

Page 1

Bauanleitung zur
ASURO-Erweiterung „Minensucher“
AREXX / Robin Gruber
23.3.2009
Page 2

1 Funktion der Schaltung
Mit Hilfe der Minensucherweiterung wird der ASURO-Roboter in die Lage versetzt, Metall, das
sich unter seinem halben Tischtennisball befindet zu detektieren. Damit kann man – natürlich nur
im Rahmen der Möglichkeiten des Roboters und des Bausatzes - Szenarien wie die robotergestützte
Minen- oder Schatzsuche oder das Auffinden und Verfolgen von Leitungen, Armierungseisen oder
Stahlträgern in Böden in vereinfachter Form ausprobieren.
Im Folgenden wird die Funktion der Schaltung nur grob erklärt, da eine ausführliche Beschreibung
einschließlich Grundlagen magnetischer Felder und komplexer Wechselstromrechnung den Rahmen
dieser Bauanleitung sprengen würde.
Ein Schwingkreis aus einem Kondensator und einer Spule mit einem einseitig offenen Schalenkern
wird durch eine Operationsverstärkerschaltung zur Oszillation angeregt. Da der verwendete
Schalenkern magnetisch offen ist, kann das Magnetfeld in den Raum austreten und wird durch in
der Nähe befindliches Metall beeinflusst.
Abb. 1 zeigt den Schaltplan. Der Schwingkreis wird durch die Spule L1 und den Kondensator C1
gebildet. Ein solches System ist schwingfähig, da zyklisch die im elektrischen Feld des
Kondensators gespeicherte Energie in im Magnetfeld der Spule gespeicherte Energie und zurück
umgewandelt wird. Die Frequenz, mit der diese Umwandlung stattfindet, hängt von der Kapazität
des Kondensators und der Induktivität der Spule ab. Sie berechnet sich (für kleine Verluste) zu:
f0=
1
2L C
Da diese Umwandlung nicht verlustlos abläuft, würde die Oszillation nach ein paar Perioden
abklingen. Man muss daher ständig Energie nachliefern um diese Verluste auszugleichen. Aber wie
beim Anschubsen einer Schaukel muss das zum richtigen Zeitpunkt passieren, sonst funktioniert es
nicht. Die hier verwendete Schaltung macht das dadurch, dass sie proportional zur Spannung am
Abbildung 1: Schaltplan der "Minensuche"-Erweiterung
Page 3

Kondensator Strom in den Kondensator schiebt.
Realisiert wird das durch den Operationsverstärker IC1A, der mit dem Widerstand R2 und dem
einstellbaren Widerstand TR1 einen nicht invertierenden Verstärker bildet. Die Spannung am
Verstärkerausgang ist damit um den einstellbaren Faktor 1..3 höher als die Spannung am
Kondensator. Das führt dazu, dass durch den Widerstand R1 ein Strom fließt, der umso höher ist, je
höher die Spannung an C1 ist.
Die Einstellbarkeit der Verstärkung ist erforderlich, da die Verluste im Schwingkreis nicht exakt
vorher bekannt sind.
Der Operationsverstärker IC1B ist als Komparator beschaltet und vergleicht die Spannung am
Schwingkreis mit einer Referenzspannung von (je nach ASUROs Batteriespannung) ca. 0,5V und
gibt das Ergebnis an den Erweiterungs-Pin INT1 weiter. R4 dient hier als Schutzbeschaltung, da im
unprogrammierten Zustand des Prozessors sonst Prozessorpin und Operationsverstärkerausgang
gegeneinander arbeiten würden.
D4 ist anstelle der alten Linienfolge-LED eingebaut.
Der linke Teil der Schaltung aus Dioden und Kondensatoren dient zur Erzeugung einer (bezogen
auf die Masse der Schaltung) negativen Versorgungsspannung. Das ist erforderlich, da die
Spannung am Schwingkreis um Masse herum schwingt und damit sowohl positiv als auch negativ
werden kann.
