

MicroConverter
® Integrated,
Preliminary Technical Data
FEATURES
High Precision ADCs
Dual Channel, Simultaneous Sampling, 16-Bit Σ−∆ ADCs
Third Independent ADC for Temperature Sensing
Programmable ADC throughput from 1Hz to 8KHz
On-Chip 5ppm/°C Voltage Reference
Current Channel
Fully differential, Buffered Input
Programmable Gain 1 to 512
ADC Input Range -200mV to +300mV
Digital Comparators, with Current Accumulator Feature
Voltage Channel
Buffered, On-Chip attenuator for 12V battery Inputs
Temperature Channel
External and On-Chip Temperature Sensor Options
Microcontroller
ARM7TDMI Core, 16/32-bit RISC architecture
20.48MHz PLL with Programmable Divider
PLL Input Source: On-Chip Precision Oscillator
On-Chip Low-Power Oscillator
External (32.768KHz) Watch Crystal
JTAG Port supports code download and debug
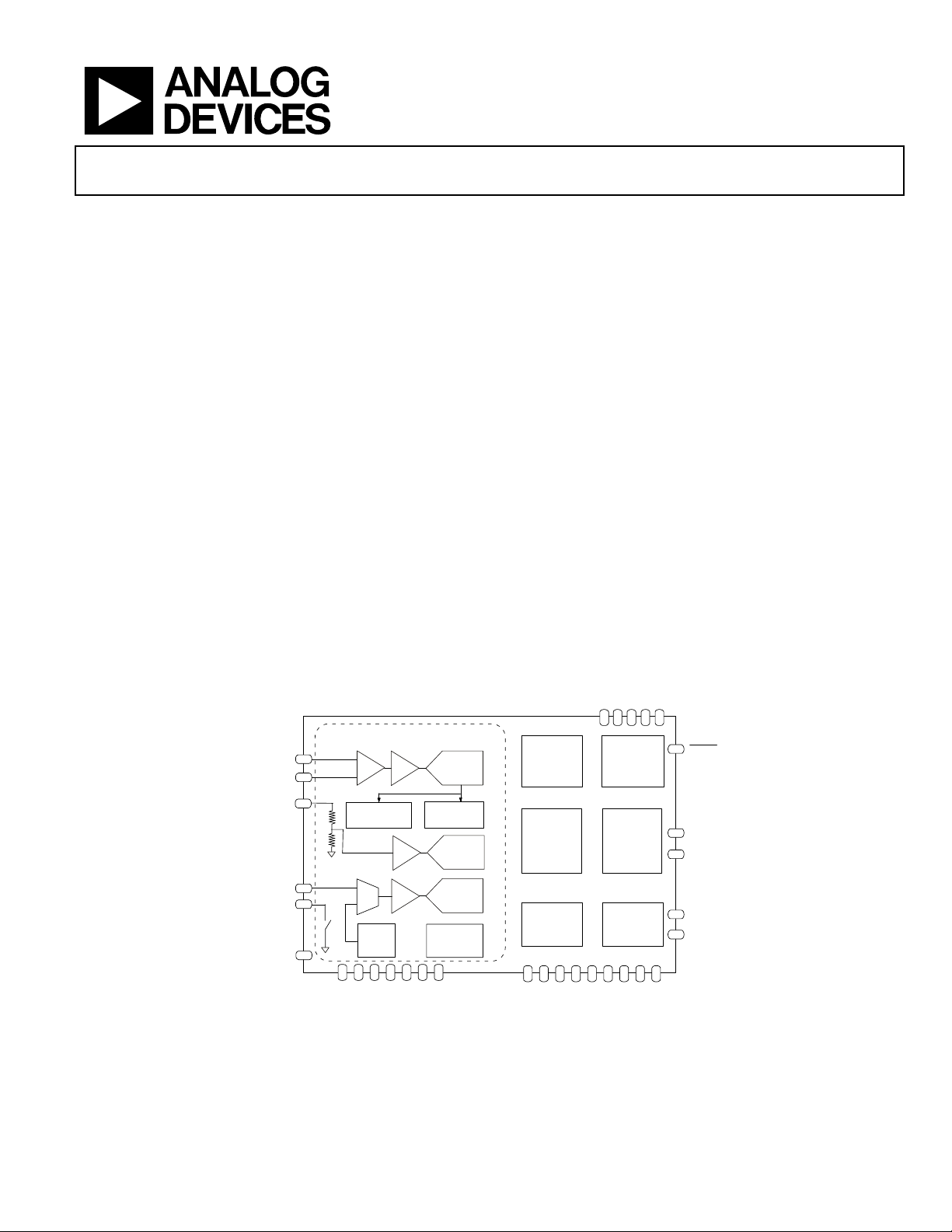
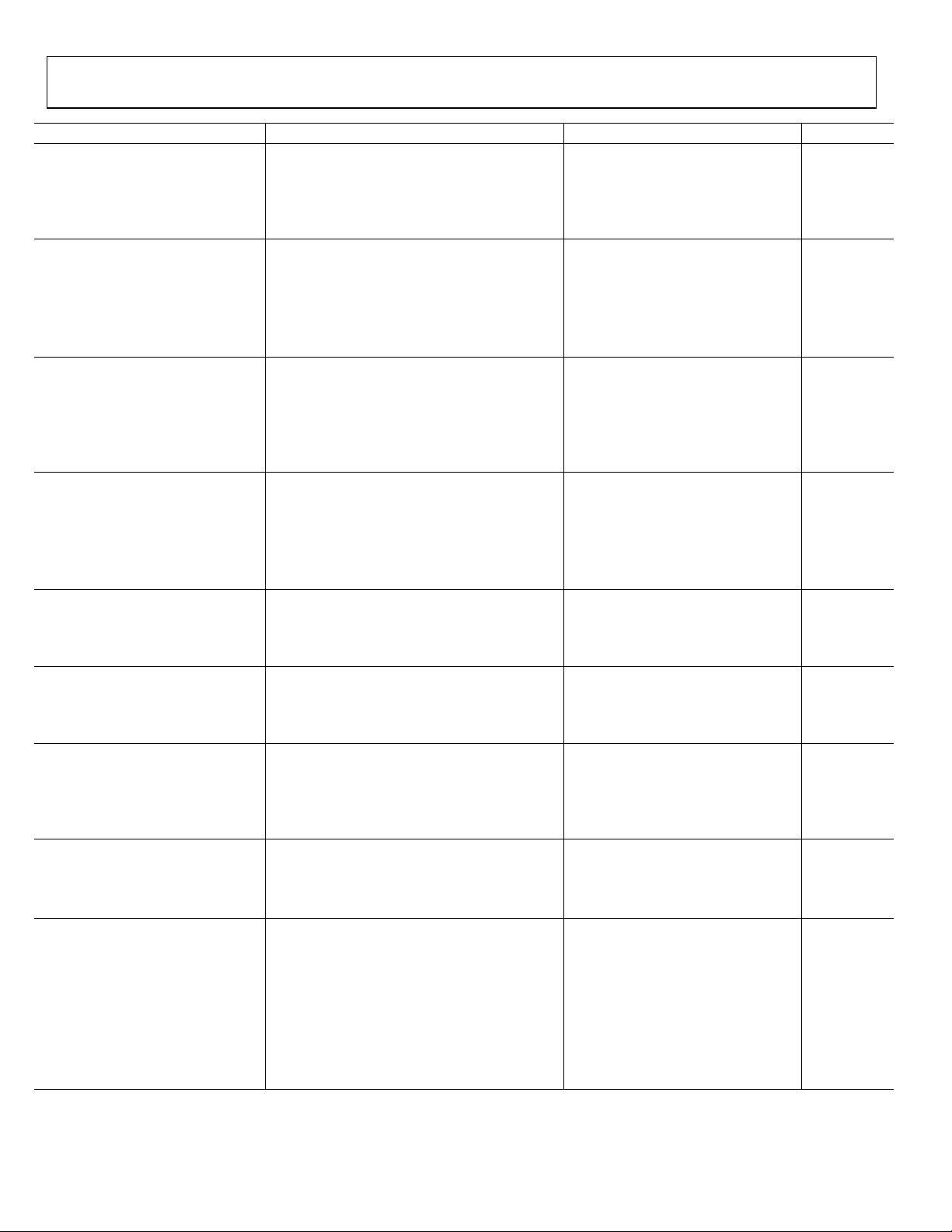
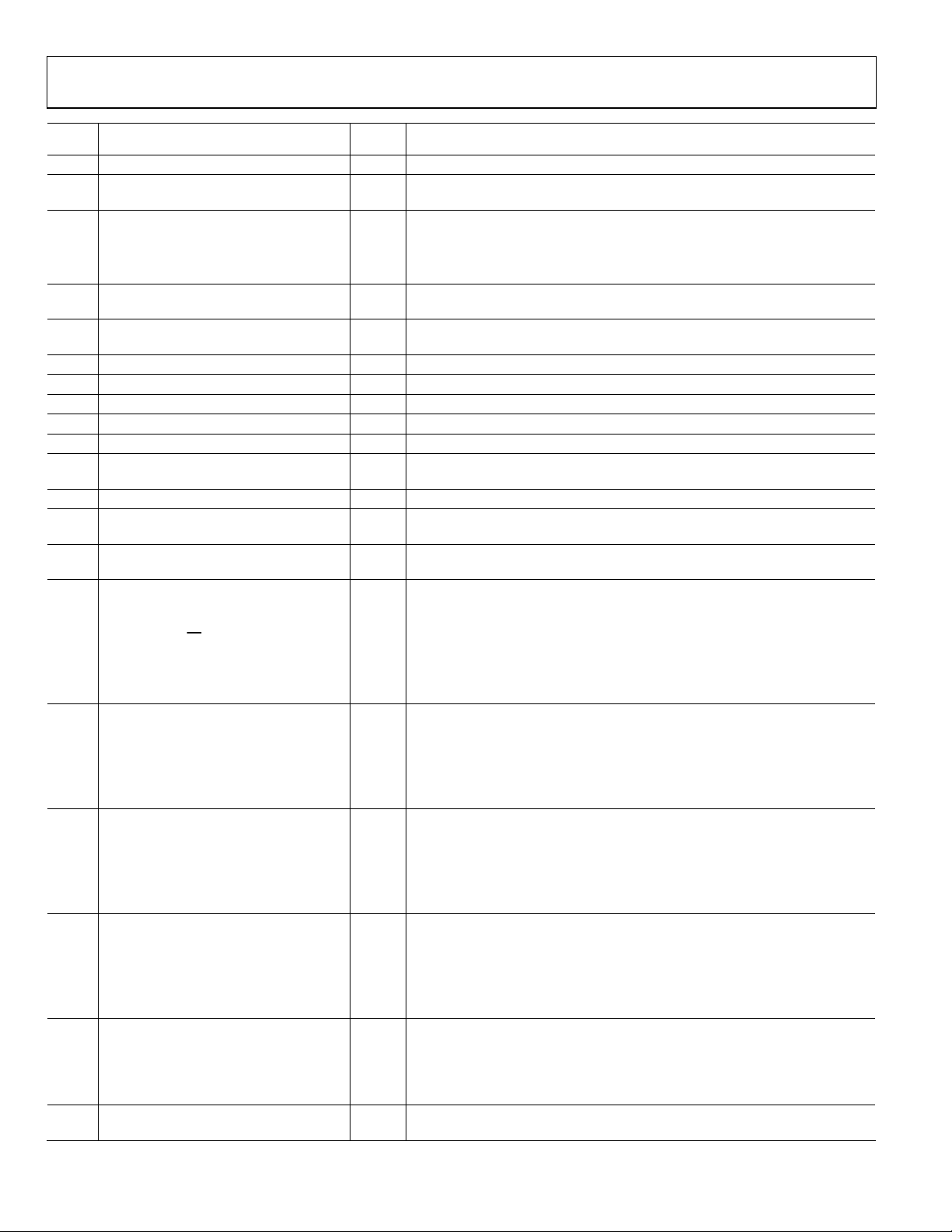
FUNCTIONAL BLOCK DIAGRAM
Precision Battery Sensor
ADuC7032
Memory
96k Bytes Flash/EE Memory, 6k Bytes SRAM
10KCycles Flash Endurance, 20 Years Flash Retention
In-Circuit Download via JTAG and LIN
64 x 16bit Result FIFO for Current and Voltage ADC
On-Chip Peripherals
LIN 1.2, 1.3 and 2.0 (Slave) Compatible Support via UART
with Hardware Synchronization
Flexible Wake-up I/O Pin, Master/Slave SPI Serial I/O
9-Pin GPIO Port, 2 X General Purpose Timers
Wake-up and Watchdog Timers
Power Supply Monitor, On-Chip Power-On-Reset
Power
Operates directly from 12V Battery Supply
Current Consumption
Normal Mode 10mA at 10MHz
Low Power Monitor Mode
Package and Temperature Range
48 Pin LQFP 7X7 mm body package
Fully specified for –40°C to 105°C operation
APPLICATIONS
Battery Sensing/Management for Automotive Systems
T
S
S
R
O
I
K
T
M
D
D
C
N
T
T
T
T
PRECISION ANALOG ACQUISITION
IIN+
IIN-
VBAT
VTEMP
GND_SW
VREF
BUF
PGA
RESULT
ACCUMULATOR
BUF
BUF
MUX
TEMP
SENSOR
D
D
D
V
D
D
N
D
D
V
V
G
A
D
A
_
_
G
G
E
E
R
R
Σ−∆
DIGITAL
COMPARATOR
Σ−∆
Σ−∆
PRECISION
REFERENCE
S
D
S
S
S
N
V
V
G
_
D
O
I
16-BIT
16-BIT
16-BIT
Figure 1: ADuC7032 Functional Block Diagram
D
Rev. Pr
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Preliminary Specifications subject to change without notice. No license is granted by
implication or otherwise under any patent or p atent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective
companies.
ADC
ADC
ADC
2.5V LDO
PSM
POR
ARM7 TDMI
MCU
20MHz
2xTIMERS
WDT
W/U TIMER
1
0
_
_
O
IO
I
P
P
G
G
2
_
IO
P
G
96KB FLASH
128B ADC FIFO
LOW POWER
ON-CHIP PLL
4
3
_
_
O
IO
I
P
P
G
G
MEMORY
6KB RAM
PRECISION
OSC
OSC
GPIO PORT
UART PORT
SPI PORT
LIN
6
5
7
_
_
_
O
O
I
IO
I
P
P
P
G
G
G
RESET
XTAL1
XTAL2
WU
LIN
8
_
O
I
P
G
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700
Fax: 781.326.8703 © 2006 Analog Devices, Inc. All rights reserved.
www.analog.com
Preliminary Technical Data ADuC7032
TABLE OF CONTENTS
TABLE OF CONTENTS................................................... 2
ADUC7032 DATASHEET TABLES.................................5
ADUC7032 DATASHEET FIGURES ..............................7
ADUC7032SPECIFICATIONS ........................................8
ELECTRICAL SPECIFICATIONS............................................ 8
TIMING SPECIFICATIONS ................................................. 15
SPI Timing Specifications...........................................15
LIN Timing Specifications.......................................... 19
SPECIFICATION TERMINOLOGY............................. 21
ABSOLUTE MAXIMUM RATINGS ............................22
ORDERING GUIDE ........................................................... 22
ESD Caution...............................................................22
PIN FUNCTION DESCRIPTIONS ...............................23
ADUC7032 GENERAL DESCRIPTION.......................26
OVERVIEW OF THE ARM7TDMI CORE ........................... 26
ARM7 Exceptions.......................................................27
ARM Registers............................................................ 27
Interrupt latency.........................................................28
MEMORY ORGANISATION ................................................28
Memory Format..........................................................28
SRAM..........................................................................28
Remap.........................................................................29
Remap operation........................................................ 29
SYSMAP0 Register :................................................... 29
ADUC7032 RESET .......................................................... 30
RSTCLR Register :..................................................... 30
RSTSTA Register :...................................................... 30
FLASH/EE MEMORY AND THE ADUC7032......................31
FLASH/EE MEMORY CONTROL INTERFACE...................... 31
FEE0CON and FEE1CON Registers : ....................... 32
FEE0ST A and FEE1STA Registers :...........................33
FEE0ADR and FEE1ADR Registers:.........................33
FEE0DAT and FEE1DAT Registers:..........................33
FEE0MOD and FEE1MOD Registers :.....................34
FLASH/EE MEMORY SECURITY ........................................34
Block0, Flash/EE Memory Protection Registers :......35
Block1, Flash/EE Memory Protection Registers :......35
FLASH/EE MEMORY RELIABILITY .................................. 36
CODE EXECUTION TIME FROM SRAM AND FLASH/EE 37
Execution from SRAM................................................ 37
Execution from Flash/EE ...........................................37
ADUC7032 KERNEL ....................................................... 38
MEMORY MAPPED REGISTERS ........................................ 40
16-BIT Σ−∆ ANALOG TO DIGITAL CONVERTERS.45
CURRENT CHANNEL ADC (I-ADC) ................................45
VOLTAGE CHANNEL ADC (V-ADC)................................46
TEMPERATURE CHANNEL ADC (T-ADC) ........................46
ADC GROUND SWITCH ...................................................47
ADC NOISE PERFORMANCE TABLES ...............................48
ADC MMR INTERFACE...................................................49
ADC Status Register :.................................................49
ADC Interrupt Mask Register :...................................50
ADC Mode Register : .................................................51
Current Channel ADC Control Register :...................52
Voltage Channel ADC Control Register :...................53
Temperature Channel ADC Control Register :...........54
ADC Filter Register : .................................................55
ADC Configuration Register :....................................57
Current Channel ADC Data Register :.......................58
Voltage Channel Data Register:.................................58
Temperature Channel ADC Data Register :...............58
ADC FIFO Register : .................................................58
Current Channel ADC Offset Calibration Register :..58
Voltage Channel Offset Calibration Register :...........58
Temperature Channel Offset Calibration Register:....58
Current Channel ADC Gain Calibration Register :...59
Voltage Channel Gain Calibration Register :.............59
Temperature Channel Gain Calibration Register :.....59
Current Channel ADC Result Counter Limit Register:
....................................................................................59
Current Channel ADC Result Count Register:...........59
Current Channel ADC Threshold Register:................59
Current Channel ADC Threshold Count Limit Register:
....................................................................................59
Current Channel ADC Threshold Count Register:.....60
Current Channel ADC Accumulator Register:...........60
Current Channel ADC Accumulator Threshold
Register: .....................................................................60
Low Power Voltage Reference Scaling Factor............60
ADC POWER MODES OF OPERATION...............................60
ADC Startup Procedure..............................................60
ADC Normal Power Mode..........................................61
ADC Low Power Mode...............................................61
ADC Low Power-Plus Mode.......................................61
ADC Sinc3 Digital Filter Response............................61
ADC Calibration.........................................................64
Using the Offset and Gain Calibration Registers.......64
Understanding the Offset and Gain Calibration
Registers.....................................................................65
ADC DIAGNOSTICS.........................................................65
Current ADC Diagnostics...........................................65
Temperature ADC Diagnostics...................................66
POWER SUPPLY SUPPORT CIRCUITS.....................67
ADUC7032 SYSTEM CLOCKS.....................................68
PLLSTA Register : ......................................................69
PLLCON Pre-write Key PLLKEY0:...........................70
Rev. PrD | Page 2 of 128

Preliminary Technical Data ADuC7032
PLLCON Pre-write Key PLLKEY1:........................... 70
PLLCON Register :.................................................... 70
POWCON Pre-write Key POWKEY0:....................... 70
POWCON Pre-write Key POWKEY1:....................... 70
POWCON Register :..................................................71
ADUC7032 LOW POWER CLOCK CALIBRATION ............. 72
OSC0TRM Register :..................................................73
OSC0CON Register : .................................................73
OSC0STA Register :................................................... 74
OSC0VAL0 Register :................................................. 74
OSC0VAL1 Register :................................................. 74
PROCESSOR REFERENCE PERIPHERALS............75
INTERRUPT SYSTEM........................................................ 75
TIMERS ........................................................................... 77
TIMER0 – LIFE-TIME TIMER ............................................ 78
Timer0 Value Register :.............................................. 78
Timer0 Capture Register :.......................................... 78
Timer0 Control Register :...........................................79
Timer0 Load Registers:.............................................. 79
Timer0 Clear Register :.............................................. 79
TIMER1 ........................................................................... 80
Timer1 Load Registers:.............................................. 80
Timer1 Clear Register :.............................................. 80
Timer1 Value Register :.............................................. 80
Timer1 Capture Register :.......................................... 81
Timer1 Control Register :...........................................81
TIMER2 - WAKE-UP TIMER ............................................. 82
Timer2 Load Registers:.............................................. 82
Timer2 Clear Register :.............................................. 82
Timer2 Value Register :.............................................. 82
Timer2 Control Register :...........................................83
TIMER3 - WATCHDOG TIMER........................................... 84
Timer3 Load Register :............................................... 84
Timer3 Value Register :.............................................. 84
Timer3 Clear Register :.............................................. 85
Timer3 Control Register :...........................................85
GENERAL P URPOSE I/O ............................................. 86
GPIO Port0 Control Register : ..................................88
GPIO Port1 Control Register : ..................................89
GPIO Port2 Control Register : ..................................89
GPIO Port0 Data Register :.......................................90
GPIO Port1 Data Register :.......................................91
GPIO Port2 Data Register :.......................................92
GPIO Port0 Set Register :.......................................... 93
GPIO Port1 Set Register :.......................................... 94
GPIO Port2 Set Register :.......................................... 94
GPIO Port0 Clear Register : .....................................95
GPIO Port1 Clear Register : .....................................95
GPIO Port2 Clear Register : .....................................96
HIGH VOLTAGE PERIPHERAL CONTROL
INTERFACE....................................................................97
High Voltage Interface Control Register :.................. 98
High Voltage Data Register:......................................99
High Voltage Configuration0 Register :...................100
High Voltage Configuration1 Register :...................101
High Voltage Interrupt Status Register :...................102
High Voltage Monitor Register :...............................103
WAKE-UP(WU).............................................................104
Wake-Up(WU) Pin Circuit Description....................104
HANDLING INTERRUPTS FROM THE HIGH VO LTAG E
PERIPHERAL CONTROL INTERFACE................................ 105
LOW VOLTAGE FLAG ( LV F )......................................... 105
HIGH VOLTAGE DIAGNOSTICS....................................... 105
UART SERIAL INTERFACE.......................................106
BAUD RATE GENERATION ..............................................106
Normal 450 UART baud rate generation. ................106
ADuC7032 Fractional divider: ................................106
UART REGISTER DEFINITION ........................................ 107
UART TX Register:..................................................107
UART RX Register:..................................................107
UART Divisor Latch Register 0:...............................107
UART Divisor Latch Register 1:...............................107
UART Control Register 0: .......................................108
UART Control Register 1: .......................................109
UART Status Register 0:..........................................109
UART Interrupt Enable Register 0:.......................... 110
UART Interrupt Identification Register 0:................ 110
UART Fractional Divider Register:..........................111
SERIAL PERIPHERAL INTERFACE........................ 112
SPI Control Register :.............................................. 113
SPI Status Register :................................................. 114
SPI Receive Register :.............................................. 114
SPI Transmit Register :.............................................114
SPI Divider Register : .............................................. 114
LIN (LOCAL INTERCONNECT NETWORK )
INTERFACE ..................................................................115
LIN MMR DESCRIPTION .............................................. 115
LIN Hardware Synchronization Status Register :.....116
LIN Hardware Synchronization Control Register 0: 117
LIN Hardware Synchronization Control Register 1: 118
LIN Hardware Synchroniz at i o n Timer0 Register : ... 118
LIN Hardware Break Timer1 Register :....................119
LIN HARDWARE INTERFACE .........................................119
LIN Frame Protocol................................................. 119
LIN Frame Break Symbol.........................................120
LIN Frame Synchronization Byte.............................120
LIN Frame Protected Identifier................................120
LIN Frame Data Byte...............................................121
LIN Frame Data Tr ansmission and Reception .........121
Example LIN Hardware Synchronization Routine....122
LIN Diagnostics........................................................123
ADUC7032 ON-CHIP DIAGNOSTICS.......................124
ADC Diagnostics......................................................124
High Voltage I/O Diagnostics...................................124
PART IDENTIFICATION ............................................125
Rev. PrD | Page 3 of 128

Preliminary Technical Data ADuC7032
System Serial ID Register 0: ....................................125
System Serial ID Register 1: ....................................126
System Kernel Checksum:........................................126
System Identification FEE0ADR:.............................127
OUTLINE DIMENSIONS.............................................128
Rev. PrD | Page 4 of 128

Preliminary Technical Data ADuC7032
ADUC7032 DATASHEET TABLES
Table 1 : ADUC7032—SPECIFICATIONS 8
Table 2 : SPI Master Mode Timing (PHASE Mode = 1) 15
Table 3 : SPI Master Mode Timing (PHASE Mode = 0) 16
Table 4 : SPI Slave Mode Timing (PHASE Mode = 1) 17
Table 5 : SPI Slave Mode Timing (PHASE Mode = 0) 18
Table 6. Absolu t e Maxim u m R atings (TA = -40°C to 105°C
unless otherwise noted) 22
Table 7: Pin Function Descriptions 23
Table 8: SYSMAP0 MMR Bit Designations 29
Table 9 : Device RESET Implications 30
Table 10: RSTSTA/RSTCLR MMR Bit Designations 30
Table 11: Command Codes in FEE0CON and FEE1CON 32
Table 12: FEE0STA and FEE1STA MMR bit designations 33
Table 13: FEE0MOD and FEE1MOD MMR bit designations 34
Table 14: FEE0HID and FEE0PRO MMR bit designations 35
Table 15: FEE1HID and FEE1PRO MMR bit designations 35
Table 16: Typical execution cycles in ARM/Thumb mode 37
Table 17 : Complete MMR List 41
Table 18 : GND_SW Configuration 47
Table 19 : Current Channel ADC, Normal Power Mode, Typical
Output RMS Noise (µV) 48
Table 20 : Voltage Channel ADC, Typical Output RMS Noise
(referred to ADC Voltage attenuator Input)(µV) 48
Table 21 : Temperat ure Chan nel ADC, Typical Out put RMS
Noise (µV) 48
Table 29 : Allowable Combinations of SF and AF 56
Table 30: ADCCFG MMR Bit Designations 57
Table 31 : Allowable Combinations of SF and AF 61
Table 32 : Common ADCFLT Configurations 63
Table 33: Current ADC Diagnostics 66
Table 34: Temperature ADC Diagnostics 66
Table 35 : PLLSTA MMR Bit Description 69
Table 36: PLLCON MMR Bit description 70
Table 37 : POWCON MMR bit designations 71
Table 38 : OSC0TRM MMR Bit Definition 73
Table 39: OSC0CON MMR Bit Definition 73
Table 40 : OSC0STA MMR Bit Definition 74
Table 41 : IRQ/FIQ MMRs bit description 75
Table 42 : SWICFG MMR Bit Descriptions 76
Table 43 : Timer Event Capture 77
Table 44 : T0CON MMR Bit Descriptions 79
Table 45 : T1CON MMR Bit Descriptions 81
Table 46 : T2CON MMR Bit Descriptions 83
Table 47 : T3CON MMR Bit Definition 85
Table 48 : External GPIO Pin to Internal Port Signal
Assignments 87
Table 49 : GP0CON MMR Bit Designations 88
Table 50 : GP1CON MMR Bit Designations 89
Table 51 : GP2CON MMR Bit Designations 89
Table 22 : ADCSTA MMR Bit Designations 49
Table 23 : ADCMDE MMR Bit Designations 51
Table 24 : ADC0CON MMR Bit Designations 52
Table 25 : ADC1CON MMR Bit Designations 53
Table 26 : ADC2CON MMR Bit Designations 54
Table 27 : ADCFLT MMR Bit Designations 55
Table 28 : ADC Conversion Rates and Settling Times 56
Rev. PrD | Page 5 of 128
Table 52 : GP0DAT MMR Bit Descriptions 90
Table 53 : GP1DAT MMR Bit Descriptions 91
Table 54 :GP2DAT MMR Bit Descriptions 92
Table 55 : GP0SET MMR Bit Descriptions 93
Table 56 : GP1SET MMR Bit Descriptions 94
Table 57 : GP2SET MMR Bit Descriptions 94
Table 58 : GP0CLR MMR Bit Descriptions 95

Preliminary Technical Data ADuC7032
Table 59 : GP1CLR MMR Bit Descriptions 95
Table 74 : COMIEN0 MMR Bit Descriptions 110
Table 60 : GP2CLR MMR Bit Descriptions 96
Table 61: HVCON MMR Write Bit Designations 98
Table 62: HVCON MMR Read Bit Designations 98
Table 63: HVDAT MMR Bit Designations 99
Table 64: HVCFG0 Bit Designations 100
Table 65: HVCFG1 Bit Designations 101
Table 66: HVSTA Bit Designations 102
Table 67: HVMON Bit Designations 103
Table 68: High Voltage Diagnostics 105
Table 69 : Baud rate using the standard Baud rate generator 106
Table 70: Baud rate using the Fractional Baud rate generator 106
Table 71 : COMCON0 MMR Bit Descriptions 108
Table 72 : COMCON1 MMR Bit Descriptions 109
Table 73: COMSTA0 MMR Bit Descriptions 109
Table 75 : COMIID0 MMR Bit Descriptions 110
Table 76 : COMDIV2 MMR Bit Descriptions 111
Table 77 : SPI Output Pins 112
Table 78: SPI speed vs. clock divider bits in master mode 112
Table 79 : SPICON MMR Bit Descriptions 113
Table 80 : SPISTA MMR Bit Descriptions 114
Table 81 : LHSSTA MMR Bit Descriptions 116
Table 82 : LHSCON0 MMR Bit Descriptions 117
Table 83 : LHSCON1 MMR Bit Descriptions 118
Table 84 : SYSSER0 MMR Bit Descriptions 125
Table 85: SYSSER1 MMR Bit Descriptions 126
Table 86: FEE0ADR System Identification MMR Bit
Descriptions 127
Rev. PrD | Page 6 of 128

