

Page 1

AC INVERTER
Series 10
Inverter Control
Installation and Operating Manual
2/00 MN710
Page 2

Table of Contents
Section 1
General Information 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limited W arranty 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Safety Notice 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Precautions 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifications 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watts Loss Data 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ratings 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 2
Installation 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Location and Mounting 2-1. . . . . . . . . . . . . . . . . . . . . . . . . .
Terminal Access Cover Removal 2-2. . . . . . . . . . . . . . . . .
Terminal and Jumper Locations 2-3. . . . . . . . . . . . . . . . . .
Wiring Considerations 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . .
Wire Size and Protection Devices 2-5. . . . . . . . . . . . . .
Recommended Terminal Tightening Torques 2-6. . . . .
Main Circuit Wiring 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AC Power Connections 2-7. . . . . . . . . . . . . . . . . . . . . . .
Motor Connections 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor Connections 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Logic Wiring 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Command Inputs 2-10. . . . . . . . . . . . . . . . . . . . . .
Analog Output 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Opto Isolated Inputs 2-11. . . . . . . . . . . . . . . . . . . . . . . . . .
External Trip Connection 2-11. . . . . . . . . . . . . . . . . . . . . .
Jumper J19 Input Selection 2-12. . . . . . . . . . . . . . . . . . . .
Relay Outputs 2-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table of Contents i
Page 3

Selection Of Operation Mode And Connection Diagrams 2-13
2 Wire Run/Stop Connections 2-14. . . . . . . . . . . . . . . . . .
3 Wire Run/Stop Connections 2-16. . . . . . . . . . . . . . . . . .
2 Wire Run/Stop, Electronic Potentiometer Connections . . .
2-17
3 Wire Run/Stop, Electronic Potentiometer Connections . . .
2-17
MOL Terminal Connections 2-18. . . . . . . . . . . . . . . . . . . .
Pre-Operation Checks 2-20. . . . . . . . . . . . . . . . . . . . . . . . . .
Check of Electrical Items 2-20. . . . . . . . . . . . . . . . . . . . . .
Check of Motors/Couplings 2-20. . . . . . . . . . . . . . . . . . . .
Temporary Application of Power 2-21. . . . . . . . . . . . . . . .
Pre-Operation Check List 2-21. . . . . . . . . . . . . . . . . . . . . .
Section 3
Operation 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Key Functions 3-1. . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Status Indicator 3-3. . . . . . . . . . . . . . . . . . . . . . . . .
Description of Keypad Displays 3-4. . . . . . . . . . . . . . . . . . .
Stop Mode 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Run Mode 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Program Mode 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Security Access/Lockout 3-6. . . . . . . . . . . . . . . . . . . . . .
Control Operation Adjustment 3-6. . . . . . . . . . . . . . . . . . . .
Level One Parameter Adjustments 3-7. . . . . . . . . . . . . . . .
07-Last Fault 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12-Output Frequency 3-7. . . . . . . . . . . . . . . . . . . . . . . . .
13-Output Voltage 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
14-Output Current 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
15-Drive Load 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii Table of Contents
Page 4

16-Load Torque 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17-Heatsink Temp 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
21-Operating Mode 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . .
31-Min Output Frequency 3-9. . . . . . . . . . . . . . . . . . . . .
32-Max Output Frequency 3-9. . . . . . . . . . . . . . . . . . . . .
42-Accel Time #1 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . .
43-Decel Time #1 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . .
52-Torque Boost 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65-Slip Comp Adj 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . .
67-Timed Overload Trip 3-11. . . . . . . . . . . . . . . . . . . . . . .
70-Analog Output Scale 3-11. . . . . . . . . . . . . . . . . . . . . . .
71-Analog Output Select 3-12. . . . . . . . . . . . . . . . . . . . . .
75-Relay Output Select 3-12. . . . . . . . . . . . . . . . . . . . . . .
Level Two Parameter Adjustments 3-13. . . . . . . . . . . . . . . .
02-Software Revision 3-13. . . . . . . . . . . . . . . . . . . . . . . . .
03-Rated Current 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . .
08-Second Fault 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
09-First Fault 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24-Analog Command Select 3-14. . . . . . . . . . . . . . . . . . .
33-Preset Speed #1 3-14. . . . . . . . . . . . . . . . . . . . . . . . . .
34-Preset Speed #2 3-14. . . . . . . . . . . . . . . . . . . . . . . . . .
35-Preset Speed #3 3-15. . . . . . . . . . . . . . . . . . . . . . . . . .
36-Preset Speed #4 3-15. . . . . . . . . . . . . . . . . . . . . . . . . .
37-Preset Speed #5 3-15. . . . . . . . . . . . . . . . . . . . . . . . . .
38-Preset Speed #6 3-15. . . . . . . . . . . . . . . . . . . . . . . . . .
39-Min Freq Torque Limit 3-15. . . . . . . . . . . . . . . . . . . . . .
41-Accel/Decel/Coast Select 3-16. . . . . . . . . . . . . . . . . . .
44-Accel Time #2 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table of Contents iii
Page 5

45-Decel Time #2 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . . .
46-Decel Time Torque Limit 3-17. . . . . . . . . . . . . . . . . . . .
47-DC Brake Time 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . .
48-DC Brake Voltage 3-18. . . . . . . . . . . . . . . . . . . . . . . . .
51-V/HZ Profile 3-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53-Control Base Frequency 3-20. . . . . . . . . . . . . . . . . . . .
59-Max. Output Volts 3-20. . . . . . . . . . . . . . . . . . . . . . . . .
61-Load Torque Limit FWD 3-20. . . . . . . . . . . . . . . . . . . .
62-Load Torque Limit REV 3-21. . . . . . . . . . . . . . . . . . . . .
63-Regen Torque Limit FWD 3-21. . . . . . . . . . . . . . . . . . .
64-Regen Torque Limit REV 3-21. . . . . . . . . . . . . . . . . . .
68-Number of Restarts 3-21. . . . . . . . . . . . . . . . . . . . . . . .
69-Restart Delay 3-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77-External Trip Select 3-22. . . . . . . . . . . . . . . . . . . . . . . .
81-Factory Settings 3-23. . . . . . . . . . . . . . . . . . . . . . . . . . .
82-Start Options 3-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Auto Restart 3-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Synchro Starts 3-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84-Display Options 3-25. . . . . . . . . . . . . . . . . . . . . . . . . . .
87-Security Access Code 3-26. . . . . . . . . . . . . . . . . . . . . .
Section 4
Troubleshooting 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagnostic Displays 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Maintenance 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Troubleshooting 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 5
Illustrations 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix A
Parameters A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iv Table of Contents
Page 6
Section 1
General Information
Limited Warranty
For a period of two (2) years from the date of original purchase,
BALDOR will repair or replace without charge controls which our
examination proves to be defective in material or workmanship.
This warranty is valid if the unit has not been tampered with by
unauthorized persons, misused, abused, or improperly installed
and has been used in accordance with the instructions and/or
ratings supplied. This warranty is in lieu of any other warranty or
guarantee expressed or implied. BALDOR shall not be held
responsible for any expense (including installation and removal),
inconvenience, or consequential damage, including injury to any
person or property caused by items of our manufacture or sale.
(Some states do not allow exclusion or limitation of incidental or
consequential damages, so the above exclusion may not apply.) In
any event, BALDOR’s total liability, under all circumstances, shall
not exceed the full purchase price of the control. Claims for
purchase price refunds, repairs, or replacements must be referred
to BALDOR with all pertinent data as to the defect, the date
purchased, the task performed by the control, and the problem
encountered. No liability is assumed for expendable items such as
fuses.
Goods may be returned only with written notification including a
BALDOR Return Authorization Number and any return shipments
must be prepaid.
General Information 1-1
Page 7
Safety Notice
This equipment contains voltages that may be as great as 800
volts! Electrical shock can cause serious or fatal injury. Only
qualified personnel should attempt the start-up procedure or
troubleshoot this equipment.
This equipment may be connected to other machines that have
rotating parts or parts that are driven by this equipment.
Improper use can cause serious or fatal injury. Only qualified
personnel should attempt the start-up procedure or troubleshoot
this equipment.
PRECAUTIONS
WARNING: Do not touch any circuit board, power device
or electrical connection before you first
ensure that power has been disconnected
and there is no high voltage present from
this equipment or other equipment to which
it is connected. Electrical shock can cause
serious or fatal injury. Only qualified
personnel should attempt the start-up
procedure or troubleshoot this equipment.
WARNING: Be sure that you are completely familiar with
the safe operation of this equipment. This
equipment may be connected to other
machines that have rotating parts or parts
that are controlled by this equipment.
Improper use can cause serious or fatal
injury. Only qualified personnel should
attempt the start-up procedure or
troubleshoot this equipment.
1-2 General Information
Page 8
WARNING: Be sure the system is properly grounded
before applying power. Do not apply AC
power before you ensure that all grounding
instructions have been followed. Electrical
shock can cause serious or fatal injury.
WARNING: Do not remove cover for at least five (5)
minutes after AC power is disconnected to
allow capacitors to discharge. Dangerous
voltages are present inside the equipment.
Electrical shock can cause serious or fatal
injury.
WARNING: Improper operation of control may cause
violent motion of the motor shaft and driven
equipment. Be certain that unexpected
motor shaft movement will not cause injury
to personnel or damage to equipment. Peak
torque of several times the rated motor
torque can occur during control failure.
WARNING: Motor circuit may have high voltage present
whenever AC power is applied, even when
motor is not rotating. Electrical shock can
cause serious or fatal injury.
WARNING: This unit has an automatic restart feature
that will start the motor whenever input
power is applied and a RUN (FWD or REV)
command is issued and maintained. If an
automatic restart of the motor could cause
injury to personnel, the automatic restart
feature should be disabled by changing the
AUTORESTART parameter 82 to MANUAL.
General Information 1-3
Page 9
Specifications
Horse Power 0.5 - 1 HP @ 115VAC, 1PH
Input Voltage 95 - 127 VAC, 50/60Hz, Single Phase
Phase Imbalance
(3Phase Only)
Input Frequency 50/60Hz (±10%)
Enclosure NEMA 1
Output Voltage 0 to Maximum Input AC Voltage
Output Frequency 0.1 to 400 Hz
Output Current See Control Rating Table
Service Factor 1.0
Duty Cycle Continuous
Overload Capacity See Control Rating Table
Control Method Voltage Vector PWM
Carrier Frequency 9.2kHz
Frequency Resolution 0.05Hz
V/Hz Ratio 0.24 - 8.85 (230VAC)
Output Transistor Type IGBT (Insulated Gate Bipolar Transistor)
Transistor Rise Time
Torque Boost Standard (automatic adjustment to load)
Volts/Hertz Pattern Linear to Squared Reduced (in 6 patterns)
Accel/Decel Time 0.1 to 600 seconds (for 2 assignable)
Base Frequency 26 to 960 Hz
Dynamic Brake Torque Up to 60% for 6 seconds
0.5 - 5 HP @ 230VAC, 3PH
1 - 5 HP @ 460VAC, 3PH
187 - 253VAC, 50/60Hz, Three Phase
342 - 506VAC, 50/60Hz, Three Phase
±2%
0.48 - 17.69 (460VAC)
2500Volts/msec (dv/dt)
Manual (0-15% of input voltage)
1-4 General Information
Page 10
Auto Restart Manual or Automatic
Min. Output Frequency 0.1 to 400Hz
Max. Output Frequency 20 to 400Hz
Slip Compensation 0 to 12%
Opto Input Impedance 4.5 k Ohms
Ambient Temperature 0°C to 40°C (Maximum without derating)
Humidity 90% Maximum RH non-condensing
Altitude 3300 Ft. (Maximum without derating)
Frequency Setting Keypad, 0-5VDC, 0-10VDC, 0-20mA
Frequency Setting Pot. 5k Ohm, 0.5 Watt
Operating Modes Keypad, 2 Wire, 3 Wire, Preset Speeds,
Vibration 0.6G Maximum
Agency Listings UL and cUL Listed
Electronic Potentiometer
General Information 1-5
Page 11
Operator Keypad
Display Custom Backlit LCD
Keypad 8 Key with Tactile Feel
Functions Output Status Monitoring, Digital Speed Control,
LED Indicators Red/Green for Status
Parameter Setting and Display and Fault Log
Display
Analog Outputs
Analog Outputs 1 Assignable
Full Scale Range 0 to 10VDC Maximum
Output Conditions 3 conditions plus calibration
(see Analog Output Table)
Relay Outputs
Relay Outputs 1 Assignable
Rated Voltage 115VAC
Rated Current 1 Ampere Maximum
Conditions 10 conditions (see Relay Output Table)
Fault Conditions
Automatic Shutdown 15 conditions (see Fault Code Table)
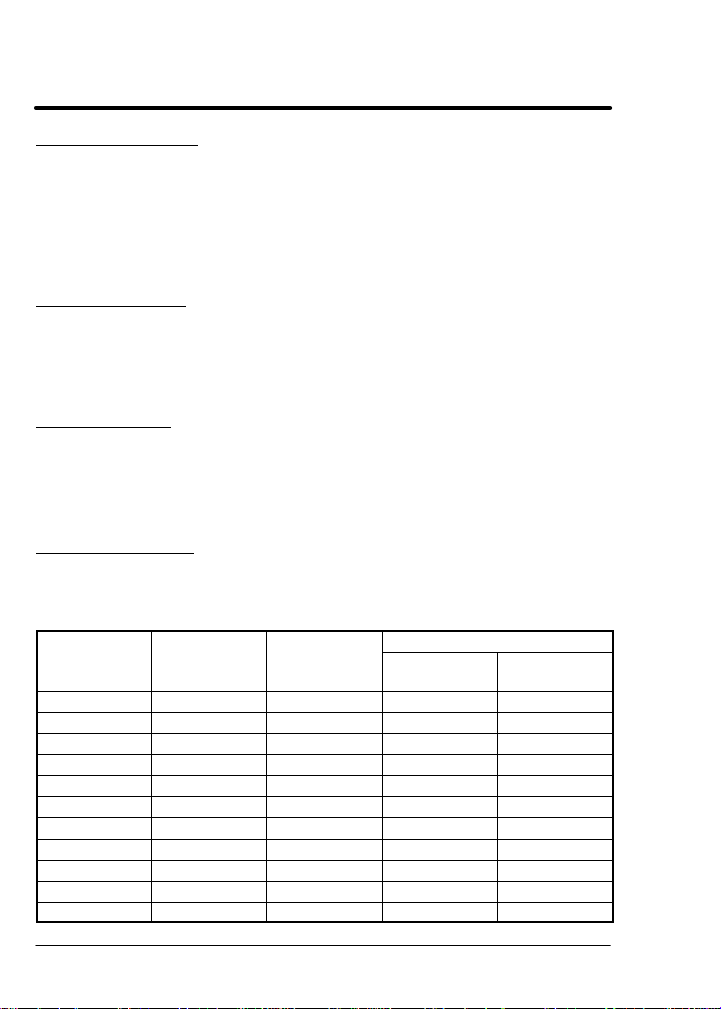
Watts Loss Data
Catalog No. Horsepower
ID101F50-E 0.5 1PH 115 24 N/A
ID10101-E 1.0 1PH 115 42 N/A
ID102F50-E 0.5 3PH 230 16 19
ID10201-E 1.0 3PH 230 28 37
ID10202-E 2.0 3PH 230 52 66
ID10203-E 3.0 3PH 230 66 70
ID10205-E 5.0 3PH 230 70 129
ID10401-E 1.0 3PH 460 N/A 40
ID10402-E 2.0 3PH 460 N/A 67
ID10403-E 3.0 3PH 460 N/A 118
ID10405-E 5.0 3PH 460 N/A 184
Input
Voltage
Total Watts Loss
Single Phase
Input
Three Phase
Input
1-6 General Information
Page 12

