

Page 1
AN-406
PGA
TO
ADC
M
U
X
100nA
20µA
AIN1(+)
AIN1(–)
AIN2(+)
AIN2(–)
THERMISTOR
CJC SENSOR
COLD
JUNCTION
THERMOCOUPLE
AD7710
a
ONE TECHNOLOGY WAY • P.O. BOX 9106
Using the AD771x Family of 24-Bit Sigma-Delta A/D Converters
INTRODUCTION
The AD771x Series is a family of ADCs that are designed
specifically for low frequency, high accuracy industrial
transducer applications. Figure 1 shows a block diagram
of one of these devices. The analog front end, which in
some cases also includes excitation sources for sensors,
accepts low level signals that can be amplified by the
internal programmable gain amplifier before being
applied to a sigma-delta modulator. The pulse stream
appearing at the output of this modulator is applied to a
digital filter which produces a low-pass filtered, high
resolution, serial output.
•
NORWOOD, MASSACHUSETTS 02062-9106
by Eamon Nash
APPLICATION NOTE
617/329-4700
•
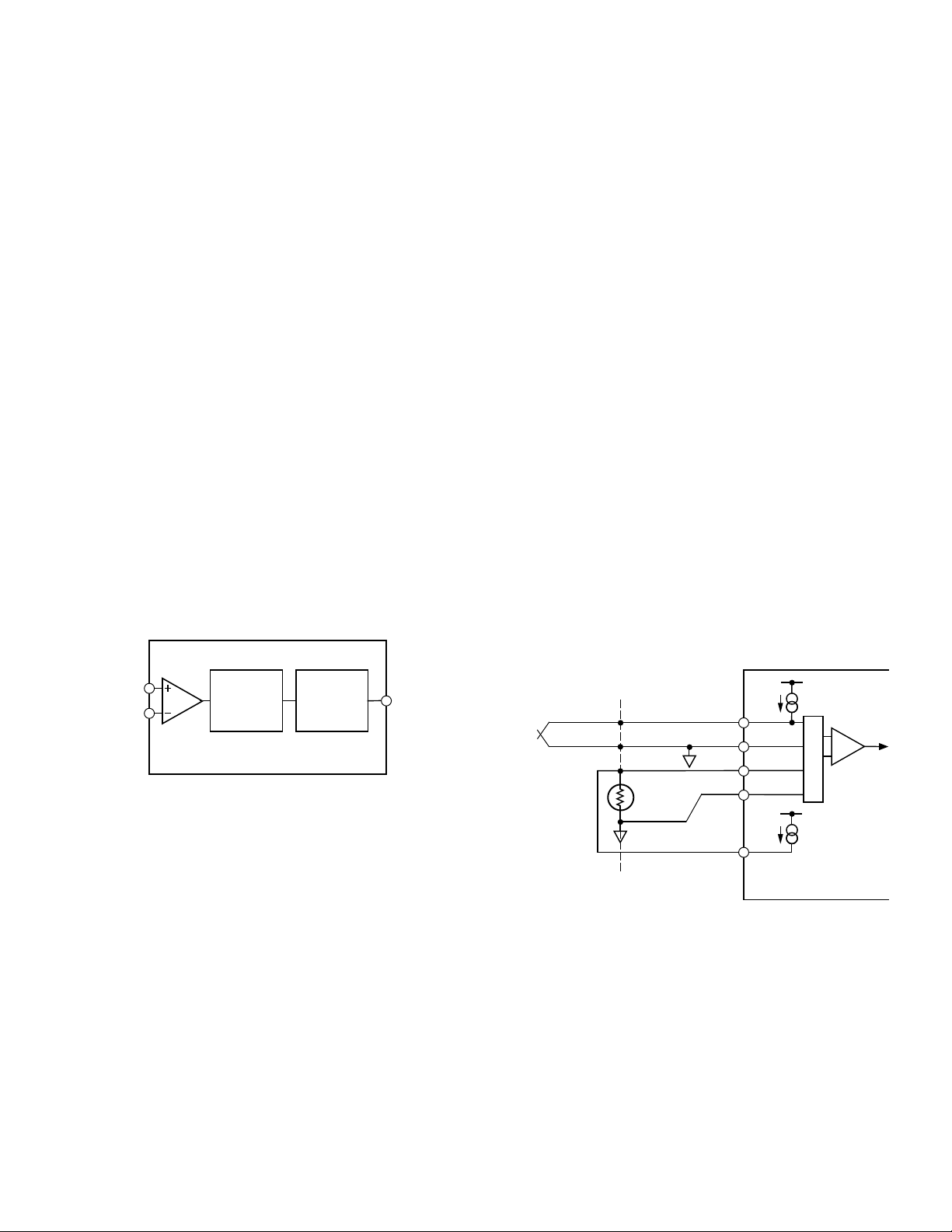
Figure 2 shows the AD7710 used in a thermocouple
application. The sensor is connected to AIN1 which
includes a burn-out detector current source. When this
100 nA current source is switched on, the AIN(+) pin will
be driven to saturation if the thermocouple is open
circuit.
While it is possible to use an analog technique to adjust
for the cold junction temperature, it may be simpler to
measure the temperature at the cold junction and
subtract this from the thermocouple reading in the
digital domain. The thermistor in Figure 2 which
measures the cold junction temperature is excited by an
onboard 20 µA current source.
