

Page 1
AUBER INSTRUMENTS WWW.AUBERINS.COM
Instruction Manual
SYL-2362B PID TEMPERATURE CONTROLLER
INSTRUCTION MANUAL
Version 2.6
Caution
This controller is intended to control equipment under normal operating
conditions. If failure or malfunction o f it cou ld lea d to an abnorm al ope rating
condition that could cause person al injury or damage to the equipment o r
other property, other devices (limit or safety contro ls) or systems (alarm or
supervisory) intended to warn of or protect against failu re or malfunction of
the controller must be incorporated into and maintained as part of the
control system.
Installing the rubber gasket supplied will protect the controller front panel
from dust and water splash (IP54 rating). Additional protection is needed
for higher IP rating.
This cont roller carries a 9 0 - d a y w a r r a n t y . This warranty is limited to the
controller only.
1. Features
The PID control with artificial intelligent enhancement for precision
temperature control.
Auto-tuning function can find the best PID parameter automatically.
On/off control mode for refrigerator, motor and solenoid valve control
application.
Bumpless transfer between Auto and Manual control.
Limit control for safety protection and special applications.
The output can be set for SSR output control or relay contactor control by
the user.
Two contact relays can be configured as one PID and one alarm output,
dual alarm outputs, or dual On/off control.
Support 10 different types of commonly used temperature sensor inputs.
3. Front Panel and Operation
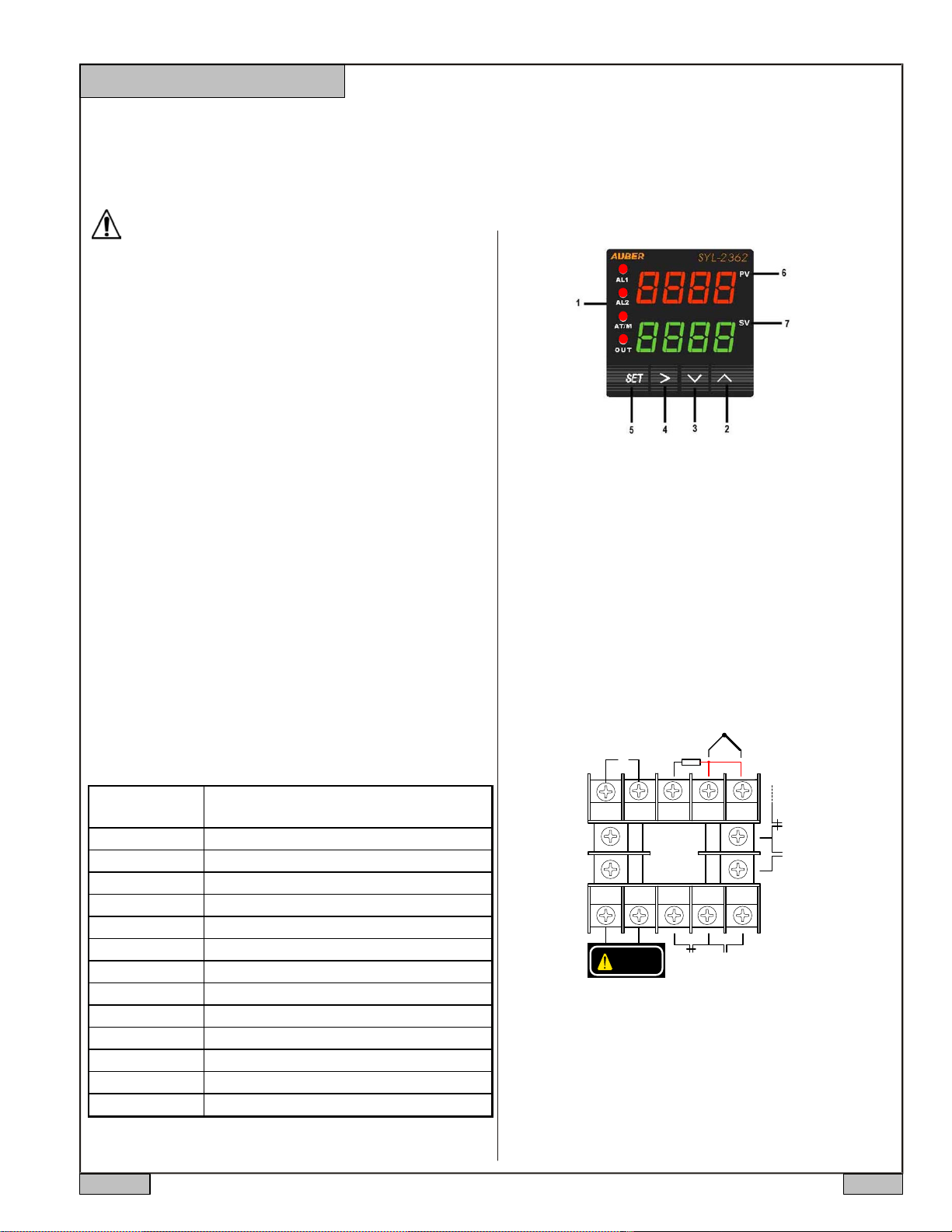
Figure 1. Front panel
① AL-1 Relay J1 output indicator
AL-2 Relay J2 output indicator
AT/M- On for manual mode. Blinking during auto-tuning process
OUT- SSR output indicator
② Value increment/Select next parameter
③ Value decrement/Select previous parameter
④ Auto tuning/Digit shift
⑤ Set/Confirm/Manual Auto switching/Reset (for Limit control mode)
⑥ Measured temperature, or, Process Value (PV)
⑦ Set temperature, or, Set Value (SV)
4. Terminal Wiring (back view)
2. Specification
I n p ut typ e
Inpu t range S ee tabl e 2
Display Dual lines, four digits, °F or °C
Display res olution 1°C, 1°F; or 0.1°C, 0.1°F with Pt100
Acc uracy ±0.2% or ±1 unit of full input range
Control m o de P ID, On-off. Li mit, Manual
