

PRELIMINARY TECHNICAL DA T A
Complete Thermal and System
=
Management Controller
Preliminary Technical Data ADM1026
FEATURES
Up to 19 Analog Measurement Channels (Including Inter-
nal Measurements)
Up to 8 Fan Speed Measurement Channels
Up to 17 General-Purpose Logic I/O Pins
Remote Temperature Measurement with Remote Diode
(Two Channels)
On-Chip Temperature Sensor
Analog and PWM Fan Speed Control Outputs
2-wire serial System Management Bus (SMBus)
8K bytes on-chip E
2
PROM
Full SMBus 1.1 support including Packet Error Checking
(PEC)
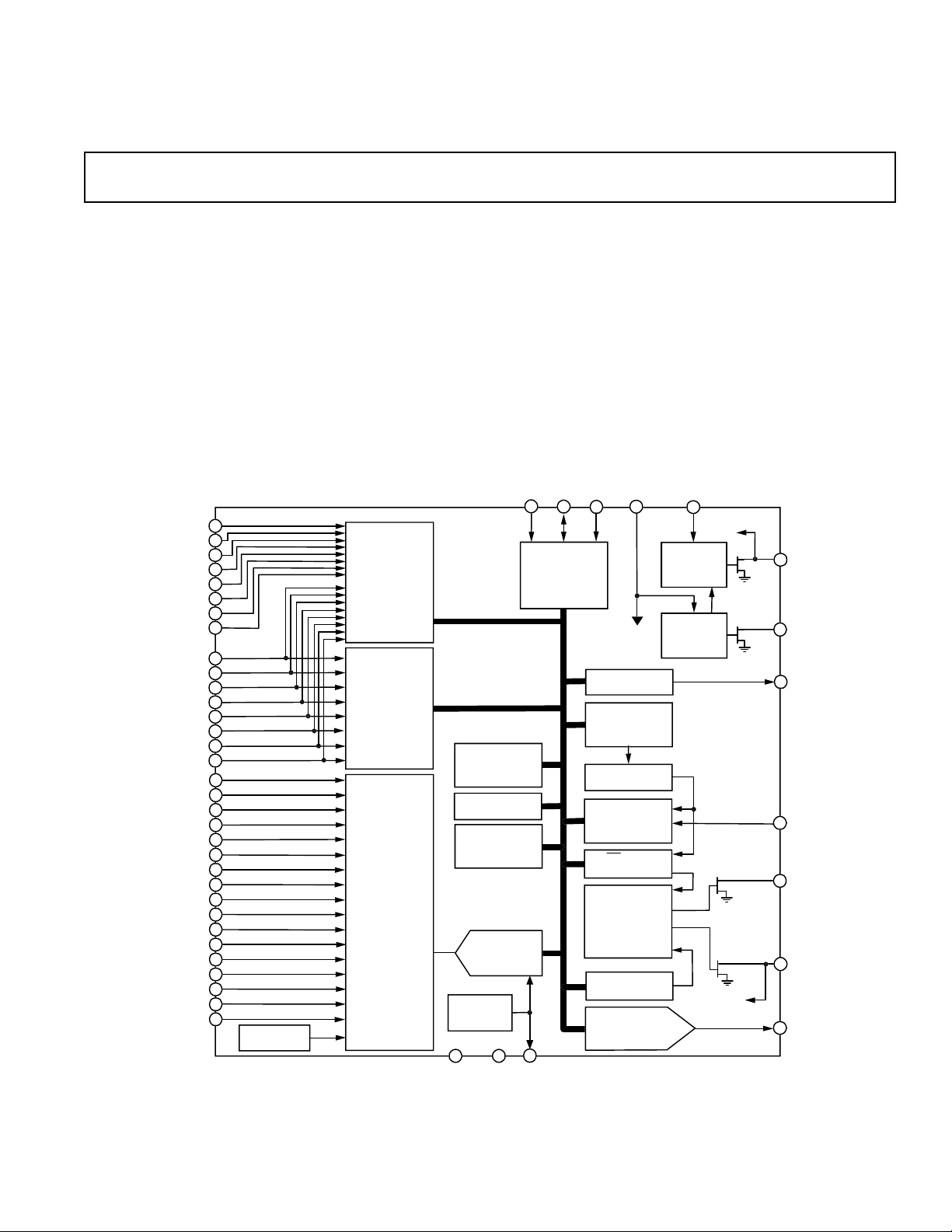
FUNCTIONAL BLOCK DIAGRAM
GPIO15
GPIO14
GPIO13
+V
+5V
-12V
+12V
+V
D2+/A
D2-/A
GPIO12
GPIO11
GPIO10
GPIO9
GPIO8
FAN7/GPIO7
FAN6/GPIO6
FAN5GPIO5
FAN4/GPIO4
FAN3/GPIO3
FAN2/GPIO2
FAN1/GPIO1
FAN0/GPIO0
(0 - +4.0V )
BAT
(0 - +6.66V)
IN
(0 - -16V )
IN
(0 - +16V)
IN
(0 - +3 V )
CCPIN
(0 - + 3 V)
A
IN0
A
(0 - + 3 V)
IN1
(0 - + 3 V)
A
IN2
IN3
(0 - + 3 V)
A
A
(0 - + 3 V)
IN4
IN5
(0 - + 3 V)
A
A
(0 - +2.5V)
IN6
(0 - +2.5V)
A
IN7
(0 - +2.5V )
IN8
(0 - +2.5V )
IN9
D1-/NTESTIN
D1+
BANDGAP
TEMP. SEN SOR
GPIO
REGISTERS
FAN SPEED
COUNTER
INP UT
ATTEN UATO RS
AND
ANALOG
MULTIPLEXER
REFERENCE
Chassis Intrusion Detection
Interrupt Output (SMBAlert)
Reset Input, Reset Outputs
Thermal Interrupt (THERM) Output
Shutdown Mode to Minimize Power Consumption
Limit Comparison of all Monitored Values
APPLICATIONS
Network Servers and Personal Computers
Telecommunications Equipment
Test Equipment and Measuring Instruments
ADD/
NTESTOUT
ADDRES S
POINTER
REGIST ER
8KBYTE S
E2PROM
TEMP E RA TUR E
CONFIGURATION
REGIST ER
SDA 3.3V M AIN
SERIAL B US
INTERFA C E
3.3VSTB Y
SCL
V
CC
PWM REGISTER
AND CONTROLLER
VALUE AND
LIMIT
REGISTE RS
LIMIT
COMPA RA TOR S
INT E R R U P T
STATUS
REGISTE RS
INT M AS K
REGISTE RS
GENERATOR
GENERATOR
3.3V M AIN
RESET
3.3V STBY
RESET
RESET IN
ADM1026
INTE RR U P T
MASKING
8-BIT ADC
CONFIGURATION
BANDGAP
REGISTE RS
ANALOG
OUTPUT REGISTE R
AND 8-BIT DAC
TO GPIO
REGISTERS
RESETM AIN
RESETST BY
PWM
CI
INT
GPIO16/THERM
DAC
AGND
REV. PrP 9/01
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
V
DGND
(1.82V O R 2.5 V)
REF
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 2001
PRELIMINARY TECHNICAL DA T A
PRODUCT DESCRIPTION
The ADM1026 is a complete system hardware monitor for microprocessor-based systems, providing measurement and limit comparison of various
system parameters. The ADM1026 has up to 19 analog measurement channels. Fifteen analog voltage inputs are provided, of which five are dedicated to monitoring +3.3V, +5V and ±12V power supplies and the processor core voltage. The ADM1026 can monitor two further power-supply
voltages by measuring its own analog and digital V
can be configured as general-purpose analog inputs to measure 0 to 2.5V, or as a second temperature sensing input.The 8 remaining inputs are
general-purpose analog inputs with a range of 0 to 2.5V or 0 to 3V. Finally, the ADM1026 has on on-chip temperature sensor.
The ADM1026 has eight pins that can be configured for fan-speed measurement or as general purpose logic I/O pins. A further 8 pins are dedicated to general-purpose logic I/O. An additional pin can be configured as a general purpose I/O or as the bidirectional THERM pin.
Measured values can be read out via a 2-wire serial System Management Bus, and values for limit comparisons can be programmed in over the
same serial bus. The high-speed successive-approximation ADC allows frequent sampling of all analog channels to ensure a fast interrupt response
to any out-of-limit measurement.
The ADM1026’s 3V to 5.5V supply voltage range, low supply current, and serial interface make it ideal for a wide range of applications. These
include hardware monitoring and protection applications in personal computers, telecommunications equipment, and office electronics.
. One input (two pins) is dedicated to a remote temperature-sensing diode. Two further pins
CC
ADM1026–SPECIFICA TIONS
(TA = T
MIN
to T
, VCC = V
MAX
MIN
to V
, unless otherwise noted)
MAX
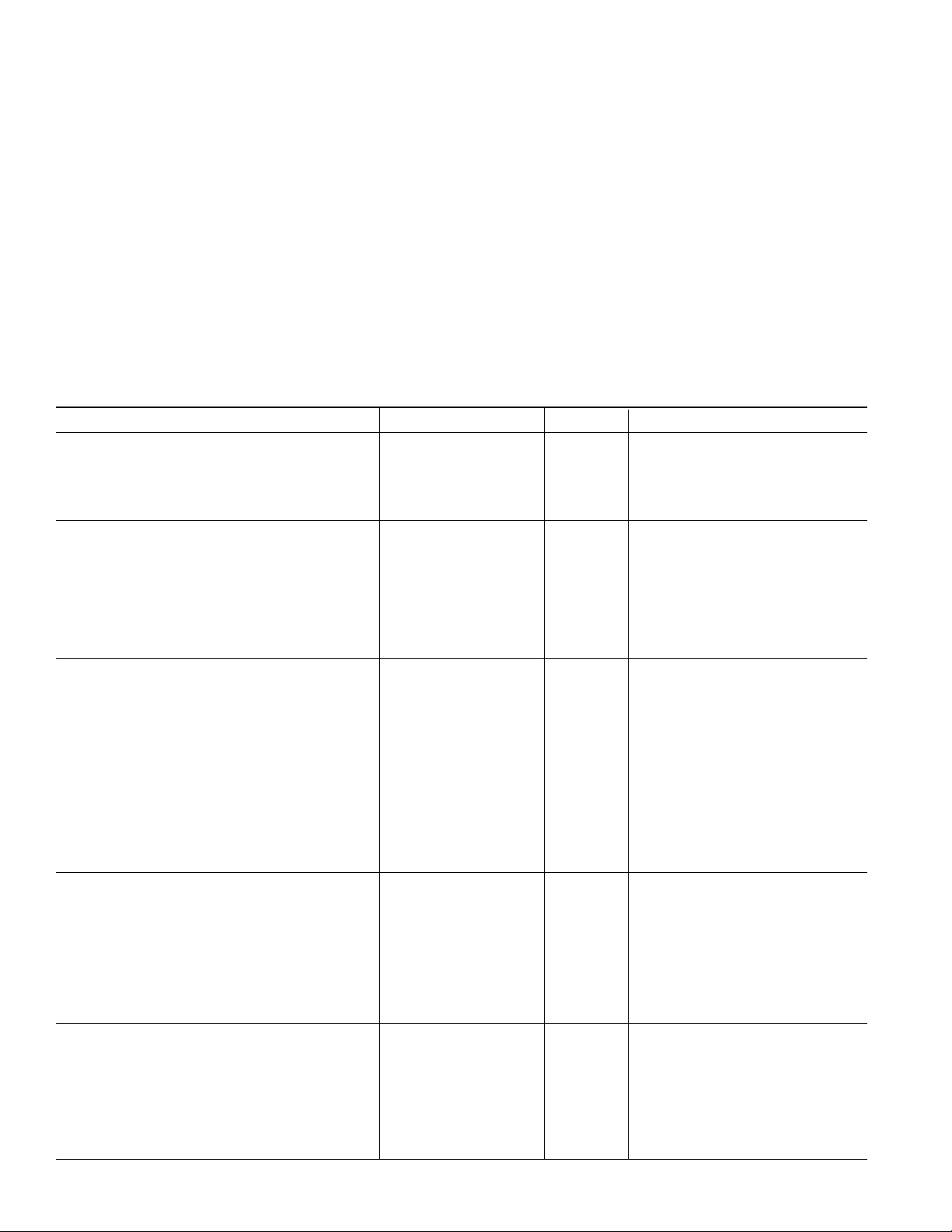
Parameter Min Typ Max Units Test Conditions/Comments
POWER SUPPLY
Supply Voltage, 3.3V STBY, 3.3V MAIN 3.135 3.3 5.5 V
Supply Current, I
CC
1.4 3.0 mA Interface Inactive, ADC Active
1.0 mA ADC Inactive, DAC Active
250 µA Shutdown Mode
TEMP. -TO-DIGITAL CONVERTER
Internal Sensor Accuracy ±3
Resolution ±1
External Diode Sensor Accuracy ±3
Resolution ±1
o
C
o
C
o
C 60 oC ≤ TD ≤ +100oC
o
C
Remote Sensor Source Current 90 µA High Level
5.5 µΑ Low Level
ANALOG-TO-DIGITAL CONVERTER (INCLUDING MUX AND ATTENUATORS)
Total Unadjusted Error, TUE ±2 % See Note 3
Differential Non-Linearity, DNL ±1 L SB
Power Supply Sensitivity ±1 %/V
Conversion Time (Analog Input or Int.Temp) 11.38 12.06 m s See Note 4
Conversion Time (External Temperature) 34.13 36.18 m s See Note 4
Input Resistance (+12V, +5V, V
, AIN0 - AIN5) 100 140 200 k⍀
CCP
Input Resistance of -12V pin 10 k⍀
Input Resistance (AIN6 - AIN9) 10 0 140 200 k⍀
Input Resistance of V
Current Drain (when measuring) 105 500 nA Gives CR2032 Battery life > 10 years
V
BAT
V
Current Drain (when not measuring) 16 nA
BAT
pin 97 k⍀ See Note 3
BAT
ANALOG OUTPUT
Output Voltage Range 0 2.5 V
Total Unadjusted Error, TUE ±3 % I
= 2mA
L
Full-Scale Error ±1 ± 3 %
Zero Error 2 LS B No Load
Differential Non-Linearity, DNL ±1 L SB Monotonic by Design
Integral Non-Linearity ±1 LS B
Output Source Current 2 mA
Output Sink Current 1 m A
REFERENCE OUTPUT
Output Voltage 1.8 1.82 1.84 V Bit 2 of Register 07h = 0
Output Voltage 2.47 2.50 2.53 V Bit 2 of Register 07h = 1
Line Regulation TB D %/V
Load Regulation TB D µV/mA
Short-Circuit Current TB D mA
Output Current Source 2 mA
Output Current Sink 2 m A
–2–
REV. PrP
PRELIMINARY TECHNICAL DA T A
ADM1026
Specifications (Continued)
Parameter Min Ty p Max Units Test Conditions/Comments
FAN RPM-TO-DIGITAL CONVERTER See Note 5
Accuracy ±6 %
Full-Scale Count 255
FAN0 TO FAN7 Nominal Input RPM 8800 RPM Divisor = 1, Fan Count = 153
(Note 5) 4400 RPM Divisor = 2, Fan Count = 153
2200 RPM Divisor = 4, Fan Count = 153
1100 RPM Divisor = 8, Fan Count = 153
Internal Clock Frequency 21.1 22.5 23.9 kHz
OPEN-DRAIN O/P'S, PWM, GPIO0-16
Output High Voltage, V
Output Low Voltage, V
OL
OH
2.4 V I
0.4 V I
PWM Output Frequency 75 Hz
OPEN-DRAIN DIGITAL OUTPUTS
,,
INT
, RESETMAIN
,,
Output Low Voltage, V
High Level Output Leakage Current, I
,,
, RESETSTBY
,,
OL
OH
))
)
))
0.4 V I
0.1 1 µA V
RESET Pulse Width 140 180 240 ms
OPEN-DRAIN SERIAL DATA BUS OUTPUT (SDA)
Output Low Voltage, V
High Level Output Leakage Current, I
OL
OH
0.1 1 µA V
0.4 V I
SERIAL BUS DIGITAL INPUTS (SCL, SDA)
Input High Voltage, V
Input Low Voltage, V
IL
IH
2.2 V
0.8 V
Hysteresis 500 mV
DIGITAL INPUT LOGIC LEVELS (ADD, CI, FAN0-7, GPIO0-16) See Notes 6 and 7
Input High Voltage, V
Input Low Voltage, V
IL
IH
2.4 V VCC = 3.3V
0.8 V VCC = 3.3V
Hysteresis (Fan 0 - 7) 250 mV VCC = 3.3V
RESETMAIN, RESETSTBY
RESETMAIN Threshold 2.94 V RESETMAIN triggered from AV
RESETSTBY Threshold 3.08 RESETSTBY triggered from DV
RESETMAIN Hysteresis 60 mV
RESETSTBY Hysteresis 50 mV
DIGITAL INPUT CURRENT
Input High Current, I
Input Low Current, I
Input Capacitance, C
IL
IN
IH
-1 µA VIN = V
1µAV
20 pF
EEPROM RELIABILITY
Endurance 100 700 K cycles See Note 9
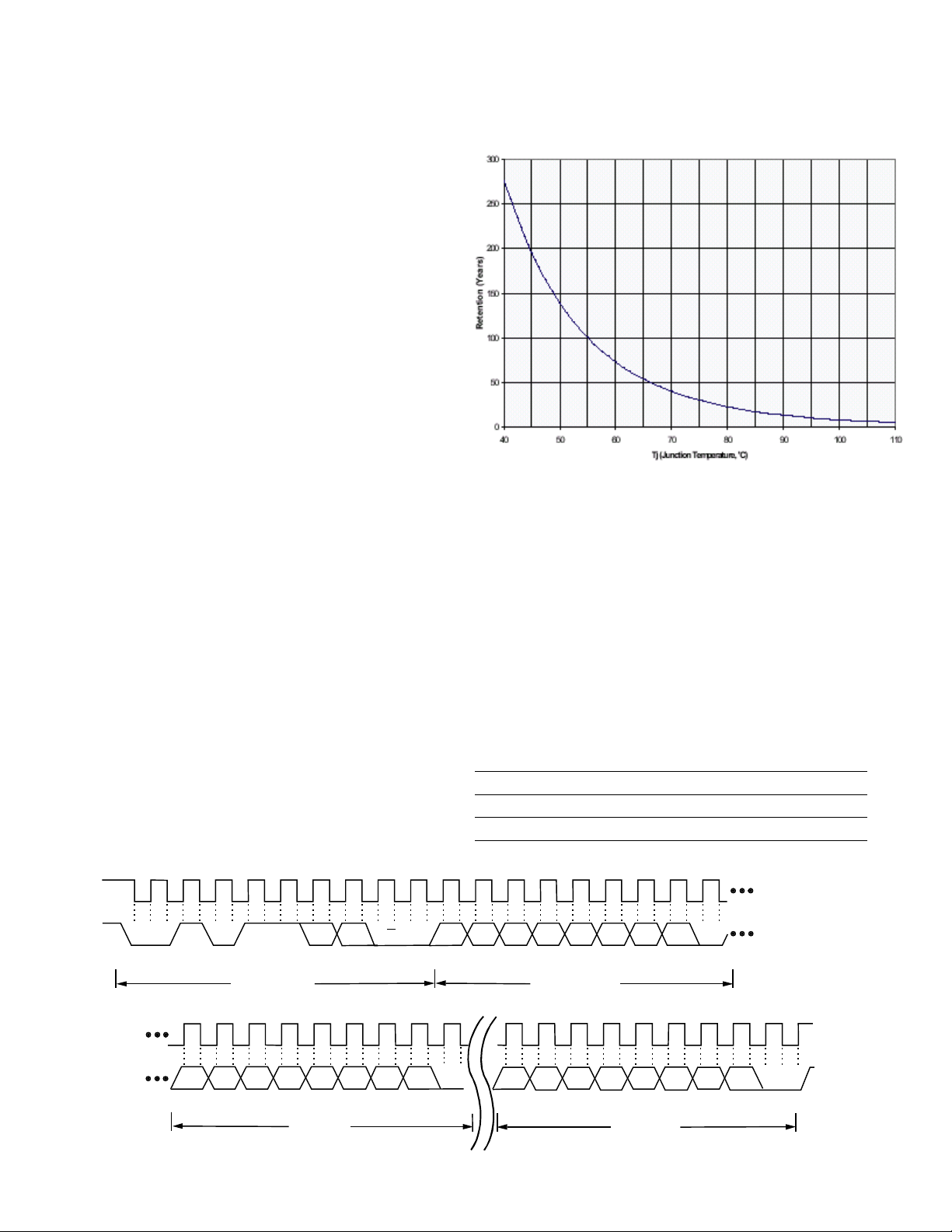
Data Retention 10 0 Years See Note 10
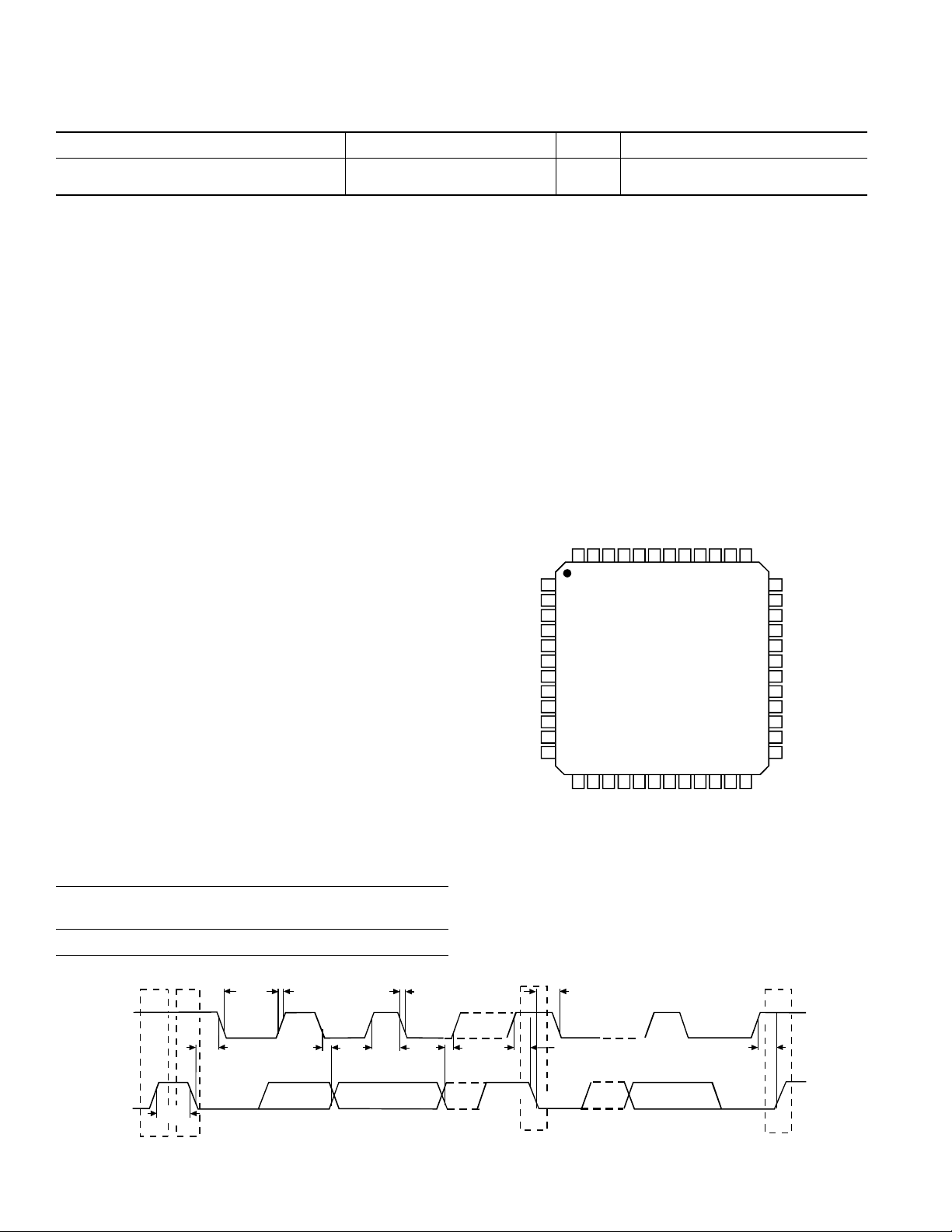
SERIAL BUS TIMING
Clock Frequency, f
Glitch Immunity, t
Bus Free Time, t
Start Setup Time, t
Start Hold Time, t
SCL Low Time, t
SCL High Time, t
SCLK
SW
BUF
SU;STA
HD;STA
LOW
HIGH
SCL, SDA Rise Time, t
SCL, SDA Fall Time, t
f
4.7 µ s See Figure 1
4.7 µ s See Figure 1
4 µ s See Figure 1
4.7 µ s See Figure 1
4 µ s See Figure 1
r
400 kHz See Figure 1
50 n s See Figure 1
1000 ns See Figure 1
300 µ s See Figure 1
= 3.0mA, VCC = 3.3V
OUT
= -3.0mA, VCC = 3.3V
OUT
= -3.0mA, VCC = 3.3V
OUT
= V
OUT
OUT
OUT
IN
CC
= -3.0mA, VCC = 3.3V
= V
CC
CC
= 0
CC
CC
REV. PrP
–3–
PRELIMINARY TECHNICAL DA T A
ADM1026
Specifications (Continued)
Parameter Min Ty p Max Units Test Conditions/Comments
Data Setup Time, t
Data Hold Time, t
NOTES
1
All voltages are measured with respect to GND, unless otherwise specified
2
Typicals are at TA=25°C and represent most likely parametric norm. Shutdown current typ is measured with VCC = 3.3V
3
TUE (Total Unadjusted Error) includes Offset, Gain and Linearity errors of the ADC, multiplexer and on-chip input attenuators. VBAT input is only linear for VBAT
voltages greater than 1.5V.
4
Total analog monitoring cycle time is nominally 273ms, made up of 18 ⫻ 11.38ms measurements on analog input and internal temperature channels, and 2 ⫻ 34.13ms
measurements on external temperature channels.
5
The total fan count is based on 2 pulses per revolution of the fan tachometer output. The total fan monitoring time depends on the number of fans connected and the
fan speed. See section on Fan Speed Monitoring for more details.
6
ADD is a three-state input that may be pulled high, low or left open-circuit.
7
Logic inputs will accept input high voltages up to 5V even when device is operating at supply voltages below 5V.
8
Timing specifications are tested at logic levels of V
9
Endurance is qualified to 100,000 cycles as per JEDEC Std. 22 method A117 and measured at -40°C, 25°C and 85°C. Typical Endurance at 25°C is 700,000 cycles.
10
Retention lifetime equivalent at junction temperature (Tj) = 55°C as per JEDEC Std. 22 method A117. Retention lifetime based on an activation energy of 0.6eV will
SU;DAT
HD;DAT
= 0.8V for a falling edge and V
IL
derate with junction temperature as shown in Figure 2.
250 n s See Figure 1
300 n s See Figure 1
= 2.1V for a rising edge.
IH
ABSOLUTE MAXIMUM RATINGS*
Positive Supply Voltage (VCC) . . . . . . . . . . . . . . . . . 6.5 V
Voltage on 12V V
Voltage on -12V V
Voltage on Analog Pins . . . . . . . . . .-0.3V to (V
Pin . . . . . . . . . . . . . . . . . . . . . . . . +20V
IN
Pin . . . . . . . . . . . . . . . . . . . . . . . -20V
IN
+0.3V)
CC
Voltage on Open Drain Digital Pins . . . . . . -0.3V to 6.5V
Input Current at any pin . . . . . . . . . . . . . . . . . . . . . . ±5mA
Package Input Current . . . . . . . . . . . . . . . . . . . . . . ±20mA
Maximum Junction Temperature (T
max) . . . . . . .150 °C
J
Storage Temperature Range . . . . . . . . .–65°C to +150°C
Lead Temperature, Soldering
Vapor Phase 60 sec . . . . . . . . . . . . . . . . . . . . . . . . . .+215°C
Infra-Red 15 sec . . . . . . . . . . . . . . . . . . . . . . . . . +200°C
ESD Rating -12V
pin . . . . . . . . . . . . . . . . . . . . . 1000 V
IN
ESD Rating all other pins . . . . . . . . . . . . . . . . . . . 2000 V
*Stresses above those listed under “Absolute Maximum Ratings” may cause permanent
damage to the device. This is a stress rating only; functional operation of the device
at these or any other conditions above those indicated in the operational section of this
specification is not implied. Exposure to absolute maximum rating conditions for
extended periods may affect device reliability.
THERMAL CHARACTERISTICS
48-Pin LQFP Package:
= 50°C/Watt, θ
θ
JA
= 10°C/Watt
JC
ORDERING GUIDE
GPIO9
GPIO8
FAN0/GPIO0
FAN1/GPIO1
FAN2/GPIO2
FAN3/GPIO3
3.3V MAIN
DGND
FAN4/GPIO4
FAN5/GPIO5
FAN6/GPIO6
FAN7/GPIO7
PIN CONFIGURATION
GPIO12
GPIO13
GPIO14
46
45
ADM10 26
(Not to Scale)
16
CI
GPIO15
43
44
TOP VIEW
17
18
INT
PWM
PIN 1 IDE NT IF IER
1
2
3
4
5
6
7
8
9
10
11
12
GPIO11
GPIO10
47
48
15
14
13
SCL
SDA
ADD/NTESTOUT
THERM
GPIO16/
42
19
BY
RESETST
)
)
)
)
)
- 3V
- 3V
- 3V
- 3V
(0
IN0
A
41
20
RESETMAIN
- 3V
(0
(0
(0
(0
IN1
IN2
IN3
A
40
21
D
AGN
IN4
A
A
A
37
38
39
A
(0 - 3V )
36
IN5
(0 - 2.5V)
A
35
IN6
(0 - 2.5V)
A
34
IN7
(0 - 3V)
V
33
CCP
(0 - 16V)
+12V
32
IN
(0 - 16V)
-12V
31
IN
+5V
(0 - 6.66 V )
30
IN
+V
(0 - 4.4V)
29
BAT
(0 - 2.5 V )
D2+/A
28
IN8
(0 - 2.5V )
D2-/A
27
IN9
D1+
26
D1-/NTESTIN
25
23
22
24
C
EF
R
DA
V
3.3V STBY
Temperature Package Package
Model Range Description Option
ADM1026JST 0°C to +100°C 48-Pin LQFP ST48
SCL
SDA
t
R
t
LOW
t
HD;STA
t
BUF
S
P
t
HD;DAT
t
HIGH
t
F
t
SU;DAT
Figure 1. Diagram for Serial Bus Timing
–4–
t
HD;STA
t
SU;STA
S
t
SU;STO
P
REV. PrP
PRELIMINARY TECHNICAL DA T A
ADM1026
PIN FUNCTION DESCRIPTION
PIN NO. MNEMONIC TYPE DESCRIPTION
1 GPIO9 Digital I/O
2 GPIO8 Digital I/O
3 FAN0/GPIO0 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
4 FAN1/GPIO1 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
5 FAN2/GPIO2 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
6 FAN3/GPIO3 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
7 3.3V MAIN Analog Input Monitors the main 3.3V system supply. Does NOT power device.
8 DGND Ground Ground pin for digital circuits.
9 FAN4/GPIO4 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
1
1
General purpose I/O pin can be configured as a digital input or output.
General purpose I/O pin can be configured as a digital input or output.
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
10 FAN5/GPIO5 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
11 FAN6/GPIO6 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
12 FAN7/GPIO7 Digital I/O Fan tachometer input, or can be re-configured as a general purpose
digital I/O pin. This has an internal 10k⍀ pullup resistor to 3.3VSTBY
13 SCL Digital Input Open-drain Serial Bus Clock. Requires 2.2k⍀ pullup resistor.
14 SDA Digital I/O Serial Bus Data. Open-drain output. Requires 2.2k⍀ pullup resistor.
15 ADD/ Digital Input This is a three-state input that controls the two LSBs of the Serial Bus
NTESTOUT Address. It also functions as the output for NAND tree testing.
16 CI Digital Input An active high input which captures a Chassis Intrusion event in Bit 6
of Status Register 4. This bit will remain set until cleared, so long as
battery voltage is applied to the V
is powered off.
17 INT Digital Output Interrupt Request (open drain). The output is enabled when Bit 1 of
the Configuration Register is set to 1. The default state is disabled.
It has an on-chip 100k⍀ pullup resistor.
18 PWM Digital Output Open drain Pulse-width modulated output for control of fan speed.
This pin defaults to being high for 100% duty cycle for use with n-
MOS drive circuitry. If a p-MOS device is used to drive the fan the
PWM output may be inverted by setting bit 1 of Test Register 1 = 1.
input, even when the ADM1026
BAT
19 RESETSTBY Digital Output Power-on Reset. 5 mA driver (open drain), active low output with a
180 ms typical pulse width. RESETSTBY is asserted whenever
3.3VSTBY is below the reset threshold. It remains asserted for approx.
180ms after 3.3VSTBY rises above the reset threshold.
20 RESETMAIN Digital I/O Power-on Reset. 5 mA driver (open drain), active low output with a
180 ms typical pulse width. RESETMAIN is asserted whenever
3.3V MAIN is below the reset threshold. It remains asserted for
approx. 180ms after 3.3V MAIN rises above the reset threshold. If,
however, 3.3V STBY rises with or before 3.3V MAIN, then
RESETMAIN remains asserted for 180ms after RESETSTBY is de-
asserted. Pin 20 also functions as an active low RESET input.
REV. PrP
–5–
PRELIMINARY TECHNICAL DA T A
ADM1026
PIN FUNCTION DESCRIPTION (CONTINUED)
PIN NO. MNEMONIC TYPE DESCRIPTION
21 AGND Ground Ground pin for analog circuits
22 3.3V STBY Power Supply Supplies 3.3V power for the ADM1026. Also monitors 3.3V standby
power rail.
23 DAC Analog Output 0 to 2.5V output for analog control of fan speed.
24 VREF Analog Output Reference voltage output. Can be selected as 1.8V (default) or 2.5V.
25 D1-/NTESTIN Analog Input Connected to cathode of 1st remote temperature sensing diode. If held
high at power up it activates NAND tree test mode.
26 D1+ Analog Input Connected to anode of 1st remote temperature sensing diode.
27 D2-/AIN9 Programmable Connected to cathode of 2nd remote temperature sensing diode, or
Analog Input may be re-configured as a 0 - 2.5V analog input
28 D2+/AIN8 Programmable Connected to anode of 2nd remote temperature sensing diode, or
Analog Input may be re-configured as a 0 - 2.5V analog input
29 V
BAT
30 +5V
31 -12V
32 +12V
33 +V
CCP
IN
IN
IN
Analog Input Monitors battery voltage, nominally +3V.
Analog Input Monitors +5 V supply.
Analog Input Monitors -12 V supply.
Analog Input Monitors +12 V supply.
Analog Input Monitors processor core voltage (0 to 3.0V).
34 AIN7 Analog Input General-purpose 0 to 2.5V analog input.
35 AIN6 Analog Input General-purpose 0 to 2.5V analog input.
36 AIN5 Analog Input General-purpose 0 to 3V analog input.
37 AIN4 Analog Input General-purpose 0 to 3V analog input.
38 AIN3 Analog Input General-purpose 0 to 3V analog input.
39 AIN2 Analog Input General-purpose 0 to 3V analog input.
40 AIN1 Analog Input General-purpose 0 to 3V analog input.
41 AIN0 Analog Input General-purpose 0 to 3V analog input.
42 GPIO16/ Digital I/O
1
General purpose I/O pin can be configured as a digital input or output.
THERM Can also be configured as a bidirectional THERM pin (open drain).
43 GPIO15 Digital I/O
44 GPIO14 Digital I/O
45 GPIO13 Digital I/O
46 GPIO12 Digital I/O
47 GPIO11 Digital I/O
48 GPIO10 Digital I/O
NOTES
1
GPIO pins are open-drain and require external pullup resistors.
1
1
1
1
1
1
General purpose I/O pin can be configured as a digital input or output.
General purpose I/O pin can be configured as a digital input or output.
General purpose I/O pin can be configured as a digital input or output.
General purpose I/O pin can be configured as a digital input or output.
General purpose I/O pin can be configured as a digital input or output.
General purpose I/O pin can be configured as a digital input or output.
–6–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
FUNCTIONAL DESCRIPTION
GENERAL DESCRIPTION
The ADM1026 is a complete system hardware monitor for
microprocessor-based systems. The device communicates
with the system via a serial System Management Bus. The
serial bus controller has a hardwired address line for device
selection (ADD, pin 15), a serial data line for reading and
writing addresses and data (SDA, pin 14), and an input line
for the serial clock (SCL, pin 13). All control and programming functions of the ADM1026 are performed over
the serial bus.
MEASUREMENT INPUTS
Programmability of the analog and digital measurement
inputs makes the ADM1026 extremely flexible and versatile. The device has an 8 bit A-to-D converter, and 17
analog measurement input pins that can be configured in
different ways.
Pins 25 and 26 are dedicated temperature inputs and may
be connected to the cathode and anode of a remote temperature-sensing diode.
Pins 27 and 28 may be configured as a temperature input
and connected to a second temperature-sensing diode, or
they may be re-configured as analog inputs with a range of
0 to +2.5V.
Pins 29 to 33 are dedicated analog inputs with on-chip attenuators, configured to monitor V
and the processor core voltage V
Pins 34 to 41 are general-purpose analog inputs with a
range of 0 to +2.5V or 0 to +3V. These are mainly intended for monitoring SCSI termination voltages, but may
be used for other purposes.
The ADC also accepts input from an on-chip bandgap temperature sensor that monitors system ambient temperature.
Finally, the ADM1026 monitors the supply from which it
is powered, 3.3VSTBY, so there is no need for a separate
pin to monitor this power supply voltage.
The ADM1026 has 8 pins that are general-purpose logic
I/O pins (pins 1,2 and 43 to 48), a pin that can be configured as GPIO or as a bidirectional thermal interrupt
(THERM) pin (pin 42) and 8 pins that can be configured
for fan speed measurement or as general-purpose logic
pins (pins 3 to 6 and 9 to 12).
SEQUENTIAL MEASUREMENT
When the ADM1026 monitoring sequence is started, it
cycles sequentially through the measurement of analog inputs and the temperature sensor, while at the same time
the fan speed inputs are independently monitored. Measured values from these inputs are stored in Value Registers. These can be read out over the serial bus, or can be
compared with programmed limits stored in the Limit
Registers. The results of out of limit comparisons are
stored in the Interrupt Status Registers, and will generate
an interrupt on the INT line (pin 17).
Any or all of the Interrupt Status Bits can be masked by
appropriate programming of the Interrupt Mask Registers.
, +5V, -12V, +12V,
BAT
, respectively.
CCP
CHASSIS INTRUSION
A chassis intrusion input (pin 16) is provided to detect
unauthorised tampering with the equipment. This event is
latched in a battery-backed register bit.
RESETS
The ADM1026 has two power on reset outputs,
RESETMAIN and RESETSTBY, that are asserted when
3.3VMAIN or 3.3VSTBY fall below the reset threshold.
These give a 180ms reset pulse at power up. RESETMAIN
also functions as an active-low RESET input.
FAN SPEED CONTROL OUTPUTS
The ADM1026 has two outputs intended to control fan
speed, though they can also be used for other purposes.
Pin 18 is an open-drain pulse-width modulated (PWM)
output with a programmable duty-cycle and an output
frequency of 75Hz.
Pin 23 is connected to the output of an on-chip, 8-bit
digital-to-analog converter with an output range of zero to
2.5V.
Either or both of these outputs may be used to implement
a temperature-controlled fan by controlling the speed of a
fan dependent upon the temperature measured by the onchip temperature sensor or remote temperature sensors.
INTERNAL REGISTERS OF THE ADM1026
The ADM1026 contains a large number of data registers.
A brief description of the principal registers is given below. More detailed descriptions are given in the relevant
sections and in the tables at the end of the data sheet.
Address Pointer Register: This register contains the address
that selects one of the other internal registers. When writing to
the ADM1026, the first byte of data is always a register address, which is written to the Address Pointer Register.
Configuration Registers: Provide control and configuration
for various operating parameters of the ADM1026.
Fan Divisor Registers: Contain counter pre-scaler values
for fan speed measurement.
DAC/PWM Control Registers: Contain speed values for
PWM and DAC fan drive outputs.
GPIO Configuration Registers: These configure the
GPIO pins as input or output and for signal polarity.
Value and Limit Registers: The results of analog voltage
inputs, temperature and fan speed measurements are
stored in these registers, along with their limit values.
Status Registers: These registers store events from the
various interrupt sources.
Mask Registers: Allow masking of individual interrupt
sources.
EEPROM
The ADM1026 has 8K bytes of non-volatile, ElectricallyErasable Programmable Read-Only Memory (EEPROM),
from register addresses 8000h to 9FFFh. This may be
used for permanent storage of data that will not be lost
when the ADM1026 is powered down, unlike the data in
REV. PrP
–7–
ADM1026
PRELIMINARY TECHNICAL DA T A
the volatile registers. Although referred to as Read Only
Memory, the EEPROM can be written to (as well as read
from) via the serial bus in exactly the same way as the
other registers. The only major differences between the
E2PROM and other registers are:
1. An EEPROM location must be blank before it can be
written to. If it contains data, it must first be erased.
2. Writing to EEPROM is slower than writing to RAM.
3. Writing to the EEPROM should be restricted because
it has a limited write/cycle life of 100,000 write operations, due to the usual EEPROM wear-out
mechanisms.
2
The E
two key E
PROM in the ADM1026 has been qualified for
2
PROM memory characteristics:- memory
cycling endurance and memory data retention.
Endurance qualifies the ability of the E
2
PROM to be
cycled through many Program, Read and Erase cycles. In
real terms, a single endurance cycle is composed of four
independent, sequential events. These events are defined
as follows:
(a) initial page erase sequence
(b) read/verify sequence
(c) program sequence
(d) second read/verify sequence
In reliability qualification, every byte is cycled from 00h
to FFh until a first fail is recorded signifying the
endurance limit of the E
Retention quantifies the ability of the memory to retain its
programmed data over time. The E
2
PROM memory.
2
PROM in the
ADM1026 has been qualified in accordance with the
formal JEDEC Retention Lifetime Specification (A117) at
a specific junction temperature (Tj = 55°C). As part of
this qualification procedure, the E
2
PROM memory is
cycled to its specified endurance limit described above,
before data retention is characterized. This means that the
2
PROM memory is guaranteed to retain its data for its
E
full specified retention lifetime every time the E
2
PROM is
reprogrammed. It should be noted that retention lifetime
based on an activation energy of 0.6eV will derate with Tj
as shown in Figure 2.
Figure 2. E2PROM Memory Retention
SERIAL BUS INTERFACE
Control of the ADM1026 is carried out via the serial System Management Bus (SMBus). The ADM1026 is connected to this bus as a slave device, under the control of a
master device.
The ADM1026 has a 7-bit serial bus slave address. When
the device is powered up, it will do so with a default serial
bus address. The five MSB's of the address are set to
01011, the two LSB's are determined by the logical states
of pin 15 (ADD/NTESTOUT). This is a three-state input that can be grounded, connected to V
or left open-
CC
circuit to give three different addresses.
TABLE 1. ADDRESS PIN TRUTH TABLE
ADD Pin A1 A0
GND 0 0
No Connect 1 0
V
CC
01
SCL
SDA
STAR T BY
MASTER
SCL
(CON T IN UED)
SDA
(CON T I N U E D)
1 91
0
1 0 1 1 A1 A0 D7
FRAME 1
SLAVE ADDRESS
1
D6
D7
D5
D4
FRAME 3
DATA BYTE
D3
D2
R/W
D1
ACK. BY
SLAVE
D0
ACK. BY
SLAVE
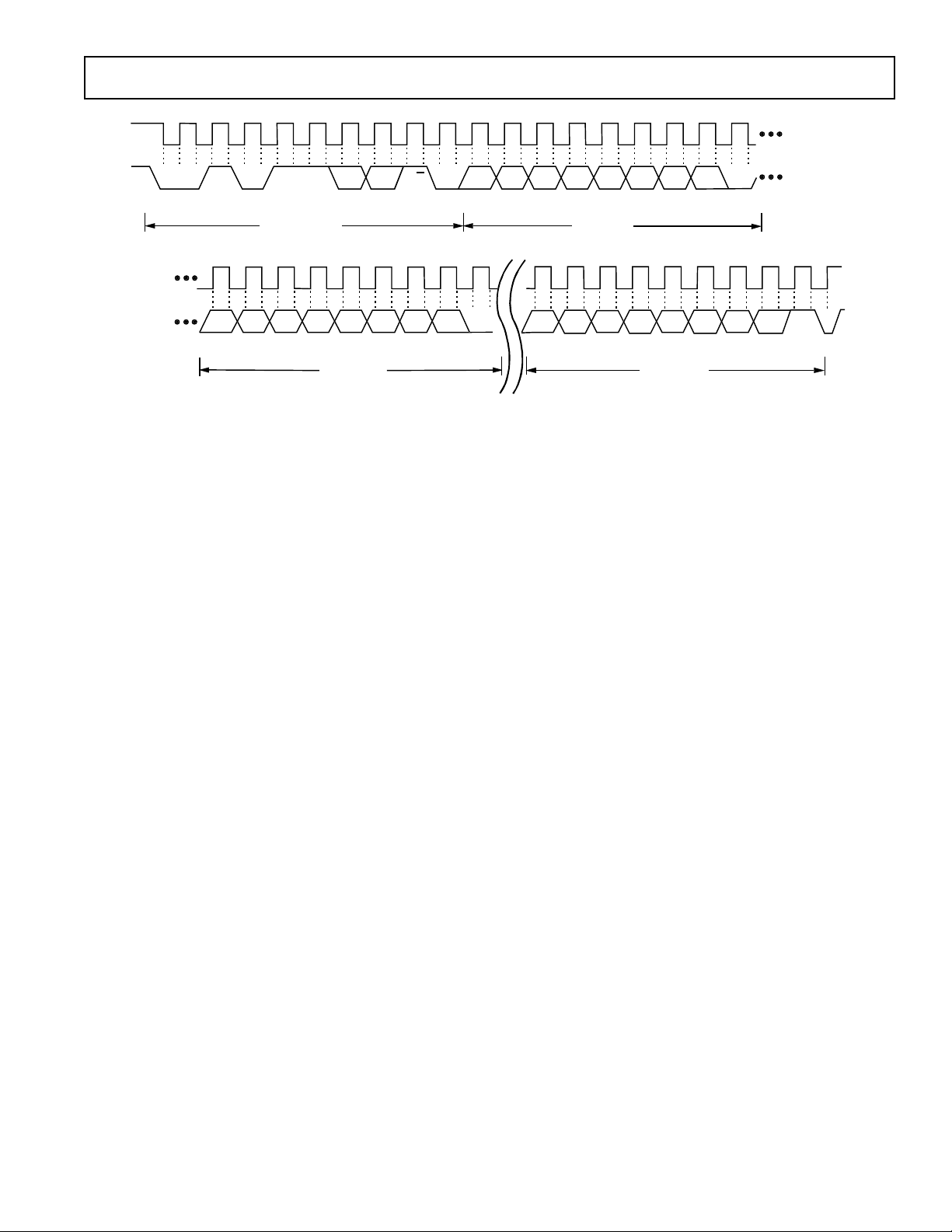
Figure 3a. General SMBus Write Timing Diagram
–8–
D6
1 99
D7
D5 D4 D3
FRAME 2
COMMAND CODE
D5
D6
9
D2
D1
D0
ACK. BY
SLAVE
D4 D3 D2 D1
FRAME N
DATA BYTE
D0
ACK. BY
SLAVE
STOP BY
MASTER
REV. PrP
PRELIMINARY TECHNICAL DA T A
ADM1026
1 91
SCL
0
SDA
STAR T BY
MASTER
SCL
(CON T IN UED)
SDA
(CON T I N U E D)
1011
FRAME 1
SLAVE ADDRESS
1
D6
D7
D5
D4
DATA BYTE
A1
D3
FRAME 3
A0
R/W
ACK. BY
SLAVE
D2
D1
D0
D7
ACK. BY
MASTER
Figure 3b. General SMBus Read Timing Diagram
If ADD is left open-circuit the default address will be
0101110. ADD is sampled only at power-up, so any changes
made while power is on will have no immediate effect.
The facility to make hardwired changes to device address
allows the user to avoid conflicts with other devices sharing the same serial bus, for example if more than one
ADM1026 is used in a system.
GENERAL SMBUS TIMING
Figures 3a and 3b show timing diagrams for general read
and write operations using the SMBus. The SMBus specification defines specific conditions for different types of
read and write operation, which are discussed later.
The general SMBus protocol operates as follows:
1. The master initiates data transfer by establishing a
START condition, defined as a high to low transition
on the serial data line SDA whilst the serial clock line
SCL remains high. This indicates that a data stream
will follow. All slave peripherals connected to the serial
bus respond to the START condition, and shift in the
next 8 bits, consisting of a 7-bit slave address (MSB
first) plus a R/W bit, which determines the direction of
the data transfer, i.e. whether data will be written to or
read from the slave device (0 = write, 1 = read).
The peripheral whose address corresponds to the transmitted address responds by pulling the data line low
during the low period before the ninth clock pulse,
known as the Acknowledge Bit, and holding it low during the high period of this clock pulse. All other devices on the bus now remain idle whilst the selected
device waits for data to be read from or written to it. If
the R/W bit is a 0 then the master will write to the slave
device. If the R/W bit is a 1 the master will read from
the slave device.
2. Data is sent over the serial bus in sequences of 9 clock
pulses, 8 bits of data followed by an Acknowledge Bit
from the slave device. Data transitions on the data line
must occur during the low period of the clock signal
and remain stable during the high period, as a low to
high transition when the clock is high may be interpreted as a STOP signal.
If the operation is a write operation, the first data byte
9
D6
D4 D3 D2 D1
D5
FRAME 2
DATA BYTE
1 99
D7
D6
D4 D3 D2 D1
D5
FRAME N
DATA BYTE
D0
ACK. BY
MASTER
D0
NO ACK.
STOP BY
MASTER
after the slave address is a command byte. This tells the
slave device what to expect next. It may be an instruction such as telling the slave device to expect a block
write, or it may simply be a register address that tells
the slave where subsequent data is to be written.
Since data can flow in only one direction as defined by
the R/W bit, it is not possible to send a command to a
slave device during a read operation. Before doing a
read operation, it may first be necessary to do a write
operation to tell the slave what sort of read operation to
expect and/or the address from which data is to be read.
3. When all data bytes have been read or written, stop conditions are established. In WRITE mode, the master
will pull the data line high during the 10th clock pulse
to assert a STOP condition. In READ mode, the master device will release the SDA line during the low period before the 9th clock pulse, but the slave device will
not pull it low. This is known as No Acknowledge. The
master will then take the data line low during the low
period before the 10th clock pulse, then high during the
10th clock pulse to assert a STOP condition.
Note:
If it is required to perform several read or write operations
in succession, the master can send a repeat start condition
instead of a stop condition to begin a new operation.
SMBUS PROTOCOLS FOR RAM AND EEPROM
The ADM1026 contains volatile registers (RAM) and
non-volatile EEPROM. RAM occupies address locations
from 00h to 6Fh, whilst EEPROM occupies addresses
from 8000h to 9FFFh.
Data can be written to and read from both RAM and
EEPROM as single data bytes and as block (sequential)
read or write operations of 32 data bytes, which is the
maximum block size allowed by the SMBus specification.
Data can only be written to unprogrammed EEPROM locations. To write new data to a programmed location it is
first necessary to erase it. EEPROM erasure cannot be
done at the byte level; the EEPROM is arranged as 128
pages* of 64 bytes, and an entire page must be erased.
The EEPROM has three RAM registers associated with it,
REV. PrP
–9–
ADM1026
PRELIMINARY TECHNICAL DA T A
EEPROM Registers 1, 2 and 3 at addresses 06h, 0Ch and
13h. EEPROM Registers 1 and 2 are for factory use only.
EEPROM Register 3 is used to set up the EEPROM operating mode.
Setting bit 0 of EEPROM Register 3 puts the EEPROM
into Read Mode. Setting bit 1 puts it into Programming
Mode. Setting Bit 2 puts it into Erase Mode.
One, and only one of these bits must be set before the
EEPROM may be accessed, setting no bits or more than
one of them will cause the device to respond with No Acknowledge if an EEPROM read, program or erase operation is attempted.
It is important to distinguish between SMBus write operations such as sending an address or command, and
EEPROM programming operations. It is possible to write
an EEPROM address over the SMBus whatever the state
of EEPROM register 3. However, EEPROM Register 3
must be correctly set before a subsequent EEPROM operation can be performed. For example, when reading
from the EEPROM, bit 0 of EEPROM Register 3 can be
set, even though SMBus write operations are required to
set up the EEPROM address for reading.
Bit 3 of EEPROM Register 3 is used for EEPROM write
protection. Setting this bit will prevent accidental programming or erasure of the EEPROM. If a an EEPROM
