

Page 1
Actuator controls
AUMATIC AC 01.2/ACExC 01.2
Profibus DP
Device integration FieldbusManual
Page 2
Actuator controls
Table of contents AC 01.2/ACExC 01.2 Profibus DP
Read operation instructions first.
●
Observe safety instructions.
Purpose of the document:
This document contains information for the commissioning staff of the distributed control system and DCS software
engineers.This document is intended to support the actuator integration into the DCS via fieldbus interface.
Reference documents:
●
Operation instructions (Assembly, operation, commissioning) for actuator
●
Manual (Operation and setting) AUMATIC AC 01.2 Profibus DP
Reference documents can be downloaded from the Internet (www.auma.com) or ordered directly from AUMA
(refer to <Addresses>).
Table of contents Page
41. Safety instructions.................................................................................................................
41.1. Basic information on safety
41.2. Range of application
51.3. Warnings and notes
51.4. References and symbols
62. General information about Profibus DP...............................................................................
62.1. Basic characteristics
62.2. Basic functions of Profibus DP
62.3. Transfer mode
62.4. Bus access
62.5. Functionality
72.6. Protective functions
72.7. Device types
83. Commissioning......................................................................................................................
83.1. Introduction
93.2. Parameter setting
103.3. Bus address (slave address)
103.4. Configuring the Profibus DP interface
113.5. Communication start-up
113.6. AUMA user parameters (AUMA specific parameters)
113.6.1. Process representation input arrangement (user parameters)
123.6.2. Settable (user definable) signals
173.6.3. Additional (user-definable) parameters (option)
173.6.4. Further adaptation options
183.7. Communication monitoring
183.7.1. Connection monitoring of the Profibus DP communication
183.7.2. Fail Safe and Global Control Clear telegrams
183.8. I & M functions
204. Description of the data interface .........................................................................................
204.1. Input data (process representation input) – signals
204.1.1. Process representation input (default process representation)
224.1.2. Description of the bytes in the process representation input
344.2. Output data (process representation output)
344.2.1. Process representation output arrangement
2
Page 3

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Table of contents
354.2.2. Description of the output data
404.3. Profibus DP V1 services
404.4. Redundancy
404.4.1. Redundant behaviour according to AUMA redundancy
434.4.2. Redundant behaviour according to Profibus DP-V2 redundancy (PNO guideline 2.212)
444.5. Profibus DP-V2 functions
444.5.1. Profibus DP-V2 redundancy
464.5.2. Profibus DP-V2 time-synchronisation with time stamp
515. Description of the Profibus DP board..................................................................................
515.1. Indications (indication and diagnostic LEDs)
536. Corrective action....................................................................................................................
536.1. Troubleshooting
546.2. Diagnostics
567. Technical data.........................................................................................................................
567.1. Profibus DP interface
588. Appendix.................................................................................................................................
588.1. Proposed wiring diagram for external sensors, 2-wire technology
598.2. Proposed wiring diagram for external sensors, 3-wire technology
608.3. Proposed wiring diagram for external sensors, 4-wire technology
618.4. Parameters
88Index........................................................................................................................................
89Addresses...............................................................................................................................
3
Page 4

Actuator controls
Safety instructions AC 01.2/ACExC 01.2 Profibus DP
1. Safety instructions
1.1. Basic information on safety Standards/directives
Safety instructions/warn-
ings
Qualification of staff
Commissioning
AUMA products are designed and manufactured in compliance with recognised
standards and directives.This is certified in a Declaration of Incorporation and a EC
Declaration of Conformity.
The end user or the contractor must ensure that all legal requirements, directives,
guidelines, national regulations and recommendations with respect to assembly,
electrical connection, commissioning and operation are met at the place of installation.
They include among others applicable configuration guidelines for fieldbus
applications.
All personnel working with this device must be familiar with the safety and warning
instructions in this manual and observe the instructions given. Safety instructions
and warning signs on the device must be observed to av oid personal injury or property
damage.
Assembly, electrical connection, commissioning, operation, and maintenance must
be carried out exclusively by suitab ly qualified personnel ha ving been authorised by
the end user or contractor of the plant only.
Prior to working on this product, the staff must have thoroughly read and understood
these instructions and, furthermore, know and observe officially recognised rules
regarding occupational health and safety.
Prior to commissioning, it is important to check that all settings meet the requirements
of the application. Incorrect settings might present a danger to the application, e.g.
cause damage to the valve or the installation.The manufacturer will not be held
liable for any consequential damage. Such risk lies entirely with the user.
Operation
Protective measures
Prerequisites for safe and smooth operation:
●
●
●
●
●
●
The end user or the contractor are responsible for implementing required protective
measures on site, such as enclosures, barriers, or personal protective equipment
for the staff.
Maintenance
Any device modification requires the consent of the manufacturer.
1.2. Range of application
AUMA actuator controls are e xclusively designed f or the operation of AUMA actuators .
Other applications require explicit (written) confirmation by the manufacturer.The
following applications are not permitted, e.g.:
●
●
No liability can be assumed for inappropriate or unintended use.
Observance of these operation instructions is considered as part of the device's
designated use.
Correct transport, proper storage, mounting and installation, as well as careful
commissioning.
Only operate the device if it is in perf ect condition while observing these instructions.
Immediately report any faults and damage and allow for corrective measures.
Observe recognised rules for occupational health and safety.
Observe the national regulations.
During operation, the housing warms up and surface temperatures > 60 °C may
occur.To prev ent possib le burns, we recommend to the check surface temperature with an appropriate thermometer prior to working with device and to wear
protective gloves, if required.
motor control
pump control
4
Page 5
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Safety instructions
1.3. Warnings and notes
The following warnings draw special attention to saf ety-rele v ant procedures in these
operation instructions, each marked by the appropriate signal word (DANGER,
WARNING, CAUTION, NOTICE).
Indicates an imminently hazardous situation with a high level of risk. Failure
to observe this warning could result in death or serious injury.
Indicates a potentially hazardous situation with a medium level of risk. F ailure
to observe this warning could result in death or serious injury.
Indicates a potentially hazardous situation with a low level of risk. Failure to
observe this warning may result in minor or moderate injury . Ma y also be used
with property damage.
Potentially hazardous situation. Failure to observe this warning may result in
property damage. Is not used for personal injury.
Arrangement and typographic structure of the warnings
Type of hazard and respective source!
Potential consequence(s) in case of non-observance (option)
→
Measures to avoid the danger
→
Further measure(s)
Safety alert symbol warns of a potential personal injury hazard.
The signal word (here: DANGER) indicates the level of hazard.
1.4. References and symbols
The following references and symbols are used in these instructions:
Information The term Information preceding the text indicates important notes and information.
Symbol for CLOSED (valve closed)
Symbol for OPEN (valve open)
Important information before the next step.This symbol indicates what is required
for the next step or what has to be prepared or observed.
Via the menu to parameter
Describes the path within the menu to the parameter. By using the push buttons of
the local controls you may quickly find the desired parameter in the display.
< > Reference to other sections
T erms in brack ets shown abov e refer to other sections of the document which provide
further information on this topic.These terms are either listed in the index, a heading
or in the table of contents and may quickly be found.
5
Page 6
Actuator controls
General information about Profibus DP AC 01.2/ACExC 01.2 Profibus DP
2. General information about Profibus DP
For exchange of information among automation systems and between automation
systems and the connected distributed field devices, the use of serial fieldbus systems
for communication is state-of-the-art.Thousands of applications have proved
impressively that, in comparison with conventional technology, cost savings of up to
40 % in wiring, commissioning, and maintenance are achieved by using fieldbus
technology.While in the past the fieldbus systems used were often manufacturer
specific and incompatible with other bus systems, the systems employed today are
almost exclusively open and standardiz ed.This means that the user does not depend
on individual suppliers and can choose within a large product range the most suitable
product at the most competitive price.
Profibus DP is the leading open fieldbus system in Europe and is also used
successfully throughout the world.The application range includes automation in the
areas of manufacturing, processing, and building. Profibus DP is an international,
open fieldbus protocol which has been standardized in the fieldbus standards IEC
61158 and IEC 61784.This standardization ensures that the investments by
manufacturers and users are protected to the best possible degree and the
independence of the manufacturer is guaranteed.
2.1. Basic characteristics
Profibus DP defines the technical and functional features of a serial fieldbus system
allowing interconnection of distributed, digital automation devices. Profibus DP
distinguishes between master and slave devices.
Profibus DP is designed for fast data transmission on the field level. Here, central
control devices, such as a PLC or PC , communicate via a f ast serial connection with
peripheral field devices such as input/output devices, valves, and actuators.
Data exchange among these field devices is based on cyclic communication.The
respectively necessary communication functions are defined by the Profibus DP
basic functions according to IEC 61158 and IEC 61784.
Master devices
Slave device
Master devices control data traffic on the bus . A master is allowed to send messages
without an external request.Within the Profibus protocol, masters are also called
‘active devices’.
Slave devices such as AUMA Profibus DP actuators are peripheral devices.Typical
slave de vices are input/output devices, v alves, actuators , and measuring transducers.
They do not have bus access rights, i.e. they may only acknowledge received
messages or, at the request of a master, transmit messages to that master. Slaves
are also called ‘passive devices’.
2.2. Basic functions of Profibus DP
On a cyclic basis, the master reads the input information from the slaves and writes
the output information to the slaves. In addition to this cyclic data transfer of the
process representation, Profibus DP also provides powerful functions f or diagnostics
and commissioning. Data traffic is monitored through the monitoring functions on
the master and slave side.
2.3. Transfer mode
●
RS-485 twisted pair cable or fibre optic cable
●
AUMA actuators support baud rates up to 1.5 Mbits/s.
2.4. Bus access
●
Token-passing between the masters and polling between master and slave
●
Mono-master or multi-master systems are possible.
●
Master and slave devices: max. 126 devices at a bus
2.5. Functionality
●
Peer-to-peer (process data exchange [DATA EX]) or Multicast (control commands to all slaves)
6
Page 7
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP General information about Profibus DP
●
Cyclic process data exchange between DP master and DP slaves.
●
Additional acyclic data exchange between DP master and DP slaves for
Profibus DP with V1 services.
●
DP-V2 redundancy according to PNO guideline 2.212
●
DP-V2 time stamp according to PNO guideline 2.192 or IEC 61158 / 64784
●
Checking the configuration of the DP slaves
●
Synchronisation of inputs and/or outputs
2.6. Protective functions
●
All messages are transmitted with Hamming Distance HD=4.
●
Watchdog timer at DP slaves
●
Access protection for the inputs/outputs of DP slaves (Sync and Freeze)
●
Process data exchange monitoring with configurable timer interval at the master
●
Adjustable failure behaviour
2.7. Device types
●
DP master class 2 (DPM2), e.g. programming/configuration tools
●
DP master class 1 (DPM1), e.g. central controllers such as PLC, PC
●
DP slave, e.g. AUMA Profibus DP devices. Devices with binary or analogue
inputs/outputs, actuators, plug valves
7
Page 8

