

Low Phase Noise, Fast Settling, 6 GHz
PLL Frequency Synthesizer
ADF4196
Rev. B
Trademarks and registered trademarks are the prop erty of their respective owner s.
Fax: 781.461.3113 ©2011 Analog Devices, Inc. All rights reserved.
09450-001
N COUNTER
SW1
CP
OUT+
CP
OUT–
SW2
REFERENCE
DATA
LE
24-BIT
DATA
REGISTER
CLK
REF
IN
A
GND
1
A
GND
2 D
GND
1 D
GND
2 D
GND
3
SD
GND
SW
GND
V
DD
DGND
LOCK DETE CT
R
DIV
N
DIV
SDV
DDDVDD
1 DVDD2 DVDD3
AV
DD
VP1 VP2
VP3 R
SET
OUTPUT
MUX
MUX
OUT
–
+
HIGH-Z
PHASE
FREQUENCY
DETECTOR
ADF4196
FRACTIONAL
INTERPOLATOR
MODULUS
REG
FRACTION
REG
INTEGER
REG
RF
IN+
RF
IN–
×2
DOUBLER
4-BIT R
COUNTER
/2
DIVIDER
CHARGE
PUMP
–
+
+
–
DIFFERENTIAL
AMPLIFIER
CMR
AIN–
AIN+
A
OUT
SW3
Data Sheet
FEATURES
Fast settling, fractional-N PLL architecture
Single PLL replaces ping-pong synthesizers
Frequency hop across GSM band in 5 μs with phase settled
within 20 μs
1 degree rms phase error at 4 GHz RF output
Digitally programmable output phase
RF input range up to 6 GHz
3-wire serial interface
On-chip, low noise differential amplifier
Phase noise figure of merit: −216 dBc/Hz
APPLICATIONS
GSM/EDGE base stations
PHS base stations
Pulse Doppler radar
Instrumentation and test equipment
Beam-forming/phased array systems
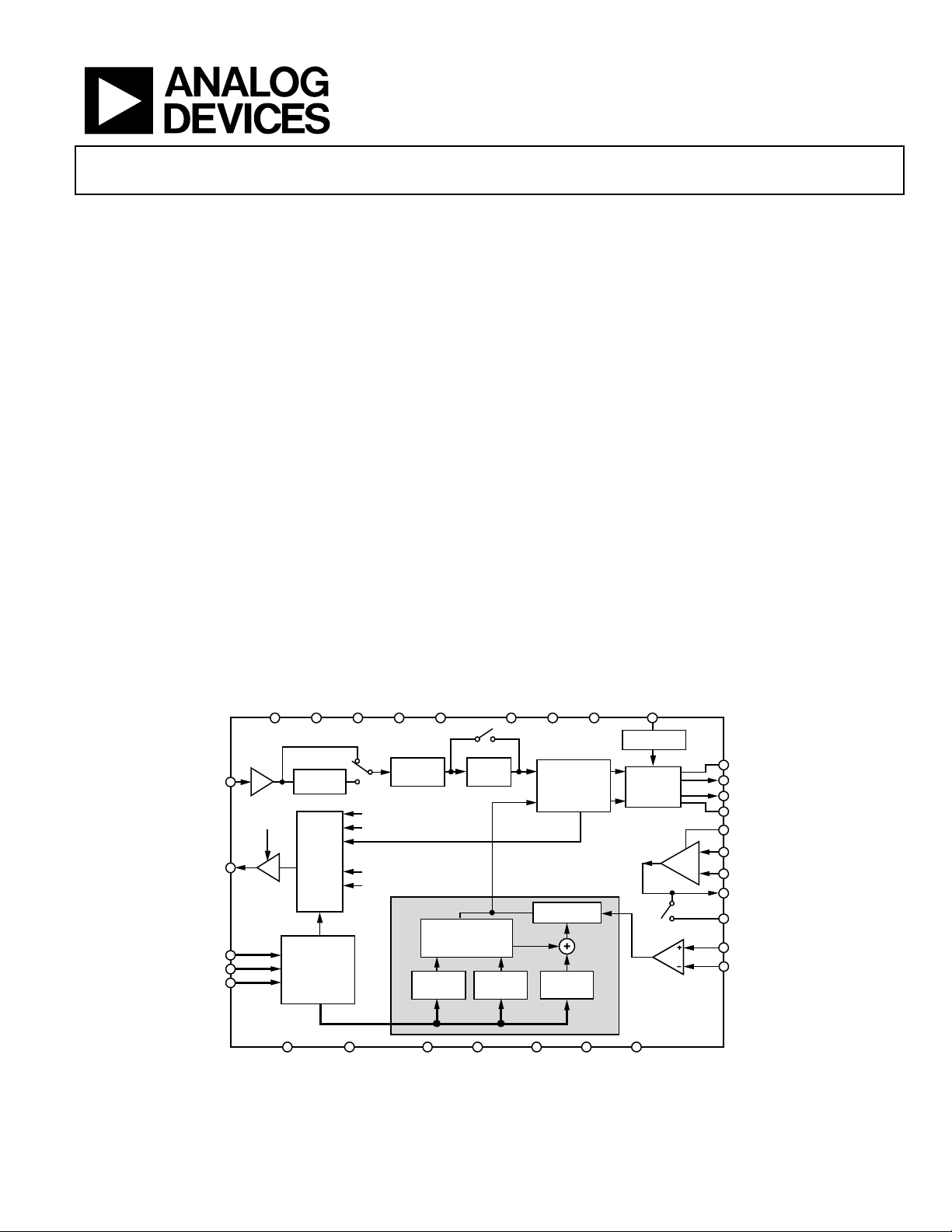
GENERAL DESCRIPTION
The ADF4196 frequency synthesizer can be used to implement
local oscillators (LO) in the upconversion and downconversion
sections of wireless receivers and transmitters. Its architecture is
specifically designed to meet the GSM/EDGE lock time requirements for base stations, and the fast settling feature makes the
ADF4196 suitable for pulse Doppler radar applications.
The ADF4196 consists of a low noise, digital phase frequency
detector (PFD) and a precision differential charge pump.
A differential amplifier converts the differential charge pump
output to a single-ended voltage for the external voltage controlled
oscillator (VCO). The sigma-delta (Σ-Δ) based fractional interpolator, working with the N divider, allows programmable modulus
fractional-N division. Additionally, the 4-bit reference (R) counter
and on-chip frequency doubler allow selectable reference signal
(REF
) frequencies at the PFD input.
IN
A complete phase-locked loop (PLL) can be implemented if the
synthesizer is used with an external loop filter and a VCO. The
switching architecture ensures that the PLL settles within the
GSM time slot guard period, removing the need for a second
PLL and associated isolation switches. This decreases the cost,
complexity, PCB area, shielding, and characterization found on
previous ping-pong GSM PLL architectures.
FUNCTIONAL BLOCK DIAGRAM
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Figure 1.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com