Output mode Relay contact: 3A at 240V AC, SS R : 8VDC, 40 mA.
Al ar m P rocess high/low alarm
Power consumption <2 Watt
Power supply 12-30V D C, 12- 18V A C (with diode)
Sample rate 4 samples/sec
Operating condition 0 ~ 50 °C, ≤85% RH
Mounting cutout 45 x 45 m m
Dim ension 48x48x75mm (1/16 D IN)
Thermocouple (TC): K, E, S, R, J, T, B, WRe3/25
RTD(Res i s tanc e temperature detector): Pt100, Cu50
SSR
-
+
67
1
+
Power
Input
4.1 Sensor connection
4.1.1 Thermocouple
The thermocouple should be connected to terminals 9 and 10. Make sure that
polarity is correct. There are two commonly used color codes for the K type
thermocouple. US color code uses yellow (positive) and red (negative).
Imported DIN color code uses red (positive) and green/blue (negative). The
temperature reading will decrease as temperature increases if the connection
is reversed.
8910
11
12
2
3
-
Figure 2. Wiring diagram
TC
RTD
+-
13
14
45
NC NO
J1
RRW
to terminal 11
NC
J2
NO
2018.07 P1/5
Page 2
AUBER INSTRUMENTS
WWW.AUBERINS.COM
Instruction Manual
4.1.2 RTD sensor
For a three-wire RTD with standard DIN color c ode, the t wo red wires should be
connected to the terminals 9 an d 1 0 . The white wire should be connected to
terminal 8.
For a two-wire RTD, the wires should be connected to terminals 8 and 9 . Jump
a wire between terminals 9 and 10.
Set controller input type, Inty, to P100 (1° resolution) or P10.0 (0.1° resolution).
4.2 Power to the controller
This controller can be powered by 1 2 - 3 0 V DC or 12-18 V AC. The power input
cables are connected to terminal 1 & 2. For DC power source, t e r m i n a l 1 i s
positive and 2 is negative. For AC power source, a diode is needed to be wired
in serial with the AC power source to th e controller terminals (to convert AC to
DC).
4.3 Control output connection
Two control output options are offered by th is controller. ( 1) The SSR control
output provides a n 8V DC signal that can control up to 4 SSRs in parallel. (2)
The J 2 relay output can be used to turn on a contactor or a sole noid valve. It
can also drive a small heater directly if the heater draws <3 Ampere. F o r
application that needs two control outputs, such as one for heating and other for
cooling, J1 relay can be used for the second output with on/off control mode.
