

Page 1

Smart ESD Device
700 Series for Safety
CM2-AVP772-2001
Instrumented Systems
Model AVP77_/78_/79_
User’s Manual
Page 2
Important
• Make sure that this manual is delivered to the user of this product.
• Copying or reprinting this manual in whole or in part without permission is
prohibited.
• The contents of this manual are subject to change without notice.
• Although we have taken all possible measures to ensure the accuracy of this
manual, please contact us if you find any errors or missing information.
• Note that we cannot be held responsible for the results of device operation by
the customer.
• HART® is a registered trademark of the FieldComm Group.
©2015–2019 Azbil Corporation. All Rights Reserved.
Page 3

Introduction
Thank you for purchasing our Smart emergency shutdown (ESD) device. Model
AVP77_/78_/79_ supports the safety instrumented systems (SIS), and is a smart ESD
Device that can connect to signal lines of 4-20 mA DC, 0-20 mA DC or 0/24 V DC.
The auto setup function makes it easy to set up the valve.
You can use the HART communication to conduct various adjustments and settings, and
use the local user interface (LUI), which is composed of an LCD (liquid crystal display)
and operation buttons, to easily monitor and conduct basic adjustments of the input signal,
valve opening, pressure displays, as well as activate and verify the result of the PST (partial
stroke test).
Furthermore, the built-in pressure sensor can be used to measure the supply air pressure
and output air pressure. With this, you can not only use this equipment for self diagnosis,
but can also combine with “Valstaff,” a valve maintenance support system, to monitor
valve’s characteristics, operating condition, etc., which will contribute to the valve’s
maintenance efficiency. This user manual explains how to handle the equipment. Please
use this manual to optimize the characteristics of this product.
Scope of this manual and related documents
This manual describes functions, as well as the installation and adjustment procedures.
For handling that is subject to conditions that are in line with the functional safety
standards of IEC61508 or IEC61511, please refer to the safety manual that is included in
the package of this device.
For details on HART communication, please refer to “Safety Instrumented Systems (SIS)
Specification - Communication Specification” (No. CM2-AVP772-2002 (T.B.D)*).
For details on valve diagnostic criteria, please refer to “Control Valve Diagnosis Function
Manual” (No. CM2-AVP700-2003).
* For any questions regarding the detail, please contact the office listed at the end of this manual.
i
Page 4
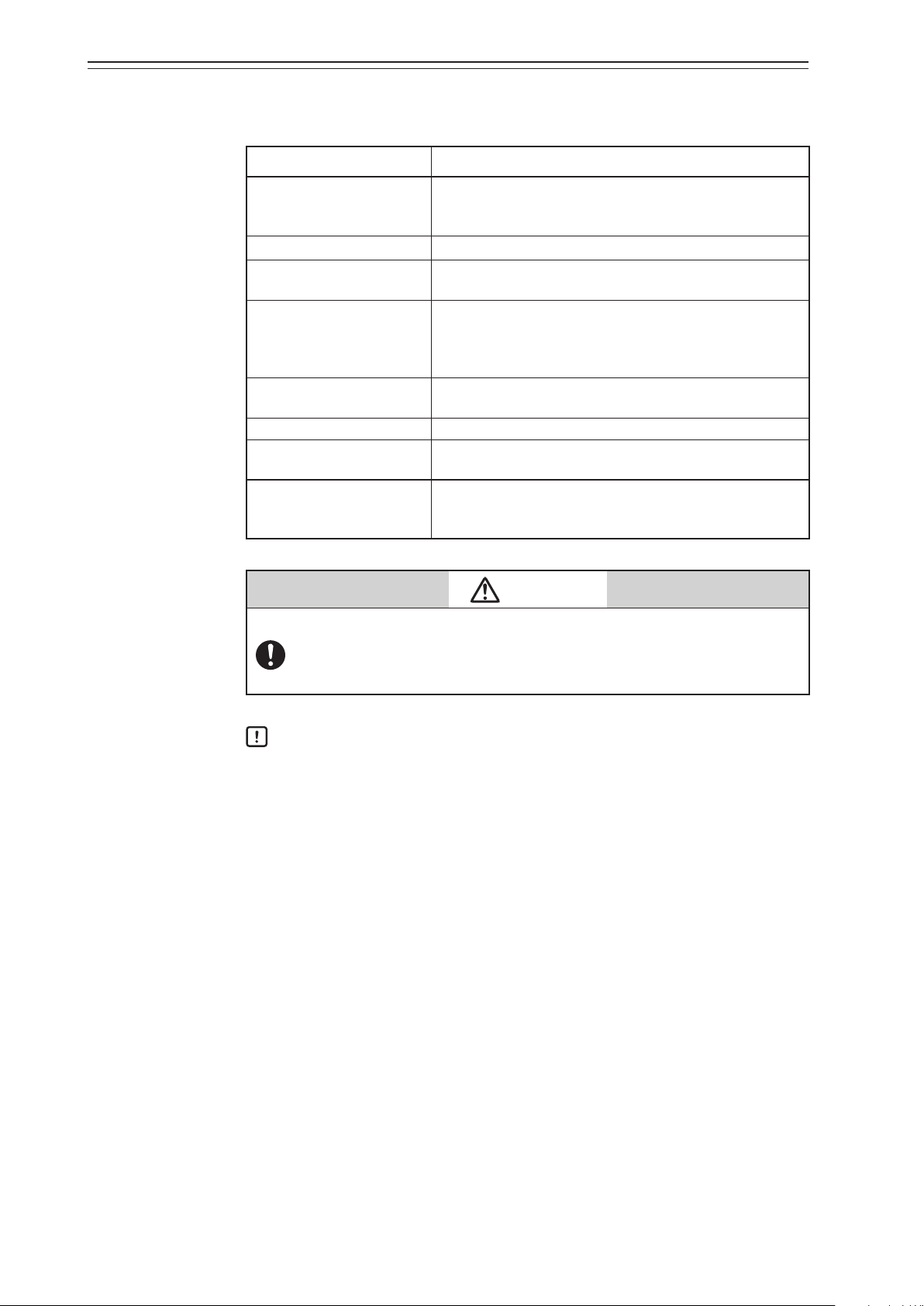
Safety precautions
J Symbols
The purpose of the safety precautions listed here is to ensure the user uses the product safely and correctly, to
prevent harm to the user and other people and damage to property. Make sure to observe the safety precautions.
Many different symbols are used in this manual.
Their appearance and meaning are described below. Thoroughly understand the explanation before starting to
read the main text.
Warning
Caution
J Sample symbols
This symbol indicates warnings and cautions for handling the device.
This symbol indicates prohibited actions that must not be taken.
This symbol indicates instructions for an action that must be taken.
J Conventions used in this instruction manual
Wrong handling may cause the death or severe injury of the user.
Wrong handling may cause a minor injury to the user or damage to equipment.
Handling Precautions : This symbol indicates a point to be noted when handling the device.
ii
Page 5
Precautions for safe work
Do not perform wiring with wet hands or while the device is energized. This may lead to electric
shock. Turn the power off before starting the work and work with dry hands or use gloves.
Follow the work procedure defined in the explosion protection guidelines of countries when
performing the power distribution work in an explosion-proof area.
For devices equipped with the pressure-resistant, explosion-proof specifications, open/close the
explosionproof enclosure and the cover according to "Chapter 7 Notes on the Explosion-Proof".
Do not get on the installed device or use it as a step stool. This is dangerous because the device may
tip over.
Do not touch the device during operation without reason. This is dangerous because the surface may
be hot or cold depending on the usage environment.
Be careful not to touch the edge of the cover or the screw threads of the main unit when opening the
cover of the terminal box. You may be injured by these parts.
Use a DC power supply with overload protection. Overload may cause smoke or fire.
Warning
Caution
If a tool or other item touches the glass part of the display, it may break, leading to an injury. Be
careful. Wear safety glasses during work.
This product is heavy. Be careful where you step and wear safety shoes during work.
Do not touch the feedback lever or other moving parts while the device is operating. You may be
injured by getting your hand or other body part caught in them.
Properly use the power supply based on the specifications. Inputting a different power supply may
damage the device.
Use gloves and other protective equipment during work in a hot, cold, or other severe environment.
Do not bring magnets or magnetic screwdrivers near the device. They may activate the valve.
Supply appropriate air pressure according to the specifications. Too much pressure may cause
abnormal valve function, damage to the pressure gauge, etc.
iii
Page 6
Unpacking, Verification, and Storage of Product
Unpacking
This device is precision measuring equipment. Carefully handle it to prevent accidents or
damage. After unpacking, check that the items below are included.
• The device
• Feedback lever and hexagon socket bolts × 2
• (4mm) hexagon wrench × 1 (for feedback lever).
(Included only when the device is shipped alone.)
• Regulator (KZ03) (optional)
• Mounting plate set (optional)
• Pressure-resistant packing cable adapter and pressure-resistant elbow
(option for explosion-proof specifications)
• Instruction manual (this document) (included if specified at the time of purchase.)
• Safety manual
• Extension lever and hexagon socket bolts × 2 (optional)
Specifications check
Specifications are written on the product nameplate. Furthermore, please verify that the
phrase “Smart ESD Device for SIS” is printed on the front cover. Verify that all ordered
items are present. Please especially take note of the following.
• Tag No.
• Model
• Production No. (PROD.)
• Input current range (INPUT)
• Supply air pressure (SUPPLY)
• Explosion protection certification seal (for explosion-proof specifications)
• Functional Safety Authorization FS Symbol
Contact
Storage
Warning
For use in an explosion-proof area, be sure to select a model that satisfies
the necessary explosion-proof requirements. Non-explosion-proof products
cannot be used in an explosion-proof area.
If any part of the specification is unclear, please contact our service representative.
When contacting us, please always have your model number and production number ready.
When storing the device after purchase, observe the following precautions.
• When storing the device before it has been used
1. Store the device as packed at shipment.
2. Store the device at an indoor location with little vibration or shocks and at normal
temperature and humidity (about 25°C, 65%RH).
• When storing the device after it has been used
1. Tightly secure the terminal box cover and block the conduit connection port with
tape to prevent humidity intrusion.
2. Block the three pneumatic piping connection ports (SUP, OUT1 and OUT2) with
tape to prevent humidity and dust intrusion.
3. Pack the device in the same way as at shipment.
4. Store the device at an indoor location with little vibration or shocks where it will not
be exposed to rain or water and at normal temperature and humidity (about 25°C,
65%RH).
iv
Page 7

Table of Contents
Chapter 1 Structure of the Control System ...............................1-1
1-1 Model Number Configuration ........................................................1-1
1-2 System Configuration ................................................................1-1
1-3 System Configuration (Model AVP7_2) without Output Signal .........................1-2
1-3-1 In the Case of Current Signal Input ............................................1-2
1-3-2 In the Case of Voltage Signal (0/24 V DC) ......................................1-2
1-4 System Configuration with Travel Transmission (Model AVP7_1) .......................1-3
1-4-1 In the Case of Current Signal Input ............................................1-3
1-4-2 In the Case of Voltage Signal (0/24 V DC) ......................................1-3
1-5 System Configuration with Contact Output (Model AVP7_0) ...........................1-4
1-5-1 In the Case of Current Signal Input ............................................1-4
1-5-2 In the Case of Voltage Signal (0/24 V DC) ......................................1-4
1-6 Structure of the Device and Description of Each Part ..................................1-5
Chapter 2 Installation ..................................................2-1
2-1 Usage Conditions ....................................................................2-1
2-2 Selection Criteria for Installation Location .............................................2-2
2-3 Installation Procedure ................................................................2-4
2-3-1 Attaching the 700 Series to the Actuator ......................................2-4
2-3-2 Pneumatic Piping Connection ...............................................2-10
2-3-3 Electrical Wiring Connection .................................................2-13
2-3-4 Input Signal and Output Signal Power .......................................2-17
2-3-5 Cables (For Input or Output Signal) ..........................................2-18
2-4 Cable gland and flameproof universal elbow for TIIS flameproof apparatus ............2-20
Chapter 3 Operation ...................................................3-1
3-1 Local User Interface (LUI) .............................................................3-1
3-2 Adjustment before Operation ........................................................3-5
3-2-1 Auto Setup ..................................................................3-5
3-2-2 Zero/Span Adjustment .......................................................3-8
3-2-3 Supply Bypass ..............................................................3-10
3-2-4 Partial Stroke Test (PST ) .....................................................3-12
3-2-5 Control Parameters ..........................................................3-14
3-2-6 Password ...................................................................3-16
3-3 Starting Operation ..................................................................3-17
3-3-1 Preoperation Check .........................................................3-17
Chapter 4 Operation with HART Communication. . . . . . . . . . . . . . . . . . . . . . . . .4-1
4-1 Operation with HART Communication ................................................4-1
4-1-1 HART Communication ........................................................4-1
4-2 Setup and Adjustment of Device .....................................................4-2
4-2-1 Process Variables .............................................................4-2
4-2-3 Input Signal Range (Input Range) (Model AVP77_/78_ Current Signal Input) ...4-4
4-2-4 Valve System .................................................................4-5
4-2-5 Control Configuration ........................................................4-6
4-2-6 Input Characterization .......................................................4-7
4-2-7 Travel Cutoff .................................................................4-8
4-2-8 Units ........................................................................4-9
4-2-9 SIS Positioner Mode ..........................................................4-9
4-2-10 Travel Calibration ...........................................................4-10
v
Page 8
4-2-11 Input Signal Calibration (Model AVP77_/78_ Current Signal Input) ............4-11
4-2-12 Pressure Sensor Adjustment .................................................4-12
4-2-13 Simulation ..................................................................4-12
4-2-14 Adjustment of EPM Drive Signal (Pneumatic Modules) ........................4-12
4-2-15 Restore factory settings .....................................................4-12
4-2-16 Operator Action Records ....................................................4-13
4-2-17 Real Time Clock .............................................................4-13
4-2-18 Password ...................................................................4-13
4-2-19 Device Information ..........................................................4-13
4-2-20 Option ......................................................................4-15
4-2-21 Diagnostic Messages ........................................................4-16
4-2-22 Valve Diagnosis .............................................................4-17
4-2-23 PST (Partial Stroke Test) ......................................................4-18
4-2-24 FST (Full Stroke Test). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-21
Chapter 5 Troubleshooting .............................................5-1
5-1 Troubleshooting .....................................................................5-1
5-1-1 If the Valve does not Close Fully (the output air pressure does not go down to 0) ...5-1
5-1-2 If the Device does not Operate (No Output Air Pressure) .......................5-1
5-1-3 If the Valve Behaves Abnormally (Output Air Is Present) ........................5-2
5-1-4 Failure to Communicate with the Communicator ..............................5-3
5-1-5 Adjustment Procedure When Hunting Occurs .................................5-3
5-1-6 Description of Messages .....................................................5-4
Chapter 6 Maintenance ................................................6-1
6-1 A/M Switch ..........................................................................6-1
6-2 Replacement of Filter and Maintenance of Flow Constriction ..........................6-4
6-3 Cleaning the Flapper .................................................................6-5
6-4 Adjusting the Pilot Relay .............................................................6-6
6-5 Insulation Resistance Test ............................................................6-7
6-6 Adjustment Procedure When Using the Device with a Booster Relay Attached ..........6-8
6-7 List of Default Values for Internal Data ................................................6-9
6-8 Internal Block Diagram of the 700 Series .............................................6-10
6-9 Replacement Parts ..................................................................6-11
6-9-1 Procedure for Changing Switch Block ........................................6-14
6-9-2 Procedure for Changing the Pilot Relay ......................................6-15
Chapter 7 Notes on Explosion-Proof Structure ...........................7-1
7-1 TIIS Flameproof Model ...............................................................7-2
7-2 IECEx Flameproof and Dust Ignition Protection ........................................7-3
7-3 FM Explosion-proof / Dust Ignition Protection .........................................7-5
7-4 FM Intrinsically Safe Explosion-Proof Type (ic) and Non-incendive Type .................7-6
7-5 FMC Explosion-proof / Dust Ignition Protection ......................................7-11
7-6 NEPSI Flameproof / Dust Ignition Protection .........................................7-12
7-7 KOSHA Flameproof Type ............................................................7-15
7-8 INMETRO Flameproof / Dust Ignition Protection ......................................7-16
7-9 EAC Flameproof .....................................................................7-18
7-10 ATEX Intrinsic Safety and Dust Ignition Protection ....................................7-19
7-11 IECEx Intrinsic Safety and Dust Ignition Protection ....................................7-20
Appendix A LUI Display Examples ....................................... A-1
Appendix B Menu List .................................................. B-1
vi
Page 9

Appendix C Specifications ...............................................C-1
Appendix D Model Number Configuration Table .......................... D-1
Appendix E External Dimension ..........................................E-1
vii
Page 10

