


ADSP-218x DSP
Instruction Set Reference
Revision 2.0, November 2004
Part Number
82-002000-01
Analog Devices, Inc.
One Technology Way
Norwood, Mass. 02062-9106
a

Copyright Information
©2004 Analog Devices, Inc., ALL RIGHTS RESERVED. This document
may not be reproduced in any form without prior, express written consent
from Analog Devices, Inc.
Printed in the USA.
Disclaimer
Analog Devices, Inc. reserves the right to change this product without
prior notice. Information furnished by Analog Devices is believed to be
accurate and reliable. However, no responsibility is assumed by Analog
Devices for its use; nor for any infringement of patents or other rights of
third parties which may result from its use. No license is granted by implication or otherwise under the patent rights of Analog Devices, Inc.
Trademark and Service Mark Notice
The Analog Devices logo, EZ-ICE, and VisualDSP++ are registered trademarks of Analog Devices, Inc.
All other brand and product names are trademarks or service marks of
their respective owners.

CONTENTS
INTRODUCTION
Audience ...................................................................................... 1-1
Contents Overview ....................................................................... 1-2
Development Tools ....................................................................... 1-4
Additional Product Information .................................................... 1-7
For Technical or Customer Support ............................................... 1-7
What’s New in This Manual .......................................................... 1-8
Related Documents ....................................................................... 1-8
Conventions ................................................................................. 1-8
PROGRAMMING MODEL
Overview ...................................................................................... 2-1
Data Address Generators .......................................................... 2-2
Always Initialize L Registers ................................................ 2-4
Program Sequencer .................................................................. 2-4
Interrupts ........................................................................... 2-5
Loop Counts ....................................................................... 2-5
Status and Mode Bits .......................................................... 2-6
Stacks ................................................................................. 2-6
ADSP-218x DSP Instruction Set Reference iii

CONTENTS
Computational Units .............................................................. 2-7
Bus Exchange .......................................................................... 2-8
Timer ..................................................................................... 2-8
Serial Ports .............................................................................. 2-8
Memory Interface and SPORT Enables ................................... 2-9
Program Example ....................................................................... 2-10
Example Program: Setup Routine Discussion ......................... 2-13
Example Program: Interrupt Routine Discussion .................... 2-15
Hardware Overlays and Software Issues ....................................... 2-16
Libraries and Overlays ........................................................... 2-17
Interrupts and Overlays ......................................................... 2-17
Loop Hardware and Overlays ................................................ 2-19
SOFTWARE EXAMPLES
Overview ...................................................................................... 3-1
System Development Process ....................................................... 3-3
Single-Precision Fir Transversal Filter ............................................ 3-5
Cascaded Biquad IIR Filter ........................................................... 3-7
Sine Approximation ...................................................................... 3-9
Single-Precision Matrix Multiply ................................................. 3-11
Radix-2 Decimation-in-Time FFT .............................................. 3-13
Main Module ........................................................................ 3-14
DIT FFT Subroutine ............................................................ 3-16
Bit-Reverse Subroutine .......................................................... 3-21
Block Floating-Point Scaling Subroutine ................................ 3-22
iv ADSP-218x DSP Instruction Set Reference

CONTENTS
INSTRUCTION SET
Quick List Of Instructions ............................................................ 4-2
Instruction Set Overview ............................................................... 4-5
Multifunction Instructions ............................................................ 4-7
ALU/MAC With Data and Program Memory Read .................. 4-7
Data and Program Memory Read ............................................. 4-9
Computation With Memory Read ........................................... 4-9
Computation With Memory Write ........................................ 4-10
Computation With Data Register Move ................................. 4-10
ALU, MAC and Shifter Instructions ............................................ 4-14
ALU Group ........................................................................... 4-14
MAC Group .......................................................................... 4-16
Shifter Group ........................................................................ 4-18
MOVE: Read and Write Instructions ........................................... 4-20
Program Flow Control ................................................................ 4-22
Miscellaneous Instructions .......................................................... 4-25
Extra Cycle Conditions ............................................................... 4-27
Multiple Off-Chip Memory Accesses ...................................... 4-27
Wait States ............................................................................ 4-27
SPORT Autobuffering and DMA ........................................... 4-28
Instruction Set Syntax ................................................................. 4-28
Punctuation and Multifunction Instructions ........................... 4-28
Syntax Notation Example ...................................................... 4-29
Status Register Notation ........................................................ 4-30
ADSP-218x DSP Instruction Set Reference v

CONTENTS
ALU Instructions ........................................................................ 4-31
Add/Add With Carry ............................................................ 4-32
Subtract X-Y/Subtract X-Y With Borrow ............................... 4-35
Subtract Y-X/Subtract Y-X With Borrow ................................ 4-39
Bitwise Logic: AND, OR, XOR ............................................. 4-42
Bit Manipulation: TSTBIT, SETBIT, CLRBIT, TGLBIT ....... 4-45
Clear: PASS .......................................................................... 4-48
Negate .................................................................................. 4-52
NOT .................................................................................... 4-54
Absolute Value: ABS ............................................................. 4-56
Increment ............................................................................. 4-59
Decrement ............................................................................ 4-61
Divide Primitives: DIVS and DIVQ ...................................... 4-63
Generate ALU Status Only: NONE ....................................... 4-71
MAC Instructions ...................................................................... 4-73
Multiply ............................................................................... 4-74
Multiply With Cumulative Add ............................................. 4-78
Multiply With Cumulative Subtract ...................................... 4-82
Squaring ............................................................................... 4-86
MAC Clear ........................................................................... 4-90
MAC Transfer MR ................................................................ 4-92
Conditional MR Saturation ................................................... 4-94
vi ADSP-218x DSP Instruction Set Reference

CONTENTS
Shifter Instructions ..................................................................... 4-96
Arithmetic Shift .................................................................... 4-97
Logical Shift ........................................................................ 4-100
Normalize ........................................................................... 4-103
Derive Exponent ................................................................. 4-106
Block Exponent Adjust ........................................................ 4-110
Arithmetic Shift Immediate ................................................. 4-112
Logical Shift Immediate ....................................................... 4-114
Move Instructions ..................................................................... 4-116
Register Move ..................................................................... 4-117
Load Register Immediate ..................................................... 4-119
Data Memory Read (Direct Address) .................................... 4-122
Data Memory Read (Indirect Address) ................................. 4-124
Program Memory Read (Indirect Address) ............................ 4-126
Data Memory Write (Direct Address) ................................... 4-128
Data Memory Write (Indirect Address) ................................ 4-130
Program Memory Write (Indirect Address) ........................... 4-133
IO Space Read/Write ........................................................... 4-135
Program Flow Instructions ........................................................ 4-137
JUMP ................................................................................. 4-138
CALL .................................................................................. 4-140
JUMP or CALL on Flag In Pin ............................................ 4-142
Modify Flag Out Pin ........................................................... 4-144
RTS (Return from Subroutine) ............................................ 4-146
ADSP-218x DSP Instruction Set Reference vii

CONTENTS
RTI (Return from Interrupt) ............................................... 4-148
Do Until ............................................................................. 4-150
Idle ..................................................................................... 4-153
MISC Instructions .................................................................... 4-155
Stack Control ...................................................................... 4-156
TOPPCSTACK .................................................................. 4-159
Mode Control ..................................................................... 4-162
Interrupt Enable and Disable ............................................... 4-165
Program Memory Overlay Register Update .......................... 4-166
Data Memory Overlay Register Update ................................ 4-169
Modify Address Register ...................................................... 4-172
No Operation ..................................................................... 4-174
Multifunction Instructions ........................................................ 4-175
Computation With Memory Read ....................................... 4-176
Computation With Register-to-Register Move ..................... 4-182
Computation With Memory Write ...................................... 4-187
Data and Program Memory Read ......................................... 4-192
ALU/MAC With Data and Program Memory Read .............. 4-194
viii ADSP-218x DSP Instruction Set Reference

CONTENTS
INSTRUCTION CODING
Opcode Definitions ..................................................................... A-2
Opcode Mnemonics ..................................................................... A-9
AMF ALU / MAC Function Codes ......................................... A-9
BO ....................................................................................... A-10
CC ....................................................................................... A-10
COND Status Condition Codes ........................................... A-11
CP Counter Stack Pop Codes ................................................ A-11
D Direction Codes ............................................................... A-12
DD Double Data Fetch Data Memory
Destination Codes ............................................................. A-12
DREG Data Register Codes .................................................. A-12
DV Divisor Codes for Slow Idle Instruction (IDLE (n)) ........ A-14
FIC FI Condition Codes ...................................................... A-14
FO Control Codes for Flag Output Pins
(FO, FL0, FL1, FL2) ......................................................... A-14
G Data Address Generator Codes .......................................... A-15
I Index Register Codes .......................................................... A-15
LP Loop Stack Pop Codes .................................................... A-15
M Modify Register Codes ..................................................... A-16
PD Dual Data Fetch Program Memory
Destination Codes ............................................................. A-16
PP PC Stack Pop Codes ........................................................ A-16
REG Register Codes ............................................................. A-17
S Jump/Call Codes ............................................................... A-18
ADSP-218x DSP Instruction Set Reference ix

CONTENTS
SF Shifter Function Codes .................................................... A-18
SPP Status Stack Push/Pop Codes .......................................... A-19
T Return Type Codes ............................................................ A-19
TERM Termination Codes for DO UNTIL ........................... A-20
X X Operand Codes .............................................................. A-21
Y Y Operand Codes .............................................................. A-21
YY ........................................................................................ A-21
Z ALU/MAC Result Register Codes ...................................... A-22
YY, CC, BO ALU / MAC Constant Codes (Type 9) ............... A-22
INDEX
x ADSP-218x DSP Instruction Set Reference

1 INTRODUCTION
The ADSP-218x DSP Instruction Set Reference provides assembly syntax
information for the ADSP-218x Digital Signal Processor (DSP). The syntax descriptions for instructions that execute within the DSP’s processor
core include processing elements, program sequencer, and data address
generators. For architecture and design information on the DSP, see the
ADSP-218x DSP Hardware Reference.
Audience
DSP system designers and programmers who are familiar with signal processing concepts are the primary audience for this manual. This manual
assumes that the audience has a working knowledge of microcomputer
technology and DSP-related mathematics.
DSP system designers and programmers who are unfamiliar with signal
processing can use this manual, but should supplement this manual with
other texts, describing DSP techniques.
All readers, particularly programmers, should refer to the DSP’s development tools documentation for software development information. For
additional suggested reading, see the section “Additional Product Infor-
mation” on page 1-7.
ADSP-218x DSP Instruction Set Reference 1-1

Contents Overview
Contents Overview
The Instruction Set Reference is a four-chapter book that describes the
instructions syntax for the ADSP-218x DSPs.
Chapter 1, “Introduction”, provides introductory information including
contacts at Analog Devices, an overview of the development tools, related
documentation and conventions.
Chapter 2, “Programming Model”, describes the computational units of
the ADSP-218x DSPs and provides a programming example with
discussion.
Chapter 3, “Software Examples”, describes the process to create executable
programs for the ADSP-218x DSPs. It provides several software examples
that can be used to create programs.
Chapter 4, “Instruction Set”, presents information organized by the type
of instruction. Instruction types relate to the machine language opcode
for the instruction. On this DSP, the opcodes categorize the instructions
by the portions of the DSP architecture that execute the instructions.
Appendix A, “Instruction Coding”, provides a summary of the complete
instruction set of the ADSP-218x DSPs with opcode descriptions.
Each reference page for an instruction shows the syntax of the instruction,
describes its function, gives one or two assembly-language examples, and
identifies fields of its opcode. The instructions are also referred to by type,
ranging from 1 to 31. These types correspond to the opcodes that
ADSP-218x DSPs recognize, but are for reference only and have no bearing on programming.
Some instructions have more than one syntactical form; for example,
instruction “Multiply” on page 4-73 has many distinct forms.
1-2 ADSP-218x DSP Instruction Set Reference

Introduction
Many instructions can be conditional. These instructions are prefaced by
IF cond; for example:
IF EQ MR = MX0 * MY0 (SS);
In a conditional instruction, the execution of the entire instruction is
based on the condition.
The following instructions groups are available for ADSP-218x DSPs:
• “Quick List Of Instructions” on page 4-2—This section provides a
a quick reference to all instructions.
• “ALU Instructions” on page 4-31—These instruction specify operations that occur in the DSP’s ALU.
• “MAC Instructions” on page 4-72—These instructions specify
operations that occur in the DSP’s Multiply–Accumulator.
• “Shifter Instructions” on page 4-94—These instructions specify
operations that occur in the DSP’s Shifter.
• “Move Instructions” on page 4-113—These instructions specify
memory and register access operations.
• “Program Flow Instructions” on page 4-133—These instructions
specify program sequencer operations.
• “MISC Instructions” on page 4-151—These instructions specify
memory access operations.
• “Multifunction Instructions” on page 4-171—These instructions
specify parallel, single-cycle operations.
Appendix A, “Instruction Coding”, lists the instruction encoding fields by
type number and defines opcode mnemonics as listed alphabetically.
ADSP-218x DSP Instruction Set Reference 1-3

Development Tools
Development Tools
The ADSP-218x DSPs are supported by VisualDSP++®, an easy-to-use
programming environment, comprised of a VisualDSP++ Integrated
Development and Debugging Environment (IDDE). VisualDSP++ lets
you manage projects from start to finish from within a single, integrated
interface. Because the project development and debug environments are
integrated, you can move easily between editing, building, and debugging
activities.
Flexible Project Management. VisualDSP++ IDDE provides flexible
project management for the development of DSP applications. VisualDSP++ includes access to all the activities necessary to create and debug
DSP projects. You can create or modify source files or view listing or map
files with the IDDE Editor. This powerful Editor is part of VisualDSP++
and includes multiple language syntax highlighting, OLE drag and drop,
bookmarks, and standard editing operations such as undo/redo,
find/replace, copy/paste/cut, and goto.
Also, VisualDSP++ includes access to the C Compiler, C Runtime
Library, Assembler, Linker, Loader, Simulator, and Splitter tools You
specify options for these tools through property dialog boxes. Tool dialog
boxes are easy to use, and make configuring, changing, and managing your
projects simple. These options control how the tools process inputs and
generate outputs, and have a one-to-one correspondence to the tools’
command line switches. You can define these options once, or modify
them to meet changing development needs. You can also access the tools
from the operating system command line if you choose.
Greatly Reduced Debugging Time. The Debugger has an easy-to-use,
common interface for all processor simulators and emulators available
through Analog Devices and third parties or custom developments. The
Debugger has many features that greatly reduce debugging time. You can
view C source interspersed with the resulting Assembly code. You can profile execution of a range of instructions in a program; set simulated watch
1-4 ADSP-218x DSP Instruction Set Reference

Introduction
points on hardware and software registers, program and data memory; and
trace instruction execution and memory accesses. These features enable
you to correct coding errors, identify bottlenecks, and examine DSP performance. You can use the custom register option to select any
combination of registers to view in a single window. The Debugger can
also generate inputs, outputs, and interrupts so you can simulate real
world application conditions.
Software Development Tools. The Software Development Tools, which
support the ADSP-218x DSPs, allow you to develop applications that take
full advantage of the DSP architecture, including shared memory and
memory overlays. Software Development tools include C Compiler, C
Runtime Library, DSP and Math Libraries, Assembler, Linker, Loader,
Simulator, and Splitter.
C Compiler and Assembler. The C Compiler generates efficient code that
is optimized for both code density and execution time. The C Compiler
allows you to include Assembly language statements inline. Because of
this, you can program in C and still use Assembly for time-critical loops.
You can also use pretested Math, DSP, and C Runtime Library routines to
help shorten your time to market. The ADSP-218x Assembly language is
based on an algebraic syntax that is easy to learn, program, and debug.
The add instruction, for example, is written in the same manner as the
actual equation using registers for variables (for example, AR = AX0 +
AY0;).
Linker and Loader. The Linker provides flexible system definition
through Linker Description Files (
.LDF). In a single .LDF file, you can
define different types of executables for a single or multiprocessor system.
The Linker resolves symbols over multiple executables, maximizes memory use, and easily shares common code among multiple processors. The
Loader supports creation of a 16-bit host port and 8-bit PROM boot
images. Along with the Linker, the Loader allows a variety of system configurations with smaller code and faster boot time.
ADSP-218x DSP Instruction Set Reference 1-5

