

Page 1
AN-541
a
APPLICATION NOTE
One Technology Way • P.O. Box 9106 • Norwood, MA 02062-9106 • 781/329-4700 • World Wide Web Site: http://www.analog.com
Proper System Grounding Techniques for 6B Series Systems
INTRODUCTION
The 6B series of digital signal conditioning modules,
when properly applied and configured, can provide the
user with unsurpassed accuracy and stability in industrial data acquisition and control applications.
However, in order to obtain the maximum performance
from these modules, it is necessary to pay careful attention to the ways in which the 6B backplanes are powered
and grounded.
It has been our experience that, when faults and errors
are encountered in 6B applications, the culprit almost
invariably can be traced to system grounding techniques. The errors produced by bad grounding sometimes manifest themselves as unstable, noisy or erratic
readings from thermocouples, RTDs, or other signals.
Occasionally, the errors result in ”code faults,” i.e., disturbances to the execution of the microcontroller, which
is contained within the 6B itself. In severe cases, the errors can result in disturbances to the communications
between the 6B system and the host computer, or even
damage to the host computer’s communications ports.
Modeling a 6B Application
First, let’s consider the model for a typical industrial signal source, such as a thermocouple. The source has a dc
component, in the range of 100 mV or less, which is the
thermocouple signal itself; this component changes
with temperature, but since most temperature measurements are narrow bandwidth phenomenon (i.e.,
slowly changing), we can model the signal as dc.
The signal may also have an ac component, most typically a 50 Hz or 60 Hz “pickup” from adjacent power circuits. The 6B series modules are particularly good at
rejecting this ac component, since they employ an integrating converter design with a rectangular window of
integration linked to the power line frequency (and programmable for either 50 Hz or 60 Hz operation over the
communications interface).
Both of the signal components we’ve just discussed are
often referred to as “normal-mode signals,” since they
appear differentially between the sensor’s high and low
terminals. Normal-mode signals are the signals we
want to measure.
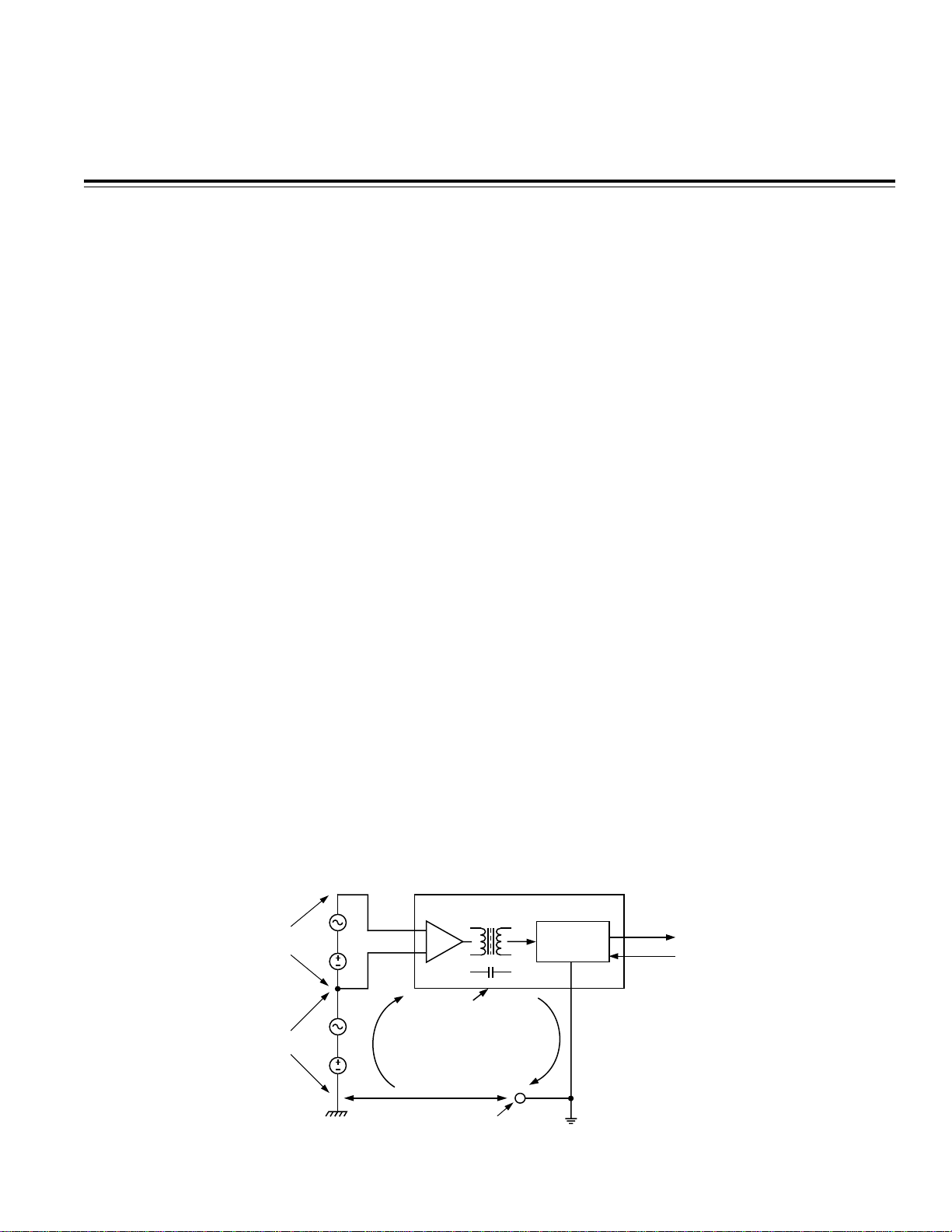
All of these effects can frequently be avoided via the use
of proper grounding and shielding techniques. As an aid
to understanding the problem, consider the diagram in
