

Page 1

Edukative Design Roboter
ROPE DANCER
BAUANLEITUNG: Modell WTR-RD1
© 2010 AREXX - DIE NIEDERLANDE
Page 2

Deutsch
Inhaltsverzeichnis
1. Produktbeschreibung ROPE DANCER 3
2. Allgemeine Information Zusammenbau 4
2.1 Teileliste ROPE DANCER 6
3. Bauanleitung ROPE DANCER 7
4. Funktionsweise der Mechanik 13
5. Motoren 14
5.1 Die Entwicklung der Motorentechnologie 14
5.2 Arbeitsweise eines Elektromotors 14
AREXX und DAGU sind registrierte Warenzeichen von AREXX Engineering Holland und AREXX China.
© Deutsche Übersetzung (March 2010): AREXX Engineering (NL).
Diese Beschreibung ist urheberrechtlich geschützt. Der Inhalt darf auch nicht teilweise kopiert oder übernommen werden ohne schriftlicher Zustimmung des Herstellers:
AREXX Engineering - Zwolle (NL).
Hersteller und Vertreiber sind nicht haftbar oder verantwortlich für die Folgen unsachgemäßer Behandlung,
Einbaufehler und oder Bedienung dieses Produkts bei Mißachtung der Bauanleitung.
Der Inhalt dieser Gebrauchsanleitung kann ohne vorheriger Ankündigung unsererseits geändert werden.
Technische Unterstützung beim
Distribution:
AREXX Engineering
ZWOLLE Die Niederlande
Bauen des Roboters:
www.arexx.com
© 2010 AREXX Engineering
2
Page 3

Deutsch
1. PRODUKTBESCHREIBUNG ROPE DANCER
Der Rope Dancer (Seiltänzer) ist ein Bausatz zum Seiltanz und zur
Seilklettertechnik Roboter, den Sie zuerst komplett selbst zusammenbauen
müssen.
Ein ausgezeichneter Roboter für Anfänger. Mit Hilfe dieses batteriebetriebenen Bausatzes lernt man die Grundlagen der Mechanik und
Bewegungsabläufe des Roboters bestens kennen. Der Zusammenbau
dieses einfachen Roboters ist normalerweise für Kinder ab 8 Jahre
problemlos möglich. Es werden nur einfache Handwerkzeuge benötigt,
wobei wir im Bausatz bereits einen Schraubenzieher und Doppelmaulschlüssel beigelegt haben.
Die Montage der Einzelkomponenten, der Zusammenbau und das
Verständnis der Anleitung unterstützen die Entwicklung der Feinmotorik,
das Zusammenspiel der Handbewegung und Augen, sowie das Lesen
einer technischen Zeichnung. Zusammengebaut klettert der Roboter am
Seil und sieht dabei wie ein Seiltänzer aus.
Spezifikation:
Betriebsspannung : 3V (2 Penlite AAA Batteriezellen zu je 1,5V
(Batterien sind nicht im Bausatz eingeschlossen)
Stromverbrauch : ca. 100 mA max
Höhe : 140 mm
Länge : 170 mm
Breite : 85 mm
Warnung
- Mit dem Öffnen der Plastikbeutel mit Komponenten und Teilen erlischt das
Rückgaberecht.
- Lese vor dem Bauen zuerst die Gebrauchsanleitung aufmerksam durch.
- Sei vorsichtig beim Hantieren der Werkzeuge.
- Baue nicht im Beisein kleiner Kinder. Die Kinder können sich verletzen an den
Werkzeugen oder kleine Komponenten und Teile in den Mund stecken.
- Achte auf die Polung der Batterien.
- Sorge dafür, daß die Batterien und die Batteriehalter trocken bleiben.
Falls der ROPE DANCER naß wird, entferne dann die Batterien und trockne
alle Teile, so gut es geht.
- Entferne die Batterien, wenn der Roboter mehr als eine Woche ruht.
- Kinder unter 14 Jahre sollen den Roboter nur mit Hilfe einer Älter bauen.
- Benutze neue Batterien und mische nie Batterien (alt, neu, aufladbar, u.s.w.)
3
Page 4