AIN(+)
AIN(–)
PGA
AD771x
∑-∆
MODULATOR
DIGITAL
FILTER
SERIAL
OUTPUT
Figure 1. AD771x Block Diagram
TYPICAL APPLICATIONS
These devices are most often used to measure signals
from thermocouples, resistive bridges and resistance
temperature detectors (RTDs). These sensors, which
output low level signals, generally measure slowly
changing physical properties such as temperature,
pressure or weight. Due to the frequent presence of
common-mode voltages, differential signal measurement is desirable. If the sensor is located remotely,
connection to the ADC is often over a long transmission
line which can be susceptible to electromagnetically
induced interference (EMI).
Figure 2. Thermocouple Interface
The thermocouple is grounded at AIN1(–) in order to
provide a return path for the input leakage currents of
the differential inputs that must flow at all times. If the
voltage coming from the thermocouple has a commonmode voltage component, this short may be replaced by
a resistor to ground. Due to the Johnson noise which
this resistor generates, it should not be any larger than
about 100 kΩ. In applications where the thermocouple is
electrically connected to a chassis whose ground is
referred to the local ground, this connection is
unnecessary.
Page 2
INPUT FILTERING CONSIDERATIONS
0
–10
–20
–30
–40
–50
0
80kHz
0
–10
–20
–30
–40
–50
0
160kHz
Before looking at some filtering schemes, it is important
to consider the internal filtering capabilities of the
converter itself as well as the nature of the noise that is
being filtered.
0
–10
–20
∑∆ MODULATOR
G = 2
G = 1
MCLK/256
MCLK/512
FREQUENCY DIVIDERMCLK
G = 8..128
G = 4
MCLK/64
MCLK/128
MCLK/512
Figure 3. Input Sampling
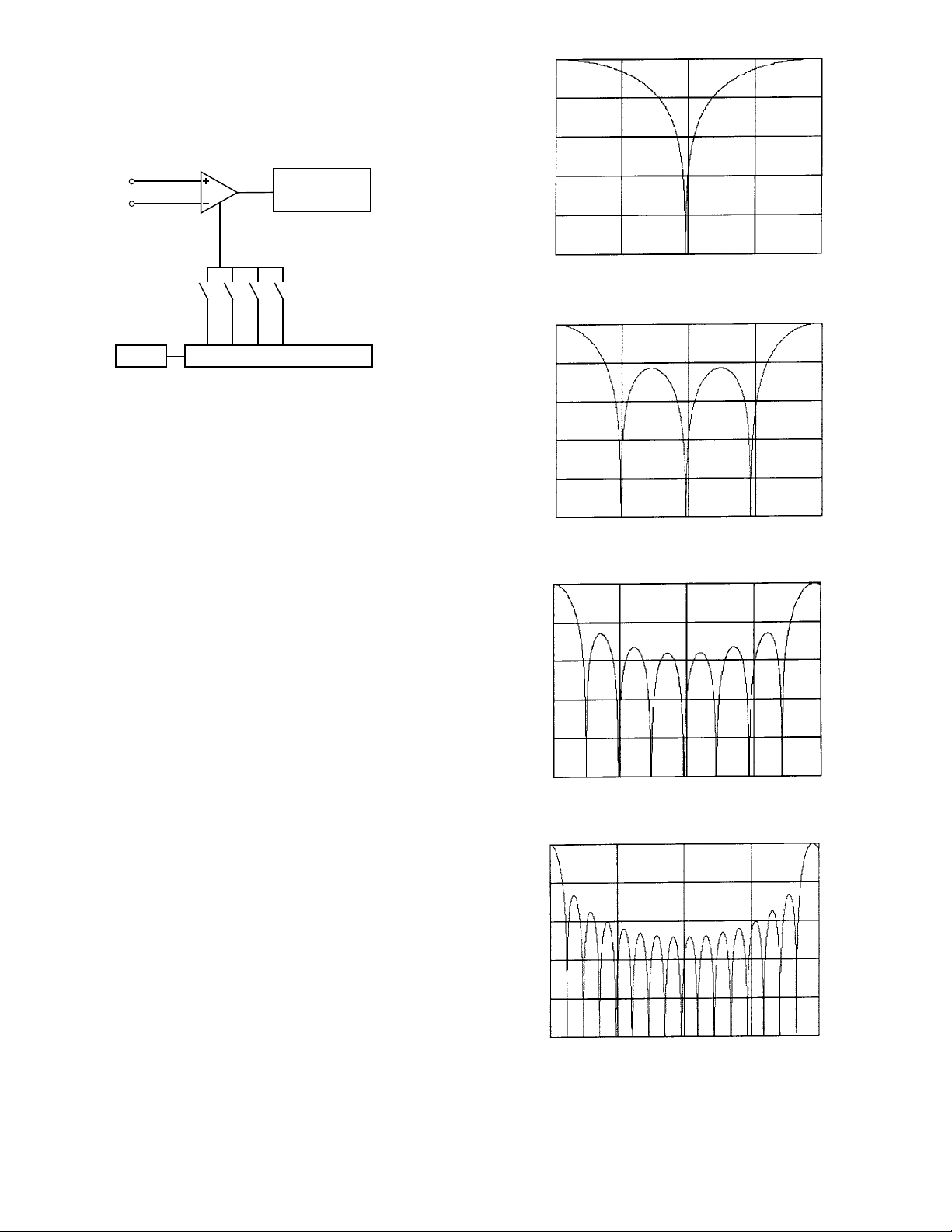
As we can see from Figure 3, the sigma-delta modulator
of the AD7710 operates at a frequency of f
(19.5 kHz @ f
= 10 MHz) which is independent of the
CLK IN
CLK IN
/512
gain of the programmable gain amplifier (PGA). The
PGA itself, however, samples the input signal at a rate
which increases as the programmed gain increases,
from 19.5 kHz (MCLK/512) at a gain of 1 up to a
maximum of 156 kHz (MCLK/64) for gains 8 through 128.
