

Page 1

KITS H.F. AREXX
WRL
NOTICE: WRL-03
© AREXX - PAYS-BAS V052012
- 1 -
Page 2
Table des Matières
1. Description WIRELESS KITS 3
2. Mises en garde 4
3. Bluetooth 5
4. Androïd 7
5. Kit de construction HF 10
6. Communication HF avec le PC 14
7. APC-220 16
8. Les modules Bluetooth 19
9. Application pour portables Android 22
10. Informations de base 24
10.1 APC-220 24
10.2 Bluetooth 25
11. Visual Basic 26
11.1 Kit de développement de logiciel 28
11.2 Eclipse 29
xx. ANNEXE 31
A. Schéma électrique de l’adaptateur de programmation
RP6v2 32
B. Adaptateur de programmation RP6v2 33
C. Schéma électrique de l’extension Wireless d’AREXX 34
D. Extension Wireless d’AREXX 35
E. Modules Bluetooth 36
AREXX et AREXX WIRELESS sont des marques déposées d’AREXX Engineering - PAYS-BAS.
© Traduction française/French translation (August 2012): AREXX Engineering (NL).
Ce manuel est protégé par les droits d’auteur. Toute reproduction ou copie même partielle est
interdite sans l’accord écrit préalable de l’importateur européen:
AREXX Engineering - Zwolle (NL).
Le fabricant et le distributeur ne déclinent toute responsabilité pour les dommages causés par
des erreurs de manipulation, d’installation et d’utilisation de ce produit suite au non respect des
instructions de montage.
Sous réserve de modifications sans préavis.
Assistance technique
lors de la construction du robot:
WWW.AREXX.COM
Fabricant:
AREXX Engineering
JAMA Oriental
© AREXX Pays-Bas et JAMA Taiwan
© Traduction française: AREXX - Pays-Bas
Importateur européen:
AREXX Engineering
ZWOLLE Pays-Bas
WWW.ROBOTERNETZ.DE
- 2 -
Page 3

1. DESCRIPTION DE WIRELESS
1.1. Introduction
Le module HF “Wireless” d’AREXX est un kit d’extension du robot
ASURO qui convient également à d’autres modèles de robot tels
que Arduino (AAR) de chez AREXX et le PRO-BOT de chez Conrad.
Le module HF “Wireless” fait appel aux circuits de la communication infrarouge normalisée qui vous permet de continuer à utiliser le
transmetteur-récepteur ASURO USB-IR avec le logiciel ASURO Flash.
Par ailleurs, ce module dispose de sufsamment d’espace pour installer un APC220 ou un module Bluetooth. Les deux modules sont
basés sur une connexion HF qui présente des avantages majeurs, à
savoir qu’ASURO n’a plus besoin de contact visuel avec la centrale
de commande, la zone de commande augmente et le robot est plus
simple à commander p.ex. avec un téléphone androïde.
Le module HF “Wireless“ est livré entièrement monté à l’exception
de la soudure des contacts de connexion. Presque tous les composants sont déjà pré-soudés ce qui évite de perdre du temps avec les
travaux de soudure.
Le dé du kit réside dans les travaux de programmation du logiciel
de pilotage. Vous trouverez des exemples de programmes sur nos
pages internet. Vous pouvez également commander le module via
un PC ou un téléphone portable androïde.
Visual Basic offre un environnement de programmation pour
l’application HF sur le PC. Il n’existe pas de modèles d’application
que l’utilisateur peut adapter.
Un téléphone portable permet d’établir une connexion avec le module Bluetooth de façon à ce que le système puisse transférer des données dans les deux sens. Cette communication se déroule dans un
environnement androïde qui s’est transformé à une vitesse spectaculaire en un système de pilotage pour la transmission radio. Le kit
d’extension ASURO, ce manuel et le logiciel disponible vous offrent
l’opportunité de vous familiariser avec Androïde.
Nous vous souhaitons beaucoup de plaisir avec ce kit
d’extension et ses modules HF !
- 3 -
Page 4

2. Mises en Garde
1. Lisez d’abord ce manuel avant de brancher une source de
tension sur l’un des connecteurs! Des connexions erronées
peuvent endommager le matériel.
2. Vériez attentivement l’affectation des broches! Soyez
particulièrement méticuleux lors du câblage du système.
Des erreurs de branchement risquent d’endommager des
composants. Respectez la polarité des bornes d’alimentation.
Une inversion de polarité des bornes d’alimentation risque
d’endommager les circuits.
3. N’utilisez pas de systèmes d’alimentation dont les tensions
dépassent les valeurs spéciées!
Utilisez des systèmes d’alimentation stabilisés et ltrés an
d’éviter des crêtes de tension.
4. La platine ne présente aucune protection contre les effets de
l’eau et de l’humidité. Conservez le robot dans un endroit sec.
5. Evitez les courts-circuits avec d’autres objets métalliques
ainsi que toute surcharge de la platine ou des connecteurs par
pression, traction ou chargement.
6. Evitez les décharges électrostatiques
précautions, mises en garde et l’article sur Wikipedia “Décharge
électrostatique”).
2
(voir à ce sujet les
2.1 Généralités
* Le droit de retour s’éteint avec l’ouverture du sachet qui contient
les composants et pièces.
* Lisez attentivement la notice de montage avant de commencer la
construction.
* Manipulez les outils avec précaution.
* Ne construisez pas le robot en présence d’enfants en bas âge.
Les enfants risquent de se blesser avec les outils et/ou avaler de
petits composants.
* Respectez la polarité des piles.
* Veillez à ce que les piles et le support de piles restent
toujours sec. Si le robot est mouillé, retirez les piles et séchez
soigneusement tous les composants.
* Retirez les piles si le robot n’est pas utilisé pendant plus d’une
semaine.
- 4 -
Page 5

