

Page 1

Digital Soft–Start
Installation & Operating Manual
5/03 MN850
Page 2

Table of Contents
Section 1
General Information 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Introduction 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limited W arranty 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Safety Notice 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 2
Installation 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Receiving, Inspection and Storage 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Physical Location 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cover Removal 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Remote Keypad Installation 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Optional Remote Keypad Installation 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AC Main Circuit 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power Disconnect 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Protective Devices 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UL Required Fuses for Short Circuit Rating 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Main Input Contactor 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor Overload and Thermal Protection 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
In–Delta Connections 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fan Connections 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Wire Size and Protection Devices 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Three Wire Control 2-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Two Wire Control 2-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
NEMA 12/4 Installation 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reversing Contactor 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installation 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 3
Operation 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Overview 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Start–Up Procedure 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Operation 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating Modes 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
System Status Mode 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Menu Mode 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Data Entry Mode 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Menu Structure 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Menu Navigation Examples 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Menu Navigation 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Changing the Power–up Settings & Select Keypad Control 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Select Keypad Starting and Keypad Control 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor Starting Definitions 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Starting and Running the Motor with Factory Settings 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Starting and Running the Motor in Optimise Mode 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Remote Start and Running the Motor 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor Stopping Definitions 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Stopping the Motor 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table of Contents iMN850
Page 3

Section 4
Parameter Index 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Menu Descriptions 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Basic Menu 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Applications Menu 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Auto Features Menu 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Advanced Menu 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Permanent Store Menu 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Password Menu 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inputs Menu 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Outputs Menu 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameters Menu 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Trips Menu 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mapping to an Output Relay 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameter Descriptions 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 5
Troubleshooting 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Safety Notice 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Preliminary Checks 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power Off Checks 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electrical Noise Considerations 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Relay and Contactor Coils 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Enclosures 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Special Motor Considerations 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Signals 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 6
Specifications and Product Data 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Identification 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Three Phase Digital Soft–Start 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mounting Dimensions 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size 1 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size 2 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size 3 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size 4 6-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix A
CE Guidelines A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix B
Parameter Values B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix C
Replacement Parts C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix D
Voltage Surge Protection D-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix E E-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Remote Keypad Mounting Template E-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii Table of Contents MN850
Page 4

Section 1
General Information
Introduction The Baldor digital three phase multipurpose soft–starter provides reduced voltage, three
phase motor starting and control over the four periods of motor operation. First, at
“Start–up” (soft–start), the motor starting voltage increases from an initial preset level to
full motor voltage to provide smooth motor acceleration to full speed. Second, the “Dwell”
period begins when maximum motor voltage is achieved. This dwell period allows time
for the motor and load to stabilize. The third period is called “Motor run” (sometimes
bypass is used during this portion of the cycle). The last period is “Stop” the motor can
be stopped gradually by reducing the torque (useful in pump applications).
Soft–start and soft–stop control provide an effective means to start and stop material
handling equipment and pumping equipment to minimize spillage and water hammer
problems. Selectable preset parameters for specific application allows simple
programming.
Several product features make this digital soft–start control easy to use:
S Selectable preset parameter settings for pumps, high inertia loads, conveyors
and compressors.
S Auto features simplify adjustments for optimum starting.
S Energy savings through real time power factor monitoring.
S Smooth starts and stops for impact free machine operation.
S Familiar interface, 32 character LCD Display and Keypad.
S Simple parameter access through 4 level programming.
S Quick exit from programming by using the “#” (Exit) button.
S Operating Current, Voltage and Power Factor displays.
S Fault indication and Trip Log.
S Programmable inputs and outputs.
Limited Warranty
For a period of two (2) years from the date of original purchase, BALDOR will repair or replace
without charge controls and accessories which our examination proves to be defective in
material or workmanship. This warranty is valid if the unit has not been tampered with by
unauthorized persons, misused, abused, or improperly installed and has been used in
accordance with the instructions and/or ratings supplied. This warranty is in lieu of any other
warranty or guarantee expressed or implied. BALDOR shall not be held responsible for any
expense (including installation and removal), inconvenience, or consequential damage,
including injury to any person or property caused by items of our manufacture or sale. (Some
states do not allow exclusion or limitation of incidental or consequential damages, so the
above exclusion may not apply.) In any event, BALDOR’s total liability, under all
circumstances, shall not exceed the full purchase price of the control. Claims for purchase
price refunds, repairs, or replacements must be referred to BALDOR with all pertinent data as
to the defect, the date purchased, the task performed by the control, and the problem
encountered. No liability is assumed for expendable items such as fuses.
Goods may be returned only with written notification including a BALDOR Return
Authorization Number and any return shipments must be prepaid.
General Information 1-1MN850
Page 5

Safety Notice This equipment contains voltages that may be as high as 600 volts! Electrical shock can
cause serious or fatal injury. Only qualified personnel should attempt the start-up
procedure or troubleshoot this equipment.
This equipment may be connected to other machines that have rotating parts or parts
that are driven by this equipment. Improper use can cause serious or fatal injury. Only
qualified personnel should attempt the start-up procedure or troubleshoot this equipment.
PRECAUTIONS
WARNING: Do not touch any circuit board, power device or electrical connection before you
first ensure that power has been disconnected and there is no high voltage present
from this equipment or other equipment to which it is connected.
Electrical shock can cause serious or fatal injury.
WARNING: Be sure that you are completely familiar with the safe operation of this equipment.
This equipment may be connected to other machines that have rotating parts or
parts that are controlled by this equipment. Improper use can cause serious or
fatal injury. Only qualified personnel should attempt the start-up procedure or
troubleshoot this equipment.
WARNING: Be sure the system is properly grounded before applying power. Do not apply AC
power before you ensure that all grounding instructions have been followed.
Electrical shock can cause serious or fatal injury.
Caution: Install MOV protection for the control. See Appendix D for information.
Caution: Do not remove keypad cable with power applied to unit. Disconnecting the keypad
cable with power applied will damage the control.
Caution: Shearpin trip feature is not equivalent to short circuit overcurrent protection
required by NEC. Instantaneous overcurrent protection must be provided by
circuit interrupting device (fuse or breaker).
Caution: Suitable for use on a circuit capable of delivering not more than the RMS
symmetrical short circuit amperes listed here at rated voltage (with fuses specified
in Section 2).
Rated Amperes RMS Symmetrical Amperes
9–59 5,000
72–242 10,000
300–500 18,000
600–750 30,000
900–1200 42,000
Caution: Do not “Megger” test the motor while it is connected to the soft–start control.
Failure to disconnect motor will result in extensive damage to the control. The
control is tested at the factory for high voltage / leakage resistance as part of
Underwriter Laboratory requirements. Do not megger any part of the control.
Caution: Do not connect power factor correction capacitors to motor terminals. If power
factor correction capacitors are necessary, contact Baldor.
Caution: If a brake motor is used, the initial starting voltage may not be sufficient to release
the brake. It may be necessary to provide separate power for the brake release
coil.
Caution: Do not connect AC incoming line power to the Motor terminals T1, T2 and T3.
Connecting AC power to these terminals may result in damage to the control.
1-2 General Information MN850
Page 6

Section 2
Installation
Receiving, Inspection and Storage
When you receive your control, there are several things you should do immediately.
1. Observe the condition of the shipping container and report any damage
immediately to the commercial carrier that delivered your control.
2. Remove the control from the carton. Inspect for shipping damage and report
any damage immediately to your commercial carrier.
3. Verify that the part number of the control you received is the same as the part
number listed on your purchase order.
4. If the control is to be stored for several weeks before use, be sure that it is
stored in a location that is clean, dry and free from corrosives and
contaminants. Storage temperature range is –25°C to 55°C.
Be sure to read an become familiar with the safety notices in Section 1 of this manual.
Failure to observe the product safety notices can result in injury or equipment damage.
If you have questions, please contact your Baldor distributor. Do not proceed unless you
understand the installation and operation requirements and safety notices.
Physical Location The location of the soft–start control is important. It should be installed in an area that is
protected from direct sunlight, corrosives, harmful gases or liquids, dust, metallic
particles, and vibration. Exposure to these elements can reduce the operating life and
degrade performance of the control.
Several other factors should be carefully evaluated when selecting a location for
installation:
1. For effective cooling and maintenance, the control should be mounted vertically
on a flat, smooth, non-flammable vertical surface. Heat dissipation of 3.3 watts
per running FLA of the motor must be provided. All factory supplied enclosures
provided adequate heat dissipation with ambient temperatures to 40°C.
2. If the control is mounted in an enclosure, sufficient air flow must be provided
(see Table 2-1). The fan or blower must be rated for at least 0.8 cubic feet of
30°C air per minute for each ampere of motor FLA rating.
Table 2-1 Air Flow Clearance Requirements
Soft–Start
Size
1 1 (25) 3 (75) 0.6 (15)
2 1 (25) 3 (75) 0.6 (15)
3 1 (25) 8 (200) 3.5 (90)
Front
inches (mm)
Top & Bottom
inches (mm)
Sides
inches (mm)
3. Keep high voltage and low voltage wiring separated. If the conduits must
cross, be sure that they cross at 90° angles only.
4. Motor overload protection is required for motor branch circuits that do not have
an overload protection device.
5. Front access must be provided to allow the control cover to be opened or
removed for service and to allow viewing of the Keypad Display (1 inch (25mm)
minimum).
6. Altitude derating. Up to 3300 feet (1000 meters), no derating required. Above
3300 feet, derate peak output current by 1% for each 330 feet above 3300 feet.
6600 feet (2000 meters) maximum.
7. Temperature derating. Up to 40°C, no derating required. Above 40°C, derate
full load current by 2% per °C above 40°C.
Maximum ambient is 60°C (at 40% derate).
8. Short circuit current and overcurrent devices are required for soft–start controls
that do not have a circuit breaker or fusible disconnect switch.
9. Dust–proof NEMA 12, NEMA 4 non–ventilated enclosure will require an end of
ramp Bypass contactor. This requires additional hardware. Refer to Figure 2-6
for details.
Installation 2-1MN850
Page 7

Cover Removal
Size 1
Size 2
Remove Cover
1. Remove two cover screws.
2. Pull bottom of cover (held by cover
Cover
screws) and lift cover off of top hinge.
Screws
Size 3, 4
Cover
Screws
Remote Keypad Installation
Remove Cover
1. Remove four cover screws.
2. Remove cover.
Cover
Screws
Remove Cover
1. Remove four cover screws.
2. Open cover (hinges on left side).
Inside View
(Terminal
Locations)
Figure 2-1 Remote Keypad Board Installation
L1 L2 L3
Control Board
J2 J3 J4
115
T1 T2 T3
X1 X2
D5
222421121411S0
S1
Firmware
Remote Keypad Connector
Procedure:
1. Remove cover and locate J7 connector on the control board (Figure 2-1).
2. Remove old Firmware IC and install new Firmware IC. Be careful to use
removal and insertion tools and anti–static procedures.
3. Install Remote Keypad Board on the J7 connector.
4. Connect remote keypad cable at Remote Keypad Connector.
5. Install cover.
6. Refer to the following Optional Remote Keypad Installation procedure and
mount the keypad.
7. Connect the keypad cable to the remote keypad.
J7 Connector
Remote Keypad Board
2-2 Installation MN850
Page 8

Section 1
General Information
Optional Remote Keypad Installation The keypad may be remotely mounted using optional Baldor keypad
extension cable. Keypad assembly (white - DC00005A-01; gray - DC00005A-02) comes
complete with the screws and gasket required to mount it to an enclosure. When the
keypad is properly mounted to a NEMA Type 4X enclosure, it retains the Type 4X rating.
Tools Required:
• Center punch, tap handle, screwdrivers (Phillips and straight) and crescent
wrench.
• 8-32 tap and #29 drill bit (for tapped mounting holes) or #19 drill (for clearance
mounting holes).
1
• 1-
• RTV sealant.
• (4) 8-32 nuts and lock washers.
• Extended 8-32 screws (socket fillister) are required if the mounting surface is
• Remote keypad mounting template. A tear out copy is provided at the end of
Mounting Instruction: For tapped mounting holes
1. Locate a flat 4″ wide x 5.5″ minimum high mounting surface. Material should
2. Place the template on the mounting surface or mark the holes as shown.
3. Accurately center punch the 4 mounting holes (marked A) and the large
4. Drill four #29 mounting holes (A). Thread each hole using an 8-32 tap.
5. Locate the 1-1/4″ knockout center (B) and punch using the manufacturers
6. Debur knockout and mounting holes making sure the panel stays clean and flat.
7. Apply RTV to the 4 holes marked (A).
8. Assemble the keypad to the panel. Use 8–32 screws, nuts and lock washers.
9. From the inside of the panel, apply RTV over each of the four mounting screws
Mounting Instructions: For clearance mounting holes
1. Locate a flat 4″ wide x 5.5″ minimum high mounting surface. Material should
2. Place the template on the mounting surface or mark the holes as shown on the
3. Accurately center punch the 4 mounting holes (marked A) and the large
4. Drill four #19 clearance holes (A).
5. Locate the 1-1/4″ knockout center (B) and punch using the manufacturers
6. Debur knockout and mounting holes making sure the panel stays clean and flat.
7. Apply RTV to the 4 holes marked (A).
8. Assemble the keypad to the panel. Use 8–32 screws, nuts and lock washers.
9. From the inside of the panel, apply RTV over each of the four mounting screws
/4″ standard knockout punch (1-11/16″ nominal diameter).
thicker than 12 gauge and is not tapped (clearance mounting holes).
this manual for your convenience. (Photo copy or tear out.)
be sufficient thickness (14 gauge minimum).
knockout (marked B).
instructions.
and nuts. Cover a 3/4″ area around each screw while making sure to completely
encapsulate the nut and washer.
be sufficient thickness (14 gauge minimum).
template.
knockout (marked B).
instructions.
and nuts. Cover a 3/4″ area around each screw while making sure to completely
encapsulate the nut and washer.
Installation 2-3MN850
Page 9

AC Main Circuit
Power Disconnect A power disconnect should be installed between the input power service and the control
for a fail safe method to disconnect power.
Protective Devices Recommended fuse sizes are based on the following:
175% of maximum continuous current for time delay.
300% of maximum continuous current for Fast or Very Fast action.
Note: These general size recommendations do not consider harmonic currents or
ambient temperatures greater than 40°C.
Be sure a suitable input power protection device is installed. Use the recommended
circuit breaker or fuses listed in Table 2-5 (Wire Size and Protection Devices). Input and
output wire size is based on the use of copper conductor wire rated at 75 °C. The table is
specified for NEMA B motors.
Circuit Breaker: 3 phase, thermal magnetic.
Equal to GE type THQ or TEB for 230VAC or
Equal to GE type TED for 460VAC and 575VAC.
Fast Action Fuses: 230VAC, Buss KTN
460VAC, Buss KTS to 600A (KTU for 601 to 1200A)
Very Fast Action: 230VAC, Buss JJN
460VAC, Buss JJS
Time Delay Fuses: 230VAC, Buss FRN
460VAC, Buss FRS to 600A (KLU for 601 to 1200A)
2-4 Installation MN850
Page 10

UL Required Fuses for Short Circuit Rating
UL requires R/C fuses, special purpose fuses (JFHR2) or semiconductor fuses rated
700VAC be used to obtain the short circuit current ratings required by UL.
Fuse Manufacturer
Model Number Bussman (300 KA A.I.C.)
Catalog Number
MD9 to MD16 170M3110 6.6 URD 30 D08 A 0063 63 5,000
MD23 to MD30 170M3112 6.6 URD 30 D08 A 0100 100 5,000
MD44 170M3114 6.6 URD 30 D08 A 0160 160 5,000
MD59 170M3115 6.6 URD 30 D08 A 0200 200 5,000
MD72 to MD85 170M3116 6.6 URD 30 D08 A 0250 250 10,000
MD105 to MD146 170M3119 6.6 URD 30 D08 A 0400 400 10,000
MD174 to MD202 170M3121 6.6 URD 30 D08 A 0500 500 10,000
MD242 170M4114 6.6 URD 31 D08 A 0500 500 10,000
MD300 170M4114 6.6 URD 31 D08 A 0500 500 18,000
MD370 170M4116 6.6 URD 31 D08 A 0630 630 18,000
MD500 170M6113 6.6 URD 33 D08 A 0900 900 18,000
MD600 170M6113 6.6 URD 33 D08 A 0900 900 30,000
MD750 170M6116 6.6 URD 33 D08 A 1250 1250 30,000
MD900 170M6116 6.6 URD 33 D08 A 1250 1250 42,000
MD1100 170M6116 1500 42,000
MD1200 (2) 170M6116 (2) 1000 42,000
Ferraz (200 KA A.I.C.)
Catalog Number
Fuse
Fuse
Current Rating
Amperes
Short Circuit Rating
Amperes
Main Input Contactor An IEC or NEMA rated contactor is recommended at the input power to the control. The
soft–start control uses three pairs of SCR (silicon controlled rectifier) semiconductor
devices that do not positively disconnect power. Figure 2-1 shows that the input
contactor provides a positive disconnect.
Table 2-2 Connection Descriptions
Terminal Description
L1, L2, L3 Input AC power terminals. Connect input isolated 3 phase supply (any phase to any terminal).
T1, T2, T3
X1, X2
S1, S0
Relay K1
Relay K2
Output Power Terminals. Connect an induction motor to these terminals. For correct motor rotation,
connection of these phases must correspond with the supply connections (L1, L2, L3).
Control Supply Input. The internal circuits require power from a 115VAC or 230VAC source (Table 2-3).
A selector switch is provided to select the voltage range of the source that is connected to this input.
Remote Start/Stop Input. A voltage present across these terminals will initiate a “Start”.
Removing the voltage from across these terminals will initiate a “Stop”.
Note that the factory setting is keypad Start/Stop.
Pins 11 and 12 are the normally closed “Run” relay contacts.
Pins 11 and 14 are the normally open “Run” relay contacts.
Pins 21 and 22 are the normally closed “Top of Ramp” relay contacts.
Pins 21 and 24 are the normally open “Top of Ramp” relay contacts.
Installation 2-5MN850
Page 11