At a gain of 8, for example, the input signal is sampled 8
times per modulator cycle. The average of the resulting
samples is stored as a charge on a capacitor. Because
the AIN(+) and AIN(–) inputs are sampled alternately and
not simultaneously and because their samples are
stored on the same capacitor, the input signal is actually
being sampled at twice this rate (e.g., 16 times per
modulator cycle at a gain of 8) which results in an
overall sampling rate of 312 kHz at a gain of 8 (or 39 kHz
at a gain of 1). This averaging causes input signals to be
subjected to a low pass frequency response whose
shape will depend upon the programmed gain. Figure 4
shows these frequency responses for the various
programmed gains. Each response repeats itself at
multiples of the effective sampling rate at that particular
gain.
–30
–40
–50
0
40kHz
a. Gain = 1
b. Gain = 2
c. Gain = 4
0
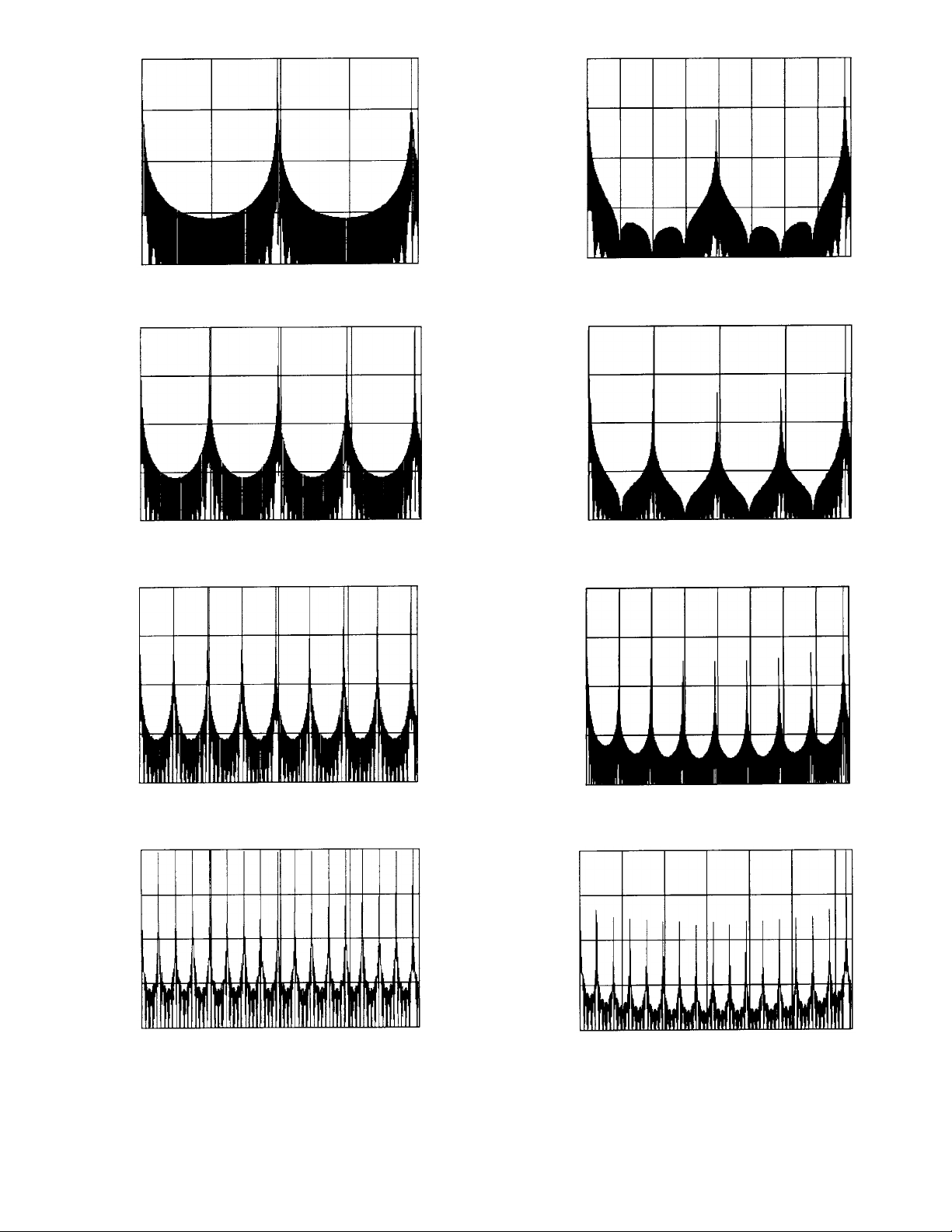
The frequency response of the digital filter in the output
stage of the converter also repeats itself, but at
multiples of the modulator frequency (19.5 kHz for the
AD7710). Figure 5 shows this frequency response for the
frequency ranges 0 kHz to 40 kHz, 0 kHz to 80 kHz, 0 kHz
to 160 kHz and 0 kHz to 320 kHz. Combining these plots
with those of Figure 4 gives the overall frequency
response of the device, shown in Figure 6.