Ratings
Catalog No. HP
(kW)
ID101F50-E 0.5
(0.37)
ID10101-E 1.0
(0.75)
ID102F50-E 0.5
(0.37)
ID10201-E 1.0
(0.75)
ID10202-E 2.0
(1.5)
ID10203-E 3.0
(2.2)
ID10205-E 5.0
(3.7)
ID10401-E 1.0
(0.75)
ID10402-E 2.0
(1.5)
ID10403-E 3.0
(2.2)
ID10405-E 5.0
(3.7)
Input Output
VAC Amps Volts
VAC
115 4.5 230 2.2 3.3
115 8.9 230 4.0 6.0
230 1.9 230 2.2 3.3
230 3.8 230 4.0 6.0
230 7.5 230 7.5 11.3
230 10.4 230 10.6 15.9
230 17.6 230 16.7 25.1
460 2.3 460 2.2 3.3
460 5.1 460 4.1 6.2
460 6.2 460 6.1 9.2
460 10.8 460 9.9 14.9
Amps
Cont *
Amps
Peak
* Rating equals 1.1 times parameter 03-Rated Current value.
Note: 230VAC three phase units can be operated at 230VAC
single phase power if the output current AMPS
(Continuous and Peak) are derated by 25%.
General Information 1-7
Page 13