Please note J1 can’t be used for main control output. Both J1 and J2 can be
used as alarm output if they are not used as control output.
4.3.1 Connecting the load through SSR
Connect the terminal 7 to the negative inpu t and terminal 6 to the positive input
of the SSR. Set the system output configuration , o uty, to 2, 3 or 6 - de pending
on the control mode used. See Figure 10 for details.
4.3.2 Connecting the load through the built-in relay
J1 relay is for alarm output only. Assuming the controller and the load are
powered by a 12V DC source, jump a wire between terminals 2 and 14. Connect
terminal 13 to on e lead of the l o ad and t erminal 1 to the other lead of the load.
Set the system output configuration, o uty, to 1, 4, or 5 - depending on the
control mode used. Please see Figure 11, 12 and 13 for examples.
4.4 For first time users without prior experience with PID controllers, the
following notes may prevent you from making common mistakes:
4.4.1 The power to the heater does not flow through terminal 1 and 2 of the
controller. The controller consumes less than 2 watts of power. It only
provides a control signal to the relay. Therefore, 20 gauge wires are sufficient
for providing power to terminal 1 and 2. Thicker wires may be more difficult to
install.
4.4.2 The J1, J2 relay are “dry single pole switches”. They do not provide
power by themselves. Figure 11 shows how it is wired when providing a 12V
output (or when output has the same voltage as the power for controller). If
the load of relay requires a different voltage than that for the controller, an
additional power source will be needed (Please see the alarm wiring of Figure
10 and controller output J2 of Figure 12 for examples).
4.4.3 SSR output power does not come from the input of the SSR. The output
of the SSR is a single pole switch between terminal 1 and 2 of the SSR. The
input of the SSR is for control, or triggering, the SSR. (Please note we are
talking about the SSR itself, not the SSR control output of the controller).