–2–
–10
–20
–30
–40
–50
0
d. Gain = 8–128
Figure 4. Frequency Response of PGA
320kHz
Page 3
–50
0
–50
–100
–150
–200
0
40kHz
0
–50
–100
–150
–200
0
80kHz
–100
–150
0
–200
–10
–100
–150
–200
–50
–100
0
a. 0–40 kHz
0
0
b. 0–80 kHz
0
40kHz
a. Gain = 1
80kHz
b. Gain = 2
0
–50
–100
–150
–200
0
160kHz
c. 0–160 kHz
0
–50
–100
–150
–200
0
320kHz
d. 0–320 kHz
Figure 5. Frequency Response of Digital Filter
–150
–200
0
160kHz
c. Gain = 4
0
–50
–100
–150
–200
0
320kHz
d. Gain = 8–128
Figure 6. Overall Frequency Response of ADC
–3–
Page 4

–50
AIN(+)
AIN(–)
AD771x
AIN(+)
AIN(–)
AD771x
–100
–150
–200
–50
–100
–150
0
38.5kHz
0
a. Gain = 1
39.5kHz
From Figure 6 it is clear that the device performs
significant low-pass filtering on its input signal, the
exact filter function being dependent upon the
programmed gain. In each case the plot repeats itself at
multiples of effective input sampling rate. At a gain of 2,
for example, there is a narrow 0 dB passband at about
78 kHz as shown in Figure 6b. Noise in this frequency
range will cause aliasing. However at all other frequencies (excluding multiples of 78 kHz), the device itself will
supply sufficient filtering to prevent aliasing.
At gains from 8 to 128, the filtering effect is even more
dramatic (Figure 6d). In this case input signals are
attenuated by 60 dB or better up to a frequency of 312 kHz
where there is a narrow 0 dB passband (Figure 7d).
Where external filtering is used, using two R-C networks
is recommended as shown in Figure 8a. This will have
good rejection of both differential noise and commonmode noise. Use of a differential filter as shown in
Figure 8b will result in no rejection of common-mode
noise and a maximum attenuation of –6 dB for
differential mode interference.
–200
77.5kHz
0
–50
–100
–150
–200
155.5kHz
0
–50
–100
–150
–200
312kHz
b. Gain = 2
c. Gain = 4
d. Gain = 8–128
78.5kHz
156.5kHz
313kHz
a. b.
Figure 8. External Passive Filter Schemes
When using external filtering, it is important to
remember the restrictions on the sizes of the passive
components used. This subject is discussed in detail in
the section “Antialias Considerations” in the AD771x
data sheets. Where large RC values are required, either
use active filtering to reduce source impedance or
choose the AD7714 which contains a high impedance
input buffer.
POST-FILTERING
It is also possible to reduce noise by post-filtering the
output data from the device. One simple way of doing
this is to implement a moving average digital filter in the
microcontroller or microprocessor/DSP which reads the
conversion results. For example, a 4-tap moving average
filter would calculate the average of the last four conversions, after each conversion. While this has the advantage
that the output data rate from the moving average filter
is the same as that of the ADC, the step response of the
overall system will be adversely affected.
Figure 7. Detail at 0 dB Passband
–4–
Page 5

The frequency response of a moving average filter has
exactly the same form as the internal programmable
gain amplifier of the ADC which is shown in Figure 4.
Figure 4b shows the frequency response of the previously discussed 4-tap filter (Figure 4a represents a
2-tap filter, Figure 4c and 3d show an 8-tap and a 16-tap
filter respectively). In this case the frequency response
will repeat itself at multiples of the output data rate (this
0 dB point will however coincide with a notch in the
internal digital filter of the ADC because the frequency of
the first notch is also equal to the output data rate). So,
for example, at an output data rate of 10 Hz, a 16-tap
moving average filter will attenuate the frequency band
1 Hz to 9 Hz (and 11 Hz to 19 Hz and so on) by between
13 dB and 23 dB.
INPUT PREAMPLIFICATION
If the input signal to the converter needs to be
preamplified and/or buffered, a single stage differential
amplifier may be implemented using two operational
amplifiers as shown in Figure 9.
