

AN-922
APPLICATION NOTE
One Technology Way • P. O . Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel : 781.329.4700 • Fax: 781.461.3113 • www.analog.com
Digital Pulse-Shaping Filter Basics
by Ken Gentile
INTRODUCTION
Data transmission systems that must operate in a bandwidthlimited environment must contend with the fact that constraining
the bandwidth of the transmitted signal necessarily increases
the likelihood of a decoding error at the receiver. Bandwidth
limited systems often employ pulse-shaping techniques that
allow for bandwidth containment while minimizing the
likelihood of errors at the receiver.
Before digital filters were available, pulse shaping was accomplished with analog filters. Unfortunately, the response of an
analog filter is affected by variations in component values due
to specified tolerance ranges, temperature, and aging. The
response of a digital filter, by contrast, is solely dependent on
the filter coefficients, which are invariant to both temperature
and aging. Therefore, digital pulse-shaping filters have become
an integral part of many digital data transmission systems. This
application note describes the fundamentals of pulse shaping
and the tradeoffs associated with the design of digital pulseshaping filters.
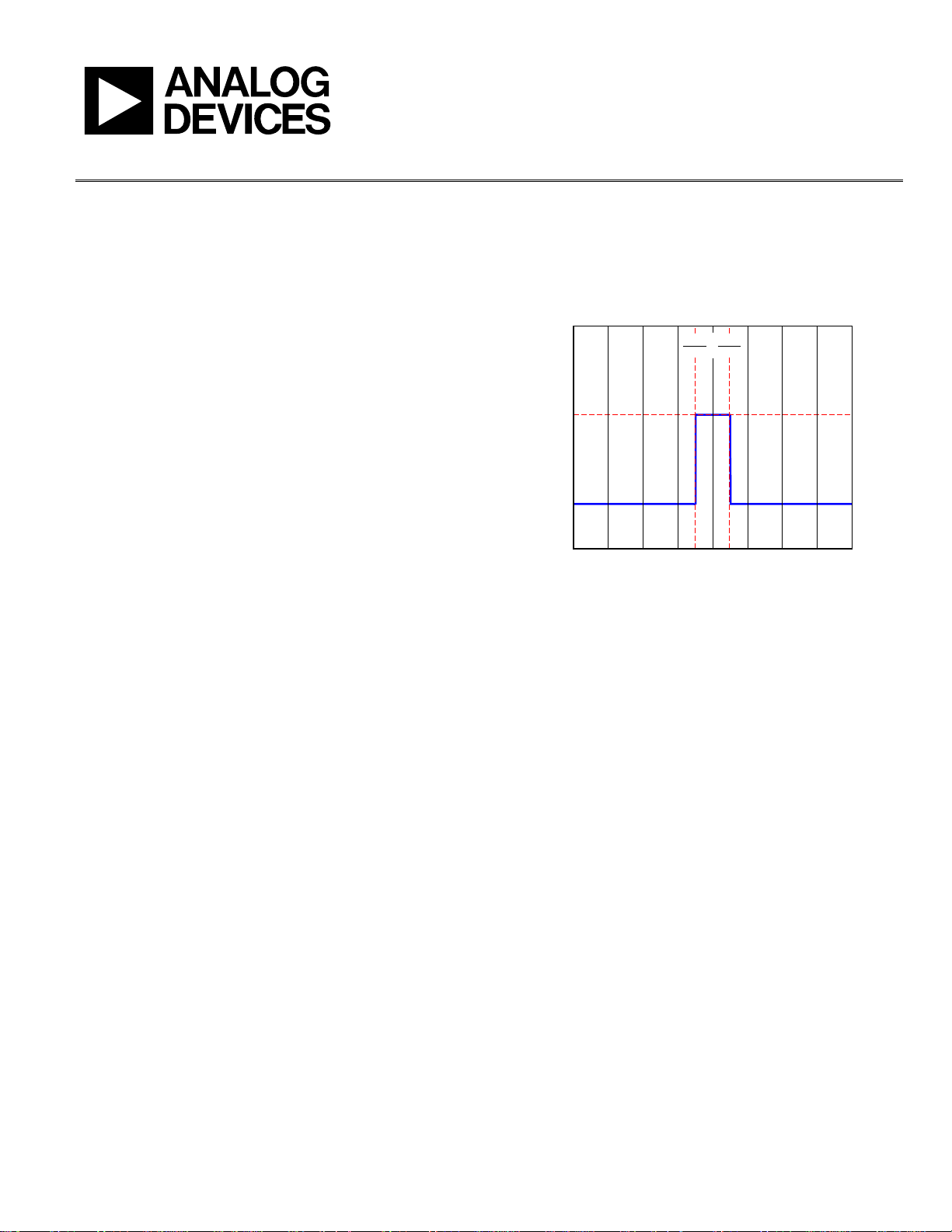
THE RECTANGULAR PULSE
The most basic information unit in a digital transmission
scheme is a rectangular pulse. It has a defined amplitude,
A, and defined duration, T. Such a pulse is shown in
where A = 1, T = T
, with the pulse centered about the time
o
origin at t = 0. Typically, a sequence of such pulses (each
delayed by T seconds relative to the previous one) constitutes
the transmission of information. The information, in this
case, is encoded in the amplitude of the pulse. The simplest
case is when a binary 0 is encoded as the absence of a pulse
(A = 0) and a binary 1 is encoded as the presence of a pulse
(A = constant). Since each pulse spans the period T, the maximum pulse rate is 1/T pulses per second, which leads to a data
transmission rate of 1/T
bits per second.