viii
Page 11
Chapter 1 Structure of the Control System
Model AVP7 _ _
7: 4-20 mA DC input signal
8: 0-20 mA DC input signal
2: without output signal
Air to the actuator
Valve
Process uid
Chapter 1 Structure of the Control System
This chapter describes device configuration in a control system that uses the device.
• Description of the configuration of the input/output system of the device
• Description of the structure of the main unit of the device and the name and function of
each part
1-1 Model Number Configuration
Smart ESD Device 700 Series for Safety Instrumented Systems
9: 0/24 V DC input signal
0: with contact output
1: with travel transmission
1-2 System Configuration
This device is a smart ESD device that can be connected to 4-20mADC, 0-20mADC, or
0/24VDC controller output signal lines. Various adjustments can be done electronically,
so the relationship between input signals and valve travel can be set to any desired value.
In addition, having a 4-line connection enables the output of the amount of valve travel
to a host monitoring system via 4-20mADC analog signal, as well as the transmission of
failure output to the monitoring system via burnout indication of the contact output signal
or the travel transmission signal. (Model AVP7_1 have travel transmission, and Model
AVP7_0 have contact output.)
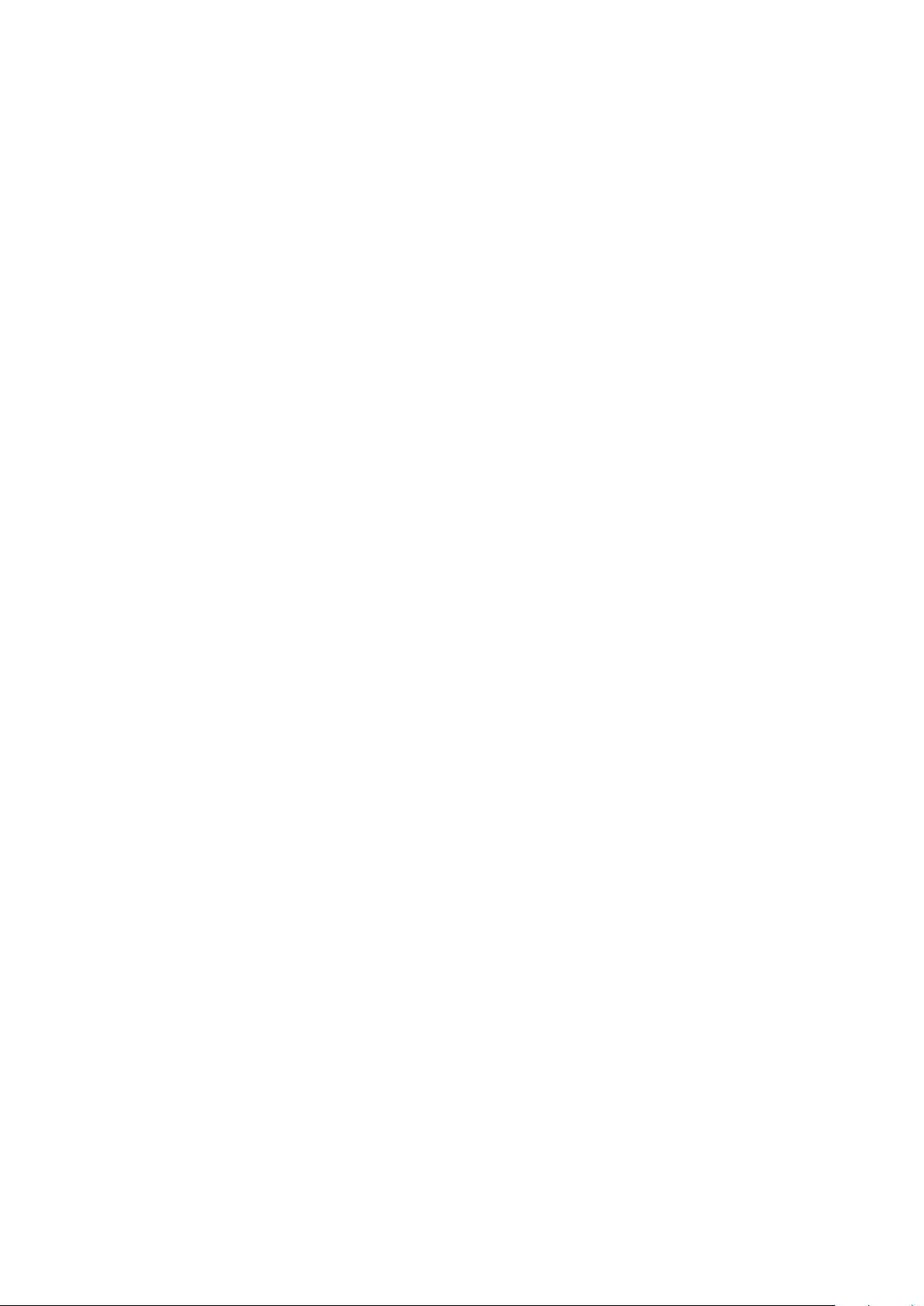
The basic concept of a valve control system using this device is shown in the following
diagram.
Host
monitoring
system
Host
controller
4-20 mA DC analog signal
or contact output signal
4-20 mA DC, 0-20 mA DC,
0/24 V DC
Supply air
S
m
a
r
t
E
S
D
c
i
D
v
e
Device
S
I
S
r
o
f
e
Air supply
system
Shuto
valve
Regulator
with lter
Figure 1-1. Concept Diagram of Control System
1-1
Page 12
Chapter 1 Structure of the Control System
HART
conguration
tool
HART
conguration
tool
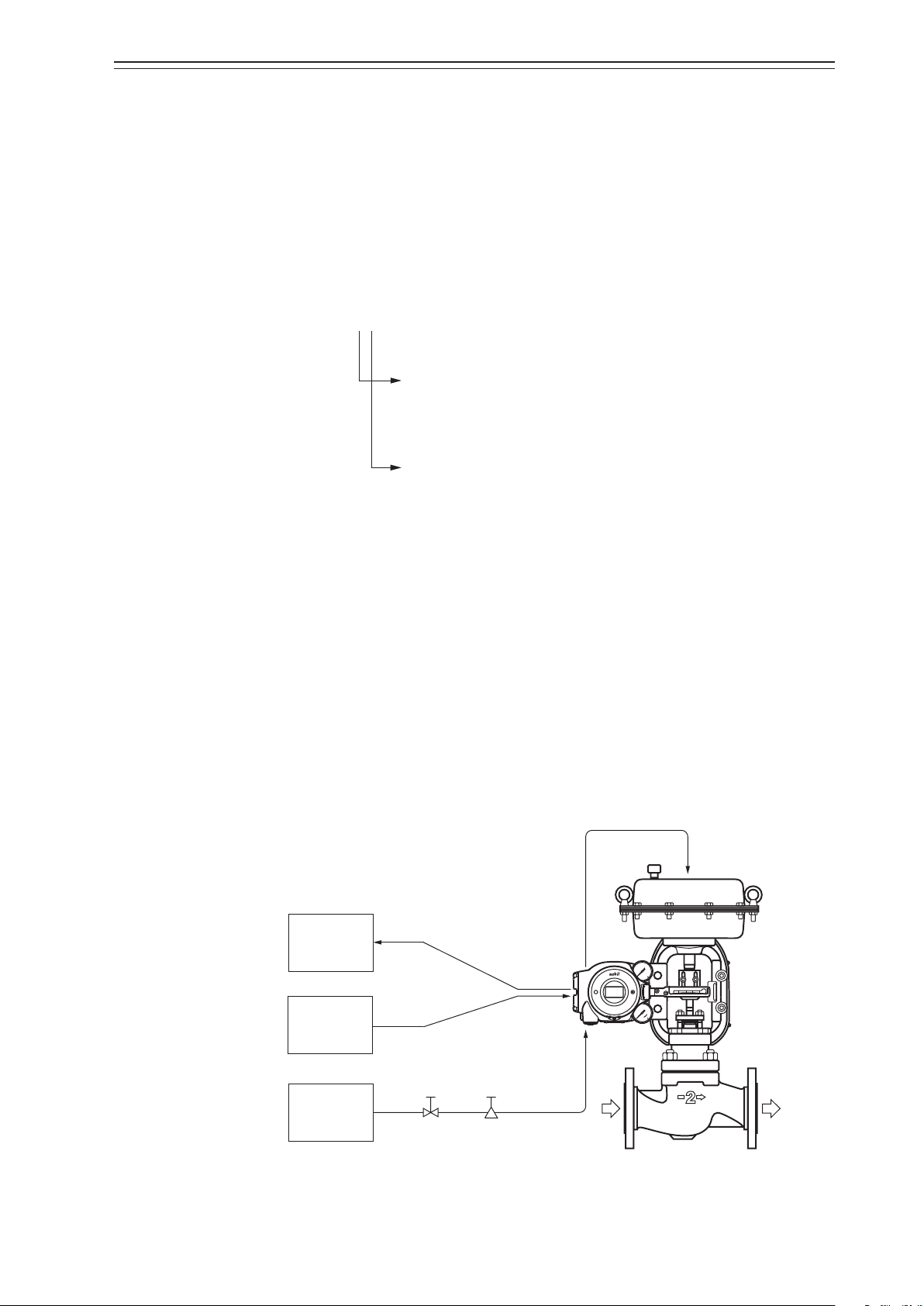
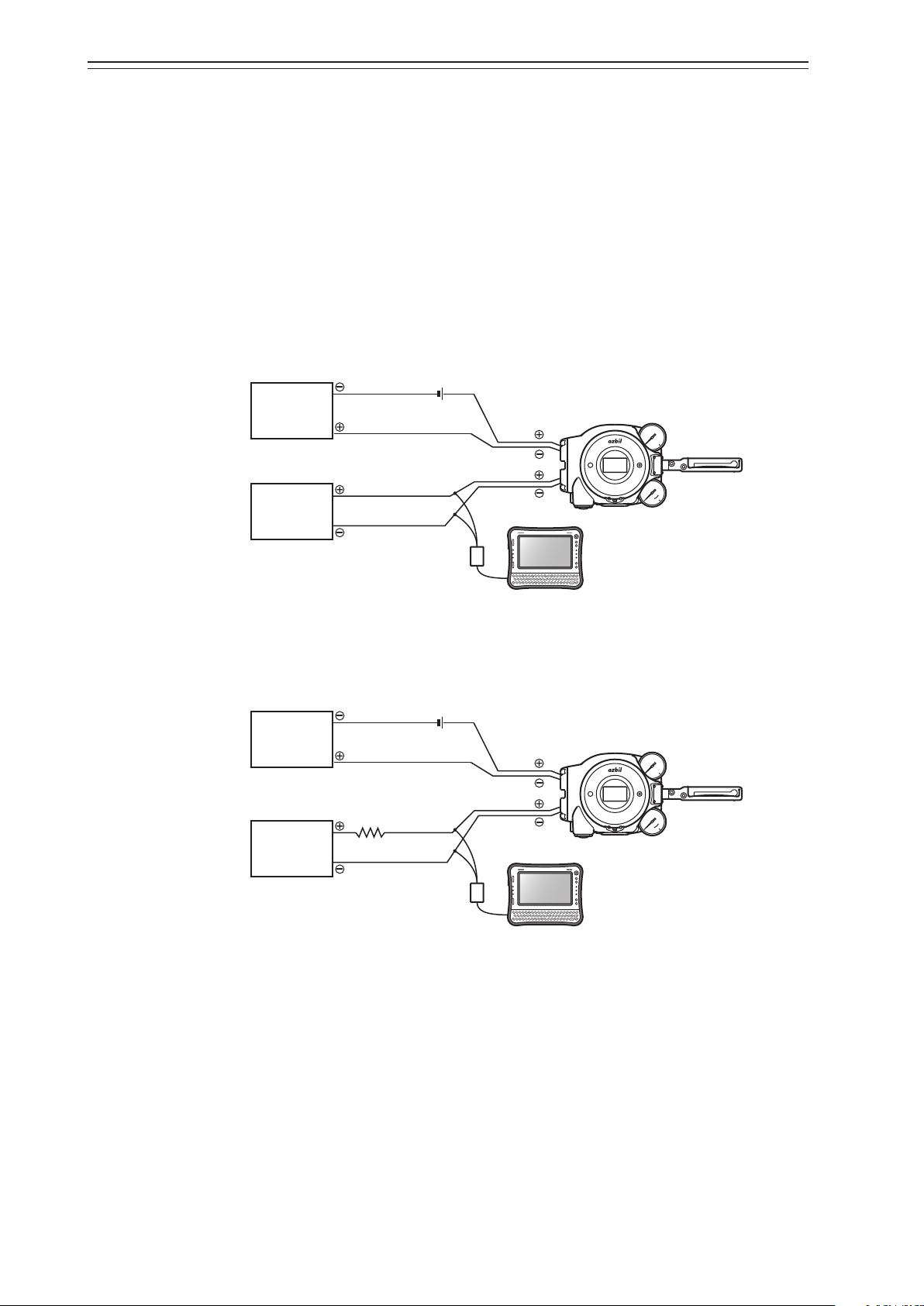
1-3 System Configuration (Model AVP7_2) without Output Signal
1-3-1 In the Case of Current Signal Input
Illustrates the system configuration for Model AVP772/782.
4-20 mA DC or
Host
0-20 mA DC
controller
HART Modem
Figure 1-2. System Configuration with Current Signal Input without Output Signal
1-3-2 In the Case of Voltage Signal (0/24 V DC)
Illustrates the system configuration for Model AVP792.
(Model AVP772/782)
IN
IN
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
Device
Host
controller
Resistance: 500 Ω
0/24 V DC
IN
IN
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
Device
HART Modem
Figure 1-3. System Configuration With Voltage Signal Input without Output Signal
(Model AVP792)
1-2
Page 13
Chapter 1 Structure of the Control System
250 Ω
24 V DC
250 Ω
24 V DC
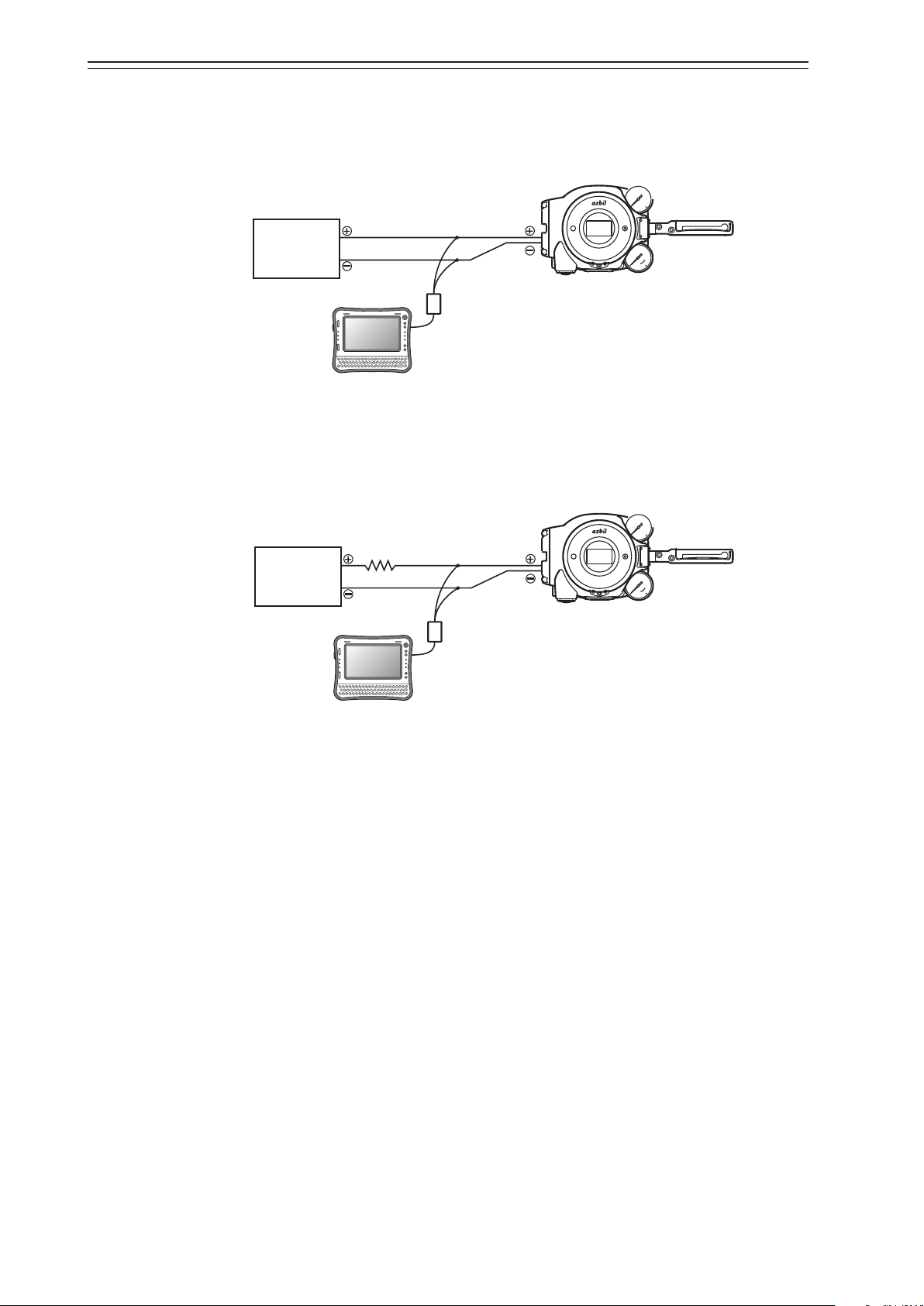
1-4 System Configuration with Travel Transmission (Model AVP7_1)
Model AVP7_1 has a function for transmitting the amount of valve travel.
This travel transmission signal will change to burnout indication (failure output) in the
preset direction when an abnormality of this device or the valve is detected during selfdiagnosis or in the PST (partial stroke test).
To output the travel signal to the host monitoring device using analog values, configure the
system with travel transmission.
Normally, travel of 0% and 100% is output at 4mA and 20mA, respectively.
Fa ilure output is
LO side: less than 3.6mA
HI side: greater than 21mA.
The following is an example of system configuration.
With this system configuration, analog signals are output directly to the host monitoring
system from this device.
1-4-1 In the Case of Current Signal Input
Illustrates the system configuration for Model AVP771/781.
Host monitoring
system
(current input)
Host
controller
Resistance *1
Analog Signal
4-20 mA DC
Power *1
4-20 mA DC or
0-20 mA DC
HART Modem
Figure 1-4. System Configuration with Current Signal Input and Travel Transmission
Signal (Model AVP771/781)
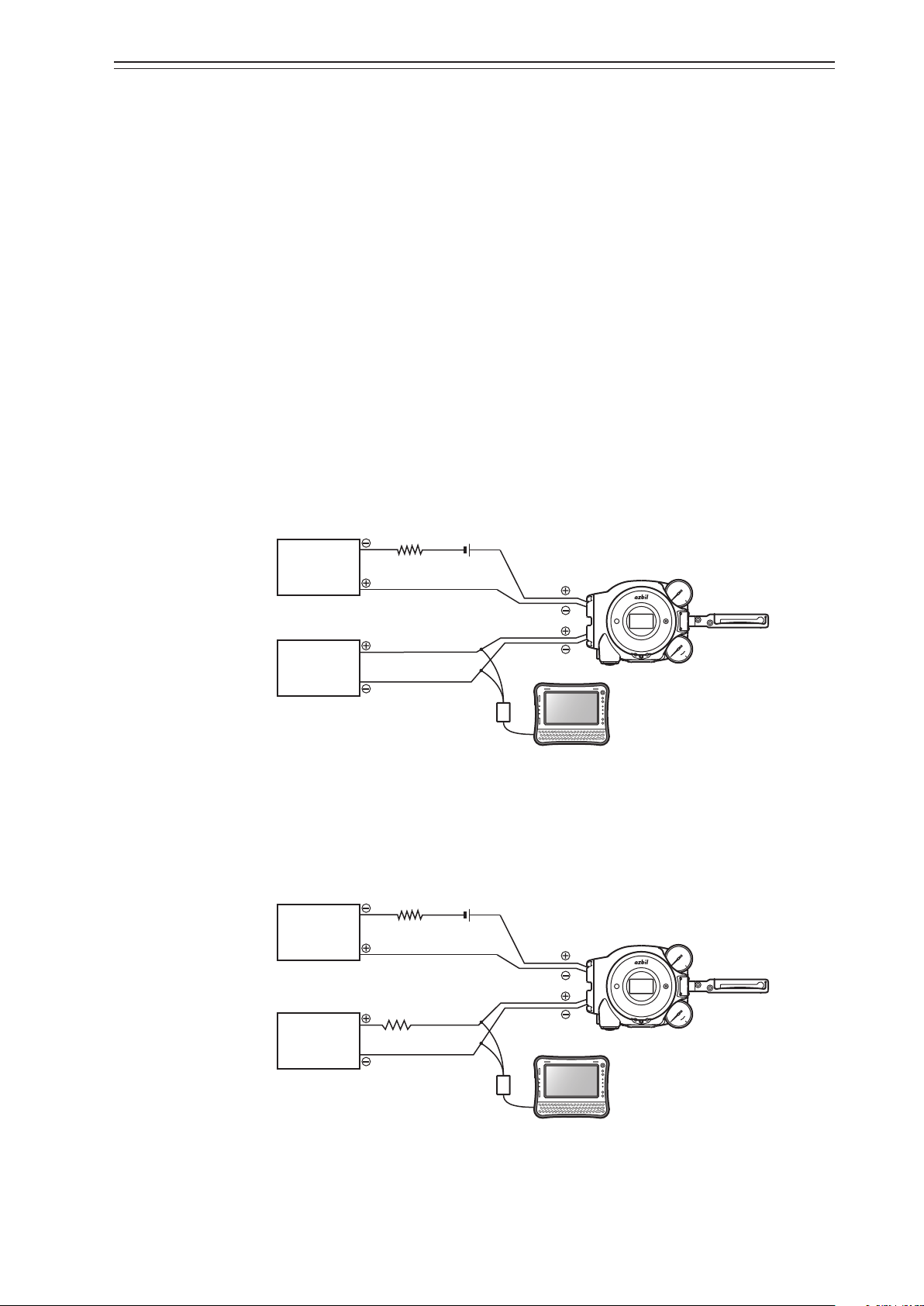
1-4-2 In the Case of Voltage Signal (0/24 V DC)
Illustrates the system configuration for Model AVP791.
Host monitoring
system
(current input)
Host
controller
Resistance *1
Analog Signal
4-20 mA DC
Resistance: 500 Ω
0/24 V DC
Power *1
HART Modem
OUT
OUT
OUT
OUT
Device
IN
IN
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
HART conguration tool
Device
IN
IN
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
HART conguration tool
Figure 1-5. System Configuration with Voltage Signal Input and Travel Transmission
Signal (Model AVP791)
*1. For details on power and resistance, please refer to section 2-3-4, “Input Signal and Output Signal Power”
1-3
Page 14
Chapter 1 Structure of the Control System
24 V DC
24 V DC
1-5 System Configuration with Contact Output (Model AVP7_0)
Model AVP7_0 has a function for transmitting a contact output signal.
This contact output is not related to valve travel, but rather transmits failure output when
an abnormality of this device or of the valve is detected during self-diagnosis or in the PST
(Partial Stroke Test).
Normal output: closed. Failure output: open.
The following is an example of system configuration.
With this system configuration, contact output is output directly to the host monitoring
system from this device.
1-5-1 In the Case of Current Signal Input
Power *1
Host monitoring
system
(Contact input)
Host
controller
Contact Signal
4-20 mA DC or
0-20 mA DC
OUT
OUT
IN
IN
HART Modem
Device
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
HART conguration tool
Figure 1-6. System Configuration with Cu rrent Signal Input and Contact Output Signal
1-5-2 In the Case of Voltage Signal (0/24 V DC)
Power *1
Host monitoring
system
(Contact input)
Contact Signal
Resistance: 500 Ω
Host
controller
0/24 V DC
HART Modem
Figure 1-7. System Configuration with Voltage Signal Input and Contact Output Signal
*1. For details regarding the power, please refer to section 2-3-4, “Input Signal and Output Signal Power.”
(Model AVP770/780)
OUT
OUT
IN
IN
(Model AVP790)
Device
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
HART conguration tool
1-4
Page 15
Chapter 1 Structure of the Control System
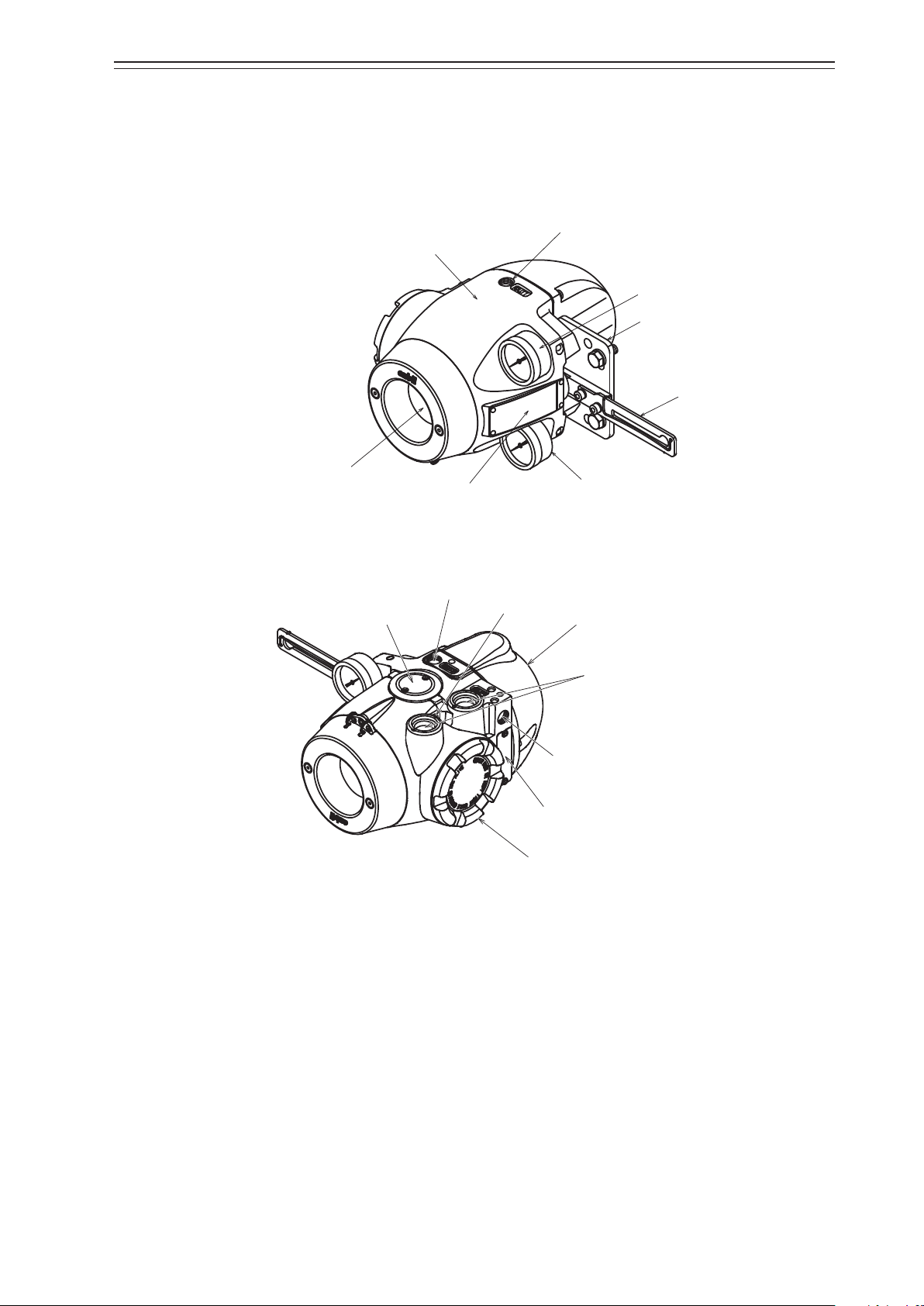
Mounting plate (optional)
interface (LUI)
Output air pressure gauge
Output air connection port (OUT1)
Safety Nameplate
Electrical conduit connection port
Terminal box cover
Output air connection port (OUT2)
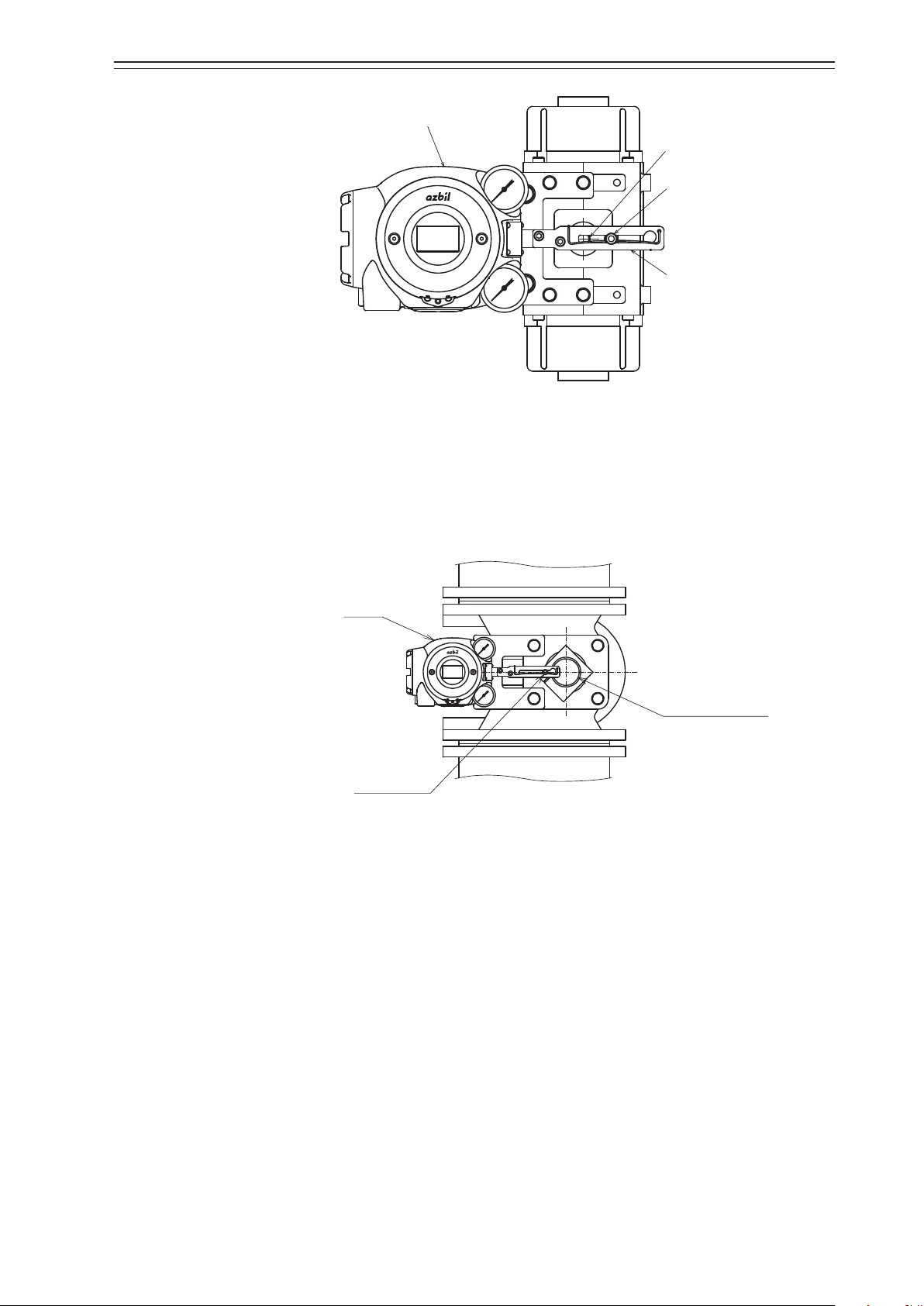
1-6 Structure of the Device and Description of Each Part
Structure of the Device
Major components
The structure of the main unit of the device is shown in the figure below.
Main unit
Feedback lever
Local user
Exhaust cap
Explosion-proof and Functional
Supply air pressure gauge
Figure 1-8. Structure of the Device (Top)
External grounding terminal
Pilot relay cover
Supply air connection port (SUP)
Nameplate
Figure 1-9. Structure of the Device (Bottom)
1-5
Page 16
Chapter 1 Structure of the Control System
Name and description of each part
The table below describes each part.
Name Description
Main unit
Pilot relay cover
Auto/Manual (A/M)
switch
Feedback lever
Local user interface (LUI)
Supply air pressure gauge • Indicates the pressure of the supply air.
Output air pressure gauge • Indicates the pressure of the output air.
Supply air connection port
(SUP)
Output air connection port
(OUT1)
Output air connection port
(OUT2)
Mounting plate (optional)
Table 1-1. Description of Each Part
• Houses electronic circuits, an electro-pneumatic transducer (EPM), a position sensor (VTD), and a pressure
sensor.
• Cover of the pilot relay that amplifies the air signal from
the EPM (electro-pneumatic transducer) and transduces
it into the air signal sent to the actuator.
• To adjust the balance pressure to switch between the pilot
relay for the single-acting actuator and the pilot relay for
the double-acting actuator, remove this cover.
• This switch is used to switch how the output air between
the auto operation status and the manual operation status
is controlled. This switch is built into the pilot relay. This
switch can be seen by removing the pilot relay cover.
• Detects the valve lift and relays it to VTD (position sensor).
• The LUI allows you to adjust the zero / span, perform
auto setup, and manually operate the device with the LCD
(liquid crystal display) and operation buttons without
using the communicator.
• Supply air is input to this port.
• “SUP” is displayed at this port.
• Output air is sent out of this port to the actuator.
• “OUT1” is displayed at this port.
• Output air is sent out of this port to the actuator.
• This port is blocked with a blind plug in the single-acting
actuator.
• OUT2 is displayed at the output port for the doubleacting actuator.
• The mounting plate is used to mount the device onto the
actuator.
• The shape of the mounting plate differs depending on the
specifications (actuator model).
1-6
Page 17
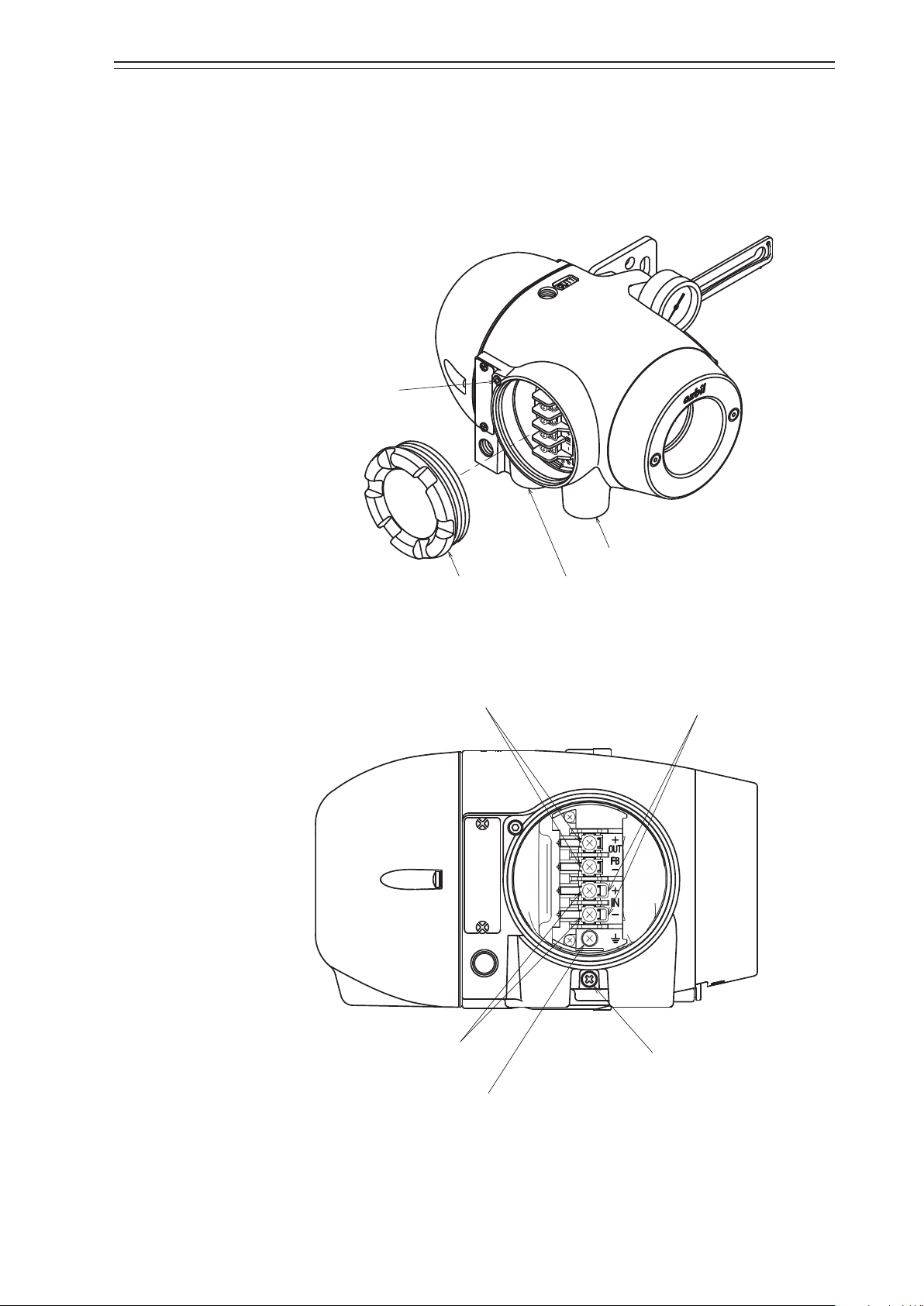
Structure of the Terminal Box
Lock screw
box cover
Terminal for output signals
M4 screw
Terminal for external grounding
Major components
This contains the input signal (controller output) terminal, output signal (travel
transmission or contact output) terminal, and internal ground terminal.
The structure of the terminal box is as shown below.
Chapter 1 Structure of the Control System
Conduit connection port (1)
Terminal
Conduit connection port (2)
Figure 1-10. Structure of the Terminal Box
M4 screw
HART check pin
Terminal for input signals
M4 screw
M4 screw
Terminal for internal grounding
Figure 1-11. Terminal Block in the Terminal Box
1-7
Page 18
Chapter 1 Structure of the Control System
Name and description of each part
The table below describes each part of the terminal box.
Name Description
Terminal box cover
Lock screw • Used to secure the terminal box cover.
Terminal for input signals
Terminal for output Signals
Internal grounding terminal
Conduit connection port (1) • Port for a cable.
Conduit connection port (2)
Check pin for HART communication
• Lid of terminal box.
• This cover has a pressure-resistant explosion-proof structure.
• Labeled IN.
• Connects the signal cable from the host controller.
• Labeled OUT.
• Connects the signal cable for output signal.
• The Model AVP7_2 (without output signal) does not have
the terminal screws.
• Internal terminal for grounding. The cable for grounding
is connected to this terminal.
• Port for a cable.
• This port is normally blocked with a blind plug.
• By connecting the connection hook for the setting device
communication cable to this pin, it is possible to communicate with this device.
Warning
When using a pressure-resistant explosion-proof model in a dangerous place,
be sure to use the specified cable adapter for pressure-resistant packing for
the conduit connection port. Securely close the terminal box cover all the way.
Then, rotate the lock screw counterclockwise to secure the terminal box cover.
Handling Precautions:
Ground either the external or internal grounding terminal according to the
specifications. Be careful not to ground the device at two points.
1-8
Page 19
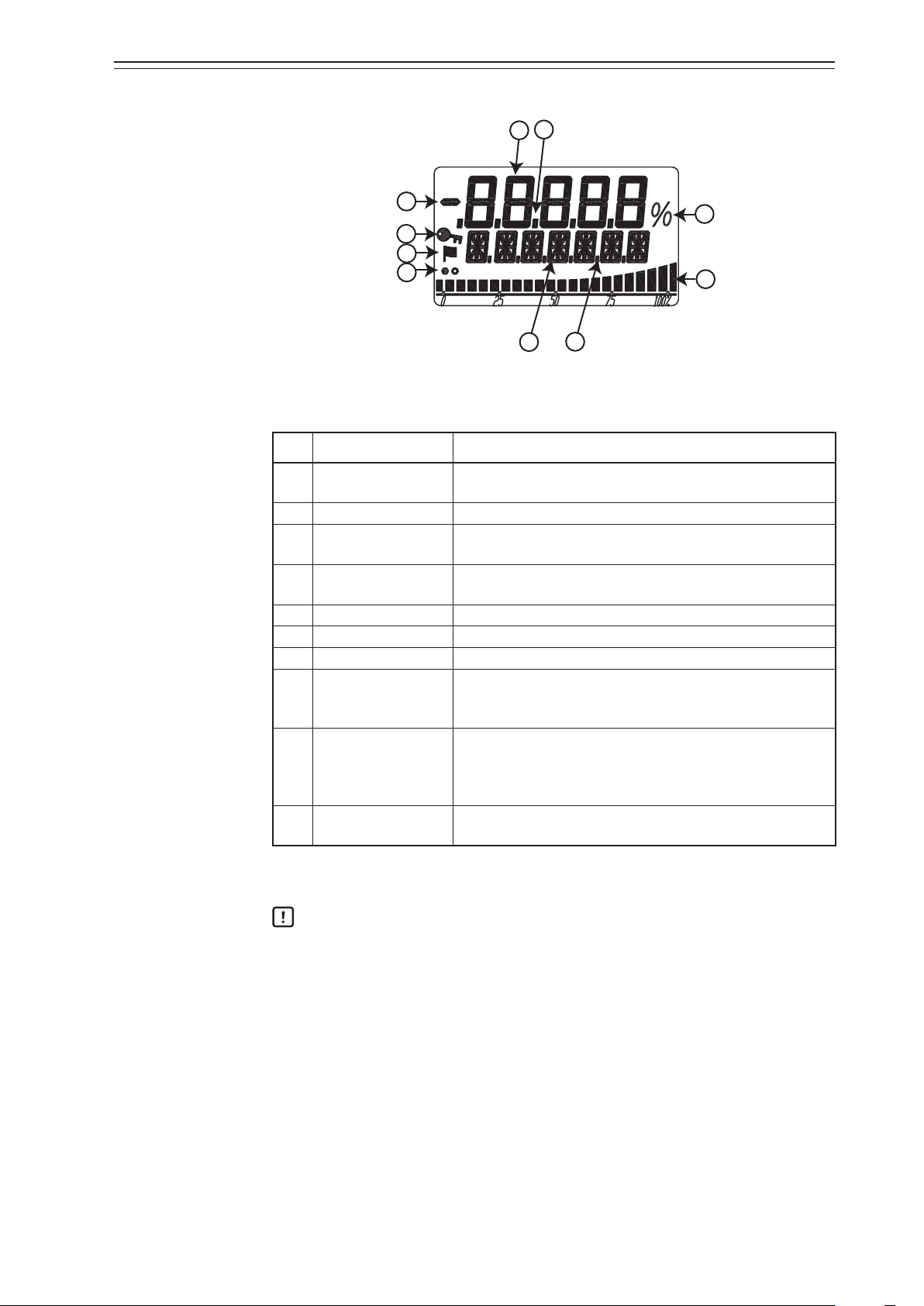
Local User Interface (LUI) Display
Chapter 1 Structure of the Control System
3
1
2
8
9
10
5
4
6
7
Figure 1-12. Segments of the LCD
Table 1-3. Description of Each Part
No. Displayed element Main display
7 segments
(1)
(5 digits)
Main numerical values such as the specified opening.
(2) Minus sign Sign (+/−) for the 7-segment number.
Decimal point
(3)
(five places)
16 segments
(4)
(7 digits)
Decimal point for the 7-segment number.
The unit, status, or other data.
(5) Dot (6 places) Delimiter, etc., for 16-segment auxiliary display.
(6) % Percentage.
(7) Bar graph (22 bars) Bar graph showing percentage of set point, etc.
Displayed: LUI cannot be used
(8) Key symbol
Hidden: LUI is operable
Flashing: LUI is busy
The flag mark is displayed when the self diagnosis alarm is
(9) Flag symbol
activated.
For details on the alarm, please refer to the status monitor
described on page 3-4.
Display refresh sym-
(10)
bol
Display during operation
White and black circles alternately blink while updating.
For a display example, refer to “LUI Display List” in Appendix A.
Handling Precautions:
The LUI buttons may not respond well near an electromagnetic inductor (such as
a large transformer or high-frequency furnace).
Remove sand, dust, and other foreign objects from the rubber parts of the
operation buttons before operating the LUI. Operating the LUI with foreign
objects on it may damage the rubber parts.
Do not pull the rubber parts of the operation buttons. This may deteriorate the
adhesive property, possibly causing malfunction.
1-9
Page 20

