

Integrated, Precision
K
Battery Sensor for Automotive Systems
FEATURES
High precision ADC
Dual channel, simultaneous sampling, 16-bit, Σ-Δ ADCs
Programmable ADC throughput from 10 Hz to 1 kHz
On-chip 5 ppm/ºC voltage reference
Current channel
Fully differential, buffered input
Programmable gain
ADC input range: −200 mV to +300 mV
Digital comparator with current accumulator feature
Voltage channel
Buffered, on-chip attenuator for 12 V battery input
Temperature channel
External and on-chip temperature sensor options
Microcontroller
ARM7TDMI-S core, 16-/32-bit RISC architecture
20.48 MHz PLL
On-chip precision oscillator
JTAG port supports code download and debug
ADuC7039
Memory
64 kB Flash/EE memory options, 4-kB SRAM
10,000-cycle Flash/EE endurance, 20-year Flash/EE
retention
In-circuit download via JTAG and LIN
On-chip peripherals
SAEJ2602/LIN 2.1-compatible slave
SPI
GPIO port
1 × general-purpose timer
Wake-up and watchdog timers
On-chip power-on-reset
Power
Operates directly from 12 V battery supply
Current consumption 7.5 mA (10 MHz)
Low power monitor mode
Package and temperature range
32-pin, 6 mm × 6 mm LFCSP
Fully specified for −40°C to +115°C operation
APPLICATIONS
Battery sensing/management for automotive systems
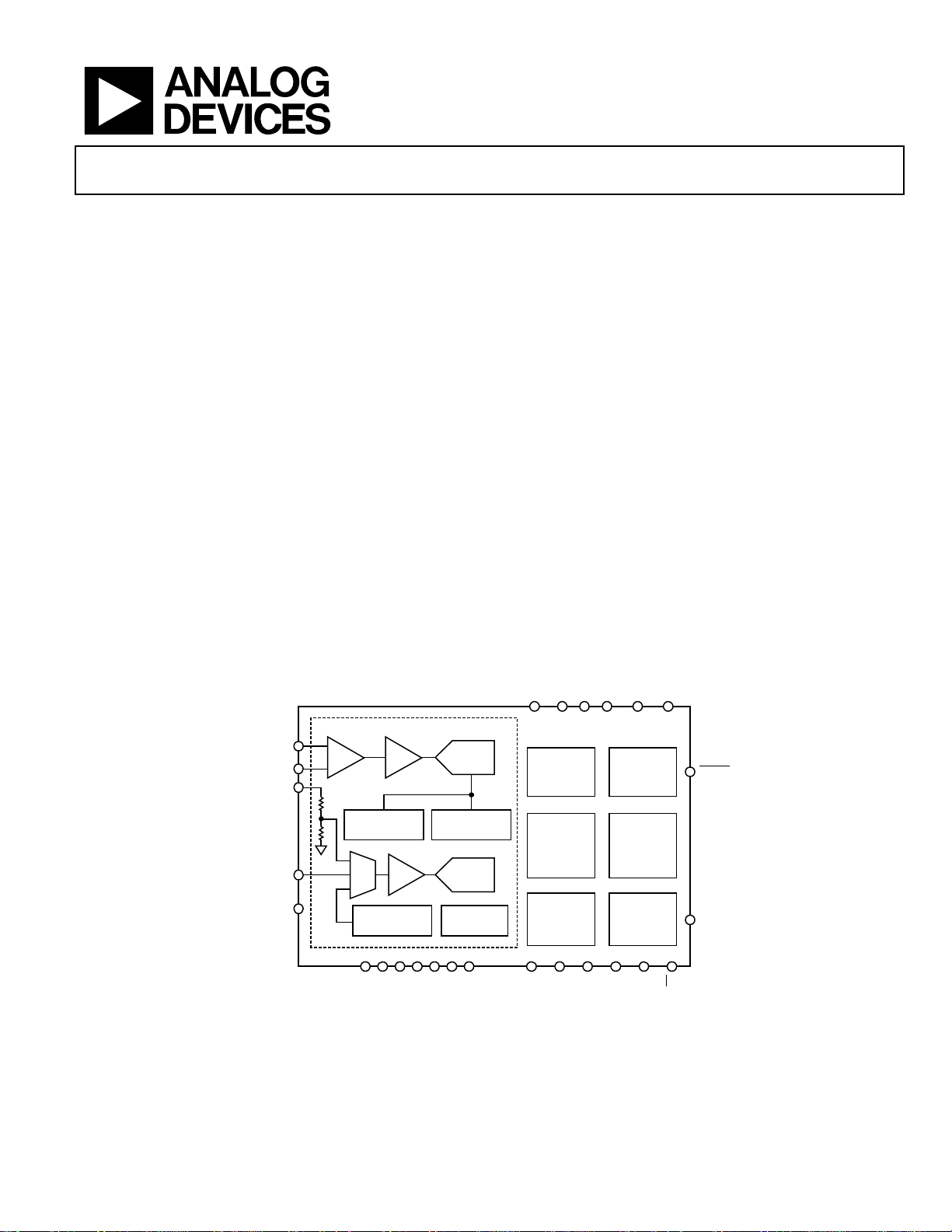
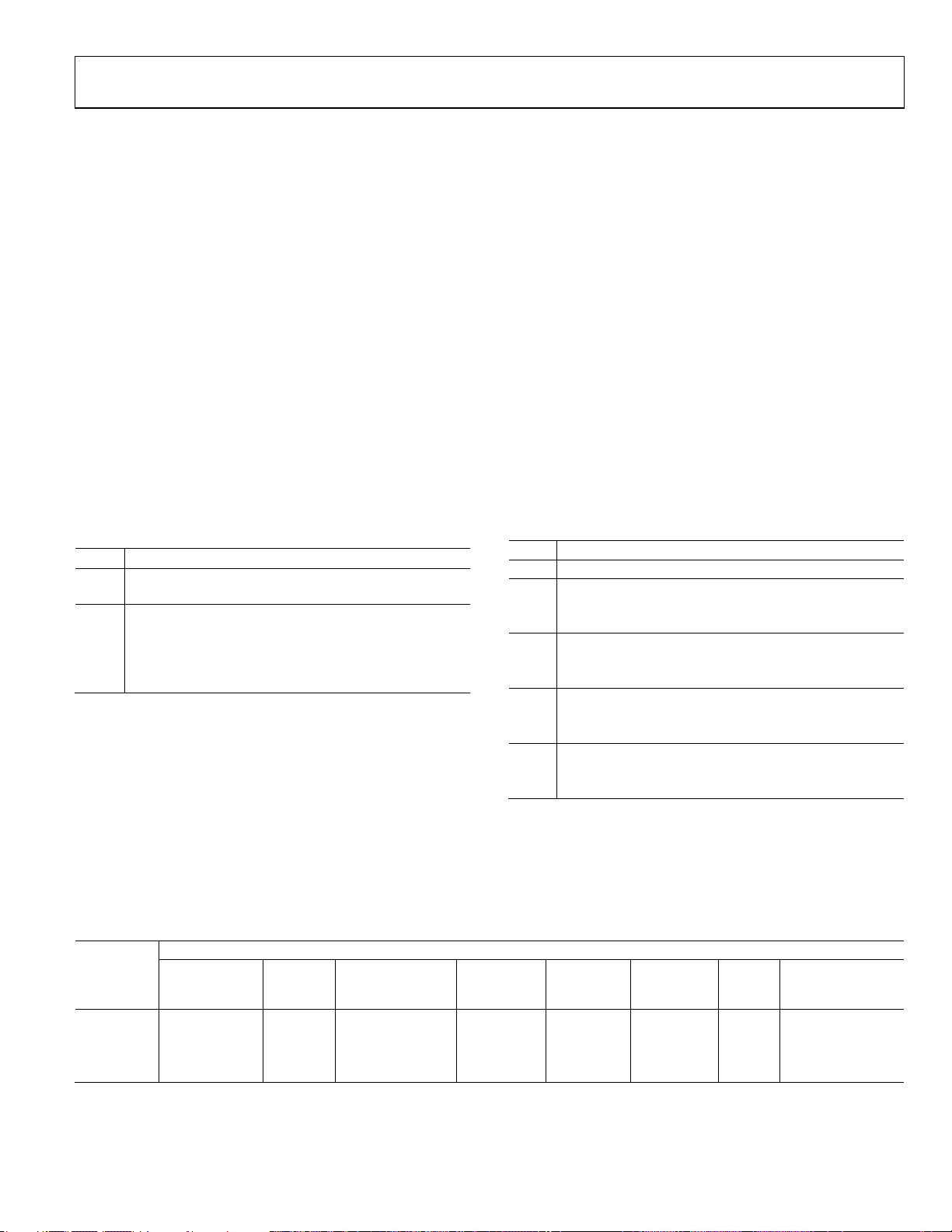
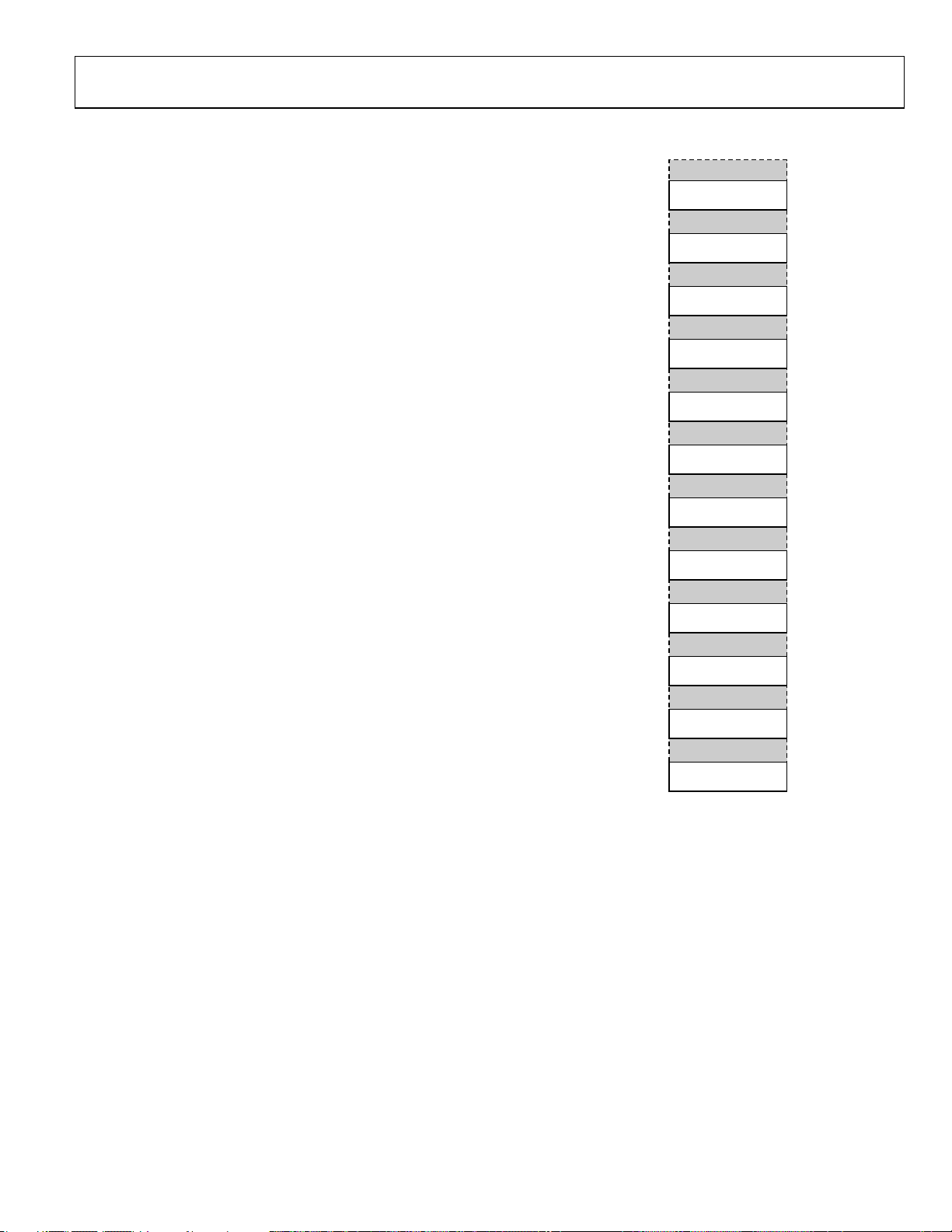
FUNCTIONAL BLOCK DIAGRAM
PRECISION ANAL OG ACQUISITION
IIN+
IIN–
VBAT
VTEMP
GND_SW
Rev. B
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
BUF PGA
RESULT
ACCUMULATOR
MUX
BUF
TEMPERATURE
SENSOR
VDD
REG_AVDD
AGND
REG_DVDD
Σ-Δ ADC
DIGITAL
COMPARATOR
Σ-Δ ADC
PRECISION
REFERENCE
VSS
DGND
16-BIT
16-BIT
IO_VSS
Figure 1.
RTCK TDI TDO NTRST TMS
TC
ADuC7039
LDO
POR
20MHz
ARM7TDMI
MCU
1 × TIMER
WDT
W/U TIMER
GPIO_5
GPIO_4
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2010 Analog Devices, Inc. All rights reserved.
64KB FLASH
LOW POWER
ON-CHIP PLL
GPIO_3/ MOSI
MEMORY
4KB RAM
PRECISION
OSC
OSC
GPIO PORT
SPI PORT
LIN
GPIO_2/ MISO
GPIO_1/SCLK
RESET
LIN
GPIO_0/SS
08463-001

ADuC7039
TABLE OF CONTENTS
Features .............................................................................................. 1
Applications ....................................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 2
Specifications ..................................................................................... 3
Electrical Specifications ............................................................... 3
Timing Specifications .................................................................. 7
Absolute Maximum Ratings ............................................................ 8
ESD Caution .................................................................................. 8
Pin Configuration and Function Descriptions ............................. 9
Terminology .................................................................................... 11
Theory of Operation ...................................................................... 12
Overview of the ARM7TDMI-S Core ..................................... 12
Memory Organization ............................................................... 14
Reset ............................................................................................. 15
Flash/EE Memory ........................................................................... 16
Flash/EE MMR Interface ........................................................... 16
Flash/EE Memory Signature ..................................................... 20
Flash/EE Memory Security ....................................................... 21
Flash/EE Memory Reliability .................................................... 23
ADuC7039 Kernel ...................................................................... 23
Memory Mapped Registers (MMR) ............................................. 25
Complete MMR Listing ............................................................. 26
16-Bit, Sigma-Delta Analog-to-Digital Converters ................... 29
ADC Ground Switch .................................................................. 32
ADC Noise Performance Tables ............................................... 32
ADC MMR Interface ................................................................. 33
ADC Sinc3 Digital Filter Response .......................................... 42
ADC Modes of Operation ......................................................... 43
ADC Configuration ................................................................... 45
I-ADC Diagnostics ..................................................................... 46
REVISION HISTORY
8/10—Rev.A to Rev. B
Changes to Fast Temperature Conversion Mode Section ......... 46
Changes to Bit 4 Description (LINCON[6] Reference) in
Table 62 ............................................................................................ 86
Changes to Part Identification Section ........................................ 87
6/10—Rev. 0 to Rev. A
Added SAEJ2602 to Features Section ............................................ 1
Changes to Table 2 ............................................................................ 9
Power Supply Support Circuits ..................................................... 47
System Clocks ................................................................................. 48
Oscillators Calibration ............................................................... 53
Interrupt System ............................................................................. 58
Timers .............................................................................................. 60
Synchronization of TIMERS Across Asynchronous Clock
Domains ...................................................................................... 60
Programming the Timers .......................................................... 61
Timer0—General-Purpose Timer ........................................... 62
Timer1—Wake-Up Timer ......................................................... 64
Timer2—Watchdog Timer ........................................................ 66
General-Purpose Input/Output .................................................... 68
Serial Peripheral Interface (SPI) ................................................... 73
Master In, Slave Out (MISO) Pin ............................................. 73
Master Out, Slave In (MOSI) Pin ............................................. 73
Serial Clock I/O (SCLK) Pin ..................................................... 73
Slave Select (SS) Pin ................................................................... 73
SPI MMR Interface .................................................................... 73
High Voltage Peripheral Control Interface ................................. 77
Low Voltage Flag (LVF) ............................................................. 80
Handling HV Interface Interrupt and HV Communication 80
LIN (Local Interconnect Network) Interface.............................. 82
LIN Physical Interface ............................................................... 82
LIN Diagnostic ........................................................................... 83
LIN Communication ................................................................. 83
LIN MMRs .................................................................................. 83
Part Identification ........................................................................... 87
Recommended Schematic ............................................................. 89
Outline Dimensions ....................................................................... 90
Ordering Guide .......................................................................... 90
Changes to Bit 2 and Bit 1 Descriptions in Table 34 .................. 39
Changes to System Clocks Section ............................................... 49
Added Syncronization of Timers across Asynchronous Clock
Domains Section, Figure 23, and Figure 24 ................................ 60
Added Programming the Timers Section ................................... 61
Changes to Recommended Schematic Text ................................ 89
3/10—Revision 0: Initial Version
Rev. B | Page 2 of 92
ADuC7039
SPECIFICATIONS
ELECTRICAL SPECIFICATIONS
VDD = 3.5 V to 18 V, V
+115°C, unless otherwise noted.