Note 2
115/230VAC
*
OT
*
OL
or
Note 1
Figure 2-1 Power and Motor Circuit Connections
L1 L2 L3
* Circuit
Breaker
Earth
Connection
Alternate *
Fuse
L1 L2 L3
Note 1
Note 6
K1 is factory preset
as the RUN" relay.
Note 7
Note 2
115VAC
*
* Input
Contactor
IC
L1 L2 L3
S1
Programmable
S0
14
11
12
24
21
22
OT
Motor Thermostat Leads
Input
K1
K2
T1 T2 T3
* AC Motor
Baldor
Digital
Soft–Start
T2 T3
T1
G
Note 3
X1
X2
Note 4, 8
115/230VAC
* Optional components not provided with control.
Note 5, 6
Notes:
1. See “Protective Devices” described previously in this section.
2. Motor Overload and/or Thermal protection is required by NEC.
3. Use same gauge wire for Earth ground as is used for L1, L2
and L3.
4. Metal conduit should be used. Connect conduits so the use of
a Reactor or RC Device does not interrupt EMI/RFI shielding.
5. X1 and X2 control terminal power must be present or the logic
circuits will not work. Either 115VAC or 230VAC can be used.
Be sure the 115/230VAC switch (Control Voltage Selector
Switch) is set to the proper voltage before you apply power.
6. The X1 and X2 control voltage input has different VA ratings
depending on enclosure size, see Table 2-3.
7. Add appropriately rated protective device for AC relay
(snubber) or DC relay (diode).
8. To protect the control, be sure to add MOV protection. Refer to
Appendix D for additional information.
See Recommended Tightening Torques in Table 2-4.
All soft–starters require a separate fused 2 wire, single phase connection at terminals X1
and X2. An external fuse is required and must be sized as described in Table 2-3.
Either 115VAC (98 – 126VAC) or 230VAC (196 – 253VAC) input may be used. The
control voltage selector switch allows simple selection of 115VAC or 230VAC input power.
Table 2-3 Control Supply
Chassis Size
Size 1
Size 1
Size 2 174A to 370A 18VA 200mA 100mA
Size 3, 4 500A to 1200A
Current Rating
(Amps)
to 23A 8VA 125mA 63mA
30A to 44A 10VA 200mA 100mA
59A to 146A 12VA 200mA 100mA
Nominal Power Consumption
140VA – separate fan supply 2A 1A
(VA)
8VA – Control card 125mA 63mA
115V Fuse 230V Fuse
Motor Overload and Thermal Protection
NEC and local codes may require thermal motor overload protection devices be installed
rather than rely only on internal protection devices. Devices such as bi–metallic overload
relays may require special Soft–Start settings (such as during low voltage starting to
prevent heating). Use of electronic overload relays with this control is not recommended
because of the distorted current waveform. A motor with built in thermal cutoff switches
(TSTAT’s) is recommended.
2-6 Installation MN850
Page 12

In–Delta Connections For Delta connected motors, the Soft–Start can be connected inside the delta windings.
This connection method is shown in Figure 2-2.
Figure 2-2 In–Delta Soft–Start Connections
Note 1
* Circuit
Breaker
L1 L2 L3
Earth
Note 2
Alternate *
Fuse
Connection
L1 L2 L3
Note 1
* Optional components not provided with control.
Note 3, 9
L1 L2 L3
X1
115/230VAC
Baldor
Digital
Soft–Start
X2
Note 6, 7
In–Delta connections for correct motor rotation
Soft–Start
Terminal
Motor
Terminal
* AC Motor
T1 T2 T3
T3T1T2
G
T5T6T4
T1
T2
T3
L1
L2
L3
T3
T1
T2
T5
T6
T4
Note 8
Notes:
See Recommended Tightening
Torques in Table 2-4.
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a Reactor or RC
Device does not interrupt EMI/RFI shielding.
4. Derating factor for soft–start is 57%.
5. Parameter P6– Firing Mode must be set to 1.
6. X1 and X2 control terminal power must be present or the logic circuits will not work.
Either 115VAC or 230VAC can be used. Be sure the 115/230VAC switch (Control
Voltage Selector Switch) is set to the proper voltage before you apply power.
7. The X1 and X2 control voltage input has different VA ratings depending on enclosure
size, see Table 2-3.
8. For reversing operation, L1 and L2 should be switched. Reversing any two of the
three input phases will reverse the motor rotation.
9. To protect the control, be sure to add MOV protection. Refer to Appendix D for
additional information.
Fan Connections – Size 3 and 4 only Size 1 and 2 controls do not have fan connections. For Size 3 controls make
the fan connections as shown in Figure 2-3.The Fan and Control voltages must be the
same (both must be 115VAC or both must be 230VAC). 150VA (minimum) required.
Figure 2-3 Fan Connections
115V Connections
230V Connections
X1 X2
(150VA minimum) X1 X2
Installation 2-7MN850
Page 13

Wire Size and Protection Devices
Table 2-4 Control Wire Sizes and Tightening Torques
Control
Control
Size
1
2
3, 4
Terminal
L1, L2, L3, T1, T2, T3
(M8 Stud for Ring connector)
Earth (Ground) Terminal
(M8 Stud for Ring connector)
L1, L2, L3, T1, T2, T3
(M8 Stud for Ring connector)
Earth (Ground) Terminal
(M8 Stud for Ring connector)
L1, L2, L3, T1, T2, T3
(Connector with two M10 holes on 30mm center)
**
Earth (Ground) Terminal
(M10 Stud for Ring connector)
Wire Gauge * Terminal Torque
AWG mm
2
Lb–in Nm
106 12
1/0 50
106 12
106 12
(2)
(2)
250MCM
Busbar size:
45x20
45x20
60x10
(2) 120
106 12
212 24
212 24
80x10
S0 and S1 14 – 22 0.5 – 2.5 4.5 0.5
All
X1 and X2 14 – 22 0.5 – 2.5 4.5 0.5
K1 (11, 12, 14) 14 – 22 0.5 – 2.5 4.5 0.5
K2 (21, 22, 24) 14 – 22 0.5 – 2.5 4.5 0.5
* Use same gauge wire for Earth ground as is used for L1, L2 and L3.
** Use terminal #4–350kcmil,1 per phase (ILSCO Part No.LO–350–S, LO–600–S or LO–1000–S or equivalent).
Table 2-5 NEC Wire Size and Protection Devices
Control Rating Input Breaker Input Fuse (Amps) Wire Gauge
Amps (Amps)
9 15 30 20 12 3.31
16 30 50 30 12 3.31
23 40 70 40 10 5.26
30 50 90 60 8 8.37
44 70 150 80 8 8.37
59 90 200 110 6 13.3
85 110 250 150 4 21.2
105 175 350 200 2 33.6
146 250 450 275 2/0 67.4
174 275 600 300 3/0 85.0
202 300 600 350 4/0 107.0
242 400 750 450 250MCM 127.0
300 450 900 600 350MCM 177.0
370 600 1200 700 500MCM 253.0
500 800 1500 900 (2) 250MCM (2) 127.0
600 900 1800 1100 (2) 350MCM (2) 177.0
750 1200 2500 1400 (2) 500MCM (2) 253.0
900 1400 3000 1600 (2) 700MCM (2) 355.0
1100 1600 2000 (3) 700MCM (3) 355.0
1200 1800 2000 (3) 700MCM (3) 355.0
Fast Acting Time Delay AWG mm
2
Note: All wire sizes are based on 75°C copper wire. Higher temperature smaller gauge wire may be used per NEC
and local codes. Recommended fuses/breakers are based on 40°C ambient, maximum continuous control
output current and no harmonic current.
2-8 Installation MN850
Page 14

Three Wire Control
Figure 2-4 Three Wire Control Connection
115 / 230VAC
Fuse Neutral
StartStop
R1
IC
X1
X2
R1
S1
S0
Note: Add appropriately rated protective
device for AC relay (snubber)
or DC relay (diode).
Baldor
Digital
Soft–Start
Two Wire Control
Choose Control Circuit
Off
On
Or
Hand
Off
Auto
R1
R1
IC
OLOT
IC= Input Contactor Coil
OL= Thermal Overload Relay
OT= Motor Thermal Overload Relay
14
11
12
24
21
22
* External hardware not provided with control.
See Recommended Tightening Torques in Table 2-4.
Figure 2-5 Two Wire Control Connection
115 / 230VAC
Fuse Neutral
Control Circuit
X1
X2
R1
IC
OLOT
IC= Input Contactor Coil
OL= Thermal Overload Relay
OT= Motor Thermal Overload Relay
* External hardware not provided with control.
S1
S0
14
11
12
24
21
22
K1
K1 is factory preset
as the RUN" relay.
K2
Note: Add appropriately rated protective
device for AC relay (snubber)
or DC relay (diode).
Baldor
Digital
Soft–Start
K1
K2
K1 is factory preset
as the RUN" relay.
See Recommended Tightening Torques in Table 2-4.
Installation 2-9MN850
Page 15

NEMA 12/4 Installation When a NEMA12, NEMA4, NEMA4x OR IP65 enclosure is used, a separate Top of Ramp
Bypass (or shunt) contactor must be connected in parallel with the soft–start control. This
will allow a solid connection of the motor to the AC power lines and eliminate the heating
effect caused by the SCR’s. At the completion of the start ramp (when full start voltage is
obtained) a Bypass contactor is closed. This contactor is controlled by the “Top of Ramp”
relay K2. This ensures that bypass will only occur when motor voltage equals the AC line
voltage.
Figure 2-6 Top of Ramp (Bypass) Connection
115/230VAC
Fuse
Neutral
X1
X2
BC
Note:
Add appropriately rated
protective device for AC
relay (snubber) or DC
relay (diode).
* External hardware not provided with control.
S1
S0
14
11
12
24
21
22
See Recommended Tightening Torques in Table 2-4.
To AC Input
L1 L2 L3
Baldor
Digital
K1
K2
Soft–Start
K2 is factory preset
as the Top of Ramp" function.
T1 T2 T3
To Motor
To protect the control, be sure to add MOV protection.
Refer to Appendix D for additional information.
* BC Bypass
Contactor
2-10 Installation MN850
Page 16

Reversing Contactor For this mode, the Stop Time must be set to zero. Also, allow a minimum of 350 milli
seconds between the Forward and Reverse commands.
Figure 2-7 Motor Reversing Connection
To AC Input
To protect the control, be sure to add MOV protection.
Refer to Appendix D for additional information.
115/230VAC
Fuse
* External hardware not provided with control.
See Recommended Tightening Torques in Table 2-4.
Neutral
Forward
Reverse
R
F
F
R
R
F
Note 1
X1
X2
S1
S0
14
12
24
21
22
11
Forward
Contacts
K1
K2
L1 L2 L3
Baldor
Digital
Soft–Start
K2 is factory preset
as the Top of Ramp" function.
T1 T2 T3
MI
MI - Mechanical Interlock
Note 1: Add appropriately rated protective
device for AC relay (snubber)
or DC relay (diode).
Reverse
Contacts
Installation 2-11MN850
Page 17

Installation
1. Remove cover. (See cover removal described previously in this section.)
2. Mount the panel or enclosure to the mounting surface. The panel or enclosure
must be securely fastened to the mounting surface. Refer to the mounting
dimensions in Section 6 of this manual.
Shock Mounting
If the control will be subjected to levels of shock greater than 1G or vibration
greater than 0.5G at 10 to 60Hz, the control should be shock mounted.
3. Ground the panel and control per NEC article 250 as well as state and local
codes.
4. Use copper wire rated for at least 75°C. Refer to Tables 2-4 and 2-5 for wire
size recommendations.
5. Connect the incoming AC power wires from the power disconnect and/or
protection devices to L1, L2 and L3 terminals. Tighten each terminal as
specified in Section 2 of this manual. To protect the control, be sure to add
MOV protection (refer to Appendix D for additional information).
6. Connect 115VAC to the X1 and X2 terminals. This 115VAC input must be
fused. Refer to Table 2-3 for ratings.
7. Be sure to set the 115/230VAC switch (Control Voltage Selector Switch) to the
115VAC position.
8. * Connect earth ground to the “GND” of the control. Be sure to comply with local
codes.
9. Connect the motor leads to terminals T1, T2, and T3.
10. * Connect motor ground wire to the “GND” of the control. Be sure to comply
with all applicable codes.
11. Connect the S0, S1, K1 and K2 control terminals as required for your
installation.
12. Verify the input line voltage is correct.
13. Verify the Control Voltage is correct and that the selector switch is correctly set.
14. Complete any optional wiring connections that may be needed for your
installation.
15. Install cover.
* Grounding by using conduit or panel connection is not adequate. A separate
conductor of the proper size must be used as a ground conductor.
2-12 Installation MN850
Page 18

Section 3
Operation
Overview The start–up procedure will help get your system up and running quickly and will allow
motor and control operation to be verified. This procedure assumes that the Control and
Motor are correctly installed (see Section 2 for procedures) and that you have a basic
understanding of the keypad programming & operation procedures.
1. Read the Safety Notice and Precautions in section 1 of this manual.
2. Mount the control.
3. Be sure the cover is on and the keypad is plugged in but all power is OFF.
4. Connect Three Phase AC power (L1, L2, L3).
5. Connect 115VAC 1 phase power (X1, X2).
Note: Factory assembled combination and non–combination controllers and
controllers in ventilated NEMA 12 enclosures have an internal transformer
that provides 115VAC power to X1 and X2 terminals (pre–wired).
6. Connect the motor.
Pre–Start Checklist Check of electrical items.
CAUTION: After completing the installation but before you apply power, be
sure to check the following items.
1. Verify the Three Phase AC line voltage at source matches control rating.
2. Verify the X1, X2 Control Voltage at source is correct. An external fuse is
required and must be sized as described in Table 2-3.
3. Verify the Control Voltage Selector Switch is correctly set.
4. Inspect all connections for accuracy, workmanship and tightness as well as
compliance to codes.
5. Verify control and motor are grounded to each other and the control is
connected to earth ground.
6. Check all signal wiring for accuracy.
7. Be certain all brake coils, contactors and relay coils have noise suppression.
This should be an R-C filter for AC coils and reverse polarity diodes for DC
coils. MOV type transient suppression is not adequate.
Check of Motors and Couplings
1. Verify freedom of motion of motor shaft.
2. Verify that the motor coupling is tight without backlash.
3. Verify the holding brakes if any, are properly adjusted to fully release and set to
the desired torque value.
Operation 3-1MN850
Page 19

Start–Up Procedure This procedure assumes that this is the first time the control and motor have been
started. The normal start–up procedure would be as follows:
1. Apply X1, X2 Control Voltage power (115VAC).
2. Apply three phase power. The display should show “Stopped & Ready”.
3. Press ENTER and the display should show “Applications”.
4. Press ENTER and the display should show “Settings”.
5. Press the UP or DOWN Arrows and select the desired type of motor load.
6. Press ENTER and the display should briefly display loading of parameters then
prompt for “Send to Store?”. Press ENTER to store values.
Note: Values must be saved to “Permanent Store” to be restored at power–up.
See “Changing the Power–up Settings” in this section.
7. Press “#” twice to exit programming.
8. The display should show “Stopped & Ready”.
Press “Start/Stop” to run the motor.
First Time Start–up (Apply X1, X2 115 volt power and become familiar with the control).
Apply X1, X2 Control Voltage power (115VAC). The backlit LCD display will illuminate
and display. The control is now ready for operation.
Action
Apply Control Voltage
(115VAC)
Keypad Display shows this
opening message.
If no faults the display will show
Description Display Comments
Baldor Soft Start
Stopped & Ready
Logo display for 2 seconds.
System Status mode.
this message.
Keypad Operation On the control front panel is a keypad and display as shown in Figure 3-1.
Figure 3-1 Keypad Definition
Baldor Soft Start
PARAMETER SETTING
Select store
ENTER
exit/reset
#
up/increment
down/decrement
OPTIMISE bit shift left
Keypad
Switch
ENTER Enters the
#
System
Status
Program menu.
No action
No action Position in the menu
Position in the menu
structure goes forward
(down) one level. (e.g. from
Level 2 to Level 3).
Position in the menu
structure goes back (up) one
level. (e.g. from Level 1 to
Level 0).
structure goes back (up) one
level.
Mode
Program Menu
Accepts any changes to the setting of
a menu item. The new setting is
flashed on the display for 2 seconds
then returns to the menu mode.
Cancels any changes to the setting of
a menu item. The display returns to
the menu mode.
Increments a menu item that has an
analog value. Or,
Sets one selected bit to Bit=1 for a
menu item that requires a logical
selection.
Data
Entry
Display is a backlit 2 line x 16 character
LCD display (32 character display).
Note: For keypad to be active,
keypad control must be selected.
No action Position in the menu
OPTIMISE Selects or
Start
Stop
deselects
optimizing, when
motor is running.
Starts or Stops the
motor.
structure goes back (up) one
level. (e.g. from Level 1 to
Level 0).
0000 0000
Shifts left one bit position at
a time.
No action No action
Decrements a menu item that has an
analog value. Or,
Sets one selected bit to Bit=0 for a
menu item that requires a logical
selection.
Note: Optimise key is used as left
right shift key to scroll through the bit
map in parameter 18, 51, 52, 53, 54,
86, 95, 96.
3-2 Operation MN850
Page 20

