

Page 1

- 1 -
YETI
© AREXX - DIE NIEDERLANDE V01082006
BAUANLEITUNG: Modell YT-3000
Laufroboter
Page 2

- 2 -
AREXX und YETI sind registrierte Warenzeichen von AREXX Engineering - HOLLAND.
© Deutsche Übersetzung/German translation (March 2006): AREXX Engineering (NL).
Diese Beschreibung ist urheberrechtlich geschützt. Der Inhalt darf auch nicht teilweise kopiert oder übernommen werden ohne schriftlicher Zustimmung des europäischen Importeurs:
AREXX Engineering - Zwolle (NL).
Hersteller und Vertreiber sind nicht haftbar oder verantwortlich für die Folgen unsachgemäßer Behandlung,
Einbaufehler und oder Bedienung dieses Produkts bei Mißachtung der Bauanleitung.
Der Inhalt dieser Gebrauchsanleitung kann ohne vorheriger Ankündigung unsererseits geändert werden.
Technische Unterstützung beim Bauen
des Roboters:
WWW.AREXX.COM
WWW.ROBOTERNETZ.DE
Fabrikant:
AREXX Engineering
JAMA Oriental
Europäischer Importeur:
AREXX Engineering
ZWOLLE Die Niederlande
© AREXX Holland und JAMA Taiwan
© Deutsche Übersetzung: AREXX - Die Niederlande
1. Produktbeschreibung YETI 3
2. YETI Allgemeine Info 4
3.
Wie laufen wir eigentlich? 11
4. Hardware 13
5. Aufbau Elektronik 17
6. Teileliste Mechanik 26
7. Bauanleitung für die Mechanikteile 29
8. YETIAkkusauaden 41
9. Software 42
10. Installation der Software 48
11.
Inbetriebnahme und Test 63
12. Kalibrierung des YETIs 66
13. YETI Programmieren 70
14. Erweiterungen 86
xx. APPENDIX 105
A. Übersicht der YETI-Funktionen 106
B. Schaltbild YETI 110
C. Schaltbild Display Module 111
D. Schaltbild US Module 112
E. Schaltbild RS232 IR 113
F. Schaltbild USB IR 114
G. Flachband Anschlußbelegung 115
H. Fehlersuche 116
I. Montage Erweiterungskits 118
J.Tastatur-Kontrollmodus und Testprogramm 119
K. ADC Messwert Akkuspannung 122
Inhaltsverzeichnis
Page 3

- 3 -
1. PRODUKTBESCHREIBUNG YETI
1.1. Zu welcher Roboterfamilie gehört YETI?
YETI ist ein gehender Roboter. Sein Name stammt vom
“Schnee-Menschen”, einem vermeintlich im Himalaja lebenden,
behaarten Riesen. Genauso wie dieses legendäre Ungeheuer
bewegt sich unser YETI auf zwei riesigen Füßen, aber darin
erschöpft sich auch schon die Ähnlichkeit dieser Namensvetter.
Der Antrieb für die Beine und Füße unseres YETIs erfolgt durch
Servomotoren, und wird gesteuert von einem Mikroprozessor.
Dieser führt ein Computerprogramm aus, das
wir zuvor im Gehirn des YETI-Roboters
gespeichert haben.
1.2. Spezikationen:
Motoren 2 Servomotoren (5 Volt)
Prozessortyp ATmega8L
Programmiersprache C
Spannung 4 St. AA Akku
4,8 - 6 Volt
Strom Min. 10 mA
Max. 600 mA
Kommunikation Infrarot und I2C Bus
Erweiterung 2 Erweiterungen möglich mittels
Flachbandkabel
Höhe 278 mm
Breite 155 mm
Tief 100 mm
Page 4

- 4 -
2. YETI ALLGEMEINE INFO
2.1. Wer oder was ist ein YETI?
Wie bereits am Anfang beschrieben stammt sein Name vom “Schneemensch”, einem vermeintlich im Himalaja lebenden behaarten Riesen.
Mit seinem Riesenkörper und seinen großen Füßen kann er sich nur
ziemlich schwerfällig bewegen.
Unser YETI ist ein hochgewachsener Roboter, der ebenfalls auf großen
Füßen läuft. Er kann vorwärts und rückwärts gehen und sich sogar
links oder rechts herum drehen.
Bei jedem Schritt vorwärts oder rückwärts muß YETI sich zuerst auf
einem Fuß abstützen und dann den anderen Fuß versetzen. Dazu
benutzt er zwei Servomotoren. Ein Servomotor verwendet ein Getriebe
und ist deshalb sehr kräftig. Außerdem enthält der Servomotor eine
impulsgesteuerte, elektronische Regelung. Die Elektronik erlaubt dem
Servo nur eine genau bestimmte Schwenkung durchzuführen.
Der YETI verwendet einen Servo an der Vorderseite und einen Servo
an der Unterseite. Der Servo an der Vorderseite zieht die Füße zum
Verschieben hoch und wird Fußservo genannt. Der Servo an der
Unterseite versetzt die Beine (und damit auch die Füße) eins nach dem
anderen und wird Beinservo genannt.
Page 5

- 5 -
2.2. Was können wir mit dem YETI anfangen?
- Neue (Beispiel-) Programme in den YETI übertragen.
- Selbsterstellte Programme in den YETI übertragen.
- YETI mit gebrauchsfertigen Erweiterungsmodulen
erweitern, so dass der YETI zum Beispiel Gegenständen
ausweichen oder Entfernungen messen kann.
- YETI mit selbstgebauten Erweiterungsmodulen erweitern.
- YETI mittels Infrarotsignalen mit dem PC kommunizieren
lassen.
- YETI mittels Infrarotsignalen aus dem PC oder aus der
Fernbedienung eines Fernsehers steuern.
- YETI zur Abgabe einer Tonfolge oder Geräuschfolge
stimulieren.
- Seine “Augen”-LEDs ein- und ausschalten.
- Den Körper des YETIs erweitern, zum Beispiel um ein
Display oder einen LED-Mund.
Page 6

- 6 -
2.3. YETI wird mit drei Handgriffen zum Leben
erweckt:
1. Setzen Sie zuerst die Mechanik- und Elektronikmodule
des YETIs mit Hilfe der Bauanleitung zusammen.
2. Laden Sie ggf. die Akkus auf.
3. Schalten Sie den YETI mit dem Hauptschalter auf der
Unterseite des Geräts ein.
Nach einigen Sekunden wird YETI seine Beine und Füße strecken und
anschließend (mittels eines Standard-Beispielprogramms im
Prozessorhirn) ein Beispiel seines Könnens geben.
Nun, das war zunächst gar nicht schwierig, und es sieht aus, als ob
man jetzt bereits fertig wäre.
Jetzt aber fängt die Arbeit erst an ...... !
Wir werden uns jetzt mit dem Entwurf und Schreiben eigener
Programme beschäftigen und können so in kreativer Weise das
Verhalten unseres YETIs anpassen.
Page 7

- 7 -
2.4. Laden eines (Beispiel-) Programms in den YETI
Zum Laden eines beliebigen YETI-Programms vom Computer in den
YETI verwenden wir unsichtbare Lichtsignale. Der im Lieferumfang
enthaltene lose COM-Port-Adapterstecker ist ein RS232-InfrarotSender/Empfänger (Transceiver). Dieser wird an einem COM-Port des
Computers angeschlossen. YETI verfügt in den beiden kleinen
Öffnungen seines Rückens über einen eingebauten RS232-InfrarotSender/Empfänger. Der COM-Port-Adapterstecker ist auch als USBAdapter verfügbar. Es handelt sich dabei um den gleichen IRTransceiver, der auch für den ASURO benutzt wird. ASURO ist ein
anderer, programmierbarer Roboter aus unserer Produktpalette.
Der Ladevorgang eines Programms in den YETI überschreibt
automatisch das bereits zuvor vorhandene Programm.
Das ursprünglich vorhandene Standard-Beispielprogramm wird
deshalb auch beim ersten Ladevorgang verschwinden. Das ist jedoch
nicht schlimm, denn wir können dieses Beispielprogramm später immer
wieder in YETI übertragen.
Page 8
- 8 -
2.5. Laden eines Programms in den YETI
- Schließen Sie den COM-Port-Adapter, bzw. USB-Adapter
auf den Computer an.
- Starten Sie bitte das Computerprogramm Flash.
- Selektieren Sie den COM-Port, an dem der Transceiver
angeschlossen ist, in Flash.
- Selektieren Sie ein zu übertragendes YETI-Programm in Flash.
- Sehen Sie zu, dass die Öffnungen im YETI-Rücken auf der
Oberseite des COM-Port-Adapters gerichtet sind.
- Schalten Sie bitte den YETI aus.
- Drücken Sie den Button „Programmieren“ im Flash-Programm.
- Schalten Sie bitte den YETI (innerhalb von 10 Sekunden) ein.
- Normalerweise wird das YETI-Programm nun in den YETI-
Prozessor übertragen.
- Warten Sie bitte, bis der Ladevorgang des YETI-Programms
abgeschlossen ist.
- Schalten Sie den YETI aus und wieder ein.
- Warten Sie bitte 3 Sekunden.
YETI wird nun sein neues Programm starten und ausführen.
Page 9

- 9 -
2.6. Erweiterungsmodule (Kits)
Sie können YETI mit zusätzlichen (nicht im Lieferumfang enthaltenen)
Baugruppen erweitern, welche die Leistungsfähigkeit des Roboters
erheblich steigern. So können Sie YETI mit einem Ultraschall-Sender/
Empfänger ausstatten, der ihm ermöglicht mit Schallwellenechos die
Distanz zu entfernten Gegenstände zu messen und diesen auszuweichen.
Auch können Sie YETI mit einem Display ausstatten, um darauf Daten
oder Nachrichten anzeigen. Ein Erweiterungsmodul besteht aus einer
kleinen Leiterplatte, die wahlweise mit oder ohne Bauelementen
geliefert wird. Die Erweiterungsmodule passen genau in YETIs Kopf
und werden sozusagen in seiner Schädeldecke genau oberhalb der
Augen festgeschraubt.
Sie können aber auch Ihre eigenen Module mit Experimentierleiterplatten entwerfen. Diese werden auf YETIs Kopf anstelle des kleinen
Vordachs platziert.
Mit einem Flachbandkabel verbinden Sie die Erweiterungsmodule über
eine I2C-Bus-Schnittstelle mit der Hauptplatine (und somit automatisch
auch mit dem I2C Bus des Mikroprozessors im YETIs Kopf.
Page 10

- 10 -
2.7. Der Kommunikationsprozess zwischen YETI und PC
Ein Druck auf die „Programmieren“-Taste im Flashprogramm
aktiviert das Flashprogramm zehn Sekunden lang zur Kontaktaufnahme mit dem YETI. Falls die Kommunikation zustande kommt,
wird das Programm in YETI übertragen. YETI wird sich nur innerhalb
den ersten drei Sekunden nach dem Einschalten des YETIs beim
Computer melden. Falls YETI innerhalb dieser drei Sekunden keinen
Kontakt zum Computer herstellen kann, wird er einfach sein bereits
geladenes Programm starten. Das Flash-Programm wird bei fehlender
Kontaktaufnahme nach 10 Sekunden eine Fehlermeldung absetzen.
Die Erfahrungen mit dem ASURO ergeben, dass der Datentransfer
manchmal etwas schwerfällig abläuft. Insbesonder bei Verwendung
der RS-232 Adapterschnittstelle werden manchmal Fehlermeldungen
erzeugt.
Man kann diese Fehlermeldungen mit folgenden Maßnahmen
verhindern:
- Sorgen Sie für eine gute Sichtverbindung zwischen IR Sender
und Empfänger.
- Verwenden Sie bitte die aktuellste Flash Softwareversion.
- Verwenden Sie frische Batterien.
- Schalten Sie störende Lichtquellen (insbesondere Leucht-
stoffröhren) ab. Verwenden Sie den USB-Adapter
(insbesondere dann, wenn die RS-232 Spannung gering ist).
Page 11

- 11 -
3. WIE LAUFEN WIR EIGENTLICH?
3.1. Zusammenfassung
YETI balanciert auf einem Fuß und versetzt anschließend den anderen
Fuß. Dazu zieht YETI die Außenseite seines abstützenden Fußes hoch
und drückt zur gleichen Zeit die Außenseite seines zu versetzenden
Fußes herunter. Dabei neigt sich YETI zum abstützenden Fuß herüber
und verlagert den Großteil seines Gewichts auf diesen abstützenden
Fuß. Anschließend schiebt YETI seinen zu versetzenden Fuß nach
vorne und schließt somit den Schritt ab. Der abstützende Fuß wird nun
der zu versetzende Fuß und umgekehrt.
Dieser Bewegungsablauf muß sich beim Gehen natürlich ständig
wiederholen.
3.2. Ausführliche Erläuterung
Sobald der YETI aus der Stillstandposition laufen soll, dreht er seinen
Fußservo von vorne betrachtet im Uhrzeigersinn. Dabei passieren zwei
Dinge gleichzeitig.
Zum einen hebt sich die rechte Seite des Fußservos und zieht die
Außenseite des rechten Fußes ein wenig hoch. Er könnte seinen
Körper nun nach rechts bewegen, tut das aber nicht, weil ein Großteil
des Gewichts sich immer noch auf der Innenseite des rechten Beines
bendet.
Zweitens senkt sich die linke Seite des Fußservos und drückt
gleichzeitig die Außenseite des linken Fußes ein wenig herunter.
Dabei wird das linke Bein hochgedrückt. Beide Bewegungen
zusammen bewegen den Körper nach rechts und verlagern das
Gewicht von den linken auf den rechten Fuß.
Page 12

- 12 -
Falls YETI seinen rechten Fuß etwas zu hoch anheben würde, drückt
der linke Fuß den Körper des YETIs über die Gleichgewichtsposition
des rechten Fußes hinweg. Der Roboter verliert dann sein Gleichgewicht und würde nach Rechts umkippen. YETI soll deshalb seinen
rechten Fuß gerade soweit hochheben, dass er, wenn sein linkes Bein
ihn nach Rechts drückt, gerade nicht seinen rechten Gleichgewichtspunkt erreicht. Je dichter sich der Körper dem Gleichgewichtspunkt
annähert, desto größer ist der Anteil des Gesamtgewichts auf dem
rechten Fuß und desto leichter lässt sich der linke Fuß versetzen.
Jetzt müssen sich noch die Beinservos bewegen. Mit dem Beinservo
versetzt YETI seinen linken Fuß möglichst weit nach vorne. Beim
Versetzen des linken Fußes von hinten nach vorne bewegt sich auch
der Körper bis zur halben Strecke des linken Fußes, aber immer noch
in der Spur des rechten Fußes. Er stützt sich also immer noch überwiegend auf den rechten Fuß. Wenn sich nun der linke Fuß weit nach
vorne gestreckt hat, zieht er die Außenseite seines linken Fußes hoch
und die Außenseite seines rechten Fußes herunter. Dadurch verschiebt
er seinen Körper, sein Körpergewicht und damit auch den Schwerpunkt
des Körpers vom rechten Fuß zum linken Fuß. Ab diesem Zeitpunkt
ruht das Gewicht hauptsächlich auf den linken Fuß. Auch hier gilt die
Regel, daß YETI nicht zu weit nach links balancieren darf, damit er
nicht nach links umkippt.
Beim nächsten Schritt wiederholt sich die Prozedur mit dem gegenüberliegenden Fuß.
Page 13

- 13 -
4. HARDWARE
4.1. YETI Basisleiterplatte
Die Hauptleiterplatte des YETIs enthält einen Atmega8L Mikrocontroller Chip. Dieser Mikrocontroller ist verbunden mit dem großen, runden
Piepser und mit den beiden roten LEDs an der Vorderseite des
Roboters. Zahlreiche andere Mikrocontrolleranschlüsse, z. B. der I2C
Bus, werden direkt zum 20-Pins Steckeranschluß auf der Rückseite
weitergeleitet. Dieser Steckverbinder erlaubt eine Systemerweiterung
mit weiterer Hardware über Flachbandkabel. Die beiden schwarzen
Steckverbinder neben der roten LED versorgen den Anschluss der
beiden Servos. Die drei weißen Steckverbinder versorgen den Ein/AusSchalter und die beiden Akkupacks.
4.2. Flachbandanschluss
Vier der zwanzig Flachbandadern sind für die Stromversorgung
reserviert. Pin 19 für VCC und Pin 7, 8 und 20 für GND.
Alle übrigen Flachbandanschlüsse sind direkt mit festgelegten
Anschlüssen des Mikrocontrollers verbunden. Direkt neben den An-
schlußnummern sind die Mikrocontrollerpinfunktionen speziziert. Ein
Mikrocontrollerpin kann je nach Anwenderprogramm auf verschiedenste Art verwendet werden. Überprüfen Sie bitte im Datenblatt bzw.
Handbuch zum Mikrocontroller die genaue Denition der Pinfunktion.
Page 14

