


Software Manual
Asuro xTend
Zur Benutzung mit dem ASURO Roboter bzw. ASURO xTend
©2014 AREXX Engineering und JM3 Engineering
www.arexx.com
Neueste Updates sind auf www.jm3-engineering.com!
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 1
Impressum
Impressum
©2014 AREXX Engineering
Nervistraat 16
8013 RS Zwolle
The Netherlands
Tel.: +31 (0) 38 454 2028
Fax.: +31 (0) 38 452 4482
"RP6" sind eingetragenes Warenzeichen von
AREXX Engineering. Alle anderen Warenzeichen
stehen im Besitz ihrer jeweiligen Eigentümer.
Diese Bedienungsanleitung ist urheberrechtlich geschützt.
Der Inhalt darf ohne vorherige schriftliche Zustimmung des
Herausgebers auch nicht teilweise kopiert oder
übernommen werden!
Änderungen an Produktspezifikationen und Lieferumfang
vorbehalten. Der Inhalt dieser Bedienungsanleitung
kann jederzeit ohne vorherige Ankündigung geändert
werden.
Neue Versionen dieser Anleitung erhalten Sie kostenlos auf
http://www.arexx.com/
Wir sind nicht verantwortlich für den Inhalt von externen Webseiten, auf die in dieser Anleitung verlinkt wird!
Hinweise zur beschränkten Garantie und Haftung
Die Gewährleistung von AREXX Engineering beschränkt sich auf Austausch oder Reparatur des Roboters und seines
Zubehörs innerhalb der gesetzlichen Gewährleistungsfrist bei nachweislichen Produktionsfehlern, wie mechanischer
Beschädigung und fehlender oder falscher Bestückung elektronischer Bauteile, ausgenommen aller über
Steckverbinder/Sockel angeschlossenen Komponenten.
Es besteht keine Haftbarkeit für Schäden, die unmittelbar durch, oder in Folge der Anwendung des Roboters entstehen.
Unberührt davon bleiben Ansprüche, die auf unabdingbaren gesetzlichen Vorschriften zur Produkthaftung beruhen.
Sobald Sie irreversible Veränderungen (z.B. Anlöten von weiteren Bauteilen, Bohren von Löchern etc.) am Roboter oder
seinem Zubehör vornehmen oder der Roboter Schaden infolge von Nichtbeachtung dieser Anleitung nimmt, erlischt
jeglicher Garantieanspruch!
Es kann nicht garantiert werden, dass die mitgelieferte Software individuellen Ansprüchen genügt oder komplett
unterbrechungs und fehlerfrei arbeiten kann. Weiterhin ist die Software beliebig veränderbar und wird vom Anwender in
das Gerät geladen. Daher trägt der Anwender das gesamte Risiko bezüglich der Qualität und der Leistungsfähigkeit des
Gerätes inklusive aller Software. Bitte beachten Sie auch die entsprechenden Lizenzvereinbarungen auf der CD-ROM!
WICHTIG
Vor dem ersten Gebrauch dieses Robot Arms lesen Sie bitte zuerst die Gebrauchsanleitung aufmerksam durch! Sie erklärt
die richtige Handhabung und informiert Sie über mögliche Gefahren. Zudem enthält sie wichtige Informationen, die nicht
allen Benutzern bekannt sein dürften
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 2

Inhalt
Impressum 2
1. Einleitung 4
2. Asuro Architektur 5
2.1 Asuro Roboter und Asuro xTend Blockschaltbild 5
2.2 Asuro Roboter 5
2.3 Asuro xTend 6
3. Asuro Software 6
3.1 Asuro Base Library 7
3.2 Asuro Base main.cpp 7
3.3 Asuro Base motorController.cpp 7
3.4 Asuro xTend Library 7
3.5 Asuro ioExt Library 7
3.6 Asuro xTend 7
4. Einfache Programm-Beispiele 7
4.1 Display Anzeige 7
4.2 LED ein- ausschalten 7
4.3 Tasten – auswerten der Tasten 7
4.4 ADC Wert messen und anzeigen 7
4.5 FETs einschalten 7
4.6 Daten über USB an einen PC senden 7
4.7 I2C Bus – Register lesen und schreiben 7
4.8 Tipps zum Debuggen 7
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 3