Figure 10 shows how the SSR output should be wired. When switching a
North American 240V AC power, the heater will be live even when the SSR is
off. User should install a double-pole mechanical switch to the power input.
5. Parameter Setting
For safety reasons, the controller parameters are divided into three groups
with different pass codes. You should only give the code to those who hav e
the responsibility and knowledge of how to properly change it. Code 0089
contains the parameters for system configuration that may need to change
during the initial set up. Code 0036 contains the parameters for tuning
performance. Code 0001 is for controlling temperature and alarm settings.
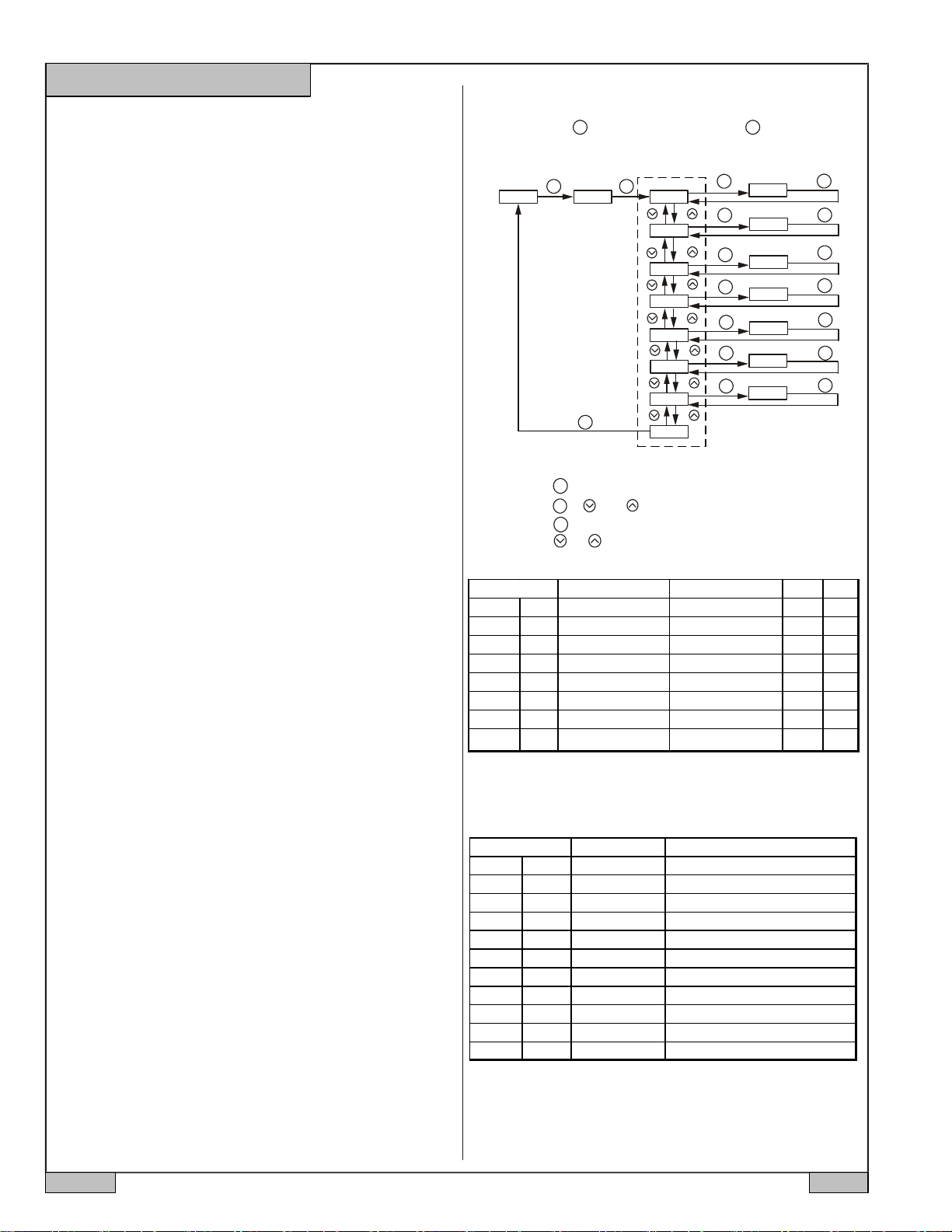
5.1 System Configuration Parameters (accessed by code 0089)
The system configuration parameter s are lis ted in table 1. To change the
parameters , press , enter code “0089” and press agai n. Th en, fo llow
SET SET
the flow chart in Figure 3.
Operation Mode
XXXX
Enter Code
SET SET
0089
SET
Parameter Display
inty
outy
HY
atdu
psb
rd
corf
end
Input Sensor Selection
SET
XXXX
Output mode selection
SET
Hysteresis Band
SET
XXXX
Autotune offset
SET
Input offset
SET
XXXX
Heating/Cooling
SET
Display Unit(C/F)
SET
SET
SET
X
SET
SET
X
SET
SET
X
SET
X
Figure 3. System setup flow chart
(1) Press to enter setting mode;
(2) Press , and to enter parameters;
(3) Press to confirm;
SET
>
SET
(4) Press or to select the new parameter.
Table 1. System configuration parameters
Inty
outy
Hy
Atd u
PSb
rd
CorF
End
Code
Inty Input Sensor T y pe See table2 K 1
outy Control Output Mode 0, 1, 2, 3, 4, 5, 6 2 2
Hy Hys teresis Band 0~9999 3 3
Atdu Autotune Offset 0~200(deg) 10 4
PSb Input Offset -100~100(deg) 0 5
rd C ontrol Func tion 0: heating 1: Cooling 0
CorF Display Unit 0: °C 1:°F 1
End Exit
Description Setting R ange Initial Note
Note 1. The controller is preset for K type thermocouple input. If any other type
of sensor is used, the Inty value needs to be changed to the corresponding
symbol as shown in Table 2.