ADF4196 Data Sheet
TABLE OF CONTENTS
Features .............................................................................................. 1
Applications ....................................................................................... 1
General Description ......................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 2
Specifications ..................................................................................... 3
Timing Characteristics ................................................................ 4
Absolute Maximum Ratings ............................................................ 5
Thermal Resistance ...................................................................... 5
Transistor Count ........................................................................... 5
ESD Caution .................................................................................. 5
Pin Configuration and Function Descriptions ............................. 6
Typical Performance Characteristics ............................................. 8
Theory of Operation ...................................................................... 11
General Description ................................................................... 11
Reference Input ........................................................................... 11
RF Input Stage ............................................................................. 11
PFD and Charge Pump .............................................................. 12
Differential Charge Pump ......................................................... 12
Fast Lock Timeout Counters ..................................................... 12
Differential Amplifier ................................................................ 13
MUX
and Lock Detect ......................................................... 13
OUT
REVISION HISTORY
12/11—Rev. A t o R e v. B
Changes to Figure 10, Figure 11, Figure 13, and
Figure 14 ............................................................................................ 9
Change to Figure 31 ....................................................................... 17
10/11—Revision A: Initial Version
Input Shift Register .................................................................... 13
Register Map ................................................................................... 14
FRAC/INT Register (R0) Latch Map ....................................... 15
MOD/R Register (R1) Latch Map ............................................ 16
Phase Register (R2) Bit Latch Map .......................................... 17
Function Register (R3) Latch Map ........................................... 18
Charge Pump Register (R4) Latch Map .................................. 19
Power-Down Register (R5) Bit Map ........................................ 20
Mux Register (R6) Latch Map and Truth Table ..................... 21
Programming the ADF4196 .......................................................... 22
Worked Example ........................................................................ 22
Spur Mechanisms ....................................................................... 22
Power-Up Initialization ............................................................. 23
Changing the Frequency of the PLL and the Phase Lookup
Tabl e ............................................................................................. 23
Applications Information .............................................................. 25
Local Oscillator for a GSM Base Station ................................. 25
Interfacing ................................................................................... 27
PCB Design Guidelines ............................................................. 27
Outline Dimensions ....................................................................... 28
Ordering Guide .......................................................................... 28
Rev. B | Page 2 of 28
Data Sheet ADF4196
RF CHARACTERISTICS
CHARGE PUMP
Output Noise
7
nV/√Hz
At 20 kHz offset
Input Low Voltage, VIL
0.7 V
22
27
mA
SPECIFICATIONS
AVDD = DVDD1, DVDD2, DVDD3 = SDVDD = 3 V ± 10%; VP1, VP2 = 5 V ± 10%; VP3 = 5.35 V ± 5%; A
R
= 2.4 kΩ; dBm referred to 50 Ω; TA = T
SET
MIN
to T
, unless otherwise noted. Operating temperature range = −40°C to +85°C.
MAX
Table 1.
Parameter Min Typ Max Unit Test Conditions/Comments
GND
1, A
GND
2 = D
GND
1, D
GND
2, D
GND
3 = 0 V;
RF Input Frequency (RF
) 0.4 6 GHz See Figure 21 for input circuit
IN±
RF Input Sensitivity −10 0 dBm
Maximum Allowable Prescaler Output
Frequency
1
750 MHz
REFIN CHARACTERISTICS
REFIN Input Frequency 300 MHz For f > 120 MHz, set REF/2 bit = 1 (Register R1)
REFIN Edge Slew Rate 300 V/µs
REFIN Input Sensitivity 0.7 VDD V p-p AC-coupled
0 to VDD V CMOS compatible
REFIN Input Capacitance 10 pF
REFIN Input Current ±100 µA
PHASE DETECTOR
Phase Detector Frequency 26 MHz
ICP Up/Down
High Value 6.6 mA R
Low Value 104 µA R
= 2.4 kΩ
SET
= 2.4 kΩ
SET
Absolute Accuracy 5 %
R
Range 1 4 kΩ Nominally R
SET
= 2.4 kΩ
SET
ICP Three-State Leakage 1 nA
ICP Up vs. Down Matching 0.1 % 0.75 V ≤ VCP ≤ VP1, VP2, VP3 − 1.5 V
ICP vs. VCP 1 % 0.75 V ≤ VCP ≤ VP1, VP2, VP3 − 1.5 V
ICP vs. Temperature 1 % 0.75 V ≤ VCP ≤ VP1, VP2, VP3 − 1.5 V
DIFFERENTIAL AMPLIFIER
Input Current 1 nA
Output Voltage Range 1.4 VP3 − 0.3 V
VCO Tuning Range 1.8 VP3 − 0.8 V
LOGIC INPUTS
Input High Voltage, VIH 1.4 V
Input Current, I
Input Capacitance, CIN 10 pF
LOGIC OUTPUTS
Output High Voltage, VOH VDD − 0.4 V IOH = 500 µA
Output Low Voltage, VOL 0.4 V IOL = 500 µA
POWER SUPPLIES
AVDD 2.7 3.3 V
DVDD1, DVDD2, DVDD3 AVDD V
VP1, VP2 4.5 5.5 V AVDD ≤ VP1, VP2 ≤ 5.5 V
VP3 5.0 5.65 V VP1, VP2 ≤ VP3 ≤ 5.65 V
IDD (AVDD + DVDD1, DVDD2, DVDD3 +
SDV
IDD (VP1 + VP2) 22 27 mA
IDD (VP3) 24 30 mA
IDD Power-Down 10 µA
, I
±1 µA
INH
INL
)
DD
Rev. B | Page 3 of 28
ADF4196 Data Sheet
1800 MHz3
−102
dBc/Hz
At 5 kHz offset and 13 MHz PFD frequency
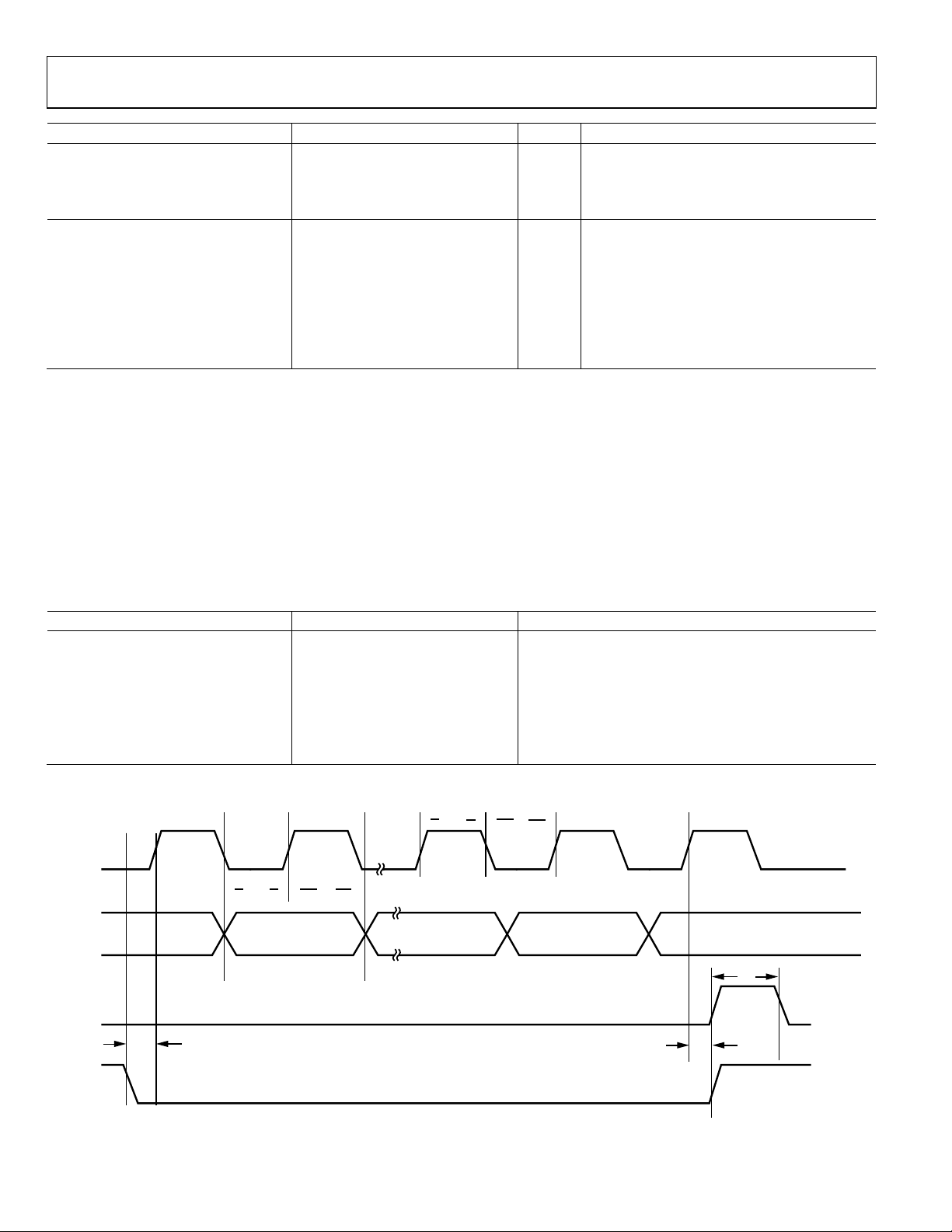
t6
10 ns min
CLK to LE setup time
09450-002
CLK
DATA
DB23
(MSB)
DB22
DB1 (LSB)
(CONTRO L BIT C2)
DB2 (LSB)
(CONTRO L BIT C3)
DB0 (LSB)
(CONTRO L BIT C1)
LE
LE
t
2
t
4
t
5
t
3
t
7
t
6
t
1
Parameter Min Typ Max Unit Test Conditions/Comments
SW1, SW2, AND SW3
On Resistance
SW1 and SW2 65 Ω
SW3 75 Ω
NOISE CHARACTERISTICS
Output
900 MHz2 −108 dBc/Hz At 5 kHz offset and 26 MHz PFD frequency
Phase Noise
Normalized Phase Noise Floor
)4
(PN
SYNTH
Normalized 1/f Noise (PN
1
Choose a prescaler value that ensures that the frequency on the RF input is less than the maximum allowable prescaler frequency (750 MHz).
2
f
= 26 MHz; f
REF
IN
3
f
= 13 MHz; f
REF
IN
4
The synthesizer phase noise floor is estimated by measuring the in-band phase noise at the output of the VCO and subtracting 20 log(N) (where N is the N divider
value) and 10 log(f
5
The PLL phase noise is composed of 1/f (flicker) noise plus the normalized PLL noise floor. The formula for calculating the 1/f noise contribution at an RF frequency,
fRF, and at an offset frequency, f, is given by PN = P1_f + 10 log(10 kHz/f) + 20 log(fRF/1 GHz). Both the normalized phase noise floor and flicker noise are modeled in
ADIsimPLL™.
= 200 kHz; fRF = 900 MHz; loop bandwidth = 40 kHz.
STEP
= 200 kHz; fRF = 1800 MHz; loop bandwidth = 60 kHz.
STEP
). PN
PFD
SYNTH
)5 −110 dBc/Hz Measured at 10 kHz offset, normalized to 1 GHz
1_f
= PN
− 10 log(f
TOT
TIMING CHARACTERISTICS
AVDD = DVDD1, DVDD2, DVDD3 = 3 V ± 10%; VP1, VP2 = 5 V ± 10%; VP3 = 5.35 V ± 5%; A
R
= 2.4 kΩ; dBm referred to 50 Ω; TA = T
SET
−216 dBc/Hz
) − 20 log(N).
PFD
to T
MIN
, unless otherwise noted. Operating temperature = −40°C to +85°C.
MAX
At VCO output with dither off, PLL loop
bandwidth = 500 kHz
1, A
GND
GND
2 = D
GND
1, D
GND
2, D
3 = 0 V;
GND
Table 2.
Parameter Limit Description
t1 10 ns min LE setup time
t2 10 ns min DATA to CLK setup time
t3 10 ns min DATA to CLK hold time
t4 15 ns min CLK high duration
t5 15 ns min CLK low duration
t7 15 ns min LE pulse width
Timing Diagram
Figure 2. Timing Diagram
Rev. B | Page 4 of 28
Data Sheet ADF4196
Peak Temperature
260°C
ABSOLUTE MAXIMUM RATINGS
TA = 25°C, unless otherwise noted.
Table 3.
Parameter Rating
AVDD to Ground −0.3 V to +3.6 V
AVDD to DVDD1, DVDD2, DVDD3, SDVDD −0.3 V to +0.3 V
VP1, VP2, VP3 to Ground −0.3 V to +5.8 V
VP1, VP2, VP3 to AVDD −0.3 V to +5.8 V
Digital I/O Voltage to Ground −0.3 V to VDD + 0.3 V
Analog I/O Voltage to Ground −0.3 V to VP1, VP2, VP3 + 0.3 V
REFIN, RF
Operating Temperature Range
Industrial −40°C to +85°C
Storage Temperature Range −65°C to +125°C
Maximum Junction Temperature 150°C
Reflow Soldering
Time at Peak Temperature 40 sec
, RF
to Ground −0.3 V to VDD + 0.3 V
IN+
IN−
THERMAL RESISTANCE
θJA is specified for the worst-case conditions, that is, a device
soldered in a circuit board for surface-mount packages.
Table 4. Thermal Resistance
Package Type θJA Unit
32-Lead LFCSP (Paddle Soldered) 27.3 °C/W
TRANSISTOR COUNT
This device includes 75,800 metal oxide semiconductors (MOS)
and 545 bipolar junction transistors (BJT).
ESD CAUTION
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
This device is a high performance RF integrated circuit with
an ESD rating of <2 kV, and it is ESD sensitive. Take proper
precautions for handling and assembly.
Rev. B | Page 5 of 28
ADF4196 Data Sheet
09450-003
1CMR
2A
OUT
3SW3
4A
GND
1
5RF
IN–
6RF
IN+
7AV
DD
24 V
P
2
23 R
SET
22 A
GND
2
21
D
GND
3
20 V
P
1
19 LE
18 DATA
17 CLK
8DV
DD
1
ADF4196
TOP VIEW
(Not to Scale)
9D
GND
1
10DV
DD
2
11
REF
IN
12
D
GND
2
13DV
DD
3
14
SD
GND
15
SDV
DD
16
MUX
OUT
32 V
P
3
31 AIN+
30 CP
OUT+
29
SW1
28 SW
GND
27
SW2
26 CP
OUT–
25
AIN–
PIN 1
INDICATOR
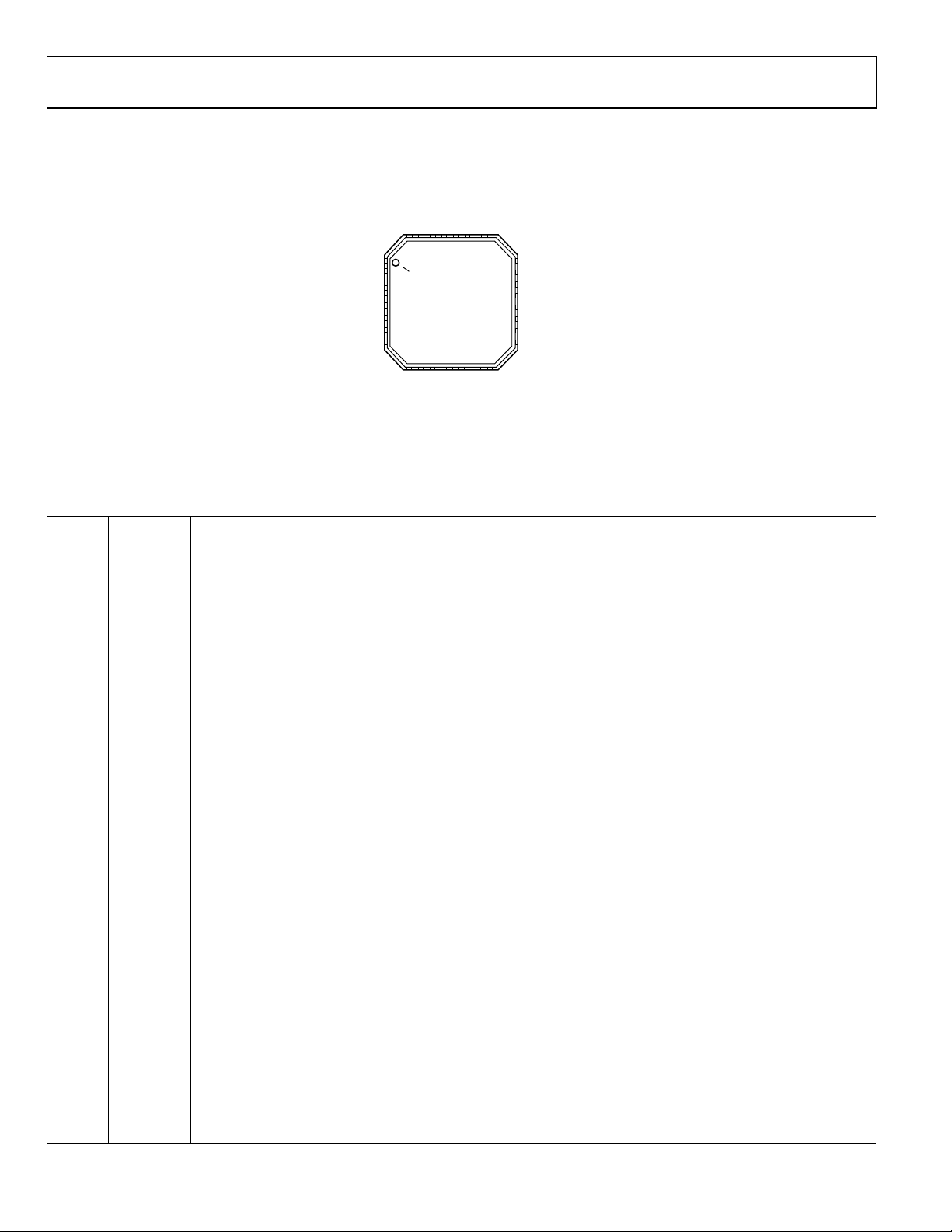
NOTES
1. THE EXPOSED PADDLE MUST BE CONNECTED
TO THE G ROUND PLANE.
5
RF
8
DVDD1
Power Supply Pin for the N Divider. DVDD1 should be at the same voltage as AVDD. Place a 0.1 µF decoupling
PIN CONFIGURATION AND FUNCTION DESCRIPTIONS
Figure 3. Pin Configuration
Table 5. Pin Function Descriptions
Pin No. Mnemonic Description
1 CMR
2 A
OUT
Differential Amplifier Output. This pin is the differential amplifier output to tune the external VCO.
Common-Mode Reference Voltage for the Output Voltage Swing of the Differential Amplifier. Internally biased to
three-fifths of V
3. Requires a 0.1 µF capacitor to the ground plane.
P
3 SW3 Fast Lock Switch 3. This switch is closed when the SW3 timeout counter is active.
4 A
1 Analog Ground. This is the ground return pin for the differential amplifier and the RF section.
GND
IN−
Complementary Input to the RF Prescaler. This pin must be decoupled to the ground plane with a small bypass
capacitor, typically 100 pF.
6 RF
7 AVDD
Input to the RF Prescaler. This small-signal input is ac-coupled to the external VCO.
IN+
Power Supply Pin for the RF Section. Nominally 3 V. Place a 100 pF decoupling capacitor to the ground plane as
close as possible to this pin.
capacitor to the ground plane as close as possible to this pin.
9 D
10 DVDD2
1 Ground Return Pin for DVDD1.
GND
Power Supply Pin for the REF
Buffer and R Divider. Nominally 3 V. Place a 0.1 µF decoupling capacitor to the
IN
ground plane as close as possible to this pin.
11 REFIN
Reference Input. This CMOS input has a nominal threshold of V
/2 and a dc equivalent input resistance of 100 kΩ.
DD
This input can be driven from a TTL or CMOS crystal oscillator, or it can be ac-coupled.
12 D
2 Ground Return Pin for DVDD2 and DVDD3.
GND
13 DVDD3 Power Supply Pin for the Serial Interface Logic. Nominally 3 V.
14 SD
15 SDVDD
Ground Return Pin for the Digital Σ-Δ Modulator.
GND
Power Supply Pin for the Digital Σ-Δ Modulator. Nominally 3 V. Place a 0.1 µF decoupling capacitor to the ground
plane as close as possible to this pin.
16 MUX
17 CLK
18 DATA
19 LE
20 VP1
21 D
22 A
Multiplexer Output. This multiplexer output allows the lock detect, the scaled RF, or the scaled reference frequency
to be accessed externally (see Figure 35 for details).
Serial Clock Input. Data is clocked into the 24-bit shift register on the CLK rising edge. This input is a high
impedance CMOS input.
OUT
Serial Data Input. The serial data is loaded MSB first with the three LSBs as the control bits. This input is a high
impedance CMOS input.
Load Enable, CMOS Input. When LE goes high, the data stored in the shift register is loaded into the register that is
selected by the three LSBs.
Power Supply Pin for the Phase Frequency Detector (PFD). Nominally 5 V, V
Place a 0.1 µF decoupling capacitor to the ground plane as close as possible to this pin.
3 Ground Return Pin for VP1.
GND
2 Ground Return Pin for VP2.
GND
Rev. B | Page 6 of 28
1 should be at the same voltage as VP2.
P
Data Sheet ADF4196
25.0
30
CP
Differential Charge Pump Positive Output Pin. Connect this pin to AIN+ and the loop filter.
Pin No. Mnemonic Description
23 R
24 VP2
25 AIN− Negative Input Pin for the Differential Amplifier.
26 CP
27 SW2 Fast Lock Switch 2. This switch is closed to SW
28 SW
29 SW1 Fast Lock Switch 1. This switch is closed to SW
31 AIN+ Positive Input Pin for the Differential Amplifier.
32 VP3
EP Exposed Paddle. The exposed paddle must be connected to the ground plane.
SET
Connecting a resistor between this pin and GND sets the charge pump output current. The nominal voltage bias at
pin is 0.55 V. The relationship between ICP and R
the R
SET
=
I
CP
R
SET
Therefore, with R
= 2.4 kΩ, ICP = 104 µA.
SET
Power Supply Pin for the Charge Pump. Nominally 5 V, V
is
SET
2 should be at the same voltage as VP1. Place a 0.1 µF
P
decoupling capacitor to the ground plane as close as possible to this pin.
Differential Charge Pump Negative Output Pin. Connect this pin to AIN− and the loop filter.
OUT−
when the SW1/SW2 timeout counter is active.
GND
Ground for SW1 and SW2 Switches. Connect this pin to the ground plane.
GND
when the SW1/SW2 timeout counter is active.
GND
OUT+
Power Supply Pin for the Differential Amplifier. Ranges from 5.0 V to 5.5 V. Place a 0.1 µF decoupling capacitor to
the ground plane as close as possible to this pin. V
3 also requires a 10 µF decoupling capacitor to the ground plane.
P
Rev. B | Page 7 of 28
ADF4196 Data Sheet
–
–
–
–
TYPICAL PERFORMANCE CHARACTERISTICS
FREQ. UNIT GHz KEYWORD R
PARAM TYPE S IMPEDANCE 50
DATA FORMAT MA
FREQ. MAGS11 ANGS11
0.5 0.8897 –16.6691
0.6 0.87693 –19.9279
0.7 0.85834 –23.561
0.8 0.85044 –26.9578
0.9 0.83494 –30.8201
1.0 0.81718 –34.9499
1.1 0.80229 –39.0436
1.2 0.78917 –42.3623
1.3 0.77598 –46.322
1.4 0.75578 –50.3484
1.5 0.74437 –54.3545
1.6 0.73821 –57.3785
1.7 0.7253 –60.695
1.8 0.71365 –63.9152
1.9 0.70699 –66.4365
2.0 0.7038 –68.4453
2.1 0.69284 –70.7986
2.2 0.67717 –73.7038
Figure 4. S-Parameter Data for the RF Input
FREQ. MAGS11 ANGS11
2.3 0.67107 –75.8206
2.4 0.66556 –77.6851
2.5 0.6564 –80.3101
2.6 0.6333 –82.5082
2.7 0.61406 –85.5623
2.8 0.5977 –87.3513
2.9 0.5655 –89.7605
3.0 0.5428 –93.0239
3.1 0.51733 –95.9754
3.2 0.49909 –99.1291
3.3 0.47309 –102.208
3.4 0.45694 –106.794
3.5 0.44698 –111.659
3.6 0.43589 –117.986
3.7 0.42472 –125.62
3.8 0.41175 –133.291
3.9 0.41055 –140.585
4.0 0.40983 –147.97
09450-038
10
5
0
–5
–10
–15
RF SENSITIVITY (d Bm)
–20
–25
–30
01234
4/5 PRESCALER 8/9 PRESCALER
FREQUENCY (GHz)
Figure 7. RF Input (RF
) Sensitivity
IN
09450-005
765
30
–40
–50
–60
–70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
–170
1k 10k 100k 1M 10M
GSM900 Rx SETUP, 40kHz LOOP BW, DITHER OFF
RF = 1092.8M Hz ,
N = 42 4/130
INTEG ER BOUNDARY S PUR: –103dBc @ 80 0 kHz
f
= 26MHz, MOD = 130
REF
FREQUENC Y (Hz)
100M
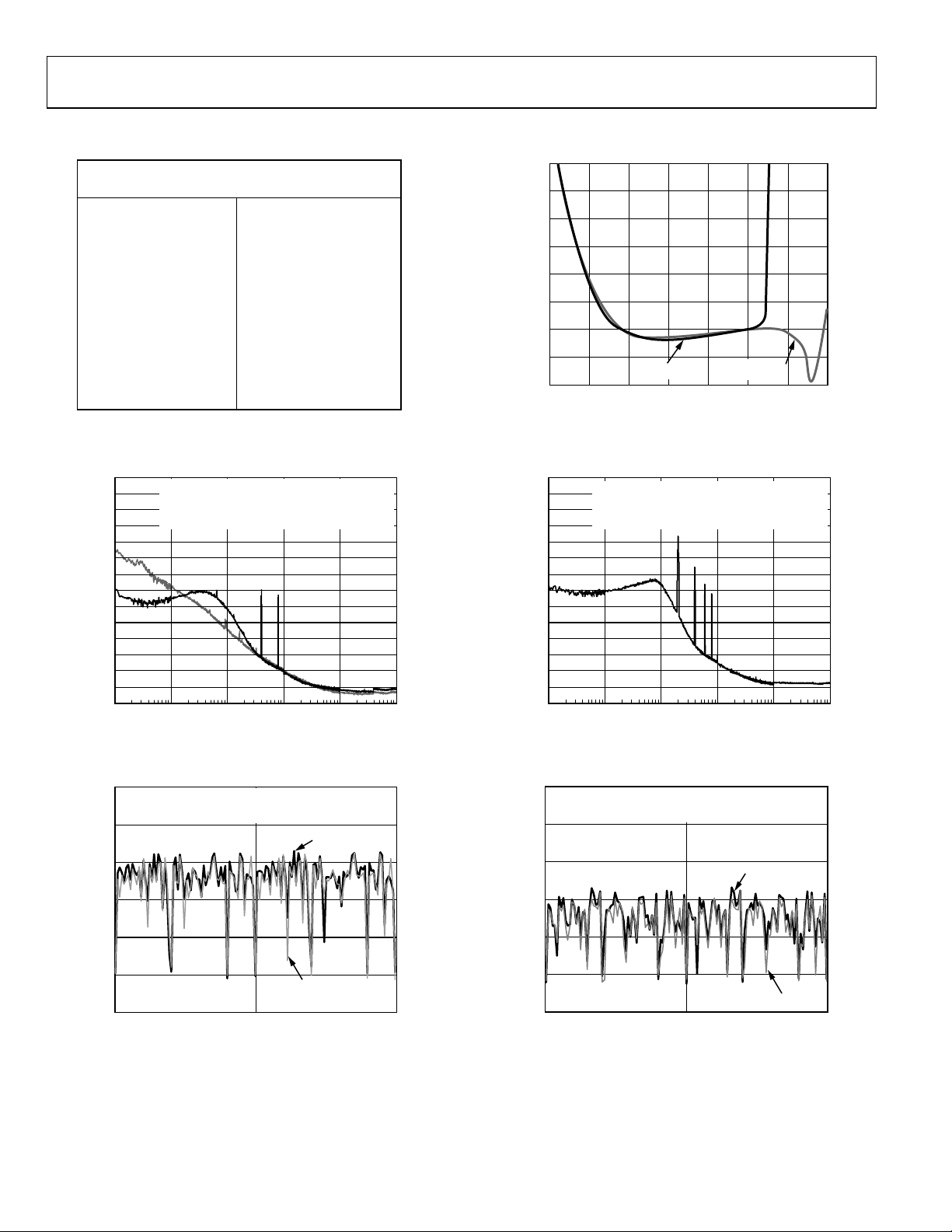
Figure 5. Single-Sideband (SSB) Phase Noise Plot at 1092.8 MHz
(GSM900 Rx Setup) vs. Free Running VCO Noise
60
DCS1800 Tx SETUP WITH DITHER OFF,
60kHz LOOP BW, 13 MHz PFD.
MEASURED ON EVAL-ADF4193EBZ1 BOARD
–70
–80
–90
400kHz SPURS @ 2 5°C
30
–40
–50
–60
–70
–80
–90
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
09450-006
–160
–170
1k 10k 100k 1M 10M
DCS1800 Tx SETUP, 60kHz LOOP BW, DITHER OFF
RF = 1842.6M Hz ,
DSB INTE GRATED PHASE ERROR = 0 .46° RMS
SIRENZA 184 3T V CO
f
= 13MHz, MOD = 65
REF
FREQUENC Y (Hz)
09450-007
100M
Figure 8. Single-Sideband (SSB) Phase Noise Plot at 1842.6 MHz
(DCS1800 Tx Setup)
60
DCS1800 Tx SETUP WITH DITHER OFF,
60kHz LOOP BW, 13MHz PFD.
MEASURED ON EVAL-ADF4193E BZ 1 BOARD
–70
–80
–90
600kHz SPURS @ 25°C
–100
SPUR LEVEL (dBc)
–110
–120
1846 1859
FREQUENC Y (MHz)
400kHz SPURS @ 85°C
09450-010
1872
Figure 6. 400 kHz Fractional Spur Levels Across All DCS1800 Tx Channels
over Two Integer Multiples of the PFD Reference
–100
SPUR LEVEL (dBc)
–110
–120
1846 1859
FREQUENCY (MHz)
600kHz SPURS @ 85°C
1872
09450-011
Figure 9. 600 kHz Fractional Spur Levels Across All DCS1800 Tx Channels over
Two Integer Multiples of the PFD Reference
Rev. B | Page 8 of 28
Data Sheet ADF4196
09450-040
TIME (µs)
CONTROL VOLTAGE (V)
–1
0
1
2
3
4
5
9876543210
V
TUNE
CP
OUT+
CP
OUT–
DCS1800 Tx SETUP, 60kHz LOO P BW.
MEASURED ON EVAL-ADF4193EBZ1
EVALUATION BOARD.
TIMERS: I
CP
= 28, SW1/S W2, SW3 = 35.
FREQUENCY L OCK IN WIDE BW MODE @ 4µs.
09450-008
TIME (µs)
PHASE ERROR (Deg rees)
–5 0 5 10 15 20 25 30 35 40
–50
50
40
30
20
10
0
–10
–20
–30
–40
45
+25°C
+85°C
–40°C
DCS1800 Tx SETUP, 60kHz LOO P BW.
MEASURED ON EVAL-ADF4193EBZ1
EVALUATION BOARD WITH AD8302
PHASE DETECT OR.
TIMERS: I
CP
= 28, SW1/S W2, SW3 = 35.
PEAK PHASE ERROR < 5° @ 17.8µs
09450-012
CP
OUT
+ / CP
OUT
– VOLTAGE (V)
I
CP
(mA)
CHANGE PUMP MISMATCH (%)
0 0.5 1.0 1.5 2.0 2.5
3.0 3.5 4.0 4.5
–8
–6
–4
–2
0
2
4
6
8
–2.0
–1.5
–1.0
–0.5
0
0.5
1.0
1.5
2.0
5.0
ICP
OUT
+ P, ICP
OUT
– P
CHARGE PUMP MISMATCH (%)
NORMAL OP E RATING RANGE
ICP
OUT
+ N, ICP
OUT
– N
IUP= | ICP
OUT
+ P | + | ICP
OUT
– N |
I
DOWN
= | ICP
OUT
– P | + | ICP
OUT
+ N |
09450-041
TIME (µs)
CONTROL VOLTAGE (V)
–1
0
1
2
3
4
5
9876543210
V
TUNE
CP
OUT–
CP
OUT+
DCS1800 Tx SETUP, 60kHz LOO P BW.
MEASURED ON EVAL-ADF4193EBZ1
EVALUATION BOARD.
TIMERS: I
CP
= 28, SW1/S W2, SW3 = 35.
FREQUENCY L OCK IN WIDE BW MODE @ 5µs.
09450-009
TIME (µs)
PHASE ERROR (Deg rees)
–5 0 5 10 15 20 25 30 35 40
–50
50
40
30
20
10
0
–10
–20
–30
–40
45
+25°C
+85°C
–40°C
DCS1800 Tx SETUP, 60kHz LOO P BW.
MEASURED ON EVAL-ADF4193EBZ1
EVALUATION BOARD WITH AD8302
PHASE DETECT OR.
TIMERS: I
CP
= 28, SW1/S W2, SW3 = 35.
PEAK PHASE ERROR < 5° @ 19.2µs
09450-013
FREQUENCY (MHz)
CONTROL VOLTAGE (V)
1780 1800 1820 1840 1860 1880 1900 1920 1940
0
2
1
3
4
5
VP1 = V
P
2 = 5V
V
P
3 = 5.5V
V
CMR
= 3.3V
CP
OUT–
(= AIN–)
A
OUT
(= V
TUNE
)
CP
OUT+
(= AIN+)
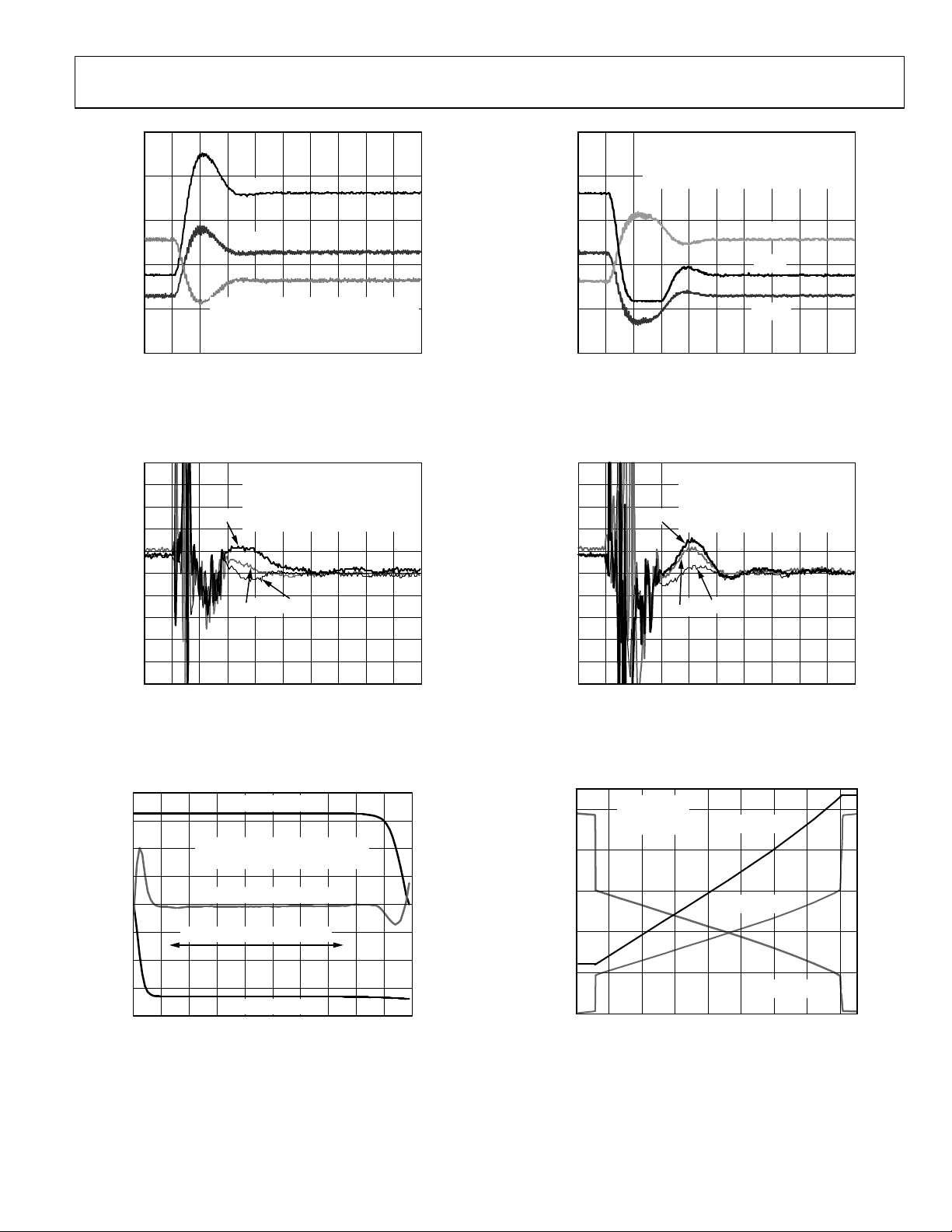
Figure 10. V
Settling Transient for a 75 MHz Jump from 1818 MHz to
TUNE
1893 MHz with Sirenza 1843T VCO
Figure 11. Phase Settling Transient for a 75 MHz Jump from 1818 MHz to
1893 MHz (V
= 1.8 V to 3.7 V with Sirenza 1843T VCO)
TUNE
Figure 13. V
Settling Transient for a 75 MHz Jump Down from 1893 MHz
TUNE
to 1818 MHz (Bottom of Allowed Tuning Range) with Sirenza 1843T VCO
Figure 14. Phase Settling Transient for a 75 MHz Jump Down from 1893 MHz
to 1818 MHz (V
= 3.7 V to 1.8 V with Sirenza 1843T VCO)
TUNE
Figure 12. Differential Charge Pump Output Compliance Range and
Charge Pump Mismatch with V
1 = VP2 = 5 V
P
Figure 15. Tuning Range with a Sirenza 1843T VCO and a 5.5 V Differential
Amplifier Power Supply Voltage
Rev. B | Page 9 of 28

