

Single Chip DSP
a
TARGET APPLICATIONS
Washing Machines, Refrigerator Compressors, Fans,
Pumps, Industrial Variable Speed Drives
FEATURES
26 MIPS Fixed-Point DSP Core
Single Cycle Instruction Execution (38.5 ns)
ADSP-2100 Family Code Compatible
Independent Computational Units
ALU
Multiplier/Accumulator
Barrel Shifter
Multifunction Instructions
Single Cycle Context Switch
Powerful Program Sequencer
Zero Overhead Looping
Conditional Instruction Execution
Two Independent Data Address Generator
Memory Configuration
2K 24-Bit Program Memory RAM
2K 24-Bit Program Memory ROM
1K 16-Bit Data Memory RAM
Three-Phase 16-Bit PWM Generator
16-Bit Center-Based PWM Generator
Programmable Deadtime and Narrow Pulse Deletion
Motor Controller
ADMC331
Edge Resolution to 38.5 ns
198 Hz Minimum Switching Frequency
Double/Single Duty Cycle Update Mode Control
Programmable PWM Pulsewidth
Suitable for AC Induction and Synchronous Motors
Special Signal Generation for Switched Reluctance
Motors
Special Crossover Function for Brushless DC Motors
Individual Enable and Disable for all PWM Outputs
High Frequency Chopping Mode for Transformer
Coupled Gate Drives
Hardwired Polarity Control
External PWMTRIP Pin
Seven Analog Input Channels
Acquisition Synchronized to PWM Switching
Frequency
Conversion Speed Control
24 Bits of Digital I/O Port
Bit Configurable as Input or Output
Change of State Interrupt Support
Two 8-Bit Auxiliary PWM Timers
Synchronized Analog Output
Programmable Frequency
0% to 100% Duty Cycle
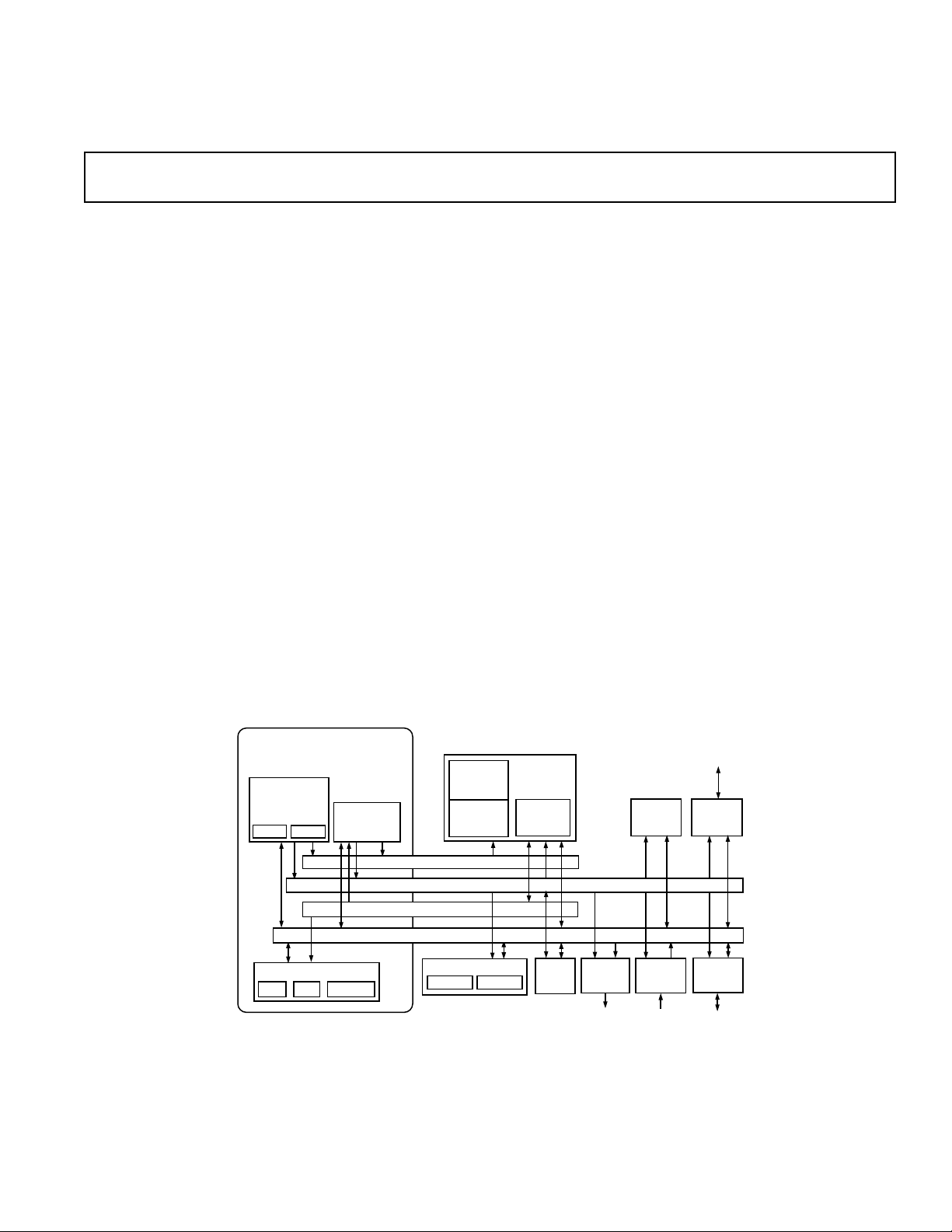
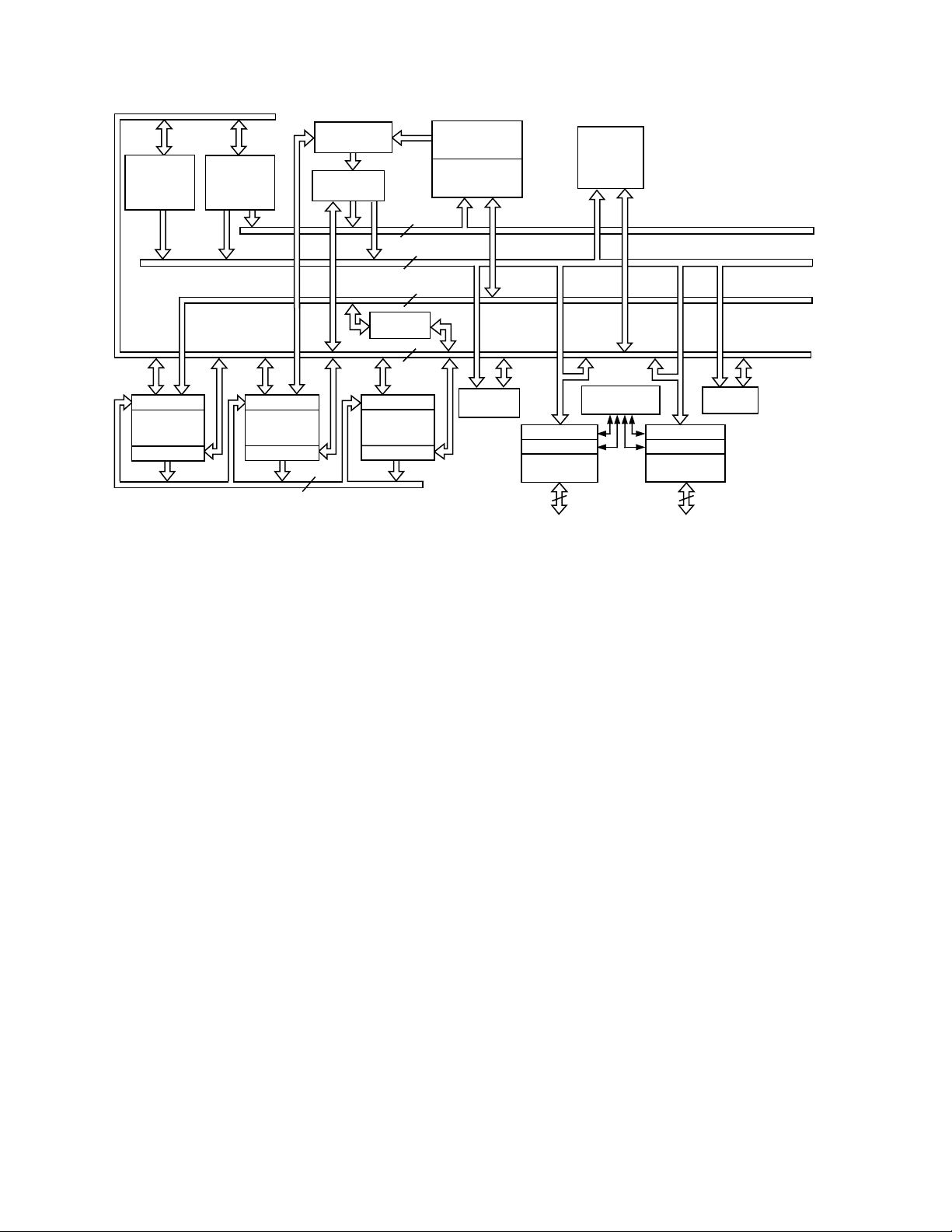
FUNCTIONAL BLOCK DIAGRAM
ADSP-2100 BASE
ARCHITECTURE
DATA
ADDRESS
GENERATORS
DAG 2
DAG 1
ARITHMETIC UNITS
MAC
ALU
PROGRAM
SEQUENCER
PROGRAM MEMORY ADDRESS
DATA MEMORY ADDRESS
PROGRAM MEMORY DATA
DATA MEMORY DATA
SHIFTER
PROGRAM
2K 24
PROGRAM
2K 24
SERIAL PORTS
SPORT 0
REV. B
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
(Continued on page 7)
ROM
RAM
MEMORY
AUX
PWM
WATCH-
DOG
TIMER
7
ANALOG
INPUTS
24-BIT
PIO
16-BIT
3-PHASE
PWM
DATA
RAM
1K 16
2 8 BIT
SPORT 1