Table 2. Temperature sensor code
t
r
j
WRE
b
s
k
e
P10.0
P100
Cu50
Symbol
r TC, T ype R -50~1600 °C; -58~2900 °F
J TC , T ype J -200~1200 °C; -320~2200 °F
WRE TC , WRe3/25 0~2300 °C; 32~4200 °F
b TC , T ype B 350~1800 °C; 660 ~3300 °F
s T C , T ype S -50~1600 °C; -58~2900 °F
k T C , T ype K -200~1300 °C; -320~2400 °F
e TC , Type E -200~900 °C; -320~1650 °F
P10.0 RTD, Pt100 -99.9~600.0 °C; -99.9~999.9 °F
P100 RT D, Pt100 - 200~600 °C; -320~1100 °F
Cu50 RTD, Cu50 -50.0~150.0 °C; -60~300 °F
Description Working Tem perature Rang e
t T C , T ype T -200~400 °C; -320~752 °F
Note 2. The value of outy determines the control mode. When it is set to:
0 - Relay J1, J2 as alarm output; SSR output disabled;
1 - Relay J1 as alarm output; J2 as PID controlled relay contact output; SSR
output disabled;.
2 - Relay J1, J2 as alarm output; SSR PID control output;
3 - Relay J1, J2 as alarm output; SSR On/off control output;
2018.07 P2/5
Page 3

AUBER INSTRUMENTS
WWW.AUBERINS.COM
Instruction Manual
4 - Relay J1 as alarm output; J2 as On/off control relay contactor output;
SSR output disabled;
5 - Relay J1 as alarm output; J2 as Limit control relay contactor output;
SSR output disabled;
6 - Relay J1, J2 as alarm output; SSR for Limit control output.
Note 3. Hysteresis Band (also called dead band, or differential), Hy, is used for
On/off control and Limit control. Its unit is in degrees (
°C or °F). For On/off
control mode, the output will be off when PV>SV and on again when PV <SVHy for heating. For cooling, the output wil l be off when PV<SV and on again
when PV>SV+Hy. For Limit control mode, the controll er ca n no t be reset (to
turn on the output) when PV>SV-Hy for heating, and when PV< SV+Hy f o r
cooling.
Note 4 . The autotune offset will shift the SV value down by the Atdu value
during the autotune process. That will prevent the s ystem from damage due to
overheating during the autotune.
Note 5. Calibration offset, PSb is used to set an input offset to compensate
the error produced by the sensor. For example, if the meter displays 5 ºC
when probe is in ice/water mixture, setting PSb=-5, will make the controller
display 0 ºC. To set negative value, shift to the very left digit, press down key
until it shows “-“.
5.2 PID Parameters (accessed by code 0036)
The PID and relevant parameters are listed in table 3. To change the
parameters, press , enter code “0036”, and press again. The
SET
SET
parameter flow chart is similar to Figure 3.
Table 3. PID and relevant parameters
Symbol
P
I
d
Sou F
ot
FILt
End
P Proportional C onstant 0.1~99.9(%) 5.0 6
I Integral T im e 2~1999(Sec ) 100 7
d Deriv ativ e Time 0~399(Sec) 20 8
SouF Damp Constant 0.1~1.0 0.2 9
ot C ycle R ate 2~199(Sec) 2 10
FILt Digital Filter Strength 0~3 0 11
End Exit
Desc r i p ti o n S e tting Ra n g e In i ti a l N o te
The values of the P, I, and D parameters are critical for good response time,
accuracy and stability of the system. Using the Auto-tune function to
automatically determine these parameters is recommended for the first time
user. If the auto-tuning result is not satisfactory, you can manually fine-tune
the PID constants for improved performance.
Note 6. Proportional Constant (P): P is also called the proportional band. Its
unit is the percentage of the temperature range. e. g. For a K type
thermocouple, the control range is 1500 °C. P=5 means the proportional
band is 75 °C (1500x5%). Assuming the set temperature (SV) = 200. When
integral, I, and derivative, d, actions are removed, the controller output power
will change from 100% to 0% when temperature increases from 125 to
200°C. The smaller the P value is, the stronger action will be for the same
temperature difference between SV and PV.
Note 7. Integral time (I): Brings the sys tem up to the set val ue by ad ding to
the output that is proportional to how far the process value (PV) is from the
set value (SV) and how long it has been there. When I decreases, the
response speed is faster but the sy stem is less stable. When I increase s,
the respond speed is slower, but the system is more stable.
Note 8. Derivative time (d): Responds to the rate of PV change, so th at the
controller can compensate in advance bef ore |SV -PV| gets too big . A larger
number increases its action. Setting d-v alue too small or too large would
decrease system stability, causing oscillation or even non-convergence.
