

BDTIC www.bdtic.com/ATMEL
特性
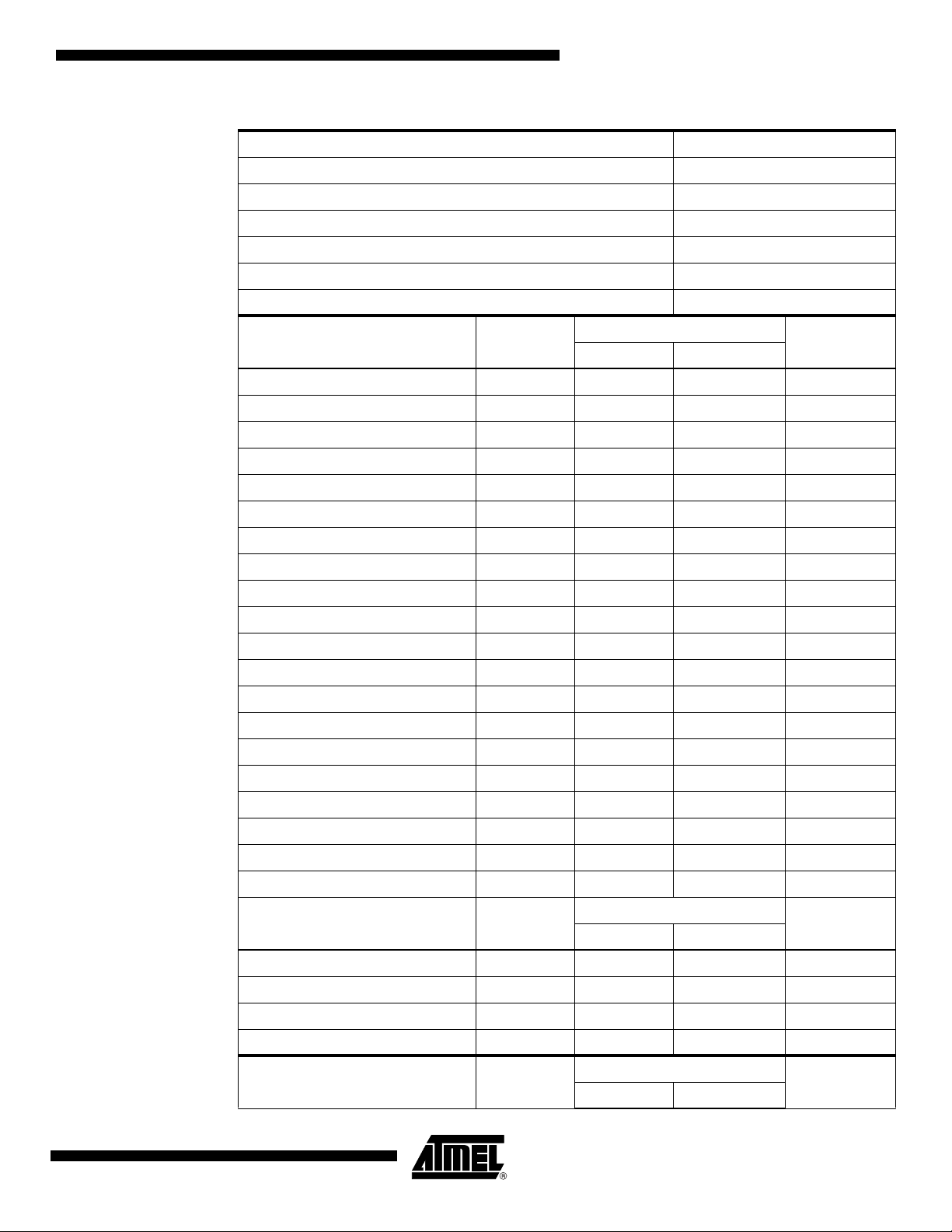
•与MCS51产品兼容的8位单片机
•增强的8051结构
–单周期指令
–时钟频率达到20MIPS运行速率
–全静态操作频率:0Hz到20MHz
–片内双周期硬件乘法器
–128 x 8内部l RAM
–4级中断优先
•非易失性程序存储
–2K字节系统内部程序 (ISP) Flash存储器
–最少10,000可重复擦写
–最少10年的数据保持时间
–32字节快速编程模式
–2级程序存储器软件加密保护
–64字节用户标识区
–2级程序存储器软件加密保护
•外围特性
–两个16位加强定时器、计数器
–两个8位PWM输出
–增强型自动地址识别和帧结构错误探测UART接口
–增强型双缓存发送接受主从式SPI接口
–带软件复位的可编程看门狗定时器
–可选中断和去抖的模拟比较器
–8个常用中断引脚
•特有属性
–双线片上调试接口
–Power-off 标志位可控布朗输出检测和上电复位
–内部RC振荡器
–低功耗空闲和低电压模式
–低电压中断恢复
•I/O和封装
–多达14个可编程 I/O口
–I/O可配置的工作方式为准双工、输入、上拉输出和开漏输出
–I/O口最大承受电压5V
–16-lead TSSOP/SOIC/PDIP封装
•工作条件
–电源电压范围 2.4V到5.5V
–温度范围 -40°C 到85°
带2K字节Flash
的8位微控制器
AT89LP216
主要功能
1. 描述
AT89LP216是一款低功耗、高性能CMOS8位单片机,它有2k字节ISPFlash存储器。产
品生产采用Atmel的高密度非易失性存储器技术而且和工业标准de的MCS51指令集相
兼容。AT89LP216基于一个加强性CPU内核,每时钟周期读取单子节指令。在经典8051
结构中,每次读取需要6个时钟周期,使得执行指令需要12、24或者48个时钟周期。
在AT89LP216CPU中,指令只需要1到4个时钟周期就可以达到传统8051速度的6到12
倍。70%的指令字节数与执行的时钟周期数相等,而且其他指令只需要一个额外时钟。
在相同功耗下,增强型CPU内核可达到20MIPS,而传统8051CPU只能达到4MIPS。相反
地,在相同的工作速率下,新CPU内核比传统的8051拥有更低的时钟速率和功耗。
本文是英文数据手册的中文
翻译,其目的是方便中国用
户的阅读。它无法自动跟随
原稿的更新,同时也可能存
在翻译上的错误。读者应该
以英文原稿为参考以获得更
准确的信息。
3621A–MICRO–6/06
AT89LP216 也拥有下列标准的特性:2K 字节 ISPFlash 存储器,128 字节 RAM、多达 12 个 I/O 口、
2 个 16 位定时器 / 计数器,两 PWM 输出,一个可编程看门狗定时器,一个全双工串口,一个串行
外围接口,一个内部 RC 振荡器,片上石英振荡器和一个 4 级、6 矢量中断系统。
AT89LP216 里的两个定时器 / 计数器增加了两个新模式。模式 0 可以被设置为 9 到 16 位的定时器
/ 计数器,模式 1 可被设置位 16 位自动装载定时器 / 计数器。此外,定时器 / 计数器可以独立驱
动 PWM 输出。AT89LP216 里面的 I/O 口能被独立配置为 4 种工作模式的其中一种。在准双工模式
中,I/O 口的工作模式和传统 8051 一样。在输入模式中,接口是三态门。推挽输出模式提供足够
的 CMOS 驱动,开漏模式则起到一个下拉的作用。另外,Port1 的所有 8 个引脚可以作为通用中断
接口。AT89LP216 的 I/O 口能承受的电压可超出电源电压达到 5.5V。当器件的电源电压为 2.4V 而
I/O 口输入 5.5V 时,所有 I/O 口的反向电流总和不超过 100 μ A。
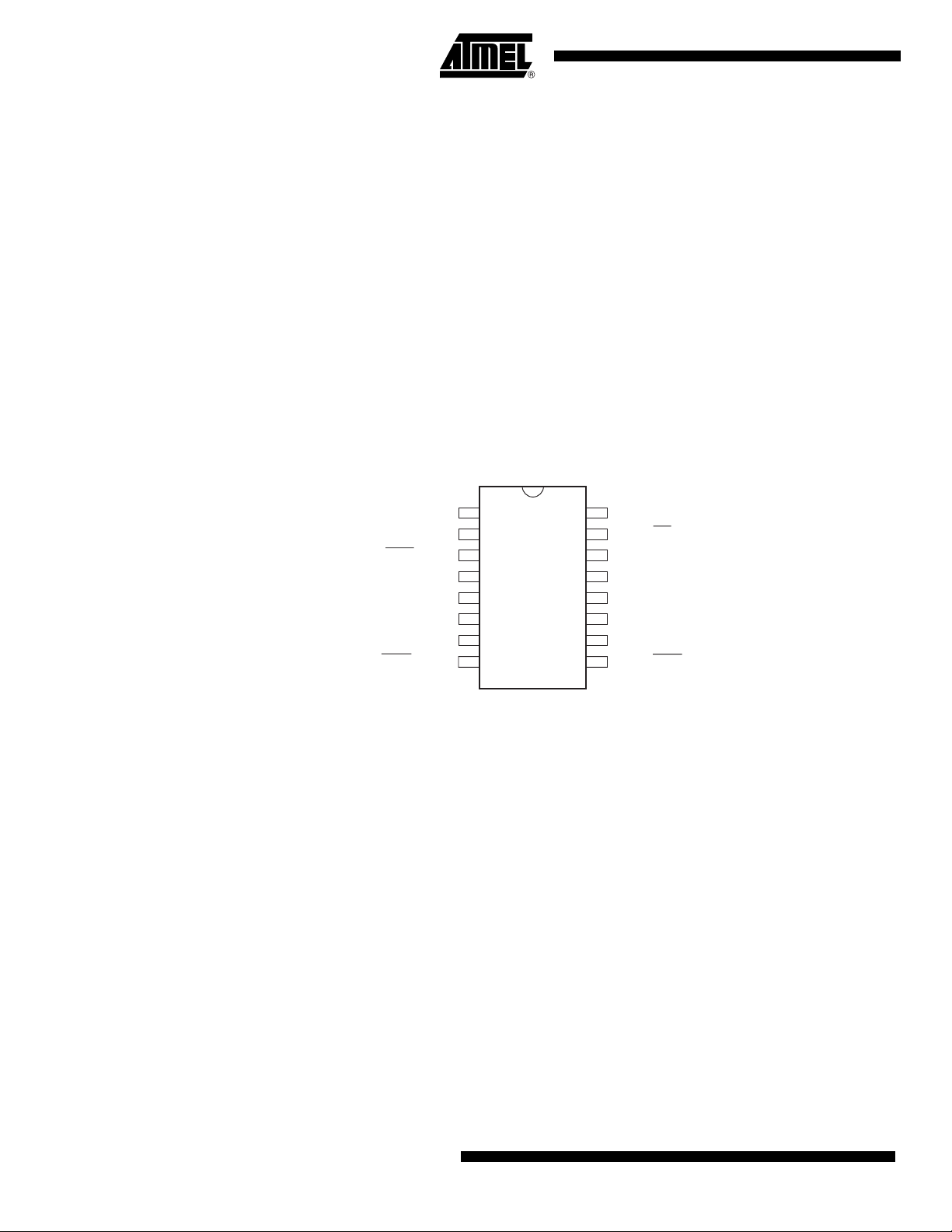
2. 引脚图
2.1 AT89LP216: 16-lead PDIP/SOIC/TSSOP
(GPI5/MOSI) P1.5
(GPI7/SCK) P1.7
(GPI3/RST) P1.3
GND
(GPI2) P1.2
(RXD) P3.0
(T0) P3.4
(XTAL1/INT0) P3.2
1
2
3
4
5
6
7
8
16
15
14
13
12
11
10
P1.6 (MISO/GPI6)
P1.4 (SS/GPI4)
P1.1 (AIN1/GPI1)
P1.0 (AIN0/GPI0)
VCC
P3.1 (TXD)
P3.5 (T1)
9
P3.3 (INT1/XTAL2/CLKOUT)
2
AT89LP216 [Preliminary]
3621A–MICRO–6/06
3. 引脚描述
Table 3-1. AT89LP216 引脚描述
管脚 符号 类型 描述
I/O
P1.5: 用户可定义 I/O 口 1 bit 5.
1P1.5
2P1.7
3P1.3
4GND I地
5P1.2
6P3.0
7P3.4
8P3.2
I/O
MOSI: SPI 主出 / 从入 . 当设置为主机时,这个引脚是输出。当设置为从机时这个引脚为输入。
GPI5: 常用中断输入 5
I
I/O
P1.7: 用户可定义 I/O 口 1 bit 7
I/O
SCK: SPI 时钟。当设置为主机时,这个引脚是输出。当设置为从机的时候该引脚作输入用
GPI7: 常用中断输入 7
I
P1.3: 用户可定义 I/O 口 ( 如果复位保险被禁止 )
I/O
I
I
I
I/O
I
I/O
I
I/O
I/O
I/O
I
I/O
: 外部低电平有效复位输入 ( 如果复位保险被允许。见第 14 页 “外部复位”)
RST
GPI3: 常用中断输入 3
DCL: 当 OCD 有效,片上调试接口的串行时钟输入
P1.2: 用户可定义 I/O 口 1 bit 2
GPI2: 常用中断输入 2
P3.0: 用户可定义 I/O 口 3 bit 0
RXD: 串口接收输入
P3.4: 用户可定义 I/O 口 3 bit 4
T0: 计时器 / 计数器 0 外部输入或 PMW 输出
P3.2: 用户可定义 I/O 口 3 bit 2
XTAL1: 振荡器反向放大器和内部时钟产生电路输入。如果启用内部 RC 振荡器作为时钟源,则该脚也可被用作输入输
出口
DDA: 当 OCD 有效时,作片上调试接口的串行输入输出和使用内部 RC 振荡器作时钟源
AT89LP216 [Preliminary]
I/O
O
P3.3: 用户可定义 I/O 口 3 bit 3.
9P3.3
10 P3.5
11 P3 .1
12 VDD I 电源供应
13 P1.0
XTAL2: 振荡器反向放大器输出,当内部 RC 振荡器被用作时钟源时,该口可用作输入输出口
O
CLKOUT: 当内部 RC 振荡器被用作时钟源时,该口被用作内部时钟 2 分频的输出
DDA: 当 OCD 有效时,作片上调试接口的串行输入输出和使用内部 RC 振荡器作时钟源
I/O
I/O
P3.5: 用户可定义 I/O 口 3 bit 5
I/O
T1: 计时器 / 计数器 1 的外部输入或 PWM 的输出
I/O
P3.1: 用户可定义 I/O 口 3 bit 1.
O
TXD: 串口传输输出口
P1.0: 用户可定义 I/O 口 1 bit 0.
I/O
I
AIN0: 模拟比较器正向输入端
I
GPI0: 通用中断输入 0
3621A–MICRO–6/06
3
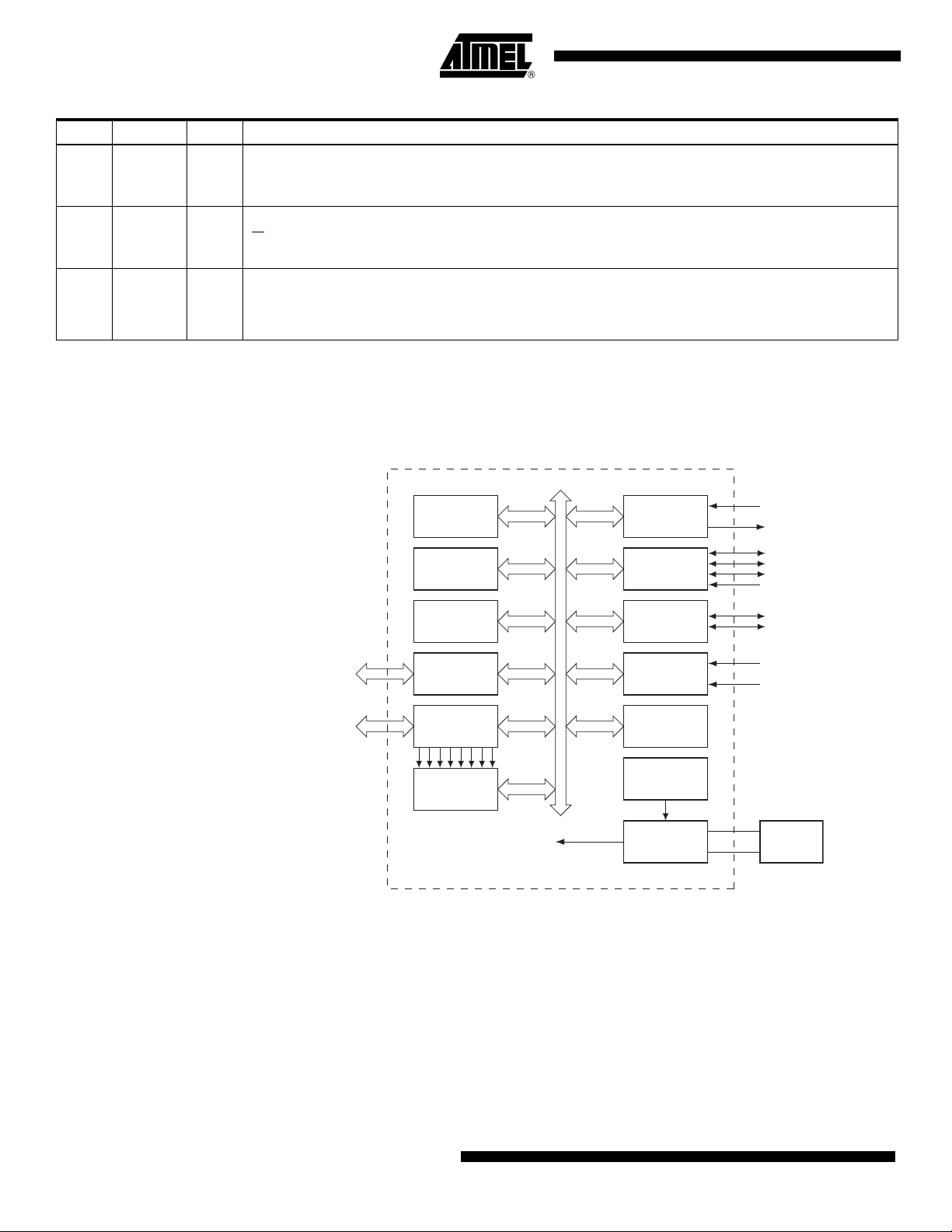
Table 3-1. AT89LP216 引脚描述
管脚 符号 类型 描述
P1.1: 用户可定义 I/O 口 1 bit 1.
I/O
14 P1.1
15 P1.4
16 P1.6
I
AIN1: 模拟比较器反向输入端
I
GPI1: 通用中断输入 1
P1.4: 用户可定义 I/O 口 1 bit 4.
I/O
I
I
I/O
I/O
I
: 从 SPI 选择输入端
SS
GPI4: 通用中断输入 4
P1.6: 用户可定义 I/O 口 1 bit 6.
MISO: SPI 接口的主机输入 / 从机输出端口。当定义为主机时,该引脚作输入端,当定义为从机时该引脚作输出端。
GPI6: 通用中断输入 6
4. 内部结构
Figure 4-1. AT89LP216 内部结构图
Single Cycle
8051 CPU
2K Bytes
Flash
128 Bytes
RAM
Port 3
Configurable I/O
Port 1
Configurable I/O
General-purpose
Interrupt
UART
SPI
Timer 0
Timer 1
Analog
Comparator
Watchdog
Timer
On-Chip
RC Oscillator
CPU Clock
Configurable
Oscillator
Crystal or
Resonator
5. 与传统 8051 的比较
AT89LP216 是具有增强功能的 51 系列单片机,它完全兼容于 MCS-51 的指令。另外,大多数
的 SFR 地址,位定义以及引脚的第二功能都与已有的 Atmel 的 51 系列单片机相同。然而,鉴于这
款单片机的高性能,某些系统性能与诸如 AT89S52 或 AT89S2051 之类的 51 系列产品有所不同。这
些不同之处将在下列章节中详细介绍。
4
AT89LP216 [Preliminary]
3621A–MICRO–6/06

5.1 系统时钟
CPU 的时钟频率与外部 XTAL1 端口的频率相同。此时振荡器不再分频以提供内部时钟,且不支持倍
频。
5.2 单周期读取指令的执行
CPU 每时钟周期从存储器中读取一个字节的指令而不是每 6 个时钟周期读取一次。这样就能极大的
提升 CPU 的性能。因为,CPU 执行指令不再需要 12 到 48 个指令周期,而只需要 1 到 4 个指令周
期。详见第 59 页 “指令设置汇总”。
5.3 中断处理
中断控制器在任意一条指令的最后一个时钟周期内获取中断标志位。在下一个到最后一个指令执
行的时钟周期中,或在前一条指令的最后一个执行时钟周期内(如果当前指令是一个单周期指令)
中断标志位必需置位为有效。
外部中断引脚, 和 ,每个时钟周期都会被采样一次,而不是每 12 个时钟周期采样一次。更短的
指令执行时间加上更快速的中断响应,保证了 CPU 对外部中断的高速响应。
5.4 定时器 / 计数器
定时器 / 计数器的步进增量默认为一个时钟周期一次。传统的 8051 需要 12 个时钟周期才增加一
次。对所有的定时器来说,时间基数可被一个比例因子整除,并且可减少步进增量频率。在特殊
功能寄存器 CLKREG 的 TPS 标志位中可设置该比例因子(见第 12 页表 9 - 2)。当设置 TPS = 1011B
时,计数器每计一次数需 12 个时钟周期。
AT89LP216 [Preliminary]
5.5 串口
5.6 看门狗定时器
5.7 I/O 口
外部定时器 / 计数器引脚,T0 和 T1,每个时钟周期而不是每 12 个时钟周期被采样一次。这
样在计数器模式中计数的频率将更高。
在模式 0 下,UART 口的波特率是系统时钟频率的一半,而传统 8051 是系统时钟的 1/12。其输出
数据仅在串行时钟的上升沿保持稳定。还需注意的是当使用定时器 1 在模式 1 或模式 3 下产生波
特率,定时器是以时钟频率计数的,而不是以时钟频率的 1/12 来计数的。要让和 8051 使用相同
系统时钟的 AT89LP216 产生同样的波特率,其时钟输出时间必需是原来的 12 倍。定时器 1 在模式
1 下支持 16 位的自动重装,这样能延长时钟输出,从而获得较低的波特率。
相对于传统的 8051 需要 12 个时钟周期才记一次数,AT89LP216 的看门狗定时器每时钟周期计一次
数。时间基数可被一个比例因子整除,并且可减少步进增量频率。
AT89LP216 的 I/O 口可定义成 4 个不同的模式。所有 I/O 口在上电或复位时都默认定义为只输入模
式 (三态门)。传统的 8051 当上电或复位时都是输出高电平的。如果要使其和 8051 一样,那么
必需清除特殊功能寄存器的 P1M0 和 P3M0,使 I/O 口进入准双工模式。用户还可通过禁止三态门用
户保险来定义端口为准双工模式。当保险被禁止时,P1M0 和 P3M0 会复位成 00h 而不是 FFh,而且
端口被拉成高电平。
3621A–MICRO–6/06
5
5.8 复位
6. 内存结构
6.1 程序存储器
AT89LP216 的复位引脚 RST 相比于 8051 的高电平有效复位它是低电平有效复位的。另外,复位引
脚每个时钟周期都采样一次,且至少保持 2 个时钟周期的低电平有效才能被确认复位有效,而不
是 24 个时钟周期。
AT89LP216 使用的是哈佛结构,它给程序存储器和数据存储器设置了独立的地址空间。程序存储器
有支持 64k 字节的直接寻址指令。数据存储器包括 128 字节的内部 RAM 和 128 字节的特殊功能寄
存器。AT89LP216 不支持外部数据存储器和外部程序存储器。
AT89LP216 包括 2k 字节的片内 FLASH。FLASH 可重复擦写 10000 次,且数据能保持 10 年。复位和
中断向量存放在程序存储器的前 59 个字节中 (参考第 19 页,表 12 - 1)。MOVC 指令可寻址 2k
字节的程序存储器。AT89LP216 不支持外部程序存储器。
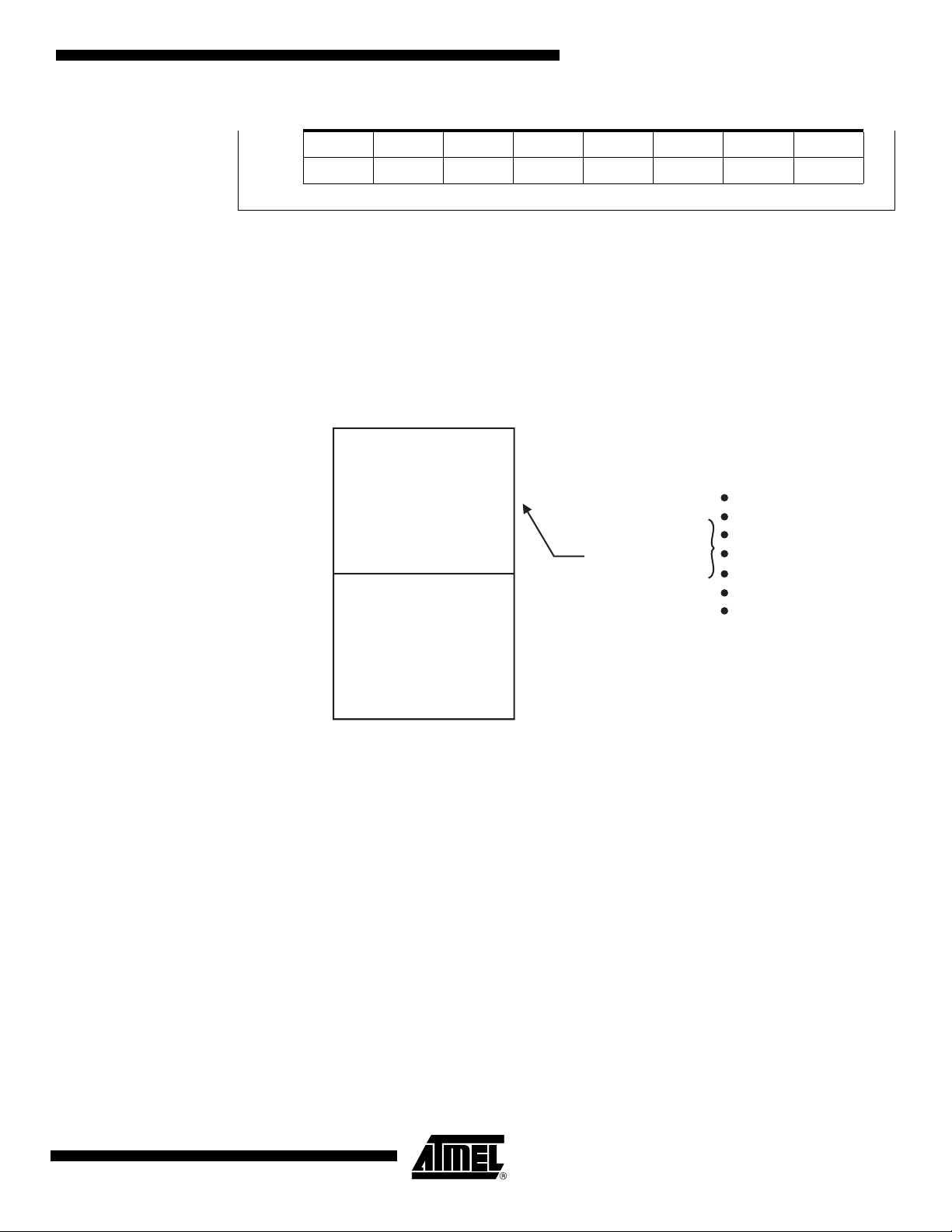
Figure 6-1. 程序存储器映射
007F
User Signature Array
0040
001F
Atmel Signature Array
0000
07FF
Program Memory
0000
AT89LP216 程序存储器的映射图示于图 6 - 1。除从 0000h 到 07FFh 的 2k 字节程序存储器之外,
AT89LP216 还支持 64 字节的在 CPU 只读模式下访问的用户标识区和 32 字节的 ATMEL 标识区。必须
对 AUXR1 的 SIGEN 置位才能读标识区。当 SIGEN 为 1,使用 MOVC A,@A+DPTR 指令进入标识区。用
户标识区从0040h到007Fh,ATMEL标识区从0000h到001Fh。SIGEN需在MOVC访问指令存储器前清除。
在出厂前使用器件 ID 来初始化 ATMEL 标识区。用户标识区使用用户鉴别码或常数来初始化。存储
在标识区的数据是不安全的。安全位会使写入标识区的操作无效;然而从该区读是始终允许的。
Table 6-1.
AUXR1 = A2H 复位值 = XXXX 0XXXB
不可位寻址
AUXR1 – 辅助寄存器 1
6
AT89LP216 [Preliminary]
3621A–MICRO–6/06
6.2 数据存储器
AT89LP216 [Preliminary]
Table 6-1. AUXR1 – 辅助寄存器 1
––––SIGEN–––
Bit76543210
AT89LP216 包括 128 字节的常用 SRAM 数据存储器和 128 字节的 I/O 存储器,它们映射在一个 8 位
的地址空间中。128 字节的数据存储器可通过直接和间接对低 128 字节地址寻址进行访问。128 字
节的 I/O 存储器存放在高 128 字节的地址空间中 (图 6 - 2)。I/O 存储器只可用直接寻址访问,
且包括特殊功能寄存器 (SFRs)。对高 128 字节的寻址操作会返回无效数据。数据存储器的低 32
字节被分为 4 段分别放入 8 个存储器中。RS0 和 RS1 位 (PSW.3 和 PSW.4)决定哪个存储区域被使
用。使用寄存器寻址的指令只能访问当前区域。AT89LP216 不支持外部数据存储器
Figure 6-2. 数据存储器映射
FFH
Accessible
UPPER
128
80H
7F H
LOWER
128
By Direct
Addressing
Only
Accessible
By Direct
and Indirect
Addressing
Only
Special Function
Registers
Ports
Status and Control Bits
Timers
Registers
Stack Pointer
Accumulator
(Etc.)
7. 特殊功能寄存器
3621A–MICRO–6/06
0
特殊功能寄存器示于表 7 - 1
注:并非所有的地址被占用,未被占用的地址不能进行任何操作。读这些地址通常会返回随机数,
写访问这些地址会产生未知后果。用户不应写入这些未列表的区域,因为它们可能会被使用在新
产品中开发新功能。
7
.
Table 7-1. AT89LP216 SFR 映射和复位值
89ABCDEF
0F8H 0FFH
0F0H
0E8H
0E0H
0D8H 0DFH
0D0H
0C8H
0C0H P1M0
0B8H
0B0H
0A8H
0A0H AUXR1
98H
90H
88H
80H
Notes: 1. 所有的特殊功能寄存器最左端的列可位寻址。
B
0000 0000
SPSR
000x x000
ACC
0000 0000
PSW
0000 0000
IP
x000 0000
P3
xx11 1111
IE
0000 0000
SCON
0000 0000
P1
1111 1111
TCON
0000 0000
01234567
2. 当 3 态门保险允许时复位值是 xx11 1111B,当 3 态门保险不允许时复位值是 xx00 0000B。
SPCR
0000 0000
SADEN
0000 0000
SADDR
0000 0000
SBUF
xxxx xxxx
TCONB
0010 0100
TMOD
0000 0000
SP
0000 0111
SPDR
xxxx xxxx
(2)
xxxx 0xxx
GPMOD
0000 0000
RL0
0000 0000
TL0
0000 0000
DPL
0000 0000
P1M1
xx00 0000
GPLS
0000 0000
RL1
0000 0000
TL1
0000 0000
DPH
0000 0000
GPIEN
0000 0000
RH0
0000 0000
TH0
0000 0000
GPIF
0000 0000
RH1
0000 0000
TH1
0000 0000
(2)
P3M0
WDTRST
(write-only)
P3M1
xx00 0000
IPH
x000 0000
WDTCON
0000 x000
ACSR
xx00 0000
CLKREG
0000 x000
PCON
0000 0000
0F7H
0EFH
0E7H
0D7H
0CFH
0C7H
0BFH
0B7H
0AFH
0A7H
9FH
97H
8FH
87H
8. 增强型 CPU
8
AT89LP216 [Preliminary]
AT89LP216 使用了一个增强型的 8051CPU,它的运行速度是标准 8051的6到12倍(或3到6倍的
X28051)这种性能提升的原因有两个。第一,每个时钟周期 CPU 从指令存储器中读取一条单字节
指令。第二,CPU 使用一个简单的双线程从而使读取指令和执行指令同时进行。这个基本的线程操
作思想使 CPU 工作速率达到 1MIPS 每 MHz。一个简单的实例如图 8 - 1 所示。
3621A–MICRO–6/06
AT89LP216 [Preliminary]
T
T
T
MCS-51 指令设置允许指令长度为 1 到 3 字节不等。在 “单时钟周期读取单字节指令”系统中,这
意味着每条指令的字节数和时钟周期数相等。AT89LP216 的大多数指令遵循下列原则:除少数指令
外,指令执行时钟数与指令字节数相等。分支语句和调用语句相当于增加一个计算目标地址的时
钟周期,其他复杂指令需要多个周期。更多指令详情请见第59页“指令设置汇总”。图例8-2
和 8 - 3 是单字节和双字节指令执行过程。
Figure 8-1. 并行指令读取和执行
System Clock
th
Instruction
(n+1)
n
th
Instruction
Fetch Execute
(n+2)th Instruction
Figure 8-2. 单周期 ALU 操作 ( 例 : INC R0)
T
System Clock
Total Execution Time
Register Operand Fetch
n
n+1
n+2
Fetch Execute
Fetch
1
T
2
T
3
3621A–MICRO–6/06
ALU Operation Execute
Result Write Back
Fetch Next Instruction
9
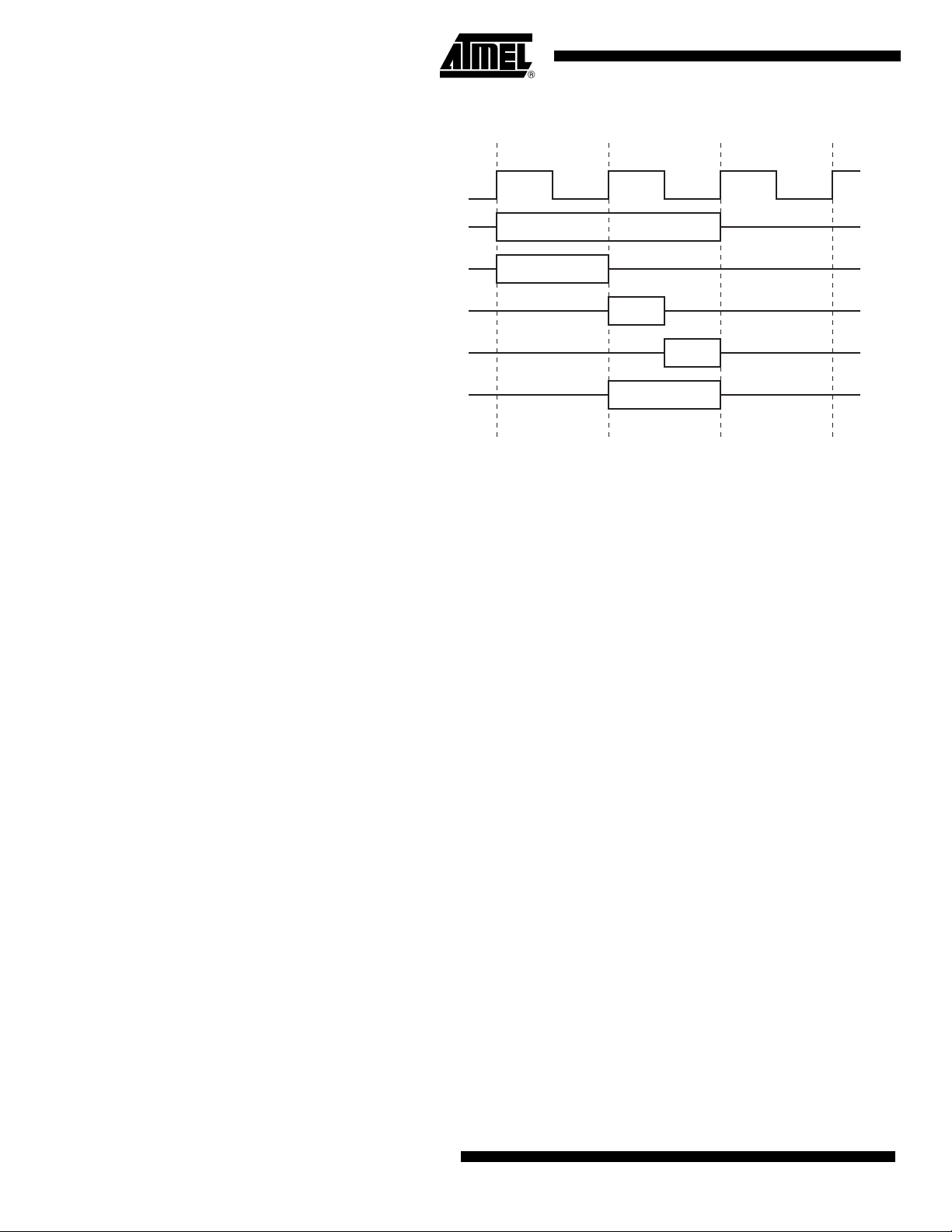
Figure 8-3. 双周期 ALU 操作 ( 例 : ADD A, #data)
F
8.1 部分指令限制
T
1
System Clock
Total Execution Time
etch Immediate Operand
ALU Operation Execute
Result Write Back
Fetch Next Instruction
AT89LP216 在 ATMEL 单片机家族中是一个廉价的成员。它拥有 2k 字节的 FLASH 程序存储器。它兼
容了 MCS - 51 的架构,同时可用 MCS - 51 的指令对其进行编程设置。然而,某些指令有所不同。
所有跳转和分支语句都只能在物理内存 (2k 字节)的范围内。这是程序员应该注意的。比如,
LJMP 7E0H 是一条有效指令,而 LJMP 900H 则不是。
T
2
T
3
8.1.1 分枝指令
LCALL, LJMP, ACALL, AJMP, SJMP, and JMP @A+DPTR 等无条件分支指令在物理内存的范围中
(000h 到 7FFh)可直接跳转到目的地址。如果超出了物理内存的限制将会得到一个未知的运行结
果。CJNE [...], DJNZ [...], JB, JNB, JC, JNC, JBC, JZ, and JNZ 等有条件分支语句也必须
遵守这个规则。重申一遍,如果超出内存范围进行操作会引起不稳定。在中断的应用中,8051 架
构中保护了中断服务地址。
8.1.2 数据存储器,MOVX 相关指令
AT89LP216 拥有 128 字节的内部数据存储器。访问 RAM 过程中若超过 7FH 将会返回一个无效的数
据。另外,堆栈深度为 128 字节,也就是 RAM 的大小。堆栈指针不允许超过 7FH。该器件不支持对
外部数据存储器和外部程序存储器的操作。因此,程序中不应有 MOVX [...] 这样的语句。
即使超过之前所讲的物理内存的范围进行编程,典型的 8051 编译器还是会对其进行编译。所以,
用户应该本款产品的特点和一些限制,从而合理的调整程序。
9. 系统时钟
三个可选时钟源中的一个直接产生系统时钟,这可通过配置完成。这三个时钟源分别是外部晶体
振荡器、外部时钟信号、片内 RC 振荡器。如表 9-1 所示,时钟源可以通过表中时钟源用户熔丝位
10
AT89LP216 [Preliminary]
3621A–MICRO–6/06
AT89LP216 [Preliminary]
来进行选择,CPU 时钟脉冲不能通过对系统时钟的分频来得到。参阅第 71 页上的 “ 用户配置熔丝
位 ” on page 68.
Table 9-1. 时钟源设置
9.1 晶体振荡器
9.2 外部时钟信号
9.3 内部 RC 振荡器
时钟源设置位 1 时钟源设置位 0
00晶体振荡器
01保留
10外部时钟 XTAL1
11内部 8 MHz RC 振荡电路
时钟源选择
当被使能后,内部反向振荡器连接在 XTAL1 和 XTAL2 之间作为与外部石英晶体或陶瓷振荡器的连
接。当使用晶体振荡器时,P3.2 和 P3.3 将失去输入 / 输出功能。同时,XTAL2 引脚应连接一个缓
冲器来驱动板级时钟。
选用外部时钟时,振荡放大器被禁止,而 XTAL1 能被外部时钟信号直接驱动。XTAL2 可以悬空,可
以作为 P3.3 通用 I/O 功能使用,或者通过配置作为系统时钟信号的分频输出。
AT89LP216 内部有一个 8.0 MHz ± 2.5% 的 RC 振荡器。当用作时钟源时,XTAL1 和 XTAL2 可以分别
作为通用 I/O P3.2 和 P3.3 使用。XTAL2 也可以作为系统时钟的分频输出。振荡器的频率可以通过
设 置 R C 调 整 熔 丝 位 来 进 行 调 整 ( 参 考 第 7 1 页 “ 用 户 配 置 熔 丝 位 ”)。 (See “ 用户配置熔丝位 ”
on page 68.).
9.4 系统时钟输出
当配置为既不采用外部时钟,也不采用内部 RC 振荡器时,AT89LP216 可以从引脚 XTAL2(P3.3) 输
出一个系统分频时钟。这可以通过设置 CLKREG 中的 CLKREG 位来获取输出时钟的参数。其中,
CDV[1,0] 决定时钟的分频数。例如,当 COE = “1”且 CDIV = “00”,P3.3 配置为输出时,可
从 P3.3 引脚输出一个频率为 3.950 MHz ( ± 5%) 的时钟信号。
Table 9-2. CLKREG – 时钟控制寄存器
CLKREG = 8FH 复位值 = 0000 0000B
不可位寻址
TPS3 TPS2 TPS1 TPS0 – CDV1 CDV0 COE
Bit76543210
符号 功能
TPS3
TPS2
TPS1
TPS0
定时器预选器。用于为定时器 0、定时器 1 和看门狗定时器选择时基信号,是通过 4bit 递减计数器来实现预选功能。当
计数到 0 时,就把 TPS 中的预分频值重装载来得到 1 ~ 16 的分频比。在默认值 (TPS = 0000B)情况下,每个时钟周期
的到来,定时器都会计数。如果要配置为标准 8051 的速率,即 1/12 时钟周期时,必须设置 TPS=1011B。
3621A–MICRO–6/06
11
符号 功能
分频时钟输出。决定输出时钟信号的频率与系统时钟之间的关系。
CDIV1
CDIV0 输出时钟频率
CDV1
CDV0
COE
00f/2
01f/4
10f/8
11f/16
时钟输出使能。使能 COE 可以从引脚 XTAL2 (P3.3) 输出系统时钟信号的一个分频信号。这时,必须选择内部 RC 振荡器
或者外部时钟作为系统时钟源。
10. 复位
10.1 上电复位
当复位时,所有的 I/O 寄存器都初始化为默认值,输入引脚都为三态,程序从复位矢量地址 0000H
开始执行。AT89LP216 有 5 个复位源:上电复位、欠压复位、外部复位、看门狗复位和软件复位。
上电复位 (POR) 由片上电压检测电路完成,检测电平一般为 1.4V。当 VCC 低于该电平时,POR 将
被激活。因此,POR 电路可用于启动复位或者在没有欠压检测器时检测器件工作电压是否正常而复
位芯片。POR 能够保证芯片上电时复位正确。上电复位时序如第 13 页的图 10-1 所示。当 VCC 达到
上电复位阀值电压 VPOR 时,初始化序列就被执行,持续时间为 tPOR。初始化序列完成后,启动定
时器就决定器件随着 VCC 的上升而持续多长时间的 POR。当 VCC 电压低于阀值电压时,POR 在没有
任何延时的情况下再次被执行。上电复位 (即冷复位)将置位 PCON 中的 POF 标志。另外,当 RST
引脚持续低电平周期大于 Time-out 设定的时间时,芯片内部将产生复位信号。
Figure 10-1. 上电复位时序 (BOD Disabled)
V
CC
V
POR
t
POR
+ t
SUT
V
POR
Time-out
RST
(RST Tied to VCC)
Internal
Reset
RST
Internal
Reset
(RST Controlled Externally)
t
RHD
V
RH
如果同时使能了欠压检测器 (BOD),这时启动定时器只有在 VCC 达到阀值电压 VBOD 后才会开始计
数如图 10-2。然而,如果在初始化时序完成前就发生了欠压,启动定时器必须等待初始化序列完
成后才能开始计数。
12
AT89LP216 [Preliminary]
3621A–MICRO–6/06
Figure 10-2. 上电复位 (BOD 开启 )
V
BOD
V
CC
Time-out
t
POR
V
POR
t
SUT
AT89LP216 [Preliminary]
RST
(RST Tied to VCC)
Internal
Reset
RST
(RST Controlled Externally)
Internal
Reset
Note: tPOR 大约为 92 μ s ± 5%
V
RH
t
RHD
启动定时器的延时可通过配置“启动定时器用户熔丝位”和选择时钟源 (表 10-1)来完成。该启
动延时必须为 VCC 和时钟源的选择提供足够的建立时间。启动定时熔丝位用于控制芯片在欠压复
位或者从内部定时唤醒低功耗模式而所需的芯片启动时间。
Table 10-1. 启动定时器设置
SUT 熔丝 1SUT熔丝 0 时钟源 t
00
01
10
11
内部 RC/ 外部时钟信号
晶体振荡器
内部 RC/ 外部时钟信号
晶体振荡器
I 内部 RC/ 外部时钟信号
晶体振荡器
内部 RC/ 外部时钟信号
晶体振荡器
(± 5%) µs
SUT
1024
2048
1024
4096
4096
16384
16
512
10.2 欠压复位
3621A–MICRO–6/06
AT89LP216 带有一个片上欠压检测 (BOD) 电路,当在工作状态时,用于监视 VCC 并把它与预设定的
某个触发阀值进行比较。该 BOD 阀值一般为 2.2V。BOD 的目的是保证系统在全速运行时由于 VCC
的下降而不发生任何错误的执行就能正确地进入复位状态。BOD 时序如图 10-3。当 VCC 低于阀值
VBOD 时,内部复位马上被激活。当 VCC 大于该 BOD 阀值并维持到 time-out 周期后,启动定时器就
释放内部复位信号 (如表 10-1)。通过设置 BOD 使能熔丝位来使能欠压监测器 (参考第 71 页的
“ 用 户 配 置 熔 丝 位 ”)。 (See “ 用户配置熔丝位 ” on page 68.).
13