- 14 -
4.3. Erweiterungsanschlussbelegung
Alle Erweiterungsmodule werden grundsätzlich mit dem gleichen
20-adrigen Flachbandkabel auf der YETI-Hauptplatine angeschlossen.
Das Flachbandkabel enthält auch die Stromversorgungsanschlüsse
der Erweiterungsmodule und den I2C Bus von und zu den
Erweiterungsmodulen.
Info Flachbandanschluss: (Mehr Infos siehe Seite 15)
Pin 1 PC5 (ADC5/SCL)
Pin 2 PC4 (ADC4/SDA)
Pin 3 PC3(ADC3)
Pin 4 PC2(ADC2)
Pin 5 PC1(ADC1)
Pin 6 PC0(ADC0)
Pin 7 GND
Pin 8 GND
Pin 9 AVCC
Pin 10 PC6(RESET)
Pin 11 PB5(SCK)
Pin 12 PB4(MISO)
Pin 13 PB3(MOSI/OC2)
Pin 14 PD3(INT1)
Pin 15 PD6(AIN0)
Pin 16 D7(AIN1)
Pin 17 PD0(RXD)
Pin 18 PD1(TXD)
Pin 19 VCC
Pin 20 GND
4.4. YETI Experimentiermodul
Im Experimentiermodul können Sie einen eigenen Entwurf einer
Elektronikbaugruppe aufbauen und dieses Modul auf
unterschiedlichste Art aus dem Mikrocontroller ansteuern.
Page 15

- 15 -
4.5. Flachbandanschlussbelegung
Vier der zwanzig Flachbandadern sind für die Stromversorgung
reserviert. Pin 19 für VCC und Pin 7, 8 und 20 für GND.
Alle übrigen Flachbandanschlüsse sind direkt mit festgelegten
Anschlüssen des Mikrocontrollers verbunden.
Direkt neben den Anschlußnummern sind die Mikrocontrollerpinfunktionen speziziert. Ein Mikrocontrollerpin kann je nach Anwenderprogramm auf verschiedenste Art verwendet werden. Überprüfen
Sie bitte im Datenblatt bzw. Handbuch zum Mikrocontroller die genaue
Denition der Pinfunktion.
Pin 1 PC5 (ADC5/SCL) Serial Clock (für die I2C Datenkommunikation)
Pin 2 PC4 (ADC4/SDA) Serial Data (für die I2C Datenkommunikation)
Pin 3 PC3(ADC3) Digitaler Eingang/Ausgang oder analoger Messeingang
Pin 4 PC2(ADC2) Digitaler Eingang/Ausgang oder analoger Messeingang
Pin 5 PC1(ADC1) Digitaler Eingang/Ausgang oder analoger Messeingang
Pin 6 PC0(ADC0) Digitaler Eingang/Ausgang oder analoger Messeingang
Pin 7 GND GND (Mehrere Anschlüsse zur Entstörung vorgesehen)
Pin 8 GND GND (Mehrere Anschlüsse zur Entstörung vorgesehen)
Pin 9 AVCC Betriebsspannung AD-Konverter
Pin 10 PC6(RESET) Mikrocontroller Reset Anschluss
Pin 11 PB5(SCK) Digitaler Eingang/Ausgang
Pin 12 PB4(MISO) Digitaler Eingang/Ausgang oder I2C Funktion Pin
Pin 13 PB3(MOSI/OC2) Digitaler Eingang/Ausgang oder I2C function pin oder
Timer2 Pin
Pin 14 PD3(INT1) Digitaler Eingang/Ausgang oder externer Interrupt
Pin 15 PD6(AIN0) Digitaler Eingang/Ausgang oder analoger Testeingang
Pin 16 D7(AIN1) Digitaler Eingang/Ausgang oder analoger Testeingang
Pin 17 PD0(RXD) Digitaler Eingang/Ausgang oder RS232 Eingang
Pin 18 PD1(TXD) Digitaler Eingang/Ausgang oder RS232 Ausgang
Pin 19 VCC VCC
Pin 20 GND GND (Mehrere Anschlüsse zur Entstörung vorgesehen)
Belegung des Flachbandkabels in einer Grak siehe seite 16
ACHTUNG:
Der AVCC-Anschluss ist wegen der Filterung über die Spule nicht so stark
belastbar ist wie der VCC-Anschluss!
Page 16

- 16 -
Page 17

- 17 -
5. AUFBAU ELEKTRONIK
Überprüfen Sie zunächst anhand der Teileliste der ElektronikKomponenten, ob alle Bauteile vorhanden sind.
5.1. Die Lötarbeit
Die Beschriftung der Leiterplatte zeigt genau, wo Sie die Bauteile
bestücken müssen. Sollten Sie sich die Position genauer ansehen
wollen, stehen Ihnen ein Bild der fertigen Platine und der
Bestückungsplan zur Verfügung, siehe Seite 20 und 21.
Beim Bestücken einer Leiterplatte beginnen wir vorzugsweise mit
den niedrigen Bauteilen. Das sind normalerweise die Widerstände.
Schneiden Sie die Drahtenden kurz nach dem Einlöten ab, so daß Sie
immer genug Platz zum Arbeiten haben.
Ehe Sie mit dem Löten beginnen, sollten Sie die integrierten
Schaltungen probeweise kurz auf der Leiterplatte einsetzen und notfalls die Beinchen mit einer Flachzange genau ausrichten. Meistens
sind die Beinchen etwas zu weit angewinkelt. Zum Schluß montieren
Sie das IC in den IC-Sockel. ICs dürfen auf keine Fall direkt eingelötet
werden, sondern müssen immer in den Sockel montiert werden!
WICHTIG
Der Elko und der IC-Sockel müssen mit korrekter Orientierung
eingelötet werden!
TIP
Die IC-Beinchen können Sie einfach auf einer harten Tischfläche ausrichten! Legen Sie dazu die Beinchen auf die Tischfläche und drücken
Sie diese vorsichtig in die richtige Position.
Bei technischen Fragen oder Problemen können Sie
in folgenden Foren um Hilfe fragen:
www.arexx.com --> Forum
www.roboternetz.de --> Forum
Page 18

- 18 -
1. Erhitze zuerst (einige
Sekunden) die Anschluß-Fläche
auf der Leiterplatte und den
Drahtanschluß des Bauteils.
2. Führe nun etwas, aber
nicht zuviel Lötzinn auf die
Anschlußfläche und auf den
Anschlufldraht, während der
Lötkolben beide erwärmt.
3. Ziehe den Lötdraht zurück
und lasse das Lötzinn richtig
fließen.
4. Ziehe den Lötkolben nun
zurück und lasse alles ruhig
abkühlen, ohne das Bauteil oder
die Leiterplatte zu berühren, bis
das Lötzinn erstarrt ist.
5. Schneide das überflüssigen
Drahtende kurz oberhalb der
Zinnfläche weg. Das Zinn sollte
den Draht-Anschluß und den
Kupfer-Anschluß vollständig
bedecken.
Das Ergebnis ist ein fließend
gewölbter Lötkegel, der sowohl
an der Anschlußfläche als am
Anschlufldraht gut anheftet. Die
Zinnfläche sieht glatt poliert aus.
Flachzange
Lötdraht
0,8- bis 1mm
Lötkolben
(15 bis 30W)
Seitenscheider
Lötkolben
Ablagestander
5.2.
Notwendige Werkzeuge für den Zusammenbau
Warnungen
* Mit dem Öffnen der Plastikbeutel mit Komponenten und Teilen erlischt das Rückgaberecht.
* Lese vor dem Bauen zuerst die Gebrauchsanleitung aufmerksam durch.
* Sei vorsichtig beim Hantieren mit den Werkzeugen.
* Baue nicht im Beisein kleiner Kinder. Die Kinder können sich an den Werkzeugen verletzen
oder kleine Komponenten und Teile in den Mund stecken.
* Achte auf die Polung der Batterien.
* Sorge dafür, daß die Batterien und die Batteriehalter trocken bleiben. Falls der YETI naß
wird, entferne dann die Batterien und trockne alle Teile, so gut es geht.
* Entferne die Batterien, wenn der YETI mehr als eine Woche ruht..
Schraubendreher-Satz
Benötigte Batterien: AA Akku, 4 Stück
(nicht im Bausatz enthalten)
5.3. Löten der Komponenten:
Lötkolben in der
einen Hand
Lötdraht in der anderen Hand.
Die korrekte Haltung zum professionellen Löten:
Lötfehler orten und reparieren:
Gute Lötverbindung
Die Zinnfläche sieht
glatt poliert aus.
Zu wenig Zinn
Zinn ist nicht gut
geflossen.
Lötschluß
Zwei Anschluß-Flächen durch
Zinnbrücke mit einander verbunden.
Kalte Lötstelle
Zinn am Bauteilanschluß,
aber nicht auf der
Anschlußflache.
Benutze nur das von uns empfohlene Lötzinn, das ein
spezielles Flußmittel für Elektronik-Bauteile enthält.
PASTE
Page 19

- 19 -
5.4. Bestückung Hauptplatine
WICHTIG! Für die Montage der Teile siehe 5.5 (Schaltplan) und
5.6 (Bilder)
YETI Teileliste
Nr. Name St.
PCB1 Platine 1
IC1 ATmega8-l (auf richtige Polung achten) 1
IC2 SFH5110 IR-Empfänger-IC (auf richtige Polung achten) 1
R1 10K / 0.25W / 5% (braun, schwarz, orange, gold) 1
R2 120K / 0.25W / 1% (braun, rot, schwarz, orange, braun) 1
R3 100K / 0.25W / 1% (braun, schwarz, schwarz, orange, braun) 1
R4 220R / 0.25W / 5% (rot, rot, braun, gold) 1
R5 220R / 0.25W / 5% (rot, rot, braun, gold) 1
R6 470R / 0.25W / 5% (gelb, violett, braun, gold) 1
R7 470R / 0.25W / 5% (gelb, violett, braun, gold) 1
R8 4K7 / 0.25W / 5% (gelb, violett, rot, gold) 1
L1 10uH (braun, schwarz, schwarz, silber) ist 0 Ohm 1
C1 220uF/16V (auf richtige Polung achten) 1
C2 10nF Aufdruck: 103 1
C3 100nF Aufdruck: 104 1
C4 100nF Aufdruck: 104 1
C5 220uF/16V (auf richtige Polung achten) 1
C6 100nF Aufdruck: 104 1
D1 SFH415-U IR-LED (auf richtige Polung achten) 1
D2 LED Rot, 5 mm (auf richtige Polung achten, sehe 5.6) 1
D3 LED Rot, 5 mm (auf richtige Polung achten, sehe 5.6) 1
Q1 Quarz, 8Mhz / 3 PIN 1
SP1 Piepser, 5V, (KC1206) (auf richtige Polung achten) 1
IC socket 28 PIN, IC Fuß (auf richtige Polung achten) 1
JP1 3 PIN, Platinensteckverbinder, schwarz 1
JP2 3 PIN, Platinensteckverbinder, schwarz 1
JP3 3 PIN, Platinensteckverbinder, weiß 1
JP4 3 PIN, Platinensteckverbinder, weiß 1
JP5 3 PIN, Platinensteckverbinder, weiß 1
CON1_PCB Konnektor, male, 20 pins,
für Flachband/ 90º gewinkelt 1
Klett-Band (male) (bereits vormontiert) 2
Klett-Band (female) (bereits vormontiert) 2
Page 20

- 20 -
5.5. Schaltbild YETI
Page 21

- 21 -
5.6. Hauptplatine
+
IC Markierung
Die Werte werden mit
einem Farbcode markiert.
Die Seite mit einer flachen
Markierung ist die Kathode.
Der längere Anschluss ist die A-Seite.
Kein Polung
Kondensator
LED & IR-LED
Widerstand & Drossel
IC
ELKO (Elektrolyt Kondensator)
Der längere Anschluss ist die Seite.
Die Seite mit einer weißen Markierungslinie ist die
+
Page 22

- 22 -
5.7. Bestückung des RS232-Infrarot-Transceivers
• IC1: Hier wird zunächst nur der 8-polige Sockel eingelötet. Dieser besitzt eine
Richtungsmarkierung, welche mit der Markierung auf der Platine übereinstimmen
muss.
• D1, D2, D3: 1N4148, auf richtige Polung achten!
Nicht verwechseln mit ZPD5.1 oder BZX55-C5V1 (Aufdruck)!
• D4: ZPD5.1 oder BZX55-C5V1, auf richtige Polung achten!
Nicht verwechseln mit 1N4148 (Aufdruck)!
• C2, C4:
100nF keramisch, Aufdruck: 104
• C3: 680pF keramisch, Aufdruck: 681
• Q1: BC547 (A,B oder C) oder BC548 (A,B oder C)
• R1, R5: 20k Ohm, 5% (rot, schwarz, orange, gold)
• R2: 4.7k Ohm, 5% (gelb, violett, rot, gold)
• R3: 470 Ohm, 5% (gelb, violett, braun, gold)
• R4: Nicht anwesend
• R6: 10k Ohm, 5% (braun, schwarz, orange, gold)
• R7: 220 Ohm (rot, rot, braun, gold)
• C1: 100µF/ mindestens 16V, auf richtige Polung achten!
• TR1: 10k Ohm Trimmer
• D5: SFH 415-U IR-LED (schwarzes Gehäuse), auf richtige Polung achten!
Gehäuse sollte auf der Platine aufliegen!
• IC2: SFH5110-36 Infrarot-Empfänger-IC, Beinchen mit Zange abwinkeln!
Auf richtige Polung achten (Seite mit Wölbung muss nach oben weisen), Achtung:
elektrostatisch gefährdet und - Hinweis für die Hobbyschweißer - hitzeempndlich!
• X1: 9 pol. SUB-D Buchse, Gehäuse muss auf der Platine aufliegen, auch die
Befestigungslaschen müssen angelötet werden!
• IC1: NE555P einstecken, Richtungsmarkierung (Nase oder Kreis) beachten!
Page 23

- 23 -
5.8. Schaltbild RS-232 IR-Transceiver
Page 24

- 24 -
Abbildung 5.1.: Bestückung des RS232- Infrarot-Transceivers
Nun nochmal mit kritischem Blick die Lötstellen auf gute Verbindung oder Kurzschlüsse
überprüfen und ggf. nachbessern.
5.9. Bestückung des RS232-Infrarot-Transceivers
Page 25