In more sophisticated data transmission schemes, the pulse
amplitude can take on both positive and negative values with
multiple discrete amplitudes used to encode more than one bit
into the pulse. For example, four levels can be used to encode
two bits in which each level is uniquely associated with one of
the four possible bit patterns. In some cases, multiple pulses are
transmitted simultaneously, which allows even more bits to be
encoded (see the Multibit Symbol Encoding section).
Figure 1,
2
1
AMPLITUDE
0
–4–3–2–101234
RECTANGULAR PULSE (TIME DO MAIN)
–T
T
O
O
2
2
TIME (IN UNITS OF TO)
Figure 1. A Single Rectangular Pulse (T = T
, A = 1)
O
A
06897-001
In sophisticated transmission systems, multiple amplitudes
and/or multiple simultaneous pulses transmit a single unit of
data. As such, each single unit of data can represent more than
one bit. The group of bits that a single unit of data represents is
referred to as a symbol. The trivial case, of course, is the single
bipolar pulse of
Figure 1 where each unit of data is a single bit
(symbol and bit are synonymous in this case).
The pulses used to transmit symbols occupy a fixed time interval, T (as in
Figure 1). Thus, the pulse rate is 1/T pulses per
second, which leads to a symbol rate of 1/T symbols per second.
The unit, symbols per second, is often referred to as baud. The
data transmission rate in bits per second is the baud rate
multiplied by the number of bits represented by each symbol.
For example, if a symbol represents four bits, then the bit rate is
four times the symbol rate. This means that a lower transmission
rate can be used to transmit symbols as opposed to directly
transmitting bits, which is the primary reason that the more
sophisticated data transmission systems encode groups of bits
into symbols. The remainder of this application note focuses on
a single bipolar pulse for transmitting one bit at a time. That is, a
logical 1 is represented by the presence of a pulse of unit
amplitude and a logical 0 by the absence of a pulse (that is, zero
amplitude). The concepts discussed in this application note,
however, extend directly to the more sophisticated encoding
schemes.
Rev. 0 | Page 1 of 12

AN-922
TABLE OF CONTENTS
Introduction ...................................................................................... 1
The Rectangular Pulse ..................................................................... 1
Spectrum of a Rectangular Pulse.................................................... 3
The Raised Cosine Filter.................................................................. 3
Pulse Shaping .................................................................................... 4
Digital Pulse-Shaping Filters........................................................... 5
Group 1 Plots: Error at the Edge of the Pass Band........................7
Group 2 Plots: Error at the Nyquist Frequency.............................8
Group 3 Plots: Minimum Stop Band Attenuation ........................9
Multibit Symbol Encoding ............................................................ 10
References........................................................................................ 11
Rev. 0 | Page 2 of 12
AN-922
τ
SPECTRUM OF A RECTANGULAR PULSE
The frequency content (or spectrum) associated with the pulse
Figure 1 is shown in Figure 2. The spectrum of the pulse is
of
obtained by applying the Fourier transform to the time domain
waveform of
Figure 1. The shape of the spectrum is the wellknown sin(x)/x response, which is often referred to as the sinc
response. The null points (where the spectral magnitude is
zero) always occur at integer multiples of f
, which is the pulse
O
(or symbol) rate. Therefore, the null points are solely determined
by the pulse period, T. In theory, the nulls and peaks extend in
frequency out to ±∞ with the peaks approaching zero magnitude.
However, because the frequency span of
Figure 2 is only ±4 fO,
only four null points are evident on each side of the f = 0 line.
RECTANGULAR PULSE SPECTRUM
–
f
O
1
PULSE SPECTRUM
MAGNITUDE
0
–4–3–2–101234
FREQUENCY (I N UNITS OF
Figure 2. Spectrum of a Single Rectangular Pulse of Duration T
f
O
T
O
f
)
O
06897-002
o
The general shape of the spectrum that appears in Figure 2 is
the same regardless of the amplitude of the rectangular pulse.
Although the amplitude of the rectangular pulse proportionally
affects the magnitude of the peaks, it has no effect on the
frequency location of the null points. Therefore, encoding
schemes that rely on pulse amplitude variations still produce
a spectrum similar to that of
Figure 2 even though the pulse
amplitude may vary from pulse to pulse.
THE RAISED COSINE FILTER
As shown in Figure 2, the spectrum of a rectangular pulse spans
infinite frequency. In many data transmission applications, the
transmitted signal must be restricted to a certain bandwidth.