Development Tools
Simulator. The Simulator is a cycle-accurate, instruction-level simulator
that allows you to simulate your application in real time.
Emulator. The EZ-ICE® serial emulator system provides state-of-the-art
emulation for the ADSP-218x DSPs using a controlled environment for
observing, debugging, and testing activities in a target system. The key
features of the ADSP-218x EZ-ICE include a shielded enclosure with the
reset switch, a high speed RS-232 serial port interface, and support for
2.5, 3.3 and 5.0V DSPs. The EZ-ICE connects directly to the target processor via the emulation interface port. It’s ease of use, full speed
emulation, and shield board ensures that your design process runs
smoothly.
3rd Party Extensible. The VisualDSP++ environment enables third party
companies to add value using Analog Devices’ published set of Application Programming Interfaces (API). Third party products including
runtime operating systems, emulators, high-level language compilers, multiprocessor hardware can interface seamlessly with VisualDSP++ thereby
simplifying the tools integration task. VisualDSP++ follows the COM API
format. Two API tools, Target Wizard and API Tester, are also available
for use with the API set. These tools help speed the time-to-market for
vendor products. Target Wizard builds the programming shell based on
API features the vendor requires. The API tester exercises the individual
features independently of VisualDSP++. Third parties can use a subset of
these APIs that meets their application needs. The interfaces are fully supported and backward compatible.
Further details and ordering information are available in the VisualDSP++
Development Tools data sheet. This data sheet can be requested from any
Analog Devices sales office or distributor.
1-6 ADSP-218x DSP Instruction Set Reference

Introduction
Additional Product Information
Analog Devices can be found on the internet at http://www.analog.com.
Our Web pages provide information about the company and products,
including access to technical information and documentation, product
overviews, and product announcements.
You may obtain additional information about Analog Devices and its
products in any of the following ways:
Visit our World Wide Web site at www.analog.com
• FAX questions or requests for information to 1(781)461-3010.
• Access the division’s File Transfer Protocol (FTP) site at ftp
ftp.analog.com or ftp 137.71.23.21 or ftp://ftp.analog.com.
For Technical or Customer Support
You can reach our Customer Support group in the following ways:
• E-mail questions to:
dsp.support@analog.com, dsptools.support@analog.com or
dsp.europe@analog.com (European customer support)
• Contact your local ADI sales office or an authorized ADI
distributor
• Send questions by mail to:
Analog Devices, Inc.
One Technology Way
P.O. Box 9106
Norwood, MA 02062-9106
USA
ADSP-218x DSP Instruction Set Reference 1-7

What’s New in This Manual
What’s New in This Manual
This edition of the ADSP-218x DSP Instruction Set Reference is formatted
for easy reading and conversion to online help. Some technical information is also updated or corrected.
Related Documents
For more information about Analog Devices DSPs and development
products, see the following documents:
• ADSP-218x DSP Hardware Reference
• VisualDSP++ Getting Started Guide for ADSP-218x DSPs
• VisualDSP++ User's Guide for ADSP-218x DSPs
• VisualDSP++ C Compiler & Library Manual for ADSP-218x DSPs
• VisualDSP++ Assembler Manual for ADSP-218x DSPs
• VisualDSP++ Linker & Utilities Manual for ADSP-218x DSPs
All the manuals are included in the software distribution CD-ROM. To
access these manuals, use the Help Topics command in the VisualDSP
environment’s Help menu and select the Online Manuals book. From this
Help topic, you can open any of the manuals, which are in Adobe Acrobat
PDF format.
Conventions
Throughout this manual there are tables summarizing the syntax of the
instruction groups. Table 1-1 identifies the notation conventions that
apply to all chapters. Note that additional conventions, which apply only
to specific chapters, may appear throughout this manual.
1-8 ADSP-218x DSP Instruction Set Reference
Introduction
Table 1-1. Instruction Set Notation
Notation Meaning
UPPERCASE Explicit syntax—assembler keyword. The assembler is case-
insensitive.
; A semicolon terminates an instruction line.
, A comma separates multiple, parallel instructions in the same
instruction line.
// single line comment
/* multi line comment */
operands Some instruction operands are shown in lowercase letters. These
<exp> Denotes exponent (shift value) in Shift Immediate instructions;
<data> Denotes an immediate data value.
<addr> Denotes an immediate address value to be encoded in the instruc-
<reg> Refers to any accessible register; see Table 4-7 “Processor Registers:
[brackets] Refers to optional instruction extensions
<dreg> Refers to any data register; see Table 4-7 “Processor Registers: reg
0x Denotes number in hexadecimal format (
h# Denotes number in hexadecimal format (h#FFFF).
b# Denotes number in binary format (b#0001000100010001).
// or /* */ indicate comments or remarks that explain program code,
but that the assembler ignores. For more details, see the Visu-
alDSP++ Assembler Manual for ADSP-218x DSPs.
operands may take different values in assembly code. For example,
the operand
must be an 8-bit signed integer constant.
tion. The <addr> may be either an immediate value (a constant) or a
program label.
reg and dreg” on page 4-22.
and dreg” on page 4-22.
yop may be one of several registers: AY0, AY1, or AF.
0xFFFF).
ADSP-218x DSP Instruction Set Reference 1-9
Conventions
Table 1-1. Instruction Set Notation (Cont’d)
Notation Meaning
L
[
Immediate values such as <exp>, <data>, or <addr> may be a constant in
decimal, hexadecimal, octal or binary format. The default format is
decimal.
A note, providing information of special interest or identifying a
related topic. In the online version of this book, the word Note
appears instead of this symbol.
A caution, providing information about critical design or programming issues that influence operation of a product. In the online version of this book, the word Caution appears instead of this symbol.
1-10 ADSP-218x DSP Instruction Set Reference

2 PROGRAMMING MODEL
This chapter provides an overview of ADSP-218x registers and their operations used in processor programming.
This chapter contains:
• “Overview” on page 2-1
• “Program Example” on page 2-10
• “Hardware Overlays and Software Issues” on page 2-16
Overview
From a programming standpoint, the ADSP-218x DSPs consist of three
computational units (ALU, MAC and Shifter), two data address generators, and a program sequencer, plus on-chip peripherals and memory that
vary with each processor. Almost all operations using these architectural
components require one or more registers to store data, to keep track of
values such as pointers, or to specify operating modes.
Internal registers hold data, addresses, control information or status information. For example,
DAG2 pointer (address); ASTAT contains status flags from arithmetic operations; fields in the wait state register control the number of wait states for
different zones of external memory.
AX0 stores an ALU operand (data); I4 stores a
ADSP-218x DSP Instruction Set Reference 2-1

Overview
There are two types of accesses for registers. The first type of access is
made to dedicated registers such as MX0 and IMASK. These registers can be
read and written explicitly in assembly language. For example,
MX0=1234;
IMASK=0xF;
The second type of access is made to memory-mapped registers such as the
system control register, wait state control register, timer registers and
SPORT registers. These registers are accessed by reading and writing the
corresponding data memory locations.
For example, the following code clears the Wait State Control Register,
which is mapped to data memory location 0x3FFE:
AX0=0;
DM(0x3FFE)=AX0;
In this example, AX0 is used to hold the constant 0 because there is no
instruction to write an immediate data value to memory using an immediate address.
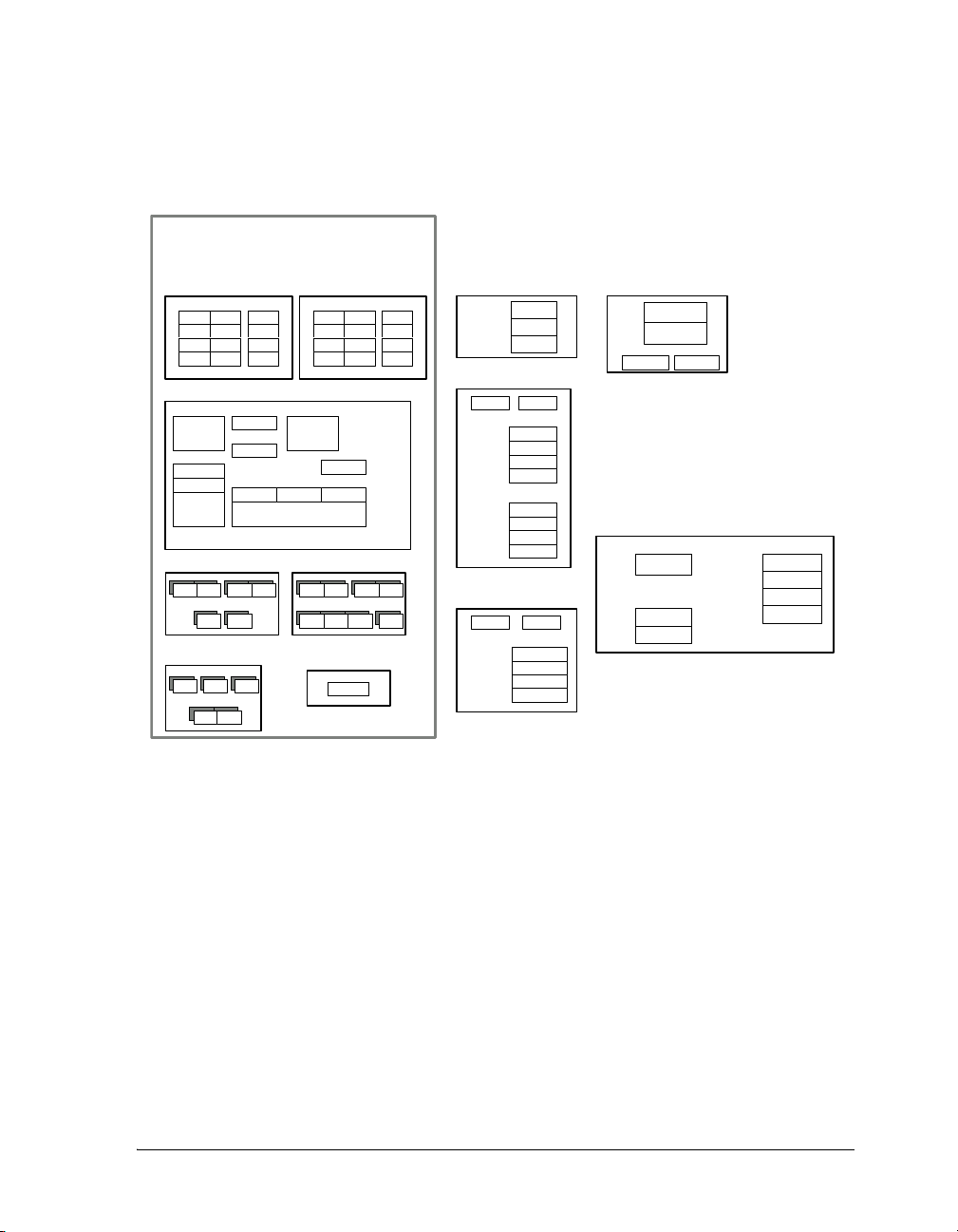
The ADSP-218x registers are shown in Figure 2-1. The registers are
grouped by function: data address generators (DAGs), program sequencer,
computational units (ALU, MAC, and shifter), bus exchange (PX), memory interface, timer, SPORTs, host interface, and DMA interface.
Data Address Generators
DAG1 and DAG2 each have twelve 14-bit registers: four index (I) registers for storing pointers, four modify (
and four length (
L) registers for implementing circular buffers. DAG1
addresses data memory only and has the capability of bit-reversing its outputs. DAG2 addresses both program and data memory and can provide
addresses for indirect branching (jumps and calls) as well as for accessing
data.
M) registers for updating pointers
2-2 ADSP-218x DSP Instruction Set Reference
Processor Core
DATA ADDRESS GENERATORS
DAG1 DAG2
(DM addressing only) (DM and PM addressing)
Bit-reverse capability Indirect branch capability
14
14
PC
STACK
16 X
14
8
710
8
MSTAT*IMASK*
MX0 MX 1 MY1MY
81616
BUS EXCHANGE
I4
I5I6L5
SSTA
T
ASTAT
8
PX
L6
L7
1414
0
MR0MR1MR2 MF
I0
L0
M0
L1
I1
I2
I3
14 1414
18
LOOP
STACK
4X18
14
OWRCNTR
CNT
R
COUNT
STACK
4X
14
* Status Stack Depth = 12 mem ory locations, Width = 25
bits
AX0 AX1 AY1AY0
SHIFTER
16
SI SE SB
M1
L2
M2
L3
M3
PROGRAM SEQUENCER
5
ICNTL
16
IFC*
STATUS STACK*
ALU MAC
AFAR
58
SR0SR1
Programming Model
TIMER
0x3FFD
M4L4
M5
M6
M7I7
TPERIOD
0x3FFC
TCOUNT
TSCALE
0x3FFB
SPORT 0
RX0 TX0
Multichannel enables
0x3FFA
RX 3116
RX 15-0
0x3FF9
TX 31-16
0x3FF8
TX 15-
0x3FF7
0
SPORT0 Control
0x3FF
Control
6
0x3FF
SCLKDIV
5
RFSDIV
0x3FF
4
0x3FF
Autobuffer
3
SPORT 1
RX1 TX1
SPORT1Control
0x3FF2
Control
0x3FF1
SCLKDIV
RFSDIV
0x3FF0
Autobuffer
0x3FEF
MEMORY INTERFACE
System Control
0x3FFF
Register
Wait
0x3FFE
States
4
DMOVLAY
PROGRAMMABLE FLAGS
IDMA Registers
IDMA Control
0x3FE0
Register
Programmable
Flag Registers
PFTYPE
0x3FE6
0x3FE5 PFDATA
4
PMOVLAY
IDMA PORT
BDMA PORT
0x3FE
4
0x3FE3
0x3FE2
0x3FE1
BDMA Registers
BWCOUNT
BDMA C ontrol
BEAD
BIAD
Figure 2-1. ADSP-218x DSP Registers
ADSP-218x DSP Instruction Set Reference 2-3

Overview
The following example is an indirect data memory read from the location
pointed to by I0. Once the read is complete, I0 is updated by M0.
AX0=DM(I0,M0);
The following example is an indirect program memory data write to the
address pointed to by I4 with a post modify by M5:
PM(I4,M5)=MR1;
The following example is an example of an indirect jump:
JUMP (I4);
Always Initialize L Registers
The ADSP-218x processors allow two addressing modes for data memory
accesses: direct and register indirect. Indirect addressing is accomplished
by loading an address into an I (index) register and specifying one of the
available M (modify) registers.
The L registers are provided to facilitate wraparound addressing of circular
data buffers. A circular buffer is only implemented when an L register is
set to a non-zero value.
[
For linear(that is, non-circular) indirect addressing, the L register
corresponding to the I register used must be set to zero. Do not
assume that the
ignored; the I, M, and L registers contain random values following
processor reset. Your program must initialize the L registers corresponding to any
L registers are automatically initialized or may be
I registers it uses.
Program Sequencer
Registers associated with the program sequencer control subroutines,
loops, and interrupts. They also indicate status and select modes of
operation.
2-4 ADSP-218x DSP Instruction Set Reference
Programming Model
Interrupts
The ICNTL register controls interrupt nesting and external interrupt sensitivity. The IFC register which is 16 bits wide lets you force and clear
interrupts in software. The IMASK register which is 10 bits wide masks (disables) individual interrupts. ADSP-218x processors support twelve
interrupts, two of which (reset, powerdown) are non-maskable.
The ADSP-2181 DSP supports a global interrupt enable instruction (ENA
INTS) and interrupt disable instruction (DIS INTS). Executing the disable
interrupt instruction causes all interrupts to be masked without changing
the contents of the IMASK register. Disabling interrupts does not affect
serial port autobuffering, which operate normally whether or not interrupts are enabled. The disable interrupt instruction masks all user
interrupts including the powerdown interrupt. The interrupt enable
instruction allows all unmasked interrupts to be serviced again.
Loop Counts
The CNTR register stores the count value for the currently executing loop.
The count stack allows the nesting of count-based loops to four levels. A
write to CNTR pushes the current value onto the count stack before writing
the new value. The following example pushes the current value of CNTR on
the count stack and then loads CNTR with 10.
CNTR=10;
OWRCNTR
for the current loop without pushing CNTR on the count stack.
L
is a special syntax with which you can overwrite the count value
OWRCNTR cannot be read (for example, used as a source register), and
must not be written in the last instruction of a
DO UNTIL loop.
ADSP-218x DSP Instruction Set Reference 2-5