1-8 General Information
Page 14
Section 2
Installation
This section describes the proper mounting and wiring of the
BALDOR Series 10 Inverter. If problems arise, please refer to
the troubleshooting information located in Section 4.
Location and Mounting
Select a mounting surface for the inverter that will allow the
control to be mounted in a vertical position using the four
mounting holes provided. The area selected should allow for
free air circulation around the control. Provide for at least five
inches of clearance on all sides for maximum cooling efficiency.
Caution: Avoid locating the inverter immediately
above or beside heat generating equipment,
or directly below water or steam pipes.
The ambient temperature around the control should not exceed
40°C. If the control is mounted into an existing control cabinet,
the ambient temperature limits should not be exceeded or failure
of the control may result. In cases where extreme temperatures
are unavoidable, a separate blower fan or cooling system should
be considered. Please contact the factory for derating of
controls operated in temperatures above 40°C.
The standard ventilated NEMA 1 enclosure should not be used
in areas where the control will be subjected to liquids, chemicals,
large amounts of airborne material (i.e. dust or lint), or explosive
atmospheres. Appropriate protection should be provided for the
inverter when used in these environments.
If the control will be subjected to levels of vibration above 0.6G,
then the inverter should be shock mounted. Excessive vibration
within the control could cause internal connections to loosen and
cause component failure or electrical shock hazard.
Installation 2-1
Page 15
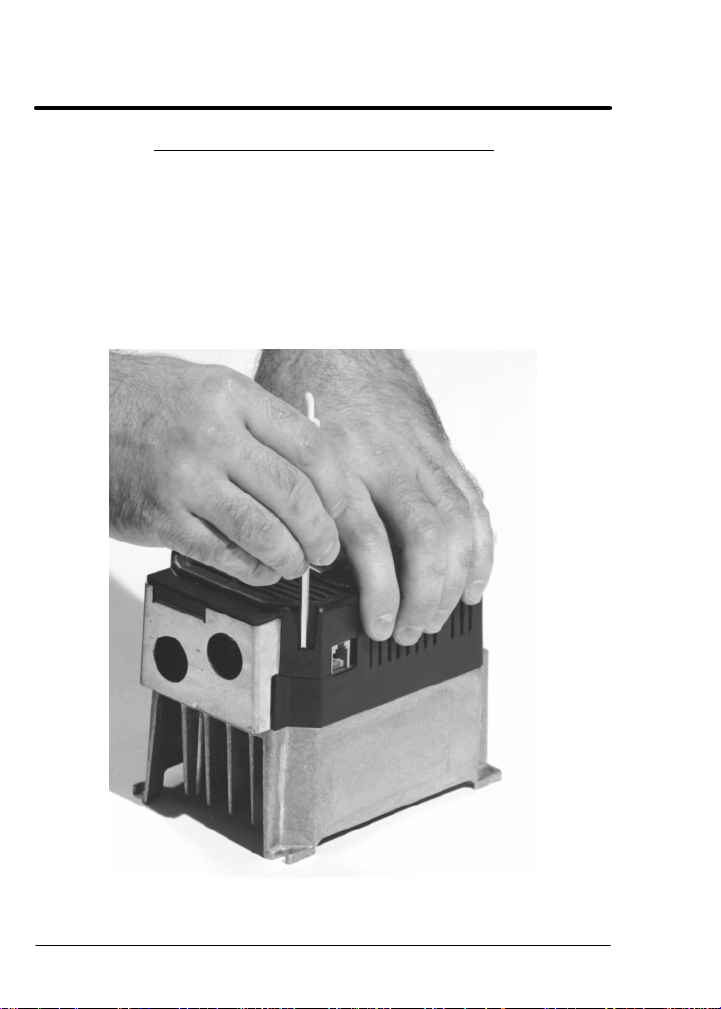
Terminal Access Cover Removal
To remove the Terminal Access Cover insert a small blade
screwdriver into the slots located on the lower left and right hand
corners of the access cover. Use a slight twisting motion while
lifting upward to loosen one side. Use the same motion to
loosen the other side then lift the cover off of the control. To
reinstall, simply snap the cover back into place. See Figure 2-1
below.
Figure 2-1
2-2 Installation
Page 16
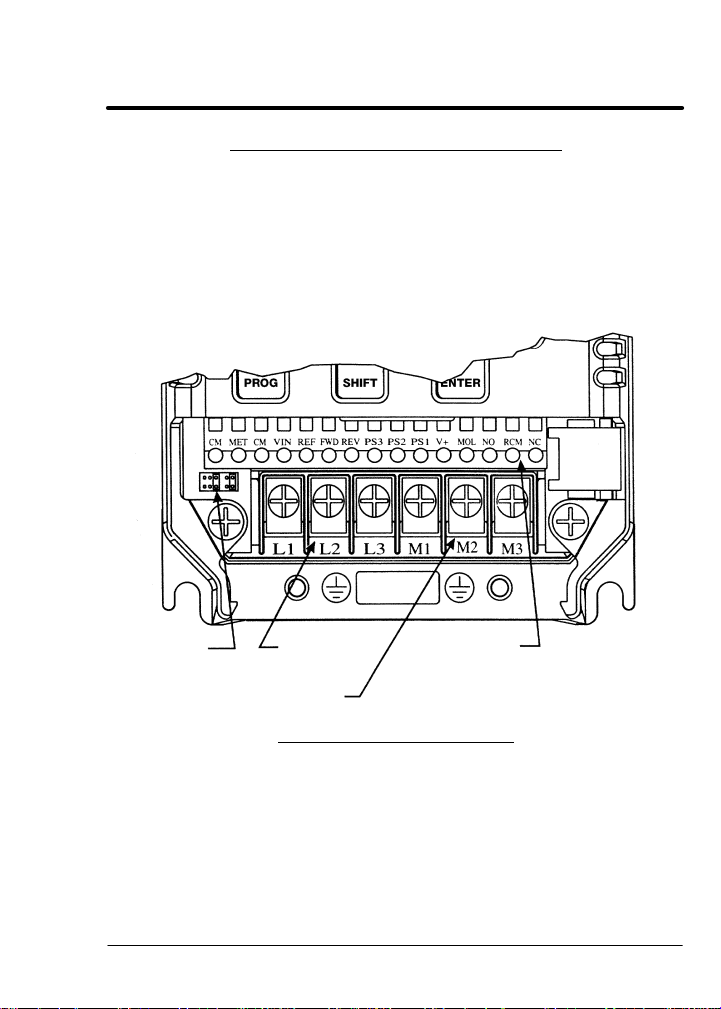
Terminal and Jumper Locations
Figure 2-2 shows the location of the power terminal strip , control
terminal strip , ground lug, and user adjustable jumper locations.
Only motor and input power should be connected to the power
terminal strip. Motor ground and input power earth ground
should be connected to the ground lug. Only external control
wiring should be connected to control terminal strip.
Figure 2-2 Terminal and Jumper Locations
J19
AC Line
L1, L2, L3
Motor
M1, M2, M3
Control
Terminals
Wiring Considerations
Interconnection wiring is required between the motor control, AC
power source, motor, host control and any operator interface
stations. Use listed closed loop connectors that are of
appropriate size for wire gauge being used. Connectors are to
be installed using crimp tool specified by the manufacturer of the
connector. Only Class 1 wiring should be used.
Installation 2-3
Page 17
Caution: Separate over-current protection may be
required by the National Electrical Code. The
installer of this equipment is responsible for
complying with the National Electrical Code
and any applicable local codes which govern
such practices as wiring protection,
grounding, disconnects, and other current
protection.
The inverter is self protected from normal AC line transients and
surges. Additional external protection may be required if high
energy transients are present on the incoming power source.
These transients could be caused by sharing a power source
with arc welding equipment, large motors being started across
the line, or other industrial equipment requiring large surge
currents. To prevent inverter damage due to power source
disturbances the following should be considered:
1. Connect the inverter on a feeder line separate from those
supplying large inductive loads.
2. Supply power to the inverter through a suitably sized
isolation transformer. When using an isolation transformer
to power the inverter, always switch the power off and on
between the transformer secondary and the inverter input to
avoid spikes at the inverter when power is removed from
the primary side.
3. Supply power to the inverter through a suitably sized line
reactor. Line reactors serve several purposes:
4.
A. Minimize voltage spikes from the power line that may
cause the inverter to trip on over-voltage.
B. Minimize voltage harmonics from the inverter to the
power line.
C. Provide additional short circuit capability at the inverter.
2-4 Installation
Page 18
Caution: Do not use power factor correction
HP
Breaker
capacitors on the input power lines to the
inverter or damage to the control may result.
All external control wiring to the inverter should be run in a
separate conduit from all other wiring. The use of shielded
twisted pair wire is recommended for all control wiring. The
shield of the control wiring should be connected to control
terminal CM of the inverter only. The other end of the shield
should be taped to the wire jacket to prevent electrical shorts.
Conduit openings are provided at the bottom of the inverter
housing to allow power and control wiring entrance to the control.
Please refer to the inverter outline drawings located in Section 5
of this manual for sizes of the conduit openings.
The following tables show recommended wire size and
protection devices along with recommended terminal tightening
torques.
Wire Size and Protection Devices
Rated
Catalog No.
ID101F50-E 0.5 14 240V/10A 240V/5A 240V/3A
ID10101-E 1 14 240V/15A 240V/10A 240V/6A
ID102F50-E 0.5 14 240V/10A 240V/5A 240V/3A
ID10201-E 1 14 240V/15A 240V/10A 240V/6A
ID10202-E 2 14 240V/20A 240V/20A 240V/12A
ID10203-E 3 14 240V/25 240V/25 240V/15
ID10205-E 5 12 240V/40 240V/35 240V/25
ID10401-E 1 14 480V/5A 480V/5A 480V/6A
ID10402-E 2 14 480V/10A 480V/10A 480V/12A
ID10403-E 3 14 480V/15 480V/15 480V/15
ID10405-E 5 14 480V/20 480V/20 480V/25
Rated
HP
Input/
Output
Output
Wire
Wire
AWG Cu
Input
Input
Breaker
Input Fuses
Fast Time
Acting Delay
Input and output wire size is based on use of 60/75°C rated
copper conductor wire.
Installation 2-5
Page 19
Recommended Terminal Tightening Torques
Catalog No.
All Series 10 10 In-Lb (1.13 Nm) 2 In-Lb (0.23 Nm)
Tightening Torques
Power Terminal TB1 Control Terminal Strip
Caution: Do not use this control with any input
voltage other than stated on the control
nameplate. Use of control with wrong power
source can damage the control.
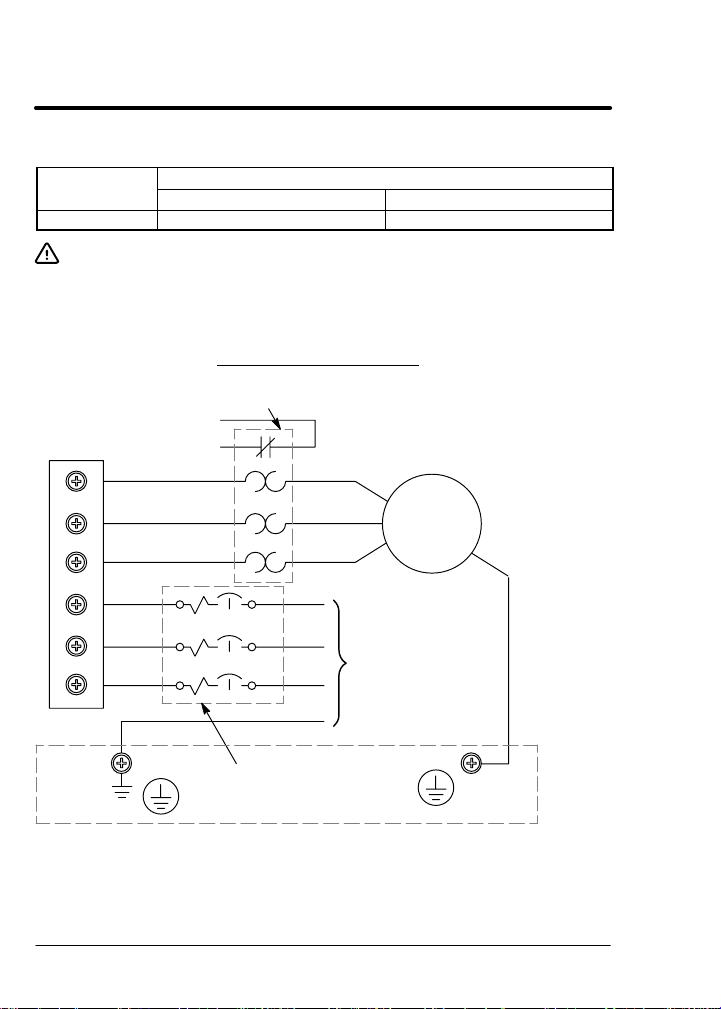
Main Circuit Wiring
External or remote motor overload protection
may be required by NEC or other regulator codes.
To External
Trip Circuit
T3
T2
T1
Motor
GND
M3
M2
M1
L3 *
L2
L1
50/60Hz
3 Phase Power
Heatsink
GND
* Note: L3 is not available on 115VAC input models.
Breaker or Fuse
Protection customer
provided option
Heatsink
GND
See recommended tightening torques for terminal connectors.
2-6 Installation
Page 20

AC Power Connections
Connect the fused three phase AC power lines to the input
power terminals L1, L2, and L3. The phase rotation of the input
power is not important since the control is not sensitive to phase
rotation of the input power. For single phase AC power connect
to input power terminals L1 and L2.
Connect an earth ground to the inverter according to any
applicable electrical code. The earth ground should be
connected to the inverter chassis ground screw.
The use of a power disconnect is recommended between the
input power and the inverter to provide a fail safe method to
disconnect the inverter from the input power. The inverter will
remain in a power up condition until all input power is removed
from the control and the internal bus voltage is depleted.
Caution: Do not attempt to service this equipment
while bus voltage is present within the
inverter. Remove input power and wait at
least 5 minutes for the residual power in the
bus capacitors to dissipate.
Caution: This unit has an automatic restart feature
that will start the motor whenever input
power is applied and a maintained external
run (FWD or REV) command is present at the
control. If an automatic restart of the motor
could cause personal injury or harm, the
auto restart feature should be defeated with
external control wiring or by adjusting
parameter 82-Start Options.
Installation 2-7
Page 21
Motor Connections
Connect the three phase power leads of the AC motor to
terminals M1, M2, and M3 of the inverter power terminal strip.
The motor ground lead or case ground should be connected to
the inverter chassis ground screw. The motor should be
connected to the inverter at all times during inverter operation.
If additional motor overload protection is required, the use of
suitably sized motor overload relays are recommended. Motor
overload relays should be connected between the motor and
inverter with the relay trip indicator circuit connected into the
external inverter control circuitry to power down or trip the
inverter in the event of motor overloading.
Caution: Overload relays with an automatic reset
feature are not recommended in applications
where an automatic restart of the motor
could cause personal injury or harm. If
manual reset relays are not available, then
the automatic reset feature should be
defeated.
If the motor is equipped with a normally closed thermostat, the
thermostat should be connected at terminals MOL and CM of the
control terminal strip. The inverter will also need to be
programmed to trip if this thermostat circuit opens indicating a
motor overload condition. The inverter will need to be
programmed by adjusting parameter 77-External Trip Select and
placing the proper jumper position on jumper terminals J19.
If during initial motor start up the motor rotation is opposite to
that desired, disconnect the input power from the inverter and
wait at least 5 minutes for the bus voltage to bleed off.
Interchange any two of the three motor leads at the inverter
power terminal strip M1, M2, and M3 to change the shaft rotation
of the motor.
2-8 Installation
Page 22
M-Contactor
If required by local codes or for safety reasons, an M-Contactor
(motor circuit contactor) may be installed. However, incorrect
installation or failure of the M-Contactor or wiring may damage
the control.
Caution: If an M-Contactor is installed, the control
must be disabled at least 20msec before the
M-Contactor is opened. If the M-Contactor is
opened while the control is supplying
voltage and current to the motor, the control
may me damaged.
A motor circuit contactor provides a positive disconnect of the
motor windings from the control. Opening the M-Contactor
ensures that the control cannot drive the motor. This may be
required during certain manual operations with the load (like
cleaning cutting knives etc.). Figure 2-3 shows how an
M-Contactor is connected to the H series control.
Figure 2-3 Typical Connections for M-Contactor
Stop/E-Stop
M
M3
M2
M1
M
Motor
See recommended tightening torques for terminal connectors.
Installation 2-9
Page 23
Logic Wiring
All logic and control connections are made at the control terminal
strip located on the motor control board. Screw type terminals
are provided for easy connection to your external control station
and meters. The control terminal strip can be divided into four
major categories as follows:
1) Analog command inputs.
2) Analog outputs.
3) Opto Isolated inputs.
4) Relay outputs.
Analog Command Inputs
An external 5kohm potentiometer can be connected at terminals
CM, VIN, and REF. The potentiometer should be connected so
that full resistance is connected from CM and REF. REF is a
5VDC potentiometer reference output. The wiper of the
potentiometer should be connected at terminal VIN. The speed
command input will be recognized at terminals CM and VIN.
When using a potentiometer as the speed command, the Analog
Command Select parameter will need to be programmed to 0 or
1 and jumper J19 will need to be set properly.
An external speed command of 0-5VDC, 0-10VDC, 0-20 mA, or
4- 20mA can be used instead of a potentiometer at terminals CM
and VIN. The positive lead should be connected at terminal VIN
and the negative lead should be connected at terminal CM. The
Analog Command Select parameter should also be programmed
to 0 or 1 and jumper J19 will need to be set properly.
2-10 Installation
Page 24