- 25 -
5.10. Info Fertiggerät USB-Infrarot-Transceiver
Optional ist ein USB-IR-Transceiver als Fertiggerät lieferbar.
Abbildung 5.2.: USB Infrarot-Transceiver
Abbildung 5.4.: Unterseite des USB-Infrarot-Transceivers
Abbildung 5.3.: Oberseite des USB-Infrarot-
Transceivers
Page 26
- 26 -
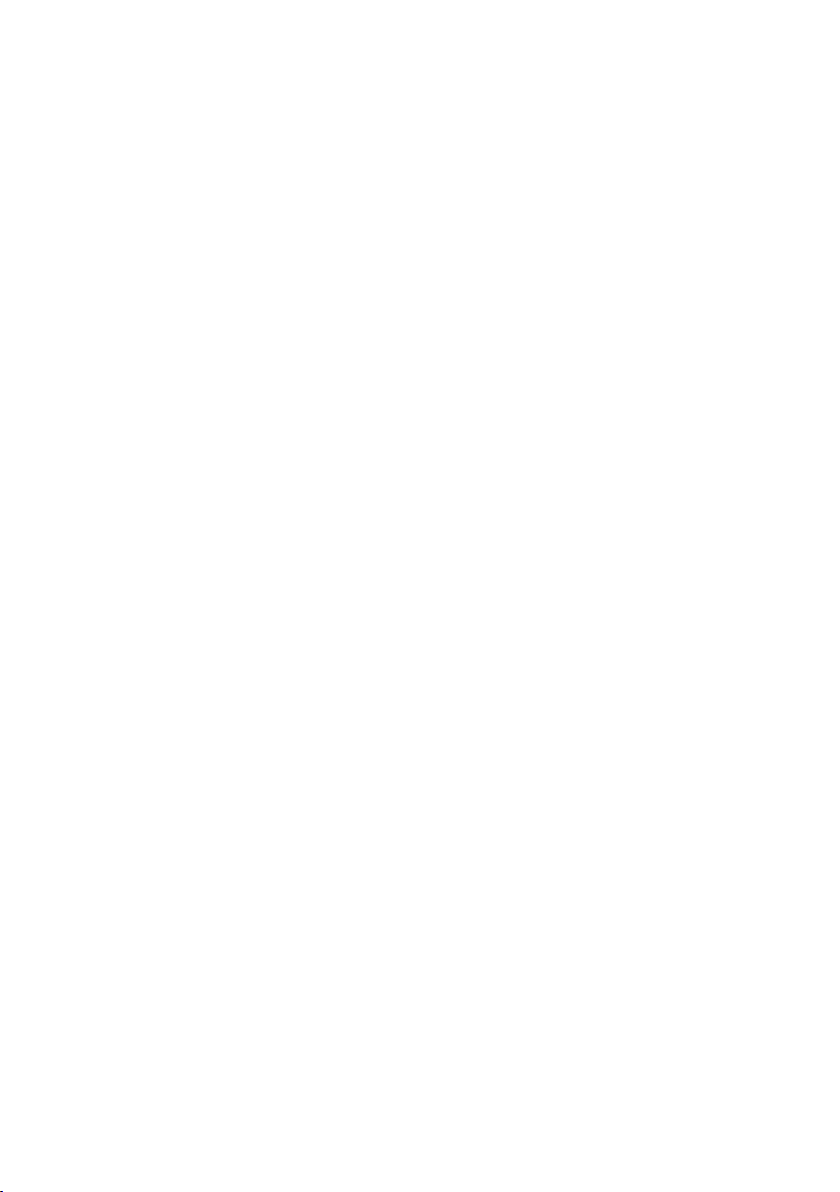
6. TEILELISTE MECHANIK
Mutter M3
O 8 St.
NieteDistanzrollen
Stellring
Groß
Linsenkopfschraube
M3x8mm
MadenSchraube
O 8 St. O 4 St. O 10 St.
Mutter M2
O 10 St.
O 4 St. O 4 St.
Gestängeanschluss
O 2 St.
Servo
Schraube
O 2 St.
Kugelkopfschraube
Gelenkkopf mit
Innengewinde
Kugelkopfmutter
O 4 St.O 4 St.O 4 St.
Drahtachse lang
Sechskant-Winkelschraubendreher
O 4 St.
O 2 St.
O 1 St.
Drahtachse kurz
Stellring
Klein
O 4 St.
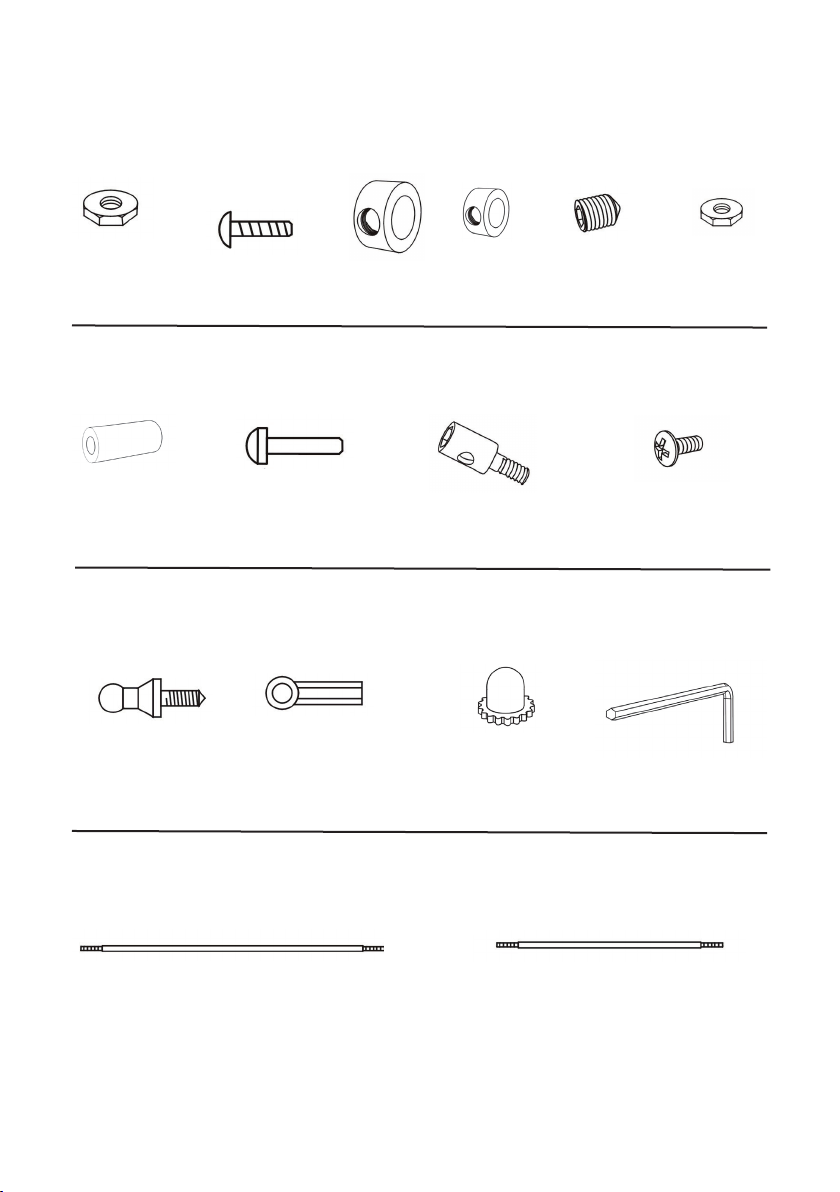
Page 27
- 27 -
Fuß
O 2 St. O 2 St.O 2 St.
Fuß KuppelstangeAchse
5x80mm
Stelldraht
Hinterbein
Vorderbein
O 2 St. O 2 St.
O 2 St.
Obere Abdeckung (unteres Teil)
Obere Abdeckung (meist oben)
O 1 St. O 1 St.
Kopfteil
Hintere Abdeckung
O 1 St. O 1 St.
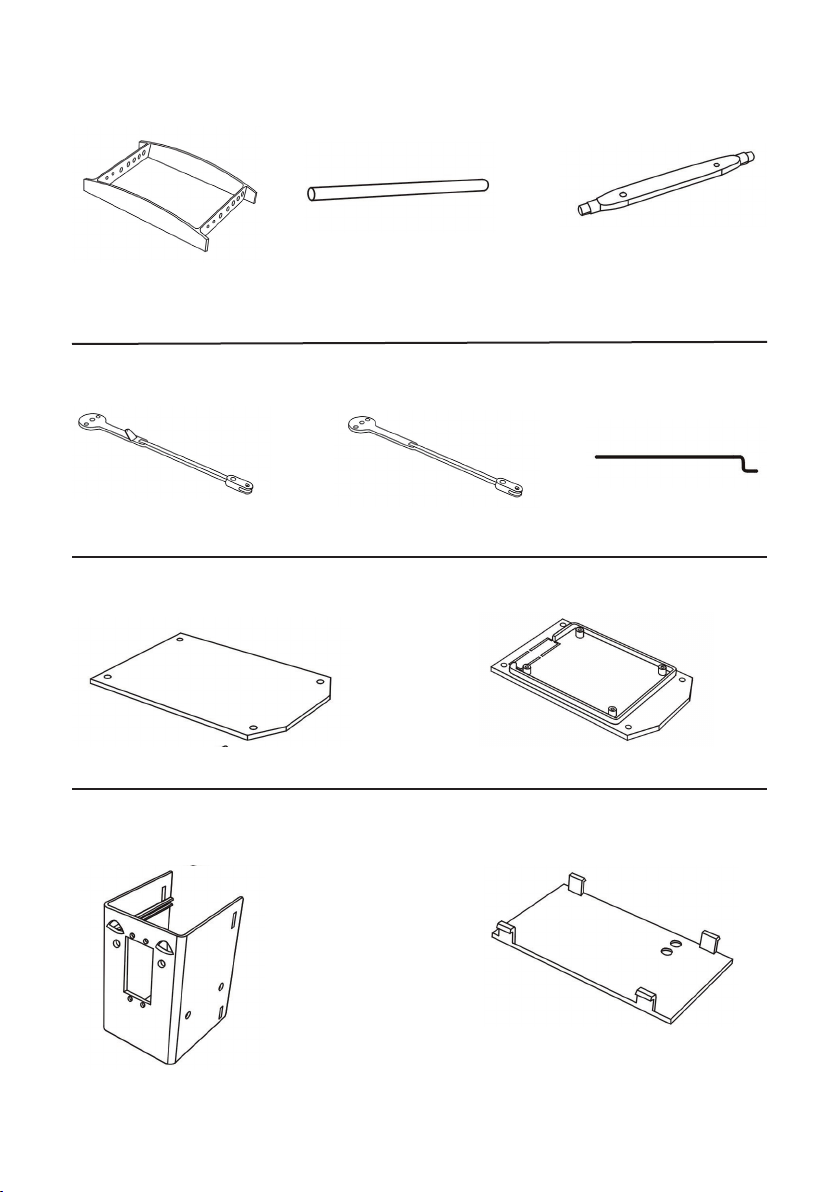
Page 28

- 28 -
O 1 St.
Bodenteil
IR/Transceiverplatine
mit Bestückung
YETI Hauptplatin
mit Bestückung
O 1 St.
O 1 St.
Klett-Band
vormontiert
O 2 St. Male
O 2 St. Female
RS-232 Kabel
O 1 St.
Servo Motor
Servo Achse
7.1. Wichtige Elektronikteile
Schalter DC-Buchse
Batteriehalter
O 1 St.
O 2 St.
O 1 St. 1mm
O 1 St. 2mm
O 2 St.
O 1 St.
Kabelsatz vormontiert
Flachbandkabel
O 1 St.O 1 St.
Mit Kabelsatz vormontiert
Page 29
- 29 -
7. Bauanleitung für die Mechanikteile
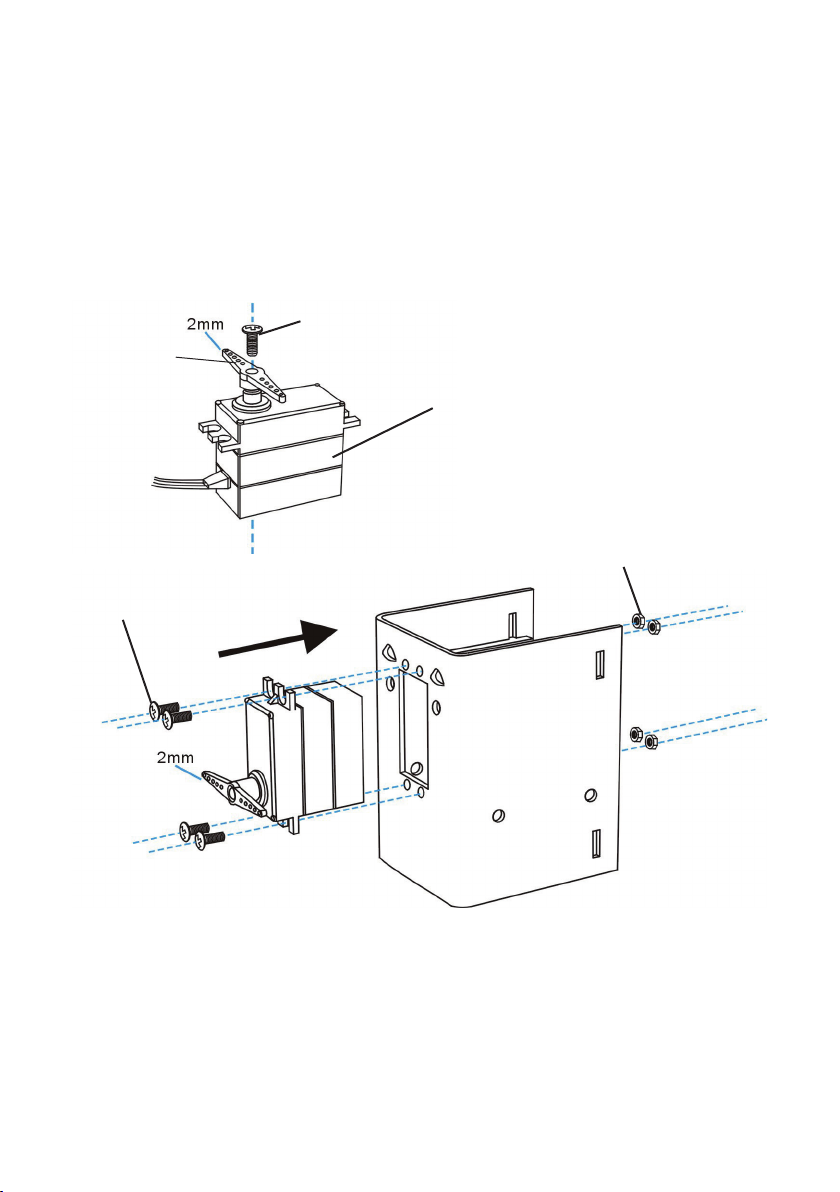
Zur Montage des Vorderservos wird folgendes benötigt;
Montage des Kopfservos:
1 St. Kopfteil
1 St. Servo
4 St. Linsenkopfschraube
4 St. Mutter M3
1 St. Servoarm mit 2mm Loch
1 St. Servoschraube
Befestigen Sie den Servo genau so, wie es in den Zeichnungen beschrieben wird.
Montieren Sie die Servoachse auf dem Servo, beachten Sie dabei bitte die kleine
Detailskizze!
Servoarm
mit 2 mm Loch
Servoschraube
Servo
Linsenkopfschraube
M3 Mutter
Page 30

- 30 -
Montage des Bodenservos:
Zur Montage des Bodenservos wird folgendes benötigt;
1 St. Bodenteil
1 St. Servo
4 St. Linsenkopfschraube
4 St. Mutter M3
1 St. Servoarm mit 1 mm Loch
1 St. Servoschraube
Befestigen Sie den Servo genau so, wie es in den Zeichnungen beschrieben wird.
Montieren Sie die Servoachse auf dem Servo, beachten Sie dabei bitte die kleine
Detailskizze!
Servoarm
mit 1mm log
M3 Mutter
Linsenkopfschraube
Servo
Servoschraube
Servoarm
mit 1mm Loch
Page 31

- 31 -
Endmontage der Bodenplatte:
Zur Endmontage des Bodenservos wird folgendes;
1 St. Montiertes Bodenteil
1 St. Schalter
1 St. DC Buchse
2 St. Batteriehalter
4 St. AA Akku
2 St. Klett-Band male
2 St. Klett-Band female
Montieren Sie die Bodenplatte genauso, wie es in der Zeichnung beschrieben wird.
ACHTUNG!
Montieren Sie erst die Batterien bevor
Sie den YETI schließen.
Batteriehalter
Schalter
DC Buchse
Montage Klett-Band
bereits vormontiert
Page 32

- 32 -
Montage des YETI Kopfes:
Zur Montage des Kopfes wird folgendes benötigt;
1 St. Montiertes Bodenteil
1 St. Montiertes Kopfteil
1 St. Montierte Hauptplatine
1 St. Hinterabdeckung
ACHTUNG!
Montieren Sie erst die komplette Verkablung bevor Sie die Hinterabdeckung
schließen.
Den Schaltplan für den Kabelanschluß finden Sie auf den Seiten 33 und 34.
Hauptplatine
Page 33

- 33 -
Kabel Endmontage:
1 St. Montiertes Bodenteil
1 St. Montiertes Kopfteil
1 St. Montierte Hauptplatine
Montierter Kabelsatz mit;
1 St. Kabel schwarz
1 St. Kabel blau
1 St. Kabel gelb
1 St. Kabel rot
Zur Endmontage der Kabel wird folgendes benötigt;
Montieren Sie zunächst die
Verkabelung genau so wie es
in die Zeichnung beschrieben
wird.
Fertig montierter
Kabelsatz
Montierter Akku
Kabelsatz
Page 34

- 34 -
JP1 = Bodenservo
JP4 = Akkusatz 2
JP5 = Kabelsatz
JP2 = Vorderservo
JP3 = Akkusatz 1
Anschlussbelegung der Hauptplatine
Weiß
JP1 & JP2 Servo Anschluß
1. Weiß
2. Rot
3. Schwarz
Page 35

- 35 -
Endmontage des YETI Kopfs:
Zur Endmontage des Kopfs wird folgendes benötigt;
1 St. YETI Kopf
1 St. Obere Abdeckung (meist oben)
1 St. Obere Abdeckung
4 St. Drahtachse Kurz
4 St. M2 Mutter
4 St. Kugelkopfmutter
4 St. Distanzrollen
M2 Mutter
Drahtachse Kurz
Kugelkopfmutter
Distanzrollen
Langes Gewinde oben!
Kurzes Gewinde!
TIP!
Benutze die extra M2 Muttern aus den Ersatzteile für die Befestigung der oberen
Abdeckung.
Extra
M2 Mutter
Obere
Abdeckung
Obere Abdeckung
(meist oben)
Page 36