This can be due to either system design constraints or government regulation. In such instances, the infinite bandwidth
associated with a rectangular pulse is not acceptable. The
bandwidth of the rectangular pulse can be limited, however, by
forcing it to pass through a low-pass filter. The act of filtering
the pulse causes its shape to change from purely rectangular to a
smooth contour without sharp edges. Therefore, the act of
filtering rectangular data pulses is often referred to as pulse
shaping.
Unfortunately, limiting the bandwidth of the rectangular pulse
necessarily introduces a damped oscillation. That is, the
rectangular pulse exhibits nonzero amplitude only during the
Rev. 0 | Page 3 of 12
pulse interval, whereas the smoothed (or filtered) pulse exhibits
ripples both before and after the pulse interval. At the receiver,
the ripples can lead to incorrect decoding of the data, because
the ripples associated with one pulse interfere with the pulses
before and after it. However, the choice of a proper filter can
yield the desired bandwidth reduction while maintaining a time
domain shape that does not interfere with the decoding process
of the receiver.
This filter is the well-known raised cosine filter and its
frequency response is given by
H
()
,
()
−ωτ
c
⎡
2
{
τ
=ω
cos
⎢
⎣
⎤
}
,
⎥
α
4
⎦
,0
c
≤ω≤
0
dc
≤ω≤
d
>ω
where:
ω is radian frequency (2πf).
τ is the pulse period (equivalent to T
in Figure 1).
O
α is the roll off factor.
c is equal to π
d is equal to π
(1 − α)/τ.
(1 + α)/τ.
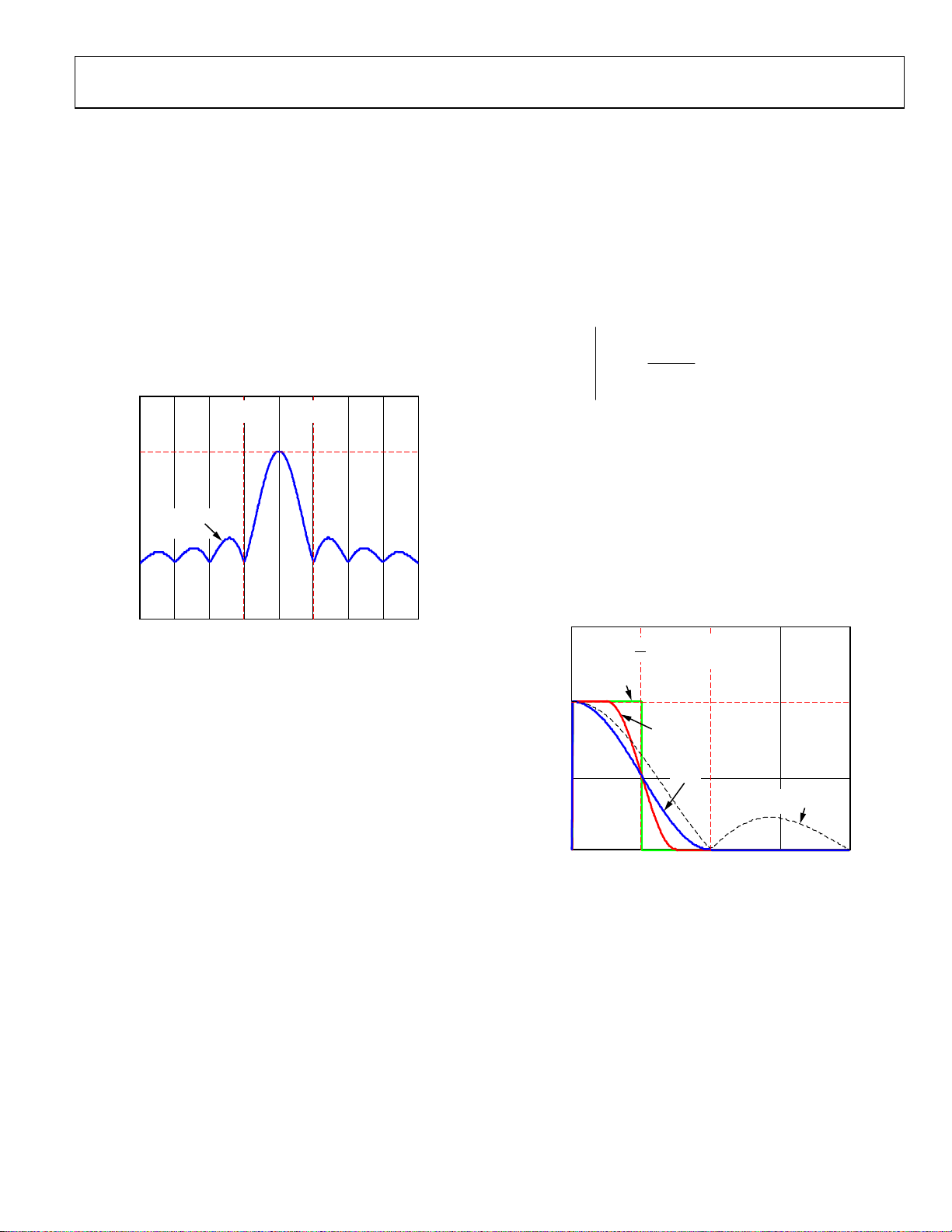
A plot of the raised cosine frequency response is shown in
Figure 3 (normalized to τ = 1). The raised cosine filter gets its
name from the shape of its frequency response, rather than its
impulse (or time domain) response.