ADF4196 Data Sheet
09450-042
FREQUENCY ( Hz )
NOISE (nV/ Hz)
1k 10k 100k 1M
1
10
100
1000
10M
7nV/ Hz @ 20kHz
09450-014
DRAIN VOLTAGE (V)
R
ON
(Ω)
0 1 2 3 4
0
100
70
90
80
60
50
40
30
20
10
5
+85°C
SW3
–40°C
+25°C
–40°C
+25°C
+85°C
SW1,
SW2
TUNING VOLTAGE RANGE
09450-044
PHASE CODE
PHASE DETECTOR OUTPUT (V)
0
0
1.8
1.5
1.2
0.9
0.6
0.3
13011710491786552392613
MEASURED USING AD8 3 02 PHAS E DETE CTOR
Y-AXIS SCALE: 10m V/DEGREE
RF = 1880MHz, PFD = 26MHz, MOD = 130
X-AXIS SCALE: 2. 7 7° /STEP
09450-045
INTERVAL BETWEEN R0 WRITES SHOULD BE A MULTIPLE OF MOD
REFERENCE CYCLES (5µs) FOR COHERENT PHASE MEASUREMENTS
SIGNAL
GENERATOR
OSCILLOSCOPE
ADF4193
EVAL BOARD
104MHz
5dBm
10MHz
EXT REF
1880MHz
1805MHz 1880MHz
RF
OUT
REF
IN
SIGNAL
GENERATOR
INPA
AD8302
EVB
VPHS
INPB
Figure 16. Voltage Noise Density Measured at the
Differential Amplifier Output
Figure 17. On Resistance of the SW1, SW2, and SW3 Loop Filter Switches
Figure 18. Detected RF Output Phase for Phase Code Sweep from 0 to MOD
Figure 19. Test Setup for Phase Lock Time Measurements
Rev. B | Page 10 of 28