write or erase operation is attempted with this bit set, the
ADM1026 will respond with No Acknowledge. This bit is
write once and can only be cleared by power-on reset.
EEPROM Register bit 7 is used for clock extend. Programming an EEPROM byte takes approximately 250µs,
which would limit the SMBus clock for repeated or block
write operations. Since EEPROM block read/write access
is slow, it is recommended that this Clock Extend bit
normally be set to 1. This allows the ADM1026 to pull
SCL low and extend the clock pulse when it cannot accept
any more data.
*Although the EEPROM is arranged into 128 pages, only
124 pages are available to the user. The last 4 pages are
reserved for manufacturing purposes and cannot be erased/
rewritten.
ADM1026 WRITE OPERATIONS
The SMBus specification defines several protocols for different types of read and write operations. The ones used in
the ADM1026 are discussed below. The following abbreviations are used in the diagrams:
S - START
P - STOP
R - READ
W - WRITE
A - ACKNOWLEDGE
A - NO ACKNOWLEDGE
The ADM1026 uses the following SMBus write protocols:
Send Byte
In this operation the master device sends a single command byte to a slave device, as follows:
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by
the write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code.
5. The slave asserts ACK on SDA.
6. The master asserts a STOP condition on SDA and the
transaction ends.
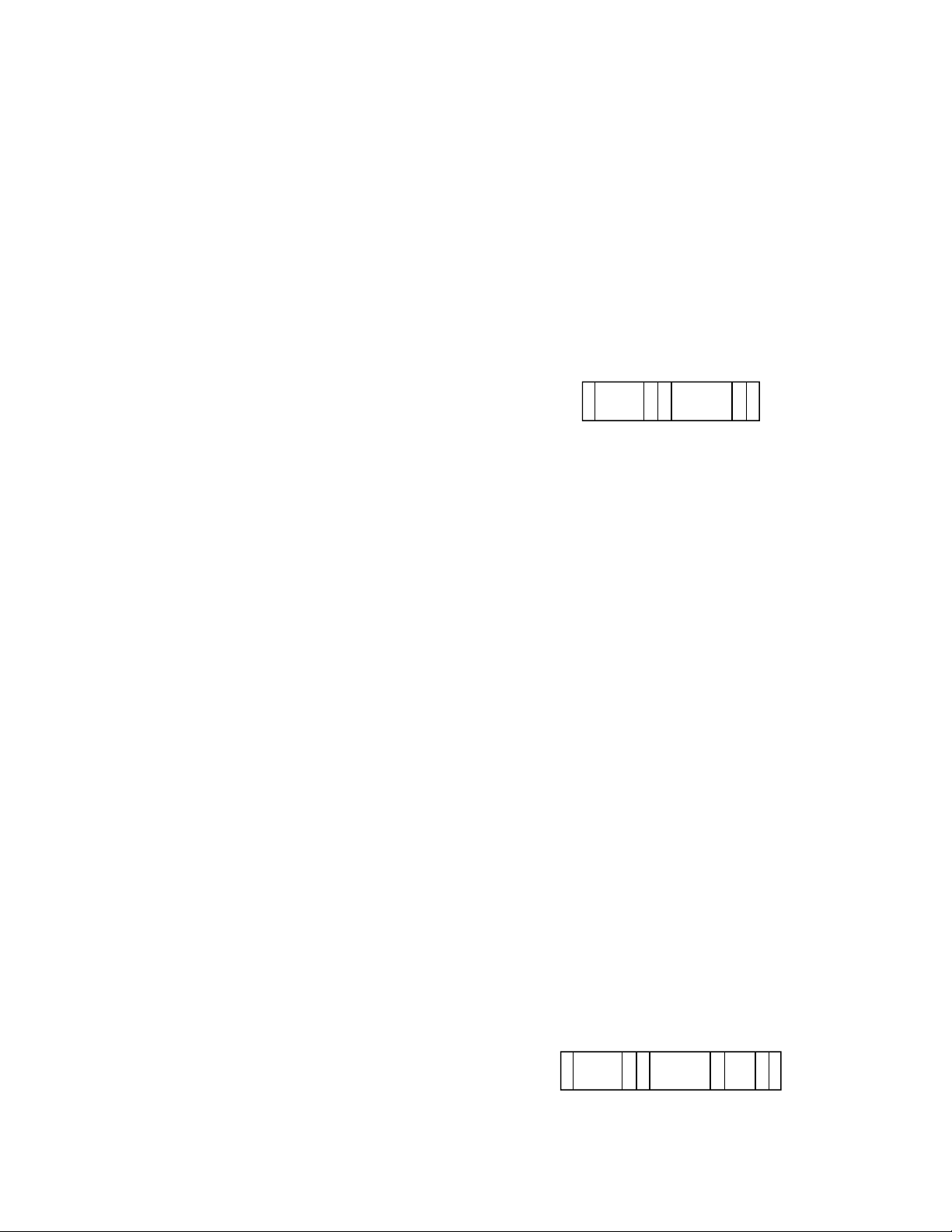
In the ADM1026, the send byte protocol is used to write a
register address to RAM for a subsequent single byte read
from the same address or block read or write starting at
that address. This is illustrated in Figure 4a.
12 3 4 56
SLAVE
S
ADDRESS
WA
RAM
ADDRESS
(00h TO 6Fh)
AP
Figure 4a. Setting A RAM Address For Subsequent Read
If it is required to read data from the RAM immediately
after setting up the address, the master can assert a repeat
start condition immediately after the final ACK and carry
out a single byte read, block read or block write operation, without asserting an intermediate stop condition.
Write Byte/Word
In this operation the master device sends a command byte
and one or two data bytes to the slave device, as follows:
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by
the write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code.
5. The slave asserts ACK on SDA.
6. The master sends a data byte.
7. The slave asserts ACK on SDA.
8. The master sends a data byte (or may assert STOP at
this point).
9. The slave asserts ACK on SDA.
10.The master asserts a STOP condition on SDA to end
the transaction.
In the ADM1026, the write byte/word protocol is used for
four purposes. The ADM1026 knows how to respond by
the value of the command byte and EEPROM register 3.
1. Write a single byte of data to RAM. In this case the
command byte is the RAM address from 00h to 6Fh
and the (only) data byte is the actual data. This is illustrated in Figure 4b.
12 345678
SLAVE
S
ADDRESS
WA
RAM
ADDRESS
(00h TO 6Fh)
ADATA A P
Figure 4b. Single Byte Write To RAM
2. Set up a two byte EEPROM address for a subsequent
read or block read. In this case the command byte is
–10–
REV. PrP
PRELIMINARY TECHNICAL DA T A
ADM1026
the high byte of the EEPROM address from 80h to
9Fh. The (only) data byte is the low byte of the
EEPROM address. This is illustrated in Figure 4c.
12 3 4 5 6 78
SLAVE
S
ADDRESS
WA
EEPROM
ADDRESS
HIGH BYTE
(80h TO 9Fh)
EEPROM
ADDRESS
A
LOW BYTE
(00h TO FFh)
AP
Figure 4c. Setting An EEPROM Address
If it is required to read data from the EEPROM immediately after setting up the address, the master can assert a repeat start condition immediately after the final
ACK and carry out a single byte read, block read or
block write operation, without asserting an intermediate stop condition. In this case bit 0 of EEPROM Register 3 should be set.
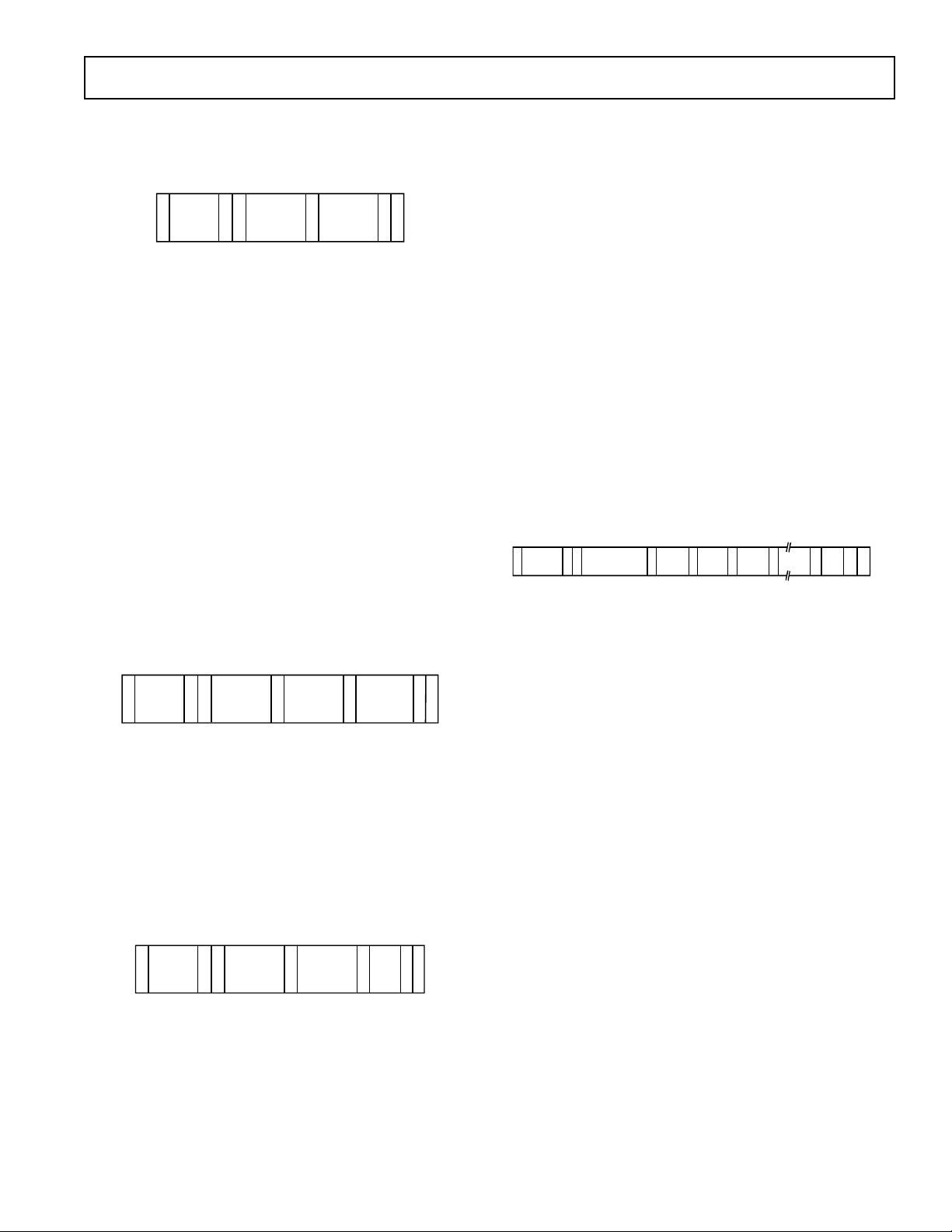
3. Erase a page of EEPROM memory. EEPROM
memory can be written to only if it is unprogrammed.
Before writing to one or more EEPROM memory locations that are already programmed, the page or pages
containing those locations must first be erased.
EEPROM memory is erased by writing an EEPROM
page address plus an arbitrary byte of data with bit 2 of
EEPROM Register 3 set to 1.
As the EEPROM consists of 128 pages of 64 bytes, the
EEPROM page address consists of the EEPROM address high byte (from 80h to 9Fh) and the two MSB's
of the low byte. The lower 6 bits of the EEPROM address low byte only specify addresses within a page and
are ignored during an erase operation.
12 3 4 5 6 7 8 910
SLAVE
S
ADDRESS
WA
EEPROM
ADDRESS
HIGH BYTE
(80h TO 9Fh)
EEPROM
ADDRESS
A
LOW BYTE
(00h TO FFh)
ARBITRARY
A
DATA
AP
Figure 4d. EEPROM Page Erasure
Page erasure takes approximately 20ms. If the
EEPROM is accessed before erasure is complete, it
will respond with No Acknowledge.
4. Write a single byte of data to EEPROM. In this case
the command byte is the high byte of the EEPROM
address from 80h to 9Fh. The first data byte is the low
byte of the EEPROM address and the second data byte
is the actual data. Bit 1 of EEPROM Register 3 must
be set. This is illustrated in Figure 4e.
12 3 4 5 6 78910
SLAVE
S
ADDRESS
WA
EEPROM
ADDRESS
HIGH BYTE
(80h TO 9Fh)
EEPROM
ADDRESS
A
LOW BYTE
(00h TO FFh)
ADATAAP
Figure 4e. Single Byte Write To EEPROM
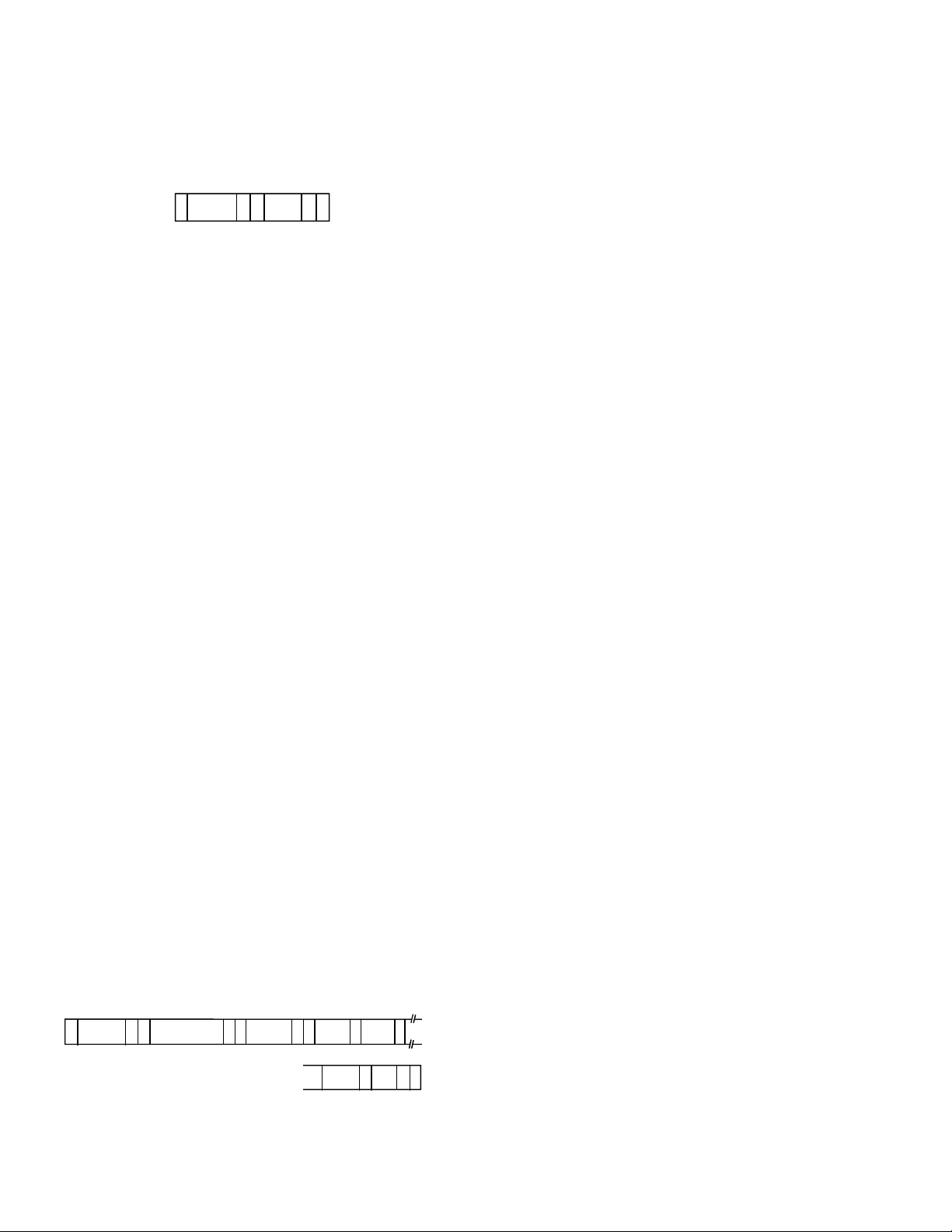
Block Write
In this operation the master device writes a block of data
to a slave device. The start address for a block write must
previously have been set. In the case of the ADM1026 this
is done by a Send Byte operation to set a RAM address or
a Write Byte/Word operation to set an EEPROM address.
1. The master device asserts a start condition on SDA.
2. The master sends the 7-bit slave address followed by
the write bit (low).
3. The addressed slave device asserts ACK on SDA.
4. The master sends a command code that tells the slave
device to expect a block write. The ADM1026 command code for a block write is A0h (10100000).
5. The slave asserts ACK on SDA.
6. The master sends a data byte (20h) that tells the slave
device 32 data bytes will be sent to it. The master
should always send 32 data bytes to the ADM1026.
7. The slave asserts ACK on SDA.
8. The master sends 32 data bytes.
9.The slave asserts ACK on SDA after each data byte.
10. The master sends a PEC (Packet Error Checking)
byte.
11. The ADM1026 checks the PEC byte and issues an
ACK if correct. If incorrect (NACK), the master should
resend the data bytes.
12. The master asserts a STOP condition on SDA to end
the transaction.
12 3 4 56789 10
SLAVE
S
ADDRESS
COMMAND A0h
WA
(BLOCK W RITE)
BYTE
AADATA 1 A
A DATA 2
COUNT
DATA
32
11
12
PEC
A
A
P
Figure 4f. Block Write To EEPROM Or RAM
When performing a block write to EEPROM, bit 1 of
EEPROM Register 3 must be set.
Unlike some EEPROM devices which limit block writes to
within a page boundary, there is no limitation on the start address when performing a block write to EEPROM, except:
1. There must be at least 32 locations from the start ad-
dress to the highest EEPROM address (9FFF), to avoiding writing to invalid addresses.
2. If the addresses cross a page boundary, both pages must
be erased before programming.
ADM1026 READ OPERATIONS
The ADM1026 uses the following SMBus read protocols:
RECEIVE BYTE
In this operation the master device receives a single byte
from a slave device, as follows:
1.The master device asserts a START condition on SDA.
2.The master sends the 7-bit slave address followed by the
read bit (high).
3.The addressed slave device asserts ACK on SDA.
4.The master receives a data byte.
5.The master asserts NO ACK on SDA.
6.The master asserts a STOP condition on SDA and the
transaction ends.
In the ADM1026, the receive byte protocol is used to read
a single byte of data from a RAM or EEPROM location
whose address has previously been set by a send byte or
REV. PrP
–11–
ADM1026
PRELIMINARY TECHNICAL DA T A
write byte/word operation. This is illustrated in Figure 4g.
When reading from EEPROM, Bit 0 of EEPROM
register 3 must be set.
12 3456
SLAVE
S
ADDRESS
RA
DATA
A P
Figure 4g. Single Byte Read From EEPROM Or RAM
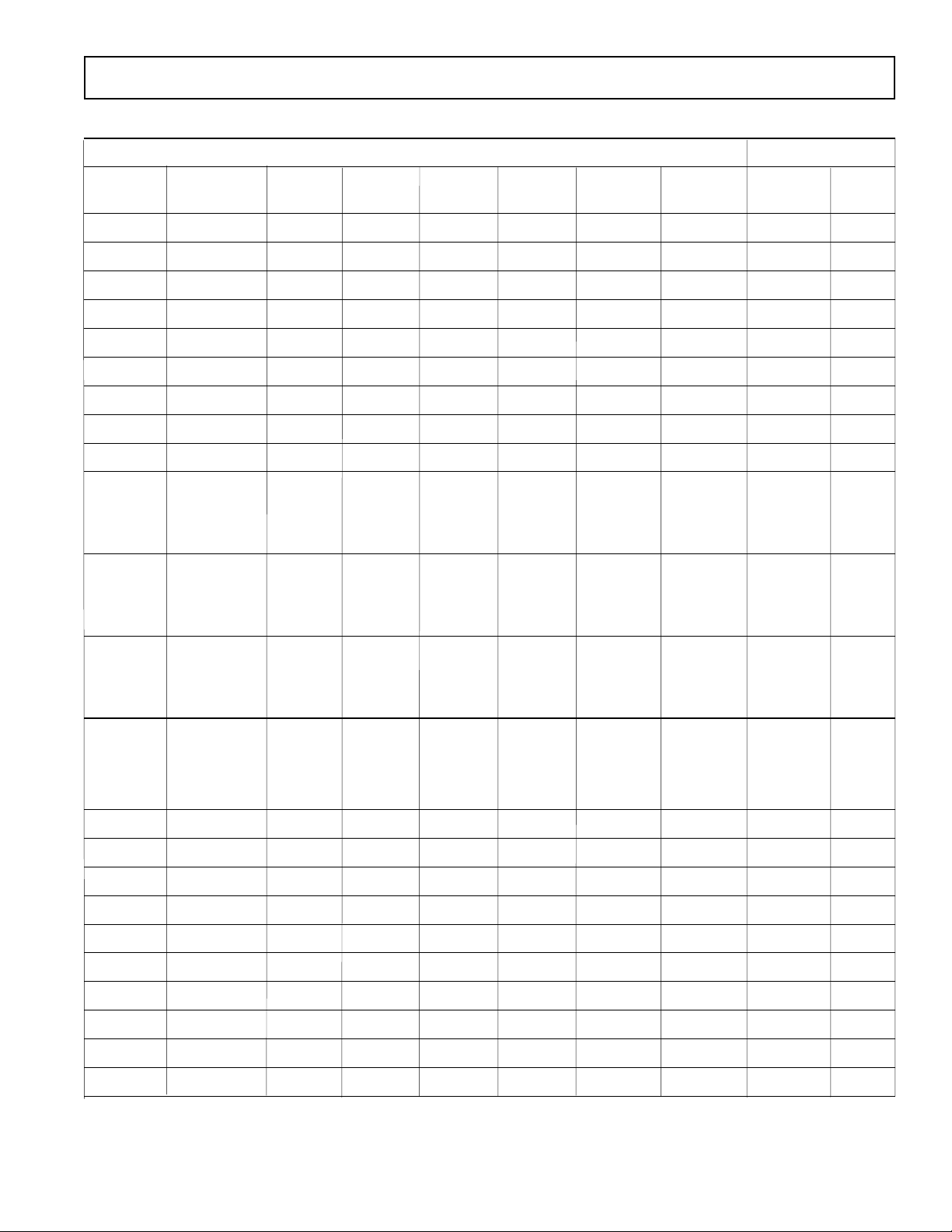
BLOCK READ
In this operation the master device reads a block of data
from a slave device. The start address for a block read
must previously have been set. In the case of the
ADM1026 this is done by a Send Byte operation to set a
RAM address, or a Write Byte/Word operation to set an
EEPROM address. The block read operation itself
consists of a Send Byte operation that sends a block read
command to the slave, immediately followed by a repeated
start and a read operation that reads out multiple data
bytes, as follows:
1.The master device asserts a START condition on SDA.
2.The master sends the 7-bit slave address followed by the
write bit (low).
3.The addressed slave device asserts ACK on SDA.
4.The master sends a command code that tells the slave
device to expect a block read. The ADM1026 command
code for a block read is A1h (10100001).
5.The slave asserts ACK on SDA.
6.The master asserts a repeat start condition on SDA.
7.The master sends the 7-bit slave address followed by the
read bit (high).
8.The slave asserts ACK on SDA.
9.The ADM1026 sends a byte count data byte that tells
the master how many data bytes to expect. The ADM1026
will always return 32 data bytes (20h), which is the
maximum allowed by the SMBus 1.1 specification.
10. The master asserts ACK on SDA.
11. The master receives 32 data bytes.
12. The master asserts ACK on SDA after each data byte.
13. The ADM1026 issues a PEC byte to the master. The
master should check the PEC byte and issue another block
read if the PEC byte is incorrect.
14. A NACK is generated after the PEC byte to signal the
end of the read.
15. The master asserts a STOP condition on SDA to end
the transaction.
12 3 4 567 89101112
SLAVE
S
ADDRESS
WA
COMMAND A1h
(BLOCK READ)
SLAVE
ADDRESS
RA
BYTE
COUNT
DATA
ADATA 1
AA S
13 14
15
PEC
A
32
A P
Figure 4h. Block Read From EEPROM or RAM
When block reading from EEPROM, bit 0 of EEPROM
register 3 must be set.
–12–
Note: Although the ADM1026 supports Packet Error
Checking (PEC), its use is optional. The PEC byte is
calculated using CRC-8. The Frame Check Sequence
(FCS) conforms to CRC-8 by the polynomial:-
C(x) = x
8
+ x2 + x1 + 1
Consult SMBus 1.1 specification for more information.
MEASUREMENT INPUTS
The ADM1026 has 17 external analog measurement pins,
which can be configured to perform various functions. It
also measures two supply voltages, 3.3V MAIN and 3.3V
STBY, and the internal chip temperature.
Pins 25 and 26 are dedicated to remote temperature measurement, whilst pins 27 and 28 can be configured as analog inputs with a range of 0 to +2.5V or as inputs for a
second remote temperature sensor.
Pins 29 to 33 are dedicated to measuring V
-12V, +12V supplies and the processor core voltage V
BAT
, +5V,
CCP
.
The remaining analog inputs, pins 34 to 41 are generalpurpose analog inputs with a range of 0 to +2.5V (pins 34
and 35) or 0 to +3V (pins 36 to 41).
A TO D CONVERTER
These inputs are multiplexed into the on-chip, successive
approximation, analog-to-digital converter. This has a
resolution of 8 bits. The basic input range is zero to
+2.5V, which is the input range of A
IN6
to A
, but five of
IN9
the inputs have built-in attenuators to allow measurement
of V
V
, +5V, -12V, +12V and the processor core voltage
BAT
, without any external components. To allow for the
CCP
tolerance of these supply voltages, the A to D converter
produces an output of 3/4 full-scale (decimal 192) for the
nominal input voltage, and so has adequate headroom to
cope with overvoltages. Table 2 shows the input ranges of
the analog inputs and output codes of the A to D converter.
When the ADC is running, it samples and converts an analog or local temperature input every 711µs (typical value).
Each input is measured 16 times and the measurements
averaged to reduce noise, so the total conversion time for
each input is 11.38ms.
Measurements on the remote temperature (D1 and D2) inputs take 2.13ms. These are also measured 16 times and
averaged, so the total conversion time for a remote temperature input is 34.13ms.
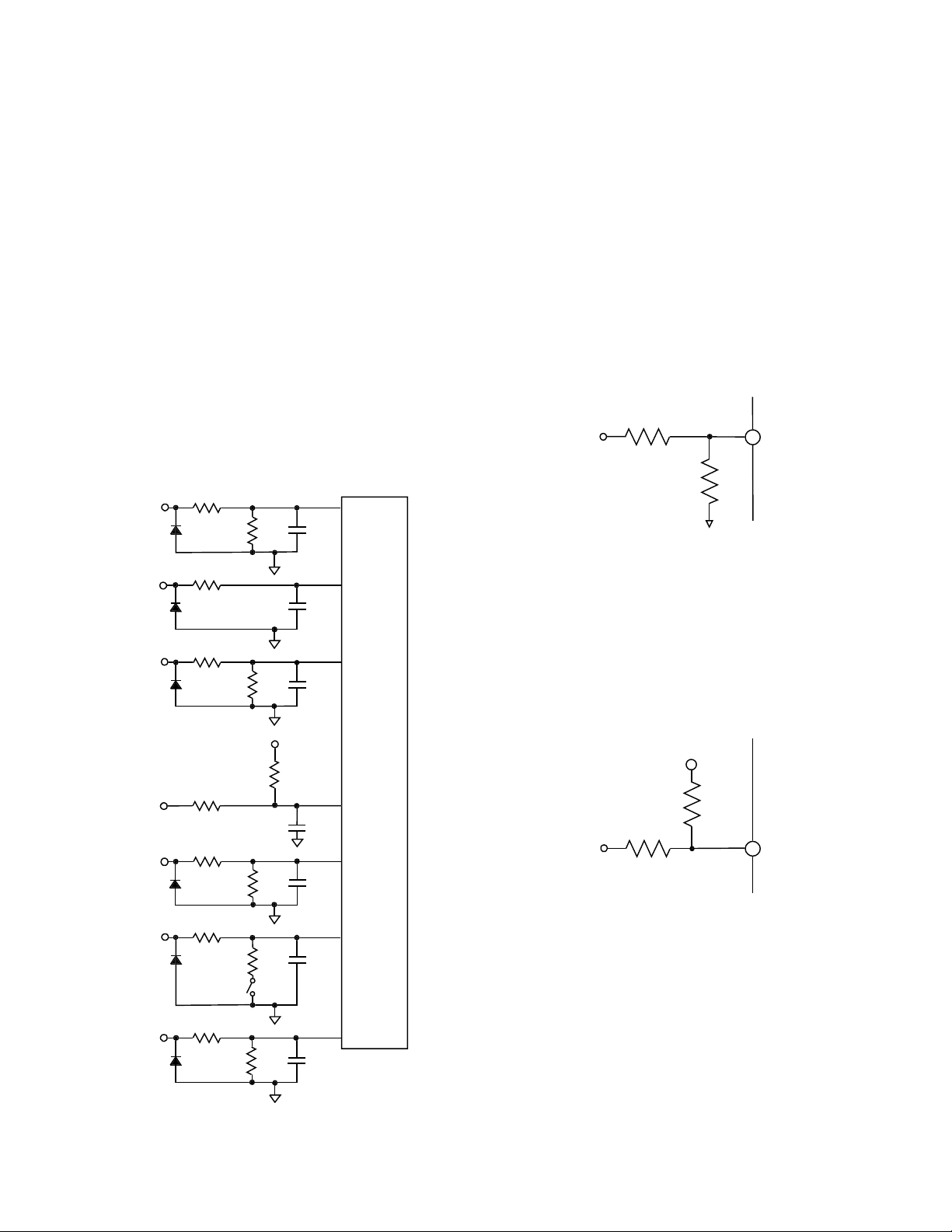
INPUT CIRCUITS
The internal structure for the analog inputs are shown in
Figure 5. Each input circuit consists of an input protection diode, an attenuator, plus a capacitor to form a firstorder lowpass filter which gives the input immunity to
high frequency noise. The -12V input also has a resistor
connected to the on-chip reference to offset the negative
voltage range so that it is always positive and can be
handled by the ADC. The V
input allows the condition
BAT
of a battery such as a CMOS backup battery to be monitored. To reduce current drain from the battery, the lower
resistor of the V
when a V
BAT
attenuator is not connected, except
BAT
measurement is being made. The total
REV. PrP
PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 2. A/D OUTPUT CODE VS. V
IN
Input Voltage A/D Output
+12V
IN
-12V
IN
+5VIN3.3VMAIN V
BAT
V
CCP
AIN (0-5) AIN(6-9) Decimal Binary
3.3VSTBY
<0.0625 <-15.928 <0.026 <0.0172 <0.016 <0.012 <0.012 <0.010 0 00000000
0.062 - 0.125 -15.928 ➝ -15.855 0.026 - 0.052 0.017 - 0.034 0.016 - 0.031 0.012 - 0.023 0.012 - 0.023 0.010 - 0.019 1 00000001
0.125 - 0.187 -15.855 ➝ -15.783 0.052 - 0.078 0.034 - 0.052 0.031 - 0.047 0.023 - 0.035 0.023 - 0.035 0.019 - 0.029 2 00000010
0.188 - 0.250 -15.783 ➝ -15.711 0.078 - 0.104 0.052 - 0.069 0.047 - 0.063 0.035 - 0.047 0.035 - 0.047 0.029 - 0.039 3 00000011
0.250 - 0.313 -15.711 ➝ -15.639 0.104 - 0.130 0.069 - 0.086 0.063 - 0.077 0.047 - 0.058 0.047 - 0.058 0.039 - 0.049 4 00000100
0.313 - 0.375 -15.639 ➝ -15.566 0.130 - 0.156 0.086 - 0.103 0.077 - 0.093 0.058 - 0.070 0.058 - 0.070 0.049 - 0.058 5 00000101
0.375 - 0.438 -15.566 ➝ -15.494 0.156 - 0.182 0.103 - 0.120 0.093 - 0.109 0.070 - 0.082 0.070 - 0.082 0.058 - 0.068 6 00000110
0.438 - 0.500 -15.494 ➝ 15.422 0.182 - 0.208 0.120 - 0.138 0.109 - 0.125 0.082 - 0.094 0.082 - 0.094 0.068 - 0.078 7 00000111
0.500 - 0563 -15.422 ➝ -15.349 0.208 - 0.234 0.138 - 0.155 0.125 - 0.140 0.094 - 0.105 0.094 - 0.105 0.078 - 0.087 8 00001000
l
l
l
4.000 - 4.063 -11.375 ➝ -11.303 1.665 - 1.691 1.110 - 1.127 1.000 - 1.040 0.750 - 0.780 0.750 - 0.780 0.625 - 0.635 64 (1/4-scale) 01000000
l
l
l
8.000 - 8.063 -6.750 ➝ -6.678 3.330 - 3.560 2.220 - 2.237 2.000 - 2.016 1.500 - 1.512 1.500 - 1.512 1.250 - 1.260 128 (1/2-scale) 10000000
l
l
l
12.000 - 12.063 -2.125 ➝ -2.053 4.995 - 5.021 3.330 - 3.347 3.000 - 3.016 2.250 - 2.262 2.250 - 2.262 1.875 - 1.885 192 (3/4 scale) 11000000
l
l
l
15.313 - 15.375 1.705 ➝ 1.777 6.374 - 6.400 4.249 - 4.267 3.828 - 3.844 2.871 - 2.883 2.871 - 2.883 2.392 - 2.402 245 11110101
15.375 - 15.437 1.777 ➝ 1.850 6.400 - 6.426 4.267 - 4.284 3.844 - 3.860 2.883 - 2.895 2.883 - 2.895 2.402 - 2.412 246 11110110
15.437 - 15.500 1.850 ➝ 1.922 6.426 - 6.452 4.284 - 4.301 3.860 - 3.875 2.895 - 2.906 2.895 - 2.906 2.412 - 2.422 247 11110111
15.500 - 15.563 1.922 ➝ 1.994 6.452 - 6.478 4.301 - 4.319 3.875 - 3.890 2.906 - 2.918 2.906 - 2.918 2.422 - 2.431 248 11111000
15.562 - 15.625 1.994 ➝ 2.066 6.478 - 6.504 4.319 - 4.336 3.890 - 3.906 2.918 - 2.930 2.918 - 2.930 2.431 - 2.441 249 11111001
15.625 - 15.688 2.066 ➝ 2.139 6.504 - 6.530 4.336 - 4.353 3.906 - 3.921 2.930 - 2.941 2.930 - 2.941 2.441 - 2.451 250 11111010
15.688 - 15.750 2.139 ➝ 2.211 6.530 - 6.556 4.353 - 4.371 3.921 - 3.937 2.941 - 2.953 2.941 - 2.953 2.451 - 2.460 251 11111011
15.750 - 15.812 2.211 ➝ 2.283 6.556 - 6.582 4.371 - 4.388 3.937 - 3.953 2.953 - 2.965 2.953 - 2.965 2.460 - 2.470 252 11111100
15.812 - 15.875 2.283 ➝ 2.355 6.582 - 6.608 4.388 - 4.405 3.953 - 3.969 2.965 - 2.977 2.965 - 2.977 2.470 - 2.480 253 11111101
15.875 - 15.938 2.355 ➝ 2.428 6.608 - 6.634 4.405 - 4.423 3.969 - 3.984 2.977 - 2.988 2.977 - 2.988 2.480 - 2.490 254 11111110
>15.938 >2.428 >6.634 >4.423 >3.984 >2.988 >2.988 >2.490 255 11111111
REV. PrP
–13–
ADM1026
PRELIMINARY TECHNICAL DA T A
current drain on the V
maximum V
voltage = 4V) so a CR2032 CMOS
BAT
pin is 105nA typical (for a
BAT
battery will function in a system in excess of the expected
10 years. Note that when a measurement is not being
made of V
the current drain is reduced to 16nA typical.
BAT
Under normal operating conditions, all measurements are
made in a round-robin format, and each measurement
result is actually 16 digitally averaged measurements.
Averaging is not carried out on the V
measurement to
BAT
reduce measurement time and hence reduce the current
drain from the battery. The V
current drain when a
BAT
measurement is being made is calculated by: I = (V
For V
/100k) *(T
BAT
= 3V;
BAT
PULSE/TPERIOD
)
I = (3/100k) * (711µs/273ms) = 78nA
T
PULSE
T
PERIOD
= V
measurement time = 711µs typical
BAT
= Time to measure all analog inputs = 273ms
typical
23.3k
80k
122.2k
8
116.7k
8
8
22.7k
8
8
25pF
10pF
35pF
AIN0 - AIN5
(0 - 3V)
AIN6 - AIN9
(0 - 2.5V )
+12V
SETTING OTHER INPUT RANGES
A
IN0
to A
can easily be scaled to voltages other than
IN9
2.5V or 3V. If the input voltage range is zero to some
positive voltage, then all that is required is an input attenuator, as shown in Figure 6.
However, when scaling A
IN0
to A
, it should be noted that
IN5
these inputs already have an on-chip attenuator, as their
primary function is to monitor SCSI termination voltages.
This attenuator will load any external attenuator. The input resistance of the on-chip attenuator can be between
100k⍀ and 200k⍀. For this tolerance not to affect the accuracy, the output resistance of the external attenuator
should be very much lower than this, e.g. 1k⍀ in order to
add not more than 1% to the TUE. Alternatively, the
input can be buffered using an op-amp.
V
IN
R1
AIN(0 -9)
R2
Figure 6. Scaling AIN(0 - 9)
R1/R2 = (Vfs-3.0)/3.0 (for A
R1/R2 = (V
-2.5)/2.5 (for A
fs
IN0
IN6
to A
to A
IN5
IN9
)
)
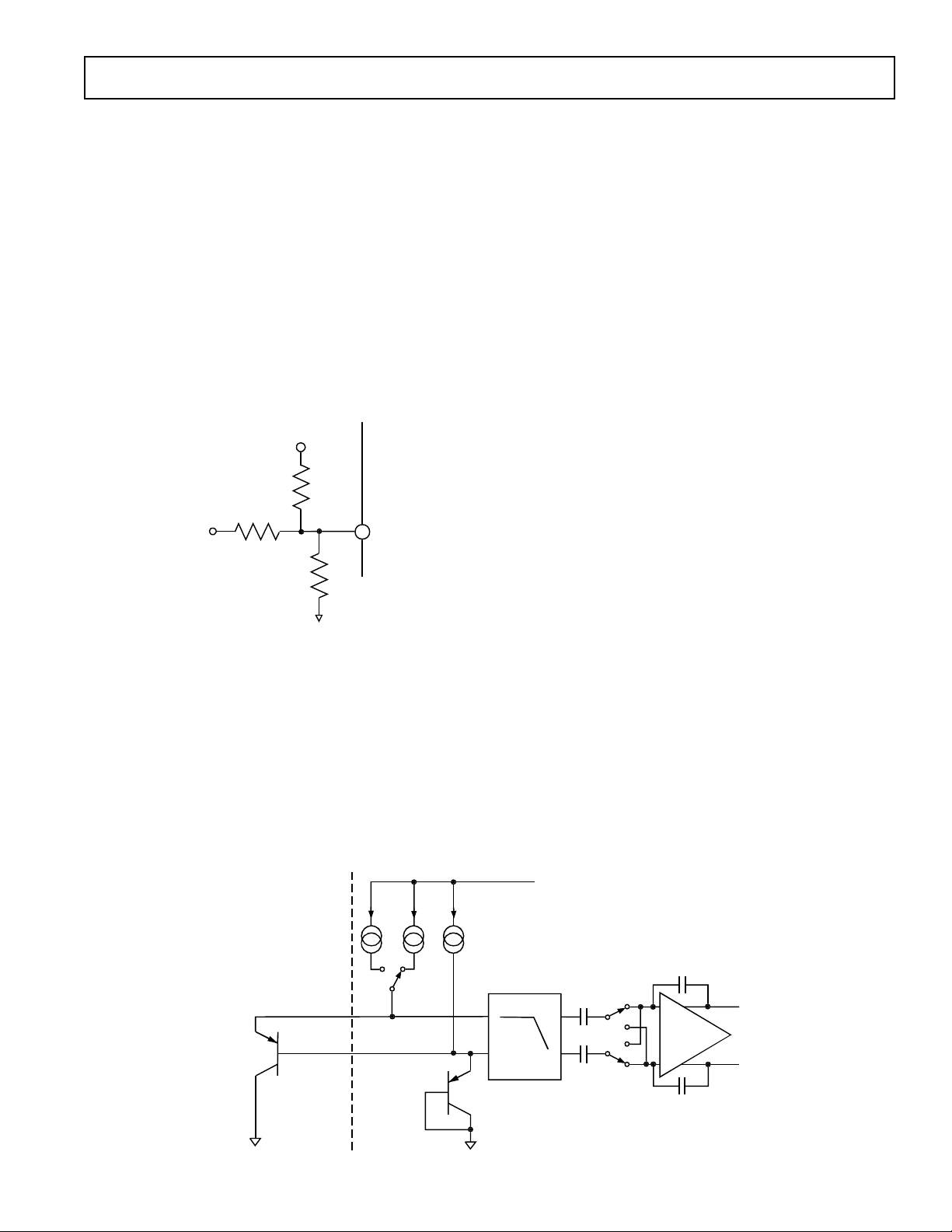
Negative and bipolar input ranges can be accommodated
by using a positive reference voltage to offset the input
voltage range so that it is always positive.
To monitor a negative input voltage, an attenuator can be
used as shown in Figure 7.
V
REF
18.9k
8
k
8
121.1
-12V
10pF
91.6k
+5V
V
BAT
+V
CCP
8
55.2k
61.1k
8
78.8k
*SEE TEXT
23.3k
8
116.7k
8
8
8
25pF
25pF
50pF
Figure 5. Structure of Analog Inputs
MUX
+V
OS
R2
V
IN
R1
AIN(0 - 9)
Figure 7. Scaling and Offsetting AIN(0 - 9) for Negative In-
puts
This offsets the negative voltage so that the ADC always
sees a positive voltage. R1 and R2 are chosen, so that the
ADC input voltage is zero when the negative input voltage
is at its maximum (most negative) value, i.e.
R1/R2 = |V
FS-
|/V
OS
This is a simple and cheap solution, but the following
point should be noted.
1. Since the input signal is offset but not inverted, the input range is transposed. An increase in the magnitude
of the negative voltage (going more negative), will
cause the input voltage to fall and give a lower output
code from the ADC. Conversely, a decrease in the
–14–
REV. PrP
PRELIMINARY TECHNICAL DA T A
ADM1026
magnitude of the negative voltage will cause the ADC
code to increase. The maximum negative voltage corresponds to zero output from the ADC. This means
that the upper and lower limits will be transposed.
2. For the ADC output to be full-scale when the negative
voltage is zero, V
voltage of the ADC, because V
and R2. If V
must be greater than the full-scale
OS
is equal to or less than the full-scale
OS
is attenuated by R1
OS
voltage of the ADC the input range is bipolar, but not
necessarily symmetrical.
This is only a problem if the ADC output must be fullscale when the negative voltage is zero.
Symmetrical bipolar input ranges can easily be accommodated by making V
equal to the full-scale voltage of the
OS
analog input and adding a third resistor to set the positive
full-scale.
+V
OS
R2
V
IN
R1
AIN(0 - 9)
REFERENCE OUTPUT
The on-chip reference voltage is scaled and buffered at pin
24 to provide a 1.82V or 2.5V reference. This output can
source or sink a load current of 2mA. The reference voltage is set to 1.82V if bit 2 of Configuration Register 3
(address 07h) is 0, 2.5V if it is 1. The voltage reference
output can be used to provide a stable reference voltage to
external circuitry such as LDO's.
TEMPERATURE MEASUREMENT SYSTEM
LOCAL TEMPERATURE MEASUREMENT
The ADM1026 contains an on-chip bandgap temperature
sensor, whose output is digitized by the on-chip ADC.
The temperature data is stored in the Local Temperature
Value Register (address 1Fh). As both positive and negative temperatures can be measured, the temperature data is
stored in two's complement format, as shown in Table 3.
Theoretically, the temperature sensor and ADC can measure temperatures from -128
tion of 1
T
MAX
o
C. However, temperatures below T
are outside the operating temperature range of the
o
C to +127oC with a resolu-
and above
MIN
device, so local temperature measurements outside this
range are not possible. Temperature measurement from
o
C to +127oC is possible using a remote sensor.
-128
R3
Figure 8. Scaling and Offsetting AIN(0 - 9) for Bipolar Inputs
R1/R2 = |V
FS-
|/V
OS
(R3 has no effect as the input voltage at the device pin is
zero when V
= minus full-scale)
IN
R1/R3 = (V
R1/R3 = (V
FS+
FS+
-3.0)/3.0 (for A
-2.5)/2.5 (for A
IN0
IN6
to A
to
AIN9
IN5
)
)
(R2 has no effect as the input voltage at the device pin is
equal to V
when VIN = plus full-scale).
OS
REMO TE
SENSING
TRANS IST OR
I
D+
D-
DIODE
N x I
BIAS
I
BIAS
REMOTE TEMPERATURE MEASUREMENT
The ADM1026 can measure the temperature of two
remote diode sensors or diode-connected transistors, connected to pins 25 and 26 or 27 and 28.
Pins 25 and 26 are a dedicated temperature input channel.
Pins 27 and 28 can be configured to measure a diode sensor by clearing bit 3 of Configuration Register 1 (address
00h) to 0. If this bit is 1 then pins 27 and 28 are A
.
A
IN9
IN8
and
The forward voltage of a diode or diode-connected transistor, operated at a constant current, exhibits a negative
temperature coefficient of about -2mV/
the absolute value of V
, varies from device to device, and
be
o
C.Unfortunately,
individual calibration is required to null this out, so the
technique is unsuitable for mass-production.
V
DD
V
OUT+
TO ADC
V
OUT-
LOWPASS FILTER
f
= 65kHz
c
REV. PrP
Figure 9. Signal Conditioning for Remote Diode temperature Sensors
–15–
ADM1026
PRELIMINARY TECHNICAL DA T A
The technique used in the ADM1026 is to measure the
change in V
when the device is operated at two different
be
currents.
This is given by:
∆V
= KT/q x ln(N)
be
where:
K is Boltzmann’s constant
q is charge on the carrier
T is absolute temperature in Kelvins
N is ratio of the two currents
Figure 9 shows the input signal conditioning used to mea-
sure the output of a remote temperature sensor. This figure shows the external sensor as a substrate transistor,
provided for temperature monitoring on some microprocessors, but it could equally well be a discrete transistor
such as a 2N3904.
If a discrete transistor is used, the collector will not be
grounded, and should be linked to the base. If a PNP
transistor is used the base is connected to the D- input and
the emitter to the D+ input. If an NPN transistor is used,
the emitter is connected to the D- input and the base to
the D+ input.
TABLE 3. TEMPERATURE DATA FORMAT
Temperature Digital Output
-128 °C 1000 0000
and to a chopper-stabilized amplifier that performs the
functions of amplification and rectification of the waveform to produce a DC voltage proportional to ∆V
. This
be
voltage is measured by the ADC to give a temperature
output in 8-bit two’s complement format. To further reduce the effects of noise, digital filtering is performed by
averaging the results of 16 measurement cycles. A remote
temperature measurement takes nominally 2.14ms.
The results of external temperature measurements are
stored in 8 bit, twos-complement format, as illustrated in
Table 3.
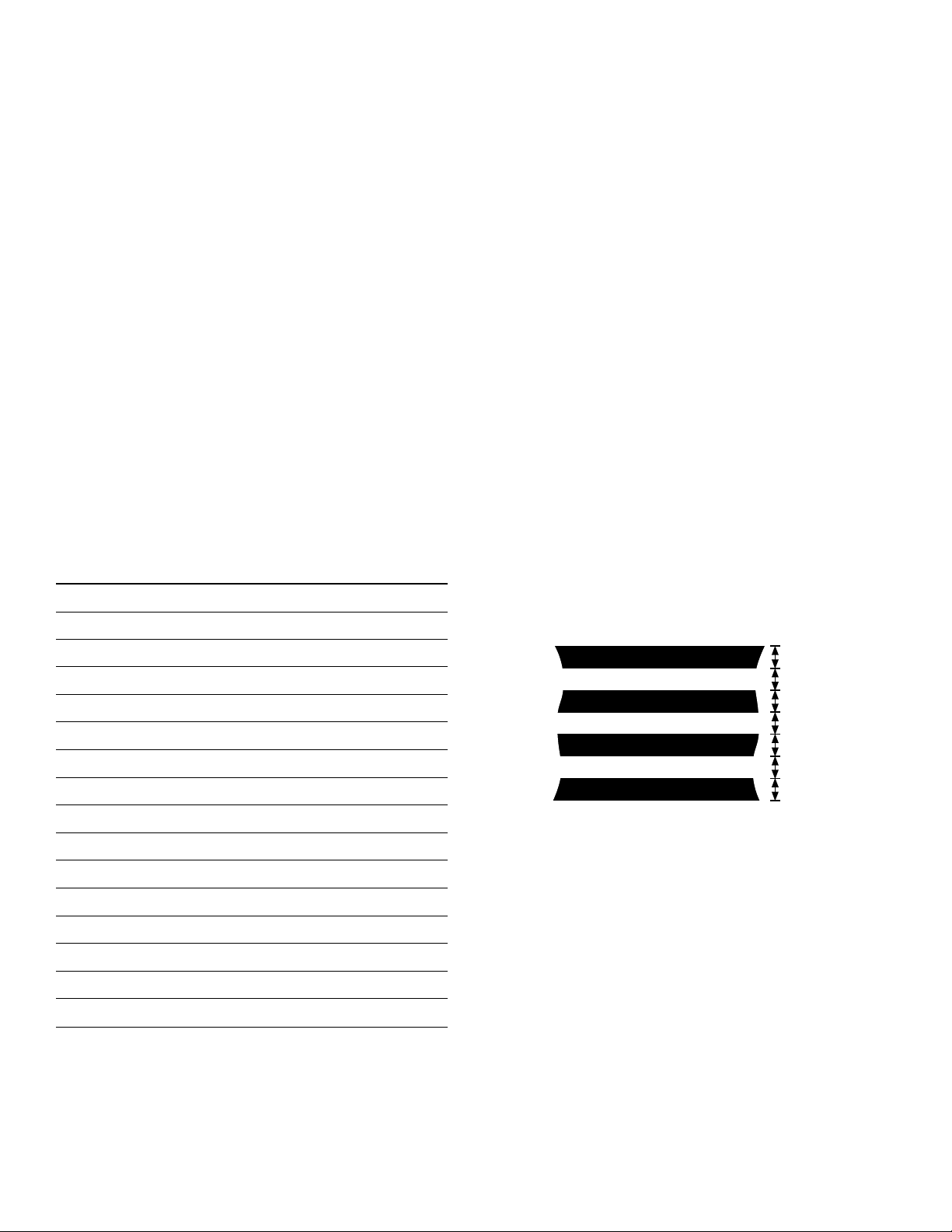
LAYOUT CONSIDERATIONS
Digital boards can be electrically noisy environments, and
care must be taken to protect the analog inputs from
noise, particularly when measuring the very small voltages
from a remote diode sensor. The following precautions
should be taken:
1. Place the ADM1026 as close as possible to the remote
sensing diode. Provided that the worst noise sources
such as clock generators, data/address buses and CRTs
are avoided, this distance can be 4 to 8 inches.
2. Route the D+ and D- tracks close together, in parallel,
with grounded guard tracks on each side. Provide a
ground plane under the tracks if possible.
3. Use wide tracks to minimize inductance and reduce
noise pickup. 10 mil track minimum width and spacing
is recommended.
-125 °C 1000 0011
-100 °C 1001 1100
-75 °C 1011 0101
-50 °C 1100 1110
-25 °C 1110 0111
-10 oC 11110110
0 °C 0000 0000
+10 °C 0000 1010
+25 °C 0001 1001
+50 °C 0011 0010
+75 °C 0100 1011
+100 °C 0110 0100
+125 °C 0111 1101
+127 °C 0111 1111
To prevent ground noise interfering with the measurement, the more negative terminal of the sensor is not referenced to ground, but is biased above ground by an
internal diode at the D- input.
To measure ∆V
, the sensor is switched between operat-
be
ing currents of I and N x I. The resulting waveform is
passed through a 65kHz lowpass filter to remove noise,
GND
D+
D-
GND
Figure 10. Arrangement of Signal Tracks
10 mil.
10 mil.
10 mil.
10 mil.
10 mil.
10 mil.
10 mil.
4. Try to minimize the number of copper/solder joints,
which can cause thermocouple effects. Where copper/
solder joints are used, make sure that they are in both
the D+ and D- path and at the same temperature.
Thermocouple effects should not be a major problem as
o
1
C corresponds to about 240µV, and thermocouple
voltages are about 3µV/
o
C of temperature difference.
Unless there are two thermocouples with a big temperature differential between them, thermocouple voltages
should be much less than 200µV.
5. Place a 0.1µF bypass capacitor close to the ADM1026.
6. If the distance to the remote sensor is more than 8
inches, the use of twisted pair cable is recommended.
This will work up to about 6 to 12 feet.
7. For really long distances (up to 100 feet) use shielded
twisted pair such as Belden #8451 microphone cable.
Connect the twisted pair to D+ and D- and the shield
to GND close to the ADM1026. Leave the remote end
–16–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
of the shield unconnected to avoid ground loops.
Because the measurement technique uses switched current
sources, excessive cable and/or filter capacitance can
affect the measurement. When using long cables, the filter
capacitor may be reduced or removed.
Cable resistance can also introduce errors. 1⍀ series resistance introduces about 0.5
LIMIT VALUES
Limit values for analog measurements are stored in the
appropriate limit registers. In the case of voltage measurements, high and low limits can be stored so that an interrupt request will be generated if the measured value goes
above or below acceptable values. In the case of temperature, a Hot Temperature or High Limit can be programmed, and a Hot Temperature Hysteresis or Low
Limit, which will usually be some degrees lower. This
can be useful as it allows the system to be shut down when
the hot limit is exceeded, and re-started automatically
when it has cooled down to a safe temperature.
ANALOG MONITORING CYCLE TIME
The analog monitoring cycle begins when a one is written to
the Start Bit (bit 0), and a zero to the INT_Clear Bit (bit 2)
of the Configuration Register. INT_Enable (Bit 1) should
be set to one to enable the INT output. The ADC measures
each analog input in turn, starting with remote temperature
channel 1 and ending with local temperature. As each measurement is completed the result is automatically stored in
the appropriate value register. This "round-robin" monitoring cycle continues until it is disabled by writing a 0 to bit 0
of the Configuration Register.
As the ADC will normally be left to free-run in this manner, the time taken to monitor all the analog inputs will
normally not be of interest, as the most recently measured
value of any input can be read out at any time.
For applications where the monitoring cycle time is important, it can easily be calculated.
The total number of channels measured is:
5 dedicated supply voltage inputs
10 general purpose analog inputs
3.3V
MAIN
3.3V
STBY
Local temperature
2 remote temperature
Pins 28 and 27 are measured both as analog inputs AIN8/
AIN9 and as remote temperature input D2+/D2-, irrespective of which configuration is selected for these pins.
If pins 28 and 27 are configured as AIN8/AIN9, the measurements for these channels are stored in registers 27h and
29h and the invalid temperature measurement is discarded.
On the other hand, if pins 28 and 27 are configured as
D2+/D2-, the temperature measurement is stored in register 29h and there will be no valid result in register 27h.
As mentioned previously, the ADC performs a conversion
every 711µs on the analog and local temperature inputs and
every 2.13ms on the remote temperature inputs. Each input
REV. PrP
o
C error.
–17–
is measured 16 times and averaged to reduce noise.
The total monitoring cycle time for voltage and tempera-
ture inputs is therefore nominally:
(18 ⫻ 16 ⫻ 0.711) + (2 ⫻ 16 ⫻ 2.13) = 273ms
The ADC uses the internal 22.5kHz clock, which has a
tolerance of ±6%, so the worst case monitoring cycle time
is 290ms.
The fan speed measurement uses a completely separate
monitoring loop, as described later.
INPUT SAFETY
Scaling of the analog inputs is performed on chip, so external attenuators are normally not required. However,
since the power supply voltages will appear directly at the
pins, its is advisable to add small external resistors (e.g.
500Ω) in series with the supply traces to the chip to prevent damaging the traces or power supplies should an accidental short such as a probe connect two power supplies
together.
As the resistors will form part of the input attenuators,
they will affect the accuracy of the analog measurement if
their value is too high.
The worst such accident would be connecting -12V to
+12V - a total of 24V difference, with the series resistors
this would draw a maximum current of approx. 24mA.
REFERENCE OUTPUT
The ADM1026 has a buffered reference voltage output
(pin 24), which can be programmed to 1.82V or 2.5V by
clearing or setting bit 2 of Configuration Register 3 (address 07h).
ANALOG OUTPUT
The ADM1026 has a single analog output from an unsigned 8 bit DAC which produces 0 - 2.5V (independent
of the reference voltage setting). The input data for this
DAC is contained in the DAC Control register (address
04h) The DAC Control Register defaults to FFh during
power-on reset, which produces maximum fan speed. The
analog output may be amplified and buffered with external circuitry such as an op-amp and transistor to provide
fan speed control. During automatic fan speed control, described later, the four MSBs of this register set the minimum fan speed.
Suitable fan drive circuits are given in Figures 11a to 11e.
When using any of these circuits, the following points
should be noted:
1. All of these circuits will provide an output range from
zero to almost +12V, apart from Figure 11a which
loses the base-emitter voltage drop of Q1 due to the
emitter-follower configuration.
2. To amplify the 2.5V range of the analog output up to
12V, the gain of these circuits needs to be around 4.8.
3. Care must be taken when choosing the op-amp to en-

