

Atmel ATxmega128A4,ATxmega64A4,ATxmega32A4,ATxmega16A4 Datasheet
Features
• High-performance, Low-power 8/16-bit Atmel
• Non-volatile Program and Data Memories
– 16 KB - 128 KB of In-System Self-Programmable Flash
– 4 KB - 8 KB Boot Code Section with Independent Lock Bits
– 1 KB - 2 KB EEPROM
– 2 KB - 8 KB Internal SRAM
• Peripheral Features
– Four-channel DMA Controller with support for external requests
– Eight-channel Event System
– Five 16-bit Timer/Counters
Three Timer/Counters with 4 Output Compare or Input Capture channels
Two Timer/Counters with 2 Output Compare or Input Capture channels
High-Resolution Extensions on all Timer/Counters
Advanced Waveform Extension on one Timer/Counter
– Five USARTs
IrDA Extension on one USART
– Two Two-Wire Interfaces with dual address match (I
– Two SPIs (Serial Peripheral Interfaces) peripherals
– AES and DES Crypto Engine
– 16-bit Real Time Counter with Separate Oscillator
– One Twelve-channel, 12-bit, 2 Msps Analog to Digital Converter
– One Two-channel, 12-bit, 1 Msps Digital to Analog Converter
– Two Analog Comparators with Window compare function
– External Interrupts on all General Purpose I/O pins
– Programmable Watchdog Timer with Separate On-chip Ultra Low Power Oscillator
• Special Microcontroller Features
– Power-on Reset and Programmable Brown-out Detection
– Internal and External Clock Options with PLL
– Programmable Multi-level Interrupt Controller
– Sleep Modes: Idle, Power-down, Standby, Power-save, Extended Standby
– Advanced Programming, Test and Debugging Interfaces
PDI (Program and Debug Interface) for programming, test and debugging
• I/O and Packages
– 34 Programmable I/O Lines
– 44 - lead TQFP
– 44 - pad VQFN/QFN
– 49 - ball VFBGA
• Operating Voltage
– 1.6 – 3.6V
• Speed performance
– 0 – 12 MHz @ 1.6 – 3.6V
– 0 – 32 MHz @ 2.7 – 3.6V
®
AVR® XMEGA™ Microcontroller
2
C and SMBus compatible)
8/16-bit
XMEGA A4
Microcontroller
ATxmega128A4
ATxmega64A4
ATxmega32A4
ATxmega16A4
Typical Applications
• Industrial control • Climate control • Hand-held battery applications
• Factory automation • ZigBee • Power tools
• Building control • Motor control • HVAC
• Board control • Networking • Metering
• White Goods • Optical • Medical Applications
8069Q–AVR–12/10
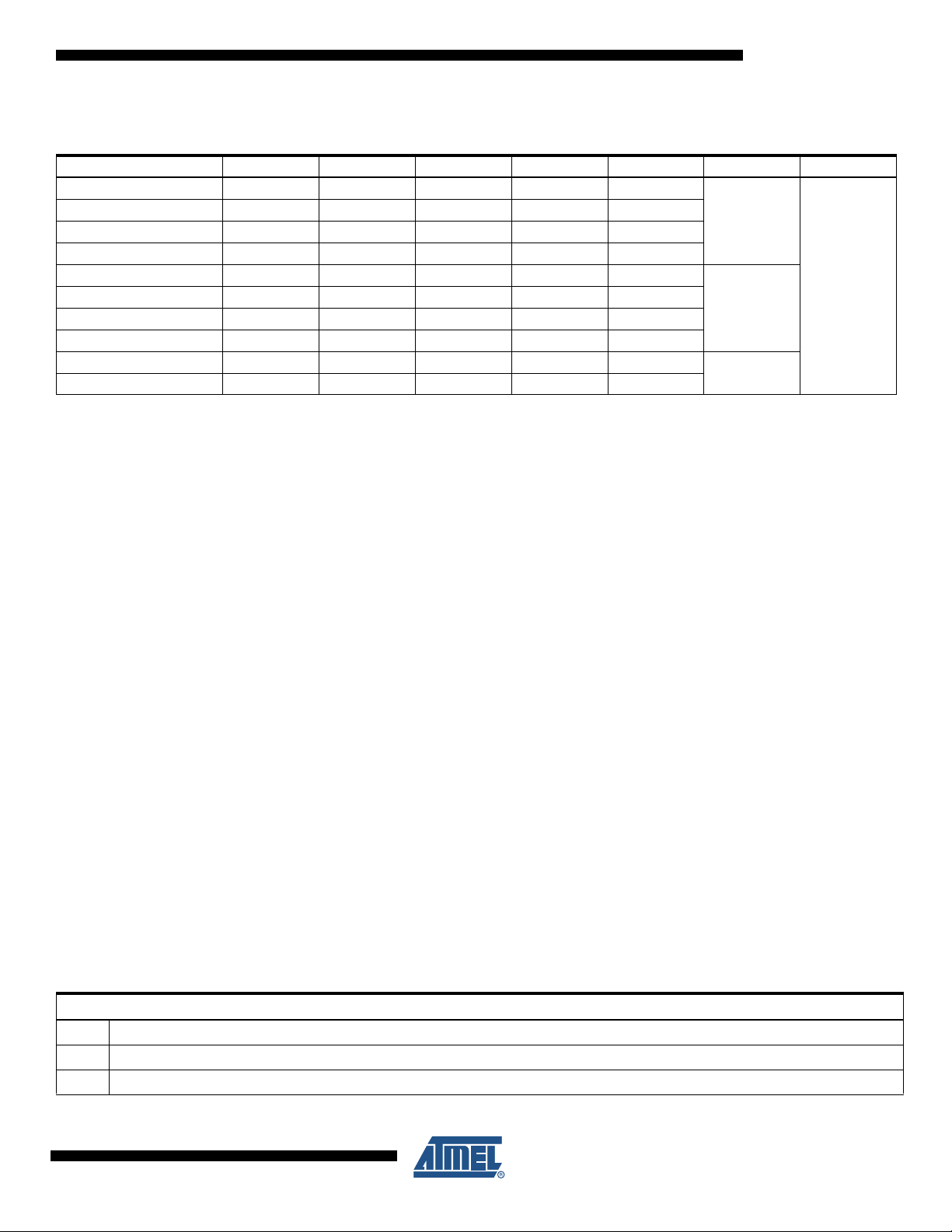
1. Ordering Information
XMEGA A4
Ordering Code Flash E
ATxmega128A4-AU 128 KB + 8 KB 2 KB 8 KB 32 1.6 - 3.6V
ATxmega64A4-AU 64 KB + 4 KB 2 KB 4 KB 32 1.6 - 3.6V
ATxmega32A4-AU 32 KB + 4 KB 1 KB 4 KB 32 1.6 - 3.6V
ATxmega16A4-AU 16 KB + 4 KB 1 KB 2 KB 32 1.6 - 3.6V