Deutsch
2. ALLGEMEINE INFORMATION ZUSAMMENBAU
Hinweis: Lese diesen Abschnitt zuallererst durch !
Weichen Sie bitte nicht von der Reihenfolge in dieser Beschreibung ab. Damit vermeiden Sie Montagefehler. Wer die Reihenfolge genau verfolgt und ab und zu das
Foto auf der Verpackung betrachtet, baut auf Anhieb einen perfekt funktionierenden
Roboter.
Schneiden Sie die Teile erst in dem Moment, wo Sie die Teile brauchen. Manche
Teile sind nämlich im Satz durchnumeriert. Die Nummern stehen jedoch NICHT auf
den Teilen selbst. Alle Teile passen haargenau. Gewaltanwendung ist überhaupt nicht
notwendig. Arbeiten Sie ruhig und lese vor Beginn der Montage diese Anleitung GANZ
durch.
Kleiner plastikhammer
Das richtige Werkzeug
ist die halbe Miete !
Schraubendreher-Satz
Benutze die richtige Größe ElektronikSchraubendreher.
Hobbymesser
ACHTUNG:
Vorsicht mit diesem scharfen Messer!
Seitenschneiderzange &
Flachzange
Ausschneiden oder Auskneifen der Teile
Montieren einer Achse
Beim Montieren der Achsen (z.B. der Motorachse) müssen
wir sehr vorsichtig arbeiten. Versuchen Sie bitte zuerst die
Achse mit der Hand einzudrücken. Nur nach einem erfolglosem Versuch sollte man einen kleinen Plastikhammer
einsetzen. Schlagen Sie sehr vorsichtig und halten Sie als
Stoßpuffer einen kleinen Holzklotz zwischen Hammer und
Gegenstand, damit nichts beschädigt wird.
4
Zange für Miniaturbauteile (150 mm).
Benutzen Sie zum Ausschneiden
oder Auskneifen der Teile ein
scharfes Hobbymesser oder
Seitenschneider. Schneide oder
Kneife vorsichtig und möglichst
genau am Bauteilrand entlang.
ACHTUNG !
Schneiden Sie keine Bauteile aus,
die Sie noch nicht brauchen.
Page 5

Deutsch
Selbstzapfende Schrauben (Parker)
Schrauben mit einem selbstzapfenden Gewinde
verhalten sich wie Holzschrauben, d.h. in einer
Drehbewegung schneidet sich die Schraube ein
Gewinde und dreht sich dabei fest in das Material.
Dazu hat diese Schraubenart ein größeres Gewinde
und eine schärfere Spitze als die normale Schraube.
Die Schrauben mit einem selbstschneidenden Gewinde haben an der Spitze auch eine
Aussparung, die den Schneidevorgang unterstützt. Der optimale Weg zum
Festschrauben einer solche Schraube ist:
Falls die Schrauben zu oft gelockert und wieder festgeschraubt werden, weitet sich das
Schraubloch immer mehr aus und paßt die Schraube nicht mehr richtig.
Bolzen und Muttern
Durchmesser
Länge
1 Eindrehen der Schraube
2 Leichte Lockerung der Schraube
3 Anschließend wieder Festdrehen
der Schraube
Mutter
Sicherungsmutter
Bolzen und Muttern sollten in einem beweglichen und vibrierenden Gerät richtig fest
gedreht werden.
Zum Schutz gegen Lockerung kann man nach dem Festschrauben etwas Nagellack
an der Trennstelle zwischen Schraube und Mutter aufbringen. Dann können Sie die
Schraube immer wieder leicht lösen, falls das mal notwendig sein sollte. Eine professionnelle Lösung ist z.B. Locktite. Dann aber ist die Schraube bombenfest und nicht
mehr nachträglich lösbar.
Der Bolzentyp wird angegeben mit der Dicke und der Länge. Ein Bolzen mit der Andeutung
M3 x 20 ist zum Beispiel 3 mm dick und 20 mm lang. Mutter werden nur mit dem Durchmesser
angegeben. Zum Beispiel M3 ist eine Mutter zum Gebrauch mit einem Bolzen von 3 mm.
Doppelmaulschlüssel:
Im Bausatz ist einen Doppelmaulschlüssel beigelegt.
Benutzen Sie diesen Schlüssel für die M2 und M3 Mutter.
Sie können diesen Schlüssel anstatt einer Zange benutzen.
5
Page 6

