


特点
• 集成了 ARM7TDMI
– 高性能的 32 位 RISC 架构
– 高密度的 16 位指令集
– 性能 / 功耗 (MIPS/Watt) 的领先者
– 嵌入式 ICE 电路仿真,支持调试通讯
• 64K 字节的片内高速 Flash 存储器,共 512 页,每页 128 字节
– 在最坏的条件下可以 30 MHz 的速度进行单时钟周期访问 ,
预取 (Prefetch) 缓冲器可以实现 Thumb 指令的优化,使处理器以最快的速度执行指令
– 页编程时间为 4 ms,包括页自动擦除,全片擦除时间为 10 ms
– 10,000 次的写寿命, 10 年数据保持能力,扇区锁定功能, Flash 安全锁定位
– 适合量产的快速 Flash 编程接口
• 16K 字节的片内高速 SRAM,可以在最高时钟速度下进行单时钟周期访问操作
• 存储器控制器 (MC)
– 嵌入式 Flash 控制器,异常中断 (Abort) 状态及未对齐 (Misalignment) 检测
• 复位控制器 (RSTC)
– 上电复位和经过工厂标定的掉电检测
– 提供复位源信息以及给外部电路使用的复位信号
• 时钟发生器 (CKGR)
– 低耗 RC 振荡器, 3 到 20MHz 的片上振荡器和一个 PLL
• 电源管理控制器 (PMC)
– 可以通过软件进行电源优化,包括慢速时钟模式 ( 低至 500 Hz) 和空闲 (Idle) 模式
– 三个可编程的外部时钟信号
• 先进的中断控制器 (AIC)
– 可以单独屏蔽的、具有 8 个优先级的向量式中断源
– 两个外部中断源和一个快速中断源,可以防止虚假 (spurious) 中断
• 调试单元 (DBGU)
–2线 UART,支持调试通讯通道中断 ; 可通过程序来禁止通过 ICE 进行访问
• 周期性间隔定时器 (PIT)
–20位可编程的计数器,加上 12 位的间隔计数器
• 时间窗看门狗 (WDT)
–12位受预设值 (key)保护的可编程计数器
– 为系统提供复位或中断信号
– 当处理器处于调试状态或空闲模式时可以停止计数器
• 实时定时器 (RTT)
–32位自由运行的具有报警功能的计数器
– 时钟来源于片内 RC 振荡器
• 一个并行输入 / 输出控制器 (PIOA)
–32个可编程的复用 I/O,每个 I/O 最多可以支持两个外设功能
– 输入电平改变时,每个 I/O 都可以产生中断
– 可以独立编程为开漏输出、使能上拉电阻以及同步输出
• 11 个外设数据控制器 (PDC) 通道
• 一个 USB 2.0 全速 (12 Mbps) 设备端口
– 片上收发器, 328 字节可编程的 FIFO
• 一个同步串行控制器 (SSC)
– 每个接收器和发送器都具有独立的时钟和帧同步信号
– 支持 I²S,支持时分多址
– 支持 32 位数据传输的高速连续数据流功能
• 两个通用的同步 / 异步收发器 (USART)
– 独立的波特率发生器, IrDA 红外调制 / 解调
– 支持 ISO7816 T0/T1 智能卡,硬件握手信号,支持 RS485
–USART1支持全功能的调制解调器信号
• 主 / 从串行外设接口 (SPI)
–8到 16 位可编程的数据长度,4 个片选线
• 一个 3 通道的 16 位定时器 / 计数器 (TC)
–3个外部时钟输入端,每个通道有两个多功能 I/O 引脚
– 倍速 PWM 发生功能,捕捉 / 波形模式,递增 / 递减计数
®
ARM® Thumb® 处理器
AT91 ARM®
Thumb
®
微处理
器
AT91SAM7S64
初稿
本文是英文数据手册的中文翻
译,其目的是方便中国用户的阅
读。它无法自动跟随 原稿的更
新,同 时 也可能存在翻译上的错
误。读者应该以英文原稿为参考
以获得更准确的信息。
6070A–ATARM–07-Jun-05

• 一个 4 通道的 16 位 PWM 控制器 (PWMC)
• 一个两线接口 (TWI)
– 只支持主机模式,支持所有的 Atmel 两线 EEPROM
• 一个 8 通道的 10 位模数转换器,其中 4 个通道与数字 I/O 复用
• IEEE 1149.1 JTAG 边界扫描支持所有的数字引脚
• 5V 兼容的 I/O,包括 4 个高达 16 mA 的大电流驱动 I/O
• 电源
– 片上 1.8V 电压调节器,可以为内核及外部元件提供高达 100 mA 的电流
– 为 I/O 口线提供电源的 3.3V VDDIO,以及独立的为 Flash 供电的 3.3V VDDFLASH
– 内核电源为 1.8V VDDCORE,并具有掉电检测 (BoD) 功能
• 全静态操作:极限条件下 (1.65V, 85°C ) 高达 55 MHz
• 封装为 64 脚的 LQFP
描述 AT91SAM7S64是Atmel 32位 ARM RISC 处理器小引脚数Flash微处理器家族的一员。它
拥有 64K 字节的高速 Flash 和 16K 字节的 SRAM,丰富的外设资源,包括一个 USB 2.0
设备,使外部器件数目减至最低的完整系统功能集。这个芯片是那些正在寻求额外处理能
力和更大存储器的 8 位处理器用户的理想选择。
Flash 存储器可以通过 JTAG-ICE 进行编程,或者是在贴装之前利用编程器的并行接口进
行编程。锁定位可以防止固件不小心被改写,而安全锁定位则可以保护固件的安全。
AT91SAM7S64 的复位控制器可以管理芯片的上电顺序以及整个系统。BOD 和看门狗则
可以监控器件是否正确工作。
AT91SAM7S64 是一个通用处理器。它 集成了 USB 设备端口,使得它成为
的外设应用的理想芯片。极 具竞争力的性价比进一步拓展了它在低成本、大产量的消费类
产品中的应用。
连接 PC或手机
2
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

方框图
Figure 1. AT91SAM7S64 框图
TDI
TDO
TMS
TCK
JTAGSEL
TST
FIQ
IRQ0-IRQ1
PCK0-PCK2
PLLRC
XIN
XOUT
VDDCORE
VDDCORE
NRST
DRXD
DTXD
RXD0
TXD0
SCK0
RTS0
CTS0
RXD1
TXD1
SCK1
RTS1
CTS1
DCD1
DSR1
DTR1
RI1
NPCS0
NPCS1
NPCS2
NPCS3
MISO
MOSI
SPCK
ADTRG
AD0
AD1
AD2
AD3
AD4
AD5
AD6
AD7
ADVREF
System Controller
PIO
PLL
OSC
RCOSC
BOD
POR
PIO
PIO
JTAG
SCAN
Controller
DBGU
AIC
PMC
Reset
PIT
WDT
RTT
PIOA
PDC
PDC
ICE
USART0
USART1
SPI
ADC
ARM7TDMI
Processor
Memory Controller
Embedded
Flash
Controller
Abort
Status
Peripheral Bridge
Peripheral DMA
Controller
11 Channels
APB
PDC
PDC
PDC
PDC
PDC
PDC
PDC
Address
Decoder
Misalignment
Detection
FIFO
PDC
PDC
AT91SAM7S64 Preliminary
USB Device
PWMC
SSC
Timer Counter
TC0
TC1
TC2
TWI
1.8 V
Voltage
Regulator
SRAM
16 Kbytes
Flash
64 Kbytes
Fast Flash
Programming
Interface
Transceiver
PIO
VDDIN
GND
VDDOUT
VDDCORE
VDDIO
VDDFLASH
ERASE
PGMRDY
PGMNVALID
PGMNOE
PGMCK
PGMM0-PGMM3
PGMD0-PGMD15
PGMNCMD
PGMEN0-PGMEN2
DDM
DDP
PWM0
PWM1
PWM2
PWM3
TF
TK
TD
RD
RK
RF
TCLK0
TCLK1
TCLK2
TIOA0
TIOB0
TIOA1
TIOB1
TIOA2
TIOB2
TWD
TWCK
6070A–ATARM–07-Jun-05
3

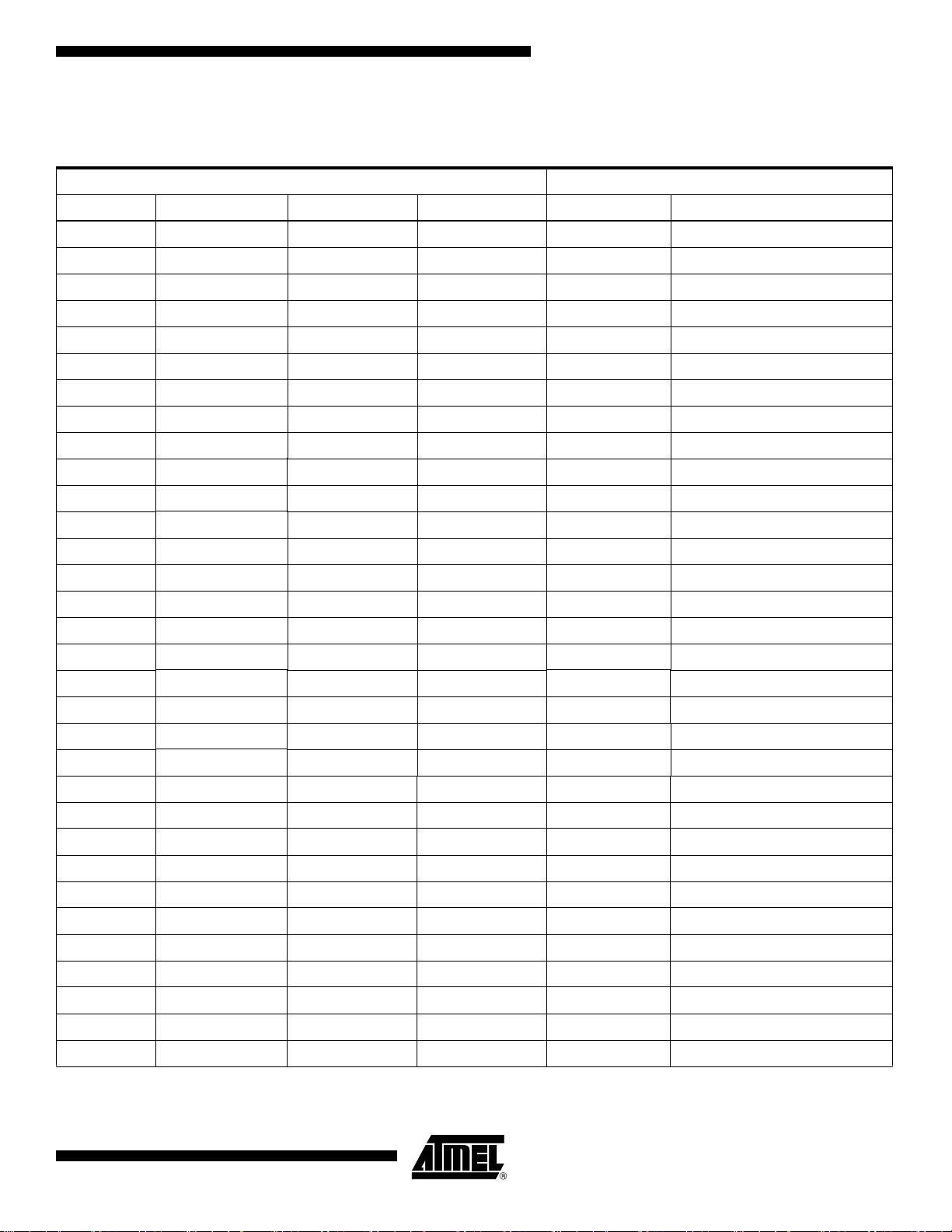
信号说明
Table 1. 信号说明列表
信号名称 功能 类型 有效电平 说明
电源
VDDIN 电压调节器电源输入端 电源 3.0V - 3.6V
VDDOUT 电压调节器输出 电源 1.85V,标称值
VDDFLASH Flash 存储器的电源 电源 3.0V - 3.6V
VDDIO I/O 电源 电源 3.0V - 3.6V
VDDCORE 内核电源 电源 1.65V - 1.95V
VDDPLL PLL 电源 1.65V - 1.95V
GND 地地
时钟,振荡器和 PLL
XIN 主时钟振荡器输入 输入
XOUT 主时钟振荡器输出 输出
PLLRC PLL 滤波器输入
PCK0 - PCK2 可编程的时钟输出 输出
ICE 和 JTAG
TCK 测试时钟 输入 没有上拉电阻
TDI 测试数据输入 输入 没有上拉电阻
TDO 测试数据输出 输出
TMS 测试模式选择 输入 没有上拉电阻
JTAGSEL JTAG 选择 输入 下拉电阻
Flash 存储器
ERASE Flash 和 NVM 配置位擦除命令 输入 高电平 下拉电阻
复位 / 测试
NRST 处理器复位 I/O 低电平 上拉电阻
TST 测试模式选择 输入 下拉电阻
调试单元
DRXD 调试数据接收 输入
DTXD 调试数据发送 输出
AIC
IRQ0 - IRQ1 外部中断输入 输入
FIQ 快速中断输入 输入
4
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
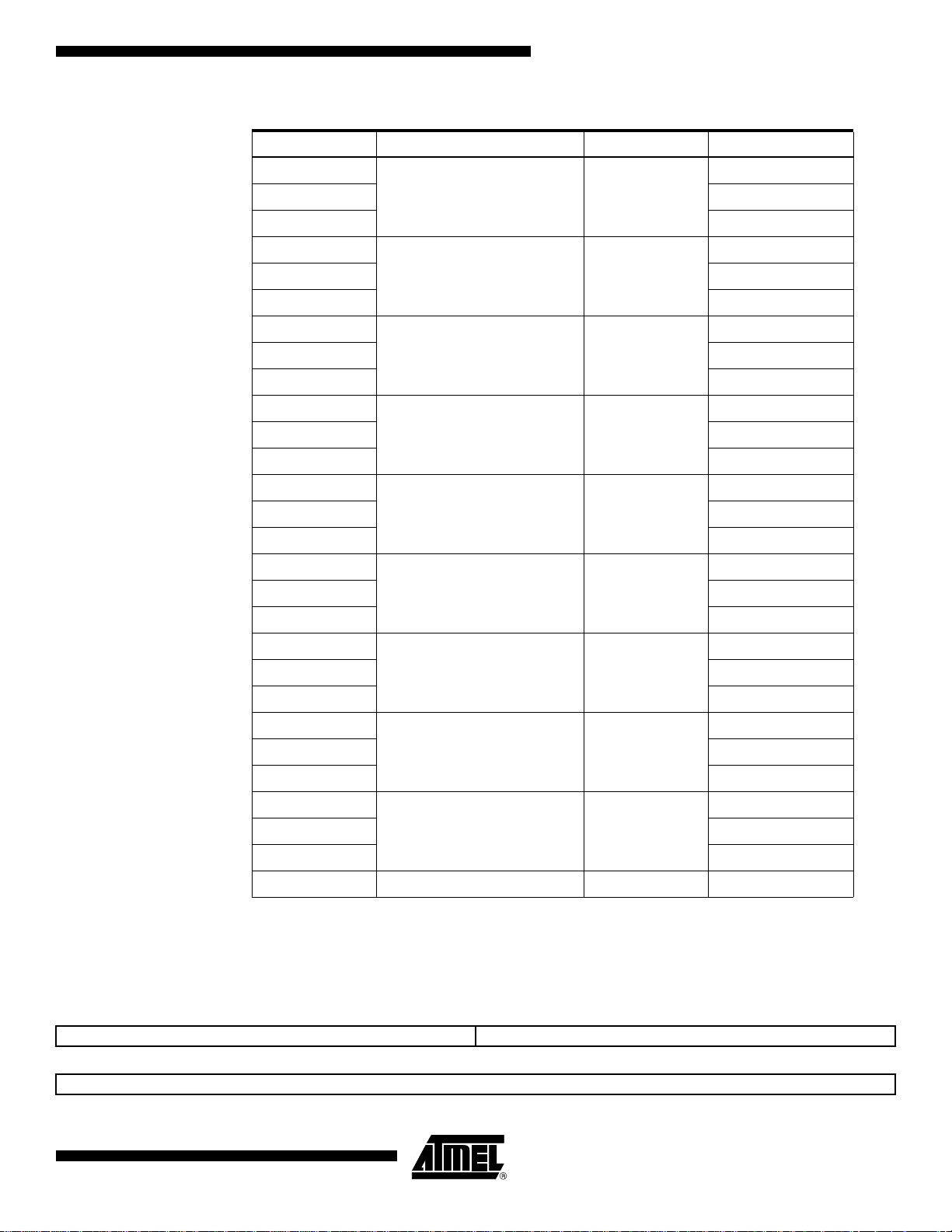
Table 1. 信号说明列表
信号名称 功能 类型 有效电平 说明
PIO
PA0 - PA31 并行 IO 控制器 AI/O复位时为带上拉电阻的输入端
USB Device Port
DDM USB 设备端口数据 - 模拟
DDP USB 设备端口数据 + 模拟
USART
SCK0 - SCK1 串行时钟 I/O
TXD0 - TXD1 发送数据 I/O
RXD0 - RXD1 接收数据 输入
RTS0 - RTS1 请求发送 输出
CTS0 - CTS1 清零后发送 输入
DCD1 数据载波检测 输入
DTR1 数据终端准备好 输出
DSR1 数据设备准备好 输入
RI1 振铃指示 输入
同步串行控制器
TD 发送数据 输出
RD 接收数据 输入
TK 发送时钟 I/O
RK 接收时钟 I/O
TF 发送帧同步 I/O
RF 接收帧同步 I/O
定时器 / 计数器
TCLK0 - TCLK2 外部时钟输入 输入
TIOA0 - TIOA2 I/O 口线 AI/O
TIOB0 - TIOB2 I/O 口线 BI/O
PWM 控制器
PWM0 - PWM3 PWM 通道 输出
SPI
MISO 主机输入,从机输出 I/O
MOSI 主机输出,
从机输入 I/O
SPCK SPI 串行时钟 I/O
NPCS0 SPI 外设片选 0I/O低电平
NPCS1-NPCS3 SPI 外设片选 1 到 3 输出 低电平
6070A–ATARM–07-Jun-05
5
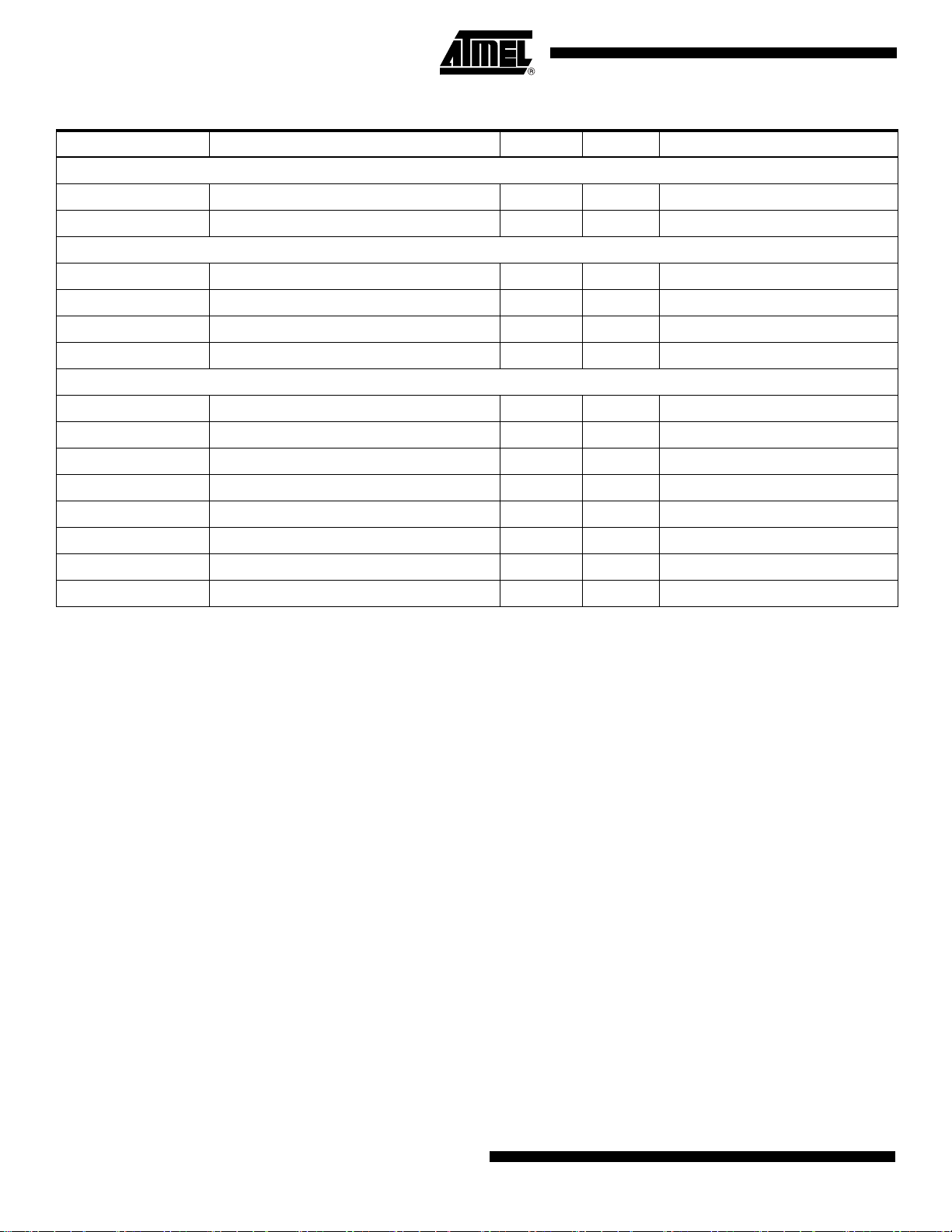
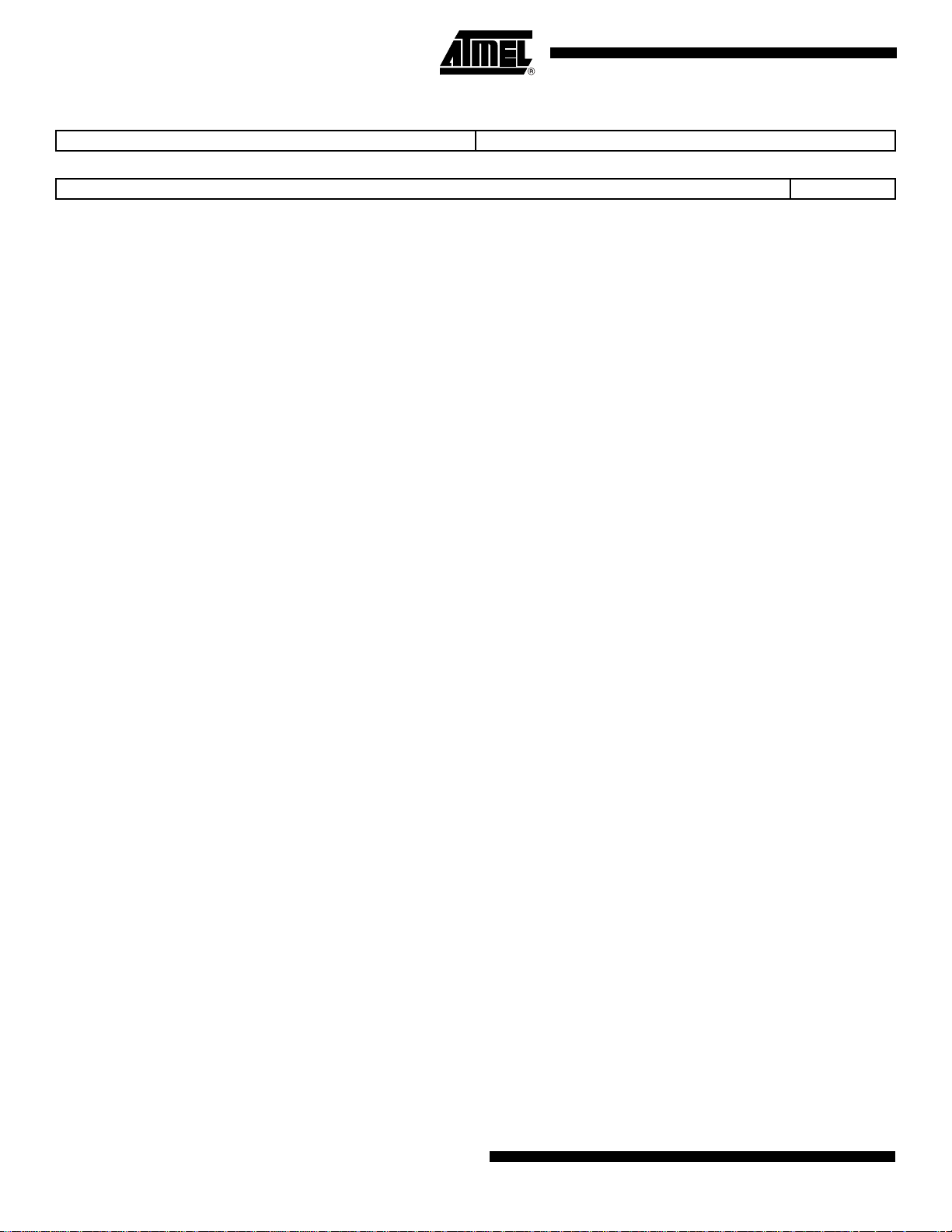
Table 1. 信号说明列表
信号名称 功能 类型 有效电平 说明
两线接口
TWD 串行数据 I/O
TWCK 串行时钟 I/O
模数转换器
AD0-AD3 模拟输入 模拟 复位时为带上拉电阻的数字输入端口
AD4-AD7 模拟输入 模拟 模拟输入
ADTRG ADC 触发输入
ADVREF ADC 参考电压 模拟
快速 Flash 编程接口
PGMEN0-PGMEN1 编程使能 输入
PGMM0-PGMM3 编程模式 输入
PGMD0-PGMD15 编程的数据 I/O
PGMRDY 编程结束 输出 高电平
PGMNVALID 数据方向 输出 低电平
PGMNOE 编程过程中读数据 输入 低电平
PGMCK 编程时钟 输入
PGMNCMD 编程命令 输入 低电平
6
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
封装和引脚排列 AT91SAM7S64 的封装为 64 脚的 LQFP。
64脚LQFP封装的机械形状 Figure 2 给出了 64 脚 LQFP 封装的定位。具体的机械尺寸在机械特性一节有详细说明。
Figure 2. 64 脚 LQFP 封装引脚 ( 顶视图 )
48
49
64
1
33
32
17
16
引脚排列
Table 2. AT91SAM7S64 引脚排列 (64 脚 LQFP 封装)
1 ADVREF 17 GND 33 TDI 49 TDO
2 GND 18 VDDIO 34 PA6/PGMNOE 50 JTAGSEL
3 AD4 19 PA16/PGMD4 35 PA5/PGMRDY 51 TMS
4 AD5 20 PA15/PGM3 36 PA4/PGMNCMD 52 PA31
5 AD6 21 PA14/PGMD2 37 PA27/PGMD15 53 TCK
6 AD7 22 PA13/PGMD1 38 PA28 54 VDDCORE
7 VDDIN 23 PA24/PGMD12 39 NRST 55 ERASE
8 VDDOUT 24 VDDCORE 40 TST 56 DDM
9 PA17/PGMD5/AD0 25 PA25/PGMD13 41 PA29 57 DDP
10 PA18/PGMD6/AD1 26 PA26/PGMD14 42 PA30 58 VDDIO
11 PA21/PGMD9 27 PA12/PGMD0 43 PA3 59 VDDFLASH
12 VDDCORE 28 PA11/PGMM3 44 PA2 60 GND
13 PA19/PGMD7/AD2 29 PA10/PGMM2 45 VDDIO 61 XOUT
14 PA22/PGMD10 30 PA9/PGMM1 46 GND 62 XIN/PGMCK
15 PA23/PGMD11 31 PA8/PGMM0 47 PA1/PGMEN1 63 PLLRC
16 PA20/PGMD8/AD3 32 PA7/PGMNVALID 48 PA0/PGMEN0 64 VDDPLL
6070A–ATARM–07-Jun-05
7