ATxmega128A4-MH 128 KB + 8 KB 2 KB 8 KB 32 1.6 - 3.6V
ATxmega64A4-MH 64 KB + 4 KB 2 KB 4 KB 32 1.6 - 3.6V
ATxmega32A4-MH 32 KB + 4 KB 1 KB 4 KB 32 1.6 - 3.6V
ATxmega16A4-MH 16 KB + 4 KB 1 KB 2 KB 32 1.6 - 3.6V
ATxmega32A4-CU 32 KB + 4K 1 KB 4 KB 32 1.6 - 3.6V
ATxmega16A4-CU 16 KB + 4 KB 1 KB 2 KB 32 1.6 - 3.6V
2
SRAM Speed (MHz) Power Supply Package
44A
44M1
49C2
(1)(2)(3)
Tem p
-40°C - 85°C
Notes: 1. This device can also be supplied in wafer form. Please contact your local Atmel sales office for detailed ordering information.
2. Pb-free packaging, complies to the European Directive for Restriction of Hazardous Substances (RoHS directive). Also
Halide free and fully Green.
3. For packaging information see ”Packaging information” on page 58.
Package Type
44A 44-Lead, 10 x 10 mm Body Size, 1.0 mm Body Thickness, 0.8 mm Lead Pitch, Thin Profile Plastic Quad Flat Package (TQFP)
44M1 44-Pad, 7x7x1 mm Body, Lead Pitch 0.50 mm, 5.20 mm Exposed Pad, Thermally Enhanced Plastic Very Thin Quad No Lead Package (VQFN)
49C2 49-Ball (7 x 7 Array), 0.65 mm Pitch, 5.0 x 5.0 x 1.0 mm, Very Thin, Fine-Pitch Ball Grid Array Package (VFBGA)
8069Q–AVR–12/10
2
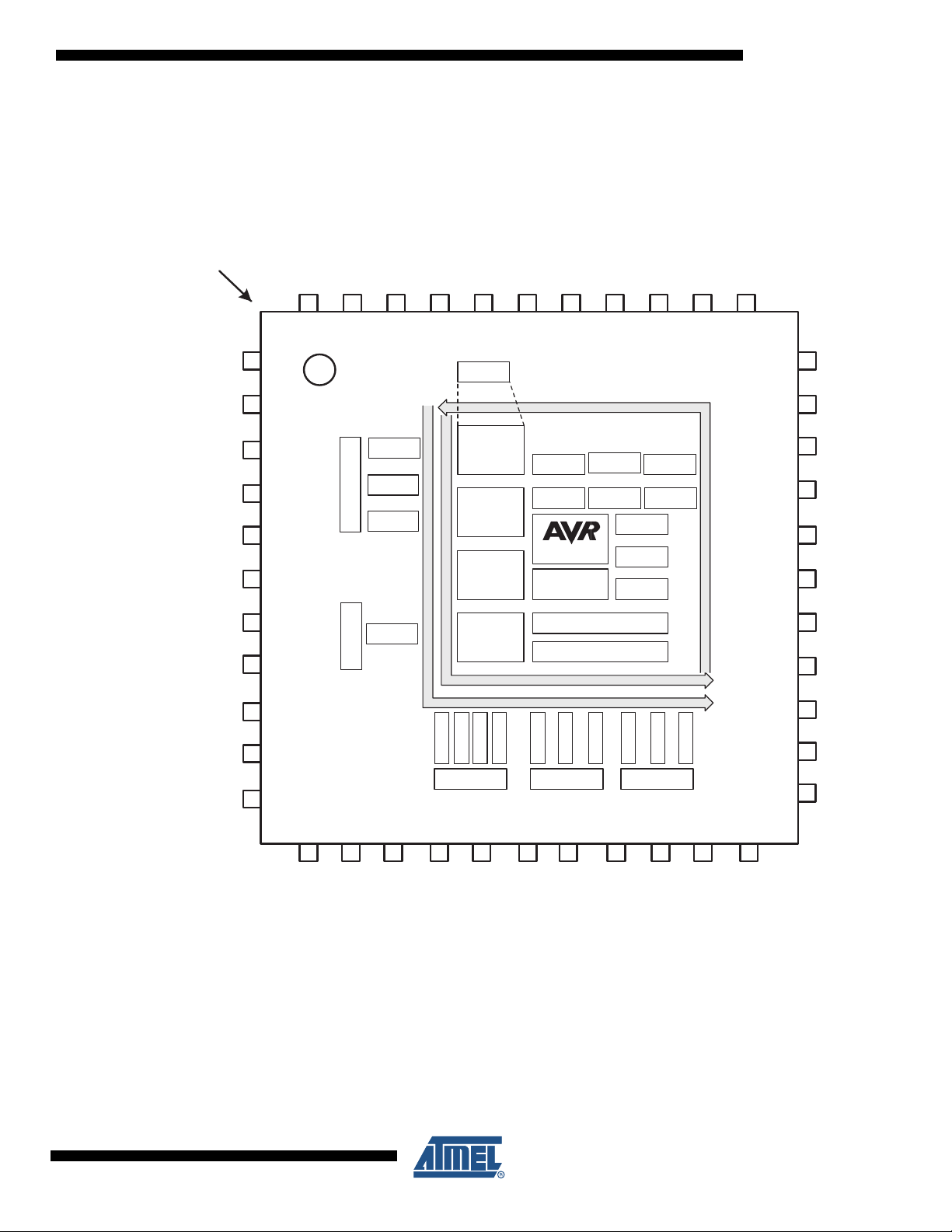
2. Pinout/Block Diagram
INDEX CORNER
PA 5
PA 6
PA 7
PB0
PB1
PB2
PB3
GND
VCC
PC0
PC1
12
13
14
15
16
17
18
19
20
21
22
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
1
2
3
4
5
6
7
8
9
10
11
PC2
PC3
PC4
PC5
PC6
PC7
VCC
PD0
PD1
PD2
PE3
PE2
VCC
GND
PE1
PE0
PD7
PD6
PD5
PD4
PD3
PA 4
PA 3
PA 2
PA 1
PA 0
AVCC
GND
PR1
PR0
RESET/PDI
PDI
FLASH
RAM
E2PROM
DMA
Interrupt Controller
OCD
ADC A
DAC B
AC A0
AC A1
A
Por t
B
Event System ctrl
T/C0:1
Por t R
Power
Control
Reset
Control
Watchdog
OSC/CLK
Control
BOD POR
RTC
EVENT ROUTING NETWORK
DATA BU S
DATA BU S
VREF
TEMP
Por t C
CPU
Por t
A
USART0:1
TWI
SPI
T/C0:1
Por t D
USART0:1
SPI
T/C0
Por t E
USART0
TWI
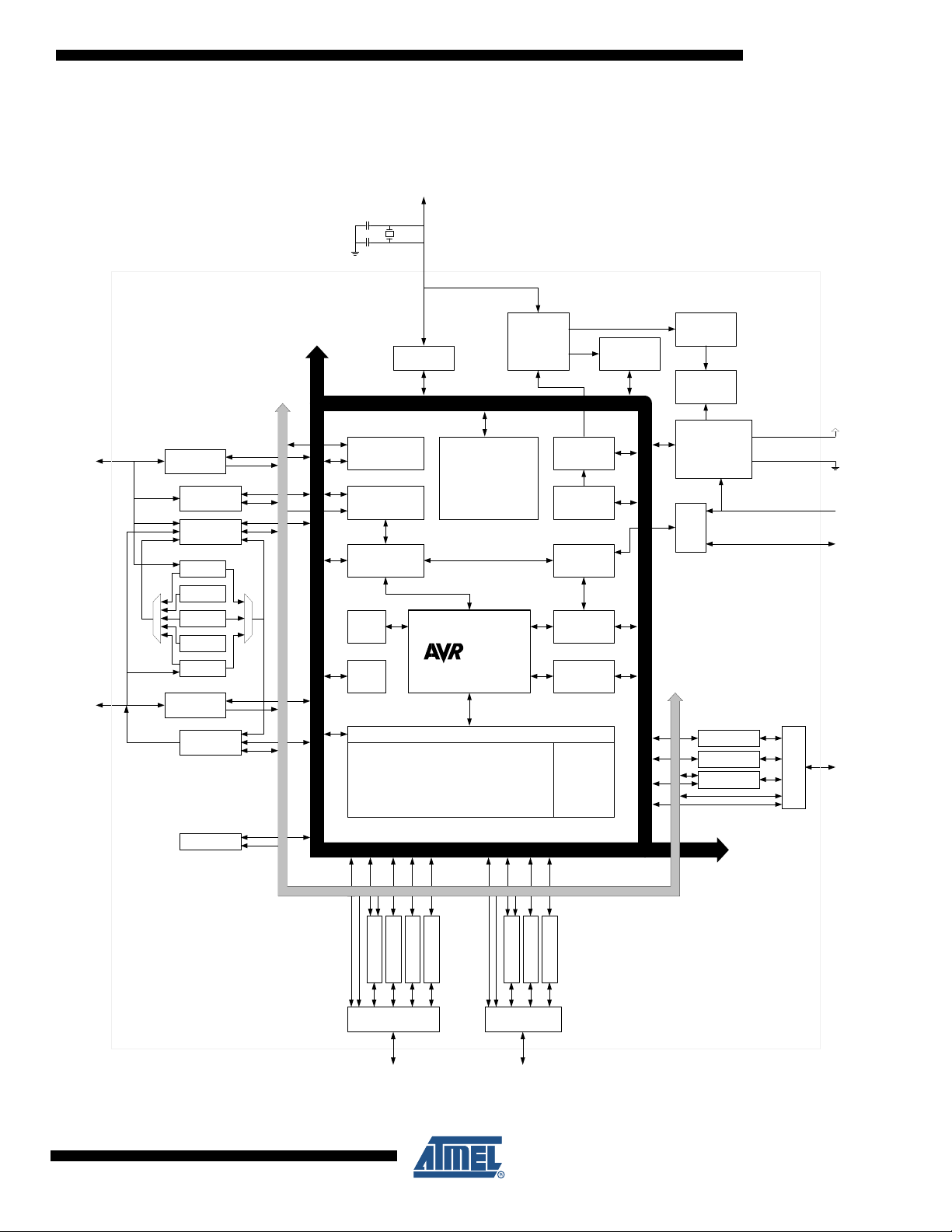
Figure 2-1. Bock Diagram and TQFP/QFN pinout
XMEGA A4
Notes: 1. For full details on pinout and pin functions refer to ”Pinout and Pin Functions” on page 49.
2. The large center pad underneath the QFN/MLF package should be soldered to ground on the board to ensure good
mechanical stability.
8069Q–AVR–12/10
3
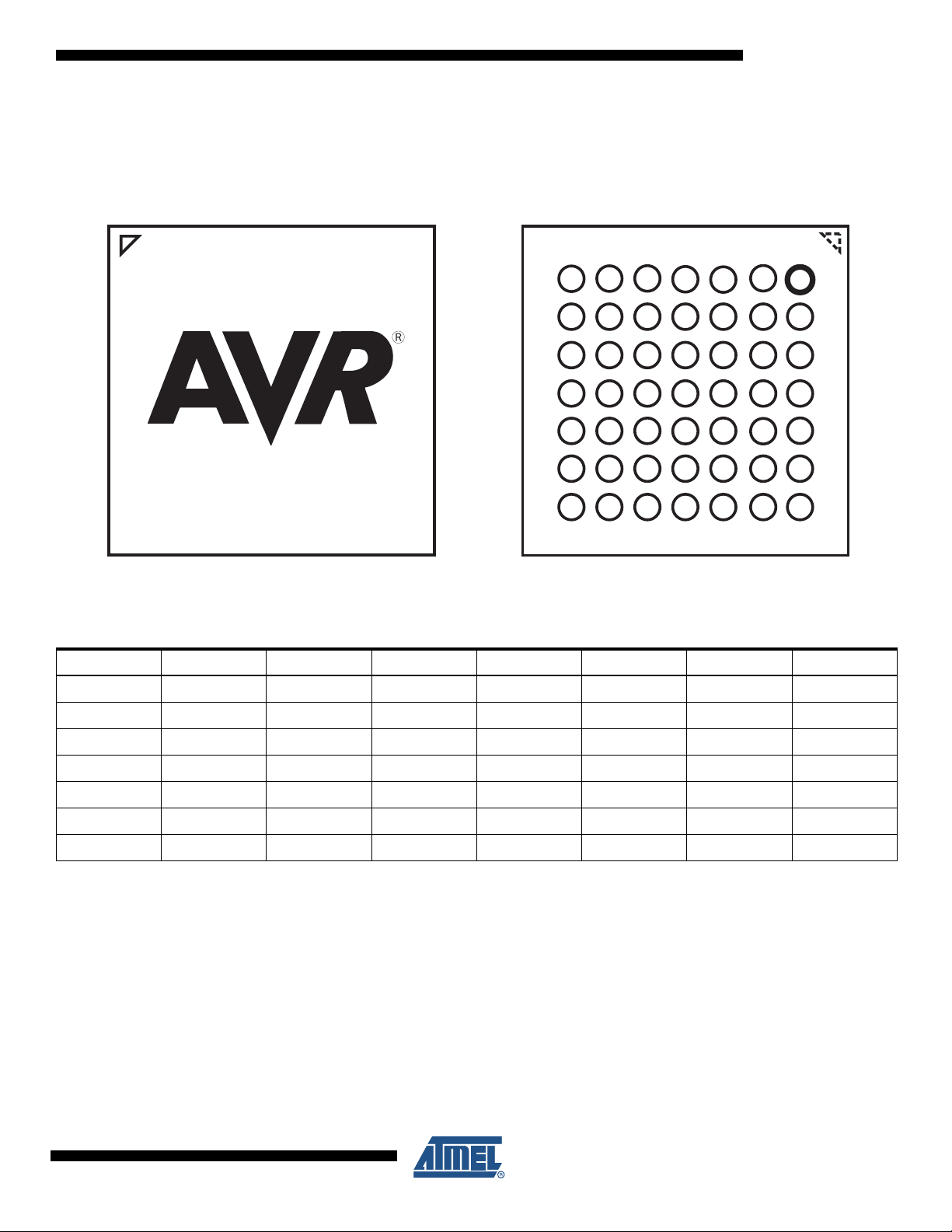
Figure 2-2. VFBGA pinout
A
B
C
D
E
F
G
1 234567
A
B
C
D
E
F
G
7654321
Top view
Bottom view
XMEGA A4
Table 2-1. VFBGA pinout
123456
A PA3 AVCC GND PR1 PR0 PDI PE3
B PA4 PA1 PA0 GND RESET/PDI PE2 VCC
C PA5 PA2 PA6 PA7 GND PE1 GND
D PB1 PB2 PB3 PB0 GND PD7 PE0
E GND GND PC3 GND PD4 PD5 PD6
F VCC PC0 PC4 PC6 PD0 PD1 PD3
G PC1 PC2 PC5 PC7 GND VCC PD2
8069Q–AVR–12/10
4