1. Einleitung
Das Dokument soll die Funktionsweise des Asuro Roboters mit der xTend Erweiterung beschreiben.
Insbesondere werden hier die implementierten Software-Funktionen besprochen, aber da es sich um
ein Real-time System handelt muss auch kurz auf die Hardware eingegangen werden damit die
Funktionsweise und das Zusammenspiel von Asuro Roboter und Asuro xTend zu verstehen.
Die Software ist in der Programmiersprache C++ geschrieben – es werden Programmierkenntnisse
in C/C++ vorausgesetzt – daher die Sprachelemente selbst werden hier nicht erklärt.
Empfehlung: C++ .. in 21 Tagen von Jesse Liberty ISBN: 3-8272-5624-1
Hier wird C++ Schritt für Schritt erklärt - sie müssen Sie über keinerlei Programmierkenntnisse
verfügen. Der Autor beginnt mit den fundamentalen Grundlagen und führt Sie sowohl in die Sprache
als auch die Konzepte von C++ ein. Zahlreiche Syntaxbeispiele und detaillierte Codeanalysen machen
das Erlernen von C++ leicht.
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 4
2. Asuro Architektur
Micro Controller
ATmega8
tactile sensors
(6 switches)
odometrie
motor
(left)
motor
(right)
LEDs
Status & back
lights
line follower
(photo transistor
+ IR LED)
battery
monitoring
Programming IF
(2400 Baud IR)
Micro Controller
ATXmega32
Display 2 x8
(contrast adj.)
Power supply
3.3V
illumination
control for
Display
Free ADC/GPIO
( 2 x)
4 x status LEDs
3 x keys
line follower
I2C switch
UART1
Programming IF
(USB -MCP2200)
Asuro Robot
Asuro xTend
Sharp FET
switches and
ADC inputs
Asuro Module
extension IF
Asuro Connector
replication /
extension
I2C – Robot Bus
I2C – xTend Bus
Display IF
(4-Bit data)
Asuro Connector
extension
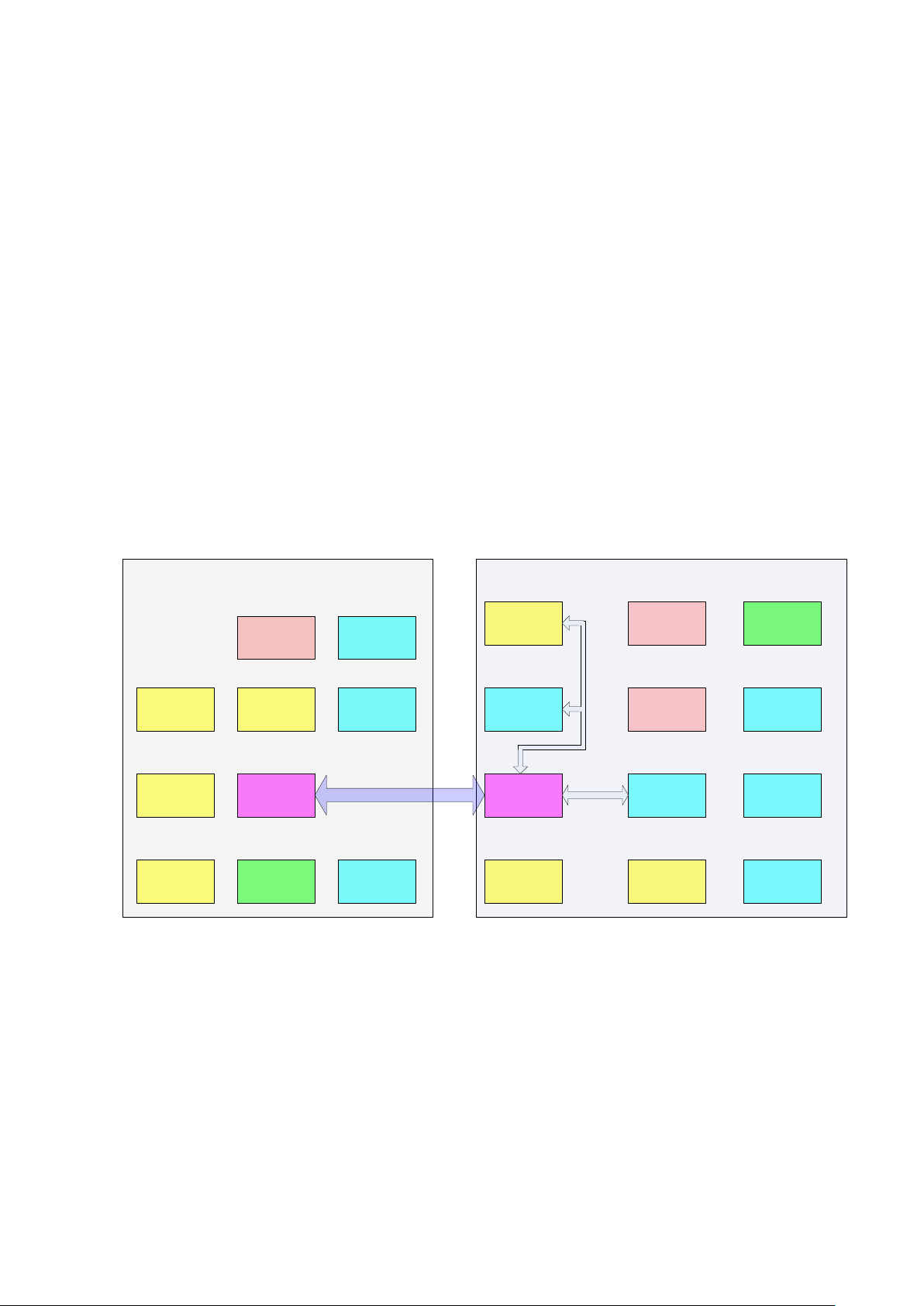
2.1 Asuro Roboter und Asuro xTend Blockschaltbild
Der Asuro Roboter und Asuro xTend werden in einer Master/Slave-Konfiguration betrieben. Der
Asuro Roboter ist der Slave und der Asuro xTend der Master. Den Asuro zu steuern und mit der
Sensorik Aufgaben lösen zu lassen wird somit in folgende Teilaufgaben zerlegt:
1) Master
Auf dem Master läuft das Applikationssoftware. Daten können auf dem Display angezeigt
werden und erweiterte Sensorik (z.B. Kompass/Gyro) ausgewertet werden.
Der Master wertet alle eigenen Sensoren und die Daten vom Salve aus. Er berechnet die neuen
Soll-Werte für den Fahrantrieb und ‚sendet‘ diese auf dem I2C Bus.
2) Slave
Der Slave steuert die beiden Motoren an und regelt die Geschwindigkeit. Die Drehzahlen von
beiden Motoren, die Batteriespannung und die taktilen Sensoren aus (Schalter) werden
ausgewertet und an den Master gesendet.
2.2 Asuro Roboter
Der Asuro Roboter enthält einen Mikro-Controller der einfache Sensorik (Taktile Schalter und IRSende-Diode und zwei Photo-Transistoren für den Linienfolger) auswertet und die beiden Motoren
regelt (PID) und ansteuert. Die Odeomerie liefert Impulse die der Geschwindigkeit proportional
sind.
Die Spannungsversorgung und der Erweiterungsbus werden auf die Asuro xTend Baugruppe
repliziert. Die I2C Schnittstelle zum Asuro xTend verbindet die beiden Platinen um Daten
auszutauschen.
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 5