Overview
Status and Mode Bits
The stack status (SSTAT) register contains full and empty flags for stacks.
The arithmetic status (ASTAT) register contains status flags for the computational units. The mode status (MSTAT) register contains control bits for
various options. MSTAT contains 4 bits that control alternate register selection for the computational units, bit-reverse mode for DAG1, and overflow
latch and saturation modes for the ALU. MSTAT also has 3 bits to control
the MAC result placement, timer enable, and Go mode enable.
Use the Mode Control instruction (ENA or DIS) to conveniently enable or
disable processor modes.
Stacks
The program sequencer contains four stacks that allow loop, subroutine
and interrupt nesting.
The PC stack is 14 bits wide and 16 locations deep. It stores return
addresses for subroutines and interrupt service routines, and top-of-loop
addresses for loops. PC stack handling is automatic for subroutine calls
and interrupt handling. In addition, the PC stack can be manually pushed
or popped using the PC Stack Control instructions TOPPCSTACK=reg and
reg=TOPPCSTACK.
The loop stack is 18 bits wide, 14 bits for the end-of-loop address and 4
bits for the termination condition code. The loop stack is four locations
deep. It is automatically pushed during the execution of a
DO UNTIL
instruction. It is popped automatically during a loop exit if the loop was
nested. The loop stack may be manually popped with the POP LOOP
instruction.
The status stack, which is automatically pushed when the processor services an interrupt, accommodates the interrupt mask (IMASK), mode status
(
MSTAT) and arithmetic status (ASTAT) registers. The depth and width of
the status stack varies with each processor, since each of the processors has
2-6 ADSP-218x DSP Instruction Set Reference

Programming Model
a different numbers of interrupts. The status stack is automatically popped
when the return from interrupt (RTI) instruction is executed. The status
stack can be pushed and popped manually with the PUSH STS and POP STS
instructions.
The count stack is 14 bits wide and holds counter (CNTR) values for nested
counter-based loops. This stack is pushed automatically with the current
CNTR value when there is a write to CNTR. The counter stack may be manu-
ally popped with the POP CNTR instruction.
Computational Units
The registers in the computational units store data. The ALU and MAC
require two inputs for most operations. The AX0, AX1, MX0, and MX1 registers store X inputs, and the AY0, AY1, MY0, and MY1 registers store Y inputs.
The AR and AF registers store ALU results; AF can be fed back to the ALU Y
input, whereas AR can provide the X input of any computational unit.
Likewise, the MR0, MR1, MR2, and MF register store MAC results and can be
fed back for other computations. The 16-bit MR0 and MR1 registers together
with the 8-bit MR2 register can store a 40-bit multiply/accumulate result.
The shifter can receive input from the ALU or MAC, from its own result
registers, or from a dedicated shifter input (SI) register. It can store a
32-bit result in the
SR0 and SR1 registers. The SB register stores the block
exponent for block floating-point operations. The SE register holds the
shift value for normalize and denormalize operations.
Registers in the computational units have secondary registers, shown in
Figure 2-1 on page 2-3 as second set of registers behind the first set. Sec-
ondary registers are useful for single-cycle context switches. The selection
of these secondary registers is controlled by a bit in the
MSTAT register; the
bit is set and cleared by these instructions:
ENA SEC_REG; /*select secondary registers*/
DIS SEC_REG; /*select primary registers*/
ADSP-218x DSP Instruction Set Reference 2-7

Overview
Bus Exchange
The PX register is an 8-bit register that allows data transfers between the
16-bit DMD bus and the 24-bit PMD bus. In a transfer between program
memory and a 16-bit register, PX provides or receives the lower eight bits
implicitly.
Timer
The TPERIOD, TCOUNT, and TSCALE hold the timer period, count, and scale
factor values, respectively. These registers are memory-mapped at locations 0x3FFD, 0x3FFC, and 0x3FFB respectively.
Serial Ports
SPORT0 and SPORT1 each have receive (RX), transmit (TX) and control
registers. The control registers are memory-mapped registers at locations
0x3FEF through 0x3FFA in data memory. SPORT0 also has registers for
controlling its multichannel functions. Each SPORT control register contains bits that control frame synchronization, companding, word length
and, in SPORT0, multichannel options. The SCLKDIV register for each
SPORT determines the frequency of the internally generated serial clock,
and the RFSDIV register determines the frequency of the internally generated receive frame sync signal for each SPORT. The autobuffer registers
control autobuffering in each SPORT.
Programming a SPORT consists of writing to its control register and,
depending on the modes selected, writing to its
SCLKDIV and/or RFSDIV
registers as well. The following example code may be used to program
SPORT0 for 8-bit µ-law companding with normal framing and an internally generated serial clock. RFSDIV is set to 255 for 256 SCLK cycles
between RFS assertions. SCLKDIV is set to 2, resulting in an SCLK frequency
that is 1/6 of the
CLKIN frequency.
2-8 ADSP-218x DSP Instruction Set Reference
Programming Model
SI=0xB27;
DM(0X3FF6)=SI; /*SPORT0 control register*/
SI=2;
DM(0x3FF5)=SI; /*SCLKDIV = 2*/
SI=255;
DM(0x3FF4)=SI; /*RFSDIV = 255*/
Memory Interface and SPORT Enables
The system control register, memory-mapped at DM(0x3fff), contains
SPORT0 and SPORT1 enable bits (bits 12 and 11 respectively) as well as
the SPORT1 configuration selection bit (bit 10). On all ADSP-218x processors, the system control register also contains fields for external
program memory wait states. For the following processors, the system
control register contains the disable BMS bit, which allows the external signal BMS to be disabled during byte memory accesses.
This feature can be used, for example, to allow the DSP to boot from an
EPROM and then access a Flash memory, or other byte-wide device, at
runtime via the CMS signal.
ADSP-2184 ADSP-2184L ADSP-2185M ADSP-2184N
ADSP-2186 ADSP-2185L ADSP-2186M ADSP-2185N
ADSP-2186L ADSP-2188M ADSP-2186N
ADSP-2187L ADSP-2189 M ADSP-2187N
ADSP-2188N
ADSP-2189 N
The wait state control register, memory-mapped at DM(
0x3ffe), contains
fields that specify the number of wait states for external data memory, and
four banks of external I/O memory space.
ADSP-218x DSP Instruction Set Reference 2-9

Program Example
On the following processors, bit 15 of the register, the wait state mode
select bit, determines whether the assigned wait state value operates in a
“1x” or “2x+1” mode:
ADSP-2185M ADSP-2185N
ADSP-2186M ADSP-2186N
ADSP-2188M ADSP-2187N
ADSP-2189M ADSP-2188N
ADSP-2189N
Other memory-mapped registers control the IDMA port and byte memory DMA (BDMA) port for booting and runtime operations. These
registers can be used in many ways that includes selecting the byte memory page, operating in data packing mode, or forcing the boot from
software.
Program Example
Listing 2-1 presents an example of an FIR filter program written for the
ADSP-2181 DSP followed by a discussion of each part of the program.
The program can also be executed on any other ADSP-218x processor,
with minor modifications. This FIR filter program demonstrates much of
the conceptual power of the ADSP-218x architecture and instruction set.
Listing 2-1. Include File, Constants Initialization
/*ADSP-2181 FIR Filter Routine
-serial port 0 used for I/O
-internally generated serial clock
-40.000 MHz processor clock rate is divided to generate a
1.5385 MHz serial clock
-serial clock divided to 8 kHz frame sampling rate*/
2-10 ADSP-218x DSP Instruction Set Reference

Programming Model
#include <def2181.h> See Notes: Section A
#define taps 15
#define taps_less_one 14
.section/dmdm_data;
.var/circdata_buffer[taps]; /* dm data buffer */
.section/pmpm_data;
.var/circ/init24coefficient[taps] = "coeff.dat";
.section/pm Interrupts;
start:
jump main; rti; rti; rti; /* 0x0000: ~Reset vector */
rti; rti; rti; rti; /* 0x0004: ~IRQ2 */
rti; rti; rti; rti; /* 0x0008: ~IRQL1 */
rti; rti; rti; rti; /* 0x000c: ~IRQL0 */
rti; rti; rti; rti; /* 0x0010: SPORT0 Transmit */
jump fir_start; rti; rti; rti; /* 0x0014: SPORT0 Receive */
rti; rti; rti; rti; /* 0x0018: ~IRQE */
rti; rti; rti; rti; /* 0x001c: BDMA */
rti; rti; rti; rti; /* 0x0020: SPORT1 Transmit or ~IRQ1 */
rti; rti; rti; rti; /* 0x0024: SPORT1 Receive or ~IRQ0 */
rti; rti; rti; rti; /* 0x0028: Timer */
rti; rti; rti; rti; /* 0x002c: Power Down (non-maskable */
.section/pm pm_code;
main:
l0 = length (data_buffer);
l4 = length (coefficient); /*setup circular buffer */
See Notes: Section B
See Notes: Section C
See Notes: Section D
/* setup circular buffer length */
m0 = 1; /* modify =1 for increment */
m4 = 1; /* through buffers */
ADSP-218x DSP Instruction Set Reference 2-11

Program Example
i0 = data_buffer; /* point to start of buffer */
i4 = coefficient; /* point to start of buffer */
ax0 = 0;
cntr = length(data_buffer);
/* initialize loop counter */
do clear until ce;
clear: dm(i0,m0) = ax0; /* clear data buffer */
/* setup divide value for 8KHz RFS */
ax0 = 0x00c0;
dm(Sport0_Rfsdiv) = ax0;
ax0 = 0x000c;
dm(Sport0_Sclkdiv) = ax0;
/* multichannel disabled, internally generated sclk,
receive frame sync required, receive width = 0, transmit
frame sync required, transmit width = 0,
external transmit frame sync, internal receive frame
sync,u-law companding, 8-bit words */
See Notes: Section E
/* 1.5385 MHz internal serial clock */
ax0 = 0x69b7;
dm(Sport0_Ctrl_Reg) = ax0;
ax0 = 0x1000; /* enable sport0 */
dm(Sys_Ctrl_Reg) = ax0;
icntl = 0x00; /* disable interrupt nesting */
imask = 0x0060;
/* enable sport0 rx and tx interrupts only */
2-12 ADSP-218x DSP Instruction Set Reference

Programming Model
mainloop:
idle; /* wait here for interrupt */
jump mainloop; /* jump back to idle after rti */
Example Program: Setup Routine Discussion
The setup and main loop routine performs initialization and then loops
on the
occurs. The filter is interrupt-driven. When the interrupt occurs, control
shifts to the interrupt service routine shown in Listing 2-2.
NOTES:
Section A of the program declares two constants and includes a header file
of definitions named
Section B of the program includes the assembler directives defining two
circular buffers in on-chip memory: one in data memory RAM that is used
to hold a delay line of samples and one in program memory RAM that is
used to store coefficients for the filter. The coefficients are actually loaded
from an external file by the linker. These values can be changed without
reassembling; only another linking is required.
IDLE instruction to wait until the receive interrupt from SPORT0
def2181.h.
Section C shows the setup of interrupts. The first instruction is placed at
the reset vector: address PM (0x0000). The first location is the reset vector
instruction, which jumps to
main. Interrupt vectors that are not used are
filled with a return from interrupt instruction. This is a preferred programming practice rather than a necessity. The SPORT0 receive interrupt
vector jumps to the interrupt service routine.
Section D, main, sets up the index (I), length (L), and modify (M) registers
used to address the two circular buffers. A non-zero value for length activates the processor’s modulus logic. Each time the interrupt occurs, the
register pointers advance one position through the buffers. The
clear loop
I
sets all values in the data memory buffer to zero.
ADSP-218x DSP Instruction Set Reference 2-13

Program Example
Section E sets up the processor’s memory-mapped control registers used in
this system. See Appendix B in the ADSP-218x Hardware Reference Man-
ual for control register initialization information.
SPORT0 is set up to generate the serial clock internally at 1.5385 MHz,
based on a processor clock rate of 40 MHz. The receive and transmit signals are both required. The receive signal is generated internally at 8
KHz, while the transmit signal comes from the external device communicating with the processor.
Finally, SPORT0 is enabled and the interrupts are enabled. Now the IDLE
instruction causes the processor to wait for interrupts. After the return
from interrupt instruction, execution resumes at the instruction following
the IDLE instruction. Once these setup instructions have been executed, all
further activity takes place in the interrupt service routine shown in
Listing 2-2.
Listing 2-2. Interrupt Routine
fir_start:
si = rx0; /* read from sport0 */
dm(i0,m0) = si; /* transfer data to buffer */
mr = 0, my0 = pm(i4,m4), mx0 = dm(i0,m0);
cntr = taps_less_one; /* perform loop taps-1 times */
do convolution until ce;
convolution:
mr = mr + mx0 * my0 (ss), my0 = pm(i4,m4), mx0 = dm(i0,m0);
mr = mr + mx0 * my0 (rnd);
/* Nth pass of loop with rounding of result */
if mv sat mr;
tx0 = mr1; /* write result to sport0 tx */
rti; /* return from interrupt */
/* setup multiplier for loop */
/* perform MAC and fetch next values */
2-14 ADSP-218x DSP Instruction Set Reference

Programming Model
Example Program: Interrupt Routine Discussion
This subroutine transfers the received data to the next location in the circular buffer overwriting the oldest sample. All samples and coefficients are
then multiplied and the products are accumulated to produce the next
output value. The subroutine checks for overflow and saturates the output
value to the appropriate full scale. It then writes the result to the transmit
section of SPORT0 and returns.
The subroutine begins by reading a new sample from SPORT0’s receive
data register, RX0, into the SI register. The choice of SI is of no particular
significance. Then, the data is written into the data buffer. Because of the
automatic circular buffer addressing, the new data overwrites the oldest
sample. The N-most recent samples are always in the buffer.
The third instruction of the routine, MR=0, MY0=PM(I4,M4),
MX0=DM(I0,M0), clears the multiplier result register (MR) and fetches the
first two operands. This instruction accesses both program and data memory but still executes in a single cycle because of the processor’s
architecture. The counter register (CNTR) directs the loop to be performed
taps-1 times.
The convolution label identifies the loop itself, consisting of only two
instructions, one instruction setting up the loop (DO UNTIL) and one
instruction nested in the loop. The MAC instruction multiplies and accumulates the previous set of operands while fetching the next ones from
each memory. This instruction also accesses both memories.
The final result is written back to the SPORT0 transmit data register TX0
to be sent to the communicating device.
ADSP-218x DSP Instruction Set Reference 2-15

Hardware Overlays and Software Issues
Hardware Overlays and Software Issues
Hardware overlay pages can be used for both program execution and data
storage. Switching between hardware overlay memory pages can be done
in a single processor cycle with no effect latencies. The following examples
show the assembly instructions for managing different program memory
hardware overlay regions:
pmovlay = ax0;
pmovlay = 5;
Since the program memory hardware overlay regions reside in address
locations PM 0x2000 through 0x3fff, programs are restricted to execute
the pmovlay= instruction from within the fixed program memory region,
located at addresses PM 0x0000 through 0x1FFF.
If a pmovlay = instruction were to be executed from a program memory
hardware overlay page, the next instruction would be fetched and executed
from the subsequent address of the new hardware overlay page. In this scenario, there is no possibility to specify a well-defined address of the target
program memory overlay region. Therefore, the portion of your program
that controls the management of the program memory overlay pages must
reside within the fixed/non-overlay program memory region.
If the program flow requires execution from a module that resides in an
overlay region, it is good programming practice to have the calling function access the overlay module using a
CALL instruction versus a JUMP
instruction. Executing a call instruction pushes the address of the subsequent address after the call instruction onto the program counter stack,
which is the return address after the overlay module is completed. Upon
return from the overlay subroutine via the rts instruction, program execution resumse with the instruction following the subroutine call.
2-16 ADSP-218x DSP Instruction Set Reference