电源的考虑
电源 AT91SAM7S64 有 6 种类型的电源输入引脚以及一个集成的电源调节器,使得器件可以工
作于单一电压。这 6 种电源引脚类型为:
•VDDIN:电压调节器的电源输入。输入电压范围是 3.0V 到 3.6V,标称值为 3.3V。如
果不用电压调节器,则 VDDIN 应该连接到 GND。
•VDDOUT:电压调节器的输出, 1.8V。
•VDDIO:I/O 及 USB 的电源。支持电压范围为 3.0V 到 3.6V,标称值为 3.3V。
• VDDFLASH:为 Flash 部分地提供电源,而且是 Flash 正确工作的先决条件。电压范
围为 3.0V 到 3.6V,标称值为 3.3V。
• VDDCORE:芯片逻辑部分的电源。电
以通过解耦电容连接到 VDDOUT 引脚。 VDDCORE 是器件内核,包括 Flash 正确
工作的前提。
•VDDPLL: 振荡器和 PLL 的电源。可以直接连接到 VDDOUT。
各个输入电源并没有独立的地回路引脚。因此 GND 与系统地平面的连接应尽可能短。
功耗 在 25°C 时,VDDCORE 的静态电流小于 60 µA,包括 RC 振荡器、电压调节器和上电复
位。使能掉电复位 BOD 将额外增加 20 µA 的静态电流。
全速工作且运行不基于 Flash 时 VDDCORE 的动态功耗 小于 50 mA。若 程序在 Flash 上
运行则 VDDFLASH 的电流不超过 10 mA。
压范围从 1.65V 到 1.95V,典型值为 1.8V。可
电压调节器 AT91SAM7S64 有一个由系统控制器管理的电压调节器。
在正常模式下,电压调节器消耗的静态电流还不到 100 µA,而输出电流则高达 100 mA。
电压调节器支持低功耗模式。在此模式下它只消耗不到 20 µA 的静态电流,输出电流可达
1 mA。
VDDOUT 必须有足够的解耦电容以减少纹波和防止振荡。最好的方法是并联两个电容于
VDDOUT和 GND 之间:一个 470 pF (或1 nF) NPO材质的电容,尽量靠近芯片;另一个是
2.2 µF ( 或 3.3 µF) X7R 材质的电容。
VDDIN 也需要足够的解耦
芯片。例如可以将两个电容并联在一起:100 nF 的 NPO 电容和 4.7 µF 的 X7R 电容。
来提高启动稳定性以及减少电压降。输入电容也需要尽量靠近
典型的电源连接图
3.3V 单电源 AT91SAM7S64 支持 3.3V 单电源模式。片内电压调节器连接到 3.3V,输出则连接到
VDDCORE 和 VDDPLL。 Figure 3 给出了通过 USB 总线供电的线路图。
8
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

Figure 3. 3.3V 单电源供电系统
AT91SAM7S64 Preliminary
VDDFLASH
Power Source
ranges
from 4.5V (USB)
to 18V
DC/DC Converter
3.3V
VDDIO
VDDIN
Voltage
Regulator
VDDOUT
VDDCORE
VDDPLL
6070A–ATARM–07-Jun-05
9

I/O 的考虑
JTAG 引脚 TMS、TDI和 TCK 都是施密特触发器型的输入引脚。TMS和TCK与 5V兼容,TDI 则不是。
TMS、 TDI 和 TCK 都没有上拉电阻。
TDO 为输出引脚,输出电平可达 VDDIO,没有上拉电阻。
引脚 JTAGSEL 拉高时选择 JTAG 边界扫描功能。此引脚集成了阻值约为 15 k Ω 的片内
下拉电阻,所以在正常工作模式下可以悬空。
测试引脚 TST用于生产测试,或是拉高以进入快速编程模式。TST集成了阻值约为 15 kΩ 的片内下
拉电阻,所以在正常工作模式下可以悬空。
为了使能快速编程模式,引脚 TST 和 PA0、 PA1 都需要拉高。
TST 为高时,若 PA0 或 PA1 为 0 将导致不可预测的结果。
复位引脚 NRST 是双向引脚。它可以被片内的复位控制器拉低,从而为外部器件产生复位信号;也
可以被外部电路拉低以复位处理器。复位脉冲没有持续时间的限制,复位控制器可以保证
产生最小长度的脉冲。从而可以在引脚 NRST 上简单地连接一个摁键开关作为用户的系
统复位控制,同时也可以利用 NRST 信号来复位系统的其他原器件。
NRST 引脚有一个上拉电阻连接到 VDDIO。
ERASE 引脚 引脚 ERASE 用于 Flash 及其一些 NVM 位的擦除。引脚具有阻值约为 15 k Ω 的下拉电
阻,所以在正常工作模式下可以悬空。
PIO 控制器 A 端口 I/O口线PA0-PA31与5V兼容,且每个I/O都具有可编程的上拉电阻。通过PIO 控制器可以
对每一个 I/O 的上拉电阻进行单独控制。
与 5V 兼容意味着 I/O 可以输出 VDDIO 的电平,而输入则可以高达 5.5V。但此时不能使
能 I/O 的上拉电阻,否则将导致不可预测的结果。特别是在复位时一定要注意,因为在复
位阶段所有的 I/O 都缺省为带上拉电阻的输入引脚。
I/O 驱动电平 PA0-PA3 可以输出大电流。每个 I/O 都可以驱动高达 16 mA 的电流。
其余的 I/O 只能输出 8 mA 的电流。
要注意的是,所有 I/O 输出的电流之和不能超过 150 mA。
10
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
处理器和结构
ARM7TDMI 处理器 • 基于 ARMv4T 冯 - 诺依曼结构的 RISC 处理器
– 运行速度可达 55 MHz, 0.9 MIPS/MHz 的性能
• 两个指令集
–ARM
–Thumb
•3级流水线结构
– 指令获取 (F)
– 指令解码 (D)
– 执行 (E)
调试和测试特点 • 集成的片上仿真器
– 两个观察点 (watchpoint) 单元
– 通过 JTAG 协议访问测试访问端口 TA P
– 调试通讯通道
• 调试单元
– 两线 UART
– 可以处理调试通讯通道中断
– 芯片 ID 寄存器
• IEEE1149.1 JTAG 边界扫描支持所有的数字引脚
®
高性能 32 位指令集
®
高代码密度 16 位指令集
存储器控制器 • 总线仲裁
– 处理来自 ARM7TDMI 和外设数据控制器的请求
• 地址译码器可以提供如下片选信号
–3个 1M 字节的片内存储区
– 一个 256M 字节的片内外设区
• 仲裁状态寄存器
– 保存了引发仲裁的来源、类型以及其他所有参数
– 通过检测被破坏的指针以方便调试
• 对齐 (alignment) 检测
– 访问数据时的对齐检查
– 发生未对齐情况时产生异常中断
• 重映射 (Remap) 命令
– 将 SRAM 映射到片内非易失性存储器 (NVM) 的位置
– 允许例外向量的动态处理
• 嵌入式 Flash 控制器
– 嵌入式 Flash 接口,最多可有 3 个可编程的等待
– 预取缓冲器,用于缓冲及预留 16 位请求,从而减少等待周期
– 受预设值保护的编程、擦除和锁定 / 解锁定序器
– 存储器擦除、编程和锁定操作都只需要一个命令
– 执行被禁止的操作将引发中断
周期
6070A–ATARM–07-Jun-05
11

外设数据控制器 • 处理外设与存储器之间的数据传输
•11个通道
– 每个 USART 有两个
– 调试单元有一个
– 串行同步控制器 (SSC) 有两个
– SPI 有两个
– 模数转换器有一个
• 低的总线仲裁开销
– 从存储器到外设的传输只需要一个主时钟周期
– 从外设到存储器的传输只需要两个主时钟周期
• “ 下一个指针” 管理减少了中断时间
12
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
存储器 •64K字节 Flash
–512页,每页 128 字节
– 快速的访问时间,在最坏的条件下访问周期可达到 30 MHz
– 页编程时间:4 ms,包括页自动擦除时间
– 没有自动擦除操作的页编程时间:2 ms
– 全片擦除时间:10 ms
– 10,000 次写寿命, 10 年数据保存时间
–16个锁定位,每个保护一个扇区 ( 每个扇区包含 32 页 )
– 保护 Flash 内容安全的保护模式
•16K字节的快速 SRAM
– 在全速工作时仍然可以单时钟进行访问
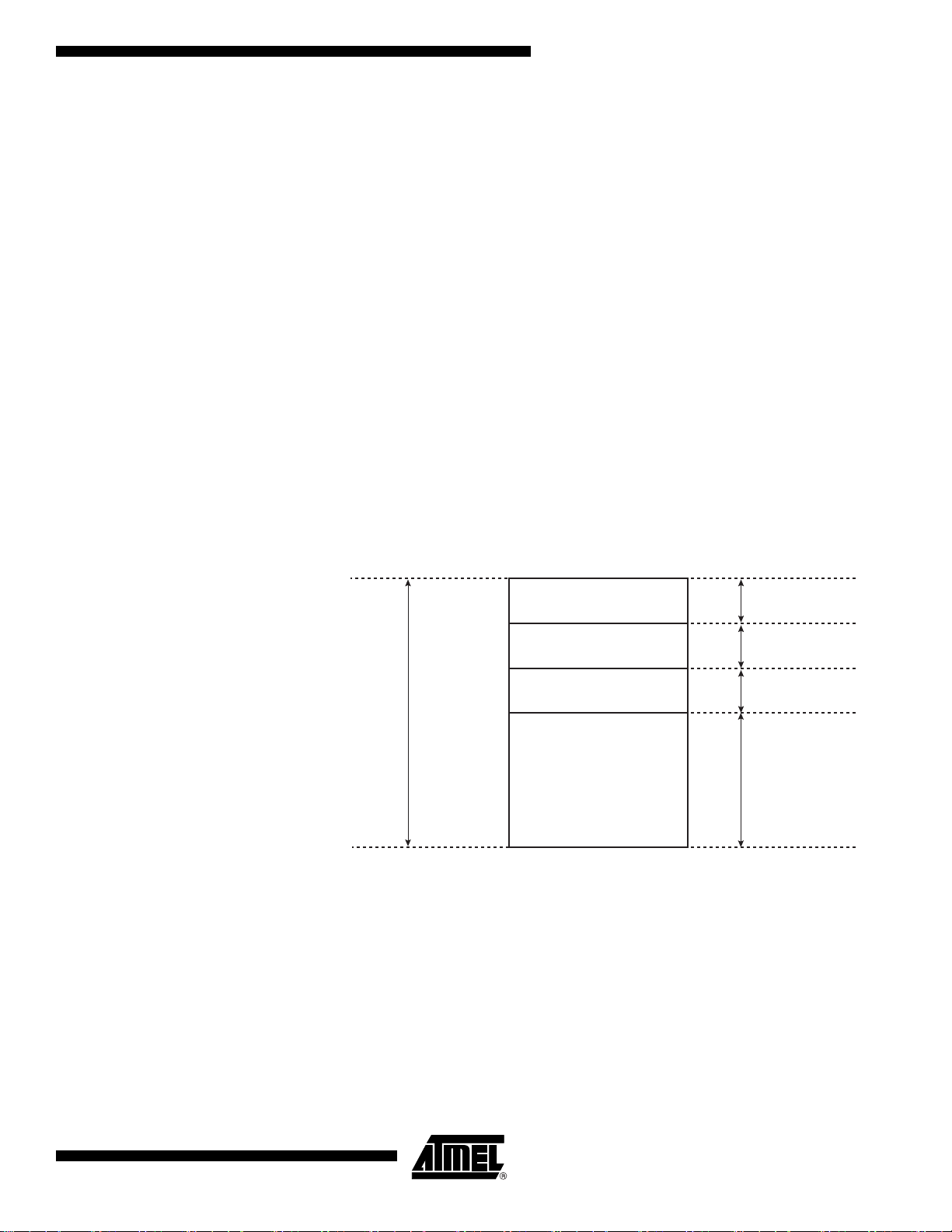
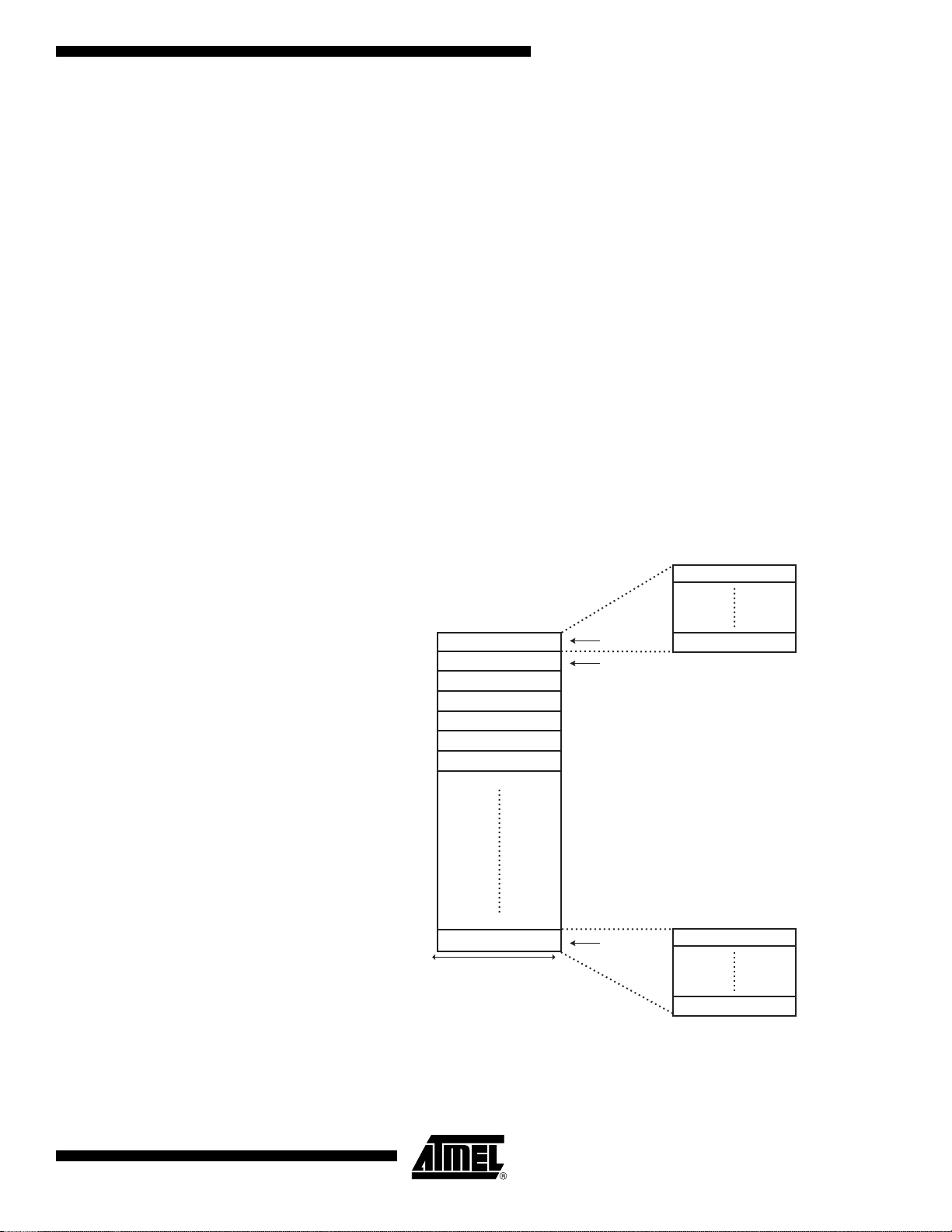
存储器映射
片内 SRAM AT91SAM7S64有16K字节的高速SRAM。芯 片复位后,直到执行 Remap 命令,SRAM 的
访问地址为 0x0020 0000。重映射之后, SRAM 的访问地址变为 0x0。
片内 Flash AT91SAM7S64有64K字节的Flash。在任何时候它的访问地址都是 0x0010 0000。此 外,
在芯片复位之后, Remap 之前,也可以从 0x0 进行访问。
Figure 4. 片内存储器映射
0x0000 0000
0x000F FFFF
0x0010 0000
0x001F FFFF
0x0020 0000
256M Bytes
0x002F FFFF
0x0030 0000
0x0FFF FFFF
Flash Before Remap
SRAM After Remap
Internal Flash
Internal SRAM
Undefined Areas
(Abort)
1 M Bytes
1 M Bytes
1 M Bytes
253 M Bytes
6070A–ATARM–07-Jun-05
13

片内 Flash
Flash 概览 AT91SAM7S64的Flash组织为512页,每页128字节。全部65,536字节以32位字的方式组
织在一起。
Flash 包含了一个 128 字节的写缓冲区,可以 32 位的接口进行访问。
片内复位单元和低电压检测器 BOD可以帮助 Flash 在电压变化时防止代码毁坏,即使在
最坏的情况之下。
片内 Flash 控制器 片内 ( 嵌入式 )Flash 控制器 (EFC) 管理系统各个主机执行的存储器访问。它 控制对 Flash
的读访问以及对写缓冲区的写访问。它还包括了一个用户接口,映射到 APB 的存储器控
制器。用户接口允许:
• 编程 Flash 的访问参数 ( 等待周期的个数,时序,等等 )
• 启动诸如全片擦除、页擦除、页写、 NVM 位设置 / 清除等命令
• 获取上一个命令的结束状态
• 获取错误状态
• 上一个命令结束或发生错误时产生中断
片内 Flash 控制器还提供双 32 位预取缓冲器以优化对 Flash 存储器的 16 位访问。这 对运
行于 Thumb 模式的处理器特别有效。
锁定区域 EFC管理着16个锁定位以保护 flash的16个区,防止这些区域被意外地擦除或编程。 每个
锁定区域包含 32 页,共 4K 字节。
如果对已经被锁住的区域进行擦除或编程,这些命令将终止,同时 EFC 激发一个中断。
通过 EFC
作; “ 清除锁定位” 命令解除锁定区域的锁定状态。
将 ERASE 拉高将清除所有的锁定位,从而将全部的 Flash 解锁。
安全位的特点 AT91SAM7S64 有一个安全位。它 是 一个特殊的 NVM位。当安全位使能时,对 Flash 的所
有访问,包括通过 ICE 接口或快速Flash编程接口,都被禁止。从 而 保护了 Flash 的内容。
这个安全位只能通过 EFC 用户接口的 “ 设置安全位” 命令来使能。而禁止安全位只能通
过将 ERASE 引脚拉高,将整个 flash 全部擦除。在安全位为禁止状态的情况下,对 flash
的所有操作都可以进行。
很重要的一点是,拉高 ERASE 引脚的时间必须大于 50 ms。
由于 ERASE 集成了下拉电阻,在正常工作模式下这个引脚可以悬空。不 过将它直接连接
到 GND 也是安全的。
非易失性掉电检测控制 掉电检测 (BOD) 由两个通用的 NVM (GPNVM) 位控制。因此即使没有了电源,掉电检测
仍然可以保持用户的定义。
两个 GPNVM 位的清除和设置分别通过 EFC 用户接口的 “ 清除通用 NVM 位” 命令和
“ 设置通用 NVM 位” 命令来实现。
• GPNVM 位 0 用于控制掉电检测的使能。设置 GPNVM0 将使能 BOD,清除它
• GPNVM 位 1 控制掉电检测信号是否可以用于系统复位。置位 GPNVM1 使能这个功
用户接口可以对 16 个 NVM 位实行软件编程。“ 设置锁定位” 命令启 动保护操
即禁止
BOD。拉高 ERASE 将清除 GPNVM0,从而禁止 BOD。
能,清零 GPNVM1 则禁止掉电检测信号复位整个芯片。拉高 ERASE 将禁止掉电检
测复位。
标定位 8 个NVM位用于标定掉电检测器及电压调节器。这 些 位的配置在出厂之前完成,用户不能
进行修改。 ERASE 引脚的状态对标定位没有影响。
14
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
快速 Flash 编程接口 FFPI 快速 Flash 编程接口允许用户通过串行 JTAG 接口或实现了握手信号的并行口对 Flash 进
行快速编程。这样就可以通过符合市场标准的工业编程器进行批量编程。
FFPI 支持读、页编程、页擦除、全片擦除、锁定、解锁和保护命令。
拉高引脚 TST、 PA0 和 PA1 即使能 FFPI,并使芯片进入快速编程模式。
6070A–ATARM–07-Jun-05
15

系统控制器 系统控制器管理处理器所有重要的模块:中断、时钟、电源、时序、调试以及复位。
Figure 5. 系统控制器框图
NRST
irq0-irq1
periph_irq[2..14]
pit_irq
rtt_irq
wdt_irq
dbgu_irq
pmc_irq
rstc_irq
periph_nreset
dbgu_rxd
debug
periph_nreset
SLCK
periph_nreset
SLCK
debug
proc_nreset
cal
gpnvm[0]
en
BOD
POR
SLCK
fiq
MCK
MCK
idle
gpnvm[1]
flash_wrdis
ice_nreset
jtag_nreset
flash_poe
System Controller
Advanced
Interrupt
Controller
Debug
Unit
Periodic
Interval
Timer
Real-Time
Timer
Watchdog
Timer
wdt_fault
WDRPROC
bod_rst_en
Reset
Controller
int
dbgu_irq
force_ntrst
dbgu_txd
pit_irq
rtt_irq
wdt_irq
periph_nreset
proc_nreset
rstc_irq
Voltage
Regulator
Mode
Controller
jtag_nreset
proc_nreset
PCK
debug
ice_nreset
force_ntrst
security_bit
flash_poe
flash_wrdis
cal
gpnvm[0..1]
MCK
proc_nreset
standby
cal
Boundary Scan
TAP Controller
nirq
nfiq
ARM7TDMI
Embedded
Flash
Memory
Controller
Voltage
Regulator
16
XIN
XOUT
PLLRC
RCOSC
OSC
PLL
MAINCK
PLLCK
periph_nreset
usb_suspend
periph_clk[2]
dbgu_rxd
SLCK
Power
Management
Controller
int
PIO
Controller
PA0-PA31
AT91SAM7S64 Preliminary
periph_clk[2..14]
pck[0-2]
PCK
UDPCK
MCK
pmc_irq
idle
periph_irq{2]periph_nreset
irq0-irq1
fiq
dbgu_txd
UDPCK
periph_clk[11]
periph_nreset
periph_irq[11]
usb_suspend
periph_clk[4..14]
periph_nreset
periph_irq[4..14]
in
out
enable
USB Device
Por t
Embedded
Peripherals
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
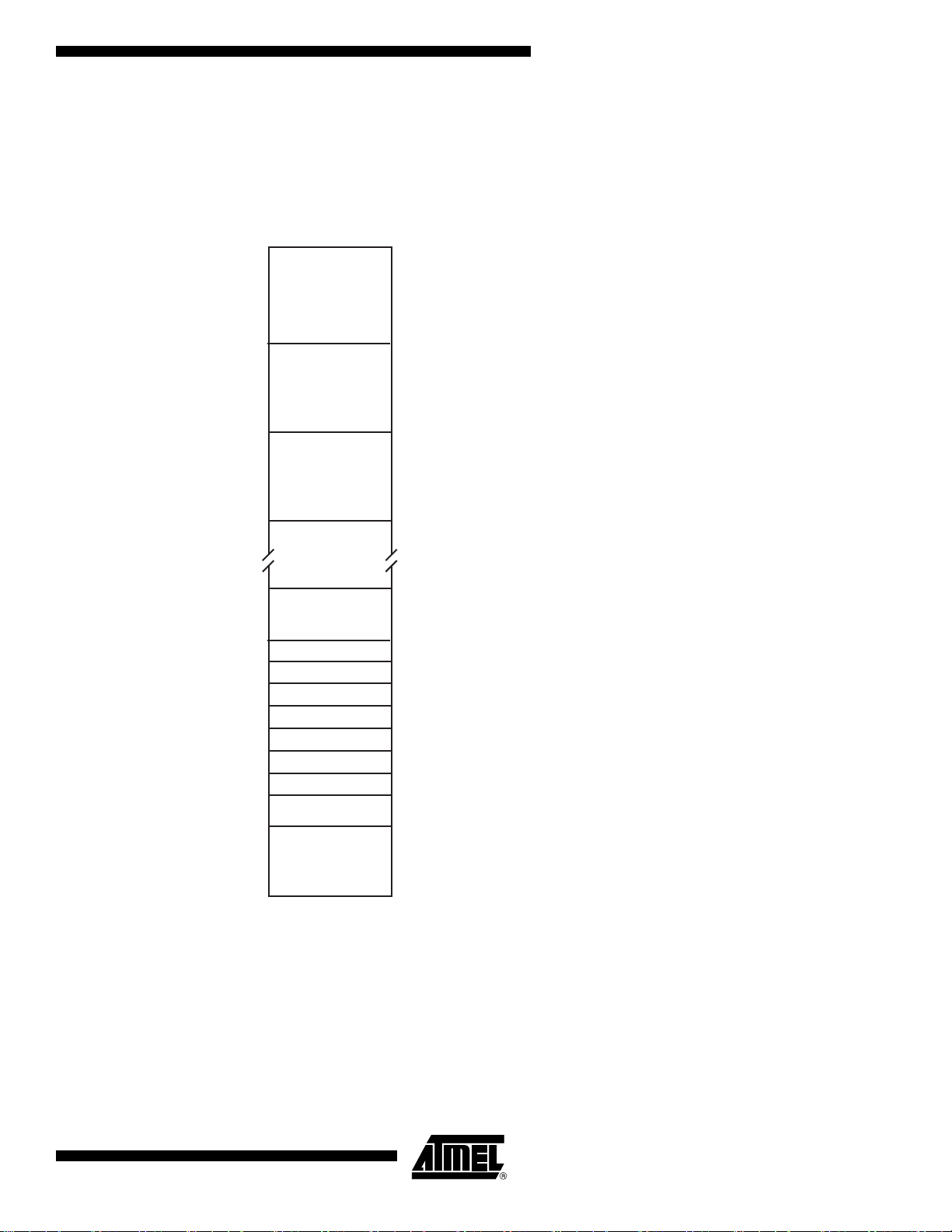
系统控制器映射 系统控制器外设映射到 4K 字节的最高地址空间,界于 0xFFFF F000 和 0xFFFF FFFF。
Figure 6 给出了系统控制器的映射情况。要注意的是,存储器控制器配置用户接口也映射
于这一地址区间。
Figure 6. 系统控制器映射
Peripheral Name SizeAddress Peripheral
0xFFFF F000
0xFFFF F1FF
0xFFFF F200
0xFFFF F3FF
0xFFFF F400
0xFFFF F5FF
0xFFFF F600
0xFFFF FBFF
0xFFFF FC00
0xFFFF FCFF
0xFFFF FD00
0xFFFF FD0F
0xFFFF FD20
0xFFFF FC2F
0xFFFF FD30
0xFFFF FC3F
0xFFFF FD40
0xFFFF FD4F
0xFFFF FD60
0xFFFF FC6F
0xFFFF FD70
0xFFFF FEFF
0xFFFF FF00
AIC
DBGU
PIOA
Reserved
PMC
RSTC
Reserved
RTT
PIT
WDT
Reserved
VREG
Reserved
Advanced Interrupt Controller
Debug Unit
PIO Controller A
Power Management Controller
Reset Controller
Real-time Timer
Periodic Interval Timer
Watchdog Timer
Voltage Regulator Mode Controller
512 Bytes/128 registers
512 Bytes/128 registers
512 Bytes/128 registers
256 Bytes/64 registers
16 Bytes/4 registers
16 Bytes/4 registers
16 Bytes/4 registers
16 Bytes/4 registers
4 Bytes/1 register
6070A–ATARM–07-Jun-05
0xFFFF FFFF
MC
Memory Controller
256 Bytes/64 registers
17