Analog Output
One programmable analog output is available for external
monitoring of the drive condition. This output is available at
terminals CM and MET. The output will be 0-10VDC. The
positive lead of the external meter should be connected to
terminal MET and the negative lead should be connected at
terminal CM. The output condition is programmed in parameter
71-Analog Output Select. The analog output gain (max output
voltage) can be adjusted in parameter 70- Analog Output Scale.
Please refer to the Analog Output Table in Section 3 for the
possible monitoring conditions.
Opto Isolated Inputs
Six digital inputs are available at terminals FWD, REV, PS3,
PS2, PS1, and MOL to command various output conditions. The
available command condition at the terminal may change
depending on the operating mode selected. These inputs can be
configured for Pull- Up or Pull-Down Logic. The factory setting is
for Pull-Up Logic. The Inputs will be active when connected to
terminal V+ or when utilizing an external 0-24 VDC power supply
with the power supply common connected to terminal CM. The
selection of Pull-UP or Pull-Down Logic is set by jumper J19.
Depending on the function of the command input, a maintained
switch closure or momentary switch closure will be required.
Connection to a PLC, CNC, or host computer are also possible.
External Trip Connection
Terminal MOL is available for connection to a normally open or
normally closed thermostat in all operating modes. This
connection is available for connection to a motor thermostat or
overload relay. The thermostat or overload relay input can also
be configured for Pull-Up or Pull-Down Logic. If the state of the
motor thermostat or overload relay should ever change indicating
an over-temperature condition, the inverter will automatically
shut down and give an External Trip fault (F07) or will cause the
Installation 2-11
Page 25

motor to coast to a stop. The fault or coast to stop operation of
the MOL input terminal is selected by parameter 77-External Trip
Select. The selection of pull- up or pull-down logic is set by
jumper J19.
Jumper J19 Input Selection
Jumper J19 is a pin-jumper selector located to the left and below
the control terminal strip (See Figure 2-2). Five jumper positions
are available and are arranged in one group of three positions
and one group of two positions with one shorting jumper in each
group. The group of two located to the right hand side are used
to select the active state of the opto isolated inputs (Pull-Up or
Pull-down Logic). The group of three located to the left hand
side are used to select the type of analog speed command signal
to be used. The available analog speed command signals are
0-5VDC, 0-10VDC, 0-20 mA, and 4-20 mA. A 5kohm 1/2 watt
potentiometer can be used by configuring for 0-5VDC. The
available jumper settings are shown in the following diagram:
Jumper J19 Selections
Analog speed
command settings
0Ć10VDC Command
Signal
0Ć20mA or 4Ć20mA
Command Signal
0Ć5VDC or Potentiometer
Command Signal
(Factory Setting)
OPTO isolated
input settings
PullĆdown logic inputs are
active when connected to
terminal CM
PullĆup logic inputs are active
when connected to terminal
V+or external 0Ć24VDC supply
with it's common connected to
CM.
0Ć3VDC = Inactive
10Ć24VDC = Active
(Factory Setting)
Caution: Remove input power and wait at least 5
minutes for the residual power in the bus
capacitors to dissipate before changing the
J19 jumper positions.
2-12 Installation
Page 26

Relay Outputs
Programmable relay outputs are available for external monitoring
of the drive condition. These outputs are available at terminals
NO (Normally Open) and NC (Normally Closed) with a common
at terminal RCM (Relay Common). The circuit must be
completed by connection at terminals NO or NC and returned to
RCM. The output condition for terminals NO and NC is
programmed in parameter 75- Relay Output Select. The relay
outputs are rated at 115 VAC and 1 Amp maximum.
Selection Of Operation Mode And Connection Diagrams
Several operating modes are available within the Series 10
inverter . These operating modes define the basic operation of
the input terminal configurations and motor control setup. The
operating modes are selected by the setting of jumper J19, and
programming of parameters 21-Operating Mode, 24-Analog
Command Select, 41- Accel/Decel/Coast Select, and 77-External
Trip Select. These functions are briefly shown below. For a
more detailed discussion please refer to Section 3 of this
manual.
0-10VDC External
Speed Reference
Shield
-
+
0-5VDC External
Speed Reference
CM
-
VIN
+
REF
Shield
CM
VIN
REF
Speed
Potentiometer
Shield
CW
CM
VIN
REF
5.2VDC
Current
Reference
Shield
-
+
CM
VIN
REF
J19 J19 J19 J19
0Ć10VDC
0Ć5VDC 0Ć5VDC 0Ć20 or
4Ć20mA
See recommended tightening torques for terminal connectors.
Installation 2-13
Page 27

2 Wire Run/Stop Connections
Parameter 21 - Operating Mode = 2 or 3
Parameter 41 - Accel/Decel/Coast select = 0, 1, 2, 4, 5 or 6
Shield
Forward
Reverse
Speed Select
Speed Select
Speed Select
J19
Pull–Up Logic
Shield
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
Forward
Reverse
Speed Select
Speed Select
Speed Select
J19
Pull–Down Logic
See recommended tightening torques for terminal connectors.
Speed Select
PS3 PS2 PS1 Function
Open Open Open Keypad or
Analog Command Input
Open Open Closed 33 - Preset Speed #1
Open Closed Open 34 - Preset Speed #2
Open Closed Closed 35 - Preset Speed #3
Closed Open Open 36 - Preset Speed #4
Closed Open Closed 37 - Preset Speed #5
Closed Closed Open 38 - Preset Speed #6
Closed Closed Closed 32 - Max Output Frequency
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
2-14 Installation
Page 28

2 Wire Run/Stop Connections
Parameter 21 - Operating Mode = 2 or 3
Parameter 41 - Accel/Decel/Coast select = 3 or 7
Shield
Forward
Reverse
Ramp Select
Speed Select
Speed Select
J19
Pull–Up Logic
Shield
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
Forward
Reverse
Ramp Select
Speed Select
Speed Select
J19
Pull–Down Logic
See recommended tightening torques for terminal connectors.
Speed Select
PS2 PS1 Function
Open Open Keypad or
Analog Command Input
Open Closed 33 - Preset Speed #1
Closed Open 34 - Preset Speed #2
Closed Closed 35 - Preset Speed #3
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
Ramp Select
PS3 Function
Open 42 - Accel Time #1 Active
Closed
43 - Decel Time #1 Active
Open 44 - Accel Time #2 Active
Closed
45 - Decel Time #2 Active
Installation 2-15
Page 29

3 Wire Run/Stop Connections
Parameter 21 - Operating Mode = 4 or 5
Shield
Forward
Reverse
Stop
Speed Select
Speed Select
J19
Pull–Up Logic
Shield
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
Forward
Reverse
Stop
Speed Select
Speed Select
J19
Pull–Down Logic
See recommended tightening torques for terminal connectors.
Speed Select
PS2 PS1 Function
Open Open Keypad or
Analog Command Input
Open Closed 33 - Preset Speed #1
Closed Open 34 - Preset Speed #2
Closed Closed 35 - Preset Speed #3
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
2-16 Installation
Page 30

2 Wire Run/Stop, Electronic Potentiometer Connections
Parameter 21 - Operating Mode = 6
Shield
Forward
Reverse
Preset Speed #4
Increase
Decrease
J19
Pull–Up Logic
Shield
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
Forward
Reverse
Preset Speed #4
Increase
Decrease
J19
Pull–Down Logic
3 Wire Run/Stop, Electronic Potentiometer Connections
Parameter 21 - Operating Mode = 7
Shield
Forward
Reverse
Stop
Increase
Decrease
J19
Pull–Up Logic
Shield
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
Forward
Reverse
Stop
Increase
Decrease
J19
Pull–Down Logic
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
CM
FWD
REV
PS3
PS2
PS1
V+
MOL
See recommended tightening torques for terminal connectors.
Installation 2-17
Page 31

MOL Terminal Connections (77-External Trip Select)
CM
CM
Shield
CM
Shield
CM
Shield
Normally Open
Device
V+
MOL
J19
Pull–Up Logic
Shield
V+
MOL
Normally Closed
Device
Analog Meter
Shield
-
+
CM
V
MET
V+
MOL
Normally Open
Device
J19
Pull–Down Logic
Relay Output
NO
RCM
NC
Normally Closed
Device
See recommended tightening torques for terminal connectors.
V+
MOL
2-18 Installation
Page 32

Jumper J19 - Used to select the active state of the opto isolated
inputs (Pull-Up or Pull-down Logic) and to select the type of
analog speed command signal to be applied. The available
analog speed command signals are 0-5 VDC, 0-10 VDC, 0-20
mA, and 4-20 mA. A 5kohm 1/2 Watt Potentiometer can be used
by configuring for 0-5 VDC.
21-Operating Mode - Defines the source for speed reference
command and RUN/STOP control inputs.
24-Analog Command Select - Defines the type of external
speed reference command and if the command is accepted as a
direct command or inverted command.
41-Accel/Decel/Coast Select - Selects which Accel and Decel
Time parameters are applied to the control output and also
defines if Coast to Stop is active after a STOP command.
77-External Trip Select - Defines if a normally open or normally
closed contact at control terminal MOL will generate an External
Trip Fault (F07) or a Coast to Stop condition.
82-Start Options - Sets the operation of Auto Restart and
Synchro Starts. Also enables or disables the STOP key as an
E-Stop when operating from the control terminal strip and the
Stop function due to a disconnection of an external command
line connected at the control terminal strip.
Installation 2-19
Page 33

Pre-Operation Checks
Check of Electrical Items
After completing all the installation steps and before applying line
power to the system, carefully check the following items:
1. Verify AC line voltage at source matches control rating.
2. Inspect all power terminations for workmanship and
tightness.
3. Verify control and motor are grounded to each other and the
control is connected to earth ground.
4. Check incoming signal wiring for accuracy.
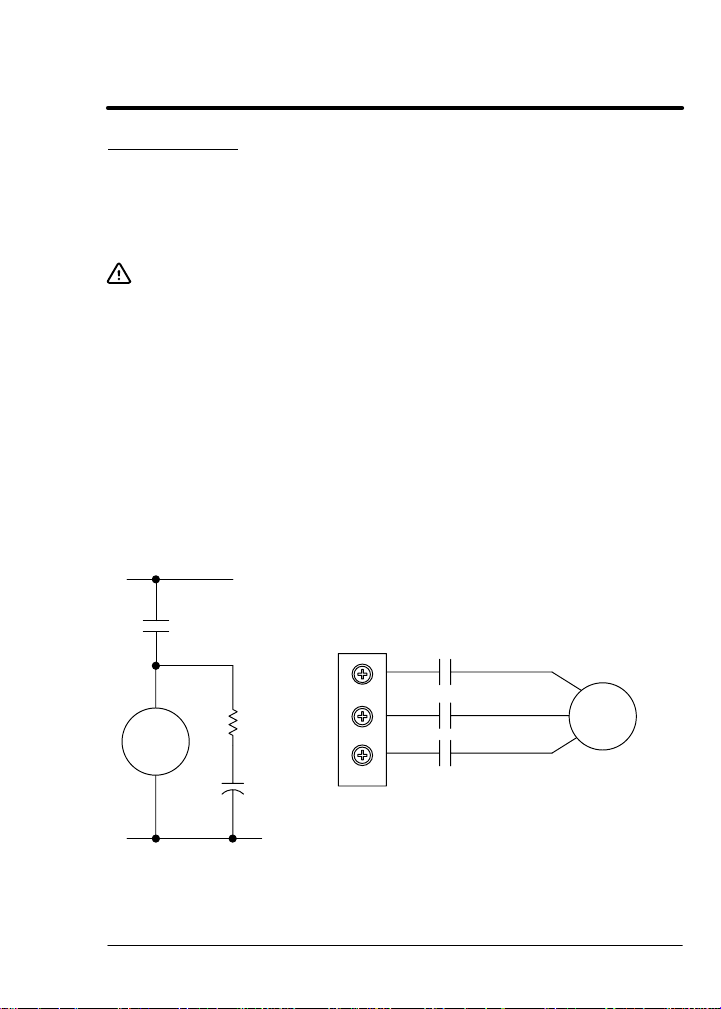
Be certain all brake coils, contactors, and relay coils have
noise suppression. This should be an R-C filter for AC coils
and reverse polarity diodes for DC coils. MOV type
transient suppression is not adequate.
WARNING: MAKE SURE THA T UNEXPECTED
OPERATION OF THE MOTOR SHAFT
DURING START-UP WILL NOT CAUSE
INJURY TO PERSONNEL OR DAMAGE TO
EQUIPMENT.
Check of Motors/Couplings
Verify freedom of motion for all motor shafts and that all motor
couplings are tight without backlash.
Verify the holding brakes, if any, are properly adjusted to fully
release and set to the desired torque value.
2-20 Installation
Page 34