Data Sheet ADF4196
09450-016
BUFFER
TO R COUNT E R
REF
IN
100kΩ
NC
SW2
SW3
NO
NC
SW1
POWER-DOWN
CONTROL
09450-017
BIAS
GENERATOR
1.6V
AGND
AV
DD
500Ω 500Ω
RF
IN–
RF
IN+
09450-018
THIRD-ORDER
FRACTIONAL
INTERPOLATOR
FRAC
VALUE
MOD
VALUE
INT
VALUE
RF N DIVIDE R N = INT + FRAC/ M OD
FROM RF
INPUT STAGE
TO PFD
N COUNTER
THEORY OF OPERATION
GENERAL DESCRIPTION
The ADF4196 is targeted at GSM base station requirements,
specifically to eliminate the need for ping-pong solutions.
It can also be used in pulse Doppler radar applications. The
ADF4196 works on the basis of fast lock, using a wide loop
bandwidth during a frequency change and narrowing the loop
bandwidth when frequency lock is achieved.
Widening the loop bandwidth is achieved by increasing the
charge pump current. To maintain stability with the changing
charge pump current, the ADF4196 includes switches that
change the loop filter component values.
The narrow loop bandwidth ensures that phase noise and spur
specifications are met. A differential charge pump and loop filter
topology ensure that the fast lock time benefit obtained from
widening the loop bandwidth is maintained when the loop is
restored to narrow bandwidth mode for normal operation.
REFERENCE INPUT
The reference input stage is shown in Figure 20. Switch SW1
and Switch SW2 are normally closed, and Switch SW3 is
normally open. During power-down, SW3 is closed, and SW1
and SW2 are opened to ensure that there is no loading of the
REF
pin. The falling edge of REFIN is the active edge at the
IN
positive edge triggered PFD.
RF INPUT STAGE
The RF input stage is shown in Figure 21. It is followed by a
two-stage limiting amplifier to generate the CML clock levels
needed for the prescaler. Two prescaler options are available:
4/5 and 8/9. Select the 8/9 prescaler for N divider values that
are greater than 80.
Figure 21. RF Input Stage
RF N Divider
The RF N divider allows a fractional division ratio in the PLL
feedback path. The integer and fractional parts of the division
are programmed using separate registers, as shown in Figure 22
and described in the INT, FRAC, and MOD Relationship section.
Integer division ratios from 26 to 511 are allowed, and a thirdorder Σ-Δ modulator interpolates the fractional value between
the integer steps.
Figure 20. Reference Input Stage
R Counter and Doubler
The 4-bit R counter allows the input reference frequency to
be divided down to produce the reference clock to the PFD.
A toggle flip-flop can be inserted after the R counter to provide
an additional divide-by-2. Using this option has the added
advantage of ensuring that the PFD reference clock has a 50/50
mark-to-space ratio. This ratio gives the maximum separation
between the fast lock timer clock, which is generated off the
falling edge of the PFD reference, and the rising edge, which is
the active edge in the PFD. It is recommended that this toggle
flip-flop be enabled for all even R divide values that are greater
than 2. The flip-flop must be enabled if dividing down a REF
frequency that is greater than 120 MHz.
An optional doubler before the 4-bit R counter can be used for
low REF
options, reference division ratios from 0.5 to 30 between REF
and the PFD are possible.
frequencies, up to 20 MHz. With these programmable
IN
IN
IN
Rev. B | Page 11 of 28
Figure 22. Fractional-N RF Divider
INT, FRAC, and MOD Relationship
The INT, FRAC, and MOD values, programmed through the
serial interface, make it possible to generate RF output frequencies
that are spaced by fractions of the PFD reference frequency.
The N divider value, shown inside the brackets of the following
equation for the RF VCO frequency (RF
), is composed of an
OUT
integer part (INT) and a fractional part (FRAC/MOD).
RF
= f
OUT
× [INT + (FRAC/MOD)] (1)
PFD
where:
is the output frequency of the external VCO.
RF
OUT
f
is the PFD reference frequency.
PFD
The value of MOD is chosen to give the desired channel step
with the available reference frequenc y. Then, program the INT
and FRAC words for the desired RF output frequency. See the
Worked Example section for more information.

ADF4196 Data Sheet
09450-019
CLR
QD
R DIVIDER
N DIVIDER
CHARGE
PUMP
ARRAY
[64:1]
CMFB
EN[64:1]
CLR
QD
CP
OUT+
CP
OUT–
09450-035
V
BIAS
P
P P
N N
UP DOWN
DOWN UP
V
BIAS
N
CP
OUT+
C
POUT–
09450-036
SW1/SW2
TIMEOUT
COUNTER
SW3
TIMEOUT
COUNTER
I
CP
TIMEOUT
COUNTER
EN[64:1]
÷4
START
f
PFD
SW3
A
OUT
SW2
SW
GND
SW1
WRITE
TO R0
CHARGE PUMP
ENABLE LOGIC
PFD AND CHARGE PUMP
The PFD takes inputs from the R divider and N divider and
produces up and down outputs with a pulse width difference
that is proportional to the phase difference between the inputs.
The charge pump outputs a net up or down current pulse of
a width that is equal to this difference, to pump up or pump down
the voltage that is integrated into the loop filter, which in turn
increases or decreases the VCO output frequency. If the N divider
phase lags the R divider phase, a net up-current pulse is produced
that increases the VCO frequency (and, thus, the phase). If the
N divider phase leads the R divider edge, a net down-current
pulse is produced to reduce the VCO frequency and phase.
Figure 23 is a simplified schematic of the PFD and charge pump.
The charge pump is made up of an array of 64 identical cells,
each of which is fully differential. All 64 cells are active during
fast lock, and only one cell is active during normal operation.
Because a single-ended control voltage is required to tune the VCO,
an on-chip differential-to-single-ended amplifier is provided for
this purpose. In addition, because the phase-locked loop controls
only the differential voltage generated across the charge pump
outputs, an internal common-mode feedback (CMFB) loop
biases the charge pump outputs at a common-mode voltage of
approximately 2 V.
Figure 23. PFD and Differential Charge Pump Simplified Schematic
DIFFERENTIAL CHARGE PUMP
The charge pump cell has a fully differential design for best upto-down current matching (see Figure 24). Good matching is
essential to minimize the phase offset created when switching
the charge pump current from its high value (in fast lock mode)
to its nominal value (in normal mode).
To pump up, the up switches are on, and the PMOS current sources
out through CP
loop filter capacitors that are connected to CP
NMOS current sink on CP
external loop filter capacitors that are connected to CP
Therefore, the differential voltage between CP
increases.
To pump down, PMOS current sources out through CP
NMOS current sinks in through CP
(CP
, CP
OUT+
OUT−
, which increases the voltage on the external
OUT+
) differential voltage. The charge pump up/down
OUT+
decreases the voltage on the
OUT−
OUT+
, which decreases the
OUT+
. Similarly, the
.
OUT−
and CP
OUT−
and
OUT−
Rev. B | Page 12 of 28
matching is improved by an order of magnitude over the
conventional single-ended charge pump that depends on the
matching of two different device types. The up/down matching
in this structure depends on how a PMOS matches a PMOS,
and how an NMOS matches an NMOS.
Figure 24. Differential Charge Pump Cell
with External Loop Filter Components
FAST LOCK TIMEOUT COUNTERS
Timeout counters, clocked at one-quarter of the PFD reference
frequency, are provided to precisely control the fast locking
operation (see Figure 25). When a new frequency is programmed,
the fast lock timers start and the PLL locks into wide bandwidth
mode with the 64 identical 100 µA charge pump cells active (for a
total of 6.4 mA).
When the I
reduced to 1× by deselecting cells in binary steps over the next
six timer clock cycles, until only one 100 µA cell is active. The
switching of the charge pump current, from 6.4 mA to 100 µA,
equates to an 8-to-1 change in loop bandwidth; when this happens,
the loop filter must be changed to ensure stability. The SW1,
SW2, and SW3 switches change the loop filter.
The applications circuit shown in Figure 37 shows how the
switches can be used to reconfigure the loop filter time constants.
They close to short out external loop filter resistors during fast lock
and open when their counters time out to restore the filter time
constants to their normal values for the 100 µA charge pump
current. Because it takes six timer clock cycles to reduce the
charge pump current to 1×, it is recommended that both switch
timers be pro-grammed to the value of the I
counter times out, the charge pump current is
CP
timer plus 7.
CP
Figure 25. Fast Lock Timeout Counters