1.5
1.0
MAGNITUDE
0.5
0
00.5 1.51.0 2.0
Figure 3. The Raised Cosine Frequency Response
RAISED COSINE SPECTRUM
f
O
2
α
= 0
α
FREQUENCY (NORMALIZED TO SYMBOL RAT E)
= 1/2
f
O
α
= 1
PULSE SPECTRUM
T
O
06897-003
The response characteristic of the raised cosine filter is
adjustable via a parameter known as the roll off factor
represented by the symbol α, where 0 ≤ α ≤ 1.
In the case of α = 0, the frequency response is confined to
(the green trace).
½ f
O
For α = 1, the frequency response is confined to f
(the
O
blue trace).
For values of α between 0 and 1, the frequency response is
restricted to an intermediate range between ½ f
and fO (the
O
red trace shows the response for α = ½).
AN-922
The dashed black trace is the spectrum of a rectangular pulse
and is included for the sake of comparison.
There are three significant frequency points associated with the
raised cosine response. The first is known as the Nyquist frequency,
which occurs at ½ f
communication theory, this is the minimum possible bandwidth
that can be used to transmit data without loss of information.
Note that the raised cosine response crosses through the ½
amplitude point at ½ f
significant frequency point is the stop band frequency (f
defined as the frequency at which the response first reaches
zero magnitude. It is related to α by:
f α+=
STOP
The third, and final, significant frequency point is the pass band
frequency (f
PAS S
first begins to depart from its peak magnitude. The raised
cosine response is perfectly flat from f = 0 (DC) to f
f α−=
PASS
Sometimes it is desirable to implement the raised cosine
response as the product of two identical responses, one at the
transmitter and the other at the receiver. In such cases, the
response becomes a square-root raised cosine response since
the product of the two responses yields the desired raised cosine
response. The square-root raised cosine response is given below.
Note that the variable definitions are the same as for the raised
cosine response.
()
H
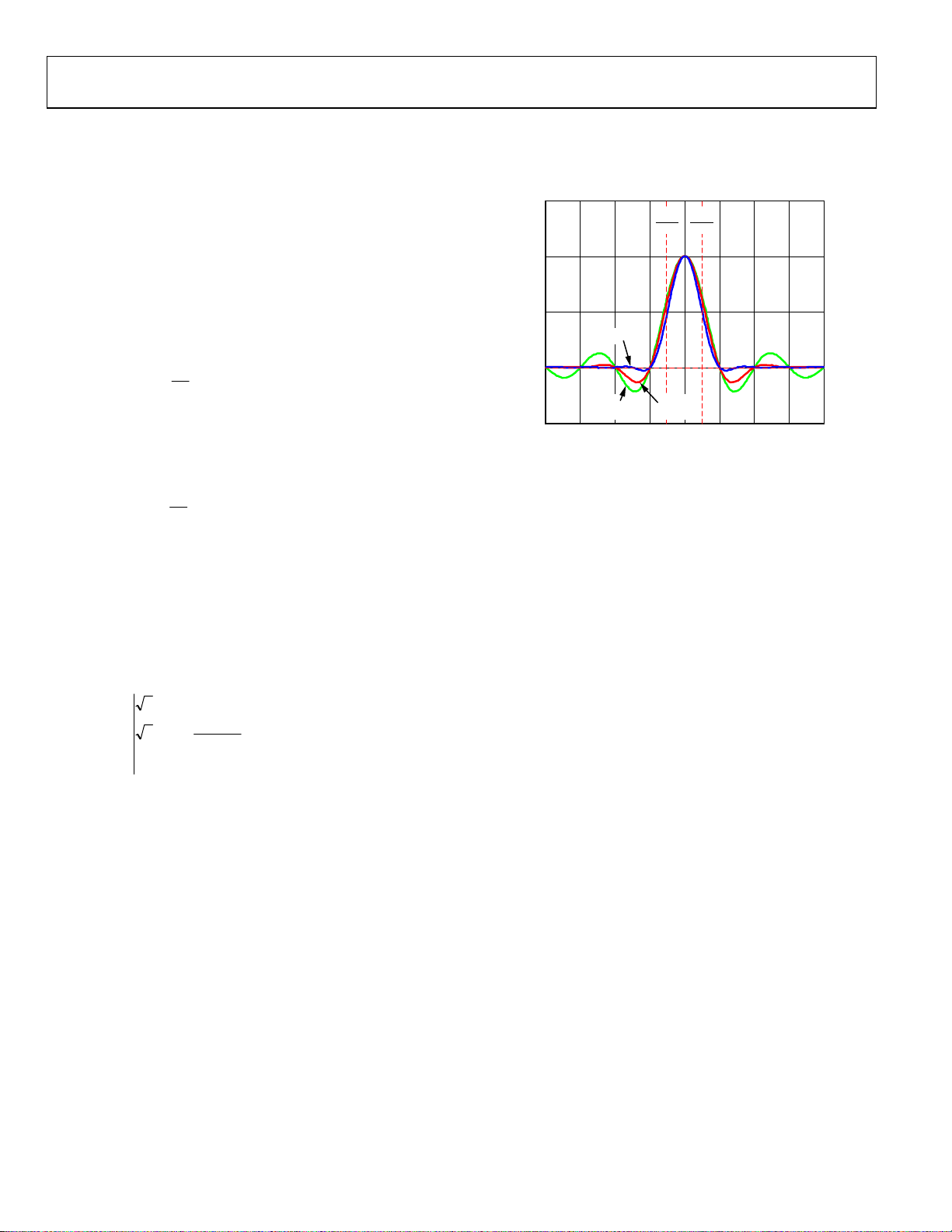
PULSE SHAPING
The consequence of pulse shaping is that it distorts the shape of
the original time domain rectangular pulse into a smoothly
rounded pulse with damped oscillations (ripples) before and
after the ±½ T
of the rectangular pulse with the raised cosine impulse response
(convolution is the process of filtering in the time domain). The
impulse response (time domain) of the raised cosine filter is
shown in
used in
impulse response for α = 0, the red trace for α = ½, and the blue
trace for
is the unavoidable consequence of limiting the bandwidth of the
filter to something less than infinity. However, the beauty of the
raised cosine filter is that the zero crossings of the impulse
response coincide with the midpoint of adjacent pulses. As long
as the receiver makes its decision at the middle of each pulse
Figure 4 where the color scheme is the same as that
Figure 3. That is, the green trace corresponds to the
α = 1. The oscillation observed in the impulse response
(that is, ½ the pulse rate). According to
O
regardless of the value of α. The second
o
)
STOP
f
O
)1(
2
) defined as the frequency at which the response
, where:
PAS S
f
O
)1(
2
,
()
−ωτ
c
⎡
{
ττ=ω
cos
⎢
α
4
⎣
,0
points. The ripples result from the convolution
o
0
c
⎤
}
,
⎥
⎦
≤ω≤
dc
≤ω≤
d
>ω
interval, then the ripples from adjacent pulses are crossing