Note 9 . Damp constant: This constant can help the PID controll er further
improve the control quality. It uses artificial intelligence to dampen the
temperature overshoot. When its value is too low, the system may
overshoot. When its value is too high, the system might be over damped.
2018.07 P3/5
SouF too low
SouF acceptable
SouF too high
Figure 4. Damp constant
Note 10 . Cycle rate (ot) : It is the time period (in seconds) that the controller
use to calculate its output. e.g. If ot=2, and the controller ou tput is set to 10%,
the heater will be on 0.2 s e c o n d and off 1.8 second s for every 2 seconds.
Smaller ot value result in more precision control. For SSR output, ot is
normally set at 2. For relay or contactor output, it should be set longer to
prevent contacts from wearing out too soon. It normally se t to 20~40 seconds.
Note 1 1 . Digital Filter (FILt): FILt=0, filter disabled; FILt=1, weak filtering
effect; FILt=3, strongest filtering effect. Stro nger fil tering incr eases th e stab ility
of the readout display, but causes more dela y in the response to changes in
temperature.
5.3 Temperature setting and Alarm setting (accessed by code 0001)
The temperature and alarm parameters are listed in table 4. To change the
parameters, press , enter code “0001” an d press again. The
SET SET
parameter flow chart is similar to Figure 3.
Table 4. Temperature and alarm parameters
Desc r i p ti o n Ini ti al S e tti n g No te
SV
AH1
AL1
AH2
AL2
END
Symbol
SV T arget temperature(Set Value) 800 12
AH1 J 1 on temperature 800 13
AL1 J1 off temperature 900
AH2 J2 on temperature 800
AL2 J2 off temperature 900
END Exit
Note 12. There are two ways to set the target temperature.
a. During the normal operation mode, press or once to switch the
display from PV to set value. The display will start to blink. Press or
again to increase or decrease the SV. When finished, wait 8 seconds and the
settings will take effect automatically (the display will stop blinking).
b. Press key once. Use , and keys to enter code 0001. Press
key to confirm, then the display would be SV (Su). Press key again
to display the SV setting. Use , and keys to enter the new SV value
and press to confirm. Press key to change the display to END. Then,
press to exit. You can also ignore the steps after confirmation of SV. The
SET
SET SET
>
>
SET
SET
controller will returns to normal operation mode automatically if no key is
pressed for 1 minute.
Note 13. Alarm setting. The J1 relay is controlled by parameters AH1 and
AL1. And the J2 relay is controlled by parameter AH2 and AL2. AH1 (or AL2)
is the temperature to turn the J1 (or J2) relay on; AL1 (or AL2) is the
temperature to turn the J1 (or J2) relay off. When AH1>AL1 (or AH2>AL2), the
J1 (or J2) alarm is set for absolute high alarm as shown in Figure 5 below.
When AH1 <AL1 (or AH2<AL2) , the J1 (or J2) alarm is set for absolute low
alarm as shown in Figure 6 below. When AH1=AL1 (or AH2=AL2), the J1 (or
J2) alarm is deactivated.
Please note that J2 can’t be used as alarm when Outy is set to 1, 4 or 5.
AH1
AL1
SV
PV
Relay on Relay on
AL1
AH1
SV
PV
Figure 5. Absolute high alarm Figure 6. Absolute low alarm
6. Auto-Tuning
The auto- t uning function (also called s elf tuning) can automatically optimize
the PID parameters for the system. The auto-tuning func tion will use the On/
off mode to heat up the system until it pass e s the set point. Then let it cool
down. It will repeat this about three times. Based on the response time of the
Page 4

AUBER INSTRUMENTS
WWW.AUBERINS.COM
Instruction Manual
system, the built-in artificial intelligence program will calculate and set the PID
parameters for the controller. If your system has a very slow response, the
auto-tuning could take a long time.
AT start
AT calculation
PV
SV
ON
OFF ON
ON/OFF PID
Figure 7. Auto-tuning
6.1 To activate A uto-tuning, press and hold key until the “AT” indic ator
starts to blink, which indicates auto-tuning is in progress. When “AT” stops
blinking, the auto-tuning is finished. Now, newly c alculated PID parameters
are set to be us ed fo r th e sy ste m . Ple as e note that Auto-tuning is only for PID
control mode (when “outy” is set at 1 or 2).
