

a
A
DashDSP® 28-Lead Flash and
ROM Memory, Mixed-Signal DSPs
with Enhanced Analog Front End
ADMC(F)341
FEATURES
20 MHz Fixed-Point DSP Core
Single-Cycle Instruction Execution (50 ns)
ADSP-21xx Family Code Compatibility
Independent Computational Units
ALU, Multiplier/Accumulator, Barrel Shifter
Multifunction Instructions
Single-Cycle Context Switch
Powerful Program Sequencer
Zero Overhead Looping
Conditional Instruction Execution
2 Independent Data Address Generators
Memory Configuration
512 16-Bit Data Memory RAM
512 24-Bit Program Memory RAM
4K 24-Bit Program Memory ROM
4K 24-Bit Program Flash Memory (ADMCF341 Only)
3 Independent Flash Memory Sectors
3584 24-Bit, 256 24-Bit, 256 24-Bit
Low Cost, Pin Compatible ROM Option
16-Bit Watchdog Timer
Programmable 16-Bit Internal Timer with Prescaler
2 Double-Buffered Serial Ports with SPI Mode Support
Integrated Power-On Reset Function
3-Phase 16-Bit PWM Generation Unit:
16-Bit Center-Based PWM Generator
Programmable PWM Pulsewidth
Edge Resolution to 50 ns
153 Hz Minimum Switching Frequency
Double/Single Duty Cycle Update Mode Control
Individual Enable and Disable for Each PWM Output
High Frequency Chopping Mode for Transformer
Coupled Gate Drives
External PWMTRIP Pin
Integrated 6-Channel ADC Subsystem
3 Bipolar I
Inputs with Programmable
SENSE
Sample-and-Hold Amplifier and Overcurrent
Protection (Usable as 3 Dedicated Analog Inputs)
Muxed Auxiliary Analog Inputs
Internal Voltage Reference (2.5 V)
Acquisition Synchronized to PWM Switching
Frequency
9-Pin Digital I/O Port
Bit Configurable as Input or Output
Change of State Interrupt Support
2 16-Bit Auxiliary PWM Timers
Synthesized Analog Output
Programmable Frequency
0% to 100% Duty Cycle
2 Programmable Operational Modes
Independent Mode/Offset Mode
Motor Types
Permanent Magnet Synchronous Motors (PMSM)
Brushless DC Motors (BDCM)
AC Induction Motors (ACIM)
APPLICATIONS
Refrigerator and Air Conditioner Compressors
Washing Machines
Industrial Variable Speed Drives
HVAC
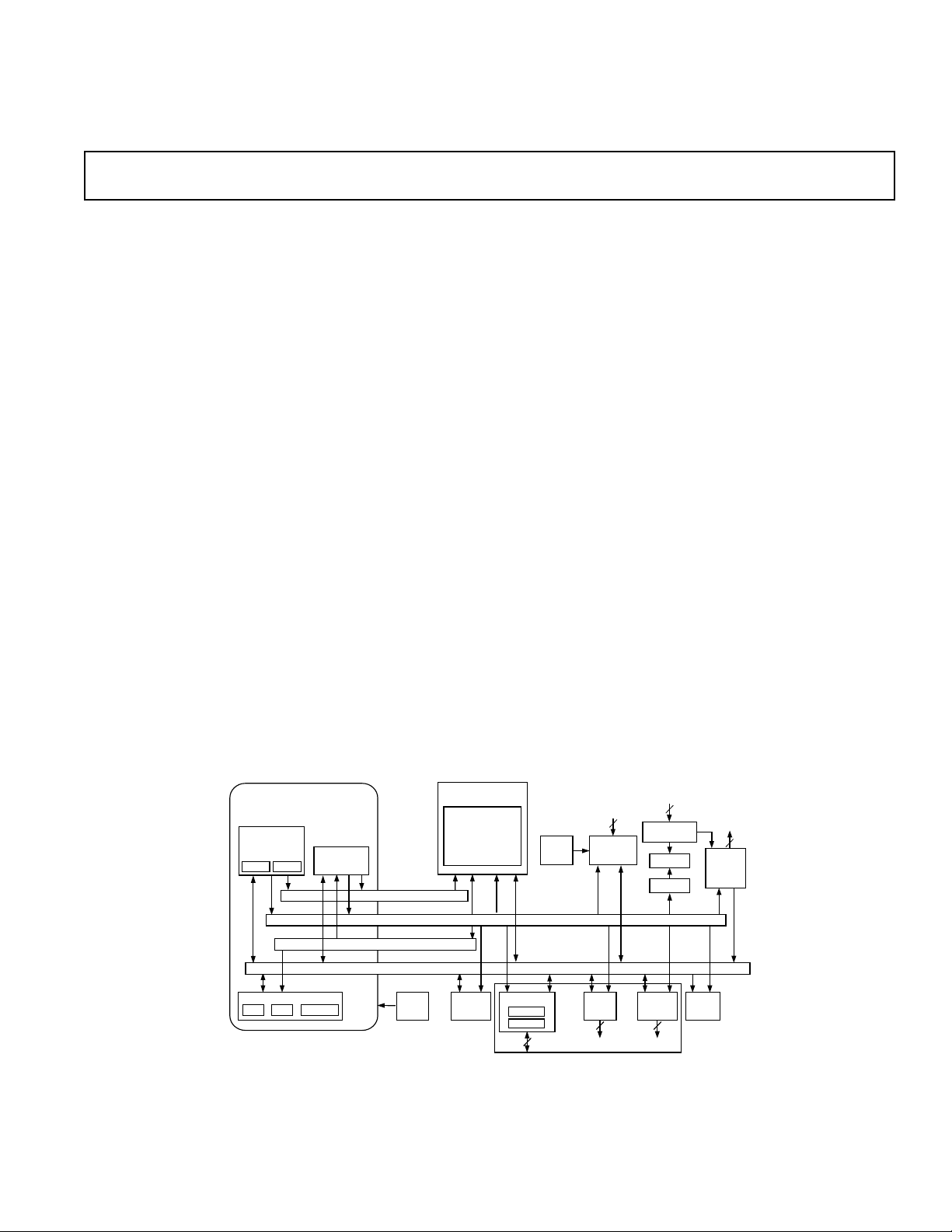
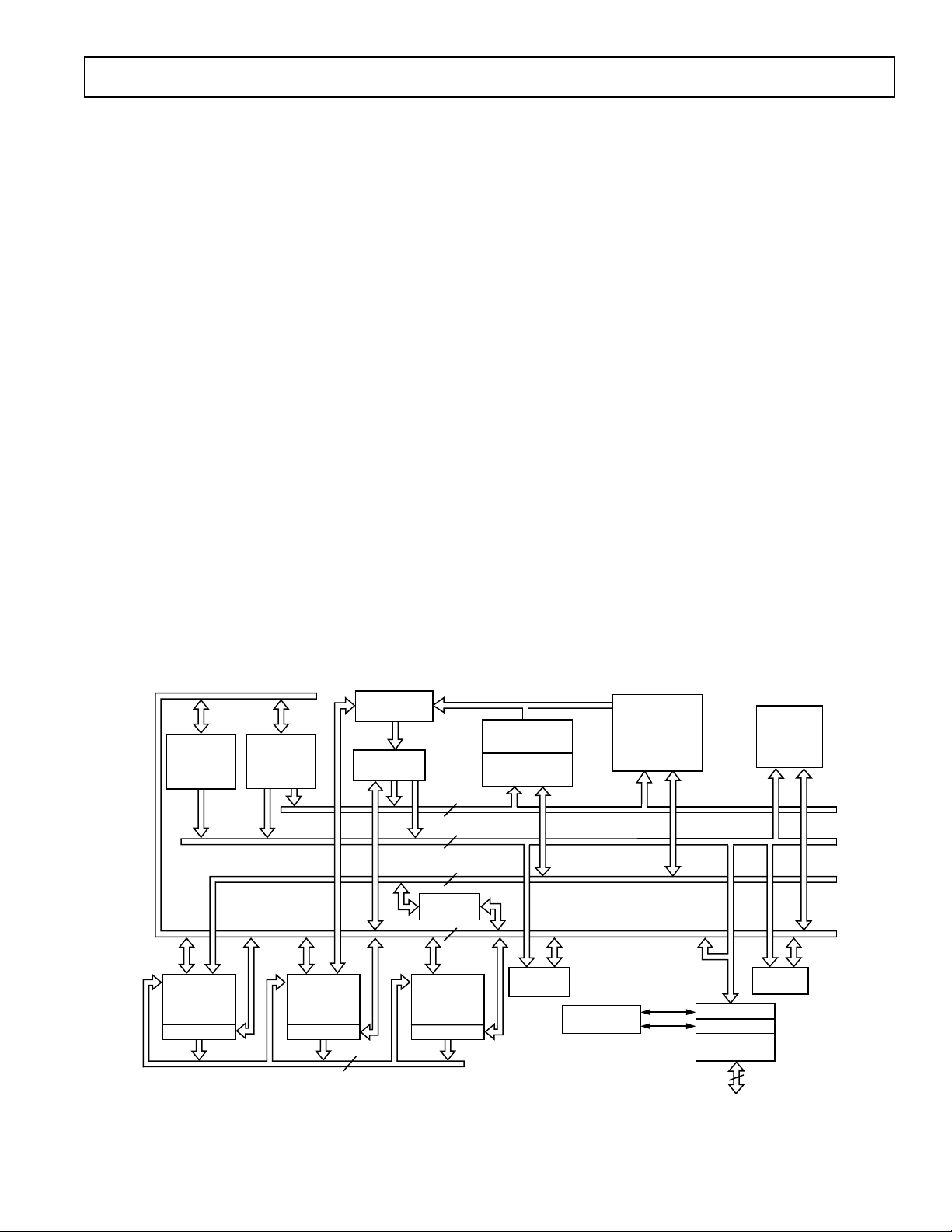
FUNCTIONAL BLOCK DIAGRAM
MEMORY BLOCK
ADSP-21xx BASE
ARCHITECTURE
DATA
ADDRESS
GENERATORS
DAG 1
ARITHMETIC UNITS
ALU
MAC
DSP is a registered trademark of Analog Devices, Inc.
DAG 2
SEQUENCER
SHIFTER
PROGRAM
PROGRAM MEMORY ADDRESS
DATA MEMORY ADDRESS
PROGRAM MEMORY DATA
DATA MEMORY DATA
POR
PROGRAM FLASH
OR ROM MEMORY
4k 24-BIT
TIMER
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties that
may result from its use. No license is granted by implication or otherwise
under any patent or patent rights of Analog Devices.
MOTOR CONTROL PERIPHERALS
ADC SUBSYSTEM
3
V
2.5V
SERIAL PORT
SPORT 0
SPORT 1
7
MULTIPLEXED ON EXTERNAL PINS
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2002
REF
ANALOG
INPUTS
PIO
9
3
I
SENSE
AND TRIP
SHA
TIMERS
2 16-BIT
AUX
PWM
2
AMP
WATCH-
DOG
TIMER
6
16-BIT
THREEPHASE
PWM
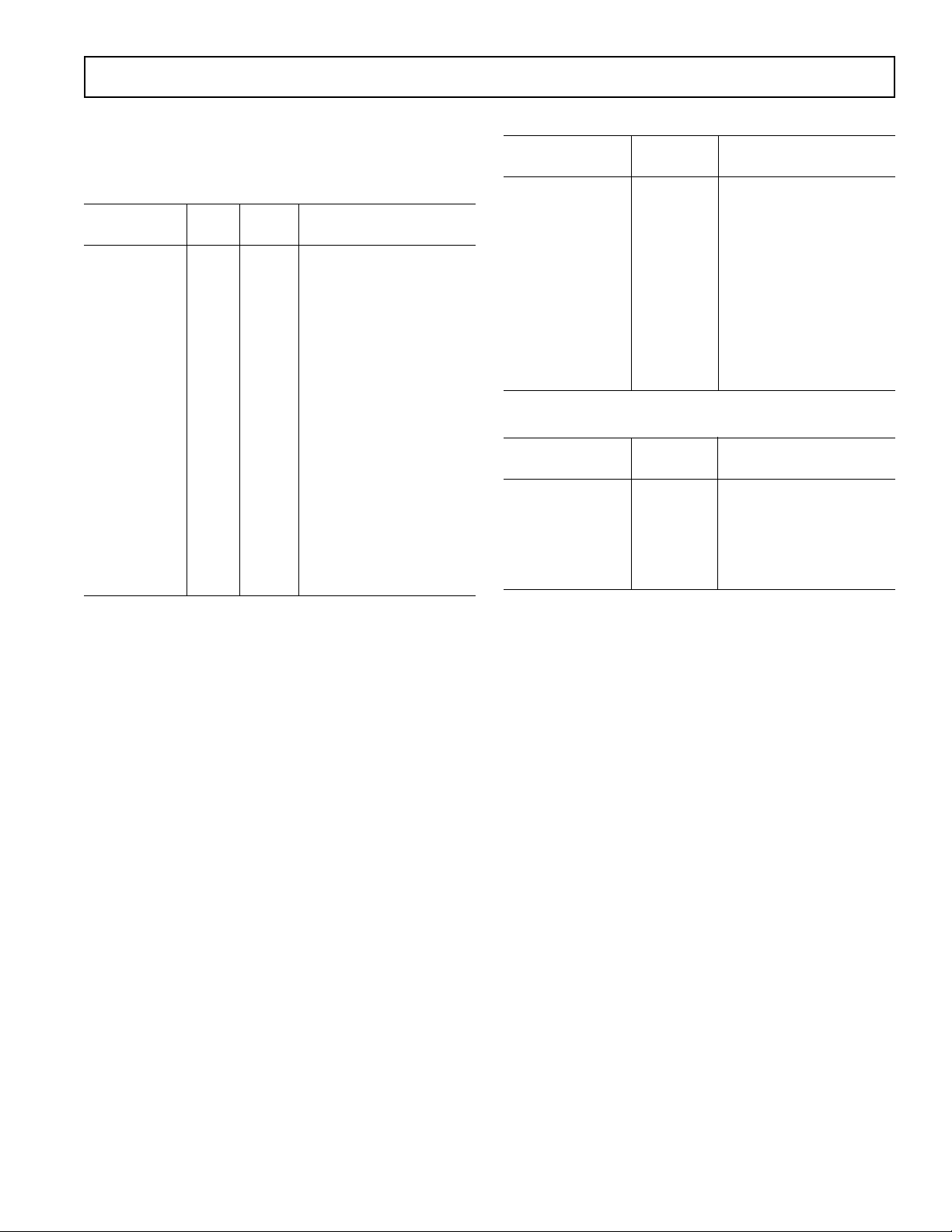
ADMC(F)341–SPECIFICATIONS
(VDD = 5%, GND = 0 V. For ADMCF341, TA = –40C to +85C.
ANALOG-TO-DIGITAL CONVERTER
Parameter Min Typ Max Unit Conditions/Comments
Signal Input 0.3 3.5 V VAUX0, VAUX1, VAUX2
Resolution
Linearity Error
Zero Offset
Comparator Delay 600 ns
ADC High Level Input Current
ADC Low Level Input Current
NOTES
1
Resolution varies with PWM switching frequency (double update mode) 78.1 kHz = 8 bits, 4.9 kHz = 12 bits.
2
2.44 kHz sample frequency, VAUX0, VAUX1, VAUX2.
3
Extrapolated point outside of operating range. 2.44 kHz sample frequency.
Specifications subject to change without notice.
I
SENSE
Parameter Min Typ Max Unit Conditions/Comments
I
SENSE
I
SENSE
I
SENSE
I
SENSE
I
SENSE
I
SENSE
I
SENSE
I
SENSE
I
SENSE
I
SENSE
(SNR)
I
SENSE
I
SENSE
I
SENSE
TRIP Threshold Low –690 –430 mV
TRIP Threshold High +430 +690 mV
TRIP Minimum Pulsewidth
NOTES
1
Variation of gain with VDD and temperature.
2
VIN = –400 mV to +400 mV.
3
fIN = 1 kHz sine wave, VIN = –400 mV to +400 mV, fS = 4 kHz.
4
High or low trip threshold.
Specifications subject to change without notice.
1
2
3
2
2
–32 0 +7 mV
–10 µAV
AMPLIFIER–TRIP
Signal Operating Range –400 +400 mV
Signal Input Range –800 +800 mV
Gain –2.6 –2.51 –2.34 % VIN = –400 mV to +400 mV
Gain Channel Matching 5.5 % VIN = –400 mV to +400 mV
Gain Stability
Linearity
Internal Offset Voltage
Internal Offset Stability
Signal-to-Noise Ratio (SNRD)
Signal-to-Noise Ratio Less Distortion 54 dB
3
Total Harmonic Distortion
Input Current –200 +10 µAV
Input Resistance 11.5 kΩ
1
2
2
2
3
3
4
For ADMC341, TA = –40C to +125C. CLKIN = 10 MHz, unless otherwise noted.)
12 Bits
3 4 Bits
+10 µAV
= 3.5 V
IN
= 0.0 V
IN
0.8 % VIN = –400 mV to +400 mV
89 Bits
1.68 1.87 2.1 V
2.1 %
51 dB
–53 dB
= –400 mV to +400 mV
IN
5 µs
CURRENT SOURCE
1
Parameter Min Typ Max Unit Conditions/Comments
Programming Resolution 3 Bits
Tuned Current
NOTES
1
For ADC calibration.
2
0.3 V to 3.5 V I
Specifications subject to change without notice.
2
CONST
91 100 109 µA
voltage.
REV. A–2–
ADMC(F)341
VOLTAGE REFERENCE
Parameter Min Typ Max Unit Conditions/Comments
Voltage Level (V
)2.442.50 2.55 V –40°C to +85°C (ADMCF341 only)
REF
2.44 2.50 2.55 V –40°C to +125°C (ADMC341 only)
Drift 110 ppm/°C
Specifications subject to change without notice.
POWER-ON RESET
Parameter Min Typ Max Unit Conditions/Comments
Reset Threshold 3.20 3.65 4.10 V
Hysteresis 100 mV
Reset Active Timeout Period 3.2
*216 CLKOUT cycles.
Specifications subject to change without notice.
*
ms
ELECTRICAL CHARACTERISTICS
Symbol Parameter Min Typ Max Unit Conditions/Comments
V
IL
V
IH
V
OL
V
OL
V
OH
I
IL
I
IL
I
IH
I
IH
I
IH
I
OZH
I
OZL
I
DD
I
DD
I
DD
I
DD
NOTES
1
Output pins PIO0-PIO8, AH, AL, BH, BL, CH, CL.
2
XTAL pin.
3
Internal pull-up, RESET.
4
Internal pull-down, PWMTRIP, PIO0-PIO8.
5
Three-stateable pins: DT1, RFS0, TFS0, SCLK1.
6
Outputs not switching.
Specifications subject to change without notice.
Low Level Input Voltage 0.8 V
High Level Input Voltage 2 V
Low Level Output Voltage
Low Level Output Voltage
High Level Output Voltage 4 V I
Low Level Input Current RESET Pin
Low Level Input Current –10 µAV
High Level Input Current RESET Pin
High Level Input Current
High Level Input Current 10 µAV
High Level Three-State Leakage Current
Low Level Three-State Leakage Current5–10 µAV
Supply Current (Idle)
Supply Current (Dynamic)
Supply Current (Idle)
Supply Current (Dynamic)
1
2
3
3
4
6
6
6
6
–100 µAV
5
0.4 V I
0.8 V I
30 µAV
100 µAV
100 µAV
2 mA
OL =
= 2 mA
OL
= 0.5 mA
OH
= 0 V
IN
= 0 V
IN
= V
IN
= V
IN
= V
IN
= V
IN
= 0 V
IN
DD
DD
DD
DD
35 mA VDD = 5.25 V (ADMC341 only)
60 mA VDD = 5.25 V (ADMC341 only)
55 mA VDD = 5.25 V (ADMCF341 only)
135 mA VDD = 5.25 V (ADMCF341 only)
REV. A
–3–
ADMC(F)341
FLASH MEMORY (ADMCF341 ONLY)
Parameter Min Typ Max Unit Conditions/Comments
Endurance 10,000 Cycles Cycle = Erase/Program/Verify
Data Retention 15 Years
Program and Erase Operating Temperature 0 85 °C
Read Operating Temperature –40 +85 °C
Specifications subject to change without notice.
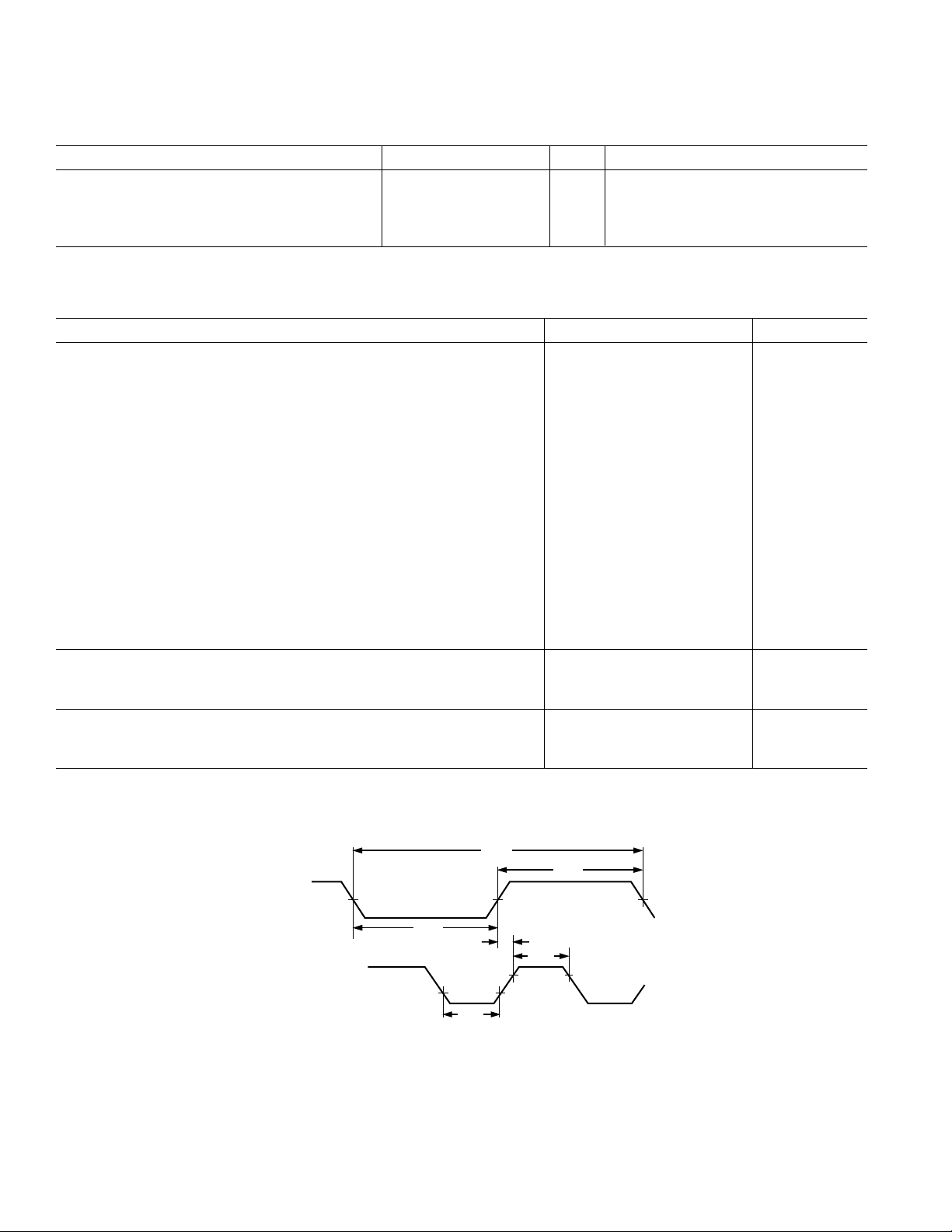
TIMING PARAMETERS
Parameter Min Max Unit
Clock Signals
Signal tCK is defined as 0.5 t
a frequency equal to half the instruction rate; a 10 MHz input clock (which is
equivalent to 100 ns) yields a 50 ns processor cycle (equivalent to 20 MHz).
When t
values are within the range of 0.5 t
CK
substituted for all relevant timing parameters to obtain specification value as
in the following example:
ttns ns ns ns
=−=×−=05 10 05 50 10 15..
CKH CK
Timing Requirements:
t
CKIN
t
CKIL
t
CKIH
CLKIN Period 100 150 ns
CLKIN Width Low 20 ns
CLKIN Width High 20 ns
Switching Characteristics:
t
CKL
t
CKH
t
CKOH
CLKOUT Width Low 0.5 tCK – 10 ns
