

Auber SYL-2342P, SYL-2352P Instruction Manual
AUBER INSTRUMENTS WWW.AUBERINS.COM
Instruction Manual
SYL-2342, SYL-2352 PID TEMPERATURE CONTROLLER
INSTRUCTION MANUAL
Version 4.4
Caution
This controller is intended to control equipment under normal operating
conditions. If failure or malfunction of the controller may lead to abnormal
operating conditions that may result in personal injury or damage to the
equipment or other property, devices (limit or safety controls) or systems
(alarm or supervisory) intended to warn of or protect against failure or
malfunction of the controller must be incorporated into and maintained as
part of the control system.
Installing the rubber gasket supplied will protect the controller front panel
from dust and water splash (IP54 rating). Additional protection is needed
for higher IP rating.
This controller carries a 90-day warranty. This warranty is limited to the
controller only.
1. Specification
Thermocouple(TC): K, E, S, N, J, T, B, WRe5/26
RTD(Resistance temperature detector): P t100, C u50
Input ty pe
Input range Please see section 4. 7 for detail.
Accuracy
Response time
Display resolution 1 °C , 1 °F; or 0.1 °C
C ontrol mode
Output mode
Alarm output Relay contact. 250V A C /1A , 120V AC /3A, 24V/3A
Alarm function
Manual function Automatic/M anual bumpless transfer
Power supply 85~260V A C /50~60H z
Power consumption ≤5 Watt
Ambient temperature 0~50º C , 32~122º F
Dimension 48 x 48 x100 mm (WxHxD)
Mounting cutout 45 x 45 mm
DC V oltage: 0~5V, 1~5V , 0~1V,
-100~100mV , -20~20mV, -5~5V, 0.2~1V.
DC current : 0~10mA, 1~20mA, 4~20mA . (use ex ternal
shunt resistor for higher c urrent)
±0.2% Full scale: RTD, linear v oltage, linear current and
thermocouple input w ith ice point compensation or C u50
copper compens ation.
0.2% Full scale or ±2 ºC: thermocouple input with internal
automatic c ompensation.
Note: for thermocouple B, the measurement accuracy of ±
0.2% can only be guaranteed when input range is betw een
600~1800 ºC .
≤
0.5s (w hen FI Lt=0)
Fuzzy logic enhanced PID control
On-off control
Manual control
Relay contact (N O ): 250V A C / 7A , 120V/10A, 24V DC/10A
SSR v oltage output: 12VDC / 30mA
Process high alarm, process low alarm, dev iation high
alarm, and dev iation low alarm
2. Available Configurations
Table 1. Controller models
Model Control output Ramp/soak option
SYL-2342 Relay c ontact output No
SYL-2352 SSR control output No
SYL-2342P Relay contact output Yes
SYL-2352P SSR control output Yes
All the models listed in table 1 are 1/16 DIN size with dual-alarm outputs.
