

Page 1
AREXX WIRELESS KITS
WRL
ANLEITUNG: WRL-03
© AREXX - DIE NIEDERLANDE V052012
- 1 -
Page 2
Inhaltsverzeichnis
1. Produktbeschreibung WIRELESS KITS 3
2. Warnungen 4
3. Bluetooth 5
4. Android 7
5. Wireless Funkbausatz 10
6. PC Funkkommunikation 14
7. APC-220 16
8. Die Bluetooth Module 19
9. Android Handy-applikation 22
10. Hintergrund information 24
10.1 APC-220 24
10.2 Bluetooth 25
11. Visual Basic 26
11.1 Software Development Kit 28
11.2 Eclipse 29
xx. APPENDIX 31
A. Schaltplan RP6v2 Programmier Adapter 32
B. RP6v2 Programmier Adapter 33
C. Schaltplan AREXX Wireles Erweiterung 34
D. AREXX Wireless Erweiterung 35
E. Bluetooth Module 36
AREXX und AREXX WIRELESS sind registrierte Warenzeichen von AREXX Engineering - HOLLAND.
© Deutsche Übersetzung/German translation (März 2012): AREXX Engineering (NL).
Diese Beschreibung ist urheberrechtlich geschützt. Der Inhalt darf auch nicht teilweise kopiert oder übernommen werden ohne schriftlicher Zustimmung des europäischen Importeurs:
AREXX Engineering - Zwolle (NL).
Hersteller und Vertreiber sind nicht haftbar oder verantwortlich für die Folgen unsachgemäßer Behandlung,
Einbaufehler und oder Bedienung dieses Produkts bei Mißachtung der Bauanleitung.
Der Inhalt dieser Gebrauchsanleitung kann ohne vorheriger Ankündigung unsererseits geändert werden.
Technische Unterstützung beim Bauen
des Roboters:
WWW.AREXX.COM
Fabrikant:
AREXX Engineering
JAMA Oriental
© AREXX Holland und JAMA Taiwan
© Deutsche Übersetzung: AREXX - Die Niederlande
Europäischer Importeur:
AREXX Engineering
ZWOLLE Die Niederlande
WWW.ROBOTERNETZ.DE
- 2 -
Page 3

1. PRODUKTBESCHREIBUNG WIRELESS
1.1. Einführung
Das AREXX „Wireless“-Funkmodul ist ein Erweiterungsbausatz zum
ASURO Roboter, der auch für andere Robotermodelle wie den AREXX
Arduino (AAR) und den PRO-BOT von Conrad geeignet ist. Das
„Wireless“-Funkmodul enthält die Schaltkreise für die standardisierte
Infrarot -Kommunikation, so dass Sie den ASURO USB-IR-Transceiver mit der ASURO Flash Software nach wie vor verwenden können.
Außerdem stellt dieses Erweiterungsmodul Platz für ein APC220 oder
ein Bluetooth Modul zur Verfügung. Beide Module basieren auf einer
Funkverbindung. Ein großer Vorteil einer Funkverbindung ist die
Option, dass der ASURO keinen Sichtkontakt mehr zur Kommandozentrale benötigt, der Steuerungsbereich größer wird und Sie den
Roboter einfacher mit zum Beispiel einem Android Telefon ansteuern
können.
Das „Wireless“-Funkmodul wird bis auf das Einlöten der Anschlussstifte komplett montiert ausgeliefert. Fast alle Bauteile sind bereits
vorgelötet, so dass man keine extra Zeit für die Lötarbeiten benötigt.
Die Herausforderung des Bausatzes steckt in der Programmierarbeit für die Steuerungssoftware. Beispielprogramme stehen auf der
Webseite zur Verfügung. Zur Ansteuerung kann man einen PC, aber
auch ein Android Mobiltelefon verwenden.
Visual Basic stellt eine Programmierumgebung für die Funkverbindungsapplikation am PC zur Verfügung. Es gibt dazu eine Beispielapplikation, die vom Anwender angepasst werden kann.
Mit einem Mobiltelefon kann man eine Verbindung zum Bluetooth
Modul herstellen, so dass das System Daten in beide Richtungen
versenden kann. Diese Kommunikation ndet in einer Android-Umgebung statt, die sich in rasanter Weise als Steuerungssystem für
den Mobilfunk entwickelt. Der ASURO Erweiterungsbausatz, diese
Betriebsanleitung und die verfügbare Software bieten Ihnen die
Möglichkeit, sich mit Android vertraut zu machen.
Wir wünschen Ihnen viel Spaß mit dem
Erweiterungsbausatz und dessen RF- Modulen!
- 3 -
Page 4

2. Warnungen
1. Sie müssen dieses Handbuch gelesen haben ehe Sie auf einem
der Anschlüssen eine Stromquelle anschließen! Fehlerhafte
Anschlüsse können die Hardware schädigen.
2. Überprüfen Sie bitte sorgfältig die Anschlussbelegung! Arbeiten
Sie bei der Verdrahtung des Systems sehr sorgfältig. Falsche
Anschlüsse können Komponenten beschädigen. Beachten
Sie die korrekte Polarität der Stromversorgungsanschlüsse.
Eine Umpolung der Stromversorgungsanschlüsse kann die
Hardware beschädigen.
3. Verwenden Sie keine Stromversorgungssysteme mit
Spannungen, die über den spezifizierten Werten liegen!
Benutzen Sie stabilisierte und gefilterte
Stromversorgungssysteme um Spannungsspitzen zu
vermeiden.
4. Die Leiterplatte bietet keinerlei Schutz gegen Wasser- oder
Feuchtigkeitseinwirkung. Zur Aufbewahrung und Benutzung
des Systems sind nur trockene Räume geeignet.
5. Vermeiden Sie Kurzschlüsse mit jeglichen Metallgegenständen
und vermeiden Sie jegliche Überbelastung der Leiterplatte
oder Anschlüssen durch Ziehen, Drücken oder Gewichten.
6. Vermeiden Sie elektrostatische Entladungen (siehe dazu
die Vorsichtsmaßnahmen, Warnungen und Dokumentation
in Wikipedias Eintrag „Elektrostatische Entladung“).
2.1 Algemein
* Mit dem Öffnen der Plastikbeutel mit Komponenten und
Teilen erlischt das Rückgaberecht.
* Lese vor dem Bauen zuerst die Gebrauchsanleitung
aufmerksam durch.
* Sei vorsichtig beim Hantieren der Werkzeuge.
* Baue nicht im Beisein kleiner Kinder. Die Kinder können sich
verletzen an den Werkzeugen oder kleine Komponenten und
Teile in den Mund stecken.
* Achte auf die Polung der Batterien.
* Sorge dafür, daß die Batterien und die Batteriehalter trocken
bleiben. Falls der Roboter naß wird, entferne dann die
Batterien und trockne alle Teile, so gut es geht.
* Entferne die Batterien, wenn der Roboter mehr als eine
Woche ruht.
- 4 -
Page 5

