

Page 1

NÁVOD K MONTÁŽI A K OBSLUZE
Obsah
Strana
1. Úvod................................................................................................................. 4
Stavebnice robota ROBOT ARM HOBBY (model RA2-HOBBY)
(Robotická ruka)
Obj. č.: 19 15 34
2. Bezpečnostní předpisy................................................................................... 4
Manipulace s bateriemi a akumulátory.........................................................................................4
3. Rozsah dodávky.............................................................................................. 4
4. Nástroje, které budete potřebovat k sestavení robota................................. 5
5. Několik poznámek k použití (utahování) samořezných šroubků.................5
6. Několik poznámek k použití (utahování) zajišťovacích matic...................... 6
7. Seznam součástí stavebnice robota.............................................................. 7
8. Popis sestavení robota................................................................................. 11
a) Montáž hlavního spodního servopohonu (maxi) na základní desku ......................................11
b) Montáž ovládací páčky se 4 rameny hlavního dolního servopohonu (maxi)..........................12
c) Montáž držáku horního servopohonu (maxi)..........................................................................13
d) Dokončení montáže držáku horního servopohonu (maxi) .....................................................14
e) Montáž horního servopohonu (maxi) .....................................................................................15
f) Montáž krytu horního servopohonu (maxi) .............................................................................16
g) Montáž ovládací páčky se 4 rameny horního servopohonu...................................................17
h) Montáž spojovacího dílu servopohonů ..................................................................................18
i) Montáž dvojitého servopohonu (dvou malých servopohonů „mini“)........................................19
j) Dokončení montáže dvojitého servopohonu (mini) a jeho držáku...........................................21
k) Montáž servopohonu zápěstního kloubu (mini) .....................................................................22
l) Montáž krytu servopohonu zápěstního kloubu........................................................................23
m) Dokončení montáže krytu zápěstního kloubu.......................................................................24
n) Montáž držáku servopohonu prstu (chapadla) robota ...........................................................25
o) Montáž doplňků držáku servopohonu prstu (chapadla) robota..............................................26
p) Montáž servopohonu prstu (chapadla) robota (mini) .............................................................27
q) Dokončení montáže servopohonu prstu (chapadla) robota ...................................................28
r) Montáže prstu (chapadla) robota............................................................................................29
s) Dokončení montáže ruky (paže) robota.................................................................................30
t) Montáž kovového podstavce robota a desky se součástkami ................................................31
u) Dokončení montáže robota („robotické“ ruky)........................................................................33
9. Součástky a konektory na desce s tištěnými spoji..................................... 34
10. Napájení robota, jeho zapnutí a vypnutí.................................................... 35
11. Instalace software na osobním počítači (notebooku) ..............................36
a) Všeobecné informace k provedení instalace software...........................................................36
b) Instalace software WinAVR...................................................................................................36
c) Software RobotLoader...........................................................................................................37
d) Ukázkové programy ovládání robota (příklady ovládání robota)............................................37
2
Page 2

12. Stažení programů do mikroprocesoru robota a jeho základní ovládání. 38
12.1 Instalace ovladače USB (programovacího adaptéru) ........................................................39
12.2 Otestování správné funkce programovacího adaptéru (interface USB).............................39
12.2.1 Volba USB portu (programovacího adaptéru) ............................................................................................40
12.2.2 Otevření USB portu (programovacího adaptéru) .......................................................................................40
12.3 Otestování správné funkce robota (SELFTEST)................................................................41
12.4 Kalibrace servopohonů robota...........................................................................................43
12.5 Otestování k robotu přiložené klávesnice k jeho ovládání .................................................46
13. Software RACS k ovládání robota.............................................................. 47
13.1 Návod k použití software RACS (základní informace) .......................................................48
13.2 Navázání spojení software RACS (počítače) s robotem....................................................48
13.3 Automatizované ovládání poloh servopohonů v programu RACS .....................................50
14. Naprogramování robota v programovacím jazyce „C“.............................51
14.1 Napsání programu, sestavení zdrojového textu v programovacím jazyce „C“...................51
14.2 Otevření ukázkového projektu a jeho kompilace ...............................................................53
15. Několik poznámek na závěr........................................................................57
3
1. Úvod
Vážená zákaznice, vážený zákazníku,
děkujeme Vám za Vaši důvěru a za nákup této stavebnice robotické ruky (dále jen robot), na které (na
kterém) se naučíte základy elektroniky, mechaniky a programování. Tento robot je řízen výkonným
mikroprocesorem „ATMEGA64“, který můžete naprogramovat programovacím jazykem „C“ v „Open
Source Tools“ na osobním počítači (notebooku). Vlastní ovládací programy robota můžete poté stáhnout
do jeho mikroprocesoru z osobního počítače pomocí přiloženého USB kabelu. Tohoto robota můžete
poté ovládat pomocí klávesnice osobního počítače (notebooku) nebo pomocí přiložené klávesnice.
Vstupy a výstupy jakož i sběrnici (bus) „I2C“, kterými je vybavena deska s tištěnými spoji a se
součástkami, můžete použít k připojení dalších modulů, které rozšíří „umělou inteligenci“ robota, aby
robot dokázal reagovat na podněty ze svého okolí (například na dotyk prstu ruky, na různé zvuky, na
hlasové příkazy, aby tento robot „slyšel“ a „viděl“, co se děje v jeho blízkosti atd.). Kromě toho dokáže
tento robot komunikovat i s jinými podobnými roboty (pomocí interface „I2C“).
Jako s opravdovou automatickou rukou umístíte s tímto robotem například na správné místo součásti
karoserie modelu automobilu a provedete s ním další práce.
2. Bezpečnostní předpisy
• Nenamáčejte tohoto robota a jeho součásti do vody nebo do jiných kapalin.
• Dejte pozor na to, aby Vám tento robot nespadl například se stolu na podlahu. Neházejte tímto
robotem, netřeste jím a netlačte na jeho součásti násilím. Mohlo by tímto dojít k jeho poškození a Vy
byste nemohli uplatnit žádné nároky, které by jinak vyplývaly ze záruky robota.
Manipulace s bateriemi a akumulátory
Abyste zabránili poškození robota (baterie mohou vytéci), odpojte od něho baterie,
pokud nebudete robota delší dobu používat.
Nepoužívejte k napájení robota současně baterie nebo akumulátory různých výrobců.
Dejte pozor nato, že obyčejné nenabíjecí baterie (alkalické, zinko-uhlíkové) nesmějí být
zkratovány, odhazovány do ohně nebo nabíjeny! V takovýchto případech hrozí
nebezpečí exploze!
Vybité baterie (již nepoužitelné akumulátory) jsou zvláštním odpadem a nepatří
v žádném případě do normálního domovního odpadu a musí být s nimi zacházeno tak,
aby nedocházelo k poškození životního prostředí! K těmto účelům (k jejich likvidaci)
slouží speciální sběrné nádoby v prodejnách s elektrospotřebiči nebo ve sběrných
surovinách!
Šetřete životní prostředí! Přispějte k jeho ochraně!
3. Rozsah dodávky
• Kompletní stavebnice robota (mechanické součásti, elektronika a nástroje)
• Kabel s USB konektory,
• Kabel k připojení přiložené klávesnice
• Kabel k provedení naprogramování robota (k připojení k programovacímu adaptéru)
• Kompaktní disk (CD-ROM) se software a s návody k použití
4
Page 3

