

Page 1
AN-552
a
APPLICATION NOTE
One Technology Way • P.O. Box 9106 • Norwood, MA 02062-9106 • 781/329-4700 • World Wide Web Site: http://www.analog.com
Automatic Motion Tracking with the ADV611
By Hakan Çivi and Alex Zatsman
OVERVIEW
Analog Devices has built and tested a two-board motion
tracking system. This applications note explains how
the two-board motion tracking demo system works. The
system, particularly relevant for surveillance purposes,
is based on the two previous demo boards, namely the
Videopipe and CCTVpipe, along with new firmware in
EPROMs. When the two boards are driven by the same
video input source, the Videopipe board performs the
motion tracking by computing the quality box coordinates, and passes this information to the CCTVpipe. The
CCTVpipe, in turn, positions the quality box, as computed, on the compressed/decompressed input video.
As you will recall, the CCTVpipe allows quality box size
and location control through a mouse. The idea, instead,
is to automatically control the quality box so it closely
follows the moving regions in a scene. To accomplish
this goal, a CCTVpipe board alone would be sufficient.
To ease the software development the detection of motion in the video field was done in the motion tracker
board, and display of the detected motion was assigned
to a fairly standard CCTVpipe board. It is quite practical
to do motion tracking in a single board.
information. The cable should be twisted and plugged
into JP17 on each board, so that Pin 1 mates with
Pin 7, Pin 2 mates with Pin 6 and so on. For a meaningful
demo, the boards should be driven by the same video
input source, typically a video camera. A simple tee connection works well. Finally, by connecting the output of
the CCTVpipe to a video display, the performance of the
motion tracking system can be evaluated. Also note
that, except the quality box control and motion detection (they are now controlled externally by the motion
tracker) functions, the CCTVpipe works identically. Thus,
the CCTVpipe user interface can be used as before to
control the rest of the functions.
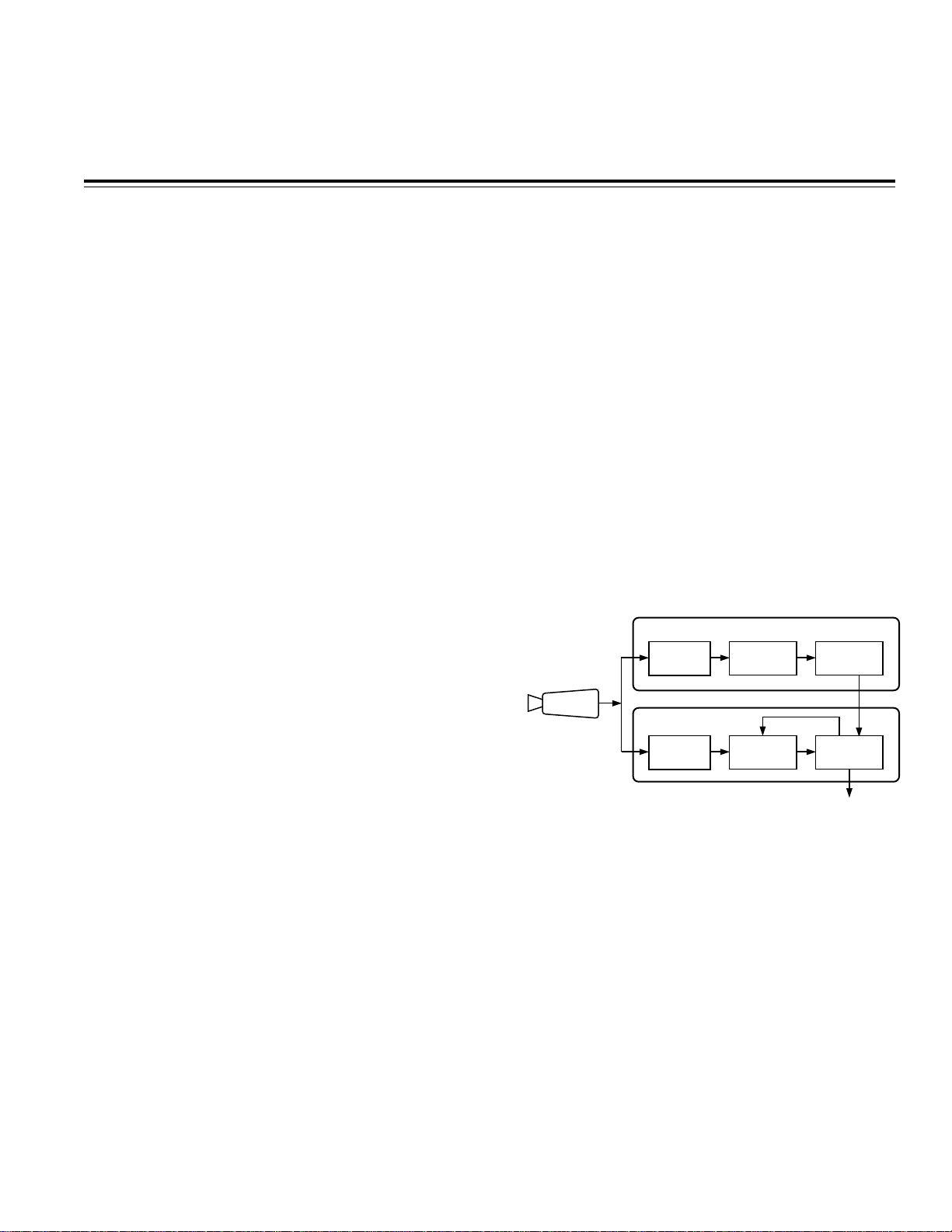
MOTION TRACKER ON VIDEOPIPE
CAMERA
VIDEO
DECODER
CCTVPipe
VIDEO
DECODER
ADV601LC
QBOX CTRL
ADV611
ADSP-2181
SPORT
ADSP-2181
Using this document and the referred algorithms you
can do the following:
• Run the demo system and evaluate it.
• Learn about the underlying algorithms and customize
them for your purposes.
• Design automatic motion tracking systems as suited
to your applications.
The software source code and hardware schematics
mentioned in this note are available on the Analog
Devices web site at
HOW TO RUN THE SYSTEM?
The system (seen in Figure 1) includes a Videopipe
board, a CCTVpipe board, the associated new EPROMs,
and a flat cable for communicating the motion tracking
www.analog.com.
COMPRESSED VIDEO
Figure 1. Two-Board Motion Tracking System
TUNING THE MOTION TRACKER
The motion tracking system depends on three control
parameters: threshold for motion sensitivity, filter
length, and delay for motion smoothing. The parameters, explained in the following sections, are part of the
