

Page 1

Elevator Application Guide
Installation & Operating Manual
3/97 MN770
Page 2

Table of Contents
Section 1
General Information 1-1.
Introduction 1-1
Drive Definition 1-1.
Modernizations 1-1
Limited Warranty 1-2.
Safety Notice 1-3.
Section 2
Technologies 2-1.
Overview 2-1
DC SCR Control 2-2.
Inverter 2-3
Vector 2-4
Section 3
Application Considerations 3-1.
General Considerations 3-1.
Common Control Features 3-3.
Elevator Motor Horsepower Selection 3-4.
Dynamic Brake Hardware Selection 3-6.
Section 4
Hardware Information 4-1.
General Considerations 4-1.
Encoder Retrofit 4-1.
Buffered Encoder Output 4-4.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20H Control 2-2.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15H Control 2-3.
21H Control 2-3.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17H & 18H Controls 2-4.
22H Control 2-4.
Hydraulic & Mechanical Drives 3-1.
Electric Drives 3-2.
15H and 18H Drives 3-6.
19H Drives 3-6.
20H, 21H and 22H Drives 3-6.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table of Contents iMN770
Page 3

Section 1
General Information
Section 5
Set-Up Information 5-1.
DC SCR Controls 5-1.
Field Control 5-1.
Feedback 5-1
Initial Installation and Startup 5-1.
Final Installation 5-2.
Final Adjustments 5-3.
Recommended Power Up/Down Sequence for Elevators Using DC SCR Controls 5-4.
Inverter Controls 5-5.
Initial Installation and Startup 5-5.
Preliminary Programming 5-5.
Recommended Power Up/Down Sequence for Elevators Using Inverter Controls 5-6.
Recommended Power Up/Down Sequence for Elevators Using Inverter Controls 5-7.
Vector Controls 5-8.
Equipment Required 5-8.
New Installations 5-8.
Modernization 5-8
Final Wiring Connections 5-10.
Initial Set-up 5-11.
Final Set-up 5-12.
Recommended Power Up/Down Sequence for Elevators Using Vector Controls 5-13.
Section 6
Troubleshooting 6-1.
DC SCR Control 6-1.
Electrical Noise Considerations 6-2.
Causes and Cures 6-2.
Special Drive Situations 6-5.
Drive Power Lines 6-5.
Radio Transmitters 6-5.
Control Enclosures 6-6.
Special Motor Considerations 6-6.
Wiring Practices 6-7.
Optical Isolation 6-8.
Plant Ground 6-8.
Appendix A A-1.
Load Weighing / Torque Feed Forward A-1.
Appendix B B-1.
Serial Communications B-1.
Appendix C C-1.
Elevator Industry Glossary C-1.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
ii Table of Contents MN770
Page 4

Section 1
General Information
Introduction Baldor Electric manufactures several different Drive types for the elevator industry.
These drives are DC SCR (Thyristor), AC Inverter (VVVF) and AC Vector. Each drive
type is best suited for a specific application in the elevator market. This manual provides
information for selection and application of Baldor Drives for use in the elevator industry.
Drive Definition Baldor’s definition of a “Drive” includes both the Motor and the Control.
M)C
Because each application is different, Baldor makes it easy to customize drive
characteristics to match the performance requirements of your application.
Programmable flexibility allows Baldor controls to be customized using a standard keypad
interface. This easy to use keypad and 32 character display give you total control of the
drive. This standard interface provides a family of H series products that have a simple,
easy to use, common sense language. These controls have the following characteristics:
1. Common Keypad
2. Common Language
3. Common Commands
4. Common family of expansion boards (I/O Interface)
+
Where: M = Motor
D
C = Control
D = Drive
This Elevator Guide is intended to assist with the following:
1. Selection of the proper drive for an elevator application.
2. Provide help with the set-up of the drive during installation.
Modernizations In the United States, most controls sold for use in elevator applications are for
modernizations. A modernization involves upgrading an existing elevator to meet present
codes and performance levels. In these cases, usually only a control is sold. Existing
motors are used. An encoder feedback device must be added when using Vector
technology. An encoder feedback device must be added if using AC Vector technology.
For existing AC elevators, older two speed motors are connected to an Inverter or Vector
control. For existing DC elevators, a DC motor generator set is replaced by a DC SCR
control. The existing DC motor must be modified to accept an encoder or tachometer
feedback device.
General Information 1-1MN770
Page 5

Section 1
General Information
For
a period of
repair or replace without charge controls which our examination proves to
be
defective in material or workmanship. This warranty is valid if the unit has
not been tampered with by unauthorized persons, misused, abused, or
improperly
and/or ratings supplied. This warranty is in lieu of any other warranty or
guarantee
any expense (including installation and removal), inconvenience, or
consequential
items of our manufacture or sale. (Some states do not allow exclusion or
limitation of incidental or consequential damages, so the above exclusion
may not apply.) In any event, BALDOR’s total liability, under all
circumstances, shall not exceed the full purchase price of the control.
Claims for purchase price refunds, repairs, or replacements must be
referred to BALDOR with all pertinent data as to the defect, the date
purchased, the task performed by the control, and the problem
encountered.
Limited Warranty
two (2) years from the date of original purchase, BALDOR will
installed and has been used in accordance with the instructions
expressed or implied.
damage, including injury to any person or property caused by
No liability is assumed for expendable items such as fuses.
BALDOR shall not be held responsible for
Goods may be returned only with written notification including a BALDOR
Return Authorization Number and any return shipments must be prepaid.
1-2 General Information MN770
Page 6

Safety Notice This equipment contains voltages that may be as great as 1000 volts! Electrical shock
can cause serious or fatal injury. Only qualified personnel should attempt the start-up
procedure or troubleshoot this equipment.
This equipment may be connected to other machines that have rotating parts or parts
that are driven by this equipment. Improper use can cause serious or fatal injury. Only
qualified personnel should attempt the start-up procedure or troubleshoot this equipment.
PRECAUTIONS
WARNING: Do not touch any circuit board, power device or electrical
connection before you first ensure that power has been
disconnected and there is no high voltage present from this
equipment or other equipment to which it is connected. Electrical
shock can cause serious or fatal injury. Only qualified personnel
should attempt the start-up procedure or troubleshoot this
equipment.
WARNING: Be sure that you are completely familiar with the safe operation of
this equipment. This equipment may be connected to other
machines that have rotating parts or parts that are controlled by
this equipment. Improper use can cause serious or fatal injury.
Only qualified personnel should attempt the start-up procedure or
troubleshoot this equipment.
WARNING: This unit has an automatic restart feature that will start the motor
whenever input power is applied and a RUN (FWD or REV)
command is issued and maintained. If an automatic restart of the
motor could cause injury to personnel, the automatic restart feature
should be disabled. Disable by changing the “Restart Auto/Man”
parameter to MANUAL.
WARNING: Be sure the system is properly grounded before applying power.
Do not apply AC power before you ensure that all grounding
instructions have been followed. Electrical shock can cause
serious or fatal injury.
WARNING: Do not remove cover for at least five (5) minutes after AC power is
disconnected to allow capacitors to discharge. Dangerous voltages
are present inside the equipment. Electrical shock can cause
serious or fatal injury.
WARNING: Improper operation of control may cause violent motion of the
motor shaft and driven equipment. Be certain that unexpected
motor shaft movement will not cause injury to personnel or damage
to equipment. Peak torque of several times the rated motor torque
can occur during control failure.
WARNING: Motor circuit may have high voltage present whenever AC power is
applied, even when motor is not rotating. Electrical shock can
cause serious or fatal injury.
WARNING: Dynamic Brake Hardware may generate enough heat to ignite
combustible materials. Keep all combustible materials and
flammable vapors away from Dynamic Brake Hardware.
Continued on Next Page
General Information 1-3MN770
Page 7

Section 1
General Information
Caution: To prevent equipment damage, be certain that the electrical service
is not capable of delivering more than the maximum line short
circuit current amperes listed in the appropriate control manual, 230
VAC or 460 VAC maximum per control rating.
Caution: Disconnect motor leads (T1, T2 and T3) from control before you
perform a “Megger” test. Failure to disconnect motor from the
control will result in extensive damage to the control. The control is
tested at the factory for high voltage / leakage resistance as part of
Underwriter Laboratory requirements.
1-4 General Information MN770
Page 8

Section 2
Technologies
Overview Baldor Electric manufactures six drive types for the elevator industry. Each drive type
(Control and Motor) is best suited for a specific application.
These Series “H” Controls are:
S 15H Inverter
S 17H Vector (Encoderless)
S 18H Vector
S 19H
DC SCR
S 20H DC SCR (Line Regenerative)
S 21H Inverter (Line Regenerative)
S 22H Vector (Line Regenerative)
These Baldor Series “H” controls all use the same keypad and display interface. This
makes it easy to become familiar with the programming and operation of the controls.
Set-up time of the control and motor is greatly reduced due to the automated features
“Auto-Tune” that are available within these controls.
The purpose of this section is to review each technology type to make it easier to choose
a drive for an application. Table 2-1 provides a brief overview of drive performance for
each technology type.
Table 2-1 Drive Performance Comparison
Feature DC
Operating speed range
(for elevators)
Relative constant torque speed
range
Speed Control Yes Yes Yes
Torque Control Yes No Yes
Positioning Yes
Speed regulation:
Open Loop
Closed Loop
Continuous full rated torque at
zero speed
Available peak torque 150% + 115 - 150% 150% +
Motor Brushes? Yes No No
Motion controller required for positioning.
Requires encoder or resolver feedback.
Depends on motor size and percent slip.
0 RPM to Base Speed 10% of Base Speed
(Encoder or resolver feedback)
± 1 - 2% of base speed
± 1% of set speed
SCR
Wide
20:1
± 3% of base speed
No No Yes
Inverter Vector
0 RPM to Base Speed
to Base Speed.
Narrow
5:1 - 10:1
No
± 0.5 to 1% of set speed
± 1% of set speed
± 0.05% of set speed
Widest
Base Speed:1
Yes
Technologies 2-1MN770
Page 9

DC SCR Control NEMA Type C designation of electrical power source equipment for adjustable speed
drives.
Series 19H DC SCR (not used in elevator applications)
Series 20H DC SCR (Line Regenerative)
DC SCR controls are used in elevator applications where speeds range from 50 to over
1000 FPM. The Baldor DC SCR (Thyristor) control is a three phase, full wave rectified,
DC motor armature and field (where applicable) control. The SCR bridge converts three
phase AC to DC power. This rectified DC provides power to the DC motor armature, and
the reference transformer to operate power supplies and other circuits.
Armature or encoder feedback may be used with either control. DC tachometer or
resolver feedback is available with the optional expansion board. A Series 20H control
can be configured to check for torque output (torque proving) before a holding brake is
released.
20H Control The Series 20H is a standard line regenerative control. Regenerated power is applied
back to the incoming power lines. External filters can improve the Total Harmonic
Distortion (THD) of the AC waveform. This control is not designed for regenerative use
with stabilized shunt or compound wound DC motors. If stabilized shunt or compound
wound motors are to be used, the series field must be isolated and not connected.
Contact the motor manufacturer for motor derating under these conditions.
Regulation from the Series 20H, using armature feedback, will be 2% of base speed.
With DC tachometer feedback, the regulation will be 1% of set speed. Use of encoder or
resolver feedback will provide 0.1% regulation.
2-2 Technologies MN770
Page 10