+V
IN
R
G
–V
IN
1/2
OP213
1/2
OP213
GAIN = 1 +
AIN(+)
R
F
R
F
AIN(–)
2R
AD771x
F
R
G
Figure 9. External Amplification
In choosing a suitable operational amplifier, low
frequency noise (0.1 Hz to 10 Hz) is probably the most
critical factor. The Referred To Input (RTI) device noise
within the passband of the digital filter should be well
below the LSB size that is being resolved. As the gain of
the internal PGA is increased, this becomes even more
critical. If, for example, the internal gain of the AD7711 is
set to 128 in bipolar mode with a first notch frequency of
10 Hz (3 dB cutoff frequency = 2.62 Hz), 1 LSB in a 14-bit
system is equal to 2.3 µV (5 V/128/2
14
). If RG and RF in
Figure 9 are set to the same value, the preamplifier gain
of 3 reduces the RTI LSB size to about 800 nV. The
OP213, which is used in Figure 9, has a low frequency
(0.1 Hz to 10 Hz) noise level of 120 nV p-p. Quadratically
summing the noise voltages from the two devices yields
a total RTI noise
level of about 170 nV p-p. At a notch
frequency of 10 Hz, the –3 dB cutoff of the digital filter is
at 2.62 Hz. This band-limiting reduces the RTI amplifier
noise to about 70 nV which is well below the LSB size
being resolved (800 nV).
INTERNAL GAIN VS. EXTERNAL GAIN
Where extremely high resolution is required, better
noise performance may be achieved by setting the gain
of the internal PGA to unity and externally amplifying
the input signal using a very low noise operational
amplifier such as the AD797. At a gain of 128 and at a
notch frequency of 10 Hz, the AD7711 has an effective
resolution of 16.5 bits which is derived from the RMS
noise of the device (see Tables I and II of AD7711 data
sheet). The number of noise free codes is calculated by
converting this value from rms to p-p which involves
dividing by a factor of about 6.6
1
(roughly 3 LSBs). This
means that we can expect about 13.5 stable bits at a gain
of 128 and at a notch frequency of 10 Hz.
We also see from Tables I and II in the data sheet that a
programmed gain of unity yields about 18.5 stable bits
at an output rate of 10 Hz. Using the same configuration
as in Figure 9, we can implement an external amplifier
using two AD797 operational amplifiers. Setting the
external gain to 128 yields an RTI LSB size of 74 nV for
19-bit resolution (5 V/128/2
19
). With a 0.1 Hz to 10 Hz RTI
noise of 50 nV (p-p), the two operational amplifiers will
contribute a combined RTI noise of about 70 nV (p-p)
that gets reduced to 28.8 nV by the 2.62 Hz cutoff of the
digital filter. Because this value is less than half the LSB
size of 74 nV, the presence of the external amplifier will
not introduce significant noise into the system.
These calculations are based on internal device noise
only. In practice power supply noise and/or noise from
the sensor may make it impossible to achieve this
resolution.
CHOOSING A SUITABLE REFERENCE
While errors due to the initial accuracy and drift of a voltage reference can be compensated using calibration, it
is critical that the output voltage noise of the reference
does not significantly degrade performance.
Table I in the data sheet lists the rms output noise of the
converter as a function of gain and first notch frequency.
The rms noise of the reference used (bandlimited to the
–3 dB bandwidth of the digital filter) should be
quadratically summed with this value to yield the overall
noise of the system. Actual measurements in systems
where reference noise is of the same order of magnitude
as AD771x noise have shown, however, that the
reference contributes less noise than expected.
As an example of this effect, which is not fully
understood, consider the effect of the internal reference
of the AD7710 on the overall noise at a gain of 1 and
at a first notch frequency of 10 Hz (3 dB cutoff point
is at 2.62 Hz). The internal reference has a p-p noise
–5–
Page 6

of 50 µV (8.3 µV rms1) in the 0.1 Hz to 10 Hz bandwidth. This corresponds to a noise spectral density of
2µ
V/ Hz(
8.3 µ
V/10Hz
. In the 2.62 Hz band-
×1.59
)
width of the ADC, the reference will therefore contribute
3.4 µV rms of noise to the internal ADC noise of 1.7 µV.
Quadratically summing these two values yields a total
noise of 3.8 µV rms which should reduce the effective
resolution from 21.5 bits to 20.5 bits. In practice, however, it was observed that the effective resolution only
degraded to about 21 bits when the internal reference
was used.
INPUT PROTECTION
Because exposure to overvoltage can permanently
damage these devices, it is important to protect the
inputs in applications where the absolute input voltage
(normal-mode or common-mode) can exceed the Absolute Maximum Ratings (AV
– 0.3 V to AVDD + 0.3 V)
SS
even if the overvoltage condition is momentary. The
input stage of the ADC does however offer a feature that
can be used as part of an input protection scheme.
AV
DD
*
R
V
P
IN
AIN
+5V
TO PGA
integrity of the conversion, can cause the ADC interface
to detect multiple clock edges for each clock edge
applied. This will have the effect of clocking incorrect
data into the device.
This overshoot can be reduced by placing a small resistor in series on the digital line that is causing the problem. This resistance will combine with the parasitic
capacitance of the digital input to form a low-pass filter
that should eliminate any ringing on the signal. Typically a resistor size of 50 Ω is recommended although
some experimentation may be necessary. It may also be
necessary to add an external capacitance from the input
to ground if the parasitic capacitance of the digital input
is not large enough. Here again experimentation is necessary but a good starting point would be around 10 pF.
USING OPTO-ISOLATORS
When an isolated digital interface is required, optoisolators can be used to create a simple and cheap
isolation barrier. As shown in Figure 11, this can be
implemented with as few as three opto-isolators when
the AD7714 is used.