3. Bluetooth
3.1 Geschichtliche Entwicklung
Die Bluetooth-Technologie wurde von der Firma Ericsson entwickelt.
Bluetooth bildet einen offenen Standard für Funkverbindungen
zwischen Geräten auf kurzer Distanz. Dabei sollten Sie sich Mobilfunkgeräte mit einem drahtlosen Kopfhöreranschluss vorstellen,
oder den Dateitransfer zwischen Mobilfunkgeräten beziehungsweise
den drahtlosen Kontakt zum GPS-Empfänger, der drahtlos Daten
zum Telefon überträgt.Ericsson hat Bluetooth im Jahre 1994 als
drahtlose Kommunikationsstrecke zwischen Mobilfunkgeräten und
anderen Systemen entwickelt.
Der bedeutendste Technikanteil stammt von Jaap Haartsen, der
damals bei Ericsson gearbeitet hat. Der Name Bluetooth verweist
auf den Vikingerkönig Harald Blauzahn. Bluetooth war ursprünglich
der Projektname und mangels einer besseren Alternative ist dieser
Name auch für das Endprodukt erhalten geblieben.
Das Kommunikationssystem verbreitete sich schnell und nach kurzer
Zeit schlossen sich die bedeutendsten Elektronikrmen zusammen in
der ‘Bluetooth Special Interest Group’ (SIG).
Zur weltweiten Anwendung musste Bluetooth auch weltweit verfügbar gemacht werden. Deshalb wurde eine allgemein anwendbare
Frequenz gesucht und im 2,45Ghz-Frequenzband gefunden.
3.2 Technik
Bluetooth ist eine Funkverbindung für Sprache und Daten im
Nahverkehr. Als Kommunikationsstruktur wurde eine Punkt zu
Multi-Punkt-Beziehung gewählt, was bedeutet, dass eine Funkstelle
mehrere Empfänger versorgen kann. Sobald zwei Bluetooth-Geräte
eine Verbindung aufbauen entsteht ein sogenanntes ‘Piconet’ (übersetzt: „winziges Netzwerk“). An einer Stelle können mehrere Piconetze nebeneinander in Betrieb sein. Bei der Zusammenfassung
von mehreren Piconetzen spricht man von einem Scatternetz.
- 5 -
Page 6

Innerhalb eines Piconetztes unterstützt Bluetooth maximal acht
aktive Individualgeräte, wobei insgesamt 127 Geräte eine Kommunikationsverbindung betreiben können, die dann zeitweilig in einem
passiven Zustand („geparkt“) gehalten werden (Abb. 1).
Abb. 1 : Scatternet
Bluetooth kommt mit einem geringen Stromverbrauch aus: 30 Mikroampere im passiven ‘standby mode’ und 8 bis 30 Milliampere im
Aktivbetrieb. Mit dieser Energiebilanz kann Bluetooth auch in batteriebetriebenen Mobilgeräten angewandt werden.
Bluetooth-Systeme werden in drei verschiedene Klassen aufgeteilt:
Klasse 1: Entwürfe für Langstreckenverbindungen (bis 100m)
Klasse 2: Für Standardstrecken (bis 10m)
Klasse 3: Für Kurzstrecken (10cm bis 1m)
- 6 -
Page 7

4. Android
4.1 Hintergrundinformation
Android ist eine „opensource“ Plattform für mobile Geräte wie
Smartphones und Tablets, die von der Firma Android Inc. entwickelt
wurde. Android wurde 2005 von der Firma Google übernommen.
Ende 2007 gab Google die Android Plattform frei und es wurde die
OHA (Open Handset Alliance) gegründet. Zur Gründungszeit waren in der OHA etwa 40 Hardwarehersteller, Softwareanbieter und
Telekommunikationsunternehmen zusammengeschlossen, die sich
zum Ziel gesetzt hatten, offene Standards für Mobilfunkgeräte zu
fördern.
Android basiert auf einem Linux-Kernel und auf der Java-Programmierumgebung. Mit dem SDK-Enwicklungswerkzeug (Software Development Kit) können abgesehen von Google auch andere Entwickler Applikationen zusammensetzen.
Diese Applikationen können auf dem Android-Markt angeboten werden. Auf diesem Markt können Endanwender Applikationen suchen
und installieren. In diesem Bereich ndet man auch alle Informationen zu den Applikationen. Sowohl der Vertrieb von kostenpichtigen
als gratis Anwendungen wird unterstützt. Den Entwicklern ist aber
auch erlaubt, die Applikationen außerhalb des Android Markts
anzubieten.
Die Applikationen werden für eine bestimmte Android-Version entwickelt, aber die Anwendungen sind rückwärts-kompatibel. Das
heißt, dass eine für Android 2.2 entwickelte Applikation auch unter
Android 2.3 funktionsfähig ist. Die bisher veröffentlichten Versionen
sind in der nachfolgenden Übersicht aufgelistet. Die Zahl der Benutzer pro Version wird in der Abbildung 3 unterhalb der Tabelle angegeben.
- 7 -
Page 8

Ice Cream Android 4.0 19-10-2011
Honeycomb Android 3.2 15-07-2011
Honeycomb Android 3.1 10-05-2011
Honeycomb Android 3.0 02-02-2011
Gingerbread Android 2.3 06-12-2010
Froyo Android 2.2 20-10-2010
Eclair Android 2.0 26-05-2010
Donut Android 1.6 15-08-2009
Cupcake Android 1.5 30-04-2009
Erste Publikation Android 1.1 10-02-2009
Abb. 2 : Übersicht der Android Versionen
Abb. 3 : Anwender pro Version ( Stand: 03-11-2011)
- 8 -
Page 9