Data Sheet ADF4196
09450-020
AIN–
A
OUT
AIN+
CMR
V
P
3
C EXT =
0.1µF
20kΩ
30kΩ
500Ω 500Ω
500Ω 500Ω
09450-021
R DIVIDER OUTPUT
N DIVIDER OUTPUT
SERIAL DATA OUTPUT
D
GND
DV
DD
CONTROLMUX
MUX
OUT
LOGIC LOW
THREE-STATE OUTPUT
TIMER OUTPUTS
DIGITAL LOCK DETECT
LOGIC HIGH
NOTE:
1. NOT ALL MUX
OUT
MODES THAT ARE S HOWN REFER TO THE
MUX REGISTER.
0 1 1
Function
R3
DIFFERENTIAL AMPLIFIER
The internal, low noise, differential-to-single-ended amplifier
converts the differential charge pump output to a single-ended
control voltage for the tuning port of the VCO. Figure 26 shows
a simplified schematic of the differential amplifier. The output
voltage is equal to the differential voltage, offset by the voltage
on the CMR pin, according to the following equation:
V
= (V
AOUT
The CMR offset voltage is internally biased to three-fifths of
V
3, the differential amplifier power supply voltage, as shown in
P
Figure 26. Connect a 0.1 µF capacitor to the ground plane from
the CMR pin to roll off the thermal noise of the biasing resistors.
As shown in Figure 15, the differential amplifier output voltage
behaves according to Equation 2 over a 4 V range from ~1.2 V
minimum up to V
is guaranteed over a tuning voltage range from 1.8 V up to
V
3 − 0.8 V only. This range allows sufficient room for overshoot
P
in the PLL frequency settling transient.
Noise from the differential amplifier is suppressed inside the
PLL loop bandwidth. For loop bandwidths of >20 kHz, the 1/f
noise has a negligible effect on the PLL output phase noise.
Outside the loop bandwidth, the FM noise of the differential
amplifier modulates the VCO. The passive filter network following
the differential amplifier (see Figure 37) suppresses this noise
contribution to below the VCO noise from offsets of 400 kHz
and greater. This network has a negligible effect on lock time
because it is bypassed when SW3 is closed while the loop is
locking.
− V
AIN+
Figure 26. Differential Amplifier Block Diagram
P
) + V
AIN−
3 − 0.3 V maximum. However, fast settling
(2)
CMR
Figure 27. MUX
OUT
Circuit
Lock Detect
MUX
can be programmed to provide a digital lock detect
OUT
signal. Digital lock detect is active high. Its output goes high if
there are 40 successive PFD cycles with an input error of <3 ns.
For reliable lock detect operation with RF frequencies of <2 GHz,
it is recommended that this threshold be increased to 10 ns by
programming Register R6. The digital lock detect goes low again
when a new channel is programmed or when the error at the
PFD input exceeds 30 ns for one or more cycles.
INPUT SHIFT REGISTER
The ADF4196 serial interface includes a 24-bit input shift register.
Data is clocked in, MSB first, on each rising edge of CLK. Data
from the shift register is latched into one of eight control registers,
R0 to R7, on the rising edge of load enable (LE) The destination
register is determined by the state of the three control bits: C3
(DB2), C2 (DB1), and C1 (DB0) in the shift register. DB2, DB1,
and DB0 are the three LSBs, as shown in the timing diagram
in Figure 2. The truth table for these bits is shown in Tabl e 6.
Figure 28 shows a summary of how the registers are programmed.
Table 6. C3, C2, and C1 Truth Table
Control Bits
C3 (DB2) C2 (DB1) C1 (DB0) Register Name Register
0 0 0 FRAC/INT R0
0 0 1 MOD/R R1
0 1 0 Phase R2
MUX
MUX
The output multiplexer on the ADF4196 allows the user to
access various internal points on the chip. The state of MUX
is controlled by Bits[M4:M1] in the mux register. Figure 35
shows the full truth table; see Figure 27 for a block diagram
of the MUX
AND LOCK DETECT
OUT
Control
OUT
circuit.
OUT
1 0 0 Charge pump R4
1 0 1 Power-down R5
1 1 0 Mux R6
OUT
1 1 1 Test mode R7
Rev. B | Page 13 of 28

ADF4196 Data Sheet
09450-022
DB23F5DB22
F4
DB210DB20
F2
DB19
F1
DB18R4DB17
R3
DB16R2DB15R1DB14
M12
DB13
M11
DB12
M10
DB11M9DB10M8DB9M7DB8
M6
DB7M5DB6
M4
DB5M3DB4
M2
DB3M1DB2
C3 (0)
DB1
C2 (0)
DB0
C1 (1)
DBB DBB DBB DBB DBB
4-BIT RF R
COUNTER
CP ADJ
REF/2
RESERVED
PRESCALER
DOUBLER
ENABLE
12-BIT MODULUS
CONTROL
BITS
MOD/R REGISTER (R1)
DB150DB14
P12
DB13
P11
DB12
P10
DB11P9DB10P8DB9P7DB8P6DB7P5DB6
P4
DB5P3DB4P2DB3P1DB2
C3 (0)
DB1
C2 (1)
DB0
C1 (0)
DBB
RESERVED
12-BIT PHASE
CONTROL
BITS
PHASE REGISTER (R2)
DB150DB140DB13
0
DB120DB110DB100DB90DB8
0
DB70DB61DB5
F3
DB41DB3F1DB2
C3 (0)
DB1
C2 (1)
DB0
C1 (1)
PFD
POLARITY
RESERVED
CPO GND
RESERVED
CONTROL
BITS
FUNCTION REGISTER (R3)
DB15
M13
DB14
M12
DB13
M11
DB12
M10
DB110DB100DB90DB80DB71DB6
M4
DB5M3DB4M2DB3M1DB2
C3 (1)
DB1
C2 (1)
DB0
C1 (0)
RESERVED MUX
OUT
CONTROL
BITS
SIGMA-DELTA
AND
LOCK DETECT MODES
MUX REGISTER (R6)
DB150DB140DB130DB120DB110DB100DB90DB80DB70DB60DB50DB40DB30DB2
C3 (1)
DB1
C2 (1)
DB0
C1 (1)
RESERVED
CONTROL
BITS
TEST MO DE REGISTER (R7)
DB7F5DB6F4DB5F3DB4F2DB3
F1
DB2
C3 (1)
DB1
C2 (0)
DB0
C1 (1)
COUNTER
RESET
CP
3-STATE
PD
CHARGE
PUMP
PD
DIFF AMP
CONTROL
BITS
POWER-DOWN REGISTER (R5)
DB230DB220DB21
0
DB20
0
DB190DB180DB17
0
DB160DB150DB141DB13
C9
DB12C8DB11
C7
DB10C6DB9
C5
DB8C4DB7C3DB6C2DB5
C1
DB4F2DB3
F1
DB2
C3 (1)
DB1
C2 (0)
DB0
C1 (0)
9-BIT TIMEOUT COUNTERRESERVED
CONTROL
BITS
TIMER
SELECT
CHARGE PUMP REGISTER (R4)
DBB = DOUBLE BUFFERED BIT( S )
DB23N9DB22
N8
DB21N7DB20
N6
DB19N5DB18N4DB17N3DB16
N2
DB15N1DB14
F12
DB13
F11
DB12
F10
DB11F9DB10
F8
DB9F7DB8F6DB7
F5
DB6F4DB5
F3
DB4
F2
DB3F1DB2
C3 (0)
DB1
C2 (0)
DB0
C1 (0)
9-BIT RF I NT VALUE
12-BIT RF F RAC V ALUE
CONTROL
BITS
FRAC/INT REGISTER (R0)
REGISTER MAP
Figure 28. Bit Maps for Register R0 to Register R7
Rev. B | Page 14 of 28

Data Sheet ADF4196
09450-023
DB23N9DB22N8DB21N7DB20N6DB19N5DB18N4DB17N3DB16N2DB15N1DB14
F12
DB13
F11
DB12
F10
DB11F9DB10F8DB9F7DB8F6DB7F5DB6F4DB5F3DB4F2DB3F1DB2
C3 (0)
DB1
C2 (0)
DB0
C1 (0)
9-BIT RF INT VALUE 12-BIT RF FRAC VALUE
CONTROL
BITS
F12
0
0
0
0
.
.
.
1
1
1
1
F11
0
0
0
0
.
.
.
1
1
1
1
F10
0
0
0
0
.
.
.
1
1
1
1
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
F3
0
0
0
0
.
.
.
1
1
1
1
F2
0
0
1
1
.
.
.
0
0
1
1
F1
0
1
0
1
.
.
.
0
1
0
1
FRACTIO NAL VALUE (FRAC)
0
1
2
3
.
.
.
4092
4093
4094
4095
N8
0
.
.
.
1
N7
0
.
.
.
1
N9
0
.
.
.
1
N6
0
.
.
.
1
N5
1
.
.
.
1
N4
1
.
.
.
1
N3
0
.
.
.
1
N2
1
.
.
.
1
N1
0
.
.
.
1
INTEGER VALUE (INT)
26
.
.
.
511
0 ≤ FRAC < MOD
FRAC/INT REGISTER (R0) LATCH MAP
R0, the FRAC/INT register, is used to program the synthesizer
output frequency. On the PFD cycle following a write to R0,
the N divider section is updated with the new INT and FRAC
values, and the PLL automatically enters fast lock mode. The
charge pump current is increased to its maximum value and
remains at this value until the I
timeout counter times out;
CP
and the SW1, SW2, and SW3 switches close and remain closed
until the SW1/SW2 and SW3 timeout counters time out.
After all the registers are programmed during the initialization
sequence (see Tab l e 9), a new channel can be programmed
by performing a write to R0. However, as described in the
Programming the ADF4196 section, it may also be desirable
to program the R1 and R2 register settings on a channel-bychannel basis. These settings are double buffered by the write to
Register R0. This means that, although the data is loaded through
the serial interface on the respective R1 and R2 write cycles, the
synthesizer is not updated with their data until the next write to
Register R0.
Figure 29. Bit Map for Register R0
Control Bits
To select R0, the FRAC/INT register, the three LSBs (C3, C2,
and C1) should be set to 0, 0, 0.
9-Bit RF INT Value
Bits[DB23:DB15] set the INT value, which determines the
integer part of the feedback division factor. All integer values
from 26 to 511 are allowed (see the Worked Example section).
12-Bit RF FRAC Value
Bits[DB14:DB3] set the numerator of the fraction that is input
to the Σ-Δ modulator. This fraction, along with INT, specifies
the new frequency channel that the synthesizer locks to, as shown
in the Worked Example section. FRAC values from 0 to MOD − 1
cover channels over a frequency range that is equal to the PFD
reference frequency.
Rev. B | Page 15 of 28