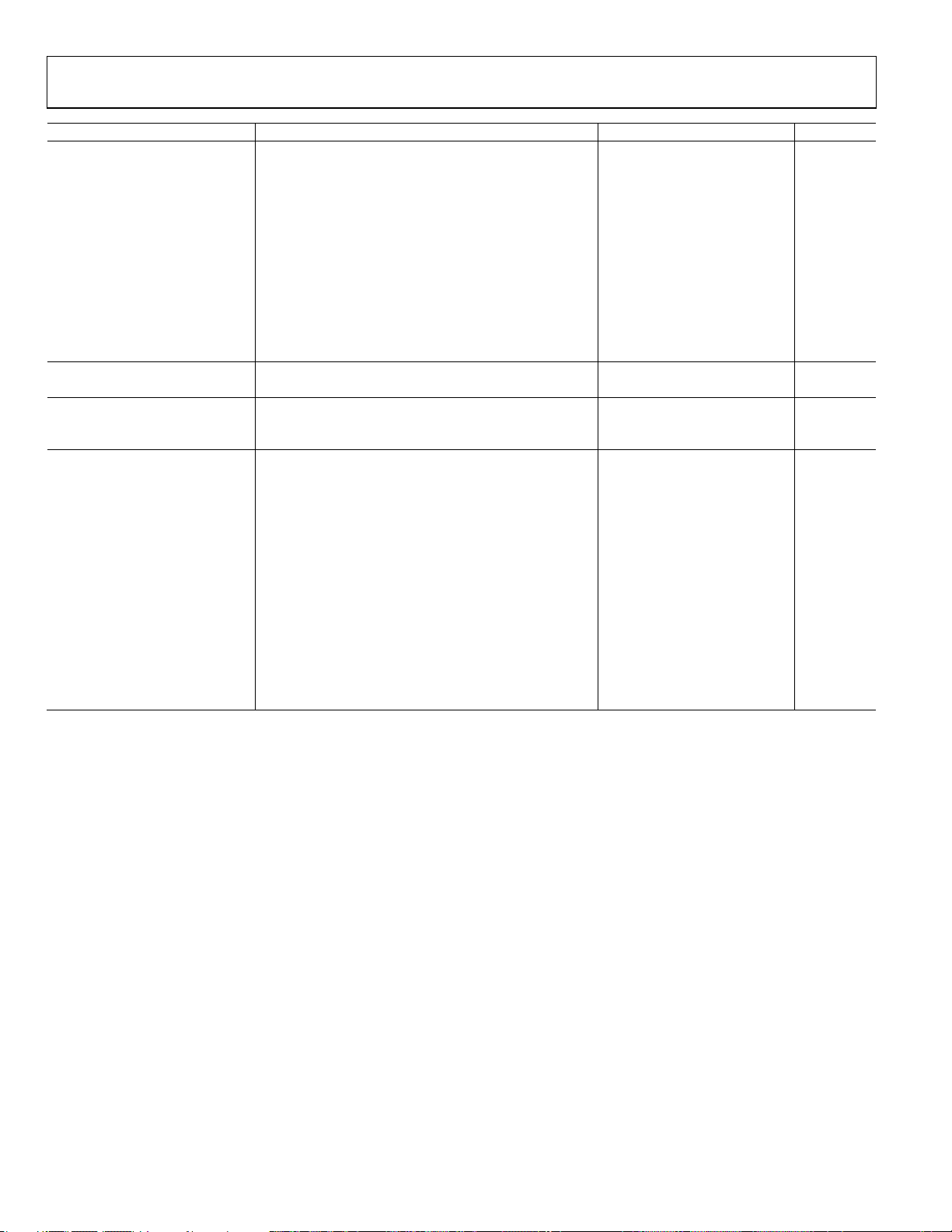
Table 1.
Parameter Test Conditions/Comments Min Typ Max Unit
ADC SPECIFICATIONS
Conversion Rate1 ADC normal operating mode 10 1000 Hz
ADC low power mode, chop on 10 650 Hz
Current Channel
No Missing Codes1 Valid for all ADC update rates and ADC modes 16 Bits
Integral Nonlinearity
Offset Error
Offset Error
Offset Error
Offset Error
Offset Error Drift
Offset Error Drift
Offset Error Drift
Total Gain Error
Low power mode −1 ±0.2 +1 %
Gain Drift
PGA Gain Mismatch Error ±0.1 %
Output Noise1 10 Hz update rate, gain = 512, chop enabled 100 150 nV rms
1 kHz update rate, gain = 512, ADCFLT = 0x0007 0.6 0.9 µV rms
1 kHz update rate, gain = 32, ADCFLT = 0x0007 0.8 1.2 µV rms
1 kHz update rate, gain = 8, ADCFLT = 0x8101 2.1 4.1 µV rms
1 kHz update rate, gain = 8, ADCFLT = 0x0007 1.6 2.4 µV rms
1 kHz update rate, gain = 4, ADCFLT = 0x0007 2.6 3.9 µV rms
ADC low power mode, 250Hz update rate, chop enable,
Voltage Channel8
No Missing Codes1 Valid at all ADC update rates 16 Bits
Integral Nonlinearity1 ±10 ±60 ppm of FSR
Offset Error
Offset Error
Offset Error Drift4 Chop off ±0.03 LSB/°C
Total Gain Error
Total Gain Error
Gain Drift
Output Noise
1 kHz update rate, ADCFLT = 0x0007 180 270 µV rms
Temperature Channel
No Missing Codes1 Valid at all ADC update rates 16 Bits
Integral Nonlinearity1 ±10 ±60 ppm of FSR
Offset Error
Offset Error
Offset Error Drift1 Chop off 0.03 LSB/°C
Total Gain Error
Gain Drift1 3 ppm/°C
Output Noise1 1 kHz update rate 7.5 11.25 µV rms
1, 2, 3
1, 3
1, 3
1, 3
1, 7
±3 ppm/°C
1, 3
1, 3
1, 7
Includes resistor mismatch drift ±3 ppm/°C
3, 10
1, 3
= 1.2 V internal reference, f
REF
1, 2
±10 ±60 ppm of FSR
Chop off, external short, after user system calibration,
= 20.48 MHz driven from on-chip precision oscillator, all specifications TA = −40°C to
CORE
−10 ±3 +10 LSB
1 LSB = (36.6/gain) µV
Chop on, external short, low power mode,
+250 ±50 −300 nV
MCU powered down
Chop on, external short, after user system calibration
0 3.0 µV
Tested at CD = 0, VDD = 18 V
Chop on, external short, after user system calibration
±0.5 µV
Tested at CD = 0, VDD = 4 V
1, 2, 4
Chop off, gains of 8 to 64, normal mode ±0.03 LSB/°C
1, 4
Chop off, valid for ADC gain of 512 ±30 nV/°C
1, 4
Chop on ±5 nV/°C
1, 3, 5 , 6
Factory calibrated at a gain of 4; normal mode −0.5 ±0.1 +0.5 %
0.6 0.9 µV rms
gain = 512
Chop off, 1 LSB = 439.5 µV, after two point calibration −10 ±1 +10 LSB
Chop on, after two point calibration −1 ±0.3 +1 LSB
1, 3, 5, 6
Includes resistor mismatch −0.25 ±0.06 +0.25 %
1, 3, 5, 6
Temperature range = −25°C to +65°C −0.15 ±0.03 +0.15 %
1, 9
10 Hz update rate, chop on 60 90 µV rms
Chop off, 1 LSB = 19.84 V (in unipolar mode) −10 ±3 +10 LSB
Chop on −5 +1 +5 LSB
1, 3, 10
VREF = (REG_AVDD, GND_SW)/2 −0.25 ±0.06 +0.25 %
Rev. B | Page 3 of 92
ADuC7039
Parameter Test Conditions/Comments Min Typ Max Unit
ADC SPECIFICATIONS, ANALOG INPUT
Current Channel
Absolute Input Voltage Range1 Applies to both IIN+ and IIN− −200 +300 mV
Input Voltage Range
Gain = 4 ±300 mV
Gain = 8 ±150 mV
Gain = 32 ±37.5 mV
Gain = 512 ±2.3 mV
Input Leakage Current1 −3 +3 nA
Input Offset Current
Voltage Channel
Absolute Input Voltage Range1 Voltage ADC specifications are valid in this range 4 18 V
Input Voltage Range1 0 to 28.8 V
VBAT Input Current VBAT = 18 V 3 5.5 8 µA
Temperature Channel V
Absolute Input Voltage
14
Range
Input Voltage Range1 0 to V
VTEMP Input Current1 2.5 100 nA
VOLTAGE REFERENCE
Internal VREF 1.2 V
Power-Up Time1 0.5 ms
Initial Accuracy1 Measured at TA = 25°C −0.15 +0.15 %
Temperature Coefficient
Long-Term Stability16 100 ppm/1000 hr
ADC DIAGNOSTICS
VREF/136 Accuracy1 At any gain setting 8.4 9.4 mV
Voltage Attenuator Current Differential voltage increase on the attenuator when current is on 2.3 3.6 V
Source Accuracy1
RESISTIVE ATTENUATOR1
Divider Ratio 24
Resistor Mismatch Drift Included in the voltage channel total gain error ±3 ppm/°C
ADC GROUND SWITCH
Resistor to Ground 15 20 30 kΩ
TEMPERATURE SENSOR17 Uncalibrated
Accuracy MCU in power down or standby mode; TA = −40°C to +85°C −10 ±3 +10 °C
MCU in power down or standby mode; TA = −20°C to +60°C −8 ±2 +8 ºC
Calibrated − ADC2GN = 0x968A;
POWER-ON RESET (POR)1
POR Trip Level Refers to voltage at the VDD pin 2.85 3.0 3.15 V
POR Hysteresis 300 mV
Reset Timeout from POR 20 ms
LOW VOLTAGE FLAG(LVF)
LVF Level Refers to voltage at the VDD pin 1.9 2.1 2.3 V
WATCHDOG TIMER (WDT)
Timeout Period1 32 kHz clock, 256 prescale 0.008 524 Seconds
Timeout Step Size 7.8 ms
FLASH/EE MEMORY1
Endurance18 10,000 Cycles
Data Retention19 20 Years
DIGITAL INPUTS1 All digital inputs except NTRST
Input Leakage Current Input (high) = REG_DVDD ±1 ±10 µA
Input Pull-Up Current1 Input (low) = 0 V 10 20 80 µA
Input Capacitance1 10 pF
Input Leakage Current NTRST only; input (low) = 0 V ±1 ±10 µA
Input Pull-Down Current NTRST only; input (high) = REG_DVDD 30 55 100 µA
11, 12
1, 13
0.5 1.5 nA
= (REG_AVDD, GND_SW)/2
REF
100 1300 mV
V
REF
1, 15
−20 ±5 +20 ppm/°C
−4 ±2 +4 °C
MCU in power down or standby mode
Rev. B | Page 4 of 92
ADuC7039
Parameter Test Conditions/Comments Min Typ Max Unit
LOGIC INPUTS1 All logic inputs
Input Low Voltage (VINL) 0.4 V
Input High Voltage (VINH) 2.0 V
ON-CHIP OSCILLATORS
Low Power Oscillator 128 kHz
Accuracy After user calibration at nominal supply and room
temperature; includes drift data from 1000 hr life-test
Precision Oscillator 128 kHz
Accuracy After run time calibration −1 +1 %
MCU CLOCK RATE1 10.24 MHz
MCU START-UP TIME1
At Power-On Includes kernel power-on execution time 25 ms
After Reset Event Includes kernel power-on execution time 5 ms
From MCU Power-Down Oscillator running 2 ms
Internal PLL Lock Time 1 ms
LIN I/O GENERAL
Baud Rate 1000 20,000 Bits/sec
VDD Supply voltage range for which the LIN interface is functional 7 18 V
Input Capacitance1 5.5 pF
LIN Comparator Response Time1 Using 22 Ω resistor 38 90 µs
LIN DC PARAMETERS
I
Current limit for driver when LIN bus is in dominant state;
LIN DOM MAX
VBAT = VBAT (maximum)
1
I
LIN_PAS_REC
I
LIN_PAS_DOM
I
LIN_NO_GND
I
BUS_NO_BAT
V
V
V
V
V
Driver off; 7.0 V < V
1
Input leakage, V
1, 20
Control unit disconnected from ground, GND = VDD;
1
VBAT disconnected, VDD = GND, 0 V < V
1
LIN receiver dominant state, VDD > 7.0 V 0.4 VDD V
LIN_DOM
1
LIN receiver recessive state, VDD > 7.0 V 0.6 VDD V
LIN_REC
1
LIN receiver center voltage, VDD > 7.0 V 0.475 VDD 0.5 VDD 0.525 VDD V
LIN_CNT
1
LIN receiver hysteresis voltage 0.175 VDD V
HYS
LIN_DOM_DRV_LOSUP
1
LIN dominant output voltage; VDD = 7.0 V
0 V < V
< 18 V; VBAT = 12 V
LIN
< 18 V; VDD = V
BUS
= 0 V −1 mA
LIN
− 0.7 V 20 µA
LIN
< 18 V 100 µA
BUS
RL 500 Ω 1.2 V
RL 1000 Ω 0.6 V
V
LIN_DOM_DRV_HISUP
1
LIN dominant output voltage; VDD = 18 V
RL 500 Ω 2 V
RL 1000 Ω 0.8 V
V
LIN_RECESSIVE
1
LIN recessive output voltage 0.8 VDD V
VBAT Shift20 0 0.115 VDD V
GND Shift20 0 0.115 VDD V
R
Slave termination resistance 20 30 47 kΩ
SLAVE
SERIAL DIODE
20
Voltage drop at the serial diode, D
0.4 0.7 1 V
Ser_Int
V
LIN AC PARAMETERS1 Bus load conditions (CBUS||RBUS):
1 nF||1 kΩ; 6.8 nF||660 Ω; 10 nF||500 Ω
D1 Duty Cycle 1 0.396
TH
TH
V
D1 = t
= 0.744 × VBAT
REC(MAX)
= 0.581 × VBAT
DOM(MAX)
= 7.0 V … 18 V; t
SUP
BUS_REC(MIN)
= 50 µs
BIT
/(2 × t
)
BIT
D2 Duty Cycle 2 0.581
TH
TH
V
D2 = t
= 0.284 × VBAT
REC(MIN)
= 0.422 × VBAT
DOM(MIN)
= 7.0 V … 18 V; t
SUP
BUS_REC(MAX)
= 50 µs
BIT
/(2 × t
)
BIT
−3 +3 %
40 200 mA
−1 +1 mA
Rev. B | Page 5 of 92
ADuC7039
Parameter Test Conditions/Comments Min Typ Max Unit
1, 20
D3
TH
TH
V
t
D3 = t
1, 20
D4
TH
TH
V
t
D4 = t
1, 20
t
Propagation delay of receiver 6 μs
RX_PDR
1, 20
t
Symmetry of receiver propagation delay rising edge,
RX_SYM
PACKAGE THERMAL SPECIFICATIONS
Thermal Impedance (θJA)21 32-lead CSP, stacked die 32 °C/W
POWER REQUIREMENTS1
Power Supply Voltages
VDD (Battery Supply) 3.5 18 V
REG_DVDD, REG_AVDD22 2.45 2.6 2.75 V
Power Consumption
IDD (MCU Normal Mode)23 ADC off (20.48 MHz) 10 20 mA
ADC off (10.24 MHz) 7.5 16 mA
IDD (MCU Powered Down)1 ADC low power mode, measured over an ambient
IDD (MCU Powered Down)1 Precision oscillator turned off, ADC off
Average current, measured with wake-up and watchdog
Average current, measured with wake-up and watchdog
IDD (Current ADC) 1.7 mA
IDD (Voltage/Temperature ADC) 0.5 mA
IDD (Precision Oscillator) 400 μA
1
Not guaranteed by production test but by design and/or characterization data at production release.
2
Valid for current ADC gain setting of PGA up to 64.
3
These numbers include temperature drift.
4
The offset error drift is included in the offset error. This typical specification is an indicator of the offset error due to temperature drift. This typical value is the mean of
the temperature drift characterization data distribution.
5
Includes internal reference temperature drift.
6
User system calibration removes this error at a given temperature and at a given gain on the current channel.