4. Nástroje, které budete potřebovat k sestavení robota
Ploché kleště (kombinačky)
Štípací kleště
Sada vhodných křížových a plochých šroubováků
Křížový šroubovák (součást dodávky)
Dvojitý vidlicový klíč na matice M2 a M3 (součást dodávky)
5. Několik poznámek k použití (utahování) samořezných šroubků
Samořezné šroubky se podobají vrutům (šroubkům do dřeva). Otáčením těchto šroubků vyřezávají jejich
závity otvor ve spojovaném materiálu, který se postupně rozšiřuje a šroubek se do spojovaného
materiálu zavrtává. Tyto samořezné šroubky se používají ke spojování kovových plechů nebo součástí
z měkkých umělých hmot (plastů). Z tohoto důvodu mají závity těchto šroubků větší vzdálenost od sebe,
jsou vyšší a tyto šroubky mají dále ostřejší hroty než vruty nebo jiné šroubky s normálními závity.
Některé druhy samořezných šroubků mají na svém hrotu (na špičce) drážky (výřezy), které usnadňují
zavrtávání (zařezávání) – viz výše uvedené vyobrazení.
Při šroubování a utahování těchto šroubků postupujte následujícím způsobem:
1. Zatlačte hrot šroubku na místo, do kterého budete chtít šroubek zašroubovat
(případně umístěte hrot šroubku do předem vyvrtaného malého otvoru). Poté
přiložte do drážek na hlavičce šroubku vhodný šroubovák a otočte šroubkem
doprava, abyste zařízli jeho závit (nebo několik jeho závitů) do materiálu (v
našem případě se u této stavebnice robota jedná o umělou hmotu).
2. Nyní šroubek poněkud povolte jeho otočením doleva.
3. Nakonec šroubek zcela utáhněte jeho otáčením (šroubováním) doprava.
Důležité upozornění:
Pokud budete tyto samořezné šroubky často povolovat a znovu utahovat, začne se
zvětšovat (rozšiřovat) šroubkem vyvrtaný otvor, což způsobí, že se začne šroubek
viklat (protáčet) a nebudete jej moci pevně utáhnout.
5
Neutahujte šroubky příliš silně. Součásti robota z umělé hmoty by mohly prasknout!
6. Několik poznámek k použití (utahování) zajišťovacích matic
Zajišťovací matice M2 a M3 můžete při utahování šroubků přidržet plochými kleštěmi (kombinačkami)
nebo můžete k tomuto účelu použit ke stavebnici přiložený dvojitý vidlicový klíč.
6
Page 4

7. Seznam součástí stavebnice robota
2 velké servopohony (elektrické motorky, maxi)
4 malé servopohony (elektrické motorky, mini)
Klávesnice s tlačítky k ovládání robota Kabel s USB konektory a CD se software
4 kotouče s hřídelí (s osičkou) 4 kotouče servopohonů
2 ovládací páčky servopohonů se 4 rameny
2 distanční držáky horního servopohonu (maxi) Kryt držáku velkého servopohomu (maxi)
4 rozpěrné (distanční) šrouby M3 x 6
Kryt dvojitého držáku servopohonů 4 rozpěrné (distanční) šrouby M3 x 30
Spirála k čistému položení spojovacího kabelu servopohonů
Držák servopohonu prstu (chapadla) robota Držák servopohonu zápěstního kloubu robota
Držák velkého servopohonu (maxi) Dvojitý držák servopohonů
7
8
Page 5

Špička prstu (horní část chapadla) robota Základní deska servopohonů
Kryt držáku servopohonu zápěstního kloubu Spojovací díl servopohonů
Kabel k provedení naprogramování robota a kabel
k připojení klávesnice (2 kusy)
Malý samořezný šroubek M2 x 6 (18 kusů) Samořezný šroubek M2.3 x 8 (4 kusy)
Deska se součástkami Kabel k propojení servopohonů
Samořezný šroubek M2.3 x 6 (10 kusů) Samořezný šroubek M2.6 x 6 (8 kusů)
Samořezný šroubek M3.5 x 8 (4 kusy) Šroubek M3 x 6 (4 kusy)
Adaptér k provedení naprogramování robota Podstavec robota
Šroubek M3 x 8 (8 kusů) Šroubek M3 x 10 (2 kusy)
9
10
Matice M3 (4 kusy) Zajišťovací matice M3 (4 kusy)
Page 6

8. Popis sestavení robota
Sestavte postupně robota podle následujících kapitol a vyobrazení.
a) Montáž hlavního spodního servopohonu (maxi) na základní desku
K provedení této montáže budete potřebovat následující součásti:
4 šroubky s normálním závitem M3 x 8.
A
Velký dolní servopohon (maxi).
B
Základní deska.
C
4 matice M3.
D
b) Montáž ovládací páčky se 4 rameny hlavního dolního servopohonu (maxi)
K provedení této montáže budete potřebovat následující součásti:
Samořezný šroubek M2.3 x 6.
A
Ovládací páčka se 4 rameny.
B
Základní deska s namontovaným dolním hlavním servopohonem.
C
11
12
Page 7

c) Montáž držáku horního servopohonu (maxi)
K provedení této montáže budete potřebovat následující součásti:
4 malé samořezné šroubky M2 x 6.
A
Držák horního velkého servopohonu (maxi).
B
Základní deska s namontovaným dolním hlavním servopohonem.
C
d) Dokončení montáže držáku horního servopohonu (maxi)
K provedení této montáže budete potřebovat následující součásti:
Šroubek s normálním závitem M3 x 8.
A
Kotouč s hřídelí (s osičkou).
B
Držák horního servopohonu (maxi).
C
Zajišťovací matice M3.
D
Základní deska s namontovaným dolním hlavním servopohonem.
E
13
14
Page 8

e) Montáž horního servopohonu (maxi)
K provedení této montáže budete potřebovat následující součásti:
2 distanční držáky horního servopohonu.
A
Servopohon (maxi).
B
4 samořezné šroubky M3.5 x 8.
C
Základní deska s namontovaným dolním hlavním servopohonem.
D
f) Montáž krytu horního servopohonu (maxi)
K provedení této montáže budete potřebovat následující součásti:
2 samořezné šroubky M3 x 10.
A
Kryt horního (velkého) servopohonu (maxi).
B
Základní deska s namontovaným dolním hlavním servopohonem.
C
15
16
Page 9

g) Montáž ovládací páčky se 4 rameny horního servopohonu
K provedení této montáže budete potřebovat následující součásti:
Ovládací páčka se 4 rameny.
A
Samořezný šroubek M2.3 x 6.
B
Základní deska s namontovaným dolním hlavním servopohonem.
C
h) Montáž spojovacího dílu servopohonů
K provedení této montáže budete potřebovat následující součásti:
Spojovací díl (spojka) servopohonů.
A
2 samořezné šroubky M2.3 x 6.
B
2 samořezné šroubky M2 x 6.
C
Základní deska s namontovaným dolním hlavním servopohonem.
D
Zkontrolujte, zda lze touto spojkou volně otáčet o 180 °.
E
17
18
Page 10

i) Montáž dvojitého servopohonu (dvou malých servopohonů „mini“)
K provedení této montáže budete potřebovat následující součásti:
2 šroubky s normálním závitem M3 x 8.
A
2 kotouče s hřídelí (a osičkou).
B
2 zajišťovací matice M3.
C
Dvojitý držák servopohonů.
D
3 samořezné šroubky M2.3 x 6.
G
Kryt držáku dvojitého servopohonu.
H
Sestavený držák se 2 servopohony (mini).
I
4 samořezné šroubky M2.6 x 6.
E
2 malé servopohony (mini).
F
19
2 kotouče servopohonů.
J
2 samořezné šroubky M2 x 6.
K
Sestavený držák se 2 servopohony (mini).
L
20
Page 11