6.2 To stop the A uto-tuning, press and hold key until “AT” indicator
stops blinking. Then, the previous PID parameters value are resumed.
7. On/off control mode
On/off control mode is not as precise as PID control mode, however it is
necessary for inductive load such as motors, co mpre sso rs, or s ole noid va lves
that do not like to take pulsed power. It works like a mechanical thermostat.
When the temperature passes the set point, the heater (or cooler) will be
turned off. When the temperature drops back to below the hysteresis band
(dead band) the heater will turn on again.
To use the On/off mode, set outy to 3 or 4 depending on the output device to
be used. Then, set the Hy to the desired range based on control precision
requirements. Smaller Hy values result in tighter temperature control, but also
cause the on/off action to occur more frequently. In the PID paramete rs menu
(code 0036), only ot and FILt are used. P, I, D and SouF are not meaningful.
AT end
OFF
>
>
9. Limit control mode.
The Limit control mode will shut the heater off when SV is reached. Th e
heater will not be turned on again until the cont roller is res et manual ly (press
SET
the ke y fo r 5 seconds). When powered on, it will not start the heating
until reset button is pressed. The controller can’t be reset when the
temperature is within Hysteresis Band (Hy).
To use the Limit control mode, set o uty to 5 o r 6 . Then, set the Hy to the
range that you want reset to be blocked. To start the heating or cooling,
SET
press key for 5 second or until the out indicator is on.
PV
100
97
Start
Relay on
SV
SV-Hy
outy=5, SV=100, Hy=3. The
heating stops after it reached 100
degree.
Figure 9. Limit control mode
10. Application Example
10.1 A thermoelectric cooler (TEC) needs to be controlled at 45 °F. If
temperature is over 46 °F, the alarm1 will turn on to warn the operator and
turn off when dropped to below 45.5 °F. If temperature is below 44 °F, the
alarm2 will turn on to warn the operator and turn off when dropped to below
44.5 °F. The system consists of a 90W 24V DC TEC, a Pt100 RTD sensor, a
10A DC SSR, and two 5V DC buzzers.
a. Wiring diagram
TEC
-
+
1
2
SSR
3
+
RTD
4
-
W
RR
100
PV
SV
97
SV-Hy
Relay On
When heating, and outy=3 or 4,
If PV≤(SV-Hy), relay on
If PV≥SV, relay off
(SV=100, Hy=3)
Figure 8. On/off control mode
8. Manual mode
Manual mode allows the user to control the output as a percentage of the total
heater power. It is like a stove dial. The output is independent of the
temperature sensor reading. One application example is controlling the
strength of boiling during beer brewing. You can use the manual mode to
control the boiling so that it will not boil over to make a mess . The manual
mode can be switched from PID mode but not from On/off mode. To switch
from the PID to the manual mode, press and hold the key until the
“AT/M” indicator turned on (about 5 seconds). In the manual mode, the top
display is for the process temp erature . Th e bot tom ri ght is the perce ntage of
power output. The bottom left display show an “M” for user to easily identify
the controller is in manual mode. To switch from manual to PID mode,
press and hold key until the “AT/M” indicator turned off. This con t ro ller
SET
offers “bumpless” switch from the PID to manual mode. If the controller
outputs 75% of power at PID mode, the controller will stay at 75% when it is
switched to the manual mode, until it is adjusted manually.
SET
8
3
910
13
14
45
J1
5V DC
J2
5V DC
Alarm2
Alarm1
24V DC
6
7
11
12
2
1
+
_
Fuse
Figure 10. Typical wiring set up for TEC cooler. For incubator control, the
TEC cooler should be change to heater. Rd=0 for heating.
b. Parameter setting. These are the parameters that need to be changed from
the initial value: Rd=1 for cooling mode. Inty=P10.0 for Pt100 RTD sensor
with 0.1° resolution input, SV=45 °F, AH1=46 °F, AL1=45.5 °F, AH2=44 °F,
AL2=44.5 °F.