7
The gain drift is included in the total gain error. This typical specification is an indicator of the gain error due to temperature drift. This typical value is the mean of the
temperature drift characterization data distribution.
8
Voltage channel specifications include resistive attenuator input stage.
9
RMS noise is referred to voltage attenuator input; for example, at f
input referred noise figures.
10
Valid after an initial self calibration.
11
It is possible to extend the ADC input range by up to 10% by modifying the factory set value of the gain calibration register or using system calibration. This approach
can also be used to reduce the ADC input range (LSB size).
12
In ADC low power mode, the input range is fixed at ±2.34375 mV.
13
Valid for a differential input less than 10 mV.
14
The absolute value of the voltage of VTEMP and GND_SW must be 100mV minimum, for accurate operation of the T-ADC.
15
Measured using box method.
16
The long-term stability specification is noncumulative. The drift in subsequent 1000 hour periods is significantly lower than in the first 1000 hour period.
17
Die temperature.
18
Endurance is qualified to 10,000 cycles, as per JEDEC Std. 22 Method A117 and measured at −40°C, +25°C, and +125°C. Typical endurance at 25°C is 170,000 cycles.
19
Retention lifetime equivalent at junction temperature (TJ) = 85°C, as per JEDEC Std. 22 Method A117. Retention lifetime derates with junction temperature.
20
These numbers are not production tested but are supported by LIN compliance testing.
21
Thermal impedance can be used to calculate the thermal gradient from ambient to die temperature.
22
Internal regulated supply available at REG_DVDD (I
23
Typical additional supply current consumed during Flash/EE memory program and erase cycles is 7 mA and 5 mA, respectively.
= 0.778 × VBAT 0.417
REC(MAX)
= 0.616 × VBAT
DOM(MAX)
= 7.0 V ... 18 V
DD
= 96 μs
BIT
/(2 × t
BUS_REC(MIN)
= 0.389 × VBAT 0.590
REC(min)
= 0.251 × VBAT
DOM(min)
= 7.0 V … 18 V
DD
= 96 μs
BIT
BUS_REC(MAX)
)
BIT
/(2 × t
)
BIT
−2 +2 μs
with respect to falling edge (t
RX_SYM
= t
RF_PDR
− t
RX_PDF
)
750 1000 μA
temperature range of T
= −10°C to +40°C, continuous ADC
A
conversion
95 300 μA
timers clocked from low power oscillator (−40°C to +85°C)
95 175 μA
timers clocked from low power oscillator over an ambient
temperature range of −10°C to +40°C
= 1 kHz, typical rms noise at the ADC input is 7.5 μV, scaled by the attenuator (24) yields these
ADC
= 5 mA) and REG_AVDD (I
SOURCE
SOURCE
=1 mA).
Rev. B | Page 6 of 92
ADuC7039
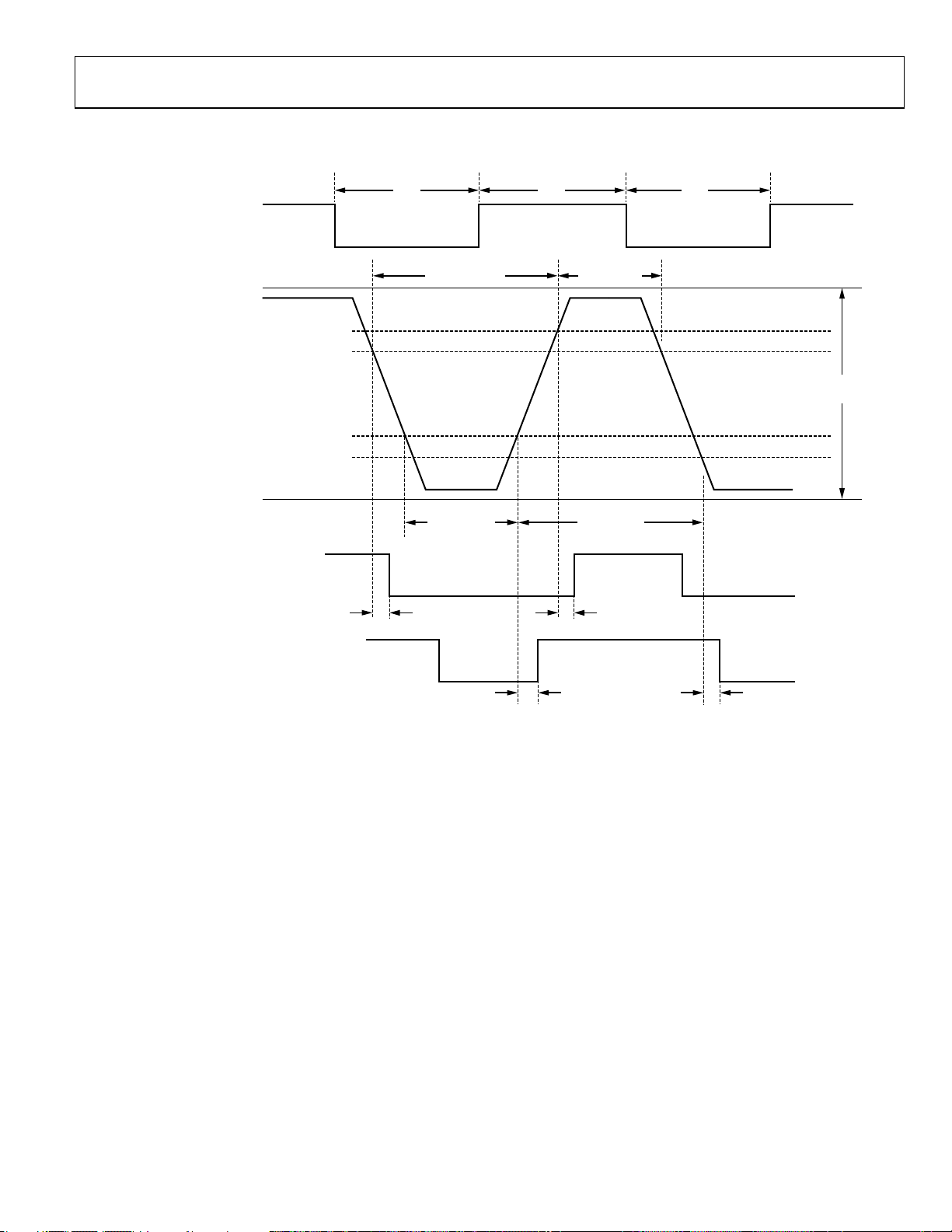
TIMING SPECIFICATIONS
LIN Timing Specifications
TRANSMIT
INPUT TO
TRANSMITTING
NODE
V
(TRANSCEIVER SUPPLY
OF TRANSMIT TING NODE)
SUP
RxD
(OUTPUT O F RECEIVING NODE 1)
RECESSIVE
DOMINANT
TH
REC (MAX)
TH
DOM (MAX)
TH
REC (MIN)
TH
DOM (MI N)
t
BIT
t
LIN_DO M (MAX )
t
LIN_DO M (MI N)
t
RX_PDF
t
BIT
t
LIN_REC ( MIN)
t
LIN_REC ( MAX)
t
RX_PDR
t
BIT
THRESHOLDS OF
RECEIVING NO DE 1
THRESHOLDS OF
RECEIVING NO DE 2
LIN
BUS
(OUTPUT O F RECEIVING NODE 2)
RxD
t
RX_PDR
Figure 2. LIN 2.1 Timing Specification
t
RX_PDF
08463-002
Rev. B | Page 7 of 92
ADuC7039
ABSOLUTE MAXIMUM RATINGS
TA = −40°C to +115°C, unless otherwise noted.
Table 2.
Parameter Rating
AGND to DGND to VSS to IO_VSS −0.3 V to +0.3 V
VBAT to AGND −22 V to +40 V
VDD to VSS −0.3 V to +40 V
LIN to IO_VSS −16 V to +40 V
LIN Short-Circuit Current1 200 mA
Digital I/O Voltage to DGND −0.3 V to REG_DVDD + 0.3 V
ADC Inputs to AGND −0.3 V to REG_AVDD + 0.3 V
ESD (HBM) Rating
HBM-ADI0082 (Based on
ANSI/ESD STM5.1-2007); All Pins
Except LIN and VBAT
LIN and VBAT ±6 kV
IEC61000-4-2 for LIN and VBAT ±7 kV
Storage Temperature 150°C
Junction Temperature
Transient 150°C
Continuous 130°C
Lead Temperature
Soldering Reflow (15 sec) 260°C
1
200 mA can be sustained on the LIN pin for 2 seconds. The active internal
short circuit protection HVCFG[1] = 0 is required to be enabled on this
device during LIN operation and is the default operation. This disconnects
the LIN pin, if a short circuit event occurs, after the specified maximum
period of 90 µs.
2.5 kV
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
ESD CAUTION
Rev. B | Page 8 of 92
ADuC7039
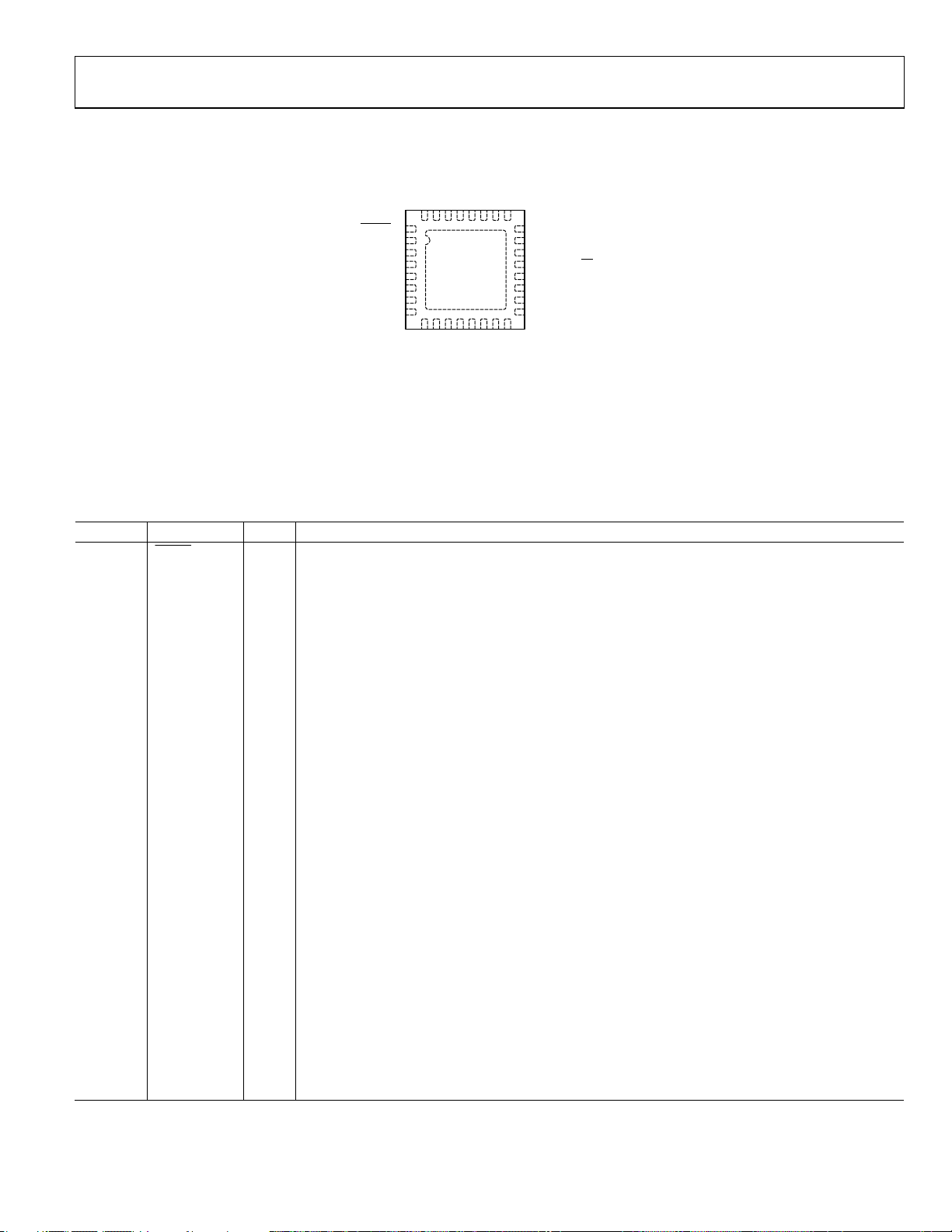
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
GPIO_5
VSS
IO_VSS
LIN
VBAT
TOP VIEW
IIN+
AGND
IIN–
VDDNCGPIO_4
AGND
AGND
25
REG_AVDD
24
23
GPIO_2/ MISO
GPIO_1/ SCLK
22
GPIO_0/ SS
21
20
DGND
19
REG_DVDD
18
REG_DVDD
17
8463-003
32313029282726
RESET
1 GPIO_3/MOSI
2
TDO
TCK
3
TMS
TDI
NTRST
RTCK
NC
NOTES:
1. FOR DETAILS ON NC PINS, SEE T HE PIN FUNCT ION
DESCRIPTIO NS TABLE.
2. EPAD IS INTERNALLY CO NNECTED TO DGND.
ADuC7039
4
5
(Not to Scale)
6
7
8REG_AVDD
9
10111213141516
VTEMP
GND_SW
Figure 3. Pin Configuration
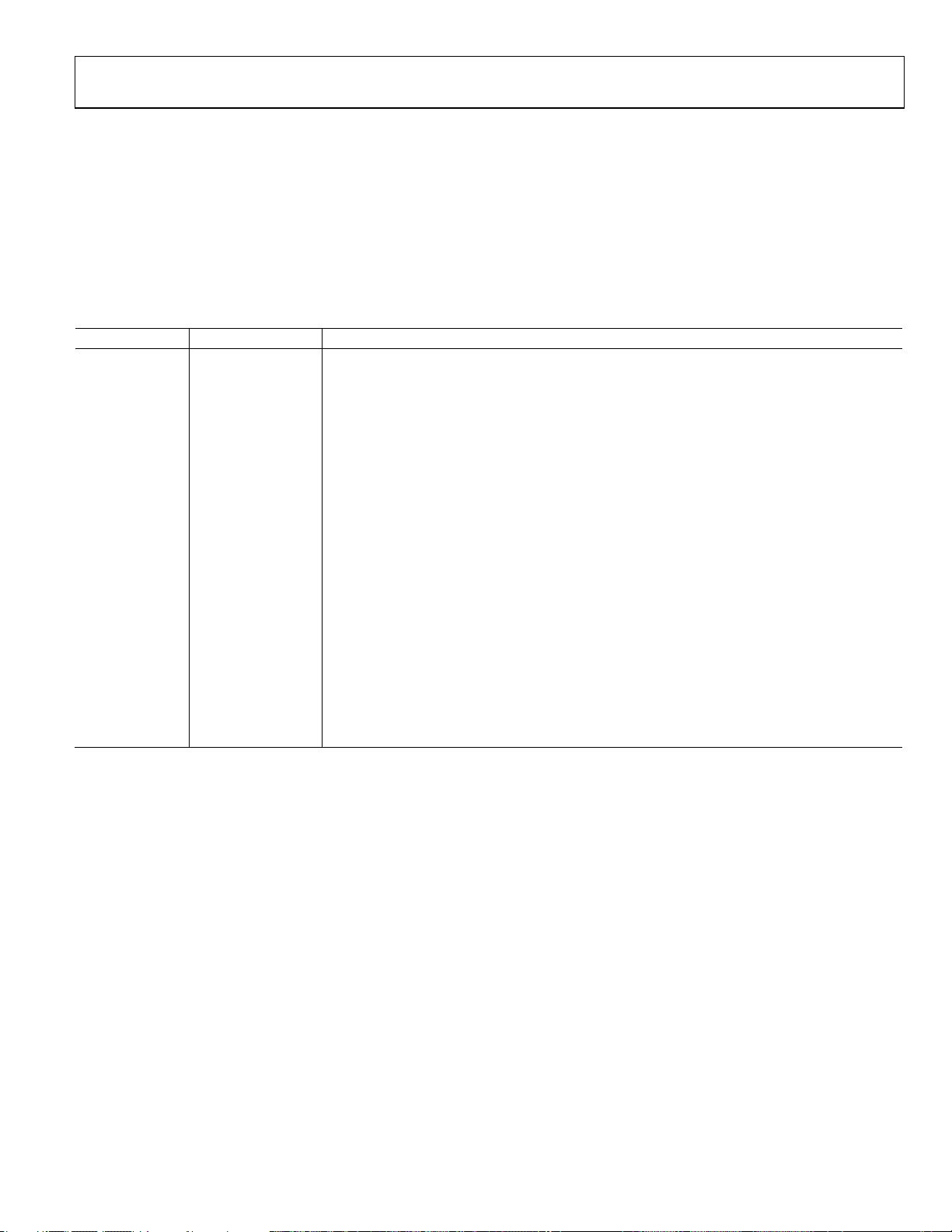
Table 3. Pin Function Descriptions
Pin No. Mnemonic Type1 Description
1
RESET
I Reset Input Pin. Active low. This pin has an internal, weak, pull-up resistor to REG_DVDD. When not in
use, this pin can be left unconnected. For added security and robustness, it is recommended that this
pin be strapped via a resistor to REG_DVDD.