CLKOUT Width High 0.5 tCK – 10 ns
CLKIN High to CLKOUT High 0 20 ns
Control Signals
Switching Characteristics:
t
RSP
RESET Width Low 5 tCK* ns
PWM Shutdown Signals
Switching Characteristics:
t
PWMTPW
*Applies after power-up sequence is complete.
Specifications subject to change without notice.
PWMTRIP Width Low t
. The ADMC(F)341 uses an input clock with
CKIN
period, they should be
CKIN
CK
ns
CLKIN
CLKOUT
t
CKIN
t
CKIL
t
CKL
Figure 1. Clock Signals
t
t
CKOH
CKH
t
CKIH
REV. A–4–
ADMC(F)341
TIMING PARAMETERS
Parameter Min Max Unit
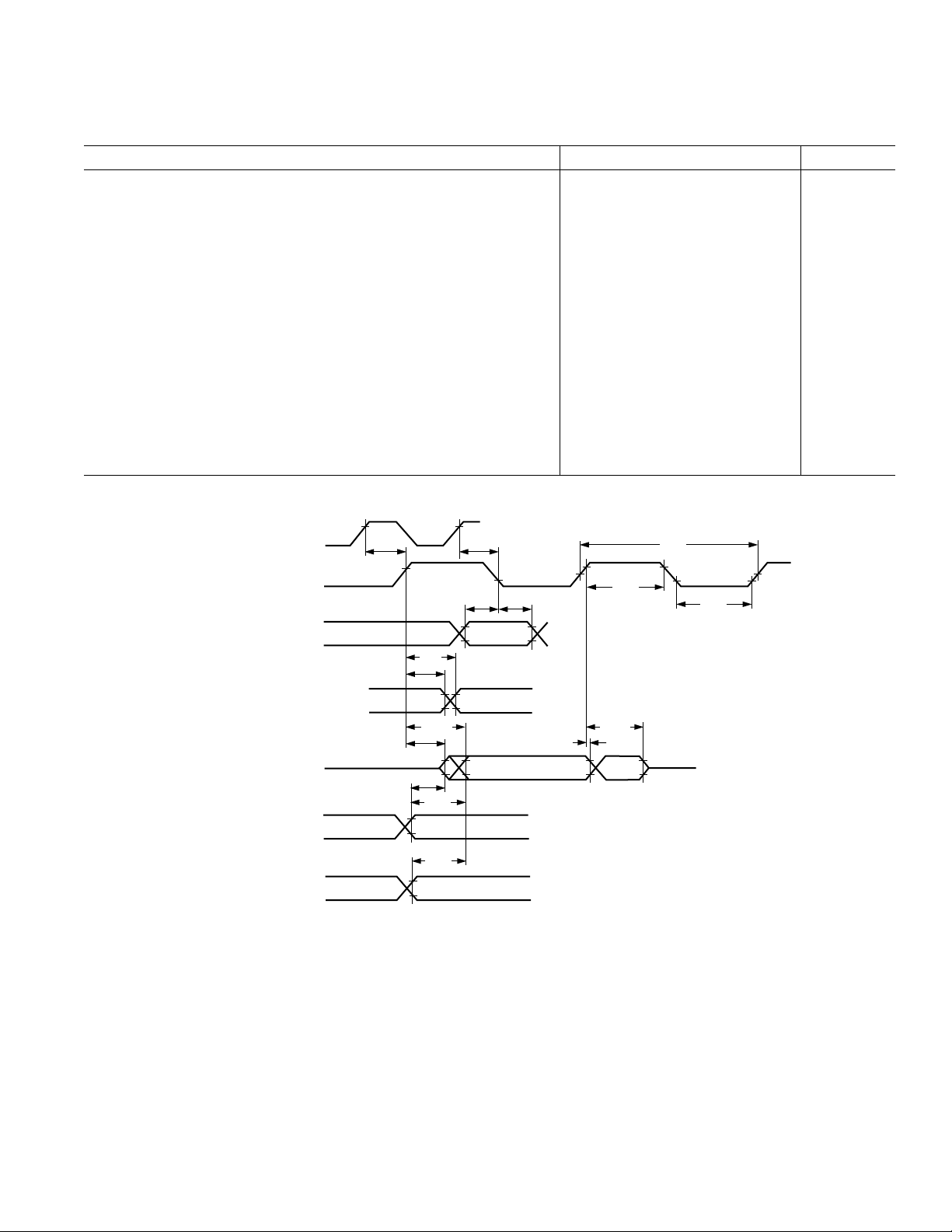
Serial Ports
Timing Requirements:
t
SCK
t
SCS
t
SCH
t
SCP
Switching Characteristics:
t
CC
t
SCDE
t
SCDV
t
RH
t
RD
t
SCDH
t
SCDD
t
TDE
t
TDV
t
RDV
Specifications subject to change without notice.
SCLK Period 100 ns
DR/TFS/RFS Setup before SCLK Low 15 ns
DR/TFS/RFS Hold after SCLK Low 20 ns
SCLKIN Width 40 ns
CLKOUT High to SCLK
OUT
0.25 t
CK
0.25 tCK + 20 ns
SCLK High to DT Enable 0 ns
SCLK High to DT Valid 30 ns
TFS/RFS
TFS/RFS
Hold after SCLK High 0 ns
OUT
Delay from SCLK High 30 ns
OUT
DT Hold after SCLK High 0 ns
SCLK High to DT Disable 30 ns
TFS (Alt) to DT Enable 0 ns
TFS (Alt) to DT Valid 25 ns
RFS (Multichannel, Frame Delay Zero) to DT Valid 30 ns
CLKOUT
SCLK
RFS
TFS
RFS
OUT
TFS
OUT
TFS
(ALTERNATE
FRAME MODE)
(MULTICHANNEL MODE,
FRAME DELAY 0 [MFD = 0])
RFS
DR
DT
t
CC
IN
IN
t
t
SCDE
t
RH
TDE
t
t
RD
SCDV
t
TDV
t
RDV
t
CC
t
SCDD
t
t
t
SCS
SCH
t
SCDH
SCP
t
SCK
t
SCP
Figure 2. Serial Port Timing
REV. A
–5–
ADMC(F)341
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage (VDD) . . . . . . . . . . . . . . . . . . –0.3 V to +7.0 V
Supply Voltage (AV
Input Voltage . . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Output Voltage Swing . . . . . . . . . . . . . . –0.3 V to V
) . . . . . . . . . . . . . . . . . –0.3 V to +7.0 V
DD
+0.3 V
DD
+0.3 V
DD
ADMCF341 Operating Temperature
Range (Ambient) . . . . . . . . . . . . . . . . . . . . –40°C to +85°C
ADMC341 Operating Temperature Range . –40°C to +125°C
Storage Temperature Range . . . . . . . . . . . . –65°C to +150°C
Lead Temperature (5 sec) . . . . . . . . . . . . . . . . . . . . . . . 280°C
*Stresses greater than those listed may cause permanent damage to the device.
These are stress ratings only; functional operation of the device at these or any
other conditions greater than those indicated in the operational sections of this
specification is not implied. Exposure to absolute maximum rating conditions for
extended periods may affect device reliability.
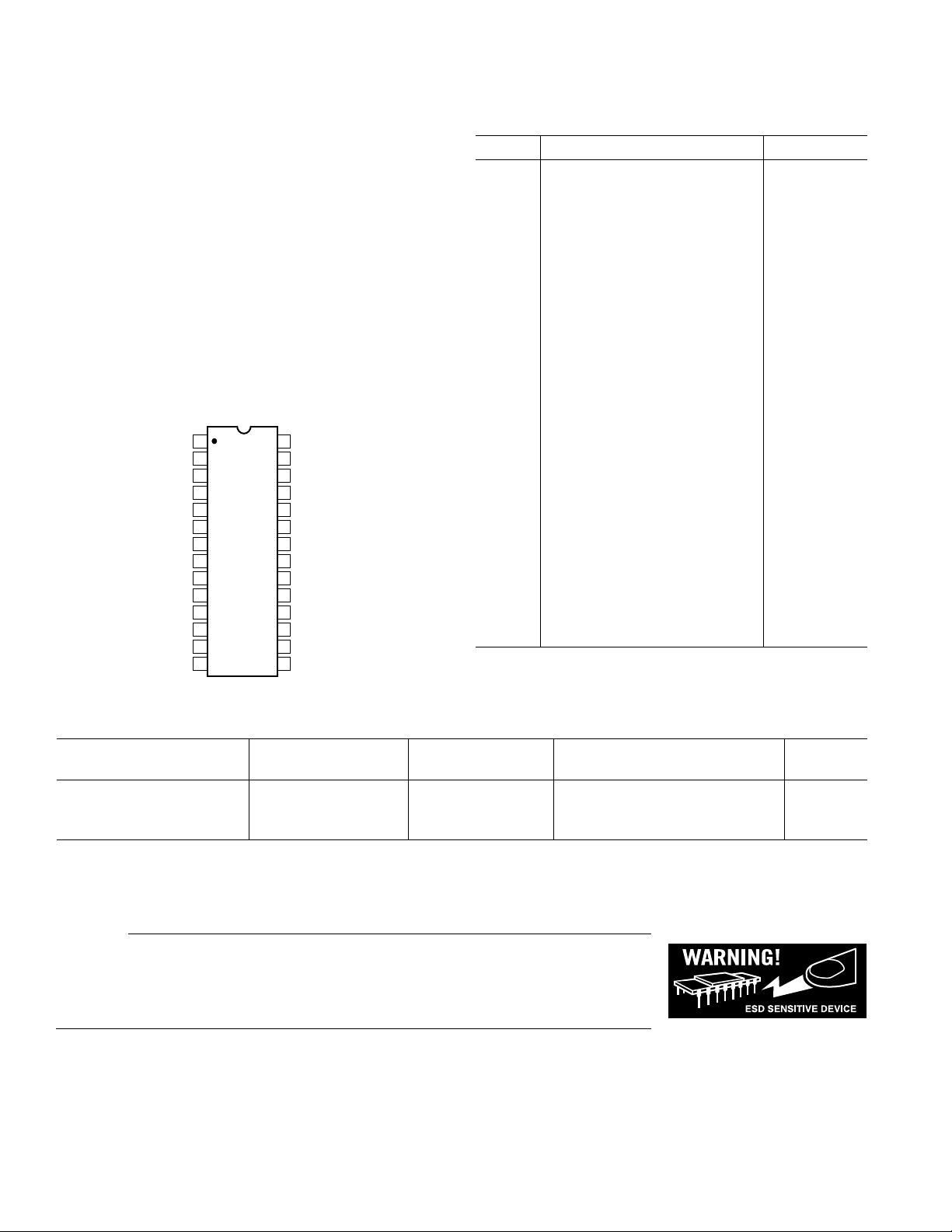
PIN CONFIGURATION
PORTA6/DR1
PORTA5/(FL1/DT1)
PORTA4/(SCLK1/SCLK0)
PORTA3/TFS0
PORTA2/RFS0
PORTA1/DT0
PORTA0/DR0
CLKIN
XTAL
V
PWMTRIP
I
SENSE3
I
SENSE2
I
SENSE1
10
DD
11
12
13
14
1
2
3
4
5
6
ADMC(F)341
7
TOP VIEW
(Not to Scale)
8
9
28
PORTA7/(AUX1/PWMSYNC)
PORTA8/(AUX0/CLKOUT)
27
AL
26
AH
25
BL
24
BH
23
CL
22
CH
21
RESET
20
GND
19
I
18
CONST
VAUX2
17
16
VAUX1
VAUX0
15
PIN FUNCTION DESCRIPTIONS
Pin Mnemonic Pin Type
1 PORTA6/DR1 I/O
2 PORTA5/(FL1/DT1) I/O
3 PORTA4/(SCLK1/SCLK0) I/O
4 PORTA3/TFS0 I/O
5 PORTA2/RFS0 I/O
6 PORTA1/DT0 I/O
7 PORTA0/DR0 I/O
8 CLKIN I
9 XTAL O
10 V
DD
SUP
11 PWMTRIP I
12 I
13 I
14 I
SENSE3
SENSE2
SENSE1
I
I
I
15 VAUX0 I
16 VAUX1 I
17 VAUX2 I
18 I
CONST
O
19 GND GND
20 RESET I
21 CH O
22 CL O
23 BH O
24 BL O
25 AH O
26 AL O
27 PORTA8/(AUX0/CLKOUT) I/O
28 PORTA7/(AUX1/PWMSYNC) I/O
ORDERING GUIDE
Package
Model Temperature Range Instruction Rate Package Description Option
ADMCF341BR –40°C to +85°C 20 MHz 28-Lead Wide Body (SOIC) RW-28
ADMCF341-EVALKIT N/A N/A Development Tool Kit
ADMC341 YR-xxx-xxxx –40°C to +125°C 20 MHz 28-Lead Wide Body (SOIC) RW-28
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection. Although the
ADMC(F)341 features proprietary ESD protection circuitry, permanent damage may occur on devices
subjected to high energy electrostatic discharges. Therefore, proper ESD precautions are recommended
to avoid performance degradation or loss of functionality.
REV. A–6–
ADMC(F)341
GENERAL DESCRIPTION
The ADMC(F)341 is a low cost, single-chip, DSP-based
controller suitable for permanent magnet synchronous motors,
ac induction motors, and brushless dc motors. The ADMC(F)341
integrates a 20 MHz, fixed-point DSP core with a complete set
of motor control and system peripherals that permits fast,
efficient development of motor controllers.
The DSP core of the ADMC(F)341 is completely code compatible with the ADSP-21xx DSP family and combines three
computational units, data address generators, and a program
sequencer. The computational units are an ALU, a multiplier/
accumulator (MAC), and a barrel shifter. There are special
instructions for bit manipulation, multiplication (x squared),
biased rounding, and global interrupt masking. The system
peripherals are the power-on reset circuit (POR), the watchdog
timer, and two synchronous serial ports. The serial ports are
configurable and double buffered, with hardware support for
UART, SCI, and SPI port emulation. The ADMC(F)341 provides 512 ⫻ 24-bit program memory RAM, 4K ⫻ 24-bit
program memory ROM, 4K ⫻ 24-bit program FLASH memory,
and 512 ⫻ 16-bit data memory RAM. The user code can be
stored and executed from the flash memory. The program and
data memory RAM can be used for dynamic data storage or
can be loaded through the serial port from an external device
as in other ADMCxxx family parts. The program memory
ROM contains a monitor function as well as useful routines for
erasing, programming, and verifying the flash memory.
The motor control peripherals of the ADMC(F)341 provide a
12-bit analog data acquisition system with six analog input
channels with three dedicated I
inputs (combining internal
SENSE
amplification, sampling, and overcurrent PWM shutdown
features) and an internal voltage reference. In addition, a threephase, 16-bit, center-based PWM generation unit can be used
to produce high accuracy PWM signals with minimal processor
overhead. The ADMC(F)341 also contains two 16-bit auxiliary
PWM timer outputs and nine lines of digital I/O.
Because the ADMC(F)341 has a limited number of pins, functions such as the auxiliary PWM timers and the serial
communication ports are multiplexed with the nine programmable digital input/output (PIO) pins. The pin functions can be
independently selected to allow maximum flexibility for different applications.
DSP CORE ARCHITECTURE OVERVIEW
Figure 3 is an overall block diagram of the DSP core of the
ADMC(F)341. The flexible architecture and comprehensive
instruction set allow the processor to perform multiple operations in parallel. In one processor cycle (50 ns with a 10 MHz
CLKIN) the DSP core can:
• Generate the next program address
• Fetch the next instruction
• Perform one or two data moves
• Update one or two data address pointers
• Perform a computational operation
This all takes place while the processor continues to:
• Receive and transmit through the serial ports
• Decrement the interval timer
• Generate three-phase PWM waveforms for a power inverter
• Generate two signals using the 16-bit auxiliary PWM timers
• Acquire four analog signals
• Decrement the watchdog timer
DATA
ADDRESS
GENERATOR
#1
INPUT REGS
ALU
OUTPUT REGS
DATA
ADDRESS
GENERATOR
#2
INPUT REGS
OUTPUT REGS
MAC
INSTRUCTION
REGISTER
PM ROM
4K 24
PROGRAM
SEQUENCER
16
R BUS
14
14
24
BUS
EXCHANGE
16
INPUT REGS
SHIFTER
OUTPUT REGS
PM RAM
512 24
CONTROL
LOGIC
Figure 3. DSP Core Block Diagram
PMA BUS
DMA BUS
PMD BUS
DMD BUS
COMPANDING
CIRCUITRY
FLASH
PROGRAM
MEMORY
4K 24
TRANSMIT REG
RECEIVE REG
SERIAL
PORT
6
DM RAM
512 16
TIMER
REV. A
–7–