Inverter Series 15H Inverter
Series 21H Inverter (Line Regenerative) IEEE-519 Compliant
Typically Inverters are used in elevator applications where speeds up to 150 FPM are
required.
The Baldor inverter converts the three phase AC line power to fixed DC power. The DC
power is then pulse width modulated into synthesized three phase AC line voltage for the
motor.
The rated horsepower of the control is based on a NEMA design B four pole motor and
60Hz operation at nominal rated input voltage. If any other type of motor is used, the
control should be sized to the motor using the rated output current of the control.
Speed regulation of an Inverter Drive is dependant upon the slip of the AC induction
motor. Typically this regulation will be 3% of base speed. Speed regulation can be
increased to 1% of base speed by the addition of a DC tachometer for feedback.
The output of the inverter is a Sinewave of current to the motor. The more pure the
Sinewave is, the less additional heat produced in the AC induction motor. If a motor
produces less heat, more torque is available to drive the load. The PWM control method
produces less heat and gives a better approximation of a Sinewave of current to the
motor when compared to a Six-Step type of inverter.
15H Control The Baldor Series 15H control may be programmed to operate in one of four operating
zones; standard constant torque, standard variable torque, quiet constant torque or quiet
variable torque. For elevator applications, only the quiet constant torque or quiet variable
torque modes are used. It can also be configured to function in a number of operating
modes for custom operation. These choices are programmed using the keypad as
explained in the programming section of this manual.
Regenerated power from the motor is applied back to the DC bus and must be dissipated
by REGEN Hardware (resistive load). The REGEN (or dynamic brake) hardware is
selected based on the power to be dissipated. The amount of power, duration and
frequency of the braking must be taken into consideration when sizing these resistors.
21H Control The Series 21H Inverter is a line regenerative control. Regenerated power is applied
back to the incoming power lines.
Regenerated power from the motor is applied to the incoming AC power lines. The
Series 21H control meets IEEE 519 (1992) for total harmonic distortion. By returning the
excess power back to the line, energy use is reduced for the building. The lower THD
causes fewer power problems for sophisticated equipment on the same power grid. No
external dynamic braking hardware is required.
Technologies 2-3MN770
Page 11

Vector Series 17H Encoderless Vector
Series 18H Vector
Series 22H Vector (Line Regenerative)
Vector drives are used in elevator applications where speeds range from 50 to over 700
FPM. Baldor is a pioneer in Flux Vector Technology and we continue to be the leader in
new product development with our Series 18H Vector Drive, Series 22H Line REGEN
Vector Drive and our recently introduced 17H Encoderless Vector Drive.
These are three phase, variable voltage and variable frequency controls. Like an inverter,
the control converts AC input voltage to a fixed voltage DC bus supply. This bus is then
converted into a synthesized AC Sinewave to the motor. The Vector control precisely
controls current into the motor allowing the motor to produce less internal heating
resulting in more continuous torque.
The name Vector Drive comes from the mathematical analysis of the electrical circuit
formulas governing motor performance. This mathematical analysis uses a vector
coordinate system. By monitoring the relative position of the motor’s rotor with respect to
the stator, the vector drive can determine how much of the applied AC stator current will
produce torque and how much will produce heat. The vector drive continuously monitors
the rotor position and changes the vector of applied stator voltage to maintain peak motor
performance.
Vector drives sense the rotor position by monitoring a position feedback device (encoder)
mounted or directly coupled to the motor shaft. The most common feedback device used
with vector drives is an incremental encoder. Resolvers are sometimes used when
environmental conditions are severe. Baldor vector drive motors are supplied with rugged
H25 encoders that provide 1024 pulses per revolution (PPR) with quadrature.
Since the control uses standard encoder feedback (except 17H), regulation is very good
at 0.1% of set speed. Full rated torque is available from base speed to zero speed. Since
an AC induction motor is used, no brush maintenance is required as with a DC motor.
17H & 18H Controls The control may be programmed to operate in one of four operating zones; standard
constant torque, standard variable torque, quiet constant torque or quiet variable torque.
For elevator applications, only the quiet constant torque or quiet variable torque modes
are used. The control can also be configured to function in a number of operating modes
for custom operation. These choices are programmed using the keypad as explained in
the programming section of this manual.
Regenerated power from the motor is applied back to the DC Bus and must be dissipated
by REGEN Hardware (resistive load). The REGEN hardware is selected based on the
power to be dissipated. The amount of power, duration and frequency of the braking must
be taken into consideration when sizing these resistors.
22H Control The Series 22H Vector is a line regenerative control. Regenerated power is applied back
to the incoming power lines.
Regenerated power from the motor is applied to the incoming AC power lines. The
Series 22H control meets IEEE 519 (1992) for total harmonic distortion. By returning the
excess power back to the line, energy use is reduced for the building. The lower THD
causes fewer power problems for sophisticated equipment on the same power grid. No
external dynamic braking hardware is required.
2-4 Technologies MN770
Page 12

Section 3
Application Considerations
General Considerations A good understanding of elevator applications and requirements is essential for proper
selection of drive components. Several classifications or categories can be identified to
make selection easier. These are:
1. The speed of the car in the hoistway. Generally speaking, there are low speed,
medium speed and high speed elevators.
2. The type of hoisting drive used in the elevator. These include hydraulic,
mechanical and electric.
Hydraulic & Mechanical Drives Hydraulic and mechanical drive designs are typically used in low to medium speed
elevators.
A rack and pinion elevator is a low speed system. The elevator is on a rack and is driven
vertically by a pinion. Speed range is in the 100 to 200 FPM range. In the past, these
have been powered by two AC speed motors or DC with generators. They are being
modernized and converted to DC SCR controls, Inverters or Vector drives.
Hydro elevators are powered by a submerged AC motor and hydraulic pump assembly.
These are generally slow speed elevators operating at 25 to 200 FPM. A hydro elevator
application is limited to low rise buildings. The AC motor used in a hydro elevator is fixed
speed and doesn’t require an adjustable speed control.
For two-speed cable traction elevators, Baldor offers a solid-state starter that allows a
soft start and stopping action with an AC induction motor. This Multipurpose control has
proven itself on many elevator applications. Contact Baldor for more information on this
product.
Application Considerations 3-1MN770
Page 13

Section 1
General Information
Electric Drives Electric drives overlap both of these technologies at their upper limits of speed and
extend to elevator speeds of more than 700 feet per minute.
Cable traction elevators are suspended by cable which is wrapped around a drum. The
elevator has a counter weight to eliminate having to dead lift the load as in a hoisting
application. These cable drums traditionally have been driven by DC motors powered
from a motor - generator set. With the introduction of SCR controls in the 60’s, many of
these were built with SCR controls. The DC motor offers high starting torques and good
speed control. The SCR control is relatively simple and reliable in design.
Cable traction elevators can be further sub-divided based on how the torque is
transmitted from the motor to the cable drum. These sub-groups are:
1. Worm gear driven at a speed of 50 to 450 FPM.
2. Helical gear driven at a speed of 200 to 500 FPM.
3. Gearless which operates at 400 to 700 FPM and above.
The most common types of elevators that use Baldor drives are cable traction elevators.
The DC SCR control is used with many worm gear and gear-less elevators operating in
the 350 FPM range. The Series 20H Digital DC SCR control is a good selection for use
on gear-less and gear driven elevators. Typical motor requirements are 15 to 75
horsepower.
Inverters may be used on worm gear cable traction elevators operating at 100 to 150
FPM. These slower elevators typically require 7.5 to 10 horsepower motors.
AC powered elevators that operate above 150 FPM should use a Baldor Vector Drive.
Vector drives perform well in the 150 to above 700 FPM range. Typical horsepower
requirements are 15 to 50 HP.
There are several factors that contribute to a good elevator drive. The predominant
requirement for a good elevator is smooth operation without any jerky movement.
Another requirement is accurate floor leveling capability. Baldor’s ability to offer better
value is the reason many customers select Baldor products for their elevator applications.
3-2 Application Considerations MN770
Page 14

Section 1
General Information
Common Control Features
S Wide Input Voltage Range
180 - 264 VAC 60 Hz 180 - 230 VAC 50 Hz
340 - 528 VAC 60 Hz 340 - 460 VAC 50 Hz
S Keypad operation - A common keypad is used for all Baldor Series H Controls.
The keypad is used to program and operate the control.
S Plain English display - The keypad has a 32 character alpha-numeric display.
This display shows the control status and parameter settings in plain English.
S Common programming language and techniques are used for DC SCR,
Inverter and Vector products.
S Adjustable features - S-Curve, acceleration and deceleration adjustments.
Eliminates the need to purchase extra equipment for smooth starts and stops.
S Common expansion boards for convenient input/output connections.
S Matched Performancet - The motor and control operate well together as a
drive. We know how
our
motor will operate when used with
our
control.
S Stable supplier - Baldor’s only business is motors and controls. Baldor Electric
was formed in 1920 as a motor company and is a quality leader in this market.
S Service - Baldor has a world-wide network of sales and service offices.
Table 3-1 Available Operating Modes
Operating Mode
Keypad X X X
Standard Run, 3 Wire Control X X X
2-Wire Control with 15 Preset Speeds X X X
Bipolar Speed / Torque Control X X
Serial X X X
Bipolar Hoist X
Fan Pump, 2-Wire Control X
Fan Pump, 2-Wire Control X
7 Speed Hoist, 2-Wire Control X
Process Mode X X X
DC SCR
Inverter Vector
Application Considerations 3-3MN770
Page 15

Section 1
General Information
Elevator Motor Horsepower Selection
Selection of a motor and control for an elevator application is dependent upon several
variables. The primary variable is the overall mechanical efficiency of the elevator. The
efficiency of gear driven elevators varies from about 45 percent for slow moving cars to
70 percent for faster moving cars. On gear-less elevators, efficiency may be in the 90
percent range.
The horsepower required for a specific application can be calculated as follows:
US Measurement System
HP +
Where:
Metric Measurement System
Motor KW +
Where:
LBS x FPM x [1 * (
LBS =
FPM = Car speed in feet per minute (FPM)
OCW = Over counter weight in %(percent) of car capacity
%EFF = Elevator mechanical efficiency (decimal)
Kg = Car capacity in Kilograms
m/s = Car speed in meters per second)
OCW = Over counter weight in %(percent) of car capacity
%EFF = Elevator mechanical efficiency (decimal)
33,000 x (
%EFF
100
)
Car capacity in pounds
Kgxmńsx[1* (
102x(
%EFF
OCW
100
100
)]
)
OCW
100
)]
3-4 Application Considerations MN770
Page 16

Section 1
General Information
Table 3-2 can be used to determine the size control and motor to use for your application.
Find the “Car Speed” column in the first row of the table. Follow that column down to find
the “Car Capacity” row. Follow that row to the left and read the recommended HP/KW
size of the motor.
Table 3-2 Motor Sizing
Car Speed Feet / Min. 100 150 200 250 300 350 400 500 700
Car Speed Meters / Sec. 0.5 0.75 1.0 1.25 1.5 1.75 2.0 2.5 3.5
Assumed Mechanical Efficiency 55% 58% 60% 62% 63% 64% 64% 67% 70%
Motor HP Car Capacity in Pounds
Motor kW Car Capacity in Kilograms
7.5 2300 1600 1250 1030 870 750 660 550 410
5.6 1045 727 568 468 395 341 300 250 186
10 3000 2150 1660 1370 1150 1000 880 740 550
7.5 1364 977 755 623 1150 455 400 336 250
15 4500 3200 2500 2060 1730 1500 1310 1100 410
11.2 2045 1455 1136 936 786 682 595 500 373
20 6050 4300 3300 2750 2300 2000 1750 1470 1090
14.9 2750 1955 1500 1250 1045 909 795 668 495
25 7500 5400 4150 3400 2880 2500 2190 1840 1370
18.6 3409 2455 1886 1545 1309 1136 995 836 623
30 9100 6400 4950 4000 3470 3000 2620 2210 1640
22.4 4136 2909 2250 1818 1577 1364 1191 1005 745
40 12100 8600 6650 5450 4620 4000 3500 2950 2180
29.8 5500 3909 3023 2477 2100 1818 1591 1341 991
50 15125 10700 8300 6840 5760 5000 4370 3670 2730
37.3 6875 4864 3773 2945 2618 2273 1986 1668 1241
60 18150 12870 9900 8200 6940 6000 5250 4430 3280
44.8 8250 5850 4500 3727 3155 2727 2386 2014 1491
75 22685 16090 12375 10300 8650 7500 6560 5520 4100
56 10311 7314 5625 4682 3932 3409 2982 2509 1864
Application Considerations 3-5MN770
Page 17