In der Praxis gibt es verschiedene Methoden der Metalldetektion. Die vorliegende Schaltung
unterstützt zwei davon:
1. Die Verstärkung der Schaltung und damit die Energiezufuhr in den Schwingkreis wird so
eingestellt, dass die elektrischen Verluste im Schwingkreis ohne Metall in der Nähe der
Spule gerade so ausgeglichen werden. Kommt nun Metall in die Nähe der Spule, so werden
durch Wirbelströme (bei leitfähigem Material) oder Ummagnetisierungsverluste (bei nicht
leitendem aber ferromagnetischem Material) zusätzliche Verluste verursacht, welche dann
die Oszillation zum Erliegen bringen.
2. Die Verstärkung wird so hoch eingestellt, dass auch zusätzliche Verluste durch Metall in
Spulennähe ausgeglichen werden, und es wird nur die Frequenz der Oszillation gemessen.
Wird nun leitfähiges Material in die Nähe der Spule gebracht, so wird durch Wirbelströme
im Material das Feld geschwächt, was zu einer Verringerung der Spuleninduktivität und
damit zur Erhöhung der Oszillationsfrequenz führt. Bei ferromagnetischen Metall wird das
Feld verstärkt, die Induktivität steigt, die Frequenz sinkt.
Bei dieser Variante ist also zusätzlich zur Detektion auch eine grobe Unterscheidung
möglich, welches Metall gefunden wurde.
2 Aufbau
2.1 Herstellen der Spule
Falls die Spule bereits fertig bewickelt, mit Kondensator beklebt und Anschlusskabeln versehen ist,
wie in Abb. 8 entfällt dieser Arbeitsschritt. Falls nicht: Viel Spaß!
Jetzt müssen 400 Windungen (ja, kein Tippfehler!) dünnen Kupferlackdrahtes (0,1mm
Durchmesser) auf den Spulenträger aufgebracht werden. Das passiert wie folgt.
Dem Bausatz liegt dann ein zweigeteilter Spulenträger bei, der für zwei Kernhälften gedacht ist
(siehe Abb. 2).
Page 4

Abbildung 2: Spulenkörper, ganz Abbildung 3: Spulenkörper, zersägt
Damit er in unseren einzelnen Kern passt, muss er auseinandergesägt werden. Das klappt am
einfachsten mit einer Bügelsäge. Dabei wird der Spulenträger an einer Seite des Mittelstegs
durchgesägt, sodass ein schmaler Spulenträger mit einer Wicklungskammer entsteht. Der Grat vom
Sägen wird noch mit einem feinen Schleifpapier (240er oder 300er Körnung) oder einem
Teppichmesser (Finger!) beseitigt. Die abgesägte andere Hälfte kann weg.
Um nun die Wicklung auf den Spulenträger zu bringen, steckt man ihn auf einen Stift oder den
Schaft eines Pinsels (besser, weil konisch) und zwar am besten so, dass man bereits den
Drahtanfang und ein paar Zentimeter des Kupferlackdrahtes zart mit einklemmt, wie es Abb. 4
zeigt. Um sicherzustellen, dass der Draht dann auch nicht doch irgendwie durchrutscht, kann man
ihn mit etwas Klebeband fixieren.
Und dann werden sorgsam (und natürlich ohne die Wickelrichtung während des Wickelns zu
ändern) und möglichst ordentlich, da sie sonst nicht drauf passen 400 Windungen des
Kupferlackdrahtes aufgewickelt. Wenn der Draht reißt (für's Flicken ist zu wenig Platz) oder man
sich verzählt, muss man von vorne anfangen. Es ist zwar nicht schlimm, wenn's 380 oder 420
Windungen werden, aber größer sollte die Abweichung nicht sein.