4.2 Das Software Development Kit (SDK)
Google hat die SDK-Software freigegeben, so dass Anwender selbst in
der Lage sind, eine Applikation für ein Smartphone, Tablet oder beides
zu schreiben. Das SDK enthält eine Sammlung verschiedener, hilfreicher Werkzeuge, sowie ein Debugger-Werkzeug und einen Emulator.
Auch enthält die Sammlung eine Reihe Beispielanwendungen und es
stehen eine Vielzahl an Tutorials (Anleitungen) auf der Webseite.
Zum Herunterladen der SDK öffnen Sie bitte folgenden Link:
http://developer.Android.com/sdk
Auf dieser Webadresse nden Sie die Installationsdateien. Auch benden sich hier ausführliche Anweisungen, wie Sie den SDK installieren
müssen.
4.3 Eclipse
Eclipse ist eine Open-Source-Framework der Eclipse Foundation, einer
gemeinnützigen Gemeinschaft für Software-Entwicklungsumgebungen.
Die populärste Anwendung ist die Entwicklungsumgebung für die Programmiersprache Java.
Die SDK enthält einen Eclipse Plug-in, so dass man als Programmierer
bequem in der Lage ist, ein Android-Projekt zu starten, zu kompilieren, zu debuggen und zu emulieren.
Das Eclipse-Programm ist eine OpenSource Software und steht zum
Herunterladen zur Verfügung auf der Webseite:
http://www.eclipse.org/downloads/
4.4 Hello World
Damit Sie die Entwicklungsumgebung besser kennenlernen, wird in
der „Hello World“-Programmieranleitung erklärt, wie leicht man den
Text „Hello World“ in einer Applikation auf einen Bildschirm übertragen
kann. Die Anweisungen erklären Schritt für Schritt, wie Sie ein Projekt starten müssen bis einschließlich den letzten Schritt, wie Sie das
„Hello World“ im Emulator darstellen.
Die Webseite der Programmieranleitung (Englisch: „Tutorial“) lautet:
http://developer.Android.com/resources/tutorials/hello-world.html
- 9 -
Page 10
5. Der AREXX Wireless Funkbausatz
Der AREXX „Wireless“ Funkbausatz ermöglicht es Ihnen, ein APC220
Modul oder ein Bluetooth Modul auf dem ASURO Roboter oder auf
anderen Robotern zu installieren. So können Sie nicht nur drahtlos
mittels Infrarotverbindung mit dem ASURO kommunizieren, sondern
auch mit RF-Radiowellen. Der Vorteil der RF-Hochfrequenzwellen ist,
dass Sender und Empfänger keinen Sichtkontakt mehr benötigen.
Mit einem APC220-Aufbau auf dem Wireless Funkbausatz kann der
ASURO mit dem PC kommunizieren. Zusätzliche Informationen nden
Sie dazu im Kapitel ‘APC220’. Durch Installation des Bluetooth Moduls
können Sie auch mit dem PC kommunizieren und ebenso mit einem
Android Smartphone. Zusätzliche Informationen nden Sie dazu im
Kapitel ‘Bluetooth Module’.
5.1 Spezikationen
Der AREXX „Wireless“ Funkbausatz umfasst:
- IR-Empfänger beziehungsweise Sender zur Flash-Übertragung
zum ASURO
- Sockel für das APC220- beziehungsweise Bluetooth RF Modul
- Umschalter für die IR oder RF-Übertragung
- Experimentierfeld zum Aufbau einer Zusatzschaltung
- Anschlussoptionen für die nicht belegten Gatter des ASUROs
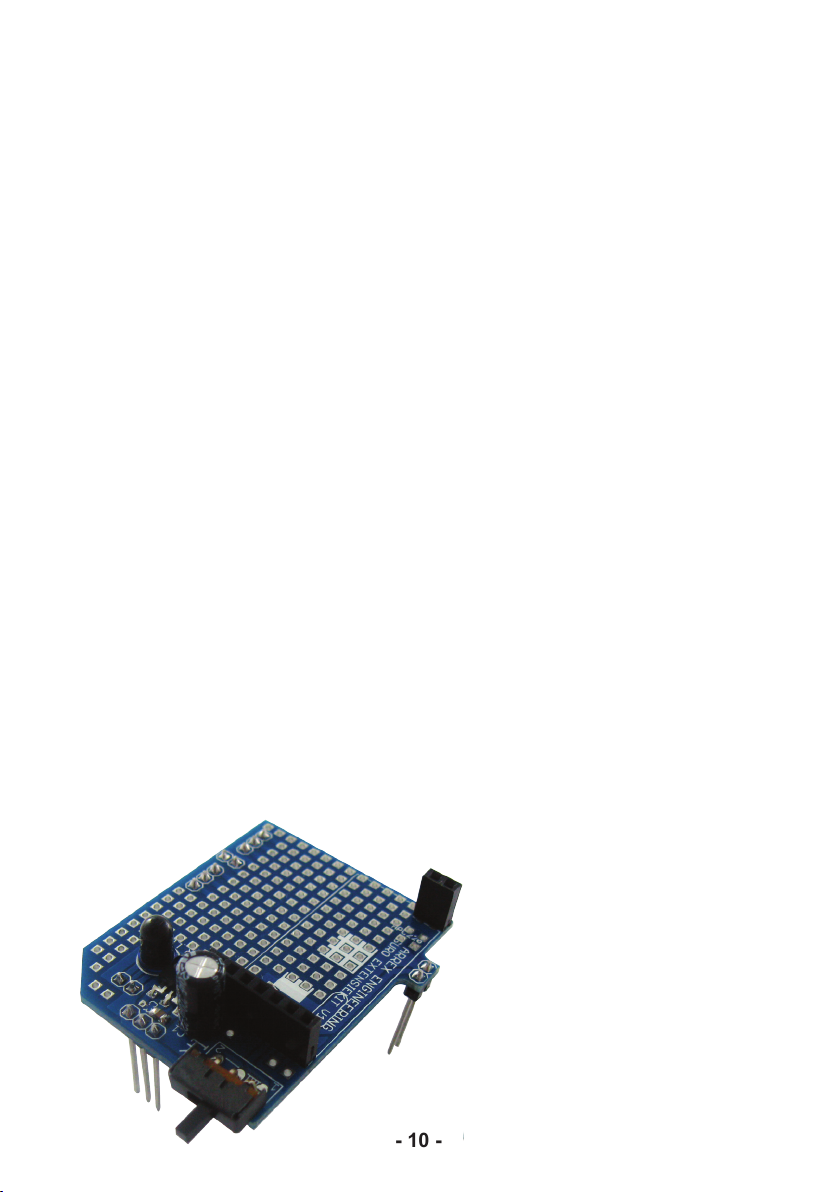
In den nachfolgenden Abbildung wird die Leiterplatte abgebildet.
Die freie Experimentierfeldäche für die Zusatzschaltung ist deutlich sichtbar. Auch unterhalb des APC220 bendet sich noch etwas
Freiraum, weil der APC220 in einer gewissen Distanz zur Leiterplatte
montiert wird.
Achtung: Der Schalter auf der
Leiterplatte erlaubt zwei Positionen: (1)
Infrarotverbindung beziehungsweise
(2) Bluetooth / APC220-Kommunikation.
Zur Flash-Übertragung der Software in
den ASURO oder auch wenn Sie mittels
Infrarotlicht kommunizieren wollen,
muss dieser Schalter auf ‘IR’ umgeschaltet werden.
Wenn Sie mit Bluetooth oder APC220/
Abb. 4 :
Funkbausatz
Bluetooth kommunizieren möchten,
sollte der Schalter in die andere Position
umgeschaltet werden.
- 10 -
Page 11

5.2 Installation am ASURO-System
Die Installation des AREXX „Wireless“ Funkmoduls kann man in drei
Schritten zusammenfassen:
Schritt 1.
Zuerst muss die ASURO-Leiterplatte wie folgt für die Montage des
„Wireless“ Funkmoduls vorbereitet werden:
A. Sie müssen zuerst die Bauteile bei den rot markierten Lötächen
auslöten und von der Leiterplatte entfernen (Abbildung 9). Verwenden Sie dazu einen speziellen Lötkolben zum Auslöten beziehungsweise spezielles Litze-Material zum Auslöten.
Achtung: Achten Sie bitte darauf, dass Sie die
Lötächennichtbeschädigen,dennsiemüssen
nochunbeschädigtzumEinlötenzurVerfügung
stehen.
Abb. 5 : Lötachen
B. Löten Sie jetzt die mitgelieferten Sockel-Teile auf diese Anschluss-
ächen. Installieren Sie die 1x3 Sockel auf die Anschlüsse mit drei
nebeneinander folgenden Flächen. Die Anschlussächenform spielt
dabei keine Rolle. Löten Sie anschließend die übrigen 1x2 Sockel auf
die leeren Anschlussächen.
- 11 -
Page 12

Schritt 2.
Installieren Sie nun den ASURO Erweiterungsbausatz auf der
ASURO-Leiterplatte. Der Aufbau sollte genau in die zuvor installierten Sockel-Teilen passen.
Abb. 6 : ASURO mit Funk Modul Erweiterung (Seitenansicht)
Abb. 7 : ASURO mit Funk Modul Erweiterung ( Vorne)
- 12 -
Page 13

Schritt 3.
Installieren Sie jetzt wahlweise das APC220 beziehungsweise
das Bluetooth Modul.
Abb. 8 : ASURO mit Bluetooth
Abb. 9 : ASURO mit APC-220
Jetzt haben Sie die Installation der Hardware abgeschlossen.
Sie können jetzt eine Verbindung mit den verschiedenen
Applikationen herstellen.
Zuerst wird im Kapitel ‘APC220’ erklärt, wie man den ASURO
mit dem APC220-Modul ansteuert.
Anschließend wird im Kapitel ‘Bluetooth Module’ verdeutlicht,
wie Sie die Bluetooth-Kommunikation anwenden.
- 13 -
Page 14