3. Overview
XMEGA A4
The Atmel® AVR® XMEGA™A4 is a family of low power, high performance and peripheral rich
CMOS 8/16-bit microcontrollers based on the AVR enhanced RISC architecture. By executing
powerful instructions in a single clock cycle, the XMEGA A4 achieves throughputs approaching
1 Million Instructions Per Second (MIPS) per MHz allowing the system designer to optimize
power consumption versus processing speed.
The AVR CPU combines a rich instruction set with 32 general purpose working registers. All the
32 registers are directly connected to the Arithmetic Logic Unit (ALU), allowing two independent
registers to be accessed in one single instruction, executed in one clock cycle. The resulting
architecture is more code efficient while achieving throughputs many times faster than conventional single-accumulator or CISC based microcontrollers.
The XMEGA A4 devices provide the following features: In-System Programmable Flash with
Read-While-Write capabilities, Internal EEPROM and SRAM, four-channel DMA Controller,
eight-channel Event System, Programmable Multi-level Interrupt Controller, 34 general purpose
I/O lines, 16-bit Real Time Counter (RTC), five flexible 16-bit Timer/Counters with compare
modes and PWM, five USARTs, two Two Wire Serial Interfaces (TWIs), two Serial Peripheral
Interfaces (SPIs), AES and DES crypto engine, one Twelve-channel, 12-bit ADC with optional
differential input with programmable gain, one Two-channel 12-bit DAC, two analog comparators
with window mode, programmable Watchdog Timer with separate Internal Oscillator, accurate
internal oscillators with PLL and prescaler and programmable Brown-Out Detection.
The Program and Debug Interface (PDI), a fast 2-pin interface for programming and debugging,
is available.
The XMEGA A4 devices have five software selectable power saving modes. The Idle mode
stops the CPU while allowing the SRAM, DMA Controller, Event System, Interrupt Controller and
all peripherals to continue functioning. The Power-down mode saves the SRAM and register
contents but stops the oscillators, disabling all other functions until the next TWI or pin-change
interrupt, or Reset. In Power-save mode, the asynchronous Real Time Counter continues to run,
allowing the application to maintain a timer base while the rest of the device is sleeping. In
Standby mode, the Crystal/Resonator Oscillator is kept running while the rest of the device is
sleeping. This allows very fast start-up from external crystal combined with low power consumption. In Extended Standby mode, both the main Oscillator and the Asynchronous Timer continue
to run. To further reduce power consumption, the peripheral clock to each individual peripheral
can optionally be stopped in Active mode and in Idle sleep mode.
The device is manufactured using Atmel's high-density nonvolatile memory technology. The program Flash memory can be reprogrammed in-system through the PDI. A Bootloader running in
the device can use any interface to download the application program to the Flash memory. The
Bootloader software in the Boot Flash section will continue to run while the Application Flash
section is updated, providing true Read-While-Write operation. By combining an 8/16-bit RISC
CPU with In-System Self-Programmable Flash, the Atmel XMEGA A4 is a powerful microcontroller family that provides a highly flexible and cost effective solution for many embedded
applications.
8069Q–AVR–12/10
The XMEGA A4 devices are supported with a full suite of program and system development
tools including: C compilers, macro assemblers, program debugger/simulators, programmers,
and evaluation kits.
5
3.1 Block Diagram
PE[0..3]
PORT E (4)
TCE0
USARTE0
TWIE
Power
Supervision
POR/BOD &
RESET
PORT A (8)
PORT B (4)
DMA
Controller
BUS
Controller
SRAM
ADCA
ACA
DACB
OCD
PDI
CPU
PA[0..7]
Watchdog
Timer
Watchdog
Oscillator
Interrupt
Controller
DATA BUS
DATA BUS
Prog/Debug
Controller
VCC
GND
Oscillator
Circuits/
Clock
Generation
Oscillator
Control
Real Time
Counter
Event System
Controller
PDI_DATA
RESET/
PDI_CLK
Sleep
Controller
Flash EEPROM
NVM Controller
DES
AES
IRCOM
PORT C (8)
PC[0..7]
TCC0:1
USARTC0:1
TWIC
SPIC
PD[0..7]
PORT R (2)
XTAL1/
TOSC1
XTAL2/
TOSC2
PR[0..1]
PORT D (8)
TCD0:1
USARTD0:1
SPID
EVENT ROUTING NETWORK
PB[0..3]
Int. Ref.
AREFA
AREFB
Tempref
VCC/10
Figure 3-1. XMEGA A4 Block Diagram
XMEGA A4
8069Q–AVR–12/10
6

4. Resources
A comprehensive set of development tools, application notes and datasheets are available for
download on http://www.atmel.com/avr.
4.1 Recommended reading
• Atmel AVR XMEGA A Manual
• XMEGA A Application Notes
This device data sheet only contains part specific information and a short description of each
peripheral and module. The XMEGA A Manual describes the modules and peripherals in depth.
The XMEGA A application notes contain example code and show applied use of the modules
and peripherals.
The XMEGA A Manual and Application Notes are available from http://www.atmel.com/avr.
5. Disclaimer
For devices that are not available yet, typical values contained in this datasheet are based on
simulations and characterization of other AVR XMEGA microcontrollers manufactured on the
same process technology. Min. and Max values will be available after the device is
characterized.
XMEGA A4
8069Q–AVR–12/10
7

6. AVR CPU
Flash
Program
Memory
Instruction
Decode
Program
Counter
OCD
32 x 8 General
Purpose
Registers
ALU
Multiplier/
DES
Instruction
Register
STATUS/
CONTROL
Peripheral
Module 1
Peripheral
Module 2
EEPROM PMICSRAM
DATA BUS
DATA BUS
6.1 Features
6.2 Overview
XMEGA A4
• 8/16-bit high performance AVR RISC Architecture
– 138 instructions
– Hardware multiplier
• 32x8-bit registers directly connected to the ALU
• Stack in RAM
• Stack Pointer accessible in I/O memory space
• Direct addressing of up to 16M Bytes of program and data memory
• True 16/24-bit access to 16/24-bit I/O registers
• Support for 8-, 16- and 32-bit Arithmetic
• Configuration Change Protection of system critical features
The XMEGA A4 uses the 8/16-bit AVR CPU. The main function of the CPU is program execution. The CPU must therefore be able to access memories, perform calculations and control
peripherals. Interrupt handling is described in a separate section. Figure 6-1 on page 8 shows
the CPU block diagram.
Figure 6-1. CPU block diagram
8069Q–AVR–12/10
The AVR uses a Harvard architecture - with separate memories and buses for program and
data. Instructions in the program memory are executed with a single level pipeline. While one
instruction is being executed, the next instruction is pre-fetched from the program memory. This
8

concept enables instructions to be executed in every clock cycle. The program memory is InSystem Re-programmable Flash memory.
6.3 Register File
The fast-access Register File contains 32 x 8-bit general purpose working registers with single
clock cycle access time. This allows single-cycle Arithmetic Logic Unit (ALU) operation. In a typical ALU cycle, the operation is performed on two Register File operands, and the result is stored
back in the Register File.
Six of the 32 registers can be used as three 16-bit address register pointers for data space
addressing - enabling efficient address calculations. One of these address pointers can also be
used as an address pointer for look up tables in Flash program memory.
6.4 ALU - Arithmetic Logic Unit
The high performance Arithmetic Logic Unit (ALU) supports arithmetic and logic operations
between registers or between a constant and a register. Single register operations can also be
executed. Within a single clock cycle, arithmetic operations between general purpose registers
or between a register and an immediate are executed. After an arithmetic or logic operation, the
Status Register is updated to reflect information about the result of the operation.
XMEGA A4
6.5 Program Flow
The ALU operations are divided into three main categories – arithmetic, logical, and bit-functions. Both 8- and 16-bit arithmetic is supported, and the instruction set allows for efficient
implementation of 32-bit arithmetic. The ALU also provides a powerful multiplier supporting both
signed and unsigned multiplication and fractional format.
When the device is powered on, the CPU starts to execute instructions from the lowest address
in the Flash Program Memory ‘0’. The Program Counter (PC) addresses the next instruction to
be fetched. After a reset, the PC is set to location ‘0’.
Program flow is provided by conditional and unconditional jump and call instructions, capable of
addressing the whole address space directly. Most AVR instructions use a 16-bit word format,
while a limited number uses a 32-bit format.
During interrupts and subroutine calls, the return address PC is stored on the Stack. The Stack
is effectively allocated in the general data SRAM, and consequently the Stack size is only limited
by the total SRAM size and the usage of the SRAM. After reset the Stack Pointer (SP) points to
the highest address in the internal SRAM. The SP is read/write accessible in the I/O memory
space, enabling easy implementation of multiple stacks or stack areas. The data SRAM can
easily be accessed through the five different addressing modes supported in the AVR CPU.
8069Q–AVR–12/10
9