j) Dokončení montáže dvojitého servopohonu (mini) a jeho držáku
K provedení této montáže budete potřebovat následující součásti:
2 samořezné šroubky M2 x 6.
A
2 samořezné šroubky M2.3 x 6.
B
Základní deska s namontovaným dolním hlavním servopohonem.
C
2 zajišťovací matice M3.
C
k) Montáž servopohonu zápěstního kloubu (mini)
K provedení této montáže budete potřebovat následující součásti:
2 samořezné šroubky M2.6 x 6.
A
Malý servopohon (mini).
B
Držák servopohonu.
C
Zkontrolujte, zda lze dvojitým servopohonem volně otáčet o 180 °.
21
22
Page 12

l) Montáž krytu servopohonu zápěstního kloubu
K provedení této montáže budete potřebovat následující součásti:
Sestavené zápěstí (sestavený zápěstní kloub) se servopohonem (mini).
A
Kryt držáku servopohonu zápěstního kloubu.
B
Samořezný šroubek M2.3 x 8.
C
m) Dokončení montáže krytu zápěstního kloubu
K provedení této montáže budete potřebovat následující součásti:
Sestavené zápěstí (sestavený zápěstní kloub) se servopohonem (mini) a s krytem.
A
Kotouč servopohonu.
B
Samořezný šroubek M2 x 6.
C
23
24
Page 13

n) Montáž držáku servopohonu prstu (chapadla) robota
K provedení této montáže budete potřebovat následující součásti:
Držák servopohonu prstu (chapadla).
A
2 samořezné šroubky M2 x 6.
B
Kompletně sestavené zápěstí (sestavený zápěstní kloub) se servopohonem a s krytem.
C
o) Montáž doplňků držáku servopohonu prstu (chapadla) robota
K provedení této montáže budete potřebovat následující součásti:
Kompletně sestavené zápěstí (sestavený zápěstní kloub) se servopohonem a s krytem.
A
Držák servopohonu prstu (chapadla).
B
Zajišťovací matice M3.
C
Kotouč servopohonu.
D
Šroubek s normálním závitem M3 x 8.
E
25
Zkontrolujte, zda lze zápěstím robota (jeho zápěstním kloubem volně otáčet o 180 °.
26
Page 14

p) Montáž servopohonu prstu (chapadla) robota (mini)
K provedení této montáže budete potřebovat následující součásti:
2 samořezné šroubky M2.6 x 6. Držák servopohonu prstu (chapadla).
A
Malý servopohon (mini).
B
Kompletně sestavené zápěstí (sestavený zápěstní kloub) se servopohonem a s krytem.
q) Dokončení montáže servopohonu prstu (chapadla) robota
K provedení této montáže budete potřebovat následující součásti:
Kompletně sestavené zápěstí (sestavený zápěstní kloub) se servopohonem a s krytem.
A
Samořezný šroubek M2 x 6 a kotouč servopohonu.
B
27
28
Page 15

r) Montáže prstu (chapadla) robota
K provedení této montáže budete potřebovat následující součásti:
2 samořezné šroubky M2.3 x 6.
A
Kompletně sestavené zápěstí (sestavený zápěstní kloub) se servopohonem a s krytem.
B
2 samořezné šroubky M2 x 6
C
Prst (horní část chapadla).
D
s) Dokončení montáže ruky (paže) robota
K provedení této montáže budete potřebovat následující součásti:
Kompletní prst (chapadlo) robota a kompletně sestavené zápěstí (sestavený zápěstní kloub) se
A
servopohonem a s krytem.
2 samořezné šroubky M2 x 6.
B
2 samořezné šroubky M2.3 x 6.
C
Spodní smontovaný díl robota.
D
29
30
Page 16

t) Montáž kovového podstavce robota a desky se součástkami
K provedení této montáže budete potřebovat následující součásti:
4 rozpěrné (distanční) šrouby M3 x 6.
A
Kovový podstavec robota.
B
4 rozpěrné (distanční) šrouby M3 x 30.
C
Deska a elektronickými součástkami.
D
Kovový podstavec robota.
B
31
32
Page 17

u) Dokončení montáže robota („robotické“ ruky)
K provedení této montáže budete potřebovat následující součásti:
4 šroubky M3 x 6 s normálním závitem.
A
9. Součástky a konektory na desce s tištěnými spoji
33
Propojte přiloženým spojovacím produžovacím kabelem všechny servopohony robota (celkem 6 kusů).
Použijte k km zajištění propojovacího kabelu ke stavebnici přiloženou spirálu.
Poznámka: Popis jednotlivých konektorů a spínačů na této desce uvádíme v následujících kapitolách.
34
Page 18

10. Napájení robota, jeho zapnutí a vypnutí
Tohoto robota můžete napájet dvěma následujícími způsoby:
A Ke kontaktům „Battery“ (+) a (–) na desce se součástkami robota můžete připojit správnou
polaritou zdroj stejnosměrného napětí (krabičku s bateriemi nebo s akumulátory), jehož napětí
nesmí být vyšší než „5,5 V“ !!!.
Budete-li chtít připojit k tomuto napěťovému vstupu například blok alkalických baterií velikosti „D“
(velké monočlánky s jmenovitým napětím 1,5 V, což představuje celkové napájecí napětí 6 V),
zapojte do série s tímto zdrojem napětí vhodnou křemíkovou diodu v propustném směru, která
sníží v tomto případě napájecí napětí na hodnotu 5,5 V.
Připojte vývod plus (+) z bloku baterií na anodu křemíkové diody a katodu diody připojte k plus (+)
kontaktu „Battery“ na desce se součástkami. K minus (–) kontaktu „Battery“ na desce se
součástkami připojte vývod minus (–) z bloku baterií.
Jako nejlepší řešení k napájení robota tímto způsobem Vám doporučujeme použít
akumulátorovou baterii (blok akumulátorů) se 4 akumulátory NiMH (NiCd) velikosti „D“, které mají
jmenovité napětí 1,2 V, což představuje celkové napájecí napětí 4,8 V. Tyto akumulátory budete
moci nabíjet ve vhodné nabíječce. V tomto případě nemusíte použít žádnou křemíkovou diodu.
Poznámka: Program „RobotLoader“, který později zobrazíte na monitoru osobního počítače
nebo notebooku, dokáže změřit maximální napájecí napětí 5,1 V.
S výhodou můžete napájet robota externím síťovým napájecím zdrojem (230 V AC) se
B
stabilizovaným výstupním stejnosměrným napětím 7 V až 12 V, který dokáže dodávat proud 2 A.
Kontakty (konektor) výstupu tohoto napájecího zdroje připojte ke kontaktům „DC 9 V power“.
Po připojení napájení a po zapnutí robota posuvným přepínačem „SW1“ na desce se součástkami do
polohy „ON“ se poněkud pohnou všechny servopohony robota a na desce se součástkami se rozsvítí
žlutá kontrolka (svítivá dioda) „LED1“. Poloha posuvného přepínače „SW1“ „OFF“ na desce se
součástkami robota znamená vypnutí robota. Nyní můžete přikročit k nainstalování software a k
naprogramování robota (viz následující kapitoly).
35
11. Instalace software na osobním počítači (notebooku)
Důležité upozornění: V následujících kapitolách popisujeme pouze požití operačního systému
Windows (XP, W7, W8). Použití operačního systému LINUX naleznete v originálním návodu k obsluze.
a) Všeobecné informace k provedení instalace software
Zapněte svůj osobní počítač (notebook), počkejte na spuštění operačního systému Windows a vložte
(zasuňte) do příslušné mechaniky na svém osobním počítači (notebooku) ke stavebnici přiložený
kompaktní disk (CD). V v normálním případě se na monitoru počítače zobrazí instalační menu, které se
nachází na tomto kompaktním disku.
Kromě toho můžete obvyklým způsobem pomocí manažeru souborů v hlavním adresáři (v hlavní složce
souborů) na CD otevřít soubor „start.htm“ v internetovém prohlížeči, například ve „Firefox“.
Pokud nemáte na svém osobním počítači (notebooku) nainstalován ještě žádný internetový prohlížeč
(například „Internet Explorer“), naleznete nstalační soubory pro internetový prohlížeč „Firefox“ na
přiloženém CD v jeho adresáři (ve složce souborů): < Jednotka CD-ROM >:\Software\Firefox.
Po volbě jazyka komunikace naleznete v menu na CD originální návod k obsluze robota (tento návod),
mnoho informací, datových listů a fotografií. K nejdůležitějšímu menu na tomto CD patří menu (adresář)
„Software“, které (který) obsahuje všechny potřebné nástroje (tools), USB ovladač a ukázkové
programy se zdrojovým kódem k ovládání robota.
V závislosti na bezpečnostních nastaveních v příslušném internetovém prohlížeči můžete spustit
instalaci příslušných programů přímo z přiloženého CD!
b) Instalace software WinAVR
Software „WinAVR“ je soubor důležitých potřebných programů k vytvoření aplikací pro mikroprocesor
AVR v programovacím jazyce „C“ k ovládání robota. Tento software je volně přístupný na internetu a
nejnovější (aktuální) verze tohoto software si můžete bezplatně stáhnout do svého počítače z následující
internetové (webové) adresy: http://winavr.sourceforge.net/.
Tento software si můžete do svého počítače nainstalovat také z přiloženého CD kliknutím myší na
nabídku „WinAVR“.
< Jednotka CD-ROM >:\Software\AVR-GCC\Windows\ WinAVR\
Instalace tohoto programu (software) do osobního pčítače (notebooku) je velice jednoduchá. Klikejte
postupně stále myší na nabídku „Weiter“ (Další).
Máte-li na svém počítači nainstalován operační systém Windows Vista, Windows 7 nebo 8 musíte
v každém případě použít nejnovější verzi software „WinAVR“ (verze software, která se nachází na
přiloženém CD, nemusí u výše uvedených operačních systémů bezvadně fungovat). Před každou
instalací novější verze proveďte nejprve odinstalování starší verze software „WinAVR“.
Dále budete potřebovat nejnovější verzi aplikace „Java“ (minimálně verzi Java 6). Nejnovější verzi
aplikace „Java“ si můžete stáhnout do svého počítače z internetové adresy „http://www.java.com“
nebo „http://java.sun.com“.
Verzi Java 6 naleznete také na přiloženém CD v následujícím adresáři.
<CD-ROM >:\Software\Java\JRE6\Windows\
36
Page 19

