

Page 1

Handleiding voor de
ASURO-module
„Mijnveger“
AREXX / Robin Gruber
23.3.2009
Page 2

Page 3

1 Functiebeschrijving van de schakeling
De uitbreidingsmodule “Mijnveger” stelt de ASURO-Robot in staat metalen voorwerpen te
detecteren, die zich onder de halve ping-pong-bal bevinden. Daarmee kan men – natuurlijk wel
begrensd door de technische randvoorwaarden, die de robot en de kit ter beschikking stellen –
diverse scenario's uitproberen, zoals bijvoorbeeld het opsporen van mijnen of het zoeken naar
schatten met behulp van een robot en het speuren en volgen van leidingen, betonstaal of andere
metalen voorwerpen in de bodem.
Deze handleiding bevat slechts een summiere beschrijving, omdat een uitvoerige documentatie
inclusief de magnetische veldbeschrijving en de behandeling van de complexe wisselstroomtheorie
niet in het kader van een handleiding past.
In de “Mijnveger” wordt een resonator, bestaande uit een condensator en een spoel met een open
kern, door een operationele versterker tot oscilleren gebracht. Omdat de spoelkern een open
structuur vormt, kan het magneetveld zich in de omgeving uitbreiden en door het in de buurt
aanwezige metaal worden beïnvloed.
Fig. 1 beschrijft het schema. De resonantiekring bestaat uit de spoel L1 en de condensator C1. De
toegepaste schakeling kan oscilleren, omdat de in het elektrische veld van de condensator
opgeslagen energie cyclisch tegen de magnetische energie van de spoel wordt uitgewisseld. Dit
proces vindt in twee richtingen plaats. De frequentie waarmee dit proces plaatsvindt hangt af van de
capaciteit van de condensator en de zelfinductie van de spoel. Bij geringe verliezen kan men voor
de berekening werken met de formule:
f0=
1
2L C
Fig. 1: Schema voor de "Mijnveger"-uitbreidingsmodule
Page 4

Omdat deze conversie niet zonder verliezen verloopt, zal de oscillatie na een paar perioden
afsterven. Men moet voortdurend energie toevoeren om deze verliezen te compenseren. Daartoe
moet men evenals bij een schommel de juiste tijdstippen voor de benodigde impuls kiezen, anders
werkt het niet. In ons ontwerp zorgt de schakeling er daarom voor, dat het systeem de laadstroom
voor de condensator proportioneel instelt tot de spanning over de condensator.
Daartoe passen wij een operationele versterker IC1A toe, die met een weerstand R2 en een
instelbare trimmerweerstand TR1 een niet-inverterende versterker vormt. De uitgangsspanning van
deze versterker wordt op een waarde ingesteld, die ca. 1..3 hoger wordt gekozen dan de
condensatorspanning. Daardoor vloeit door weerstand R1 een stroom, die zal stijgen naarmate de
spanning over C1 hoger wordt.
De versterking moet instelbaar zijn omdat de verliezen in de resonatorkring vooraf niet nauwkeurig
genoeg bekend zijn.
De operationele versterker (Opamp) IC1B is als comparator geconfigureerd en vergelijkt de
spanning over de resonatorkring met een referentiespanning van ca. 0,5V (deze waarde hangt af
van de ASURO-voedingsspanning) en stelt het resultaat aan extension-pin INT1 ter beschikking. R4
beschermt daarbij de in- en uitgangen, om te voorkomen, dat een processor- en een Opamp-pin in
een ongeprogrammeerde processor elkaar eventueel kunnen beschadigen.
D4 vervangt de oorspronkelijke lijnvolger-LED.
Het linker gedeelte van het schema met de diodes en condensatoren bevat een schakeling ter
opwekking van een negatieve voedingsspanning (ten opzichte van de massa-pool in het systeem).
Wij hebben deze hulpspanning nodig, omdat de spanning in het resonatorcircuit ten opzichte van de
0V-spanning varieert en in dit bereik zowel positief als negatief kan worden.
In de praktijk zijn er meerdere methoden voor het zoeken naar metaal. Ons ontwerp werkt met twee
van deze methoden:
1. De versterkingsfactor van de schakeling en daarmee ook de energietoevoer naar het
resonatorcircuit wordt zodanig ingesteld, dat de elektrische verliezen in de resonator bij
afwezigheid van metaal in de directe omgeving van de spoel precies worden
gecompenseerd. Zodra er zich nu metaal in de buurt van de spoel bevindt, veroorzaken de
wervelstroom (bij geleidend materiaal) of magnetisatie-verliezen (bij isolerend, maar
ferromagnetisch materiaal) extra verliezen, die daardoor de oscillaties uitdoven.
2. De versterkingsfactor wordt zo hoog gekozen, dat ook de extra verliezen door metaal in de
buurt van de spoel worden gecompenseerd. Daarbij wordt nu de oscillatiefrequentie
gemeten. Als zich geleidend materiaal in de omgeving van de spoel bevindt, verzwakt de
wervelstroom het veld, waardoor de zelfinductie van de spoel daalt en de oscillatiefrequentie stijgt. Ferromagnetisch materiaal versterkt daarentegen het veld, zodat de
zelfinductie stijgt en de frequentie daalt. Met behulp van deze meetmethode wordt dus niet
alleen het metaal gedetecteerd, maar ook nog geclassificeerd.
2 Opbouw
2.1 De opbouw van de spoel
Indien de spoel reeds kant en klaar is gewikkeld en volgens fig. 8 van een condensator en
aansluitdraden is voorzien, kan deze procedure worden overgeslagen. Als dat niet het geval is,
wensen wij je alvast veel plezier met deze klus!
Page 5