through zero. Therefore, they do not interfere with the decision
making process.
1.5
1.0
0.5
AMPLITUDE
0
–0.5
–4–3–2–101234
RAISED COSINE TIME DOMAI N RESPONSE
–T
T
O
O
2
2
α
= 1
α
α
= 0
FREQUENCY (NO RMALIZED T O SYMBOL PERIOD)
Figure 4. The Raised Cosine Time Domain Response
= 1/2
06897-004
Note that as α is increased from 0 to 1 the pass band of the filter
is increased (see
domain ripples is decreased (see
Figure 3) while the amplitude of the time
Figure 4). Thus, α = 0 offers
the most efficient use of bandwidth, but this comes at the cost
of more pronounced ripples in the time domain response
(relative to α > 0). Choosing α > 0 causes an increase in the
bandwidth of the transmitted spectrum, but this negative effect
is offset by a reduction of the ripple amplitude in the time
domain response.
The raised cosine response is beneficial because it produces
time domain ripples that cross through zero at the middle of
adjacent pulse intervals. If the raised cosine pulse exhibits zero
crossings at the midpoint of adjacent pulse intervals regardless
of the choice of α, then why be concerned about the ripple
amplitude? Why not just choose α = 0 to get the minimum
bandwidth and accept the maximum ripple amplitude? The
reason is that the receiver is usually not capable of sampling at
exactly the midpoint of each pulse. Since the ripples only
exhibit zero amplitude at the middle of adjacent pulse intervals,
then a receiver sample that is not coincident with the midpoint
of a pulse interval necessarily samples some ripple from
adjacent pulses.
This is a source of decision-making error at the receiver known
as intersymbol interference (ISI). Reduced bandwidth means
larger ripple, which exacerbates ISI and increases the likelihood
of an incorrect decision (that is, error) at the receiver. Obviously,
a trade off exists between bandwidth containment in the frequency domain and ripple attenuation in the time domain. It is
this trade off of bandwidth containment vs. ripple amplitude
that must be considered by design engineers when developing a
data transmission system that employs pulse shaping.
Rev. 0 | Page 4 of 12

AN-922
DIGITAL PULSE-SHAPING FILTERS
Raised cosine filters are frequently implemented as digital
rather than analog filters. A digital implementation means that
the filter is subject to the constraints of a Nyquist system. That
is, the filter sample rate must be twice that of the input bandwidth in order to avoid aliasing. If a digital pulse shaping filter
operates at a sample rate of f
maximum input bandwidth must be limited to ½ f
a problem because
is greater than ½ f
Figure 3 shows that the required bandwidth
for α > 0 and can extend to fo for α = 1. The
O
implication is that digital pulse-shaping filters must oversample
the symbol pulses by at least a factor of two in order to
accommodate bandwidths as high as f
Although digital filters typically produce a desired frequency
domain response, they actually perform the filtering task in the
time domain. That is, the digital filter coefficients (taps) define
the impulse response of the filter (a time domain characteristic),
which produces the desired frequency response. Therefore, the
digital filter design task is greatly simplified with knowledge of
the desired impulse response rather than the frequency response.
