

ANALOG DEVICES ADT7470 Service Manual
Temperature Sensor Hub and Fan Controller
FEATURES
Monitors up to 10 remote temperature sensors
Monitors and controls speed of up to 4 fans independently
PWM outputs drive each fan under software control
FULL_SPEED
external hardware
SMBALERT
Three-state ADDR pin allows up to 3 devices on a single bus
Temperature decoder interprets TMP05/TMP06 temperature
sensors and communicates values over I
Limit comparison of all monitored values
Supports fast I
Meets SMBus 2.0 electrical specifications
(fully SMBus 1.1-compliant)
Footprint-compatible with ADT7460
APPLICATIONS
Servers
Networking and telecommunications equipment
Desktops
input allows fans to be blasted PWMMAX by
interrupt signals failures to system controller
2
C bus
2
C standard (400 kHz max)
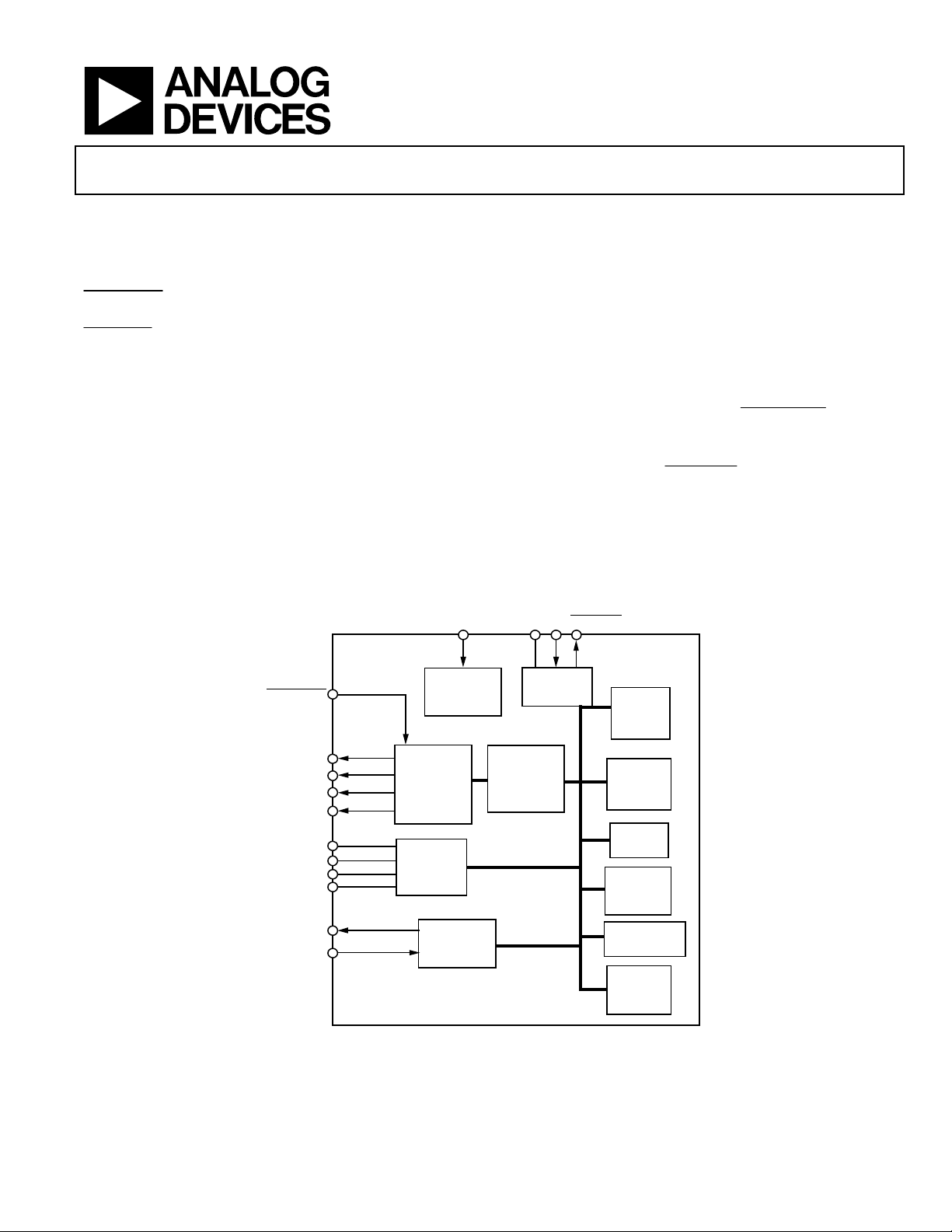
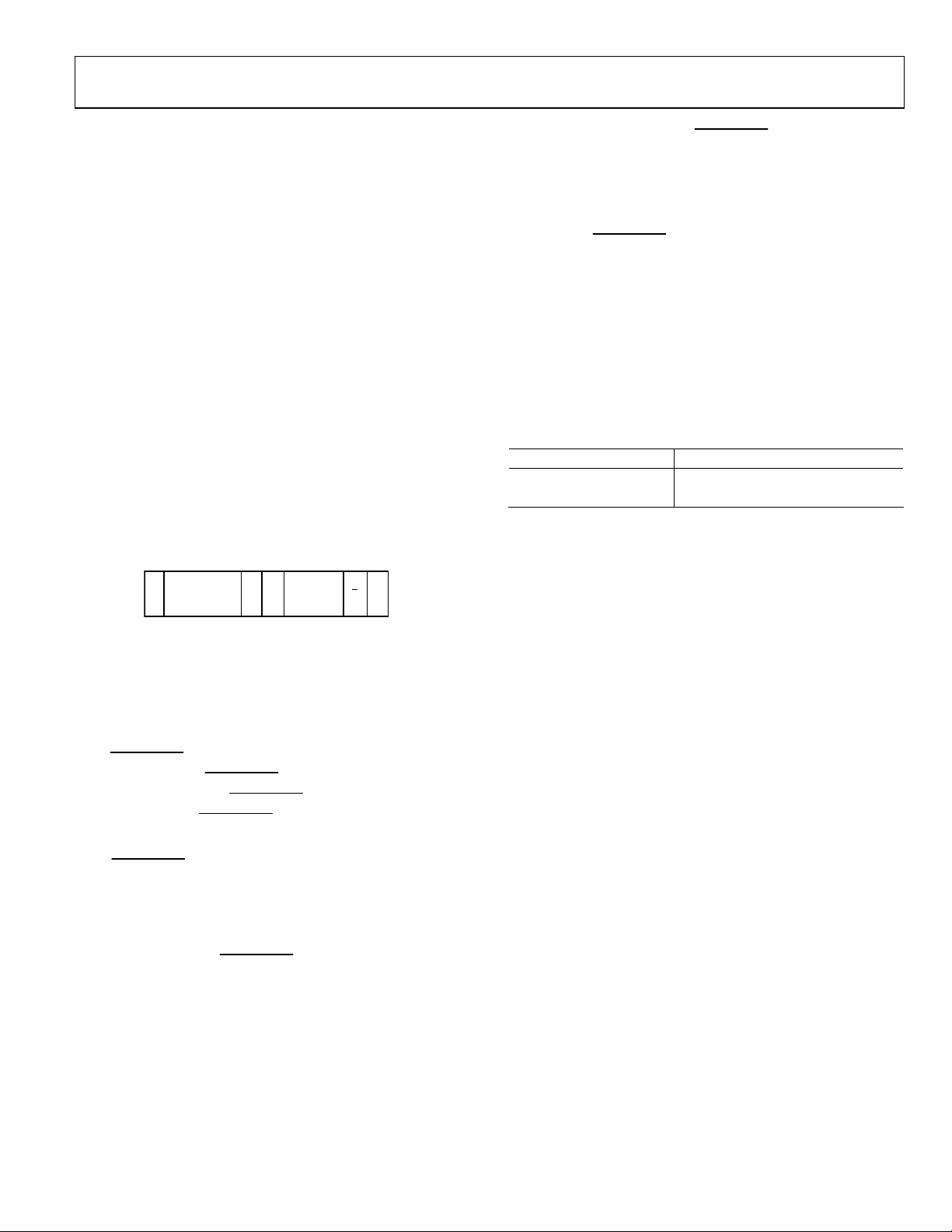
FUNCTIONAL BLOCK DIAGRAM
ADDR SDASCL
ADT7470
GENERAL DESCRIPTION
The ADT7470 controller is a multichannel temperature sensor
and PWM fan controller and fan speed monitor for noisesensitive systems requiring active system cooling. It is designed
to interface directly to an I
fans using a service processor. The aim is to quickly develop
systems that are modular and can easily be expanded depending
on the system’s cooling requirements. The device can monitor
up to 10 temperature sensors. It can also monitor and control
the speed of four fans so that they operate at the lowest possible
speed for minimum acoustic noise. A
provided to allow the fans to be “blasted” to PWMMAX, via
external hardware control, under extreme thermal conditions
or on system startup. An
error conditions such as fan underspeed and fan failure to the
system service processor. Individual error conditions can then
be read from status registers over the I
failure condition, any or all PWM outputs can be programmed to
automatically adjust to PWMMAX to provide fail-safe cooling.