Operating Modes
System Status Mode
Description Display Comments
During normal operation, the display shows the status
of operation.
Menu Mode At the power up display, press ENTER one time to go to the menu mode and display the
level 1 menu.
Description Display Comments
In the menu mode, a flashing cursor is displayed. Use
the ⇑ or ⇓ keys to scroll through the menu items. Use
the ENTER key to select a menu item or move to the
next level.
Data Entry Mode At the menu mode, scroll to the desired parameter value you wish to change. Press
enter to view or change the data. (If a blinking cursor is not present, the data is read
only.)
Description Display Comments
In the data entry mode, a flashing cursor is displayed.
Use the ⇑ or ⇓ keys to increase or decrease the value
of the parameter. Use the ENTER key to save the
data value. The display will flash one time if the value
is accepted. The display will flash two times if the
value is erroneous.
OPTIMIZE
CURRENT 183 A
APPLICATIONS
BASIC
START PEDESTAL
20 PERCENT
Shows that Optimized operation
is selected and the load current is
183 amperes.
V represents blinking cursor.
V represents blinking cursor.
Operation 3-3MN850
Page 21

Menu Structure
Level 0 Level 1 Level 2 Level 3
ENTER ENTER ENTER ENTER
Figure 3-2 Menu Structure Diagram
Stopped and ready
Applications
Auto features
Auto features
Basic
Basic
Advanced
Advanced
Permanent store
Permanent store
Password
Password
Inputs
Outputs
Parameters
Trips
Settings
Auto Jog (Off)
Auto Pedestal (Off)
Auto end start (Off)
Auto stop (Off)
Auto end stop (Off)
Auto bypass (On)
Auto 3MC (On)
Auto off (Off)
Stop smoothing (Off)
Starting (Keypad)
Start pedestal
Start time (5s)
Stop pedestal (10%)
Stop time (0s)
Current limit (3.5xle)
Power on Param
Protection
Save parameters
Power on parameters
Default parameters
Enter password
Change password
Settings
Default (keypad)
Small Pump
Large Pump
Conveyor
Low Inertia Fan
High Inertia Fan
Recip Compressor
Screw Compressor
Rotary Compressor
Current
Optimise rate (5)
Kick start (Off)
Kick pedestal (75%)
Kick time (25cycles)
Dwell time (5s)
Low volts stop (On)
Contactor delay (160ms)
Trip sensitivity (1)
Station number (1)
Language (44)
Firing mode (0) *
Stop Smoothing (5)
Full
Full + optimise(Preset)
Start + bypass
Phase loss only
Rated current (Ie) **
Low current (Off)
Low amps level (0.1xFLC)
Low amps time (50cycles)
C/L time out (On)
Current limit (3.5xIe)
Limit time out (30s)
Shearpin (On)
Shearpin level (3.125xIe)
Shearpin time (100cycles)
Overload level (1.1xIe)
Overload delay (140)
# # #
* The “Firing Mode” must be set to 1 for the In–Delta configuration.
** The “Rated Current” setting is for reference only and is not user adjustable.
#
3-4 Operation MN850
Page 22

Menu Navigation Examples
Menu Navigation This example shows how to go to the Inputs menu and map an input parameter.
Action Description Display Comments
Apply Control Voltage
(115VAC)
Keypad Display shows this
opening message.
Baldor Soft Start
Logo display for 2 seconds.
If no faults the display will show
this message.
Press ENTER key
Press ⇓ key Scroll to the AUTO FEATURES
Press ⇓ key Scroll to the BASIC menu.
Press ⇓ key Scroll to the ADVANCED menu.
Press ⇓ key Scroll to the PERMANENT
Press ⇓ key Scroll to the PASSWORD menu.
Press ⇓ key Scroll to the INPUTS menu.
Press ENTER key Enter level 2 of inputs menu.
Press ENTER key Enter level 3 of inputs menu.
Press ⇓ key Scroll to the 52 Parameter menu.
Press ⇓ key Scroll to the Bit Number menu.
Press ENTER key Enter the Bit Number menu.
Press OPTIMISE key Allows you to change the value of
Press OPTIMISE key Allows you to change the value of
Press OPTIMISE key Allows you to change the value of
Press ⇑ key Allows you to change the value of
Press ENTER key Accept the change.
Press # key several
times
menu.
STORE menu.
the first bit.
the second bit.
the third bit.
the third bit.
Press the # key numerous times
to return to the system status
mode.
Stopped & Ready
APPLICATIONS
AUTO FEATURES
AUTO FEATURES
BASIC
BASIC
ADVANCED
ADVANCED
PERMANENT STORE
PERMANENT STORE
PASSWORD
PASSWORD
INPUTS
INPUTS
OUTPUTS
DIGITAL I/P 1
MAP TO
52 PARAMETER
52 PARAMETER
BIT NUMBER
BIT NUMBER
POLARITY
BIT NUMBER
01000000 MASK
BIT NUMBER
01000000 MASK
BIT NUMBER
01000000 MASK
BIT NUMBER
01000000 MASK
BIT NUMBER
01100000 MASK
BIT NUMBER
01100000 MASK
Stopped & Ready
System Status mode.
Press ENTER to access menu
mode.
Press ENTER to access Basic
level 2 parameters if desired.
Press ENTER to access
Advanced level 2 parameters if
desired.
Press ENTER to access
Advanced level 2 parameters if
desired.
Press ENTER to access
Password parameter if desired.
Press ENTER to access
Password parameter if desired.
Press ENTER to access
Password parameter if desired.
System Status mode.
Operation 3-5MN850
Page 23

Changing the Power–up Settings & Select Keypad Control When the Control Supply (115VAC) power is first
applied, the control loads the parameter settings into working memory. You may change
any of these parameters and operate a motor with the changed settings. However, if
these values are not saved they will be lost the next time power is removed. You can
save the new values as power–up values so they will be loaded the next time Control
Supply power is turned off and turned back on.
Procedure:
Turn Control Supply power on. Use the menu’s and change any parameters to the new
values as desired. When all changes are made, operate the motor to ensure that all
values are as desired. Then, stop the control and perform the following:
Action Description Display Comments
Press ENTER key
Press ⇓ key several
times
Scroll to the Permanent Store
menu.
APPLICATIONS
AUTO FEATURES
PERMANENT STORE
PASSWORD
Press ENTER to access menu
mode.
Press ENTER key Enter level 2 of Permanent Store
Press ⇓ key several
times
Press ENTER key Stores the new parameter values
Press # key several
times
menu.
Scroll to the Default Param menu.
in permanent memory. Thew
display will flash one time to show
parameters were successfully
saved.
Scroll to the Basic menu.
Select Keypad Starting and Keypad Control
Action Description Display Comments
Press ENTER key
Press ⇓ key Scroll to the Basic menu.
Press ENTER key Enter level 2 of Basic menu.
Press ENTER key Accept the change to keypad
starting.
SAVE PARAM
POWER ON PARAM
DEFAULT PARAM
DEFAULT PARAM
APPLICATIONS
AUTO FEATURES
APPLICATIONS
AUTO FEATURES
BASIC
ADVANCED
STARTING (KEYPAD)
START PEDESTAL
STARTING (KEYPAD)
START PEDESTAL
Next time power is applied, these
new values will be loaded and
used for motor operation.
Press ENTER to access menu
mode.
Press # key several
times
Scroll to the Basic menu.
APPLICATIONS
AUTO FEATURES
3-6 Operation MN850
Page 24

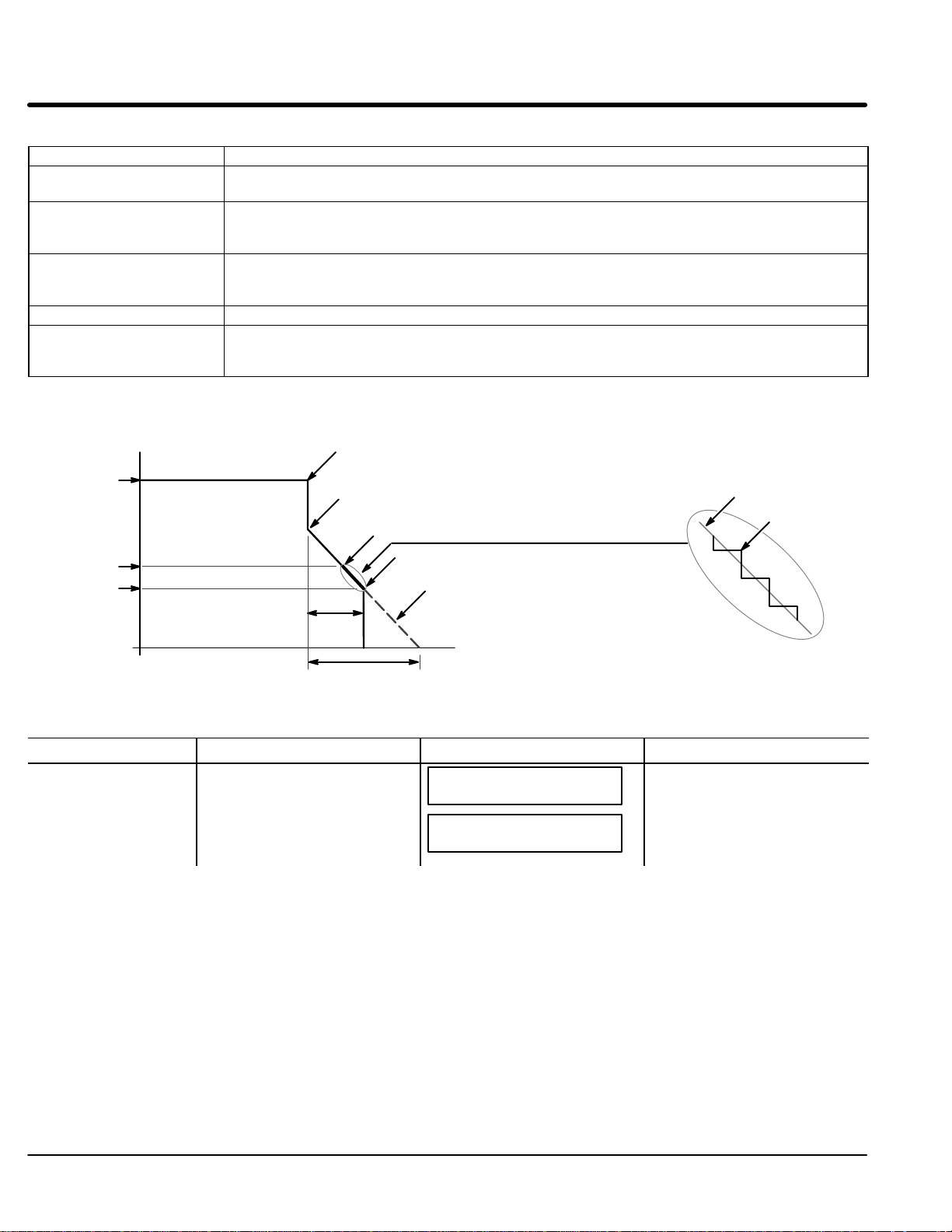
Motor Starting Definitions
Term Definition
Starting Selectable in Basic Menu as either Keypad or Remote starting method.
Voltage Pedestal Initial voltage applied to motor after the 3 cycle power–up ramp.
Programmed as parameter 11 or as Start Pedestal in Basic Menu.
Kick Pedestal For traction or “frozen” loads, this boost pulse of higher voltage helps the load to start
moving. Kick Start is in the Advanced menu. Kick Pedestal is parameter 13 or as Kick
Pedestal in Advanced menu.
Kick Time Number of cycles duration the kick pedestal voltage is applied. Programmed as parameter
14 or as Kick Time in Advanced menu.
Start Time Number of seconds after the 3 cycle power–up to full motor voltage. Programmed as
parameter 12 or as Start Time in Basic Menu.
Dwell Time Number of seconds that full voltage is applied to the motor before optimizing begins (if
optimizing is selected). Programmed as parameter 15 or as Dwell Time in Advanced menu.
Optimizing Process of detecting underload condition and reducing the RMS voltage to the motor. This
eliminates overflux condition of the motor windings to reduce saturation and results in
substantial power savings (up to 2% efficiency increase). Optimizing is selected by the
keypad or as parameter 7 or as Protection parameter in Basic Menu.
Optimizing Rate A numerical value that represents the rate at which the motor voltage is reduced during
optimizing. When this number is large, improves efficiency on stable loads. A lower
number for unstable loads will reduce speed variations. Programmed as parameter P19.
Contactor Delay A delay is required when an input contactor is energized by the soft–start “Run” relay. This
delay allows bouncing contactor armature to settle during the “Closed” position.
Programmed as parameter 71 or as Contactor Delay in Advanced menu.
3 Cycle Power–up This non adjustable time is to allow voltage build up from zero to the initial pedestal. It is
intended to reduce current inrush and allows for shorted SCR detection. This delay may be
turned off to start a motor even with one shorted SCR or to use high inertia loads on class C
or D motors. Programmed as the “Auto 3MC” parameter in Auto Features menu.
Kick Pedestal
Auto Pedestal
Voltage Pedestal
Contactor
Delay
Motor
Voltage
Kick
Time
3 Cycle
Power–up
Start Time
Figure 3-3 Motor Starting Key Terms
Optimise Rate
Full Voltage
Optimizing
Time
Dwell Time Run
Operation 3-7MN850
Page 25

Keypad Starting and Running the Motor with Factory Settings
Action Description Display Comments
Apply Control Voltage
(115VAC)
Keypad Display shows this
opening message.
Baldor Soft Start
Logo display for 2 seconds.
If no faults the display will show
this message.
Press ENTER key
Press ENTER key Access Level 1 Application Menu.
Press ⇓ key two times Scroll to the correct application.
Press ENTER key Select the application.
Press ENTER key Choose set of parameters for the
application.
Press ENTER key Scroll to the PASSWORD menu.
Press # key twice Press # key two times to exit
programming.
Press Start/Stop key Displays motor starting current
and full voltage and current.
Stopped & Ready
APPLICATIONS
AUTO FEATURES
Settings
Default (Keypad)
Small Pump
Large Pump
Large Pump
Conveyor
Send to Store
’#’=no Enter=Yes
Storing
Large Pump
Conveyor
Starting
Current 8A
Full volts
Current 8A
System Status mode.
Large pump is selected in this
example.
3-8 Operation MN850
Page 26

Keypad Starting and Running the Motor in Optimise Mode
Action Description Display Comments
Apply Control Voltage
(115VAC)
Keypad Display shows this
opening message.
Baldor Soft Start
Logo display for 2 seconds.
If no faults the display will show
this message.
Press ENTER key
Press ENTER key Access Level 1 Application Menu.
Press ⇓ key two times Scroll to the correct application.
Press ENTER key Select the application.
Press ENTER key Choose set of parameters for the
application.
Press ENTER key Scroll to the PASSWORD menu.
Press # key twice Press # key two times to exit
programming.
Press Start/Stop key Displays motor starting current
and full voltage and current.
Stopped & Ready
APPLICATIONS
AUTO FEATURES
Settings
Default (Keypad)
Small Pump
Large Pump
Large Pump
Conveyor
Send to Store
’#’=no Enter=Yes
Storing
Large Pump
Conveyor
Starting
Current 8A
Full volts
Current 8A
System Status mode.
Large pump is selected in this
example.
Press OPTIMISE key
Ready for Remote Start/Stop.
Baldor Digital Soft–Start offers three modes of protection during operation:
Remote Start and Running the Motor
When Remote Starting is selected, the keypad Start/Stop pushbutton is not active.
Action Description Display Comments
Apply 115VAC at the
input terminals S0 and
S1.
Input 1 is Start/Stop input when
Remote Starting is selected.
(P52 Bit 16 set to terminal.)
Optimising
Current 4A
1. Full protection with full voltage after top of ramp.
2. Full optimize protection with energy optimizing by reduced voltage at lower
loads.
3. Start + Bypass protection (during start only). No soft–start protection is
provided when during bypass (when soft–start is shorted by the bypass
contactor).
Operation 3-9MN850
Page 27
Motor Stopping Definitions
Term Definition
Stop Pedestal Voltage Stop Pedestal Voltage is the percentage of line voltage applied to the motor after a stop
command. Programmed as parameter 16 or as Stop Pedestal in Basic Menu.
Stop Time Time in seconds after a stop command to ramp down the motor voltage (Stop Time 1 or 2)
Stop Time 1 with low voltage ramp active. Stop Time 2 with no low voltage ramp.
Programmed as parameter 17 or as Stop Time in Basic Menu.
Stop Smoothing Adjustable voltage ramp for smooth deceleration. Motor current is monitored and stop
smoothing will continue until the Start Pedestal value is reached.
Programmed as parameter
Run Voltage Full voltage or Running Voltage
Start Pedestal Voltage Start Pedestal Voltage – end of stop smoothing and beginning of low voltage ramp to zero
volts (if low voltage ramp is active). Programmed as parameter 11 or as Start Pedestal in
Basic Menu.
Figure 3-4 Motor Stopping Key Terms
Motor
Voltage
Run
Voltage
Stop Pedestal
Voltage
Start Pedestal
Voltage
Stopping the Motor
Full Voltage
When Remote Starting is selected, the keypad Start/Stop pushbutton is not active.
Stop
Stop Pedestal
Stop
Time 2
Stop Time 1
Smoothing Effect
Ideal
Actual
Stop Smoothing
End of Stop Smoothing
Low Voltage Ramp
Time
Action Description Display Comments
Press Start/Stop key
(Keypad Stop)
Remove the 115VAC
from S0 and S1.
(Remote Stop)
Displays motor starting current
and full voltage and current.
Stopping
Current 8A
Stopping
Current 8A
Begins the Stop operation
Begins the Stop operation
3-10 Operation MN850
Page 28