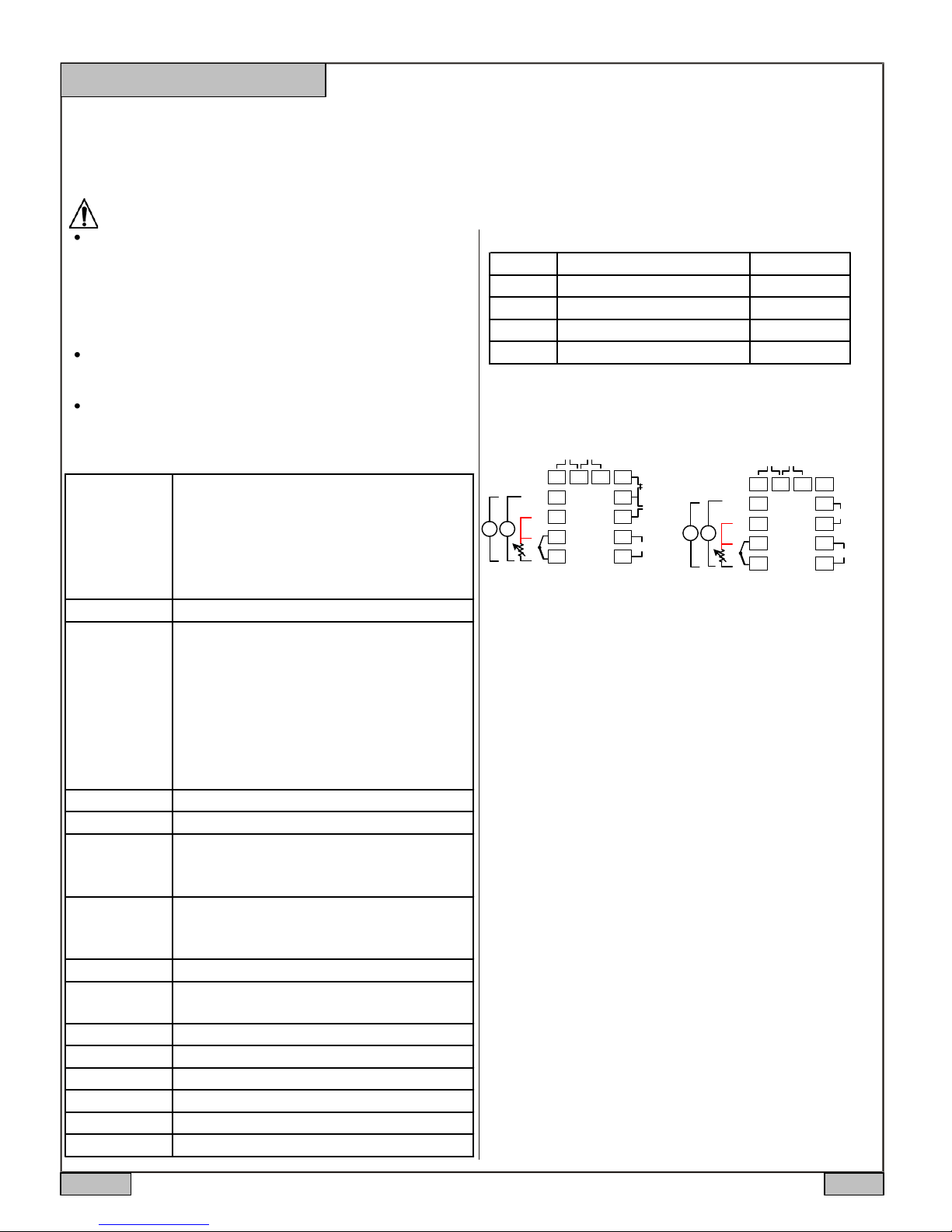
3. Terminal Wiring
Model SYL-2342, SYL-2342P
AL1 AL2
1
+
-
TC
13 14 6
2
3
4
5
Out
7
8
9
AC
85~260V
10
+
+
RTD
R
mA
V
R
W
Figure 1. Wiring diagram
3.1 Sensor connection
Please refer to table 3 for the input sensor type (Sn) setting codes. The initial
setting for input is for a K type thermocouple. Set Sn to the right sensor code
if another sensor type is used.
3.1.1 Thermocouple
The thermocouple should be connected to terminals 4 and 5. Make sure that
the polarity is correct. There are two commonly used color codes for the K
type thermocouple. US color code uses yellow (positive) and red (negative).
Imported DIN color code uses red (positive) and green/blue (negative). The
temperature reading will decrease as temperature increases if the connection
is reversed.
When using ungrounded thermocouple that is in touch with a large
conductive subject, the electromagnetic field picked up by the sensor tip
might be too large for the controller to handle, the temperature display will
change erratically. In that case, connecting the shield of thermocouple to
terminal 5 (circuit ground of the controller) might solve the problem. Another
option is to connect the conductive subject to terminal 5.
3.1.2 RTD sensor
For a three-wire RTD with standard DIN color code, the two red wires should
be connected to the terminals 3 and 4. The white wire should be connected
to terminal 5. For a two-wire RTD, the wires should be connected to terminals
4 and 5. Jump a wire between terminals 3 and 4. Set controller input type, Sn
to 21.