Temporary Application of Power
Double check electrical and mechanical connections before
applying power to the control.
Temporarily apply power and observe that the display is on. If
this indication doesn’t occur, double check all connections and
verify input voltage. If the display still is not on, refer to the
troubleshooting table in Section 4.
Pre-Operation Check List
1) Verify jumper J19 settings.
2) Verify 21-Operating Mode setting.
3) Verify 24-Analog Command Select settings.
4) Verify 41-Accel/Decel/Coast Select settings.
5) Verify 77-External Trip Select settings.
6) Verify 82-Start Options settings.
7) Review Section 3 of this manual for more detailed
information on parameter adjustments and their affects on
motor operation.
Installation 2-21
Page 35

2-22 Installation
Page 36

Section 3
Operation
Keypad Key Functions
The programming and basic operation of the Series 10 Inverter
is accomplished by simple keystrokes on the operator control
panel. The function of the keys are as follows:
Operation 3-1
Page 37

STOP Push to initiate a stop command. Depending on the
setup of the control the motor will either ramp (Regen) or Coast
to Stop. See 41-Accel/Decel/Coast Select in Section 3 for more
information.
FWD Used to initiate a forward direction run of the motor .
REV Used to initiate a reverse direction run of the motor.
PROG Used to access Level 1 Parameters. Holding the SHIFT
key then pressing the PROG key will access Level 2
Parameters. If in the Run Mode the control will only allow
viewing of the parameter values. Any attempt to change a
parameter value while in the Run Mode will result in the display
showing “-----”. If in the Stop Mode pressing PROG or holding
SHIFT then pressing PROG will enter the Programming Mode at
Level 1 and Level 2 Parameters respectively. Pressing the
PROG key while in the Programming Mode will return the control
to the Stop Mode.
SHIFT Used in the Program Mode to allow changing of a
parameter value. While in Program Mode, the factory preset
value may be reset for any parameter by pressing the SHIFT key
then the UP and DOWN ARROW keys simultaneously. The New
parameter value is stored when the ENTER key is pressed.
UP ARROW Used to change the displayed parameter or
parameter value up one increment. In the Programming Mode
the displayed parameters or parameter values will increment up
until the highest possible value is reached. The UP Arrow is also
used to increment the set speed in the Stop Mode and increment
the actual speed in the Run Mode. The value will increase at a
faster rate after holding the UP Arrow key for 5 seconds.
Pressing SHIFT while holding the UP Arrow will bypass the 5
second delay.
DOWN ARROW Used to change the displayed parameter or
parameter value down one increment. In the Programming Mode
the displayed parameters or parameter values will increment
down until the lowest possible value is reached. The DOWN
3-2 Operation
Page 38

Arrow is also used to decrement the set speed in the Stop Mode
and decrement the actual speed in the Run Mode. The value will
decrease at a faster rate after holding the DOWN Arrow key for 5
seconds. Pressing SHIFT while holding the DOWN Arrow will
bypass the 5 second delay.
ENTER Used to store a new parameter value when in the
Programming Mode. Also used in the Run and Stop Modes to
store the current output frequency as the initial output frequency
when power is applied to the inverter.
Keypad Status Indicator
The STATUS indicator consists of two LED’s, one green and one
red. They are visible through a lens in the upper right hand
corner of the keypad. The following table defines the STATUS
indicator state for the various operating conditions of the inverter.
STATUS INDICATION OPERATING CONDITION
Continuous displays
Green and Red Power on, Restart (2 Seconds)
Red Stop, Running in Torque Limit
Green Run
Intermittent Displays
Alternate Green and
Red Blinking
Green Blinking Running in and out of an Overvoltage
Red Blinking Fault Condition, Emergency Stop,
Running in and out of Torque Limit
or Undervoltage condition
Auto Restart Lock-out, Low Voltage
Operation 3-3
Page 39

Description of Keypad Displays
The custom, back-lit, LCD display provides information on drive
operation and programming. The four large 7-segment displays
show inverter output and programming data.
Two smaller 7-segment displays are used to indicate parameter
numbers. Special symbols and displays provide further
clarification of drive operation. In normal operation only those
segments that are active are displayed. The following figure
shows all segments displayed. The following table lists the
special symbols and their meaning.
3-4 Operation
Page 40

Symbol Description
FWD Forward direction commanded
REV Reverse direction commanded
PRG Program Mode Selected (Steady)
Parameter Value may be changed (Blinking)
SET Drive is Stopped or running frequency being set
OV Overvoltage condition
UV Undervoltage condition
LIM Running in Torque Limit
OC Running in Overcurrent condition (Blinking)
Overcurrent Fault (Steady)
TEMP Running in Overtemperature condition (Blinking)
Overtemperature Fault (Steady)
DB Dynamic Brake circuit is active
rpm Revolutions per minute indication
Hz Frequency in Hertz
h Time in Hours
s Time in Seconds
A Output Current in Amperes
V Output Voltage in Volts
% Display is in percent of units
C Degrees Centigrade
Stop Mode
At the time of initial power up and after a Stop command the
control is in the Stop Mode and the display will show the set
output frequency of the control.
Run Mode
When a Forward or Reverse Run command is given the control
is in the Run Mode and the display will show one of several
output status values. The displayed output can be Output
Frequency, Output Current, Drive Load, or RPM. The displayed
output is selected by parameter 84-Display Options.
Operation 3-5
Page 41

Program Mode
Use the Program Mode to customize the control to suit a variety
of applications by programming the operating parameters. From
the Stop Mode press the PROG key to access the Level 1
Program Mode. Hold the SHIFT key and press the PROG key to
access the Level 2 Program Mode. When in the Program Mode
press the SHIFT key then the UP/DOWN Arrow keys to change
a parameter value. Pressing the ENTER key will save the new
parameter value. To return to the Stop Mode, press the PROG
key. Parameters may only be programmed when accessed from
the Stop Mode. If entering the Programming Mode from the Run
Mode the parameter values may only be viewed.
Security Access/Lockout
Access to the control parameters can be protected by use of the
security code. Security is enabled, and the Security Code is
defined by setting parameter 87-Security Access Code. If the
Security Access Code is enabled and the Programming Mode is
entered then the following display is shown to prompt for the
previously defined Security Code. After the proper Security
Code is entered, the display will return to the normal
Programming Mode Display.
Control Operation Adjustment
The following control adjustments are available within the Series
10 inverter to allow custom tailoring of the drive for particular
applications. Table NO TAG user parameters lists the location
and possible values of the various control adjustments. The
following paragraphs discuss control parameter adjustments and
their effect on drive performance.
3-6 Operation
Page 42

Level One Parameter Adjustments
07-Last Fault - A view only parameter that displays the most
recent fault condition along with the elapsed time from the last
restart of the control and the fault occurrence. The elapsed time
is indicated in 0.1 hour increments with 0.9 hour maximum
displayed. The two left most digits displayed is the fault code
and the right most digits is the elapsed time.
12-Output Frequency - A view only parameter that displays
inverter output frequency in Hertz applied to the motor.
13-Output Voltage - A view only parameter that displays inverter
output voltage as a percentage of line input voltage.
14-Output Current - A view only parameter that displays
inverter output current in Amps RMS per phase. The accuracy
of the displayed current is ±20% and should not be used for
motor overload sizing.
15-Drive Load - A view only parameter that displays true part of
motor current with motor power factor considered. The
displayed value is shown as a percentage of parameter
03-Rated Current and has an accuracy of ±20%. Positive values
indicate motoring and negative values will indicate a
regenerative overhauling load.
16-Load Torque - A view only parameter that displays torque
output of the motor. The displayed value is a percentage of
rated motor torque. Positive values will indicate motoring and
negative values indicate a regenerative overhauling load. This
parameter is most useful in determining available motor torque
when operating with output frequencies above the value set in
parameter 53-Control Base Frequency.
17-Heatsink Temp - A view only parameter that displays the
inverter heatsink temperature in degrees Centigrade.
Operation 3-7
Page 43

21-Operating Mode - Sets the basic operation of the inverter
input terminals and keypad FWD and REV keys. The Series 10
inverter has several modes of operation to fit various application
requirements. Please refer to the following table to determine
which operating mode is right for your application. The available
options include keypad only, control terminal strip only,
combination keypad and control terminal strip operation,
electronic potentiometer, preset speeds, 2-wire control, and
3-wire control. The factory setting is “0”, keypad speed control
and keypad run FWD only.
Parameter 21-Operating Mode
Value
Speed
Control
0 Keypad Keypad Keypad FWD Only, 8 Speeds or 4 speeds
10 Keypad Keypad Keypad FWD and REV, 8 Speeds or 4 speeds
1 Terminals Keypad Keypad FWD Only, 8 Speeds or 4 speeds
11 Terminals Keypad Keypad FWD and REV, 8 Speeds or 4 speeds
2 Keypad Terminals 2-Wire, 8 Speeds or 4 speeds with Accel/De3 Terminals Terminals 2-Wire, 8 Speeds or 4 speeds with Accel/De4 Keypad Terminals 3-Wire, 4 Speeds
5 Terminals Terminals 3-Wire, 4 Speeds
6 Terminals Terminals 2-Wire Electronic Pot with 1 Preset Speed or
7 Terminals Terminals 3-Wire Electronic Pot
Start
Control
Type of Control
with Accel/Decel Select
with Accel/Decel Select
with Accel/Decel Select
with Accel/Decel Select
cel Select
cel Select
Accel/Decel Select
3-8 Operation
Page 44

Electronic Pot Control Terminal Logic
Parameter 21-Operating Mode = 6 or 7
COMMAND CONTROL TERMINALS
DESCRIPTION
STOP OPEN OPEN X X
Speed = 0 CLOSED CLOSED X X
FWD Decrease CLOSED OPEN CLOSED X
FWD Hold CLOSED OPEN OPEN OPEN
FWD Increase CLOSED OPEN OPEN CLOSED
REV Decrease OPEN CLOSED CLOSED X
REV Hold OPEN CLOSED OPEN OPEN
REV Increase OPEN CLOSED OPEN CLOSED
FWD REV PS1 PS2
X=Don’t Care Condition.
31-Min Output Frequency - Sets a minimum output frequency
provided to the motor. During operation the output frequency will
not be allowed to go below the minimum output frequency unless
the motor is starting from 0 Hz or is ramped to a stop. The
available values are 0 to 400 Hz. The factory setting is 0 Hz.
32-Max Output Frequency - Sets a maximum output frequency
provided to the motor. The available values are 20 to 400 Hz.
The factory setting is 60 Hz.
42-Accel Time #1 - Sets the time in seconds for the output
frequency of the inverter to linearly increase from 0 Hz to the
frequency specified by parameter 32-Max Output Frequency.
The adjustable range is from 0 Sec to 600 Sec.
43-Decel Time #1 - Sets the time in seconds for the output
frequency of the inverter to linearly decrease from the frequency
specified by parameter 32-Max Output Frequency to 0 Hz. The
adjustable range is from 0 Sec to 600 Sec.
Operation 3-9
Page 45