Programming Model
The example below shows one application of switching between program
memory overlay regions at runtime:
main:
. . .
pmovlay = 4; /* switch to PM overlay #4 */
call Ovl4Function; /* call overlay function */
pmovlay = 5; /* return from overlay #4 & goto overlay #5 */
call Ovl5Function; /* call overlay function */
. . .
Libraries and Overlays
Because the program sequencer works independently from the program
memory overlay register (PMOVLAY), program modules that run within an
overlay page have no direct access to any program modules resident in
other overlay pages. This means that all the required libraries and
sub-functions must be placed either in the same page as the calling function or in the fixed memory/non-overlay area. Place libraries that are used
by multiple modules located in different pages in the fixed program memory region as well. Unfortunately, for some applications there is a limited
amount of fixed program memory. In this case, the linker places parts of
the library in different overlay pages to help balance the memory usage in
the system.
Interrupts and Overlays
The interrupt vector table occupies program memory addresses 0x0000
through 0x002f. When an unmasked interrupt is raised, ASTAT, MSTAT and
IMASK are pushed onto the status stack in this specific order. The current
value of the program counter which contains the address of the next
instruction is placed onto the PC stack. This allows the program execution
to continue with the next instruction of the main program after the interrupt is serviced.
ADSP-218x DSP Instruction Set Reference 2-17

Hardware Overlays and Software Issues
The ADSP-218x interrupt controller has no knowledge of the PMOVLAY
and DMOVLAY registers. Therefore, the values of these registers must be
saved or restored by the programmer in the interrupt service routine.
Whenever the interrupt service routine is located within the fixed program
memory region, no special context saving of the overlay registers is
required. However, if you would like to place the ISR within an overlay
page, some additional instructions are needed to facilitate the saving or
restoring of the PMOVLAY and DMOVLAY registers. The interrupt vector table
features only four instruction locations per interrupt. Listing 2-3 is an
example of a four instruction implementation that restores the PMOVLAY
register after an interrupt.
Listing 2-3. PMOVLAY Register Restoration
Interrupt Vector:
ax0 = PMOVLAY; /* save PMOVLAY value into ax0 */
Toppcstack = ax0; /* push PMOVLAY value onto PC stack */
Jump My_ISR; /* jump to interrupt subroutine */
Rti; /* placeholder in vector table (4 locations total */
My_ISR:
/* ISR code goes here */
jump I_Handler; /* use instead of rti to restore PMOVLAY
reg */
I_Handler: /* this subroutine should reside in fixed PM */
ax0 = Toppcstack; /* pop PMOVLAY value into ax0 */
nop; /* one cycle effect latency */
rti; /* return from interrupt */
If the interrupt service routine also accesses alternate data memory overlay
pages, the DMOVLAY register must be saved and restored like the PMOVLAY
register. Listing 2-4 is an example of a
DMOVLAY register restoration.
2-18 ADSP-218x DSP Instruction Set Reference

Programming Model
Listing 2-4. DMOVLAY Register Restoration
Interrupt Vector:
jump I_Handler; /* jump to interrupt handler */
rti; /* unreachable instructions */
rti; /* used as placeholders to */
rti; /* occupy all 4 locations of the vector */
I_Handler: /* this subroutine should reside in fixed PM */
ax0 = PMOVLAY; /* save PMOVLAY value into ax0 */
dm(save_PMOVLY)= ax0;/* save PMOVLAY value to DM variable*/
ax0 = DMOVLAY; /* save DMOVLAY value into ax0 */
dm(save_DMOVLY)= ax0;/*save DMOVLAY value to DM variable */
PMOVLAY = 5; /* isr is in PM page 5 */
DMOVLAY = 4; /* isr accesses DM page 4 */
call My_ISR;
ax0 = dm(save_DMOVLY);
/* return from isr and restore DMOVLAY */
DMOVLAY = ax0; /* restore DMOVLAY value */
ax0 = dm(save_PMOVLY);
/* restore “saved” PMOVLAY from memory */
PMOVLAY = ax0; /* restore PMOVLAY value */
rti; /* return from interrupt */
My_ISR:
/* isr code goes here */
rts; /* return to I_Handler instead of rti */
Loop Hardware and Overlays
The loop hardware of the ADSP-218x DSPs operates independent of the
PMOVLAY register. Once a DO UNTIL instruction has been executed, the loop
comparator compares the next address generated by the program
sequencer to the address of the last instruction of the loop. The loop com-
ADSP-218x DSP Instruction Set Reference 2-19

Hardware Overlays and Software Issues
pares the address value only. This comparison is performed independently
from the value of the PMOVLAY register. Whenever the PMOVLAY register is
updated to point to another overlay page while a loop in another overlay
page is still active, the loop comparator may detect an end-of-loop address
and force the PC to branch to an undesired memory location. In a real system design, this scenario may happen when a loop within an overlay page
is exited temporarily by an interrupt service routine that runs in a different
overlay page.
L
To avoid the improper execution of a loop:
The fixed memory region for program memory occupies addresses
0x0000 through 0x1fff; the program memory overlay region occu-
pies addresses 0x2000 through 0x3fff.
• Place hardware loops either in the fixed program memory or in
overlay pages. Do not place loops whose loop bodies cross the
boundary between program memory and an overlay page.
• Always place interrupt service routines in fixed program memory or
in non-overlay program memory.
• Avoid end-of-loop addresses in ISRs.
2-20 ADSP-218x DSP Instruction Set Reference

3 SOFTWARE EXAMPLES
This chapter provides a brief summary of the development process that
you use to create executable programs for the ADSP-218x DSPs. The
overview is followed by software examples that you can use as a guide
when writing your own applications.
The chapter contains:
• “Overview” on page 3-1
• “System Development Process” on page 3-3
• “Single-Precision Fir Transversal Filter” on page 3-5
• “Cascaded Biquad IIR Filter” on page 3-7
• “Sine Approximation” on page 3-9
• “Single-Precision Matrix Multiply” on page 3-11
• “Radix-2 Decimation-in-Time FFT” on page 3-13
Refer to the VisualDSP++ 3.5 Compiler amd Library Manual for
ADSP-218x DSPs for information on appropriate library functions.
Overview
The software examples presented in this chapter are used for a variety of
DSP operations. The FIR filter and cascaded biquad IIR filter are general
filter algorithms that can be tailored to many applications. Matrix multiplication is used in image processing and other areas requiring vector
ADSP-218x DSP Instruction Set Reference 3-1

Overview
operations. The sine function is required for many scientific calculations.
The FFT (fast Fourier transform) has wide application in signal analysis.
Each of these examples is described in greater detail in Digital Signal Pro-
cessing Applications Using The ADSP-2100 Family, Volume1, available
from our website at www.analog.com. They are presented here to show
some aspects of typical programs.
The FFT example is a complete program, including a subroutine that performs the FFT, a main calling program that initializes registers and calls
the FFT subroutine, and an auxiliary routine.
Each of the other examples is shown as a subroutine in its own module.
The module starts with a .SECTION assignment for data or code, using the
section name defined in the .LDF file. The subroutine can be called from a
program in another module that declares the starting label of the subroutine as an external symbol .EXTERN. This is the same label that is declared
with the .GLOBAL directive in the subroutine module. This makes the subroutine callable from routines defined in other .ASM files. The last
instruction in each subroutine is the RTS instruction, which returns control to the calling program.
Each module is prefaced by a comment block that provides the information shown in Table 3-1.
Table 3-1. Subroutine Modules and Comment Information
Module Comment Information
Calling Parameters Register values that the calling program must set before
calling the subroutine
Return Values Registers that hold the results of the subroutine
Altered Registers Register used by the subroutine. The calling program
must save them before calling the subroutine and restore
them afterward in order to preserve their values
Computation Time The number of instruction cycles needed to perform the
subroutine
3-2 ADSP-218x DSP Instruction Set Reference

Software Examples
System Development Process
The ADSP-218x DSPs are supported by a complete set of development
tools. Programming aids and processor simulators facilitate software
design and debug. In-circuit emulators and demonstration boards help in
hardware prototyping.
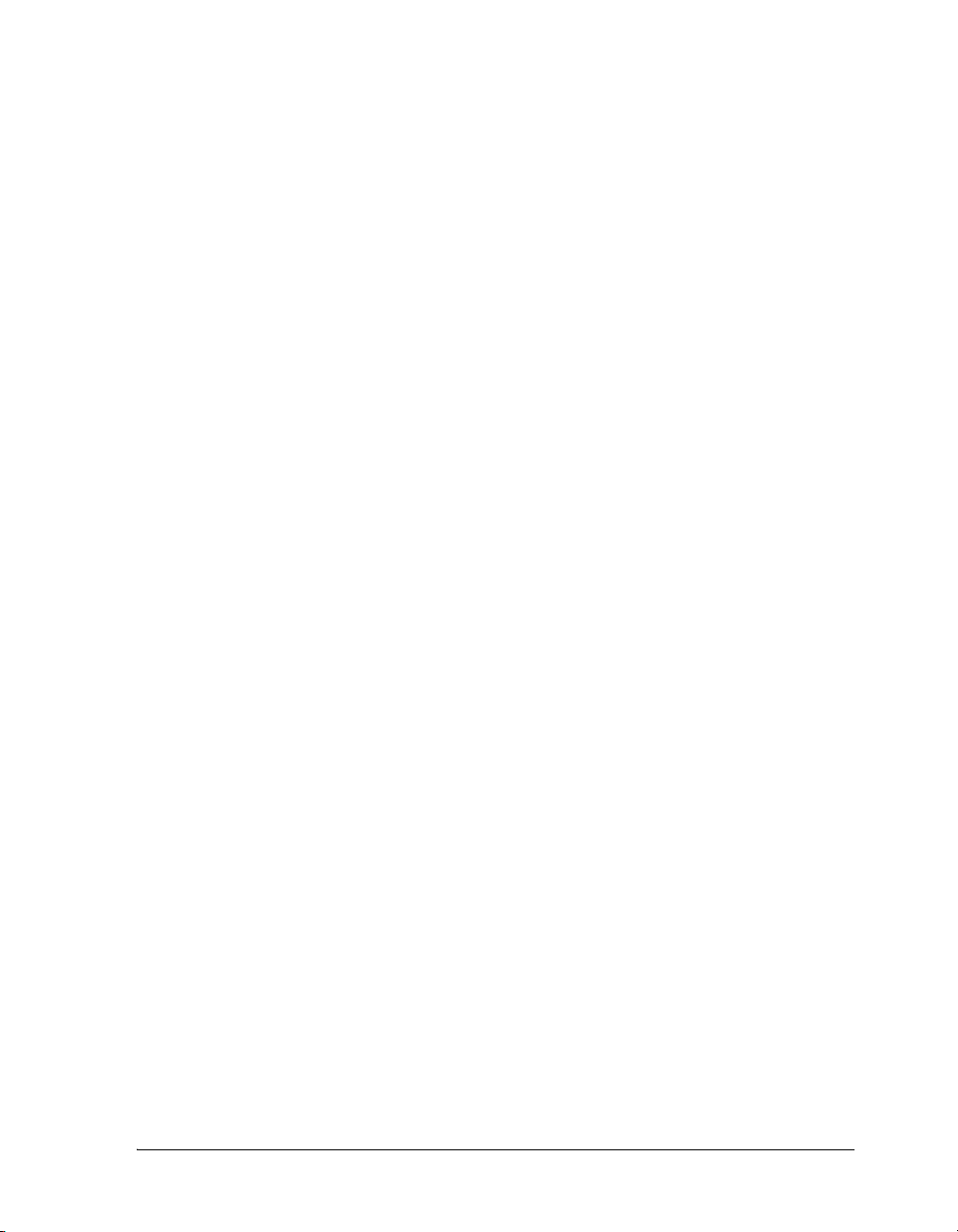
Figure 3-1 shows a flow chart of the system development process.
Linker
Step 1: ArchitectureDescription
Description File
(. LDF )
Step 2: Code Generation
Step 3: System V erification
Step 4: Software Verification
Generate
Assem bly
S ource
(.DSP, .ASM)
and/or
GenerateC
Sour ce
(.C)
Assembler
EASM218x
C Compiler
cc218x
(. DOJ )
Linker
linker.exe
(. DX E)
VisualD SP
Debugg er
debu gapp
Worki ng
Cod e?
NO
YES
Ha rdwa re E val uat ion
EZ-Kit Lit e
Tar get V erification
EZ-ICE
ROM Production
E LFS PL21
Figure 3-1. ADSP-218x DSP System Development Process
Software development tools include a C Compiler, C Runtime Library,
DSP and Math Libraries, Assembler, Linker, Loader, Simulator, and Splitter. These tools are described in detail in the following documents:
• VisualDSP++ Assembler and Preprocessor Manual for ADSP-218x
DSPs
• VisualDSP++ C Compiler & Library Manual for ADSP-218x DSPs
ADSP-218x DSP Instruction Set Reference 3-3

System Development Process
• Product Bulletin for VisualDSP++ and ADSP-218x DSPs
• VisualDSP++ User’s Manual for ADSP-218x DSPs
• VisualDSP++ Linker & Utilities Manual for ADSP-218 DSPs
These documents are included in the software distribution CD-ROM and
can be downloaded from our website at www.analog.com.
The development process begins with the task of describing the system
and generating source code. You describe the system in the Linker
Description File (.LDF) and you generate source code in C and/or assembly language.
Describing the system in the .LDF file includes providing information
about the hardware environment and memory layout. Refer to the
VisualDSP++ Linker & Utilities Manual for ADSP-218x DSPs for details.
Generating source code requires creating code modules, which can be
written in either assembly language or C language. These modules include
a main program, subroutines, or data variable declarations. The C modules are compiled by the C compiler cc218x.exe. Each code module is
assembled separately by the assembler, which produces an object file
(.DOJ).
The .DOJ file is input to the Linker linker.exe, along with the .LDF file.
The linker links several object modules together to form an executable
program
.LDF file to determine appropriate addresses for code and data. You specify
.DXE. The linker reads the target hardware information from the
the segment your code or data belongs to in the assembly file. You specify
the location of the segment in the
.LDF file.
The linker places non-relocatable code or data modules at the specified
memory addresses, provided the memory area has the correct attributes.
The linker selects addresses for relocatable object. The linker generates a
3-4 ADSP-218x DSP Instruction Set Reference

Software Examples
memory image file .DXE containing a single executable program, which
may be loaded into a VisualDSP debugger session (simulator or emulator)
for testing.
The simulator provides windows that display different portions of the
hardware environment. To replicate the target hardware, the simulator
configures memory according to the memory specification in the .LDF
file. The resulting simulation allows you to debug the system and analyze
performance before committing to a hardware prototype.
After fully simulating your system and software, you can use an EZ-ICE
in-circuit emulator in the prototype hardware to test circuitry, timing, and
real-time software execution.
The PROM splitter software tool elfpsl21.exe translates the .DXE file
into an industry-standard file format for a PROM programmer. Once you
program the code in PROM devices and install an ADSP-218x processor
into your prototype, it is ready to run.
Single-Precision Fir Transversal Filter
An FIR transversal filter structure can be obtained directly from the equation for discrete-time convolution:
N 1–
yn() hkn()xn k–()
≡
∑
k 0=
In this equation,
the filter at time n. The output y(n) is formed as a weighted linear combination of the current and past input values of x, x(n–k). The weights,
h
(n), are the transversal filter coefficients at time n.
k
x(n) and y(n) represent the input to and output from
ADSP-218x DSP Instruction Set Reference 3-5

Single-Precision Fir Transversal Filter
In the equation, x(n–k) represents the past value of the input signal “contained” in the (k+1)th tap of the transversal filter. For example, x(n), the
present value of the input signal, would correspond to the first tap, while
x(n–42) would correspond to the forty-third filter tap.
The subroutine that realizes the sum-of-products operation used in computing the transversal filter is shown in Listing 3-1.
Listing 3-1. Single-Precision FIR Transversal Filter
.SECTION/CODE program;
/*
* FIR Transversal Filter Subroutine
* Calling Parameters
* I0 -> Oldest input data value in delay line
* L0 = Filter length (N)
* I4 -> Beginning of filter coefficient table
* L4 = Filter length (N)
* M1,M5 = 1
* CNTR = Filter length - 1 (N-1)
* Return Values
* MR1 = Sum of products (rounded and saturated)
* I0 -> Oldest input data value in delay line
* I4 -> Beginning of filter coefficient table
*
* Altered Registers
* MX0,MY0,MR
*
* Computation Time
* N - 1 + 5 + 2 cycles
*
* All coefficients and data values are assumed to be
* in 1.15 format.
*
*/
3-6 ADSP-218x DSP Instruction Set Reference