3. Bluetooth
3.1 Historique
La technologie Bluetooth a été développée par la société Ericsson.
Bluetooth constitue un standard ouvert pour des transmissions radio
entre appareils sur de courtes distances. Imaginez-vous des télé-
phones mobiles avec un casque sans l ou bien la transmission de
données entre téléphones mobiles ou bien un récepteur GPS qui
transmet sans l des données vers un téléphone.
En 1994, Ericsson a développé Bluetooth en tant que voie de communication sans l entre radio-télephones mobiles et autres systèmes.
La partie technique la plus importante provient de Jaap Haartsen qui
travaillait chez Ericsson à l’époque. Le nom Bluetooth provient du roi
des vikings Harald Blåtand (ce qui signie „dent bleue“). Bluetooth
était le nom du project initial et à défaut d’une meilleure alternative,
ce nom a été conservé pour le produit nal.
Le système de communication s’est répandu très vite et peu de
temps après, les sociétés électroniques les plus importantes se sont
réunis pour former le ‘Bluetooth Special Interest Group’ (SIG).
Pour rendre Bluetooth disponible dans le monde entier, il a fallu
trouver une fréquence mondialement utilisable ce qui fut le cas pour
la bande de fréquence 2,45GHz.
3.2 Technologie
Bluetooth est une connexion radio pour le discours et les données
sur de courtes distances. Une relation point à multi-point a été retenue comme structure de communication ce qui signie qu’un émetteur peut désservir plusieurs récepteurs. Dès que deux appareils
Bluetooth établissent une connexion, il se forme ce que l’on appelle
un picoréseau (traduction: réseau minuscule). Plusieurs picoréseaux
peuvent fonctionner simultanément côte à côte. Lorsque l’on réunit
plusieurs picoréseaux, on parle d’un inter-réseau Bluetooth (scatternet).
A l’intérieur d’un picoréseau, Bluetooth supporte 8 appareils individuels au maximum alors que 127 appareils peuvent fonctionner en
mode „parked“ (Fig. 1).
- 5 -
Page 6

A l’intérieur d’un picoréseau, Bluetooth supporte 8 appareils individuels au maximum alors que 127 appareils peuvent fonctionner en
mode „parked“ (Fig. 1).
Fig. 1 : Scatternet
Bluetooth ne consomme que très peu d’énergie: 30 micro ampères
en mode passif de veille et 8 à 30 milli ampères en mode actif. Avec
un tel résultat, Bluetooth peut également être utilisé dans des appareils mobiles alimentés par piles.
Les systèmes Bluetooth sont divisés en 3 catégories:
Catégorie 1: Projets pour connexion longue distance (jusqu’à 100m)
Catégorie 2: Pour distances standard (bis 10m)
Catégorie 3: Pour des distances courtes (10cm à 1m)
- 6 -
Page 7

4. Android
4.1 Informations de base
Android est une plateforme „open source“ pour appareils mobiles
tels que Smartphones et Tablets qui ont été développés par la société Android Inc. Android a été repris en 2005 par la société Google.
A la n de l’année 2007, Google a libéré la plateforme Android et le
consortium OHA (Open Handset Alliance) fut créée. A l’époque de sa
création, l’OHA comptait environ 40 fabricants de matériel, éditeurs
de logiciels et entreprises de télécommunication qui s’étaient xés
pour objectif de promouvoir des standards ouverts pour la téléphonie mobile.
Android est basé sur un noyau Linux et sur l’environnement de programmation Java. L’outil de développement SDK (Software Development Kit) permet non seulement à Google mais aussi à d’autres
développeurs de composer des applications.
Ces applications sont commercialisées sur le marché Android. Sur
ce marché, des utilisateurs naux peuvent chercher et installer des
applications. On y trouve également toutes les informations sur les
applications. Aussi bien la commercialisation d’applications payantes
que gratuites est promue. Les développeurs ont également le droit
de proposer ces applications en dehors du marché Android.
Les applications sont développées pour une version Android déterminée mais elles sont cependant rétrocompatibles. Cela veut dire
qu’une application qui a été dévloppée pour Android 2.2 fonctionne
également sous Android 2.3. Les versions qui ont été publiées
jusqu’à présent, sont listées dans le tableau ci-dessous. Le nombre
d’utilisateurs par version est indiqué dans la g. 3 en dessous du
tableau.
- 7 -
Page 8

Ice Cream Android 4.0 19-10-2011
Honeycomb Android 3.2 15-07-2011
Honeycomb Android 3.1 10-05-2011
Honeycomb Android 3.0 02-02-2011
Gingerbread Android 2.3 06-12-2010
Froyo Android 2.2 20-10-2010
Eclair Android 2.0 26-05-2010
Donut Android 1.6 15-08-2009
Cupcake Android 1.5 30-04-2009
Première édition Android 1.1 10-02-2009
Fig. 2 : Aperçu des versions Androïde
Fig. 3 : Utilisateur par version ( Statut: 03-11-2011)
- 8 -
Page 9