Chapter 1 Structure of the Control System
1-10
Page 21
Chapter 2 Installation
This chapter describes the usage conditions, installation, piping, and wiring of the device.
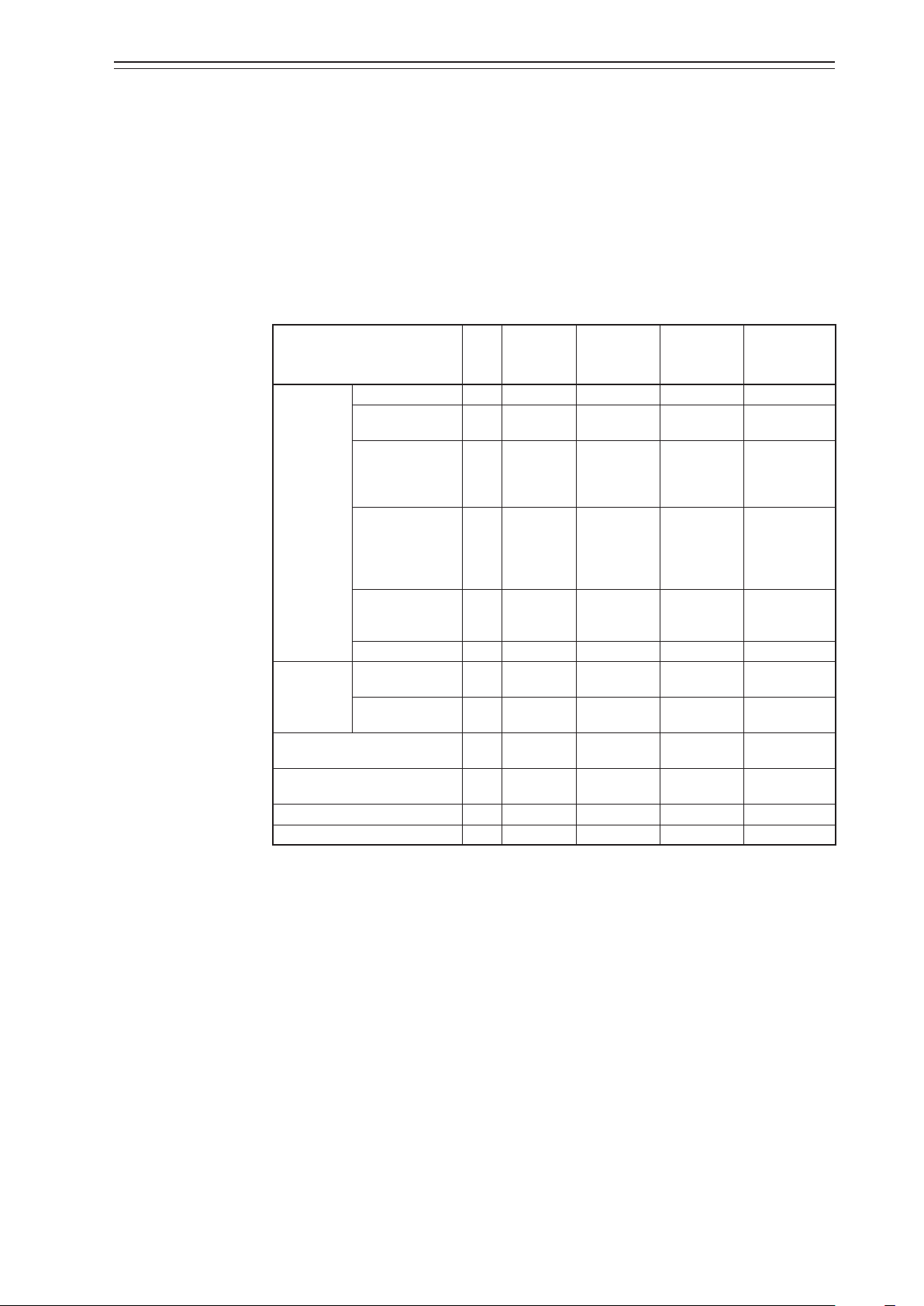
2-1 Usage Conditions
Install the device in a location that satisfies the following conditions.
Be sure to use it in accordance with the specifications.
Chapter 2 Installation
Table 2-2. Range of Usage Conditions
Units
Basic
operating
conditions
Normal
operating
conditions
Marginal
operating
conditions
Transportation
conditions
General model °C 23±2 −40 to +80 −40 to +80 −40 to +70
TIIS flameproof
model
°C 23±2 −20 to +55 −20 to +55 −40 to +70
IECEx/FM/FMC/
Operating
temperature
range
NEPSI/EAC/INMETRO/KOSHA
flameproof model
FM Intrinsically
Safe ExplosionProof Type (ic)/
°C 23±2 −30 to +75 −30 to +75 −40 to +70
°C 23±2 −24 to +75 −24 to +75 −40 to +70
Non-incendive
Typ e
ATEX/IECEx
Intrinsically Safe
°C 23±2 −40 to +60 −40 to +60 −40 to +70
model
LUI °C 23±2 0 to 50 −40 to +80 −40 to +70
15
(5 to 8 Hz)
20
(8 to 400 Hz)
Vibration
Amplitude
Acceleration
*1
*1 4
mm
m/s
p-p
0
2
0
Friction of the valve % 3 to 20 3 to 20
Supply air pressure Ps
(140 kPa ≤ Ps ≤ 700 kPa)
Installation orientation
*3
kPa Ps±1% 140 to 700 0 to 710 —
° ±1
*2
±180 ±180 ±180
15
(5 to 10 Hz)
40
(10 to 400 Hz)
0 to 3
20 to 100
15
(5 to 10 Hz)
40
(10 to 400 Hz)
—
Humidity range %RH 50±10 5 to 100 5 to 100 5 to 100
The types of operating condition are defined as follows.
• Basic operating condition: Range in which the accuracy is guaranteed
• Normal operating condition: Range in which the device normally operates
• Marginal operating condition: Range in which performance is not guaranteed but the
device can be used without being permanently damaged
• Transportation condition: Environment condition range in which the nonoperating device will not be permanently damaged
during transportation
*1. When the positioner cover is centered in front.
*2. The status where the drive shaft of the direct acting actuator is perpendicular to the ground and that is used
as the reference.
*3. The tilt characteristics are not included.
*4. Not applicable to the pressure gauge.
2-1
Page 22

Chapter 2 Installation
2-2 Selection Criteria for Installation Location
The device is designed to withstand severe conditions, but the installation location should
be selected according to the criteria described below to maximize performance.
1) Selection Criteria for Installation Location
Install the device in a location that satisfies all of the following conditions.
• Operating temperature range that conforms to the explosion protection rules
• Relative humidity: 5 to 100%RH
• Ambient temperature change rate: ±20°C/h or slower
• Electromagnetic induction: 400A/m or less (avoid places near a large transducer, highfrequency furnace, or other such equipment)
• Do not use a transceiver near the device.
2
• Vibration: 20m/s
(The vibration conditions defined for the device are vibrations at the main unit of the
device.)
2) Criteria for instrumentation air
(8 to 400Hz) or less
The device employs a nozzle flapper structure in the electropneumatic transduction
section. If instrumentation air is contaminated (includes oil, water, or other substance),
the main unit function of the device may not function properly or an irrecoverable failure
may occur. Therefore, the quality of instrumentation air supplied to the device is defined
as follows.
• Solid material: No particles with a diameter larger than 3 μm.
• Oil: Less than 1 ppm.
• Supply air humidity: The dew point temperature is at least 10°C lower than that of the
device. (This criterion is based on the Japanese industrial standard
JIS C 1805-1 (2001).)
Select a compressor and main line or terminal-installation type compressed air purifier by
referring to the above specifications.
(1) Compressed air purifier for the main line
Select a compressed air purifier for the main line, such as a main line filter or microalescer, to satisfy the above specifications.
Japanese compressed air purifier manufacturers: SMC Corporation and CKD Corporation
(2) Compressed air purifier to be installed on the terminal
If you cannot install the air purifier in the main line due to problems with valve setup,
please install a terminal-type compressed air cleaner, and make the above specification
attainable.
2-2
Page 23
<Example devices>
Products from SMC Corporation
Mist Separator, AM150 or AM250 series
(Filtering level: 0.3μm, Secondary oil mist concentration: 1.0 mg/m
CKD Corporation
Oil mist filter, M1000 or M3000 Series
Mantle S Type (Filtering level: 0.3μm, Remaining oil: 1.0 mg/m
Handling Precautions:
Select a compressed air purifier with specifications suited to the usage conditions.
Even when you install the above oil removal equipment, it is necessary to properly
inspect and maintain the air circuit section for long-term stable operation. Install
the oil removal equipment before use and perform periodic inspection and
maintenance.
The warranty is void if the device fails because the quality of the instrumentation
air was not sufficient.
Chapter 2 Installation
3
)
3
)
2-3
Page 24
Chapter 2 Installation
Drain plug
2-3 Installation Procedure
2-3-1 Attaching the 700 Series to the Actuator
This device is a smart ESD device that is used together with a valve having a direct or
rotary actuator. The weight of this device is about 4.2kg. The basic installation procedure
is the same as for a conventional electric/air positioner.
Be careful not to get injured by sharp parts such as the edge of the main unit
or actuator or screw threads during mounting.
The type of mounting plate, mounting method, and mounting procedure
differ depending on the actuator model to be mounted in the device.
If the device is not properly mounted, not only will it not be able to operate
at its true performance but it may be damaged or fail. Pay attention to the
following points.
• The mounting plate and its accessories differ depending on the
specifications (actuator model). Be sure to use the appropriate mounting
plate and accessories for the actuator to be mounted.
• When installing the valve, please consider ease of maintenance
(piping, wiring, adjustments, etc.) and have as much space as possible
surrounding it, and orient the equipment correctly.
• Deliver the device to the installation location in the packaged state if
possible.
• Do not apply excessive force to the feedback lever during mounting.
• Do not bend the feedback pin.
• Do not block the exhaust port located underneath.
•
Install the device so that the electrical conduit connection port does not
face upward.
• Securely tighten bolts.
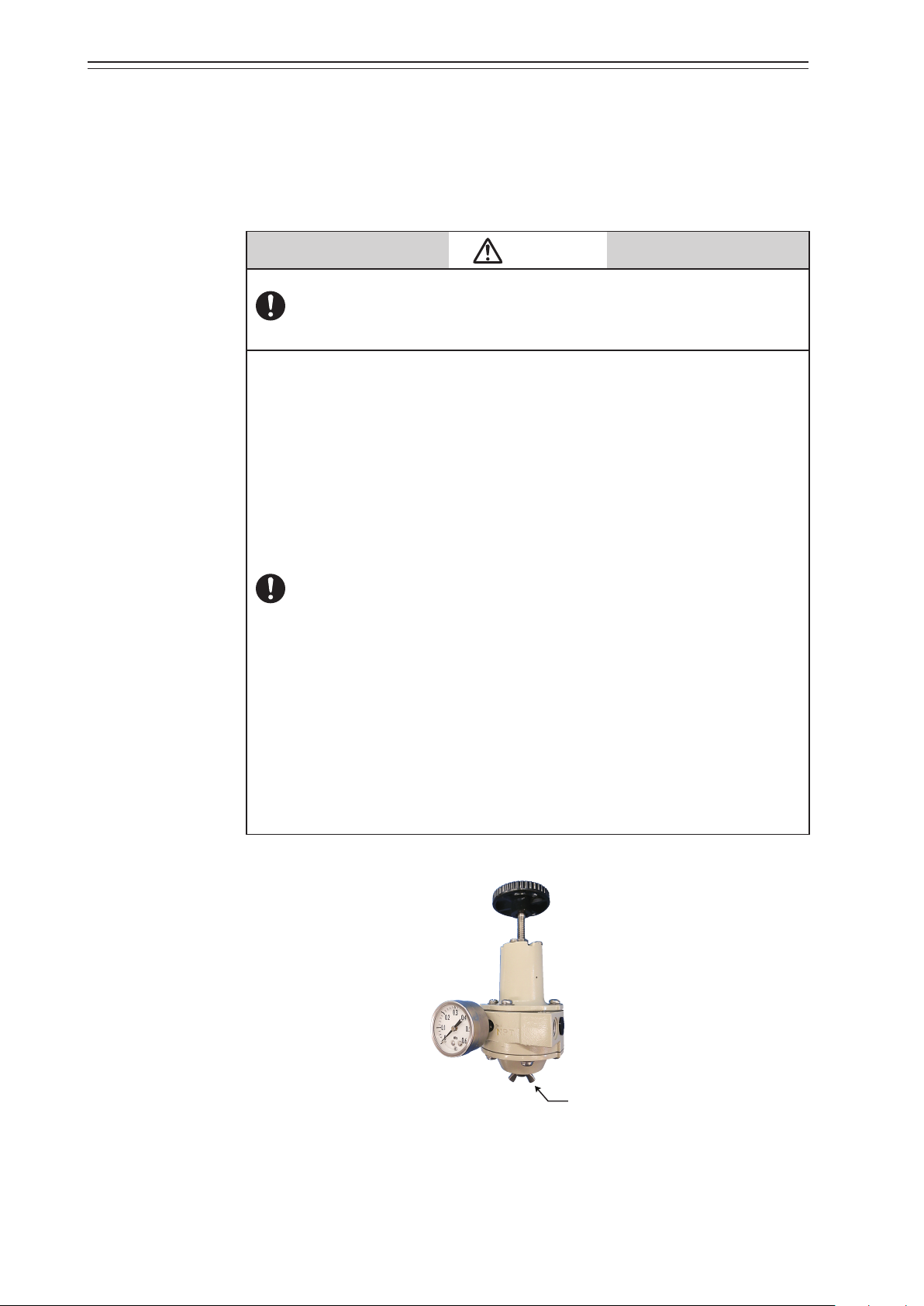
• If the model KZ03 pressure regulator with filter is installed with the
device, install with the drain of the KZ03 facing downward. If the KZ03
cannot be attached vertically (with the drain facing downward), remove
it from the device.
• In order to avoid the possibility of rainwater entering the pressure gauge,
install the gauge such that it does not face upward or downward. In
addition, the pressure gauge has a rainwater drain on its underside, so
install the gauge with this hole facing downward.
Caution
2-4
Page 25
1) Mounting the feedback lever
Assemble the feedback lever from the front of the main unit of the device using the two
included hexagon socket bolts.
Figure 2-13. Mounting Procedure for Feedback Lever
Assemble the extension lever as shown in the figure below if necessary.
Chapter 2 Installation
Figure 2-14. Mounting Procedure for Extension Lever
2-5
Page 26
Chapter 2 Installation
Hexagon socket ange bolts (x 2)
Yok e
Hexagonal bolt
Hexagonal bolt
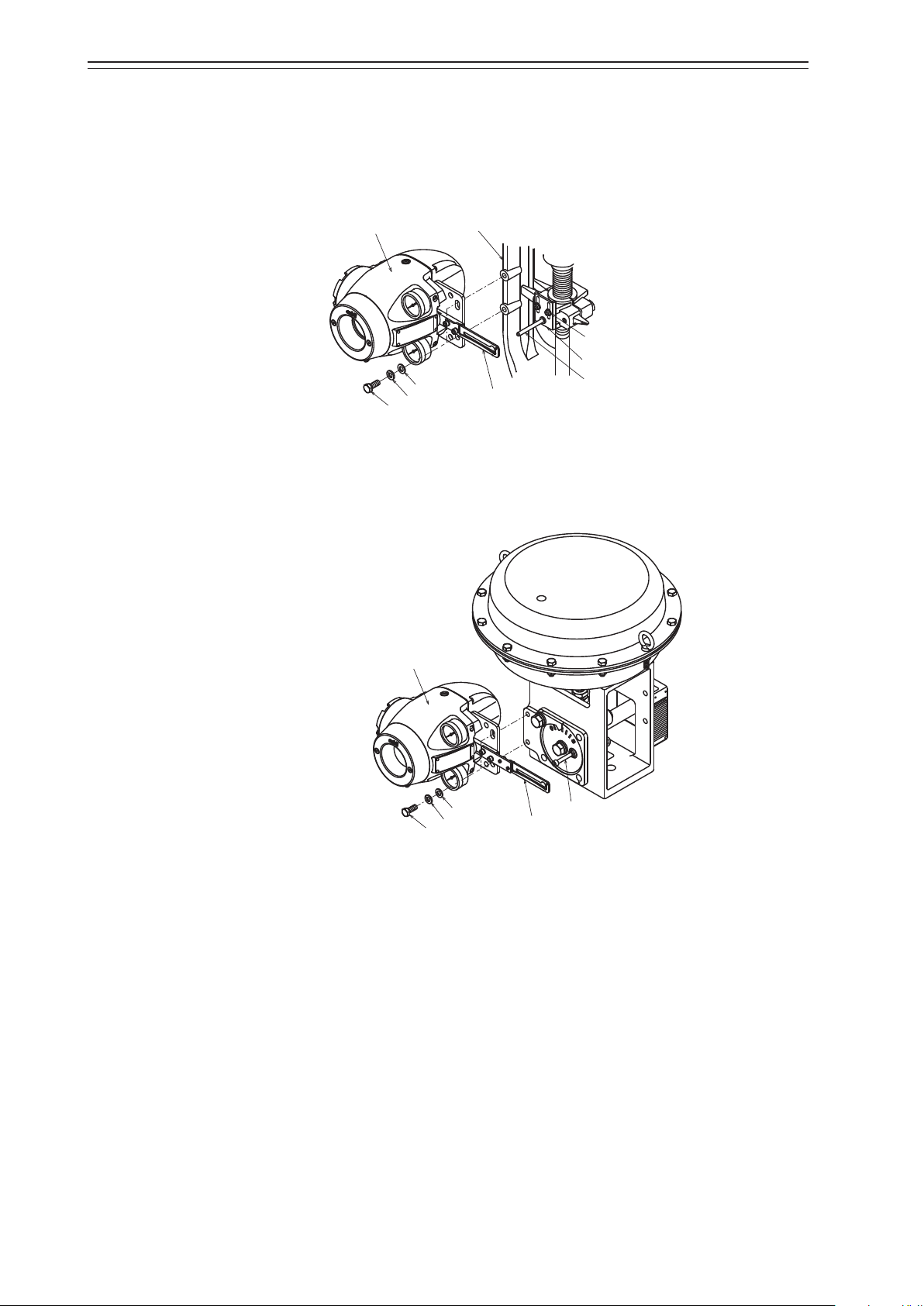
2) Mounting example
A typical mounting method is shown in the figure below. If your actuator is not shown in
the figure below, refer to the assembly diagram included with the device.
[Direct-Acting Actuator HA2 to 4, PSA1 to 4, 6, VA1 to 6 from Azbil Corporation]
AVP
Connector pin assembly
Plain washer
Spring washer
Feedback lever
Feedback pin
Figure 2-15. Mounting Procedure for Direct-Acting Actuator HA2 to 4, PSA1 to 4, 6, VA1
to 6 from Azbil Corporation
[RSA1, 2, VR3 actuator from Azbil Corporation]
AVP
Plain washer
Spring washer
Feedback pin
Feedback lever
Figure 2-16. Mounting Procedure for RSA1, 2, VR3 Actuator from Azbil Corporation
2-6
Page 27