Actuator controls
Commissioning AC 01.2/ACExC 01.2 Profibus DP
3. Commissioning
3.1. Introduction
When commissioning a Profibus DP network, the devices on the Profibus DP must
be parameterized and configured using the programming software at the controls
(Profibus configurator).
The programming software first reads the GSD file (GeneralStationData) of the
individual actuators.The GSD file contains information about the device properties
needed by the master.
Afterwards, the user can configure and parameterize the device at the Profibus DP
for the programming software of the process control system.
This information is then stored in the controls (DP master) and sent to the actuators
(DP slaves) each time cyclic communication is started.
The process representation input and output bytes are used to control the actuator
and to supply the feedback signals. If a configuration with consistent data is selected,
certain PLCs require special functional elements for the control of the Profibus DP
slaves.
Certification
ID number
Device Master Data
(GSD)
AUMA actuators with Profibus DP are certified by the Profibus user organisation
(PNO).
Each DP slave and each DP master have individual ID numbers.The ID number is
required for the DP master to identify the type of device connected without signification
protocol overhead.The master compares the ID numbers of the connected DP
devices to the ID number in the specified configuration data.The process data transfer
will only be started if the correct device types with the correct station addresses were
connected to the bus.This ensures a high security against configuration errors.
The PNO manages the ID numbers together with the device master data (GSD).
AUMA actuators with actuator controls AC 01.2 are listed under the following ID
numbers at the PNO:
●
ID number of the standard version:0x0C4F with functions for:
- Single channel Profibus DP interface (not redundant)
- Redundant Profibus DP interface according to AUMA redundancy (I or II)
- Optional Profibus DP V1 services
●
ID number of the extended version:0x0CBD with functions for:
- Redundant Profibus DP interface according to Profib us DP-V2 redundancy
- Time stamp and alarms according to Profibus DP-V2
- Optional Profibus DP V1 services
For Profibus DP, the performance features of the devices are documented by the
manufacturer and made available to the users as device data sheet and device
master data. Structure, contents and coding of the device master data (GSD) are
standardised.They enable comfortable configuration of any DP slaves with
configuration devices by different manufacturers.
For AUMA actuators with AC 01.2 controls, the following GSD files are available:
●
Standard version:AUMA0C4F.GSD with functions for:
- Single channel Profibus DP interface (not redundant)
- Redundant Profibus DP interface according to AUMA redundancy
- Optional Profibus DP V1 services
●
Optional version:AUMA0CBD.GSD with functions for:
- Redundant Profibus DP interface according to Profib us DP-V2 redundancy
- Time stamp and alarms according to Profibus DP-V2
- Optional Profibus DP V1 services
Information GSD files can be downloaded from our website: www.auma.com.
8
Page 9
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Commissioning
3.2. Parameter setting
The parameter setting is partly defined in the Profibus standard, e.g. one bit for
switching bus monitoring on and off (watchdog).
In addition, the Profibus DP interface can receive further user parameters thus
enabling complete configuration of the process representation input.These
parameters can be modified via the programming software of the controls. New
programming software supports the parameter setting via text and a menu selection.
For older versions, the parameters must be entered as hexadecimal numbers.
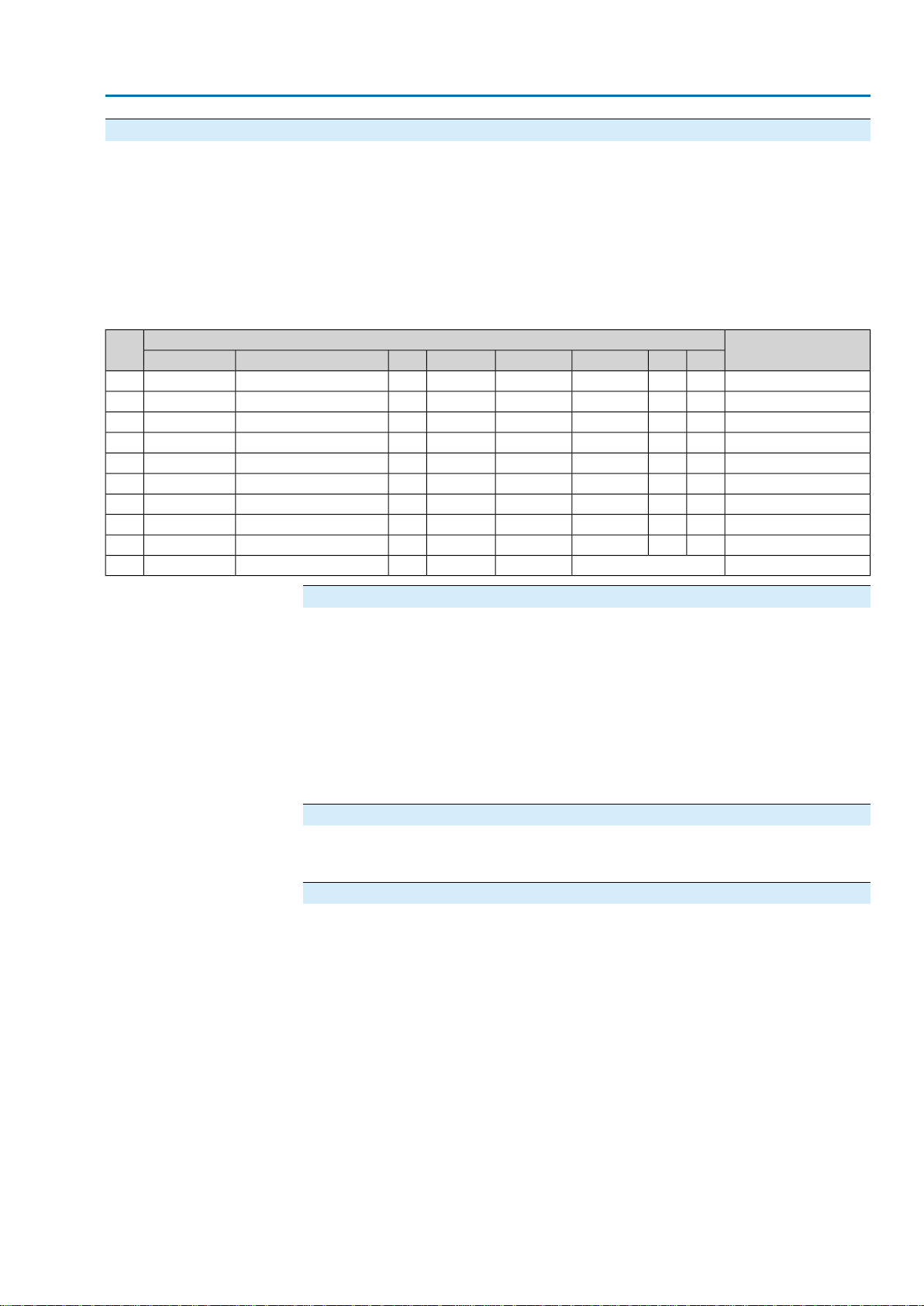
Table 1: Structure of the parameter telegram
RemarkBitByte
01234567
000WD_ONFreezeSyncUnlockLock1
WD factor 12
WD factor 23
MinTSDR4
ID no. high5
ID no. low6
Group ID7
DP-V1 status 100WD_Base0000DPV1 Enable8
DP-V1 status 2000000Enable Process AlarmPrmCmd9
DP-V1 status 3Alarm ModePrmStruct000010
WD_Base
MinTSDR
ID no.
Group ID
DPV1 Enable
Enable Process Alarm
Alarm Mode
PrmStruct
PrmCmd
Settings for basic functions of the Profibus:
WD_Base = 0 (time base 10 ms)
WD_Base = 1 (time base 1 ms)
Connection monitoring time of the Profibus DP communication:
TWD = (1 or 10 ms, depending on WD_Base) x (WD factor 1) x (WD factor 2)
Minimum response time of the actuator (in T
Bit
)
ID number of the actuator
Group assignment by the master
Settings for Profibus DP-V1 services (option):
Activates the DP-V1 services available as an option; must be set to 1 when using
DP-V1 services.
Settings for Profibus DP-V2 functions (option):
Enables the process alarm (required for time synchronisation with time stamp), must
be set to 1.
Number of supported alarms, must be set to 0 (i.e. one alarm of each type is
supported).
Structured parameter setting possible, must be set to 1.
Parameter command activated, must be set to 1 for Profibus DP-V2 redundancy.
In the bytes following byte 10 of the parameter telegram the user parameters for
adaptation of the process representation input to the DCS can among others be
found (AUMA specific parameters).
The GSD file available on the website does not contain any user parameters for
adapting the process representation input to DCS requirements.The actuator will
use the default process representation with this GSD file. For further information
please refer to <Process representation input (default process representation)>.
9
Page 10
Actuator controls
Commissioning AC 01.2/ACExC 01.2 Profibus DP
3.3. Bus address (slave address)
Each participant at the bus is addressed via its specific bus address (slave address).
The bus address may be assigned only once per fieldbus network.
The bus address is stored in a non-volatile memory.
On delivery, address 126 (default value) is set for all devices.
The bus address (slave address) can be set in the following ways:
●
Locally via push buttons (indication in the display).
For details on setting refer to the operation instructions to the actuator or
Manual (Operation and Setting) AUMATIC AC 01.1 Profibus DP.
●
Using the AUMA CDT service software (via PC or laptop with Bluetooth).
The latest version of the AUMA CDT can be downloaded from our website:
www.auma.com.
●
Via fieldbus. Please note that only one device with the address 126 (default
value) may be connected to Profib us DP. A new bus address may be assigned
to the actuator using the SAP 55 (Service-Access-Point Set Slave Address).
For redundant version according to Profibus DP-V2 redundancy, only the address
of the primary channel can be set; the address of the backup channel is derived from
the primary.
For redundant version according to AUMA redundancy, the addresses of both
channels can be set individually.
3.4. Configuring the Profibus DP interface
During configuration, the number of input and output bytes reserved for each de vice
in the controls’ memory is selected. Additionally, the method of data processing is
defined: consistently or non-consistently.
Information Only the number of bytes determined in the configuration is transferred between DP
master and DP slave.
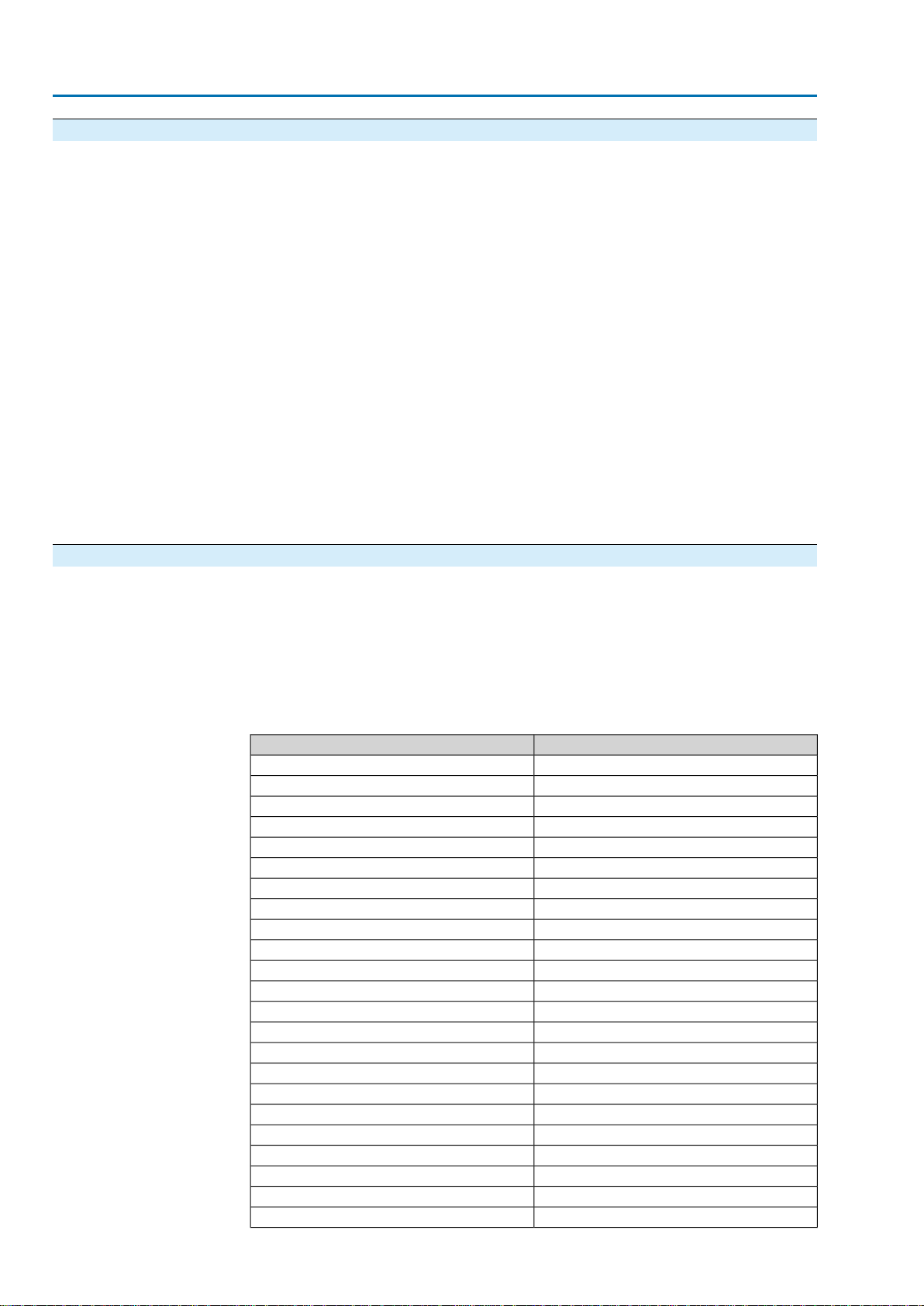
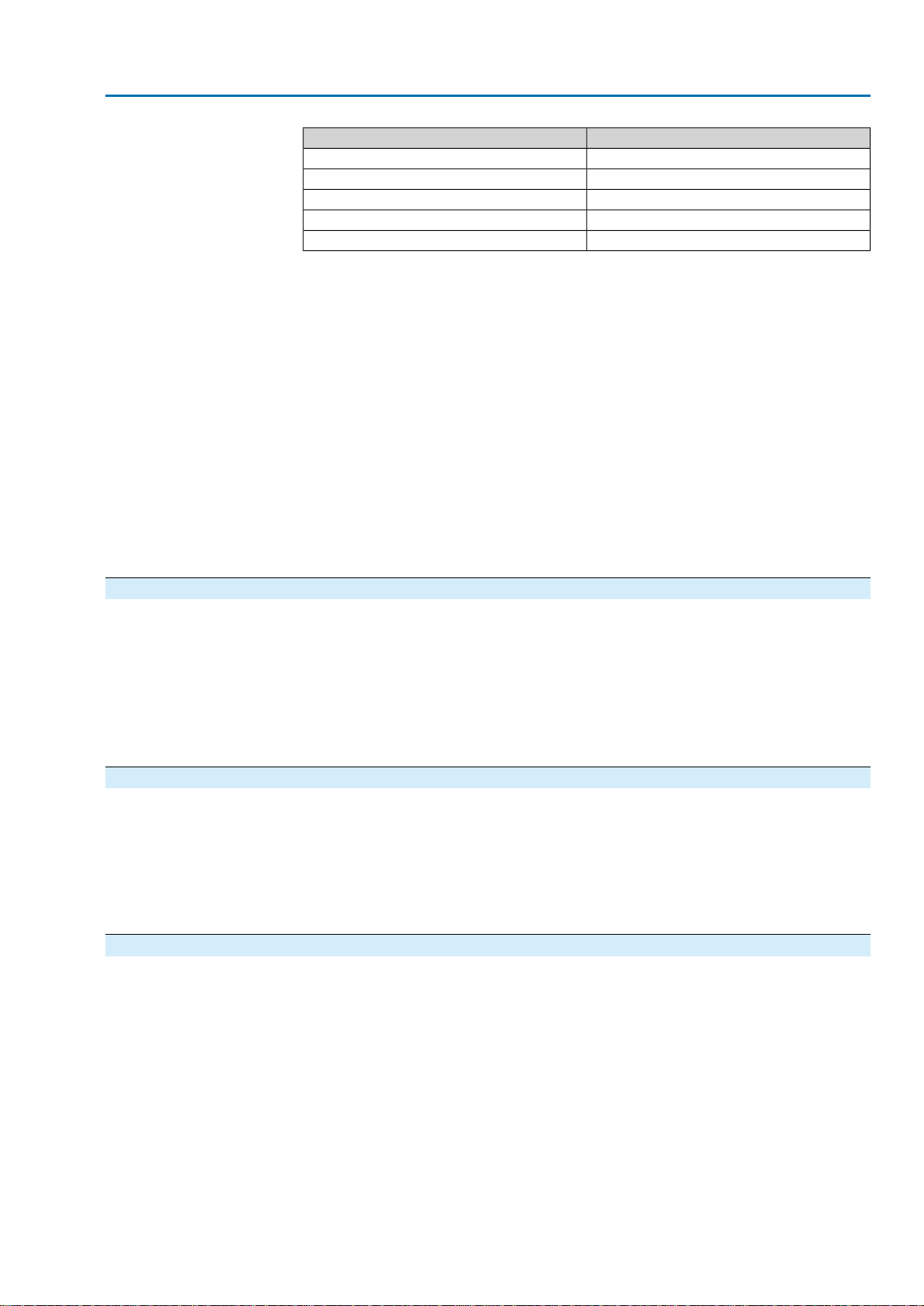
The following configurations are possible with AUMA Profibus DP actuators:
Number of output bytesNumber of input bytes
11
41
81
12
42
82
162
14
44
84
164
86
166
48
88
128
412
812
1212
1612
420
820
1220
10
Page 11
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Commissioning
Number of output bytesNumber of input bytes
432
832
1232
1632
2640
All these configurations (except 1 In, 1 Out) can be selected as consistent or
inconsistent.
The number of input bytes indicates how many of the maximum 40 bytes are sent
to the DP master by the DP slaves.
The number of output bytes states how many of the maximum of 26 bytes the DP
master sends to the DP slave.
If, for example, the configuration with 8 bytes input is selected, only the first 8 bytes
are sent from the DP slave to the DP master. In this case , the master does not ha ve
access to bytes 9 to 40.This way, the DP master saves memory space since only
8 input bytes are reserved for the actuator.
The data of the AUMA actuators should be consistently processed b y the DP master.
This ensures that the value of a 2-byte variable (position transmitter, analogue
customer input) does not change after reading out the first byte and, thus, does not
distort the value. If a master does not offer the possibility to use consistent
configurations by means of the process control system, a non-consistent configuration
can be selected.
3.5. Communication start-up
When switching on the DP master , it first sends one parameter and one configuration
telegram to each DP slave . If parameters and configuration are correct, the DP sla ve
enters the ‘Data Exchange’ mode to exchange process data between controls and
slave.Then, the DP master can control the DP slave and read its current state via
the process representation.
If communication is interrupted (e.g. when switching the slave off or in the event of
Profibus cable rupture), it is automatically resumed by the DP master once the cause
of the fault is eliminated.
3.6. AUMA user parameters (AUMA specific parameters)
The process representation input can be updated by means of the user parameters.
Default values and selection options are defined in a specific GSD file available on
request.
Two GSD files are available for AUMATIC AC 01.2/ACExC 01.2. A standard version
(AUMA04CF for ident-no. 0x0C4F) and an optional version with additional user
parameters for setting time stamp and alarms according to Profibus DP-V2
(AUMA0CBD for ident no. 0x0CBD).
3.6.1. Process representation input arrangement (user parameters)
The process representation input data can be arranged in any order. Arrangement
is defined by means of the user parameters in the GSD file, available on request.
Users may assign a specific indication to each Profibus DP signal.The data volume
of the transmitted data depends on the type of signals selected (u8, u16, i, individual
signals).
11
Page 12
Actuator controls
Commissioning AC 01.2/ACExC 01.2 Profibus DP
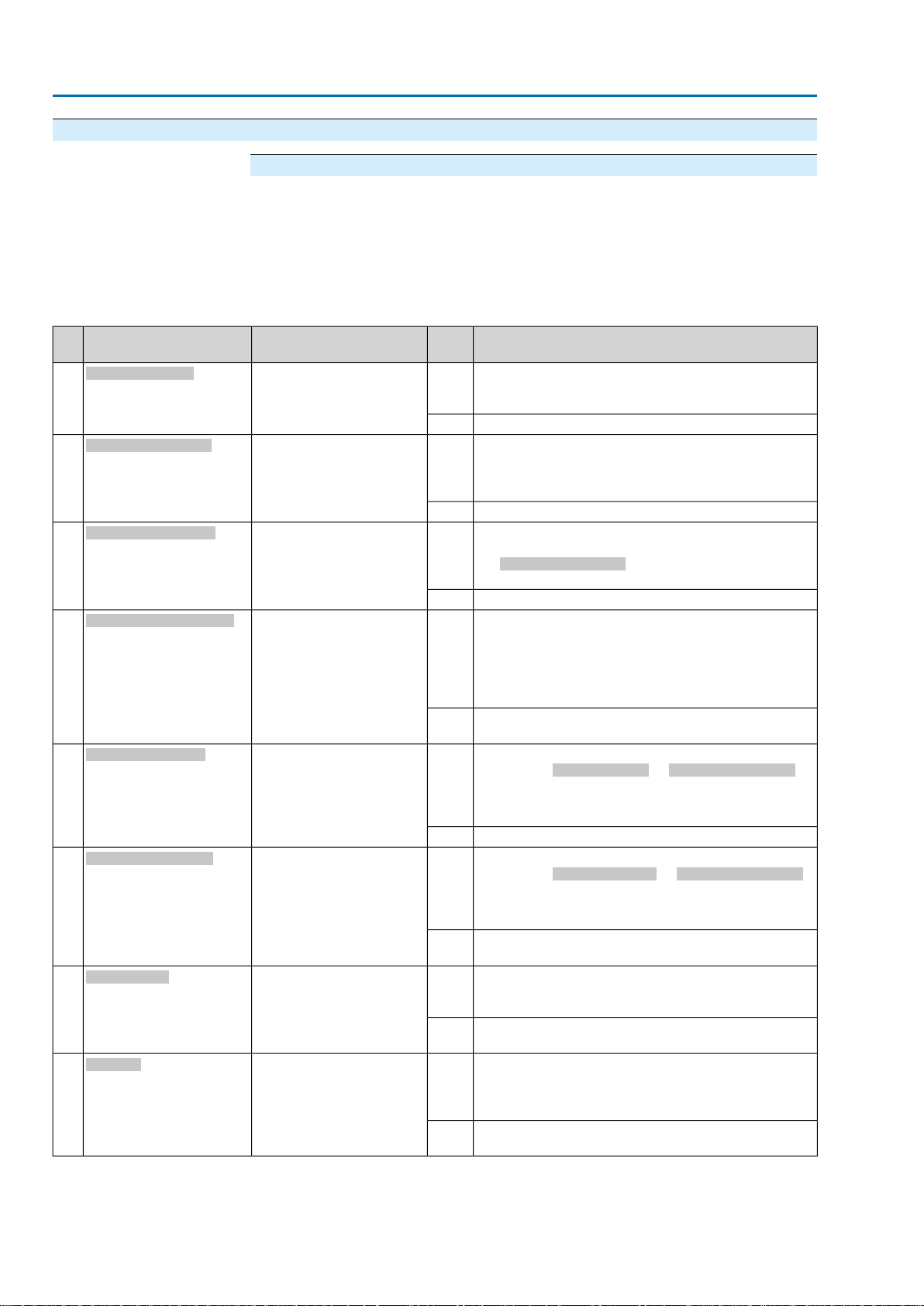
3.6.2. Settable (user definable) signals
Table 2: Description of the parameter settings
Prm-Text-Def GSD file
(1) = "Bit: End p. CLOSED"
(2) = "Bit: End p. OPEN"
(3) = "Bit: End p. CLOSED, blink"
(4) = "Bit: End p. OPEN, blink"
(5) = "Bit: Setpoint reached"
(6) = "Bit: Running CLOSE"
(7) = "Bit: Running OPEN"
(8) = "Bit: Selector sw. LOCAL"
(9) = "Bit: Sel. sw. REMOTE"
(10) = "Bit: Sel. sw. OFF"
(11) = "Bit: Limit sw. CLOSED"
(12) = "Bit: Limit sw. OPEN"
(13) = "Bit:Torque sw. CLOSE"
(14) = "Bit:Torque sw. OPEN"
(15) = "Bit: Device ok"
(16) = "Bit: Failure"
(17) = "Bit: Function check"
(18) = "Bit: Out of spec."
(19) = "Bit: Maintenance requ."
(process representation)
–(0) = "Bit: Reserved"
Bit: End p. CLOSED
Bit: End p. OPEN
Bit: EP CLOSED, blink
Bit: EP OPEN, blink
Bit: Setpoint reached
Bit: Running CLOSE
Bit: Running OPEN
Bit: Sel. sw. LOCAL
Bit: Sel. sw. REMOTE
Bit: Sel. sw. OFF
Bit: Limit sw. CLOSED
Bit: Limit sw. OPEN
Bit: Torque sw.CLOSE
Bit: Torque sw.OPEN
Bit: Device ok
Bit: Failure
Bit: Function check
Bit: Out of spec.
Bit: Maintenance requ.
DescriptionDesignation
For limit seating: Limit switch operated in direction CLOSE
For torque seating:Torque switch and limit switch operated
in direction CLOSE
For limit seating: Limit switch operated in direction OPEN
For torque seating:Torque switch and limit switch operated
in direction OPEN
End position CLOSED reached or intermediate position
reached
(The intermediate position is only indicated if parameter
Signal interm. pos. M0167 = OPEN/CLOSED = On.)
Signal blinking: Actuator runs in direction CLOSE.
End position OPEN reached or intermediate position
reached.
(The intermediate position is only indicated if parameter
Signal interm. pos. M0167 = OPEN/CLOSED = On.)
Signal blinking: Actuator runs in direction OPEN.
The position setpoint is is within max. error variable (outer
dead band). Is only signalled if Profibus DP master has set
the Fieldbus SETPOINT bit (process representation output).
An operation command in direction CLOSE is performed
via fieldbus:Fieldbus CLOSE or Fieldbus SETPOINT (process representation output).This bit remains also set during
operation pauses (e.g. due to the dead time or the rev ersing
prevention time).
An operation command in direction OPEN is performed via
fieldbus:Fieldbus OPEN or Fieldbus SETPOINT (process
representation output).This bit remains also set during operation pauses (e.g. due to the dead time or the reversing
prevention time).
Selector switch is in position LOCAL.
Selector switch is in position REMOTE.
Selector switch is in position OFF.
Limit switch operated in end position CLOSED
Limit switch operated in end position OPEN
Torque switch operated in direction CLOSE
Torque switch operated in direction OPEN
Collective signal 05:
The device is ready for remote control.
No AUMA warnings, AUMA faults or signals according to
NAMUR are present.
Collective signal 10:
Indication according to NAMUR recommendation NE 107
Actuator function failure, output signals are invalid.
Collective signal 08:
Indication according to NAMUR recommendation NE 107
The actuator is being worked on; output signals are temporarily invalid.
Collective signal 07:
Indication according to NAMUR recommendation NE 107
Actuator is operated outside the normal operation conditions.
Collective signal 09:
Indication according to NAMUR recommendation NE 107
Recommendation to perform maintenance.
12
Page 13
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Commissioning
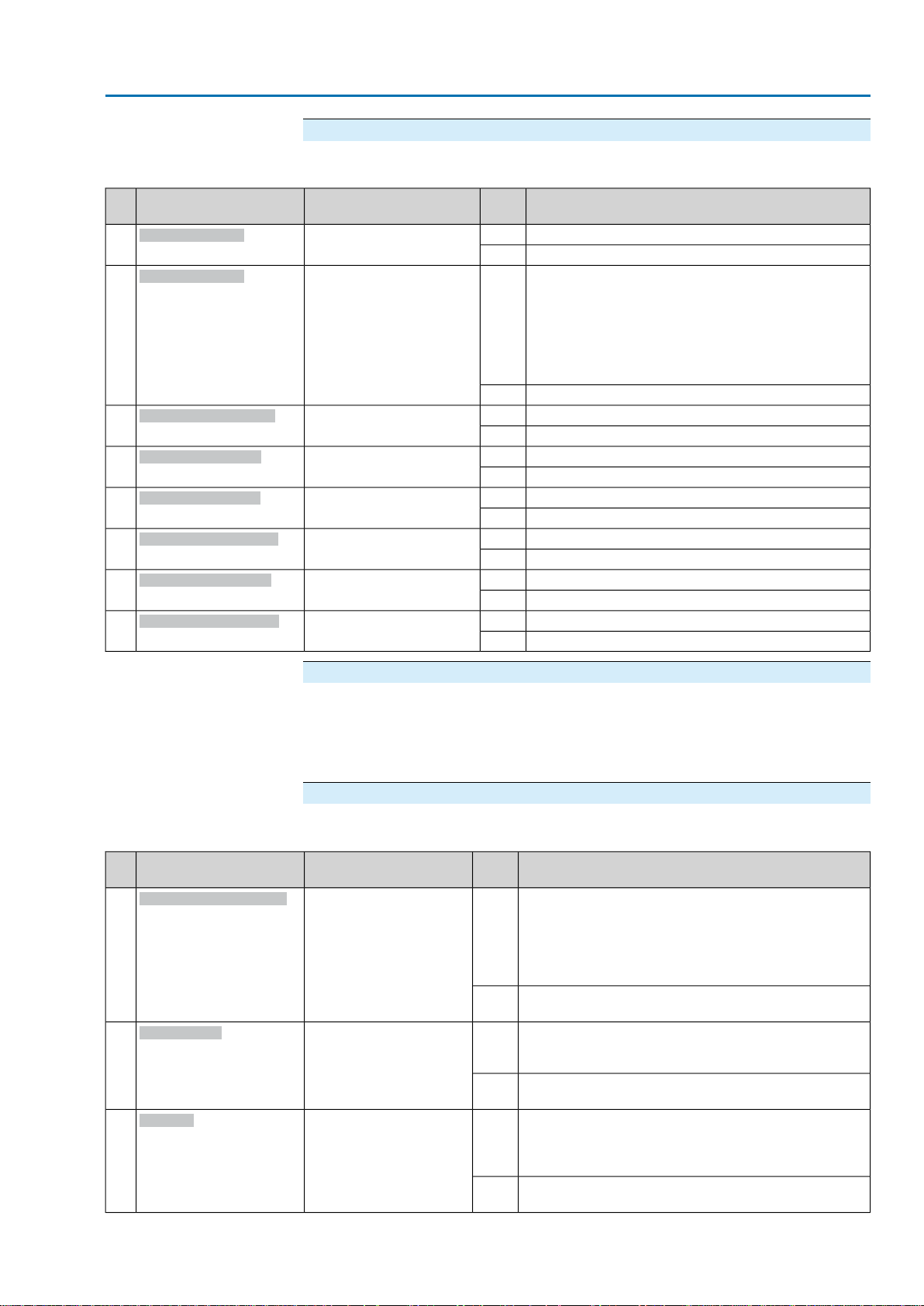
Prm-Text-Def GSD file
(20) = "Bit: Fault"
(21) = "Bit:Warnings"
(22) = "Bit: Not ready REMOTE"
(23) = "Bit: Op. pause active"
(24) = "Bit: Start step mode"
(25) = "Bit: Actuator running"
(26) = "Bit: Running LOCAL"
(27) = "Bit: Running REMOTE"
(28) = "Bit: Running via handw."
(29) = "Bit: In interm. position"
(30) = "Bit: Failure behav. active"
(31) = "Bit: Intermediate pos. 1"
(32) = "Bit: Intermediate pos. 2"
(33) = "Bit: Intermediate pos. 3"
(34) = "Bit: Intermediate pos. 4"
(35) = "Bit: Intermediate pos. 5"
(36) = "Bit: Intermediate pos. 6"
(37) = "Bit: Intermediate pos. 7"
(38) = "Bit: Intermediate pos. 8"
(39) = "Bit: Input DIN 1"
(40) = "Bit: Input DIN 2"
(41) = "Bit: Input DIN 3"
(42) = "Bit: Input DIN 4"
(43) = "Bit: Input DIN 5"
(44) = "Bit: Input DIN 6"
(45) = "Bit: Input DIN 7"
(46) = "Bit: Input DIN 8"
(47) = "Bit: FailState fieldbus"
(48) = "Bit: I/O interface"
(49) = "Bit: EMCY behav.act."
(50) = "Bit: EMCY stop active"
(51) = "Bit: Service active"
(52) = "Bit: Interlock active"
(53) = "Bit: Sel. sw. not REMOTE"
(54) = "Bit: Handwheel active"
(process representation)
Bit: Fault
Bit: Warnings
Bit: Not ready REMOTE
Bit: Op. pause active
Bit: Start step mode
Bit: Actuator running
Bit: Running LOCAL
Bit: Running REMOTE
Bit: Handwheel oper.
Bit: In interm. position
Bit: Failure behav. act.
Bit: Interm. pos. 1
Bit: Interm. pos. 2
Bit: Interm. pos. 3
Bit: Interm. pos. 4
Bit: Interm. pos. 5
Bit: Interm. pos. 6
Bit: Interm. pos. 7
Bit: Interm. pos. 8
Bit: Input DIN 1
Bit: Input DIN 2
Bit: Input DIN 3
Bit: Input DIN 4
Bit: Input DIN 5
Bit: Input DIN 6
Bit: Input DIN 7
Bit: Input DIN 8
Bit: FailState fieldbus
Bit: I/O interface
Bit: EMCY behav. act.
Bit: EMCY stop active
Bit: Service active
Bit: Interlock active
Bit: Sel. sw. not REMOTE
Bit: Handwheel active
DescriptionDesignation
Collective signal 03:
Contains the result of a disjunction (OR operation) of all
faults.
The actuator cannot be operated.
Collective signal 02:
Contains the result of an OR disjunction of all warnings.
Collective signal 04:
Contains the result of a disjunction (OR-operation) of the
signals, forming the "Not ready REMOTE" group.
The actuator cannot be operated from REMOTE.
The actuator is in off-time (e.g. stepping mode or reversing
prevention time).
The actuator is within the set stepping range.
Actuator is running (output drive is moving)
Hard wired collective signal consisting of signals:
●
(26) Bit: Running LOCAL
●
(27) Bit: Running REMOTE
●
(28) Bit: Handwheel oper.
Output drive rotates due to operation command from LOCAL.
Output drive rotates due to operation command from RE-
MOTE.
Output drive rotates without electric operation command
(manual operation).
The actuator is in an intermediate position e.g. neither in
end position OPEN nor in end position CLOSED.
The failure behaviour is active.
Intermediate position 1 reached
Intermediate position 2 reached
Intermediate position 3 reached
Intermediate position 4 reached
Intermediate position 5 reached
Intermediate position 6 reached
Intermediate position 7 reached
Intermediate position 8 reached
A high signal (+24 V DC) is present at digital input 1.
A high signal (+24 V DC) is present at digital input 2.
A high signal (+24 V DC) is present at digital input 3.
A high signal (+24 V DC) is present at digital input 4.
A high signal (+24 V DC) is present at digital input 5.
A high signal (+24 V DC) is present at digital input 6.
Parameter not available
Parameter not available
No valid communication via fieldbus (despite a vailab le con-
nection)
The actuator is controlled via the I/O interface (parallel).
Operation mode EMERGENCY is active (EMERGENCY
signal was sent).
Operation mode EMERGENCY stop is active (EMERGENCY
stop button pressed).
Operation mode Service (via Bluetooth) is active.
Actuator is interlocked.
Selector switch is in position Local control (LOCAL) or 0
(OFF).
Manual operation is active (handwheel is engaged); optional
signal
13
Page 14
Actuator controls
Commissioning AC 01.2/ACExC 01.2 Profibus DP
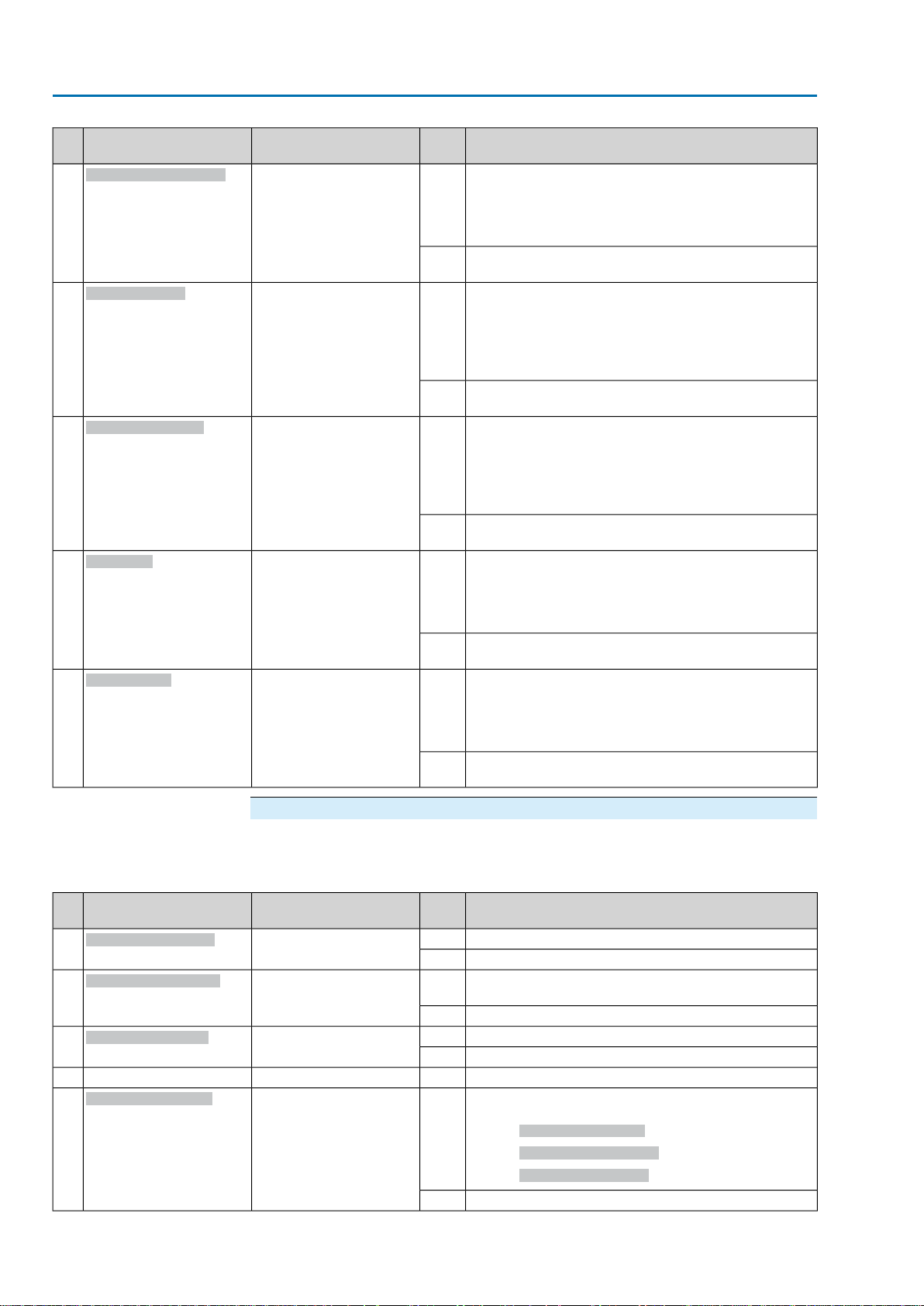
Prm-Text-Def GSD file
(55) = "Bit:Wrong command"
(56) = "Bit:Thermal fault"
(57) = "Bit: Phase fault"
(58) = "Bit:Wrong phase sequence"
(59) = "Bit: Mains quality"
(60) = "Bit:Torque fault CLOSE"
(61) = "Bit:Torque fault OPEN"
(62) = "Bit:Torque fault"
(63) = "Bit: Operat. time warning"
(64) = "Bit: On time warning"
(65) = "Bit: 24 V AC, internal"
(66) = "Bit: 24 V DC control volt."
(67) = "Bit: 24 V DC, internal"
(68) = "Bit: 24 V DC, external"
(69) = "Bit: Internal error"
(70) = "Bit: Internal warning"
(71) = "Bit: No reaction"
(72) = "Bit: Configuration error"
(73) = "Bit:Temp. fault controls"
(74) = "Bit:Temp. fault motor"
(75) = "Bit:Temp.fault gearbox"
(76) = "Bit:Wrn heater"
(77) = "Bit: RTC not set"
(78) = "Bit:Wrn humidity"
(79) = "Bit:WrnRefActPos"
(80) = "Bit:WrnSigRgeActPos"
(81) = "Bit:WrnSigLossActPos"
(82) = "Bit:WrnActPosition"
(process representation)
Bit: Setpoint disabled
Bit: Thermal fault
Bit: Phase failure
Bit: Incorrect phase seq
Bit: Mains quality
Bit: Torque fault CLOSE
Bit: Torque fault OPEN
Bit: Torque fault
Bit: Op. time warning
Bit: On time warning
Bit: 24 V AC internal
Bit: 24 V DC control volt.
Bit: 24 V DC internal
Bit: 24 V DC, external
Bit: Internal error
Bit: Internal warning
Bit: No reaction
Bit: Configuration error
Bit: Temp. fault controls
Bit: Temp. fault motor
Bit: Temp. fault gear
Bit: Wrn heater
Bit: RTC not set
Bit: Wrn humidity
Bit: WrnRefActPos
Bit: WrnSigRgeActPos
Bit: WrnSigLossActPos
Bit: WrnActPosition
DescriptionDesignation
Received setpoint cannot be performed as the positioner is
not available.
Motor protection tripped.
●
When connecting to a 3-ph AC system and with internal
24 V DC supply of the electronics: Phase 2 is missing.
●
When connecting to a 3-ph or 1-ph AC system and with
external 24 V DC supply of the electronics: One of the
phases L1, L2 or L3 is missing.
The phase conductors L1, L2 and L3 are connected in the
wrong sequence.
Due to insufficient mains quality, the controls cannot detect
the phase sequence (sequence of phase conductors L1, L2
and L3) within the pre-set time frame provided for monitoring.
Torque fault in direction CLOSE
Torque fault in direction OPEN
Torque fault in directions CLOSE or OPEN
Warning: Max. permissible operating time for an operation
(OPEN-CLOSE) exceeded
Warning: Max. number of motor starts (starts) or max. run-
ning time/h exceeded
The internal 24 V AC v oltage supply of the controls has ex-
ceeded the power supply limits.
The 24 V A C v oltage supply is used to control the re v ersing
contactors, to assess the thermoswitches, to supply the internal actuator heater and, as an option, to generate the 115
V AC supply for the customer.
The 24 V DC auxiliary voltage (e.g. for supply of the control
outputs) is outside the supply voltage limits.
The internal 24 V DC supply voltage of the controls for
supply of the electronic components is outside the supply
voltage limits.
The external 24 V DC voltage supply of the controls has
exceeded the power supply limits.
Collective signal 14: Internal error
Collective signal 15: Internal warning
No actuator reaction to operation commands within the set
reaction time.
Incorrect configuration, i.e. the current setting is invalid.
Parameter not available
Parameter not available
Parameter not available
Heater failure at actuator (control unit)
Real time clock has not yet been set.
Parameter not available
Warning:
Position feedback of actuator was not yet referenced for
limit end positions.
Warning:
Current position feedback signal range is outside the permissible range.
Warning:
A signal loss has occurred for actuator position feedback.
Warning: Actual position of actuator
Collective signal consisting of:
●
(79) Bit: WrnRefActPos
●
(80) Bit: WrnSigRgeActPos
●
(81) Bit: WrnSigLossActPos
14
Page 15
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Commissioning
Prm-Text-Def GSD file
(83) = "Bit:Wrn FO ring"
(84) = "Bit:WrnOnTiRunning"
(85) = "Bit:WrnOnTiStarts"
(86) = "Bit:Wrn vibration"
(87) = "Bit:Wrn dew point"
(88) = "Bit:WrnControlsTemp"
(89) = "Bit:Wrn motor temp."
(90) = "Bit:Wrn gearbox temp."
(91) = "Bit:Wrn input AIN 1"
(92) = "Bit:Wrn input AIN 2"
(93) = "Bit:WrnActProcVal"
(94) = "Bit:WrnProcSetpoint"
(95) = "Bit:WrnSetpointPos"
(96) = "Bit: Fieldbus failure"
(97) = "Bit: Local Stop"
(98) = "Bit:Wrong operation cmd"
(99) = "Bit: Channel 1 active"
(100) = "Bit: Channel 2 active"
(101) = "Bit: Motor running Close"
(102) = "Bit: Motor running Open"
(103) = "Bit:Time Sync active"
(104) = "Bit: Interlock Remote"
(105) = "Bit: Interlock Local"
(106) = "Bit: Interlock"
(107) = "Bit: Disabled"
(108) = "Bit: Config.Warning"
(109) = "Bit: Pb DataEx Ch1"
(110) = "Bit: Pb DataEx Ch2"
(111) = "Bit:Wrn FOC budget"
(112) = "Bit: FieldbusFailsafeAct.1"
(113) = "Bit: FieldbusFailsafeAct.2"
(114) = "Bit: Chan1 BusComm"
(115) = "Bit: Chan2 BusComm"
(116) = "Bit: PVST active"
(117) = "Bit: PVST fault"
(process representation)
Bit: Wrn FO cables
Bit: WrnOnTiRunning
Bit: WrnOnTiStarts
Bit: WrnOnTiRunning
Bit: WrnOnTiStarts
Bit: Wrn controls temp
Bit: Wrn motor temp
Bit: Wrn gearbox temp
Bit: Wrn input AIN 1
Bit: Wrn input AIN 2
Bit: WrnActProcVal
Bit: WrnProcSetpoint
Bit: WrnSetpointPos
Bit: Fieldbus failure
Bit: Local STOP
Bit: Wrong oper. cmd
Bit: Channel 1 active
Bit: Channel 2 active
Bit:Motor runs CLOSE
Bit:Motor runs OPEN
Bit: DP TimeSynch (Set-
Prm)
Bit: Interlock Remote
Bit: Interlock Local
Bit: Interlock
Bit: Disabled
Bit: Config. warning
Bit: Channel 1 DataEx
Bit: Channel 2 DataEx
Bit: Wrn FOC budget
Bit: Chan 1 FailState fieldbus
Bit: Chan 2 FailState fieldbus
Bit: Channel 1 activity
Bit: Channel 2 activity
Bit: PVST active
Bit: PVST error
DescriptionDesignation
Warning:
Optical receiving signal (channel 1) incorrect (no or insufficient Rx receive level) or RS-485 format error (incorrect
bit(s))
Warning on time max. running time/h exceeded
Warning on time max. number of motor starts (starts) ex-
ceeded
Parameter not available
Parameter not available
Warning:Temperature within controls housing too high
Parameter not available
Parameter not available
Warning: Loss of signal analogue input 1
Warning: Loss of signal analogue input 2
Warning: Loss of signal actual process value
Warning: Loss of signal process setpoint
Warning: Loss of signal of actuator setpoint position
Fieldbus failure
A local STOP is active.
Push button STOP of local controls is operated.
Wrong operation command
Indicates that several operation commands were received
simultaneously via Profibus DP (e.g. Remote OPEN and
Remote CLOSE simultaneously or Remote CLOSE/Remote
OPEN and Remote SETPOINT simultaneously) or that the
max. value for a setpoint position has been exceeded (setpoint position > 1,000).
Channel 1 is the active operation command channel.
Channel 2 is the active operation command channel.
Motor runs in direction CLOSE.
Motor runs in direction OPEN.
Time synchronisation is active.
The Interlock function prevents an operation in operation
mode REMOTE.
The Interlock function prevents an operation in operation
mode LOCAL.
The Interlock function prevents an operation in operation
mode REMOTE or in operation mode LOCAL.
Operation mode disabled.
Warning: Configuration setting is incorrect.
The device can still be operated with restrictions.
Channel 1 is in the data exchange state (DataEx).
Channel 2 is in the data exchange state (DataEx).
Warning: FO cable system reserve reached (critical or per-
missible Rx receive level)
No valid fieldbus communication via channel 1 (application
does not communicate with the DCS).
No valid fieldbus communication via channel 2 (application
does not communicate with the DCS).
Bus communication available on channel 1.
Bus communication available on channel 2.
Partial Valve Stroke Test (PVST) is active.
Partial Valve Stroke Test (PVST) could not be successfully
completed.
15
Page 16
Actuator controls
Commissioning AC 01.2/ACExC 01.2 Profibus DP
Prm-Text-Def GSD file
(118) = "Bit: PVST abort"
(119) = "Bit: Interlock OPEN"
(120) = "Bit: Interlock CLOSE"
(121) = "Bit: Bypass Interlock"
(122) = "Bit: Fault no reaction"
(123) = "Bit: Config error remote"
(124) = "Bit:Torque wrn OPEN"
(125) = "Bit:Torque wrn CLOSE"
(126) = "Bit: RTC button cell"
(127) = "Bit:Wrn FOC connection"
(128) = "u16: Actual position"
(129) = "u16: Input AIN 1"
(130) = "u16: Input AIN 2"
(131) = "u16:Torque CLOSE %"
(132) = "u16:Torque OPEN %"
(133) = "u16:Torque CLOSE Nm"
(134) = "u16:Torque OPEN Nm"
(135) = "u16: torque CLOSE ft-lb"
(136) = "u16:Torque OPEN ft-lb"
(137) = "u16:Torque"
(139) = "u16: Actual P osition 0-100%"
(process representation)
Bit: PVST abort
Bit: Interlock OPEN
Bit: Interlock CLOSE
Bit: Interlock by-pass
Bit: No reaction (fault)
Bit: Config. error REMOTE
Bit: Torque warn. OPEN
Bit: Torque warn. CLOSE
Bit: RTC button cell
Bit: Wrn FOC connection
u16: Actual position
u16: Input AIN 1
u16: Input AIN 2
u16: Torque CLOSE %
u16: Torque OPEN %
u16: Torque CLOSE Nm
u16: Torque OPEN Nm
u16: torque CLOSE ft-lb
u16: Torque OPEN ft-lb
u16: Torque
Actual position 0-100 %
DescriptionDesignation
Partial Valve Stroke Test (PVST) was aborted or could not
be started. Remedy: Perform RESET or restart PVST.
Release signal OPEN not active: Operation commands in
direction OPEN are disabled.
Release signal CLOSE not active: Operation commands in
direction CLOSE are disabled.
Bypass of interlock function is active.
No reaction detected at actuator output drive.
Config. error of REMOTE interface active.
Warning: Limit value for torque warning in direction OPEN
exceeded.
Warning: Limit v alue f or torque w arning in direction CLOSE
exceeded.
Warning:Voltage of RTC button cell too low.
Warning: FO cable connection is not available.
Actual actuator position (0 – 1,000 per mil)
Analogue input 1
Analogue input 2
Torque in direction CLOSE, unit in %
Torque in direction OPEN, unit in %
Torque in direction CLOSE, unit in Nm
Torque in direction OPEN, unit in Nm
Torque in direction CLOSE, unit in ft-lb
Torque in direction OPEN, unit in ft-lb
Actual torque value
Actual actuator position (0 – 100 percent)
(201) = "Cylinder printing max."
(202) = "Hydraulics fault"
(203) = "Hydraulics warning"
(204) = "Safe ESD"
(205) = "Safe Stop"
(206) = "SIL fault"
(207) = "SIL function active"
(208) = "PVST required"
(209) = "Mechanic lifetime"
Bit: Cylinder pressure max.
Bit: Hydraulic pressure
fault
Bit: Wrn hydraulics
Bit: Safe ESD
Bit: Safe STOP
Bit: SIL fault
Bit: SIL function active
1)
1)
1)
1)
Bit: PVST required
Bit: Maintenance mechan-
ics
Parameter not available(160) = "i16: Actual position"
Parameter not available(161) = "i16: Input AIN 1"
Parameter not available(162) = "i16: Input AIN 2"
Parameter not available(163) = "i16:Torque CLOSE %"
Parameter not available(164) = "i16:Torque OPEN %"
Parameter not available(192) = "float: Actual position"
Parameter not available(193) = "float: Input AIN 1"
Parameter not available(194) = "float: Input AIN 2"
Parameter not available(195) = "float:T CLOSE %"
Parameter not available(196) = "float:T OPEN %"
Parameter not available(197) = "float:T CLOSE Nm"
Parameter not available(198) = "float:T OPEN Nm"
Parameter not available(199) = "float:T CLOSE lbs/ft."
Parameter not available(200) = "float:T OPEN lbs/ft."
Parameter not available
Parameter not available
Parameter not available
Safe ESD function (Emergency Shut Down) is active.
Safe STOP function is active.
A SIL fault has occurred (collective signal).
A SIL function is active.
(PVST) Partial Valve Stroke Test should be executed
Mechanic maintenance requirement
16
Page 17
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Commissioning
Prm-Text-Def GSD file
(210) = "Seal lifetime"
(211) = "Seal lifetime"
(212) = "Contactor lifetime"
(213) = "Maintenance interval"
(214) = "Maintenance required"
The safety function indications via fieldbus are for information only and must not be used as part of a safety function.The I/O signals of
1)
the SIL module must be used for this purpose.
(process representation)
Bit: Maintenance seals
Bit: Maintenance lubricant
Bit: Maintenance contact-
ors
Bit: Maintenance interval
Bit: Maintenance required
DescriptionDesignation
Seal maintenance requirement
Lubricant maintenance requirement
Contactor maintenance requirement
The set maintenance interval has expired.
Maintenance required
3.6.3. Additional (user-definable) parameters (option)
Parameter description of additional user parameters for setting the time stamp and
alarms according to Profibus DP-V2, available with the optional version
AUMA0CBD.gsd.
Table 3: Description of additional settings
ExtUserPrmData =
Text(0) = "disable"3 "TS -> End Position Close"
Text(1) = "enable"
Text(0) = "disable"4 "TS -> End Position Open"
Text(1) = "enable"
Text(0) = "disable"5 "TS -> Torque Limit Switch Close"
Text(1) = "enable"
Text(0) = "disable"6 "TS -> Torque Limit Switch Open"
Text(1) = "enable"
Text(0) = "disable"7 "TS -> Ready and Remote"
Text(1) = "enable"
Text(0) = "disable"8 "TS -> Fault"
Text(1) = "enable"
Text(0) = "disable"9 "TS -> Power Supply Fault"
Text(1) = "enable"
DescriptionSettingPrm-Text GSD Datei
No function–1 "Setpoint valid bit"
DP-V2 time stamp deactivated.Text(0) = "disable"2 "Timestamp (TS)"
DP-V2 time stamp activated.Text(1) = "enable"
DP-V2 time stamp of End position CLOSED signal deactiv-
ated.
DP-V2 time stamp of End position CLOSED signal activated.
DP-V2 time stamp of End position OPEN signal deactivated.
DP-V2 time stamp of End position OPEN signal activated.
DP-V2 time stamp of Torque sw. CLOSED signal deactiv-
ated.
DP-V2 time stamp of Torque sw. CLOSED signal activated.
DP-V2 time stamp of Torque sw. OPEN signal deactivated.
DP-V2 time stamp of Torque sw. OPEN signal activated.
DP-V2 time stamp of Selector sw. REMOTE signal deactiv-
ated.
DP-V2 time stamp of Selector sw. REMOTE signal activated.
DP-V2 time stamp of Fault signal deactivated.
DP-V2 time stamp of Fault signal activated.
DP-V2 time stamp of Phase fault signal deactivated.
DP-V2 time stamp of Phase fault signal activated.
Without function (reserved)–10 "TS -> reserved"
Without function (reserved)–11 "reserved Byte"
3.6.4. Further adaptation options
From firmware 04.05.xx, the actuator controls provide the option to adapt to the
existing DCS configurations of the actuator type range A C 01.1/ACExC 01.1. Actuator
controls of type range AC 01.2/A CExC 01.2 can be adapted as to support the default
arrangement of the Profibus DP-V0 process representation input of
AC 01.1/ACExC 01.1 without changing the Profibus configuration of the DCS.
Setting is performed using the following parameter:Device
configuration>Profibus>Connection type = AUMATIC .1
17
Page 18
Actuator controls
Commissioning AC 01.2/ACExC 01.2 Profibus DP
●
Information
Only the Profibus DP-V0 standard arrangement of the process representation
input of AC 01.1/ACExC 01.1 is supported, deviating arrangements of the
Profibus DP-V0 process data input require use/installation of AUMA04CF.gsd
or AUMA0CBD.gsd file in the DCS.
●
With connection type = AUMATIC.1 the AC 01.2/A CExC 01.2 does not provide
any diagnostic NAMUR NE 107 information within the cyclic process data representation.
●
EDD or DTM of the AC 01.2/ACExC 01.2 m ust imperativ ely be used f or acyclic
communication via Profibus DP-V1 with AC 01.2/ACExC 01.2!
●
Factory setting:Connection type = AUMATIC.2
3.7. Communication monitoring
3.7.1. Connection monitoring of the Profibus DP communication
The connection monitoring within the master has to be activated to monitor both
master and cable connection between master and actuator (parameter telegram
byte 1, bit 3, WD_ON = 1).
Only if the connection monitoring is active can the actuator react in the even of loss
of communication once the monitoring time also set in the master has elapsed.
The reaction of the actuator also depends on the settings for failure behaviour or
EMERGENCY BEHAVIOUR.
3.7.2. Fail Safe and Global Control Clear telegrams
Another possibility to set the slave to a safe state in the event of a fault are the fail
safe telegrams (telegr ams with data length = 0). If fails safe telegrams are received,
the actuator remains in the DataExchange state; depending on the respectiv e setting,
the actuator may initiate the failure behaviour or the EMERGENCY behaviour.The
actuator quits the Fail Safe state as soon as valid telegrams with the data length ≠
0 are received.
Furthermore, the Global Control Clear (GC Clear) master telegrams can also be
used to initiate the failure behaviour or the EMERGENCY behaviour.This state can
be disabled using a Global Control Operate telegram (GC Operate).
For activated EMERGENCY behaviour:
The actuator can start its operation due to an EMERGENCY signal or a loss
of communication.
Risk of personal injuries or damage to the valve.
→
For commissioning and maintenance work: Set selector switch to position 0
(OFF).The motor operation can only be interrupted in this selector switch position.
→
If the actuator starts its operation by accident: Set selector switch to position 0
(OFF).
3.8. I & M functions
18
The actuator controls support the I & M functions according to PNO guideline 3.502.
With the term Identification & Maintenance (I & M) functions, the Profibus user
organisation e.V. (PNO) introduced a new functionality for all Profibus devices with
acyclic communication channel that may prove very useful for plant operators.The
I & M functions define how certain device-describing data (according to name plate)
is to be uniformly stored in the Profibus devices. Engineering tools may then read
and inteprete the data according to a code which can be accessed on the PNO
server.This provides uniform and powerful access to all important and current device
data, one of the major requirements for asset management.
Part of the device-specific I & M information is the unambiguous asset identification
using a manufacturer ID (MANUFACTURER_ID, for AUMA actuators = 319), the
Page 19