DT
DR
DATA IN
DATA OUT
*1N5712 OR SD103C
V
IN
R
=
P
*
−
AV
()
max
()
5mA
V
DD
SS
+
AD771x
–5V
0.7V
Figure 10. Input Overvoltage Protection
As shown in Figure 10 the analog inputs are connected
through ESD protection diodes to both power supply
rails. By adding a current limiting resistor (R
), the
P
analog input can be clamped to within 0.6 V of either
supply. The protection resistor should be chosen such
that the input current during overvoltage does not
exceed about 5 mA. If the Johnson noise due to R
is
P
excessive, its value may be reduced by using external
Schottky diodes which clamp at 0.3 V above the supplies
and which can safely conduct larger currents.
INTERFACING TO NOISY LOGIC
In addition to causing possible long-term damage to the
device, overshoot or undershoot in the digital signals
driving the converter, can cause communications errors.
For example, an undershoot of more than 0.3 volts
below ground on the SCLK line is sufficient to turn on
parasitic diodes between the device and the substrate.
This disturbance, in addition to adversely affecting the
SCLK
OPTO-ISOLATORS
µCONTROLLER
SCLK
AD7714
Figure 11. Isolated 3-Wire Interface
However, using opto-isolators which have relatively
slow rise and fall can cause problems even when the
serial clock is running at a slow speed.
CMOS logic inputs such as the SCLK and DATA IN inputs
on the AD771x series are designed to be driven by either
a logic zero or a logic one. In these states they source/
sink a minimum amount of current. However while the
input voltage is in the dead-band between logic zero
and logic one (0.8 V to 2.0 V), the logic input will sink an
increased amount of current. If opto-isolators are used
that have relatively slow rise and fall times, the excessive amount of time spent in the dead-band will cause
self-heating in the ADC. This self-heating tends to shift
the threshold voltage of the logic gate which can lead to
a single clock edge being interpreted by the ADC as multiple clock pulses. To prevent this threshold jitter, the
SCLK lines coming from the opto-isolators should be
buffered using a Schmitt trigger.
–6–
Page 7

Event Output Status
Table I. DRDY Status
Power On DRDY goes High after Power-ON, goes Low after three Notch Periods and stays low
until data are read.
Wake-Up After Power Down DRDY goes High after Wake-Up, goes Low after three Notch Periods and stays low
until data are read.
Voltage Step at Input Valid data after three to four DRDYs.
1
1
2
Switch Channel Resets DRDY3 (high). Next DRDY after three Notch Periods.
Self-Calibration Resets DRDY3 (high). Next DRDY after nine Notch Periods.
System Calibration Resets DRDY3 (high). Next DRDY after six Notch Periods.
System Offset Calibration Resets DRDY3 (high). Next DRDY after nine Notch Periods.
3
DRDY
Background Calibration Resets
4
DRDY
. Output data rate is reduced by 1/6.
Write New Cal. Coefficients Valid data after three to four DRDYs.
Change Notch Frequency Valid data after three to four DRDYs.
Turn On/Off B/O Current Valid data after three to four DRDYs.
Turn On/Off RTD Current
Turn On/Off CJC Current
NOTES
1
The DRDY pin on the AD7714 returns high just before the Output Register is updated even if the old data have not been read.
2
Asserting SYNC during or directly after the operation/event reduces the delay by up to one notch period.
3
DRDY will not be reset high if TFS and SYNC are tied together.
4
In Background Calibration mode, a measurement of the input voltage is interlaced alternately with either a zero-scale or a full-scale calibration, hence the
need to wait for two DRDYs after the calibration command has been issued before reading the first valid data.
5
AD7711 and AD7713 only.
6
AD7710 only.
5
6
Valid data after three to four DRDYs.
Valid data after three to four DRDYs.
(high). First DRDY after six Notch Periods. Valid Data after second
2
2
2
2
2
USING DRDY AS A STATUS INDICATOR
The DRDY logic output indicates that a new conversion
result is available in the output register. However as
shown in Table I, this conversion result is not always
valid. When a step change occurs at the input for
example (this could be caused by an actual step in the
input voltage or by the turning on or off of one of the
onboard current sources such as the Burn-Out Current),
the next three conversion results (indicated by a falling
edge on
DRDY) are invalid due to the internal pipeline
delay of the converter’s digital filter. This can pose
problems in systems whose interrupt lines are driven by
DRDY. One possible solution is to pulse the SYNC input
directly after the event (i.e., turning on the Burn-Out
current) has occurred. This has the effect of setting all
nodes of the digital filter to zero and of keeping the
DRDY line high until the output register contains a valid
result. Pulsing the
SYNC input also reduces the delay, to
valid data, to exactly 3 notch periods.
When the device receives a calibration command, the
DRDY
output is driven high within one modulator cycle
(1/19.5 kHz) and stays high until the calibration sequence
is complete and the device has a valid conversion result
in its output register. The duration of the calibration
varies from 6 to 9 times the output rate depending on
which calibration mode is used. Because it is necessary
to recalibrate after changing the output rate (i.e., the
notch frequency), it is
not
possible to save time by
calibrating at a high output rate and then operating at a
lower output rate. It should be noted that if the
and
TFS lines are tied together, this has the
disadvantage that
DRDY is not driven high when the
SYNC
calibration command is used.