ADM1026
PRELIMINARY TECHNICAL DA T A
+12V
1/4 LM324
DAC
+
R1
10k
Q1
R2
36k
8
2N2219A
8
Figure 11a.Fan Drive Circuit with Op-Amp and Emitter—
Follower
+12V
DAC
1/4 LM324
-
+
39k
R1
8
10k
R2
8
1k
R3
1k
8
R4
8
Q1
BD136
2SA9 68
DAC
R1
100k
MBT3904
8
Q1/Q2
DUAL
R2
100k
8
IRF 9 620
R3
8
3.9k
R4
8
1k
Figure 11d. Discrete Fan Drive Circuit with P-Channel
MOSFET, SIngle Supply
R2
100k
8
IRF 9 62 0
R3
39k
R4
10k
8
8
DAC
Q1/Q2
MBT3904
DUAL
R1
4.7k
8
+12V
Q3
+12V
Q3
Figure 11b. Fan Drive Circuit with Op-Amp and PNP Tran-
sistor
+12V
R3
8
100k
Q1
IRF 9 620
8
DAC
1/4 LM324
-
+
R2
39k
R1
8
10k
Figure 11c. Fan Drive Circuit with Op-Amp and P-Channel
MOSFET
–18–
-12 V
Figure 11e.Discrete Fan Drive Circuit with P-Channel
MOSFET, Dual Supply
+V
+3.3V
5V or 12V
Fan
10k
typic al
Q1
PWM
NDT3055L
Figure 11f. PWM Fan Drive Circuit using an N-Channel
MOSFET
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
sure that its input common-mode range and output
voltage swing are suitable.
4. The op-amp may be powered from the +12V rail alone
or from ±12V. If it is powered from +12V then the input common-mode range should include ground to accommodate the minimum output voltage of the DAC,
and the output voltage should swing below 0.6V to ensure that the transistor can be turned fully off.
5. If the op-amp is powered from -12V then precautions
such as a clamp diode to ground may be needed to prevent the base-emitter junction of the output transistor
being reverse-biased in the unlikely event that the output of the op-amp should swing negative for any reason.
6. In all these circuits, the output transistor must have an
greater than the maximum fan current, and be
I
CMAX
capable of dissipating power due to the voltage
dropped across it when the fan is not operating at fullspeed.
7. If the fan motor produces a large back e.m.f when
switched off, it may be necessary to add clamp diodes
to protect the output transistors in the event that the
output goes from full-scale to zero very quickly.
PWM OUTPUT
Fan speed may also be controlled using pulse-width
modulation (PWM). The PWM output (pin 18) produces
a pulsed output with a frequency of approximately 75Hz
and a duty-cycle defined by the contents of the PWM
Control Register (address 05h). During automatic fan
speed control, described below, the four MSBs of this
register set the minimum fan speed.
The open-drain PWM output must be amplified and
buffered to drive the fans. The PWM output is intended to
be used with an NMOS driver, but may be inverted by
setting bit 1 of Test Register 1(address 14h) if using
PMOS drivers. Figure 11f shows how a fan may be driven
under PWM control using an N-channel MOSFET.
In Automatic Fan Speed Control Mode, the four MSBs of
the DAC Control Register (address 04h) and PWM
Control Register (address 05h) set the minimum values
for the DAC and PWM outputs. Note: If both DAC
Control and PWM Control is enabled (bits 5, 6 of
Configuration Register 1 = 1), the four MSBs of the DAC
Control Register (address 04h) define the minimum fan
speed values for both the DAC and PWM outputs. The
value in the PWM Control Register (address 05h) has no
effect.
Minimum DAC Code DAC
= 16 ⫻ D
MIN
(DAC output voltage = 2.5 ⫻ Code/256)
Minimum PWM Duty-Cycle PWM
= 6.67 ⫻ D
MIN
where D is the decimal equivalent of bits 7 to 4 of the register.
When the temperature measured by any of the sensors exceeds the corresponding T
, the fan is spun up for two
MIN
seconds with the fan drive set to maximum (full-scale
from the DAC or 100% PWM duty-cycle. The fan speed
is then set to the minimum as previously defined. As the
temperature increases, the fan drive will increase until the
temperature reaches T
The fan drive at any temperature up to 20
MIN
+20oC.
o
C above T
MIN
is
given by:
PWM = PWM
+ (100 - PWM
MIN
MIN
) ⫻ (T
ACTUAL
- T
MIN
)/20)
or
DAC = DAC
+ (240 - DAC
MIN
MIN
) ⫻ (T
ACTUAL
- T
MIN
)/20)
For simplicity of the automatic fan speed algorithm, the
DAC code increases linearly up to 240, not its full-scale
of 255. However, when the temperature exceeds T
MIN
+20oC, the DAC output will jump to full-scale.
100%
SPIN UP FO R 2 SECONDS
AUTOMATIC FAN SPEED CONTROL
The ADM1026 offers a simple method of controlling fan
speed according to temperature without intervention from
the host processor.
To enable automatic fan speed control, monitoring must
be enabled by setting Bit 0 of Configuration Register 1
(address 00h).
Automatic fan speed control can be applied to the DAC
output, the PWM output, or both, by setting bit 5 and/or
6 of Configuration Register 1.
The T
registers (addresses 10h to 12h) contain mini-
MIN
mum temperature values for the three temperature channels (on-chip sensor and two remote diodes). This is the
temperature at which a fan will start to operate when the
temperature sensed by the controlling sensor exceeds
. T
T
MIN
nels. T
ture value to the T
not required for automatic fan speed control, T
channel should be set to +127
REV. PrP
can be the same or different for all three chan-
MIN
is set by writing a two's complement tempera-
MIN
registers. If any sensor channel is
MIN
o
C (01111111).
MIN
for that
–19–
PWM
OUTPUT
MIN
o
- 4
T
MIN
TEMPERATURE
T
MIN
o
T
+ 20
MIN
Figure 12a. Automatic PWM Fan Control Transfer Function

