

Analog Devices ADM1034 Datasheet
Thermal Monitor and
FEATURES
1 local and 2 remote temperature channels
±1°C accuracy on local and remote channels
Automatic remote temperature channels, up to 1 kΩ
Fast (up to 64 measurements per second)
SMBus 2.0, 1.1, and 1.0 compliant
SMBus address input/LOCATION input to UDID
Programmable over-/undertemperature limits
Programmable fault queue
SMBusALERT
Fail-safe overtemperature comparator output
Fan speed (RPM) controller
DRIVE1
DRIVE2
output
ADM1034
1
3
FAN SPEED
CONTROLLER
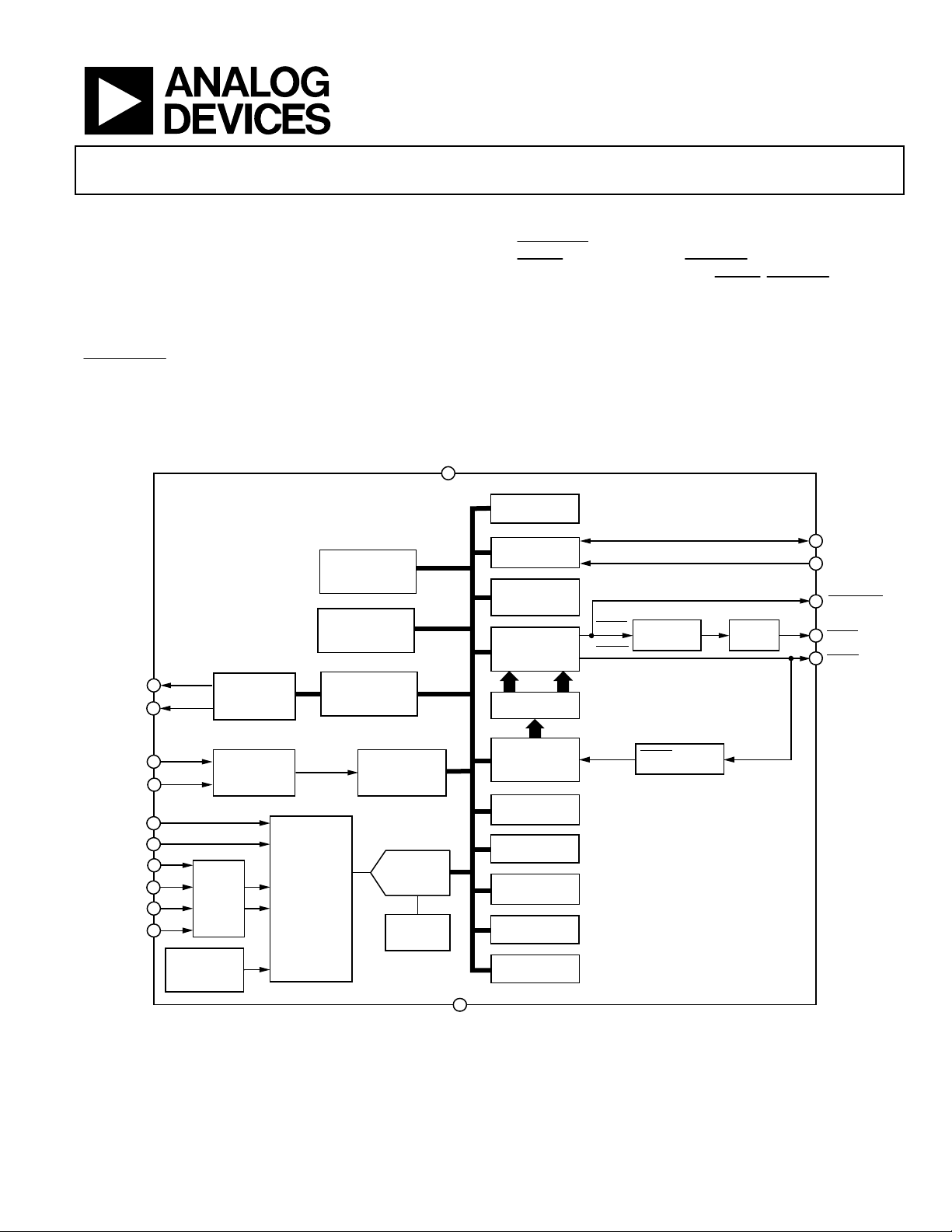
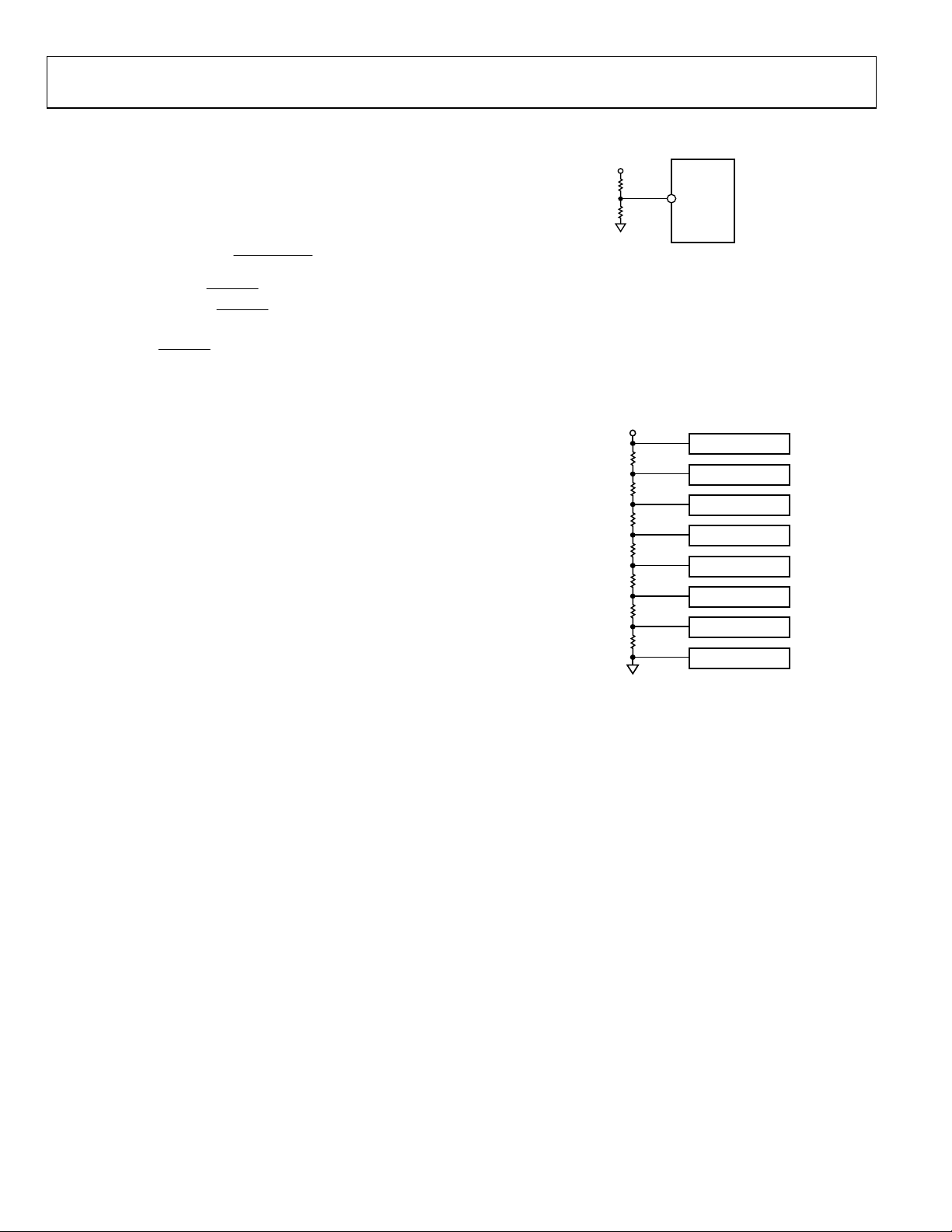
FUNCTIONAL BLOCK DIAGRAM
MANUAL FAN
SPEED CONTROL
REGISTERS
TEMPERATURE-TO-
FAN-SPEED
LOOK-UP TABLE
FAN RESPONSE
Fan Speed (RPM) Controller
ADM1034
Look-up table for temperature-to-fan-speed control
Linear and discrete options for look-up table
FAN _FA ULT
THERM
REF input, used as reference for
3 V to 5.5 V supply
Small 16-lead QSOP package
APPLICATIONS
Desktop and notebook PCs
Embedded systems
Telecommunications equipment
LCD projectors
V
CC
6
SMBUS
ADDRESS
SERIAL BUS
INTERFACE
ADDRESS
POINTER
REGISTER
STATUS
REGISTER
LIMIT
COMPARATOR
output
input, used to time
ALERT
THERM
MASK
REGISTERS
PROCHOT
assertions
THERM (PROCHOT
FAULT
QUEUE
)
16
SCL
15
SDA
8
FAN_FAULT
14
ALERT
7
THERM
2
TACH1
4
TACH2
8
REF
D1–
D1+
D2–
D2+
13
9
10
11
12
TEMPERATURE
LOCATION
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its use.
Specifications subject to change without notice. No license is granted by implication
or otherwise under any patent or patent rights of Anal og Devices. Trademarks and
registered trademarks are the property of their respective owners.
SRC
BLOCK
BAND GAP
SENSOR
TACH SIGNAL
CONDITIONING
ANALOG
MULTIPLEXER
FAN
SPEED
COUNTER
ADC
BAND GAP
REFERENCE
GND
5
Figure 1.
VALUE AND
LIMIT
REGISTERS
FAULT
QUEUE
HYSTERESIS
REGISTERS
OFFSET
REGISTERS
CONVERSION
RATE REGISTER
CONFIGURATION
REGISTERS
THERM PERCENT
TIMER
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700
Fax: 781.326.8703 © 2004 Analog Devices, Inc. All rights reserved.
www.analog.com
04918-0-001
ADM1034
TABLE OF CONTENTS
Specifications..................................................................................... 4
Interrupt Behavior ....................................................... 21
ALERT
Absolute Maximum Ratings............................................................ 6
Thermal Characteristics .............................................................. 6
ESD Caution.................................................................................. 6
Pin Configuration and Function Descriptions............................. 7
Typical Performance Characteristics............................................. 8
Functional Description ..................................................................10
Internal Registers ........................................................................ 10
Serial Bus Interface..................................................................... 10
Location Input.............................................................................10
SMBus 2.0 ARP-Capable Mode................................................ 10
SMBus 2.0 Fixed-and-Discoverable Mode.............................. 12
SMBus 2.0 Read and Write Operations ...................................12
Register Addresses for Single/Block Byte Modes ...................14
Write Operations ........................................................................ 14
Read Operations ......................................................................... 15
SMBus Timeout ..........................................................................15