Preliminary Technical Data ADuC7032
ADUC7032 DATASHEET FIGURES
Figure 1: ADuC7032 Functional Block Diagram..........................1
Figure 2. SPI Master Mode Timing (PHASE Mode = 1)............15
Figure 3. SPI Master Mode Timing (PHASE Mode = 0)............16
Figure 4. SPI Slave Mode Timing (PHASE Mode = 1)...............17
Figure 5 : SPI Slave Mode Timing (PHASE Mode = 0)..............18
Figure 6 : LIN V1.3 Timing Specification....................................19
Figure 7 : LIN V2.0 Timing Specification....................................20
Figure 8 : Package Pin Configuration...........................................22
Figure 9: ADuC7032 Register Organization................................27
Figure 10: Little Endian Format ....................................................28
Figure 11: ADuC7032 Memory Map...........................................28
Figure 12. Flash/EE Memory Data Retention .............................36
Figure 13: ADuC7032 Kernel Flowchart......................................39
Figure 14: Top Level MMR Map ...................................................40
Figure 15: Current ADC, Top Level Overview............................45
Figure 16 : Voltage/ Temperature ADC, Top Level Overview...46
Figure 17 : Example External Temperature Sensor Circuits......47
Figure 18: Internal Ground Switch Configuration .....................47
Figure 19 : Typical Digital Filter Response at FADC=1.0kHz
(ADCFLT = 0x0007)..............................................................62
Figure 20 : ModifiedSinc3 Digital Filter Response at
FADC=1.0kHz (ADCFLT = 0x0087)...................................62
Figure 24 : Typical Digital Filter Response at FADC=4Hz,
(ADCFLT = 0xBF1D)............................................................63
Figure 25 : Typical Digital Filter Response at FADC=1Hz,
(ADCFLT = 0xBD1F..............................................................63
Figure 26: Typical Power-On Cycle ..............................................67
Figure 27: ADuC7032 System Clock Generation .......................68
Figure 28 : Example OSC0TRM Calibration Routine................72
Figure 29: Interrupt Structure .......................................................76
Figure 30 : Timer 0 block diagram................................................78
Figure 31 : Timer 1 Block Diagram ..............................................80
Figure 32 : Timer 2 block diagram................................................82
Figure 33 : Timer3 Block Diagram ..............................................84
Figure 34 : ADuC7032 GPIO.........................................................86
Figure 35 : High Voltage Interface, Top Level Block Diagram..97
Figure 36 : WU Circuit, Block Diagram ....................................104
Figure 37 : Fractional Divider Baud Rate generation...............106
Figure 38 : LIN I/O, Block Diagram...........................................115
Figure 39 : LIN Interface Timing ...............................................119
Figure 40 : LIN Break Field..........................................................120
Figure 41 : LIN Synch byte Field .................................................120
Figure 42 : LIN Identifier Byte Field...........................................120
Figure 43 : LIN Data Byte Field...................................................121
Figure 21 : Typical Digital Filter Response at FADC=8KHz,
(ADCFLT = 0x0000)..............................................................62
Figure 22 : Typical Digital Filter Response at FADC=8KHz,
(ADCFLT = 0x4000)..............................................................62
Figure 23 Typical Digital Filter Response at FADC=8KHz,
(ADCFLT = 0x961F)..............................................................63
Figure 44 : Example LIN Configuration ....................................123
Figure 45 : 48-Lead, Plastic Quad Flat Pack, (LQFP-48),
Rev. PrD | Page 7 of 128
Dimensions shown in millimeters.....................................128
Preliminary Technical Data
ADUC7032SPECIFICATIONS
ADuC7032
ELECTRICAL SPECIFICATIONS
(VDD =3.5V to18V, V
= 1.2 V Internal Reference, f
REF
Table 1 : ADUC7032—SPECIFICATIONS
= 10.24MHz driven from external 32.768kHz watch crystal or on-chip
CORE
precision oscillator, All specifications TA = -40°C to 105C, unless otherwise noted.)
Parameter Test Conditions/Comments Min Typ Max Unit
ADC SPECIFICATIONS
1
Conversion Rate
Chop Off, ADC Normal Operating Mode
Chop On, ADC Normal Operating Mode
Chop On, ADC Low Power Mode
4 8000
4 2600
1 650
Hz
Hz
Hz
Current Channel
No Missing Codes 1
Integral Nonlinearity
Offset Error
Offset Error
2, 3, 4, 5
1, 3, 6
Chop On -2 ±0.5 +2
1, 2
Valid for all ADC Update Rates and ADC Modes
Chop Off, 1LSB = (36.6/Gain)µV
Offset Error Drift6 Chop off, Valid for ADC Gains of 4 – 64,
Normal Mode
Offset Error Drift6
Chop off. Valid for ADC Gains of 128 – 512,
Normal Mode
16
±10 ±60
Bits
PPM of FSR
-10 ±3 +10 LSB
µV
0.03 LSB/°C
30 nV/°C
Offset Error Drift6 Chop On 10 nV/°C
Total Gain Error
Total Gain Error
Total Gain Error
1, 3, 7, 8, 9
1, 3, 7, 9, 10
1, 3, 7, 9, 11
Normal Mode
Low Power Mode
Low Power-Plus Mode, using Precision Vref
-0.5 ±0.1 +0.5
-2 ±0.2 +2
-1 ±0.2 +1
%
%
%
Gain Drift 3 ppm/°C
PGA Gain Mismatch Error ±0.1 %
Output Noise
1, 12
4Hz Update Rate, Gain = 512, Chop Enabled 60 90 nV rms
10Hz Update Rate, Gain = 512, Chop Enabled 100 150 nV rms
1KHz Update Rate, Gain = 512 0.6 0.9 µV rms
1KHz Update Rate, Gain = 32 0.8 1.2 µV rms
1KHz Update Rate, Gain = 4 2.0 2.8 µV rms
8KHz Update Rate, Gain = 32 2.5 3.5 µV rms
8KHz Update Rate, Gain = 4 14 21 µV rms
ADC Low Power Mode, F
ADC Low Power Mode, F
ADC Low Power-Plus Mode,F
= 10Hz, Gain=128 1.25 1.9 µV rms
ADC
= 1Hz, Gain=128 0.35 0.5 µV rms
ADC
=1Hz,Gain=512 0.1 0.15 µV rms
ADC
Voltage Channel 13
No Missing Codes 1 Valid at all ADC Update Rates 16 Bits
Integral Nonlinearity
Offset Error
Offset Error
3, 5
1, 3
1
±10 ±60 ppm of FSR
Chop Off , 1 LSB16=439.5uV -10 ±1 +10 LSB
Chop On 0.3 1 LSB
Offset Error Drift Chop Off 0.03 LSB/°C
Total Gain Error
Total Gain Error
Gain Drift
Output Noise
1,3, 7, 14
Includes Resistor Mismatch -0.25 ±0.06 +0.25 %
1,3, 7, 14
Temperature Range = -25°C to 65°C -0.15 ±0.03 +0.15 %
Includes Resistor Mismatch Drift 3 ppm/°C
1, 15
4Hz Update Rate 60 90 µV rms
10Hz Update Rate 60 90 µV rms
1KHz Update Rate 180 270 µV rms
8KHz Update Rate 1600 2400 µV rms
Rev. PrD | Page 8 of 128
Preliminary Technical Data ADuC7032
Parameter Test Conditions/Comments Min Typ Max Unit
Temperature Channel
No Missing Codes 1 Valid at all ADC Update Rates 16 Bits
Integral Nonlinearity
Offset Error
Offset Error
3, 5,16, 17
1, 3
Offset Error Drift
Total Gain Error
Gain Drift
Output Noise
ADC SPECIFICATIONS
ANALOG INPUT
Current Channel
Absolute Input Voltage Range Applies to both IIN+ and IIN-
Input Voltage Range
Gain =222 ±600 mV
Gain =422 ±300 mV
Gain =8 ±150 mV
Gain = 16 ±75 mV
Gain = 32 ±37.5 mV
Gain = 64 ±18.75 mV
Gain = 128 ±9.375 mV
Gain = 256 ±4.68 mV
Gain = 512 ±2.3 mV
Input Leakage Current
Input Offset Current
Voltage Channel
Absolute Input Voltage Range 4 18 V
Input Voltage Range 0 to 28.8 V
VBAT Input Current VBAT = 18V 4 5.5 7 µA
Temperature Channel
Absolute Input Voltage Range 100 1300 mV
Input Voltage Range 0 to VREF V
VTEMP Input Current1 2.5 100 nA
VOLTAGE REFERENCE
ADC Precision Reference
Internal V
Power Up Time1 0.5 Ms
Initial Accuracy1 Measured at TA = 35°C -0.15 0.15 %
Internal V
Coefficient
Long term stability25 100 ppm/1000h
External Reference Input
Range
V
26
Divide by 2 Initial Error
REF
ADC Low Power Reference
Internal V
Initial Accuracy
Initial Accuracy10 Using ADCREF, measured at TA = 35°C 0.1 %
Temperature Coefficient
1
±10 ±60 ppm of FSR
Chop Off , 1 LSB16=19.84uV -10 ±3 +10 LSB
Chop On -5 1 5 LSB
1,3, 18, 19, 17
-0.2 ±0.06 +0.2 %
0.03 LSB/°C
3 ppm/°C
1
20,21
1
1, 23
0.5 1.5 nA
1KHz Update Rate 7.5 11.25 µV rms
Internal V
REF
=1.2V
Gain =122 ±1.2
-200 +300
mV
-3 3 nA
REF
Temperature
REF
1, 24
REF
1.2 V
-20 ±5 +20
0.1 1.3
1
0.1 0.3 %
ppm/°C
V
1.2 V
Measured at TA = 35°C -5 5 %
1, 24
-300 ±150 +300 ppm/°C
Rev. PrD | Page 9 of 128
Preliminary Technical Data ADuC7032
Parameter Test Conditions/Comments Min Typ Max Unit
RESISTIVE ATTENUATOR
Divider Ratio 24
Resistor Mismatch Drift
ADC Ground Switch
Resistance Direct path to ground 10
Input Current
TEMPERATURE SENSOR27
Accuracy MCU in power down or standby mode ±3 °C
POWER-ON RESET (POR)
POR Trip Level Refers to Voltage at VDD pin 2.85 3.0 3.15 V
POR Hysteresis 300 mV
RESET Time-Out from POR
LOW VOLTAGE FLAG (LVF)
LVF Level
POWER SUPPLY MONITOR (PSM)
PSM Trip Level
WATCHDOG TIMER (WDT)
Timeout Period
1
Timeout Step Size
FLASH/EE MEMORY
1
Endurance28 32.768Khz Clock, 256 pre-scale 10,000 Cycles
Data Retention29 TJ = 85°C 20 Years
DIGITAL INPUTS
Input Leakage Current Input (High) = REG_DVDD ±1 ±10 µA
Input Pull-up Current
Input Capacitance
Input Leakage Current NTRST Only :Input (Low) = 0V ±1 ±10 µA
Input Pull-down Current
3 ppm/°C
Ω
20kΩ Resistor selected
10 20 30
kΩ
6 mA
MCU in power down or standby mode
Temperature Range = -25°C to 65°C
±2 °C
20 msec
Refers to Voltage at VDD pin 1.9 2.1 2.3 V
Refers to Voltage at VDD pin 6.0 V
32.768Khz Clock, 256 pre-scale 0.008 512 sec
7.8 msec
All digital inputs except NTRST
Input (Low) = 0V 10 20 80 µA
10 pF
NTRST Only : Input (High) = REG_DVDD 30 55 100 µA
Rev. PrD | Page 10 of 128
Preliminary Technical Data ADuC7032
Parameter Test Conditions/Comments Min Typ Max Unit
LOGIC INPUTS
VINL, Input Low Voltage 0.4 V
VINH, Input High Voltage
CRYSTAL OSCILLATOR
Logic Inputs, XTAL1 Only
VINL, Input Low Voltage 0.8 V
VINH, Input High Voltage 1.7 V
XTAL1 Capacitance 12 pF
XTAL2 Capacitance
ON-CHIP OSCILLATORS
Low Power Oscillator 131.072 kHz
Accuracy30 Includes drift data from 1000hr life-test -6 3
Precision Oscillator 131.072 kHz
Accuracy Includes drift data from 1000hr life-test -1.2 1.2 %
1
All Logic inputs
2.0 V
1
12 pF
%
MCU CLOCK RATE
8 programmable core clock selections within
0.160 10.24 20.48
MHz
this range (binary divisions 1,2,4,8…..64, 128)
MCU START-UP TIME
at Power-On Includes kernel power-on execution time 25
after Reset Event Includes kernel power-on execution time 5
From MCU Power-Down
Oscillator Running
Wakeup from Interrupt
Wakeup from LIN
Crystal Powered Down
Wakeup from Interrupt
2
2
500
msec
msec
msec
msec
msec
Internal PLL Lock Time 1 msec
LIN I/O General
Baud Rate 1000 20000 Bits/sec
VDD Supply Voltage Range for which the LIN
interface is functional
7 18
V
Input capacitance 5.5 pF
LIN comparator response
Error! Bookmark not defined.
time
I
LIN DOM MAX
I
LIN_PAS_REC
I
LIN_PAS_DOM1
Current Limit for driver when LIN Bus is in
Driver Off ; 7.0V < V
Using 22Ohm resistor 38 90 µs
dominant state. V
Input Leakage V
= V
BAT
< 18V ; VDD = V
BUS
= 0V -1 mA
LIN
BAT (MAX)
-0.7V 20 µA
LIN
40 200
mA
Rev. PrD | Page 11 of 128
Preliminary Technical Data ADuC7032
Parameter Test Conditions/Comments Min Typ Max Unit
I
LIN_NO_GND
V
V
V
V
V
V
V
V
VLIN_RECESSIVE
V
GND-Shift
R
V
LIN I/O General Contd.
Transmit Propagation Delay 1
31
Control Unit disconnected from ground
GND = V
LIN_DOM1
LIN_REC1
1
LIN Receiver Centre Voltage, VDD > 7.0V 0.475VDD 0.5 V
LIN_CNT
1
LIN Receiver Hysteresis Voltage 0.175VDD V
HYS
LIN_DOM_DRV_LOSUP1
LIN_DOM_DRV_HISUP
LIN_DOM_DRV_LOSUP1
LIN_DOM_DRV_HISUP
1
-Shift31 0 0.1V
BAT
31
LIN Receiver Dominant State, VDD > 7.0V 0.4VDD V
LIN Receiver Recessive State, VDD > 7.0V 0.6VDD V
LIN Dominant Output Voltage. VDD 7V, RL 500Ω
LIN Dominant Output Voltage. V
LIN Dominant Output Voltage. VDD 7V, RL 1000Ω
LIN Dominant Output Voltage. V
LIN Recessive Output Voltage 0.8 VDD V
DD
; 0V V
<18V ; V
LIN
= 12V
BAT
18V,RL 500Ω
DD
18V,RL 1000Ω
DD
-1 1
DD
0.525VDD V
1.2 V
2 V
0.6 V
0.8 V
DD
0 0.1VDD V
Slave Termination Resistance 20 30 47
slave
31
Serial Diode
Voltage Drop at the serial diode D
Ser_Int
0.4 0.7 1 V
VDD
= 7V
MIN
Bus Load Conditions ( C
BUS
|| R
BUS
):
4
mA
V
KΩ
µs
Symmetry of Transmit
1
Propagation Delay
Receive Propagation Delay
Symmetry of Receive
Propagation Delay
1
LIN V1.3 Specification
dV
1
dt
dV
1
dt
t
SYM
t
SYM1
1nF||1kΩ ; 6.8nF|| 660 Ω ; 10nF || 500Ω
VDD
= 7V
MIN
1
VDD
MIN
= 7V
VDD
= 7V
MIN
Bus Load Conditions ( C
BUS
|| R
BUS
) :
-2 2
6
-2 2
µs
µs
µs
1nF||1kΩ ; 6.8nF|| 660 Ω ; 10nF || 500Ω
Slew Rate
Dominant and recessive Edges V
BAT
= 18V
Slew Rate
Dominant and recessive Edges V
BAT
= 7V
Symmetry of rising and falling edge V
Symmetry of rising and falling edge V
BAT
BAT
= 18V
= 7V
1 2 3
0.5 3 V/µs
-5 5
-4 4
V/µs
µs
µs
Rev. PrD | Page 12 of 128
Preliminary Technical Data ADuC7032
Parameter Test Conditions/Comments Min Typ Max Unit
LIN V2.0 Specification
|| R
Bus Load Conditions ( C
BUS
BUS
) :
1nF||1kΩ ; 6.8nF|| 660 Ω ; 10nF || 500Ω
D1 Duty Cycle 1
TH
REC(MAX)
TH
DOM(MAX)
V
= 7.0V…18V; t
SUP
D2
D1 = t
Duty Cycle 2
TH
TH
D2 = t
BUS_REC(MIN)
REC(MIN)
DOM(MIN)
V
= 7.0V…18V; t
SUP
BUS_REC(MAX)
= 0.744 * V
= 0.581 * V
/ (2 * t
= 0..284 * V
= 0.422 * V
/ (2 * t
BAT
BAT
= 50µs
BIT
BIT
BAT
BAT
= 50µs
BIT
BIT
)
0.396
)
0.581
Wake
R
= 1kOhm, C
L
= 91nF, R
BUS
= 39Ohms
LIMIT
VDD1
32
V
OH
32
V
OL
Supply Voltage Range for which the Wake Pin is
functional
Output High Level 5 V
Output Low Level 2 V
7 18
V
VIH Input High Level 4.6 V
VIL
Monoflop Timeout
Package Thermal Specifications
Input Low Level 1.2 V
Timeout Period
1.3 sec
Thermal Shutdown
Thermal Impedance (θja)34
33
140 150 160 °C
48 LQFP, Stacked Die
Top Die 50 °C/W
Bottom Die 25
°C/W
POWER REQUIREMENTS
Power Supply Voltages
VDD (Battery Supply) 3.5 18 V
REG_DV
REG_AV
DD,
35
DD
2.5 2.6 2.7 V
Power Consumption
IDD – MCU Normal Mode36 MCU Clock Rate = 10.24MHz, ADC Off 10 20 mA
IDD – MCU Normal Mode36 MCU Clock Rate = 20.48MHz, ADC Off 20 mA
IDD – MCU Powered Down1
IDD–MCU Powered Down1
ADC Low Power Mode, measured over an
ambient temperature range of -10°C to +40°C
(Continuous ADC Conversion )
ADC Low Power Mode, measured over an
ambient temperature range of -40°C to +85°C
(Continuous ADC Conversion )
300 400
300 500
µA
µA
Rev. PrD | Page 13 of 128
Preliminary Technical Data ADuC7032
Parameter Test Conditions/Comments Min Typ Max Unit
IDD – MCU Powered Down
IDD – MCU Powered Down
IDD – MCU Powered Down1
IDD – Current ADC
I
– Voltage/Temperature ADC
DD
I
– Precision Oscillator
DD
1
These numbers are not production tested but are guaranteed by design and/or characterization data at production release
2
Valid for Current ADC Gain setting of PGA=4 to 64
3
These numbers include temperature drift
4
Tested at Gain Range=4, Self-Offset Calibration will remove this error.
5
Measured with an internal short after an initial offset calibration.
6
Measured with an internal short
7
These numbers include internal reference temperature drift.
8
Factory Calibrated at Gain = 1.
9
System calibration at specific gain range will remove the error at this gain range
10
When used in conjunction with ADCREF, the Low Power Mode Reference error MMR.
11
Using ADC Normal Mode Voltage Reference
12
Typical Noise in Low Power modes is measured with Chop enabled.
13
Voltage Channel Specifications include resistive attenuator input stage
14
System Calibration will remove this error
15
rms noise is referred to Voltage attenuator input, for example at F
input referred noise figures
16
ADC Self Offset calibration will remove this error.
17
Valid after an initial Self Calibration
18
Factory calibrated for the internal temperature sensor during final production test.
19
System Calibration will remove this error
20
In ADC Low Power Mode the input range is fixed at ±9.375mV. In ADC Low Power Plus Mode the input range is fixed at ±2.34375mV.
21
It is possible to extend the ADC input range by up to 10% by modifying the factory set value of the Gain Calibration register or using system calibration. This approach
can also be used to reduce the ADC Input Range (LSB Size).
22
Limited by minimum absolute input voltage range.
23
Valid for a differential input less than 10mV
24
Measured using Box Method
25
The long-term stability specification is non cumulative. The drift in subsequent 1,000 hour periods is significantly lower than in the first 1,000 hour period.
26
References of up to REG_AVDD can be accommodated by enabling an internal Divide-by-2
27
Die Temperature.
28
Endurance is qualified to 10,000 cycles as per JEDEC Std. 22 method A117 and measured at -40°C, +25°C and +125°C. Typical endurance at 25°C is 170,000 cycles.
29
Retention lifetime equivalent at junction temperature (Tj) = 85°C as per JEDEC Std. 22 method A117. Retention lifetime will de-rate with junction temperature.
30
Low Power oscillator can be calibrated against either the precision oscillator or the external 32.768kHz crystal in user code
31
These numbers are not production tested, but are supported by LIN Compliance testing.
32
Specified after Rlimit of 39Ohms
33
The MCU core is not shutdown but an interrupt is generated, if enabled.
34
Thermal Impedance can be used to calculate the thermal gradient from ambient to die temperature.
35
Internal Regulated Supply available at REG_DVDD (I
36
Typical, additional supply current consumed during Flash memory program and erase cycles is 7mA and 5mA respectively.
1
ADC Low Power-Plus Mode, measured over an
ambient temperature range of -10°C to +40°C
(Continuous ADC Conversion )
Average Current, Measured with Wake and
Watchdog Timer clocked from Low Power
Oscillator
Average Current, Measured with Wake and
Watchdog Timer clocked from Low Power
Oscillator over an ambient temperature range of
-10°C to +40°C
Per ADC
520 700
120 300
120 175
1.7
0.5
400
µA
µA
µA
mA
mA
µA
=1KHz, typical rms noise at the ADC input is 7.5uV, scaled by the attenuator (24) yields these
ADC
=5mA), and REG_AVDD (I
SOURCE
SOURCE
=1mA)
Rev. PrD | Page 14 of 128

Preliminary Technical Data ADuC7032
TIMING SPECIFICATIONS
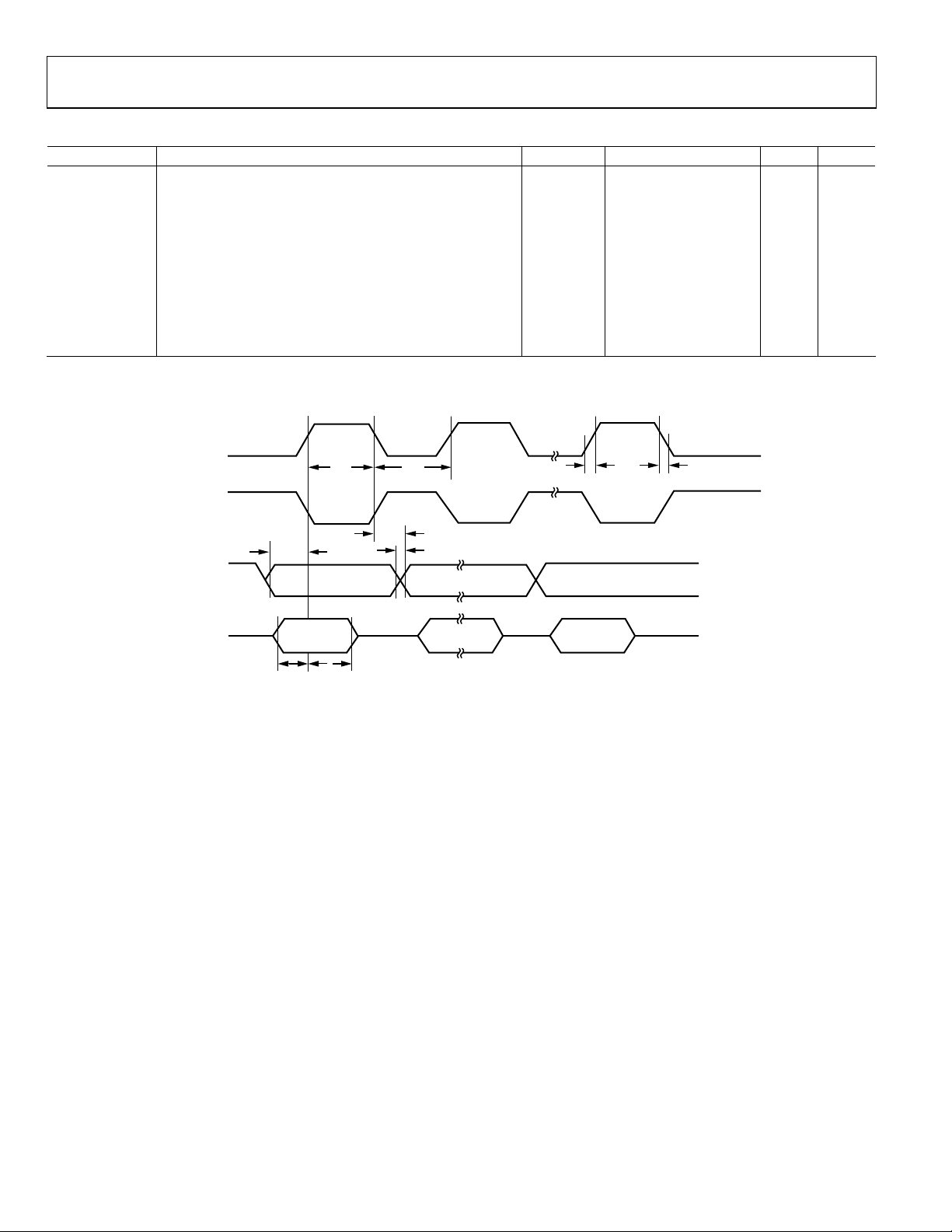
SPI Timing Specifications
Table 2 : SPI Master Mode Timing (PHASE Mode = 1)
Parameter Description Min Typ Max Unit
tSL SCLOCK low pulsewidth (SPIDIV + 1) × t
tSH SCLOCK high pulsewidth (SPIDIV + 1) × t
t
Data output valid after SCLOCK edge ns
DAV
t
Data input setup time before SCLOCK edge ns
DSU
t
Data input hold time after SCLOCK edge ns
DHD
tDF Data output fall time ns
tDR Data output rise time ns
tSR SCLOCK rise time ns
tSF SCLOCK fall time ns
ns
HCLK
ns
HCLK
SCLOCK
(POLARITY = 0)
SCLOCK
(POLARITY = 1)
MOSI
MISO
t
DAV
t
SH
t
DSUtDHD
t
SL
t
DF
MSB IN BITS 6 – 1 L SB IN
t
DR
Figure 2. SPI Master Mode Timing (PHASE Mode = 1)
t
SR
t
SF
LSBBITS 6 – 1MSB
05994-002
Rev. PrD | Page 15 of 128
Preliminary Technical Data ADuC7032
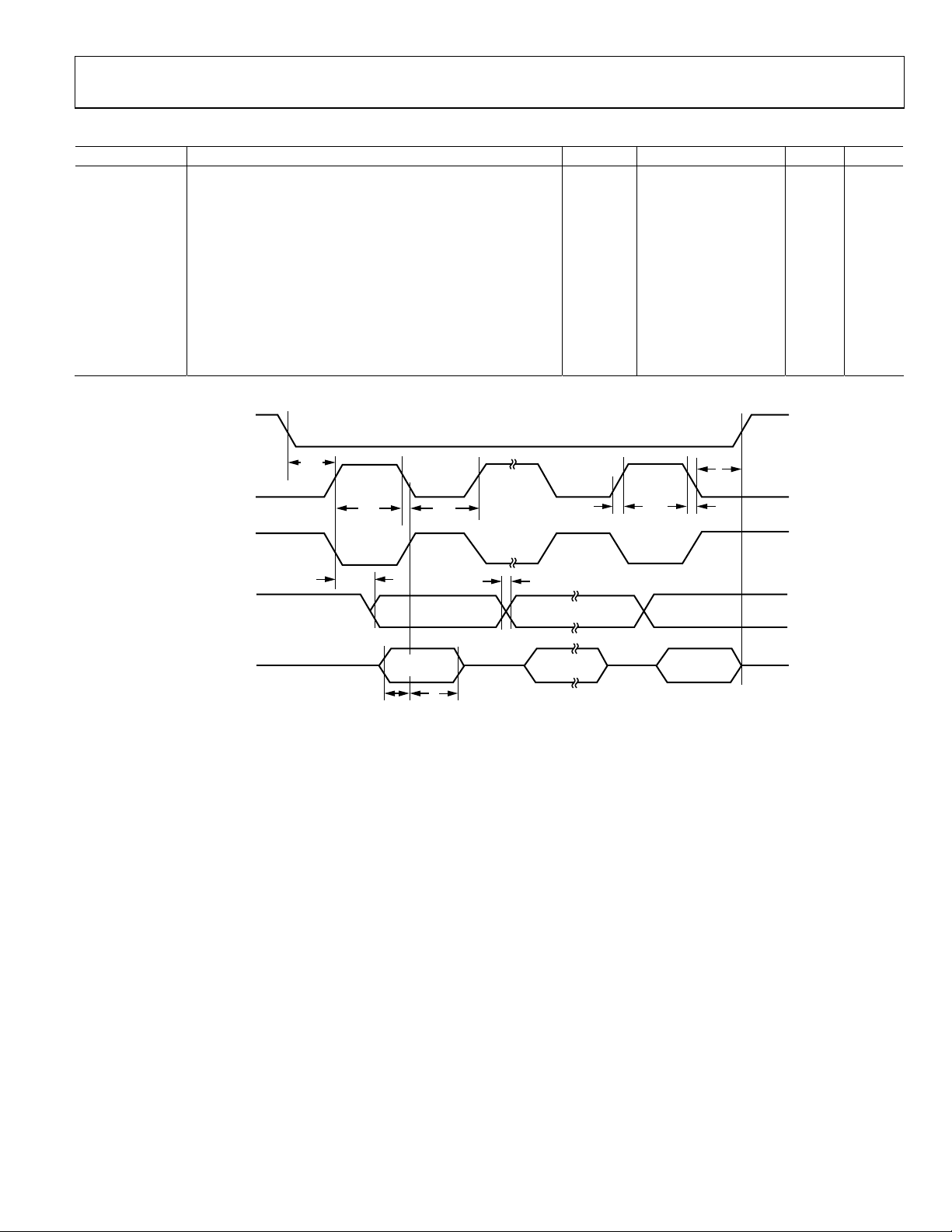
Table 3 : SPI Master Mode Timing (PHASE Mode = 0)
Parameter Description Min Typ Max Unit
tSL SCLOCK low pulsewidth (SPIDIV + 1) × t
tSH SCLOCK high pulsewidth (SPIDIV + 1) × t
t
Data output valid after SCLOCK edge ns
DAV
t
Data output setup before SCLOCK edge ns
DOSU
t
Data input setup time before SCLOCK edge ns
DSU
t
Data input hold time after SCLOCK edge ns
DHD
tDF Data output fall time ns
tDR Data output rise time ns
tSR SCLOCK rise time ns
tSF SCLOCK fall time ns
SCLOCK
(POLARITY = 0)
SCLOCK
(POLARITY = 1)
t
DOSU
t
SH
t
t
SL
t
DAV
DF
t
DR
t
SR
t
SF
ns
HCLK
ns
HCLK
MOSI
MISO
MSB IN BITS 6 – 1 LSB IN
t
DSUtDHD
Figure 3. SPI Master Mode Timing (PHASE Mode = 0)
LSBBITS 6 – 1MSB
5994-003
Rev. PrD | Page 16 of 128
Preliminary Technical Data ADuC7032
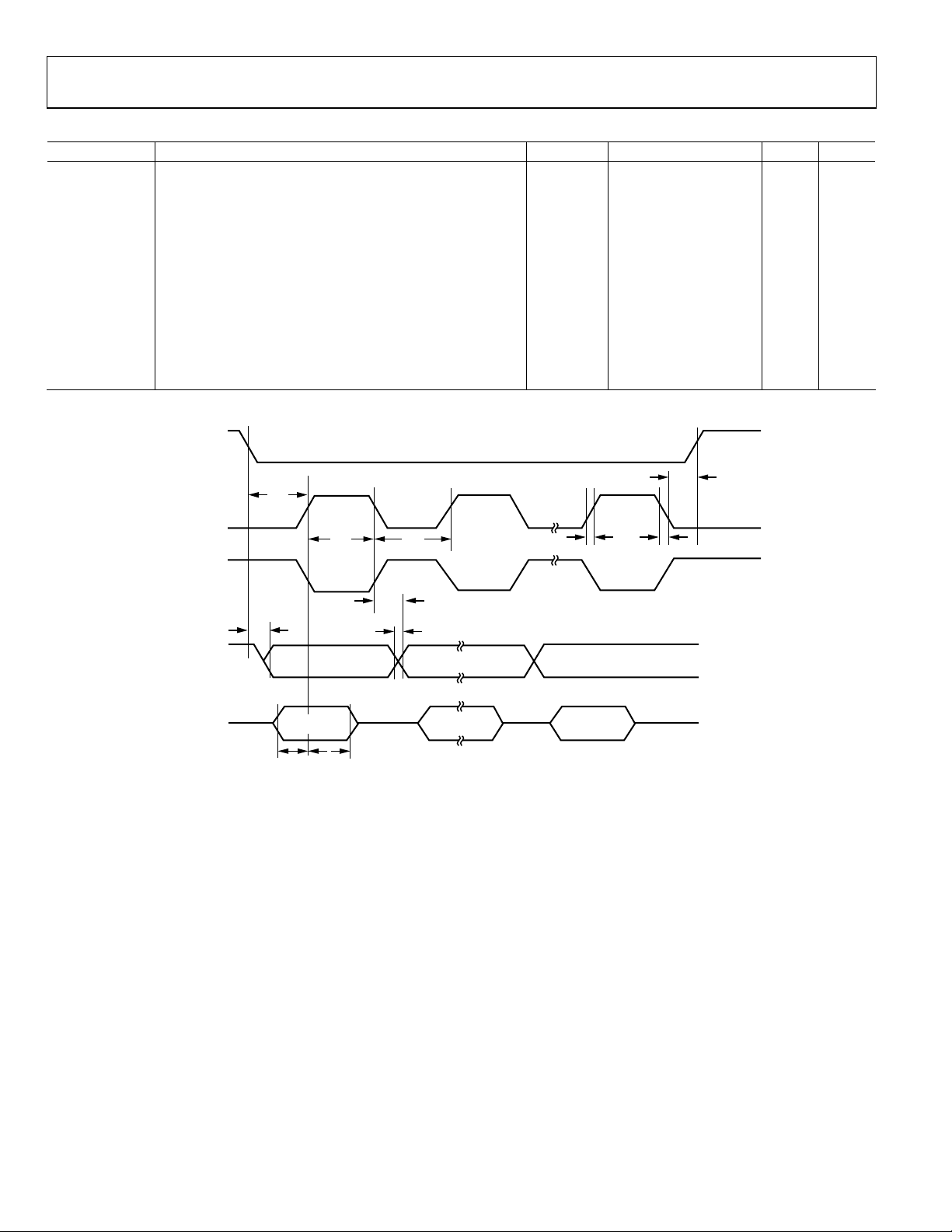
Table 4 : SPI Slave Mode Timing (PHASE Mode = 1)
Parameter Description Min Typ Max Unit
tCS CS to SCLOCK edge ns
tSL SCLOCK low pulsewidth (SPIDIV + 1) × t
tSH SCLOCK high pulsewidth (SPIDIV + 1) × t
t
Data output valid after SCLOCK edge ns
DAV
t
Data input setup time before SCLOCK edge ns
DSU
t
Data input hold time after SCLOCK edge ns
DHD
tDF Data output fall time ns
tDR Data output rise time ns
tSR SCLOCK rise time ns
tSF SCLOCK fall time ns
t
CS high after SCLOCK edge ns
SFS
CS
ns
HCLK
ns
HCLK
SCLOCK
(POLARITY = 0)
SCLOCK
(POLARITY = 1)
MISO
MOSI
t
CS
t
SH
t
DAV
t
DSUtDHD
t
SL
t
DF
MSB IN BITS 6 – 1 LSB IN
t
DR
t
SR
t
SFS
t
SF
LSBBIT S 6 – 1MSB
05994-004
Figure 4. SPI Slave Mode Timing (PHASE Mode = 1)
Rev. PrD | Page 17 of 128
Preliminary Technical Data ADuC7032
Table 5 : SPI Slave Mode Timing (PHASE Mode = 0)
Parameter Description Min Typ Max Unit
tCS CS to SCLOCK edge ns
tSL SCLOCK low pulsewidth (SPIDIV + 1) × t
tSH SCLOCK high pulsewidth (SPIDIV + 1) × t
t
Data output valid after SCLOCK edge ns
DAV
t
Data input setup time before SCLOCK edge ns
DSU
t
Data input hold time after SCLOCK edge ns
DHD
ns
HCLK
ns
HCLK
tDF Data output fall time ns
tDR Data output rise time ns
tSR SCLOCK rise time ns
tSF SCLOCK fall time ns
t
Data output valid after CS edge ns
DOCS
t
CS high after SCLOCK edge ns
SFS
CS
t
SFS
t
SF
SCLOCK
(POLARITY = 0)
SCLOCK
(POLARITY = 1)
t
DOCS
t
CS
t
SH
t
DF
t
DAV
t
SL
t
DR
t
SR
MISO
MOSI
MSB IN BITS 6 – 1 LSB IN
t
DSUtDHD
Figure 5 : SPI Slave Mode Timing (PHASE Mode = 0)
LSBBITS 6 – 1MSB
05994-005
Rev. PrD | Page 18 of 128
Preliminary Technical Data ADuC7032
LIN Timing Specifications
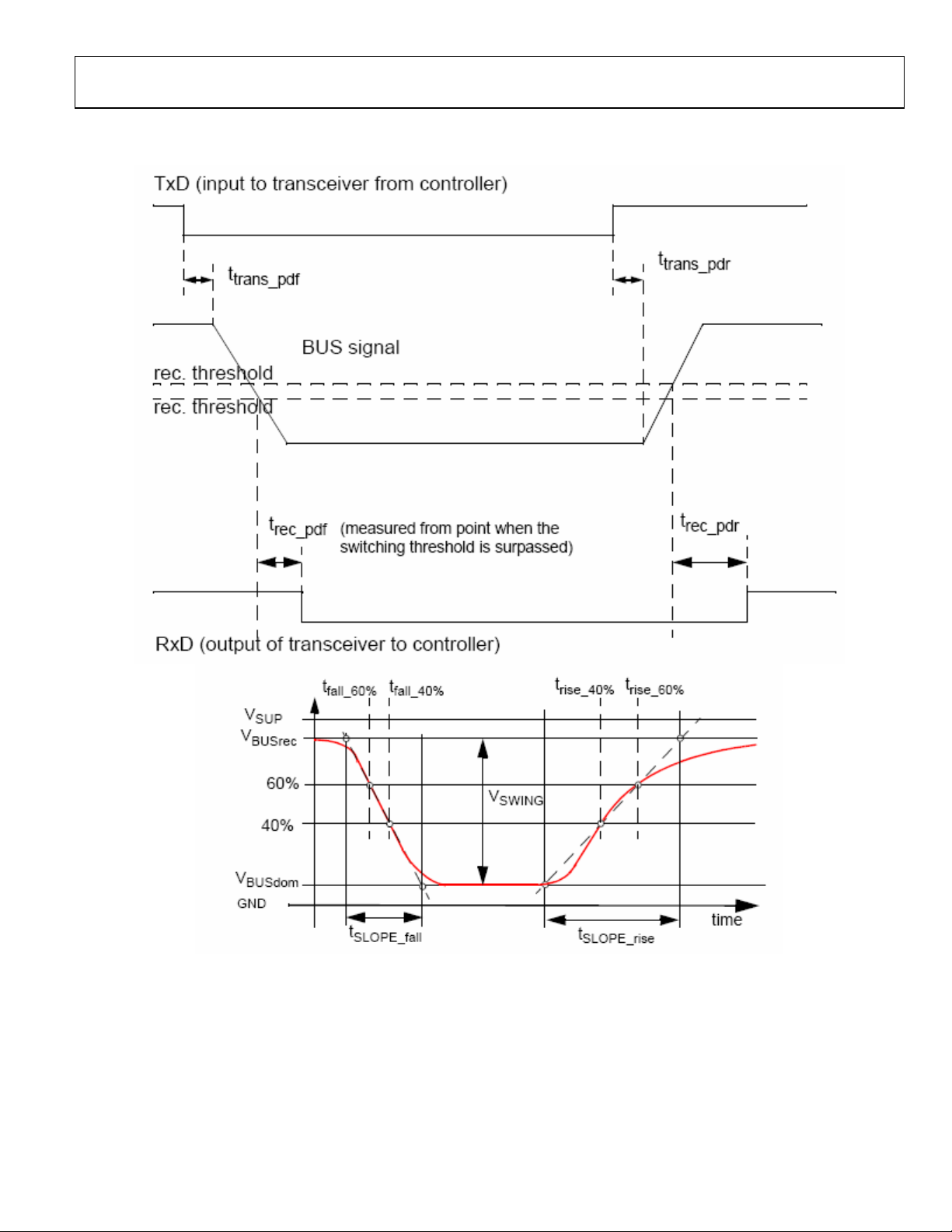
Figure 6 : LIN V1.3 Timing Specification
Rev. PrD | Page 19 of 128
Preliminary Technical Data ADuC7032
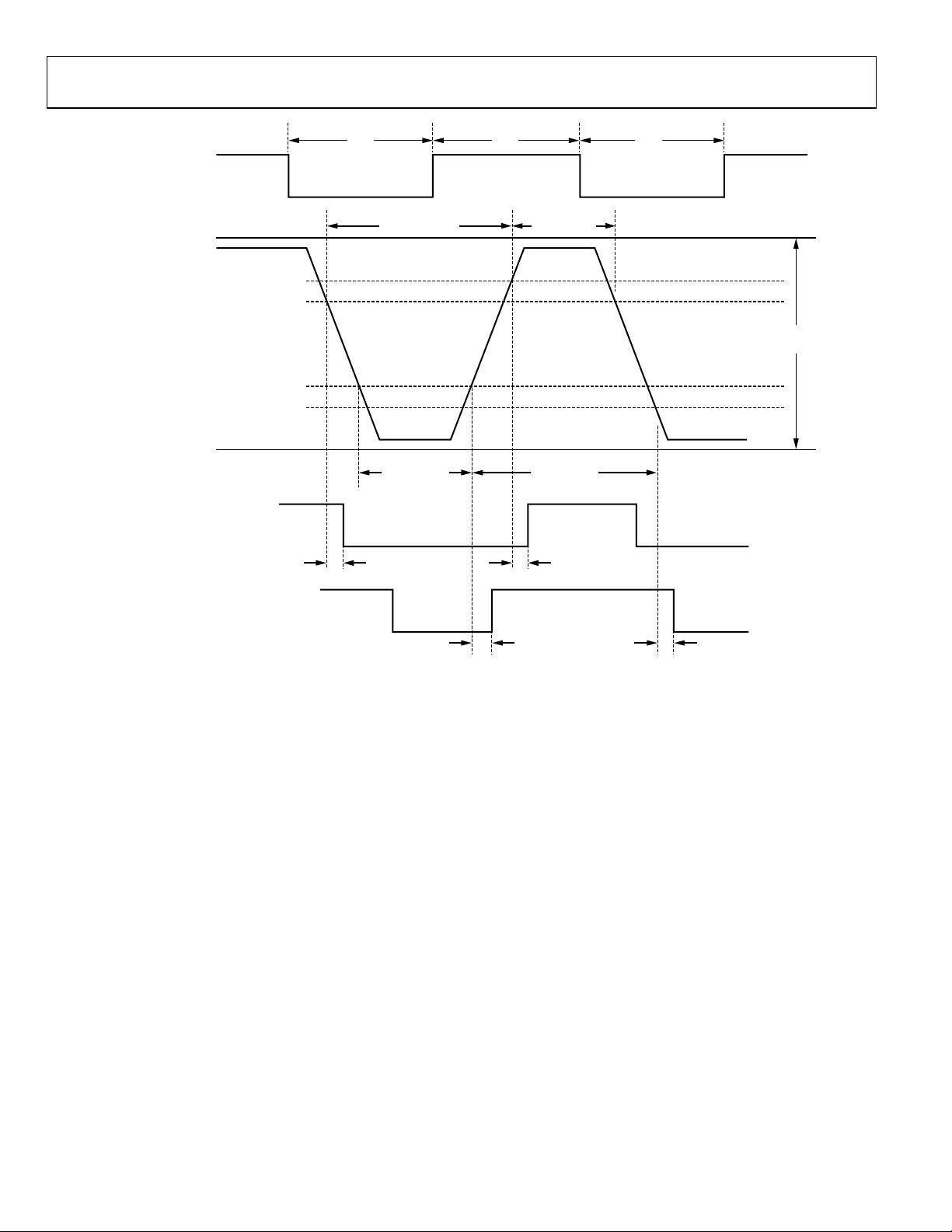
TRANSMIT
INPUT TO
TRANSMITTING
NODE
RECESSIVE
DOMINANT
t
BIT
t
BIT
t
BIT
V
(TRANSCEIVER SUPPLY
OF TRANSMITTING NODE)
SUP
RxD
(OUTPUT O F RECEIVING NO DE 1)
RxD
(OUTPUT O F RECEIVING NO DE 2)
TH
REC (MAX)
TH
DOM (MAX)
TH
REC (MIN)
TH
DOM (MI N)
t
LIN_DOM (M AX)
t
LIN_DO M (MIN)
t
RX_PDF
t
LIN_REC ( MIN)
t
LIN_REC ( MAX)
t
RX_PDR
Figure 7 : LIN V2.0 Timing Specification
t
RX_PDR
t
RX_PDF
THRESHOLDS OF
RECEIVING NO DE 1
THRESHOLDS OF
RECEIVING NO DE 2
LIN
BUS
05994-005
Rev. PrD | Page 20 of 128