2 TDO O
JTAG Test Data Output. This data output pin is one of the standard 6-pin JTAG debug ports on the
part. TDO is an output pin only. At power-on, this output is disabled and pulled high via an internal,
weak, pull-up resistor. This pin can be left unconnected when not in use.
3 TCK I
JTAG Test Clock. This clock input pin is one of the standard 6-pin JTAG debug ports on the part. TCK
is an input pin only and has an internal, weak, pull-up resistor. This pin can be left unconnected when
not in use.
4 TMS I
JTAG Test Mode Select. This mode select input pin is one of the standard 6-pin JTAG debug ports on
the part. TMS is an input pin only and has an internal, weak, pull-up resistor. This pin can be left
unconnected when not in use.
5 TDI I
JTAG Test Data Input. This data input pin is one of the standard 6-pin JTAG debug ports on the part.
TDI is an input pin only and has an internal, weak, pull-up resistor. This pin can be left unconnected
when not in use.
6 NTRST I
JTAG Test Reset. This reset input pin is one of the standard 6-pin JTAG debug ports on the part.
NTRST is an input pin only and has an internal, weak, pull-down resistor. This pin can be left unconnected when not in use. NTRST is also monitored by the on-chip kernel to enable LIN boot load mode.
7 RTCK O
JTAG Return Test Clock. This output pin is used to adjust the JTAG clock speed to the highest possible
rate of the ADuC7039.
8 NC No Connect. This pin is internally connected; therefore, do not externally connect this pin.
9 GND_SW I
Switch to Internal Analog Ground Reference. This pin is the negative input for the external temperature
channel and external reference. If this input is not used, connect it directly to the AGND system ground.
10 VTEMP I External Pin for NTC/PTC Temperature Measurement.
11, 14, 15 AGND S Ground Reference for On-Chip Precision Analog Circuits.
12 IIN+ I Positive Differential Input for Current Channel.
13 IIN− I Negative Differential Input for Current Channel.
16, 17 REG_AVDD S
Nominal 2.6 V analog Output from On-Chip Regulator. Pin 16 and Pin 17 must be connected together
to a capacitor to ground.
18, 19 REG_DVDD S
Nominal 2.6 V digital Output from On-Chip Regulator. Pin 18 and Pin 19 must be connected together
to capacitors to ground.
20 DGND S Ground Reference for On-Chip Digital Circuits.
Rev. B | Page 9 of 92
ADuC7039
Pin No. Mnemonic Type1 Description
21
GPIO_0/SS
22 GPIO_1/SCLK I/O
23 GPIO_2/MISO I/O
24 GPIO_3/MOSI I/O
25 GPIO_4 I/O
26 NC
27 VDD S Battery Power Supply to On-Chip Regulator.
28 VBAT I Battery Voltage Input to Resistor Divider.
29 LIN I/O LIN Serial Interface Input/Output Pin.
30 IO_VSS S Ground Reference for LIN Pin.
31 VSS S Ground Reference. This is the ground reference for the internal voltage regulators.
32 GPIO_5 I/O
EPAD EPAD The exposed pad is internally connected to DGND.
1
I = input, O = output, S = supply.
I/O General-Purpose Digital I/O 0, or SPI Interface. By default, this pin is configured as an input. The
pin has an internal, weak, pull-up resistor and, when not in use, can be left unconnected. This
multifunction pin can be configured in one of two states, namely
General-Purpose Digital I/O 0.
SPI interface, slave select input.
General-Purpose Digital I/O 1 or SPI Interface. By default, this pin is configured as an input. The pin
has an internal, weak, pull-up resistor and, when not in use, can be left unconnected. This
multifunction pin can be configured in one of two states, namely
General-Purpose Digital I/O 1.
SPI interface, serial clock input.
General-Purpose Digital I/O 2 or SPI Interface. By default, this pin is configured as an input. The pin
has an internal, weak, pull-up resistor and, when not in use, can be left unconnected. This
multifunction pin can be configured in one of two states, namely
General-Purpose Digital I/O 2.
SPI interface, master input/slave output pin.
General-Purpose Digital I/O 3 or SPI Interface. By default, this pin is configured as an input. The pin
has an internal, weak, pull-up resistor and, when not in use, can be left unconnected. This
multifunction pin can be configured in one of two states, namely
General-Purpose Digital I/O 3.
SPI interface, master output/slave input pin.
General-Purpose I/O 4. By default, this pin is configured as an input. The pin has an internal, weak,
pull-up resistor and when not in use, can be left unconnected.
No Connect. This pin is not internally connected, but is reserved for possible future use. Therefore,
do not externally connect this pin.
General-Purpose I/O 5. By default, this pin is configured as an input. The pin has an internal, weak,
pull-up resistor and when not in use, can be left unconnected.
Rev. B | Page 10 of 92
ADuC7039
TERMINOLOGY
Conversion Rate
The conversion rate specifies the rate at which an output result
is available from the ADC, after the ADC has settled.
The sigma-delta (Σ-) conversion techniques used on this part
mean that while the ADC front-end signal is oversampled at a
relatively high sample rate, a subsequent digital filter is used to
decimate the output giving a valid 16-bit data conversion result
at output rates from 1 Hz to 1 kHz.
Note that when software switches from one input to another
(on the same ADC), the digital filter must first be cleared and
then allowed to average a new result. Depending on the configuration of the ADC and the type of filter, this can require
multiple conversion cycles.
Integral Nonlinearity (INL)
INL is the maximum deviation of any code from a straight
line passing through the endpoints of the transfer function.
The endpoints of the transfer function are zero scale, a point
½ LSB below the first code transition, and full scale, a point ½
LSB above the last code transition (111 . . . 110 to 111 . . . 111).
The error is expressed as a percentage of full scale.
No Missing Codes
No missing codes is a measure of the differential nonlinearity
of the ADC. The error is expressed in bits and specifies the
number of codes (ADC results) as 2
N
bits, where N = no
missing codes, guaranteed to occur through the full ADC
input range.
Offset Error
Offset error is the deviation of the first code transition ADC
input voltage from the ideal first code transition.
Offset Error Drift
Offset error drift is the variation in absolute offset error with
respect to temperature. This error is expressed as LSB/°C
or nV/°C.
Gain Error
Gain error is a measure of the span error of the ADC. It is a
measure of the difference between the measured and the ideal
span between any two points in the transfer function.
Output Noise
The output noise is specified as the standard deviation (or 1 × Σ)
of ADC output codes distribution collected when the ADC
input voltage is at a dc voltage. It is expressed as µV or nV rms.
The output, or rms noise, can be used to calculate the effective
resolution of the ADC as defined by the following equation:
Effective Resolution = log
(Full-Scale Range/rms Noise) bits
2
The peak-to-peak noise is defined as the deviation of codes that
fall within 6.6 × Σ of the distribution of ADC output codes collected when the ADC input voltage is at dc. The peak-to-peak
noise is, therefore, calculated as 6.6 × the rms noise.
The peak-to-peak noise can be used to calculate the ADC
(noise free, code) resolution for which there is no code flicker
within a 6.6 × Σ limit as defined by the following equation:
Noise Free Code Resolution = log
(Full-Scale Range/Peak-
2
to-Peak Noise) bits
Table 4. Data Sheet Acronyms
Acronym Definition
ADC Analog-to-digital converter
ARM Advanced RISC machine
JTAG Joint test action group
LIN Local interconnect network
LSB Least significant byte/bit
MCU Microcontroller
MMR Memory mapped register
MSB Most significant byte/bit
OTP One time programmable
PID Protected identifier
POR Power-on reset
rms Root mean square
Rev. B | Page 11 of 92
ADuC7039
THEORY OF OPERATION
The ADuC7039 is a complete system solution for battery monitoring in 12 V automotive applications. This device integrates
all of the required features to precisely and intelligently monitor,
process, and diagnose 12 V battery parameters including battery
current, voltage, and temperature over a wide range of operating conditions.
Minimizing external system components, the device is powered
directly from the 12 V battery. An on-chip, low dropout regulator generates the supply voltage for two integrated, 16-bit, Σ-
ADCs. The ADCs precisely measure battery current, voltage,
and temperature to characterize the state of health and charge
of the car battery.
A Flash/EE memory-based ARM7™ microcontroller (MCU) is
also integrated on-chip. It is used to both preprocess the acquired
battery variables and to manage communications from the
ADuC7039 to the main electronic control unit (ECU) via a local
interconnect network (LIN) interface that is integrated on-chip.
The MCU can be configured to operate in normal or flexible
power saving modes of operation.
In its normal operating mode, the MCU is clocked indirectly
from an on-chip oscillator via the phase-locked loop (PLL) at
a maximum clock rate of 10.24 MHz. In its power saving operating modes, the MCU can be totally powered down, waking
up only in response to the wake-up timer, a POR, or a LIN
communication event.
The ADC can be configured to operate in a normal (full power)
mode of operation, interrupting the MCU after various sample
conversion events.
On-chip factory firmware supports in-circuit Flash/EE reprogramming via the LIN or JTAG serial interface ports, and
nonintrusive emulation is also supported via the JTAG interface.
These features are incorporated into a low cost QuickStart™
development system supporting the ADuC7039.
The ADuC7039 operates directly from the 12 V battery supply
and is fully specified over a temperature range of −40°C to
+115°C. The ADuC7039 is functional, but with degraded
performance, at temperatures from 115°C to 125°C.
OVERVIEW OF THE ARM7TDMI-S CORE
The ARM7 core is a 32-bit, reduced instruction set computer
(RISC), developed by ARM® Ltd. The ARM7TDMI-S is a von
Neumann-based architecture, meaning that it uses a single
32-bit bus for instruction and data. The length of the data
can be 8, 16, or 32 bits, and the length of the instruction word
is either 16 bits or 32 bits, depending on the mode in which
the core is operating.
The ARM7TDMI-S is an ARM7 core with four additional
features, as listed in Tabl e 5.
Table 5. ARM7TDMI-S
Feature Description
T Support for the Thumb® (16-bit) instruction set
D Support for debug
M Enhanced multiplier
I
Includes the EmbeddedICE™ module to support
embedded system debugging
Thumb Mode (T)
An ARM instruction is 32 bits long. The ARM7TDMI-S processor supports a second instruction set compressed into 16 bits,
the Thumb instruction set. Faster code execution from 16-bit
memory and greater code density can be achieved by using the
Thumb instruction set, making the ARM7TDMI-S core
particularly suited for embedded applications.
However, the Thumb mode has three limitations.
• Relative to ARM, the Thumb code usually requires more
instructions to perform that same task. Therefore, ARM
code is best for maximizing the performance of timecritical code in most applications.
• The Thumb instruction set does not include some
instructions that are needed for exception handling,
so ARM code can be required for exception handling.
• When an interrupt occurs, the core vectors to the interrupt
location in memory and executes the code present at that
address. The first command is required to be in ARM code.
Multiplier (M)
The ARM7TDMI-S instruction set includes an enhanced
multiplier, with four extra instructions to perform 32-bit by
32-bit multiplication with a 64-bit result, and 32-bit by 32-bit
multiplication-accumulation (MAC) with a 64-bit result.
EmbeddedICE (I)
The EmbeddedICE module provides integrated on-chip
debug support for the ARM7TDMI-S. The EmbeddedICE
module contains the breakpoint and watchpoint registers
that allow nonintrusive user code debugging. These registers
are controlled through the JTAG test port. When a breakpoint
or watchpoint is encountered, the processor halts and enters
the debug state. Once in a debug state, the processor registers
can be interrogated, as can the Flash/EE, SRAM, and memory
mapped registers.
Rev. B | Page 12 of 92

ADuC7039
ARM7 Exceptions
The ARM7 supports five types of exceptions, with a privileged
processing mode associated with each type. The five types of
exceptions are as follows:
• Normal interrupt or IRQ. This is provided to service
general-purpose interrupt handling of internal and
external events.
• Fast interrupt or FIQ. This is provided to service data
transfer or a communication channel with low latency.
FIQ has priority over IRQ.
• Memory abort (prefetch and data).
• Attempted execution of an undefined instruction.
• Software interrupt (SWI) instruction that can be used
to make a call to an operating system.
Typically, the programmer defines interrupts as IRQ, but
for higher priority interrupts, the programmer can define
interrupts as the FIQ type.
The priority of these exceptions and the vector addresses are
listed in Table 6 .
Table 6. Exception Priorities and Vector Addresses
Priority Exception Address
1 Hardware reset 0x00
2 Memory abort (data) 0x10
3 FIQ 0x1C
4 IRQ 0x18
5 Memory abort (prefetch) 0x0C
6 Software interrupt1 0x08
6 Undefined instruction1 0x04
1
A software interrupt and an undefined instruction exception have the same
priority and are mutually exclusive.
ARM Registers
The ARM7TDMI-S has 16 standard registers. R0 to R12 are
used for data manipulation, R13 is the stack pointer, R14 is the
link register, and R15 is the program counter that indicates the
instruction currently being executed. The link register contains
the address from which the user has branched (if the branch
and link command was used) or the command during which
an exception occurred.
The stack pointer contains the current location of the stack. As
a general rule, on an ARM7TDMI-S, the stack starts at the top
of the available RAM area and descends using the area as
required. A separate stack is defined for each of the exceptions.
The size of each stack is user configurable and is dependent on
the target application. On the ADuC7039, the stack begins at
0x00040FFC and descends. When programming using high
level languages, such as C, it is necessary to ensure that the stack
does not over-flow. This is dependent on the performance of
the compiler that is used.
When an exception occurs, some of the standard registers are
replaced with registers specific to the exception mode. All
exception modes have replacement banked registers for the
Rev. B | Page 13 of 92
stack pointer (R13) and the link register (R14) as represented
in Figure 4. The FIQ mode has more registers (R8 to R12)
supporting faster interrupt processing. With the increased
number of noncritical registers, the interrupt can be processed
without the need to save or restore these registers, thereby
reducing the response time of the interrupt handling process.
More information relative to the programmer’s model and the
ARM7TDMI-S core architecture can be found in ARM7TDMI-S
technical and ARM architecture manuals available directly from
ARM Ltd.
R13_ABT
R14_ABT
ABORT
MODE
USABLE IN USER MODE
SYSTEM MODES ONLY
IRQ
R13_UND
R14_UND
SPSR_UND
UNDEFINED
MODE
R13_IRQ
R14_IRQ
SPSR_IRQ
MODE
R10
R11
R12
R13
R14
R15 (PC)
CPSR
USER MODE
R0
R1
R2
R3
R4
R5
R6
R7
R8
R9
R8_FIQ
R9_FIQ
R10_FIQ
R11_FIQ
R12_FIQ
R13_FIQ
R14_FIQ
SPSR_FIQ
R13_SVC
R14_SVC
SVC
MODE
SPSR_ABT
SPSR_SVC
FIQ
MODE
Figure 4. Register Organization
Interrupt Latency
The worst-case latency for an FIQ consists of the longest time
the request can take to pass through the synchronizer, and the
time for the longest instruction to complete (the longest instruction is an LDM that loads all the registers including the PC),
plus the time for the data abort entry and the time for FIQ
entry. At the end of this time, the ARM7TDMI-S is executing
the instruction at 0x1C (FIQ interrupt vector address). The
maximum total time is 50 processor cycles, or just under 5 s
in a system using a continuous 10.24 MHz processor clock. The
maximum IRQ latency calculation is similar but must allow for
the fact that FIQ has higher priority and could delay entry into
the IRQ handling routine for an arbitrary length of time. This
time can be reduced to 42 cycles if the LDM command is not
used; some compilers have an option to compile without using
this command. Another option is to run the part in Thumb
mode where this is reduced to 22 cycles.
The minimum latency for FIQ or IRQ interrupts is five cycles.
This consists of the shortest time the request can take through
the synchronizer and the time to enter the exception mode.
Note that the ARM7TDMI-S initially (first instruction) runs
in ARM (32-bit) mode when an exception occurs. The user
can immediately switch from ARM mode to Thumb mode
if required, for example, when executing interrupt service
routines.