Ist man fertig mit Wickeln, kann man die Wicklung mit ganz wenig Nagellack oder Sekundenkleber
fixieren. Ist dieser fest, kann man das Klebeband vorsichtig vom Pinsel oder Stift lösen und den
bewickelten Spulenträger abnehmen. Auch kann man den Draht jetzt abschneiden, aber auch hier
ein paar Zentimeter stehen lassen. Die Drahtenden müssen jetzt in eine Richtung zeigen und dürfen
auch nicht durch das Loch im Spulenkörper gehen (siehe Abb. 5).
Abbildung 4: Wickelvorrichtung
Page 5

Abbildung 5: Spulenkörper fertig
Ist der Spulenkörper soweit fertig, kann er mit wenig Sekundenkleber in den Kern geklebt werden.
Die Drahtenden gehen zur geschlossenen Seite des Kerns durch den Schlitz raus (siehe Abb. 6).
Jetzt werden die Drahtenden ab der Stelle, wo sie aus den Kern auf der Rückseite herausragen plus
ein oder zwei Millimeter abisoliert. Das macht man am besten mit einem Lötkolben, der etwas
frisches Zinn an der Spitze hat. Damit wird der Draht solange erhitzt, bis die Isolation
verschwunden und der Draht verzinnt ist. Achtung: Die dabei entstehenden Dämpfe sind ungesund
und dürfen nicht eingeatmet werden!
Anschließend wird auf der Spulenrückseite der 10nF-Kondensator (Aufdruck: 103) mit
Sekundenkleber festgeklebt, sodass die Anschlüsse Richtung dem Schlitz zeigen, aus dem die
Drähte kommen. In Abb. 7 ist der Kondensator neben das Loch im Kern geklebt – vielleicht braucht
man das Loch ja später mal für irgendwas noch. Für die Funktion der Schaltung ist dies aber
unerheblich.
Die Anschlussbeinchen des Kondensators werden jetzt bis auf ca. 5mm gekürzt und die verzinnten
Enden des Kupferlackdrahtes darumgewickelt (ggf. mit Hilfe einer Pinzette) und dann festgelötet.