[Example of double-acting rotary cylinder actuator]
Hexagonal bolt
Figure 2-17. Mounting Procedure for Double-Acting Rotary Cylinder Actuator
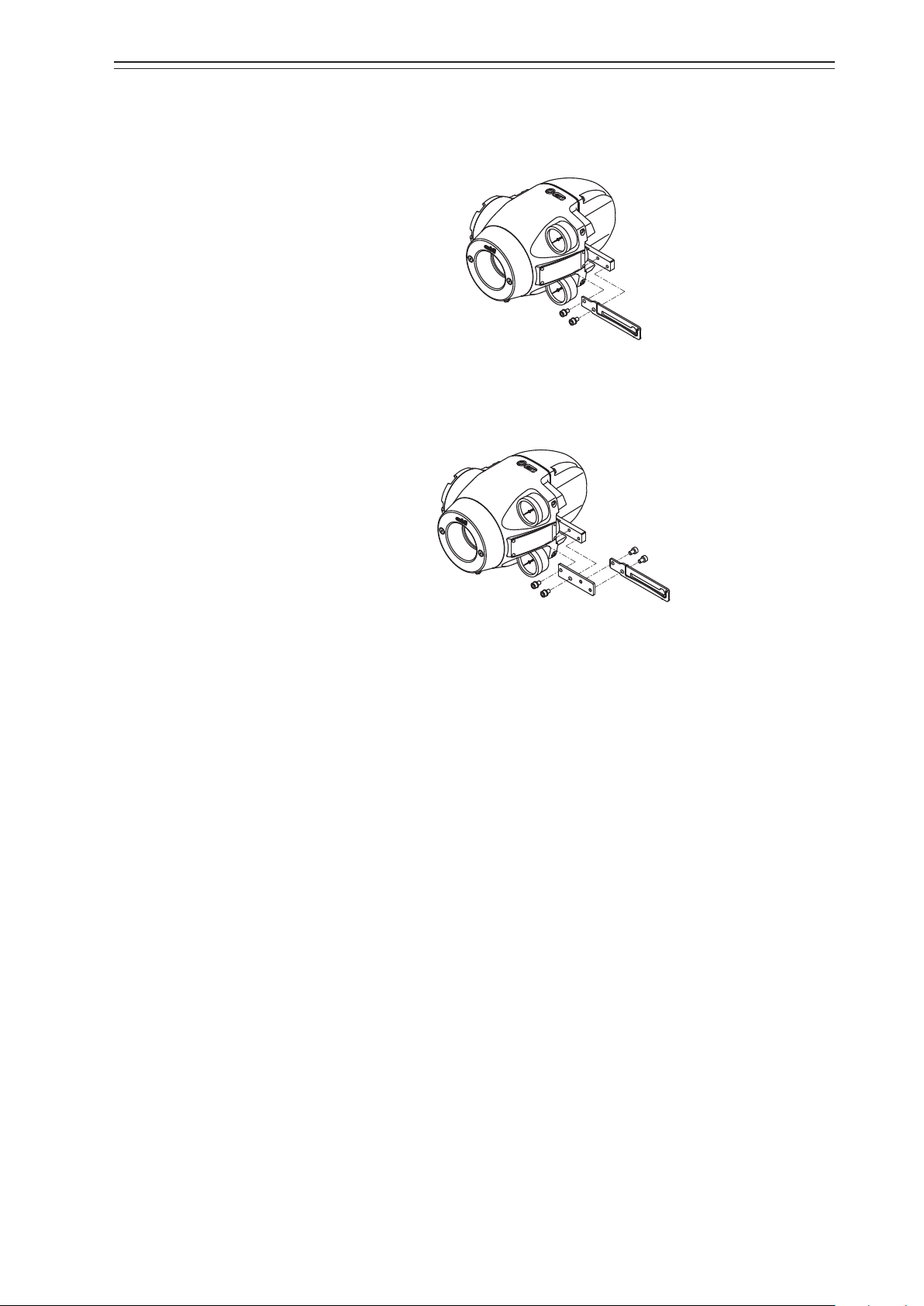
3) Mounting procedure
The procedure for mounting the feedback lever onto the actuator is shown below.
Step Procedure
Spring
washer
SpacerAVP
Feedback pin
Arm
Spring washer
Hexagonal nut
Feedback lever
Chapter 2 Installation
Spring washer
Hexagonal bolt
1
Tightly secure the mounting plate by inserting hexagonal bolts (M8×20)
with spring washers into the (two) screw holes at the rear of the device.
Tightly secure the device (mounting plate) onto the mounting seat of the
2
actuator using bolts and washers. At this time, insert the actuator feedback
pin into the slotted hole of the feedback lever in the device.
2-7
Page 28
Chapter 2 Installation
Pin
30°
30°
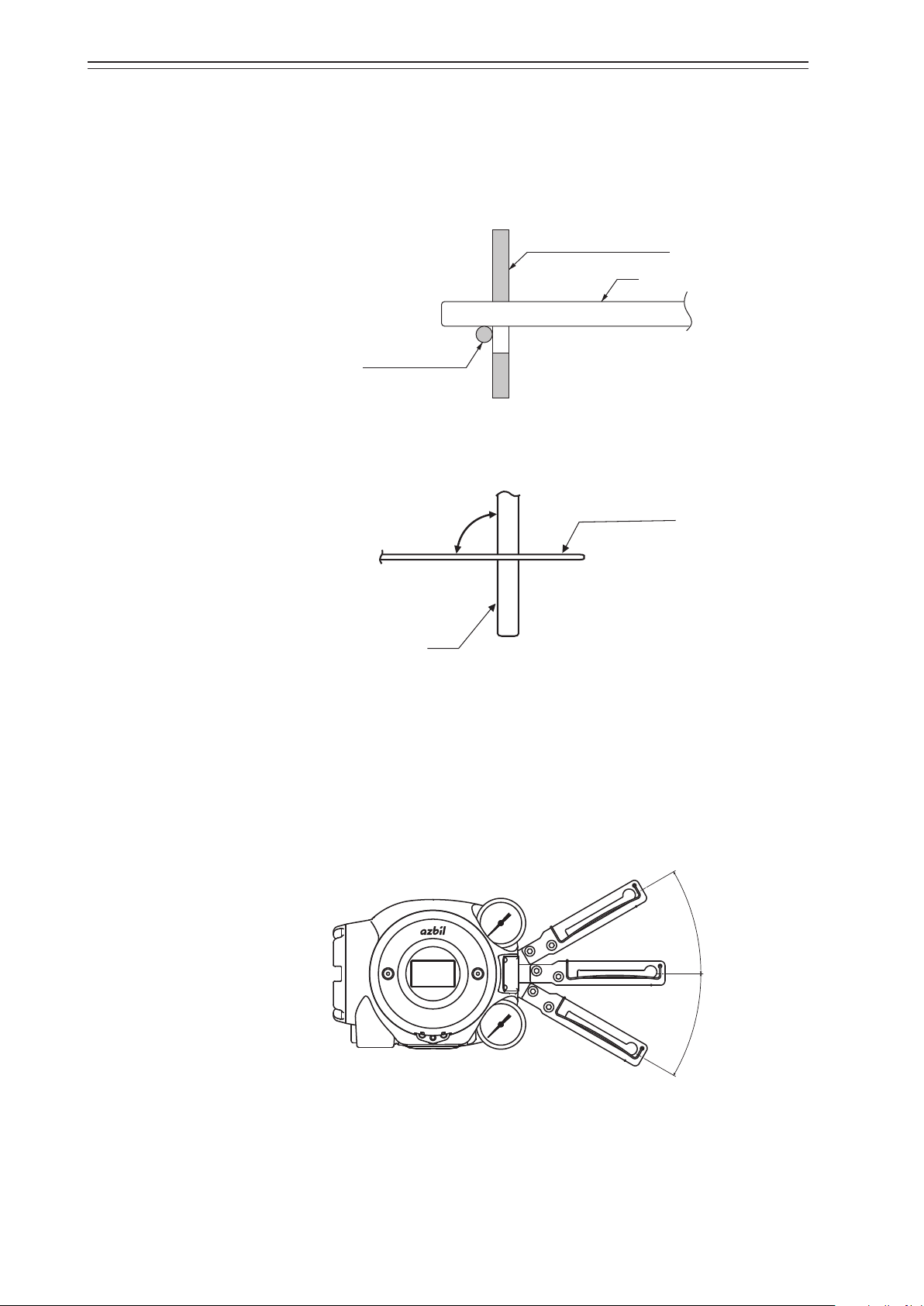
4) Connection of feedback pin and feedback lever
There are several points to be careful of when connecting the feedback lever to the device
and the actuator feedback pin. Connect correctly.
• Only a pin with a diameter of 6 mm can be used.
• Insert the pin between the guide and the spring.
Feedback lever (cross section)
Pin
Spring (cross section)
Figure 2-18. Connection of Feedback Lever and Feedback Pin
• Make the feedback lever perpendicular to the pin when viewed from the above.
90°
Feedback lever
Figure 2-19. Angle between Feedback Lever and Pin
• Mount the lever so that it is horizontal when opened 50%.
Contact us to find out how to mount the lever onto other actuators.
• The allowable rotation angle of the feedback lever is horizontal ±30°. If the angle exceeds
±30°, the self-diagnostic function detects VTD Travel Detector Out of Range and the
device will not operate normally. (The accuracy is guaranteed when the rotation angle is
between ±4° and ±20°.)
S
m
a
r
t
E
S
D
S
I
S
r
o
f
e
c
i
v
e
D
Figure 2-20. Operation Angle of Feedback Lever
• When attaching the lever to a rotary cylinder so that the shaft of the rotary cylinder is
positioned between the feedback pin and the positioner as shown in the figure below,
select Rotary/90° (for 90°) or Rotary/other (for angles other than 90°) as the Actuator
Type according to the rotation angle.
2-8
Page 29
Sha of rotary cylinder
Positioner
Feedback pin
Positioner
Chapter 2 Installation
Feedback pin
S
m
a
r
t
E
S
S
I
S
r
o
f
e
c
i
D
v
e
D
Feedback lever
Figure 2-21. Connection of the Rotary Cylinder to the Feedback Pin and Feedback
Lever
• When the rotary cylinder is large and the lever is assembled so that the feedback pin is
positioned between the main unit and the shaft of the rotary cylinder as shown in the
figure below, select Rotary (sub)/90° (for 90°) or Rotary (sub)/other (for angles other
than 90°) as the Actuator Type according to the rotation angle.
S
S
I
m
S
a
r
r
o
t
f
E
e
S
c
i
D
v
e
D
Sha of rotary cylinder
Figure 2-22. Feedback Pin and Feedback Lever Connection for Rotary Cylinder
(Large Cylinder)
5) Maintenance space behind the device
The device has a nozzle flapper mechanism in the back of the main unit. When cleaning
the flapper, you must remove the pilot relay cover secured to the back with three screws.
Design the clamp and feedback mechanism to ensure maintenance space for cleaning.
2-9
Page 30
Chapter 2 Installation
Supply air
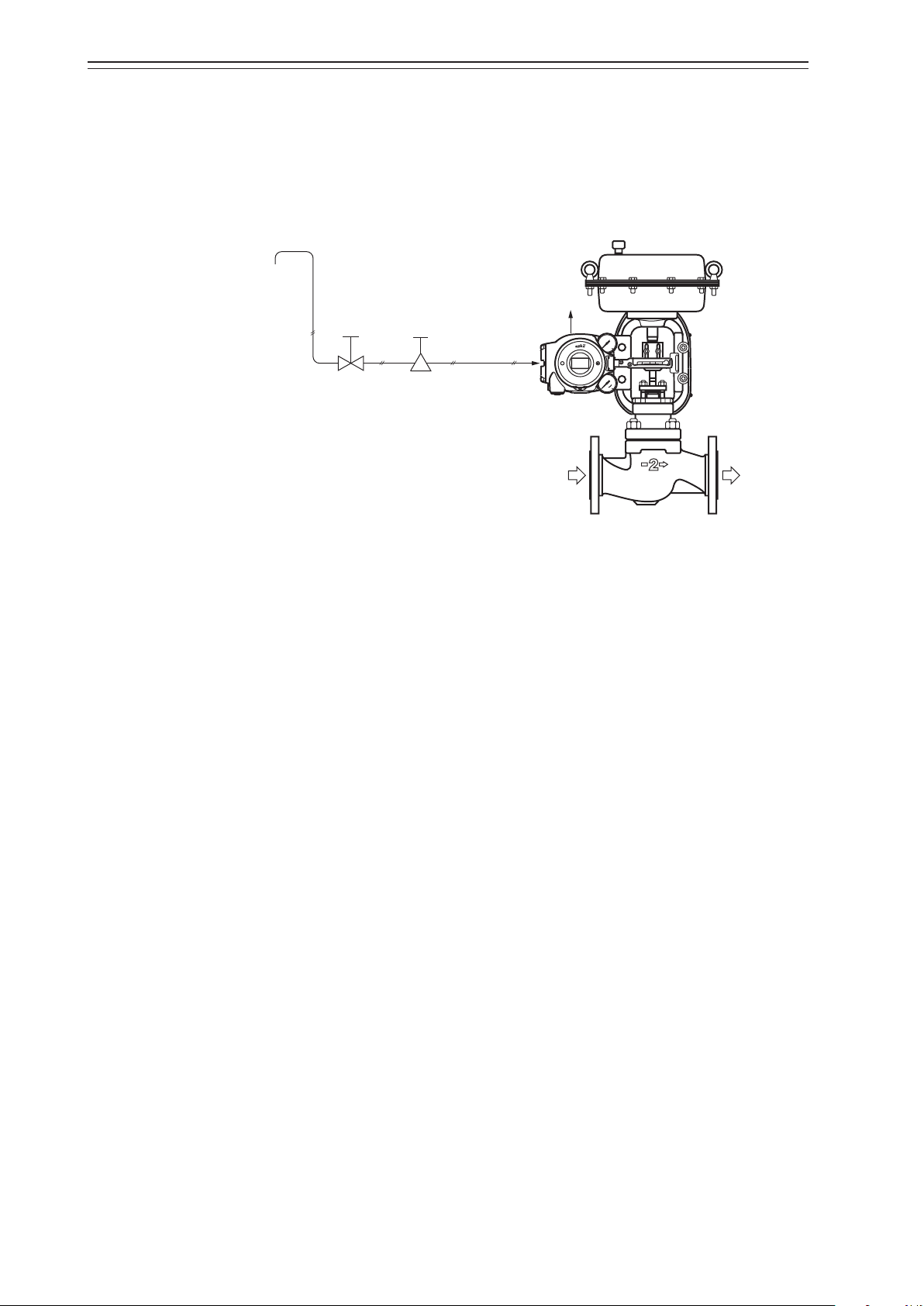
2-3-2 Pneumatic Piping Connection
This section describes how to supply the air for the device to drive the actuator.
1) Air supply system
Supply air must be clean and dry for reliable use of the device for a long time. A typical
example of an air supply system is shown in the figure below.
Shuto
2) Supply air
Use supply air that conforms to the instrumentation air standards (on page 2-3).
3) Regulator with filter
• The regulator with filter is used to adjust the pressure of the supply air to the device.
• Install the regulator as close to the main unit of the device as possible.
• The regulator can be manually operated by using the A/M switching function.
(The double-acting actuator does not support manual operation.)
valve
Regulator
with lter
Output air
piping
Supply air piping
Figure 2-23. Air Supply System
S
m
S
a
I
r
S
t
r
E
o
f
S
D
e
c
i
D
v
e
• Use a 3μm or less filter.
• The filter removes solid materials from supply air.
• If the filter is not equipped, separately insert a (3μm or less) filter immediately before
the regulator.
• Install the regulator so that the drain faces downward.
• If you select the built-in KZ03 Azbil regulator, the filter is built into the device before
shipment.
4) Shutoff valve
• The shutoff valve is used to temporarily stop supplying air to the device.
• During maintenance, you can dismantle the equipment and valve without stopping the
whole air supply system.
2-10
Page 31

5) Piping
Output air connection port (OUT1)
Supply air connection port (SUP)
Rc1/4 or 1/4NPT
• Use piping with an inside diameter of 6mm.
• When using the device in a corrosive atmosphere, select piping appropriate for the
environment of the installation location. For example, you may use vinyl-coated copper
pipe.
• To prevent air leaks, please always use plumbing coupling that fits the piping to be used.
6) Connection positions
The positions of the supply air connection port and output air connection port are shown
in the figure below. Select the dimensions of the connection port screws according to the
specifications.
Chapter 2 Installation
Rc1/4 or 1/4NPT
Output air connection port (OUT2)
(for double-acting actuator)
Figure 2-24. Pneumatic Piping Connection
Handling Precautions:
When connecting the electromagnetic valve for emergency shutoff, air valve, or
other part, install it between the output air connection and the actuator rather
than the supply air connection side of the device.
2-11
Page 32

Chapter 2 Installation
7) Mounting procedure
The procedure for connecting pneumatic piping to operate the device is shown below.
Step Procedure
Connect the joint for piping to the connection port using seal tape.
Handling Precautions:
1
• Use seal tape as the seal material. Avoid using solid or liquid seal
material if possible.
• Do not let the seal tape get in the piping.
• If you do use a liquid seal, make sure that no drops of the seal
material get into the piping.
Connect the supply and output pipes to each joint in consideration of
the arrangement of the piping.
Handling Precautions:
2
3 After all piping is complete, make sure that air does not leak.
• For the double-acting actuator, the connection between output
air connection ports OUT1 and OUT2 and the actuator is
determined by the valve operation. Check the valve operation
before connecting pipes.
• Sufficiently flush piping before connection to prevent burrs on
the piping or other foreign objects from getting in the piping.
• Keep the output air piping as short as possible.
2-12
Page 33

2-3-3 Electrical Wiring Connection
Terminal for output signals
Terminal for input signals
M4 screw
M4 screw
Terminal for external grounding
This section describes the methods for electrical wiring for signal input from the controller
and signal output to the monitoring system.
Turn the power off before starting wiring work. Otherwise, electric shock may
occur.
When using the explosion-proof model in a dangerous place, be sure to
connect the wiring while following Chapter 7, “Precautions for the ExplosionProof Model.”
Be sure to perform grounding work following the electrical work guidelines for
the local region.
Handling Precautions:
Be sure to attach a blind plug to the unused conduit connection port so that it is
completely covered.
Chapter 2 Installation
Warning
Caution
1) Connection positions
The figure below shows the terminal block in the terminal box.
Terminal for internal grounding
Figure 2-25. Terminal Block in the Terminal Box
2) Terminal for external grounding
Connect the external grounding terminal to the case with two washers as follows.
M4 screw
HART check pin
M4 screw
Cable lug
Washer
Washer
Figure 2-26. Connection of External Grounding Terminal
2-13
Page 34

Chapter 2 Installation
Ground
Ground
3) Electrical wiring of Model AVP7_2 without output signal
3-1) In the case of Model AVP772/782 with current signal input
Remove the terminal box cover and connect the wires as shown in the figure below.
Controller
4-20 mA DC or
0-20 mA DC
• Use only one of the two ground terminals (internal or external) and do the grounding
work according to all local laws and ordinances governing electrical work.
Figure 2-27. Electrical Wiring with Current Signal Input without Output Signal
(2-conductor Cable)
3-2) In the Case of Voltage Signal (0/24 V DC) (Model AVP792)
Remove the terminal box cover and connect the wires as shown in the figure below.
Resistance: 500 Ω
Controller
0/24 V DC
• Use only one of the two ground terminals (internal or external) and do the grounding
work according to all local laws and ordinances governing electrical work.
Figure 2-28. Electrical Wiring with Voltage Signal Input without Output Signal
(2-conductor Cable)
2-14
Page 35

4) Electrical Wiring with Travel Transmission (Model AVP7_1)
Ground
Ground
4-1) In the case of Model AVP771/781 with current signal input
Remove the terminal box cover and connect the wires as shown in the figure below.
Chapter 2 Installation
*1
Monitoring system
(current input)
Controller
At least 250 Ω
Analog Signal
4-20 mA DC
4-20 mA DC or
0-20 mA DC
• Use only one of the two ground terminals (internal or external) and do the grounding
work according to all local laws and ordinances governing electrical work.
Figure 2-29. Electrical Wiring with Current Signal Input and Travel Transmission
(4-conductor Cable)
4-2) In the Case of Voltage Signal (0/24 V DC) Input (Model AVP791)
Remove the terminal box cover and connect the wires as shown in the figure below.
*1
Monitoring system
(current input)
At least 250 Ω
Analog Signal
4-20 mA DC
Controller
Resistance: 500 Ω
0/24 V DC
• Use only one of the two ground terminals (internal or external) and do the grounding
work according to all local laws and ordinances governing electrical work.
Figure 2-30. Electrical Wiring with Voltage Signal Input and Travel Transmission
(4-conductor Cable)
*1. For details on power and resistance, please refer to section 2-3-4, “Input Signal and Output Signal Power.”
4-3) When the monitoring system is using voltage input (1-5 V)
Please conduct the wiring as follows.
Monitoring
system
(voltage input)
At least 250 Ω
*1
*1. reference Figures 2-22
Figure 2-31. Electrical wiring for monitoring system that uses a voltage input
2-15
Page 36