SMBALERT
2
C® bus and control and monitor the
SMBALERT
FULL_SPEED
interrupt communicates
2
C bus. In the event of a fan
input is
ADT7470
FULL_SPEED
PWM1
PWM2
PWM3
PWM4
TACH1
TACH2
TACH3
TACH4
TMP_START
TMP_IN
SMBus
ADDRESS
SELECTION
PWM
REGISTERS
AND
CONTROLLERS
FAN SPEED
COUNTERS
TEMPERATURE
DECODER
SERIAL BUS
INTERFACE
AUTOMATIC
FAN SPEED
CONTROL
ADDRESS
POINTER
REGISTER
PWM
CONFIG
REGISTERS
INTERRUPT
MASKING
INTERRUPT
STATUS
REGISTERS
LIMIT
COMPARATORS
VALUE AND
LIMIT
REGISTERS
Figure 1.
Protected by Patent Numbers US6,188,189, US6,169,442, US6,097,239, US5,982,221, US5,867,012. Other patents pending.
Rev. B
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Analog Devices. Trademarks and
registered trademarks are the property of their respective owners.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700
Fax: 781.461.3113 © 2005 Analog Devices, Inc. All rights reserved.
www.analog.com
04684-0-001

ADT7470
TABLE OF CONTENTS
Specifications..................................................................................... 3
Absolute Maximum Ratings............................................................ 5
Thermal Characteristics .............................................................. 5
ESD Caution.................................................................................. 5
Pin Configuration and Function Descriptions............................. 6
Functional Description .................................................................... 7
General Description..................................................................... 7
Fan Speed Measurement.............................................................. 7
Internal Registers of the ADT7470 ............................................ 7
SMBus/I2C Communications Interface..................................... 7
Address Selection ......................................................................... 7
Write Operations ........................................................................ 10
Read Operations ......................................................................... 11
SMBus Timeout .......................................................................... 11
General-Purpose I/O Pins (Open Drain) ............................... 11
Limit Values ................................................................................ 14
8-Bit Limits.................................................................................. 14
16-Bit Limits ............................................................................... 14
Out-of-Limit Comparisons....................................................... 15
Monitoring Cycle Time ............................................................. 16
Status Registers ........................................................................... 16
SMBALERT
Handling
Masking Interrupt Sources........................................................ 18
Enabling the
Fan Drive Using PWM Control.................................................... 19
Fan Speed Measurement................................................................ 20
Tac h Input s .................................................................................. 20
Fan Speed Measurement ........................................................... 20
Fan Speed Control.......................................................................... 23
Interrupt Behavior ............................................... 17
SMBALERT
SMBALERT
Interrupts............................................. 17
Interrupt Output ........................... 18
Temperature Measurement Using TMP05/TMP06 ................... 12
Measuring Temperature ............................................................ 12
TMP05/TMP06 Decoder........................................................... 12
Thermal Zones............................................................................ 12
Temp e ratu re R e adi ng ..................................................................... 13
Interrupt Functionality and Status Registers ..............................14
REVISION HISTORY
7/05—Rev. A to Rev. B
References to PWM_IN changed to TMP_IN ...............Universal
Changes to T
Added Address Selection Section................................................... 7
Added Thermal Zones Section ..................................................... 12
Added Temperature Reading Section .......................................... 13
Added Note to Table 39 ................................................................. 32
Registers Section.................................................. 7
MIN
PWM Logic State........................................................................ 23
Manual Fan Speed Control ....................................................... 23
Automatic Fan Speed Control .................................................. 23
Registers........................................................................................... 24
Outline Dimensions ....................................................................... 39
Ordering Guide .......................................................................... 39
2/05—Rev. 0 to Rev. A
Added General-Purpose I/O Pins (Open Drain) Section......... 11
11/04—Revision 0: Initial Version
Rev. B | Page 2 of 40
ADT7470
SPECIFICATIONS
TA = T
Table 1.
Parameter
POWER SUPPLY1
FAN RPM-TO-DIGITAL CONVERTER
329 RPM Fan count = 0x3FFF
5,000 RPM Fan count = 0x0438
10,000 RPM Fan count = 0x021C
OPEN-DRAIN DIGITAL OUTPUTS, PWM1–PWM4, SMBALERT
OPEN-DRAIN SERIAL DATA BUS OUTPUT (SDA)
SMBus DIGITAL INPUTS (SCL, SDA)
DIGITAL INPUT LOGIC LEVELS (TACH INPUTS, FULL_SPEED, GPIO)
DIGITAL INPUT LOGIC LEVELS (TMP_IN)
DIGITAL INPUT CURRENT
SERIAL BUS TIMING
MIN
to T
MAX
1, , , , 2 3 4 5
, VCC = V
MIN
to V
, unless otherwise noted. T
MAX
= −40oC, T
MIN
= +125oC.