4.2 Le kit de développement logiciel (SDK)
Google a libéré le logiciel SDK an de permettre aux utilisateurs
d’écrire eux-mêmes une application pour un smartphone, une tablette
ou les deux. Le SDK contient une collection d’outils divers et utiles tels
qu’un outil de débuggage et un émulateur. Par ailleurs, la collection
contient une série d’applications modèle et le site offre une multitude
de tutoriels.
Pour télécharger le SDK, ouvrez le lien suivant:
http://developer.Android.com/sdk
Sur ce site web vous trouverez les chiers d’installation ainsi que des
instructions détaillées sur la manière d’installer le SDK.
4.3 Eclipse
Eclipse est un open source framework de l’Eclipse Foundation, une
association à but non lucratif pour des environnements de développement de logiciels. L’application la plus populaire est l’environnement
de développement pour le langage de programmation Java.
Le SDK contient un plug-in Eclipse ce qui permet au programmateur
de démarrer, compiler, débugger et émuler facilement un project Android.
Le programme Eclipse est un logiciel open source et est disponible au
téléchargement sur la page web:
http://www.eclipse.org/downloads/
4.4 Hello World
An de vous familiariser avec cet environnement de développement,
les instructions de programmation „Hello World“ montrent à quel point
il est facile de transférer le texte „Hello World“ dans une application
sur un écran. Les instructions expliquent pas à pas comment vous
devez démarrer un projet jusqu’à la dernière étape, où vous devez
représenter le „Hello World“ dans l’émulateur.
Le site internet des instructions de programmation (en anglais: „Tuto-
rial“) est:
http://developer.Android.com/resources/tutorials/hello-world.html
- 9 -
Page 10

5. Le kit radio Wireless d’AREXX
Le kit radio „Wireless“ d’AREXX vous permet d’installer un module
APC220 ou Bluetooth sur ASURO ou d’autres robots. Ainsi vous
pouvez non seulement communiquer sans l par liaison infrarouge
avec ASURO mais également au moyen d’ondes radio. L’avantage des
ondes radio à haute fréquence est que l’émetteur et le transmetteur
n’ont plus besoin d’être en contact visuel.
Un montage APC220 sur le kit radio „Wireless“ permet à ASURO de
communiquer avec le PC. Vous trouverez d’autres informations à ce
sujet dans le chapitre ‘APC220’. L’installation du module Bluetooth
vous permet non seulement de communiquer avec le PC mais également avec un smartphone Android. Vous trouverez de plus amples
informations dans le chapitre „Module Bluetooth“.
5.1 Caractéristiques
Le kit radio „Wireless“ d’AREXX comprend:
• Récepteur ou émetteur IR pour la transmission Flash vers ASURO
• Connecteur pour l’APC220 ou bien le module HF Bluetooth
• Commutateur pour la transmission IR ou HF
• Plaque d’expérimentation pour construire un circuit supplémen-
taire.
• Options de connexion pour les ports non affectés d’ASURO.
Les gures ci-dessous montrent la disposition du PCB. La zone
d’expérimentation libre pour le circuit supplémentaire est clairement
visible. Par ailleurs, il reste aussi de l’espace en-dessous de l’APC220
parce que l’APC220 est installé à une certaine distance de la platine.
Attention: Le commutateur sur la
platine permet 2 positions: (1) Liaison
infrarouge ou (2) communication Bluetooth / APC220.
Pour la transmission Flash du logiciel
dans ASURO ou bien si vous souhaitez
communiquer par infrarouge, vous devez mettre ce commutateur sur ‘IR’.
Si vous souhaitez communiquer par
Bluetooth ou APC220, vous devez mettre le commutateur dans l’autre posi-
Fig. 4 :
Kit radio
tion.
- 10 -
Page 11
5.2 Installation sur le système ASURO
L’installation du module radio „Wireless“ d’AREXX peut se résumer en
3 étapes:
Etape 1.
Tout d’abord vous devez préparer la platine ASURO de la manière
suivante pour accueillir le module radio „Wireless“:
A. Commencez par dessouder les composants sur les points de sou-
dure rouge et retirez-les de la platine (g. 9). Pour cela vous devez
utiliser un fer à souder spécial ou bien de la tresse à dessouder spéciale.
Attention:
Veillez à ne pas endommager les surfaces de soudure car
vous en avez encore besoin pour la resoudure.
Fig. 5 : Surface de soudure
B. Soudez maintenant les composants fournis du connecteur sur ces
surfaces de soudure. Installez le connecteur 1x3 sur les 3 contacts
adjacents. La forme de la connexion n’a pas d’importance. Soudez
ensuite les autres connecteurs 1x2 sur les surfaces vides..
- 11 -
Page 12

Etape 2.
Installez maintenant le kit d’extension sur la platine ASURO.
L’ensemble doit s’adapter parfaitement sur les parties précédemment installées du connecteur.
Fig. 6 : ASURO avec l’extension du module radio (Vue de côté)
Fig. 7 : avec l’extension du module radio (Vue de face)
- 12 -
Page 13

Etape 3.
Installez maintenant au choix l’APC220 ou bien le module
Bluetooth
Fig. 8 : ASURO avec Bluetooth
Fig. 9 : ASURO avec APC-220
Maintenant vous avez terminé l’installation du matériel et
vous pouvez établir une connexion entre les différentes applications.
Le chapitre APC220 explique comment il faut piloter ASURO
au moyen du module APC220.
Le chapitre ‘Module Bluetooth’ illustre comment vous devez
utiliser la communication Bluetooth.
- 13 -
Page 14