Deutsch
2.1 Teileliste ROPE DANCER
Überprüfen Sie vor Beginn der Montage auf Vollständigkeit:
Bolzen kurz
M2 x 8
O 8 St.
Selbstschneidende Schrauben
Rundkopf
dünn
M2 x 5
O 2 St.
Motor
Zahnrad
O 1 St.
8 Zacken
Kupfer
Buchse
O 3 St.
Ø 4 - 4mm
Bolzen mittel
M3 x 14
O 2 St.
Rundkopf
dicker
M2.3 x 6
O 5 St.
Getriebezahnrad,
klein
O 1 St.
28 und 10 Zacken
Kupfer
Buchse
O 2 St.
Ø 4 - 6mm
M3 x 24
O 2 St.
Getriebezahnrad,
mittel
O 1 St.
30 und 10 Zacken
Kurbel
O 2 St.
Senkkopf
M3 x 6
O 2 St.
Motor
mit Kabel
mit Draht
MutterBolzen lang
M2
O 8 St.
Getriebezahnrad,
groß
O 1 St.
32 und 10 Zacken
Seil
O 1 St.O 1 St.
Sicherungsmutter
M3
O 4 St.
Rundkopf
mit Scheibe
M3 x 10
O 3 St.
Zahnrad mit Achse
O 1 St.
40 Zacken
Draht,
alles vorgelötet
Bereits
gelötet
Motorhalter
O 1 St. O 1 St.
Arm
O 2 St.
Batteriehalter
mit Draht
6
Bein
Kopf
Leib
Zahnrad
Seitenteil 1
ZahhnräderAbdeckung
Schalter
mit Draht
O 1 St.O 1 St.O 1 St.O 1 St.
Zahnrad
Seitenteil 2
O 1 St.O 1 St.O 2 St.
Page 7

Deutsch
3. BAUANLEITUNG ROPE DANCER
Überprüfen Sie alle Teile vor Beginn der Montage auf Vollständigkeit:
Schritt 1: Montage Getriebemodul
Assemblieren Sie den Getriebemodul wie auf
die untenstehende Zeichnung skizziert.
Zahnrad
Seitenteil 2
Getriebezahnrad
28/10
Getriebezahnrad
30/10
Getriebezahnrad
32/10
Zahnrad
Seitenteil 1
Schritt 2:
Befestigung Getriebemodul
Sie benötigen:
1 St. Getriebemodul aus Schritt 1
1 St. Leib
4 St. Bolzen M2 x 8
4 St. Mutter M2
Bolzen M2 x 8
Sie benötigen:
1 St. Getriebezahnrad klein
1 St. Getriebezahnrad mittel
1 St. Getriebezahnrad groß
1 St. Zahnrad Seitenteil 1
1 St. Zahnrad Seitenteil 2
1 St. Zahnrad mit Achse
Zahnrad
mit Achse
Montieren Sie die Zahnräder in
Reihenfolge der Ziffern.
Schritt 3: Montage Motorzahnrad
Sie benötigen:
1 St. Motorzahnrad
1 St. Motor
Befestigen Sie das Motorzahnrad wie auf die
untenstehenden Zeichnungen skizziert ist.
Befestigen Sie bitte das Zahnrad auf die Motorachse. Tippen
Sie vorsichtig mit einem kleinen Plastik Hammer auf die
Motorachse, oder drücken Sie die Achse lieber mit den Händen
in das Zahnrad (Siehe Zeichnung).
Leib
Mutter M2
Montieren Sie die Getriebmodul wie auf die Zeichnung
skizziert.
Tippen Sie äußerst vorsichtig
auf die Achse:
BESSER NOCH:
Drücken Sie die Achse mit
den Händen in das Rad.
Das Zahnrad ist korrekt befestigt,
falls Sie die Achse bis unten
durchgedrückt haben.
7
Page 8

Deutsch
Schritt 4: Montage Motor:
Motor
Sie benötigen:
1 St. Motor aus Schritt 3
1 St. Motorhalter
2 St. Schraube M2.3 x 6
Schraube M2.3 x 6
Schraube M2.3 x 6
Motorhalter
Schritt 5: Montage Motorhalter:
Sie benötigen:
1 St. Motorhalter aus Schritt 4
1 St. Leib aus Schritt 2
4 St. Bolzen M2 x 8
4 St. Mutter M2
Montieren Sie den Motorhalter,
wie auf die Zeichnung skizziert.
Montieren Sie den Motor im Motorhalter,
wie auf die Zeichnung skizziert.
Bolzen M2 x 8
Mutter M2
Nach diesem Bauabschnitt werden wir den soeben
fertiggestellte Hauptteil den Rumpf nennen.
8
Page 9