Packet Error Checking (PEC)................................................... 15
Alert Response Address (ARA)................................................ 15
Temperature Measurement System.............................................. 16
Internal Temperature Measurement........................................ 16
Remote Temperature Measurement......................................... 16
Additional Functions ................................................................. 18
Handling
Interrupt Masking Register ....................................................... 22
FAN_ FAULT
Fault Queue ................................................................................. 23
Conversion Rate Register.......................................................... 23
THERM
THERM
Fan Drive Signal ......................................................................... 25
Synchronous Speed Control ..................................................... 25
Fan Inputs .................................................................................... 26
Fan Speed Measurement ........................................................... 26
Fan Speed Measurement Registers........................................... 27
Reading Fan Speed ..................................................................... 27
Calculating Fan Speed ............................................................... 27
Alarm Speed................................................................................ 27
Look-Up Table: Modes of Operation....................................... 28
Setting Up the Size of the Look-Up Table............................... 29
Setting Up the Look-Up Table in Linear Mode...................... 29
Setting Which Temperature Channel Controls a Fan ........... 29
Look-Up Table Hysteresis ......................................................... 29
Programming the
Channel
SMBUSALERT
Output ................................................................. 23
I/O Timer and Limits ................................................ 23
% Limit Register ......................................................... 24
........................................................................................ 30
Interrupts ....................................... 22
THERM
Limit for Each Temperature
Layout Considerations................................................................... 19
Limits, Status Registers, and Interrupts ....................................... 20
8-Bit Limits.................................................................................. 20
Out-of-Limit Comparisons .......................................................20
Analog Monitoring Cycle Time................................................ 20
Status Registers ........................................................................... 20
REVISION HISTORY
8/04—Revision 0: Initial Version
Rev. 0 | Page 2 of 40
XOR Tree Test Mode .................................................................. 30
Lock Bit........................................................................................ 30
SW Reset...................................................................................... 30
Outline Dimensions....................................................................... 40
Ordering Guide .......................................................................... 40
ADM1034
GENERAL DESCRIPTION
The ADM1034 is a dual-channel remote- and local-temperature
sensor and fan controller. The remote channels monitor the
temperature of two remote thermal diodes, which may be
discrete 2N3904/6s or may be located on a microprocessor die.