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Commissioning
order number (ORDER_ID) of the actuator as well as the individual serial number
(SERIAL_NUMBER). Further data supplements the asset information.
SizeContent
Header
10 OctetsManufacturer specific
I & M Block
2 OctetsMANUFACTURER_ID
20 OctetsORDER_ID
16 OctetsSERIAL_NUMBER
2 OctetsHARDWARE_REVISION
4 OctetsSOFTWARE_REVISION
2 OctetsREVISION_COUNTER
2 OctetsPROFILE_ID
2 OctetsPROFILE_SPECIFIC_TYPE
2 OctetsIM_VERSION
2 OctetsIM_SUPPORTED
19
Page 20
Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
4. Description of the data interface
4.1. Input data (process representation input) – signals
The process representation input allows the master (controls) to read the state of
the slave (actuator).
4.1.1. Process representation input (default process representation)
Grey bits are collective signals.They contain the results of a disjunction (OR
operation) of other information.
20
Page 21
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
21
Page 22
Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
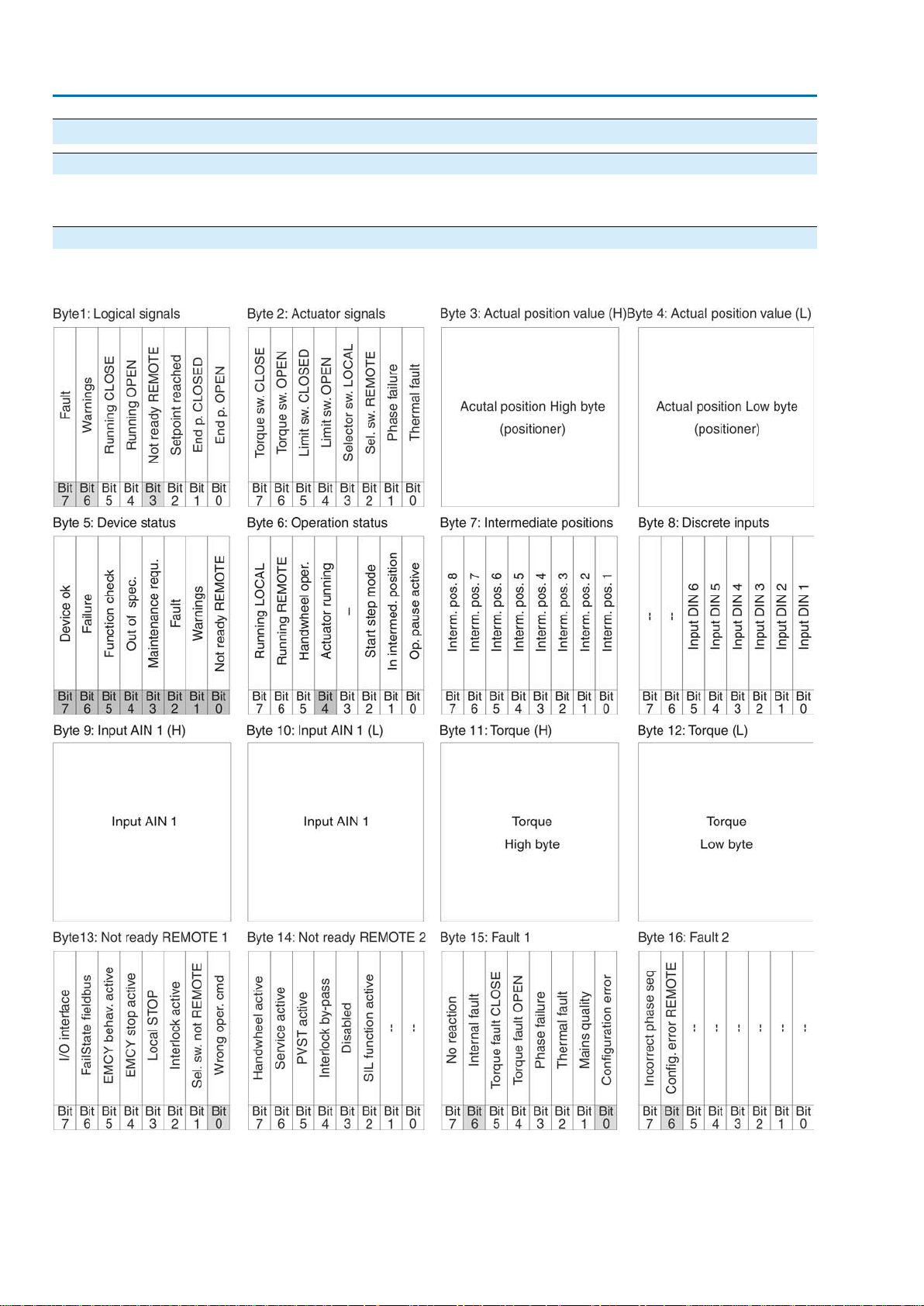
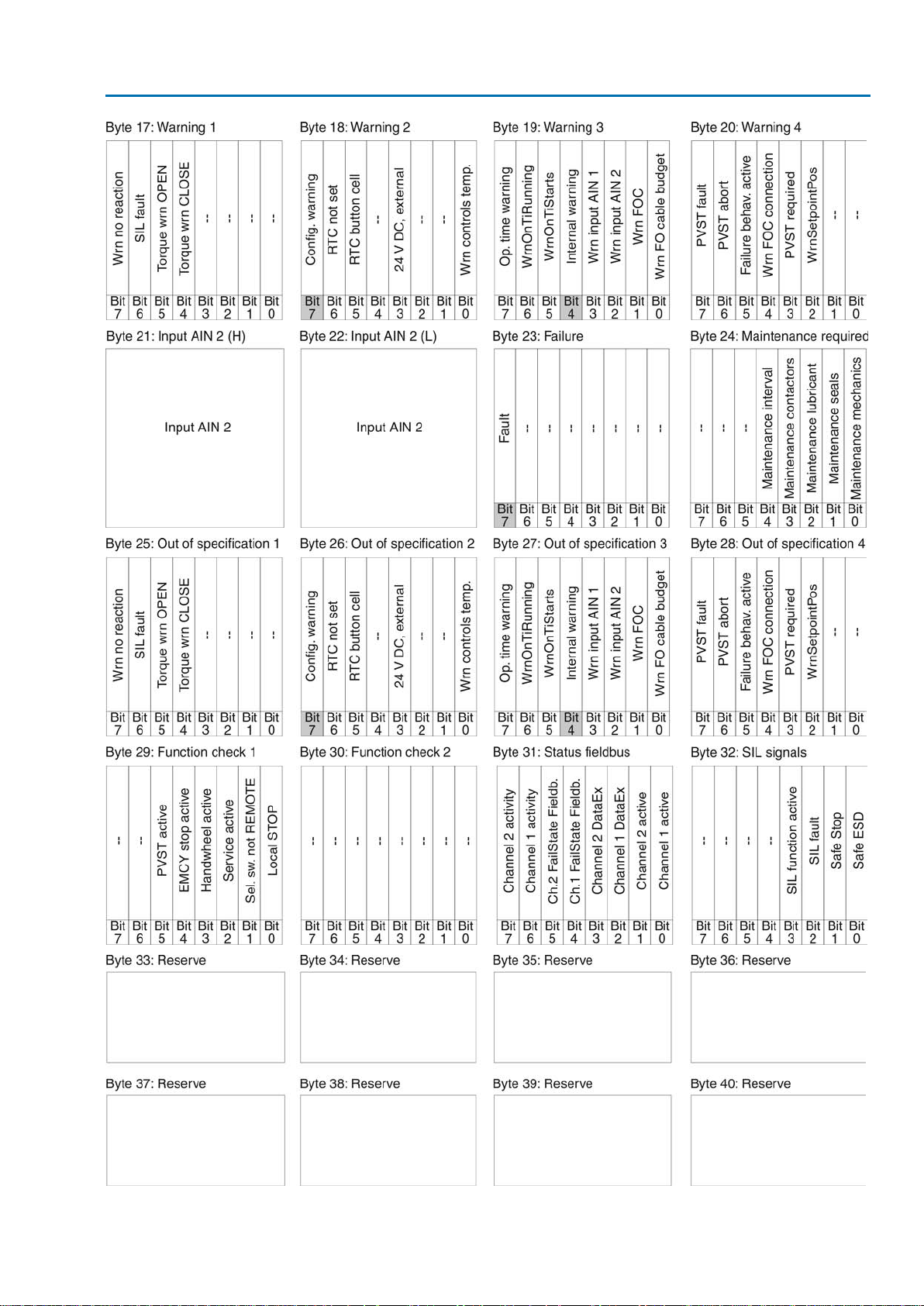
4.1.2. Description of the bytes in the process representation input Byte 1: Logical signals
Bits 3, 6, and 7 are collective signals.
Bits 5 and 4 of the logical signals (byte1) indicate a logical operation of the actuator ,
i.e. they are set when the actuator has received the command to perf orm an electrical
operation (also active when e.g. the actuator is in a stepping pause during stepping
mode or waiting for the end of the dead time).
Table 4: Byte 1: Logical signals
Bit
(process representation)
0
Bit: End p. OPEN
1
Bit: End p. CLOSED
2
Bit: Setpoint reached
3
Bit: Not ready REMOTE
4
Bit: Running OPEN
5
Bit: Running CLOSE
6
Bit: Warnings
7
Bit: Fault
MOTE"
DescriptionValuePrm-Text-Def GSD fileDesignation
For limit seating: Limit switch operated in direction OPEN
1(2) = "Bit: End p. OPEN"
For torque seating:Torque switch and limit switch operated in direction OPEN
No signal0
For limit seating: Limit switch operated in direction
1(1) = "Bit End p. CLOSED"
CLOSE
For torque seating:Torque switch and limit switch operated in direction CLOSE
No signal0
The setpoint is within max. error variable (outer dead
1(5) = "Bit: Setpoint reached"
band). Is only signalled if Profibus DP master has set
the Fieldbus SETPOINT bit (process representation
output).
No signal0
Collective signal 04:
1(22) = "Bit: Not ready RE-
Contains the result of a disjunction (OR-operation) of all
bits comprised in bytes 13 and 14 (Not ready REMOTE
1 and Not ready REMOTE 2).
The actuator cannot be operated from REMOTE.
The actuator can only be operated via the local controls.
In bytes 13 and 14, no signals are active (all bits are set
0
to 0).
An operation command in direction OPEN is performed
1(7) = "Bit: Running OPEN"
via fieldbus:Fieldbus OPEN or Fieldbus SETPOINT
(process representation output).This bit remains also
set during operation pauses (e.g. due to the dead time
or the reversing prevention time).
Operation in direction OPEN via fieldbus is not ex ecuted.0
An operation command in direction CLOSE is performed
1(6) = "Bit: Running CLOSE"
via fieldbus:Fieldbus CLOSE or Fieldbus SETPOINT
(process representation output).This bit remains also
set during operation pauses (e.g. due to the dead time
or the reversing prevention time).
Operation in direction CLOSE via fieldbus is not ex-
0
ecuted.
Collective signal 02:
1(21) = "Bit:Warnings"
Contains the result of a disjunction (OR-operation) of all
bits of bytes 17 to 20 (Warning 1 to Warning 4).
In bytes 17 and 20, no warnings are active (all bits are
0
set to 0).
Collective signal 03:
1(20) = "Bit: Fault"
Contains the result of a disjunction (OR-operation) of all
bits of bytes 15 and 16 (Fault 1 and Fault 2).
The actuator cannot be operated.
In bytes 15 and 16, no faults are active (all bits are set
0
to 0).
22
Page 23
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Byte 2: Actuator signals
Table 5: Byte 2: Actuator signals
Bit
(process representation)
0
Bit: Thermal fault
1
Bit: Phase failure
2
Bit: Sel. sw. REMOTE
3
Bit: Sel. sw. LOCAL
4
Bit: Limit sw. OPEN
5
Bit: Limit sw. CLOSED
6
Bit: Torque sw.OPEN
7
Bit: Torque sw.CLOSE
MOTE"
LOCAL"
CLOSED"
OPEN"
CLOSE"
DescriptionValuePrm-Text-Def GSD fileDesignation
Motor protection tripped1(56) = "Bit:Thermal fault"
No signal0
●
1(57) = "Bit: Phase fault"
When connecting to a 3-ph AC system and with internal 24 V DC supply of the electronics: Phase 2 is
missing.
●
When connecting to a 3-ph or 1-ph AC system and
with external 24 V DC supply of the electronics: One
of the phases L1, L2 or L3 is missing.
All phases are available.0
Selector switch is in position REMOTE.1(9) = "Bit: Sel. sw. RESelector switch is not in position REMOTE.0
Selector switch is in position LOCAL.1(8) = "Bit: Selector sw.
Selector switch is not in position LOCAL.0
Limit switch operated in end position OPEN1(12) = "Bit: Limit sw. OPEN"
No signal0
Limit switch operated in end position CLOSED1(11) = "Bit: Limit sw.
No signal0
Torque switch operated in direction OPEN.1(14) = "Bit:Torque sw.
No signal0
Torque switch operated in direction CLOSE.1(13) = "Bit:Torque sw.
No signal0
Table 6: Byte 5: Device status
Bit
(process representation)
0
Bit: Not ready REMOTE
1
Bit: Warnings
2
Bit: Fault
Bytes 3 and 4: Actual position
Byte 3 = high byte, byte 4 = low byte.
If a position transmitter (potentiometer, RWG, EWG, or MWG) is installed in the
actuator, b ytes 3 and 4 are used to tr ansmit the current actuator position.The value
is transmitted in per mil (value: 0 – 1,000).
Byte 5: Device status
DescriptionValuePrm-Text-Def GSD fileDesignation
Collective signal 04:
1(22) = "Bit: Not ready RE-
MOTE"
Contains the result of a disjunction (OR-operation) of all
bits comprised in bytes 13 and 14 (Not ready REMOTE
1 and Not ready REMOTE 2).
The actuator cannot be operated from REMOTE.
The actuator can only be operated via the local controls.
In bytes 13 and 14, no signals are active (all bits are set
0
to 0).
Collective signal 02:
1(21) = "Bit:Warnings"
Contains the result of a disjunction (OR-operation) of all
bits of bytes 17 to 20 (Warning 1 to Warning 4).
In bytes 17 and 20, no warnings are active (all bits are
0
set to 0).
Collective signal 03:
1(20) = "Bit: Fault"
Contains the result of a disjunction (OR-operation) of all
bits of bytes 15 and 16 (Fault 1 and Fault 2).
The actuator cannot be operated.
In bytes 15 and 16, no faults are activ e (all bits are set to
0
0).
23
Page 24
Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Bit
(process representation)
3
Bit: Maintenance requ.
4
Bit: Out of spec.
5
Bit: Function check
6
Bit: Failure
7
Bit: Device ok
requ."
DescriptionValuePrm-Text-Def GSD fileDesignation
Collective signal 09:
1(19) = "Bit: Maintenance
Indication according to NAMUR recommendation NE 107
Recommendation to perform maintenance.
Contains the result of a disjunction (OR-operation) of all
bits of byte 24 (Maintenance required).
In all bits of byte 24, no signals are active (all bits are set
0
to 0).
Collective signal 07:
1(18) = "Bit: Out of spec."
Indication according to NAMUR recommendation NE 107
Actuator is operated outside the normal operation conditions.
Contains the result of a disjunction (OR-operation) of all
bits of bytes 25 to 28 (Out of specification 1 to 4).
In bytes 25 and 28, no signals are active (all bits are set
0
to 0).
Collective signal 08:
1(17) = "Bit: Function check"
Indication according to NAMUR recommendation NE 107
The actuator is being worked on; output signals are temporarily invalid.
Contains the result of a disjunction (OR-operation) of all
bits of bytes 29 and 30 (Function check 1 and 2).
In bytes 29 and 30, no signals are active (all bits are set
0
to 0).
Collective signal 10:
1(16) = "Bit: Failure"
Indication according to NAMUR recommendation NE 107
Actuator function failure, output signals are invalid.
Contains the result of a disjunction (OR-operation) of all
bits of byte 23 (Failure).
In all bits of byte 23, no signals are active (all bits are set
0
to 0).
Sammelmeldung 05:
1(15) = "Bit: Device ok"
The device is ready for remote control.
No AUMA warnings, AUMA faults or signals according to
NAMUR are present.
Bit 7 is set if bits 0 to 6 are deleted.
Contains the result of a disjunction (OR-operation) of bits
0
0 to 6 (device status).
Byte 6: Operation status
This byte stores information about actuator movement.
Table 7: Byte 6: Operation status
Bit
(process representation)
0
Bit: Op. pause active
1
Bit: In interm. position
2
Bit: Start step mode
4
Bit: Actuator running
ive"
tion"
mode"
ning"
DescriptionValuePrm-Text-Def GSD fileDesignation
The actuator is in off-time (e.g. rev ersing prevention time)1(23) = "Bit: Op. pause actNo signal0
The actuator is in an intermediate position e.g. neither in
1(29) = "Bit: In interm. posi-
end position OPEN nor in end position CLOSED.
No signal0
The actuator is within the set stepping range.1(24) = "Bit: Start step
The actuator is outside the set stepping range.0
No signal (reserved)——3
Actuator is running (output drive is moving)
1(25) = "Bit: Actuator run-
Hard wired collective signal consisting of signals:
●
(26) Bit: Running LOCAL
●
(27) Bit: Running REMOTE
●
(28) Bit: Handwheel oper.
No signal0
24
Page 25
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Bit
(process representation)
5
Bit: Handwheel oper.
6
Bit: Running REMOTE
7
Bit: Running LOCAL
handw."
MOTE"
AL"
Byte 7: Intermediate positions
Table 8: Byte 7: Intermediate positions
Bit
(process representation)
0
Bit: Interm. pos. 1
1
Bit: Interm. pos. 2
2
Bit: Interm. pos. 3
3
Bit: Interm. pos. 4
4
Bit: Interm. pos. 5
5
Bit: Interm. pos. 6
6
Bit: Interm. pos. 7
7
Bit: Interm. pos. 8
pos. 1"
pos. 2"
pos. 3"
pos. 4"
pos. 5"
pos. 6"
pos. 7"
pos. 8"
DescriptionValuePrm-Text-Def GSD fileDesignation
Output drive rotates without electric operation command.1(28) = "Bit: Running via
No signal0
Output drive rotates due to operation command from
1(27) = "Bit: Running RE-
REMOTE.
No signal0
Output drive rotates due to operation command from
1(26) = "Bit: Running LOC-
LOCAL.
No signal0
DescriptionValuePrm-Text-Def GSD fileDesignation
Intermediate position 1 reached1(31) = "Bit: Intermediate
No signal0
Intermediate position 2 reached1(32) = "Bit: Intermediate
No signal0
Intermediate position 3 reached1(33) = "Bit: Intermediate
No signal0
Intermediate position 4 reached1(34) = "Bit: Intermediate
No signal0
Intermediate position 5 reached1(35) = "Bit: Intermediate
No signal0
Intermediate position 6 reached1(36) = "Bit: Intermediate
No signal0
Intermediate position 7 reached1(37) = "Bit: Intermediate
No signal0
Intermediate position 8 reached1(38) = "Bit: Intermediate
No signal0
Table 9: Byte 8: Discrete inputs
Bit
(process representation)
0
Bit: Input DIN 1
1
Bit: Input DIN 2
2
Bit: Input DIN 3
3
Bit: Input DIN 4
4
Bit: Input DIN 5
5
Bit: Input DIN 6
Byte 9 = high byte, byte 10 = low byte.
Byte 8: Discrete inputs
DescriptionValuePrm-Text-Def GSD fileDesignation
A high signal (+24 V DC) is present at digital input 1.1(39) = "Bit: Input DIN 1"
No signal0
A high signal (+24 V DC) is present at digital input 2.1(40) = "Bit: Input DIN 2"
No signal0
A high signal (+24 V DC) is present at digital input 3.1(41) = "Bit: Input DIN 3"
No signal0
A high signal (+24 V DC) is present at digital input 4.1(42) = "Bit: Input DIN 4"
No signal0
A high signal (+24 V DC) is present at digital input 5.1(43) = "Bit: Input DIN 5"
No signal0
A high signal (+24 V DC) is present at digital input 6.1(44) = "Bit: Input DIN 6"
No signal0
No signal (reserved)——6
No signal (reserved)——7
Byte 9 and byte 10: Input AIN 1
25
Page 26
Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Bytes 9 and 10 transmit the value of the first additional free analogue current input
of the Profibus DP interface.The start and end values can be set at the AC via push
buttons and display. (For operation, please refer to the respective operation
instructions for the actuator.)
If the measuring values are 0.3 mA below the initial value, a signal loss is indicated.
The value is transmitted in per mil (value: 0 – 1,000).
Byte 11 and byte 12:Torque
Byte 11 = high byte, byte 12 = low byte.
Bytes 11 and 12 transmit the current torque of the actuator (only if an MWG is installed
in the actuator).
The value transmitted is the current torque in percent or per mil of the nominal actuator
torque.
The value is transmitted in per mil (value: 0 – 1,000).
●
The value 1,000 corresponds to 127.0 % torque in direction OPEN.
●
The value 500 is the torque zero point.
●
The value 0 corresponds to 127.0 % torque in direction CLOSE.
Byte 13: Not ready REMOTE 1
Table 10: Byte 13: Not ready REMOTE 1
Bit
(process representation)
0
Bit: Wrong oper. cmd
1
Bit: Sel. sw. not REMOTE
2
Bit: Interlock active
3
Bit: Local STOP
4
Bit: EMCY stop active
5
Bit: EMCY behav. act.
6
Bit: FailState fieldbus
7
Bit: I/O interface
tion cmd"
REMOTE""
active"
hav.act."
bus"
DescriptionValuePrm-Text-Def GSD fileDesignation
Wrong operation command
1(98) = "Bit:Wrong opera-
Indicates the fact that sev eral oper ation commands were
received simultaneously via Profibus DP (e.g. Remote
OPEN and Remote CLOSE simultaneously or Remote
CLOSE/Remote OPEN and Remote SETPOINT simultaneously) or that the max. value for a setpoint position has
been exceeded (setpoint position > 1,000).
Operation commands are ok.0
Selector switch is in position Local control (LOCAL) or
1(53) = "Bit: Sel. sw. not
0 (OFF).
Selector switch is in position Remote control (REMO TE).0
Actuator is interlocked.1(52) = "Bit: Interlock activ e"
No signal0
Push button STOP of local controls is operated.1(97) = "Bit: Local Stop"
No signal0
Operation mode EMERGENCY stop is active (EMER-
1(50) = "Bit: EMCY stop
GENCY stop button has been pressed).
EMERGENCY stop button not pressed (normal operation).0
Operation mode EMERGENCY behaviour is active
1(49) = "Bit: EMCY be-
(EMERGENCY signal was sent).
No signal0
No valid communication via fieldbus (despite available
1(47) = "Bit: FailState field-
connection)
Communication via fieldbus is ok.0
The actuator is controlled via the I/O interface (parallel).1(48) = "Bit: I/O interface"
The actuator is controlled via fieldbus.0
26
Page 27
Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Byte 14: Not ready REMOTE 2
Table 11: Byte 14: Not ready REMOTE 2
Bit
DescriptionValuePrm-Text-Def GSD fileDesignation
(process representation)
No signal (reserved)——0
No signal (reserved)——1
2
Bit: SIL function active
3
Bit: Disabled
1)
ive"
The safety function of the SIL sub-assembly is active.1(207) = "SIL function actNo signal.0
Actuator is in operation mode Disabled.1(107) = "Bit: Disabled"
No signal0
4
Bit: Interlock by-pass
5
Bit: PVST active
lock"
By-pass of interlock function is active.1(121) = "Bit: Bypass InterNo signal0
Partial Valve Stroke Test (PVST) is active.1(116) = "Bit: PVST active"
No signal0
6
Bit: Service active
Operation mode Service is active.1(51) = "Bit: Service active"
No signal0
Manual operation is active (handwheel is engaged); op-
7
Bit: Handwheel active
active"
1(54) = "Bit: Handwheel
tional signal
No signal0
The safety function indications via fieldbus are for information only and must not be used as part of a safety function.The I/O signals of
1)
the SIL module must be used for this purpose.
Byte 15: Fault 1
The fault signals contain the causes why the actuator cannot be operated.
Table 12: Byte 15: Fault 1
Bit
(process representation)
0
Bit: Configuration error
1
Bit: Mains quality
2
Bit: Thermal fault
3
Bit: Phase failure
4
Bit: Torque fault OPEN
5
Bit: Torque fault CLOSE
6
Bit: Internal error
7
Bit: No reaction
error"
OPEN"
CLOSE"
DescriptionValuePrm-Text-Def GSD fileDesignation
Incorrect configuration, i.e. the current setting of the actu-
1(72) = "Bit: Configuration
ator controls is invalid.
Configuration is ok.0
Due to insufficient mains quality, the controls cannot de-
1(59) = "Bit: Mains quality"
tect the phase sequence (sequence of phase conductors
L1, L2 and L3) within the pre-set time frame provided for
monitoring.
No signal0
Motor protection tripped1(56) = "Bit:Thermal fault"
No signal0
●
1(57) = "Bit: Phase fault"
When connecting to a 3-ph AC system and with internal 24 V DC supply of the electronics: Phase 2 is
missing.
●
When connecting to a 3-ph or 1-ph AC system and
with external 24 V DC supply of the electronics: One
of the phases L1, L2 or L3 is missing.
No signal0
Torque fault in direction OPEN1(61) = "Bit:Torque fault
No signal0
Torque fault in direction CLOSE1(60) = "Bit:Torque fault
No signal0
Collective signal 14: Internal fault1(69) = "Bit: Internal fault"
No internal fault0
No actuator reaction to operation commands within the
1(71) = "Bit: No reaction"
set reaction time.
No signal0
27
Page 28
Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Byte 16: Fault 2
The fault signals contain the causes why the actuator cannot be operated.
Table 13: Byte 16: Fault 2
Bit
(process representation)
6
Bit: Config. error REMOTE
7
Bit: Incorrect phase seq
remote"
sequence"
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——0
No signal (reserved)——1
No signal (reserved)——2
No signal (reserved)——3
No signal (reserved)——4
No signal (reserved)——5
Configuration error of REMOTE interface active.1(123) = "Bit: Config error
No signal.0
The phase conductors L1, L2 and L3 are connected in
1(58) = "Bit:Wrong phase
the wrong sequence.
Phase sequence is ok.0
Byte 17:Warnings 1
The warning signals are for information only and do not interrupt or disable an
operation (as opposed to faults).
Table 14: Byte 17:Warnings 1
Bit
(process representation)
4
Bit: Torque warn. CLOSE
5
Bit: Torque warn. OPEN
6
Bit: SIL fault
7
Bit: No reaction
The safety function indications via fieldbus are for information only and must not be used as part of a safety function.The I/O signals of
1)
the SIL module must be used for this purpose.
1)
CLOSE"
OPEN"
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——0
No signal (reserved)——1
No signal (reserved)——2
No signal (reserved)——3
Warning: Limit value for Torque warning CLOSE ex-
1(125) = "Bit:Torque wrn
ceeded
No signal0
Warning: Limit v alue for Torque warning OPEN exceeded1(124) = "Bit: Torque wrn
No signal0
Warning: A SIL fault of the SIL sub-assembly has oc-
1(206) = "SIL fault"
curred.
No signal0
Warning: No actuator reaction to operation commands
1(71) = "Bit: No reaction"
within the set reaction time.
No signal0
Table 15: Byte 18:Warnings 2
Bit
(process representation)
0
Bit: Wrn controls temp
3
Bit: 24 V DC, external
28
Byte 18:Warnings 2
sTemp"
al"
DescriptionValuePrm-Text-Def GSD fileDesignation
Warning:Temperature within controls housing too high1(88) = "Bit:WrnControlNo signal0
No signal (reserved)——1
No signal (reserved)——2
The external 24 V DC voltage supply of the controls has
1(68) = "Bit: 24 V DC, e xtern-
exceeded the power supply limits.
No signal0
Page 29