MAX
Min Typ Max Unit Test Conditions/Comments
Supply Voltage 3.0 3.3 5.5 V
Supply Current, I
Standby Current, I
CC
CC
0.5 0.8 mA
4 µA
Accuracy ±12 %
Full-Scale Count 65,535
Nominal Input RPM 109 RPM Fan count = 0xBFFF
Output Low Voltage, V
OL
High Level Output Current, I
Output Low Voltage, V
OL
High Level Output Current, I
Input High Voltage, V
Input Low Voltage, V
IH
IL
OH
OH
0.4 V I
0.1 1 µA V
0.4 V I
0.1 1 µA V
= –8.0 mA, VCC = +3.3 V
OUT
= V
OUT
= –4.0 mA, VCC = +3.3 V
OUT
= V
OUT
2.4 V
0.4 V
CC
CC
Hysteresis 500 mV
Input High Voltage, V
Input Low Voltage, V
IH
IL
2.4 V
0.8 V
Hysteresis 50 mV p-p
Input High Voltage, V
Input Low Voltage, V
Input High Current, I
Input Low Current, I
Input Capacitance, C
Clock Frequency, f
Glitch Immunity, t
Bus Free Time, t
Start Setup Time, t
Start Hold Time, t
SCL Low Time, t
SCL High Time, t
SCLK
SW
BUF
SU;STA
HD;STA
LOW
HIGH
SCL, SDA Rise Time, t
IH
IL
IH
IL
IN
r
VDD – 0.3 V
0.4 V
–5 µA VIN = V
CC
5 µA VIN = 0
5 pF
400 kHz See Figure 2
50 ns See Figure 2
1.3 µs See Figure 2
600 ns See Figure 2
600 ns See Figure 2
1.3 µs See Figure 2
0.6 µs See Figure 2
300 ns See Figure 2
Rev. B | Page 3 of 40
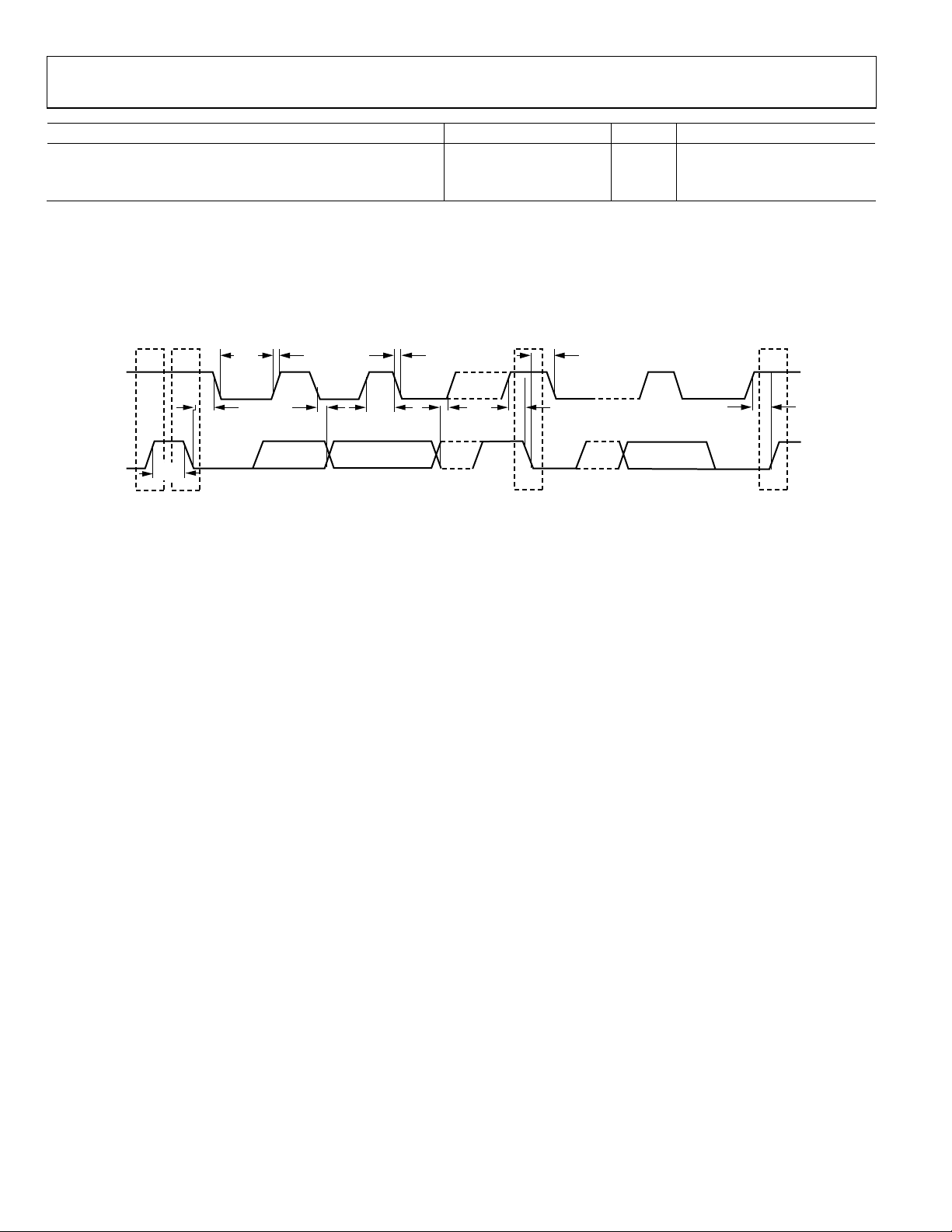
ADT7470
Parameter
SCL, SDA Fall Time, t
Data Setup Time, t
Detect Clock Low Timeout, t
1
VDD should never be floated in the presence of SCL/SDA activity. Charge injection can be sufficient to induce approximately 0.6 V on V
2
All voltages are measured with respect to GND, unless otherwise specified.
3
Typical values are at %A = 25°C and represent the most likely parametric norm.
4
Logic inputs accept input high voltages up to 5 V even when the device is operating at supply voltages below 5 V.
5
Timing specifications are tested at logic levels of VIL = 0.8 V for a falling edge and VIH = 2.0 V for a rising edge.
1, 2, 3, 4, 5
f
SU;DAT
TIMEOUT
Min Typ Max Unit Test Conditions/Comments
300 ns See Figure 2
100 ns See Figure 2
25 28 31 ms Can be optionally disabled
SCL
SDA
t
BUF
PS
t
HD;STA
t
LOW
t
R
t
HD;DAT
t
F
t
HIGH
t
SU;DAT
SP
Figure 2. Serial Bus Timing Diagram
t
SU;STA
t
HD;STA
t
SU;STO
DD.
04684-0-002
Rev. B | Page 4 of 40
ADT7470
ABSOLUTE MAXIMUM RATINGS
Table 2.