The device also monitors its own ambient temperature.
The ADM1034 can monitor and control the speed of two
cooling fans. The user can program a target fan speed, or else
use the look-up table to input a temperature-to-fan-speed
profile. The look-up table can be configured to run the fans at
discrete speeds (discrete mode) or to ramp the fan speed with
temperature (linear mode).
The ADM1034 communicates over a 2-wire SMBus 2.0
interface. An 8-level LOCATION input allows the user to
choose between SMBus 1.1 and SMBus 2.0. An
indicates error conditions. The
temperature as an output and times
an input. Pin 8 can be configured as a reference for the
THERM (PROCHOT
) input.
THERM
I/O signals over-
THERM
assertions as
ALERT
output
Rev. 0 | Page 3 of 40
ADM1034
SPECIFICATIONS
TA = T
MIN
to T
, VCC = V
MAX
MIN
to V
, unless otherwise noted.
MAX
Table 1.
Parameter Min Typ Max Unit Test Conditions/Comments
POWER SUPPLY
Supply Voltage, V
Supply Current, I
2
CC
CC
3.0 3.30 3.6 V
3 mA Interface inactive, ADC active
900 µA Standby mode
Undervoltage Lockout Threshold 2.5 V
Power-On Reset Threshold 1 2.4 V
TEMPERATURE-TO-DIGITAL CONVERTER
Internal Sensor Accuracy ±1 ±2 °C 20°C ≤ TA ≤ 60°C
−4
Resolution 0.03125 °C
External Diode Sensor Accuracy ±0.5 ±1 °C
±1 °C
−3
Resolution 0.03125 °C
Remote Sensor Source Current 85 µA High level
34 µΑ Mid level
5 µΑ Low level
Series Resistance Cancellation 1000 Ω
Power Supply Sensitivity ±1 %/V
Conversion Time (Local Temperature) 11 ms Averaging enabled
Conversion Time (Remote Temperature) 32 ms Averaging enabled
Total Conversion Time 75 ms Averaging enabled
OPEN-DRAIN DIGITAL OUTPUTS
3
(ALERT, THERM, FAN _ FAU LT, DRIVE1, DRIVE2)
Output Low Voltage, V
High Level Output Leakage Current, I
OL
OH
0.4 V
0.1 1 µA V
DIGITAL INPUT LEAKAGE CURRENT
(TACH1, TACH2)
Input High Current, I
Input Low Current, I
Input Capacitance, C
IH
IL
IN
−1
1 µA VIN = 0
7 pF
DIGITAL INPUT LOGIC LEVELS
(TACH1, TACH2)
Input High Voltage, V
Input Low Voltage, V
IH
IL
2.0 5.5 V
−0.3
Hysteresis 500
OPEN-DRAIN SERIAL DATA
BUS OUTPUT (SDA)
Output Low Voltage, V
OL
High Level Output Leakage Current, I
OH
0.4 V
0.1 1 µA V
SERIAL BUS DIGITAL INPUTS
(SCL, SDA)
Input High Voltage, V
Input Low Voltage, V
IH
IL
2.1 V
0.8 V
Hysteresis 500 mV
1
+2 °C
+2 °C
µA
−40°C ≤ T
−40°C ≤ T
−40°C ≤ T
−40°C ≤ T
I
OUT
OUT
−VIN = V
A
D
D
D
= −6.0 mA; VCC = +3 V
= VCC; VCC = 3 V
CC
+0.8 V
mV p−p
I
= −6.0 mA; V
OUT
= V
OUT
CC
≤ +100°C
≤ +100°C; TA = +40°C
≤ +100°C; +20°C ≤ TA ≤ +60°C
≤ +100°C; −40°C ≤ TA ≤ +100°C
CC
Rev. 0 | Page 4 of 40
ADM1034
A
Parameter Min Typ Max Unit Test Conditions/Comments
ANALOG INPUTS
(LOCATION, REF)
Input Resistance 80 125 160 kΩ
AGTL + INPUT
(THERM)
Input High Level
0.75 ×
REF
Input Low Level 0.4 V
TACHOMETER ACCURACY
Fan Speed Measurement Accuracy ±4 %
BUF
LOW
HIGH
4
SCLK
SW
SU:STA
HD:STA
SU:DAT
1.3
0.6
0.6
SU:STO
0.6
1.3
0.6
r
f
100
TIMEOUT
25
50
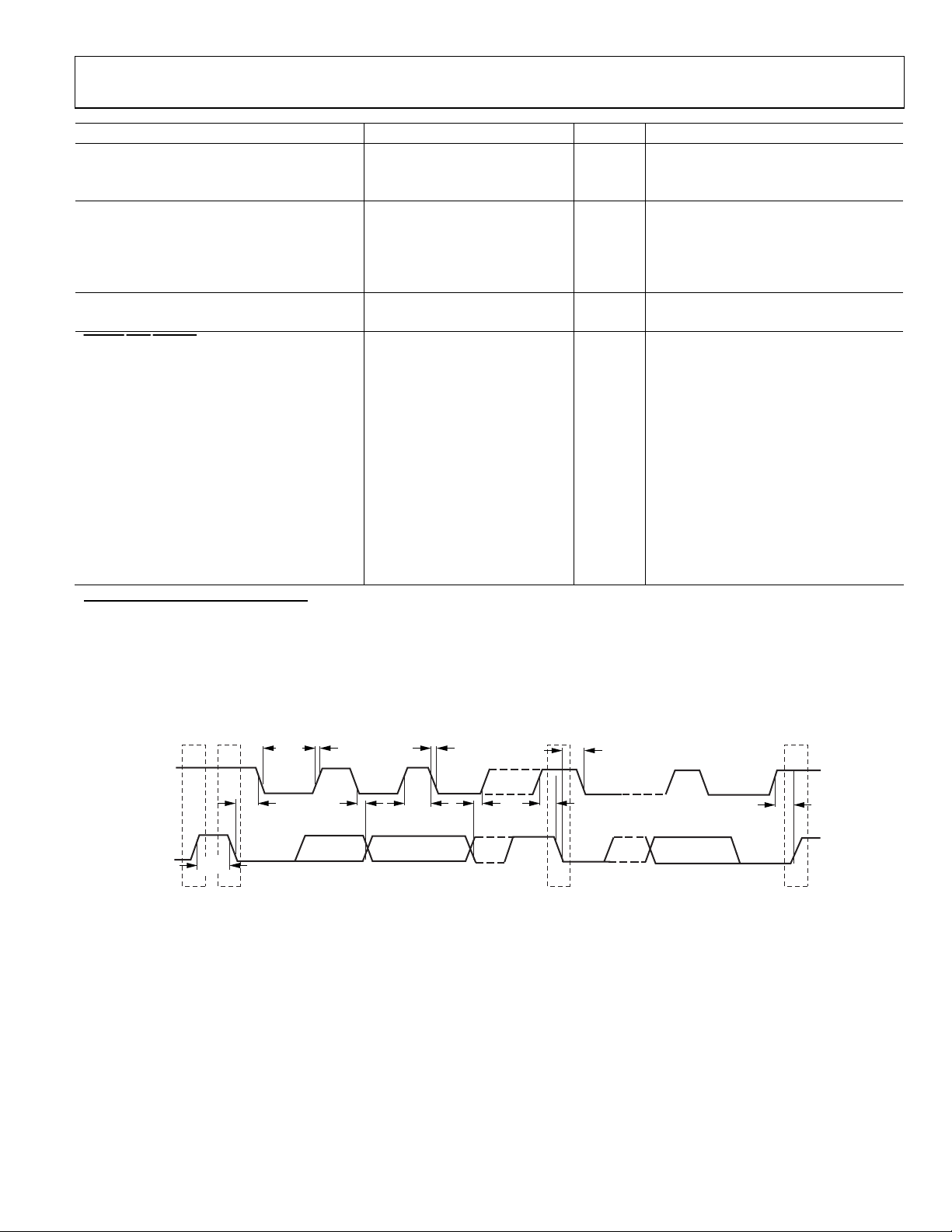
SERIAL BUS TIMING
Clock Frequency, f
Glitch Immunity, t
Bus Free Time, t
Start Setup Time, t
Start Hold Time, t
Stop Condition Setup Time t
SCL Low Time, t
SCL High Time, t
SCL, SDA Rise Time, t
SCL, SDA Fall Time, t
Data Setup Time, t
Detect Clock Low Timeout, t
1
Typicals are at TA = 25°C and represent most likely parametric norm. Standby current typ is measured with VCC = 3.3 V. Timing specifications are tested at logic levels of
= 0.8 V for a falling edge and VIH = 2.1 V for a rising edge.
V
IL
2
Operation at 5.5 V is guaranteed by design, not production tested.
3
Recommend use of 100 kΩ pull-up resistors for all open-drain outputs from the ADM1034.
4
Guaranteed by design, not production tested.
5
SMBus timeout disabled by default. See the section for more information. SMBUS