Figure 1, which illustrates a single 6B module application.
NORMAL-
MODE SIGNAL
COMMON-
MODE SIGNAL
A
BARRIER
CAPACITANCE
CONNECT GROUND
STUD TO REFERENCE
POINT OF COMMONMODE SIGNAL
Figure 1. Normal-Mode and Common-Mode Signals in a 6B Application
6B MODULE
HEAVY
GROUND STUD
In addition to the normal-mode components of our signal, a “common-mode” signal present may also be. The
common-mode signal is that signal which appears between the low side of the normal-mode signal, and
earth ground or any other point of reference. The com-
MICRO-
CONTROLLER
RS-485 OR RS-232
COMMUNICATIONS
POWER (NONISOLATED)
GROUND FOR MODULE
Page 2
AN-541
mon-mode signal is often unintentional, and caused by
ground drops between earth ground potential near the
signal source and earth ground potential near the 6B
system. In these cases, the common-mode signal can be
dc, ac, or a combination of the two.
In some applications, the common-mode signal may be
completely intentional; cases such as these include applications where the sensor, such as a thermocouple, is
in electrical contact with a high electrical potential (for
example, a thermocouple “buried” within the stator of
an electric motor). In such a case, the design depends on
the isolation characteristics of the 6B module to reject
the common-mode signal and measure only the normalmode component. In situations like these, the commonmode component is mostly ac, and frequently at power
line frequency and potential. Another example can be
found in aluminum manufacturing (electrolytic reduction), where measurements are often made of voltage
and current at each crucible, and the crucible itself is at
an elevated dc potential with respect to earth ground.
Finally, there are some applications in which there is no
intentional common-mode component to the signal, but
the user is employing an isolated signal conditioner like
the 6B in order to preclude damage in the event of an
error such as a short circuit or an unintentional miswiring of the system.
The isolation barrier within the 6B module (as with most
of Analog Devices’ industrial signal conditioning products) is a magnetic barrier, built in the form of a transformer. This kind of barrier offers superb rejection of
common-mode signals within a reasonable bandwidth,
but is not perfect. The barrier has capacitance and fast
common-mode transients can cause impulse currents to
flow through the barrier in an effort to find their way
back to the common, or ground, of their source.