bewickelt
Abbildung 6: Spule in Kern eingeklebt
Page 6
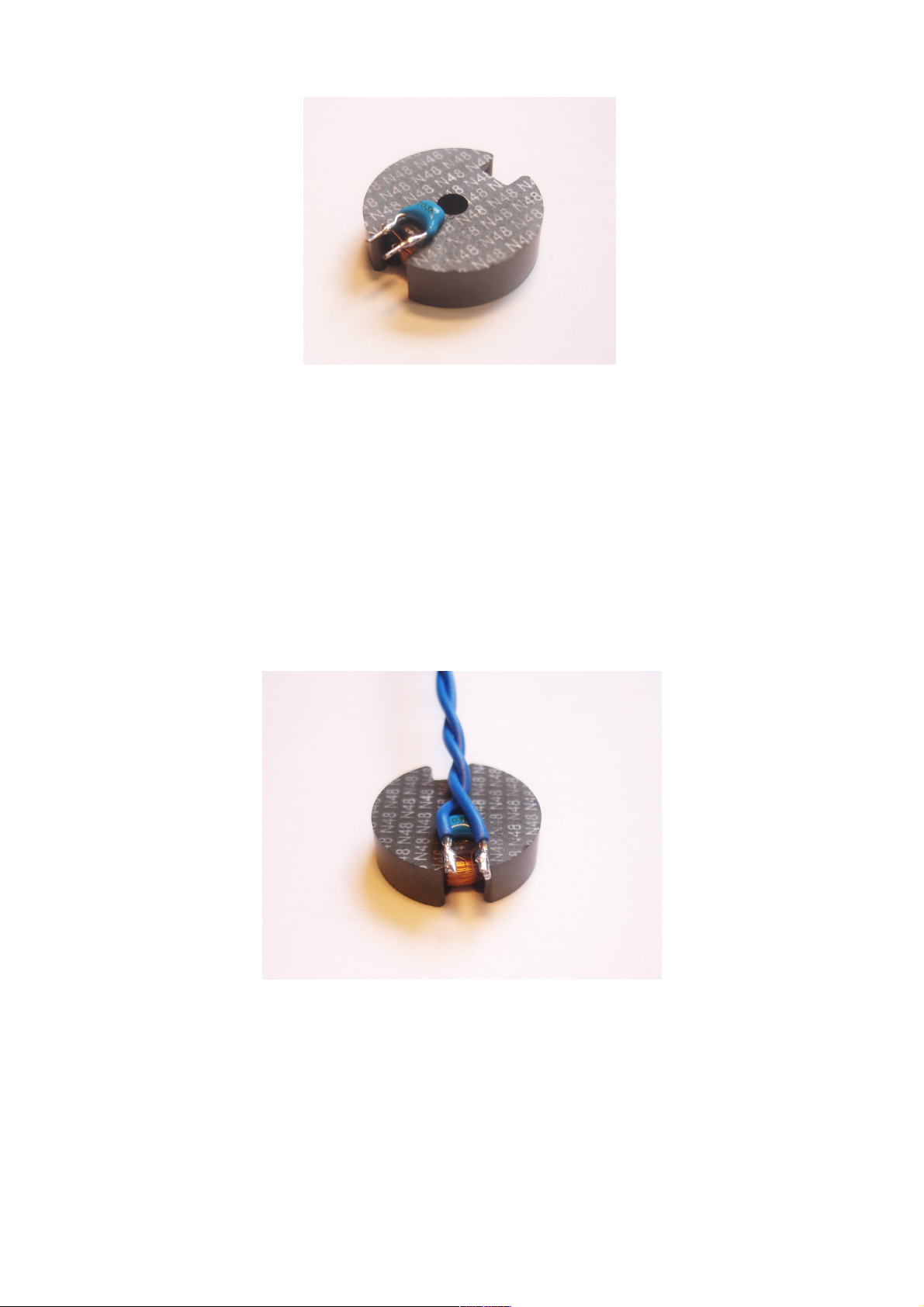
Abbildung 7: Spule mit Kondensator
Nun kommen noch die auf 70mm gekürzten Kabel mit an beiden Enden abisolierten, verdrillten und
verzinnten Enden dran. Diese werden direkt an die Kondensatorbeinchen gelötet, sodass sie
Richtung Spulenmitte zeigen und zuletzt noch verflochten, wie es Abb. 8 darstellt. Die Polung ist
dabei völlig egal. Steht ein Multimeter zur Verfügung, dann kann man jetzt den Widerstand
zwischen den Kabelenden messen. Dieser sollte so im Bereich von 30Ω liegen. Liegt er weit
darüber (60Ω und mehr), sollte kontrolliert werden, ob der Kupferdraht richtig abisoliert wurde und
ob er wirklich angelötet und nicht inzwischen abgerissen ist. Liegt der Widerstand weit darunter
(kleiner 10Ω), dann sollte die Lötstelle auf Kurzschlüsse untersucht werden. Kurzschlüsse im
Inneren der Wicklung kann man so leider nicht detektieren. Hier also Prinzip Hoffnung!
2.2 Montage der Spule
Um die jetzt fertige Spule an den Roboter zu montieren, muss zunächst der Tischtennisball wieder
abgenommen werden. Spätestens jetzt rächt es sich, wenn man statt mit ein paar Punkten den
Tischtennisball vollflächig verklebt hat.
Die Spule wird nun – ebenfalls wieder mit Sekundenkleber – unten im halben Tischtennisball
befestigt (siehe Abb. 9).
Abbildung 8: Fertige Spule
Page 7

Achtung: Sollte ASURO noch nicht für das Aufstecken einer Erweiterungsplatine vorbereitet sein,
darf der Ball erst wieder aufgeklebt werden, wenn das passiert ist.
2.3 Bestückung der Pfostenstecker
Bevor die Bauteile in die Platine kommen, müssen zunächst die Pfostenstecker eingebaut werden.