Parameter Rating
Positive Supply Voltage (VCC) 6.5 V
Voltage on Any Tach or PWM Pin –0.3 V to +6.5 V
Voltage on Any Input or Output Pin –0.3 V to VCC + 0.3 V
Maximum Junction Temperature (TJ max) 150°C
Storage Temperature Range –65°C to +150°C
Lead Temperature, Soldering
Vapor Phase, 60 sec 215°C
Infrared, 15 sec 200°C
ESD Rating 3000 V
THERMAL CHARACTERISTICS
16-Lead QSOP Package:
= 105°C/W
θ
JA
= 39°C/W
θ
JC
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on
the human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Rev. B | Page 5 of 40
ADT7470
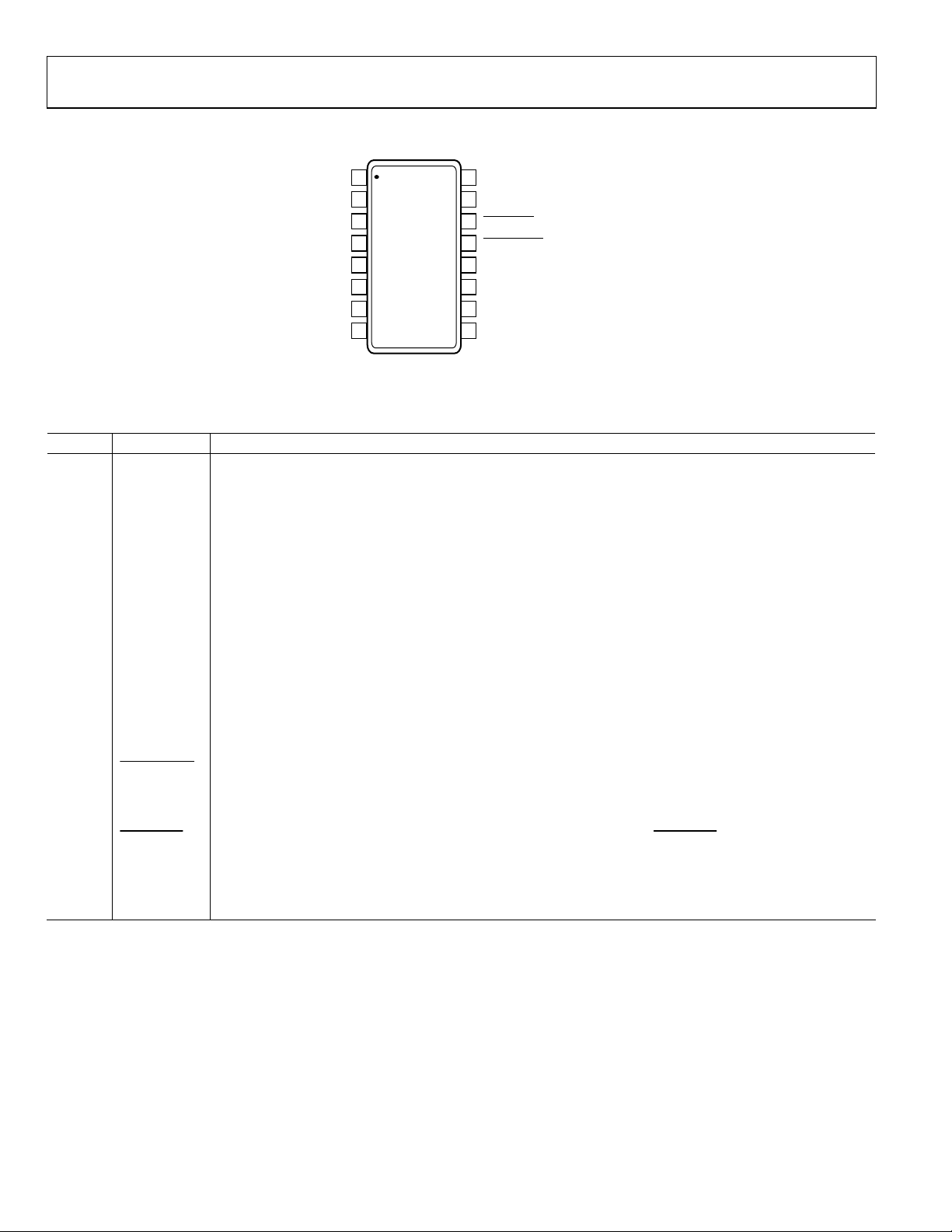
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
1
SCL
2
GND
3
V
CC
TACH3
PWM2
TACH1
TACH2
PWM3 TACH4
4
5
6
7
8
ADT7470
TOP VIEW
(Not to Scale)
16
SDA
15
PWM1
14
SMBALERT
13
FULL_SPEED/TMP_START
12
TMP_IN
11
ADDR
10
PWM4
9
04684-0-003
Figure 3. Pin Configuration
Table 3. Pin Function Descriptions
Pin No. Mnemonic Description
1 SCL Digital Input (Open Drain). SMBus serial clock input. Requires SMBus pull-up.
2 GND Ground Pin.
3 V
CC
Power Supply Pin. Can be powered by 3.3 V standby if operation in low power states is required.
4 TACH3 Digital Input (Open Drain). Fan tachometer input to measure the speed of Fan 3.
5 PWM2
Digital I/O (Open Drain). Requires 10 kΩ typical pull-up. Pulse-width modulated output to control
the speed of Fan 2. Can be configured as GPIO by setting Bit 0x7F<2> = 1.
6 TACH1 Digital Input (Open Drain). Fan tachometer input to measure the speed of Fan 1.
7 TACH2 Digital Input (Open Drain). Fan tachometer input to measure the speed of Fan 2.
8 PWM3
Digital I/O (Open Drain). Pulse-width modulated output to control the speed of Fan 3.
Requires 10 kΩ typical pull-up. Can be configured as GPIO by setting Bit 0x7F<1> = 1.
9 TACH4 Digital Input (Open Drain). Fan tachometer input to measure the speed of Fan 4.
10 PWM4
Digital I/O (Open Drain). Pulse-width modulated output to control the speed of Fan 4.
Requires 10 kΩ typical pull-up. Can be configured as GPIO by setting Bit 0x7F<0> = 1.
11 ADDR Three-state Input. Used to set the SMBus device address.
12 TMP_IN
Digital Input (Open Drain). PWM input to PWM processing engine that interprets daisy-chained output
from multiple TMP05 temperature sensors. Readings from individual TMP05 temperature sensors are
available by reading the temperature reading registers over the SMBus.
13
FULL_SPEED Digital Input Active Low (Open Drain). This input blasts the fans to PWMMAX when the pin is pulled low
externally.
13 TMP_START
Digital Output (Open Drain). This pin can be used as an output to start daisy-chained temperature
measurements from TMP05 or TMP06 temperature sensors.
14
SMBALERT Digital Output Active Low (Open Drain). This pin can be reconfigured as an SMBALERT interrupt output
to signal out-of-limit conditions such as fan failures.
15 PWM1
Digital I/O (Open Drain). Pulse-width modulated output to control the speed of Fan 1.
Requires 10 kΩ typical pull-up. Can be configured as GPIO by setting Bit 0x7F<3> = 1.
16 SDA Digital I/O (Open Drain). SMBus bidirectional serial data. Requires SMBus pull-up.
Rev. B | Page 6 of 40

ADT7470
FUNCTIONAL DESCRIPTION
GENERAL DESCRIPTION
The ADT7470 is a multichannel, pulse-width modulation
(PWM) fan controller and monitor for any system requiring
monitoring and cooling. The device communicates with the
system via a serial system management bus. The device has a
single address line for address selection (Pin 11), a serial data
line for reading and writing addresses and data (Pin 16), and
an input line for the serial clock (Pin 1). All control and
programming functions of the ADT7470 are performed over
2
the serial bus, which supports both SMBus and fast I
specifications. In addition, an
SMBALERT
interrupt output
C
is provided to indicate out-of-limit conditions.