Je moet nu namelijk 400 windingen (ja, dat is geen typefout!) dun koperdraad (0,1mm diameter) op
de spoelvorm wikkelen. Dat gebeurt als volgt:
In de bouwdoos bevindt zich een spoelvorm met een dubbele kamer, die in feite voor twee kernhelften is ontworpen (zie fig. 2).
Om ervoor te zorgen, dat de spoelvorm in onze enkelvoudige kern past, moet de vorm doorgezaagd
worden. Daartoe is een beugelzaag goed geschikt. In dit geval zaag je de spoelvorm aan een kant in
het midden van de kamer door, zodat er een smalle spoelvorm met slechts een enkele wikkelkamer
onstaat. De braam van het zagen moet je nog even verwijderen met fijn schuurpapier (korrelgrootte
240 tot 300) of met een Stanleymes (let op je vingers!). Het afgezaagde restant kan worden
weggegooid.
Om de wikkeling op de spoelvorm te brengen, kun je deze het beste op een potlood of een penseel
schuiven. Een penseel is wellicht beter geschikt, omdat deze vaak een konische vorm heeft. Bij
voorkeur klem je het aanloopgedeelte en enkele centimeters van de gelakte koperdraad voorzichtig
tussen de spoelvorm en de penseel, zoals in fig. 4 aangeduid. Om het verschuiven van de draad te
verhinderen, kun je deze ook met wat plakband fixeren.
Fig. 2: Spoelvorm,
met dubbele kamer
Fig. 3: Spoelvorm, doorgezaagd
Fig. 4: Wikkelsysteem
Page 6