Section 1
General Information
Dynamic Brake Hardware Selection
15H and 18H Drives Baldor Series 15H Inverters and Series 17H and 18H Vector Drives require optional
dynamic brake hardware to dissipate regenerative power from the motor. The conditions
causing regeneration for an elevator occur about 50 percent of the time the car is moving.
This regenerative power is produced when:
1. When a lightly loaded car is being raised.
2. When a fully loaded car is being lowered.
3. Whenever the car is decelerated.
Regenerative power is calculated in the same way as the motor and drive horsepower
except that efficiency losses decrease the amount of energy to be absorbed.
The watt rating of the Dynamic Brake (or REGEN) hardware required for a specific
application can be calculated as follows:
US Measurement System
88
OCW
100
OCW
)] x %EFF
100
)] x %EFF
Ǔ
Ǔ
x 1.25
x 1.25
LBS x FPM x [1 * (
Watts +
Where:
Metric Measurement System
Watts +
Where:
The calculations show a value of 25% greater than the base calculation. This over sizing
allows for normal variations in values and operating conditions. The resulting power
value compensates for high ratio worm gear drives having substantially lower back
driving efficiency than forward driving efficiency.
19H Drives Not used in elevator applications.
20H, 21H and 22H Drives No dynamic braking hardware is required for these drives.
Baldor’s Series 20H DC SCR, Series 21H Inverter and Series 22H Vector Drives are all
line regenerative drives. Excess energy is supplied back to the incoming AC power line.
ǒ
LBS =
FPM = Car speed in feet per minute (FPM)
OCW = Over counter weight in %(percent) of car capacity
%EFF = Elevator mechanical efficiency (decimal)
Kgxmńsx[1* (
ǒ
Kg = Car capacity in Kilograms
m/s = Car speed in meters per second)
OCW = Over counter weight in %(percent) of car capacity
%EFF = Elevator mechanical efficiency (decimal)
Car capacity in pounds
0.202
3-6 Application Considerations MN770
Page 18

Section 4
Hardware Information
General Considerations All Baldor Series H drives are designed for ease of use. The keypad interface provides
the same interface for each Series H control. In other words, if you are familiar with
parameter set-up for one Series H drive type, the set-up for another Series H drive is
similar.
Power and logic wiring are essentially the same. Depending on the technology, feedback
wiring may be different.
For elevator applications, it is not possible to uncouple the load from the motor to
“Auto-tune” the motor parameters. Therefore, the parameter values can be calculated
and manually entered manually.
Encoder Retrofit Use care when an encoder is to be installed on a motor that is not equipped with one. An
encoder may be used with a DC SCR or Vector control and motor. Encoders cannot be
used with inverter controls and motors. The encoder housing must be rigidly mounted to
the existing motor case and an anti-backlash coupling must be used. Baldor offers a
special encoder kit designed for modernization which includes the rugged 1024 PPR H25
encoder, adapter, special coupling, stub shaft, hardware and mounting template.
Electrical isolation of the encoder case and shaft from the motor is highly recommended
to prevent capacitively-coupled motor noise from degrading the encoder signal. This
feature is standard on Baldor’s Elevator Drive DC and Vector Drive motors. If the
encoder added during the modernization is later found to have electrical noise because it
couldn’t be electrically isolated, adding an Isolated Encoder expansion board may help
with the electrical noise problems.
Cable Preparation
2
Encoder wiring must be shielded twisted pairs, #22 AWG (0.34mm
maximum length, with an insulated overall shield. Belden 9891 and Manhattan M4190
cables are suitable.
Control End (See Figure 3-1.)
1. Strip the outside jacket approximately 0.375″ (9.5mm) from the end.
2. Solder a #22 AWG (0.34mm2) wire to the braided shield.
3. Connect all shields to J1-30. To do this, solder a “Drain Wire” from each shield
to the wire soldered to the braided shield in step 2.
4. Insulate or tape off ungrounded end of shields to prevent contact with other
conductors or ground.
Encoder End
1. Strip the outside jacket approximately 0.375″ (9.5mm) from the end.
2. Identify each of the four twisted pair and label or use the color codes shown in
Figure 3-2 for the optional Baldor Encoder Cable.
3. Insulate or tape off ungrounded end of shields and unused conductors to
prevent contact with other conductors or ground.
) minimum size, 200′
CAUTION: Do not connect any shields to the encoder case or motor frame.
The encoder +5VDC supply at J1-29 is referenced to circuit board
common. Do not connect any shields to ground or another power
supply or damage to the control may result.
Hardware Information 4-1MN770
Page 19
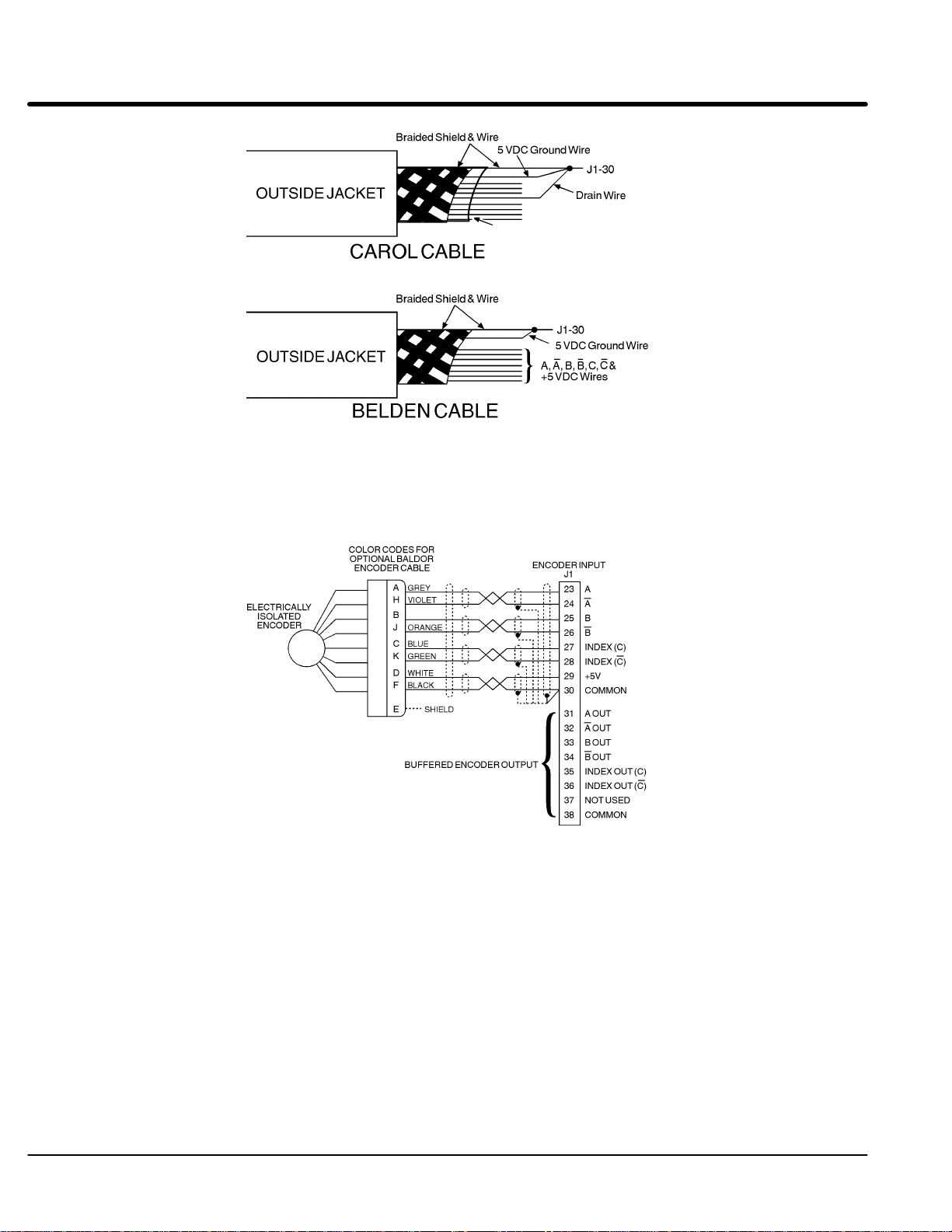
Figure 3-1 Encoder Cables
Mylar Sleeve
Figure 3-2 Encoder Connections
See Control manual for proper terminal tightening torque.
4-2 Hardware Information MN770
Page 20

Section 1
General Information
Encoder Cable Connection
Encoder cable must be separated by at least 3” from parallel runs of power wires.
Encoder cables that cross power wires must cross at a 90° angle only. Encoder wires
must be #22 AWG (0.34mm2) minimum, 200 feet maximum length and must have an
overall shield.
Note: Be careful not to pinch the wires’ insulation in terminal. If insulation is caught
in screw terminal, proper electrical connection will not be made. Encoder will
not operate properly.
1. Feed the control end of the cable through one of the holes in the control case
so connections can be made inside the control.
2. Differential Connections
Connect the cable braided shield to J1-30 at control end.
Connect the cable ends as follows: (See Figure 3-2.)
Encoder End
A J1-23 (A)
H J1-24 (A)
B J1-25 (B)
J J1-26 (B
C J1-27 Index(C)
K J1-28 Index(C)
D J1-29 (+5VDC)
F J1-30 (Common)
E N/C
3. Single Ended Connections
Differential inputs are recommended for best noise immunity. If only single
ended encoder signals are available, connect them to A, B, and INDEX (C)
(J1-23, J1-25 and J1-27 respectively).
Control End
)
Hardware Information 4-3MN770
Page 21

Buffered Encoder Output The DC SCR and Vector controls provides a buffered encoder output on pins J1-31 to
J1-38 as shown in Figure 3-3. This output may be used by external hardware to monitor
the encoder signals. It is recommended that this output only drive one output circuit load.
Driving multiple loads is not recommended.
Figure 3-3 Buffered Encoder Output
See Control manual for proper terminal tightening torque.
4-4 Hardware Information MN770
Page 22

Section 5
Set-Up Information
DC SCR Controls DC motors use voltage to obtain their speed and current to develop their output torque.
A DC SCR control must be able to supply the required voltage and current to operate the
motor under all conditions of load and speed.
Note: Do not assume that having the required horsepower is sufficient information to
size the control. You will need to know the maximum voltage and current. The
motor nameplate should be the source for the RMS (continuous) ratings but
actual measurements should be made to determine the maximum required
current and voltage with the elevator loaded to capacity.
Field Control Remember that the Series 20H control’s DC output is a maximum of 113% of input
voltage for the armature and up to 85% of input voltage for the field. This means that if
the field voltage is more than 195 volts for a 230 volt AC line, a single phase transformer
must be used to boost the AC input to the field power module. Some gearless elevator
DC motors have odd voltages which need to be supplied from special controls through
isolation transformers.
All Series 20H field power modules can be operated from 480 VAC or less, regardless of
the catalog or spec number of the control. The standard field power supply module is
rated for 15 amps maximum, but a 40 amp field power module is available as an option.
Feedback Most elevator DC controls operate closed loop which means that the motor speed is fed
back to the control using a DC tachometer, encoder or resolver. The feedback device is
usually coupled to the motor shaft but also may operate from a wheel on the sheave. A
DC tachometer is the most common feedback device and this requires the EXB006A01
expansion board mounted in the Series 20H.
Gearless elevators often benefit from using encoder feedback due to the higher
resolution of the feedback signal during low speed (leveling) conditions. The Encoder
interface is built into in the Series 20H while a DC tach or resolver feedback requires an
expansion board. A DC tach may be used on a gearless elevator but it should be
optimized to give a high DC volts per RPM output.
Typical DC tachometers provide 50, 60, 100 or 200 volts DC output per 1000 RPM when
coupled 1:1 to the motor. Encoders are usually 1000 or 1024 pulses per revolution (PPR).
Note: The boosted voltage must be in phase with the incoming lines L1 and L2.
Initial Installation and Startup When installed in a panel, the Series 20H control should be located away from
sources of heat and in an area where the keypad is visible and convenient to operate.
See the Series 20H manual (MN720) for additional installation information, watts loss
requirements, and other information regarding the selection of a mounting location. Any
required expansion boards should be installed before applying power.
Preliminary programming should include setting the following:
1. Level 1 Input Block, Operating Mode.
2. Level 1 Output Block, Opto Output values.
3. Level 1 DC Control Block, all parameters.
4. Level 2 Output Limits Block, all parameters.
5. Level 2 Motor Data Block, all parameters.
Other parameters will be set after final installation.
Note: In many elevator applications the BIPOLAR HOIST MODE is used with the
elevator controller as well as an external S-Curve generator.
Set-Up Information 5-1MN770
Page 23