ADM1026
PRELIMINARY TECHNICAL DA T A
255
DAC
OUTPUT
MIN
SPIN UP FO R 2 SECONDS
o
T
- 4
T
MIN
MIN
TEMPERATURE
240
o
T
+ 20
MIN
Figure 12b. Automatic DAC Fan Control Transfer Function
To ensure that the maximum cooling capacity is always
available, the fan drive is always set by the sensor channel
demanding the highest fan speed.
If the temperature falls, the fan will not turn off until the
temperature measured by all three temperature sensors has
fallen to their corresponding T
– 4oC. This prevents
MIN
the fan from cycling on and off continuously when the
temperature is close to T
MIN
.
Whenever a fan starts or stops during automatic fan speed
control, a one-off interrupt is generated at the INT output. This is described in more detail in the section on the
ADM1026 Interrupt Structure.
FAN INPUTS
Pins 3 to 6 and 9 to 12 may be configured as fan speed
measuring inputs by clearing the corresponding bit(s) of
Configuration Register 2 (address 01h) or as general-purpose logic inputs/outputs by setting bits in this register.
The power-on default value for this register is 00h, which
means all the inputs are set for fan speed measurement.
Signal conditioning in the ADM1026 accommodates the
slow rise and fall times typical of fan tachometer outputs.
The Fan Tach inputs have internal 10kΩ pullup resistors
to 3.3VSTBY. In the event that these inputs are supplied
from fan outputs which exceed the supply, either resistive
attenuation of the fan signal or diode clamping must be
included to keep inputs within an acceptable range.
Figures 13a to 13d show circuits for most common fan
tacho outputs.
If the fan tacho output is open drain or has a resistive pullup
to V
then it can be connected directly to the fan input, as
CC
shown in Figure 13a.
If the fan output has a resistive pullup to +12V (or other
voltage greater than 3.3VSTBY) then the fan output can
be clamped with a zener diode, as shown in Figure 13b.
The zener voltage should be chosen so that it is greater
than V
but less than 3.3VSTBY, allowing for the voltage
IH
tolerance of the zener.
V
+12V
PULLUP
4.7k
TYP.
*CHOOS E Z D1 V O L T AG E AP P RO X. 0.8 x V
TACHO
8
OUTPUT
FAN(0-7)
ZD1*
ZENER
CC
FAN SPEED
COUNTER
CC
Figure 13b. Fan with Tach. Pullup to Voltage >VCC e.g. 12V)
Clamped with Zener Diode
If the fan has a strong pullup (less than 1k⍀) to +12V, or
a totem-pole output, then a series resistor can be added to
limit the zener current, as shown in Figure 13c. Alternatively, a resistive attenuator may be used, as shown in
Figure 13d.
R1 and R2 should be chosen such that:
2V < V
PULLUP
+12V
OR TOTEM-POLE
x R2/(R
PULLUP
TYP. <1k
8
*CHOO SE ZD1 VO LT AG E AP P RO X . 0.8 x V
+ R1 + R2) < 3.3VSTBY
PULLUP
TACHO
O/P
FAN(0-7)
R1
10k
ZD1
8
ZENE R*
V
CC
FAN SPEED
COUNTER
CC
Figure 13c. Fan with Strong Tach. Pullup to >VCC or Totem-
Pole Output, Clamped with Zener and Resistor
V
+12V
<1k
8
TACHO
OUTPUT
R1*
*SE E TE X T
FAN(0-7)
R2*
CC
FAN SPEED
COUNTER
Figure 13d. Fan with Strong Tach. Pullup to >VCC or Totem-
Pole Output, Attenuated with R1/R2
V
+12V
PULLUP
4.7k
8
TYP.
TACHO
OUTPUT
FAN(0-7)
CC
FAN SPEED
COUNTER
Figure 13a. Fan With Tach Pullup To +VCC.
FAN SPEED MEASUREMENT
The fan counter does not count the fan tacho output pulses
directly, because the fan speed may be less than 1000 RPM
and it would take several seconds to accumulate a reasonably large and accurate count. Instead, the period of the fan
revolution is measured by gating an on-chip 22.5kHz oscillator into the input of an 8-bit counter for two periods of
the fan tacho output, as shown in Figure 14, so the accumulated count is actually proportional to the fan tacho period and inversely proportional to the fan speed.
–20–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
22.5kHz
CLOCK
CONFIG
REG. 1 BIT 0
2
34
FAN0
MEASUREMENT
PERIOD
12
FAN1
MEASUREMENT
PERIOD
4
3
FAN0
INPUT
FAN1
INPUT
MONITORING
1
START OF
CYCLE
Figure 14. Fan Speed Measurement
The monitoring cycle begins when a one is written to the
Monitor Bit (bit 0 of Configuration Register 1). The
INT_Enable (Bit 1) should be set to one to enable the
INT output.
Speed measurement of the Fan 0 channel is initialized on
the first rising edge of the fan tach pulse after Start goes
low, and oscillator pulses are actually counted from the
second rising tach edge to the fourth rising edge. The
measurement then switches to Fan 1. Here again, the
measurement is initialized on the first tach pulse rising
edge after the Fan 0 measurement finishes and oscillator
pulses are counted from the second rising edge to the
fourth rising edge. This is repeated for the other six fan
channels.
To accommodate fans of different speed and/or different
numbers of output pulses per revolution, a pre-scaler (divisor) of 1, 2, 4 or 8 may be added before the counter.
Divisor values for Fans 0 to 3 are contained in the Fan 03 Divisor Register (address 02h) and those for Fans 4 to 7
in the Fan 4-7 Divisor Register (address 03h). The default value is 2, which gives a count of 153 for a fan running at 4400 RPM producing two output pulses per
revolution.
The count is calculated by the equation:
Count = (22.5 x 10
3
x 60) /(RPM x Divisor)
For constant speed fans, fan failure is normally considered
to have occurred when the speed drops below 70% of
nominal, which would correspond to a count of 219. Fullscale (255) would be reached if the fan speed fell to 60%
of its nominal value. For temperature-controlled variable
speed fans the situation will be different.
Table 4 shows the relationship between fan speed and
time per revolution at 60%, 70% and 100% of nominal
RPM for fan speeds of 1100, 2200, 4400 and 8800 RPM,
and the divisor that would be used for each of these fans,
based on two tacho pulses per revolution.
TABLE 4. FAN SPEEDS AND DIVISORS
Divisor Nominal Time per 70% Time per 60% Time per
RPM rev RPM rev (70%) RPM rev (60%)
(ms) (ms) (ms)
÷ 4 2200 27.27 1540 38.96 1320 45.45
÷ 8 1100 54.54 770 77.92 660 90.9
LIMIT VALUES
Fans generally do not overspeed if run from the correct
voltage, so the failure condition of interest is underspeed
due to electrical or mechanical failure. For this reason
only low-speed limits are programmed into the limit registers for the fans. It should be noted that, since fan period
rather than speed is being measured, a fan failure interrupt
will occur when the measurement exceeds the limit value.
FAN MONITORING CYCLE TIME
The fan speeds are measured in sequence from 0 to 7.
The monitoring cycle time depends on the fan speed, the
number of tacho output pulses per revolution and the
number of fans being monitored.
If a fan is stopped or running so slowly that the fan speed
counter reaches 255 before the second tach pulse after initialization, or before the fourth tach pulse during measurement, the measurement will be terminated. This will
also occur if an input is configured as GPIO instead of
fan. Any channels so connected will time out after 255
clock pulses.
The worst-case measurement time for a fan-configured
channel occurs when the counter reaches 254 from start to
the 2nd tach pulse and reaches 255 after the second tach
pulse. Taking into account the tolerance of the oscillator
frequency, the worst-case measurement time is:
509 ⫻ D ⫻ 0.047 milliseconds
where:
509 is the total number of clock pulses.
D is the divisor, 1,2, 4 or 8.
0.047 is the worst-case oscillator period in ms.
The worst-case fan monitoring cycle time is the sum of
the worst case measurement time for each fan.
Although the fan monitoring cycle and the analog input
monitoring cycle are started together, they are not
synchronised in any other way.
FAN MANUFACTURERS
Manufacturers of cooling fans with tachometer outputs are
listed below:
NMB Tech
9730 Independence Ave.
Chatsworth, California 91311
818-341-3355
818-341-8207
÷ 1 8800 6.82 6160 9.74 5280 11.36
÷ 2 4400 13.64 3080 19.48 2640 22.73
REV. PrP
–21–