To this end, the impulse response of the raised cosine filter is
given in the following equation.
t
π
()
th
⎛
⎜
⎜
=
⎜
⎜
⎝
⎞
⎛
⎟
⎜
τ
⎠
⎝
t
π
⎞
⎛
⎟
⎜
τ
⎠
⎝
The variable definitions are the same as for the raised cosine
frequency response, except that the time variable, t, replaces the
frequency variable, ω. Although h(t) is indeterminate for t = 0
and undefined for t = ±τ/(2α), it can be shown that:
()
10 =h
and
τ
⎞
⎛
h
±
⎜
⎝
sin
=
⎟
22
α
⎠
Likewise, the impulse response of the square-root raised cosine
filter is given by
⎡
cos
⎢
4
α
⎞
⎛
()
th
=
⎢
⎟
⎜
⎟
⎜
⎢
τπ
⎠
⎝
⎢
⎣
Again, h(t) is undefined at t = 0, but it can be shown that
1
⎞
⎛
()
= 1
0h
⎡
1
⎟
⎜
⎟
⎜
⎢
τ
⎣
⎠
⎝
It turns out that h(t) is also undefined at t =
without remedy. Therefore, avoid designing a square-root raised
cosine filter with any taps that coincide with this value of t.
(the symbol rate), then the
O
.
O
⎛
⎞
⎜
cossin
⎟
⎜
⎟
×
⎜
⎟
⎛
⎜
1
−
⎟
⎜
⎜
⎠
⎝
⎝
πα
⎞
⎛
⎟
⎜
2
α
⎠
⎝
() ()
1
⎛
⎜
τ
⎝
4
⎛
−
α+
⎜
π
⎝
⎞
t
πα
⎞
⎛
⎟
⎟
⎜
τ
⎠
⎝
⎟
2
⎟
2
t
α
⎞
⎟
⎟
⎟
τ
⎠
⎠
α+π
⎤
⎞
⎟
⎥
⎠
⎦
τ
t
⎞
+
⎟
α
4
t
⎠
α
4
t
⎛
−
1
⎜
τ
⎝
⎞
⎟
⎠
sin
2
1
⎛
⎜
⎝
± τ/(4α), but
. This poses
O
⎤
α−π
t
⎞
⎟
⎥
τ
⎠
⎥
⎥
⎥
⎦
Generally, digital pulse-shaping filters are implemented as finite
impulse response (FIR) filters rather than as infinite impulse
response (IIR) filters for several reasons.
• FIR filters can be easily designed with linear phase
response, which can be of paramount importance in
applications that must guarantee constant group delay.
• FIR filters do not suffer from limit cycles, which often
plague IIR designs. Limit cycles are small oscillations that
persist at the output of the filter even when the input signal
is removed.
• FIR filters are intrinsically stable because they do not
incorporate feedback. The IIR architecture, on the other
hand, does have feedback so the choice of coefficients has
an impact on stability. In fact, an IIR filter can oscillate if
care is not taken to ensure an unconditionally stable design.
• If the filter is implemented in hardware (as opposed to
software), FIR filters lend themselves to a polyphase
architecture, which significantly reduces the amount of
hardware required. This is important because an IIR filter
generally requires fewer filter coefficients (or taps) than an
FIR filter with a similar frequency response characteristic.
Since the amount of hardware required to implement the
filter is directly proportional to the number of taps, FIR
filters tend to be more hardware intensive. However, the
hardware reduction offered by the polyphase option tends
to make the IIR hardware advantage less significant.
For the sake of brevity, only the FIR implementation is
considered in this application note. However, regardless of
whether one chooses a FIR or IIR digital filter implementation,
the filter response is, at best, an approximation of the ideal
response (raised cosine in this case). The degree to which the
filter response matches the ideal response is dependent on two
parameters: the amount of over sampling (M) and the number
of taps (N).
Generally, N is chosen to be an integer multiple of M when
designing a FIR for the purpose of pulse shaping. This guarantees that the impulse response of the filter spans an integer
number of pulses. As such, the number of filter taps is given by
N = D × M
where D and M are both integers.
The filter order is odd or even based on whether N is odd or
even. If a particular filter order is preferred, then it is customary
to add 1 to N to yield the desired order. Note that the value of D
defines the number of symbols spanned by the impulse response
of the filter. Generally, a larger D means a better approximation
of the ideal response. Unfortunately, the complexity of the filter
is proportional to D, so it is advantageous to use the smallest
value of D that meets the filtering requirements. Determination
of the smallest acceptable value of D can be a daunting task,
especially if the filter must be designed to handle a wide range
of α values. This is because the frequency response of the filter
Rev. 0 | Page 5 of 12

AN-922
is affected by the roll off factor (α), the number of symbols
spanned by the impulse response (D), the oversampling factor
(M), and the filter order (odd or even number of taps).