- 36 -
Bein- und Fußmontage:
2 St. Fuß
2 St. Vorderbein
2 St. Hinterbein
2 St. Fußkuppelstange
2 St. Niete
2 St. Stellring klein
Zur Bein- und Fußmontage wird folgendes benötigt;
Montieren Sie Beine und Fuß genauso,
wie es in der Zeichnung beschrieben wird.
Hinterbein
mit Anschlusspunkt
Hinterbein
mit Anschlusspunkt
Stellring
klein
Niete
Fuß
Fußkuppelstange
Vorderbein
Vorderbein
Satz linker Beine
Satz rechter Beine
Page 37

- 37 -
Montieren Sie die Beine an am Chassis genau so,
wie es in der Zeichnung beschrieben wird.
Montage der Beine I:
1 St. Montiertes Chassis
1 St. Montierte Beinesatz Links
1 St. Montierte Beinesatz Rechts
2 St. Achse 5 x 80mm
4 St. Stellring 5 mm
Zum ersten Teil der Montage der Beine wird
folgendes benötigt;
Stellring
groß
Page 38

- 38 -
Montage der Beine II:
1 St. Montiertes Chassis
4 St. Gelenkkopf
4 St. Kugelkopfschraube
2 St. Drahtachse lang
4 St. Mutter M2
Zum zweiten Teil der Montage der Beine wird
folgendes benötigt;
Montiere das Drahtende mit Kugelkopf genau so,
wie es in der Zeichnung beschrieben wird.
Mittelstes Loch
des Servoarms
Kugelkopfschraube
Gelenkkopf
Drahtachse lang
M2 Mutter
M2 Mutter
Page 39

- 39 -
Montieren Sie die Beine genau so an den
Servo, wie es in der Zeichnung beschrieben
wird.
Endmontage der YETI Beine:
1 St. Montiertes Chassis
2 St. Mutter M2
2 St. Gestängeanschluss
2 St. Stelldraht
Zur Endmontage der YETI Beine wird folgendes benötigt;
Gestängeanschluss
M2 Mutter
Stelldraht
Stelldraht
Page 40

- 40 -
DER FERTIGE YETI !
Page 41

- 41 -
8. YETIS AKKUS AUFLADEN
Als Versorgungsspannung ist eine Gleichspannung von 4,8 Volt
vorgesehen, die mit 4 NiMH (1,2V) Akkumulatoren erzeugt wird.
ACHTUNG: Die Akkus sind nicht durch einen Widerstand oder eine
Sicherung geschützt!
Verwenden Sie zum Laden nur geprüfte Ladegeräte, am besten ein
Mikroprozessorgesteuertes!
Alternativ funktioniert auch ein Steckernetzgerät mit sehr niedrigem
Ladestrom, z.B. 5 Volt / 300 mA.
DC Buchse
(Mitte = +)
Schalter
Akkus laden:
1. Den Schalter auf Aus stellen!
2. Ladegerät an die DC-Buchse anschließen.
SEHE APPENDIX K für extra Info!
Page 42

- 42 -
9. SOFTWARE
9.1. Schreiben Sie ein eigenes YETI-Programm
Für die Unerfahrenen, die mit dem Programmieren noch wenig
Erfahrung haben, folgt hier eine kurze Einführung. Auch werden wir
einige Hintergrunddetails zum Schreiben eigener Programme liefern.
Das Kapitel ist sicherlich nicht einfach und Sie werden einigen neuen
Begriffen begegnen. Der Vorteil dieses Kapitels (der auch als kleiner
Crashkurs betrachtet werden kann) ist auch ein besseres Verständnis
für unser Vorgehen. Aber auch für Fragen und Antworten oder für
Diskussionen ist ein gemeinsamer Wortschatz und gemeinsames
Basiswissen vorteilhaft.
Sie können also den YETI mit einem selbstgeschriebenen
Programm ausstatten!
Wie machen wir das?
- Sie schreiben ein Programm in einer Sprache, die C
genannt wird (z.B. “test.c”).
- Sie compilieren das Programm und erzeugen dabei eine
Hex-Datei (z.B. “test.hex”).
- Sie übertragen diese Hex-Datei in den YETI.
Der Ablauf besteht tatsächlich nur aus drei einfachen Schritten und ist
für erfahrene Programmierer einfach. Den unerfahreneren Anfänger
werden wir nun schrittweise voranbringen.
Page 43

- 43 -
9.2. Stufe 1 Die Erstellung eines “C”-Programms.
Sie schreiben ein YETI-Programm in einer vorgegebenen Programmiersprache. Wir haben für diese Aufgabe die mächtige und gängige
Programmiersprache mit dem ausgefallenen Namen “C” gewählt. Sie
schreiben das YETI-Programm mit einer speziellen Textverarbeitung
(einem Editor). Dieses Programm heißt “Programmers Notepad 2”
(PN2).
Prinzipiell wäre es zwar möglich Programme mit einer Textverarbeitung
wie “MS Word” zu verfassen, jedoch raten wir Ihnen dringend davon
ab.
“C” Quelltexte sind reiner ASCII Text - ohne jegliche Formatierungen!
Programmers Notepad ist dafür deutlich besser geeignet und
vereinfacht die Programmerstellung immens!
Das PN2-Programm ist nämlich speziell auf die Programmierung in
mehreren Sprachen zugeschnitten. Die Sprache, zum Beispiel “C”,
“Visual Basic” oder “HTML” wird in PN2 einmal deniert. Mit dieser
Festlegung werden alle speziellen Sprachelemente des Programmtextes mit einer abweichenden Farbe markiert. Dieses Hilfsmittel bietet
dem Programmierer eine hervorragende Unterstützung bei der
Programmentwicklung.
Im PN2 können Sie zudem selbstdenierte Aufträge hinzufügen. Das
ist mit einem normalen Textverabeitung nicht möglich. Unabhängig
von der gewählten Textverarbeitung entsteht jedoch zunächst als erste
Stufe eines selbstgeschriebenen Programms eine normale Textdatei.
Page 44

- 44 -
Diese Prozedur verwendet eine große Menge neuer Dateien und
Dateinamen, ist kompliziert und vielleicht auch verwirrend. Die
Beschreibung der genauen Prozedur ist jedoch nur interessant für
diejenigen, die das Verfahren wirklich genau verstehen wollen. In der
Praxis wird das Verfahren stark vereinfacht!
Wie vereinfachen wir die Prozedur? ..... Nun, wir starten eine kleine
Batchdatei, die ihrerseits eine Makele-Datei aufruft. Und wenn wir
unserem Hauptprogramm PN2 mit dieser Kommandofolge bestücken,
wird die ganze Arbeit automatisch erledigt!
Die Compiler- und Linkervorgänge werden jetzt gestartet mit einem
Menubutton im PN2 oder mit einer bestimmten Tastenkombination im
PN2. Einfacher geht es nicht mehr! Im Hintergrund führt PN2 die vielen
kleinen Programmschritte in den Einzelprogrammen durch und liefert
als Endergebnis eine HEX-Datei, die Sie in den YETI-Prozessor
übertragen können.
PN2 wurde als Universalwerkzeug entworfen für eine Vielzahl an
Compilern und Linkerprogrammen. Dadurch ist die Schnittstelle
zwischen PN2 und den Compilern beziehungsweise Linkern etwas
komplexer geraten.
Hört sich das immer noch komplex an? Das ist es in gewisser Hinsicht
auch. Aber um in “C” zu programmieren, braucht uns das Verfahren
nicht zu belasten.
Diese Schnittstelle und Ankopplung der Compiler-/Linkersoftware wird
stufenweise in diesem Handbuch beschrieben.
Page 45

- 45 -
Warum haben wir genau diesen Compiler gewählt?
Nun, zunächst weil es sich um ein sehr professionelles und leistungsfähiges Werkzeug handelt und weiterhin, weil es sich dabei um Open
Source Software handelt, die jeder frei benutzen kann ohne dafür erst
teure Lizenzgebühren zahlen zu müssen!
Die “GNU” Organisation entwickelt den GCC neben vielen weiteren
Unix Programmen ständig weiter. Mehr informationen erhalten Sie
unter http://www.gnu.org/ bzw. http://gcc.gnu.org/
Der GCC ist also für Unix Betriebssysteme wie Linux entwickelt
worden und die Installation wäre unter Windows normalerweise nicht
ganz einfach. Glücklicherweise gibt es aber das Projekt WinAVR (wird
wie das englische Wort “whenever” ausgesprochen), welches die
Installation und die Mikrocontroller Programmentwicklung mit dem
GCC unter Windows sehr stark erleichtert.
Im WinAVR Paket bendet sich unter anderem der speziell für
AVR Mikrocontroller angepasste Compiler AVR-GCC, viele weitere
Unix Tools wie z.B. ‘make’, ein Debugger, Simulator und vieles andere
- allesamt fertig für die Verwendung unter Windows eingerichtet!
Weiterhin wird ein komfortabler Quelltext Editor ‘Programmers Notepad
2’ (PN2) mitgeliefert, welchen wir auch für die Programmentwicklung
für YETI empfehlen!
Neben der WinAVR Version 20060421 auf der CD nden Sie stets eine
aktuellste Version von WinAVR unter http://winavr.sourceforge.net/
zum Download!
Bei der Installation von WinAVR werden hunderte von Dateien in den
WinAVR Ordner kopiert, allerdings benötigen wir für unsere Zwecke
nur sehr wenige davon.
Sie müssen also nicht alle Tools und Dateien von WinAVR verstehen
um YETI zu programmieren!
Page 46

- 46 -
9.3. Stufe 2 Der Compilervorgang bei einem
“C”-Programm
Ein selbsterstelltes YETI-Programm, das in der erste Phase auch
Programmquelle oder “Sourcecode” genannt wird, ist eine normale
Textdatei, zum Beispiel die Datei “test.c”.
Ein sogenannter “Compiler”, in unserem Fall das Programm GCC,
transformiert die in der C-Sprache geschriebene Programmquelle
“test.c” um in eine Objektdatei “test.o”. Eine Objektdatei enthält
sogenannte Assemblerkommandos, die der YETI-Prozessor versteht
und ausführen kann, die aber in der Objektdatei noch als lesbarer Text
vorliegen.
Eine “.o”-Objektdatei enthält somit Ihre eigene “C”-Programmquelle,
angereichert mit Prozessorkommandos (für den speziellen Prozessor,
den Sie verwenden werden).
Anschließend setzt ein sogenannter “Linker” diese Kommandos um in
die für den Prozessor benötigten, ausführbaren sogenannten
(HEXadezimalen) Kommandos und fügt diese Daten zusammen in
eine Datei “test.hex”.
Theoretisch müßten Sie bei jeder Änderung eines YETI-Programms
zuerst den Compiler und anschließend das Linkerprogramm starten.
Wir können jedoch diese Prozedur mit einer Batch-Datei (.bat) und
einer “makele”-Datei automatisieren.
Eine Batch-Datei kann eine Kommandoreihe in einer Serie abarbeiten.
In einer Makedatei legen Sie fest, wie und welche Dateien compiliert
und gelinkt werden sollen. Siehe zum Beispiel die Information auf
http://www.gnu.org/software/make und http://www.gnu.org/software/
make/manual.
Page 47

- 47 -
9.4. Stufe 3 Der Transfer eines YETI-Programms
Im DLR (Deutsches Zentrum für Luft- und Raumfahrt) wurde ein
spezielles Werkzeug entwickelt um das YETI-Programm mit dem
beiliegenden COM-Port oder mit dem USB-Adapter in den YETI zu
übertragen. Dieses Werkzeug mit dem Namen Flash transferiert die
vom Benutzer selektierte Hex-Datei, zum Beispiel “test.hex”, in den
YETI Mikroprozessor.
Im YETI bendet sich eine kleine, fest eingebaute Kommunikations-
software, die “Bootloader” genannt wird. Dieses Mini-Programm kann
vom Benutzer nicht geändert oder entfernt werden und gehört im YETI
mehr oder weniger zur Hardware.
Nach dem Einschalten des YETIs wird immer zuerst der “Bootloader”
gestartet. Dieses fest eingebaute Kommunikationsprogramm horcht
drei Sekunden lang, ob irgendwelche Infrarotsignale aus der FlashSoftware im Computer empfangen werden. Wenn ja, dann registriert
YETI diese Daten und schreibt das empfangene Programm in seinen
Programmspeicher.
Wenn nein, dann startet YETI anschließend das in seinem Programmspeicher vorhandene Programm.
YETI verfügt über eine besondere Art von Speicher, der auch nach
dem Ausschalten des Roboters erhalten bleibt. Dieser Speichertyp
heißt “Flash”-Speicher. Sicherlich werden Sie jetzt auch den Grund für
den Namen “Flash”-Programm verstehen.
Page 48

- 48 -
10. INSTALLATION DER SOFTWARE
Die YETI-CD ins CDROM-Laufwerk einlegen, sie ist autostartfähig. Falls
Autostart deaktiviert ist, kann man die CD auch mit dem Windows-Explorer
öffnen. Nach der Auswahl der Sprache ndet sich im Abschnitt “Software”
alles, was für den Betrieb von YETI erforderlich ist. Diese Programme
müssen zunächst installiert werden. Für die Installation des Compilers sind
Administrator-Rechte erforderlich. Falls der aktuelle Benutzer diese Rechte
nicht besitzt, abmelden und als Administrator wieder anmelden.
Während der Softwareinstallation werden folgende Schritte durchgeführt:
1. Das Flash-Tool zum Übertragen der eigenen Programme auf YETI wird
installiert
2. Ein Programmeditor (Programmers Notepad 2, PN2) und ein Compiler
(WinAVR) wird installiert.
3. Ein Beispielprogramm wird von CDROM auf Festplatte kopiert.
4. Im Programmeditor (PN2) wird je ein Menüeintrag für MAKE und für
CLEAN eingerichtet.
10.1 Windows
10.1.1 Flash-Tool
Das Flash-Tool kann entweder in ein Verzeichnis auf der Festplatte kopiert
(z.B.:C:\Programme\Flash) oder später direkt von CD ausgeführt werden.
In jedem Fall ist es hilfreich, wenn man sich einen Link auf den Desktop
einrichtet, um das Flash-Tool einfach starten zu können.
10.1.2 Installation des Programmeditors und des Compilers
Für die Installation des Compilers sind Administratorrechte erforderlich (weil
bei der Installation die Registry geändert wird). Sollte der aktuelle Benutzer
diese nicht besitzen, abmelden und als Administrator wieder anmelden!
Klick auf [Install]
COMPILER WinAVR (20060421)
WINDOWS is the trade mark of Microsoft Corporation.
Page 49

- 49 -
Folgendes Fenster erscheint:
Klick auf OK [I Agree]
Folgendes Fenster erscheint:
Klick auf Weiter [Next]
Page 50

- 50 -
Folgendes Fenster erscheint:
Klick auf Annehmen [Agree]
Folgendes Fenster erscheint:
Page 51

- 51 -
Folgendes Fenster erscheint:
Nun das Fenster ‘Programmers Notepad 2’ schließen.
Klick auf Installieren [instal]
Folgendes Fenster erscheint:
Page 52

- 52 -
Folgendes Fenster erscheint:
Klick auf Fertig Stellen [safe]
Folgendes Fenster erscheint:
Schliessen Sie dieses Fenster
Page 53

- 53 -
Auf dem Desktop erscheint das ‘Programmers Notepad 2’ Symbol:
Der Programmeditor und der Compiler sind jetzt installiert.
10.1.3. Beispielprogramme von CDROM auf die Festplatte
kopieren
Von der CD den Ordner YETI_src’ in einen beliebigen Ordner
(Z.B. ‘C:\YETI_src’) auf der Festplatte kopieren.
Das YETI-Programm öffnen und kompilieren.
Doppelklicken Sie auf das ‘Programmers Notepad 2’ Symbol auf dem
Desktop.
Folgendes Fenster erscheint:
Page 54

- 54 -
Selektieren: Open Project(s)...
Finden Sie die Datei:
C:\YETI_scr\Firsttry\YETI.pnproj
Folgendes Fenster erscheint:
Klicken Sie auf Öffnen
Page 55

- 55 -
Folgendes Fenster erscheint:
Doppelklicken auf ’test.c’:
Page 56

- 56 -
Folgendes Fenster erscheint:
Das Programm kompilieren:
Warten bis...
…Errors: ’none’ und ’Process Exit Code: 0’ erscheint.
Damit ist das Kompilieren fertig und die Datei ’test.hex’ generiert worden.
Page 57