TIMER
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2000
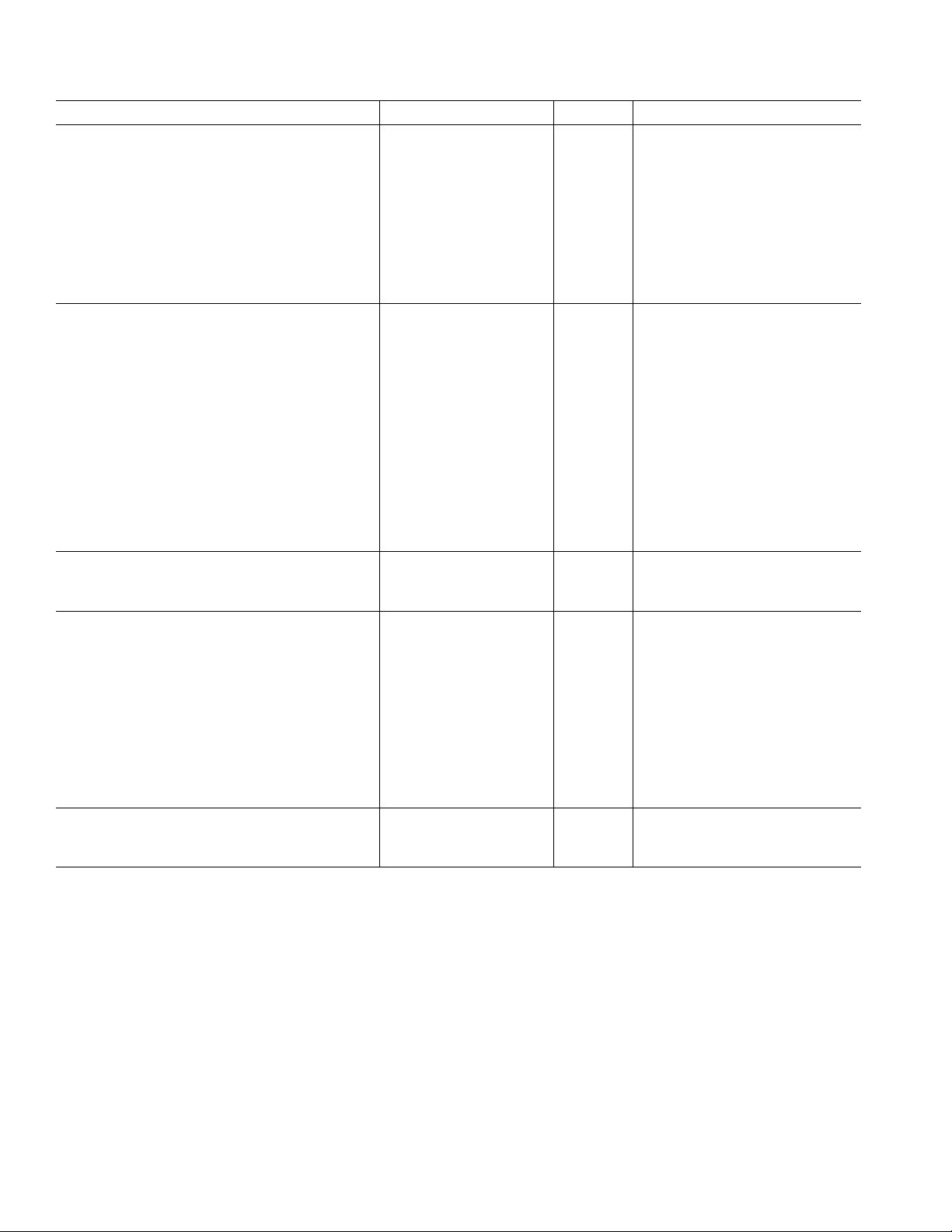
ADMC331–SPECIFICATIONS
(VDD = +5 V 10%, GND = SGND = 0 V, TA = –40C to +85C, unless otherwise noted)
Parameter Min Typ Max Units Conditions/Comments
ANALOG-TO-DIGITAL CONVERTER Charging Capacitor = 1000 pF
2.5 kHz Sample Frequency
Signal Input 0.3 3.3
Resolution 12
1
2
V
Bits No Missing Codes
Converter Linearity 2 12 LSBs
Zero Offset 5 50 mV
Channel-to-Channel Comparator Match 22 mV
Comparator Delay 600 ns
Current Source 10.16 12.7 15.24 µA
Current Source Linearity 2 %
ELECTRICAL CHARACTERISTICS
V
Logic Low 0.8 V
IL
Logic High 2 V
V
IH
V
Low Level Output Voltage 0.4 V IOL = 2 mA
OL
V
Low Level Output Voltage (XTAL) 0.5 V IOL = 2 mA
OL
High Level Output Voltage 4 V I
V
OH
I
Low Level Input Current –10 µAV
IL
I
High Level Input Current 10 µAV
IH
I
Hi-Level PWMTRIP, PIO0–PIO23 Current 100 µA@ V
IH
I
Hi-Level PWMPOL/PWMSR Current 10 µA@ V
IH
I
Lo-Level PWMTRIP, PIO0–PIO23 Current 10 µA@ V
IL
Lo-Level PWMPOL/PWMSR Current 100 µA@ V
I
IL
I
Supply Current (Dynamic) 120 mA 13 MHz DSP Clock
DD
I
Supply Current (Idle) 60 mA 13 MHz DSP Clock
DD
= 0.5 mA
OH
= 0 V
IN
= V
IN
DD
= max, VIN = VDD max
DD
= max, VIN = VDD max
DD
= max, VIN = 0 V
DD
= max, VIN = 0 V
DD
REFERENCE VOLTAGE OUTPUT
Voltage Level 2.2 2.55 2.9 V 100 µA Load
Output Voltage Change T
MIN
to T
MAX
20 mV
16-BIT PWM TIMER
Counter Resolution 16 Bits
Edge Resolution (Single Update Mode) 76.9 ns 13 MHz CLKIN
Edge Resolution (Double Update Mode) 38.5 ns 13 MHz CLKIN
Programmable Deadtime Range 0 78 µs 13 MHz CLKIN
Programmable Deadtime Increments 76.9 ns 13 MHz CLKIN
Programmable Pulse Deletion Range 0 78 µs 13 MHz CLKIN
Programmable Pulse Deletion Increments 76.9 ns 13 MHz CLKIN
PWM Frequency Range 0.198 kHz 13 MHz CLKIN
PWMSYNC Pulsewidth (T
) 0.077 9.8 µs 13 MHz CLKIN
CRST
Gate Drive Chop Frequency Range 0.02 6.5 MHz 13 MHz CLKIN
AUXILIARY PWM TIMERS
Resolution 8 Bits
PWM Frequency 0.051 6.5 MHz 13 MHz CLKIN
NOTES
1
Signal input max V = 3.5 V if VDD = 5 V ± 5%.