Section 4
Parameter Index
Menu Descriptions
Basic Menu
Block Title Parameter Description
Basic Starting Keypad – Allows motor starting and stopping by pressing Start/Stop key on keypad.
Remote – Allows motor starting and stopping by applying or removing 115VAC at
terminals S0 and S1 of the control board.
Start Pedestal Start Pedestal Voltage – end of stop smoothing and beginning of low voltage ramp to
Start Time Number of seconds after the 3 cycle power–up to full motor voltage.
Stop Pedestal Stop Pedestal Voltage is the percentage of line voltage applied to the motor after a stop
Stop Time Time in seconds after a stop command to ramp down the motor voltage (Stop Time 1 or
Current Limit Percentage of running current (P24 and P25). Adjustable from 100 – 800%.
Power on
Parameter
Protection Full – provides shorted SCR protection during start and run, single phase protection
zero volts (if low voltage ramp is active).
command.
2). Stop Time 1 with low voltage ramp active. Stop Time 2 with no low voltage ramp.
Resets all parameter values to the values at the most recent power up. Display blinks
twice to confirm reset is complete.
during start, optimizing not selected.
Full + Optimise – provides shorted SCR protection during start and run, single phase
protection during start, optimizing is selected.
Start + Bypass – provides shorted SCR protection during start, single phase protection
during start, optimizing not selected and no single phase protection during run.
This mode must be used with top of ramp bypass contactor.
Phase Loss only – shorted SCR protection during start and run is disabled, single phase
protection during start, optimizing not selected.
This mode is recommended when input power noise frequently causes nuisance trips.
Applications Menu
Block Title Parameter Description
Applications Settings Display starting method, either Keypad or Remote. Also displays operating mode
Default (Keypad) Sets starting and stopping mode to keypad, resets control and restores all parameters to
Small Pump Uses preset parameter values for typical small centrifugal pump. (P11, P12, P16, P17,
Large Pump Uses preset parameter values for typical large centrifugal pump. (P11, P12, P16, P17,
Conveyor Uses preset parameter values for typical conveyor. (P11, P12, P16, P17, P30 and P31
Low Inertia Fan Uses preset parameter values for Low Inertia Fan. (P11, P12, P16, P17, P30 and P31
High Inertia Fan Uses preset parameter values for High Inertia Fan. (P11, P12, P16, P17, P30 and P31
Reciprocating
Compressor
Screw Compressor Uses preset parameter values for Screw Compressor. (P11, P12, P16, P17, P30 and
Rotary Compressor Uses preset parameter values for Rotary Compressor. (P11, P12, P16, P17, P30 and
(Optimizing or Full Voltage).
factory preset values.
P30 and P31 values).
P30 and P31 values).
values).
values).
values).
Uses preset parameter values for Reciprocating Compressor. (P11, P12, P16, P17, P30
and P31 values).
P31 values).
P31 values).
Parameter Index 4-1MN850
Page 29

Applications Menu Continued
Small PumpName
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
%
10
S
5
3.5
*FLC
Auto 3MC
Low Voltage SoftStop
Stop Pedestal %
Stop Time
Current Limit Time 25 S
Auto Pedestal
Auto Bypass
10
30
Auto Jog
Auto Stop
Auto End Stop
Screw CompressorName
%
S
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
7.8125
%
40
S
7
*FLC
Auto 3MC
Low Voltage SoftStop
Stop Pedestal %
Stop Time
Current Limit Time 25 S
Auto Pedestal
Auto Bypass
Auto Jog
Auto Stop
Auto End Stop
%
0
S
0
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
Large PumpName
%
10
S
7
3.5
*FLC
Auto 3MC
Low Voltage SoftStop
Low Inertia FanName
%
30
S
15
*FLC
3.5
Auto 3MC
Low Voltage SoftStop
High Inertia FanName
%
40
S
3
2.8125
ConveyorName
*FLC
Auto 3MC
Low Voltage SoftStop
%
10
S
10
*FLC
3.5
Auto 3MC
Low Voltage SoftStop
Stop Pedestal %
Stop Time
Current Limit Time 25 S
Auto Pedestal
Auto Bypass
Stop Pedestal %
Stop Time
Current Limit Time 30 S
Auto Pedestal
Auto Bypass
Stop Pedestal %
Stop Time
Current Limit Time 60 S
Auto Pedestal
Auto Bypass
Stop Pedestal %
Stop Time
Current Limit Time 30 S
Auto Pedestal
Auto Bypass
10
45
Auto Jog
Auto Stop
Auto End Stop
0
0
Auto Jog
Auto Stop
Auto End Stop
0
0
Auto Jog
Auto Stop
Auto End Stop
0
7
Auto Jog
Auto Stop
Auto End Stop
Rotary CompressorName
%
S
%
S
%
S
%
S
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
CrusherName
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate 2.8125
Auto End Start
Soft Stop Smoothing
GrinderName
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate
Auto End Start
Soft Stop Smoothing
2.8125
High Torque StartName
%
35
S
7
3.5
*FLC
Auto 3MC
Low Voltage SoftStop
%
40
S
3
*FLC
3.5
Auto 3MC
Low Voltage SoftStop
%
40
S
3
*FLC
Auto 3MC
Low Voltage SoftStop
%
60
S
3
*FLC
4.375
Auto 3MC
Low Voltage SoftStop
Stop Pedestal %
Stop Time
Current Limit Time 25 S
Auto Pedestal
Auto Bypass
Stop Pedestal %
Stop Time
Current Limit Time 60 S
Auto Pedestal
Auto Bypass
Stop Pedestal %
Stop Time
Current Limit Time 60 S
Auto Pedestal
Auto Bypass
Stop Pedestal %
Stop Time
Current Limit Time 12 S
Auto Pedestal
Auto Bypass
0
0
Auto Jog
Auto Stop
Auto End Stop
0
0
Auto Jog
Auto Stop
Auto End Stop
0
0
Auto Jog
Auto Stop
Auto End Stop
0
0
Auto Jog
Auto Stop
Auto End Stop
%
S
%
S
%
S
%
S
Reciprocating CompressorName
45
Start Pedestal %
Start Time
Current Limit Level
Optimise Rate 15
Auto End Start
Soft Stop Smoothing
3.5
Auto 3MC
%
S
3
*FLC
Low Voltage SoftStop
Stop Pedestal %
Stop Time
Current Limit Time 25 S
Auto Pedestal
Auto Bypass
Auto Jog
Auto Stop
Auto End Stop
%
0
S
0
4-2 Parameter Index MN850
Page 30

Advanced Menu
Block Title Parameter Description
Advanced Current Rated Current – (View Only) this value is the continuous current rating of the control.
Low Current – If on, activates low current trip protection. Useful to detect a low current
condition (broken belt, coupling, pump etc.) on driven equipment.
Low Current Level – The value of the low current trip detection. Value can be 0 to 100%
of the Rated Current parameter value. Parameter 28.
Low Current Time – The number of power cycles the motor current is allowed to remain
below the low current level before a low current trip occurs. Value can be 5 to 255
cycles. Parameter 29.
C/L Time Out – If on, allows current limit time out trip (active).
Current Limit – The value of the current limit trip detection. Value can be 1 to 7.9 times
the Rated Current parameter value. Parameter 30.
Limit Time Out – The number of seconds
Value can be 0 to 255 seconds. Parameter 31.
Shearpin – If on, Shearpin protection is active. Useful to detect a high current condition
(such as a jammed conveyor or press) on driven equipment.
Shearpin Level – The value of the high current Shearpin trip detection. Value can be 1 to
5 times the Rated Current parameter value. Parameter 32.
Shearpin Time – The number of power cycles the motor current is allowed to remain
above the low shearpin level before a Shearpin trip occurs. Value can be
cycles. Parameter 33.
Overload Level – Provides overload protection for SCR’s. (Not for motor thermal
overload). The value of the overload current trip detection. Value can be 0.6 to 2
times the Rated Current parameter value. Parameter 34.
Overload Delay – A numerical value that represents the time and current characteristics
for overload integration. Value can be 10 to 140. Parameter 35.
Note: For applications that have frequent Start/Stop sequences, it is necessary to
maintain 115VAC at terminals X1 and X2. Removing 115VAC from these
terminals resets the overload delay integration to 140.
Overload Set Point
Seconds
to Trip
Delay = 140
Delay = 80
Delay =30
Delay = 10
Overload Level (Motor Current x N)
Optimise Rate A numerical value that represents the rate at which the motor voltage is reduced during
optimizing. When this number is large, improves efficiency on stable loads. A lower
number for unstable loads will reduce speed variations. Value can be 4 to 30.
Parameter 19.
Kick Start If on, Kick Start feature is active.
Kick Pedestal For traction or “frozen” loads, this boost pulse of higher voltage helps the load to start
moving. Value can be 60% to 90% of line voltage. Parameter 13.
Kick Time Number of cycles duration the kick pedestal voltage is applied. Value can be 10 to 40.
Parameter 14.
Dwell Time Number of seconds that full voltage is applied to the motor before optimizing begins (if
optimizing is selected). Value can be 1 to 255. Parameter 15.
Low Volts Stop Allows decel to zero volts (not just to the level of the start pedestal). (Sometimes helpful
for unstable loads or regeneration).
Parameter Index 4-3MN850
Page 31

Advanced Menu Continued
Block Title Parameter Description
Advanced Contactor Delay A delay is required when an input contactor is energized by the soft–start “Run” relay.
Trip Sensitivity A numerical value that sets the sensitivity level for all trips. A larger number provides
Station Number Reserved for future use.
Language English (44) is preset. Value can be 1 to 255. Parameter 2.
Firing Mode Sets the SCR firing mode to one of the following: (Value can be 0 to 3. Parameter 7.)
Stop Smoothing Adjustable voltage ramp for smooth deceleration. Motor current is monitored and stop
This delay allows bouncing contactor armature to settle during the “Closed” position.
Value can be 20 to 800 milliseconds. Parameter 71.
slower response to a trip. Value can be 1 to 15. Parameter 72.
0 – Normal, 3 phase induction motor, Soft–Start conducting line current.
1 – Induction motor (Delta), Soft–Start conducting phase current.
2 – Closed loop phase control for electrical loads other than motors.
Current sensing is active but current protection is disabled.
3 – Open loop phase control for electrical loads other than motors.
Current sensing is disabled and current protection is disabled.
Note: Modes 2 and 3 are not suitable for motor loads and may damage motor and
control. These modes are suitable for electrical loads such as lighting or
resistive heaters.
smoothing will continue until the Start Pedestal value is reached. Value can be 1 to
255. Parameter 122.
Auto Features Menu
Block Title Parameter Description
Auto Features Settings Display starting method, either Keypad or Remote. Also displays operating mode
Auto Jog If on, and Stop is commanded within 0.5 seconds of a start command the control will
Auto Pedestal If on, will automatically increase the voltage pedestal to start motor rotation.
Auto End Start If on and motor reaches full speed during ramp up, the start ramp will be terminated and
Auto Stop If on, automatically activates stop smoothing if required by the load during stop for
Auto End Stop If on, detects a stalled or stopped motor and terminates ramp down (turns SCR’s off)
Auto Bypass If on, control detects the bypass contactor closing and automatically disables shorted
Auto 3MC If on, reduces inrush current by allowing the motor voltage to build up from zero to the
Auto Off Off – No effect.
Stop Smoothing If on, allows motor deceleration smoothing (see Stop Smoothing Rate, Advanced menu).
(Optimizing or Full Voltage).
change to jog mode. In jog mode, the decel ramp is changed to 0 seconds.
Repeatedly pushing the Start/Stop button will cause the motor to move slightly in the
same direction.
full voltage will be applied to the motor.
smooth deceleration of the load.
during stop.
SCR detection (activates shorted SCR detection when contactor opens).
set voltage pedestal over 2 to 3 cycles. On “Sticky” or “Traction” type loads, this
mode allows dynamic boost and stall sensing to start load.
On – changes the setting of all “Auto” parameters. If on, the parameter turns off etc.
4-4 Parameter Index MN850
Page 32

Permanent Store Menu
Block Title Parameter Description
Permanent Store Save Parameters Saves all parameter values and overwrites previously saved values.
Power on
Parameters
Default Parameters Restores all parameter values to the factory settings. All parameter values are
Restores all parameter values to the values that were last saved (last power up cycle).
All parameter values changes since last power up are overwritten. Display blinks
twice to confirm reset is complete.
overwritten. Display blinks twice to confirm reset is complete.
Password Menu
Block Title Parameter Description
Password Enter Password If a password is set, it prevents unauthorized users from changing any parameter
Change Password If the parameters are unlocked, a new password can be set using this option. Value can
values. Value can be 0 to 255 (0=no password). If the correct password is entered,
all parameters are unlocked. Parameter 5.
be 0 to 255 (0=no password). Parameter 5.
Note: Remember your password. Removing power etc. will not clear the
password. When a password is set, use Enter Password to unlock
the parameters.
Inputs Menu
Block Title Parameter Description
Inputs Digital i/p1 Input 1 is available at J10, terminals S1 (hot) and S0 (neutral). May be set as follows:
Map to – Value can be parameter 0 – 112. Parameter 65.
Bit number – Press “Optimise” to shift one position to the left. Press “⇑” to change that
character to a logic 1. Press “⇓” to change that character to a logic 0.
The value is stored in Parameter 66.
Polarity – Value of each of the 8 I/O bits can be Positive or Inverse Logic. The value is
stored in Parameter 54.
Digital i/p2
Digital i/p3
Temperature i/p
4–20ma i/p
DC i/p
Reserved for future use.
Reserved for future use.
Reserved for future use.
Reserved for future use.
Reserved for future use.
Parameter Index 4-5MN850
Page 33

Outputs Menu The internal LED, four digital outputs and two analog outputs can be individually defined
as desired. Each digital output can be assigned positive or inverse logic.
Block Title Parameter Description
Outputs LED Available only on size 2 and 3 controls, this Red LED can represent a variety of status
K1 Relay output with Form C (1 N.O. and 1 N.C.) single pole, double throw contacts.
K2 Relay output with Form C (1 N.O. and 1 N.C.) single pole, double throw contacts.
K3 Available with optional I/O expansion board. Refer to MN851 for information.
K4 Available with optional I/O expansion board. Refer to MN851 for information.
Analog o/p1 Available with optional I/O expansion board. Refer to MN851 for information.
Analog o/p2 Available with optional I/O expansion board. Refer to MN851 for information.
Voltage o/p Available with optional I/O expansion board. Refer to MN851 for information.
conditions. The LED is located on the control board.
Contacts are rated for 10Amp @ 250VAC.
Parameter 57 contains the parameter number of the status parameter assigned to K1.
Parameter 58 contains the bit location for the K1 output.
Parameter 54 contains the polarity value for the K1 output.
Contacts are rated for 10Amp @ 250VAC.
Parameter 59 contains the parameter number of the status parameter assigned to K1.
Parameter 60 contains the bit location for the K1 output.
Parameter 54 contains the polarity value for the K1 output.
Parameters Menu Allows quick access to parameter values. Useful to view status or change a value of any
programmable parameter. Refer to Appendix B for parameter numbers and values.
Block Title Parameter Description
Parameters P1 – P20 Entry point for viewing or programming parameters P1 – P20.
P21 – P40 Entry point for viewing or programming parameters P21 – P40.
P41 – P60 Entry point for viewing or programming parameters P41 – P60.
P61 – P80 Entry point for viewing or programming parameters P61 – P80.
P81 – P100 Entry point for viewing or programming parameters P81 – P100.
P101 – P120 Entry point for viewing or programming parameters P101 – P120.
P121 – P125 Entry point for viewing or programming parameters P121 – P125.
Trips Menu This menu is used to view the last five fault trip conditions. Additional information about
fault trips may be found in the troubleshooting section of this manual.
Block Title Parameter Description
Trips 1–16 External Trip Use the “⇑” and “⇓” keys to scroll through the fault trip list. In this example,
1 = the most recent trip (5 would indicate oldest).
16 = the code for the fault trip.
External Trip = the text message for the fault trip.
4-6 Parameter Index MN850
Page 34

Mapping to an Output Relay Most status values are stored in memory as status words.
The following is a list of these status words:
Parameter Description (128)
8 Status 1 Stopping Energy
9 Status 2 4-20mA level
10 Status 3 Red LED
51 User Flag 1
52 User Flag 2
53 User Flag 3
54 I/O Polarity Red LED
86 Auto Config 2 Auto
95 User Flag 1
96 User Flag 2
112 Status 4 Thermal
(for first Param. set)
(for first Param. set)
(for first Param. set)
(for 2nd Param. set)
(for 2nd Param. set)
10000000
>P46
(Not Used)
Remote
Starting
Zero Start
Time
Auto
Pedestal
Polarity
(Unused)
Pedestal
Remote
Starting
Zero Start
Time
Switch
(64)
01000000
Saving
DC I/p level
>P48
Input 3 Input 2 Input 1 Relay K4 Relay K3 Relay K2 Relay K1
Not Used Thermistor
Second
Parameter
Set
Auto End
Start
Input 3 Input 2 Input 1 Relay K4 Relay K3 Relay K2 Relay K1
Auto
Endstart
Not Used Thermistor
Second
Parameter
Set
Overload Timeout Thermistor Under
(32)
00100000
Full
Conduction
Inhibit Start Noise on
Selector
Main
Contactor
Auto Stop Auto End
Auto Stop Auto
Selector
Main
Contactor
(16)
00010000
Dwell Top of
Power
Low
Current
Selector
Remote
Start/Stop
Stop
Endstop
Low
Current
Selector
Remote
Start/Stop
(8)
00001000
Ramp
Forced
Override
Shearpin
Selector
Keypad
Start/Stop
Inverted
Control
Input
Auto Jog Auto
Shearpin
Selector
Keypad
Start/Stop
Current
00000100
Current
Limit
Stall Overload
Overload
Selector
Not Global
Enable 2
User
Current
Limit
Bypass
Overload
Selector
Not Global
Enable 2
Shearpin RYB Phase
(4)
(2)
00000010
Starting Stopped
Integrating
Current
Limit
Timeout
Not Global
Enable 1
User Flag 2
Polarity
Auto 3MC (Unused)
Current
Limit
Timeout
Not Global
Enable 1
Sequence
(1)
00000001
Alarm
Kickstart
Selector
Low
Voltage
Soft–Stop
User Flag 1
Polarity
Kickstart
Selector
Low
Voltage
Soft–Stop
60Hz
Each parameter is an 8 bit word and is used as a bit mask. Any bit of each word can be
assigned to an output relay (K1, K2, K3 or K4).
Parameter Index 4-7MN850
Page 35