08463-004
ADuC7039
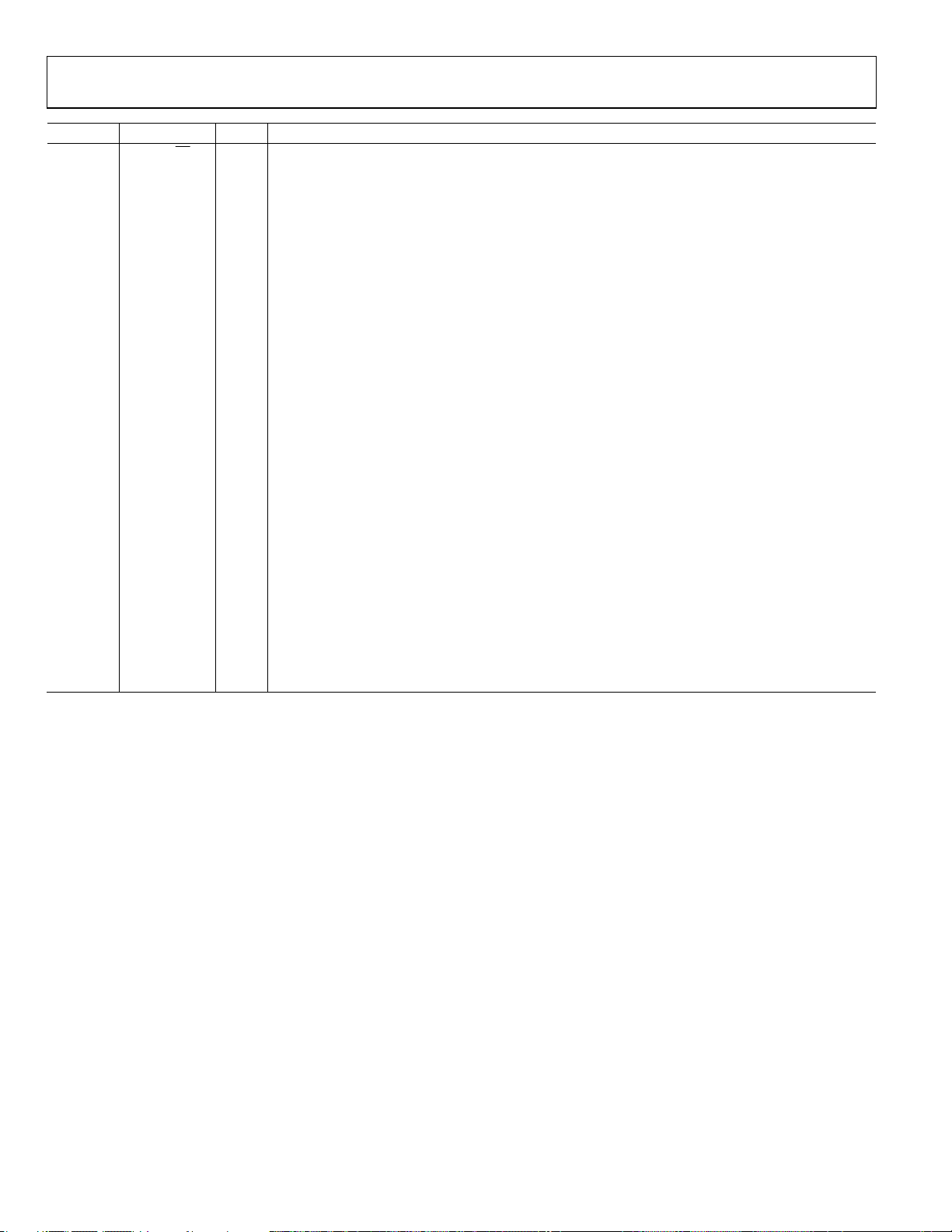
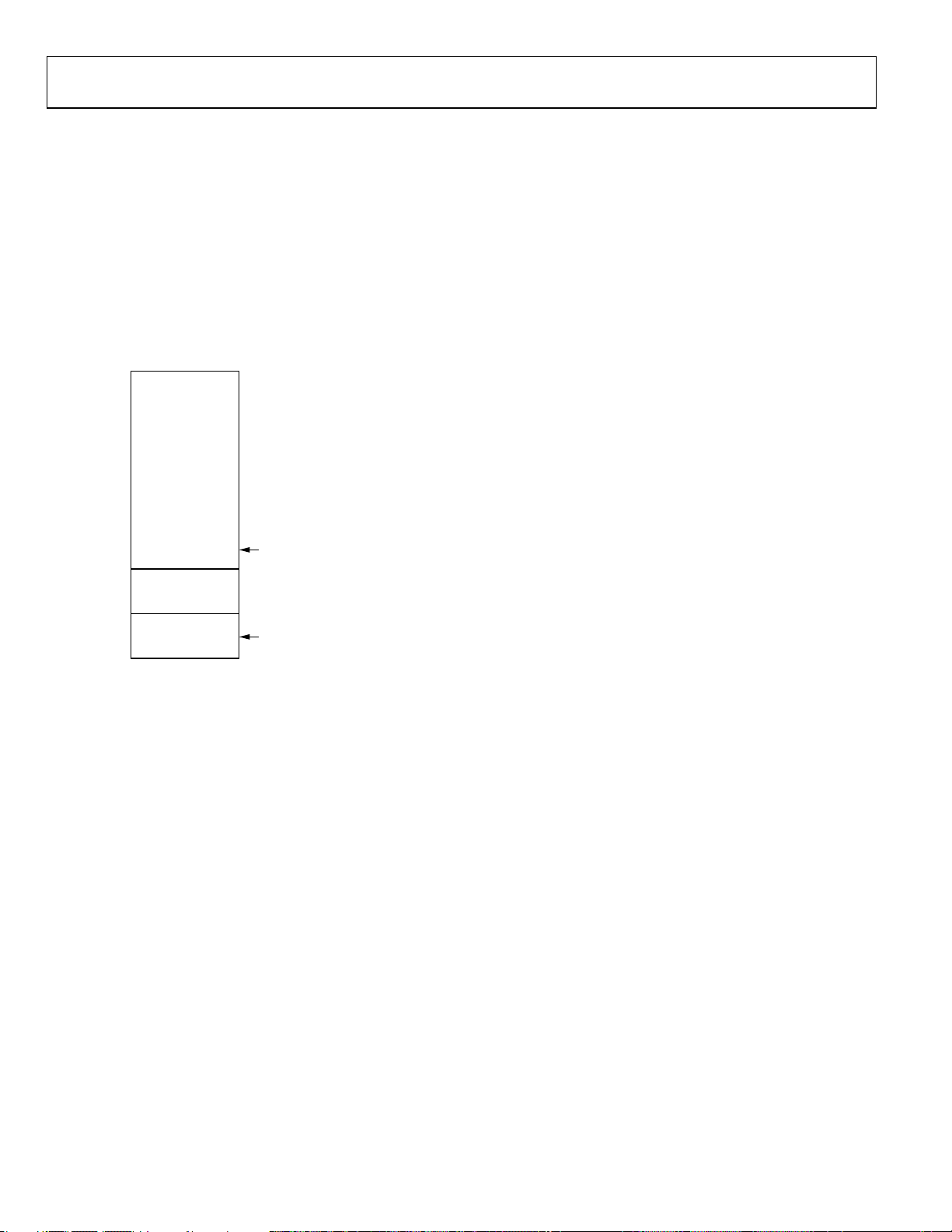
MEMORY ORGANIZATION
The ARM7, a von Neumann architecture, MCU core sees memory as a linear array of 2
the ADuC7039 maps this into four distinct user areas, namely: a
memory area that can be remapped, an SRAM area, a Flash/EE
area, and a memory mapped register (MMR) area.
0xFFFF0000
0x00080000
0x00040000
0x00000000
Figure 5. ADuC7039 Memory Map, 64 kB Flash Option
• The first 64 kB of this memory space is used as an area into
which the on-chip Flash/EE or SRAM can be remapped.
• The ADuC7039 features a second 4 kB area at the top of
the memory map used to locate the MMRs, through which
all on-chip peripherals are configured and monitored.
• The ADuC7039 features an SRAM size of 4 kB.
• The ADuC7039 features 64 kB of on-chip Flash/EE
memory. However, 62 kB of on-chip Flash/EE memory are
available to the user. In addition, 2 kB are reserved for the
on-chip kernel.
32
byte locations. As shown in Figure 5,
RESERVED
0xFFFF0FFF
0x0008FFFF
0x0040FFF
0x0000F7FF
MMRs
RESERVED
FLASH/EE
RESERVED
SRAM
RESERVED
REMAPPABLE MEMORY SPACE
(FLASH/EE OR SRAM)
8463-005
SRAM
The ADuC7039 features 4 kB of SRAM, organized as 1024 × 32
bits, that is, 1024 words, which is located at 0x40000.
The RAM space can be used as data memory and also as a
volatile program space.
ARM code can run directly from SRAM at full clock speed
given that the SRAM array is configured as a 32-bit wide
memory array. SRAM is read/writeable in 8-, 16-, and 32-bit
segments.
Remap
The ARM exception vectors are all situated at the bottom
of the memory array, from Address 0x00000000 to Address
0x00000020.
By default, after a reset, the Flash/EE memory is logically mapped
to Address 0x00000000. It is possible to logically remap the
SRAM to Address 0x00000000. This is accomplished by setting
Bit 0 of the SYSMAP MMR located at 0xFFFF0220. To revert
Flash/EE to 0x00000000, Bit 0 of SYSMAP is cleared.
It is sometimes desirable to remap RAM to 0x00000000 to
execute code from SRAM while erasing a page of Flash/EE
memory.
Remap Operation
When a reset occurs on the ADuC7039, execution starts automatically in the factory programmed internal configuration
code. This so-called kernel is hidden and cannot be accessed
by user code. If the ADuC7039 is in normal mode, it executes
the power-on configuration routine of the kernel and then
jumps to the reset vector, Address 0x00000000, to execute the
user’s reset exception routine. Because the Flash/EE is mirrored
at the bottom of the memory array at reset, the reset routine
must always be written in Flash/EE.
Any access, either reading or writing, to an area not defined in
the memory map results in a data abort exception.
Memory Format
The ADuC7039 memory organization is configured in little
endian format: the least significant byte is located in the lowest
byte address, and the most significant byte in the highest byte
address.
BIT 31
BYTE 3
.
.
.
B
7
3
BYTE 2
BYTE 1
.
.
.
.
.
.
A
9
6
5
2
1
32 BITS
Figure 6. Little Endian Format
BYTE 0
.
.
.
8
4
0
BIT 0
0xFFFFFFFF
0x00000004
0x00000000
8463-007
Rev. B | Page 14 of 92
ADuC7039
The remap command must be executed from the absolute
Flash/EE address, and not from the mirrored, remapped
segment of memory, because this may be replaced by SRAM. If
a remap operation is executed while operating code from
the mirrored location, prefetch/data aborts can occur, or the
user can observe abnormal program operation.
Any kind of reset logically remaps the Flash/EE memory to
the bottom of the memory array.
SYSMAP Register
Name: SYSMAP
RSTSTA Register
Name: RSTSTA
Address: 0xFFFF0230
Default Value: N/A
Access: Read/write
Function: This 8-bit register indicates the source of the
last reset event and can also be written by user
code to initiate a software reset.
Address: 0xFFFF0220
Default Value: Updated by the kernel
Access: Read/write
Function: This 8-bit register allows user code to remap
either RAM or Flash/EE space into the bottom
of the ARM memory space starting at Address
0x00000000.
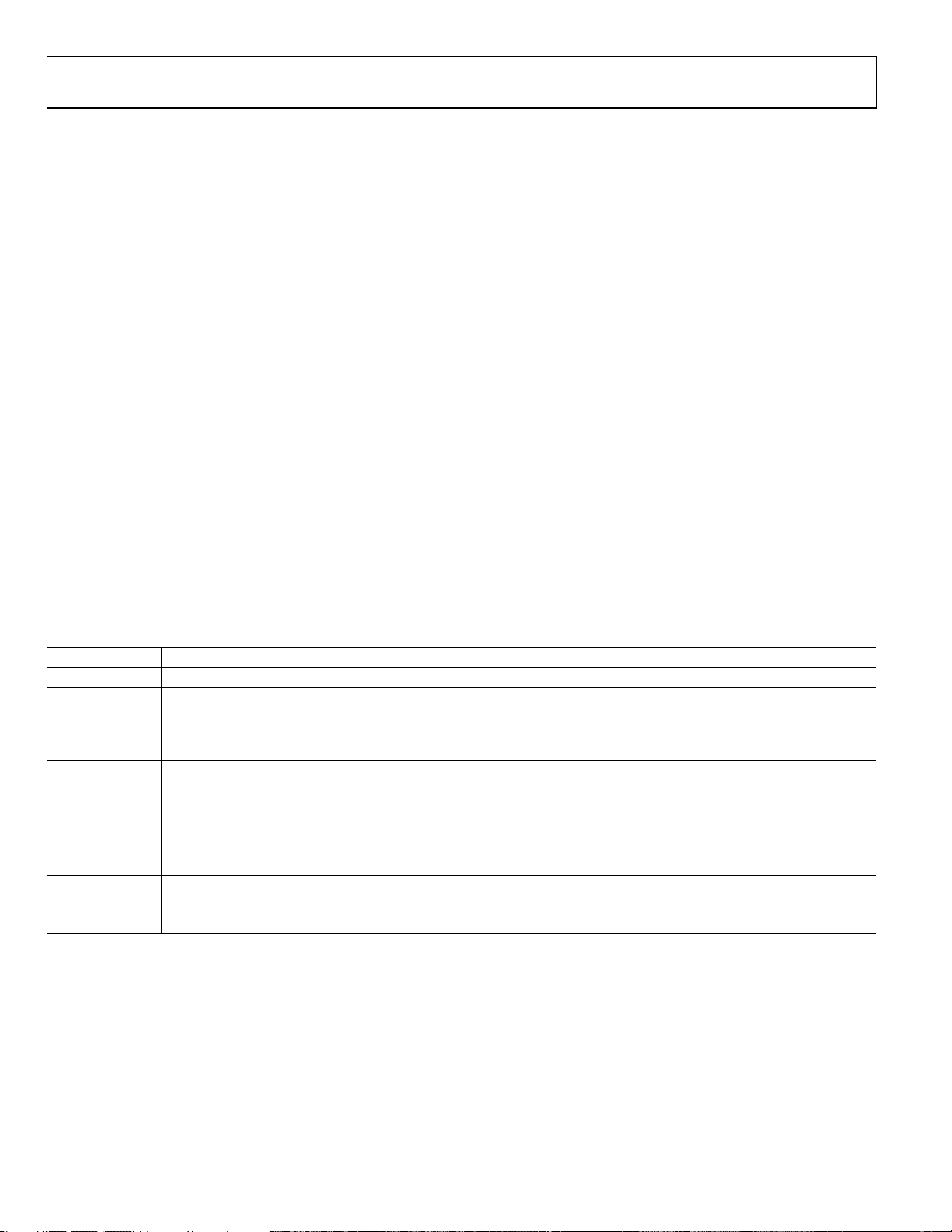
Table 7. SYSMAP MMR Bit Designations
Bit Description
7 to 1
Reserved. These bits are reserved and should be written
as 0 by user code.
0 Remap bit.
This bit is set by the user to remap the SRAM to
0x00000000.
This bit is cleared automatically after reset to remap the
Flash/EE memory to 0x00000000.
RESET
There are four kinds of reset: external reset, power-on-reset,
watchdog reset, and software reset. The RSTSTA register
indicates the source of the last reset and can also be written
by user code to initiate a software reset event. The bits in this
register can be cleared to 0 by writing to the RSTCLR MMR at
0xFFFF0234. The bit designations in RSTCLR mirror those of
RSTSTA. These registers can be used during a reset exception
service routine to identify the source of the reset. The implications of all four kinds of reset event are tabulated in Ta ble 9.
RSTCLR Register
Name: RSTCLR
Address: 0xFFFF0234
Access: Write only
Function: This 8-bit write-only register clears the
corresponding bit in RSTSTA.
Table 8. RSTSTA/RSTCLR MMR Bit Designations
Bit Description
7 to 4 Not used. These bits are not used and always read as 0.
3 External reset.
This bit is set by hardware when an external reset occurs.
This bit is cleared by setting the corresponding bit in RSTCLR.
2 Software reset.
This bit is set by user code to generate a software reset.
This bit is cleared by setting the corresponding bit in RSTCLR.1
1 Watchdog timeout.
This bit is set by hardware when a watchdog timeout occurs.
This bit is cleared by setting the corresponding bit in RSTCLR.
0 Power-on reset.
This bit is set by hardware when a power-on-reset occurs.
This bit is cleared by setting the corresponding bit in RSTCLR.
1
If the software reset bit in RSTSTA is set, any write to RSTCLR that does not
clear this bit generates a software reset.
Table 9. Device Reset Implications
Impact
Reset External
RESET
POR Yes Yes Yes Yes Yes Yes Yes/No2 RSTSTA[0] = 1
Watchdog Yes Yes Yes Yes Yes No Yes RSTSTA[1] = 1
Software Yes Yes Yes Yes Yes No Yes RSTSTA[2] = 1
External Pin Yes Yes Yes Yes Yes No Yes RSTSTA[3] = 1
1
RAM is not valid in the case of a reset following LIN download.