PRELIMINARY TECHNICAL DA T A
ADM1026
Model Frame Size Airflow
CFM
2408NL 2.36 in sq. X 0.79 in (60mm sq. X 20mm) 9-16
2410ML 2.36 in sq. X 0.98 in (60mm sq. X 25mm) 14-25
3108NL 3.15 in sq. X 0.79 in (80mm sq. X 20mm) 25-42
V
R1
TEMP.
7
10k
8
1
2
Q1
6
R
SET
AD22105
SENS OR
3
CC
CI
18
3110KL 3.15 in sq. X 0.98 in (80mm sq. X 25mm) 25-40
Mechatronis Inc.
P.O. Box 20
Mercer Island, WA 98040
800-453-4569
Models - Various sizes available with tach output option.
Sanyo Denki/Keymarc Electronics
2310 205th, Suite 101
Torrance, CA 90501
310-212-7724
Models - 109P Series
CHASSIS INTRUSION INPUT
The Chassis Intrusion input is an active high input intended for detection and signalling of unauthorised tampering with the system. When this input goes high, the
event is latched in bit 6 of Status Register 4 and an interrupt will be generated. The bit will remain set until
cleared by writing a zero to it, so long as battery voltage is
connected to the V
input, even if the ADM1026 is pow-
BAT
ered off.
The CI input will detect chassis intrusion events even
when the ADM1026 is powered off (provided battery voltage is applied to V
) but will not immediately generate
BAT
an interrupt. Once a chassis intrusion event has been detected and latched, an interrupt will be generated when the
system is powered up.
The actual detection of chassis intrusion is performed by
an external circuit that will detect (for example), when the
cover has been removed. A wide variety of techniques may
be used for the detection, for example:
- Microswitch that opens or closes when the cover is re
moved.
- Reed switch operated by magnet fixed to the cover
- Hall-effect switch operated by magnet fixed to the
cover.
- Phototransistor that detects light when cover is removed.
The Chassis Intrusion input can also be used for other types
of alarm input. Figure 15 shows a temperature alarm circuit
using an AD22105 temperature switch sensor. This produces a low-going output when the preset temperature is
exceeded, so the output is inverted by Q1 to make it compatible with the CI input. Q1 can be almost any small-signal NPN transistor, or a TTL or CMOS inverter gate may
be used if one is available. See the AD22105 data sheet for
information on selecting R
SET
.
Figure 15. Using the CI Input with a Temperature Sensor
GENERAL-PURPOSE I/O PINS
The ADM1026 has 8 pins that are dedicated to generalpurpose logic input/output (pins 1, 2 and 43 to 48), 8 pins
that can be configured as general-purpose logic pins or fan
speed inputs (pins 3 to 6 and 9 to 12) and one pin that can
be configured as GPIO16 or THERM output (pin 42).
The GPIO/FAN pins are configured as general-purpose
logic pins by setting bits 0 to 7 of Configuration Register
2 (address 01h). Pin 42 is configured as GPIO16 by setting bit 0 of Configuration Register 3, or as THERM output by clearing this bit.
Each GPIO pin has four data bits associated with it, two
bits in one of the GPIO Configuration Registers
(addresses 08h to OBh), one in the GPIO Status Registers
(addresses 24h and 25h), and one in the GPIO Mask
Registers (addresses 1Ch and 1Dh)
Setting a Direction Bit = 1 in one of the GPIO
Configuration Registers makes the corresponding GPIO
pin an output. Clearing the direction bit to 0 makes it an
input.
Setting a Polarity Bit = 1 in one of the GPIO
Configuration Registers makes the corresponding GPIO
pin active high. Clearing the polarity bit to 0 makes it
active low.
When a GPIO pin is configured as an INPUT, the corresponding bit in one of the GPIO status registers is readonly, and is set when the input is asserted ("asserted" may
be high or low depending on the setting of the Polarity
Bit).
When a GPIO pin is configured as an OUTPUT, the corresponding bit in one of the GPIO status registers
becomes read/write. Setting this bit will then assert the
GPIO output. (here again, "asserted" may be high or low
depending on the setting of the polarity bit).
The effect of a GPIO Status Register bit on the INT out-
put can be masked out by setting the corresponding bit in
one of the GPIO Mask Registers. When the pin is configured as an output, this bit will automatically be masked to
prevent the data written to the status bit from causing an
interrupt, with the exception of GPIO16 which must be
masked manually by setting bit 7 of Mask Register 4.
When configured as inputs, the GPIO pins may be connected
to external interrupt sources such as temperature sensors with
digital output. Another application of the GPIO pins would
be to monitor a processor's Voltage ID code (VID code).
–22–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
FROM ANALOG/TEMP.
VALUE AND LIMIT
REGISTERS
HIGH LIMIT
VALUE
LOW LIMIT
VALUE
FROM FAN SPEED
VALUE AND
LIMIT REG ISTERS
HIGH LIMIT
Ext1 Temp
Ext 2 Temp
3.3VSTBY
3.3VMAIN
MASK DATA FROM
SMBUS (SAM E BIT
NAMES A N D ORD ER
AS STATUS B ITS)
S
R
T
D
1 = OUT
TO
N
MI
OF LIMIT
A
A
LI
R
H
W
G
PA
HI
M
LO
CO
1 = OUT
MIT
OF LIMIT
ATOR
HIGH LI
COMPAR
IPLE X E R
DATA
DEMULT
MASK DATA FROM
SMBUS (SAME BIT
NAMES AND ORDER
AS STATUS B ITS)
MASK DATA FROM
SMBUS (SAM E BIT
NAMES A ND ORDE R
AS STATUS B ITS)
ER
EX
A
PL
TI
DAT
UL
DEM
MASK DATA FROM
SMBUS (SAM E BIT
NAMES A ND ORDE R
AS STATUS B ITS)
GPIO 0 TO GPIO7
INT Te m p
THERM
RESERVED
GPIO16
STATUS REGISTER 5
+5V
V
CCP
+12V
-12V
AIN0
AIN1
AIN2
AIN3
AIN4
AIN5
AIN6
AIN7
VBAT
AIN8
AFC
FAN0
FAN1
FAN2
FAN3
FAN4
FAN5
FAN6
FAN7
CI
0
1
2
3
4
STATUS
REGISTER 1
5
6
7
MASK
REGISTER 1
0
1
2
3
4
STATUS
5
REGISTER 2
6
7
MASK
REGISTER 2
0
1
2
3
4
STATUS
5
REGISTER 4
6
7
MASK
REGISTER 4
0
1
2
3
4
STATUS
REGISTER 3
5
6
7
MASK
REGISTER 3
MASK GATING
STATUS
BIT
MASK
BIT
MASK GATING
STATUS
BIT
MASK
BIT
MASK GATING
STATUS
BIT
MASK
BIT
MASK GATING
STATUS
BIT
MASK
BIT
MASK GATING ! 8
STATUS
BIT
8
!
8
!
IN
OUT
LATCH
RESET
8
!
CI
GPIO16
8
!
IN OUT
LATCH
RESET
INT CLEAR
INT ENABLE
INT
REV. PrP
MASKING DATA
FROM SMBUS
GPIO8 TO GPIO15
MASKING DATA
FROM SMBUS
Figure 16. ADM1026 Interrupt Structure
MASK REGISTER 5
STATUS REG ISTER 6
MASK REGISTER 6
–23–
MASK
BIT
MASK GATING ! 8
STATUS
BIT
MASK
BIT