Section 1
General Information
Final Installation
After the control has been mounted and wired, the final settings can be made.
1. The CALC PRESETS, CMD OFFSET TRIM (if using any analog mode), and
CUR LOOP COMP auto tune tests should be performed. Close the armature
contactor when doing the CUR LOOP COMP test.
2. The elevator should be operated at inspection speed to set the FEEDBACK
DIRECTION and verify the jumper settings on the DC tachometer expansion
board (if one is installed). The feedback direction is correct when the motor runs
in both directions at a stable speed with an inspection speed command. If the
motor attempts to “run away”, change the FEEDBACK DIRECTION parameter
in the DC CONTROL block (or reverse the DC Tachometer leads at terminals 1
and 4 of the DC Tachometer expansion board).
3. When the motor can be rotated using automatic control, the field current and
voltage should be measured and verified against the motor nameplate rating.
Field Forcing, Running and Standing currents can be produced in only the two
Hoist modes. Forcing the field is possible using an external input signal.
4. Operate the car at contract speed. Adjust the ACCEL, DECEL and S-CURVE
parameter values as required for best ride.
Note: The BIPOLAR HOIST MODE is used in many applications with an external
S-curve generator. In this case, Accel, Decel and S-Curve parameters should
be set to 0.
5. In the DC CONTROL block, adjust the RA
provide the smoothest ride and best performance for empty car, balanced car
and full capacity conditions.
6. When optimum conditions are achieved, set the following LEVEL 2,
PROTECTION block parameters:
OVERLOAD = FAULT
FOLLOWING ERROR = ON
TORQUE PROVING = ON
Be certain to test these settings under empty car and full capacity conditions,
and in both directions of travel. It may be necessary to increase the Level 1
OUTPUT block, At Speed Band parameter value to prevent a trip at capacity in
the down direction. Torque proving may not be usable with low current motors.
TE PROP and RA
TE INT gains to
5-2 Set-Up Information MN770
Page 24

Section 1
General Information
Final Adjustments Roughness and instability of motor operation are often the result of a loosely mounted
feedback device. Incorrect adjustment of the Level 1 DC Control, ARM PROP GAIN
parameter and/or the SPEED PROP GAIN can also cause speed instability and
oscillation of the car.
Note: It is desirable to have the ARM PROP GAIN as high as possible without
oscillation and the SPEED PROP GAIN as low as possible without rollback or
overshoot.
If adjustment of the SPEED PROP GAIN parameter does not help, check the feedback
device for lost motion. Any lost motion from either the coupling or the mount will affect the
motor’s operation.
Set-Up Information 5-3MN770
Page 25

Section 1
General Information
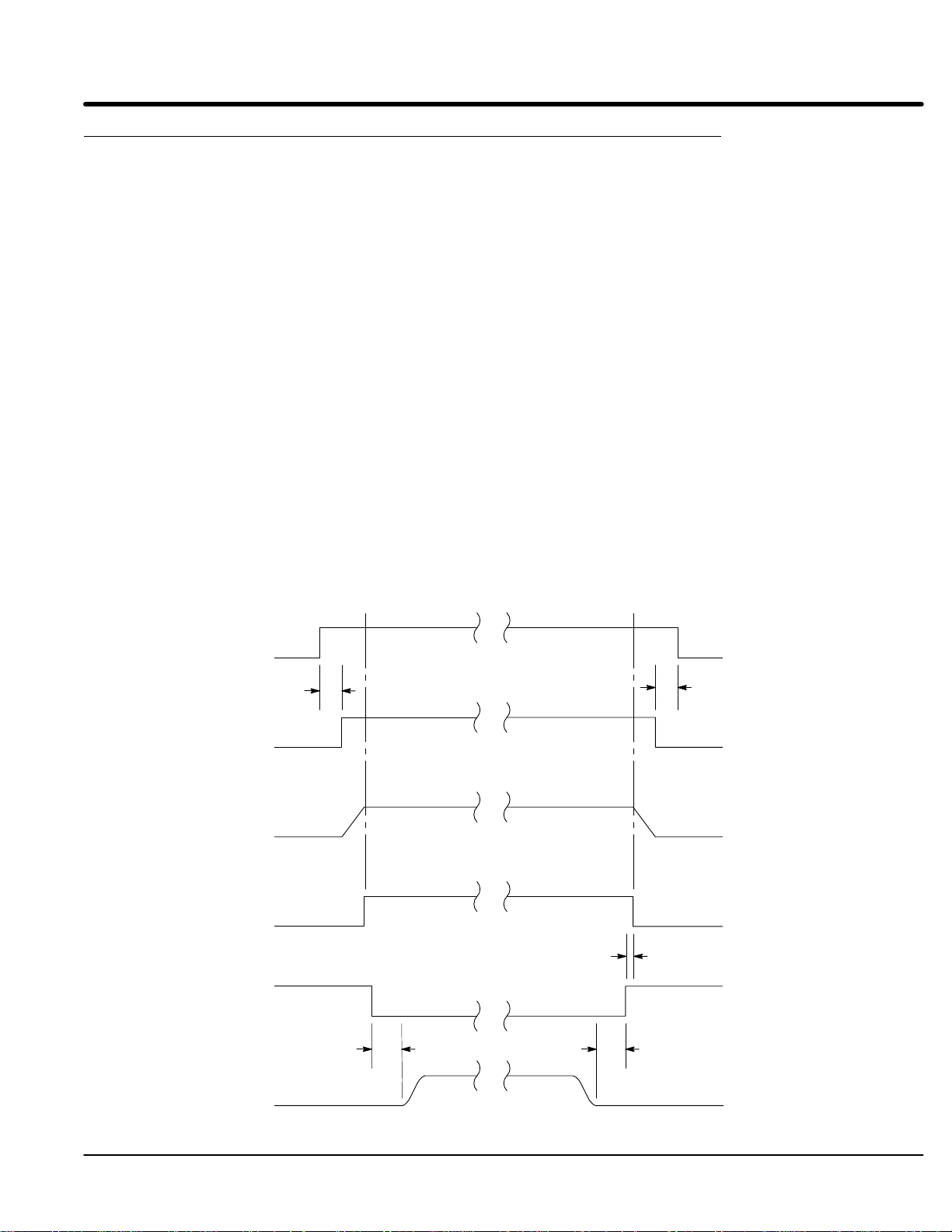
Recommended Power Up/Down Sequence for Elevators Using DC SCR Controls
The following is a recommended sequence for turning on and off the elevator drive and
external OEM control. Figure 5-4 shows this sequence.
Figure 5-4 Typical Power Up/Down Sequence for DC SCR Controls.
RUN TIMETURN-ON TURN-OFF
M Contactor
20msec
Armature Enable
Field
Economy
“Drive ON”
Opto Output
Brake Release Signal
(from elevator controller)
Contract Speed
Speed Command
Closed
Open
On
Off
Forcing
On
Off
Disengaged
Zero FPM
Engaged
Running
50msec
Closed
Open
20msec
On
Off
Forcing or “Leveling”
Running
Standing or Economy
Brake Set Time
Engaged or “Set”
Disengaged or “Picked Up”
50msec
Sequence:
1. Close the M Contactor. Approximately 20msec is required for the contacts to
close and connect the Control to the Motor and complete the armature loop.
2. The filed is controlled independently of the armature. The field can be at
running voltage (or at forcing voltage) prior to actual commanding speed.
3. Armature enable (pin J1-8 of the DC SCR Control) allows the SCR’s to begin
firing.
4. The “Drive ON” Opto output from the DC SCR Control provides an indication
(for the elevator control) that the drive is ready to act on Speed or Torque
commands.
5. Zero speed command should be held until the brake has actually disengaged,
allowing the car to move.
5-4 Set-Up Information MN770
Page 26
Section 1
General Information
Inverter Controls AC induction motors may have their speed adjusted by using an AC Inverter (VVVF) to
change the voltage and frequency supplied to the motor. The motor speed will be
relatively proportional to the frequency supplied. An AC Inverter must be able to supply
the amount of current the motor requires both on a continuous and peak basis under all
conditions of load and speed.
Note: Do not assume that having the required horsepower is sufficient information to
size the control. You will need to know the maximum voltage and current. The
motor nameplate should be the source for the RMS (continuous) ratings but
actual measurements should be made to determine the maximum required
current and voltage with the elevator loaded to capacity.
Initial Installation and Startup
When installed in a panel, the Series 15H control should be located away from sources of
heat and in an area where the keypad is visible and convenient to operate. Refer to
Series 15H manual (MN715) for installation information, watts loss requirements, and
other information regarding the selection of a mounting location. Expansion boards
should be installed before applying power.
Preliminary Programming
After the control has been mounted and wired, the final settings can be made.
1. Level 1 Input Block, Operating Mode.
2. Level 1 Output Block, Opto Outputs.
3. Level 1 V/Hz and Boost, starting with:
CTRL BASE FREQ
T
ORQUE BOOST
DYNAMIC BOOST
SLIP COMP ADJ
V/HZ PROFILE 3PT
V/HZ 3 PT. VOLTS 10
V/HZ 3PT. FREQ 1.6
MAX OUTPUT VOLTS 100
4. Level 2 Output Limits Block, all parameters.
OPERATING ZONE QUIET CT
PK CURRENT LIMIT Set to max available
5. Level 2 Motor Data Block, all parameters.
6. Level 2 Brake Adjust, all parameters.
7. Set the following Level 2, Protection Block, EXTERNAL TRIP parameter to ON.
8. Calculate the size of the dynamic brake (DB) Hardware required. Refer to
MN701 for sizing and selection information. Connect the DB hardware as
described in MN715.
9. Operate the elevator at inspection speed. Check for correct operation of the
elevator.
10. Operate the elevator at contract speed. Adjust the ACCEL, DECEL and
S-CURVE parameter values as required for the best ride.
Note: In many elevator applications, the ST
used depending on the elevator controller as well as an external S-curve
generator.
60
5
10
2.0
ANDARD RUN or 15 SPEED MODE is
Set-Up Information 5-5MN770
Page 27

Section 1
General Information
Recommended Power Up/Down Sequence for Elevators Using Inverter Controls
The following is a recommended sequence for turning on and off the elevator drive and
external OEM controller. Figure 5-5 shows this sequence.
1. Close the M-Contactor.
2. Close the drive ENABLE.
3. Use the DRIVE ON opto output to energize an external coil for a relay to
perform the following:
a. Signal the OEM elevator controller, computer or PLC to engage or
disengage the holding brake and feed the speed command reference
(pattern generator) signal into the drive. There should be a 50 mSec
(milli-second) delay between the brake release signal and the speed
command signal. This allows time to release the brake mechanically.
b. The time between DRIVE ON and the ENABLE signal allows flux to build
up in the AC motor. This delay should be at least 20 mSec.
4. An inverter drive will not hold the car in position until the brake is set. When the
car reaches the floor, open the J4-8 ENABLE and J4-11 STOP inputs at the
same time.
5-6 Set-Up Information MN770
Page 28