10.3 外部
10.4 看门狗复位
Figure 10-3. 欠压检测器复位
V
V
CC
V
POR
BOD
t
SUT
Time-out
Internal
Reset
引脚 P1.3/RST 既可以作为低电平有效复位输入,也可以作为通用 I/O P1.3 功能使用。当置位复
位使能熔丝位 (即置’1’)时,P1.3 被配置为外部复位输入 (参考第 71 页的 “用户配置熔丝
位”)。当清零时,P1.3 用作输入 / 输出引脚。当配置为复位输入引脚时,该引脚上的电平必须维
持至少两个时钟周期的低电平才能触发芯片内部复位。
Note: 在上电时序过程中,熔丝位的设置总是被忽略的,这时该引脚用作复位输入。连接在该引脚上的外
部电路也不能在上电时序中就把该引脚拉低,因为该低电平将使器件处于复位状态直到为高电平为
止。上电延迟后,该引脚可用于外部复位输入或者通用 I/O,这是由熔丝位的配置决定。只有上电
复位优先于复位熔丝位的设定,而其他的复位源都不能优先于复位熔丝位的设定。P1.3/RST 也用
作 ISP (在线编程)使能。当外部复位引脚为低电平时,ISP 被使能。当熔丝位配置引脚为通用
I/O 时,只有在上电时拉低引脚 P1.3,芯片才能进入 ISP 模式。
当看门狗定时器溢出时,将产生一个持续 16 个时钟周期的内部复位脉冲用于复位芯片。看门狗复
位可通过设置 WDTCON 中的 WDTOVF 标志来实现。为了防止看门狗复位芯片,必须在看门狗定时溢
出前把看门狗复位时序 1EH/E1H 写入到 WDTRST 中。(参考第 57 页 “可编程看门狗定时器”的看
门狗定时器的详细操作步骤。) See “ 可编程看门狗定时器 ” on page 55.
10.5 软件复位
11. 省电模式
11.1 空闲模式
11.2 掉电模式
把软件复位时序写入 5AH/A5H 到寄存器 WDRST 时,CPU 将产生一个维持 16 个时钟周期的内部复位
脉冲。置位 WDTCON 中的 SWRST 标志将使能软件复位功能。有关软件复位的更多信息请参考第 58
页 “软件复位”。 See “ 软件复位 ” on page 55.
AT89LP216 支持两种不同的低功耗模式:空闲模式和掉电模式。可通过寄存器 PCON 来选择模式。
置位 PCON 的 IDL 标志可进入空闲模式。空闲模式下,内部 CPU 时钟信号停止,而 CPU 还处于工作
状态,包括 RAM、堆栈指针、程序计数器、程序状态字以及累加器。另外,输入 / 输出引脚保持进
入空闲模式时刻的逻辑值。空闲模式下保持外设能运行的目的在于让他们产生中断信号而把 CPU
从空闲模式中唤醒。因此,定时器、串口、SPI 和 GPI 等模块能在空闲模式下照常运行。而比较器
和看门狗可设定为使能或禁止。任何使能的中断源或者复位信号都能结束空闲模式。当中断唤醒
空闲模式时,中断服务将立即执行,并在 RETI 后的下一条可执行指令将是下一次让器件进入空闲
模式的指令。
置位 PCON 的 PD 标志可进入掉电模式。掉电模式下,振荡器将停止振荡,且 Flash 存储器也进入
低功耗状态,来尽量降低功耗。因此,只有上电电路继续消耗功耗。在掉电模式中,供电电压可
14
AT89LP216 [Preliminary]
3621A–MICRO–6/06
以降低到能持续刷新 RAM 的电平值。这时 VCC 下降后,仍能维持 RAM 中的数据,而 SFR 中的数据
却不能保证能维持住。外部复位、上电复位或者某些中断可以使器件从掉电模式中退出。
11.2.1 外部中断唤醒掉电模式
三个外部中断可以配置为唤醒掉电模式。当引脚 XTAL1 或 XTAL2 不用作为晶体振荡器或者外部时
钟输入时,可以分别用作外部中断 (P3.2)和 (P3.3)来退出掉电模式。这时,需要使能外部
中断 或 ,并设置为低电平触发中断。当 被禁止后,GPI3 也能用来唤醒掉电模式,这时需要使能
并设置 GPI3 为低电平检测。
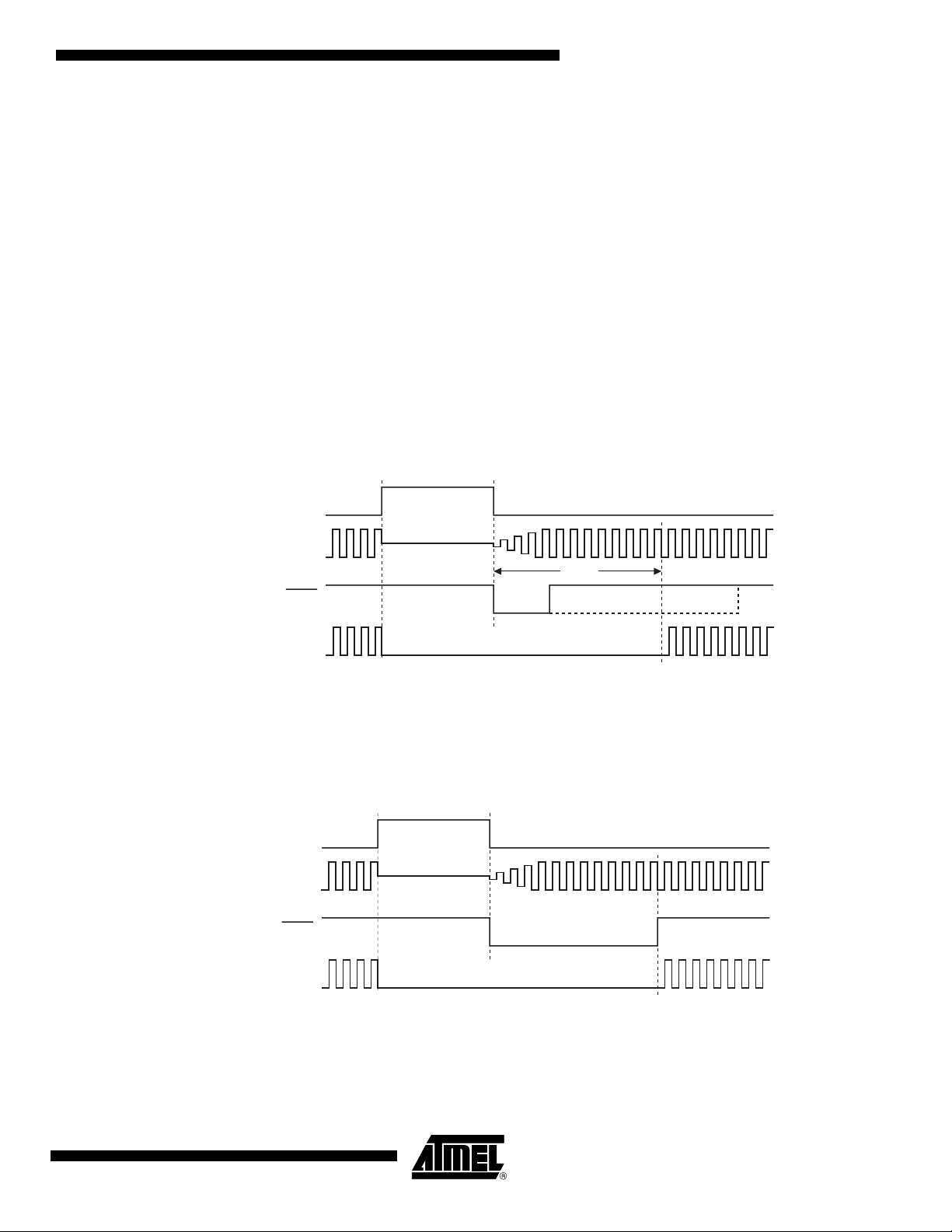
当用中断结束掉电模式时,可采用两种唤醒模式。如果 PCON 中的 PWDEX 标志被清零,则如图 111 所示,芯片内部产生定时来唤醒芯片,在外部中断引脚电平的下降沿时掉电模式结束,接着振荡
器起振,以及内部定时器开始计数,并直到溢出后内部时钟信号才能传送给 CPU 使用,中断服务
也是在暂停周期结束后才被执行。配置启动定时熔丝位可控制暂停周期 ( 参考第 14 页上的表 10-
1)。此时,外部中断引脚无需维持整个暂停周期的低电平。 Table 10-1 on page 13
Figure 11-1. 中断唤醒掉电模式 (PWDEX = 0)
AT89LP216 [Preliminary]
PWD
XTAL1
t
SUT
INT1
Internal
Clock
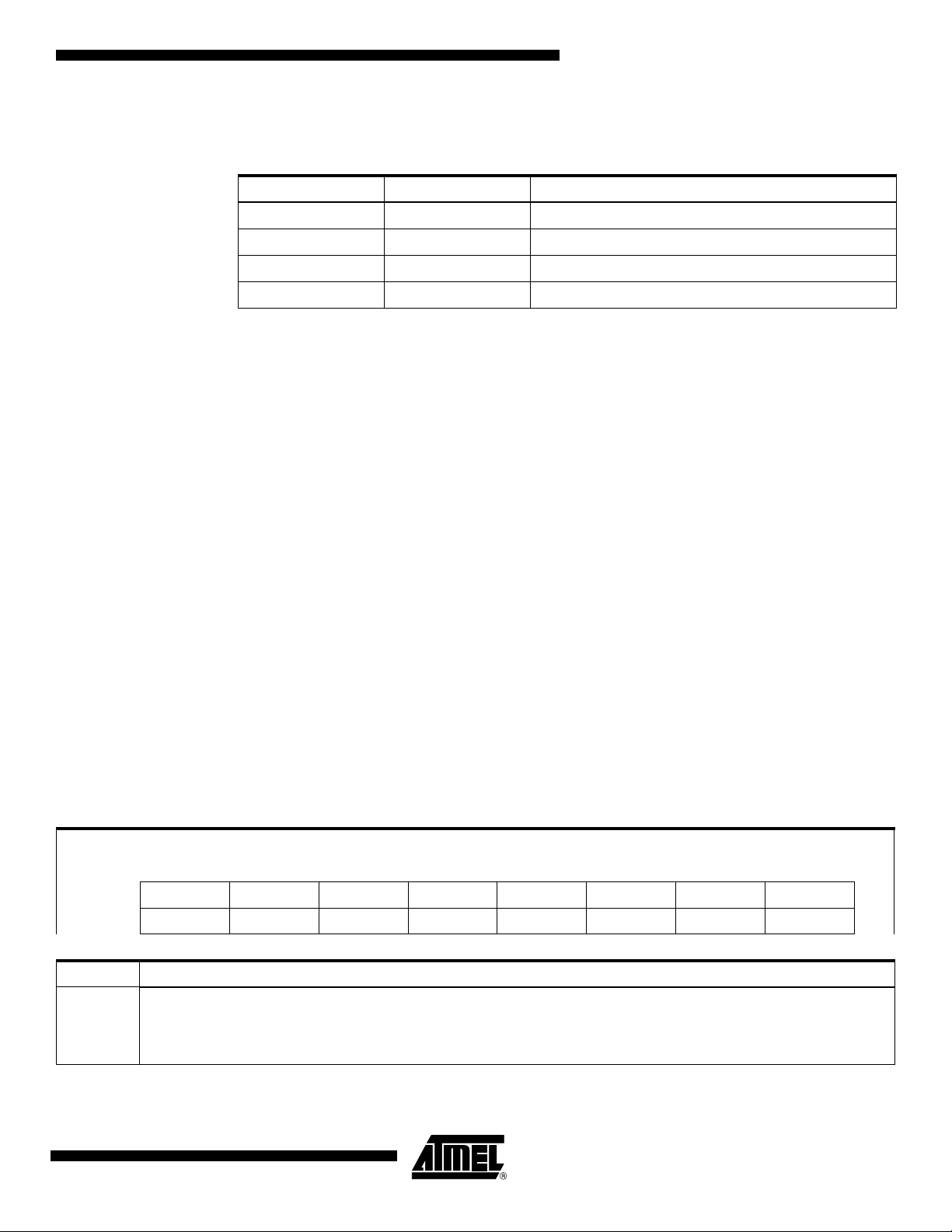
当 PWDEX = “1”时,唤醒周期是由外部中断信号来控制的。同样,在外部中断引脚电平的下降
沿就退出掉电模式,振荡器起振。然而,内部时钟信号只有在中断引脚电平的上升沿后才能被传
送给 CPU,如图 11-2。因此,中断引脚必须保持足够长时间的低电平周期使得选用的时钟源稳定
后才变为高电平。中断服务程序在跳变为上升沿后就被执行。
Figure 11-2. 中断唤醒掉电模式 (PWDEX = 1)
PWD
XTAL1
INT1
Internal
Clock
11.2.2 外部复位唤醒掉电模式
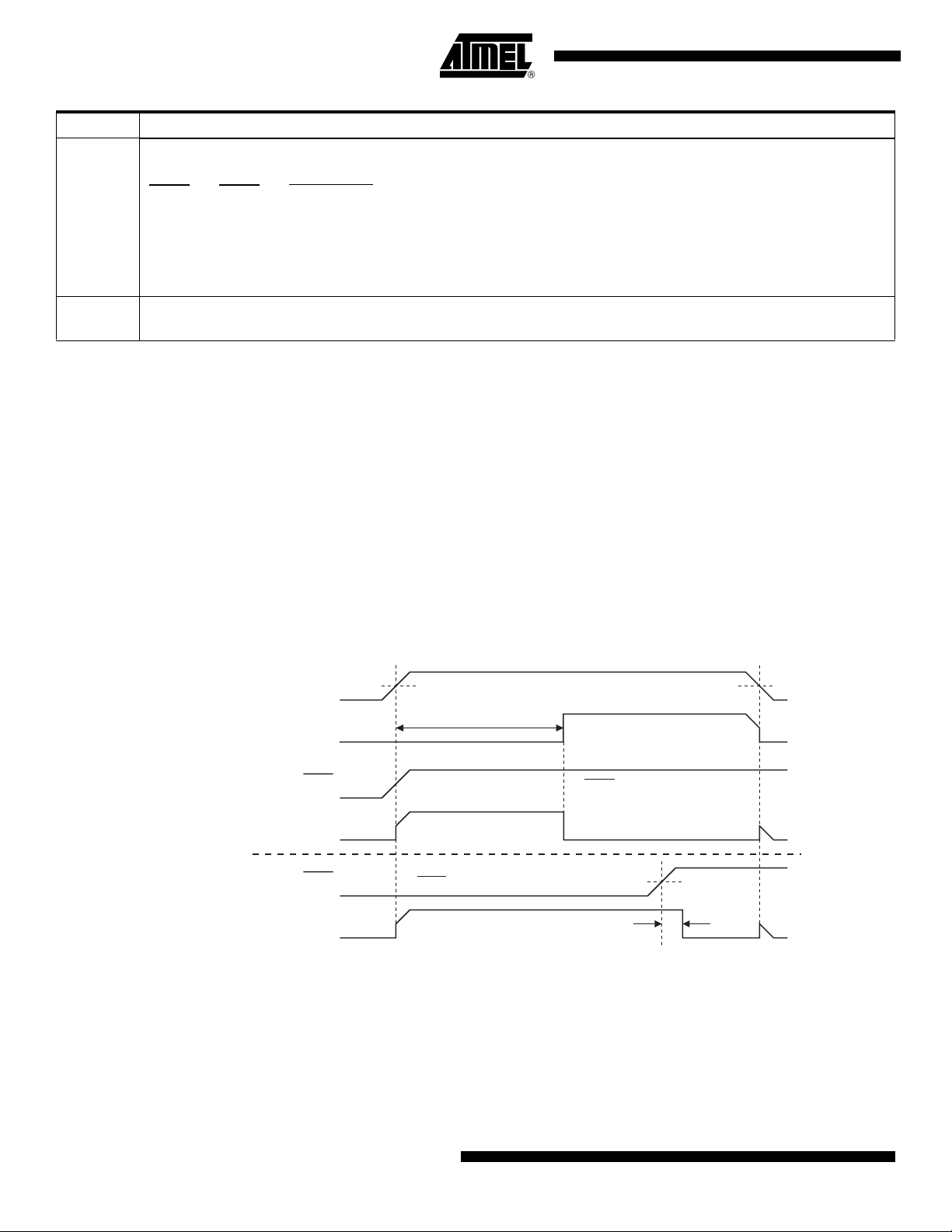
外部复位唤醒掉电模式与 PWDEX = “0”的中断唤醒情况相似。如图 11-3 所示,在 的下降沿后,
掉电模式结束,振荡器起振,以及内部定时器开始计数,并直到溢出后内部时钟信号才能传送给
CPU 使用。配置启动定时熔丝位可控制暂停周期 ( 参考第 14 页上的表 10-1)。如果 在计数溢出前
3621A–MICRO–6/06
15
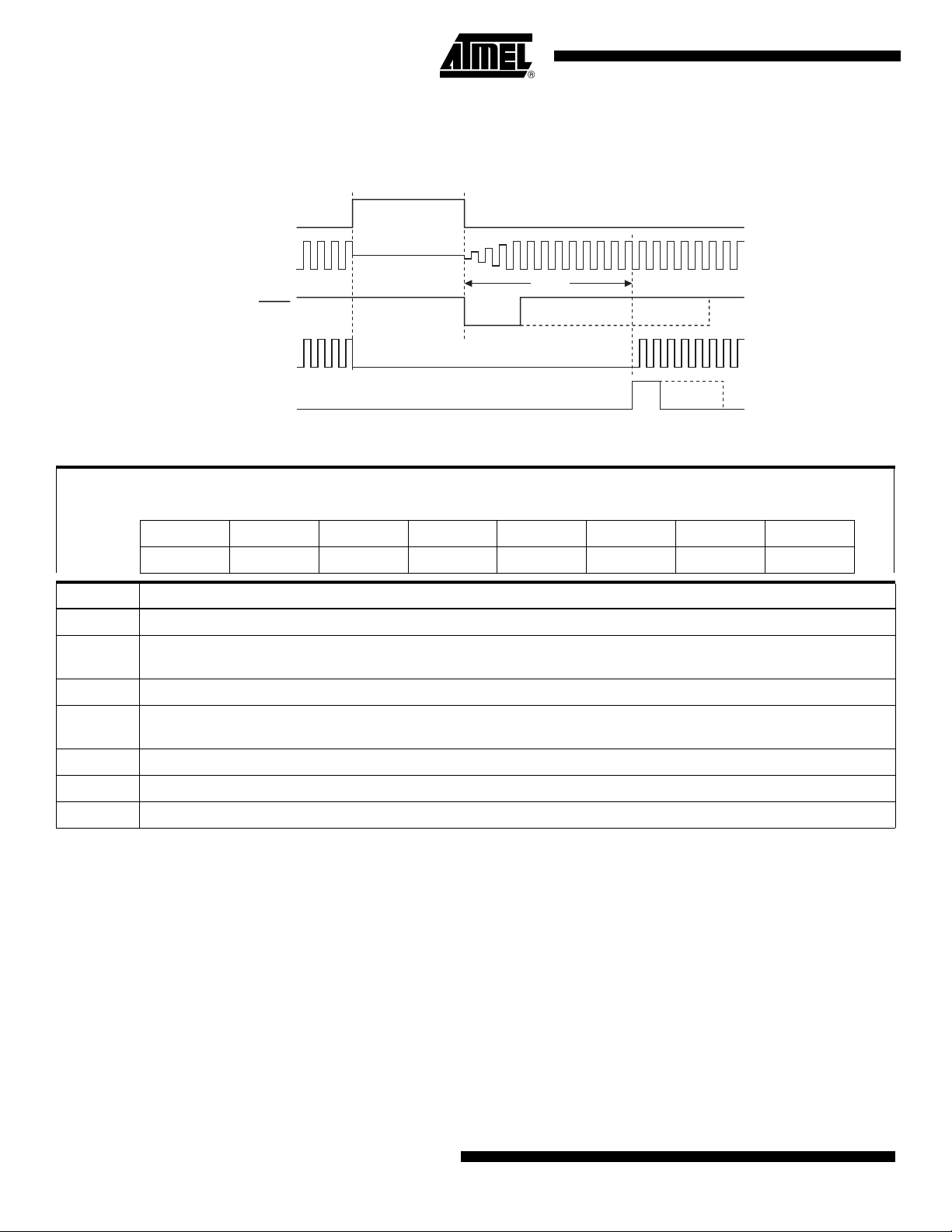
就跳变为高电平,则在内部时钟重启时产生一个维持 2 个时钟周期的内部复位;否则,器件将保
持复位状态直到 变为高电平。
Figure 11-3. 外部复位唤醒掉电模式
PWD
XTAL1
t
SUT
RST
Internal
Clock
Internal
Reset
Table 11 -1. PCON – 电源控制寄存器
PCON = 87H 复位值 = 000X 0000B
不可位寻址
SMOD1 SMOD0 PWDEX POF GF1 GF0 PD IDL
Bit76543210
符号 功能
SMOD1
SMOD0
PWDEX
POF
GF1, GF0
PD
IDL
波特率加倍。当置位时,串口模式 1、2 或 3 时波特率加倍。
帧出错选择。当 SMOD0 = 0,SCON.7 为 SM0 ;当 SMOD0 = 1, SCON.7 为 FE。注意:只要帧出错,FE 马上被设置,而与
SMOD0 的值无关。
掉电模式退出。当 PWDEX = 1 时,外部信号控制唤醒;当 PWDEX = 1 时,内部定时计数唤醒。
断电标志。在上电时置位 POF ( 即冷复位 )。该标志可通过软件置位或清零,而 RST 或 BOD (即热复位)对它不产生影
响。
通用标志。
掉电模式比特位。置位时,激活掉电模式。
空闲模式比特位。置位时,激活空闲模式。
16
AT89LP216 [Preliminary]
3621A–MICRO–6/06
12. 中断
AT89LP216 [Preliminary]
AT89LP216 拥有 7 个中断源:两个外部中断、两个定时中断、一个串口中断、一个通用中断以及一
个模拟比较器中断。这些中断源和系统复位一样,在程序空间开始处都有各自的向量地址。可通
过单独置位或清零在中断允许寄存器 IE 中相应的比特位,来使能 / 禁止每一个中断源。全局中断
使能 / 禁止比特位 EA 也在 IE 寄存器中,它控制所有的中断允许。
每一个中断源 (除了模拟比较器中断外)都拥有 4 个优先级,通过置位或清零在中断优先寄存器
IP 和 IPH 中相应的比特位,可以编程为 4 个优先级中的某一级别。而模拟比较器中断固定为最低
优先级的中断。处于高优先级的中断服务程序可以中断低优先级的,但不能中断同一优先级别的
或者更高优先级别的。任何中断源都不能中断优先级最高的中断服务程序的执行。如果在某指令
结束时有两个不同级别的中断申请同时发生时,只有优先级高的中断服务被先执行;如果是同一
优先级的,由于中断矢量地址越低优先级越高,相反中断矢量地址越高其优先级越低,从而内部
产生的优先级选择时序就选择高优先级的中断来服务,即先执行中断矢量地址低的那个中断服务
程序。注意:只有在同一优先级的中断申请同时发生时,才使用优先级选择时序。
通过配置寄存器 TCON 中的 IE0 和 IE1 来产生相应的 IT0 和 IT1 标志,外部中断 和 可以设置为电
平或边沿触发。如果是边沿触发产生中断,则在进入中断服务时硬件清楚这些标志;如果是电平
触发中断,则外部信号源 (而不是片内硬件)控制这些标志。
定时器 0 和定时器 1 由相应的定时 / 计数寄存器中预设溢出值而产生中断 (除了定时器 0 的模式
3,因为该模式为波特率发生器)。当进入定时器中断服务程序时,片上的硬件会自动清楚中断申
请标志。
串口中断由寄存器 SCON 中的 RI 和 TI 标志进行逻辑或运算,以及 SPSR 中的 SPIF 标志决定。当进
入中断服务程序时,硬件不清除这些标志,需要用户手工清除。事实上,中断服务的执行就能确
定该中断是由 RI、TI 或 SPIF 中的哪一个产生的。因此,在程序中可以进行软件复位相应标志。
通用中断是由寄存器 GPIF 中的八个标志进行逻辑或运算来决定的。在进入中断服务程序时,硬件
不清除标志。中断服务程序的执行能确定该中断是由哪一个标志触发,所以在程序中需要软件复
位相应标志。如果是电平触发中断,则外部申请源在标志没有被软件清除前是不能进行申请中断
服务的。
比较器中断是由寄存器 ACSR 中的 CF 位产生。在进入中断服务程序时,硬件不清除该标志,需要
软件清除。
由于 SPI 的中断标志位 SPIF 和在 GPIF 中的通用中断标志位,只能被硬件置位和软件复位。除此
之外,大部分的中断标志都可以由软件进行置位或复位,其操作结果与硬件进行置位或复位一致。
也就是说,既可以产生中断,也可以取消还未执行的中断。
Table 12-1. 中断向量地址
3621A–MICRO–6/06
中断 中断源 地址向量
System Reset RST or POR or BOD 0000H
External Interrupt 0 IE0 0003H
Timer 0 Overflow TF0 000BH
17
12.1 中断响应时间
Table 12-1. 中断向量地址
中断 中断源 地址向量
外部中断 1 IE1 0013H
定时器 1 溢出 TF1 001BH
串行口中断 RI or TI or SPIF 0023H
通用中断 GPIF 002BH
模拟比较器 CF 0033H
中断标志在每个时钟周期由相应的硬件电路置位。中断控制器在执行指令的时钟周期结束
时设置这些标志位。如果其中的某个标志在前一个周期就被设置,轮询周期将发现它,假定该中
断没有被下面任何一个条件所阻拦,则中断系统将产生 LCALL 指令作为下一条指令来执行相应的
中断服务程序:同一优先级的或者更高优先级的中断正在处理;正在执行 RETI 指令或者正在对寄
存器 IE、IP 或 IPH 进行写入操作。其中的任何一个都能阻断产生 LCALL 指令而不能进行该中断服
务。如果正在执行 RETI 指令,或者对 IE、IP 或 IPH 进行任何的访问,则第二个条件能保证在进
行中断服务前将至少执行一条指令。在指令周期结束时,将重复产生轮询周期,而且该轮询值为
前一周期的值。如果一个置位了的中断标志被上述其中的一个条件阻断后,则就算后来该条件已
经消除了,该中断也将不再执行。换言之,置位的中断标志如果没有被马上服务,则该标志无效。
因为每个轮询周期都是重新进行的。
如果申请被激活,且条件也满足,则该中断申请服务产生一个硬件调用函数作为下一条指令来执
行,该调用函数占用 4 个周期。因此,从激活中断到开始执行中断申请至少需要 5 个周期。如果
中断申请被上述的条件阻断,则所需的响应时间会更长。如果同一优先级或更高优先级的中断正
在执行,则等待时间由正在执行的中断服务决定。如果正在执行的指令还未结束,则额外等待时
间就不大于 3 个周期,因为最多只能为 4 个周期。如果正在执行 RETI 指令,或者访问 IE 或 IP 时,
则额外等待时间就不大于 7 个周期 (最大 3 个周期去完成该指令,再外加 4 个周期去完成下一条
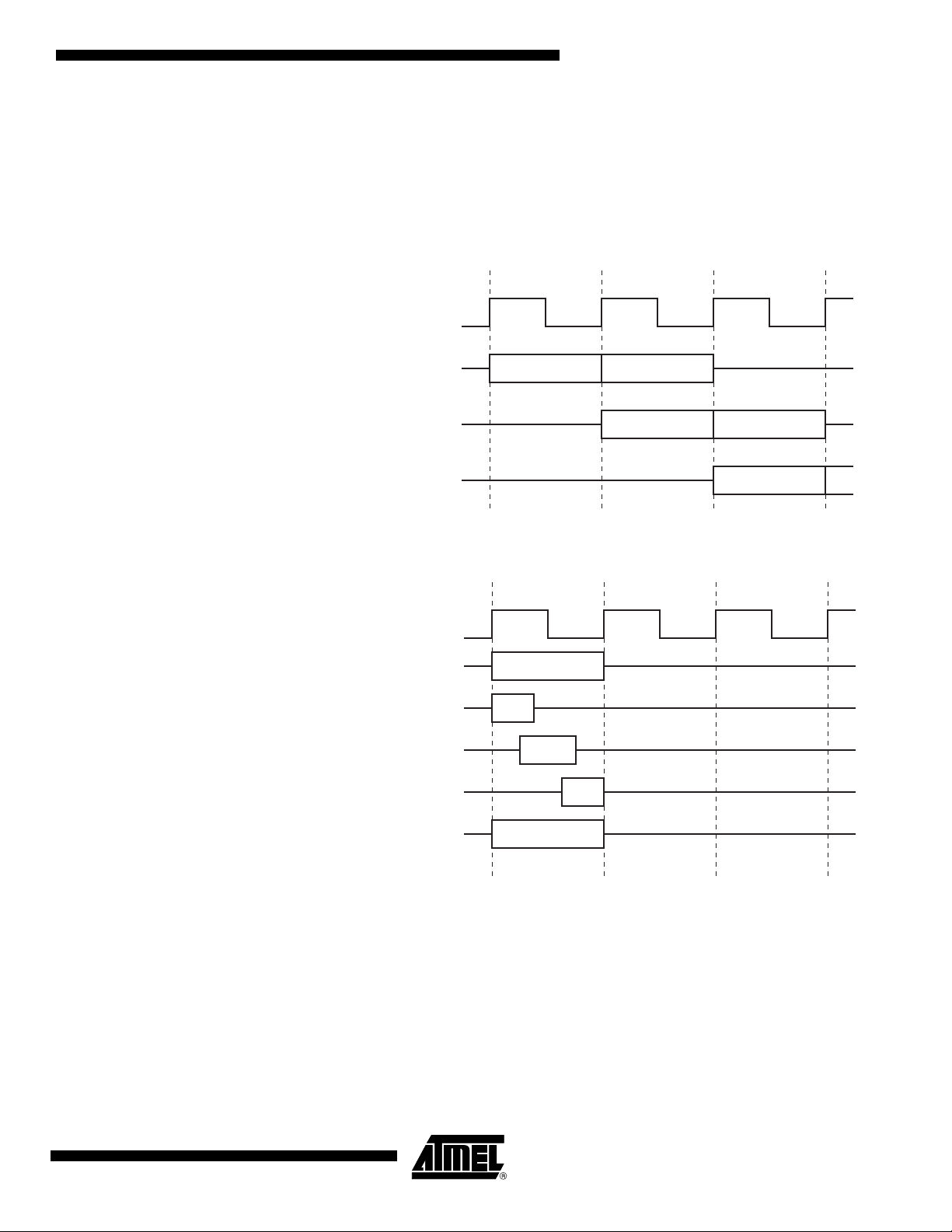
指令)。因此,在单个中断系统中,一个中断响应时间总为 5 ~ 13 个周期,如图 12-1 和 12-2。
Figure 12-1. 最小中断响应时间
Clock Cycles
Instruction LCALL 1st ISR Instr.Cur. Instr.
18
AT89LP216 [Preliminary]
INT0
IE0
15
Ack.
3621A–MICRO–6/06
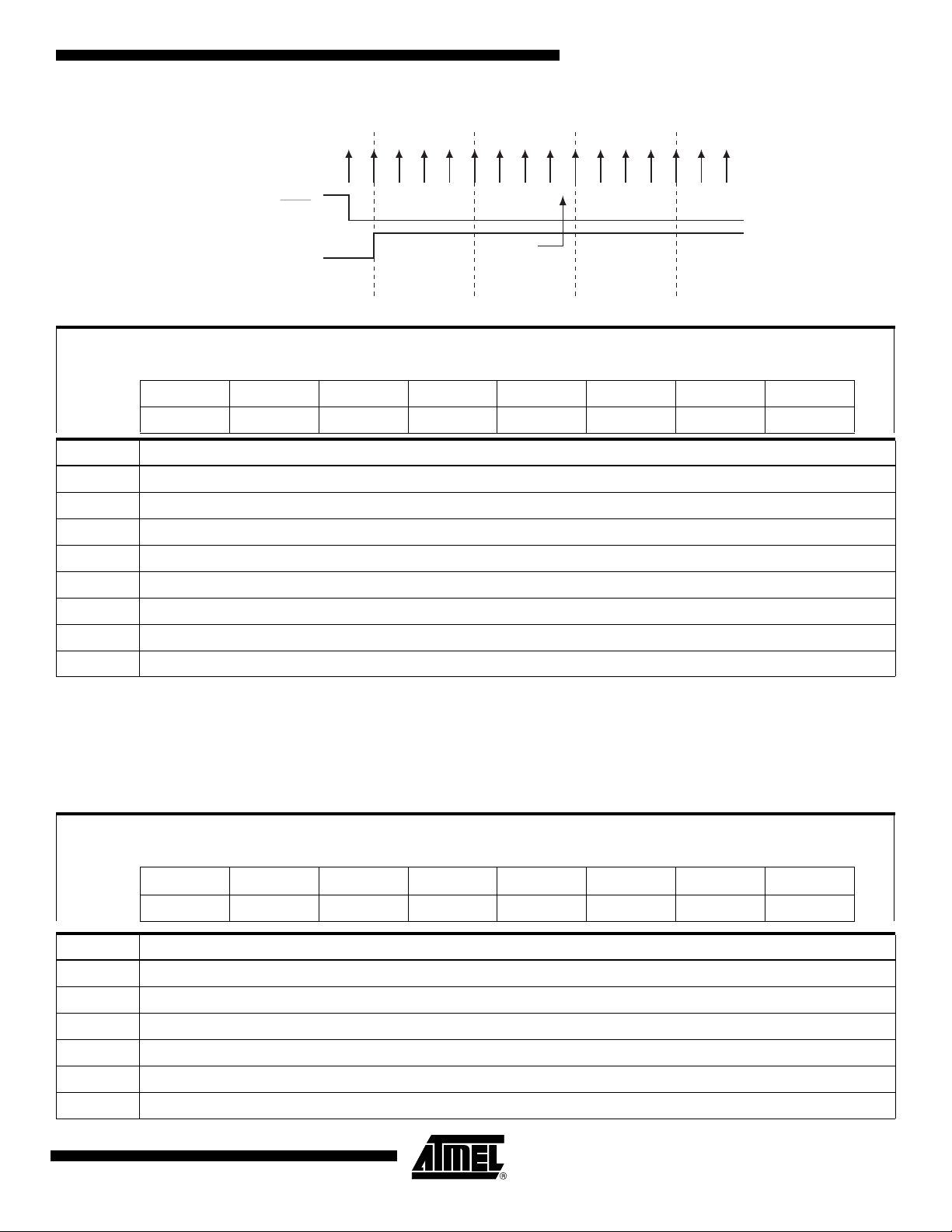
Figure 12-2. 最大中断响应时间
In
AT89LP216 [Preliminary]
Clock Cycles
INT0
IE0
Instruction RETI 4 Cyc. Instr. LCALL 1st ISR
113
Ack.
Table 12-2. IE – 中断使能寄存器
IE = A8H 复位值 = 0000 0000B
可位寻址
EA EC EGP ES ET1 EX1 ET0 EX0
Bit76543210
符号 功能
EA
EC
EGP
ES
ET1
EX1
ET0
EX0
全局使能 / 禁止。当 EA = 0,禁止所有中断源;当 EA = 1,通过置位 / 复位各个中断使能位来允许各个中断源。
比较器中断使能位
通用中断使能位
串口中断使能位
定时器 1 中断使能位
外部中断 1 使能位
定时器 0 中断使能位
外部中断 0 使能位
.
Table 12-3. IP – 中断优先级寄存器
IP = B8H 复位值 = X000 0000B
可位寻址
–
Bit76543210
符号 功能
PGP
PS
PT1
PX1
PT0
PX0
3621A–MICRO–6/06
通用中断优先级低字节
串口中断优先级低字节
定时器 1 中断低字节
外部中断 1 低字节
定时器 0 中断低字节
外部中断 0 低字节
–
PGP PS PT1 PX1 PT0 PX0
19
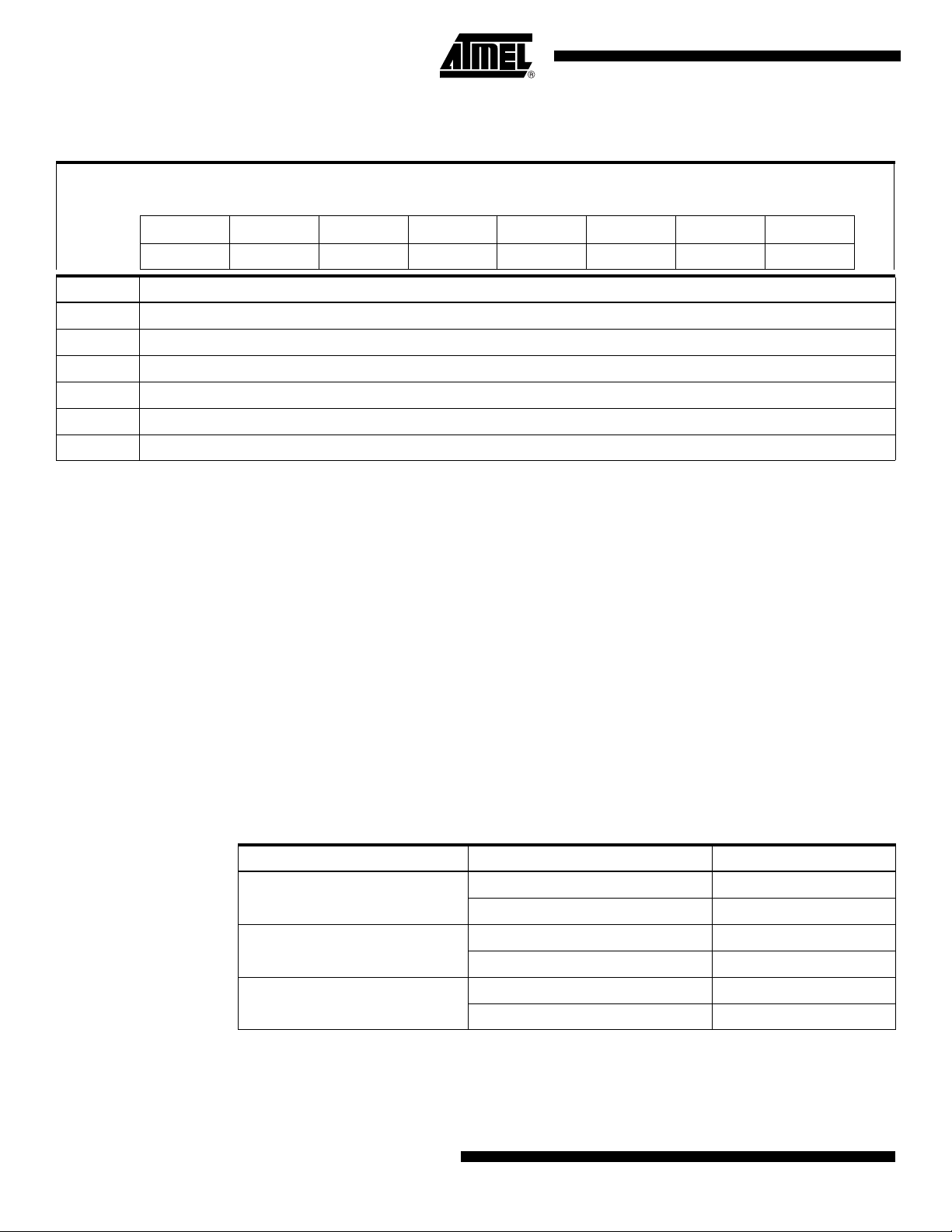
Table 12-4. IPH –中断优先级高半位寄存器
IPH = B7H 复位值 = X000 0000B
不可位寻址
–
Bit76543210
符号 功能
–
PGH PSH PT1H PX1H PT0H PX0H
PGH
PSH
PT1H
PX1H
PT0H
PX0H
通用中断优先级高字节
串口中断优先级高字节
定时器 1 中断高字节
外部中断 1 高字节
定时器 0 中断高字节
外部中断 0 高字节
13. I/O 端口
AT89LP216作为通用I/O引脚数一般为9~12个。具体的个数由表13-1中的时钟源与复位源的选择来
决定。所有引脚的电平都采用 5V 电平逻辑。因此,即使 VCC 低到 3V,引脚都能上拉或驱动最大到
5.5V。 .
13.1 端口配置
20
AT89LP216 [Preliminary]
Table 13-1. II/O 引脚配置表
时钟源
外部晶体或振荡电路
外部时钟信号
内部 RC 振荡器
复位源 可用 I/O 数量
采用外部复位
不采用外部复位
采用外部复位
不采用外部复位
采用外部复位
不采用外部复位
11
12
12
13
13
14
AT89LP216 所有引脚都可以配置为以下 4 种模式中的一种:准双向 (标准 8051 端口)、推挽式输
出、漏极开路输出、输入模式。如表 13-2,端口模式可通过软件一个一个引脚进行配置,而三态
3621A–MICRO–6/06
AT89LP216 [Preliminary]
端口用户熔丝位决定端口引脚的默认状态。如果熔丝位使能,则在器件复位时所有端口引脚都处
于输入模式。否则,除了引脚 P1.0 和 P1.1 外,在器件复位时所有引脚都处于准双向状态并被弱
上拉。每一个引脚都具有一个施密特触发器,用于提高输入噪声容限。在掉电模式时,除了 P1.3、
P3.2 和 P3.3 要用于唤醒器件外,所有输入端的施密特触发器都被禁止因此,在掉电模式时,引脚
P1.3、P3.2 和 P3.3 不应悬空。
.
Table 13-2. 引脚模式配置表
PxM0.y PxM1.y 引脚模式
00
01
10
11
准双向
推挽式输出
输入 ( 高阻抗 )
漏极输出
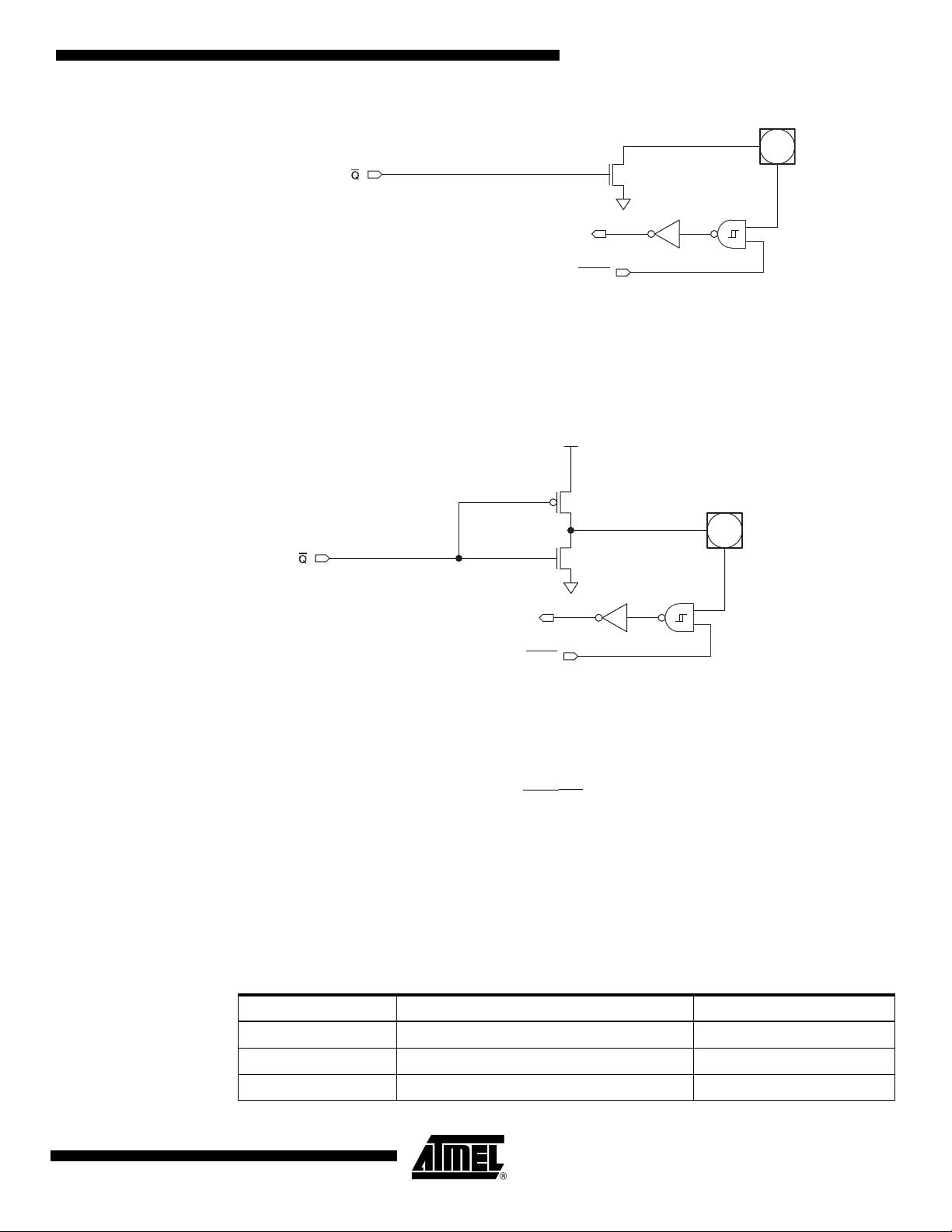
13.1.1 准双向输出
准双向输出模式与标准 8051 端口相似。该模式下,无需配置端口,就既可用作输入,也可以用作
输出。因为在输出高电平时是弱驱动的,所以允许外部器件把该引脚拉低;而输出为低电平时是
强驱动的,它能吸收大电流。因此,在准双向输出时,用三个上拉晶体管来完成不同需要。
其中一个,称为 “非常弱上拉”。只要引脚锁存进逻辑电平 “1”,管子打开工作。在引脚悬空时
由于产生一个微弱的灌电流而把引脚上拉为高电平状态。
第二个,称为 “弱上拉”。只要引脚锁存进逻辑电平 “1”且该引脚也处于逻辑电平 “1”时,管
子打开工作。该上拉管子能提供较大的灌电流从而引脚输出逻辑 “1”。如果该引脚被外部器件拉
低,该上拉晶体管就关闭,所以只有非常弱的上拉效果。为了在这种情况能把该引脚拉低,外部
器件必须能吸足够大的电流而给弱上拉管子提供过强功率,使得该引脚被拉到低于阀值电压,从
而表现为低电平。
第三个,称为 “强上拉”。当端口锁存器由逻辑 “0”变为 “1”时,它能加快准双向端口从低电
平变为高电平的瞬态响应。此时,管子打开工作,并在两个时钟周期后很快地将管脚拉高。准双
向口的配置如图 13-1。在掉电模式时,引脚 P1.3、P3.2 和 P3.3 的电路不能被禁止 ( 如图 13-3)。
3621A–MICRO–6/06
21
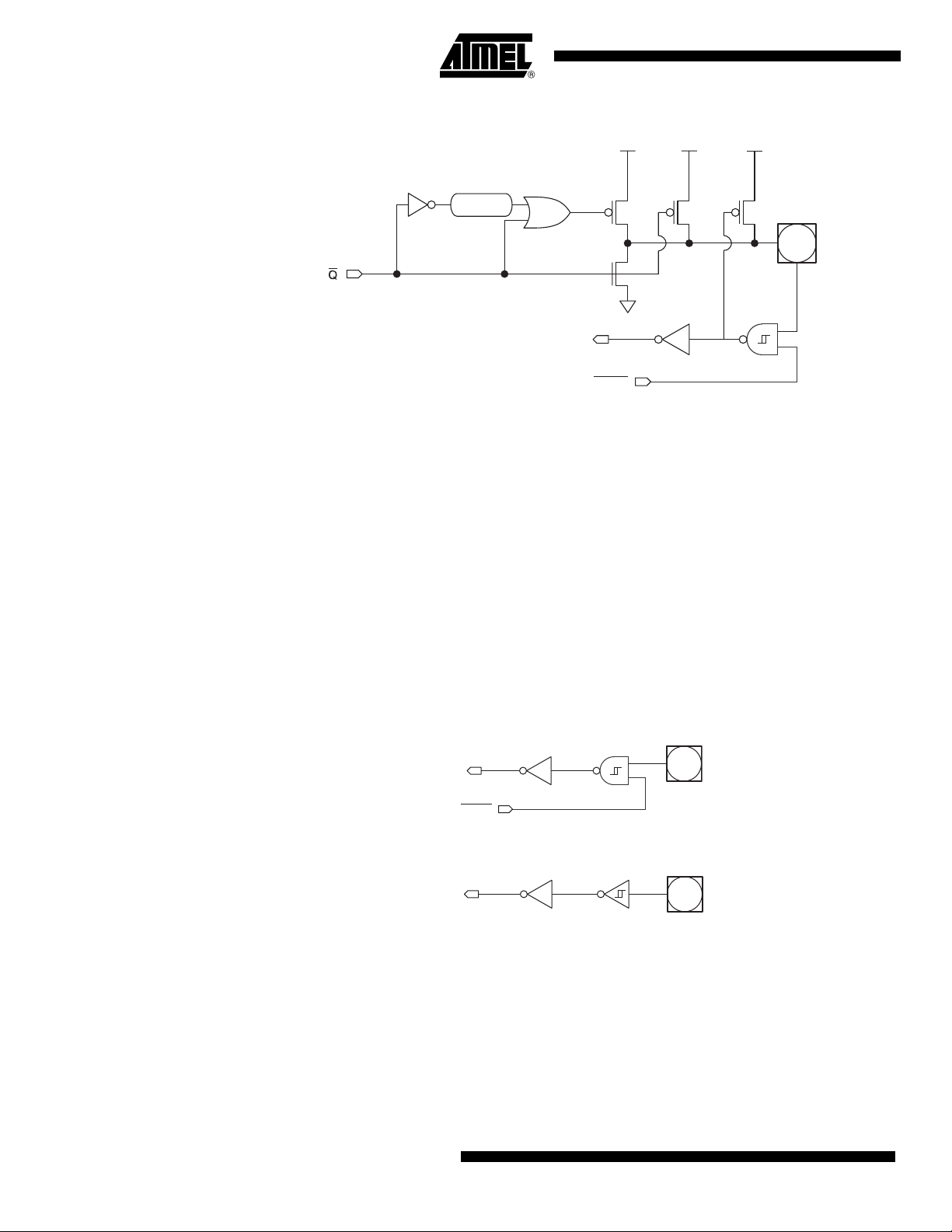
Figure 13-1. 准双向输出
V
V
V
F
R
PWD
I
D
I
CC
CC
CC
13.1.2 输入模式
1 Clock Delay
(D Flip-Flop)
Strong
Very
Weak
Weak
Port
Pin
rom Port
egister
Input
Data
输入模式配置如图 13-2,输出驱动是三态的,而输入端包含了一个施密特触发器输入来提高输入
噪声容限。在掉电模式时,引脚 P1.3、P3.2 和 P3.3 的电路不能被禁止 ( 如图 13-3)。即使在 VCC
较低的情况下,驱动引脚的电平值可以高达 5.5V。但值得注意的是,施密特触发器的输入有可能
被该 VCC 置位。
Figure 13-2. I 输入模式
nput
ata
PWD
Port
Pin
Figure 13-3. 引脚 1.3、P3.2 和 P3.3 的输入模式
nput
Data
Port
Pin
13.1.3 漏极输出模式
在漏极输出模式下,当端口锁存进一个逻辑“0”时,端口的上拉晶体管全部关闭,而只有下拉晶
体管有效。为了能输出逻辑电平,这时一般使用一个外部上拉电阻连接到 VCC。输出电平时与准双
向情况类似。漏极输出的配置如图 13-4。在掉电模式时,引脚 P1.3、P3.2 和 P3.3 的电路不能被
禁止 ( 如图 13-3)。即使在 VCC 较低的情况下,驱动引脚的电平值可以高达 5.5V。但值得注意的
是,施密特触发器的输入有可能被该 VCC 置位。
22
AT89LP216 [Preliminary]
3621A–MICRO–6/06
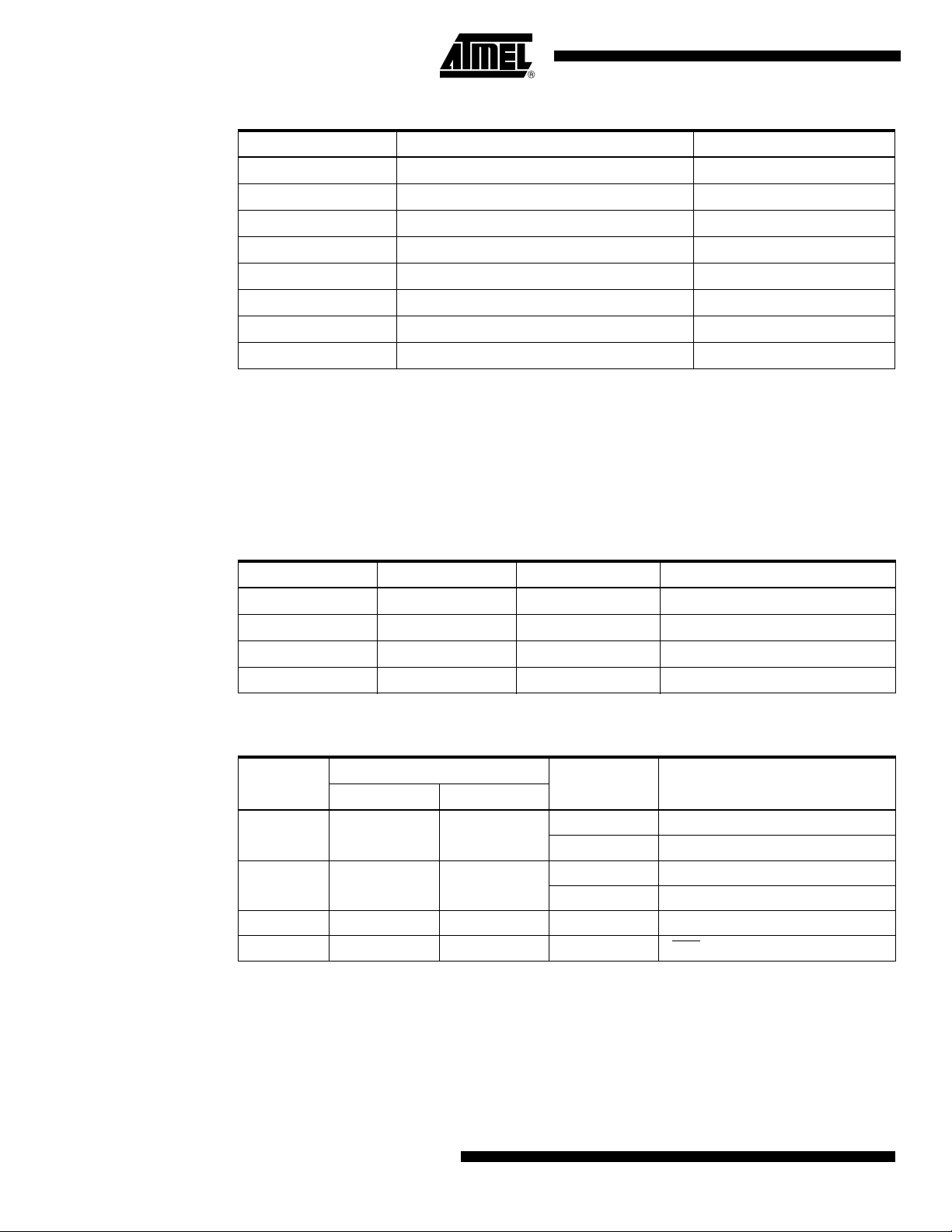
13.1.4 推挽式输出模式
F
R
V
F
R
AT89LP216 [Preliminary]
Figure 13-4. 漏极输出模式
Port
Pin
rom Port
egister
Input
Data
PWD
推挽式输出的配置具有与漏极输出和准双向输出一致的下拉结构,但在端口锁存进逻辑“1”时它
能提供持续强上拉。在需要更多的灌电流从端口输出时,一般采用推挽式输出模式。推挽式输出
的端口配置如图 13-5。在掉电模式时,引脚 P1.3、P3.2 和 P3.3 的电路不能被禁止 ( 如图 13-3)。
Figure 13-5. 推挽式输出模式
CC
13.2 端口 1 模拟功能
AT89LP216 组建一台模拟比较器。为了达到最好的模拟性能和最小的能量消耗。用于模拟功能的
引脚的数字输入和输出都可以被设置为无效。如 22 页所描述的 “端口配制”,当端口引脚被设为
数据输入时,数据输出是无效的。只要模拟比较器通过置位 ACSR 中的 CEN 位,引脚 P1.1 和
P1.0上的数据输入就是无效的。CEN 强制PWD
发电路置为无效。无论三态门重启之后的状态。 P1.0 和 P1.1 引脚始终默认为输入模式。
13.3 端口读-修改-写
从端口读取数据时,使用哪种指令将决定读到的是端口的状态还是端口寄存器的值。简单的读指
令直接访问端口的引脚。 读 - 修改 - 写指令,就是读取一个数值,或许进行修改然后写回。这将始
终访问端口寄存器。这可能包括位指令比如:CLR 或 SETB,实际上这些指令也要访问整个端口
修改其中一位数据,然后写回整个端口。 Table 13-3 是一个读 - 修改 - 写指令的详细的表 .
rom Port
egister
Input
Data
Port
Pin
PWD
在 P1.0和P1.1 脚上输入低电平。从而将施密特触
Table 13-3. 端口 读 - 修改 - 写指令
助记符 指令 范例
ANL 逻辑与 ANL P1, A
ORL 逻辑或 ORL P1, A
XRL 逻辑 异或 XRL P1, A
3621A–MICRO–6/06
23
13.4 端口复用功能
Table 13-3. 端口 读 - 修改 - 写指令
助记符 指令 范例
JBC 置位则跳转并清零该位 JBC P3.0, LABEL
CPL 位取反 CPL P3.1
INC 自加 INC P1
DEC 自减 DEC P3
DJNZ 自减,不等于 0 时跳转 DJNZ P3, LABEL
MOV PX.Y, C 移动进位至端口 x 中的 y 位 MOV P1.0, C
CLR PX.Y 清零端口 x 中的 y 位 CLR P1.1
SETB PX.Y 置位端口 x 中的 y 位 SETB P3.2
AT89LP216 大多数的 普通 I/O 引脚可以连接多个外设。 Table 13-5 列出了端口引脚复用功能。复
用功能与处于逻辑与状态下的引脚相联系,为了使一个端口引脚具有复用功能。那个引脚必须置
位相应的寄存器。否则这个引脚的输出始终是 “0”。此外,在每个引脚被使用之前都必须对他进行
置位,来选择适当的输入输出模式,这种模式是它的外设所决定的。
Table 13-4 表示如何配置一个用于复用功能的普通引脚
Table 13-4. 为端口 x 的 y 引脚配制复用功能
PxM0.y PxM1.y Px.y I/O 模式
00 1双向 ( 内部上拉 )
01 1输出
10 X输入
11 1双向 ( 外部上拉 )
Table 13-5. 端口引脚复用功能
配制位
端口引脚
P1.0 P1M0.0 P1M1.0
P1.1 P1M0.1 P1M1.1
P1.2 P1M0.2 P1M1.2 GPI2
P1.3 P1M0.3 P1M1.3 GPI3 RST
复用功能 备注PxM0.y PxM1.y
AIN0 仅输入
GPI0
AIN1 仅输入
GPI1
必须失效
24
AT89LP216 [Preliminary]
3621A–MICRO–6/06
AT89LP216 [Preliminary]
Table 13-5. 端口引脚复用功能
配制位
端口引脚
P1.4 P1M0.4 P1M1.4
P1.5 P1M0.5 P1M1.5
P1.6 P1M0.6 P1M1.6
P1.7 P1M0.7 P1M1.7
P3.0 P3M0.0 P3M1.0 RXD
P3.1 P3M0.1 P3M1.1 TXD
P3.2 P3M0.2 P3M1.2 INT0 仅内部 RC 振荡器
P3.3 P3M0.3 P3M1.3
P3.4 P3M0.4 P3M1.4 T0
P3.5 P3M0.5 P3M1.5 T1
P3.6 没有配制 CMPOUT 引脚设定为比较器
复用功能 备注PxM0.y PxM1.y
SS
GPI4
MOSI
GPI5
MISO
GPI6
SCK
GPI7
INT1
内部 RC 振荡器或外部时钟源
CLKOUT
14. 增强定时 / 计数器
AT89LP216 有两个 16 位的定时器/ 计数器。定时器 0和定时器 1。作为定时器每个时钟周期增值。
如此,定时器计算每个时钟周期。由于一个时钟周期由一个晶振周期组成。所以计数周期就是时
钟周期 。使用定时器预测计数器,通过 1 到 16 之间的一个数值 ( 见 Table 9-2 on page 12).。定
时器速率可以被预测。两个定时器使用同一个。
作为一个计数器,寄存器根据输入引脚 T0 或 T1 的电平高低变化而自加。每个时钟周期都对外部
输入信号做抽样。当采样信号在一个周期是高电平,在下一个周期是低平时,寄存器数值加 1。在
接下来被检测到的转变周期中,新的计数值出现在寄存器里,由于需要两个时钟周期去识别一个
高低电平的变化,所以最大的采样频率是 1/2 的振荡器频率。对输入信号的占空比没有限制,但
是它至少应该持续一个完整的周期,这样在它变化前至少能被采样到一次。
此外对于定时器 0 和定时器 1 来说,定时或计数的模式有 4 种:变宽度定时器,16 位自动重装定
时器,8 位自动重装定时器,和可拆分的定时器特殊功能寄存器 TMOD 里的 C/T 位选择定时器或
计数器的功能 。 TMOD 里的 (M1, M0) 选择操作模式。
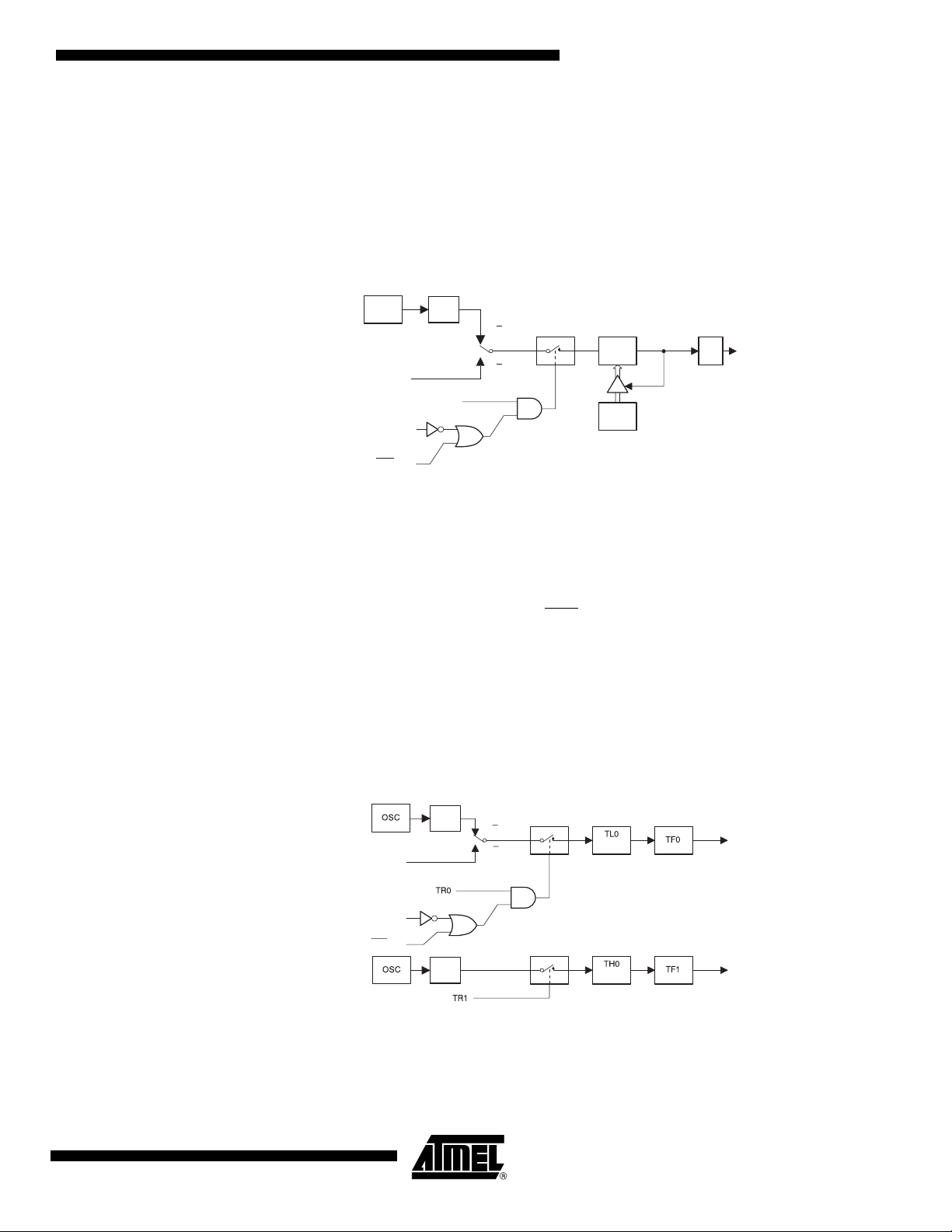
14.1 模式 0 -可变宽度的定时 / 计数器
在模式 0 情况下,两个定时器都是带有一个 8 位可预分频的计数器。通过设置 TCONB 中的 PSC
位预分频器可以在1到8位之间变化。供给定时器9到16位的变化范围,通过默认值把定时器配
置为一个 13 位定时器。这与 80c51 里的模式 0 是一样的。当计数器从全“1”到全 “0”翻转时,
它置位定时器中断标志位 TF1。对定时器而言。当 TR1 = 1 并且 GATE = 0 或者 INT1
数器的输入被激活。设定 GATE = 1 则允许定时器外部中断 INT1
能寄存器 TCON 中 TR1 是一个控制位。门空位 GATE 在模式控制寄存器 TCON 中13位寄存器由
TH1的8位和TH1的 5位构成。TH1的高 3位是不变的,应该被忽略。设置的启动标志位 (TR1)对寄
存器不进行清除。
= 1 时,计
控制用于脉冲宽度测量在特殊功
3621A–MICRO–6/06
25
PSC
INT1 Pin
pt
INT1 Pin
pt
01+
×
TPS
1+()×=
Mode 0: Time-out Period
256 2
------------------------------------------------------ -
Oscillator Frequency
Note: 在模式 0 情况下 RH1/RL1 对定时器 1 而言不是必要的,可以作为临时存储寄存器。
Figure 14-1. 定时 / 计数器 1 模式 0: 可变宽度计数器
OSC
T1 Pin
GATE
÷TPS
TR1
模式 0 情况下。对定时器 0 和定时器 1 的操作是一样的, 只是 TR0 和 TF0 还有 INT0
Figure 14-1 上相应的定时器 1 的信号。这里有两个不同的门控制位,一个用于定时器 1(TMOD.7)
另外一个用于定时器 0(TMOD.3)。引脚 INT0
作为系统时钟时,它们仅被用于门控制功能。
14.2 模式 1-16 位自动充装定时 / 计数器
在模式 1 的情况下,配置定时器用于 16 位自动重装。定时器的寄存器运行在 16 位模式下。 16 位
的重装值储存在 (RH1/RL1) 这两个寄存器中,时钟被用于组合高、低寄存器 (TH1/TL1)。收到时
钟脉冲,定时器就把他们相加起来,0000H, 0001H, 0002H 依次类推,溢出出现在 FFFH 到 0000H
的转变时,此时寄存器被装入来自 RH1/RL1 的值。溢出位 TCON 被置位。见 Figure 14-2 重装的
值默认是 0000H,提供给全部 16 位的定时器周期,和标准的 8051 相同。模式 1 操作对定时器 0
和定时器 1 是相同的。 .
Mode 1: Time-out Period
C/T = 0
C/T = 1
Control
TL1
(8 Bits)
PSC1
TH1
(8 Bits)
TF1
Interru
代替了图
和 INT1 分享 XTAL 处的振荡器频率。当用内部 RC
65536
------------------------------------------------------ -
Oscillator Frequency
RH0RL
0{, }–()
TPS
1+()×=
26
Figure 14-2. 定时 / 计时器 1 模式 1: 16 位自动重装
OSC
T1 Pin
GATE
÷TPS
TR1
AT89LP216 [Preliminary]
C/T = 0
C/T =1
Control
RL1
(8 Bits)
TL1
(8 Bits)
RH1
(8 Bits)
TH1
(8 Bits)
Reload
TF1
Interru
3621A–MICRO–6/06
14.3 模式 2 8 位自动重装定时 / 计数器
模式 2 下配置的定时器是一个有自动重装功能的 8 位计数器 (TL1)。如 图 Figure 14-3 所示,从 TL1
溢出不仅需要置位 TF1,还需要软件设置好 TH1 的值,重装入 TL1。 在装入保持 TH1 不变,模
式 2 操作对定时器 0 和定时器 1 是一样的。 .
Mode 2: Time-out Period
Figure 14-3. 定时器 1 模式 2 8 位自动重装
AT89LP216 [Preliminary]
256
TH
------------------------------------------------------ -
Oscillator Frequency
0–()
TPS
1+()×=
Note: 在模式 2 情况下 RH1/RL1 对定时器 1 而言是没有用的,可以作为临时寄存器。
14.4 模式 3 可拆分定时器
定时器 1 在模式 3 情况下仅仅保留它的计数功能。效果和设置 TR1 = 0 一样。模式 3 下的定时器
0 设置了 TL0 和 TH0 作为两个单独的计数器。模式 3 下,定时器 0 如图 Figure 14-4 所示。 TL0
使用了定时器 0 的控制位 : C/T, GATE, TR0, INT0
器周期 ) 接替来自定时器 1 中的 TR1 和 TF1 的功能。 因此 TH0 控制定时器 1 的中断 ,当定时器
0 处与模式 3 状态时,定时器 1 仍然遵循它在模式控制寄存器 TMOD 中的设置。
因为需要一个而外的 8 位定时器或计数器,所以才有了模式 3。定时器 0 在模式 3 下的应用使得
AT89LP216有了3个定时/计数器。 当定时器0处于模式3时, 定时器1可以通过转换进入或离开模
式 3,启动或停止。这种情况下,定时器 1 仍然能被使用,可以作为波特率发生器不需要任何中
断场合都可以使用
OSC
T1 Pin
INT0 Pin
GATE
÷TPS
TR1
C/T = 0
C/T = 1
Control
TL1
(8 Bits)
TH1
(8 Bits)
Reload
TF1
Interrupt
, 和 TF0. TH0 被锁定成定时器功能 , ( 计数机
3621A–MICRO–6/06
Figure 14-4. 定时/计数器0 模式 3: 双 8 位计数器
÷TPS
T0 Pin
GATE
INT0 Pin
÷TPS
Note: 在模式 3 情况下 RH1/RL1 对定时器 1 而言是没有用的,可以作为临时寄存器。
C/T = 0
C/T =1
Control
Control
(8 Bits)
(8 Bits)
Interrupt
Interrupt
27
.
Table 14-1. TCON – 定时 / 计数器控制寄存器
TCON = 88H 复位值 = 0000 0000B
可位寻址
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
Bit76543210
符号 功能
TF1
TR1
TF0
TR0
IE1
IT1
IE0
IT0
定时器 1 溢出标志位。定时器 / 计数器的溢出由硬件置位。在处理器转向中断程序时由硬件清除
定时器 1 启动控制位。由软件设置 / 清除来启动 / 停止定时器 / 计数器的工作。
定时器 0 溢出标志位。定时器 / 计数器的溢出由硬件置位。在处理器转向中断程序时由硬件清除。
定时器 0 启动控制位。由软件设置 / 清除来启动 / 停止定时器 / 计数器的工作。
中断 1 的边缘标志位。当检测到外部中断边缘时由硬件置位。在处理中断时自动清除。
中断 1 触发方式控制位。由软件设置 / 清除来指定下降沿 / 低电平触发外部中断。
中断 0 的边缘标志位。当检测到外部中断边缘时由硬件置位。在处理中断时自动清除。
中断 0 触发方式控制位。由软件设置 / 清除来指定下降沿 / 低电平触发外部中断。
28
AT89LP216 [Preliminary]
3621A–MICRO–6/06