6. Communication APC220/Bluetooth et Radio Data PC
Pour la communication entre le PC et l’ASURO il vous faut un dongle.
A cet effet, nous utiliserons l’adaptateur de programmation RP6v2
(Dongle WT).
Fig. 10 : Dongle WT d’adaptateur de programmation RP6v2 USB
Pour la communication radio à partir du PC, il existe un module de
données radio APC220 et le module Bluetooth maître. Ces modules présentent une faible consommation d’énergie et sont faciles à
régler ce qui les rend particulièrement aptes à notre application sur
un robot.
6.1 Installation de la communication radio avec le PC
La fréquence et la vitesse de baud des modules APC220 sont réglées
sur des valeurs standard au moyen du dongle WT. Un logiciel Vi-
sual Basic spécique (VB) existe pour le dongle WT qui supporte
l’installation et fait partie du programme d’application APC-220.
Branchez le dongle WT au moyen du cordon USB sur le PC. Pour cela
il faut encore installer le driver de l’adaptateur de programmation
RP6v2. Vous trouverez les drivers les plus récents sur notre site Internet sur les pages du robot RP.
Les modules APC-220 ou bien Bluetooth se branchent sur le dongle
WT. A l’aide du programme Visual Basic pour l‘application APC-220
vous pouvez installer l’APC-220 et piloter le robot.
WT
PC
Fig. 11 : Exemple de communication
La construction de l’environnement test est indiqué dans le schéma ci-dessus.
dongle
APC-
220
APC-
220 ASURO
- 14 -
Page 15

6.2 Préparation du Robot pour la communication HF
Important!
Le robot ne peut pas encore communiquer via la transmission HF.
En plus de l’adaptation du matériel sur lequel est installé la platine
d’extension Wireless, il faut installer un programme dans le robot.
1 2
PC ou GSM
TRANSCEIVER 1
Dans une communication Androïd, il faut installer l’application dans
un smartphone Androïd ou une tablette. Dans le cas d’une communication basée sur le PC, il faut placer le transcepteur 1 sur
l’adaptateur de programmation USB RP6v2 (dongle WT) et installer
l’application dans votre PC.
TRANSCEIVER 2
Tout d’abord nous devons installer le module d’extension qui comporte le module HF APC-220 ou bien le système Bluetooth.
Ensuite il faut transférer le logiciel adéquat dans le robot.
Le logiciel requis varie en fonction du type de robot.
Il existe des chiers spéciques
*.HEX (Hex Dateien) pour:
- ASURO
- RP6(v2)
- ROBOT ARM
Robot
*.PDE (chier Arduino) pour:
- AAR ou autres robots Arduino
*.CBAS (C-Control le) pour:
- PRO-BOT128
- 15 -
Page 16

7. APC220
Lorsque le module APC220 est installé sur ASURO, vous pouvez le
piloter au moyen du programme „ASURO Control“ que vous devez
auparavant installer sur votre PC. Vous pouvez télécharger l’ASURO
Control sur le site Internet. Le logiciel a été écrit en Visual Basic et
est à la disposition de l’utilisateur sous forme de source modiable.
Le logiciel ASURO doit être légèrement adapté mais ce logiciel est
également un produit open source.
L’adaptation est nécessaire car le système doit transmettre
un protocole qui contient un byte de contrôle et un jeu de bits
d’information. Fig. 12 montre comment l’application (en orange)
envoie le signal vers le PC pour requérir les données. A cela, ASURO
répond avec les données de réponse en rouge.
Protocole du PC vers ASURO:
Fig. 12 : Exemple de communication
Le logiciel ASURO contient quelques fonctions pour l’interrogation
des sondes et le pilotage des moteurs. Si le programme de pilotage
le demande, ASURO renvoie immédiatement les données mesurées.
A cette occasion, vous avez la possibilité d’ajouter vous-mêmes
enore 4 bytes au signal. Cela pourrait être un thermomètre qui se
branche sur les connecteurs libres du kit d’extension. Dans le texte
suivant, nous allons décrire le codage pour la transmission de ce
type de données de mesure.
- 16 -
Page 17

Dans ce code, vous constaterez que le système appelle quelques
fonctions dans Battery() pour mesurer p.ex. la tension de la batterie.
Cette fonction délivre une valeur comprise entre 0 et 255 qui est traitée dans le programme du PC et représentée ensuite sur l’écran. Les
bytes 10 jusqu’à 13 compris sont encore libres et programmables.
Fig. 13 : Logiciel Asuro Control (Visual Basic)
Après le démarrage de l’application ‘ASURO Control’, le programme
afche la fenêtre ci-dessus. Vous pouvez maintenant rentrer en contact avec ASURO et piloter le robot. Le dongle WT doit être connecté
sur le PC. Lorsque ce dongle est branché, un clic sur la fonction „Refresh“ (rafraîchir) déclenche une interrogation de tous les ports COM
connectés.
Après sélection du bon port COM pour le dongle WT, la connexion est
établie par un clic sur la fonction ‘Connect’ sur l’écran ‘ASURO Control’.
Cela fait apparaître la vitesse du moteur et la tension de la batterie
en bas à gauche de l’écran. Dès qu’un commutateur sur la face avant
du robot est activé, le programme matérialise ce commutateur par un
point rouge. De cette façon, le programme indique une collision dans
la fenêtre d’ASURO Control’. L’application afche également les changements de couleur des LED d’ASURO.
- 17 -
Page 18