7. Memories
7.1 Features
7.2 Overview
XMEGA A4
• Flash Program Memory
– One linear address space
– In-System Programmable
– Self-Programming and Bootloader support
– Application Section for application code
– Application Table Section for application code or data storage
– Boot Section for application code or bootloader code
– Separate lock bits and protection for all sections
– Built in fast CRC check of a selectable flash program memory section
• Data Memory
– One linear address space
– Single cycle access from CPU
– SRAM
– EEPROM
Byte and page accessible
Optional memory mapping for direct load and store
– I/O Memory
Configuration and Status registers for all peripherals and modules
16 bit-accessible General Purpose Register for global variables or flags
– Bus arbitration
Safe and deterministic handling of CPU and DMA Controller priority
– Separate buses for SRAM, EEPROM, I/O Memory and External Memory access
Simultaneous bus access for CPU and DMA Controller
• Production Signature Row Memory for factory programmed data
Device ID for each microcontroller device type
Serial number for each device
Oscillator calibration bytes
ADC, DAC and temperature sensor calibration data
• User Signature Row
One flash page in size
Can be read and written from software
Content is kept after chip erase
8069Q–AVR–12/10
The AVR architecture has two main memory spaces, the Program Memory and the Data Memory. In addition, the XMEGA A4 features an EEPROM Memory for non-volatile data storage. All
three memory spaces are linear and require no paging. The available memory size configurations are shown in ”Ordering Information” on page 2. In addition each device has a Flash
memory signature row for calibration data, device identification, serial number etc.
Non-volatile memory spaces can be locked for further write or read/write operations. This prevents unrestricted access to the application software.
10

7.3 In-System Programmable Flash Program Memory
The XMEGA A4 devices contain On-chip In-System Programmable Flash memory for program
storage, see Figure 7-1 on page 11. Since all AVR instructions are 16- or 32-bits wide, each
Flash address location is 16 bits.
The Program Flash memory space is divided into Application and Boot sections. Both sections
have dedicated Lock Bits for setting restrictions on write or read/write operations. The Store Program Memory (SPM) instruction must reside in the Boot Section when used to write to the Flash
memory.
A third section inside the Application section is referred to as the Application Table section which
has separate Lock bits for storage of write or read/write protection. The Application Table section can be used for storing non-volatile data or application software.
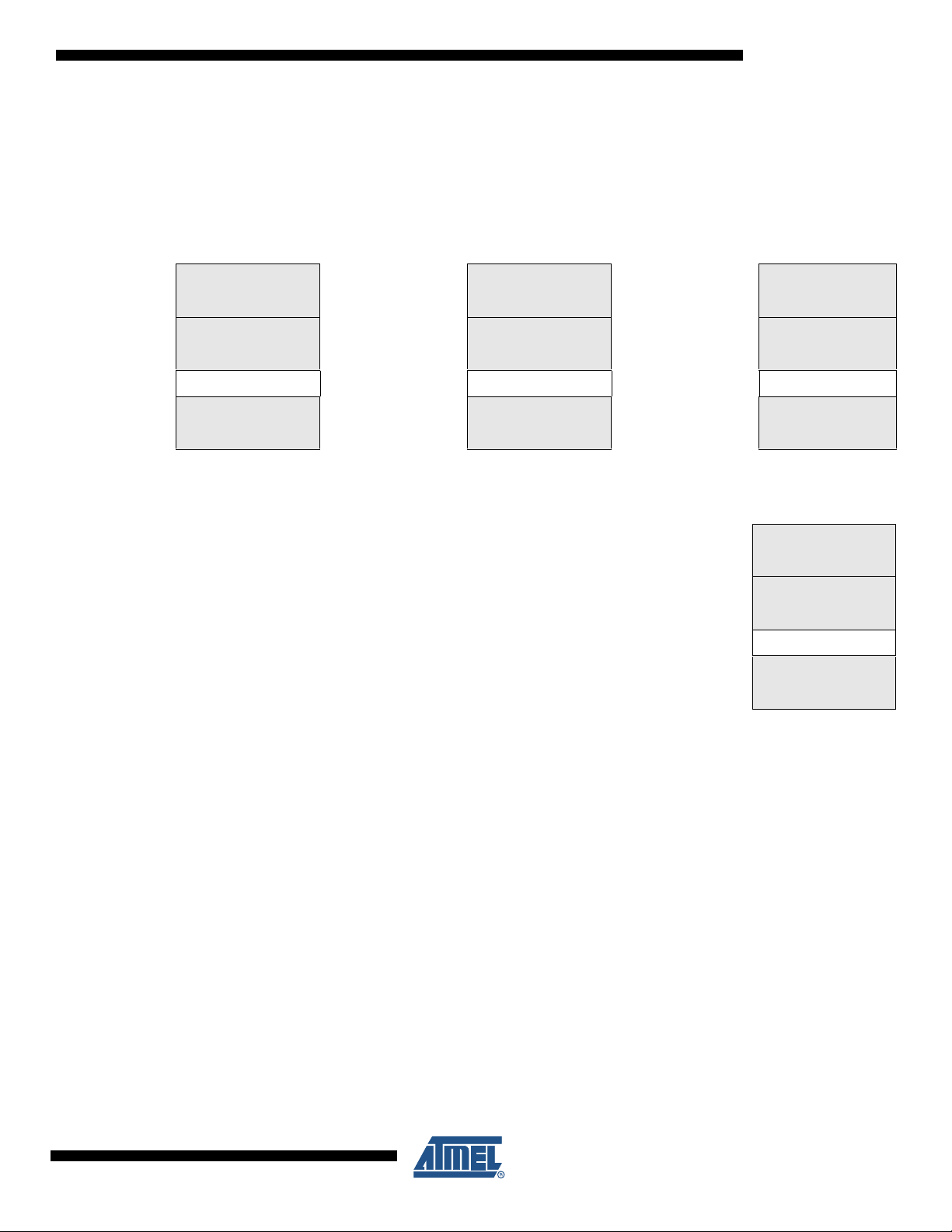
Figure 7-1. Flash Program Memory (Hexadecimal address)
Word Address
XMEGA A4
0
EFFF / 77FF / 37FF / 17FF
F000 / 7800 / 3800 / 1800
FFFF / 7FFF / 3FFF / 1FFF
10000 / 8000 / 4000 / 2000
10FFF / 87FF / 47FF / 27FF
Application Section
(128 KB/64 KB/32 KB/16 KB)
...
Application Table Section
(4 KB/4 KB/4 KB/4 KB)
Boot Section
(8 KB/4 KB/4 KB/4 KB)
The Application Table Section and Boot Section can also be used for general application
software.
8069Q–AVR–12/10
11
XMEGA A4
7.4 Data Memory
The Data Memory consist of the I/O Memory, EEPROM and SRAM memories, all within one linear address space, see Figure 7-2 on page 12. To simplify development, the memory map for all
devices in the family is identical and with empty, reserved memory space for smaller devices.
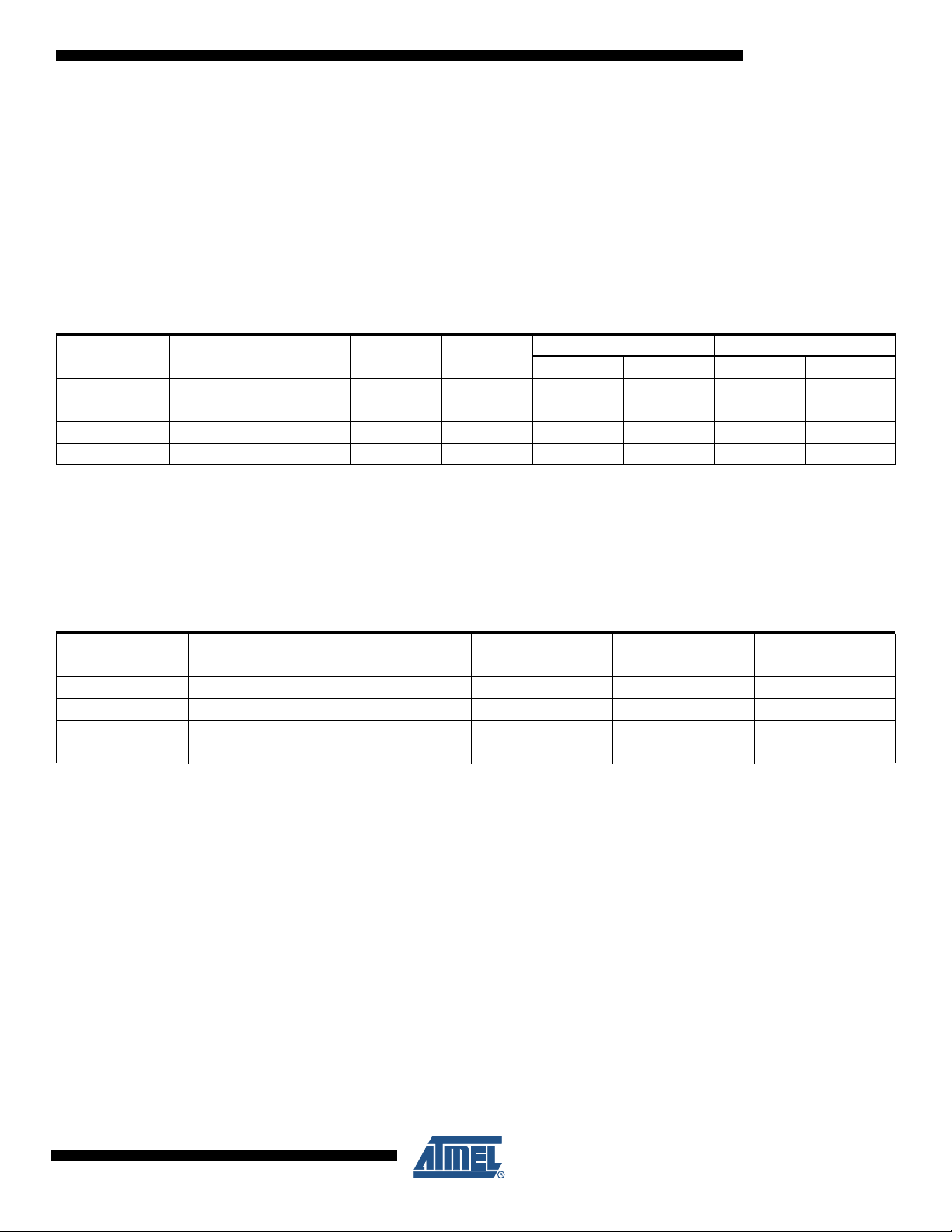
Figure 7-2. Data Memory Map (Hexadecimal address)
Byte Address ATxmega64A4 Byte Address ATxmega32A4 Byte Address ATxmega16A4
1000
0
I/O Registers
(4 KB)
EEPROM
(1 KB)
0
FFF FFF FFF
1000
17FF 13FF 13FF
I/O Registers
(4 KB)
EEPROM
(2 KB)
RESERVED RESERVED RESERVED
1000
0
I/O Registers
(4 KB)
EEPROM
(1 KB)
2000
2FFF 2FFF 27FF
7.4.1 I/O Memory
Internal SRAM
(4 KB)
2000
Internal SRAM
(4 KB)
2000
Internal SRAM
(2 KB)
Byte Address ATxmega128A4
0
FFF
1000
17FF
2000
3FFF
I/O Registers
(4 KB)
EEPROM
(2 KB)
RESERVED
Internal SRAM
(8 KB)
All peripherals and modules are addressable through I/O memory locations in the data memory
space. All I/O memory locations can be accessed by the Load (LD/LDS/LDD) and Store
(ST/STS/STD) instructions, transferring data between the 32 general purpose registers in the
CPU and the I/O Memory.
The IN and OUT instructions can address I/O memory locations in the range 0x00 - 0x3F
directly.
I/O registers within the address range 0x00 - 0x1F are directly bit-accessible using the SBI and
CBI instructions. The value of single bits can be checked by using the SBIS and SBIC instructions on these registers.
The I/O memory address for all peripherals and modules in XMEGA A4 is shown in the ”Periph-
eral Module Address Map” on page 53.
7.4.2 SRAM Data Memory
The XMEGA A4 devices have internal SRAM memory for data storage.
8069Q–AVR–12/10
12