Parameter Descriptions Version 5MC (4/2/01)
Title P# Parameter Description
Parameter P0 Dummy Parameter Map unused bits, parameters etc.
P1 Station Number Unused
P2 Country Determines the language used by the display. 44=English.
P3 Software Type Manufacturers product code for the Soft-Start software.
P4 Software Version Version of the software.
Password P5 Password Value Allows you to set and enter a password.
Advanced P6 Firing Mode 0= Normal motor (outside delta or star)
Basic P7 Protection Mode Determines the fault protection method.
Parameters P8 Status 1 Definition (Preset Value, all = 0)
P9 Status 2 Definition (Preset Value, all = 0)
P10 Status 3 Definition (Preset Value, all = 0)
Basic P11 Start Pedestal Sets the voltage level for the Start of Voltage Ramp". Must be sufficient to allow
P12 Start Time Sets the time allowed for motor voltage to equal line voltage.
Advanced P13 Kick Pedestal Sets the voltage level at the start of the kickstart operation.
P14 Kick Time Sets the number of cycles that the P13 voltage is applied. Note that for
P15 Dwell Time Sets the dwell time allowed after top of ramp is reached.
Basic P16 Stop Pedestal Sets the drop in motor voltage for the Stop Voltage Ramp" operation.
P17 Stop Time Sets the ramp down time for motor stopping.
Auto Features P18 Auto Config Auto configuration flags to use with the first parameter set.
Advanced P19 Optimise Rate Sets the optimizing response rate. This parameter helps to stabilize small slip speed
1= Delta (inside delta, no optimization)
2= Closed loop phase control
3= Open loop phase control
0= Input phase loss detection only.
64= Full protection with full volts after top of ramp.
128= Full protection during start then bypass (no protection)
192= Full protection + Optimization
Bit0= Stopped (1=Start/stop signal inactive, SCR's Off, Main contactor open).
Bit1= Starting (1= Starter is in Start Ramp).
Bit2= Current Limit (1=Motor current has reached limit and is being held).
Bit3= Top of Ramp (Full volts) (1=start ramp and current limit is complete).
Bit4= Dwell (1=the time at the end of the start ramp when the motor is
held at full volts before optimizing to stabilize the load).
Bit5= Full Conduction- (1= thyristors in continuous conduction).
Bit6= Energy Saving (1=Motor pf is monitored and volts are adjusted to optimum)
Bit7= Stopping (1=the stop ramp is active).
Bit0= Alarm (1=fault is detected and a trip has occurred)
Bit1= Overload Integrating (1=overcurrent is detected and is integrating)
Bit2= Stall (1=a stall condition is detected, motor speed decreasing).
Bit3= Forced Override (1= Optimizing not available even if selected because
motor current>80%FLA).
Bit4= Noise (1=Noise on AC input power mains is detected).
Bit5= Inhibit Start (1=Start is inhibited for a period to maintain duty cycle).
Bit6= DC I/P level reached (1= DC > P48).
Bit7= 4-20mA I/P level reached (1= 4-20mA > P46).
Bit0= K1 (1= K1 Active).
Bit1= K2 (1= K2 Active).
Bit2= K3 (1= K3 Active).
Bit3= K4 (1= K4 Active).
Bit4= Starter I/P 1 (1= Control Input1 is high).
Bit5= Starter I/P 2 (1= Control Input2 is high).
Bit6= Starter I/P 3 (1= Control Input3 is high).
Bit7= Red LED status (unused)
motor to generate a breakaway torque.
60 Hz, 40 cycles = 667ms. For 50 Hz, 40 cycles = 800ms.
Definition (Preset Value)
Bit0= Unused
Bit1= Auto 3MC (1, Auto remove low volt. ramp for high start pedestal).
Bit2= Auto Bypass (1, Enable Automatic Bypass Contactor detection).
Bit3= Auto Jog (0, Disable auto jog detect. If 1, a stop request within .5 sec
of a start request is forced to 0 stop time).
Bit4= Auto Endstop (0, Do not detect stalled motor at softstop).
Bit5= Auto Stop (0, Do not detect variations in pf during stop smooth stall).
Bit6= Auto Endstart (0, Do not detect full speed at start and adjust start ramp).
Bit7= Auto Pedestal (0, Do not detect rotation at start and adjust pedestal).
motors with low inertia loads. (4=fastest optimizing rate).
4-8 Parameter Index MN850
Page 36

Title P# Parameter Description
Parameters
Advanced Current
Parameters
P20 Reference PF (Power Factor) The calculated power factor to optimize the control loop.
P21 Present PF (Power Factor) The present power factor of the motor (load).
P22 Delay Angle (SCR OFF time) The period (in degrees) that the thyristors are in the OFF state.
P23 Maximum Optimizing Delay Sets the maximum delay angle (max degrees that the thyristors are
P24 Rated Current (High Byte –Hundreds) The current rating of the soft–start set by manufacturer.
P25 Rated Current (Low Byte – Units) The current rating of the soft–start set by manufacturer.
P26 Running Current Amps
(RatedCurrent) x (7.96875)
32
P27 Peak Start Current (measured at last start) The maximum current used during the last start–up.
P28 Low Current Level (undercurrent trip)
(scaling = 0.03125)
P29 Low Current Time (delay before trip) The number of cycles allowed for a low current level condition (P28)
P30 Current Limit Level (scaling = 0.03125)
(RatedCurrent) x (7.96875)
32
P31 Current Limit Time (delay before trip) The time allowed for start current to equal P30 value before tripping.
P32 Shearpin Level (overcurrent trip) Sets the over current trip level. Shearpin operation begins after
P33 Shearpin Time (delay before trip) The number of cycles allowed for an overcurrent condition before
P34 Overload Level (SCR protection) Sets the overload current level as a portion of FLA. (P34 is always
P35 Overload Delay (delay before trip) The time allowed for an overload condition before tripping. For 60
P36 % Overload (status only) The integration of the Current–Time product represented as a % of a
P37 Chassis Temp The heatsink temperature. When the temperature exceeds a
P38 Pot1 The value of RV1 on the control card. 255=fully CW setting for
P39 Pot2 The value of RV2 on the control card. 255=fully CW setting for
P40 Pot3 The value of RV3 on the control card. 255=fully CW setting for
P41 DC I/P 0–12V input for load monitoring or phase angle setpoint etc.
P42 Thermistor Monitors the Thermistor I/P (standard motor thermistor). The values
P43 4–20mA I/P Monitors the 4 to 20mA input. Note this input is referenced to the
P44 TEMP Trip Level The value at which Parameter 37 causes a trip.
P45 4–20mA MAP Value is the Parameter to which the 4–20mA data is sent.
P46 4–20mA Set Level Value is the level at which the 4–20mA level bit will be set.
P47 DC Input Map Value is parameter to which the DC input data is sent.
P48 Set Level DC I/P Value is the level at which the DC–I/P level bit will be set.
P49 MAP DAC O/P 1 The value is the parameter that is the source for DAC 1 (0–10VDC).
P50 MAP DAC O/P 2 The value is the parameter that is the source for DAC 2 (0–10VDC).
OFF) used during the optimizing mode.
The load current. (Always shown as phase current).
Sets the under current trip level. (The low current level flag is
updated even if the low current trip is disabled).
to exist before tripping. For 60 Hz, 40 cycles = 667ms.
For 50 Hz, 40 cycles = 800ms.
Sets the level that the start ramp is held. (The start ramp is only held
if the P30 value is reached. The current decreases as motor speed
increases allowing the ramp to continue).
Note that for 60 Hz, 40 cycles = 667ms.
For 50 Hz, 40 cycles = 800ms.
start–up is complete.
tripping (only when shearpin flag P51, Bit3=1). For 60 Hz, 60 cycles
= 1second. For 50 Hz, 50 cycles = 1second.
active but P30 is only active during motor starting.)
Hz, 60 cycles = 1second. For 50 Hz, 50 cycles = 1second.
value that was preset by the manufacturer.
threshold value, P37 value will change from <20 to >200.
5VDC input. (Not applicable for keypad operation).
5VDC input. (Not applicable for keypad operation).
5VDC input. (Not applicable for keypad operation).
are not all that useful as thermistors act much like a switch.
PCB 0V and so cannot be used with daisy chained sensors.
Parameter Index 4-9MN850
Page 37

Title P# Parameter Description
Parameters
Continued
P51 User Flags 1 Note that these bits operate with P52 bit 6 (param group selector). This lets you set
a primary and secondary group value: e.g. P14: Kick Time 1 (primary);
P82: Kick Time 2 (secondary).
Definition (Preset Value)
Bit0= Kickstart selector (0, do not select kickstart)
Bit1= Current limit timeout (1, trip on timeout)
Bit2= Overload selector (1, selects overload operation)
Bit3= Shearpin selector (1, selects shearpin operation)
Bit4= Low current selector (0, do not select low current operation)
Bit5= Thermistor selector (0, do not select thermistor operation)
Bit6= Not Used
Bit7= Remote input selector (1, start/stop by remote terminals) (See P52 Bit4)
P52 User Flags 2 Definition (Preset Value)
Bit0= Low voltage stop selector (0, do not select low voltage part of stop ramp)
Bit1= Not global enable 1 - active low (0, not active signal from terminal)
Bit2= Not global enable 2 - active low (0, not active signal from bus)
Bit3= Keypad Start/Stop (0, Off)- (Available when P51 Bit7=0)
Bit4= Remote Start/Stop (0, Off)- (Available when P51 Bit7=1)
Bit5= Main contactor selector (0, Off)- (use with a relay)
Bit6= Parameter group selector (0, Off= Group 1)
Bit7= Zero Start Time (0, do not use full voltage at motor start)
P53 User Flags 3 Definition (Preset Value)
Bit0= User Flag 1 Polarity (1, positive)
Bit1= User Flag 2 Polarity (1, positive)
Bit2= User Current limit (0, do not request a start ramp hold)
Bit3= User trip (0, do not request a trip)
Bit4= Invert Controller Input (1, set point source input is inverted in servo loop)
Bit5= Inhibit restart (0, inhibited restart control is disabled)
Bit6= Thermal Switch 2 Enable (0, Secondary thermal control is disabled)
Bit7= Unused
P54 I/O Polarity Determines the polarity of the digital inputs and outputs.
A Bit set=0; is negative logic. A Bit set=1; is positive logic.
Example:
P54, Bit0=1 (K1 mapped to Main Contactor), P57=52,
P58=00100000 P52, Bit 5=1 will cause K1 to close.
Definition (Preset Value)
Bit0= Relay K1 (1, positive)
Bit1= Relay K2 (1, positive)
Bit2= Relay K3 (1, positive)
Bit3= Relay K4 (1, positive)
Bit4= Control Input 1 (1, positive)
Bit5= Control Input 2 (1, positive)
Bit6= Control Input 3 (1, positive)
Bit7= Led (RED) Unused
P55 MAP LED Unused
P56 LED MASK Unused
P57 Map K1 To (Parameter) The parameter number that will control Relay K1. The preset is P52:
User Flags 1–2. (P57 operates with P58). (Mapped to means
electronic transfer of the analog value.)
P58 K1 Bit Mask (P57 bit selected for K1) Sets the bit in the parameter selected by P57 that operates the relay
K1 on the control card. The preset is P52:User Flags 1–2, Bit5 (main
contactor). (P58 operates with P57).
7 6 5 4 3 2 1 0 Bits
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0 (Preset)
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
P59 Map K2 To (Parameter) The parameter number that will control Relay K2. The preset is P8:
Status 1. (P59 operates with P60). (Mapped to means electronic
transfer of the analog value.)
4-10 Parameter Index MN850
Page 38

Title P# Parameter Description
Parameters
Continued
P60 K2 Bit Mask (P59 bit selected for K2) Sets the bit in the parameter selected by P59 that operates the relay
P61 MAP K3 TO (Parameter) Value is the destination parameter number for the K3 bit.
P62 K3 BIT MASK Parameter 62 is the mask for P61 (Map K3 To).
P63 MAP K4 TO (Parameter) Value is the destination parameter number for the K4 bit.
P64 K4 BIT MASK Parameter 64 is the mask for P63 (Map K4 To).
P65 Map I/P1 To (Parameter) The parameter number that will control Input 1 on the control card.
P66 I/P1 Bit Mask (P65 bit selected for I/P1) Sets the bit in the parameter selected by P65 that operates Input 1 of
P67 Map I/P2 To (Parameter) The parameter number that will control Input 2 on the control card.
P68 I/P2 Bit Mask (P67 bit selected for I/P2) Parameter 68 is the mask for P67, Map I/P2 To.
P69 Map I/P3 To (Parameter) The parameter number that will control Input 3 on the control card.
P70 I/P3 Bit Mask (P69 bit selected for I/P3) Parameter 70 is the mask for P69, Map I/P3 To.
K2 on the control card. The preset is P8:Status 1, Bit3 (Top of Ramp
or Full Volts). (P60 operates with P59).
7 6 5 4 3 2 1 0
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0 (Preset)
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
Parameter 62 is the mask for P61 (Map K3 To).
Parameter 64 is the mask for P63 (Map K4 To).
The preset is P52: User Flags 1–2. (Parameter 66 is the mask for
P65, Map I/P1 To). (Mapped to means electronic transfer of the
analog value.)
the control card. The preset is P52:User Flags 1–2, Bit4 (Board
Start/Stop). (Parameter 66 is the mask for P65, Map I/P1 To).
7 6 5 4 3 2 1 0 Bits
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 0 (Preset)
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
The preset is P0. (Parameter 68 is the mask for P67, Map I/P2 To).
(Mapped to means electronic transfer of the analog value.)
The preset is P0. (Parameter 70 is the mask for P69, Map I/P3 To).
(Mapped to means electronic transfer of the analog value.)
Bits
Parameter Index 4-11MN850
Page 39

Title P# Parameter Description
Advanced Current
Parameters P74 2nd Last Trip P74 stores the trip code for the fault previous to P73. See P73 for definitions.
P71 Contactor Delay (after start command) Sets the delay time between the request to actuate K1 and the start
P72 Trip Sensitivity (1=fastest trip) Unused
P73 Last Trip (Most Recent Trip) P73 stores the most recent trip code for the most recent fault. Trip
P75 3rd Last Trip P75 stores the trip code for the fault previous to P74. See P73 for definitions.
P76 4th Last Trip P76 stores the trip code for the fault previous to P75. See P73 for definitions.
P77 5th Last Trip (Oldest trip) P77 stores the trip code for the fault previous to P76. See P73 for definitions.
P78 Protection Mode 2
(trips or 2nd param set)
P79 Start Pedestal 2
(for 2nd param set)
P80 Start Time 2 (for 2nd param set) Sets the time allowed for motor voltage to equal line voltage.
P81 Kick Pedestal 2 (for 2nd param set) Sets the voltage level at the start of the kickstart operation.
P82 Kick Time 2 (for 2nd param set) Sets the number of cycles that the P81 voltage is applied. Note that
P83 Dwell 2 (for 2nd param set) Sets the dwell time allowed after top of ramp is reached.
P84 Stop Pedestal 2 (for 2nd param set) Sets the drop in motor voltage for the “Stop Voltage Ramp”
P85 Stop Time 2 (for 2nd param set) Sets the ramp down time for motor stopping.
of firing the thyristors.
code definitions are as follows:
0 Not Used
1 Phase Loss Fault. One or phases of the incoming three phase AC power is
missing. Check fuses etc.
2 Thermal Switch Fault. A thermal switch (fan cooled units only) detected an over
temperature condition. P51 (or P95) bit 5 enabled.
3 * Thyristor Signal Fault. Thyristor control signal fault.
4 * Thyristor Firing Fault. One or more thyristors not firing.
5 * Thyristor Signal Fault. Thyristor control signal fault.
6 * Thyristor Signal Fault. Thyristor control signal fault.
7 * Thyristor Sensing Signal Fault.
8 * Thyristor Sensing Signal Fault.
9 * Thyristor Sensing Signal Fault.
10 * Thyristor Short Circuit. Thyristor shorted across the poles.
11 Under Current Fault. When Top of Ramp" is reached, P28 (or P87) Low
Current Level and P29 (or P88) Low Current Time become active. If P51, Bit 4
is enabled, a fault will occur if the output current is less than P28 for longer
than the P29 time period.
12 Current Limit Fault. During start-up, P30 (or P89) Current Limit Level and P31
(or P90) Current Limit Time are active. If P51, Bit 1 is enabled, a fault will occur
if the output current exceeds P30 for longer than the P31 time period.
13 Overload Fault. During normal operation, P34 (or P93) Overload Level and P35
(or P94) Overload Delay are active. If P51, Bit 2 is enabled, a fault will occur if
the output current is equal to or greater than P34 for longer than the P35 time
period.
14 Shearpin Fault. When Top of Ramp" is reached, P32 (or P91) Shearpin Level
and P33 (or P92) Shearpin Time become active. If P51, Bit 3 is enabled, a fault
will occur if the output current is greater than P32 for longer than the P33 time
period.
15 Thermistor Fault. Motor is overtemperature.
16 External Trip.
* Contact Baldor if this fault occurs.
Determines the fault protection method
0= Input phase loss detection only.
64= Full protection with full volts after top of ramp.
128= Full protection during start then bypass (no protection)
192= Full protection + Optimization
Sets the voltage level for the “Start of Voltage Ramp”. Must be
sufficient to allow motor to generate a breakaway torque.
for 60 Hz, 40 cycles = 667ms. For 50 Hz, 40 cycles = 800ms.
operation.
4-12 Parameter Index MN850
Page 40