Vervolgens wordt voorzichtig (vanzelfsprekend zonder tijdens het wikkelen van wikkelrichting te
veranderen) en secuur 400 windingen van het dunne gelakte koperdraad gewikkeld. Als je niet
secuur te werk gaat, past het niet op de spoelvorm. Als de draad breekt (in dat geval is er geen
plaats voor een reparatie) of je de tel kwijtraakt, moet je weer opnieuw beginnen. Het maakt niet
zoveel uit, of je 380 of 420 windingen wikkelt, maar de afwijkingen mogen niet al te veel groter
worden.
Als je klaar bent met het wikkelen, kun je de wikkeling met een druppeltje nagellak of secondelijm
fixeren. Na de uitharding kun je het plakband voorzichtig van het potlood of het penseel losmaken
en de gewikkelde spoel er afhalen. Daarna kun je ook de draad afknippen, maar daarbij wel enkele
centimeters laten staan. De uiteinden van de draad moeten nu in een richting wijzen en mogen ook
niet door het gat in de spoelvorm worden gestoken (zie fig. 5).
Nu de spoelvorm deze fase heeft bereikt, kan de spoel met een druppel secondelijm in de kern
worden geplakt. De uiteinden van de draden worden aan de afgesloten zijde van de kern via een
sleuf naar buiten gevoerd (zie fig. 6).
Vervolgens moet je van de uiteinden van de aansluitdraden, op de plek waar deze uit de achterkant
van de kern naar buiten steken, vanaf een afstand van een tot twee millimeters de isolatie
verwijderen. Daartoe kun je het beste een soldeerbout gebruiken, waarbij je op de hete spits wat
vers soldeer hebt aangebracht. Daarmee verhit je de draad, totdat de isolatie is verdwenen en de
draad is vertind.
Attentie: De daarbij opstijgende dampen zijn ongezond en mogen niet worden ingeademd!
Fig. 5: Spoelvorm,
kant en klaar gewikkeld
Fig. 6: Spoel - in de kern geplakt
Page 7

Ter afsluiting plak je de 10nF-condensator (met de opdruk: 103) met secondelijm op de achterkant
van de spoel vast, zodat de draadeinden in de richting van de sleuf wijzen, waaruit de draden steken.
Fig. 7 schetst de plaatsing van de condensator naast het gat in het midden van de kern – misschien
kunnen wij dit gat later nog ergens voor gebruiken. Voor de nu te bouwen schakeling is dit gat
echter niet van belang.
Verkort nu eerst de aansluitdraden van de condensator tot een lengte van ca. 5mm, wikkel dan de
vertinde uiteinden van de gelakte koperdraden daaromheen (waarbij men eventueel een pincet kan
gebruiken) en soldeer deze vast.
Nu komen nog de tot op 70mm ingekorte kabels met de aan beide zijden gestripte, in elkaar
gedraaide en vertinde uiteinden aan de beurt. Deze worden direct aan de condensatoraansluitdraden
gesoldeerd en wel in de richting van de spoel. Daarbij worden de aders nog gedraaid, zoals
geschetst in figuur 8. Op de polariteit van de aansluitingen hoeft men ditmaal niet te letten. Als er
een multimeter ter beschikking staat, kun je de weerstand tussen de aansluitdraden meten. De te
meten waarde moet ongeveer 30Ω bedragen. Bij veel hogere waarden (60Ω en meer) moet je
controleren, of je de isolatie van de koperdraad correct hebt verwijderd, de draden goed hebt
gesoldeerd en niet per ongeluk hebt laten breken. Bij beduidend lagere waarden (10Ω en minder)
moet je de soldeerpunten op kortsluitingen controleren. Op deze wijze kan men echter geen
kortsluitingen binnenin de wikkeling onderzoeken, zodat je voor deze problemen alleen maar kan
hopen, dat ze zich nooit voordoen!
Fig. 7: Spoel met condensator
Page 8