c) Software RobotLoader
Tato aplikace byla vyvinuta ke stažení nových vytvořených programů do mikroprocesoru robota
(programů k jeho ovládání). Tento program nemusíte instalovat. Zkopírujte tento program do libovolného
adresáře (do libovolné složky souborů) na pevném disku svého počítače (notebooku) z přiloženého CD.
Program „RobotLoader“ je na tomto CD uložen v komprimovaném souboru „RobotLoader.zip“.
<CD-ROM >:\Software\RobotLoader\RobotLoader.zip
Po zkopírování souboru „RobotLoader.zip“ do počítače tento soubor dekomprimujte (rozbalte) do
nového adresáře (do nové složky), například do „C:\Programy\RobotLoader“. V tomto adresáři
s rozbalenými soubory naleznete soubor „RobotLoader.exe“. Dvojím kliknutím myší na tento soubor po
jeho nalezení spustíte program „RobotLoader“.
Vlastní program „RobotLoader“ se nachází v archivu Java, ve kterém jej můžete také alternativně
spustit (otevřít) v příkazovém řádku
java -Djava.library.path=”.\lib” -jar RobotLoader_lib.jar
V případě potřeby si tento program uložte známým způsobem na plochu obrazovky počítače jako ikonu.
d) Ukázkové programy ovládání robota (příklady ovládání robota)
Ukázkové programy ovládání robota se nacházejí na přiloženém CD v komprimovaném souboru
s příponou „.zip“.
<CD-ROM-Laufwerk>:\Software\Robot Arm Examples\Robot ArmExamples [MINI].zip
Rozbalte (dekomprimujte) tento soubor do vhodného adresáře (do vhodné složky) na pevném disku
svého počítače, například do adresáře nebo podadresáře „Robot Arm\Examples\“.
37
12. Stažení programů do mikroprocesoru robota a jeho základní ovládání
K tomuto účelu budete potřebovat programovací adaptér s konektorem USB (viz následující vyobrazení)
a výše uvedený software „RobotLoader“.
Tento adaptér propojte přiloženým kabelem s volným USB konektorem (portem) na osobním počítači
(notebooku) a přiloženým kabelem s konektorem „Prog/Uart“ na desce se součástkami robota. Každé
stažení nového programu do mikroprocesoru robota přepíše automaticky dřívější uložený program.
Software „RobotLoader“
38
Page 20

12.1 Instalace ovladače USB (programovacího adaptéru)
Dříve než přistoupíte k naprogramování robota, musíte si do svého osobního počítače (notebooku)
nainstalovat ovladač USB (ovladač programovacího adaptéru, interface USB). Toto proveďte před
prvním připojením robota k osobnímu počítači (notebooku). Nepřipojujte zatím programovací adaptér
k osobnímu počítači (notebooku).
Ovladač USB (program „CDM“) se nachází na přiloženém CD v souboru „CDM_Setup.exe“.
<CD-ROM >:\Software\USB_DRIVER\Win2k_XP\CDM_Setup.exe
Po instalaci tohoto ovladače, respektive programu „CDM“, můžete programovací adaptér připojit
přiloženým USB kabelem k osobnímu počítači (notebooku).
Pokud jste již předtím připojili programovací adaptér k PC, pak po vyžádání instalace příslušného
ovladače, použijte následující adresář na přiloženém CD.
<CD-ROM >:\Software\USB_DRIVER\Win2k_XP\FTDI_CDM2\
12.2 Otestování správné funkce programovacího adaptéru (interface USB)
Propojte programovací adaptér přiloženým kabelem s volným USB konektorem (portem) na osobním
počítači (notebooku) a poté s konektorem „Prog/Uart“ na desce se součástkami robota.
Robot musí zůstat vypnutý!
Nyní spusťte (otevřete) výše uvedeným způsobem program „RobotLoader“.
Zvolte menu „Options“ („Preferences“) a poté v nabídce „Language / Sprache“ zvolte jazyk
komunikace s programem: „German“ (Němčina) nebo „English“ (Angličtina). Zvolený jazyk potvrďte
kliknutím myší na nabídku „OK“.
Po zvolení jazyka, pokud budete chtít v programu „RobotLoader“ provést další změny, musíte provést
nové spuštění programu.
12.2.1 Volba USB portu (programovacího adaptéru)
Nyní můžete zvolit USB port (Port wählen). Pokud jste nepřipojili k PC žádné další zařízení USB (žádný
sériový adaptér s ovladačem FRCI), uvidíte v příslušném okně (v seznamu portů) na monitoru PC pouze
jeden port. Tento port zvolte (otevřením) kliknutím myší na nabídku „Verbinden“ („Connect“) (Spojit) –
viz odstavec „12.2.2 Otevření USB portu (programovacího adaptéru)“.
Pokud se v tomto seznamu ve výše uvedeném okně zobrazí více portů, pak bude mít příslušný
(správný) port název „Robot USB Interface“ nebo „FT232R USB UART“. Jestliže se v tomto seznamu
ve výše uvedeném okně nezobrazí žádný název portu, můžete provést aktualizaci seznamu portů
v menu „RobotLoader → Portliste aktualisieren“ („RobotLoader → Refresh Portlist“).
12.2.2 Otevření USB portu (programovacího adaptéru)
Nyní zvolte tento USB port kliknutím myší na nabídku „Verbinden“ („Connect“) (Spojit).
Program „RobotLoader“ provede nyní test, zda PC komunikuje s programovacím adaptérem. Bude-li
vše v pořádku, zobrazí se ve stavovém řádku následující zpráva: “Connected to: Robot Arm ...”
s informací o naměřené hodnotě napětí napájecího zdroje robota.
Poznámka: Program „RobotLoader“ dokáže změřit maximální napájecí napětí robota 5,1 V.
Změří-li tento program nižší napětí napájecího zdroje robota než 4,4 V, zobrazí se v příslušném okně na
monitoru PC varování. V tomto případě byste měli vyměnit baterie v napájecím zdroji nebo provést dobití
akumulátorů v napájecím zdroji (při nižším napětí než 4,0 V).
39
40
Page 21