- 57 -
…und wenn das Programm keine Fehler enthält (was zu erwarten ist, da
gerade das Beispielprogramm geladen ist), erscheint unten die Meldung:
Errors: none.
Was ist passiert?
Aus der Datei test.c (und YETI.c) ist eine Datei test.hex generiert worden.
Diese Datei stellt das in Maschinencode übersetzte Programm dar, welches
nun in YETI Speicher geladen (geflasht) werden kann. Das Programm selbst
macht noch gar nichts, wir werden es später aber zum Ausprobieren des
Flash-Tools benötigen.
Wie hat’s funktioniert?
Der Menüeintrag `make` ruft die Batch-Datei Test-all.bat auf (eine BatchDatei enthält eine Liste mit Kommandozeilenbefehlen, die der Reihe nach
ausgeführt werden).
In Test-all.bat wird der Befehl ‘make all’ ausgeführt. ‘make’ führt immer ein
makele aus, das sich (bei der YETI-Programmierung) im gleichen Ordner
benden muss wie test.c.
Ein makele ist eine Textdatei, die festlegt, wie ein oder mehrere Programm
compiliert werden müssen. Bei Programmen, die nur aus einer Datei
übersetzt werden ist das noch recht übersichtlich. Nachdem aber ganze
Betriebssysteme in C geschrieben werden und der Code auf mehrere
Dateien aufgeteilt ist, die alle in einer bestimmten Reihenfolge übersetzt und
zusammengebunden (gelinkt) werden müssen, kann auch ein makele sehr
aufwändig werden. Das ‘all’ ruft den Eintrag im makele namens ‘all’ auf, was
bedeutet, dass ein komplettes Projekt und nicht nur einzelne Teile übersetzt
werden sollen.
Das zu unserem Beispielprogramm gehörige makele ist so geschrieben,
dass es eine Datei mit Namen test.c zusammen mit YETI.c (das einige
vordenierte Funktionen enthält) compiliert und eine .hex-Datei erzeugt, die so
auf YETI geladen werden kann.
Achtung! Das heißt auch, dass – solange das makele nicht geändert,
sondern nur kopiert wird – das das eigene Programm immer test.c
heißen muss.
Wer makeles komplett verstehen will (was aber für erste Schritte
nicht erforderlich ist) kann beispielsweise unter http://www.gnu.org/ die
Dokumentation zu Rate ziehen.
Die Grundlagen der YETI-Programmierung werden in Kapitel 13 erklärt.
Page 58

- 58 -
Beim Compilieren eines Programms werden einige “Nebendateien” erzeugt,
die nur während der Übersetzung benötigt werden und später überflüssig sind.
Diese können mit dem neu eingerichteten ‘clean’-Tool gelöscht werden.
Mit ’File -> Open’ kann mann die generierten Dateien anschauen. Hier sind die
neuen Dateien markiert, u.A. mit der Datei ’test.hex’
Mit ’Tools -> [WinAVR] Make Clean’ lassen sich diese markierten Dateien
wieder loschen.
FERTIG
Mehr WINAVR Infos siehe:
http://www.kreatives-chaos.com --> software
http://www.avrfreaks.net
http://winavr.sourceforge.net
http://www.mikrocontroller.net --> AVR-GCC-Tutorial
Page 59

- 59 -
10.2. LINUX
Für die Installation der Software sind root-Rechte erforderlich. Entweder
ausloggen und als root einloggen oder eine shell öffnen und mit “su” rootRechte erlangen.
10.2.1 Flash-Tool
Die YETI CD-ROM einlegen, ggf. mounten und die beiden Flash-Tools
“YETIflash” und “YETIcon” aus dem Verzeichnis “/Linux/Tools/” in das
Verzeichnis “/usr/local/bin” kopieren.
Danach noch das Ausführen mit “chmod a+x /usr/local/bin YETIcon YETIflash”
erlauben.
Wird ein in einer Shell eingetipptes “YETIflash” nicht gefunden, muss der Pfad
“/usr/local/bin” noch der %PATH-Variable hinzugefügt oder das Programm mit
vollem Pfad aufgerufen werden.
Page 60

- 60 -
10.2.2 Compiler
Zur Installation des Gnu-Compilers für AVR-Prozessoren die YETI CDROM einlegen und aus dem Verzeichnis “/Linux/Compiler/” mindestens die
folgenden Pakete in der angegebenen Reihenfolge installieren:
1. avr-binutils-... .rpm
2. avr-gcc-... .rpm
3. avr-libc-... .rpm
Die Installation ist denkbar einfach! Einfach in der Konsole mit root-Rechten
den Befehl : rpm -i <paket>.rpm eingeben. Fertig!
Als Editoren eignen sich zum Beispiel Exmacs, Kate oder Kedit. Zum
Ausprobieren kopiert man sich (als normaler User) die Beispieldateien von
der CD aus dem Verzeichnis “/ASURO_src/FirstTry/” ins home-Verzeichnis
beispielsweise unter “~/ASURO/”. Danach öffnet man eine Shell, wechselt in
obiges Verzeichnis und gibt “make” ein. Ist alles richtig installiert, ergibt sich
etwa folgendes Bild (siehe Abbild. 10.1):
Abbildung 10.1.: Make all
Page 61

- 61 -
10.3. Flash - das YETI-Programmier-Tool
Hierzu wird das Programm Flash (siehe Abb. 10.2) benötigt.
Damit das Flashen auch richtig gut klappt, muss natürlich der RS232- oder
USB-IR-Transceiver angeschlossen werden. Danach das Programm starten
und die Schnittstelle auswählen, welche auch bei der Inbetriebnahme
funktioniert hat.
Die Datei “Test.hex” aus dem Verzeichnis “C:\YETI_src\FirstTry” (bzw. ~/
YETI/) auswählen.
Den fertig zusammengebauten und getesteten YETI bereit halten und beim
Flash-Tool den Knopf Programm anklicken. YETI muss Sichtkontakt (ca.
50cm Abstand zwischen IR-Transceiver und YETI, beide Bestückungsseiten
zeigen zueinander und nichts ist im Lichtweg) zum IR-Transceiver haben
und wird jetzt eingeschaltet (S1 auf ON), bevor der Statusbalken ganz rechts
angekommen ist. Sollte man mal nicht schnell genug gewesen sein oder sollte
die Kontaktaufnahme nicht geklappt haben, einfach YETI ausschalten, erneut
Programm drücken und YETI einschalten.
Hat der Verbindungsaufbau geklappt, sieht man an der Statusanzeige und
dem Protokollfenster, dass nun die Datei Test.hex zu YETI übertragen wird.
Dort wird das Programm im Flash-Speicher des Prozessors abgelegt, sodass
das Programm auch nach einem Abschalten der Versorgungsspannung immer
wieder zur Verfügung steht.
War der Vorgang erfolgreich, muss YETI aus- und erneut eingeschaltet
werden, um das Programm zu starten. Das vor kurzem geschriebene
Programm wird ausgeführt und die roten LEDs erstrahlen in hellem Glanz.
Abbildung 10.2.:
Flash-Tools für
Windows und LINUX
Page 62

- 62 -
10.3.1. Wie funktioniert das Flashen?
Sobald das Programm Flash ausgeführt wird, versucht der Rechner 10 Sekunden lang
eine Verbindung mit YETI herzustellen. Schaltet man YETI ein, leuchten die “Augen”LEDs für ca. 3 Sekunden auf. Dies ist die “Boot-Phase”. YETI schaut nach, ob der PC
neue Software für ihn bereitstellt. Diese wird gegebenenfalls geladen. Nach Aus- und
Wiedereinschalten wird diese dann gestartet.
10.4. Flash Fehler
Folgende Fehler können während des Flashens auftreten:
•
• “c” ⇥ Checksum Error. Es sind andere als die vom PC geschickten Daten bei YETI
angekommen.
Das kann durch Störlicht (wie Leuchtstofflampen) kurze Unterbrechungen in der
Sichtverbindung oder ähnliches passieren.
• “t”
⇥ Timeout. Die Sichtverbindung zu YETI ist abgerissen.
* “v” ⇥ Verify Error. YETI hat falsche Daten in seinen Flashspeicher geschrieben.
Das sollte normalerweise nicht passieren und ist ein Zeichen dafür, dass der
nichtflüchtige Programmspeicher (Flash-EPROM) das Ende seiner Lebenszeit erreicht
hat, was typischerweise erst nach 10.000 Programmierungen passiert.
Es wird bis zu zehnmal versucht den Fehler zu beheben. Gelingt dies nicht, wird der
Flashvorgang
abgebrochen.
Treten beim Flashen gehäuft Checksum Errors auf, hilft es oftmals das
Raumlicht abzuschalten bzw. etwas abzuschatten, besonders wenn es
sich um Leuchtstofampen handelt.
Immer erst den Programm-Knopf drücken, dann ASURO einschalten,
sonst ist kein Softwaredownload möglich!
Page 63

- 63 -
11. INBETRIEBNAME UND TEST
Endlich ist alles zusammengebaut und der Spaß kann beginnen. Zunächst müssen aber
noch die zuvor eingebauten Fehler gesucht, gefunden und beseitigt werden, ohne dabei
allzu großen Schaden anzurichten.
11.1. RS232-Infrarot-Transceiver
Diese Inbetriebnahme gilt nur für den RS232-IR-Transceiver.
Als erstes sollte der RS232-IR-Transceiver auf seine volle Funktionsfähigkeit überprüft
werden, da dieser später für den Selbsttest des YETIs benötigt wird.
Dazu wird der RS232-IR-Transceiver über das mitgelieferte serielle Verlängerungskabel
an eine freie serielle Schnittstelle angeschlossen.
Danach startet man das Terminal-Programm von Windows “Hyperterminal” (unter Linux
beispielsweise “Minicom”). Normalerweise ndet man es unter Start --> Programme -->
Zubehör --> Kommunikation --> Hyperterminal. Falls es nicht vorhanden ist, muss man
es von der Windows-CD nachinstallieren. Terminalprogramme stammen eigentlich noch
aus der Zeit des Modems und davor, als man häuger über die serielle Schnittstelle mit
anderen Rechnern kommunizierte. Heutzutage werden sie vorwiegend dann benutzt,
wenn man sich über das Internet rein textbasiert auf einem anderen Rechner einloggen
will.
Nach dem Start von Hyperterminal fragt das Programm nach einem Namen für die neue
Verbindung. Hier kann man YETI eingeben und ein beliebiges Symbol auswählen. Im
nächsten Fenster wählt man bei “Verbinden über:” die COM-Schnittstelle aus, an der der
Transceiver angeschlossen worden ist. Nach Drücken auf “OK” wählt man
• Bits pro Sekunde: 2400
• Datenbits: 8
• Parität: keine
• Stoppbits: 1
• Flusssteuerung: kein
Danach wieder bestätigen mit “OK”.
Nun den IR-Transceiver ca. 10 cm über ein weißes Blatt Papier halten. Die Bauteile
zeigen zum Papier. Nun munter ein paar Tasten auf der PC-Tastatur gedrückt und
das Terminal-Programm sollte diese Tasten anzeigen. Der IR-Transceiver sendet
dabei den Tastendruck über die IR-Diode (D5), das am Papier reflektierte Signal trifft
auf das Empfänger-IC (IC2) und wird zum PC übertragen. Kommen gar keine oder
falsche Zeichen an, so kann man mit einem kleinen Schraubenzieher vorsichtig den
Trimmer zwischen seinem linken und rechten Anschlag verdrehen und wieder ein paar
Tasten drücken, bis korrekte Zeichen erscheinen. Das Ganze funktioniert nicht so wie
beschrieben? Schade, hier muss wohl ein Fehler vorliegen, der behoben werden sollte
(siehe. WWW.AREXX.COM --> Forum). Zur Sicherheit kann man abschließend den IRTransceiver wieder abstecken und nochmal ein paar Tasten drücken. Nun dürfen keine
Zeichen mehr erscheinen.
Page 64

- 64 -
11.2. USB-Infrarot-Tranceiver
Diese Inbetriebnahme gilt nur für den USB-Infrarot-Transceiver.
Achtung! Der ungehäuste USB-Infrarot-Transceiver ist empndlich gegen
elektrostatische Entladungen. Vor der Benutzung muss man sich an einem
metallischen Körper (Heizung, Computergehäuse) entladen um Schäden zu
vermeiden. Alternativ kann man den Transceiver auch in ein für Infrarotlicht
durchsichtiges Gehäuse einbauen.
11.2.1 Windows
Der USB-Transceiver wird mit dem USB-Kabel an einer freien USB-Buchse
angeschlossen. Es erscheint die Meldung:
“Neue Hardware gefunden: AREXX ASURO/YETI USB-IR-Transceiver”
Danach den USB-Treiber von der YETI-CD installieren. Sollte der Treiber nicht
automatisch gefunden werden, das Verzeichnis (D: steht hier für das CDROM-Laufwerk) D:\Windows\USB_Driver” auswählen. Eventuell sind hierzu
Administratorrechte erforderlich. Dann abmelden und als Administrator erneut
anmelden. Es wird nun ein Treiber installiert, damit man unter Windows den USBTransceiver wie eine normale serielle Schnittstelle ansprechen kann.
Hat dies Fehlerfrei geklappt, so startet man zum Ausprobieren auch hier das
Terminalprogramm “Hyperterminal”, gibt YETIUSB für den Verbindungsnamen an und
wählt ein beliebiges Symbol aus. Beim nächsten Fenster “Verbinden über:” wählt man
die letzte verfügbare COM-Schnittstelle aus. Nach Drücken auf “OK” wählt man:
• Bits pro Sekunde: 2400
• Datenbits: 8
• Parität: keine
• Stoppbits: 1
• Flusssteuerung: kein
Danach wieder bestätigen mit “OK”.
Nun hält man den Transceiver mit der Seite der Leuchtdiode nach unten 10 cm über
ein weißes Blatt Papier. Falls der Transceiver ohne Gehäuse betrieben wird, darf die
Platine nur am Stecker oder am Platinenrand gehalten werden, um die Schaltung
nicht zu stören. Nun drückt man am Terminalprogramm einige Tasten. Dabei muss die
gelbe Leuchtdiode auf der Platine blinken und die Tastendrücke auf dem Bildschirm
erscheinen.
Page 65

- 65 -
11.2.2 Linux
Der USB-Transceiver wird mit dem USB-Kabel an einer freien USB-Buchse
angeschlossen.
Ein kurzes “Piep” ertönt, wenn Linux den Transceiver erkannt hat. Um zu überprüfen,
ob das Gerät korrekt erkannt wurde, kann man sich den entsprechenden Eintrag im
proc-Verzeichnis anschauen:
foo@bar:/>cat /proc/tty/driver/usb-serial
Was eine Ausgabe produzieren muss, die mindestens folgende Einträge aufweist (statt
der “0:” kann auch “1:”, “2:” usw. stehen):
usbserinfo:1.0 driver:v1.4
0: module:ftdi_sio name:”FTDI 8U232AM Compatible” vendor:0403 product:6001
num_ports:1 port:1 path:usb-00:11.2-1
Zum Ausprobieren konguriert man Minicom auf die Schnittstelle /dev/ttyUSB0 (oder 1,
2 usw...) und folgende Parameter:
• Bits pro Sekunde: 2400
• Datenbits: 8
• Parität: keine
• Stoppbits: 1
• Flusssteuerung: kein
Danach wieder bestätigen mit “OK”.
Dazu sind eventuell root-Rechte erforderlich.
Eventuell muss man dem gewünschten User oder der gewünschten Gruppe noch
Lese- und Schreibrechte auf dem Device /dev/ttyUSB? einräumen. Das kann mit einem
chmod u+rw /dev/ttyUSB0 (oder 1, 2...) oder chmod g+rw /dev/ttyUSB0 (auch mit rootRechten) erfolgen.
Nun hält man den Transceiver mit der Seite der Leuchtdiode nach unten ca. 10cm über
ein weißes Blatt Papier. Falls der Transceiver ohne Gehäuse betrieben wird, darf die
Platine nur am Stecker oder am Platinenrand gehalten werden, um die Schaltung nicht
zu stören.
Nun drückt man am Terminalprogramm einige Tasten. Dabei muss die gelbe
Leuchtdiode auf der Platine blinken und die Tastendrücke auf dem Bildschirm
erscheinen.
Funktioniert das nicht, bei www.arexx.com --> Forum weiterlesen
oder www.roboternetz.de --> Forum.
Page 66