Section 1
General Information
Recommended Power Up/Down Sequence for Elevators Using Inverter Controls
The following is a recommended sequence for turning on and off the elevator drive and
external OEM control. Figure 5-5 shows this sequence.
Figure 5-5 Power Up/Down Sequence for Inverter Controls.
RUN TIMETURN-ON TURN-OFF
Close M Open M
Enable
Motor Flux
“Drive ON”
Opto Output
Brake Release Signal
(from controller)
Speed Command
20mSec
50mSec
20mSec
Enable
Motor Flux
“Drive ON”
Opto Output
Brake Set Time
Brake Release Signal
(from controller)
50mSec
Speed Command
Set-Up Information 5-7MN770
Page 29
Section 1
General Information
Vector Controls If this is a modernization, do not disconnect the old control from the motor. It is needed to
operate the motor for some preliminary measurements before it is disconnected. See
Modernization.
Equipment Required The following equipment is required for this upgrade.
1. Elevator rated AC induction motor with encoder installed.
2. Baldor Series 18H or 22H Vector Control.
3. Elevator system controller (PLC-not supplied by Baldor). This controller will be
connected to the Vector Control.
4. Clamp-On AC Amp Meter. (Voltage and Current range depend on the motor).
New Installations For new elevator installations that are pre-configured by the OEM, perform the following:
(Skip this procedure if this is a modernization).
1. Install the motor and Vector Control. Refer to the Installation and Operating
Manual supplied with the control for mounting and wiring instructions.
2. Refer to the Installation and Operating manual. Perform the following parts of
the Manual Tuning procedure: CALC Presets, CMD Offset Trim and CUR Loop
Comp. Be sure the motor contactor is closed for the CUR Loop Comp test.
3. Apply power. Adjust the Level 1 Vector Control block, Current Prop Gain and
Speed Prop Gain parameter values for best ride.
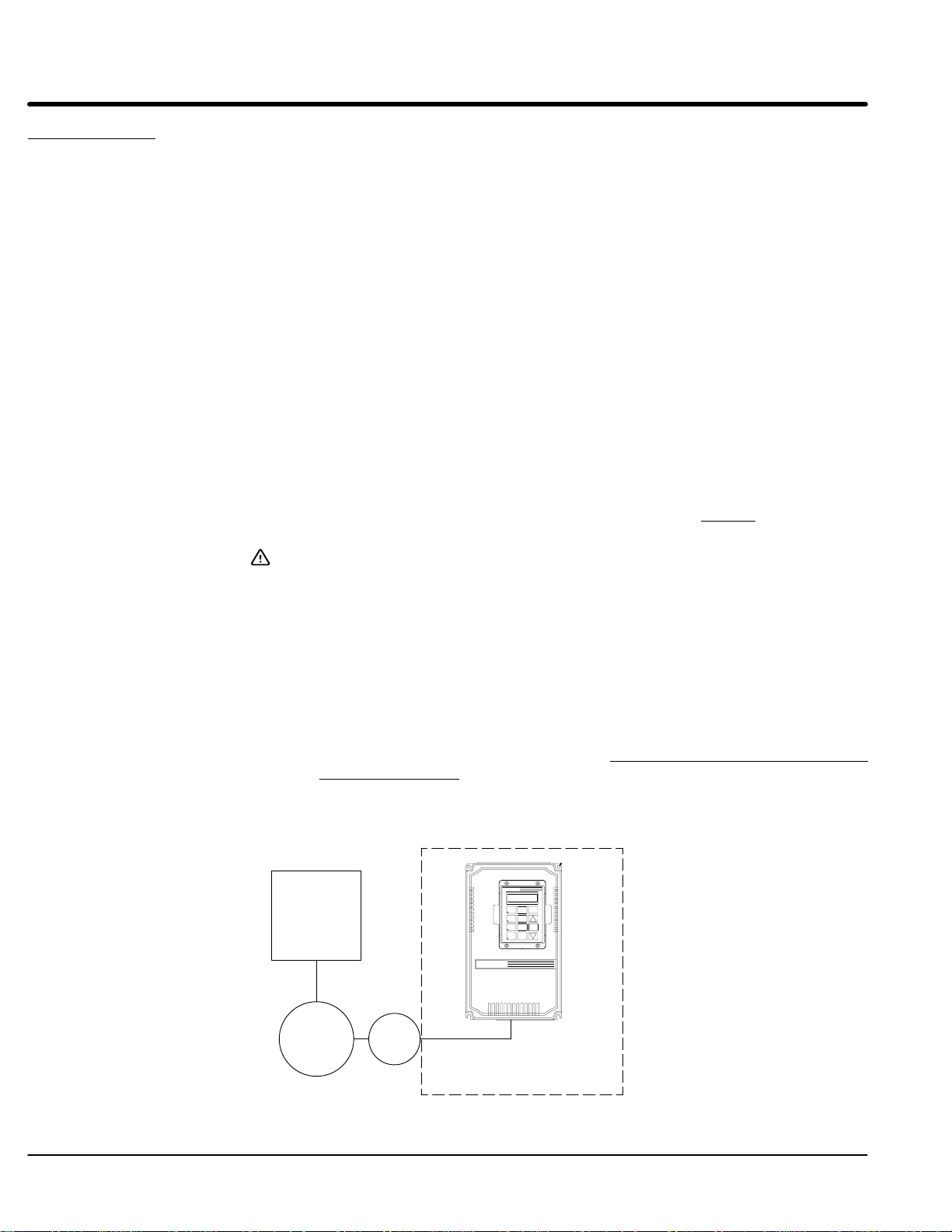
Modernization For modernization of an existing installation, perform these steps instead
“New Installation”:
of those for
Caution: Check the motor nameplate ratings and the input voltage at the
power source and be sure that they match. If the measured input
voltage is different than the rated voltage on the nameplate do not
proceed. The Vector control ratings must match the motor ratings
and the input line voltage. If the Vector Control nameplate shows
the input voltage and frequency required for proper operation.
Other input power may damage the control. Refer to the Vector
Control manual for installation considerations.
1. Disconnect all elevator power.
2. Modify the existing motor and mount the encoder. Temporarily connect the
encoder to the Vector control J1 terminals
the Vector Control)
. See Figure 5-1. The existing elevator control will be used
(Do not connect the motor leads to
to drive the load for these tests. Encoder connections are describe in Section 4
of this manual.
Figure 5-1 Initial Vector Control Connection
Existing
Elevator
Control
Wiring
LOCAL
PROG
JOG
DISP
FWD
SHIFT
ENTER
REV
RESET
STOP
Motor
Encoder
Temporary
Connection
5-8 Set-Up Information MN770
Page 30

Section 1
General Information
Modernization Continued
3. Apply power to the existing elevator control wiring and the Vector Control.
4. Refer to Table 5-2 “Pre-Installation Tests”. Perform all tests with the elevator
connected
for future use. These tests are performed with the existing elevator control.
5. Balanced Car Test
a. A balanced elevator car is required for this test.
b. Apply power to the Vector control and press the DISPLAY button until the
c. Operate the elevator at contract speed in both the up and down directions.
Note: If the RPM display is erratic or varies more than 10 RPM at contract speed,
there may be a problem involving the encoder mounting, wiring or shielding.
Eliminate the problem and rerun the test.
6. Full Load Test
a. Load the elevator car to its rated capacity. (Use a distributed load, not a
b. Operate the elevator at contract speed in both the up and down directions.
c. Verify the motor current under full load at contract speed does not exceed
d. AC line voltages recorded during the tests should be within the operating
in this temporary configuration. It is important to record all information
motor speed RPM is displayed.
Recording the AC line voltage, motor current and motor speed in both
directions of travel.
point load).
Recording the AC line voltage, motor current and motor speed in both
directions of travel.
the rating of the Vector Control. If the measured current exceeds the
motor’s nameplate rating, then the motor and Vector control may be
undersized for the application. This must be evaluated and corrected
before continuing with the Vector control installation.
range for the Vector control as specified in the Installation and Operating
Manual that is supplied with the control.
Caution: If the full load measurements exceed the ratings stated on the
motor or control nameplates, do not proceed. A correctly sized
Vector Control and Motor must be installed. Otherwise, equipment
damage may result.
Set-Up Information 5-9MN770
Page 31

Section 1
General Information
Final Wiring Connections
1. Disconnect all electrical power to all controls.
2. Disconnect
the Vector control.
3. Connect the Vector control to the AC line, motor and encoder as shown in the
Installation and Operating Manual supplied with the Vector control.
Refer to the sections in that manual for recommendations on wire size, terminal
torques, grounding, noise and other pertinent information.
4. Connect the elevator system controller to the Vector control as described in
Section
the Bipolar Speed or Torque Control Mode.
Note: Refer to the diagram supplied by the elevator controller manufacturer for
specific instructions.
Series 18H Control Considerations:
If using a Baldor Series 18H Vector control, be sure to calculate the appropriate wattage
of braking hardware as calculated in Dynamic Braking (DB) Hardware manual MN701.
The dynamic brake hardware is available from your Baldor distributor. Additional brake
hardware installation information is provided in MN718.
the temporary wiring that was used for the Pre-Installation tests from
3 of the Series 18H manual MN718. Use the
configuration described for
5-10 Set-Up Information MN770
Page 32

Section 1
General Information
Initial Set-up If the Vector control has already been programmed by the OEM, the correct motor data
has been installed. If this information has not been programmed, set the correct
parameter values (refer to the interface specifications from the elevator controller OEM).
You will need the following information to perform the initial setup:
S The information obtained and recorded in Table 5-2 for the following steps:
S Interface Specifications, Operating mode and data from the elevator OEM.
S The Installation and Operator manual for the Vector Control.
Procedure:
1. Verify that all wiring is correct before you proceed.
2. Apply power to the Vector control.
3. Program (or verify OEM programming) the Vector control as follows:
(Be
sure to record your settings in the Parameter Block V
Control manual.)
a.
Set Level 1 PRESET SPEEDS as desired.
b. Set Level 1 ACCEL/DECEL Rate Block, ACCEL TIME #1 as desired.
c. Set Level 1 ACCEL/DECEL Rate Block, DECEL TIME #1 as desired.
d. Set Level 1 ACCEL/DECEL Rate Block, S-CURVE #1 as desired.
e. Set Level 1 INPUT Block, OPERATING MODE as desired.
f. Set Level 1 OUTPUT Block, OPTO OUTPUTs #1 to #4 as desired.
Be sure to set on of the OPTO OUTPUTS to “DRIVE RUN”.
g. Set Level 1 VECTOR CONTROL Block, FEEDBACK ALIGN as desired.
Improper setting will result in peak motor current and slow or jerky
operation.
h. Set Level 1 VECTOR CONTROL Block, SPEED PROP GAIN as desired.
Begin with a value of 20 and increase or decrease value for best
performance.
i. Set Level 1 VECTOR CONTROL Block, SPEED INT GAIN as desired.
This value is normally set to 1. Change this value if the car is not aligned
with the floor at the end of deceleration.
alues table of the V
ector
Set-Up Information 5-11MN770
Page 33

Section 1
General Information
Initial Set-up Continued
j. Set Level 1 VECTOR CONTROL Block, SLIP FREQUENCY as desired.
This value can be calculated from the values recorded previously in Table
5-2. Record these calculated values in Table 5-3.
Calculate the Slip RPM of the motor:
Slip RPM + (RPM of Balanced Car) * (RPM of Fully Loaded Car)
Calculate the % of Motor Loading:
Full Load AC Motor Current
% Rated Motor Load +
Determine the Slip Adjustment Value from Table 5-1.
ǒ
Rated Motor Amps
Table 5-1 Slip Adjustment Value.
% Rated Motor Load Slip Adjustment Value
100 - 110% 1.0
90 - 100% 1.1
80 - 90% 1.3
70 - 80% 1.5
Calculate the Slip Frequency parameter value:
Slip Frequency +
k. Set Level 2 Operating Zone as desired (usually Quiet Constant Torque).
l. Set Level 2 Output Limits block, MIN OUTPUT SPEED parameter.
m. Set Level 2 Output Limits block, MAX OUTPUT SPEED parameter.
n. Set Level 2 MOT
Motor Voltage (input)
Motor Rated Amps (FLA)
Motor Rated Speed (Base Speed)
Motor Rated Frequency
Motor Mag Amps (no load current)
4. Manual Tuning Method - Because the load cannot be uncoupled from the motor
shaft, proceed with the manual tuning procedure. The manual tuning procedure
is provided in MN718 for the Series 18H Vector Control.
Final Set-up After Initial Set-up is complete, operate the elevator using the Vector control and make
any final adjustments. Accel, Decel and S-Curve values may need adjustment for
smooth operation.
Line Frequency x Slip RPM x Slip Adjustment Value
RPM of Balanced Car
OR DA
TA block parameters:
Ǔ
X 100%
5-12 Set-Up Information MN770
Page 34
Section 1
General Information
Recommended Power Up/Down Sequence for Elevators Using Vector Controls
The following is a recommended sequence for turning on and off the elevator drive and
external OEM control. Figure 5-2 shows this sequence.
1. Close the M-Contactor.
2. After a 20mSec minimum delay (to ensure the M Contactor is closed), close the
drive ENABLE input. This will allow current to flow and the IGBT’s to begin
switching.
3. The “Drive ON” Opto output will be active when the Motor MAG AMPS have
reached the programmed value. Use the Drive ON opto output to energize an
external coil for a relay to perform the following:
A.
Signal
the OEM elevator controller, computer or PLC to engage or disengage
the
holding brake and feed the speed command reference (pattern
signal into the drive. There should be a 50 milli-seconds delay between the
brake release signal and the speed command signal. This allows time to
release the brake mechanically.
B.
The
time between DRIVE
the AC motor. This delay should be no less than 20 mS. The TORQUE
PROVING fault will prevent a DRIVE ON output if the Vector drive is not
applying
open
and
4. Once the elevator reaches the floor, a zero speed command should be held
until the brakes are set.
5. Disable the Vector drive after the brake is set, and then open the M-Contactor.
current to the motor due to an open contactor
motor
winding. If during operations a fault occurs, then the DRIVE ON
READY
both go inactive, engage the brake and open the motor contactor
Figure 5-2 Power Up/Down Sequence for Vector Controls.
RUN TIMETURN-ON TURN-OFF
ON and the ENABLE signal allows flux build-up in
generator)
, broken motor lead or
.
Close M Open M
Enable
Motor Flux
“Drive ON”
Opto Output
Brake Release Signal
(from controller)
Speed Command
20mSec
50mSec
20mSec
Enable
Motor Flux
“Drive ON”
Opto Output
Brake Set Time
Brake Release Signal
(from controller)
50mSec
Speed Command
Set-Up Information 5-13MN770
Page 35