Section 1
General Information
Title P# Parameter Description
Parameters
Continued
Parameters
Continued
86 Auto Config 2 (for 2nd param set)
P87 Under Current 2 (for 2nd param set) Sets the under current trip level.
P88 Under Current Time 2 (for 2nd param set) The time allowed for a low current level condition (P87) to exist
P89 Current Limit 2 (for 2nd param set) Sets the motor starting current.
90 (for 2nd param set) The time allowed for start current to equal P89 value before tripping.
91 Shearpin 2 (for 2nd param set) Sets the over current trip level. Shearpin operation begins after
92 (for 2nd param set) The number of cycles allowed for an overcurrent condition before
93 (for 2nd param set) Sets the overload current level as a portion of FLA. (P93 is always
94 (for 2nd param set) The time allowed for an overload condition before tripping. For 60
95 User Flags 1 (for 2nd param set) Note that these bits operate with P96 bit 6 (param group selector).
96 User Flags 2 (for 2nd param set) Definition (Preset Value)
97 Flag1 I/P Source Address Address of source flag parameter.
98 Flag1 I/P Source Mask The bit mask for source flag parameter.
99 Flag1 O/P Destination Address Address of destination flag parameter.
Auto configuration flags for the second
parameter set.
Definition (Preset Value)
Bit0= Unused
Bit1= Auto 3MC (1, enable auto removal of low voltage ramp for
high start pedestals)
Bit2= Auto Bypass (1, enable automatic bypass contactor detection).
Bit3= Auto Jog (0, disable jog detection. If enabled a stop request within
0.5 second of a start request is forced to 0 stop time).
Bit4= Auto Endstop (0, disabled. If enabled detect a stalled motor during
softstop and turn off thyristors).
Bit5= Auto Stop (0, do not detect variations in pf during stop smooth stall).
Bit6= Auto Endstart (0, disable detection of full speed during start and
end of start ramp)
Bit7= Auto Pedestal (0, disable detection of motor rotation at start with
pedestal adjustment).
before tripping. For 60 Hz, 40 cycles = 667ms.
For 50 Hz, 40 cycles = 800ms.
Note that for 60 Hz, 40 cycles = 667ms.
For 50 Hz, 40 cycles = 800ms.
start–up is complete.
tripping (only when shearpin flag P95, Bit3=1). For 60 Hz, 60 cycles
= 1second. For 50 Hz, 50 cycles = 1second.
active but P89 is only active during motor starting.)
Hz, 60 cycles = 1second. For 50 Hz, 50 cycles = 1second.
This lets you set a primary and secondary group value.
Definition (Preset Value)
Bit0= Kickstart 2 (0, Off)
Bit1= Current limit selector 2 (1, On)
Bit2= Overload selector 2 (1, On)
Bit3= Shearpin selector 2 (0, Off)
Bit4= Low current selector 2 (0, Off)
Bit5= Thermistor selector 2 (0, Off)
Bit6= Unused
Bit7= Remote starting 2 (1=P96 Bit4) (If 0, 0=P96 Bit 3)
Bit0= Low voltage Softstop (0, Off)
Bit1= Not global enable 1(2) (0, Off)
Bit2= Not global enable 2(2) (0, Off)
Bit3= Keypad Start/Stop 2 (0, Off)- (Available when P95 Bit7=1)
Bit4= Remote Start/Stop (0, Off)- (Available when P95 Bit7=0)
Bit5= Main contactor 2 (0, Off)- (use with a relay)
Bit6= Second Parameter Set 2 (1, On= Group 2)
Bit7= Zero Start time 2 (0, Off)
(Parameter 98 is the mask for P97.)
(Parameter 100 is the mask for P99.)
Parameter Index 4-13MN850
Page 41

Section 1
General Information
Title P# Parameter Description
Parameters
Continued
Parameters
Continued
100 Flag1 O/P Destination Mask The bit mask for destination flag parameter.
101 Flag2 I/P Source Address Address of source flag parameter.
102 Flag2 I/P Source Mask The bit mask for source flag parameter.
103 Flag2 O/P Destination Address Address of destination flag parameter.
104 Flag2 O/P Destination Mask The bit mask for destination flag parameter.
105 Loop Input The parameter number used as the source for control loop setpoint.
106 Loop Feedback The parameter number used as the source for control loop feedback.
107 Error Gain Multiplier for the control loop error signal.
108 Error Divisor Divisor for the control loop error signal.
109 Max Slope The maximum allowed single error in open loop.
110 Guard Gap The minimum allowed firing delay in both open loop and phase
111 User Parameter This parameter may be set by the user by the serial link.
112 Status 4 Definition (Preset Value, all = 0)
113 Drive Type Unused
114 Baud Rate Unused
115 Selected App Value selected from application table. Not implemented on some
116 5MC Inhibit Time (restart not allowed) Number of minutes after stop that restart is not allowed. (Protects
117 Command Source Unused
118 Action On Bus Error Unused
119 Preset Parameter Number to Display Unused
120 Status 5 Definition (Preset Value)
121 User Flags 4 Definition (Preset Value)
122 Soft–Start Smoothing Sets the amount of soft–start smoothing. This parameter helps
123 Reserved for future use. Unused
124 Reserved for future use. Unused
125 Reserved for future use. Unused
(Parameter 102 is the mask for P101.)
(Parameter 104 is the mask for P103.)
control modes. This allows for jitter and power factor of the load.
Bit0= The unit is using 60Hz parameters
Bit1= The phase rotation detected at start (RYB Sequence)
Bit2= Indicates current is greater than shearpin level
Bit3= Indicates current is less than under current level
Bit4= Thermistor is overtemperature or I/P's are open circuit
Bit5= Current limit has timed out
Bit6= Overload has passed trip level
Bit7= Heatsink temperature is greater than max allowed
versions of software.
SCR’s for large loads.)
Bit0= Thermal Switch 2 Over temp . Prevents re-start if set. (0, Off)
Bit0= Unused
Bit1= Allow for quicker comms response (0, Off)
Bit2= enable Soft stop smoothing for pumps (0, Off)
stabilize jitter caused by unstable loads.
4-14 Parameter Index MN850
Page 42

Section 5
Troubleshooting
Safety Notice Be sure to read and understand all notices, warning and caution statements in Section 1
of this manual. If you have any questions about the safe operation of this equipment,
please contact your Baldor representative before you proceed.
Preliminary Checks In the event of trouble, disconnect all input power to the control and perform these
preliminary checks.
Power Off Checks
1. Check all connections for tightness and signs of overheating.
2. Check for cracked or damaged insulators and terminal blocks.
3. Ensure the correct setting of the overload relay.
4. Check the 115VAC input power.
5. If one or more SCR’s should be replaced, contact Baldor.
Table 5-1 Fault Trip Messages
This menu is used to view the last five fault trip conditions. Additional information about
fault trips may be found in the troubleshooting section of this manual.
Note: The control is shipped with five fault messages in the log (P73–P77). The last
message is “External Trip”. There is no software method to clear the fault log.
Block Title Parameter Description
Trips 1 16 External Trip Use the “⇑” and “⇓” keys to scroll through the fault trip list. In this example,
1 = the most recent trip (5 would indicate oldest). Parameters P73 to P77.
16 = the code for the fault trip.
External Trip = the text message for the fault trip.
16 error conditions that cause a fault trip to occur are: (E1 – E16)
1 – Phase loss. This is a start–up protection fault that indicates single phase power at the
AC input. This error can also indicate phase unbalance or undervoltage (low voltage).
2 – Too Hot. Heat sink temperature exceeded limit. Possible causes are overload, frequent
starting, poor ventilation, excessive dirty on heat sink, high ambient temperature or high
humidity.
3 – SCR Signal. Excessive electrical noise on input power lines.
4 – SCR Firing. SCR’s are not responding to firing commands. May be a result of a failed
control board, voltage spikes on power lines, noise, loose connections or SCR failure.
5 – SCR Signal. Excessive electrical noise on input power lines.
6 – SCR Signal. Excessive electrical noise on input power lines.
7 – SCR Sensing. Loss of the sensing signal from an SCR. May be a result of a failed SCR,
loss of phase current when running, undervoltage or phase unbalance when running.
8 – SCR Sensing. Loss of the sensing signal from an SCR. May be a result of a failed SCR,
loss of phase current when running, undervoltage or phase unbalance when running.
9 – SCR Sensing. Loss of the sensing signal from an SCR. May be a result of a failed SCR,
loss of phase current when running, undervoltage or phase unbalance when running.
10 – SCR Shorted. Shorted SCR is detected. If not using input contactor , it is recommended
that you map this fault to an output relay to trip the circuit breaker if the error occurs. When
one phase is shorted, motor can be stopped. However, when two or three phases are
shorted, the motor cannot be stopped without the input contactor.
11 – Low Current. Motor current is less than full load current level (broken belt or coupling).
12 – C/L Timeout. Motor current exceeded current limit value. V oltage was reduced to limit
output current but it still exceeded limit for longer than allowed.
13 – Overload. Provides overload protection for SCR’s. (Not for motor thermal overload).
The value of the overload current trip detection was exceeded.
14 – Shearpin. The value of the high current Shearpin trip detection has been exceeded.
15 – Thermistor. Optional with I/O expansion board. Refer to MN851 for information.
16 – External Trip. Optional with I/O expansion board. Refer to MN851 for information.
Troubleshooting 5-1MN850
Page 43

Table 5-2 Troubleshooting Guide
INDICATION CORRECTIVE ACTION
Unit fails to start LED’s on control card are OFF and no error messages displayed:
Unit trips during
start
Bad start then unit
trips
SCR’s short on
first start–up
Unit trips during
ramp–up
1. Verify that 115VAC is present at X1 and X2 terminals.
2. Verify that 9VAC is present at terminal J2 (see Section 2 cover removal).
Green power LED is ON and no error messages displayed:
1. Control board or other component may be defective. Contact Baldor.
1. Check parameter 73 (last trip) error code and isolate source of problem (see Table 5-1).
2. Verify that all three phases of AC input power and motor power are present (no missing phases).
3. If input contactor is used, verify AC input power is present at L1, L2 and L3 before the contactor delay time
is complete. If the SCR’s fire before AC power is present, the “Phase Loss” message is displayed and
unit will trip.
4. Verify all connections at the SCR gate connections. (Resistance check: with all power removed, the
resistance between adjacent Red & Yellow wires at the control card connections can be checked.
Between pins 1–2, 3–4, 5–8 etc. the resistance should be between 10 – 50 ohms ±20%.
5. Verify there are no power factor correction capacitors on the output. Power factor correction capacitors may
only be connected on the line side of the control and must be switched out during starting.
6. Verify SCR are not shorted (error display “Motor SCR Loss”). (Resistance check: with all power removed,
the resistance can be checked between adjacent Red to Red wires at the control connections. Between
pins 1–4 (L3 & T3), 5–8 (L2 & T2) and 9–12 (L1 & T1) the resistance must be greater than 500k ohms.
7. If the “Shearpin” or “Overload” messages are displayed, verify that the soft–start control is correctly sized.
8. If the “Too Hot” message is displayed, verify the thermal switch connection (or jumper is installed) at J4.
9. If the “Sensing Signal” or “SCR Signal” messages are displayed, problem can be excess noise or failure on
another circuit board. Contact Baldor.
10. Verify that the motor is less than 328ft.(100m) from the soft–start control.
1. Check parameter 73 (last trip) error code and isolate source of problem (see Table 5-1).
2. Verify that AC input power and motor power wires are not reversed. (The motor will give an initial kick then
start very roughly.)
3. Verify all connections at the SCR gate connections. (Resistance check: with all power removed, the
resistance between adjacent Red & Yellow wires at the control card connections can be checked.
Between pins 1–2, 3–4, 5–8 etc. the resistance should be between 10 – 50 ohms ±20%.
4. Verify there are no power factor correction capacitors on the output. Power factor correction capacitors may
only be connected on the line side of the control and must be switched out during starting.
5. Verify SCR are not shorted (error display “Motor SCR Loss”). (Resistance check: with all power removed,
the resistance can be checked between adjacent Red to Red wires at the control connections. Between
pins 1–4 (L1 & T1), 5–8 (L2 & T2) and 9–12 (L3 & T3) the resistance must be greater than 500k ohms.
6. Verify that the motor is less than 328ft.(100m) from the soft–start control.
1. Verify there are no power factor correction capacitors on the output. Power factor correction capacitors may
only be connected on the line side of the control and must be switched out during starting.
2. Verify that the soft–start control is correctly sized. Verify the Rated Current, Overload Trip level, and trip
delay are correct for the application.
3. Verify that the motor is less than 328ft.(100m) from the soft–start control. Also, verify the motor and motor
leads are good.
1. Check parameter 73 (last trip) error code and isolate source of problem (see Table 5-1).
2. Verify that all three phases of AC input power and motor power are present (no missing phases).
Check for blown fuse if “Phase Loss” message is displayed.
3. Verify that the soft–start control is correctly sized. Verify the Rated Current, Overload Trip level, and trip
delay are correct for the application.
4. If the “Too Hot” message is displayed, verify the thermal switch connection (or jumper is installed) at J4.
5-2 Troubleshooting MN850
Page 44

Table 5-2 Troubleshooting Guide Continued
INDICATION CORRECTIVE ACTION
Initial motor kick
then bad start
Current is not
displayed
Motor does not
accelerate
Verify that AC input power and motor power wires are not reversed.
(The motor will give an initial kick then start very roughly.)
1. Verify the current transformer connections at J3 control terminal.
2. Verify that the soft–start control is correctly sized.
1. Verify the Current Limit parameter value and increase if necessary.
2. Verify the Ramp Time parameter value and decrease if necessary.
3. Excessive motor current, decrease load.
4. Insufficient break away torque. Change pedestal voltage value to allow greater break away torque.
Fuse(s) blown 1. Excessive start time.
2. Fuse undersized. Use only specified fuses for UL short circuit current ratings (see Section 2).
Cannot change
starting from
“Remote” to
“Keypad”
Remote start input. Factory preset start input is Programmable Input 1 terminals S1 and S0. If a start voltage has
been applied to S1 and S0, you cannot change to Keypad until the start command is removed. Therefore,
remove the start voltage from S1 and S0 and then change to keypad.
Figure 5-1
230/460VAC 3 Phase
L3L2L1
5
3
1
2
4
6
Red
Yellow
Yellow
Red
Red
Yellow
Yellow
Red
Red
Yellow
Yellow
Red
1
2
3
4
5
6
7
8
9
10
11
12
5MC–PCB
RUN
TOR
3 Phase
Motor
T3T2T1
Troubleshooting 5-3MN850
Page 45

Electrical Noise Considerations
All electronic devices are vulnerable to significant electronic interference signals
(commonly called “Electrical Noise”). At the lowest level, noise can cause intermittent
operating errors or faults. From a circuit standpoint, 5 or 10 millivolts of noise may cause
detrimental operation. For example, analog speed and torque inputs are often scaled at 5
to 10VDC maximum with a typical resolution of one part in 1,000. Thus, noise of only 5
mV represents a substantial error.
At the extreme level, significant noise can cause damage to the drive. Therefore, it is
advisable to prevent noise generation and to follow wiring practices that prevent noise
generated by other devices from reaching sensitive circuits. In a control, such circuits
include inputs for speed, torque, control logic, and speed and position feedback, plus
outputs to some indicators and computers.
Relay and Contactor Coils
Among the most common sources of noise are the coils of contactors and relays. When
these highly inductive coil circuits are opened, transient conditions often generate spikes
of several hundred volts in the control circuit. These spikes can induce several volts of
noise in an adjacent wire that runs parallel to a control-circuit wire. Figure 5-1 illustrates
noise suppression for AC and DC relay coils.
Figure 5-1 AC and DC Coil Noise Suppression
AC Coil
RC snubber
0.47 mf
33 W
+
DC Coil
-
Diode
Control Enclosures Motor controls mounted in a grounded enclosure should also be connected to earth
ground with a separate conductor to ensure best ground connection. Often grounding
the control to the grounded metallic enclosure is not sufficient. Usually painted surfaces
and seals prevent solid metallic contact between the control and the panel enclosure.
Likewise, conduit should never be used as a ground conductor for motor power wires or
signal conductors.
Special Motor Considerations
Motor frames must also be grounded. As with control enclosures, motors must be
grounded directly to the control and plant ground with as short a ground wire as possible.
Capacitive coupling within the motor windings produces transient voltages between the
motor frame and ground. The severity of these voltages increases with the length of the
ground wire. Installations with the motor and control mounted on a common frame, and
with heavy ground wires less than 10 ft. long, rarely have a problem caused by these
motor–generated transient voltages.
Analog Signals Analog signals generally originate from speed and torque controls, plus DC tachometers
and process controllers. Reliability is often improved by the following noise reduction
techniques:
• Use twisted-pair shielded wires with the shield grounded at the drive end only.
• Route analog signal wires away from power or control wires (all other wiring types).
• Cross power and control wires at right angles (90°) to minimize inductive noise
coupling.
5-4 Troubleshooting MN850
Page 46