2
Resolution varies with PWM switching frequency (13 MHz Clock in Double Update mode), 50.7 kHz = 9 bits, 6.3 kHz = 12 bits.
Specifications subject to change without notice.
–2–
REV. B
ADMC331
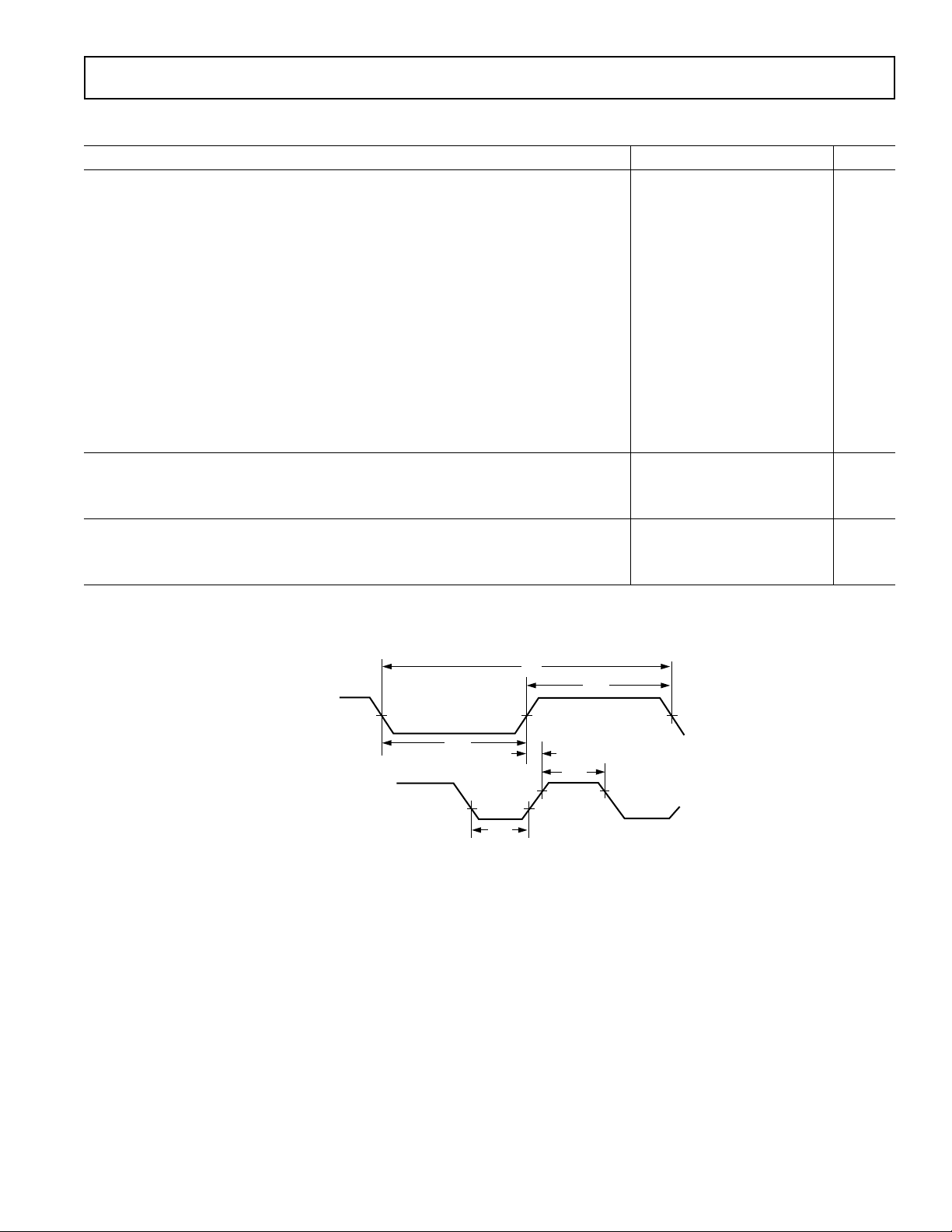
CLKIN
CLKOUT
t
CKOH
t
CKI
t
CKIH
t
CKH
t
CKL
t
CKIL
TIMING PARAMETERS
Parameter Min Max Unit
Clock Signals
tCK is defined as 0.5 t
to half the instruction rate; a 13 MHz input clock (which is equivalent to 76.9 ns)
yields a 38.5 ns processor cycle (equivalent to 26 MHz). t
of 0.5 t
period should be substituted for all relevant timing parameters to obtain
CKI
specification value.
Example: t
= 0.5 tCK – 10 ns = 0.5 (38.5 ns) – 10 ns = 9.25 ns.
CKH
Timing Requirements:
t
CKI
t
CKIL
t
CKIH
Switching Characteristics:
t
CKL
t
CKH
t
CKOH
Control Signals
Timing Requirement:
t
RSP
PWM Shutdown Signals
Timing Requirement:
t
PWMTPW
NOTE
1
Applies after power-up sequence is complete. Internal phase lock loop requires no more than 2000 CLKIN cycles assuming stable CLKIN (not including crystal
oscillator start-up time).