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Bit
(process representation)
5
Bit: RTC button cell
6
Bit: RTC not set
7
Bit: Config. warning
Table 16: Byte 19:Warnings 3
Bit
(process representation)
0
Bit: Wrn FOC budget
1
Bit: Wrn FO cables
2
Bit: Wrn input AIN 2
3
Bit: Wrn input AIN 1
4
Bit: Internal warning
5
Bit: WrnOnTiStarts
6
Bit: WrnOnTiRunning
7
Bit: Op. time warning
cell"
ing”
Byte 19:Warnings 3
budget”
2"
1"
ing"
ning"
warning"
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——4
Warning:The voltage of the RTC button cell is too low.1(126) = "Bit: RTC button
No signal0
The real time clock has not yet been set on the basis of
1(77) = "Bit: RTC not set"
valid values.
No signal0
Warning: Configuration setting is incorrect.
1(108) = “Bit: Config.Warn-
The device can still be operated with restrictions.
No signal0
DescriptionValuePrm-Text-Def GSD fileDesignation
Warning: FO cable system reserve reached (critical or
1(111) = “Bit:Wrn FOC
permissible Rx receive level)
No signal0
Warning:
1(83) = "Bit:Wrn FO loop"
Optical receiving signal (channel 1) incorrect (no or insufficient Rx receive lev el) or RS-485 f ormat error (incorrect
bit(s))
No signal0
Warning: Loss of signal analogue input 21(92) = "Bit:Wrn input AIN
No signal0
Warning: Loss of signal analogue input 11(91) = "Bit:Wrn input AIN
No signal0
Collective signal 15: Internal warning1(70) = "Bit: Internal warnNo internal warning0
Warning: Max. number of motor starts (starts) exceeded1(85) = "Bit:WrnOnTiStarts"
No signal0
Warning: Max. running time/h exceeded1(84) = "Bit:WrnOnTiRunNo signal0
Warning: Max. permissible operating time f or an operation
1(63) = "Bit: Operat. time
(OPEN-CLOSE) exceeded
No signal0
Table 17: Byte 20:Warnings 4
Bit
(process representation)
2
Bit: WrnSetpointPos
3
Bit: PVST required
4
Bit: Wrn FOC connection
5
Bit: Failure behav. act.
Byte 20:Warnings 4
Pos"
connection"
active"
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——0
No signal (reserved)——1
Warning: Loss of signal of actuator setpoint position1(95) = "Bit:WrnSetpointNo signal0
Warning: A Partial Valve Stroke Test (PVST) should be
1(208) = "PVST required"
performed.
0
Warning: FO cable connection not available.1(127) = "Bit:Wrn FOC
No signal0
The failure behaviour is active.1(30) = "Bit: Failure behav.
No signal0
29
Page 30

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Bit
(process representation)
6
Bit: PVST abort
7
Bit: PVST error
Table 18: Byte 23: Failure
Bit
(process representation)
7
Bit: Fault
DescriptionValuePrm-Text-Def GSD fileDesignation
Partial Valve Stroke Test (PVST) was aborted or could
1(118) = "Bit: PVST abort"
not be started. Remedy: P erf orm RESET or restart PVST.
No signal0
Partial V alv e Stroke Test (PVST) could not be successfully
1(117) = "Bit: PVST fault"
completed.
No signal0
Byte 21 and byte 22: Input AIN 2
Byte 21 = high byte, byte 22 = low byte.
Bytes 9 and 10 transmit the value of the second additional free analogue current
input of the Profibus DP interface.The start and end values can be set at the AC via
push buttons and display. (For operation, please refer to the respective operation
instructions for the actuator.)
If the measuring values are 0.3 mA below the initial value, a signal loss is indicated.
The value is transmitted in per mil (value: 0 – 1,000).
Byte 23: Failure
Causes of the Failure signal in accordance with NAMUR recommendation NE 107.
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——0
No signal (reserved)——1
No signal (reserved)——2
No signal (reserved)——3
No signal (reserved)——4
No signal (reserved)——5
No signal (reserved)——6
Collective signal 03:
1(20) = "Bit: Fault"
Contains the result of a disjunction (OR-operation) of all
bits of bytes 15 and 16 (Fault 1 and Fault 2).
The actuator cannot be operated.
In bytes 15 and 16, no faults are activ e (all bits are set to
0
0).
Byte 24: Maintenance required
Causes of the Maintenance required signal in accordance with NAMUR
recommendation NE 107.
Table 19: Byte 24: Maintenance required
Bit
(process representation)
0
Bit: Maintenance mechanics
1
Bit: Maintenance seals
2
Bit: Maintenance lubricant
3
Bit: Maintenance contactors
4
Bit: Maintenance interval
30
val"
DescriptionValuePrm-Text-Def GSD fileDesignation
Mechanic maintenance requirement (AUMA service)1(209) = "Mechanic lifetime"
No signal0
Seal maintenance requirement (AUMA service)1(210) = "Seal lifetime"
No signal0
Lubricant maintenance requirement (AUMA service)1(211) = "Seal lifetime"
No signal0
Contactor maintenance requirement (AUMA service)1(212) = "Contactor lifetime"
No signal0
The set maintenance interval has expired.1(213) = "Maintenance interNo signal0
Page 31

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Bit
(process representation)
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——5
No signal (reserved)——6
No signal (reserved)——7
Byte 25: Out of specification 1
Causes of the Out of specification signal in accordance with NAMUR recommendation
NE 107.
Table 20: Byte 25: Out of specification 1
Bit
(process representation)
4
Bit: Torque warn. CLOSE
5
Bit: Torque warn. OPEN
6
Bit: SIL fault
7
Bit: No reaction
The safety function indications via fieldbus are for information only and must not be used as part of a safety function.The I/O signals of
1)
the SIL module must be used for this purpose.
1)
CLOSE"
OPEN"
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——0
No signal (reserved)——1
No signal (reserved)——2
No signal (reserved)——3
Warning: Limit value for Torque warning CLOSE ex-
1(125) = "Bit:Torque wrn
ceeded
No signal0
Warning: Limit v alue for Torque warning OPEN exceeded1(124) = "Bit: Torque wrn
No signal0
Warning: A SIL fault of the SIL sub-assembly has oc-
1(206) = "SIL fault"
curred.
No signal0
Warning: No actuator reaction to operation commands
1(71) = "Bit: No reaction"
within the set reaction time.
No signal0
Byte 26: Out of specification 2
Table 21: Byte 26: Out of specification 2
Bit
(process representation)
0
Bit: Wrn controls temp
3
Bit: 24 V DC, external
5
Bit: RTC button cell
6
Bit: RTC not set
7
Bit: Config. warning
sTemp"
al"
cell"
ing”
DescriptionValuePrm-Text-Def GSD fileDesignation
Warning:Temperature within controls housing too high1(88) = "Bit:WrnControlNo signal0
No signal (reserved)——1
No signal (reserved)——2
The external 24 V DC voltage supply of the controls has
1(68) = "Bit: 24 V DC, e xtern-
exceeded the power supply limits.
No signal0
No signal (reserved)——4
Warning:The voltage of the RTC button cell is too low.1(126) = "Bit: RTC button
No signal0
The real time clock has not yet been set on the basis of
1(77) = "Bit: RTC not set"
valid values.
No signal0
Warning: Configuration setting is incorrect.
1(108) = “Bit: Config.Warn-
The device can still be operated with restrictions.
No signal0
31
Page 32

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Byte 27: Out of specification 3
Table 22: Byte 27: Out of specification 3
Bit
(process representation)
0
Bit: Wrn FOC budget
1
Bit: Wrn FO cables
2
Bit: Wrn input AIN 2
3
Bit: Wrn input AIN 1
4
Bit: Internal warning
5
Bit: WrnOnTiStarts
6
Bit: WrnOnTiRunning
7
Bit: Op. time warning
budget”
2"
1"
ing"
ning"
warning"
DescriptionValuePrm-Text-Def GSD fileDesignation
Warning: FO cable system reserve reached (critical or
1(111) = “Bit:Wrn FOC
permissible Rx receive level)
No signal0
Warning:
1(83) = "Bit:Wrn FO loop"
Optical receiving signal (channel 1) incorrect (no or insufficient Rx receive lev el) or RS-485 f ormat error (incorrect
bit(s))
No signal0
Warning: Loss of signal analogue input 21(92) = "Bit:Wrn input AIN
No signal0
Warning: Loss of signal analogue input 11(91) = "Bit:Wrn input AIN
No signal0
Collective signal 15: Internal warning1(70) = "Bit: Internal warnNo internal warning0
Warning: Max. number of motor starts (starts) exceeded1(85) = "Bit:WrnOnTiStarts"
No signal0
Warning: Max. running time/h exceeded1(84) = "Bit:WrnOnTiRunNo signal0
Warning: Max. permissible operating time f or an operation
1(63) = "Bit: Operat. time
(OPEN-CLOSE) exceeded
No signal0
Byte 28: Out of specification 4
Table 23: Byte 28: Out of specification 4
Bit
(process representation)
2
Bit: WrnSetpointPos
3
Bit: PVST required
4
Bit: Wrn FOC connection
5
Bit: Failure behav. act.
6
Bit: PVST abort
7
Bit: PVST error
Pos"
connection"
active"
Byte 29: Function check 1
DescriptionValuePrm-Text-Def GSD fileDesignation
No signal (reserved)——0
No signal (reserved)——1
Warning: Loss of signal of actuator setpoint position1(95) = "Bit:WrnSetpointNo signal0
Warning: A Partial Valve Stroke Test (PVST) should be
1(208) = "PVST required"
performed.
0
Warning: FO cable connection not available.1(127) = "Bit:Wrn FOC
No signal0
The failure behaviour is active.1(30) = "Bit: Failure behav.
No signal0
Partial Valve Stroke Test (PVST) was aborted or could
1(118) = "Bit: PVST abort"
not be started. Remedy: P erf orm RESET or restart PVST.
No signal0
Partial V alv e Stroke Test (PVST) could not be successfully
1(117) = "Bit: PVST fault"
completed.
No signal0
32
Causes of the Function check signal in accordance with NAMUR recommendation
NE 107.
Page 33

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Table 24: Byte 29: Function check 1
Bit
(process representation)
0
Bit: Local STOP
1
Bit: Sel. sw. not REMOTE
2
Bit: Service active
3
Bit: Handwheel active
4
Bit: EMCY stop active
5
Bit: PVST active
DescriptionValuePrm-Text-Def GSD fileDesignation
Push button STOP of the local controls is operated.1(97) = "Bit: Local Stop"
No signal0
Selector switch is in position Local control (LOCAL) or
1(53) = "Bit: Sel. sw. not
REMOTE""
active"
active"
0 (OFF).
Selector switch is in position Remote control (REMO TE).0
Operation mode Service is active.1(51) = "Bit: Service active"
No signal0
Manual operation is active (handwheel is engaged); op-
1(54) = "Bit: Handwheel
tional signal
No signal0
Operation mode EMERGENCY stop is active (EMER-
1(50) = "Bit: EMCY stop
GENCY stop button has been pressed).
EMERGENCY stop button not pressed (normal operation).0
Partial Valve Stroke Test (PVST) is active.1(116) = "Bit: PVST active"
No signal0
No signal (reserved)——6
No signal (reserved)——7
Byte 30: Function check 2
The contents are reserved for further Function check signals in accordance with
NAMUR recommendation NE 107.
Byte 31: Status fieldbus
Information on the fieldbus status.
Table 25: Byte 31: Status fieldbus
Bit
(process representation)
0
Bit: Channel 1 active
1
Bit: Channel 2 active
2
Bit: Channel 1 DataEx
3
Bit: Channel 2 DataEx
4
Bit: Chan 1 FailState fieldbus
5
Bit: Chan 2 FailState fieldbus
6
Bit: Channel 1 activity
7
Bit: Channel 2 activity
1 active"
2 active"
Ch1”
Ch2”
FailsafeAct.1”
FailsafeAct.2”
BusComm”
BusComm”
DescriptionValuePrm-Text-Def GSD fileDesignation
Channel 1 is the active operation command channel.1(99) = "Fieldbus Channel
No signal0
Channel 2 is the active operation command channel.1(100) = "Fieldbus Channel
No signal0
Channel 1 is in the data exchange state.1(109) = “Bit: Pb DataEx
No signal0
Channel 1 is in the data exchange state (DataEx).1(110) = “Bit: Pb DataEx
No signal0
No valid fieldbus communication via channel 1 (application
1(112) = “Bit: Fieldbus-
does not communicate with the DCS).
No signal0
No valid fieldbus communication via channel 2 (application
1(113) = “Bit: Fieldbus-
does not communicate with the DCS).
No signal0
Fieldbus communication on channel 11(114) = “Bit: Chan1
No signal0
Fieldbus communication on channel 21(115) = “Bit: Chan2
No signal0
Byte 32: SIL indications
Causes of the Maintenance required signal in accordance with NAMUR
recommendation NE 107.
33
Page 34