AT89LP216 [Preliminary]
Table 14-2. TMOD: 定时 / 计数器模式控制寄存器
TMOD = 88H 复位值 = 0000 0000B
不可位寻址
GATE C/T M1 M0 GATE C/T M1 M0
76
定时器 1 定时器 0
Gate
C/T
M1 定时器 1 模式位 1 模式位 0 M1 位
M0 定时器 1 模式位 0 模式位 0 M0 位
当置位时通控制。定时器 / 计数器 x 仅在 INT
平并且 TRx 控制引脚被置位时启动。当清除时,无论 TRx
控制位是否被置位定时器都能启动。
定时器或计数器选择位清除时定时器工作 (来自外部系统
时钟的输入),置位时计数器工作 (来自 Tx 输入引脚的输
入)。
M1 M0 Mode 操作模式
000
011
102
113
543210
x 引脚为高电
可调的 9-16 位定时器模式
8 位定时器 / 计数器。THx 和 TLx 作为 1 – 8 位预分频器 .
可自动再装入的 16 位模式 .
16 位定时器 / 计数器 THx 和 TLx 联结 ; 这里没有预分频器 .
8 位自动再装入模式 .
可自动再装入的 8 位定时器 / 计数器 THx 保持一个值, TLx TLx 每次溢出
后再装入这个值 .
可拆分定时器模式 .
( 定时器 0) TL0 是一个 8 位定时器 / 计数器,由标准的定时器 0 控制位
控制。 TH0 是一个 8 位定时器仅由定时器 1 的
控制位控制 .
定时器 0 门控位
定时器 0 定时 / 计数选择位
113
Timer 寄存器 作用 地址 位寻址
TCON Control 88H Yes
TMOD Mode 89H No
TL0 Timer 0 low-byte 8AH No
TL1 Timer 1 low-byte 8BH No
TH0 Timer 0 high-byte 8CH No
TH1 Timer 1 high-byte 8DH No
TCONB Mode 91H No
RL0 Timer 0 reload low-byte 92H No
RL1 Timer 1 reload low-byte 93H No
RH0 Timer 0 reload high-byte 94H No
RH1 Timer 1 reload high-byte 95H No
( 定时器 1) 定时器 / 计数器 1 停止 .
3621A–MICRO–6/06
29
.
0)
Table 14-3. TCONB – 定时器 / 计数器 控制寄存器 B
TCONB = 91H 复位值 = 0010 0100B
不可位寻址
PWM1EN PWM0EN PSC12 PSC11 PSC10 PSC02 PSC01 PSC00
Bit76543210
符号 功能
PWM1EN
PWM0EN
PSC12
PSC11
PSC10
PSC02
PSC01
PSC00
配置定时器 1 用于 T1 (P3.5) 引脚上的脉冲宽度调制输出 .
配置定时器 0 用于 T0 (P3.4) 引脚上的脉冲宽度调制输出 .
预分频器用于模式 0 下的定时器 1. TL1 中起作用的位的数量为 PSC1 + 1. 重新复位后 PSC1 = 100B ,这使得 TL1 的 5 位
能与 AT89S2051 中的 13 位模式 0 兼容 .
预分频器用于模式 0 下的定时器 0. TL0 中起作用的位的数量为 PSC0 + 1. 重新复位后 PSC0 = 100B ,这使得 TL0 的 5 位
能与 AT89S2051 中的 13 位模式 0 兼容
14.5 脉冲宽度调制
在 AT89LP216 上 , 分别设置 TCONB 中的 PWM0EN 位或 PWM1EN 位,定时器 0 和定时器 1 可独立地配
置成 8 位不对称 ( 边缘排列 ) 的脉冲宽度调制器(PWM)。在 PWM 模式下产生的波形在定时器的输
入引脚 T0 或 T1 上输出。因此,在 PWM 模式下 C/T 位必须置 “0”,并且 T0 (P3.4) 和 T1 (P3.5)
必须设置成输出方式。处于 PWM 模式,定时器溢出标志位和中断将继续工作,定时器 1 仍然可以
为异步串行通信口 (UART)产生波特率。每个 PWM 信道有四种模式,由模式控制寄存器 (TMOD)
中的模式位选择。
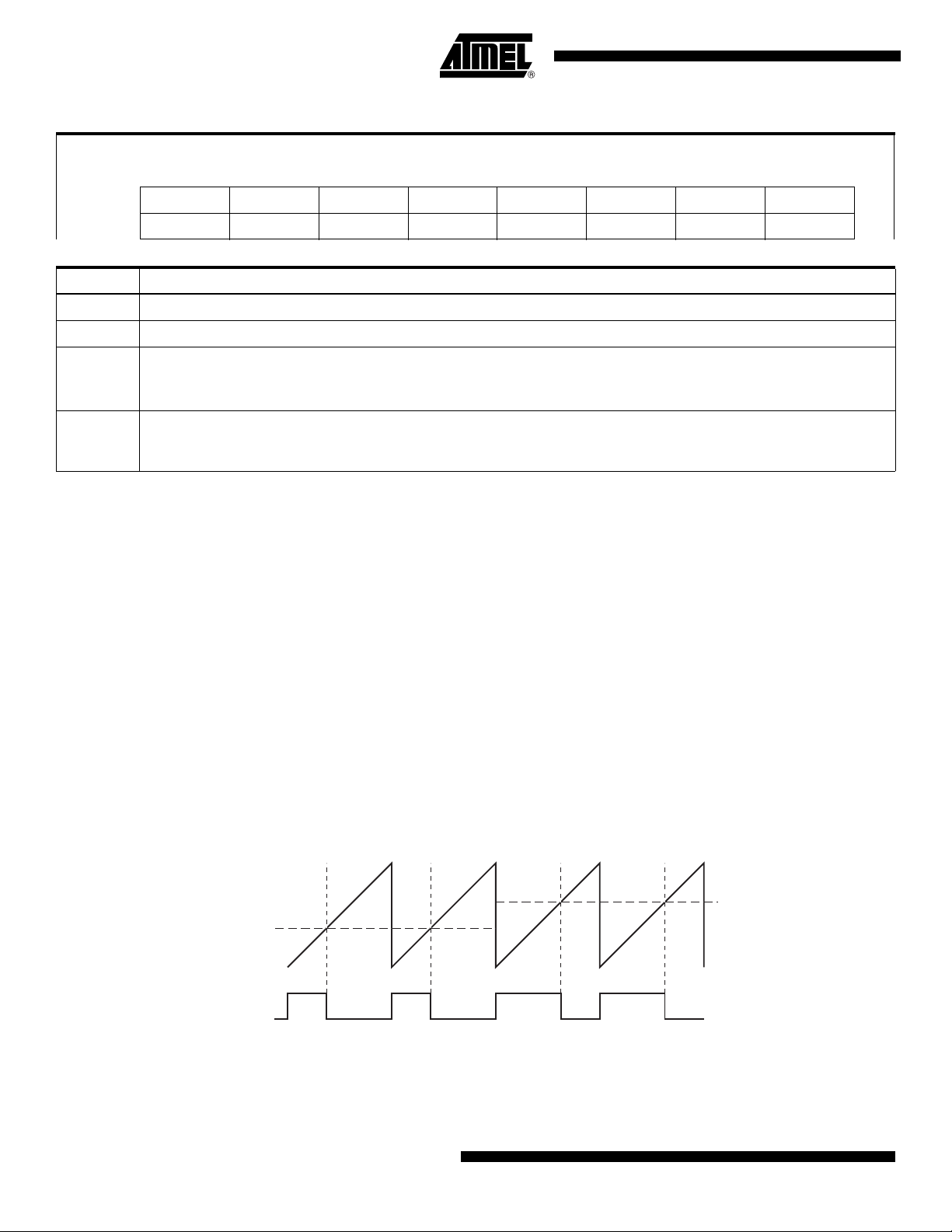
定时器 0 在 PWM 模式 0 下的波形样例如图 14-5 所示。当 RH0 存储 8 位比较值时,TH0 作为 8 位计
数器使用。TH0 为 00H 时 PWM 输出置高电平; TH0 计数达到 RH0 中存储值时,PWM 输出置低电平。
因此脉冲宽度与 RH0 中的值成比例。为了防止短时脉冲波形干扰,向 RH0 写入仅在 TH0 从 FFH 到
00H 溢出时有效。RH0 置 00H 将保持 PWM 输出为低电平。
30
.
Figure 14-5. 不对称的脉冲宽度调制
Counter Value (TH0)
Compare Value (RH
PWM Output (T0)
AT89LP216 [Preliminary]
3621A–MICRO–6/06