Buchse
Ø 4 - 4mm
Buchse
Ø 4 - 6mm
Buchse
Ø 4 - 6mm
Deutsch
Schritt 6: Montage Arme:
Sicherungsmutter
M3
Bolzen mittel
M3 x 14
Kurbel
Schraube Rundkopf
mit Scheibe M3 x 10
Sie benötigen:
1 St. Rumpf aus Schritt 5
2 St. Arm
2 St. Kurbel
2 St. Buchse Ø 4 - 4mm
2 St. Buchse Ø 4 - 6mm
2 St. Bolzen mittel M3 x 14
2 St. Sicherungsmutter M3
2 St. Schraube Rundkopf mit
Scheibe M3 x 10
Montieren Sie die Arme,
Kurbel
AUCHTUNG!
Montieren Sie die Kurbel in Gegentakt,
wie auf die Detailzeichnung skizziert.
wie auf die Zeichnung skizziert.
Schritt 7: Montage Batteriehalter:
Schraube Senkkopf
M3 x 6
Sie benötigen:
1 St. Rumpf aus Schritt 6
1 St. Batteriehalter
2 St. Schraube Senkkopf mit
Scheibe M3 x 6
Batteriehalter
Montieren Sie den Batteriehalter,
wie auf die Zeichnung skizziert.
9
Page 10

Buchse
Ø 4 - 4mm
Deutsch
Schritt 8: Montage Kopf:
Selbstschneidende Schraube mit Scheibe M3
Kopf
Schritt 9a: Montage Beine:
Bolzen M3 x 24
Sie benötigen:
1 St. Rumpf aus Schritt 6
1 St. Kopf
1 St. Schraube Rundkopf M3 x 10
1 St. Buchse Ø 4 - 4mm
Montieren Sie den Kopf,
wie auf die Zeichnung skizziert.
Sie benötigen:
1 St. Rumpf aus Schritt 8
2 St. Beine
2 St. Bolzen lang M3 x 24
2 St. Sicherungsmutter M3
Sicherungsmutter M3
Beine
Schritt 9b: Montage Schalter:
Schraube M2 x 5
Schalter
10
Montieren Sie die Beine, wie
auf die Zeichnung skizziert.
Sie benötigen:
1 St. Rumpf aus Schritt 9a
1 St. Schalter
2 St. Schraube M2 x 5
Page 11

Rundkopf-
schraube M2,3 x 6
Zahnräderabdeckung
Deutsch
Schritt 10: Endmontage:
Schritt 11: Bedrahtung:
Sie benötigen:
1 St. Rumpf von Schritt 8
1 St. Zahnräderabdeckung
3 St. Rundkopfschraube M2,3 x 6
Montieren Sie die
Zahnräderabdeckung, wie
auf die Zeichnung skizziert.
Befestigen Sie die Bedrahtung wie auf die untenstehende Zeichnung skizziert ist:
11
Page 12

Deutsch
Schritt 12: Einsetzen der Batterien
Setzen Sie die Batterien in den Batteriehalter,
wie auf die unterstehende Zeichnung skizziert ist:
Die Drehweise des Motors ist abhängig von der
Polarität der Batterien.
Letzte Schritt: BETRIEBSTEST
Legen Sie die Arme des Rope Dancer um
das Seil (Zeichnung) und stellen Sie den
Schalter auf die EIN-Position.
Falls der Rope Dancer sich nicht vorwärts bewegt, bitte wechseln Sie die
Polarität der Batterien!
Falls der Motor nicht dreht, überprüfen
Sie:
- ob die Batterien voll sind
- die Bedrahtung (Seite 11)
- die Zahnräder (Seite 7)
Die meist wahrscheinliche Ursache:
Fehler bei der Zahnradmontage oder
schlechte Batterien.
Im schlimmsten Fall müssen Sie den
Rope Dancer wieder demontieren und
nochmals aufbauen.
Let op !
Monteer de vlakke
kant van de motoras
op de juiste manier.
12
Page 13