ADF4196 Data Sheet
09450-024
DB23F5DB22F4DB210DB20F2DB19F1DB18R4DB17
R3
DB16R2DB15R1DB14
M12
DB13
M11
DB12
M10
DB11M9DB10M8DB9M7DB8M6DB7M5DB6M4DB5M3DB4M2DB3M1DB2
C3 (0)
DB1
C2 (0)
DB0
C1 (1)
4-BIT RF
R COUNTER
CP
ADJ
REF/2
RESERVED
PRESCALER
DOUBLER
ENABLE
12-BIT MO DULUS
CONTROL
BITS
01NOMINAL
ADJUSTED
CP ADJF5
01DISABLED
ENABLED
REF/2F4
0
1
F2
4/5
8/9
PRESCALER
0
1
F1
DOUBLER DIS ABLED
DOUBLER ENABL E D
DOUBLER ENABL E
M12
0
0
0
.
.
.
1
1
1
1
M11
0
0
0
.
.
.
1
1
1
1
M10
0
0
0
.
.
.
1
1
1
1
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
M3
1
1
1
.
.
.
1
1
1
1
M2
0
1
1
.
.
.
0
0
1
1
M1
1
0
1
.
.
.
0
1
0
1
INTERPO LATOR MODULUS VALUE (M OD)
13
14
15
.
.
.
4092
4093
4094
4095
R4
0
0
0
0
.
.
.
1
1
1
1
R3
0
0
0
1
.
.
.
1
1
1
1
R2
0
1
1
0
.
.
.
0
0
1
1
R1
1
0
1
0
.
.
.
0
1
0
1
RF R COUNTER DIVIDE RATI O
1
2
3
4
.
.
.
12
13
14
15
MOD/R REGISTER (R1) LATCH MAP
R1, the MOD/R register, sets the PFD reference frequency and
the channel step size, which is determined by the PFD frequency
divided by the fractional modulus. Note that the 12-bit modulus,
the 4-bit RF R counter, the doubler enable bits, REF/2, and
CP ADJ are double buffered. They do not take effect until the
next write to R0 (the FRAC/INT register) is complete.
Control Bits
Register R1 is selected with C3, C2, and C1 set to 0, 0, 1.
CP ADJ
When the CP ADJ bit is set to 1, the charge pump current is
scaled up 25% from its nominal value on the next write to R0.
When this bit is set to 0, the charge pump current remains at its
nominal value on the next write to R0. See the Programming
the ADF4196 section for more information on how this feature
can be used.
REF/2
Setting the REF/2 bit to 1 inserts a divide-by-2 toggle flip-flop
between the R counter and the PFD, which extends the maximum
REF
input rate.
IN
Reserved Bit
The reserved bit, DB21, must be set to 0.
Figure 30. Bit Map for Register R1
Prescaler (P/P + 1)
The dual-modulus prescaler (P/P + 1), along with INT, FRAC,
and MOD, determine the overall division ratio from RF
to the
IN
PFD input. Operating at CML levels, it takes the clock from the
RF input stage and divides it down for the counters. It is based on
a synchronous 4/5 core. When set to 4/5, the maximum RF
frequency allowed is 3 GHz. Therefore, when operating the
ADF4196 above 3 GHz, the prescaler must be set to 8/9. The
prescaler limits the INT value. If P = 4/5, then N
If P = 8/9, N
MIN
= 80.
Doubler Enable
MIN
= 26.
Setting the doubler enabler bit to 1 inserts a frequency doubler
between REF
and the 4-bit RF R counter. Setting this bit to 0
IN
bypasses the doubler.
4-Bit RF R Counter
The 4-bit RF R counter allows the REFIN frequency to be divided
down to produce the reference clock to the PFD. All integer
values from 1 to 15 are allowed (see the Worked Example section).
12-Bit Modulus
For a given PFD reference frequenc y, the fractional denominator
or modulus sets the channel step resolution at the RF output. All
Rev. B | Page 16 of 28
integer values from 13 to 4095 are allowed. See the Programming
the ADF4196 section for a Worked Example and guidelines for
selecting the value of MOD.

Data Sheet ADF4196
09450-025
DB15
0
DB14
P12
DB13
P11
DB12
P10
DB11
P9
DB10
P8
DB9
P7
DB8
P6
DB7
P5
DB6
P4
DB5
P3
DB4
P2
DB3
P1
DB2
C3 (0)
DB1
C2 (1)
DB0
C1 (0)
RESERVED
12-BIT PHASE
CONTROL
BITS
P12
0
0
0
.
.
.
1
1
1
1
P11
0
0
0
.
.
.
1
1
1
1
P10
0
0
0
.
.
.
1
1
1
1
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
P3
0
0
0
.
.
.
1
1
1
1
P2
0
0
1
.
.
.
0
0
1
1
P1
0
1
0
.
.
.
0
1
0
1
PHASE VALUE
1
0
1
2
.
.
.
4092
4093
4094
4095
1
0 ≤ PHASE VALUE < MOD
PHASE REGISTER (R2) BIT LATCH MAP
Figure 31. Bit Map for Register R2
R2, the phase register, is used to program the phase of the VCO
output signal.
Control Bits
Register R2 is selected with C3, C2, and C1 set to 0, 1, 0.
12-Bit Phase
The 12-bit phase word sets the seed value of the Σ-Δ modulator.
It can be programmed to any integer value from 0 to MOD, where
MOD is the modulus value that is programmed in Register R1,
Bits[DB14:DB3]. As the phase word is swept from 0 to MOD,
the phase of the VCO output sweeps over a 360° range in steps
of 360°/MOD.
Note that the phase bits are double buffered; they do not take
effect until the load enable of the next write to R0 (the FRAC/INT
register). Thus, to change the phase of the VCO output frequency,
it is necessary to rewrite the INT and FRAC values to Register R0
following the write to Register R2.
The output of a fractional-N PLL can settle to any one of the
MOD possible phase offsets with respect to the reference, where
MOD is the fractional modulus.
To keep the output at the same phase offset with respect to the
reference, each time that particular output frequency is programmed, the interval between writes to Register R0 must be an
integer multiple of MOD reference cycles.
To keep the outputs of two ADF4196-based synthesizers phase
coherent with each other (but not necessarily with the reference
they have in common), the write to Register R0 on both chips
must be performed during the same reference cycle. In this
case, the interval between the R0 writes does not need to be
an integer multiple of MOD cycles.
Reserved Bit
Set the reserved bit, DB15, to 0.
Rev. B | Page 17 of 28

ADF4196 Data Sheet
09450-026
DB150DB140DB13
0
DB12
0
DB110DB10
0
DB90DB80DB70DB6
1
DB5F3DB4
1
DB3F1DB2
C3 (0)
DB1
C2 (1)
DB0
C1 (1)
PFD
POLARITY
RESERVED
CPO GND
RESERVED
CONTROL
BITS
0
1
F1
NEGATIVE
POSITIVE
PFD POLARITY
0
1
F3
CPO/CPO GND
NORMAL
CPO GND
FUNCTION REGISTER (R3) LATCH MAP
Figure 32. Bit Map for Register R3
R3, the function register, needs to be programmed only during
the initialization sequence (see Tab l e 9).
Control Bits
Register R3 is selected with C3, C2, and C1 set to 0, 1, 1.
CPO GND
When the CPO GND bit is low, the charge pump outputs are
internally pulled to ground. This is invoked during the initialization sequence to discharge the loop filter capacitors. For
normal operation, this bit should be set to 1.
PFD Polarity
Set the PFD polarity bit to 1 for positive polarity, and set it to 0
for negative polarity.
Reserved Bits
Program the DB15 to DB6 reserved bits to a hexadecimal code of
0x001, and set the DB4 reserved bit to 1.
Rev. B | Page 18 of 28

09450-027
DB23
0
DB220DB210DB20
0
DB190DB180DB170DB160DB150DB141DB13C9DB12C8DB11C7DB10C6DB9C5DB8C4DB7C3DB6C2DB5C1DB4
F2
DB3F1DB2
C3 (1)
DB1
C2 (0)
DB0
C1 (0)
9-BIT TIMEOUT COUNTERRESERVED
CONTROL
BITS
TIMER
SELECT
0
0
1
1
F2
0
1
0
1
F1
SW1/SW2
SW3
I
CP
NOT USED
TIMER SELECT
C9
0
0
0
0
.
.
.
1
1
1
1
C8
0
0
0
0
.
.
.
1
1
1
1
C7
0
0
0
0
.
.
.
1
1
1
1
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
C3
0
0
0
0
.
.
.
1
1
1
1
C2
0
0
1
1
.
.
.
0
0
1
1
C1
0
1
0
1
.
.
.
0
1
0
1
TIMEOUT COUNTER
0
1
2
3
.
.
.
508
509
510
511
xPFD CYCLES
0
4
8
12
.
.
.
2032
2036
2040
2044
DELAY µs
1
0
0.15
0.30
0.46
.
.
.
78.15
78.30
78.46
78.61
1
DELAY WITH 26MHz PFD
Data Sheet ADF4196
CHARGE PUMP REGISTER (R4) LATCH MAP
Figure 33. Bit Map for Register R4
R4, the charge pump register, is used for programming the timers
for loop filter switches. These switches help maintain the stability
of the loop filter after boosting the charge pump current.
Control Bits
Register R4 is selected with C3, C2, and C1 (Bits[DB2:DB0]) set
to 1, 0, 0.
Reserved Bits
For normal operation, set the DB23 to DB14 reserved bits to
a hexadecimal code of 0x001.
9-Bit Timeout Counter
These bits are used to program the fast lock timeout counters.
The counters are clocked at one-quarter the PFD reference
frequency; therefore, their time delay scales with the PFD
frequency according to the following equation:
Delay(s) = (Timeout Counter Value × 4)/(PFD Frequency)
For example, if 35 is loaded with timer select = 00, with
a 13 MHz PFD, SW1 and SW2 switch after the following:
(35 × 4)/13 MHz = 10.8 µs
Timer Select
The two timer select bits select the timeout counter that is to
be programmed. Note that setting up the ADF4196 for correct
operation requires setup of these three timeout counters: I
,
CP
SW1/SW2, and SW3. Therefore, three writes to this register
are required in the initialization sequence. Ta b le 7 shows
example values for a GSM Tx synthesizer with a 60 kHz final
loop bandwidth. See the Applications Information section for
more information.
Table 7. Recommended Values for a GSM Tx LO
Timer
Select
Timeout
Counter
Value
Time (µs) with
PFD = 13 MHz
10 ICP 28 8.6
01 SW3 35 10.8
00 SW1/SW2 35 10.8
On each write to R0, the timeout counters start. Switch SW3 closes
until the SW3 counter times out. Similarly, the SW1 and SW2
switches close until the SW1/SW2 counter times out. When the
I
counter times out, the charge pump current is ramped down
CP
from 64× to 1× in six binary steps. It is recommended that the
SW1/SW2 and SW3 timeout counter values be set equal to the
I
timeout counter value plus 7, as in the example shown in
CP
Tabl e 7.
Rev. B | Page 19 of 28

ADF4196 Data Sheet
09450-028
DB7F5DB6
F4
DB5
F3
DB4
F2
DB3
F1
DB2
C3 (1)
DB1
C2 (0)
DB0
C1 (1)
COUNTER
RESET
CP
3-STATE
PD
CHARGE
PUMP
CONTROL
BITS
PD
DIFF AMP
0
1
F4
0
1
F5
DISABLED
ENABLED
DIFF AMP
POWER-DOWN
0
1
F2
NORMAL OPERATION
3-STATE E NABLED
CHARGE PUMP
3-STATE
0
1
F1
NORMAL OPERATION
COUNTER RES E T
COUNTER RES E T
0
1
F3
DISABLED
ENABLED
CHARGE PUMP
POWER-DOWN
POWER-DOWN REGISTER (R5) BIT MAP
R5, the power-down register, can be used to power down the PLL
and differential amplifier sections. After power is initially applied,
Register R5 must be programmed to clear the power-down bits.
Then, before the ADF4196 comes out of power-down, the R2,
R1, and R0 registers must be programmed.
Control Bits
Register R5 is selected with C3, C2, and C1 set to 1, 0, 1.
Power-Down Differential Amplifier
When the DB7 and DB6 bits are set to 1, the differential
amplifier is put into power-down. When DB7 and DB6 are set
to 0, normal operation resumes.
Power-Down Charge Pump
Setting Bit DB5 to 1 activates a charge pump power-down, and
the following events occur:
• All active dc current paths are removed, except for the
differential amplifier.
• The R and N divider counters are forced to their load state
conditions.
Figure 34. Bit Map for Register R5
• The charge pump is powered down with its outputs in
three-state mode.
• The digital lock detect circuitry is reset.
• The RF
• The reference input buffer circuitry is disabled.
• The serial interface remains active and capable of loading
and latching data.
For normal operation, set Bit DB5 to 0, followed by a write to R0.
CP Three-State
When the CP three-state bit is set to 1, the charge pump outputs
enter three-state. Setting the CP three-state bit to 0 enables the
charge pump outputs.
Counter Reset
When the counter reset bit is set to 1, the counters are held in reset.
For normal operation, set this bit to 0, followed by a write to R0.
input is debiased.
IN
Rev. B | Page 20 of 28

Data Sheet ADF4196
09450-029
DB15
M13
DB14
M12
DB13
M11
DB12
M10
DB11
0
DB10
0
DB9
0
DB8
0
DB7
1
DB6
M4
DB5
M3
DB4
M2
DB3
M1
DB2
C3 (1)
DB1
C2 (1)
DB0
C1 (0)
RESERVED MUX
OUT
CONTROL
BITS
SIGMA-DELTA
AND
LOCK DETE CT MODES
0
1
1
M10
0
1
0
M11
0
0
0
ALL OTHER STATES
M12
0
0
1
M13
INIT STATE, DITHER OFF,
3ns LOCK DETECT THRESHOLD
DITHER ON
10ns LOCK DETECT THRESHOLD
RESERVED
SIGMA-DELTA MODES
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
M4
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
M3
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
M2
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
M1
3-STATE
DIGITAL LOCK DETECT
N DIVIDER O UTPUT
LOGIC HIGH
R DIVIDER O UTPUT
RESERVED
SERIAL DAT A OUTPUT
LOGIC LOW
R DIVIDER/ 2 OUTPUT
N DIVIDER/ 2 OUTPUT
RESERVED
RESERVED
I
CP
TIMEOUT SIGNAL
SW1/SW2 TIMEOUT SIGNAL
SW3 TIMEOUT SIGNAL
RESERVED
MUX
OUT
MUX REGISTER (R6) LATCH MAP AND TRUTH TABLE
R6, the mux register, is used to program MUX
Σ-Δ and lock detect modes.
Control Bits
Register R6 is selected with C3, C2, and C1 set to 1, 1, 0.
Σ-Δ and Lock Detect Modes
Bit DB15 to Bit DB12 are used to reconfigure certain PLL
operating modes. In the initialization sequence after power is
applied to the chip, the four bits must first be programmed to
all zeros. This initializes the PLL to a known state with dither
off in the Σ-Δ modulator and a 3 ns PFD error threshold in the
lock detect circuit.
To turn on dither in the Σ-Δ modulator, an additional write should
be made to Register R6 to program Bits[DB15:DB12] = 0011.
However, for lowest noise operation, it is best to leave dither off.
To change the lock detect threshold from 3 ns to 10 ns, perform
a separate write to R6 to program Bits[DB15:DB12] = 1001.
This separate write is needed for reliable lock detect operation
when the RF frequency is <2 GHz.
A write to R6 that programs Bits[DB15:DB12] = 0000 returns
operation to the default state with both dither off and a 3 ns
lock detect threshold.
Figure 35. Bit Map and MUX
, as well as
OUT
Truth Table for Register R6
OUT
Reserved Bits
For normal operation, the reserved bits (Bits[DB11:DB7]) must
be set to 00001.
MUX
Modes
OUT
These bits control the on-chip multiplexer, Pin 16 (see Figure 35
for the truth table). This pin is useful for diagnosis because it
allows the user to look at various internal points of the chip,
such as the R divider and the INT divider outputs.
In addition, it is possible to monitor the programmed timeout
counter intervals on MUX
. For example, if the ICP timeout
OUT
counter is programmed to 65 (with a 26 MHz PFD), then
following the next write to R0, a pulse width of 10 µs is
observed on the MUX
Digital lock detect is available via the MUX
OUT
pin.
OUT
pin.
Rev. B | Page 21 of 28