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Table 26: Byte 32: SIL indications
Bit
(process representation)
1
Bit: Safe ESD
2
Bit: Safe STOP
3
Bit: SIL fault
4
Bit: SIL function active
The safety function indications via fieldbus are for information only and must not be used as part of a safety function.The I/O signals of
1)
the SIL module must be used for this purpose.
1)
1)
1)
1)
ive"
DescriptionValuePrm-Text-Def GSD fileDesignation
Safe ESD (Emergency Shut Down) saf ety function of the
1(204) = "Safe ESD"
SIL sub-assembly is active.
No signal0
Safe STOP safety function of the SIL sub-assembly is
1(205) = "Safe Stop"
active.
No signal0
Collective signal
1(206) = "SIL fault"
Warning: A SIL fault of the SIL sub-assembly has occurred.
No signal0
A safety function of the SIL sub-assembly is active.1(207) = "SIL function actNo signal0
No signal (reserved)——4
No signal (reserved)——5
No signal (reserved)——6
No signal (reserved)——7
Byte 33 to byte 40: Reserve
The contents are reserved for future extensions.
4.2. Output data (process representation output)
The master (controls) can control the slave (actuator) via the process representation
output.
4.2.1. Process representation output arrangement
Information To perform remote operations, the selector switch must be in position Remote
control (REMOTE).
34
Page 35

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
4.2.2. Description of the output data Byte 1: Commands
Table 27: Byte 1: Commands
Bit
(process representation)
0
Fieldbus OPEN
1
Fieldbus CLOSE
2
Fieldbus SETPOINT
3
Fieldbus RESET
DescriptionValueDesignation
Operation command in direction OPEN1
No command0
Operation command in direction CLOSE1
No command0
Run to setpoint
1
Setpoint is provided via bytes 3 and 4.
In combination with a proces controller, this bit is
used to change-over between process controller
mode and OPEN-CLOSE control.
No command0
Certain indications of the actuator controls can be
1
reset via fieldbus while the selector switch is in position Remote control (REMOTE) via fieldbus (e.g.
PTC tripping device and torque fault).
The function of this bit corresponds to the push button RESET at the local controls.
No command0
No command (reserved)—4
35
Page 36

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Bits 0, 1, 2 = operation
commands
Bits 4, 5, 6 , 7
Bit
(process representation)
DescriptionValueDesignation
No command (reserved)—5
No command (reserved)—6
No command (reserved)—7
Bits 0 – 2 are used to transmit operation commands to the actuator. Only one of
these bits may be set to 1 at any given time. If several bits are set, no operation is
performed and the following signal is given: Wrong oper. cmd
For operation commands via bit 2 (Fieldbus SETPOINT):
●
Condition: Position transmitter (potentiometer, RWG, EWG or MWG) installed
in the actuator
●
If the setpoint is 0 per mil, the actuators runs to the end position CLOSED; it
runs to the end position OPEN for 1000 per mil.
●
If the limit of 1,000 is exceeded, the actuator completely runs to end position
OPEN.
●
To avoid placing too much strain on the mechanics, the reversing of direction
is delayed.The default setting in the factory for the reversing prevention time
is 300 ms.
Bits 4 through 7 are not used and must be set to 0.
Byte 2: Reserved 1
The contents are reserved for future extensions.
Bytes 3 and 4: Setpoint position /(process setpoint, option)
Byte 3 = high byte, byte 4 = low byte.
The setpoint position is transmitted via bytes 3 and 4 (value: 0 – 1,000), using the
position controller.
●
The value 1,000 corresponds to the maximum setpoint, i.e. end position OPEN.
●
The value 0 corresponds to the minimum setpoint, i.e. end position CLOSED.
As an alternative, the process setpoint can be transmitted via bytes 3 and 4 (value
0... 1,000), using a process controller (option).Value 1,000 corresponds to the
maximum process setpoint, value 0 to the minimum process setpoint.
Byte 5: Additional commands
Table 28: Byte 5: Additional commands
Bit
(process representation)
0
Fieldb. enable LOCAL
1
Fieldb. enable OPEN
2
Fieldb. enable CLOSE
4
Fieldbus channel 1
5
Fieldbus channel 2
6
Fieldbus EMCY
7
PVST
DescriptionValueDesignation
Actuator operation via local controls enabled1
Actuator operation via local controls disabled0
Enabling operation command in direction OPEN1
Operation command in direction OPEN disabled.0
Enabling operation command in direction CLOSE1
Operation command in direction CLOSE disabled.0
No command (reserved)—3
Initiate change-over to channel 11
No operation command0
Initiate change-over to channel 21
No operation command0
EMERGENCY signal, triggers EMERGENCY beha-
1
viour.
No command0
Start Partial Valve Stroke Test (functional test)1
No operation command0
36
Page 37

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Byte 6: Intermediate positions
Table 29: Byte 6: Intermediate positions
Bit
(process representation)
0
Fieldb. interm. pos. 1
1
Fieldb. interm. pos. 2
2
Fieldb. interm. pos. 3
3
Fieldb. interm. pos. 4
4
Fieldb. interm. pos. 5
5
Fieldb. interm. pos. 6
6
Fieldb. interm. pos. 7
7
Fieldb. interm. pos. 8
DescriptionValueDesignation
Run to intermediate position 1.1
No command0
Run to intermediate position 2.1
No command0
Run to intermediate position 3.1
No command0
Run to intermediate position 4.1
No command0
Run to intermediate position 5.1
No command0
Run to intermediate position 6.1
No command0
Run to intermediate position 7.1
No command0
Run to intermediate position 8.1
No command0
Bits 0 – 7 allow the direct selection of 8 intermediate positions via fieldbus commands.
Hereby the selected intermediate position is approached directly, without stopping
in another intermediate position.
In this case, the actuator continues running until the selected intermediate position
has been reached. Example: Operation from position 5 to 7 without stopping at
position 6.
For further information, please refer to Manual (Operation and setting) AUMATIC
AC 01.2 Profibus DP.
If the multiport valve function is active (option), the entire byte 6 is used for coding
of multiport valve operation commands. Up to 12 positions can either be approached
selecting the shortest path, in clockwise direction (CW), or in counterclockwise
direction (CCW). Furthermore, the actuator can also be operated without any position
indications in clockwise or counterclockwise direction (CW or CCW).
Table 30: Operation commands via byte 6 for activated multiport valve function
Value
0x01
0x02
0x04
0x08
0x10
0x20
0x40
0x80
0x81
≙ Operation direction/position
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Position 9
Behaviour
Position 1 is approached selecting the shortest
path
Position 2 is approached selecting the shortest
path
Position 3 is approached selecting the shortest
path
Position 4 is approached selecting the shortest
path
Position 5 is approached selecting the shortest
path
Position 6 is approached selecting the shortest
path
Position 7 is approached selecting the shortest
path
Position 8 is approached selecting the shortest
path
Position 9 is approached selecting the shortest
path
37
Page 38

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Value
0x82
0x83
0x84
0x90
0x91
0x92
0x93
0x94
0x95
0x96
0x97
0x98
0x99
0x9A
0x9B
0x9C
0xA0
0xA1
0xA2
0xA3
0xA4
0xA5
0xA6
0xA7
0xA8
0xA9
0xAA
0xAB
0xAC
≙ Operation direction/position
Position 10
Position 11
Position 12
CW
CW Position 1
CW Position 2
CW Position 3
CW Position 4
CW Position 5
CW Position 6
CW Position 7
CW Position 8
CW Position 9
CW Position 10
CW Position 11
CW Position 12
CCW
CCW Position 1
CCW Position 2
CCW Position 3
CCW Position 4
CCW Position 5
CCW Position 6
CCW Position 7
CCW Position 8
CCW Position 9
CCW Position 10
CCW Position 11
CCW Position 12
Behaviour
Position 10 is approached selecting the shortest
path
Position 11 is approached selecting the shortest
path
Position 12 is approached selecting the shortest
path
Actuator operates in clockwise direction (without
stop at any position)
Position 1 is approached in clockwise direction
(CW).
Position 2 is approached in clockwise direction
(CW).
Position 3 is approached in clockwise direction
(CW).
Position 4 is approached in clockwise direction
(CW).
Position 5 is approached in clockwise direction
(CW).
Position 6 is approached in clockwise direction
(CW).
Position 7 is approached in clockwise direction
(CW).
Position 8 is approached in clockwise direction
(CW).
Position 9 is approached in clockwise direction
(CW).
Position 10 is approached in clockwise direction
(CW).
Position 11 is approached in clockwise direction
(CW).
Position 12 is approached in clockwise direction
(CW).
Actuator operation in counterclockwise direction
(without stop at any position)
Position 1 is approached in counterclockwise direction (CCW).
Position 2 is approached in counterclockwise direction (CCW).
Position 3 is approached in counterclockwise direction (CCW).
Position 4 is approached in counterclockwise direction (CCW).
Position 5 is approached in counterclockwise direction (CCW).
Position 6 is approached in counterclockwise direction (CCW).
Position 7 is approached in counterclockwise direction (CCW).
Position 8 is approached in counterclockwise direction (CCW).
Position 9 is approached in counterclockwise direction (CCW).
Position 10 is approached in counterclockwise direction (CCW).
Position 11 is approached in counterclockwise direction (CCW).
Position 12 is approached in counterclockwise direction (CCW).
38
Page 39

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Byte 7: Digital outputs 1
The digital outputs Fieldbus DOUT 1 – DOUT 6 of the fieldbus interf ace can be used
as commands for the output contact. For this , the outputs of the output contacts have
to be assigned with the signals Fieldbus DOUT 1 – Fieldbus DOUT 6.
Table 31: Byte 7: Digital outputs 1
Bit
(process representation)
Byte 8: Digital outputs 2
Table 32: Byte 8: Digital outputs 2
Bit
(process representation)
0
Fieldbus DOUT 1
1
Fieldbus DOUT 2
2
Fieldbus DOUT 3
3
Fieldbus DOUT 4
4
Fieldbus DOUT 5
5
Fieldbus DOUT 6
DescriptionValueDesignation
No command (reserved)—0
No command (reserved)—1
No command (reserved)—2
No command (reserved)—3
No command (reserved)—4
No command (reserved)—5
No command (reserved)—6
No command (reserved)—7
DescriptionValueDesignation
Digital output 1 is activated.1
Output is deactivated.0
Digital output 2 is activated.1
Output is deactivated.0
Digital output 3 is activated.1
Output is deactivated.0
Digital output 4 is activated.1
Output is deactivated.0
Digital output 5 is activated.1
Output is deactivated.0
Digital output 6 is activated.1
Output is deactivated.0
No command (reserved)—6
No command (reserved)—7
Bytes 9 and 10: Actual process value
Byte 9 = high byte, byte 10 = low byte.
Byte 9 and byte 10 in combination with a process controller (option) can be used to
transmit the actual process value.
Bytes 11 and 12: Fieldbus output AOUT 1
Byte 11 = high byte, byte 12 = low byte.
Bytes 11 and 12 can be used to send an analogue value to the actuator.
The value is transmitted in per mil (value: 0 – 1,000). 0 – 1000
The outputs "Fieldbus output AOUT 1" and "Fieldbus output AOUT 2) can be used
as output values via the analogue outputs. For this, the outputs of the analogue
outputs have to be assigned with the signals Fieldbus AOUT 1 or Fieldbus AOUT 2.
Bytes 13 and 14: Fieldbus output AOUT 2
Byte 13 = high byte, byte 14 = low byte.
A second analogue value can be sent to the actuator using bytes 13 and 14.
39
Page 40

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
The value is transmitted in per mil (value: 0 – 1,000).
Bytes 15 to 26: Reserve
The contents are reserved for future extensions.
4.3. Profibus DP V1 services — Option —
Apart from the cyclic DP-V0 process data exchange, the Profibus DP-V1 services
can establish an additional acyclic communication via the fieldbus.
Actuator controls with activated Profibus DP-V1 services grant access to the contents
of the device ID, the operating data, and the most important parameters for setting
and the maintenance information.
Access to the data of all actuators connected by the Profibus DP network is therefore
enabled for preventive maintenance or uniform parameter setting.
Actuator controls support an acyclic DP-V1 connection with controls (DPM1 = master
of class 1) and one acyclic DP-V1 connection with engineering stations (DPM2 =
master of class 2).
The following DP-V1 fault indications are supported:
4.4. Redundancy
Fault ind.
Error
class
CauseError
code
An invalid slot was accessed.211Access.Invalid SlotRead
An invalid index was accessed.011Access.Invalid Index
An invalid slot was accessed.211Access.Invalid SlotWrite
An invalid index was accessed.011Access.Invalid Index
The transmitted data length is invalid.111Access.write length
Invalid parameter value811Access.invalid parameter
No write access permitted611Access.access denied
Slot/index can only be read.110Application write error
Depending on the DCS, either a DTM (Device Type Manager) or an EDD (Electronic
Device Description) is required to integrate device-specific information, data and
parameters, which can be accessed via Profibus DP-V1, into the engineering station.
The availability of the Profibus DP-V1 services is preset in the factory. For a
description of the DP-V1 services, refer to the appendix.
— Option —
To increase the security of the installation, the actuator controls may be equipped
with a redundant Profibus DP interface.
The following redundant operation modes are supported:
1. Redundant behaviour according to AUMA redundancy (A UMA redundancy I or
AUMA redundancy II)
(use of AUMA 0C4F.GSD in combination with the ident. no. of the standard
version:0x0C4F)
2. Redundant behaviour according to Profibus DP-V2 redundancy in accordance
with PNO guideline 2.212 (system redundancy or flying redundancy)
(use of AUMA AUMA 0CBD.GSD in combination with the ident. no. of the
standard version:0x0CBD)
The redundant behaviour is set using the following parameter: Device configuration
> Profibus > Redundancy M0601
4.4.1. Redundant behaviour according to AUMA redundancy
This redundancy type can be selected if the DCS does not support Profibus DP-V2
redundancy according to Profibus DP guideline 2.212 but a redundant structure is
nevertheless required.
40
Page 41

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
The physical structure of the redundant Profibus DP interfaces within the controls is
based on two independent, galvanically isolated Profibus DP interfaces with an
internal RedCom data channel for exchanging the communication status.
AUMA redundancy I
In general, the actuator decides autonomously which of the Profibus DP
communication channels will be the active channel and therefore be ab le to oper ate
the actuator and which channel will be the passive channel only providing f eedback
signals of the actuator.The slave addresses can be individually assigned for
both channels.
Figure 1: Basic structure for AUMA redundancy I
The operation of both communication channels is logically, physically and
chronologically separated.
The communication channel, which first exchanges process data with the controls
(data exchange state), is the active channel, the second channel will automatically
become the passive channel.The actuator can only be controlled via the active
channel.
Controls (DPM1 = master of class 1) can only write and read acyclic data via the
active channel. Engineering stations (DPM2 = master of class 2) can use both
channels to read and write acyclic DP-V1 data (writing the same parameter via both
communication channels simultaneously is, however, not possible).
Byte 31 Fieldbus status is used to signal the following communication states of the
two channels to the DCS:
●
Active or passive channel (Bit: Channel 1 active, Bit: Channel 2 active)
●
Profibus DP Watchdog Status (Bit: Channel 1 DataEx, Bit: Channel 2 DataEx)
●
Fault state (Bit: Chan 1 FailState fieldbus, Bit: Chan 2 FailState fieldbus)
●
Availab le fieldbus communication (Bit: Channel 1 activity, Bit: Channel 2 activity),
i.e. Profibus Watchdog Status ≠ Baud Search
The DCS may change over the active channel if both channels do not signal a fault
state (neither Global Control Clear nor telegrams with the data length 0) and are in
the DataEx state. Change-over is made during the logical 0–1 change of bits Fieldbus
channel 1 or Fieldbus channel 2 in byte 5 of the output data (process representation
output).
Change-over can be initiated both via the active and the passive channel.
Automatic change-ov er to another channel is perf ormed if either the communication
of the active channel fails or if Fail Safe telegrams (telegrams with the data length
= 0) or Global Control Clear (GC Clear) telegrams are received via the activ e channel.
Changing channels does not result in a loss of data.
If neither of the channels exchange process data with the controls or if both channels
receive Fail Safe telegrams (telegrams with the data length = 0) or Global Control
Clear (GC Clear) telegrams, the set failure behaviour or EMERGENCY behaviour
is started.
41
Page 42

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
AUMA redundancy II
In general, the actuator decides autonomously which of the Profibus DP
communication channels will be the active channel and therefore be ab le to oper ate
the actuator and which channel will be the passive channel only providing f eedback
signals of the actuator. Only one slave address can be assigned for both
channels.
Figure 2: Basic structure for AUMA redundancy II
Response path of the active channel
Response path after change-over
The operation of both communication channels is physically separated, however
they are logically and chronologically synchronised.
The communication channel, which first exchanges process data with the controls
(data exchange state), is the active channel, the second channel will automatically
become the passive channel.The actuator can only be controlled via the active
channel.
Controls (DPM1 = master of class 1) can only write and read acyclic data via the
active channel. Engineering stations (DPM2 = master of class 2) can use both
channels to read and write acyclic DP-V1 data (writing the same parameter via both
communication channels simultaneously is, however, not possible).
Byte 31 Fieldbus status is used to signal the following communication states of the
two channels to the DCS:
●
Active or passive channel (Bit: Channel 1 active, Bit: Channel 2 active)
●
Profibus DP Watchdog Status (Bit: Channel 1 DataEx, Bit: Channel 2 DataEx)
●
Fault state (Bit: Chan 1 FailState fieldbus, Bit: Chan 2 FailState fieldbus)
●
Availab le fieldbus communication (Bit: Channel 1 activity, Bit: Channel 2 activity),
i.e. Profibus Watchdog Status ≠ Baud Search
The DCS may change-over the active channel if both channels do not signal a fault
state (neither Global control clear nor telegrams with the data length 0) and are in
the DataEx state. Change-over is made during the logical 0–1 change of bits Fieldbus
channel 1 or Fieldbus channel 2 in byte 5 of the output data (process representation
output).
Change-over can be initiated both via the active and the passive channel.
Changing channels does not result in a loss of data.
If neither of the channels exchange process data with the controls or if both channels
receive Fail Safe telegrams (telegrams with the data length = 0) or Global Control
Clear (GC Clear) telegrams, the set failure behaviour or EMERGENCY behaviour
is started.
42
Page 43

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
The special feature of AUMA redundancy II is its absolute, chronologically
synchronised response of the Profibus telegrams via both communication channels
with simultaneous monitoring of the passive channel on the basis of the received
DataEx request telegrams.This redundancy behaviour is imperatively required in
combination with DCS splitting a Profibus Stack to two redundant channels using a
voter.
The Behaviour Tx parameter can be used to influence the transmission of response
telegrams via the passive channel:
Tx active channel
Tx both channels
Response telegrams are only sent via the active channel.
Response telegrams are sent via both channels, the active and the passiv e channel.
4.4.2. Redundant behaviour according to Profibus DP-V2 redundancy (PNO guideline 2.212)
This redundancy type can be selected if the DCS supports Profibus DP-V2
redundancy according to Profibus DP guideline 2.212.
The physical structure of the redundant Profibus DP interfaces within the actuator
corresponds to the structure for AUMA redundancy; two independent, galvanically
isolated Profibus DP interfaces with an internal Redcom data channel for e xchanging
the communication status.
Figure 3: Structure for DP-V2 redundancy according to guideline 2.212
The master generally uses parameter telegrams to determine which Profibus DP
communication channel is the primary channel and which is the backup channel.
The primary channel is used to operate the actuator, the backup channel can also
be used to establish a Profibus DP connection as an option; operation commands
of the backup channel will, however, be ignored by the actuator.
Feedback signals on the communication status of the two Profibus DP interfaces
and on received requests for changing the channels are perf ormed by the extended
diagnostic (Red_Status, 3 bytes); not all DCS support this extended diagnostic
telegram.
Controls (DPM1 = master of class 1) can only write and read acyclic DP-V1 data via
the primary channel. Engineering stations (DPM2 = master of class 2) can use both
channels to read and write acyclic DP-V1 data (writing the same parameter via both
communication channels simultaneously is, however, not possible).
Details for change-over and behaviour are stipulated in PNO guideline 2.212.
If neither of the channels exchange process data with the controls or if both channels
receive Fail Safe telegrams (telegrams with the data length = 0) or Global Control
Clear (GC Clear) telegrams, the set failure behaviour or EMERGENCY behaviour
is started.
The redundant behaviour according to Profibus DP-V2 redundancy requires activation
of the Profibus DP-V2 functions.
43
Page 44

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
4.5. Profibus DP-V2 functions — Option —
In addition to the cyclic Profibus DP-V0 process data exchange and in addition to
the acyclic Profibus DP-V1 data exchange, the Profibus DP-V2 functions define
further, more comprehensive functions:
●
Isochronous mode
●
Cross traffic between slaves
●
Upload and download
●
Redundancy
●
Time synchronisation with time stamp
The actuator controls AUMATIC AC 01.2 supports the following functions:
●
Redundancy
●
Time synchronisation with time stamp
This means the two functions are only available combined. If only the time
synchronisation with time stamp is exclusively required, the redundant channel can
remain unconnected (connection with Profibus DP master not imperatively required.)
Profibus DP-V2 functions can be activated via the following parameters:Device
configuration > Application functions > Activation > Profibus DP-V2 M0587
4.5.1. Profibus DP-V2 redundancy
The behaviour and the states of a redundant slave are defined in the "Specification
Slave Redundancy 2.212" (also ref er to <Redundant behaviour according to Profibus
DP-V2 redundancy (PNO guideline 2.212)>). A distinction is made betw een a primary
and a backup channel, with different effects on the properties of Profibus DP
communication:
●
Cyclic Profibus DP-V0 communication
- Operation commands of the primary channel are processed and executed
- Feedback signals of the actuator can be sent via both channels.
- Diagnostic feedback signals of the primary channel contain diagnostic
●
Acyclic Profibus DP-V1 services of the controls (DPM1 = master class 1) are
only supported by the primary channel.
●
Acyclic Profibus DP-V1 services of the engineering stations (DPM2 = master
class 2) are only supported by the primary channel.
Furthermore, a distinction is made between two configuration types within the Profibus
DP-V2 redundancy:
●
Flying redundancy (FR)
The slave address of the primary channel is different from the address of the
backup channel (slave address backup = slave address primary + 64, for this
reason the slave address of the primary must be < 62).
●
Only the slave address of the primary channel has to be set.
●
The master never communicates via the backup channel with the slave.
●
System redundancy (SR)
The slave address of the primary channel corresponds to the slave address of
the backup channel.
●
The master can configure both channels and can establish a cyclic DP-V0
connection via both channels.
by the actuator; operation commands b y the backup channel are ignored,
the communication for the backup channel is only used for monitoring.
status data of both the primary and the backup channel.
44
Page 45

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Figure 4: Configuration type for Profibus DP-V2
Setting the bus address (slave address)
Each channel has its own address. After setting the primary address, the backup
automatically accepts the address of the primary plus a configurable offset (either 0
or 64).
Startup behaviour
The channels automatically change between the startup_primary and startup_waiting
states until the master starts the communication with the actuator. In the
startup_primary state, the actuator waits with the primary slave address for the master
to start the communication.The cycle starts with 2 s, this time is doubled after each
cycle to max. 32 s.
Change over
The actuator does not decide autonomously on change-over.The master detects a
loss of communication of the primary channel and may initiate change-over using a
parameter telegram (parameter command PrmCmd).The former backup channel
becomes the new primary channel.
Parameter command
Apart from the change-over commands, different parameters for the configuration
of the Profibus DP-V2 redundancy are transmitted using the PrmCmd parameter
command.
For Profibus DP-V2, the parameter command is part of the parameter telegram which
is sent to the actuator on startup of the communication.
Table 33: Structure of the PrmCmd parameter command
RemarkBitByte
01234567
Block length (= 0x08)000100001
010000002
Structure type (= 0x02,
PrmCmd parameter
command for DP-V2
redundancy
Slot000000003
SpecifierReservedSequence number4
45
Page 46

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
RemarkBitByte
01234567
Res5
State
Clear
Reserved6
ResMaster
Check
Properties
Start
MSAC1S
Address
Offset64
MSAC1S
Address
Change
Start/ Stop MSAC1S
used
Req_MS0_MS1
used
FunctionResPrimary RequestStop
PropertiesPrimary
Output Hold Time high7
Output Hold Time low8
Output Hold Time
In the event of change-over, the outputs will not be changed during this time (time
base = 10 ms)
Address Offset64/ Ad-
ress Change
Change-over between flying redundancy and system redundancy
AddressOffset64 = 1 and AddressChange = 1, > Flying redundancy is selected
AddressOffset64 = 0 and AddressChange = 1, > System redundancy is selected
Extended diagnostic
For activated Profib us DP-V2 redundancy , the primary channel of the actuator sends
a high priority response telegram; after that, the master reads the e xtended diagnostic
data Red_Status (Status_Type = 0x9F) with the new states.
When transmitting the PrmCmd parameter command via the master, the actuator
responds with Prm_Cmd_Ack (Status_Type = 0x9E).
With Red_Status/ Prm_Cmd_Ack, the actuator signals both the status of the primary
and of the backup channel.
Table 34: Prm_Cmd_Ack/ Red_Status
2
Res5
Res6
Res7
State Clear
Output
Hold Time
started
Output
Hold Time
started
ResMaster
Baud rate
found
Baud rate
found
Check
Properties
Master
State Clear
Master
State Clear
Start
MSAC1S
Data Exchange
Data Exchange
Stop
MSAC1S
defective
defective
quest
RemarkBitByte
01234567
Header (0x08)000100001
Status_Type
0x9E = Prm_Cmd_Ack
0x9F = Red_Status
Slot000000003
SpecifierReservedSequence number4
FunctionResPrimary Re-
BackupPrimaryHardware
BackupPrimaryHardware
Red_State_1
(Primary status)
Red_State_2
(Backup status)
Red_State_3Not used8
4.5.2. Profibus DP-V2 time-synchronisation with time stamp
Certain events within the actuator can be marked with a time stamp.The event is
sent to the master using an alarm signal; the master then reads the event with time
stamp from the actuator.
46
Page 47

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Figure 5:Time synchronisation
To ensure that all events within an installation are recorded in the correct sequence,
all Profibus DP-V2 field devices must have the same time information. For this
purpose, the master cyclically sends the current time to all field devices.
Basic procedure during communication startup
1. During communication startup, a parameter telegram is sent from the master
to the actuator.The parameter telegram contains parameters for configuring
the time stamp and time synchronisation.
2. The master then cyclically sends Time_Event and Clock_Value telegrams to
synchronise the time.
3. The actuator sends the startup data of the time stamp (current state of the signals to be stamped).
Procedure during operation:
1. The actuator detects an event, stamps the time and sends a high priority response telegram (in the DataExchange state).
2. The master reads the alarm information from the actuator using a diagnostic
telegram.
3. The master acknowledges the alarm.
4. The master reads the indicated data record (event with time) from the actuator .
The following events are stamped by the actuator with a resolution of 10 ms
End position CLOSED
End position OPEN
Torque sw. CLOSED
Torque sw. OPEN
Selector sw. REMOTE
Fault
Phase fault
A time stamp is made for any change of state of these signals, for both rising and
falling signal flank.
47
Page 48

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Configuration of the time stamp
The parameters of the time stamp are part of the AUMA user parameters transmitted
to the actuator during communication startup.
The time stamp is activated via byte 2 of the parameters.
Table 35: Parameters of the time stamp
RemarkBitByte
01234567
Reserved000000001
X00000002
Activate time stamp
0 = deactivated
1 = activated
Res3
FaultPhase
fault
Selector
sw. RE-
Torque
sw. OPEN
MOTE
Torque
sw.
CLOSED
End position
OPEN
End position
CLOSED
Enabling the individual
indications
0 = not active
1 = active
ReservedNot used4
Configuration of the time synchronisation
This parameter block is part of the structured parameterisation transmitted to the
actuator during communication startup.
Table 36: TIme AR parameter
Default value 1000 (0x03F8, corresponds to 10 s)5
6
8
9
10
Split seconds (231 .. 0) unit: 1/232 seconds11
12
13
14
RemarkBitByte
01234567
Block length (= 0x08)000100001
000100002
Structure type (= 0x08, Time AR
parameter command for time synchronisation)
Slot000000003
Reserved000000004
Clock _Sync_Interval
(time basis 10 ms)
Clock_Sync Delay TimeSeconds (231 .. 0)7
Clock_Sync_Interval
The following time intervals are supported:
●
1 s
●
10 s
●
1 min.
●
10 min.
Transmission of time information
The time is transmitted in two steps:
●
Master sends Time_Event telegram (layer 2 data telegram)
●
Master sends Clock_Value telegram indicating the precise time when the time
event was sent.
48
Page 49