FAN SPEED MEASUREMENT
When the ADT7470 monitoring sequence is started, it cycles
through each fan tach input to measure fan speed. Measured
values from these inputs are stored in value registers. These
can be read out over the serial bus, or they can be compared
with programmed limits stored in the limit registers. The results
of out-of-limit comparisons are stored in the status registers,
which can be read over the serial bus to flag out-of-limit
conditions. If fan speeds drop below preset levels or a fan stalls,
an interrupt is generated, and the fans can automatically blast
to PWMMAX. Likewise, the ADT7470 can flag fan overspeed
conditions by using fan tach max registers.
INTERNAL REGISTERS OF THE ADT7470
A brief description of the ADT7470’s principal internal registers
is given in the following sections. For detailed information on
the function of each register, see the register map in Table 21.
Configuration Registers
These registers provide control and configuration of the
ADT7470, including alternate pinout functionality such as
a fan blast input (
measurement (start) output.
Address Pointer Register
This register contains the address that selects one of the other
internal registers. When writing to the ADT7470, the first byte
of data is always a register address that is written to the address
pointer register.
Status Registers
These registers provide status of each limit comparison and are
used to signal out-of-limit conditions on the fan speed channels,
or on the temperature channels if monitored using the TMP_IN
feature. If Pin 14 (
asserts low whenever a status bit is set, signaling an out-of-limit
condition.
FULL_SPEED
SMBALERT
) or daisy-chained TMP05
) is used in the system, this pin
Interrupt Mask Registers
The interrupt mask registers allow each interrupt status event
to be individually masked from driving the
SMBALERT
output
as required. This is useful where fan tach inputs are unused and
left floating, or if temperature inputs from TMP05s are ignored
from an interrupt perspective. Masking interrupt status bits
prevents the
SMBALERT
output from being driven, although
the status bits still reflect out-of-limit conditions. This can prevent a service processor from being continually tied up in an
interrupt service routine if a value remains outside limits for
a relatively long duration.
Value and Limit Registers
The results of fan speed measurements are stored in these registers, along with their limit values. The limit values store the
slowest speed at which the fans are expected to run. Alternatively,
the limit value can determine the expected fan failure in terms
of running speed, in case the fan does not completely stall.
If TMP05s and TMP06s are daisy-chained in through the
TMP_IN pin, the measured temperatures are stored in temperature value registers.
Registers
T
MIN
These registers program the starting temperature for each fan
under automatic fan speed control. T
= T
Therefore, T
MAX
+ 20°C. Fan on/off hysteresis is set
MIN
is set to 20°C.
RANGE
at 4°C so that the fans turn off 4°C below the temperature
at which they turn on. This prevents fan chatter in the system.
SMBus/I2C COMMUNICATIONS INTERFACE
Serial Bus Interface
Control of the ADT7470 is carried out using the serial system
management bus (SMBus). This interface is fully compatible
with SMBus 2.0 electrical specifications and meets 400 pF bus
2
capacitance requirements. The device also supports fast I
C
(400 kHz max). The ADT7470 is connected to the bus as a slave
device under the control of a master controller or service
processor.
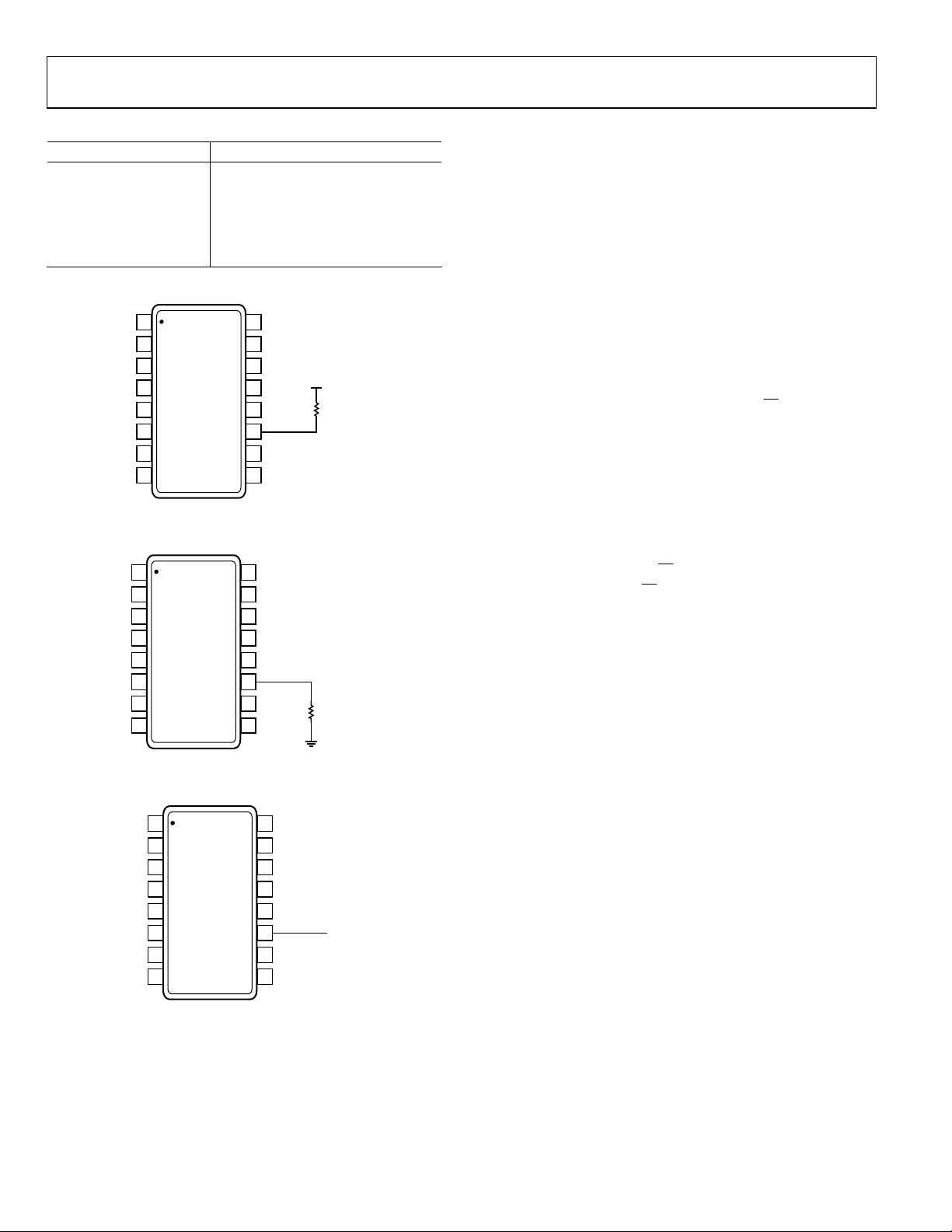
ADDRESS SELECTION
The ADT7470 has a 7-bit serial bus address. When the device
is powered up with Pin 11 (ADDR) high, the ADT7470 has an
SMBus address of 010 1111 or 0x5E (left-justified). Because the
address is 7 bits, it can be left- or right-justified; this determines
whether the address reads as 0x5x or 0x2x. Pin 11 can be left
floating or tied low for other addressing options, as shown in
Table 4. See also Figure 4, Figure 5, and Figure 6.