- 66 -
12. KALIBRIERUNG
Eine genaue Kalibrierung der Servomotoren und YETIs Beinmuskeln
garantiert eine stabile Gangart. Eine Justierung wird benötigt damit die
Servomotoren bei einer softwaretechnischen Positionsmitte auch tatsächlich
die mechanische Positionsmitte einnehmen. Eine Hardwarejustierung stellt
sicher, dass YETIs Beine zur Mittelposition der Servomotoren die genaue
Sollposition einnehmen.
12.1. Servo-Arm Kalibrierung
Eine Kalibrierung der Servo-Arm ist für eine stabile Gangart unerlässlich.
Diese Justierung wird einmalig durchgeführt. Wir benötigen dazu das Programm Hyperterminal. Version 6.3 steht für einen Abruf kostenlos im Internet
zur Verfügung.
Starten Sie Hyperterminal.
Programmieren Sie Hyper-terminal für COM (X) --> 2400 Baud,
8-Bit, ohne Parität und ohne Hardware Steuerung.
Schließen Sie den USB- oder RS-232-Adapter auf den PC an.
Legen Sie YETI kopfüber auf den Tisch und sehen Sie zu, dass der USBAdapter und YETIs Hinterkopf für die Infrarotlichtübertragung Sichtkontakt
haben.
Schalten Sie YETI ein.
1. Bevor Sie den YETI einschalten, lösen sie die Schrauben der beiden
Servoarme auf der Servoachse (nur lösen nicht rausschrauben).
2. Nach ca. 3 Sekunden ertönt ein Signalton.
3. Betätigen Sie jetzt, innerhalb von 1 Sekunde nach dem Signalton,
eine beliebige Taste auf Ihrer PC-Tastatur.
4. ***Der YETI ist jetzt zu Software-Kalibrierung bereit.
5. Betätigen Sie bitte die Minus-Taste [-] auf der numerischen
PC-Tastatur.
6. ***Die beiden Servomotoren nehmen jetzt automatisch ihre
Mittenposition ein.
Page 67

- 67 -
7. Entfernen Sie die gelöste Schraube des vorderen Servoarms.
8. Ziehen Sie jetzt vorsichtig, ohne die Servoachse zu verdrehen, den
Arm von der Servoachse.
9. Setzen Sie bitte den Arm horizontal, also parallel zu den roten LED’s,
zurück auf die Servoachse und schrauben ihn vorsichtig fest.
10. Falls Sie dabei die Servoachse verdrehen schalten Sie den YETI aus,
wieder ein und wiederholen Sie die Schritte 2-6.
11. Justieren Sie jetzt (Feinjustierung) mit den Tasten [7] und [9] der
numerischen PC-Tastatur den Servoarm so genau wie möglich in eine
horizontale, also parallel zu den LED’s stehende, Position.
12. ***Bestätigen Sie Ihre Einstellung mit der Taste [1].
13. Damit ist die Softwarejustierung des vorderen Servoarms
beendet. Zur Kontrolle können Sie mit der Taste [7] oder [9] den
Servo aus dieser Position rausdrehen. Betätigen Sie danach die
Taste [8], nimmt der Servo automatisch wieder die von Ihnen
eingestellte Mittenposition ein.
14. Wiederholen Sie die gleiche Einstellung für den unteren Servo.
Verwenden Sie zur Servosteuerung die Tasten [4],[5] und [6].
Zum Abspeichern der Servoposition verwenden Sie jetzt aber die
Taste [2].
15. Damit ist die Software-Kalibrierung der Servomotoren beendet!
Page 68

- 68 -
Mehr Infos über die Testsoftware,
siehe APPENDIX J
ACHTUNG!
In YETIs standardmäßig mitgeliefertem Programm bendet sich eine Funktion
‘Test.hex()’ mit der die Selbsttest ausgeführt wird.
Numerisches Tastenfeld am PC
[-]
[7]
‘Vorderer’
Servomotor
Linksdrehung
[8]
‘‘Vorderer’
Servomotor
Kalibrierte
Nullposition
[9]
‘Vorderer’
Servomotor
Rechtsdrehung
[+]
Bewege 2 Servos
in ihre kalibrierte
Nullposition
(wie [8] & [5]
gleichzeitig)
[ENTER]
Ende der
Tastur Kontrol
Modus
[4]
‘Unterer’
Servomotor
Linksdrehung
[5]
‘Unterer’
Servomotor
Kalibrierte
Nullposition
[6]
‘‘Unterer’
Servomotor
Rechtsdrehung
[1] [2]
Page 69

- 69 -
12.2. Hardware Kalibrierung
Die Servomotor-Arm des YETIs sind jetzt justiert. Nun sind die Beine an der
Reihe.
Lösen Sie bitte die Schrauben für Befestigung der „Beinmuskeln“ an den
Hinterbeinen. Die Beinmuskeln sollten sich dabei leicht durch die Führung
bewegen können.
Legen Sie YETI auf den Rücken auf einer CD-Schachtel (1 cm Höhe). Die
„Fersen“ liegen nun etwas (d.h. eine CD-Schachteldicke) tiefer als der Rücken. (Siehe Abb. 12.1).
Kleben Sie einen Streifen Klebeband fest um den Roboterkörper und dessen
Beine, so dass sich die Beine nicht mehr bewegen können.
Starten Sie Hyperterminal. Legen Sie YETI bitte kopfüber auf den Tisch und
sehen Sie zu, dass der USB-Adapter und YETIs Hinterkopf für die Infrarotlichtübertragung Sichtkontakt haben.
Schalten Sie YETI ein. Warten Sie bis eine Piepstonreihe ertönt und YETI
seine Beine in die Nullposition bringt.
Drücken Sie jetzt innerhalb 1 Sekunden eine willkürliche Taste der
PC-Tastatur. YETI piepst einmal und wird innerhalb der Kalibrierungsfunktion
bleiben, damit die Servos aktiviert bleiben.
Befestigen Sie die Schrauben der Beinmuskeln zu den Hinterbeinen mit einem
Imbus-Schlüssel.
Schalten Sie YETI aus.
Entfernen Sie das Klebeband.
Und jetzt, bitte sehr, ist YETI zum ersten Laufgang bereit.
Abb. 12.1
YETI Hardware Kalibrierungsposition
Page 70

- 70 -
13. PROGRAMMIEREN
Und jetzt?
So, unser YETI ist betriebsbereit und funktionsfähig. Das war’s
wohl, oder?
Vergiß es, die wirkliche Arbeit fängt jetzt erst an!
Erfahrene C-Programmierer können nun direkt mit der Programmierung beginnen. Anfänger sollten jedoch lieber zuerst dieses Kapitel lesen, auch wenn
das eine oder andere Thema Ihnen vielleicht bekannt vorkommt.
Ein Minicomputer
Wir fangen mal mit einer einfachen Einführung an. Die Hauptplatine des YETIs enthält einen Minicomputer. Einen solchen Kleinstrechner nennt man auch
‘Mikrocontroller’ und wird in einem IC eingebaut. Ein ‘IC’ ist ein Integrated Circuit (Integrierter Schaltkreis) und wird manchmal auch kurzweg Chip genannt.
Unser ‘Mikrocontroller’ bendet sich nun in der kleinen schwarzen Box mit den
28 Beinchen, welche die elektrische Anschlüsse zu den roten Lämpchen, zum
Lautsprecher, und zu den Antriebsmotoren in den YETI-Muskeln und Infrarot
Sender/Empfänger des YETIs versorgen.
Diese Kurzbeschreibung reicht zur Einführung, wird jedoch in den nachfolgenden Kapiteln für die Anfängergruppe Schritt für Schritt
erläutert. Beim Lesen werden Sie feststellen, dass die Lektüre langsam
anspruchsvoller wird und Sie unbemerkt mit der Programmierung
angefangen haben.
Rote Augenlichter
Die roten Augenlichter des YETIs sind sogenannte LEDs. LED ist eine verkürzte Schreibweise für Light Emitting Diode oder Leuchtdiode. Eine Diode ist
ein Elektronikteil, das den elektrischen Strom nur in eine Richtung leitet. Eine
LED ist eine spezielle Diode, die dabei auch noch leuchtet. In der Leuchtdiode
bendet sich kein Glühdraht. Die LED wird deshalb nicht heiß und verbraucht
relativ wenig Energie. Ausführliche Information über LEDs nden Sie im Inter-
net, z.B. unter
www.wikipedia.org .
Page 71

- 71 -
Motoren
Der YETI verfügt über zwei Spezialmotoren. Diese Motoren
benden sich zusammen mit einigen Zahnrädern und mit einiger
Steuerelektronik jeweils in einem kleinen Gehäuse. Ein solches
Antriebsmodul nennt man auch ‘Servomotor’. Die Zahnräder
bilden ein Getriebe. In der Praxis setzt das Servomotorgetriebe die
Drehzahl herab und das Ausgangszahnrad dreht sich erheblich
langsamer als der Motor selbst. Tatsächlich kann das Ausgangszahnrad nicht einmal eine volle Umdrehung durchführen und erreicht
nur eine Dreivierteldrehung von etwa 220 Grad. Die Herabsetzung der
Drehzahl führt jedoch zu einer erheblichen Drehkraft.
Der Mikrocontroller und sein Befehlssatz
Der Befehlssatz für den Mikrocontroller umfaßt 120 einzelne Basiskommandos, die in der englischen Fachsprache der Programmierer
auch ‘Instructions’ genannt werden. Der Mikrocontroller kann jedoch
Hunderte von Basiskommandokombinationen verarbeiten. Eine Reihe
von Basiskommandos wird ein Programm genannt. Zur Ausführung
eines Programms muß der Mikrocontroller diese Reihe in seinen
Speicher laden, nimmt dann ein einzelnes Basiskommando aus dem
Speicher und führt es aus. Dann nimmt er das nächste Kommando der
Reihe und führt auch dieses aus. Der Prozessor wiederholt diese
Prozedur ununterbrochen.
Bei einem normalen Computer müssen Sie immer zuerst ein
Programm, wie zum Beispiel ein Spielprogramm, starten, damit Sie es
benutzen können. Beim Starten kopiert der Computer das Programm
von der Festplatte oder CD in den Arbeitsspeicher des Computers.
Falls Sie den Computer danach abschalten, verschwindet das
Programm aus dem Arbeitsspeicher und Sie müssen das Programm
zum Benutzen wiederum starten.
In einem Mikrocontroller ist das Programm in einem Spezialspeicher
(im sog. ‘Flash’-Speicher) abgelegt. Beim Stromausfall und Abschalten
bleibt das Programm im ‘Flash’-Speicher erhalten. Um ein solchermaßen gespeichertes Programm zu löschen, muß der Mikrocontroller
zuerst eingeschaltet werden.
Page 72

- 72 -
Im Mikrocontroller ist der ‘Flash’-Speicher sozusagen der Arbeitsspeicher, der ständig bereits das betriebsbereite Programm enthält und es
beim Abschalten auch nicht verliert. Sie können diesen Speicher als
Kombination eines Festplattenspeichers und eines Arbeitsspeichers
betrachten.
Das Laden eines Programms
Wie können wir ein Computerprogramm in den Flashspeicher
eines Mikrocontrollers übertragen?
Normalerweise würden wir dazu ein spezielles Programmiergerät
mit einem Sockel benötigen, in den man das Mikrocontroller-IC
einsteckt. Danach lädt man das Programm direkt in den Flashspeicher
des Mikrocontrollers. In der englischen Fachsprache nennen wir ein
solches Programmiergerät einen ‘Programmer’.
Dieses würde bedeuten, dass wir den YETI mit einem Spezialstecker
an einem Programmiergerät anschließen und dann mit Hilfe des Programmiergeräts Ihr Programm in den YETI übertragen müßten. Soweit
wird es jedoch nicht kommen, denn einige fachkundige Entwickler beim
DLR (www.dlr.de) haben dazu eine trickreiche Software geschrieben,
die eine alternative Methode verwendet.
Der Trick besteht aus einem kleinen Programm im Flashspeicher des
Mikrocontrollers. Dieses Miniprogramm wird ‘Bootloader’ genannt und
der Name bedeutet: ‘Ladeprogramm zum Starten’.
Unmittelbar nach dem Einschalten des Mikrocontrollers untersucht
der Mikrocontroller immer den Inhalt des Flashspeichers, ob darin ein
Bootloaderprogramm enthalten ist. Wenn ja, wird der Mikrocontroller
grundsätzlich zuerst das Bootladerprogramm ausführen.
Achtung, jetzt wird es spannend:
Das Bootloaderprogramm wurde so entworfen, dass es mit dem Infrarot Sende-/Empfangsmodul im YETI, d.h. mit unsichtbaren Lichtstrahlen, Information austauschen kann. Auf dieser Weise können wir
mit einem Spezialprogramm auf einem normalen Computer sozusagen
mit dem YETI ‘reden’. Dieses Spezialprogramm heißt ‘Flash’ und dieser
Name kommt Ihnen vielleicht schon bekannt vor. Selbstverständlich
muß der Computer auch mit einem eigenen Infrarot Sende-/Empfangsmodul verbunden werden.
Page 73

- 73 -
Das Bootloaderprogramm und das Flashprogramm starten nun einen
Dialog. Anschließend überträgt das Flashprogramm Kommando nach
Kommando ein YETIprogramm zum Bootloaderprogramm. Das Bootloaderprogramm erhält diese Einzelkommandos und legt diese
nacheinander in den internen Flashspeicher. Dieser Speichervorgang
überschreibt dabei natürlich niemals den Speicherbereich, der das
Bootloaderprogramm selbst enthält und beginnt mit dem darauf folgenden Speicherbereich.
Sobald der Programmtransfer abgeschlossen ist, stoppt der Mikrocontroller die Ausführung des Bootladerprogramms und startet die Ausführung des zuletzt geladenen Programms.
Das Bootloaderprogramm beansprucht somit ein fester Bereich im normalen Flashspeicher des Mikrocontrollers und wird derart abgesichert,
dass man es weder lesen noch löschen kann. Es ist vielleicht besser
so, dass das Bootloaderprogramm, abgesehen vom Löschvorgang im
speziellen Programmiergerät, nicht einfach gelöscht werden kann. So
brauchen Sie keine Angst haben, dieses Programm irrtümlicherweise
zu löschen oder zu überschreiben.
Programmieren
Wie aber erstellen wir jetzt ein Programm?
In aller Kürze:
Sie schreiben ein YETI-Programm in einem Texteditor in einer ganz
bestimmten ‘Sprache’. Anschließend übersetzen Sie diese Textdatei
in sog. HEX-Kommandos, die der Mikrocontroller versteht und in einer
HEX-Datei abgelegt werden. Diese HEX-Datei können Sie nun mit
Hilfe des im vorangegangen Kapitel bereits beschriebenen Flashprogramms in den YETIprozessor übertragen.
Theoretisch könnten Sie auch Programme für den Mikrocontroller
direkt als Folge von HEX-Kommandos schreiben. Das ist jedoch sehr
kompliziert und unübersichtlich und für Laien nahezu unmöglich.
Page 74

- 74 -
Programme schreiben
In gewisser Weise ähnelt die Programmerstellung oft dem Schreiben
eines Briefes und im Idealfall sind Fachleute in der Lage, die
Programmquelle auch als Text fließend zu lesen. Zum Erstellen und
Ändern (Editieren) eines Programms verwenden wir eine spezielle
Textverarbeitung mit dem Namen ‘Programmers Notepad2’ oder in der
Kurzform PN2. Tatsächlich könnten wir zum Schreiben eines YETI-Programms auch eine andere Textverarbeitung wie zum Beispiel Notepad
oder Microsoft Word verwenden, aber das Werkzeug ‘Programmers
Notepad2’ wurde speziell entwickelt zum Editieren der Programmquellen. Dazu sind zum Beispiel bequeme Hilfsmittel, wie Spezialfarben für Schlüsselwörter, Variablen und Kommentare, verfügbar.
Ein Programm besteht aus einer Reihe normaler Textzeilen, die
natürlich einer Sprachkonvention entsprechen und einige Randbedingungen erfüllen müssen. Der Programmtext heißt auch
‘Programmquelle’ oder ‘Sourcecode’ in der englischen Fachsprache.
Sprachkonvention und Randbedingungen bilden zusammen die
‘Programmiersprache’. Genau wie bei den menschlichen Fremdsprachen gibt es im Computersprachbereich ebenfalls verschiedene
Sprachen und Übersetzersoftware, die eine Textdatei in eine Kommandodatei für einen ganz bestimmten Mikrokontroller übersetzen kann.
Es gibt zahllose Programmiersprachen, aber eine der bekanntesten
Sprachen für Mikrocontrollerprogramme ist eine Sprache mit dem
kurzen Namen ‘C’. Diese Sprache ‘C’ ist auch die Sprache, die wir für
die Programmierung des YETIs ausgewählt haben.
Page 75