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the data interface
Table 37: Clock Value telegram
RemarkBitByte
01234567
1
or
2
if value < 0x9DFF4400, since 7.2.2036 6:28,16
3
4
Split seconds (231 .. 0) unit: 1/232 seconds5
6
7
8
Seconds (231 .. 0) since 1.1.1900 0:00,00
9
or
10
if value < 0x9DFF4400 since 7.2.2036 6:28,16
11
12
Split seconds (231 .. 0) unit: 1/232 seconds13
14
15
16
Clock_value of Time_Event (TE)Seconds (231 .. 0) since1.1.1900 0:00,00
Clock_value of the previousTime_Events (TE)
Clock_Value_Status1ReservedCVC17
Clock_Value_Status2SYFReservedCRResSWTANH18
Table 38: Process alarm
6
7
The information of Clock_Value_Status1 and Clock_Value_Status2 is used for the
transmission of time corrections (C and CV), the synchronisation status (SYF), the
daylight saving time information (ANH and SWT) and the accuracy (CR).
Process alarm
The diagnostic telegram is used to signal to the master that a time-stamped event
has been recorded.The actuator only supports process alarms.
RemarkBitByte
01234567
Block length (= 0x08)000100001
010000002
Restarted5
Buffer Overrun
101100008
Alarm_Type
0x02 = Time Stamped Process Alarm
Slot000000003
Specifier000Sequence number4
Time stamp state
Buffer Overrun = Internal buffer full,
time stamp stopped
Restarted = Time stamp started anew
Index of the data record (value range
100 to 115)
Number of indications within the data
record (value range 1 -17)
Type of data record
Permanently assigned to 0x0D:
Delta_Trigger_Discrete
Read time-stamped data
The data record signalled via a process alarm (slot 0 index 100 to 115) can be read
using the Profibus DP-V1 services once the alarm has been acknowledged.
A data record may contain up to 17 alarms, each data record consists of 14 bytes.
49
Page 50

Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP
Table 39: Alarms
RemarkBitByte
01234567
Type of signal
0x01 = Delta_Trigger_Discrete
0x02 = Time_Trigger_Discrete
0x80 = Start-up data
0x84 = End of time stamp
0x85 = Buffer overrun
0x86 = Channel change-over for redundancy
0x87 = Loss of information for redundancy
Slot000000002
Signal
1 = End position CLOSED
2 = End position OPEN
3 = Torque sw. CLOSED
4 = Torque sw. OPEN
5 = Selector sw. REMOTE
6 = Fault
7 = Phase fault
Status of the indication
Active = 1: Indication active (rising
signal flank)
Active = 0: Indication not active (falling signal flank)
Not used5
Not used6
Time- stampSeconds (231 .. 0) since 1.1.1900 0:00,00
3
Active4
7
or
8
if value< 0x9DFF4400 since 7.2.2036 6:28,16
9
10
Split seconds (231 .. 0) unit: 1/232 seconds11
12
13
14
000100001
Time stamp and redundancy
Time-stamped data is only sent via the primary channel. During a channel
change-over , the time-stamped indications are b uff ered and sent to the master after
change-over. In case of a buffer overrun, the startup data is sent.
50
Page 51

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Description of the Profibus DP board
5. Description of the Profibus DP board
The Profibus DP boards is directly located below the local controls.
Figure 6: Profibus DP board
Hazardous voltage!
Risk of electric shock.
→
When connected to the mains, the local controls may only be remov ed by suitably
qualified personnel (electricians).
5.1. Indications (indication and diagnostic LEDs)
Figure 7: Indication and diagnostic LEDs
[BA2] Profibus channel 2 active (green)
[DX1] Data Exchange channel 1 (yellow)
[BA1] Profibus channel 1 active (green)
[CH1] Communication via channels 1/2 (yellow)
[DX2] Data Exchange channel 2 (yellow)
[BA2]
[DX1]
[BA1]
[CH1]
Option for redundancy
Illuminated in green if Profibus channel 2 is active.
If the LED is illuminated in yellow, the Profibus DP interface has entered the ‘Data
Exchange’ state on channel 1. Controlling the actuator by the Profibus DP master
and reading the actuator status can be performed in this state only.
Illuminated in green if Profibus channel 1 is active.
Option for redundancy
ON (illuminated in yellow): Communication via channel 1
51
Page 52

Actuator controls
Description of the Profibus DP board AC 01.2/ACExC 01.2 Profibus DP
OFF: Communication via channel 2
[DX2]
Option for redundancy
If the LED is illuminated in yellow, the Profibus DP interface has entered the ‘Data
Exchange’ state on channel 2. Controlling the actuator by the Profibus DP master
and reading the actuator status can be performed in this state only.
Figure 8: Status LEDs
[RES] RESET (green)
[DBG]DEBUG (green)
[CAN]CAN (red)
[RES]
[DBG]
[CAN]
Illuminated in green after Reset phase: 3.3 V voltage supply is ok.
Blinking in green after Reset phase: 5 V voltage supply is ok
Blinking at 1 Hz: PCB test
Blinking at 2 Hz: Application is ok.
Illuminated in red: Communication to logic is faulty.
Not illuminated: Communication with logic is ok.
52
Page 53

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Corrective action
6. Corrective action
6.1. Troubleshooting
In case of problems with Profibus DP communication, the AUMATIC provides
important information with regard to troubleshooting via the display (menu Diagnostic
M0022).
The indication and diagnostic LEDs on the Profibus DP board can also be used as
support.
Table 40: Troubleshooting table
Causes and remedies
1
trolled via Profibus DP?
Select menu:
2
Diagnostic M0022
Select menu:
3.
for channel 1:
Profibus DP1 M0240
for channel 2 (option):
Profibus DP2 M0549
Select menu:
4
for channel 1:
DP1 Profibus status
for channel 2 (option):
DP2 Profibus status
Select menu:
5
for channel 1:
DP1 GC clear M0556
for channel 2 (option):
DP2 GC clear
Select menu:
6
for channel 1:
DP1 data length 0
for channel 2 (option):
DP2 data length 0
7
button of the local controls
possible?
No
Data Ex
or LEDs on Profibus DP
board:
[DX1] is illuminated: Channel 1
[DX2] is illuminated: Channel 2
Wait Prm
Wait Cfg
GC Clear active
Data length 0 active
YesOperation via the push
No
No faultYesCan the actuator be con-
→ Continue with 2
→ Continue with 3
→ Continue with 4
Profibus DP communication is ok.
→ Continue with 5
No communication between slave and master
Possible causes and remedies:
●
Parameter data incorrect→ Correct parameter data in master .
●
Parameters not yet sent→ Send parameters
●
Incorrect GSD file was possibly used→ Check GSD file
●
Cable connection may either be interrupted or connected with
the wrong polarity.→ Check cable connection
No communication between slave and master
Possible causes and remedies:
●
Configuration data incorrect → Correct configuration in master.
●
Configuration data not yet sent → Send configuration data.
Slave is in the Fail Safe state.
Possible remedies:
→ Check all other implemented slaves at the Profibus.
→ Deactivate Autoclear function in the master, if required.
→ Send GC OPERATE telegram.
→ Continue with 6GC Clear inactive
Slave is in the Fail Safe state.
Possible remedies:
→ Check all other implemented slaves at the Profibus.
→ Deactivate Autoclear function in the master, if required.
→ Send GC OPERATE telegram.
→ Continue with 7Data length 0 inactive
Possible causes and remedies:
●
Master does not send an operation command.
●
Master sends wrong operation command.
→ Check program of the controls.
Possible causes and remedies:
Faults such as torque fault, thermal fault or internal fault
→ Check logic board, motor control and motor.
→ continue with 8
53
Page 54

Actuator controls
Corrective action AC 01.2/ACExC 01.2 Profibus DP
Causes and remedies
8
board is illuminated in
green.
9
board
is not illuminated
3.3 V power supply is ok.YesLED [RES] on Profibus DP
3.3 V power supply not availableNo
5 V power supply is ok.is blinking in green.LED [DBG] on Profibus DP
5 V power supply not available
Possible causes and remedies:
→ Check power supply of the AUMATIC (check fuses).
→ Check Profibus DP board.
6.2. Diagnostics
V arious Profibus DP interface states can be check ed via the menu Diagnostic M0022.
The <Information on Profibus DP 1> tables shows the men us for the 1st DP interf ace.
In case a second, redundant DP interface is installed, this table ma y be used as well.
In the menu, DP2 is displayed instead of DP1.
Table 41: Information on Profibus DP 1
Value and descriptionIndication in display
DP1 slave address M0547
DP1 baud rate M0099
DP1 watchdog status M0411
DP1 Profibus status M0554
DP1 GC clear M0556
DP1 data length 0 M0557
DP1 GC freeze M0558
Bus address (slave address)
Baud rate
Watchdog status
Baud search
The Profibus DP interface searches a baud rate. If no baud rate
was found:
●
●
●
Baud control
The detected baud rate is monitored.The DP watchdog within
the master is not activated. In this case, the f ailure function is not
available.
DP control
The DP communication is monitored, the DP watchdog within
the master is activated.Therefore, the failure function is also
available.
Profibus status
Wait Prm
Wait Cfg
Data Ex
The Profibus DP interface is waiting for correct parameter data.
The Profibus DP interface is waiting f or correct configuration data.
The Profibus DP interface is currently exchanging data with the
master.
Global Control Clear Status
GC Clear inactive
GC Clear active
The Profibus DP interface has receiv ed the Global Control Clear
telegram and is waiting for the Global Control Oper ate telegram.
In this mode, DP communication works perfectly, however the
actuator cannot be operated via PLC. If the safety function is
activated it will be initiated.
Data length 0 status
Data length 0 inactive
Data length 0 active
The Profibus DP interface receives data telegrams of the length
0. In this mode , DP communication w orks perf ectly, however the
actuator cannot be operated via PLC. If the safety function is
activated it will be initiated.
Global Control Freeze Status
GC Freeze inactive
With Unfreeze Global Control telegram the Freeze state is deactivated again.
GC Freeze active
The Freeze Global Control telegram can be used to freeze the
Profibus DP inputs (feedback signals).
Connect bus cables.
Check bus cables.
Switch on DP master.
54
Page 55

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Corrective action
Value and descriptionIndication in display
DP1 GC sync M059
DP1 config. data M1195
Global Control Sync Status
GC Sync inactive
GC Sync active
Configuration data (number of input and output bytes) set by the master.
With the Unsync Global Control telegram is the Sync state is
deactivated again.
The Sync Global Control telegram can be used to freeze the
Profibus DP outputs (operation commands).
Table 42: Profibus details
Value and descriptionIndication in display
DP-V1 control
DP-V1 active
Channel 1 active
Channel 2 active
Primary
Backup
Profibus ID no.
Redundancy
DP-V1 (SetPrm)
Alarms (SetPrm)
Redundancy (SetPrm)
Behaviour Tx
In this state, the actuator can only be operated by means of the acyclic Profibus DP-V1
services (only possible if there is no cyclic DP-V0 connection available.
At least one acyclic Profibus DP-V1 connection is active.
Profibus interface of channel 1 is used.
Profibus interface of channel 2 is used.
Profibus DP2 (Profibus DP, channel 1)
None
Channel 1
Channel 2
Profibus DP2 (Profibus DP, channel 2)
None
Channel 1
Channel 2
The actuator controls are assigned different ident numbers depending on the function.
0x0C4F
0x0CBD
Redundancy
None
DP-V2 (SR)
DP-V2 (FR)
AUMA redundancy I
AUMA redundancy II
DP-V1 function in the parameter telegram (SetPrm)
Deactivated
Activated
Signalling alarms in the parameter telegram (SetPrm)
Deactivated
Activated
Redundancy function in the parameter telegram (SetPrm)
Deactivated
Activated
Response behaviour (response) for AUMA redundancy II
Tx active channel
Tx both channels
No channel is used as primary channel.
Channel 1 is used as primary channel.
Channel 2 is used as primary channel.
No channel is used as backup channel.
Channel 1 is used as backup channel.
Channel 2 is used as backup channel.
For Profibus DP-V0 and DP-V1
for Profibus DP-V0 and DP-V1 including the DP-V2 functions
Redundancy with time synchronisation, time stamp and alarms.
No redundancy available.
Redundancy activated according to Profibus DP-V2 (SR).
Redundancy activated according to Profibus DP-V2 (FR).
General Profibus DP redundancy (AUMA redundancy I)
AUMA redundancy II
The DP-V1 services were deactivated using the parameters in
the parameter telegram (SetPrm).
The DP-V1 services were activated using the parameters in the
parameter telegram (SetPrm).
The alarms were deactivated using the parameters in the parameter telegram (SetPrm).
The alarms were activated using the parameters in the parameter
telegram (SetPrm).
The redundancy function according to Profibus DP-V2 was deactivated using the parameters in the parameter telegram (SetPrm).
The redundancy function according to Profibus DP-V2 was activated using the parameters in the parameter telegram (SetPrm).
Profibus DP response telegrams are exclusively sent via the
active channel
Profibus DP response telegrams are sent via both channels.
55
Page 56

Actuator controls
Technical data AC 01.2/ACExC 01.2 Profibus DP
7. Technical data
Information The following technical data includes standard and optional features. For detailed
information on the customer-specific version, refer to the order-related data sheet.
The technical data sheet can be downloaded from the Internet at www.auma.com
in both German and English (please state the order number).
7.1. Profibus DP interface
Settings/programming the Profibus DP interface
Automatic baud rate recognitionBaud rate setting
face
Configurable process represent-
ation via GSD file
Commands and signals of the Profibus interface
Process representation output
(command signals)
Process representation input
(feedback signals)
Process representation input
(fault signals)
Behaviour on loss of communication
The setting of the Profibus DP address is made via the display of the AUMATICSetting the Profibus DP inter-
For an optimum adaptation to the process control system, the process representation may
be freely configured.
OPEN, STOP, CLOSE, position setpoint, RESET, EMERGENCY, Interlock OPEN/CLOSE,
Enable LOCAL
●
End position OPEN, CLOSED
●
Actual position value
●
Actual torque value
●
Selector switch in position LOCAL/REMOTE
●
Running indication (directional)
●
Torque switch OPEN, CLOSED
●
Limit switch OPEN, CLOSED
●
Manual operation by handwheel or via local controls
●
2 analogue and 4 digital customer inputs
●
Motor protection tripped
●
Torque switch tripped in mid-travel
●
One phase missing
●
Loss of the analogue customer inputs
1)
The behaviour of the actuator is programmable:
●
Stop in current position
●
Travel to end position OPEN or CLOSED
●
Travel to any intermediate position
Requires magnetic limit and torque transmitter (MWG) in actuator1)
General Profibus DP interface data
Profibus DP according to IEC 61158 and IEC 61784-1Communication protocol
Network topology
●
●
●
Twisted, screened copper cable according to IEC 61158Transmission medium
EIA-485 (RS485)Fieldbus interface
56
Line (bus) structure
When using repeaters, tree structures can also be implemented.
Coupling and uncoupling of devices during operation without affecting other devices is
possible
Page 57

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Technical data
General Profibus DP interface data
Transmission speed/cable
length
Device types
Bus access
Profibus DP ident no.
●
Baud rate and maximum cable length (segment length) without repeater:
between 9.6 and 93.75 kbit/s: 1,200 m
-
for 187.5 kbit/s: 1,000 m
-
for 500 kbit/s: 400 m
-
for 1,500 kbit/s: 200 m
-
●
Baud rate and possible cable length with repeater (total network cable length):
between 9.6 and 93.75 kbit/s: approx. 10 km
-
for 187.5 kbit/s: approx. 10 km
-
for 500 kbit/s: approx. 4 km
-
for 1,500 kbit/s: approx. 2 km
-
●
DP master class 1, e.g. central controllers such as PLC, PC, ...
●
DP master class 2, e.g. programming/configuration tools
●
DP slave, e.g. devices with digital and/or analogue inputs/outputs such as actuators,
sensors
32 devices without repeater, with repeater expandable to 126Number of devices
●
Token-passing between masters and polling for slaves
●
Mono-master or multi-master systems are possible.
Cyclic data exchange, sync mode, freeze mode, fail-safe modeSupported fieldbus functions
0x0C4F: Standard applications with Profibus DP-V0 and DP-V1
0x0CBD: Applications with Profibus DP-V2
57
Page 58

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
8. Appendix
8.1. Proposed wiring diagram for external sensors, 2-wire technology
58
Page 59

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
8.2. Proposed wiring diagram for external sensors, 3-wire technology
59
Page 60

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
8.3. Proposed wiring diagram for external sensors, 4-wire technology
60
Page 61

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
8.4. Parameters
The present appendix contains notes on the parameterization of the actuator controls
via Profibus DP-V1 as a table (with read/write access codes).
Several par ameters (Vie w Objects) are read or written per DP-V1 request.The data
lengths indicated in the tables have to be considered accordingly.
View Objects
View Objects group several parameters enabling easy write access to the grouped
parameters.The bus load is reduced as the parameters do no longer have to be
read out individually.
Explanations to the table:
No.
View Object number (corresponds to Profibus DP-V1 index). Profibus DP-V1 slot is
always 254.
Type
Parameters
Access
Default
Setting value
Data lengthDescriptionData type
4 bytesLogical valueBOOL
2/4/6/8 bytesBit stringBS8/16/32/64
4 bytesProcess dataDRVCMD4
2 bytesValue from the value listenum
1/2/4 bytesInteger valuesI8/16/32
2 bytesTime informationMMSS01
4/8/16/32/48/64 bytesOctet stringOS4/8/16/32/48/64
10/20/30/40 bytesStringS10/20/30/40
1/2/4/ bytes (8/16/32 bits)Unsigned valueU8/16/32
Parameter name. Is indicated in the display of actuator controls.
Read and write access
R = Read
W = Write
Default value
Permissible, settab le value or setting range. Depending on the data type , scale factor
and unit are also indicated in square brackets. Example:
Min = 0 [0.1 s]
Max = 50 [0.1 s]
Corresponds to a setting range between 0.1 and 5.0 seconds
61
Page 62

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
Table 43: Display...
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 14 bytes
enum1-1
enum1-2
enum1-3
enum1-4
enum1-5
enum1-6
enum1-7
Language
Date format
Time format
Number format
Torque unit
Temperature unit
Diagnostic classific.
1R/W
2 : English
3 : Français
4 : Español
5 : Italiano
6 : Pусский
7 : Polski
8 : Português
9 : Türkçe
10 : Magyar
11 : 中国
12 : Nederlands
13 : Čeština
14 : Română
15 : 日本語
16 : Български
17 : Dansk
18 : Ελληνικά
19 : Suomi
20 : 한국어
21 : Svenska
22 : Tiếng Việt
23 : يبرع
24 : Eesti keel
25 : Hrvatski
26 : Lietuvių
27 : Latviešu
28 : Norsk
29 : Slovenčina
30 : Slovenščina
31 : Srpski
32 : ไทย
33 : Bahasa Indonesia
1R/W
1 : DD.MM.YYYY
2 : YYYY-MM-DD
1R/W
1 : 24h
0R/W
1 : xx,x
0R/W
1 : ft-lb
2 : %
0R/W
1 : °F
0R/W
0 : AUMA
1 : NAMUR
Language setting1 : Deutsch
Date format setting0 : MM/DD/YYYY
Time format setting0 : 12h
Number format setting0 : xx.x
Torque unit setting0 : Nm
Temperature unit setting0 :°C
Selection of diagnostic classification to be indicated within the
status area of the display
62
Page 63

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
Table 44: Identifications
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 60 bytes
S202-1
S202-2
S202-3
Device designation
Device tag
Project name
R/W
AC 01.2R
_GERAETETAG_
_PROJEKT_R/W
Device designation of actuator
controls
Information for actuator identification within the plant (e.g. KKS
designation - Power Plant Classification system)
Project name of the plant
Table 45: Controls
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 80 bytes
S203-1
S203-2
S203-3
S203-4
Order no. controls
Serial no. controls
Wiring diagram
Date of manufacture
R
R
R
_ KOMMNR
STEUERUNG
_
_ WERKNR
STEUERUNG
_
TPCR
_DATE_PRO-
DUCTION_
Order number of controls
Serial number of controls
Wiring diagram
Date of manufacture of the actu-
ator controls
Table 46: Actuator
Data length = 60 bytes
S204-1
S204-2
S204-3
Order no. actuator
Serial no. actuator
Wiring diagram actuator
Table 47: Version
Data length = 40 bytes
S205-1
S205-2
Firmware
Language
Table 48: Firmware details
Data length = 160 bytes
S206-1
S206-2
S206-3
S206-4
S206-5
S206-6
S206-7
S206-8
LC
LC (Bootloader)
Logic
Logic (Bootloader)
Fieldbus
Fieldbus (Bootloader)
MWG
MWG (Bootloader)
ExplanationSetting valueDefaultAccessParametersTypeNo.
R
R
_ KOMMNR
ANTRIEB _
_ WERKNR
ANTRIEB _
TPAR
Vxx.xx.xxR
VxxxR
0R
0R
0R
0R
0R
0R
0R
0R
Actuator order number
Actuator serial number
Actuator wiring diagram
ExplanationSetting valueDefaultAccessParametersTypeNo.
Firmware version
Language version
ExplanationSetting valueDefaultAccessParametersTypeNo.
Firmware version for local controls
Firmware version for local controls (Bootloader)
Logic firmware version
Logic firmware version (Boot-
loader)
Fieldbus firmware version
Fieldbus firmware version
(Bootloader)
MWG firmware version
MWG firmware version (Boot-
loader)
63
Page 64

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
Table 49: Hardware article no.
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 140 bytes
S207-1
S207-2
S207-3
S207-4
S207-5
S207-6
S207-7
ArtNo LC
ArtNo logic
ArtNo MCM
ArtNo PSO
ArtNo I/O interface
ArtNo fieldbus
ArtNo MWG
R
R
R
R
R
R
R
_ ARTNR
OSS _
_ ARTNR LOGIK _
_ ARTNR RELAIS _
_ ARTNR_OPT _
_ ARTNR INTF _
_ ARTNR
PBD _
_ ARTNR
MWG _
Article number of 'Local controls'
electronics sub-assembly (A9)
Article number of 'Logic' electronics sub-assembly (A2)
Article number of 'MCM' (Motor
Control and Monitoring / A52)
electronics sub-assembly
Article number of 'PSO' (Power
Supply Options / A52.1) electronics sub-assembly
Article number of 'I/O interface'
electronics sub-assembly (A1.0)
Article number of 'Fieldbus'
electronics sub-assembly (A1.8)
Article number of 'MWG' electronics sub-assembly (B6)
Table 50: Type of seating
Data length = 4 bytes
enum9-1
enum9-2
End position CLOSED
End position OPEN
Table 51: Torque switching
Data length = 12 bytes
enum10-1
U1610-2
U1610-3
U1610-4
Torque by-pass
Torque by-pass [s]
Trip torque CLO [Nm]
Trip torque OPEN [Nm]
ExplanationSetting valueDefaultAccessParametersTypeNo.
0R/W
0R/W
1R/W
0 : Limit
1 : Torque
0 : Limit
1 : Torque
0 : Function not active
1 : Function active
Min = 0 [0.1 s]0R/W
Max = 50 [0.1 s]
Min = 0 [Nm]20R/W
Max = 65535 [Nm]
Min = 0 [Nm]20R/W
Max = 65535 [Nm]
Type of seating in end position
CLOSED
Type of seating in end position
OPEN
ExplanationSetting valueDefaultAccessParametersTypeNo.
Enabling/disabling torque bypass. Torque by-pass' = function
active means that the torque
monitoring is suspended for
each start and this for the time
as defined in the field 'Time
torque by-pass'. Consequently,
unseating is possible without
torque fault tripping.
By-pass duration of torque
monitoring at actuator start
Tripping torque in direction
CLOSE [Nm]
Tripping torque in direction
OPEN [Nm]
64
Page 65

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
I1610-5
I1610-6
Wrn torque CLOSE
Wrn torque OPEN
Min = 20 [%]80R/W
Max = 100 [%]
Min = 20 [%]80R/W
Max = 100 [%]
Setting of warning torque in direction CLOSE
Setting of warning torque in direction OPEN
Table 52: Local controls
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 10 bytes
enum11-1
enum11-2
enum11-3
enum11-4
enum11-5
Self-retaining Local
Local STOP
Enable LOCAL
Priority REMOTE
Fieldbus auto enable
3R/W
0R/W
0R/W
0R/W
1R/W
0 : Off (push-to-run op.)
1 : OPEN
2 : CLOSE
3 : OPEN and CLOSE
4 :OPEN & CL w/o STOP
1 : Sel.sw.Local + Re-
mote
1 : Sel. sw. Local + Off
0 : Selector switch Local
1 : Sel. sw. Local + Off
0 : Off
1 : On
Setting the self-retaining local
mode
Operation mode local STOP0 : Off
Operation mode Enable LOCAL0 : Sel. sw. Local
Preserving the operation mode
REMOTE in selector switch position LOCAL or OFF depending
on the enable signal
Automatic generation of enable
signal for priority REMOTE
function in case loss of fieldbus
communication
Table 53: I/O interface
Data length = 4 bytes
enum12-1
enum12-2
Self-retaining Remote
Self-retaining Remote
II
ExplanationSetting valueDefaultAccessParametersTypeNo.
3R/W
0R/W
0 : Off (push-to-run op.)
1 : OPEN
2 : CLOSE
3 : OPEN and CLOSE
4 :OPEN & CL w/o STOP
0 : Off (push-to-run op.)
1 : OPEN
2 : CLOSE
3 : OPEN and CLOSE
4 :OPEN & CL w/o STOP
Setting the operation behaviour
(push-to-run opereration or selfretaining) for binary operation
commands (OPEN, STOP,
CLOSE) from remote.
Setting the self-retaining Remote II mode
65
Page 66

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
Table 54: Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 4 bytes
U1613-1
U1613-2
DP1 slave address
DP2 slave address
Min = 0126R/W
Max = 126
Min = 0126R/W
Max = 126
Profibus DP slave address
Profibus DP slave address,
channel 2
Table 55: Positioner
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 30 bytes
enum14-1
U1614-2
U1614-3
U1614-4
U1614-5
U1614-6
I3214-7
I3214-8
U1614-9
U1614-10
enum14-11
U1614-12
U1614-13
Adaptive behaviour
Dead time
Dead band OPEN
Dead band CLOSE
Positioner hyst. OPEN
Positioner hyst.
CLOSE
Tolerance CLOSE
Tolerance OPEN
Permissible starts/h
Outer dead band
Limit positioner range
Limit OPEN
Limit CLOSE
0R/W
0R/W
0 : Off
1 : Adaptive I
Min = 2 [0.1 s]5R/W
Max = 600 [0.1 s]
Min = 0 [0.1 %]5R/W
Max = 100 [0.1 %]
Min = 0 [0.1 %]5R/W
Max = 100 [0.1 %]
Min = 0 [0.1 %]5R/W
Max = 50 [0.1 %]
Min = 0 [0.1 %]5R/W
Max = 50 [0.1 %]
Min = 0 [0.1 %]0R/W
Max = 50 [0.1 %]
Min = 950 [0.1 %]1000R/W
Max = 1000 [0.1 %]
Min = 11200R/W
Min = 1800
Min = 1 [0.1 %]10R/W
Max = 100 [0.1 %]
1 : Function active
Min = 0 [0.1 %]1000R/W
Max = 1000 [0.1 %]
Min = 0 [0.1 %]0R/W
Max = 1000 [0.1 %]
Setting the adaptive behaviour
of the positioner
Setting the dead time
Setting dead band OPEN (irrelevant for adaptive behaviour)
Setting dead band CLOSE (irrelevant for adaptive behaviour)
Hysteresis in direction OPEN
(for adaptive positioner only)
Hysteresis in direction CLOSE
(for adaptive positioner only)
Tolerance for the function
"Closing fully" for end position
CLOSED
Tolerance for the function
"Opening fully" for end position
OPEN
Permissible number of starts/h
(only in combination with Adaptive behaviour = Adaptive II)
Setting the outer dead band (irrelevant for adaptive behaviour)
Function Limit positioner range0 :Function not active
Limit OPEN
Limit CLOSE
Table 56: Process controller
Data length = 26 bytes
enum67-1
enum67-2
enum67-3
U1667-4
66
Setpoint source
Beh. setpoint failure
Inverse operation
Internal setpoint 1
ExplanationSetting valueDefaultAccessParametersTypeNo.
0R/W
0R/W
0R/W
0 : I/O interface
1 : Fieldbus interface
2 : Internal setpoint
1 : Internal setpoint 2
2 : Failure behaviour
1 : Function active
Min = 0 [0.1 %]500R/W
Max = 1000 [0.1 %]
Setpoint source of process controller
Behaviour on setpoint failure0 : Internal setpoint 1
Inverse operation0 : Function not active
Internal setpoint 1 for process
controller
Page 67