Chapter 2 Installation
Ground
Ground
5) Electrical wiring for contact output (Model AVP7_0)
5-1) In the case of Model AVP770/780 with current signal input
Remove the terminal box cover and connect the wires as shown in the figure below.
Monitoring system
(Contact input)
Controller
Power: 24 V DC
Contact Signal
4-20 mA DC or
0-20 mA DC
• Use only one of the two ground terminals (internal or external) and do the grounding
work according to all local laws and ordinances governing electrical work.
Figure 2-32. Electrical Wiring with Current Signal Input and Contact Output
(4-conductor Cable)
5-2) In the Case of Voltage Signal (0/24 V DC) Input (Model AVP790)
Remove the terminal box cover and connect the wires as shown in the figure below.
Monitoring system
(Contact input)
Controller
Power: 24 V DC
Contact Signal
Resistance: 500Ω
0/24 V DC
• Use only one of the two ground terminals (internal or external) and do the grounding
work according to all local laws and ordinances governing electrical work.
Figure 2-33. Electrical Wiring with Voltage Signal Input and Contact Output
(4-conductor Cable)
2-16
Page 37

Chapter 2 Installation
2-3-4 Input Signal and Output Signal Power
1) Input signal
There are the following three types of input signals to this device.
• 4-20 mA DC (Model AVP77_)
• 0-20 mA DC (Model AVP78_)
• 0/24 V DC (Model AVP79_)
These input signals are also used as the power source to drive the internal circuits.
The input siginal specification of the device differs depending on the SIS positioner mode.
The SIS positioner mode has a positioning mode that controls the valve travel, and an ON/
OFF mode that fully closes or opens the valve.
When the device is used for an emergency shutdown valve (or the emergency open valve),
please set the SIS positioner mode to an ON/OFF mode.
When the device is used for a control valve, please set the SIS positioner mode to a
positioning mode. (For details regarding the modification of the settings of the SIS
positioner mode, please refer to section 4-2-9, “SIS Positioner Mode”)
Table 2-3. Input Signal Specification
When used for an emergency shut down valve (or the emergency open valve) (when the SIS positioner mode is set to ON/OFF mode)
Basic Model
No.
Model AVP77_ 4-20 mA DC 3.84-4.48 mA DC
Model AVP78_ 0-20 mA DC Less than 0.5 mA DC
Model AVP79_ 0/24 V DC Less than 0.5 V DC 24±4.8 V DC
Basic Model
No.
Model AVP77_
Model AVP78_
Input Speci-
fication
If used for a control valve (When the SIS positioner mode is in positioning mode)
Input Speci-
fication
4-20 mA DC 3.84-4.48 mA DC
0-20 mA DC Less than 0.5 mA DC 4-20 mA DC
*: For double-acting units, OUT1’s pressure will be at 0, and OUT2’s will be at supplied air pressure.
Operation cannot be guaranteed with an input signal outside of these ranges.
Emergency Operation Normal Operation
Input Signal
Emergency Operation Normal Operation
Input Signal
Output Air
Pressure
0*
Output Air
Pressure
0*
Input Signal
12-20 mA DC
Input Signal
5.6-20 mA DC
Handling Precautions:
• When operating with current input, do not go over 24mA DC.
• When operating with voltage input, do not apply more than 30V DC.
Output Air
Pressure
Maximum
Pressure
Output Air
Pressure
Control
Pressure
PST Execution
(Feasibility)
PST
Executable
PST Execution
(Feasibility)
PST
Not executable
• When Model AVP77_ are operated by the positioning mode, the output air
pressure is 0 if the input signal falls to less than 5.6mA. Accordingly, use Model
AVP78_ if you need positioning with an input signal in the 4-20mA range.
2) Travel Transmission Power
The travel transmission power is 17.9–45V DC.
The load resistance for connections to the travel transmission loop should fall within the
operating range shown below for the power voltage used.
2-17
Page 38

Chapter 2 Installation
1,484
(Ω)
Operable range
: Includes input resistance from host monitoring system
Handling Precautions:
Do not apply a travel transmission power greater than 45 V DC.
1,347
External load resistance
E - 12.5
R=
0.0219
R
*1
525
247
Operating range
Figure 2-34. Voltage for the Travel Transmission vs. Load Resistance Characteristics
3) Power for contact output
• Contact capacity: 30 V DC max, 100 mA DC max
• Saturation voltage: 5 V DC max
2-3-5 Cables (For Input or Output Signal)
1) Selection and conditions of cables
The criteria for selection and the condition of cables for wiring are described below.
• We recommend using “CVV” 600V PVC- insulated sheath control cable (Japanese
industrial standard JIS C 3401) with a conductive cross-sectional area of 1.25 mm
stranded cable with equivalent or higher performance.
• When routing cable in a place subject to electromagnetic noise, use “CVVS” shielded
wire (standard JCS 4258 of the Japanese Electric Wire & Cable Makers’ Association).
• Select a sheath material that withstands the cable installation environment (including the
ambient temperature, corrosive gas, and corrosive liquid).
17.9 24 450
Supply voltage E (V DC)
*1
42
2
or a
2) Cable installation
• Use cable with an outside diameter of 7 to 12 mm. When using a pressure-resistant packing
cable adapter, be sure to use packing appropriate for the outside diameter of the cable.
• Crimp terminals with insulated sleeve (for M4 screw) are recommended for terminals.
• The maximum permissible cable length is 1500 m.
Comply with the following when installing cables between this device and the actuator.
• Avoid installing cables near devices that generate electrical noise such as large capacity
transformers, motors, or power sources for motors.
• Do not install cables in the same tray or duct with other power cables for motors.
• We recommend the use of conduits and ducts to prevent water and mechanical damage
to electrical lines. Also, always use water-tight glands at conduit connection ports.
• Use conduits and ducts for locations exposed to electromagnetic noise.
• When using shielded cable, the cable must be grounded at a single point on the DCS side.
2-18
Page 39

Handling Precautions:
The device is intended for use in industrial locations defined in CE marking
directive (EN 61326-1).
3) Wiring procedure
The procedure for electrical wiring to operate the device is shown below.
Step Procedure
Chapter 2 Installation
1
2
3 Remove the dust-proof plug from the conduit connection port.
4
Loosen the locking bolts (M4) on the terminal box cover with a hex
wrench (3). (Turn the bolts clockwise.)
Rotate the terminal box cover counterclockwise to remove it.
Handling Precautions:
Be careful not to damage the paint with a tool or other object.
Insert the cable into the conduit connection port.
Handling Precautions:
Be careful not to damage the sheath of the cable.
Wire the cable to the relevant terminal in the terminal box.
Handling Precautions:
5
6
• Be careful of the polarity.
• Sufficiently tighten the terminal screw. The recommended
tightening torque is 1.5N·m.
Apply sufficient waterproofing treatment to the conduit to prevent rainwater or other liquid from entering inside.
Handling Precautions:
We recommend using silicone non-hardening sealant.
Mount the terminal box cover, sufficiently tighten it with an appropriate
tool, and then secure the cover by rotating the lock screw counterclockwise.
Caution
Be careful not to get your finger caught in the clamp.
7
Handling Precautions:
Handling Precautions:
The input resistance of Model AVP77_/78_ is equivalent to 600Ω. At 20mADC,
it would require an inter-terminal voltage of at least 12V. Check the controller’s
allowable load resistance and the output voltage. Note that when the controller’s
allowable load resistance is less than 600Ω, an isolator or similar device should be
used.
Be careful not to hurt your finger with the edge of cover or
the screw threads of the main unit.
Be careful not to damage the paint of the device with a tool or other
object.
2-19
Page 40

Chapter 2 Installation
O-ring
Cable diameter ≥ 8 mm
Cable diameter ≤ 8 mm
2-4 Cable gland and flameproof universal elbow for TIIS flameproof apparatus
The TIIS flameproof models are provided with a certified cable gland. The cable gland
seals the cable entering the positioner’s case to withstand an internal explosion and
protects the cable from being damaged mechanically and electrically. Use the specially
designed elbow if it is necessary to change the direction of the cable with these models.
Handling Precautions:
Cable Entry Device other than the TIIS Explosion-proof Model
If this device received explosion-proof certification other than TIIS flameproof
certification, and if you wish to use it, please connect the cable according to the
regional electrical wiring work guidelines.
1) Structure of the flameproof cable gland
The flameproof cable gland is shown below in assembled and exploded views.
Clamp (Lower)
Clamp (Upper)
Cross recessed
head screws
Figure 2-35. Flameproof Cable Gland
Hex socket head set screw
Body
O-ring
Gland
Coupling
O-ring
Clamp
(Upper)
Cross recessed
head screws
Hex socket head set screw (2)
Washer
Sealing ring
Washer
Hex socket head set screw (2)
Union nut
Gland
Coupling
O-ring
Union nut
Figure 2-36. Constituent Elements of Flameproof Cable Gland
2-20
Page 41

2) Structure of the flameproof universal elbow
Lock nut
The figure below shows the universal elbow.
Chapter 2 Installation
3) Mounting example
The flameproof cable gland and the universal elbow are used to connect the field wiring
cable to the device enclosure, as shown below.
[Use of flameproof cable gland]
O-ring
Figure 2-37. Flameproof Elbow
S
m
a
r
t
E
S
D
D
S
I
S
r
o
f
e
c
i
v
e
Elbow
[Use of flameproof cable gland and elbow]
S
m
a
r
t
E
S
D
e
D
Figure 2-38. Mounting Example of Flameproof Cable Gland and Elbow
S
I
S
r
o
f
e
c
i
v
2-21
Page 42

Chapter 2 Installation
4) Mounting procedure for flameproof cable gland
The procedure for mounting the flameproof cable gland is shown below.
Step Procedure
Firmly tighten the body of the cable gland to the conduit connection port
on the terminal box or to the universal elbow to hold it in place.
1
Handling Precautions:
Apply adequate waterproofing to these parts. We recommend the use
of silicone resin based non-hardening seal materials.
Refer to the illustrations and insert the cable carefully.
Warning
If the diameters of the cable and the packing do not match
each other, the flame propagation cannot be prevented. Refer
to the table below and select packing with the correct internal
diameter for the outer diameter of the cable.
Cable outer
diameter (mm)
2
7.0-8.0 8 Provided
8.0-10.0 10 Built in
10.0-12.0 12 Provided
If the cable outer diameter is 8 mm or less, use the lower
clamp when attaching the cable gland.
Packing inner
diameter (mm)
Handling Precautions:
Be careful not to damage the coating of the device with a tool.
Clamp the cable gland with screwing and tightening it to the body.
3
To prevent injuries due to flame propagation, be sure to
tighten the packing adequately.
4 Insert the cable end into the terminal box.
5
Screw the union nut to the body and tighten it securely. Then, tighten the
union nut's hex socket set screw in the union nut.
Warning
Notes
2-22
Page 43

5) Mounting procedure for flameproof universal elbow
Elbow
Lock nut
O-ring
O-ring groove
The procedure for mounting the flameproof universal elbow is shown below.
Step Procedure
Align the lock nut with the O-ring groove as shown below.
Chapter 2 Installation
Lock nut face
1
end surface
Figure 2-39. Arrangement of Lock Nut and O-ring
Screw the flameproof universal elbow into the terminal box conduit connection port until the lock nut end surface meets the connection port end
surface.
When two elbows are used, first screw the first elbow into the terminal box.
2
Next, screw the second elbow into the terminal box in the reverse direction
to the first elbow.
Handling Precautions:
Apply adequate waterproofing to these parts.
Turn the flameproof universal elbow to loosen it in the desired direction.
3
4
Handling Precautions:
Do not loosen it more than 1 turn.
Lock the flameproof universal elbow in place by tightening down the lock
nut using the special tool.
2-23
Page 44

Chapter 2
2-24
Page 45

Chapter 3 Operation
socket bolts
This chapter describes how to start operating the device and adjust it using the local user
interface (LUI). If you purchase the device as a separate item, be sure to read Chapter 2
before reading this chapter.
3-1 Local User Interface (LUI)
Four push buttons on the LUI (with , , , and symbols) can be operated by
removing two screws ((2.5mm) hexagonal socket bolts) from the front cover of the device.
Chapter 3 Operation
Front cover
Hexagonal
Figure 3-40. LUI Structure with the Front Cover Removed
Table 3-4.
Key input Monitor mode Setup mode
Switches between display categories. Goes to the next display.
Selects the next item.
Selects the previous item.
Operation
buttons
Switches between display categories. Goes back to the previous display.
Hold down
Hold down
The LUI has monitor and setup modes.
In monitor mode, normal, detailed and status monitoring are available. The normal
monitor can be used to monitor data such as opening and input signals and it displays
alarm information if a self-diagnostic alarm is issued.
Switches between setup mode and monitor mode.
Executes the function.
3-1
Page 46

Chapter 3 Operation
To change from monitor mode to setup mode, hold down the
operations such as auto setup and zero / span adjustment can be performed. Figure 3-2
shows a diagram of the LUI screen transition.
The LUI displays the dynamic values of the device and can be used to adjust and set up the
following six functions.
• Auto setup function
• Zero/span adjustment
• Supply Bypass Function
• PST (Partial Stroke Test) Activation
• Control Parameter Configuration
• Valve System Configuration
This section describes the adjustment and setting procedure using the LUI.
button. In setup mode,
Handling Precautions:
• Operation from a host unit is suspended while the LUI is being used to make
adjustments or change settings.
• If there is an object near the operation button, remove it before operation.
• Return the display to the normal monitor when you want to display alarms,
because you cannot display alarms while using a monitor other than the normal
monitor.
Alarms and the present values are alternately displayed at that time of alarm
outbreak.
• Switch to your desired screen when mounting the cover, as the screen does not
automatically change from the screen that was displayed.
• The design of the front cover differs depending on whether you are following
the SIS or general specification, so please pay attention to the difference when
mounting.
• If automatic PST is already set, the PST is not executed while the LUI is in
the setup mode. Please verify the execution time of the automatic PST before
operating.
• If you have made adjustments, make sure to verify them by checking device
operation. If you have also modified settings, make sure that they were modified
correctly.
3-2
Page 47

The LUI display differs depending on the software version.
Check the software version on the LUI in details monitor mode
with guide No. 2-1.
For software version 2.2 and earlier
Monitor modeMonitor mode
Enter the password if a
password has been set.
Hold down
Chapter 3 Operation
If you use another host or communicator
for communication during setup, this
screen is displayed and the setup mode
cannot be entered.
Setup modeSetup mode
Normal monitorNormal monitor
Details monitorDetails monitor
e codes are the same
as those of 5-1-6 and 5-1-7.
Status monitorStatus monitor
When the alarm is
activated in the normal
monitor, the alarm
messages are displayed.
It is not possible to
jump directly back to
ASu from ConF.
For display details, refer to Appendix A.
Figure 3-41.
3-3
Page 48

Chapter 3 Operation
For software version 2.3 and later
Normal monitorNormal monitor
Monitor modeMonitor mode
Details monitor
Details monitor
e codes are the same
as those of 5-1-6 and 5-1-7.
Enter the password if a
password has been set.
Hold down
Status monitor
Status monitor
If you use another host or communicator
for communication during setup, this
screen is displayed and the setup mode
cannot be entered.
Test/setup modeTest/setup mode
Test/setup mode
Test/setup mode
selection display
selection display
Note: Displays inside the dotted line are
shown only in ON/OFF mode.
If the SIS positioner is in ON/OFF mode
when the LUI is changed from monitor
mode to test/setup mode, the test/setup
mode selection display is shown. If the
positioner is in positioning mode, setup
mode displays are shown.
Test modeTest mode
Setup modeSetup mode
When the alarm is
activated in the normal
monitor, the alarm
messages are displayed.
For display details, refer to Appendix A.
It is not possible to
jump directly back to
ASu from ConF.
Figure 3-42.
3-4
Page 49

3-2 Adjustment before Operation
Perform auto setup before using the device. Then, adjust the zero/span if necessary.
The zero/span adjustment function in the device electrically sets the fully closed and fully
open positions of the valve independently of each other. Therefore, you can adjust each of
these positions without interfering with the other one.
3-2-1 Auto Setup
There are two auto setup methods.
• Using the LUI
• Using HART communication
This section describes the method using the LUI. For the method through HART
communication and the details of auto setup, refer to Chapter 4.
Handling Precautions:
• Set the input signal to 5.6mA or more when the SIS positioner mode is in
positioning mode, and when it is in ON/OFF mode, set it to 12mA or more
or 19.2V or more. You will not be able to execute auto setup if the signal falls
below 5.6mA when the SIS positioner mode is in positioning mode, or if it falls
below 12mA or 19.2V in ON/OFF mode.
• In the self-diagnosis result, if there is a message with a check mark in the
positioning mode field in table 4-6 in section 4-2-21, “Diagnostic Messages,” the
auto setup will not function correctly.
• Once auto setup and zero/span adjustment are completed, always remember to
change the input signal and to check the opening, valve travel, and other valve
operations.
• Correctly set the actuator type and feedback lever position when fully closed
before starting auto setup.
• The dynamic characteristics may not be properly set due to the operating
unit capacity, operation stroke, inner diameter and length of the air piping,
etc. When that happens, please refer to section 4-2-5, “Control Setting” and
manually adjust the dynamic characteristics.
• If the size of the operating unit is set to “Custom,” then its size will not be
modified even if the auto setup is conducted. When selecting the operating
unit’s size via the auto setup, please set it to Param1-6, A-C.
• Even if the size of the operating unit and the valve is the same, there may be
times when the factory default setting will differ depending on the equipment
combination. After installation, please conduct an operation check, as well as
appropriate adjustments and setting, if necessary.
• After executing auto-setup, the forced fully open value (see section 4-2-7,
“Forced Fully Open/Closed Characteristics”) may be changed. If necessary,
reconfigure the forced fully open value. However, if the SIS positioner mode is
in ON/OFF mode, then the value will be fixed at 99%.
• If the booster relay is incorporated, hunting may occur during auto-setup, so
either adjust the booster’s sensitivity or refer to section 4-2-5, “Control Setting”
and manually adjust the dynamic characteristics.
• If a speed controller is incorporated, set it to full open and execute auto-setup.
Then, adjust the speed via speed controller.
• If the main unit is purchased separately, its initial settings are set by default to
those in the list of default values in section 6-7, “List of Default Internal Data
Values.” If it is connected to an operating unit with setting that differs from
these default settings, it will not operate just by itself. Before operating, be sure
to execute auto-setup and that it is configured appropriately.
Chapter 3 Operation
3-5
Page 50

Chapter 3 Operation
Caution
There is a danger during auto setup because the fully closed valve moves to
fully open. Be prepared in advance to prevent injury and effects on the process
when the valve moves.
If the factory default setting is not instructed at the time of shipment, then the operating
unit type is set to Linear, and the feedback lever position during forced closure is set
to Down. If the factory default setting was instructed, please refer to the section on the
factory default setting. In addition, modify the setting if necessary.
If you can’t properly close the auto setup, check the following.
• The supply air pressure is at an appropriate level
• A/M conversion switch is in auto drive mode
• Feedback pin and lever are properly connected.
• The output air pressure is properly connected to the operating unit
• The valve unit is not fixated by the manual handle, etc.
The reverse action actuator fully closes, fully opens, and fully closes the valve when auto
setup starts. The direct operation actuator fully opens, fully closes, and fully opens the
valve. Afterwards, it will operate near the aperture range of 20% <=> 25% and 80% <=>
85%.
When you exit auto setup, it will maintain an aperture suited to the input signal.
Check the following points before starting auto setup.
• Actuator Type
Linear (standard): Direct-acting actuator
Rotary/90°: When the distance between the feedback lever of the rotary actuator
(90°) and the pin is longer than the distance from the valve shaft
Rotary/Other: When the distance between the feedback lever of the rotary actuator
(around 60°) and the pin is longer than the distance from the valve
shaft
Rotary(sub)/90°: When the distance between the feedback lever of the rotary actuator
(90°) and the pin is shorter than the distance from the valve shaft
Rotary(sub)/Other: When the distance between the feedback lever of the rotary actuator
(around 60°) and the pin is shorter than the distance from the valve
shaft
• Valve Closed Position
DOWN (standard)
UP
3-6
Page 51

Chapter 3 Operation
(1) Procedure for performing auto setup
Step Procedure LUI display
Loosen two hexagonal socket bolts and remove the
1
front cover.
Press and hold the
Enter the password if prompted to do so. For details
2
on setting up the password, please refer to section
3-2-6, “Password.” To change Actuator Type or Valve
Closed Position, refer to (3) below.
Set the input signal to 5.6mA or more if the SIS positioner mode is in positioning mode, and set it to
12mA or more or to 19.2V or more if it is in ON/OFF
3
mode; then press the button once, confirm that it
switched to the screen on the right, then make a long
press of the button once more to execute the auto
setup.
The valve, which is initially fully closed, will fully open
and then fully close again. Then, it opens to between
4
20% and 25% and between 80% and 85%. After the
valve operation ends, the LUI screen changes and the
opening appropriate to the input signal is set.
5
will return to the initial screen of the auto setup.
button to enter Settings mode.
The meaning of the word FAIL that may occur during the execution of auto setup is as
follows.
FAIL00: auto setup failed
FAIL01: input signal is low
FAIL02: function other than auto setup is currently in progress
FAIL90: forced termination
(2) Procedure for aborting auto setup
Step Procedure LUI display
To abort auto setup during execution, press the
1
button.
2
Holding down the
When you press the
3
right is displayed again.
button aborts the execution.
button, the screen on the
3-7
Page 52

Chapter 3 Operation
(3) Procedure for specifying Actuator Type and Valve Closed Position
Step Procedure LUI display
Press the
1
screen on the right.
2
Press the
Select an appropriate actuator type with the
3
Select an appropriate feedback lever position when
the valve is fully closed with the
4
and hold down the button to set that position.
The specified actuator type and feedback lever po-
5
sition when the valve is fully closed are displayed.
Check the settings.
Go back to the desired menu with the
6
buttons.
3-2-2 Zero/Span Adjustment
or button repeatedly to display the
button.
and
buttons and press the button.
and buttons
and
After auto setup, check the 0% and 100% positions. If adjustment is required, adjust the
zero/span.
The following two zero/span adjustment methods are available.
• Using the LUI
• Using HART communication (This method is further broken down into the following
four methods.)
- Auto Travel Calibration
- Angle Correction
- Manual Setting
- Change Travel Angle
This section describes the method using the LUI. For the method using HART
communication, refer to Chapter 4.
Handling Precautions:
• If you adjust the span after auto setup, the forced fully opening value is
automatically changed to the value calculated by subtracting 1% from the
overstroke percentage.
Caution
There is a danger during auto setup because the fully closed valve moves to
fully open. Be prepared in advance to prevent injury and effects on the process
when the valve moves.
3-8
Page 53

Chapter 3 Operation
(1) Procedure for adjusting the zero/span
Step Procedure LUI display
Loosen two hex socket bolts (2.5mm) to remove
1
the front cover.
Press and hold the
mode. Enter the password if prompted to do so.
2
For details on inputting the password, please refer
button to enter Settings
to section 3-2-6, “Password.”
3
Press the
right (ADJ).
Press the
button to display the screen on the
button, select whether to adjust the
angle for 100% or 0% opening with the and
buttons, and press the button. (Refer to
(2) below, “Procedure for adjusting the angle.”)
To manually adjust the opening rather than using
4
the angle adjustment function, select manual adjustment for 100% opening (0% opening) with
the and buttons and press the button.
(Referto (3) below, “Procedure for manual adjustment.”)
(100% opening angle adjustment)
(0% opening angle adjustment)
(100% opening manual adjustment)
(0% opening manual adjustment)
(2) Procedure for adjusting the angle
Step Procedure LUI display
Select the angle (COARSE, MID, FINE) for 100%
opening adjustment (0% opening adjustment)
and buttons and press the
1
with the
button.
COARSE: Angle 1°
MEDIUM: Angle 0.1°
FINE: Angle 0.01°
Adjust the angle by pressing the
2
increase the angle and pressing the button to
button to
decrease the angle.
3-9
Page 54

Chapter 3 Operation
Step Procedure LUI display
Pressing the
ing and output air pressure (Pout1). Check that the
3
angle is properly adjusted.
If further adjustment is required, go back to the
adjustment screen with the button.
(3) Procedure for manual adjustment
Step Procedure LUI display
Manually specify the desired position for 100%
1
opening (0% opening).
2
Press the
button displays the current open-
button.
3-2-3 Supply Bypass
Supply bypass allows the valve to be fully closed and opened and enables operation with
the regulator. (For double-acting actuators, the valve can only be fully opened or closed.)
(1) Procedure for supply bypass
Check that the desired position is selected and
3
then hold down the button. This adjusts the
100% opening (0% opening).
Step Procedure LUI display
Loosen two hexagonal socket bolts and remove the
1
front cover.
Hold down the
to the setup mode.
If the password is required to change the mode, enter
2
the password.
For detailed information of the password, please refer
to section 3-2-6, “Password”.
button and set the current setting
3
Press the
the right.
button to display the screen shown on
3-10
Page 55