3.1.3 Linear input (V or mA)
Voltage and mA current signal inputs should be connected between terminals
2 and 5. Terminal 2 is positive.
3.2 Power to the controller
The power cables should be connected to terminals 9 and 10. Polarity does
not matter. It can be powered by 85- 2 6 0 V AC power source. Ne i t h e r a
transformer nor jumper is needed to wire it up. For the sake of consistency
with the wiring example described later, we suggest you connect the hot wire
to terminal 9 and neutral to 10.
Model SYL-2352, SYL-2352P
AL1 AL2
1
TC
2
3
+
4
5
13 14 6
+
+
RTD
R
mA
V
R
W
+
7
SSR
8
-
9
AC
85~260V
10
2011.02 P1/8

AUBER INSTRUMENTS
3.3 Control output connection
The SSR control output of the controller SYL-2352 provides a 12V DC signal
that can control up to 5 SSRs in parallel. The r e lay o utpu t of the controller
SYL-2342 can be used to turn on a contactor or a solenoid valve. It can drive
a small heater directly if the heater draws less than 10 Ampere when
connected to 120V AC power source. For applications needing two control
outputs, such as one for heating and another for cooling, relays AL1 or AL2
can be used for the second output with on/off control mode. Please see
Figure 11 for details.
3.3.1 Connecting the load through SSR (for SYL-2352)
Connect terminal 7 to the positive input and terminal 8 to the negative input of
the SSR. See Figure 8 and 9 for details.
3.3.2 Connecting the load through a contactor (for SYL-2342)
Assuming the controller is powered by 120V AC and the contactor has a 120V
AC coil, jump a wire between terminals 8 and 9. Connect terminal 7 to one
lead of the coil and terminal 10 to the other lead of the coil. Please see Figure
7 for example.
3.3.3. Connecting the heater (or cooler) directly from the internal relay
Assuming the controller and the load (heater or cooler) are powered by the
same voltage. Jump a wire from terminal 9 to 8. Connect terminal 7 to the one
lead of the load and terminal 10 to the other lead of the load. Please see
Figure 6 and 11 for details.
3.4 For first time users without prior experience with PID con trollers, the
following notes may prevent you from making common mis take s.
3.4.1 Power to the heater does not flow through terminal 9 and 1 0 of the
controller. The controller consumes less than 2 watts of power. It only
provides a control signal to the relay. Therefore, wires in the 18 to 26 gauge
range should be used for providing power to terminals 9 and 10. Thicker wires
may be more difficult to install.
3.4.2 The control relay outputs (for SYL-2342), -AL1 and AL2, are “dry” single
pole switches. They do not provide power by themselves. Please see Figure
6, 7 and 11 for how they are wired when providing a 120V output ( o r when
output voltage is the same as the power source for the controller). If the load
of the relay requires a different voltage than that for the controller, another
power source will be needed. See Figure 10 for examples.
3.4.3 SSR output power does not come from the input of the SSR. The output
of the SSR is a single pole switch between terminals 1 and 2 of the SSR. The
input of the SSR is for control, or triggering the SSR. (Please note we are
talking about the SSR itself, not the SSR control output of the controller).
When switching a North American 240V AC power, the heater will be live
even when the SSR is off. Users should install a double pole mechanical
switch to the power input.
3.4.4. For all controller models listed in this manual, the power is controlled by
regulating the duration of on time for a fixed period of time. It is not controlled
by regulating amplitude of the voltage or current. This is often referred as time
proportional control. e.g. If the cycle rate is set for 100 seconds, a 60% output
means controller will switch on the power for 60 seconds and off for 40
seconds (60/100=60%). Almost all high power control systems use time
proportional control because amplitude proportional control is too expensive
and inefficient.
4. Front Panel and Operation
3
4
5
6
8888
8888
78910
Figure 2. Front panel
1
2
WWW.AUBERINS.COM
① PV display: Indicates the sensor read out, or process value (PV).
② SV display: Indicates the set value (SV) or output value (%).