Software Examples
.GLOBAL fir;
fir: MR=0, MX0=DM(I0,M1), MY0=PM(I4,M5);
DO sop UNTIL CE;
sop: MR=MR+MX0*MY0(SS), MX0=DM(I0,M1), MY0=PM(I4,M5);
MR=MR+MX0*MY0(RND);
IF MV SAT MR;
RTS;
Cascaded Biquad IIR Filter
A second-order biquad IIR filter section is represented by the transfer
function (in the z-domain):
H(z) = Y(z)/X(z) = ( B0+ B
z–1+ B
1
–2
z
2
)/( 1 + A
–1
z
1
+ A2z
–2
)
where A1, A2, B0, B1 and B2 are coefficients that determine the desired
impulse response of the system H(z). The corresponding difference equation for a biquad section is:
Y(n) = B0X(n) + B1X(n–1) + B
X(n–2) – A
2
Y(n–1) – A
1
Y(n–2)
2
Higher-order filters can be obtained by cascading several biquad sections
with appropriate coefficients. The biquad sections can be scaled separately
and then cascaded in order to minimize the coefficient quantization and
the recursive accumulation errors.
A subroutine that implements a high-order filter is shown in Listing 3-2.
A circular buffer in program memory contains the scaled biquad coeffi-
B
cients. These coefficients are stored in the order:
, B1. B0, A2 and A1 for
2
each biquad. The individual biquad coefficient groups must be stored in
the order that the biquads are cascaded.
ADSP-218x DSP Instruction Set Reference 3-7

Cascaded Biquad IIR Filter
Listing 3-2. Cascaded Biquad IIR Filter
.SECTION/DATA data1;
.var number_of_biquads;
.SECTION/CODE program;
/* Nth order cascaded biquad filter subroutine
*
* Calling Parameters:
*
* SR1=input X(n)
* I0 -> delay line buffer for X(n-2), X(n-1),
* Y(n-2), Y(n-1)
* L0 = 0
* I1 -> scaling factors for each biquad section
* L1 = 0 (in the case of a single biquad)
* L1 = number of biquad sections
* for multiple biquads)
* I4 -> scaled biquad coefficients
* L4 = 5 x [number of biquads]
* M0, M4 = 1
* M1 = -3
* M2 = 1 (in the case of multiple biquads)
* M2 = 0 (in the case of a single biquad)
* M3 = (1 - length of delay line buffer)
*
* Return Value:
* SR1 = output sample Y(n)
*
* Altered Registers:
* SE, MX0, MX1, MY0, MR, SR
*
* Computation Time (with N even):
* ADSP-218X: (8 x N/2) + 5 cycles
* ADSP-218X: (8 x N/2) + 5 + 5 cycles
*
* All coefficients and data values are assumed to
* be in 1.15 format
*
/
3-8 ADSP-218x DSP Instruction Set Reference

.GLOBAL biquad;
biquad: CNTR = number_of_biquads;
DO sections UNTIL CE; /* Loop once for each biquad */
SE=DM(I1,M2); /* Scale factor for biquad */
MX0=DM(I0,M0), MY0=PM(I4,M4);
MR=MX0*MY0(SS), MX1=DM(I0,M0), MY0=PM(I4,M4);
MR=MR+MX1*MY0(SS), MY0=PM(I4,M4);
MR=MR+SR1*MY0(SS), MX0=DM(I0,M0), MY0=PM(I4,M4);
MR=MR+MX0*MY0(SS), MX0=DM(I0,M1), MY0=PM(I4,M4);
DM(I0,M0)=MX1, MR=MR+MX0*MY0(RND);
sections: DM(I0,M0)=SR1, SR=ASHIFT MR1 (HI);
DM(I0,M0)=MX0;
DM(I0,M3)=SR1;
RTS;
Software Examples
Sine Approximation
The following formula approximates the sine of the input variable x (in
radians):
y(x) = sin(x)
= 3.140625(x/
+ 0.5446778(x/
π) + 0.02026367(x/π)
4
π)
+ 1.800293(x/π)
where:
0 < X < (π/2)
The approximation is a 5th order polynomial fit, accurate for any value of
x from 0° to 90° (the first quadrant). However, because sin(–x) =
-sin(x)
and sin(x) = sin(180° – x), you can infer the sine of any angle
from the sine of an angle in the first quadrant.
2
– 5.325196(x/π)3
5
ADSP-218x DSP Instruction Set Reference 3-9

Sine Approximation
The routine that implements this sine approximation, accurate to within
two LSBs, is shown in Listing 3-3. This routine accepts input values in
1.15 format. The coefficients, which are initialized in data memory in
4.12 format, have been adjusted to reflect an input value scaled to the
maximum range allowed by this format. On this scale, 180° ( π radians)
equals the maximum positive value, 0x7FFF, while –180° ( π radians)
equals the maximum negative value, 0x8000.
The routine shown in Listing 3-3 first adjusts the input angle to its equiv-
alent in the first quadrant. The sine of the modified angle is calculated by
multiplying increasing powers of the angle by the appropriate coefficients.
The result is adjusted if necessary to compensate for the modifications
made to the original input value.
Listing 3-3. Sine Approximation
/*
* Sine Approximation
* Y = Sin(x)
*
* Calling Parameters
* AX0 = x in scaled 1.15 format
* M3 = 1
* L3 = 0
*
* Return Values
* AR = y in 1.15 format
*
* Altered Registers
* AY0,AF,AR,MY1,MX1,MF,MR,SR,I3
*
* Computation Time
* 25 cycles
*/
.SECTION/DATA data1;
.VAR sin_coeff[5] = 0x3240, 0x0053, 0xAACC, 0x08B7, 0x1CCE;
3-10 ADSP-218x DSP Instruction Set Reference

Software Examples
.SECTION/CODE program;
.GLOBAL sin;
sin: I3=sin_coeff; /* Pointer to coeff. buffer */
AY0=0x4000;
AR=AX0; /* Copy x */
AF=AX0 AND AY0; /* Check 2nd or 4th Quad */
IF NE AR = -AX0; /* If yes, negate */
AY0=0x7FFF;
AR=AR AND AY0; /* Remove sign bit */
MY1=AR; /* Copy x */
MF=AR*MY1 (RND); MX1=DM(I3,M3);
/* MF = x
MR=MX1*MY1 (SS); MX1=DM(I3,M3);
/* MR = x * 1st coeff, Get 2nd coeff */
CNTR=3;
DO approx UNTIL CE;
MR=MR+MX1*MF (SS);
MF=AR*MF (RND); /* MF = x
approx: MX1=DM(I3,M3); /* Get coeff. C,D,E */
MR=MR+MX1*MF (SS);
2
, Get 1st coeff */
3
, x4, x
5
*/
SR=ASHIFT MR1 BY 3 (HI); /* Convert to 1.15 fmt */
SR=SR OR LSHIFT MR0 BY 3 (LO);
AR=PASS SR1;
IF LT AR=PASS AY0; /* Saturate if needed */
AF=PASS AX0;
IF LT AR=-AR; /* Negate output if needed */
RTS;
Single-Precision Matrix Multiply
The routine presented in this section multiplies two input matrices: X and
Y. X is an
SxT (S rows, T columns) matrix stored in program memory. The output,
Z, is an
RxS (R rows, S columns) matrix stored in data memory. Y is an
RxT (R rows, T columns) matrix written to data memory.
ADSP-218x DSP Instruction Set Reference 3-11

Single-Precision Matrix Multiply
The matrix multiply routine is shown in Listing 3-4. It requires that you
initialize a number of registers as listed in the Calling Parameters section
of the initial comment. SE must contain the value necessary to shift the
result of each multiplication into the desired format. For example, SE
would be set to zero to obtain a matrix of 1.31 values from the multiplication of two matrices of 1.15 values.
Listing 3-4. Single-Precision Matrix Multiply
/* Single-Precision Matrix Multiplication
*S
* Z(i,j) =
* k=0
*
* X is an RxS matrix, Y is an SxT matrix, Z is an RxT matrix
*
* Calling Parameters
* I1 -> Z buffer in data memory L1 = 0
* I2 -> X, stored by rows in data memory L2 = 0
* I6 -> Y, stored by rows in program memory L6 = 0
* M0 = 1M1 = S
* M4 = 1M5 = T
* L0,L4,L5 = 0
* SE = Appropriate scale value
* CNTR = R
*
* Return Values
* Z Buffer filled by rows
*
* Altered Registers
* I0,I1,I2,I4,I5,MR,MX0,MY0,SR
*
∑[X(i,k) × Y(k,j)] i=0 to R; j=0 to T
3-12 ADSP-218x DSP Instruction Set Reference

Software Examples
* Computation Time
* ((S + 8) × T + 4) × R + 2 + 2 cycles
*/
.SECTION/CODE program;
.GLOBALspmm;
spmm: DO row_loop UNTIL CE;
I5=I6;/* I5 = start of Y */
CNTR=M5;
DO column_loop UNTIL CE;
I0=I2; /* Set I0 to current X row */
I4=I5; /* Set I4 to current Y col */
CNTR=M1;
MR=0, MX0=DM(I0,M0), MY0=PM(I4,M5)
/* Get 1st data */
DO element_loop UNTIL CE;
element_loop: MR=MR+MX0*MY0 (SS), MX0=DM(I0,M0),
MY0=PM(I4,M5);
SR=ASHIFT MR1 (HI), MY0=DM(I5,M4); /* Update I5 */
SR=SR OR LSHIFT MR0 (LO); /* Finish Shift */
column_loop: DM(I1,M0)=SR1; /* Save Output */
row_loop: MODIFY(I2,M1); /* Update I2 to next X row */
RTS;
Radix-2 Decimation-in-Time FFT
The FFT program includes three subroutines. The first subroutine scrambles the input data placing the data in bit-reversed address order, so that
the FFT output is in the normal, sequential order. The next subroutine
computes the FFT. The third subroutine scales the output data to maintain the block floating-point data format.
ADSP-218x DSP Instruction Set Reference 3-13

Radix-2 Decimation-in-Time FFT
The program is contained in four modules. The main module declares and
initializes data buffers and calls subroutines. The other three modules contain the FFT, bit reversal, and block floating-point scaling subroutines.
The main module calls the FFT and bit reversal subroutines. The FFT
module calls the data scaling subroutine.
The FFT is performed in place; that is, the outputs are written to the same
buffer that the inputs are read from.
Main Module
The dit_fft_main module is shown in Listing 3-5. N is the number of
points in the FFT (in this example, N=1024) and N_div_2 is used for specifying the lengths of buffers. To change the number of points in the FFT,
you change the value of these constants and the twiddle factors.
The data buffers twid_real and twid_imag in program memory hold the
twiddle factor cosine and sine values. The inplacereal, inplaceimag,
inputreal and inputimag buffers in data memory store real and imaginary
data values. Sequentially ordered input data is stored in inputreal and
inputimag. This data is scrambled and written to inplacereal and inplaceimag. A four-location buffer called “padding” is placed at the end of
inplaceimag to allow data accesses to exceed the buffer length. This buffer
assists in debugging but is not necessary in a real system. Variables
(one-location buffers) named
blk_exponent are declared last.
groups, bflys_per_group, node_space and
The real parts (cosine values) of the twiddle factors are stored in the buffer
twid_real. This buffer is initialized from the file twid_real.dat. Like-
wise, twid_imag.dat values initialize the twid_imag buffer that stores the
sine values of the twiddle factors. In an actual system, the hardware would
be set up to initialize these memory locations.
3-14 ADSP-218x DSP Instruction Set Reference

Software Examples
The variable called groups is initialized to N_div_2. The variables
bflys_per_group and node_space are each initialized to 2 because there
are two butterflies per group in the second stage of the FFT. The
blk_exponent
variable is initialized to zero. This exponent value is
updated when the output data is scaled.
After the initializations are complete, two subroutines are called. The first
subroutine places the input sequence in bit-reversed order. The second
performs the FFT and calls the block floating-point scaling routine.
Listing 3-5. Main Module, Radix-2 DIT FFT
.SECTION/CODE program;
#define N 1024
#define N_div_2 512 /* For 2048 points */
.SECTION/DATA data1;
.VAR padding [4]=0,0,0,0;
.VAR inputreal [N] = "inputreal.dat";
.VAR inputimag [N] = "inputimag.dat";
.GLOBAL inputreal, inputimag;
.VAR inplacereal[N];
.VAR inplaceimag[N] = "inputimag.dat";
.GLOBAL inplacereal, inplaceimag;
.VAR groups = N_div_2;
.VAR bflys_per_group = 2;
.VAR node_space = 2;
.VAR blk_exponent = 0;
.GLOBAL
.SECTION/DATA data2;
.VAR twid_real [N_div_2] = "twid_real.dat";
.VAR twid_imag [N_div_2] = "twid_imag.dat";
groups, bflys_per_group, node_space, blk_exponent;
ADSP-218x DSP Instruction Set Reference 3-15

Radix-2 Decimation-in-Time FFT
.GLOBAL twid_real, twid_imag;
.SECTION/CODE program;
.EXTERN scramble, fft_strt;
CALL scramble; /* subroutine calls */
CALL fft_strt;
IDLE; /* halt program */
DIT FFT Subroutine
The radix-2 DIT FFT routine is shown in Listing 3-6. The constants N
and log2N are the number of points and the number of stages in the FFT,
respectively. To change the number of points in the FFT, you modify
these constants.
The first and last stages of the FFT are performed outside of the loop that
executes all the other stages. Treating the first and last stages individually
allows them to execute faster. In the first stage, there is only one butterfly
per group, so the butterfly loop is unnecessary. The twiddle factors are all
either 1 or 0 making multiplications unnecessary. In the last stage, there is
only one group. Therefore, the group loop is unnecessary and the setup
operations for the next stage.
Listing 3-6. Radix-2 DIT FFT Routine, Conditional Block Floating-Point
/* 1024 point DIT radix 2 FFT
* Block Floating Point Scaling */
.SECTION/CODE program;
/* Calling Parameters
* inplacereal=real input data in scrambled order
* inplaceimag=all zeroes (real input assumed)
* twid_real=twiddle factor cosine values
* twid_imag=twiddle factor sine values
* groups=N/2
3-16 ADSP-218x DSP Instruction Set Reference

Software Examples
* bflys_per_group=1
* node_space=1
*
* Return Values
* inplacereal=real FFT results, sequential order
* inplaceimag=imag. FFT results, sequential order
*
* Altered Registers
* I0,I1,I2,I3,I4,I5,L0,L1,L2,L3,L4,L5
* M0,M1,M2,M3,M4,M5
* AX0,AX1,AY0,AY1,AR,AF
* MX0,MX1,MY0,MY1,MR,SB,SE,SR,SI
*
* Altered Memory
* inplacereal, inplaceimag, groups, node_space,
* bflys_per_group, blk_exponent
*/
#define log2N 10
#define N 1024
#define nover2 512
#define nover4 256
.EXTERN twid_real, twid_imag;
.EXTERN inplacereal, inplaceimag;
.EXTERN groups, bflys_per_group, node_space;
.EXTERN bfp_adj;
.GLOBAL fft_strt;
fft_strt: CNTR=log2N - 2;
/* Initialize stage counter */
M0=0;
M1=1;
L1=0;
L2=0;
L3=0;
L4=LENGTH(twid_real);
L5=LENGTH(twid_imag);
L6=0;
SB=-2;
ADSP-218x DSP Instruction Set Reference 3-17