Deutsch
4. FUNKTIONSWEISE DER MECHANIK
Die Mechanik des ROPE DANCER besteht im wesentlichen aus zwei Teilen. Der erste
Teil ist das Getriebe, der die Leistung der Motorachse auf die Antriebsachse überträgt.
Der zweite Teil setzt die Drehbewegung der Antriebsachse um in die Bewegung der
Arme.
Die Übertragung der mechanischen Leistung
Zahnräder, Antriebsriemen, Stangen, Kurbel, Wellen und Ketten können Energie
übertragen. Vier Zahnräder transferieren die Drehleistung des Motors von der
Motorachse zur Antriebsachse in den Rope Dancer. Diese Transmission nennen wir
Zahnradübersetzung. Die Kräfte werden an den Zacken der Zahnräder übermittelt.
Es finden dabei drei Umsetzungen gleichzeitig statt:
a. Die Umpolung der Drehrichtung
b. Die Änderung der Drehgeschwindigkeit
c. Die Verstärkung der Drehkraft
90º
a. Die Umpolung der Drehrichtung
Mit der Umpolung der Drehrichtung beschreiben
wir, daß das erste Zahnrad sich im Uhrzeigersinn
und das zweite Zahnrad sich gegen Uhrzeigersinn
bewegt. Ein Zahnrad polt die Drehrichtung um.
Rechtsherum
Linksherum
b. Die Änderung der Drehgeschwindigkeit
Die Änderung der Drehgeschwindigkeit hängt zusammen mit der Zahl der Zacken der
Zahnräder. Als Beispiel beschreiben wir hier ein Getriebe mit
einem Rad mit 10 Zacken und ein weiteres Zahnrad mit 40
Zacken. Nachdem das erste Zahnrad eine volle Umdrehung
gemacht hat, wird das zweite Rad erst ein Viertel einer kompletten Umdrehung geleistet haben. Damit dieses zweite
10
Zähne
40
Zähne
Zahnrad eine volle Umdrehung macht, muß das erste Rad
also vier Umdrehungen machen. Diese Funktion setzt auch die
Drehgeschwindigkeit herab.
c. Die Übertragung der Drehkraft
Antriebs- Motordrehzahl
Übersetzung =
Drehzahl des
letzten Zahnrads
Die Drehkraftübertragung ist vergleichbar mit dem Hebelprinzip.
Stellen Sie sich vor, wie jemand einen Stein anhebt mit einem Hebel.
Die Person, die den Hebel hochhebt,
H
e
b
e
l
A
muss mehr Kraft aufwenden wenn die
Distanz A kürzer und/oder Distanz B
länger wird.
Stützpunkt
Das gleiche gilt für die Zahnräder des ROPE DANCER.
Die Kraft an den Zacken der Zahnräder wächst zum
Inneren der Räder an. Die Getriebezahnräder sind dafür zuständig.
B
Stützpunkt
A
B
13
Page 14