③ AL1 indicator: It lights up when AL1 relay is on.
④ AL2 indicator: It lights up when AL2 relay is on.
⑤A-M indicator: The light indicates that the controller is in manual mode. For
the controllers with the Ramp/Soak option, this light indicates that the
program is running.
⑥ Output indicator: It is synchronized with control output (terminal 7 and 8),
and the power to the load. When it is on, the heater (or cooler) is
powered.
⑦ SET key: When it is pressed momentarily, the controller will switch the
lower (SV) display between set value and percentage of output. When
pressed and held for two seconds will put the controller into pa r amete r
setting mode.
⑧ Automatic/Manual function key (A/M) /Data shift key
⑨ Decrement key ▼: Decreases numeric value of the setting value.
⑩ Increment key ▲: Increases numeric value of the setting value.
4.1 Display Status
Power on
Display mode 1
800.0
800.5
SET
2S
A L M1
A/M
PV
SV
SET
+
SET
800.0
A6 0
“A 60” means
output value=60%
on Automatic mode
SET
100 5
ALM1 (high limit alarm)=1005
Figure 3. Display modes
Display mode 1: When the power is turned on, the upper display window
shows the measured value (PV) and the lower window shows the four-digit set
value (SV).
Display mode 2: Press the SET key to change the display status into mode
2. The upper display window shows the measured value (PV) and the lower
windows shows the output value. This picture shows the output percentage is
60% when in Automatic (PID) control mode. If parameter A-M=1 (see table 2),
pressing the A/M key will switch the controller between PID and Manual
control mode with the output unchanged. -This bumpless transfer allows the
controller to be switched between manual and automatic mode without the
output suddenly 'bumping' to a different value.
Display mode 3: Press the SET key for 2 seconds to enter the display mode
3. This mode allows users to change the system parameters.
PV
A/M
Next parameter
4.2 Basic Operation
4.2.1 Changing set value (SV)
Press the ▼ or ▲ key once, and then release it. The decimal point on the
lower right corner will start to flash. Press the ▼ or ▲ key to change SV until
the desired value is displayed. If the change of SV is large, press the A/M key
to move the flashing decimal point to the desired digit that needs to be
changed. Then press the ▼ or ▲ key to start changing SV from that digit.
The decimal point will stop flashing after no key is pressed for 3 seconds. The
changed SV will be automatically registered without pressing the SET key.
Display mode 2
800.0
M 6 0
“M 60” means
output value=60%
on manual mode
Display mode 3
PV
2011.02
P2/8
AUBER INSTRUMENTS
4.2.2 Display change
Press the SET key to change the display mode. The display can be changed
between display modes 1 and 2.
4.2.3 Manual/Automatic mode switch
Bumpless switching between PID mode and Manual mode can be performed
by pressing the A/M key. The A-M LED will light up when the controller is in
Manual mode. In Manual mode, the output amplitude can be increased or
decreased by pressing ▲ and ▼(display mode 2).
Please note that manual control is initially disabled (A/M = 2). To activa te
the manual control, set A/M=0 or 1.
4.2.4 Parameter Setup Mode
When the display mode is 1 or 2, press SET and hold for roughly 2 seconds
until the parameter setup menu is displayed (display mode 3). Please refer to
4.3 for how to set the parameters.