. The ADMC331 uses an input clock with a frequency equal
CKI
values within the range
CK
CLKIN Period 76.9 150 ns
CLKIN Width Low 20 ns
CLKIN Width High 20 ns
CLKOUT Width Low 0.5 tCK – 10 ns
CLKOUT Width High 0.5 tCK – 10 ns
CLKIN High to CLKOUT High 0 20 ns
RESET Width Low 5 t
PWMTRIP Width Low 2 t
CK
CK
1
ns
ns
Figure 1. Clock Signals
–3–REV. B
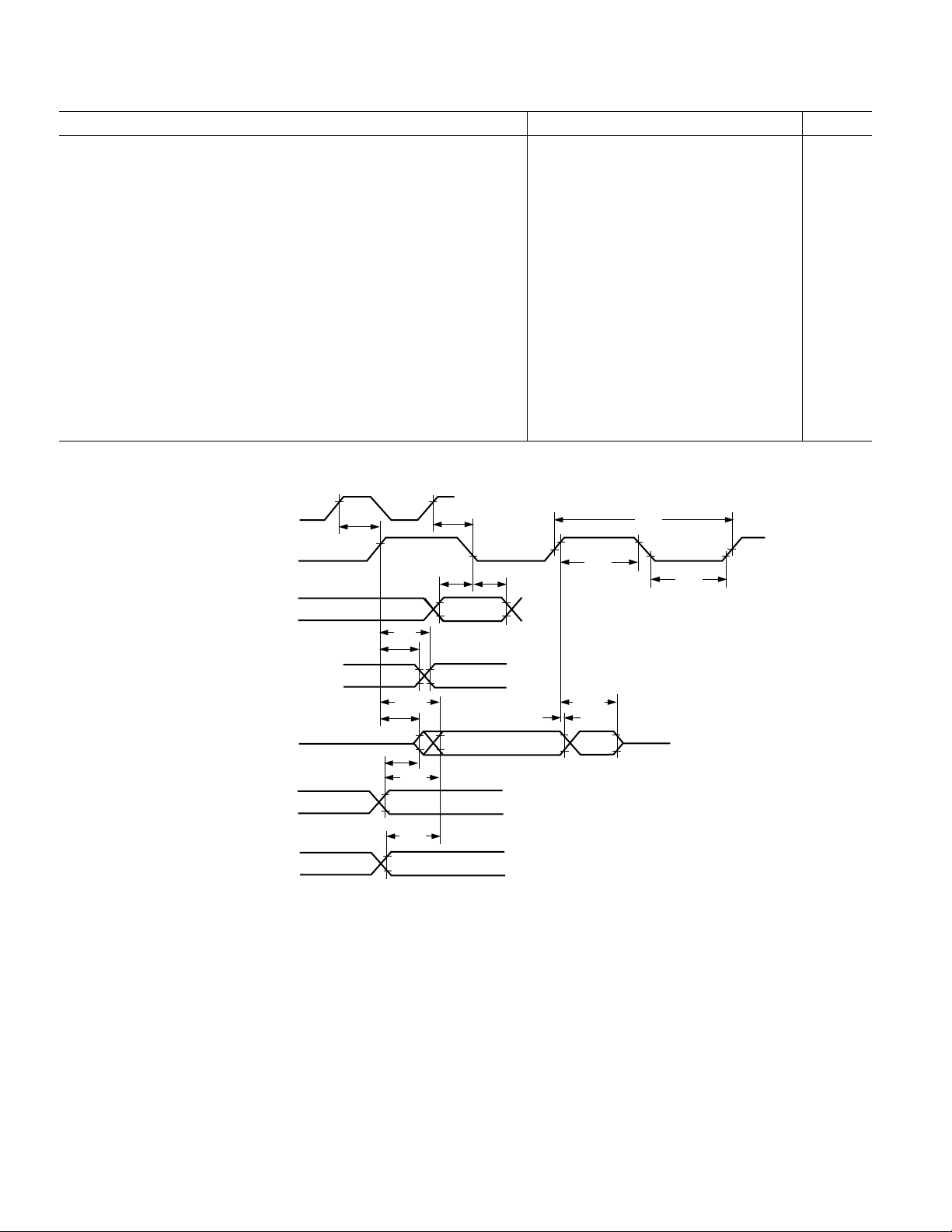
ADMC331
Parameter Min Max Unit
Serial Ports
Timing Requirements:
t
SCK
t
SCS
t
SCH
t
SCP
Switching Characteristics:
t
CC
t
SCDE
t
SCDV
t
RH
t
RD
t
SCDH
t
SCDD
t
TDE
t
TDV
t
RDV
SCLK Period 100 ns
DR/TFS/RFS Setup before SCLK Low 15 ns
DR/TFS/RFS Hold after SCLK Low 20 ns
SCLKIN Width 40 ns
CLKOUT High to SCLK
OUT
0.25 t
CK
0.25 tCK + 20 ns
SCLK High to DT Enable 0 ns
SCLK High to DT Valid 30 ns
TFS/RFS
TFS/RFS
Hold after SCLK High 0 ns
OUT
Delay from SCLK High 30 ns
OUT
DT Hold after SCLK High 0 ns
SCLK High to DT Disable 30 ns
TFS (Alt) to DT Enable 0 ns
TFS (Alt) to DT Valid 25 ns
RFS (Multichannel, Frame Delay Zero) to DT Valid 30 ns
CLKOUT
SCLK
DR
RFS
TFS
RFS
OUT
TFS
OUT
DT
TFS
(ALTERNATE
FRAME MODE)
(MULTICHANNEL MODE,
FRAME DELAY 0 [MFD = 0])
RFS
t
CC
IN
IN
t
t
RH
SCDE
t
t
TDE
t
RD
SCDV
t
t
TDV
RDV
t
CC
t
t
SCDD
t
t
SCH
SCS
t
SCDH
SCP
t
SCK
t
SCP
Figure 2. Serial Ports
–4–
REV. B
ADMC331
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage (VDD) . . . . . . . . . . . . . . . . . . –0.3 V to +7.0 V
Supply Voltage (AV
Input Voltage . . . . . . . . . . . . . . . . . . . . –0.3 V to V
Output Voltage Swing . . . . . . . . . . . . . .–0.3 V to V
) . . . . . . . . . . . . . . . . .–0.3 V to +7.0 V
DD
+ 0.3 V
DD
+ 0.3 V
DD
*Stresses greater than those listed above may cause permanent damage to the
device. These are stress ratings only; functional operation of the device at these
or any other conditions greater than those indicated in the operational sections of
this specification is not implied. Exposure to absolute maximum rating conditions
for extended periods may affect device reliability.
Operating Temperature Range (Ambient) . . . –40°C to +85°C
Storage Temperature Range . . . . . . . . . . . . –65°C to +150°C
Lead Temperature (5 sec) . . . . . . . . . . . . . . . . . . . . . .+280°C
ORDERING GUIDE
Temperature Instruction Package Package
Model Range Rate Description Option
ADMC331BST –40°C to +85°C 26 MHz 80-Lead Plastic Thin Quad Flatpack (TQFP) ST-80
ADMC331-ADVEVALKIT Development Tool Kit
ADMC331-PB Evaluation/Processor Board
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the ADMC331 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high-energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
–5–REV. B
ADMC331
PIN FUNCTION DESCRIPTIONS
Pin Pin Pin
No. Type Name
1 O/P VREF
2 SUP AV
DD
3 GND GND
4 BIDIR PIO9
5 BIDIR PIO8
6 BIDIR PIO7
7 BIDIR PIO6
8 BIDIR PIO5
9 BIDIR PIO4
10 BIDIR PIO3
11 BIDIR PIO2
12 BIDIR PIO1
13 BIDIR PIO0
14 O/P AUX1
15 O/P AUX0
16 BIDIR PIO10
17 BIDIR PIO11
18 SUP V
DD
19 I/P PWMTRIP
20 GND GND
Pin Pin Pin
No. Type Name
21 SUP V
DD
22 GND GND
23 BIDIR PIO12
24 BIDIR PIO13
25 O/P PWMSYNC
26 O/P CL
27 O/P CH
28 O/P BL
29 O/P BH
30 O/P AL
31 O/P AH
32 BIDIR PIO14
33 BIDIR PIO15
34 BIDIR PIO16
35 SUP V
DD
36 GND GND
37 BIDIR PIO17
38 GND GND
39 BIDIR PIO18
40 GND GND
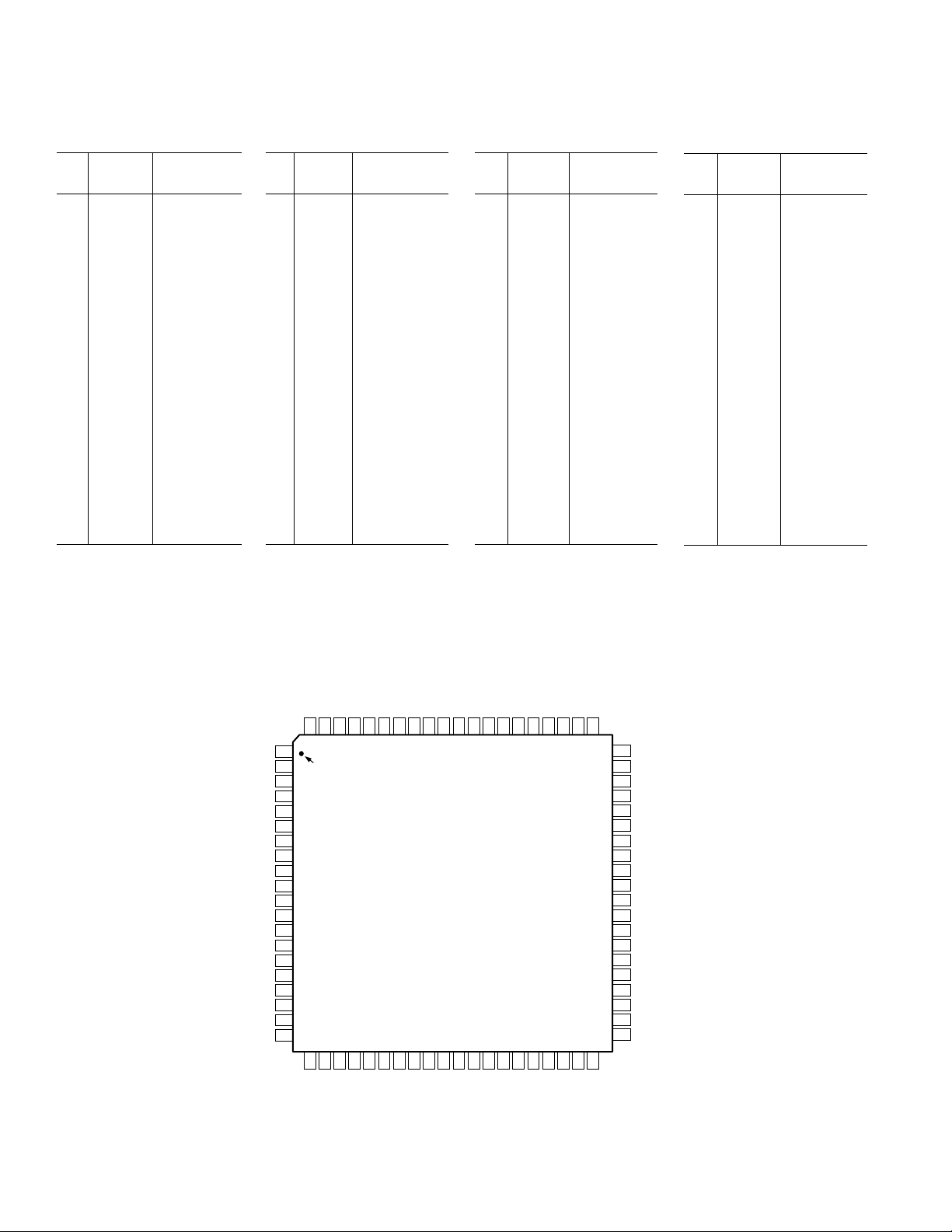
PIN CONFIGURATION
80-Lead Plastic Thin Quad Flatpack (TQFP)
Pin Pin Pin
No. Type Name
41 GND GND
42 GND GND
43 O/P XTAL
44 I/P CLKIN
45 I/P PWMPOL
46 I/P RESET
47 GND GND
48 SUP V
49 BIDIR PIO19
50 BIDIR PIO20
51 O/P CLKOUT
52 GND GND
53 O/P DT1
54 BIDIR TFS1
55 BIDIR RFS1/SROM
56 I/P DR1A
57 I/P DR1B
58 BIDIR SCLK1
59 O/P DT0
60 I/P PWMSR
(ST-80)
DD
Pin Pin Pin
No. Type Name
61 BIDIR TFS0
62 BIDIR RFS0
63 I/P DR0
64 BIDIR SCLK0
65 BIDIR PIO21
66 BIDIR PIO22
67 BIDIR PIO23
68 SUP V
DD
69 GND GND
70 GND AGND
71 I/P CAPIN
72 O/P ICONST
73 GND SGND
74 I/P V1
75 I/P V2
76 I/P V3
77 I/P VAUX0
78 I/P VAUX1
79 I/P VAUX2
80 I/P VAUX3
VREF
AV
GND
PIO9
PIO8
PIO7
PIO6
PIO5
PIO4
PIO3
PIO2
PIO1