Preliminary Technical Data ADuC7032
SPECIFICATION TERMINOLOGY
CONVERSION RATE:
The conversion rate specifies the rate at which an output result
is available from the ADC, once the ADC has settled.
The sigma-delta conversion techniques used on this part mean
that while the ADC front-end signal is over-sampled at a
relatively high sample rate, a subsequent digital filter is
employed to decimate the output to give a valid 16-Bit data
conversion result at output rates from 1Hz to 8 KHz.
It should also be noted that when software switches from one
input to another (on the same ADC), the digital filter must first
be cleared and then allowed to average a new result. Depending
on the configuration of the ADC and the type of filter this can
take multiple conversion cycles.
INTEGRAL NON_LINEARITY (INL):
This is the maximum deviation of any code from a straight line
passing through the endpoints of the transfer function. The
endpoints of the transfer function are zero scale, a point 0.5
LSB below the first code transition and full scale, a point 0.5
LSB above the last code transition (111 . . . 110 to 111 . . . 111).
The error is expressed as a percentage of full scale.
NO MISSING CODES:
This is a measure of the Differential Non-Linearity of the ADC.
The error is expressed in bits and specifies the number of codes
(ADC results) as 2^N Bits, where is N = No Missing Codes,
guaranteed to occur through the full ADC input range.
Acronyms used in this Datasheet:
ADC Analog to Digital Converter
ARM Advanced RISC Machine
JTAG Joint Test Action Group
LIN Local Interconnect Network
LSB Least Significant Byte/Bit
LVF Low Voltage Flag
MCU MicroController
MMR Memory Mapped Register
MSB Most Significant Byte/Bit
PID Protected Identifier
POR Power On Reset
PSM Power Supply Monitor
RMS Root Mean Square
OFFSET ERROR:
This is the deviation of the first code transition ADC input
voltage from the ideal first code transition.
OFFSET ERROR DRIFT:
Offset Error Drift is the variation in absolute offset error with
respect to temperature. This error is expressed as LSBs per °C.
GAIN ERROR
This is a measure of the span error of the ADC. It is a measure
of the difference between the measured and the ideal span
between any two points in the transfer function.
OUTPUT NOISE:
The output noise is specified as the standard deviation (or 1 X
Sigma) of ADC output codes distribution collected when the
ADC input voltage is at a dc voltage. It is expressed as µ rms.
The output or RMS noise can be used to calculate the Effective
Resolution of the ADC as defined by the following equation
Effective Resolution= Log 2 (Full-Scale Range / RMS Noise) Bits
The peak-to-peak noise is defined as the deviation of codes that
fall within 6.6 X Sigma of the distribution of ADC output codes
collected when the ADC input voltage is at dc. The peak-topeak noise is therefore calculated as 6.6 times the RMS noise.
The peak-to-peak noise can be used to calculate the ADC
(Noise Free, Code) Resolution for which there will be no code
flicker within a 6.6-Sigma limit as defined by the following
equation
Noise Free Code Resolution = Log
Peak Noise) Bits
(Full-Scale Range / Peak to
2
Rev. PrD | Page 21 of 128
Preliminary Technical Data ADuC7032
ABSOLUTE MAXIMUM RATINGS
Table 6. Absolute Maximum Ratings (TA = -40°C to 105°C unless otherwise noted)
Parameter Rating
AGND to DGND to VSS to IO_VSS -0.3V to +0.3V
VBAT to AGND -22V to 40V
VDD to VSS
to VSS for 1 second
V
DD
-0.3V to 33V
-0.3V to 40V
LIN to IO_VSS -16V to 40V
WU to IO_VSS
Wake Continuous Current
HV IO Pins Short Circuit Current
-3V to 33V
50mA
100mA
Digital I/O Voltage to DGND -0.3V to REG_DVDD +0.3
VREF to AGND -0.3V to REG_AV
DD
+ 0.3
ADC Inputs to AGND -0.3V to REG_AVDD +0.3
ESD (HBM) Rating
LIN, WU and VBAT
± 4KV
All other pins ± 2KV
Storage Temperature Range 125°C
Junction Temperature (transient) 150°C
Junction Temperature (continuous) 130°C
Lead Temperature, Soldering
Reflow (15 sec) 260°C
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those listed in the operational sections
of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
1
2
3
4
5
6
7
8
9
10
11
12
13 14 15 16 17 18 19 20 21 22 23 24
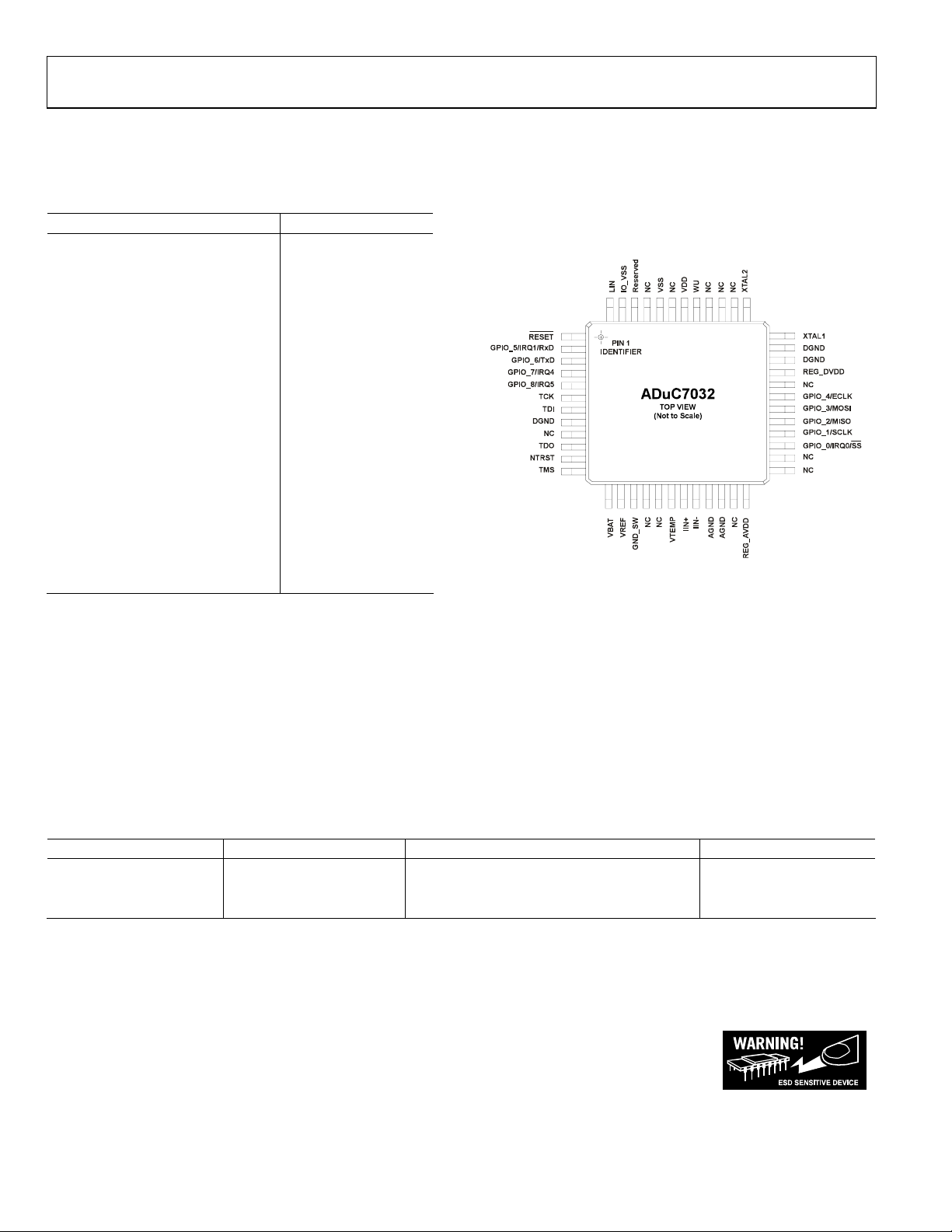
Figure 8 : Package Pin Configuration
3740 39 384142434445464748
36
35
34
33
32
31
30
29
28
27
26
25
ORDERING GUIDE
Model Temperature Range Package Description Package Option
ESD Caution
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on the
human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high-energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Rev. PrD | Page 22 of 128
Preliminary Technical Data ADuC7032
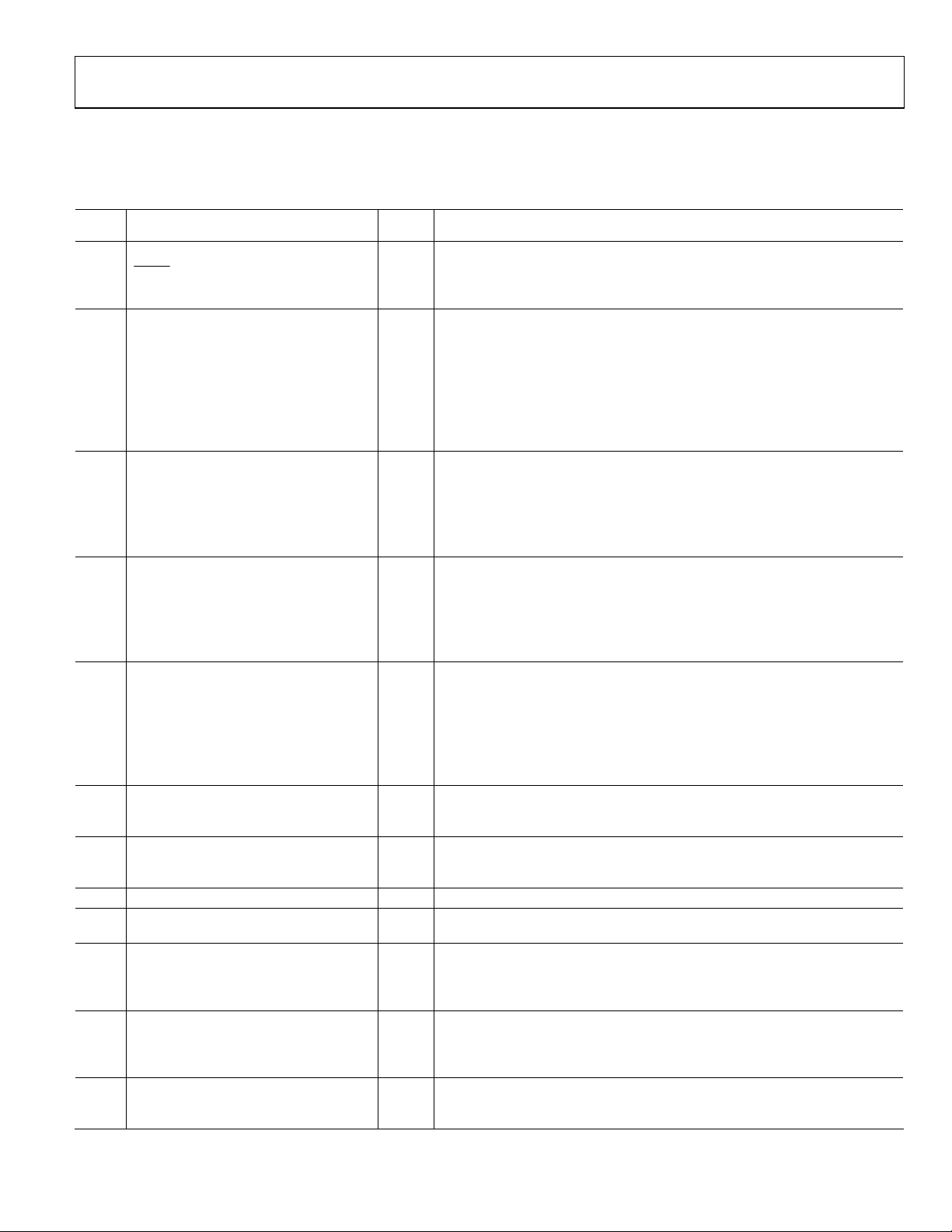
PIN FUNCTION DESCRIPTIONS
Table 7: Pin Function Descriptions
Pin# Mnemonic Type* Function
Reset Input Pin, Active Low. This pin has an internal, weak pull-up resistor to
RESET
1
2 GPIO_5/IRQ1/RxD I/O
3 GPIO_6/TxD I/O
4 GPIO_7/IRQ4 I/O
5 GPIO_8/ IRQ5 I/O
6 TCK I
7 TDI I
8 DGND S Ground Reference for On-Chip Digital Circuits
9 NC
10 TDO O
11 NTRST I
12 TMS I
REG_DVDD. If this pin is not being used it can be left not connected. For
I
added security and robustness, it is recommended that this pin be strapped
via a resistor to REG_DVDD.
General Purpose Digital I/O 5 is a Multi-Function Pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 3 states, namely:
General Purpose Digital I/O 5
External Interrupt Request 1, Active High
Receive Data for UART Serial Port
This Pin may also be used as a clock input to Timer1.
General Purpose Digital I/O 6 is a Multi-Function Pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 2 states, namely:
General Purpose Digital I/O 6
Transmit Data for UART Serial Port
General Purpose Digital I/O 7 is a multi-function pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 2 states, namely:
General Purpose Digital I/O 7
External Interrupt Request 4, Active High
General Purpose Digital I/O 8 is a multi-function pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 2 states, namely:
General Purpose Digital I/O 8
External Interrupt Request 5, Active High
This Pin may also be used as a clock input to Timer1.
JTAG Test Clock. This clock input pin is one of the standard 5 pin JTAG debug
port on the part. TCK is an input pin only and has an internal weak pull-up
resistor. If not being used this pin can be left unconnected
JTAG Test Data Input. This data input pin is one of the standard 5 pin JTAG
debug port on the part. TDI is an input pin only and has an internal weak pullup resistor. If not being used this pin can be left unconnected
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
JTAG Test Data Output. This data output pin is one of the standard 5 pin JTAG
debug port on the part. TDO is an output pin only. On power-on this output is
disabled and pulled high via an internal weak pull-up resistor. If not being
used this pin can be left unconnected
JTAG Test Reset. This Reset input pin is one of the standard 5 pin JTAG debug
port on the part. NTRST is an input pin only and has an internal weak pulldown resistor. If not being used this pin can be left unconnected. NTRST is
also monitored by the on-chip kernel to enable LIN boot-load mode.
JTAG Test Mode Select. This Mode Select input pin is one of the standard 5
pin JTAG debug port on the part. TMS is an input pin only and has an internal
weak pull-up resistor. If not being used this pin can be left unconnected
Rev. PrD | Page 23 of 128
Preliminary Technical Data ADuC7032
Pin# Mnemonic Type* Function
13 VBAT I Battery Voltage Input to resistor divider
14 VREF I
15 GND_SW S
16 NC
17 NC
18 VTEMP
19 IIN+ I Positive Differential Input for Current Channel
20 IIN- I Negative Differential Input for Current Channel
21 AGND S Ground Reference for On-Chip Precision Analog Circuits
22 AGND S Ground Reference for On-Chip Precision Analog Circuits
23 NC
24 REG_AVDD S Nominal 2.6V output from on chip regulator
25 NC
26 NC
27
28 GPIO_1/SCLK I/O
29 GPIO_2/MIS0 I/O
30 GPIO_3/MOSI I/O
31 GPIO_4/ECLK I/O
32 NC
GPIO_0/IRQ0/SS
External Reference Input Terminal. If this input is not being used it should be
connected directly to the AGND system ground
Switch to internal analog ground reference.
Negative input for external temperature channel and external reference
If this input is not being used it should be connected directly to the AGND
system ground.
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
I External Pin for NTC/PTC temperature measurement
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
General Purpose Digital I/O 0 is a Multi-Function Pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 3 states, namely:
I/O
General Purpose Digital I/O 0
External Interrupt Request 0, Active High
SPI Interface, Slave Select Input
General Purpose Digital I/O 1 is a Multi-Function Pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 2 states, namely:
General Purpose Digital I/O 1
SPI Interface, Serial Clock Input
General Purpose Digital I/O 2 is a Multi-Function Pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 2 states, namely:
General Purpose Digital I/O 2
SPI Interface, Master Input/Slave Output Pin
General Purpose Digital I/O 3 is a Multi-Function Pin. By default and after
Power-On-Reset, this pin is configured as an input. The pin has an internal
weak pull-up resistor and if not being used it can be left unconnected. This
multi-function pin can be configured in one of 2 states, namely:
General Purpose Digital I/O 3
SPI Interface, Master Output/Slave Input Pin
General Purpose Digital I/O 4 is a programmable digital I/O pin. By default and
after Power-On-Reset, this pin is configured as an input. The pin has an
internal weak pull-up resistor and if not being used this pin can be left
unconnected.
GPIO4 is can also be configured to output a 2.56MHz clock
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
Rev. PrD | Page 24 of 128
Preliminary Technical Data ADuC7032
Pin# Mnemonic Type* Function
33 REG_DVDD S Nominal 2.6V output from the on-chip regulator
34 DGND S Ground Reference for On-Chip Digital Circuits
35 DGND S Ground Reference for On-Chip Digital Circuits
36 XTAL1 O
37 XTAL2 I
38 NC
39 NC
40 NC
41 WU O
42 VDD S Battery Power Supply to on-chip regulator
43 NC
44 VSS S Ground Reference for the internal Voltage Regulators
45 NC
46 Reserved
47 IO_VSS S Ground Reference for High Voltage I/O Pins
48 LIN I/O LIN Serial Interface Input/Output Pin
*
I = Input, O = Output, S = Supply
No Connect ( NC ) pins may be grounded if required.
Crystal Oscillator Output. If an external Crystal is not being used, this pin can
be left unconnected.
Crystal Oscillator Input. If an external Crystal is not being used, this pin should
be connected to the DGND system ground.
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
High Voltage Wake-Up Transmit pin. If this pin is not being used, it should not
be connected externally.
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
No Connect, this pin is not connected internally but is reserved for possible
future use, this pin should therefore not be connected externally
This pin is reserved for HV-IO Output only functionality. This pin should
connected externally to the IO_VSS ground reference
Rev. PrD | Page 25 of 128

Preliminary Technical Data ADuC7032
ADUC7032 GENERAL DESCRIPTION
The ADuC7032 is a complete, system solution for battery
monitoring in 12V automotive applications. The device
integrates all of the required features to precisely and
intelligently monitor, process and diagnose 12V battery
parameters including battery current, voltage and temperature
over a wide range of operating conditions.
Minimizing external system components, the device is powered
directly from the 12V battery. An on-chip LDO, Low DropOut, regulator generates the supply voltage for the three
integrated 16-Bit Σ−∆ ADCs. The ADCs precisely measure
battery current, voltage and temperature, which may be used to
characterize the car battery’s state of health and charge.
A Flash/EE memory based ARM7 microcontroller (MCU) is
also integrated on-chip and is used both to pre-process the
acquired battery variables, and to manage communications
from the ADuC7032 to the main Electronic Control Unit
(ECU) via a Local Interconnect Network (LIN) interface, which
is integrated on-chip.
Both the MCU and the ADC sub-system can be individually
configured to operate in normal or flexible power-saving
modes of operation.
In its normal operating mode the MCU is clocked indirectly
from an on-chip oscillator via the Phase Locked Loop (PLL) at
a maximum clock rate of 20.48MHz.
In its power-saving operating modes, the MCU can be totally
powered down, waking up only in response to an ADC
conversion result ready, digital comparators, the wake-up
timer, a POR or an external serial communication event.
The ADC can be configured to operate in a normal (full power)
mode of operation, interrupting the MCU after various sample
conversion events. The Current Channel features two low
power modes, Low Power and Low Power-Plus, generating
conversion results to a lower performance specification.
On-chip factory firmware supports in-circuit Flash/EE
reprogramming via the LIN or JTAG serial interface ports while
non-intrusive emulation is also supported via the JTAG
interface. These features are incorporated into a low-cost
QuickStart Development System supporting the ADuC7032.
The ADuC7032 operates directly from the 12V battery supply
and is fully specified over a temperature range of -40°C to
105°C. The ADuC7032 is functional, with degraded
performance, at temperatures from 105°C to 125°C.
OVERVIEW OF THE ARM7TDMI CORE
The ARM7 core is a 32-bit Reduced Instruction Set Computer
(RISC), developed by ARM Ltd. The ARM7TDMI is a Von
Neumann based architecture, which means that it uses a single
32-bit bus for instruction and data. The length of the data can
be 8, 16 or 32 bits and the length of the instruction word is
either 16 bits or 32 bits, depending on which mode the core is
operating in.
The ARM7TDMI is an ARM7 core with 4 additional features:
- T support for the Thumb (16 bit) instruction set.
- D support for debug
- M enhanced multiplier
- I includes the EmbeddedICE module to support
embedded system debugging.
Thumb mode (T)
An ARM instruction is 32-bits long. The ARM7TDMI
processor supports a second instruction set that has been
compressed into 16-bits, the Thumb instruction set. Faster code
execution from 16-bit memory and greater code density can be
achieved by using the Thumb instruction set, which makes the
ARM7TDMI core particularly suited for embedded
applications.
However the Thumb mode has three limitations:
- Relative to ARM, Thumb code usually requires more
instructions to perform that same task. Therefore, ARM code
is best for maximizing the performance of time-critical code.
In most applications.
- The Thumb instruction set does not include some
instructions which are needed for exception handling, so
ARM code may be required for exception handling.
- When an interrupt occurs, the core vectors to the interrupt
location in memory and executes the code present at this
address. The first command is required to be in ARM code.
Multiplier (M)
The ARM7TDMI instruction set includes an enhanced
multiplier, with four extra instructions which perform 32-bit by
32-bit multiplication with 64-bit result and 32-bit by 32-bit
multiplication-accumulation (MAC) with 64-bit result.
Rev. PrD | Page 26 of 128
Preliminary Technical Data ADuC7032
EmbeddedICE (I)
ARM Registers
The EmbeddedICE module provides integrated on-chip debug
support for the ARM7TDMI. The EmbeddedICE module
contains the breakpoint and watchpoint registers which allow
non intrusive user code debugging. These registers are
controlled through the JTAG test port.
When a breakpoint or watchpoint is encountered, the processor
halts and enters debug state. Once in a debug state, the
processor registers may be interrogated, as well as the Flash/EE,
the SRAM and the Memory Mapped Registers.
ARM7 Exceptions
The ARM7 supports five types of exceptions, with a privileged
processing mode associated with each type. The five types of
exceptions are:
- Normal interrupt or IRQ. It is provided to service general-
purpose interrupt handling of internal and external events
- Fast interrupt or FIQ. It is provided to service data transfer or
communication channel with low latency. FIQ has priority
over IRQ
- Memory abort (Prefetch and Data)
- Attempted execution of an undefined instruction
- Software interrupt (SWI) instruction which can be used to
make a call to an operating system.
Typically the programmer will define interrupts as IRQ but for
higher priority interrupts, the programmer can define
interrupts as of type FIQ.
The priority of the above exceptions and vector address are as
follows:
1. Hardware Reset 0x00
2. Memory Abort ( Data ) 0x10
3. FIQ 0x1C
4. IRQ 0x18
5. Memory Abort ( Prefetch ) 0x0C
6. Software Interrupt and 0x08
Undefined Instruction 0x04
A Software interrupt and an Undefined Instruction
Note:
exception have the same priority and are mutually exclusive.
NOTE:
The above list are located from 0x00 -0x1C, with a
reserved location at 0x14. This location is required to be written
with either 0x27011970 or the checksum of Page Zero,
excluding location 0x14. If this is not done, user code will not
be executed and LIN download mode will be entered. For more
information please refer to the ADuC7032 LIN download
Te ch n o te .
The ARM7TDMI has 16 standard registers. R0-R12 are used for
data manipulation, R13 is the stack pointer, R14 is the link
register and R15 is the program counter which indicates the
instruction currently being executed. The link register contains
the address from which the user has branched, if the branch and
link command was used, or the command during which an
exception occurred.
The stack pointer contains the current location of the stack. As
a general rule of thumb on an ARM7TDMI, the stack starts at
the top of the available RAM area, and descends, using the area
as required. A separate stack is defined for each of the
exceptions. The size of each stack is user configurable and is
dependent on the target application. On the ADuC7032 the
stack begins at 0x000417FC and descends.
Whilst programming using high level languages, such as C, it
may be possible to ensure that the stack does not overflow. This
is dependent on the compiler used.
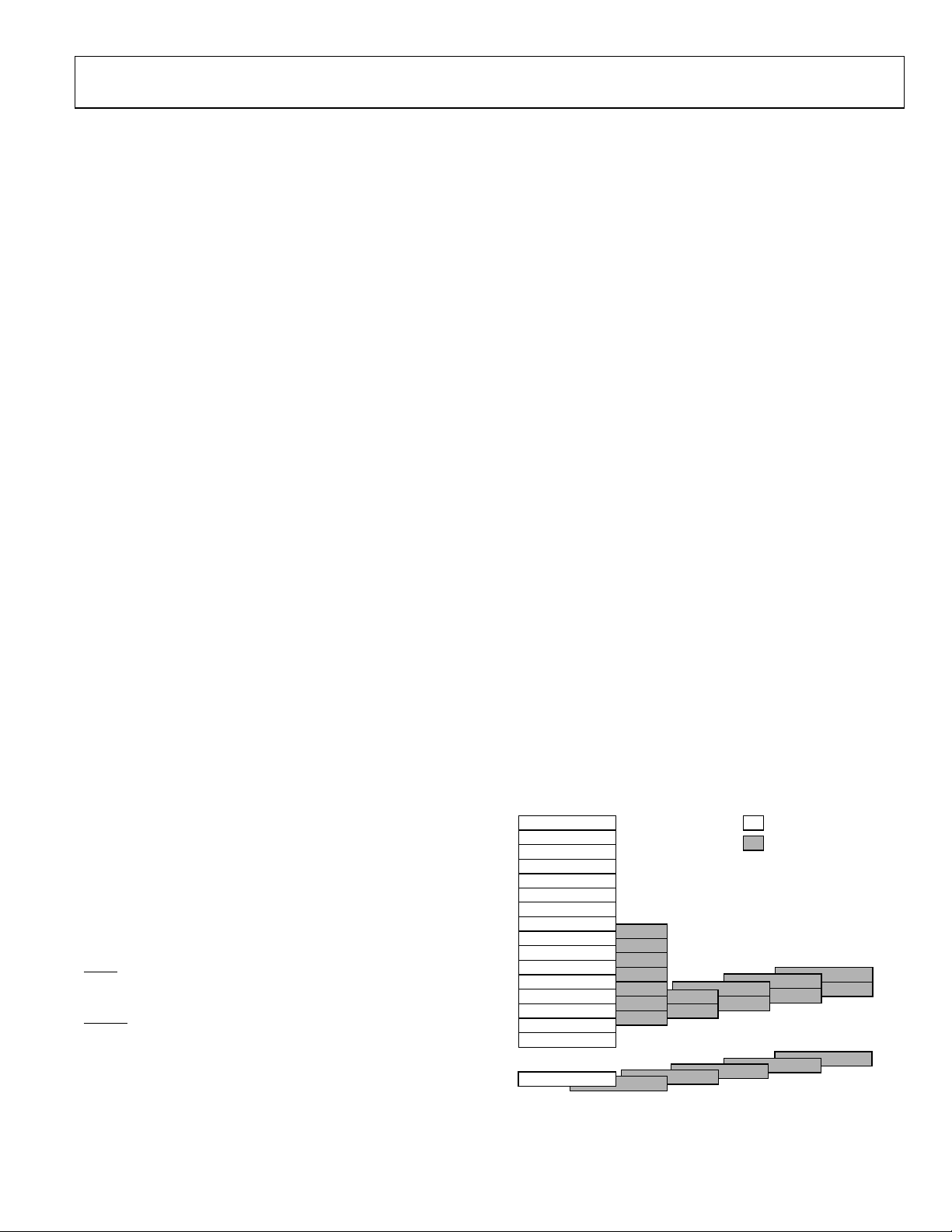
When an exception occurs, some of the standard register are
replaced with registers specific to the exception mode. All
exception modes have replacement banked registers for the
stack pointer (R13) and the link register (R14) as represented in
Figure 9. The FIQ mode has more registers (R8 to R12)
supporting faster interrupt processing. With the increased
number of non-critical registers, the interrupt may be
processed without the need to save or restore these registers,
which reduces the response time of the interrupt handling
process.
More information relative to the programmer’s model and the
ARM7TDMI core architecture can be found in the following
documents available from ARM Ltd.:
- DDI0029G, ARM7TDMI Technical Reference Manual.
- DDI0100E, ARM Architecture Reference Manual..
USABLE IN USE R MODE
SYSTEM MODES ONLY
R13_ABT
R14_ABT
ABORT
MODE
R13_IRQ
R14_IRQ
SPSR_IRQ
IRQ
MODE
R13_UND
R14_UND
SPSR_UND
UNDEFINED
MODE
05994-008
R15 (PC)
CPSR
USER MODE
R0
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R13
R14
R8_FIQ
R9_FIQ
R10_FIQ
R11_FIQ
R12_FIQ
R13_FIQ
R14_FIQ
SPSR_FIQ
Figure 9: ADuC7032 Register Organization
FIQ
MODE
R13_SVC
R14_SVC
SPSR_SVC
SVC
MODE
SPSR_ABT
Rev. PrD | Page 27 of 128
Preliminary Technical Data ADuC7032
Interrupt latency
The worst case latency for an FIQ consists of the longest time
the request can take to pass through the synchronizer, plus the
time for the longest instruction to complete (the longest
instruction is an LDM) which loads all the registers including
the PC, plus the time for the data abort entry, plus the time for
FIQ entry. At the end of this time, the ARM7TDMI will be
executing the instruction at 0x1C (FIQ interrupt vector
address). The maximum total time is 50 processor cycles, which
is just over 2.44µS in a system using a continuous 20.48MHz
processor clock. The maximum IRQ latency calculation is
similar, but must allow for the fact that FIQ has higher priority
and could delay entry into the IRQ handling routine for an
arbitrary length of time. This time may be reduced to 42 cycles
if the LDM command is not used, some compilers have an
option to compile without using this command. Another option
is to run the part in THUMB mode where this is reduced to 22
cycles.
The minimum latency for FIQ or IRQ interrupts is five cycles.
This consists of the shortest time the request can take through
the synchronizer plus the time to enter the exception mode.
st
Note that the ARM7TDMI will initially (1
instruction) run in
ARM (32-bit) mode when an exception occurs. The user may
immediately switch from ARM mode to Thumb mode if
required, e.g. when executing interrupt service routines.
MEMORY ORGANISATION
The ARM7, a Von Neumann architecture, MCU core sees
memory as a linear array of 232 byte locations. As shown in
Figure 11, the ADuC7032 maps this into 4 distinct user areas
namely, a re-mappable memory area, an SRAM area, a Flash/EE
area and a Memory Mapped Register (MMR) area.
The first 96kBytes of this memory space is used as an area into
which the on-chip Flash/EE or SRAM can be remapped. A
second 4kByte area at the top of the memory map is used to
locate the Memory Mapped Registers (MMR), through which
all on-chip peripherals are configured and monitored. The
remaining 2 areas of memory are constituted as 6kByte of
SRAM and 96kByte of On-Chip Flash/EE memory. 94kByte of
On-Chip Flash/EE memory are available to the user, and the
remaining 2kBytes are reserved for the on-chip Kernel. These
areas are described in more detail below.
Memory Format
The ADuC7032 memory organization is configured in little
endian format: the least significant byte is located in the lowest
byte address and the most significant byte in the highest byte
address.
BIT 31
BYTE 3
.
.
.
B
7
3
BYTE 2
BYTE 1
.
.
.
.
.
.
A
9
6
5
2
1
32 BITS
Figure 10: Little Endian Format
BYTE 0
.
.
.
8
4
0
BIT 0
0xFFFFFFFFh
0x00000004h
0x00000000h
5994-009
RESERVED
FFFF 0000h
FFFF0FFFh
00097FFFh
00080000h
00417FFh
00040000h
0017FFFh
00000000h
Figure 11: ADuC7032 Memory Map
MMRs
RESERVED
FLASH/EE
RESERVED
SRAM
RESERVED
RE-MAPP ABLE MEMORY SPACE
(FLASH/EE OR SRAM)
5994-011
SRAM
6kBytes of SRAM are available to the user, organized as 1536 X
32 bits, i.e. 1536Words, which is located at 0x40000. The RAM
space can be used as data memory and also as a volatile
program space.
ARM code can run directly from SRAM at full clock speed
given that the SRAM array is configured as a 32-bit wide
memory array.
SRAM is read/writeable in 8/16/32 bit segments.
Any access, either reading or writing, to an area not defined in
the memory map will result in a Data Abort exception.
Rev. PrD | Page 28 of 128
Preliminary Technical Data ADuC7032
code. This so called kernel is hidden and cannot be accessed by
Remap
The ARM exception vectors are all situated at the bottom of the
memory array, from address 0x00000000 to address
0x00000020.
By default, after a reset, the Flash/EE memory is logically
mapped to address 0x00000000.
It is possible to logically REMAP the SRAM to address
0x00000000. This is done by a setting bit zero of the SYSMAP0
MMR, which is located at 0xFFFF0220. To revert Flash/EE to
0x00000000, bit zero of SYSMAP0 is cleared.
It may be desirable to remap RAM to 0x00000000 to optimize
the interrupt latency of the ADuC7032, as code may be run in
full 32bit ARM mode and at the maximum core speed. It should
be noted that when an exception occurs, the core will default to
ARM mode.
Remap operation
When a reset occurs on the ADuC7032, execution starts
automatically in the factory programmed internal configuration
user code. If the ADuC7032 is in normal mode, it will execute
the power-on configuration routine of the kernel and then jump
to the reset vector address, 0x00000000, to execute the users
reset exception routine.
Because the Flash/EE is mirrored at the bottom of the memory
array at reset, the reset routine must always be written in
Flash/EE.
Precaution must be taken to execute the REMAP command
from the absolute Flash/EE address, and not from the mirrored,
remapped segment of memory, as this will be replaced by the
SRAM. If a remap operation is executed whilst operating code
from the mirrored location, Prefetch/Data aborts may occur or
the user may observe abnormal program operation.
This operation is reversible: the Flash/EE memory may be
remapped at address 0x00000000 by clearing bit zero of the
SYSMAP0 MMR. Precaution must again be taken to execute the
remap function from outside the mirrored area.
Any kind of reset will logically remap the Flash/EE memory to
the bottom of the memory array.
SYSMAP0 Register :
Name : SYSMAP0
Address : 0xFFFF0220
Default Value : 0x00
Access : Read/Write Access
Function : This 8-bit register allows user code to remap either RAM or Flash/EE memory space into the bottom of the ARM
memory space starting at location 0x00000000.
Table 8: SYSMAP0 MMR Bit Designations
Bit Description
7-1 Reserved
These bits are reserved and should be written as 0 by user code
0
Remap Bit.
Set by the user to remap the SRAM to 0x00000000.
Cleared automatically after reset to remap the Flash/EE memory to 0x00000000.
Rev. PrD | Page 29 of 128
Preliminary Technical Data ADuC7032
ADUC7032 RESET
There are four kinds of reset: external reset, Power-on-reset,
watchdog reset and software reset. The RSTSTA register
indicates the source of the last reset and can also be written by
user code to initiate a software reset event. The bits in this
register can be cleared to ‘0’ by writing to the RSTCLR MMR at
Table 9 : Device RESET Implications
0xFFFF0234. The bit designations in RSTCLR mirror those of
RSTSTA. These registers can be used during a reset exception
service routine to identify the source of the reset. The
implications of all four kinds of reset event are tabulated in
Table 9 b e low.
IMPACT
RESET
POR
Watchdog
Reset
Software Reset
External Reset
Pin
Note1: If LVF is enabled(HVCFG0[2]), RAM has not been corrupt by the POR reset mechanism if LVF Status bit HVSTA[6] is ‘1’.
Reset
External
Pins to
Default
State
Kernel
Executed
Reset All
External MMRs
(excluding
RSTSTA)
RSTCLR Register :
Name : RSTCLR
Address : 0xFFFF0234
Default Value : 0x00
Access : Write Only
Function : This 8-bit write only register clears the
corresponding bit in RSTSTA.
Reset All
HV
Indirect
Registers
Peripherals
Reset
RAM
Valid
Note 1 RSTSTA[0] =1
RSTSTA
(Status after
Reset Event)
RSTSTA[1] =1
RSTSTA[2] =1
RSTSTA[3] =1
RSTSTA Register :
Name : RSTSTA
Address : 0xFFFF0230
Default Value : 0x01
Access : Read/Write Access
Function : This 8-bit register indicates the source of
the last reset event and can also be written
by user code to initiate a software reset.
Table 10: RSTSTA/RSTCLR MMR Bit Designations
Bit Description
7-4 Not Used
These bits are not used and will always read as ‘0’
3
External Reset
Set to 1 automatically when an external reset occurs
Cleared by setting the corresponding bit in RSTCLR
2
Software Reset
Set to ‘1’ by user code to generate a software reset.
Cleared by setting the corresponding bit in RSTCLR
1
Watchdog timeout
Set to 1 automatically when a watchdog timeout occurs
Cleared by setting the corresponding bit in RSTCLR
0
Power-on-reset
Set automatically when a power-on-reset occurs
Cleared by setting the corresponding bit in RSTCLR
Rev. PrD | Page 30 of 128