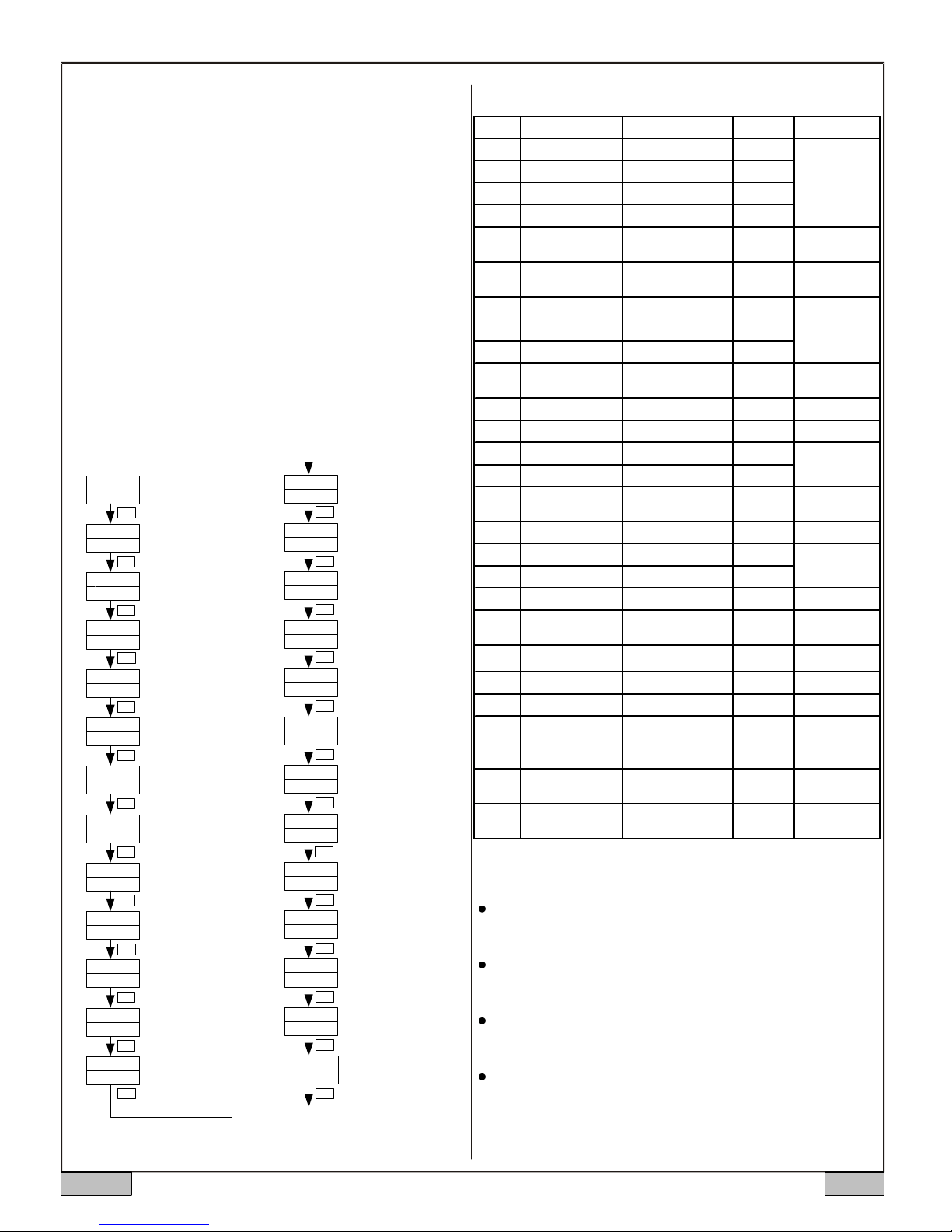
4.3 Setup flow chart
While in the parameter setup mode, use ▲ and ▼ to modify a digit and use
A/M to select the digit that needs to be modified. Press the A/M and SET key
at the same time to exit the parameter setup mode. The instrument will
automatically exit if no key is pressed for 10 seconds. Figure 4 is the setup
flow chart.
Pleas e no te t he changed parameter will be automatically registered without
pressing the SET key. If the controller is locked ( see 4.17 ) , only limited
parameters (or no parameters) can be changed.