Radix-2 Decimation-in-Time FFT
/* ---- STAGE 1 ---- */
I0=inplacereal;
I1=inplacereal + 1;
I2=inplaceimag;
I3=inplaceimag + 1;
M2=2;
CNTR=nover2;
AX0=DM(I0,M0);
AY0=DM(I1,M0);
AY1=DM(I3,M0);
DO group_lp UNTIL CE;
AR=AX0+AY0, AX1=DM(I2,M0);
SB=EXPADJ AR, DM(I0,M2)=AR;
AR=AX0-AY0;
SB=EXPADJ AR;
DM(I1,M2)=AR, AR=AX1+AY1;
SB=EXPADJ AR, DM(I2,M2)=AR;
AR=AX1-AY1, AX0=DM(I0,M0);
SB=EXPADJ AR, DM(I3,M2)=AR;
AY0=DM(I1,M0);
group_lp: AY1=DM(I3,M0);
CALL bfp_adj;
/* ----- STAGES 2 TO N-1----- */
DO stage_loop UNTIL CE; /* Compute all stages in FFT */
I0=inplacereal; /* I0 ->x0 in 1st grp of stage */
I2=inplaceimag; /* I2 ->y0 in 1st grp of stage */
SI=DM(groups);
SR=ASHIFT SI BY -1(LO); /* groups / 2 */
DM(groups)=SR0; /* groups=groups / 2 */
CNTR=SR0; /* CNTR=group counter */
M4=SR0; /* M4=twiddle factor modifier */
M2=DM(node_space); /* M2=node space modifier */
I1=I0;
MODIFY(I1,M2); /* I1 ->y0 of 1st grp in stage */
3-18 ADSP-218x DSP Instruction Set Reference

MODIFY(I3,M2); /* I3 ->y1 of 1st grp in stage */
DO group_loop UNTIL CE;
I4=twid_real; /* I4 -> C of W0 */
I5=twid_imag; /* I5 -> (-S) of W0 */
CNTR=DM(bflys_per_group); /* CNTR=bfly count */
MY0=PM(I4,M4),MX0=DM(I1,M0); /* MY0=C,MX0=x1 */
MY1=PM(I5,M4),MX1=DM(I3,M0); /* MY1=-S,MX1=y1 */
DO bfly_loop UNTIL CE;
MR=MX0*MY1(SS),AX0=DM(I0,M0);
MR=MR+MX1*MY0(RND),AX1=DM(I2,M0);
/* MR=(y1(C)+x1(-S)),AX1=y0 */
AY1=MR1,MR=MX0*MY0(SS);
/* AY1=y1(C)+x1(-S),MR=x1(C) */
MR=MR-MX1*MY1(RND); /* MR=x1(C)-y1(-S) */
AY0=MR1,AR=AX1-AY1; /* AY0=x1(C)-y1(-S), */
SB=EXPADJ AR,DM(I3,M1)=AR;
AR=AX0-AY0,MX1=DM(I3,M0),MY1=PM(I5,M4);
/* AR=x0-[x1(C)-y1(-S)], */
/* MX1=next y1,MY1=next (-S) */
SB=EXPADJ AR,DM(I1,M1)=AR;
/* x1=x0-[x1(C)-y1(-S)] */
AR=AX0+AY0,MX0=DM(I1,M0),MY0=PM(I4,M4);
SB=EXPADJ AR,DM(I0,M1)=AR;
AR=AX1+AY1; /* AR=y0+[y1(C)+x1(-S)] */
bfly_loop: SB=EXPADJ AR,DM(I2,M1)=AR;
MODIFY(I0,M2); /* I0 ->1st x0 in next group */
MODIFY(I1,M2); /* I1 ->1st x1 in next group */
MODIFY(I2,M2); /* I2 ->1st y0 in next group */
Software Examples
/* MR=x1(-S),AX0=x0 */
/* AR=y0-[y1(C)+x1(-S)] */
/* Check for bit growth, */
/* y1=y0-[y1(C)+x1(-S)] */
/* Check for bit growth, */
/* AR=x0+[x1(C)-y1(-S)], */
/* MX0=next x1,MY0=next C */
/* Check for bit growth, */
/* x0=x0+[x1(C)-y1(-S)] */
/* Check for bit growth, */
/* y0=y0+[y1(C)+x1(-S)] */
ADSP-218x DSP Instruction Set Reference 3-19

Radix-2 Decimation-in-Time FFT
group_loop: MODIFY(I3,M2); /* I3 ->1st y1 in next group */
CALL bfp_adj; /* Compensate for bit growth */
SI=DM(bflys_per_group);
SR=ASHIFT SI BY 1(LO);
DM(node_space)=SR0; /* node_space=node_space / 2 */
stage_loop: DM(bflys_per_group)=SR0;
/* bflys_per_group=bflys_per_group / 2 */
/* ---- LAST STAGE ---- */
I0=inplacereal;
I1=inplacereal+nover2;
I2=inplaceimag;
I3=inplaceimag+nover2;
CNTR=nover2;
M2=DM(node_space);
M4=1;
I4=twid_real;
I5=twid_imag;
MY0=PM(I4,M4),MX0=DM(I1,M0); /* MY0=C,MX0=x1 */
MY1=PM(I5,M4),MX1=DM(I3,M0); /* MY1=-S,MX1=y1 */
DO bfly_lp UNTIL CE;
MR=MX0*MY1(SS),AX0=DM(I0,M0);
MR=MR+MX1*MY0(RND),AX1=DM(I2,M0);
/* MR=(y1(C)+x1(-S)),AX1=y0 */
AY1=MR1,MR=MX0*MY0(SS);
/* AY1=y1(C)+x1(-S),MR=x1(C) */
MR=MR-MX1*MY1(RND); /* MR=x1(C)-y1(-S) */
AY0=MR1,AR=AX1-AY1;
/* AY0=x1(C)-y1(-S), */
/* AR=y0-[y1(C)+x1(-S)] */
SB=EXPADJ AR,DM(I3,M1)=AR;
/* Check for bit growth, */
/* y1=y0-[y1(C)+x1(-S)] */
AR=AX0-AY0,MX1=DM(I3,M0),MY1=PM(I5,M4);
/* AR=x0-[x1(C)-y1(-S)], */
3-20 ADSP-218x DSP Instruction Set Reference
/* MR=x1(-S),AX0=x0 */

SB=EXPADJ AR,DM(I1,M1)=AR;
AR=AX0+AY0,MX0=DM(I1,M0),MY0=PM(I4,M4);
SB=EXPADJ AR,DM(I0,M1)=AR;
AR=AX1+AY1; /* AR=y0+[y1(C)+x1(-S)] */
bfly_lp: SB=EXPADJ AR,DM(I2,M1)=AR;
CALL bfp_adj;
RTS;
Bit-Reverse Subroutine
Software Examples
/* MX1=next y1,MY1=next (-S) */
/* Check for bit growth, */
/* x1=x0-[x1(C)-y1(-S)] */
/* AR=x0+[x1(C)-y1(-S)], */
/* MX0=next x1,MY0=next C */
/* Check for bit growth, */
/* x0=x0+[x1(C)-y1(-S)] */
/* Check for bit growth */
The bit-reversal routine, called scramble, puts the input data in
bit-reversed order so that the results are in sequential order. This routine
(Listing 3-7) uses the bit-reverse capability of the ADSP-218x processors.
Listing 3-7. Bit-Reverse Routine (Scramble)
.SECTION/CODE program;
/* Calling Parameters
* Sequentially ordered input data in inputreal
*
* Return Values
* Scrambled input data in inplacereal
*
* Altered Registers
* I0,I4,M0,M4,AY1
*
ADSP-218x DSP Instruction Set Reference 3-21

Radix-2 Decimation-in-Time FFT
* Altered Memory
* inplacereal
*/
#define N 1024
#define mod_value 0x0010; /* Initialize constants */
.EXTERN inputreal, inplacereal;
.GLOBAL scramble;
scramble: I4=inputreal; /* I4->sequentially ordered data */
I0=inplacereal; /* I0->scrambled data */
M4=1;
M0=mod_value; /* M0=modifier for reversing N Bits */
L4=0;
L0=0;
CNTR = N;
ENA BIT_REV; /* Enable bit-reversed outputs on DAG1 */
DO brev UNTIL CE;
AY1=DM(I4,M4); /* Read sequentially ordered data */
brev: DM(I0,M0)=AY1;
/* Write data in bit-reversed location */
DIS BIT_REV; /* Disable bit-reverse */
RTS; /* Return to calling program */
Block Floating-Point Scaling Subroutine
The bfp_adj routine checks the FFT output data for bit growth and scales
the entire set of data if necessary. This check prevents data overflow for
each stage in the FFT. The routine, shown in Listing 3-8, uses the exponent detection capability of the shifter.
3-22 ADSP-218x DSP Instruction Set Reference

Software Examples
Listing 3-8. Radix-2 Block Floating-Point Scaling Routine
.SECTION/CODE program;
/* Calling Parameters
* Radix-2 DIT FFT stage results in inplacereal and inplaceimag
*
* Return Parameters
* inplacereal and inplaceimag adjusted for bit growth
*
* Altered Registers
* I0,I1,AX0,AY0,AR,MX0,MY0,MR,CNTR
*
* Altered Memory
* inplacereal, inplaceimag, blk_exponent
*/
#define Ntimes 2048
.EXTERN inplacereal, blk_exponent;
/* Begin declaration */
.GLOBAL bfp_adj;
bfp_adj: AY0=CNTR; /* Check for last stage */
AR=AY0-1;
IF EQ RTS; /* If last stage, return */
AY0=-2;
AX0=SB;
AR=AX0-AY0; /* Check for SB=-2 */
IF EQ RTS; /* IF SB=-2, no bit */
/* growth, return */
I0=inplacereal; /* I0=read pointer */
I1=inplacereal; /* I1=write pointer */
AY0=-1;
MY0=0x4000; /* Set MY0 to shift 1 */
/* bit right */
AR=AX0-AY0,MX0=DM(I0,M1);
/* Check if SB=-1 */
ADSP-218x DSP Instruction Set Reference 3-23

Radix-2 Decimation-in-Time FFT
/* Get 1st sample */
IF EQ JUMP strt_shift;
/* If SB=-1, shift block */
/* data 1 bit */
AX0=-2; /* Set AX0 for block */
/* exponent update */
MY0=0x2000; /* Set MY0 to shift 2 */
/* bits right */
strt_shift: CNTR=Ntimes2 - 1; /* initialize loop counter */
DO shift_loop UNTIL CE; /* Shift block of data*/
MR=MX0*MY0(RND),MX0=DM(I0,M1);
/* MR=shifted data */
/* MX0=next value */
shift_loop: DM(I1,M1)=MR1; /* Unshifted data */
/* shifted data */
MR=MX0*MY0(RND); /* Shift last data word */
AY0=DM(blk_exponent); /* Update block exponent */
/*and store last shifted sample */
DM(I1,M1)=MR1,AR=AY0-AX0;
DM(blk_exponent)=AR;
RTS;
3-24 ADSP-218x DSP Instruction Set Reference

4 INSTRUCTION SET
This chapter is a complete reference for the instruction set of the
ADSP-218x DSPs.
The chapter contains:
• “Quick List Of Instructions” on page 4-2
• “Instruction Set Overview” on page 4-5
• “Multifunction Instructions” on page 4-7
• “ALU, MAC and Shifter Instructions” on page 4-14
• “MOVE: Read and Write Instructions” on page 4-20
• “Program Flow Control” on page 4-22
• “Miscellaneous Instructions” on page 4-25
• “Extra Cycle Conditions” on page 4-27
• “Instruction Set Syntax” on page 4-28
• “ALU Instructions” on page 4-31
• “MAC Instructions” on page 4-72
• “Shifter Instructions” on page 4-94
• “Move Instructions” on page 4-113
• “Program Flow Instructions” on page 4-133
• “MISC Instructions” on page 4-151
• “Multifunction Instructions” on page 4-171
ADSP-218x DSP Instruction Set Reference 4-1

Quick List Of Instructions
Quick List Of Instructions
The instruction set is organized by instruction group and, within each
group, by individual instruction. The list below shows all of the instructions and the reference page for each instruction.
ALU Instructions
• “Add/Add With Carry” on page 4-32
• “Subtract X-Y/Subtract X-Y With Borrow” on page 4-35
• “Subtract Y-X/Subtract Y-X With Borrow” on page 4-39
• “Bitwise Logic: AND, OR, XOR” on page 4-42
• “Bit Manipulation: TSTBIT, SETBIT, CLRBIT, TGLBIT” on
page 4-45
• “Clear: PASS” on page 4-48
• “Syntax” on page 4-32
• “NOT” on page 4-54
• “Absolute Value: ABS” on page 4-56
• “Increment” on page 4-58
• “Decrement” on page 4-60
• “Divide Primitives: DIVS and DIVQ” on page 4-62
• “Generate ALU Status Only: NONE” on page 4-70
MAC Instructions
• “Multiply” on page 4-73
• “Multiply With Cumulative Add” on page 4-77
• “Multiply With Cumulative Subtract” on page 4-81
4-2 ADSP-218x DSP Instruction Set Reference

• “Squaring” on page 4-85
• “MAC Clear” on page 4-88
• “MAC Transfer MR” on page 4-90
• “Conditional MR Saturation” on page 4-92
Shifter Instructions
• “Arithmetic Shift” on page 4-95
• “Logical Shift” on page 4-98
• “Normalize” on page 4-101
• “Derive Exponent” on page 4-104
• “Block Exponent Adjust” on page 4-107
• “Arithmetic Shift Immediate” on page 4-109
Instruction Set
• “Logical Shift Immediate” on page 4-111
Move Instructions
• “Register Move” on page 4-114
• “Load Register Immediate” on page 4-116
• “Data Memory Read (Direct Address)” on page 4-118
• “Data Memory Read (Indirect Address)” on page 4-120
• “Program Memory Read (Indirect Address)” on page 4-122
• “Data Memory Write (Direct Address)” on page 4-124
• “Data Memory Read (Indirect Address)” on page 4-120
• “Program Memory Write (Indirect Address)” on page 4-129
• “IO Space Read/Write” on page 4-131
ADSP-218x DSP Instruction Set Reference 4-3

Quick List Of Instructions
Program Flow Instructions
• “JUMP” on page 4-134
• “CALL” on page 4-136
• “JUMP or CALL on Flag In Pin” on page 4-138
• “Modify Flag Out Pin” on page 4-140
• “RTS (Return from Subroutine)” on page 4-142
• “RTI (Return from Interrupt)” on page 4-144
• “Do Until” on page 4-146
• “Idle” on page 4-149
MISC Instructions
• “Stack Control” on page 4-152
• “Program Memory Overlay Register Update” on page 4-162
• “Data Memory Overlay Register Update” on page 4-165
• “Modify Address Register” on page 4-168
• “No Operation” on page 4-170
Multifunction Instructions
• “Computation With Memory Read” on page 4-172
• “Computation With Register-to-Register Move” on page 4-178
• “Computation With Memory Write” on page 4-183
• “Data and Program Memory Read” on page 4-188
• “ALU/MAC With Data and Program Memory Read” on
page 4-190
4-4 ADSP-218x DSP Instruction Set Reference

Instruction Set
Instruction Set Overview
This chapter provides an overview and detailed reference for the instruction set of the ADSP-218x DSPs. The instruction set is grouped into the
following categories:
• Computational: ALU, MAC, Shifter
•Move
• Program Flow
• Multifunction
• Miscellaneous
The instruction set is tailored to the computation-intensive algorithms
common in DSP applications. For example, sustained single-cycle multiplication/accumulation operations are possible. The instruction set
provides full control of the processors’ three computational units: the
ALU, MAC and Shifter. Arithmetic instructions can process single-precision 16-bit operands directly; provisions for multiprecision operations are
available.
The high-level syntax of ADSP-218x source code is both readable and efficient. Unlike many assembly languages, the ADSP-218x instruction set
uses an algebraic notation for arithmetic operations and for data moves,
resulting in highly readable source code. There is no performance penalty
for this; each program statement assembles into one 24-bit instruction
which executes in a single cycle. There are no multicycle instructions in
the instruction set. (If memory access times require, or contention for
off-chip memory occurs, overhead cycles are required, but all instructions
can otherwise execute in a single cycle.)
ADSP-218x DSP Instruction Set Reference 4-5