12.3 Otestování správné funkce robota (SELFTEST)
Jakmile zapnete robota posuvným přepínačem „SW1“ na desce se součástkami jeho přepnutím do
polohy „ON“, rozsvítí se na desce se součástkami se žlutá kontrolka (svítivá dioda) „LED1“. Jakmile
spustíte nějaký program ovládání robota, rozsvítí se kontrolka provozního režimu robota červenou
barvou a v případě stavu „Fertig“ (Hotovo) začne tato kontrolka svítit zelenou barvou.
Pokud bude vše v pořádku, můžete spustit krátký program automatického otestování správné funkce
robota „Selftest.hex“. Klikněte myší na nabídku „Hinzufügen“ („Add“) (Přidat, vložit) v příslušném okně
programu „RobotLoader“ a poté zvolte v adresáři (ve složce) ukázkových programů
„RobotArmExamples [MINI]“ soubor (program) „Example_11_Selftest\RobotArm_Selftest.hex“.
Tento testovací program „Selftest.hex“ je uložen v tomto adresáři v hexadecimální podobě a uloží se do
příslušného seznamu, do kterého můžete později přidat vlastní ovládací programy robota jako
hexadecimální soubory.
Nyní můžete začít ovládat robota dalšími ukázkovými programy (Examples) nebo začít s vytvářením
vlastních ovládacích programů. Zvolte za tímto účelem v seznamu soubor „RobotArm_Selftest.hex“
(testovací program) nebo vlastní prováděcí program a klikněte myší na nabídku „Upload!“
Zvolený program se po této akci zkopíruje (přenese) do mikroprocesoru robota „ATMEGA64“. Toto by
nemělo trvat déle než několik sekund (maximálně 5 sekund u automatického testovacího programu).
Nyní zvolte kliknutím myší nabídku „Terminal“, která se nachází na spodní liště okna programu.
Po zobrazení výše uvedeného okna můžete provést automatické otestování robota (Selftest) a kalibraci
robota (Calibrate Robotarm). Program automatického otestování robota spustíte stisknutím tlačítka
„Start Stop Reset“ na desce se součástkami robota. Později můžete toto provést také alternativně
v programu „RobotLoader“ kliknutím myší na nabídku „Start“ nebo stisknutím kombinace kláves
V tomto seznamu můžete tyto soubory (ovládací programy v hexadecimální podobě) přehledně setřídit.
Po ukončení programu „RobotLoader“ dojde vždy k aktualizaci tohoto seznamu a k jeho uložení do
„paměti“ programu „RobotLoader“.
Budete-li zpracovávat nějaký program, stačí, když jednou přidáte (vložíte) požadovaný hexadecimální
soubor do tohoto seznamu a zvolíte jej – viz „Hexfile hinzufügen / auswählen“.
Poté můžete okamžitě po každém novém překladu (po nové kompilaci) ovládacího programu stáhnout
nový program do mikroprocesoru robota a spustit jej (například stisknutím kombinace kláves „Ctrl+D“
nebo „Ctrl+Y“ na klávesnici počítače nebo notebooku).
41
„Ctrl+S“ na klávesnici počítače (notebooku).
42
Page 22
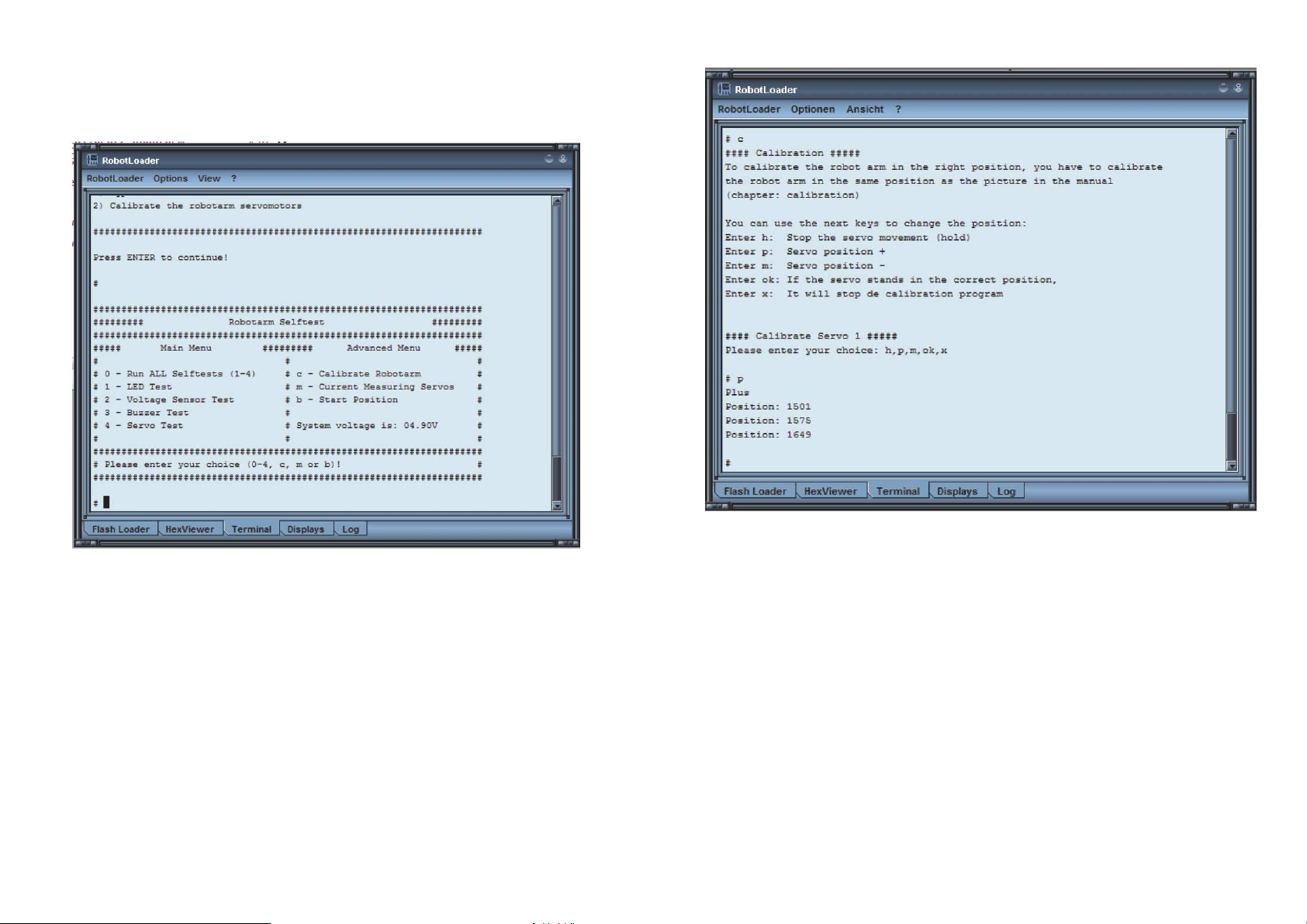
12.4 Kalibrace servopohonů robota
Kalibrační program slouží k nastavení správné (výchozí) polohy všech servopohonů robota.
Klikněte myší na nabídku „Hinzufügen“ („Add“) (Přidat, vložit) v příslušném okně programu
„RobotLoader“ a poté zvolte soubor „RobotArmExamples [MINI]“ a dále soubor (program)
„Example_11_Selftest\RobotArm_Selftest.hex“ v adresáři (ve složce) ukázkových programů.
Nyní nastavte rukou všechny servopohony robota do střední polohy (viz vyobrazení na následující
Po zobrazení výše uvedeného okna zvolte nabídku „C“ (Calibrate Robotarm). Tím spustíte kalibrační
program k nastavení správné (výchozí) polohy všech šesti servopohonů robota.
43
stránce). Chapadlo robota (servo 1) by mělo zůstat téměř zcela uzavřeno.
Po ukončení kalibrace servopohonů robota proveďte znovu automatické otestování robota (Selftest).
Výsledky ukončené kalibrace robota se uloží do mikroprocesoru robota „ATMEGA64“.
44
Page 23