Deutsch
5. MOTOREN
Einführung:
In unserer Umgebung beobachten wir viele Geräten mit Motoren. Die Zahl der Motoren
wird leicht unterschätzt. So verwendet man Motoren im Vibrationsalarm eines Handys,
im Ventilator, in einer Abzugshaube, im Fön, im Staubsauger,
usw. Diese Geräte enthalten alle Motoren.
5.1 Die Entwicklung der Motorentechnologie
Am Anfang des 19. Jahrhunderts hat der englische Physiker Michael Faraday das
erste Prototyp eines Elektromotors entworfen und gebaut. Dieser Motor basierte auf die
elektromagnetische Induktion. Wir nehmen an, dass Faraday die Drehbewegung durch
Zufall entdeckt hat, nachdem er einen Generator (ein Gerät zur Stromerzeugung) auf
eine Spannung angeschlossen hatte. Diese Annahme ist glaubhaft, weil der Generator
früher erfunden wurde als der Motor.
In etwa zur gleichen Zeit hat auch der amerikanische Physiker Joseph Henry einen
Elektromotor entwickelt. Faraday hat jedoch seine Entdeckung früher veröffentlicht und
wird daher allgemein als Erfinder des Elektromotors gefeiert.
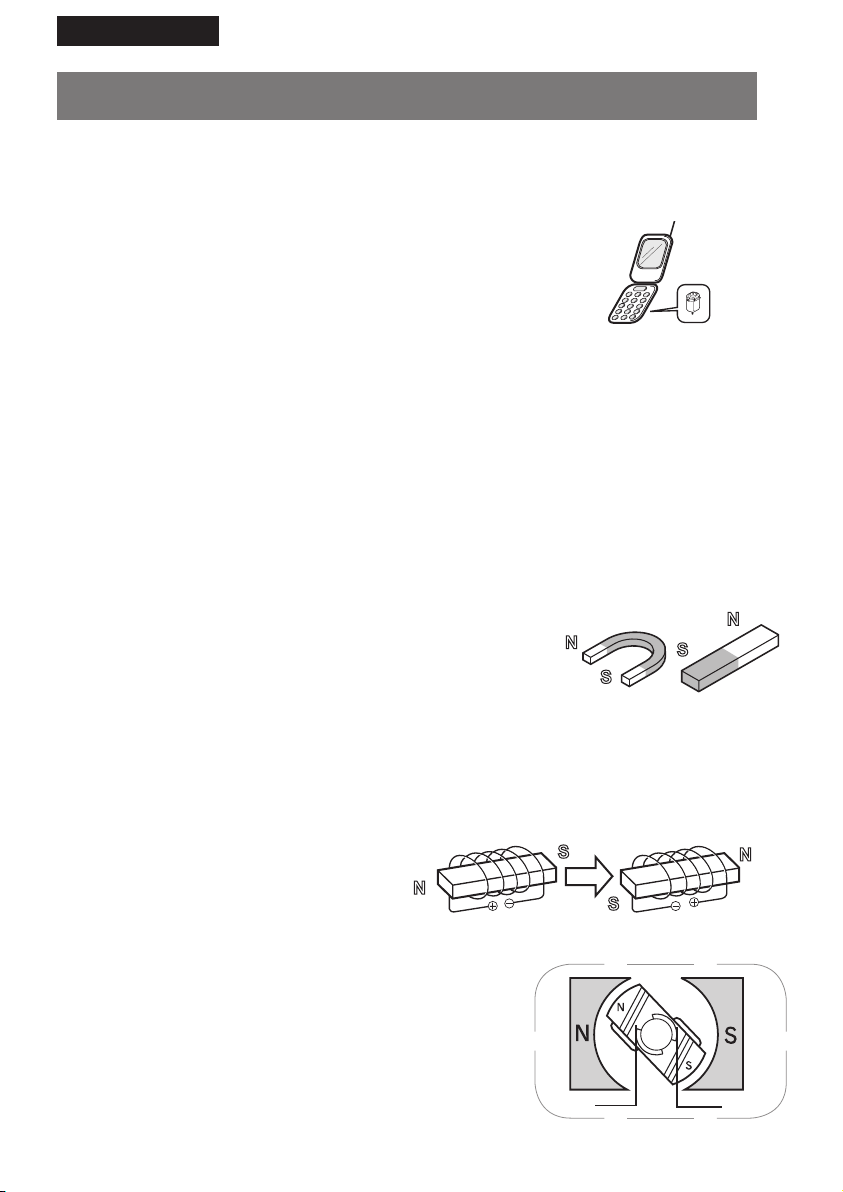
5.2 Arbeitsweise eines Elektromotors
Elektromotoren benötigen zum Drehen zwei Typen Magneten.
Der eine Typ ist ein permanenter Magnet, oder Dauermagnet.
Der zweite Typ ist ein Elektromagnet, der nur magnetisch wird
wenn eine Spule einen Strom führt.
Beide Magneten weisen einen Nordpol (N) und Südpol (S) auf. Beim permanenten
Magneten sind die Pole fixiert, aber beim Elektromagneten können wir die Pole tauschen, indem wir die Stromrichtung in der Spule umkehren. Wie Sie vielleicht wissen,
ziehen ungleiche Poltypen eines Magneten sich gegenseitig an und stoßen gleiche
Poltype sich gegenseitig ab. Diese Kräfte wenden wir im Elektromotor an.
Normale Gleichstrommotoren, wie diese in
den AREXX Robotern eingesetzt werden,
enthalten folgende Elemente:
• einen permanenten Magneten
(Festmagnet),
• eine drehbare Achse mit Weicheisenkern und Spulen.
Diese Bilden zusammen den Elektromagneten im Rotor.
Am Ende der Achse befindet sich der Kollektor, der
die Stromrichtung steuert. Außerdem enthält der Motor
noch Kohlenbürste, die den elektrischen Kontakt zum
Kollektor herstellen.
N
N
S
S
S
S
14
N
N
 Loading...
Loading...