Pour piloter le robot ASURO, vous disposez de commutateurs sur
la droite. La vitesse est réglée par un curseur sur le côté supérieur
droit.
Par ailleurs, il est possible de piloter le robot avec le clavier. Pour ce
faire, il faut cocher la case ‘Key Control’.
W: En avant
A: A gauche
S: En arrière
D: A droite
E: Arrêt
Le fréquence de travail de l’APC220 peut être réglée sur plusieurs
valeurs. Si plusieurs APC220 ayant la même fréquence, fonctionnent à proximité les uns des autres, le protocole peut assurer que
les données seront tout de même transmises vers le bon ASURO.
Il est cependant conseillé d’éviter ce type de situation et de choisir, si possible, des fréquences de communication différentes parce
que certains programmes communiquent plusieurs fois par seconde
avec ASURO.
Les paramètres de travail de l’APC220 sont définis dans le programme du PC et adaptés, si besoin est. Lorsque vous êtes dans la
page principale du programme, cliquez sur ‘Settings’ afin d’afficher
l’écran ci-dessous (fig. 14):
Fig. 14 : Settings dans le
programme Control
- 18 -
Page 19

8. Les modules Bluetooth
Vous pouvez piloter ASURO avec un PC ou un téléphone en intégrant
un module Bluetooth esclave dans le module d’extension. Pour cela
il est nécessaire d’installer un module Bluetooth maître sur le dongle
WT. La différence entre le module maître et esclave est illustré dans
la gure 15 et 16.
Fig. 15 : Esclave
Fig. 16 : Maître
Ces deux modules (maître et esclave) n’existent que dans le kit
Wireless WRL-03 de chez AREXX.
Le module Maître (à droite) est marqué par un point blanc sur le CI
supérieur. Par ailleurs, il possède un commutateur.
Le module Esclave (à gauche) n’a ni point ni commutateur.
Après la mise sous tension des deux modules, le module Maître
commencera à chercher un esclave et établira automatiquement une
connexion. Lorsque le maître a établit la connexion avec l’esclave, il
va mémoriser l’adresse de l’esclave.
Si jamais la connexion était interrompue et que le Maître continue
ultérieurement à chercher son esclave, le système ne cherchera que
l’esclave dont l’adresse a été mémorisée.
- 19 -
Page 20

Cette situation est matérialisée par la LED bleue. Au cours de cette
procédure, les modes de fonctionnement suivants sont dénis:
Clignotement rapide: Maître et esclave ne sont pas connectés
ensemble
Allumé en permanence: Maître et esclave sont reliés ensemble
Clignotement lent: Le maître n’est pas relié mais il a une
adresse en mémoire. Dans ce cas,
vous pouvez effacer l’adresse
mémorisée en appuyant sur le
commutateur.
Vous pouvez donner un nom de
votre choix au module Bluetooth
Esclave. An de laisser le système
communiquer avec un autre appareil Bluetooth, l’adaptation de
la vitesse de Bauds et le code PIN
ont été intégrés.
Ces paramètres sont modiables
sur la page de dialogue principal
dans ‘Settings’ (en français: réglages). Cliquez sur le bouton ‘Set-
tings’ du programme an d’afcher
la fenêtre suivante (g.17).
Fig 17 : Réglages Bluetooth
Le module à modier doit se trouver dans le dongle WT au moment
de la modication. Les changements sont ensuite sauvegardés en
cliquant sur ‘Save Settings’ (Enregistrer les paramètres).
Le protocole log indique ensuite si l’enregistrement a réussi ou non.
Si ce n’était pas le cas, un time-out (dépassement du temps) est
annoncé.
Attention:
Vous ne pouvez pas changer le nom du module maître. Un time-out
est annoncé après l’enregistrement de la vitesse baud et du code
PIN ce qui est normal.
- 20 -
Page 21

Après l’intégration du module Bluetooth Maître dans le dongle WT et
de l’Esclave dans le kit d’extension ASURO, vous pouvez établir une
communication tout comme dans le cas de l’APC220.
A cet effet, démarrez le programme ‘ASURO Control’. Le port COM
reste inchangé et les mêmes étapes de travail que celles décrites
dans le chapitre APC220 sont effectués.
- 21 -
Page 22

9. Application mobile Android
Même un téléphone mobile permet de piloter ASURO. Pour cela vous
devez installer le module Bluetooth Esclave sur le kit d’extension
ASURO.
Ensuite vous n’avez plus qu’à installer l’application ‘ASURO Bluetooth’ sur votre téléphone mobile. Ce logiciel est disponible sur le
site internet d’AREXX. Au même endroit vous pouvez également
télécharger le code source de cette application an que vous disposiez également la source pour l’adapter selon vos propres besoins.
La plupart des téléphones androïdes sont maintenant équipés du
système d’exploitation Android 2.1 ou plus récent (voir g. 3). C’est
pourquoi cette application a été écrite pour Android 2.1 ou plus récent (c’est-à-dire supérieur).
Fig. 18 : ANDROID APP
Après le démarrage de l’application, le programme demande d’abord
l’autorisation de démarrer la fonction Bluetooth dans la mesure où
celle-ci ne l’était pas encore. L’interface est très claire.
- 22 -
Page 23