2
The impact on RAM is dependent on the HVSTA[2] contents if LVF is enabled. When LVF is enabled using HVCFG[4], RAM has not been corrupted by the POR reset
mechanism if the LVF Status Bit HVSTA[2] is 1. See the Low Voltage Flag (LVF) section for more information.
Pins to Default
State
Kernel
Executed
Reset All External
MMRs (Excluding
RSTSTA)
Reset All HV
Indirect
Registers
Peripherals
Reset
Watchdog
Timer Reset
RAM
Valid1
RSTSTA (Status
After Reset Event)
Rev. B | Page 15 of 92

ADuC7039
FLASH/EE MEMORY
The ADuC7039 incorporates Flash/EE memory technology
on chip to provide the user with nonvolatile, in-circuit
reprogrammable memory space.
Like EEPROM, flash memory can be programmed in-system
at a byte level, although it must first be erased, the erase being
performed in page blocks. Thus, flash memory is often and
more correctly referred to as Flash/EE memory.
Overall, Flash/EE memory represents a step closer to the ideal
memory device that includes nonvolatility, in-circuit programmability, high density, and low cost. Incorporated within the
ADuC7039, Flash/EE memory technology allows the user to
update program code space in-circuit, without the need to
replace one-time programmable (OTP) devices at remote
operating nodes.
The Flash/EE memory is physically located at 0x80000. Upon a
hard reset, it logically maps to 0x00000000. The factory default
contents of all Flash/EE memory locations is 0xFFFF. Flash/EE
can be read in 8-/16-/32-bit segments, and written in segments
of 16 bits. The Flash/EE is rated for 10,000 endurance cycles.
This rating is based on the number of times that each individual
byte is cycled, that is, erased and programmed. Implementing a
redundancy scheme in the software ensures a greater than
10,000-cycle endurance.
The user can also write data variables to the Flash/EE memory
during run-time code execution, for example, for storing
diagnostic battery parameter data.
The entire Flash/EE is available to the user as code and nonvolatile data memory. There is no distinction between data and
program, because ARM code shares the same space. The real
width of the Flash/EE memory is 16 bits, meaning that in ARM
mode (32-bit instruction), two accesses to the Flash/EE are
necessary for each instruction fetch. The ARM7TDMI-S
operates at a fixed 10.24 MHz clock frequency, but the Flash/EE
memory controller is operating at 20.48 MHz. This means that
the Flash/EE memory controller can transparently fetch the
second 16-bit half-word (part of the 32-bit ARM operation
code) within a single core clock period.
The page size of this Flash/EE memory is 512 bytes. Typically,
it takes the Flash/EE controller 20 ms to erase a page. To write a
16-bit word requires 50 s.
It is possible to write to a single, 16-bit location at most twice
between erases; that is, it is possible to walk bytes, not bits. If
a location is written to more than twice, then it is possible to
corrupt the contents of the Flash/EE page.
The Flash/EE memory can be programmed in-circuit, using a
serial download mode via the LIN interface or the integrated
JTAG port.
Serial Downloading (In-Circuit Programming)
The ADuC7039 facilitates code download via the LIN pin.
The protocol is documented in the AN-946 Application
Note, Flash/EE Memory Programming via LIN (Protocol 6).
JTAG Access
The ADuC7039 features an on-chip JTAG debug port to
facilitate code download and debug.
FLASH/EE MMR INTERFACE
Access to, and control of, the Flash/EE memory on the ADuC7039
is managed by an on-chip memory controller. The controller
manages the Flash/EE memory as a single block of 64 kB.
Note that if executing from Flash/EE memory, the MCU core
is halted until the command is completed. User software must
ensure that the Flash/EE controller has completed any erase
or write cycle before the PLL is powered down. If the PLL is
powered down before an erase or write cycle is completed, the
Flash/EE page can be corrupted. User code, LIN, and JTAG
programming use the Flash/EE control interface, consisting
of the following MMRs:
• FEESTA: read-only register, reflects the status of the
Flash/EE control interface.
• FEEMOD: sets the operating mode of the Flash/EE control
interface.
• FEECON: 8-bit command register. The commands are
interpreted as described in Ta bl e 10 .
• FEEDAT: 16-bit data register.
• FEEADR: 16-bit address register.
• FEESIG: holds the 24-bit code signature as a result of the
signature command being initiated.
• FEEHID: protection MMR. Controls read and write
protection of the Flash/EE memory code space. If
previously configured via the FEEPRO register, FEEHID
can require a software key to enable access.
• FEEPRO: a buffer of the FEEHID register that stores the
FEEHID value, thus, it automatically downloads to the
FEEHID registers on subsequent reset and power-on
events.
The following sections provide detailed descriptions of the bit
designations for each of the Flash/EE control MMRs.
Rev. B | Page 16 of 92
ADuC7039
FEECON Register
Name: FEECON
Address: 0xFFFF0E08
Default Value: 0x07
Access: Read/write
Function: This 8-bit register is written by user code to control the operating modes of the Flash/EE memory controller.
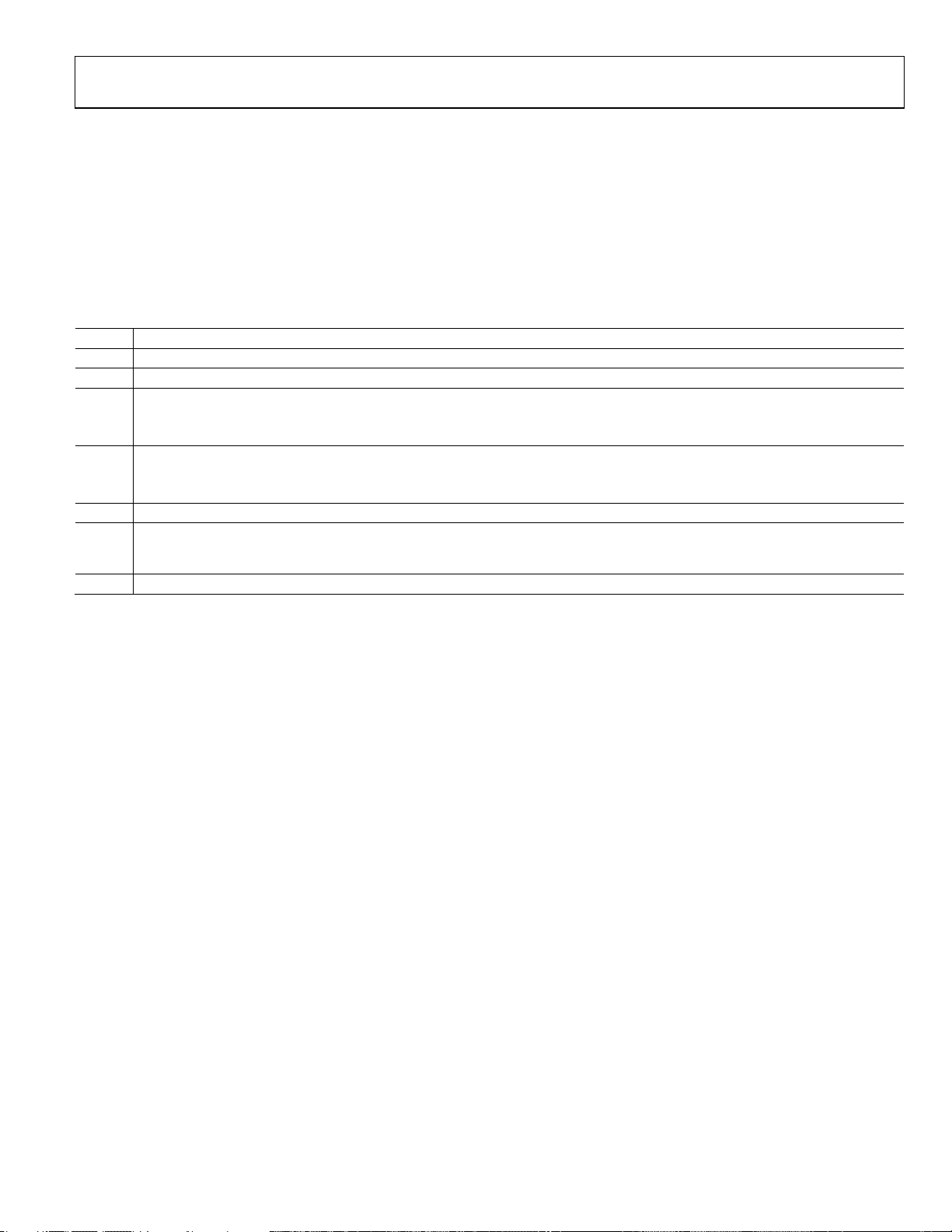
Table 10. Command Codes in FEECON
Code Command Description
0x001 Reserved Reserved; this command should not be written by user code.
0x011 Single read Load FEEDAT with the 16-bit data indexed by FEEADR.
0x021 Single write Write FEEDAT at the address indexed by FEEADR. This operation takes 50 s.
0x031 Erase write
0x041 Single verify
0x051 Single erase Erase the page indexed by FEEADR.
0x061 Mass erase
0x07 Idle Default command.
0x08 Reserved Reserved; this command should not be written by user code.
0x09 Reserved Reserved; this command should not be written by user code.
0x0A Reserved Reserved; this command should not be written by user code.
0x0B Signature
0x0C Protect
0x0D Reserved Reserved; this command should not be written by user code.
0x0E Reserved Reserved; this command should not be written by user code.
0x0F Ping No operation; interrupt generated.
1
The FEECON always reads 0x07 immediately after execution of any of these commands.
Erase the page indexed by FEEADR and write FEEDAT at the location pointed by FEEADR. This
operation takes 20 ms.
Compare the contents of the location indexed by FEEADR to the data in FEEDAT. The result of the
comparison is returned in FEESTA Bit 1.
Erase 62 kB of user space. The 2 kB kernel is protected. This operation takes 2.48 seconds. To
prevent accidental execution, a command sequence is required to execute this instruction; this is
described in the Command Sequence for Executing a Mass Erase section.
This command results in a 24-bit, LFSR-based signature being generated and loaded into FEESIG.
See the Flash/EE Memory Signature section.
This command can be run one time only. The value of FEEPRO is saved and can be removed only
with a mass erase (0x06) or with the software protection key.
Rev. B | Page 17 of 92
ADuC7039
Command Sequence for Executing a Mass Erase
Given the significance of the mass erase command, a specific code sequence must be executed to initiate this operation.
1. Ensure FEESTA is cleared.
2. Set Bit 3 in FEEMOD.
3. Write 0xFFC3 in FEEADR.
4. Write 0x3CFF in FEEDAT.
5. Run the mass erase command (0x06) in FEECON.
This sequence is illustrated in the following example:
Int a = FEESTA; // Ensure FEESTA is cleared
FEEMOD = 0x08
FEEADR = 0xFFC3
FEEDAT = 0x3CFF
FEECON = 0x06; //Mass erase command
while (FEESTA & 0x04){} //Wait for command to finish
FEESTA Register
Name: FEESTA
Address: 0xFFFF0E00
Default Value: 0xXXX0
Access: Read only
Function: This 16-bit, read-only register can be read by user code and reflects the current status of the Flash/EE memory controller.
Table 11. FEESTA MMR Bit Designation
Bit Description
15 to 4 Reserved.
3 Flash/EE interrupt status bit.
This bit is cleared automatically when the FEESTA register is read by user code.
2 Flash/EE controller busy.
This bit is set automatically when the Flash/EE controller is busy.
This bit is cleared automatically when the controller is not busy.
1 Command fail.
This bit is set automatically when a command written to FEECON completes unsuccessfully.
This bit is cleared automatically when the FEESTA register is read by user code.
0 Command successful.
This bit is set automatically by MCU when a command is completed successfully.
This bit is cleared automatically when the FEESTA register is read by user code.
This bit is set automatically when an interrupt occurs, that is, when a command is complete and the Flash/EE interrupt
enable bit in the FEEMOD register is set.
Rev. B | Page 18 of 92
ADuC7039
FEEMOD Register
Name: FEEMOD
Address: 0xFFFF0E04
Default Value: 0x0000
Access: Read/write
Function: This register is written by user code to configure the mode of operation of the Flash/EE memory controller.
Table 12. FEEMOD MMR Bit Designation
Bit Description
15 to 7 Not used. These bits are reserved for future functionality and should be written as 0 by user code.
6 to 5 Flash/EE security lock bits. These bits must be written as [6:5] = 1, 0 to complete the Flash/EE security protect sequence.
4 Flash/EE controller command complete interrupt enable.
This bit is set by user code to enable the Flash/EE controller to generate an interrupt upon completion of a Flash/EE command.
This bit is cleared by user code to disable the generation of a Flash/EE interrupt upon completion of a Flash/EE command.
3 Flash/EE erase/write enable.
This bit is set by user code to enable the Flash/EE erase and write access via FEECON.
This bit is cleared by user code to disable the Flash/EE erase and write access via FEECON.
2 Reserved.
1
0 Reserved.
Flash/EE controller abort enable.
This bit is set by user code to enable the Flash/EE controller abort functionality.
This bit is cleared by user code to disable the Flash/EE controller abort functionality.
FEEADR Registers
Name: FEEADR
Address: 0xFFFF0E10
Default Value: Updated by kernel
Access: Read/write
Function: This 16-bit register dictates the address upon which any Flash/EE command executed via FEECON acts.
FEEDAT Registers
Name: FEEDAT
Address: 0xFFFF0E0C
Default Value: 0x0000
Access: Read/write
Function: This 16-bit register contains the data either read from, or to be written to, the Flash/EE memory.
Rev. B | Page 19 of 92
ADuC7039
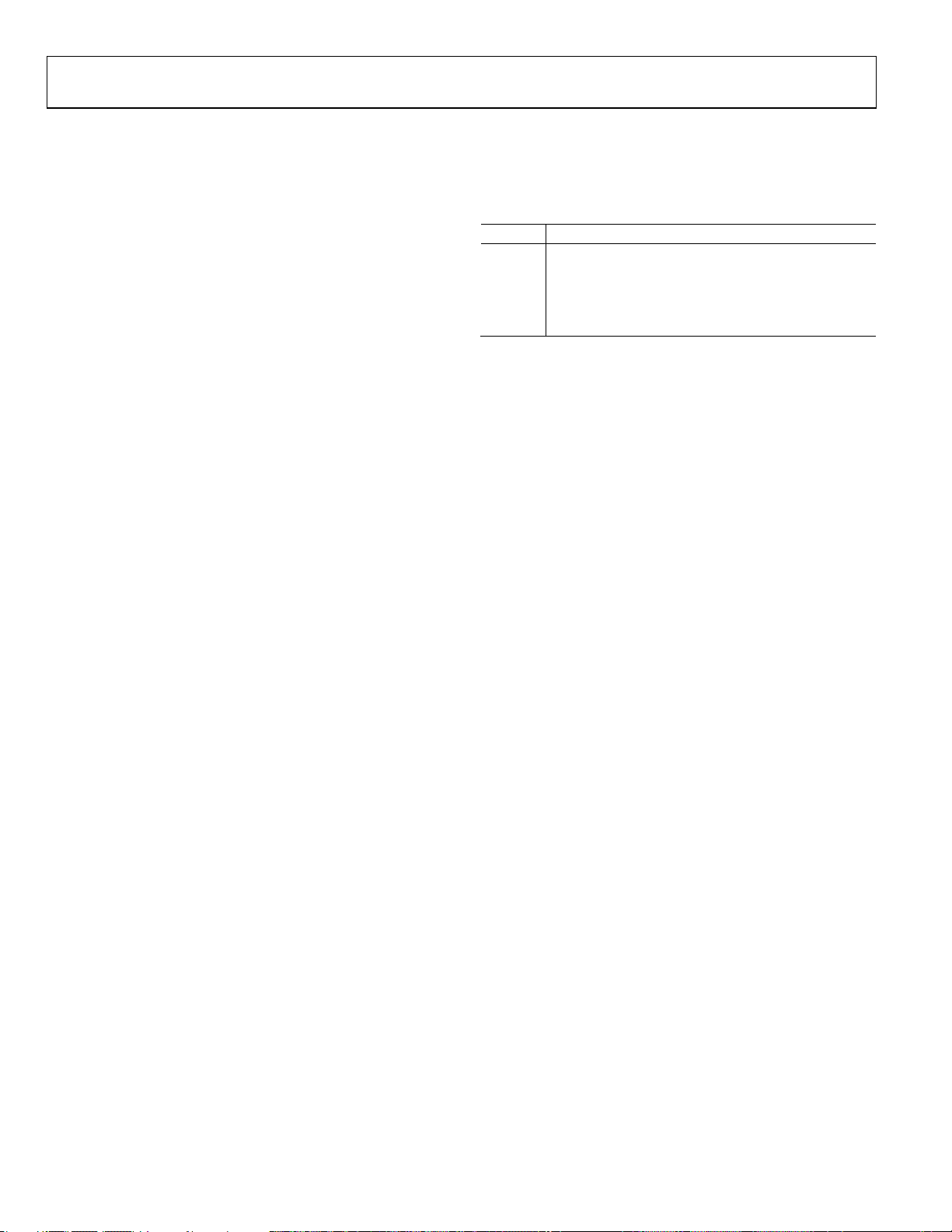
FLASH/EE MEMORY SIGNATURE
The entire 62 kB or the part of Flash/EE memory available to
the user can be signed using the FEESIG register and signature
command.