Auto-tune is used to set the PID parameters. Power up the controller. Press
and hold the key until “AT” starts to blink. The controller starts the Auto-
>
tuning. When the “AT” stops blinking, the new PID parameters are generated
for the system. The controller is in normal operation mode. The TEC will be
maintained at 45 °F.
Please note that you don’t not have to wire or set the alarm to control
the temperature.
2018.07 P4/5
Page 5

AUBER INSTRUMENTS
Instruction Manual
10.2 A 24V DC solenoid valve is switched by J2 relay in On/off mode. The
valve will be on until temperature reaches 105 °F. Then, it will shut off. When
the temperature drops to below 100 °F, it will be on agai n. The po wer source
is 24V DC. A K type thermocouple is used as the temperature sensor.
a. Wiring diagram
K type TC
-
+
6
7
11
12
2
1
8
3
910
13
14
45
Figure 11. Typical wiring set up for a 24V gas, hot water valve, or
a contractor with 24V coil voltage
b. Parameter setting. These are th e param eters t hat need t o be c hanged
from the initial value: outy=4 for On/Off mode with J2 relay output; Hy =5
degree, SV=105 °F for the target temperature.
10.3 A B B Q smok er needs to be controlled a t 200°F. The power source is
12 V D C . A K type thermocouple is used as the temperature sensor. The
system consists of a 12V DC fan, a K type thermocouple.
a. Wiring diagram
Solenoid valve
S
J2
Fuse
24V DC
+
11. Error Message and trouble shooting
11.1 Display EEEE
This is an input error message. The possible reasons are, the sensor is not
connected correctly; the inpu t set ting i s wrong type; or the s ensor is def ectiv e.
If this happen s when using thermocouple s ensor, you can short terminals 9
and 10. If the display shows the ambient tempe rature, the thermocouple is
defective. If it still displays EEEE, check the input setting, Inty, to make sure it
is set to the right thermocouple type. If Inty settin g is correct, the controller is
defective. For RTD sensor, check the input setting first because most
controllers are shipped with input se t for th ermocouple. Then check the wiring.
The two red wires should be on terminals 9 and 10. The clear wire should be
on terminal 8.
11.2 No heating
When controller output is set for relay output, the “AL2” LED is synchronized
with output relay. When controller output is set for SSR output, the “OUT” LED
is synchronized with SSR control output. If there is no heat when it is
supposed to, check the AL2 or OUT first. If i t is no t lit, the controller parameter
setting is wrong. If i t is on, check external switching device (if the relay is
pulled-in, or the red LED o f the SSR). If the external switchin g device is on,
then the problem is either the external switc hing device output, its wiring, or
the heater. If the external switching device is not on, then the problem is either
the controller output, or the external switch device.
11.3 Poor Accuracy
Please make sure calibration is done by immersing the probe in liquid.
Comparing with reference in air is not recommended because response time
of sensor depends on its mass. Some o f our sensor has response time >10
minutes in the air. When the error is larger than 5°F, the most common
problem is improper connection between the thermocouple and the c ontroller.
The thermocouple needs to be connected directly to the controller unless a
thermocouple connector or an ext ension wire is used. A copper connector,
copper wire, or thermocouple extens ion wire with wrong p olarity conn ected on
the thermocouple will cause the reading drift more than 5°F.
K type TC
-
+
6
1
78
11
12
2
3
910
13
14
45
Fan
J2
12V DC
Fuse
+
Figure 12. Typical wiring for BBQ smoker temperature control
b . Parameter setting. These are the parameters that need to be changed
from the initial value: outy=1 for PID mode with relay output; ot= 1 0 , the
reason we set the cycle time at 1 0 is that the fan needs time to start;
SV=250 °F for the target temperature. Following are the tuning parameters
that we found wor k best for this type of application. P=1.2, I=300, d=70,
SouF=0.7
Auber Instruments
5755 North Point Parkway, Suite 99
Alpharetta, GA 30022
www.auberins.com
e-mail: info@auberins.com Tel: 770-569-8420
Copyright 2007-2018, Auber Instrume nts All Rights Reserved.
No part of this manual shall be copied, reproduced, or transmitted in any
way without the prior, written consent of Auber Instruments. Auber
Instruments retains the exclusive rights to all information included in this
document.
2018.07
P5/5
 Loading...
Loading...