Fig. 8: De kant en klare spoel
2.2 De montage van de spoel
Om de nu kant en klare spoel op de robot te monteren moet je eerst de ping-pong bal weer
verwijderen. Als je de ping-pong bal over de gehele rand (in plaats van slechts op een paar puntjes)
hebt vastgelijmd, is dit een vervelend klusje.
De spoel wordt vervolgens – ook weer met secondelijm – aan de binnenkant onder de halve pingpong bal vastgelijmd (zie fig. 9).
Attentie: Als de ASURO nog niet op de montage van een uitbreidingsprint is voorbereid mag je de
ping-pong bal pas weer monteren, nadat die montage is afgesloten.
2.3 Montage van de aansluitingspins
Voordat wij de onderdelen op de print monteren, moeten wij eerst de aansluitingspins inbouwen.
Deze fase hangt in hoge mate af van de voorbereidingen ter opname van de uitbreidingsprints, die
eventueel al vooraf aan de ASURO heeft plaatsgevonden.
Fig. 9: Spoel na de montage in de bal
Page 9
a) Op de ASURO zijn nog geen aansluiting-pins voor de uitbreidingsprint beschikbaar
In dit geval moeten allereerst enkele onderdelen voor de lijnvolger, en wel de fototransistors T9,
T10 en de LED D11 van de print worden weggenomen. Daartoe moet je eerst de ping-pong bal
hebben verwijderd. Meestal lukt de demontage van onderdelen prima, als je de gesoldeerde
aansluitingen van een onderdeel tegelijkertijd met een soldeerbout verhit en het onderdeel
voorzichtig van de printplaat trekt. Als de montageboringen daarna nog met soldeer gevuld zijn,
kun je deze met desoldeerlitze en/of een desoldeerpomp weer zuiveren.
Vervolgens monteer je de twee- respectievelijk drie-polige stekkers en plug-arrays, die je dan – op
de aansluitpunten van de ASURO-print – op de ASURO-printplaat aansluit (zie daartoe fig. 10 ).
Hierop plaats je eerst de uitbreidingsprint. Pas daarna soldeer je de stekker- en plug-arrays op de
uitbreidingsprint en op de hoofdprint van de ASURO vast.
b) Op de ASURO zijn pluggen voor de uitbreidingsprint beschikbaar
De twee- respectievelijk drie-polige stekkers worden in de op de ASURO ingebouwde plug-arrays
gestoken (zie fig. 10). Vervolgens wordt daarop de uitbreidingsprint geplaatst en wel zo, dat de pins
door de printboringen naar buiten steken. Als dit allemaal past, worden de pins op de
uitbreidingsprint vastgesoldeerd.
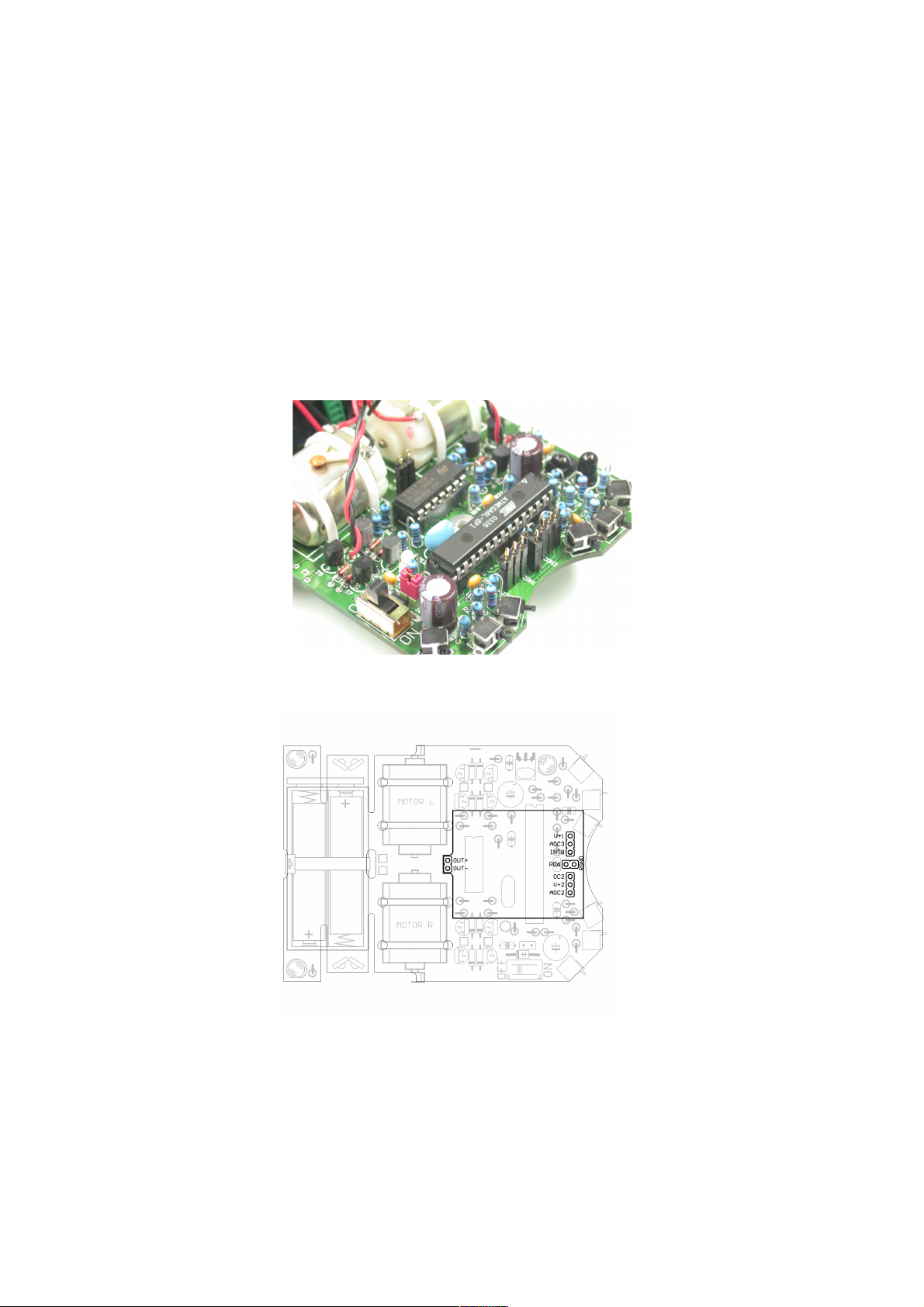
Fig. 10: Montage van de stekker-arrays
Fig. 11: Montage van de uitbreidingsprint
Page 10