–7–
Page 8

USING CALIBRATION TO COMPENSATE FOR
TEMPERATURE DRIFT AND REFERENCE INACCURACY
In microcontroller or microprocessor based systems
where EPROM data storage is available, it is possible to
calibrate the ADC to a very high accuracy even when the
local reference voltage is inaccurate and drifts over
temperature. In Figure 12, a reference voltage of 2.5 V is
generated by driving one of the RTD current sources of
the AD7711 through a 12.5 kΩ resistor. This current,
which has an initial but repeatable inaccuracy of ±20%
and a temperature drift of 20 ppm/°C, is also used to
excite a thermistor (located close to or on the AD7711)
which measures the ambient temperature. Apart from
the temperature coefficient of the 12.5 kΩ resistor, the
voltage generated across the thermistor (which is connected to AIN2), will be drift-free relative to the
reference voltage.
POWER ON
HEAT DEVICE
TO REQUIRED
TEMPERATURE
PERFORM
SYSTEM CAL
ON AIN1
READ BACK AND
STORE ZS AND FS
CAL COEFFS
PERFORM SELF-
CAL ON AIN2
READ AIN2
(TEMPERATURE)
200µA
RTD1
REF IN (+)
12.5kΩ
THERMISTOR
(LOCATE NEAR
OR ON ADC)
HIGH ACCURACY
VOLTAGE REFERENCE
REF IN (–)
AIN2
AIN1 (+)
AIN1 (–)
AD7711
Figure 12. High Accuracy Calibration Using AD7711
Figure 13 shows the steps involved in calibrating the
device over a particular temperature range. As an
example let’s assume that we want to calibrate over the
temperature range 0°C to +70°C. After power-up, the
ambient temperature is set to 5°C. A system calibration
is performed on the AIN1 channel using a drift free, high
accuracy voltage reference. The zero-scale (ZS) and
full-scale (FS) calibration coefficients generated are
read back and stored. Next we perform a self-calibration
on AIN2 and then measure and store the subsequent
conversion result from this channel.
The temperature is increased and the same procedure is
repeated at 15°C, 25°C and so on up to 65°C. We end up
with a look-up table containing seven sets of calibration
coefficients corresponding to seven temperature ranges,
each range covering 10°C.
STORE AIN2
CONVERSION
RESULT
CALIBRATE
AT ANOTHER
TEMPERATURE?
NO
END
YES
Figure 13. Flowchart for Calibration Over Temperature
Figure 14 details how to use this look-up table to perform precision measurements even while the ambient
temperature is varying by a large amount. After powerup, AIN2 is self-calibrated and measured. By comparing
the measured result with the values in the look-up table,
we can determine in which temperature range we are
operating. Finally we load the appropriate calibration
coefficients from the look-up table and measure the
voltage on AIN1. It is important to note that no calibration is performed on AIN1 during normal operation.
If we periodically monitor the ambient temperature by
measuring AIN2 (it is probably not necessary to
measure AIN2 as often as AIN1), we can load a different
set of calibration coefficients if the temperature drifts
outside the band in which it is currently operating.
The above example calibrated the device in 10°C segments (i.e., Calibration Temperature ±5°C). Drift occurring within these segments will not be corrected. If
higher accuracy is required, smaller segments can be
selected.
–8–
Page 9

CALCULATE
RATIO BETWEEN
SYSTEM-CAL
AND SELF-CAL
COEFFICIENTS
HEAT DEVICE
TO AMBIENT
TEMPERATURE
CALIBRATE
AT ANOTHER
TEMPERATURE?
YES
NO
END
POWER ON
HEAT DEVICE
TO NEXT
CALIBRATION
TEMPERATURE
PERFORM
SYSTEM CAL
ON AIN1
READ BACK AND
STOR ZS AND FS
CAL COEFFS
PERFORM
SELF-CAL
ON AIN1
PERFORM
SELF-CAL
ON AIN1
READ BACK
ZS AND FS CAL
COEFFICIENTS
CALCULATE AND
STORE EFFECTIVE
SYSTEM-CAL
COEFFICIENTS
POWER ON
PERFORM SELF-
CAL ON AIN2
READ AIN2
AND CALCULATE
TEMPERATURE
USING LUT
LOAD
APPROPRIATE
CAL COEFFS
FOR AIN1
MEASURE AIN1
READ AIN2
AND CALCULATE
TEMPERATURE
necessary to self-calibrate and measure the voltage on
AIN2 (ambient) at each temperature. These values are
stored in a look-up table along with the calculated system calibration coefficients. For operational conditions,
the same scheme as described in Figure 14 is used.
*
Figure 14. Flowchart for Low Drift Measurement Over
Temperature Using a Look-Up Table
Figure 15 shows a flowchart for an alternative calibration scheme that relies more on self-calibration which
is less labor-intensive than system calibration. Initially the system is powered on, and heated up to a
temperature at which the external reference voltage is
most accurate (probably room temperature). At this
temperature, both a self-calibration and a system calibration are performed, the calibration coefficients being
read back in each case. Next, the ratios of the self-cal
coefficients to the system-cal coefficients are calculated.