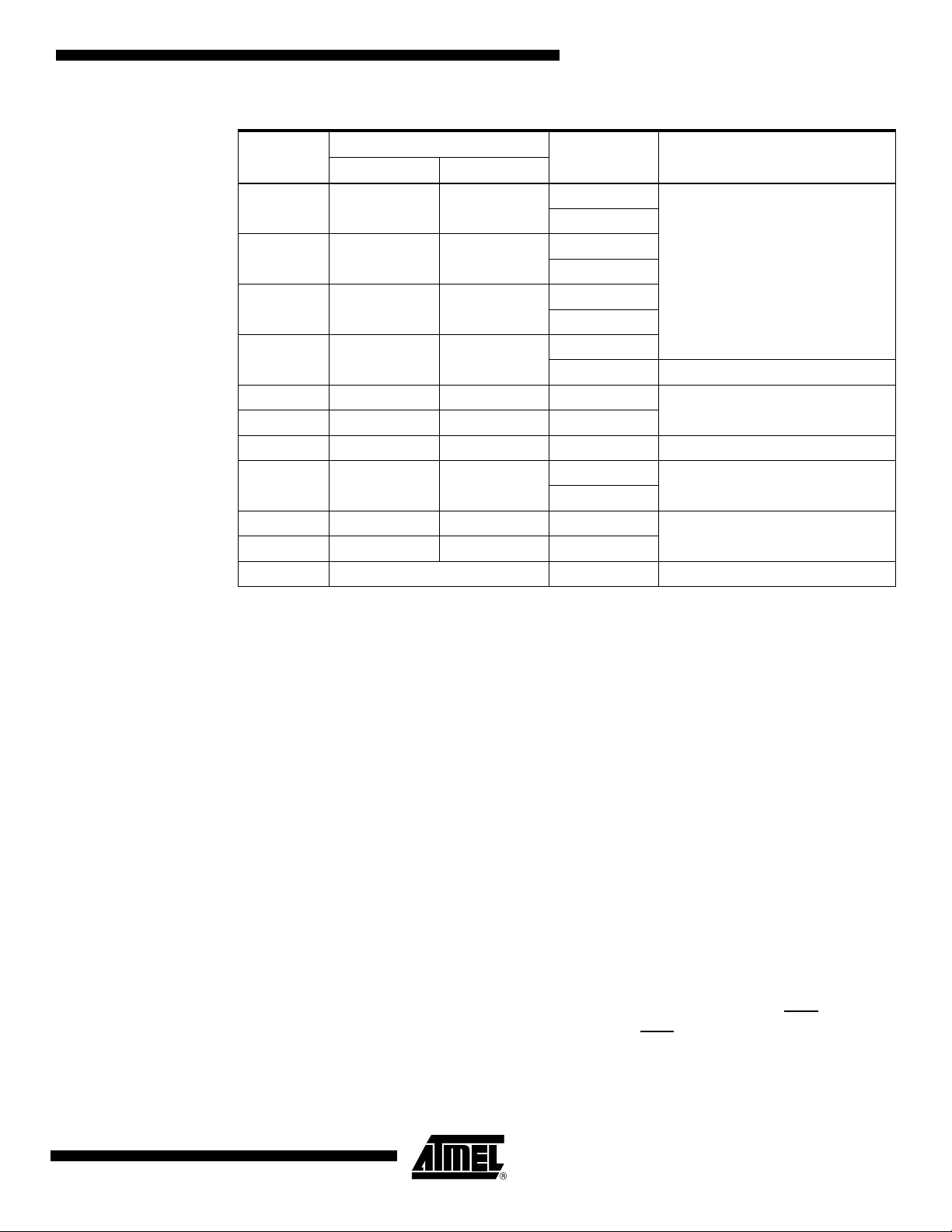
14.5.1 模式 0 –带有 8 位对数预分频器的 8 位 PWM
INT1 Pin
在模式 0 下,TLx 作为一个对数预分频器驱动 8 位计数器 THx (见图 14-6)。TCONB 中的 PSCx 位
控制预分频器值。在 THx 溢出时,RHx 中的占空比值转给 OCRx,输出置高电平。当 THx 中的计数
与 OCRx 匹配时,输出引脚清除为低电平。下面的公式给出了定时器 0 在 PWM 模式 0 下的输出频率
和占空比。定时器1在PWM模式0下的情况与定时器0相同。
Mode 0:
f
Oscillator Frequency
------------------------------------------------------ -
out
256 2
AT89LP216 [Preliminary]
1
PSC
01+
×
------------------ -×=
TPS
1+
Mode 0: Duty Cycle % 100
Figure 14-6. 定时器 / 计数器 1 PWM 模式 0
OSC
TR1
GATE
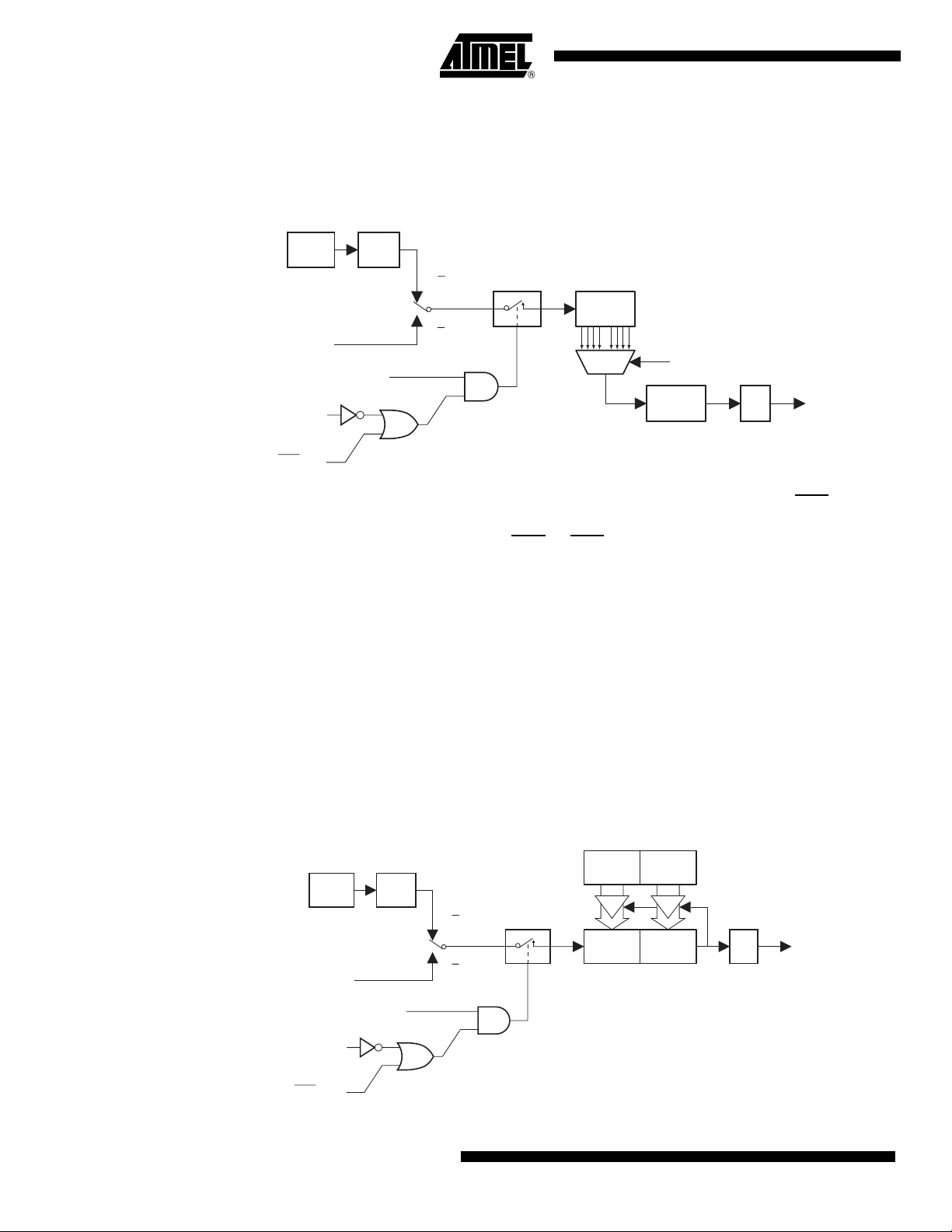
14.5.2 模式 1 –带有 8 位线性预分频器的 8 位 PWM
在模式 1 下,TLx 供给线性预分频 (linear prescaling)一个来自 RLx 的 8 位自动再装入(见图
14-7)。当 TLx 溢出时,TLx 装入 RLx 的值。THx 作为 8 位计数器使用。当 THx 溢出时,RHx 中的
占空比值转给 OCRx,输出置高电平。当 THx 中的计数与 OCRx 匹配时,输出引脚清除为低电平。下
面的公式给出了定时器 0 在 PWM 模式 1 下的输出频率和占空比。定时器 1 在 PWM 模式 0 下的情况
与定时器 0 相同。
Mode 1:
÷TPS
f
Control
PSC1
Oscillator Frequency
------------------------------------------------------ -
out
256 256
TL1
(8 Bits)
RL
RH0
----------- -×=
256
0–()×
RH1
(8 Bits)
OCR1
TH1
(8 Bits)
------------------ -×=
TPS
=
T1
1
1+
3621A–MICRO–6/06
Mode 1: Duty Cycle % 100
RH0
----------- -×=
256
31