复位控制器 复位控制器包括上电复位和掉电检测复位。它可以给出上一次复位的状态,指明上一次复
位是上电复位、软件复位、用户复位、看门狗复位还是掉电检测复位。此外,它还控制内
部复位以及 NRST 引脚的输出,并控制 NRST 脉冲的长度以满足系统要求。
掉电检测及上电复位 AT91SAM7S64 嵌入了掉电检测电路和上电复位单元。两个电路都由VDDCORE供电,并
反过来监视 VDDCORE。两个信号都输送到 Flash,以防止在上电和下电的过程中,或是
电压跳变的过程中, Flash 中的代码被损毁。
上电复位单元具有有限精度的门限值,大约是 1.5V。在 VDDCORE 达到这个电平之前其
输出一直保持为低。这个信号输送到复位控制器,实现对芯片的重新初始化。
掉电检测器监视 VDDCORE 的电平,将其与固定的触发电平进行比较。它可以在大多数
情况下保证系统安全工作,并保
掉电检测器只监视 VDDCORE。这 是 因 为 VDDFLASH 或其他电源的跌落对 Flash 的意外
改写没有影响。
掉电检测器使能后,一旦 VDDCORE 下降到触发电平 (Vbot-,定义为 Vbot - hyst/2),掉
电检测输出立即被激活。
当 VDDCORE 上升到触发电平 (Vbot+,定 义为 Vbot + hyst/2),复位信号即被释放。掉电
检测器只监视 VDDCORE 跌落到门限值以下,持续时间大于 1µs 的情况。
证在 VDDCORE 发生跳变时存储器里的代码不被损毁。
为了防止电压尖峰的影响,门限电压有大约为 50 mV 的
1.68V,精度为 ± 2%。
掉电检测器是低功耗单元,只消耗大约 20 µA 的静态电流。为了进一步降低系统静态功
耗,还可以将其关闭。此时它消耗的静态电流小于 1µA。关闭掉电检测器是通过配置
GPNVM0 来实现的。
滞后值。门限电压的典型值为
18
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
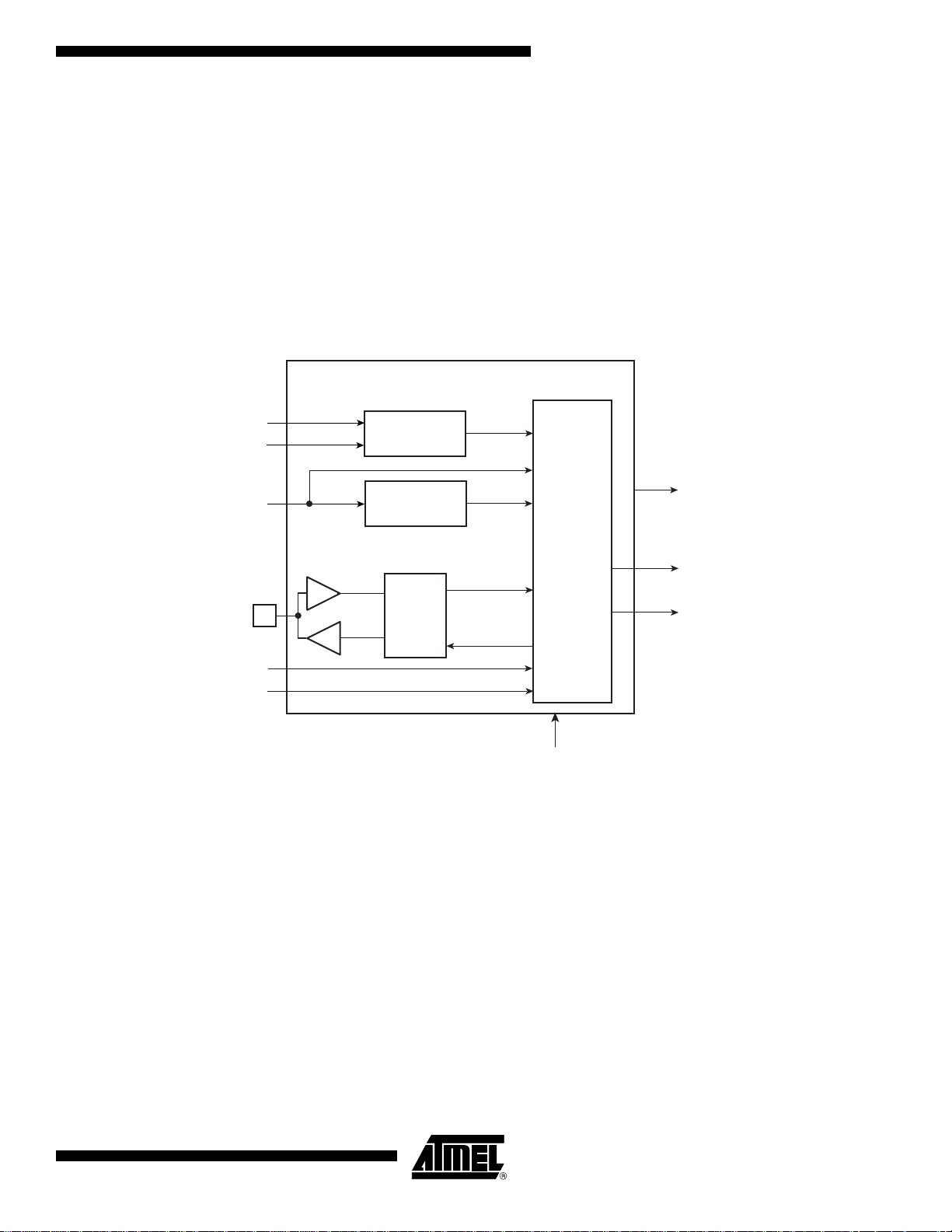
时钟发生器 时钟发生器包括一个低功耗 RC 振荡器,一个主振荡器和一个 PLL。其特性为:
•RC振荡器的频率范围是 22 KHz 到 42 KHz
• 主振荡器的频率范围是 3 到 20 MHz
• 主振荡器可以被旁路
•PLL输出范围是 80 到 200 MHz
它提供了 SLCK、 MAINCK 以及 PLLCK。
Figure 7. 时钟发生器框图
Clock Generator
XIN
XOUT
PLLRC
Embedded
RC
Oscillator
Main
Oscillator
PLL and
Divider
Status
Power
Management
Controller
Control
Slow Clock
SLCK
Main Clock
MAINCK
PLL Clock
PLLCK
6070A–ATARM–07-Jun-05
19

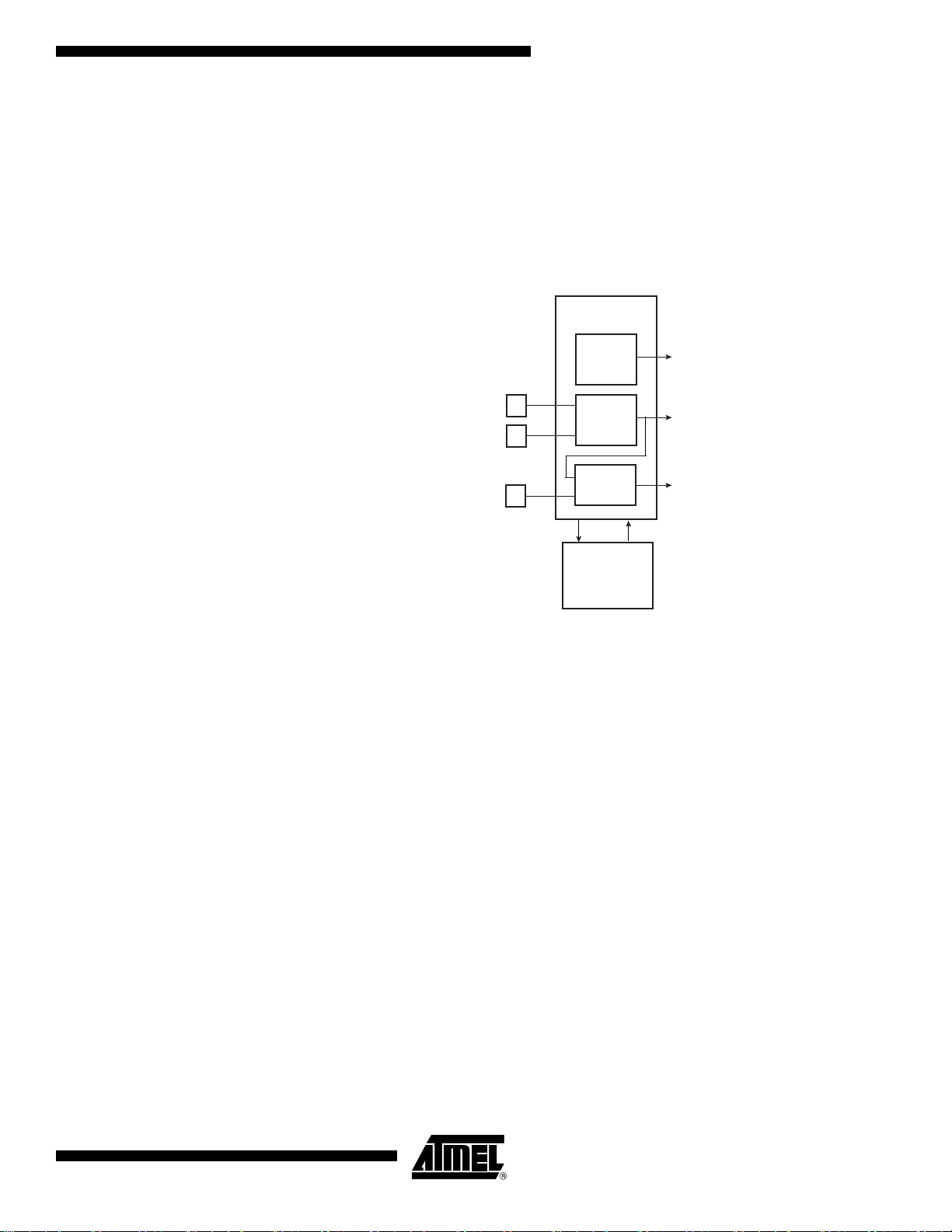
电源管理控制器 电源管理控制器利用时钟发生器的输出提供 :
• 处理器时钟 PCK
• 主时钟 MCK
•USB时钟 UDPCK
• 所有独立可控的外设时钟
•3个可编程的时钟输出
通过编程,主时钟 (MCK) 可以从几百赫兹一直到芯片的最大工作频率。
处理器进入空闲模式等待中断发生时,处理器时钟 (PCK) 被关闭,从而降低器件功耗。
Figure 8. 电源管理控制器框图
Master Clock Controller
SLCK
MAINCK
PLLCK
SLCK
MAINCK
PLLCK
PLLCK
Prescaler
/1,/2,/4,...,/64
Programmable Clock Controller
Prescaler
/1,/2,/4,...,/64
USB Clock Controller
ON/OFF
Divider
/1,/2,/4
先进的中断控制器 • 控制 ARM 处理器的中断线 (nIRQ 和 nFIQ)
• 可以单独屏蔽的向量化中断源
– 中断源 0 为快速中断输入 (FIQ)
– 中断源 1 为系统外设 (RTT, PIT, EFC, PMC, DBGU,等 )
– 其他中断源控制外设中断或外部中断
– 可编程的边沿触发或电平敏感的内部中断源
– 可编程的正 / 负边沿触发或高 / 低电平敏感的外部中断源
•8级优先级控制器
– 驱动处理器的正常中断
– 处理中断源的优先级
– 高优先级中断可以插入正在执行的低优先级中断
• 向量化
– 优化中断服务例程的跳转及执行
– 每个中断源都有一个 32 位的向量寄存器
– 中断向量寄存器读取对应的当前中断向量
Processor
Clock
Controller
Idle Mode
Peripherals
Clock Controller
ON/OFF
PCK
int
MCK
periph_clk[2..14]
pck[0..2]
usb_suspend
UDPCK
20
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

• 保护模式
– 通过禁止自动操作简化调试
• 强制更新为快速中断
– 允许将任意一个中断源重定义为快速中断
• 通用的中断屏蔽
– 使处理器保持与事件的同步,同时不引发中断
调试单元 • 构成元素:
– 两线 UART
– 支持调试通讯通道 (DCC) 的接口
– 一组芯片 ID 寄存器
– 一个禁止 ICE 访问的接口
• 两线 UART
– 实现与 USART 兼容的特性
– 可编程的波特率发生器
– 奇偶校验、帧错误和超速错误
– 自动回应、本地回环和远程回环通道模式
• 支持调试通讯通道
– 输出了 ARM 处理器的 COMMRX 和 COMMTX 信号
• 芯片 ID 寄存器
– 识别器件的版本,片内存储器的大小及外设集
– 芯片 ID 为 0x27090540 ( 版本 0)
AT91SAM7S64 Preliminary
周期性间隔定时器 •20位可编程的计数器,外加 12 位的间隔计数器
看门狗定时器 •12位受预设值保护的可编程计数器,计数时钟为经过预分频的 SLCK
• 为系统提供复位或中断信号
• 处理器处于调试状态或空闲模式时可以停止计数器
实时定时器 •32位自由运行的计数器,带闹铃功能,计数时钟为经过预分频的 SLCK
• 可编程的 16 位预分频器用于 SLCK 精度补偿
PIO 控制器 • 一个 PIO 控制器,掌管 32 个 I/O 口线
• 通过设置 / 清除寄存器实现对 I/O 的完全控制
• 每个 I/O 都被两个外设功能所复用
• 每一个 I/O 口 ( 不论是分配给外设使用还是作为通用 I/O) 都支持
– 输入电平变化中断
– 半个时钟周期的尖峰滤波器
– 多种驱动选择,可以工作于开漏状态
– 可编程的上拉电阻
– 引脚数据状态寄存器给出了任意时候引脚上的电平
• 同步输出,设置和清零几个 I/O 口线只需要一个写操作
6070A–ATARM–07-Jun-05
21

电压调节器控制器 这个控制器的作用是选择电压调节器的工作模式:正 常模式 ( 位 0 清零 ) 或 Standby 模式
( 位 0 置位 )。
22
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
外设
外设映射 每个外设都分配了 16K 字节的地址空间。
Figure 9. 用户外设映射
0xF000 0000
Reserved
0xFFF9 FFFF
0xFFFA 0000
0xFFFA 3FFF
0xFFFA 4000
0xFFFA FFFF
0xFFFB 0000
0xFFFB 3FFF
0xFFFB 4000
0xFFFB 7FFF
0xFFFB 8000
0xFFFB BFFF
0xFFFB C000
0xFFFB FFFF
0xFFFC 0000
0xFFFC 3FFF
0xFFFC 4000
0xFFFC 7FFF
0xFFFC 8000
0xFFFC BFFF
0xFFFC C000
0xFFFC FFFF
0xFFFD 0000
0xFFFD 3FFF
0xFFFD 4000
0xFFFD 7FFF
0xFFFD 8000
0xFFFD BFFF
0xFFFD C000
0xFFFD FFFF
0xFFFE 0000
0xFFFE 3FFF
0xFFFE 4000
0xFFFE FFFF
TC0, TC1, TC2 Timer/Counter 0, 1 and 2
Reserved
UDP USB Device Port
Reserved
TWI Two-Wire Interface
Reserved
USART0 Universal Synchronous Asynchronous
USART1 Universal Synchronous Asynchronous
Reserved
PWMC
Reserved
SSC Serial Synchronous Controller
ADC Analog-to-Digital Converter
Reserved
SPI Serial Peripheral Interface
Reserved
Peripheral Name Size
16 Kbytes
16 Kbytes
16 Kbytes
16 Kbytes
Receiver Transmitter 0
16 Kbytes
Receiver Transmitter 1
PWM Controller
16 Kbytes
16 Kbytes
16 Kbytes
16 Kbytes
6070A–ATARM–07-Jun-05
23

外设功能在 PIO 口线上的复用
AT91SAM7S64 的 PIO 控制器 PIOA 复用了 I/O 口线作为外设功能。
PIO控制器A控制32个口线。每个口线都可以分配为两个外设功能的一个,A或B。其 中的
一些还可以复用为 ADC 控制器的模拟输入。
Table 3 on page 25 说明了PIO 控制器 A的 I/O口线是如何被外设 A,B 或模拟输入所复用
的。 “ 功能 ” 及 “ 说明 ” 这两列主要是方便用户针对具体应用做注释以跟踪各个引脚是如
何被分配使用的。
要注意某些只能作为输出的外设功能在表中被复制了多次。
复位时所有的并行 I/O 都配置为输入,且
上拉电阻使能。
24
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
PIO 控制器 A 引脚复用
Table 3. PIO 控制器 A 引脚复用
PIO 控制器 A 应用
I/O 外设 A 外设 B 说明 功能 说明
PA 0 P WM0 T I OA 0 大电流驱动
PA 1 P WM1 T IOB0 大电流驱动
PA 2 P WM2 S C K 0 大电流驱动
PA 3 T WD N P C S3 大电流驱动
PA 4 T W CK T C LK 0
PA5 RXD0 NPCS3
PA 6 TX D 0 PC K 0
PA 7 RT S 0 PW M 3
PA 8 CT S 0 AD T R G
PA9 DRXD NPCS1
PA10 DTXD NPCS2
PA11 NPCS0 PWM0
PA12 MISO PWM1
PA13 MOSI PWM2
PA14 SPCK PWM3
PA15 TF TIOA1
PA 16 T K TI O B 1
PA17 TD PCK1 AD0
PA18 RD PCK2 AD1
PA 19 RK FIQ AD2
PA 20
PA21 RXD1 PCK1
PA22 TXD1 NPCS3
PA23 SCK1 PWM0
PA24 RTS1 PWM1
PA25 CTS1 PWM2
PA26 DCD1 TIOA2
PA27 DTR1 TIOB2
PA28 DSR1 TCLK1
PA 29 R I1 T C LK2
PA 30 I R Q 1 N PCS2
PA31 NPCS1 PCK2
RF IRQ0 AD3
6070A–ATARM–07-Jun-05
25
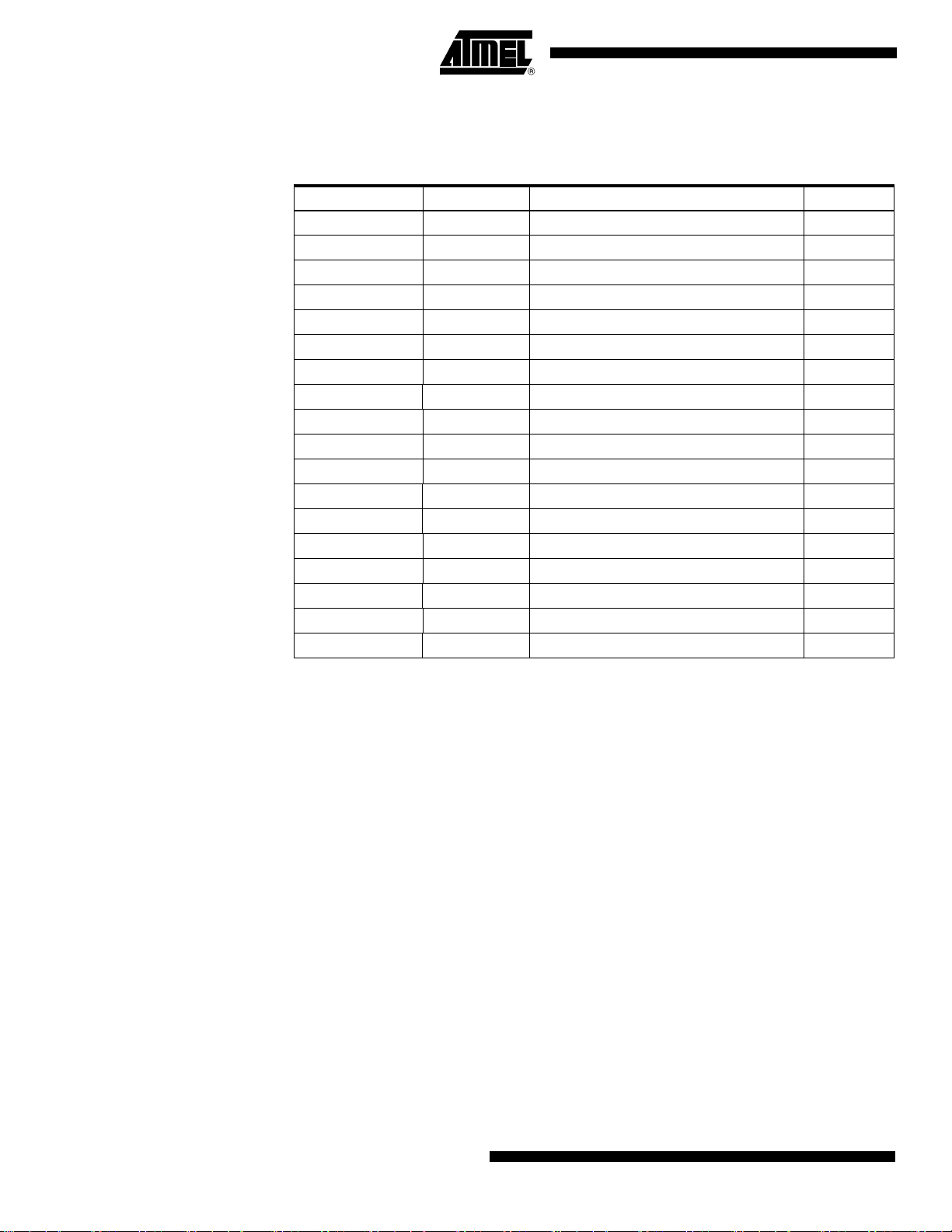
外设标识符 AT91SAM7S64 拥有很多外设。Table 4 给出了各种外设的标识符。中断控制器用标识符
来控制外设中断,而电源管理控制器则用标识符来控制外设时钟。
Table 4. 外设标识符
外设 ID 外设助记符 外设名称 外部中断
0AIC先进的中断控制器 FIQ
1 SYSIRQ
2PIOA并行 I/O 控制器 A
3 保留
4ADC
5 SPI 串行外设接口
6US0USART 0
7US1USART 1
8 SSC 同步串行接口
9TWI两线接口
10 PWMC PWM 控制器
11 UDP USB 设备端口
12 TC0 定时器 / 计数器 0
13 TC1 定时器 / 计数器 1
14 TC2 定时器 / 计数器 2
15 - 29 保留
30 AIC 先进的中断控制器 IRQ0
31 AIC 先进的中断控制器 IRQ1
Note: 1. 对电源管理控制器(PMC)时钟置位/清除寄存器的SYSIRQ以及ADC进行置位操作不会
引起任何作用。系统控制器总是有时钟驱动的。进行第一次转换时 ADC 时钟自动启
动。在休眠模式下,每一次转换结束后 ADC 时钟自动停止。
(1)
(1)
系统中断
模数转换器
串行外设接口 SPI • 支持与其他串行设备的通讯
–4个片选线,在解码芯片的协助下可以与多达 15 个器件进行通讯
– 串行存储器,如 DataFlash
– 串行外设,如 ADC, DAC, LCD 控制器, CAN 控制器和传感器等
– 外部协处理器
• 主 / 从 SPI 总线
– 每个片选线都支持 8 到 16 位可编程的数据长度
– 每个片选线都支持可编程的信号相位和极性
– 每个片选线都支持可编程的连续数据帧间传输延迟,以及时钟和数据之间的
传输延迟
– 可编程的连续传输延迟
– 可选择的模式错误检测
– 最高频率为主时钟
两线接口 TWI • 只支持主机模式
• 与标准的两线串行存储器兼容
26
AT91SAM7S64 Preliminary
®
和 3 线 EEPROM
6070A–ATARM–07-Jun-05