V
400 kHz See Figure 2
ns See Figure 2
µs See Figure 2
µs See Figure 2
µs See Figure 2
µs See Figure 2
µs See Figure 2
µs See Figure 2
1000 ns See Figure 2
300 ns See Figure 2
ns See Figure 2
35 ms See Note 5
SCL
SD
t
t
BUF
PS
HD:STA
t
LOW
t
R
t
HD:DAT
t
HIGH
t
F
t
SU:DAT
t
HD:STA
t
SU:STA
S
t
SU:STO
P
04918-0-002
Figure 2. Serial Bus Timing Diagram
Rev. 0 | Page 5 of 40
ADM1034
ABSOLUTE MAXIMUM RATINGS
Table 2.
Parameter Rating
Positive Supply Voltage (VCC)
Voltage on Any Input or Output Pin except
FA N_ FAU LT and LOCATION
Voltage on FA N_ FAU LT
Voltage on LOCATION VCC + 0.3 V
Input Current at Any Pin ±20 mA
Maximum Junction Temperature (TJ max) 150°C
Storage Temperature Range
Lead Temperature, Soldering (10 s) 300°C
IR Reflow Peak Temperature 220°C
ESD Rating—All Pins 1500 V
1
−0.3 V to +6.5 V
−0.3 V to +6.5 V
V
CC
−65°C to +150°C
1
During power-up the voltage on
FAN _ FAU LT
should not be higher than VCC.
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on
the human body and test equipment and can discharge without detection. Although this product features
proprietary ESD protection circuitry, permanent damage may occur on devices subjected to high energy
electrostatic discharges. Therefore, proper ESD precautions are recommended to avoid performance
degradation or loss of functionality.
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to Absolute
Maximum Rating conditions for extended periods may affect
device reliability.
THERMAL CHARACTERISTICS
16-Lead QSOP Package:
= 150°C/W, θJC = 39°C/W
θ
JA
Rev. 0 | Page 6 of 40

ADM1034
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
1
DRIVE1
2
TACH1
3
DRIVE2
TACH2
GND
V
CC
THERM
FAN_FAULT/REF D1–
ADM1034
TOP VIEW
4
(Not to Scale)
5
6
7
8
16
SCL
15
SDA
14
ALERT
13
LOCATION
12
D2+
11
D2–
10
D1+
9
04918-0-003
Figure 3. Pin Configuration
Table 3. Pin Function Descriptions
Pin No. Mnemonic Description
1 DRIVE1 DRIVE1 Pin Drives Fan 1. Open-drain output. Requires a pull-up resistor.
2 TACH1 Fan 1 Fan Speed Measurement Input. Connects to the fan’s TACH output to measure the fan speed.
3 DRIVE2 DRIVE2 Pin Drives Fan 2. Open-drain output. Requires a pull-up resistor.
4 TACH2 Fan 2 Fan Speed Measurement Input. Connects to the fan’s TACH output to measure the fan speed.
5 GND Ground for Analog and Digital Circuitry.
6 V
7
8
CC
THERM Can be configured as an overtemperature interrupt output, or as an input (to monitor PROCHOT output of
FA N_ FAU LT/REF FA N_ FAU LT: Open-Drain Output. Asserted low when one or both fans stall. Requires a pull-up resistor to V
Power. Can be powered by 3.3 V standby power if monitoring in low power states is required.
an INTEL CPU). A timer measures assertion times on the
REF: Analog Input Reference for the
THERM Input.
THERM pin (either input or output).
9 D1− Cathode Connection for the First Thermal Diode or Diode-Connected Transistor.
10 D1+ Anode Connection for the First Thermal Diode or Diode-Connected Transistor.
11 D2− Cathode Connection for the Second Thermal Diode or Diode-Connected Transistor.
12 D2+ Anode Connection for the Second Thermal Diode or Diode-Connected Transistor.
13 LOCATION 8-Level Analog Input. Used to determine the correct SMBus version and the SMBus address (in
fixed-and-discoverable mode) and to set the LLL bits in the UDID (in ARP-capable mode).
14
ALERT Open-Drain Output. SMBusALERT pin. Alerts the system in the case of out-of-limit events, such as over
temperature. Can be configured as sticky SMBus mode or comparator mode.
15 SDA
Serial Bus Bidirectional Data. Connects to the SMBus master’s data line. Requires pull-up resistor if not
provided elsewhere in the system.