6. APC220/Bluetooth und PC Radio Data Kommunikation
Zur Kommunikation zwischen dem PC und dem Asuro benötigt man
ein Dongle-Modul. Wir verwenden dazu den RP6v2
Programmieradapter (WT Dongle).
Abb. 10 : RP6v2 USB Programmier Adapter
WT dongle
Für die Funkverbindung vom PC stehen ein APC220 Radio-Datenmodul
oder Master Bluetooth Modul zur Verfügung. Diese Module weisen
einen geringen Energieverbrauch auf und sind leicht einstellbar, sodass
sie für unseren Roboterapplikationen ausgezeichnet brauchbar sind.
6.1 Einrichtung der Funkverbindung zum PC
Die Frequenz und Baudrate der APC220-Module wird mit Hilfe des WT
Dongles auf Standardwerten eingestellt. Für das WT Dongle steht eine
spezielle Visual Basic (VB) Software zur Verfügung, welche die Einrichtung unterstützt und zum APC-220 Applikationsprogramm gehört.
Man verbindet das WT Dongle-Modul mittels USB-Kabel mit dem PC.
Dazu muss der Treiber des RP6v2 Programmieradapters noch
installiert werden. Den aktuellsten Treiber nden sie auf unserer
Webseite im Bereich des RP-Roboters.
Die APC-220- beziehungsweise Bluetooth-Module sind steckbar auf
das WT-Dongle. Mit Hilfe des Visual Basic Programms für die APC-220
Applikation können sie den APC-220 einrichten und die Roboter
steuern.
WT
PC
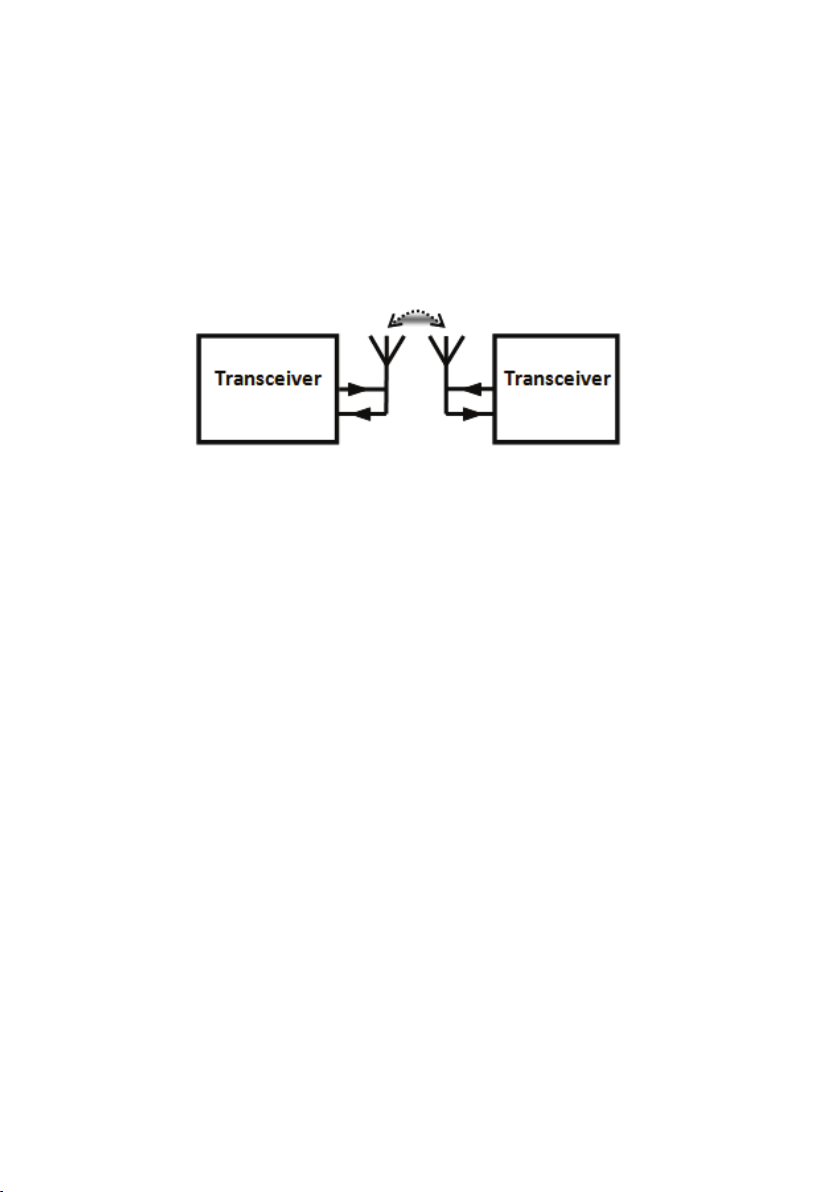
Abb. 11 : Kommunikationsbeispiel
Der Aufbau der Testumgebung ist im oben abgebildeten Blockdiagramm
abgebildet.
dongle
APC-
220
APC-
220 ASURO
- 14 -
Page 15
6.2 Vorbereitung Roboter für den Funkverbindung
Wichtig!
Der Roboter kann noch nicht sofort mit der Funkverbindung kommunizieren. Zusätzlich zur Hardwareanpassung, in der die Wireless
Erweiterungsplatine eingebaut wird, soll auch noch ein Programm im
Roboter installiert werden.
1 2
PC or Phone
TRANCEIVER 1
In einer Android Kommunikationsverbindung muss die Applikation
in ein Android Smartphone oder Tablett installiert werden. Bei einer
PC-basierender Kommunikation platziert man Transceiver 1 auf dem
RP6v2 USB Programmieradapter (WT Dongle) und müssen Sie die
Applikation auf Ihrem PC installieren.
TRANCEIVER 2
Als erstes müssen wir das Erweiterungsmodul mit dem RF Modul
APC-220 beziehungsweise Bluetooth-System installieren.
Anschließend folgt die Übertragung der passenden Software in den
Roboter.
Die benötigte Software variiert je nach Robotertyp.
Esgibtjeweilsspezischen
*.HEX (Hex Dateien) für:
- ASURO
- RP6(v2)
- ROBOT ARM
*.PDE (Arduino le) für:
- AAR oder andere Arduino Roboter
Robot
*.CBAS (C-Control le) für:
- PRO-BOT128
- 15 -
Page 16

7. APC220
In der Kombination mit dem APC220-Modul kann der ASURO mit
dem Programm “ASURO Control” angesteuert werden, das dazu
auf dem PC installiert werden muss. “ASURO Control” kann von der
Web-Seite abgerufen werden. Die Software wurde in Visual Basic
geschrieben und steht dem Anwender als veränderbare Quelle zur
Verfügung.
Die ASURO-Software muss in geringem Umfang angepasst werden.
Auch diese Software ist ein OpenSource-Produkt.
Die Anpassung wird benötigt, weil das System ein Protokoll übertragen soll. Darin benden sich ein Control-Byte und ein Satz mit Informationsbits. In Abbildung 12 kann man sehen, wie die Applikation
(in Orange) das Signal zur Datenabfrage am PC abschickt. Daraufhin antwortet das ASURO-System mit den Antwortdaten in Rot.
Protokoll vom PC zum ASURO:
Abb. 12 : Kommunikationsbeispiel
Die ASURO-Software beinhaltet einige Funktionen zur Abfrage der
Sensoren und zur Steuerung der Motoren. Falls das Ansteuerungsprogramm darum bittet, sendet ASURO dem Auftraggeber die
erfassten Daten umgehend zu. Bei dieser Gelegenheit steht eine
Option zur Verfügung, selbst dem Signal noch 4 Bytes Information
beizusteuern. Zu diesem Zweck könnte man zum Beispiel an einem
Thermometer denken, das auf den freien Anschlüssen des Erweiterungsbausatz angeschlossen wird. Im nachfolgenden Text wird die
Codierung zur Datenübermittlung solcher Messdaten beschrieben.
- 16 -
Page 17