• 从机地址可以为一个字节,两个字节和三个字节
• 连续的读 / 写操作
USART • 可编程的波特率发生器
•5到 9 位的全双工同步或异步串行通讯
–1、 1.5 或 2 个停止位,异步模式
–1或 2 个停止位,同步模式
– 奇偶校验发生器和错误检测
– 帧错误检测,超速错误检测
–MSB先发送或 LSB 先发送
– 可选的中断 (break) 产生及检测
– 接收器采样频率为数据频率的 8 或 16 倍
– 硬件握手信号 RTS - CTS
– Modem 信号管理 DTR-DSR-DCD-RI, USART1
– 接收器时间溢出,发送器时间保护 (timeguard)
– 具有地址产生和检测功能的多地址 (Multi-drop) 通讯模式
• 支持 RS485 通讯,具有驱动器控制信号
• 支持 ISO7816 的 T = 0 或 T = 1 协议
–NACK信号处理,有限重复次数的错误计数器
•IrDA调制与解调
– 通讯速率可达 115.2 Kbps
• 测试模式
– 远程回环,本地回环,自动回发
AT91SAM7S64 Preliminary
,实现与智能卡的接口
串行同步控制器 • 为语音和电信应用提供了串行同步通讯链路
• 包括一个独立的接收器和独立的发送器,以及共用的时钟分频器
• 可配置的帧同步和数据长度
• 接收器和发送器都可以编程为自动启动,或是在检测到帧同步信号上的不同事件之
后再启动
• 接收器和发送器包括了数据信号、时钟信号和帧同步信号
定时器 / 计数器 •3个 16 位的定时器 / 计数器通道
–3个输出比较或两个输入捕捉
• 如下多种功能:
– 频率测量
– 事件计数
– 时间间隔测量
– 脉冲产生
– 延迟
–PWM
– 向上递增计数和向下递减计数的能力
• 每个通道都可以进行配置,并包括了:
–3个外部时钟输入
6070A–ATARM–07-Jun-05
27
–5个外部时钟输入,如 Table 5 所示。
Table 5. 定时器 / 计数器时钟分配
TC 时钟输入 时钟
TIMER_CLOCK1 MCK/2
TIMER_CLOCK2 MCK/8
TIMER_CLOCK3 MCK/32
TIMER_CLOCK4 MCK/128
TIMER_CLOCK5 MCK/1024
– 两个多功能输入 / 输出信号
– 两个作用于所有 3 个 TC 通道的全局寄存器
PWM 控制器 •4个通道,每个通道有一个 16 位的计数器
• 公共的时钟发生器,可以提供 13 个不同的时钟
– 一个 Mod(n) 计数器,提供 11 个时钟
– 作用于 Mod(n) 计数器输出的两个独立的线性分频器
• 通道的编程是独立的
– 独立的使能 / 禁止命令
– 独立的时钟选择
– 独立的双缓冲周期和占空比
– 可编程的输出波形极性选择
– 可编程的输出波形对准方式:中心对准或左边对准
USB 设备端口 • 与 USB V2.0 全速标准兼容,通讯速率为 12 Mbps
• 片内 USB V2.0 全速收发器
• 为端点所使用的片 内 328 字节双口 RAM
•4个端点
– 端点 0: 8 字节
– 端点 1 和端点 2: 64 字节, ping-pong
– 端点 3: 64 字节
–bulk端点支持 Ping-pong 模式 ( 两个存储区 )
• 挂起 / 继续 (suspend/resume) 逻辑
模数转换器 •8通道的 ADC
•10位数据,每秒采样次数高达 100K,连续逼近寄存器 ADC
• -2/+2 LSB 积分非线性误差, -1/+2 LSB 差分非线性误差
• 集成的 8-1 多工器,可以有 8 个独立的 3.3V 模拟输入
• 每个通路可以单独使能和禁止
• 对于低电压输入信号可以使用外部电压基准源来提高转换精度
• 多个触发源
– 硬件或软件触发
– 外部触发引脚
– 利用定时器 / 计数器 0-2 的输出 TIOA0-2 进行触发
28
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
• 休眠模式和转换序列
– 触发信号将使芯片自动唤醒;所有使能的通道转换结束之后器件又进入睡眠
模式
•8个模拟输入中的的 4 个与数字信号共享引脚
6070A–ATARM–07-Jun-05
29

30
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

ARM7TDMI 处理器综述
AT91SAM7S64 Preliminary
概述 ARM7TDMI内核既可以执行32位的ARM
使用户在高性能和高代码密度之间进行平衡。 ARM7TDMI 处理器为冯 - 诺依曼结构,具有三级
流水线,即指令获取、解码和执行三个阶段。
ARM7TDMI 处理器的主要特点是:
•ARM7TDMI基于 ARMv4T 结构
• 两个指令集
–ARM
–Thumb
• 三级流水线结构
– 指令获取 (F)
– 指令解码 (D)
– 执行 (E)
®
高性能 32 位指令集
®
高代码密度 16 位指令集
®
指令集,也可以执行16位的Thumb®指令集,从而可以
6070A–ATARM–07-Jun-05
31

ARM7TDMI 处理器
有关 ARM7TDMI 更详细的信息请参阅下面的 ARM 文档:
ARM Architecture Reference Manual (DDI 0100E)
ARM7TDMI Technical Reference Manual (DDI 0210B)
指令类型 指令或者是 32 位 (ARM 模式 ),或者是 16 位 (THUMB 模式 )。
数据类型 ARM7TDMI支持字节(8位),半字(16位)以及字(32位)这三种数据类型。字必须与4字节的边界对
齐,半字必须与 2 字节的边界对齐。
未对齐的数据访问行为取决于指令类型。
ARM7TDMI 工作模 式
ARM7TDMI 基于 ARM 结构 v4T,支持如下 7 种处理器模式:
User:一般的 ARM 程序执行状态
FIQ:设计为高速数据传输或通道处理
IRQ:用于通常的中断处理
Supervisor:用于操作系统的保护模式
Abort mode:实现虚拟内存和 / 或内存保护
System:操作系统的特权用户模式
Undefined:支持硬件协处理器的软件仿真
模式之间的转换可以通过软件进行控制,也可能由中断或例外处理引起。大多数应用程序运行
于 User 模式。而 非用户模式,或特权用户模式,则针对中断或例外,或者是访问受保护的资源。
ARM7TDMI 寄存器 ARM7TDMI 处理器总共有 37 个寄存器:
•31个通用 32 位寄存器
•6个状态寄存器
这些寄存器不能够在同一时间都访问到。处理器状态及工作模式决定了哪些寄存器可以被程序
员使用。
在任意时刻有 16 个寄存器是可访问的。其他的则与这 16 个寄存器拥有相同的名字,并用于加
速例外的处理。
32
寄存器 R15 为程序计数器 (PC),可以用于所有的指令来获取相对于当前指令的数据。
R14 保留着子程序调用的返回地址。
R13 通常用做堆栈指针。
.
Table 6. ARM7TDMI ARM 模式及
User 和
System 模式
R0 R0 R0 R0 R0 R0
R1 R1 R1 R1 R1 R1
R2 R2 R2 R2 R2 R2
R3 R3 R3 R3 R3 R3
Supervisor模
式 Abort 模式
AT91SAM7S64 Preliminary
寄存器规划
Undefined 模
式 IRQ 模式 FIQ 模式
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
Table 6. ARM7TDMI ARM 模式及寄存器规划
User 和
System 模式
R4 R4 R4 R4 R4 R4
R5 R5 R5 R5 R5 R5
R6 R6 R6 R6 R6 R6
R7 R7 R7 R7 R7 R7
R8 R8 R8 R8 R8
R9 R9 R9 R9 R9
R10 R10 R10 R10 R10 R10_FIQ
R11 R11 R11 R11 R11
R12 R12 R12 R12 R12
R13 R13_SVC R13_ABORT R13_UNDEF R13_IRQ R13_FIQ
R14 R14_SVC R14_ABORT R14_UNDEF R14_IRQ R14_FIQ
PC PC PC PC PC PC
CPSR CPSR CPSR CPSR CPSR CPSR
Supervisor模
式 Abort 模式
SPSR_SVC SPSR_ABORT SPSR_UNDEF SPSR_IRQ SPSR_FIQ
Undefined 模
式 IRQ 模式 FIQ 模式
R8_FIQ
R9_FIQ
R11_FIQ
R12_FIQ
与模式相关的分区的寄存器
寄存器 R0 到 R7 是不分区的。也就是说,在所有的工作模式下,它们指向的是相同的 32 位物
理寄存器。它们也是通用寄存器,与处理器结构没有直接的关系,可 以 出现在任何指令允许它
们出现的地方。
R8 到 R14 则是分区的寄存器。它们指向的物理寄存器根据处理器工作模式的不同而不同。
模式和例外处理 所有的例外都有分区的寄存器 R14 和 R13。
例外发生后, R14 保存了例外处理的返回地址。例外处理结束后,通过这个地址程序
外发生时的指令。
对于各种例外模式, R13 也是分区的,从而可以外各个例外处理程序提供单独的堆栈指针。
快速中断模式还实现了 R8 到 R12 的分区,从而中断处理程序可以不保存这些寄存器就开始执
行中断处理。
第 7 个处理模式,即 System 模式,没有任何分区的寄存器。它 使用与 User 模式相同的寄存器。
在 System 模式里可以运行那些需要特权模式的任务,并允许它们引发各种级别的例外。
状态寄存器 所 有 其 他 的处理器状态保存于状态寄 存器。当前 处理器状态保存于当
(Current Program Status Register,CPSR)。其内容为:
• 4 个 ALU 标志 ( 负,零,进位,溢出 )
• 两个中断禁止位 ( 每种中断一个 )
• 一个比特用来指示 ARM 状态还是 Thumb 状态
• 5 个比特用来解码当前的处理器模式
所有 5 个例外模式还拥有一个保存的程序状态寄存器(Saved Program Status Register,SPSR),
这个寄存器保存了在例外发生之前的那个任务的 CPSR。
返回到例
前程序状态寄存器
6070A–ATARM–07-Jun-05
33
例外类型 ARM7TDMI 支持 5 种类型的例外,每一种都有对应的特权处理模式。这些例外类型是:
• 快速中断 (FIQ)
• 普通中断 (IRQ)
• 内存异常中断 ( 用来实现内存保护或虚拟内存 )
• 尝试执行未定义的指令
• 软件中断 (SWI)
例外由片内外的中断源产生。
在同一时间可以有多个例外发生。
例外发生时,此例外对应的、分区的 R14 和 SPSR 将当前状态保存下来。
从例外返回时需要将 SPSR 拷贝回 CPSR,同 时 将 R14 的值赋给 PC。实现的方法有如下两个:
• 使用数据处理指令, S 置位, PC 为目的寄存器
• 使用 LDM 指令
ARM 指令集概览 ARM 指令集分为:
• 分支跳转指令
• 数据处理指令
• 状态寄存器传输指令
• 加载和保存指令
• 协处理器指令
• 例外产生指令
ARM 指令可以有条件地执行。每个指令都包括 4 比特的条件代码域 (bit[31:28])。
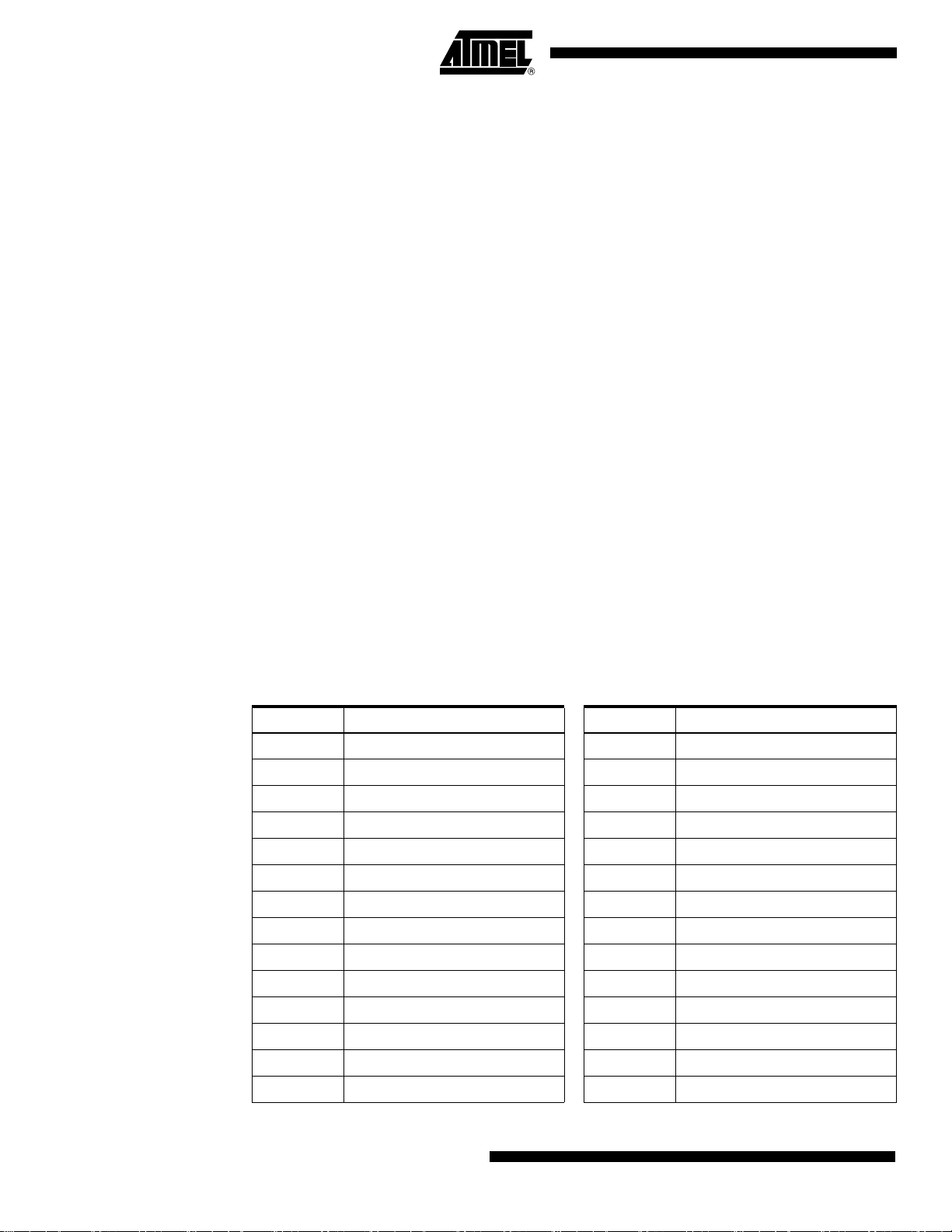
Table 7 给出了 ARM 指令表。
Table 7. ARM 指令表
助记符 操作 助记符 操作
MOV Move CDP Coprocessor Data Processing
ADD Add MVN Move Not
SUB Subtract ADC Add with Carry
RSB Reverse Subtract SBC Subtract with Carry
CMP Compare RSC Reverse Subtract with Carry
TST Test CMN Compare Negated
AND Logical AND TEQ Test Equivalence
EOR Logical Exclusive OR BIC Bit Clear
MUL Multiply ORR Logical (inclusive) OR
SMULL Sign Long Multiply MLA Multiply Accumulate
SMLAL Signed Long Multiply Accumulate UMULL Unsigned Long Multiply
MSR Move to Status Register UMLAL Unsigned Long Multiply Accumulate
B Branch MRS Move From Status Register
BX Branch and Exchange BL Branch and Link
34
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
Table 7. ARM 指令表
助记符 操作 助记符 操作
LDR Load Word SWI Software Interrupt
LDRSH Load Signed Halfword STR Store Word
LDRSB Load Signed Byte STRH Store Half Word
LDRH Load Half Word STRB Store Byte
LDRB Load Byte STRBT Store Register Byte with Translation
LDRBT Load Register Byte with Translation STRT Store Register with Translation
LDRT Load Register with Translation STM Store Multiple
LDM Load Multiple SWPB Swap Byte
SWP Swap Word MRC Move From Coprocessor
MCR Move To Coprocessor STC Store From Coprocessor
LDC Load To Coprocessor
Thumb 指令集概览 Thumb 指令集是 ARM 指令集经过重新编码的子集。
Thumb 指令集分为:
• 分支跳转指令
• 数据处理指令
• 加载和保存指令
• 加载和保存 ( 多个数据 ) 指令
• 例外产生指令
在 Thumb 模式中 8 个通用寄存器,R0 到 R7,是可访问的。还可以访问的是程序计数器 (ARM
寄存器 15),链接寄存器 (ARM 寄存器 14) 以及堆栈指针 (ARM 寄存器 13)。还有一些指令对
ARM 寄存器 R8 到 R15 有有限的访问权限。
Table 8 给出了 Thumb 指令集。
Table 8. Thumb 指令集
助记符 操作 助记符 操作
MOV Move MVN Move Not
ADD Add ADC Add with Carry
SUB Subtract SBC Subtract with Carry
CMP Compare CMN Compare Negated
TST Test NEG Negate
AND Logical AND BIC Bit Clear
EOR Logical Exclusive OR ORR Logical (inclusive) OR
LSL Logical Shift Left LSR Logical Shift Right
ASR Arithmetic Shift Right ROR Rotate Right
MUL Multiply
B Branch BL Branch and Link
BX Branch and Exchange SWI Software Interrupt
LDR Load Word STR Store Word
6070A–ATARM–07-Jun-05
35

Table 8. Thumb 指令集
助记符 操作 助记符 操作
LDRH Load Half Word STRH Store Half Word
LDRB Load Byte STRB Store Byte
LDRSH Load Signed Halfword LDRSB Load Signed Byte
LDMIA Load Multiple STMIA Store Multiple
PUSH Push Register to stack POP Pop Register from stack
36
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
AT91SAM7S64 调试及测试特点
说明 AT91SAM7S64 具有调试及测试能力。 JTAG/ICE (In-Circuit Emulator) 用于标准的调试功能,
如下载代码,在程序里实现单步执行等。调试单元提供了一个两线 UART,可以利用它将应用
程序上载到片内 SRAM。它管理着 COMMTX 和 COMMRX 信号的中断处理,实现对调试通讯
通道活动的跟踪。
通过一整套复杂的调试与测试输入 / 输出引脚, PC 端的测试环境可以直接访问这些调试 / 测试
功能。
方框图
Figure 10. 调试及测试框图
TMS
TCK
TDI
PDC
Boundary
TA P
ARM7TDMI
ICE
DBGU
ICE/JTAG
TA P
Reset
and
Test
PIO
JTAGSEL
TDO
POR
TST
DTXD
DRXD
6070A–ATARM–07-Jun-05
37

应用例子
调试环境 Figure 11 on page 38 展示了一个完整的调试环境例子。 ICE/JTAG 接口用于标准的调试功能,
如下载代码和单步执行程序。
Figure 11. 调试环境例子
Host Debugger
ICE/JTAG
Interface
ICE/JTAG
Connector
AT91SAM7S64
AT91SAM7S64-based Application Board
RS232
Connector
Terminal
38
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
测试环境 Figure 12 on page 39 展示了测试环境的例子。测试向量由测试仪发送和解释。在这个例子中,
接受测试的板子上有一些与 JTAG 兼容的器件。这些器件可以连接到一起组成一个扫描链。
Figure 12. 测试环境例子
调试及测试引脚
说明
Test Adaptor
JTAG
Interface
ICE/JTAG
Connector
AT91SAM7S64
AT91SAM7S64-based Application Board In Test
Chip 2Chip n
Chip 1
Tester
Table 9. 调试及测试引脚列表
引脚名称 功能 类型 有效电平
复位 / 测试
NRST 处理器复位 输入 / 输出 低
TST 测试模式选择 输入 高
ICE 及 JTAG
TCK 测试时钟 输入
TDI 测试数据输入 输入
TDO 测试数据输出 输出
TMS 测试模式选择 输入
JTAGSEL JTAG 选择 输入
调试单元
DRXD 调试接收数据 输入
DTXD 调试发送数据 输出
6070A–ATARM–07-Jun-05
39