Instruction Set Overview
In addition to JUMP and CALL, the instruction set’s control instructions
support conditional execution of most calculations and a DO UNTIL looping instruction. Return from interrupt (RTI) and return from subroutine
(RTS) are also provided.
The IDLE instruction is provided for idling the processor until an interrupt
occurs. IDLE puts the processor into a low-power state while waiting for
interrupts.
Two addressing modes are supported for memory fetches. Direct addressing uses immediate address values; indirect addressing uses the I registers
of the two data address generators (DAGs).
The 24-bit instruction word allows a high degree of parallelism in performing operations. The instruction set allows for single-cycle execution
of any of the following combinations:
• Any ALU, MAC or Shifter operation (conditional or
non-conditional)
• Any register-to-register move
• Any data memory read or write
• A computation with any data register to data register move
• A computation with any memory read or write
• A computation with a read from two memories
The instruction set allows maximum flexibility. It provides moves from
any register to any other register, and from most registers to/from memory. In addition, almost any ALU, MAC or Shifter operation may be
combined with any register-to-register move or with a register move to or
from internal or external memory.
4-6 ADSP-218x DSP Instruction Set Reference

Instruction Set
Because the multifunction instructions best illustrate the power of the
processors’ architecture, in the next section we begin with a discussion of
this group of instructions.
Multifunction Instructions
Multifunction operations take advantage of the inherent parallelism of the
ADSP-218x architecture by providing combinations of data moves, memory reads/memory writes, and computation, all in a single cycle.
ALU/MAC With Data and Program Memory Read
Perhaps the single most common operation in DSP algorithms is the sum
of products, performed as follows:
• Fetch two operands (such as a coefficient and data point)
• Multiply the operands and sum the result with previous products
The ADSP-218x processors can execute both data fetches and the multiplication/accumulation in a single-cycle. Typically, a loop of
multiply/accumulates can be expressed in ADSP-218x source code in just
two program lines. Since the on-chip program memory of the ADSP-218x
processors is fast enough to provide an operand and the next instruction in
a single cycle, loops of this type can execute with sustained single-cycle
throughput. An example of such an instruction is:
MR=MR+MX0*MY0(SS), MX0=DM(I0,M0), MY0=PM(I4,M5);
The first clause of this instruction (up to the first comma) says that MR, the
MAC result register, gets the sum of its previous value plus the product of
the (current) X and Y input registers of the MAC (MX0 and MY0) both
treated as signed (
SS).
ADSP-218x DSP Instruction Set Reference 4-7

Multifunction Instructions
In the second and third clauses of this multifunction instruction, two new
operands are fetched. One is fetched from the data memory (DM) pointed
to by index register zero (I0, post modified by the value in M0) and the
other is fetched from the program memory location (PM) pointed to by I4
(post-modified by M5 in this instance). Note that indirect memory addressing uses a syntax similar to array indexing, with DAG registers providing
the index values. Any I register may be paired with any M register within
the same DAG.
As discussed in the ADSP-218x DSP Hardware Reference Manual, Chapter
2, “Computational Units”, registers are read at the beginning of the cycle
and written at the end of the cycle. The operands present in the MX0 and
MY0 registers at the beginning of the instruction cycle are multiplied and
added to the MAC result register, MR. The new operands fetched at the
end of this same instruction overwrite the old operands after the multiplication has taken place and are available for computation on the following
cycle. You may, of course, load any data registers in conjunction with the
computation, not just MAC registers with a MAC operation as in our
example.
The computational part of this multifunction instruction may be any
unconditional ALU instruction except division or any MAC instruction
except saturation. Certain other restrictions apply: the next X operand
must be loaded into MX0 from data memory and the new Y operand must
be loaded into MY0 from program memory (internal and external memory
are identical at the level of the instruction set). The result of the computation must go to the result register (
MR or AR) not to the feedback register
(MF or AF).
4-8 ADSP-218x DSP Instruction Set Reference

Instruction Set
Data and Program Memory Read
This variation of a multifunction instruction is a special case of the multifunction instruction described above in which the computation is
omitted. It executes only the dual operand fetch, as shown below:
AX0=DM(I2,M0), AY0=PM(I4,M6);
In this example we have used the ALU input registers as the destination.
As with the previous multifunction instruction, X operands must come
from data memory and Y operands from program memory (internal or
external memory in either case, for the processors with on-chip memory).
Computation With Memory Read
If a single memory read is performed instead of the dual memory read of
the previous two multifunction instructions, a wider range of computations can be executed. The legal computations include all ALU operations
except division, all MAC operations and all Shifter operations except
SHIFT IMMEDIATE. Computation must be unconditional. An example of
this kind of multifunction instruction is:
AR=AX0+AY0, DM(I0,M0)=AX0;
Here, an addition is performed in the ALU while a single operand is
fetched from data memory. The restrictions are similar to those for previous multifunction instructions. The value of AX0, used as a source for the
computation, is the value at the beginning of the cycle. The data read
operation loads a new value into
reason, the destination register (
AX0 by the end of the cycle. For this same
AR in the example above) cannot be the
destination for the memory read.
ADSP-218x DSP Instruction Set Reference 4-9

Multifunction Instructions
Computation With Memory Write
The computation with memory write instruction is similar in structure to
the computation with memory read: the order of the clauses in the
instruction line, however, is reversed. First the memory write is performed, then the computation, as shown below:
DM(I0,M0)=AR, AR=AX0+AY0;
Again the value of the source register for the memory write (AR in this
example) is the value at the beginning of the instruction. The computation loads a new value into the same register; this is the value in AR at the
end of this instruction. Reversing the order of the clauses would imply
that the result of the computation is written to memory when, in fact, the
previous value of the register is what is written. There is no requirement
that the same register be used in this way although this usually is the case
in order to pipeline operands to the computation.
The restrictions on computation operations are identical to those given
above. All ALU operations except division, all MAC operations, and all
Shifter operations except SHIFT IMMEDIATE are legal. Computations must
be unconditional.
Computation With Data Register Move
This final type of multifunction instruction performs a data register to
data register move in parallel with a computation. Most of the restrictions
applying to the previous two instructions also apply to this instruction.
AR=AX0+AY0, AX0=MR2;
Here, an ALU addition operation occurs while a new value is loaded into
AX0 from MR2. As before, the value of AX0 at the beginning of the instruc-
tion is the value used in the computation. The move may be from or to all
ALU, MAC and Shifter input and output registers except the feedback
registers (AF and MF) and SB.
4-10 ADSP-218x DSP Instruction Set Reference

Instruction Set
In the example, the data register move loads the AX0 register with the new
value at the end of the cycle. All ALU operations except division, all MAC
operations and all Shifter operations except SHIFT IMMEDIATE are legal.
Computation must be unconditional.
A complete list of data registers is given in “Processor Registers: reg and
dreg” on page 4-22. A complete list of the permissible xops and yops for
computational operations is given in the reference page for each instruction. Table 4-1 shows the legal combinations for multifunction
instructions (described in Table 4-2). You may combine operations on the
same row with each other.
Table 4-1. Summary of Valid Combinations for Multifunction
Instructions
Unconditional Computations Data Move
(DM=DAG1)
None or any ALU (except Division) or MAC DM read PM read
Any MAC
Any ALU except Division
Any Shift except Immediate
DM read
—
DM write
—
Register-to-Register
Data Move
(PM=DAG2)
—
PM read
—
PM write
ADSP-218x DSP Instruction Set Reference 4-11

Multifunction Instructions
Table 4-2. Multifunction Instructions
<ALU>*† , AX0 = DM ( I0 , M0 ), AY0 = PM ( I4 , M4
<MAC>*† AX1 I1 , M1 AY1 I5 , M5
MX0 I2 , M2 MY0 I6 , M6
MX1 I3 , M3 MY1 I7 , M7
AX0 = DM ( I0 , M0 ) , AY0 = PM ( I4 , M4 );
AX1 I1 , M1 AY1 I5 , M5
MX0 I2 , M2 MY0 I6 , M6
MX1 I3 , M3 MY1 I7 , M7
<ALU>* , dreg = DM ( I0 , M0 ) ;
<MAC>* I1 , M1
<SHIFT>* I2 , M2
I3 , M3
),
I4 , M4
I5 , M5
I6 , M6
I7 , M7
PM ( I4 , M4 )
I5 , M5
I6 , M6
I7 , M7
* May not be conditional instruction
4-12 ADSP-218x DSP Instruction Set Reference

DM ( I0 , M0 ) = dreg, <ALU>* ;
I1 , M1 <MAC>*
I2 , M2 <SHIFT>*
I3 , M3
I4 , M4
I5 , M5
I6 , M6
I7 , M7
PM ( I4 , M4 )
I5 , M5
I6 , M6
I7 , M7
<ALU>* , dreg = dreg;
<MAC>*
<SHIFT>*
Instruction Set
<ALU> Any ALU instructions (except DIVS, DIVQ)
<MAC> Any multiply/accumulate instruction
<SHIFT> Any shifter instruction (except Shift Immediate)
* May not be conditional instruction
† AR, MR result registers must be used-- not AF, MF feedback registers
or NONE.
SEE ALSO:
• “ALU/MAC With Data and Program Memory Read” on
page 4-190
ADSP-218x DSP Instruction Set Reference 4-13

ALU, MAC and Shifter Instructions
ALU, MAC and Shifter Instructions
This group of instructions performs computations. All of these instructions can be executed conditionally except the ALU division instructions
and the Shifter SHIFT IMMEDIATE instructions.
ALU Group
The following is an example of one ALU instruction, Add/Add with
Carry:
IF AC AR=AX0+AY0+C;
The (optional) conditional expression, IF AC, tests the ALU Carry bit
(AC); if there is a carry from the previous instruction, this instruction executes, otherwise a NOP occurs and execution continues with the next
instruction. The algebraic expression AR=AX0+AY0+C means that the ALU
result register (AR) gets the value of the ALU X input and Y input registers
plus the value of the carry-in bit.
Table 4-3 gives a summary list of all ALU instructions. In this list, condi-
tion stands for all the possible conditions that can be tested and xop and
yop stand for the registers that can be specified as input for the ALU. The
conditional clause is optional and is enclosed in square brackets to show
this. A complete list of the permissible xops and yops is given in the reference page for each instruction.
A complete list of conditions is given in Table 4-9 on page 4-24.
4-14 ADSP-218x DSP Instruction Set Reference

Table 4-3. ALU Instructions
[IF cond] AR = xop + yop ;
AF + C
+ yop + C
+ constant
+ constant + C
[IF cond] AR = xop – yop ;
AF – yop + C – 1
+ C – 1
– constant
–1 constant + C – 1
Instruction Set
[IF cond] AR = – xop ;
AF yop
[IF cond] AR = NOT xop ;
AF yop
[IF cond] AR = ABS xop;
AF
[IF cond] AR = yop + 1;
AF
[IF cond] AR = yop – 1;
AF
DIVS yop, xop ;
DIVQ xop ;
NONE = <ALU> ;
ADSP-218x DSP Instruction Set Reference 4-15

ALU, MAC and Shifter Instructions
[IF cond] AR = yop – xop ;
AF – xop + C – 1
– xop + constant + C –1
[IF cond] AR = xop AND yop ;
AF OR constant
[IF cond] AR = TSTBIT n OF xop ;
AF SETBIT n OF xop
CLRBIT n OF xop
TGLBIT n OF xop
– xop + C – 1
– xop + constant
XOR
[IF cond] AR = PASS xop ;
AF yop
constant
MAC Group
Here is an example of one of the MAC instructions,
Multiply/Accumulate:
IF NOT MV MR=MR+MX0*MY0(UU);
The conditional expression, IF NOT MV, tests the MAC overflow bit. If the
condition is not true, a
the multiply/accumulate operation: the multiplier result register (
the value of itself plus the product of the X and Y input registers selected.
The modifier in parentheses (
4-16 ADSP-218x DSP Instruction Set Reference
NOP is executed. The expression MR=MR+MX0*MY0 is
UU) treats the operands as unsigned. There
MR) gets

Instruction Set
can be only one such modifier selected from the available set. The modifier (SS) means both are signed, while (US) and (SU) mean that either the
first or second operand is signed; (RND) means to round the (implicitly
signed) result.
Table 4-4 gives a summary list of all MAC instructions. In this list,
condition stands for all the possible conditions that can be tested and xop
and yop stand for the registers that can be specified as input for the MAC.
A complete list of the permissible xops and yops is given in the reference
page for each instructions.
Table 4-4. MAC Instructions
[IF cond] MR = xop * yop ( SS );
MF xop SU
US
UU
RND
[IF cond] MR = MR + xop * yop ( SS );
MF xop SU
US
UU
RND
[IF cond] MR = MR – xop * yop ( SS );
MF xop SU
US
UU
RND
ADSP-218x DSP Instruction Set Reference 4-17

ALU, MAC and Shifter Instructions
Table 4-4. MAC Instructions (Cont’d)
[IF cond] MR = 0;
MF
[IF cond] MR = MR [(RND)];
MF
IF MV SAT MR ;
Shifter Group
Here is an example of one of the Shifter instruction, Normalize:
IF NOT CE SR= SR OR NORM SI (HI);
The conditional expression, IF NOT CE, tests the “not counter expired”
condition. If the condition is false, a NOP is executed. The destination of
all shifting operations is the Shifter Result register, SR. The destination of
exponent detection instructions is SE or SB, as shown in Table 4-5. In this
example, SI, the Shifter Input register, is the operand. The amount and
direction of the shift is controlled by the signed value in the
SE register in
all shift operations except an immediate shift. Positive values cause left
shifts; negative values cause right shifts.
The optional SR OR modifier logically ORs the result with the current contents of the
from two 16-bit pieces.
SR register; this allows you to construct a 32-bit value in SR
NORM is the operator and HI is the modifier that
determines whether the shift is relative to the HI or LO (16-bit) half of SR.
If
SR OR is omitted, the result is passed directly into SR.
Table 4-5 gives a summary list of all Shifter instructions. In this list, con-
dition stands for all the possible conditions that can be tested.
4-18 ADSP-218x DSP Instruction Set Reference

Table 4-5. Shifter Instructions
[IF cond] SR = [SR OR] ASHIFT xop ( HI );
[IF cond] SR = [SR OR] LSHIFT xop ( HI );
[IF cond] SR = [SR OR] NORM xop ( HI );
[IF cond] SE = EXP xop ( HI );
Instruction Set
LO
LO
LO
LO
HIX
[IF cond] SB = EXPADJ xop;
SR = [SR OR] ASHIFT xop BY <exp> ( HI );
SR = [SR OR] LSHIFT xop BY <exp> ( HI );
ADSP-218x DSP Instruction Set Reference 4-19
LO
LO

MOVE: Read and Write Instructions
MOVE: Read and Write Instructions
Move instructions, shown in Table 4-6, move data to and from data registers and external memory. Registers are divided into two groups, referred
to as reg which includes almost all registers and dreg, or data registers,
which is a subset. Only the program counter (PC) and the ALU and MAC
feedback registers (AF and MF) are not accessible.
Table 4-6. Move Instructions
reg = reg ;
reg = DM (<address>) ;
dreg = DM ( I0 , M0 );
I1 , M1
I2 , M2
I3 , M3
I4 , M4
I5 , M5
I6 , M6
I7 , M7
DM ( I0 , M0 ) = dreg ;
I1 , M1 <data>
I2 , M2
I3 , M3
4-20 ADSP-218x DSP Instruction Set Reference

Table 4-6. Move Instructions (Cont’d)
I4 , M4
I5 , M5
I6 , M6
I7 , M7
DM (<address>) = reg ;
reg = <data> ;
dreg = PM ( I4 ’ M4 );
I5 ’ M5
I6 ’ M6
I7 ’ M7
Instruction Set
PM ( I4 ’ M4 ) = dreg;
I5 ’ M5
I6 ’ M6
I7 ’ M7
Table 4-7 shows how registers are grouped. These registers are read and
written via their register names.
ADSP-218x DSP Instruction Set Reference 4-21