16 SCL
Serial SMBus Clock Input. Connects to the SMBus master’s clock line. Requires pull-up resistor if not already
provided in the system.
.
CC
Rev. 0 | Page 7 of 40
ADM1034
TYPICAL PERFORMANCE CHARACTERISTICS
40
20
0
–20
–40
–60
TEMPERATURE ERROR (°C)
–80
D+ TO GND
D+ TO V
CC
20
15
10
5
0
TEMPERATURE ERROR (°C)
–5
EXT 100mVpp
EXT 250mVpp
–100
0 10203040 5060708090100
LEAKAGE RESISTANCE (MΩ)
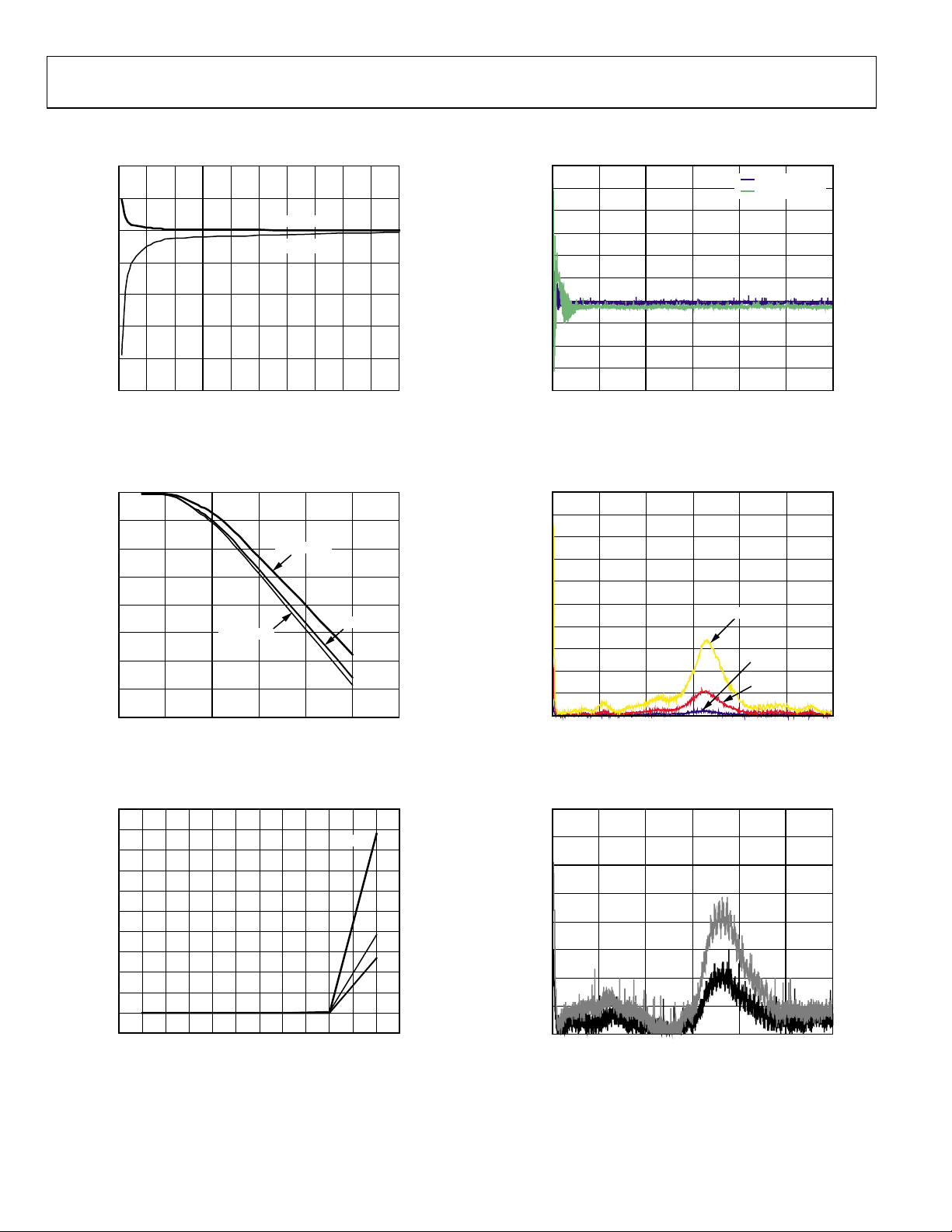
Figure 4. Temperature Error vs. PCB Track Resistance DXP to GND and V
0
–10
–20
–30
–40
–50
–60
TEMPERATURE ERROR (°C)
–70
–80
0426810
DEV 32 (°C)
CAPACITANCE (nF)
DEV 33 (°C)
DEV 31 (°C)
12
Figure 5. Remote Temperature Error vs. D+, D− Capacitance
100
90
80
70
60
50
40
30
20
TEMPERATURE ERROR (°C)
10
0
–10
12 3 4 65
SERIES RESISTANCE IN D+/D– LINES (kΩ)
DEV 33
DEV 31
DEV 32
Figure 6. Remote Temperature Error vs. Series Resistance on D+ and D−
04918-0-004
CC
04918-0-005
04918-0-006
–10
01M2M3M4M 65M
04918-0-007
M
Figure 7. Remote Temperature Error vs. Power Supply Noise Frequency
50
45
40
35
30
25
20
15
TEMPERATURE ERROR (°C)
10
5
00
01M2M 4M3M 5M 6M
NOISE FREQUENCY (Hz)
100mV
20mV
50mV
04918-0-008
Figure 8. Remote Temperature Error vs. Common-Mode Noise Frequency
Coupled on D+ and D−
4.0
3.5
3.0
2.5
2.0
1.5
1.0
TEMPERATURE ERROR (°C)
0.5
0
01M 3M2M 5M4M 6M
NOISE FREQUENCY
20mV
10mV
04918-0-009
Figure 9. Remote Temperature Error vs. Differential Mode Noise Frequency
Coupled on D+ and D−
Rev. 0 | Page 8 of 40
ADM1034
2
1
0
–1
–2
–3
ERROR (°C)
–4
–5
–6
–7
S1
S2
S3
S4
S5
–60 –40 –20 0 80 100 12040 6020 140
V1
V2
V3
V4
V5
TEMPERATURE (
MEAN
°
C)
HIGH 4 SIGMA
LOW 4 SIGMA
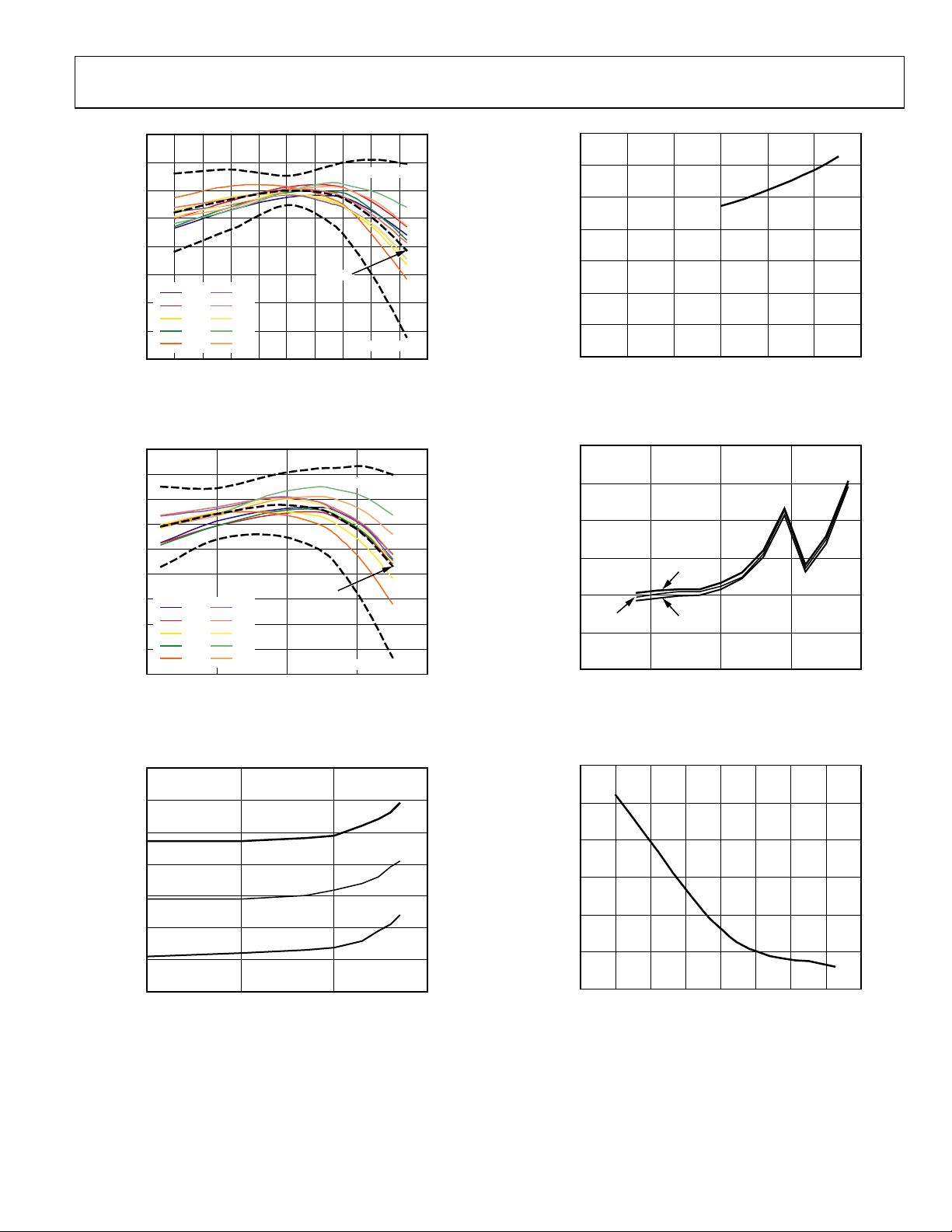
Figure 10. Remote Temperature Error vs. Actual Diode Temperature
2
1
0
–1
–2
–3
ERROR (°C)
–4
–5
–6
–7
S1
S2
S3
S4
S5
–50 0 10050 150
V1
V2
V3
V4
V5
TEMPERATURE (°C)
HIGH 4 SIGMA
MEAN
LOW 4 SIGMA
Figure 11. Local Temperature Error vs. Actual Temperature
430
04918-0-010
04918-0-011
0.7
0.6
0.5
0.4
0.3
0.2
STANDBY SUPPLY CURRENT
0.1
0
024531
SUPPLY VOLTAGE (V)
Figure 13. Standby Supply Current vs. Supply Voltage
1200
1000
800
(µA)
600