P-SL
PV
SV
SET
ALM1
100
SET
ALM2
50
SET
HY-1
9999
SET
HY-2
9999
SET
HY
0.3
SET
AT
SET
I
100 0
SET
P
500
SET
d
1 2 0
SET
t
SET
SN
SET
DP
SET
2S
ALM1
Process high alarm
ALM2
Process low alarm
Hy-1
Deviation high alarm
Hy-2
Deviation low alarm
Hy
Hysteresis band
At
3
Control mode
I
Integral time
P
Proportional constant
d
Derivative time
t
2
Cycle time
Sn
0
Input type
dP
0
Decimal point position
P-SL
-1 0 0
SET
P-SH
2500
SET
Pb
0.0
SET
Op-A
0
SET
outL
SET
OUtH
100
SET
AL-P
1 7
SET
COOL
1 0
SET
Addr
SET
Baud
9600
SET
filt
SET
A-M
SET
Locw
8 0 8
SET
EP1-EP8
Display low limit
P-SH
Display high limit
Pb
Input offset
OP-A
Output mode
OutL
0
Output low limit
OutH
Output high limit
AL-P
Alarm output definition
Cool
System function selection
Addr
1
Communication address
Baud
Communication baud
FILT
0
PV input filter
A-M
2
Running status
Lock
Configuration privilege
WWW.AUBERINS.COM
4.4 Parameter Setting
Table 2. System parameters
Code Descripti on Setting Range Initial Setti ng Remarks
ALM1 Process high alarm -1999~+9999 °C or °F 100
ALM2 Process low alarm -1999~+9999 °C or °F 50
Hy-1 Deviation hi gh alarm 0~9999 °C or °F 9999
Hy-2 Devi ation low alarm 0~9999 °C or °F 9999
Hy Hys teresi s Band
At Auto tuning
I Integral time 0~9999 1000
P Proportional Constant 1~9999 % 500
d Derivativ e Time 0~2000 120
t Cycl e time 2~125
Sn Input type 0~37 0 (K type TC) See 4.7
dP Decimal point position 0~3 0 See 4.8
P-SL Display low limit -1999~+9999 °C or °F -100
P-SH Dis play high l imit -1999~+9999 °C or °F 2500
Pb Input offset
OP-A Output mode 0~2 0 See 4.11
OUTL Output low limit 0~110 % 0
OUTH Output hi gh limit 0~110 % 100
AL-P Alarm output defini tion 0-31 17 See 4.13
COOL
Addr Communicati on address 0~20 1 Ignore this setting
bAud Communicati on baud rate 0~19200 9600 Ignore this setting
FILt PV i nput filter 0~20 0 See 4.15
A-M
LocK Configuration privil ege 0~9999 808
EP1-EP8
System function
selection
Automatic/Manual
status
Fi eld parameter
definition
0~200.0 °C or °F
or 0~2000 for linear input
0~3. Set to 1 or 2 to start
auto tuning
-1999~+4000
-1999~+9999 °C or °F
0~15 10
0. Manual
1. Automatic
2. Manual suppressing
nonE ~ A-M nonE
0.3 See 4.4.2
3 See 4.4.3
2 for SSR
20 for relay
0.0 See 4.10
2
4.4.1 Alarm parameters
This controller offers four types of alarm, “ALM1”, “ALM2”, “Hy-1”, “Hy-2”.
ALM1: High limit absolute alarm. If the process value is greater th an the
value specified as “ALM1+Hy” (Hy is the Hysteresis Band), then the alarm
will turn on. It will turn off when the process value is less than “ALM1-Hy”.
ALM2: Low limit absolute alarm. If the process value is less than the value
specified as “ALM2-Hy”, then the alarm will turn on, and the alarm will turn
off if the process value is greater than “ALM2+Hy”.
Hy-1: Deviation high alarm. If the temperature is above “SV+Hy-1 +Hy”,
the alarm will turn on, and the alarm will turn off if the process value is less
than “SV+Hy-1 -Hy” (we will discuss the role of Hy in the next section)
Hy-2: Deviation low alarm. If the temperature is below “SV-Hy-2 -Hy”, the
alarm will turn on, and the alarm will turn off if the temperature is greater
than “SV-Hy-2 +Hy”.
See 4.4.1
See 4.5.1
See 4.6
See 4.9
See 4.12
For heating and
°F display, s ee 4.14
Manual control is
disabl ed. Set to 1 to
activate. See 4.16
Al l para meters are
unlock ed. See 4.17
To be defi ned by
user. See 4.17
Figure 4. System setup flow chart
2011.02 P3/8
 Loading...
Loading...