In diesem Code kann man feststellen, dass das System in Battery()
einige Funktionen aufruft, um zum Beispiel die Batteriespannung zu
messen. Diese Funktion liefert einen Wert zwischen 0 und 255 zurück,
der im PC-Programm verarbeitet und auf dem Bildschirm dargestellt
wird. Die Bytes 10 bis einschließlich 13 sind noch frei, können jedoch
frei programmiert werden.
Abb. 13 : Asuro Control Software (Visual Basic)
Nach Starten der Applikation ‘ASURO Control’ meldet sich das Programm mit dem obenstehenden Bildschirminhalt. Sie können nun
mit dem ASURO Kontakt aufnehmen und den Roboter ansteuern. Das
WT-Dongle muss mit dem PC verbunden sein. Bei angeschlossenem
WT-Dongle löst ein Anklicken der „Refresh“-Funktion eine Abfrage aller
angeschlossenen COM-Ports aus.
Nach Wahl des richtigen COM-Ports für den WT-Dongle wird die Verbindung durch Anklicken der ‘Connect’-Funktion auf der ‘ASURO Control’Maske hergestellt. Dieser Befehl löst die Verbindung zwischen dem
WT-Dongle und ‘ASURO Control’ aus.
Daraufhin werden die Motorgeschwindigkeit und Batteriespannung
links unten auf dem Bildschirm angezeigt. Sobald ein Schalter an der
Frontseite des Roboters aktiviert wird, zeigt das Programm zu diesem
Schalter einen roten Punkt. Auf diese Weise meldet das Programm auf
der ‘ASURO Control’-Anzeige einen Zusammenstoß. In der Programmanzeige der Applikation werden auch die Farbwechsel der ASUROLEDs angezeigt.
- 17 -
Page 18
Zur Ansteuerung des ASURO-Roboters stehen auf der rechten
Seite Taster zur Verfügung. Die Geschwindigkeit wird mit einem
Schieberegler auf der oberen rechten Seite vorgegeben
Zudem ist es möglich, den Roboter mit der Tastatur zu steuern.
Dazu muss das Feld ‘Key Control’ mit einem Häkchen aktiviert
werden.
W: Vorwärts
A: Links
S: Rückwärts
D: Rechts
E: Anhalten
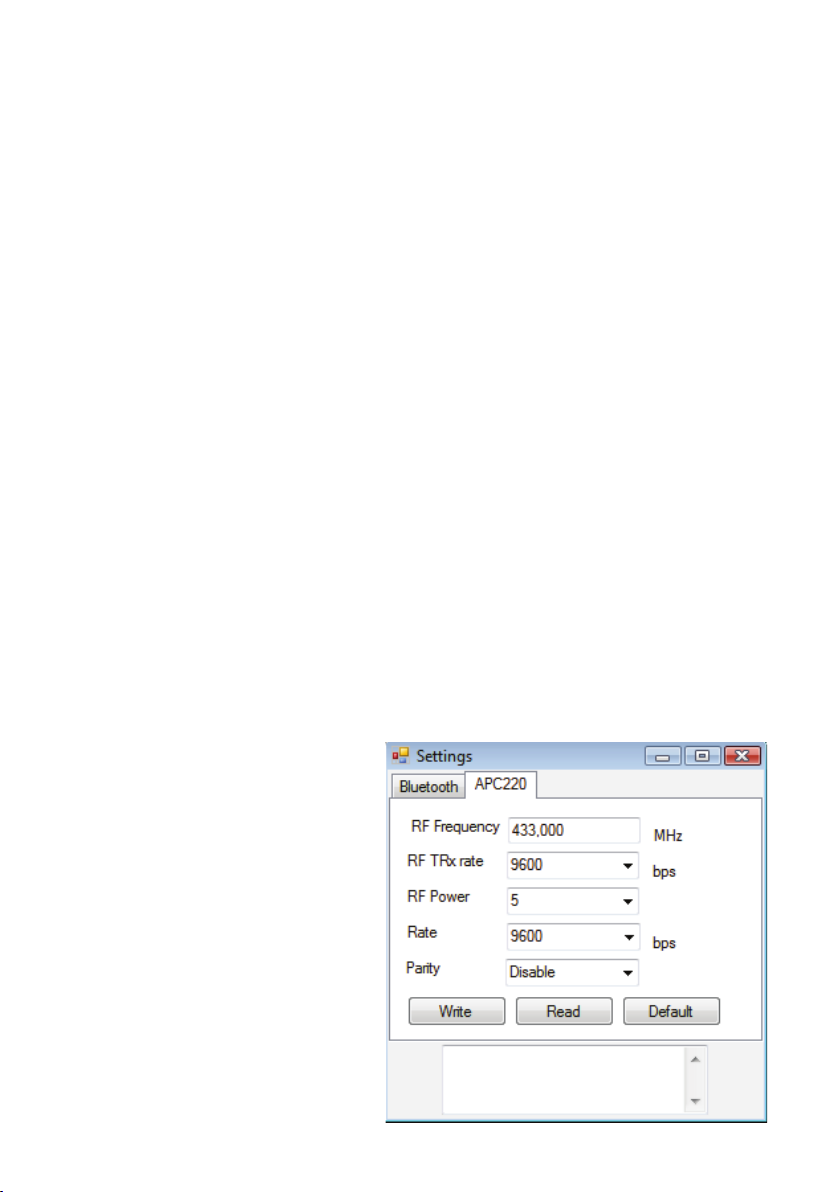
Die Arbeitsfrequenz des APC220 kann auf verschiedene Werte festgelegt werden. Sollten mehrere APC220 mit der gleichen Frequenz
in unmittelbarer Nähe in Betrieb sein, kann das Protokoll sicherstellen, dass die Daten trotzdem beim richtigen ASURO landen. Es
ist jedoch ratsam, diese Situation zu vermeiden und wenn möglich
unterschiedliche Kommunikationsfrequenzen zu wählen, weil manche Programme mehrmals pro Sekunde mit dem ASURO kommunizieren.
Die APC220-Arbeitsparameter werden im PC-Programm festgelegt
und gegebenenfalls angepasst. Klicken Sie auf der Hauptdialogseite
des Programms auf ‘Settings’, damit folgender Inhalt nach Abb. 17
auf dem Bildschirm erscheint:
Abb. 14 : Settings ins
Control Programm
- 18 -
Page 19

8. Die Bluetooth Module
Sie können den ASURO mit einem PC oder Telefon ansteuern, indem
Sie ein Bluetooth Slave Modul in das Erweiterungsmodul einsetzen.
Dazu ist jedoch erforderlich, dass auf dem WT-Dongle ein Bluetooth
Master Modul eingesetzt wurde. Der Unterschied zwischen Slave
beziehungsweise Master Modul wird in Abbildung 15 beziehungsweise 16 dargestellt.
Afb. 15 : Slave
Afb. 16 : Master
Diese beide (master und Slave Modul) gibt es nur bei die AREXX
Wireless Kit WRL-03
Das Master Module (rechts) wird mit einem weißen Punkt auf dem
oberen IC markiert. Außerdem enthält dieses Modul einen Schalter.
Das Slave Modul (links) weist keinen weißen Punkt und auch keinen
Schalter auf.
Nach dem Einschalten beider Module wird das Master Modul einen
Slave suchen und automatisch eine Verbindung aufbauen. Nachdem
der Master die Verbindung zum Slave hergestellt hat, wird dieser die
Slave-Adresse speichern.
Falls die Verbindung unterbrochen wird und der Master später wieder
seinen Slave sucht, wird das System nur den Slave mit der
gespeicherten Slave-Adresse suchen.
- 19 -
Page 20