7.4.3 EEPROM Data Memory
The XMEGA A4 devices have internal EEPROM memory for non-volatile data storage. It is
addressable either in a separate data space or it can be memory mapped into the normal data
memory space. The EEPROM memory supports both byte and page access.
7.5 Production Signature Row
The Production Signature Row is a separate memory section for factory programmed data. It
contains calibration data for functions such as oscillators and analog modules.
The production signature row also contains a device ID that identify each microcontroller device
type, and a serial number that is unique for each manufactured device. The device ID for the
available XMEGA A4 devices is shown in Table 7-1 on page 13. The serial number consist of
the production LOT number, wafer number, and wafer coordinates for the device.
The production signature row can not be written or erased, but it can be read from both application software and external programming.
Table 7-1. Device ID bytes for XMEGA A4 devices.
ATxmega16A4 41 94 1E
XMEGA A4
Device Device ID bytes
Byte 2 Byte 1 Byte 0
7.6 User Signature Row
The User Signature Row is a separate memory section that is fully accessible (read and write)
from application software and external programming. The user signature row is one flash page
in size, and is meant for static user parameter storage, such as calibration data, custom serial
numbers or identification numbers, random number seeds etc. This section is not erased by
Chip Erase commands that erase the Flash, and requires a dedicated erase command. This
ensures parameter storage during multiple program/erase session and on-chip debug sessions.
ATxmega32A4 41 95 1E
ATxmega64A4 46 96 1E
ATxmega128A4 46 97 1E
8069Q–AVR–12/10
13
XMEGA A4
7.7 Flash and EEPROM Page Size
The Flash Program Memory and EEPROM data memory are organized in pages. The pages are
word accessible for the Flash and byte accessible for the EEPROM.
Table 7-2 on page 14 shows the Flash Program Memory organization. Flash write and erase
operations are performed on one page at a time, while reading the Flash is done one byte at a
time. For Flash access the Z-pointer (Z[m:n]) is used for addressing. The most significant bits in
the address (FPAGE) give the page number and the least significant address bits (FWORD)
give the word in the page.
Table 7-2. Number of words and Pages in the Flash.
Devices Flash Page Size FWORD FPAGE Application Boot
Size (words) Size No of Pages Size No of Pages
ATxmega16A4 16 KB + 4 KB 128 Z[6:0] Z[13:7] 16 KB 64 4 KB 16
ATxmega32A4 32 KB + 4 KB 128 Z[6:0] Z[14:7] 32 KB 128 4 KB 16
ATxmega64A4 64 KB + 4 KB 128 Z[6:0] Z[15:7] 64 KB 128 4 KB 16
ATxmega128A4 128 KB + 8 KB 256 Z[7:0] Z[16:8] 128 KB 256 8 KB 16
Table 7-3 on page 14 shows EEPROM memory organization for the XMEGA A4 devices.
EEPROM write and erase operations can be performed one page or one byte at a time, while
reading the EEPROM is done one byte at a time. For EEPROM access the NVM Address Register (ADDR[m:n]) is used for addressing. The most significant bits in the address (E2PAGE) give
the page number and the least significant address bits (E2BYTE) give the byte in the page.
Table 7-3. Number of Bytes and Pages in the EEPROM.
Devices EEPROM Page Size E2BYTE E2PAGE No of Pages
Size (Bytes)
ATxmega16A4 1 KB 32 ADDR[4:0] ADDR[10:5] 32
ATxmega32A4 1 KB 32 ADDR[4:0] ADDR[10:5] 32
ATxmega64A4 2 KB 32 ADDR[4:0] ADDR[10:5] 64
ATxmega128A4 2 KB 32 ADDR[4:0] ADDR[10:5] 64
8069Q–AVR–12/10
14

8. DMAC - Direct Memory Access Controller
8.1 Features
• Allows High-speed data transfer
– From memory to peripheral
– From memory to memory
– From peripheral to memory
– From peripheral to peripheral
• 4 Channels
• From 1 byte and up to 16 M bytes transfers in a single transaction
• Multiple addressing modes for source and destination address
–Increment
– Decrement
– Static
• 1, 2, 4, or 8 bytes Burst Transfers
• Programmable priority between channels
8.2 Overview
The XMEGA A4 has a Direct Memory Access (DMA) Controller to move data between memories
and peripherals in the data space. The DMA controller uses the same data bus as the CPU to
transfer data.
XMEGA A4
It has 4 channels that can be configured independently. Each DMA channel can perform data
transfers in blocks of configurable size from 1 to 64K bytes. A repeat counter can be used to
repeat each block transfer for single transactions up to 16M bytes. Each DMA channel can be
configured to access the source and destination memory address with incrementing, decrementing or static addressing. The addressing is independent for source and destination address.
When the transaction is complete the original source and destination address can automatically
be reloaded to be ready for the next transaction.
The DMAC can access all the peripherals through their I/O memory registers, and the DMA may
be used for automatic transfer of data to/from communication modules, as well as automatic
data retrieval from ADC conversions, data transfer to DAC conversions, or data transfer to or
from port pins. A wide range of transfer triggers is available from the peripherals, Event System
and software. Each DMA channel has different transfer triggers.
To allow for continuous transfer, two channels can be interlinked so that the second takes over
the transfer when the first is finished and vice versa.
The DMA controller can read from memory mapped EEPROM, but it cannot write to the
EEPROM or access the Flash.
8069Q–AVR–12/10
15

9. Event System
9.1 Features
9.2 Overview
• Inter-peripheral communication and signalling with minimum latency
• CPU and DMA independent operation
• 8 Event Channels allow for up to 8 signals to be routed at the same time
• Events can be generated by
– TImer/Counters (TCxn)
– Real Time Counter (RTC)
– Analog to Digital Converters (ADCx)
– Analog Comparators (ACx)
– Ports (PORTx)
– System Clock (Clk
– Software (CPU)
SYS
)
• Events can be used by
– TImer/Counters (TCxn)
– Analog to Digital Converters (ADCx)
– Digital to Analog Converters (DACx)
– Ports (PORTx)
– DMA Controller (DMAC)
– IR Communication Module (IRCOM)
• The same event can be used by multiple peripherals for synchronized timing
• Advanced Features
– Manual Event Generation from software (CPU)
– Quadrature Decoding
– Digital Filtering
• Functions in Active and Idle mode
XMEGA A4
8069Q–AVR–12/10
The Event System is a set of features for inter-peripheral communication. It enables the possibility for a change of state in one peripheral to automatically trigger actions in one or more
peripherals. Whose changes in a peripheral that will trigger actions in other peripherals are configurable by software. It is a simple, but powerful system as it allows for autonomous control of
peripherals without any use of interrupts, CPU or DMA resources.
The indication of a change in a peripheral is referred to as an event, and is usually the same as
the interrupt conditions for that peripheral. Events are passed between peripherals using a dedicated routing network called the Event Routing Network. Figure 9-1 on page 17 shows a basic
block diagram of the Event System with the Event Routing Network and the peripherals to which
it is connected. This highly flexible system can be used for simple routing of signals, pin functions or for sequencing of events.
The maximum latency is two CPU clock cycles from when an event is generated in one peripheral, until the actions are triggered in one or more other peripherals.
The Event System is functional in both Active and Idle modes.
16