Chapter 3 Operation
Step Procedure LUI display
Set the input signal 5.6mA or more if the SIS positioner mode is in positioning mode, or set it to
12mA or more or to 19.2V or more if it is in ON/
OFF mode; then press the
switched to the screen on the right, then make a long
4
press of the button if you wish to set the output
air pressure to 0.
(If the output air pressure is already 0 or it is set to
the supply air pressure at the supply bypass, go to the
screen of step 6 where the supply bypass can be operated.)
To change the output air pressure to the supply air
5
pressure, press the button to display the screen
on the right and hold down the button.
If the supply bypass requirements are not satisfied
(if the input signal falls below 5.6mA when the SIS
6
positioner mode is in positioning mode, or if it falls
below 12mA or 19.2V during ON/OFF mode), it will
switch to the screen on the right.
button, confirm that it
If supply bypass conditions are satisfied, the screen
7
shows that the bypasses are operating.
To clear supply bypass operations, press the
8
ton to display the screen shown on the right.
Holding down the
9
pass.
The meaning of the word FAIL that may occur during the execution of the supply bypass is
as follows.
FAIL01: input signal is low
FAIL02: function other than supply bypass is currently in progress
FAIL90: forced termination
button clears the supply by-
but-
Caution
There is a danger in using the supply bypass, as the valve will be moved.
Also during the supply bypass setting, it is dangerous to not operate it for
more than 10minutes, as this will cancel out the setting, and the valve will
start moving. Ensure ahead of time that there will be no injuries or effects on
the process if the valve is moved.
3-11
Page 56

Chapter 3 Operation
3-2-4 Partial Stroke Test (PST)
Partial Stroke Test (PST) is a function that tests whether the valve can be operated correctly
by partially moving the travel from 100% (or 0%).
Please verify whether the target travel, the ramp time until reaching that travel, etc., are set
up correctly before activating the PST.
The default factory setting is as follows: target travel of 90% (or 10%), 15 seconds of ramp
time until reaching the target travel, 15 seconds of wait time at the target travel, and 15
seconds of ramp time until reaching the initial travel. For details on the setting, please refer
to section 4-2-23, “PST (Partial Stroke Test).”
Please set an automatic PST disabled via HART communication, as an error will show if
the automatic PST is activated when the PST is being executed via the LUI.
For details on modifying the setting of the automatic PST, please refer to section 4-2-23,
“PST (Partial Stroke Test).”
Activate it via the following procedure, and verify the test result.
PST Operation Procedure
Step Procedure LUI display
Loosen two hex socket bolts to remove the front
1
cover.
Press and hold the button to enter the password
and enter the settings mode.
2
For details on inputting the password, please refer to
section 3-2-6, “Password.”
3
4
5 PST is activated, and the valve starts moving.
6
Press the button to display the screen on the
right.
Set the input signal to to 12mA or more or to 19.2V
or more, push the
on the right, and then apply a long press to the
button once again.
When you push the button, the travel and output air pressure are displayed as on the screen on the
right.
button, move into the screen
After the PST is complete and is successful, “SUC-
7
CESS” is displayed as on the screen on the right.
If the PST fails, or verification of the result is required, then the screen on the right will display
8
“FAIL,” where the cause of the failure will be displayed according to its designated number.
3-12
Page 57

Chapter 3 Operation
Step Procedure LUI display
When you push the
being executed, it will switch into the screen on the
9
button when the PST is
right. The PST can be canceled by applying a long
press to the button.
The meaning of the word FAIL that may occur during the execution of the PST is as follows.
FAIL00: An error was detected.
*2
FAIL01: Input signal is below the low limit indicated in step 4 in “PST Operation
Procedure” above in this section.
FAIL02: A function other than PST is running.
FAIL03: Starting a PST using the LUI is not enabled in [PST Enabled], or the SIS positioner
is not in ON/OFF mode.
FAIL04: Self-diagnosis detected a problem.
FAIL10: One or more of the following PST errors were detected.*1
*3
*3
The valve travel does not change during the PST.
The target valve travel is not reached.
The valve travel at the end of the PST is abnormal.
Stick-slip occurred.
FAIL60: Excessive valve travel (the target travel was exceeded by 20 %)
FAIL70: The valve travel when the PST started was abnormal.
FAIL80: Pressure was abnormal.
*3
*3
*3
FAIL90: The PST was aborted (canceled from the LUI)
WARN21: Restriction is clogged.
WARN22: Deposits on the nozzle-flapper
*3
*3
*1. Check [PST Detailed Result] using HART communication.
*2. This fail code is displayed only in software version 2.2 and earlier versions. FAIL_10,
FAIL_70, and FAIL_80, which are displayed in software version 2.3, are all indicated as
FAIL_00.
*3. Displayed only in software version 2.3 and later versions. Check the software version on
the LUI in details monitor mode with guide No. 2-1.
Handling Precautions:
Please confirm that the following conditions that allow PST execution are met
before actually executing it.
• The supply air pressure is input appropriately
• The travel during the start of PST is within ±5% of the PST Initial Travel (please
refer to section 4-2-23, “PST (Partial Stroke Test)”
• None of the problems marked with the symbol “•” in the Positioning mode
column of table 4-6 in section 4-2-21 (“Diagnostic Messages”) have occurred.
Also, A/D Conversion Module 2 Failure, Temperature Sensor Failure, Internal
Program Execution Error, and SIS RAM Data Failure listed in the same table
have not occurred.
• SIS positioner mode is in ON/OFF mode
• PST Enable is not set to None
3-13
Page 58

Chapter 3 Operation
3-2-5 Control Parameters
Control parameters are determined by Actuator Size (Param 1 to 6, A, B, C) and Friction
Level (Light (L), Medium (M), Heavy (H)).
Table 3-5. Actuator size
Actuator Size Stroke Speed [s] Actuator Model
Actuator Diaphragm
Capacity [cm3]
PARAM A 0.25 max. — 200
PARAM B 0.35 max. — 300
PARAM C 0.45 max. — 400
PARAM 1 0.75 max. PSA1, PSK1 600
PARAM 2 2.0 max. PSA2, HA2 1400
PARAM 3 5.5 max. PSA3, HA3 2700
PARAM 4 8.15 max. PSA4, HA4 6600
PARAM 5 12 max. PSA6 8100
PARAM 6 99 max. VA5 25300
Custom — — Individual setting*
* Consult an Azbil Corp. service representative.
Table 3-6. Friction Level
Friction Level* Gland packing material example
HEAVY Graphite packing
MEDIUM Yarn packing
LIGHT Type V PTFE packing
* This is not determined by the material, but rather changes depending on the frictional force on the gland packing.
3-14
Page 59

Chapter 3 Operation
(1) Procedure for specifying control parameters
Step Procedure LUI display
Loosen two hexagonal socket bolts and remove the
1
front cover.
Hold down the
Enter the password if prompted to do so.
2
For details on inputting the password, please refer to
section 3-2-6, “Password.”
Press the
3
the right (tune).
Press the
4
and select Param 1 to 6, A, B, or C for Actuator Size
using the button, and press the button.
Select L (Light), M (Medium), or H (Heavy) for Friction Level and set it by holding down the button.
5
To return the setting to its original value, reset the
value with before holding down the button.
6 Check the specification result when it is displayed.
button to start the setup mode.
button to display the screen shown on
button to display the screen on the right
Caution
The valve moves when control parameters are changed. Be prepared in
advance to prevent injury and effects on the process when the valve moves.
3-15
Page 60

Chapter 3 Operation
3-2-6 Password
The password consists of four alphanumeric characters.
The default factory password function is set to “Enabled.”
The default factory password is “0000.”
How to enter the password
Step Procedure LUI display
Check that the password screen (screen on the right)
is displayed and that the leftmost digit is blinking.
1
Select the alphanumeric character of the password
with the
The second digit from the right starts blinking.
Specify all four digits in the same way.
2
To return to and specify a digit to the right of the current digit, use the
After specifying the fourth digit, press and hold the
3
button.
or button and press the button.
button.
If the password matches, it changes to Settings mode.
If not, the error screen shown on the right is dis-
4
played. In this case, enter the password again.
Handling Precautions:
• When changing the password function to “Enabled,” you must input a new
password.
• While the device is operating, set the password function to “Enabled.”
3-16
Page 61

3-3 Starting Operation
3-3-1 Preoperation Check
Check the following points before starting operation.
• The device is properly installed and the feedback lever, feedback pin and other parts are
not damaged or fractured.
• The pneumatic piping is completely connected and an appropriate supply air pressure is
supplied. (Air is not leaking.)
• Appropriate input signal is applied.
1) Procedure for checking the device operation
The procedure for checking the device operation is shown below.
Step Procedure
1
2 After confirming normal operation, tightly secure the terminal box cover.
Chapter 3 Operation
Check that the valve travel changes to match the preset characteristics by
changing the input signal from the controller (constant current source).
If operation is not normal, refer to chapter 5, “Troubleshooting.”
Handling Precautions:
• The travel transmission output or the contact output will change to failure
output right after applying the input signal.
It will return to normal several seconds later.
• Confirm all other settings using the HART communication tool by going to
[Device] → [Review.]
Caution
There is a danger if the automatic PST is enabled, as PST is automatically
activated, which might result in unexpected movement of the valve.
Take extra precautions when coming near the valve so that no injuries will
occur if the valve starts moving.
3-17
Page 62

Chapter 3
3-18
Page 63

Chapter 4 Operation with HART Communication
Chapter 4 Operation with HART Communication
J
Summary
This chapter describes the operations performed using HART communication.
For details on the basics of operation, relationship between the SIS positioner mode and
data setting, data setting and modification, storage of various data, etc., please refer to this
chapter.
4-1 Operation with HART Communication
4-1-1 HART Communication
This section describes the menu configuration and functions for adjustment and settings
using HART communication. The HART communication tool is used to adjust, set,
and read the data of this device. For details, see the operation manual for the HART
communication tool.
J
HART communication tool and wiring
Wire as shown in the following diagram.
Host
4-20 mA
controller
IN
IN
HART communication tool
Figure 4-43.
J
Before starting HART communication
Check the following before starting communication.
• The wiring connections with this device are complete.
• The input signal from the controller is correctly applied.
Handling Precautions:
• If there is no input signal from the controller, connect the appropriate input
signal to the input signal terminal (IN). The lines from the controller must be
removed in this case.
• Please download the latest DD (Device Description) when using the HART
communication tool.
(Download from http://www.azbil.com/products/bi/iap/index.html)
S
m
a
r
t
E
S
Device
S
I
S
r
o
f
e
c
i
D
v
e
D
4-1
Page 64

Chapter 4 Operation with HART Communication
4-2 Setup and Adjustment of Device
Set up and adjust the functions required for the device to operate properly.
The explanations in this section are based on the menu of the 475 communicator.
To change settings and make adjustments, select [Device] → [Configuration] → [Operator
Action Setting] → [Allow operator action].
This allows you to change settings and make adjustments, and also restricts settings
changes and adjustments from LUI and the other HART master*.
* HART communication master stations are configured for either the primary or secondary. In most cases, the
host system is the primary and the 475 communicator is the secondary.
Once the settings and adjustments are complete, select [Device] → [Configuration] →
[Operator Action Setting] → [Forbid operator action]. The LUI becomes inoperable if you
do not perform this operation. (When there has been no HART communication for more
than 10 minutes, this operation will be performed automatically and the LUI becomes
operable.)
Handling Precautions:
• If the automatic PST is enabled, the PST is not executed while you are selecting
“Allow operator action” and making adjustments and conducting settings. Please
verify the execution time of the automatic PST before operating.
• If you have made adjustments, make sure to verify them by checking how
the device operates. If you also modified settings, make sure that they were
modified correctly.
4-2-1 Process Variables
The measurement value data present when the device is operating can be viewed.
Select [Process Variables].
• Checking measured values
Selecting [Process Variables] allows the following items to be checked.
Input (mA) Current input value.
Input (%)
Set Point (SP)
Travel Valve travel (%).
Position
Drive Signal EPM (electric-pneumatic converter) drive signal (%).
Po1 Output air pressure (OUT1).
Po2 Output air pressure (OUT2).
Ps Supply air pressure (SUP).
Pn Nozzle back pressure.
Temperature Temperature inside the main unit.
*1. This is not displayed if flow type conversion was not performed.
*2. The set point during forced closure is fixed at 0%.
The set point during forced opening is equal to the travel cutoff high +1%.
Item What is Displayed
*1
*2
*1
Input signal (%).
Input signal (%) following flow type conversion.
Valve travel following flow type conversion.
4-2
Page 65

4-2-2 Auto Setup
Chapter 4 Operation with HART Communication
Auto setup is a function that automatically performs basic adjustments and setup after the
device is mounted on the actuator.
Select [Device] → [Basic Setup] → [Auto Setup].
Caution
There is a danger during auto setup because the fully closed valve moves to
fully open. Be prepared in advance to prevent injury and effects on the process
when the valve moves.
Handling Precautions:
• Set the input signal at 5.6mA or more when the SIS positioner mode is in
positioning mode, and when it is in ON/OFF mode, set it to 12mA or more or
19.2V or more. You will not be able to execute auto setup if it falls below 5.6mA
when the SIS positioner mode is in positioning mode, or if it falls below 12mA
or 19.2V during ON/OFF mode.
• In the self-diagnosis result, if there is a message with a check mark in the
positioning mode field in table 4-6 in section 4-2-21, “Diagnostic Messages,” the
auto setup will not function correctly.
• Check that an appropriate supply air pressure is supplied to the device before
starting auto setup.
• When auto setup and zero/span adjustment are complete, change the input
signal and be sure to check valve operations such as opening and shutoff.
• In some cases, configuration may not be properly performed due to the
actuator’s diaphragm capacity (if lower than with Azbil Corporation’s PSA1 type
actuator, which has a diaphragm capacity of 850cm
less than 14.3mm). If this occurs, refer to section 4-2-5, “Control Setting” and
manually adjust the dynamic characteristics.
• After executing auto-setup, the forced fully open value (see section 4-2-7,
“Forced Fully Open/Closed Characteristics”) may be changed. If necessary,
reconfigure the forced fully open value. However, if the SIS positioner mode is
in ON/OFF mode, then the value will be fixed at 99%.
• If the booster relay is incorporated, hunting may occur during auto-setup, so
either adjust the booster’s sensitivity or refer to section 4-2-5, “Control Setting”
and manually adjust the dynamic characteristics.
• If a speed controller is incorporated, set it to full open and execute auto-setup.
Then, adjust the speed via speed controller.
• If the main unit is purchased separately, its initial settings are set by default to
those in the list of default values in section 6-7, “List of Default Internal Data
Values.” If it is connected to an operating unit with setting that differs from
these default settings, it will not operate just by itself. Before operating, be sure
to execute auto-setup and that it is configured appropriately.
3
) or operation stroke (if
Check the actuator type and feedback lever position before starting auto setup.
The actuator type is set to Linear and the feedback lever position is set to Down when
the valve is fully closed at the time of shipment unless there are other shipment setup
instructions. If factory setting (initial setup) is requested, check the settings at the time of
shipment. Configure settings as needed.
If auto setup is not successful, check the following points.
• The supply air pressure is appropriate.
• The A/M switch is in auto operation mode.
4-3
Page 66

Chapter 4 Operation with HART Communication
• The feedback pin and feedback lever are correctly connected.
• The output air pressure is correctly connected to the actuator.
• The valve is not fixed in place because of the manual handle or other part.
The reverse action actuator fully closes, fully opens, and fully closes the valve when auto
setup starts. The direct action actuator fully opens, fully closes, and fully opens the valve.
Then, it is opened to between 20% and 25% and between 80% and 85%.
After auto setup, the valve moves to the opening appropriate to the input signal.
The following items are automatically adjusted and set during auto setup.
(1) Zero/span adjustment
The zero point is set to the position of the feedback lever when the valve is fully closed.
The span point (100% opening) is set to the position, which is the opening of forced
fully open value +1%, when the valve is fully opened. (When the forced fully open
value is 99%, the opening position is the span point.) When the span is adjusted after
auto setup, the forced fully open value is changed and stored.
(2) Input signal range (Input Range), PV LRV (Close) and PV URV (Open) settings
Interchange the range settings (PV LRV and PV URV) so that the power-off operation
is identical to the fully close operation.
Example: The feedback lever position is in the DOWN direction when the valve is
fully closed.
When the actuator action is reversed:
PV LRV (Close) = 4mA, PV URV (Open) = 20mA
When the actuator action is forwarded:
PV LRV (Close) =20mA, PV URV (Open) = 4mA
(3) Specification of Actuator Size
Select the actuator size from among Param 1 to Param 6, Param A, B, and C.
(4) Specification of Friction Level
Select the friction level of the gland packing from among LIGHT, MEDIUM, and
HEAVY.
(5) Specification of Feedback Lever Motion
Specify UP or DOWN as the operation of the feedback lever when output air pressure
OUT1 increases.
(6) Specification of Positioner Action
When the input signal is “Disconnected,” the positioner action is forward operation
(Direct) if the output air pressure is 0.
When the input signal is “Disconnected,” the positioner action is reverse operation
(Reverse) if the output air pressure is the supply air pressure. The main unit cannot be
set to conduct reverse operation.
(7) Specification of Pilot Relay Type
Select Single Acting or Double Acting as the operation of the actuator.
4-2-3 Input Signal Range (Input Range) (Model AVP77_/78_ Current Signal Input)
Sets the current input value when the valve travel is at 0% (PV LRV (Close)) and the
current input value when the valve travel is at 100% (PV URV (Open)). An input in the
4-20mA range can be used.
Select [Device] → [Configuration] → [Input Range].
PV URV (Open/100%): Set the input signal at 100% travel.
PV LRV (Closed/0%): Set the input signal at 0% travel.
4-4
Page 67

4-2-4 Valve System
Chapter 4 Operation with HART Communication
Caution
Changing the input signal range will move the valve, which is dangerous.
Ensure ahead of time that there will be no injuries or effects on process if the
valve is moved.
Handling Precautions:
• Set the current input span to exceed 4 mA for (PV URV (Open) - PV LRV
(Close)). If the current input span is less than 8mA, the precision will be ±1.5%
of full scale.
• Set the value so that the operation direction is the same when the input signal is
0mA and 4mA.
Set the operation of the valve (actuator/valve) and main unit.
Select [Device] → [Configuration] → [Valve System].
Caution
There is danger because the valve moves when the settings are changed. Be
prepared in advance to prevent injury and effects on the process when the
valve moves.
• Actuator Type
Linear Linear motion valve
Rotary/90° When the distance between the feedback lever of the rotary actuator
(90°) and the pin is longer than the distance from the valve shaft
Rotary/Other When the distance between the feedback lever of the rotary actuator
(around 60°) and the pin is longer than the distance from the valve
shaft
Rotary sub/90° When the distance between the feedback lever of the rotary actuator
(90°) and the pin is shorter than the distance from the valve shaft
Rotary sub/Other When the distance between the feedback lever of the rotary actuator
(around 60°) and the pin is shorter than the distance from the valve
shaft
• Fully closed feedback lever position (Valve Closed Position)
DOWN (standard)
UP
• Feedback Lever Motion
Specify UP or DOWN as the operation of the feedback lever when output air pressure
OUT1 increases. This setting is automatically set by auto setup.
• Pilot Relay Type
The single acting or double acting of actuator action setting is automatically set by auto
setup.
• Positioner Action
Positioner Action means the EPM operation direction, which is judged by auto setup. The
device surely has the direct action. If the reverse action is judged by auto setup, the auto
setup results in 09, which means the failure with Invalid Positioner Action.
4-5
Page 68

Chapter 4 Operation with HART Communication
Handling Precautions:
The positioner’s operational direction is determined by the device’s hardware. The
operational direction cannot be switched using this function.
• Electrical Fail To
Open or Closed is automatically set as the fail safe direction when the electrical signal is
“Disconnected” based on the settings for Valve Closed Position, Feedback Lever Motion,
and Positioner Action.
• Air Fail To
Open or Closed is automatically set as the fail safe direction when the supply air pressure
is “Disconnected” based on the settings for Valve Closed Position and Feedback Lever
Motion. This item is not displayed when Pilot Relay Type is Double Acting.
4-2-5 Control Configuration
The control parameters are the PID calculation parameters for controlling the valve, and
the parameters are selected based on the actuator size and friction level.
Select [Device] → [Configuration] → [Control Configuration].
• Actuator Size
Specify Param 1 to 6 or Param A to C depending on the operation speed and capacity of
the actuator.
To specify every PID operation parameter, select Custom. (For details, consult with one
of our service representatives.)
Table 4-2. Actuator Size
Actuator Size Stroke speed [s] Actuator Model
PARAM A 0.25 max. — 200
PARAM B 0.35 max. — 300
PARAM C 0.45 max. — 400
PARAM 1 0.75 max. PSA1, PSK1 600
PARAM 2 2.0 max. PSA2, HA2 1400
PARAM 3 5.5 max. PSA3, HA3 2700
PARAM 4 8.15 max. PSA4, HA4 6600
PARAM 5 12 max. PSA6 8100
PARAM 6 99 max. VA5 25300
• Friction Level
Select Heavy, Medium, or Light depending on the gland packing. (It is not necessary to
specify this item when Custom is selected for Actuator Size.)
Table 4-3. Friction Level
Friction Level * Gland packing material example
HEAVY Graphite packing
MEDIUM Yarn packing
LIGHT Type V PTFE packing
* This is not determined by the material, but rather changes depending on the frictional force on the gland
packing.
Actuator Diaphragm
Capacity [cm3]
4-6
Page 69

Chapter 4 Operation with HART Communication
% IN
Input signal
% STROKE
opening
• Control Deadband
Specify the deadband. Although deadband may be effective in preventing hunting, when
the friction of the gland packing is especially large, for example, we recommend keeping
this value within 1%.
• Replace Control Parameters
Replace the PID parameters selected in Actuator Size and Friction Level with the values
in Control Parameters. The replacement is available only when the Actuator Size is
“C us t om”.
• Control Parameters
When Actuator Size is Custom, each PID must be specified individually.
The control algorithm employs dual gap PID control, which switches PID parameters
between three levels depending on the control deviation size. There are 11 parameters
as shown below. Set a value larger than the dual width to the gap width. The integration
operation is disabled when 9999 is set as the value of the integral.
P outside of Gap1: Proportional gain outside the gap width [1/%]
I outside of Gap1: Integral time outside the gap width [s]
D outside of Gap1: Differential time outside the gap width [s]
Gap Band: Gap width [±%]
P inside Gap1: Proportional gain within the gap width [1/%]
I inside Gap1: Integral time within the gap width [s]
D inside Gap1: Differential time within the gap width [s]
Dual Gap Band: Dual gap width [±%]
P inside of Gap2: Proportional gain within the dual gap width [1/%]
I inside of Gap2: Integral time within the dual gap width [s]
D inside of Gap2: Differential time within the dual gap width [s]
4-2-6 Input Characterization
This is configuration of the flow characteristics. It can be done only when the SIS
positioner is in positioning mode; you will not be able to set it if it is in ON/OFF mode.
Select [Device] → [Configuration] → [Input Characterization] → [Input Characterization].
• Characterization
Select Linear, Equal Percent, Quick Open, or Custom Curve.
The concept of each characteristic is shown below.
100
0
0
Quick Open
Linear
Custom
Equal percent
100
Valve
Figure 4-44. Concept of Flow Characteristics
4-7
Page 70

Chapter 4 Operation with HART Communication
% STROKE
Valve
opening
closed value
open value
Input signal
• Custom Curve Data
When selecting Custom Curve, individually specify the input signal (Custom Data IN1
to 21) and the opening (Custom Data OUT1 to 21) to specify a polygonal line consisting
of 21 points.
Handling Precautions:
• Specify both Custom Data IN and Custom Data OUT so that they
monotonically increase.
• The setting range is between 0% and 100%. The linear characteristic is set from
both edges outside this range.
4-2-7 Travel Cutoff
Specify the input signal (%) that will force the valve fully open or fully closed. The valve
fully closes when the input signal is less than or equal to the forced fully closed value. It
fully opens when the input signal is greater than or equal to the forced fully open value.
These values can be independently specified.
Select [Device] → [Configuration] → [Travel Cutoff], then set forced fully closed value
(TravelCutoff Low) and forced fully open value (Travel Cutoff High).
The concept of input/output characteristics when the forced fully open and closed values
are specified is shown below.
100
0
-0.1% +0.1% -0.1% +0.1%
0
Forced fully
Forced fully
100 % IN
Figure 4-45. Forced Fully Open and Closed Values
Handling Precautions:
• If the SIS positioner is in ON/OFF mode, then the forced fully open value is a
fixed value of 99%.
• Set so that the forced fully closed value is less than the forced fully opened value.
• The settable range is between −200% and 50% for the forced fully closed value
and between 50% and 200% for the forced fully open value.
• If you adjust the span after auto setup, the forced fully open value is
automatically changed to the value calculated by subtracting 1% from the
overstroke percentage.
• The forced fully closed and open values each have a hysteresis difference of
0.1%.
• The set point during forced closure is fixed at 0%. The set point during forced
opening is equal to the travel cutoff high +1%.
4-8
Page 71