ADF4196 Data Sheet
PROGRAMMING THE ADF4196
The ADF4196 can synthesize output frequencies with a channel
step or resolution that is a fraction of the input reference frequency. For a given input reference frequency and a desired
output frequency step, the first choice to make is the PFD
reference frequency and the MOD value. After these are chosen,
the desired output frequency channels are set by programming
the INT and FRAC values.
WORKED EXAMPLE
In this example of a GSM900 Rx system, the RF output frequencies
must be generated with channel steps of 200 kHz. A reference
frequency input (REF
) of 104 MHz is available. The R divider
IN
setting that determines the PFD reference is shown in Equation 3.
f
= REFIN × [(1 + D)/(R × (1 + T))] (3)
PFD
where:
is the input reference frequency.
REF
IN
D is the doubler enable bit (0 or 1).
R is the 4-bit R counter code (1 to 15).
T is the REF/2 bit (0 or 1).
The maximum PFD reference frequency of 26 MHz is chosen,
and the following settings are programmed to give an R divider
value of 4:
• Doubler enable = 0
• R = 2
• REF/2 = 1
Next, the modulus is chosen to allow fractional steps of 200 kHz:
MOD = 26 MHz/200 kHz = 130 (4)
When the channel step is defined, Equation 5 shows how output
frequency channels are programmed.
RF
= [INT + (FRAC/MOD)] × f
OUT
(5)
PFD
where:
RF
is the desired RF output frequency.
OUT
INT is the integer part of the division.
FRAC is the numerator part of the fractional division.
MOD is the modulus or denominator part of the fractional
division.
Thus, the frequency channel at 962.4 MHz is synthesized by
programming the following values: INT = 37 and FRAC = 2.
SPUR MECHANISMS
The following sections describe the three different spur
mechanisms that arise with a fractional-N synthesizer and how
the ADF4196 can best be programmed to minimize them.
Fractional Spurs
The fractional interpolator in the ADF4196 is a third-order, Σ-Δ
modulator (SDM) with a modulus MOD that is programmable
to any integer value from 13 to 4095. If dither is enabled, the
minimum allowed value of MOD is 50. The SDM is clocked at
the PFD reference rate (f
to be synthesized at a channel step resolution of f
), which allows PLL output frequencies
PFD
/MOD.
PFD
With dither turned off, the quantization noise from the Σ-Δ
modulator appears as fractional spurs. The interval between spurs
is f
/L, where L is the repeat length of the code sequence in
PFD
the digital Σ-Δ modulator. For the third-order modulator used
in the ADF4196, the repeat length depends on the value of
MOD, as shown in
Tabl e 8.
Table 8. Fractional Spurs with Dither Off
Repeat
Condition (Dither Off)
MOD Is Divisible by 2 but Not by 3 2 × MOD Channel step/2
MOD Is Divisible by 3 but Not by 2 3 × MOD Channel step/3
MOD Is Divisible by 6 6 × MOD Channel step/6
All Other Divisors MOD Channel step
Length Spur Interval
With dither enabled, the repeat length is extended to 221 cycles,
regardless of the value of MOD, which makes the quantization
error spectrum look like broadband noise. This can degrade the
in-band phase noise at the PLL output by as much as 10 dB.
Therefore, for lowest noise, dither off is a better choice, particularly
when the final loop bandwidth is low enough to attenuate even
the lowest frequency fractional spur. The wide loop bandwidth
range that is available with the ADF4196 allows the use of dither
in most applications.
Integer Boundary Spurs
Another mechanism for fractional spur creation involves
interactions between the RF VCO frequency and the reference
frequency. When these frequencies are not integer related
(which is the purpose of a fractional-N synthesizer), spur
sidebands appear on the VCO output spectrum at an offset
frequency that corresponds to the beat note or difference
frequency between an integer multiple of the reference and
the VCO frequency.
These spurs are attenuated by the loop filter and are more
noticeable on channels that are close to integer multiples of the
reference, where the difference frequency can be inside the loop
bandwidth (thus, the name integer boundary spurs).
The 8:1 loop bandwidth switching ratio of the ADF4196 makes
it possible to attenuate all spurs to sufficiently low levels for most
applications. The final loop bandwidth can be chosen to ensure
that all spurs are far enough out of band and meet the lock time
requirements with the 8× bandwidth boost.
The programmable modulus and R divider of the ADF4196 can
also be used to avoid integer boundary channels. This option is
described in the Avoiding Integer Boundary Channels section.
Rev. B | Page 22 of 28

Data Sheet ADF4196
Reference Spurs
Reference spurs are generally not a problem in fractional-N
synthesizers because the reference offset is far outside the loop
bandwidth. However, any reference feedthrough mechanism
that bypasses the loop can cause a problem. One such mechanism
is feedthrough of low levels of on-chip reference switching noise
out of the RF
pins back to the VCO, resulting in reference
IN±
spur levels as high as −90 dBc. These spurs can be suppressed
below −110 dBc by inserting sufficient reverse isolation, for
example, through an RF buffer between the VCO and RF
IN±
pins.
Also, take care in the printed circuit board (PCB) layout to ensure
that the VCO is well separated from the input reference to avoid
a possible feedthrough path on the board.
POWER-UP INITIALIZATION
After applying power to the ADF4196 for the first time, a 14-2530
sequence is recommended, as described in Table 9.
The divider and timer settings used in the example in Table 9 are
for a DCS1800 Tx synthesizer with a 104 MHz REF
The ADF4196 powers up after Step 13 and locks to the programmed channel frequency after Step 14.
Table 9. Power-Up Initialization Sequence A and
Initialization Sequence B
Register/
Step1
Bits
Hex Code Description
1 R5 [7:0] 0xFD Set all power-down bits.
2 R3 [15:0] 0x005B
Wait
10 ms
PFD polarity = 1, ground
CP
/CP
OUT+
OUT−
Allow time for loop filter
capacitors to discharge.
3 R7 [15:0] 0x0007 Clear test modes.
4 R6 [15:0] 0x000E
Initialize PLL modes, digital
lock detect on MUX
5A R6 [15:0] 0x900E
10 ns lock detect threshold,
digital lock detect on MUX
5B R6 [15:0] 0x000E
Add 16 PFD cycle delay after
LE before starting hop to next
frequency.
6 R4 [23:0] 0x004464 SW1/SW2 timer = 10.8 μs.
7 R4 [23:0] 0x00446C SW3 timer = 10.8 μs.
8 R4 [23:0] 0x004394 ICP timer = 8.6 μs.
9 R2 [15:0] 0x00D2 Phase = 26.
10 R1 [23:0] 0x520209
8/9 prescaler, doubler disabled,
R = 4, toggle FF on, MOD = 65.
11 R0 [23:0] 0x480140
INT = 144, FRAC = 40 for
1880 MHz output frequency.
12 R3 [15:0] 0x007B
PFD polarity = 1, release
+/CP
CP
OUT
OUT−
13 R5 [7:0] 0x05 Clear all power-down bits.
14 R0 [23:0] 0x480140
INT = 144, FRAC = 40 for
1880 MHz output frequency.
1
Initialization Sequence A includes Step 5A and omits Step 5B; Initialization
Sequence B includes Step 5B and omits Step 5A.
IN
.
.
frequency.
.
OUT
.
OUT
Two initialization sequences are available for the ADF4196:
Initialization Sequence A and Initialization Sequence B. One or
the other must be selected. Initialization Sequence A consists of
Step 1 through Step 14 in Table 9, including Step 5A (but not
Step 5B). (For Initialization Sequence B, Step 5A is replaced by
Step 5B.) In Initialization Sequence A, the frequency hop starts
immediately after the rising edge of LE, whereas in Initialization
Sequence B, the ADF4196 waits 16 PFD cycles and then starts the
hop. Initialization Sequence B reduces the overshoot of a
frequency jump, but the start of a jump is delayed by 16 PFD
cycles. Figure 36 shows this phenomenon.
LE
5.5
INITIALIZATION SEQUENCE A
5.0
4.5
4.0
(V)
TUNE
3.5
V
3.0
2.5
2.0
Figure 36. Frequency Jumps for Initialization Sequence A and
INITIALIZATION SEQUENCE B
TIME (µs/DIV)
Initialization Sequence B
CHANGING THE FREQUENCY OF THE PLL AND THE PHASE LOOKUP TABLE
After the ADF4196 is initialized, only a write to Register R0 is
required to program a new output frequency. The N divider is
updated with the values of INT and FRAC on the next PFD cycle
following the LE edge that latches in the R0 word. However, the
settling time and spurious performance of the synthesizer can
be further optimized by modifying the R1 and R2 register settings
on a channel-by-channel basis. These settings are double buffered
by the write to R0. This means that, although the data is loaded
through the serial interface on the respective R1 and R2 write
cycles, the synthesizer is not updated with the new data until
the next write to Register R0.
Register R2 can be used to digitally adjust the phase of the VCO
output relative to the reference edge. The phase can be adjusted
over the full 360° range at RF with a resolution of 360°/MOD.
In most frequency synthesizer applications, the actual phase offset
of the VCO output with respect to the reference is unknown
and is irrelevant. In such applications, the phase adjustment
capability of R2 can, instead, be used to optimize the settling time
performance as described in the Phase Lookup Table section.
09450-136
Rev. B | Page 23 of 28

ADF4196 Data Sheet
Phase Lookup Table
The fast lock sequence of the ADF4196 is initiated after the
write to Register R0. The fast lock timers are programmed so
that after the PLL has settled into wide bandwidth mode, the
charge pump current is reduced and the loop filter resistor
switches are opened, which reduces the loop bandwidth. The
reference cycle on which these events occur is determined by
the values that are preprogrammed into the timeout counters.
The phase locking plots of Figure 11 and Figure 14 show that
the lock time to final phase is dominated by the phase swing
that occurs when the bandwidth is reduced. When the PLL
settles to its final frequency and phase, in wide bandwidth
mode, this phase swing is the same regardless of the size of the
frequency jump of the synthesizer. The amplitude of the phase
swing is related to the current flowing through the loop filter
resistors on the PFD reference cycle that open the SW1 and
SW2 switches.
In an integer-N PLL, this current is zero when the PLL has
settled. In a fractional-N PLL, the current is zero, on average,
but it varies from one reference cycle to the next, depending
on the quantization error sequence output from the digital Σ-Δ
mo dulat or. Because the Σ-Δ modulator is all digital logic, clocked
at the PFD reference rate for a given value of MOD, the actual
quantization error on any given reference cycle is determined
by the value of FRAC and the phase word with which the
modulator is seeded, following the write to R0.
By choosing an appropriate value of phase corresponding to the
value of FRAC that is programmed on the next write to R0, the
size of the error current when the SW1 and SW2 switches are
opened can be minimized. Thus, the phase swing that occurs
when the bandwidth is reduced can be minimized.
With dither off, the fractional spur pattern that is due to the
quantization noise of the SDM also depends on the phase word
with which the modulator is seeded. Tables of optimized FRAC
and phase values for popular SW1/SW2 and I
timer settings can
CP
be downloaded from the ADF4196 product page. If using a phase
table, first write the phase to double buffered Register R2, and
then write the INT and FRAC values to Register R0.
Avoiding Integer Boundary Channels
When programming a new frequency, another option involves
a write to Register R1 to avoid integer boundary spurs. If the
integer boundary spur level is too high, the integer boundary
can be moved away from the desired channel by reprogramming
the R divider to select a different PFD frequency. For example,
if REF
= 104 MHz and R = 4 for a 26 MHz PFD reference,
IN
and MOD = 130 for 200 kHz steps, the frequency channel at
910.2 MHz has a 200 kHz integer boundary spur because it is
offset by 200 kHz from 35 × 26 MHz.
An alternative way to synthesize this channel is to set R = 5 for
a 20.8 MHz PFD reference and MOD = 104 for 200 kHz steps.
The 910.2 MHz channel becomes a 5 MHz offset from the nearest
integer multiple of 20.8 MHz, and the 5 MHz beat note spurs
are well attenuated by the loop. Setting the double buffered DB23
bit (Bit CP ADJ in Register R1) to 1 increases the charge pump
current by 25%, which compensates for the 25% increase in N
with the change to the 20.8 MHz PFD frequency. This maintains
constant loop dynamics and settling time performance for jumps
between the two PFD frequencies. Clear the CP ADJ bit when
returning to 26 MHz-based channels.
The Register R1 settings that are required for integer boundary
spur avoidance are all double buffered and do not become active
on the chip until the next write to Register R0. Always ensure that
Register R0 is the last register written to when programming
a new frequency.
Serial Interface Activity
The serial interface activity when programming the R2 or R1
register causes no noticeable disturbance to the synthesizer’s
settled phase or degradation in its frequency spectrum. Thus,
in a GSM application, serial interface activity can be performed
during the active part of the data burst. Because it takes only
10.2 µs to program the three registers (R2, R1, and R0) with the
6.5 MHz serial interface clock rate typically used, this programming can also be performed during the previous guard period
with the LE edge to latch in the R0 data, delayed until it is time
to switch the frequency.
Rev. B | Page 24 of 28