Preliminary Technical Data ADuC7032
FLASH/EE MEMORY AND THE ADUC7032
The ADuC7032 incorporates Flash/EE memory technology onchip to provide the user with non-volatile, in-circuit
reprogrammable memory space.
Like EEPROM, Flash memory can be programmed in-system at
a byte level, although it must first be erased, the erase being
performed in page blocks. Thus, Flash memory is often and
more correctly referred to as Flash/EE memory.
Overall, Flash/EE memory represents a step closer to the ideal
memory device that includes non-volatility, in-circuit
programmability, high density, and low cost. Incorporated in
the ADuC7032 Flash/EE memory technology allows the user to
update program code space in-circuit, without the need to
replace one time programmable (OTP) devices at remote
operating nodes.
Flash/EE Memory
The total 96kBytes of Flash/EE memory are organized as 48k X
16 bits. 94kBytes are user space and 2kBytes are reserved for
boot loader/kernel space. The page size of this Flash/EE
memory is 512Bytes. Typically, it takes the Flash/EE memory
controller 20msec to erase a page, and 50µsec to write a 16-Bit
word. These Flash/EE memory timings are independent of
MCU core clock.
battery parameter data.
It is possible to write to a single 16 bit location only twice
between erases, i.e. It is possible to walk bytes, not bits. If a
location is written to more than twice, then it is possible that
the contents of the Flash/EE page may be corrupted.
The 94kBytes of Flash/EE memory can be programmed incircuit, using a serial download mode via the LIN interface or
the integrated JTAG port.
(1) Serial Downloading (In-Circuit Programming)
The ADuC7032 facilitates code download via the LIN pin.
(2) JTAG access
The ADuC7032 features an on-chip JTAG Debug Port to
facilitate code download and debug.
FLASH/EE MEMORY CONTROL INTERFACE
The access to and control of the Flash/EE memory on the
ADuC7032 is managed by an on-chip memory controller. The
controller manages the Flash/EE memory as two separate
blocks (0 and 1).
Block 0 consists of the 32KB Flash/EE memory mapped from
0x0009 0000 to 0x0009 7FFF (including the 2KB kernel space
which is reserved at the top of this block).
94kBytes of Flash/EE memory are available to the user as code
and non-volatile data memory. There is no distinction between
data and program, as ARM code shares the same space. The real
width of the Flash/EE memory is 16 bits, which means that in
ARM mode (32-bit instruction), two accesses to the Flash/EE
memory are necessary for each instruction fetch. When
operating at speeds less than 20.48MHz the Flash/EE memory
controller can transparently fetch the second 16-bit half word
(part of the 32-bit ARM op-code) within a single core clock
period. It is therefore recommend that for speeds less than
20.48MHz, i.e. CD > 0, that ARM mode is used. For 20.48MHz
operation, i.e. CD = 0 , it is recommended to operate in
THUMB mode.
The Flash/EE memory is physically located at 0x80000. Upon a
hard reset it is logically mapped to 0x00000000. The factory
default contents of all Flash/EE memory locations is 0xFF.
Flash/EE memory may be read in 8/16/32 bit segments, and
written in segments of 16 bits. The Flash/EE memory is rated
for 10K endurance cycles. This rating is based on the number of
times that each individual half word ( 16 bit location ) is cycled
i.e. erased and programmed. A redundancy scheme may be
implemented in software to ensure greater than 10K cycles
endurance.
The user may also write data variables to the Flash/EE memory
during run-time code execution, e.g. for storing diagnostic
Block 1 consists of the 64KB Flash/EE memory mapped from
from 0x0008 0000 to 0x0008 FFFF.
It should be noted that MCU core can continue to execute code
from one memory block while an active erase or program cycle
is being carried out on the other block. If a command operates
on the same block as the code currently executing, the core is
halted until the command is completed, this also applies to code
execution.
User Code, LIN and JTAG programming use the Flash/EE
memory Control Interface, which consists of the following
MMRs :
- FEExSTA (x= 0 or 1): read only register, reflects the status of
the Flash Control Interface
- FEExMOD (x= 0 or 1): sets the operating mode of the Flash
Control Interface
- FEExCON (x= 0 or 1): 8-bit command register. The
commands are interpreted as described in Table 11.
- FEExDAT (x= 0 or 1): 16-bit data register.
- FEExADR (x= 0 or 1): 16-bit address register.
- FEExSIGN (x= 0 or 1): Holds the 24-bit code signature as a
result of the signature command being initiated.
- FEExHIDE (x= 0 or 1): Protection MMR. Controls read and
write protection of the Flash memory code space. If
previously configured via the FEEPRO register, FEEHIDE
may require a software key to enable access.
Rev. PrD | Page 31 of 128

Preliminary Technical Data ADuC7032
- FEExPRO (x= 0 or 1): A buffer of the FEEHIDE register,
which is used to store the FEEHIDE value, so it is
automatically downloaded to the FEEHIDE registers on
subsequent reset and power-on events.
NOTE: User Software must ensure that the Flash/EE memory
The following sections describe in detail the bit designations of
each of Flash/EE control MMRs
controller has completed any Erase or Write cycle
before the PLL is powered down. If the PLL is
powered down before an Erase or Write cycle is
FEE0CON and FEE1CON Registers :
Name : FEE0CON and FEE1CON
Address : 0xFFFF0E08 and 0xFFFF0E88
Default Value (both registers) : 0x07
Access : Read/Write Access
Function : These 8-bit registers are written by user code to control the operating modes of the Flash/EE memory controllers for
Block0 (32KB) and Block1 (64KB).
Table 11: Command Codes in FEE0CON and FEE1CON
Code Command Description (note x is 0 or 1 to designate Flash/EE Block 0 or 1)
0x00* Reserved
0x01*
0x02*
0x03*
0x04*
0x05*
0x06*
Single Read Load FEExDAT with the 16-bit data indexed by FEExADR
Single Write
Erase-Write Erase the page indexed by FEExADR and write FEExDAT at the location pointed by FEExADR. This
Single Verify Compare the contents of the location pointed by FEExADR to the data in FEExDAT. The result of the
Single Erase Erase the page indexed by FEExADR
Mass erase
0x07 Default command.
0x08
0x09
Reserved
Reserved
0x0A Reserved
0x0B Signature FEE0CON:
0x0C Protect This command can be run only once. The value of FEExPRO is saved and can be removed only with a mass
0x0D
0x0E
Reserved Reserved, this command should not be written by user code
Reserved Reserved, this command should not be written by user code
0x0F Ping No operation, interrupt generated
*
The FEExCON will always read 0x07 immediately after execution of any of these commands.
Reserved, this command should not be written by user code
Write FEExDAT at the address pointed by FEExADR. This operation takes 50µs.
operation takes 20ms
comparison is returned in FEExSTA bit 1
Erase Block0(30kByte) or Block1(64kByte) of user space. The 2kByte Kernel is protected. This operation
takes 1.2s To prevent accidental execution, a command sequence is required to execute this instruction,
this is described below.
Reserved, this command should not be written by user code
Reserved, this command should not be written by user code
Reserved, this command should not be written by user code
This command will result in a 24-bit LFSR based signature been generated and loaded into FEE0SIG.
If FEE0ADR is less than 0x97800, this command will result in a 24 bit LFSR based signature of the user code
space from the page specified in FEE0ADR upwards, including the Kernel, security bits and Flash/EE key.
If FEE0ADR is greater than 0x97800, the Kernel and manufacturing data is signed
FEE1CON:
This command will result in a 24-bit LFSR based signature been generated, beginning at FEE1ADR and
ending at the end of the 63.5k Block, and loaded into FEE1SIG. The last page of this block is not included
in the Sign generation.
erase (0x06) or with the key
completed, the Flash/EE page or byte may be
corrupted.
Rev. PrD | Page 32 of 128

Preliminary Technical Data ADuC7032
Command Sequence for executing a Mass Erase
Giving the significance of the ‘Mass Erase’ command, a
specific code sequence must be executed to initiate this
operation.
1. Set bit 3 in FEExMOD.
2. Write 0xFFC3 in FEExADR
3. Write 0x3CFF in FEExDAT
4. Run the Mass Erase command 0x06 in FEExCON
FEE0STA and FEE1STA Registers :
Name : FEE0STA and FEE1STA
Address : 0xFFFF0E00 and 0xFFFF0E80
Default Value (both registers) : 0x00
Access : ReadOnly
This sequence is illustrated in the following example,:
FEExMOD= 0x08
FEExADR= 0xFFC3
FEExDAT= 0x3CFF
FEExCON= 0x06; // Mass-Erase command
while (FEExSTA & 0x04){} //Wait for command to finish
Note: To run the mass erase command via FEE0CON, Write
protection on the lower 64kbytes must be disabled, i.e.
FEE1HIDE/FEE1PRO are set to 0xFFFFFFFF.. This may
be done be first removing the protection or erasing the
lower 64kbytes first.
Function : These 8-bit read only registers can be read by user code and reflect the current status of the Flash/EE memory
controllers.
Table 12: FEE0STA and FEE1STA MMR bit designations
Bit Description (note x is 0 or 1 to designate Flash/EE Block 0 or 1)
15-4 Not Used
These bits are not used and will always read as 0.
3
2
1
0
FEE0ADR and FEE1ADR Registers:
Name : FEE0ADR and FEE1ADR
Address : 0xFFFF0E10 and 0xFFFF0E90
Default Value : Non Zero
Access : Read/Write Access
Flash Interrupt Status Bit
Set automatically when an interrupt occurs, i.e. when a command is complete and the Flash/EE interrupt enable bit in the
FEExMOD register is set
Cleared automatically when the FEExSTA register is read by user code
Flash/EE controller busy
Set automatically when the Flash/EE controller is busy
Cleared automatically when the controller is not busy
Command fail
Set automatically when a command written to FEExCON completes unsuccessfully
Cleared automatically when the FEExSTA register is read by user code
Command Successful
Set automatically by MCU when a command is completed successfully.
Cleared automatically when the FEExSTA register is read by user code
FEE0DAT and FEE1DAT Registers:
Name : FEE0DAT and FEE1DAT
Address : 0xFFFF0E0C and 0xFFFF0E8C
Default Value : Non Zero
Access : Read/Write Access
Function : This 16-bit register dictates the address
upon which any Flash/EE command
executed via FEExCON will act upon.
Rev. PrD | Page 33 of 128
Function : This 16-bit register contains the data either
read from or to be written to the Flash/EE
memory.

Preliminary Technical Data ADuC7032
FEE0MOD and FEE1MOD Registers :
Name : FEE0MOD and FEE1MOD
Address : 0xFFFF0E04 and 0xFFFF0E84
Default Value (both registers) : 0x00
Access : Read/Write
Function : These registers are written by user code to configure the mode of operation of the Flash/EE memory controllers.
Table 13: FEE0MOD and FEE1MOD MMR bit designations
Bit Description (note: x is 0 or 1 to designate Flash/EE Block 0 or 1)
15-7 Not Used
These bits are reserved for future functionality and should be written as 0 by user code
6, 5
4
3
2
1
0
Flash/EE Security Lock Bits
These bits must be written as [6,5] = 1,0 to complete the Flash security protect sequence
Flash/EE Controller Command Complete Interrupt Enable
This bit is set to 1 by user code to enable the Flash/EE controller to generate an interrupt upon completion of a Flash/EE
command.
This bit is cleared to disable the generation of a Flash/EE interrupt upon completion of a Flash/EE command.
Flash/EE Erase/Write Enable
Set by user code to enable the Flash/EE erase and write access via FEExCON
Cleared by user code to disable the Flash/EE erase and write access via FEExCON
Reserved and should be written as zero
Flash/EE Controller Abort Enable
This bit is set to 1 by user code to enable the Flash/EE controller abort functionality.
Reserved and should be written as zero
FLASH/EE MEMORY SECURITY
The 94kByte of Flash/EE memory available to the user can be
read and write protected using the FFE0HID and FEE1HID
registers.
In Block0, the FEE0HID MMR protects the 30kBytes. Bits 0-28
of this register protect pages 0-57 from writing. Each bit
protects 2 pages, i.e. 1kBytes. Bits 29-30 protect pages 58 and 59
respectively, i.e. each bit write protects a single page of 512
bytes. The MSB of this register (Bit31) protects Block0 from
been read via JTAG.
The FEE0PRO register mirrors the bit definitions of the
FEE0HID MMR. The FEE0PRO MMR allows user code to lock
the protection or security configuration of the Flash memory so
that the protection configuration is automatically loaded on
subsequent power-on or reset events. This flexibility allows the
user to set and test protection settings temporarily using the
FEE0HID MMR and subsequently lock the required protection
configuration (using FEE0PRO) when shipping protection
systems into the field.
In Block1 (64K), the FEE1HID MMR protects the 64kBytes.
Bits 0-29 of this register protect pages 0-119 from writing. Each
bit protects 4 pages, i.e. 2kBytes. Bit30 protect pages 120-127,
i.e. bit 30 write protects eight pages of 512 bytes. The MSB of
this register (Bit31) protects Flash/EE Block1, from been read
via JTAG.
As with Block0, FEE1PRO register mirrors the bit definitions of
the FEE1HID MMR. The FEE1PRO MMR is allows user code
to lock the protection or security configuration of the Flash
memory so that the protection configuration is automatically
loaded on subsequent power-on or reset events.
Rev. PrD | Page 34 of 128

Preliminary Technical Data ADuC7032
Block0, Flash/EE Memory Protection Registers :
Name : FEE0HID and FEE0PRO
Address : 0xFFFF0E20 (for FEE0HID) and 0xFFFF0E1C (for FEE0PRO)
Default Value (both registers) : 0xFFFFFFFF
Access : Read/Write Access
Function : These registers are written by user code to configure the protection of the Flash/EE memory.
Table 14: FEE0HID and FEE0PRO MMR bit designations
Bit Description (note: x is 0 or 1 to designate Flash/EE Block 0 or 1)
31
30
29
28-0
Read protection
Cleared by user to protect the 32kbyte Flash/EE Block code via JTAG read access
Set by user to allow reading the 32kbyte Flash/EE Block code via JTAG read access
Write Protection Bit
This bit is set by user code to unprotect protect page 59
This bit is cleared by user code write protect page 59
Write Protection Bit
This bit is set by user code to unprotect page 58
This bit is cleared by user code write protect page 58
Write Protection Bits
When set by user code these bits will unprotect pages 0-57 of the 30KB Flash/EE code memory. Each bit write protects 2
pages and each pages consists of 512 bytes.
When cleared by user code these bits will write protect pages 0-57 of the 30KB Flash/EE code memory. Each bit write
protects 2 pages and each pages consists of 512 bytes.
Block1, Flash/EE Memory Protection Registers :
Name : FEE1HID and FEE1PRO
Address : 0xFFFF0EA0 (for FEE0HID) and 0xFFFF0E9C (for FEE0PRO)
Default Value (both registers) : 0xFFFFFFFF
Access : Read/Write Access
Function : These registers are written by user code to configure the protection of the Flash/EE memory.
Table 15: FEE1HID and FEE1PRO MMR bit designations
Bit Description
31
30
29-0 Write Protection Bits
Read protection
Cleared by user to protect the 64kbyte Flash/EE Block code via JTAG read access
Set by user to allow reading the 64kbyte Flash/EE Block code via JTAG read access
Read protection
When set by user code these bits will protect pages 120-127 of the 64KB Flash/EE code memory. This bit write protects 8
pages and each page consists of 512 bytes.
When cleared by user code these bits will write protect pages 120-127 of the 64KB Flash/EE code memory.This bit write
protects 8 pages and each page consists of 512 bytes.
When set by user code these bits will unprotect pages 0-119 of the 64KB Flash/EE code memory. Each bit write protects 4
pages and each pages consists of 512 bytes.
When cleared by user code these bits will write protect pages 0-119 of the 64KB Flash/EE code memory. Each bit write
protects 2 pages and each pages consists of 512 bytes.
Rev. PrD | Page 35 of 128

Preliminary Technical Data ADuC7032
In Summary, there are three levels of protection:
- Temporary Protection can be set and removed by writing
directly into FEExHID MMR. This register is volatile and
therefore protection will only be in place while the part
remains powered on. This protection is not reloaded after
a power cycle.
- Keyed Permanent Protection can be set via FEExPRO
which is used to lock the protection configuration. The
software key used at the start of the required FEExPRO
write sequence is saved once and MUST subsequently be
used for any subsequent access of the FEExHID or
FEExPRO MMRs. A mass erase will set the key back to
0xFFFF but will also erase the entire user code space.
- Permanent Protection can be set via FEExPRO, similarily
to Keyed Permanent Protection, the only difference been
that the software key used is 0xDEADDEAD. Once the
FEExPRO write sequence is saved, only a mass erase will
set the key back to 0xFFFFFFFF. This will also erase the
entire user code space.
Sequence to write the key and set permanent protection:
1. Write in FEExPRO corresponding to the pages to be
protected.
2. Write the new (user defined) 32 bit key in FEExADR [ Bits
31-16 ] and FEExDAT [ Bits 15-0 ].
3. Write 1,0 in FEExMOD[6:5] and set FEExMOD[3].
4. Run the write key command 0x0C in FEExCON.
To remove or modify the protection the same sequence can be
used with a modified value of FEExPRO.
The sequence above is illustrated in the following example, this
protects writing pages 4 and 5of the FLASH:
FLASH/EE MEMORY RELIABILITY
The Flash/EE memory array on the part is fully qualified for
two key Flash/EE memory characteristics: Flash/EE memory
cycling endurance and Flash/EE memory data retention.
Endurance quantifies the ability of the Flash/EE memory to be
cycled through many program, read, and erase cycles. A single
endurance cycle is composed of four independent, sequential
events, defined as:
1. Initial page erase sequence.
2. Read/verify sequence a single Flash/EE.
3. Byte program sequence memory.
4. Second read/verify sequence endurance cycle.
In reliability qualification, every half word (16-bit wide)
location of the three pages(top, middle and bottom) in the
Flash/EE memory is cycled 10,000 times from 0x0000 to
0xFFFF. As indicated in Table 1, the parts’ Flash/EE memory
endurance qualification is carried out in accordance with
JEDEC Retention Lifetime Specification A117 . the results allow
the specification of a minimum endurance figure over supply,
temperature of 10,000 cycles.
Retention quantifies the ability of the Flash/EE memory to
retain its programmed data over time. Again, the parts is
qualified in accordance with the formal JEDEC Retention
Lifetime Specification (A117) at a specific junction temperature
J = 85°C). As part of this qualification procedure, the
(T
Flash/EE memory is cycled to its specified endurance limit,
described previously, before data retention is characterized.
This means that the Flash/EE memory is guaranteed to retain
its data for its fully specified retention lifetime every time the
Flash/EE memory is reprogrammed. Also note that retention
lifetime, based on an activation energy of 0.6 eV, derates with T
as shown in Figure 12.
600
J
FEExPRO =0xFFFFFFFB; //Protect pages 4 and 5
FEExADR =0x66BB; //32 bit key value [Bits 31-16]
FEExDAT =0xAA55; //32 bit key value [Bits 15-0]
FEExMOD = 0x0048 // Lock Security Sequence
FEExCON = 0x0C; // Write key command
while (FEExSTA & 0x04){} //Wait for command to finish
Rev. PrD | Page 36 of 128
450
300
RETENTIO N (Years)
150
0
30 40 55 70 85 100 125 135 150
JUNCTION TEM PERATURE (°C)
Figure 12. Flash/EE Memory Data Retention
04955-085

Preliminary Technical Data ADuC7032
CODE EXECUTION TIME FROM SRAM AND FLASH/EE
This chapter describes SRAM and Flash/EE access times during
execution for applications where execution time is critical.
Execution from SRAM
Fetching instructions from SRAM takes one clock cycle as the
access time of the SRAM is 2ns and a clock cycle is 49ns
minimum. However, if the instruction involves reading or
writing data to memory, one extra cycle must be added if the
data is in SRAM, or three cycle if the data is in Flash/EE, one
cycle to execute the instruction and two cycles to get the 32-bit
data from Flash/EE. A control flow instruction, for example a
branch instruction will take one cycle to fetch but also two cycle
to fill the pipeline with the new instructions.
Execution from Flash/EE
Because the Flash/EE width is 16-bit, execution from Flash/EE
cannot be done in one cycle, as from SRAM, when CD bit =0.
Also some dead time is needed before accessing data for any
value of CD bits.
In ARM mode, where instructions are 32 bits, two extra cycles
are needed to fetch any instruction when CD = 0 and in Thumb
mode, where instructions are 16 bits, one extra cycle is needed
to fetch any instruction.
Timing is identical in both modes when executing instructions
that involve using the Flash/EE for data memory. If the
instruction to be executed is a control flow instruction, an extra
cycle is needed to decode the new address of the program
counter and then four cycles are needed to fill the pipe-line. A
data processing instruction involving only core register doesn’t
require any extra clock cycle but if it involves data in Flash/EE,
an extra clock cycle is needed to decode the address of the data
and two cycles to get the 32-bit data from Flash/EE. An extra
cycle must also be added before fetching another instruction.
Data transfer instruction are more complex and are
summarized Table 16.
Table 16: Typical execution cycles in ARM/Thumb mode
Instructions
LD 2/1
LDH 2/1
LDM/POP 2/1
STR 2/1
STRH 2/1
STM/PUSH 2/1
With 1<N≤16, N number of data to load or store in the multiple
load/store instruction.
By default, Flash/EE code execution will be suspended during
any Flash/EE erase or write cycle. A page (512 Bytes) erase cycle
will take 20 ms and a write (16 bits) word command will take
50us. However, the FLASH/EE controller allows Erase/Write
cycles to be aborted, if the ARM core receives an enabled
interrupt during the current FLASH/EE Erase/Write cycle. The
ARM7 can therefore immediately service the interrupt and then
return to repeat the FLASH/EE command. The Abort operation
will typically take 10 clock cycles. If the abort operation is not
feasible, it is possible to run FLASH/EE programming code and
the relevant interrupt routines from SRAM, allowing the core
to service the Interrupt immediately.
Fetch
cycles
Dead
time
1 2
1 1
N 2 x N
1
1
N
Data access
2 x 50µs
50µs
2 x N x 50µs
Rev. PrD | Page 37 of 128

Preliminary Technical Data ADuC7032
ADUC7032 KERNEL
The ADuC7032 features an on-chip Kernel resident in the top
2k of the Flash/EE Code space. After any reset event, this kernel
copies the factory calibrated data from the manufacturing data
space, into the various on-chip peripherals. The peripherals
calibrated by the Kernel are:
- PSM Power Supply Monitor
- Precision, Oscillator
- Low Power, Oscillator
- REG_AVDD/ REG_DVDD
- Low Power Voltage Reference
- Normal Mode Voltage Reference
- Current ADC ( Offset and Gain )
- Voltage ADC ( Offset and Gain )
- Temperature ADC ( Offset and Gain )
User MMRs which may be modified by the kernel and differ
from their POR default values are as follows:
- R0-R15
- GP0CON/GP2CON
- SYSCHK
- ADCMDE/ADC0CON
- FEE0ADR/FEE0CON/FEESIG
- HVDAT/HVCON
- HVCFG0/1
- T3LD
The ADuC7032 also features an On-Chip LIN downloader. The
operation of this download is detailed in “ADuC7032Series
Flash/EE Programming via LIN” Technote.
A flow chart showing the execution of the kernel is shown in
Figure 13.
The current revision of the Kernel may be derived from
SYSSER1, as described in Table 85.
For the duration of Kernel execution, the Watchdog Timer is
active with a timeout period of 30ms. This ensures that if an
error occurs in the Kernel, the ADuC7032 will be reset. After
any reset, the Watchdog timer is disabled once the Kernel code
is exited.
Normal Kernel execution time, excluding LIN Download, is
approximately 5ms.
It is only possible to leave LIN download mode via a Reset.
SRAM is not corrupted during normal Kernel execution. SRAM
is corrupted during LIN download Kernel execution.
User code will not be executed unless location 0x14
NOTE:
contains either 0x27011970 or the checksum of Page Zero,
excluding location 0x14. If location 0x14 does not contain this
information user code will not be executed and LIN download
mode will be entered. For more information please refer to the
relevant LIN download Technote.
Rev. PrD | Page 38 of 128

Preliminary Technical Data ADuC7032
INITIALIZE ON-CHIP
PERIPHERALS T O FACTORY
CALIBRATED STAT E
PAGE ERASED?
0x14 = 0xfffffff f
YES
LIN COMMAND
NO YES
NO
YES
JTAG MODE?
NTRST = 1
KEY PRESENT?
0x14 = 0x27011970
NO
CHECKSUM PRESENT?
0x14 = CHECKSUM
NO
FLAG PAGE 0 ERROR
NO
RESET
COMMAND
YES
EXECUTE
USER CODE
Figure 13: ADuC7032 Kernel Flowchart
05994-013
Rev. PrD | Page 39 of 128

Preliminary Technical Data ADuC7032
MEMORY MAPPED REGISTERS
The Memory Mapped Register (MMR) space is mapped into
the top 4kBytes of the MCU memory space and accessed by
indirect addressing, load and store commands, through the
ARM7 banked registers. An outline of the ADuC7032s Memory
Mapped Register Bank is shown in Figure 14.
The MMR space provides an interface between the CPU and all
on-chip peripherals. All registers except the ARM7 core
registers (described in ARM Registers) reside in the MMR area.
As can be seen from the detailed MMR map in Table 17, the
MMR data widths vary from 1 Byte (8 bits) to 4 Bytes (32 bits).
The ARM7 core can access any of the MMRs (single byte or
multiple byte width registers) with a 32 bit read or write access.
The resultant read for example, aligned per ‘little endian’
format described earlier. However, errors will result if the
ARM7 core tries to access 4 Byte (32 bit) MMRs with a 16-bit
access. In the case of a (16-bit) write access to a 32-bit MMR,
the (upper) 16 most significant bits will be written as 0’s. More
obviously, in the case of a 16-bit read access to a 32-bit MMR,
only 16 of the MMR bits can be read.
0xFFFFFFFF
0xFFFF 1000
0xFFFF0E00
0xFFFF0D50
0xFFFF0D00
0xFFFF0A14
0xFFFF0A00
0xFFFF 0894
0xFFFF 0880
0xFFFF 0810
0xFFFF 0800
0xFFFF079C
0xFFFF 0780
0xFFFF 0730
0xFFFF 0700
0xFFFF 0568
0xFFFF 0500
0xFFFF044C
0xFFFF 0400
0xFFFF 0394
0xFFFF 0380
0xFFFF 0370
0xFFFF 0360
0xFFFF 0350
0xFFFF 0340
0xFFFF 0334
0xFFFF 0320
0xFFFF 0318
0xFFFF 0300
0xFFFF 0244
0xFFFF 0220
0xFFFF 0110
0xFFFF 0000
FLASH CONTRO L
INTERFACE
GPIO
SPI
SERIAL TEST
INTERFACE
HV INTERFACE
LIN/BSD
HARDWARE
UART
ADC
PLL AND
OSCILLATOR CONTROL
GENERAL PURPO SE
TIMER 4
WATCHDOG
TIMER 3
WAKE UP
TIMER 2
GENERAL PURPO SE
TIMER 1
TIMER 0
REMAP AND
SYSTEM CONT ROL
INTERRUPT
CONTROLL ER
Figure 14: Top Level MMR Map
05994-014
Rev. PrD | Page 40 of 128

Preliminary Technical Data ADuC7032
Table 17 : Complete MMR List
Address Name Byte
Access
Typ e
IRQ address base = 0xFFFF0000
0x0000 IRQSTA 4 R
0x0004 IRQSIG1 4 R
0x0008 IRQEN 4 RW
0x000C IRQCLR 4 W
0x0010 SWICFG 4 W
0x0100 FIQSTA 4 R
0x0104 FIQSIG1 4 R
0x0108 FIQEN 4 RW
0x010C FIQCLR 4 W
System Control address base = 0xFFFF0200
0x0220 SYSMAP0 1 RW
0x0230
0x0234
0x0238
0x023C
0x0240
RSTSTA 1 RW
RSTCLR 1 W
SYSSER0
SYSSER1
SYSCHK
2
4 RW
2
4 RW
2
4 RW
Timer address base = 0xFFFF0300
0x0300 T0LD 4 RW
0x0304 T0VAL0 2 R
0x0308 T0VAL1 4 R
0x030C T0CON 2 RW
0x0310 T0CLRI 1 W
0x0314 T0CAP 2 RW
0x0320 T1LD 4 RW
0x0324 T1VAL 4 R
0x0328 T1CON 2 RW
0x032C T1CLRI 1 W
0x0330 T1CAP 4 RW
0x0340 T2LD 4 RW
0x0344 T2VAL 4 R
0x0348 T2CON 2 RW
0x034C T2CLRI 1 W
0x0360 T3LD2 2 RW
0x0364 T3VAL2 2 R
Default
Value
0x00000000
0x00000000
0x00000000
Page
75
75
75
75
Description
Active IRQ Source
Current State of all IRQ sources ( Enabled and Disabled )
Enabled IRQ sources
MMR used to disabled IRQ Sources
76 Software Interrupt Configuration MMR
0x00000000
0x00000000
0x00000000
75
75
75
75
Active IRQ Source
Current State of all IRQ sources ( Enabled and Disabled )
Enabled IRQ sources
MMR used to disabled IRQ Sources
29 REMAP control Register
0x01 30 Reset Status MMR
0x00 30 RSTSTA clear MMR
125 SYSTEM Serial Number 0
126 SYSTEM Serial Number 1
126 Kernel Checksum
0x00000000 79 Timer 0 Load Register
0x0000 78 Timer 0 Value Register 0
0x00000000 78 Timer 0 Value Register 1
0x0000 79 Timer 0 Control MMR
0xFF 79 Timer 0 Interrupt Clear Register
0x0000 78 Timer 0 Capture Register
0x00000000 80 Timer 1 Load Register
0xFFFFFFFF 80 Timer 1 Value Register
0x0000 81 Timer 1 Control MMR
0xFF 80 Timer 1 Interrupt Clear Register
0x00000000 81 Timer 1 Capture Register
0x00000000 82 Timer 2 Load Register
0xFFFFFFFF 82 Timer 2 Value Register
0x00 83 Timer 2 Control MMR
0xFF 82 Timer 2 Interrupt Clear Register
84 Timer 3 Load Register
84 Timer 3 Value Register
Rev. PrD | Page 41 of 128

Preliminary Technical Data ADuC7032
0x0368 T3CON2 2 RW
0x036C T3CLRI2 1 W
PLL base address = 0xFFFF0400
0X0400 PLLSTA 4 RW
0x0404 POWKEY0 4 W
0x0408 POWCON 1 RW
0x040C POWKEY1 4 W
0x0410 PLLKEY0 4 W
0x0414 PLLCON 1 RW
0x0418 PLLKEY1 4 W
0x042C OSC0TRM 1 RW
0x0440 OSC0CON 1 RW
0x0444 OSC0STA 1 R
0x0448 0SC0VAL0 2 R
0x044C OSC0VAL1 2 R
ADC address base = 0xFFFF0500
0x0500 ADCSTA 2 R
0x0504 ADCMSKI 1 RW
0x0508 ADCMDE 1 RW
85 Timer 3 Control MMR
85 Timer 3 Interrupt Clear Register
0x02 69 PLL Status MMR
70 POWCON Pre Write Key
0x79 71 Power Control and Core speed Control Register
70 POWCON Post Write Key
70 PLLCON Pre Write Key
0x00 70 PLL clock source selection MMR
70 PLLCON Post Write Key
0x08 73 Low Power Oscillator trim bits MMR.
0x00 73 Low Power Oscillator Calibration Control MMR
0x00 74 Low Power Oscillator Calibration Status MMR
0x00 74 Low Power Oscillator Calibration Counter 0 MMR
0x00 74 Low Power Oscillator Calibration Counter 1 MMR
0x0000 49 ADC Status MMR
0x00 50 ADC Interrupt Source Enable MMR
0x00 51 ADC Mode Register
0x050C ADC0CON 2 RW
0x0510 ADC1CON 2 RW
0x0514 ADC2CON 2 RW
0x0518 ADCFLT 2 RW
0x051C ADCCFG 1 RW
0x0520 ADC0DAT 2 R
0x0524 ADC1DAT 2 R
0x0528 ADC2DAT 2 R
0x052C ADCFIFO 4 R
0x0530 ADC0OF2 2 RW
0x0534 ADC1OF2 2 RW
0x0538 ADC2OF2 2 RW
0x053C ADC0GN2 2 RW
0x0540 ADC1GN2 2 RW
0x0544 ADC2GN2 2 RW
0x0548 ADC0RCL 2 RW
0x0000 52 Current ADC Control MMR
0x0000 53 Voltage ADC Control MMR
0x0000 54 Temperature ADC Control MMR
0x0007 55 ADC Filter Control MMR
0x00 57 ADC Configuration MMR
0x0000 58 Current ADC Result MMR
0x0000 58 V ADC Result MMR
0x0000 58 V ADC Result MMR
58 Current/Voltage Result FIFO
58 Current ADC Offset MMR
58 Voltage ADC Offset MMR
58 Temperature ADC Offset MMR
59 Current ADC Gain MMR
59 Voltage ADC Gain MMR
59 Temperature ADC Gain MMR
0x0001 59 Current ADC Result Count Limit
0x054C ADC0RCV 2 R
0x0550 ADC0TH 2 RW
0x0000 59 Current ADC Result Count Value
0x0000 59 Current ADC Result Threshold
Rev. PrD | Page 42 of 128