Note: Since the motor uses rotor slip to produce motor torque,
the motor speed will not necessarily increase/decrease
linearly with a linear increase/decrease in applied motor
frequency. Some trial and error may be necessary to find
the optimum Accel and Decel settings for your application.
If the control trips (faults) during rapid accel or decel,
selecting longer ramp times will help eliminate the trips.
52-Torque Boost - The Torque Boost parameter can be
adjusted to provide more or less starting torque from the motor
than is available with the factory setting. The boost adjustment
alters the output voltage of the inverter from the normal value (as
defined by the V/HZ Profile) by increasing or decreasing the
starting output voltage by fixed values.
The boost is set from the factory at a level that is suitable for
most applications. If adjustment is required, adjust the boost up
in small increments until the motor shaft just starts to rotate with
maximum load applied. Caution should be exercised when
adjusting the Torque Boost parameter to prevent motor
overheating at low operating speeds. The Torque Boost is
adjustable from 0% to 25% of the nominal input voltage.
65-Slip Comp Adj - The Slip Compensation Adjustment is
available to compensate for varying load conditions during
normal operation. This parameter will set the maximum amount
of allowable variation in output frequency under varying load
conditions which the control will see as changes in output
current. As the control sees the motor current increase towards
100% of parameter 03-Rated Current (Inverter Rated Current),
the inverter will automatically increase the output frequency to
compensate for slip. The range of adjustment is from 0-12%.
The factory setting is 0%.
3-10 Operation
Page 46

67-Timed Overload Trip - Sets the amount of overload that will
cause a Timed Overload fault (F20) to occur. A Timed Overload
fault will occur when the output current reaches 150% of the set
value for 1 minute. The Timed Overload Trip is active between
30-100% of the Inverter Rated Current (03-Rated Current)
parameter value. The value of the Timed Overload Trip
parameter should be calculated by the following formula:
Value of Parameter 67 +
Motor FLA X 100
03–Rated Current
The range of adjustment is from 0 to 100%. The factory setting
is 0%. The Timed Overload Trip for various output frequencies is
shown in the following figure:
Trip T ime (Min)
6
0 20 >40Hz
5
4
3
2
1
0
0
50% 100% 150%
70-Analog Output Scale - Allows scaling of the analog meter
output at control terminal MET to be more or less than the
normal 0-10 VDC level. The factory setting is for 10 VDC output
at full inverter output. The adjustable range is 0-255 in digital
units.
Operation 3-11
Page 47

71-Analog Output Select - Allows setting of the analog output
available at the control terminal MET to represent various drive
operating conditions. The analog output is 0 to 10 VDC nominal.
The analog output is useful in applications where a higher level
control is monitoring the operation of the control to make process
decisions based on the current status of the inverter. The output
can also be used to drive remote analog meters that may be
located near the operator. Please review the Analog Output
Table below for the available operating condition selections.
Parameter 71-ANALOG OUTPUT SELECT
Value Description
0 Output Off
1 Output Frequency, Full scale = Parameter 32- MAXIMUM
2 Output Current, Full Scale = 200% of Rated Current
3 Drive Load, Full Scale = 200% of Rated Load
OUTPUT FREQUENCY
75-Relay Output Select - Allows setting of the normally open
and normally closed relay outputs available at the control
terminal strip to represent various drive operating conditions.
The relay outputs are useful in applications where a higher level
control is monitoring the operation of the control to make process
decisions based on the current status of the inverter. These
outputs can also be used to interlock into mechanical brakes,
bypass contactors, and signal an operator if various operating
conditions are present. Please refer to the Relay Output Select
Table for the available operating condition selections.
3-12 Operation
Page 48

Parameter 75-RELAY OUTPUT SELECT
Value Description
0 Off
1 Ready. Inactive at Fault, Low Voltage, Idle, and in Program
2 Fault
3 Forward and Reverse Output, Output Frequency above 0.5 Hz
4 Reverse Output, Output Frequency above 0.5 Hz
5 Forward Output, Output Frequency above 0.5 Hz
6 Output Frequency less than 0.5 Hz
7 Output at Set Frequency
8 Output Frequency greater than Parameter 36-Preset Speed #4
9 Running in Torque Limit
10 Overtemperature Warning. Temperature is within 10 degrees
Mode
setting
C of maximum rating
Level Two Parameter Adjustments
02-Software Revision - A view only parameter that displays the
software revision code of the installed software version.
03-Rated Current - A view only parameter that displays the
factory set nominal output current of the inverter. The factory
setting also serves as the 100% reference for all displayed
output currents. The inverter continuous output current is 110%
of the factory setting.
08-Second Fault - A view only parameter that displays the
second most recent fault condition before the Last Fault along
with the elapsed time from the last restart of the control and the
fault occurrence. The elapsed time is indicated in 0.1 hour
increments with 0.9 hour maximum displayed. The two left most
digits displayed is the fault code and the right most digits is the
elapsed time.
09-First Fault - A view only parameter that displays the most
recent fault condition before the Last Fault along with the
elapsed time from the last restart of the control and the fault
Operation 3-13
Page 49

occurrence. The elapsed time is indicated in 0.1 hour
increments with 0.9 hour maximum displayed. The two left most
digits displayed is the fault code and the right most digits is the
elapsed time.
24-Analog Command Select - Selects the type of external
speed reference command the control should be expecting to
see in your application. The possible values are 0-10V, 0-5V,
0-20mA, and 4- 20mA. If long distances are required between
the control and the external speed command location then 0-20
mA or 4-20mA should be considered since a current loop
command scheme will allow no loss of the command signal with
long cable lengths.
Also sets if the control will recognize a high value of command
signal as a high output command or a low output command of
the inverter. If Direct is selected the control will see a low
command signal as a low speed command and a high command
signal as a high speed command. Direct is the selection used in
most applications. If Inverted is selected the control will see a
low command signal as a high speed command and a high
command signal as a low speed command.
Parameter 24-ANALOG COMMAND SELECT
Value Operation Analog Command Signal
0 Direct 0-10 VDC, 0-5 VDC, 0-20 mA
1 Inverted 10-0 VDC, 5-0 VDC, 20-0 mA
2 Direct 4-20 mA
3 Inverted 20-4 mA
33-Preset Speed #1 - Sets the output frequency when Preset
Speed #1 is commanded at the Control Terminal Strip. The
adjustable range is 0.1-400 Hz. The factory setting is 5 Hz.
34-Preset Speed #2 - Sets the output frequency when Preset
Speed #2 is commanded at the Control Terminal Strip. The
adjustable range is 0.1-400 Hz. The factory setting is 20 Hz.
3-14 Operation
Page 50

35-Preset Speed #3 - Sets the output frequency when Preset
Speed #3 is commanded at the Control Terminal Strip. The
adjustable range is 0.1-400 Hz. The factory setting is 40 Hz.
36-Preset Speed #4 - Sets the output frequency when Preset
Speed #4 is commanded at the Control Terminal Strip. The
adjustable range is 0.1-400 Hz. The factory setting is 60 Hz.
37-Preset Speed #5 - Sets the output frequency when Preset
Speed #5 is commanded at the Control Terminal Strip. The
adjustable range is 0.1-400 Hz. The factory setting is 0 Hz.
38-Preset Speed #6 - Sets the output frequency when Preset
Speed #6 is commanded at the Control Terminal Strip. The
adjustable range is 0.1-400 Hz. The factory setting is 0 Hz.
Note: Preset Speed adjustments set the commanded frequency
to be output from the control when the appropriate preset
speed is initiated. Preset speeds can be initiated by
external command at the control terminal strip. Since a
preset speed only sets an operating speed, a motor
direction command will also need to be initiated in order
for the motor to have rotation.
39-Min Freq Torque Limit - Sets the lowest output frequency
the inverter will output when in torque limit. If the motor loading
is large enough to drive the inverter below this output frequency,
the inverter will trip on an overcurrent fault (F16, F17 or F18).
The adjustable range is 0-400 Hz and the factory setting is 10
Hz. To disable torque limit set a value greater than the
frequency setting in parameter 32- Max Output Frequency. The
rate of deceleration in torque limit is set by parameter 46-Decel
Time Torque Limit.
Operation 3-15
Page 51

41-Accel/Decel/Coast Select - Sets when Accel Times 1 or 2
and Decel Times 1 or 2 are called upon to affect the output
frequency of the inverter. Also can select a Coast to Stop
deceleration after a Stop command. The factory setting is “0”
indicating that parameters 42-Accel Time #1 and 43-Decel Time
#1 are active. Please review the following table for the available
selections.
Parameter 41-ACCEL/DECEL/COAST SELECT
Value Description
0 Ramp to Stop. Parameters 42-Accel Time #1 and 43-Decel Time #1
active
1 Ramp to Stop. Parameters 42-Accel Time #1 and 43-Decel Time #1
active in Forward, Parameters 44-Accel Time #2 and 45-Decel Time #2
active in Reverse
2 Ramp to Stop. Parameters 42-Accel Time #1 and 43-Decel Time #1
active when output frequency is less than Parameter 37-Preset Speed
#5, Parameters 44-Accel Time #2 and 45- Decel Time #2 active when
output frequency is greater than or equal to parameter 37-Preset
Speed #5
3 Ramp to Stop. When Parameter 21-Operating Mode is set to
0,1,2,3,6,10 or 11 an input at PS3 when active will activate Parameters
44-Accel Time #2 and 45-Decel Time #2. Note that input PS3 cannot
be used as a preset speed selector when a value of 3 is chosen
4 Coast to Stop after STOP command. Parameters 42-Accel Time #1
and 43-Decel Time #1 active
5 Coast to Stop after STOP command. Parameters 42-Accel Time #1
and 43-Decel Time #1 active in Forward, Parameters 44-Accel Time #2
and 45-Decel Time #2 active in Reverse
6 Coast to Stop after STOP command. Parameters 42-Accel Time #1
and 43-Decel Time #1 active when output frequency is less than
Parameter 37-Preset Speed #5, Parameters 44- Accel Time #2 and
45-Decel Time #2 active when output frequency is greater than or
equal to parameter 37-Preset Speed #5
7 Coast to Stop after STOP command. When Parameter 21- Operating
Mode is set to 0,1,2,3,6,10 or 11 an input at PS3 when active will
activate Parameters 44-Accel Time #2 and 45-Decel Time #2. Note
that input PS3 cannot be used as a preset speed selector when a
value of 7 is chosen
3-16 Operation
Page 52

44-Accel Time #2 - Sets the time in seconds for the output
frequency of the inverter to linearly increase from 0 Hz to the
frequency specified by parameter 32-Max Output Frequency.
The adjustable range is from 0.1 Sec to 600 Sec.
45-Decel Time #2 - Sets the time in seconds for the output
frequency of the inverter to linearly decrease from the frequency
specified by parameter 32-Max Output Frequency to 0 Hz. The
adjustable range is from 0.1 Sec to 600 Sec.
Note: Since the motor uses rotor slip to produce motor torque,
the motor speed will not necessarily increase/decrease
linearly with a linear increase/decrease in applied motor
frequency. Some trial and error may be necessary to find
the optimum Accel and Decel settings for your application.
If the control trips (faults) during rapid accel or decel,
selecting longer ramp times will help eliminate the trips.
46-Decel Time Torque Limit - Sets the deceleration rate when
the control is operating in torque limit. Also serves as the
acceleration time when the control is in torque limit due to a
regenerative (overhauling load) condition. The adjustable range
is 0.1-30 seconds.
47-DC Brake Time - Sets the amount of time the DC Injection
Braking will be allowed. There are several available options
including Timed DC Braking, Continuous DC Braking, and Off
(disabled). The options are defined in the following table:
Operation 3-17
Page 53