4-2-8 Units
Chapter 4 Operation with HART Communication
Specify the units for pressure.
Select [Device] → [Configuration] → [Unit].
At the factory, the positioner is set to one of the following SI system or non-SI system
units. If you require a non-SI system unit, please specify kg/cm
SI system: kPa, MPa and bar
Non-SI system: kPa, MPa, bar, kg/cm
This unit setting is not effective for LUI displays. Only kPa is applicable for LUI display.
4-2-9 SIS Positioner Mode
The SIS positioner mode has a positioning mode (positioning mode) that controls the
valve travel, and an ON/OFF mode that fully closes or opens the valve.
Select [Device] → [Configuration] → [SIS Positioner Mode] → [Change SIS Positioner
Mode] and modify the SIS positioner mode.
To set it to the ON/OFF mode or positioning mode, select “On/OFF” or “Positioning,”
respectively.
2
or psi when purchasing.
2
, psi
Warning
Changing the SIS positioner mode will move the valve, which could be
dangerous. Ensure ahead of time that there will be no injuries or effects on
process if the valve is moved.
Handling Precautions:
If you had changed the SIS positioner mode, please conduct the auto setup. If you
switch from positioning mode to ON/OFF mode, the forced fully open value will
be changed to 99%, and the fully open position will be set to 100% travel.
The fail safe action
method of recovery from the fail safe state, will differ depending on the SIS positioner mode.
Table 4-4. fail safe action and method of recovery from the fail safe state
fail safe action Output air pressure: Zero Output air pressure: No change
method of recovery
from the fail safe state
*1. For self-diagnosis messages and PST results that accompany fail safe action, see section 4-2-21 and 4-2-23,
respectively.
*2. The PST function is valid only when the SIS positioner mode is ON/OFF mode. Accordingly, the failsafe
action associated with the PST result, and the method of recovering from the failsafe state associated with the
PST result, depend on the “ON/OFF mode” column only.
*3. If all of the self-diagnosis messages related to fail safe action are resolved, the output air pressure and output
signal will return to normal. (The PST function is disabled in positioning mode.)
*4. If all the self-diagnosis messages and targets of failsafe action related to PST results are resolved, executing
“Reset the Failure Output” will restore normal output. (See 4-2-20 “Option.”)
*1
accompanying the self-diagnosis message or PST result, as well as the
SIS positioner mode
Positioning mode ON/OFF mode
*2
Output signal (travel transmission output or contact output):
Failure output
Auto resetting
*3
Enable the setting of auto resetting
or manual resetting*4.
4-9
Page 72

Chapter 4 Operation with HART Communication
4-2-10 Travel Calibration
Adjust zero and span of valve opening.
Select [Maintenance] → [Travel Calibration].
The following four types of zero / span adjustment methods are available.
(1) Auto Travel Calibration
(2) Angle Correction
(3) Manual Setting
(4) Change Travel Angle
Handling Precautions:
If you adjust the span after auto setup, the forced fully opening value is
automatically changed to the value calculated by subtracting 1% from the
overstroke percentage. However, if the SIS positioner mode is in ON/OFF mode,
then the value will be fixed at 99%.
(1) Auto Travel Calibration
When you select [Maintenance] → [Travel Calibration] → [Auto Travel Calibration],
the valve, which is initially fully closed, is fully opened and then fully closed, and the
zero point and span point are automatically set.
Handling Precautions:
• Set the input signal to 5.6mA or more when the SIS positioner is in positioning
mode, and when it is in ON/OFF mode, set it to 12mA or more or to 19.2V or
more.
• You will not be able to execute auto travel adjustment if it falls below 5.6mA
when the SIS positioner mode is in positioning mode, or if it falls below 12mA
or 19.2V during ON/OFF mode.
• In the self-diagnosis results, if there is a message with a check mark in the
positioning mode field in table 4-6 of section 4-2-21, “Diagnostic Messages,”
auto travel calibration will not function correctly.
• Once adjustments are completed, always remember to change the input signal
and to check the opening, valve travel, and other valve operations
Caution
There is a danger during automatic opening adjustment because the fully
opened valve moves to fully closed. Be prepared in advance to prevent injury
and effects on the process when the valve moves.
(2) Angle Correction
Adjust the angles of the zero and span points.
Select [Maintenance] → [Travel Calibration] → [Angle Correction].
• 0% Travel
Adjust the input current to 0%.
After setting a value less than 0 % for Travel Cutoff Low, select the angle increment
and decrement values, and adjust the zero point. (To increase the value by 0.01°, select
Increment/0.01.)
After adjustment, return Travel Cutoff Low to the original value.
4-10
Page 73

Chapter 4 Operation with HART Communication
• 100% Travel
Adjust the input current to 100%.
If Travel Cutoff High is less than 100%, set a value larger than 100%, select the angle
increment and decrement values, and adjust the span point. After adjustment, return
Travel Cutoff High to its original value.
Handling Precautions:
If the angle after adjustment changes by more than ±30°, operation is disabled.
(3) Manual Setting
Manually fix the 0% or 100% opening and set the zero and span points.
Select [Maintenance] → [Travel Calibration] → [Manual Setting].
• 0% Travel
Move the valve to the 0% opening position by operating the input signal, actuator
pressure, manual handle, or other means and set the zero point.
• 100% Travel
Move the valve to the 100% opening position by operating the input signal, actuator
pressure, manual handle, or other means and set the span point.
Handling Precautions:
If the angle after adjustment changes by more than ±30°, operation is disabled.
(4) Change Travel Angle
This sets the angles for 0% opening and 100% opening.
The angle is 0° when the feedback lever is horizontal. The angle is negative if the lever
is lower than the horizontal position. The angle is positive if the lever is higher than
the horizontal position.
Select [Maintenance] → [Travel Calibration] → [Change Travel Angle].
• 0% Travel Angle
This sets the angle for the 0% opening position.
• 100% Travel Angle
This sets the angle for the 100% opening position.
Handling Precautions:
Specify an angle within ±30°. Accuracy is guaranteed between ±4° and ±20°.
4-2-11 Input Signal Calibration (Model AVP77_/78_ Current Signal Input)
This calibrates the input signal (4mA, 20mA).
Select [Maintenance] → [Input Calibration].
• Calibrate the 4mA signal
Set after making the current input (controller output) 4mA.
• Calibrate the 20mA signal
Set after making the current input (controller output) 20mA.
4-11
Page 74

Chapter 4 Operation with HART Communication
4-2-12 Pressure Sensor Adjustment
Adjust the zero point of the pressure sensor.
Select [Maintenance] → [Pressure Sensor Adjustment] → [Zero Adjustment].
Shut off the supply air pressure before zero adjustment.
4-2-13 Simulation
The following two output signals can be changed for simulation.
Handling Precautions:
Set the input signal to 5.6mA or more when the SIS positioner mode is in
positioning mode, and when it is in ON/OFF mode, set it to to 12mA or more or
to 19.2V or more. It will not function properly if it falls below 5.6mA when the
SIS positioner mode is in positioning mode, or if it falls below 12mA or 19.2V
during ON/OFF mode.
(1) Dummy input signal
Set the dummy input signal (0% to 100%).
Select [Maintenance] → [Simulation] → [Dummy Input Signal].
(2) Dummy EPM Drive Signal
Set the dummy EPM drive signal (0% to 100%).
Select [Maintenance] → [Simulation] → [Dummy Drive Signal].
Caution
When a simulation is running, it is dangerous to leave it unused for more than
10minutes, as this will cancel out the setting, and the valve may start moving.
Ensure ahead of time that there will be no injuries or effects on process if the
valve is moved.
4-2-14 Adjustment of EPM Drive Signal (Pneumatic Modules)
If the EPM drive signal has shifted, it can be adjusted as described below.
Handling Precautions:
Since erroneous use of this function can damage the device, please ask one of our
service representatives to do it.
Select [Maintenance] → [Pneumatic Modules] → [EPM Adjustment].
4-2-15 Restore factory settings
This procedure restores the factory settings.
Select [Maintenance] → [Restore factory settings].
(It may be necessary to restart the communication tool after restoring the factory data.)
Handling Precautions:
This operation does not change the HART communication settings such as Device
Tag and Long Tag, etc., and history information.
4-12
Page 75

4-2-16 Operator Action Records
This function keeps a log of settings changes.
The changed item, method of the change, and time of the last 10 changes are saved.
Simulation operations are not recorded.
Select [Maintenance] → [Operator Action Records].
4-2-17 Real Time Clock
Checks and sets the current time.
Select [Maintenance] → [Real Time Clock].
Handling Precautions:
The “Current Time” set by this function is reset to 2012/04/01 00:00:00 if the
power is lost.
4-2-18 Password
Sets whether to use the password function and sets the password.
The default factory password function is set to “Enabled.”
Chapter 4 Operation with HART Communication
The default factory password is “0000.”
Select [Maintenance] → [Password].
Handling Precautions:
4-2-19 Device Information
Select [Device] → [Device Information].
The following information can be checked and the settings can be changed.
• Manufacturer
Displays “Azbil Corporation” as the device manufacturer.
• Model
Displays “AVP700-SIS” as the name and model number of the device.
• Dev id
Displays the device’s unique ID information.
• Tag
Displays and changes the Tag No. assigned to the device.
• When changing the password function to “Enabled,” you must input a new
password.
• While the device is operating, set the password function to “Enabled.”
• Lon g Ta g
Displays and changes the Long Tag No. assigned to the device.
• Date
Allows display and modification of specific dates such as the last settings change date
and special dates for the device.
4-13
Page 76

Chapter 4 Operation with HART Communication
• Descriptor
Allows display and modification of various information required for managing the
device.
• Message
Displays and changes the messages registered in the device.
• Serial Number
Displays the unique serial number of the device.
• Final Asmbly num (Final Assembly Number)
Allows display and modification of specific management numbers such as the last
settings change date for the device and system.
• Distributor
Displays the name of the company that sold the device.
• Cfg chng count (Config Change Counter)
Displays the number of times the device’s settings have been changed.
• Operating Time
Displays the time the device has been operating.
• Poll addr (Polling Address)
Allows display and modification of the device address. Specifies the device address when
multiple devices are connected to the same loop (split range, multi-drop connection,
etc.).
• Num reg preams (Number of Request Preambles)
Displays the number of preambles requested from the host by the device.
• Num resp preams (Number of Response Preambles)
Displays the number of preambles returned to the host from the device.
• Revision Number
•
Universal rev (HART Version):
Displays the revision number for HART universal commands supported by this
device.
•
Fld dev rev (Device Revision):
Displays the revision number of the device-specific commands supported by this
device.
•
Software rev (Software Revision):
Displays the revision number of the software in a given Device Revision.
•
Hardware rev (Hardware Revision):
Displays the revision number of the hardware for this device.
• Factory Setting Information
•
Production Number:
Displays the production number.
•
Model Number:
Displays the model number.
•
Valve Model Number:
Displays the valve model number.
•
Factory Setting Date:
Displays the factory shipping date.
4-14
Page 77

4-2-20 Option
Chapter 4 Operation with HART Communication
Additional functions include the following.
• Travel transmission signal output
Select [Device] → [Option] → [Travel Transmission (AO)] → [Travel Transmission] allows
the travel signal output to be monitored.
Select [Device] → [Option] → [Travel Transmission (AO)] → [Dummy Travel
Transmission] allows the travel signal output to be changed freely.
Select [Device] → [Option] → [Travel Transmission (AO)] → [Fail Safe Direction] allows
the fail safe direction (High or Low) for the travel signal to be checked.
This setting is set at the time of factory shipment, and changing the setting after delivery
is not possible.
If there is a self-diagnosis message or PST result related to fail safe action (see table 4-6
of section 4-2-21 and table 4-8 of section 4-2-23), the travel signal will indicate burnout
in the preset fail safe direction.
Select [Device] → [Option] → [Travel Transmission (AO)] → [D/A Trim] calibrates the
travel signal output (4 mA, 20 mA). Connect to an ammeter to calibrate the current
value.
Select [Device] → [Option] → [Travel Transmission (AO)] → [Failure Output Reset
Method], to select the method of resetting the travel transmission burnout output and
restoring normal output.
Select “Auto” if you want to have it automatically restored, and “Manual” to manually
restore it. This setting will only be effective if the SIS positioner mode is in ON/OFF
mode.
If you set it to “Manual,” you can restore output by selecting [Device] → [Option] →
[Travel Transmission (AO)] → [Reset the Failure Output].
The precondition for restoring the output is that all self-diagnosis messages and PST
results related to fail safe action are resolved.
• Contact Output
Select [Device] → [Option] → [Contact Output] → [Contact Output] to verify the status
of the contact output.
Select [Device] → [Option] → [Contact Output] → [Dummy Contact Output] to verify
the status of the contact output.
Select [Device] → [Option] → [Contact Output] → [Failure Output Reset Method], which
will set the method of restoring the failure output signal.
Select “Auto” if you want to have it automatically restored, and “Manual” to manually
restore it. This setting will only be effective if the SIS positioner mode is in ON/OFF
mode
If you set it to “Manual,” you can restore output by selecting [Device] → [Option] →
[Contact Output] → [Reset the Failure Output].
The precondition for restoring the output is that all self-diagnosis messages and PST
results related to fail safe action are resolved.
4-15
Page 78

Chapter 4 Operation with HART Communication
4-2-21 Diagnostic Messages
The device has a self-diagnostic function.
Select [Diagnostics] → [Diagnostic Status] → [Positioner Diagnostic].
Table 4-5. List of Self-Diagnostic Messages
Failure Valve Travel Detector Failure
Function Check Local User I/F Active
Out of Specification VTD Angle Span Out of Range
Maintenance Required Restriction is clogged*
Information Travel Cutoff High
* This message can be enabled or disabled by changing the setting of [Diagnostics] → [Diagnostic Setup] →
[Positioner Air Circuit] → [Positioner Air Circuit Alarm Enabled]. The factory default setting is “Enabled.”
(“Enabled” is recommended.)
In addition, you can set the threshold value of this message with [Diagnostics] → [Diagnostic Setup] →
[Positioner Air Circuit] → [Drive Sig Shift Threshold +] or [Drive Sig Shift Threshold −]. The factory default
setting is “±25%.” (“±25%” is recommended.)
Message
Valve Travel Detector Out of Range
CPU Failure
RAM Failure
ROM Failure
A/D Conversion Module 1 Failure
A/D Conversion Module 2 Failure
Non-Volatile Memory Failure
Po 1 Pressure Sensor Failure
Po 2 Pressure Sensor Failure
Ps Pressure Sensor Failure
Pn Pressure Sensor Failure
Input Circuit Failure
Temperature Sensor Failure
Internal Program Execution Error
Scheduled PST Start Failure
PST Scheduler Fault
SIS RAM Data Failure
Dummy Input Signal simulation is running
Dummy Drive Signal simulation is running
Dummy Travel Transmission simulation is running
Auto Setup is running
Auto Travel Calibration is running
Step Response Test is running
Valve Signature is running
Partial Stroke Test is running
Full Stroke Test is running
Dummy Contact Output simulation is running
Input Signal Low
Insufficient Input Signal Range
Temperature Out of Range
Supply Pressure Out of Range
VTD Temperature Out of Range
Incorrect Setting of Input Range High/Low
Deposits on the Nozzle-Flapper*
Travel Cutoff Low
Factory Settings Restored
In Use by an Operator
Local User I/F Abnormal
Failure Output (AO)
Local User I/F was used in past 10 min.
Rejection of Request for PST
PST Overridden (aborted)
PST Timeout
Rejection of Request for FST
FST Overridden (aborted)
FST Timeout
Emergency Demand Input (H/W)
Emergency Demand Input (S/W)
Self-Shutdown
4-16
Page 79

Chapter 4 Operation with HART Communication
Self-diagnosis messages that accompany fail safe action
The availability varies depending on the SIS positioner mode.
Table 4-6. Self diagnosis messages that accompany fail safe action
Message SIS positioner mode
Positioning mode ON/OFF mode
Valve Travel Detector Failure
Valve Travel Detector Out of Range
CPU Failure
RAM Failure
ROM Failure
Po 1 Pressure Sensor Failure
Po 2 Pressure Sensor Failure
Ps Pressure Sensor Failure
Pn Pressure Sensor Failure
A/D Conversion Module 1 Failure
A/D Conversion Module 2 Failure
Non-Volatile Memory Failure
Input Circuit Failure
Temperature Sensor Failure
Internal Program Execution Error
Scheduled PST Start Failure
PST Scheduler Fault
SIS RAM Data Failure
4-2-22 Valve Diagnosis
Valve Diagnosis Message
The positioner is equipped with a valve diagnosis function. Select [Diagnostics] →
[Diagnostic Status] → [Valve Diagnostic].
Out of Specification Supply Pressure High Alarm
Maintenance Required Total Stroke Alarm
Table 4-7. List of Valve Diagnostic Message
Message
Supply Pressure Low Alarm
Temp High Alarm
Temp Low Alarm
Deviation + Alarm
Deviation − Alarm
Zero Travel + Alarm
Zero Travel − Alarm
Cycle Count Alarm
Shut Count Alarm
Max Tvl Speed + Alarm
Max Tvl Speed − Alarm
Po Validity + Alarm
Po Validity − Alarm
Max Friction Alarm
Stick-Slip High Alarm
Stick-Slip Medium Alarm
Stick-Slip Low Alarm
PST Start Position Failure
No change in valve travel in PST
Did not Reach to Target in PST
PST Pressure Failure
PST Incomplete
Stick-Slip in PST
FST Start Position Failure
No change in valve travel in FST
Did not Reach to Target in FST
FST Pressure Failure
FST Incomplete
4-17
Page 80

Chapter 4 Operation with HART Communication
Figure: PST Pattern
PST Ramp Time
PST Target Travel
4-2-23 PST (Partial Stroke Test)
You can set, execute and verify the result of a PST (if the SIS positioner mode is in ON/
OFF mode).
PST Initial Travel
Verify whether you can execute the PST as follows: [Diagnostics] → [Partial Stroke Test] →
[PST Enabled]. It will display the methods of executing the PST.
Set up the PST by selecting [Diagnostics] → [Partial Stroke Test] → [Change PST Enabled].
If you select “Schedule,” you will also need to set the “PST Initial Start Date,” “PST Initial
Start Time,” and “PST Interval” for the scheduled auto PST.
PST Pause Time
PST Completion Timeout
You can check the travel which is expected to be at the beginning of the PST: [Diagnostics]
→ [Partial Stroke Test] → [PST Initial Travel]. The factory default setting is “100%.”
This value cannot be modified, as it is automatically set during auto setup.
Set the target travel during the PST as follows: select [Diagnostics] → [Partial Stroke Test] →
[PST Target Travel]. The factory default setting is “90%.”
Set the wait time after reaching the target travel by selecting [Diagnostics] → [Partial Stroke
Test] → [PST Pause Time]. The factory default setting is “15 sec.”
Set the operation speed until the target travel is reached by selecting [Diagnostics] →
[Partial Stroke Test] → [PST Ramp Rate]. The factory default setting is “0.666%/sec.”
Set the maximum permissible time until change in travel is detected by selecting
[Diagnostics] → [Partial Stroke Test] → [PST Breakout Timeout]. The factory default
setting is “15 sec.”
If the travel does not change during this time period, failure travel transmission output
or failure contact output will be generated and [No change in valve travel in PST] will be
reported in [PST Detailed Result].
Select [Diagnostics] → [Partial Stroke Test] → [PST Stroke Travel Timeout] to set the
maximum time the target travel is reached. The factory default setting is “30 sec.”
If the target travel is not reached during this time period, failure travel transmission output
or failure contact output will be generated and [Did not Reach Target in PST] will be
reported in [PST Detailed Result].
Set the time until completion of execution of the PST by selecting [Diagnostics] → [Partial
Stroke Test] → [PST Completion Timeout]. The factory default setting is “66 sec.”
If the device does not return to the original amount of travel within this time period,
failure travel transmission output or failure contact output will be generated and [PST
Incomplete] will be reported in [PST Detailed Result].
4-18
Page 81

Chapter 4 Operation with HART Communication
Set the threshold that would determine an abnormality in the output air pressure by
selecting [Diagnostics] → [Partial Stroke Test] → [PST Pressure Threshold]. The factory
default setting is 208kPa, but if auto setup is executed, the device will automatically
calculate it and change the setting. If an abnormality in the output air pressure is
determined, failure travel transmission output or failure contact output will be generated
and [PST Pressure Failure] will be reported in [PST Detailed Result].
Set the threshold for stick-slip diagnosis during PST by selecting [Diagnostics] → [Partial
Stroke Test] → [PST Stick-Slip Threshold]. The factory default setting is “10.”
Set the alarm for PST stick-slip diagnosis by selecting [Diagnostics] → [Partial Stroke Test]
→ [PST Stick-Slip Alarm Enabled].
Verify whether the PST setting is appropriate by selecting [Diagnostics] → [Partial Stroke
Test] → [Check the Validity of PST Settings].
Handling Precautions:
If the PST settings are changed, perform this operation and make sure that there
is no error message. If the device has the error messages, the PST does not operate
normally.
Execute PST by selecting [Diagnostics] → [Partial Stroke Test] → [Execute PST].
Abort an executed PST by selecting [Diagnostics] → [Partial Stroke Test] → [Abort PST].
You can check the PST result by selecting [Diagnostics] → [Partial Stroke Test] → [Result].
PST detailed results that accompany fail safe action
Some PST detailed results accompany fail safe action.*
Table 4-8. PST detailed results that accompany fail safe action
Message fail safe action
PST Start Position Failure
No change in valve travel in PST
Did not Reach to Target in PST
PST Pressure Failure
PST Incomplete
Stick Slip Occurred in PST
Rejection of Request for PST
PST Overridden (aborted)
PST Timeout
Scheduled PST Start Failure
Restriction is clogged
Deposits on the Nozzle-Flapper
* You can check the PST Result by selecting [Diagnostics]→[Partial Stroke Test]→[Result]. The PST Result is not
related to the fail safe action. If either one of the PST Detailed Result is set, the PST Result becomes “Failure”.
• Excessive valve travel and “PST Overridden” status
In software version 2.3 and later, if the valve travel exceeds the target value by 20 % when
the PST is in progress, the test will be canceled. (In software version 2.2 and earlier, there
was no function for detecting excessive valve travel. Check the software version on the
LUI in details monitor mode with guide No. 2-1.)
The PST Result will be "Fail," and [PST Detailed Result] will be set to “PST Overridden.”
4-19
Page 82

Chapter 4 Operation with HART Communication
Handling Precautions:
• If excessive valve travel occurs, there may be a problem with this device, the
actuator, or the valve. First, check the actuator and the valve for problems. If
there are no problems, contact our service staff.
• PST Overridden status has one of the three possible causes described below.
The cause can be identified by checking [Operator Action Records] and the selfdiagnostic messages.
- The PST was canceled by the user using HART communication or the LUI
(Check [Operator Action Records] for user operations.)
- The PST was canceled due to one of the problems marked with the
symbol “•” in the Positioning mode column of table 4-6 in section 4-221 (“Diagnostic Messages”), or due to A/D Conversion Module 2 Failure,
Temperature Sensor Failure, Internal Program Execution Error, or SIS RAM
Data Failure listed in the same table.
- The PST was canceled due to excessive valve travel (for software version 2.3
or later)
• Resetting the PST Result
If the result of a second PST is normal, previous PST result will be reset.
If you wish to reset the PST results without relaunching another PST, do the following.
Select [Diagnostic] → [Partial Stroke Test] → [Result] → [Reset PST Result].
You can also reset the PST results by turning the power off and back on again.
• Setting the automatic PST
You can enable an automatic PST for periodic execution as follows: [Diagnostics] →
[Partial Stroke Test] → [Set PST Schedule], and then set the “PST Initial Start Date,” “PST
Initial Start Time” and “PST Interval.”
You can check the remaining time until the next execution of PST by selecting
[Diagnostics] → [Partial Stroke Test] → [PST Next Execute Time]. The factory default
setting is “0 days.” This value is determined by the current time and the following setting:
“PST Initial Start Date,” “PST Initial Start Time,” and “PST Interval.”
You can check the time period of when the PST will be executed by selecting [Diagnostics]
→ [Partial Stroke Test] → [PST Interval]. The factory default setting is “0 days.” You can set
this value via the “Set PST Schedule” or “Change PST Enabled” option.
Handling Precautions:
• Please confirm that the following conditions that allow PST execution are met
before actually executing it.
- SIS positioner mode is in ON/OFF mode
- The supply air pressure is input appropriately
- The input signal must be the input for regular operation as outlined in Table
2-2
- The travel at the start of the PST must be within ±5% of the PST Initial Travel
- There are no messages with a check mark in the positioning mode field in
table 4-6 of section 4-2-21, “Diagnostic Messages.”
- If you are executing a scheduled auto PST, other setters must not be operating
it (User Operator of the Operator Action Setting must be set to “None”)
• Please test to see whether the PST can be appropriately launched with the preset
parameters.
4-20
Page 83

4-2-24 FST (Full Stroke Test)
FST Initial Travel
FST Target Travel
You can set, execute, and verify the results of an FST.
Verify whether you can execute the FST by selecting [Diagnostics] → [Full Stroke Test] → [FST
Enabled].
You can confirm the travel at the time of starting the FST as follows: [Diagnostics] → [Full
Stroke Test] → [FST Initial Travel]. The factory default setting is “100%.”
This value cannot be modified, as it is automatically set during auto setup.
Set the wait time after reaching the target travel by selecting [Diagnostics] → [Full Stroke
Test] → [FST Pause Time]. The factory default setting is “30 sec.”
Set the maximum time until change in travel is detected by selecting [Diagnostics] → [Full
Stroke Test] → [FST Breakout Timeout]. The factory default setting is “5 sec.”
If the travel does not change during this time period, [No change in valve travel in FST]
will be reported in [FST Detailed Result].
Chapter 4 Operation with HART Communication
Set the maximum time until the target travel is reached by selecting [Diagnostics] → [Full
Stroke Test] → [FST Stroke Travel Timeout]. The factory default setting is “30 sec.”
If the target travel is not reached during this time period, [Did not Reach to Target in FST]
will be reported in [FST Detailed Result].
4-21
Page 84