ADMC(F)341
The processor contains three independent computational units:
the arithmetic and logic unit (ALU), the multiplier/accumulator
(MAC), and the shifter. The computational units process 16-bit
data directly and have provisions to support multiprecision
computations. The ALU performs a standard set of arithmetic
and logic operations, and provides support for division primitives. The MAC performs single-cycle multiply, multiply/add, and
multiply/subtract operations with 40 bits of accumulation. The
shifter performs logical and arithmetic shifts, normalization,
denormalization, and derive-exponent operations. The shifter
can be used to efficiently implement numeric format control,
including floating-point representations. The internal result (R)
bus directly connects the computational units so that the output
of any unit may be the input of any unit on the next cycle.
A powerful program sequencer and two dedicated data address
generators ensure efficient delivery of operands to these computational units. The sequencer supports conditional jumps and
subroutine calls and returns in a single cycle. With internal loop
counters and loop stacks, the ADMC(F)341 executes looped code
with zero overhead; no explicit jump instructions are required to
maintain the loop.
Two data address generators (DAGs) provide addresses for
simultaneous dual operand fetches from data memory and program memory. Each DAG maintains and updates four address
pointers (I registers). Whenever the pointer is used to access
data (indirect addressing), it is post-modified by the value in
one of four modifications (M registers). A length value may be
associated with each pointer (L registers) to implement automatic modulo addressing for circular buffers. The circular
buffering feature is also used by the serial ports for automatic
data transfers to and from on-chip memory. DAG1 generates
only data memory addresses and provides an optional bit-reversal
capability. DAG2 may generate either program or data memory
addresses but has no bit-reversal capability. Efficient data transfer is achieved with the use of five internal buses:
• Program memory address (PMA) bus
• Program memory data (PMD) bus
• Data memory address (DMA) bus
• Data memory data (DMD) bus
• Result (R) bus
Program memory can store both instructions and data, permitting
the ADMC(F)341 to fetch two operands in a single cycle—one
from program memory and one from data memory. The
ADMC(F)341 can fetch an operand from on-chip program
memory and the next instruction in the same cycle. The
ADMC(F)341 writes data from its 16-bit registers to the 24-bit
program memory using the PX register to provide the lower
eight bits. When it reads data (not instructions) from 24-bit
program memory to a 16-bit data register, the lower eight bits
are placed in the PX register.
The ADMC(F)341 can respond to a number of distinct DSP
core and peripheral interrupts. The DSP interrupts comprise a
serial port receive interrupt, a serial port transmit interrupt, a
timer interrupt, and two software interrupts. Additionally, the
motor control peripherals include two PWM interrupts and a
PIO interrupt.
Serial port 0 (SPORT0) provides a complete synchronous serial
interface with optional companding in hardware and a wide
variety of framed and unframed data transmit and receive
modes of operation. Serial port 1 (SPORT1) is available with a
limited number of I/Os. It is mainly intended for codebooting to
serial ROMs (SROM) and supporting the debugging tools.
SPORT0 and SPORT1 can generate an internal programmable
serial clock or accept an external serial clock.
A programmable interval counter is also included in the DSP
core and can be used to generate periodic interrupts. A 16-bit
count register (TCOUNT) is decremented every n processor
cycles, where n – 1 is a scaling value stored in the 8-bit TSCALE
register. When the value of the counter reaches zero, an interrupt is generated, and the count register is reloaded from a
16-bit period register (TPERIOD).
The ADMC(F)341 instruction set provides flexible data moves
and multifunction (one or two data moves with a computation)
instructions. Each instruction is executed in a single 50 ns
processor cycle (for a 10 MHz CLKIN). The ADMC(F)341
assembly language uses an algebraic syntax for ease of coding
and readability. A comprehensive set of development tools
supports program development. For further information on the
DSP core, refer to the ADSP-2100 Family User’s Manual, Third
Edition, with particular reference to the ADSP-2171.
SERIAL PORTS
The ADMCF341 incorporates two complete synchronous serial
ports (SPORT1 and SPORT0) for serial communication and
multiprocessor communication.
Following is a brief list of capabilities of the ADMC(F)341
SPORTs. Refer to the ADSP-2100 Family User’s Manual, Third
Edition, for further details.
• SPORTs are bidirectional and have a separate, doublebuffered transmit and receive section.
• SPORTs use an external serial clock or generate their own
serial clock internally.
• SPORTs have independent framing for the receive and
transmit sections. Sections run in a frameless mode or with
frame synchronization signals internally or externally
generated. Frame synchronization signals are active high or
inverted, with either of two pulsewidths and timings.
• SPORTs support serial data-word lengths from 3 bits to
16 bits and provide optional A-law and µ-law companding
according to ITU (formerly CCITT) recommendation
G.711.
• SPORT receive and transmit sections can generate unique
interrupts on completing a data-word transfer.
• SPORTs can receive and transmit an entire circular buffer
of data with only one overhead cycle per data-word. An
interrupt is generated after a data buffer transfer.
• SPORT0 has a multichannel interface to selectively receive
and transmit a 24-word or 32-word time-division multiplexed, serial bitstream.
• SPORT0 can be configured as an SPI port (master mode
only). The clock phase and polarity are programmable
through the MODECTRL register.
• SPORT1 is the default port for program/data memory boot
loading and for development tools interface. The DT1/FL1
pin can be configured as SROM/E
2
PROM reset signal.
REV. A–8–
ADMC(F)341
PIN FUNCTION DESCRIPTION
The ADMC(F)341 is available in a 28-lead SOIC package.
Table I describes the pins.
Table I. Pin List
Pin Group No. of Input/
Name Pins Output Function
RESET 1I Processor Reset Input
SPORT1
SPORT0
CLKOUT 1
1
1
2 I/O Serial Port 1 Pins (DT1/FL1,
DR1, SCLK1/SCLK0
5 I/O Serial Port 0 Pins (DT0, DR0
1
I/O Processor Clock Output
TFSO, SCLK1/SCLK0
2
)
2
)
CLKIN, XTAL 2 I, O External Clock or Quartz
Crystal Connection Point
PORTA0– 9 I/O Digital I/O Port Pins
PORTA8
1
AUX0–AUX112O Auxiliary PWM Outputs
AH–CL 6 O PWM Outputs
PWMTRIP 1I PWM Trip Signal
–3II
I
SENSE1
I
SENSE3
SENSE
Inputs
VAUX0–VAUX2 3 I Auxiliary Analog Inputs
I
CONST
1O ADC Constant Current
Source
V
DD
1I Power Supply
GND 1 I Ground
NOTES
1
Multiplexed pins, individually selectable through PORTA_SELECT
and PORTA_DATA registers.
2
SCLK1/SCLK0 multiplexed signals. Selectable through MODECTRL
Register Bit 4.
INTERRUPT OVERVIEW
The ADMC(F)341 can respond to 18 different interrupt sources
with minimal overhead, seven of which are internal DSP core
interrupts and 11 are from the motor control peripherals. The
seven DSP core interrupts are SPORT1 receive (or IRQ0) and
transmit (or IRQ1), SPORT0 receive and transmit, the internal
timer, and two software interrupts. The motor control peripheral
interrupts are the nine programmable I/Os and two from the
PWM (PWMSYNC pulse and PWMTRIP). All motor control
interrupts are multiplexed into the DSP core through the
peripheral IRQ2 interrupt. The interrupts are internally prioritized
and individually maskable. A detailed description of the entire
interrupt system of the ADMC(F)341 is presented later, following
a more detailed description of each peripheral block.
MEMORY MAP
The ADMC(F)341 has two distinct memory types: program
and data. In general, program memory contains user code and
coefficients, while the data memory is used to store variables
and data during program execution. Three kinds of program
memory are provided on the ADMC(F)341: RAM, ROM, and
FLASH. The motor control peripherals are memory mapped
into a region of the data memory space starting at 0x2000. The
complete program and data memory maps are given in Tables II
and III, respectively.
Table II. Program Memory Map
Memory
Address Range Type Function
0x0000–0x002F RAM Internal Vector Table
0x0030–0x01FF RAM User Program Memory
0x0200–0x07FF Reserved
0x0800–0x17FF ROM Reserved Program Memory
0x1800–0x1FFF Reserved
0x2000–0x20FF FLASH User Program Memory
Sector 0
0x2100–0x21FF FLASH User Program Memory
Sector 1
0x2200–0x2FFF FLASH User Program Memory
Sector 2
0x3000–0x3FFF Reserved
Table III. Data Memory Map
Memory
Address Range Type Function
0x0000–0x1FFF Reserved
0x2000–0x20FF Memory Mapped Registers
0x2100–0x37FF Reserved
0x3800–0x39FF RAM User Data Memory
0x3A00–0x3BFF RAM Reserved
0x3C00–0x3FFF Memory Mapped Registers
FLASH MEMORY SUBSYSTEM
The ADMC(F)341 has 4K ⫻ 24-bits of user-programmable,
nonvolatile flash memory. A flash programming utility is provided
with the development tools, which perform the basic device
programming operations: erase, program, and verify.
The flash memory array is portioned into three asymmetrically
sized sectors of 256 words, 256 words, and 3584 words, labeled
sector 0, sector 1, and sector 2, respectively. These sectors are
mapped into external program memory address space.
Four flash memory interface registers are connected to the DSP.
These 16-bit registers are mapped into the register area of data
memory space. They are named flash memory control register
(FMCR), flash memory address register (FMAR), flash memory
data register low (FMDRL), and flash memory data register
high (FMDRH). These registers are diagrammed in Figure 22.
They are used by the flash memory programming utility. The
user program may read these registers, but should not modify
them directly. The flash programming utility provides a complete
interface to the flash memory.
It should be noted that the core accesses flash memory through
an external memory interface that multiplexes the program
memory and data memory buses into a single external bus.
Therefore, if more than one external transfer must be made in the
same instruction, there will be at least one overhead cycle required.
REV. A
–9–
ADMC(F)341
Special Flash Registers
The flash module has four nonvolatile 8-bit registers called
special flash registers (SFRs) that are accessible independent of
the main flash array via the flash programming utility. These
registers are for general-purpose, nonvolatile storage. When
erased, the special flash registers contain all 0s. To read special
flash registers from the user program, call the read_reg routine
contained in ROM. Refer to the ADMCF34x DSP Motor
Controller Developers Reference Manual for an example.
Boot-from-Flash Code
A security feature is available in the form of a code that,
when set, causes the processor to execute the program in
flash memory at power-up or reset. In this mode, the flash
programming utility and debugger are unable to communicate
with the ADMC(F)341. Consequently, the contents of the
flash memory can be neither programmed nor read.
The boot-from-flash code may be set via the flash programming
utility, when the user’s program is thoroughly tested and loaded into
flash program memory at address 0x2200. The user’s program must
contain a mechanism for clearing the boot-from-flash code if reprogramming the flash memory is desired. The only way to clear
boot-from-flash is from within the user program, by calling the
flash_init or auto_erase_reg routines that are included in the ROM.
The user program must be signaled in some way to call the
necessary routine to clear the boot-from-flash code. An example
would be to detect a high level on a PIO pin during startup
initialization and then call the flash_init or auto_erase_reg routine.
The flash_init routine will erase the entire user program in flash
memory before clearing the boot-from-flash code, thus ensuring
the security of the user program. If security is not a concern, the
auto_erase_reg routine can be used to clear the boot-from-flash
code while leaving the user program intact.
Refer to the ADMCF34x DSP Motor Controller Developer’s
Reference Manual for further instructions and an example of
using the boot-from-flash code.
FLASH PROGRAM BOOT SEQUENCE
On power-up or reset, the processor begins instruction execution at address 0x0800 of internal program ROM. The ROM
monitor program that is located there checks the boot-from-flash
code. If that code is set, the processor jumps to location 0x2200
in external flash program memory, where it expects to find the
user’s application program.
If the boot-from-flash code is not set, the monitor attempts to
boot from an external device as described in the ADMCF34x
DSP Motor Controller Developers Reference Manual.
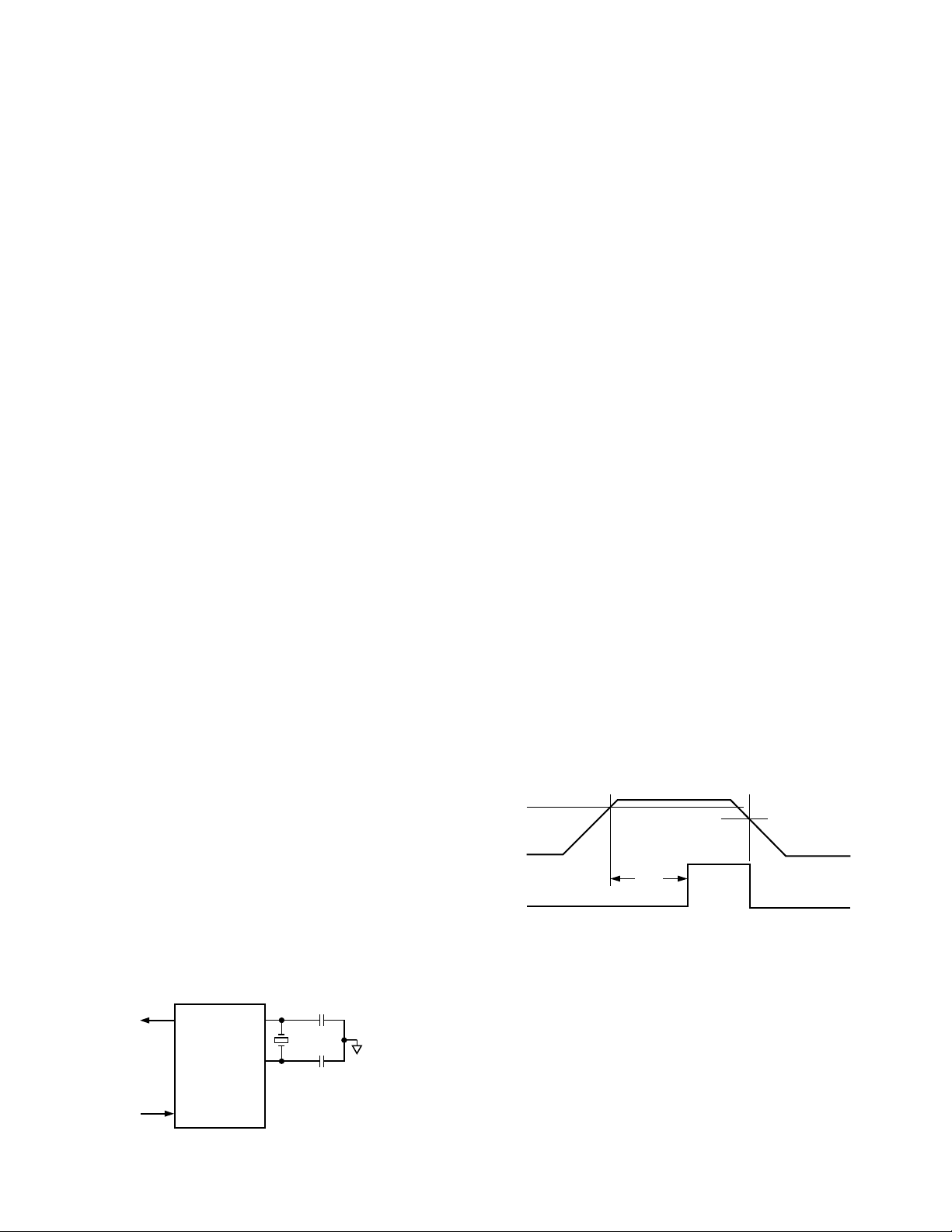
SYSTEM INTERFACE
Figure 4 shows a basic system configuration for the ADMC(F)341
with an external crystal.
CLKOUT
CLKIN
ADMC(F)341
XTAL
22pF
10MHz
22pF
Clock Signals
The ADMC(F)341 can be clocked either by a crystal or a TTL
compatible clock signal. For normal operation, the CLKIN input
cannot be halted, changed during operation, or operated below the
specified minimum frequency. If an external clock is used, it should
be a TTL compatible signal running at half the instruction rate.
The signal is connected to the CLKIN pin of the ADMC(F)341.
In this mode, with an external clock signal, the XTAL pin must be
left unconnected. The ADMC(F)341 uses an input clock with a
frequency equal to half the instruction rate; a 10 MHz input clock
yields a 50 ns processor cycle (which is equivalent to 20 MHz).
Normally, instructions are executed in a single processor cycle. All
device timing is relative to the internal instruction rate, which is
indicated by the CLKOUT signal when enabled.
Because the ADMC(F)341 includes an on-chip oscillator feedback
circuit, an external crystal may be used instead of a clock source,
as shown in Figure 4. The crystal should be connected across the
CLKIN and XTAL pins with two capacitors, as shown in
Figure 4. A parallel-resonant, fundamental frequency, microprocessor grade crystal should be used. A clock output signal
(CLKOUT) is generated by the processor at the processor’s cycle
rate of twice the input frequency.
Reset
The ADMC(F)341 DSP core and peripherals must be correctly
reset when the device is powered up to ensure proper unitization.
The ADMC(F)341 contains an integrated power-on-reset (POR)
circuit that provides a complete system reset on power-up and
power-down. The POR circuit monitors the voltage on the
ADMC(F)341 V
in reset while V
pin and holds the DSP core and peripherals
DD
is less than the threshold voltage level, V
DD
RST
.
When this voltage is exceeded, the ADMC(F)341 is held in reset
for an additional 216 DSP clock cycles (T
this time (T
), the supply voltage must reach the recommended
RST
in Figure 5). During
RST
operating condition. On power-down, when the voltage on the
V
pin falls below V
DD
RST
–V
, the ADMC(F)341 will be
HYST
reset. Also, if the external RESET pin is actively pulled low at
any time after power-up, a complete hardware reset of the
ADMC(F)341 is initiated.
V
RST
V
RESET
DD
T
RST
V
V
RST
HYST
–
Figure 5. Power-On Reset Operation
The ADMC(F)341 sets all internal stack pointers to the empty
stack condition, masks all interrupts, clears the MSTAT register,
and performs a full reset of all of the motor control peripherals.
Following a power-up, it is possible to initiate a DSP core and
motor control peripheral reset by pulling the RESET pin low.
The RESET signal must be the minimum pulsewidth specification,
. Following the reset sequence, the DSP core starts executing
t
RSP
code from the internal PM ROM located at 0x0800.
RESET
Figure 4. Basic System Configuration
REV. A–10–
ADMC(F)341
DSP Control Registers
The DSP core has a system control register, SYSCNTL,
memory-mapped at DM (0x3FFF). SPORT1 must be configured
as a serial port by setting Bit 10. SPORT0 and SPORT1 are
enabled by setting Bit 11 and Bit 12.
The DSP core has a wait state control register, MEMWAIT,
memory-mapped at DM (0x3FFE). The default value of this
register is 0xFFFF. For proper operation of the ADMC(F)341,
this register must always contain the value 0x8000. This value
sets the minimum access time to the program memory.
The configurations of both the SYSCNTL and MEMWAIT
registers of the ADMC(F)341 are shown in Figure 31.
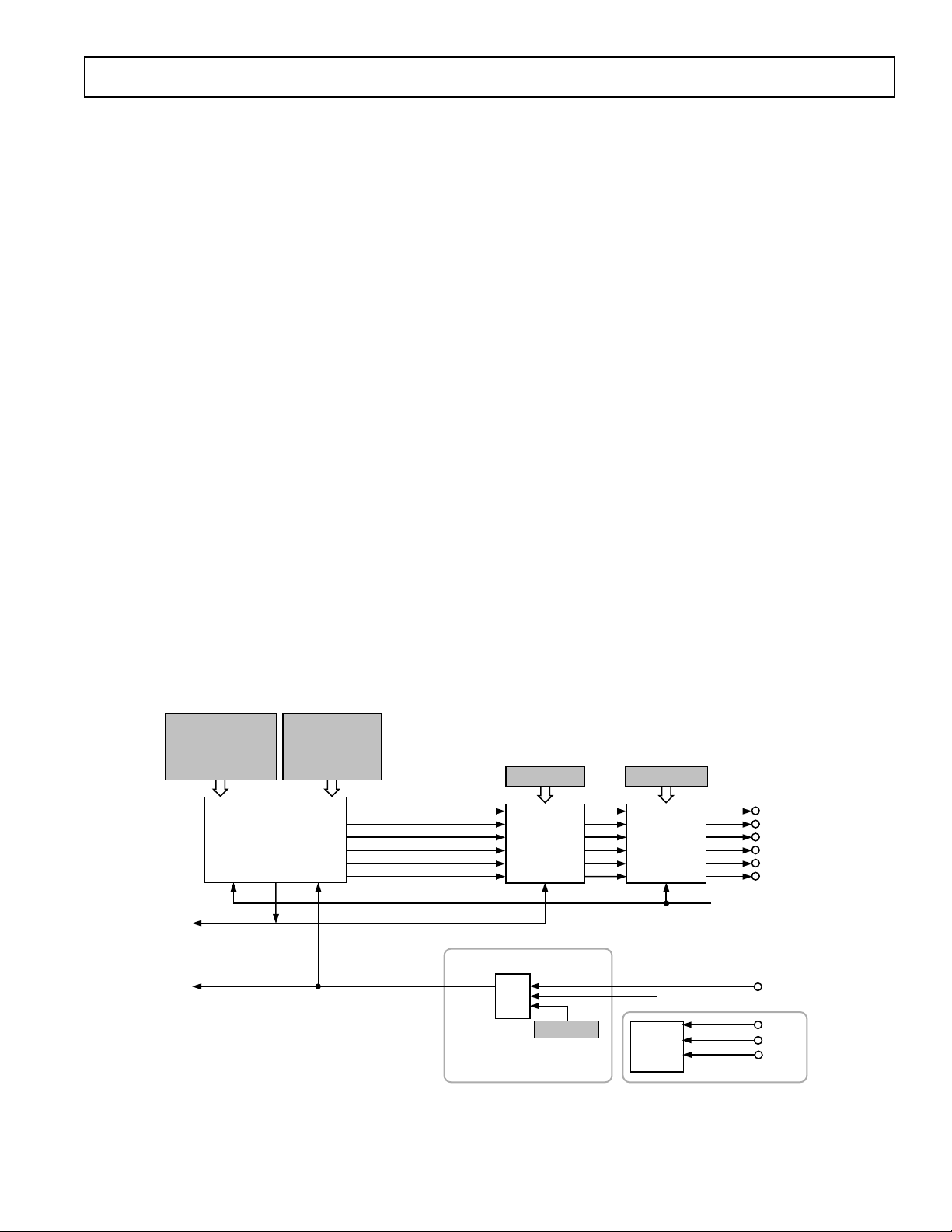
THREE-PHASE PWM CONTROLLER
Overview
The PWM generator block of the ADMC(F)341 is a flexible,
programmable three-phase PWM waveform generator that can
be programmed to generate the required switching patterns to
drive a three-phase voltage source inverter for ac induction
motors (ACIM) or permanent magnet synchronous motors
(PMSM). In addition, the PWM block contains special functions
that considerably simplify the generation of the required PWM
switching patterns for control of brushless dc motors (BDCM),
including electronically commutated motors (ECM).
The six PWM output signals consist of three high side drive
signals (AH, BH, and CH) and three low side drive signals
(AL, BL, and CL). The switching frequency, dead time, and
minimum pulsewidths of the generated PWM patterns are
programmable using, respectively, the PWMTM, PWMDT, and
PWMPD registers. In addition, three registers (PWMCHA,
PWMCHB, and PWMCHC) control the duty cycles of the
three pairs of PWM signals.
Each of the six PWM output signals can be enabled or disabled
by separate output enable bits of the PWMSEG register. In
addition, three control bits of the PWMSEG register permit
crossover of the two signals of a PWM pair for easy control of
ECM or BDCM. In crossover mode, the high side PWM signals
are diverted to the complementary low side output and the low
side signals are diverted to the corresponding high side outputs.
In many applications, there is a need to provide an isolation
barrier in the gate-drive circuits that turn on the power devices
of the inverter. In general, there are two common isolation
techniques: optical isolation using optocouplers, and transformer isolation using pulse transformers. The PWM controller
of the ADMC(F)341 permits mixing of the output PWM signals
with a high frequency chopping signal to permit an easy interface
to such pulse transformers. The features of this gate-drive
chopping mode can be controlled by the PWMGATE register.
There is an 8-bit value within the PWMGATE register that
directly controls the chopping frequency. In addition, high
frequency chopping can be independently enabled for the high
side and the low side outputs using separate control bits in the
PWMGATE register.
The PWM generator is capable of operating in two distinct modes:
single update mode and double update mode. In single update
mode, the duty cycle values are programmable only once per
PWM period so that the resultant PWM patterns are symmetrical
about the midpoint of the PWM period. In double update mode,
a second updating of the PWM duty cycle values is implemented
at the midpoint of the PWM period. In this mode, it is possible
PWM CONFIGURATION
REGISTERS
PWMTM (15...0)
PWMDT (9...0)
PWMPD (9...0)
PWMSYNCWT (7...0)
MODECTRL (6)
THREE-PHASE
PWM TIMING
CLK RESETSYNC
PWMSYNC
TO INTERRUPT
CONTROLLER
PWMTRIP
PWM DUTY CYCLE
REGISTERS
PWMCHA (15...0)
PWMCHB (15...0)
PWMCHC (15...0)
UNIT
PWMSEG (8...0)
OUTPUT
CONTROL
UNIT
SYNC
OR
PWMSWT (0)
PWM SHUTDOWN CONTROLLER
PWMGATE (9...0)
GATE
DRIVE
UNIT
CLK
OVER-
CURRENT
TRIP
Figure 6. Overview of the PWM Controller of the ADMC(F)341
CLKOUT
ANALOG BLOCK
AH
AL
BH
BL
CH
CL
PWMTRIP
I
SENSE1
I
SENSE2
I
SENSE3
REV. A
–11–

