplifiers should be disabled if there is
no program running (there is often an LED on the front of
the amplifier to indicate status).
•
Check that the Configuration file is loaded into controller
and has been
RUN
, or that the servo loop gains are
correctly set-up. (Check the
Gains
window or type
PRINT KP
to verify that the controller proportional gain
KP
is not zero and refer to servo-system set-up).
Motor runs off uncontrollably
when controller is switched on.
•
Check that the encoders are connected to controller, have
power through encoder V+ and are functioning correctly.
(Use a dual trace oscilloscope to display both channels of
the encoder and/or the complements simultaneously).
•
Check that the amplifiers are connected correctly to the
controller and that with zero demand there is 0V at the
amplifier demand input.
•
Verify that the controller and amplifier are correctly
grounded to a common earth point.
Page 91

Troubleshooting Guide
MN1258V4 08/2000
79
Motor runs off uncontrollably
when controller is switched on
and servo loop gains are applied
or when a move is set in progress.
Motor then stops after a short
time.
•
Check that encoder 0 and demand 0 are connected to the
same axes of motion; repeat for axis 1 and 2. Check
amplifier connection is correct with respect to polarity of
amplifier demand.
•
Check that for a positive command signal, a positive
increase in axis position is seen. The
DACMODE
keyword
can be used to reverse DAC output polarity.
•
Check that the maximum following error is set to a
reasonable value. For setting up purposes, following error
detection may be disabled by setting
FOLERRORMODE =
0
.
Motor is under control, but
vibrates or overshoots during a
move.
•
Servo loop gains may be set too high. (Go through the
servo system set-up procedure to establish correct gains.)
Motor is under control, but when
moved to a position and then back
to the start it does not return to the
same position.
•
Check that all encoder channels are clear signals and that
they are correctly wired to the controller. (Use a dual
trace oscilloscope to display channels A and B of the
encoder at the controller Breakout Unit. Verify that when
the motor turns, the two square wave signals are 90
degrees out of phase. Also check the complement signals.)
•
Check that the encoder signals are free from electrical
noise. (Use the oscilloscope as above).
•
Ensure that the encoder leads uses screened twisted pair
cable and that the screen is attached to the screen
connection on the encoder plug
at the controller end
only
.)
•
Verify that the controller and amplifier are correctly
grounded to a common earth point.
Page 92

NextMove BX Installation Manual
80
MN1258V4 08/2000
Page 93

Bibliography
MN1258V4 08/2000
81
8. Bibliography
8
Bibliography
[1] Mint v4 Programming Guide (MN1262)
[2] Mint v4 Advanced Programming Guide (MN1270)
[3] Mint v4 PC Programming Guide (MN1278)
[4] Mint v4 Embedded Programming Guide (MN1279)
[5] Mint v4 Function Reference Guide (MN1280)
[6] Mint v4 CAN Programming Guide (MN1282)
All manuals can be found in the Baldor Motion Toolkit CD which accompanies the controllers.
Page 94

NextMove BX Installation Manual
82
MN1258V4 08/2000
 Loading...
Loading...