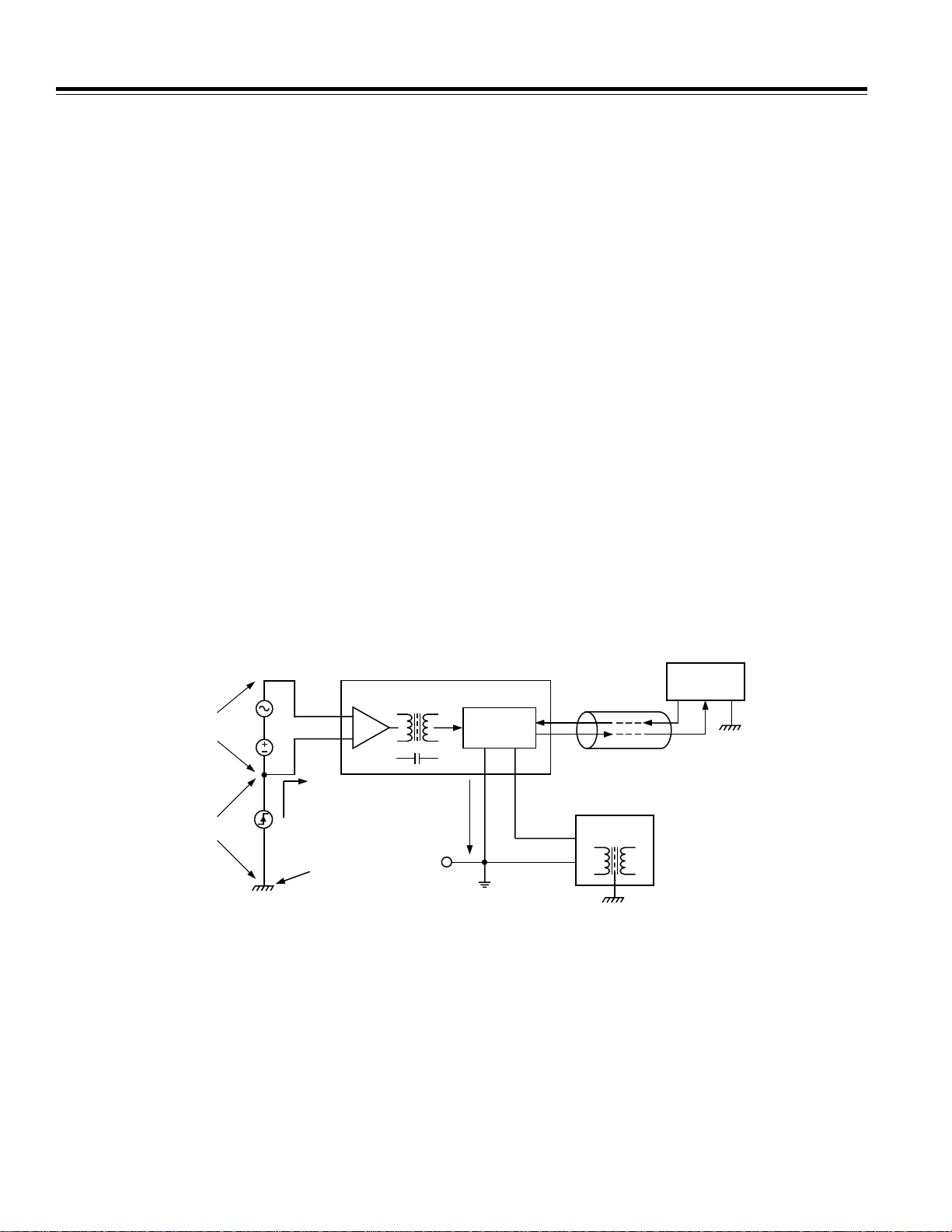
Consider the diagram in Figure 2, where a very fast transient appears in common-mode at the input to a 6B. Due
to barrier capacitance, the transient generates an impulse of current that needs to return to the source from
which it is generated. In this case, the return path is via
the 6B’s nonisolated ground (which is in common with
the 6B power supply ground).