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
U1667-5
U1667-6
U1667-7
U1667-8
U1667-9
U1667-10
U1667-11
enum67-12
enum67-13
Internal setpoint 2
Proport. gain Kp
Reset time Ti
Rate time Td
Min reaction act. value
Max reaction act. value
React. time act. value
Actual value source
Modulating behaviour
0R/W
0R/W
Min = 0 [0.1 %]500R/W
Max = 1000 [0.1 %]
Min = 1 [0.1]10R/W
Max = 100 [0.1]
Min = 1 [s]1000R/W
Max = 1000 [s]
Min = 0 [s]0R/W
Max = 100 [s]
Min = 0 [0.1 %]0R/W
Min = 100 [0.1 %]
Min = 100 [0.1 %]1000R/W
Max = 1000 [0.1 %]
Min = 0 [s]0R/W
Max = 100 [s]
0 : I/O interface
1 : Fieldbus interface
0: P controller
1: PI controller
2: PID controller
Internal setpoint 2 for process
controller
Proportional gain Kp
Reset time Ti
Rate time Td
Minimum reaction required of
actual process value within reaction time
Maximum reaction required of
actual process value within reaction time
Reaction time for monitoring
min. or max. reaction of actual
process value
Actual value source of process
controller
Modulating behaviour of PID
controller
Table 57: Failure behaviour
Data length = 12 bytes
enum15-1
enum15-2
enum15-3
Mmss0115-4
Failure behaviour
Failure operation
Failure source
Delay time
ExplanationSetting valueDefaultAccessParametersTypeNo.
1R/W
1 : Immediately active
0R/W
4R/W
0 : STOP
1 : CLOSE
2 : OPEN
3 : Approach position
4 : Execute last CMD
1 : Fieldbus interface
2 : I/O interface
4 : Active interface
Min = 0 [0.1 s]30R/W
Max = 1800 [0.1 s]
Activate failure behaviour0 : Good signal first
Setting the actuator reaction for
active failure behaviour
Failure source (failure reason)
for failure behaviour
Failure operation is only executed after delay time has expired.
67
Page 68

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
U1615-5
U1615-6
Failure position
Failure position MPV
Min = 0 [0.1 %]500R/W
Max = 1000 [0.1 %]
Min = 0 [0.1 %]500R/W
Max = 1000 [0.1 %]
Failure position in percent
Failure position of multiport
valve
Table 58: EMERGENCY behaviour
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 26 bytes
enum16-1
enum16-2
enum16-3
enum16-4
U1616-5
enum16-6
enum16-7
enum16-8
enum16-9
enum16-10
enum16-11
Failure reaction EMCY
EMCY operation mode
EMCY failure source
EMCY operation
EMCY position
By-pass torque
Thermal by-pass
By-pass timer
By-pass operat.profile
By-pass Interlock
By-pass Local STOP
1R/W
0R/W
3R/W
0R/W
0R/W
0R/W
0R/W
0R/W
0R/W
0R/W
1 : Good signal first
2 : Immediately active
0 : Remote only
1 : Remote and local
1 : I/O interface
2 : Fieldbus interface
3 : I/O or fieldbus
4 : Active interface
0 : STOP
1 : CLOSE
2 : OPEN
3 : Approach EMCY pos.
Min = 0 [0.1 %]0R/W
Max = 1000 [0.1 %]
0 : Off
1 : On
0 : Off
1 : On
0 : Off
1 : On
0 : Off
1 : On
0 : Off
1 : On
0 : Off
1 : On
Failure reaction EMERGENCY.
The EMERGENCY failure reaction defines the actuator behaviour once the EMERGENCY
signal is initiated.
Determines the availability of
EMERGENCY behaviour depending on the selector switch
position Local or Remote
Failure source for EMERGENCY
behaviour
Actuator reaction in EMERGENCY operation mode
Setting the EMERGENCY position
By-passing the torque monitoring in EMERGENCY operation
mode
By-passing the thermal monitoring in EMERGENCY operation
mode
By-passing the timer function in
EMERGENCY operation mode
By-pass of operation profile in
EMERGENCY operation mode
By-pass of interlock function in
operation mode EMERGENCY
By-pass of local STOP function
in EMERGENCY operation
mode
68
Page 69

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
Mmss0116-12
U1616-13
Delay time
EMCY position MPV
Min = 0 [0.1 s]10R
Max = 1800 [0.1 s]
Min = 0 [0.1 s]10R/W
Max = 1800 [0.1 s]
Delay time for EMERGENCY
behaviour (EMERGENCY behaviour is only executed after the
delay time has expired).
EMERGENCY position of multiport valve
Table 59: Timer function
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 20 bytes
enum17-1
Mmss0117-2
Mmss0117-3
U1617-4
U1617-5
enum17-6
Mmss0117-7
Mmss0117-8
Step mode CLOSE
On time CLOSE
Off time CLOSE
Start stepping CLOSE
End stepping CLOSE
Step mode OPEN
On time OPEN
Off time OPEN
0R/W
0R/W
0 : Off
1 : Remote
2 : Local
3 : Remote and local
Min = 10 [0.1 s]50R/W
Max = 1800 [0.1 s]
Min = 10 [0.1 s]50R/W
Max = 1800 [0.1 s]
Min = 1 [0.1 %]1000R/W
Max = 1000 [0.1 %]
Min = 0 [0.1 %]0R/W
Max = 999 [0.1 %]
0 : Off
1 : Remote
2 : Local
3 : Remote and local
Min = 10 [0.1 s]50R/W
Max = 1000 [0.1 s]
Min = 10 [0.1 s]50R/W
Max = 1000 [0.1 s]
Setting the operation mode:
Stepping mode in direction
CLOSE
Setting the on time in direction
CLOSE
Setting the off time in direction
CLOSE
Setting the start of stepping
mode in direction CLOSE
Setting the end of stepping
mode in direction CLOSE
Setting the operation mode:
Stepping mode in direction
OPEN
Setting the on time in direction
OPEN
Setting the off time in direction
OPEN
69
Page 70

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
U1617-9
U1617-10
Start stepping OPEN
End stepping OPEN
Min = 0 [0.1 %]0R/W
Max = 999 [0.1 %]
Min = 1 [0.1 %]1000R/W
Max = 1000 [0.1 %]
Setting the start of stepping
mode in direction OPEN
Setting the end of stepping
mode in direction OPEN
Table 60: On time monitoring
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 6 bytes
enum23-1
U1623-2
U1623-3
On time monitoring
Perm. running time/h
Permissible starts/h
0R/W
0 : Function not active
1 : Function active
Min = 10 [min]15R/W
Max = 60 [min]
Min = 11200R/W
Max = 1800
Enable/disable on time monitoring
A warning is issued when exceeding the permissible running
time/h.
A warning is issued when exceeding the permissible starts/h.
Table 61: Motion detector
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 12 bytes
enum24-1
Mmss0124-2
U1624-3
Mmss0124-4
Motion detector
Detect. time dt
Travel diff. dx
Detect. time dt (MWG)
1R/W
0 : Function not active
1 : Function active
Min = 10 [0.1 s]50R/W
Max = 1800 [0.1 s]
Min = 10 [0.1 %]10R/W
Max = 100 [0.1 %]
Min = 1 [0.1 s]5R/W
Max = 20 [0.1 s]
With active motion detection the
verification is made whether the
actuator position changes due
to the manual operation within
the detection time dt by the
travel difference dx. Consequently, a mechanical movement can be detected at output
drive (signal: 'Handwheel operation')
Setting the detection time dt
Setting the travel difference dt
Setting the detection time dt
70
Page 71

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
U1624-5
U1624-6
Travel diff. dx (MWG)
Delay time
Min = 23R/W
Max = 20
Min = 1 [0.001 s]6000R/W
Max = 65535 [0.001 s]
Setting the travel difference dx
The delay time defines the time
interval after terminating manual
operation until reset of the signal
'Handwheel operation'.
Table 62: Operating time monitoring
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 4 bytes
enum25-1
Mmss0125-2
Operation mode
Perm.op. time, manual
0R/W
0 : Off
1 : Manual
Min = 0 [0.1 s]9000R/W
Max = 36000 [0.1 s]
Operation mode of operating
time monitoring. The actuator
operating time can be made in
'Manual' operation mode.
Perm.op. time, manual
Table 63: Reaction monitoring
ErläuterungSetting valueDefaultAccessParametersTypeNo.
Data length = 4 bytes
enum26-1
U1626-2
Operation mode
Perm.op. time, manual
0R/W
0 : Off
1 : Manual
Min = 150 [0.1 s]150R/W
Max = 3000 [0.1 s]
Operation mode of operating
time monitoring. The actuator
operating time can be made in
'Manual' operation mode.
Perm.op. time, manual
Table 64: Interlock
Data length = 6 bytes
enum27-1
enum27-2
enum27-3
Oper. mode Interlock
Running dir. Interlock
By-pass Interlock
ExplanationSetting valueDefaultAccessParametersTypeNo.
3R/W
3R/W
0R/W
1 : Remote
2 : Local
3 : Remote and Local
1 : OPEN
2 : CLOSE
3 : OPEN and CLOSE
0 : Off
1 : On
Operation mode of interlock
function
Running direction in which the
interlock function is active
By-pass of interlock function in
operation mode EMERGENCY
71
Page 72

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
enum27-4
Interlock failure source
3R/W
1 : Interface
2 : Fieldbus
3 : Active comm. source
Failure source of interlock function
Table 65: PVST
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 16 bytes
enum66-1
enum66-2
U1666-3
Mmss0166-4
Mmss0166-5
Mmss0166-6
enum66-7
U1666-8
PVST operation mode
PVST behaviour
PVST stroke
PVST monitoring
PVST operating time
PVST reverse time
PVST reminder
PVST reminder period
0R/W
1R/W
0R/W
0 : Stroke
1 : End position test
0 : OPEN
1 : CLOSE
Min = 0 [0.1 %]100R/W
Max = 1000 [0.1 %]
Min = 10 [0.1 s]600R/W
Max = 3000 [0.1 s]
Min = 1 [0.1 s]20R/W
Max = 600 [0.1 s]
Min = 1 [0.1 s]20R/W
Max = 600 [0.1 s]
0 : Function not active
1 : Function active
Min = 00R/W
Max = 65535
Setting the operation mode
PVST: Stroke = stroke-controlled PVST; based on travel
across a defined stroke (stroke
PVST) within a given time
(PVST monitoring time); can be
started in any valve position
(even outside the end position)
End position test = PVST based
on test when leaving the end
position within a defined time
(PVST travel time); Can only be
started from an end position
PVST (Partial Valve Stroke
Test) behaviour
PVST (Partial Valve Stroke
Test) stroke
PVST (Partial Valve Stroke
Test) monitoring time
PVST (Partial Valve Stroke
Test) operating time
Waiting time during PVST prior
to returning to initial position.
When function is active, a message is generated if no PVST
can be executed during reminder period.
Reminder period of PVST function. Generates message if no
PVST was executed during this
reminder period.
Table 66: Local controls
Data length = 22 bytes
enum28-1
enum28-2
enum28-3
enum28-4
enum28-5
Setting values for parameter no.: 28-1/-2/-3/-4/-5
72
Indication light 1 (left)
Indication light 2
Indication light 3
Indication light 4
Indicat. light 5 (right)
ExplanationSetting valueDefaultAccessParametersTypeNo.
370R/W
269R/W
270R/W
268R/W
369R/W
372 : Not assigned
259 : End position
CLOSED
Signal assignment for indication
light 1 (left) on the local controls
Signal assignment for indication
light 2 on the local controls
Signal assignment for indication
light 3 on the local controls
Signal assignment for indication
light 4 on the local controls
Signal assignment for indication
light 5 (right) on the local controls
Page 73

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
258 : End position OPEN
370 : End p. CLOSED,
blink
369 : End p. OPEN, blink
401 : Setpoint pos.
reached
265 : Running CLOSE
264 : Running OPEN
113 :Selector sw. LOCAL
115 : Selector sw. RE-
MOTE
116 : Selector sw. OFF
376 : Limit switch
CLOSED
375 : Limit switch OPEN
460 : Torque sw.
CLOSED
459 : Torque sw. OPEN
86 : Failure
84 : Function check
83 : Out of specification
85 : Maintenance re-
quired
79 : Fault
78 : Warning
80 : Not ready REMOTE
554 : Op. pause active
560 :Start stepping mode
603 : Actuator running
539 : Running LOCAL
540 : Running REMOTE
541 : Handwheel opera-
tion
549 :In intermed. position
392 : Intermed. pos. 1
399 : Intermed. pos. 2
398 : Intermed. pos. 3
397 : Intermed. pos. 4
396 : Intermed. pos. 5
395 : Intermed. pos. 6
394 : Intermed. pos. 7
393 : Intermed. pos. 8
500 : Input DIN 1
501 : Input DIN 2
505 : Input DIN 3
504 : Input DIN 4
503 : Input DIN 5
502 : Input DIN 6
285 : EMCY stop active
269 :Torque fault CLOSE
Torque fault OPEN
Torque fault
Thermal fault
73
Page 74

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
Phase fault
Fieldbus DOUT 1
Fieldbus DOUT 2
Fieldbus DOUT 3
Fieldbus DOUT 4
Fieldbus DOUT 5
Fieldbus DOUT 6
Fieldbus DOUT 7
Fieldbus DOUT 8
Fieldbus DOUT 9
Fieldbus DOUT 10
Fieldbus DOUT 11
Fieldbus DOUT 12
FailState fieldbus
Handwheel active
PVST active
PVST error
PVST abort
Table 67: Profibus
Data length = 4 bytes
enum35-1
enum35-2
Redundancy
Behaviour Tx
Table 68: FO connection
Data length = 6 bytes
enum68-1
enum68-2
enum68-3
FO cable monitoring
FO cable topology
FO cable baud rate
ExplanationSetting valueDefaultAccessParametersTypeNo.
0R/W
1 : DP-V2 (SR)
4 : DP-V2 (FR)
2 : AUMA redundancy I
3 : AUMA redundancy II
0R/W
1 : Tx both channels
0R/W
1 : Off (final device)
1R
1 : Star/line
0R
1 : 9.6 kbit/s
2 : 19.2 kbit/s
3 : 38.4 kbit/s
4 : 45.45 kbit/s
5 : 57.6 kbit/s
6 : 93.75 kbit/s
7 : 115.2 kbit/s
8 : 187.5 kbit/s
9 : 500 kbit/s
10 : 1500 kbit/s
11 : 3000 kbit/s
12 : 6000 kbit/s
13 : 12000 kbit/s
Redundancy0 : None
Behaviour Tx0 : Tx active channel
ExplanationSetting valueDefaultAccessParametersTypeNo.
FO cable monitoring0 : On (not final device)
FO cable topology0 : Loop
FO cable baud rate0 : Auto
74
Page 75

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
Table 69: Actuator
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 12 bytes
enum36-1
enum36-2
enum36-3
enum36-4
U3236-5
Motor prot. mode
Closing rotation
Handwheel switch
Heater monitor
Heater monitor. time
0R/W
0R
0R
0R
0 : Auto
1 : Reset
1 : Counterclockwise rot.
1 : NC
2 : NO
0 : Function not active
1 : Function active
Min = 600 [0.1 s]3000R
Max = 36000 [0.1 s]
Signal behaviour of motor protection (thermal monitoring). Auto:
Automatic thermal fault reset
after cooling down. Reset: requires manual thermal fault reset after colling down via a RESET command.
Setting the direction of rotation0 :Clockwise rotation
Handwheel switch0 : Without
Montitoring the heater in actuator
Monitoring time of heater resp.
of the heating system (warning
"Wrn heater" is issued if a fault
has continuously occurred during this period)
Table 70: MWG
Data length = 44 bytes
U1637-1
U1637-2
U1637-3
U1637-4
U1637-5
U1637-6
U1637-7
U1637-8
U1637-9
U1637-10
U1637-11
U1637-12
U1637-13
U1637-14
Nom. torque CLOSE
Nom. torque OPEN
CLOSE min. angle
CLOSE min. torque
CLOSE max. angle
CLOSE max. torque
OPEN min. angle
OPEN min. torque
OPEN max. angle
OPEN max. torque
Correction CLOSE
Correction OPEN
Hysteresis torque
Dead band torque
Min = 0 [Nm]100R
Max = 65535 [Nm]
Min = 0 [Nm]100R
Max = 65535 [Nm]
Min = 65120R
Max = 125
Min = 20 [%]50R
Max = 80 [%]
Min = 8105R
Max = 122
Min = 80 [%]100R
Max = 125 [%]
Min = 129134R
Max = 189
Min = 20 [%]50R
Max = 80 [%]
Min = 132149R
Max = 247
Min = 80 [%]100R
Max = 125 [%]
Min = 80100R
Max = 120
Min = 80100R
Max = 120
Min = 05R
Max = 20
Min = 22R
Max = 20
ExplanationSetting valueDefaultAccessParametersTypeNo.
Setting the nominal torque
CLOSE in Nm
Setting the nominal torque
OPEN in Nm
Torque pivot point CLOSE
(minimum angle value)
Torque pivot point CLOSE
(minimum torque)
Torque pivot point CLOSE
(maximum angle value)
Torque pivot point CLOSE
(maximum torque)
Torque pivot point OPEN (minimum angle value)
Torque pivot point OPEN (minimum torque)
Torque pivot point OPEN (maximum angle value)
Torque pivot point OPEN (maximum torque)
Correction factor for torque
characteristic CLOSE
Correction factor for torque
characteristic OPEN
Hysteresis of torque switching
Dead band of torque switching
75
Page 76

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
U1637-15
U1637-16
U1637-17
U1637-18
U1637-19
U1637-20
Hysteresis limit
Torque adjust 0 point
Low limit T CLOSE
High limit T CLOSE
Low limit T OPEN
High limit T OPEN
Min = 03R
Max = 100
Min = 200R
Max = 20
Min = 0 [Nm]20R
Max = 65535 [Nm]
Min = 0 [Nm]100R
Max = 65535 [Nm]
Min = 0 [Nm]20R
Max = 65535 [Nm]
Min = 0 [Nm]100R
Max = 65535 [Nm]
Hysteresis of limit switching
Adjust zero point for torque
Low limit setting (initial value)
for tripping torque CLOSE
High limit setting (final value) for
tripping torque CLOSE
Low limit setting (initial value)
for tripping torque OPEN
High limit setting (final value) for
tripping torque OPEN
Table 71: Potentiometer
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 8 bytes
U1638-1
U1638-2
U1638-3
U1638-4
Low limit Uref
Low limit Upoti
Low limit Uspan
Hysteresis
Min = 0450R
Max = 1023
Min = 077R
Max = 1023
Min = 0610R/W
Max = 1023
Min = 02R
Max = 10
Low limit setting for Uref (monitoring the 5 V reference voltage
for potentiometer)
Low limit setting for Upote (limit
monitoring the potentiometer
wiper voltage)
Low limit setting of potentiometer signal range (monitoring the
potentiometer span)
Hysteresis of potentiometer
Table 72: Phase failure monitoring
Data length = 4 bytes
enum39-1
U1639-2
Adapt rotary dir.
Tripping time
Table 73: Switchgear
Data length = 2 bytes
U1640-1
Revers. prevent. time
Table 74: Monitoring functions
Data length = 18 bytes
enum41-1
enum41-2
enum41-3
enum41-4
Monitor heat. system
Monitor 24 V DC ext.
Monitor 24 V DC cust.
Monitor 24 V AC
ExplanationSetting valueDefaultAccessParametersTypeNo.
1R
0R
0R
1R/W
1R
0 : Function not active
1 : Function active
Min = 20 [0.1 s]100R/W
Max = 3000 [0.1 s]
Min = 1 [0.1 s]3R
Max = 300 [0.1 s]
0 : Function not active
1 : Function active
0 : Function not active
1 : Function active
0 : Function not active
1 : Function active
1 : Function active
Adapt rotary direction for counterclockwise rotating field
Duration until phase monitoring
trips
ExplanationSetting valueDefaultAccessParametersTypeNo.
Setting the reversing prevention
time
ExplanationSetting valueDefaultAccessParametersTypeNo.
Monitoring the heating system
in the AC
Monitoring external 24 V DC
(external supply)
Monitoring 24 V DC for customer (control voltage)
Monitoring 24 V AC0 : Function not active
76
Page 77

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
enum41-5
enum41-6
enum41-7
U3241-8
Monitor 24 V DC intern
PTC trip. monit.
RTC test
Heater monitor. time
1R
1 : Function active
0R
1 : Function active
1R
1 : Function active
Min = 600 [0.1 s]3000R
Max = 36000 [0.1 s]
Monitoring internal 24 V DC0 : Function not active
PTC tripping device monitoring0 :Function not active
RTC test0 : Function not active
Monitoring time of heater resp.
of the heating system (warning
"Wrn heater" is issued if a fault
has continuously occurred during this period)
Table 75: Service interface
ErläuterungSetting valueDefaultAccessParametersTypeNo.
Data length = 22 bytes
S2042-1
enum42-2
Device tag
Service op. mode
R/W
_GERAETETAG_
0R/W
0 : Control: LOCAL
1 : Control: LOC+REM
Information for actuator identification within the plant (e.g. KKS
designation - Power Plant Classification system)
Settings for service operation
mode. Allows actuator control
via remote operation of service
interface depending on operation modes LOCAL or REMOTE.
Table 76: Service functions
Data length = 4 bytes
I1645-1
I1645-2
Create factory settings
Reset factory settings
Table 77: General information
Data length = 48 bytes
BOOL44-1
BOOL44-2
enum44-3
U1644-4
U1644-5
Torque fault OPEN
Torque fault CLOSE
Selector switch
Actual position
Torque
ExplanationSetting valueDefaultAccessParametersTypeNo.
Min = 32768-1R
Max = 32767
Min = 32768-1R/W
Max = 32767
Min = 0R
Max = 1
Min = 0R
Max = 1
R
2 : Off
3 : Remote
Min = 0 [0.1 %]R
Max = 1000 [0.1 %]
Min = 0 [0.1 %]R
Max = 1000 [0.1 %]
Creates new factory settings by
adopting the current settings
Reset current settings to factory
settings
ExplanationSetting valueDefaultAccessParametersTypeNo.
Torque fault OPEN active
Torque fault CLOSE active
Selector switch1 : Local
Actual position
Torque
77
Page 78

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
enum44-6
DrvCmd444-7
BOOL44-8
BOOL44-9
BOOL44-10
BOOL44-11
BOOL44-12
BOOL44-13
BOOL44-14
Operation mode
Operation command
Running OPEN
Running CLOSE
Setpoint position
reached
Limit switch OPEN
Limit switch CLOSED
Torque sw. OPEN
Torque sw. CLOSED
R
1 : EMCY stop
2 : Off
3 : Service
4 : Local
5 : Interlock
6 : EMERGENCY
7 : Remote
8 : Remote II
9 : Fieldbus
10 : Disabled
Min = 0R
Max = 0xFFFFFFFF
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
Operation mode0 :Power Off
Operation command
Running OPEN
Running CLOSE
Setpoint position reached
Limit switch OPEN
Limit switch CLOSED
Torque switch OPEN
Torque switch CLOSED
Table 78: Positioner
Data length = 18 bytes
enum52-1
U1652-2
U1652-3
U3252-4
U3252-5
U3252-6
Adaptive behaviour
Setpoint position
Actual position
Outer dead band
Outer dead b. OPEN
Outer dead b. CLOSE
ExplanationSetting valueDefaultAccessParametersTypeNo.
0R/W
0 : Off
1 : Adaptive I
Min = 0 [0.1 %]R
Max = 1000 [0.1 %]
Min = 0 [0.1 %]R/W
Max = 1000 [0.1 %]
Min = 0 [0.1 %]R
Max = 1000 [0.1 %]
Min = 0 [0,1 %]R
Max = 1000 [0,1 %]
Min = 0 [0,1 %]R
Max = 1000 [0,1 %]
Setting the adaptive behaviour
of the positioner
Setpoint position
Actual position
Outer dead band
Outer dead b. OPEN
Outer dead b. CLOSE
78
Page 79

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
U3252-7
U3252-8
Inner dead b. OPEN
Inner dead b. CLOSE
Min = 0 [0,1 %]R
Max = 1000 [0,1 %]
Min = 0 [0,1 %]R
Max = 1000 [0,1 %]
Inner dead b. OPEN
Inner dead b. CLOSE
Table 79: On time monitoring
ErläuterungSetting valueDefaultAccessParametersTypeNo.
Data length = 8 bytes
U3253-1
U3253-2
On time/h
Starts/h
Min = 0R
Max = 3600
Min = 0R
Max = 3600
Current on time/h
Current starts/h
Table 80: Process controller
ErläuterungEinstellwertDefaultZugriffParameterTypNr.
Data lenght= 8 Bytes
U1673-1
U1673-2
U3273-3
Process setpoint
Actual process value
Op. com. PID contr.
0 [0,0 %]R
1000 [0,0 %]
0 [0,0 %]R
1000 [0,0 %]
0R
0
Process setpoint of PID controller
Actual process value of PID
controller
Op. com. PID contr.
Table 81: Bluetooth
Data length = 62 bytes
S2054-1
S2054-2
S2054-3
enum54-4
Device tag
Bluetooth address
Bluetooth add.partner
Bluetooth
Table 82: Position transmitter
Data length = 10 bytes
U1669-1
U1669-2
U1669-3
Low limit Uspan
Volt.level diff. potent.
Raw val. pos. OPEN
R/W
_GERAETETAG_
XX:XX:XX:XX:XX:XXR
XX:XX:XX:XX:XX:XXR
1R/W
0 : Function not active
1 : Function active
Min = 0610R/W
Max = 1023
Min = 0R
Max = 1023
0R
65535
ExplanationSetting valueDefaultAccessParametersTypeNo.
Information for actuator identification within the plant (e.g. KKS
designation - Power Plant Classification system)
Bluetooth address (BD_ADDR)
of controls
Bluetooth address (BD_ADDR)
of the Bluetooth partner
Activate/deactivate Buetooth interface
ExplanationSetting valueDefaultAccessParametersTypeNo.
Low limit setting of potentiometer signal range (monitoring the
potentiometer span)
Current voltage level difference
of the potentiometer.
Raw value end position OPEN
79
Page 80