Data Sheet ADF4196
Prescaler
4/5
4/5
8/9
8/9
APPLICATIONS INFORMATION
LOCAL OSCILLATOR FOR A GSM BASE STATION
Figure 37 shows the ADF4196 being used with a VCO to
produce the LO for a GSM1800 base station. For GSM, the
REF
signal can be any integer multiple of 13 MHz, but the
IN
main requirement is that the slew rate be at least 300 V/µs.
The 104 MHz, 5 dBm input sine wave shown in Figure 37
satisfies this requirement.
Recommended parameters for the various GSM/DCS/PCS
synthesizers are listed in Tab l e 10.
Table 10. Recommended Setup Parameters
GSM900 DCS1800/PCS1900
Parameter Tx Rx Tx Rx
Loop BW 60 kHz 40 kHz 60 kHz 40 kHz
PFD 13 MHz 26 MHz 13 MHz 13 MHz
MOD 65 130 65 65
Dither Off Off Off Off
ICP Timer 28 78 28 38
SW1, SW2,
SW3 Timers
VCO KV 18 MHz/V 18 MHz/V 38 MHz/V 38 MHz/V
Loop Bandwidth and PFD Frequency
A 60 kHz loop bandwidth is narrow enough to attenuate the
PLL phase noise and spurs to the required level for a Tx low.
A 40 kHz bandwidth is necessary to meet the GSM900 Rx
synthesizer’s particularly tough phase noise and spur requirements
at ±800 kHz offsets. To get the lowest spur levels at ±800 kHz
offsets for Rx, the Σ-Δ modulator should be run at the highest oversampling rate possible. Therefore, for GSM900 Rx, a 26 MHz PFD
frequency is chosen, and MOD = 130 is required for 200 kHz steps.
Because this value of MOD is divisible by two, certain FRAC
channels have a 100 kHz fractional spur. This is attenuated by the
40 kHz loop filter and, therefore, is not a concern. However, the
60 kHz loop filter that is recommended for Tx has a closed-loop
response that peaks close to 100 kHz. Therefore, a 13 MHz PFD
with MOD = 65, which avoids the 100 kHz spur, is the best choice
for a Tx synthesizer.
Dither
Dither off should be selected for the lowest rms phase error.
Prescaler
The 8/9 prescaler should be selected for the DCS and PCS bands.
The 4/5 prescaler allows an N divider range low enough to cover
the GSM900 Tx and Rx bands with either a 13 MHz or 26 MHz
PFD frequency.
35 85 35 45
Timer Values for Tx
To comply with the GSM spectrum due to switching requirements,
the Tx synthesizer should not switch frequency until the PA output
power has ramped down by at least 50 dB. If it takes 10 µs to ramp
down to this level, only the last 20 µs of the 30 µs guard period is
available for the Tx synthesizer to lock to final frequency and phase.
In fast lock mode, the Tx loop bandwidth is widened by a factor
of 8 to 480 kHz and, therefore, the PLL achieves frequency lock
for a jump across the entire band in <6 µs. After this, the PA
power can start to ramp up again, and the loop bandwidth can
be restored to the final value. With the I
timer = 28, the charge
CP
pump current reduction begins at ~8.6 µs. When the SW1, SW2,
and SW3 timers = 35, the current reaches its final value before
the loop filter switches open at ~10.8 µs.
With these timer values, the phase disturbance created when
the bandwidth is reduced settles back to its final value by 20 µs,
in time for the start of the active part of the GSM burst. If faster
phase settling is desired with the 60 kHz bandwidth setting, the
timer values can be reduced further but should not be brought
less than the 6 µs that is required to achieve frequency lock in
wide bandwidth mode.
Timer Values for Rx
The 40 kHz Rx loop bandwidth is increased by a factor of 8 to
approximately 320 kHz during fast lock. With the Rx timer values
shown in Ta b le 10, the bandwidth is reduced after ~12 µs, which
allows sufficient time for the phase disturbance to settle back
before the start of the active part of the Rx time slot at 30 µs.
As in the Tx synthesizer case, faster Rx settling can be achieved by
reducing these timer values, their lower limit being determined
by the time it takes to achieve frequency lock in wide bandwidth
mode. In addition, the DCS and PCS Rx synthesizers have relaxed
800 kHz blocker specifications and, thus, can tolerate a wider
loop bandwidth, which allows correspondingly faster settling.
VCO KV
In general, the VCO gain, KV, should be set as low as possible to
minimize the reference and integer boundary spur levels that arise
due to feedthrough mechanisms. When deciding on the optimum
VCO K
band, centered on the available tuning range. With V
, a good choice is to allow 2 V to tune across the desired
V
3 regulated
P
to 5.5 V ± 100 mV, the tuning range available is 2.8 V.
Loop Filter Components
For good settling performance, it is important that capacitors
with low dielectric absorption be used in the loop filter. Ceramic
NPO C0G capacitors are a good choice for this application.
A 2% tolerance is recommended for loop filter capacitors and
1% for resistors. A 10% tolerance is adequate for the inductor, L1.
Rev. B | Page 25 of 28

ADF4196 Data Sheet
09450-037
R
SET
23
MUX
OUT
D
GND
1
16
SW2
27
SW
GND
28
SW1
29
CP
OUT+
30
CP
OUT–
26
REF
IN
11
RF
IN–
5
RF
IN+
6
CLK
17
SD
GND
14
A
GND
1
4
A
GND
2
22
LOCK DETE CT OUT
DATA
18
LE
19
REFERENCE
104MHz, 5dBm
ADF4196
SDV
DD
15
DVDDx
8, 10, 13
VP1
20
V
P
224AV
DD
7
V
P
3
32
9
D
GND
2
12
D
GND
3
21
R
SET
2.40kΩ
AIN+
AIN–
31
25
3
2
A
OUT
SW3
INTEGRATED
DIFFERENTIAL
AMPLIFIER
C1B
120pF
C1A
120pF
C3
470pF
100nF
1
CMR
Ct
30pF
R1B1
820Ω
R1B2
6.20kΩ
R1A2
6.20kΩ
R1A1
820Ω
C2B
1.20nF
C2A
1.20nF
R3
62Ω
R2
1.80kΩ
L1
2.2mH
SIRENZA VCO190-1843T
38MHz/V
100pF
100pF
1nF1nF
51Ω
51Ω
100nF
10µF
+
10µF
+
100nF
100nF 100nF
100pF
10µF
+
100nF
100nF
3V
5V
5.5V
10pF 100pF
18Ω
18Ω
18Ω
RF OUT
ADIsimPLL Support
The ADF4193 loop filter design is supported on ADIsimPLL v2.7
or later. Example files for popular applications are available for
download from the ADF4193 and ADF4196 product pages.
Also available is a technical note (ADF4193-TN-001, ADF4193
Loop Filter Design Using ADIsimPLL) that outlines a loop filter
design procedure that takes full advantage of the new degree of
freedom in the filter design that the differential amplifier and
loop filter switches provide.
Figure 37. LO for DCS1800 Tx Using the ADF4196
Rev. B | Page 26 of 28

Data Sheet ADF4196
INTERFACING
The ADF4196 has a simple SPI-compatible serial interface for
writing to the device. The CLK, DATA, and LE pins control the
data transfer. When LE goes high, the 24 bits that have been
clocked into the input register on each rising edge of CLK are
latched into the appropriate register. See Figure 2 for the timing
diagram and Table 6 for the register address table.
The maximum allowable serial clock rate is 33 MHz.
ADuC70xx Interface
Figure 38 shows the interface between the ADF4196 and the
ADuC70xx family of analog microcontrollers. The ADuC70xx
family is based on an ARM7™ core, although the same interface
can be used with any 8051-based microcontroller. The microcontroller is set up for SPI master mode with CPHA = 0. To
initiate the operation, the I/O port driving LE is brought low.
Each latch of the ADF4196 needs a 24-bit word. This is achieved
by writing three 8-bit bytes from the microcontroller to the device.
When the third byte is written, bring the LE input high to
complete the transfer.
When power is first applied to the ADF4196, an initialization
sequence is required for the output to become active (see Table 9).
I/O port lines on the microcontroller are also used to detect lock
(MUX
When operating in the SPI master mode, the maximum SPI transfer
rate of the ADuC7023, for example, is 20 Mbps. This means that
the maximum rate at which the output frequency can be changed
is 833 kHz. If using a faster SPI clock, ensure adherence to the
SPI timing requirements that are listed in Table 2.
configured as lock detect and polled by the port input).
OUT
ADuC70xx
SPICLK
MOSI
I/O PORTS
Figure 38. ADuC70xx-to-ADF4196 Interface
ADF4196
CLK
DATA
LE
MUX
OUT
(LOCK DETECT )
09450-033
Blackfin ADSP-BF527 Interface
Figure 39 shows the interface between the ADF4196 and the
Blackfin® ADSP-BF527 digital signal processor (DSP). The
ADF4196 needs a 24-bit serial word for each latch write. The
easiest way to accomplish this, when using the Blackfin family,
is to use the autobuffered transmit mode of operation with
alternate framing. This provides a means for transmitting an
entire block of serial data before an interrupt is generated.
Set up the word length for eight bits, and use three memory
locations for each 24-bit word. To program each 24-bit latch,
store the three 8-bit bytes, enable the autobuffered mode, and
write to the transmit register of the DSP. This last operation
initiates the autobuffer transfer. Ensure that the clock speeds are
within the maximum limits that are outlined in Table 2.
ADSP-BF527
SCLK
MOSI
GPIO
I/O FLAGS
Figure 39. ADSP-BF527-to-ADF4196 Interface
ADF4196
CLK
DATA
LE
MUX
OUT
(LOCK DETECT)
09450-034
PCB DESIGN GUIDELINES
The lands on the chip scale package (CP-32-2) are rectangular.
The printed circuit board (PCB) pad for these lands should be
0.1 mm longer than the package land length and 0.05 mm wider
than the package land width. To ensure that the solder joint size
is maximized, center the land on the pad.
The bottom of the chip scale package has a central thermal pad.
The thermal pad on the PCB should be at least as large as the
exposed pad. To avoid shorting, provide a clearance on the PCB
of at least 0.25 mm between the thermal pad and the inner edges
of the pad pattern.
Thermal vias can be used on the PCB thermal pad to improve the
thermal performance of the package. If vias are used, incorporate
them into the thermal pad at a 1.2 mm pitch grid. Provide a via
diameter between 0.3 mm and 0.33 mm, and plate the via barrel
with 1 oz copper to plug the via. Connect the PCB thermal pad
to A
GND
1 or A
GND
2.
Rev. B | Page 27 of 28

ADF4196 Data Sheet
3.25
3.10 SQ
2.95
FOR PROPE R CONNECTIO N OF
THE EXPOSED PAD, REFER TO
THE PIN CONFIGURATION AND
FUNCTION DE S CRIPTIO NS
SECTION OF THIS DATA SHEET.
COMPLIANT TO JEDEC STANDARDS MO-220-VHHD-2
1
32
8
9
25
24
17
16
COPLANARITY
0.08
3.50 REF
0.50
BSC
PIN 1
INDICATOR
PIN 1
INDICATOR
0.30
0.25
0.18
0.20 REF
12° MAX
0.80 MAX
0.65 TYP
1.00
0.85
0.80
0.05 MAX
0.02 NOM
SEATING
PLANE
0.50
0.40
0.30
5.00
BSC SQ
4.75
BSC SQ
0.60 MAX
0.60 MAX
0.25 MIN
05-25-2011-A
TOP VIEW
EXPOSED
PAD
BOTTOM VIEW
ADF4196BCPZ-RL7
−40°C to +85°C
32-Lead LFCSP_VQ
CP-32-2
©2011 Analog Devices, Inc. All rights reserved. Trademarks and
OUTLINE DIMENSIONS
Figure 40. 32-Lead Lead Frame Chip Scale Package [LFCSP_VQ]
5 mm × 5 mm Body, Very Thin Quad
(CP-32-2)
Dimensions shown in millimeters
ORDERING GUIDE
1, 2
Model
ADF4196BCPZ −40°C to +85°C 32-Lead LFCSP_VQ CP-32-2
EVAL-ADF4193EBZ1 Evaluation Board (GSM1800)
EVAL-ADF4193EBZ2 Evaluation Board (No VCO or Loop Filter)
1
Z = RoHS Compliant Part.
2
The EVAL-ADF4193EBZ1 and EVAL-ADF4193EBZ2 evaluation boards are designed to accommodate either the ADF4193 or the ADF4196.
Temperature Range Package Description Package Option
registered trademarks are the property of their respective owners.
D09450-0-12/11(B)
Rev. B | Page 28 of 28
 Loading...
Loading...