Diese Situation wird mit der blauen LED visualisiert. Bei diesem Ver-
fahren sind folgende Arbeitsmodi deniert:
Schneller Leuchtwechsel: Slave und Master sind nicht miteinander
verbunden
Ununterbrochen leuchtend: Slave und Master sind miteinander
verbunden
Langsamer Leuchtwechsel: Der Master ist nicht verbunden,
hat aber eine Slave-Adresse gespeichert.
In diesem Fall können Sie die
gespeicherte Adresse löschen, indem Sie
den Schalter drücken auf Master Module.
Dem Bluetooth Slave Modul kann
man einen selbst gewählten
Namen zuweisen. Damit Sie das
System mit einem anderen
Bluetooth-Gerät kommunizieren
lassen können, wurde als Option
die Anpassung der Baudrate und
PIN-Code eingebaut.
Diese Parameter werden in der
Hauptdialogseite in ‘Settings’
(Deutsch: Einstellungs parameter) verändert. Klicken Sie
in der Programm auf ‘Settings’,
damit folgender Inhalt dargestellt
wird Abbildung 17.
Abb. 17 : Bluetooth Settings
Das zu ändernde Modul muss sich zum Änderungszeitpunkt im
WT-Dongle benden. Die Änderungen werden danach mit einem Klick
auf ‘Save Settings’ (Einstellungsparameter sichern) gespeichert.
Im Log-Protokoll wird dokumentiert, ob der Speichervorgang gelungen ist. Falls das nicht der Fall ist, wird ein sogenannter Time-out
(Zeitüberschreitung) gemeldet.
Achtung:
Der Name des Master Moduls kann nicht geändert werden. Nach dem
Speichern der Baudrate und PIN-Code wird ein Time-Out gemeldet.
Das ist jedoch normal.
- 20 -
Page 21

Nach dem Einsetzen des Bluetooth Master Moduls in den
WT-Dongle, beziehungsweise dem Einsetzen des Slaves in den
ASURO Erweiterungsbausatz kann genauso wie im Falle des APC220
eine Kommunikationsverbindung zum ASURO hergestellt werden.
Dazu starten Sie das Programm “ASURO Control”. Der COM-Port
bleibt unverändert erhalten und es werden die gleichen
Arbeitsschritte durchgeführt, sowie sie im APC220-Kapitel
beschrieben worden sind.
- 21 -
Page 22

9. Android Handyapplikation
Auch mit einem Mobiltelefon kann man den ASURO steuern. Dazu
muss das Bluetooth Slave Modul auf dem ASURO Erweiterungsbausatz installiert werden.
Anschließend müssen Sie noch die Applikation „ASURO Bluetooth“
auf Ihrem Telefon installieren. Diese Software steht auf der AREXXWebseite zur Verfügung. Im gleichen Bereich können Sie auch den
Quellcode für diese Applikation herunterladen, so dass Sie auch die
Quelle einlesen und nach Ihren eigenen Wünschen anpassen können.
Die meisten Android Telefone sind inzwischen mit dem Betriebssystem Android 2.1 oder aktueller ausgestattet (Siehe Abbildung 3).
Deshalb wurde auch diese Applikation für Android 2.1 oder Android
2.1 oder aktueller (das heißt: „höher“) entworfen.
Abb. 18 : ANDROID APP
Nach dem Starten der Applikation bittet das Programm zuerst um
Erlaubnis, Bluetooth starten zu dürfen, sofern diese Anwendung
noch nicht in Betrieb war. Das Interface ist sehr übersichtlich.
- 22 -
Page 23

Sobald Sie die ‘Options’-Taste des Geräts anklicken, öffnet das
Programm eine Bildschirmmaske mit den Angaben ‘Connect a
device’ (Verbinde ein Gerät) und ‘Disconnect’ (Trenne die Verbindung). Diese Kommandos sind selbsterklärend: zunächst wird das
Telefon eine Verbindung mit dem Slave Modul herstellen müssen.
Mit dem Kommando ‘Connect a device’ befehlen Sie dem Telefon, in
der Umgebung nach Bluetooth-Geräten zu suchen.
Sobald der Name eines Slave Moduls dargestellt wird, können Sie
den Namen anklicken und das System wird die gewünschte
Verbindung herstellen.
Nach der Einrichtung der Kommunikationsverbindung können Sie
den ASURO mit der Applikation ansteuern.
- 23 -
Page 24

10. Hintergrund Information
10.1 APC220
Zur Datenübertragung zwischen dem PC und dem Asuro kann man
ein APC220 Radio Data Module verwenden. Es handelt sich dabei
um einen sogenannten Transceiver der Firma Appcon Technologies.
Ein Transceiver (Deutsch: „Sender/Empfänger“) besteht aus einem
Sender (Transmitter) und einem Empfänger (Receiver). Eine solche
Kombination erlaubt es uns mit nur einem Chip oder Modul zu senden und zu empfangen.
Der Transceiver verfügt über einem UART Interface, womit man das
Modul auch leicht mit einem PC, beziehungsweise mit einem Mikrocontroller kommunizieren lassen kann.
Abb. 19 : APC-220
Abb. 20 : Funk Kommunikation
Der Stromverbrauch für dieses Modul ist gering (etwa 30mA).
Außerdem ist der Transceiver leicht einstellbar und sehr gut geeignet für eine Funkverbindung. Die Reichweite beträgt etwa 250 m für
eine Baudrate von 9600 bps. Die maximale Reichweite beträgt etwa
1200m bei 1200 bps. Diese Angaben werden im Datenblatt in Ap-
pendix 7 speziziert.
In einem Vorgängerprojekt Wild Thumper wurde das Modul schon
mal erprobt. Dabei wurde der APC220 ausgiebig getestet und man
hat festgestellt, dass die Daten mühelos einen Abstand von 200m
überbrücken können.
Der Nachteil dieses Transceivertyps ist, dass dieser Typ zur Datenkommunikation kein eigenes Protokoll zur Verfügung stellt. Wir
werden daher ein eigenes Protokoll denieren müssen.
- 24 -
Page 25

10.2 Bluetooth
Bluetooth ist ein offener Standard für Funkverbindungen auf
Kurzstrecken. Ericsson hat Bluetooth ursprünglich als Funkstrecke
zwischen Mobilfunktelefone und anderen Geräte konzipiert. Der
RF-Frequenzbereich befindet sich im 2,45 GHz-Band.
Eine sogenannte Sichtverbindung ist nicht erforderlich. Im GHzFrequenzbereich sind die elektromagnetische Wellen auch in der
Lage Festmaterialien zu durchdringen, solange es sich dabei nicht
um Metallen handelt.
Genau genommen ist Bluetooth eine Ersatzlösung für eine
(kurze) Kabelverbindung und kann somit verwendet werden als
Kommunikationsstrecke zwischen Geräten. Die Entwickler haben
absichtlich preiswerte Funktechnologien verwendet, sodass
Bluetooth problemlos in jedem Gerät eingesetzt werden kann.
Weil Bluetooth normalerweise auch wenig Energie benötigt (30
Mikroampere im ‘Hold-Modus und ca. 8-30 Milliampere in einer
aktiven Verbindung), kann man es auch in batteriebetriebenen
Mobilfunkgeräten anwenden. In der Klasse 2 arbeitet die BluetoothTechnologie mit einer Reichweite vom 10 Metern.
Moderne Mobilfunktelefone verfügen zur Zeit fast immer über
Bluetooth-Schnittstellen. Aus diesem Grund ist es interessant die
Asuros und andere AREXX Roboter ebenfalls mit Bluetooth
auszustatten.
- 25 -
Page 26