2.3 Asuro xTend
Der Asuro xTend enthält einen leistungsstarken Mikro-Controller mit 2 IC2 Bus und 2 UART
Schnittstellen und einen Display Interface. Außerdem können zwei Sharp-Sensoren angeschlossen
werden. Alle Sensorik wird hier ausgewertet und für die ‚autonome‘ Fahrt des Asuro verwendet.
Hier werden von jetzt ab alle Programme laufen die sie entwickeln. In der Regel müssen sie an der
mitgelieferten Software für den Asuro Roboter nichts mehr ändern.
3. Asuro Software
In der mitgelieferten Asuro Demo Software befinden sich drei Hauptbestandteile:
1) Asuro Base Demo - für den Asuro Roboter
2) Asuro Control - für den Asuro xTend)
3) IoExt – für die Asuro Sensor Module
Die modular aufgebaute Software-Struktur unterteilt sich für die einzelnen Funktionen in:
1) Common Files - allgemeine Definitionen die für beide Micro-Controller gelten
2) Library für die Low-level Hardware Treiber (*.h und *.cpp files)
Dies sind Programmteile, die die Hardware initialisieren bzw. ansprechen.
Hier sollten sie nichts ändern oder sie wissen ganz genau was sie machen!
3) Header Dateien der Software-Module (*.h files)
4) Hauptprogramm (main.cpp –file) und andere Software-Module (*.cpp files)
Hinweis: Alle nachfolgenden Kapitel werden als Download in der nächsten
Version des Dokumentes verfügbar sein!
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 6

3.1 Asuro Base Library
3.2 Asuro Base main.cpp
3.3 Asuro Base motorController.cpp
3.4 Asuro xTend Library
3.5 Asuro ioExt Library
3.6 Asuro xTend
4. Einfache Programm-Beispiele
4.1 Display Anzeige
4.2 LED ein- ausschalten
4.3 Tasten – auswerten der Tasten
4.4 ADC Wert messen und anzeigen
4.5 FETs einschalten
4.6 Daten über USB an einen PC senden
4.7 I2C Bus – Register lesen und schreiben
4.8 Tipps zum Debuggen
AREXX Engineering & JM3 Engineering
Version: 0.90 16. Nov. 2014 Seite: 7
 Loading...
Loading...