ADM1026
PRELIMINARY TECHNICAL DA T A
THE ADM1026 INTERRUPT STRUCTURE
The Interrupt Structure of the ADM1026 is shown in Figure
16. Interrupts can come from a number of sources, which
are combined to form a common INT output. When INT
is asserted, this output pulls low. The INT pin has an internal, 100k⍀ pullup resistor.
1. Analog/Temperature Inputs
As each analog measurement value is obtained and stored in
the appropriate value register, the value and the limits from
the corresponding limit registers are fed to the high and low
limit comparators. The result of each comparison (1 = out of
limit, 0 = in limit) is routed to the corresponding bit input of
Interrupt Status Register 1, 2 or 4 via a data demultiplexer,
and used to set that bit high or low as appropriate. Status
bits are self-clearing. If a bit in a status register is set due
to an out-of-limit measurement, it will continue to cause
INT to be asserted as long as it remains set, as described
below. However, if a subsequent measurement is in limit
it will be reset and will not cause INT to be re-asserted.
Status bits are unaffected by clearing the interrupt.
Interrupt Mask Registers, 1, 2 and 4 have bits corresponding to each of the Interrupt Status Register Bits. Setting
an Interrupt Mask Bit high forces the corresponding Status Bit output low, whilst setting an Interrupt Mask Bit
low allows the corresponding Status Bit to be asserted. After mask gating, the status bits are all OR'd together to
produce the analog and fan interrupt, which is used to set
a latch. The output of this latch is OR'd with other interrupt sources to produce the INT output. This will pull
low if any unmasked status bit goes high, i.e. when any
measured value goes out of limit.
When an INT output due to an out-of-limit analog/temp.
measurement is cleared by one of the methods described
later, the latch is reset. It will not be set again, and INT
will not be re-asserted, until the end of the next monitor-
ing cycle, even if the status bit remains set or a new analog/temp. event occurs. However, interrupts from other
sources such as fan or GPIO can still be asserted. This is
illustrated in Figures 17 and 18.
Status Register 4 also stores inputs from two other interrupt sources, which operate in a different way from the
other status bits. If automatic fan speed control (AFC) is
enabled, bit 4 of status register 4 will be set whenever a
fan starts or stops. This bit causes a one-off INT output as
shown in Figure 19. It is cleared during the next monitoring cycle and if INT has been cleared it will not cause
INT to be re-asserted.
FAN ON
FAN OFF
INT
INT CLEARED BY STATUS REG 1 READ,
BIT 2 O F C O N F IG .REG. 1 SE T, O R AR A
Figure 19. Assertion Of INT Due To AFC Event
In a similar way, a change of state at the THERM output
(described in more detail later), sets bit 3 of Status Register 4 and causes a one-off INT output. A change of state
at the THERM output also causes bit 0 of Status Register
1, bit 1 of Status Register 1, or bit 0 of Status Register 4
to be set, depending on which temperature channel caused
the THERM event. This bit will be reset during the next
monitoring cycle, provided the temperature channel is
within the normal high and low limits.
2. Fan Inputs
Fan inputs generate interrupts in a similar way to analog/
temp. inputs, but as the analog/temp. inputs and fan inputs
have different monitoring cycles, they have separate inter-
START OF ANALOG
MONITORING
CYCLE
INT
START OF AN ALOG
MONITORING CYCLE
INT
OUT-OF -LIM IT
MEASUREMENT
INT
CLEARED
LOCAL TEMP .
MEASUREMENT
START O F AN AL O G
MONITORING
CYCLE
LOCAL TEMP .
MEASUREMENT
INT RE-ASSERTED
Figure 17. Delay After Clearing INT Before Re-assertion
OUT-OF-LIMIT
MEASUR EME NT
INT
CLEARED
NEW INT FROM
FAN
LOCAL TEMP.
MEASUR EME NT
INT
CLEARE D
START OF AN ALOG
MONITORING CYCLE
GPIO
DE-ASSERTED
NEW INT FROM
GPIO
LOCAL TEMP.
MEASUR EME NT
Figure 18. Other Interrupt Sources Can Re-assert INT Immediately
–24–
START O F AN AL O G
MONITORING
CYCLE
START OF AN ALOG
MONITORING CYCLE
INT RE-ASSERTED
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
rupt circuits. As the speed of each fan is measured, the
output of the fan speed counter is stored in a value register. The result is compared to the fan speed limit and used
to set or clear a bit in Status Register 3. In this case the
fan is only monitored for under-speed (fan counter > fan
speed limit). Mask Register 3 is used to mask fan interrupts. After mask gating, the fan status bits are OR'd together and used to set a latch, whose output is OR'd with
other interrupt sources to produce the INT output.
Like the analog/temp. interrupt, an INT output caused by
an out-of-limit fan speed measurement, once cleared, will
not be re-asserted until the end of the next monitoring
cycle, although other interrupt sources may cause INT to
be asserted.
3. GPIO and CI Pins
When GPIO pins are configured as inputs, asserting a
GPIO input (high or low, depending on polarity) sets the
corresponding GPIO status bit in Status Registers 5 and 6
or bit 7 of Status Register 4 (GPIO16). A chassis intrusion event sets bit 6 of Status Register 4.
The GPIO and CI status bits, after mask gating, are OR'd
together and OR'd with other interrupt sources to produce
the INT output. GPIO and CI interrupts are not latched
and cannot be cleared by normal interrupt clearing. They
can only be cleared by masking the status bits or by removing the source of the interrupt.
ENABLING AND CLEARING INTERRUPTS
The INT output is enabled when Bit 1 of Configuration Register 1 (INT_Enable) is high, and Bit 2 (INT_Clear) is low.
INT may be cleared if:
- Status Register 1 is read. Ideally, if polling the Status
Registers trying to identify interrupt sources, Status
Register 1 should be polled last, since a read of Status
Register 1 clears all the other Interrupt Status
Registers.
- the ADM1026 receives the Alert Response Address
(0001 100) over the SMBus.
- bit 2 of Configuration Register 1 is set.
BIDIRECTIONAL THERM PIN
The ADM1026 has a second interrupt pin
(GPIO16/THERM, pin 42) that responds only to thermal
events, e.g. if any of the three temperature sensors exceeds
its THERM temperature limit. This output is enabled by
setting bit 4 of Configuration Register 1 (Reg.00h).
Three thermal limit registers are provided for the three
temperature sensors at addresses 0Dh to 0Fh. These registers are dedicated to the THERM output and none of the
other limit registers have any effect on the THERM output.
If any of the temperature inputs exceeds the corresponding
limit, THERM will be asserted (low) and the DAC and
PWM outputs will go to maximum to drive any cooling
fans to full speed.
To avoid cooling fans cycling on and off continually when
the temperature is close to the limit, a fixed hysteresis of
o
5
C is provided. THERM will only be de-asserted when
the measured temperature of all three sensors is 5
o
C below
the limit.
Whenever the THERM output changes, INT will be as-
serted, as shown in Figure 20. However, this is edge-triggered, so if INT is subsequently cleared by one of the
methods previously described, it will not be re-asserted,
even if THERM remains asserted. THERM will only
cause INT to be asserted again when it changes state.
Note that the THERM pin is bidirectional, so THERM
may be pulled low externally as an input. This will cause
the PWM and DAC outputs to go to full-scale until
THERM is returned high again.
TEMPERATURE
THERM LIMIT
o
THERM
INT
C
INT CLEARED BY ST ATUS R EG 1 READ ,
BIT 2 O F C O N F IG.RE G . 1 S E T, O R ARA
THERM LIMIT -5
Figure 20. Assertion Of INT Due To THERM Event
RESET INPUT AND OUTPUTS
The ADM1026 has two active-low, power-on reset outputs, RESETMAIN and RESETSTBY. These operate as
follows:
RESETSTBY monitors 3.3V STBY. At power-up
RESETSTBY will be asserted (pulled low) until 180ms
after 3.3VSTBY rises above the reset threshold.
RESETMAIN monitors 3.3V MAIN. At power-up
RESETMAIN will be asserted (pulled low) until 180ms
after 3.3V MAIN rises above the reset threshold.
If 3.3V MAIN rises with or before DV
, RESETMAIN
CC
will remain asserted until 180ms after RESETSTBY is
negated. RESETMAIN can also function as a RESET input. Pulling this pin low will reset the system to power-on
defaults.
3.3V STBY
3.3V MAIN
RESETSTBY
RESETMAIN
~1V
~1V
180ms
POWER-ON RESET
180ms
Figure 21. Operation Of Reset Outputs
NAND TREE TESTS
A NAND tree is provided in the ADM1026 for Auto-
REV. PrP
–25–

ADM1026
PRELIMINARY TECHNICAL DA T A
mated Test Equipment (ATE) board level connectivity
testing. This allows the functionality of all digital inputs
to be tested in a simple manner and any pins that are nonfunctional or shorted together to be identified. The structure of the NAND tree is shown in Figure 22. The device
is placed into NAND Tree Test Mode by powering up
with pin 25 held high. This pin is sampled automatically
after power-up and if it is connected high, then the
NAND test mode is invoked.
GPIO8
GPIO9
GPIO10
GPIO11
GPIO12
GPIO13
GPIO14
GPIO15
GPIO16
NTESTOUT
INT
SDA
SCL
FAN7
FAN0
FAN1
FAN2
FAN3
CI
FAN4
FAN5
FAN6
Figure 22. NAND Tree
The NAND tree test may be carried out in one of two ways.
1. Start with all inputs low and take them high in turn,
starting with the input nearest to NTEST_OUT
(GPIO16/THERM) and working back up the tree to the
input furthest from NTESTOUT (INT). This should
give the characteristic output pattern shown in Figure 23,
with NTESTOUT toggling each time an input is taken
high.
GPIO16
GPIO15
GPIO14
GPIO13
GPIO12
GPIO11
GPIO10
GPIO9
GPIO8
FAN0
FAN1
FAN2
FAN3
FAN4
FAN5
FAN6
FAN7
SCL
SDA
CI
INT
NTESTOUT
Figure 23. NAND Tree Test Taking Inputs High In Turn
1. Start with all inputs high and take them low in turn,
starting with the input furthest from NTEST_OUT
(INT) and working down the tree to the input nearest to
NTEST_OUT (GPIO16/THERM). This should give a
similar output pattern to Figure 24.
Notes:
1. When generating test waveforms, a typical propagation
delay of 500 ns through the NAND tree should be allowed for.
2. If any of the inputs shown in Figure 22 are unused,
they should not be connected direct to ground, but via
a resistor such as 10k⍀. This will allow the ATE (Automatic Test Equipment) to drive every input high so
that the NAND tree test can be properly carried out.
–26–
REV. PrP

PRELIMINARY TECHNICAL DA T A
INT
CI
SDA
SCL
FAN7
FAN6
FAN5
FAN4
FAN3
FAN2
FAN1
FAN0
GPIO8
GPIO9
GPIO10
GPIO11
GPIO12
GPIO13
GPIO14
GPIO15
GPIO16
NTESTOUT
Figure 24. NAND Tree Test taking Inputs Low In Turn
In the event of an input being non-functional(stuck high
or low) or two inputs shorted together, the output pattern
will be different. Some examples are given in Figures 25
to 27.
ADM1026
GPIO16
GPIO15
GPIO14
GPIO13
GPIO12
GPIO11
GPIO10
GPIO9
GPIO8
FAN0
FAN1
NTESTOUT
Figure 25. NAND Tree Test With GPIO11 Stuck Low
Figure 25 shows the effect of one input being stuck low.
The output pattern is normal until the stuck input is
reached. Because that input is permanently low, neither it
nor any inputs further up the tree can have any effect on
the output.
GPIO16
GPIO15
GPIO14
GPIO13
GPIO12
GPIO11
GPIO10
GPIO9
GPIO8
FAN0
FAN1
NTESTOUT
REV. PrP
Figure 26. NAND Tree Test With One Input Stuck High
Figure 26 shows the effect of one input being stuck high.
Taking GPIO12 high should take the output high. However, the next input up the tree, GPIO11, is already high,
so the output immediately goes low again, causing a missing pulse in the output pattern.
–27–

ADM1026
PRELIMINARY TECHNICAL DA T A
GPIO16
GPIO15
GPIO14
GPIO13
GPIO12
GPIO11
GPIO10
GPIO9
GPIO8
FAN0
FAN1
NTESTOUT
Figure 27. NAND Tree Test With Two Inputs Shorted
A similar effect occurs if two adjacent inputs are shorted
together. The example in Figure 27 assumes that the current sink capability of the circuit driving the inputs is considerably higher than the source capability, so the inputs
will be low if either is low, but high only if both are high.
When GPIO12 goes high the output should go high, but
since GPIO12 and GPIO11 are shorted, they both go
high together, causing a missing pulse in the output pattern.
USING THE ADM1026
When power is first applied, the ADM1026 performs a
power-on reset on all its registers (not EEPROM), which
sets them to default conditions as shown in Table 6. In
particular it should be noted that all GPIO pins are configured as inputs to avoid possible conflicts with circuits
trying to drive these pins.
The ADM1026 can also be initialized at any time by writing a 1 to Bit 7 of Configuration Register 1, which sets
some registers to their default power-on conditions. This
Bit should be cleared by writing a 0 to it.
After power-up, the ADM1026 must be configured to the
user's specific requirements. This consists of:
- writing values to the limit registers.
- configuring pins 3 to 6 and 9 to 12 as fan inputs or
GPIO, using Configuration Register 2 (address 01h)
- setting the fan divisors using the Fan Divisor Registers
(addresses 02h and 03h).
- configuring the GPIO pins for input/output, polarity, using GPIO Configuration Registers 1 to 4 (addresses 08h
to 0Bh) and bits 6 and 7 of Configuration Register 3.
- setting mask bits in Mask Registers 1 to 6 (addresses
18h to 1Dh) for any inputs that are to be masked out.
- setting up Configuration Registers 1 and 3, as follows:
Configuration Register 1
Bit 0 controls the monitoring loop of the ADM1026. Setting Bit 0 low stops the monitoring loop and puts the
ADM1026 into a low power mode thereby reducing power
consumption. Serial bus communication is still possible
with any register in the ADM1026 while in low-power
mode. Setting Bit 0 high starts the monitoring loop.
Bit 1 enables or disables the INT Interrupt output. Setting
Bit 1 high enables the INT output, setting bit 1 low disables the output.
Bit 2 is used to clear the INT interrupt output when set
high. GPIO pins and Interrupt Status register contents
will not be affected.
Bit 3 configures pins 27 and 28 as the second external
temperature channel when 0, and as A
and A
IN8
when set
IN9
to 1.
Bit 4 enables the THERM output when set to 1.
Bit 5 enables automatic fan speed control on the DAC
output when set to 1.
Bit 6 enables automatic fan speed control on the PWM
output when set to 1.
Bit 7 performs a soft reset when set to 1.
Configuration Register 3
Bit 0 configures pin 42 as GPIO when set to 1 or as
THERM when cleared to 0.
Bit 1 clears the CI latch when set to 1. A 0 must be
written thereafter to allow subsequent CI detection.
Bit 2 selects VREF as 2.5V when set to 1 or as 1.82V
when cleared to 0.
Bits 3 to 5 are unused.
Bits 6 and 7 set up GPIO16 for direction and polarity.
STARTING CONVERSION
The monitoring function (Analog inputs, temperature, and
fan speeds) in the ADM1026 is started by writing to Configuration Register 1 and setting Start (Bit 0), high. The
INT_Enable (Bit 1) should be set to 1, and INT Clear
(Bit 2) set to 0 to enable interrupts. The THERM enable
bit (bit 4) should be set to 1 to enable temperature interrupts at the THERM pin. Apart from initially starting together, the analog measurements and fan speed
measurements proceed independently, and are not
synchronised in any way.
REDUCED POWER AND SHUTDOWN MODE
The ADM1026 can be placed in a low-power mode by
setting bit 0 of the Configuration register to 0. This disables the internal ADC. Full shutdown mode may then be
achieved by setting bit 7 of the Test Register 1 (address
14h) to 1. This turns off the analog output and stops the
monitoring cycle, if running, but it does not affect the
condition of any of the registers. The device will return to
its previous state when this bit is reset to zero. However, it
should be noted that if the device is placed into Shutdown
Mode and woken up again, RSTMAIN and RSTSTBY
will both assert low. Care must be taken since if either of
these pins connect to the CPU then this can cause an
entire system reset. In the Shutdown Mode, the
ADM1026 current consumption is reduced to 250µA
typical.
–28–
REV. PrP

PRELIMINARY TECHNICAL DA T A
SOFTWARE RESET FUNCTION
As previously mentioned, the ADM1026 can be reset in
software by setting bit 7 of Configuration Register 1 (Reg.
00h) = 1. This bit should then be cleared to 0. Note that
the software reset differs from a power-on reset in that only
some of the ADM1026 registers get re-initialized to their
power-on default values. The registers that are initialized
to their default values by the Software Reset are: -
- Configuration Registers (Registers 00h to 0Bh)
- Mask Registers 1 to 6, Internal Temp Offset, and Status
Registers 4, 5 and 6 (Registers 18h to 25h)
- All value registers (Registers 1Fh, 20h to 3Fh)
- External 1 and External 2 Offset Registers (6Eh, 6Fh)
Note that the Limit Registers (0Dh to 12h, 40h to 6Dh)
are not reset by the Software Reset function. This can be
useful if you need to reset the part but do not want to have
to reprogram all parameters again. Note that a Power-on
Reset initializes all registers on the ADM1026 including
the Limit Registers.
ADM1026
REV. PrP
–29–

PRELIMINARY TECHNICAL DA T A
ADM1026
ADM1026 REGISTERS
TABLE 5. ADDRESS POINTER REGISTER
Bit Name R/W Description
7-0 Address Pointer Write Address of ADM1026 Registers. See the tables below for detail.
TABLE 6. LIST OF REGISTERS
Hex Name Power on Value Description
Address (Hex or Binary Bit 7 - 0)
00 Configuration 1 00h Configures various operating parameters
01 Configuration 2 00h Configures pins 3-6 and 9-12 as fan inputs or GPIO
02 Fan 0-3 Divisor 55h Sets oscillator frequency for Fan 0 - 3 speed
measurement
03 Fan 4-7 Divisor 55h Sets oscillator frequency for Fan 4 - 7 speed
measurement
04 DAC Control FFh Contains value for fan speed DAC (analog fan
speed control) or minimum value for automatic fan
speed control
05 PWM Control FFh Contains value for PWM fan speed control or
minimum value for automatic fan speed control
06 EEPROM Register 1 00h For factory use only.
07 Configuration Register 3 00h Config. register for THERM, VREF and GPIO16
08 GPIO Config 1 00h Configures GPIO0 to GPIO3 as input or output
and as active high or active low
09 GPIO Config 2 00h Configures GPIO4 to GPIO7 as input or output
and as active high or active low
0A GPIO Config 3 00h Configures GPIO8 to GPIO11 as input or output
and as active high or active low
0B GPIO Config 4 00h Configures GPIO12 to GPIO15 as input or output
and as active high or active low
0C EEPROM Register 2 00h For factory use only
o
0D Int Temp THERM Limit 37h (55
C) High limit for THERM interrupt output based on
internal temperature measurement
o
0E TDM1 THERM Limit 50h (80
C) High limit for THERM interrupt output based on
remote channel 1 (D1) temperature measurement
o
0 F TDM2 THERM Limit 50h (80
C) High limit for THERM interrupt output based on
remote channel 2 (D2) temperature measurement
10 Int Temp T
MIN
28h (40oC) T
value for automatic fan speed control based
MIN
on internal temperature measurement
11 TDM1 T
MIN
40h (64oC) T
value for automatic fan speed control based
MIN
on remote channel 1 (D1) temperature measurement
12 TDM2 T
MIN
40h (64oC) T
value for automatic fan speed control based
MIN
on remote channel 2 (D2) temperature measurement
13 EEPROM Register 3 00h Configures EEPROM for read/write/erase etc.
14 Test Register 1 00h Manufacturer's Test Register
–30–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
Hex Name Power on Value Description
Address (Hex or Binary Bit 7 - 0)
15 Test Register 2 00h For manufacturer's use only
16 Manufacturer’s ID 41h Contains manufacturer's ID code
17 Revision 4xh Contains code for major and minor revisions
18 Mask Register 1 00h Interrupt Mask register for temperature and supply
voltage faults
19 Mask Register 2 00h Interrupt mask register for analog input faults
1A Mask Register 3 00h Interrupt mask register for fan faults
1B Mask Register 4 00h Interrupt mask register for local temp, V
BAT
, A
IN8,
THERM, AFC, CI and GPIO16
1C Mask Register 5 00h Interrupt mask register for GPIO0 to GPIO7
1D Mask Register 6 00h Interrupt mask register for GPIO8 to GPIO15
1E Int Temp Offset 00h Offset register for internal temperature measurement
1F Int Temp Value 00h Measured temperature from on-chip sensor
20 Status Register 1 00h Interrupt status register for external temp and
supply voltage faults
21 Status Register 2 00h Interrupt status register for analog input faults
22 Status Register 3 00h Interrupt status register for fan faults
, A
23 Status Register 4 00h Interrupt status register for local temp, V
BAT
IN8
,
THERM, AFC, CI and GPIO16
24 Status Register 5 00h Interrupt status register for GPIO0 to GPIO7
25 Status Register 6 00h Interrupt status register for GPIO8 to GPIO15
26 V
27 A
Value 00h Measured value of V
BAT
Value 00h Measured value of A
IN8
BAT
IN8
28 TDM1 Value 00h Measured value of remote temperature channel 1
(D1)
29 TDM2/A
Value 00h Measured value of remote temperature channel 2
IN9
(D2) or A
IN9
2A 3.3VSTBY Value 00h Measured value of standby digital V
2B 3.3VMAIN Value 00h Measured value of 3.3VMAIN
2C +5V Value 00h Measured value of +5V supply
2D V
Value 00h Measured value of processor core voltage
CCP
2E +12V Value 00h Measured value of +12V supply
2F -12V Value 00h Measured value of -12V supply
30 A
31 A
32 A
33 A
34 A
REV. PrP
Value 00h Measured value of A
IN0
Value 00h Measured value of A
IN1
Value 00h Measured value of A
IN2
Value 00h Measured value of A
IN3
Value 00h Measured value of A
IN4
–31–
IN0
IN1
IN2
IN3
IN4
CC