Dès que vous cliquez sur la touche ‘Options’ de l’appareil, le programme ouvre une fenêtre avec les boutons ‘Connect a device’
(Connectez un appareil) et ‘Disconnect’ (déconnectez l’appareil). Ces
commandes s’expliquent d’elles-mêmes: d’abord le téléphone établira une connexion avec le module Esclave. La commande ‘Connect
a device’ ordonne au téléphone de chercher des appareils Bluetooth
autour de lui.
Dès que le nom d’un module Esclave s’afche, vous pouvez cliquer
sur le nom et le système établira la connexion souhaitée.
Une fois la communication installée, vous pouvez piloter ASURO
avec cette application.
- 23 -
Page 24

10. Informations de base
10.1 APC220
Pour la transmission des données entre le PC et Asuro, vous pouvez
utiliser un module Radio Data AOC220. Il s’agit d’un “transcepteur”
de la société Appcon Technologies.
Un “transcepteur” (en français: Emetteur-récepteur) se compose
d’un émetteur (transmitter) et d’un récepteur (receiver). Cette combinaison nous permet d’émettre et de recevoir avec un seul chip ou
module.
Le transcepteur dispose d’une interface UART qui communique également avec un PC ou un micro-contrôleur.
Fig. 19 : APC-220
Fig. 20 : Communcaction sans l
La consommation électrique de ce module est très faible (env.
30mA). En outre, le transcepteur est facile à régler et convient
parfaitement à une communication radio. La portée est d’env. 250m
pour une vitesse de bauds de 9600bps. La portée maximale est
d’env. 1200m pour une vitesse de 1200 bauds. Ces indications sont
spéciées dans la che technique en annexe 7.
Ce module avait déjà été testé dans le passé dans le cadre du projet
Wild Thumper. L’APC220 a fait l’objet de tests complets et il s’est
avéré que les données peuvent franchir sans problème une distance
de 200m.
L’inconvénient de ce type de transcepteur est qu’il ne dispose pas de
protocole propre pour la communication de données. Nous sommes
donc contraints de dénir notre propre protocole.
- 24 -
Page 25

10.2 Bluetooth
Bluetooth constitue un standard ouvert pour des transmissions
radio entre appareils sur de courtes distances.
Initialement Ericsson a développé Bluetooth en tant que voie de
communication sans fil entre radio-télephones mobiles et autres
systèmes. La bande de fréquences se trouve sur la bande 2,45GHz.
Un contact visuel n’est pas requis. Sur la bande de fréquence GHz,
les ondes électro-magnétiques sont en mesure de traverser des
matériaux solides à l’exception des métaux.
Pour être précis, Bluetooth est une solution de rechange pour une
liaison (courte) par câble et sert de ce fait comme voie de communication entre appareils. Les développeurs ont intentionnellement
utilisé des technoloiges radio bon marché afin que Bluetooth puisse
être installé sans problème dans tout appareil. Du fait de sa faible
consommation d’énergie (30µA en mode veille et env. 8-30mA en
mode actif), Bluetooth est utilisable dans des appareils de communication HF mobiles alimentés par piles. La technologie Bluetooth de
classe 2 travaille sur une portée de 10m.
La quasi-totalité des téléphones portables modernes comportent
actuellement des interfaces Bluetooth. Pour cette raison, il est intéressant d’équiper les Asuros et autres robots d’AREXX avec cette
technologie.
- 25 -
Page 26

11. Visual Basic
Une application a été développée an de permettre à l’utilisateur de
piloter les systèmes Asuro via son PC. Il existe un grand nombre de
langages de programmation pour développer une telle application.
Nous avons choisi Visual Basic pour sa simplicité relative car les étudiants n’ont que très peu d’expérience dans le domaine du développement d’application.
Visual Basic (VB) est un langage de programmation mais aussi un
environnement de développement.
VB nous permet d’écrire des programmes qui tournent sous Windows. Le terme “Visual” se rapporte à l’interface graphique de
l’utilisateur (Graphical User Interface, abrégé par les lettres „GUI“).
Le terme “Basic” fait allusion au langage de programmation universel pour débutants BASIC (Beginners All-Purpose Symbolic Instruction Code).
Nous avons travaillé sur ce projet avec la version Visual Basic 2010
qui est la version la plus récente actuellement disponible.
Fig. 21: Connecteur ISP
- 26 -
Page 27

Figure 21 illustre le programme ASURO Control. Cette copie d’écran
montre la fenêtre principale de l’application. Sur la partie gauche
se trouvent les boutons, timers (horloges) et fenêtres de texte.
L’utilisateur peut adapter les propriétés de ces éléments et se reporter dans son code de programmation à ces éléments.
Dès que l’on actionne en tant qu’utilisateur le bouton ‘refresh’
(rafraîchir) à l’écran, la fonction ??? peut y réagir. Sobald man als
Anwender zum Beispiel den ‘refresh’-Knopf (Auffrischen) auf dem
Bildschirm betätigt kann die Knopf-Treiberfunktion darauf reagieren.
Private Sub Button_Refresh_Click(ByVal sender As System.
Object, ByVal e As System.EventArgs) Handles
Button_Refresh. Click
GetSerialPortNames()
End Sub
Dans l’exemple du code ci-dessus, la fonction
‘GetSerialPortNames()’ est activée dès que la touche ‘refresh’ est
cliquée.
- 27 -
Page 28