Program Flow Control
Table 4-7. Processor Registers: reg and dreg
reg (registers) dreg (Data Registers)
SB
PX
I0 – 17, M0 – M7, L0 – L7 AX0, AX1, AY0, AY1, AR
CNTR MX0, MX1, MY0, MY1, MR0,
MR1, MR2
ASTAT, MSTAT, SSTAT SI, SE, SR0, SR1
IMASK, ICNTL, IFC
TX0, TX1, RX0, RX1
Program Flow Control
Program flow control on the ADSP-218x processors is simple but powerful. Here is an example of one instruction:
IF EQ JUMP my_label;
JUMP, of course, is a familiar construct from many other languages.
My_label is any identifier you wish to use as a label for the destination
jumped to. Instead of the label, an index register in DAG2 may be explicitly used. The default scope for any label is the source code module in
which it is declared. The assembler directive .
ENTRY makes a label visible as
an entry point for routines outside the module. Conversely, the .EXTERNAL
directive makes it possible to use a label declared in another module.
If the counter condition (
ment to
CALL permit the additional conditionals FLAG_IN and NOT FLAG_IN to be
CNTR must be executed to initialize the counter value. JUMP and
used for branching on the state of the
DO UNTIL CE, IF NOT CE) is to be used, an assign-
FI pin, but only with direct address-
ing, not with DAG2 as the address source.
4-22 ADSP-218x DSP Instruction Set Reference

Instruction Set
RTS and RTI provide for conditional return from CALL or interrupt vectors
respectively.
The IDLE instruction provides a way to wait for interrupts. IDLE causes the
processor to wait in a low-power state until an interrupt occurs. When an
interrupt is serviced, control returns to the instruction following the IDLE
statement. IDLE uses less power than loops created with NOPs.
Table 4-8 gives a summary of all program flow control instructions. The
condition codes are described in Table 4-9.
Table 4-8. Program Flow Control Instructions
[IF cond] JUMP (I4) ;
(I5)
(I6)
(I7)
<address>
IF FLAG_IN JUMP <address>;
NOT FLAG_IN
[IF cond] CALL (I4) ;
(I5)
(I6)
(I7)
<address>
IF FLAG_IN CALL <address>;
NOT FLAG_IN
[IF cond] RTS;
ADSP-218x DSP Instruction Set Reference 4-23

Program Flow Control
Table 4-8. Program Flow Control Instructions (Cont’d)
[IF cond] RTI;
DO <address> [UNTIL termination];
IDLE [(n)];
Table 4-9. IF Status Condition Codes
Syntax Status Condition True If:
EQ Equal Zero AZ = 1
NE Not Equal Zero AZ = 0
LT Less Than Zero AN .XOR. AV = 1
GE Greater Than or Equal Zero AN .XOR. AV = 0
LE Less Than or Equal Zero (AN .XOR. AV) .OR. AZ = 1
GT Greater Than Zero (AN .XOR. AV) .OR. AZ = 0
AC ALU Carry AC = 1
NOT AC Not ALU Carry AC = 0
AV ALU Overflow AV = 1
NOT AV Not ALU Overflow AV = 0
MV MAC Overflow MV = 1
NOT MV Not MAC Overflow MV = 0
NEG X Input Sign Negative AS = 1
POS X Input Sign Positive AS = 0
NOT CE Not Counter Expired
FLAG_IN
NOT FLAG_IN1 Not FI pin Last sample of FI pin = 0
1
FI pin Last sample of FI pin = 1
1 Only available on JUMP and CALL instructions
4-24 ADSP-218x DSP Instruction Set Reference

Instruction Set
Miscellaneous Instructions
There are several miscellaneous instructions. NOP is a no operation instruction. The PUSH/POP instructions allow you to explicitly control the status,
counter, PC and loop stacks; interrupt servicing automatically pushes and
pops these stacks.
The Mode Control instruction enables and disables processor modes of
operation: bit-reversal on DAG1, latching ALU overflow, saturating the
ALU result register, choosing the primary or secondary register set, GO
mode for continued operation during bus grant, multiplier shift mode for
fractional or integer arithmetic, and timer enabling.
A single ENA or DIS can be followed by any number of mode identifiers,
separated by commas; ENA and DIS can also be repeated. All seven modes
can be enabled, disabled, or changed in a single instruction.
The MODIFY instruction modifies the address pointer in the I register
selected with the value in the selected M register, without performing any
actual memory access. As always, the I and M registers must be from the
same DAG; any of I0-I3 may be used only with one from M0-M3 and the
same for I4-I7 and M4-M7. If circular buffering is in use, modulus logic
applies. See the ADSP-218x DSP Hardware Reference Manual, Chapter 4,
“Data Address Generators” for more information.
FO (Flag Out), FL0, FL1, and FL2 pins can each be set, cleared, or tog-
The
gled. This instruction provides a control structure for multiprocessor
communication.
ADSP-218x DSP Instruction Set Reference 4-25

Miscellaneous Instructions
Table 4-10. Miscellaneous Instructions
NOP;
[ PUSH STS] [, POP CNTR] [, POP PC] [,POP LOOP];
POP
ENA BIT_REV [,] ;
DIS AV_LATCH
AR_SAT
SEC_REG
G_MODE
M_MODE
TIMER
MODIFY ( I0 , M0 );
I1 , M1
I2 , M2
I3 , M3
I4 , M4
I5 , M5
I6 , M6
I7 , M7
[IF cond] SET FLAG_OUT [,];
RESET FL0
TOGGLE FL1
FL2
ENA INTS;
DIS
4-26 ADSP-218x DSP Instruction Set Reference

Instruction Set
Extra Cycle Conditions
All instructions execute in a single cycle except under certain conditions,
as explained below.
Multiple Off-Chip Memory Accesses
The data and address buses of the ADSP-218x processors are multiplexed
off-chip. Because of this occurrence, the processors can perform only one
off-chip access per instruction in a single cycle. If two off-chip accesses are
required such as the instruction fetch and one data fetch, or data fetches
from both program and data memory, then one overhead cycle occurs. In
this case the program memory access occurs first, followed by the data
memory access. If three off-chip accesses are required—the instruction
fetch as well as data fetches from both program and data memory—then
two overhead cycles occur.
A multifunction instruction requires three items to be fetched from memory: the instruction itself and two data words. No extra cycle is needed to
execute the instruction as long as only one of the fetches is from external
memory. This excludes external wait states or bus request holdoffs. Two
fetches must be from on-chip memory, either PM or DM.
Wait States
All family processors allow the programming of wait states for external
memory chips. Up to 15 extra wait state cycles for the ADSP-2185M,
ADSP-2186M, ADSP-2188M, ADSP-2189M, ADSP-2188N,
ADSP-2185N, ADSP-2186N, ADSP-2187N and ADSP-2189N DSPs
and up to seven extra wait state cycles for all other ADSP-218x models
may be added to the processor’s access time for external memory. Extra
cycles inserted due to wait states are in addition to any cycles caused by
multiple off-chip accesses. Wait state programming is described in the
ADSP-218x DSP Hardware Reference, Chapter 8, “Memory Interface”.
ADSP-218x DSP Instruction Set Reference 4-27

Instruction Set Syntax
Wait states and multiple off-chip memory accesses are the two cases when
an extra cycle is generated during instruction execution. The following
case, SPORT autobuffering and DMA, causes the insertion of extra cycles
between instructions.
SPORT Autobuffering and DMA
If serial port autobuffering or DMA is being used to transfer data words to
or from internal memory, then one memory access is “stolen” for each
transfer. The stolen memory access occurs only between complete instructions. If extra cycles are required to execute any instruction (for one of the
two reasons above), the processor waits until it is completed before “stealing” the access cycle.
Instruction Set Syntax
The following sections describe instruction set syntax and other notation
conventions used in the reference page of each instruction.
Punctuation and Multifunction Instructions
All instructions terminate with a semicolon. A comma separates the
clauses of a multifunction instruction but does not terminate it. For example, the statements below in Example A comprise one multifunction
instruction (which can execute in a single cycle). Example B shows two
separate instructions, requiring two instruction cycles.
Example A: One multifunction instruction
/* a comma is used in multifunction instructions */
AX0 = DM(I0, M0), or AX0 = DM(I0, M0),AY0 = PM(I4, M4);
AY0 = PM(I4, M4);
4-28 ADSP-218x DSP Instruction Set Reference

Instruction Set
Example B: Two separate instructions
/* a semicolon terminates an instruction */
AX0 = DM(I0, M0);
AY0 = PM(I4, M4);
Syntax Notation Example
Here is an example of one instruction, the ALU Add/Add with Carry
instruction:
[ IF cond ] AR = xop + yop ;
AF C
yop + C
The permissible conds, xops, and yops are given in a list. The conditional IF
clause is enclosed in square brackets, indicating that it is optional.
The destination register for the add operation must be either AR or AF.
These are listed within parallel bars, indicating that one of the two must
be chosen.
Similarly, the yop term may consist of a Y operand, the carry bit, or the
sum of both. One of these three terms must be used.
ADSP-218x DSP Instruction Set Reference 4-29

Instruction Set Syntax
Status Register Notation
The following notation is used in the discussion of the effect each instruction has on the processors’ status registers:
Table 4-11. Status Register Notation
Notation Meaning
* An asterisk indicates a bit in the status word that is changed by the execution
of the instruction.
– A dash indicates that a bit is not affected by the instruction.
0 or 1 Indicates that a bit is unconditionally cleared or set.
For example, the status word ASTAT is shown below:
ASTAT:76543210
SS MV AQ AS AC AV AN AZ
–*–––0––
Here the MV bit is updated and the AV bit is cleared.
4-30 ADSP-218x DSP Instruction Set Reference

ALU Instructions
ALU instructions are:
• “Add/Add With Carry” on page 4-32
• “Subtract X-Y/Subtract X-Y With Borrow” on page 4-35
• “Subtract Y-X/Subtract Y-X With Borrow” on page 4-39
• “Bitwise Logic: AND, OR, XOR” on page 4-42
• “Bit Manipulation: TSTBIT, SETBIT, CLRBIT, TGLBIT” on
page 4-45
• “Clear: PASS” on page 4-48
Instruction Set
• “Syntax” on page 4-32
• “NOT” on page 4-54
• “Absolute Value: ABS” on page 4-56
• “Increment” on page 4-58
• “Decrement” on page 4-60
• “Divide Primitives: DIVS and DIVQ” on page 4-62
• “Generate ALU Status Only: NONE” on page 4-70
ADSP-218x DSP Instruction Set Reference 4-31

ALU Instructions
Add/Add With Carry
Syntax
[ IF cond ] AR = xop + yop ;
AF + C
+ yop + C
+ [constant]
+ [constant] + C
Permissible xops Permissible yops Permissible conds
AX0
AX1
AR
Permissible constants
1, 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024, 2048, 4096, 8192, 16384,
32767, -2, -3, -5, -9, -17, -33, -65, -129, -257, -513, -1025, -2049, -4097,
-8193, -16385, -32768
MR2
MR1
MR0
SR1
SR0
AY0
AY1
AF
EQ
NE
GT
GE
LT
LE
NEG
POS
AV
NOT AV
AC
NOT AC
MV
NOT MV
NOT CE
Example
/* Conditional ADD with carry */
IF EQ AR = AX0 + AY0 + C;
/* Unconditional ADD */
AR = AR + 512;
/* ADD a negative constant */
AR = AX0 - 129; /* AR = AX0 + (- 129) */
/* 32 Bit Addition: AX1:AX0 = AX1:AX0 + AY1:AY0 */
DIS AR_SAT; /* If not already disabled */
AR = AX0 + AY0; /* Add low words */
AR = AX1 + AY1 + C, AX0 = AR; /* Add high words + carry */
AX1 = AR; /* Copy result if required */
4-32 ADSP-218x DSP Instruction Set Reference

Instruction Set
Description
Test the optional condition and, if true, perform the specified addition. If
false then perform a no-operation. Omitting the condition performs the
addition unconditionally. The addition operation adds the first source
operand to the second source operand along with the ALU carry bit, AC, (if
designated by the +C notation), using binary addition. The result is stored
in the destination register. The operands are contained in the data registers or constant specified in the instruction.
Status Generated
(See Table 4-11 on page 4-30 for register notation)
ASTAT: 76543210
SS MV AQ AS AC AV AN AZ
–––*** * *
AZ Set if the result equals zero. Cleared otherwise.
AN Set if the result is negative. Cleared otherwise.
AV Set if an arithmetic overflow occurs. Cleared otherwise.
AC Set if a carry is generated. Cleared otherwise.
Instruction Format
Conditional ALU/MAC operation, Instruction Type 9:
23222120 191817161514131211109876543210
00100ZAMF Yop Xop 0000COND
AMF specifies the ALU or MAC operation, in this case:
AMF = 10010 for + yop + C
AMF = 10011 for xop + yop
Note that xop + C is a special case of xop + yop + C with yop=0.
Z: Destination register Yop: Y operand
ADSP-218x DSP Instruction Set Reference 4-33

ALU Instructions
Xop: X operand COND: Condition
(xop + constant) Conditional ALU/MAC operation, Instruction Type 9:
23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
00100ZAMF YY Xop CC BO COND
AMF specifies the ALU or MAC operation, in this case:
AMF = 10010 for xop + constant + C
AMF = 10011 for xop + constant
Z
: Destination register COND: Condition
Xop: X operand
BO, CC, and YY specify the constant.
See Also
• IF Condition Codes Table 4-9 on page 4-24
• “Status Condition Codes” on page A-11
• BO, CC, and YY “ALU/MAC Constant Codes” on page A-22
• “AMF Function Codes” on page A-9
• “ALU/MAC Result Register Codes” on page A-22
• “Y Operand Codes” on page A-21
4-34 ADSP-218x DSP Instruction Set Reference

Subtract X-Y/Subtract X-Y With Borrow
Syntax
[ IF cond ] AR = xop – yop ;
AF – yop + C–1
+ C–1
– [constant]
– [constant] + C–1
Permissible xops Permissible yops Permissible status conditions
AX0
AX1
AR
Permissible constants
0, 1, 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024, 2048, 4096, 8192, 16384,
32767, -2, -3, -5, -9, -17, -33, -65, -129, -257, -513, -1025, -2049, -4097,
-8193, -16385, -32768
MR2
MR1
MR0
SR1
SR0
AY0
AY1
AF
EQ
NE
GT
GE
LT
LE
NEG
POS
AV
NOT AV
Instruction Set
AC
NOT AC
MV
NOT MV
NOT CE
Example
/* Conditional subtraction */
IF GE AR = AX0 - AY0;
/* Subtraction of the negative value -17 */
AR = AX0 + 17; /* AR = AX0 -(-17) */
/* 32 Bit Subtraction: AX1:AX0 = AX1:AX0 - AY1:AY0 */
DIS AR_SAT; /* If not already disabled */
AR = AX0 - AY0; /* Subtract low words */
AR = AX1 - AY1 + C -1, AX0 = AR; /* Sub high words - borrow */
AX1 = AR; /* Copy result if required */
/* Negate MR Register MR = -MR */
DIS AR_SAT; /* If not already disabled */
ADSP-218x DSP Instruction Set Reference 4-35

ALU Instructions
AR = -MR0;/* Negate low word */
AR = -MR1 + C -1, MR0 = AR; /* Negate middle word - borrow */
AR = -MR2 + C -1, MR1 = AR; /* Negate high word minus borrow */
MR2 = AR;
Description
Test the optional condition and, if true, then perform the specified subtraction. If the condition is not true then perform a no-operation.
Omitting the condition performs the subtraction unconditionally. The
subtraction operation subtracts the second source operand from the first
source operand, and optionally adds the ALU Carry bit (AC) minus 1
(0x0001), and stores the result in the destination register. The (C–1) quantity effectively implements a borrow capability for multiprecision
subtractions. The operands are contained in the data registers or constant
specified in the instruction.
Status Generated
(See Table 4-11 on page 4-30 for register notation)
ASTAT: 76543210
SS MV AQ AS AC AV AN AZ
–––*** * *
AZ Set if the result equals zero. Cleared otherwise.
AN Set if the result is negative. Cleared otherwise.
AV Set if an arithmetic overflow occurs. Cleared otherwise.
AC Set if a carry is generated. Cleared otherwise.
Instruction Format
Conditional ALU/MAC operation, Instruction Type 9:
23222120 191817161514131211109876543210
00100ZAMF Yop Xop 0000COND
4-36 ADSP-218x DSP Instruction Set Reference
 Loading...
Loading...