12.5 Otestování k robotu přiložené klávesnice k jeho ovládání
K této stavebnici robota přikládáme malou klávesnici s 10 ovládacími klávesami a propojovací kabel.
Šest těchto kláves „SERVO1“ až „SERVO6“ se zdvojenými tlačítky „DWN“ (Dolů) a „UP“ (Nahoru) na
této klávesnici můžete použít přímo k ovládání všech šesti servopohonů robota vhodným programem
v hexadecimální podobě, který přenesete (uložíte) do mikroprocesoru robota. Jedná se celkem o
dvanáct ovládacích tlačítek.
Další čtyři samostatné klávesy „TANK_LEFT“, „TANK_LEFT“, „TANK_FNT“ a „TANK_BCK“ slouží
k pozdějšímu rozšíření ovládání robota.
Propojte způsobem zobrazeným na následujícím vyobrazení přiloženým propojovacím kabelem
klávesnici s konektorem „EXT Pad“ na desce se součástkami robota.
Klikněte myší po spuštění programu „RobotLoader“ dole v zobrazeném okně na nabídku „Hinzufügen“
(„Add“) (Přidat, vložit) a poté zvolte soubor „RobotArmExample“ a dále soubor (program)
„RobotArm_Key_Board.hex“ v adresáři (ve složce) ukázkových programů.
Zvolte v zobrazeném seznamu znovu soubor (program) „RobotArm_Key_Board.hex“ a klikněte myší
na nabídku „Upload!“ Nyní můžete vyzkoušet ovládání robota tlačítky (klávesami) na klávesnici.
Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Servo 6
Ovládání prstu (rozevírání a zavírání chapadla) robota
Otáčení zápěstním kloubem
Ohýbání zápěstí
Ovládání loketního kloubu
Ovládání ramena
Základní (hlavní) servopohon (otáčení robota)
45
46
Page 24

13. Software RACS k ovládání robota
Software „RACS“ (Robot Arm Control Software) patří nejjednodušším metodám naprogramování a
ovládání robota. K tomuto účelu budete potřebovat programovací adaptér s konektorem USB a výše
uvedený software „RobotLoader“.
Po provedení všech propojení spusťte na svém počítači (notebooku) program „RobotLoader“. Na
monitoru počítače se objeví následující zobrazení (základní okno programu „RobotLoader“).
13.1 Návod k použití software RACS (základní informace)
Jak jsme již uvedli výše, slouží tento software k jednoduchému ovládání robota myší osobního počítače
(notebooku). Aktuální polohy jednotlivých servopohonů lze uložit do okna seznamů, ve kterém je můžete
změnit nebo vymazat.
Důležité upozornění!
Elektronika tohoto robota kontroluje proud protékající jednotlivými elektrickými motorky
servopohonů. Dojde-li k překročení mezní hodnoty tohoto proudu, například při kolizi
robota nebo při přetížení servopohonu, začnou na monitoru osobního počítače
(notebooku) v otevřeném okně software „RACS“ blikat textové informace.
V tomto případě, jakmile začnou na monitoru PC blikat textové informace (překročení
maximálně dovolených proudů elektrických motorků servopohonů robota), musíte
provést velmi rychle změnu polohy všech šesti servopohonů (celého kompletního
robota) do poslední přijatelném polohy nebo provést deaktivaci funkce „servo power“
v okně „servo control“ – viz vyobrazení v následujícím odstavci „13.2 Navázání spojení
software RACS (počítače) s robotem“.
Jestliže toto neprovedete, hrozí neodstranitelné poškození robota!!!
13.2 Navázání spojení software RACS (počítače) s robotem
1.
Spusťte dvojitým kliknutím myší program „RACS“.
Jestliže se v tomto výše zobrazeném okně „Schritt 1: Port wählen“ (Krok 1: Volba portu) nezobrazí
žádný port, respektive jestliže se v tomto okně nezobrazí název portu programovacího adaptéru robota
„FT232R USB UART“, proveďte kontrolu všech propojení a další kontroly podle výše uvedených kapitol
– například podle odstavce „12.2.2 Otevření USB portu (programovacího adaptéru)“. Po těchto
kontrolách můžete provést aktualizaci seznamu všech existujících portů zvolením následujícího menu
„RobotLoader → Portliste aktualisieren“ („RobotLoader → Refresh Portlist“) a poté, jakmile se
zobrazí v tomto seznamu název portu „FT232R USB UART“ nebo „Robot USB Interface“, zvolte tento
USB port kliknutím myší na nabídku „Verbinden“ („Connect“) (Spojit).
V okně „Schritt 2: Hexfile hinzufügen / auswählen“ (Krok 2: Přidat / zvolit hexadecimální soubor)
zvolte nabídku (program) „RAC-Mini.hex“ a poté klikněte myší na nabídku „Hinzufügen“ („Add“).
V okně „Schritt 3: In den Mikrocontroller laden“ (Krok 3: Stažení do mikroprocesoru) klikněte myší na
nabídku „Upload!“ (případně později na nabídku „Upload + Start!“: Uložení a spuštění programu). Tím
uložíte tento program do mikroprocesoru robota.
Poté klikněte myší v okně „Schritt 1“ (Krok 1) na nabídku „Schließen“ (Uzavřít, ukončit). Tím ukončíte
automaticky spojení robota s počítačem (notebookem). Toto je důležité pro případ použití tohoto
programu „RACS“ a jiných dalších ovládacích programů robota.
Dejte přitom pozor na to, aby program „RobotLoader“ neměl žádné spojení s robotem. V tomto případě
byste nemohli ovládat robota pomocí software „RACS“.
47
48
Page 25