Figure 9-1. Event System Block Diagram
ADCx
DACx
Event Routing
Network
PORTx
CPU
ACx
RTC
T/Cxn
DMACIRCOM
ClkSYS
XMEGA A4
The Event Routing Network can directly connect together ADCs, DACs, Analog Comparators
(ACx), I/O ports (PORTx), the Real-time Counter (RTC), Timer/Counters (T/C) and the IR Communication Module (IRCOM). Events can also be generated from software (CPU).
All events from all peripherals are always routed into the Event Routing Network. This consist of
eight multiplexers where each can be configured in software to select which event to be routed
into that event channel. All eight event channels are connected to the peripherals that can use
events, and each of these peripherals can be configured to use events from one or more event
channels to automatically trigger a software selectable action.
8069Q–AVR–12/10
17

10. System Clock and Clock options
10.1 Features
• Fast start-up time
• Safe run-time clock switching
• Internal Oscillators:
– 32 MHz run-time calibrated RC oscillator
– 2 MHz run-time calibrated RC oscillator
– 32.768 kHz calibrated RC oscillator
– 32 kHz Ultra Low Power (ULP) oscillator with 1 kHz ouput
• External clock options
– 0.4 - 16 MHz Crystal Oscillator
– 32 kHz Crystal Oscillator
– External clock
• PLL with internal and external clock options with 1 to 31x multiplication
• Clock Prescalers with 1 to 2048x division
• Fast peripheral clock running at 2 and 4 times the CPU clock speed
• Automatic Run-Time Calibration of internal oscillators
• Crystal Oscillator failure detection
10.2 Overview
XMEGA A4
XMEGA A4 has an advanced clock system, supporting a large number of clock sources. It incorporates both integrated oscillators, external crystal oscillators and resonators. A high frequency
Phase Locked Loop (PLL) and clock prescalers can be controlled from software to generate a
wide range of clock frequencies from the clock source input.
It is possible to switch between clock sources from software during run-time. After reset the
device will always start up running from the 2 Mhz internal oscillator.
A calibration feature is available, and can be used for automatic run-time calibration of the internal 2 MHz and 32 MHz oscillators. This reduce frequency drift over voltage and temperature.
A Crystal Oscillator Failure Monitor can be enabled to issue a Non-Maskable Interrupt and
switch to internal oscillator if the external oscillator fails. Figure 10-1 on page 19 shows the principal clock system in XMEGA A4.
8069Q–AVR–12/10
18
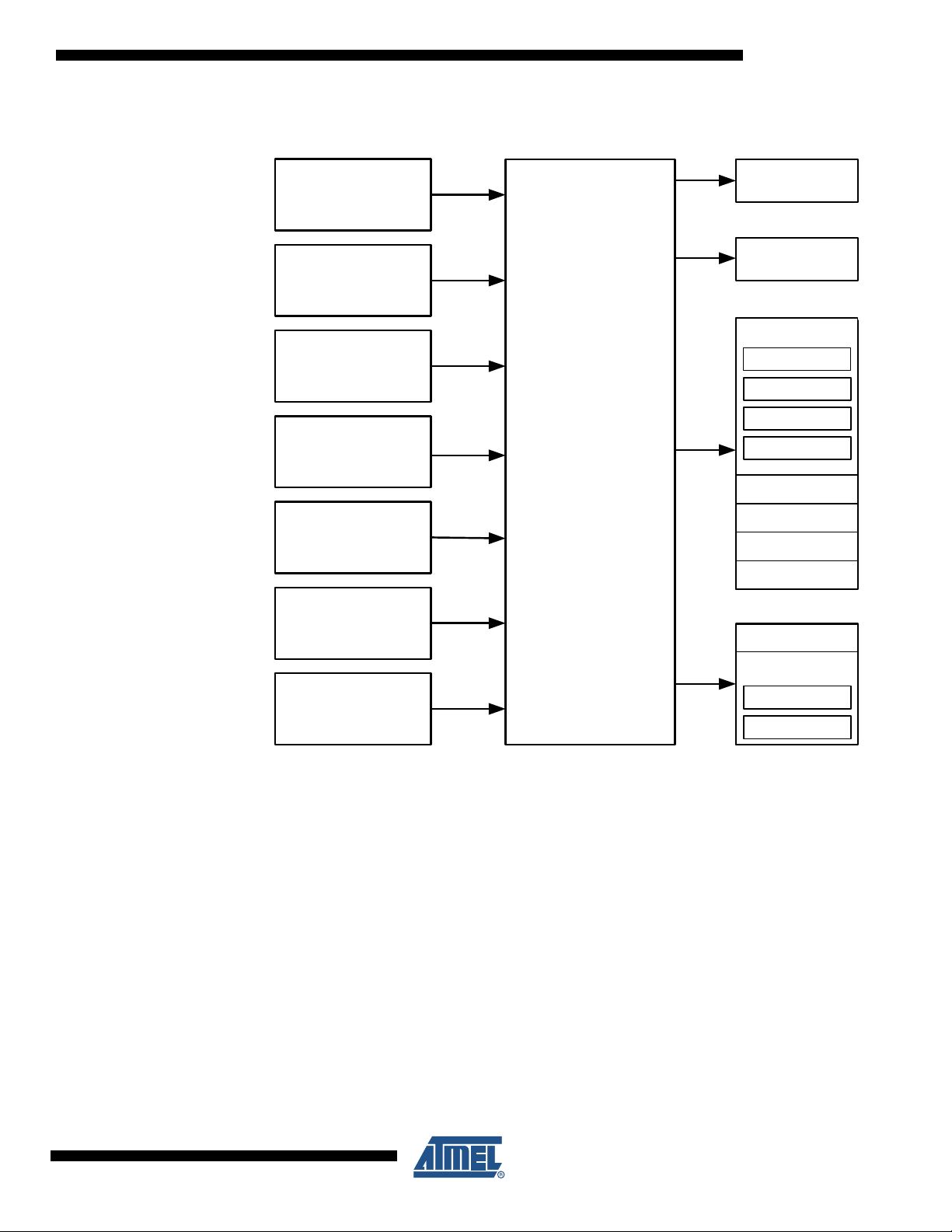
Figure 10-1. Clock system overview
32 MHz
Run-time Calibrated
Internal Oscillator
32 kHz ULP
Internal Oscillator
32.768 kHz
Calibrated Internal
Oscillator
32.768 KHz
Crystal Oscillator
0.4 - 16 MHz
Crystal Oscillator
2 MHz
Run-Time Calibrated
Internal Oscillator
External
Clock Input
CLOCK CONTROL
UNIT
with PLL and
Prescaler
WDT/BOD
clk
ULP
RTC
clk
RTC
EVSYS
PERIPHERALS
ADC
DAC
PORTS
...
clk
PER
DMA
INTERRUPT
RAM
NVM MEMORY
FLASH
EEPROM
CPU
clk
CPU
XMEGA A4
10.3 Clock Options
10.3.1 32 kHz Ultra Low Power Internal Oscillator
Each clock source is briefly described in the following sub-sections.
The 32 kHz Ultra Low Power (ULP) Internal Oscillator is a very low power consumption clock
source. It is used for the Watchdog Timer, Brown-Out Detection and as an asynchronous clock
source for the Real Time Counter. This oscillator cannot be used as the system clock source,
and it cannot be directly controlled from software.
10.3.2 32.768 kHz Calibrated Internal Oscillator
The 32.768 kHz Calibrated Internal Oscillator is a high accuracy clock source that can be used
as the system clock source or as an asynchronous clock source for the Real Time Counter. It is
calibrated during production to provide a default frequency which is close to its nominal
frequency.
8069Q–AVR–12/10
19

10.3.3 32.768 kHz Crystal Oscillator
The 32.768 kHz Crystal Oscillator is a low power driver for an external watch crystal. It can be
used as system clock source or as asynchronous clock source for the Real Time Counter.
10.3.4 0.4 - 16 MHz Crystal Oscillator
The 0.4 - 16 MHz Crystal Oscillator is a driver intended for driving both external resonators and
crystals ranging from 400 kHz to 16 MHz.
10.3.5 2 MHz Run-time Calibrated Internal Oscillator
The 2 MHz Run-time Calibrated Internal Oscillator is a high frequency oscillator. It is calibrated
during production to provide a default frequency which is close to its nominal frequency. The
oscillator can use the 32 kHz Calibrated Internal Oscillator or the 32 kHz Crystal Oscillator as a
source for calibrating the frequency run-time to compensate for temperature and voltage drift
hereby optimizing the accuracy of the oscillator.
10.3.6 32 MHz Run-time Calibrated Internal Oscillator
The 32 MHz Run-time Calibrated Internal Oscillator is a high frequency oscillator. It is calibrated
during production to provide a default frequency which is close to its nominal frequency. The
oscillator can use the 32 kHz Calibrated Internal Oscillator or the 32 kHz Crystal Oscillator as a
source for calibrating the frequency run-time to compensate for temperature and voltage drift
hereby optimizing the accuracy of the oscillator.
XMEGA A4
10.3.7 External Clock input
The external clock input gives the possibility to connect a clock from an external source.
10.3.8 PLL with Multiplication factor 1 - 31x
The PLL provides the possibility of multiplying a frequency by any number from 1 to 31. In combination with the prescalers, this gives a wide range of output frequencies from all clock sources.
8069Q–AVR–12/10
20