Section 6
Specifications and Product Data
Identification
Three Phase Digital Soft–Start
7 016
MD
Control Type
MD – Multipurpose Digital
Input Voltage
7- 208, 230, 460VAC
8- 230, 460, 575VAC
C B
Ampere Rating
009- 9 Amp
016- 16 Amp
023- 23 Amp
030- 30 Amp
044- 44 Amp
059- 59 Amp
072- 72 Amp
085- 85 Amp
105- 105 Amp
146- 146 Amp
174- 174 Amp
202- 202 Amp
242- 242 Amp
300- 300 Amp
370- 370 Amp
500- 500 Amp
600- 600 Amp
750- 750 Amp
900- 900 Amp
1100- 1100 Amp
1200- 1200 Amp
Enclosure
A- Open Kit
B- Open Chassis (IP20)
C- NEMA12 (IP65)
P- Panel Mount
Note: Open Chassis meets NEMA Type 1 enclosure
requirements but does not comply with UL Type
1 requirement for cable bending space.
Soft–Start Type
A- Combination controller with:
S Input circuit breaker
S Input contactor
S Motor overload
S Multipurpose Digital Soft–Start
B- Non–Combination controller with:
S Input contactor
S Motor overload
S Multipurpose Digital Soft–Start
C- Controller only
S Multipurpose Digital Soft–Start
Specifications and Product Data 6-1MN850
Page 47

Input Ratings
Input Voltage Range
MD7–XXX = 208/230/460 VAC +10% to –15%
MD8–XXX = 230/460/575 VAC +10% to –15%
Phase Three Phase
Input Frequency 60/50 HZ ± 5%
Overload Rating Continuous 115% of FLA; 350% for 30 seconds.
Duty Cycle Continuous
Peak Inverse Voltage MD7–XXX = 1400VAC maximum
MD8–XXX = 1600VAC maximum
S0, S1 12VDC or 24VDC
X1, X2 115VAC (98 – 126VAC) or 230VAC (196 – 253VAC)
Storage Conditions
Ambient Temperature: –4 to 140°F (-20 to 60 °C)
Humidity: 0 - 95% RH Non-Condensing
Operating Conditions
Enclosure: NEMA 1 – Wall mounted (Industrial indoor, general purpose)
For other enclosures, contact Baldor.
The SCR’s generate about 3.3 watts of heat per running amp (motor
FLA). If the control is mounted in an enclosure, the installer must
provide fans or blower with sufficient ventilation. Fan or blower
should be rated for at least 0.8 CFM per ampere of motor FLA rating.
Baldor provided enclosures are designed to dissipate the heat from
the SCR’s.
Humidity: 0 - 85% RH Non-Condensing (not to exceed 50% at 40°C ambient).
Control Heat Loss 3.3 Watt per running ampere of input current
Ambient Operating Temperature: 32-113°F (0 to +40 °C) enclosed
32-122°F (0 to +40 °C) open panel
Altitude: Sea level to 3300 Feet (1000 Meters)
Derate 1% per 330 Feet (100 Meters) above 3300 Feet
Derating Derate Amp rating 1% per 330 Feet (100 Meters) above 3300 Feet
Derate Amp rating 2% per °C over 40 °C to 60 °C Max
Output Relays – K1 and K2 contacts Category AC1, 230VAC, 3A.
6-2 Specifications and Product Data MN850
Page 48
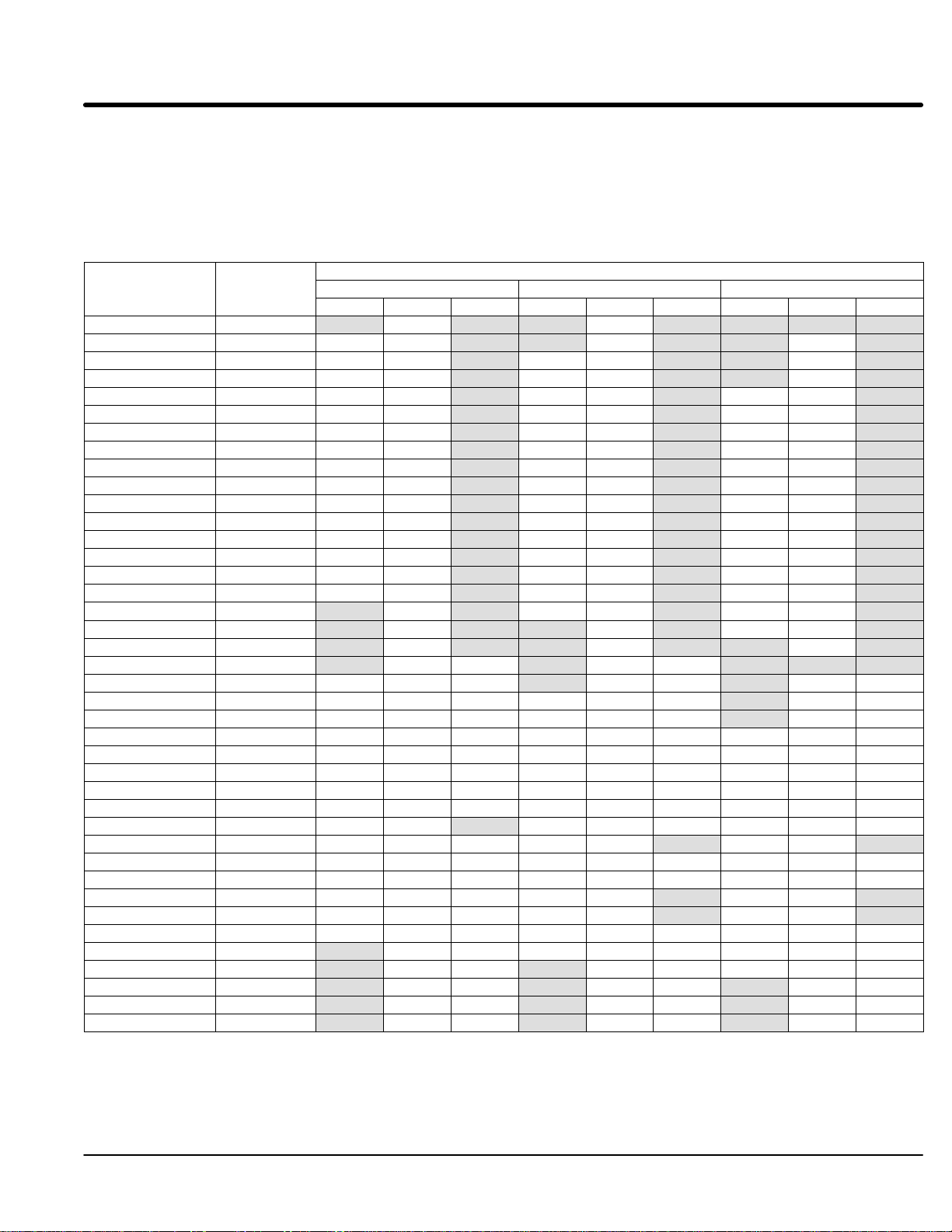
Standard Duty: Agitator, Compressor, Centrifuge, Fan, Blower, Chiller, Escalator, Pump,
Bandsaw, Low Inertia Fan, Small Pump.
Medium Duty: Mill, Conveyor, Drilling Press, Reciprocating Compressor, Elevator, Screw
Feeder, Grinder, Hammer Press, Mixer, Large Pump, High Inertia Fan, Pelletizer, Pulper, Flywheel
Press, Positive Displacement Pump, Circular Saw, Vibrating Screens.
Heavy Duty: Rock Crusher, Pulverizer, Separator, Chipper, Screw Compressor.
Output
Catalog
Number
MD7–009–CB 9A 5 5
MD7–016–CB 16A 5 10 7.5 5
MD7–023–CB 23A 7.5 15 5 10 7.5
MD7–030–CB 30A 10 20 7.5 15 10
MD7–044–CB 44A 15 30 10 20 5 15
MD7–059–CB 59A 20 40 15 30 7.5 20
MD7–072–CB 72A 25 50 15 40 10 30
MD7–085–CB 85A 30 60 20 50 15 40
MD7–105–CB 105A 40 75 30 60 20 50
MD7–146–CB 146A 50 100 40 75 30 60
MD7–174–CB 174A 60 125 50 100 40 75
MD7–202–CB 202A 75 150 60 125 50 100
MD7–242–CB 242A 100 200 75 150 60 125
MD7–300–CB 300A 125 250 100 200 75 150
MD7–370–CB 370A 150 300 125 250 100 200
MD7–500–CB 500A 200 400 150 300 125 250
MD7–600–CB 600A 500 200 400 150 300
MD7–750–CB 750A 600 500 200 400
MD7–900–CB 900A 700 600 500
MD8–009–CB 9A 5 7.5 5 5
MD8–016–CB 16A 5 10 10 7.5 7.5 5 5
MD8–023–CB 23A 7.5 15 20 5 10 10 7.5 7.5
MD8–030–CB 30A 10 20 25 7.5 15 20 10 10
MD8–044–CB 44A 15 30 40 10 20 30 5 15 20
MD8–059–CB 59A 20 40 50 15 30 40 7.5 20 30
MD8–072–CB 72A 25 50 60 15 40 50 10 30 40
MD8–085–CB 85A 30 60 75 20 50 60 15 40 50
MD8–105–CB 105A 40 75 100 30 60 75 20 50 60
MD8–146–CB 146A 50 100 40 75 125 30 60 100
MD8–174–CB 174A 60 125 150 50 100 40 75
MD8–202–CB 202A 75 150 200 60 125 150 50 100 125
MD8–242–CB 242A 100 200 250 75 150 200 60 125 150
MD8–300–CB 300A 125 250 100 200 75 150
MD8–370–CB 370A 150 300 300 125 250 100 200
MD8–500–CB 500A 200 400 400 150 300 250 125 250 300
MD8–600–CB 600A 500 500 200 400 400 150 300 400
MD8–750–CB 750A 600 600 500 500 200 400 500
MD8–900–CB 900A 700 700 600 600 500 600
MD8–1100–CB 1100A 800 800 700 700 600 600
MD8–1200–CB 1200A 900 900 800 800 700 700
Output
Cont.
Cont.
Current
Standard Duty Medium Duty Heavy Duty
230V 460V 575V 230V 460V 575V 230V 460V 575V
HP Ratings
Specifications and Product Data 6-3MN850
Page 49

Mounting Dimensions
Size 1
0.23 (M6) Hole
4 Places
0.23 (M6) Slot
4 Places
Ground
(379)
14.93
(414)
16.31
Ground
1.41
(36)
8.74
(222)
4.9
(125)
7.68
(195)
5.9
(150)
Model # Weight lb (kg)
–9 16.1(7.3)
–16 16.1(7.3)
–23 16.1(7.3)
–30 16.1(7.3)
–44 16.1(7.3)
–59 18.3(8.3)
–72 18.3(8.3)
–85 18.3(8.3)
–105 18.3(8.3)
–146 18.3(8.3)
6-4 Specifications and Product Data MN850
Page 50

Mounting Dimensions Continued
Size 2
0.23 (M6) Hole
2 Places
0.23 (M6) Slot
2 Places
(500)
19.68
(520)
20.47
Ground
13.38
(340)
9.84
(250)
10.43
(265)
Model # Weight lb (kg)
–174 34.6(15.7)
–202 34.6(15.7)
–242 48.5(22)
–300 48.5(22)
–370 48.5(22)
Specifications and Product Data 6-5MN850
Page 51

Mounting Dimensions Continued
Size 3
0.39 (M10) Hole
3 Places
0.39 (M10) Slot
3 Places
1.38(35)
(575)
22.64
(610)
24.01
9.84
(250)
26.58
(675)
9.84
(250)
3.44
(87.5)
15.75
(400)
Model # Weight lb (kg)
–500 143.3(65)
–600 143.3(65)
–750 158.8(72)
–900 158.8(72)
6-6 Specifications and Product Data MN850
Page 52

Mounting Dimensions Continued
Size 4
24.45 (621)
5.95
(151)
7.88
(200)
7.88
(200)
25 (635)
12.68 (322)
10.87 (276)
Air Flow
3.94
(100)
4.13
(105)
1.9
7
(50)
7.59 (193)
7.59 (193)
m10
T1, T2, T3
L1, L2, L3
6.58
(167)
Model # Weight lb (kg)
–1100 158.8 (72)
–1200 165.4 (75)
4.53
(115)
Specifications and Product Data 6-7MN850
Page 53

6-8 Specifications and Product Data MN850
Page 54

Appendix A
CE Guidelines
CE Declaration of Conformity
Baldor indicates that the products are only components and not ready for immediate or instant use
within the meaning of “Safety law of appliance”, “EMC Law” or “Machine directive”.
The final mode of operation is defined only after installation into the user’s equipment. It is the
responsibility of the user to verify compliance.
The product conforms with the following standards:
EN 60947–4–2 Low–voltage switch gear and control gear – Contactors and motor
EMC – Conformity and CE – Marking
The information contained herein is for your guidance only and does not guarantee that the
installation will meet the requirements of the council directive 89/336/EEC.
The purpose of the EEC directives is to state a minimum technical requirement common to all the
member states within the European Union. In turn, these minimum technical requirements are
intended to enhance the levels of safety both directly and indirectly.
Council directive 89/336/EEC relating to Electro Magnetic Compliance (EMC) indicates that it is the
responsibility of the system integrator to ensure that the entire system complies with all relative
directives at the time of installing into service.
Motors and controls are used as components of a system, per the EMC directive. Hence all
components, installation of the components, interconnection between components, and shielding and
grounding of the system as a whole determines EMC compliance.
The CE mark does not inform the purchaser which directive the product complies with. It rests upon
the manufacturer or his authorized representative to ensure the item in question complies fully with all
the relative directives in force at the time of installing into service, in the same way as the system
integrator previously mentioned. Remember, it is the instructions of installation and use, coupled with
the product, that comply with the directive.
Wiring of Shielded (Screened) Cables
starters – AC semiconductor motor controllers and starters.
Remove the outer insulation
to expose the overall screen.
Conductive
Clamp
Appendix A-1MN850
Page 55

Using CE approved components will not guarantee a CE compliant system!
1. The components used in the drive, installation methods used, materials
selected for interconnection of components are important.
2. The installation methods, interconnection materials, shielding, filtering and
grounding of the system as a whole will determine CE compliance.
3. The responsibility of CE mark compliance rests entirely with the party who
offers the end system for sale (such as an OEM or system integrator).
Baldor products which meet the EMC directive requirements are indicated with a “CE” mark. A duly
signed CE declaration of conformity is available from Baldor.
AC Main
Supply
Four Wire
“Wye”
PE
All shields
Note: Use shielded cable for control signal wires. Route
control signal wires in conduit. These wires must be
kept separate from power and motor wires.
L1
L2
L3
Route all power wires
L1, L2, L3 and Earth
(Ground) together in
conduit or cable.
Enclosure Backplane (see Section 2)
Control
L2 L3 T3
PE
T1 T2L1
Note:
Wiring shown for clarity of
grounding method only.
Not representative of actual
terminal block location.
Motor
GND
A-2 Appendix MN850
Page 56

EMC Installation Instructions
To ensure electromagnetic compatibility (EMC), the following installation instructions should be
completed. These steps help to reduce interference.
Consider the following:
A proper enclosure should have the following characteristics:
• Grounding of all system elements to a central ground point
• Shielding of all cables and signal wires
• Filtering of power lines
A) All metal conducting parts of the enclosure must be electrically connected to the
back plane. These connections should be made with a grounding strap from
each element to a central grounding point .
B) Keep the power wiring (motor and power cable) and control wiring separated. If
these wires must cross, be sure they cross at 90 degrees to minimize noise due
to induction.
C) The shield connections of the signal and power cables should be connected to
the screen rails or clamps. The screen rails or clamps should be conductive
clamps fastened to the cabinet.
D) The cable to the regeneration resistor must be shielded. The shield must be
connected to ground at both ends.
E) The location of the AC mains filter has to be situated close to the drive so the
AC power wires are as short as possible.
F) Wires inside the enclosure should be placed as close as possible to conducting
metal, cabinet walls and plates. It is advised to terminate unused wires to
chassis ground.
G) To reduce ground current, use at least a 10mm2 (6 AWG) solid wire for ground
connections.
Grounding in general describes all metal parts which can be connected to a
protective conductor, e.g. housing of cabinet, motor housing, etc. to a central
ground point. This central ground point is then connected to the main plant (or
building) ground.
Or run as twisted pair at minimum.
Cable Screens Grounding
Cable (Twisted Pair Conductors)
Conductive Clamp – Must contact bare cable shield
and be secured to metal backplane.
Appendix A-3MN850
Page 57