11.1 Le kit de développement logiciel (SDK)
Google a libéré le logiciel SDK an de permettre aux utilisateurs
d’écrire eux-mêmes une application pour un smartphone, une tablette ou les deux. Le SDK contient une collection d’outils divers et
utiles tels qu’un outil de débuggage et un émulateur. Par ailleurs,
la collection contient une série d’applications modèle et le site offre
une multitude de tutoriels.
Le gestionnaire SDK (g. 22) permet à l’utilisateur d’ajouter d’autres
plates-formes à son environnement de développement. Il peut également installer des modèles d’application.
Fig. 22 : Gestionnaire SDK
- 28 -
Page 29

La panoplie SDK contient également un Virtual Device Manager.
Avec ce “gestionnaire androïde virtuel de matériel”, l’utilisateur peut
installer un appareil virtuel qui lui permet d’émuler (tester) le logiciel qu’il a développé et de le débugger.
Fig. 23 : Android Virtual device manager
Pour télécharger le SDK, ouvrez le lien suivant:
http://developer.Android.com/sdk
Sur ce site web vous trouverez les chiers d’installation ainsi que
des instructions détaillées sur la manière d’installer le SDK.
- 29 -
Page 30

11.2 Eclipse
Eclipse est un open source framework de l’Eclipse Foundation,
une association à but non lucratif pour des environnements de
développement de logiciels. L’application la plus populaire est
l’environnement de développement pour le langage de programmation Java.
Le SDK contient un plug-in Eclipse ce qui permet au programmateur
de démarrer, compiler, débugger et émuler facilement un project
Android.
A la n, on génère un chier .apk du projet d’application qui peut
être installé sur tout téléphone portable Androïd.
Fig. 24 : ECLIPSE
Le programme Eclipse est disponible au téléchargement sur la page
web:
http://www.eclipse.org/downloads/
- 30 -
Page 31

ANNEXE
- 31 -
Page 32

A. Schéma électrique de l’adaptateur de programmation
RP6v2 (DONGLE WT)
X1
USB
123
4
DC-JACK
J1
10n 100n
C1 C2
ferrite bead 600 ohm 100Mhz
L1
321
+
22uF
C9
GND
100n
C5
+
22uF
C4
GND
100n
+3V3
C3
25
FT232RL
GND
GND
GND
GND
18
21
7
GND
100n
17
15
16
3V3OUT
USBDP
USBDM
TEST
12
26
CBUS4
CBUS3
OSCO28OSCI
CBUS023CBUS122CBUS213CBUS314CBUS4
DCD
RI
CBUS2
CBUS1
CBUS0
Vtarget
100K
GND
R3
R4
1K
R6
3K9
VCC
BC847
T1
R5
1K
BC847
T2
APC220
C6
20
19
27
DSR
DTR
9
10RI6
DCD
DTR
DSR
1
GND
IC1
VCC
VCCIO4RESET
RXD
CTS
RTS
3
11
2
5
RTS
RXD
CTS
GND
DTR
100
3
6
7
EN
AUX
SET
470R
470R
R2
TXD
1
TXD
UART-FULL-HDR
RXD
R8
5
LED_TX
Blue
CBUS0
RI
DTR
CBUS4
1
9
5
HDR1
CBUS43VTARGET
DTR7TX
RI
CBUS2
GND
DSR
RTS
RX
4
2
8
10
6
RXD
RTS
DSR
CBUS2
TXDTXD
GND
100n
100
RXD4TXD
C7
R7
2
M1
VCC
VCC
GND
R1
LED_RX
Blue
CBUS1
Vtarget
VCC
3
IC2
VIN
REG1117
VOUT
1
GND
2
100n
C8
+
MBRS130LT3
22uF
C10
D1
VCC
- 32 -
Page 33

B. Adaptateur de programmation RP6v2 (DONGLE WT)
- 33 -
Page 34

C. Schéma électrique EXTENSION AREXX WIRELESS
A
B
C
D
Extensiekit
E
25-10-2011
Joris Kok
Designed by:
AREXX Engineering
www.arexx.com
SW1
1
2
3
JP8
3
GND
2
1
JP8
JP7
2
1
JP7
JP6
2
1
JP6
GND
5V
IRLED-
IRLED+
GND
IR_LED
SFH415-U
C4
GND
GND
V+
PC2(ADC2)
AVCC_2
PB3(MOSI/OSC2)
GND1
PD6(AIN0)
PD2(INT0)
PC3(ADC3)
AVCC_1
10uF
JP4
1
2
3
JP5
JP4
1
2
JP5
JP3
1
2
3
JP3
1 2 3 4 5 6 7 8
SWITCH_IR_OR_MODULE
5V
VCC
100n
C3
GND
GND
GND
GND
220uF
GND
C1
+
EN
AUX
SET
OUT
OUT
SFH5110
C2
MODULE
100n
VCC
2
RXD
4
TXD
5
EN
3
AUX
6
SET
7
GND
1
APC220
GND
V1.1 Aanpassing gedaan aan RXD signaal en LED, deze moet aan de - van de LEd en niet aan de +
1 2 3 4 5 6 7 8
A
B
C
D
E
- 34 -
Page 35