11. Visual Basic
Um den Anwender zu ermöglichen die Asuro-Systeme mit seinem
PC zu steuern wurde eine Applikation entwickelt. Zur Entwicklung
einer solchen Applikation stehen zahlreiche Programmiersprachen
zur Verfügung. Weil bei den Studenten nur geringe Erfahrungen im
Bereich der Applikationsentwicklung vorhanden ist, haben wir Visual
Basic gewählt, womit man relativ einfach Applikationen aufbauen
kann.
Visual Basic (VB) ist sowohl eine Programmiersprache als auch eine
Entwicklungsumgebung.
VB erlaubt es uns auf Windows lauffähige Programme zu schreiben.
Der Begriff “Visual” bezieht sich dabei auf das für die für den Benutzer verfügbare graphische Benutzerschnittstelle (Graphical User
Interface, in der Abkürzung bekannt als „GUI“). Das Wort “Basic”
bezieht sich auf die universelle Anfänger-Programmiersprache BASIC
(Beginners All-Purpose Symbolic Instruction Code).
In diesem Projekt haben wir mit der Version Visual Basic 2010
gearbeitet, die zur Zeit als modernste Fassung verfügbar ist.
Afb. 21: ISP connector
- 26 -
Page 27
In Abbildung 21 ist das Programm ASURO Control dargestellt. Diese
Bildschirmdarstellung zeigt das Hauptbildschirmfenster der Applikation. Im linken Fensterbereich stehen die Buttons (Knöpfe), Timers
(Zeitgeber) und Textfenster zum Einsetzen zur Verfügung. Der Anwender kann die Eigenschaften dieser Elemente anpassen und sich
in seinem Programmcode auf dieses Elemente beziehen.
Sobald man als Anwender zum Beispiel den ‘refresh’-Knopf (Auffrischen) auf dem Bildschirm betätigt kann die Knopf-Treiberfunktion
darauf reagieren.
Private Sub Button_Refresh_Click(ByVal sender As System.
Object, ByVal e As System.EventArgs) Handles
Button_Refresh. Click
GetSerialPortNames()
End Sub
In obengenanntem Codebeispiel wird die Funktion
‘GetSerialPortNames()’ aktiviert sobald auf der ‘Refresh’-Taste
geklickt wird.
- 27 -
Page 28

11.1 Software Development Kit
Google hat unter dem Namen „Software Development Kit“ (SDK)
einen Software-Entwicklungsbaukasten freigegeben, womit Anwender selbst eine Applikation für einen Smartphone, Tablett oder
beide entwickeln können. Die SDK enthält einen Satz hervorragender Werkzeugen. Dazu gehören zum Beispiel ein Debugger und
ein Emulator. Auch gibt es eine Vielzahl von Beispielapplikationen
und stehen auf der zugehörigen Webseite viele Arbeitsanleitungen
(sogenannte „Tutorials“) zur Verfügung.
Mit dem SDK Manager (Abbildung 22) kann der Anwender weitere
Plattformen an seine Entwicklungsumgebung zufügen. Auch kann
man Beispielapplikationen installieren.
Abb. 22 : SDK Manager
- 28 -
Page 29
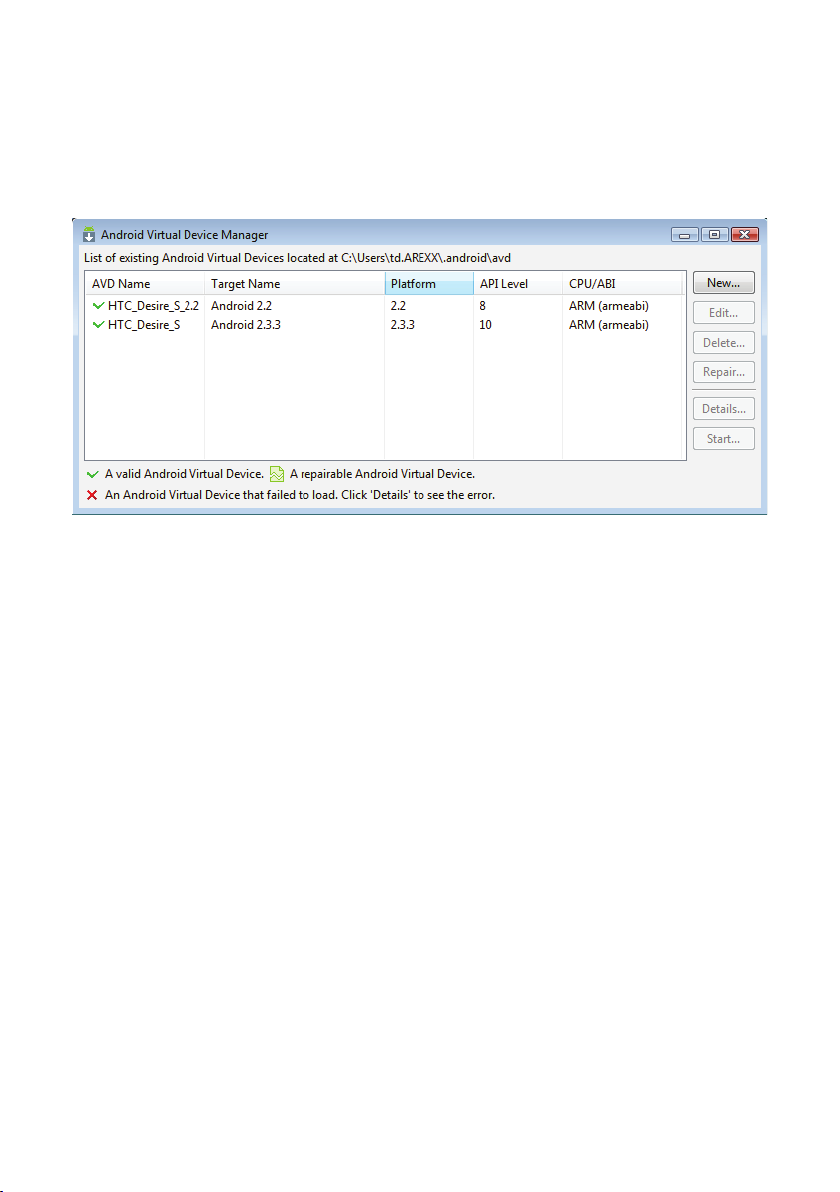
Der SDK-Baukasten verfügt auch über einem Virtual Device Manager. Mit diesem Android Virtual Device Manager kann der Anwender
ein virtuelles Gerät einrichten. Auf diesem virtuellen Gerät kann man
die selbst entwickelte Software emulieren (testen) und debuggen.
Abb. 23 : Android Virtual device manager
Zum Herunterladen des SDK-Baukastens sollte man folgende Website anwählen:
http://developer.android.com/sdk
Hier ndet man die Installationsadressen und die ausführlichen
Installationsanleitungen, wie man die SDK auf seinem PC einrichten
kann.
- 29 -
Page 30

11.2 Eclipse
Eclipse ist ein frei verfügbares („opensource“) Programmiergerüst
(Englisch: framework) für Software Entwicklungsumgebungen, das
von der Eclipse Stiftung entwickelt worden ist.
Die bekannteste Anwendung ist der Einsatz als Entwicklungsumgebung für die Programmiersprache Java.
Die SDK verfügt über eine Schnittstelle für Eclipse, sodass ein Programmierer sehr bequem ein Android Projekt starten, compilieren,
debuggen und emulieren kann.
Zum Abschluss wird dann eine apk-Datei des Applikationsentwurf
erzeugt, die auf jedem Android-Handy installiert werden kann.
Abb. 24 : ECLIPSE
Das frei verfügbare Eclipse-Programm steht zum Download zur
Verfügung auf:
http://www.eclipse.org/downloads/
- 30 -
Page 31