2.
V příslušném menu se zobrazí všechny sériové komunikační port porty „COM“.
9.
Zaregistruje-li program „RACS“ chybu ve spojení s robotem, zobrazí se v příslušném okně
programu následující chybové hlášení.
3. Připojte k desce se součástkami robota a k počítači programovací adaptér
4.
Kliknutím myší na nabídku „update“ se zobrazí v seznamu další sériový port „COM“ (například
„COM4“), který představuje programovací adaptér.
5. Zvolte tento nový port (COM4).
6.
Proveďte aktivaci (připojení) tohoto portu zaškrtnutím políčka „connect“.
7.
Proveďte aktivaci napájení servopohonů „servo power“.
8. Nyní můžete posunováním čtverečku doleva nebo doprava myší v poli za každým symbolem
servopohonu (Servo1 až Servo6) začít ovládat robota (jeho jednotlivé servopohony).
49
V tomto případě vytvořte nové spojení mezi robotem a počítačem zopakováním kroků 2.až 6.
13.3 Automatizované ovládání poloh servopohonů v programu RACS
V dolním řádku programu naleznete následující nabídky k rozšířenému ovládání robota.
add
Přidání aktuálních poloh servopohonů robota do seznamu (polohy servohonů, které jste
nastavili myší).
replace
Nahrazení označeného zápisu uložených poloh servopohonů aktuálními polohami
servopohonů robota v seznamu (polohy servohonů, které jste nastavili myší).
insert
Vložení aktuálních poloh servopohonů robota nad označený, již dříve provedený zápis
uložených poloh servopohonů do seznamu poloh servopohonů.
claer
V pravém okně naleznete následující nabídky k rozšířenému ovládání robota.
save
load
Vymazání označeného zápisu uložených poloh servopohonů.
Uložení všech zápisů poloh servopohonů robota do souboru.
Načtení všech zápisů uložených poloh servopohonů robota ze souboru. Dejte přitom pozor
na to, že po této akci dojde k vymazání aktuálních zápisů poloh servopohonů robota.
run
Uložené zápisy všech poloh servopohonů robota začne program „RACS“ vykonávat
(zpracovávat) od první polohy příslušného servopohonu. Provedete-li dodatečně aktivaci
nabídky „repeat“ (opakovat), bude program „RACS“ provádět opakovaně všechna
nastavení poloh servopohonů ze všech uložených seznamů.
Step Time
V tomto posuvném „regulátoru“ (dolů a nahoru) nastavíte jezdcem (posunutím myší) čas
v sekundách (1 až 5 sekund), po jakou dobu bude robot čekat, dokud nezvolí další
polohu svých servopohonů (například otevření a opětovné uzavření svého chapadla).
pause
Přerušení (pauza) v prováděném programu ovládání robota a opětovné spuštění
programu od místa jeho dočasného přerušní.
stop
Ukončení (stop) prováděcího programu ovládání robota.
50
Page 26

14. Naprogramování robota v programovacím jazyce „C“
14.1 Napsání programu, sestavení zdrojového textu v programovacím jazyce „C“
Nejdříve musíte vytvořit zdrojový text neboli kód (anglicky „source code“) pro programovací jazyk „C“,
který uložíte do příslušného souboru na svém osobním počítači (notebooku).
K tomuto účelu nelze v žádném případě použít textové editory (procesory), jako jsou například
„OpenOffice“, „Word“ či „Excel“. Pomocí těchto textových a tabulkových editorů můžete psát různé
zprávy, příručky, návody k obsluze nebo vytvářet tabulky.
Zdrojový text neboli kód pro programovací jazyk „C“ musí být čistý text bez jakéhokoliv formátování, tedy
bez různých typů (fontů) a velikostí písma, bez barev (s určitými výjimkami – viz dále), bez kurzívy,
bez podtržítek atd. Takovýto text by kompilátor (překladač) programovacího jazyka „C“ nepřijal.
Pro mnoho lidí (programátorů) je přirozeně přehlednější, mohou-li některá klíčová slova nebo příkazy
(instrukce) ve zdrojovém textu označit barvou. K tomuto účelu můžete použít programovací aplikaci
(editor) „Notepad 2“ (dále jen zkratka „PN2“). V následujících odstavcích tohoto návodu k obsluze
popisujeme k vytvoření zdrojového textu použití tohoto editoru „PN2“ (Programmer´s Notepad).
Tímto editorem můžete bez problému vyvolat například programy „AVR-GCC“ a tyto programy můžete
dále nechat přeložit (zkompilovat) pomocí zápisu v menu. Program „AVR-GCC“ je normální program
s čistými příkazovými řádkami (instrukcemi) bez grafiky.
Nové verze programovacího editoru „PN2“ naleznete na internetové (webové adrese)
http://www.pnotepad.org/
Poznámka:
U nových verzí sotware „WinAVR“ není nutné vytvářet zápisy do menu! Z tohoto důvodu v tomto návodu
k obsluze nepopisujeme, jakým způsobem byste měli vytvořit v editoru „PN2“ zápisy do menu.
Viz dále odstavec „14.2 Otevření ukázkového projektu a jeho kompilace“.
51
Po otevření ukázkového projektu se seznamem ukázkových programů, by se mělo objevit na monitoru
osobního počítače (notebooku) v okně PN2 následující vyobrazení s podobným obsahem.
Seznam ukázkových programů
52
Page 27

14.2 Otevření ukázkového projektu a jeho kompilace
Nakonec si vyzkoušejte, zda správně funguje zkompilovaný (přeložený) program.
Nyní si vyzkoušejte, zda všechno správně funguje. Otevřete ukázkové projekty následující způsobem:
V menu „File“ (Soubor) zvolte nabídku „Open Project(s)“ (Otevření projektu nebo projektů).
V příslušném okně se zobrazí normální dialog ke zvolení příslušného souboru.
Nyní vyhledejte adresář (složku souborů) „Robot Arm_Examples [MINI]\“ a v tomto adresáři (v této
složce) vyhledejte soubor „Robot ArmExamples.ppg“. Tento soubor představuje projekční skupinu
editoru „PN2“, ze které lze stáhnout všechny ukázkové programy jakož i knihovnu „Robot Arm Library“
do seznamu projektů („Projects“).
Otevřete první ukázkový program zcela nahoře v seznamu ukázkových programů „01_Leds“ a vyberte
soubor „01_Leds“, který se nachází na levém okraji programového okna. Za tímto účelem klikněte
dvakrát myší na „01_Leds.c“. Na monitoru počítače se zobrazí v okně programu editor zdrojového textu.
Dole v programovém okně editoru „PN2“ by se měla objevit výstupní oblast. Pokud se tak nestane,
musíte tuto výstupní oblast aktivovat v menu „View“ (Náhled) s použitím nabídky „Output“ (Výstup).
Bude-li tato oblast příliš malá, roztáhněte (zvětšete) ji myší.
Nyní si můžete ovládací program robota prohlédnout v otevřeném textovém editoru. Pokud nebudete
něčemu rozumět, co tento program přesně provádí, nemusíte si dělat zbytečné starosti. Vysvětlení
naleznete na dalších stránkách tohoto návodu k obsluze.
Zeleně zbarvený text představuje komentáře, které nepatří k vlastnímu programu (tyto komentáře
neovlivňují provádění programu ovládání robota a slouží pouze k jeho popisu a k dokumentaci).
Samozřejmě, že existuje také verze tohoto programu bez komentářů. V této verzi bez popisů a
komentářů k jednotlivým sledům příkazů a instrukcí (vysvětlení, co má robot vykonávat) uvidíte vlastní
délku prováděcího programu ve zdrojovém kódu. Tuto praktickou verzi bez komentářů si můžete
s výhodou zkopírovat do svých vlastních programů ovládání robota.
53
V menu nástrojů „Tools“ by měly být k dispozici oba právě založené zápisy do menu nebo již
standardně v PN (Programmer´s Notepad) existující zápisy [WinAVR]. Obě tyto alternativy
v normálním případě fungují. Klikněte myší na nabídku „Make All“ (Provést všechno).
Editor „PN2“ (Programmer´s Notepad) nyní otevře soubor „make_all.bat“. Tento soubor vyvolá
následovně prováděcí aplikaci „make“ (provedení).
Po této akci provede systém kompilaci (překlad) ukázkového programu a vytvoří soubor (hotový
program) v hexadecimální podobě. Tento program ovládání robota můžete později přenést do
mikroprocesoru robota. Během této kompilace dojde k vytvoření několika dočasných (temporárních)
soborů s příponami (koncovkami) „.o“, „.lss", „.map“, „.sym“, .elf“, „.dep“ atd. Tyto dočasné soubory
Vás nemusejí zajímat. Tyto dočasné soubory můžete vymazat ze svého osobního počítače (notebooku)
zvolením nabídky „make clean“ (vyčistit), aniž byste zničili (vymazali) svůj vytvořený program.
Po vyvolání (zvolení) nabídky (příkazu) „Make All“ by se měly na monitoru PC (notebooku) objevit
přibližně následující textové řádky (viz následující stránka).
54
Page 28