2.4 De bevestiging van de ping-pong bal
Als de aansluitingspins op de print zijn gesoldeerd, moet je de uitbreidingsprint weer verwijderen
en tijdens de verdere montage opzij leggen. Nu wordt eerst de aansluitkabel van de spoel door het
gat in de ASURO-print gevoerd en de ping-pong bal met de daarin vastgeplakte spoel weer
voorzichtig met drie tot vier puntjes op de ASURO-print vastgelijmd.
2.5 De montage van de onderdelen op de print
Zodra de aansluitingspins (en eventueel ook de stekker-arrays) gesoldeerd zijn, kan men de print
weer verwijderen en de resterende onderdelen plaatsen. In de volgorde van de navolgende
onderdelenlijst plaats je de weerstanden rechtop (behalve R7), net als bij de ASURO. Dit betekent,
dat een van de aansluitdraden over 180° omgebogen moet worden. Bij R7 worden beide
aansluitingen over 90° gebogen.
Fig. 12: Uitbreidingsprint met de plug-
verbindingen
Page 11

Fig. 13: Onderdelenposities
Bij de plaatsing moet de onderstaande volgorde worden aangehouden:
IC1: Eerst wordt alleen de voet geplaatst, let daarbij op de polariteit!
D1, D2, D3: 1N4148, let daarbij op de polariteit!
C4, C5, C6: 100nF ceramisch
R1, R2, R3, R7: 10kΩ 5% (bruin, zwart, oranje, goud)
R4: 220Ω 5% (rood, rood, bruin, goud)
R5: 1kΩ 5% (bruin, zwart, rood, goud)
R6: 100kΩ 5% (bruin, zwart, geel, goud )
C2, C3: Elco 100µF, minimaal 16V, let daarbij op de polariteit!
TR1: Spindel-trimmer 20k, rechtop geplaatst
D4: LED 5mm rood, let daarbij op de polariteit!
CON1: Schroefaansluiting. De kabelingang wijst naar de rand van de print.
IC1: Nu wordt TS912 in de voet geplaatst, nadat je eventueel de pootjes wat naar binnen gebogen
hebt. Let op de polariteit! De markering (of kerf) op de IC-behuizing moet met de markering (of
kerf) van de voet overeenkomen!
Page 12