Preliminary Technical Data ADuC7032
0x0554 ADC0TCL 1 RW
0x01 59 Current ADC Result Threshold Count Limit
0x0558 ADC0THV 1 R
0x055C ADC0ACC 4 R
0x0560 ADC0ATH 4 RW
0x057C ADCREF2 4 R
UART BASE ADDRESS = 0XFFFF0700
0x0700 COMTX 1 W
COMRX 1 R
COMDIV0 1 RW
0x0704 COMIEN0 1 RW
COMDIV1 1 R/W
0x0708 COMIID0 1 R
0x070C COMCON0 1 RW
0x0710 COMCON1 1 RW
0x0714 COMSTA0 1 R
0X072C COMDIV2 2 RW
LIN Hardware Sync base address = 0XFFFF0780
0x0780 LHSSTA 1
0x0784 LHSCON0 2
0x0788 LHSVAL0 2
0x078C LHSCON1 1
0x0790 LHSVAL1 1.5
High Voltage Interface base address = 0xFFFF0800
0x0804 HVCON 1 RW
0x080C HVDAT 1.5 RW
SPI base address = 0xFFFF0A00
0x0A00 SPISTA 1 R
0x0A04 SPIRX 1 R
0x0A08 SPITX 1 W
0x0A0C SPIDIV 1 RW
0x0A10 SPICON 2 RW
GPIO base address = 0xFFFF0D00
0x0D 00 GP0CON 4 RW
0x0D 04 GP1CON 4 RW
0x0D 08 GP2CON 4 RW
0x0D 20 GP0DAT3 4 RW
0x0D 24 GP0SET3 4 W
0x0D 28 GP0CLR3 4 W
0x0D 30 GP1DAT3 4 RW
0x0D 34 GP1SET3 4 W
R 0x00 116 LHS Status MMR
R/W 0x0000 117 LHS Control MMR 0
R/W 0x0000 118 LHS Timer 0 MMR
R/W 0x32 118 LHS Control MMR 1
R/W 0x0000 119 LHS Timer 1 MMR
0x00 60 Current ADC Result Threshold Count Limit Value
0x00000000 60 Current ADC Result Accumulator
0x00000000 60 Current ADC Result Accumulator Threshold
60 Low Power Mode Voltage Reference Scaling Factor
0x00 107 UART Transmit Register
107 UART Receive Register
107 UART Standard Baud Rate Generator Divisor Value 0
0x00 110 UART Interrupt Enable MMR 0
107 UART Standard Baud Rate Generator Divisor Value 1
0x01 110 UART Interrupt Identification 0
0x00 108 UART Control Register 0
0x00 109 UART Control Register 1
0x60 109 UART Status Register 0
0x0000 111 UART Fractional Divider MMR
99 High Voltage Interface Control MMR
99 High Voltage Interface Data MMR
0x00 114 SPI Status MMR
0x00 114 SPI Receive MMR
0x00 114 SPI Transmit MMR
0x1B 114 SPI Baud Rate Select MMR
0x00 113 SPI Control MMR
0x00000000 88 GPIO Port 0 Control MMR
0x00000000 89 GPIO Port 1 Control MMR
0x00000000 89 GPIO Port 2 Control MMR
0x000000XX 90 GPIO Port 0 Data Control MMR
0x000000XX 93 GPIO Port 0 Data Set MMR
0x000000XX 95 GPIO Port 0 Data Clear MMR
0x000000XX 91 GPIO Port 1 Data Control MMR
0x000000XX 94 GPIO Port 1 Data Set MMR
Rev. PrD | Page 43 of 128

Preliminary Technical Data ADuC7032
0x0D 38 GP1CLR3 4 W
0x0D 40 GP2DAT3 4 W
0x0D 44 GP2SET3 4 W
0x0D 48 GP2CLR3 4 W
Flash/EE base address = 0xFFFF0E00
0x0E00 FEE0STA 1 R
0x0E04 FEE0MOD 2 RW
0x0E08 FEE0CON 1 RW
0x0E0C FEE0DAT 2 RW
0x0E10 FEE0ADR 2 RW
0x0E18 FEE0SIG 3 R
0x0E1C FEE0PRO 4 RW
0x0E20 FEE0HID 4 RW
0x0E80 FEE1STA 1 R
0x0E84 FEE1MOD 2 RW
0x0E88 FEE1CON 1 RW
0x0E8C FEE1DAT 2 RW
0x0E90 FEE1ADR 2 RW
0x0E98 FEE1SIG 3 R
0x0E9C FEE1PRO 4 RW
0x0EA0 FEE1HID 4 RW
1
Depends on the level on the external interrupt pins GP0, GP5, GP7 and GP8
2
Updated by Kernel
3
Depends on the level on the external GPIO pins
0x000000XX 95 GPIO Port 1 Data Clear MMR
0x000000XX 92 GPIO Port 2 Data Control MMR
0x000000XX 94 GPIO Port 2 Data Set MMR
0x000000XX 96 GPIO Port 2 Data Clear MMR
0x00 33 Flash/EE Status MMR
0x00 34 Flash/EE Control MMR
0x07 32 Flash/EE Control MMR
33 Flash/EE Data MMR
33 Flash/EE Address MMR
0xFFFFFF Flash/EE LFSR MMR
0x00000000 35 Flash/EE Protection MMR
0xFFFFFFFF 35 Flash/EE Protection MMR
0x00 33 Flash/EE Status MMR
0x00 34 Flash/EE Control MMR
0x07 32 Flash/EE Control MMR
33 Flash/EE Data MMR
33 Flash/EE Address MMR
0x0000 Flash/EE LFSR MMR
0x00000000 35 Flash/EE Protection MMR
0xFFFFFFFF 35 Flash/EE Protection MMR
Rev. PrD | Page 44 of 128

Preliminary Technical Data ADuC7032
16-BIT Σ−∆ ANALOG TO DIGITAL CONVERTERS
The ADuC7032 incorporates three independent sigma-delta
ADCs namely, the Current Channel ADC (I-ADC), the Voltage
Channel ADC (V-ADC) and the Temperature Channel ADC
(T-ADC). These precision measurement channels integrate onchip buffering, programmable gain amplifier, 16-bit sigmadelta modulators and digital filtering and are intended for the
precision measurement of current, voltage and temperature
variables in 12V automotive battery systems.
CURRENT CHANNEL ADC (I-ADC)
This ADC is intended to convert battery current sensed
through an external 100μΩ shunt resistor. On-Chip
programmable gain mean the I-ADC can be configured to
accommodate battery current levels from ±1A to ±1500A
As shown in Figure 15 below, the I-ADC employs a sigma-delta
conversion technique to realize 16 bits of no missing codes
performance. The sigma-delta modulator converts the sampled
input signal into a digital pulse train whose duty cycle contains
the digital information. A modified Sinc3 programmable lowpass filter is then employed to decimate the modulator output
data stream to give a valid 16-Bit data conversion result at
programmable output rates from 4Hz to 8 KHz in Normal
mode and 1Hz to 2kHz in Low Power Mode.
The I-ADC also incorporates counter, comparator and
accumulator logic. This allows the I-ADC result to generate an
interrupt after a predefined number of conversions have
elapsed or if the I-ADC result exceeds a programmable
threshold value. A fast ADC-Over-Range feature is also
supported. Once enabled, a 32-bit accumulator automatically
sums the 16-bit I-ADC results.
The time to a first valid (fully settled) result on the current
channel is three ADC conversion cycles with chop mode turned
off and two ADC conversion cycles with chop mode turned on.
Diagnosti c Current So urces
Two 50uA IIN+ and IIN-
IN+
IN-
VREF/
136
GND
ANALOG INPUT
Current Sour ces
REG_AVDDREG_AVDD
ANALOGINPUT
Diagnostic Voltage Source
VREF/136 Voltage Input
ANALOG INPUT
PROGRAMM ABLE
CHOPPING
THE INPUTSARE
ALTERNATELY REVERSED
THROUGH THE
CONVERSION CYCLE.
BUFFER AMPLIFIER
THE BUFFER AMPLIFIER
PRESENTS A HIGH
IMPEDANCE INPUT STAGE
FOR THEPGA DRIVING THE
SIGMA_DELTA MODULATOR.
PROGRAMMABLE GA IN
AMPLIFIER
THE PROGRAMMAB LE
GAIN AMPLIFIER ALLOWS
EIGHT BIPOLAR INPUT
RANGES FROM ±2.3mV TO
±1.2V (INT V
REF
PGA
BUF
CHOP
PRECISION
REFERENCE
THE INTERNAL 5PPM/C
REFERNCE IS ROUTEDTO THE
ADC BY DEFAULT. AN EXTERNAL
REFRENCEON THE VREF PIN CAN
ALSO BE SELECTED
THE SINC3FILTER REMOVES
QUANTIZATIONNOISE INTRODUCED
BY THE MODULATOR. THE UPDATE
RATE AND BANDWIDTH OF THIS
FILTERARE PROGRAMMABLE
Figure 15: Current ADC, Top Level Overview
THE MODULATOR PROVIDES
DATA STREAM (THE OUTPUT
OF WHICH IS ALSO CHOPPED)
THE DUTY CYCLEOF WHICH
REPRESENTS THESAMPLED
=1.2V).
SIGMADELTA
MODULATOR
INTERNAL
REFERNCE
VREF
PROGRAMMABLE
DIGITAL FIL TER
VIA THE ADCFLT MMR
SIGMA-DELTA
MODULATOR
AHIGHFREQUENCY1-BIT
TO THE DIGITAL FILTER,
ANALOG INPUT VOLTAGE.
SIGMA-DELTA A/D CONVERTER
PROGRAMMABLE
DIGITAL
FILTER
OUTPUT SC ALING
THE OUPUT WORD FROM THE
DIGITAL FILTER IS SCALED
BY THE CALIBRATION
COEFFICIENTS BEFORE
BEING PROVIDED AS
THE CONVERSION RESULT.
DIGITAL COMPARATOR
THE ADC RESULT IS
COMPARED TO A PRESET
SIGMA-DELTA ADC
THE SIGMA-DELTA
ARCHITECTURE ENSURES
16 BITS NO MISSING
CODES.
CHOP
OFFSET
COEFFICIENT
GAIN
COEFFICIENT
THRESHOLD
OUTPUT AV ERAGE
AS PART OFTHE CHOPPING
IMPLEMENTATION, EACH
DATA-WORD OUTPUT
FROM T HE FIL TER IS
SUMMED AND AVERAGED
WITH ITS PREDECESSOR
OUTPUT
AVERAGE
+
-
x
OUTPUT
FORMAT
ADC
RESULT
ADC
THRESHOLD
THRESHOLD COUNTER
COUNTS UP IFADC
RESULT>THRESHOLD
COUNTS DOWN/RESET IF ADC
RESULT<THRESHOL. GENER-
ATES AN INTERRUPT ON
COUNTER OVERFLOW
ADC ACCUMUL ATOR
ACCUMULATES THE ADC
RESULT
ADC RESULT
ACCUMULATOR
RESULT
ADC RESULT
COUNTER
THRESHOLD
COUNTER
ADC
ADC FAST OVER-RANGE
GENERATES AN ADC
INTERRUPT IF THE CURRENT
INPUT IS GROSSLY
OVER-RANGED
ADC INTERRUPT GENERATOR
GENERATES AN ADC RESULT
FROM ANY ONE OF FOUR
SOURCES
ADC RESULT COUN TER
COUNTS ADC RESULTS,
GENERATES AN INTERRUPT
ON COUNTERO VERFLOW
ADC
INTERRUPT
Rev. PrD | Page 45 of 128

Preliminary Technical Data ADuC7032
VOLTAGE CHANNEL ADC (V-ADC)
This ADC is intended to convert battery voltage As with the
Current Channel ADC described previously, this ADC employs
an identical sigma-delta conversion technique, including a
modified Sinc3 low-pass filter to give a valid 16-Bit data
conversion result at programmable output rates from 4Hz to 8
KHz. An external RC filter network is not required as this is
implemented internally in the voltage channel.
The external battery voltage (VBAT) is routed to the ADC
input via an on-chip high voltage, resistive attenuator This
must be enabled/disabled via HVCFG1[7].
The time to a first valid (fully settled) result on the voltage
channel is three ADC conversion cycles with chop mode turned
off and two ADC conversion cycles with chop mode turned on.
This ADC is again buffered but unlike the current channel has
a fixed VBAT input range of 0 V to 28.8V (assuming an
internal 1.2V reference). A top level overview of this ADC
signal chain is shown in Figure 16 below.
TEMPERATURE CHANNEL ADC (T-ADC)
This ADC is intended to convert battery temperature. The
battery temperature can be derived via the on-chip temperature
sensor or an external temperature sensor input.
The time to a first valid (fully settled) result after an input
channel switch on the temperature channel is three ADC
conversion cycles with chop mode turned off and two ADC
conversion cycles with chop mode turned on.
As with the Current and Voltage Channel ADCs, this ADC
employs an identical sigma-delta conversion technique,
including a modified Sinc3 low-pass filter to give a valid 16-Bit
data conversion result at programmable output rates from 4Hz
to 8 KHz
VBAT
DIFFERENT IAL
ATTENUATOR
DIVIDE BY 24,INPUT
ATTENUATOR
45R
2R
1R
BUF
ALTERNATELY REVERSED
CONVERSION CYCLE.
CHOP
BUFFER AMPLIFIER
THE BU FFER AMP LIFIER
PRESENTS A HIGH
IMPEDANCE INPUT STAGE
FOR THE ANALOG INPUT.
THE INTERNAL 5PPM/C
REFERNCE IS ROUTED TO THE
ADC BY DEFAULT.AN EXTERNAL
REFRENCEON THE VREF PINCAN
ALSO BE SELECTED
Figure 16 : Voltage/ Temperature ADC, Top Level Overview
ANALOG INPUT
PROGRAMM ABLE
CHOPPING
THE INPUTS ARE
THROUGH THE
PRECISION
REFERENCE
PROGRAMMABLE
DIGITAL FILTER
THE SINC3FILTER REMOVES
QUANTIZATION NOISEINTRODUCED
BY THE MODULATOR. THE UPDATE
RATE AND BANDWIDTH OF THIS
FILTER ARE PROGRAMMABLE
VIA THE ADCFLT MMR
SIGMA-DELTA
MODULATOR
THE MODULATOR PROVIDES
AHIGHFREQUENCY1-BIT
DATA STREAM (THE OUTPUT
OF WHICH IS ALSOCHOPPED)
TO THE DIGITAL FILTER,
THE DUTY CYCLE OF WHICH
REPRESENTS THE SAMPLED
ANALOG INPUT VOLTAGE.
SIGMA-DELTA A/D CONVERTER
SIGMADELTA
MODULATOR
INTERNAL
REFERNCE
VREF
PROGRAMMABLE
SIGMA-DELTA ADC
THE SIGMA-DELTA
ARCHITECTURE ENSURES
16 BIT S NO MIS SING
DIGITAL
FILTER
OFFSET
COEFFICIENT
GAIN
COEFFICIENT
OUTPUT SCALING
THE OUPUT WORDFROM THE
DIGITAL FILTER ISSCALED
BY THE CALIBRATION
COEFFICIENTS BEFORE
BEING PROVIDED AS
THE CONVERSION RESULT.
ADC RESULT
FINAL (16-BIT) ADC RESULT
CODES.
CHOP
AS PART OF THE CHOPPING
IMPLEMENTATION, EACH
SUMMED AND AVERAGED
WITH ITS PRE DECESSOR
OUTPUT
AVERAGE
+
-
x
OUTPUT
FORMAT
ADC
RESULT
OUTPUT AVE RAGE
DATA-WORD OUTPUT
FROM T HE FILTER IS
Rev. PrD | Page 46 of 128

Preliminary Technical Data ADuC7032
ADC GROUND SWITCH
The ADuC7032 features an integrated ground switch pin,
GND_SW located on Pin15. This switch allows the user to
dynamically disconnect ground from external devices. It allows
either a direct connection to ground, or a connection to ground
via a 20kΩ, this additional resistor may be used to reduce the
number of external components required for an NTC circuit.
The ground switch feature may be used for reducing power
consumption on application specific boards..
An example application is shown in Figure 17. This diagram
shows an external NTC used in two modes, one using the
internal 20kΩ resistor, and the second showing a direct
connection to ground, via the GND_SW. ADCCFG[7] controls
the connection of the ground switch to ground and
ADCMDE[6] controls the GND_SW resistance.
REG_AVDD
R
REF
VTEMP
NTC
20kΩ
Figure 17 : Example External Temperature Sensor Circuits
NTC
REG_AVDD
VTEMP
05994-017
The possible combinations are shown in Table 18.
Table 18 : GND_SW Configuration
ADCCFG[7] ADCMDE[6] GND_SW
0 0 Floating
0 1 Floating
1 0 Direct connection to Ground
1 1
GND_SW
Figure 18: Internal Ground Switch Configuration
Connected to ground via 20kΩ
resistor
ADCCFG[7]
20kΩ
ADCMDE[6]
05994-018
Rev. PrD | Page 47 of 128

Preliminary Technical Data ADuC7032
ADC NOISE PERFORMANCE TABLES
Table 19, Table 20 and Table 21 below show the output RMS noise in μV for some typical output update rates on the I and V/T ADCs.
The numbers are typical and are generated at a differential input voltage of 0 V The output RMS noise is specified as the standard
deviation (or 1 X Sigma) of the distribution of ADC output codes collected when the ADC input voltage is at a dc voltage. It is expressed
as µV RMS.
Table 19 : Current Channel ADC, Normal Power Mode, Typical Output RMS Noise (µV)
Data
ADCFLT
0xBF1D 4Hz 0.040 0.040 0.043 0.087 0.087 0.175 0.35 0.7 2.8 2.8
0x961F 10Hz 0.060 0.060 0.060 0.087 0.087 0.175 0.35 0.7 2.8 2.8
0x007F 50Hz 0.142 0.142 0.144 0.145 0.170 0.305 0.380 0.7 2.8 2.8
0x0007 1KHz 0.620 0.620 0.625 0.625 0.770 1.310 1.650 2.520 7.600 7.600
Update
Rate
±2.3mV
(512)
±4.6mV
(256)
±4.68mV
(128)
±18.75mV
(64)
ADC Input Range
±37.5mV
(32)
±75mV
(16)
±150mV
(8)
±300mV
(4*)
±600mV
(2*)
±1.2V
(1*)
0x0000 8KHz 2.000 2.000 2.000 2.000 2.650 4.960 8.020 15.0 55.0 55.0
*Please note that the maximum absolute input voltage allowed is -200mV to 300mV relative to ground
Table 20 : Voltage Channel ADC, Typical Output RMS Noise (referred to ADC Voltage attenuator Input)(µV)
Data
ADCFLT
Update
Rate
0xBF1D 4Hz 65
0x961F 10Hz
0x0007 1KHz
0x0000 8KHz
Table 21 : Temperature Channel ADC, Typical Output RMS Noise (µV)
Data
ADCFLT
Update
Rate
0xBF1D 4Hz
28.8V
ADC
Input
Range
65
180
1600
0-1.2V
ADC
Input
Range
2.8
0x961F 10Hz
0x0007 1KHz
0x0000 8KHz
Rev. PrD | Page 48 of 128
2.8
7.5
55

Preliminary Technical Data ADuC7032
ADC MMR INTERFACE
The ADC is controlled and configured via a number of MMRs that are described in detail in the following pages:
ADC Status Register :
Name : ADCSTA
Address : 0xFFFF0500
Default Value : 0x0000
Access : Read Only
Function : This read only register holds general status information related to the mode of operation or current status of the
ADuC7032ADCs.
Table 22 : ADCSTA MMR Bit Designations
Bit Description
15 ADC Calibration Status
This bit is set automatically in hardware to indicate an ADC calibration cycle has been completed.
This bit is cleared after ADCMDE is written to.
14 ADC Temperature Conversion Error
This bit is set automatically in hardware to indicate that a temperature conversion over-range or under-range has occurred.
The conversion result will be clamped to negative full-scale (under-range error) or positive full-scale (over-range error) in this
case.
This bit will be cleared when a valid (in-range) temperature conversion result is written to the ADC2DAT register.
13 ADC Voltage Conversion Error
This bit is set automatically in hardware to indicate that a voltage conversion over-range or under-range has occurred. The
conversion result will be clamped to negative full-scale (under-range error) or positive full-scale (over-range error) in this case.
This bit will be cleared when a valid (in-range) voltage conversion result is written to the ADC1DAT register.
12 ADC Current Conversion Error
This bit is set automatically in hardware to indicate that an a current conversion over-range or under-range has occurred. The
conversion result will be clamped to negative full-scale (under-range error) or positive full-scale (over-range error) in this case.
This bit will be cleared when a valid (in-range) current conversion result is written to the ADC0DAT register.
11
Not Used
This bit is reserved for future functionality and should not be monitored by user code
10
Not Used
This bit is reserved for future functionality and should not be monitored by user code
9 ADCFIFO Error Flag
This bit is set to 1 automatically to indicate that the FIFO has overflowed. This bit does not cause an interrupt but is latched
high and can only be cleared by disabling the FIFO or reconfiguring the ADC.
This bit will read 0 is the FIFO is disabled or if the FIFO has not overflowed.
8 ADC FIFO Empty Flag
This bit is set to 1 automatically to indicate the ADC FIFO is empty. It is a flag bit only and cannot generate an interrupt.
This bit reads 0 if the ADC FIFO is disabled.
7 ADC FIFO Full Flag
This bit is set to 1 automatically to indicate the ADC FIFO is full and any subsequent I and V ADC conversion results will
overflow and corrupt the ADC FIFO.
This bit is cleared by disabling the FIFO or reconfiguring the ADC.
6 Accumulator Comparator Threshold Exceeded
This bit indicates that the absolute value of the Current Channel Accumulator has exceeded the programmed threshold.
This bit is cleared by disabling the Accumulator Comparator function in ADCCFG[6,5] or by reconfiguring the ADC.
5
Not Used
This bit is reserved for future functionality and should not be monitored by user code
Rev. PrD | Page 49 of 128

Preliminary Technical Data ADuC7032
4 Current Channel ADC Comparator Threshold
This bit is only valid if the Current Channel ADC comparator is enabled via the ADCCFG MMR. This bit is set by hardware if the
absolute value of the I-ADC conversion result exceeds the value written in the ADC0TH MMR. If the ADC threshold counter is
used (ADC0TCL), this bit is only set once the specified number of I-ADC conversions equals the value in the ADC0THV MMR.
3 Current Channel ADC Over-Range Bit
If the Over-Range Detect function is enabled via the ADCCFG MMR, this bit is set by hardware if the I-ADC input is grossly
(>30% approx.) over-ranged. This bit is updated every 125usecs. Once set, t
ADCCFG[2] is cleared to disable the function, or the ADC gain is changed via the ADC0CON MMR.
2 Temperature Conversion Result Ready Bit
If the Temperature Channel ADC is enabled, this bit is set by hardware as soon as a valid temperature conversion result is
written in the temperature data register (ADC2DAT MMR)
This bit is cleared by reading either ADC2DAT or ADC0DAT.
1 Voltage Conversion Result Ready Bit
If the Voltage Channel ADC is enabled, this bit is set by hardware as soon as a valid voltage conversion result is written in the
voltage data register (ADC1DAT MMR)
This bit is cleared by reading either ADC1DAT or ADC0DAT.
0 Current Conversion Result Ready Bit
If the Current Channel ADC is enabled, this bit is set by hardware as soon as a valid current conversion result is written in the
current data register (ADC0DAT MMR)
This bit is cleared by reading ADC0DAT.
his bit can only be cleared by software when
NOTES
1. All bits defined in the top 8 MSBs (bits 8–15) of the MMR are used as flags only and will not generate interrupts
2. All bits defined in the lower 8 LSBs (bits 0-7) of this MMR are logic OR’ed to produce a single ADC interrupt to the MCU core.
3. In response to an ADC interrupt, user code should interrogate the ADCSTA MMR to determine the source of the interrupt.
4. Each ADC interrupt source can be individually masked via the ADCMSKI MMR described below
5. All ADC Result Ready bits are cleared by a read of the ADC0DAT MMR. If the Current Channel ADC is not enabled, all ADC
Result Ready bits are cleared by a read of the ADC1DAT or ADC2DAT MMRs.
6. To ensure that I-ADC, V-ADC and T-ADC conversion data are synchronous, user code should first read the
ADC2DAT/ADC1DAT MMRs and then ADC0DAT MMR.
7. New ADC conversion results will not be written to the ADCxDAT MMRs unless the respective ADC Result Ready bits are first
cleared. The only exception to this rule is data conversion result updates when the ARM core is powered down. In this
modes ADCxDAT registers will always contain the most recent ADC conversion result even though the Ready bits have not
been cleared.
ADC Interrupt Mask Register :
Name : ADCMSKI
Address : 0xFFFF0504
Default Value : 0x00
Access : Read/Write
Function : This register allows the ADC interrupt sources to be enabled individually. The bit positions in this register are the
same as the lower 8-bits in the ADCSTA MMR. If a bit is set by user code to a ‘1’, the respective interrupt is enabled.
By default all bits are ‘0’ meaning all ADC interrupt sources are disabled.
Rev. PrD | Page 50 of 128

Preliminary Technical Data ADuC7032
ADC Mode Register :
Name : ADCMDE
Address : 0xFFFF0508
Default Value : 0x00
Access : Read/Write
Function : The ADC Mode MMR is an 8-bit register that configures the mode .of operation of the ADC sub-system
Table 23 : ADCMDE MMR Bit Designations
Bit Description
7 Not Used
This bit is reserved for future functionality and be written as 0 by user code
6
20KΩ resistor select:
This bit is set to 1 to select the 20 KΩ resistor as shown in Figure 18
This bit is set to 0 to select the direct path to ground as shown in Figure 18 ( Default ).
5 Low Power Mode Reference Select:
This bit is set to 1 to enable the Precision Voltage Reference in ADC Low Power Mode. This will increase current consumption.
This bit is set to 0 to enable the Low Power Voltage Reference in ADC Low Power Mode ( Default ).
4-3 ADC Power Mode Configuration
0, 0 ADC Normal Mode
If enabled, the ADC will operate with normal current consumption yielding optimum electrical performance
0, 1 ADC Low Power Mode
If enabled, the I-ADC will operate with reduced current consumption. This limitation is current consumption is
achieved, (at the expense of ADC noise performance) by fixing the gain to 128 and using the on-chip low power
(131kHz) oscillator to drive the ADC circuits directly.
1, 0 ADC Low Power-Plus Mode
If enabled, the ADC will again operate with reduced current consumption. In this mode the gain is fixed to 512 and
the current consumed is 200uA (approx.) more than ADC low Power Mode above. The additional current consumed
also ensures ADC noise performance is better than that achieved in ADC Low Power Mode.
1, 1 Not Defined
2-0 ADC Operation Mode Configuration
0, 0, 0 ADC Power-Down Mode
All ADC circuits (including internal reference) are powered-down
0, 0, 1 ADC Continuous Conversion Mode
In this mode, any enabled ADC will continuously convert.
0, 1, 0 ADC Single Conversion Mode
In this mode, any enabled ADC will perform a single conversion. The ADC will enter Idle Mode once the single
shot conversion is complete. A single conversion will take 2/3 ADC clock cycles depending on the CHOP mode.
0, 1, 1 ADC IDLE Mode
In this Mode, the ADC is fully powered on but is held in RESET
1, 0, 0 ADC Self-Offset Calibration
In this mode, an offset calibration is performed on any enabled ADC using an internally generated 0V. The
calibration is carried out at the user programmed ADC settings, therefore, as with a normal single ADC
conversion, it will take 2/3 ADC conversion cycles before a fully settled calibration result is ready. The calibration
result is automatically written to the ADCxOF MMR of the respective ADC. The ADC returns to IDLE Mode and the
Calibration and Conversion Ready status bits are set at the end of an offset calibration cycle.
1, 0, 1 ADC Self Gain Calibration
In this mode, a gain calibration against an internal reference voltage is performed on all enabled ADCs. A gain
calibration is a 2 stage process and takes twice the time of an offset calibration. The calibration result is
automatically written to the ADCxGN MMR of the respective ADC. The ADC returns to IDLE Mode and the calibration
and Conversion Ready status bits are set at the end of an gain calibration cycle. An ADC self gain calibration should
only be carried out on the Current Channel ADC while pre-programmed, factory calibration coefficients (downloaded
automatically from internal Flash) should be used for voltage temperature measurements. If an external NTC is used,
an ADC Self Calibration should be done on the temperature channel.
Rev. PrD | Page 51 of 128

Preliminary Technical Data ADuC7032
1, 1, 0 ADC System Zero-Scale Calibration
In this mode, an zero-scale calibration is performed on enabled ADC channels against an external zero-scale voltage
driven at the ADC input pins. The calibration is carried out at the user programmed ADC settings, therefore, as with a
normal single ADC conversion, it will take 3 ADC conversion cycles before a fully settled calibration result is ready.
1, 1, 1 ADC System Full-Scale Calibration
In this mode, an full-scale calibration is performed on enabled ADC channels against an external full-scale voltage
driven at the ADC input pins.
Current Channel ADC Control Register :
Name : ADC0CON
Address : 0xFFFF050C
Default Value : 0x0002
Access : Read/Write
Function : The Current Channel ADC Control MMR is an 16-bit register that is used to configure the I-ADC.
Note: If the Current ADC is reconfigured via ADC0CON, the Voltage and Temperature ADCs are also reset.
Table 24 : ADC0CON MMR Bit Designations
Bit Description
15 Current Channel ADC Enable
This bit is set to 1 by user code to enable the I-ADC
Clearing this bit to 0, powers down the I-ADC and resets the respective ADC READY bit in the ADCSTA MMR to 0
14, 13 IIN Current Source Enable
0, 0 Current Sources Off
0, 1 Enable 50uA current source on IIN+
1, 0 Enable 50uA current source on IIN1, 1 Enable 50uA current source on both IIN- and IIN+
NOTE: These current sources have a tolerance of +-30%. A PGA gain equal to or greater than 2 ( ADC0CON [3-0 ] != 0000 )
must be used when current sources are enabled.
12– 10
9 Current Channel ADC Output Coding
8
7, 6 Current Channel ADC Input Select
5, 4 Current Channel ADC Reference Select
Not Used
These bits are reserved for future functionality and should be written as zero
This bit is set to 1 by user code to configure I-ADC output coding as unipolar
This bit is cleared to 0 by user code to configure I-ADC output coding as 2’s complement
Not Used
This bit is reserved for future functionality and should be written as zero
0, 0 IIN+, IIN0, 1 IIN-, IIN- Diagnostic, internal short configuration
1, 0 ADC Reference/136, 0V Diagnostic, test voltage for gain settings <= 128
ADC Reference/(1.0625XGain), 0V Diagnostic, test voltage for gain settings > 128
Note: If (REG_AVDD, AGND) divided by 2 Reference is selected, REG_AVDD is used for Vref in this mode. This will
lead to ADC0DAT scaled by two
1, 1 Not Defined
0, 0 Internal, 1.2V precision reference selected. In ADC Low Power Mode, the Voltage Reference selection is
controlled by ADCMDE[5]
0, 1 External reference inputs (VREF, GND_SW) selected
1, 0 External reference inputs divided by 2 (VREF, GND_SW)/2 selected, this allows an external reference up to
REG_AVDD
1, 1 (REG_AVDD, AGND) divided by 2 selected
Rev. PrD | Page 52 of 128

Preliminary Technical Data ADuC7032
3 - 0 Current Channel ADC Gain Select (note, nominal I-ADC Full-scale Input Voltage = (Vref/GAIN)
0, 0, 0, 0 I-ADC Gain =1
0, 0, 0, 1 I-ADC Gain =2
0, 0, 1, 0 I-ADC Gain =4
0, 0, 1, 1 I-ADC Gain =8
0, 1, 0, 0 I-ADC Gain =16
0, 1, 0, 1 I-ADC Gain =32
0, 1, 1, 0 I-ADC Gain =64
0, 1, 1, 1 I-ADC Gain =128
1, 0, 0, 0 I-ADC Gain =256
1, 0, 0, 1 I-ADC Gain =512
1, x, x, x I-ADC Gain is undefined
Voltage Channel ADC Control Register :
Name : ADC1CON
Address : 0xFFFF0510
Default Value : 0x0000
Access : Read/Write
Function : The Voltage Channel ADC Control MMR is an 16-bit register that is used to configure the V-ADC.
Note: When enabling/disabling the Voltage ADC, the Voltage Attenuator must also be enabled/disabled via HVCFG1[7].
Bit Description
15 Voltage Channel ADC Enable
This bit is set to 1 by user code to enable the V-ADC. When enabling/disabling the Voltage ADC, the Voltage Attenuator
must also be enabled/disabled via HVCFG1[7].
Clearing this bit to 0, powers down the V-ADC.
14– 10 Not Used
These bits are reserved for future functionality and should not be modified by user code
9 Voltage Channel ADC Output Coding
This bit is set to 1 by user code to configure V-ADC output coding as unipolar
This bit is cleared to 0 by user code to configure V-ADC output coding as 2’s compliment
8 Not Used
This bit is reserved for future functionality and should be written as 0 by user code
7, 6 Voltage Channel ADC Input Select
0, 0 VBAT/24, AGND VBAT attenuator selected
0, 1 Not Defined
1, 0 Not Defined
1, 1 Internal Short Shorted Input
5, 4 Voltage Channel ADC Reference Select
0, 0 Internal, 1.2V precision reference selected.
0, 1 External reference inputs (VREF, GND_SW) selected.
1, 0 External reference inputs divided by 2 (VREF, GND_SW)/2 selected. This allows an external reference up to
REG_AVDD
1, 1 (REG_AVDD, AGND) divided by 2 selected.
3 – 0 Not Used
These bits are reserved for future functionality and should be written as 0 by user code
Table 25 : ADC1CON MMR Bit Designations
Rev. PrD | Page 53 of 128

Preliminary Technical Data ADuC7032
Temperature Channel ADC Control Register :
Name : ADC2CON
Address : 0xFFFF0514
Default Value : 0x0000
Access : Read/Write
Function : The Temperature Channel ADC Control MMR is an 16-bit register that is used to configure the T-ADC.
Note: The Temperature channel is calibrated to read 0x0000 at 0°K.
The temperature gradient is then 16 codes per degree Celsius
Table 26 : ADC2CON MMR Bit Designations
Bit Description
15 Temperature Channel ADC Enable
This bit is set to 1 by user code to enable the T-ADC
Clearing this bit to 0, powers down the T-ADC
14, 13 VTEMP Current Source Enable
0, 0 Current Sources Off
0, 1 Enable 50uA current source on VTEMP+
1, 0 Enable 50uA current source on GND_SW
1, 1 Enable 50uA current source on both VTEMP+ and GND_SW
NOTE: These current sources have a tolerance of +-30%.
12– 10 Not Used
These bits are reserved for future functionality and should not be modified by user code
9 Temperature Channel ADC Output Coding
This bit is set to 1 by user code to configure T-ADC output coding as unipolar
This bit is cleared to 0 by user code to configure T-ADC output coding as 2’s compliment
8 Not Used
This bit is reserved for future functionality and should be written 0 by user code
7, 6 Temperature Channel ADC Input Select
0, 0 Internal Temperature Sensor
The Temperature gradient is 0.5mV/°C. This is only applicable to the Internal Temperature Sensor
0, 1 External ( VTEMP, GND_SW)
1, 0 Shorted Input ( GND_SW, GND_SW)
1, 1 ADC Reference/136
5, 4 Temperature Channel ADC Reference Select
0, 0 Internal, 1.2V precision reference selected.
0, 1 External reference inputs (VREF, GND_SW) selected.
1, 0 External reference inputs divided by 2 (VREF, GND_SW)/2 selected. This allows an external reference up to
REG_AVDD
1, 1 (REG_AVDD, GND_SW) divided by 2 selected. Used for external temperature sensor measurements.
3 – 0 Not Used
This bit is reserved for future functionality and should be written 0 by user code
Rev. PrD | Page 54 of 128

Preliminary Technical Data ADuC7032
ADC Filter Register :
Name : ADCFLT
Address : 0xFFFF0518
Default Value : 0x0007
Access : Read/Write
Function : The ADC Filter MMR is an 16-bit register that controls the speed and resolution of the on-chip ADCs.
Note: If ADCFLT is modified, the Current, Voltage and Temperature ADCs are reset. An additional time of 60us per
enabled ADC is required before the first ADC result is available.
Table 27 : ADCFLT MMR Bit Designations
Bit Description
15
14
13 - 8
7
6 – 0
Chop enable
Set by user to enable system chopping of all active ADCs. When this bit is set the ADC will have very low offset errors and
drift but the ADC output rate will be reduced by a factor of 3 if AF=0 (see Sinc3 Decimation Factor bits below). If AF ≠ 0,
then ADC output update rate will be the same with chop on or off. When chop is enabled, the settling time is 2 output
periods.
Note: Should only be used with SF > 1
Running Average
Set by user to enable a running average by 2 function reducing ADC noise. This function is automatically enabled when
chopping is active. It is an optional feature when chopping is inactive and if enabled (when chopping is inactive) does
not reduce ADC output rate but will increase the settling time by 1 conversion period.
Cleared by user to disable the running average function.
Averaging Factor ( AF )
The value written to these bits is use to implement a programmable 1
st
order Sinc post filter. The averaging factor can
further reduce ADC noise at the expense of output rate as described in Sinc Decimation Factor bits below.
Sinc3 Modify
Set by user to modify the standard Sinc3 frequency response to increase the filter stopband rejection by 5dBs approx.
This is achieved by inserting a second notch (NOTCH2) at F
NOTCH2
= 1.333 * F
NOTCH
where F
is the location of the 1st
NOTCH
notch in the response.
Sinc3 Decimation Factor (SF)
The value (SF) written in these bits controls the over sampling (decimation factor) of the Sinc3 filter. The output rate from
the Sinc3 filter is given by
F
= ( 512,000 / ( [SF+1] X 64 )) Hz when the CHOP bit (bit#15 above) = 0 and AF=0 (note AF = Averaging Factor)
ADC
Note : this is valid for all SF values <= 125
For SF= 126, F
For SF= 127, F
For information on calculating the F
is forced to 60Hz
ADC
is forced to 50Hz
ADC
for SF ( other than 126 and 127 ) and AF values please refer to Table 2 8.
ADC
Note:
- Due to limitations on the digital filter internal data-path, there are some limitations on the combinations of SF(Sinc3
Decimation Factor) and AF(Averaging Factor) that can be used to generate a required ADC output rate. This
restriction limits the minimum ADC update in Normal Power Mode to 4Hz or 1Hz in Low Power Mode. If all three ADCs
are enabled, then the minimum value of SF written by user code must be 1
- In low power mode and low power-plus mode, the ADC is driven directly by the low power oscillator (131KHz) and
not 512KHz. All F
calculations should be divided by 4 (approx).
ADC
- For optimal ADC performance, SF should be increased before AF is used.
Rev. PrD | Page 55 of 128