APPENDIX
- 31 -
Page 32
A. Schaltplan RP6v2 Programmier Adapter (WT DONGLE)
X1
USB
123
4
DC-JACK
J1
10n 100n
C1 C2
ferrite bead 600 ohm 100Mhz
L1
321
+
22uF
C9
GND
100n
C5
+
22uF
C4
GND
100n
+3V3
C3
25
FT232RL
GND
GND
GND
GND
18
21
7
GND
100n
17
15
16
3V3OUT
USBDP
USBDM
TEST
12
26
CBUS4
CBUS3
OSCO28OSCI
CBUS023CBUS122CBUS213CBUS314CBUS4
DCD
RI
CBUS2
CBUS1
CBUS0
Vtarget
100K
GND
R3
R4
1K
R6
3K9
VCC
BC847
T1
R5
1K
BC847
T2
APC220
C6
20
19
27
DSR
DTR
9
10RI6
DCD
DTR
DSR
1
GND
IC1
VCC
VCCIO4RESET
RXD
CTS
RTS
3
11
2
5
RTS
RXD
CTS
GND
DTR
100
3
6
7
EN
AUX
SET
470R
470R
R2
TXD
1
TXD
UART-FULL-HDR
RXD
R8
5
LED_TX
Blue
CBUS0
RI
DTR
CBUS4
1
9
5
HDR1
CBUS43VTARGET
DTR7TX
RI
CBUS2
GND
DSR
RTS
RX
4
2
8
10
6
RXD
RTS
DSR
CBUS2
TXDTXD
GND
100n
100
RXD4TXD
C7
R7
2
M1
VCC
VCC
GND
R1
LED_RX
Blue
CBUS1
Vtarget
VCC
3
IC2
VIN
REG1117
VOUT
1
GND
2
100n
C8
+
MBRS130LT3
22uF
C10
D1
VCC
- 32 -
Page 33

B. RP6v2 Programmier Adapter (WT DONGLE)
- 33 -
Page 34

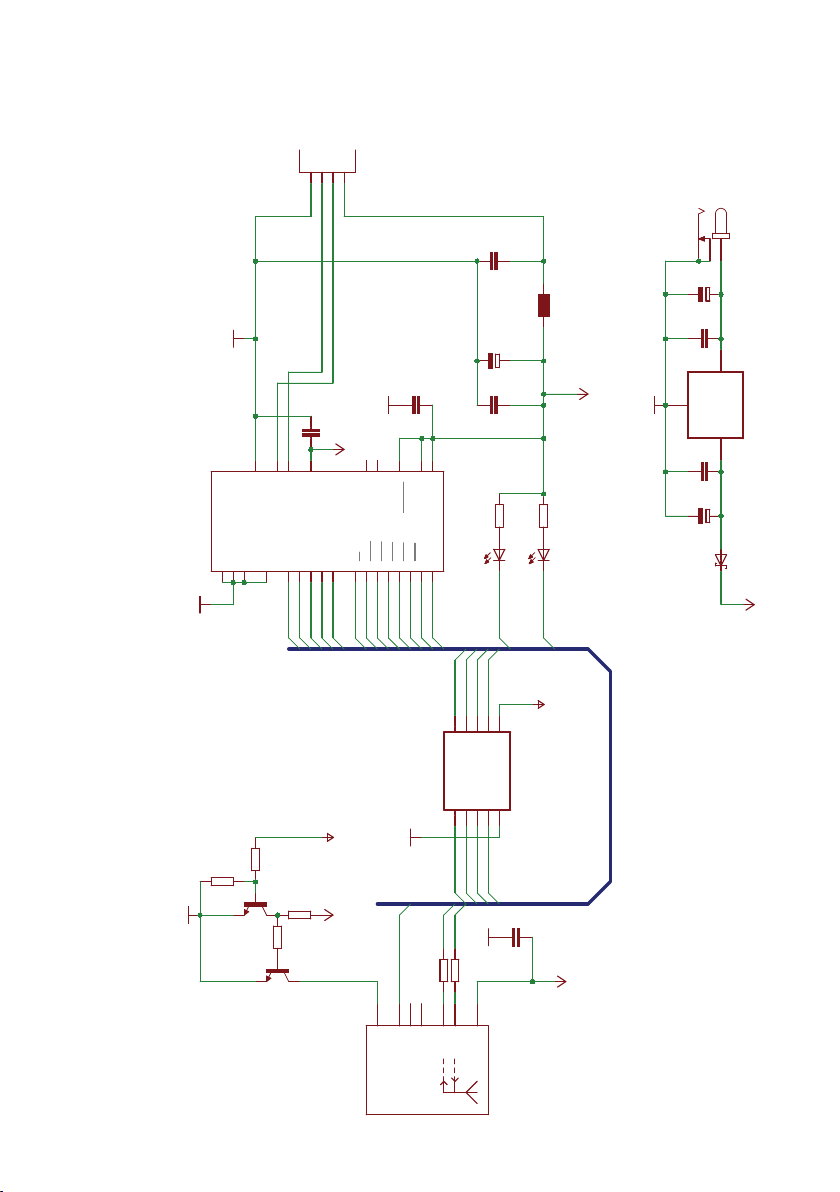
C. SCHALTPLAN AREXX WIRELESS ERWEITERUNG
A
B
C
D
E
25-10-2011
Joris Kok
Designed by:
Extensiekit
AREXX Engineering
www.arexx.com
SW1
1
2
3
JP8
3
GND
2
1
JP8
JP7
2
1
JP7
JP6
2
1
JP6
GND
5V
IRLED-
IRLED+
GND
IR_LED
SFH415-U
C4
GND
GND
V+
PC2(ADC2)
AVCC_2
PB3(MOSI/OSC2)
GND1
PD6(AIN0)
PD2(INT0)
PC3(ADC3)
AVCC_1
10uF
JP4
1
2
3
JP5
JP4
1
2
JP5
JP3
1
2
3
JP3
1 2 3 4 5 6 7 8
SWITCH_IR_OR_MODULE
5V
VCC
100n
C3
GND
GND
GND
GND
220uF
GND
C1
+
EN
AUX
SET
OUT
OUT
SFH5110
C2
MODULE
100n
VCC
2
RXD
4
TXD
5
EN
3
AUX
6
SET
7
GND
1
APC220
GND
V1.1 Aanpassing gedaan aan RXD signaal en LED, deze moet aan de - van de LEd en niet aan de +
1 2 3 4 5 6 7 8
A
B
C
D
E
- 34 -
Page 35

D. AREXX WIRELESS ERWEITERUNG
POSITION PINHEADER LAY-OUT, other components are not drawn or wrong
- 35 -
Page 36

1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
E. Schaltplan BLUETOOTH SLAVE
2
1
PIN
7
6
R2
5
4
27k
3
2
1
CON
GND
GND
IC1
3
VIN
VOUT
C2
100nF 10uF
GND
GND
1
47k
R1
GND
2
GND
HC-06-S_MODULE
HC-06
1
TX
2
RX
3
CTS
4
RTS
5
PCM_CLK
6
PCM_OUT
7
PCM_IN
8
PCN_SYNC
9
AIO0
10
AIO1
11
RST
12
3V3
13
GND
C1 C3
GND
NC14VBUSD-15CSB16MOSI17MISO18CLK19VBUSD+20GND1
100nF
GND
F. Schaltplan BLUETOOTH MASTER
21
PIO11
PIO10
PIO9
PIO8
PIO7
PIO6
PIO5
PIO4
PIO3
PIO2
PIO1
PIO0
GND2
34
33
32
31
30
29
28
27
26
25
470
24
23
R3
22
GND
GND
BLUE
LED1
GNDREG1117
2
1
PIN
7
6
R2
5
4
27k
3
2
1
CON
R1
GND
GND
IC1
3
VIN
VOUT
C2
100nF 10uF
GND
1
GND
2
GND
HC-06-M_MODULE
HC-06
1
TX
2
RX
3
CTS
4
RTS
5
PCM_CLK
47k
6
PCM_OUT
7
PCM_IN
8
PCN_SYNC
9
AIO0
10
AIO1
11
RST
12
3V3
13
GND
C1 C3
GND
NC14VBUSD-15CSB16MOSI17MISO18CLK19VBUSD+20GND1
100nF
GND
21
PIO11
PIO10
PIO9
PIO8
PIO7
PIO6
PIO5
PIO4
PIO3
PIO2
PIO1
PIO0
GND2
34
33
32
31
30
S1
29
28
27
3 1
26
25
24
23
22
GND
GND
470
24
R3
BLUE
LED1
GNDREG1117
GND
- 36 -
 Loading...
Loading...