Fig. 14: Kant-en-klare uitbreidingsprint
Attentie: De aansluitingen VCCOUT1/2, GNDOUT1/2 en ADC2OUT/ADC3OUT worden
voorlopig niet gebruikt. Deze aansluitingen kunnen later samen met een bevestigingsgat op de print
toegepast worden, om twee afstandssensoren voor een triangulatiemeting aan te sluiten. Daarmee
kan de ASURO zowel autonoom navigeren als ook metalen objecten opsporen. De bijbehorende
details staan in „Meer plezier met ASURO, Deel II“. De triangulatiesensoren worden in dit geval
niet direct op de ASURO-print, maar op de uitbreidingsprint aangesloten.
2.6 Inbedrijfname
Nadat de ping-pong bal inclusief spoeltje geplaatst en de print gemonteerd is, kun je de print (in
uitgeschakelde toestand !!) op de robot plaatsen. Controleer daarbij, dat er geen sluiting tussen de
onderdelen op de ASURO-print en de metalen onderdelen of soldeerpunten van de uitbreidingsprint
kan optreden. De kabelaansluitingen van de spoel moeten aan de kant van de schroefverbinding
CON1 onder de print doorgevoerd worden en vervolgens – de polariteit speelt daarbij geen rol – in
de schroefklem worden bevestigd.
Om de oscillatie in de resonator aan te tonen, laden wij eerst het volgende programma
(MinesweeperTest1):
#include "asuro.h"
extern volatile unsigned char count72kHz;
int main(void)
{
unsigned char oscillation;
Init();
DDRD &= ~(1<<2); // Change Port D Pin 2 to input
StatusLED(OFF);
while(1)
{
count72kHz=0;
oscillation = FALSE;
while (count72kHz<100) {
// Detect low level
Page 13

if ((PIND & (1<<2)) == 0) oscillation = TRUE;
}
// If oscillator is running, no metal object is within
// range, so LED should be off
if (oscillation) FrontLED(OFF); else FrontLED(ON);
}
return 0;
}
Dit programma zorgt ervoor, dat de LED uitgaat, als de oscillator werkt. Afhankelijk van de
toegepaste detectiemethode (uitdemping van de oscillaties of verandering van de oscillatiefrequentie) moet men verschillende ijkingsprocedures volgen. Allereerst demonstreren wij de ijking
voor de eenvoudige methode, d.w.z. uitdemping van de oscillaties, die ook voor testprocedures (met
behulp van het bovenstaande programma) bij voorkeur wordt toegepast.
Als na het inschakelen de rode LED op de uitbreidingsprint niet oplicht, moet je de spindel-trimmer
zo ver naar rechts draaien, dat de LED wel oplicht. De trimmer kan tien omwentelingen in een
richting volgen en wordt ook dan niet beschadigd, als je nog verder draait. Als de tien
omwentelingen voorbij zijn en er gebeurt niets, dan is er iets mis en moet je de fout door debugging
opsporen en verhelpen...
Lukt het echter wel de LED te laten branden, dan plaats je de robot op een verhoging, die
gegarandeerd vrij van metaal moet zijn, bijv. een plastic of houten kist, of een tafeltje zonder
spijkers, respectievelijk schroeven in de buurt van de robot ...) en draai je de spindel-trimmer zover
naar links, dat de LED helemaal uitdooft. Het kan nodig zijn, deze ijkprocedure later nogmaals te
herhalen, omdat de temperatuur en de variatie van de batterijspanning het oorspronkelijk
nauwkeurig ingestelde werkpunt hebben laten verschuiven. Hoe nauwkeuriger men de ijking
doorvoert, des te gevoeliger reageert de sensor, maar des te vaker moet men de ijking herhalen.
Als je nu met een metalen object (een schroevendraaier, o.i.d.) de ping-pong bal benadert, dan moet
– op zijn minst bij aanraking – de LED weer oplichten.
De sensor is nu zo gevoelig, dat deze ook kleine stukjes aluminiumfolie door karton heen kan
opsporen.
Indien je nu de verandering van de frequentie wilt meten, dan moet je de sensor in de kant-en-klaar
voorbereide applicatie ijken. Daarbij wordt de robot aan het maximaal te verwachten sensorsignaal
blootgesteld (d.w.z. het metalen voorwerp of de metalen oppervlakte wordt zo dicht mogelijk
benaderd) en de trimmer zo ver naar links gedraaid, dat ook dan de LED niet uitdooft. Voor deze
demonstratie kan men het navolgende programma toepassen (MinesweeperTest2):
#include "asuro.h"
#include <stdio.h>
extern volatile unsigned char count72kHz;
int main(void)
{
unsigned char oldlevel=0, newlevel;
unsigned int freq;
int i;
char s[9];
Init();
DDRD &= ~(1<<2); // Change Port D Pin 2 to input
StatusLED(OFF);
while(1)
{
freq=0;
Page 14