To assist with the choice of D, a collection of surface plots are
provided on the following pages. These plots are intended as a
guide for selecting a workable value of D for a given set of
filtering requirements. The plots were produced from simulations that used floating-point operations. Therefore, the plots
do not include the quantization and/or truncation errors that
must be considered if a fixed-point design is employed.
Generally, quantization and truncation tend to reduce stop
band attenuation, which makes applications with an aggressive
stop band requirement more sensitive to their effects.
The α
and D values covered by each plot are 0.05 ≤ α ≤ 1 and
2 ≤ D ≤ 20. The plots are organized into three major groups
corresponding to the three significant frequency points: passband edge, Nyquist frequency, and stop band. All the plots
employ decibel units on the vertical scale.
• Group 1: pass band edge frequency, f = ½(1 − α)f
Group 1 plots the error of the filter response at the passband edge frequency relative to 0 dB (or unity, which is the
magnitude of the ideal raised cosine response at the passband edge).
• Group 2: Nyquist frequency, f = ½ f
(which is ½ the
O
symbol rate).
Group 2 plots the error of the filter response at the Nyquist
frequency relative to −6 dB (or ½, which is the magnitude
of the ideal raised cosine response at the Nyquist frequency).
• Group 3: the stop band, f ≥ ½(1 + α)f
.
O
Group 3 plots the minimum stop band attenuation, which
is the smallest attenuation value that occurs across the
entire stop band: ½(1 + α)f
≤ f ≤ ½ MfO.
O
O.
Each group consists of four plots arranged in a 2 × 2 grid. The
left side is for an even order filter and the right side is for an
odd order filter. The upper two plots are for an oversampling
factor of 2 (M = 2) and the lower two plots are for an oversampling factor of 7 (M = 7). Only two oversampling factors are
shown for the sake of brevity. The goal of the plots is to indicate
general trends rather than to serve as a comprehensive collection
of data.
Inspection of the plots reveals some clues about the relationships between the various design parameters (M, D, and α).
• As α approaches zero, D must increase dramatically to
maintain a given level of pass band, stop band, and Nyquist
performance. Thus, a filter design that accommodates both
small and large values of α must be designed with a D value
large enough to satisfy the filter requirements for the
smallest α value.
• The smallest acceptable value of D is primarily driven by
the minimum stop band attenuation requirement. This is
especially true for small α values. For example, when
α = 1, the minimum stop band attenuation is nearly 80 dB
for D = 20, but the same value of D only yields about
20 dB attenuation when α = 0.05.
• The amount of oversampling (M) has little impact on filter
performance other than to reduce the variation in stop
band attenuation for small changes in D or α.
The choice of an even or odd filter design appears to be
•
academic. The odd design offers an advantage at the
Nyquist frequency point, but only for small D and α
.
Rev. 0 | Page 6 of 12

AN-922
GROUP 1 PLOTS: ERROR AT THE EDGE OF THE PASS BAND
The plots shown in Figure 5 through Figure 8 correspond to the pass band edge frequency, f = ½(1 − α)fO.
A
L
P
HA
Y
S
Figure 5. M = 2, Even Order Filter
AL
P
HA
Y
S
Figure 6. M = 2, Odd Order Filter
PASS BAND ERROR (dB)
H
T
P
E
D
L
O
B
M
06897-005
A
L
P
H
A
M
Y
S
H
T
P
E
D
L
O
B
Figure 7. M = 7, Even Order Filter
PASS BAND ERROR (dB)
H
H
T
P
E
D
L
O
B
M
06897-006
AL
P
H
A
M
Y
S
T
P
E
D
L
O
B
Figure 8. M = 7, Odd Order Filter
PASS BAND ERROR (dB)
06897-007
PASS BAND ERROR (dB)
06897-008
Rev. 0 | Page 7 of 12

AN-922
GROUP 2 PLOTS: ERROR AT THE NYQUIST FREQUENCY
The plots shown in Figure 9 through Figure 12 correspond to the Nyquist frequency, f = ½ fO.
AL
P
H
A
M
Y
S
Figure 9. M = 2, Even Order Filter
A
L
P
HA
M
Y
S
Figure 10. M = 2, Odd Order Filter
NYQUIST ERRO R (dB)
H
T
P
E
D
L
O
B
06897-009
AL
P
H
A
B
M
Y
S
H
T
P
E
D
L
O
NYQUIST ERRO R (dB)
06897-011
Figure 11. M = 7, Even Order Filter
NYQUIST ERROR (dB)
H
T
P
E
D
L
O
B
06897-010
A
L
P
HA
M
Y
S
H
T
P
E
D
L
O
B
NYQUIST ERROR (dB)
06897-012
Figure 12. M = 7, Odd Order Filter
Rev. 0 | Page 8 of 12

AN-922
GROUP 3 PLOTS: MINIMUM STOP BAND ATTENUATION
The plots shown in Figure 13 through Figure 16 correspond to the stop band, f ≥ ½(1 + α)fO.