This feature automatically reads the code in that section of the
memory specified by the FEEADR and FEEDAT MMRS:
• FEEADR contains an address situated in the first half page
of the section to be signed.
• FEEDAT contains an address situated in the first half page
above the last page of the section to be signed. See Figure 7
in this example, Page 0 and Page 1 are signed.
0x80400
PAGE 1
0x80200
FEEDAT = 0x04XX
• If the 8 MSB of FEEADR and FEEDAT are identical, that
is, the MMRS point to the same page, nothing is signed.
• The last two 16-bit locations are not included in the
signature; they are reserved for the user-programmed
signature.
• It is possible to sign half pages, by specifying a half page
address in FEEADR and FEEDAT. For example, to sign
the second half of Page 0 and the first half of Page 1,
FEEADR = 0x0100 and FEEDAT = 0x0300.
This feature is also used by the on-chip kernel at power-up to
check the validity of Page 0 before jumping to user code. Store
the signature of Page 0 at Address 0x801FC when programming
the device. See the ADUC7039 Kernel section for more details.
Flash/EE Memory Signature Registers
Name: FEESIG
Address: 0xFFFF0E18
Default Value: Updated by kernel
Access: Read only
Function: This MMR contains a 24-bit signature of the
Flash/EE memory.
PAGE 0
0x80000
Figure 7. Signature Command Indexing
FEEADR = 0x00XX
08463-008
Example of User Code Signature
Int a = FEESTA; // Ensure FEESTA is cleared
FEEADR = 0x0000; // Start page address
FEEDAT = 0x0600; // Stop (page + 1) address
FEECON = 0x0B; // Signs Page 0 to Page 2 excluding
// Address 0x805FC
while (FEESTA & 0x04){} // Wait for command to finish
User code can compare the content of FEESIG with the content of Address 0x805FC.
Polynomial
A software routine is provided by Analog Devices, Inc., to calculate the unique 24-bit signature.
Rev. B | Page 20 of 92
ADuC7039
FLASH/EE MEMORY SECURITY
The 62 kB of Flash/EE memory available to the user can be
read- and write-protected using the FEEHID register.
The MSB of FEEHID (Bit 31) protects the entire Flash/EE from
being read through JTAG.
Bits[30:0] of FEEHID protect Page 123 to Page 0 from writing.
Each bit protects four pages, that is, 2 kB. On the 30 kB version,
Bits[30:15] are unused.
Flash/EE Memory Protection Registers
Name: FEEHID and FEEPRO
Address: 0xFFFF0E20 (for FEEHID) and 0xFFFF0E1C (for FEEPRO)
Default Value: 0xFFFFFFFF (for FEEHID) and 0x00000000 (for FEEPRO)
Access: Read/write
Function: These registers are written by user code to configure the protection of the Flash/EE memory.
Table 13. FEEHID and FEEPRO MMR Bit Designations
Bit Description
31 Read protection.
This bit is cleared by user code to read protect the 62 kB Flash/EE block code.
This bit is set by user code to allow read access to the 62 kB Flash/EE block via JTAG.
30 to 0 Write protection bits.
When set by user code, these bits unprotect Page 0 to Page 123 of the 62 kB Flash/EE code memory. Each bit write
protects four pages, and each page consists of 512 bytes.
When cleared by user code, these bits write protect Page 0 to Page 123 of the 62 kB Flash/EE code memory. Each bit
write protects four pages, and each page consists of 512 bytes.
The FEEPRO register mirrors the bit definitions of the FEEHID
MMR. The FEEPRO MMR allows user code to lock the protection or security configuration of the Flash/EE memory so
that the protection configuration is automatically loaded on
subsequent power-on or reset events. This flexibility allows
the user to temporarily set and test protection settings using
the FEEHID MMR and, subsequently, lock the required
protection configuration (using FEEPRO) when shipping
protection systems into the field.
Rev. B | Page 21 of 92

ADuC7039
In summary, there are three levels of protection as follows.
Temporary Protection
Temporary protection can be set and removed by writing
directly into FEEHID MMR. This register is volatile and,
therefore, protection is only in place for as long as the part
remains powered on. This protection is not reloaded after a
power cycle.
Keyed Permanent Protection
Keyed permanent protection can be set via FEEPRO to lock the
protection configuration. The software key used at the start of
the required FEEPRO write sequence is saved one time only
and must be used for any subsequent access of the FEEHID or
FEEPRO MMRs. A mass erase sets the software protection key
back to 0xFFFF but also erases the entire user code space.
Permanent Protection
Permanent protection can be set via FEEPRO, similarly to
keyed permanent protection, the only difference being that
Int a = FEESTA; // Ensure FEESTA is cleared
FEEPRO = 0xFFFFFFFB; // Protect Page 8 to Page 11
FEEADR = 0x66BB; // 32-bit key value (Bits[31:16])
FEEDAT = 0xAA55; // 32-bit key value (Bits 15:0])
FEEMOD = 0x0048 // Lock security sequence
FEECON = 0x0C; // Write key command
while (FEESTA & 0x04){}
// Wait for command to finish
the software key used is 0xDEADDEAD. When the FEEPRO
write sequence is saved, only a mass erase sets the software
protection key back to 0xFFFFFFFF. This also erases the entire
user code space.
Sequence to Write the Software Protection Key and Set Permanent Protection
1. Write in FEEPRO corresponding to the pages to be protected.
2. Write the new (user-defined) 32-bit software protection
key in FEEADR (Bits[31:16]) and FEEDAT (Bits[15:0]).
3. Write 1, 0 in FEEMOD (Bits[6:5]) and set FEEMOD (Bit 3).
4. Run the Write Key Command 0x0C in FEECON.
To remove or modify the protection, the same sequence can be
used with a modified value of FEEPRO.
The previous sequence for writing the key and setting permanent protection is illustrated in the following example, this
protects writing Page 8 to Page 11 of the Flash/EE.
Rev. B | Page 22 of 92
ADuC7039
FLASH/EE MEMORY RELIABILITY
The Flash/EE memory array on the part is fully qualified for
two key Flash/EE memory characteristics: Flash/EE memory
cycling endurance and Flash/EE memory data retention.
Endurance quantifies the ability of the Flash/EE memory to be
cycled through many program, read, and erase cycles. A single
endurance cycle is composed of four independent, sequential
events, defined as
• Initial page erase sequence.
• Read/verify sequence.
• Byte program sequence.
• Second read/verify sequence.
ADuC7039 KERNEL
The ADuC7039 features an on-chip kernel resident in the
top 2 kB of the Flash/EE code space. After any reset event,
this kernel calculates its own checksum and compares it to the
checksum programmed during production test, to ensure that
the kernel does not contain any error. If an error occurs, the
SYSCHK register contains its default value and user mode is
entered. In normal circumstances, the checksum is written to
the SYSCHK MMR.
System Kernel Checksum
Name: SYSCHK
Address: 0xFFFF0244
In reliability qualification, every half-word (16-bit wide) location of the three pages (top, middle, and bottom) in the Flash/EE
memory is cycled 10,000 times from 0x0000 to 0xFFFF. As
indicated in Tab l e 1, the Flash/EE memory endurance qualification of the part is carried out in accordance with the JEDEC
Retention Lifetime Specification A117. The results allow the
specification of a minimum endurance figure over supply and
temperature of 10,000 cycles.
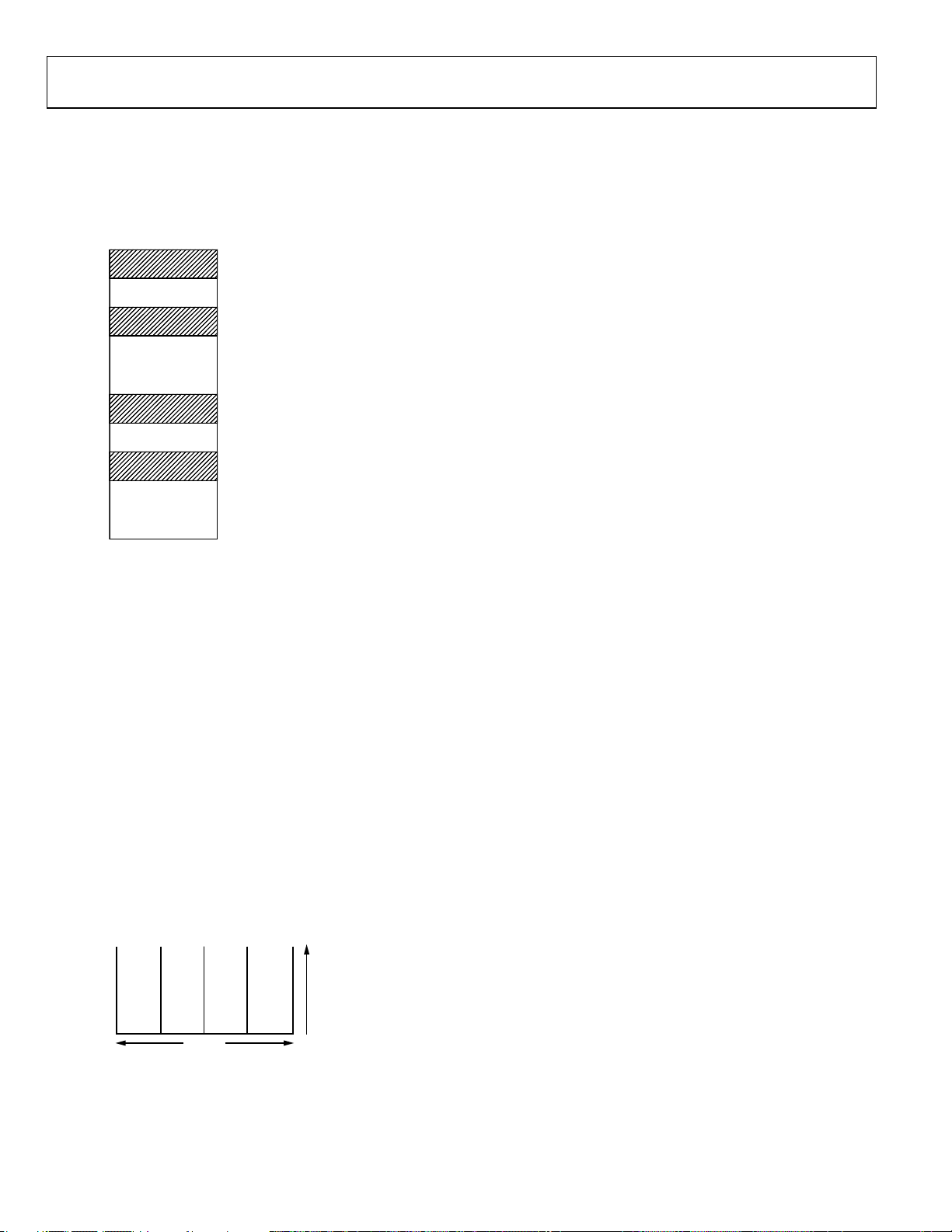
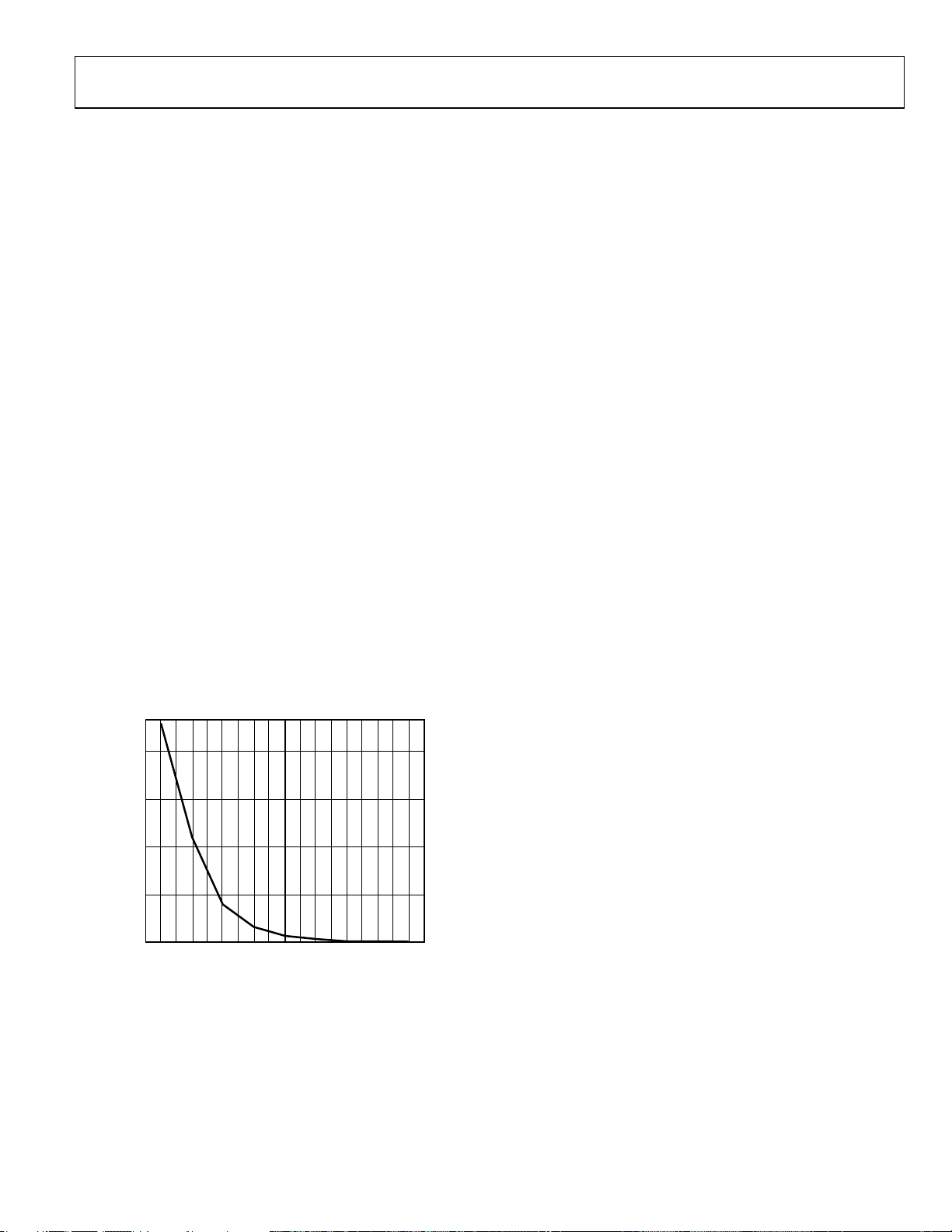
Retention quantifies the ability of the Flash/EE memory to
retain its programmed data over time. The part is qualified in
accordance with the formal JEDEC Retention Lifetime Specification A117 at a specific junction temperature (T
= 85°C) as
J
indicated in Table 1. This means that the Flash/EE memory
is guaranteed to retain its data for its fully specified retention
lifetime every time the Flash/EE memory is reprogrammed.
Also, note that retention lifetime, based on an activation energy
of 0.6 eV, derates with T
600
450
300
RETENTIO N (Years)
150
0
30 40 55 70 85 100 125 135 150
Figure 8. Flash/EE Memory Data Retention
as shown in Figure 8.
J
JUNCTION TEM PERATURE (°C)
08463-009
Default Value: 0x00000000 (updated by kernel at power-on)
Access: Read/write
Function: At power-on, this 32-bit register holds the
kernel checksum.
The kernel then copies the factory calibrated data from the
manufacturing data space into the various on-chip peripherals.