A-4 Appendix MN850
Page 58

Appendix B
Parameter Values
Version 5MC (4/2/01) Read Only Parameter Values
Title P# Parameter Adjustable Range Factory User Setting
Parameter P0 Dummy Parameter 0–255 0
P1 Station Number 1–99 1
P2 Country 1–255 44 (England)
P3 Software Type Factory Set Read Only
P4 Software Version Factory Set Read Only
Password P5 Password Value 0–255 0
Advanced P6 Firing Mode 0–3 0
Basic P7 Protection Mode 0–192 192 (Full + Optimize)
Parameters P8 Status 1 0–255 1 (bit 00000001)
P9 Status 2 0–99 0 (bit 00000000)
P10 Status 3 0–255 0 (bit 0000000)
Basic P11 Start Pedestal 10–60% 20 (% of line volts)
P12 Start Time 1–255 seconds 5 (seconds)
Advanced P13 Kick Pedestal 60–90% 75 (% of Line)
P14 Kick Time 10–40 cycles 25 Cycles
P15 Dwell Time 1–255 seconds 5 seconds
Basic P16 Stop Pedestal 10–60% 10 (% of Line)
P17 Stop Time 0–255 seconds 0 seconds
Auto Features P18 Auto Config. 0–255 6 (bit 00000110)
Advanced P19 Optimise Rate 4–30 5 (for unstable load)
Parameters P20 Reference PF (Power Factor) 0–147 degrees 146.7626 degrees
P21 Present PF (Power Factor) 0–147 degrees 146.7626 degrees
P22 Delay Angle (SCR OFF time) 0–147 degrees 146.7626 degrees
P23 Maximum Optimizing Delay 17–147 degrees 57.55396 degrees
P24 Rated Current (High Byte –Hundreds) Factory Set Factory Set
P25 Rated Current (Low Byte – Units) Factory Set Factory Set
P26 Running Current Amps 0–255 Amps 0 Amps
P27 Peak Start Current (measured at last start) 0–255 Amps 0 Amps
Advanced Current P28 Low Current Level (undercurrent trip) 100–800% of running
Amps (P24 & P25)
P29 Low Current Time (delay before trip) 5–255 seconds 50 seconds
P30 Current Limit Level (scaling = 0.03125) 1–7.96875 (x Ie) Amps 350% of running
P31 Current Limit Time (delay before trip) 5–255 seconds 30 seconds
P32 Shearpin Level (undercurrent trip) 1–5 (x Ie) Amps 3.125 x Ie Amps
P33 Shearpin Time (delay before trip) 5–255 cycles 100 cycles
P34 Overload Level (SCR protection) 0.59–2 (x Ie) Amps 1.09375 x Ie Amps
P35 Overload Delay (delay before trip) 10–140 140
9.375% of running
Amps
Amps
Note: (x Ie) means “Times the rated current of the control (P24 and P25 values).”
Applications B-1MN850
Page 59

Read Only Parameter Values
Title P# Parameter Adjustable Range Factory User Setting
Parameters P36 % Overload (status only) 0–100% (100%=Tripped) 0%
P37 Chassis Temperature 0–255 0
P38 Pot1 0–255 0
P39 Pot2 0–255 0
P40 Pot3 0–1 0
P41 DC I/P 0–12 0VDC
P42 Thermistor 0–255 0
P43 4–20mA I/P 0–20.4 0mA
P44 TEMP Trip Level 20–255 30
P45 4–20mA Map 0–125 0 (parameter #)
P46 4–20mA Set Level 0.08–20.32 10.24mA
P47 DC Input Map 0–125 0 (parameter #)
P48 Set Level DC I/P 0.03922–9.960784 5.019608 VDC
P49 Map DAC O/P 1 0–125 26 (parameter #)
P50 Map DAC O/P 2 0–125 22 (parameter #)
P51 User Flags 1 0–255 142 (Bit 10001110)
P52 User Flags 2 0–255 0 (Bit 00000000)
P53 User Flags 3 0–255 19 (Bit 00010011)
P54 I/O Polarity 0–255 127 (Bit 01111111)
P55 MAP LED 0–255 9 (x Ie)
P56 LED MASK 0–255 1 (x Ie)
P57 Map K1 To (Parameter) 0–125 52 (Parameter #)
P58 K1 Bit Mask (P57 bit selected for K1) 0–255 32 (bit 00100000)
P59 Map K2 To (Parameter) 0–125 8 (Parameter #)
P60 K2 Bit Mask (P59 bit selected for K2) 0–128 8 (bit 00001000)
P61 Map K3 To (Parameter) 0–125 9 (Parameter #)
P62 K3 Bit Mask (P61 bit selected for K3) 0.1–3 1 (bit 00000001)
P63 Map K4 To (Parameter) 0–125 9 (Parameter #)
P64 K4 Bit Mask (P63 bit selected for K4) 0–3 2 (bit 00000010)
P65 Map I/P1 To (Parameter) 0–125 52 (Parameter #)
P66 I/P1 Bit Mask (P65 bit selected for I/P1) 0–128 16 (bit 00010000)
P67 Map I/P2 To (Parameter) 0–125 0 (Parameter #)
P68 I/P2 Bit Mask (P67 bit selected for I/P2) 0–128 0 (bit 00000000)
P69 Map I/P3 To (Parameter) 0–125 0 (Parameter #)
P70 I/P3 Bit Mask (P69 bit selected for I/P3) 0–128 0 (bit 00000000)
Advanced Current P71 Contactor Delay (after start command) 20–800milli seconds 160 milli seconds
P72 Trip Sensitivity (1=fastest trip) 1–15 (Status Code) 1
P73 Last Trip (Most Recent Trip) 1–16 (Status Code) 0
B-2 Applications MN850
Page 60

Section 1
General Information
Read Only Parameter Values
Title P# Parameter Adjustable Range Factory User Setting
Parameters P74 2nd Last Trip 1–16 (Status Code) 0
P75 3rd Last Trip 1–16 (Status Code) 0
P76 4th Last Trip 1–16 (Status Code) 0
P77 5th Last Trip (Oldest trip) 1–16 (Status Code) 0
P78 Protection Mode 2 0–192 192 (Full + Optimize)
P79 Start Pedestal 2 10–60% 50 (% of line volts)
P80 Start Time 2 1–255 seconds 5 seconds
P81 Kick Pedestal 2 60–90% 75 (% of line volts)
P82 Kick Time 2 10–40 seconds 25 seconds
P83 Dwell 2 1–255 seconds 5 seconds
P84 Stop Pedestal 2 10–60 seconds 10 seconds
P85 Stop Time 2 0–255 seconds 0 seconds
P86 Auto Config 2 0–255 6 (Bit 00000110)
P87 Under Current 2 0–1 (x Ie) Amps 0.125 x Ie Amps
P88 Under Current Time 2 5–255 seconds 50 seconds
P89 Current Limit 2 0–8 (x Ie) Amps 4 x Ie Amps
P90 Current Limit Time 2 5–255 seconds 15 seconds
P91 Shearpin 2 1–5 (x Ie) Amps 3 x Ie Amps
P92 Shearpin Time 2 5–255 cycles 50 cycles
P93 Overload Level 2 0.5–2 (x Ie) Amps 1.09375 x Ie Amps
P94 Overload Delay 2 10–140 seconds 140 seconds
P95 User Flags 1 (for 2nd param set) 0–255 134 (Bit 10000110)
P96 User Flags 2 (for 2nd param set) 0–255 64 (Bit 01000000)
P97 Flag 1 I/P Source Address 0–125 0 (Parameter #)
P98 Flag 1 I/P Source Mask 0–128 0 (bit 00000000)
P99 Flag 1 O/P Destination Address 0–125 0 (Parameter #)
P100 Flag 1 O/P Destination Mask 0–255 0 (bit 00000000)
P101 Flag 2 I/P Source Address 0–125 0 (Parameter #)
P102 Flag 2 I/P Source Mask 0–20 0 (bit 00000000)
P103 Flag 2 O/P Destination Address 0–125 0 (Parameter #)
P104 Flag 2 O/P Destination Mask 0–11 0 (bit 00000000)
P105 Loop Input 0–125 41 (Parameter #)
P106 Loop Feedback 0–125 26 (Parameter #)
P107 Error Gain 1–255 37
P108 Error Divisor 1–255 7
P109 Max Slope 0–50 10
P110 Guard Gap 0–150 10
Applications B-3MN850
Page 61

Section 1
General Information
Read Only Parameter Values
Title P# Parameter Adjustable Range Factory User Setting
Parameters P111 User Parameter 0–255 0
P112 Status 4 0–255 0 (bit 00000000)
P113 Drive Type 0–255 0
P114 Baud Rate 0–4 0
P115 Selected App 0–9 0
P116 5MC Inhibit Time (restart not allowed) 0–63.75 minutes 0 minutes
P117 Command Source Unused
P118 Action On Bus Error 0–3 0
P119 Preset Parameter Number to Display 0.1–125 26 (parameter #)
P120 Status 5 0–255 0 (bit 00000000)
P121 User Flags 4 1–255 0 (bit 00000000)
P122 Soft–Start Smoothing 1–15 5 (for unstable load)
P123 Reserved for future use.
P124 Reserved for future use.
P125 Reserved for future use.
B-4 Applications MN850
Page 62

Appendix C
Replacement Parts
Voltage Independent Parts
PART No. Description
SSDTR900 Control power transformer, 9–44 A & 500–900 A
SSDTR370 Control power transformer, 59–370 A
SSDCBL146 Keypad Cable, 16–146 A
SSDCBL900 Keypad Cable, 500–900 A
SSDCBL370 Keypad Cable, 174–370 A
SSDEBKPD Keypad for all amp sizes
SSDCT044 Current transformer, 9– 44 A AND 500–900A
SSDCT202 Current transformer, 59–202 A
SSDCT370 Current transformer, 242–370 A
SSDCT900 Current transformer, 500–900 A
SSDCVR146 Cover, 9–146 A
SSDCVR900 Cover, 174–900 A
460VAC Parts
PART No. Description
SSD1PSCR030 1 Phase SCR pair for 9, 16, 23, 30 A
SSD1PSCR146 1 Phase SCR pair for 72, 85, 105, 146 A
SSD1SCR202 1 Phase SCR pair for 174, 202 A
SSD3PC242 1 Phase power cell for 242, 300A
SSD1SCR300 Single SCR 242, 300A, 460V
SSD3SCR370 1 Phase power cell for 370 A
SSD1SCR370 Single SCR 370A
SSDPC600 1 Phase power cell for 500, 600 A
SSD1SCR600 Single SCR 500, 600A
SSDPC900 1 Phase power cell for 750, 900 A
SSD1SCR900 Single SCR 900A
SSDEB009 Standard control board for 9 A
SSDEB016 Standard control board for 16 A
SSDEB023 Standard control board for 23 A
SSDEB030 Standard control board for 30 A
SSDEB044 Standard control board for 44 A
SSDEB059 Standard control board for 59 A
SSDEB072 Standard control board for 72 A
SSDEB085 Standard control board for 85 A
SSDEB105 Standard control board for 105 A
SSDEB146 Standard control board for 146 A
SSDEB174 Standard control board for 174 A
SSDEB202 Standard control board for 202 A
SSDEB242 Standard control board for 242 A
SSDEB300 Standard control board for 300 A
SSDEB370 Standard control board for 370 A
SSDEB500 Standard control board for 500 A
SSDEB600 Standard control board for 600 A
SSDEB750 Standard control board for 750 A
SSDEB900 Standard control board for 900 A
SSDCBLGT900 Gate/Cathode wire assembly, 500–900 A
SSDCBLGT059 Gate/Cathode wires, 16–59 A
SSDCBLGT146 Gate/Cathode wires, 72–146 A
SSDCBLGT370 Gate/Cathode wires, 174–370 A
Continued on next page
Appendix C-1MN850
Page 63

575VAC Parts
PART No. Description
SSD1PSCR059 1 Phase SCR pair for 44, 59 A
SSD1PSCR8030 1 Phase SCR pair for 9, 16, 23, 30 A
SSD1PSCR8059 1 Phase SCR pair for 44, 59 A
SSD1PSCR8146 1 Phase SCR pair for 72, 85, 105, 146 A
SSD1SCR8202 1 Phase SCR pair for 174, 202 A
SSD3PC8242 1 Phase power cell for 242, 300A
SSD1SCR8300 Single SCR 242, 300A
SSD3SCR8370 1 Phase power cell for 370 A
SSD1SCR8370 Single SCR 370A
SSDPC8600 1 Phase power cell for 500, 600 A
SSD1SCR8600 Single SCR 500, 600A
SSDPC8900 1 Phase power cell for 750, 900 A
SSD1SCR8900 Single SCR 900A
SSDEB8009 Standard control board for 9 A
SSDEB8016 Standard control board for 16 A
SSDEB8023 Standard control board for 23 A
SSDEB8030 Standard control board for 30 A
SSDEB8044 Standard control board for 44 A
SSDEB8059 Standard control board for 59 A
SSDEB8072 Standard control board for 72 A
SSDEB8085 Standard control board for 85 A
SSDEB8105 Standard control board for 105 A
SSDEB8146 Standard control board for 146 A
SSDEB8174 Standard control board for 174 A
SSDEB8202 Standard control board for 202 A
SSDEB8242 Standard control board for 242 A
SSDEB8300 Standard control board for 300 A
SSDEB8370 Standard control board for 370 A
SSDEB8500 Standard control board for 500 A
SSDEB8600 Standard control board for 600 A
SSDEB8750 Standard control board for 750 A
SSDEB8900 Standard control board for 900 A
SSDCBLGT8059 Gate/Cathode wires, 16–59 A
SSDCBLGT8146 Gate/Cathode wires, 72–146 A
SSDCBLGT8370 Gate/Cathode wires, 174–370 A
SSDCBLGT8900 Gate/Cathode wire assembly, 500–900 A
C-2 Appendix MN850
Page 64

Appendix D
Voltage Surge Protection
Grounding Proper grounding is extremely important. The symptoms produced by improper
grounding are obvious. Sometimes filters and other expensive devices are added to
reduce the effects of problems caused by poor grounding. There can be several
reference points (neutrals) in a circuit but there should always only be one ground point.
Neutral and ground are not the same. Neutral should normally be a non current carrying
conductor, but it should be sized to carry momentary current caused be short circuits in
the equipment. All of the neutrals in a system should connect at a central point and that
point should be connected to the system ground.
The goal is to minimize the current through the ground conductor. Circulating ground
current is a source of electrical noise normally associated with unbalanced voltages or
unbalanced loads. Capacitive or inductive coupling between power lines and the neutral
or ground conductors is another noise source. Currents that flow through capacitive
paths or from a magnetic field tend to change rapidly and produce high frequency
interference called RFI (radio frequency interference).
Good grounding is also important to minimize the effects of large voltage spikes that can
create significant current flow in the ground conductors. The source of these voltages
can be lightning striking the power lines, switching of large power loads and others. A
balanced three phase four wire system with a system ground as shown in Figure D-1 can
minimize noise problems normally associated with grounding. AC power and motor
leads should be as short as possible and enclosed in conduit or shielded cable should be
used. Power wires and Motor leads should never be in the same conduit.
Figure D-1
Control
Enclosure
L1
L2 L3 T1 T2 T3
AC Main Supply
Safety
Ground
Driven Earth Ground Rod
(Plant Ground)
Route all 4 wires T1, T2, T3 and Motor Ground together in conduit or shielded cable.
Connect all wires (including motor ground) inside the motor terminal box.
Four Wire
“Wye”
L1
L2
L3
Earth
Route all 4 wires L1, L2, L3 and Earth (Ground)
together in conduit or shielded cable.
MOV (Metal Oxide Varistor)
Baldor recommends that MOV devices be installed at the input power connections to the
Soft–Start control to provide “phase–to phase” and “phase–to–ground” voltage spike
protection. Three MOV devices can be connected in “WYE” configuration with an
additional MOV device connected to ground. Figures D-2 and D-3 shows how to connect
the MOV’s into the various power distribution system designs. Voltage spikes on any
phase will be conducted to ground by the lowest impedance path (phase–to–phase or
phase–to–ground).
Note: Wiring shown for clarity of grounding
method only. Not representative of
actual terminal block location.
Ground per NEC and Local codes.
Voltage Surge Protection D-1MN850
Page 65

Ungrounded
L1
L2
L3
Figure D-2 WYE Configurations
Control
Enclosure
L1
L2 L3 T1 T2 T3
Symbol
Grounded or
High Resistance Ground
L1
L2
L3
MOV
MOV
Control
Enclosure
L1
L2 L3 T1 T2 T3
Do not ground MOV. Cut off green wire and insulate (cap off) with wire nut.
Symbol
D-2 Voltage Surge Protection MN850
Page 66

Ungrounded
L1
L2
L3
Figure D-3 Delta Configurations
Control
Enclosure
L1
L2 L3 T1 T2 T3
Symbol
Corner or Center–Tap
Grounded
MOV
Control
Do not ground MOV. Cut off green wire and insulate (cap off) with wire nut.
Symbol
Enclosure
L1
L2 L3 T1 T2 T3
L1
L2
L3
MOV
Do not ground MOV. Cut off green wire and insulate (cap off) with wire nut.
Table D-1 Baldor MOV Specifications
Catalog # MOV505L MOV620EL
Line Voltage Volts 480 575
Energy Joules 260 300
Peak Current Amps 6500 6500
Clamping Voltage Volts 1300 1580
Voltage Surge Protection D-3MN850
Page 67

D-4 Voltage Surge Protection MN850
Page 68

Appendix E
Appendix E-1MN850
Page 69

Section 1
General Information
Remote Keypad Mounting Template
(A) (A)
Four Places
Tapped mounting holes, use #29 drill and 8-32 tap
(Clearance mounting holes, use #19 or 0.166″ drill)
4.00
2.500
1-11/16″ diameter hole
Use 1.25″ conduit knockout
(B)
(A) (A)
1.250
Note: Template may be distorted due to reproduction.
1.340
4.810
5.500
E-2 Appendix MN850
Page 70

BALDOR ELECTRIC COMPANY
P.O. Box 2400
Ft. Smith, AR 72902–2400
(479) 646–4711
Fax (479) 648–5792
www.baldor.com
CH
TEL:+41 52 647 4700
FAX:+41 52 659 2394
I
TEL:+39 11 562 4440
FAX:+39 11 562 5660
Baldor Electric Company
MN850
D
TEL:+49 89 90 50 80
FAX:+49 89 90 50 8491
AU
TEL:+61 29674 5455
FAX:+61 29674 2495
UK
TEL:+44 1454 850000
FAX:+44 1454 850001
CC
TEL:+65 744 2572
FAX:+65 747 1708
F
TEL:+33 145 10 7902
FAX:+33 145 09 0864
MX
TEL:+52 477 761 2030
FAX:+52 477 761 2010
Printed in USA
5/03 C&J1500
 Loading...
Loading...