Rev. B | Page 7 of 40
ADT7470
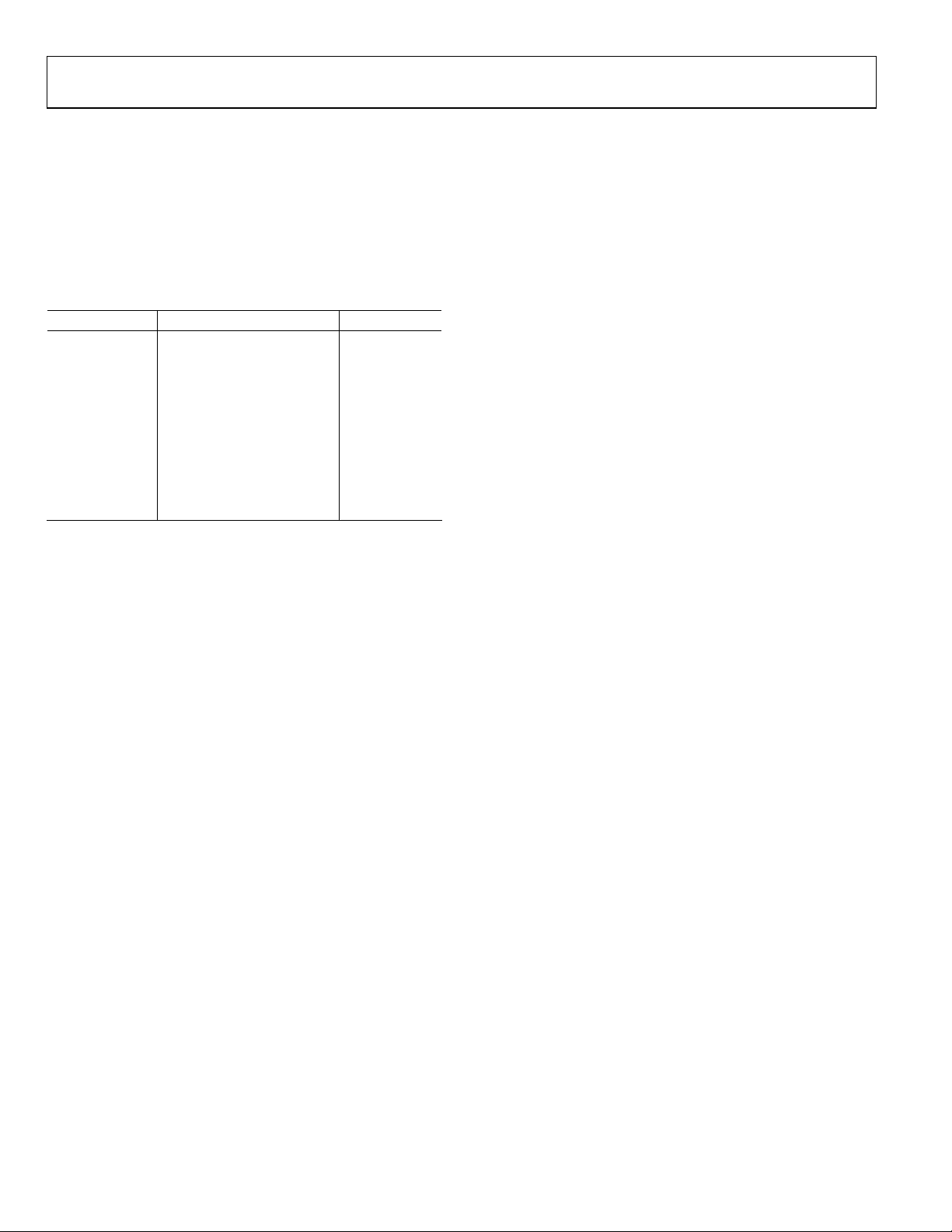
Table 4. ADT7470 Address Select Mode
Pin 11 (ADDR) State Address
High (10 kΩ to VCC)
Low (10 kΩ to GND)
Floating (no pull-up)
1
2
3
4
5
6
7
8
Figure 4. SMBus Address = 0x5E or 0x2F (Pin 11 = 1)
1
2
3
ADT7470
4
5
6
7
8
Figure 5. SMBus Address = 0x58 or 0x2C (Pin 11 = 0)
1
2
3
4
5
6
7
8
Figure 6. SMBus Address = 0x5C or 0x2E (Pin 11 = Floating)
010 1111 (0x5E left-justified or
0x2F right-justified)
010 1100 (0x58 left-justified or
0x2C right-justified)
010 1110 (0x5C left-justified or
0x2E right-justified)
16
15
ADT7470
ADT7470
14
13
12
ADDR
11
10
9
16
15
14
13
12
ADDR
11
10
9
16
15
14
13
12
ADDR
11
10
9
The device address is sampled and latched on the first valid
SMBus transaction, so any additional attempted addressing
changes have no immediate effect. The facility to make
hardwired changes to the SMBus slave address allows the user
to avoid conflicts with other devices sharing the same serial bus,
for example, if more than one ADT7470 is used in a system.
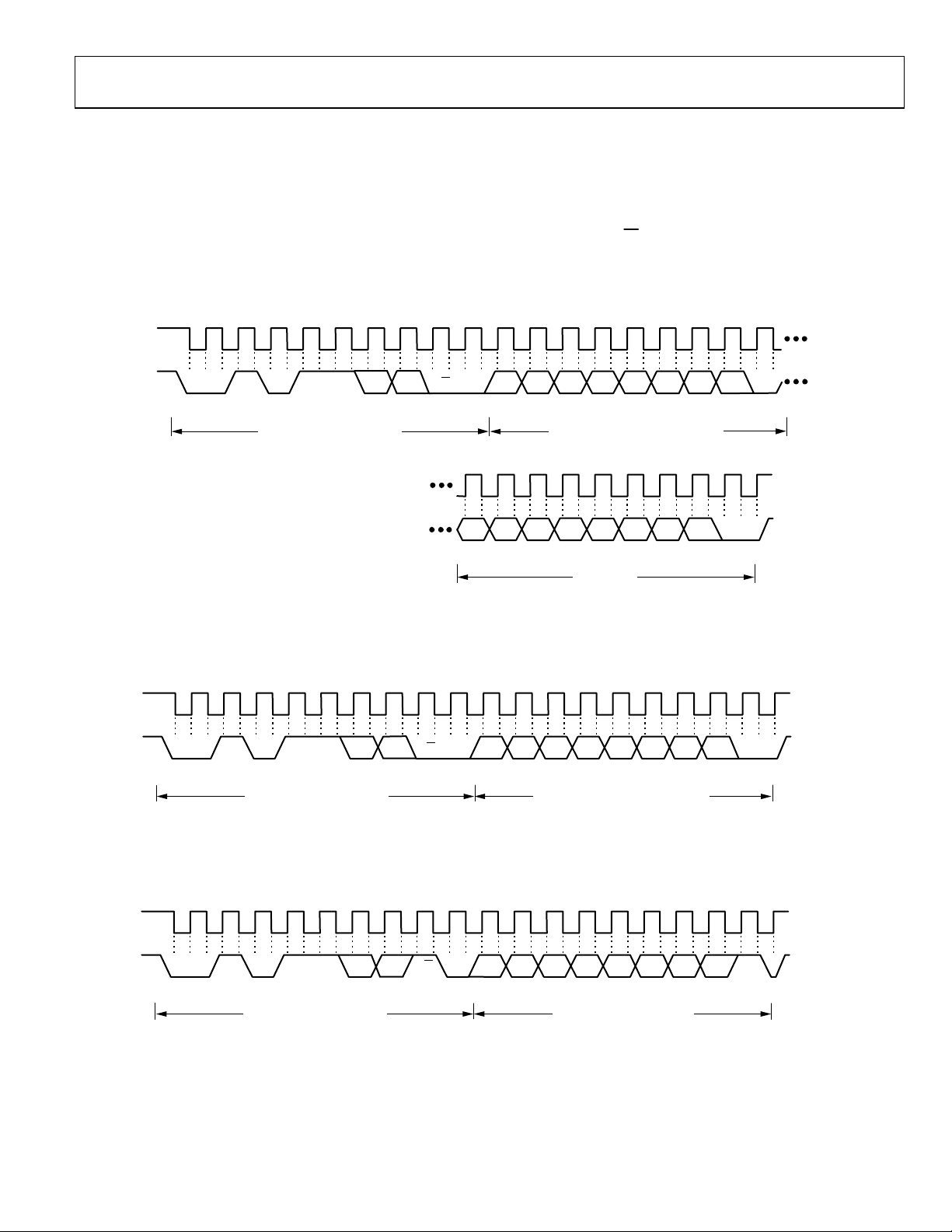
The serial bus protocol operates as follows:
1. The master initiates data transfer by establishing a start
condition, defined as a high-to-low transition on the serial
data line, SDA, while the serial clock line, SCL, remains
high. This indicates that an address/data stream follows.