For more information on the structure of the calibration
coefficients and on calculating this ratio, contact Analog
Devices Applications.
The system is now heated up to the temperatures at
which calibration is required. A self-calibration is performed at each temperature. Using the ratios previously calculated, it is now possible to use the self-cal
coefficients to calculate the effective system-calibration
coefficients which are based on a calibration voltage
from a highly accurate voltage reference (not from the
relatively inaccurate combination of a 200 µA current
source and a 12.5 kΩ resistor). At this point the selfcalibration coefficients can be discarded. As before, it is
NO
HAS
TEMPERATURE
CHANGED?
END
YES
*THIS STEP CAN BE
PERFORMED LESS
OFTEN IF DESIRED
Figure 15. Using Self-Calibration as an Alternative to
System Calibration
–9–
Page 10

DEFAULT REGISTER SETTINGS ON POWER-UP
Table II lists the default settings of the control registers
of the AD7710/AD7711/AD7712/AD7713 and of the filter
register of the AD7714. These values can be read back
on power-up as a useful test of both the functionality of
the ADC and of the communication with the processor
to which it interfaces.
Table II. Register Settings after Power-On or Reset
Device Control Register
AD7710 000146 Hex
AD7711 000146 Hex
AD7712 000146 Hex
AD7713 000041 Hex
Device Filter Register
AD7714 0140 Hex
References
1
Analog-Digital Conversion Handbook
, 3d. edition,
pp. 46–47, 1986, by the Engineering Staff of Analog
Devices, Inc., edited by Daniel H. Sheingold, PrenticeHall, Englewood Cliffs, NJ 07632
–10–
Page 11

APPENDIX A
*This program contains subroutines to read and write
*to the AD7710 family of ADCs from the 68HC11
*microcontroller. These subroutines were developed for the
*68HC11 Evaluation Board, which is where the references to
*BUFFALO come from, in conjunction with the AD7710 Evaluation
*board. The following connections need to be made.
*68HC11 AD7710
*PC0 RFS
*PC1 TFS
*PC2 DRDY
*PC3 A0
*PD2,PD3 SDATA 10K pull-up resistor
* PD2 and PD3 attached together
*PD4 SCLK 10K pull-up
*PD5 10K pull-up, no connection to AD7710
*
portc equ $1003
portd equ $1008
ddrd equ $1009
spcr equ $1028
spsr equ $1029
spdr equ $102a
ddrc equ $1007
*
org $C000
read lds #$CFFF sub-routine to read from the AD771x
*
ldaa #$fb initialize port c outputs: 11111011
staa ddrc Set up drdy as input (PC2) and
* A0, RFS, TFS (PC3,PC0,PC1) as outputs
ldaa #$30 00110000
staa ddrd MOSI is low for input,
* MISO is high, SCK as output
*
ldaa #$37 00110111
staa spcr SPI system off, resets itself
*
ldaa #$77 01110111
staa spcr Interrupts disabled, SPI system on,
* DWOM mode, 68hc11 is master,
* CPOL 0, CPHA 1, SCK=ECK/32
*
ldy #$1000
bset portc,y $03 TFS and RFS set high
*
bset portc,y $08 A0 high to read data
* bclr portc,y $08 A0 low to read from cal. reg
*
ldaa spsr Initial dummy read to clear port and SPIF
ldaa spdr
*
ldab #$03 b is 0 when write finished
ldx #$00 x points to start of 24 bit word
* to be read
*
pause ldaa #$04
anda portc
bne pause Wait until DRDY is low
*
bclr portc,y $01 Clear RFS
*
–11–
Page 12

go1 staa spdr Start SCK
wait1 ldaa spsr
bpl wait1 wait until SPIF flag is clear
ldaa spdr and then read.
staa 0,x And then put in memory
*
decb
beq fin1
inx points to next byte to be read
jmp go1
*
fin1 bset portc,y $09 set RFS and A0
*
jmp $e000 Return to BUFFALO
*
*
*
write lds #$cfff
ldaa #$fb
staa ddrc Set up drdy as input (PC2) and
* A0, RFS, TFS (PC3,PC0,PC1) as outputs
ldaa #$37
staa spcr SPI system off, resets itself
*
ldaa #$73
staa spcr Interrupts disabled, SPI system on,
* DWOM mode, 68hc11 is master,
* CPOL=0, CPHA=0, SCK=ECK/32
ldaa #$38
staa ddrd MOSI is high for output,
* MISO is low, SCK is high
ldy #$1000
bset portc,y $03 Set TFS and RFS
*
bclr portc,y $08 Set A0 low to write
* to control register
*
* ldaa spsr Initial dummy read to clear
* ldaa spdr port and SPIF
*
*
ldab #$03 b is 0 when write finished
ldx #$00 x points to start of 24 bit word
* to be written
*
bclr portc,y $02 clear TFS
*
go2 ldaa 0,x
staa spdr write byte to serial port
*
wait2 ldaa spsr
bpl wait2 wait until SPIF flag is clear
*
decb
beq fin2
inx points to next byte to be written
jmp go2
*
fin2 bset portc,y $0a set TFS and A0
*
jmp $e000 Return to BUFFALO
E2113–10–6/96
PRINTED IN U.S.A.
–12–
 Loading...
Loading...