Preliminary Technical Data ADuC7032
3
Table 28 : ADC Conversion Rates and Settling Times
Chop
Enabled
No No No
No No Yes
No Yes No
No Yes Yes
Yes N/A N/A
*An additional time of 60us per enabled ADC is required before the first ADC result is available.
Running
Average
Table 29 : Allowable Combinations of SF and AF
AF Range
SF
Averaging Factor F
512000
512000
512000
+SF
512000
512000
(SF+1) x 64 x (AF+3) +
0 1 to 7 8 to63
*T
ADC
64*]1[
+SF
]3[*64*]1[
AFSF ++
64*]1[
]3[*64*]1[
AFSF ++
Settling
3
F
ADC
1
F
ADC
4
F
ADC
2
F
ADC
2
F
ADC
0-31
32-63
64-127
Rev. PrD | Page 56 of 128

Preliminary Technical Data ADuC7032
ADC Configuration Register :
Name : ADCCFG
Address : 0xFFFF051C
Default Value : 0x00
Access : Read/Write
Function : The 8-bit ADC Configuration MMR controls extended functionality related to the on-chip ADCs.
Table 30: ADCCFG MMR Bit Designations
Bit Description
7 Analog Ground Switch Enable
This bit is set to ‘1’ by user software to connect the external ‘GND_SW’ pin (pin#15) to an internal analog ground reference
point. This bit can be used to connect and disconnect external circuits and components to ground under program
control and thereby minimize dc current consumption when the external circuit or component is not being used.
This bit is used in conjunction with ADCMDE[6] to select a 20KΩ resistor to ground.
6, 5
4, 3
2
1 ADC FIFO Enable
0 Current Channel ADC, Result Counter Enable
Current Channel (32-bit) Accumulator Enable
0, 0 Accumulator Disabled and reset to 0
0, 1 Accumulator Active
Positive current values are added to accumulator total, accumulator can overflow if allowed run for > 65535
conversions
Negative current values are subtracted from accumulator total, accumulator is clamped to a
minimum value of 0
1, 0 Accumulator Active
Positive current values are added to accumulator total, accumulator can overflow if allowed run for > 65535
conversions
The absolute values of Negative current are subtracted from accumulator total, accumulator in this mode will
continue to accumulate negatively, below 0
1, 1 Accumulator and Accumulator Comparator Enabled
This mode is the same as Mode |1,0|, but with the Accumulator Comparator enabled.
Current Channel ADC Comparator Enable
0, 0 Comparator Disabled
0, 1 Comparator Active, Interrupt asserted if absolute value of I-ADC conversion result |I| >= ADC0TH
1, 0 Comparator-Count Mode Active, Interrupt asserted if absolute value of an I-ADC conversion result |I| >=
ADC0TH for #ADC0TCL conversions. A conversion value |I| < ADC0TH will reset the threshold counter value
(ADC0THV) to 0
1, 1 Comparator-Count Mode Active, Interrupt asserted if absolute value of an I-ADC conversion result |I| >=
ADC0TH for #ADC0TCL conversions. A conversion value |I| < ADC0TH will decrement the threshold counter
value (ADC0THV) towards 0.
Current Channel ADC OverRange Enable
Set by user to enable a ‘coarse’ comparator on the Current Channel ADC. If the current reading is grossly (>30% approx.)
over-ranged for the active gain setting, then the over range bit in the ADCSTA MMR is set. The current must be outside
this range for greater than 125usecs for the flag to be set.
This feature should not be used in ADC Low Power Mode
This bit is set to 1 by user code to enable ADC FIFO on Current and Voltage ADC Channels. The FIFO function allows up to
32 current and voltage ADC results to be stored in an on-chip FIFO. The current status of the FIFO is reflected by 3 bits in
the ADCSTA register.
If more than 32 results are stored in the FIFO, the contents of the FIFO may be corrupted.
Set by user to enable the result count mode. In this mode an I-ADC interrupt will only be generated when
ADC0RCV=ADC0RCL. This allows the I-ADC to continuously monitor current but only interrupt the MCU core after a
defined number of conversions. It should be noted that unless the ADC FIFO is enabled (ADCCNG[1]=1), only the last
conversion value will be available (intermediate I-ADC conversion results are not stored) when the ADC counter interrupt
occurs. The Voltage and Temperature ADCs will also continue to convert if enabled but again only the last conversion
result will be available (intermediate V/T-ADC conversion results are not stored) when the ADC counter interrupt occurs
Rev. PrD | Page 57 of 128

Preliminary Technical Data ADuC7032
Current Channel ADC Offset Calibration Register :
Current Channel ADC Data Register :
Name : ADC0DAT
Address : 0xFFFF0520
Default Value : 0x0000
Access : Read Only
Function : This ADC Data MMR holds the 16-bit
conversion result from the I-ADC. The ADC will not update
this MMR if the ADC0 Conversion Result READY bit
(ADCSTA[0]) is set. A read of this MMR by the MCU clears all
asserted READY flags (ADCSTA[2:0]).
Voltage Channel Data Register:
Name : ADC1DAT
Address : 0xFFFF0524
Default Value : 0x0000
Access : Read Only
Function : This ADC Data MMR holds the 16-bit
conversion result from the V-ADC. The ADC will not update
this MMR if the Voltage Conversion Result READY bit
(ADCSTA[1]) is set. If I-ADC is not active, a read of this MMR
by the MCU clears all asserted READY flags (ADCSTA[2:1]).
Temperature Channel ADC Data Register :
Name : ADC2DAT
Address : 0xFFFF0528
Default Value : 0x0000
Access : Read Only
Function : This ADC Data MMR holds the 16-bit
conversion result from the T-ADC. The ADC will not update
this MMR if the Temperature Conversion Result READY bit
(ADCSTA[2]) is set.
ADC FIFO Register :
Name : ADCFIFO
Address : 0xFFFF052C
Default Value : 0x0000
Access : Read Only
Function : This 32-bit, read-only register returns the
value of I-ADC and V-ADC conversion result held in the FIFO
location currently pointed to by the FIFO read pointer. The low
16 bits [15-0] of this 32-bit word are the I-ADC result and the
high 16-bits [31-16] are the V-ADC result. The FIFO function
is enabled via the ADCCFG[1] bit and 3 flags available in the
ADCSTA register allow user code monitor and read the FIFO
contents.
Name : ADC0OF
Address : 0xFFFF0530
Default Value : Part Specific, factory programmed
Access : Read/Write
Function : This ADC Offset MMR holds a 16-bit offset
calibration coefficient for the I-ADC. The register is configured
at power-on with a factory default value. However, this register
will be automatically overwritten if an offset calibration of the
I-ADC is initiated by the user via bits in the ADCMDE MMR.
User code can only write to this calibration register if the ADC
is in idle mode. An ADC must be enabled and in idle mode
before written to any Offset or Gain Register. A delay of 23us
should be included before ADCMDE is modified.
Voltage Channel Offset Calibration Register :
Name : ADC1OF
Address : 0xFFFF0534
Default Value : Part Specific, factory programmed
Access : Read/Write
Function : This Offset MMR holds a 16-bit offset
calibration coefficient for the voltage channel. The register is
configured at power-on with a factory default value. However,
this register will be automatically overwritten if an offset
calibration of the voltage channel is initiated by the user via bits
in the ADCMDE MMR. User code can only write to this
calibration register if the ADC is in idle mode. An ADC must
be enabled and in idle mode before written to any Offset or
Gain Register. A delay of 23us should be included before
ADCMDE is modified.
Temperature Channel Offset Calibration Register:
Name : ADC2OF
Address : 0xFFFF0538
Default Value : Part Specific, factory programmed
Access : Read/Write
Function : This ADC Offset MMR holds a 16-bit offset
calibration coefficient for the temperature channel. The register
is configured at power-on with a factory default value.
However, this register will be automatically overwritten if an
offset calibration of the temperature channel is initiated by the
user via bits in the ADCMDE MMR. User code can only write
to this calibration register if the ADC is in idle mode. An ADC
must be enabled and in idle mode before written to any Offset
or Gain Register. A delay of 23us should be included before
ADCMDE is modified.
Rev. PrD | Page 58 of 128

Preliminary Technical Data ADuC7032
Current Channel ADC Gain Calibration Register :
Name : ADC0GN
Address : 0xFFFF053C
Default Value : Part Specific, factory programmed
Access : Read/Write
Function : This Gain MMR holds a 16-bit gain
calibration coefficient for scaling the I-ADC conversion result.
The register is configured at power-on with a factory default
value. However, this register will be automatically overwritten if
aa gain calibration of the I-ADC is initiated by the user via bits
in the ADCMDE MMR. User code can only write to this
calibration register if the ADC is in idle mode. An ADC must
be enabled and in idle mode before written to any Offset or
Gain Register. A delay of 23us should be included before
ADCMDE is modified.
Voltage Channel Gain Calibration Register :
Name : ADC1GN
Address : 0xFFFF0540
Default Value : Part Specific, factory programmed
Access : Read/Write
Function : This Gain MMR holds a 16-bit gain
calibration coefficient for scaling a voltage channel conversion
result. The register is configured at power-on with a factory
default value. However, this register will be automatically
overwritten if a gain calibration of the voltage channel is
initiated by the user via bits in the ADCMDE MMR. User code
can only write to this calibration register if the ADC is in idle
mode. An ADC must be enabled and in idle mode before
written to any Offset or Gain Register. A delay of 23us should
be included before ADCMDE is modified.
Temperature Channel Gain Calibration Register :
Name : ADC2GN
Address : 0xFFFF0544
Default Value : Part Specific, factory programmed
Access : Read/Write
Function : This Gain MMR holds a 16-bit gain
calibration coefficient for scaling a temperature channel
conversion result. The register is configured at power-on with a
factory default value. However, this register will be
automatically overwritten if a gain calibration of the
temperature channel is initiated by the user via bits in the
ADCMDE MMR. User code can only write to this calibration
register if the ADC is in idle mode. An ADC must be enabled
and in idle mode before written to any Offset or Gain Register.
A delay of 23us should be included before ADCMDE is
modified.
Current Channel ADC Result Counter Limit
Register:
Name : ADC0RCL
Address : 0xFFFF0548
Default Value : 0x0001
Access : Read/Write
Function : This 16-bit MMR sets the number of
conversions required before an ADC interrupt is generated. By
default this register is set to 0x01. The ADC counter function
must be enabled via the ADC Result Counter Enable bit in the
ADCCFG MMR.
Current Channel ADC Result Count Register:
Name : ADC0RCV
Address : 0xFFFF054C
Default Value : 0x0000
Access : Read Only
Function : This 16-bit, Read Only MMR holds the
current number of I-ADC conversion results. It is used in
conjunction with ADC0RCL to mask I-ADC interrupts,
generating a lower interrupt rate. Once ADC0RCV=ADC0RCL,
the value is ADC0RCV resets to 0 and recommences counting.
It can also be used in conjunction with the Accumulator
(ADC0ACC) to allow an average current calculation to be
undertaken. The result counter is enabled via ADCCFG[0].
This MMR is also reset to 0 when the I-ADC is reconfigured i.e.
when the ADC0CON or ADCMDE are written.
Current Channel ADC Threshold Register:
Name : ADC0TH
Address : 0xFFFF0550
Default Value : 0x0000
Access : Read/Write
Function : This 16-bit MMR sets the threshold against
which the absolute value of the I-ADC conversion result is
compared. In Unipolar mode ADC0TH [15:0] are compared
and in 2’s compliment mode ADC0TH[14:0] are compared.
Current Channel ADC Threshold Count Limit
Register:
Name : ADC0TCL
Address : 0xFFFF0554
Default Value : 0x01
Access : Read/Write
Function : This 8-bit MMR determines how many
cumulative(given values below the threshold will decrement or
reset the count to 0) I-ADC conversion result readings above
ADC0TH must occur before the I-ADC Comparator Threshold
Rev. PrD | Page 59 of 128

Preliminary Technical Data ADuC7032
bit is set in the ADCSTA MMR generating an ADC interrupt.
The I-ADC Comparator Threshold bit is asserted as soon as the
ADC0THV=ADC0TCL.
Current Channel ADC Threshold Count Register:
Name : ADC0THV
Address : 0xFFFF0558
Default Value : 0x00
Access : Read Only
Function : This 8-bit MMR is incremented every time
the absolute value of an I-ADC conversion result |I| >=
ADC0TH. This register is decremented or reset to 0 every time
the absolute value of an I-ADC conversion result |I| <
ADC0TH. The configuration of this function is enabled via the
Current Channel ADC Comparator bits in the ADCCFG MMR
Current Channel ADC Accumulator Register:
Name : ADC0ACC
Address : 0xFFFF055C
Default Value : 0x00000000
Access : Read Only
Function : This 32-bit MMR holds the current
accumulator value. The I-ADC READY bit in the ADCSTA
MMR should be used to determine when it is safe to read this
MMR. The MMR value is reset to 0 by disabling the
accumulator in the ADCCFG MMR or reconfiguring the
Current Channel ADC.
Current Channel ADC Accumulator Threshold
Register:
Name : ADC0ATH
Address : 0xFFFF0560
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR sets the threshold against
which the accumulated value of the I-ADC results is compared.
In Unipolar mode ADC0TH [15:0] are compared and in 2’s
compliment mode ADC0TH[14:0] are compared.
Low Power Voltage Reference Scaling Factor
Name : ADCREF
Address : 0xFFFF057C
Default Value : Part Specific, factory programmed
Access : Read
Function : This allows user code to correct for the
initial error of the LPM reference. The default value of 0x8000
corresponds to no error when compared to the Normal Mode
Reference.
If the LPM Voltage Reference is 1% below1.200V,then the value
of ADCREF will be approximately 0x7EB9
If the LPM Voltage Reference is 1% above1.200V,then the value
of ADCREF will be approximately 0x8147
ADC POWER MODES OF OPERATION
The ADCs can be configured into various reduced or full
‘power’ modes of operation by configuring ADCMDE[4:3] as
appropriate. The ARM7 MCU can itself also be configured in
Low Power modes of operation (POWCON[5:3]). The core
power modes are independently controlled and are not related
to the ADC power modes described here. The ADC power
modes of operation are described in more detail below.
Every I-ADC result can also compared to a pre-set threshold
level (ADC0TH) as configured via ADCCFG[4:3]. An MCU
interrupt is generated if the absolute (sign-independent) value
of the ADC result is greater than the pre-programmed
comparator threshold level. An extended function of this
comparator function allows user code to configure a threshold
counter (ADC0THV) which monitors the number of I-ADC
results that have occurred above or below the pre-set threshold
level. Again an ADC interrupt is generated once the threshold
counter reaches a pre-set value (ADC0TCL).
Finally, a 32-bit accumulator(ADC0ACC) function can be
configured(ADCCFG[6:5]) allowing the I-ADC to add(or
subtract) multiple I-ADC sample results. User code can read
the accumulated value directly( via ADC0ACC) without any
further software processing.
ADC Startup Procedure
Prior to beginning converting, the following procedure should
be followed.
1. Configure the Current ADC, ADC0, into Low-PowerMode
(ADC0CON = 0x8007; ADCMDE = 0x09)
2. Delay for 200us.
3. Switch the Current ADC, ADC0, into Idle-Mode
(ADCMDE = 0x03), keeping ADC0CON unchanged.
If the Voltage or Temperature channels are to be
used, they should be enabled here.
4. Delay for 1ms
5. Switch ADCMDE to desired mode,
e.g. ADC0CON = 0x1.
Rev. PrD | Page 60 of 128

Preliminary Technical Data ADuC7032
digital comparator and accumulator) described earlier in
ADC Normal Power Mode
In Normal Mode, the Current and Voltage/Temperature
channels are fully enabled. The ADC modulator clock is
512KHz and enables the ADCs to provide regular conversion
results at a rate of between 4Hz and 8KHz (see ADCFLT). Both
channels are under full control of the MCU and can be
reconfigured at any time. The default ADC update rate for all
channels in this mode is 1.0kHz
It is worth emphasizing that I-ADC and V/T-ADC channels
can be configured to initiate periodic, normal power mode,
high accuracy, single conversion cycles before returning to
ADC full power-down mode. This flexibility is facilitated under
full MCU control via the ADCMDE MMR and ensures that
continuous periodic monitoring of battery current, voltage and
temperature settings is feasible while ensuring the average dc
current consumption is minimized.
In ADC Normal Mode, the PLL must not be powered down.
ADC Low Power Mode
In ADC Low Power mode, the I-ADC is enabled in a reduced
power and reduced accuracy configuration. The ADC
modulator clock is now driven directly from the on-chip
131KHz low power oscillator, which allows the ADC to be
configured at update rates as low as 1Hz(ADCFLT). The gain of
the ADC in this mode is fixed at 128.
All of the ADC peripheral functions (result counter, digital
comparator and accumulator) described earlier in normal
power mode can still be enabled in low power mode.
Typically, in Low Power Mode, the I-ADC only, is configured
to run at a low update rate, continuously monitoring battery
current. The MCU will be in power-down mode and will only
be woken up when the I-ADC interrupts the MCU. This would
happen after the I-ADC detects a current conversion or an
accumulated current value has risen beyond a pre-programmed
threshold, set-point or a set number of conversions.
It is also possible to select either the ADC Normal Mode
Voltage Reference of the ADC Low Power Mode Voltage
Reference via ADCMDE[5].
ADC Low Power-Plus Mode
In Low Power-Plus mode, the I-ADC channel is enabled in a
mode almost identical to low-power mode(ADCMDE[4:3]).
However, in this mode, the I-ADC gain is fixed at 512 and the
ADC consumes an additional 200uA (approx.) to yield
improved noise performance relative to the low-power mode
setting.
normal power mode can still be enabled in Low Power-Plus
mode.
As in Low Power Mode, the I-ADC only, is configured to run at
a low update rate, continuously monitoring battery current.
The MCU will be in power-down mode and will only be woken
up when the I-ADC interrupts the MCU. This would happen
after the I-ADC detects a current conversion result or an
accumulated current value has risen beyond a pre-programmed
threshold or set-point.
It is also possible to select either the ADC Normal Mode
Voltage Reference of the ADC Low Power Mode Voltage
Reference via ADCMDE[5].
ADC Sinc3 Digital Filter Response
The overall frequency response on all ADuC7032s ADCs is
dominated by the low pass filter response of the on-chip Sinc3
digital filters. The Sinc3 filters are used to decimate the ADC
sigma-delta modulator output data bit-stream to generate a
valid 16-bit data result. The digital filter response is identical
for all ADCs and is configured via the 16-bit ADC Filter
(ADCFLT) register which determines the overall throughput
rate of the ADCs. The noise resolution of the ADCs is
determined by the programmed ADC throughput rate. In the
case of the Current Channel ADC, the noise resolution will be
determined by throughput rate and selected gain.
The overall frequency response and the ADC through-put is
dominated by the configuration of the Sinc3 Filter Decimation
Factor (SF) bits (ADCFLT[6:0]) and the Averaging Factor (AF)
bits(ADCFLT[13:8]). Due to limitations on the digital filter
internal data-path, there are some limitations on the allowable
combinations of SF(Sinc3 Decimation Factor) and
AF(Averaging Factor) that can be used to generate a required
ADC output rate. This restriction limits the minimum ADC
update in Normal Power Mode to 4Hz or 1Hz in Low Power
Mode. The calculation of the ADC through-put rate is detailed
in the ADCFLT bit designations table and the restrictions on
allowable combinations of AF and SF values are outlined again
in Table 31
Table 31 : Allowable Combinations of SF and AF
AF Range
SF
<= 31
63
127
0 1 to 7 8-63
Again, all of the ADC peripheral functions (result counter,
Rev. PrD | Page 61 of 128

Preliminary Technical Data ADuC7032
By default the ADCFLT = 0x07 which configures the ADCs for
a through-put of 1.0KHz with all other filtering options (Chop,
Running Average, Averaging Factor and Sinc3 Modify) being
disabled. A typical filter response based on this default
configuration is shown in Figure 19 below.
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
f
Figure 19 : Typical Digital Filter Response at FADC=1.0kHz (ADCFLT = 0x0007)
An additional ‘Sinc3 Modify’ bit (ADCFLT[7]) is also available
in the ADCFLT register. This bit is set by user code to modify
the standard Sinc3 frequency response increasing the filter stopband rejection by 5dBs approx. This is achieved by inserting a
second notch (NOTCH2) at FNOTCH2 = 1.333 X FNOTCH
where FNOTCH is the location of the 1st notch in the response.
There is a slight increase in ADC noise if this bit is active.
Figure 20 shows the modified 1KHz filter response when the
Sinc3 modify bit is active. The ‘new’ notch is clearly visible at
1.33KHz as is the improvement in stop-band rejection when
compared to the standard 1KHz response above.
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Figure 20 : ModifiedSinc3 Digital Filter Response at FADC=1.0kHz (ADCFLT =
0x0087)
In ADC Normal Power Mode, the maximum ADC through-put
rate is 8KHz which is configured by setting the SF and AF bits
in the ADCFLT MMR to 0, with all other filtering options
disabled. This results in 0x0000 written to ADCFLT and a
typical 8KHz filter response based on these settings is shown
below in Figure 21.
f
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0 2000 4000 6000 8000 10000 12000 14000 16000 18000 20000 22000 24000
f [Hz]
Figure 21 : Typical Digital Filter Response at FADC=8KHz, (ADCFLT = 0x0000)
A modified version of the 8KHz filter response can be
configured by setting the ‘Running Average’ bit (ADCFLT[14]).
This has the effect of introducing an additional running average
by 2 filter on all ADC output samples. This further reduces the
ADC output noise and while maintaining an 8KHz ADC
through-put rate the ADC settling time is increased by 1 full
conversion period. The modified frequency response for this
configuration is shown below in Figure 22.
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0 2000 4000 6000 8000 10000 12000 14000 16000 18000 20000 22000 24000
f [Hz]
Figure 22 : Typical Digital Filter Response at FADC=8KHz, (ADCFLT = 0x4000)
At very low throughput rates, the chop bit in the ADCFLT
register can be enabled to minimize offset errors and more
importantly and temperature drift in the ADC DC errors. With
Chop enabled, there are again 2 primary variables (Sinc3
decimation factor and averaging factor) available to allow the
user select an optimum filter response trading off filter
bandwidth against ADC noise.
For example, with the CHOP bit ADCFLT[15] set to 1,
increasing the SF value (ADCFLT[6:0]) to 0x1F (31dec) and
selecting an AF value (ADCFLT[13:8]) of 0x16 (22dec) results
in an ADC through-put of 10Hz. The frequency response in
this case is shown in Figure 23.
Rev. PrD | Page 62 of 128

Preliminary Technical Data ADuC7032
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0 20 40 60 80 100 120 140 160 180 200
f
Figure 23 Typical Digital Filter Response at FADC=8KHz, (ADCFLT = 0x961F)
Changing SF to 0x1D and setting AF to 0x3F, again with the
Chop bit enabled, configures the ADC into its minimum
through-put rate in Normal Mode of 4Hz. The digital filter
frequency response with this configuration is shown below in
Figure 24.
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0204060
f
Figure 24 : Typical Digital Filter Response at FADC=4Hz, (ADCFLT = 0xBF1D)
In ADC Low Power Mode, the ADC, Sigma-Delta modulator
clock no longer driven at 512KHz but is driven directly from
the on-chip low power (131KHz) oscillator. Subsequently, for
the same ADCFLT configurations in Normal Mode, all filter
values should be scaled by a factor of approximately 4. This
means that is possible to configure the ADC for 1Hz throughput is Low Power Mode. The filter frequency response for this
configuration is shown below in Figure 25.
0
H(f)
[dB]
-10
-20
-30
-40
-50
-60
-70
-80
-90
-100
0 2 4 6 8 101214161820
Figure 25 : Typical Digital Filter Response at FADC=1Hz, (ADCFLT = 0xBD1F
In general, it should be noted that it is possible to program
different values of SF and AF in the ADCFLT register and
achieve the same ADC update rate. In practical terms the tradeoff with any value of ADCFLT will be frequency response
versus ADC noise. For optimum filter response and ADC noise
when using combinations of SF and AF, a good rule of thumb
to use would be to first choose an SF in the range of 16 – 40
(dec) or 0x10 to 0x28 and then increase the AF value to
achieve the required ADC through-put. Table 32 shows some
common ADCFLT configurations.
Table 32 : Common ADCFLT Configurations
ADC
Mode
Normal 0x1D 0x3F Chop On 0xBF1D 4Hz 0.5secs
Normal 0x1F 0x16 Chop On 0x961F 10Hz 0.2secs
Normal 0x07 0x00 None 0x0007 1KHz 3msecs
Normal 0x07 0x00
Normal 0x03 0x00
Normal 0x00 0x01
Low
Power
SF AF
0x10 0x03 Chop On 0x8310 20Hz 100ms
Other
Config
Sinc 3
Modifiy
Running
Average
Running
Average
ADCFLT F
ADC
T
0x0087 1KHz 3msec
0x4003 2KHz 2msec
0x4000 8KHz 0.5ms
SETTLE
f
Low
Power
Low
Power
Rev. PrD | Page 63 of 128
0x10 0x09 Chop On 0x8910 10Hz 200ms
0x1F 0x3D Chop On 0xBD1F 1Hz 2sec

Preliminary Technical Data ADuC7032
ADC Calibration
As described in detail in the top level diagrams at the start of
this section, the signal flow through all ADC Channels can be
described in simple terms as:
An Input-voltage is applied through an input buffer
(and PGA in the case of the I-ADC) to the SigmaDelta Modulator.
The Modulator-output is applied to a programmable
Digital Decimation Filter
The filter output result is then averaged if chopping is
used.
An Offset value (ADCxOF) is subtracted from the
result.
This result is scaled by a Gain value (ADCxGN).
Finally, the result is formatted as
- 2’s Complement. / Offset-Binary,
- Rounded to 16-Bit
- Clamped to +/-Full-Scale
Each ADC has a specific Offset and Gain correction or
Calibration coefficient associated with it that are stored in
MMR based Offset and Gain registers(ADCxOF and
ADCxGN). The offset and gain registers can be used to remove
offsets and gain errors arising within the part as well as Systemlevel offset and gain errors external to the part.
These registers are configured at power-on with a factory
programmed calibration value. These factory calibration values
will vary from part to part reflecting the manufacturing
variability of internal ADC circuits . However, these registers
can also be overwritten by user code (only if the ADC is in idle
mode) and will be automatically overwritten if an offset or gain
calibration cycle is initiated by user via the mode bits in the
ADCMDE[2:0] MMR. 2 types of automatic calibration are
available to the user, namely :
- Self (Offset or Gain) Calibration, where the ADC
generates its calibration coefficient based on an
internally generated 0V in the case of Self-Offset
calibration and full-scale voltage in the case of Self-Gain
calibration. It should be emphasized that ADC SelfCalibrations correct for offset and gain errors within
ADC. Self calibrations cannot compensate for other
external errors in the system, e.g. Shunt-Resistor
tolerance/drift, external offset voltages etc.
- System (Offset or Gain) Calibration, where the ADC
generates its calibration coefficient based on an
externally generated zero-scale voltage in the case of
System-Offset calibration and Full-scale voltage in the
case of System-Gain calibration which are applied to the
external ADC input for the duration of the calibration
cycle.
the
The duration of an Offset calibration is 1 single conversion
cycle (3/F
ADC to idle mode. A Gain calibration is a 2 stage process and
subsequently takes twice as long as an offset calibration cycle.
Once a calibration cycle is initiated, any ongoing ADC
conversion is immediately halted, the calibration is carried out
automatically at an ADC update rate programmed into
ADCFLT and the ADC is always returned to idle after any
calibration cycle. It is strongly recommended that ADC
calibration is initiated at as low an ADC update rate as possible
(high SF value in ADCFLT) in order to minimize the impact of
ADC noise during calibration.
NOTE: ADC0OF and ADC0GN must first contain the values
for PGA = 1 before a calibration scheme is started
Chop off, 2/F
ADC
Chop on) before returning the
ADC
Using the Offset and Gain Calibration Registers
If the Chop bit (ADCFLT[15]) is enabled, then internal ADC
offset errors will be minimized and an Offset calibration may
not be required. If chopping is disabled however, an initial
Offset calibration will be required and may need to be repeated.
A Gain calibration, particularly in the context of the I-ADC
(with internal PGA) may need to be carried out at all relevant
system gain ranges depending on system accuracy
requirements. If it is not possible to apply an external full-scale
current on all gain ranges then it is possible to apply a lower
current, and scale the result produced by the calibration. e.g
Apply a 50% current and then divide the ADC0GN value
produced by 2 and write this value back into ADC0GN. It
should be noted that there is a lower limit to the input signal
that can be applied for a System-Calibration because the
ADC0GN register is only 16-Bit. The input span (difference
between the System Zero-Scale value and System Full-Scale
value) should be greater than 40% of the nominal Full-ScaleInput range, ie > 40% of Vref/Gain.
The on-chip Flash/EE memory can be used to store multiple
calibration coefficients which can be copied by user code
directly into the relevant calibration registers as appropriate
based on system configuration. In general, the simplest way to
use the calibration registers is to let the ADC calculate the
values required as part of the ADC automatic calibration
modes.
Rev. PrD | Page 64 of 128

Preliminary Technical Data ADuC7032
A factory or end-of-line calibration for the I-ADC would be a
2-step procedure:
1. Apply 0A current.
Configure the ADC in the required PGA setting etc. and write
to ADCMDE[2:0] to perform a System Zero-Scale Calibration.
This writes a new offset calibration value into ADC0OF.
2. Apply a Full-Scale current for the selected PGA setting.
Write to ADCMDE to perform a System Full-Scale Calibration.
This writes a new gain calibration value into ADC0GN.
Understanding the Offset and Gain Calibration
Registers
The output of the average block in the ADC signal flow
described earlier after the digital filter and before the Offset and
Gain scaling can be considered to be a fractional number with a
span, for a +/- Full-Scale input, of approx +/-0.75. The span is
less than +/-1.0 because there is attenuation in the modulator
to accommodate some over-range capacity on the input signal.
The exact value of the attenuation will vary slightly from partto-part, because of manufacturing tolerances.
The Offset Coefficient is read from the ADC0OF calibration
register. This value is a 16-Bit 2's complement number. The
range of this number, in terms of the signal chain, is effectively
+/-1.0. 1 LSB of the ADC0OF register is therefore not the same
as 1LSB of ADC0DAT.
A positive value of ADC0OF indicates that offset is subtracted
from the output of the filter, a negative value is added. The
nominal value of this register is 0x0000, indicating zero offset is
to be removed. The actual offset of the ADC may vary slightly
from part-to-part and at different PGA gains. The offset within
the ADC is minimized if the Chopping mode is active
(ADCFLT[15]=1).
The Gain Coefficient is a unitless scaling factor. The 16-Bit
value in this register is divided by 16384, and then multiplied
by the offset-corrected value. The nominal value of this register
equals 0x5555, which corresponds to a multiplication factor of
1.3333. This scales the nominal +/-0.75 signal to produce a fullscale output signal of +/-1.0 which is checked for Overflow/
Underflow and converted to Two's Complement or Unipolar
mode as appropriate, before being output to the Data register.
The actual gain, and the required scaling coefficient for zero
gain error, varies slightly from part to part, and at different
PGA settings and in Normal / Low-Power-Mode. The value
downloaded into ADC0GN at power-on/reset represents the
scaling factor for a PGA Gain=1. There will be some level of
gain error if this value is used at different PGA settings. User
code can over-write the calibration coefficients or run ADC
calibrations to correct the gain error at the current PGA setting.
In Summary, the simplified ADC transfer function can be
described as :
VIN
ADCOUT *
This equation is valid for Voltage/Temperature channel ADC.
For the Current Channel ADC,
ADCOUT
where K is dependent on PGA gain setting and ADC mode.
Normal Mode:
For PGA gains of 1,4,8,16,32 and 64 the K factor is 1. For
PGA gains of 2 and 128 the K factor is 2. For PGA gain of 256
the K Factor is 4. For PGA gain of 512, the K factor is 8.
Low Power Mode:
The PGA gain is set to 128 and the K factor is 32.
Low Power Plus Mode:
The K factor is 8.
In Low-Power and Low-Power-Plus Mode, the K factor doubles
if (AVDD_Reg)/2 is used as the reference.
⎡
⎢
VREF
⎣
VIN
⎡
⎢
VREF
⎣
ADCOF
−=
−=
ADCOFK
ADCGN
⎤
⎥
ADCGNNOM
⎦
⎤
**
⎥
ADCGNNOM
⎦
ADCGN
ADC DIAGNOSTICS
The ADuC7032 features diagnostic capability on all three
ADCs.
Current ADC Diagnostics
The ADuC7032 features the capability to detect Open Circuit
conditions on the application board. This is accomplished
using the two current sources on IIN+ and IIN-, which is
controlled via ADC0CON[14,13].
The use of both the IIN+ and IIN- current sources is shown in
Table 33.
To verify the current ADC is converting correctly, it is possible
to select an internal test voltage via ADC0CON[7,6]. Selecting
mode 10 results in the current ADC converting the Voltage
Reference, e.g. The Precision 1.2V Reference, divided by 136 for
PGA settings less than or equal to 128 and divided by
(1.0625*Gain) for PGA settings greater than 128.
Rev. PrD | Page 65 of 128

Preliminary Technical Data ADuC7032
Temperature ADC Diagnostics
The ADuC7032 features the capability to detect Open Circuit
conditions on the Temperature Channel inputs. This is
accomplished using the two current sources on VTEMP+ and
GND_SW, which is controlled via ADC2CON[14,13].
The use of both the VTEMP+ and GND_SW current sources is
shown in Table 34.
Table 33: Current ADC Diagnostics
To verify the Temperature ADC is converting correctly, it is
possible to select an internal test voltage via ADC2CON[7,6].
Selecting mode 10 results in the current ADC converting the
Voltage Reference, e.g. The Precision 1.2V Reference, divided
by 136.
Fault Condition
Short between IIN+ and IIN-
at pins of device
Short Between IIN+ and GND IIN+
Short Between IIN- and GND IIN-
IIN+ Open Circuit IIN+ Positive Full Scale ( 0x7FFF in Bi Polar Mode )
IIN- Open Circuit IIN- Negative Full Scale ( 0x8000 in Bi Polar Mode )
Enabled
IIN+ or IIN-
Table 34: Temperature ADC Diagnostics
No difference between ADC0DAT result prior to and after IIN+
No difference between ADC0DAT result prior to and after IIN+
No difference between ADC0DAT result prior to and after IIN-
ADC0DAT Result
(or IIN-) current source is enabled
current source is enabled
current source is enabled
Current Source
Current Source
Fault Condition
Short between VTEMP+ and
GND_SW at pins of device
Short Between VTEMP+ and
GND
Short Between GND_SW and
GND
Enabled
VTEMP+ or GND_SW
VTEMP+
GND_SW
No difference between reading prior to and after VTEMP+ or
No difference between reading prior to and after VTEMP+
No difference between reading prior to and after GND_SW
ADC0DAT Result
GND_SW current source is enabled
current source is enabled
current source is enabled
VTEMP+ Open Circuit VTEMP+ Positive Full Scale ( 0x7FFF in Bi Polar Mode )
GND_SW Open Circuit GND_SW Negative Full Scale ( 0x8000 in Bi Polar Mode )
Rev. PrD | Page 66 of 128