V
CC
10kΩ
TYP
All slave peripherals connected to the serial bus respond
to the start condition, and shift in the next 8 bits, consist-
W
ing of a 7-bit address (MSB first) and an R/
bit. This
determines the direction of the data transfer, that is,
whether data is written to or read from the slave device.
The peripheral whose address corresponds to the transmit-
04684-0-004
ted address responds by pulling the data line low during
the low period before the 9th clock pulse, known as the
acknowledge bit. All other devices on the bus now remain
idle while the selected device waits for data to be read from
W
or written to it. If the R/
slave device. If the R/
bit is 0, the master writes to the
W
bit is 1, the master reads from the
slave device.
2. Data is sent over the serial bus in sequences of 9 clock pulses:
8 bits of data followed by an acknowledge bit from the slave
device. Transitions on the data line must occur during the
10kΩ
TYP
04684-0-005
low period of the clock signal and remain stable during the
high period. This is because a low-to-high transition when
the clock is high might be interpreted as a stop signal. The
number of data bytes that can be transmitted over the serial
bus in a single read or write operation is limited only by
what the master and slave devices can handle.
3. After all data bytes are read or written, stop conditions
are established. In write mode, the master pulls the data
line high during the 10th clock pulse to assert a stop
condition. In read mode, the master device overrides
the acknowledge bit by pulling the data line high during
the low period before the 9th clock pulse. This is known as
No Acknowledge. The master then takes the data line low
during the low period before the 10th clock pulse, then
high during the 10th clock pulse to assert a stop condition.
04684-0-006
Any number of bytes of data can be transferred over the serial
bus in one operation. However, it is not possible to mix read
and write in one operation, because the type of operation is
determined at the beginning and subsequently cannot be
changed without starting a new operation.
Rev. B | Page 8 of 40
ADT7470
A
A
A
In the ADT7470, write operations contain either one or two
bytes, and read operations contain one byte and perform the
following functions.
To write data to one of the device data registers or read data
from it, the address pointer register must be set so that the
correct data register is addressed. Then data can be written into
that register or read from it. The first byte of a write operation
1
SCL
991
always contains an address that is stored in the address pointer
register. If data is to be written to the device, the write operation
contains a second data byte that is written to the register selected
by the address pointer register.
This is illustrated in Figure 7. The device address is sent over the
W
bus followed by R/
set to 0. This is followed by two data bytes.
SD
START BY
MASTER
001 1 1 A1 A0 R/W
FRAME 1
SERIAL BUS ADDRESS
BYTE
SCL (CONTINUED)
SDA (CONTINUED)
ACK. BY
ADT7470
D7 D6 D5 D4 D3 D2 D1 D0
FRAME 3
DATA
BYTE
FRAME 2
ADDRESS POINTER REGISTER BYTE
1
D7 D6 D5 D4 D3 D2 D1 D0
9
ACK. BY
ADT7470
ACK. BY
ADT7470
STOP BY
MASTER
04684-0-007
Figure 7. Writing a Register Address to the Address Pointer Register, Then Writing Data to the Selected Register
991
R/W D7 D6 D5 D4 D3 D2 D1 D0
ACK. BY
ADT7470
ADDRESS POINTER REGISTER BYTE
FRAME 2
ACK. BY
ADT7470
STOP BY
MASTER
04684-0-008
SCL
SD
START BY
MASTER
1
01 01 1A1A0
FRAME 1
SERIAL BUS ADDRESS
BYTE
Figure 8. Writing to the Address Pointer Register Only
1
SCL
991
SD
START BY
MASTER
01 01 1A1A0
FRAME 1
SERIAL BUS ADDRESS
BYTE
R/W D7 D6 D5 D4 D3 D2 D1 D0
ACK. BY
ADT7470
FRAME 2
DATA BYTE FROM
ADT7470
NO ACK.
BY MASTER
STOP BY
MASTER
04684-0-009
Figure 9. Reading Data from a Previously Selected Register
Rev. B | Page 9 of 40
ADT7470
The first data byte is the address of the internal data register
to be written to, which is stored in the address pointer register.
The second data byte is the data to be written to the internal
data register.
How data is read from a register depends on whether or not
the address pointer register value is known.
If the ADT7470 address pointer register value is unknown or
not the desired value, it is first necessary to set it to the correct
value before data can be read from the desired data register.
This is done by performing a write to the ADT7470 as before,
but only the data byte containing the register address is sent,
because data cannot be written to the register. This is shown
in Figure 8.
A read operation is then performed consisting of the serial bus
W
address, R/
the data register. This is shown in Figure 9.
If the address pointer register is known to be already at the
desired address, data can be read from the corresponding data
register without first writing to the address pointer register,
so the operation shown in Figure 8 can be omitted.
Note the following:
• Although it is possible to read a data byte from a data
register without first writing to the address pointer register
if the address pointer register is already at the correct value,
it is not possible to write data to a register without writing
to the address pointer register. This is because the first data
byte of a write is always written to the address pointer
register.
• In Figure 7 to Figure 9, the serial bus address is shown as
the default value 01011(A1)(A0), where A1 and A0 are set
by the address select mode function previously defined.
• In addition to supporting the send byte and receive byte
protocols, the ADT7470 also supports the read byte
protocol. See System Management Bus Specifications
Rev. 2.0 for more information.
• If it is required to perform several read or write operations
in succession, the master can send a repeat start condition
instead of a stop condition to begin a new operation.
WRITE OPERATIONS
The SMBus specification defines several protocols for different
types of read and write operations. The protocols used in the
ADT7470 are discussed in the following sections. The following
abbreviations are used in the diagrams:
S—Start
P—Stop
R—Read
W—Wri te
A—Acknowl edge
A
—No Acknowledge
bit set to 1, followed by the data byte read from
The ADT7470 uses the following SMBus write protocols.