PRELIMINARY TECHNICAL DA T A
ADM1026
Hex Name Power on Value Description
Address (Hex or Binary Bit 7 - 0)
35 A
36 A
37 A
Value 00h Measured value of A
IN5
Value 00h Measured value of A
IN6
Value 00h Measured value of A
IN7
IN5
IN6
IN7
38 FAN0 Value 00h Measured speed of Fan 0
39 FAN1 Value 00h Measured speed of Fan 1
3A FAN2 Value 00h Measured speed of Fan 2
3B FAN3 Value 00h Measured speed of Fan 3
3C FAN4 Value 00h Measured speed of Fan 4
3D FAN5 Value 00h Measured speed of Fan 5
3E FAN6 Value 00h Measured speed of Fan 6
3F FAN7 Value 00h Measured speed of Fan 7
o
40 TDM1 High Limit 64h (100
C) High limit for remote temperature channel 1 (D1)
measurement
o
41 TDM2/AIN9 High Limit 64h (100
C) High limit for remote temperature channel 2 (D2)
or AIN 9 measurement
42 3.3VSTBY High Limit FFh High limit for digital VCC measurement
43 3.3VMAIN High Limit FFh High limit for analog VCC measurement
44 +5V High Limit FFh High limit for +5V supply measurement
45 V
High Limit FFh High limit for processor core voltage measurement
CCP
46 +12V High Limit FFh High limit for +12V supply measurement
47 -12V High Limit FFh High limit for -12V supply measurement
48 TDM1 Low Limit 80h Low limit for remote temperature channel 1 (D1)
measurement
49 TDM2/A
Low Limit 80h Low limit for remote temperature channel 2 (D2)
IN9
or AIN 9 measurement
4A 3.3VSTBY Low Limit 00h Low limit for digital VCC measurement
4B 3.3VMAIN Low Limit 00h Low limit for analog VCC measurement
4C +5V Low Limit 00h Low limit for +5V supply
4D V
Low Limit 00h Low limit for processor core voltage measurement
CCP
4E +12V Low Limit 00h Low limit for +12V supply measurement
4F -12V Low Limit 00h Low limit for -12V supply measurement
50 A
51 A
52 A
53 A
High Limit FFh High limit for A
IN0
High Limit FFh High limit for A
IN1
High Limit FFh High limit for A
IN2
High Limit FFh High limit for A
IN3
measurement
IN0
measurement
IN1
measurement
IN2
measurement
IN3
–32–
REV. PrP

PRELIMINARY TECHNICAL DA T A
Hex Name Power on Value Description
Address (Hex or Binary Bit 7 - 0)
ADM1026
54 A
55 A
56 A
57 A
58 A
59 A
5A A
5B A
5C A
5D A
5E A
5F A
High Limit FFh High limit for A
IN4
High Limit FFh High limit for A
IN5
High Limit FFh High limit for A
IN6
High Limit FFh High limit for A
IN7
Low Limit 00h Low limit for A
IN0
Low Limit 00h Low limit for A
IN1
Low Limit 00h Low limit for A
IN2
Low Limit 00h Low limit for A
IN3
Low Limit 00h Low limit for A
IN4
Low Limit 00h Low limit for A
IN5
Low Limit 00h Low limit for A
IN6
Low Limit 00h Low limit for A
IN7
measurement
IN4
measurement
IN5
measurement
IN6
measurement
IN7
measurement
IN0
measurement
IN1
measurement
IN2
measurement
IN3
measurement
IN4
measurement
IN5
measurement
IN6
measurement
IN7
60 FAN0 High Limit FFh High limit for Fan 0 speed measurement (no low
limit)
61 FAN1 High Limit FFh High limit for Fan 1 speed measurement (no low
limit)
62 FAN2 High Limit FFh High limit for Fan 2 speed measurement (no low
limit)
63 FAN3 High Limit FFh High limit for Fan 3 speed measurement (no low
limit)
64 FAN4 High Limit FFh High limit for Fan 4 speed measurement (no low
limit)
65 FAN5 High Limit FFh High limit for Fan 5 speed measurement (no low
limit)
66 FAN6 High Limit FFh High limit for Fan 6 speed measurement (no low
limit)
67 FAN7 High Limit FFh High limit for Fan 7 speed measurement (no low
limit)
68 Int. Temp. High Limit 50h (80oC) High limit for local temperature measurement
69 Int. Temp. Low Limit 80h Low limit for local temperature measurement
6A V
6B V
6C A
6D A
High Limit FFh High limit for V
BAT
Low Limit 00h Low limit for V
BAT
High Limit FFh High limit for A
IN8
Low Limit 00h Low limit for A
IN8
measurement
BAT
measurement
BAT
measurement
IN8
measurement
IN8
6E Ext1 Temp Offset 00h Offset register for remote temperature channel 1
6F Ext2 Temp Offset 00h Offset register for remote temperature channel 2
REV. PrP
–33–

PRELIMINARY TECHNICAL DA T A
ADM1026
DETAILED REGISTER DESCRIPTIONS
TABLE 7. REGISTER 00H, CONFIGURATION REGISTER 1(POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Monitor = 0 R/W When this bit is set the ADM1026 monitors all voltage, temperature
and fan channels in a round robin manner.
1 Int Enable = 0 R/W When this bit is set the INT output pin is enabled.
2 Int Clear = 0 R/W Setting this bit will clear an interrupt from the voltage, temperature or fan
speed channels. Because GPIO interrupts are level triggered, this bit will have
no effect on interrupts originating from GPIO channels. This bit is cleared by
writing a 0 to it. If in monitoring mode voltages, temperatures and fan speeds
will continue to be monitored after writing to this bit to clear an interrupt, so
an interrupt may be set again on the next monitoring cycle.
3 Enable Voltage / Ext2 = 0 R/W When this bit is 1 the ADM1026 monitors voltage (AIN8 and AIN9) on pins
28 and 27 respectively. When this bit is 0, the ADM1026 monitors a second
thermal diode temperature channel, D2, on these pins. If the second thermal
diode channel is not being used, it is recommended that bit be set to 1.
4 Enable THERM = 0 R/W When this bit is 1 the THERM pin (Pin 42) will be asserted (go low) if any
of the THERM limits are exceeded. If THERM is pulled low as an input, the
DAC and PWM outputs are forced to full-scale until THERM is taken high.
5 Enable DAC AFC = 0 R/W When this bit is 1 the DAC output is enabled for automatic fan speed control
(AFC) based on temperature. When this bit is 0 the DAC Output reflects the
value in Reg 04h, DAC Control Register.
6 Enable PWM AFC = 0 R/W When this bit is 1 the PWM output is enabled for automatic fan speed control
(AFC) based on temperature. When this bit is 0 the PWM Output reflects the
value in Reg 05h, PWM Control Register.
7 Software Reset = 0 R/W Writing a 1 to this bit restores all registers to the power on defaults. This bit
is cleared by writing a 0 to it. For more info, see S/W Reset section.
TABLE 8. REGISTER 01H, CONFIGURATION REGISTER 2 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Enable GPIO0 / Fan0 = 0 R/W When this bit is 1, pin 3 is enabled as a General Purpose IO pin (GPIO0),
otherwise it is a Fan Tach measurement input (Fan 0).
1 Enable GPIO1 / Fan1 = 0 R/W When this bit is 1, pin 4 is enabled as a General Purpose IO pin (GPIO1),
otherwise it is a Fan Tach measurement input (Fan 1).
2 Enable GPIO2 / Fan2 = 0 R/W When this bit is 1, pin 5 is enabled as a General Purpose IO pin (GPIO2),
otherwise it is a Fan Tach measurement input (Fan 2).
3 Enable GPIO3 / Fan3 = 0 R/W When this bit is 1, pin 6 is enabled as a General Purpose IO pin (GPIO3),
otherwise it is a Fan Tach measurement input (Fan 3).
4 Enable GPIO4 / Fan4 = 0 R/W When this bit is 1, pin 9 is enabled as a General Purpose IO pin (GPIO4),
otherwise it is a Fan Tach measurement input (Fan 4).
5 Enable GPIO5 / Fan5 = 0 R/W When this bit is 1, pin 10 is enabled as a General Purpose IO pin (GPIO5),
otherwise it is a Fan Tach measurement input (Fan 5).
6 Enable GPIO6 / Fan6 = 0 R/W When this bit is 1, pin 11 is enabled as a General Purpose IO pin (GPIO6),
otherwise it is a Fan Tach measurement input (Fan 6).
7 Enable GPIO7 / Fan7 = 0 R/W When this bit is 1, pin 12 is enabled as a General Purpose IO pin (GPIO7),
otherwise it is a Fan Tach measurement input (Fan 7).
–34–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 9. REGISTER 02H, FANS 0 TO 3 FAN DIVISOR REGISTER (POWER-ON DEFAULT 55H)
Bit Name R/W Description
1-0 Fan 0 Divisor R/W Sets the oscillator prescaler division ratio for Fan 0 speed measurement. The
division ratios, oscillator frequencies and typical fan speeds (based on 2 tach
pulses per rev.) are as follows:
Code Divide-by Osc. Frequency (kHz) Fan Speed (RPM)
00 1 22.5 8800, nominal, for count of 153
01 2 11.25 4400 , nominal, for count of 153
10 4 5.62 2200 , nominal, for count of 153
11 8 2.81 1100 , nominal, for count of 153
3-2 Fan 1 Divisor R/W Same as for Fan 0
5-4 Fan 2 Divisor R/W Same as for Fan 0
7-6 Fan 3 Divisor R/W Same as for Fan 0
TABLE 10. REGISTER 03H, FANS 4 TO 7 FAN DIVISOR REGISTER (POWER-ON DEFAULT 55H)
Bit Name R/W Description
1-0 Fan 4 Divisor R/W Sets the oscillator prescaler division ratio for Fan 4 speed measurement. The
division ratios, oscillator frequencies and typical fan speeds (based on 2 tach
pulses per rev.) are as follows:
Code Divide-by Osc. Frequency (kHz) Fan Speed (RPM)
00 1 22.5 8800, nominal, for count of 153
01 2 11.25 4400 , nominal, for count of 153
10 4 5.62 2200 , nominal, for count of 153
11 8 2.81 1100 , nominal, for count of 153
3-2 Fan 5 Divisor R/W Same as for Fan 4
5-4 Fan 6 Divisor R/W Same as for Fan 4
7-6 Fan 7 Divisor R/W Same as for Fan 4
TABLE 11. REGISTER 04H, DAC CONTROL REGISTER (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 DAC Control R/W This register contains the value to which the Fan Speed DAC is programmed
in normal mode, or the 4 MSBs contain the Min Fan Speed in Auto Fan
Speed control mode.
TABLE 12. REGISTER 05H, PWM CONTROL REGISTER (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–4 PWM Control R/W This register contains the value to which the PWM Fan Speed is programmed
in normal mode, or the 4 MSBs contain the Min Fan Speed in Auto Fan
Speed control mode.
0000 = 0% Duty Cycle
0001 = 7% Duty Cycle
|
|
0101 = 33% Duty Cycle
0110 = 40% Duty Cycle
0111 = 47% Duty Cycle
|
|
1110 = 93% Duty Cycle
1111 = 100% Duty Cycle
3-0 Unused R Undefined.
REV. PrP
–35–

PRELIMINARY TECHNICAL DA T A
-36-
REV. PrP
ADM1026
TABLE 13. REGISTER 06H, EEPROM REGISTER 1 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7- 0 Factory Use R For factory use only. Do NOT write to this register.
TABLE 14. REGISTER 07H, CONFIGURATION REGISTER 3 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Enable GPIO16/ R/W When this bit is 1, pin 42 is enabled as a General Purpose IO pin
THERM = 0 (GPIO16), otherwise it is the THERM output.
1 CI Clear = 0 R/W Writing a 1 to this bit will clear the CI latch. This bit is cleared by writing a
0 to it.
2 VREF Select = 0 R/W When this bit is 0, VREF (pin 24) outputs 1.82V, otherwise it outputs 2.5V.
5-3 Unused R Undefined, will read back 0.
6 GPIO16 Direction R/W When this bit is 0, GPIO16 is configured as an input, otherwise, it is an
output.
7 GPIO16 Polarity R/W When this bit is 0, GPIO16 is active low, otherwise it is active high.
TABLE 15. REGISTER 08H, GPIO CONFIGURATION REGISTER 1 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO0 Direction R/W When this bit is 0, GPIO0 is configured as an input, otherwise, it is an
output.
1 GPIO0 Polarity R/W When this bit is 0, GPIO0 is active low, otherwise it is active high.
2 GPIO1 Direction R/W When this bit is 0, GPIO1 is configured as an input, otherwise, it is an
output.
3 GPIO1 Polarity R/W When this bit is 0, GPIO1 is active low, otherwise it is active high.
4 GPIO2 Direction R/W When this bit is 0, GPIO2 is configured as an input, otherwise, it is an
output.
5 GPIO2 Polarity R/W When this bit is 0, GPIO2 is active low, otherwise it is active high.
6 GPIO3 Direction R/W When this bit is 0, GPIO3 is configured as an input, otherwise, it is an
output.
7 GPIO3 Polarity R/W When this bit is 0, GPIO3 is active low, otherwise it is active high.
TABLE 16. REGISTER 09H, GPIO CONFIGURATION REGISTER 2 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO4 Direction R/W When this bit is 0, GPIO4 is configured as an input, otherwise, it is an
output.
1 GPIO4 Polarity R/W When this bit is 0, GPIO4 is active low, otherwise it is active high.
2 GPIO5 Direction R/W When this bit is 0, GPIO5 is configured as an input, otherwise, it is an
output.
3 GPIO5 Polarity R/W When this bit is 0, GPIO5 is active low, otherwise it is active high.
4 GPIO6 Direction R/W When this bit is 0, GPIO6 is configured as an input, otherwise, it is an
output.
5 GPIO6 Polarity R/W When this bit is 0, GPIO6 is active low, otherwise it is active high.
6 GPIO7 Direction R/W When this bit is 0, GPIO7 is configured as an input, otherwise, it is an
output.
7 GPIO7 Polarity R/W When this bit is 0, GPIO7 is active low, otherwise it is active high.

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 17. REGISTER 0AH, GPIO CONFIGURATION REGISTER 3 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO8 Direction R/W When this bit is 0, GPIO8 is configured as an input, otherwise, it is an
output.
1 GPIO8 Polarity R/W When this bit is 0, GPIO8 is active low, otherwise it is active high.
2 GPIO9 Direction R/W When this bit is 0, GPIO9 is configured as an input, otherwise, it is an
output.
3 GPIO9 Polarity R/W When this bit is 0, GPIO9 is active low, otherwise it is active high.
4 GPIO10 Direction R/W When this bit is 0, GPIO10 is configured as an input, otherwise, it is an
output.
5 GPIO10 Polarity R/W When this bit is 0, GPIO10 is active low, otherwise it is active high.
6 GPIO11 Direction R/W When this bit is 0, GPIO11 is configured as an input, otherwise, it is an
output.
7 GPIO11 Polarity R/W When this bit is 0, GPIO11 is active low, otherwise it is active high.
TABLE 18. REGISTER 0BH, GPIO CONFIGURATION REGISTER 4 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO12 Direction R/W When this bit is 0, GPIO12 is configured as an input, otherwise, it is an
output.
1 GPIO12 Polarity R/W When this bit is 0, GPIO12 is active low, otherwise it is active high.
2 GPIO13 Direction R/W When this bit is 0, GPIO13 is configured as an input, otherwise, it is an
output.
3 GPIO13 Polarity R/W When this bit is 0, GPIO13 is active low, otherwise it is active high.
4 GPIO14 Direction R/W When this bit is 0, GPIO14 is configured as an input, otherwise, it is an
output.
5 GPIO14 Polarity R/W When this bit is 0, GPIO14 is active low, otherwise it is active high.
6 GPIO15 Direction R/W When this bit is 0, GPIO15 is configured as an input, otherwise, it is an
output.
7 GPIO15 Polarity R/W When this bit is 0, GPIO15 is active low, otherwise it is active high.
TABLE 19. REGISTER 0CH, EEPROM REGISTER 2 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7- 0 Factory Use R For factory use only. Do NOT write to this register.
TABLE 20. REGISTER 0DH, INTERNAL TEMPERATURE THERM LIMIT (POWER-ON DEFAULT 37H (55
Bit Name R/W Description
7-0 Int Temp THERM Limit R/W This register contains the THERM limit for the Internal Temperature
Channel. Exceeding this limit will cause the THERM output pin to be
asserted.
TABLE 21. REGISTER 0EH, TDM1 THERM LIMIT (POWER-ON DEFAULT 50H (80
Bit Name R/W Description
7-0 TDM1 THERM Limit R/W This register contains the THERM limit for the TDM1 Temperature
Channel. Exceeding this limit will cause the THERM output pin to be
asserted.
REV. PrP
–37–
O
C))
O
C))

ADM1026
PRELIMINARY TECHNICAL DA T A
TABLE 22. REGISTER 0FH, TDM2 THERM LIMIT (POWER-ON DEFAULT 50H (80
O
C))
Bit Name R/W Description
7-0 TDM2 THERM Limit R/W This register contains the THERM limit for the TDM2 Temperature
Channel. Exceeding this limit will cause the THERM output pin to be
asserted.
TABLE 23. REGISTER 10H, INTERNAL TEMPERATURE TMIN (POWER-ON DEFAULT 28H (40
O
C))
Bit Name R/W Description
7-0 Internal Temp TMIN R/W This register contains the TMIN value for automatic fan speed control based
on the Internal Temperature Channel.
TABLE 24. REGISTER 11H, TDM1 TEMPERATURE TMIN (POWER-ON DEFAULT 40H (64
O
C))
Bit Name R/W Description
7-0 TDM1 Temp TMIN R/W This register contains the TMIN value for automatic fan speed control based
on the TDM1 Temperature Channel.
TABLE 25. REGISTER 12H, TDM2 TEMPERATURE TMIN (POWER-ON DEFAULT 40H (64
O
C))
Bit Name R/W Description
7–0 TDM2 Temp TMIN R/W This register contains the TMIN value for automatic fan speed control based
on the TDM2 Temperature Channel.
TABLE 19. REGISTER 13H, EEPROM REGISTER 3 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Read R/ W Setting this bit puts the EEPROM into Read mode.
1 Write R/W Setting this bit puts the EEPROM in Write (program) mode.
2 Erase R/W Setting this bit puts the EEPROM into Erase mode.
3 Write Protect Read/Write Setting this bit protects the EEPROM against accidental writing or erasure.
Once This bit is write-once and can only be cleared by power-on reset.
4 Test Mode bit 0 R/W Test mode bit. For factory use only.
5 Test Mode bit 1 R/W Test mode bit. For factory use only.
6 Test Mode bit 2 R/W Test mode bit. For factory use only.
7 Clock Extend R/W Setting this bit enables SMBus clock extension. The ADM1026 can pull SCL
low to extend the clock pulse if it cannot acccept any more data. It is
recommended to set this bit to 1 to extend the clock pulse during repeated
EEPROM write or block write operations.
TABLE 27. REGISTER 14H, MANUFACTURER'S TEST REGISTER 1 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7-0 Manufacturer's Test 1 R/W This register is used by the manufacturer for test purposes. It should not be
read from or written to in normal operation.
TABLE 28. REGISTER 15H, MANUFACTURER’S TEST REGISTER 2 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7-0 Manufacturer’s Test 2 R/W This register is used by the manufacturer for test purposes. It should not be
read from or written to in normal operation.
–38–
REV. PrP

PRELIMINARY TECHNICAL DA T A
–39–
REV. PrP
ADM1026
TABLE 29. REGISTER 16H, MANUFACTURER’S ID (POWER-ON DEFAULT 41H)
Bit Name R/W Description
7-0 Manufacturer’s ID Code R This register contains the manufacturer’s ID code.
TABLE 30. REGISTER 17H, REVISION REGISTER (POWER-ON DEFAULT 4xH)
Bit Name R/W Description
3–0 Minor Revision Code R This nibble contains the manufacturer’s code for minor revisions to the
device. Rev 1 = 0h, Rev 2 = 1h, etc.
7–4 Major Revision Code R This nibble denotes the generation of the device.
For the ADM1026 this nibble will read 4h.
TABLE 31. REGISTER 18H, MASK REGISTER 1 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Ext1 Temp Mask = 0 R/W When this bit is set, interrupts generated on the Ext1 Temp channel are
masked out.
1 Ext 2 Temp R/ W When this bit is set, interrupts generated on the Ext2 / A
/A
Mask = 0 channel are masked out.
IN9
IN9
2 3.3VSTBY Mask = 0 R/W When this bit is set, interrupts generated on the 3.3VSTBY Voltage channel
are masked out.
3 3.3VMAIN Mask = 0 R/W When this bit is set, interrupts generated on the 3.3VMAIN Voltage channel
are masked out.
4 +5V Mask = 0 R/W When this bit is set, interrupts generated on the +5V Voltage channel are
masked out.
5V
Mask = 0 R/W When this bit is set, interrupts generated on the V
CCP
Voltage channel are
CCP
masked out.
6 +12V Mask = 0 R/W When this bit is set, interrupts generated on the +12V Voltage channel are
masked out.
7 -12V Mask = 0 R/W When this bit is set, interrupts generated on the –12V Voltage channel are
masked out.
TABLE 32. REGISTER 19H, MASK REGISTER 2 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0A
IN0
Mask = 0 R/W When this bit is set, interrupts generated on the A
Voltage channel are
IN0
masked out.
1A
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN1
Voltage channel are
IN1
masked out.
2A
IN2
3A
IN3
4A
IN4
5A
IN5
6A
IN6
7A
IN7
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN2
masked out.
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN3
masked out.
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN4
masked out.
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN5
masked out.
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN6
masked out.
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN7
masked out.
Voltage channel are
Voltage channel are
Voltage channel are
Voltage channel are
Voltage channel are
Voltage channel are

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 33. REGISTER 1AH, MASK REGISTER 3 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 FAN0 Mask = 0 R/W When this bit is set, interrupts generated on the FAN0 Tach channel are
masked out.
1 FAN1 Mask = 0 R/W When this bit is set, interrupts generated on the FAN1 Tach channel are
masked out.
2 FAN2 Mask = 0 R/W When this bit is set, interrupts generated on the FAN2 Tach channel are
masked out.
3 FAN3 Mask = 0 R/W When this bit is set, interrupts generated on the FAN3 Tach channel are
masked out.
4 FAN4 Mask = 0 R/W When this bit is set, interrupts generated on the FAN4 Tach channel are
masked out.
5 FAN5 Mask = 0 R/W When this bit is set, interrupts generated on the FAN5 Tach channel are
masked out.
6 FAN6 Mask = 0 R/W When this bit is set, interrupts generated on the FAN6 Tach channel are
masked out.
7 FAN7 Mask = 0 R/W When this bit is set, interrupts generated on the FAN7 Tach channel are
masked out.
TABLE 34. REGISTER 1BH, MASK REGISTER 4 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Int Temp Mask = 0 R/W When this bit is set, interrupts generated on the Int Temp channel are masked
out.
1V
2A
3 THERM Mask = 0 R/W When this bit is set, interrupts generated from THERM events are masked
4 AFC Mask = 0 R/W When this bit is set, interrupts generated from Automatic Fan Control events
5 Unused R Unused. Will read back 0.
6 CI Mask = 0 R/W When this bit is set, interrupts generated by the Chassis Intrusion input are
7 GPIO16 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO16 channel are
Mask = 0 R/W When this bit is set, interrupts generated on the V
BAT
Mask = 0 R/W When this bit is set, interrupts generated on the A
IN8
masked out.
masked out.
out.
are masked out.
masked out.
masked out.
Voltage channel are
BAT
Voltage channel are
IN8
–40–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 35. REGISTER 1CH, MASK REGISTER 5 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO0 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO0 channel are masked
out.
1 GPIO1 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO1 channel are masked
out.
2 GPIO2 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO2 channel are masked
out.
3 GPIO3 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO3 channel are masked
out.
4 GPIO4 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO4 channel are masked
out.
5 GPIO5 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO5 channel are masked
out.
6 GPIO6 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO6 channel are masked
out.
7 GPIO7 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO7 channel are masked
out.
TABLE 36. REGISTER 1DH, MASK REGISTER 6 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO8 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO8 channel are masked
out.
1 GPIO9 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO9 channel are masked
out.
2 GPIO10 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO10 channel are masked
out.
3 GPIO11Mask = 0 R/W When this bit is set, interrupts generated on the GPIO11 channel are masked
out.
4 GPIO12 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO12 channel are masked
out.
5 GPIO13 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO13 channel are masked
out.
6 GPIO14 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO14 channel are masked
out.
7 GPIO15 Mask = 0 R/W When this bit is set, interrupts generated on the GPIO15 channel are masked
out.
REV. PrP
–41–