Preliminary Technical Data ADuC7032
V
POWER SUPPLY SUPPORT CIRCUITS
The ADuC7032 incorporates an on-chip Low Drop-Out(LDO)
regulator which is driven directly from the battery voltage to
generate a 2.6V internal supply. This 2.6V supply is then used
as the supply voltage for the ARM7 MCU and peripherals
including the precision analog circuits on-chip.
Power on Reset(POR), Power Supply Monitor(PSM) and Low
Voltage Flag (LVF) functions are also integrated to ensure safe
operation of the MCU as well as continuously monitoring the
battery power supply.
The POR circuit is designed to handle all battery ramp rates
and guarantee full functional operation of the Flash/EE
memory based MCU during power-on and power-down cycles.
As shown in Figure 26, once the supply voltage, VDD, reaches a
minimum operating voltage of 3V, a POR signal keeps the
ARM core in reset for 20ms. This ensures that the regulated
power supply voltage. REG_DVDD, supplied to the ARM core
and associated peripherals is above the minimum operational
12
VDD
3V TYP
voltage to guarantee full functionality. A POR flag is set in the
RSTSTA MMR to indicate a POR reset event has occurred
The ADuC7032also features a PSM, or Power Supply Monitor
function. Once enabled via HVCFG0[3], the PSM continuously
monitors the voltage at the V
6.0V
, the PSM flag is automatically asserted and can, if the
TYP
pin. If this voltage drops below
DD
high voltage IRQ is enabled via IRQ/FIQEN[16], generate a
system interrupt. An example of this operation is shown in
Figure 26.
At voltages below the POR level, an additional Low Voltage
Flag can be enabled (HVCFG0[2]). It may be used to indicate
that the contents of the SRAM are still valid after a reset event.
The operation of the low voltage flag is shown in Figure 26.
Once enabled, the status of this bit may be monitored via
HVSTA[6]. If this bit is set, then the SRAM contents are valid.
If this bit is cleared, then the SRAM contents may have been
corrupted.
PSM TRIP 6.0V TYP
POR TRIP 3.0V TYP
LVF TRIP 2.1V TYP
REG_DV
POR_TRIP
RESET_CORE
(INTERNAL SI GNAL)
ENABLE_PSM
ENABLE_LVF
2.6V
DD
20ms TYP
05994-026
Figure 26: Typical Power-On Cycle
Rev. PrD | Page 67 of 128

Preliminary Technical Data ADuC7032
ADUC7032 SYSTEM CLOCKS
The ADuC7032 integrates a highly flexible clocking system,
which may be clocked from one of three sources:
1. An integrated on-chip precision oscillator
2. An integrated on-chip low power oscillator.
3. An external watch crystal
These three options are shown in Figure 27.
Each of the internal oscillators are divided by 4 to generate a
clock frequency of 32.768kHz. The PLL locks onto a multiple
(625) of 32.768kHz, supplied by either of the internal oscillators
or the external crystal, to provide a stable 20.48MHz clock for
the system. The core can operate at this frequency, or at binary
submultiples of it, which allows power saving if peak
performance is not required.
By default, the PLL is driven by the Low Power oscillator which
EXTERNAL CRYSTAL
(OPTIO NAL)
CIRCUITRY
PRECISION
32.768kHz
CRYSTAL
LOW POWER
PLLCON
LOW POWER
OSCILLATOR
32.768kHz
PRECISION
OSCILLATOR
PRECISION
131kHz
DIV 4
EXTERNAL
32.768kHz
LOW POWER
generates a 20.48MHz clock source. The ARM7TDMI Core, is
driven by a CD divided clock derived from the output of the
PLL. By default, the CD divider is configured to divide the PLL
output by 2, which generates a core clock of 10.24MHz. The
divide factor may be modified to generate a binary weighted
divider factor from 1 to 128, which may be altered dynamically
by user code.
The ADC is driven by the output of the PLL, divided to give an
ADC clock source of 512kHz. In low-power mode the ADC
clock source is switched from the standard 512kHz to the Low
Power 131kHz oscillator.
It should also be noted that the low power oscillator drives both
the watchdog and core wake-up timers through a divide by 4
circuit. A detailed block diagram of the ADuC7032 clocking
system is shown in Figure 27.
131kHz
DIV 4
PRECISION
131kHz
EXTERNAL
32.768kHz
LOW POWER
OSCILLAT OR
EXTERNAL
32.768kHz
PRECISION
32.768kHz
LOW POWER
32.768kHz
CORE CLOCK
GPIO_5
HIGH ACCURCY
CALIBRATION
COUNTER
LOW POWER
CALIBRATION
COUNTER
TIMER 0
LIFE TIME
1
8
CORE
CLOCK
CORE CLOCK
PLL OUTPUT
(20.48MHz)
PLL LOCK
1
CD
2
MCU
SPI
PLL
PLL OUTPUT
20.48MHz
FLASH
CONTROLL ER
CORE CLOCK
ECLK 2.5MHz
CLOCK
DIVIDER
ADCMDE
ADC
CLOCK
UART
ADC
Figure 27: ADuC7032 System Clock Generation
Rev. PrD | Page 68 of 128
GPIO_8
CORE CLOCK
LOW POWER
32.768kHz
CORE CLOCK
EXTERNAL
32.768kHz
PRECISION
32.768kHz
LOW POWER
32.768kHz
LOW POWER
32.768kHz
LOW POWER
32.768kHz
CORE CLOCK
LOW POWER
32.768kHz
PLL OUTPUT
(5MHz)
TIMER 1
TIMER 2
WAKE-UP
WATCHDOG
TIMER 3
TIMER 4
STI
LIN H/W
SYNCHRONIZAT ION
5994-027

Preliminary Technical Data ADuC7032
The operating mode, clocking mode and programmable clock
divider are controlled via two MMRs, PLLCON and POWCON,
and the status of the PLL is indicated by PLLSTA. PLLCON
controls the operating mode of the clock system while
POWCON controls the core clock frequency and the powerdown mode. PLLSTA indicates the presence of an oscillator on
the XTAL1 pin, the PLL Lock status, and the PLL Interrupt.
It is recommended that before the ADuC7032 is powered down,
that the clock source for the PLL is switched to the Low Power
131kHz oscillator to reduce wake up time. The Low Power,
Oscillator is always active.
When the ADuC7032 wakes up from power down, the MCU
core will begin executing code once the PLL begins oscillating.
This occurs before the PLL has locked to a frequency of
20.48MHz. To ensure the Flash memory controller is executing
with a valid clock, the controller is driven with a PLL-Output/8
clock source while the PLL is locking. Once the PLL locks, the
PLL’s output is switched from the PLL-Output/8 to the locked
PLL-Output.
If user code requires an accurate PLL output, user code must
poll the Lock bit (PLLSTA[1]) after wake-up before resuming
normal code execution.
The PLL will be locked and executing user code within 2ms, if
the PLL is clocked from an active clock source, e.g. Low Power
131kHz oscillator after waking up.
PLLCON is a protected MMR with two 32 bit keys PLLKEY0, a
pre write key, and PLLKEY1, a post write key.
- PLLKEY0 = 0x000000AA
- PLLKEY1 = 0x00000055
POWCON is a protected MMR with two 32 bit keys
POWKEY0, a pre write key, and POWKEY1, a post write key.
- POWKEY0 = 0x00000001
- POWKEY1 = 0x000000F4
An example of writing to both MMRs is shown below:
POWKEY0 = 0x01 //POWCON KEY
POWCON = 0x00 //Full Power-down
POWKEY1 = 0xF4 //POWCON KEY
iA1*iA2 //dummy cycle
PLLKEY0 = 0xAA //PLLCON KEY
PLLCON = 0x0 //Switch to Low
//Power Osc.
PLLKEY1 = 0x55 //PLLCON KEY
iA1*iA2 //dummy cycle
PLLSTA Register :
Name : PLLSTA
Address : 0xFFFF0400
Default Value : 0x02
Access : Read/Write
Function : This 8-bit register allows user code to monitor the lock state of the PLL and the status of the external crystal.
Table 35 : PLLSTA MMR Bit Description
Bit Description
31-3
Reserved and should be written as zeros
2 XTAL Clock, Read Only
This is a live representation of the current logic level on XTAL1. This allows the user to check to see if an external clock
source is present. If present this bit will alternate high and low at a frequency of 32.768kHz.
1 PLL Lock Status Bit, Read Only
Set when the PLL is locked and outputting 20.48MHz.
Clear when the PLL is not locked and outputting a Fcore/8 clock source
0 PLL Interrupt:
Set if the PLL Lock status bit signal goes low.
Cleared by writing 1 to this bit
Rev. PrD | Page 69 of 128

Preliminary Technical Data ADuC7032
PLLCON Pre-write Key PLLKEY1:
PLLCON Pre-write Key PLLKEY0:
Name : PLLKEY0
Address : 0xFFFF0410
Default Value : 0x00000000
Access : Write Only
Key: 0x000000AA
Function : PLLCON is a keyed register that requires a
32 Bit key value to be written before and
after PLLCON. PLLKEY0 is the Pre-Write
Key
PLLCON Register :
Name : PLLCON
Address : 0xFFFF0414
Default Value : 0x00
Access : Read/Write
Function : This 8-bit register allows user code dynamically select the PLL source clock from three different oscillator sources.
Table 36: PLLCON MMR Bit description
Bit Description
31-3
1
If user code switches MCU clock sources, a dummy MCU cycle should be included after the clock switch is written to PLLCON.
Reserved, these bits should be written as 0 by user code
2 Not Used, must be written 0 by user software.
1-0
PLL Clock Source
00 Low Power 131kHz oscillator
01 Precision 131kHz oscillator
10 External 32.768kHz Crystal
11 Reserved
1
Name : PLLKEY1
Address : 0xFFFF0418
Default Value : 0x00000000
Access : Write Only
Key: 0x00000055
Function : PLLCON is a keyed register that requires a
32 Bit key value to be written before and
after PLLCON. PLLKEY1 is the Post-Write
Key
POWCON Pre-write Key POWKEY0:
Name : POWKEY0
Address : 0xFFFF0404
Default Value : 0x00000000
Access : Write Only
Key: 0x00000001
Function : POWCON is a keyed register that requires a
32 Bit key value to be written before and
after POWCON. POWKEY0 is the Pre Write Key
Rev. PrD | Page 70 of 128
POWCON Pre-write Key POWKEY1:
Name : POWKEY1
Address : 0xFFFF040C
Default Value : 0x00000000
Access : Write Only
Key: 0x000000F4
Function : POWCON is a keyed register that requires a
32 Bit key value to be written before and
after POWCON. POWKEY1 is the Post Write Key

Preliminary Technical Data ADuC7032
POWCON Register :
Name : POWCON
Address : 0xFFFF0408
Default Value : 0x079
Access : Read/Write
Function : This 8-bit register allows user code dynamically enter various Low Power modes and modify the CD divider which
controls the speed of the ARM7TDMI Core.
Table 37 : POWCON MMR bit designations
Bit Description
31-8 Reserved
7 Precision 131kHz Input Enable:
Cleared by the user to Power down the Precision 131kHz Input Enable.
Set by the user to enable the Precision 131kHz Input Enable. The Precision 131kHz oscillator must also be enabled via
HVCFG0[6]. Setting this bit increases current consumption by approximately 50uA and should be disabled when not in use.
6 XTAL Power Down:
Cleared by the user to Power down the external crystal circuitry.
Set by the user to enable the external crystal circuitry.
5 PLL Power Down1:
This bit is cleared to 0 to power down the PLL. The PLL can not be powered down if either the core or peripherals are enabled:
Bits 3, 4 and 5 must be cleared simultaneously.
Set by default, and set by hardware on a wake up event
4 Peripherals
Cleared to power down the peripherals. The peripherals cannot be powered down if the core is enabled: bits 3 and 4 must be
cleared simultaneously.
Set by default, or and by hardware on a wake up event
3 Core Power Down:
Cleared to power down the ARM Core
Set by default, and set by hardware on a wake up event
2-0
CD Core clock divider bits:
000 20.48 MHz 48.83ns
001 10.24 MHz 97.66ns
010 5.12 MHz 195.31ns
011 2.56 MHz 390.63ns
100 1.28 MHz 781.25ns
101 640 kHz 1.56µs
110 320 kHz 3.125µs
111 160 kHz 6.25µs
1
Timer peripherals will be powered down if driven from the PLL Output clock. Timers driven from an active clock source will stay in normal power mode.
2
The peripherals that are powered down by this bit are as follows:
3
LIN can still respond to wake-up events even if this bit is cleared.
4
Wake-Up Timer (Timer2) can still be active if driven from low power oscillator even if this bit is set.
5
If user code powers down the MCU, a dummy MCU cycle should be included after the power-down command is written to POWCON.
SRAM, Flash/EE Memory and GPIO Interfaces
SPI and UART Serial Ports
2,3, 4
Power Down:
5
Rev. PrD | Page 71 of 128

Preliminary Technical Data ADuC7032
ADUC7032 LOW POWER CLOCK CALIBRATION
The low power 131kHz oscillator may be calibrated using either
the precision 131kHz oscillator, or an external 32.768KHz
watch crystal. Two dedicated calibration counters and an
oscillator trim register are used to implement this feature.
One counter, 9-bits wide, is clocked by the accurate clock
oscillator, either the Precision oscillator or external watch
crystal. The second counter, 10-bits wide, is clocked by the low
power oscillator, either directly at 131kHz or via a divide by 4
block generating 32.768kHz. The source for each calibration
counter should be of the same frequency. The trim register
(OSC0TRM) is an 8-bit wide register, the lower 4-bits of which
are user accessible trim bits. Increasing the value in OSC0TRM
will decrease the frequency of the low power oscillator,
decreasing the value will increase the frequency. Based on a
nominal frequency of 131KHz, the typical trim range is
between 127KHz to 135KHz. The OSC0TRIM bits have a
resolution of typically 500Hz per LSB.
The clock calibration mode is configured and controlled by the
following MMRs:
- OSC0CON: Control bits for calibration,
- OSC0STA: Calibration Status Register
- OSC0VAL0: 9Bit counter. Counter 0
- OSC0VAL1: 10Bit counter. Counter 1
- OSC0TRM: Oscillator Trim Register
An example calibration routine is shown in Figure 28. User
code configures and enables the calibration sequence via
OSC0CON. When the precision oscillator calibration counter,
OSC0VAL0, reaches 0x1FF, both counters are disabled.
When the OSC0TRM has been changed the routine should be
re-run and the new frequency checked.
Using the internal precision 131kHz oscillator, it will take
approximately 4milliseconds to execute the calibration routine.
If the external 32.768kHz crystal is used, this time increases to
16milliseconds.
NOTE: Prior to the clock calibration routine been started, it is
required that the user switch to either the precision 131kHz
oscillator or the external 32.768KHz watch crystal as the PLL
Clock Source. If this is note done, it is possible that the PLL will
lose lock each time OSC0TRM is modified. This will increase
the length of time it takes to calibrate the Low Power,
Oscillator.
BEGIN
CALIBRATION
ROUTINE
WHILE
OSCSTA[0] = 1
OSC0VAL0 < OSC0VAL1 OSC0VAL0 > OSC0VAL1
OSC0VAL0 = OSC0VAL1
INCREASE
OSC0TRM
DECREASE
OSC0TRM
User code then reads back the value of the low power oscillator
calibration counter. There are three possible scenarios:
- OSC0VAL0 = OSC0VAL1. No Further Action is
required.
- OSC0VAL0 > OSC0VAL1. The Low Power Oscillator
is running slow. OSC0TRM must be decreased.
- OSC0VAL0 < OSC0VAL1. The Low Power Oscillator
is running fast. OSC0TRM must be increased.
Rev. PrD | Page 72 of 128
NO
IS ERROR WIT HIN
DESIRED LEVEL?
YES
END
CALIBRATIO N
ROUTINE
Figure 28 : Example OSC0TRM Calibration Routine
05994-028

Preliminary Technical Data ADuC7032
OSC0TRM Register :
Name : OSC0TRM
Address : 0xFFFF042C
Default Value : 0x08
Access : Read/Write
Function : This 8-bit register controls the Low Power Oscillator Trim
Table 38 : OSC0TRM MMR Bit Definition
Bit Description
7-4
3-0 User Trim Bits
Reserved and should be written as zeros
OSC0CON Register :
Name : OSC0CON
Address : 0xFFFF0440
Default Value : 0x00
Access : Read/Write
Function : This 8-bit register controls the Low Power Oscillator Calibration routine
Table 39: OSC0CON MMR Bit Definition
Bit Description
7-5 Reserved and should be written as zeros
4
3 Calibration Reset
2 Set to clear OSCVAL1
Calibration Source
Set to select external 32.768KHz crystal
Cleared to select internal precision 131KHz Oscillator.
Set to reset the calibration counters and disable the Calibration logic
1 Set to clear OSCVAL0
0
Calibration Enable
Set to begin calibration
Cleared to abort calibration
Rev. PrD | Page 73 of 128

Preliminary Technical Data ADuC7032
OSC0STA Register :
Name : OSC0STA
Address : 0xFFFF0444
Default Value : 0x00
Access : Read Access only
Function : This 8-bit register reflects the status of the Low Power Oscillator Calibration routine
Table 40 : OSC0STA MMR Bit Definition
Bit Description
31-4
3-2
1
0
Reserved
Current State of Calibration
00 Calibration Idle, device disabled or completed
01 Counter Enable state
10 Counting
11 Finished, return to Idle
Calibration Enable
Set to begin calibration
Cleared to abort calibration
Set if calibration is in progress.
Cleared if calibration completed
OSC0VAL0 Register :
Name : OSC0VAL0
Address : 0xFFFF0448
Default Value : 0x00
Access : Read Access only
Function : This 9-bit counter is clocked from either the
131kHz Precision Oscillator or the 32.768kHz external crystal.
OSC0VAL1 Register :
Name : OSC0VAL1
Address : 0xFFFF044C
Default Value : 0x00
Access : Read Access only
Function : This 10 bit counter is clocked from the Low
Power, 131kHz oscillator..
Rev. PrD | Page 74 of 128

Preliminary Technical Data ADuC7032
Q
Σ
PROCESSOR REFERENCE PERIPHERALS
INTERRUPT SYSTEM
There are 15 interrupt sources on the ADuC7032 which are
controlled by the Interrupt Controller. Most interrupts are
generated from the on-chip peripherals such as the ADC,
UART, etc.. The ARM7TDMI CPU core will only recognize
interrupts as one of two types, a normal interrupt request IRQ
and a fast interrupt request FIQ. All the interrupts can be
masked separately.
The control and configuration of the interrupt system is
managed through nine interrupt-related registers, four
dedicated to IRQ, four dedicated to FIQ. An additional MMR is
used to select the programmed interrupt source. The bits in
each IRQ and FIQ registers represent the same interrupt source
as described in Table 41.
IRQSTA/FIQSTA should be saved immediately upon entering
the ISR ( Interrupt Service Routine ) to ensure that all valid
interrupt sources are serviced.
The interrupt generation route through the ARM7TDMI core
is shown in Figure 29.
Table 41 : IRQ/FIQ MMRs bit description
Consider the example of Timer0 which is configured to
generate a timeout every 1ms.
After the first 1ms timeout, FIQSIG/IRQSIG[2] will be set and
will only be cleared by writing to T0CLRI.
If Timer0 is not enabled in either IRQEN or FIQEN, then
FIQSTA/IRQSTA[2] will not be set and an interrupt will not
occur.
If Timer0 is enabled in either IRQEN or FIQEN, then either
FIQSTA/IRQSTA[2] will be set and either an FIQ or an IRQ
interrupt will occur.
Please note that the IRQ and FIQ interrupt bit definitions in the
CPSR only control interrupt recognition by the ARM Core, not
by the peripherals.
For example, if Timer2 is confirgured to generate an IRQ via
IRQEN, the IRQ interrupt bit is set ( Disabled ) in the CPSR
and the ADuC7032 is powered down. When an interrupt
occurs, the peripherals will be woken, but the ARM core will
remain powered down. This is equivalent to POWCON = 0x71.
The ARM Core can only be powered up by a reset event if this
occurs.
Bit Description For more information please refer to:
0 All interrupts OR’ed
1 SWI:
not used in IR
2 Timer 0 Timer0 – Life-Time timer Page 78
3 Timer 1 Timer1 Page 79
4 Timer 2 - Wake Up timer Timer2 - Wake-UpTimer Page 82
5 Timer 3 - Watchdog Timer Timer3 - Watchdog Timer Page 83
6 Reserved and should be written as zero
7 LIN Hardware LIN (Local Interconnect Network ) INTERFACE Page 115
8 Flash/EE Interrupt Flash/EE memoryControl Interface Page 31
9 PLL Lock ADuC7032 System Clocks Page 68
10 ADC
11 UA RT UART SERIAL IN TERFACE Page 105
12 SPI SERIAL PERIPHERAL INTERFACE Page 112
13 XIRQ0 ( GPIO IRQ 0 ) General Purpose I/O Page 84
14 XIRQ1 ( GPIO IRQ 1 ) General Purpose I/O Page 84
15 Reserved and should be written as zero
16 IRQ3 High Voltage IRQ High Voltage Interrupt
17 XIRQ4 ( GPIO IRQ 4 ) General Purpose I/O Page 84
18 XIRQ5 ( GPIO IRQ 5 ) General Purpose I/O Page 84
EN/CLR and FIQEN/CLR
16-Bit
−∆ Analog to Digital Converters Page 44
Rev. PrD | Page 75 of 128

Preliminary Technical Data ADuC7032
FIQEN. An interrupt source can be disabled in both IRQEN
IRQ
The IRQ is the exception signal to enter the IRQ mode of the
processor. It is used to service general purpose interrupt
handling of internal and external events.
The four 32-bit registers dedicated to IRQ are:
- IRQSIG, reflects the status of the different IRQ sources. If a
peripheral generates an IRQ signal, the corresponding bit in
the IRQSIG will be set, otherwise it is cleared. The IRQSIG
bits are cleared when the interrupt in the particular
peripheral is cleared. All IRQ sources can be masked in the
IRQEN MMR. IRQSIG is read-only.
IRQSIG may be used to poll interrupt sources.
- IRQEN, provides the value of the current enable mask. When
bit is set to 1, the source request is enabled to create an IRQ
exception. When bit is set to 0, the source request is disabled
or masked which will not
create an IRQ exception.
- IRQCLR, (write-only register) allows clearing the IRQEN
register in order to mask an interrupt source. Each bit set to 1
will clear the corresponding bit in the IRQEN register
without affecting the remaining bits. The pair of registers
IRQEN and IRQCLR allows independent manipulation of
the enable mask without requiring an atomic read-modifywrite.
- IRQSTA, (read-only register) provides the current enabled
IRQ source status( effectively a logic AND of the IRQSIG
and IRQEN bits). When set to 1 that source will generate an
active IRQ request to the ARM7TDMI core. There is no
priority encoder or interrupt vector generation. This function
is implemented in software in a common interrupt handler
routine. All 32 bits are logically OR’ed to create a single IRQ
signal to the ARM7TDMI core.
FIQ
The FIQ (Fast Interrupt reQuest) is the exception signal to
enter the FIQ mode of the processor. It is provided to service
data transferor communication channel tasks with low latency.
The FIQ interface is identical to the IRQ interface providing the
second level interrupt (highest priority). Four 32-bit registers
are dedicated to FIQ, FIQSIG, FIQEN, FIQCLR and FIQSTA.
Bit 31 to 1 of FIQSTA are logically OR’ed to create the FIQ
signal to the core and the bit 0 of both the FIQ and IRQ
registers (FIQ source).
The logic for FIQEN and FIQCLR will not allow an interrupt
source to be enabled in both IRQ and FIQ masks. A bit set to ‘1’
in FIQEN will, as a side-effect, clear the same bit in IRQEN. A
bit set to ‘1’ in IRQEN will, as a side-effect, clear the same bit in
and FIQEN masks.
Programmed interrupts
As the programmed interrupts are non-maskable, they are
controlled by another register, SWICFG, which write into both
IRQSTA and IRQSIG registers or/and FIQSTA and FIQSIG
registers at the same time.
The 32-bit register dedicated to software interrupt is SWICFG
described in Table 42a. This MMR allows the control of
programmed source interrupt.
Table 42 : SWICFG MMR Bit Descriptions
Bit Description
31-3
Reserved
2
Programmed Interrupt-FIQ
Setting/clearing this bit correspond in setting/clearing
bit 1 of FIQSTA and FIQSIG
1
Programmed Interrupt-IRQ
Setting/clearing this bit correspond in setting/clearing
bit 1 of IRQSTA and IRQSIG
0
Reserved
Note that any interrupt signal must be active for at least the
minimum interrupt latency time, to be detected by the interrupt
controller and to be detected by user in the IRQSTA/FIQSTA
register.
TIMER0
TIMER1
TIMER2
TIMER3
LIN H/W
FLASH/EE
PLL LOCK
ADC
UART
SPI
XIRQ
TIMER0
TIMER1
TIMER2
TIMER3
LIN H/W
FLASH/EE
PLL LOCK
ADC
UART
SPI
XIRQ
FIQSIG
IRQSIG
FIQEN
IRQEN
Figure 29: Interrupt Structure
IRQSTA
IRQ
FIQ
FIQSTA
05994-029
Rev. PrD | Page 76 of 128

Preliminary Technical Data ADuC7032
Σ
)
)
)
)
TIMERS
The ADuC7032 features four general purpose Timer/Counters:
- Timer0, or Life-Time Timer
- Timer1,
- Timer2 or Wake-up Timer,
- Timer3 or Watchdog Timer.
The four timers in their normal mode of operation may either
be free-running or periodic.
- In free-running mode the counter decrements/increments
from the maximum/minimum value until zero/full scale and
starts again at the maximum /minimum value.
- In periodic mode the counter decrements/increments from
the value in the Load Register(TxLD MMR,) until zero/full
scale and starts again at the value stored in the Load Register.
Table 43 : Timer Event Capture
The value of a counter can be read at any time by accessing its
value register (TxVAL). Timers are started by writing in the
Control register of the corresponding timer (TxCON).
In normal mode, an IRQ is generated each time the value of the
counter reaches zero, if counting down, or full-scale, if counting
up. An IRQ can be cleared by writing any value to Clear register
of the particular timer (TxCLRI). Once TxCLRI is written to,
the Timer is reloaded with TxLD within 4 clocks of the timers
clock source.
Bit Description For more information please refer to:
0 Timer 0 Timer0 – Life-Time timer Page 78
1 Timer 1 Timer1 Page 79
2 Timer 2 - Wake Up timer Timer2 - Wake-UpTimer Page 82
3 Timer 3 - Watchdog Timer Timer3 - Watchdog Timer Page 83
4 Reserved Should be written as zero
5 LIN Hardware LIN (Local Interconnect Network ) INTERFACE Page 115
6 Flash/EE Interrupt Flash/EE memoryControl Interface Page 31
7 PLL Lock ADuC7032 System Clocks Page 68
8 ADC
9 UART UART SER IAL INTERFACE Page 105
10 SPI SERIAL PERIPHERAL INTERFACE Page 112
11 XIRQ0 ( GPIO IRQ 0
12 XIRQ1 ( GPIO IRQ 1
13 Reserved Should be written as zero
14 IRQ3 High Voltage IRQ High Voltage Interrupt
15 XIRQ4 ( GPIO IRQ 4
16 XIRQ5 ( GPIO IRQ 5
16-Bit
General Purpose I/O Page 84
General Purpose I/O Page 84
General Purpose I/O Page 84
General Purpose I/O Page 84
−∆ Analog to Digital Converters Page 44
Rev. PrD | Page 77 of 128

Preliminary Technical Data ADuC7032
Q
TIMER0 – LIFE-TIME TIMER
Timer0 is a general purpose 48-bit count-up, or a 16-bit count
up/down timer with a programmable prescalar. Timer0 may be
clocked from either the Core clock, the Low Power 32.768kHz
Oscillator, the Precision 32.768kHz Oscillator or an external
32.768kHz crystal, with a prescalar of 1,16, 256 or 32768. This
gives a minimum resolution of 48.83ns when the core is
operating at 20.48MHz, and with a prescalar of 1.
In 48-bit mode, Timer0 counts up from zero. The current
counter value may be read from T0VAL0 and T0VAL1.
In 16-Bit mode,Timer0 may count up or count down. A 16-bit
value may be written to T0LD which will be loaded into the
counter. The current counter value may be read from T0VAL0.
Timer0 has a capture register (T0CAP), which may be triggered
by a selected IRQ’s source initial assertion. Once triggered, the
current timer value is copied to T0CAP, and the timer keeps
running. This feature can be used to determine the assertion of
an event with more accuracy than by servicing an interrupt
alone.
32.768kHz OSCI LLATOR
32.768kHz OSCI LLATOR
LOW POWER
PRECISION
EXTERNAL 32. 768kHz
WATCH CRYSTAL
CLOCK FREQUENCY
CORE
PRESCALER
1, 16, 256, O R 32768
Timer0 reloads the value from T0LD either when TIMER0
overflows, or immediately when T0CLRI is written.
Timer0 interface consists of six MMRS:
- T0LD is a 16-bit register which holds the 16 bit value that is
loaded into the counter. Only available in 16-bit mode.
- T0CAP is a 16-bit register which holds the 16-bit value
captured by an enabled IRQ event. Only available in 16-bit
mode.
- T0VAL0/T0VAL1 are 16-bit and 32-bit registers which hold
the 16 least significant bits and 32 most significant bits
respectively. T0VAL0 and T0VAL1 is read-only. In 16-bit
mode 16-bit T0VAL0 is used. In 48-bit mode both 16-bit
T0VAL0 and 32-bit T0VAL1 are used.
- T0CLRI is an 8-bit register. Writing any value to this register
will clear the interrupt. Only available in 16-bit mode.
- T0CON is the configuration MMR described in Table 44.
16-BIT LO AD
48-BIT UP COUNTER
16-BIT UP/DO WN COUNTER
TIMER0
VALUE
TIMER0 IR
IRQ[31:0]
Figure 30 : Timer 0 block diagram
Timer0 Value Register :
Name : T0VAL0/T0VAL1
Address : 0xFFFF0304, 0xFFFF0308
Default Value : 0x00, 0x00
Access : Read Only
Function : T0VAL0 and T0VAL1 are 16-bit and 32-bit
registers which hold the 16 least significant bits and 32 most
significant bits respectively. T0VAL0 and T0VAL1 is read-only.
In 16-bit mode 16-bit T0VAL0 is used. In 48-bit mode both 16bit T0VAL0 and 32-bit T0VAL1 are used.
Rev. PrD | Page 78 of 128
CAPTURE
05994-030
Timer0 Capture Register :
Name : T0CAP
Address : 0xFFFF0314
Default Value : 0x00
Access : Read Only
Function : This is a 16-bit register which holds the 16-
bit value captured by an enabled IRQ event. Only available in
16-bit mode.

Preliminary Technical Data ADuC7032
Timer0 Control Register :
Name : T0CON
Address : 0xFFFF030C
Default Value : 0x00
Access : Read/Write Only
Function : The 17-bit MMR configures the mode of operation of Timer0
Tab le 44 : T 0CO N M MR Bit Descriptions
Bit Description
31-18
17
16-12
11
10-9
8
7
6
5
4
3-0
Reserved
This bit is reserved and should be written as 0 by user code.
Event Select bit:
Set by user to enable time capture of an event
Cleared by user to disable time capture of an event
Event select range, 0 to 31
The events are as described in Table 43.
Reserved
This bit is reserved and should be written as 0 by user code.
Clock Select:
00
01
10
11
Count up: ( Only available in 16Bit Mode )
Set by user for timer 0 to count up
Cleared by user for timer 0 to count down. ( Default )
Timer0 enable bit:
Set by user to enable timer 0
Cleared by user to disable timer 0. ( Default )
Timer 0 mode:
Set by user to operate in periodic mode
Cleared by user to operate in free-running mode. ( Default )
Reserved
This bit is reserved and should be written as 0 by user code.
Timer0 Mode of Operation:
0 16 Bit operation ( Default )
1 48 Bit Operation
Prescalar:
0000 Source clock / 1 ( Default )
0100 Source clock / 16
1000 Source clock / 256
1111 Source clock / 32768
Core Clock ( Default )
Low Power 32.768kHz Oscillator
External 32.768kHz Watch Crystal
Precision 32.768kHz Oscillator
Timer0 Load Registers:
Name : T0LD
Address : 0xFFFF0300
Default Value : 0x00
Access : Write Once Only
Function : T0LD0 is a 16-bit register which holds the
16 bit value that is loaded into the counter. Only available in
16-bit mode.
Rev. PrD | Page 79 of 128
Timer0 Clear Register :
Name : T0CLRI
Address : 0xFFFF0310
Default Value : 0x0FF
Access : Write Only
Function : This 16-bit, write-only MMR is written
(with any value) by user code to refresh(reload) Timer0.