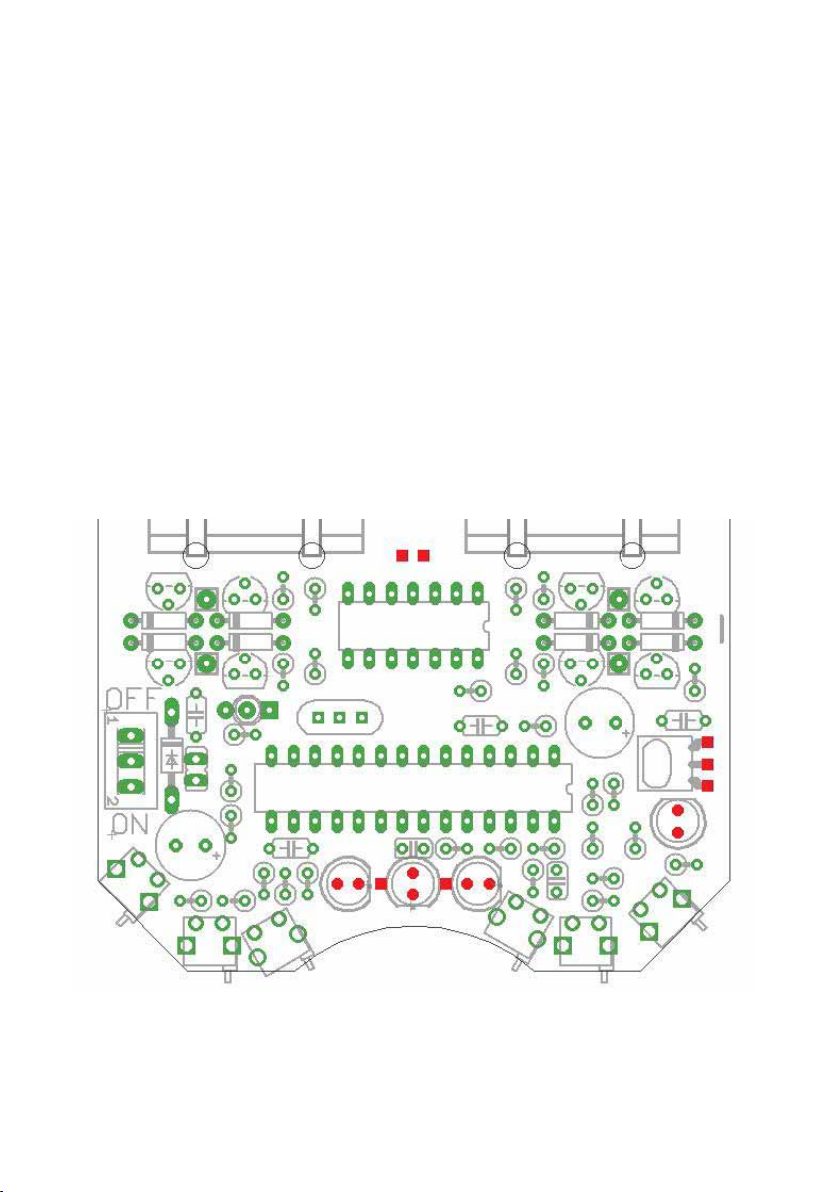
D. EXTENSION WIRELESS AREXX
POSITION PINHEADER LAY-OUT, other components are not drawn or wrong
- 35 -
Page 36

1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
E. Schéma électrique BLUETOOTH SLAVE
2
1
PIN
7
6
R2
5
4
27k
3
2
1
CON
GND
GND
IC1
3
VIN
VOUT
C2
GND
100nF 10uF
GND
1
47k
R1
GND
2
GND
HC-06-S_MODULE
HC-06
1
TX
2
RX
3
CTS
4
RTS
5
PCM_CLK
6
PCM_OUT
7
PCM_IN
8
PCN_SYNC
9
AIO0
10
AIO1
11
RST
12
3V3
13
GND
C1 C3
GND
NC14VBUSD-15CSB16MOSI17MISO18CLK19VBUSD+20GND1
100nF
21
PIO11
PIO10
PIO9
PIO8
PIO7
PIO6
PIO5
PIO4
PIO3
PIO2
PIO1
PIO0
GND2
GND
F. Schéma électrique BLUETOOTH MASTER
34
33
32
31
30
29
28
27
26
25
470
24
23
R3
22
GND
GND
BLUE
LED1
GNDREG1117
2
1
PIN
7
6
R2
5
4
27k
3
2
1
CON
R1
GND
47k
GND
IC1
3
VIN
VOUT
C2
100nF 10uF
GND
1
GND
2
GND
HC-06-M_MODULE
HC-06
1
TX
2
RX
3
CTS
4
RTS
5
PCM_CLK
6
PCM_OUT
7
PCM_IN
8
PCN_SYNC
9
AIO0
10
AIO1
11
RST
12
3V3
13
GND
C1 C3
GND
GND
NC14VBUSD-15CSB16MOSI17MISO18CLK19VBUSD+20GND1
100nF
21
PIO11
PIO10
PIO9
PIO8
PIO7
PIO6
PIO5
PIO4
PIO3
PIO2
PIO1
PIO0
GND2
34
33
32
31
30
S1
29
28
27
3 1
26
25
24
23
22
GND
GND
470
24
R3
BLUE
LED1
GNDREG1117
GND
- 36 -
 Loading...
Loading...