for (i=0; i<100; i++) {
count72kHz=0; // This counter is incremented in timer interrupt
FrontLED(OFF);
while (count72kHz<72) {
// Detect level change
newlevel = PIND & (1<<2);
if (oldlevel != newlevel) {
oldlevel = newlevel;
freq++;
FrontLED(ON);
}
}
}
sprintf(s,"%5d\n\r",freq);
SerWrite(s,7);
}
return 0;
}
2.7 Debugging
Als de schakeling niet volgens de handleiding werkt, moet je een debugging (speurtocht naar de
fouten) starten. Helaas is in dit geval het aantal debugging opties geringer dan in het geval van de
ASURO-print en om deze redenen kan een multimeter een handig hulpmiddel zijn.
● In eerste instantie moet je controleren, of het testprogramma foutloos gecompileerd en ook
inderdaad geflashed is. Dan moet je ook nogmaals de soldeerpunten en de waarden, resp.
opschriften van de onderdelen nalopen.
● Heb je de isolering van de aansluitdraden van de spoel goed verwijderd, de draadeinden
vertind en daarna correct in de schroefklemmen vastgezet of wordt alleen maar de isolatie
vastgeschroefd? Bij een uitgeschakelde (!) robot kun je de meetwaarde 30Ω tussen de
schroeven meten. Als je een veel hogere weerstand meet, is de kabel niet goed in de
schroefklemmen gemonteerd, is de isolatie niet goed verwijderd en kan de draad daarom
geen goed contact met de schakeling maken of is de draad binnen de spoel bij de montage
gebroken. Deze laatste fout treedt vaak in de buurt van de condensator op.
Als je een veel lagere weerstand meet, wijst dit op een kortsluiting op de print of in de spoel.
In dit geval is het een goed idee, de kabel nogmaals uit de schroefklem te verwijderen en de
weerstand op de plaats van de schroefklem te meten. Als de weerstand nu veel hoger dan 30
Ohm wordt geregistreerd, bevindt zich de kortsluiting aan de zijde van de spoel.
● Tussen GNDOUT1 en VCCOUT1 moet je bij een ingeschakelde robot een
voedingsspanning van 4,5 .. 5,5V kunnen meten. Als dat niet het geval is, dan is de batterij/
accu leeg, de robot uitgeschakeld, de leiding voor de batterijhouder onderbroken of een
koude soldeerverbinding in de omgeving van de achterste plug-stekkers op de
uitbreidingsprint of op de robot opgetreden.
● De voedingsspanning voor de operationele versterker wordt gemeten tussen pin 4 (Minus,
in de linker benedenhoek, als de kerf op het IC zich aan de bovenkant bevindt) en pin 8
(Plus, in de rechter bovenhoek, als de kerf op het IC zich aan de bovenkant bevindt). Deze
spanning moet minimaal 2V boven de voedingsspanning van de batterij liggen.
 Loading...
Loading...