功能描述
测试引脚
嵌入式在线仿真器 -
ICE
TST引脚用来定义芯片工作模式。在正常工作模式下用户必须保证这个引脚接到低电平。高电平
则用于生产测试。
ARM7TDMI 嵌入式在线仿真是通过 ICE/JTAG 得到支持的。 ARM7TDMI 的内部状态通过
ICE/JTAG 得以检查。
ARM7TDMI 处理器具有实现先进的调试特性的硬件扩展:
• 在暂停 (halt) 模式下,“ 存储多个数据” (STM) 可以插入到指令流水线。这个指令可以输出
ARM7TDMI 寄存器的内容。然后这些数据以串行的方式从 TDI 输出 ,而不影响系统的其他
部分。
• 在监控模式下, JTAG 接口用于在调试器和运行于 ARM7TDMI 处理器内部的简单监控程序
之间传输数据。
ARM7TDMI处理器有三个扫描链分别支持测试、调试及编程。所 有扫描链都由 ICE/JTAG控制。
JTAGSEL引脚为低时选择嵌入式ICE模式
SEL 变化后必须进行芯片复位。
进一步的嵌入式ICE信息请参阅 ARM7TDMI (Rev4) Technical Reference Manual (DDI0210B)。
。不 能在ICE和JTAG模式之间直接进行切换。JTAG-
调试单元 调试单元提供了两线 (DXRD 和 TXRD) USART 用于一些调试及跟踪的目的。同时这也是现场编
程和调试监控通讯的理想方法。此外,由于两个外设数据控制器通道的存在,处理器处理数据
包的时间可以减至最小。
调试单元还管理着 COMMTX 和 COMMRX 的中断处理。这是两个来自 ICE 的信号,它们跟踪
着调试通讯通道的活动。调试单元可以阻止通过 ICE 接口对系统进行的访问。
IEEE 1149.1 JTAG
边界扫描
JTAG 边界扫描寄存器
调试单元可以用来上载应用程序到片内 SRAM。当引导程序没有发现有效的应用程序时即激活
这个功能。用来加载应用程序的协议是 XMODEM。
调试单元芯片 ID 寄存器保存了有关产品版本及内部配置的信息。
AT91SAM7S64 的调试单元芯片 ID 的数值为 0x27090540。
有
关调试单元的更多信息请参阅 “Debug Unit (DBGU)” on page 179。
通过 IEEE 1149.1 JTAG 边界扫描可以访问每个引脚,而不必关心器件的封装形式。
JTAGSEL 为高时使能 IEEE 1149.1 JTAG 边界扫描。实现的功能有 SAMPLE、 EXTEST 和
BYPASS。在 ICE 调试模式下,ARM 处理器将返回一个非 JTAG芯片 ID 到 ICE 系统。这 与 IEEE
1149.1 JTAG 是不兼容的。
JTAG 模式和 ICE 模式不能直接进行切换。 JTAGSEL 电平改变之后必须对芯片进行复位。
Atmel 提供了边界扫描叙词语言 (BSDL) 文件以方便客户设置测试系统。
边界扫描寄存器 (BSR) 包含与各个引脚和相关控制信号对应的 96 个比特。
40
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
每个 AT91SAM7S64 输入 / 输出引脚在 BSR 里都占 3 个比特。OUTPUT 表示数据可以强制输
出到引脚; INPUT 用来观察加载于引脚的数据; CONTROL 则控制引脚的方向。
Table 10. AT91SAM7S64 JTAG 边界扫描寄存器
比特流的顺序号 引脚名称 引脚类型 相关的 BSR 单元
96
95 OUTPUT
94 CONTROL
93
92 OUTPUT
91 CONTROL
90
89 OUTPUT
88 CONTROL
87
86 OUTPUT
85 CONTROL
84
83 OUTPUT
82 CONTROL
81
80 OUTPUT
79 CONTROL
78
77 OUTPUT
PA17/PGMD5/AD0 IN/OUT
PA18/PGMD6/AD1 IN/OUT
PA21/PGMD9 IN/OUT
PA19/PGMD7/AD2 IN/OUT
PA20/PGMD8/AD3 IN/OUT
PA16/PGMD4 IN/OUT
PA15/PGM3 IN/OUT
INPUT
INPUT
INPUT
INPUT
INPUT
INPUT
INPUT
6070A–ATARM–07-Jun-05
76 CONTROL
75
74 OUTPUT
73 CONTROL
72
71 OUTPUT
70 CONTROL
69
68 OUTPUT
67 CONTROL
66
65 OUTPUT
64 CONTROL
PA14/PGMD2 IN/OUT
PA13/PGMD1 IN/OUT
PA22/PGMD10 IN/OUT
PA23/PGMD11 IN/OUT
INPUT
INPUT
INPUT
INPUT
41
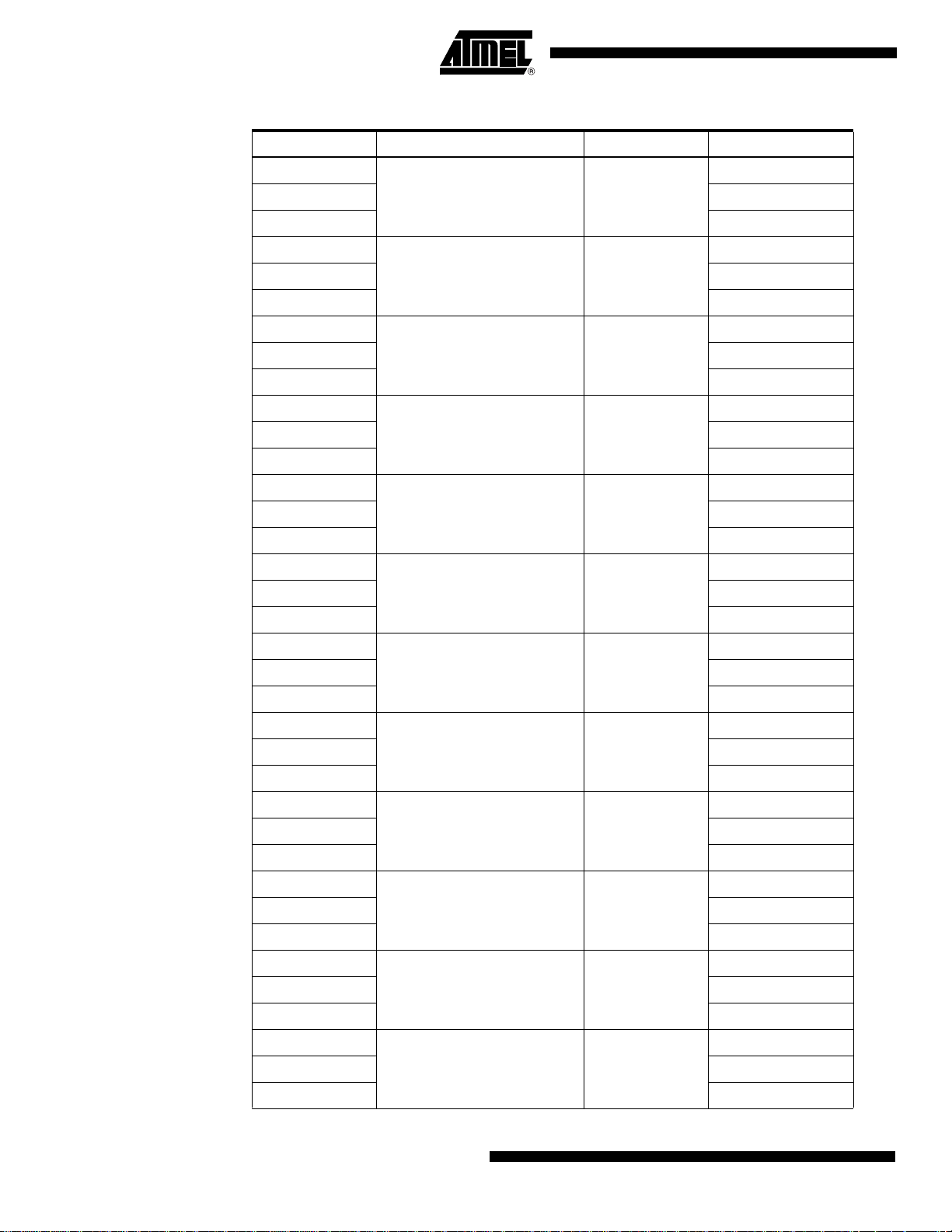
Table 10. AT91SAM7S64 JTAG 边界扫描寄存器
比特流的顺序号 引脚名称 引脚类型 相关的 BSR 单元
63
62 OUTPUT
61 CONTROL
60
PA24/PGMD12 IN/OUT
INPUT
INPUT
59 OUTPUT
58 CONTROL
57
56 OUTPUT
55 CONTROL
54
53 OUTPUT
52 CONTROL
51
50 OUTPUT
49 CONTROL
48
47 OUTPUT
46 CONTROL
45
44 OUTPUT
43 CONTROL
42
PA12/PGMD0 IN/OUT
INPUT
PA11/PGMM3 IN/OUT
INPUT
PA10/PGMM2 IN/OUT
INPUT
PA 9 /P G M M1 I N /O U T
INPUT
PA 8 /P G M M0 I N /O U T
INPUT
PA7/PGMNVALID IN/OUT
INPUT
42
41 OUTPUT
40 CONTROL
39
38 OUTPUT
37 CONTROL
36
35 OUTPUT
34 CONTROL
33
32 OUTPUT
31 CONTROL
30
29 OUTPUT
28 CONTROL
PA6/PGMNOE IN/OUT
PA 5/ PG M R DY I N /O U T
PA4/PGMNCMD IN/OUT
PA25/PGMD13 IN/OUT
PA26/PGMD14 IN/OUT
AT91SAM7S64 Preliminary
INPUT
INPUT
INPUT
INPUT
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
Table 10. AT91SAM7S64 JTAG 边界扫描寄存器
比特流的顺序号 引脚名称 引脚类型 相关的 BSR 单元
27
26 OUTPUT
25 CONTROL
24
PA27/PGMD15 IN/OUT
INPUT
INPUT
23 OUTPUT
22 CONTROL
21
20 OUTPUT
19 CONTROL
18
17 OUTPUT
16 CONTROL
15
14 OUTPUT
13 CONTROL
12
11 OUTPUT
10 CONTROL
9
8OUTPUT
7 CONTROL
6
PA 28 I N /OUT
INPUT
PA 3 I N / OUT
INPUT
PA 2 I N / OUT
INPUT
PA1/PGMEN1 IN/OUT
INPUT
PA0/PGMEN0 IN/OUT
INPUT
PA 29 I N /OUT
INPUT
5OUTPUT
4 CONTROL
3
2OUTPUT
1 CONTROL
0 ERASE IN INPUT
PA 30 I N /OUT
PA 31 I N /OUT
ID 代码寄存器
访问类型:只读
31 30 29 28 27 26 25 24
VERSION PART NUMBER
23 22 21 20 19 18 17 16
PART NUMBER
6070A–ATARM–07-Jun-05
INPUT
43
15 14 13 12 11 10 9 8
PART NUMBER MANUFACTURER IDENTITY
76543210
MANUFACTURER IDENTITY 1
VERSION[31:28]: 芯片版本号
0x1
PART NUMBER[27:12]: 芯片型号
0x5B06
MANUFACTURER IDENTITY[11:1]
0x01F
Bit[0] Required by IEEE Std. 1149.1.
0x1
JTAG ID 代码为 05B0_603F
44
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
复位控制器 (RSTC)
概述 基于上电复位单元的复位控制器 (RSTC) 处理系统的所有复位,而无需其它器件。它 可以给出上
一次复位源的信息。
复位控制器可以独立地、或同时驱动外部复位和外设及处理器复位。
掉电检测可以防止处理器进入不可预测的状态。
方框图
Figure 13. 复位控制器框图
Reset Controller
bod_rst_en
brown_out
Main Supply
POR
NRST
WDRPROC
wd_fault
nrst_out
Brownout
Manager
Startup
Counter
NRST
Manager
bod_reset
user_reset
exter_nreset
Reset
State
Manager
SLCK
rstc_irq
proc_nreset
periph_nreset
6070A–ATARM–07-Jun-05
45
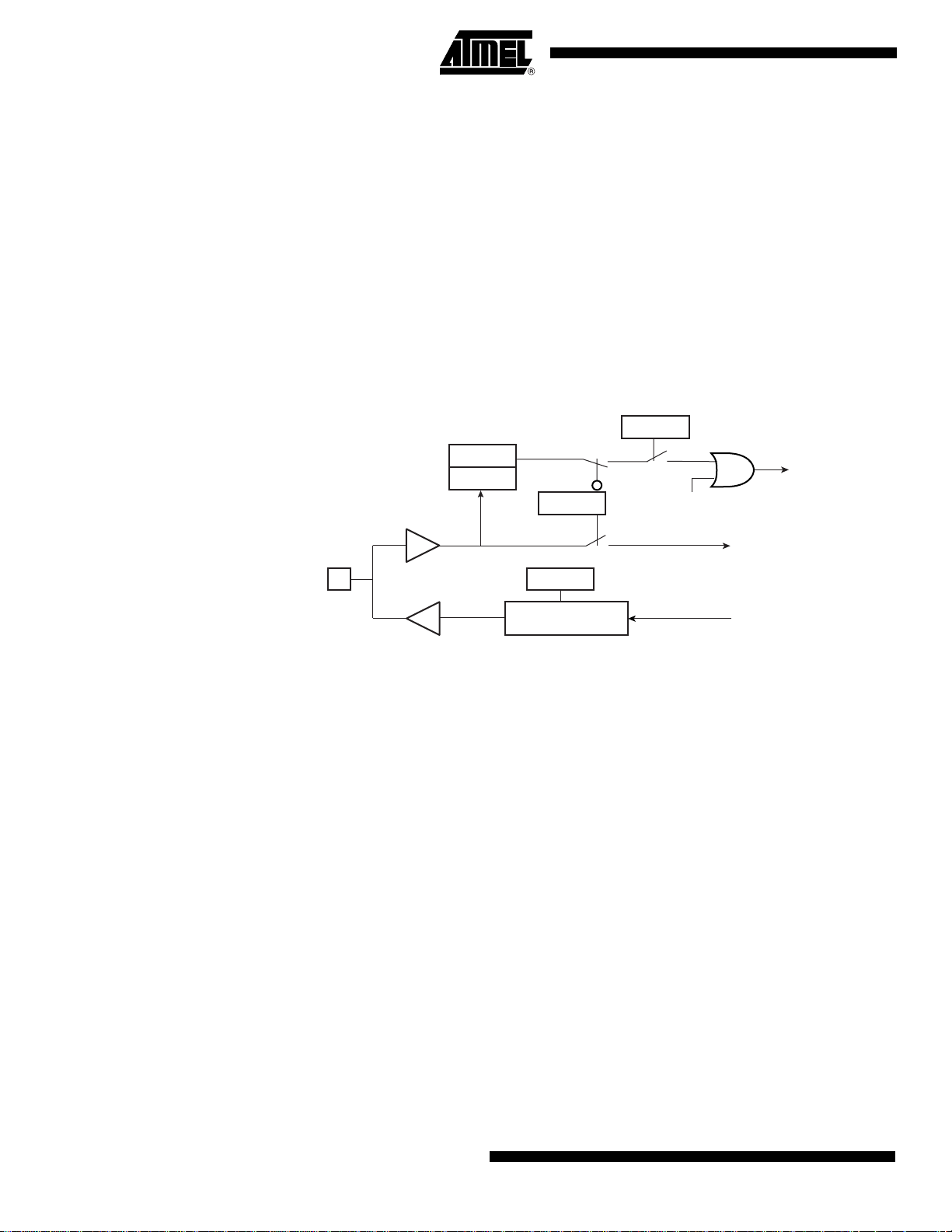
功能说明 复位控制器由 NRST 管理器、掉电检测管理器、启动计数器和复位状态管理器组成。它运行于
慢速时钟,可以产生如下复位信号:
• proc_nreset:处理器复位。它同时也复位看门狗定时器。
• periph_nreset:作用于所有的外设。
•nrst_out:驱动 NRST 引脚。
这些复位信号由复位控制器或者基于外部事件,或者基于软件行为产生。复位状态管理器控制
着这些信号的产生,并在需要激活 NRST 引脚的时候为 NRST 管理器提供信号。
NRST 管理器控制 NRST 信号保持预先编好程的一段时间,从而控制外部器件的复位。
NRST 管理器 NRST 管理器对NRST 引脚的输入进行采样,并在复位状态管理器需要的时候将引脚电平拉低。
Figure 14 给出了 NRST 管理器的方框图。
Figure 14. NRST 管理器
RSTC_MR
RSTC_SR
URSTS
NRSTL
RSTC_MR
URSTEN
URSTIEN
rstc_irq
Other
interrupt
sources
NRST
nrst_out
RSTC_MR
ERSTL
External Reset Timer
user_reset
exter_nreset
NRST 信号或中断
NRST 管理器以低速时钟对 NRST引脚信号进行采样。当检测到信号为低时,用户复位的信号将
报告给复位状态管理器。
此外,通过编程还可以使 NRST 管理器在 NRST 为低时并不触发复位。这 可以通过将RSTC_MR
寄存器的 URSTEN 位清零来实现。
引脚 NRST 的电平可以在任何时候通过读取寄存器 RSTC_SR 的 NRSTL 来了解。一旦 NRST
上施加了有效信号,寄存器 RSTC_SR 的位 URSTS 置位。只有读取 RSTC_SR 之后这一位才
清零。
通过编程
还可以使复位控制器产生中断,而不是复位。方法就是置位 RSTC_MR 寄存器的
URSTIEN。
NRST 外部复位控制 复位状态管理器产生 ext_nreset 信号来拉低 NRST 引脚。同时, “nrst_out” 信号被 NRST 管理
器拉低,并持续由 RSTC_MR 寄 存器的 ERSTL 域 控制的一段 时间。这段 名 为
EXTERNAL_RESET_LENGTH的时间持续2
(ERSTL+1)
个慢速时钟周期。所 以其时间范围为60 µs
到 2 秒。 ERSTL 为 0 时 NRST 脉冲持续两个时钟周期。
这个特性使得复位控制器可以塑造 NRST 引脚的电平,从而保证 NRST 低电平持续时间满足连
接到系统复位的外部器件的复位要求。
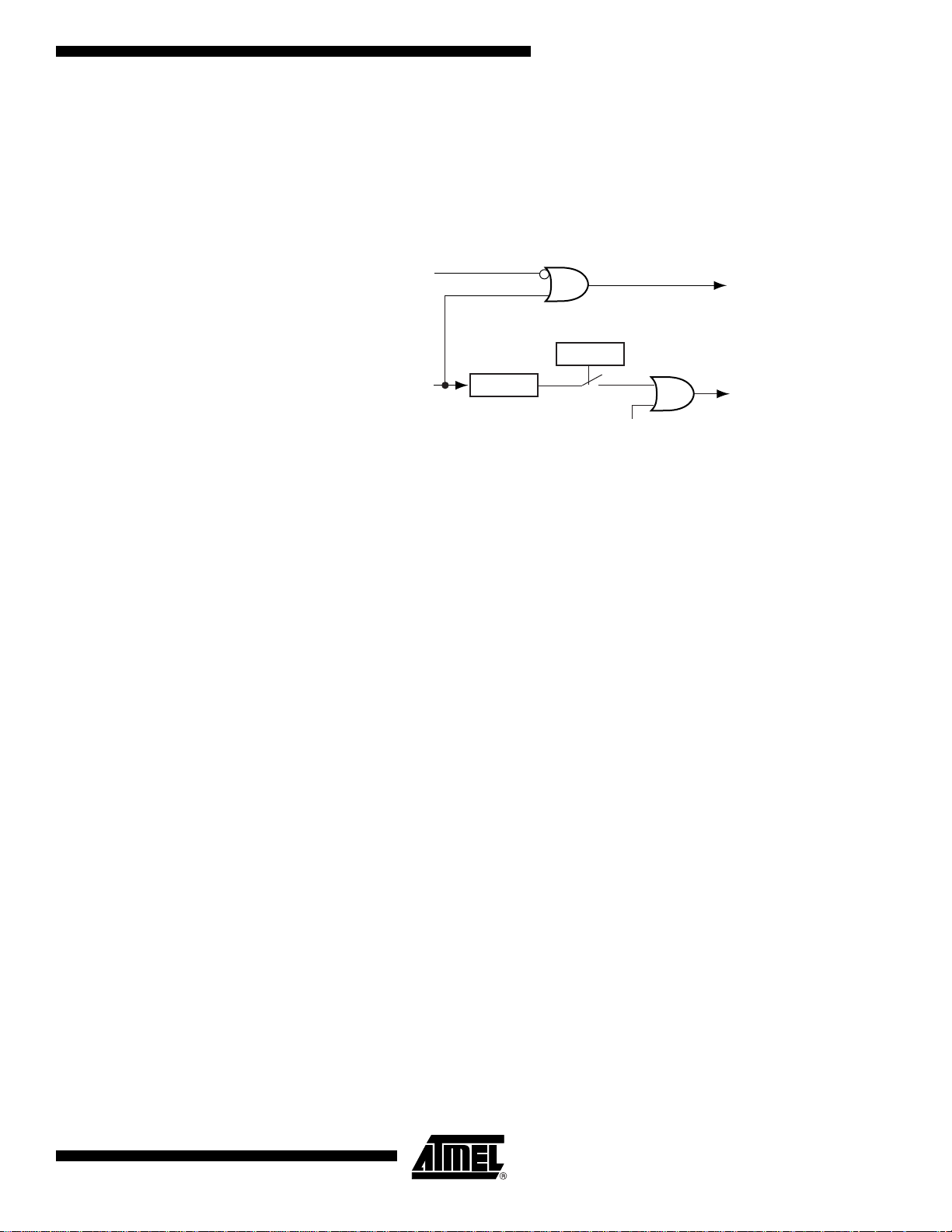
掉电检测管理器 掉电检测可以防止处理器在电源下降到某个特定电平之后进入不可预测的状态。当 VDDCORE
低于掉电检测门限时,掉电检测管理器通过激活 bod_reset 信号来请求掉电检测复位。
46
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
程序员可以通过拉低 bod_rst_en 信号的方法来禁止掉电检测复位,即锁定 Flash 中对应的通用
NVM位。然后掉电检测复位就不会再发生了。此 时可以通过 寄存器RSTC_SR的位BODSTS 来
查看是否发生了掉电检测。 BODSTS 置位后只能通过读取 RSTC_SR 来清除。
若寄存器 RSTC_MR 的 BODIEN 置位,则 BODSTS 可以触发中断。
芯片出厂时掉电检测复位是禁止的。
Figure 15. 掉电检测管理器
bod_rst_en
brown_out
RSTC_SR
BODSTS
RSTC_MR
BODIEN
Other
interrupt
sources
bod_reset
rstc_irq
6070A–ATARM–07-Jun-05
47

复位状态 复位状态管理器处理不同的复位源,并产生内部复位信号。它通过状态寄存器 RSTC_SR 的
RSTTYP 域来报告复位状态。处理器复位释放后 RSTTYP 即得以更新。
上电复位 VDDCORE 上电后,主电源 POR 单元输出被运行于慢速时钟的启动计数器所过滤。这个计数器
的目的是保证启动芯片之前慢速时钟振荡器先稳定下来。
Figure 16 所示的启动时间是硬件决定的,并与慢速时钟振荡器的启动时间兼容。经过启动时间
之后,复位信号被释放, RSTC_SR 寄存器的 RSTTYP 得以更新,指明发生了上电复位。
当主电源 POR 单元检测到 VDDCORE 为低时,所有的复位信号立即生效。
Figure 16.
上电复位
SLCK
MCK
Main Supply
POR output
proc_nreset
periph_nreset
NRST
(nrst_out)
Startup Time
Processor Startup
= 3 cycles
EXTERNAL RESET LENGTH
= 2 cycles
Any
Freq.
48
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
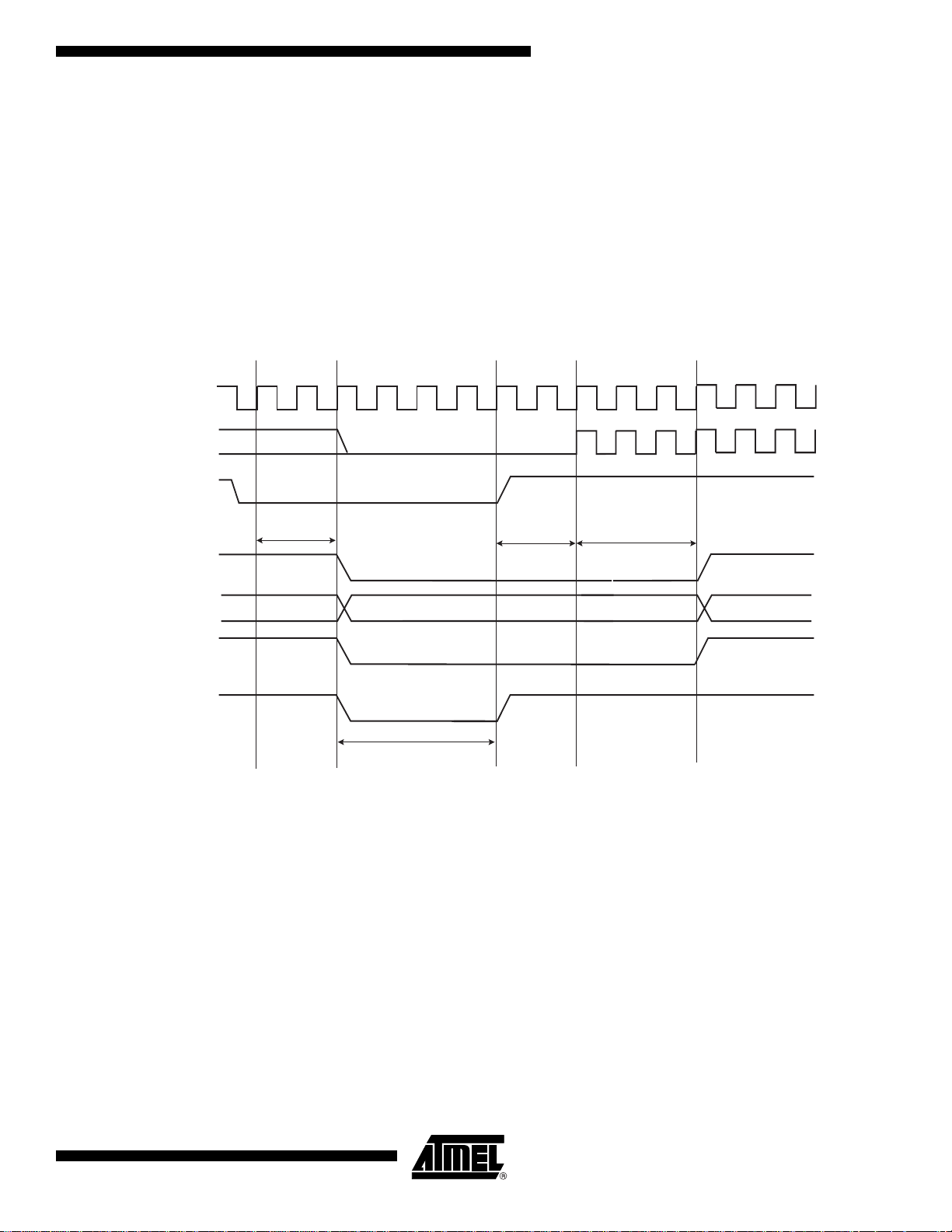
用户复位 当 NRST 引脚电平为低,且寄存器 RSTC_MR 的 URSTEN 为 1 时即进入用户复位。 NRST 输
入信号被同步到 SLCK 以保证系统的正确运行。
一旦检测到 NRST 为低电平,系统即进入用户复位。同时还引发处理器复位和外设复位。
NRST 电平拉高后,经过两个周期的重新同步时间和三个周期的处理器启动时间,处理器即退出
用户复位。一旦 NRST 为高,处理器时钟即重新使能。
处理器复位信号释放之后,状态寄存器的 RSTTYP 域即更新为 0x4,表示发生了用户复位。
NRST 管理器保证 NRST 信号持续 EXTERNAL_RESET_LENGTH 个慢速时钟周期,正如域
ERSTL 编程的那样
部复位将保持有效直到 NRST 变高。
Figure 17. 用户复位状态
SLCK
。然而,如果由于被外部电路拉低而使得 NRST 并没有在预定时间变高,内
MCK
NRST
proc_nreset
RSTTYP
periph_nreset
NRST
(nrst_out)
Any
Freq.
Resynch.
2 cycles
Any XXX
>= EXTERNAL RESET LENGTH
Resynch.
2 cycles
Processor Startup
= 3 cycles
0x4 = User Reset
6070A–ATARM–07-Jun-05
49

掉电检测复位 brown_out/bod_reset 信号有效时,复位状态管理器立即进入掉电检测复位。处理器复位、外设
复位和外部复位信号同时生效。
brown_out/bod_reset 变高后,经过两个周期的重新同步时间和额外的 3 个慢速时钟周期,处理
器退出掉电检测复位。同时外部复位被触发。
处理器复位释放之后, RSTC_SR 寄存器的 RSTTYP 更新为 0x5,表明发生了掉电检测复位。
Figure 18. 掉电检测复位状态
SLCK
MCK
brown_out
or bod_reset
proc_nreset
RSTTYP
periph_nreset
NRST
(nrst_out)
Any
Freq.
Any
Resynch.
2 cycles
XXX
Processor Startup
= 3 cycles
0x5 = Brownout Reset
EXTERNAL RESET LENGTH
8 cycles (ERSTL=2)
50
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
软件复位 复位控制器提供了几 个命令来激活不 同的复位信号。执行这些命令只需要将控制寄存器
RSTC_CR 的如下控制位写 1:
• PROCRST:置 1 将复位处理器和看门狗
• PERRST:置 1 将复位所有的外设,包括存储器系统,特别是重映像 (Remap) 命令。外设复
位一般用于调试的目的。
• EXTRST:置 1将拉低 NRST 引脚,并保持由模式寄存器RSTC_MR的 ERSTL 域定义的一段
时间。
一旦软件设置了上述的某一位或某几位,处理器即进入软件复位。所 有这些命令可以单独执行,
也可以同时执行。软件复位持续 3 个慢速时钟周期。
Figure 19. 软件复位
一旦执行了控制寄存器写操作,内部各个复位信号立即
生产。这可以通过主时钟 (MCK) 检测出
来:处理器退出软件复位时这些复位信号即被释放,亦即它们都同步于 SLCK。
如果 EXTRST 置 1, nrst_out 信号是否有效还取决于 ERSTL 的设置。然而 NRST 的下降沿并
不会导致用户复位。
若仅有 PROCRST 置位,复位控制器将通过状态寄存器 RSTC_SR 的 RSTTYP 域报告软件复
位。 RSTTYP 不报告其它的软件复位。
一旦发生了 软件复位,状态寄存器 RSTC_SR 的位 SRCMP (Software Reset Command in
Progress- 正在执行软件复位命令 )即置位。处理器退出软件复位后它
即被清零。SRCMP 置位后
无法执行其它软件复位,对 RSTC_CR 的写操作也没有任何效果。
SLCK
MCK
Write RSTC_CR
proc_nreset
if PROCRST=1
RSTTYP
Any
Freq.
Any
Resynch.
1 cycle
Processor Startup
= 3 cycles
XXX
0x3 = Software Reset
6070A–ATARM–07-Jun-05
periph_nreset
if PERRST=1
NRST
(nrst_out)
if EXTRST=1
SRCMP in RSTC_SR
EXTERNAL RESET LENGTH
8 cycles (ERSTL=2)
51

看门狗复位 看门狗错误发生时引发看门狗复位。这个状态将持续 3 个慢速时钟周期。
看门狗复位时,内部各个复位信号的产生取决于 WDT_MR 寄存器的位 WDRPROC:
• 若 WDRPROC 为 0,处理器复位和外设复位信号有效。NRST 引脚也被拉低,持续时间与
ERSTL 有关。但是 NRST 引脚的低电平并不会引起用户复位。
• 若 WDRPROC = 1,则只有处理器复位有效。
看门狗定时器由 proc_nreset 信号复位。如果 WDRSTEN 置位,看门狗溢出总是会引起处理器
复位,因此看门狗定时器总是在看门狗复位之后复位。在缺省条件下看门狗是使能的,而且溢
出时间设置为最长。
Figure 20. 看门狗复位
Only if
WDRPROC = 0
寄存器WDT_MR的WDRSTEN清零时,看门狗错误(
SLCK
MCK
wd_fault
proc_nreset
RSTTYP
periph_nreset
NRST
(nrst_out)
Any
Freq.
Any
Processor Startup
= 3 cycles
XXX
EXTERNAL RESET LENGTH
8 cycles (ERSTL=2)
定时器溢出)对复位控制器没有任何影响。
0x2 = Watchdog Reset
52
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
复位状态优先级 复位状态管理器管理的复位源优先级以递减的方式排列如下:
• 上电复位
• 掉电检测复位
• 看门狗复位
• 软件复位
• 用户复位
特例则排列如下:
• 用户复位状态:
– 看门狗事件永远不会发生,因为看门狗定时器被 proc_nreset 信号复位了
– 软件复位不会发生,因为处理器复位已经被激活了
• 软件复位状态:
– 看门狗事件优先级高于当前状态
–NRST没有效用
• 看门狗复位状态:
– 处理器复位已经激活,所以不可能进行软件复位的编程
– 不能进入用户复位
复位控制器状态寄存 器
复位控制器状态寄存器 (RSTC_SR) 给出了如下几个状态域:
•RSTTYP:表明了上一次复位的复位源
•SRCMP:表明软件复位命令正在执行当中,不能够执行其它的软件复位。当前软件复位
结束后这一位自动清零。
•NRSTL:给出了在每一个主时钟 MCK 上升沿采样到的 NRST 引脚的电平
•URSTS:NRST 信号从高电平到低电平的变化将置位 RSTC_SR 寄存器的 URSTS。这 个电
平变换也是在主时钟 MCK 的上升沿采样到的 ( 参见 Figure 21)。如果用户复位已经被禁止
(URSTEN = 0),而且通过 RSTC_MR 寄存器的URSTIEN使能了中断,则 URSTS将触发中
断。读取状态寄存器 RSTC_SR 将复位 URSTS
•BODSTS:当掉电检测复位被禁止时 (bod_rst_en = 0) 这一位表示发生了掉电检测。如果
通过 RSTC_MR 寄存器的 URSTIEN 使能了中断则 BODSTS 将触发中断。读取状态寄存
器 RSTC_SR 将复位 BODSTS 并清除中断。
Figure 21. 复位控制器状态和中断
MCK
Peripheral Access
2 cycle
resynchronization
NRST
并清除中断。
read
RSTC_SR
2 cycle
resynchronization
if (URSTEN = 0) and
(URSTIEN = 1)
6070A–ATARM–07-Jun-05
NRSTL
URSTS
rstc_irq
53