Chapter 4 Operation with HART Communication
Set the time until completion of execution of the FST by selecting [Diagnostics] → [Full
Stroke Test] → [FST Completion Timeout]. The factory default setting is “66 sec.”
If the device does not return to the original amount of travel within this time period, [FST
Incomplete] will be reported in [FST Detailed Result].
Verify whether the FST settings are appropriate by selecting [Diagnostics] → [Full Stroke
Test] → [Check the Validity of FST Settings].
Handling Precautions:
• If the FST settings are changed, perform this operation and make sure that
there is no error message. If the device has the error messages, the FST does not
operate normally.
Execute the FST by selecting [Diagnostics] → [Full Stroke Test] → [Execute FST].
Abort an executed FST by selecting [Diagnostics] → [Full Stroke Test] → [Abort FST].
You can check the results of the FST by selecting [Diagnostics] → [Full Stroke Test] →
[Result].
• Resetting the FST Results
If the result of a second FST is normal, the previous FST result will be reset.
If you wish to reset the FST results without relaunching another FST, do the following.
Select [Diagnostic] → [Full Stroke Test] → [Result] → [Reset FST Result].
You can also reset the FST results by turning the power off and back on again.
Handling Precautions:
• Please confirm that the following conditions that enable FST execution are met
before actually executing it.
- The supply air pressure is input appropriately
- The input signal is set appropriately
- The travel at the start of the FST must be within ±5% of the FST Initial Travel
- There are no messages with a check mark in the positioning mode field in
table 4-6 in section 4-2-21, “Diagnostic Messages.”
• Please test to see whether the FST can be appropriately launched with the preset
parameters.
• The FST cannot be used as a proof test to satisfy the functional safety standards.
If you wish to conduct a proof test, please follow the procedure outlined in the
safety manual included in the package of this device.
4-22
Page 85

Chapter 5 Troubleshooting
Chapter 5 Troubleshooting
This chapter describes how to address problems that may arise.
The following three types of problems may occur when you start up and start operating the
device.
• Problems that occur because the specifications of the device are not suitable for the
actual use conditions
• Problems due to setup or operation errors
• Problems due to failure of the device
If problems arise, please refer to this troubleshooting guide and take appropriate measures.
For contact information, please refer to the following site.
http://www.azbil.com/products/bi/iap/index.html
5-1 Troubleshooting
If problems occur during startup or while operating, please use the following procedure to
remedy the situation. If you cannot resolve the problem with the following procedure, the
device may be faulty. Please contact our service representative.
5-1-1 If the Valve does not Close Fully (the output air pressure does not go down to 0)
1 Check whether the input signal is signaling full closure.
2 Check whether the output air pressure is 0kPa.
If it is not at 0kPa, please clean the flapper (section 6-3).
If it’s at 0kPa, and if the valve doesn’t fully close when the supply air pressure is set to
0, there is an abnormality in the valve, which requires maintenance.
5-1-2 If the Device does not Operate (No Output Air Pressure)
1. Check that setup has been properly completed (e.g., allowable rotation angle of
feedback lever).
2. Check that an appropriate supply air pressure is supplied (check for air leaks).
3. Check that an appropriate input signal (power supply) is input (e.g., whether electrical
wiring is correct).
4 If HART communication is possible, conduct “self-diagnosis” on the equipment and
follow the messages to resolve the problem (please refer to the message explanation in
sections 5-1-6 and 5-1-7).
5. Check whether the internal data in the device is properly specified.
5-1
Page 86

Chapter 5 Troubleshooting
5-1-3 If the Valve Behaves Abnormally (Output Air Is Present)
1. Activate manual operation status with the A/M switch, adjust the air with the
regulator, and check that the valve shaft moves smoothly. (Check whether galling or
packing solidification has occurred.)
2. Check whether the internal data in the device is properly specified (actuator size and
hysteresis, among other data).
3. If the symptoms of the problem can be found in the table below, take action according
to the table.
Problem Point to be checked and action
• Check that the rotation angle of the feedback lever is within
limits.
Hunting,
Overshoot
The device does not
complete a full stroke.
The response speed is
too slow.
• Change the friction level from Light to Medium to Heavy. If
this does not solve the problem, change the actuator size setting
to a smaller parameter with the friction level set to Heavy. (For
the procedure, refer to “Adjustment Procedure when Hunting
Occurs” on the next page.)
• Check that the fully closed and open positions (zero and span)
of the valve are properly adjusted.
• Check that the EPM drive signal is within the range of 50
±25%.
5-2
Page 87

5-1-4 Failure to Communicate with the Communicator
1. Check whether the electrical wiring is correct.
2. Check whether the communicator is correctly connected to the device.
3. Check whether both input and output devices have power sources.
4. Check whether the relationship between the power supply voltage and external load
meets the specifications.
5-1-5 Adjustment Procedure When Hunting Occurs
Start adjustment
Hunting event
conrmed
Chapter 5 Troubleshooting
NO
Is the control loop
controller auto or manual?
Manual
Manually change the
device's control parameters
Perform the dynamic
characteristics test.
Did hunting stop?
Auto
Does hunting still occur
aer the controller
is set to manual?
NO
The device is in
normal state.
YES
Change the hysteresis, a control parameter of the device, in the
order of Light → Medium → Heavy, as well as in the direction
where the actuator size number gets smaller (In the case of a
double-acting actuator, the actuator size number increases in the
reverse direction.)
<Example>
PARAM4-LIGHT → PARAM4-MEDIUM → PARAM4-HEAVY →
PARAM3-HEAVY → PARAM2-HEAVY → PARAM1-HEAVY
If hunting still occurs aer PARAM1-HEAVY is set or if you need
quick response, consult with one of our service representatives.
Conduct the 5-point check of the valve, and verify its dynamic
characteristics.
Readjust the
control loop.
YES
Adjustment
completed
Figure 5-46.
5-3
Page 88

Chapter 5 Troubleshooting
5-1-6 Description of Messages
Message
ROM Failure
RAM Failure
Non-Volatile
Memory
Failure
CPU Failure
Valve Travel
Detector
Failure
LUI display
example
*1
LUI display
Upper
part
AL_00
AL_00
AL_00
AL_00
AL_01 0x*1,0x*5,0x*9,0x*d
Lower part
[*: Optional]
0x01,0x03,0x05,0x07
0x09,0x0b,0x0d,0x0F
0x02,0x03,0x06,0x07
0x0A,0x0b,0x0E,0x0F
0x04,0x05,0x06,0x07
0x0c,0x0d,0x0E,0x0F
0x08,0x09,0x0A,0x0b
0x0c,0x0d,0x0E,0x0F
Description and cause Action
ROM error. Contact Azbil Corporation.
RAM error. Contact Azbil Corporation.
Non-volatile memory error. Contact Azbil Corporation.
CPU error. Contact Azbil Corporation.
VTD (angle sensor) error.
• The VTD connector is
disconnected.
• VTD signal line is disconnected or short-circuited.
Contact Azbil Corporation.
Valve Travel
Detector Out
of Range
A/D
Conversion
Module 1
Failure
A/D
Conversion
Module 2
Failure
Input Circuit
Failure
Po 1 Pressure
Sensor Failure
AL_01 0x*2,0x*6,0x*A,0x*E
0x*4,0x*5,0x*6,0x*c
AL_01
0x*d,0x*E
0x*8,0x*9,0x*A,0x*c
AL_01
0x*d,0x*E
0x*1,0x*3,0x*5,0x*7
AL_14
0x*9,0x*b,0x*E,0x*F
0x1*,0x3*,0x5*,0x7*
AL_01
0x9*,0xb*,0xd*,0xF*
VTD (angle sensor) output
error.
• The allowable rotation
angle of feedback lever
(±30°) is exceeded.
• The feedback lever is disengaged.
Error in the AD conversion
section (operation part).
Error in the AD conversion
section (pressure sensor).
Input circuit error Contact Azbil Corporation.
Error in the Po1 pressure
sensor.
Check that the feedback
lever is not disengaged and
that the angle of rotation is
allowable (±30°).
If the error message does not
disappear after you check
these points, contact Azbil
Corporation.
Contact Azbil Corporation.
Contact Azbil Corporation.
Contact Azbil Corporation.
Po 2 Pressure
Sensor Failure
AL_01
0x2*,0x3*,0x6*,0x7*
0xA*,0xb*,0xE*,0xF*
5-4
Error in the Po2 pressure
sensor.
Contact Azbil Corporation.
Page 89

Chapter 5 Troubleshooting
Message
Ps Pressure
Sensor Failure
Pn Pressure
Sensor Failure
Temperature
Sensor Failure
Internal
Program
Execution
Error
Scheduled
PST Start
Failure
LUI display
example
*1
Upper
part
AL_01
AL_01
AL_14
AL_14
AL_14
LUI display
Lower part
[*: Optional]
0x4*,0x5*,0x6*,0x7*
0xc*,0xd*,0xE*,0xF*
0x8*,0x9*,0xA*,0xb*
0xc*,0xd*,0xE*,0xF*
0x02,0x03,0x06,0x07
0x0A,0x0b,0x0E,0x0F
0x04,0x05,0x06,0x07
0x0c,0x0d,0x0E,0x0F
0x*8,0x*9,0x*A,0x*b
0x*C,0xD,0x*E,0x*F
Description and cause Action
Error in the Ps pressure
sensor.
Error in the Pn pressure
sensor.
Temperature sensor abnormality
Program execution abnormality
Unable to execute auto PST
because PST execution requirements are not satisfied
Contact Azbil Corporation.
Contact Azbil Corporation.
Contact Azbil Corporation.
Contact Azbil Corporation.
Please check the PST execution requirements.
PST
Scheduler
Fault
SIS RAM
Data Failure
Local User
I/F Active
Dummy
Drive Signal
simulation is
running
Auto Setup is
running
Auto Travel
Calibration is
running
AL_14 0x1*,0x3*
AL_14 0x2*,0x3* SIS RAM data abnormality Contact Azbil Corporation.
— —
AL_02 0x*8,0x*9,0x*A,0x*b
AL_02 0x1* Auto setup is in progress
AL_02 0x2*
Unable to execute auto PST
due to internal abnormality
The LUI is operating
(insetup mode).
The device is in the dummy
EPM drive signal output
state.
Automatic opening
adjustment is in progress
Contact Azbil Corporation.
Exit the LUI setup mode by
holding down
.
Clear the dummy EPM drive
signal output state.
Wait until execution ends
or stop it with the stop
command as needed.
Wait until execution ends
or stop it with the stop
command as needed.
Step
Response Test
is running
Valv e
Signature is
running
AL_02 0x4*
AL_02 0x8*
The step response test is in
progress
Valve signature is in
progress
5-5
Wait until execution ends
or stop it with the stop
command as needed.
Wait until execution ends
or stop it with the stop
command as needed.
Page 90

Chapter 5 Troubleshooting
Message
VTD Angle
Span Out of
Range
Input Signal
Low
Insufficient
Input Signal
Range
Temperature
Out of Range
LUI display
example
*1
Upper
part
AL_03
AL_03
AL_03
AL_03
LUI display
Lower part
[*: Optional]
0x*1,0x*3,0x*5,0x*7
0x*9,0x*b,0x*d,0x*F
0x*2,0x*3,0x*6,0x*7
0x*A,0x*b,0x*E,0x*F
0x*4,0x*5,0x*6,0x*7
0x*c,0x*d,0x*E,0x*F
0x*8,0x*9,0x*A,0x*b
0x*c,0x*d,0x*E,0x*F
Description and cause Action
Adjust the zero and span
The zero and span range is
to o narrow.
so that the angle of the
feedback lever has a span of
4° or larger.
The input current is too low. Input at least 3.5mA
The input signal range is
to o narrow.
Set the input signal span
more than 2mA.
Set the ambient temperature
to between −40° and 80°
The temperature in the
device is lower than −40° or
higher than 80°.
as specified by the usage
conditions. If this message
is displayed even though
this condition is satisfied, a
sensor error is likely. Contact
Azbil Corporation.
Supply
Pressure Out
of Range
Incorrect
Setting of
Input Range
High/Low
Partial
Stroke Test is
running
Full Stroke
Test is
running
Dummy
Contact
Output
simulation is
running
The supply air pressure
AL_03 0x1*,0x5*
detected in the device is
lower than 50kPa or higher
than 715kPa.
The high and low setting of
AL_03 0x4*,0x5*
the input signal range are
incorrect.
AL_15 0x01,0x03,0x05,0x07 PST is in progress
AL_15 0x02,0x03,0x06,0x07 FST is in progress
AL_15 0x04,0x05,0x06,0x07
It’s in dummy contact
output state
• Check that the supply air
pressure is applied.
• Set the supply air pressure
to 715kPa or lower. If this
message is displayed even
though this condition is
satisfied, a sensor error is
likely. Contact AzbilCorporation.
Check the settings for Input
Range High (Open) and
Input Range Low (Closed).
Since PST is in progress,
please either wait until
it finishes, or if you wish
to abort it, use the abort
command.
Since a FST is in progress,
please either wait until
it finishes, or if you wish
to abort it, use the abort
command.
Please call off the dummy
contact output state.
Supply
Pressure High
Alarm
AL_16 0x01,0x05,0x09
The supply air pressure is
higher than the specified
threshold value
5-6
• Check the supply air pressure.
• Check that the threshold
value is appropriate.
Page 91

Chapter 5 Troubleshooting
Message
Supply
Pressure Low
Alarm
Temp High
Alarm
Temp Low
Alarm
Restriction is
clogged
LUI display
example
*1
LUI display
Upper
part
AL_16 0x02,0x06,0x0A
AL_16 0x04,0x05,0x06
AL_16 0x08,0x09,0x0A
AL_04 0x01
Lower part
[*: Optional]
Description and cause Action
The supply air pressure is
lower than the specified
threshold value
• Check the ambient tem-
The internal temperature
is higher than the specified
threshold value
The internal temperature
is lower than the specified
threshold value
The EPM drive signal
has exceeded the normal
operation range.
• The fixed diaphragm is
clogged.
• Air is not supplied.
• Gal
ling of the valve
shaft.
perature.
• Check that the threshold
value is appropriate for the
usage environment.
• Check the ambient temperature.
• Check that the threshold
value is appropriate for the
usage environment.
• Clean the fixed flow restriction.
• Check the supply air pressure.
• Check the EPM drive
signal.
• Change the input signal to
confirm smooth operation.
(• Perform auto setup.)
Deposits on
the NozzleFlapper
AL_04 0x02
Total Stroke
Alarm — —
Cycle Count
Alarm — —
Shut Count
Alarm — —
Max Tvl
Speed+Alarm — —
Max Tvl
Speed−Alarm — —
The EPM drive signal
has exceeded the normal
operation range.
• The nozzle is clogged.
• The A/M switch is in
manual mode.
The cumulative sliding
distance is larger than the
threshold value.
The number of inversion
operations is larger than the
threshold value.
The number of full close
operations is larger than the
threshold value.
The maximum operation
speed + is larger than the
threshold value.
The maximum operation
speed − is smaller than the
threshold value.
• Clean the nozzle.
• Check that the A/M switch
is in auto mode.
• Check the EPM drive
signal.
• Change the input signal to
confirm smooth operation.
Check the valve’s operation.
Check the valve’s operation.
Check the valve’s operation.
Check the valve’s operation.
Check the valve’s operation.
Po Validity +
Alarm — —
Po Validity −
Alarm — —
The output air pressure
validity + is larger than the
threshold value.
The output air pressure
validity − is smaller than the
threshold value.
5-7
Check the valve’s operation.
Check the valve’s operation.
Page 92

Chapter 5 Troubleshooting
Message
LUI display
example
*1
Upper
part
[*: Optional]
Max Friction
Alarm — —
LUI display
Stick-Slip
High Alarm
— —
Stick-Slip
Medium
— —
Alarm
Stick-Slip
Low Alarm
Deviation +
Alarm
Deviation −
Alarm
— —
— —
— —
Zero Travel +
Alarm — —
Zero Travel −
Alarm — —
Lower part
Description and cause Action
The maximum friction is
larger than the threshold
Check the valve’s operation.
value.
Stick-slip is larger than the
“High” threshold value.
Stick-slip is larger than the
“Medium” threshold value.
Stick-slip is larger than the
“Low” threshold value.
The deviation + is larger
than the threshold value.
The deviation − is smaller
than the threshold value.
Check the valve’s operation.
Check the valve’s operation.
Check the valve’s operation.
Check the valve’s operation.
Check the valve’s operation.
The zero point opening +
is larger than the threshold
Check the valve’s operation.
value.
The zero point opening − is
smaller than the threshold
Check the valve’s operation.
value.
Travel Cutoff
High
Travel Cutoff
Low
PST Start
Position
Failure
No change in
valve travel in
PST
Did not
Reach Target
in PST
PST Pressure
Failure
— —
— —
0x*1,0x*3,0x*5,0x*7
AL_19
0x*9,0x*b,0x*E,0x*F
0x*2,0x*3,0x*6,0x*7
AL_19
0x*A,0x*b,0x*E,0x*F
0x*4,0x*5,0x*6,0x*7
AL_19
0x*C,0x*D,0x*E,0x*F
0x*8,0x*9,0x*A,0x*b
AL_19
0x*C,0xD,0x*E,0x*F
The valve was forcibly fully
opened.
The valve was forcibly fully
closed.
PST starting travel
abnormality
Valve doesn’t move during
PST
Valve doesn’t reach the
target travel during PST
Abnormality in pressure
during PST
Confirm the forced full
closure value and fully open
value, then specify an input
signal within the setting
range.
Set the valve travel to the
initial travel for the PST.
Test the valve’s operation.
Test the valve’s operation.
Test the valve’s operation.
PST
Incomplete
Stick-Slip in
PST
AL_19 0x1* PST didn’t finish.
Relaunch PST, or test the
valve’s operation.
— — Stick-slip occurs during PST Test the valve’s operation.
5-8
Page 93

Chapter 5 Troubleshooting
Message
FST Start
Position
Failure
No change in
valve travel in
FST
Did not
Reach to
Target in FST
FST Pressure
Failure
FST
Incomplete
Factory
Settings
Restored
LUI display
example
*1
Upper
part
— —
— —
— —
— —
Lower part
[*: Optional]
Description and cause Action
FST starting travel
abnormality
Valve doesn’t move during
FST
Valve doesn’t reach the
target travel during FST
Abnormality in pressure
during FST
— — FST didn’t finish.
The data set when the
device was shipped from the
LUI display
— —
factory was restored.
The factory data reset
(restoring factory settings)
operation was performed.
Set the valve travel to the
initial travel for the FST.
Test the valve’s operation.
Test the valve’s operation.
Test the valve’s operation.
Relaunch FST, or test the
valve’s operation.
Perform appropriate
adjustment and setup.
In Use by an
Operator
Local User
I/F Abnormal
Local User I/F
was used in
past 10min.
Settings are being
— —
changed through HART
communication or with the
Check which operator is
changing the settings.
LUI.
LUI module error.
Check the key status. Move
the device away from any
nearby strong magnetic field.
— —
Key input is still recognized
as ON.
The key is being physically
pressed down.
— —
*1. These alarms are displayed with the normal monitor. The alarms are not displayed with other monitors.
The LUI key was used
within the past 10 minutes.
There may be someone near
the device. Check the safety
in the field.
5-9
Page 94

Chapter 5 Troubleshooting
5-10
Page 95

Chapter 6 Maintenance
This chapter describes periodic maintenance for the device. You can keep the device in
good working order by performing appropriate maintenance. Also, the limited life parts
that may be purchased are listed in 6-9. Because the replacement frequencies of resale
parts differ depending on the usage environment and usage situation of the device, specify
appropriate replacement frequencies.
Precautions for safe work
If appropriate maintenance is not performed, an unexpected operation may cause the feedback lever
to move, causing an injury. Perform maintenance at appropriate times.
Maintenance work is dangerous because the valve moves. Be prepared in advance to prevent injury
and effects on the process when the valve moves.
Chapter 6 Maintenance
Caution
6-1 A/M Switch
1) Auto operation
2) Manual operation
Maintenance work can be done by switching from Auto to Manual. The device has a
built-in Auto/Manual (A/M) switch.
The A/M switch switches the control method of output air from the positioner between
auto operation and manual operation.
• The device outputs the output air pressure to control the opening according to the input
signal.
• The main unit directly outputs the supply air pressure.
• Manual operations with the regulator are possible. (The double-acting actuator does not
support manual operation.)
Warning
Operation of the A/M switch is dangerous because the valve moves. Be
prepared in advance to prevent injury and effects on the process when the
valve moves.
6-1
Page 96

Chapter 6 Maintenance
Setscrew
A/M switch
MANUAL
3) Structure of A/M switch
The structure of the A/M switch is shown in the figure below.
Remove the pilot relay cover.
AUTO
Figure 6-47. Structure of A/M Switch
Handling Precautions:
Please note that if it’s used during MAN operation state, it would not be operable
during an emergency.
6-2
Page 97

Chapter 6 Maintenance
4) Procedure for switching from auto operation to manual operation
The procedure for switching from auto operation to manual operation is shown below.
Step Procedure
1
2
Loosen the three screws to remove the pilot relay cover in order to operate
the A/M switch.
Rotate the A/M switch counterclockwise (in the MAN direction) one revolution using a flat-head screwdriver. (Confirm that operation has switched
by using the output air pressure gauge.)
5) Procedure for switching from manual operation to auto operation
The procedure for switching from auto operation to manual operation is shown below.
Step Procedure
Securely rotate the A/M switch clockwise (in the AUTO direction) using a
1
2 Attach the pilot relay cover to the main unit with the three screws.
flat-head screwdriver until it stops. (Confirm that operation has switched
by using the output air pressure gauge.)
Caution
Do not loosen the setscrew. If the setscrew is loosened, the A/M switch will
pop out due to the air pressure, potentially causing an injury.
6-3
Page 98

Chapter 6 Maintenance
6-2 Replacement of Filter and Maintenance of Flow Constriction
Foreign matter from the instrumentation air that is stuck in the constricted flow section
of the device can be removed during maintenance. The replacement and maintenance
procedures are described below.
Handling Precautions:
Use clean dry air with solid particles no larger than 3μm as the instrumentation
air.
1) Replacement and Maintenance Procedure
Step Procedure
1 Shut off the supply air to the device.
2
3 Rotate the A/M switch in the MAN direction to remove.
4
Loosen the three screws to remove the pilot relay cover and remove the setscrew in the A/M switch section.
Cut the holder with nippers or other tool to remove the old filter.
Handling Precautions:
Properly dispose of the old holder and filter.
Clean the constricted flow section using a wire (with a diameter of
0.25mm) or other tool.
5
6 Wrap a new filter around the A/M switch and secure it with the holder.
7 Screw in the A/M switch until it stops.
8 Screw the setscrew into the A/M switch section.
9 Attach the pilot relay cover with the three screws.
Handling Precautions:
When cleaning, be careful not to damage the hole of the flow
constriction. Do not use an air gun.
Be careful not to let oil get on the cleaned area.
6-4
Page 99

6-3 Cleaning the Flapper
P cover
If the flapper is contaminated by instrumentation air, clean it as described below.
Step Procedure
1 Remove the three screws from the pilot relay cover.
2
3
4
If air pressure is supplied to the device, the back pressure of the nozzle will
change after the flapper is cleaned, and therefore the valve opening will
suddenly change. Perform cleaning under conditions where a sudden move of
the valve will not injure people or disturb plant operation.
Chapter 6 Maintenance
Prepare a piece of 0.2mm thick paper. A typical business card is appropriate.
Chip away dirt that has accumulated in the space between the nozzle and
flapper in the EPM using the paper.
After cleaning, attach the pilot relay cover to the main unit with the three
screws.
Caution
Nozzle apper
Figure 6-48. Structure
6-5
Page 100

Chapter 6 Maintenance
6-4 Adjusting the Pilot Relay
The adjustment method for the pilot relay differs depending on whether the single-acting
or double-acting actuator is used.
Adjust as appropriate for the actuator being used, referring to the procedures below.
1) Procedure for adjusting the pilot relay for a double-acting actuator
(adjustment from single-acting to double-acting type)
Step Procedure
Rotate the pilot relay adjustment screw clockwise (tightening direction)
1
2
3
4
5
6
until it stops.
The balance pressure of output air pressures P
ply air pressure.
Perform auto setup. (Use the LUI or communication.)
Auto setup configures the double-acting settings and roughly adjusts the
zero point and span.
After confirming that auto setup is completed, apply the input signal to
make the opening 50%.
While checking output air pressure P
gauge, rotate the pilot relay adjustment screw to adjust the output air pressure to 70% ±10% of the supply air pressure.
Rotating the adjustment screw clockwise increases the balance pressure
while rotating it counterclockwise decreases the balance pressure.
Handling Precautions:
Perform auto setup again.
The final adjustment value is measured.
Perform operation checks including a five-point check (0, 25, 50, 75, 100%
opening).
out1
and P
out1
or P
with the LUI or pressure
out2
is used as the sup-
out2
If the actuator has a large capacity, it takes time for the balance
pressure to stabilize. Rotating the adjustment back a bit facilitates
stabilization.
2) Procedure for adjusting the pilot relay for a single-acting actuator
(adjustment from double-acting to single-acting type)
Step Procedure
Rotate the pilot relay adjustment screw counterclockwise (loosening direc-
1
tion) until it stops.
Output air pressure P
becomes 0.
out2
2 Perform auto setup.
3
Perform operation checks including a five-point check (0, 25, 50, 75, 100%
opening).
Caution
When rotating the pilot relay adjustment screw, be careful not to get your
finger caught in the space between it and the adapter.
The adjustment screw may be damaged if you rotate it with excessive force
using a tool.
6-6
 Loading...
Loading...