11. Power Management and Sleep Modes
11.1 Features
• 5 sleep modes
–Idle
– Power-down
–Power-save
–Standby
– Extended standby
• Power Reduction registers to disable clocks to unused peripherals
11.2 Overview
The XMEGA A4 provides various sleep modes tailored to reduce power consumption to a minimum. All sleep modes are available and can be entered from Active mode. In Active mode the
CPU is executing application code. The application code decides when and what sleep mode to
enter. Interrupts from enabled peripherals and all enabled reset sources can restore the microcontroller from sleep to Active mode.
In addition, Power Reduction registers provide a method to stop the clock to individual peripherals from software. When this is done, the current state of the peripheral is frozen and there is no
power consumption from that peripheral. This reduces the power consumption in Active mode
and Idle sleep mode.
XMEGA A4
11.3 Sleep Modes
11.3.1 Idle Mode
In Idle mode the CPU and Non-Volatile Memory are stopped, but all peripherals including the
Interrupt Controller, Event System and DMA Controller are kept running. Interrupt requests from
all enabled interrupts will wake the device.
11.3.2 Power-down Mode
In Power-down mode all system clock sources, and the asynchronous Real Time Counter (RTC)
clock source, are stopped. This allows operation of asynchronous modules only. The only interrupts that can wake up the MCU are the Two Wire Interface address match interrupts, and
asynchronous port interrupts, e.g pin change.
11.3.3 Power-save Mode
Power-save mode is identical to Power-down, with one exception: If the RTC is enabled, it will
keep running during sleep and the device can also wake up from RTC interrupts.
11.3.4 Standby Mode
Standby mode is identical to Power-down with the exception that all enabled system clock
sources are kept running, while the CPU, Peripheral and RTC clocks are stopped. This reduces
the wake-up time when external crystals or resonators are used.
8069Q–AVR–12/10
21

11.3.5 Extended Standby Mode
Extended Standby mode is identical to Power-save mode with the exception that all enabled
system clock sources are kept running while the CPU and Peripheral clocks are stopped. This
reduces the wake-up time when external crystals or resonators are used.
XMEGA A4
8069Q–AVR–12/10
22

12. System Control and Reset
12.1 Features
• Multiple reset sources for safe operation and device reset
– Power-On Reset
– External Reset
– Watchdog Reset
The Watchdog Timer runs from separate, dedicated oscillator
– Brown-Out Reset
Accurate, programmable Brown-Out levels
– PDI reset
– Software reset
• Asynchronous reset
– No running clock in the device is required for reset
• Reset status register
12.2 Resetting the AVR
During reset, all I/O registers are set to their initial values. The SRAM content is not reset. Application execution starts from the Reset Vector. The instruction placed at the Reset Vector should
be an Absolute Jump (JMP) instruction to the reset handling routine. By default the Reset Vector
address is the lowest Flash program memory address, ‘0’, but it is possible to move the Reset
Vector to the first address in the Boot Section.
XMEGA A4
The I/O ports of the AVR are immediately tri-stated when a reset source goes active.
The reset functionality is asynchronous, so no running clock is required to reset the device.
After the device is reset, the reset source can be determined by the application by reading the
Reset Status Register.
12.3 Reset Sources
12.3.1 Power-On Reset
The MCU is reset when the supply voltage VCC is below the Power-on Reset threshold voltage.
12.3.2 External Reset
The MCU is reset when a low level is present on the RESET pin.
12.3.3 Watchdog Reset
The MCU is reset when the Watchdog Timer period expires and the Watchdog Reset is enabled.
The Watchdog Timer runs from a dedicated oscillator independent of the System Clock. For
more details see ”WDT - Watchdog Timer” on page 24.
12.3.4 Brown-Out Reset
The MCU is reset when the supply voltage VCC is below the Brown-Out Reset threshold voltage
and the Brown-out Detector is enabled. The Brown-out threshold voltage is programmable.
8069Q–AVR–12/10
23

12.3.5 PDI reset
The MCU can be reset through the Program and Debug Interface (PDI).
12.3.6 Software reset
The MCU can be reset by the CPU writing to a special I/O register through a timed sequence.
13. WDT - Watchdog Timer
13.1 Features
• 11 selectable timeout periods, from 8 ms to 8s.
• Two operation modes
– Standard mode
– Window mode
• Runs from the 1 kHz output of the 32 kHz Ultra Low Power oscillator
• Configuration lock to prevent unwanted changes
13.2 Overview
XMEGA A4
The XMEGA A4 has a Watchdog Timer (WDT). The WDT will run continuously when turned on
and if the Watchdog Timer is not reset within a software configurable time-out period, the microcontroller will be reset. The Watchdog Reset (WDR) instruction must be run by software to reset
the WDT, and prevent microcontroller reset.
The WDT has a Window mode. In this mode the WDR instruction must be run within a specified
period called a window. Application software can set the minimum and maximum limits for this
window. If the WDR instruction is not executed inside the window limits, the microcontroller will
be reset.
A protection mechanism using a timed write sequence is implemented in order to prevent
unwanted enabling, disabling or change of WDT settings.
For maximum safety, the WDT also has an Always-on mode. This mode is enabled by programming a fuse. In Always-on mode, application software can not disable the WDT.
8069Q–AVR–12/10
24

14. PMIC - Programmable Multi-level Interrupt Controller
14.1 Features
• Separate interrupt vector for each interrupt
• Short, predictable interrupt response time
• Programmable Multi-level Interrupt Controller
– 3 programmable interrupt levels
– Selectable priority scheme within low level interrupts (round-robin or fixed)
– Non-Maskable Interrupts (NMI)
• Interrupt vectors can be moved to the start of the Boot Section
14.2 Overview
XMEGA A4 has a Programmable Multi-level Interrupt Controller (PMIC). All peripherals can
define three different priority levels for interrupts; high, medium or low. Medium level interrupts
may interrupt low level interrupt service routines. High level interrupts may interrupt both lowand medium level interrupt service routines. Low level interrupts have an optional round robin
scheme to make sure all interrupts are serviced within a certain amount of time.
The built in oscillator failure detection mechanism can issue a Non-Maskable Interrupt (NMI).
XMEGA A4
14.3 Interrupt vectors
When an interrupt is serviced, the program counter will jump to the interrupt vector address. The
interrupt vector is the sum of the peripheral’s base interrupt address and the offset address for
specific interrupts in each peripheral. The base addresses for the XMEGA A4 devices are shown
in Table 14-1. Offset addresses for each interrupt available in the peripheral are described for
each peripheral in the XMEGA A manual. For peripherals or modules that have only one interrupt, the interrupt vector is shown in Table 14-1. The program address is the word address.
Table 14-1. Reset and Interrupt Vectors
Program Address
(Base Address) Source Interrupt Description
0x000 RESET
0x002 OSCF_INT_vect Crystal Oscillator Failure Interrupt vector (NMI)
0x004 PORTC_INT_base Port C Interrupt base
0x008 PORTR_INT_base Port R Interrupt base
0x00C DMA_INT_base DMA Controller Interrupt base
0x014 RTC_INT_base Real Time Counter Interrupt base
0x018 TWIC_INT_base Two-Wire Interface on Port C Interrupt base
0x01C TCC0_INT_base Timer/Counter 0 on port C Interrupt base
0x028 TCC1_INT_base Timer/Counter 1 on port C Interrupt base
0x030 SPIC_INT_vect SPI on port C Interrupt vector
0x032 USARTC0_INT_base USART 0 on port C Interrupt base
0x038 USARTC1_INT_base USART 1 on port C Interrupt base
0x03E AES_INT_vect AES Interrupt vector
8069Q–AVR–12/10
25

Table 14-1. Reset and Interrupt Vectors (Continued)
Program Address
(Base Address) Source Interrupt Description
0x040 NVM_INT_base Non-Volatile Memory Interrupt base
0x044 PORTB_INT_base Port B Interrupt base
0x056 PORTE_INT_base Port E Interrupt base
0x05A TWIE_INT_base Two-Wire Interface on Port E Interrupt base
0x05E TCE0_INT_base Timer/Counter 0 on port E Interrupt base
0x06A TCE1_INT_base Timer/Counter 1 on port E Interrupt base
0x074 USARTE0_INT_base USART 0 on port E Interrupt base
0x080 PORTD_INT_base Port D Interrupt base
0x084 PORTA_INT_base Port A Interrupt base
0x088 ACA_INT_base Analog Comparator on Port A Interrupt base
0x08E ADCA_INT_base Analog to Digital Converter on Port A Interrupt base
0x09A TCD0_INT_base Timer/Counter 0 on port D Interrupt base
0x0A6 TCD1_INT_base Timer/Counter 1 on port D Interrupt base
0x0AE SPID_INT_vector SPI on port D Interrupt vector
0x0B0 USARTD0_INT_base USART 0 on port D Interrupt base
XMEGA A4
0x0B6 USARTD1_INT_base USART 1 on port D Interrupt base
8069Q–AVR–12/10
26