Figure 14-7. 定时器 / 计数器 1 PWM 模式 1
INT1 Pin
INT1 Pin
RH1
(8 Bits)
GATE
14.5.3 模式 2 – 8 位频率产生ٛ˜
定时器 0 在 PWM 模式 2 中作为一个 8 位自动再装入定时器运行,和正常模式 2 的相同,例外的是
输出引脚 T0 在每次 TL0 溢出时被触发(见图 14-8)。定时器 1 在 PWM 模式 2 下和定时器 0 是一样
的。PWM 模式 2 可用于输出频率可调的矩形波。THx 充当 8 位计数器。下面公式给出了定时器 0 在
PWM 模式 2 下的输出频率。.
OSC
TR1
Mode 2:
÷TPS
Control
f
out
RL1
(8 Bits)
TL1
(8 Bits)
Oscillator Frequency
------------------------------------------------------ -
2256
TH
0–()×
OCR1
TH1
(8 Bits)
------------------ -×=
TPS
=
T1
1
1+
Figure 14-8. 定时 / 计数器 1 PWM 模式 2
Note: {RH0 & RL0}/{RH1 & RL1} 对定时器 0/ 定时器 1 而言在 PWM 模式 2 下不是必需的,可以作为暂时
存储寄存器使用。
14.5.4 模式 3 – 可拆分的 8 位 PWM
定时器 1 在 PWM 模式 3 下仅仅保持它的计数。效果和设置 TR1 = 0 一样。在某种意义上,定时器
0 在 PWM 模式 3 下设立了 TL0 和 TH0,作为两个分离的 PWM 计数器,与正常模式 3 类似。PWM 模式
GATE
OSC
TR1
÷TPS
Control
TH1
(8 Bits)
TL1
(8 Bits)
T1
32
AT89LP216 [Preliminary]
3621A–MICRO–6/06

AT89LP216 [Preliminary]
I
TR1
3 作用于定时器 0 如图 14-9 所示。在 PWM 模式 3 下只有定时器预分频器可用于改变输出频率。TL0
可以使用定时器 0 的控制位:GATE, TR0, INT0
TR1, PWM1EN 和 TF1. RL0 为 TL0 提供占空比,RH0 为 TH0 提供占空比 .
因为应用需要一个单一的 PWM 信道和两个定时器,或两个 PWM 信道和一个额外的定时器或计数器,
所以产生了 PWM 模式 3。PWM 模式 3 下的定时器 0,使 AT89LP216 可能出现有三个定时器 / 计数器。
当定时器 0 处于模式 3 时,定时器 1 可以通过转换进入和离开自己的模式 3 而被启动和停止。在
这种情况下,定时器 1 仍然能使用,连续的端口可作为波特率产生器;任何不需要中断的场合都
可以用。下面的公式给出了定时器 0 在 PWM 模式 3 下的输出频率和占空比
.
Oscillator Frequency
Mode 3:
f
------------------------------------------------------ -
out
Mode 3, T0: Duty Cycle % 100
Mode 3, T1: Duty Cycle % 100
, PWM0EN 和 TF0. TH0 锁定为定时器功能,使用
1
RL
--------- -×=
256
RH
--------- -×=
256
------------------ -×=
TPS
0
0
1+
256
Figure 14-9. 定时器 / 计数器 0 PWM 模式 3
OSC
TR1
GATE
NT1 Pin
OSC
÷TPS
Control
÷TPS
RL0
(8 Bits)
OCR0
=
T0
TL0
(8 Bits)
RH0
(8 Bits)
OCR1
=
T1
TH0
(8 Bits)
15. 外部中断
配置 AT89LP216 使用内部 RC 振荡器,此时 XTAL1 和 XTAL2 可以用作 INT0 和 INT1 的外部中断源。
3621A–MICRO–6/06
通过将寄存器 TCON 中的 IT1 或 IT0 置位或清空,外部中断可以编程设置为电平激发或跃迁激发。
33

如果 ITx = 0,当检测到 INTx 管脚为低时,外部中断 x 被触发。如果 ITx = 1, 外部中断为边缘
触发。在这种模式下,如果 INTx
管脚的连续采样显示,一个周期为高电平,下一个周期为低电
平,TCON 的中断请求标志 IEx 被置位。然后标志位 IEx 请求中断。因为外部中断管脚每个时钟周
期采样一次,因为输入的高电平或低电平至少应该保持 2 个振荡时期,以确保采样的进行。
如果外部中断是跃迁激活的,外部中断源必须要保持请求管脚高电平至少两个时钟周期,再保持
该管脚低电平至少两个时钟周期,以确保该迁跃能够被检测到,使中断请求标志 IEx 能被置位。
如果在边缘触发模式下,调用服务程序时,IEx 将会由 CPU 自动清空。如果外部中断是水平激活,
那么外部源必须保持请求有效,直到真正生成请求中断。因此外部中断源必须在中断服务程序完
成之前接触请求,否则将会产生另一个中断。
16. 通用中断
通用中断(General-purpose Interrupt-GPI)功能在端口 1 提供 8 个可配置的外部中断。每个端
口管脚可以检测高 / 低电平或者正 / 负沿。寄存器 GPIEN 选择使端口 1 的某些位有效,产生一个
中断。寄存器 GPMOD 和 GPLS 决定每一个单独管脚的模式。GPMOD 在电平敏感触发和边缘触发模式
中选择一种,GPLS 在高 / 低电平模式和正 / 负沿模式中选择一种。端口 1 的管脚每个时钟周期采
样一次。在电平敏感模式下,有效电平必须在两个连续采样中出现,并且在产生中断之前出现。
在边缘触发模式下,如果电平值从一个采样转变为下一个采样值,就会检测到跃迁。当一个管脚
检测到产生中断的条件,并且该管脚是激活的,那么寄存器 GPIF 的相应标志位被置位。GPIF 的标
志位必须由软件清空。
.
Table 16-1. GPMOD – 通用中断模式寄存器
GPMOD = 9AH 复位值 = 0000 0000B
不可位寻址
GPMOD7 GPMOD6 GPMOD5 GPMOD4 GPMOD3 GPMOD2 GPMOD1 GPMOD0
Bit76543210
GPMOD.x 0 = 电平敏感中断 P1.x
1 = 边沿触发敏感中断 P1.x
Table 16-2. GPLS – 通用中断电平选择寄存器
GPLS = 9BH 复位值 = 0000 0000B
不可位寻址
GPLS7 GPLS6 GPLS5 GPLS4 GPLS3 GPLS2 GPLS1 GPLS0
Bit76543210
34
AT89LP216 [Preliminary]
3621A–MICRO–6/06
AT89LP216 [Preliminary]
Table 16-2. GPLS – 通用中断电平选择寄存器
GPMOD.x 0 = P1.x 检测低电平或下降沿
1 = P1.x 检测高电平或上升沿
.
Table 16-3. GPIEN – 通用中断使能寄存ٛ˜
GPIEN = 9CH 复位值 = 0000 0000B
不可位寻址
GPIEN7 GPIEN6 GPIEN5 GPIEN4 GPIEN3 GPIEN2 GPIEN1 GPIEN0
Bit76543210
GPIEN.x 0 =P1.x 中断无效
1 = P1.x 中断有效
.
Table 16-4. GPIF – 通用中断标志位寄存器
GPIF = 9DH 复位值 = 0000 0000B
不可位寻址
GPIF7 GPIF6 GPIF5 GPIF4 GPIF3 GPIF2 GPIF1 GPIF0
Bit76543210
GPIF.x 0 = P1.x 中断停止
1 = P1.x 中断激活,必须软件清除
17. 串行接口
AT89LP216 的串行接口符合通用异步收 / 发报机 (UART)标准。UART 具有以下特点:
* 全双工操作。
* 8 个或 9 个数据位元
3621A–MICRO–6/06
* 帧错误检测
35

* 自动地址辨认下的多处理器通信模式
* 利用定时器 1 的波特率产生器
* 接收缓存满载或传输完成中断
全双工模式的串口,意味着它能同时进行发送和接收。具有接收缓存,表明它能在上一个接收的
字节被读出接收寄存器之前开始接收第二个字节 (然而,如果第一个字节没有被读出而第二个字
节已经完成了接收,那么第一个字节会丢失)。对串行端口接收和发送寄存器的存取都是通过特殊
功能寄存器 (Special Function Register)SBUF 实现的。写入 SBUF 即加载了发送寄存器,读
SBUF 即访问了物理上独立的接收寄存器。串行端口能够运行在下面四个模式中。
* 模式 0:串行数据通过 RXD 进出。TXD 输出移位时钟。八个数据位元以最低有效位 (LSB)在前
进行发送 / 接收。波特率固定为震荡频率的一半。
* 模式 1:10 位数据通过 TXD 进行发送,或者通过 RXD 进行接收,其中包括一个起始位 (0),8
个数据位元 (LSB 在前)以及一个停止位 (1)。接收时,停止位进入特殊功能寄存器的 RB8。波
特率根据定时器 1 而变化。
* 模式 2:11 位数据通过 TXD 进行发送,或者通过 RXD 进行接收,其中包括一个起始位 (0),8
个数据位元 (LSB 在前),一个可编程的第 9 位数据,以及一个停止位 (1)。发送时,第 9 位数
据 (SCON 的 TB8)被设置为”0”或”1”。比如,奇偶校验位 (P,在 PSW 中)可以被移至 TB8。
接收时,第 9 位数据进入特殊功能寄存器 SCON 的 RB8,而停止位被忽略。波特率可以编程设置为
震荡频率的 1/16 或 1/32。
17.1 多处理器间通信
* 模式 3:11 位数据通过 TXD 进行发送,或者通过 RXD 进行接收,其中包括一个起始位 (0),8
个数据位元 (LSB 在前),一个可编程的第 9 位数据,以及一个停止位 (1)。实际上,模式 3 除
了波特率之外,在其他方面与模式 2 都一致。模式 3 的波特率根据定时器 1 而变化。
这 4 种模式中,通过使用 SBUF 作为目标寄存器的任何指令开始发送。模式 0 中,以 RI=0 和 REN=1
为条件开始接收。在其他模式中,如果 REN=1,则以收到起始位开始接收。
模式 2 和模式 3 提供专用的多处理器间通信功能。在这些模式中,9 个数据位元被接收,其后是一
位停止位。而第 9 位进入 RB8。紧接着是停止位。端口可进行编程,这样当停止位被接收时,只有
在 RB8=1 时串行端口中断才被激活。这个特性由设置 SCON 的 SM2 位实现。
以下的例子表示了如何使用串行中断实现多处理器间通信。当主处理器必须发送一块数据给从处
理器之一时,它首先发送一个地址字节,指明目标从处理器。地址字节与数据字节的不同在于第
9 位在地址字节中为 “1”, 而在数据字节中为 “0”。SM2=1 时,没有从处理器可以被数据字节中
断。而地址字节可以中断所有从处理器。每一个从处理器检查收到的字节,看它是否标志了地址。
为目标地址的从处理器清空它的 SM2 位,准备接收后面的数据字节。不是目标地址的从处理器将
它们的 SM2 位置位,并忽略数据字节。
在模式 0 中,SM2 位没有作用,但是在模式 1 中可以用来检查停止位的合法性。模式 1 的接收过
程,如果 SM2=1,接收中断没有被激活,除非接收到有效的停止位。
36
AT89LP216 [Preliminary]
3621A–MICRO–6/06

AT89LP216 [Preliminary]
Table 17-1. SCON – 串行端口控制寄存ٛ˜
SCON Address = 98H 复位值 = 0000 0000B
不可位寻址
SM0/FE SM1 SM2 REN TB8 RB8 T1 RI
Bit7 6543210
(SMOD0 = 0/1)
符号 功能
(1)
FE
SM0
帧错误位。当不合法的停止位被检测到时,接受器将该位置 1。FE 位不能被合法帧清 0,必须软件清 0。SMOD0 必须置位
才能存取 FE 位。不论 SMOD0 状态如何,FE 都能被置位。
串行端口模式位 0,(SMOD0 必须为 0,以访问 SM0 位)
串口模式位 1
SM0 SM1 Mode 描述 波特率
SM1
000移位寄存器 f
0 1 1 8-bit UART variable (Timer 1)
1 0 2 9-bit UART f
1 1 3 9-bit UART variable (Timer 1)
启用模式 2 或 3 的自动辨识地址特性。如果 SM2=1,此时除非接收到的第 9 位数据 (RB8)是 1,即表明这是一个地址,
SM2
接收到的字节是指定的或广播的地址,否则不能将 R1 置位。在模式 1 下,如果 SM2=1,那么只有在收到一个有效停止位,
并且接收到的字节为指定的或广播的地址时,R1 才被激活。在模式 0 下,SM2 应该为 0。
REN
TB8
RB8
TI
RI
使串行接收有效。通过软件置位使接收有效。通过软件清零使接收无效。
在模式 2,3 中被传输的第 9 位数据。根据设计通过软件置位或清零。
在模式 2,3 中被接收的第 9 位数据。模式 1 中,如果 SM2=0,RB8 就是接收到的停止位。在模式 0 中,没有使用 RB8。
发送中断标志。任意串行发送时,在模式 0 中,通过硬件在第 8 位发送结束时置位,或者在其他模式中,在停止位开始发
送时置位。必须由软件清零。
接收终端标志。任意串行接收时 (例外情况见 SM2 说明),在模式 0 中,通过硬件在第 8 位发送结束时置位,或者在其他
模式中,在停止位接收时中途置位。必须有软件清零。
Notes: 1. SMOD0 在 PCON.6 中
2. f
= 晶体振荡器频率
osc
osc
osc
/32 or f
(2)
/2
/16
osc
17.2 波特率
3621A–MICRO–6/06
模式 0 中,波特率固定为由下面的公式表示:
Mode 0 Baud Rate
Oscillator Frequency
------------------------------------------------------ -=
2
模式 2 的波特率由特殊功能寄存器 PCON.7 的 SMOD1 位的值决定。如果 SMOD1=0 (重设的值),波
特率为振荡频率的 1/32。如果 SMOD1=1,波特率为振荡频率的 1/16,由下面的公式表示:
SMOD1
Mode 2 Baud Rate
2
-------------------- (Oscillator Frequency)×=
32
37

17.2.1 使用定时器 1 产生波特率
定时器 1 溢出速率决定了模式 1 和模式 3 的波特率。当定时器 1 为波特率发生器时,波特率由定
时器 1 的溢出速率和 SMOD1 的值决定,如下面的公式所示:
Modes 1, 3
Baud Rate
SMOD1
2
-------------------- (Timer 1 Overflow Rate)×=
32
定时器 1 中断在此处应失效。在它的 3 个运行模式下,定时器本身能够配置为定时器或计数器操
作。在最典型的应用中,它被配置为自动重载模式 (TMOD 的高 4 位 =0010B)的定时器操作。在这
种情况下,波特率由下面的公式指定:
Modes 1, 3
Baud Rate
SMOD1
2
--------------------
32
Oscillator Frequency
------------------------------------------------------ -
256 TH1()–[]
------------------ -××=
TPS
1
1+
程序员可以通过设置定时器运行于 16 位自动重载状态 (TMOD 的高 4 位 =0001B),获得非常低的
波特率。这种情况下,波特率由下面的公式指定:.
Modes 1, 3
Baud Rate
SMOD1
2
--------------------
32
Oscillator Frequency
------------------------------------------------------ -×
256
R
H1,RL1()–[]
------------------ -×=
TPS
1
1+
38
表 17-2 列出通常用到的波特率以及这些波特率如何由定时器 1 得到的。
Table 17-2. 定时器 1 通常波特率 (TPS = 0000B)
波特率 f
Mode 0: 1 MHz 2 X X X X
Mode 2: 375K 12 0 X X X
62.5K 12 1 0 2 F4H
19.2K 11.059 1 0 2 DCH
9.6K 11.059 0 0 2 DCH
4.8K 11.059 0 0 2 B8H
(MHz) SMOD1
OSC
AT89LP216 [Preliminary]
定时器 1
C/T 模式 重装值
3621A–MICRO–6/06

17.3 模式 0 介绍
AT89LP216 [Preliminary]
Table 17-2. 定时器 1 通常波特率 (TPS = 0000B)
定时器 1
波特率 f
2.4K 11.059 0 0 2 70H
1.2K 11.059 0 0 1 FEE0H
137.5 11.986 0 0 1 F55CH
110 6 0 0 1 F958H
110 12 0 0 1 F304H
串行的数据通过 RXD 进出。TXD 输出移位时钟。8 个数据位元,以最低有效位在前进行发送和接
收。波特率固定为振荡频率的 1/2。42 页上的图 17-1 显示了模式 0 的串行端口简化功能图和相关
的时序。
通过使用 SBUF 作为目标寄存器的任何指令开始发送。同时信号 “写入 SBUF”将“1”载入发送移
位寄存器的第 9 位,告诉 TX 控制区开始发送。内部定时使一个全工作周期在 “写 SBUF”和激活
发送 SEND 之间开始并结束。
(MHz) SMOD1
OSC
C/T 模式 重装值
SEND 将移位寄存器的输出传输至 P3.0 的选择输出功能线,也将移位时钟传输至 P3.1 的选择输出
功能线。在移位时钟的下降沿,发送移位寄存器的内容向右移一位。.
数据右移一位后,最左边填充“0”。当数据字节的最高有效位位于移位寄存器的输出位置时,最
初载入第 9 位的 “1”位于最高有效位的最左边,并且所有在它左边的位都为 “0”。这种情况标
志 TX 控制区做最后一次移位,然后接触发送的激活,并将 TI 置位。
当 REN=0,R1=0 时,开始接收过程。在下一个时钟周期,RX 控制单元将位 “11111110”写入接收
移位寄存器,并在下一个时钟阶段激活接收。
接收 RECEIVE 使移位时钟对 P3.1 的选择输入功能线有效。在移位时钟的下降沿,接收移位寄存器
的内容向左移一位。从右边进入的值就是 P3.0 管脚在移位时钟的上升沿进行采样的值。
数据位从右进入时,“1”从最左边移出。当开始载入最右边位置的 “0”到达移位寄存器的最左
边时,标志着 RX 控制区做最后一次移位,并且载入 SBUF。接下来,将 RECEIVE 清零,将 RI 置位。
3621A–MICRO–6/06
39
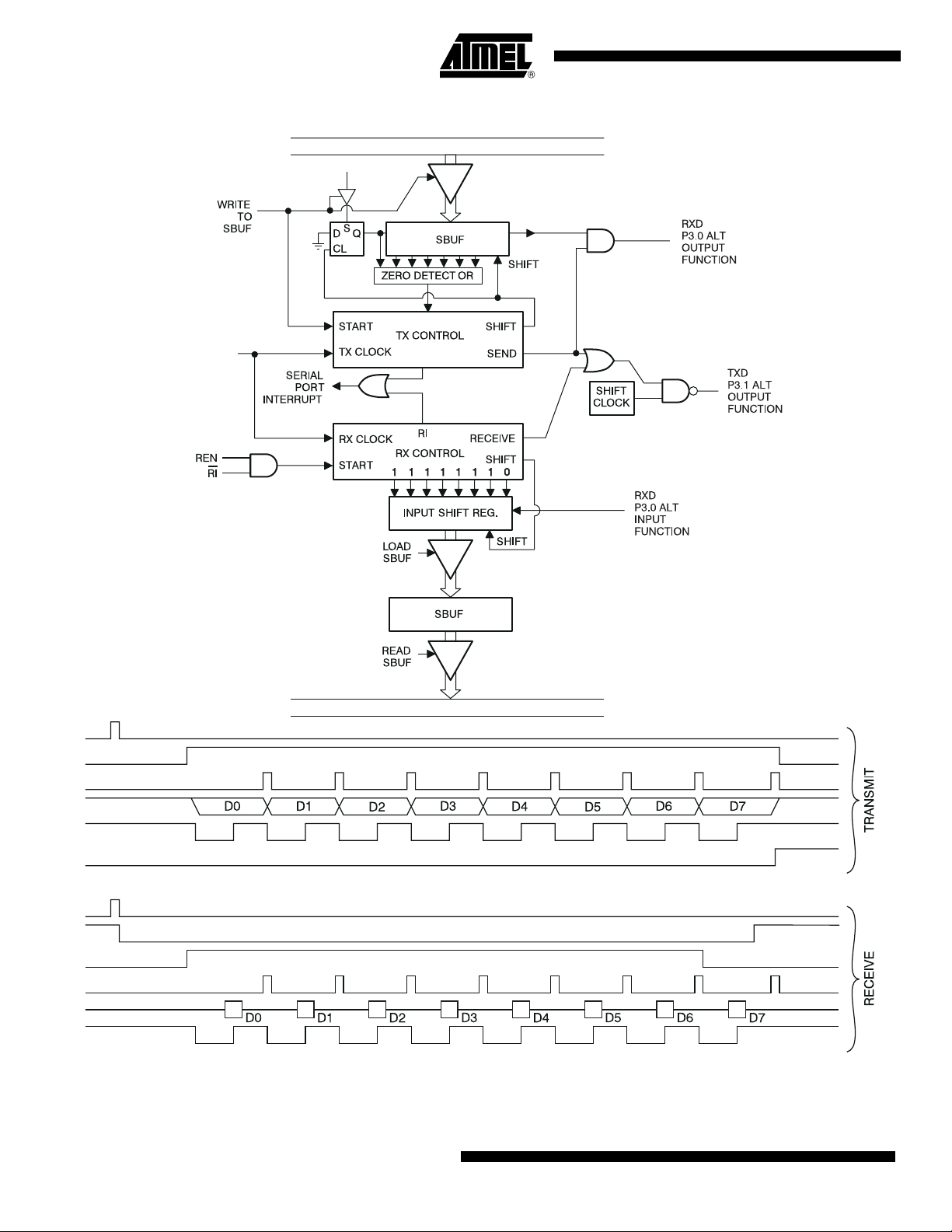
Figure 17-1. 串行模式 0
T
R
T
R
S
S
T
S
R
R
1/2 f
osc
INTERNAL BUS
“1“
INTERNAL BUS
WRITE TO SBUF
END
HIFT
XD (DATA OUT)
XD (SHIFT CLOCK)
I
WRITE TO SCON (CLEAR RI)
I
ECEIVE
HIFT
XD (DATA IN)
XD (SHIFT CLOCK)
40
AT89LP216 [Preliminary]
3621A–MICRO–6/06

17.4 模式 1 介绍
AT89LP216 [Preliminary]
通过 TXD 进行 10 位数据的发送,通过 RXD 进行 10 位数据的接收。10 位数据包括:1 个起始位
(0),8 个数据位元 (LSB 在前),以及 1 个停止位 (1)。接收时,停止位进入 SCON 的 RB8。
AT89LP216 中,波特率由定时器 1 的溢出速率决定。图 17-2 为模式 1 的简化功能图以及发送接收
的相关时序。
通过使用 SBUF 作为目标寄存器的任何指令开始发送。信号“写入 SBUF”将一个“1”载入发送移
位寄存的第 9 位,标志 TX 控制单元有一个发送的请求。发送实际开始于紧接着 16 分计数器的下
一次翻转机器周期的 S1P1。因此,位的时间是与 16 分计数器同步,而不是与 “写入 SBUF”信号
同步。
当 SEND 被激活时,开始发送,向 TXD 放入开始位。一个数据位的时间后,数据 DATA 激活,使发
送移位寄存器的输出的位到 TXD。之后产生第一个移位脉冲。
随着数据位向右移出,从左边进入的“0”被计时。当数据字节的最高有效位位于移位寄存器的输
出位置时,最初载入第 9 位的 “1”刚好在最高有效位的左边,在它左边的所有位都为 “0”。这
种情况标志 TX 控制单元将做最后一次移位,然后解除 SEND 的激活并将 TI 置位。这些发生在“写
入 SBUF”后 16 分计数器第 10 次翻转时。
RXD 检测到由 “1”到 “0”的跃迁后,开始接收过程。为了达到这个目的,RXD 以指定波特率的
16 倍的速率进行采样。检测到跃迁后,16 分计数器马上复位,“1FFH”写入输入移位寄存器中。
复位 16 分计数器使它的翻转与接收到的位元的次数一致。
计数器的 16 种状态将每一个位元的时间 16 等分。在每个位元时间的第 7,8,9 个计数器状态,
位元检测器对 RXD 的值进行采样。公认的值至少存在于 2/3 的采样值中。这样做是为了避免噪音。
为了避免错误的位元,如果第一个位元时间接受的值不是 0,接收电路重启,并且该单元继续寻找
另一个 “1”到 “0”的跃迁。如果起始位有效,就将它移至输入移位寄存器,继续接受该帧剩余
部分。
随着数据位由右侧进入,“1”从左边移出。当起始位到达移位寄存器 (即模式 1 中的 9 位寄存
器)最左边位置时,标志着 RX 控制区将做最后一次移位,载入 SBUF 和 SB8,并重启 RI。只有在
最后一个移位脉冲产生时,在下列条件都满足的情况下,才会产生载入 SBUF 和 RB8,将 RI 置位的
信号。
1 . RI = 0
2 . SM2 = 0, 或接收到的停止位 = 1
如果上述两个条件之一不满足,接收到的帧会不可挽回的丢弃。如果两者都满足了,停止位进入
RB8,8 个数据位元进入 SBUF,激活 RI。同时,不管上述条件是否满足,该单元继续寻找 RXD 中
“1”到 “0”的跃迁。
3621A–MICRO–6/06
41

Figure 17-2. 串行模式 1
S
TI
TIMER 1
OVERFLOW
WRITE
RXD
TO
SBUF
SAMPLE
TRANSITION
DETECTOR
÷16
SERIAL
PORT
INTERRUPT
1-TO-0
÷2
= 0
SMOD1
= 1
MOD1
“1”
S
Q
D
CL
START
RX CLOCK
÷16
RX CLOCK
START
BIT
DETECTOR
INTERNAL BUS
SBUF
ZERO DETECTOR
SHIFT
TX CONTROL
TI
RI
RX CONTROL
INPUT SHIFT REG.
LOAD
SBUF
DATA
SEND
LOAD
SBUF
SHIFT
1FFH
(9 BITS)
TXD
SHIFT
TX
CLOCK
WRITE TO SBUF
SEND
DATA
SHIFT
TXD
TI
START BIT
RX
CLOCK
RXD
BIT DETECTOR SAMPLE TIMES
SHIFT
RECEIVE
RI
SBUF
READ
SBUF
INTERNAL BUS
D0 D1 D2 D3 D4 D5 D6 D7
÷16 RESET
START BIT
D0 D1 D2 D3 D4 D5 D6 D7
TRANSMIT
STOP BIT
STOP BIT
42
AT89LP216 [Preliminary]
3621A–MICRO–6/06

17.5 模式 2,3 介绍
AT89LP216 [Preliminary]
通过 TXD 进行 11 位数据的发送,通过 RXD 进行 11 位数据的接收。11 位数据包括:1 个起始位
(0),8 个数据位元 (LSB 在前),一个可编程的第 9 位数据位元,以及 1 个停止位 (1)。发送
时,第 9 位数据位元 (TB8 )可以被设置为 “0”或 “1”。接收时,第 9 位数据位元进入 SCON
的 RB8。模式 2 中,波特率可以编程设置为振荡频率的 1/16 或 1/32。模式 3 中,波特率可变,由
定时器 1 决定。
图 17-3 和 17-4 显示了模式 2,3 的串行端口功能图。接收部分与模式 1 完全相同,发送部分与模
式 1 的差别只在于发送移位寄存器的第 9 个数据位元。
通过使用 SBUF 作为目标寄存器的任何指令开始发送。信号 “写入 SBUF”同样将 TB8 载入发送移
位寄存的第 9 位,标志 TX 控制单元有一个发送的请求。发送实际开始于紧接着 16 分计数器的下
一次翻转机器周期的 S1P1。因此,位的时间是与 16 分计数器同步,而不是与 “写入 SBUF”信号
同步。
当 SEND 被激活时,开始发送,向 TXD 放入开始位。一个数据位的时间后,数据 DATA 激活,使发
送移位寄存器的输出的位到 TXD。之后产生第一个移位脉冲。第一次移位记录 “1”(停止位)进
入移位计时器第 9 位的时间。然后唯一的“0”被计时。因此随着数据位向右移出,从左边进入的
“0”被计时。当 TB8 位于移位寄存器的输出位置时,停止位刚好在 TB8 的左边,在停止位的左边
都为 “0”。这种情况标志 TX 控制单元将做最后一次移位,然后解除 SEND 的激活并将 TI 置位。
这些发生在 “写入 SBUF”后 16 分计数器第 11 次翻转时。
RXD 检测到由 “1”到 “0”的跃迁后,开始接收过程。为了达到这个目的,RXD 以指定波特率的
16 倍的速率进行采样。检测到跃迁后,16 分计数器马上复位,“1FFH”写入输入移位寄存器中。
在每个位元时间的第 7,8,9 个计数器状态,位元检测器对 RXD 的值进行采样。公认的值至少存
在于 2/3 的采样值中。如果第一个位元时间接受的值不是 0,接收电路重启,并且该单元继续寻找
另一个 “1”到 “0”的跃迁。如果起始位有效,就将它移至输入移位寄存器,继续接受该帧剩余
部分。
随着数据位由右侧进入,“1”从左边移出。当起始位到达移位寄存器 (即模式 2,3 中的 9 位寄
存器)最左边位置时,标志着 RX 控制区将做最后一次移位,载入 SBUF 和 SB8,并重启 RI。只有
在最后一个移位脉冲产生时,在下列条件都满足的情况下,才会产生载入 SBUF 和 RB8,将 RI 置位
的信号:
1 . RI = 0
2 . SM2 = 0, 或接收到的第 9 个数据位元 = 1
如果上述两个条件之一不满足,接收到的帧会不可挽回的丢弃,并且 RI 不被置位。如果两者都满
足了,接收到的第 9 个数据位元进入 RB8,而前 8 个数据位元进入 SBUF。一个位元时间后,不管
上述条件是否满足,该单元继续寻找 RXD 输入中 “1”到 “0”的跃迁。
注意:接收到的停止位的值与 SBUF,RB8 或 RI 均无关。
3621A–MICRO–6/06
43

Figure 17-3. 串行模式 2
CPU CLOCK
SMOD1
SMOD1 0
INTERNAL BUS
1
44
INTERNAL BUS
AT89LP216 [Preliminary]
3621A–MICRO–6/06
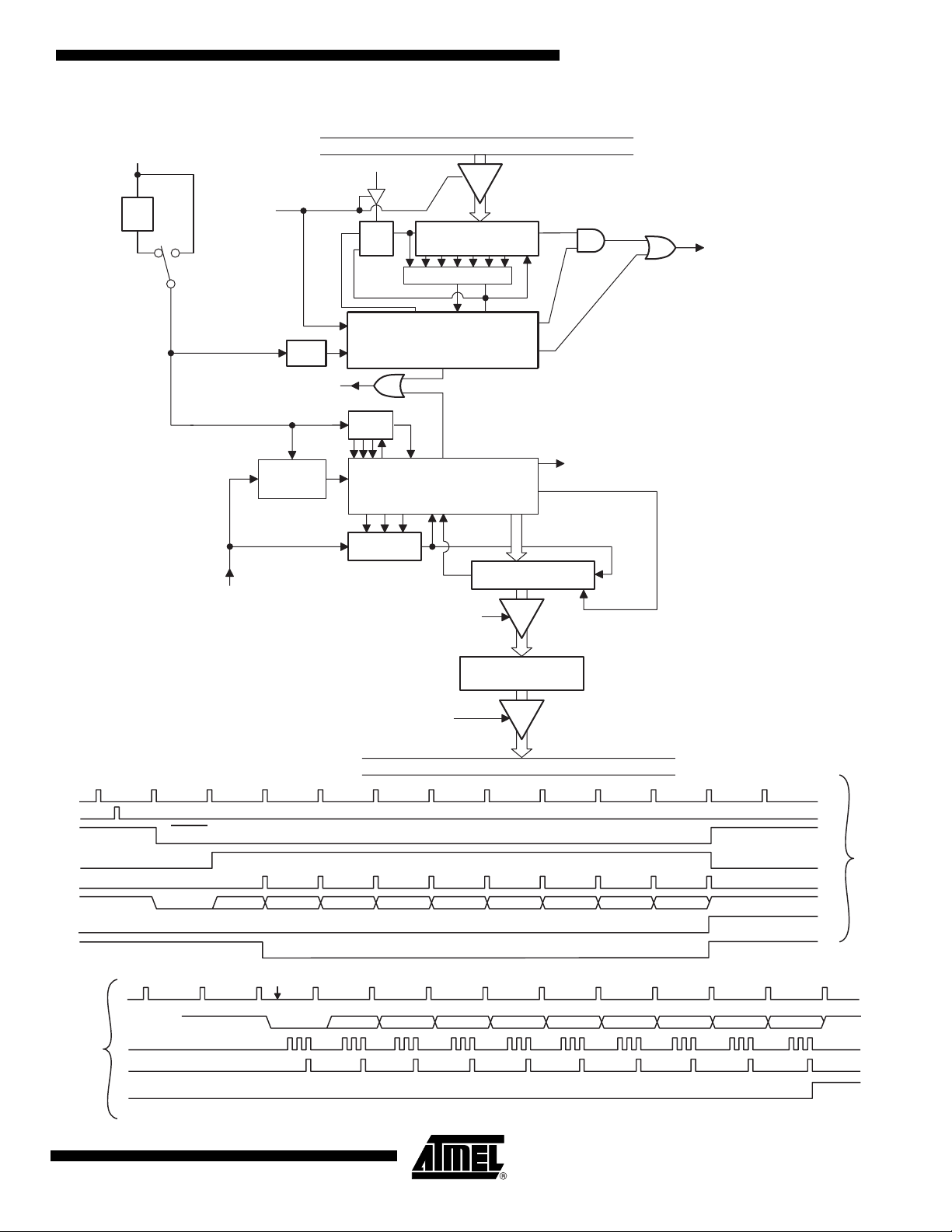
Figure 17-4. 串行模式 3
TIMER 1
OVERFLOW
÷2
SMOD1
= 0
SMOD1
= 1
WRITE
TO
SBUF
TB8
D
CL
S
Q
ZERO DETECTOR
INTERNAL BUS
SBUF
AT89LP216 [Preliminary]
TXD
TX
CLOCK
WRITE TO SBUF
SEND
DATA
SHIFT
TXD
TI
START BIT
STOP BIT GEN
RX
CLOCK
STOP BIT
START
÷16
SERIAL
PORT
INTERRUPT
SAMPLE
1-TO-0
TRANSITION
DETECTOR
RXD
D0 D1 D2 D3 D4 D5 D6 D7 TB8
÷16 RESET
RX CLOCK
÷16
START
DETECTOR
TX CONTROL
RX CLOCK
RX CONTROL
BIT
READ
SBUF
TI
RI
LOAD
SBUF
SHIFT
DATA
SEND
LOAD
SBUF
SHIFT
1FFH
INPUT SHIFT REG.
(9 BITS)
SBUF
INTERNAL BUS
SHIFT
STOP BIT
TRANSMIT
BIT DETECTOR SAMPLETIMES
SHIFT
RECEIVE
RI
3621A–MICRO–6/06
RXD
START BIT
D0 D1 D2 D3 D4 D5 D6 D7 RB8
STOP
BIT
45