Section 1
General Information
Table 5-2 Pre-Installation Tests
Date:
Customer:
Address:
Elevator Location:
Address:
Motor Ratings (From Nameplate)
Rated Voltage: Rated Current:
Rated Speed (RPM): Rated Frequency:
Installation Data
Encoder Counts (PPR): Operating Mode:
Dynamic Operating Conditions
Balanced Car Test UP DOWN
AC Line V
AC Motor Current
Speed (RPM)
Full Load Test UP DOWN
AC Line V
AC Motor Current
oltage
oltage
Speed (RPM)
5-14 Set-Up Information MN770
Page 36

Section 1
Installed by:
General Information
Table 5-3 Vector Control Worksheet
Date:
Catalog Number: Rated Voltage:
Rated Horse Power: Rated Current:
Slip RPM:
Slip Adjustment Value: Slip Frequency:
Installed by:
Date:
% Rated Motor Load:
Set-Up Information 5-15MN770
Page 37

Section 1
General Information
5-16 Set-Up Information MN770
Page 38

Section 6
Troubleshooting
DC SCR Control Roughness of car ride quality and instability of motor operation are often a result of poor
mounting of the feedback device. Incorrect adjustment of the ARM GAIN and/or the
RATE PROP GAIN can also cause speed instability and oscillation of the car. If
adjustment of RATE PROP GAIN does not help, check the feedback device for
misalignment, slippage, sensitivity to mechanical vibration. Any of these problems in the
coupling or the mount will affect the motor’s operation. Running feedback wiring too close
to the AC or DC power wiring will also cause roughness. Switching parameter tables or
ACC/DEC tables while the speed is changing may also cause a bump in the car travel
due to a recalculation of the slope, required to prevent excessive jerk.
If wires for the feedback device are placed too close to AC or DC power wires,
roughness of motor operation may result. This is due to the induced noise from the
power wires. Other causes could be 1.) selecting a different parameter table or 2.)
selecting a different ACC/DEC table while motor speed is changing. Either of these
changes may also cause a bump in the car travel due to a recalculation of the slope.
Noisy motors often result from insufficient filtering of the 360 Hz AC ripple of the DC
output voltage. An SCR based control is not capable of producing “generator quality” DC
voltages, so a filter assemble (made from a DC-rated inductor and non-polarized
capacitors) on the DC loop is often used to reduce or eliminate noise.
Fuse blowing may result if the ARM GAIN setting is too high for the application. Reduce
the ARM GAIN by 50% and verify proper operation.
Other problems should result in a fault displayed as an entry in the Fault Log. Refer the
the Series 20H manual on how to access and interpret these faults. Additional
troubleshooting information is also in this manual.
Troublehsooting 6-1MN770
Page 39

Section 1
General Information
Electrical Noise Considerations All electronic devices including a Series H Control are vulnerable to significant
electronic interference signals (commonly called “Electrical Noise”). At the lowest level,
noise can cause intermittent operating errors or faults. From a circuit standpoint, 5 or 10
millivolts of noise may cause detrimental operation. For example, analog speed and
torque inputs are often scaled at 5 to 10 VDC maximum with a typical resolution of one
part in 1,000. Thus noise of only 5 mv represents a substantial error.
At the extreme level, significant noise can cause damage to the drive. Therefore, it is
advisable to prevent noise generation and to follow wiring practices that prevent noise
generated by other devices from reaching sensitive circuits. In a control, such circuits
include inputs for speed, torque, control logic, and speed and position feedback, plus
outputs to some indicators and computers.
Causes and Cures Unwanted electrical noise can be produced by many sources. Depending upon the
source, various methods can be used to reduce the effects of this noise and to reduce the
coupling to sensitive circuits. All methods are less costly when designed into a system
initially than if added after installation.
Figure 6-1 shows an oscilloscope trace of noise induced (as the coil circuit is opened) in
a 1–ft. wire located next to a lead for a Size 2 contactor coil. Scope input impedance is
10KW for all scope traces. Maximum peak voltage is over 40V. Unless well filtered this is
often enough noise to ruin the output of a productive machine.
Figure 6-1 Electrical Noise Display
Relay and Contactor CoilsAmong the most common sources of noise are the ever–present coils of contactors and
relays. When these highly inductive coil circuits are opened, transient conditions often
generate spikes of several hundred volts in the control circuit. These spikes can induce
several volts of noise in an adjacent wire that runs parallel to a control–circuit wire.
To suppress noise in these AC coils, add an R–C snubber across each relay and
contactor coil. A snubber consisting of a 33KW resistor in series with a 0.47
usually works well. The snubber reduces the rate of rise and peak voltage in the coil
when current flow is interrupted. This eliminates arcing and reduces the noise voltage
induced in adjacent wires. In our example, the noise was reduced from over 40 V
zero–to–peak (V0P) to about 16 V0P as shown in Figure 6-2.
mf capacitor
Figure 6-2 R-C Snubber Circuit
6-2 Troublehsooting MN770
Page 40

Section 1
General Information
Electrical Noise Considerations Continued
Combining an R-C snubber and twisted-pair shielded cable keeps the voltage in a circuit
to less than 2 V for a fraction of a millisecond. The waveform shown in Figure 6-3 in
addition to the snubber across the coil, the adjacent wire is grounded in a twisted–pair,
shielded cable. Note that the vertical scale is 1 V/div., rather than the 20 V/div. in figures
6-1 and 6-2. This shows that snubbers and twisted-pair shielded wire should be used for
sensitive circuits located adjacent to coil wires.
Figure 6-3 R-C Snubber Circuit & twisted-pair
A reverse biased diode across a DC coil achieves the same result as adding an R–C
snubber across an AC coil, Figure 6-4.
Figure 6-4 AC & DC Coil Noise Suppression
AC Coil
RC snubber
0.47 mf
33
W
+
DC Coil
–
Diode
Troublehsooting 6-3MN770
Page 41

Section 1
General Information
Electrical Noise Considerations Continued
Wires between Controls and Motors
Output leads from a typical 460 VAC drive controller contain rapid voltage rises created
by power semiconductors switching 650V in less than a microsecond, 1,000 to 10,000
times a second. These noise signals can couple into sensitive drive circuits as shown in
Figure 6-5. For this waveform, a transient induced in 1 ft. of wire adjacent to motor lead
of a 10 hp, 460 VAC drive. Scope is set at 5 V/div. and 2 sec/div.
Figure 6-5 10HP, 460VAC Drive
If the shielded pair cable is used, the coupling is reduced by nearly 90%, Figure 6-6.
Figure 6-6 10HP, 460VAC Drive, Shielded
The motor leads of DC motors contain similar voltage transients. The switching rate is
about 360 times a second. These noise transients can produce about 2V of noise
induced in a wire adjacent to the motor lead. A 30HP, 500VDC Drive, as shown in Figure
6-7. Scope is set at 1 V/div. and 5 sec/div.
Figure 6-7 30HP, 500VDC Drive
Again, Replacing a single wire with a shielded pair cable reduces the induced noise to
less than 0.3 V, Figure 6-8.
Figure 6-8 30HP, 500VDC Drive, Shielded
6-4 Troublehsooting MN770
Page 42