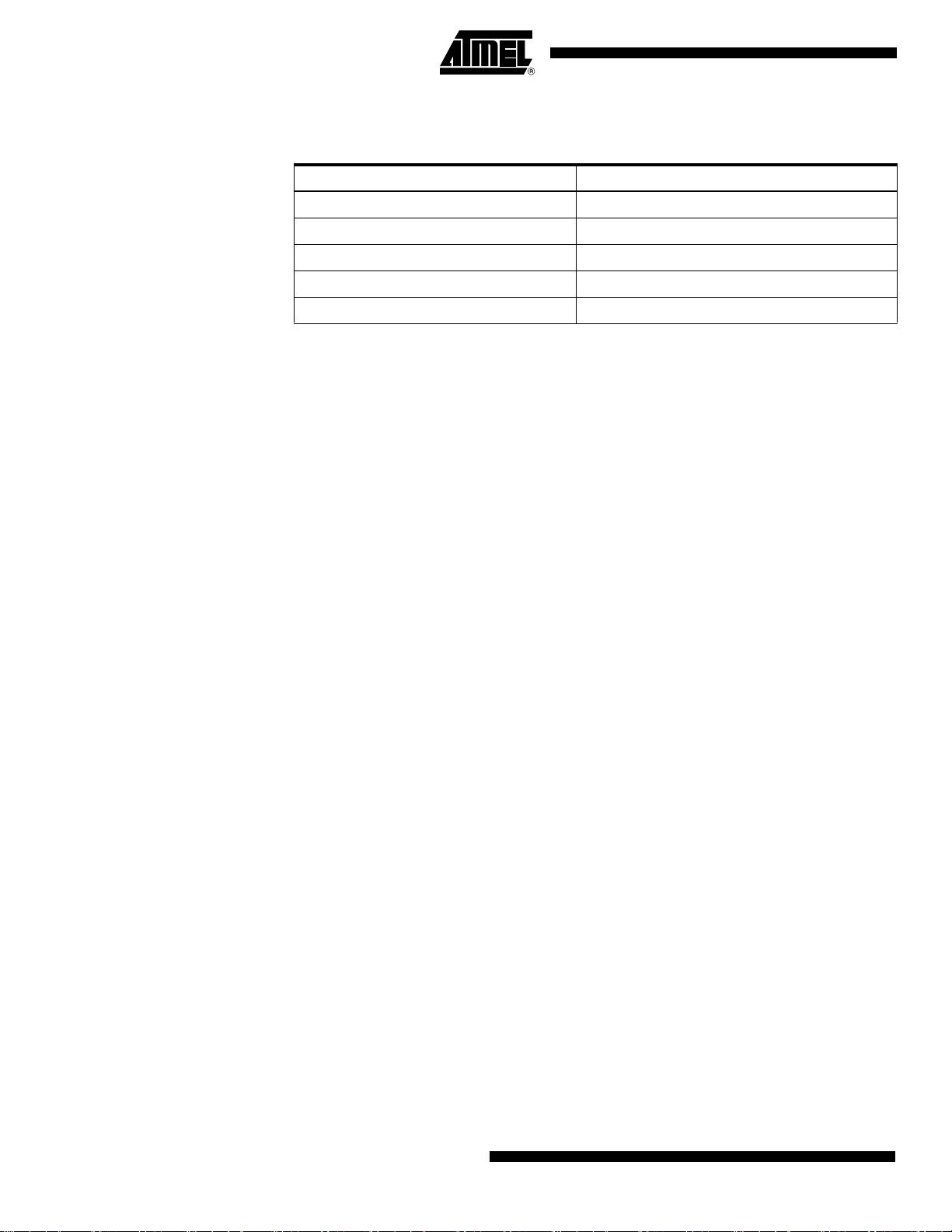
复位控制器 (RSTC) 用户接口
Table 11. 复位控制器寄存器
地址偏移 寄存器 名称 访问类型 复位值
0x00 控制寄存器 RSTC_CR 只写 -
0x04 状态寄存器 RSTC_SR 只读 0x0000_0000
0x08 模式寄存器 RSTC_MR 读 / 写 0x0000_0000
54
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
复位控制器控制寄存器
寄存器名称 : RSTC_CR
访问类型 : 只写
31 30 29 28 27 26 25 24
KEY
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
–––––– –
76543210
––––EXTRSTPERRST–PROCRST
• PROCRST: 处理器复位
0 = 无效。
1 = 若 KEY 是正确的,则复位处理器。
• PERRST: 外设复位
0 = 无效。
1 = 若 KEY 是正确的,则复位所有外设。
• EXTRST: 外部复位
0 = 无效。
1 = 若 KEY 是正确的,则拉低 NRST 引脚。
•KEY: 预设值
0xA5。写入其它任何数值都将使本次写操作失败。
6070A–ATARM–07-Jun-05
55

复位控制器状态寄存器
寄存器名称 : RSTC_SR
访问类型 : 只读
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
––––––SRCMPNRSTL
15 14 13 12 11 10 9 8
––––– RSTTYP
76543210
––––––BODSTSURSTS
• URSTS: 用户复位状态
0 = 自上次读取 RSTC_SR 以来 NRST 引脚上没有发生从高电平到低电平的转换。
1 = 自上次读取 RSTC_SR 以来 NRST 引脚上至少检测到一次从高电平到低电平的转换。
• BODSTS: 掉电检测状态
0 = 自上次读取 RSTC_SR 以来没有发生掉电检测。
1 = 自上次读取 RSTC_SR 以来已经发生过掉电检测。
• RSTTYP: 复位类型
报告上一次处理器复位的原因。读取 RSTC_SR 不会影响它的数值。
RSTTYP 复位类型 说明
000上电复位 VDDCORE 上升
010看门狗复位 发生了看门狗错误 ( 定时器溢出 )
011软件复位 软件要求的处理器复位
100用户复位 NRST 引脚检测为低
101掉电检测复位 发生了掉电检测复位
• NRSTL: NRST 引脚电平
记录了主时钟 MCK 上升沿时刻的 NRST 引脚电平。
•SRCMP: 软件复位命令执行中
0 = 复位控制器没有在执行软件复位命令。
复位控制器可以执行软件复位命令了。
1 = 复位控制器正在执行软件复位命令。复位控制器忙。
56
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
复位控制器模式寄存器
寄存器名称 : RSTC_MR
访问类型 : 读 / 写
31 30 29 28 27 26 25 24
KEY
23 22 21 20 19 18 17 16
–––––––BODIEN
15 14 13 12 11 10 9 8
–––– ERSTL
76543210
– – URSTIEN – – – URSTEN
• URSTEN: 用户复位使能
0 = 检测到 NRST 引脚为低电平不产生用户复位。
1 = 检测到 NRST 引脚为低电平产生用户复位。
• URSTIEN: 用户复位中断使能
0 = 寄存器 RSTC_SR 的位 USRTS 为 1 时对 rstc_irq 没有作用。
1 = 若 URSTEN = 0 则寄存器 RSTC_SR 的位 USRTS 为 1 时触发 rstc_irq。
•BODIEN: 掉电检测中断使能
0 = 寄存器 RSTC_SR 的位 BODSTS 为 1 时对 rstc_irq 没有作用。
1 = 寄存器 RSTC_SR 的位 BODSTS 为 1 时触发 rstc_irq。
• ERSTL: 外部复位持续时间
这个
域定义了外部复位的持续时间。外部复位一直持续 2
•KEY: 预设值
0xA5。写入其它任何数值都将使本次写操作失败。
(ERSTL+1)
个慢速时钟周期。时间范围为 60 µs 到 2 秒。
6070A–ATARM–07-Jun-05
57

58
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
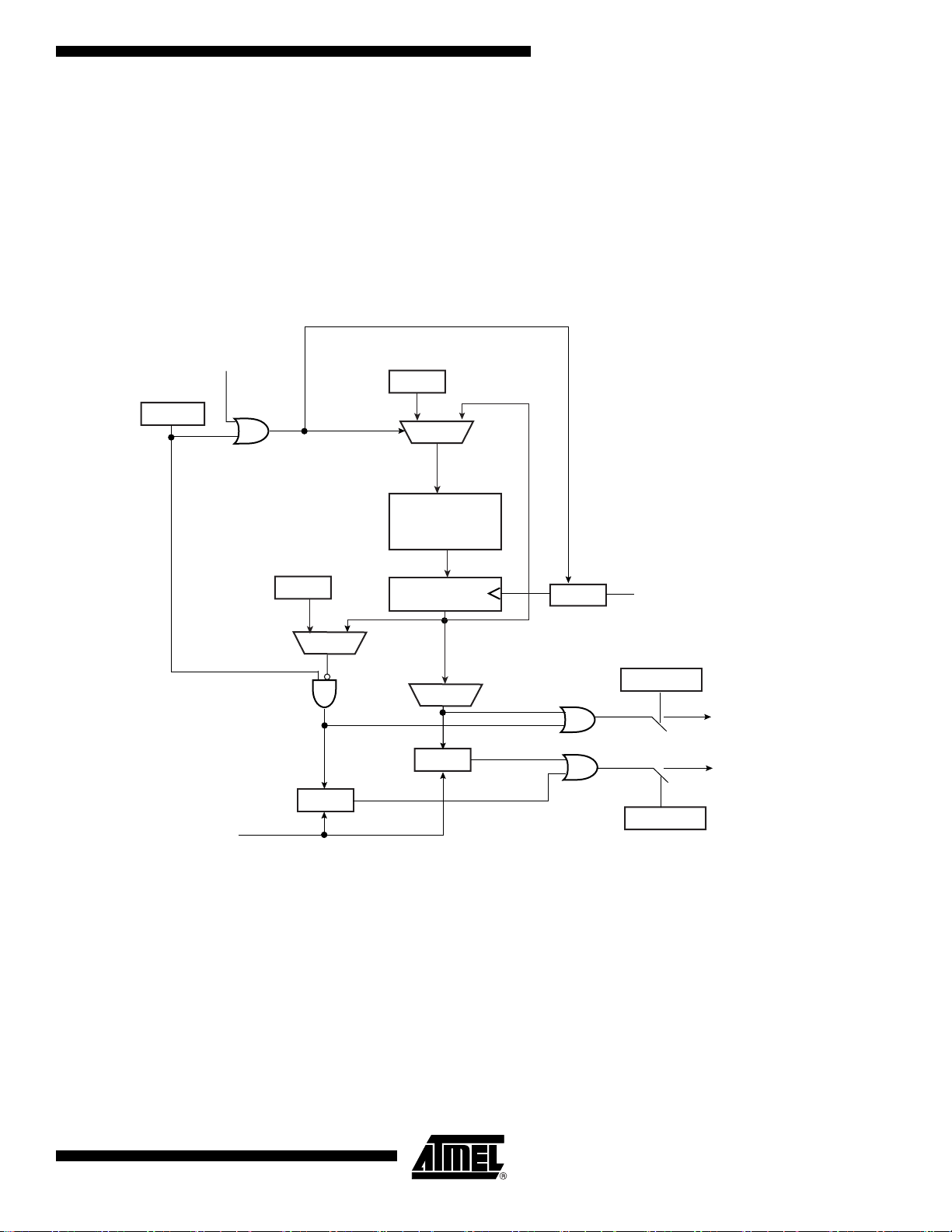
实时定时器 (RTT)
概述 实时定时器基于一个 32 位的计数器,用来记录经过的秒数。它可以产生周期性的中断或 / 和基
于一个预选编好程的数值触发闹铃。
方框图
Figure 22. 实时定时器
SLCK
RTT_MR
RTTRST
reload
16-bit
Divider
RTT_MR
RTPRES
RTT_MR
RTTRST
0
10
RTT_SR
RTT_MR
RTTINCIEN
set
RTTINC
reset
RTT_VR
RTT_AR
32-bit
Counter
CRTV
ALMV
RTT_SR
RTT_SR
=
read
reset
set
rtt_int
RTT_MR
ALMIEN
ALMS
rtt_alarm
6070A–ATARM–07-Jun-05
59
功能描述
实时定时器用来记录经历的秒数。它基于 32 位的计数器。而这个计数器的时钟来源为慢速 时
钟,并经过 16 位数值的预分频。这个数值要写入实时模式寄存器 RTT_MR 的 RTPRES 域。
Figure 23. RTT 计数
将 RTPRES 设置为 0x00008000 相当于给实时计数器提供 1Hz 的时钟信号 ( 如果慢速时钟为
32.768 Hz)。 32 位的计数器可以计 2
32
秒,相当于 136 年,然后计数器数值恢复为 0。
实时定时器也可以用做自由运行的基于慢速时钟的定时器。获得最佳精度的方法是将 RTPRES
设置为 1。此时提供给实时计数器的时钟信号的周期为 30.52 µs ( 慢速时钟为 32.768 Hz 时 )。
实时定时器可以应付 131072 秒,相当于 36 天。
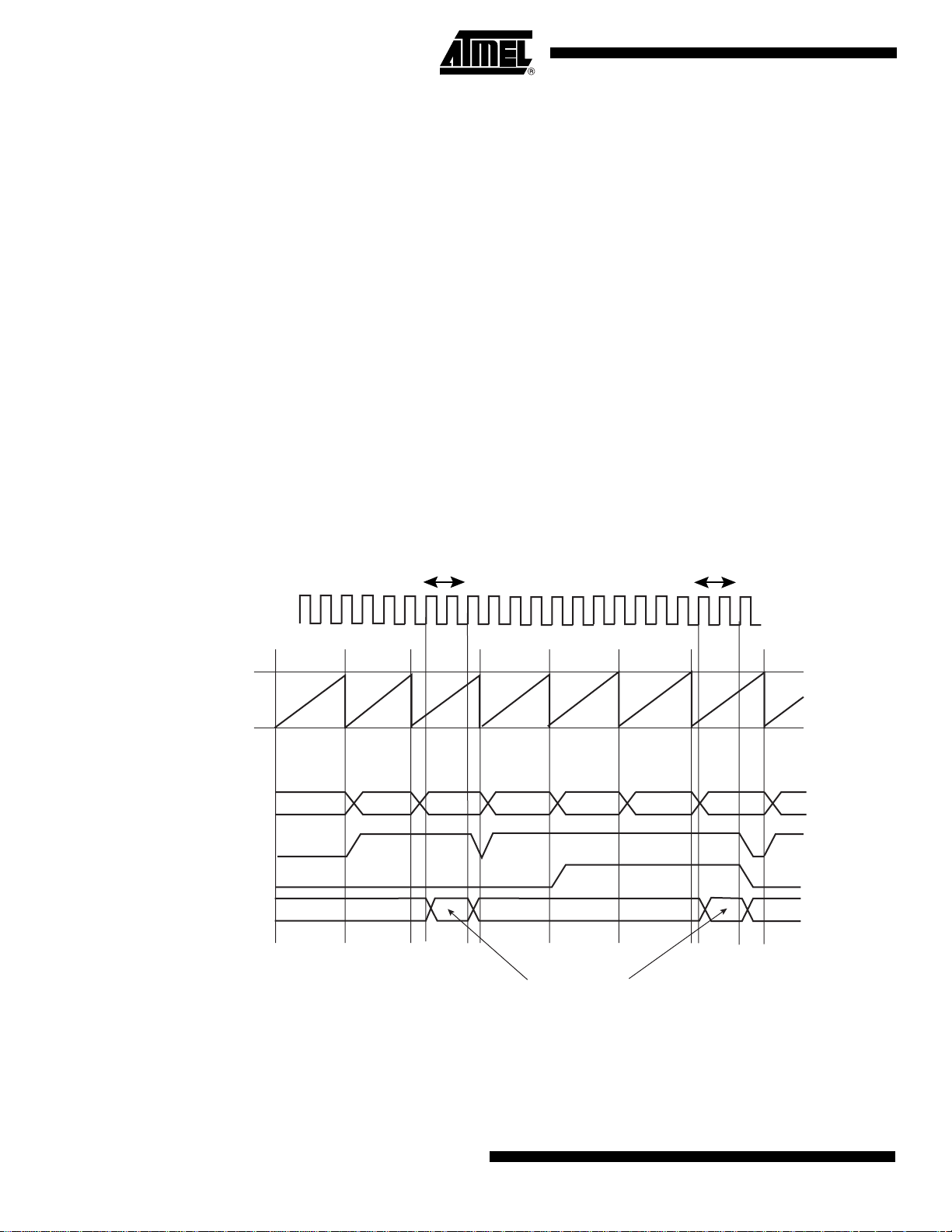
可以在任何时候通过读取寄存器 RTT_VR 来获得实时定时器的数值 (CRTV)。因为这个数值由
主时钟进行异步更新,所以建议在读取的时候连续读两次,以解决数值归零可能带来的问题。
计数器的当前值与写入闹铃寄存器 RTT_AR ( 实时
闹铃寄存器 ) 的数值进行比较。两个数值相等
将置位寄存器 RTT_SR 的 ALMS。复位时闹铃寄存器的数值设置为最大值 0xFFFF_FFFF。
每一次实时定时器计数器数值增加时 RTT_SR 寄存器的位 RTTINC 即置位。这一位可以用来产
生周期性中断。当 RTPRES 编程为 0x8000,且慢速时钟等于 32.768 Hz 时周期为一秒。
读取状态寄存器 RTT_SR 将复位 RTTINC 和 ALMS。
执行对寄存器 RTT_MR 的位 RTTRST 的写操作将立即使 RTT 重新加载及启动时钟分频器。这
个操作同时也复位 32 位的计数器。
APB cycle
MCK
APB cycle
RTPRES - 1
Prescaler
RTT
RTTINC (RTT_SR)
ALMS (RTT_SR)
APB Interface
0
...
ALMVALMV-10 ALMV+1
read RTT_SR
ALMV+2 ALMV+3
60
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
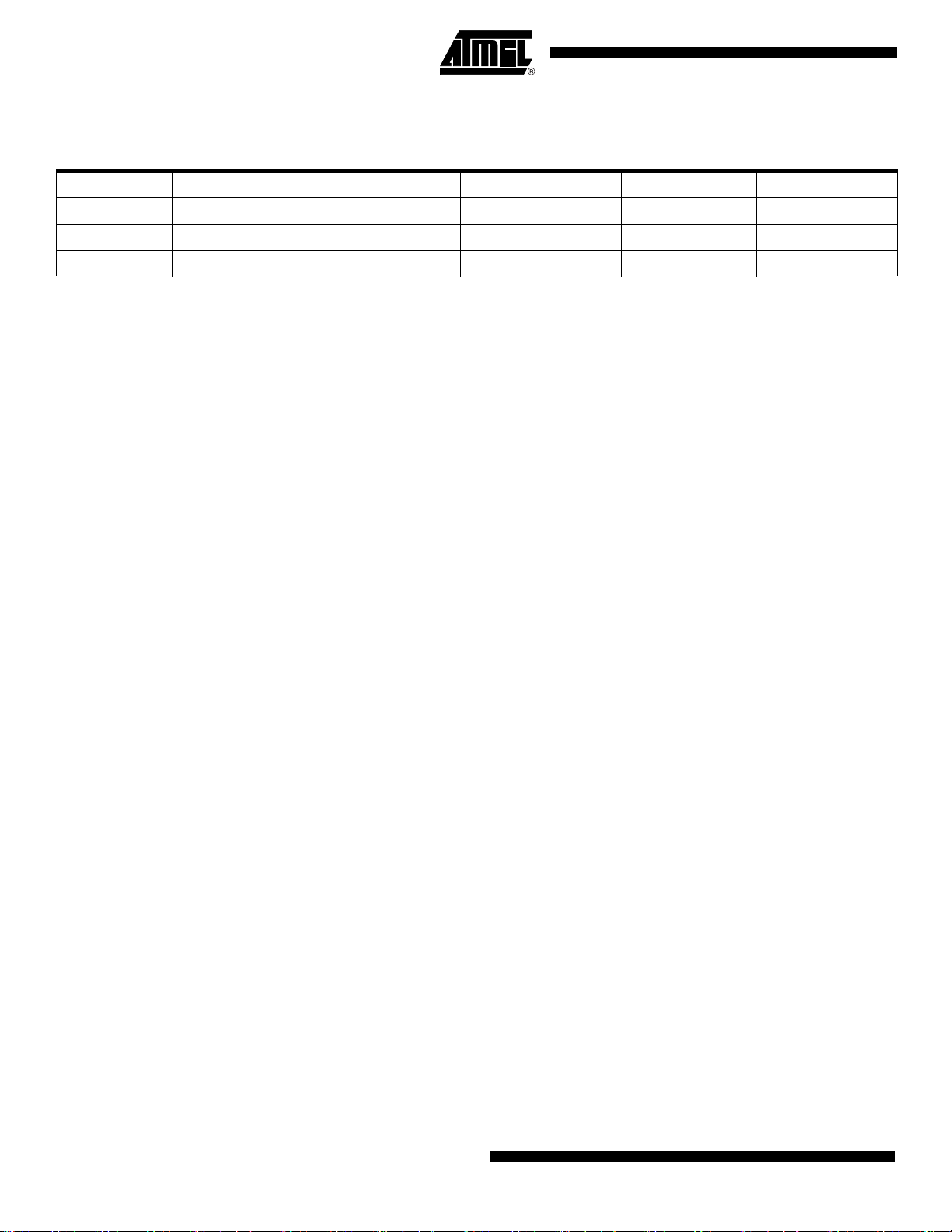
实时定时器 (RTT) 用户接口
Table 12. 实时定时器寄存器映射
地址偏移 寄存器 名称 访问类型 复位值
0x00 模式寄存器 RTT_MR 读 / 写 0x0000_8000
0x04 闹铃寄存器 RTT_AR 读 / 写 0xFFFF_FFFF
0x08 数值寄存器 RTT_VR 只读 0x0000_0000
0x0C 状态寄存器 RTT_SR 只读 0x0000_0000
6070A–ATARM–07-Jun-05
61
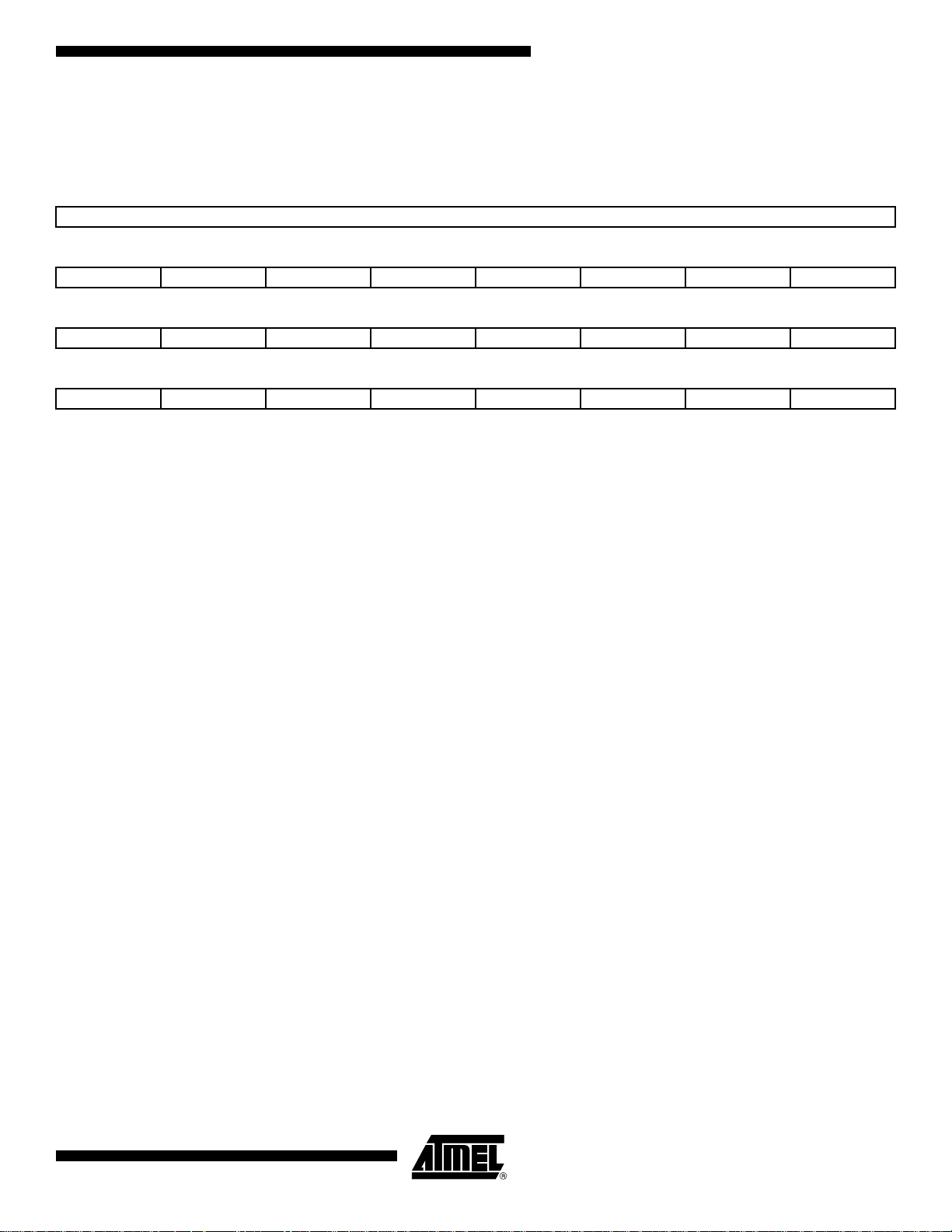
实时定时器模式寄存器
寄存器名称 : RTT_MR
访问类型 : 读 / 写
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
–––––RTTRSTRTTINCIENALMIEN
15 14 13 12 11 10 9 8
RTPRES
76543210
RTPRES
• RTPRES: 实时定时器预分频数值
定义使实时定时器加一的 SLCK 个数。
RTPRES = 0:预分频值为 2
RTPRES ≠ 0:预分频值为 RTPRES。
•ALMIEN: 中断使能
0 = RTT_SR 寄存器的 ALMS 对中断不起作用。
1 = ALMS 将引发中断。
• RTTINCIEN: 实时定时器增一中断使能
0 = RTT_SR 寄存器的 RTTINC 对中断不起作用。
1 = RTTINC 将引发中断。
•RTTRST: 实时定时器重新启动
1 = 重新加载及重新启动时钟分频器。此操作同时复位 32 位的计数器。
16
。
62
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
实时定时器闹铃寄存器
寄存器名称 : RTT_AR
访问类型 : 读 / 写
31 30 29 28 27 26 25 24
ALMV
23 22 21 20 19 18 17 16
ALMV
15 14 13 12 11 10 9 8
ALMV
76543210
ALMV
•ALMV: 闹铃值
定义了与实时定时器进行比较的数值, (ALMV+1)。
6070A–ATARM–07-Jun-05
63