17.6 帧错误检测
17.7 自动地址识别
除了所有通常模式外,UART 能提供通过查找丢失的停止位进行帧错误检测,以及自动地址辨认。
当用于帧错误检测时,UART 在通信中查找丢失的停止位。丢失的位将使 SCON 寄存器中的 FE 位置
位。FE 位与 SM0 共享 SCON.7 位,SCON.7 的功能是由 PCON.6(SMOD0) 决定的。如果 SMOD0 置位,
那么 SCON.7 的功能是 FE。当 SMOD0 清零时,SCON.7 的功能是 SM0。当用作 FE 时,SCON.7 只能由
软件清零。
自动地址识别具有一种特性,即利用硬件作出的比较使 UART 可以从大量连续字位中识别某些特定
地址。这种特性减少了依赖大量软件来检测通过连续端口的每一个连续地址。把 SM2 字位设置在
SCON 就可激活这种特性。在这种第 9 字位 UART 模式中,当接收到包含 “已知”地址或 “广播”
地址的字节时,模式 2 模式 3 和接受中断信号识标将自动激活。这种第 9 字位模式为了表明所接
受到的信息是地址而非数据,则要求第 9 个信息字位必须为 “1”。
第 8 字位模式也叫模式 1。在这种模式中,如果 SM2 被激活并且接受的信息在第 8 字位后有终端中
止的字位,不管是已知地址还是广播地址,接受中断信号识标将会设置为激活。
模式 0 是个备份寄存器模式,同时 SM2 就无任何作用。
利用自动地址识别的特性调用已知分端口的地址或地址群,就可以使主端口有选择性地连接一个
或多个分端口。所有的分端口都可以用 “广播”地址来连接起来。两种特殊功能的寄存器被用来
定义分端口地址 SADDR,和地址掩模 SADEN.SADEN 是来定义在 SADDR 中哪些字位将被用到,哪些则
无任何意义。逻辑上,SADEN 掩模和 SADDR 与门给出已知地址,主端口用已知地址来分配每个分端
口的地址。用已知地址可以识别多个分端口并且不和其他的混淆。下面的例子来说明这种配置具
有多功能性:
分端口 0: SADDR = 1100 0000
SADEN = 1111 1101
Given = 1100 00X0
分端口 1 SADDR = 1100 0000
SADEN = 1111 1110
Given = 1100 000X
在上面的例子中,SADDR 是同样的,SADEN 的数据用来区分两个分端口。分端口 0 需要一个 “0”
在 0 字位而不用考虑 1 字位,分端口 1 需要一个“0”在 1 字位而不用考虑 0 字位。对分端口 0 来
说只有唯一的地址 1100 0010,因为分端口 1 在 1 字位是 “0”。对分端口 1 来说也只有唯一的地
址 1100 0001,因为 “1”在 0 字位就不和分端口 0 重复了。用同一个地址即 0 字位 =0 (分端口
0)1 字位 =0 (分端口 1),两个分端口就可以被同时选择了。因此,两个分端口的地址都可以表
示成 1100 0000。
在一台更加复杂的系统中,用下面的方法就可以选择分端口1和2,而同时不包含分端0:
分端口 0 SADDR = 1100 0000
SADEN = 1111 1001
46
Given = 1100 0XX0
AT89LP216 [Preliminary]
3621A–MICRO–6/06

AT89LP216 [Preliminary]
分端口 1 SADDR = 1110 0000
SADEN = 1111 1010
Given = 1110 0X0X
分端口 2 SADDR = 1110 0000
SADEN = 1111 1100
Given = 1110 00XX
在上面例子中,三个端口之间的区别在于低端 3 位地址位的不同。端口 0 需要 0 字位 =0,就有唯
一的地址 1110 0110。端口 1 需要 1 字位 =0,就有唯一的地址 1110 0101。端口 2 需要 2 字位 =0,
就有唯一的地址 1110 0011。要选择端口0和1,就得用地址1110 0100,因为必须使 2 字位 =1 来
排除端口 2。
每一个分端口的广播地址是取 SADDR 和 SADEN 的逻辑 OR 获得的。在这个结果中所有的 0 被忽略。
大多数情况下,如果视忽略值为 1,广播地址则为 16 进制的 FF。
重设 SADDR (SFR 地址 0A9H)和 SADEN (SFR 地址 0B9H)后,所有地址位归置为 “0”。这就产
生了包含所有无意义字位的已知地址和包含所有无意义字位的广播地址。并有效地禁止自动寻址
模式,使微控制器使用不执行这个特性的标准 80C51 型 UART 驱动器。
18. 串行外设接口
串行外设接口可使高速同步数据在 AT89LP216 和外设元件或者多个 AT89LP216 元件之间传输。串
行外设接口特性如下:
* 双向,3 线同步数据传输
* 主、从操作方式
* 最大字位频率 =fosc/4
* LSB 或 MSB 优先数据传输
* 4 级可编程地址位的从模式
* 传输结束中断标识
* 存写冲突标识保护
* 双缓冲接受
* 双缓冲传输 (高级模式才有)
* 闲置模式唤醒
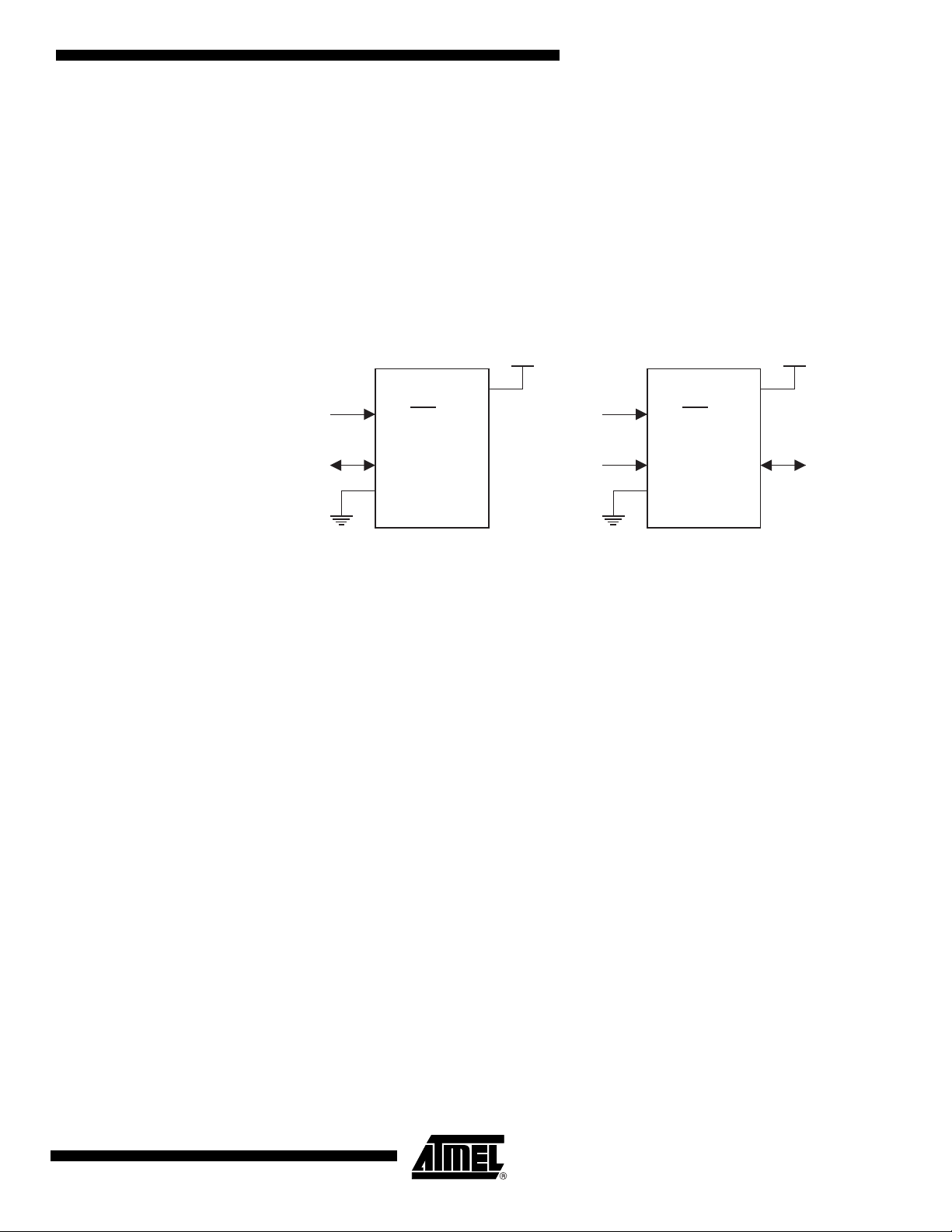
主、从 CPU 用 SPI 连接的方式如图 18-1 所示。接口的四个引脚分别是主进从出 (MISO),主
出从进 (MOSI),移位时钟 (SCK)和从属选择 ( )。SCK 引脚在主模式中是时钟输出,而在从
模式中是时钟输入。在 SPCR 中 MSTR 位决定了 MISO 和 MOSI 的方向。要注意到 MOSI 连接 MOSI,
MISO 连接 MISO。在主模式中, /P1.4 被忽略而只有可能作为一般的输入输出。在从模式中, 必须
置于低电平来选择单个元件作为从属。当 置于高电平时,从属的 SPI 端口无效并且 MOSI/P1.5 能
用于一般输出。
3621A–MICRO–6/06
47

Figure 18-1. 主从连接
MSB LSB
SPI
Clock Generator
Master
8-Bit Shift Register 8-Bit Shift Register
MISO
MISO
MOSI MOSI
SCK
SCK
SS SS
V
CC
MSB LSB
Slave
SPI 有两种操作模式:标准模式 (无缓冲存写)和高级模式 (缓冲存写)。对主 CPU 的 SPI 数据
寄存器的存写触发 SPI 时钟寄存器,然后存写数据从 MOSI 引脚输出再输入到从 CPU 的 MOSI 的引
脚。当时钟寄存器等待下一个指定波长的满位槽时,传输经过一段初始延时就可触发。转移一个
字节后,SPI 时钟寄存器停止,同时设置传输中断位并把接受的字节传输到可读缓冲器中。如果要
同时设置 SPI 中断激活位和串口中断激活位,就需要中断(传输)。需要指出的是无论 SPDR 用可
写数据寄存器或可读数据寄存器,都取决于访问路径是可读还是可写。在标准模式下,由于可写
缓冲器是透明的 (并且对 SPDR 的存写路径会访问移位缓存器),所以在进行传输时任何向 SPDR
的存写都将导致和 WCOL 设置的存写冲突。但传输仍将正常完成,不过新字节是无效的所以必须再
重新写到 SPDR。
除可写缓冲器能控制传输下一字节外,高级模式类似于标准模式。SPDR 的存写会占用可写
缓冲器,并告诉 WCOL 缓冲器已经满荷,以后任何的存写都将覆盖掉缓冲器。当缓冲字节加载到移
位寄存器开始传输时,硬件将会清除 WCOL。如果主 SPI 处于闲置状态,比如当前是第一个字节,
在加载 SPDR 后,字节传输就会开始并且 WCOL 会被立即清除。在当前字节传输时,下一个字节也
有可能被写入到 SPDR。SPDR 中的加载激活标识 (LDEN)用来决定传输开始的时间。LDEN 取决于
SPI 传输的前四位字位。每加载下一字节前,主 CPU 应当首先检测 LDEN 的设置和 WCOL 是否被清
除。在高级模式下,如果在传输完成后 WCOL 是设置的,比如若可以进行下一字节传输,SPI 会即
时把缓存字节加载到移位寄存器,重设 WCOL,进行不中断传输同时重新开始时钟发生器。只要 CPU
能保持最大利用可写缓存,大量的字节就可以在最短时间间隔内传输出去。
Table 18-1. SPCR – SPI 控制寄存器
SPCR Address = E9H 复位值 = 0000 0000B
不可位寻址
SPIE SPE DORD MSTR CPOL CPHA SPR1 SPR0
Bit76543210
符号 功能
SPIE
SPE
DORD Data order. DORD = 1 selects LSB first data transmission. DORD = 0 selects MSB first data transmission.
SPI interrupt enable. This bit, in conjunction with the ES bit in the IE register, enables SPI interrupts: SPIE = 1 and ES = 1
enable SPI interrupts. SPIE = 0 disables SPI interrupts.
SPI enable. SPI = 1 enables the SPI channel and connects SS
SPI = 0 disables the SPI channel.
, MOSI, MISO and SCK to pins P1.4, P1.5, P1.6, and P1.7.
MSTR Master/slave select. MSTR = 1 selects Master SPI mode. MSTR = 0 selects slave SPI mode.
48
AT89LP216 [Preliminary]
3621A–MICRO–6/06

符号 功能
CPOL
Clock polarity. When CPOL = 1, SCK is high when idle. When CPOL = 0, SCK of the master device is low when not
transmitting. Please refer to figure on SPI clock phase and polarity control.
AT89LP216 [Preliminary]
CPHA
Clock phase. The CPHA bit together with the CPOL bit controls the clock and data relationship between master and
slave. Please refer to figure on SPI clock phase and polarity control.
SPI clock rate select. These two bits control the SCK rate of the device configured as master. SPR1 and SPR0 have no
SPR0
SPR1
effect on the slave. The relationship between SCK and the oscillator frequency, F
SPR1
SPR0 SCK
00f
01f
10f
11f
OSC
OSC
OSC
OSC
/4
/8
/32
/64
, is as follows:
OSC.
Notes: 1. 激活 SPI 前设置成时钟模式;除 SPE 字位外,设置好所有 SPCR 需要的字位,然后再设置 SPE。
2. 激活主 SPI 优先于从元件。
3. 无新加载数据时,主从对应在下个 Tx。
Table 18-2. SPDR – SPI D 数据寄存器
SPDR Address = EAH
不可位寻址
SPD7 SPD6 SPD5 SPD4 SPD3 SPD2 SPD1 SPD0
Bit76543210
复位值 = 00H (after cold reset)
unchanged (after warm reset)
Table 18-3. SPSR – SPI 状态寄存器
SPSR Address = E8H 复位值 = 000X X000B
不可位寻址
SPIF WCOL
Bit76543210
3621A–MICRO–6/06
LDEN – – SSIG DISSO ENH
49
符号 功能
SPIF
WCOL
LDEN
SSIG
DISSO
ENH
SP interrupt flag. When a serial transfer is complete, the SPIF bit is set and an interrupt is generated if SPIE = 1 and
ES = 1. The SPIF bit is cleared by reading the SPI status register followed by reading/writing the SPI data register.
When ENH = 0: Write collision flag. The WCOL bit is set if the SPI data register is written during a data transfer. During
data transfer, the result of reading the SPDR register may be incorrect, and writing to it has no effect. The WCOL bit
(and the SPIF bit) are cleared by reading the SPI status register followed by reading/writing the SPI data register.
When ENH = 1: WCOL works in Enhanced mode as Tx Buffer Full. Writing during WCOL = 1 in enhanced mode will
overwrite the waiting data already present in the Tx Buffer. In this mode, WCOL is no longer reset by the SPIF reset but
is reset when the write buffer has been unloaded into the serial shift register.
Load enable for the Tx buffer in enhanced SPI mode.
When ENH is set, it is safe to load the Tx Buffer while LDEN = 1 and WCOL = 0. LDEN is high during bits 0 - 3 and is low
during bits 4 - 7 of the SPI serial byte transmission time frame.
Slave Select Ignore. If SSIG = 0, the SPI will only operate in slave mode if SS (P1.4) is pulled low. When SSIG = 1, the
SPI ignores SS
SSIG = 1.
Disable slave output bit.
When set, this bit causes the MISO pin to be tri-stated so more than one slave device can share the same interface with
a single master. Normally, the first byte in a transmission could be the slave address and only the selected slave should
clear its DISSO bit.
Enhanced SPI mode select bit. When ENH = 0, SPI is in normal mode, i.e. without write double buffering.
When ENH = 1, SPI is in enhanced mode with write double buffering. The Tx buffer shares the same address with the
SPDR register.
in slave mode and is active whenever SPE (SPCR.6) is set. P1.4 may be used as a regular I/O pin when
50
AT89LP216 [Preliminary]
3621A–MICRO–6/06

Figure 18-2. SPI 移位寄存器结构
AT89LP216 [Preliminary]
7
Serial In
Transmit
Byte
8
MUX
8 8
Figure 18-3. SPI 结构
Oscillator
Divider
÷4÷8÷32÷64
2:1
Serial Master Serial Slave
DQ
LATCH
CLK
8
Parallel Master
(Write Buffer)
DQ
LATCH
CLK
2:1
MUX
DQ
LATCH
CLK
Parallel Slave
(Read Buffer)
DQ
LATCH
CLK
S
M
M
MSB
8-bit Shift Register
LSB
S
Read Data Buffer
Write Data Buffer
Serial Out
Receive
Byte
8
MISO
P1.6
MOSI
P1.5
Select
SPR1
SPR0
SPI Control
WCOL
SPIF
SPI Status Register
SPI Clock (Mater)
SPI Interrupt
Request
MSTR
SPE
8
Internal
Data Bus
Clock
Clock
Logic
8
SPIE
SPE
DORD
MSTR
CPOL
CPHA
SPR1
SPR0
Pin Control Logic
S
M
MSTR
SPE
DORD
SCK
1.7
SS
P1.4
SPI Control Register
8
3621A–MICRO–6/06
51

CPHA (时钟状态),CPOL (时钟特性)和 SPR (串行外设时钟比率 = 波特比率)在 SPCR 中控制
SCK 比率和形态。当 SPI 在主模式时,两个 SPR 字位提供四种可能的时钟比率。在从模式下,只要
输入来的 SCK 比率不超过最大位比率,SPI 在此比率下运作。根据串行数据的不同,SCK 的相位和
特性有四种可能的组合。SPI 数据传输形式表示在图 18-4 和 18-5中。为避免接口的中断干扰 SCK,
CPHA,CPOL 和 SPR 不应该在接口激活时被修改,并且主元件应该先于从元件激活。
Figure 18-4. 在 CPHA=0 时 SPI 传输形式
Note: * 无特殊定义时,MSB 一般只接受数据。
Figure 18-5. * 在 CPHA=1 时 SPI 传输形式
SCK CYCLE #
(FOR REFERENCE)
SCK (CPOL = 0)
1 2 3 4 5 6 7 8
SCK (CPOL = 1)
MOSI
(FROM MASTER)
MISO
(FROM SLAVE)
SS (TO SLAVE)
Note: 无特殊定义时,LSB 为前一个传输特性。
MSB 6 5 4 3 2
MSB
*
19. 模拟比较器
在 AT89LP216 上带有模拟比较器。模拟比较器有下列特性:
* 比较输出标识和中断
65432
1 LSB
1 LSB
52
* 可选择中断条件
AT89LP216 [Preliminary]
3621A–MICRO–6/06

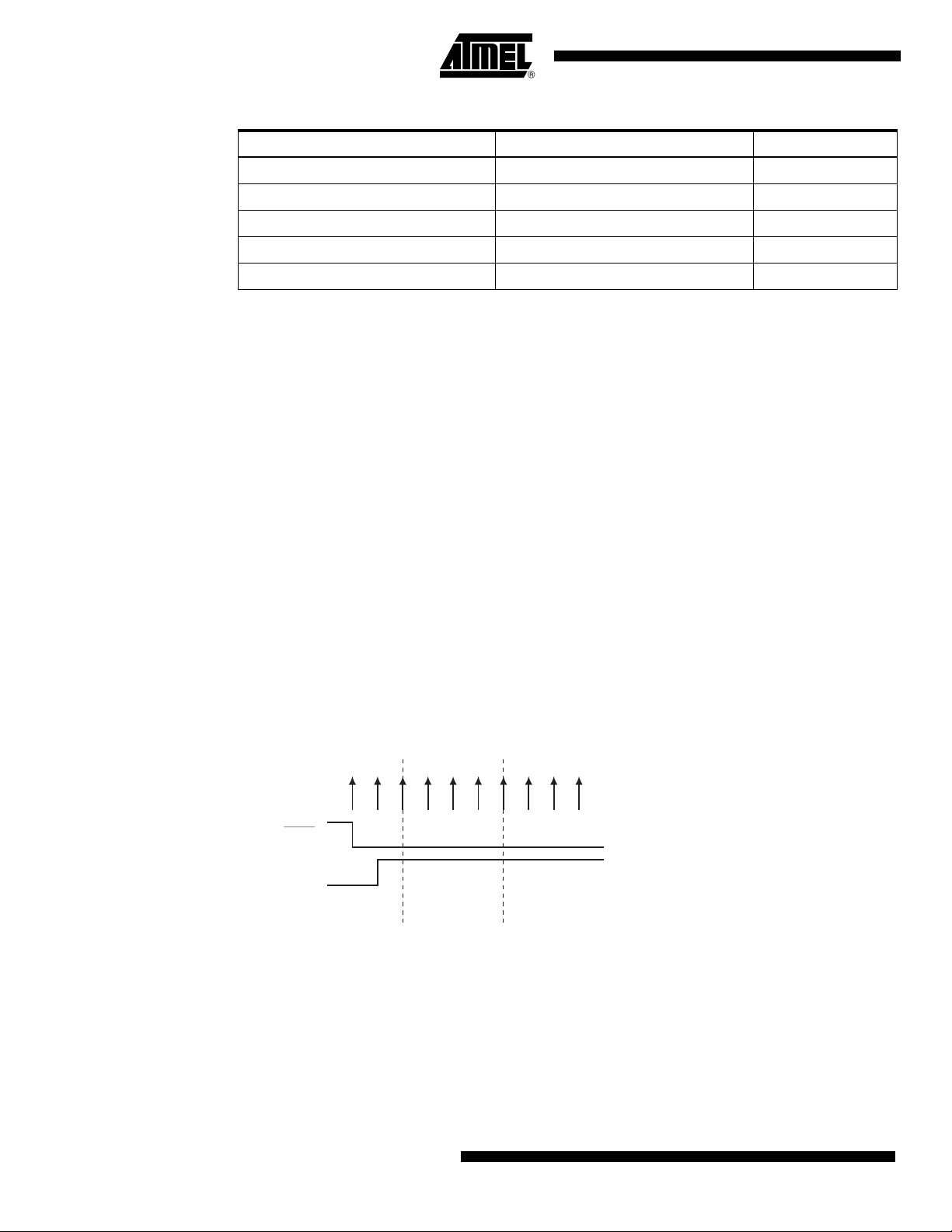
19.1 比较器反跳中断
T
AT89LP216 [Preliminary]
―高电平或低电平
―上升沿或下降沿
―输出锁定
* 硬件反跳模式
比较器工作原理是当正输入 AIN0 (P1.0)大于负输入 AIN0 (P1.1)时,输出为逻辑 “1”
;否则输出为逻辑 “0”。在 ACSR 中设置 CEN 字位就可激活比较器。当比较器首先被激活时,比
较器输出和中断标识无法保证能稳定 10us ;此时不能激活相应的比较器中断,并且在为避免突然
中断而触发中断前,比较器中断标识必须清空。在激活比较器前,应当把 P1.0 和 P1.1 设置只可
输入模式使模拟输入处于三态。第 25 页上图示 “端口 1 模拟功能”
在 ACSR 中设置 CM 位会引起输出值得变化,这种配置可能导致比较器的中断。只要比较器输出值
和 CM 的特定条件相匹配,ACSR 中的比较器中断标识就会被设置。此标识可能会被软件消除也可能
产生一个中断然后被软件清除。
比较器输出样本是每一个时钟周期循环。模拟输入的条件比较器输出极端锁死。尤其是运用速度
很慢的模拟输入时更是如此。有三种反跳模式来过滤掉这种干扰杂音。反跳模式中,比较器用计
时器 1 来调整样本时间。当一个相关的传输发生时,比较器要等到取样输出前的两个计时器溢满
时。如果新样本接受期望值,CF 就设置;否则,这个过程就无效。通过调节计时器 1 的暂停周期
就可调谐过滤器。由于计时器 1 是空转的,反跳器必须等待两次时间溢满才能保证样本延时至少
是一个暂停周期。因此在初始过程后,中断可发生在第 1 次和第 2 次暂停之间。看图 19-1
闲置模式下比较器是默认在非激活状态下。为使比较器在闲置状态时也能工作,必须设置ACSR
中的 CIDL。在 CIDL 设置后,如果比较器中断在激活状态,比较器就可唤醒 CPU 从闲置状态到工作
状态。关电模式下比较器一直处在非激活状态。
Figure 19-1. 反跳模式中的负边缘
Comparator Out
imer 1 Overflow
CF
Start Compare
Start Compare
53
3621A–MICRO–6/06
Table 19-1. ACSR- 模拟比较器控制及状态寄存器
ACSR = 97H 复位值 = XXX0 0000B
不可位寻址
––
Bit76543210
符号 功能
CIDL Comparator Idle Enable. If CIDL = 1 the comparator will continue to operate during Idle mode. If CIDL = 0 the
comparator is powered down during Idle mode. The comparator is always shut down during Power-down mode.
CF Comparator Interrupt Flag. Set when the comparator output meets the conditions specified by the CM [2:0] bits and CEN
is set. The flag must be cleared by software. The interrupt may be enabled/disabled by setting/clearing bit 6 of IE.
CEN Comparator Enable. Set this bit to enable the comparator. Clearing this bit will force the comparator output low and
prevent further events from setting CF. When CEN = 1 the analog input pins, P1.0 and P1.1, have their digital inputs
disabled.
CM [2:0] Comparator Interrupt Mode
CM2
000Negative (Low) level
001Positive edge
010Toggle with debouncing
011Positive edge with debouncing
CM1 CM0 Interrupt Mode
CIDL CF CEN CM3 CM1 CM0
(1)
(1)
100Negative edge
101Toggle
110Negative edge with debouncing
111Positive (High) level
Note: 1. Debouncing modes require the use of Timer 1 to generate the sampling delay.
(1)
54
AT89LP216 [Preliminary]
3621A–MICRO–6/06

20. 可编程看门狗定时器
在计时器溢满前软件无法支持计时器后,系统会超时并触发系统重启,可编程监控计时器 (WDT)
就用来防止此类误操作。WDT 计算着 CPU 的时钟循环。一些高字位,PS0,PS1,PS2 在 SFR WDTCON
中用来把监控计时器的时钟周期从 16K 设到 2048K。计时器溢出还可以延长暂停时间(看第 12 页
上的表 9-2)。在重启和关电模式下,WDT 是非激活状态。当 WDT 超时延时后,会产生一个内部的
RST 脉冲信号来重启 CPU。WDT 可选择周期见表 20-1 。 .
Table 20-1. Watchdog Timer Time-out Period Selection
AT89LP216 [Preliminary]
WDT Prescaler Bits
000 16K
001 32K
010 64K
011 128K
100 256K
101 512K
1 1 0 1024K
1 1 1 2048K
Note: 1. WDT 暂停周期取决于系统时钟频率 .
Time-out Period
------------------------------------------------------ -
Oscillator Frequency
2
PS
14+()
TPS
(Clock Cycles)PS2 PS1 PS0
1+()×=
Period
(1)
监控计时器包括一个含 7 位可编程增溢的 14 位计时器。把程序 1EH/E1H 写到 WDTRST 寄存器会激
发计时器。当 WDT 激活时,WDTCON 里的 WDTEN 字位就会变成 “1”。为防止 WDT 在溢出时会重启,
必须在暂停周期结束前把监控程序写到 WDTRST。在两次写入指令中间,SFR 可读不可写。指令会
把 1EH 移到 WDTRST 寄存器然后 1EH 就会过去。错误的程序会导致监控器的突然重启。可编程程序
激活监控计时器的程序如下:
20.1 软件复位
3621A–MICRO–6/06
MOV WDTRST, #01Eh
MOV WDTRST, #0E1h
把软件重启程序 5AH/A5H 写到 WDTRST SFR 就可完成 AT89LP216 的软件重启。不用激活 WDT 重启软
件。一次正常的软件重启必须在 WDTCON 中设置 SWRST。但是,如果任何时候有错误程序写到
WDTRST,软件将立即重启并且 SWRST 和 WDTOVF 标识也将设置。在这类情形下,正常的软件重启就
要比程序出错引起软件重启好得多。使软件重启的可编程程序如下:
MOV WDTRST, #05Ah
MOV WDTRST, #0A5h
55

Table 20-2. WDTCON – 看门狗控制寄存器
WDTCON Address = A7H 复位值 = 0000 X000B
不可位寻址
PS2 PS1 PS0 WDIDLE
Bit76543210
符号 功能
PS2
PS1
PS0
WDIDLE Disable/enable the Watchdog Timer in IDLE mode. When WDIDLE = 0, WDT continues to count in IDLE mode. When
SWRST Software Reset Flag. Set when a software reset is generated by writing the sequence 5AH/A5H to WDTRST. Also set
WDTOVF Watchdog Overflow Flag. Set when a WDT rest is generated by the WDT timer overflow. Also set when an incorrect
WDTEN Watchdog Enable Flag. This bit is READ-ONLY and reflects the status of the WDT (whether it is running or not). The
Prescaler bits for the watchdog timer (WDT). When all three bits are cleared to 0, the watchdog timer has a nominal
period of 16K clock cycles. When all three bits are set to 1, the nominal period is 2048K clock cycles.
WDIDLE = 1, WDT freezes while the device is in IDLE mode.
when an incorrect sequence is written to WDTRST. Must be cleared by software.
sequence is written to WDTRST. Must be cleared by software.
WDT is disabled after any reset and must be re-enabled by writing 1EH/E1H to WDTRST
–
SWRST WDTOVF WDTEN
Table 20-3. WDTRST – 看门狗复位寄存器
WDTCON Address = A6H ( 只能写 )
不可位寻址
––––––––
Bit76543210
The WDT is enabled by writing the sequence 1EH/E1H to the WDTRST SFR. The current status may be checked by reading
the WDTEN bit in WDTCON. To prevent the WDT from resetting the device, the same sequence 1EH/E1H must be written to
WDTRST before the time-out interval expires. A software reset is generated by writing the sequence 5AH/A5H to WDTRST.
21. 指令设置总结
AT89LP216 是和 MCS-51 的指令设置完全二进制式匹配的。AT89LP216 和标准 8051 之间的区别在于
循环次数需要执行指令来完成。在 AT89LP216 中,指令可能需要 1,2,3 甚至 4 个时钟周期完成。
大多数指令的执行时间可用表 21-1 来估算出。.
Table 21-1. 指令执行时间和一些特例
Generic Instruction Types Cycle Count Formula
Most arithmetic, logical, bit and transfer instructions # bytes
Branches and Calls # bytes + 1
56
AT89LP216 [Preliminary]
3621A–MICRO–6/06
AT89LP216 [Preliminary]
Table 21-1. 指令执行时间和一些特例
Single Byte Indirect (i.e. ADD A, @Ri, etc.) 2
RET, RETI 4
MOVC 3
MOVX 4
MUL 2
DIV 4
INC DPTR 2
Clock Cycles
Arithmetic Bytes
ADD A, Rn 1 12 1 28-2F
ADD A, direct 2 12 2 25
ADD A, @Ri 1 12 2 26-27
ADD A, #data 2 12 2 24
ADDC A, Rn 1 12 1 38-3F
ADDC A, direct 2 12 2 35
ADDC A, @Ri 1 12 2 36-37
ADDC A, #data 2 12 2 34
SUBB A, Rn 1 12 1 98-9F
SUBB A, direct 2 12 2 95
SUBB A, @Ri 1 12 2 96-97
SUBB A, #data 2 12 2 94
INC Rn 1 12 1 08-0F
INC direct 2 12 2 05
INC @Ri 1 12 2 06-07
INC A 2 12 2 04
DEC Rn 1 12 1 18-1F
Hex Code8051 AT89LP
3621A–MICRO–6/06
DEC direct 2 12 2 15
DEC @Ri 1 12 2 16-17
DEC A 2 12 2 14
Clock Cycles
Arithmetic Bytes
INC DPTR 1 24 2 A3
MUL AB 1 48 2 A4
DIV AB 1 48 4 84
DA A 1 12 1 D4
Clock Cycles
Logical Bytes
Hex Code8051 AT89LP
Hex Code8051 AT89LP
57

Table 21-1. 指令执行时间和一些特例
CLR A 1 12 1 E4
CPL A 1 12 1 F4
ANL A, Rn 1 12 1 58-5F
ANL A, direct 2 12 2 55
ANL A, @Ri 1 12 2 56-57
ANL A, #data 2 12 2 54
ANL direct, A 2 12 2 52
ANL direct, #data 3 24 3 53
ORL A, Rn 1 12 1 48-4F
ORL A, direct 2 12 2 45
ORL A, @Ri 1 12 2 46-47
ORL A, #data 2 12 2 44
ORL direct, A 2 12 2 42
ORL direct, #data 3 24 3 43
XRL A, Rn 1 12 1 68-6F
XRL A, direct 2 12 2 65
XRL A, @Ri 1 12 2 66-67
XRL A, #data 2 12 2 64
XRL direct, A 2 12 2 62
XRL direct, #data 3 24 3 63
RL A 1 12 1 23
RLC A 1 12 1 33
RR A 1 12 1 03
RRC A 1 12 1 13
SWAP A 1 12 1 C4
Clock Cycles
Data Transfer Bytes
MOV A, Rn 1 12 1 E8-EF
MOV A, direct 2 12 2 E5
MOV A, @Ri 1 12 2 E6-E7
MOV A, #data 2 12 2 74
MOV Rn, A 1 12 1 F8-FF
MOV Rn, direct 2 24 2 A8-AF
MOV Rn, #data 2 12 2 78-7F
MOV direct, A 2 12 2 F5
MOV direct, Rn 2 24 2 88-8F
MOV direct, direct 3 24 3 85
Hex Code8051 AT89LP
58
AT89LP216 [Preliminary]
3621A–MICRO–6/06