CC
I
400
DEV 33
200
0
0.01 0.1 1 10010
DEV 31
DEV 32
CONVERSION RATE (Hz)
Figure 14. Supply Current vs. Conversion Rate
1.55
04918-0-013
6
04918-0-014
420
410
400
(µA)
CC
I
390
380
370
360
1 10 1000100
FSCL (kHz)
Figure 12. Standby Supply Current vs. SCLK Frequency
DEV 31
DEV 33
DEV 32
04918-0-012
1.50
1.45
1.40
1.35
SUPPLY CURRENT
1.30
1.25
–60 –40 –20 0 10040 60 8020
TEMPERATURE (°C)
Figure 15. Supply Current vs. ADM1034 Temperature
04918-0-015
Rev. 0 | Page 9 of 40
ADM1034
0
0
FUNCTIONAL DESCRIPTION
The ADM1034 is a local- and remote-temperature monitor and
fan controller for use in a variety of applications, including
microprocessor-based systems. The device accurately monitors
remote and ambient temperature and uses that information to
quietly control the speed of a cooling fan. Whenever one of the
fans stalls, the device asserts a
The ADM1034 features a
measures assertions on the
FAN_ FAULT
THERM
THERM
I/O. As an input, this
a low signal to indicate when the measured temperature exceeds
the programmed
THERM
temperature. The ADM1034
communicates over an SMBus 2.0 interface. Its LOCATION
input determines which version of SMBus to use, as well as the
SMBus address (in fixed-and-discoverable mode) and the
LOCATION bits in the UDID (in ARP-capable mode).
INTERNAL REGISTERS
Table 4 gives a brief description of the ADM1034’s principal
internal registers. For more detailed information on the
function of each register, refer to Table 34.
SERIAL BUS INTERFACE
The ADM1034 communicates with the master via the 2-wire
SMBus 2.0 interface. It supports two versions of SMBus 2.0,
determined by the value of the LOCATION input’s resistors.
The first version is fully ARP-capable. This means that it
supports address resolution protocol (ARP), allowing the
master to dynamically address the device on power-up. It
responds to ARP commands such as “Prepare to ARP.”
The second SMBus version, fixed-and-discoverable, is
backwards-compatible with SMBus 1.0 and 1.1. In this mode,
the ADM1034 powers up with a fixed address, which is
determined by the state of the LOCATION pin on power-up.