Das Vorgehen hier hängt davon ab, ob ASURO schon für die Aufnahme von Erweiterungsplatinen
vorbereitet ist.
a) ASURO hat noch keine Buchsenleisten für die Erweiterungsplatine
In diesem Fall müssen die Bauteile zur Linienverfolgung, nämlich die Fototransistoren T9 und T10,
sowie die LED D11 aus der Platine ausgebaut werden. Dazu muss der Tischtennisball abmontiert
sein. Am einfachsten geht es, wenn man die Lötstellen des zu entfernenden Bauteils gleichzeitig mit
einem Lötkolben erhitzt und das Bauteil dann vorsichtig durch die Platine herauszieht. Sind die
Löcher danach nicht frei, können sie mit Entlötlitze und/oder einer Entlötsaugpumpe vorsichtig
freigemacht werden.
Danach werden die zwei- und dreipoligen Stecker und Buchsenleisten zusammengesteckt und – mit
den Buchsen in der ASURO-Platine – in die ASURO-Platine gesteckt, wie es Abb. 10 zeigt. Darauf
kommt dann die Erweiterungsplatine und erst dann werden die Stecker- und Buchsenleisten auf der
Erweiterungsplatine und auf der ASURO-Hauptplatine festgelötet.
Abbildung 9: Spule in Tischtennisball eingeklebt
Abbildung 10: Montage der Pfostenstecker
Page 8
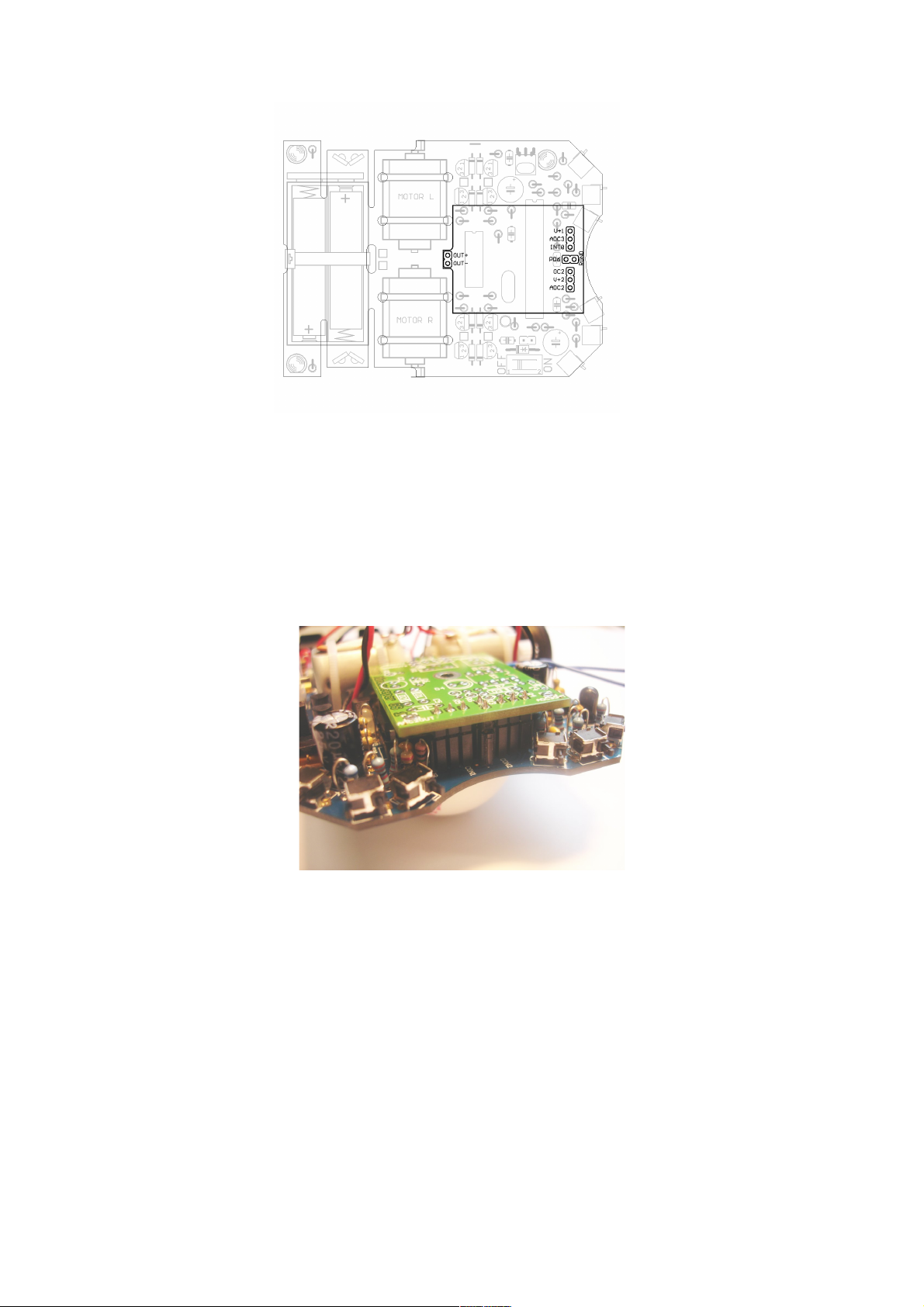
Abbildung 11: Montage der Erweiterungsplatine
b) ASURO hat bereits Buchsenleisten für die Erweiterungsplatine
Die zwei- und dreipoligen Pfostenstecker werden in die im ASURO eingebauten Buchsenleisten
gesteckt (siehe Abb. 10) und darauf wird die Erweiterungsplatine platziert, sodass die Pins durch die