AT89LP216 [Preliminary]
Table 21-1. 指令执行时间和一些特例
MOV direct, @Ri 2 24 2 86-87
MOV direct, #data 3 24 3 75
MOV @Ri, A 1 12 1 F6-F7
MOV @Ri, direct 2 24 2 A6-A7
MOV @Ri, #data 2 12 2 76-77
MOV DPTR, #data16 3 24 3 90
MOVC A, @A+DPTR 1 24 3 93
MOVC A, @A+PC 1 24 3 83
MOVX A, @Ri 1 24 4 E2-E3
MOVX A, @DPTR 1 24 4 E0
MOVX @Ri, A 1 24 4 F2-F3
MOVX @DPTR, A 1 24 4 F0
PUSH direct 2 24 2 C0
POP direct 2 24 2 D0
XCH A, Rn 1 12 1 C8-CF
XCH A, direct 2 12 2 C5
XCH A, @Ri 1 12 2 C6-C7
XCHD A, @Ri 1 12 2 D6-D7
CLR C 1 12 1 C3
CLR bit 2 12 2 C2
SETB C 1 12 1 D3
SETB bit 2 12 2 D2
CPL C 1 12 1 B3
CPL bit 2 12 2 B2
ANL C, bit 2 24 2 82
Clock Cycles
Bit Operations Bytes
ANL C, bit 2 24 2 B0
ORL C, bit 2 24 2 72
ORL C, /bit 2 24 2 A0
MOV C, bit 2 12 2 A2
MOV bit, C 2 24 2 92
Hex Code8051 AT89LP
3621A–MICRO–6/06
Clock Cycles
Branching Bytes
JC rel 2 24 3 40
JNC rel 2 24 3 50
JB bit, rel 3 24 4 20
Hex Code8051 AT89LP
59
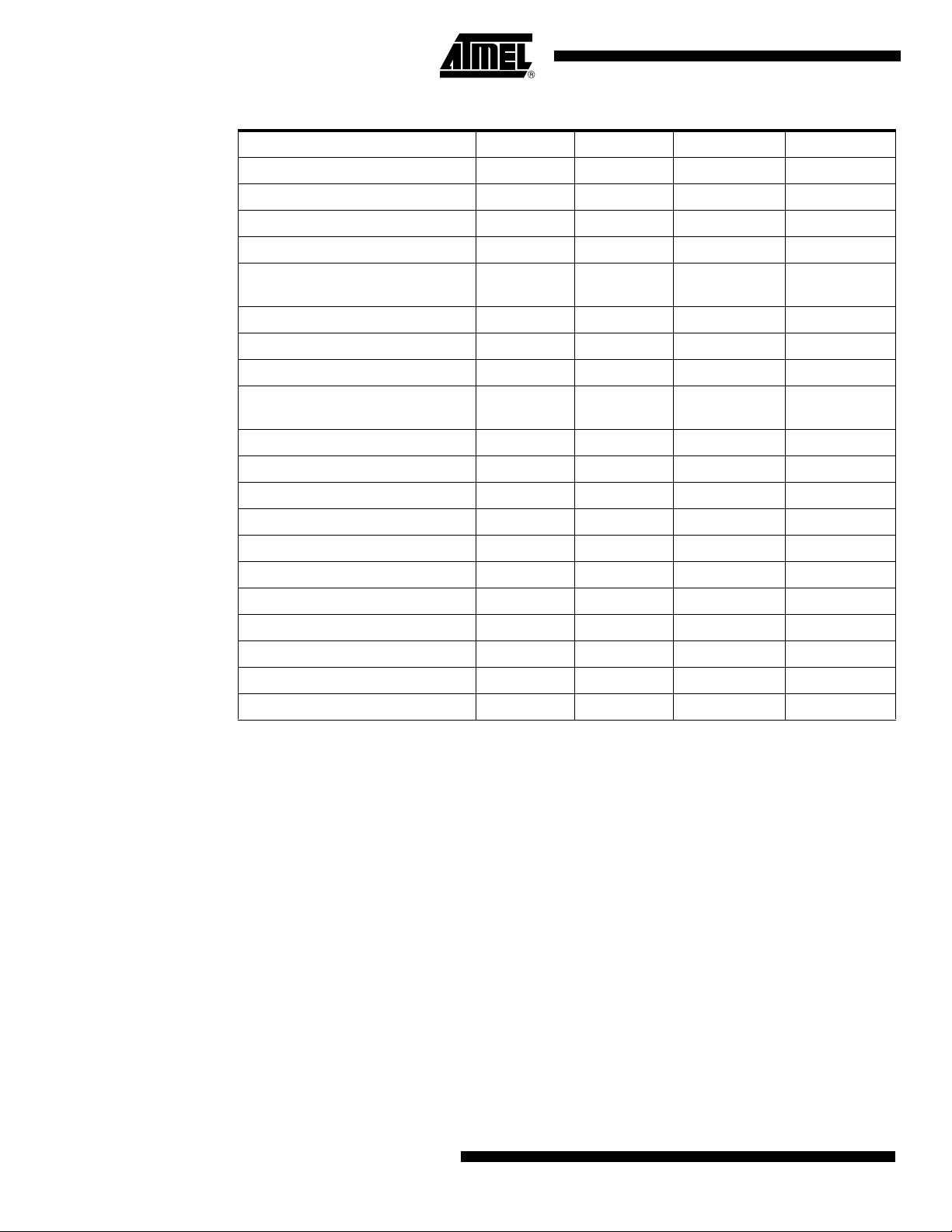
Table 21-1. 指令执行时间和一些特例
JNB bit, rel 3 24 4 30
JBC bit, rel 3 24 4 10
JZ rel 2 24 3 60
JNZ rel 2 24 3 70
SJMP rel 2 24 3 80
ACALL addr11 2 24 3
LCALL addr16 3 24 4 12
RET 1 24 4 22
RETI 1 24 4 32
AJMP addr11 2 24 3
LJMP addr16 3 24 4 02
JMP @A+DPTR 1 24 2 73
JMP @A+PC
CJNE A, direct, rel 3 24 4 B5
CJNE A, #data, rel 3 24 4 B4
(1)
2– 3A573
11,31,51,71,9
1,B1,D1,F1
01,21,41,61,8
1,A1,C1,E1
22. 片上调试系统
CJNE Rn, #data, rel 3 24 4 B8-BF
CJNE @Ri, #data, rel 3 24 4 B6-B7
DJNZ Rn, rel 2 24 3 D8-DF
DJNZ direct, rel 3 24 4 D5
NOP 1 12 1 00
(1)
BREAK
Note: 1. 这个逃逸指令是对指令设置的延伸应用。
2– 2A500
AT89LP216 片上调试 (OCD)系统使用两线串行接口控制程序流程;读取、修改、加写系统状态;
编写非易失性存储器。OCD 系统有以下特点:
. 完全的程序流程控制
. 可对内部所有特殊功能寄存器和数据存储器进行读写和修改
. 四个硬件编程地址断点
. 通过 BREAK 指令设置软件断点
60
. 堆栈上溢 / 下溢时程序中止
. 看门狗溢出时程序中止
. 非入侵操作
AT89LP216 [Preliminary]
3621A–MICRO–6/06
22.1 物理接口
A
AT89LP216 [Preliminary]
. 非易失性存储器编程
片上调试系统使用两线同步串行接口在目标器件和仿真系统之间建立通信。OCD接口由两个用户熔
丝位控制。通过清零 Enable 熔丝位使能 OCD。当 OCD 使能时,RST 管脚被配置成调试时钟 (DCL)
的输入。根据被选择的时钟源,XTAL1 或 XTAL2 被配置成调试数据 (DDA) 的双向数据线。如果选择
了外部时钟,XTAL2 就被配置成 DDA。如果选择了内部 RC 振荡器,XTAL1 就被配置成 DDA。OCD 接
线见图 22 - 1。当 OCD 使能时,接口类型依据 OCD 接口选择用户熔丝位。这个熔丝位提供普通两
线串口 (TWI)和高速两线串口 (FTWI)两种选择。用户必须在使能 OCD 的同时对该熔丝位进行
合理配置。(见 71 页 “用户配置熔丝位”) “ 用户配置熔丝位 ” on page 68).
Figure 22-1. AT89LP216 片上调试连线
22.2 软件断点
DCL
DDA
VCC
P1.3/RST
XTAL1
GND
CLK = Internal RC
DCL
P1.3/RST
XTAL1CLK
GND
CLK = External Clock
VCC
XTAL2
DD
当用到片上调试功能时,必须注意以下几点:
• P1.3/RST 不能和 VCC 直接相连,必须去除任何和 RST 相连的外部电容。
• 去除所有外部复位电压。
• 去除 XTAL1、XTAL2 上的石英晶体和电容。如果不想用内部 RC 振荡器,必须在 XTAL1 上驱动一个
外部时钟信号,为了这个目的,有些仿真系统可能提供用户可配置的时钟。
AT89LP216 微控制器包括一个 BREAK 指令,用来在软件内执行程序存储器断点。通过在代码中放置
BREAK 指令,可以人为插入软件断点。有些仿真系统可能允许自动添加 / 删除软件断点。每当一个
软件断点改变时,闪存都要重新编程。频繁的添加 / 删除软件断点,会降低非易失性存储器的数
据保持力。用于调试的器件禁止给任何客户。当 OCD 未使能时,BREAK 指令看作一个两周期的 NOP
指令。
22.3 片上调试的缺陷
3621A–MICRO–6/06
AT89LP216 是一种低功耗,管脚少然而功能完善的微控制器,在它有限的 I/0 管脚上复合了一些功
能。为了为片上调试提供资源一些功能必须牺牲。片上调试系统有以下一些缺陷:
* 调试时钟管脚 (DCL) 和管脚 P1.3 还有外部复位管脚 (RST)复用,所以当 OCD 使能时,P1.3 和
外部复位都不可用。
* 调试数据管脚(DDA)和 XTAL1/P3.2 或 XTAL2/P3.3 复用。所以在调试时,晶体振荡器是不被支
持的。必须选择内部 RC 振荡器或外部时钟源来提供系统时钟。熔丝位指定晶体振荡器时,当 OCD
使能时默认外部时钟模式。
61

* 当调试时使用内部 RC 振荡器时,DDA 位于 XTAL1/P3.2 管脚上,INT0 功能在此模式下失效。
* 当调试时使用外部时钟时,DDA 位于 XTAL2/P3.3 管教上,系统时钟驱动 XTAL1/P3.2。INT0,INT1
和 CLKOUT 功能在此模式下失效。
* AT89LP216 不支持程序运行时编程,因此调试过程中当想改变代码时必须先复位器件,包括添加
/ 删除软件断点。
* 当使用看门狗溢出产生中断来代替复位时,看门狗的状态将不会被复位。为了保证看门狗正确
工作,必须在继续工作之前向器件发送 OCD 复位命令。
23. 闪存编程
AT89LP216 微控制器有 2K 字节的片上在线可编程程序闪存。在线编程允许微控制器在终端系统中
时进行反复的编程。在线编程器使用简单的四线 SPI 接口和 AT89LP216 进行串行通信,对片上所
有非易失性存储器重新编程。在线编程消除了从系统中移除芯片的需要,无论是实验室研发还是
升级软件或参数,都可以节约时间和金钱。AT89LP216 的 ISP 接口具有以下特点:
* 四线 SPI 编程接口
* 低有效复位编程入口
* 从机选择允许同一个接口接多个器件
* 用户签名队列
* 灵活的页编程
* 行擦除能力
* 带自动擦除命令的页写入
* 编程状态寄存器
要了解在线编程的更多详情,参考应用手册 “AT89LP 在线编程说明”。
.
62
AT89LP216 [Preliminary]
3621A–MICRO–6/06
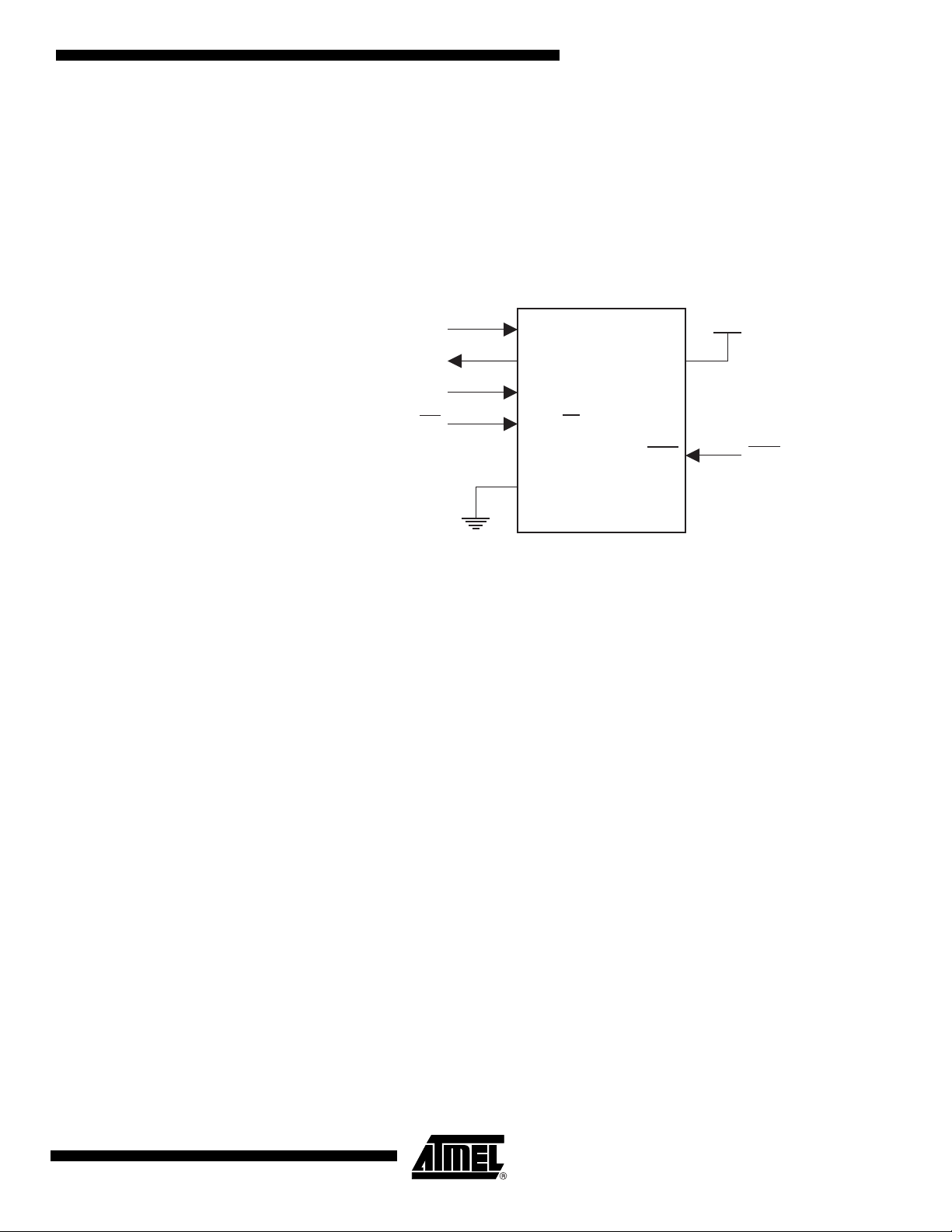
23.1 物理接口
T
AT89LP216 [Preliminary]
在线编程使用 AT89LP216 的串行外围接口 (SPI)管脚。SPI 是全双工同步串行接口,它由四根线
组成:串行时钟 (SCK), 主进 / 从出 (MISO), 主出 / 从进 (MOSI) 和低有效的从机选择 (SS)。
当对 AT89LP216 编程时,编程器总是作为 SPI 主机,目标系统总是作为 SPI 从机。要进入或保持
在线编程模式,器件的复位线 (RST)必须保持有效 ( 低 )。除了 VCC 和 GND,AT89LP216 可以最
少只用七根连线就能进行编程,如图 23 - 1。 Figure 23-1.
Figure 23-1. 在线编程器件连线
AT89LP216
Serial Clock
Serial In
SS
在线编程接口是外部对 AT89LP216 进行编程的唯一方法。ISP 接口可以在线或在独立的串行编程器
中对器件进行编程。ISP 接口除了 SCK 不需要任何时钟而且不受系统时钟频率的限制。在线编程
时,目标器件的系统时钟源可以正常工作。
当设计一个需要使用在线编程的系统时,必须注意以下几点:
* ISP 接口只使用 SPI 时钟模式 0 (CPOL=0,CPHA=0), 最高频率为 5MHZ.
* AT89LP216 只有在复位线 (RST)有效(低)时才会进入编程模式。为了简化这个步骤,建议目
标复位由在线编程器控制。为了避免出现问题,在线编程器必须能够在整个编程周期内保持整个
目标系统复位。目标系统禁止在复位线有效时驱动四根 SPI 线。
P1.7/SCK
P1.6/MISOSerial Out
P1.5/MOSI
P1.4/SS
GND
VCC
P1.3/RST
RS
23.2 存储器结构
3621A–MICRO–6/06
?RST 输入可能不能够获得额外的 I/O 引脚。这种情况下,RST 引脚在上电期间总是作为复位引脚。
为了进行编程,必须在带电复位 (POR)结束之前拉低 RST 引脚。POR 结束之后,除非 RST 被拉
高,否则器件一直保持 ISP 模式。一旦初始化 ISP 操作结束,目标器件上的电源必须循环开关进
入另一次操作。
* 当 ISP 使能时,在复位期间,SS 引脚禁止悬空。
* 在任何复位期间,ISP 使能熔丝位必须置位才能进行编程。如果 ISP 熔丝位被禁止,那么只有在
POR 时才能进入 ISP。
AT89LP216 提供 2K 字节的在线可编程 (ISP)的非易失性闪存。除此之外,它还包含一个 64 字节
的用户签名队列和一个32字节只读的Atmel签名队列。内存结构见表23-1和图23-2。存储
器被分成一些页,每页有 32 字节。一个读或写指令只能进入一页。每种存储器占据自己的地址空
间,由专门针对该存储器的指令进行访问。然而所有类型的存储器页大小都一样。
63

用户配置熔丝位在存储器中映射为一行,每个字节代表一个熔丝位。从编程的角度来看,熔丝位
可看成是一般的代码字节,当然它们不受芯片擦除的影响。在熔丝位那一行的适当位置写入 00h
就可以使能熔丝位。然而当想禁止熔丝位,例如写入 FFh,必须先擦除整个熔丝位所在的行然后再
重新编程。编程器必须先记下所有熔丝位的状态,然后修改需要禁止的熔丝位,最后发出一个带
自动擦除的写熔丝位命令,数据就是前面记下的熔丝位的状态。锁定位的操作情况和熔丝位相似,
不过它们只能通过芯片擦除的方法解除锁定状态。
.
Table 23-1. Code Memory Size
设备 # 程序空间 页大小 页数 地址范围
AT89LP216 2K bytes 32 bytes 64 0000H - 07FFH
Figure 23-2. 程序存储器大小
23.3 命令格式
User Fuse Row
User Signature Array
Atmel Signature Array
Page 0
Page 1
Page 0
Page 0
Page 63
Page 62
07FF
Code Memory
Page 1
Page 0
00 1F
0000
编程命令由一个操作码字节,两个地址字节和零或更多数据字节构成。除此之外,所有命令数据
包必须以 AAH 和 55H 开头。这个开头能够使编程接口增加抗干扰性。68 页图 23 - 3 显示了一个简
化的命令流程图。
64
68 页图 23 - 4 显示了命令数据包的一个样例。SS 管脚定义了包帧。命令中第一个字节发送之前
SS 必须拉低,命令中最后一个字节发送之后 SS 必须被拉回到高的状态。直到 SS 返回高命令才传
输完成。命令字节在 MOSI 上串行传输。MISO 上串行接收数据输出字节。通过在最后一个字节传输
完毕时 SS 返回高,就可以支持可变长的包。有时,命令字节中有些不用理睬的值,如果这些值在
包的当中就必须传输,如果在结尾部分则可以忽略。
面向页的指令总是包含一个完整的 16 位地址。高位选择页数,低位选择字节。AT89LP216 分配 5
位给字节地址 6 位给页地址。当传输时要访问的页总是固定的。字节地址指定第一个数据字节的
起始地址。当一个数据字节传输完毕,字节地址就增加指向下面的数据字节。这就可以让页命令
AT89LP216 [Preliminary]
3621A–MICRO–6/06
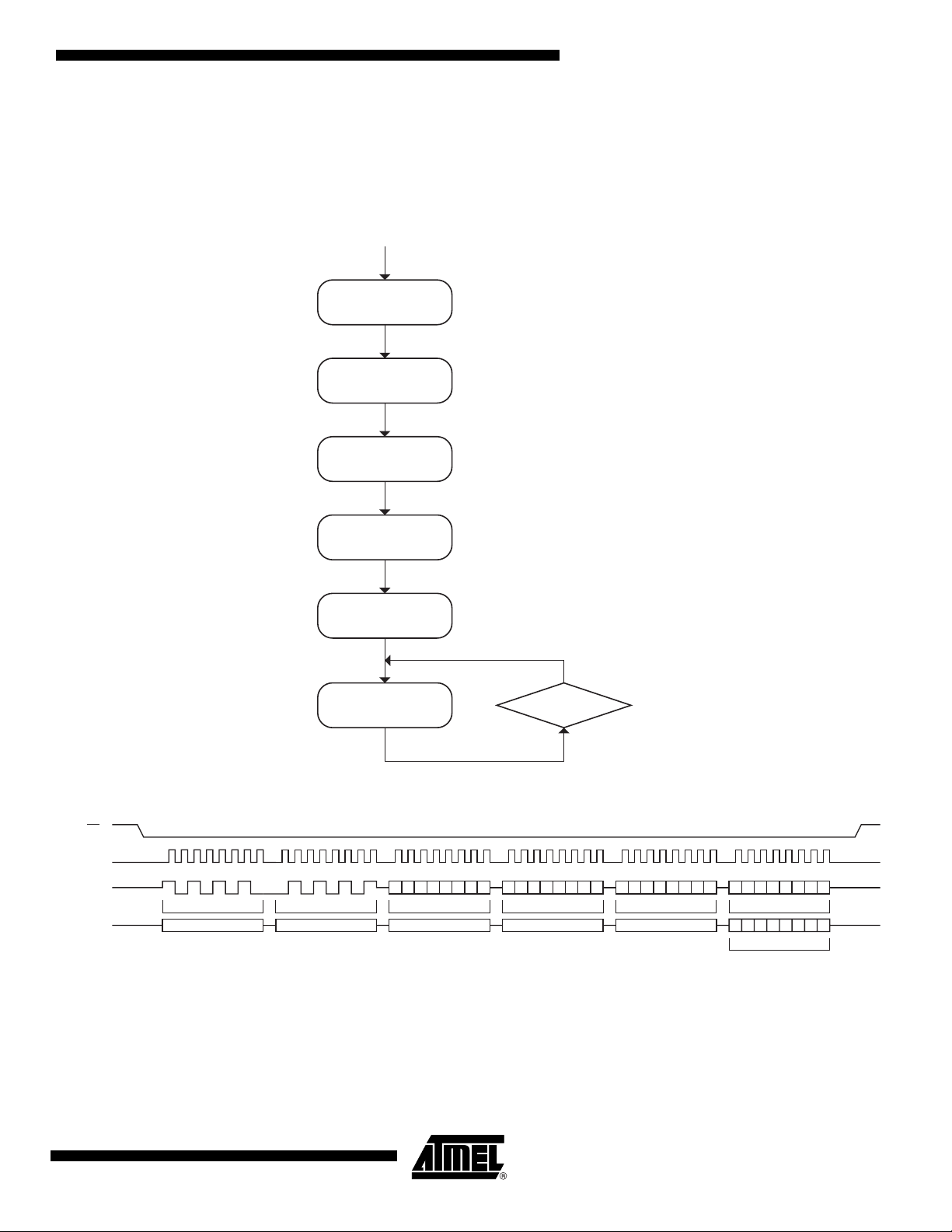
Figure 23-3. 命令流程图 t
AT89LP216 [Preliminary]
线性扫描一页中的字节。如果字节地址超过了页中的最后一个字节,字节地址将滚回到同一页的
第一个字节处。当往页缓冲中载入字节时,过载数据可能引起数据冲突。
69页表23-2显示了一些常用命令。
Table 23-2 on page 66.
Input Preamble 1
(AAh)
Input Preamble 2
(55h)
Input Opcode
Figure 23-4. ISP 命令数据包
SS
SCK
MOSI
Preamble 1
MISO
X
Input Address
High Byte
Input Address
Low Byte
Input/Output
Data
70654321 7 0654321 7 0654321 7 0654321
Preamble 2 Opcode Address High Address Low Data In
X
XXX
Address +1
70654321
Data Out
3621A–MICRO–6/06
65

Table 23-2. 编程命令总结
命令
编程使能
操作码
(1)
1010 1100 0101 0011 – – –
高地址 低地址 数据 0 数据 n
片擦除 1000 1010 – – – –
读状态 0110 0000 xxxx xxxx xxxx xxxx Status Out
页下载缓冲
写代码页
带自动擦除的写代码页
读代码页
写用户熔丝
带自动擦除功能的写用户熔丝
读用户熔丝
写锁定位
读锁定位
写用户签名页
带擦除的写用户签名页
(2)
(2)
(2)
(2)(3)(4)
(2)(3)(4)
(2)(3)(5)
(2)(3)(5)
0101 0001 xxxx xxxx xxxb bbbb DataIn 0 ... DataIn n
0101 0000 xxxx xaaa aaab bbbb DataIn 0 ... DataIn n
(2)
0111 0000 xxxx xaaa aaab bbbb DataIn 0 ... DataIn n
0011 0000 xxxx xaaa aaab bbbb DataOut 0 ... DataOut n
1110 0001 0000 0000 000b bbbb DataIn 0 ... DataIn n
(2)(3)(4)
1111 0 001 0000 0000 000b bbbb Da t a I n 0 . . . D a t a I n n
0110 0001 0000 0000 000b bbbb DataOut 0 ... DataOut n
1110 0100 0000 0000 000b bbbb DataIn 0 ... DataIn n
0110 0100 0000 0000 000b bbbb DataOut 0 ... DataOut n
(2)
(2)
0101 0010 xxxx xxxx xaab bbbb DataIn 0 ... DataIn n
0111 0010 xxxx xxxx xaab bbbb DataIn 0 ... DataIn n
读用户签名页
读 Atmel 签名页
(2)
(2)(6)
0011 0010 xxxx xxxx xaab bbbb DataOut 0 ... DataOut n
0011 1000 xxxx xxxx xxxb bbbb DataOut 0 ... DataOut n
Notes: 1. 使能命令必须是在进入编程模式之后首个发送的命令。
2. 从 1 到 32 的任何数量的数据字节都可能被读写,地址每隔一个字节就增加。
3. 每个字节地址选择一个熔丝位或锁定位。数据字节必须是 00h 或 FFh。
4. 见 71 页表 23 - 5 熔丝位定义。
5. 见 70 页表 23 - 4 锁定位定义。
6. AAtmel 签名字节
AT89LP216: 地址 00H = 1EH
01H = 29H
02H = FFH
7. 关键字
a: 页地址位
b: 字节地址位
x: 无关位
66
AT89LP216 [Preliminary]
3621A–MICRO–6/06

23.4 状态寄存器
Table 23-3. 状态寄存器
AT89LP216 [Preliminary]
可以通过读取状态寄存器访问存储器状态。表 23 - 3 显示状态寄存器 .
––––
Bit76543210
符号 功能
LOAD
SUCCESS
WRTINH
BUSY
下载标志。下载页缓冲命令清零,下次存储器写命令置高。此标志显示页缓冲之前通过下载页缓冲命令装载过数据
成功标志。编程周期开始时清零,编程周期结束并且无误时置高。
写禁止标志。当 VCC 降到最小编程电压之下导致编程被禁止时,该位就会被警戒灯火管制检测器 (BOD)拉低,此时,
SUCCESS 标志在周期结束时会保持低状态。WRTINH
忙标志。当存储器忙于编程时或写被禁止时标志清零。
为低时 BUSY 线也会拉低。
LOAD SUCCESS WRTINH BUSY
23.5 DATA 轮询
AT89LP216 执行 DATA 轮询来显示编程周期结束。当器件忙时,任何试图读取最后一个字节的行为
都会返回一个最高位为 1 的数据字节。一旦编程周期结束,会获得真正的值。在擦除期间,假设
数据为FFH,则DATA
轮询会返回 7FH。当在一页中写多个字节,DATA 的值是编程开始之前最后一
个载入的数据字节,而不是一页中物理地址最高的那个字节。
23.6 闪存安全
AT89LP216 为了保证程序闪存的安全提供了两个锁定位。锁定位可以不被编程 (FFh)也可以被编
程 (00h)来获得表 23-4 所列出的保护水平。锁定位只能通过芯片擦除来擦除 (FFh)。锁定位模
式 2 禁止了对所有存储器空间的编程,包括用户签名队列和用户配置熔丝位。用户熔丝位必须在
使能锁定位模式 2 或 3 之前编写。锁定位模式 3 执行模式 2 的操作,并且也阻塞对程序存储器的
读取,然而,对用户签名队列、Atmel 签名队列和用户配置熔丝位的读取仍旧是允许的。
Table 23-4. 锁定位保护模式
程序锁定位 ( 按地址排列 )
模式 00h 01h 保护模式
1 FFh FFh
200hFFh
3 00h 00h
23.7 用户配置熔丝位
AT89LP216 包括 19 个用户熔丝位用来对器件进行配置。每个熔丝位在用户熔丝位行中占据各自的
位置,见表 23-5。熔丝位通过编写 00h 清零,对熔丝位编写 FFh 可使其保持之前的状态。要置位
3621A–MICRO–6/06
没有程序锁定
禁止对闪存的高级编程
禁止对闪存的高级编程,禁止读取闪存,禁止 OCD
67

熔丝位(置成 FFh),熔丝位行必须被清零然后用带自动擦除功能的熔丝位写命令来重新编写。所
有熔丝位的默认状态是 FFh。 .
Table 23-5. 用户配置熔丝位定义
地址 熔丝名称 描述
00 – 01h 时钟源 – CS[0:1]
02 – 03h 开始时间 – SUT[0:1]
(2)
选择系统时钟源:
CS1 CS0 时钟源
00h 00h 晶体振荡器 (XTAL)
00h FFh 保留
FFh 00h 外部时钟 XTAL1 (XCLK)
FFh FFh 内部 RC 振荡器 (IRC)
选择 POR/BOD/PWD 唤醒的延时时间 :
SUT1 SUT0 Selected Time-out
00h 00h 1 ms (XTAL); 16 µs (XCLK/IRC)
00h FFh 2 ms (XTAL); 512 µs (XCLK/IRC)
FFh 00h 4 ms (XTAL); 1 ms (XCLK/IRC)
FFh FFh 16 ms (XTAL); 4 ms (XCLK/IRC)
04h 管脚复位使能
05h
06h 片上调试使能
07h ISP 使能
08 – 0FH RC 振荡器频率调整 [0:7]
10H 用户签名编程
11H 三态管脚
12H OCD 接口选择
Notes: 1. 所有熔丝位的默认状态是 FFh。
警戒灯火管制检测器使能
2. 对熔丝位的更改只有在器件 POR 之后才有效。
3. 对熔丝位的更改只有在 ISP 操作结束时把 RST
(3)
(3)
FFh: RST 管脚作为复位管脚
00h: RST 管脚作为通用 I/O
FFh: 警戒灯火管制检测器使能
00h:警戒灯火管制检测器禁止
FFh: 在线编程使能
00h: 在线编程禁止 (只在 POR 时使能)
FFh: ISP 使能
00h: ISP 禁用 (POR)
调整内部 RC 振荡器频率
FFh: 用户签名编程禁止
00h: 用户签名编程使能
FFh: 复位之后 I/O 管脚以只输入模式启动
00h: 复位之后 I/O 管脚以准双向模式启动
FFh: 普通两线接口
00h: 快速两线接口
拉高时才有效。
23.8 编程接口时序
68
AT89LP216 [Preliminary]
本小节详细论述系统通用时序、进入退出在线编程的约束条件和 ISP 中与串行外围接口有关的参
数。以下波形图的通用时序参数见 75 页 “时序参数”一节 .
3621A–MICRO–6/06

23.8.1 上电时序
AT89LP216 [Preliminary]
执行这个时序之后就能在上电之后立即进入编程模式。如果 RST 管脚或 ISP 熔丝位被禁止,那么
这就是唯一进入编程模式的方法。 ( 见 14 页 “外部复位”).
1. 在 VCC 和 GND 之间供电。RST 必须保持低。
2. 等待至少 tPWRUP. ,然后驱动 SS 为高
3. 等待至少 tSUT 到内部上电复位结束。tSUT 的值取决于器件的电路设置。
4. 开始编程操作。
Figure 23-5. 串行编程上电时序
V
CC
RST
SS
SCK
t
PWRUP
t
+ t
POR
SUT
HIGH ZMISO
t
ZSS
23.8.2 下电时序
HIGH ZMOSI
执行该时序之后在编程完成后断电。
1. 驱动 SCK 低。
2. 等待至少 tSSD, 然后把 SS 拉高。
3. MOSI 三态。.
4. 等待至少 tSSZ 然后 SS 和 SCK 变成三态。
5. 等待不超过 tPWRDN 然后 VCC 断电。
Figure 23-6. 串行编程下电时序
V
CC
RST
SS
SCK
t
SSD
t
SSZ
HIGH ZMISO
t
PWRDN
23.8.3 ISP 启动时序
3621A–MICRO–6/06
HIGH ZMOSI
当器件已经通过上电复位并且已经在操作时,执行这个时序将退出 CPU 执行模式进入 ISP 模式。
69