Note: When using the ADM1034, Addresses 0xC2 and 0xCA
should not be used by any other device on the bus.
LOCATION INPUT
The LOCATION input is a resistor divider input. It has multiple
functions and can specify the SMBus version (in fixed-anddiscoverable or ARP-capable modes); the SMBus address (in
fixed-and-discoverable mode); and the LLL bits (in UDID in
ARP-capable mode).
The voltage of this 8-level input is set by a potential divider. The
voltage on LOCATION is sampled on power-up and digitized
by the on-chip ADC to determine the LOCATION input value.
Because the LOCATION input is sampled only at power-up,
changes made while power is applied have no effect.
output.
pin. As an output, it asserts
V
CC
R1
R2
GND
Figure 16. Bootstrapping the LOCATION Input
PIN 13
ADM1034
LOCATION
04918-0-016
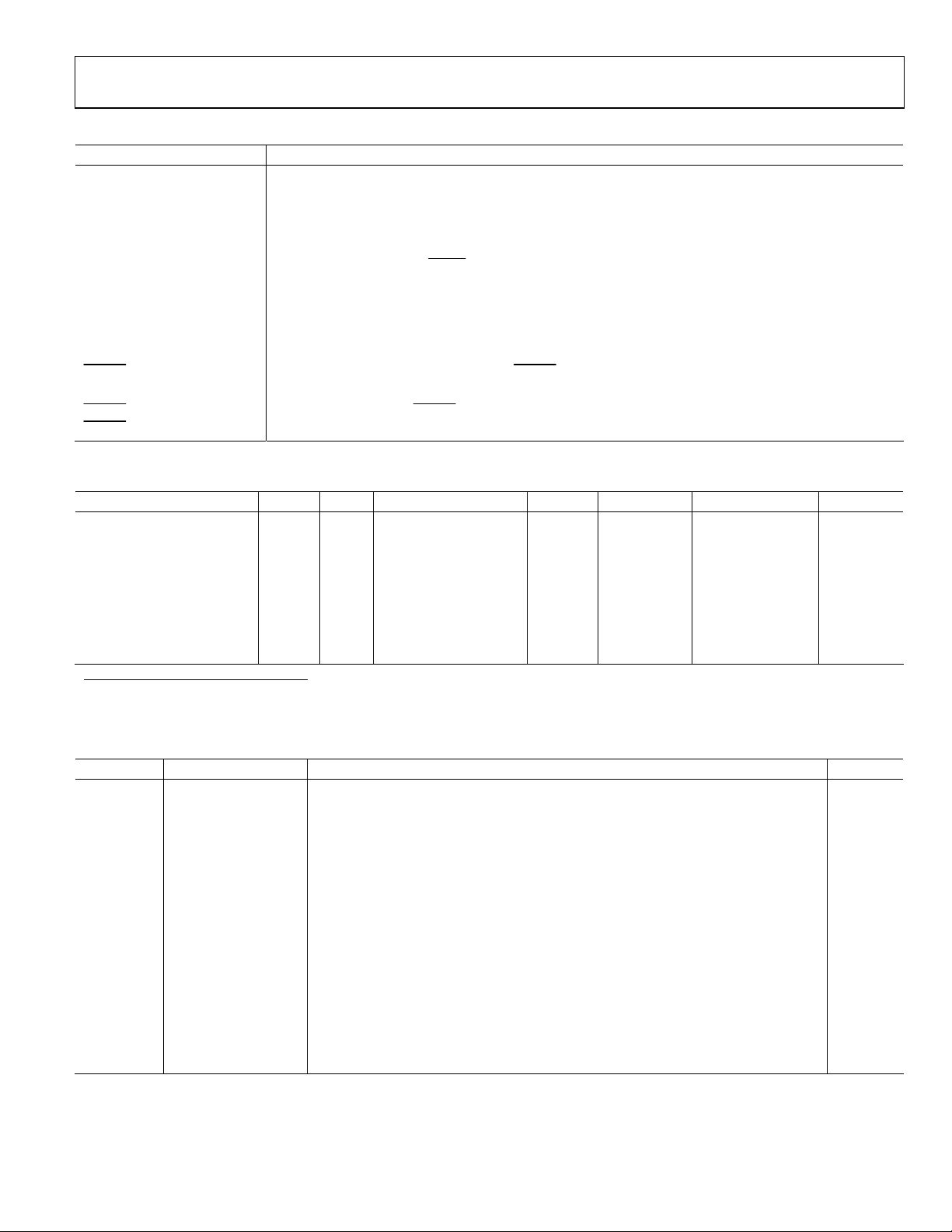
SMBus 2.0 ARP-CAPABLE MODE
In ARP-capable mode, the ADM1034 supports features such as
address resolution protocol (ARP) and unique device identifier
(UDID). The UDID is a 128-bit message that describes the
ADM1034’s capabilities to the master. The UDID also includes a
vendor-specific ID for functionally equivalent devices.
V
CC
LOCATION = 111
LOCATION = 11
LOCATION = 101
LOCATION = 10
ADDRESS = 53h
ADDRESS = 52h
ADDRESS = 51h
ADDRESS = 50h
Figure 17. Setting Up Multiple ADM1034 Addresses in
ARP
1.5kΩ
ARP
1kΩ
ARP
1kΩ
ARP
1kΩ
FD
1kΩ
FD
1kΩ
FD
1.5kΩ
FD
GND
SMBus 2.0 ARP-Capable Mode
In SMBus 2.0 mode, this vendor-specific ID is generated by an
on-chip random number generator. This should enable two
adjacent ADM1034s in the same system to power up with a
different vendor-specific ID, allowing the master to identify the
two separate ADM1034s and assign a different address to each.
The state of the LOCATION input on power-up is also reflected
in the UDID. This is useful when there is more than one
ADM1034 in the system, so the master knows which one it is
communicating with. The complete UDID is listed in Table 6.
The SMBus 2.0 master issues both general and directed ARP
commands. A general command is directed at all ARP devices.
A directed command is targeted at a single device once an
address has been established. The PEC byte must be used for
ARP commands. (Refer to the Packet Error Checking (PEC)
section.) The ADM1034 responds to the following commands:
• Prepare to ARP (general)
• Reset device (general and directed)
• Get UDID (general and directed)
• Assign address (general)
ADM1034 NO. 1
ADM1034 NO. 2
ADM1034 NO. 3
ADM1034 NO. 4
ADM1034 NO. 5
ADM1034 NO. 6
ADM1034 NO. 7
ADM1034 NO. 8
04918-0-017
Rev. 0 | Page 10 of 40
ADM1034
Table 4. Internal Register Descriptions
Register Description
Configuration Provides control and configuration of various functions on the device.