Platine schauen. Wenn alles passt, werden die Pfostenstecker auf der Erweiterungsplatine verlötet.
2.4 Anbringen des Tischtennisballs
Sind die Pfostenstecker in der Platine verlötet, wird die Erweiterungsplatine wieder abgezogen und
für die restliche Bestückung beiseite gelegt. Nun wird das Anschlusskabel der Spule durch das Loch
in der ASURO-Platine gezogen und der Tischtennisball mit der darin eingeklebten Spule wieder
vorsichtig und nur mit drei bis vier Klebepunkten auf die ASURO-Platine geklebt.
2.5 Bestückung der Platine
Sobald die Pfostenstecker (und ggf. auch die Buchsenleisten) eingelötet sind, kann man die Platine
wieder abziehen und die restlichen Bauteile bestücken. Nach Bestückungsplan (siehe Abb. 13) wird
in folgender Reihenfolge bestückt. Bis auf R7 werden alle Widerstände – wie bei ASURO – stehend
eingelötet, was bedeutet, dass ein Beinchen um 180° gebogen werden muss. Bei R7 werden beide
Abbildung 12: Erweiterungplatine mit
Pfostensteckern
Page 9

Beinchen um 90° abgewinkelt.
In folgender Reihenfolge wird bestückt:
IC1: Erstmal nur der Sockel, auf richtige Polung achten!
D1, D2, D3: 1N4148, auf richtige Polung achten!
C4, C5, C6: 100nF keramisch
R1, R2, R3, R7: 10kΩ 5% (braun, schwarz, orange, gold)
R4: 220Ω 5% (rot, rot, braun, gold)
R5: 1kΩ 5% (braun, schwarz, rot, gold)
R6: 100kΩ 5% (braun, schwarz, gelb, gold)
C2, C3: Elko 100µF, mind 16V, auf richtige Polung achten!
TR1: Spindeltrimmer 20k stehend
D4: LED 5mm rot, auf richtige Polung achten!
CON1: Schraubklemme, Kabeleingang muss zum Platinenrand zeigen.