Preliminary Technical Data ADuC7032
3
TIMER1
Timer1 is a 32-bit general purpose timer, count-down or countup, with a programmable pre-scalar. The pre-scalar source can
be the Low Power 32.768kHz Oscillator, the core clock, or from
one of two external GPIO. This source can be scaled by a factor
of 1, 16, 256 or 32768. This gives a minimum resolution of
48.83ns when operating at CD zero, the core is operating at
20.48MHz, and with a pre-scalar of 1 ( Ignoring external
GPIO).
The counter can be formatted as a standard 32-bit value or as
Hours:Minutes:Seconds:Hundreths.
Timer1 has a capture register (T1CAP), which can be triggered
by a selected IRQ’s source initial assertion. Once triggered, the
current timer value is copied to T1CAP, and the timer keeps
running. This feature can be used to determine the assertion of
an event with increased accuracy.
Timer1 interface consists of five MMRS:
- T1LD, T1VAL and T1CAP are 32-bit registers and hold 32-
bit unsigned integers. T1VAL and T1CAP are read-only.
- T1CLRI is an 8-bit register. Writing any value to this register
will clear the timer1 interrupt.
- T1CON is the configuration MMR described in below.
Timer1 features a post-scalar. This allows the user to count
between1 and 256 the number of timer1 timeouts. To activate
the post-scalar, the user sets bit 23 and writes the desired
number to count into bits 24-31 of T1CON. Once that number
of timeouts has reached, Timer1 will generate an interrupt if
T1CON[18] is set.
NOTE: If the part is in a low power mode, and Timer1 is
clocked from the GPIO or low power oscillator source
then, Timer1 will continue to be operate.
Timer1 reloads the value from T1LD either when TIMER01
overflows, or immediately when T1CLRI is written.
Timer1 Load Registers:
Name : T1LD
Address : 0xFFFF0320
Default Value : 0x00000
Access : Write Only
Function : T1LD is a 32 bit register which holds the 32
bit value that is loaded into the counter.
Timer1 Clear Register :
Name : T1CLRI
Address : 0xFFFF032C
Default Value : 0xFF
Access : Write Only
Function : This 32-bit, write-only MMR is written
(with any value) by user code to refresh(reload) Timer1.
Timer1 Value Register :
Name : T1VAL
Address : 0xFFFF0324
Default Value : 0xFFFFFFFF
Access : Read Only
Function : T1VAL is a 32-bit register which holds the
current value of Timer1
32-BIT LO AD
LOW POWER
2.768kHz OSCI LLATOR
CLOCK FREQUE NCY
CORE
GPIO
GPIO
PRESCALER
1, 16, 256, O R 32768
IRQ[31:0]
Figure 31 : Timer 1 Block Diagram
32-BIT
UP/DOWN COUNT ER
CAPTURE
Rev. PrD | Page 80 of 128
TIMER1
VALUE
8-BIT
POSTSCALER
TIMER1 IRQ
05994-031

Preliminary Technical Data ADuC7032
Timer1 Control Register :
Timer1 Capture Register :
Name : T1CAP
Address : 0xFFFF0330
Default Value : 0x00
Access : Write Only
Function : This is a 32-bit register which holds the 32-
bit value captured by an enabled IRQ event.
Table 45 : T1CON MMR Bit Descriptions
Bit Description
31-24
23
22-20
19
18
17
16-12
11-9
8
7
6
5-4
3-0
Timer 1 8 Bit Post-Scalar
By writing to these 8 bits, a value is loaded into the post-scalar. By reading these 8 bits, the current value of the
counter is loaded.
Timer 1 Enable Post-Scalar:
Set To enable Timer1 Post Scalar. If enabled, an interrupts will be generated after T1CON[31-24] periods as defined
by T1LD.
Cleared To disable Timer1 Post Scalar.
Reserved
This bit is reserved and should be written as 0 by user code.
Post-Scalar Compare Flag.
Set if the number of Timer1 overflows is equal to the number written to the post-scalar
Timer 1 Interrupt Source
Set To select interrupt generation from post-scalar counter
Cleared To select interrupt generation direct from Timer1
Event Select bit:
Set by user to enable time capture of an event
Cleared by user to disable time capture of an event
Event select range, 0 to 31
The events are as described in Table 43.
Clock select:
000 Core clock ( Default )
001
010
011
Count up:
Set by user for timer 1 to count up
Cleared by user for timer 1 to count down. ( Default )
Timer1 enable bit:
Set by user to enable timer 1
Cleared by user to disable timer 1. ( Default )
Timer 1 mode:
Set by user to operate in periodic mode
Cleared by user to operate in free-running mode. ( Default )
Format:
00 Binary ( Default )
01
10 Hr:Min:Sec:Hundredths – 23 hours to 0 hour
11 Hr:Min:Sec:Hundredths – 255 hours to 0 hour
Pre-Scalar:
0000 Source clock / 1 ( Default )
0100 Source clock / 16
1000 Source clock / 256
1111 Source clock / 32768
Low Power 32.768kHz Oscillator
GPIO8
GPIO5
Reserved
Name : T1CON
Address : 0xFFFF0328
Default Value : 0x0000
Access : Read/Write Only
Function : This 32-bit MMR configures the mode of
operation of Timer1
Rev. PrD | Page 81 of 128

Preliminary Technical Data
TIMER2 - WAKE-UP TIMER
Timer2 is a 32-bit wake-up timer, count-down or count-up,
with a programmable prescalar. The pre-scalar is clocked
directly from 1 of 4 clock sources, namely, the Core Clock
(default selection), the Low Power 32.768kHz Oscillator,
External 32.768kHz Watch Crystal, or the Precision 32.768kHz
Oscillator. The selected clock source can be scaled by a factor of
1, 16, 256 or 32768. The wake-up timer will continue to run
when the core clock is disabled. This gives a minimum
resolution of 48.83ns when operating at CD zero, the core is
operating at 20.48MHz, and with a prescalar of 1. Capture of
the current timer value is enabled if the Timer2 interrupt is
enabled via IRQEN[4].
The counter can be formatted as plain 32-bit value or as
Hours:Minutes:Seconds:Hundreths.
Timer2 reloads the value from T2LD either when TIMER2
overflows, or immediately when T2CLRI is written.
Timer2 interface consists of four MMRS:
- T2LD and T2VAL are 32-bit registers and hold 32-bit
unsigned integers. T2VAL is read-only.
- T2CLRI is an 8-bit register. Writing any value to this register
will clear the timer2 interrupt.
- T2CON is the configuration MMR described in Table 36
below.
ADuC7032
Timer2 Load Registers:
Name : T2LD
Address : 0xFFFF0340
Default Value : 0x00000
Access : Write Only
Function : T2LD is a 32 bit register which holds the 32
bit value that is loaded into the counter.
Timer2 Clear Register :
Name : T2CLRI
Address : 0xFFFF034C
Default Value : 0xFF
Access : Write Only
Function : This 32-bit, write-only MMR is written
(with any value) by user code to refresh(reload) Timer2.
Timer2 Value Register :
Name : T2VAL
Address : 0xFFFF0344
Default Value : 0xFFFFFFFF
Access : Read Only
Function : T2VAL is a 32-bit register which holds the
current value of Timer2
32.768kHz OSCI LLATOR
32.768kHz OSCI LLATOR
EXTERNAL 32.768kHz
PRECISION
LOW POWER
CORE
CLOCK
WATCH CRY STAL
PRESCALER
1, 16, 256, O R 32768
Figure 32 : Timer 2 block diagram
32-BIT LO AD
32-BIT
UP/DOWN COUNT ER
TIMER2
VALUE
TIMER2 IRQ
5994-032
Rev. PrD | Page 82 of 128

Preliminary Technical Data ADuC7032
Timer2 Control Register :
Name : T2CON
Address : 0xFFFF0348
Default Value : 0x0000
Access : Read/Write Only
Function : This 32-bit MMR configures the mode of operation of Timer2
Tab le 46 : T 2CO N M MR Bit Descriptions
Bit Description
31-11
10-9
8
7
6
5-4
3-0
Reserved
Clock Source Select:
00
01
10
11
Count up:
Set by user for timer 2 to count up
Cleared by user for timer 2 to count down. ( Default )
Timer2 enable bit:
Set by user to enable timer 2
Cleared by user to disable timer 2. ( Default )
Timer 2 mode:
Set by user to operate in periodic mode
Cleared by user to operate in free-running mode. ( Default )
Format:
00 Binary ( Default )
01
10 Hr:Min:Sec:Hundredths – 23 hours to 0 hour
11 Hr:Min:Sec:Hundredths – 255 hours to 0 hour
Prescalar:
0000 Source clock / 1 ( Default )
0100 Source clock / 16
1000 Source clock / 256 ( This setting should be used in conjunction Timer2 Formats 1,0 and 1,1 )
1111 Source clock / 32768
Core Clock ( Default )
Low Power 32.768kHz Oscillator
External 32.768kHz Watch Crystal
Precision 32.768kHz Oscillator
Reserved
Rev. PrD | Page 83 of 128

Preliminary Technical Data ADuC7032
TIMER3 - WATCHDOG TIMER
Timer3 has two modes of operation, normal mode and
watchdog mode. The Watchdog timer is used to recover from
an illegal software state. Once enabled it requires periodic
servicing to prevent it from forcing a reset of the processor.
Timer3 reloads the value from T3LD either when TIMER3
overflows, or immediately when T3CLRI is written.
Normal mode:
The Timer3 in normal mode is identical to Timer0, in 16-bit
mode of operation, except for the clock source. The clock
source is the Low Power 32.768kHz oscillator and can be
scaled by a factor of 1, 16, or 256. Timer3 also features a
capture facility, which allows the capture of the current timer
value if the Timer2 interrupt is enabled via IRQEN[5].
Watchdog mode:
Watchdog mode is entered by setting T3CON[5]. Timer3
decrements from the timeout value present in T3LD Register
until zero. The maximum timeout is 512 seconds, using the
maximum pre-scalar /256 and full-scale in T3LD.
User software should only configure a minimum timeout
period of 30msecs. This is to avoid any conflict with Flash/EE
memory page erase cycles, which require 20ms to complete a
single page erase cycle.
If T3VAL reaches 0, a reset or an interrupt occurs, depending
on T3CON[1]. To avoid a reset or an interrupt event, any value
must be written to T3ICLR before T3VAL reaches zero. This
reloads the counter with T3LD and begins a new timeout
period.
Once watchdog mode is entered, T3LD and T3CON are writeprotected. These two registers can not be modified until a reset
event resets the Watchdog Timer.
Timer3 is automatically halted during JTAG debug access and
will only recommence counting once JTAG has relinquished
control of the ARM7 core. By default, Timer3 continues to
count during power-down. This may be disabled by setting bit
zero in T3CON. It is recommended that the default value is
used, i.e. that the Watchdog Timer continues to count during
power-down.
16-BIT LO AD
LOW POWER
32.768kHz
PRESCALER
1, 16, 256
Figure 33 : Timer3 Block Diagram
Timer3 Interface:
Timer3 interface consists of four MMRS:
- T3CON is the configuration MMR described in Table 37
- T3LD and T3VAL are 16-bit registers (bit 0 to 15) and hold
16-bit unsigned integers. T3VAL is read-only.
- T3CLRI is an 8-bit register. Writing any value to this register
will clear the Timer3 interrupt in normal mode or will reset a
new timeout period in watchdog mode
16-BIT
UP/DOWN COUNTER
TIMER3
VALUE
WATCHDOG RESET
TIMER3 IRQ
05994-033
Timer3 Load Register :
Name : T3LD
Address : 0xFFFF0364
Default Value : 0x03D7
Access : Write Once Only
Function : This 16-bit MMR holds the Timer3 reload
value.
Timer3 Value Register :
Name : T3VAL
Address : 0xFFFF0364
Default Value : 0x03D7
Access : Read Only
Function : This 16-bit, read-only MMR holds the
currentTimer3 count value.
Rev. PrD | Page 84 of 128

Preliminary Technical Data ADuC7032
Timer3 Clear Register :
Name : T3CLRI
Address : 0xFFFF036C
Default Value : 0x00
Access : Write Only
Function : This 16-bit, write-only MMR is written
Timer3 Control Register :
Name : T3CON
Address : 0xFFFF0368
Default Value : 0x00
Access : Read/Write Once Only
Function : The 16-bit MMR configures the mode of operation of Timer3 as is described in detail in Table 47.
Table 47 : T3CON MMR Bit Definition
Bit Description
16-9
8 Count Up/Down Enable
7 Timer3 Enable
6 Timer3 Operating Mode
5 Watchdog Timer Mode Enable
4
3-2 Timer3 Clock(32.768kHz) Pre-Scalar
1 Watchdog Timer IRQ Enable
0 PD_OFF
These bits are reserved and should be written as 0 by user code
Set by user code to configure Timer3 to count up
Cleared by user code to configure Timer3 to count down.
Set by user code to enable Timer 3
Cleared by user code to disable Timer 3. .
Set by user code to configure Timer3 to operate in periodic mode
Cleared by user to configure Timer3 to operate in free-running mode.
Set by user code to enable watchdog mode
Cleared by user code to disable watchdog mode.
This bit is reserved and should be written as 0 by user code
00 Source clock / 1 ( Default )
01 Source clock / 16
10 Source clock / 256
11 Reserved
Set by user code to produce an IRQ instead of a reset when the watchdog reaches 0
Cleared by user code to disable the IRQ option.
Set by the user code to stop Timer3 when the peripherals are powered down via bit 4 in the POWCON MMR.
Cleared by the user code to enable Timer3 when the peripherals are powered down via bit 4 in the POWCON MMR.
(with any value) by user code to refresh(reload) Timer3 in
watchdog mode to prevent a watchdog timer reset event. This
register must be written with a specific value (generated by user
code, based on a polynomial equation) to refresh the watchdog
timer and prevent a watchdog reset.
Rev. PrD | Page 85 of 128

Preliminary Technical Data
GENERAL PURPOSE I/O
The ADuC7032 features 9 General Purpose bi-directional I/O
pins (GPIO). In general, many of the GPIO pins have multiple
functions which can be configured by user code. By default, the
GPIO pins are configured in GPIO mode. All GPIO pins have
an internal pull up resistor and their sink capability is 0.8mA
and they can source 0.1mA.
The 9 GPIO are grouped into three ports, Port0, Port1 and
Port2. Port0 is 5 bits wide. Port1 and Port2 are both 2 bits wide.
The GPIO assignment within each port is detailed in Table 48.
A typical GPIO structure is shown Figure 34.
External Interrupts are present on GP0, GP5, GP7 and GP8.
This interrupts are level triggered and are active high. These
interrupts are not latched, therefore the interrupts source must
be present until either IRQSTA or FIQSTA are interrogated.
The Interrupt source must be active for at least 1 CD divided
core clock to guarantee recognition.
OUTPUT DRIVE ENABLE
GPxDAT[31:24]
OUTPUT DATA
GPxDAT[23:16]
INPUT DATA
GPxDAT[7:0]
1
GPIO IRQ
1
ONLY AVAIL ABLE ON GP0, G P5, GP7, AND GP8.
Figure 34 : ADuC7032 GPIO
ADuC7032
All port pins are configured and controlled by 4 sets (1 set for
each port) of four port specific MMRs:
GPxCON: Port x Control Register
GPxDAT: Port x Configuration and Data Register
GPxSET: Data set port x
GPxCLR: Data clear port x
where x corresponds to the port number 0,1 or 2
During normal operation, user code can control the function
and state of the external GPIO pins via these general purpose
registers. All GPIO pins will retain their external (high or low)
during power-down (POWCON) mode.
REG_DVDD
GPIO
05994-035
Rev. PrD | Page 86 of 128

Preliminary Technical Data ADuC7032
Table 48 : External GPIO Pin to Internal Port Signal Assignments
1
These signals are internal signals only and do not appear on an external pin. These pins are used along with HVCON as the 2 wire
interface to the high voltage interface circuits.
2
These pins/signals are internal signals only and do not appear on an external pins. Both signals are used to provide external pin
diagnostic write(GPIO12) and read-back(GPIO11) capability.
GPIO PIN PORT SIGNAL Functionality ( Defined by GPxCON )
General Purpose I/O GPIO0 P0.0
IRQ0
SS
, Slave Select I/O for SPI
General Purpose I/O GPIO1 P0.1
SCLK, Serial Clock I/O for SPI
General Purpose I/O GPIO2 P0.2
MISO, Master Input, Slave Output for SPI
Port 0
General Purpose I/O GPIO3 P0.3
MOSI, Master Output, Slave Input for SPI
General Purpose I/O GPIO4 P0.4
ECLK , a 2.56MHz clock output
P0.51 High Voltage Serial Interface
1
High Voltage Serial Interface
P0.6
General Purpose I/O GPIO5 P1.0
IRQ1
GPIO6 P1.1
Port 1
RxD Pin for UART
General Purpose I/O
TxD Pin for UART
General Purpose I/O GPIO7 P2.0
IRQ4
LIN Output Pin. Used to read directly from LIN PIN for conformance testing.
General Purpose I/O GPIO8 P2.1
IRQ5
2
LIN HV Input Pin. Used to directly drive LIN Pin for conformance testing.
General Purpose I/O GPIO112 P2.4
LIN Output Pin
2
General Purpose I/O GPIO122 P2.5
LIN Input Pin
Port 2
GPIO131 P2.6
1
Reserved
Reserved
Rev. PrD | Page 87 of 128

Preliminary Technical Data ADuC7032
GPIO Port0 Control Register :
Name : GP0CON
Address : 0xFFFF0D00
Default Value : 0x00000000
Access : Read/Write
Function : The 32-bit MMR selects the pin function for each Port0 pin.
Table 49 : GP0CON MMR Bit Designations
Bit Description
31-29 Reserved
These bits are reserved and should be written as 0 by user code
28 Reserved
This bit is reserved and should be written as 1 by user code
27-25 Reserved
These bits are reserved and should be written as 0 by user code
24 Internal P0.6 Enable Bit
This bit must be set to 1 by user software to enable the High Voltage Serial Interface before using the HVCON and HVDAT
registered high voltage interface
23-21 Reserved
These bits are reserved and should be written as 0 by user code
20 Internal P0.5 Enable Bit
This bit must be set to 1 by user software to enable the High Voltage Serial Interface before using the HVCON and HVDAT
registered high voltage interface
19-17 Reserved
These bits are reserved and should be written as 0 by user code
16
15-13 Reserved
12
11-9 Reserved
8
7-5 Reserved
4
3-1 Reserved
0
GPIO4 Function Select Bit
This bit is cleared by user code to 0 to configure the GPIO4 pin as a General Purpose I/O (GPIO) pin
This bit is set to 1 by user code to configure the GPIO4 pin as ECLK enabling a 2.56MHz clock output on this pin
These bits are reserved and should be written as 0 by user code
GPIO3 Function Select Bit
This bit is cleared by user code to 0 to configure the GPIO3 pin as a General Purpose I/O (GPIO) pin
This bit is set to 1 by user code to configure the GPIO2 pin as MOSI, Master Output, Slave Input Data for the SPI Port
These bits are reserved and should be written as 0 by user code
GPIO2 Function Select Bit
This bit is cleared to 0 by user code to configure the GPIO2 pin as a General Purpose I/O (GPIO) pin
This bit is set to 1 by user code to configure the GPIO3 pin as MISO, Master Input, Slave Output Data for the SPI Port
These bits are reserved and should be written as 0 by user code
GPIO1 Function Select Bit
This bit is cleared to 0 by user code to configure the GPIO1 pin as a General Purpose I/O (GPIO) pin
This bit is set to 1 by user code to configure the GPIO1 pin as SCLK, Serial Clock I/O for the SPI Port
These bits are reserved and should be written as 0 by user code
GPIO0 Function Select Bit
This bit is cleared to 0 by user code to configure the GPIO0 pin as a General Purpose I/O (GPIO) pin
This bit is set to 1 by user code to configure the GPIO0 pin as
, Slave Select I/O for the SPI Port
SS
Rev. PrD | Page 88 of 128

Preliminary Technical Data ADuC7032
GPIO Port1 Control Register :
Name : GP1CON
Address : 0xFFFF0D04
Default Value : 0x00000000
Access : Read/Write
Function : The 32-bit MMR selects the pin function for each Port1 pin.
Table 50 : GP1CON MMR Bit Designations
Bit Description
31-5 Reserved
These bits are reserved and should be written as 0 by user code
4
3-1 Reserved
0
GPIO Port2 Control Register :
Name : GP2CON
Address : 0xFFFF0D08
Default Value : 0x00000000
Access : Read/Write
Function : The 32-bit MMR selects the pin function for each Port2 pin.
GPIO6 Function Select Bit
This bit is cleared by user code to 0 to configure the GPIO6 pin as a General Purpose I/O (GPIO) pin
This bit is set to 1 by user code to configure the GPIO6 pin as TxD, Transmit Data for UART Serial Port
These bits are reserved and should be written as 0 by user code
GPIO5 Function Select Bit
This bit is cleared by user code to 0 to configure the GPIO5 pin as a General Purpose I/O (GPIO) pin
This bit is set by user code to 1 to configure the GPIO5 RxD. Receive Data for UART Serial Port
Bit Description
31-21 Reserved
These bits are reserved and should be written as 0 by user code
20 GPIO12 Function Select Bit
This bit is cleared to 0 by user code to route the LIN transmit data to an internal General Purpose I/O (GPIO12) pad which
can then be written via the GP2DAT MMR.
This bit is set to 1 by user code to route the UART TxD (transmit data) to the LIN data pin. This configuration is used in LIN
mode.
19-17 Reserved
These bits are reserved and should be written as 0 by user code
Table 51 : GP2CON MMR Bit Designations
Rev. PrD | Page 89 of 128

Preliminary Technical Data ADuC7032
16 GPIO11 Function Select Bit
This bit is cleared to 0 by user code to internally disable the LIN input data path. In this configuration GPIO11 is used to
support diagnostic read-back on all external high-voltage I/O pins (see HVCFG1[2:0])
This bit is set to 1 by user code to route input data from the LIN interface to both the LIN hardware
timing/synchronization logic and to the UART RxD (receive data). This mode must be configured by user code when
using LIN .
15-5 Reserved
These bits are reserved and should be written as 0 by user code
4 GPIO8 Function Select Bit
This bit is cleared by user code to 0 to configure the GPIO8 pin as a General Purpose I/O (GPIO) pin
This bit is set by user code to 1 to route the LIN input data to the GPIO8 pin. This mode can be used to drive the LIN
transceiver interface as a standalone component without any interaction from MCU or UART.
3-1 Reserved
These bits are reserved and should be written as 0 by user code
0 GPIO7 Function Select Bi
This bit is cleared by user code to 0 to configure the GPIO7 pin as a General Purpose I/O (GPIO) pin
This bit is set by user code to 1 to route data driven into the GPIO7 pin through the on-chip LIN transceiver to be output
at the LIN pin. This mode can be used to drive the LIN transceiver interface as a standalone component without any
interaction from MCU or UART.
GPIO Port0 Data Register :
Name : GP0DAT
Address : 0xFFFF0D20
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR configures the direction of the GPIO pins assigned to Port0 (see Table 48). This register also sets
the output value for GPIO pins configured as outputs and reads the status of GPIO pins configured as inputs.
Table 52 : GP0DAT MMR Bit Descriptions
Bit Description
31-29
28
27
26
25
24
23-21
Reserved
These bits are reserved and should be written as 0 by user code
Port 0.4 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P0.4 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P0.4 as an output.
Port 0.3 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P0.3 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P0.3 as an output.
Port 0.2 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P0.2 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P0.2 as an output.
Port 0.1 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P0.1 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P0.1 as an output.
Port 0.0 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P0.0 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P0.0 as an output.
Reserved
These bits are reserved and should be written as 0 by user code
Rev. PrD | Page 90 of 128

Preliminary Technical Data ADuC7032
20
19
18
17
16
15-5
4
3
2
1
0
Port 0.4 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P0.4.
Port 0.3 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P0.3.
Port 0.2 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P0.2.
Port 0.1 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P0.1.
Port 0.0 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P0.0.
Reserved
These bits are reserved and should be written as 0 by user code
Port 0.4 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P0.4. User code should write 0 to this bit.
Port 0.3 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P0.3. User code should write 0 to this bit.
Port 0.2 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P0.2. User code should write 0 to this bit.
Port 0.1 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P0.1. User code should write 0 to this bit.
Port 0.0 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P0.0. User code should write 0 to this bit.
GPIO Port1 Data Register :
Name : GP1DAT
Address : 0xFFFF0D30
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR configures the direction of the GPIO pins assigned to Port1 (see Table 48). This register also sets
the output value for GPIO pins configured as outputs and reads the status of GPIO pins configured as inputs.
Table 53 : GP1DAT MMR Bit Descriptions
Bit Description
31-26
25
24
23-18
17
16
15-2
1
0
Reserved
These bits are reserved and should be written as 0 by user code
Port 1.1 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P1.1 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P1.1 as an output.
Port 1.0 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P1.0 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P1.0 as an output.
Reserved
These bits are reserved and should be written as 0 by user code
Port 1.1 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P1.1.
Port 1.0 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P1.0.
Reserved
These bits are reserved and should be written as 0 by user code
Port 1.1 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P1.1. User code should write 0 to this bit.
Port 1.0 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P1.0. User code should write 0 to this bit.
Rev. PrD | Page 91 of 128

Preliminary Technical Data ADuC7032
GPIO Port2 Data Register :
Name : GP2DAT
Address : 0xFFFF0D40
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR configures the direction of the GPIO pins assigned to Port2 (see Table 48). This register also sets
the output value for GPIO pins configured as outputs and reads the status of GPIO pins configured as inputs.
Table 54 :GP2DAT MMR Bit Descriptions
Bit Description
31
30 Port 2.6 Direction Select Bit
29 Port 2.5 Direction Select Bit
28 Port 2.4 Direction Select Bit
27-26
25
24
23
22
21
20-18
17
16
15-7
6
5
4
3-2
Reserved
This bit is reserved and should be written as 0 by user code
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P2.6 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P2.6 as an output.
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P2.5 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P2.5 as an output. This configuration is used to support
diagnostic write capability to the high-voltage I/O pins.
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P2.4 as an input. This configuration is used to support
diagnostic read-back capability from the high-voltage I/O pins(see HVCFG1[2:0]).
This bit is set to 1 by user code to configure the GPIO pin assigned to P2.4 as an output.
Reserved
These bits are reserved and should be written as 0 by user code
Port 2.1 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P2.1 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P2.1 as an output.
Port 2.0 Direction Select Bit
This bit is cleared to 0 by user code to configure the GPIO pin assigned to P2.0 as an input.
This bit is set to 1 by user code to configure the GPIO pin assigned to P2.0 as an output.
Reserved
This bit is reserved and should be written as 0 by user code
Port 2.6 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P2.6
Port 2.5 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P2.5.
Reserved
These bits are reserved and should be written as 0 by user code
Port 2.1 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P2.1.
Port 2.0 Data Output
The value written to this bit appears directly on the GPIO pin assigned to P2.0.
Reserved
These bits are reserved and should be written as 0 by user code
Port 2.6 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P2.6. User code should write 0 to this bit.
Port 2.5 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P2.5. User code should write 0 to this bit.
Port 2.4 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P2.4. User code should write 0 to this bit.
Reserved
These bits are reserved and should be written as 0 by user code
Rev. PrD | Page 92 of 128

Preliminary Technical Data ADuC7032
1
0
Port 2.1 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P2.1. User code should write 0 to this bit.
Port 2.0 Data Input
This bit is a read-only bit that reflects the current status of the GPIO pin assigned to P2.0. User code should write 0 to this bit.
GPIO Port0 Set Register :
Name : GP0SET
Address : 0xFFFF0D24
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR allow user code to individually bit address external GPIO pins to set them high only.
User code can do this via the GP0SET MMR without having to modify or maintain the status of any other GPIO pins
as user code would need to do when using GP0DAT.
Table 55 : GP0SET MMR Bit Descriptions
Bit Description
31-21 Reserved
These bits are reserved and should be written as 0 by user code
20
19
18
17
16
15-0 Reserved
Port 0.4 Set Bit
This bit is set to 1 by user code to set the external GPIO4 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO4 pin.
Port 0.3 Set Bit
This bit is set to 1 by user code to set the external GPIO3 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO3 pin.
Port 0.2 Set Bit
This bit is set to 1 by user code to set the external GPIO2 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO2 pin.
Port 0.1 Set Bit
This bit is set to 1 by user code to set the external GPIO1 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO1 pin.
Port 0.0 Set Bit
This bit is set to 1 by user code to set the external GPIO0 pin high
If user software clears this bit to 0, this will have no effect on the external GPIO0 pin.
These bits are reserved and should be written as 0 by user code
Rev. PrD | Page 93 of 128

Preliminary Technical Data ADuC7032
GPIO Port1 Set Register :
Name : GP1SET
Address : 0xFFFF0D34
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR allow user code to individually bit address external GPIO pins to set them high only.
User code can do this via the GP1SET MMR without having to modify or maintain the status of any other GPIO pins
as user code would need to do when using GP1DAT.
Table 56 : GP1SET MMR Bit Descriptions
Bit Description
31-18 Reserved
These bits are reserved and should be written as 0 by user code
17
16
15-0 Reserved
Port 1.1 Set Bit
This bit is set to 1 by user code to set the external GPIO6 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO6 pin.
Port 1.0 Set Bit
This bit is set to 1 by user code to set the external GPIO5 pin high
If user software clears this bit to 0, this will have no effect on the external GPIO5 pin.
These bits are reserved and should be written as 0 by user code
GPIO Port2 Set Register :
Name : GP2SET
Address : 0xFFFF0D44
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR allow user code to individually bit address external GPIO pins to set them high only.
User code can do this via the GP2SET MMR without having to modify or maintain the status of any other GPIO pins
as user code would need to do when using GP2DAT.
Table 57 : GP2SET MMR Bit Descriptions
Bit Description
31-23 Reserved
These bits are reserved and should be written as 0 by user code
22
21
20-18 Reserved
17
16
15-0 Reserved
Port 2.6 Set Bit
This bit is set to 1 by user code to set the external GPIO13 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO13 pin.
Port 2.5 Set Bit
This bit is set to 1 by user code to set the external GPIO12 pin high
If user software clears this bit to 0, this will have no effect on the external GPIO12 pin.
These bits are reserved and should be written as 0 by user code
Port 2.1 Set Bit
This bit is set to 1 by user code to set the external GPIO8 pin high.
If user software clears this bit to 0, this will have no effect on the external GPIO8 pin.
Port 2.0 Set Bit
This bit is set to 1 by user code to set the external GPIO7 pin high
If user software clears this bit to 0, this will have no effect on the external GPIO7 pin.
These bits are reserved and should be written as 0 by user code
Rev. PrD | Page 94 of 128

Preliminary Technical Data ADuC7032
GPIO Port0 Clear Register :
Name : GP0CLR
Address : 0xFFFF0D28
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR allows user code to individually bit address external GPIO pins to clear them low only.
User code can do this via the GP0CLR MMR without having to modify or maintain the status of any other GPIO
pins as user code would need to do when using GP0DAT.
Table 58 : GP0CLR MMR Bit Descriptions
Bit Description
31-21 Reserved
These bits are reserved and should be written as 0 by user code
20
19
18
17
16
15-0
Port 0.4 Clear Bit
This bit is set to 1 by user code to clear the external GPIO4 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO4 pin.
Port 0.3 Clear Bit
This bit is set to 1 by user code to clear the external GPIO3 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO3 pin.
Port 0.2 Clear Bit
This bit is set to 1 by user code to clear the external GPIO2 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO2 pin.
Port 0.1 Clear Bit
This bit is set to 1 by user code to clear the external GPIO1 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO1 pin.
Port 0.0 Clear Bit
This bit is set to 1 by user code to clear the external GPIO0 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO0 pin.
Reserved
These bits are reserved and should be written as 0 by user code
GPIO Port1 Clear Register :
Name : GP1CLR
Address : 0xFFFF0D38
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR allows user code to individually bit address external GPIO pins to clear them low only.
User code can do this via the GP1CLR MMR without having to modify or maintain the status of any other GPIO
pins as user code would need to do when using GP1DAT.
Table 59 : GP1CLR MMR Bit Descriptions
Bit Description
31-18 Reserved
These bits are reserved and should be written as 0 by user code
17
16
15-0
Port 1.1 Clear Bit
This bit is set to 1 by user code to clear the external GPIO6 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO6 pin.
Port 1.0 Clear Bit
This bit is set to 1 by user code to clear the external GPIO5 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO5 pin.
Reserved
These bits are reserved and should be written as 0 by user code
Rev. PrD | Page 95 of 128

Preliminary Technical Data ADuC7032
GPIO Port2 Clear Register :
Name : GP2CLR
Address : 0xFFFF0D48
Default Value : 0x00000000
Access : Read/Write
Function : This 32-bit MMR allows user code to individually bit address external GPIO pins to clear them low only.
User code can do this via the GP2CLR MMR without having to modify or maintain the status of any other GPIO
pins as user code would need to do when using GP2DAT.
Table 60 : GP2CLR MMR Bit Descriptions
Bit Description
31-23 Reserved
These bits are reserved and should be written as 0 by user code
22
21
20-18 Reserved
17
16
15-0
Port 2.6 Clear Bit
This bit is set to 1 by user code to clear the external GPIO13 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO8 pin.
Port 2.5 Clear Bit
This bit is set to 1 by user code to clear the external GPIO12 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO7 pin.
These bits are reserved and should be written as 0 by user code
Port 2.1 Clear Bit
This bit is set to 1 by user code to clear the external GPIO8 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO8 pin.
Port 2.0 Clear Bit
This bit is set to 1 by user code to clear the external GPIO7 pin low.
If user software clears this bit to 0, this will have no effect on the external GPIO7 pin.
Reserved
These bits are reserved and should be written as 0 by user code
Rev. PrD | Page 96 of 128

Preliminary Technical Data
HIGH VOLTAGE PERIPHERAL CONTROL
INTERFACE
The ADuC7032 integrates a number of high voltage circuit
functions which are controlled and monitored via a registered
interface consisting of 2 MMRs, namely, HVCON and HVDAT.
The HVCON register acts as a command byte interpreter
allowing the microcontroller to indirectly read or write 8-bit
data(the value in HVDAT) from/to one of 4 High voltage
status/configuration registers. It should be noted that these high
voltage registers are not MMRs but are so called ‘indirect’
registers that can only be accessed (as the name suggests)
indirectly via the HVCON and HVDAT MMRs.
The physical interface between the HVCON register and the
indirect high voltage registers is a 2 wire (data and clock) serial
interface based on a 2.56MHz serial clock. Therefore, there is a
finite, 10usecs(maximum) latency between the MCU core
writing a command into HVCON and that command or data
HIGH-VOLTAGE
INTERFACE
MMRs
HVCON
HVDAT
SERIAL
DATA
SERIAL
CLOCK
SERIAL
INTERFACE
CONTROLL ER
ADuC7032
reaching the indirect high voltage registers. There is also a finite
10usecs latency between the MCU core writing a command into
HVCON and indirect register data being read back into the
HVDAT register. A busy bit (Bit0 of the HVCON when read by
MCU) can be polled by the MCU to confirm when a read/write
command has completed.
The following high voltage circuit functions are controlled and
monitored via this interface and Figure 35 below describes the
top-level architecture of the high voltage interface and related
circuits.
- Precision Oscillator
- Wake-Up pin functionality
- Power Supply Monitor
- Low Voltage Flag
- LIN Operating Modes
- High Voltage Diagnostics
- High Voltage Attenuator/Buffer Circuit
- High Voltage Temperature Monitor
(INDIRECT)
HIGH-VOLTAGE
REGISTERS
HVCFG0
HVCFG1
HVSTA
HVMON
HVCFG0[6]
PRECISION
OSCILLATOR
PSMHVCFG0[ 3]
LVFHVCFG0[2]
ARM7
MCU
AND
PERIPHERALS
IRQ3
(IRQEN[16])
WU DIAGNOST IC I/P
STI DIAGNOSTIC I/P
LIN DIAGNO STIC I/P
PSM—HVSTA[5]
WU—HVSTA[4]
OVER TEMP—HVSTA[3]
LIN S-SCT—HVSTA[2]
STI S-SCT—HVSTA[1]
WU S-SCT—HVSTA[0]
WU DIAGNOST IC O/P
HVMON[7]
STI DIAGNOSTIC O/P
HVMON[5]
LIN DI AGNOSTI C O/P
P2.4
HVCFG1[6]
HV TEMP
MONITOR
HVCFG0[4]
P2.6
P2.5
HVCFG1[3]
HVCFG1[7]
HVCFG1[5]
HIGH VO LTAGE
INTERRUPT
CONTROLL ER
HIGH VO LTAGE
DIAGNOSTI C
CONTROLL ER
ATTENUATOR
AND
BUFFER
Figure 35 : High Voltage Interface, Top Level Block Diagram
HVCFG0[5]
HVCFG0[1:0]
HVCFG0[4]
HVCFG1[4]
HVCFG1[4]
HVCFG1[3]
LIN
MODES
WU I/O
CONTROL
STI I/O
CONTROL
05994-036
Rev. PrD | Page 97 of 128

Preliminary Technical Data ADuC7032
High Voltage Interface Control Register :
Name : HVCON
Address : 0xFFFF0804
Default Value : 0x00
Access : Read/Write
Function : This 8-bit register acts as a command byte interpreter for the high voltage control interface. Bytes written to this
register are interpreted as read or write commands to a set of 4 indirect registers related to the high voltage circuits.
The HVDAT register is used to store data to be written to or read back from the indirect registers
Table 61: HVCON MMR Write Bit Designations
Bit Description
7-0
Command Byte Interpreted as
0x00 Read back high voltage register HVCFG0 into HVDAT
0x01 Read back high voltage register HVCFG1 into HVDAT
0x02 Read back high voltage status register HVSTA into HVDAT
0x03 Read back high voltage status register HVMON into HVDAT
0x08 Write the value in HVDAT to the high voltage register HVCFG0
0x09 Write the value in HVDAT to the high voltage register HVCFG1
All other command bytes are reserved and should not be written by user code
Bit Description
7-3
2
1
0
Reserved
Transmit Command to High Voltage Die Status:
1 Command Completed Successfully
0 Command Failed
Read Command from High Voltage Die Status:
1 Command Completed Successfully
0 Command Failed
Bit 0 (Read Only) BUSY Bit
When user code reads this register, Bit0 should be interpreted as the BUSY signal for the high-voltage interface. This bit can be
used to determine if a read request has completed. High voltage (read/write) commands as described above should not be
written to HVCON unless BUSY=0.
BUSY = 1, High voltage interface is busy and has not completed the previous command written to HVCON. Bit 1 and bit 2 are
not valid.
BUSY = 0, High voltage interface is not busy and has completed the command written to HVCON. Bit 1 and bit 2 are valid.
Table 62: HVCON MMR Read Bit Designations
Rev. PrD | Page 98 of 128

Preliminary Technical Data ADuC7032
High Voltage Data Register:
Name : HVDAT
Address : 0xFFFF080C
Default Value : 0x00
Access : Read/Write
Function : HVDAT is a 12-bit register that is used to hold data to be written indirectly to and read indirectly from the following
high voltage interface registers
Tab le 63: H VDAT M MR Bit D es ign at ions
Bit Description
11-8
7-0
Command to which High Voltage Data, HVDAT[7-0], is associated with.
These bits are read only and should be written as zeros.
0x00 Read back high voltage register HVCFG0 into HVDAT
0x01 Read back high voltage register HVCFG1 into HVDAT
0x02 Read back high voltage status register HVSTA into HVDAT
0x03 Read back high voltage status register HVMON into HVDAT
0x08 Write the value in HVDAT to the high voltage register HVCFG0
0x09 Write the value in HVDAT to the high voltage register HVCFG1
High Voltage Data to Read/Write
Rev. PrD | Page 99 of 128

Preliminary Technical Data ADuC7032
High Voltage Configuration0 Register :
Name : HVCFG0
Address : Indirectly addressed via the HVCON high voltage interface
Default Value : 0x00
Access : Read/Write
Function : This 8-bit register controls the function of high voltage circuits on the ADuC7032. This register is not an MMR and
does not appear in the MMR memory map. It is accessed via the HVCON registered interface. Data to be written to
this register is loaded via the HVDAT MMR and data is read back from this register via the HVDAT MMR.
Table 64: HVCFG0 Bit Designations
Bit Description
7
6
5
4
3
2
1-0
Wake Thermal Shutdown Disable:
This bit is set to 1 to disable the automatic shutdown of the Wake driver when a thermal event occurs.
This bit is cleared to 0 to enable the automatic shutdown of the Wake driver when a thermal event occurs.
Precision Oscillator Enable Bit
This bit is set to 1 to enable the Precision, 131kHz oscillator. The oscillator start-up time is typically 70µsecs (including HV
interface latency of 10µsecs)
This bit is cleared to 0 to power down the Precision, 131kHz oscillator
Reserved
This bit is reserved and should be written as 0 by user code.
WU Assert Bit
This bit is set to 1 to assert the external WU pin high.
This bit is cleared to 0 to pull the external WU pin low via an internal 10KΩ pull-down resistor.
PSM Enable Bit
This bit is cleared to 0 to disable the Power Supply (Voltage at the VDD pin) Monitor
This bit is set to 1 to enable the Power Supply (Voltage at the VDD pin) Monitor. If IRQ3 (IRQEN[16] is enabled the PSM will
generate an interrupt if the voltage at the VDD pin drops below 6.0V.
Low Voltage Flag Enable Bit
This bit is cleared to 0 to disable the Low Voltage Flag function
This bit is set to 1 to enable the Low Voltage Flag function. The Low Voltage Flag can be interrogated via HVMON[3] after
power up to determine if the REG_DVDD voltage previously dropped below 2.1V
LIN Operating Mode
These bits enable/disable the LIN driver.
0 0 LIN Disabled
0 1 Reserved – (not LIN V2.0 compliant)
1 0 LIN Enabled
1 1 Reserved
Rev. PrD | Page 100 of 128
 Loading...
Loading...