Section 1
General Information
Electrical Noise Considerations Continued
Even input AC power lines contain noise and can induce noise in adjacent wires. This is
especially severe with SCR controlled DC drives, current–source and six–step inverters.
Figure 6-9 shows a transient induced in 1–ft. wire adjacent to AC input power wire to 20
hp, DC drive. Scope is set at 500 mV/div. and 2sec/div.
Figure 6-9 30HP, 500VDC Drive, Shielded
To prevent induced transient noise in signal wires, all motor leads and AC power lines
should be contained in rigid metal conduit, or flexible conduit. Do not place line
conductors and load conductors in same conduit. Use separate conduit for 3 phase input
wires and motor leads. The conduit should be grounded to form a shield to contain the
electrical noise within the conduit path. Signal wires - even ones in shielded cable should
never be placed in the conduit with motor power wires.
If flexible conduit is required, the wires should be shielded twisted-pair. Although this
practice gives better protection than unshielded wires, it lacks the protection offered by
rigid metal conduit.
Special Drive SituationsFor severe noise situations, it may be necessary to reduce transient voltages in the wires
to the motor by adding load reactors. Load reactors are installed between the control and
motor. These are often required where a motor housing lacks the necessary shielding
(typically linear motors mounted directly to machine frames) or where the power wires to
motors are contained in flexible cables.
Reactors are typically 3% reactance and are designed for the frequencies encountered in
PWM drives. For maximum benefit, the reactors should be mounted in the drive
enclosure with short leads between the control and the reactors. Baldor offers a
complete line of line and load reactors that will reduce ripple current and improve motor
life.
Drive Power Lines The same type of reactor as installed on the load side of the control can also suppress
transients on incoming power lines. Connected on the line side of the drive, the reactor
protects the adjustable–speed drive from some transients generated by other equipment
and suppresses some of the transients produced by the drive itself.
Radio Transmitters Not a common cause of noise, radio frequency transmitters, such as commercial
broadcast stations, fixed short–wave stations, and mobile communications equipment
(including walkie talkies) create electrical noise. The probability of this noise affecting an
adjustable–speed drive increases with the use of open control enclosures, open wiring,
and poor grounding.
Troublehsooting 6-5MN770
Page 43
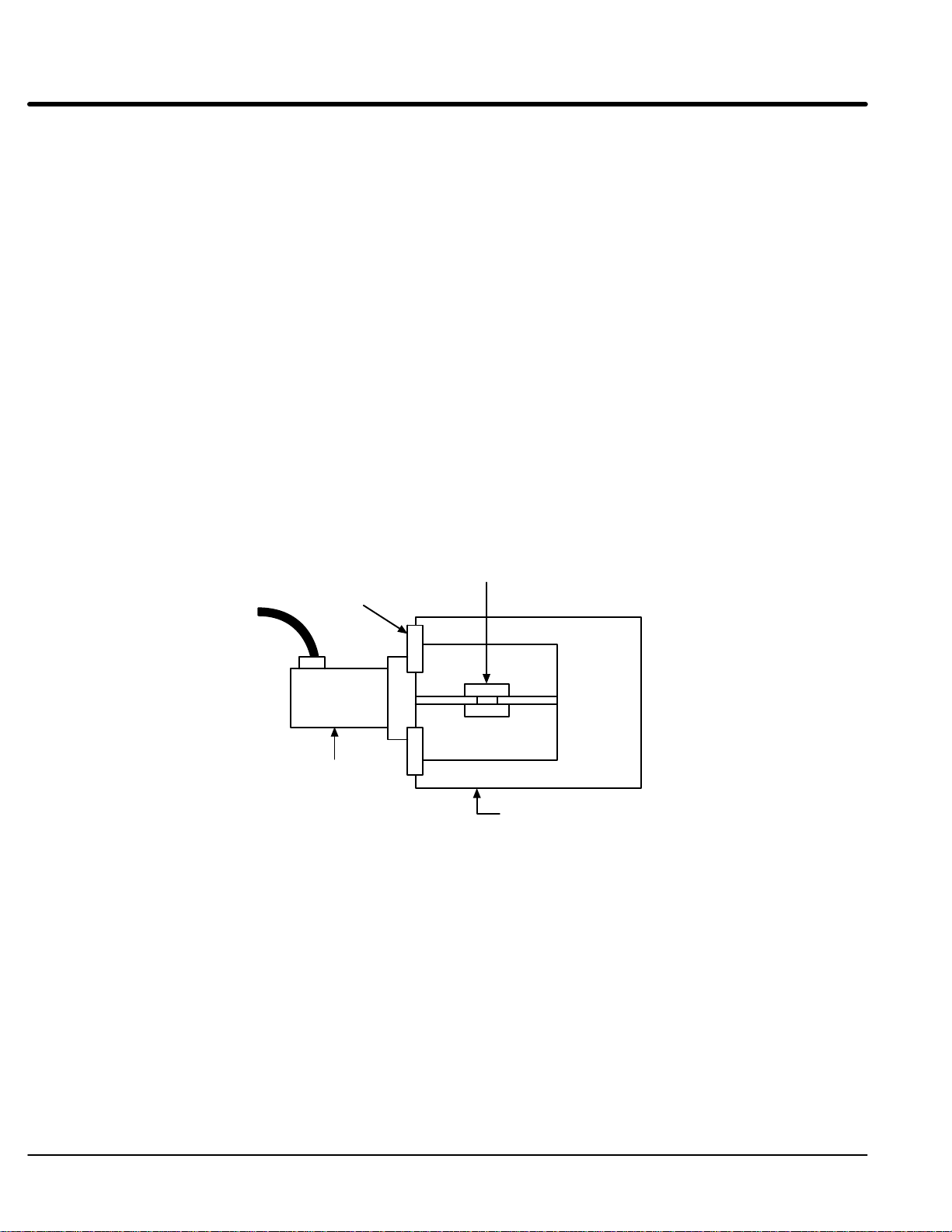
Section 1
General Information
Electrical Noise Considerations Continued
Control Enclosures Motor controls mounted in a grounded enclosure should also be connected to earth
ground with a separate conductor to ensure best ground connection. Often grounding
the control to the grounded metallic enclosure is not sufficient. Usually painted surfaces
and seals prevent solid metallic contact between the control and the panel enclosure.
Likewise, conduit should never be used as a ground conductor for motor power wires or
signal conductors.
Special Motor Considerations Motor frames are also on the required grounding list. As with control enclosures,
motors should be grounded directly to the control and plant ground with as short a ground
wire as possible. Here’s why. Capacitive coupling within the motor windings produces
transient voltages between the motor frame and ground. The severity of these voltages
increases with the length of the ground wire. Installations with the motor and control
mounted on a common frame, and with heavy ground wires less than 10 ft. long, rarely
have a problem caused by these motor–generated transient voltages.
Another cure may be needed when the motor frame transient voltages are capacitively
coupled to feedback devices mounted on the motor shaft. Especially with optical
encoders, these transients create noise on the signal leads and disrupt drive operation.
To prevent this problem, add electrical isolation between the motor and the feedback
device to stop the current flow and the resulting transients. The most simple isolation
method, shown in Figure 6-10, has two parts: 1) A plate of electrical insulating material
placed between the motor mounting surface and the feedback device. 2) An insulating
coupling between motor shaft and the shaft of the feedback device.
Figure 6-10 Isolated Mounting Method
Insulating
plate
Insulating Coupling
Encoder or other
feedback device
6-6 Troublehsooting MN770
Mounting bracket
Page 44

Section 1
General Information
Wiring Practices
The type of wire used and how it is installed for specific applications makes the difference
between obtaining reliable operation and creating additional problems.
Power Wiring Conductors carrying power to anything (motor, heater, brake coil, or lighting units, for
example) should be contained in conductive conduit that is grounded at both ends.
These power wires must be routed in conduit separately from signal and control wiring.
Control–logic Conductors Typically, operator’s controls (push buttons and switches), relay contacts, limit switches,
PLC I/O’s, operator displays, and relay and contactor coils operate at 115VAC or 24VDC.
Although these devices usually operate at low current levels, they contain switching noise
caused by contact open/closure and solid–state switch operations. Therefore, these wires
should be routed away from sensitive signal wires and contained within conduits or
bundled away from open power and signal wires.
DC Tachometer Circuits Among the most sensitive circuits is the DC Tachometer. Reliability of a DC tachometer
circuit is often improved by the following noise reduction techniques:
• Connect a 0.1 f capacitor across the tachometer terminals to suppress AC
noise.
• Use twisted-pair shielded wires with the shield grounded at the control end only.
You should avoid grounding the shield to the tachometer case or conduit.
• Follow the practices for analog signal wiring.
Analog Signal Wires Analog signals generally originate from speed and torque controls, plus DC tachometers
and process controllers. Reliability is often improved by the following noise reduction
techniques:
• Use twisted-pair shielded wires with the shield grounded at the drive end only.
• Route analog signal wires away from power or control wires (all other wiring
types).
• Cross power and control wires at right angles (90°) to minimize inductive noise
coupling.
Encoder Circuits Adjustable speed drives are especially sensitive to high frequency noise on encoder
signal lines. Because these input signals cannot be heavily filtered special care must be
taken to avoid transient noise from entering these signal lines. Drive reliability can be
greatly improved by using the following noise reduction techniques:
• Use line driver output encoders to reduce the encoder output impedance.
• Select line driver inputs on the adjustable speed drive.
• Install twisted-pair shielded wire for power to the encoder and having each
output with its own return. (Avoid common conductors with multiple outputs or
with an output and the power source.)
• Never connect the encoder ground to the power ground terminal of the control.
• Run all encoder wires independently from all other power wires.
Serial Communication Conductors Standard serial communication cables are usually made with a shield that is
connected to the connector shell at both ends. This usually grounds the data source to
the grounded drive chassis. If the data source is floating, such a connection offers good
data transmission. However, if the data source is grounded, adding a heavy ground wire
(#14 or larger) in parallel with the communication cable between the source and the drive
chassis usually reduces noise problems.
Troublehsooting 6-7MN770
Page 45

Section 1
General Information
Optical Isolation
Isolating electrical circuits with some form of light transmission reduces the electrical
noise that is transmitted from one part of a circuit to another. That is, an electrical signal
is converted to a light signal that is transmitted to a light receiver. This converts the light
back to an electrical signal that has less noise than the input. Two methods are
commonly used; optical couplers and fiber optics.
Optical Couplers Optical couplers, often referred to as opto couplers use a light transmitter and light
receiver in the same unit to transmit data while electrically isolating two circuits. This
isolation rejects some noise. The magnitude of noise rejection is usually specified by the
“common mode rejection, dv/dt rating”. Typically, low cost opto couplers have a common
mode rejection of 100 to 500 V/
High performance opto couplers with common mode ratings up to 5,000 V/ sec are
installed for the most severe noise environments.
Fiber Optics Special plastic fiber strands transmit light over long as well as short distances. Because
the fibers are immune to electromagnetic energy, the use of fiber optic bundles eliminate
the problem of coupling noise into such circuits. These noise–free fiber optic cables can
be run with power or motor conductors because noise cannot be inductively or
capacitively coupled into the fiber optic stands.
Plant Ground Connecting electrical equipment to a good ground is essential for safety and reliable
operation. In many cases, what is perceived as a ground isn’t.
Result: equipment malfunctions or electrical shock hazard exists.
It may be necessary to retain the services of an electrical consultant, who is also a
licensed professional engineer experienced in grounding practices to make the necessary
measurements to establish if the plant ground is really grounded.
sec, which is adequate for most control logic signals.
6-8 Troublehsooting MN770
Page 46

Appendix A
Load Weighing / Torque Feed Forward
In many advanced elevator applications, the system is designed to weigh the elevator
load to offset the counterweight of the car. We also refer to this as a torque feed forward
application. Both the Baldor AC Vector (Series 18H and 22H) and Series 20H SCR
Controls can be programmed to use the torque feed forward option (Level 1 Input block;
Command Select parameter, 10V w/Torq FF).
In a typical installation, a car is balanced with a 40% load. In order to move the car in the
up direction, the drive should receive a forward speed command. If the car is full, then it
would have to generate positive torque in order to move the car forward or in the up
direction.
A load cell is installed on the car to measure the loading of the car. Typically, 10 volts
output from the load cell equals a full car and 0 volts equals an empty car. This means
that 10 volts equals a value of positive torque and 0 volts equals a smaller absolute value
of negative torque.
Since the output of the control requires the torque feed forward signal to be bipolar, then
the load cell voltage needs to be scaled properly in order to generate the appropriate
values of torque. A customer supplied signal processor board can be used for this
purpose (the load cell could have this feature built in).
In a typical elevator application, the accelerating torque is significantly greater than the
holding torque (or torque required at zero speed), which means that it is not necessary to
use the full range (±10 volt) capability of the torque feed forward. This is shown in Figure
A-1. A ±5 volt output of the signal processor board is probably adequate for most typical
elevator applications.
Figure A-1 Typical Elevator Application
Counterweight
Load
Cell
Elevator Car
0-10V
Signal
Signal
Processor Board
±5V
Signal
LOCAL
PROG
JOG
DISP
FWD
SHIFT
ENTER
REV
RESET
STOP
Baldor Series H
Vector or
DC SCR Control
Appendix A-1MN770
Page 47
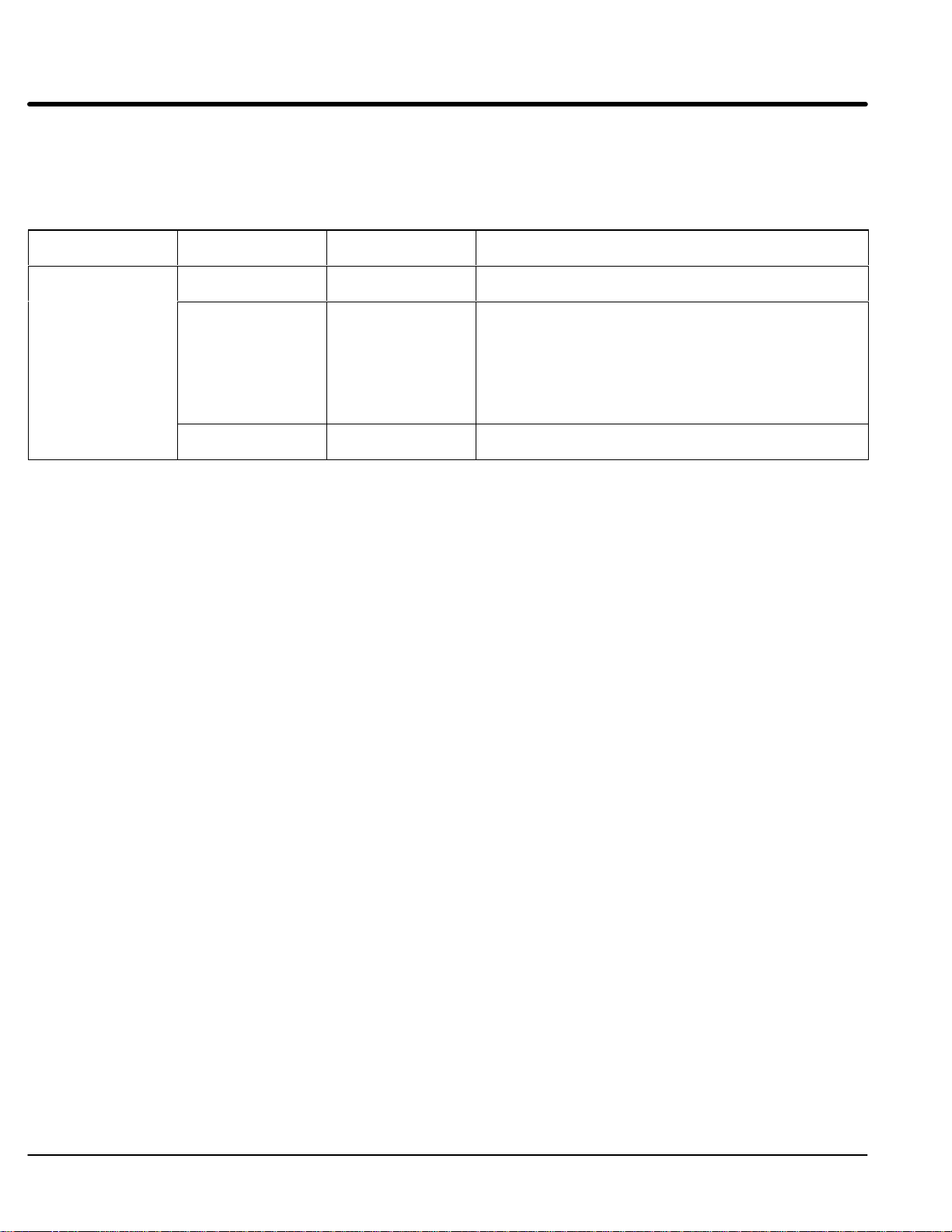
Section 1
General Information
The parameters and inputs used for torque feed forward are indicated in the Table A-1.
For a Vector control, the OPERATING MODE selected will be BIPOLAR or 15 SPEED.
For a Series 20H DC SCR control, BIPOLAR HOIST or 7 SPEED HOIST should be
selected.
Table A-1
Analog Command
Select Parameter
10V W/TORQ FF J1-4, 5
Input Terminal
(J4-4, 5 for Inverter)
J1-2
(J4-2 for inverter)
J1-1
(J4-1 for inverter)
Input Range and
Location
–10 to +10VDC
Differential
–10 to +10VDC This input is bipolar and controls the Torque Feed
common Input reference (J1-2 or J4-2).
Note: It may be necessary to connect J1-4 or J1-5 to J1-1 (ground). This will
provide a single ended input range of 0 to 10VDC or 0 to –10VDC.
Description of Operation
This input signal should be applied to the control prior to the control ENABLE signal and
the release of the holding brake. The control will then generate the commanded torque
when the control is enabled and the holding brake is released. This occurs because the
initial current will be greater than the MAG AMPS value. This will generate torque and
because it is directly proportional to the measured load, it will prevent roll back. It is not
necessary to remove this input during normal operation.
Type
This input is bipolar. The polarity of the signal selects
the direction and speed of travel.
Forward value. Torque is proportional to current. The
input voltage is scaled to the PK Current Limit value of
the control. +10VDC = PK Current Limit parameter
value for positive torque, +5VDC= 1/2 the PK Current
Limit parameter value and 0VDC= zero current.
Negative input voltages represent negative torque.
Description
A-2 Appendix A MN770
Page 48