ADMC(F)341
to produce asymmetrical PWM patterns that produce lower
harmonic distortion in three-phase PWM inverters. This technique
also permits the closed-loop controller to change the average
voltage applied to the machine winding at a faster rate, allowing
wider closed-loop bandwidths to be achieved. The operating mode
of the PWM block (single or double update mode) is selected by
a control bit in MODECTRL register.
The PWM generator of the ADMC(F)341 also provides an
internal signal that synchronizes the PWM switching frequency
to the A/D operation. In single update mode, a PWMSYNC
pulse is produced at the start of each PWM period. In double
update mode, an additional PWMSYNC pulse is produced at
the midpoint of each PWM period. The width of the PWMSYNC
pulse is programmable through the PWMSYNCWT register.
The PWM signals produced by the ADMC(F)341 can be shut
off in a number of different ways. First, there is a dedicated
asynchronous PWM shutdown pin, PWMTRIP, that, when
brought LOW, instantaneously places all six PWM outputs in
the OFF state. In addition, PWM shutdown is initiated when
the voltage on any of the input pins (I
) exceeds the trip
SENSE
thresholds (high or low) or the input is unconnected (floating).
Because these two hardware shutdown mechanisms are asynchronous, and the associated PWM disable circuitry does not
use clocked logic, the PWM will shut down even if the DSP
clock is not running. The PWM system may also be shut down
from software by writing to the PWMSWT register.
Status information about the PWM system of the ADMC(F)341
is available to the user in the SYSSTAT register. In particular,
the state of PWMTRIP is available, as well as a status bit that
indicates whether the operation is in the first half or the second
half of the PWM period.
A functional block diagram of the PWM controller is shown in
Figure 6. The generation of the six output PWM signals on pins
AH to CL is controlled by four important blocks:
• The three-phase PWM timing unit, which is the core of the
PWM controller, generates three pairs of complemented
and dead-time-adjusted center-based PWM signals.
• The output control unit allows the redirection of the outputs
of the three-phase timing unit for each channel to either the
high side or the low side output. In addition, the output
control unit allows individual enabling/disabling of each of
the six PWM output signals.
• The GATE drive unit provides the high chopping frequency
and its subsequent mixing with the PWM signals.
• The PWM shutdown controller manages the three PWM
shutdown modes (via the PWMTRIP pin, the analog block,
or the PWMSWT register) and generates the correct
RESET signal for the timing unit.
The PWM controller is driven by a clock at the same frequency
as the DSP instruction rate, CLKOUT, and is capable of generating two interrupts to the DSP core. One interrupt is generated
on the occurrence of a PWMSYNC pulse, and the other is
generated on the occurrence of any PWM shutdown action.
Three-Phase Timing Unit
The 16-bit three-phase timing unit is the core of the PWM
controller and produces three pairs of pulsewidth modulated
signals with high resolution and minimal processor overhead.
There are four main configuration registers (PWMTM,
PWMDT, PWMPD, and PWMSYNCWT) that determine the
fundamental characteristics of the PWM outputs. In addition,
the operating mode of the PWM (single or double update
mode) is selected by Bit 6 of the MODECTRL register. These
registers, in conjunction with the three 16-bit duty cycle registers (PWMCHA, PWMCHB, and PWMCHC), control the
output of the three-phase timing unit.
PWM Switching Frequency: PWMTM Register
The PWM switching frequency is controlled by the PWM
period register, PWMTM. The fundamental timing unit of
the PWM controller is t
CK
= 1/f
CLKOUT
, where f
CLKOUT
is the
CLKOUT frequency (DSP instruction rate). Therefore, for a
20 MHz CLKOUT, the fundamental time increment is 50 ns.
The value written to the PWMTM register is effectively the
number of tCK clock increments in half a PWM period. The
required PWMTM value is a function of the desired PWM
switching frequency (f
PWMTM
) and is given by:
PWM
f
CLKOUT
=
f
×=2
PWM
f
CLKINT
f
PWM
Therefore, the PWM switching period, TS, can be written as:
T PWMTM t
=× ×2
SCK
For example, for a 20 MHz CLKOUT and a desired PWM
switching frequency of 10 kHz (T
= 100 µs), the correct value
S
to load into the PWMTM register is:
6
×
PWMTM x E=
20 10
××
21010
3
==
1000 0 3 8
The largest value that can be written to the 16-bit PWMTM
register is 0xFFFF = 65,535, which corresponds to a minimum
PWM switching frequency of:
6
×
fHz
PWM,min
20 10
=
×
265535
=
153
,
for a CLKOUT frequency of 20 MHz.
PWM Switching Dead Time: PWMDT Register
The second important PWM block parameter that must be
initialized is the switching dead time. This is a short delay time
introduced between turning off one PWM signal (e.g., AH) and
turning on its complementary signal (e.g., AL). This short time
delay is introduced to permit the power switch being turned off
to completely recover its blocking capability before the complementary switch is turned on. This time delay prevents a potentially
destructive short-circuit condition from developing across the
dc link capacitor of a typical voltage source inverter.
Dead time is controlled by the PWMDT register. The dead time
is inserted into the three pairs of PWM output signals. The dead
time, T
, is related to the value in the PWMDT register by:
D
T PWMDT t
=××=×22
DCK
PWMDT
f
CLKOUT
Therefore, a PWMDT value of 0x00A (= 10) introduces a
1 µs delay between the turn-off of any PWM signal (e.g., AH)
and the turn-on of its complementary signal (e.g., AL). The
amount of the dead time can therefore be programmed in increments of 2 t
(or 100 ns for a 20 MHz CLKOUT).
CK
REV. A–12–