- 75 -
Das Übersetzen eines Programms
Ein Mikrocontroller kann mit einem in der ‘C’-Sprache geschriebene
Textdatei nichts anfangen. Zum Übersetzen einer in der ‘C’-Sprache
geschriebenen Textquelle in eine Datei mit HEX-Kommandos für den
Mikrocontroller benötigen wir ein Übersetzungsprogramm. Ein solches
Übersetzungsprogramm ist zunächst ein ganz normales Computerprogramm, das in Fachkreisen üblicherweise ‘Compiler’ genannt wird.
Für den YETI benötigen wir daher einen ‘C’-Compiler. Das dazu geeignete Programm heißt ‘gcc.exe’. Dieser Compiler erwartet zur Übersetzung eine Textdatei mit einer Dateinamensendung ‘.c’. Der Compiler
kann somit keine Datei ‘test.txt’, dafür jedoch ‘test.c’ sehr wohl übersetzen.
Wenn die Textverarbeitung Programmers Notepad2 mit dem korrekten ‘C’-Compiler ausgestattet wird, kann der Menupunkt Tools->Make
automatisch die Übersetzung einer Programmquelle in eine HEX-Datei
durchführen.
Die Programmübertragung oder der ‘Programm upload’
Der Compiler hat jetzt zum Beispiel das ‘C’-Programm ‘test.c’ übersetzt
in eine HEX-Datei ‘test.hex’ mit den Mikrocontrollerkommandos. Das
Flashprogramm kann diese HEX-Datei mittels Infrarotlichtübertragung
in den YETI-Mikrocontroller transferieren. Der Transport heißt in der
englischen Fachsprache auch ‘Programm upload’, weil das Flashprogramm die HEX-Datei in den YETI-Roboter überträgt.
KongurationderCompilersoftware
Sollten Sie beabsichtigen, einen ‘C’-Compiler zu kaufen, dann
sollten Sie schon einige Hundert Euro beiseite legen. Es gibt jedoch
eine Gruppe professionelle und begeisterte Programmierer, die einen
ausgezeichneten und kostenlosen ‘C’-Compiler entwickelt haben, der
zudem noch frei kongurierbar ist.
Page 76

- 76 -
Die WINAVR Entwickler haben den ‘C’-Compiler und den
Programmers-Notepad2 bereits vorkonguriert. Der Benutzer kann
diese Einstellung jedoch anpassen. Die Voreinstellung erfordert, dass
das Hauptprogramm grundsätzlich als ‘test.c’ abgelegt werden muß.
Außerdem sollte eine Datei ‘YETI.c’ verfügbar sein, in der ergänzende
Funktionen festgelegt werden können. In diesen beiden Dateien werden Hauptprogramm und ergänzende Funktionen ordentlich getrennt
verwaltet.
Der Programmers-Notepad2 übernimmt die Aufgabe, die Quelldateien
‘test.c’ und ‘YETI.c’ immer zusammen zu compilieren, so dass man
sich als Benutzer auf wichtigere Aufgaben konzentrieren kann.
Das habe ich doch schon mal gelesen, werden Sie jetzt vielleicht
denken. Stimmt, aber beim zweiten Mal Lesen sieht alles viel einfacher
aus und ist es auch leichter zu verstehen.
Die Erstellung eines ‘C’-Programms für den YETI.
Ist die Erstellung eines ‘C’-Programms schwierig?
Die Antwort ist sowohl positiv als negativ. Negativ, weil ein Steuerungsprogramm für den YETI ziemlich einfach sein kann. Andererseits aber
auch positiv, weil man in ‘C’ auch sehr komplizierte Programme schreiben kann.
Wenn man erstmalig mit ‘C’ in Berührung kommt, ähnelt alles zunächst
Zauberei, aber nach einer Weile werden die Programme durchschaubar und übersichtlich. Man muß nicht einmal alles verstehen. Beim
Weiterlesen wird Ihnen dieses einleuchten.
Page 77

- 77 -
Hauptprogrammstruktur
# Eine ‘C’-Hauptprogramm hat eigentlich immer nachfolgende
Grundstruktur:
int main(void){
return 0;
}
‘int’ beschreibt den Typ der Hauptfunktion
‘main’ ist der Name der Hauptfunktion
‘void’ bedeutet ‘leer’ oder ‘unbesetzt’
‘return 0’ bedeutet: liefere eine Zahl Null zurück an die Variable,
womit die Funktion ‘main’ aufgerufen wurde.
# Grundsätzlich sollte jede ‘C’-Kommandozeile immer mit einem
Semikolon, d.h. ‘;’, abgeschlossen werden. Ausgenommen sind nur
Zeilen, die mit einer Funktionsklammer ‘}’ enden.
# Programmers Notepad2 kann bestimmte Textteile automatisch mit
einer speziellen, frei wählbaren Farbe darstellen. So kann man zum
Beispiel die Syntax oder die speziellen ‘C’-Kommandocodewörter blau
darstellen. Zahlen werden in Türkis, Kommentare in Grün geschrieben.
# Man kann fast überall Kommentar einfügen, nach ‘//’ oder zwischen
‘/*’ und ‘*/’
int main/*Beliebiger Kommentartext*/(void){ /*Irgendein Kommentar*/
//Kommentarzeile
/* Textzeilen
*/
return 0; // Beliebige Textzeile
/*
weiterer Text
*/
}
Page 78

- 78 -
# Nachfolgendes Programm generiert eine Fehlermeldung beim
Kompilieren, denn ‘Main’ wurde mit einem Großbuchstaben geschrieben. Die ‘C’-Sprache unterscheidet die Wörter, die mit Groß-
buchstaben oder Kleinbuchstaben geschrieben werden.
int Main(void){
return 0;
}
# Ein Programm darf zum Beispiel auch wie folgt zusammengeschrieben werden, aber das Ergebnis ist nicht so gut lesbar:
int main(void){return 0;}
#Kommentare können zum Beispiel am Ende einer Programmzeile
eingefügt werden:
int main(void){ //Beginn der main-Funktion
return 0; //verlasse die Hauptfunktion unter
//Rückgabe des Werts 0
} //Ende der main-Funktion
#Kommentare können aber auch vor der Programmzeile eingefügt
werden:
//Beginn der main-Funktion
int main(void){
//verlasse die Hauptfunktion unter Rückgabe des Werts 0
return 0;
//Ende der main-Funktion
}
Page 79

- 79 -
#Die ‘C’-Sprache setzt immer eine und nur eine Hauptfunktion
mit dem Namen ‘main’ voraus und daneben ggf. noch eine oder
mehrere Zusatzfunktionen mit beliebigen Namen.
#Nachfolgendes Programm enthält nur eine Hauptfunktion mit
dem Namen ‘main’, führt jedoch keine Kommandos aus und bildet
sozusagen nur ein Gerüst:
int main(void){ //Beginn der main-Funktion
return 0; //verlasse die Hauptfunktion unter Rückgabe des Werts 0
} //Ende der main-Funktion
‘C’-Kurs
Wie bereits gesagt, wäre es nicht schlecht an dieser Stelle einen
kompletten ‘C’-Programmierkurs ein zu fügen. Auf diesem Bereich
sind jedoch viele Handbücher im Handel und ausführliche Webseiten
verfügbar, die ‘C’ sehr detailliert dokumentieren. Deshalb werden wir
in diesem Manuskript nur die für den YETI benötigten ‘C’-Begriffe und
Funktionen beschreiben.
Nachdem wir die Grundbegriffe verstanden haben, fangen wir die
Programmierung mal vorsichtig an. Wir werden dazu keinen kompletten ‘C’-Programmierkurs anbieten, aber die auf der CD mitgelieferten
Beispielprogramme beschreiben.
OK, es soll also kein ‘C’-Programmierkurs werden, denn diese gibt es
in Hülle und Fülle und Information zum ‘C’-Programmieren gibt es auch
in Büchern und im Internet. Unsere Information bildet jedoch einen
guten Grundstock für eine Wiederholung des Wesentlichen und ein
Leitfaden für Anfänger mit Praxisbeispielen.
Page 80

- 80 -
WICHTIG
Der Buchstaben v am Anfang der YETI-Funktionen ist ein
Hilfsmittel des Programmierers! Der Buchstaben v (void) am
Anfang der YETI-Funktionen bedeutet, dass die Funktion
keinen Wert zurückliefert.
YETI schaltet sein rechtes ‘Auge’ ein
#Dieses Programm schaltet das rechte YETI-‘Auge’ ein
#include “yeti.h” //Lade Denitionen und Funktionen
int main(void){ //Beginn der main-Hauptfunktion
vInitYeti(); //Initialisiere alle
//Mikrocontrollerfunktionen des YETIs
vFrontLEDs(RIGHT); //Schalte LED im rechten YETI-Auge ein
return 0; //Verlasse main-Hauptfunktion mit
//Rückgabe Wert 0
} //Ende der main-Hauptfunktion
#include “yeti.h”
An dieser Stelle wird die Datei ‘yeti.h’ eingefügt, welche die Denitionen der benötigten Funktionen enthält, z.B. die Funktion ‘vInitYeti();’.
Die vollständigen Funktionen benden sich in der Datei ‘yeti.c’.
vInitYeti();
Diese Spezialfunktion legt die Startbedingungen für alle Mikrocontrollerfunktionen des YETIs fest. Die Funktion wird als erster Programmschritt ‘vInitYeti();’ aufgerufen. Die tatsächlich auszuführende
Funktionsteile benden sich in der Funktionsdenition in der Datei
‘yeti.c’.
Page 81

- 81 -
vFrontLEDs(LEFT);
Diese Funktion schaltet das linke YETI-‘Auge’ ein.
Gleichartige Funktionen sind:
vFrontLEDs(RIGHT);
Diese Funktion schaltet das rechte YETI-‘Auge’ ein.
vFrontLEDs(OFF);
Diese Funktion schaltet beide YETI-‘Auge’ aus.
vFrontLEDs(BOTH);
Diese Funktion schaltet beide YETI-‘Auge’ ein.
Wir lassen das rechte YETI-Auge 5-Mal blinken
#Dieses Programm lässt das rechte YETI-Auge 5-Mal im Sekundentakt
blinken
#include “yeti.h” //Lade Denitionen und
//Funktionen
int main(void){ //Beginn der main-Hauptfunktion
int i; //Deklariere Variable ‘i’ als Integer
vInitYeti(); //Initialisiere alle Mikrocontroller
//funktionen des YETIs
for(i=0 ;i<5 ;i++){ //Wiederhole 5 Mal
vFrontLEDs(RIGHT); //Schalte LED im rechten
//YETI-Auge ein
vWaitMilliseconds(500); //Warte eine halbe Sekunde
vFrontLEDs(OFF); //Schalte LED im rechten
//YETI-Auge aus
vWaitMilliseconds(500); //Warte eine halbe Sekunde
} //Ende der 5-maligen ‘for’-Schleife
return 0; //Verlasse main-Hauptfunktion
} //Ende der main-Hauptfunktion
Page 82

- 82 -
Der Programmteil innerhalb den geschweiften ‘for’-Klammern ‘{‘
und ‘}’ heißt ‘Schleife’ oder ‘Loop’.
for(…){
}
Int i;
An dieser Stelle wird eine Variable mit dem beliebigen Namen ‘i’
deniert.
for(i=0 ;i<5 ;i++){
Deniere zuerst ‘i’ als Zahl 0 und wiederhole alle Programmteile
zwischen der geschweiften ‘for’-Öffnungsklammer ‘{‘ und der zugehörigen ‘for’-Abschlussklammer ‘}’, solange Variable ‘i’ kleiner ist als
5. Dabei wird jedes Mal, wenn das Programm an der ‘for’-Zeile vorbeikommt, die Variable ‘i’ mit 1 erhöht. Beim ersten Vorbeikommen ist
dieser Wert daher 0.
Beim 6en Mal hat ‘i’ den Wert 5 erreicht und ist somit nicht mehr kleiner
als 5. Das Programm wird daher keine weitere ‘for’-iSchleife durchlaufen und seinen Weg mit der erstfolgenden Zeile nach der ‘for’-Abschlussklammer verfolgen, d.h. mit der Zeile return 0;
Die Schleife wurde unserem Wunsch entsprechend insgesamt 5 Mal
ausgeführt.
Page 83

- 83 -
vWaitMilliseconds(500);
Diese Zeile ruft die Funktion vWaitMilliSeconds mit dem Übergabewert
500 auf.
Die Funktion bendet sich in der Datei ‘YETI.c’. Sie können die Datei
‘YETI.c’ und die Funktionsbeschreibungen darin mit dem Programmers
Notepad2 durchlesen. Die Funktion verwendet für die Warteschleife
einen internen Zähler des Mikrocontrollers und kehrt anschließend aus
der Funktion zurück zum Programm.
Als Eingabewert akzeptiert die Funktion Zeitangaben in Millisekunden.
Das sind Tausendstel Sekunden. 500 Tausendstel Sekunden entsprechen daher einer halben Sekunde.
Der YETI soll Geräusche produzieren
#Dieses Programm lässt YETI Geräusche produzieren
#include “yeti.h” //Lade Denitionen und Funktionen
int main(void){ //Beginn der main-Hauptfunktion
vInitYeti(); //Initialisiere alle Mikrocontroller //funktionen des YETIs
vBeep(400,80); //lässt YETI einen Piepston produzieren
vBeep(520,120); //lässt YETI einen Piepston produzieren
vBeep(360,80); //lässt YETI einen Piepston produzieren
vBeep(580,160); //lässt YETI einen Piepston produzieren
return 0; //Verlasse main-Hauptfunktion
} //Ende der main-Hauptfunktion
vBeep(400,80);
Aufruf der Funktion ‘vBeep’ mit einer Tonhöhe 400 und mit einer Tondauer von 80 Millisekunden.
Page 84

- 84 -
Der YETI soll tänzeln
#Dieses Programm veranlasst YETI, seine Füße in einem Tanz zu
bewegen.
#include “yeti.h” //Lade Denitionen und Funktionen
#include “yetimove.h” //Einfügen der YETI-Bewegungs //funktionen
int main(void){ //Beginn der main-Hauptfunktion
int i; //Deklariere Variabele ‘i’ als Integer
vInitYeti(); //Initialisiere alle Mikrocontroller //funktionen des YETIs
for(i=0 ;i<3 ;i++){ //Wiederhole 3 Mal
vMoveBody(16,10); //Bewege den Servo für die YETI //Körperbewegungen nach links
vMoveBody(-16,10); //Bewege den Servo für die YETI //Körperbewegungen nach rechts
} //Ende der 3-maligen ‘for’-Schleife
vMoveBody(0,10); //Bewege den Körper in die Ruheposition
return 0; //Verlasse main-Hauptfunktion
} //Ende der main-Hauptfunktion
#include “yetimove.h”
Einfügen der Datei ‘YETImove.c’ mit den YETI-Bewegungsfunktionen.
vMoveBody(16,10);
Bewege den Server für die YETI-Körperbewegungen um 16 Schritte
nach links und warte bei jedem Schritt 10 Millisekunden.
vMoveBody(-16,10);
Bewege den Server für dieYETI-Körperbewegungen um 16 Schritte
nach rechts und warte bei jedem Schritt 10 Millisekunden.
Sie können die Schrittzahl für die YETI-Körperbewegungen zwischen
–58 und +58 wählen. Die Wartezeiten werden immer auf ein Vielfaches
von 10 aufgerundet. So wird für jede Zahl zwischen 1-10 Millisekunden
eine Wartezeit von 10 Millisekunden und für jede Zahl zwischen 11-20
Millisekunden eine Wartezeit von 20 Millisekunden angehalten.
Page 85

- 85 -
vMoveBody(0,10);
Bringe den YETIkörper wieder in die Ruheposition.
Mit einer artverwandten Funktion ‘vMoveLegs()’ können Sie die YETIbeine nach vorne oder nach hinten bewegen.
YETI soll laufen
#Dieses Programm lässt YETI drei Schritte laufen.
#include “yeti.h” //Lade Denitionen und Funktionen
#include “yetimove.h” //Einfügen der YETI-Bewegungs //funktionen
int main(void){ //Beginn der main-Hauptfunktion
vInitYeti(); //Initialisiere alle Mikrocontrol //lerfunktionen des YETIs
vMoveForwardXSteps(3); //Bewege den Körper 3 Schritte vorwärts
vStandUpright(); //Zurück zur Ruheposition
return 0; //Verlasse main-Hauptfunktion
} //Ende der main-Hauptfunktion
vMoveForwardXSteps(3);
YETI bewegt sich drei Schritte nach vorne. Als Anfangsschritt wird
YETI immer mit dem rechten Fuß beginnen.
vStandUpright();
YETI bewegt seinen Körper zurück in die Ruheposition
Page 86

- 86 -
14. ERWEITERUNGEN
Erweiterungsmodule (Kits)
Sie können YETI erweitern mit zusätzlichen (nicht im Lieferumfang
enthaltenen) Baugruppen, welche die Leistungsfähigkeit des Roboters
erheblich steigern. So können Sie YETI mit einem Ultraschall-Sender/Empfänger ausstatten, der ihm ermöglicht mit Schallwellenechos
die Distanz zu entfernten Gegenständen zu messen und diesen beim
Gehen auszuweichen.
14.1.2. YETI Experimentiermodul YT-EXP1
Im Experimentiermodul können Sie einen eigenen Entwurf einer Elektronikbaugruppe aufbauen und dieses Modul auf unterschiedlichste Art
mit dem Mikrocontroller ansteuern.
14.1.2. Teilleliste Experimentiermodul YT-EXP1
PCB-DSP YETI Experimentierplatine
CON1-PCB Platinenstecker, male, 20 Pins,
für Flachbandkabel
CON1-FC (2 St.) Flachbandstecker, 20 Pins
F1 Flachbandkabel, 20 Adern, 10cm
Page 87