DSP code, and changing them requires a source code
modification. Motion sensitivity threshold can easily be
changed by modifying the corresponding constant in
the source code. A change in delay or filter length requires two things: changing the corresponding constants, and recomputing and modifying the filter
coefficients. A C program is available for filter coefficient computation.
Page 2
AN-552
ALGORITHM AND COMPUTATIONAL COMPLEXITY
Two unique properties of the ADV601LC/ADV611 video
compression chips make it particularly suitable for motion tracking and detection for the CCTV applications:
• Multiscale representation of images inside ADV601/
ADV611: This makes it possible to compute motion on
a scaled version of a field of video (see next section).
• Quality Box feature of the ADV611: This allows allocating more bits (and thus video quality) to the areas
with motion and reduces bits/quality/contrast in
static areas.
Initial Motion Computation
The motion computation is done through analyzing the
difference between the consecutive video fields. This
could be done on fields themselves, but the computational burden would be prohibitive. Fortunately, as a
side effect of the compression algorithm we receive a
scaled version of the image. The advantages of using
the scaled version are:
• Noise Filtering: Because each sample in the scaled
version of the image is built by averaging many pixels of the original image, the noise contribution cancels out.
• Reduced computational burden: The scaled version
of NTSC image is only 23 × 16 samples (= 368) and
24 × 18 (= 432) for PAL.
After the differences between individual samples are
computed, those samples where differences exceed the
user-specified motion sensitivity threshold are considered to contain motion. The motion area is defined as
the minimal rectangle encompassing all the samples
containing motion.
Motion Filtering and Prediction
The motion area computed as described above, is not
particularly smooth. If it is directly used as the quality
box it will exhibit an unstable motion. The first reason
for this is the granularity of the result, because each
sample in the scaled version roughly corresponds to a
32 × 32 area in the original image. The second reason is
possible spurious differences in the image. Another reason for filtering is that there is always a delay (typically
2 to 3 fields long) between the last field used in the motion computation and the first field to which the computed quality box can be applied.
A special filter was designed to solve these problems.
The motion tracker uses a linear approximation of motion for the duration of the filter and predicts where the
motion will be after 2 or 3 fields of delay. Because the
filter output is computed over multiple fields, the overall
effect is some motion smoothing.
As explained above, the filter has two parameters: delay
and filter length. Delay specifies for how many fields
ahead the quality box positioning is estimated, while
filter length is the number of previous positioning
samples used for the estimation. Delay is typically 2 or 3
(2 in the current version), and the filter length is 8 to 60
(15 in the current version).