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
U1669-4
U1669-5
Raw val. pos. CLOSED
Potent. raw value /mV
0R
65535
0R
5000 [mV]
Raw value end position
CLOSED
Potentiometer raw value /mV
Table 83: Profibus DP1
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 15 bytes
U856-1
enum56-2
enum55-3
enum55-4
enum55-5
enum55-6
enum55-7
enum55-8
DP1 slave address
DP1 baud rate
DP1 watchdog status
DP1 Profibus status
DP1 GC clear
DP1 data length 0
DP1 GC freeze
DP1 GC sync
R
R
R
R
R
R
R
Min = 0R
Max = 126
0 : 12 Mbit/s
1 : 6 Mbit/s
2 : 3 Mbit/s
3 : 1.5 Mbit/s
4 : 500 kbit/s
5 : 187.5 kbit/s
6 : 93.75 kbit/s
7 : 45.45 kbit/s
8 : 19.20 kbit/s
9 : 9.6 kbit/s
15 : Not available
0 : Baud search
1 : Baud control
2 : DP control
0 : Wait Prm
1 : Wait Cfg
2 : Data Ex
0 : GC Clear inactive
1 : GC Clear active
0 : Data length 0 inactive
1 : Data length 0 active
0 : GC Freeze inactive
1 : GC Freeze active
0 : GC Sync inactive
1 : GC Sync active
Profibus DP channel 1; current
slave address
Profibus DP channel 1; baud
rate
Profibus DP channel 1; watchdog status
Profibus DP channel 1; Profibus
status
Profibus DP channel 1; Global
Control Clear
Profibus DP channel 1; data
length 0
Profibus DP channel 1; Global
Control Freeze
Profibus DP channel 1; Global
Control Sync
Table 84: Profibus DP2
Data length = 15 bytes
U856-1
enum56-2
80
DP2 slave address
DP2 baud rate
ErläuterungSetting valueDefaultAccessParametersTypeNo.
Min = 0R
Max = 126
R
0 : 12 Mbit/s
1 : 6 Mbit/s
2 : 3 Mbit/s
3 : 1.5 Mbit/s
4 : 500 kbit/s
5 : 187.5 kbit/s
6 : 93.75 kbit/s
7 : 45.45 kbit/s
8 : 19.20 kbit/s
9 : 9.6 kbit/s
15 : Not available
Profibus DP channel 2; current
slave address
Profibus DP channel 2: baud
rate
Page 81

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ErläuterungSetting valueDefaultAccessParametersTypeNo.
enum56-3
enum56-4
enum56-5
enum56-6
enum56-7
enum56-8
DP2 watchdog status
DP2 Profibus status
DP2 GC clear
DP2 data length 0
DP2 GC freeze
DP2 GC sync
R
R
R
R
R
R
0 : Baud search
1 : Baud control
2 : DP control
0 : Wait Prm
1 : Wait Cfg
2 : Data Ex
0 : GC Clear inactive
1 : GC Clear active
0 : Data length 0 inactive
1 : Data length 0 active
0 : GC Freeze inactive
1 : GC Freeze active
0 : GC Sync inactive
1 : GC Sync active
Profibus DP channel 2; watchdog status
Profibus DP channel 2: Profibus
status
Profibus DP channel 2: Global
Control Clear
Profibus DP channel 2; data
length 0
Profibus DP channel 2: Global
Control Freeze
Profibus DP channel 2; Global
Control Sync
Table 85: Profibus details
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 16 bytes
BOOL57-1
BOOL57-2
BOOL57-3
BOOL57-4
enum57-5
enum57-6
enum57-7
enum57-8
enum57-9
enum57-10
DP-V1 control
DP-V1 active
Channel 1 active
Channel 2 active
Primary
Backup
Profibus ID no.
Redundancy
DP-V1 (SetPrm)
Alarms (SetPrm)
R
R
3151R
0R/W
R
R
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
Min = 0R
Max = 1
1 : Channel 1
2 : Channel 2
1 : Channel 1
2 : Channel 2
3261 : 0x0CBD
3191 : 0x0C77
1 : DP-V2 (SR)
4 : DP-V2 (FR)
2 : AUMA redundancy I
3 : AUMA redundancy II
0 : Deactivated
1 : Activated
0 : Deactivated
1 : Activated
DP-V1 control active
DP-V1 connection active
Channel 1 is the active operation command channel
Channel 2 is active operation
command channel
Primary0 :None
Backup0 : None
Profibus ID no.3151 : 0x0C4F
Redundancy0 : None
DP-V1 function in the parameter
telegram (SetPrm)
Signalling alarms in the parameter telegram (SetPrm)
81
Page 82

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParametersTypeNo.
enum57-11
enum57-12
Redundancy (SetPrm)
Behaviour Tx
R
0R
0 : Deactivated
1 : Activated
1 : Tx both channels
Activation of the redundancy
function in the parameter telegram (SetPrm)
Behaviour Tx0 : Tx active channel
Table 86: FO
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 28 bytes
enum58-1
enum58-2
U1658-3
enum58-4
S2058-5
FOC level channel 1
FOC level channel 2
FOC RS-485 error
FO cable baud rate
FOC FPGA version
R
R
R
0R
0 : Chanel deactivated
1 : Level bad!
2 : Level critical, no Rx
3 : Level critical, Rx
4 : Level good, no Rx
5 : Level good, Rx
0 : Chanel deactivated
1 : Level bad!
2 : Level critical, no Rx
3 : Level critical, Rx
4 : Level good, no Rx
5 : Level good, Rx
Min = 0R
Max = 1
1: 9.6 kbit/s
2: 19.2 kbit/s
3: 38.4 kbit/s
4: 45.45 kbit/s
5: 57.6 kbit/s
6: 93.75 kbit/s
7: 115.2 kbit/s
8: 187.5 kbit/s
9: 500.0 kbit/s
10: 1500 kbit/s
11: 3000 kbit/s
12: 6000 kbit/s
13: 12000 kbit/s
FO cable receive level channel
1
FO cable receive level channel
2
RS-485 format error of FOC
sub-assembly
FO cable baud rate0: Invalid
FO cables FPGA version
Table 87: Operational info total
Data length = 80 bytes
U3259-1
U3259-2
U3259-3
U3259-4
U3259-5
82
Motor running time
Motor starts
Thermal fault
Torque fault CLOSE
Torque fault OPEN
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
ExplanationSetting valueDefaultAccessParameterTypeNo.
Motor running time throughout
the lifetime
Number of motor starts
throughout the lifetime
Number of thermal faults
throughout the lifetime
Number torque faults CLOSE
throughout the lifetime
Number of torque faults OPEN
throughout the lifetime
Page 83

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParameterTypeNo.
U3259-6
U3259-7
U3259-8
U3259-9
U3259-10
U3259-11
U3259-12
I3259-13
I3259-14
I3259-15
I3259-16
I3259-17
I3259-18
I3259-19
I3259-20
Limit trip CLOSE
Limit trip OPEN
Torque trip CLOSE
Torque trip OPEN
On time warning 1
On time warning 2
System starts
Max. temp. controls
Min. temp. controls
Max. temp. motor
Min. temp. motor
Max. temp. gearbox
Min. temp. gearbox
Max. temp. MWG
Min. temp. MWG
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Number of limit switch CLOSE
trippings throughout the lifetime
Number of limit switch OPEN
trippings throughout the lifetime
Number of torque switch
CLOSE trippings throughout the
lifetime
Number of torque switch OPEN
trippings throughout the lifetime
Total number of all time intervals
throughout the lifetime during
which an on time warning was
indicated.
Max. time span during which an
on time warning was indicated.
Number of AUMATIC system
starts throughout the lifetime
Maximum temperature of controls
Minimum temperature of controls
Maximum temperature of motor
Minimum temperature of motors
Maximum temperature of gearbox
Minimum temperature of gearbox
Maximum temperature of MWG
Minimum temperature of MWG
Table 88: Operational info
Data length = 82 bytes
U3260-1
U3260-2
U3260-3
U3260-4
U3260-5
U3260-6
U3260-7
U3260-8
Motor running time
Motor starts
Thermal fault
Torque fault CLOSE
Torque fault OPEN
Limit trip CLOSED
Limit trip OPEN
Torque trip CLOSE
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
ExplanationSetting valueDefaultAccessParameterTypeNo.
Motor running time
Number of motor starts
Number of thermal faults
Number torque faults CLOSE
Number of torque faults OPEN
Number of limit switch CLOSED
trippings
Number of limit switch OPEN
trippings
Number of torque switch
CLOSE trippings
83
Page 84

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
ExplanationSetting valueDefaultAccessParameterTypeNo.
U3260-9
U3260-10
U3260-11
U3260-12
I3260-13
I3260-14
I3260-15
I3260-16
I3260-17
I3260-18
I3260-19
I3260-20
I1660-21
Torque trip OPEN
On time warning 1
On time warning 2
System starts
Max. tem. controls
Min. temp. controls
Max. temp. motor
Min. temp. motor
Max. temp. gearbox
Min. temp. gearbox
Max. temp. MWG
Min. temp. MWG
Reset operating data
R/W
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = 0 [s]R
Max = 4294967295 [s]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Min = –100 [°C]R
Max = +150 [°C]
Number of torque switch OPEN
trippings
Total number of all time intervals
during which an on time warning
was indicated.
Max. time span during which an
on time warning was indicated.
Number of AUMATIC system
starts
Maximum temperature of controls
Minimum temperature of controls
Maximum temperature of motor
Minimum temperature of motor
Maximum temperature of gearbox
Minimum temperature of gearbox
Maximum temperature of MWG
Minimum temperature of MWG
Value = 1:Deleting operating
data
Table 89: Event report
Data length = 10 bytes
U1661-1
U1661-2
U1661-3
enum61-4
File size
Save interval
Buffer size
System event filter
ExplanationSetting valueDefaultAccessParametersTypeNo.
Min = 0548R
Max = 1024
Min = 100050000R
Max = 65535
Min = 1050R
Max = 100
31R
0 : Commands
1 : Parameterization
2 : Enable processes
3 : System events
4 : Simulation
File size of event report
Save interval for event data from
buffer
Max. number of events in the
buffer
The event filter for System
defines which system events are
to be recorded into the event
report.
84
Page 85

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
enum61-5
Event filter for Events
93223R
0 : PVST status
1 : Warnings
2 : Fault
3 : Not ready REMOTE
4 : Device status
5 : Configuration warning
6 : Out of specification
7 : Function check
8 : Maintenance required
9 : Failure
10 : Configuration error
11 : Hydraulics error
12 : Wrong oper. com-
mand
13 : Internal error
14 : Internal warning
15 : Fieldbus status
16 : Hydraulics warning
17 : Failure (Cfg)
18 : Fault (Cfg)
19 : Warnings (Cfg)
20 : Not ready REMOTE
(Cfg)
21 : Config. error RE-
MOTE
22 : Collective signal 23
23 : SIL status
24 : Collective signal 25
25 : Collective signal 26
26 : Collective signal 27
27 : Collective signal 28
28 : FOC status
29 : Service 1
30 : Service 2
31 : Service 3
The event filter for Events is
used to define which collective
signals are to be recorded into
the event report. As soon as the
memory is full, the oldest events
are overwritten.
85
Page 86

Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
Table 90: Characteristics
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 62 bytes
S2065-1
S2065-2
S2065-3
U1665-4
Tag torque-position 1
Tag torque-position 2
Tag torque-position 3
Interval position-time
_ REF 1 _R/W
_ REF 2 _R/W
_ REF 3 _R/W
Min = 1 [s]10R/W
Max = 3600 [s]
Tag for torque-position characteristic 1
Tag for torque-position characteristic 2
Tag for torque-position characteristic 3
Interval position-time
Table 91: Device temperatures
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 8 bytes
I1662-1
I1662-2
I1662-3
I1662-4
Temp. controls
Temp. control unit
Temp. motor
Temp. gearbox
Min = -60 [C°]R
Max = 150 [C°]
Min = -60 [C°]R
Max = 150 [C°]
Min = -60 [C°]R
Max = 150 [C°]
Min = -60 [C°]R
Max = 150 [C°]
Temperature of the controls
Temperature of the control unit
Temp. motor
Temperature of the gearbox
Table 92: Controls version
Data length = 4 bytes
enum63-1
enum63-2
enum63-3
Ex version
Hydraulic version
SIL version
Table 93: Hardware equipment
Data length = 44 bytes
enum64-1
enum64-2
enum64-3
enum64-4
enum64-5
enum64-6
LC (target)
LC
Logic (target)
Logic
Pos. transm. (target)
Position transmitter
ExplanationSetting valueDefaultAccessParametersTypeNo.
0R
0R
0R
1R
0R
1R
0R
1R
0R
0 : Off
1 : On
0 : Off
1 : On
0: Off
1: On
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : None
1 : Potentiometer
2 : RWG
4 : MWG
0 : None
1 : Potentiometer
2 : RWG
4 : MWG
Version for explosion-proof applications
Version for applications with hydraulic actuators
ExplanationSetting valueDefaultAccessParametersTypeNo.
Target configuration of 'LC'
(Local Controls/ A9) electronics
sub-assembly
'LC' (Local Controls) electronics
sub-assembly (A9)
'Logic' (target configuration)
electronics sub-assembly (A2)
'Logic' electronics sub-assembly
(A2)
Target configuration of position
transmitter
Type of position transmitter
used
86
Page 87

Actuator controls
AC 01.2/ACExC 01.2 Profibus DP Appendix
ExplanationSetting valueDefaultAccessParametersTypeNo.
enum64-7
enum64-8
enum64-9
enum64-10
enum64-11
enum64-12
enum64-13
enum64-14
enum64-15
enum64-16
enum64-17
enum64-18
enum64-19
enum64-20
enum64-21
enum64-22
enum64-23
MCM (target)
MCM
PSO (target)
PSO
I/O interface (target)
Logic
I/O interface 2 (target)
I/O interface 2
Fieldbus (target)
Ex version
MWG (target)
MWG
FO cables (target)
Redundancy (target)
Redundancy
FO cables
FOC Ex (target)
1R
0R
0R
0R
1R
0R
0R
0R
0R
0R
0R
0R
0R
0R
0R
0R
0R
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : No fieldbus
1 : Profibus
2 : Available
0 : No fieldbus
1 : Profibus
2 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Available
0 : Not available
1 : Red. for line and loop
2 : Red. for line and loop
0 : Not available
1 : Red. for line and loop
2 : Red. for line and loop
1 : Available
0 : Without FOC Ex
1 : FOC Ex for line/star
2 : FOC Ex for ring
Target configuration of 'MCM'
(Motor Control and Monitoring /
A52) electronics sub-assembly
'MCM' (Motor Control and Monitoring / A52) electronics subassembly
Target configuration of 'PSO'
(Power Supply Options ( A52.1)
electronics sub-assembly
'PSO' (Power Supply Options /
A52.1) electronics sub-assembly
Target configuration of 'I/O interface' electronics sub-assembly
(A1.0)
'Logic' electronics sub-assembly
(A2)
Target configuration of 'I/O interface 2' electronics sub-assembly
(A1.1)
'I/O interface 2' electronics subassembly (A1.1)
Target configuration of 'Fieldbus'
electronics sub-assembly (A1.8)
Version for explosion-proof applications
Target configuration of 'MWG'
(magnetic limit and torque
transmitter / B6) electronics subassembly
'MWG' (magnetic limit and
torque transmitter / B6) electronics sub-assembly
Default configuration of 'FO
cables' electronics sub-assembly
Redundancy arrangement of
fieldbus interface (hardware)
Redundancy arrangement of
fieldbus interface (hardware)
Electronics sub-assembly 'FOC'0 : Not available
Target configuration of Ex electrical connection
87
Page 88

Actuator controls
Index AC 01.2/ACExC 01.2 Profibus DP
S
Index
A
Appendix 58
AUMA redundancy 40
B
Bus access 6
Bus address 10 , 45
C
Certification 8
Commissioning 4 , 8
Communication monitoring 18
Connection monitoring 18
Control Clear telegram 18
Corrective action 53
D
Data interface description 20
Device Master Data (GSD) 8
Device types 7
Diagnostics 54
Directives 4
DP-V2 functions 44
Safety instructions 4
Safety instructions/warnings 4
Signals 20
Slave address 10 , 45 , 54
Standards 4
System redundancy (SR) 44
T
Technical data 56
Telegram 9
Time stamp 46
Time synchronisation 46
Transfer mode 6
Troubleshooting 53
U
User parameters 11
V
View Objects 61
F
Fail Safe telegram 18
Flying redundancy (FR) 44
Functionality 6
I
I & M functions 18
ID number 8
Input data 20
M
Maintenance 4
Multiport valve function 37
O
Operation 4
Output data 34
P
Parameters (tables) 61
Parameter setting 9
Process alarm 49
Process representation input 20
process representation output 34
Profibus DP-V1 index 61
Profibus DP-V1 slot 61
Protective functions 7
Protective measures 4
Q
Qualification of staff 4
R
Redundancy 40 , 44
88
Page 89

AUMA worldwide
Europe
AUMA Riester GmbH & Co. KG
Plant Müllheim
DE 79373 Müllheim
Tel +49 7631 809 - 0
riester@auma.com
www.auma.com
Plant Ostfildern-Nellingen
DE 73747 Ostfildern
Tel +49 711 34803 - 0
riester@wof.auma.com
Service-Center Bayern
DE 85386 Eching
Tel +49 81 65 9017- 0
Riester@scb.auma.com
Service-Center Köln
DE 50858 Köln
Tel +49 2234 2037 - 900
Service@sck.auma.com
Service-Center Magdeburg
DE 39167 Niederndodeleben
Tel +49 39204 759 - 0
Service@scm.auma.com
AUMA-Armaturenantriebe Ges.m.b.H.
AT 2512 Tribuswinkel
Tel +43 2252 82540
office@auma.at
www.auma.at
AUMA BENELUX B.V. B. A.
BE 8800 Roeselare
Tel +32 51 24 24 80
office@auma.be
www.auma.nl
ProStream Group Ltd.
BG 1632 Sofia
Tel +359 2 9179-337
valtchev@prostream.bg
www.prostream.bg
OOO “Dunkan-Privod”
BY 220004 Minsk
Tel +375 29 6945574
belarus@auma.ru
www.zatvor.by
AUMA (Schweiz) AG
CH 8965 Berikon
Tel +41 566 400945
RettichP.ch@auma.com
AUMA Servopohony spol. s.r.o.
CZ 250 01 Brandýs n.L.-St.Boleslav
Tel +420 326 396 993
auma-s@auma.cz
www.auma.cz
GRØNBECH & SØNNER A/S
DK 2450 København SV
Tel +45 33 26 63 00
GS@g-s.dk
www.g-s.dk
IBEROPLAN S.A.
ES 28027 Madrid
Tel +34 91 3717130
iberoplan@iberoplan.com
AUMA Finland Oy
FI 02230 Espoo
Tel +358 9 5840 22
auma@auma.fi
www.auma.fi
AUMA France S.A.R.L.
FR 95157 Taverny Cedex
Tel +33 1 39327272
info@auma.fr
www.auma.fr
AUMA ACTUATORS Ltd.
GB Clevedon, North Somerset BS21 6TH
Tel +44 1275 871141
mail@auma.co.uk
www.auma.co.uk
D. G. Bellos & Co. O.E.
GR 13673 Acharnai, Athens
Tel +30 210 2409485
info@dgbellos.gr
APIS CENTAR d. o. o.
HR 10437 Bestovje
Tel +385 1 6531 485
auma@apis-centar.com
www.apis-centar.com
Fabo Kereskedelmi és Szolgáltató Kft.
HU 8800 Nagykanizsa
Tel +36 93/324-666
auma@fabo.hu
www.fabo.hu
Falkinn HF
IS 108 Reykjavik
Tel +00354 540 7000
os@falkinn.is
www.falkinn.is
AUMA ITALIANA S.r.l. a socio unico
IT 20023 Cerro Maggiore (MI)
Tel +39 0331 51351
info@auma.it
www.auma.it
AUMA BENELUX B.V.
LU Leiden (NL)
Tel +31 71 581 40 40
office@auma.nl
NB Engineering Services
MT ZBR 08 Zabbar
Tel + 356 2169 2647
nikibel@onvol.net
AUMA BENELUX B.V.
NL 2314 XT Leiden
Tel +31 71 581 40 40
office@auma.nl
www.auma.nl
SIGUM A. S.
NO 1338 Sandvika
Tel +47 67572600
post@sigum.no
AUMA Polska Sp. z o.o.
PL 41-219 Sosnowiec
Tel +48 32 783 52 00
biuro@auma.com.pl
www.auma.com.pl
AUMA-LUSA Representative Office, Lda.
PT 2730-033 Barcarena
Tel +351 211 307 100
geral@aumalusa.pt
SAUTECH
RO 011783 Bucuresti
Tel +40 372 303982
office@sautech.ro
OOO PRIWODY AUMA
RU 141402 Khimki, Moscow region
Tel +7 495 221 64 28
aumarussia@auma.ru
www.auma.ru
OOO PRIWODY AUMA
RU 125362 Moscow
Tel +7 495 787 78 21
aumarussia@auma.ru
www.auma.ru
ERICHS ARMATUR AB
SE 20039 Malmö
Tel +46 40 311550
info@erichsarmatur.se
www.erichsarmatur.se
ELSO-b, s.r.o.
SK 94901 Nitra
Tel +421 905/336-926
elsob@stonline.sk
www.elsob.sk
Auma Endüstri Kontrol Sistemleri Limited
Sirketi
TR 06810 Ankara
Tel +90 312 217 32 88
info@auma.com.tr
AUMA Technology Automations Ltd
UA 02099 Kiev
Tel +38 044 586-53-03
auma-tech@aumatech.com.ua
Africa
Solution Technique Contrôle Commande
DZ Bir Mourad Rais, Algiers
Tel +213 21 56 42 09/18
stcco@wissal.dz
A.T.E.C.
EG Cairo
Tel +20 2 23599680 - 23590861
contactus@atec-eg.com
SAMIREG
MA 203000 Casablanca
Tel +212 5 22 40 09 65
samireg@menara.ma
MANZ INCORPORATED LTD.
NG Port Harcourt
Tel +234-84-462741
mail@manzincorporated.com
www.manzincorporated.com
89
Page 90

AUMA worldwide
AUMA South Africa (Pty) Ltd.
ZA 1560 Springs
Tel +27 11 3632880
aumasa@mweb.co.za
America
AUMA Argentina Rep.Office
AR Buenos Aires
Tel +54 11 4737 9026
contacto@aumaargentina.com.ar
AUMA Automação do Brazil ltda.
BR Sao Paulo
Tel +55 11 4612-3477
contato@auma-br.com
TROY-ONTOR Inc.
CA L4N 8X1 Barrie, Ontario
Tel +1 705 721-8246
troy-ontor@troy-ontor.ca
AUMA Chile Representative Office
CL 9500414 Buin
Tel +56 2 821 4108
aumachile@auma-chile.cl
Ferrostaal de Colombia Ltda.
CO Bogotá D.C.
Tel +57 1 401 1300
dorian.hernandez@ferrostaal.com
www.ferrostaal.com
Transcontinental Trading Overseas SA.
CU Ciudad Habana
Tel +53 7 208 9603 / 208 7729
tto@ttoweb.com
AUMA Región Andina & Centroamérica
EC Quito
Tel +593 2 245 4614
auma@auma-ac.com
www.auma.com
Corsusa International S.A.C.
PE Miraflores - Lima
Tel +511444-1200 / 0044 / 2321
corsusa@corsusa.com
www.corsusa.com
Control Technologies Limited
TT Marabella,Trinidad,W.I.
Tel + 1 868 658 1744/5011
www.ctltech.com
AUMA Actuators Middle East
BH 152 68 Salmabad
Tel +97 3 17896585
salesme@auma.com
Mikuni (B) Sdn. Bhd.
BN KA1189 Kuala Belait
Tel + 673 3331269 / 3331272
mikuni@brunet.bn
AUMA Actuators (China) Co., Ltd
CN 215499 Taicang
Tel +86 512 3302 6900
mailbox@auma-china.com
www.auma-china.com
PERFECT CONTROLS Ltd.
HK Tsuen Wan, Kowloon
Tel +852 2493 7726
joeip@perfectcontrols.com.hk
PT. Carakamas Inti Alam
ID 11460 Jakarta
Tel +62 215607952-55
auma-jkt@indo.net.id
AUMA INDIA PRIVATE LIMITED.
IN 560 058 Bangalore
Tel +91 80 2839 4656
info@auma.co.in
www.auma.co.in
ITG - Iranians Torque Generator
IR 13998-34411 Teheran
+982144545654
info@itg-co.ir
Trans-Jordan Electro Mechanical Supplies
JO 11133 Amman
Tel +962 - 6 - 5332020
Info@transjordan.net
AUMA JAPAN Co., Ltd.
JP 211-0016 Kawasaki-shi, Kanagawa
Tel +81-(0)44-863-8371
mailbox@auma.co.jp
www.auma.co.jp
DW Controls Co., Ltd.
KR 153-702 Gasan-dong, GeumChun-Gu,,
Seoul
Tel +82 2 2624 3400
import@actuatorbank.com
www.actuatorbank.com
AUMA Malaysia Office
MY 70300 Seremban, Negeri Sembilan
Tel +606 633 1988
sales@auma.com.my
Mustafa Sultan Science & Industry Co LLC
OM Ruwi
Tel +968 24 636036
r-negi@mustafasultan.com
FLOWTORK TECHNOLOGIES
CORPORATION
PH 1550 Mandaluyong City
Tel +63 2 532 4058
flowtork@pldtdsl.net
M & C Group of Companies
PK 54000 Cavalry Ground, Lahore Cantt
Tel +92 42 3665 0542, +92 42 3668 0118
sales@mcss.com.pk
www.mcss.com.pk
Petrogulf W.L.L
QA Doha
Tel +974 44350151
pgulf@qatar.net.qa
AUMA Saudi Arabia Support Office
SA 31952 Al Khobar
Tel + 966 5 5359 6025
Vinod.Fernandes@auma.com
AUMA ACTUATORS (Singapore) Pte Ltd.
SG 569551 Singapore
Tel +65 6 4818750
sales@auma.com.sg
www.auma.com.sg
NETWORK ENGINEERING
SY Homs
+963 31 231 571
eyad3@scs-net.org
Sunny Valves and Intertrade Corp. Ltd.
TH 10120 Yannawa, Bangkok
Tel +66 2 2400656
mainbox@sunnyvalves.co.th
www.sunnyvalves.co.th
Top Advance Enterprises Ltd.
TW Jhonghe City,Taipei Hsien (235)
Tel +886 2 2225 1718
support@auma-taiwan.com.tw
www.auma-taiwan.com.tw
AUMA ACTUATORS INC.
US PA 15317 Canonsburg
Tel +1 724-743-AUMA (2862)
mailbox@auma-usa.com
www.auma-usa.com
Suplibarca
VE Maracaibo, Estado, Zulia
Tel +58 261 7 555 667
suplibarca@intercable.net.ve
Asia
AUMA Actuators UAE Support Office
AE 287 Abu Dhabi
Tel +971 26338688
Nagaraj.Shetty@auma.com
90
Al-Arfaj Engineering Co WLL
KW 22004 Salmiyah
Tel +965-24817448
info@arfajengg.com
www.arfajengg.com
TOO “Armaturny Center”
KZ 060005 Atyrau
Tel +7 7122 454 602
armacentre@bk.ru
Network Engineering
LB 4501 7401 JBEIL, Beirut
Tel +961 9 944080
nabil.ibrahim@networkenglb.com
www.networkenglb.com
AUMA Vietnam Hanoi RO
VN Hanoi
+84 4 37822115
chiennguyen@auma.com.vn
Australia
BARRON GJM Pty. Ltd.
AU NSW 1570 Artarmon
Tel +61 2 8437 4300
info@barron.com.au
www.barron.com.au
Page 91

AUMA worldwide
91
Page 92

AUMA Riester GmbH & Co. KG
P.O.Box 1362
DE 79373 Muellheim
Tel +49 7631 809 - 0
Fax +49 7631 809 - 1250
riester@auma.com
www.auma.com
For detailed information on AUMA products refer to the Internet: www.auma.com
Y004.942/003/en/1.14
 Loading...
Loading...