- 87 -
14.1.3. Montage Erweiterungskits
Flachbandkabel
Ultraschallplatine
Obere Abdeckung
(unteres Teil)
Montage Ultraschallplatine
Montage Experimentierplatine
Montage
Display Platine
Ultraschallplatine
Hauptplatine
Akkusatz
SERVO
Page 88

- 88 -
14.2. YETI Display Erweiterungsmodul YT-DSP2
Allgemeine Beschreibung
Das Display Erweiterungsmodul enthält 4 Stück 8-Segmentanzeigeblöcke. Ein ebenfalls im Erweiterungsmodul vorhandener 24 Pin I2C
Treiberchip erledigt die Ansteuerung des Displays.
Der YETI Mikrocontroller steuert seinerseits den I2C Treiberchip. I2C
(buchstabiert als I-Quadrat-C) ist eine ofzielle Standardmethode für
die gegenseitige Kommunikation zwischen Elektronikmodule mit nur
zwei Anschlussadern SCL (Serial Clock) und SDA (Serial Data). Wir
benötigen für dieses Kommunikationsprotokoll deshalb nur 2 der 20
Adern des Flachbandkabels.
Das Display bietet eine Anzeigeoption für diverse Nachrichten oder
Daten. Die einfache Ansteuerung des I2C Chips erlaubt die Darstellung
vielerlei selbstdenierten Symbole auf dem Display.
Hardware Beschreibung
Das Displaymodul enthält vier 8-Segment Displays, einen I2C Displaychip und einige Hilfskomponenten.
Der Chip kommuniziert über das I2C-Interface mit einem Steuerungsmodul, in der Regel einem Mikrokontroller. Der Chip liefert selbstständig alle Steuerungssignale zur Ansteuerung der Displays.
Der Anwender braucht sich um diese Details nicht mehr zu kümmern
und muss nur festlegen welches Symbol in jedem einzelnen Zeichen
angezeigt werden soll. Dazu wird selbstverständlich der I2C-Bus
verwendet.
Auch die Helligkeit der
Anzeige lässt sich in 8 Stufen
regeln. Zudem verfügt jede
Displayeinheit über
8 Anschlüsse für die
Einzelsegmente: sieben
Datensignale für die
Einzelsegmente und ein
Dezimalpunkt.
Page 89

- 89 -
Jedes Segment besteht aus einer Leuchtdiode oder LED. Außerdem
wird noch ein gemeinsamer Pol für den Stromversorgungsanschluß
der Leuchtdioden in jedem Displayelement benötigt. Der Hersteller
hat dazu vier Segmente jeweils an einem Anschluss verknüpft und die
Anschlüsse 3 und 14 intern zu einen gemeinsamen Stromversorgungsanschluß zusammengelegt.
Zur Ansteuerung der vier Displays mit jeweils 8+2=10 Anschlüssen
würde man theoretisch ein 40-poliges IC benötigen. Diese Verbindungsfülle können wir jedoch mit dem Multiplexertrick beseitigen.
Der Chip benötigt dazu 2 Sätze 8-Segment-Anschlüsse: P1-P8 und
P9-P16.
Zunächst betrachten wir den Satz P1-P8, die sowohl mit Display 1 als
mit Display 2 verbunden sind. Falls wir nun eine bestimmten Bitkombination auf P1-P8 schalten, dann werden beide angeschlossenen
Displays das gleiche Symbol anzeigen. Der Trick besteht nun darin,
mit den Transistoren Q1 und Q2 Display 1 ein- und Display 2 abzuschalten. Mit dieser Schaltung wird zuerst nur Display 1 das Symbol
anzeigen. Nun jedoch schalten wir Display 1 mit Transistor Q2 aus,
erzeugen auf den Datenleitungen P1-P8 eine neue Bitkombination für
ein weiteres Symbol und schalten Display 2 mit Transistor Q1 ein. Das
zweite Symbol wird nun auf Display 2 angezeigt. Dieses Multiplexerprinzip wird auch für Display 3 und 4 angewandt. Falls wir nun den
Multiplexertrick mit höheren Schaltgeschwindigkeit betreiben, wird das
menschliche Auge nicht registrieren, daß die Displays eigentlich die
Hälfte der Zeit gar nicht aufleuchten.
Wir können zwei der vier Displays auch ohne Multiplexermodul ansteuern. Diese beiden Displays sind ständig eingeschaltet, falls ein Display
(z.B. Display 1) auf P1-P8 und das zweite Display (Display 3) auf P9P16 angeschlossen wird. Die Beispielsoftware basiert auf die Randbedingung, daß die Displays folgendermaßen geschaltet werden:
Displayschaltung:
Display 4 Display 2 Display 3 Display 1
Diese Schaltung basiert auf die grundlegende Idee, daß zum Betrieb
zweier Displays (Display 1 und 3) im statischen Modus diese Module
nebeneinander stehen sollten..
Page 90

- 90 -
14.2.1. Teilleliste YETI Displaysatz YT-DSP2 KIT
PCB-DSP YETI Display platine
R1 330R
(orange, orange, braun, gold)
R2 330R (orange, orange, braun, gold)
R3 18K (braun, grau, orange, gold)
C1 2,7nF (Aufdruck: 272)
C2 100nF (Aufdruck: 104)
Q1 BC547B/C (auf richtige Polung achten)
Q2 BC547B/C (auf richtige Polung achten)
D1 8-Segment display, common anode
D2 8-Segment display, common anode
D3 8-Segment display, common anode
D4 8-Segment display, common anode
IC1 SAA1064 (auf richtige Polung achten)
S1 IC-Fuß, 24-pins, 600mil (auf richtige Polung achten)
CON2 Kontaktleiste 13-polig, Platinenmontage
CON, 3, 4 und 5 (3 St.) Kontaktleiste 2-polig, Platinenmontage
CON1-PCB Platinenstecker, male, 20 polig,
für Flachbandkabel
CON1-FC (2 St.) Flachbandstecker, 20-polig
F1 Flachbandkabel, 20 Adern, 10cm
Display auf
Experimentierplatine
Display auf orginal Display Platine YT-DSP2 KIT
Page 91

- 91 -
Page 92

- 92 -
14.2.2. Display Modul Schaltplan
Page 93

- 93 -
14.3. YETI Ultraschall Erweiterungsmodul YT-ULT3
Der Ultraschall Erweiterungssatz enthält einen Ultraschallsender und
einen Ultraschallempfänger. Ultraschall bedeutet: Schallwellen mit
einer so hohen Frequenz, dass Menschen diesen Ton nicht hören
können.
Fledermäuse senden zum Beispiel Ultraschallwellen aus, damit sie im
Dunkeln fliegen und jagen können. Men nennt dieses Verfahren EchoOrtung. Gegenstände reflektieren die Schallwellen, die dann im Ohr
empfangen werden.
Beim YETI wird ein Mikrofon zum Schallwellenempfang benutzt.
Der Sender erzeugt Schallwellen mit einer Frequenz von 40.000Hz.
Der Empfänger registriert die eventuell von einem Gegenstand reflektierten Signale und auch die Zeitverzögerung zwischen Sende- und
Empfangsimpuls.
Aus der Zeitverzögerung zwischen Sende- und Empfangsimpuls können wir den Abstand zum Gegenstand berechnen. Das Ultraschallmodul verwandelt die Zeitverzögerung in eine elektrische Spannung.
Das Flachbandkabel führt diese elektrische Spannung zur Analog/Digitalwandlereingang des Mikroprozessors im YETI.
Ein im YETI verfügbares Programm kann die Spannung messen und
aufgrund der Daten eine
Aktion ausführen.
Im YETI ist zur Aufnahme
des Ultraschallmoduls
bereits ein Platz am Deckel
zum Innenraum des Kopfes
reserviert. Hinter den beiden
“Augenbrauen”-Öffnungen
in der Stirn benden sich
der Sender, beziehungsweise Empfänger.
Page 94

- 94 -
14.3.1. Hardware Beschreibung
Das Ultraschallmodul besteht aus 5 Komponenten:
1. Der Sender
2. Der Empfänger
3. Der Empfängerverstärker
4. Eine konstante Referenzspannung
5. Eine variable Referenzspannung
Der Mikrocontroller generiert das benötigte Ultraschallsignal.
Ein Senderlautsprecher (TX) erzeugt das akustische Signal und ein
Empfängermikrofon (RX) empfängt die reflektierte Schallwelle. Der
Empfängerverstärker erhöht den schwachen Empfangspegel, wobei
der Verstärkungsfaktor manuell mit R10 einstellbar ist. Die konstante
Referenzspannung liefert eine Spannung, die auf genau 50% der
Stromversorgungsspannung eingestellt und zur Ansteuerung des
Senders und zur Erzeugung der variablen Referenzspannung benötigt
wird. Ein spezieller Regelkreis läßt mit Hilfe der variablen Referenz-
spannung den Mikrocontroller je nach Entfernung der Reflexionsquelle
nach jeder Schallwelle immer genauer zuhören. Diese Regelung ist
sehr wichtig, denn bei großer Entfernung der Reflexionsquellen nimmt
der Empfangspegel rapide ab.
Der Mikrocontroller erzeugt die benötigten Ultraschallwellen und führt
diese Signale über CON1-13 in das Ultraschallmodul. Das reflektierte
und im Ultraschallmikrofon empfangene Signal wird über CON1-6 in
den Mikrocontroller zurückgeführt. Anschluß CON1-15 liefert nach
jedem Senderimpuls ein abnehmendes Spannungssignal an den
Mikrocontroller.
Das im Mikrocontroller erzeugte ‘Ultraschall’-Signal ist zunächst natürlich keine Schallwelle, sondern ein elektrisches Signal. Genau genommen darf man diese Signale erst ‘Ultraschallwellen’ nennen, nachdem
der Lautsprecher das Signal in Schallwellen verwandelt hat.
Page 95

- 95 -
Dieses im Mikrocontroller generierte ‘Ultraschall’-Signal wird zunächst
über CON1-13 und über Widerstand R3 in den Sender eingespeist.
Der Sender besteht aus 2 (von 4) Verstärker, die einzelnes IC (Integrated Circuit = Chip) mit dem Namen IC1 zur Verfügung stellt. Fachleute
nennen diese Verstärker oft Opamp, d.h. Operational Amplier oder
Operationsverstärker. Es handelt sich dabei um Differenzverstärker mit
zwei Eingängen: einen Plus- und einen Minuseingang. Wie der Name
Differenzverstärker andeutet, verstärkt das Verstärkermodul die
Differenzspannung zwischen den beiden Eingängen.
Das Ultraschallsignal erreicht nun einen Eingang eines der beiden
Opamps. Die übrigen Eingänge der beiden Opamps werden mit einer
festen Referenzspannung in Höhe von 50% der Stromversorgungsspannung verbunden. Beide Opamps haben zur Aufgabe den Lautsprecher mit Energie zu versorgen und das vom Mikrocontroller geringfügig geschwächt und verzerrt aufbereitete Signal zu regenerieren. Das
Ultraschallmikrofon (RX) empfängt das reflektierte Signal und verwandelt es in ein elektrisches Signal. Nach einem einfachen Filter erreicht
das Signal den Empfangsverstärker Opamp IC1B, dessen Verstärkungsfaktor mit einem Regelwiderstand einstellbar ist.
Nach jedem Senderimpuls steigt die Spannung auf CON1-15 sprunghaft auf 50% der Stromversorgungsspannung VCC. Dazu wird das
elektrische ‘Ultraschallsignal’ nicht nur über R3 an den Verstärker, aber
auch über Diode D1 an Kondensator C7 weitergeleitet. Nachdem diese
Spannung C7 zunächst sofort aufgeladen hat, entlädt der Kondensator
sich langsam über Widerstand R14.
Der Mikrocontroller enthält einen analogen Komparator, d.h. einen Vergleichsmodul, das zwei elektrische Spannungspegel vergleicht. Sowohl
der Empfangspegel als auch diese Entladungsspannung werden nun
auf CON1-6 beziehungsweise CON1-15 dem analogen Komparator
zum Vergleich angeboten. Der Mikrocontroller vergleicht den
Empfangspegel und die Entladungsspannung. Falls der Empfangspegel die Entladungsspannung übersteigt, betrachtet der Mikrocontroller den Empfangspegel als ein zuverlässiges Empfangssignal. Unmittelbar nach dem Senderimpuls muß ein Empfangspegel daher schon
relativ hoch sein, um als reflektiertes Signal akzeptiert zu werden. Je
länger der Senderimpuls jedoch zurückliegt, desto geringer darf der
Empfangspegel sein, um als reflektiertes Signal akzeptiert zu werden.
Page 96

- 96 -
14.3.2. Abgleich Ultraschall-Zusatzmodul
Die Ultraschallplatine ist in YETIs Kopf eingebaut. Allerdings wird das
Ultraschallmodul in dieser Position durch folgende Dingen negativ
beeinflußt:
1. Unerwünschte Reflektionen des Ultraschallltons innerhalb des
YETI Chassis.
2. Unerwünschte Reflektionen des Ultraschalltons durch die
Aussenhülle von YETI.
In folgender Grak sehen Sie ein Oszillogramm der Referenzspannung
(rot, gemessen an CON1-15) und des Ultraschallsignals des Senders
(blau, CON1-13, 5 Impulse von etwa 4.5V, vom Mikrocontroller
erzeugt):
Das erste Signal (CON1-13) zeigt kurz 5 Pulse von etwa 4.5 Volt.
Das Signal kommt sofort vom Mikroprozessor und geht zu der
Ultraschallplatine.
Page 97

- 97 -
Die rote Kurve an CON1-15 ist eine Entladekurve, welche als Referenzsignal dient. Diese wird auf der Ultraschallplatine erzeugt und
zurück zum Mikrocontroller geleitet. Erzeugt der Empfängerteil des
Ultraschallsensors eine Spannung die höher ist als das Referenzsignal,
wird dies vom Mikrocontroller als Reflektion an einem Objekt erkannt.
Nun eine weitere Messung, diesmal jedoch neben der Referenzspannung (rot) auch das empfangene Echo (blau, CON1-6 - wird zum
Mikrocontroller geleitet).
Wie man leicht erkennen kann gibt es zu Beginn eine sehr starke Fehl-
messung! Das Objekt welches das Signal eigentlich reflektieren sollte
bendet sich bei der Markierung in 60 cm Entfernung. Dies wird durch
Schallreflektionen innerhalb von YETI verursacht.
Im Folgenden werden wir beschreiben wie man dies stark verbessern
kann!
60 cm
Page 98

- 98 -
Wie man aus der Beschreibung des Messverfahrens unseres
Ultraschallsensors herauslesen kann, reagiert der Empfänger sehr
empndlich auf jegliche Arten von Reflektion des Ultraschallsignals. So
auch auf Reflektionen innerhalb von YETI!
Um diesen zu verringern, müssen wir das Innere von YETI unterhalb
des Ultraschallsensors vollständig mit Watte auffüllen (s. Abbildung 1)!
Abbildung 1. YETI vollständig mit Watte ausgefüllt.
Schritt 1.
Abdämmen der unerwünschten Schallreflektionen innerhalb von YETI.
Page 99

- 99 -
Folgendes Oszillogramm zeigt die neue Situation
(YETI vollständig mit Watte aufgefüllt):
Es ist leicht zu erkennen das es nun deutlich geringere
unerwünschte Reflektionen gibt!
Doch noch immer gibt es einen kleinen Bereich zu Beginn der
Messung, der höher als das Referenzsignal liegt. Dies wird durch
Reflektionen direkt vor YETIs Kopf verursacht.
Schritt 2.
Dies lässt sich mit einem weiteren Stück
Watte (oder ähnlichem, evtl. etwas festeres
Material verwenden!) vermeiden, welches
so ausserhalb von YETI angebracht wird,
wie es auf dem nebenstehenden Bild zu
sehen ist!
60 cm
Page 100

- 100 -
Auf dem Oszillogramm erkennt man das Ergebnis unserer
Bemühungen: Alle zu beginn der Messung empfangenen Signale
bleiben unterhalb der Referenzspannung! Erst das tatsächlich zu
detektierende Objekt erzeugt eine höhere Spannung am
Empfängerausgang!
Die Zeitspanne zwischen den 5 übertragenen Ultraschallpulsen und
dem Reflektierten Signal wird vom Mikrocontroller gemessen und
in den Abstand umgerechnet. Diesen Abstand kann man dann
z.B. auf dem YETI Display anzeigen!
Es ist sehr wichtig, dass Sie beim Abgleich (14.3.2) dafür
sorgen das die Reektion zu Beginn der Messung unterhalb
der Referenzspannung bleiben.
60 cm
 Loading...
Loading...