实时定时器数值寄存器
寄存器名称 : RTT_VR
访问类型 : 只读
31 30 29 28 27 26 25 24
CRTV
23 22 21 20 19 18 17 16
CRTV
15 14 13 12 11 10 9 8
CRTV
76543210
CRTV
•CRTV: 当前实时数值
返回实时定时器的当前数值。
64
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
实时定时器状态寄存器
寄存器名称 : RTT_SR
访问类型 : 只读
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
––––––––
76543210
––––––RTTINCALMS
•ALMS: 实时状态
0 = 自上一次读取寄存器 RTT_SR 之后实时没有发生过。
1 = 自上一次读取寄存器 RTT_SR 之后发生了实时。
• RTTINC: 实时定时器增加
0 = 自上一次读取寄存器 RTT_SR 之后实时定时器没有增加。
1 = 自上一次读取寄存器 RTT_SR 之后实时定时器增加了。
6070A–ATARM–07-Jun-05
65

66
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
周期性间隔定时器 (PIT)
概述 周期性间隔定时器 (PIT) 为操作系统的调度程序提供时间间隔中断。这 个定时器设计的目的是提
供最大的精确度和高效率的管理,即使对要求长响应时间的系统也是如此。
方框图
Figure 24. 周期性间隔定时器
PIT_MR
PIV
MCK
Prescaler
MCK/16
= ?
0
0
1
0
20-bit
Counter
CPIV
CPIV PICNT
PIT_PIVR
PIT_PIIR
12-bit
Adder
PICNT
PIT_MR
PITIEN
set
PIT_SR
10
PITS
reset
read PIT_PIVR
pit_irq
6070A–ATARM–07-Jun-05
67

功能说明
周期性间隔定时器的目的是为操作系统提供周期性的中断。
PIT 有一个可编程的溢出计数器和读后即复位的特性。它 基 于两个计数器:一个 20 位的 CPIV 计
数器和一个 12 位的 PICNT 计数器。两个计数器的时钟都是主时钟的 1/16。
20位的CPIV计数器从0开始计数,直到模式寄存器 PIT_MR的PIV域定义的溢出数值为止。CPIV
计到这个数值后即复位为 0,同时周期性间隔计数器 PICNT 加一。然后状态寄存器 PIT_SR 的
位 PITS 置位并触发中断,只要此时中断是使能的 (PIT_MR 的位 PITIEN)。
将新的数值赋予给寄存器 PIT_MR 的 PIV 域不会复位
通过读取周期性间隔数值寄存器PIT_PIVR获得CPIV和PICNT的数值之后,溢出计数器(PICNT)
复位, PITS 清零, 从而确认中断。 PICNT 的数值表示自上一次读取 PIT_PIVR 之后发生的周
期性间隔次数。
通过读取周期性间隔映像寄存器 PIT_PIIR 获得 CPIV 和 PICNT 的数值对计数器的 CPIV 和
PICNT,以 及 PITS 没有影响。例 如 ,软 件 剖析工具可以读取 PIT_PIIR 而不会清除任何已经发生
但还未处理的中断,而定时器中断通过读 PIT_PIVR 清除中断。
通过寄存器 PIT_MR 的 PITEN 位可以使能 / 禁止 PIT( 复位时处于禁止状态 )。只有在 CPIV 为
0 时操作 PITEN
CPIV 继续计数,直到达到 PIV 的数值,然后再复位。 PITEN 置位后 PIT 才能重新开始计数。
在内核进入调试状态时 PIT 停止。
Figure 25. 利用 PITEN 使能 / 禁用 PIT
15
MCK Prescaler
0
/ 重启动计数器。
才有作用。Figure 25 演示了 PIT 的计数方式。PIT 使能位复位后 (PITEN= 0),
APB cycle
MCK
APB cycle
restarts MCK Prescaler
68
PITEN
CPIV
PICNT
PITS (PIT_SR)
APB Interface
10
0
PIVPIV - 10
AT91SAM7S64 Preliminary
1
read PIT_PIVR
1
0
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
周期性间隔定时器 (PIT) 用户接口
Table 13. 周期性间隔定时器 (PIT) 寄存器映射
地址偏移 寄存器 名称 访问类型 复位值
0x00 模式寄存器 PIT_MR 读 / 写 0x000F_FFFF
0x04 状态寄存器 PIT_SR 只读 0x0000_0000
0x08 周期性间隔数值寄存器 PIT_PIVR 只读 0x0000_0000
0x0C 周期性间隔映像寄存器 PIT_PIIR 只读 0x0000_0000
6070A–ATARM–07-Jun-05
69
周期性间隔定时器模式寄存器
寄存器名称 : PIT_MR
访问类型 : 读 / 写
31 30 29 28 27 26 25 24
––––––PITIENPITEN
23 22 21 20 19 18 17 16
–––– PIV
15 14 13 12 11 10 9 8
PIV
76543210
PIV
•PIV: 周期性间隔数值
定义了与周期性间隔寄存器 20 位计数器 CPIV 比较的数值。周期等于 PIV + 1。
•PITEN: 使能周期性间隔定时器
0 = 计数值达到 PIV 后周期性间隔寄存器被禁用。
1 = 周期性间隔寄存器使能。
• PITIEN: 使能周期性间隔定时器中断
0 = PIT_SR 寄存器的 PITS 对中断没有影响。
1 = PIT_SR 寄存器的 PITS 可以触发中断。
70
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
周期性间隔定时器状态寄存器
寄存器名称 : PIT_SR
访问类型 : 只读
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
––––––––
76543210
–––––––PITS
•PITS: 周期性间隔定时器状态
0 = 自上次读取 PIT_PIVR 之后周期性间隔定时器还没有计数到 PIV。
1 = 自上次读取 PIT_PIVR 之后周期性间隔定时器已经计数到 PIV。
6070A–ATARM–07-Jun-05
71

周期性间隔定时器数值寄存器
寄存器名称 : PIT_PIVR
访问类型 : 只读
31 30 29 28 27 26 25 24
PICNT
23 22 21 20 19 18 17 16
PICNT CPIV
15 14 13 12 11 10 9 8
CPIV
76543210
CPIV
读取该寄存器将清除寄存器 PIT_SR 的 PITS。
•CPIV: 当前周期性间隔数值
返回周期性间隔定时器的当前数值。
•PICNT: 周期性间隔计数器
返回自上一次读取 PIT_PIVR 之后发生的周期性间隔次数。
72
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
周期性间隔定时器映像寄存器
寄存器名称 : PIT_PIIR
访问类型 : 只读
31 30 29 28 27 26 25 24
PICNT
23 22 21 20 19 18 17 16
PICNT CPIV
15 14 13 12 11 10 9 8
CPIV
76543210
CPIV
•CPIV: 当前周期性间隔数值
返回周期性间隔定时器的当前数值。
•PICNT: 周期性间隔计数器
返回自上一次读取 PIT_PIVR 之后发生的周期性间隔次数。
6070A–ATARM–07-Jun-05
73

74
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
看门狗定时器 (WDT)
概述 看门狗定时器可以用来防止由于软件陷于死循环而导致的系统死锁。它 具有一个 12 位的向下计
数器,使得看门狗周期可以达到 16 秒 ( 慢速时钟, 32.768 kHz)。它可以产生通常的复位,或
者仅仅是处理器复位。此外,当处理器处于调试模式或空闲模式时看门狗可以被禁止。
方框图
Figure 26. 看门狗定时器框图
WDT_CR
WDRSTT
read WDT_SR
or
reset
write WDT_MR
WDT_MR
WDD
<= WDD
WDERR
set
reset
reload
WDT_MR
WV
10
12-bit Down
Counter
Current
Value
=
WDUNF
0
set
reset
reload
1/128
SLCK
WDT_MR
WDRSTEN
WDFIEN
WDT_MR
wdt_fault
(to Reset Controlle
wdt_int
r)
6070A–ATARM–07-Jun-05
75

功能描述 看门狗定时器可以用来防止由于软件陷于死循环而导致的系统死锁。它的电源是 VDDCORE。
处理器复位后它从初始值重新开始启动。
看门狗基于一个 12 位的向下计数器,加载的数据可以通过模式寄存器 WDT_MR 的 WV 域来定
义。如果使用经过 128 分频的慢速时钟来驱动看门狗定时器,溢出周期达到最大值 16 秒 ( 慢速
时钟的典型值为 32.768 kHz)。
处理器复位之后, WV 的数值为 0xFFF,对应于计数器的最大值,并使能了外部复位 (Backup
复位时 WDRSTEN 为 1)。也就是说,复位之后看门狗就运行了。如果用户程序没有使用看门
狗,则必须禁止它 ( 置位 WDT_MR
求。
看门狗模式寄存器 (WDT_MR) 只能写一次。只有处理器复位才可以复位它。对 WDT_MR 执行
写操作可以把最后编程的模式参数加载到定时器。
在普通的操作中,用户需要通过置位控制寄存器 WDT_CR 的位 WDRSTT 来定时地重新加载看
门狗,以防止定时器溢出。计数器将立即由 WDT_MR 重新加载并重新启动,慢速时钟的 128
分频器也被复位及重新启动。 WDT_CR 是写保护的。因此,如果预设值不正确,对 WDT_CR
的写操作是没有作用的。如果发生了计数器溢出,并
1,则连接到复位控制器的“wdt_fault” 信号生效,看门狗状态寄存器 WDT_SR的位WDUNF也被
设置为 1。
为了防止软件死锁时持续不断地触发看门狗,看门狗的重新加载必须在由 0和WDT_MR的WDD
定义的时间窗之内发生:
0 ≤ WDT ≤ WDD:执行对 WDRSTT 的写操作将使看门狗定时器重新启动。
任何在 [WDV:WDD] 之间重新启动看门狗定时器的企图都将导致看门狗错误,即使此时看门狗
时禁止的:WDT_SR 的位 WDERR 置位,连接到复位控制器的 “wdt_fault” 信号生效。
寄存器的位 WDDIS),否则必须对它进行编程以满足应用要
且模式寄存器 WDT_MR 的 WDRSTEN 为
要注意的
[0:WDV] 的整个区间都可以重新启动而不产生错误。这也是芯片复位时的缺省配置 (WDD 与
WDV 的数值时相等的 )。
若模式寄存器的 WDFIEN 为 1,状 态 位 WDUNF ( 看门狗溢出 ) 和 WDERR ( 看门狗错误 ) 置位
将触发中断。如果 WDRSTEN 同时也为 1,则连接到复位控制器的 “wdt_fault” 信号将引起看门
狗复位。在这种情况下,处理器和看门狗定时器复位, WDERR 及 WDUNF 标志被清零。
如果复位已经产生,或是读访问了寄存器 WDT_SR,则状态位
位控制器的 “wdt_fault” 信号不再有效。
执行对 WDT_MR 的写操作将重新加载向下计数器,并使其重新启动。
当处理器处于调试状态或空闲模式时,根据寄存器 WDT_MR 的 WDIDLEHLT 和 WDDBGHLT
的设置,计数器可以被停止。
是,当 WDD 等于或大于 WDV 时,这个特性即被禁止。这个配置允许看门狗定时器在
被清零,中断被清除,输送到复
76
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
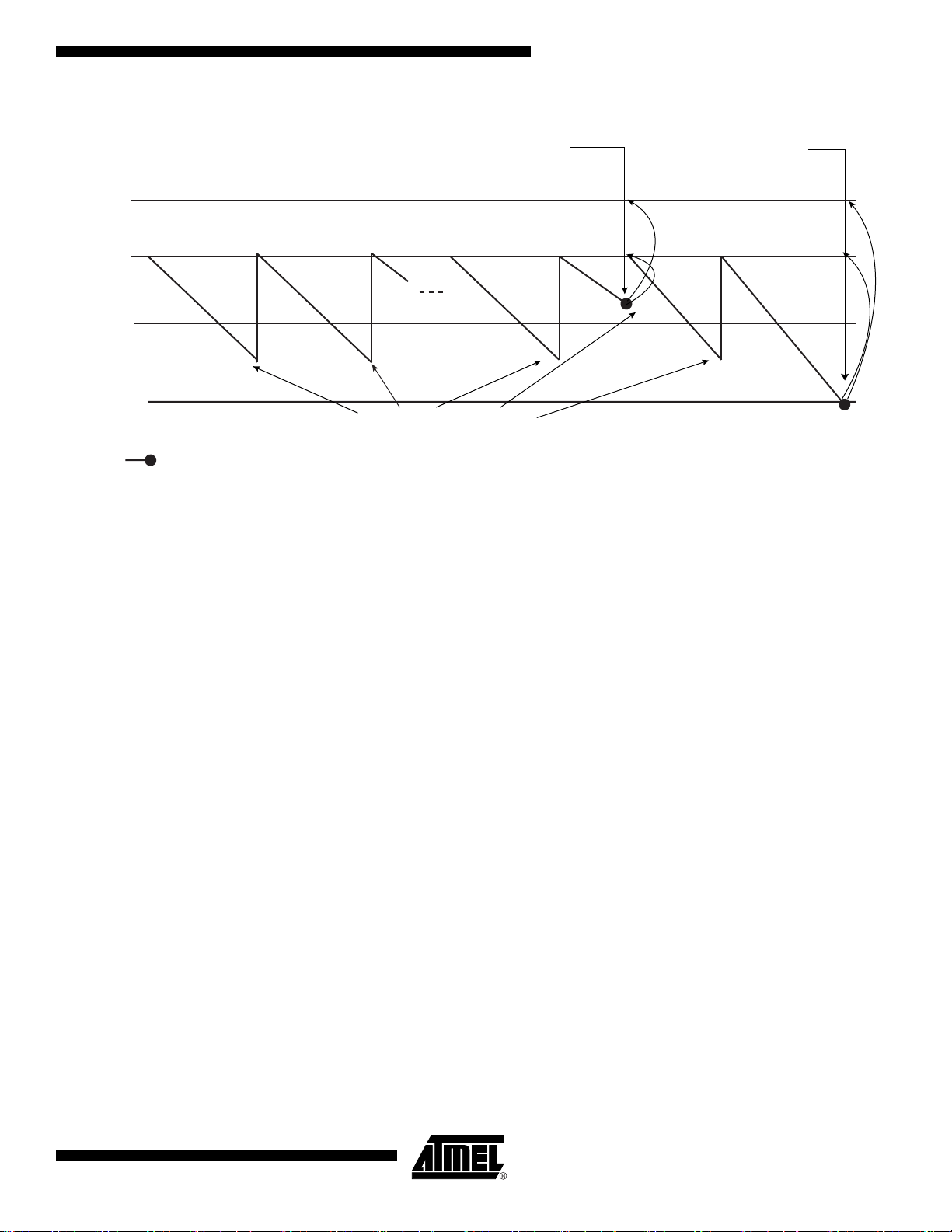
Figure 27. 看门狗的工作行为
AT91SAM7S64 Preliminary
Watchdog Error
Watchdog Underflow
FFF
WDV
Forbidden
Window
WDD
Permitted
Window
0
Watchdog
Fault
Normal behavior
if WDRSTEN is 1
if WDRSTEN is 0
WDT_CR = WDRSTT
6070A–ATARM–07-Jun-05
77
看门狗定时器 (WDT) 用户接口
Table 14. 看门狗定时器 (WDT) 寄存器映射
地址偏移 寄存器 名称 访问类型 复位值
0x00 控制寄存器 WDT_CR 只写 -
0x04 模式寄存器 WDT_MR 读 / 写,一次 0x3FFF_2FFF
0x08 状态寄存器 WDT_SR 只读 0x0000_0000
78
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
看门狗定时器控制寄存器
寄存器名称 : WDT_CR
访问类型 : 只写
31 30 29 28 27 26 25 24
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
––––––––
76543210
–––––––WDRSTT
•WDRSTT: 看门狗重新启动
0:无效。
1:重新启动看门狗。
•KEY: 预设值
0xA5。写入其它任何数值都将使本次写操作失败。
KEY
6070A–ATARM–07-Jun-05
79

看门狗定时器模式寄存器
寄存器名称 : WDT_MR
访问类型 : 读 / 写,一次
31 30 29 28 27 26 25 24
WDIDLEHLT WDDBGHLT WDD
23 22 21 20 19 18 17 16
WDD
15 14 13 12 11 10 9 8
WDDIS
76543210
•WDV: 看门狗计数器的数值
定义了加载到 12 位看门狗计数器的数值。
• WDFIEN: 使能看门狗故障中断
0:看门狗故障 ( 溢出或错误 ) 对中断不产生影响。
1:看门狗故障 ( 溢出或错误 ) 将产生中断。
• WDRSTEN: 使能看门狗复位
0:看门狗故障 ( 溢出或错误 ) 对复位没有影响。
1:看门狗故障 ( 溢出或错误 ) 将引发看门狗复位。
•WDRPROC: 看门狗复位处理器
0:若 WDRSTEN 为 1,则看门狗故障 ( 溢出或错误 ) 将引发所有的复位。
1:若 WDRSTEN 为 1,则看门狗故障 ( 溢出或错误 ) 只引发处理器复位。
•WDD: 看门狗 Delta 数值
定义了重新加载看门狗定时器所允许的范围。
如果看门狗定时器的数值小于等于 WDD,置位 WDT_CR 的 WDRSTT 将使定时器重新启动。
如果看门狗定时器的数值大于 WDD,置位 WDT_CR 的 WDRSTT 将产生看门狗错误。
• WDDBGHLT: 看门狗调试停止
0:处理器处于调试状态时看门狗仍然运行。
1:处理器处于调试状态时看门狗停止。
• WDIDLEHLT: 看门狗空闲停止
0:系统处于空闲状态时看门狗仍然运行。
1:系统处于空闲状态时看门狗停止。
•WDDIS: 禁止看门狗
0:使能看门狗定时器。
1:禁止看门狗定时器。
WDRPROC WDRSTEN WDFIEN WDV
WDV
80
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
看门狗定时器状态寄存器
寄存器名称 : WDT_SR
访问类型 : 只读
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
––––––––
76543210
––––––WDERRWDUNF
• WDUNF: 看门狗溢出
0:自上一次读取 WDT_SR 之后没有发生看门狗溢出。
1:自上一次读取 WDT_SR 之后至少发生了一次看门狗溢出。
• WDERR: 看门狗错误
0:自上一次读取 WDT_SR 之后没有发生看门狗错误。
1:自上一次读取 WDT_SR 之后至少发生了一次看门狗错误。
6070A–ATARM–07-Jun-05
81

82
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
电压调节器模式控制器 (VREG)
概述 电压调节器模式控制器包括一个读 / 写寄存器 - 电压调节器模式寄存器。它 相对系统控制器的偏
移地址为 0x60。
这个寄存器控制着电压调节器的模式。置位 PSTDBY 将使电压调节器进入待机模式或低功耗模
式。一旦复位, PSTDBY 即清零,从而使电压调节器进入正常模式。
电压调节器电源控制器 (VREG) 用户接口
Table 15. 电压调节器电源控制器寄存器映射
地址偏移 寄存器 名称 访问类型 复位值
0x60 电压调节器模式寄存器 VREG_MR 读 / 写 0x0
电压调节器模式寄存器
寄存器名称 : VREG_MR
访问类型 : 读 / 写
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
––––––––
76543210
–––––––PSTDBY
• PSTDBY: 周期性间隔数值
0 = 普通模式。
1 = 待机模式 ( 低功耗模式 )。
6070A–ATARM–07-Jun-05
83

84
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
存储器控制器 (MC)
概述 存储器控制器 (MC) 管理 ASB 总线,并控制主机的访问请求。这里主机指的使 ARM7TDMI 处
理器以及外设数据控制器。它具有一个简单的总线仲裁器,地址译码器,异常中断状态,地址
未对齐检测器和嵌入式 Flash 控制器。
方框图
Figure 28. 存储器控制器框图
Memory Controller
ASB
ARM7TDMI
Processor
Peripheral
DMA
Controller
Abort
Bus
Arbiter
Abort
Status
Misalignment
Detector
User
Interface
Address
Decoder
APB
Bridge
Embedded
Flash
Controller
Internal
Flash
Internal
RAM
6070A–ATARM–07-Jun-05
Peripheral 0
Peripheral 1
Peripheral N
APB
From Master
to Slave
85

功能说明 存储器控制器处理 ASB 总线,并对主机的访问进行仲裁。
其组成部分为:
• 总线仲裁器
• 地址译码器
• 异常中断状态
• 地址未对齐检测器
• 嵌入式 Flash 控制器
MC 只能够处理 little-endian 模式的访问。主机也只能够工作于 little-endian 模式。
总线仲裁器 存储器控制器有一个简单的、硬连接优先级总线仲裁器,控制两个主机对总线的访问。外设数
据控制器的优先级比 ARM 处理器的要高。
地址译码器 存储器控制器的地址译码器首先对 32 位地址总线的高 4 位进行解码,并 定 义了 3 个不同的地址
范围:
•256M字节的内部存储器
• 为片内外设所保留的 256M 字节地址空间
• 未定义的 3584M 字节表现为 14 个 256M 字节的存储区。访问这个区域将导致异常中断
Figure 29 给出了 256M 字节存储区的分配情况。
Figure 29. 存储区
256M Bytes
0x0000 0000
0x0FFF FFFF
0x1000 0000
Internal Memories
86
14 x 256MBytes
3,584 Mbytes
256M Bytes
AT91SAM7S64 Preliminary
0xEFFF FFFF
0xF000 0000
0xFFFF FFFF
Undefined
(Abort)
Peripherals
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
片内存储器映射 在内部存储器地址空间里,地址 译码器将增加 8 个比特的译码,以 便为嵌入式存储器分配 1M 字
节的地址空间。
分配的存储器位于 1M 字节的地址空间,在这个访问空间里可能会重复 n 次, n 等于 1M 字节
除以存储器大小。
访问地址没有定义时,地址译码器将返回异常中断到主机。
Figure 30. 内部存储器映射
0x0000 0000
256M Bytes
0x000F FFFF
0x0010 0000
0x001F FFFF
0x0020 0000
0x002F FFFF
0x0030 0000
Internal Memory Area 0
Internal Memory Area 1
Internal Flash
Internal Memory Area 2
Internal SRAM
1M Bytes
1M Bytes
1M Bytes
Undefined Areas
(Abort)
0x0FFF FFFF
内部存储器 区域 0
内部存储器区域 0 的前 32 个字节包含了 ARM 处理器的例外向量,尤其是位于地址 0x0 的复位
向量。
执行
重映射 (remap) 命令之前,片内 Flash 映射于内部存储器区域 0,因此 ARM7TDMI 可以访
问到位于 Flash 的可执行指令。重映射之后,原来位于地址 0x0020 0000 的片内 SRAM 映射到
内部存储器区域 0。它同时还可以原来的地址进行访问。
重映射命令 重映射之后,片内 SRAM 可以通过 内部存储器区域 0 进行访问。
由于 ARM 向量 ( 复位,异常,数据异常,预取异常,未定义指令,中断和快速中断 ) 从地址 0x0
映射到地址 0x20,重映射命令允许用户通过软件动态地对这些向量重新进行定义。
重映射命令通过存储器控制器用户接口进行控制,方法是将寄存器 MC_RCR ( 重映射控制寄存
器 ) 的 RCB 置位。
再一次置位 MC_RCR 的 RCB 即取消重映射命令。这个功能可以将芯片置于与复位之后相同的
配置,从而简化用户自定义启动序列的调试。
253M bytes
6070A–ATARM–07-Jun-05
87