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 37. REGISTER 1EH, INT TEMP OFFSET (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 Int Temp Offset R/W This register contains the Offset Value for the Internal Temperature Channel.
A 2’s complement number can be written to this register which is then ‘added’
to the measured result before it is stored or compared to limits. In this way a
sort of one-point calibration can be done whereby the whole transfer function
of the channel can be moved up or down. From a software point of view this
may be a very simple method to vary the characteristics of the measurement
channel if the thermal characteristics change, for whatever reason, for instance
from one chassis to another, if the measurement point is moved, if a plug-in
card is inserted or removed, etc.
TABLE 38. REGISTER 1FH, INT TEMP MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 Int Temp Value R This register contains the measured value of the Internal Temperature
Channel.
TABLE 39. REGISTER 20H, STATUS REGISTER 1 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 Ext1 Temp Status = 0 R 1, if Ext1 Value is above the High Limit or below the Low Limit on the
previous conversion cycle, 0 otherwise. This bit is set (once only) if a
THERM mode is engaged as a result of Ext1 temp readings exceeding the
Ext1 THERM limit. This bit is also set (once only) if THERM mode is
disengaged as a result of Ext1 temp readings going 5
o
C below Ext1
THERM limit.
1 Ext 2 Temp R 1, if Ext 2 Value (or A
/A
Status = 0 High Limit or below the Low Limit on the previous conversion cycle, 0
IN9
if in voltage measurement mode) is above the
IN9
otherwise. This bit is set (once only) if a THERM mode is engaged as a
result of Ext2 temp readings exceeding the Ext2 THERM limit. This bit
is also set (once only) if THERM mode is disengaged as a result of Ext2
temp readings going 5oC below Ext2 THERM limit.
2 3.3VSTBY Status = 0 R 1, if 3.3VSTBY Value is above the High Limit or below the Low Limit on
the previous conversion cycle, 0 otherwise.
3 3.3VMAIN Status = 0 R 1, if 3.3VMAIN Value is above the High Limit or below the Low Limit on
the previous conversion cycle, 0 otherwise.
4 +5V Status = 0 R 1, if +5V Value is above the High Limit or below the Low Limit on the
previous conversion cycle, 0 otherwise.
5V
CCP
Status = 0 R 1, if V
Value is above the High Limit or below the Low Limit on the
CCP
previous conversion cycle, 0 otherwise.
6 +12V Status = 0 R 1, if +12V Value is above the High Limit or below the Low Limit on the
previous conversion cycle, 0 otherwise.
7 -12V Status = 0 R 1, if –12V Value is above the High Limit or below the Low Limit on the
previous conversion cycle, 0 otherwise.
–42–
REV. PrP

PRELIMINARY TECHNICAL DA T A
TABLE 40. REGISTER 21H, STATUS REGISTER 2 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
ADM1026
0A
Status = 0 R 1, if A
IN0
Value is above the High Limit or below the Low Limit on the
IN0
previous conversion cycle, 0 otherwise.
1A
Status = 0 R 1, if A
IN1
Value is above the High Limit or below the Low Limit on the
IN1
previous conversion cycle, 0 otherwise.
2A
IN2
Status = 0 R 1, if A
Value is above the High Limit or below the Low Limit on the
IN2
previous conversion cycle, 0 otherwise.
3A
IN3
Status = 0 R 1, if A
Value is above the High Limit or below the Low Limit on the
IN3
previous conversion cycle, 0 otherwise.
4A
IN4
Status = 0 R 1, if A
Value is above the High Limit or below the Low Limit on the
IN4
previous conversion cycle, 0 otherwise.
5A
IN5
Status = 0 R 1, if A
Value is above the High Limit or below the Low Limit on the
IN5
previous conversion cycle, 0 otherwise.
6A
IN6
Status = 0 R 1, if A
Value is above the High Limit or below the Low Limit on the
IN6
previous conversion cycle, 0 otherwise.
7A
IN7
Status = 0 R 1, if A
Value is above the High Limit or below the Low Limit on the
IN7
previous conversion cycle, 0 otherwise.
TABLE 41. REGISTER 22H, STATUS REGISTER 3 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 FAN0 Status = 0 R 1, if FAN0 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
1 FAN1 Status = 0 R 1, if FAN1 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
2 FAN2 Status = 0 R 1, if FAN2 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
3 FAN3 Status = 0 R 1, if FAN3 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
4 FAN4 Status = 0 R 1, if FAN4 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
5 FAN5 Status = 0 R 1, if FAN5 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
6 FAN6 Status = 0 R 1, if FAN6 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
7 FAN7 Status = 0 R 1, if FAN7 Value is above the High Limit on the previous conversion cycle,
0 otherwise.
REV. PrP
–43–

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 42. REGISTER 23H STATUS REGISTER 4 POWER-ON DEFAULT 00H
Bit Name R/W Description
0 Int Temp Status = 0 R 1, if Int Value is above the High Limit or below the Low Limit on the
previous conversion cycle, 0 otherwise. This bit is set (once only) if a
THERM mode is engaged as a result of Int temp readings exceeding the
Int THERM limit. This bit is also set (once only) if THERM mode is
disengaged as a result of Int temp readings going 5
limit.
o
C below Int THERM
1V
2A
3 THERM Status = 0 R This bit is set (once only) if a THERM mode is engaged as a result of
4 AFC Status = 0 R This bit is set (once only) if the fan turns on when in automatic fan speed
5 Unused R Unused. Will read back 0.
6 CI Status = 0 R This bit latches a Chassis Intrusion event.
7 GPIO16 Status = 0 R When GPIO16 is configured as an input , this bit is set when GPIO16 is
Status = 0 R 1, if V
BAT
Status = 0 R 1, if A
IN8
R/W When GPIO16 is configured as an output, setting this bit asserts GPIO16.
Value is above the High Limit or below the Low Limit on the
BAT
previous conversion cycle, 0 otherwise.
Value is above the High Limit or below the Low Limit on the
IN8
previous conversion cycle, 0 otherwise.
temperature readings exceeding the THERM limits on any channel. This bit
is also set (once only) if THERM mode is disengaged as a result of
temperature readings going 5oC below THERM limits on any channel.
control (AFC) mode as a result of a temperature reading exceeding TMIN on
any channel. This bit is also set (once only) if the fan turns off when in
automatic fan speed control mode.
asserted. ("asserted" may be active-high or active-low depending on setting in
GPIO Configuration Register).
("asserted" may be active-high or active-low depending on setting in
GPIO Configuration Register).
–44–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 43. REGISTER 24H, STATUS REGISTER 5 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO0 Status = 0 R When GPIO0 is configured as an input , this bit is set when GPIO0 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 1 in GPIO Configuration Register 1).
R/W* When GPIO0 is configured as an output, setting this bit asserts GPIO0.
("asserted" may be active-high or active-low depending on setting of bit 1 in
GPIO Configuration Register 1).
1 GPIO1 Status = 0 R When GPIO1 is configured as an input , this bit is set when GPIO1 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 3 in GPIO Configuration Register 1).
R/W* When GPIO1 is configured as an output, setting this bit asserts GPIO1.
("asserted" may be active-high or active-low depending on setting of bit 3 in
GPIO Configuration Register 1).
2 GPIO2 Status = 0 R When GPIO2 is configured as an input , this bit is set when GPIO2 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 5 in GPIO Configuration Register 1).
R/W* When GPIO2 is configured as an output, setting this bit asserts GPIO2.
("asserted" may be active-high or active-low depending on setting of bit 5 in
GPIO Configuration Register 1).
3 GPIO3 Status = 0 R When GPIO3 is configured as an input , this bit is set when GPIO3 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 7 in GPIO Configuration Register 1).
R/W* When GPIO3 is configured as an output, setting this bit asserts GPIO3.
("asserted" may be active-high or active-low depending on setting of bit 7 in
GPIO Configuration Register 1).
4 GPIO4 Status = 0 R When GPIO4 is configured as an input , this bit is set when GPIO4 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 1 in GPIO Configuration Register 2).
R/W* When GPIO4 is configured as an output, setting this bit asserts GPIO4.
("asserted" may be active-high or active-low depending on setting of bit 1 in
GPIO Configuration Register 2).
5 GPIO5 Status = 0 R When GPIO5 is configured as an input , this bit is set when GPIO5 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 3 in GPIO Configuration Register 2).
R/W* When GPIO5 is configured as an output, setting this bit asserts GPIO5.
("asserted" may be active-high or active-low depending on setting of bit 3 in
GPIO Configuration Register 2).
6 GPIO6 Status = 0 R When GPIO6 is configured as an input , this bit is set when GPIO6 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 5 in GPIO Configuration Register 2).
R/W When GPIO6 is configured as an output, setting this bit asserts GPIO6.
("asserted" may be active-high or active-low depending on setting of bit 5 in
GPIO Configuration Register 2).
7 GPIO7 Status = 0 R When GPIO7 is configured as an input , this bit is set when GPIO7 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 7 in GPIO Configuration Register 2).
R/W* When GPIO7 is configured as an output, setting this bit asserts GPIO7.
("asserted" may be active-high or active-low depending on setting of bit 7 in
GPIO Configuration Register 2).
*Note: GPIO status bits can be written only when a GPIO pin is configured as output. Read-only otherwise.
REV. PrP
–45–

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 44. REGISTER 25H, STATUS REGISTER 6 (POWER-ON DEFAULT 00H)
Bit Name R/W Description
0 GPIO8 Status = 0 R When GPIO8 is configured as an input , this bit is set when GPIO8 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 1 in GPIO Configuration Register 3).
R/W* When GPIO8 is configured as an output, setting this bit asserts GPIO8.
("asserted" may be active-high or active-low depending on setting of bit 1 in
GPIO Configuration Register 3).
1 GPIO9 Status = 0 R When GPIO9 is configured as an input , this bit is set when GPIO9 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 3 in GPIO Configuration Register 3).
R/W* When GPIO9 is configured as an output, setting this bit asserts GPIO9.
("asserted" may be active-high or active-low depending on setting of bit 3 in
GPIO Configuration Register 3).
2 GPIO10 Status = 0 R When GPIO10 is configured as an input , this bit is set when GPIO10 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 5 in GPIO Configuration Register 3).
R/W* When GPIO10 is configured as an output, setting this bit asserts GPIO10.
("asserted" may be active-high or active-low depending on setting of bit 5 in
GPIO Configuration Register 3).
3 GPIO11 Status = 0 R When GPIO11 is configured as an input , this bit is set when GPIO11 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 7 in GPIO Configuration Register 3).
R/W* When GPIO11 is configured as an output, setting this bit asserts GPIO11.
("asserted" may be active-high or active-low depending on setting of bit 7 in
GPIO Configuration Register 3).
4 GPIO12 Status = 0 R When GPIO12 is configured as an input , this bit is set when GPIO12 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 1 in GPIO Configuration Register 4).
R/W* When GPIO12 is configured as an output, setting this bit asserts GPIO12.
("asserted" may be active-high or active-low depending on setting of bit 1 in
GPIO Configuration Register 4).
5 GPIO13 Status = 0 R When GPIO13 is configured as an input , this bit is set when GPIO13 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 3 in GPIO Configuration Register 4).
R/W* When GPIO13 is configured as an output, setting this bit asserts GPIO13.
("asserted" may be active-high or active-low depending on setting of bit 3 in
GPIO Configuration Register 4).
6 GPIO14 Status = 0 R When GPIO14 is configured as an input , this bit is set when GPIO14 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 5 in GPIO Configuration Register 4).
R/W* When GPIO14 is configured as an output, setting this bit asserts GPIO14.
("asserted" may be active-high or active-low depending on setting of bit 5 in
GPIO Configuration Register 4).
7 GPIO15 Status = 0 R When GPIO15 is configured as an input , this bit is set when GPIO15 is
asserted. ("asserted" may be active-high or active-low depending on setting of
bit 7 in GPIO Configuration Register 4).
R/W* When GPIO14 is configured as an output, setting this bit asserts GPIO14.
("asserted" may be active-high or active-low depending on setting of bit 7 in
GPIO Configuration Register 4).
*Note: GPIO status bits can be written only when a GPIO pin is configured as output. Read-only otherwise.
–46–
REV. PrP

PRELIMINARY TECHNICAL DA T A
TABLE 45. REGISTER 26H, VBAT MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
ADM1026
7–0 V
TABLE 46. REGISTER 27H, AIN8 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the V
BAT
analog input channel.
BAT
Bit Name R/W Description
7–0 A
TABLE 47. REGISTER 28H, EXT1 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN8
analog input channel.
IN8
Bit Name R/W Description
7–0 Ext1 Value R This register contains the measured value of the Ext1 Temp channel.
TABLE 48. REGISTER 29H, EXT2 / AIN9 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 Ext2 Temp/AIN9 Value R This register contains the measured value of the Ext2 Temp / AIN9
channel depending on which one is configured.
TABLE 49. REGISTER 2AH, 3.3VSTBY MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 3.3VSTBY Value R This register contains the measured value of the 3.3VSTBY voltage
TABLE 50. REGISTER 2BH, 3.3VMAIN MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 3.3VMAIN Value R This register contains the measured value of the 3.3VMAIN voltage
TABLE 51. REGISTER 2CH, +5V MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 +5V Value R This register contains the measured value of the +5V analog input channel
TABLE 52. REGISTER 2DH, VCCP MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 V
TABLE 53. REGISTER 2EH, +12V MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the V
CCP
analog input channel
CCP
Bit Name R/W Description
7–0 +12V Value R This register contains the measured value of the +12V analog input channel
TABLE 54. REGISTER 2FH, -12V MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 -12V Value R This register contains the measured value of the –12V analog input channel
TABLE 55. REGISTER 30H, AIN0 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
REV. PrP
Value R This register contains the measured value of the A
IN0
–47–
analog input channel.
IN0

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 56. REGISTER 31H, AIN1 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
TABLE 57. REGISTER 32H, AIN2 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN1
IN1
Bit Name R/W Description
7–0 A
TABLE 58. REGISTER 33H, AIN3 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN2
IN2
Bit Name R/W Description
7–0 A
TABLE 59. REGISTER 34H, AIN4 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN3
IN3
Bit Name R/W Description
7–0 A
TABLE 60. REGISTER 35H, AIN5 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN4
IN4
Bit Name R/W Description
7–0 A
TABLE 61. REGISTER 36H, AIN6 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN5
IN5
Bit Name R/W Description
analog input channel.
analog input channel.
analog input channel.
analog input channel.
analog input channel.
7–0 A
TABLE 62. REGISTER 37H, AIN7 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN6
analog input channel.
IN6
Bit Name R/W Description
7–0 A
TABLE 63. REGISTER 38H, FAN0 MEASURED VALUE (POWER-ON DEFAULT 00H)
Value R This register contains the measured value of the A
IN7
analog input channel.
IN7
Bit Name R/W Description
7–0 FAN0 Value R This register contains the measured value of the FAN0 tach input channel.
TABLE 64. REGISTER 39H, FAN1 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN1 Value R This register contains the measured value of the FAN1 tach input channel.
TABLE 65. REGISTER 3AH, FAN2 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN2 Value R This register contains the measured value of the FAN2 tach input channel.
TABLE 66. REGISTER 3BH, FAN3 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN3 Value R This register contains the measured value of the FAN3 tach input channel.
–48–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 67. REGISTER 3CH, FAN4 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN4 Value R This register contains the measured value of the FAN4 tach input channel.
TABLE 68. REGISTER 3DH, FAN5 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN5 Value R This register contains the measured value of the FAN5 tach input channel.
TABLE 69. REGISTER 3EH, FAN6 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN6 Value R This register contains the measured value of the FAN6 tach input channel.
TABLE 70. REGISTER 3FH, FAN7 MEASURED VALUE (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 FAN7 Value R This register contains the measured value of the FAN7 tach input channel.
TABLE 71. REGISTER 40H, EXT1 HIGH LIMIT (POWER-ON DEFAULT 64H/100
O
C)
Bit Name R/W Description
7–0 Ext1 High Limit R/W This register contains the high limit of the Ext1 Temp channel.
TABLE 72. REGISTER 41H, EXT2 / AIN9 HIGH LIMIT (POWER-ON DEFAULT 64H/100
O
C)
Bit Name R/W Description
7–0 Ext2 Temp R/W This register contains the high limit of the Ext2 Temp / A
/A
High Limit channel depending on which one is configured.
IN9
TABLE 73. REGISTER 42H, 3.3VSTBY HIGH LIMIT (POWER-ON DEFAULT FFH)
IN9
Bit Name R/W Description
7–0 3.3VSTBY High Limit R/W This register contains the high limit of the 3.3VSTBY analog input channel
TABLE 74. REGISTER 43H, 3.3VMAIN HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 3.3VMAIN High Limit R/W This register contains the high limit of the 3.3VMAIN analog input channel
TABLE 75. REGISTER 44H, +5V HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 +5V High Limit R/W This register contains the high limit of the +5V analog input channel
TABLE 76. REGISTER 45H, VCCP HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 V
TABLE 77. REGISTER 46H, +12V HIGH LIMIT (POWER-ON DEFAULT FFH)
High Limit R/W This register contains the high limit of the V
CCP
analog input channel
CCP
Bit Name R/W Description
7–0 +12V High Limit R/W This register contains the high limit of the +12V analog input channel
REV. PrP
–49–

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 78. REGISTER 47H, -12V HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 -12V High Limit R/W This register contains the high limit of the –12V analog input channel
TABLE 79. REGISTER 48H, EXT1 LOW LIMIT (POWER-ON DEFAULT 80H)
Bit Name R/W Description
7–0 Ext1 Low Limit R/W This register contains the low limit of the Ext1 Temp channel.
TABLE 80. REGISTER 49H, EXT2 / AIN9 LOW LIMIT (POWER-ON DEFAULT 80H)
Bit Name R/W Description
7–0 Ext2 Temp R/W This register contains the low limit of the Ext2 Temp / AIN9 channel
/AIN9 Low Limit depending on which one is configured.
TABLE 81. REGISTER 4AH, 3.3VSTBY LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 3.3VSTBY Low Limit R/W This register contains the low limit of the 3.3VSTBY analog input channel
TABLE 82. REGISTER 4BH, 3.3VMAIN LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 3.3VMAIN Low Limit R/W This register contains the low limit of the 3.3VMAIN analog input channel
TABLE 83. REGISTER 4CH, +5V LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 +5V Low Limit R/W This register contains the low limit of the +5V analog input channel
TABLE 84. REGISTER 4DH, VCCP LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 V
TABLE 85. REGISTER 4EH, +12V LOW LIMIT (POWER-ON DEFAULT 00H)
Low Limit R/W This register contains the low limit of the V
CCP
analog input channel
CCP
Bit Name R/W Description
7–0 +12V Low Limit R/W This register contains the low limit of the +12V analog input channel
TABLE 86. REGISTER 4FH, -12V LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 -12V Low Limit R/W This register contains the low limit of the –12V analog input channel
TABLE 87. REGISTER 50H, AIN0 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 A
TABLE 88. REGISTER 51H, AIN1 HIGH LIMIT (POWER-ON DEFAULT FFH)
High Limit R/W This register contains the high limit of the A
IN0
Bit Name R/W Description
7–0 A
High Limit R/W This register contains the high limit of the A
IN1
–50–
analog input channel.
IN0
analog input channel
IN1
REV. PrP

PRELIMINARY TECHNICAL DA T A
TABLE 89. REGISTER 52H, AIN2 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
ADM1026
7–0 A
High Limit R/W This register contains the high limit of the A
IN2
TABLE 90. REGISTER 53H, AIN3 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 A
High Limit R/W This register contains the high limit of the A
IN3
TABLE 91. REGISTER 54H, AIN4 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 A
High Limit R/W This register contains the high limit of the A
IN4
TABLE 92. REGISTER 55H, AIN5 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 A
High Limit R/W This register contains the high limit of the A
IN5
TABLE 93. REGISTER 56H, AIN6 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 A
High Limit R/W This register contains the high limit of the A
IN6
TABLE 94. REGISTER 57H, AIN7 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
analog input channel
IN2
analog input channel
IN3
analog input channel
IN4
analog input channel
IN5
analog input channel
IN6
7–0 A
High Limit R/W This register contains the high limit of the A
IN7
TABLE 95. REGISTER 58H, AIN0 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
Low Limit R/W This register contains the low limit of the A
IN0
TABLE 96. REGISTER 59H, AIN1 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
Low Limit R/W This register contains the low limit of the A
IN1
TABLE 97. REGISTER 5AH, AIN2 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
Low Limit R/W This register contains the low limit of the A
IN2
TABLE 98. REGISTER 5BH, AIN3 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
Low Limit R/W This register contains the low limit of the A
IN3
TABLE 99. REGISTER 5CH, AIN4 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
analog input channel
IN7
analog input channel.
IN0
analog input channel
IN1
analog input channel
IN2
analog input channel
IN3
7–0 A
REV. PrP
Low Limit R/W This register contains the low limit of the A
IN4
–51–
analog input channel
IN4

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 100. REGISTER 5DH, AIN5 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
TABLE 101. REGISTER 5EH, AIN6 LOW LIMIT (POWER-ON DEFAULT 00H)
Low Limit R/W This register contains the low limit of the A
IN5
analog input channel
IN5
Bit Name R/W Description
7–0 A
TABLE 102. REGISTER 5FH, AIN7 LOW LIMIT (POWER-ON DEFAULT 00H)
Low Limit R/W This register contains the low limit of the A
IN6
analog input channel
IN6
Bit Name R/W Description
7–0 A
TABLE 103. REGISTER 60H, FAN0 HIGH LIMIT (POWER-ON DEFAULT FFH)
Low Limit R/W This register contains the low limit of the A
IN7
analog input channel
IN7
Bit Name R/W Description
7–0 FAN0 High Limit R/W This register contains the high limit of the FAN0 tach channel.
TABLE 104. REGISTER 61H, FAN1 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN1 High Limit R/W This register contains the high limit of the FAN1 tach channel
TABLE 105. REGISTER 62H, FAN2 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN2 High Limit R/W This register contains the high limit of the FAN2 tach channel
TABLE 106. REGISTER 63H, FAN3 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN3 High Limit R/W This register contains the high limit of the FAN3 tach channel
TABLE 107. REGISTER 64H, FAN4 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN4 High Limit R/W This register contains the high limit of the FAN4 tach channel
TABLE 108. REGISTER 65H, FAN5 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN5 High Limit R/W This register contains the high limit of the FAN5 tach channel
TABLE 109. REGISTER 66H, FAN6 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN6 High Limit R/W This register contains the high limit of the FAN6 tach channel
TABLE 110. REGISTER 67H, FAN7 HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 FAN7 High Limit R/W This register contains the high limit of the FAN7 tach channel
–52–
REV. PrP

PRELIMINARY TECHNICAL DA T A
ADM1026
TABLE 111. REGISTER 68H, INT TEMP HIGH LIMIT (POWER-ON DEFAULT 50H (80
O
C) )
Bit Name R/W Description
7–0 Int Temp High Limit R/W This register contains the high limit of the internal temperature channel.
TABLE 112. REGISTER 69H, INT TEMP LOW LIMIT (POWER-ON DEFAULT 80H)
Bit Name R/W Description
7–0 Int Temp Low Limit R/W This register contains the low limit of the internal temperature channel
TABLE 113. REGISTER 6AH, VBAT HIGH LIMIT (POWER-ON DEFAULT FFH)
Bit Name R/W Description
7–0 V
TABLE 114. REGISTER 6BH, VBAT LOW LIMIT (POWER-ON DEFAULT 00H)
High Limit R/W This register contains the high limit of the V
BAT
analog input channel
BAT
Bit Name R/W Description
7–0 V
TABLE 115. REGISTER 6CH, AIN8 HIGH LIMIT (POWER-ON DEFAULT FFH)
Low Limit R/W This register contains the low limit of the V
BAT
analog input channel
BAT
Bit Name R/W Description
7–0 A
High Limit R/W This register contains the high limit of the A
IN8
analog input channel
IN8
TABLE 116. REGISTER 6DH, AIN8 LOW LIMIT (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 A
TABLE 117. REGISTER 6EH, EXT1 TEMP OFFSET (POWER-ON DEFAULT 00H)
Low Limit R/W This register contains the low limit of the A
IN8
analog input channel
IN8
Bit Name R/W Description
7–0 Ext1 Temp Offset R/W This register contains the Offset Value for the External 1 Temperature
Channel. A 2’s complement number can be written to this register which is
then ‘added’ to the measured result before it is stored or compared to limits.
In this way a sort of one-point calibration can be done whereby the whole
transfer function of the channel can be moved up or down. From a software
point of view this may be a very simple method to vary the characteristics of
the measurement channel if the thermal characteristics change, for whatever
reason, for instance from one chassis to another, if the measurement point is
moved, if a plug-in card is inserted or removed, etc.
TABLE 118. REGISTER 6FH, EXT2 TEMP OFFSET (POWER-ON DEFAULT 00H)
Bit Name R/W Description
7–0 Ext2 Temp Offset R/W This register contains the Offset Value for the External 2 Temperature
Channel. A 2’s complement number can be written to this register which is
then ‘added’ to the measured result before it is stored or compared to limits.
In this way a sort of one-point calibration can be done whereby the whole
transfer function of the channel can be moved up or down. From a software
point of view this may be a very simple method to vary the characteristics of
the measurement channel if the thermal characteristics change, for whatever
reason, for instance from one chassis to another, if the measurement point is
moved, if a plug-in card is inserted or removed, etc.
REV. PrP
–53–

ADM1026
PRELIMINARY TECHNICAL DA T A
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
0.354 (9.00) BSC
0.276 (7.00) BSC
PIN 1
0) BSC
0) BSC
0.354 (9.0
0.276 (7.0
(1.00)
(0.60)
o
MIN
0
0.01 (0.25)
(0.22)
0.063 (1.60)
0.055 (1.40)
0
7
o
o
0.02 (0.50) BSC
0.006 (0.15)
0.002 (0.05)
48-Pin LQFP Package (ST-48)
–54–
REV. PrP
 Loading...
Loading...