15. I/O Ports
15.1 Features
15.2 Overview
XMEGA A4
• Selectable input and output configuration for each pin individually
• Flexible pin configuration through dedicated Pin Configuration Register
• Synchronous and/or asynchronous input sensing with port interrupts and events
– Sense both edges
– Sense rising edges
– Sense falling edges
– Sense low level
• Asynchronous wake-up from all input sensing configurations
• Two port interrupts with flexible pin masking
• Highly configurable output driver and pull settings:
– Totem-pole
– Pull-up/-down
– Wired-AND
– Wired-OR
– Bus-keeper
– Inverted I/O
• Optional Slew rate control
• Configuration of multiple pins in a single operation
• Read-Modify-Write (RMW) support
• Toggle/clear/set registers for Output and Direction registers
• Clock output on port pin
• Event Channel 0 output on port pin 7
• Mapping of port registers (virtual ports) into bit accessible I/O memory space
The XMEGA A4 devices have flexible General Purpose I/O Ports. A port consists of up to 8 pins,
ranging from pin 0 to pin 7. The ports implement several functions, including synchronous/asynchronous input sensing, pin change interrupts and configurable output settings. All functions are
individual per pin, but several pins may be configured in a single operation.
15.3 I/O configuration
All port pins (Pn) have programmable output configuration. In addition, all port pins have an
inverted I/O function. For an input, this means inverting the signal between the port pin and the
pin register. For an output, this means inverting the output signal between the port register and
the port pin. The inverted I/O function can be used also when the pin is used for alternate
functions.
8069Q–AVR–12/10
27
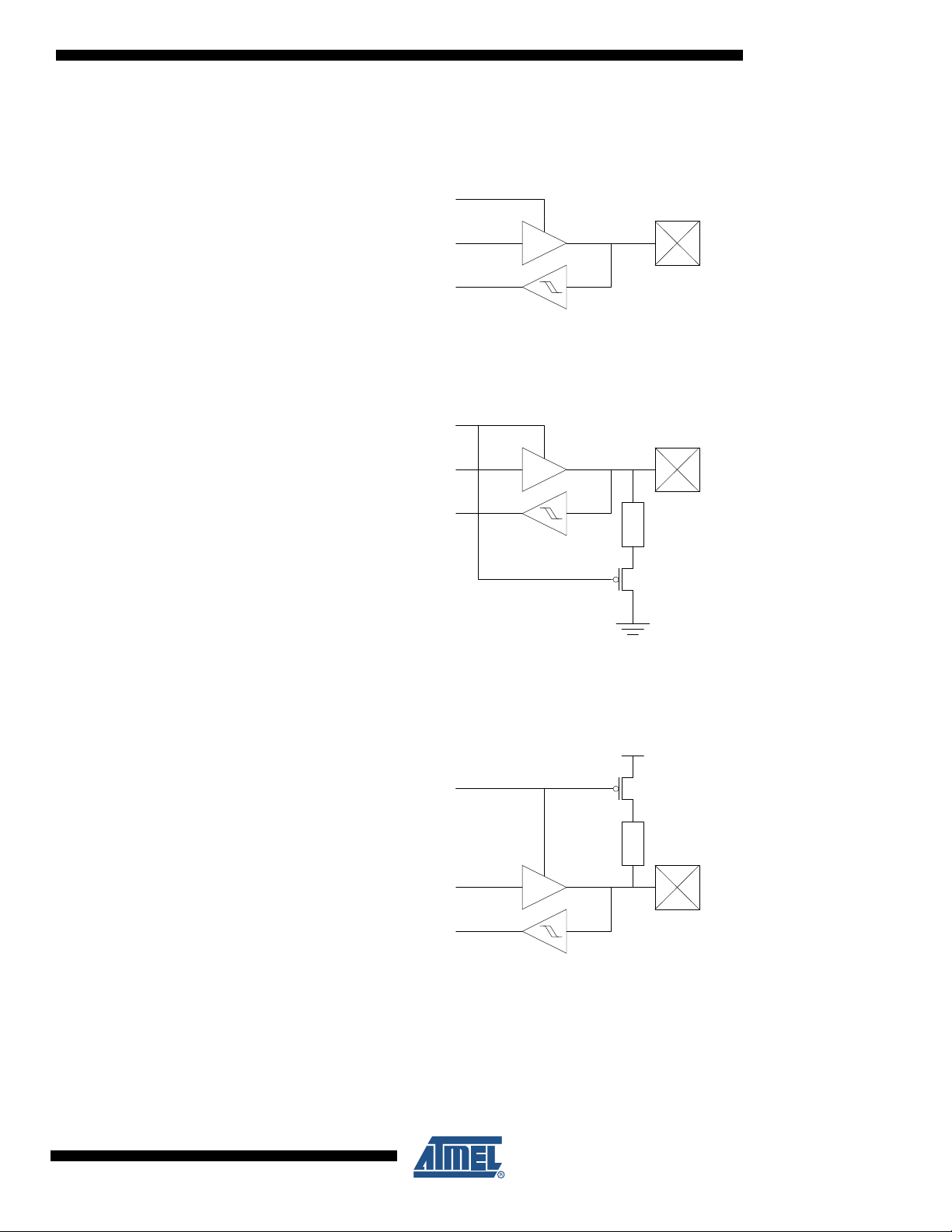
15.3.1 Push-pull
INn
OUTn
DIRn
Pn
INn
OUTn
DIRn
Pn
INn
OUTn
DIRn
Pn
15.3.2 Pull-down
XMEGA A4
Figure 15-1. I/O configuration - Totem-pole
Figure 15-2. I/O configuration - Totem-pole with pull-down (on input)
15.3.3 Pull-up
15.3.4 Bus-keeper
Figure 15-3. I/O configuration - Totem-pole with pull-up (on input)
The bus-keeper’s weak output produces the same logical level as the last output level. It acts as
a pull-up if the last level was ‘1’, and pull-down if the last level was ‘0’.
8069Q–AVR–12/10
28

15.3.5 Others
INn
OUTn
DIRn
Pn
INn
OUTn
Pn
INn
OUTn
Pn
XMEGA A4
Figure 15-4. I/O configuration - Totem-pole with bus-keeper
Figure 15-5. Output configuration - Wired-OR with optional pull-down
8069Q–AVR–12/10
Figure 15-6. I/O configuration - Wired-AND with optional pull-up
29
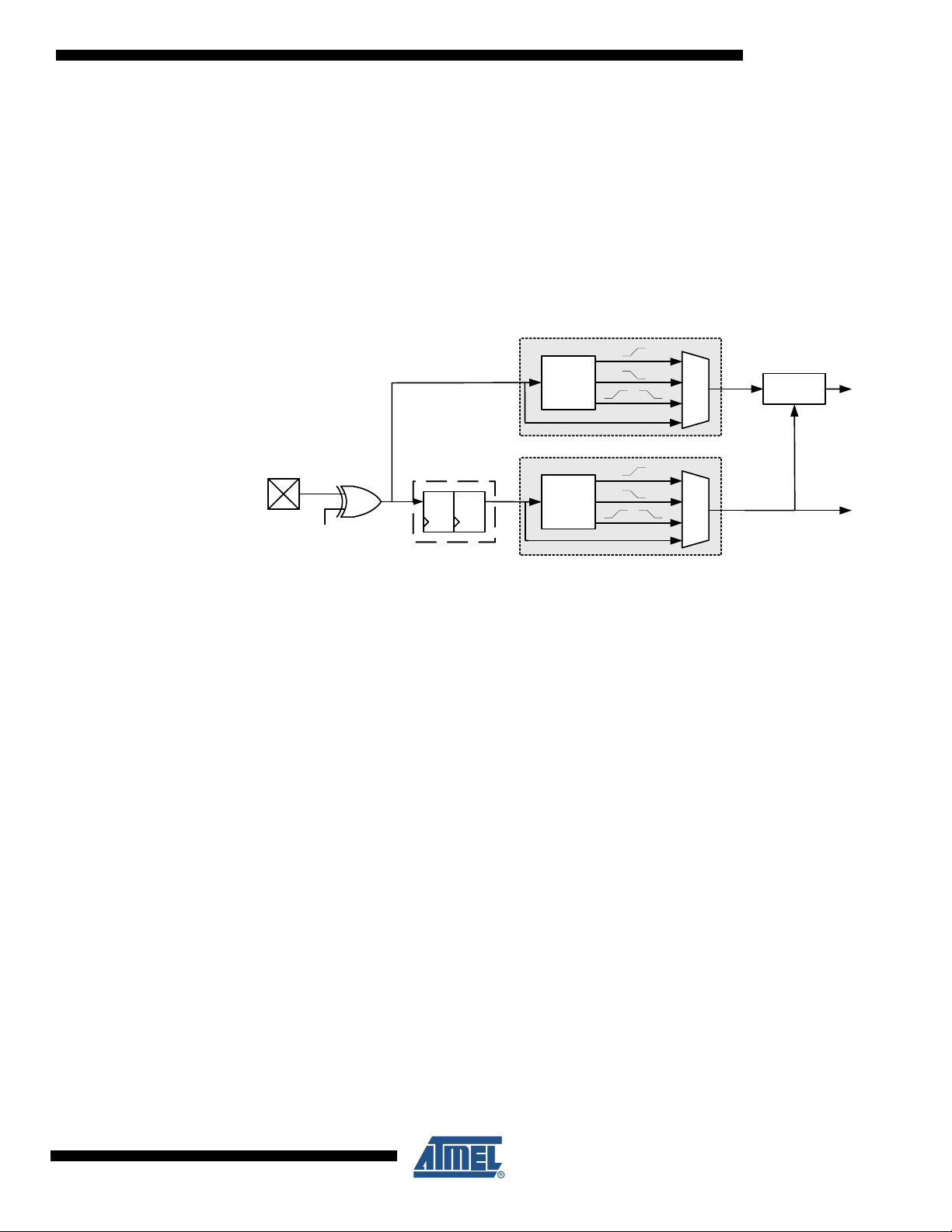
15.4 Input sensing
INVERTED I/O
Interrupt
Control
IREQ
Event
Pn
D
Q
R
D
Q
R
Synchronizer
INn
EDGE
DETECT
Asynchronous sensing
Synchronous sensing
EDGE
DETECT
XMEGA A4
• Sense both edges
• Sense rising edges
• Sense falling edges
• Sense low level
Input sensing is synchronous or asynchronous depending on the enabled clock for the ports,
and the configuration is shown in Figure 15-7 on page 30.
Figure 15-7. Input sensing system overview
When a pin is configured with inverted I/O, the pin value is inverted before the input sensing.
15.5 Port Interrupt
Each port has two interrupts with separate priority and interrupt vector. All pins on the port can
be individually selected as source for each of the interrupts. The interrupts are then triggered
according to the input sense configuration for each pin configured as source for the interrupt.
15.6 Alternate Port Functions
In addition to the input/output functions on all port pins, most pins have alternate functions. This
means that other modules or peripherals connected to the port can use the port pins for their
functions, such as communication or pulse-width modulation. ”Pinout and Pin Functions” on
page 49 shows which modules on peripherals that enable alternate functions on a pin, and
which alternate function is available on a pin.
8069Q–AVR–12/10
30
 Loading...
Loading...