PIO0
AUX1
AUX0
PIO10
PIO11
V
PWMTRIP
GND
VAUX3
80
7978777675
1
PIN 1
2
DD
DD
IDENTIFIER
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
DD
V
GND
PIO12
25
24
PIO13
PWMSYNC
V2
26
CL
V1
74
27
CH
CAPIN
ICONST
SGND
73
727170
ADMC331
TOP VIEW
(Not to Scale)
30
28
29
AL
BL
BH
V3
VAUX0
VAUX1
VAUX2
DD
V
GND
AGND
31
AH
PIO22
PIO23
69686766656463
32
35
33
34
DD
V
PIO16
PIO15
PIO14
PIO21
36
GND
SCLK0
37
38
GND
PIO17
DR0
RFS0
62
39
GND
PIO18
TFS0
61
40
60
PWMSR
DT0
59
SCLK1
58
DR1B
57
DR1A
56
55
RFS1/ SROM
TFS1
54
53
DT1
GND
52
51
CLKOUT
50
PIO20
PIO19
49
V
48
DD
GND
47
46
RESET
45
PWMPOL
CLKIN
44
XTAL
43
GND
42
GND
41
–6–
REV. B

ADMC331
(Continued from page 1)
Two Programmable Operational Modes
Independent Mode
Offset Mode
16-Bit Watchdog Timer
Programmable 16-Bit Internal Timer with Prescaler
Two Double Buffered Synchronous Serial Ports
Four Boot Load Protocols via SPORT1
2
PROM/SROM Booting
E
UART Booting (SCI Compatible) with Autobaud
Feature
Synchronous Master Booting with Autobaud Feature
Synchronous Slave Booting with Autobaud Feature
Debugger Interface via SPORT1 with Autobaud (UART
and Synchronous Supported)
ROM Utilities
Full Debugger for Program Development
Preprogrammed Math Functions
Preprogrammed Motor Control Functions—Vector
Transformations
80-Lead TQFP Package
Industrial Temperature Range –40C to +85C
GENERAL DESCRIPTION
The ADMC331 is a low cost, single-chip DSP-based controller,
suitable for ac induction motors, permanent magnet synchronous motors, brushless dc motors, and switched reluctance
motors. The ADMC331 integrates a 26 MIPS, fixed-point DSP
core with a complete set of motor control peripherals that permits fast, efficient development of motor controllers.
The DSP core of the ADMC331 is the ADSP-2171, which is
completely code compatible with the ADSP-2100 DSP family
and combines three computational units, data address generators and a program sequencer. The computational units comprise an ALU, a multiplier/accumulator (MAC) and a barrel
shifter. The ADSP-2171 adds new instructions for bit manipulation, multiplication (X squared), biased rounding and global
interrupt masking. In addition, two flexible, double-buffered,
bidirectional, synchronous serial ports are included in the
ADMC331.
The ADMC331 provides 2K × 24-bit program memory RAM,
2K × 24-bit program memory ROM and 1K × 16-bit data
memory RAM. The program and data memory RAM can be
boot loaded through the serial port from a Serial ROM (SROM),
E2PROM, asynchronous (UART) connection or synchronous
connection. The program memory ROM includes a monitor
that adds software debugging features through the serial port. In
addition, a number of preprogrammed mathematical and motor
control functions are included in the program memory ROM.
The motor control peripherals of the ADMC331 include a
16-bit center-based PWM generation unit that can be used to
produce high accuracy PWM signals with minimal processor
overhead and seven analog input channels. The device also
contains two auxiliary 8-bit PWM channels, a 16-bit watchdog timer and expanded capability through the serial ports
and 24-bit digital I/O ports.
–7–REV. B
ADMC331
DATA
ADDRESS
GENERATOR
#1
INPUT REGS
ALU
OUTPUT REGS
DATA
ADDRESS
GENERATOR
#2
INPUT REGS
OUTPUT REGS
MAC
INSTRUCTION
PROGRAM
SEQUENCER
16
R BUS
REGISTER
OUTPUT REGS
14
14
24
BUS
EXCHANGE
16
INPUT REGS
SHIFTER
PM ROM
2K 24
PM RAM
2K 24
CONTROL
LOGIC
PMA BUS
DMA BUS
PMD BUS
DMD BUS
TRANSMIT REG
RECEIVE REG
Figure 3. DSP Core Block Diagram
SERIAL
PORT 0
5
DM RAM
1K 16
COMPANDING
CIRCUITRY
TRANSMIT REG
RECEIVE REG
SERIAL
PORT 1
6
TIMER
DSP CORE ARCHITECTURE OVERVIEW
Figure 3 is an overall block diagram of the DSP core of the
ADMC331, which is based on the fixed-point ADSP-2171. The
flexible architecture and comprehensive instruction set of the
ADSP-2171 allows the processor to perform multiple operations
in parallel. In one processor cycle (38.5 ns with a 13 MHz
CLKIN) the DSP core can:
• Generate the next program address.