ADMC(F)341
The PWMDT register is a 10-bit register. For a CLKOUT
rate of 20 MHz its maximum value of 0x3FF (= 1023) corresponds to a maximum programmed dead time of:
Tt
=××
1023 2
DCKmax
=×××
1023 2 50 10
=µ
102
s
−
9
sec
The dead time can be programmed to zero by writing 0 to the
PWMDT register.
PWM Operating Mode: MODECTRL and SYSSTAT Registers
The PWM controller of the ADMC(F)341 can operate in two
distinct modes: single update mode and double update mode.
The operating mode of the PWM controller is determined by
the state of Bit 6 of the MODECTRL register. If this bit is
cleared, the PWM operates in the single update mode. Setting
Bit 6 places the PWM in the double update mode. By default,
following either a peripheral reset or power-on, Bit 6 of the
MODECTRL register is cleared. This means that the default
operating mode is single update mode.
In single update mode, a single PWMSYNC pulse is produced
in each PWM period. The rising edge of this signal marks the
start of a new PWM cycle and is used to latch new values from
the PWM configuration registers (PWMTM, PWMDT, PWMPD,
and PWMSYNCWT) and the PWM duty cycle registers
(PWMCHA, PWMCHB, and PWMCHC) into the three-phase
timing unit. The PWMSEG register is also latched into the
output control unit on the rising edge of the PWMSYNC pulse.
In effect, this means that the parameters of the PWM signals
can be updated only once per PWM period at the start of each
cycle. Thus, the generated PWM patterns are symmetrical,
centered around the midpoint of the switching period.
In double update mode, there is an additional PWMSYNC
pulse produced at the midpoint of each PWM period. The
rising edge of this new PWMSYNC pulse is again used to latch
new values of the PWM configuration registers, duty cycle
registers, and the PWMSEG register. As a result, it is possible
to alter both the characteristics (switching frequency, dead time,
minimum pulsewidth, and PWMSYNC pulsewidth) and the
output duty cycles at the midpoint of each PWM cycle. Consequently, it is possible to produce PWM switching patterns that
are no longer symmetrical, centered around the midpoint of the
period (asymmetrical PWM patterns).
In double update mode, operation in the first half or the second
half of the PWM cycle is indicated by Bit 3 of the SYSSTAT
register. In double update mode, this bit is cleared during
operation in the first half of each PWM period (between the
rising edge of the original PWMSYNC pulse and the rising edge
of the new PWMSYNC pulse, which is introduced in double
update mode). Bit 3 of the SYSSTAT register is set during the
second half of each PWM period. If required, a user may
determine the status of this bit during a PWMSYNC interrupt
service routine.
The advantages of double update mode are that lower harmonic
voltages can be produced by the PWM process and wider
control bandwidths are possible. However, for a given PWM
switching frequency, the PWMSYNC pulses occur at twice the
rate in the double update mode. Because new duty cycle values
must be computed in each PWMSYNC interrupt service routine, there is a larger computational burden on the DSP in
double update mode.
Width of the PWMSYNC Pulse: PWMSYNCWT Register
The PWM controller of the ADMC(F)341 produces an internal
PWM synchronization pulse at a rate equal to the PWM switching
frequency in single update mode and at twice the PWM frequency in double update mode. This PWMSYNC synchronizes
the operation of the PWM unit with the A/D converter system.
The width of this PWMSYNC pulse is programmable by the
PWMSYNCWT register. The width of the PWMSYNC pulse,
T
PWMSYNC
, is given by:
TtPWMSYNCWT
PWMSYNC CK
=× +()1
which means that the width of the pulse is programmable from
to 256 tCK (corresponding to 50 ns to 12.8 µs for a CLKOUT
t
CK
rate of 20 MHz). Following a reset, the PWMSYNCWT
register contains 0x27 (= 39) so that the default PWMSYNC
width is 2.0 µs.
PWM Duty Cycles: PWMCHA, PWMCHB, PWMCHC Registers
The duty cycles of the six PWM output signals are controlled
by the three duty cycle registers, PWMCHA, PWMCHB, and
PWMCHC. The integer value in the register PWMCHA controls the duty cycle of the signals on AH and AL. PWMCHB
controls the duty cycle of the signals on BH and BL, and
PWMCHC controls the duty cycle of the signals on CH and
CL. The duty cycle registers are programmed in integer counts
of the fundamental time unit, t
, and define the desired on-time
CK
of the high side PWM signal produced by the three-phase timing
unit over half the PWM period. The switching signals produced
by the three-phase timing unit are also adjusted to incorporate
the programmed dead time value in the PWMDT register.
The PWM is center-based. This means that in single update
mode, the resulting output waveforms are symmetrical and
centered in the PWMSYNC period. Figure 7 presents a typical
PWM timing diagram illustrating the PWM-related registers’
(PWMCHA, PWMTM, PWMDT, and PWMSYNCWT) control over the waveform timing in both half cycles of the PWM
period. The magnitude of each parameter in the timing diagram
is determined by multiplying the integer value in each register
(typically 50 ns). It may be seen in the timing diagram
by t
CK
how dead time is incorporated into the waveforms by moving
the switching edges away from the original values set in the
PWMCHA register.
REV. A
–13–

ADMC(F)341
T
PWMCHA PWMCHA
PWMDT PWMDT T
AH
CK
=
+−
−×
(
)
12
12
AH
2 PWMDT
AL
PWMSYNC
SYSSTAT (3)
Figure 7. Typical PWM Outputs of Three-Phase
Timing Unit in Single Update Mode
Each switching edge is moved by an equal amount (PWMDT ⫻
) to preserve the symmetrical output patterns. The
t
CK
PWMSYNC pulse, whose width is set by the PWMSYNCWT
register, is also shown. Bit 3 of the SYSSTAT register indicates
which half cycle is active. This can be useful in double update
mode, as will be discussed later.
The resultant on-times of the PWM signals shown in Figure 7
may be written as:
T PWMCHA PWMDT t
=× − ×2( )
AH CK
T PWMTM PWMCHA PWMDT t
=× − − ×2( )
AL CK
The corresponding duty cycles are:
d
AH
T
d
AL
==
AL
T
S
Obviously, negative values of TAH and TAL are not permitted
because the minimum permissible value is zero, corresponding
to a 0% duty cycle. In a similar fashion, the maximum value is
, corresponding to a 100% duty cycle.
T
S
The output signals from the timing unit for operation in double
update mode are shown in Figure 8. This illustrates a completely
general case where the switching frequency, dead time, and duty
cycle are all changed in the second half of the PWM period. Of
course, the same value for any or all of these quantities could be
used in both halves of the PWM cycle. However, it can be seen
that there is no guarantee that symmetrical PWM signals will be
produced by the timing unit in this double update mode.
Additionally, it is seen that the dead time is inserted into the PWM
signals in the same way as in single update mode.
PWMCHA PWMCHA
PWMSYNCWT + 1
PWMTM
T
PWMCHA PWMDT
AH
==
T
S
PWMTM PWMCHA PWMDT
PWMTM
−−
PWMTM
−
PWMTM
2 PWMDT
1
PWMCHA
2
2 PWMDT
PWMSYNCWT2 + 1
PWMTM
2
2
AH
PWMSYNC
SYSSTAT (3)
AL
2 PWMDT
PWMSYNCWT1 + 1
PWMTM
PWMCHA
1
1
Figure 8. Typical PWM Outputs of Three-Phase
Timing Unit in Double Update Mode
In general, the on-times of the PWM signals in double update
mode are defined by:
T
=
AL
PWMTM PWMTM PWMCHA
(
PWMCHA PWMDT PWMDT t
T
d
AH
==
AH
T
S
PWMCHA PWMCHA
PWMTM PWMTM
T
d
AL
==
AL
T
S
PWMCHA PWMDT PWMCHA
PWMTM PWMTM
+− −
12 1
−− ×
212
+
12
+
12
PWMTM PWMTM PWMCHA
PWMTM PWMTM
++
21 1
+
12
PWMDT PWMDT
−
PWMTM PWMTM
++
12 1
+
12
)
CK
+
12
+
12
−
because for the completely general case in double update mode,
the switching period is given by:
TPWMTM PWMTM t
=+×()
SCK
12
Again, the values of TAH and TAL are constrained to lie between
zero and T
.
S
PWM signals similar to those illustrated in Figure 7 and Figure 8
can be produced on the BH, BL, CH, and CL outputs by
programming the PWMCHB and PWMCHC registers in a
manner identical to that described for PWMCHA.
The PWM controller does not produce any PWM outputs until
all of the PWMTM, PWMCHA, PWMCHB, and PWMCHC
registers have been written to at least once. After these registers
have been written, the counters in the three-phase timing unit
are enabled. Writing to these registers also starts the main PWM
timer. If, during initialization, the PWMTM register is written
before the PWMCHA, PWMCHB, and PWMCHC registers,
the first PWMSYNC pulse (and interrupt if enabled) will be
generated (1.5 × t
× PWMTM) seconds after the initial write
CK
to the PWMTM register in single update mode. In double update
mode, the first PWMSYNC pulse will be generated (t
CK
×
PWMTM) seconds after the initial write to the PWMTM register
in single update mode.
REV. A–14–

ADMC(F)341
Effective PWM Resolution
In single update mode, the same values of PWMCHA,
PWMCHB, and PWMCHC are used to define the on-times in
both half cycles of the PWM period. As a result, the effective
resolution of the PWM generation process is 2 t
(or 100 ns for a
CK
20 MHz CLKOUT), since incrementing one of the duty cycle
registers by 1 changes the resultant on-time of the associated PWM
signals by t
in each half period (or 2 tCK for the full period).
CK
In double update mode, improved resolution is possible since
different values of the duty cycle registers are used to define the
on-times in both the first and second halves of the PWM period.
As a result, it is possible to adjust the on-time over the whole
period in increments of t
PWM resolution of t
. This corresponds to an effective
CK
in double update mode (or 50 ns for a
CK
20 MHz CLKOUT).
Table IV. Achievable PWM Resolution in Single and Double
Update Modes
Resolution Single Update Mode Double Update Mode
(Bit) (kHz) PWM Frequency (kHz) PWM Frequency
8 39.1 78.4
9 19.5 39.1
10 9.8 19.5
11 4.9 9.8
12 2.4 4.9
Minimum Pulsewidth: PWMPD Register
In many power converter switching applications, it is desirable
to eliminate PWM switching pulses shorter than a certain width.
It takes a finite time to both turn on and turn off modern power
semiconductor devices. Therefore, if the width of any of the
PWM pulses is shorter than some minimum value, it may be
desirable to completely eliminate the PWM switching for that
particular cycle.
The allowable minimum on-time for any of the six PWM outputs
for half a PWM period that can be produced by the PWM
controller may be programmed using the PWMPD register. The
minimum on-time is programmed in increments of tCK so that the
minimum on-time produced for any half PWM period, T
MIN
,
is related to the value in the PWMPD register by:
TPWMPD t
=×
MIN CK
A PWMPD value of 0x002 defines a permissible minimum
on-time of 100 ns for a 20 MHz CLKOUT.
In each half cycle of the PWM, the timing unit checks the on-time
of each of the six PWM signals. If any of the times is found to
be less than the value specified by the PWMPD register, the
corresponding PWM signal is turned OFF for the entire half
period, and its complementary signal is turned completely ON.
Consider the example where PWMTM = 200, PWMCHA = 5,
PWMDT = 3, and PWMPD = 10 with a CLKOUT of 20 MHz,
while operating in single update mode. For this case, the
PWM switching frequency is 50 kHz and the dead time is
300 ns. The minimum permissible on-time of any PWM signal
over one-half of any period is 500 ns. Clearly, for this example,
the dead-time adjusted on-time of the AH signal for one-half a
PWM period is (5–3) × 50 ns = 100 ns. Because this is less than
the minimum permissible value, output AH of the timing unit
will remain OFF (0% duty cycle). Additionally, the AL signal
will be turned ON for the entire half period (100% duty cycle).
Output Control Unit: PWMSEG Register
The operation of the output control unit is managed by the 9-bit
read/write PWMSEG register. This register sets two distinct
features of the output control unit that are directly useful in the
control of ECM or BDCM.
The PWMSEG register contains three crossover bits, one for
each pair of PWM outputs. Setting Bit 8 of the PWMSEG
register enables the crossover mode for the AH/AL pair of
PWM signals; setting Bit 7 enables crossover on the BH/BL pair
of PWM signals; and setting Bit 6 enables crossover on the
CH/CL pair of PWM signals. If crossover mode is enabled for
any pair of PWM signals, the high side PWM signal from the
timing unit (for example, AH) is diverted to the associated low
side output of the output control unit so that the signal will
ultimately appear at the AL pin. Of course, the corresponding
low side output of the timing unit is also diverted to the complementary high side output of the output control unit so that the
signal appears at pin AH. Following a reset, the three crossover
bits are cleared so that the crossover mode is disabled on all
three pairs of PWM signals.
The PWMSEG register also contains six bits (Bits 0 to 5) that
can be used individually to enable or disable each of the six
PWM outputs. If the associated bit of the PWMSEG register is
set, the corresponding PWM output is disabled regardless of the
value of the corresponding duty cycle register. This PWM output
signal will remain in the OFF state as long as the corresponding
enable/disable bit of the PWMSEG register is set. The PWM
output enable function gates the crossover function. After a
reset, all six enable bits of the PWMSEG register are cleared,
thereby enabling all PWM outputs by default.
In a manner identical to the duty cycle registers, the PWMSEG
is latched on the rising edge of the PWMSYNC signal so that
changes to this register only become effective at the start of each
PWM cycle in single update mode. In double update mode, the
PWMSEG register can also be updated at the midpoint of the
PWM cycle.
In the control of an ECM, only two inverter legs are switched at
any time, and often the high side device in one leg must be
switched on at the same time as the low side driver in a second
leg. Therefore, by programming identical duty cycles for two
PWM channels (for example, let PWMCHA = PWMCHB) and
setting Bit 7 of the PWMSEG register to cross over the BH/BL
pair of PWM signals, it is possible to turn ON the high side
switch of phase A and the low side switch of phase B at the
same time. In the control of an ECM, one inverter leg (phase C
in this example) is disabled for a number of PWM cycles. This
disable may be implemented by disabling both the CH and CL
PWM outputs by setting Bits 0 and 1 of the PWMSEG register.
This is illustrated in Figure 7, where it can be seen that both the
AH and BL signals are identical, because PWMCHA = PWM
CHB, and the crossover bit for phase B is set. In addition, the
other four signals (AL, BH, CH, and CL) have been disabled by
setting the appropriate enable/disable bits of the PWMSEG
register. For the situation illustrated in Figure 9, the appropriate
value for the PWMSEG register is 0x00A7. In ECM operation,
because each inverter leg is disabled for a certain period of time,
the PWMSEG register is changed based upon the position of
the rotor shaft (motor commutation).
REV. A
–15–