IC1: Jetzt wird der TS912 in den Sockel eingesteckt. Vorher ggf. die Beinchen zusammenbiegen
und auf richtige Polung achten (Einkerbung im oder Markierung auf Gehäuse muss Richtung
Einkerbung im Sockel zeigen)!
Abbildung 13: Bestückungsplan
Page 10

Abbildung 14: Fertig aufgebaute Erweiterunsplatine
Anmerkung: Die Anschlüsse VCCOUT1/2, GNDOUT1/2 und ADC2OUT/ADC3OUT werden
erstmal nicht benötigt. Sie können später zusammen mit dem Befestigungsloch in der Platine
verwendet werden, um zwei Abstandssensoren nach dem Triangulationsprinzip anzuschließen.
Dann kann ASURO sowohl autonom navigieren, als auch dabei metallische Objekte finden.
Genaues dazu findet sich in „Mehr Spaß mit ASURO, Band II“. Die Triangulationssensoren werden
dabei aber statt direkt an der ASURO-Platine an der Erweiterungsplatine angeschlossen.
2.6 Inbetriebnahme
Ist der Tischtennisball mitsamt Spule aufgeklebt und die Platine bestückt, so wird diese nun auf den
(ausgeschalteten!) Roboter gesteckt. Dabei muss kontrolliert werden, dass keines der Bauteile der
ASURO-Platine die Lötstellen der Erweiterungsplatine berührt. Die Kabel von der Spule werden
dabei auf der Seite der Schraubklemme CON1 unter der Platine herausgeführt und dann – Polung
ist egal – in der Schraubklemme festgeschraubt.
Um die Oszillation im Schwingkreis sichtbar zu machen, wird zunächst das folgende Programm
eingespielt (MinesweeperTest1):
#include "asuro.h"
extern volatile unsigned char count72kHz;
int main(void)
{
unsigned char oscillation;
Init();
DDRD &= ~(1<<2); // Change Port D Pin 2 to input
StatusLED(OFF);
while(1)
{
count72kHz=0;
oscillation = FALSE;
while (count72kHz<100) {
// Detect low level
if ((PIND & (1<<2)) == 0) oscillation = TRUE;
Page 11

}
// If oscillator is running, no metal object is within
// range, so LED should be off
if (oscillation) FrontLED(OFF); else FrontLED(ON);
}
return 0;
}
Dieses sorgt dafür, dass die LED ausgeht, wenn der Oszillator läuft.
Je nach verwendeter Detektionsart (Zusammenbruch der Oszillation oder Änderung der
Oszillatorfrequenz) wird unterschiedlich abgeglichen. Zunächst wird der Abgleich für den
einfachen Fall des Zusammenbrechens der Oszillation erklärt und dieser sollte auch zu Testzwecken
(und mit obigem Programm) in jedem Fall als erstes vorgenommen werden.
Leuchtet nach dem Einschalten die rote LED auf der Erweiterungsplatine nicht, so wird der
Spindeltrimmer so lange nach rechts gedreht, bis sie aufleuchtet. Der Trimmer kann bis zu zehn
Umdrehungen in eine Richtung gedreht werden und geht auch nicht kaputt, wenn er weiter gedreht
wird. Sind die zehn Umdrehungen durch und es passiert nichts, muss mit der Fehlersuche
weitergemacht werden...
Klappt das soweit, stellt man den Roboter auf eine garantiert metallfreie Unterlage (Plastik- oder
Holzkiste, Tisch ohne Nägel oder Schrauben in der Nähe...) und dreht den Trimmer soweit nach
links, bis die LED ganz ausgeht. Es kann erforderlich sein, diesen Abgleich später zu wiederholen,
da Temperaturdrift und Änderungen der Batteriespannung den nun präzise eingestellten
Arbeitspunkt verschieben können. Je sorgsamer man den Abgleich durchführt, umso empfindlicher
ist der Sensor, aber umso wahrscheinlicher ist es, dass man nachtrimmen muss.