• Fetch the next instruction.
• Perform one or two data moves.
• Update one or two data address pointers.
• Perform a computational operation.
This all takes place while the processor continues to:
• Receive and transmit through the serial ports.
• Decrement the interval timer.
• Generate three-phase PWM waveforms for a power inverter.
• Generate two signals using the 8-bit auxiliary PWM timers.
• Acquire four analog signals.
• Decrement the watchdog timer.
The processor contains three independent computational units:
the arithmetic and logic unit (ALU), the multiplier/accumulator
(MAC) and the shifter. The computational units process 16-bit
data directly and have provisions to support multiprecision computations. The ALU performs a standard set of arithmetic and
logic operations; division primitives are also supported. The
MAC performs single-cycle multiply, multiply/add, multiply/
subtract operations with 40 bits of accumulation. The shifter
performs logical and arithmetic shifts, normalization, denormalization
and derive exponent operations. The shifter can be used to efficiently implement numeric format control including floatingpoint representations.
The internal result (R) bus directly connects the computational
units so that the output of any unit may be the input of any unit
on the next cycle.
A powerful program sequencer and two dedicated data address
generators ensure efficient delivery of operands to these computational units. The sequencer supports conditional jumps and
subroutine calls and returns in a single cycle. With internal loop
counters and loop stacks, the ADMC331 executes looped code
with zero overhead; no explicit jump instructions are required
to maintain the loop.
Two data address generators (DAGs) provide addresses for
simultaneous dual operand fetches from data memory and
program memory. Each DAG maintains and updates four address pointers (I registers). Whenever the pointer is used to
access data (indirect addressing), it is post-modified by the
value in one of four modify (M registers). A length value may
be associated with each pointer (L registers) to implement automatic modulo addressing for circular buffers. The circular buffering feature is also used by the serial ports for automatic data
transfers to and from on-chip memory. DAG1 generates only
data memory address but provides an optional bit-reversal
capability. DAG2 may generate either program or data memory
addresses, but has no bit-reversal capability.
Efficient data transfer is achieved with the use of five internal
buses:
• Program Memory Address (PMA) Bus
• Program Memory Data (PMD) Bus
• Data Memory Address (DMA) Bus
• Data Memory Data (DMD) Bus
• Result (R) Bus
–8–
REV. B

ADMC331
Program memory can store both instructions and data, permitting the ADMC331 to fetch two operands in a single cycle—
one from program memory and one from data memory. The
ADMC331 can fetch an operand from on-chip program memory
and the next instruction in the same cycle.
The ADMC331 writes data from its 16-bit registers to the 24-bit
program memory using the PX register to provide the lower
eight bits. When it reads data (not instructions) from 24-bit
program memory to a 16-bit data register, the lower eight bits
are placed in the PX register.
The ADMC331 can respond to a number of distinct DSP core
and peripheral interrupts. The DSP core interrupts include
serial port receive and transmit interrupts, timer interrupts,
software interrupts and external interrupts. The motor control
peripherals also produce interrupts to the DSP core.
The two serial ports (SPORTs) provide a complete synchronous
serial interface with optional companding in hardware and a
wide variety of framed and unframed data transmit and receive
modes of operation. Each SPORT can generate an internal
programmable serial clock or accept an external serial clock.
Boot loading of both the program and data memory RAM of the
ADMC331 is through the serial port SPORT1.
A programmable interval counter is also included in the DSP
core and can be used to generate periodic interrupts. A 16-bit
count register (TCOUNT) is decremented every n processor
cycle, where n–1 is a scaling value stored in the 8-bit TSCALE
register. When the value of the counter reaches zero, an interrupt is
generated and the count register is reloaded from a 16-bit period register (TPERIOD).
The ADMC331 instruction set provides flexible data moves and
multifunction (one or two data moves with a computation) instructions. Each instruction is executed in a single 38.5 ns processor
cycle (for a 13 MHz CLKIN). The ADMC331 assembly language uses an algebraic syntax for ease of coding and readability. A comprehensive set of development tools support program
development. For further information on the DSP core, refer to
the ADSP-2100 Family User’s Manual, Third Edition, with par-
ticular reference to the ADSP-2171.
Serial Ports
The ADMC331 incorporates two complete synchronous serial
ports (SPORT0 and SPORT1) for serial communication and
multiprocessor communication. Following is a brief list of capabilities of the ADMC331 SPORTs. Refer to the ADSP-2100
Family User’s Manual, Third Edition, for further details.
• SPORTs are bidirectional and have a separate, double-buffered
transmit and receive section.
• SPORTs can use an external serial clock or generate their
own serial clock internally.
• SPORTs have independent framing for the receive and transmit sections. Sections run in a frameless mode or with frame
synchronization signals internally or externally generated. Frame
synchronization signals are active high or inverted, with either of
two pulsewidths and timings.
• SPORTs support serial data word lengths from 3 bits to 16
bits and provide optional A-law and µ-law companding ac-
cording to ITU (formerly CCITT) recommendation G.711.
• SPORT receive and transmit sections can generate unique
interrupts on completing a data word transfer.
• SPORTs can receive and transmit an entire circular buffer of
data with only one overhead cycle per data word. An interrupt
is generated after a data buffer transfer.
• SPORT0 has a multichannel interface to selectively receive
and transmit a 24-word or 32-word, time-division multiplexed, serial bitstream.
• SPORT1 can be configured to have two external interrupts
(IRQ0 and IRQ1), and the Flag In and Flag Out signals. The
internally generated serial clock may still be used in this configuration.
• SPORT1 is the default input for program and data memory
boot loading. The RFS1 pin can be configured internal to the
ADMC331 as an SROM/E
• SPORT1 has two data receive pins (DR1A and DR1B). The
DR1A pin is intended for synchronous boot loading from the
external SROM/E
data receive pin for boot loading from an external asynchronous (UART) connection (SCI compatible), an external
synchronous connection as the data receive pin for an external
device communicating over the debugger interface, or as the
data receive pin for a general purpose SPORT after booting.
These two pins are internally multiplexed onto the one DR1
port of the SPORT. The particular data receive pin selected is
determined by a bit in the MODECTRL register.
2
PROM. The DR1B pin can be used as the
2
PROM reset signal.
–9–REV. B
ADMC331
PIN FUNCTION DESCRIPTION
The ADMC331 is available in an 80-lead TQFP package. Table I
contains the pin descriptions.
Table I. Pin List
Pin #
Group of Input/
Name Pins Output Function
RESET 1 I/P Processor Reset Input.
SPORT0 5 I/P, O/P Serial Port 0 Pins (TFS0, RFS0,
DT0, DR0, SCLK0).
SPORT1 6 I/P, O/P Serial Port 1 Pins (TFS1, RFS1,
DT1, DR1A, DR1B, SCLK1).
CLKOUT 1 O/P Processor Clock Output.
CLKIN, XTAL 2 I/P, O/P External Clock or Quartz Crystal
Connection Point.
PIO0–PIO23 24 I/P, O/P Digital I/O Port Pins.
AUX0–AUX1 2 O/P Auxiliary PWM Outputs.
AH–CL 6 O/P PWM Outputs.
PWMTRIP 1 I/P PWM Trip Signal.
PWMPOL 1 I/P PWM Polarity Pin.
PWMSYNC 1 O/P PWM Synchronization Pin.
PWMSR 1 I/P Switch Reluctance Mode Pin.