ADMC(F)341
PWMCHA = PWMCHB
AH
2 PWMDT
AL
BH
BL
CH
CL
PWMTM
2 PWMDT
PWMTM
Figure 9. An Example of PWM Signals Suitable for
ECM Control. PWMCHA = PWMCHB, BH/BL are a
Crossover Pair. AL, BH, CH, and CL Outputs are
Disabled. Operation is in Single Update Mode.
Gate Drive Unit: PWMGATE Register
The gate drive unit of the PWM controller adds features that
simplify the design of isolated gate drive circuits for PWM
inverters. If a transformer-coupled power device gate drive
amplifier is used, the active PWM signal must be chopped at a
high frequency. The PWMGATE register allows the programming
of this high frequency chopping mode. The chopped active
PWM signals may be required for the high side drivers only, for
the low side drivers only, or for both the high side and low side
switches. Therefore, independent control of this mode for both
high side and low side switches is included with two separate
control bits in the PWMGATE register.
Typical PWM output signals with high frequency chopping
enabled on both high side and low side signals are shown in
Figure 10. Chopping of the high side PWM outputs (AH, BH
and CH) is enabled by setting Bit 8 of the PWMGATE register.
Chopping of the low side PWM outputs (AL, BL, and CL) is
enabled by setting Bit 9 of the PWMGATE register. The high
chopping frequency is controlled by the 8-bit word (GDCLK)
written to Bits 0 to 7 of the PWMGATE register. The period
and the frequency of this high frequency carrier are:
T GDCLK t
=×
()
[]
CHOP CK
f
=
CHOP
GDCLK
41
×+
()
[]
f
CLKOUT
+
×41
The GDCLK value may range from 0 to 255, corresponding to
a programmable chopping frequency rate from 19.5 kHz to 5 MHz
for a 20 MHz CLKOUT rate. The gate drive features must be
programmed before operation of the PWM controller and typically
are not changed during normal operation of the PWM controller. Following a reset, by default, all bits of the PWMGATE
register are cleared so that high frequency chopping is disabled.
PWMCHA PWMCHA
AH
2
PWMDT
AL
2
PWMDT
PWMTM
[4
(GDCLK+1)]
PWMTM
Figure 10. Typical PWM Signals With High
Frequency Gate Chopping Enabled on Both
High Side and Low Side Switches. (GDCLK is
the Integer Equivalent of the Value in Bits 0
to 7 of the PWMGATE Register.)
PWM Shutdown
In the event of external fault conditions, it is essential that the
PWM system be instantaneously shut down. Two methods of
sensing a fault condition are provided by the ADMC(F)341.
For the first method, a low level on the PWMTRIP pin initiates
an instantaneous, asynchronous (independent of DSP clock)
shutdown of the PWM controller. This places all six PWM
outputs in the OFF state, disables the PWMSYNC pulse and
associated interrupt signal, and generates a PWMTRIP inter-
rupt signal. The PWMTRIP pin has an internal pull-down
resistor so that even if the pin becomes disconnected, the PWM
outputs will be disabled. The state of the PWMTRIP pin can be
read from Bit 0 of the SYSSTAT register.
The second method for detecting a fault condition is through
the I
the voltage at any of the I
(high or low), or the I
pins of the analog block of the ADMC(F)341. When
SENSE
SENSE
pins exceeds the trip threshold
SENSE
pin is in high impedance (floating),
PWMTRIP will be internally pulled low. The negative edge of
the internal PWMTRIP will generate a shutdown in the same
manner as a negative edge on pin PWMTRIP.
It is possible through software to initiate a PWM shutdown by
writing to the 1-bit read/write PWMSWT register (0x2061).
Writing to this bit generates a PWM shutdown in a manner
identical to the PWMTRIP or I
pins. Following a PWM
SENSE
shutdown, it is possible to determine if the shutdown was generated from hardware or software by reading the same PWMSWT
register. Reading this register also clears it.
Restarting the PWM after a fault condition is detected requires
clearing the fault and reinitializing the PWM. Clearing the fault
requires PWMTRIP to return to a high state and I
turn to a voltage in the I
trip level range. After the fault has
SENSE
SENSE
to re-
been cleared, the PWM can be restarted by writing to registers
PWMTM, PWMCHA, PWMCHB, and PWMCHC. After the
fault is cleared and the PWM registers are initialized, internal
timing of the three-phase timing unit will resume, and the new
duty cycle values will be latched on the next rising edge of
PWMSYNC.
PWM Registers
The configuration of the PWM registers is described in Figures
23, 24, and 27. The parameters of the PWM block are tabulated in Table V.
REV. A–16–

ADMC(F)341
Table V. Fundamental Characteristics of PWM Generation Unit of ADMC(F)341
Parameter Min Typ Max Unit
16-BIT PWM TIMER
Counter Resolution 16 Bits
Edge Resolution (Single Update Mode) 100 ns
Edge Resolution (Double Update Mode) 50 ns
Programmable Dead Time Range 0 102 µs
Programmable Dead Time Increments 100 ns
Programmable Pulse Deletion Range 0 51 µs
Programmable Pulse Deletion Increments 50 ns
PWM Frequency Range 153
PWMSYNC Pulsewidth (T
) 2.0 12.8 µs
CRST
Gate Drive Chop Frequency Range 0.02 5 MHz
NOTES
1
153 Hz is calculated based on 16-bit resolution.
2
78,431 Hz is calculated based on 8-bit resolution.
1
78,431
2
Hz
ADC Overview
The ADC of the ADMC(F)341 is based upon the single slope
conversion technique. This approach offers an inherently monotonic conversion process within the noise and stability of its
components, and there will be no missing codes.
The single slope technique has been adopted on the
ADMC(F)341 for four channels that are simultaneously converted. Refer to Figure 11 for the functional schematic of the
ADC. The main inputs (I
SENSE1
to I
) are connected to the
SENSE3
ADC converter through three front end blocks. Figure 15 shows
the block diagram of a single front end block. Each front end
block has a bipolar current amplifier (Gain = –2.5) designed to
acquire the voltage on a current-sensing resistor whose voltage
can be either positive or negative with respect to the power
supply ground rail.
The fourth channel has been configured with a serially connected 4-to-1 multiplexer. Table VI shows the multiplexer input
selection codes. One of these auxiliary multiplexed channels is
used to acquire the internal voltage reference (V
) for calibra-
REF
tion purposes.
Table VI. ADC Auxiliary Channel Selection
MODECTRL (1) MODECTRL (0)
Select ADCMUX1 ADCMUX0
VAUX0 0 0
VAUX1 0 1
VAUX2 1 0
Calibration (V
)1 1
REF
I
_TRIM
CONST
REG <2:0>
FILTER
MODECTRL
REG <07>
CLK
V1L
V2L
V3L
12-BIT ADC TIMER BLOCK
VAUXL
ADC1
ADC2
ADC3
ADCAUX
I
SENSE1
I
SENSE2
I
SENSE3
VAUX0
VAUX1
VAUX2
I
CONST
MODECTRL REG
<09..10..11>
VOLTAGE
CURRENT
VOLTAGE
CURRENT
VOLTAGE
CURRENT
VAUX0 (V)
VAUX1 (V)
VAUX2 (V)
VAUX3 (V)
V
REF
CHANNEL1
CHANNEL2
CHANNEL3
MULTIPLEXER
MODECTRL REG <0..1>
4-1
CAPACITOR RESET
PWMSYNC (CONVST)
I
CONST
COMP
COMP
COMP
COMP
Figure 11. ADC Overview
Single Slope ADC Operations
The ADC conversion process is done by comparing each ADC
input to a reference ramp voltage and timing the comparison of
the two signals. The actual conversion point is the time-point
intersection of the input voltage and the ramp voltage (V
C
), as
shown in Figure 12. This time is converted to counts by the
12-bit ADC timer block and is stored in the ADC registers.
The ramp voltage used to perform the conversion is generated
by driving a fixed current into an off-chip capacitor, where the
capacitor voltage is:
VICt
=×()
C
REV. A
–17–

ADMC(F)341
Following reset, VC = 0 at t = 0. This reset and the start of the
conversion process are initiated by the PWMSYNC pulse, as
shown in Figure 12. The width of the PWMSYNC pulse is
controlled by the PWMSYNCWT register and should be programmed according to Figure 13 to ensure complete resetting.
To compensate for IC process manufacturing tolerances (and to
adjust for capacitor tolerances), the current source of the
ADMC(F)341 is software-programmable. Using software to set
the magnitude of the ICONST current generator is accomplished by selecting one of eight steps over approximately 20%
current range.
V
PWMSYNC
COMPARATOR
OUTPUT
T
PWM
C
T
VIL
– T
CRST
V
CMAX
T
CRST
V1
Figure 12. Analog Input Block Operation
The ADC system consists of four comparators and a single
timer that may be clocked at either the DSP rate or half the
DSP rate, depending on the setting of the ADCCNT bit (Bit 7)
of the MODECTRL register. When this bit is cleared, the timer
counts at a slower rate of CLKIN. When this bit is set, it counts
at CLKOUT or twice the rate of CLKIN. ADC1, ADC2, ADC3,
and ADCAUX are the registers that capture the conversion times,
which are the timer values when the associated comparator trips.
200
150
100
DECIMAL COUNTS
50
0
0 2 4 6 8 10
CHARGING CAPACITOR – nF
Figure 13. PWMSYNCWT Program Value
ADC Resolution
The ADC is intrinsically linked to the PWM block through the
PWMSYNC pulse’s control of the ADC conversion process.
Because of this link, the effective resolution of the ADC is a
function of both the PWM switching frequency and the rate at
which the ADC counter timer is clocked. For a CLKOUT
period of t
and a PWM period of T
CK
, the maximum count
PWM
of the ADC is given by:
where T
Max Count T T t
Max Count T T t
PWM
=−
min
(,( )/)
4095 2
for MODECTRL Bit
=−
min
(,( )/)
4095
for MODECTRL Bit
PWM CRST CK
=
70
PWM CRST CK
=
71
is equal to the PWM period if operating in single
update mode to half that period if operating in double update
mode. For an assumed CLKOUT frequency of 20 MHz and
PWMSYNC pulsewidth of 2.0 µs, the effective resolution of
the ADC block is tabulated for various PWM switching frequencies in Table VII.
Table VII. ADC Resolution Examples
PWM MODECTRL[7] = 0 MODECTRL[7] = 1
Frequency Max Effective Max Effective
(kHz) Count Resolution Count Resolution
2.4 4095 12 4095 12
4 2480 >11 4095 12
8 1230 >10 2460 >11
18 535 >9 1070 >10
25 380 >8 760 >9
Programmable Current Source
The ADMC(F)341 has an internal current source that is used
to charge an external capacitor, generating the voltage ramp
used for conversion. The magnitude of the output of the current
source circuit is subject to manufacturing variations and can
vary from one device to the next. Therefore, the ADMC(F)341
includes a programmable current source whose output can
always be tuned to within 5% of the target 100 µA. A 3-bit
register, I
_TRIM, allows the user to make this adjust-
CONST
ment. The output current is proportional to the value written to
the register: 0x0 produces the minimum output and 0x7 produces
the maximum output. The default value of I
CONST
_TRIM after
reset is 0x0.
Charging Capacitor Selection
The charging capacitor value is selected based on the sample
(PWM) frequency desired. A too-small capacitor value will reduce
the available resolution of the ADC by having the ramp voltage rise
rapidly and convert too quickly, not utilizing all possible counts
available in the PWM cycle. A too-large capacitor may not convert
in the available PWM cycle returning 0x000.
To select a charging capacitor use Figure 14. Select the sampling frequency desired, determine if the current source is to be
tuned to a nominal 100 µA or left in the default (0x0 code) trim
state, then determine the proper charge capacitor off the appropriate curve.
REV. A–18–

– nF
SHA TIMER
REGISTER
SHA
STATE
MACHINE
MUX
OVERCURRENT
COMPARATOR
SHA TIMER
COUNTER
VOLTAGE (THIS IS NOT AVAILABLE EXTERNALLY ON THE ADMC(F)341)
CURRENT
PWMSYNC
CLOCKOUT
MODECTRL REGISTER
CHANNEL SELECTION (I
SENSE
/V)
ADC CONVERSION
STATUS BIT
(ADC REGISTER)
SHA
–2.5
VxL
(TO ADC)
TRIP
(TO PWMTRIP FILTER)
TRIP REF HIGH
TRIP REF LOW
NOM
C
100
ADMC(F)341
10
TUNED I
CONST
DEFAULT I
1
1 10 100
CONST
Figure 14. Timing Capacitor Selection
Analog Front End
The main analog inputs of the ADMC(F)341 (I
) are connected to the ADC converter through three
I
SENSE3
SENSE1
to
front end blocks. Figure 15 shows the block diagram of a single
analog front end.
1 2 3 4 5 6 7 8 9 10 11 12
CYCLE
N–1 N N+1 N+2 N+3
PWMSYNC
VC
SHA TIMER
COUNTER
SHA STATUS
T
SAMPLE
T
SAMPLE
X T H T H H T H
Figure 15. Analog Front End Block Diagram
T
SAMPLE
TRACK
N+4
T
SAMPLE
N+5
INPUT
I
SENSE
ADC REGISTER
Figure 16. ADC Conversion Sequence of a Current Input
REV. A
SS
DATA READY
SAMPLED ON
CYCLE N–2
INVALID
LSB = 1
DATA READY
SAMPLED ON
CYCLE N
INVALID
LSB = 1
S
DATA READY
SAMPLED ON
CYCLE N+2
–19–
S
DATA READY
SAMPLED ON
CYCLE N+4

ADMC(F)341
Table VIII. Fundamental Characteristics of Auxiliary PWM Timers
Parameter Test Conditions Min Typ Max Unit
Resolution 16 Bits
PWM Frequency 10 MHz CLKIN 0.152 MHz
Each analog front end has two analog inputs: voltage and current. A 2-to-1 multiplexer selects which input will be converted;
the multiplexer selection is determined by the MODECTRL
register. Note that in the ADMC(F)341, only the current inputs
) are externally available.
(I
SENSE
The current input (I
) is amplified through a bipolar ampli-
SENSE
fier (Gain –2.5). There is an output offset that matches the
amplifier output signal range to the input signal range of the
A/D converter. The amplifier has built-in overcurrent and opencircuit protection. The overcurrent protection shuts the PWM
Block when the voltage at any of the I
pins exceeds the trip
SENSE
threshold (high or low). The open-circuit detection shuts the
PWM block when any of the I
inputs is in high impedance
SENSE
(for example, the current sense resistor or transducer is disconnected). The shutdown signals generated by the amplifiers are
then OR-ed and filtered to avoid a spurious trip caused by the
switching of the power devices. The amplifier is followed by a
sample-and-hold amplifier (SHA). The SHA time is user-programmable through the SHA timer register. The sampling time
is set as a delay from the rising edge of the PWMSYNC signal
and is calculated as:
T SHA CNT t
=+×(_ )2
SAMPLE CK
The SHA timer counter has a minimum reload value of 0x0003,
which ensures a minimum settling time of the SHA output in
case the user is programming the SHA timer register to a value
smaller than 0x0003. This means that the sampling time is
programmable from 5 t
to 65,535 tCK (corresponding to 250 ns
CK
to 3.28 ms for a CLKOUT rate of 20 MHz). The sampling time
is limited, however, to the rising edge of the following PWMSYNC
cycle. Each channel has an independent amplifier, SHA, and
SHA timing unit/state machine. Figure 16 shows a conversion
sequence of a single channel.
At the beginning of the cycle N [rising edge of PWMSYNC
signal (1)], the timer counter is loaded with the value contained
in the SHA_CNT register. After the timer counter has been
reloaded, it starts counting down at the CLKOUT rate. In this
phase, the SHA state-machine forces the SHA in TRACK
(sample) status.
When the counter reaches the value of 0x0000 (after the time
T
from the rising edge of PWMSYNC), the SHA state-
SAMPLE
machine forces the SHA in HOLD status.
The conversion of the sampled value is then taking place in the
cycle N + 1 [from (4) to (5)] in Figure 16. The result of the
conversion is available on the ADC register at the cycle N + 2
[rising edge of PWMSYNC (5)].
On cycle N + 2, the reload value of the timer counter exceeds
the period of the PWMSYNC signal. In this case, the SHA
state-machine forces the SHA in HOLD status at the rising edge
of PWMSYNC of the next cycle (7). The conversion then takes
place on cycle N + 3, and the conversion result is available on the
ADC register at the cycle N + 4 [rising edge of PWMSYNC (9)].
During the acquire phase (the PWMSYNC cycle during the
sampling of the input value), the conversion takes place. However, the value on the ADC registers is not considered valid.
This condition is signaled by the ADC by setting the LSB of the
ADC register to high.
On cycle N + 4, at the rising edge of the PWMSYNC signal (9),
the timer counter is reloaded with a value smaller than the
PWMSYNC pulsewidth. In this case, the SHA samples within
the PWMSYNC pulsewidth and the conversion take place in
the same PWMSYNC cycle [from (10) to (11)].
AUXILIARY PWM TIMERS
Overview
The ADMC(F)341 provides two variable frequency, variable
duty cycle, 16-bit, auxiliary PWM outputs that, when enabled,
are available at the AUX1 and AUX0 pins. These auxiliary
PWM outputs can be used to provide switching signals to
other circuits in typical motor control systems, such as power
factor corrected front end converters or other switching power
converters. Alternatively, by adding a suitable filter network, the
auxiliary PWM output signals can be used as simple single-bit
digital-to-analog converters as shown in Figure 17. The auxiliary
PWM system of the ADMC(F)341 can operate in two different
modes: independent mode and offset mode. The operating
mode of the auxiliary PWM system is controlled by Bit 8 of the
MODECTRL register. Setting Bit 8 of the MODECTRL register places the auxiliary PWM system in the independent mode.
In this mode, the two auxiliary PWM generators are completely
independent and separate switching frequencies and duty cycles
may be programmed for each auxiliary PWM output. In this
mode, the 16-bit AUXTM0 register sets the switching frequency
of the signal at the AUX0 output pin. Similarly, the 16-bit
AUXTM1 register sets the switching frequency of the signal at
the AUX1 pin. The fundamental time increment for the auxiliary
PWM outputs is twice the DSP instruction rate (or 2 t
CK
) and
the corresponding switching periods are given by:
T AUXTM t
T AUXTM t
201
=× + ×
AUX CK
AUX CK
()
0
211
=× + ×
()
1
Since the values in both AUXTM0 and AUXTM1 can range
from 0 to 0xFFFF, the achievable switching frequency of the
auxiliary PWM signals may range from 152.59 Hz to 10 MHz
for a CLKOUT frequency of 20 MHz. The on-time of the two
auxiliary PWM signals is programmed by the two 16-bit AUXCH0
and AUXCH1 registers, according to:
T AUX AUXCH t
,()
02 0
ON CK
T AUX AUXCH t
,()
ON CK
=× ×
12 1
=× ×
so that output duty cycles from 0% to 100% are possible. Duty
cycles of 100% are produced if the on-time value exceeds the
period value. Typical auxiliary PWM waveforms in independent
mode are shown in Figure 18a. When Bit 8 of the MODECTRL
register is cleared, the auxiliary PWM channels are placed
REV. A–20–