Nähert man sich nun mit einem metallischen Objekt (Schraubenzieher, o.ä.) dem Tischtennisball, so
sollte – spätestens bei Berührung – die LED wieder angehen.
Der Sensor ist nun so empfindlich, dass er auch kleine Schipsel Alufolie durch einen Karton
hindurch orten kann.
Möchte man nur die Frequenzveränderung messen, so gleicht man den Sensor am besten in der
fertigen Applikation ab. Dabei wird der Roboter dem maximal zu erwartendem Sensorsignal
ausgesetzt (also die Metallfäche oder das Metallobjekt möglichst nahe dran), und der Trimmer so
weit nach links verdreht, dass auch dann die LED nicht ausgeht. Folgendes Programm kann für die
Demonstration der Funktion verwendet werden (MinesweeperTest2):
#include "asuro.h"
#include <stdio.h>
extern volatile unsigned char count72kHz;
int main(void)
{
unsigned char oldlevel=0, newlevel;
unsigned int freq;
int i;
char s[9];
Init();
DDRD &= ~(1<<2); // Change Port D Pin 2 to input
StatusLED(OFF);
while(1)
{
freq=0;
for (i=0; i<100; i++) {
count72kHz=0; // This counter is incremented in timer interrupt
Page 12

FrontLED(OFF);
while (count72kHz<72) {
// Detect level change
newlevel = PIND & (1<<2);
if (oldlevel != newlevel) {
oldlevel = newlevel;
freq++;
FrontLED(ON);
}
}
}
sprintf(s,"%5d\n\r",freq);
SerWrite(s,7);
}
return 0;
}
2.7 Fehlersuche
Funktioniert die Schaltung nicht wie beschrieben, so geht es an die Fehlersuche. Hier gibt es leider
weniger Debug-Möglichkeiten, als bei der ASURO-Platine, daher ist ein Multimeter unter
Umständen hilfreich.
● Als erstes sollte man überprüfen, ob das Testprogramm fehlerfrei compiliert und auch
tatsächlich geflasht wurde. Danach sollte man die Lötstellen nochmals kontrollieren und die
Bauteilewerte überprüfen.
● Sind die abisolierten und verzinnten Anschlüsse der Spule korrekt in der Schraubklemme
oder wird nur die Isolation kontaktiert? Beim ausgeschalteten(!) Roboter müssen sich die ca.
30Ω der Spule zwischen den Schrauben messen lassen.
Wird ein viel höherer Widerstand angezeigt, ist das Kabel nicht richtig in der
Schraubklemme, an der Suchspule wurde der Draht nicht richtig abisoliert und es besteht
daher kein Kontakt oder der dünne Draht auf der Spule ist beim Zusammenbau gerissen.
Letzteres findet meist in der Nähe des Kondensators statt.
Ist der Widerstand viel kleiner liegt ein Kurzschluss auf der Platine oder in der Spule vor.
Hier ist es sinnvoll, das Kabel nochmal aus der Schraubklemme zu nehmen und nochmal
den Widerstand an der Schraubklemme zu messen. Wird der Widerstand nun viel größer als
30 Ohm, so liegt der Kurzschluss auf Seiten der Spule.
● Zwischen GNDOUT1 und VCCOUT1 muss sich bei eingeschaltetem Roboter die
Betriebsspannung von 4,5 .. 5,5V messen lassen. Wenn nicht, ist die Batterie leer, der
Roboter nicht eingeschaltet, die Leitung des Batteriehalters ab, oder eine kalte Lötstelle im
Bereich des hinteren Pfostensteckers auf der Aufsteckplatine oder am Roboter.
● Die Spannung am Operationsverstärker kann zwischen den Pins 4 Minus (wenn die Kerbe
im IC oben ist, links unten) und 8 Plus (rechts oben) abgegriffen werden. Die Spannung
sollte mindestens 2V mehr als die Batteriespannung betragen.
 Loading...
Loading...