Appendix B
Serial Communications
Baldor’s Series 15H and 21H Inverters, 20H DC SCR or 18H and 22H Vector controls
may be monitored or operated remotely by a modem an a Serial Communication
expansion board on the control. By using either the EXB001A01 or EXB002A01 Serial
Communications boards for RS-232 communications, the control parameters and
diagnostic menus may be viewed and parameter values changed from a remote
computer.
Note: Operating the Baldor control from a remote location is only possible if the the
Level 1 Input block, Operation Mode parameter is changed to Serial. Refer to
MN1310 for more details on Serial Communication and serial operation of
Baldor controls.
WARNING: Use extreme care when in the Remote mode. You can gain
complete control of the Series H control and motor operation from
any phone line available. You can initiate an operation that could
be hazardous to personnel or equipment from a remote location.
Baldor assumes no liability for use, installation or application of the
information contained in this document.
WARNING: Using the elevator with the control in the Serial operating mode
should only be done when the elevator is not occupied and an
authorized and competent elevator operator is next to the control to
take over manually if necessary. When Serial communications is
finished, the serial communications equipment should be
disconnected and operation should be returned to the elevator
controller.
Laptop or
Other Computer
Figure B-1 shows the overall concept of Serial Communications for operating a control
from a remote location. Refer to MN1310 Serial Communications for more information
regarding this operating mode.
Figure B-1 Remote Communications
RS232 CableRS232 Cable
Modem, any 14,400 or
28,800BPS modem.
Modem, US Robotics
28,800BPS External.
Appendix B-1MN770
Page 49

Section 1
General Information
B-2 Appendix B MN770
Page 50

Appendix C
Elevator Industry Glossary
Adjusters – The elevator mechanic who does advanced maintenance or supervisory functions in conjunction with
mechanics.
Approach Speed – A fixed speed sometimes used on high speed elevators as an intermediate speed for the last few feet
before switching to the leveling speed.
Balanced Car – A condition where the elevator car is balanced by adding weights into the car equal to the counterweight.
Under this condition, the car neither falls or rises in the shaft if the brake is released and the drive disabled.
Brake – Elevators use a spring set brake consisting of a drum acted upon by brake friction shoes. Some modern
elevators now have disc brakes.
Braking Resistors – Large resistors added externally to the motor control to absorb excess energy generated during
regeneration or overhauling loads.
Braking Transistor – Usually added to the motor control which can be switched on when a high bus is detected to bleed
off excess energy to external braking resistors.
Capacity – The load of the car expressed in pounds or kilograms (does not include car or cable weight).
Car
– The cab of the elevator which is raised or lowered in the hoist way.
Commissioning – The procedure of testing the elevator at all conditions and full loads to ensure that it meets the design
criteria specified by the consultant.
Consultant – An individual who aids building owners and architects in the design and specifications of elevators by
writing performance specifications. Usually a member of NAVTP (National Association of Vertical
Transportation Professionals).
Contract Speed – The maximum speed in Feet per minute (FPM) or Meters per second (M/S) an elevator runs. Usually
specified in the initial contract for the job.
Contractor – A company which performs installation and maintenance of elevators. Usually a member of NAEC (National
Association of Elevator Contractors).
Controller – This is the computer or PLC which commands the drives. It performing the logic and sequencing for each
elevator. It dispatches elevators based on call requests and provides for fault safety protection.
Controller Manufacturer – The company which engineers the complete elevator drive system including dispatcher,
computer or PLC, software, motor and control. This is usually provided as a panel for local installation.
Counterweight – Weight added to counterbalance the elevator, usually when it is loaded to 40% of its maximum capacity.
Efficiency – Usually the efficiency of gearing on geared elevators.
Elevator Room – With traction machines, this is located above the hoist ways and contains the motors and controls for
the elevators. With hydros, the elevator room may be located on the lowest floor, adjacent to the elevators
and containing the hydraulic pumps and elevator controls.
Field Forcing – On a DC motor and control, the motor field may be supplied with more than rated voltage to
over–saturate the field providing quick response.
Floor to Floor Time – A specification of the time it would take an elevator to go from one floor to the next or multiple
floors.
Following Error – The difference between the commanded speed and the actual speed of the elevator car.
Appendix C-1MN770
Page 51

Section 1
General Information
Gearless Elevator – An elevator powered by a low speed motor (usually DC) which has the drive sheave mounted
directly on the motor shaft. It uses no gearbox. These are used in high speed elevators. Typical motor speeds
are 70 -150 RPM at contract speed.
Governor – A mechanical speed measuring device propelled by a cable suspended from the elevator. As speed
increases, centrifugal force causes counterweights to move and signal the controller of a fault condition.
Eventually, the brake is activated to stop the elevator movement if a predetermined car speed limit is
exceeded.
Hoist way – The elevator shaft.
Hydraulic Elevator – An elevator raised and lowered by a hydraulic cylinder. Limited to fairly slow speeds and a low
number of stops. Also called a hydro.
Inspection – The act of visual and functional testing of the elevator. May be performed by contractors or city/state
inspectors.
Inspection Speed – A fixed low speed (about 10 ft/min) used to move the elevator car for inspection purposes. Similar to
a jog speed in an industrial application.
Jerk – Represents the rate of change of acceleration or deceleration during an S–curve.
Leveling – The act of aligning the elevator car with the floor. Current elevator code requires this to be within ±1/4 inch.
Leveling Field – On a DC control, the field voltage setting which provides more than rated voltage to over–excite the
motor field used during the leveling process.
Leveling Speed – A fixed low speed used to move the elevator the final two feet allowing precision floor leveling.
M-Contactor – Provides a positive disconnect of the motor from electrical power. Most elevator codes require one or two
M-Contactors between the motor and control.
Mechanic – An electrically operated device that provides a positive disconnect of the motor from the control. Elevator
codes vary but most require one or two M-Contactors be installed between the motor and control.
Modernization – Updating of an old elevator with new drives and controls to meet current codes.
Motor-Generator Set – On older DC elevators, an AC motor powers a DC generator supplying DC power to operate the
DC traction motor. By varying the field excitation of the DC generator, the power supplied to the DC motor
may be adjusted. Also known as a Ward–Leonard set.
NAEC – National Association of Elevator Contractors, the trade organization of contractors, suppliers and consultants for
the elevator industry in the US.
NAVTP – National Association of Vertical Transportation Specialists, the trade organization of elevator consultants.
Overhead – The area above the elevator at the top of the hoist way.
Overhauling Load – When a load requires more torque than the motor can provide, the motor may exceed the
commanded speed. This is an overhauling load. Braking is used to prevent the load (car) from falling. The
brake may be mechanical or electrical (dynamic or regenerative). Ultimately a mechanical brake must be set
to hold the load in case of a power failure or when the drive is not enabled. Baldor Line Regenerative controls
provide reverse torque to hold the load and prevent a run away over speed condition.
C-2 Appendix C MN770
Page 52

Section 1
General Information
Pattern Generator – An external circuit board used to generate an adjustable S–curve speed command for smooth
acceleration and deceleration. This signal is used by the motor control instead of any on–board S–curve. It
uses feedback from the elevator by means of a DC tach or encoder.
Pit – The area below the elevator at the bottom of the hoist way. It usually contains a buffer or other means of stopping
the car during emergencies.
Rails – The steel tracks which guide the elevator in the hoist way.
Rollback – A condition where the holding brake is released and the elevator car rolls slightly in the hoist way before the
control is able to hold it steady prior to moving to the next stop.
Ropes – The steel cables used to suspend the car and counterweights.
Running Field – On a DC control, the normal field voltage setting which provides rated field voltage to the motor for most
conditions.
Sheave – A drum mounted on the output shaft of the traction machine gearbox or the armature of a gearless motor on
which the cables holding the elevator are wrapped. This rotates to drive the elevator.
Standby Field – On a DC control, the field voltage setting which provides a reduced field voltage to the motor allowing the
field to be continuously energized. It is the same as field economy in industrial applications, usually 67% of
rated field voltage.
Stop – The number of floors in the building where the elevator may be boarded.
Tape – A punched tape (similar to a NC machine programming tape) which is attached in the hoist way providing actual
elevator position to the controller.
Torque Feed Forward – A control scheme where the elevator weight is sensed and a voltage is provided to the motor
control as a trim to eliminate any rollback of the car when the brake is released.
Torque Proving – After closing the motor contactors, the motor control checks for continuity with the motor before
releasing the brake and providing full power to the motor.
Tracking – The act of the control following the commanded signal.
Traction Elevator – A geared elevator in which a motor drives either a right angle worm gearbox or an inline gearbox for
speed reduction and torque multiplication. “Traction” comes from the friction of the ropes gripping the sheave
and preventing slippage. The ropes usually have a number of turns around the sheave to increase the
traction.
Turned Over – The final step in commissioning the elevator system for normal passenger use.
VVVF – Variable voltage, variable frequency control – usually an AC inverter.
Appendix C-3MN770
Page 53

Section 1
General Information
C-4 Appendix C MN770
Page 54

BALDOR ELECTRIC COMPANY
P.O. Box 2400
Ft. Smith, AR 72902–2400
(501) 646–4711
Fax (501) 648–5792
Baldor Electric Company
MN770
Printed in USA
3/97 C&J300
 Loading...
Loading...