in offset mode. In offset mode, the switching frequencies of the
two signals on the AUX0 and AUX1 pins are identical and
controlled by AUXTM0 in a manner similar to that previously
described for independent mode. In addition, the on-times of
both the AUX0 and AUX1 signals are controlled by the AUXCH0
and AUXCH1 registers as before.
In this mode, however, the AUXTM1 register defines the offset
time from the rising edge of the signal on the AUX0 pin to that
on the AUX1 pin according to:
T AUXTM t
=× +×21()1
OFFSET CK
For correct operation in this mode, the value written to the
AUXTM1 register must be less than the value written to the
AUXTM0 register. Typical auxiliary PWM waveforms in offset
mode are shown in Figure 18b. Again, duty cycles from 0% to
100% are possible in this mode.
In both operating modes, the resolution of the auxiliary PWM
system is 16 bits only at the minimum switching frequency
(AUXTM0 = AUXTM1 = 65,535 in independent mode,
AUXTM0 = 65,535 in offset mode). Obviously, as the switching
frequency is increased, the resolution is reduced.
Values can be written to the auxiliary PWM registers at any
time. However, new duty cycle values written to the AUXCH0
and AUXCH1 registers only become effective at the start of
the next cycle. Writing to the AUXTM0 or AUXTM1
registers causes the internal timers to be reset to 0 and new
PWM cycles to begin. By default following a reset, Bit 8 of
the MODECTRL register is cleared, thus enabling offset mode.
In addition, the registers AUXTM0 and AUXTM1 default to
0xFFFF, corresponding to the minimum switching frequency
and zero offset. The on-time registers AUXCH0 and AUXCH1
default to 0x0000.
AUXPWM
R1 R2
C1 C2
ADMC(F)341
2 AUXCH0
AUX0
AUX1
2 (AUXTM1 + 1)
Figure 18b. Typical Auxiliary PWM Signals
(All Times in Increments of t
WATCHDOG TIMER
The ADMC(F)341 incorporates a watchdog timer that can
perform a full reset of the DSP and motor control peripherals
in the event of a software error. The watchdog timer is enabled
by writing a timeout value to the 16-bit WDTIMER register.
The timeout value represents the number of CLKIN cycles
required for the watchdog timer to count down to zero. When the
watchdog timer reaches zero, a full DSP core and motor control
peripheral reset is performed. In addition, Bit 1 of the
SYSSTAT register is set so that after a watchdog reset, the
ADMC(F)341 can determine that the reset was due to the
timeout of the watchdog timer and was not an external reset.
Following a watchdog reset, Bit 1 of the SYSSTAT register may
be cleared by writing zero to the WDTIMER register. This
clears the status bit but does not enable the watchdog timer.
On reset, the watchdog timer is disabled and is enabled only
when the first timeout value is written to the WDTIMER
register. To prevent the watchdog timer from timing out, the
user must write to the WDTIMER register at regular intervals
(shorter than the programmed WDTIMER period value). On
all but the first write to WDTIMER, the particular value written
to the register is unimportant, since writing to WDTIMER
simply reloads the first value written to this register.
2 (AUXTM0 + 1)
2 (AUXTM0 + 1)
2 AUXCH1
), Offset Mode
CK
R1 = R2 = 13k
C1 = C2 = 10nF
Figure 17. Auxiliary PWM Output Filter
Auxiliary PWM Interface, Registers, and Pins
The registers of the auxiliary PWM system are summarized in
Figure 27.
2 AUXCH1
2 (AUXTM0 + 1)
2 (AUXTM1 + 1)
2 AUXCH1
2 AUXCH0
AUX0
AUX1
Figure 18a. Typical Auxiliary PWM Signals
(All Times in Increments of t
), Independent
CK
Mode
REV. A
–21–
PROGRAMMABLE DIGITAL INPUT/OUTPUT
The ADMC(F)341 has a 9-pin programmable digital input/
output (PIO) port (PORTA). The nine pins (PORTA0 to
PORTA8) are multiplexed with other on-chip peripheral
functions, in accordance with Table IX. When configured as a
PIO, each of these nine pins can act as an input or output, or an
interrupt source.
The operating mode (PIO or alternate function) of pins PORTA0
to PORTA8 is controlled by the PORTA_SELECT register.
This 9-bit register has a bit for each input so that the mode of
each pin may be selected individually.
Bit 0 of PORTA_SELECT controls the operation of the PORTA0
pin, Bit 1 controls the PORTA1 pin, and so on. Setting the
appropriate bit in the PORTA_SELECT register causes the
corresponding pin to be configured for PIO functionality.
Clearing the bit selects the alternate mode of the corresponding
pin. Following power-on reset, all bits of PORTA_SELECT
are set such that PIO functionality is selected. The second

ADMC(F)341
Table IX. Port A Multiplexing
PORTA Pin First Alternate Function (Peripheral) Second Alternate Function (Peripheral)
PORTA8 AUX0 (Auxiliary PWM Output) CLKOUT (System CLOCK)
PORTA7 AUX1 (Auxiliary PWM Output) PWMSYNC (PWM)
PORTA6 DR1 (Data Receive SPORT1) None
PORTA5 FL1 (Flag Out SPORT1) DT1 (Data Transmit SPORT1)
PORTA4 SCLK1 (Serial Clock SPORT1) SCLK0 (Serial Clock SPORT0)
PORTA3 TFS0 (Transmit Frame Sync SPORT0) None
PORTA2 RFS0 (Receive Frame Sync SPORT0) None
PORTA1 DT0 (Data Transmit SPORT0) None
PORTA0 DR0 (Data Receive SPORT0) None
alternate function of PORTA7 is selected by Bit 14 of the
PORTA_SELECT register. The second alternate function of
PORTA8 is selected by Bit 15 of the PORTA_SELECT register.
The second alternate function of the PORTA4 and PORTA5
pins is selected by Bit 4 of MODECTRL Register (SPORT1
mode: boot mode/UART mode).
Once PIO functionality has been selected for any or all of these nine
pins, the direction may be set by the 9-bit PORTA_DIR register.
Clearing any bit configures the corresponding PIO line as an input,
while setting the bit configures it as an output. By default, following
a reset, all bits of PORTA_DIR are cleared, configuring the PIO
lines as inputs. The data of the PORTA0 to PORTA8 lines is controlled by the PORTA_DATA register. These registers can be used
to read data from those PIO lines configured as inputs and write data
to those configured as outputs. Any of the nine pins that have been
configured for PIO functionality can be made to act as an interrupt
source by setting the appropriate bit of the PORTA_INTEN register.
To act as an interrupt source, the pin must also be configured as an
input. An interrupt is generated upon a change of state (low-to-high
transition or high-to-low transition) on any input that has been
configured as an interrupt source. Following a change of state event
on any such input, the corresponding bit is set in the
PORTA_FLAG, register and a common PIO interrupt is generated.
Reading the PORTA_FLAG register permits determining
the interrupt source. Reading the PORTA_FLAG register
automatically clears all bits of the registers. Following poweron or reset, all bits of PORTA_INTEN are cleared so that no
interrupts are enabled.
Each PIO line has an internal pull-down resistor so that following
power-on or reset, all nine lines are configured as input PIOs
and will be read as logic lows if left unconnected.
PIO Registers
The configuration of all registers of the PIO system is shown in
Figure 25.
INTERRUPT CONTROL
The ADMC(F)341 can respond to 18 different interrupt sources
with minimal overhead. Seven of these interrupts are internal
DSP core interrupts and 11 are from the on-chip peripherals.
The seven DSP core interrupts are SPORT0 receive and
transmit, SPORT1 receive (or IRQ0) and transmit (or IRQ1),
the internal timer, and two software interrupts. The motor
control interrupts are the nine PORTA PIOs and two from the
PWM block (PWMSYNC pulse and PWMTRIP). All the on-chip
peripheral interrupts are multiplexed into the DSP core via the
peripheral IRQ2 interrupt. They are also internally prioritized
and individually maskable. The start address in the interrupt
vector table for the ADMC(F)341 interrupt sources is shown in
Table X. The interrupts are listed from highest to lowest priority. The PWMSYNC interrupt is triggered by a low-to-high
transition on the PWMSYNC pulse. The PWMTRIP interrupt
is triggered on a high-to-low transition on the PWMTRIP pin.
A PIO interrupt is detected on any change of state (high-to-low
or low-to-high) on the PIO lines.
The entire interrupt control system of the ADMC(F)341 is
configured and controlled by the IFC, IMASK, and ICNTL
registers of the DSP core, the IRQFLAG register for the
PWMSYNC and PWMTRIP interrupts, and PORTA_FLAG
register for the PIO interrupts.
Table X. Interrupt Vector Addresses
Interrupt Source Interrupt Vector Address
PWMTRIP 0x002C (Highest Priority)
Peripheral Interrupt (IRQ2) 0x0004
PWMSYNC 0x000C
PIO 0x0008
Software Interrupt 1 0x0018
Software Interrupt 0 0 x001C
SPORT0 Transmit Interrupt 0x0010
SPORT0 Receive Interrupt 0x0014
SPORT1 Transmit Interrupt (or IRQ1) 0x0020
SPORT1 Receive Interrupt (or IRQ0) 0x0024
Timer 0x0028 (Lowest Priority)
Interrupt Masking
Interrupt masking (or disabling) is controlled by the IMASK
register of the DSP core. This register contains individual bits
that must be set to enable the various interrupt sources. If any
peripheral interrupt is to be enabled, the IRQ2 interrupt enable
bit (Bit 9) of the IMASK register must be set. The configuration
of the IMASK register of the ADMC(F)341 is shown in Figure 30.
REV. A–22–

ADMC(F)341
Interrupt Configuration
The IFC and ICNTL registers of the DSP core control and
configure the interrupt controller of the DSP core. The IFC
register is a 16-bit register that may be used to force and/or clear
any of the eight DSP interrupts. Bits 0 to 7 of the IFC register
may be used to clear the DSP interrupts while Bits 8 to 15 can be
used to force a corresponding interrupt. Writing to Bits 11 and
12 in IFC is the only way to create the two software interrupts.
The ICNTL register is used to configure the sensitivity (edge or
level) of the IRQ0, IRQ1, and IRQ2 interrupts and to enable/
disable interrupt nesting. Setting Bit 0 of ICNTL configures the
IRQ0 as edge-sensitive, while clearing the bit configures it as
level-sensitive. Bit 1 is used to configure the IRQ1 interrupt, and
Bit 2 is used to configure the IRQ2 interrupt. It is recommended
that the IRQ2 interrupt always be configured as level-sensitive, as this ensures that no peripheral interrupts are lost. Setting
Bit 4 of the ICNTL register enables interrupt nesting. The configuration of both IFC and ICNTL registers is shown in Figure 30.
INTERRUPT OPERATION
Following a reset, the ROM code on the ADMC(F)341 must
copy a default interrupt vector table into program memory
RAM from address 0x0000 to address 0x002F. Since each
interrupt source has a dedicated four-word space in this vector
table, it is possible to code short interrupt service routines (ISR)
in place. Alternatively, it may be necessary to insert a JUMP
instruction to the appropriate start address of the ISR if the ISR
requires more memory. When an interrupt occurs, the program
sequencer ensures that there is no latency (beyond synchronization
delay) when processing unmasked interrupts. In the case of the
timer, SPORT0, SPORT1, and software interrupts, the interrupt
controller automatically jumps to the appropriate location in the
interrupt vector table. At this point, a JUMP instruction to the
appropriate ISR is required. Motor control peripheral interrupts
are slightly different. When a peripheral interrupt is detected,
a bit is set in the IRQFLAG register for PWMSYNC and
PWMTRIP or in the PORTA_FLAG register for a PIO interrupt, and the IRQ2 line is pulled low until all pending interrupts
are acknowledged. The DSP software must determine the source
of the interrupts by reading the IRQFLAG register. If more than
one interrupt occurs simultaneously, the higher priority interrupt
service routine is executed. Reading the IRQFLAG register
clears the PWMTRIP and PWMSYNC bits and acknowledges
the interrupt, thus allowing further interrupts when the ISR
exits. A user’s PIO interrupt service routine must read the
PORTA_FLAG register to determine which PIO port is the
source of the interrupt. Reading register PORTA_FLAG clears
all bits in the registers and acknowledges the interrupt, thus
allowing further interrupts after the ISR exits. The configuration
of all these registers is shown in Figures 26 and 29.
SYSTEM CONTROLLER
The system controller block of the ADMC(F)341 performs the
following functions:
1. Manages the interface and data transfer between the DSP
core and the motor control peripherals.
2. Handles interrupts generated by the motor control peripherals and generates a DSP core interrupt signal IRQ2.
3. Controls the ADC multiplexer select lines.
4. Enables PWMTRIP and PWMSYNC interrupts.
5. Controls the multiplexing of the SPORT1 and SPORT0
pins.
6. Controls the PWM single/double update mode.
7. Controls the ADC conversion time modes and the SHA
timers.
8. Controls the auxiliary PWM operation mode.
9. Contains a status register (SYSSTAT) that indicates the
state of the PWMTRIP pin, the watchdog timer, and the
PWM timer.
10. Performs a reset of the motor control peripherals and
control registers following a hardware, software, or watchdog initiated reset.
SPORT1 and SPORT0 Control
The ADMC(F)341 has two serial ports: SPORT0 and SPORT1.
SPORT1 is available with a limited number of pins and is mainly
intended as a secondary port for development tools interfacing
and/or code booting from, as well as for external serial
memory. Figure 19 shows the internal multiplexing of the
SPORT0 and SPORT1 signals. SPORT0 is intended as a
general-purpose communication port. SPORT0 can support
the following operating modes: SPORT, UART, and SPI.
SPORT1 Configuration
There are two operating modes for SPORT1: boot mode and
UART mode. These modes are selectable through Bit 4 of the
MODECTRL register. With SPORT1 in boot mode, the
SPORT1 serial clock (SCLK1) is externally available through
the SCLK1/SCLK0 pin. The signal SCLK1 is used to drive the
external serial memory input clock.
The SPORT1 flag signal (FL1) is externally available through
the FL1/DT1 pin. This signal is used to drive the external serial
memory input reset.
With SPORT1 configured in UART mode, the SPORT0 serial
clock (SCLK0) is externally available through the SCLK1/SCLK0
pin. The SPORT1 data transmit (DT1) is externally available
through the FL1/DT1 pin.
SPORT0 Configuration
SPORT0 can be configured in the following modes: SPORT
mode, UART mode, and SPI mode.
SPORT0 can be configured for UART mode. In this mode, the DR0
and RFS0 signals of the internal serial port are connected together.
SPORT0 can be configured to operate as the master SPI interface. The SPI mode is set through Bit 14 of the MODECTRL
register. When SPORT0 is configured as the SPI interface, the
SPORT I/O pins assume the configuration shown in Table XI.
REV. A
–23–

ADMC(F)341
Table XI. SPORT0 Pin Assignment in SPI Mode
SPORT I/O Signal SPI Mode SPI Mode I/O
DT0 (Data Transmit) MOSI Output
(Master Output/
Slave Input)
DR0 MISO Input
(Master Input/
Slave Output)
TFS0 SS Output
(Slave Select)
RFS0 Unused N/A
SCLK0 SCK Output
(Serial Clock)
MODECTRL REGISTER (04)
SPORT1 BOOT MODE/UART MODE
DT1
FL1
DSP
CORE
SPORT1
TFS1
RFS1
DR1
SCLK1
The slave select pin automatically generates the select signal
at each word transfer. This pin can also be used as a generalpurpose I/O during the SPI transfer without affecting the
SPORT operations.
The SPI clock polarity and phase are configurable through
Bits 13 and 12 of the MODECTRL register. The SPI transfer
using clock phase is shown in Figures 20 and 21.
DT1/FL1
DR1
SCLK1/SCLK0
DT1
FL1
DSP
CORE
SPORT0
MODECTRL REGISTER (15)
SPORT0 SPORT MODE/UART MODE
TFS1
RFS1
SCLK1
SPI
CONTROL
BLOCK
MODECTRL REGISTER (14..13..12)
SPORT0 SPI INTERFACE CONTROL
DT0
DR0
TFS0
RFS0
Figure 19. SPORT0 and SPORT1 Internal Multiplexing (Simplified Diagram)
REV. A–24–