1. RST 拉低。
23.8.4 ISP 退出时序
2. SS
拉高。
3. 等待 tRLZ + tSTL。
4. 开始编程操作。
Figure 23-7. 在线编程 (ISP) 启动时序
V
CC
XTAL1
RST
SS
SCK
t
RLZ
执行该时序将退出 ISP 模式继续 CPU 执行模式。
t
STL
t
ZSS
t
SSE
HIGH ZMISO
HIGH ZMOSI
1. SCK 拉低。
1. 等待至少 tSSD 然后将 SS 拉高。
2. MOSI 三态。
3. 等待至少 tSSZ 然后拉高 RST。
4. SCK 三态。
5. 等待 tRHZ 然后 SS
三态。
70
AT89LP216 [Preliminary]
3621A–MICRO–6/06

Figure 23-8. 在线编程 (ISP) 退出时序
V
CC
XTAL1
RST
AT89LP216 [Preliminary]
23.8.5 串行外围接口
SS
t
SCK
Note: 本页各波形不按比例。
SSD
t
SSZ
t
RHZ
HIGH ZMISO
HIGH ZMOSI
串行外围接口 (SPI)是面向字节的全双工同步串行通信通道。在在线编程中, 编程器总是作为
SPI 主机,目标器件总是作为 SPI 从机。目标器件在 MOSI 上接收串行数据,在 MISO 上输出串行数
据。编程接口作为标准的 SPI 端口,数据次序固定。对于在线编程而言,MSB 第一个传输,如图
23-9 所示。SCK 相位和极性跟随 SPI 时钟模式 0(CPOL = 0, CPHA = 0),在 SCK 上升沿采样,在
SCK 下降沿输出。欲知更多时序信息见图 23-10。
Figure 23-9. ISP 字节时序
SCK
MOSI
7
6
5
4
3
2
1
0
3621A–MICRO–6/06
MISO
7
6
Data Sampled
5
4
3
2
1
0
71

Figure 23-10. 串行编程接口时序
SS
t
SSE
t
SCK
SHSL
t
SCK
t
SR
t
SLSH
t
SF
t
SSD
23.8.6 时序参数
t
SOE
t
SOV
t
SOH
MISO
MOSI
图 23-5, 图 23-6, 图 23-7, 图 23-8 和图 23-10 的时序参数见表。
t
SIS
t
SIH
t
SOX
72
Table 23-6. 编程接口时序参数
符号 参数 最小 最大 单位
t
CLCL
t
PWRUP
t
POR
t
PWRDN
t
RLZ
t
STL
t
RHZ
t
SCK
t
SHSL
t
SLSH
t
SR
t
SF
系统时钟循环时间
上电到 SS 为高的时间
上电复位时间
SS 三态到断电
RST 低到 I/O 三态
RST 处于低的时间
RST 高到 SS 三态
串行时钟循环时间
时钟高的时间
时钟低的时间
上升时间
下降时间
AT89LP216 [Preliminary]
060ns
10 µs
100 µs
1µs
t
CLCL
2 t
CLCL
ns
100 ns
02 t
(1)
200
CLCL
ns
ns
75 ns
50 ns
25 ns
25 ns
3621A–MICRO–6/06

AT89LP216 [Preliminary]
Table 23-6. 编程接口时序参数
符号 参数 最小 最大 单位
t
SIS
t
SIH
t
SOH
t
SOV
t
SOE
t
SOX
t
SSE
t
SSD
t
ZSS
t
SSZ
t
WR
t
AWR
t
ERS
Note: 1. t
串行输入设置时间
串行输入保持时间
串行输出保持时间
串行输出有效时间
输出使能时间
输出禁止时间
SS 使能引导时间
SS 禁止延迟时间
SCK 设置到 SS 低
SS 高之后 SCK 保持时间
写循环时间
带自动擦除写循环时间
芯片擦除循环时间
独立于 t
SCK
CLCL
.
10 ns
10 ns
10 ns
35 ns
10 ns
25 ns
t
SLSH
t
SLSH
25 ns
25 ns
2.5 ms
5ms
7.5 ms
ns
ns
3621A–MICRO–6/06
73

24. 电器特性
24.1 绝对极限值 *
操作温度 .......................................................... -40°C to +85°C
*NOTICE: 如果强制芯片在超出 “绝对极限值”表中所列的
条件之下工作可能会造成器件的永久性损坏。这
存储温度 ........................................................ -65°C to +150°C
仅是工作应力的极限。并不表示器件可以工作于
表中所列条件之下,或是那些超越工作范围明确
任意管脚对地电压..............................................-0.7V to +5.5V
规定的其他条件之下。长时间工作于绝对极限值
可能会影响器件的寿命。
最大工作电压 .................................................................... 5.5V
直流输出电流 .............................................................. 15.0 mA
24.2 直流特性
TA = -40°C to 85°C, VCC = 2.4V to 5.5V ( 除非另行标注 )
符号 参数 条件 最小 最大 单位
V
IL
V
IH
V
OL
V
OH
V
OH1
输入低电压 -0.5 0.2 V
输入高电压 0.2 V
输出低电压 (Ports 1, 3)
输出低电压 (Ports 1, 3)
带弱上拉使能
(1)
809 IOL = 10 mA, VCC = 2.7V, TA = 85°C 0.5 V
IOH = -80 µA, VCC = 5V ± 10% 2.4 V
I
= -30 µA 0.75 V
OH
= -12 µA 0.9 V
I
OH
输出高电压(Ports 1, 3)
带强上拉使能
IOH = -10 mA, TA = 85°C
CC
0.9 V
+ 0.9 V
CC
CC
CC
- 0.1 V
CC
+ 0.5 V
CC
V
V
-50 µA
-750 µA
±10 µA
CC
V
10 pF
1.2/1 mA
100 µA
20 µA
I
IL
I
TL
I
LI
V
OS
V
CM
RRST
C
IO
I
CC
逻辑 0 输入电流
(Ports 1, 3) V
逻辑 1 到 0 转换电流 (Ports 1,
3)
输入漏电流
(Port P1.0, P1.1)
比较输入偏移电压
普通模式下比较输入电压
复位下拉电阻
复位下拉电阻
电源供电电流
掉电模式 (2)
= 0.45V
IN
VIN = 2V, VCC = 5V ± 10%
0 < V
< V
IN
CC
= 5V 20 mV
V
CC
0V
50 150 KΩ
测试频率 = 1 MHz, T
激活模式 , 12 MHz, V
空闲模式 , 12 MHz, V
P1.0 & P1.1 = 0V or V
V
= 5.5V, P1.0 & P1.1 = 0V or V
CC
V
= 3V, P1.0 & P1.1 = 0V or V
CC
= 25°C
A
= 5.5V/3V 5.5/3.5 mA
CC
= 5.5V/3V
CC
CC
CC
CC
Notes: 1. 在稳定状态 ( 无瞬态产生) 条件下,IOL 必须严格作如下限制:: 每个端口引脚的 IOL不超出10 mA所有输出引脚的 IOL 总和不超
出 15 mA 如果 IOL 超过出了测试条件,VOL 可能会超过相关标准规定,此时不能保证引脚能吸收比测试条件下更大的电流。
74
AT89LP216 [Preliminary]
3621A–MICRO–6/06

AT89LP216 [Preliminary]
掉电时最小 VCC 为 2V。
24.3 串行外围接口时序
Table 24-1. 主机模式下 SPI 特性
符号 参数 最小 最大 单位
t
CLCL
t
SCK
t
SHSL
t
SLSH
t
SR
t
SF
t
SIS
t
SIH
t
SOH
t
SOV
振荡器周期
串行时钟周期
时钟高电平时间
时钟低电平时间
上升时间
下降时间
串行输入建立时间
串行输入保持时间
串行输出保持时间
串行输出有效时间
41.6 ns
4t
CLCL
/2 - 25 ns
t
SCK
/2 - 25 ns
t
SCK
25 ns
25 ns
10 ns
10 ns
10 ns
35 ns
Table 24-2. 从机模式下 SPI 特性
符号 参数 最小 最大 单位
t
CLCL
t
SCK
t
SHSL
t
SLSH
t
SR
t
SF
t
SIS
t
SIH
t
SOH
t
SOV
t
SOE
t
SOX
t
SSE
t
SSD
振荡器周期
串行时钟周期
时钟高电平时间
时钟低电平时间
上升时间
下降时间
串行输入建立时间
串行输入保持时间
串行输出保持时间
串行输出确认时间
输出使能时间
输出禁止时间
从机使能引导时间
从机禁止滞后时间
41.6 ns
4t
CLCL
1.5 t
1.5 t
- 25 ns
CLCL
- 25 ns
CLCL
25 ns
25 ns
10 ns
10 ns
10 ns
35 ns
10 ns
25 ns
10 ns
0ns
ns
ns
3621A–MICRO–6/06
75
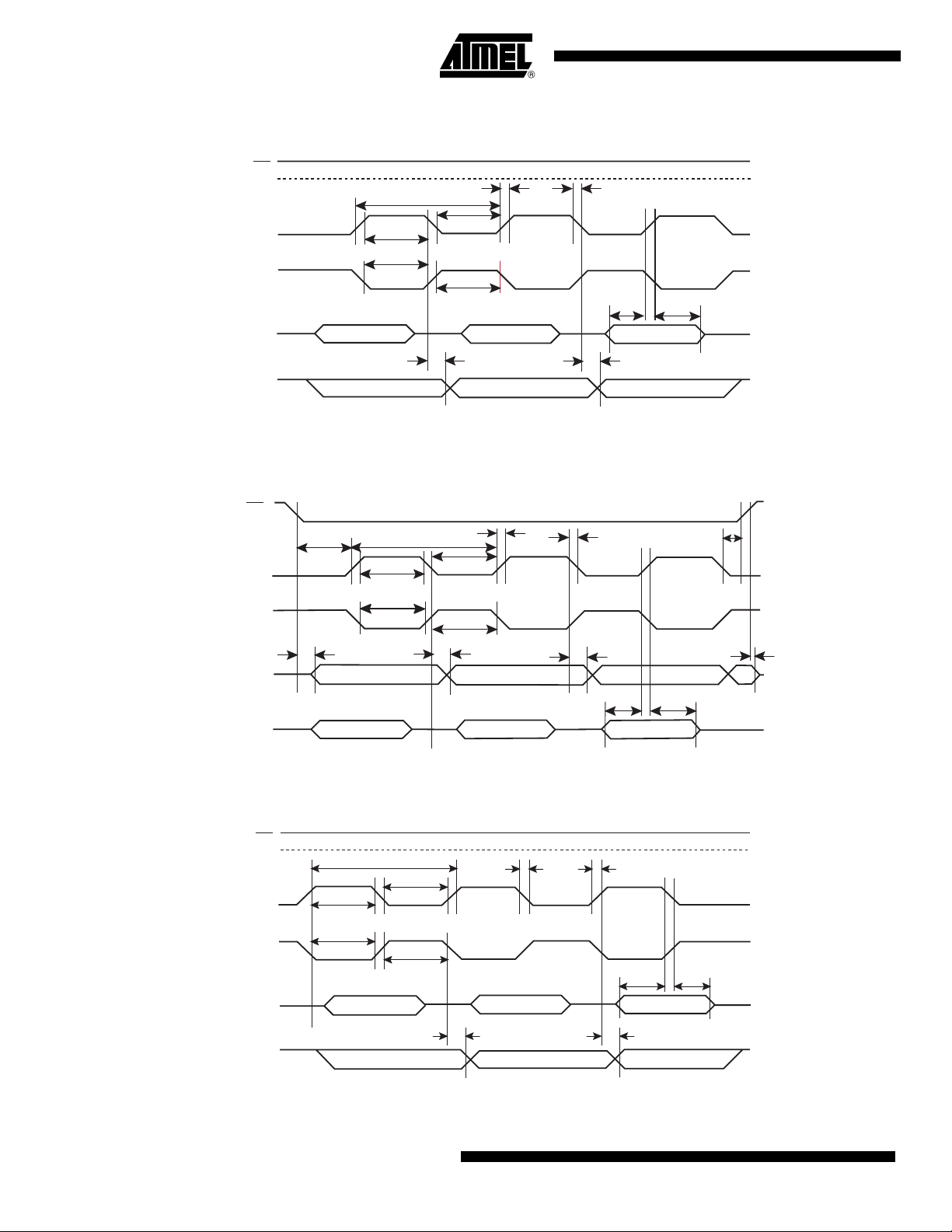
Figure 24-1. 主机模式下 SPI 时序 (CPHA = 0)
SS
SCK
(CPOL = 0)
SCK
(CPOL = 1)
MISO
MOSI
Figure 24-2. 从机模式下 SPI 时序 (CPHA = 0)
SS
t
SSE
SCK
(CPOL = 0)
SCK
(CPOL= 1)
t
SOE
MISO
t
SHSL
t
SLSH
t
SHSL
t
SLSH
t
t
SCK
SCK
t
t
SLSH
t
SHSL
t
SR
t
SLSH
t
SHSL
SR
t
SOH
t
SOV
t
SOH
t
SOV
t
SF
t
SIS
t
SF
t
SIS
t
t
SIH
SIH
t
SSD
t
SOX
MOSI
Figure 24-3. 主机模式下 SPI 时序 (CPHA = 1)
SS
t
SHSL
t
SLSH
76
SCK
(CPOL = 0)
SCK
(CPOL = 1)
MISO
MOSI
AT89LP216 [Preliminary]
t
SCK
t
SLSH
t
SHSL
t
SOH
t
SF
t
SOV
t
SR
t
SIS
t
SIH
3621A–MICRO–6/06

Figure 24-4. 从机模式下 SPI 时序 (CPHA = 1)
SS
t
SSE
t
SCK
(CPOL = 0)
SCK
(CPOL = 1)
SHSL
t
SLSH
t
SCK
t
SLSH
t
SHSL
AT89LP216 [Preliminary]
t
SF
t
SR
t
SSD
MISO
MOSI
24.4 外部时钟驱动
Figure 24-5. 外部时钟驱动波形
t
SOE
t
SOV
t
SIS
t
SIH
t
SOH
t
SOX
符号 参数
1/t
CLCL
t
CLCL
t
CHCX
t
CLCX
t
CLCH
t
CHCL
3621A–MICRO–6/06
V
= 2.4V to 5.5V
CC
单位最小 最大
Oscillator Frequency 0 20 MHz
Clock Period 50 ns
High Time 12 ns
Low Time 12 ns
Rise Time 5 ns
Fall Time 5ns
77

24.5 串口时序 : 移位寄存器模式
下表各值的测试条件为 VCC = 2.4V 到 5.5V ,负载电容 = 80 pF.
符号 参数
可变振荡器
单位最小 最大
t
XLXL
t
QVXH
t
XHQX
t
XHDX
t
XHDV
串口时钟周期
输出数据建立到时钟上升沿时间
时钟上升沿后输出数据保持时间
时钟上升沿后输入数据保持时间
输入数据有效到时钟上升沿时间
Figure 24-6. 移位寄存器模式
Clock
Write to SBUF
Output Data
Clear RI
Input Data
24.6 测试条件
-15 µs
2t
CLCL
-15 ns
t
CLCL
-15 ns
t
CLCL
0ns
15 ns
01234567
ValidValidValidValid Valid Valid Valid Valid
24.6.1 交流测试输入 / 输出波形 (1)
Note: 1. 交流输入测试的驱动条件 VCC -0.5V 为逻辑 “1”,0.45V 为逻辑 “0”。 时序的测试条件 VIH 为逻辑“1”的最小值,VIL
为逻辑 “0”的最大值
24.6.2 悬浮状态的波形 (1)
Note: 1. 1. 因为时序的要求,当负载电压有 100mV 的变化时端口引脚状态不再悬浮,当有 100mV 电压在 VOH/VOL 状态下变化时,端口的
引脚状态变为悬浮。
78
AT89LP216 [Preliminary]
3621A–MICRO–6/06

24.6.3 ICC 测试条件,运行模式,所有其他引脚断开
RST
AT89LP216 [Preliminary]
V
CC
I
CC
V
CC
(NC)
CLOCK SIGNAL
XTAL2
XTAL1
V
SS
24.6.4 ICC 测试条件,空闲模式,所有其他引脚断开
I
V
CC
(NC)
CLOCK SIGNAL
RST
XTAL2
XTAL1
V
SS
24.6.5 运行和空闲模式下 ICC 时钟信号的波形, tCLCH = tCHCL = 5 ns
VCC - 0.5V
0.45V
0.2 V
0.7 V
CC
t
CC
- 0.1V
CHCL
t
CHCX
t
CLCL
CC
V
CC
t
CHCX
t
CLCH
24.6.6 ICC 测试条件,空闲模式,所有其他引脚断开,VCC = 2V to 5.5V
V
CC
I
CC
V
CC
3621A–MICRO–6/06
(NC)
RST
XTAL2
XTAL1
VSS
79

25. 定购信息
25.1 标准封装
速度
(MHz) 电源供应 订购号 封装 适用范围
AT89LP216-20PI
20 2.4V to 5.5V
AT89LP216-20SI
AT89LP216-20XI
25.2 绿色封装 ( 无铅汞 )
速度
(MHz) 电源供应 订购号 封装
AT89LP216-20PU
20 2.4V to 5.5V
AT89LP216-20SU
AT89LP216-20XU
16P3
16S2
16X
16P3
16S2
16X
工业
(-40°C to 85°C)
适用范围
工业
(-40°C to 85°C)
封装类型
16P3 16-lead, 0.300” Wide, Plastic Dual In-line Package (PDIP)
16S2 16-lead, 0.300” Wide, Plastic Gull Wing Small Outline (SOIC)
16X 16-lead, 0.173” Wide, Plastic Thin Shrink Small Outline Package (TSSOP)
80
AT89LP216 [Preliminary]
3621A–MICRO–6/06

26. Packaging Information
26.1 16P3 – PDIP
AT89LP216 [Preliminary]
D
PIN
1
E1
A
A1
SEATING PLANE
L
e
B1
B
B2
E
C
eB
Notes: 1. This package conforms to JEDEC reference MS-001, Variation AB.
2. Dimensions D and E1 do not include mold Flash or Protrusion.
Mold Flash or Protrusion shall not exceed 0.25 mm (0.010").
eC
COMMON DIMENSIONS
(Unit of Measure = mm)
SYMBOL
A – – 5.334
A1 0.381 – –
D 19.81 – 20.32 Note 2
E 7.620 – 8.255
E1 6.096 – 7.112 Note 2
B 0.356 – 0.559
B1 1.143 – 1.778
B2 0.762 – 1.143
L 2.921 – 3.810
C 0.203 – 0.356
eB – – 10.922
eC 0.000 – 1.524
e 2.540 TYP
MIN
NOM
MAX
NOTE
2325 Orchard Parkway
R
San Jose, CA 95131
3621A–MICRO–6/06
TITLE
16P3, 16-lead (0.300"/7.62 mm Wide) Plastic Dual
Inline Package (PDIP)
DRAWING NO.
16P3
11/02/05
REV.
A
81
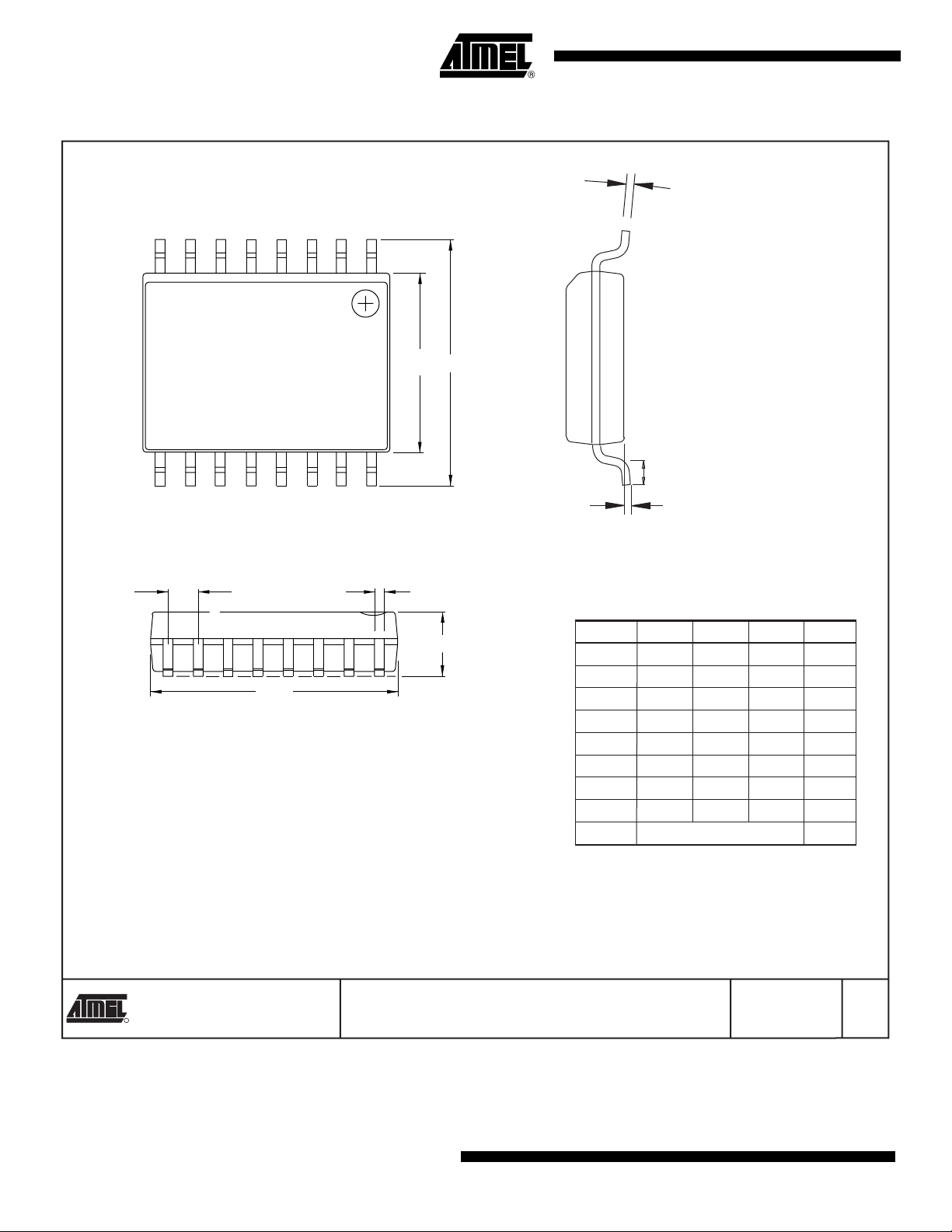
26.2 16S2 – SOIC
C
1
E
H
L
N
Top View
A1
End View
e
D
Side View
Notes: 1. This drawing is for general information only; refer to JEDEC Drawing MS-013, Variation AA for additional information.
2. Dimension "D" does not include mold Flash, protrusions or gate burrs. Mold Flash, protrusions and gate burrs shall not exceed
0.15 mm (0.006") per side.
3. Dimension "E" does not include inter-lead Flash or protrusion. Inter-lead Flash and protrusions shall not exceed 0.25 mm
(0.010") per side.
4. "L" is the length of the terminal for soldering to a substrate.
5. The lead width "B", as measured 0.36 mm (0.014") or greater above the seating plane, shall not exceed a maximum value of 0.61 mm
(0.024") per side.
b
A
SYMBOL
A 0.0926 0.1043
A1 0.0040 0.0118
b 0.0130 0.0200 5
C 0.0091 0.0125
D 0.3977 0.4133 2
E 0.2914 0.2992 3
H 0.3940 0.4190
L 0.0160 0.050 4
e 0.050 BSC
TITLE
2325 Orchard Parkway
R
San Jose, CA 95131
16S2, 16-lead, 0.300" Wide Body, Plastic Gull
Wing Small Outline Package (SOIC)
COMMON DIMENSIONS
(Unit of Measure = inches)
MIN
NOM
MAX
DRAWING NO.
16S2
NOTE
1/9/02
REV.
A
82
AT89LP216 [Preliminary]
3621A–MICRO–6/06
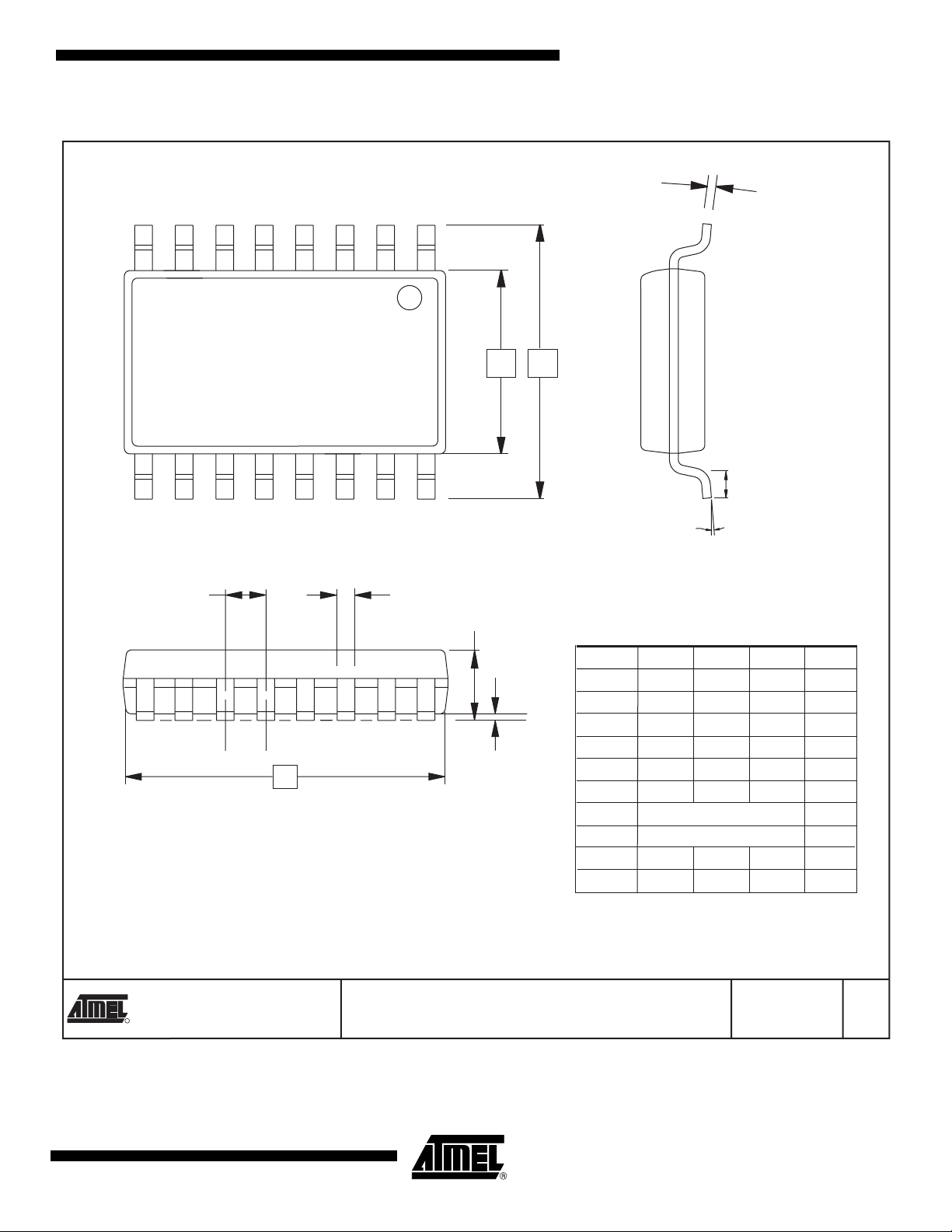
26.3 16X – TSSOP
A1
E1
AT89LP216 [Preliminary]
C
1
e
Side View
Top View
D
E
End View
E1
L
Ø
b
COMMON DIMENSIONS
(Unit of Measure = mm)
MIN
0
o
– 8o
NOM
MAX
NOTE
A
A1
SYMBOL
A – – 1.20
A1 0.05 – 0.15
b 0.19 – 0.30
C 0.09 – 0.20
D 4.90 5.00 5.10
E1 4.30 4.40 4.50
E 6.40 BSC
e 0.65 TYP
L 0.45 0.60 0.75
Ø
Note: These drawings are for general information only. Refer to JEDEC Drawing MO-153-AB.
TITLE
2325 Orchard Parkway
San Jose, CA 95131
R
3621A–MICRO–6/06
16X, 16-lead, 4.4 mm Body Width, Plastic Thin Shrink
Small Outline Package (TSSOP)
DRAWING NO.
16X A
11/11/05
REV.
83
27. Revision History
Revision No. History
Revision A – June 2006 • Initial Release
84
AT89LP216 [Preliminary]
3621A–MICRO–6/06

Table of Contents
AT89LP216 [Preliminary]
1. Description ............................................................................................... 1
2. Pin Configuration ..................................................................................... 2
2.1 AT89LP216: 16-lead PDIP/SOIC/TSSOP .............................................................. 2
3. Pin Description ......................................................................................... 3
4. Block Diagram .......................................................................................... 4
5. Comparison to Standard 8051 ................................................................ 4
5.1 System Clock .......................................................................................................... 4
5.2 Instruction Execution with Single-cycle Fetch .........................................................4
5.3 Interrupt Handling ................................................................................................... 5
5.4 Timer/Counters .......................................................................................................5
5.5 Serial Port ...............................................................................................................5
5.6 Watchdog Timer ..................................................................................................... 5
5.7 I/O Ports ..................................................................................................................5
5.8 Reset ...................................................................................................................... 6
6. Memory Organization .............................................................................. 6
6.1 Program Memory ....................................................................................................6
6.2 Data Memory ..........................................................................................................7
7. Special Function Registers ..................................................................... 8
8. Enhanced CPU ......................................................................................... 9
8.1 Restrictions on Certain Instructions ...................................................................... 10
9. System Clock ......................................................................................... 11
9.1 Crystal Oscillator ................................................................................................... 11
9.2 External Clock Source .......................................................................................... 11
9.3 Internal RC Oscillator ............................................................................................11
9.4 System Clock Out ................................................................................................. 11
10. Reset ....................................................................................................... 12
10.1 Power-on Reset ....................................................................................................12
10.2 Brown-out Reset ...................................................................................................14
10.3 External Reset ......................................................................................................14
10.4 Watchdog Reset ...................................................................................................15
10.5 Software Reset .....................................................................................................15
11. Power Saving Modes ............................................................................. 15
11.1 Idle Mode ..............................................................................................................15
11.2 Power-down Mode ................................................................................................15
3621A–MICRO–6/06
i

Table of Contents (Continued)
12. Interrupts ................................................................................................ 18
12.1 Interrupt Response Time ...................................................................................... 19
13. I/O Ports .................................................................................................. 22
13.1 Port Configuration .................................................................................................22
13.2 Port 1 Analog Functions ....................................................................................... 25
13.3 Port Read-Modify-Write ........................................................................................25
13.4 Port Alternate Functions .......................................................................................26
14. Enhanced Timer/Counters .................................................................... 27
14.1 Mode 0 – Variable Width Timer/Counter ..............................................................27
14.2 Mode 1 – 16-bit Auto-Reload Timer/Counter ........................................................28
14.3 Mode 2 – 8-bit Auto-Reload Timer/Counter ..........................................................29
14.4 Mode 3 – 8-bit Split Timer .....................................................................................29
14.5 Pulse Width Modulation ........................................................................................ 32
15. External Interrupts ................................................................................. 36
16. General-purpose Interrupts .................................................................. 36
17. Serial Interface ....................................................................................... 38
17.1 Multiprocessor Communications ...........................................................................38
17.2 Baud Rates ...........................................................................................................40
17.3 More About Mode 0 ..............................................................................................41
17.4 More About Mode 1 ..............................................................................................43
17.5 More About Modes 2 and 3 ..................................................................................45
17.6 Framing Error Detection ....................................................................................... 48
17.7 Automatic Address Recognition ............................................................................48
18. Serial Peripheral Interface ..................................................................... 49
19. Analog Comparator ............................................................................... 55
19.1 Comparator Interrupt with Debouncing .................................................................55
20. Programmable Watchdog Timer ........................................................... 57
20.1 Software Reset .....................................................................................................58
21. Instruction Set Summary ...................................................................... 59
22. On-Chip Debug System ......................................................................... 63
22.1 Physical Interface ................................................................................................. 63
22.2 Software Breakpoints ............................................................................................64
22.3 Limitations of On-Chip Debug ............................................................................... 64
ii
AT89LP216 [Preliminary]
3621A–MICRO–6/06

Table of Contents (Continued)
23. Programming the Flash Memory .......................................................... 65
23.1 Physical Interface ................................................................................................. 65
23.2 Memory Organization ........................................................................................... 66
23.3 Command Format .................................................................................................67
23.4 Status Register .....................................................................................................70
23.5 DATA Polling ........................................................................................................ 70
23.6 Flash Security ....................................................................................................... 70
23.7 User Configuration Fuses .....................................................................................71
23.8 Programming Interface Timing ............................................................................. 72
24. Electrical Characteristics ...................................................................... 76
24.1 Absolute Maximum Ratings* ................................................................................. 76
24.2 DC Characteristics ................................................................................................76
24.3 Serial Peripheral Interface Timing .......................................................................77
24.4 External Clock Drive .............................................................................................79
24.5 Serial Port Timing: Shift Register Mode ................................................................80
24.6 Test Conditions .....................................................................................................80
AT89LP216 [Preliminary]
25. Ordering Information ............................................................................. 82
25.1 Standard Package ................................................................................................82
25.2 Green Package Option (Pb/Halide-free) ............................................................... 82
26. Packaging Information .......................................................................... 83
26.1 16P3 – PDIP .........................................................................................................83
26.2 16S2 – SOIC ......................................................................................................... 84
26.3 16X – TSSOP ....................................................................................................... 85
27. Revision History ..................................................................................... 86
3621A–MICRO–6/06
iii
 Loading...
Loading...