Parameter 41-Parameter 47-DC BRAKE TIME
Value Braking Action / Function
0 DC Braking Disabled
Timed DC Braking (Parameter Value Sets Braking Time)
When both FWD and REV Terminals are closed (active) and
Parameter 21-OPERATING MODE = 2, 3, 4, 5, 6, or (Terminal Strip
Start/Stop Control)
0.05
0.05
When Speed Command is reduced to less than 0.1 Hz while in FWD or
to
REV Run Mode
4.95
4.95
After a STOP Command and the output frequency is reduced to less
than 0.1 Hz
Continuous DC Braking
When both FWD and REV Terminals are closed (active) and
Parameter 21-OPERATING MODE = 2, 3, 4, 5, 6, or 7 (Terminal Strip
Start/Stop Control)
5
5
When Speed Command is reduced to less than 0.1 Hz while in FWD or
REV Run Mode
48-DC Brake Voltage - Sets the amount of DC Voltage applied
to the motor windings to cause the motor to stop. Increasing the
DC Brake Voltage setting will cause the motor to have more
braking torque available for stopping. Caution should be
exercised when adjusting this parameter since DC Injection
Braking will cause additional motor heating if used in applications
requiring frequent starts and stops. The adjustable range is from
0-15 % of parameter 52-Torque Boost setting.
3-18 Operation
Page 54

51-V/HZ Profile - Sets the output V/Hz ratio for all values of
output voltage verses output frequency up to the Control Base
Frequency point. This adjustment will define how much voltage
is applied to the motor in various segments of the output
frequency range. Please note that motor voltage is related to
motor current which can then be related to motor torque. By
adjusting the V/Hz profile you can effectively adjust how much
torque is available from the motor at various speed points. The
available selections include LINEAR (0 or 1) to be used for
constant torque applications such as conveyors, and 50%
Square Law (2 or 3), or 100% Square Law (4 or 5) to be used for
variable torque applications such as centrifugal pumps and
blowers. Even number parameter values will select Auto-Boost
with the maximum amount of Torque Boost set by Parameter
52-Torque Boost. Odd number parameter values will select a
fixed amount of Torque Boost set by Parameter 52-Torque Boost.
The choices are shown graphically in Figure 3-1.
Figure 3-1 Volts/Hertz Profiles
Linear
100% V
Boost
0%
51-V/Hz Profile = 0
F Base
100% V
Boost
0%
51-V/Hz Profile = 1
F Base
100% V
50% Square
Law
Boost
0%
100% V
100% Square
Law
Boost
0%
51-V/Hz Profile = 2
F Base
51-V/Hz Profile = 4
F Base
100% V
Boost
0%
100% V
Boost
0%
51-V/Hz Profile = 3
F Base
51-V/Hz Profile = 5
F Base
Fixed BoostAuto Boost
Operation 3-19
Page 55

53-Control Base Frequency - Sets the point on the V/Hz profile
where the output voltage becomes a constant value with
increasing output frequency. The base frequency point defines
the output frequency where the motor goes from constant torque
(or variable torque) to constant horsepower operation. The
range of adjustment is from 26 to 960 HZ. The factory setting is
60 Hz.
59-Max. Output Volts - Sets the maximum output voltage
available to the motor from the control. The maximum output
voltage of the inverter can be reduced from the line input voltage
to facilitate the use of a motor with an input voltage that is less
than the input voltage to the inverter.
Note: In some cases the Max. Output Volts along with the
Control Base Frequency adjustment can be manipulated
to provide a wider constant torque or wider constant
horsepower speed range than is normally available from
the motor. The Max Output Volts and Control Base
Frequency parameters are normally set to the motors’
rated voltage and rated frequency respectively. Caution
should be exercised if any other values are set into these
parameters. Incorrect values may cause the motor to run
at extreme temperatures or fail prematurely.
61-Load Torque Limit FWD - Sets the maximum amount of
current that is supplied to the motor under a motoring forward
condition before Torque Limiting takes affect. The range of
adjustment is 30- 150% of parameter 03-Rated Current. The
factory setting is 150%.
3-20 Operation
Page 56

62-Load Torque Limit REV - Sets the maximum amount of
current that is supplied to the motor under a motoring reverse
condition before Torque Limiting takes affect. The range of
adjustment is 30- 150% of parameter 03-Rated Current. The
factory setting is 150%.
63-Regen Torque Limit FWD - Sets the maximum amount of
current that is absorbed by the control from the motor under a
regenerative forward condition before Torque Limiting takes
affect. The range of adjustment is 30-110% of parameter
03-Rated Current. The factory setting is 80%.
64-Regen Torque Limit REV - Sets the maximum amount of
current that is absorbed by the control from the motor under a
regenerative reverse condition before Torque Limiting takes
affect. The range of adjustment is 30-110% of parameter
03-Rated Current. The factory setting is 80%.
68-Number of Restarts - Sets the maximum number of
automatic restart attempts that is allowed before the control will
require a manual restart. After ten minutes without reaching the
maximum number of faults, the number of allowable restarts will
be reset to the value specified in the Number Of Restarts
parameter. This feature is useful in applications that require
unattended operation and automatic operation even in the event
of various fault conditions such as unscheduled power outages.
The control will not automatically clear faults F01 through F10.
The adjustable range is 0 - 8. the factory setting is 0 effectively
disabling the Auto Restart function.
69-Restart Delay - Sets the amount of time allowed between a
fault condition (F11 through F20) and an automatic restart. This
feature is useful in setting a sufficient time period for a fault
condition to be cleared before an automatic restart is attempted.
The adjustable range is 0 to 60 seconds.
Operation 3-21
Page 57

77-External Trip Select - Sets if the control will trip (Fault F07)
Logic
Logic
or Coast to Stop if the condition at control terminal MOL is
changed. If set to 0 or 1, then the control will automatically shut
down indicating an External Trip (F07). If set to 2 or 3 the output
to the motor is turned off and the motor is allowed to coast (free
wheel) to a stop. Even values (0 or 2) will cause terminal MOL
to expect a normally low input condition while Odd values (1 or
3) will cause terminal MOL to expect a normally high signal
condition. Jumper J19 sets terminal MOL for Pull-Up or
Pull-Down logic. The following table summarizes the available
options.
Parameter 77-External Trip Select
Jumper J19
Setting
Pull-Up
Logic
Pull-Down
Logic
Value Description / Function
0 Connection of terminal V+ to terminal MOL will cause
an External Trip fault (F07) - Normally Open Operation.
1 Removal of terminal V+ from terminal MOL will cause
an External Trip fault (F07) - Normally Closed
Operation.
2 Connection of terminal V+ to terminal MOL will cause a
Coast to Stop command - Normally Open Operation.
3 Removal of terminal V+ from terminal MOL will cause a
Coast to Stop command - Normally Closed Operation.
0 Connection of terminal CM to terminal MOL will cause
an External Trip fault (F07) - Normally Open Operation.
1 Removal of terminal CM from terminal MOL will cause
an External Trip fault (F07) - Normally Closed
Operation.
2 Connection of terminal CM to terminal MOL will cause a
Coast to Stop command - Normally Open Operation.
3 Removal of terminal CM from terminal MOL will cause
a Coast to Stop command - Normally Closed
Operation.
3-22 Operation
Page 58

81-Factory Settings - If during start-up or operation you find the
control operating parameters have been adjusted to the point of
erratic or abnormal motor operation, the operating parameters
can be reset to the factory settings (1). User parameter settings
can also be stored (2) or recalled (3) for future use. The
selected option will not execute until leaving the Program Mode
and the display will prompt with SETP, STOC, or SETC when
completed. The available options are listed in the table below.
Parameter 81-Factory Settings
Value Description
0 No Action
1 Reset Parameters to Factory Settings
(Display Prompt = SETP)
2 Store User Parameter Settings
(Display Prompt = STOC)
3 Recall User Parameter Settings
(Display Prompt = SETC)
82-Start Options - Sets the operation of Auto Restart and
Synchro Starts. Also enables or disables the STOP key as an
E-Stop when operating from the control terminal strip and the
Stop function due to a disconnection of an external command
line connected at the control terminal strip. Please review the
following paragraphs and logic table for more information on
available selections.
Auto Restart - In the event of a power failure or inverter fault,
the Series 10 inverter can be adjusted to restart automatically.
The number of restart attempts after a fault condition can be set
by specifying the allowable number of trips within a ten minute
time period. After ten minutes has past since the first trip
occurrence, the trip counter within the microprocessor is reset to
zero. The number of allowable trips can be set by adjusting the
parameter 68-Number of Restarts. The time between a trip and
an auto restart is set by parameter 69-Restart Delay.
Operation 3-23
Page 59

If the inverter is set in an Auto Restart Mode and normal
operation is using input power to start and stop the motor, the
inverter may be started once every two minutes. The inverter will
prevent operation if more frequent starts are commanded using
line power connection.
Synchro Starts - The Synchro Starts feature is desirable in
applications where the motor shaft is rotating at the time that
power is supplied to the motor from the inverter. If enabled the
control will automatically sense the motor rotational frequency
and immediately output that frequency at start up.
WARNING: A lightly loaded motor may suddenly
accelerate before locking in the proper
speed. Ensure that this operation will not
cause injury to personnel or damage to
driven equipment.
Parameter 82-Start Options
Value Description
Manual Restart. If parameter 21-OPERATING MODE = 2, 3, or 6
(2-Wire Control) then Run FWD or REV commands must be
0
removed and then re-applied to start after application of line power.
Keypad STOP Key active as a Coast to Stop command. To reset
after Keypad Coast to Stop, press Keypad STOP Key again.
Auto Restart is active after application of line power and Run
Command is given at the Control Terminal Strip. If parameter
1
21-OPERATING MODE = 2, 3, 4, 5, 6, or 7 then Keypad STOP Key
active as a Coast to Stop command. To reset after Keypad Coast
to Stop, press Keypad STOP Key again.
Synchro Start and Manual Restart. If parameter 21- OPERATING
MODE = 2, 3, 4, 5, 6, or 7 then Keypad STOP Key active as a
2
Coast to Stop command. To reset after Keypad Coast to Stop,
press Keypad STOP Key again.
Synchro Start and Auto Restart. If parameter 21-OPERATING
MODE = 2, 3, 4, 5, 6, or 7 then Keypad STOP Key active as a
3
Coast to Stop command. To reset after Keypad Coast to Stop,
press Keypad STOP Key again.
3-24 Operation
Page 60