V1–V3, 3 I/P Analog Inputs.
VAUX0–VAUX3 4 I/P Auxiliary Analog Input
CAPIN 1 I/P ADC Capacitor Input.
ICONST 1 O/P ADC Constant Current Source.
VREF 1 O/P Voltage Reference Output.
AV
DD
AGND 1 Analog Ground.
SGND 1 Analog Signal Ground
V
DD
GND 11
INTERRUPT OVERVIEW
1 Analog Power Supply.
5 Digital Power Supply.
Digital Ground.
The ADMC331 can respond to 34 different interrupt sources
with minimal overhead, 8 of which are internal DSP core
interrupts and 26 interrupts from the motor control peripherals.
The 8 DSP core interrupts are SPORT0 receive and transmit,
SPORT1 receive (or IRQ0) and transmit (or IRQ1), the internal
timer and two software interrupts. The motor control peripheral
interrupts are the 24 peripheral I/Os and two from the PWM
(PWMSYNC pulse and PWMTRIP). All motor control interrupts are multiplexed into the DSP core through the peripheral
IRQ2 interrupt. The interrupts are internally prioritized and individually maskable. A detailed description of the entire interrupt system of the ADMC331 is given later, following a more
detailed description of each peripheral block.
Memory Map
The ADMC331 has two distinct memory types: program
memory and data memory. In general, program memory contains
user code and coefficients, while the data memory is used to store
variables and data during program execution. Both program
memory RAM and ROM are provided on the ADMC331. Program memory RAM is arranged as one contiguous 2K × 24-bit
block, starting at address 0x0000. Program memory ROM is
located at address 0x0800. Data memory is arranged as a 1K ×
16-bit block starting at address 0x3800. The motor control
peripherals are memory mapped into a region of the data
memory space starting at 0x2000. The complete program and
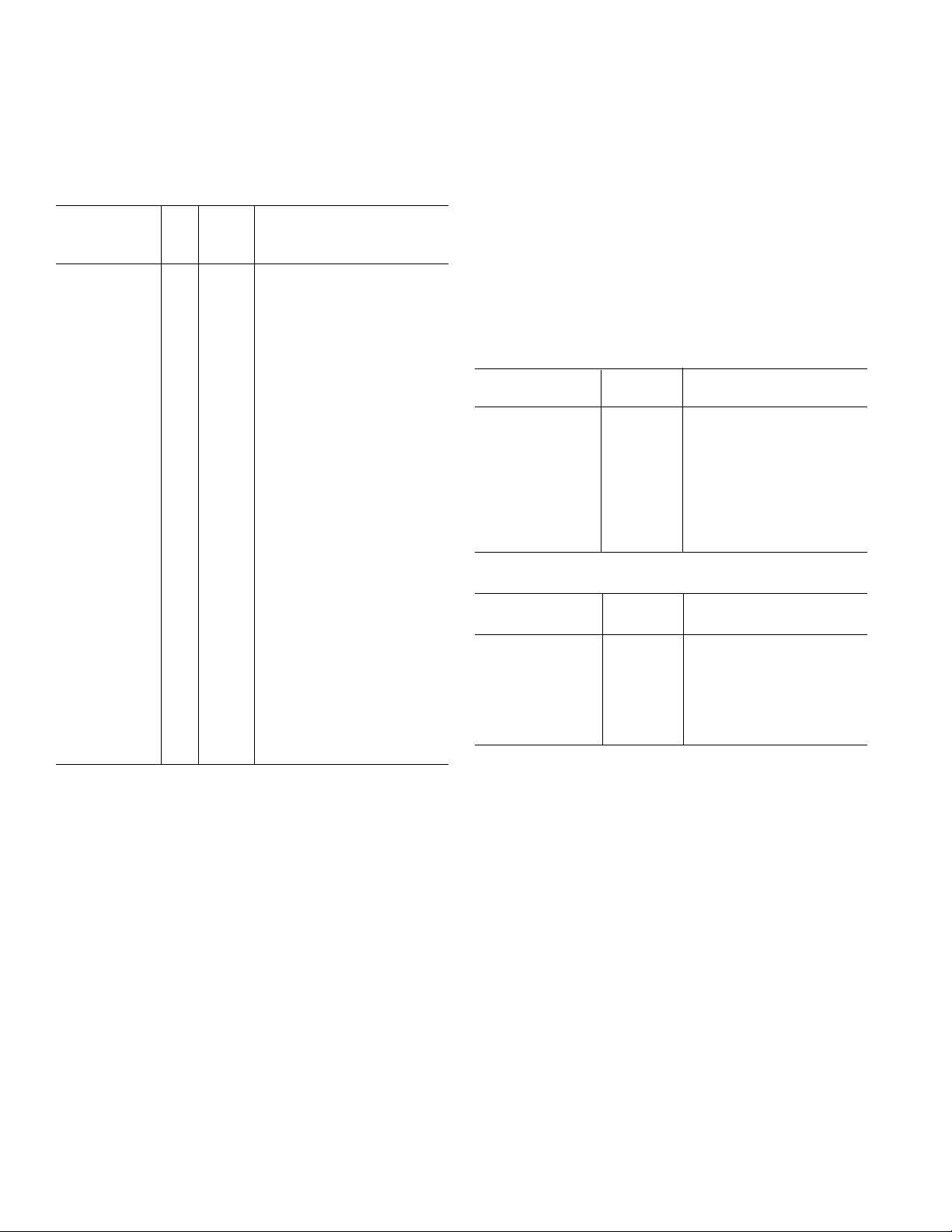
data memory maps are given in Tables II and III, respectively.
Table II. Program Memory Map
Memory
Address Range Type Function
0x0000–0x002F RAM Interrupt Vector Table
0x0030–0x071F RAM User Program Space
0x0720–0x07EC RAM Reserved by Debugger
0x07ED–0x07FF RAM Reserved by Monitor
0x0800–0x0DEC ROM ROM Monitor
0x0DED–0x0FEA ROM ROM Math and Motor
Control Utilities
0x0FEB–0x0FFF ROM Reserved
Table III. Data Memory Map
Memory
Address Range Type Function
0x0000–0x1FFF Reserved
0x2000–0x20FF Memory Mapped Registers
0x2100–0x37FF Reserved
0x3800–0x3B5F RAM User Data Space
0x3B60–0x3BFF RAM Reserved by Monitor
0x3C00–0x3FFF Memory Mapped Registers
ROM Code
The 2K × 24-bit block of program memory ROM starting at address 0x0800 contains a monitor function that is used to download
and execute user programs via the serial port. In addition, the
monitor function supports an interactive mode in which commands
are received and processed from a host. An example of such a host
is the Windows
®
-based Motion Control Debugger, which is part of
the software development system for the ADMC331. In the interactive mode, the host can access both the internal DSP and peripheral motor control registers of the ADMC331, read and write to
both program and data memory, implement breakpoints and perform single-step and run/halt operation as part of the program
debugging cycle.
In addition to the monitor function, the program memory ROM
contains a number of useful mathematical and motor control utilities that can be called as subroutines from the user code. A complete list of these ROM functions is given in Table IV. The start
address of the function in the program memory ROM is also given.
Refer to the ADMC331 DSP Motor Controller Developer’s Reference
Manual for more details of the ROM functions.
Windows is a registered trademark of Microsoft Corporation.
–10–
REV. B
ADMC331
Table IV. ROM Utilities
Utility Address Function
PER_RST 0x07F1 Reset Peripherals.
UMASK 0x0DED Limits Unsigned Value to
Given Range.
PUT_VECTOR 0x0DF4 Facilitates User Setup of
Vector Table.
SMASK 0x0E06 Limits Signed Value to Given
Range.
ADMC_COS 0x0E26 Cosine Function.
ADMC_SIN 0x0E2D Sine Function.
ARCTAN 0x0E43 Arctangent Function.
RECIPROCAL 0x0E65 Reciprocal (1/×) Function.
SQRT 0x0E7B Square Root Function.