异常状态 异常发生的原因有三个:
• 访问未定义的地址
• 访问未对齐的地址
异常发生时,所有的主机都将接收到一个信号,不论是哪一个主机产生了这个访问。但是只有
ARM7TDMI 会处理此信号,而且是在这个访问由它自己产生的条件之下。外设数据控制器不处
理异常输入信号。 Figure 28 没有给出信号的连接关系。
为了便利操作系统的调试或错误分析,存储器控制器集成了异常状态寄存器集。
完整的 32 位异常地址保存于 MC_AASR,访问参数则保存于 MC_ASR,其内容有:
• 请求的变量位宽 (ABTSZ)
• 访问类型,看
• 访问的是未定义的地址 (UNDADD) 还是未对齐的地址 (MISADD)
• 导致异常的访问来源 (MST0 和 MST1)
• 自从上一次读取这个寄存器后是否每一个主机都发生了异常 (SVMST0 和 SVMST1),除非
这个信息已经加载到 MSTx
发生来自处理器的数据异常时,数据地址得以保存。这非常有用,因为搜索哪个地址引起异常
要求进行反汇编并明了处理器的上下文。
发生预取异常时,由于预取发生在流水线中,地址可能已经变了。只有在执行读指令时 ARM 处
理器才会理会预取异常,而此时可能
接寄存器。
其是数据读 / 写访问还是代码访问 (ABTTYP)
已经发生几次异常了。因 此最好使用 ARM 处理器的异常链
嵌入式 Flash 控制 器
嵌入式 Flash 控制器被加入存储器控制器以保证 Flash 模块与 32 位内部总线的接口。通过其 32
位的缓冲器可以提高 Thumb 模式下代码获取的性能。它同时还通过完整的命令集管理着 Flash
的编程、擦除、加锁和解锁。
不对齐检测器 存储器控制器的未对齐检测器可以检查内存访问的一致性。
不论内存访问是由哪一个主机发起,检 测 器 将检查每一次内存访问的总线宽度以及位 0 和位 1。
如果以字 (32 位 ) 来访问,而且位 0 和位 1 不为 0,或者以半自字 (16 位 ) 来访问,而位 0 不为
0,则异常返回到主机,此次访问被取消。要注意的是,当 ARM 处理器在获取指令时不执行这种
检查。
地址不对齐通常是由软件缺陷引起的,会引发错误的指针操作
难以检测。
由于请求的地址保存于异常状态寄存器,而引起地址不对齐的指令保存于异常链接寄存器,检
测及修正这类软件缺陷因此得到了简化。
。这些软件缺陷在调试阶段特别
88
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
存储器控制器 (MC) 用户接口
基地址:0xFFFFFF00
Table 16. 存储器控制器 (MC) 寄存器映射
偏移地址 寄存器 名称 访问类型 复位状态
0x00 MC 重映射控制寄存器 MC_RCR 只写
0x04 MC 异常状态寄存器 MC_ASR 只读 0x0
0x08 MC 异常地址状态寄存器 MC_AASR 只读 0x0
0x0C-0x5C 保留 –––
0x60 EFC 配置寄存器 参见 “ 嵌入式 Flash 控制器 (EFC)” on page 93.
6070A–ATARM–07-Jun-05
89
MC 重映射控制寄存器
寄存器名称:MC_RCR
访问类型:只写
偏移地址: 0x00
31 30 29 28 27 26 25 24
––––––––
23 22 21 20 19 18 17 16
––––––––
15 14 13 12 11 10 9 8
––––––––
76543210
–––––––RCB
• RCB: 重映射命令位
0:无效。
1:这一位的作用象是一个切换开关:写 1 将交替地执行 / 取消第零页储存器的重映射。
90
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

MC 异常状态寄存器
寄存器名称: MC_ASR
访问类型:只 读
复位值: 0x0
偏移地址: 0x04
31 30 29 28 27 26 25 24
––––––SVMST1SVMST0
23 22 21 20 19 18 17 16
––––––MST1MST0
15 14 13 12 11 10 9 8
– – – – ABTTYP ABTSZ
76543210
––––––MISADDUNDADD
• UNDADD: 未定义的地址异常状态
0: 上一个异常不是由于执行了对未定义地址的访问而引起的。
1: 上一个异常是由于执行了对未定义地址的访问而引起的。
• MISADD: 未对齐的地址异常状态
0: 上一个异常不是由于地址未对齐引起的。
1: 上一个异常是由于地址未对齐引起的。
• ABTSZ: 异常变量位宽状态
AT91SAM7S64 Preliminary
ABTSZ 异常变量位宽
00 字节
01 半字
10 字
11 保留
• ABTTYP: 异常类型状态
ABTTYP 异常类型
00 读数据
01 写数据
10 获取代码
11 保留
•MST0: ARM7TDMI异常来源
0:上一个异常不是由于 ARM7TDMI 引起的。
1:上一个异常是由于 ARM7TDMI 引起的。
• MST1: PDC 异常来源
0:上一个异常不是由于 PDC 引起的
。
1:上一个异常是由于 PDC 引起的。
6070A–ATARM–07-Jun-05
91
• SVMST0: 保留的 ARM7TDMI 异常来源
0:自上一次读取 MC_ASR,或是通过 MST0 得到通知之后,没有发生由于 ARM7TDMI 造成的异常。
1:自上一次读取 MC_ASR 之后,至少发生了一次由于 ARM7TDMI 造成的异常。
• SVMST1: 保留的 PDC 异常来源
0:自上一次读取 MC_ASR,或是通过 MST1 得到通知之后,没有发生由于 PDC 造成的异常。
1:自上一次读取 MC_ASR 之后,至少发生了一次由于 PDC 造成的异常。
MC 异常地址状态寄存器
寄存器名称 : MC_AASR
访问类型:只 读
复位值: 0x0
偏移地址: 0x08
31 30 29 28 27 26 25 24
23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8
76543210
ABTADD
ABTADD
ABTADD
ABTADD
• ABTADD: 异常地址
包含了上一次异常访问的地址。
92
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
AT91SAM7S64 Preliminary
嵌入式 Flash 控制器 (EFC)
概述 嵌入式 Flash 控制器 (EFC) 是存储器控制器的一部分,确保 Flash 块与 32 位内部总线的接口。
通过其 32 位缓冲器系统,EFC 提高了 Thumb 模式下代码获取的性能。它同时还通过一套完整
的命令集管理 Flash 的编程、擦除、加锁和解锁。
功能说明
嵌入式 Flash 的组 织形式
嵌入式 Flash 与 32 位内部总线直接接口。它具体由下面几个接口组成:
• 一个存储面由几个相同大小的页面构成。
• 两个 32 位读缓冲器用来优化代码访问 (See “ 读操作 ” on page 94.)。
• 一个写缓冲区用来管理页面编程。写缓冲区与页面大小相同。这个缓冲区是只写的,而且
可以在 1 M 字节地址空间里进行访问。所以每个字都可以写到它的最终地址 (See “ 写操作
” on page 96.)。
• 几个锁定位用来保护锁定区域的写和擦除操作。锁定区域由几个连续的页面组成,每个锁
定区域具有自己的锁定位。
•
几个通用 NVM 位。每个位控制一个特定的功能。具体请参考产品定义一节。
嵌入式 Flash 大小,页面大小和锁定区域组织在产品定义一节有描述。
Figure 31. 嵌入式 Flash 存储器映射
Page 0
Start Address
Flash Memory
Lock Region 0
Lock Region 1
Lock Bit 0
Lock Bit 1
Page (m-1)
6070A–ATARM–07-Jun-05
Lock Region
32-bit wide
(n-1)
Lock Bit n-1
Page ( (n-1)*m )
Page (n*m-1)
93
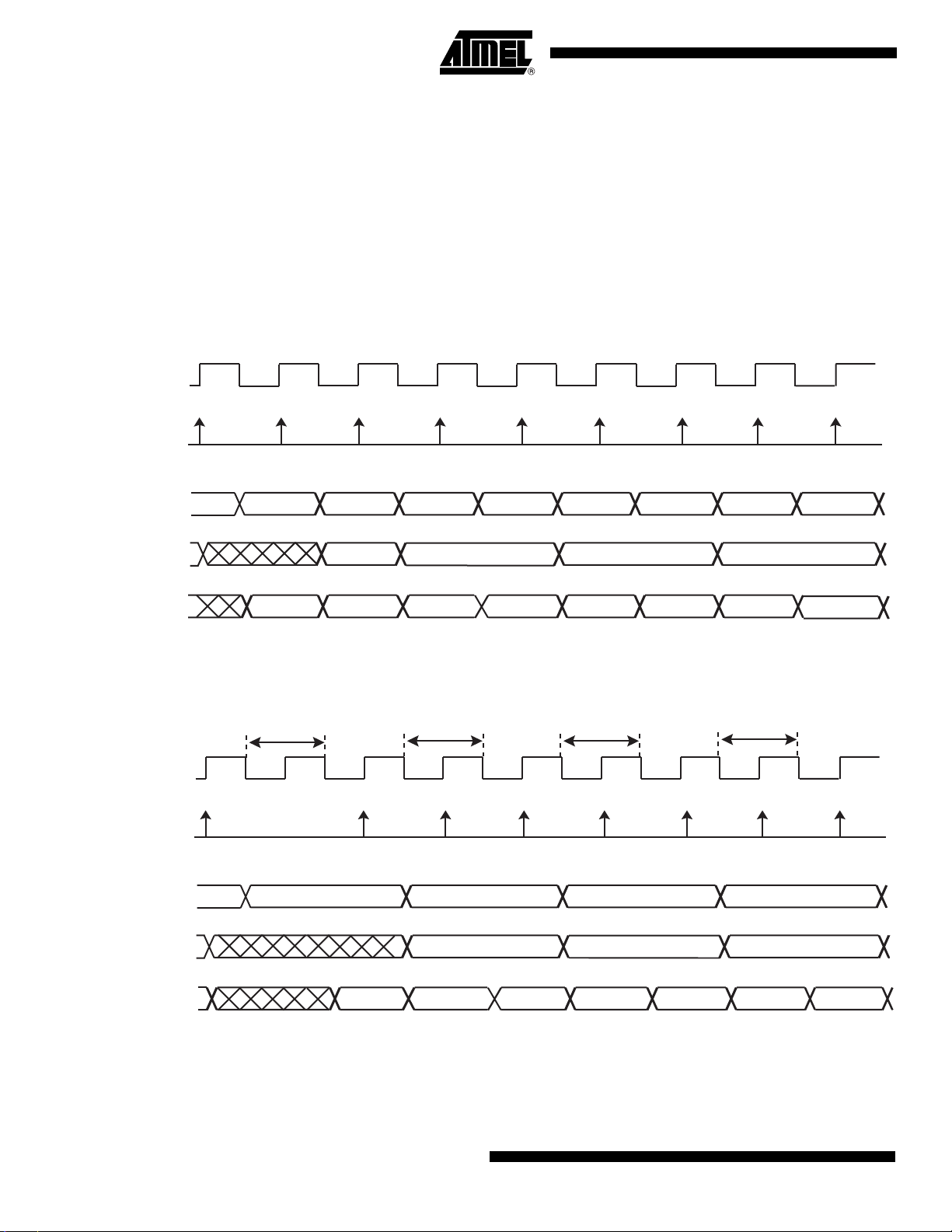
读操作 一个优化的控制器管理着嵌入式 Flash 的读操作。系统增加了两个 32 位的缓冲器。其作用是访
问第二个读操作的地址,从而提高了处理器运行于 Thumb(16 位指令集 ) 模式时的性能。图示请
参见 Figure 32, Figure 33 和 Figure 34。
此优化只对代码获取有效,对数据无效。
读操作可以利用等待状态。通过编程 Flash 模式寄存器 MC_FMR ( 见 “MC Flash 模式寄存器 ”
on page 102)的FWS (Flash等待状态),最多可以插入3个等待状态。FWS为 0表示对片内 Flash
进行单周期访问。
Flash 存储器可以 8、 16 和 32 位的方式进行访问
由于 Flash 模块比保留的片内存储区地址空间要小,访问这个地址空间时 Flash 将重复出现。
Figure 32. 代码读取优化, Thumb 模式, FWS = 0
Master Clock
ARM Request (16-bit)
Code Fetch
Flash Access
Buffer (32 bits)
Data To ARM
@Byte 0
@Byte 2 @Byte 4
Bytes 0-3 Bytes 4-7
Bytes 0-3
Bytes 0-1
Bytes 2-3 Bytes 4-5 Bytes 6-7
Note: FWS 为 0 时,所有的访问都是单周期访问。
Figure 33. 代码读取优化, Thumb 模式, FWS = 1
1 Wait State Cycle
1 Wait State Cycle 1 Wait State Cycle
@Byte 6
Bytes 4-7
@Byte 8
Bytes 8-11
。
@Byte 10 @Byte 12
Bytes 12-15 Bytes 16-19
Bytes 8-11
Bytes 8-9 Bytes 10-11 Bytes 12-13
@Byte 14 @Byte 16
Bytes 12-15
1 Wait State Cycle
Bytes 14-15
Master Clock
ARM Request (16-bit)
Code Fetch
Flash Access
Buffer (32 bits)
Data To ARM
@Byte 0
@Byte 2
Bytes 0-3 Bytes 4-7
Bytes 0-1
@Byte 4
Bytes 0-3
Bytes 2-3
@Byte 6
Bytes 4-5
Note: FWS 为 1 且执行序列读时,所有的访问都是单周期访问 ( 除了第一次访问 )。
94
AT91SAM7S64 Preliminary
@Byte 8 @Byte 10
Bytes 8-11
Bytes 4-7
Bytes 6-7
Bytes 8-9 Bytes 10-11
@Byte 12 @Byte 14
Bytes 12-15
Bytes 8-11
Bytes 12-13
6070A–ATARM–07-Jun-05
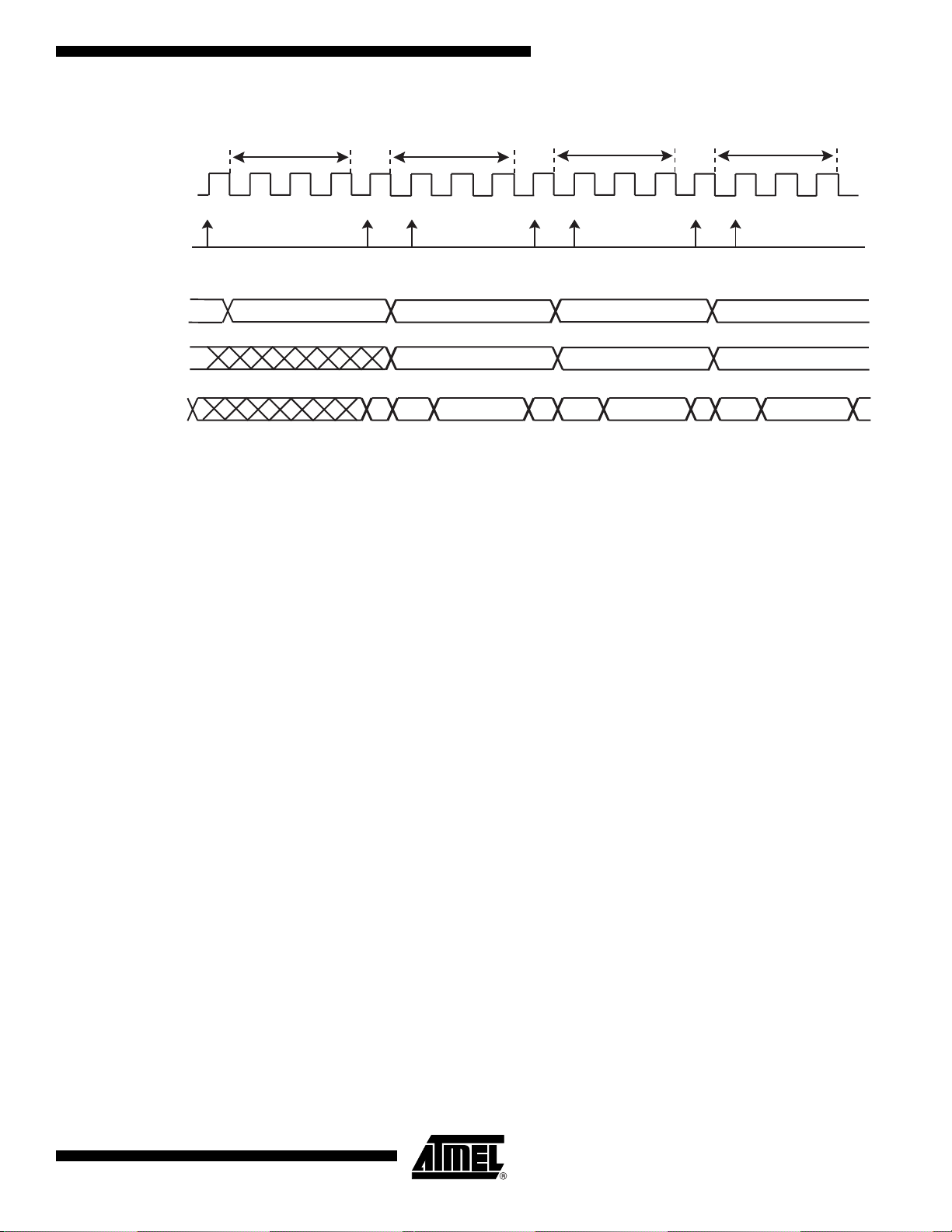
Figure 34. 代码读取优化, Thumb 模式, FWS = 3
3 Wait State Cycles
Master Clock
3 Wait State Cycles
AT91SAM7S64 Preliminary
3 Wait State Cycles 3 Wait State Cycles
ARM Request (16-bit)
Code Fetch
Flash Access
Buffer (32 bits)
Data To ARM
@Byte 0
Bytes 0-3
@2
0-1
@4
2-3
Bytes 4-7
Bytes 0-3
@6
4-5
@12
@8
Bytes 8-11 Bytes 12-15
Bytes 4-7
6-7
@10
8-9
10-11
Bytes 8-11
12-13
Note: FWS为 2 或3,且执行序列读时,第一个访问需要 FWS 个周期,第二个访问需要一个周期, 第三个访问需要FWS 个周期,第四个
访问需要一个周期,依此类推。
6070A–ATARM–07-Jun-05
95
写操作 通过只写锁存缓冲器可以实现对片内保留的 Flash 存储空间的写操作。但是写操作只利用了最
低的8位地址,因此访问整个地址空间时最低地址位,在内部存储器地址空间中反转并重复1024
次。
通过编程存储器保护单元可以禁止写操作。
以 8 位和 16 位方式进行的写操作是不允许的,可能导致不可预期的数据毁坏。
执行写操作时的等待周期等于读等待周期 + 1,除了 FWS = 3 ( 见 “MC Flash 模式寄存器 ” on
page 102) 的情况。
Flash 命令 嵌入式 Flash 控制器提供了一套命令来管理 flash 存储器的编程、扇区加锁和解锁、连续编程与
上锁,以及全片擦除。
Table 17. 命令集
命令 数值 助记符
页写 0x01 WP
设置锁定位 0x02 SLB
页写和锁定 0x03 WPL
清除锁定位 0x04 CLB
全片擦除 0x08 EA
设置通用 NVM 位 0x0B SGPB
清除通用 NVM 位 0x0D CGPB
设定安全位 0x0F SSB
执行命令之前首先要对 MC_FCR 寄存器的 FCMD 域赋以命令编号。一旦执行了 MC_FCR 寄存
器的写操作, FRDY 标志自动清零。一旦命令执行结束 FRDY 标志又自动被置位。如果此时相
应的中断使能,存储器控制器的中断线即被激活。
所有的命令都通过相同的关键字进行保护。这个关键字必须写入 MC_FCR 寄存器的高 8 位。
如果关键字不正确,将数据写入 MC_FCR 对 存储器 没有任何影响;除了 MC_FSR 寄存器的
PROGE 标志置位。读取
如果当前命令试图写入或擦除保护区域的某一页,此命令不会对存储器产生任何影响,除了
MC_FSR 寄存器的 FLOCKE 标志置位。读取 MC_FSR 即可将此标志清零。
MC_FSR 即可将此标志清零。
96
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

Figure 35. 命令状态图
Read Status: MC_FSR
AT91SAM7S64 Preliminary
Check if FRDY flag set
Yes
Write FCMD and PAGENB in MC_FCR
Read Status: MC_FSR
Check if FRDY flag set
Yes
Check if LOCKE flag set
No
No
No
Yes
Locking region violation
Check if PROGE flag set
Command Successful
为了保证对 Flash 的正确操作, Flash 模式寄存器 MC_FMR 的 Flash 微秒周期数 (FMCN) 必
须得到正确编程 ( 参见 “MC Flash 模式寄存器 ” on page 102)。
Note: 这个域定义了 1 个微秒的主时钟周期数,以确保一些必要的内部时序。
Flash 编程 有几个命令用于 Flash 编程。
Flash 技术决定了编程之前必须进行擦除。整个存储区可以同时进行擦除,也可以对页面自动进
行擦除。具体操作是对 MC_FCR 寄存器写入命令之前清除 MC_FMR 寄存器的 NEBP。
6070A–ATARM–07-Jun-05
No
Yes
Bad keyword violation and/or Invalid command
97

置位MC_FMR寄存器的NEBP后,如果页面已经被擦除,则可以几个步骤进行编程 (参见 Figure
36)。
Figure 36. 页面部分编程的例子 :
16 words
16 words
16 words
16 words
32 bits wide
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
Step 1.
Erase All Flash
Page 7 erased
编程后,页 ( 整个锁定区域 ) 能上锁以防止其它写或擦除序列。使用 WPL 编程后锁定位将自动
设定。
写入的数据存储于一个内部锁存缓冲器中。锁存缓冲器的大小由页的大小决定。锁存缓冲器在
内部存储器区域地址空间中,重复的次数为页的数目。
Note: 不允许写 8 位或 16 位数据,因为可能会引起数据错误。
32 bits wide 32 bits wide
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
CA FE CA FE
...
CA FE CA FE
CA FE CA FE
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
FF FF FF FF
...
FF FF FF FF
FF FF FF FF
Step 2.
FF FF FF FF
FF FF FF FF
FF FF FF FF
CA FE CA FE
CA FE CA FE
CA FE CA FE
DE CA DE CA
DE CA DE CA
DE CA DE CA
FF FF FF FF
FF FF FF FF
FF FF FF FF
...
...
...
...
Step 3.
Programming of the second part of Page 7 Programming of the third part of Page 7
(NEBP = 1)
(NEBP = 1)
在编程命令写入 Flash 命令寄存器 MC_FCR 前将数据写入锁存缓冲器。序列如下:
• 对整个页中任意地址写入时,只允许 32 位访问。
• 页序号与编程命令写入 Flash 命令寄存器后编程启动。Flash 编程状态寄存器 (MC_FSR) 的
FRDY 位自动清零。
• 编程结束, FRDY 位上升。若通过设置 FRDY 使能中断,存储控制器中断线激活。
编程序列后, MC_FSR 寄存器能检测到两类错误:
• 编程错误:MC_FCR 寄存器中写入错误的关键字或一条无效的命令。
• 锁定错误:编程页属于锁定区域。事先必须将相应区域解 锁。
98
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05

AT91SAM7S64 Preliminary
擦除所有命令 若 MC_FCR 中擦除所有命令 (EA) 位写入,将擦除整个存储器。
只有当没有设置锁定位时允许擦除所有的操作。因此若至少有一个区域锁定, MC_FSR 中的
LOCKE 位上升并将命令取消。若 LOCKE 位已写入 1 则中断线上升。
编程结束, FRDY 位上升。若通过设置 FRDY 使能中断,存储控制器中断线激活。
编程序列后, MC_FSR 寄存器能检测到两类错误:
• 编程错误:MC_FCR 寄存器中写入错误的关键字或一条无效的命令。
• 锁定错误:至少有一个擦除区域有锁定保护。擦除命令无效且不会擦除任何页。事先必须
将相应区域解锁。
锁定位保护 锁定位与内置 Flash 存储器中的几个页相关。它 用来定义内置 Flash 存储器的锁定区域。它 们防
止写 / 擦除保护页。
出品时,器件可能有一些 Flash 锁定区域上锁。这些锁定区域用于默认应用。参见产品说明中
关于默认的内置 Flash 映射部分。可通过擦除将锁定区域解锁,再对其编程。
锁定序列为:
•Flash命令寄存器中必须写入下列值:
(0x5A << 24) | (lockPageNumber << 8 & PAGEN) | SLB
lockPageNumber 为锁定区域相应的页。
• 当锁定完成, FRDY 位上升。若通过设
置 FRDY 使能中断,存储控制器中断线激活。
MC_FCR 寄存器中写入错误的关键字或一条无效的命令时,在编程序列后,MC_FSR 寄存器能
检测到。
可清除预先设定的锁定位。这样可对锁定的区域进行擦除或编程。解锁序列为:
•Flash命令寄存器中必须写入下列值:
(0x5A << 24) | (lockPageNumber << 8 & PAGEN) | CLB
lockPageNumber 为锁定区域相应的页。
• 当解锁完成, FRDY 位上升。若通过设置 FRDY 使能中断,存储控制器中断线激活。
MC_FCR 寄存器中写入错误的关键字或一条无效的命令时,在编程序列后,MC_FSR 寄存器能
检测到。
解锁命令将锁定位编程为 1 ; MC_FSR 中相应位 LOCKSx 读 0。锁定命令将锁定位编程为 0
MC_FSR 中相应位 LOCKSx 读 1。
Note: 在读模式下,当执行锁定或解锁命令时允许访问 Flash。
通用功能 NVM 位 通用功能 NVM 位不与内置 Flash 存储器连接。这些通用功能位专门用于保护产品的其它部分。
它们可独立置位 ( 激活 ) 或清除。参见产品说明中关于通用功能 NVM 位的说明。
激活序列为:
• 使用SEL命令对Flash命令寄存器写入,以启动设置通用功能位命令 (SGPB) ,并 在 PAG E N
中设定激活通用功能位数目。
• 当该位置位, FRDY 位上升。若通过设置 FRDY 使能中断,存储控制器中断线激活。
编程序列后, MC_FSR 寄存器能检测到两类错误:
• 编程错误:MC_FCR 寄存器中写入错误的关键字或一条无效
• 若通用功能位数大于通用功能位总数,则命令无效。
的命令。
;
6070A–ATARM–07-Jun-05
可事先将通用功能 NVM 位中止,清除序列为:
• 使用 CGPB 命令对 Flash 命令寄存器写入,以启动清除通用功能位命令 (CGPB) ,并在
PAG EN 中设定清除通用功能位数目。
• 当清除完成, FRDY 位上升。若通过设置 FRDY 使能中断,存储控制器中断线激活。
99

编程序列后, MC_FSR 寄存器能检测到两类错误:
• 编程错误:MC_FCR 寄存器中写入错误的关键字或一条无效的命令。
• 若 PA GE N 中设置的通用功能位数大于通用功能位总数,则命令无效。
清除通用功能位命令将通用功能 NVM 位编程为 1 ; MC_FSR 中相应位 GPNVMx 读 0。设置通
用功能位命令将通用功能 NVM 位编程为 0 ; MC_FSR 中相应位 GPNVMx 读 1。
Note: 在读模式下,当执行设置、清除或得到通用功能 NVM 位命令时允许访问 Flash。
安全位 安全位的目的是防止外部对内部总线系统的访问。JTAG、快速 Flash 编程及 Flash 串行测试接
口特性禁用。置 位后,该位只能通过外部硬件 ERASE 向芯片请求来复位。参 见产品说明中关于
控制 ERASE 引脚的说明。此时,整个存储器被擦除且所有锁定及通用功能 NVM 位被清除。只
有在这些操作完成后,才会将 MC_FSR 中的安全位清除。
激活序列为:
• 对 Flash 命令寄存器写入以启动安全位命令 (SSB)。
• 当锁定完成, FRDY 位上升。若通过设置 FRDY 使能中断,存储控制器中断线激活。
当安全位激活
, MC_FSR 中的 SECURITY 位置位。
100
AT91SAM7S64 Preliminary
6070A–ATARM–07-Jun-05
 Loading...
Loading...