ADMC(F)341
SCK CYCLE #
SCK (POLARITY = 0)
SCK (POLARITY = 1)
MOSI
MOSO
SCK CYCLE #
SCK (POLARITY = 0)
SCK (POLARITY = 1)
MOSI
MOSO
12345 N
SS
SEE NOTE 1
SEE NOTE 2
NOTES
1. LSB OF PREVIOUSLY TRANSMITTED WORD
2. UNDEFINED
MSB
MSB
Figure 20. SPI Transfer Using Clock Phase CPHA = 0
12345 N
SS
SEE NOTE 1
SEE NOTE 2
MSB
MSB
LSB
LSB
LSB
LSB
NOTES
1. LSB OF PREVIOUSLY TRANSMITTED WORD
2. UNDEFINED
Figure 21. SPI Transfer Using Clock Phase CPHA = 1
REV. A
–25–

ADMC(F)341
Table XII. Peripheral Register Map
Address (hex) Name Bits Used Function
0x2000 ADC1 [15 ...4] ADC Results for I
0x2001 ADC2 [15 ...4] ADC Results for I
0x2002 ADC3 [15 ...4] ADC Results for I
0x2003 ADCAUX [15 ...4] ADC Results for VAUX
0x2004 PORTA_DIR [8 . . . 0] PA8 . . . PA0 Direction Setting
0x2005 PORTA_DATA [8 . . . 0] PA8 . . . PA0 Input/Output Data
0x2006 PORTA_INTEN [8 . . . 0] PA8 . . . PA0 Interrupt Enable
0x2007 PORTA_FLAG [8 . . . 0] PA8 . . . PA0 Interrupt Status
0x2008 PWMTM [15 ...0] PWM Period
0x2009 PWMDT [9 . . . 0] PWM Dead Time
0x200A PWMPD [9 . . . 0] PWM Pulse Deletion Time
0x200B PWMGATE [9 . . . 0] PWM Gate Drive Configuration
0x200C PWMCHA [15 ...0] PWM Channel A Pulsewidth
0x200D PWMCHB [15 ...0] PWM Channel B Pulsewidth
0x200E PWMCHC [15 ...0] PWM Channel C Pulsewidth
0x200F PWMSEG [8 . . . 0] PWM Segment Select
0x2010 AUXCH0 [7 . . . 0] AUX PWM Output 0
0x2011 AUXCH1 [7 . . . 0] AUX PWM Output 1
0x2012 AUXTM0 [7 . . . 0] Auxiliary PWM Frequency Value
0x2013 AUXTM1 [7 . . . 0] Auxiliary PWM Frequency Value/Offset
0x2014 Reserved
0x2015 MODECTRL [8 . . . 0] Mode Control Register
0x2016 SYSSTAT [3 . . . 0] System Status
0x2017 IRQFLAG [1 . . . 0] Interrupt Status
0x2018 WDTIMER [15 ...0] Watchdog Timer
0x2019 . . . 48 Reserved
0x2049 PORTA-SELECT [8 . . . 0] PA8 . . . PA0 Mode Select
0x204A . . . 5F Reserved
0x2060 PWMSYNCWT [7 . . . 0] PWMSYNC Pulsewidth
0x2061 PWMSWT [0] PWM S/W Trip Bit
0x2062 . . . 67 Reserved
0x2068 I
_TRIM [2 . . . 0] I
CONST
CONST
_TRIM
0x2069 SHA1_TM [15 ...0] Sample Hold Timer 1
0x206A SHA2_TM [15 ...0] Sample Hold Timer 2
0x206B SHA3_TM [15 ...0] Sample Hold Timer 3
0x2070 Reserved
0x2080 FMCR [15 ...0] Flash Memory Control Register (ADMCF341 Only)
0x2081 FMAR [11 ...0] Flash Memory Address Register (ADMCF341 Only)
0x2082 FMDRH [13 ...0] Flash Memory Data Register High (ADMCF341 Only)
0x2083 FMDRL [15 ...0] Flash Memory Data Register Low (ADMCF341 Only)
0x2084 . . . FF Reserved (ADMCF341 Only)
SENSE1
SENSE2
SENSE3
REV. A–26–

ADMC(F)341
Table XIII. DSP Core Registers
Address (hex) Name Bits Function
0x3FFF SYSCNTL [15 . . . 0] System Control Register
0x3FFE MEMWAIT [15 . . . 0] Memory Wait State Control Register
0x3FFD TPERIOD [15 . . . 0] Interval Timer Period Register
0x3FFC TCOUNT [15 . . . 0] Interval Timer Count Register
0x3FFB TSCALE [7 . . . 0] Interval Timer Scale Register
0x3FFA SPORT0_RX_WORDS1 [15 . . . 0] SPORT0 Multichannel Word 1 Receive
0x3FF9 SPORT0_RX_WORDS0 [15 . . . 0] SPORT0 Multichannel Word 0 Receive
0x3FF8 SPORT0_TX_WORDS1 [15 . . . 0] SPORT0 Multichannel Word 1 Transmit
0x3FF7 SPORT0_TX_WORDS0 [15 . . . 0] SPORT0 Multichannel Word 0 Transmit
0x3FF6 SPORT0_CTRL_REG [15 . . . 0] SPORT0 Control Register
0x3FF5 SPORT0_SCLKDIV [15 . . . 0] SPORT0 Clock Divide Register
0x3FF4 SPORT0_RFSDIV [15 . . . 0] SPORT0 Receive Frame Sync Divide
0x3FF3 SPORT0_AUTOBUF_CTRL [15 . . . 0] SPORT0 Autobuffer Control Register
0x3FF2 SPORT1_CTRL_REG [15 . . . 0] SPORT1 Control Register
0x3FF1 SPORT1_SCLKDIV [15 . . . 0] SPORT1 Clock Divide Register
0x3FF0 SPORT1_RFSDIV [15 . . . 0] SPORT1 Receive Frame Sync Divide
0x3FEF SPORT1_AUTOBUF_CTRL [15 ...0] SPORT1 Autobuffer Control Register
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
BOOT ⬇ MEMORY ⬇ FLASH ⬇ CODE
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
RESERVED
ALWAYS READ 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
RESERVED
ALWAYS READ 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
FLASH MEMORY CONTROL REGISTER
FLASH MEMORY ADDRESS REGISTER
0000000000000000
ADDRESS 11 ⬇ 0
FLASH MEMORY DATA REGISTER LOW (FMDRL)
0000000000000000
STATUS 5 ⬇ 0 DATA 7 ⬇ 0
FLASH MEMORY DATA REGISTER HIGH (FMDRH)
0000000000000000
0
000000000000001
0x2080
0x2081
0x2083
0x2082
DATA 23 ⬇ 8
MOST SIGNIFICANT BIT IS ON THE LEFT. FOR EXAMPLE, DATA23 IS BIT 15 OF FMDRH.
Figure 22. Configuration of Flash Memory Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
REV. A
–27–

ADMC(F)341
PWMTM (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PWMDT (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
00000000
PWMSEG (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
00 00 000
00000000
000000000
DM (0x 2008)
PWMTM
f
f
PWM
DM (0x2009)
PWMDT
TD =
DM (0x200F)
CLKOUT
=
2 PWMTM
2 PWMTM
f
CLKOUT
0 = NO CROSSOVER
1 = CROSSOVER
A CHANNEL CROSSOVER
B CHANNEL CROSSOVER
C CHANNEL CROSSOVER
PWMSYNCWT (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2
0100011100000000
PWMSWT (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
00 0 0
000000000000
1
Figure 23. Configuration of PWM Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
CH OUTPUT DISABLE
CL OUTPUT DISABLE
BH OUTPUT DISABLE
BL OUTPUT DISABLE
AH OUTPUT DISABLE
AL OUTPUT DISABLE
0
DM (0x2060)
PWMSYNCWT
T
PWMSYNC, ON
0
DM (0x2061)
0 = ENABLE
1 = DISABLE
PWMSYNCWT + 1
=
f
CLKOUT
REV. A–28–

0 = DISABLE
1 = ENABLE
PWMPD (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
00000000
PWMGATE (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
000000
LOW SIDE GATE CHOPPING
HIGH SIDE GATE CHOPPING
PWMCHA (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
DM (0x200A)
00000000
PWMPD
PWMPD
=
T
MIN
f
CLKOUT
DM (0x200B)
0000000000
GDCLK
GATE DRIVE CHOPPING FREQUENCY
f
CLKOUT
=
f
CHOP
4 (GDCLK + 1)
DM (0x200C)
ADMC(F)341
PWMCHB (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PWMCHC (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Figure 24. Configuration of Additional PWM Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
PWM CHANNEL A
DUTY CYCLE
DM (0x200D)
PWM CHANNEL B
DUTY CYCLE
DM (0x200E)
PWM CHANNEL C
DUTY CYCLE
REV. A
–29–

ADMC(F)341
PORTA_DIR (R/W)
14
15
0
13 12 11 10 9 8 7 6 5 4 3 2 1 0
0
0
0
000000000000
DM (0x2004)
0 = CLOCKOUT
1 = AUX0
0 = PWMSYNC
1 = AUX1
PA0-PA8
PORTA_DATA (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
00000000
PORTA_SELECT (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0000
0 = AUX0/CLOCKOUT
0 = AUX1/PWMSYNC
1 = PA8
1 = PA7
0 = DR1
1 = PA6
0 = DT1/FL1
1 = PA5
1000
00000000
PA0-PA8
11111111
0 = LOW LEVEL
1 = HIGH LEVEL
0 = INPUT
1 = OUTPUT
DM (0x2005)
DM (0x2049)
0 = DT0
1 = PA1
0 = DR0
1 = PA0
0 = RFS0
1 = PA2
0 = TFS0
1 = PA3
0 = SCLK1/SCLK0
1 = PA4
Figure 25. Configuration of PIO Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
REV. A–30–

ADMC(F)341
PORTA_INTEN (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0000
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
00000000
PORTA_FLAG (R/W)
000000000000
Figure 26. Configuration of Additional PIO Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset. Reserved bits are shown on a gray field—these
bits should always be written as shown.
DM (0x2006)
0000
0 = INTERRUPT DISABLE
1 = INTERRUPT ENABLE
DM (0x2007)
0000
0 = INTERRUPT DISABLE
1 = INTERRUPT ENABLE
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
AUXCH0 (R/W)
AUXCH1 (R/W)
AUXTM0 (R/W)
AUXTM1 (R/W)
000000000000
T
= 2 (AUXCH0)
ON, AUX0
000000000000
T
= 2 (AUXCH1)
ON, AUX1
111111111111
AUX0 PERIOD = 2 (AUXTM0 + 1)
AUX1 PERIOD = 2 (AUXTM1)
OFFSET = 2 (AUXTM1)
Figure 27. Configuration of Auxiliary PWM Register
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
0000
0000
1111
1111111111111111
DM (0x2010)
t
CK
DM (0x2011)
t
CK
DM (0x2012)
DM (0x2013)
t
CK
t
CK
t
CK
REV. A
–31–

ADMC(F)341
ADCAUX (R)
I
CONST
ADC1 (R)
ADC2 (R)
ADC3 (R)
_TRIM (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0000000000000000
0000
DM (0x2000)
CONVERSION
STATUS
DM (0x2001)
0000
CONVERSION
STATUS
DM (0x2002)
0000
CONVERSION
STATUS
DM (0x2003)
0000
DM (0x2068)
0 = DATA READY
1 = NOT READY
0 = DATA READY
1 = NOT READY
0 = DATA READY
1 = NOT READY
I
MIN = BITS 0 – 2 CLEARED.
CONST
I
MAX = BITS 0 – 2 SET.
CONST
SHA1_TM (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
DM (0x2069)
0000000000000000
SHA2 _TM (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
DM (0x206A)
0000000000000000
SHA3 _TM (R/W)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
DM (0x206B)
0000000000000000
Figure 28. Configuration of ADC Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
REV. A–32–

15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MODECTRL (R/W)
0000000000000000
ADMC(F)341
DM (0x2015)
0 = SPORT MODE
1 = UART MODE
0 = SPORT
1 = SPI MODE
0 = STANDARD
1 = REVERSE
0 = PHA0
1 = PHA1
0 = I
SENSE
1 = VOLTAGE
0 = I
SENSE
1 = VOLTAGE
0 = I
SENSE
1 = VOLTAGE
0 = OFFSET MODE
1 = INDEPENDENT MODE
SPORT 0
MODE SELECT
SPORT 0
SPI MODE
SPI CLOCK
POLARITY
SPI CLOCK
CHANNEL 3
SELECTION
CHANNEL 2
SELECTION
CHANNEL 1
SELECTION
AUX PWM
MODE SELECT
PHASE
ADC MUX CONTROL
00 VAUX0
01 VAUX1
10 VAUX2
11 VREF
PWMTRIP
INTERRUPT
PWMSYNC
INTERRUPT
SPORT1 MODE
SELECT
ADC MUX
CONTROL
PWM UPDATE
MODE SELECT
0 = DISABLE
1 = ENABLE
0 = DISABLE
1 = ENABLE
0 = BOOT MODE
1 = UART MODE
NOT USED IN ADMCF341
SET BIT TO ZERO
0 = SINGLE UPDATE MODE
1 = DOUBLE UPDATE MODE
0 = CLKIN RATE
1 = CLKOUT RATE
ADC
COUNTER
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 = 1ST HALF OF PWM
CYCLE
1 = 2ND HALF OF PWM
CYCLE
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PWM TIMER
STATUS
SYSSTAT (R)
IRQFLAG (R)
WDTIMER (W)
00000000000
01
000000000000
0000000000000000
0000
DM (0x2016)
PWMTRIP
PIN STATUS
WATCHDOG
STATUS
DM (0x2017)
PWMTRIP INTERRUPT
PWMSYNC INTERRUPT
DM (0x2018)
0 = LOW
1 = HIGH
0 = NORMAL
1 = WATCHDOG RESET
OCCURRED
0 = NO INTERRUPT
1 = INTERRUPT
OCCURRED
Figure 29. Configuration of Status/Control Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
REV. A
–33–

ADMC(F)341
ICNTL
43210
11000
DSP REGISTER
0 = DISABLE
1 = ENABLE
INTERRUPT FORCE INTERRUPT CLEAR
IRQ2
SPORT0 TRANSMIT
SPORT0 RECEIVE
SOFTWARE 1
SOFTWARE 0
SPORT1 TRANSMIT OR IRQ1
SPORT1 RECEIVE OR IRQ0
INTERRUPT NESTING
IFC
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
IRQ0 SENSITIVITY
IRQ1 SENSITIVITY
IRQ2 SENSITIVITY
0 = LEVEL
1 = EDGE
DSP REGISTER
0000000000000000
TIMER
SPORT1 RECEIVE OR IRQ0
SPORT1 TRANSMIT OR IRQ1
SOFTWARE 0
SOFTWARE 1
SPORT0 RECEIVE
SPORT0 TRANSMIT
TIMER
IMASK (R/W)
0000000000000110
DSP REGISTER
TIMER
SPORT1 RECEIVE
(OR IRQ0)
SPORT1 TRANSMIT
(OR IRQ1)
SOFTWARE 0
0 = DISABLE
(MASK)
1 = ENABLE
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PERIPHERAL (OR IRQ2)
SPORT0 TRANSMIT
SPORT0 RECEIVE
SOFTWARE 1
Figure 30. Configuration of Interrupt Control Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
IRQ2
0 = DISABLE
(MASK)
1 = ENABLE
REV. A–34–

ADMC(F)341
00
SPORT1 CONFIGURE
MEMWAIT (R/W)
SYSCNTL (R/W)
11000000011111
0 = FI, FO, IRQ0, IRQ1, SCLK
1 = SERIAL PORT
0 = DISABLED
1 = DISABLED
0 = DISABLED
1 = ENABLED
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SPORT0 ENABLE
SPORT1 ENABLE
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
1
1111111 11111111
Figure 31. Configuration of Registers
Default bit values are shown; if no value is shown, the bit field is undefined at reset.
Reserved bits are shown on a gray field—these bits should always be written as shown.
DM (0x3FFF)
DM (0x3FFE)
REV. A
–35–

ADMC(F)341
OUTLINE DIMENSIONS
28-Lead Standard Small Outline Package [SOIC]
Wide Body
(RW-28)
Dimensions shown in millimeters and (inches)
18.10 (0.7126)
17.70 (0.6969)
28 15
1
0.30 (0.0118)
0.10 (0.0039)
COPLANARITY
0.10
CONTROLLING DIMENSIONS ARE IN MILLIMETERS; INCH DIMENSIONS
(IN PARENTHESES) ARE ROUNDED-OFF MILLIMETER EQUIVALENTS FOR
REFERENCE ONLY AND ARE NOT APPROPRIATE FOR USE IN DESIGN
1.27 (0.0500)
COMPLIANT TO JEDEC STANDARDS MS-013AE
BSC
0.51 (0.0201)
0.33 (0.0130)
14
2.65 (0.1043)
2.35 (0.0925)
SEATING
PLANE
7.60 (0.2992)
7.40 (0.2913)
10.65 (0.4193)
10.00 (0.3937)
0.32 (0.0126)
0.23 (0.0091)
0.75 (0.0295)
0.25 (0.0098)
8
0
45
1.27 (0.0500)
0.40 (0.0157)
Revision History
Location Page
10/02—Data Sheet changed from REV. 0 to REV. A.
ADMCF341 changed to ADMC(F)341, unless otherwise noted . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Universal
Title Change . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Change to FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Change to Memory Block of FUNCTIONAL BLOCK DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Changes to VOLTAGE REFERENCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Change to FLASH MEMORY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Changes to ABSOLUTE MAXIMUM RATINGS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Changes to ORDERING GUIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Changes to Table XII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Updated OUTLINE DIMENSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
C02470–0–10/02(A)
–36–
PRINTED IN U.S.A.
REV. A
 Loading...
Loading...