> “make.exe” all
-------- begin --------
avr-gcc (WinAVR 20100110) 4.3.3
Copyright (C) 2008 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
Size before:
AVR Memory Usage
----------------
Device: atmega64
Program: 3074 bytes (4.7% Full)
(.text + .data + .bootloader)
Data: 68 bytes (1.7% Full)
(.data + .bss + .noinit)
EEPROM: 14 bytes (0.7% Full)
(.eeprom)
Compiling C: Robot Arm_Leds.c
avr-gcc -c -mmcu=atmega64 -I.
-gdwarf-2 -DF_CPU=16000000UL -Os -funsigned-char -funsigned-bitfields -fpackstruct
-fshort-enums -Wall
-Wstrict-prototypes -Wa,-adhlns=./Robot Arm_Leds.lst -std=gnu99 -MMD -MP -MF
.dep/Robot Arm_Leds.o.d Robot Arm_Leds.c -o Caterpillar_Leds.o
Linking: Robot Arm_Leds.elf
avr-gcc -mmcu=atmega16 -I. -gdwarf-2 -DF_CPU=16000000UL -Os -funsigned-char -funsignedbitfields
Creating load file for Flash: Robot Arm_Leds.hex
Creating load file for EEPROM: Robot Arm_Leds.eep
avr-objcopy -j .eeprom --set-section-flags=.eeprom=”alloc,load” \
--change-section-lma .eeprom=0 --no-change-warnings -O ihex Robot Arm_Leds.elf
Robot Arm_Leds.eep || exit 0
Size after:
AVR Memory Usage
----------------
Device: atmega64
Program: 3074 bytes (4.7% Full)
(.text + .data + .bootloader)
Data: 68 bytes (1.7% Full)
(.data + .bss + .noinit)
EEPROM: 14 bytes (0.7% Full)
(.eeprom)
-------- end -------->
Process Exit Code: 0
> Time Taken: 00:04
55
Velmi důležité je sdělení zcela dole „Process Exit Code: 0“. Tato zpráva znamená, že se při kompilaci
(překladu) programu neobjevila žádná syntaktická chyba. Pokud se v této zprávě (v tomto řádku)
zobrazí jiný kód než „0“, zaregistroval kompilátor ve zdrojovém textu zásadní chybu syntaxe programu,
kterou musíte odstranit.
Důležité upozornění: Při provádění kompilace (překladu) programu ovládání robota zobrazí editor
(kompilátor) „PN2“ další doplňující informace a varování v barevném provedení, které Vás upozorní na
důležité problémy a chyby v sestaveném programu. Kompilátor zobrazuje rovněž čísla právě
překládaných řádků. Kliknete-li myší na barevně zobrazenou informaci, zobrazí se na monitoru počítače
příslušný řádek programu. Dejte přitom pozor na to, že sdělení „Process Exit Code: 0“ nemusí
znamenat, že je program zcela v pořádku. Chyby v postupu ovládání robota tento kompilátor nedokáže
odhalit (například nesmyslné pohyby robota atd.).
Velmi důležité je také sdělení „
AVR Memory Usage
“ (Využití paměti AVR).
---------------Size after:
AVR Memory Usage
---------------Device: atmega64
Program: 3074 bytes (4.7% Full)
(.text + .data + .bootloader)
Data: 68 bytes (1.7% Full)
(.data + .bss + .noinit)
Toto znamená, že při použití mikroprocesoru robota „Atmega64“ zaujímá vytvořený program ovládání
robota 3074 bytů a 68 bytů paměti RAM pro rezervaci statických proměnných. Dále je ještě nutno
počítat s dynamickými oblastmi „Heap“ a „Stack“. S těmito oblastmi se nemusíte zabývat. Zajistěte
pouze, aby zůstalo v paměti počítače několik stovek bytů volných.
Máte k dispozici celkem 64 kB (65536 bytů) v paměti „Flash ROM“ a 2 KB (2048 bytů) v paměti „RAM“.
Z těchto 64 kB jsou vyhrazeny 2 KB funkci „Bootloader“, takže můžete použít celkem 62 KB. Dejte
přitom pozor na to, aby se program ovládání robota vešel do této paměti. Software „RobotLoader“
nepřenese do mikroprocesoru robota žádný ovládací (prováděcí) program, pokud bude příliš velký!
U výše uvedeného ukázkového programu ovládání robota zůstává k dispozici 60414 volných bytů. Tento
velmi krátký ukázkový program „Example_01_Leds.c“ je takto velký z toho důvodu, protože je svázán
s knihovnou „Robot ArmBaseLibrary“. Takže se nemusíte obávat toho, že Vám nezůstane volné místo
k vytvoření vlastních programů ovládání robota. Knihovna funkcí vyžaduje sice několik KB (kilobajtů)
z paměti „Flash“, ale ulehčí Vám mnoho práce. Z tohoto důvodu budou Vaše vlastní programy zaujímat
poměrně málo místa ve srovnání s knihovnou „Robot ArmBaseLibrary“.
Nyní můžete zkompilovaný (přeložený) program ovládání robota přenést do jeho mikroprocesoru pomocí
programu software „RobotLoader“. Poté můžete kliknutím myší na nabídku „Hinzufügen“ („Add“)
(Přidat, vložit) v příslušném okně programu „RobotLoader“ uložit tento program v hexadecimální
podobě do seznamu prováděcích programů a dále kliknout myší na nabídku „Upload!“
Pokud budete chtít, zvolte kliknutím myší nabídku „Terminal“ a prohlédněte si výstup programu
prováděcího programu ovládání robota. Povedení (spuštění) programu ovládání robota můžete provést
v menu „Terminal“ stisknutím kombinace kláves „Ctrl + S“ na klávesnici osobního počítače (notebooku)
nebo můžete k tomuto účelu použít menu.
Dále můžete vyslat písmeno „s“ – po provedení zpětného nastavení „Reset“ musíte chvíli počkat, dokud
se v menu „Terminal“ nezobrazí hlášení „[READY]“ (Připraveno, hotovo).
Také stisknutí kombinace kláves „Ctrl + Y“ na klávesnici osobního počítače (notebooku) může být
důležité. Touto akcí přenesete aktuálně vybraný prováděcí program do mikroprocesoru robota a tím
tento program přímo spustíte.
56
Page 29

15. Několik poznámek na závěr
Výše uvedený prováděcí ukázkový program je velmi jednoduchý. Představuje pouze rozsvěcování
svítivé diody (LED) a několik textových informací.
Z důvodů zkrácení tohoto návodu k obsluze v českém jazyce, nepřidáváme k tomuto návodu různá
schéma zapojení atd. Toto naleznete v originálním návodu k obsluze.
Překlad tohoto návodu zajistila společnost Conrad Electronic Česká republika, s. r. o.
Všechna práva vyhrazena. Jakékoliv druhy kopií tohoto návodu, jako např. fotokopie, jsou předmětem souhlasu
společnosti Conrad Electronic Česká republika, s. r. o. Návod k použití odpovídá technickému stavu při tisku!
Změny vyhrazeny!
© Copyright Conrad Electronic Česká republika, s. r. o. KU/04/2014
57
 Loading...
Loading...