ATTENUATION (dB)
MINIMUM ST OP BAND
ATTENUATION (dB)
MINIMUM ST OP BAND
06897-015
06897-016
A
L
P
HA
B
M
Y
S
Figure 13. M = 2, Even Order Filter
A
L
P
H
A
B
M
Y
S
Figure 14. M = 2, Odd Order Filter
ATTENUATIO N (dB)
MINIMUM ST OP BAND
H
T
P
E
D
L
O
06897-013
A
L
P
H
A
M
Y
S
H
T
P
E
D
L
O
B
Figure 15. M = 7, Even Order Filter
ATTENUATION (dB)
MINIMUM ST OP BAND
H
T
P
E
D
L
O
06897-014
AL
P
HA
M
Y
S
H
T
P
E
D
L
O
B
Figure 16. M = 7, Odd Order Filter
Rev. 0 | Page 9 of 12

AN-922
Q
MULTIBIT SYMBOL ENCODING
A commonly used multibit pulse-encoding scheme is quadrature amplitude modulation (QAM). QAM relies on two
mechanisms to encode bits. One is the pulse amplitude, which
can assume both positive and negative values, and the other is
the use of two simultaneous pulses. The latter requires two
independent baseband channels, one for each pulse. One
channel is referred to as the I, or in-phase, channel and the
other as the Q, or quadrature, channel.
QAM comes in a variety of forms depending on the number
of bits encoded into each pair of pulses. For example, 16 QAM
uses a 4-bit symbol to represent 16 possible symbol values;
64 QAM uses a 6-bit symbol to represent 64 possible symbol
values; and 256 QAM uses an 8-bit symbol to represent 256
possible symbol values. Generally, QAM symbols encode an
even number of bits (4, 6, 8 and so on), but odd bit schemes,
though uncommon, exist as well.
For a more detailed look at the QAM encoding scheme, consider 16 QAM. Like the other QAM versions, 16 QAM uses
two simultaneous pulses to encode a symbol. Therefore, for
16 QAM, each pulse must be able to assume one of four levels,
because two pulses with four possible levels per pulse yields
16 possible combinations. The four possible pulse levels are:
MAX,
−1/3 A
+1/3 A
maximum pulse amplitude). An example of the I and Q pulses
for 16 QAM is shown in
values taken from
I
PULSES
A
MAX
, +A
MAX
MAX
, and −A
MAX
(A
MAX
Figure 17 (included are the symbol
Table 1 .).
denotes the
The amplitude values displayed on the vertical axes of Figure 17
provide equal steps in amplitude from the lowest to the highest
value. With this arrangement, the levels of the two simultaneous
pulses identify a unique 4-bit symbol. For example, let the
amplitude of the I and Q pulses be represented by a coordinate
, Qm), where the index values (k and m) range from 0 to
pair, (I
k
3 and the amplitudes (I
. Assigning amplitude pairs to symbol values, as shown in
±A
MAX
and Qm) take on values of ±1/3 A
k
MAX
or
Tabl e 1 , yields the constellation diagram shown in Figure 18.
Table 1.
Symbol (Binary) k m Ik Q
0000 0 0 1/3 A
0001 0 1 1/3 A
0010 0 2 +1/3 A
0011 0 3 +1/3 A
0100 1 0 A
0101 1 1 A
0110 1 2 +A
0111 1 3 +A
1000 2 0 −1/3 A
1001 2 1 −1/3 A
1010 2 2 −1/3 A
1011 2 3 −1/3 A
1100 3 0 −A
1101 3 1 −A
1110 3 2 −A
1111 3 3 −A
1/3 A
MAX
A
MAX
−1/3 A
MAX
−A
MAX
1/3 A
MAX
A
MAX
−1/3 A
MAX
−A
MAX
+1/3 A
MAX
+A
MAX
−1/3 A
MAX
−A
MAX
+1/3 A
MAX
+A
MAX
−1/3 A
MAX
−A
MAX
m
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
MAX
–A
–A
A
–A
A
–A
MAX
MAX
A
MAX
MAX
MAX
MAX
MAX
/3
0
/3
/3
0
/3
Q
PULSES
0100 1010001010010101011111010000
Figure 17. I and Q Pulses for 16 QAM
SYMBOL
VALUES
06897-018
Rev. 0 | Page 10 of 12
MAX
A
1101
1100
–A
MAX
1110
1111
1001
1000
1010
1011
0001
0000
0010
0011
MAX
–A
0101
0100
0110
0111
I
A
MAX
06897-017
Figure 18. Constellation Diagram

AN-922
REFERENCES
Gentile, K., 2002, “The Care and Feeding of Digital Pulse-Shaping Filters”, RF Design Magazine (April).
nd
Gibson, J. D., 1993, Principles of Analog and Digital Communications, 2
Edition, Prentice Hall.
Rev. 0 | Page 11 of 12

AN-922
NOTES
©2007 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
AN06897-0-9/07(0)
Rev. 0 | Page 12 of 12
 Loading...
Loading...