Parameter 82-Start Options - Continued
Value Description
Manual Restart. If parameter 21-OPERATING MODE = 2, 3, or 6
(2-Wire Control) Then Run FWD or REV commands must be
4
removed and then re-applied to start after application of line power.
Auto Restart is active after application of line power and Run
5
Command is given at the Control Terminal Strip.
6 Synchro Start and Manual Restart
7 Synchro Start and Auto Restart
Manual Restart. If parameter 21-OPERATING MODE = 2, 3, or 6
(2-Wire Control) Then Run FWD or REV commands must be
removed and then re-applied to start after application of line power.
Keypad STOP Key is active as a Coast to Stop command. To reset
8
after Keypad Coast to Stop, press Keypad STOP Key again. A
STOP Command is given if a command signal is sensed at the
Control Terminal Strip and then lost.
Auto Restart is active after application of line power and Run
Command is given at the Control Terminal Strip. If parameter
21-OPERATING MODE = 2, 3, 4, 5, 6, or 7 then Keypad STOP Key
active as a Coast to Stop command. To reset after Keypad Coast
9
to Stop, press Keypad STOP Key again. A STOP Command is
given if a command signal is sensed at the Control Terminal Strip
and then lost.
Synchro Start and Manual Restart. If parameter 21- OPERATING
MODE = 2, 3, 4, 5, 6, or 7 then Keypad STOP Key active as a
Coast to Stop command. To reset after Keypad Coast to Stop,
10
press Keypad STOP Key again. A STOP Command is given if a
command signal is sensed at the Control Terminal Strip and then
lost.
Synchro Start and Auto Restart. If parameter 21- OPERATING
MODE = 2, 3, 4, 5, 6, or 7 then Keypad STOP Key active as a
Coast to Stop command. To reset after Keypad Coast to Stop,
11
press Keypad STOP Key again. A STOP Command is given if a
command signal is sensed at the Control Terminal Strip and then
lost.
84-Display Options - Sets the information to be displayed on
the keypad LCD display during Run operation. The display will
always show set frequency in the Stop Mode and while the
output frequency is being set. If set to a value of “0” the display
will indicate Output Frequency (parameter 12-Output
Operation 3-25
Page 61

Frequency), a setting of “1” will display Output Current
(parameter 14-Output Current), and a setting of “2” will display
Drive Load (parameter 15-Drive Load). A setting of 3-3000 will
display RPM. To display an exact RPM number for a given
motor rated speed, the value of Display Options is found by the
following formula:
Value Displayed 20
(Output Frequency)
+ Display Option Value
For Example: To display 1800 RPM at 60 Hz use 600 as the
Display Option value:
1800 20
60
+ 600
87-Security Access Code - Sets if a security code will need to
be entered before any parameter can be modified. If the
Security State is active a security code will need to be entered
before parameter changes can be made from the keypad.
Setting the Security Access Code to “0” will defeat the security
system. In any case the user will have the ability to view the
parameter values. Access is allowed for ten minutes after the
last keystroke or until the control goes through a restart
sequence. Press the PROG key twice within two seconds after
programming to immediately reinstate the access code. The
security access code can be set from any number between 001
and 999. When changing the Security Access Code parameter
the old Access Code will not be displayed. The factory setting is
0.
Note: Please write down your chosen Security Access Code in a
secure location. If you cannot gain entry into the security
area to change a parameter, please contact BALDOR.
3-26 Operation
Page 62

Section 4
Troubleshooting
Diagnostic Displays
Several diagnostic displays are available from the keypad
display to aid in trouble shooting the inverter. These displays
may occur from normal operation or from a fault trip condition.
Manual Restart (Line Start Lockout). See parameter 82–START
OPTIONS for more information.
Emergency Coast To Stop (Emergency Stop). See parameter
82–START OPTIONS for more information.
Undervoltage Condition (Low Voltage). Input line voltage is
too low.
Typical Fault Display.
Troubleshooting 4-1
Page 63

In the event of a fault trip, the display will show the fault code
and the STATUS indicator will begin to blink red. Pressing the
UP Arrow before the fault is reset will display the status of the
drive at the time of the fault. More than one display symbol may
be shown to better define the cause of the fault.
Faults can be reset by the following methods:
1) Pressing the Keypad STOP Key
2) Simultaneously closing the FWD and REV terminals at the
Control Terminal Strip
3) Removing AC Line Power
4) By the Auto Restart feature
The following table lists the available Fault Codes. Please note
that only faults F11 through F20 will be reset by the Auto Restart
feature.
Fault Codes
Fault Code Description
F01 Computer Malfunction
F02 Parameter Block Fault
F03 Bus Current Measurement Fault
F04 Power Supply Overload
F05 No DC Bus Voltage
F06 Output Short Circuit
F07 External Trip Fault
F10 Auto Restart Fault
F11 Ground Fault
F13 DC Bus Overvoltage
F16 Overcurrent During Acceleration
F17 Overcurrent During Deceleration
F18 Overcurrent While Running
F19 Heatsink Overtemperature
F20 Timed Overload
4-2 Troubleshooting
Page 64

Maintenance
The BALDOR Series 10 inverters require very little maintenance,
if any, and should provide years of trouble free operation when
installed and applied correctly. Occasional visual inspection
should be considered to insure tight wiring connections and to
avoid the build up of any dust, dirt, or foreign debris. The control
should be physically located in such a manner as to protect the
internal circuits and associated external wiring from any
accumulation of moisture or other types of liquid contaminants.
Before attempting to service this equipment, all input power
should be removed from the inverter to avoid the possibility of
electrical shock. The servicing of this equipment should be
handled by a qualified electrical service technician experienced
in the area of high power electronics.
Troubleshooting
Indication Possible Cause Corrective Action
No Display
Motor Will
Not Start
Motor does
not reach
max speed
Lack of input voltage Verify correct input voltage
Loose connections Check input power connections
Not enough starting
torque
Motor overloaded
Motor overloaded
Max. Output Frequency
Limit set too low
Motor overloaded Check for mechanical overload. If
Improper speed command Verify control is receiving proper
Speed potentiometer
failure
Increase torque boost setting
Verify proper motor and control
rating
Verify couplings are not binding
Install a motor and control with
higher ratings
Adjust setting of Max. Output
Frequency Limit
unloaded motor shaft does not
rotate freely, check motor bearings
command signals at the control
terminal strip
Verify control is set to receive your
type of speed command
Replace potentiometer
Troubleshooting 4-3
Page 65

Indication Possible Cause Corrective Action
Motor will
not stop
not stop
rotation
Unstable
Unstable
motor speed
Motor runs
rough at low
speeds
External trip
fault
Over current
Over current
Timed
overload
overload
fault
MIN. Output Frequency
Limit set too high
Improper speed command Verify control is receiving proper
Speed potentiometer
failure
Oscillating load Correct the loading problem
Unstable input power Correct the input power problem
Slip compensation set too
high
Torque boost set too high Adjust torque boost setting
Misalignment of
motor/load coupling
Defective motor Replace motor.
Insufficient motor
ventilation
ventilation
Motor drawing excessive
current
Volts/Hertz ratio not
adjusted
No thermostat connected Verify connection of all external trip
Accel/Decel rate set too
quickly
Torque boost set too high Reduce torque boost setting
Motor overloaded Verify proper motor and control
Adjust setting of Min. Output
Frequency Limit
command signals at the control
terminal strip
Verify control is set to receive your
type of speed command
Replace potentiometer
Adjust slip compensation
Verify and align motor/load
coupling
Clean the motor air intake and
exhaust areas
Check external blower for proper
operation
Verify motor’s internal fan is
securely coupled to shaft
Check for excessive motor load
Verify proper motor and control
rating
Adjust V/Hz profile
Adjust control base frequency
Adjust Max. Output Volts
Connect thermostat
circuits used with thermostat
Increase Accel/Decel rate
rating
Correct the loading problem
4-4 Troubleshooting
Page 66

Indication Possible Cause Corrective Action
overvoltage
undervoltage
overtemp
Correct the input power problem
Bus
Bus
overvoltage
fault
Bus
undervoltage
fault
Heatsink
Heatsink
overtemp
fault
Computer
malfunction
fault
Parameter
block fault
Power
supply
overload
fault
Output short
Output short
circuit fault
Auto restart
fault
Ground fault
Input voltage too high
Input voltage too high
Decel rate set too quickly Adjust Decel rate setting
Overhauling motor load Correct the motor load problem
Insufficient input voltage
Insufficient input voltage
Motor overloaded Verify proper motor and control
Ambient temperature too
Ambient temperature too
high
Corrupt memory contents Reset control by pressing Keypad
Corrupt memory contents Restore all parameters to factory
excessive loading of
control terminals REF
and/or V+
Motor failure Check motor windings for shorts
Shorted motor leads Check motor lead wires for shorts
Number of restarts
exceeded parameter
value
Motor failure Check motor windings for shorts
Shorted motor leads Check motor lead wires for shorts
Use step down transformer
Use line reactor to minimize spikes
Correct the input power problem
Use step up transformer
Check power line disturbances
due to starting other equipment
Monitor power line for date/time
correlation of power fluctuations
Contact power company
Correct the motor loading problem
rating
Reduce ambient temperature
Relocate control to cooler area
Add cooling fans or air conditioner
to control cabinet
Stop Key for more than one
second
settings
Correct the power supply loading
problem
Check fault log and correct the
source of failures
Troubleshooting 4-5
Page 67

4-6 Troubleshooting
Page 68

Section 5
Illustrations
Illustrations 5-1
Page 69

5-2 Illustrations
Page 70

3 & 5 HP NEMA 1
230 & 460VAC
Illustrations 5-3
Page 71

5-4 Illustrations
Page 72

Appendix A
Parameters
Parameter List
Param
Parameter Description Adj.
No.
02 Software revision View only View only
03 Rated current View only View only
07 Last fault View only View only
08 Second fault View only View only
09 First fault View only View only
12 Output frequency View only View only
13 Output voltage View only View only
14 Output current View only View only
15 Drive load View only View only
16 Load torque View only View only
17 Heatsink temperature View only View only
21 Operating mode 0-11 0
24 Analog command select 0-3 0
31 Min. output frequency 0.1-400Hz 0Hz
32 Max. output frequency 20-400Hz 60Hz
33 Preset speed #1 0.1-400Hz 5Hz
34 Preset speed #2 0.1-400Hz 20Hz
35 Preset speed #3 0.1-400Hz 40Hz
36 Preset speed #4 0.1-400Hz 60Hz
37 Preset speed #5 0.1-400Hz 0Hz
38 Preset speed #6 0.1-400Hz 0Hz
39 Minimum frequency
torque limit
41 Accel/Decel/Coast select 0-7 0
42 Accel Time #1 .1-600sec 3sec
43 Decel Time #1 .1-600sec 3sec
44 Accel Time #2 .1-600sec 1sec
45 Decel Time #2 .1-600sec 1sec
46 Decel Time Torque limit .1-30sec 1sec
Range
0.1-400Hz 10Hz
Factory
Setting
User
Setting
Level 2 parameters are shaded.
Parameters A-1
Page 73

Parameter List – Continued
Param
Parameter Description Adj.
No.
47 DC brake time 0-5sec 0.2sec
48 DC brake voltage 0-15% Factory
51 V/Hz profile 0-5 0
52 Torque boost 0-25% Factory
53 Control base frequency 26-960Hz 60Hz
59 Maximum output volts 185-
61 Load torque limit FWD 30-150% 150%
62 Load torque limit REV 30-150% 150%
63 Regen torque limit FWD 30-150% 80%
64 Regen torque limit REV 30-150% 80%
65 Slip comp adj. 0-12% 0%
67 Time overload trip 0-100% 0%
68 Number of restarts 0-8 0
69 Restart delay 0-60sec 0sec
70 Analog output scale 0-255 Factory
71 Analog output select 0-3 1
75 Relay output select 0-10 2
77 External trip select 0-3 0
81 Factory settings 0-3 0
82 Start options 0-3 0
84 Display options 0-7 0
87 Security access code 0-999 0
Range
480Volts
Factory
Setting
Factory
User
Setting
Set
Set
Set
Set
Level 2 parameters are shaded.
A-2 Parameters
Page 74

BALDOR ELECTRIC COMPANY
P.O. Box 2400
Fort Smith, AR 72901--2400
(501) 646--4711
Fax (501) 648--5792
Form 1099A
© Baldor Electric Company Printed in USA
MN710 2/00
 Loading...
Loading...