Conversion Rate Determines the number of measurements per second completed by the ADM1034.
Address Pointer
Status Provides the status of each limit comparison.
Interrupt Mask
Value and Limit Stores the results of temperature and fan speed measurements, along with their limit values.
Offset
THERM Limit and Hysteresis Contains the temperature value at which THERM is asserted and indicates the level of hysteresis.
Look-Up Table Used to program the look-up table for the fan-speed-to-temperature profile.
THERM % Ontime and
THERM % Limit
Table 5. Resistor Ratios for Setting LOCATION Bits
Ideal Ratio R2/(R1 + R2) R1 kΩ R2 Ω Actual R2/(R1 + R2) Error % SMBus Ver SMBus Address UDID LLL
N/A 0 O/C 1 0 ARP
0.8125 18 82 0.82 +0.75 ARP1 N/A 110
0.6875 22 47 0.6812 −0.63 ARP1 N/A 101
0.5625 12 15 0.5556 −0.69 ARP1 N/A 100
0.4375 15 12 0.4444 +0.69 FD1 0x53 N/A
0.3125 47 22 0.3188 +0.63 FD1 0x52 N/A
0.1875 82 18 0.18 −0.75 FD1 0x51 N/A
N/A O/C 0 0 0 FD1 0x50 N/A
1
FD denotes fixed-and-discoverable mode, ARP denotes ARP-capable mode.
Table 6. UDID Values
Bit No. Name Function Value
<127:120> Device Capabilities
<119:112> Version/Revision UDID version number (Version 1) and silicon revision identification 00001010
<111:96> Vendor ID
<95:80> Device ID Device ID.
<79:64> Interface
<63:48> Subsystem Vendor ID Subsystem Vendor ID = 0 (subsystem fields are unsupported).
<47:32> Subsystem Device ID Subsystem Device ID = 0 (subsystem fields are unsupported).
<31:0> Vendor Specific ID
Contains the address that selects one of the other internal registers. When writing to the ADM1034, the
first byte of data is always a register address, written to the address pointer register.
Allows the option to mask
ALERTs due to particular out-of-limit conditions.
Allows the local and remote temperature channel readings to be offset by a twos complement value
written to them. These values are automatically added to the temperature values (or subtracted from them
if negative). This allows the systems designer to optimize the system if required, by adding or subtracting
up to 15.875°C from a temperature reading.
Reflects the state of the
THERM input and monitors the duration of the assertion time of the signal as a
percentage of a time window. The user can program the length of the time window.
1
Describes the ADM1034’s capabilities (for instance, that it supports PEC and uses a
N/A 111
11000001
random number address device).
Analog Devices vendor ID number, as assigned by the SBS Implementer’s Forum or
the PCI SIG.
00010001
11010100
00010000
00110100
Identifies the protocol layer interfaces supported by the ADM1034. This represents
SMBus 2.0 as the Interface version..
00000000
00000100
00000000
00000000
00000000
00000000
A unique number per device. Contains LOCATION information (LL) and a 16-bit
random number (x). See Table 5 for information on setting the LLL bits.
00000000
00000LLL
xxxxxxxx
xxxxxxxx
Rev. 0 | Page 11 of 40

ADM1034
SMBus 2.0 FIXED-AND-DISCOVERABLE MODE
The ADM1034 also supports fixed-and-discoverable mode,
which is backwards-compatible with SMBus 1.0 and 1.1. Fixedand-discoverable mode supports all the same functionality as
ARP-capable mode, except for assign address—in which case it
powers up with a fixed address and is not changed by the assign
address call. The fixed address is determined by the state of the
LOCATION pin on power-up.
SMBus 2.0 READ AND WRITE OPERATIONS
The master initiates data transfer by establishing a start
condition, defined as a high-to-low transition on the serial data
line (SDA) while the serial clock line (SCL) remains high. This
indicates that an address/data stream is to follow. All slave
peripherals connected to the serial bus respond to the start
condition and shift in the next 8 bits, which consist of a 7-bit
address (MSB first) plus an R/
direction of the data transfer (whether data is written to or read
from the slave device).
1. The peripheral that corresponds to the transmitted address
responds by pulling the data line low during the low period
before the 9th clock pulse, which is known as the
acknowledge bit. All other devices on the bus remain idle
while the selected device waits for data to be read from or
written to it. If the R/
slave device. If the R/
2. Data is sent over the serial bus in sequences of 9 clock
pulses—8 bits of data followed by an acknowledge bit from
the slave device. Transitions on the data line must occur
during the low period of the clock signal and remain stable
during the high period, because a low-to-high transition
when the clock is high may be interpreted as a stop signal.
The number of data bytes that can be transmitted over the
serial bus in a single read or write operation is limited only
by what the master and slave devices can handle.
bit. This last bit determines the
W
bit is a 0, the master writes to the
W
bit is a 1, the master reads from it.
W
It is not possible to mix read and write in one operation,
because the type of operation is determined at the beginning
and cannot be changed without starting a new operation.
To write data to one of the device data registers or to read data
from it, the address pointer register (APR) must be set so that
the correct data register is addressed; then data can be written
into that register or read from it. The first byte of a write
operation always contains an address that is stored in the APR.
If data is to be written to the device, then the write operation
contains a second data byte, which is written to the register
selected by the APR.
As illustrated in Figure 18, the device address is sent over the
bus, followed by R/
bytes. The first data byte is the address of the internal data
register to be written to, which is stored in the APR. The second
data byte is the data to be written to the internal data register.
When reading data from a register there are two possibilities.
If the ADM1034’s APR value is unknown or incorrect, it must
be set to the correct value before data can be read from the
desired data register. To do this, perform a write to the ADM1034
as before, but send only the data byte containing the register.
(See Figure 19.) A read operation is then performed, using the
serial bus address and the R/
byte read from the data register. (See Figure 20.)
However, if the APR is already at the desired address, data can
be read from the corresponding data register without first
writing to the APR. In this case, Figure 19 can be omitted.
In Figure 18 to Figure 20, the serial bus address is determined
by the state of the LOCATION pin on power-up.
set to 0. This is followed by two data
W
bit set to 1, followed by the data
W
3. When all data bytes have been read or written, stop
conditions are established. In write mode, the master pulls
the data line high during the 10th clock pulse to assert a
stop condition. In read mode, the master device overrides
the acknowledge bit by pulling the data line high during
the low period before the 9th clock pulse. This is known as
no acknowledge. The master takes the data line low during
the low period before the 10th clock pulse, then high
during the 10th clock pulse to assert a stop condition.
Rev. 0 | Page 12 of 40
 Loading...
Loading...