Send Byte
In this protocol, the master device sends a single command byte
to a slave device, as follows:
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by
the write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code.
5. The slave asserts ACK on SDA.
6. The master asserts a stop condition on SDA,
and the transaction ends.
For the ADT7470, the send byte protocol is used to write a
register address to RAM for a subsequent single byte read
from the same address. This is shown in Figure 10.
12 3 4 56
SLAVE
SWA A
ADDRESS
Figure 10. Setting a Register Address for Subsequent Read
REGISTER
ADDRESS
P
04684-0-010
If it is required to read data from the register immediately after
setting up the address, the master can assert a repeat start condition immediately after the final ACK and carry out a singlebyte read without asserting an intermediate stop condition.
Write Byte
In this operation, the master device sends a command byte and
one data byte to the slave device, as follows:
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by the
write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code.
5. The slave asserts ACK on SDA.
6. The master sends a data byte.
7. The slave asserts ACK on SDA.
8. The master asserts a stop condition on SDA to end
the transaction.
This is shown in Figure 11.
12 3 4 5678
SLAVE
SWA AADATA
ADDRESS
Figure 11. Single-Byte Write to a Register
REGISTER
ADDRESS
P
04684-0-011
Rev. B | Page 10 of 40
ADT7470
READ OPERATIONS
The ADT7470 uses the following SMBus read protocols.
Receive Byte
This is useful when repeatedly reading a single register.
The register address must be set up previously. In this
operation, the master device receives a single byte from
a slave device, as follows:
4. If more than one device’s
the one with the lowest device address has priority,
in accordance with normal SMBus arbitration.
5. Once the ADT7470 responds to the alert response
address, the master must read the status registers,
and the
SMBALERT
tion is gone.
SMBALERT
output is low,
is cleared only if the error condi
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by
the read bit (high).
3. The addressed slave device asserts ACK on SDA.
4. The master receives a data byte.
5. The master asserts NO ACK on SDA.
6. The master asserts a stop condition on SDA
and the transaction ends.
In the ADT7470, the receive byte protocol is used to read a
single byte of data from a register whose address was previously
set by a send byte or write byte operation.
12 3456
SLAVE
S R A DATA A P
ADDRESS
Figure 12. Single-Byte Write from a Register
04684-0-012
Alert Response Address
Alert response address (ARA) is a feature of SMBus devices,
which allows an interrupting device to identify itself to the host
when multiple devices exist on the same bus.
SMBALERT
The
or can be used as an
connected to a common
master. If a device’s
output can be used as an interrupt output
SMBALERT
SMBALERT
SMBALERT
. One or more outputs can be
line connected to the
line goes low, the following
occurs:
SMBALERT
1.
is pulled low.
2. The master initiates a read operation and sends the alert
response address (ARA = 000 1100). This is a general call
address that must not be used as a specific device address.
3. The device whose
SMBALERT
output is low responds to
the alert response address, and the master reads its device
address. The address of the device is now known, and it
can be interrogated in the usual way.
SMBus TIMEOUT
The ADT7470 includes an SMBus timeout feature. If there is no
SMBus activity for more than 31 ms, the ADT7470 assumes that
the bus is locked and releases the bus. This prevents the device
from locking or holding the SMBus expecting data. Some SMBus
controllers cannot handle the SMBus timeout feature, so it can
be disabled.
Table 5. Configuration Register 1—Register 0x40
Bit Address and Value Description
<3> TODIS = 0 SMBus timeout enabled (default).
<3> TODIS = 1 SMBus timeout disabled.
Although the ADT7470 supports packet error checking (PEC),
its use is optional. It is triggered by supplying the extra clock
for the PEC byte. The PEC byte is calculated using CRC-8.
The frame check sequence (FCS) conforms to CRC-8 by the
following polynomial:
8
C(x) = x
+ x2 + x1 + 1
Consult the SMBus 1.1 Specification for more information
(www.smbus.org).
GENERAL-PURPOSE I/O PINS (OPEN DRAIN)
The ADT7470 has four pins that can be configured as either
general-purpose logic pins or as PWM outputs They are configured as general-purpose logic pins by setting Bit 0 to Bit 3
of the TMP05 COEF Select 2 Register (Address 0x07F). Each
GPIO pin has three data bits associated with it: two bits in the
GPIO configuration register (Address 0x80) and one in the
GPIO status register (Address 0x81).
Setting a direction bit to 1 in the GPIO configuration register
makes the corresponding GPIO pin an output. Clearing the
direction bit to 0 makes it an input. Setting a polarity bit to 1
makes the corresponding GPIO pin active high. Clearing the
polarity bit to 0 makes it active low. When a GPIO pin is configured as an input, the corresponding bit in the GPIO status
register is read-only and is set when the input is asserted.
When a GPIO pin is configured as an output, the corresponding
bit in one of the GPIO status registers becomes read/write.
Setting this bit asserts the GPIO output. Note that whether a
GPIO pin is configured as an input or as an output, “asserted”
can be high or low, depending on the setting of the polarity bit.
Rev. B | Page 11 of 40
ADT7470
TEMPERATURE MEASUREMENT USING TMP05/TMP06
MEASURING TEMPERATURE
For more information, refer to the TMP05/TMP06 data sheet.
TMP05 generates a PWM output proportional to temperature,
which can be easily interfaced to most microprocessors or CPUs.
Table 6 lists the temperature reading registers on the ADT7470.
Table 6. Temperature Reading Registers
Register Reading Default
0x20 Temperature 1 Reading 0x00
0x21 Temperature 2 Reading 0x00
0x22 Temperature 3 Reading 0x00
0x23 Temperature 4 Reading 0x00
0x24 Temperature 5 Reading 0x00
0x25 Temperature 6 Reading 0x00
0x26 Temperature 7 Reading 0x00
0x27 Temperature 8 Reading 0x00
0x28 Temperature 9 Reading 0x00
0x29 Temperature 10 Reading 0x00
Reporting of 8-bit temperature values occurs in the preceding
registers only if the TMP_IN function is used and if TMP05s
and TMP06s are daisy-chained according to their data sheet
and connected as shown in Figure 13. This device does not have
any temperature measurement capability when used as a standalone device without TMP05s and TMP06s connected.
TMP05/TMP06 DECODER
The ADT7470 includes a PWM processing engine to decode the
daisy-chained PWM output from multiple TMP05s and TMP06s.
It then passes each decoded temperature value to temperature
value registers. This allows the ADT7470 to do high/low limit
comparisons of temperature and to automatically control fan
speed based on measured temperature. The PWM processing
engine contains all necessary logic to initiate start conversions
on the first daisy-chained TMP05/TMP06 and to synchronize
with each temperature value as it is fed back to the device through
the daisy chain. The start function is multiplexed onto the same
pin that can be used to blast the fans to full speed. The start
conversion for TMP05/TMP06 temperature measurement is
fully transparent to the user and does not require any software
intervention to function.
THERMAL ZONES
Using Reg7Ch and Reg7Dh, the user can set up which TMP05
controls which fan. An individual TMP05, or the hottest TMP05
in the daisy chain, can control each fan. This allows the ADT7470
to create and control up to four independent thermal zones. In a
system with n TMP05s, it is possible to have 1 or n TMP05s
controlling each fan.
Rev. B | Page 12 of 40
 Loading...
Loading...