The transient current will follow the path of least resistance back to its source. If the 6B system has no ground
connection to the ground of the source of the transient,
the ground potential will follow whatever path it can find
to return to its source. If it can find a return path locally
(i.e., near the 6B backplane itself), then it will even attempt to return via the communications ground, thereby
putting the control computer in jeopardy!
6B MODULE
NORMAL-
MODE SIGNAL
COMMON-
MODE SIGNAL
A
WITH NO GROUND STUD
CONNECTION, TRANSIENT CURRENT MUST RETURN VIA POWER
SUPPLY OR COMMUNICATIONS
LINE GROUNDS
FAST TRANSIENT
CURRENT WANTS TO
RETURN HERE
MICRO-
CONTROLLER
DC POWER
SUPPLY
Figure 2. Transient Current Return Path Without Ground Stud Connection
CONTROL
COMPUTER
–2–
Page 3

AN-541
Solving the Problem
The designers of the 6B took this into consideration
when creating the 6B subsystem. We have provided a
heavy ground stud on each backplane, connected to the
nonisolated ground of the system. The purpose of this
ground stud is to provide a suitable connection point for
attaching a ground lead that will divert transient current
through the isolation barrier, back to its source.
It is important that the application be wired such that
any potential transient currents be diverted back to their
source via a heavy wire from this ground stud. Without
this ground, transient currents will choose whatever
path they can find to return to their source. One possible
path is via the power supply used to power the 6B backplane; all transformer-based power supplies have capacitance between their outputs and the power line, and
sometimes this barrier capacitance can reach hundreds
of picofarads, making them an attractive path to the
transient current
Where Do Fast Transients Come From?
Many industrial environments are, unfortunately, a rich
source of high current fast transient signals. Things like
motor controllers, etc., often use IGBT (Insulated Gate
Bipolar Transistor) devices, or SCR (Silicon Controlled
Rectifier) devices as control elements; these devices can
generate transients as fast as several thousand volts per
microsecond, or faster, and often switch currents on the
order of tens or even hundreds of amperes! The magnetic fields created by these transients are pervasive,
and difficult to suppress.
How to Minimize the Transient Problem
Unfortunately, grounding methodologies don’t lend
themselves to “cookbook” analysis, because every situation is different. However, the following considerations
if no more suitable path is provided!
are good ones to follow when dealing with 6B signal
conditioning subsystems.
1.
Use the ground stud.
sure to attach the ground stud to the most likely point
of reference where common mode transients originate. Often, this point is earth ground near the source
of heavy equipment or high power sources associated with the measurement being made. Use a heavy
lead, as short as possible, in as straight a route as
possible, for best results.
2.
Ground the power supply
supply being used to power the 6B backplane. Its own
barrier capacitance may be significant, and can represent a path to earth ground. However,
use the power supply in place of the ground stud on
the backplane, because this can exacerbate the
problems.
3.
Consider isolating the communications lines.
severe cases, fast transients may actually attempt to
return to their point of origin via the ground conductors of the RS-485 communications connection
to/from the 6B system. While this situation is rare, it
has been known to happen and can cause faults or
even damage to the computer being used to interface
to the 6B subsystem.
Normally, the proper use of the ground stud can prevent
this situation. In extreme cases, however, it may be
helpful to use an isolation barrier on the communications port of the 6B to prevent these transients from using this path. A number of RS-485 and/or RS-232C
isolation devices are available, or the Applications staff
at Analog Devices can recommend devices for this
purpose.
When wiring a 6B backplane, be
. Don’t ignore the power
don’t
try to
In very
E3337–0–6/98
–3–
PRINTED IN U.S.A.
 Loading...
Loading...