The peripherals calibrated by the kernel are as follows:
• Precision oscillator
• Low power oscillator
• REG_AVDD/REG_DVDD
• Voltage reference
• Current ADC (offset and gain)
• Voltage/temperature ADC (offset and gain)
Processor registers and user registers that can be modified
by the kernel and differ from their POR default values are as
follows:
• R0 to R15
• GP0CON
• SYSCHK
• FEEADR/FEEDAT/FEECON/FEESIG
• HVDAT/HVCON
• HVCFG
• T2LD
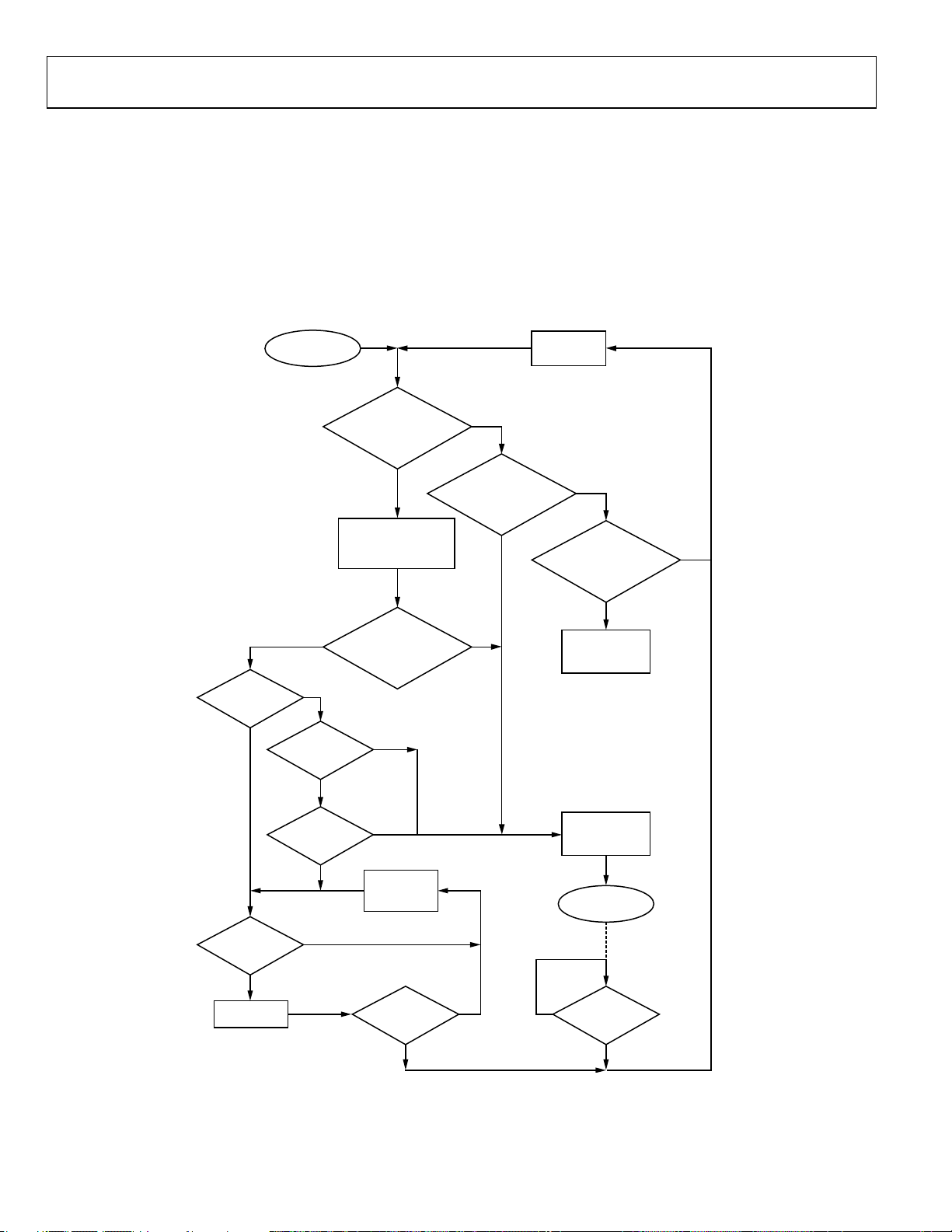
The ADuC7039 also features an on-chip LIN downloader.
A flow chart of the execution of the kernel is shown in Figure 9.
The current revision of the kernel can be derived from R5, as
described in Ta ble 6 5.
After any reset, the watchdog timer is disabled once the kernel
code is exited. For the duration of the kernel execution, the
watchdog timer is active with a timeout period of 500 ms. This
ensures that if an error occurs in the kernel, the ADuC7039
automatically resets. If LIN download mode is entered, the
watchdog is periodically refreshed.
Rev. B | Page 23 of 92
ADuC7039
Normal kernel execution time, excluding LIN download, is less
than 5 ms. It is only possible to enter and leave LIN download
mode through a reset.
SRAM Address 0 to Address 0x2B are modified during normal
kernel execution, SRAM Address 0xFF to Address 0x110 are
also modified during a LIN download.
Note that even with NTRST = 0, user code is not executed
unless Address 0x1FC contains either 0x16400000 or the
checksum of Page 0, excluding Address 0x1FC. If Address
0x1FC does not contain this information, user code is not
executed and LIN download mode is entered. During kernel
execution, JTAG access is disabled.
The ADuC7039 is delivered with flash user space fully erased
and if NTRST = 0 at first power-up, the LIN download mode
is entered.
With NTRST = 1, user code is always executed and JTAG is
enabled.
0x801FC
YES
RESET
NO
0x801FC =
0x16400000
NO
KERNEL
CRC
NO
INITIALIZE WDT
INITIALIZE HV CHIP
COPY MANID TO MMRs
NTRST = 1?
YES
YES
NTRST = 1?
YESNO
SOFTW ARE
RESET
MULTIPLE
CRC ERROR?
POWER DOW N
LIN RECEIVE D?
YES
HANDLE LIN
COMMAND
0x801FC =
PAGE0 CRC?
NO
NO
YES
KICK WDT
RESET
COMMAND?
YES
NO
NO
Figure 9. ADuC7039 Kernel Flowchart
Rev. B | Page 24 of 92
KICK WDT
TRY TO SWITCH
OFF WDT
RUN
USER CODE
USER RESET?
YES
08463-010
ADuC7039
F
MEMORY MAPPED REGISTERS (MMR)
The memory mapped register (MMR) space is mapped into
the top 4 kB of the MCU memory space and accessed by
indirect addressing, load, and store commands through the
ARM7 banked registers. An outline of the memory mapped
register bank for the ADuC7039 is shown in Figure 10.
The MMR space provides an interface between the CPU and
all on-chip peripherals. All registers except the ARM7 core
registers (described in the ARM Registers section) reside in
the MMR area.
As shown in the detailed MMR maps in the Complete MMR
Listing section (Table 14 to Ta b le 2 3), the MMR data widths
vary from 1 byte (8 bits) to 4 bytes (32 bits). The ARM7 core
can access any of the MMRs (single byte or multiple byte width
registers) with a 32-bit read or write access.
The resultant read, for example, is aligned per little endian
format as previously described in this data sheet. However,
errors result if the ARM7 core tries to access 4-byte (32-bit)
MMRs with a 16-bit access. In the case of a (16-bit) write
access to a 32-bit MMR, the (upper) 16 most significant
bits are written as 0s. More obviously, in the case of a
16-bit read access to a 32-bit MMR, only 16 of the MMR
bits can be read.
0xFFFFFFF
0xFFFF0E24
0xFFFF0E00
0xFFFF0D20
0xFFFF0D00
0xFFFF0A14
0xFFFF0A00
0xFFFF0810
0xFFFF0804
0xFFFF0800
0xFFFF0700
0xFFFF0560
0xFFFF0500
0xFFFF 04A4
0xFFFF0400
0xFFFF0350
0xFFFF0340
0xFFFF0334
0xFFFF0320
0xFFFF0310
0xFFFF0300
0xFFFF0248
0xFFFF0220
0xFFFF0110
0xFFFF0000
FLASH CO NTRO L
INTERFACE
GPIO
SPI
HV
INTERFACE
LIN
HARDWARE
ADC
PLL AND
OSCILLATOR CONTROL
WATCHDOG
TIMER 2
WAKE-UP
TIMER 1
TIMER 0
REMAP AND
SYSTEM CONTROL
INTERRUPT
CONTROLL ER
Figure 10. Top Level MMR Map
08463-011
Rev. B | Page 25 of 92
ADuC7039
COMPLETE MMR LISTING
In the following MMR tables, addresses are listed in hex code. Access types include R for read, W for write, and RW for read and write.
Table 14. IRQ Address Base = 0xFFFF0000
Access
Address Name Byte
0x0000 IRQSTA 4 R 0x00000000 Active IRQ source.
0x0004 IRQSIG 4 R 0x00003080 Current state of all IRQ sources (enabled and disabled).
0x0008 IRQEN 4 RW 0x00000000 Enabled IRQ sources.
0x000C IRQCLR 4 W N/A MMR to disable IRQ sources.
0x0010 SWICFG 4 W N/A Software interrupt configuration MMR.
0x0100 FIQSTA 4 R 0x00000000 Active IRQ source.
0x0104 FIQSIG 4 R 0x00003081 Current state of all IRQ sources (enabled and disabled).
0x0108 FIQEN 4 RW 0x00000000 Enabled IRQ sources.
0x010C FIQCLR 4 W N/A MMR to disable IRQ sources.
Table 15. System Control Address Base = 0xFFFF0200
Address Name Byte
0x0220 SYSMAP 1 RW N/A REMAP control register.
0x0230 RSTSTA 1 RW N/A Reset status MMR.
0x0234 RSTCLR 1 W N/A RSTSTA clear MMR.
0x0244 SYSCHK1 4 RW N/A Kernel checksum. See the System Kernel Checksum section.
1
Updated by kernel.
Type Default Value Description
Access
Type Default Value Description
Table 16. Timer Address Base = 0xFFFF0300
Access
Address Name Byte
Typ e
Default Value Description
0x0300 T0LD 2 RW 0x0000 Timer0 load register.
0x0304 T0VAL 2 R 0x0000 Timer0 Value Register 0.
0x0308 T0CON 4 RW 0x0000 Timer0 control MMR.
0x030C T0CLRI 1 W N/A Timer0 interrupt clear register.
0x0320 T1LD 4 RW 0x00000000 Timer1 load register.
0x0324 T1VAL 4 R 0xFFFFFFFF Timer1 value register.
0x0328 T1CON 4 RW 0x0000 Timer1 control MMR.
0x032C T1CLRI 1 W N/A Timer1 interrupt clear register.
0x0340 T2LD1 4 RW 0x0050 Timer2 load register.
0x0344 T2VAL 4 R 0x00000050 Timer2 value register.
0x0348 T2CON 2 RW 0x0000 Timer2 control MMR.
0x034C T2CLRI 1 W N/A Timer2 interrupt clear register.
1
Updated by kernel.
Rev. B | Page 26 of 92
ADuC7039
Table 17. PLL Base Address = 0xFFFF0400
Access
Address Name Byte
0x0400 PLLSTA 4 R N/A PLL status MMR.
0x0404 POWKEY0 4 W N/A POWCON prewrite key.
0x0408 POWCON 2 RW 0x079 Power control register.
0x040C POWKEY1 4 W N/A POWCON postwrite key.
0x0410 PLLKEY0 4 W N/A PLLCON prewrite key.
0x0414 PLLCON 1 RW 0x00 PLL clock source selection MMR.
0x0418 PLLKEY1 4 W N/A PLLCON postwrite key.
0x0440 OSCCON 1 RW 0x00 Low power oscillator calibration control MMR.
0x0444 OSCSTA 1 R 0x00 Low power oscillator calibration status MMR.
0x0448 0SCVAL0 2 R 0x0000 Low Power Oscillator Calibration Counter 0 MMR.
0x044C OSCVAL1 2 R 0x0000 Low Power Oscillator Calibration Counter 1 MMR.
0x0480 LOCCON 1 RW 0x00 LIN oscillator calibration control register.
0x0484 LOCUSR0 1 RW N/A Low power oscillator user trim register.
0x0488 LOCUSR1 2 RW N/A Precision oscillator user trim register.
0x048C LOCMAX 3 RW 0x00000 LIN oscillator calibration, maximum baud rate tolerance (LINBR + x).
0x0490 LOCMIN 3 RW 0x00000 LIN oscillator calibration, minimum baud rate tolerance (LINBR − x).
0x0494 LOCSTA 1 R 0x01 LIN oscillator calibration status register.
0x0498 LOCVAL0 1 R N/A Low power oscillator current trim value register.
0x049C LOCVAL1 2 R N/A Precision oscillator current trim value register.
0x04A0 LOCKEY 2 W N/A LIN oscillator calibration lock register.
Type Default Value Description
Table 18. ADC Address Base = 0xFFFF0500
Access
Address Name Byte
0x0500 ADCSTA 2 R 0x0000 ADC status MMR.
0x0504 ADCMSKI 1 RW 0x00 ADC interrupt source enable MMR.
0x0508 ADCMDE 1 RW 0x00 ADC mode register.
0x050C ADC0CON 2 RW 0x0002 Current ADC control MMR.
0x0510 ADC1CON 2 RW 0x0000 V/T ADC control MMR.
0x0518 ADCFLT 2 RW 0x0007 ADC filter control MMR.
0x051C ADCCFG 1 RW 0x00 ADC configuration MMR.
0x0520 ADC0DAT 2 R 0x0000 Current ADC result MMR.
0x0524 ADC1DAT 2 R 0x0000 V/T ADC result MMR.
0x0530 ADC0OF1 2 RW N/A Current ADC offset MMR.
0x0534 ADC1OF1 2 RW N/A Voltage ADC offset MMR.
0x0538 ADC2OF1 2 RW N/A Temperature ADC offset MMR.
0x053C ADC0GN1 2 RW N/A Current ADC gain MMR.
0x0540 ADC1GN1 2 RW N/A Voltage ADC gain MMR.
0x0544 ADC2GN1 2 RW N/A Temperature ADC gain MMR.
0x0548 ADC0RCL 2 RW 0x0001 Current ADC result count limit.
0x054C ADC0RCV 2 R 0x0000 Current ADC result count value.
0x0550 ADC0TH 2 RW 0x0000 Current ADC result threshold.
0x055C ADC0ACC 4 R 0x00000000 Current ADC result accumulator.
1
Updated by kernel.
Typ e
Default Value Description
Rev. B | Page 27 of 92
ADuC7039
Table 19. LIN Base Address = 0XFFFF0700
Access
Address Name Byte
0x0700 LINCON 2 RW 0x0000 LIN control MMR.
0x0704 LINCS 1 RW 0xFF LIN checksum MMR.
0x0708 LINBR 3 RW 0x00FA0 19-bit LIN baud rate MMR.
0x070C LINBK 3 RW 0x0157C 19-bit LIN break MMR.
0x0710 LINSTA 2 R 0x0100 LIN status MMR.
0x0714 LINDAT 1 RW 0x00 LIN data MMR.
0x0718 LINLOW 3 RW 0x00000 LIN counter to force the bus low.
0x071C LINWU 3 RW 0x00013 LIN wake-up break length.
Table 20. High Voltage Interface Base Address = 0xFFFF0804
Address Name Byte
0x0804 HVCON 1 RW N/A High voltage interface control MMR.
0x080C HVDAT 1 RW N/A High voltage interface data MMR.
Table 21. SPI Base Address = 0xFFFF0A00
Address Name Byte
0x0A00 SPISTA 2 R 0x0000 SPI status MMR.
0x0A04 SPIRX 1 R 0x00 SPI receive MMR.
0x0A08 SPITX 1 W N/A SPI transmit MMR.
0x0A0C SPIDIV 1 R/W 0x00 SPI baud rate selection MMR.
0x0A10 SPICON 2 R/W 0x0000 SPI control MMR.
Type Default Value Description
Access
Type Default Value Description
Access
Type Default Value Description
Table 22. GPIO Base Address = 0xFFFF0D00
Access
Address Name Byte
Type Default Value Description
0x0D00 GPCON 4 RW 0x00000000 GPIO port control MMR.
0x0D10 GPDAT1 4 RW 0x000000FF GPIO port data control MMR.
0x0D14 GPSET 4 W N/A GPIO port data set MMR.
0x0D18 GPCLR 4 W N/A GPIO port data clear MMR.
1
Depends on the level on the external GPIO pins.
Table 23. Flash/EE Base Address = 0xFFFF0E00
Access
Address Name Byte
Type Default Value Description
0x0E00 FEESTA 2 R 0xXXX0 Flash/EE status MMR.
0x0E04 FEEMOD 2 RW 0x0000 Flash/EE control MMR.
0x0E08 FEECON 1 RW 0x07 Flash/EE control MMR.
0x0E0C FEEDAT 2 RW 0x0000 Flash/EE data MMR.
0x0E10 FEEADR1 2 RW 0xF009 Flash/EE address MMR.
0x0E18 FEESIG 3 R N/A Flash/EE LFSR MMR.
0x0E1C FEEPRO 4 RW 0x00000000 Flash/EE protection MMR.
0x0E20 FEEHID 4 RW 0xFFFFFFFF Flash/EE protection MMR.
1
Updated by kernel.
Rev. B | Page 28 of 92
 Loading...
Loading...