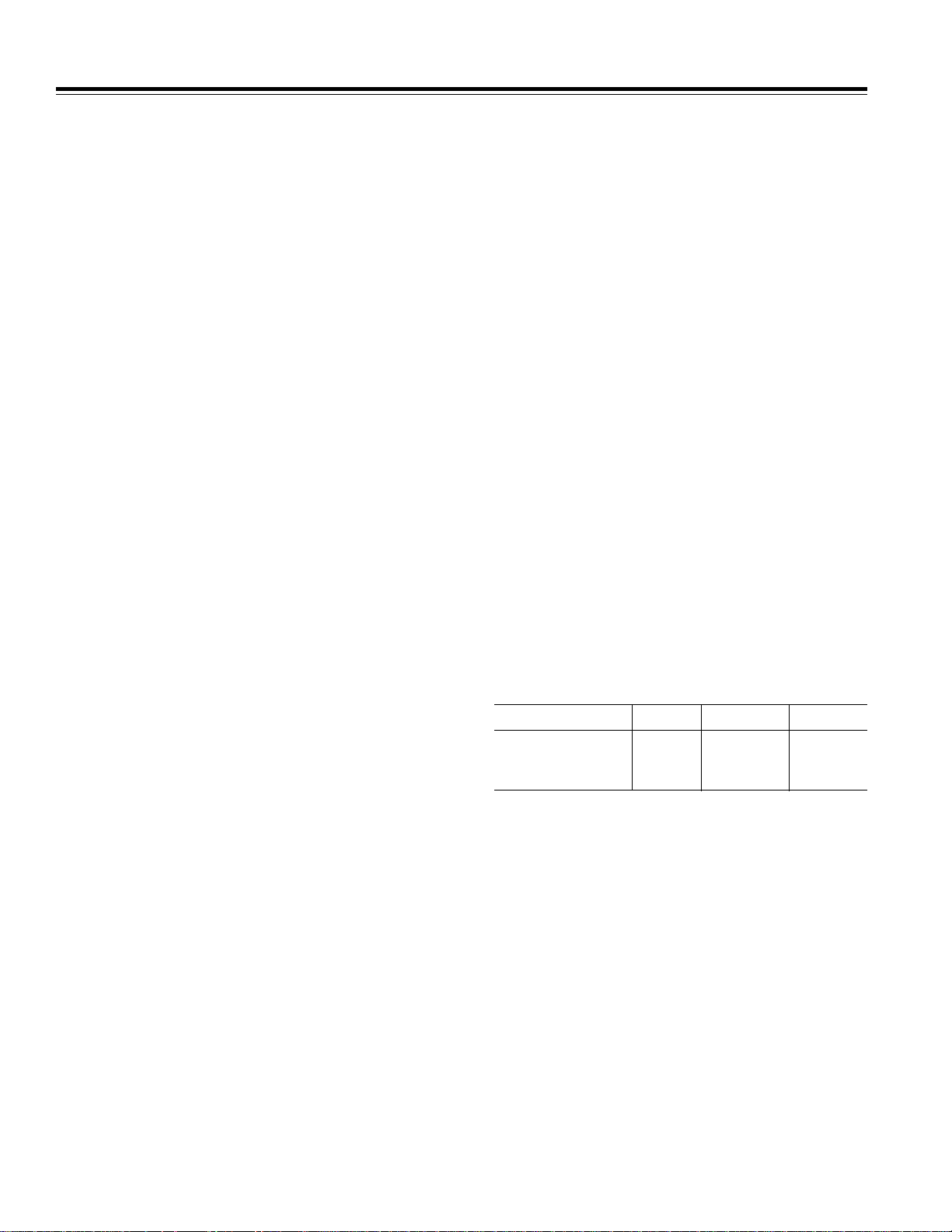
Complexity
Table I shows the number of cycles spent by ADSP-2185
on motion tracking, including the time spent on the decoding on the scaled image (Block 39 of ADV601). This
time does not include the cycles spent on searching for
Block 39 (this is minimal as the system uses fixed bin
widths, thus zeroing out all blocks except Block 39) in
the bit stream and other small housekeeping operations,
which are also not significant.
Table I.
Per Field Per Second Percentage
Motion Computation 14,768 886,080 12.26
Decoding Block 39 105,504 6,330,240 87.74
Total 120,272 7,216,320 100.00
E3604–2–5/99
–2–
PRINTED IN U.S.A.
 Loading...
Loading...