LN 0x0EB5 Natural Logarithm Function.
LOG 0x0EB8 Logarithm (Base 10) Function.
FLTONE 0x0ED4 Fixed Pt. to Float Conversion.
FIXONE 0x0ED9 Float to Fixed Pt. Conversion.
FPA 0x0EDD Floating Pt. Addition.
FPS 0x0EEC Floating Pt. Subtraction.
FPM 0x0EFC Floating Pt. Multiplication.
FPD 0x0F05 Floating Pt. Division.
FPMACC 0x0F26 Floating Pt. Multiply/Accumulate.
PARK 0x0F48 Forward/Reverse Park
Transformation.
REV_CLARK 0x0F5C Reverse Clark Transformation.
FOR_CLARK 0x0F72 Forward Clark Transformation.
COS64 0x0F80 64 Pt. COS Table.
ONE_BY_X 0x0FCO 16 Pt. 1/× Table.
SDIVQINT 0x0FD0 Unsigned Single Precision
Division (Integer).
SDIVQ 0x0FD9 Unsigned Single Precision
Division (Fractional).
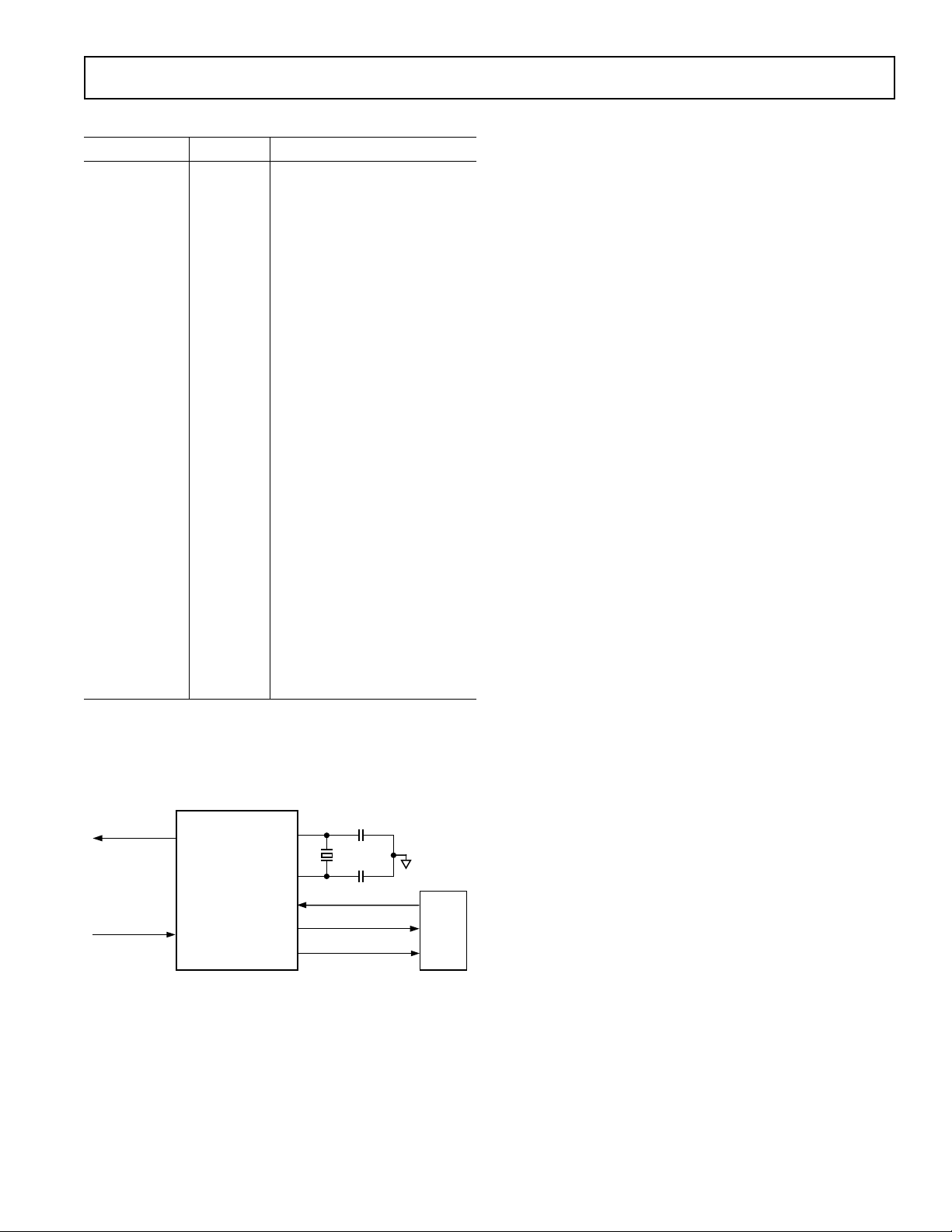
SYSTEM INTERFACE
Figure 4 shows a basic system configuration for the ADMC331,
with an external crystal and serial E
2
PROM for boot loading of
program and data memory RAM.
CLKOUT
ADMC331
RESET
XTAL
CLKIN
DR1A
SCLK1
RFS1/ SROM
13 MHz
DATA
CLK
RESET
SERIAL
2
E
PROM
Figure 4. Basic System Configuration
Clock Signals
The ADMC331 can be clocked by either a crystal or a TTLcompatible clock signal. The CLKIN input cannot be halted,
changed during operation nor operated below the specified
minimum frequency during normal operation. If an external
clock is used, it should be a TTL-compatible signal running at
half the instruction rate. The signal is connected to the CLKIN
pin of the ADMC331. In this mode, with an external clock
signal, the XTAL pin must be left unconnected. The ADMC331
uses an input clock with a frequency equal to half the instruction rate; a 13 MHz input clock yields a 38.5 ns processor cycle
(which is equivalent to 26 MHz). Normally, instructions are
executed in a single processor cycle. All device timing is
relative to the internal instruction rate, which is indicated by
the CLKOUT signal.
Because the ADMC331 includes an on-chip oscillator feedback
circuit, an external crystal may be used instead of a clock
source, as shown in Figure 4. The crystal should be connected
across the CLKIN and XTAL pins, with two capacitors as
shown in Figure 4. A parallel-resonant, fundamental frequency,
microprocessor-grade crystal should be used. A clock output
signal (CLKOUT) is generated by the processor at the processor’s
cycle rate of twice the input frequency. This output can be
enabled and disabled by the CLKODIS bit of the SPORT0
Autobuffer Control Register, DM[0x3FF3]. However, extreme
care must be exercised when using this bit since disabling
CLKOUT effectively disables all motor control peripherals,
except the watchdog timer.
Reset
The RESET signal initiates a master reset of the ADMC331.
The RESET signal must be asserted during the power-up sequence to assure proper initialization. RESET during initial
power-up must be held long enough to allow the internal clock
to stabilize. If RESET is activated any time after power-up, the
clock continues to run and does not require stabilization time.
The power-up sequence is defined as the total time required for
the crystal oscillator circuit to stabilize after a valid V
DD
is applied to the processor, and for the internal phase-locked loop
(PLL) to lock onto the specific crystal frequency. A minimum
of 2000 CLKIN cycles ensures that the PLL has locked, but
does not include the crystal oscillator start-up time. During this
power-up sequence, the RESET signal should be held low. On
any subsequent resets, the RESET signal must meet the minimum pulsewidth specification, t
RSP
.
If an RC circuit is used to generate the RESET signal, the use of
an external Schmitt trigger is recommended.
The master reset sets all internal stack pointers to the empty
stack condition, masks all interrupts, initializes DSP core registers and performs a full reset of all of the motor control peripherals. When the RESET line is released, the first instruction is
fetched from internal program memory ROM at location 0x0800.
The internal monitor code at this location then commences the
boot-loading sequence over the serial port, SPORT1. A software controlled full peripheral reset is achieved by toggling the
DSP FL2 flag from 1 to 0 to 1 again.
–11–REV. B
 Loading...
Loading...